1- Présentation : moteur à courant continu - MySin.frpigo.free.fr/_media/cours--moteur-cc.pdf ·...
4
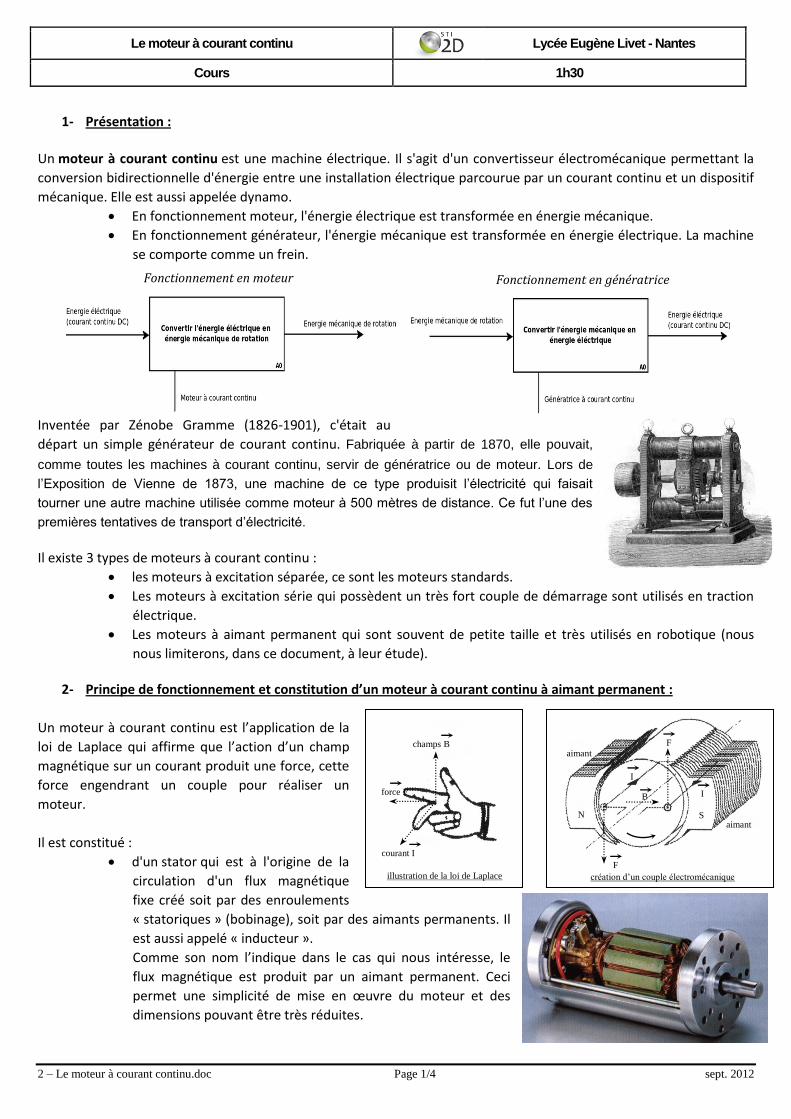
Le moteur à courant continu Lycée Eugène Livet - Nantes Cours 1h30 2 – Le moteur à courant continu.doc Page 1/4 sept. 2012 1- Présentation : Un moteur à courant continu est une machine électrique. Il s'agit d'un convertisseur électromécanique permettant la conversion bidirectionnelle d'énergie entre une installation électrique parcourue par un courant continu et un dispositif mécanique. Elle est aussi appelée dynamo. En fonctionnement moteur, l'énergie électrique est transformée en énergie mécanique. En fonctionnement générateur, l'énergie mécanique est transformée en énergie électrique. La machine se comporte comme un frein. Inventée par Zénobe Gramme (1826-1901), c'était au départ un simple générateur de courant continu. Fabriquée à partir de 1870, elle pouvait, comme toutes les machines à courant continu, servir de génératrice ou de moteur. Lors de l’Exposition de Vienne de 1873, une machine de ce type produisit l’électricité qui faisait tourner une autre machine utilisée comme moteur à 500 mètres de distance. Ce fut l’une des premières tentatives de transport d’électricité. Il existe 3 types de moteurs à courant continu : les moteurs à excitation séparée, ce sont les moteurs standards. Les moteurs à excitation série qui possèdent un très fort couple de démarrage sont utilisés en traction électrique. Les moteurs à aimant permanent qui sont souvent de petite taille et très utilisés en robotique (nous nous limiterons, dans ce document, à leur étude). 2- Principe de fonctionnement et constitution d’un moteur à courant continu à aimant permanent : Un moteur à courant continu est l’application de la loi de Laplace qui affirme que l’action d’un champ magnétique sur un courant produit une force, cette force engendrant un couple pour réaliser un moteur. Il est constitué : d'un stator qui est à l'origine de la circulation d'un flux magnétique fixe créé soit par des enroulements « statoriques » (bobinage), soit par des aimants permanents. Il est aussi appelé « inducteur ». Comme son nom l’indique dans le cas qui nous intéresse, le flux magnétique est produit par un aimant permanent. Ceci permet une simplicité de mise en œuvre du moteur et des dimensions pouvant être très réduites. Fonctionnement en moteur Fonctionnement en génératrice champs B force F courant I illustration de la loi de Laplace F F B I I aimant aimant N S création d’un couple électromécanique
-
Upload
nguyentruc -
Category
Documents
-
view
226 -
download
2
Transcript of 1- Présentation : moteur à courant continu - MySin.frpigo.free.fr/_media/cours--moteur-cc.pdf ·...
Le moteur à courant continu Lycée Eugène Livet - Nantes
Cours 1h30
2 – Le moteur à courant continu.doc Page 1/4 sept. 2012
1- Présentation :
Un moteur à courant continu est une machine électrique. Il s'agit d'un convertisseur électromécanique permettant la
conversion bidirectionnelle d'énergie entre une installation électrique parcourue par un courant continu et un dispositif
mécanique. Elle est aussi appelée dynamo.
En fonctionnement moteur, l'énergie électrique est transformée en énergie mécanique.
En fonctionnement générateur, l'énergie mécanique est transformée en énergie électrique. La machine
se comporte comme un frein.
Inventée par Zénobe Gramme (1826-1901), c'était au
départ un simple générateur de courant continu. Fabriquée à partir de 1870, elle pouvait,
comme toutes les machines à courant continu, servir de génératrice ou de moteur. Lors de
l’Exposition de Vienne de 1873, une machine de ce type produisit l’électricité qui faisait
tourner une autre machine utilisée comme moteur à 500 mètres de distance. Ce fut l’une des
premières tentatives de transport d’électricité.
Il existe 3 types de moteurs à courant continu :
les moteurs à excitation séparée, ce sont les moteurs standards.
Les moteurs à excitation série qui possèdent un très fort couple de démarrage sont utilisés en traction
électrique.
Les moteurs à aimant permanent qui sont souvent de petite taille et très utilisés en robotique (nous
nous limiterons, dans ce document, à leur étude).
2- Principe de fonctionnement et constitution d’un moteur à courant continu à aimant permanent :
Un moteur à courant continu est l’application de la
loi de Laplace qui affirme que l’action d’un champ
magnétique sur un courant produit une force, cette
force engendrant un couple pour réaliser un
moteur.
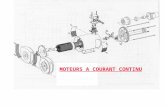
Il est constitué :
d'un stator qui est à l'origine de la
circulation d'un flux magnétique
fixe créé soit par des enroulements
« statoriques » (bobinage), soit par des aimants permanents. Il
est aussi appelé « inducteur ».
Comme son nom l’indique dans le cas qui nous intéresse, le
flux magnétique est produit par un aimant permanent. Ceci
permet une simplicité de mise en œuvre du moteur et des
dimensions pouvant être très réduites.
Fonctionnement en moteur Fonctionnement en génératrice
champs B
force F
courant I
illustration de la loi de Laplace
F
F
B
I
I
aimant
aimant
N S
création d’un couple électromécanique
2 – Le moteur à courant continu.doc Page 2/4 sept. 2012
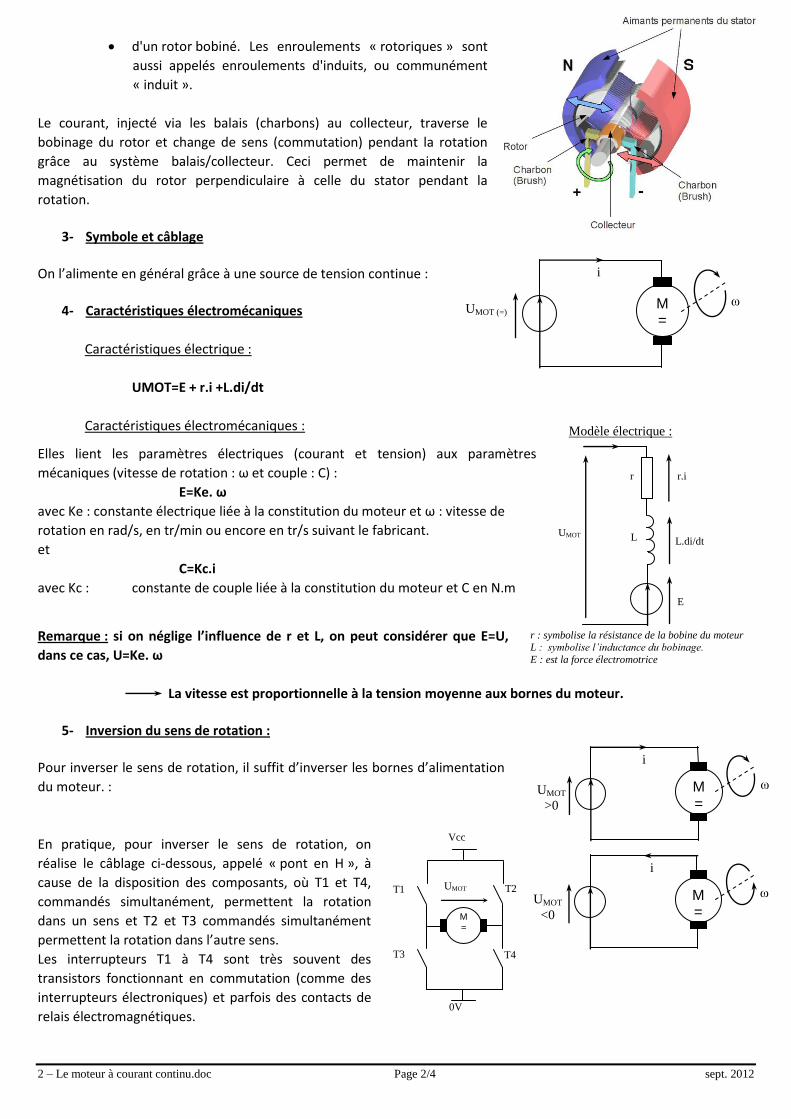
d'un rotor bobiné. Les enroulements « rotoriques » sont
aussi appelés enroulements d'induits, ou communément
« induit ».
Le courant, injecté via les balais (charbons) au collecteur, traverse le
bobinage du rotor et change de sens (commutation) pendant la rotation
grâce au système balais/collecteur. Ceci permet de maintenir la
magnétisation du rotor perpendiculaire à celle du stator pendant la
rotation.
3- Symbole et câblage
On l’alimente en général grâce à une source de tension continue :
4- Caractéristiques électromécaniques
Caractéristiques électrique :
UMOT=E + r.i +L.di/dt
Caractéristiques électromécaniques :
Elles lient les paramètres électriques (courant et tension) aux paramètres
mécaniques (vitesse de rotation : ω et couple : C) :
E=Ke. ω
avec Ke : constante électrique liée à la constitution du moteur et ω : vitesse de
rotation en rad/s, en tr/min ou encore en tr/s suivant le fabricant.
et
C=Kc.i
avec Kc : constante de couple liée à la constitution du moteur et C en N.m
Remarque : si on néglige l’influence de r et L, on peut considérer que E=U,
dans ce cas, U=Ke. ω
La vitesse est proportionnelle à la tension moyenne aux bornes du moteur.
5- Inversion du sens de rotation :
Pour inverser le sens de rotation, il suffit d’inverser les bornes d’alimentation
du moteur. :
En pratique, pour inverser le sens de rotation, on
réalise le câblage ci-dessous, appelé « pont en H », à
cause de la disposition des composants, où T1 et T4,
commandés simultanément, permettent la rotation
dans un sens et T2 et T3 commandés simultanément
permettent la rotation dans l’autre sens.
Les interrupteurs T1 à T4 sont très souvent des
transistors fonctionnant en commutation (comme des
interrupteurs électroniques) et parfois des contacts de
relais électromagnétiques.
M =
UMOT (=) ω
i
r
L
r.i
L.di/dt
E
UMOT
r : symbolise la résistance de la bobine du moteur L : symbolise l’inductance du bobinage.
E : est la force électromotrice
Modèle électrique :
M =
ω
i
M =
UMOT
<0
ω
i
UMOT
>0
M =
UMOT T1 T2
T3 T4
Vcc
0V

2 – Le moteur à courant continu.doc Page 3/4 sept. 2012
6- Variation de la vitesse de rotation :
Le principe est de « hacher » la tension continue appliquée au moteur,
c’est à dire successivement d’alimenter le moteur puis de ne plus
l’alimenter et ceci à un rythme très rapide (plusieurs centaine de Hz voire
quelques kHz), de façon que la vitesse de rotation soit régulière.
En effet, à partir d’une certaine fréquence, l’inductance du bobinage et
l’inertie lissent le mouvement de rotation.
L’interrupteur de commande est en fait un transistor fonctionnant en commutation (comme un interrupteur qui s’ouvre
et se ferme très rapidement). Très souvent, le principe du pont en H est combiné au principe du hacheur pour
permettre la variation de vitesse et l’inversion du sens de rotation d’un moteur à courant continu.
Très souvent, le principe du pont en H est combiné au principe du hacheur.
La vitesse de rotation du moteur est proportionnelle
à la valeur moyenne de la tension UMOTEUR, qui
dépend du rapport cyclique et de la tension
d’alimentation.
= TH / T (0 < < 1)
et : UMOTEUR_MOY = VCC x
Si =0, la tension moyenne aux bornes du moteur est nulle et donc le moteur est l’arrêt.
Si =1, la tension moyenne aux bornes du moteur est maximum et donc sa vitesse également.
Le principe de hacher la tension fournie au moteur et de faire varier la largeur de l’impulsion au niveau logique haut
s’appelle faire de la :
Modulation de Largeur d’Impulsion (MLI) en français et de la
Pulse Width Modulation (PWM) en anglais.
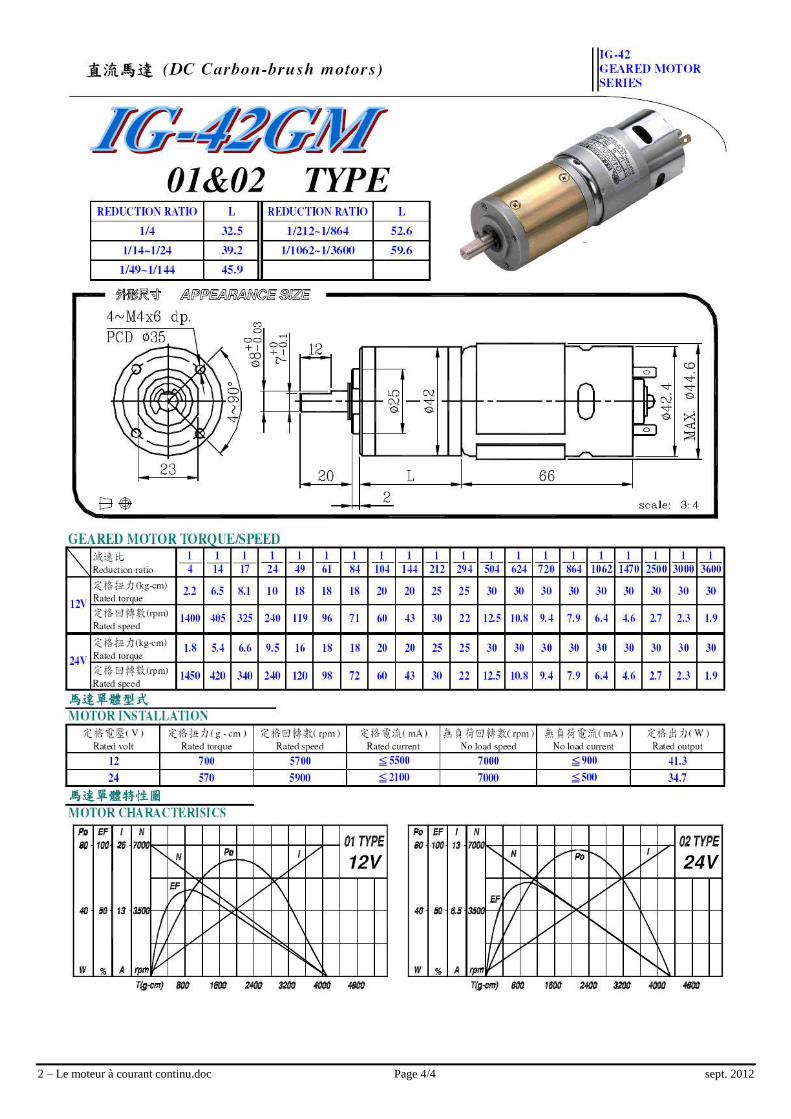
7- Exemples de documentations techniques :
M =
UMOT
ω
commande
UA
LIM
EN
TA
TIO
N
UMOTEUR
t(S)
TH
0
Vcc
=5V T
1 2 3 4 5
ici : = 1/2 = 0,5
et : UMOTEUR_MOY = VCC x = 5 x 1/2 = 2,5V
2 – Le moteur à courant continu.doc Page 4/4 sept. 2012