95692963-Initiation-a-l’automatique
22
Initiation à l’automatique Département de Physique Présenté le 4/06/2009 Par binôme: -ELMOURABITI KHALID -ESSAKALI YASSINE Encadrant : Pr. Fouad mesquine 1 Année universitaire : 2008-2009
-
Upload
hajri-mohamed -
Category
Documents
-
view
27 -
download
0
Transcript of 95692963-Initiation-a-l’automatique

Initiation à l’automatique
Département de Physique
Présenté le 4/06/2009
Par binôme:
-ELMOURABITI KHALID
-ESSAKALI YASSINE
Encadrant : Pr. Fouad mesquine
1
Année universitaire : 2008-2009

Initiation à l’automatique
2
Remerciements
Nous souhaitons exprimer toute notre profonde gratitude au Mr Fouad mesquine Professeur
de l’Enseignement Supérieur à la Faculté des Sciences Semlalia d’avoir accepté de diriger ce
travail. Nous le remerciant pour les efforts qu’il a déployé pour l’aboutissement de ce travail.
Nous remercions également le Professeur Mohammed Skouri Responsable de la Filière SMP
et Mohammed Benhayoun Professeur supérieur de l’électronique pour ses encouragements et sa
grande disponibilité.
Que tous les enseignements chercheurs ayant contribués à notre formation tout au long de
ces dernières années reçoivent l’expression de nos sincères respects.
Nos remerciements vont également à tous nos amis qui nous ont soutenu de près ou de loin .
A la fin C’est avec notre enthousiasme le plus vif et le plus sincère que nous voudrions
rendre mérite à toute personne qui a contribué de prés ou de loin à l’élaboration de ce travail.

Initiation à l’automatique
3
Sommaire : I . Introduction …………………………………….…….....1
II . Fonction de transfert ………………………..…… ..…2
1) Définition.……………………………………….… ....2 2) Exemple……………………………………………. ..3
III. Schéma fonctionnel..………………………………….3
1) Schéma fonctionnel général ……………………………..3 2) Réduction des Schémas fonctionnels .………………..……4
IV. Stabilité .………………………………………………4
1) Définition …………………………………………….4 2) Condition de stabilité d’un système asservi ………………..4 3) Critère algébrique de Routh …………………………….5 4) critères géométriques………………………………… ..6 5) Degrés de stabilité ……………………………………...9
V . Correction des systèmes ………………………………9
1) le régulateur …………………………………………..9 2) Correcteurs classiques …………………………………10
3) Correcteur à actions proportionnelle et intégrale (PI) ………11 4) Correcteur à actions proportionnelle et dérivée (PD) …….....12
5) Correcteur a action proportionnel, intégrale et dérivée …….12 VI. Exemple : Asservissement de vitesse de moteur à courant continu .………………………………….……….12 VII. Conclusion générale ……………………………..…...18 Bibliographie

Initiation à l’automatique
I Introduction : L'automatique est un ensemble de théories mathématique et une technique de
raisonnement qui concernent la prise de décision et la commande des systèmes. L’automatique est présente dans tous les secteurs d’activité (Menuiserie, textile, agro-alimentaire, automobile…).
L'histoire de l'automatique démarre sans doute dès la préhistoire, le système souvent cité comme étant la première réalisation d'un correcteur automatique est la clepsydre de Ktesibios (-270 av. J.C). Afin d'améliorer le principe de l'horloge à eau, Ktesibios introduit un réservoir supplémentaire dans lequel le volume du liquide reste constant grâce à un moteur qui ferme l'entrée du réservoir lorsque celui-ci est trop plein. En gros, c'est une chasse d'eau moderne.
L'horloge, des siècles plus tard, est encore un moteur de découvertes dans le domaine
de l'automatique, les développements de l'horloge conduisent, alors à la création d'automates extrêmement compliqués. Citons, à titre d'exemple, le canard de Vaucanson (1709-1782) qui pouvait boire, se nourrir, caqueter, nager, "digérer" et déféquer. L'idée de la programmation est née à peu près à la même époque. En 1728, Jean-Philippe Falcon crée le premier métier à tisser programmable par cartons perforés. Vaucanson réalise un métier à tisser programmable en 1745, et en 1801 le célèbre métier à tisser automatique programmable de Joseph Marie Jacquard.
Les objectifs de ce mémoire sont une initiation à l’automatique, l’assimilation des notions de base, ainsi que l’exercice sur les techniques les plus classiques de la conduite des systèmes.
Définitions de base :
4
• Systèmes : c’est un ensemble d’éléments liés entre eux qui définissent un ensemble de relations causales entre des grandeurs.

Initiation à l’automatique
• Causalité : la réponse à un signal n’apparaît qu’après l’apparition du signal. • Systèmes linéaires : Un système physique est linéaire si la relation entre les
grandeurs d’entrées et les grandeurs de sortie est un ensemble d’équations différentielles linéaires. Si les coefficients de ces équations sont constants, on dit que le système est stationnaire ou invariant dans le temps.
• Systèmes continus : Un Système est continu si le temps qui le caractérise est de nature continue, c'est-à-dire que le déroulement de temps est continu. II Fonction de transfert :
• Fonction de transfert : Elle est basée sur la transformée de Laplace. Soit x(t) un signal ,sa transformée de Laplace est définie par :
Z Elle notée X (p). dtetxtx pt−∞
∫= .)())((0
1) Définition: On appelle fonction de transfert du système le rapport H (p) des transformées de Laplace de l’entrée et de la sortie lorsque les conditions initiales sont nulles :
)()()(
pUpYpH =
.
De façon générale l’équation différentielle à coefficients constants liant la sortie d’un système linéaire monovariable à son entrée s’écrit :
)(.....)(..... 0011
1
1 tubdt
udbtyadtdya
dtyda
dtyda m
m
mn
n
nn
n
n ++=++++ −
−
−
Système physique donc n≥m. La fonction de transfert : conditions initiales nulles en passant à la transformée de Laplace :
01
1
01
1
.......
)()()(
apapabpbpb
pUpYpH n
nn
n
mm
mm
++++++
== −−
−−
à conditions initiales non nulles :
)()....)(()()....)(( 01
101
1 pIbpbpbpUpJapapapY mm
mm
nn
nn −+++=−+++ −
−−
−
5

Initiation à l’automatique
01
1 ...)()()()()(
apapapIpJpUpHpY n
nn
n +++−
+= −−
J(p)et I(p) regroupent tous les termes relatifs aux conditions initiales .
2) Exemple: Soit le circuit RLC suivant :
On a selon la loi de maille :
)()()()( tVstVtVrtVe L ++= où Vs=Vc
avec ,)()( tRItVr =dtdILtVL =)( et ∫=
t
S dttIC
tV0
)(1)(
Donc: dt
tdVCtI S )(
)( =
En passant aux transformes de Laplace avec condition initiales nulles nous avons : )()()()( 2 pVpVLCppRCpVpV SSSe ++=
211
)()(
)(LCpRCppV
pVpH
e
S
++==
III Schéma fonctionnel :
1) Schéma fonctionnel général : Une manière schématique de représenter un système par un rectangle avec des flèches pour montrer l’entrée et la sortie.
6

Initiation à l’automatique
2) Réduction des Schémas fonctionnels :
- Cascade :
avec : )()()( 21 pHpHpH +=
- Somme :
- Contre réaction :
IV Stabilité : 1) Définition :
Un système est dit stable si en absence d’entrée, l’effet d’une perturbation ne provoque pas la divergence de sa sortie. Condition de stabilité : un système est dit stable si toutes les racines de son dénominateur sont à patrie réelle négative
2) Condition de stabilité d’un système asservi: Puisque la fonction de transfert en boucle fermée F (p) d’un système asservi ne possède pas de pôle à l’origine, la condition nécessaire et suffisante de stabilité d’un système est que tous les pôles de F (p) aient leurs parties réelles négatives
)()(1)()(
pHpGpGpF
+=
7

Initiation à l’automatique
Les fonctions de transfert se présentant sous la forme de rapport de deux polynômes en p,
on peut écrire : )()()(
pBpApG = et
)()()(
pDpCpH = alors :
)()()()()()()(
pCpApDpBpDpApF
+=
L’équation caractéristique de système est donc : 0)()()()( =+ pCpApDpB
ou 0)(1 =+ pT avec : )()()()()(
pDpBpCpApT =
Le système est donc stable si l’équation 01T(p) =+ ne possède pas de zéro à partie réelle positive.
3) Critère algébrique de Routh : Pour vérifier la stabilité d’un système sans résoudre l’équation caractéristique, le critère de Routh peut être utilisé. Soit : l’équation caractéristique. 0...............)( 1
10 =+++= nn papaapD
Critère de Routh : pour que D (p) ne possède que des racines à parties réelles négatives il faut et il suffit que :
• Tous les coefficients ia soient positifs. • Tous les termes de la première colonne du tableau Routh soient positifs.
Le tableau de Routh est construit comme suit :
avec:
1
3211
−
−−− −=
n
nnnn
aaaaa
B , 1
5412
−
−−− −=
n
nnnn
aaaaa
B ,1
12311 B
aBaBC nn −− −
= et
1
13512 B
aBaBC nn −− −
=
8

Initiation à l’automatique
- Exemple : Soit le polynôme suivant: 0332 234 =++++ ppppLe tableau de Routh peut être formé comme suite :
4p 1 2 3
1 3 0 3p
2p 0 1B 2B
0
1p 1C 2C
0p 3 0 0
avec : 11
321 −=
−=B , 3
103
2 =−
=B , 61
331 =
−−−
=C et 01
1.00.12 =
−−−
=C
donc les le tableau de Routh devient : 1 2 3
4p
1 3 0
3p
-1 3 0
2p
1p 6 0 0
0p 3 0 0
d’où le système n’est pas stable .
4) critères géométriques: Les critères permettent d’étudier la stabilité d’un système bouclé par retour unitaire à partir du tracé des lieu de transfert dans les plans de Bode et Nyquist.
- Plan de Nyquist : Soit le système suivante :
9

Initiation à l’automatique
-en parcourant dans le sens des ω croissants le lieu de Nyquist en boucle ouverte T(jω) d’un système asservi on laisse le point critique (-1,0) à sa gauche le système bouclé est stable
-si on laisse le point A, à droite, le système bouclé est instable.
- Plan de bode : Un système asservi est stable si à la pulsation ωco pour laquelle |T(jω)| = 0 dB ,le déphasage de la réponse en fréquence en boucle ouverte T(jω) est supérieur a -1800.
10

Initiation à l’automatique
- Remarque :
Nous pouvons aussi faire la même étude en regardant le signe du gain en dB à la pulsation pour la quelle la phase vaut -1800.
11

Initiation à l’automatique
5) Degrés de stabilité :
La manière la plus classique de mesurer la plage de confiance pour la stabilité sont la marge de gain et la marge de phase.
- la marge de gain : La marge de gain est l’accroissement de gain maximum autorisé sans déstabiliser le système bouclé, à la pulsation pour laquelle l’argument de la fonction de transfert vaut
. o 180-La marge de gain est égal à :
|)(|1
nG jFTBO
Mω
= ; on 180)( −=ωϕ
- la marge de phase:
La marge de phase est la phase que l’on peut ajouter à l’argument de la fonction de transfert en boucle ouverte sans déstabiliser le système bouclé lorsque le module en dB est nul. La marge de phase est donnée par :
))(arg(180 cro jFTBOM ωϕ +=
où crω est la pulsation de croisement telle que dbG crdb 0)( =ω . V correction des systèmes :
Soit le schéma suivant d’une correction série :
1) le régulateur :
Définition : Le régulateur est la partie intelligente d’un asservissement, il est
composé des éléments suivants : - Un comparateur : il compare la valeur de la sortie obtenue à celle de l’entrée. - Correcteur : selon la valeur de l’écart donne la valeur de la commande qui assure les performances spécifiées. - Un amplificateur : amplifie le signal de commande pour attaquer le système.
12

Initiation à l’automatique
2) Correcteurs classiques :
- Action proportionnelle : on parle d’action proportionnelle lorsque le signal de commande est proportionnel au signal d’erreur )(tEC E(t).Le correcteur proportionnel est donné par : PKpC =)( .
- Action intégrale :
On parle d’action intégrale lorsque le signal de commande est proportionnel à l’intégrale du signal d’erreur. Le correcteur intégrale est donné par:
pKipC =)(
Une manière analogique de le réaliser peut être la suivante :
- Action dérivée :
On parle d’action dérivée ou différentielle, lorsque le signal de commande est proportionnel à la dérivée du signal d’erreur : Le correcteur dérivé est donné par:
pKpC d .)( =
13

Initiation à l’automatique
Une manière analogique de le réaliser peut être la suivante :
- Remarque : Les actions intégrale ou dérivée ne s’emploient jamais seules, mais en combinaison avec l’action proportionnelle.
3) Correcteur à actions proportionnelle et intégrale (PI) :
Ce correcteur est utilisé si le système est stable avec une marge de stabilité mais une mauvaise précision.
Le correcteur dans ce cas est donné par :p
KKpC Ip +=)(
: Gain de l’action proportionnelle. pK : Gain de l’action intégrale. IKPour pouvoir utiliser la méthode du gain optimal et la constante de temps on écrit le correcteur sous la forme suivante :
)1()( nC pT
pKpC +=
avec IC KK = et I
pn K
KT =
On détermine alors les constantes et , et on déduit et . cK nT pK IKLorsqu’on place ce correcteur en cascade de la chaîne directe, la fonction de transfert en boucle ouverte devient :
)()1()()(0
pRpK
pTp
KpR
pK
pCF oro
nc
ro
oco
+==
)(1)1( 10pR
ppTKF orncoc ++= avec cooc KKK =
donc :o
occ K
KK = et cnp KTK =
avec : Gain du système corrigé en boucle ouverte. ocK : Gain du système en boucle ouverte oK : Classe du système en boucle ouverte. or
14

Initiation à l’automatique
4) Correcteur à actions proportionnelle et dérivée (PD) :
Le correcteur dans ce cas est donné par :
).1()( dcdp TpKpKKpC +=+=
pc KK = et p
dd K
KT = .
Ce correcteur améliore les marges de stabilité avec précision constante
5) Correcteur à action proportionnel, intégrale et dérivée :
C’est une combinaison des trois actions proportionnelle, intégrale et dérivée, on parle de correcteur PID, dans ce cas C (p) est donné par :
dI
p pKp
KKpC ++=)(
Le réglage des paramètres du PID peut se faire par deux méthode classique : limite de pompage ou l’essai indiciel. VI Exemple : Asservissement de vitesse d’un moteur à
courant continu
• Présentation : Cette application met en oeuvre un modèle de Moteur à Courant Continu à aimant permanent défini à partir de ses grandeurs caractéristiques dont certaines seront négligées pour mener une étude simplifiée:
- et : tension et courant du moteur mU mI- Ω : vitesse de rotation angulaire - R : résistance électrique du rotor m
- L : inductance du rotor (négligée) m
- : constante caractéristique = dEK EK Ω /d en rd.s-1/V Um- : couple de frottements secs en N.m fC- : couple utile en N.m. uC- f : coefficient de frottement visqueux en N.m/ (rad. s-1) (négligé) - J : moment d’inertie ramené à l’axe du rotor
Pour le moteur étudie, ces grandeurs auront les valeurs numériques suivantes :
- L =1 mH m
- Vitesse de rotation nominale = 2800 tr/min - R = 6, 2 ohms m
- K =0,035 V/ (rad/s) E
15
- J := 2..4 mkgμ

Initiation à l’automatique
Le modèle électrique du MCC est un dipôle [R ; L ; E] et si l’on simplifie l’effet de l’inductance on obtient un dipôle [R ; E] :
Equations électriques (1) et mécanique (2) (grandeurs instantanées) :
E /dt .dIL .IR U mmmmm ++= (1) ufm C - f.– C– C /dt J.d Ω=Ω (2)
avec : Ω= .K E E , Force électromotrice induite.
mEm IK C = : Couple moteur. Cu : Couple utile, demandé par la charge et fum CC C += .
• Fonction de transfert et schéma Fonctionnel du MCC: Des équations caractéristiques (1) et (2) , on passe dans le domaine de Laplace (Hypothèses de conditions initiales nulles) : On a : (1) => E(p) (p).p).IL(R (p)U mmmm ++= (1’)
avec E(p) = K .E Ω (p) (2) => (2’) (p)C - (p)C = (p)C- (p) C - (p)C = (p)J.p. rmufmΩ On suppose que le couple de perte est négligeable devant le moment du couple électromagnétique ce qui donne :
pJIK
pJC
KEp mEm
E ..)( ===Ω
donc E
m KpJpI .).(Ω
=
Et on remplaçant dans l’équation (1’) on trouve : (p) Im
16

Initiation à l’automatique
K(p)).K Lm.p).J.p(Rm ( Um(p)
E
2E
Ω++=
On peut maintenant exprimer la fonction de transfert en boucle ouvert :
222 ....).()()()(
Emm
E
Emm
E
m KpJRpJLK
KpJpLRK
pUppH
++=
++=
Ω=
On peut écrire so us la forme canonique d’une fonction de transfert de second ordre :
22121
0
.)..(1)(
ppK
pHτττατ +++
=
Avec:
smK
JR
E
m .20)035,0(
10.4.2,6.2
6
21 ===−
τ et smRL
m
m ..16,02,6
10 3
2 ===−
τ .
et le gain statique 10 .57,28 −= VK
et 0=α
donc 2610.2,302,0157,28)(
pppH −++
=
Le schéma fonctionnel sans perturbation de H (p) est :
Le schéma fonctionnel avec perturbation de cette fonction est :
avec 2
211
0
..1)(
ppK
pHτττ ++
= et )()()(
pCrppF Ω
=
lorsque U m (p)=0 donc I (p)=0 et m )(0)()(.. pCrpCrIKppJ mE −=−=Ω
d’où ppJpCr
ppF410
.1
)()()(
6−−=
−=
Ω=
17

Initiation à l’automatique
• Etude d’asservissement de vitesse :
On envisage le cas où l’on rajoute une génératrice tachymétrie pour mesurer la vitesse de Rotation réelle, Le MCC est commandé en tension, élaborée par un étage Correcteur (traite le signal d’écart e) suivi d’un amplificateur de puissance (circuit de commande d’une façon générale, de type hacheur éventuellement) pouvant fournir le courant demandé par le MCC.
Et c
pCpHpCpHpCr
pCpHpF
pcpHpCpCrpFp
Ω+
++
−=Ω
Ω−Ω+−=Ω
)()(1)().()(
)()(1)(
))()(().()().()(
Or en utilisant le correcteur proportionnel à pour fonction : pK (p) C = et on donne . 1K p =
On peut écrire en faisant le changement variable :
cr pYpCpX Ω+=Ω ).()().(
avec : ppp
ppKpH
pFpXp 03,010.210.2,3
102,010.2,3)(1)()( 2539
26
++−−−
=+−
= −−
−
et 57,2961,010.510.29,110
57,2857,010.14,9)().(1
)().()( 2437411
25
++++++
=+
= −−
−
pppppp
pCpFpCpFpY
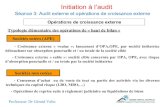
la réponse indicielle du system bouclé pour les différents valeurs de kp ,et =1 , Cr=0 donc
cΩ
Ω = )( pY
18

Initiation à l’automatique
si augmente donc la précision du système bouclé augmente mais les oscillations augmentent .
pK
pK =50 on a le temps de réponse très petit mais il y a plusieurs oscillations.
pK =20 on a le temps de réponse est petit mais avec des oscillations moyennes.
pK =5 dans ce cas on a le temps de réponse moyen avec peu des oscillations.
pK =1 on a le temps de réponse est grand et pas d’oscillations, système stable pas précis. dans ce cas on choisit le gain en boucle ouverte de façon à avoir la réponse plus précise,c’est =5 dans ce cas on a le temps de réponse est moyen égale à 0,4 s , et l’amplitude égale à 2801,2 tr/min .
pK 310. −
19

Initiation à l’automatique
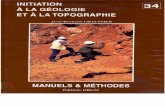
On perturbe le system bouclé avec une impulsion et on obtient la réponse suivante avec
=5 =0 et Cr =1 donc Ω = . pK cΩ )( pX
- on a l’erreur de position nulle en régime permanent,l’erreur est rejetée - La valeur de pK =5 conduisant à une stabilité acceptable et une bonne précision. - Un dépassement important D= 410.5 . - Le système en boucle fermée pour cette valeur de pK est moins rapide.
20

Initiation à l’automatique
21
VII Conclusion générale :
Au cours de ce stage, nous avons appris quelques notions de l’automatique, et nous avons étudié les éléments d’une boucle de commande. L’étude d’un exemple d’asservissement de vitesse d’un M.C.C nous a permis de déterminer les paramètres du correcteur adéquat pour notre système moteur à courant continu.

Initiation à l’automatique
22
Bibliographie :
Voici des références sur Internet
• http://iai1.eivd.ch/cours/cours_ra/chap_04/html/node4.htm
• http://csd.newcastle.edu.au/control//index.html
• http://newton.ex.ac.uk/teaching/CDHW/Feedback/SystemModel.html
• http://www.messiah.edu/acdept/depthome/engineer/Resources/tutorial/matlab/gui.html
• http://www.engin.umich.edu/group/ctm/examples/ball/ball.html
Voici des références que l’on trouve à la bibliothèque :
1-F.MESQUINE, «cours asservissement des système linéaires continues » polycopie cours departement de physique FSSM .
2-J. Gille, P. De, M. Pelegrin, « Théorie et calcul des asservissements linéaires », Dunod, bordas, Paris, 1987.
3-P. Borne et al, « Analyse et régulation des processus industriels ; tome2 : régulation numérique», Editions
Technique, Paris, 1993,