17281795 Commande Dune Machine a Courant Continu a Vitesse Variable

of 30
-
Upload
hakim-hancha -
Category
Documents
-
view
227 -
download
0
Transcript of 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
1/30
Prpar Par S.C.
Universit libanaise facult degnie II
Introduction:
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
2/30
S.C.ULFG2-2009
Ce projet a pour but l'tude de la commande d'une machine a courantcontinu a vitesse variable.
L'alimentation de cette machine, sera travers un pont redresseur
command qui fournira cette machine un courant continu.
Nous cherchons dans ce travail asservir deux paramtres de la machine:le courant absorb qui ne doit pas dpasser en aucun cas le courant
maximale supporte par la machine; ainsi que la vitesse de rotation qu'oncherche varier.
Dans ce but l; ce projet comportera trois parties principales:
1-Choix et modlisation de la machine2-Modlisation du convertisseur utilis (pont redresseur a
thyristors(3-Correction du systme asservi.
I-Choix et modlisation de la machine a courantcontinu.
1-Modlisation et schma bloc.
La commande de cette machine est effectue travers la variationde la tension d'induit; le flux inducteur est donc considr constantgale au flux maximal.
Machine fonctionnant a vide:
Deux quations fondamentales rgissent le fonctionnement d'unemachine courant continu:
Soit E la force lectromotrice vide; la vitesse de rotation durotor; Ce le couple lectromagntique dvelopp par la machine; et
Ia le courant circulant dans l'induit.
=
=
Ia.kCe
.kE
max
max
Avec
cte
==maxmax
kk
La tension Va aux bornes de l'induit serait:
dt
dILIREV
aaaaa ++=
2
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
3/30
S.C.ULFG2-2009
Appliquons la transforme de Laplace sur ces quations:
++=
=
=
)()().()(
)(.)(
)(.)(
max
max
pEpIpLRpV
pIkpC
pkpE
aaaa
ae
Do le schma bloc de la machine a courant continu a videcommande par la tension d'induit
Machine fonctionnant en charge:
L'quation mcanique fondamentale rgissant la rotation de l'arbre dumoteur en charge s'crit:
=dt
dJCCe
tresis tan
AvecCrfC tresis += .tan
Ou:fest le coefficient de frottement fluides de l'ensemble moteur + charge
Jest le moment d'inertie de l'ensemble moteur + charge
Schma bloc final:
Le schma bloc fonctionnel du moteur a courant continu pilote partension d'induit est le suivant:
3
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
4/30
S.C.ULFG2-2009
2-Simulation du modle de la machine sur Matlab-Simulink
Pour simuler le modle de la machine nous allons appliquer commeentre du systme une tension en chelon et visualiser comme sortie la
vitesse de rotation ainsi que le couple fourni par la machine et le courantabsorbe. Les caractristiques de la machine choisie sont:
-Tension d'alimentation nominale: Un=260V
-Vitesse de rotation nominale: Nn=2150 tr/min= 225 rad/s -Rsistance d'induit: Ra=1.26 -Inductance d'induit: La=34 mH
-Couple nominal fourni par la machine en charge: Cn=14 N.m-Courant nominal absorbe Ian=13.5 A-Coefficient de frottement visqueuxf= 0.01-Moment d'inertie du rotorJ= 0.02 kg.m2
-A vide:
4
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
5/30
S.C.ULFG2-2009
5
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
6/30
S.C.ULFG2-2009
En charge
6
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
7/30
S.C.ULFG2-2009
7
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
8/30
S.C.ULFG2-2009
Dans la suite du travail nous allons modliser la machine par un'subsystem' dont les entres sont la tension d'alimentation et le couple de
charge les sorties tant la vitesse de rotation, le couple et le courant.
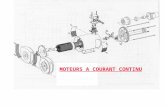
II-Modlisation du convertisseur
1-Schma du circuit
Le convertisseur utilis n'est autre qu'un pont complet commande c..d.un pont de six thyristors.
De mme nous allons utiliser un subsystem pour modliser ce circuit
8
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
9/30
S.C.ULFG2-2009
R
S
T
Pulse1
Pulse2
Pulse3Pulse4
Pulse5
Pulse6
-
V+
ThyristorSubsystem
2-Commande des thyristors
La commande des thyristors sera travers un gnrateur de 6 pulses quifourni en sortie six vecteurs dont chacun commande un seul thyristor
De nouveau ce circuit sera regroupe en un subsystem
9
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
10/30
S.C.ULFG2-2009
3-Simulation de l'ensembleSimulons ce circuit l'aide du logiciel Matlab-Simulink:
10
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
11/30
S.C.ULFG2-2009
Finalement nous allons regrouper toutes les parties du redresseur en
un seul bloc:
11
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
12/30
S.C.ULFG2-2009
Alpha_deg
R
S
T
V-
V+
mes_pulses
TriggeredPontThyristor
4-S imulation du systme complet (machine etconvertisseur(
Pour mieux clarifier les ides nous allons utiliser ce bloc pour alimenterla machine courant continu et simuler notre systme sans correction
12
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
13/30
S.C.ULFG2-2009
13
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
14/30
S.C.ULFG2-2009
14
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
15/30
S.C.ULFG2-2009
III-C orrection du systme
1-Structure de la correction
La correction utilise est une correction en cascade; les deuxgrandeurs corriges sont le courant et la vitesse de rotation du moteur
le systme corrig aura la forme suivante:
15
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
16/30
S.C.ULFG2-2009
16
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
17/30
S.C.ULFG2-2009
Cahier de charge:Boucle de courant:
tm=0.35ms
s
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
18/30
S.C.ULFG2-2009
Remarque :Il est alors plus simple de traiter lasservissement comme unsystme retour unitaire, puis de prendre en compte dans un deuxime
temps le gain du capteur.
Etude de la boucle de courant:Le schma bloc suivant reprsentatif de la fonction de transfert en courant
du moteur:
CeN (rd/s)
1
Ia
1
J.s+f
Transfer Fcn1
1
La.s+Ra
Transfer Fcn
K
Kmax1
K
Kmax
1
U
A partir du schma bloc au dessus il est possible de calculer (eneffectuant des simplifications) la fonction de transfert C(p)=I(p)/U(p),
reprsentative du comportement en courant de la machine:Cp=K0.1+pw11+pw4.1+pw3
Avec W1 = 1/m = f/J = 0.5 rd/sW2 = Sqrt( Kmax2 +Rf / LJ ) = 44 rd/s[=(W3+W4)/2[
W3 = 1/e = R/L = 37 rd/sW4 = 1/em = Kmax2/RJ = 52.5 rd/s
18
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
19/30
S.C.ULFG2-2009
K0 = f/Kmax2 = 7.56e-3
Les diagrammes asymptotiques de Bode sont alors les suivants:
Sur MatLab:
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
20/30
S.C.ULFG2-2009
-50
-40
-30
-20
-10
0
Magnitude(dB)
10-2
10-1
100
101
102
103
104
-90
-45
0
45
90
Phase(deg)
Bode Diagram
Frequency (rad/sec)
Le schma bloc de la boucle de courant est donn ci-dessous
e
I*
ec U I
1
I
In1 Out1
Correcteur de courant
In1 Out1
Convertisseur
In1Out1
Capteur
In1 Out1
C(p)
1
Ic
On assimilera le convertisseur un gain de valeur Go, le correcteur ungain de valeur Kp et le capteur de courant un gain unitaire. Il est alorspossible dvaluer la fonction de transfert en boucle ferme H(p)=I(p) /
Ic(p.(
Notons Kbo=Kp.Go.Ko (gain boucle ouverte), il vient alors:Hp=11+w1pKbo. (w2)2
20
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
21/30
S.C.ULFG2-2009
Il apparat que la fonction de transfert en boucle ferme est de typepremier ordre, dont la constante de temps est:
Pour obtenir un temps de mont tm=0.35ms c..d. s Wc= 8.8Krd/s, Il FautChoisir:
Kp.Go = 300.Do Kbo= 2.268 ( = 7.11db(
Diagramme de bode de la boucle ouverte de courant corrige par uncorrecteur proportionnel simul sur matlab:
10-2
10-1
100
101
102
103
104
-90
-45
0
45
90
Phase(deg)
0
10
20
30
40
Magnitude(dB)
System: untitled1
Frequency (rad/sec): 8.8e+003
Magnitude (dB): 0.00421
Bode Diagram
Frequency (rad/sec)
Pour annuler lerreur statique en courant on ajoute un correcteur Pi.Tic est calcul de sorte que le systme sera plus proche de lordre 1.
Soit Tic = e = 0.027 = 1/w3)Voire Bode asymptotique : La pente entre W1 et W3 Devient 0(
Cip=1+ipipTransfer function of PI:
Tic s + 1
= -----------Tic s
21
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
22/30
S.C.ULFG2-2009
0.027s + 1-----------
0.027s
Diagramme de bode de la boucle ouverte de courant corrige par lecorrecteur proportionnel Integrale PI simul sur matlab:
Larponse (duboucl
e decoura
ntcorrig
) un
chel
on vadonner:
Onremar
queque letemps
de
mont
tm=0.35ms(plus
oumoins carcalcu
22
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
23/30
S.C.ULFG2-2009
le approch) et lerreur Statique est nulle ce qui vrifie le calcule djfait.
Remarque : Sans le correcteur PI lerreur statique est de 2% (trs
acceptable) donc on peut seulement utiliser un correcteur Proportionnel Ppour rguler le courant.
Etude de la boucle de vitesseLe schma bloc de la boucle de vitesse est donn ci-dessous:
En reprenant lapplication du principe fondamental de la dynamique, eten supposant le correcteur de type proportionnel, on obtient le schma
bloc suivant:
En boucle ouverte, la fonction de transfert de vitesse est donc:
(p)c(p)=1f+fe'+Jp+ e'Jp2
Rappelons que la fonction de transfert en boucle ferme du courant est:Hp=11+w1pKbo. (w2)2
Avec:
Il est alors possible de calculer la fonction de transfert en boucle ferme
/c:
23
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
24/30
S.C.ULFG2-2009
Il apparat alors un dilemme entre stabilit et prcision. En effet, uneaugmentation de KBO, ayant pour objectif de rduire lerreur statique
entrane une diminution de z, et donc dstabilise le systme. Il va donctre ncessaire dintroduire un le correcteur PI ayant pour rle dannuler
lerreur statique, sans pour autant dstabiliser le systme.AN : K= 0.7e=3.69e-4
Reprenons ltude de la fonction de transfert de vitesse en boucleouverte:
(p)c(p)=1f+fe'+Jp+ e'Jp2=10.01+0.02p+(7.378e-006)p2
24
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
25/30
S.C.ULFG2-2009
10-2
10-1
100
101
102
103
104
105
-180
-135
-90
-45
0
Phase(de
g)
-100
-50
0
50
Magnitude(dB)
System: G
Frequency (rad/sec): 49.9
Magnitude (dB): 0.0125
Bode Diagram
Frequency (rad/sec)
Calcule du correcteur de vitesse:peut prendre 1/Tv =15.7rd/s ou Tv = 0.06
pour rduire le temps de mont qui est 0.05s a 0.02s par exemple on peutajoute un correcteur proportionnel quon peut encore calculergraphiquement:
157 rd/s on a -9.95 db donc il faut ajouter 9.95 db do Kp =3.14On peut prendre 1/Tv = Wc/10 =15.7rd/s ou Tv = 0.06
Do le correcteur PI de Vitesse:
Cp=Kp1+vpvp = 3.141+0.06p0.06p
Bode de la boucle de Vitesse corrige est alors:
25
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
26/30
S.C.ULFG2-2009
10-2
10-1
100
101
102
103
104
105
-180
-135
-90
Phase(de
g)
-100
-50
0
50
100
150
System: untitled1
Frequency (rad/sec): 136
Magnitude (dB): 1.27
System: untitled1
Frequency (rad/sec): 157
Magnitude (dB): 0.0586
Magnitude(dB)
Bode Diagram
Frequency (rad/sec)
La rponse un chelon de Wc (consigne) nous donne:
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
0.2
0.4
0.6
0.8
1
1.2
1.4
On remarque que le tm= 0.02s, s =0 et le dpassement est de 6%(acceptable(
Dans ce cas la rponse du courant ( vide) devient:26
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
27/30
S.C.ULFG2-2009
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2-0.5
0
0.5
1
1.5
2
2.5
3
I*
I
I* : le courant de consigne (a la sortie du rgulateur de vitesse(I : le courant absorb par la machine.
Si on ajoute un couple 4 N.m aprs 0.5 secondes les courbes seront:
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
Temps en s
Courante
nA
I
I*
27
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
28/30
S.C.ULFG2-2009
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
Temps en s
N
enrd/s
N
N*
Avec Saturation block:Si on ajoute un couple 4 N.m aprs 2 .5 secondes et pour Nc=100rd/s, les
courbes seront:
0 1 2 3 4 50
50
100
150
200
Vitesse
en
rd/s
0 1 2 3 4 5-5
0
5
10
15
Temps en s
couranten
A
N
Nc
Ic
I
28
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
29/30
S.C.ULFG2-2009
Ic : le courant de consigne (a la sortie du rgulateur de vitesse(I : le courant absorb par la machine.
Nc: Vitesse de consigne en rd/sN : Vitesse de rotation de la machine
Saturation block : Limite Ic entre 0 et 13 A
Finalement on a obtenu:Boucle de courant:
Tm = 0.35ms
s =2% (si correction proportionnelle), s =0% (si correction PI(Pas de dpassement lorsquon applique un chelon (I*=U(t) page 23( Le courant de consigne sera limit par un Saturation block
Boucle de Vitesse:Tm=0.02s sans Saturation block (ou pour I*
-
8/9/2019 17281795 Commande Dune Machine a Courant Continu a Vitesse Variable
30/30
S.C.ULFG2-2009