1 - Aspects théoriques et numériques de quelques problèmes issus ...
463
1 - Aspects théoriques et numériques de quelques problèmes issus des équations aux dérivées partielles stochastiques. 2 - Méthodes de quantification et quelques applications à la finance. J. Printems
Transcript of 1 - Aspects théoriques et numériques de quelques problèmes issus ...

1 - Aspects théoriques et numériques de quelques
problèmes issus des équations aux dérivées partielles
stochastiques.
2 - Méthodes de quantification et quelques applications à
la finance.
J. Printems

2

Table des matières
1 Introduction. 5
1.1 Équations d’évolution stochastiques. . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.1 Modèle de perturbations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.2 Intégrales stochastiques, processus de Wiener et bruit blanc. . . . . . . . 6
1.2 L’équation de Korteweg–de Vries stochastique. . . . . . . . . . . . . . . . . . . . 8
1.2.1 Rappel historique. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2.2 Bref historique des résultats concernant le problème de Cauchy déterministe. 10
1.2.3 Caractère générique du soliton. . . . . . . . . . . . . . . . . . . . . . . . . 11
1.2.4 L’équation de Korteweg–de Vries stochastique. . . . . . . . . . . . . . . . 11
1.3 Thèmes abordés relatifs aux EDPS . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.3.1 L’équation de Korteweg–de Vries stochastique dans L2(R). . . . . . . . . 14
1.3.2 Capture numérique d’un soliton « bruité ». . . . . . . . . . . . . . . . . . 15
1.3.3 Convergence, ordre de convergence. . . . . . . . . . . . . . . . . . . . . . . 16
1.4 Thèmes abordés relatifs aux méthodes de quantifications. . . . . . . . . . . . . . 17
1.4.1 Quantification optimale de vecteurs aléatoires. . . . . . . . . . . . . . . . 18
1.4.2 Comment obtenir une quantification optimale ? . . . . . . . . . . . . . . . 21
1.4.3 Intégration numérique. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.4.4 Quantification de chaînes de Markov. . . . . . . . . . . . . . . . . . . . . . 23
1.4.5 Quantification fonctionnelle de processus gaussiens. . . . . . . . . . . . . . 24
2 Équations aux Dérivées Partielles Stochastiques. 27
2.1 L’équation de Korteweg–de Vries stochastique dans L2(R) . . . . . . . . . . . . . 27
2.1.1 Unicité trajectorielle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.1.2 Existence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2 Aspects numériques de la propagation d’un soliton dans un milieu bruité. . . . . 30
2.3 Convergence d’un schéma pour KdV stochastique . . . . . . . . . . . . . . . . . . 32
2.4 Approximation faible et forte de l’équation de la chaleur . . . . . . . . . . . . . . 33
2.5 Perspectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.5.1 Approximation faible des EDPS non linéaires. . . . . . . . . . . . . . . . . 36
2.5.2 Comportement en temps long des solutions de l’équation de Korteweg–deVries stochastique. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3

4 TABLE DES MATIÈRES
3 Quantification et application en Finance 39
3.1 Quantification optimale de vecteurs gaussiens. . . . . . . . . . . . . . . . . . . . . 39
3.2 Intégration numérique et options européennes. . . . . . . . . . . . . . . . . . . . 40
3.3 Quantification de chaînes de Markov et options américaines. . . . . . . . . . . . . 41
3.4 Quantification fonctionnelle et options asiatiques. . . . . . . . . . . . . . . . . . . 43
3.5 Perspectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.5.1 Extrapolations de Romberg. . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.5.2 La quantification comme technique de réduction de variance. . . . . . . . 44
4 EDPS 55
4.1 The stochastic KdV equation in L2(R). . . . . . . . . . . . . . . . . . . . . . . . 55
4.2 Numerical simulation of the stochastic KdV equation. . . . . . . . . . . . . . . . 92
4.3 Effect of a random term on the KdV equation . . . . . . . . . . . . . . . . . . . . 120
4.4 On the time discretization of parabolic SPDEs . . . . . . . . . . . . . . . . . . . 145
4.5 Convergence of a semi-discrete scheme for the stochastic KdV equation . . . . . . 170
4.6 Weak order for the stochastic heat equation . . . . . . . . . . . . . . . . . . . . . 193
5 Méthodes de quantification et quelques applications à la finance. 213
5.1 First order schemes in the numerical quantization method. . . . . . . . . . . . . . 213
5.2 Optimal quadratic quantization for numerics : the Gaussian case. . . . . . . . . . 230
5.3 An Optimal Markovian Quantization Algorithm for Multidimensional StochasticControl Problems. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261
5.4 Optimal quantization and applications to numerical problems in finance. . . . . . 304
5.5 A quantization tree method for pricing and hedging multidimensional Americanoptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 348
5.6 Functional quantization for numerics with an application to option pricing. . . . 394
5.7 Discretization and simulation of Zakai equation. . . . . . . . . . . . . . . . . . . . 429

Chapitre 1
Introduction.
Le présent mémoire résume mes travaux effectués depuis neuf ans. Ils s’articulent autourde deux thèmes distincts et dans une large mesure indépendants : les équations aux dérivéespartielles stochastiques et les méthodes de quantification et ses applications numériques auxmathématiques financières. Ces travaux ont en partie été réalisé en collaboration avec VladBally, Arnaud Debussche, Emmanuel Gobet, Gilles Pagès et Huyên Pham.
Nous allons dans cette introduction, dans un premier temps, faire une courte description desprincipaux objets considérés, puis ensuite mentionner les principaux thèmes abordés.
1.1 Équations d’évolution stochastiques.
Les équations d’évolution stochastiques en dimension infinie, principalement dans des es-paces de Banach et de Hilbert, sont des généralisations naturelles des équations différentiellesstochastiques d’Itô [82, 83] introduites dans les années 40.
Les concepts de base sur lesquels s’appuie la théorie des équations aux dérivées partiellesstochastiques, du moins celles gouvernées par des bruits gaussiens, sont celui du processus deWiener à valeurs dans un espace de Hilbert et celui de l’intégrale stochastique associée. Lepremier joue le rôle de mouvement brownien à valeurs dans un espace de dimension infinie.Le second va permettre de donner un sens, du point de vue de l’analyse, au produit entre desfonctions dont la régularité en temps est très différente.
Je rappellerai, après le paragraphe suivant, certains de ces concepts mais le lecteur peut déjàse référer à [60, 138] pour la théorie des processus stochastiques et à [38, Chap. 5] pour lesprocessus stochastiques en dimension infinie et la construction de l’intégrale stochastique.
1.1.1 Modèle de perturbations
Les problèmes que nous allons considérer par la suite seront des problèmes de type Cauchy,associés à des systèmes dynamiques déterministes perturbés par un forçage aléatoire, où, parexemple en dimension un en espace, on cherche une fonction u(t, x; ω) solution « formelle » duproblème aux valeurs initiales suivant :
(1.1.1)
∂u
∂t(t, x; ω) + F
(x, u,
∂u
∂x,∂2u
∂x2, . . .
)= g(t, x; ω) +
∂f
∂t(t, x; ω),
u(0, x; ω) = u0(x), x ∈ R,
où (t, x) ∈ [0, T ] × R et où ω est un paramètre. Le terme du membre de droite représente lesperturbations.
Dans le cas linéaire, une des particularités de l’équation homogène (c.-à-d. sans second membre)
5

6 CHAPITRE 1. INTRODUCTION.
est que le système dynamique sous-jacent (en supposant que le problème soit bien posé) estautonome :
Si l’on connaît l’état du système à la date s, à savoir u(s), la valeur de u(t) à la datet ≥ s ne dépend que de t − s et de u(s).
Cela n’est évidemment plus le cas lorsqu’un terme de force dépendant du temps est ajouté.Malgré tout, sous certaines hypothèses sur f (si g = 0), on peut retrouver ce caractère autonomeà condition de lui donner un sens probabiliste, via le paramètre ω :
Partant à la date t = 0 d’une valeur fixée u0, et connaissant son état u jusqu’à ladate s, la probabilité qu’à la date t ≥ s, u(t) appartienne à un certain sous-ensembleA de R ne dépend que de t − s, de u(s) et de A.
C’est la propriété dite de Markov homogène1. Malheureusement, ces hypothèses sur f s’avèrentsouvent incompatibles avec sa régularité en temps : f n’est presque sûrement pas à variationsbornées. On veut néanmoins pouvoir donner un sens à des quantités du type
∫ t
0
G(s, u(s))∂f
∂t(s) ds ou
∫ t
0
G(s, u(s)) df(s),
pour des fonctions G raisonnables. Pour ce faire, on doit abandonner l’intégrale au sens de Stieljesau profit de l’intégrale au sens d’Itô et on se trouve alors pour l’équation (1.1.1) dans le cas d’unegénéralisation, à des équations aux dérivées partielles, des travaux d’Itô [83] sur les équationsdifférentielles stochastiques.
1.1.2 Intégrales stochastiques, processus de Wiener et bruit blanc.
Les opérateurs nucléaires jouent un rôle important dans la construction des processus et desintégrales stochastiques à valeurs dans des espaces de Banach. Dans le cadre Hilbertien, on leursubstitue souvent la notion d’opérateurs Hilbert–Schmidt.
On rappelle qu’un opérateur T ∈ L(E, F ), où E et F sont deux espaces de Banach, est ditnucléaire s’il existe deux suites ai ⊂ F et ϕi ⊂ E⋆ telles que
+∞∑
i=1
‖ai‖F‖ϕi‖E⋆ < +∞,
et pour lesquelles on a la représentation suivante
Tx =∑
i≥1
aiϕi(x), x ∈ E.
L’espace de tous les opérateurs nucléaires de E dans F muni de la norme
‖T ‖L1 = inf
+∞∑
j=1
‖ai‖F‖ϕj‖E⋆ où Tx =
∑
i≥1
aiϕi(x)
,
est un espace de Banach, noté L1(E, F ). Si E = F , on note L1(E).
Si (E, (·, ·)E) et (F, (·, ·)F ) désignent deux espaces de Hilbert séparables. Soit ei ⊂ E unsystème orthonormé complet. Un opérateur linéaire borné T ∈ L(E, F ) est dit être Hilbert–Schmidt si ∑
i≥1
‖Tei‖2F < ∞.
1Ceci va dans le sens de ne pas trop dénaturer de façon artificielle le système dynamique tout en essayant derendre compte de perturbations.

1.1. ÉQUATIONS D’ÉVOLUTION STOCHASTIQUES. 7
Il est bien connu qu’une telle somme est indépendante de la base choisie. L’ensemble de tous lesopérateurs Hilbert–Schmidt muni de la norme
‖T ‖L2(E,F ) =
∑
i≥1
‖Tei‖2F
1/2
,
est un espace de Hilbert, noté L2(E, F ).
On introduit également la trace d’un opérateur nucléaire T ∈ L1(E, E) par
Tr(T ) =∑
i≥1
(Tei, ei)E .
Il est facile de voir que c’est un nombre fini dès que T est nucléaire et qu’il est indépendantde la base choisie. Les relations entre opérateurs Hilbert–Schmidt et opérateurs nucléaires (ou ànoyau) peuvent se résumer ainsi : un opérateur T ∈ L(E, F ) est Hilbert–Schmidt si T ⋆T est unopérateur nucléaire sur E ou si TT ⋆ est un opérateur nucléaire sur F . Ainsi, on a
‖T ‖L2(E,F ) = (Tr(TT ⋆))1/2
= (Tr(T ⋆T ))1/2,
les deux traces ne portant pas sur les mêmes espaces.
On pourra consulter [38] (appendice C) ou [63] pour plus de détails sur les opérateurs nu-cléaires et Hilbert–Schmidt.
Soit (Ω,F , P, Ftt≥0) un espace de probabilité muni d’une filtration Ftt≥0, famille crois-sante de sous-tribu de F , représentant la richesse des évènements possibles à la date t. On ala
Définition 1.1.1 (Processus de Wiener cylindrique) Soit (H, (·, ·)H
) un espace de Hilbertséparable et eii∈N une base Hilbertienne de H. Soit U un espace de Hilbert tel que H ⊂ U avecinjection Hilbert-Schmidt. On appelle processus de Wiener cylindrique sur H à valeurs dans U ,un processus stochastique W défini sur l’espace (Ω,F , P, Ftt≥0) tel que
(i) ∀i ≥ 0, t 7−→ (W (t), ei)H est un mouvement brownien scalaire adapté à la filtrationFtt≥0 ;
(ii) (W, ei)Hi∈N est une famille de processus mutuellememt indépendants.
On pose alors,
(1.1.2) βi(t) = (W (t), ei)Het W (t) =
∑
i∈N
βi(t) ei.
où βi(t)i∈N désigne une famille de mouvements browniens mutuellement indépendants sur(Ω,F , P, Ftt≥0). De plus, la série (1.1.2) converge dans L2(Ω; U) ainsi que dans C([0, T ]; U),P p.s. mais W (t) n’est P p.s. pas à valeurs dans H.
La somme (1.1.2) ne converge pas dans H et cela reflète l’irrégularité en espace d’un tel processus.Cependant, il converge p.s. et dans Lp(Ω, U) pour tout p ≥ 1 pour tout espace U tel queH ⊂ U avec injection Hilbert–Schmidt. Si H = L2(O), O ⊂ R
d ouvert borné, on peut prendreU = H−s(O) avec s > d/2.
Un tel processus gaussien peut également être caractérisé par
E W (t) = 0 dans H, E (W (t), u)H
(W (s), v)H
= min(t, s)(u, v)H
,
pour tout u, v ∈ H .
Étant donnée une fonction aléatoire, prévisible, à valeurs opérateur t 7→ Φ(t), t ∈ [0, T ], ilest possible de définir
∫ T
0 Φ(s) dW (s) dans un espace de Hilbert K si Φ prend des valeurs dans

8 CHAPITRE 1. INTRODUCTION.
L2(H, K) et∫ T
0‖Φ(s)‖2
L2(H,K) ds < +∞ p.s.. Dans ce cas∫ T
0Φ(s) dW (s) est une v.a. bien définie
à valeurs dans K et ∫ T
0
Φ(s) dW (s) =
+∞∑
i=1
∫ T
0
Φ(s)ei dβi(s).
De plus, si E
(∫ T
0 ‖Φ(s)‖2L2(H,K) ds
)< +∞, alors on a
E
∫ T
0
Φ(s) dW (s) = 0,
E
(∫ T
0
Φ(s) dW (s)
)2 = E
(∫ T
0
‖Φ(s)‖2L2(H,K) ds
).
⋄Bruit blanc espace-temps
En dimension infinie, nous donnons une définition que l’on trouve dans [161] : on appellebruit blanc espace-temps dans R+ × R
d, un processus stochastique ηtt∈[0,T ] gaussien centré àvaleurs mesure tel que pour tout Borélien A et B de R
d et pour tous t, s > 0, on a
E 〈ηt, A〉〈ηs, B〉 = λd(A ∩ B) δt−s,
où λ désigne la mesure de Lebesgue sur Rd. On parle aussi de processus indexé par la mesure de
Lebesgue. Soit W un processus de Wiener cylindrique définie plus haut, on montre [144] qu’ausens des distributions on a p.s.
dW
dt= η.
Les premiers processus de Wiener à valeurs dans des espaces de Hilbert, où plus généralementles premiers processus de diffusion à valeurs dans des espaces de Hilbert, ont été introduits commeoutils pour étudier certains problèmes de Dirichlet où les fonctions dépendent d’une infinité devariables.
1.2 L’équation de Korteweg–de Vries stochastique.
1.2.1 Rappel historique.
L’histoire de l’équation de Korteweg-de Vries tout au long des deux derniers siècles est in-timement liée dès l’origine à la remarquable découverte scientifique que fit un jeune ingénieurécossais du nom de John Scott Russel, un beau jour d’août 1834 [139] :
« — Je ne puis donner une idée plus nette du phénomène qu’en décrivant les circonstancesdans lequelles il m’apparut pour la première fois. J’observais le mouvement d’un bateauque deux chevaux tiraient rapidement dans un canal étroit, lorsque ce bateau vint às’arrêter tout à coup : mais il n’en fut pas de même de la masse d’eau qu’il avait mise enmouvement dans le canal ; elle s’accumula autour de la proue dans un état de violenteagitation, puis, laissant tout à coup le bateau en arrière, se mit à cheminer en avantavec une grande vitesse sous la forme d’une seule grande ondulation, dont la surfaceétait arrondie, lisse et parfaitement déterminée. Cette onde continua sa marche dans lecanal sans que sa forme et sa vitesse parussent s’altérer en rien. Je la suivis à cheval etla retrouvai cheminant encore avec une vitesse de 8 à 9 milles à l’heure et conservantsa figure initiale (environ 30 pieds de longueur sur 1 pied à 1 1/2 pied de hauteur). Lahauteur de l’onde diminuait graduellement, et après l’avoir suivie pendant un mille oudeux, je la perdis dans les sinuosités du canal. »2
2traduit in Recherches Hydrauliques, par M. H. Darcy et M. H. Bazin, Deuxième Partie, Paris, ImprimerieImpériale, 1865, p.9.

1.2. L’ÉQUATION DE KORTEWEG–DE VRIES STOCHASTIQUE. 9
Tout le long de sa vie, Russel resta persuadé que sa découverte de l’onde solitaire qu’il appelaitonde de translation, qui pouvait se propager sur de grandes distances sans se déformer, étaitd’une importance fondamentale. Cependant elle donna lieu à une controverse fameuse entre lesdifférents spécialistes de l’époque, et notamment parmi eux l’astronome royal Sir George BiddellAiry, qui soutenaient que toute onde localisée devait se disperser à la longue.
En effet, le problème se pose en ces termes : soit u(x, t) = a cos(kx − ωt), une onde sinusoïdalepour simplifier, se propageant à la surface d’un fluide parfait, incompressible impliquant un écou-lement irrotationnel dans un canal de faible profondeur h0. Nous supposerons en outre, pour nousmettre dans les conditions d’observations de Russel, λ = 2π/k grand et a petit devant h0. Plusprécisément soit α et ε des paramètres définis comme
α =a
h0≪ 1, ε =
„h0
λ
«2
≪ 1.
Les équations d’Euler linéarisées fournissent la relation de dispersion suivante concernant l’ondeprogressive (cf. [164], p.438)
ω2(k) = gk tanh(kh0).
La vitesse de phase de l’onde u se développe donc comme :
c(k) = c0
„1 +
1
6h20 k2
«+ o(ε).
où c0 =√
gh0.Considérons maintenant un profil initial u0 et décomposons le en ses coefficients de Fourier
cu0(k)k∈R. Il n’est pas difficile de voir que la vitesse de phase calculée ci-dessus implique quechaque harmonique constituant le profil se propage à une vitesse différente impliquant à terme unedestruction du profil initial. De plus, ce qui précède nous amène à ce que, toujours dans l’approxi-mation linéaire, le profil u à la date t s’écrive sous la forme d’une intégrale oscillante :
u(x, t) =
Z +∞
−∞
cu0(k) ei(kx−c0t) e−ic0h2
06
k3t dk,
On montre alors que pour u0 intégrable, le caractère fortement oscillant de cette dernière im-plique que non seulement cette intégrale converge, mais également que l’on a l’inégalité suivante
‖u(t)‖L∞(R) ≤ Ct−1/3‖u0‖L1(R), ∀t > 0.
Ainsi, comme le soutenait-on à l’époque, l’onde se disperse. Mais alors qu’a donc observé Russel ?
Ce n’est qu’en 1895, soit treize ans après la mort de Russel, que deux chercheurs hollandaisKorteweg et De Vries [97] mettaient un terme à la controverse en élaborant un cadre théoriquepour l’onde de translation de Russel3. Toujours à partir des équations d’Euler pour un fluideparfait incompressible s’écoulant dans un canal de faible profondeur h0, et en se limitant auxvagues de grandes longueurs d’onde λ et de petites amplitude a, ils trouvèrent une équationd’évolution gouvernant la propagation des ondes u à la surface, l’équation de Korteweg–de Vries,
(1.2.3)∂u
∂t+ c0
∂u
∂x+
3
2
c0
h0u
∂u
∂x+
c0h20
6
∂3u
∂x3= 0,
possédant une solution ϕ(x, t) qui correspondait parfaitement avec les observations de Russel :
ϕ(x, t) = a sech2
[1
2
√3 a
h30
(x − Ut)
].
avec U = c0 (1 + a2h0
).
Cette fois, les effets non linéaires, dus aux petites amplitudes, sont pris en compte de façonà contre-balancer les effets dispersifs, dus aux grandes longueurs d’onde. Plus exactement, lesparamètres a, λ et h0 vérifient la relation d’échelle suivante
(1.2.4)aλ2
h30
= O(1)
3Citons toutefois les travaux intermédiaires de G. G. Stokes [147], de J. Boussinesq [24], ainsi que de LordRayleigh [137].

10 CHAPITRE 1. INTRODUCTION.
La propagation sans déformation de l’onde solitaire est la conséquence de cette balance et l’équa-tion trouvée constitue l’approximation non linéaire d’ordre le plus bas : on parle d’ondes disper-sives faiblement non linéaires. Le problème résolu, l’intérêt pour les ondes solitaires diminua.
Ce n’est que soixante-dix ans plus tard que, dans un contexte différent, les ondes solitairesrevinrent au goût du jour. En 1965, Zabusky et Kruskal [171] remarquèrent à travers des simu-lations numériques de l’équation de Korteweg–de Vries qu’un profil initial pouvait éclater en untrain d’ondes solitaires de tailles différentes, la plus grande se propageant le plus rapidement. Ilsobservèrent surtout qu’en faisant se rencontrer deux de ces ondes solitaires, chacune d’entre ellessortait de l’interaction sans changement aucun de sa forme, si ce n’est un certain déphasage,positif pour la plus grande et négatif pour la plus petite. Ces ondes se comportant alors commedes particules, on leur attribua le nom de solitons.
Intrigués, ces physiciens mirent au point une méthode [58] afin de calculer explicitementles solutions de Korteweg–de Vries pour une classe de données initiales plus générale que l’ondesolitaire seule. Des généralisations de cette technique connues sous le nom de méthode de diffusioninverse ou inverse scattering method en anglais, ont permis par la suite de démontrer l’existencede nombreux autres types de solitons pour d’autres équations que Korteweg–de Vries. Notonsque lorsque cette méthode s’applique à une équation d’évolution, elle met en évidence son aspectcomplètement intégrable (cf. [2, 3]). Ceci se traduit entre autre par l’existence d’une infinité defonctionnelles invariantes de la solution [118], mais aussi par le fait qu’une interaction entre deuxsolitons se fasse élastiquement, c.-à-d. sans échange d’énergie.
À la même époque, on établit des propriétés de stabilité « orbitale », c.-à-d. modulo lestranslations, de l’onde solitaire pour l’équation de Korteweg–de Vries [10, 14], consacrant ainsileur robustesse.
1.2.2 Bref historique des résultats concernant le problème de Cauchy
déterministe.
On a depuis beaucoup écrit sur l’équation de Korteweg–de Vries. Pour se convraincre desa richesse (tant du point de vue algébrique, géométrique, que par rapport à la théorie de ladiffusion inverse, l’analyse harmonique, etc), il suffit de constater le volume important qu’occupela littérature qui lui est consacrée. Mis-à-part le phénomène « soliton », signalons quelques« jalons » dans l’historique des études consacrées au problème de Cauchy associé à l’équationde Korteweg–de Vries (existence, unicité, caractère bien posé).
Outre la méthode de diffusion inverse déjà citée, parmi les premiers résultats figure le résultatd’existence globale de solutions faibles dans H1(R) (existence globale et unicité dans H2(R)) deR. Temam [155]. La technique utilisée est une méthode d’énergie basée sur l’existence d’invariantsà l’équation. D’autres travaux ensuite [19, 20, 142] établirent, toujours à partir de méthodesd’énergie, le caractère localement bien posé dans les espaces Hs(R) pour s > 3/2. À partir delà, il semble naturel de travailler avec des hypothèses de régularité sur la donnée initiale de plusen plus faible.
La première utilisation d’effets régularisants locaux de la partie linéaire de l’équation est dueà Kato [85] (cf. aussi [34]) et lui permit de démontrer l’existence globale de solutions faibles dansL2(R). Ces mêmes effets généralisés dans des espaces à poids [61, 99] permirent de déterminerl’existence globale et l’unicité de solutions dans ces mêmes espaces à poids.
Des techniques d’intégrales oscillantes permirent une utilisation plus fine encore de la disper-sion et furent employées par Kenig, Ponce et Vega [89, 90] pour démontrer le caractère localementbien posé de l’équation dans Hs(R) pour s > 3/4 (et donc globalement bien posé dans Hs(R),s ≥ 1). C’est alors qu’intervinrent les travaux de Bourgain. Dans [23], l’auteur démontra le carac-tère globalement bien posé du problème dans L2(R) à l’aide de techniques d’analyse harmoniquenéanmoins très différentes4 en utilisant de nouveaux espaces fonctionnels basés sur la partie li-néaire de l’équation. Finalement, Kenig et al [91, 92], en reprenant les travaux de Bourgain sousune forme plus simple et en réutilisant quelques estimées de leur précédent travail prolongèrent
4L’auteur utilise des lemmes de restriction de la transformée de Fourier à des hypersurfaces de l’espace deFourier (ξ, τ) ∈ R
2 du type τ = ξ3.

1.2. L’ÉQUATION DE KORTEWEG–DE VRIES STOCHASTIQUE. 11
ses résultats en démontrant le caractère localement bien posé dans Hs(R) pour s > −3/4. Laprincipale difficulté lorsque l’on utilise la méthode de Bourgain pour l’équation de Korteweg–deVries consiste à obtenir une estimée bilinéaire dans les espaces fonctionnels mentionnés plus haut.Une fois que c’est fait, on utilise un argument de point fixe.
1.2.3 Caractère générique du soliton.
Bien que cela ne soit pas mon sujet, signalons qu’aujourd’hui la notion de solitons dépassele cadre strict de l’équation de Korteweg–de Vries et constitue un concept à part entière. Onconstate le rôle accru des solitons, ou plus généralement des phénomènes non linéaires de loca-lisation, dans de nombreuses branches de la physique et de la biologie, comme par exemple :
– en optique (soliton optique) ; dans ce cas les solitons représentent une balance entre ladispersion induite par la fibre et l’indice de réfraction fonction de l’intensité du signal [1] ;
– en astrophysique et physique des plasmas (« ion-acoustic solitons ») [30, 130] ;– en chimie des matériaux (solitons magnétiques) [22] ;– lors de la dénaturation thermique de l’ADN [39] ;– en cinétique des réactions biologiques [55] ;– dans des réseaux d’oscillateurs non harmoniques faiblement couplés (comme dans certains
modèles de cristaux) [53, 109, 149].
On voit l’importance du concept de soliton optique dans le cadre des télécommunications oùpeuvent être mises à profit les propriétés de stabilité des solitons ainsi que l’élasticité de leursinteractions pour faire se propager beaucoup d’informations en même temps.
Les trois derniers cas cités ont ceci de particulier qu’ils ont lieu dans des configurationsspatiales de type réseau. On ne parle non plus de soliton mais de respirateurs discrets (ou« discrete breathers » en anglais). Les équations d’évolution sous-jacentes sont le plus souventdu type de Schrödinger non linéaire discret ou bien Sine-Gordon discret. Signalons qu’il s’agitd’un phénomène spécifiquement discret.
Toutes ces manifestations ne concernent pas toujours le soliton véritable, mais parfois desformes voisines, chahutées, tant il est fréquent d’observer des facteurs de perturbations dus parexemple à des impuretés ou des inhomogénéités dans une fibre pour les solitons optiques. Dansle cadre des télécommunications, un gros effort est fourni afin de comprendre ces phénomènes etde les enrayer.
D’un point de vue mathématique, on peut remarquer également que la prise en compte destermes d’ordres plus élevés dans la dérivation des équations conduit en général à des systèmesnon-intégrables où on parle plutôt de quasi-soliton. Cette perte d’intégrabilité peut se traduirepar une interaction non élastique contrairement au cas intégrable. Ainsi, du point de vue dusoliton de la théorie, ces termes d’ordre supérieur peuvent jouer le rôle de perturbations.
Pour toutes ces raisons, il est légitime d’étudier les effets que peuvent avoir des termes deforces convenablement choisis sur la propagation ou l’interaction de solitons. Le travail présentéici, pour une partie, va dans ce sens, tout en se plaçant dans un cadre moins général en serestreignant à l’étude de l’équation de Korteweg–de Vries perturbée par un forçage aléatoire.
1.2.4 L’équation de Korteweg–de Vries stochastique.
Les possibilités de modélisation qu’offrent l’équation de Korteweg–de Vries vont au-delà ducadre strict de la propagation d’ondes à la surface d’un fluide parfait incompressible irrotation-nel [97, 164]. Elle modélise aujourd’hui la propagation d’onde dispersives non linéaire dans denombreux domaines : physique des plasmas [146], propagation de faisceau [135]. D’un point devue mathématique, cette équation est rconnue comme une modèle canonique simple pour de telsphénomènes dans ce qu’elle combine quelques-uns des types les plus simples de dispersion avecquelques-uns des types non linéaires les plus simples.
L’équation (1.2.3) peut s’écrire sous forme adimensionnée et après un changement d’échelle

12 CHAPITRE 1. INTRODUCTION.
sous la forme (voir [131])
(1.2.5)∂u
∂t+
∂u
∂x+
3
2αu
∂u
∂x+
1
6ε∂3u
∂x3= o(α, ε),
où l’on a pris en compte dans le membre de droite les termes négligés lors de la dérivation del’équation. Typiquement α = a/λ et ε = (h0/λ)2. La relation d’échelle (1.2.4) est exploitéecomme α ∼ ε ≪ 1.
D’un point de vue mathématique, cette équation doit être complétée avec une donnée initialeet des conditions aux bords. Ces dernières peuvent être de deux types. Soit u décroît vers 0 àl’infini, soit u est périodique, par exemple de période L.
Dans (1.2.5), aucune influence extérieure n’est prise en compte. Toutefois, dans le cadre dela propagation de solitons de type ion-acoustic dans un plasma, il semble qu’un terme de bruitdoive être ajouté dans le second membre. En effet, Chang et al [30] ont observé que pour unprofil initial de type soliton, l’onde moyenne (calculée sur plusieurs expériences) est amortieet son amplitude décroît comme t−α, pour α > 0. Or ce comportement avait été déjà étudiéthéoriquement par des auteurs qui considéraient l’équation de Korteweg–de Vries stochastiquesuivante
(1.2.6)∂u
∂t+ u
∂u
∂x+
∂3u
∂x3= γξ
quand la perturbation ξ est de type bruit blanc temps. Le cas du bruit en temps ξ = ξ(t) estparticulier parce que l’équation est encore intégrable. C’est le cas en particulier de Wadati dans[159] qui montra que, pour un bruit indépendant de la variable d’espace x et pour un profilinitial soliton, l’amplitude de la solution moyenne de (1.2.6) décroît comme t−3/2. On peut citerégalement le cas d’auteurs qui, en utilisant des techniques de perturbations, ont obtenu desrésultats similaires dans le cas d’un bruit en temps avec un amortissement (c.-à-d. en rajoutantδ u, δ > 0, dans le membre de gauche) [160] ; pour un bruit multiplicatif (c.-à-d. du type γ(u)ξ(t))[79] ; pour un bruit espace-temps [96]. Mentionnons également une étude numérique faite dans[143] qui montre que (1.2.6), avec un bruit espace-temps, semble reproduire le comportementobservé expérimentalement dans [30].
Dans beaucoup d’autres circonstances, en dehors de la théorie des plasmas, l’équation deKorteweg–de Vries (1.2.5) est un modèle idéal dans lequel beaucoup d’effets ont été négligés etil n’est pas déraisonnable de les prendre en compte stochastiquement : lorsque les échelles detemps du phénomène modélisé par (1.2.5) sont plus grandes que les corrélations du bruit, onpeut supposer qu’il est du type bruit blanc.
Enfin, au-delà encore des motivations d’ordre physique décrites plus haut, dans le cadre deperturbations d’un système intégrable par un terme de bruit blanc espace-temps (par l’ajoutd’énergie sur toute les fréquences), l’étude d’équation du type de (1.2.6) comporte un grandintérêt mathématique.
Beaucoup d’articles ont également dédié l’équation de Korteweg–de Vries forcée :
(1.2.7)∂u
∂t+
∂3u
∂x3+ u
∂u
∂x= f,
à la modélisation de la génération d’ondes en présence de la propagation d’un champ de pressionextérieur ou au dessus d’un obstacle et ceci dans de diverses circonstances : vagues de surface[4, 33, 101, 170] ; fluide tournant [66] ; courant côtier dans une disposition topographique parti-culière [67, 117] ; ondes planes dans un écoulement contraint par une topographie [69, 128, 163].L’équation (1.2.7) a été étudiée mathématiquement dans [21]. En général, le terme de force f estlocalisé spatialement et repésente la perturbation. Il est encore raisonnable de considérer le casde petites perturbations de cette équation. Il semble que le bruit devrait être également localisé.L’étude de l’influence du bruit sur la génération d’ondes est étudiée numériquement dans [46].
Décrivons maintenant quel type de bruit nous allons considérer. Ici, ξ(x, t) est un processusgaussien centré de corrélation
(1.2.8) Eξ(x, t)ξ(y, s) = c(x, y)δt−s.

1.2. L’ÉQUATION DE KORTEWEG–DE VRIES STOCHASTIQUE. 13
Il est δ-corrélé en temps puisque c’est un bruit blanc en temps. On montre comment construireun tel processus. Soit W un processus de Wiener cylindrique sur L2(I) (voir paragraphe 1.1.2)qui s’écrit donc comme
W (t) =+∞∑
i=0
βi(t)ei
où eii∈N désigne une base Hilbertienne de L2(0, L) et βi(t)i∈N une famille de mouvementsbrowniens mutuellement indépendants définis sur un espace de probabilité (Ω,F , P, Ftt≥0). Lasérie précédente ne converge bien sûr pas dans L2(Ω, L2(I)), mais dans un espace plus grand telque L2(Ω, U) où l’injection de L2(I) dans U est Hilbert-Schmidt. Le bruit blanc en espace et entemps peut être défini de façon formelle (cf. [144]) par
η =dW
dt.
C’est un processus gaussien caractérisé par
E 〈η, u〉〈η, v〉 =
∫
I×R+
u(x, t)v(x, t) dxdt
pour tout (u, v) ∈ (Hα0 (I)2. Soit Φ un opérateur linéaire de L2(I) dans lui-même et posons
W = Φ W =
+∞∑
i=0
Φeiβi, et ξ = Φ η.
On peut choisir par exemple pour Φ un opérateur de la forme
Φ f =
∫
I
k(x, y)f(y) dy, f ∈ L2(I),
alors le processus gaussien ξ est caractérisé par
E 〈ξ, u〉〈ξ, v〉 =
∫∫∫
R+×I2
c(y, z)u(y, t) v(z, t) dy dz dt
où on a posé
c(y, z) =
∫
I
k(y, x)k(z, x) dx.
Ainsi, pour un choix de Φ tel que k soit une fonction invariante par translation (c.-à-d. k(x, y) =k(x− y), (x, y) ∈ I2), c est également homogène et on retrouve un bruit homogène dans (1.2.8).
Il est facile de voir que l’opérateur Φ est Hilbert–Schmidt de L2(I) dans lui-même ssi k ∈L2(I × I). Ainsi, lorsque k est invariante par translation, cas du bruit homogène en espace, Φn’est pas Hilbert–Schmidt à moins que I soit un intervalle borné (cas périodique).
Les formes mathématiques de (1.2.6) et (1.2.7) s’écrivent alors à l’aide de la formulation d’Itôsuivante
(1.2.9) du +
(∂3u
∂x3+ u
∂u
∂x
)dt = f dt + γΦ dW.
Il s’agit de l’équation de Korteweg–de Vries stochastique qu’il faut comprendre comme
u(t) − u0 +
∫ t
0
(∂3u
∂x3+ u
∂u
∂x
)dτ =
∫ t
0
g(τ) d τ + γΦ W (t), ∀t ≥ 0,
au sens des distributions.

14 CHAPITRE 1. INTRODUCTION.
1.3 Thèmes abordés relatifs aux équations aux dérivées par-tielles stochastiques.
1.3.1 L’équation de Korteweg–de Vries stochastique dans L2(R).
Un premier problème consiste à démontrer l’existence et l’unicité des solutions de
(1.3.10) du +
(∂3u
∂x3+ u
∂u
∂x
)dt = Φ dW,
avec la condition initiale
(1.3.11) u(x, 0) = u0(x), x ∈ R.
Dès lors qu’il s’agit de processus stochastiques, il existe plusieurs notions de solutions. Nousen donnons deux ci-dessous dans le contexte (1.3.10)–(1.3.11) : les solutions fortes et les solutionsfaibles ou solutions martingales (à ne pas confondre avec la notion de solution faible en EDP).
Soit T > 0. On appelle base stochastique un système (Ω,G, P, Gtt∈[0,T ], W (t)t∈[0,T ]) où(Ω,G, P) est un espace de probabilité, Gtt∈[0,T ] une filtration et W (t)t∈[0,T ] un processus deWiener cylindrique sur L2(R) adapté à cette filtration. Alors, on a
Définition 1.3.1 (Solution forte) Soit Ω,G, P, Gtt∈[0,T ], W (t)t∈[0,T ] une base stochastiquedonnée pour un certain T > 0 Soit u0 ∈ L2(R) et Φ ∈ L2(L
2(R)). On appelle solution forte de(1.3.10)–(1.3.11), un processus stochastique u adapté à cette base tel que
(i) u ∈ L∞([0, T ], L2(R)) ∩ C([0, T ], H−γloc (R)), P p.s., pour γ > 0,
(ii) u(t) − u0 +
∫ t
0
(∂3u
∂x3+ u
∂u
∂x
)dτ = Φ W (t), P p.s., t ∈ [0, T ] au sens des distributions.
Une solution martingale a un sens plus faible :
Définition 1.3.2 (Solution martingale) Soit T > 0, u0 ∈ L2(R) et Φ ∈ L2(L2(R)). On ap-
pelle solution martingale de (1.3.10)–(1.3.11) tout sextuplet (Ω, G, P, Gtt∈[0,T ], W (t)t∈[0,T ], u)tel que
(i) (Ω, G, P, Gtt∈[0,T ], W (t)t∈[0,T ]) est une base stochastique,
(ii) u ∈ L∞([0, T ], L2(R)) ∩ C([0, T ], H−γloc (R)), P p.s., pour γ > 0,
(iii) u(t) − u0 +
∫ t
0
(∂3u
∂x3+ u
∂u
∂x
)dτ = Φ W (t), P p.s., t ∈ [0, T ] au sens des distributions.
Il faut noter ici que la base stochastique fait partie des inconnues au même titre que u. Il s’agitde solutions en lois.
Nous construirons en fait une solution mild, c.-à-d. suivant la formulation suivante, pour toutt ∈ [0, T ],
(1.3.12) u(t) = S(t)u0 −1
2
∫ t
0
S(t − s)∂
∂x
(u2)
ds +
∫ t
0
S(t − s)Φ dW (s).
Remarquons qu’une solution forte telle que donnée dans la définition 1.3.1, c.-à-d. une solutionfaible au sens des EDP, telle que
∂
∂x(u) ∈ L1([0, T ], L2
loc(R))
satisfait la formulation (1.3.12).
Un dernier concept est important, celui de l’unicité trajectorielle :

1.3. THÈMES ABORDÉS RELATIFS AUX EDPS 15
Définition 1.3.3 (Unicité trajectorielle) On dit que l’unicité tractorielle a lieu pour (1.3.10)pour une paire d’espace de Lusin (X, Y ) si, pour u1 et u2 deux solutions fortes définies sur lamême base stochastique telle que u1(0) = u2(0) dans X, on a u1 = u2 dans Y .
On envisage ici deux types de construction de solutions : les itérations de Picard (point fixe)et les méthodes de compacité. Les premières conduisent généralement à l’existence de solutionsfortes. Les méthodes de compacité consistent dans un premier temps à construire des solutionsapprochées puis à exploiter dans un deuxième temps des estimations a priori dans L2(Ω, X1)où X1 est un espace métrique qui s’injecte de façon compacte dans un autre espace métriqueX2. Ensuite, comme il est naturel dans le contexte des EDPS, le critère de Prokhorov conclutà la tension des lois dans X2 et par la suite, le théorème de Skorohod, conduit typiquement àdes solutions martingales. On remarque au passage que l’obtention d’estimées a priori dans desespace du type L2(Ω, X1) nécessite souvent l’hypothèse Hilbert–Schmidt sur le bruit.
Un résultat célèbre en dimension finie de Yamada–Watanabe [166] généralisé en dimensioninfinie par Viot [158] permet, grâce à l’unicité trajectorielle, de conclure à l’existence de solutionsfortes à partir de celles de solutions faibles. Nous n’utiliserons pas toujours cet argument, quipasse donc par la construction effective de solutions martingales. On utilisera souvent le résultatsuivant dû à Gyöngy et Krylov [72] (lemme 1.1, p. 144) qui, combiné avec le théorème de Skorohodet l’unicité trajectorielle, permet souvent de conclure à l’existence de solution forte :
Lemme 1.3.4 Soit Zn une suite de v.a. à valeurs dans un espace polonais (E, ρ) muni desa tribu des Boréliens. Alors Zn converge en probabilité vers une v.a. à valeur dans E ssipour toute paire de sous-suites Zℓ et Zm il existe une sous-suite vk = (Zℓ(k), Zm(k)) quiconverge en loi vers une v.a. v située sur la diagonale (x, y) ∈ E2 | x = y.
Ce lemme s’utilise comme suit. D’une suite d’approximations uε de solution de (1.3.10), onextrait un couple quelconque de suites (uε′ , uε′′) et on lui adjoint la suite constante W . Les esti-mées a priori dans L2(Ω, X1) permettent de conclure dans un premier temps à la tension des loisde (uε′ , uε′′ , W ), puis dans un deuxième temps, via le théorème de Skorohod, à l’existence d’unespace de probabilité (Ω, G, P, Gtt∈[0,T ]), de processus u, u, W et des suites (uε′(k), uε′′(k), Wk)telles que pour tout k les projections fini-dimensionelles des lois jointes de
(uε′(k), uε′′(k), Wk) et (uε′(k), uε′′(k), W )
coincident et telles que l’on a les convergences pour P-presque tout ω ∈ Ω suivantes :
uε′(k) → u dans X2, uε′′(k) → u dans X2,
Wk → W dans C([0, T ], H−γloc (R)).
L’espace X2 est en général celui avec lequel on peut passer à la limite dans les termes nonlinéaires. On constate donc que u et u vérifient la même équation avec la même donnée initialeet le même Wiener W . On conclut grâce au lemme 1.3.4 et à l’unicité trajectorielle que uεconverge en probabilité vers u ∈ X2. Un travail supplémentaire permet en général de passer à lalimite dans l’équation d’origine et de montrer que u est solution forte.
Cette technique a été utilisée initialement dans le cadre de la construction de solutions fortesvia des approximations du style de celles fournies par des schémas numériques [72]. C’est pourquoielle est dédiée spécialement pour les études de convergence de schémas. Elle fut utilisée dans lecadre des schémas pour les EDPS dans [43, 47].
1.3.2 Capture numérique d’un soliton « bruité ».
D’un point de vue numérique, une attention particulière doit être portée sur le choix duschéma pour intégrer numériquement une équation non linéaire dispersive comme celle de Korteweg–de Vries. En effet, dans l’équation (1.2.3), les structures d’échelles les plus fines tendent à sepropager à une vitesse de plus en plus rapide. C’est la source des principales difficultés que l’onrencontre lors de la simulation numérique de tels systèmes, puisque les erreurs numériques sont

16 CHAPITRE 1. INTRODUCTION.
précisément dans ce cas-là. Un premier moyen d’y remédier consiste à constater que dans (1.2.5)qu’on a, au premier ordre en ε ∼ α, ∂u
∂t + ∂u∂x = 0, ce qui permet de remplacer ∂3u
∂x3 par le terme
− ∂3u∂x2∂t (cf. [11, 17, 18, 129]). Signalons qu’il ne s’agit pas seulement d’une astuce numérique
mais que cette nouvelle équation a, tout comme Korteweg–de Vries, une origine physique5. Aveccette nouvelle équation (dite de Benjamin–Bona–Mahoney), la situation devient radicalementdifférente, au moins d’un point de vue numérique, pour les petites échelles puisque leurs vitessesde propagation tendent à se rapprocher d’une vitesse constante. C’est pourquoi, cette équationest souvent préférée à celle de Korteweg–de Vries pour la simulation dans la limite d’approxi-mation des échelles moyennes. Nous n’avons pas fait ce choix ici et nous renvoyons le lecteurà [54] pour des travaux théoriques sur l’équation de BBM ainsi que des références sur le sujet.Notons que dans [132] (chap. 5), des simulations sont faites afin de comparer les deux équationsen présence de bruit.
Mais revenons à l’équation de Korteweg–de Vries. En règle générale, la question que l’ondoit se poser est : quelle propriété de l’équation continue veut-on conserver dans le passage àl’approximation numérique ?
Il est important tout d’abord que le schéma n’introduise pas de dissipation numérique, ce quiest le cas lorsque l’on conserve la norme L2(R). Concernant les quantités invariantes en général,on sait construire des schémas qui conservent une infinité d’invariants (voir [148]) et donc lapropriété d’exacte intégrabilité. Cependant, Bona et al. [16] ont montré que des schémas d’ordreélevé en temps et en espace se comportent très bien bien qu’ils ne conservent que la norme L2(R).Ils montrèrent que des schémas de Runge–Kutta implicites et convervatifs (en norme L2) étaienttrès bien adaptés pour l’équation de Korteweg–de Vries.
D’un autre côté, il est difficile de construire des schémas d’ordre élevés pour des équationsdifférentielles stochastiques (voir le paragraphe suivant).
Lorsque l’on s’intéresse plus particulièrement à la simulation d’un soliton, divers critèresrentrent en jeu. Dans [141], les auteurs listent trois tests de simulation que doit satisfaire un« bon » code : la propagation d’un soliton, l’interaction entre deux solitons et le cas de l’écla-tement d’un profil initial en plus de deux solitons sans queue dispersive (cas du reflexionlesspotential) (cf. [51] pour des formules explicites des données initiales). Le dernier test est le plusdifficile à simuler car de forts gradients en temps et en espace se manisfestent alors. Leur conclu-sion est que tout comme le soliton est le résultat d’un équilibre entre les termes non linéaireset les termes de dispersion, la principale propriété qu’il faut garder du continu est cette balanceentre la non-linéarité et la dispersion. On s’attachera donc à traiter numériquement les deuxtermes en même temps dans les simulations. Ce qui exclut les méthodes à pas fractionnaires,split-step, etc. Dans le cadre de notre étude, toutes les précautions doivent être prises afin d’avoirl’assurance que les phénomènes que l’on va observer dans le cas stochastique ne sont dus qu’aubruit et non à des erreurs numériques.
En conclusion, nous avons choisi dans [45, 46] le schéma de Runge–Kutta conservatif implicited’ordre le plus bas : le schéma de Crank–Nicolson où les termes non linéaires et de dispersionsont traités en même temps à chaque pas de temps à travers une méthode de Newton. Ladiscrétisation spatiale fut faite dans un premier temps à l’aide d’un schéma inspiré de [29], quiest à base d’éléments finis peu réguliers (fonctions « chapeaux ») et de méthodes de moindrescarrés et dans un deuxième temps à l’aide d’un schéma inspiré de [16] basé sur des splines(éléments finis plus réguliers).
1.3.3 Convergence, ordre de convergence.
Éloignons-nous de l’équation de Korteweg–de Vries pour nous intéresser plus généralementà la discrétisation des équations aux dérivées partielles stochastiques. De nombreux travaux sesont d’abord portés sur la discrétisation des équations différentielles stochastiques (voir [94, 112,113, 114, 151, 150, 152]). Dans ce cas, deux types d’ordre différents peuvent être considérés selon
5En particulier, dans [129], l’auteur aboutit à cette équation en décrivant l’influence de l’accélération du fluideà la surface libre sur la pression. Ainsi, cette équation décrit l’évolution de la vitesse du fluide à la surface etdécoule d’une théorie non-hydrostatique contrairement à Korteweg–de Vries.

1.4. THÈMES ABORDÉS RELATIFS AUX MÉTHODES DE QUANTIFICATIONS. 17
que l’on souhaite une approximation trajectorielle dite forte ou une approximation en loi ditefaible de la solution. Typiquement, un schéma déterministe utilisé sur une équation différentiellestochastique est d’ordre fort 1/2 et d’ordre faible 1. Il est possible d’écrire des schémas d’ordreplus élevés mais des termes de correction compliquées apparaissent.
Quant aux équations aux dérivées partielles stochastiques, leur analyse numérique est unsujet récent même si de plus en plus d’articles sont consacrés à la question (voir [5, 40, 65, 70,71, 73, 74, 75, 76, 77, 78, 105, 111, 134, 145, 162, 167, 168]).
Dans le cas d’opérateur spatial de type parabolique, on peut écrire formellement ces équationssous la forme
(1.3.13)∂u
∂t(x, t) = ∆u(x, t) + f(u(x, t)) + σ(u(x, t)) ξ(x, t), x ∈ O, t > 0,
avec la condition initiale u(x, 0) = u0(x), x ∈ O un ouvert borné de Rd, où f, σ : R → R sont en
général des applications non linéaires et où ξ(·, t)t est un bruit blanc espace-temps (voir 1.1.2).
Nous nous plaçons pour simplifier dans un cadre semi-discret. Une approche populaire consisteà remplacer l’équation précédente par le schéma d’Euler suivant
(1.3.14)un+1 − un
∆t= ∆un+1 + f(un) + σ(un)
χn+1
√∆t
,
où ∆t = T/N désigne le pas de temps et où f et σ désignent par abus de notation les applicationsà valeurs dans les espaces fonctionnelles adéquats (ex : f : v 7→ f(v(·))). Ici χn+1 est une suitei.i.d. de variables aléatoires de loi normale à valeurs dans L2(O) par exemple. Pour être plusconcret, on peut penser à une série (non convergente dans L2 mais dans un espace fonctionnelle« plus gros ») χn+1 =
∑j≥1 ejξ
n+1j pour tout choix de base Hilbertienne ej de L2(O) où les
ξn+1j sont des v.a. normales réelles indépendantes.
Il est très important de comprendre comment ces schémas numériques approchent les so-lutions et la première étape est d’analyser l’erreur et la vitesse de convergence. Dès lors qu’ils’agit de variables aléatoires, divers types de convergence de un vers u(t) peuvent être en-visagés : via une approximation trajectorielle (dite forte) ou bien via une approximation en loi(dite faible). La première conclut à des résultats du type
E‖u(T ) − uN‖X = O(∆tα),
pour un certains espaces fonctionnels X tandis que la deuxième cherche à approcher des fonc-tionnelles du processus :
|E ϕ(u(T )) − E ϕ(uN )| = O(∆tβ),
comme par exemple
ϕ(v) =
∫
B(x0,r)
v(x) dx, ϕ(v) = v(x0), . . .
Il est clair que l’on s’attend en général (mais pas toujours) à un ordre faible plus grand quel’ordre fort pour le même schéma car on moyenne d’abord, éliminant les termes stochastiquespeu réguliers et on soustrait ensuite.
La plupart des articles traitant des EDPS tentent d’analyser la convergence trajectorielleainsi que l’ordre fort de schémas de type Euler (1.3.14) pour des EDPS de type parabolique(1.3.13) (voir par exemple [70, 71, 77, 134]). En dimension infinie, très récemment, des étudessur l’ordre faible sur ce type d’équations ont commencées à paraître (voir [26, 43, 48]).
1.4 Thèmes abordés relatifs aux méthodes de quantifica-tions.
La quantification est un moyen de discrétiser l’espace des trajectoires d’un phénomène aléa-toire : un vecteur aléatoire en dimension finie, un processus stochastique en dimension infinie.

18 CHAPITRE 1. INTRODUCTION.
La théorie de la quantification vectorielle optimale (en dimension finie) des vecteurs aléatoiresremonte au début des années 50 et fut introduite pour discrétiser des émissions de signaux sta-tionnaires continus (cf. [59, 64]). Elle fut développée ensuite par des spécialistes en théorie dusignal, puis en théorie de l’information. Le cas de la dimension infinie commence à être explorédepuis le début des années 2000 (voir entre autres [49, 50, 106, 107, 108]).
On précise dans les paragraphes qui suivent quelques-uns des aspects généraux de la quanti-fication vectorielle et fonctionnelle.
1.4.1 Quantification optimale de vecteurs aléatoires.
La quantification optimale de vecteurs aléatoire consiste à trouver la meilleure approximationpossible (dans Lp) d’un vecteur aléatoire X à valeurs dans R
d par une application mesurablequi ne prend qu’un nombre fini N de valeurs dans R
d.
Nous allons exposer ici dans le cas quadratique (p = 2) quelques-uns des aspects de ceproblème. Soit (H, (·, ·)
H) un espace de Hilbert séparable. Soit X : (Ω,F , P) 7→ H un vecteur
aléatoire tel que E|X |2H
< +∞. Étant donné un entier N ≥ 1, un N -quantifieur est défini par ladonnée d’un sous-ensemble
Γ = x1, . . . , xN ⊂ H,
de cardinal N . Dans les applications numériques, Γ est également appelée grille. On peut alorsdiscrétiser (ou quantifier) X par le vecteur q(X) où q : H → Γ est une application Borélienne.On remarque immédiatement que pour tout ω de Ω
(1.4.15) |X(ω) − q(X(ω))|H≥ d(X(ω), Γ) = min
1≤i≤N|X(ω) − xi|
H,
de telle sorte que la meilleure approximation de X est fournie en considérant pour q la projectionau plus proche voisin sur Γ, notée πΓ. Une telle projection est en bijection avec les diagrammesde Voronoï de R
d induit par Γ, c.-à-d. les partitions Boréliennes de Rd satisfaisant
(1.4.16) Ci(Γ) ⊂
ξ ∈ Rd : |ξ − xi|
H= min
1≤j≤N|ξ − xj |
H
= Ci(Γ),
où i = 1, . . . , N et Ci(Γ) désigne la fermeture de Ci(Γ) dans H . Ainsi
πΓ(ξ) =
N∑
i=1
xi1Ci(Γ)(ξ),
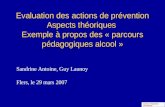
est la projection au plus proche voisin sur Γ. Ces projections diffèrent d’un choix de partitionà l’autre uniquement sur les frontières des cellules de Voronoï. Notons que toutes les partitionsde Voronoï (1.4.16) ont en commun la même frontière, contenue dans la réunion des hyperplansmédians associés aux couples (xi, xj), i 6= j. On représente à titre d’exemple dans la figure1.1 un exemple de diagramme de Voronoï pour N = 10 points dans R
2. On définit alors unN -quantifieur Voronoï de X en posant pour tout ω ∈ Ω,
XΓ(ω) = πΓ(X(ω)) =N∑
i=1
xi1Ci(Γ)(X(ω)).
Il est facile de voir qu’un tel choix d’application q réalise le minimum dans (1.4.15). Ainsi, pourtout ω ∈ Ω,
(1.4.17) |X(ω) − XΓ(ω)|H
= d(X(ω), Γ) = min1≤i≤N
|X(ω) − xi|H
L’erreur quadratique moyenne est alors définie par
(1.4.18) e(Γ, X, H) = ‖X − XΓ‖2 =
√E
(min
1≤i≤N|X − xi|2
H
)

1.4. THÈMES ABORDÉS RELATIFS AUX MÉTHODES DE QUANTIFICATIONS. 19
Fig. 1.1 – 10-quantifieur Γ = x1, . . . , xN en dimension 2 avec son diagramme de Voronoï.
La distribution de XΓ en tant que vecteur aléatoire est donnée par le N -uplet P(X ∈ Ci(Γ))1≤i≤N
associé aux cellules de Voronoï. Cette distribution dépend clairement du choix fait de la partitionde Voronoï comme le montre l’exemple suivant : H = R, X de loi PX = 1
3 (δ0 + δ1/2 + δ1), N = 2et Γ = 0, 1 puisque 1/2 ∈ ∂C0(Γ) ∩ ∂C1(Γ). Cependant, si PX ne charge aucun hyperplan, ladistribution de XΓ ne dépend que de Γ.
⋄Maintenant, nous pouvons nous demander s’il est possible, pour une loi donnée PX , de trouverparmi toutes les grilles de taille au plus N celles qui induisent l’erreur quadratique moyenne(1.4.18) la plus petite, c.-à-d. s’il est possible de trouver des grilles optimales pour une loi donnée.Cela revient à poser le problème d’optimisation suivant
eN (X, H) = infΓ⊂H,Card(Γ)≤N
e(Γ, X, H).
Il est peut-être utile de distinguer deux types d’approches. La première consiste à associer auxquantifieurs (optimaux ou pas) un N -uplets de HN (avec une redondance implicite dès lorsqu’un N -uplet est ordonné alors que la grille ne l’est pas). La seconde élimine ce problème enassociant aux quantifieurs des mesures (la somme de Dirac des points de la grille). La premièreapproche est néanmoins utile pour obtenir l’existence de quantifieurs optimaux en minimisantdes fonctions de N -uplets de H , soit définies sur HN . Nous allons exposer quelques conséquencesde cette première idée.
Il est aisé d’établir une correspondance entre grilles (quantifieurs) de taille au plus N et lesN -uplets de H : à chaque N -uplets x = (x1, . . . , xN ), on associe un quantifieur Γ = Γ(x) =xi, i = 1, . . . , N (de taillle au plus N). On introduit ainsi la distorsion quadratique, notée DX
N ,défini sur HN comme une fonction symétrique, par
DXN : HN → R+,
(x1, . . . , xN ) 7→ E
(min
1≤i≤N|X − xi|2
H
).
Combinant (1.4.17) avec la précédente définition de la distorsion, montre que
DXN (x1, . . . , xN ) = E
(min
1≤i≤N|X − xi|2
H
)= E(d(X, Γ(x))2) = ‖X − XΓ(x)‖2
2,
de sorte que
eN (X, H) = inf(x1,...,xN )∈HN
√DX
N (x1, . . . , xN ).
Les propriétés de cette fonction (symétrique) sont résumées dans la proposition suivante.

20 CHAPITRE 1. INTRODUCTION.
Proposition 1.4.1(a) La fonction DX
N est semi-continue inférieurement pour la topologie faible sur (Rd)N .
(b) La fonction DXN atteint son minimum en un N -uplet x(N,∗) (et donc Γ(N,∗) est un quan-
tifieur optimal de taille N). De plus
– si Card(Supp(PX)) ≥ N , le quantifieur est exactement de taille N et eN (X) < eN−1(X),
– si Card(Supp(PX)) ≤ N , alors eN (X) = 0.
Également, limN eN (X) = 0.
(c) Tout quantifieur (Voronoï) optimal de taille N , XΓ(N,∗), vérifie
(1.4.19) XΓ(N,∗) = E
(X | σ(XΓ(N,∗))
).
(d) Tout quantifieur (quadratique) optimal de taille N est une meilleure approximation ausens des moindres carrés (c.-à-d. dans L2(P)) de X parmi toutes les variables aléatoires àvaleurs dans R
d ne prenant qu’un nombre fini de valeurs. Plus précisément, on a
eN (X) = ‖X − XΓ(N,∗)‖2 = min‖X − Y ‖2, Y : Ω → H, Card(Y (Ω)) ≤ N.
Fig. 1.2 – Exemples de deux 500-quantifieurs (avec leurs diagrammes de Voronoï) pour la loinormale en dimension 2. Lequel est le meilleur ?
Ainsi, eN (X) est une suite strictement décroissante vers 0 quand N tends vers l’infini. Àquelle vitesse ?
La réponse est fournie par le théorème suivant, dit Théorème de Zador. Ce théorème futétabli pour la première fois pour des distributions à support compact par Zador [172, 173]. Il futétendu à des cas plus généraux de distributions sur R
d dans [25]. La première preuve rigoureuse(mathématiquement) peut être trouvée dans [64] et repose sur un argument de quantificationaléatoire (lemme de Pierce). Si on note pour N entier et r > 0 :
eN,r(X, Rd) = inf‖X − XΓ‖r, Γ ⊂ R
d, Card(Γ) ≤ N
,
on a

1.4. THÈMES ABORDÉS RELATIFS AUX MÉTHODES DE QUANTIFICATIONS. 21
Théorème 1.4.1 (Zador) (a) Taux asymptotique.
Soit r > 0 et X ∈ Lr+ε(Ω) où ε > 0. Soit L(X)(dx) = ϕ(x) dx + ν(dx) la décompositioncanonique de la loi de X (c.-à-d. ν singulière par rapport à la mesure de Lebesgue). Alors (siϕ 6= 0),
eN,r(X, Rd) ∼ Jr,d ×(∫
Rd
ϕ(u)d
d+r du
) 1d+ 1
r
× N− 1d ,
quand N tend vers l’infini, où Jr,d > 0.
(b) Borne supérieure non asymptotique.
Soit d ≥ 1. Il existe une constante Cd,r,ε > 0 telle que pour tout vecteur aléatoire X : Ω → Rd
tel que X ∈ Lr+ε(Ω), on a
eN,r(X, Rd) ≤ Cd,r,ε‖X‖r+ε N− 1d .
⋄Point de vue mesure
McClure [110] montre en 1975 un résultat assez inattendu, à savoir que pour une loi admettantune densité notée f , une condition nécessaire que doit vérifier un quantifieur optimal (quadratiquepour simplifier) est
1
N
N∑
i=1
δxi −→ fd/(d+2)
(∫
Rd
f(x)d/(d+2) dx
)(d+2)/d,
lorsque N tend vers l’infini (au sens des mesures).
1.4.2 Comment obtenir une quantification optimale ?
On dresse ici une rapide revue des principales méthodes utilisées pour le calcul de quantifieursoptimaux ou tout du moins localement optimaux en dimension finie (H = R
d). Pour plus dedétails on peut consulter [125]. Dans tout les cas, on construit une suite xN (k)k≥0 de N -upletsxN = (x1
N , . . . , xNN ) de (Rd)N approchant un quantifieur optimal.
La première tentative historique de résoudre le problème d’optimisation – quand r = 2 etd = 1 – est la méthode dite de Lloyd I. Elle exploite sous forme de point fixe la relation (1.4.19) :
(1.4.20) ZxN
(k+1) = E
(Z | Zx
N(k)), xN (0) ∈ (Rd)N .
À chaque itération de l’algorithme, l’espérance conditionnelle E
(Z | Zx
N(k))
est calculée en utili-
sant une méthode de Monte-Carlo. On montre, en dimension 1, que la suite ‖X−πxN
(k)(X)‖2k≥0
est décroissante et que, sous certaines hypothèses (cf. [93]), πxN
(k)(X) converge vers un vecteur
aléatoire X prenant N valeurs. De plus, X satisfait la relation de stationarité (1.4.19).
Quand la dimension d augmente, la convergence peut ne pas avoir lieu et quand elle a lieule vecteur X reste stationnaire mais n’a plus de raison de minimiser l’erreur de quantification(1.4.18). En fait, son principal inconvénient est d’être une procédure purement « locale » quin’explore pas tous l’espace des états.
La deuxième technique est une méthode d’optimisation stochastique. Elle repose sur le résul-tat suivant [120] qui exploite une autre propriété de la distorsion quadratique DX
N : sa régularité.
Proposition 1.4.2 La fonction DXN est continûment différentiable en tout N -uplet x de (Rd)N
de composantes deux à deux distinctes et dont la mesure de la frontière de ses cellules de Voronoï∪N
i=1∂Ci(x) est nulle. De plus, son gradient a la représentation (dérivation sous le signe somme)
∇DXN (x) = E
(∇dX
N (x, X)),

22 CHAPITRE 1. INTRODUCTION.
où
(1.4.21) ∇dXN (x, ξ) = 2
((xi − ξ)1Ci(x)(ξ)
)1≤i≤N
.
La représentation intégrale (1.4.21) du gradient de DXN suggère, tant qu’une simulation de copies
de X indépendantes est possible, l’implémentation d’un algorithme de gradient stochastique :
(1.4.22) xN
(k + 1) = xN
(k) − γk+1∇dXN (x
N(k), ξk+1), x
N(0) ∈ (Rd)N ,
où ξk+1k≥0 désigne une suite i.i.d. de v.a. de même loi que X et où les γk > 0 sont desconstantes à (bien) choisir. Compte tenu de l’expression particulière (1.4.21) du gradient (dansle cas quadratique), l’algorithme précédent consiste à chaque itération à
(i) trouver le plus proche voisin, noté xi⋆(k+1)N
(k) de ξk+1 parmi toutes les composantesxi
N(k)1≤i≤N ;
(ii) procéder à l’homothétie de centre ξk+1 et de raison 1− γk+1 suivante sur la composantetrouvée :
xi⋆(k+1)N
(k + 1) = xi⋆(k+1)N
(k) − γk+1(xi⋆(k+1)N
(k) − ξk+1);
(iii) et laisser invariantes les autres :
xjN
(k + 1) = xjN
(k), j 6= i⋆(k + 1).
En pratique, une fois l’optimisation atteinte pour un nombre N de points de Rd on se sert de
la grille obtenue pour débuter l’algorithme au rang N +1 ou N +m, m ≥ 1 en rassemblant dansla même grille la grille de taille N obtenue auparavant et m points simulés de façon indépendantepour une densité proportionelle à ϕ
dd+2 où ϕ désigne la densité de X . Ce choix inattendu est
motivé par le fait que cette distribution fournit l’erreur de quantification aléatoire la plus petiteen moyenne (cf. [31, 32]).
1.4.3 Intégration numérique.
Initialement proposée dans [120], une première application de la quantification optimale estl’approximation de l’espérance de fonctionnelles de v.a.. Pour F : H → R, une fonctionnellecontinue (par rapport à | · |H) et pour Γ ⊂ H , un N -quantifieur, il est naturel d’approcherEF (X) par EF (XΓ). Cette quantité est simplement la somme pondérée
(1.4.23) EF (XΓ) =
N∑
i=1
F (xi)P(XΓ = xi).
Le calcul numérique de EF (XΓ) est possible tant que F (ξ) peut être calculée pour tout ξ ∈ H etque la distribution P(XΓ = xi)1≤i≤N est connue. L’erreur de quantification ‖X − XΓ‖2 peutalors être utilisée pour le contrôle de l’erreur.
Divers qualités d’approximation peuvent être envisagées selon la régularité de F : F Lipschitz,F convexe, F différentiable de différentielle Lipschitz. Signalons déjà le cas intéressant F convexe.Si X est un quantifieur stationnaire (cf. (1.4.19)), une application immédiate de l’inégalité deJensen fournit
E
(F (X) | X
)≥ F (X),
de telle sorte que E
(F (X)
)≤ E F (X). Une intégration numérique par quantification station-
naire d’une fonction convexe sous-estime toujours la valeur exacte.
Si maintenant F est différentiable et de différentielle DF Lipschitz, alors une autre consé-quence de (1.4.19) est d’obtenir une erreur au second ordre, puisque le terme de premier ordre(dans un développement de Taylor)
E
(DF (X) · (X − X)
)= E
(DF (X) · (X − X | X)
)

1.4. THÈMES ABORDÉS RELATIFS AUX MÉTHODES DE QUANTIFICATIONS. 23
s’annule par stationnarité du quantifieur X .
Des conséquences de ceci seront exploitées dans [125, 126].
1.4.4 Quantification de chaînes de Markov.
L’étape suivante concerne l’application de la quantification à des problèmes non linéairesassociés à une dynamique (discrète) Markovienne (ex : les options américaines ou le filtragenon linéaire). D’un point de vue probabiliste la non-linéarité a pour conséquence le calcul defonctionnelle d’espérance conditionnelle le long des trajectoires. D’un point de vue numérique,l’approche de ces problèmes par quantification conduit à des algorithmes de type arbre où àchaque pas de temps est associé une grille de quantifieurs, optimale dans un certain sens pourla chaîne de Markov.
0
0.05
0.1
0.15
0.2
-1.5 -1 -0.5 0 0.5 1 1.5
t
B_t
One dimensional case | Delta t = 0.04 | N_1 = 47 | N_2 = 56 | N_3 =62"
Fig. 1.3 – Quantification marginale du mouvement brownien discrétisé en temps.
Si l’on considère une chaîne de Markov Xk0≤k≤n à valeurs dans Rd adpatée à une filtration
Fk dont les probabilités de transition sont données Pk(x, dx′) (de k − 1 à k) ainsi que la loiintiale µ, la loi jointe de Xk0≤k≤n est fournie par µ(dx0)P1(x0, dx1) · · ·Pn(xn−1, dxn). Uneapproche naïve consiste donc à quantifier dans R
(n+1)d le vecteur aléatoire (X0, X1, . . . , Xn)suivant les méthodes décrites au paragraphe 1.4.1. Mais il est clair vu la conclusion du théorème1.4.1 que cela n’est pas intéressant car la distorsion serait en N− 1
nd . Ce qui serait beaucoup troplent.
On propose alors une approche basée sur le fait qu’une chaîne de Markov est caractériséepar sa distribution initiale et des probabilités de transition. On quantifie la loi intiale µ ainsique toutes les probabilités conditionnelles de Xk sachant Xk−1. L’erreur obtenue n’est plus quede n1+1/d/N1/d. Deux méthodes ont été introduites. La première, basée sur une quantificationà chaque date k de la v.a. Xk, fut introduite dans [6] et utilisée dans [7, 8] et est appeléequantification marginale. La deuxième, qui préserve la propriété de Markov, fut introduite dans[121] et est appelée quantification Markovienne (voir [124] pour plus de détails).
On donne ci-dessous quelques détails sur la quantification marginale d’une chaîne de Markov.Que ce soit dans ce cas ou dans le cas de la quantification markovienne, tout est basé sur lapossibilité de simuler Xk sachant Xk−1. La quantification de chaque Xk peut alors être effectuéegrâce à un algorithme de type gradient stochastique ou Lloyd (cf. le paragraphe 1.4.2) couplé à lasimulation des trajectoires de la chaîne Xk. Si Γk = x1
k, . . . , xNk
k désgine chacune des grillesassociées au vecteur quantifié Xk, on calcule durant ces simulations les distributions discrètes
(1.4.24) pik = P(Xk = xi
k) = P(Xk ∈ Ci(Γk)), 0 ≤ k ≤ n, 1 ≤ i ≤ Nk,

24 CHAPITRE 1. INTRODUCTION.
de Xk ainsi que les probabilités de transition discrètes
πi,jk = P(Xk+1 = xj
k+1 | Xk = xik)(1.4.25)
=pi,j
k
pik
avec pi,jk = P(Xk+1 = xj
k+1, Xk = xik)
1.4.5 Quantification fonctionnelle de processus gaussiens.
Formellement la présentation est la même que dans la section 1.4.1. La différence est qu’iciH est de dimension infinie. Dans le cas H = L2(]0, T [), l’objectif est d’estimer l’espérance defonctionnelle continue L2 en temps de processus stochastique X ∈ L2(Ω×]0, T [).
La quantification fonctionnelle optimale des processus gaussiens est intimement liée à leursérie de Karhunen–Loève qui peut être vue comme une version en dimension infinie d’une analyseen composante principale du processus. Plus particulièrement, une telle série permet de distinguerles dépendances en temps et en omega du processus. Par la suite, la discrétisation est doncdouble : à la fois au niveau de la troncature de la série et à la fois au niveau de la quantificationdes vecteurs aléatoires. C’est-à-dire qu’il faut à la fois déterminer une dimension d optimale detroncature et déterminer un nombre de points N optimal pour quantifier le vecteur aléatoiredont les composantes sont les d premiers termes de la série (voir paragraphe 1.4.1).
Formellement, si X désigne un tel processus, on écrit sa décomposition de Karhunen-Loevecomme suit
X(ω, t) =
+∞∑
n=1
ξXn (ω)eX
n (t) dans L2(Ω × (0, T ))
où eXn n≥1 est une base Hilbertienne de L2(0, T ) et ξX
n n≥1 une famille de variables aléatoiresindépendantes.
Pratiquement, un nombre N étant donné, on détermine d(N) un seuil de troncature de lasérie. On remplace le processus X par les N processus déterministes
(1.4.26) X i(t) =
d(N)∑
n=1
xin eX
n (t), 1 ≤ i ≤ N
où xi = (xi1, . . . , x
id(N)) ∈ R
d(N) et où (x1, . . . , xN ) est un N -uplet de points de Rd(N) quantifiant
le vecteur aléatoire d(N) dimensionnel :
ξN = ξX1 , . . . , ξX
d(N).
⋄Exemple de cas gaussien : le mouvement brownien
Dans le cas du mouvement brownien standard sur [0, T ], les termes de la série de Karhunen–Loève sont explicites :
eWn (t) =
√2
Tsin
(πt
T
(n − 1
2
)), ξW
n ∼ N (0, λn), n ≥ 1,
où
λn =
(T
π
)2(n − 1
2
)2
, n ≥ 1.
Dans ce cas, le vecteur aléatoire d(N) dimensionnelle à quantifier suit une loi gaussienne dansR
d(N) de covariance diagonale :
ξN = ξW1 , . . . , ξW
d(N) ∼ N (0; Γ), avec Γ = diag(λ1, . . . , λd(N)).
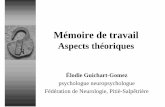
On peut consulter [169] pour plus de détails numériques. On présente dans la figure 1.4 unexemple de quantification du mouvement brownien pour N = 10. Ici on a d(N) = 2.

1.4. THÈMES ABORDÉS RELATIFS AUX MÉTHODES DE QUANTIFICATIONS. 25
−1.5 −1 −0.5 0 0.5 1 1.5−0.2
0
0.2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Fig. 1.4 – Quantification fonctionnelle du mouvement brownien sur [0, 1] pour N = 10, d(N) = 2.Au-dessus figure le 10-uplet correspondant de R
2.
⋄
La première tentative d’obtenir des quantifications fonctionnelles se fit à l’aide des quantifieursproduits. La quantification fonctionnelle produit consiste à chercher le précédent N -uplet depoints de R
d(N) dans (1.4.26) sous la forme d’un produit tensoriel de grilles de « plus petitedimension ». Nous nous limiterons ici à des grilles de dimension 1. Ainsi, on remplace xi =
(xi1, . . . , x
id(N)) ∈ R
d(N) par xi1,...,id(N) = (xi11 , xi2
2 , . . . , xid(N)
d(N) ) ∈ Rd(N) où xi
k1≤i≤Nkquantifient
chacun avec N(k) points la loi normale en dimension 1 de façon optimale (voir paragraphe 1.4.2)et où les N(k) sont tels que N = N1 × N2 × Nd(N).
Il reste pour un entier N donné à déterminer tous les produits possibles qui le composentet à sélectionner celui qui donne la plus petite erreur de distorsion. On fournit plus bas entéléchargement ces correspondances. Du point de vue de l’erreur de distorsion, on peut montrerqu’un tel produit n’est pas optimal mais seulement stationnaire ce qui est toujours très utile.De plus, on peut montrer qu’ils ont le même taux de convergence que les quantifieurs optimaux(voir [106]).
Cela donne finalement dans le cas d’un mouvement brownien sur [0,T] les N quantifieurssuivants :
X i1,i2,...,id(N)(t) =
√2
T
d(N)∑
k=1
T
π(k − 12 )
xik
k sin
(πt
T
(k − 1
2
)), 1 ≤ ik ≤ Nk.
Cette approche est utilisée dans [126] où ces grilles produits sont utilisées pour calculer le prixd’asiatique.

26 CHAPITRE 1. INTRODUCTION.

Chapitre 2
Équations aux Dérivées PartiellesStochastiques.
Ce chapitre résume mes travaux effectués dans le cadre des équations aux dérivées partiellesstochastiques [45, 46, 47, 48, 132, 133, 134].
2.1 Caractère bien posé de Korteweg–de Vries stochastiquedans L
2(R).
Ce paragraphe présente le travail publié dans [133]. On s’intéresse dans cet article au problèmede Cauchy (existence et unicité de la solution) associé à (1.3.10)–(1.3.11). Avant de décrire unethéorie de l’équation de Korteweg–de Vries stochastique (1.3.10), signalons que la partie linéairede l’équation définit un groupe unitaire, noté S(t)t∈R, dans tous les espaces de Sobolev Hs(R).Il semble donc difficile d’obtenir des solutions dans Hs(R) pour s ∈ R si Φ n’est pas un opérateurHilbert–Schmidt de L2(R) dans Hs(R). En effet, la solution du problème linéaire
(2.1.1) du +∂3u
∂x3dt = Φ dW, u(0) = 0
est donnée par l’intégrale stochastique
(2.1.2) WL(t) =
∫ t
0
S(t − τ)Φ dW (τ)
et on voit facilement, par définition de l’intégrale stochastique, que
E‖WL(t)‖2Hs(R) = t‖Φ‖2
L2(L2(R),Hs(R))
où ‖·‖L2(L2(R),Hs(R)) est la norme de l’espace des opérateurs Hilbert–Schmidt de L2(R) to Hs(R)(cf. le paragraphe 1.1.2, p. 6).
Un travail antérieur [42] a déjà généralisé les techniques de [89, 90] sous l’hypothèse que Φsoit un opérateur Hilbert–Schmidt de L2(R) dans H1(R) démontrant l’existence et l’unicité dansC([0, T ], H1(R)). J’ai considéré ici un opérateur de covariance plus général. En remarquant que lemodèle physique des équations de Korteweg–de Vries forcées suppose un terme de force localisé(voir paragraphe 1.2.4), j’ai considéré un bruit localisé, dans un sens à préciser. D’un point devue mathématique, cette remarque permet de travailler dans des espaces à poids basés sur L2(R)et d’utiliser les techniques de [61]. On substitue en quelque sorte les hypothèses de régularité surΦ par des hypothèses de localisation. Dit autrement encore, je suppose Φ Hilbert–Schmidt deL2(R) dans lui-même et « petit » à l’infini.
27

28 CHAPITRE 2. ÉQUATIONS AUX DÉRIVÉES PARTIELLES STOCHASTIQUES.
2.1.1 Unicité trajectorielle.
Pour T > 0, α > 0 et q entier, on introduit les espaces
Xα,q([0, T ]) = hαu ∈ Lq([0, T ], L4(R)),
Y = (1 + x+)38 u ∈ L2(R)
où hα est une fonction C∞ strictement croissante qui vaut 1 si x ≥ 1 et eαx si x ≤ 0. Le premierespace « met du poids » en +∞ et le second en −∞. Cette dissymétrie en ±∞ exploite lastructure de la fonction d’Airy (solution fondamentale de ∂tu + ∂3
xu = 0) à travers le résultatsuivant dû à [61] :
Lemme 2.1.1 Soit T > 0, α > 0 et q tel que 1/4 < 1/q < 5/8. Il existe C(T ) > 0 telle quepour tout u dans Xα,q([0, T ]) et pour tout v dans L∞([0, T ], Y ), on a
(2.1.3)
∥∥∥∥∫ .
0
S(. − τ)∂(uv)
∂xdτ
∥∥∥∥Xα,q([0,T ])
≤ C(T )‖u‖Xα,q([0,T ])‖v‖L83 ([0,T ],Y )
,
où C(·) est uniformément bornée sur les compacts de R.
Ici, le bruit est additif, c.-à-d. que Φ ne dépend pas de u. Le lemme précédent entraîne doncl’unicité trajectorielle dans Xα,q([0, T ]) ∩ L∞([0, T ], Y ) :
Corollaire 2.1.2 Soit T > 0, α > 0 et q tels que dans le lemme 2.1.1. Alors, il existe au plusune solution forte u à (1.3.10)–(1.3.11) tel que
u ∈ L∞([0, T ], Y ) ∩ Xα,q([0, T ]), p.s..
2.1.2 Existence.
Il y a deux constructions différentes présentées ici. Un premier résultat est présenté avec leshypothèses suivantes sur les données
(2.1.4) u0 ∈ Y, Φ ∈ L2(L2(R), Y ) ∩ L2(L
2(R), Hε(R)) pour un ε > 0.
Théorème 2.1.3 ([133]) Soit T > 0 et α > 0. Alors, sous les hypothèses (2.1.4), il existe ununique processus stochastique u solution forte globale de (1.3.10)–(1.3.11) tel que
u ∈ Xα,q([0, T ]) ∩ L∞([0, T ], Y ),1
4<
1
q<
1
2, p.s.,
∂u
∂x∈ L2([0, T ], L2
loc(R)), p.s..
De plus u ∈ C([0, T ], Y ), p.s..
Là encore, la méthode utilisée est spécifique au caractère additive du bruit. Dans ce cas, on peuten effet décomposer la solution u comme la somme
u = v + WL,
où WL défini par (2.1.2) est solution de la partie linéaire et où v est solution de l’EDP « para-métrée » par ω :
∂v
∂t+
∂3v
∂x3+
1
2
∂
∂x(v + WL)2 = 0, P p.s., v(0) = u0.
On ne peut pas utiliser directement le lemme 2.1.1. En effet, pour pouvoir effectuer une contrac-tion dans Xα,q([0, T ]) il faut pouvoir avoir des estimées indépendantes dans un second espaceà poids du type L∞([0, T ], Y ). Cette asymétrie est naturelle et provient de la structure de lafonction d’Airy. On surmonte cette difficulté en construisant une suite uε de solutions obtenuesavec des données régulières (cf. [155] par exemple) et on montre successivement les estimées apriori trajectorielles suivantes :

2.1. L’ÉQUATION DE KORTEWEG–DE VRIES STOCHASTIQUE DANS L2(R) 29
Proposition 2.1.4 Soit T > 0. Il existe des fonctions positives croissantes Ci, i = 1, 2, 3 tellesque
‖u‖Xα,q([0,T ]) ≤ C1
(T, ‖u‖L∞([0,T ],Y ), ‖WL‖Xα,q([0,T ])
),
‖u‖L∞([0,T ],Y ) ≤ C2
(T, ‖u0‖Y , ‖u‖L∞([0,T ],L2(R)), ‖WL‖L∞([0,T ],Y )
),
‖u‖L∞([0,T ],L2(R)) ≤ C3
(T, ‖u0‖L2(R),
∥∥∥∥∂WL
∂x
∥∥∥∥L1([0,T ],L∞(R))
, ‖WL‖L∞([0,T ],L2(R))
).
Donc, si l’on sait contrôler les termes en WL, on peut utiliser les estimées précédentes avec lelemme 2.1.1 pour montrer que uε est p.s. de Cauchy dans Xα,q([0, T ]) en exploitant la relation
uε(t)−uε′(t) = S(t)(u0,ε −u0,ε′)− 1
2
∫ t
0
S(t− s)∂
∂x[(uε −uε′)(uε +uε′)]ds+WL,ε(t)−WL,ε′ (t).
On conclut finalement à l’existence d’une solution mild (voir (1.3.12)), puis à une solution forte.
Les principales difficultés sont ici les estimées concernant la partie linéaire de l’équation. Enfait, dans les équations où le bruit est additif, il faut très souvent vérifier que la solution duproblème linéaire, ici WL, appartient aux mêmes espaces que ceux de la théorie déterministe.Ici, du fait de la présence d’une dérivée dans le terme non linéaire, il faut obtenir une estiméede ∂WL/∂x sur L1([0, T ], L∞(R). Cette estimée particulière est obtenue grâce à une propriétéde régularisation fine du groupe S(t)t∈R découverte par [90] et qui permet d’obtenir
(2.1.5) supt∈R
E
(supx∈R
∣∣∣∣∂
∂x
∫ t
0
S(t − τ)Φ dW (τ)
∣∣∣∣p)
≤ Cp‖Φ‖L2(L2(R),Hε(R))
pour tout entier p ≥ 1. Cette dernière estimée requiert l’hypothèse Φ ∈ L2(L2(R), Hε(R)) (voir
(2.1.4).⋄
La deuxième construction repose sur une méthode de compacité basée sur une méthode d’énergiepour l’obtention des estimées a priori. Les hypothèses sur les données sont moins restrictives :
(2.1.6) u0 ∈ Y, Φ ∈ L2(L2(R), Y ).
Le résultat d’existence de solutions fortes est alors donné par le théorème
Théorème 2.1.5 ([133]) Soit T > 0. Sous les hypothèses (2.1.6, il existe une unique solutionu de (1.3.10)–(1.3.11). De plus, les estimées suivantes ont lieu p.s. :
u ∈ L∞([0, T ], Y ),
u ∈ C([0, T ], H−s′
loc (R)), pour tout s′ > 2,
∂u
∂x∈ L2([0, T ], Hs
loc(R)), pour tout s < 0.
La démonstration consiste à construire une suite approchée de solutions un obtenues en régu-larisant les données (cf. [155]) puis à obtenir les estimées suivantes :
Proposition 2.1.6 Pour tout T > 0,
unn≥0 est bornée dans L2(Ω, L∞([0, T ], L2(R))),∂un
∂x
n≥0
est bornée dans L2(Ω, L∞([0, T ], L2loc(R))).
Puis, en injectant ces estimées dans l’équation (1.3.10) :

30 CHAPITRE 2. ÉQUATIONS AUX DÉRIVÉES PARTIELLES STOCHASTIQUES.
Proposition 2.1.7 Pour tout T > 0,
unn≥0 est bornée dans L2(Ω, W γ,2([0, T ], H−2loc (R))),
∂un
∂x
n≥0
est bornée dans L2(Ω, Cδ([0, T ], H−2loc (R))),
pour tout couple (γ, δ) ∈]0, 12 [2.
On conclut à la tension des lois de un grâce au lemme de compacité suivant basé sur un résultatclassique d’injection compacte (voir [104, théorème 5.2, p. 61]), le théorème d’Ascoli–Arzela etune extraction diagonale.
Lemme 2.1.8 Soit T > 0, α > 0, β > 0. Soit A un ensemble de distributions u telle que(i) A est borné dans L2([0, T ], H1
loc(R)) ∩ Wα,2([0, T ], H−2loc (R)) ;
(ii) A est borné dans Cβ([0, T ], H−2(R)).Alors A est relativement compact dans L2([0, T ], Hs
loc(R)) ∩ C([0, T ], H−s′
(R)) pour tout s < 1et s′ > 2.
On utilise pour finir le lemme 1.3.4 et les arguments exposés dans le paragraphe 1.3.1.
2.2 Aspects numériques de la propagation d’un soliton dansun milieu bruité.
Nous allons maintenant aborder certains aspects qualitatifs des solutions de l’équation deKorteweg–de Vries stochastique à travers une étude numérique. Ce qui suit est un résumé desdeux articles [45, 46] ainsi que d’une partie de la thèse [132] (chapitre 5).
Dans [45], nous souhaitons étudier l’influence d’un terme de bruit sur la propagation d’unprofil de type soliton et considérer des quantités plus générales que la moyenne <u(x, t)> qui ànotre opinion ne contient pas assez d’informations. En effet, un soliton étant considéré commecondition initiale, il est raisonnable de penser qu’il gardera sa forme pour quelques temps et ilsemble intéressant par exemple de mesurer la moyenne de son amplitude maximum. L’évolutionde E u(x, t) ne nous donne en effet aucune information sur cet aspect. De façon similaire, noussouhaitons étudier le déphasage dû à la collision de deux ondes solitaires en présence de bruit.
De façon générale, les résultats numériques tendent à montrer que la présence d’un bruithomogène sur tout le domaine de calcul crée un fond bruité dans le profil de la solution. Audébut, ce bruit à l’arrière plan est uniforme mais il semble progressivement s’organiser lui-mêmeet nous pouvons observer la formation d’ondes non linéaires se propageant vers la droite (nonlinéaires puisque se propageant vers la droite). Quand un soliton est pris comme donnée initiale,il ne semble pas affecté par le bruit au début de la simulation. Puis il semble interagir avecl’onde créée par le bruit et de cette interaction inélastique résulte un changement d’amplitudeet de vitesse dans les deux ondes (voir la figure 2.1). Cependant, l’onde n’est pas détruite etse propage sur de très grands temps comme on peut le voir sur des courbes de niveau dans leplan (x, t) (une observation directe à une date fixée ne donne pas d’informations à ce sujet).On observe ce phénomène sur plusieurs trajectoires du bruit. Concernant le comportement del’onde avant la création d’ondes non linéaires, on a pu calculer des moyennes, par exemple, lamoyenne des vitesses des ondes solitaires bruités. La valeur obtenue est très proche de celle del’équation déterministe. On a également calculé la moyenne des quantités invariantes ainsi que lamoyenne du déphasage lors de la collision de deux solitons. On peut constater alors que le bruitaffecte fortement les invariants. On observe une évolution linéaire en temps (comme préditepar la formule d’Itô) mais la valeur du déphasage n’est pas changée en moyenne. Rappelonsque dans la théorie déterministe, l’intégrabilité du système (1.2.5), conséquence de l’existenced’une infinité de lois de conservation, implique des interactions élastiques entre solitons. Or, bienque ces invariants soient détruits et tant que l’élasticité est concernée (c.-à-d. vitesse inchangéeet déphasage), le bruit n’affecte pas en moyenne ces interactions. Cependant, l’écart-type dudéphasage croît avec l’amplitude du bruit, indiquant que l’interaction perd son aspect élastiquelorsque l’on considère les trajectoires seulement.

2.2. ASPECTS NUMÉRIQUES DE LA PROPAGATION D’UN SOLITON DANS UN MILIEU BRUITÉ.31
(a)
Single soliton with noise | gamma = 0.01 | tau = 0.01 | h = 0.01 | epsilon = 1e-4
"KdV1_1.save" 0.9 0.7 0.5
x 0 0.5 1 1.5 20
5
10
15
20 t
(b)
Null initial data with noise | gamma = 0.01 | tau = 0.01 | h = 0.01 | epsilon = 1e-4
"KdV1_ter.save" 0.9 0.7 0.5
x 0 0.5 1 1.5 20
5
10
15
20 t
Fig. 2.1 – Courbes de niveau dans le plan (x, t) correspondant aux niveaux 0.5, 0.7 et 0.9 pourune donnée initiale c = 0.3, x0 = 0.4 et des coefficients ε = 10−4 (dispersion) et γ = 0.01(amplitude du bruit).

32 CHAPITRE 2. ÉQUATIONS AUX DÉRIVÉES PARTIELLES STOCHASTIQUES.
2.3 Convergence d’un schéma implicite pour l’approxima-tion de Korteweg–de Vries stochastique.
Le sujet de ce paragraphe est de justifier l’utilisation du schéma numérique utilisé dans lesétudes précédentes en établissant la convergence du schéma semi-discret en temps. Ce fut l’objetde la publication [47]. Nous nous y sommes intéressés à l’analyse numérique du schéma semi-discret suivant :
(2.3.7) uk+1n − uk
n + ∆t
(∂3
xuk+1/2n +
1
2∂x
(uk+1/2
n
)2)
=√
∆t χk+1.
Le pas de temps est ∆t = T/(n+1) > 0 et√
∆t χk+1 = ξ((k+1)∆t)−ξ(k∆t) est l’incrément dubruit. L’inconnue est alors approchée aux temps discrets k∆t par uk
n. Dans (2.3.7), on a utilisé
la notation uk+1/2n = (uk
n + uk+1n )/2.
Dans [45, 46], les conditions aux bords étaient spécifiées sur un intervalle borné puisqu’il estimpossible de discrétiser une équation sur la droite réelle. De plus, une discrétisation spatialeà base de splines était introduites. Ici, nous nous concentrons sur la discrétisation en temps.Le schéma (2.3.7) a été choisi car il est conservatif quant à la partie déterministe. Le problèmeest qu’un schéma conservatif est nécessairement implicite et l’analyse numérique des schémasimplicites pour des équations aux dérivées partielles stochastiques est souvent très difficile. Deplus, nous avons à tenir compte de la structure mathématiquement complexe de l’équation deKorteweg–de Vries.
Nous allons utiliser le cadre fonctionnel introduit dans [61] et utilisé dans le cas stochastiquedans [133] (voir paragraphe 2.1). Il donne l’unicité dans des espaces à poids sur L2(R) grâce à uneffet régularisant local du groupe d’Airy. Dans [133], le processus gaussien ξ est un processus deWiener sur L2(R) dont l’opérateur de covariance Φ⋆Φ est de trace finie dans un espace à poidssur L2(R), c.-à-d. dans L2
w où
L2w =
(1 + x+)3/8u ∈ L2(R)
.
Dans ce cadre, le bruit numérique dans (2.3.7) est donné par
χk+1 =ΦW ((k + 1)∆t) − ΦW (k∆t)√
∆t, 0 ≤ k ≤ n − 1,
où W est un processus de Wiener sur L2(R).
Deux types de résultats sont attendus dans l’analyse numérique d’une équation aux dérivéespartielles : la convergence d’approximations sous des hypothèses de régularité faible des donnéesou un ordre de convergence avec plus de régularité. Ici, on s’intéresse au premier aspect qui,me semble-t-il, est plus important pour l’équation de Korteweg–de Vries stochastique qui a étésimulée avec des données très irrégulières dans [45, 46, 143]. Dans ces articles, le bruit était blancen temps et en espace. Cependant, le cadre fonctionnel choisi ici ne nous permet pas de traiterde tels bruits irréguliers.
La preuve de convergence repose sur une méthode de compacité et sur le lemme 1.3.4. Celemme est très utile et permet d’avoir la convergence en probabilité dans l’espace de probabilitéoriginel à condition d’obtenir la tension des lois de suites approchantes d’une part et d’avoird’autre part l’unicité du problème continu. Ce dernier point suit [61] comme il est montré dans[133]. La tension résulte d’estimées a priori dans les espaces fonctionnelles adéquats. En fait, dufait de l’effet régularisant mentionné plus haut, la tension est prouvée dès lors que l’on obtientdes estimées en moyenn quadratique dans l’espace L2
w. Le principal problème est d’obtenir desmoments de la norme L2(R) de la solution. Dans le cas continu, il est facile d’obtenir une telleestimée par la formule d’Itô mais cet outil n’est pas disponible dans le cadre discret.
On utilise alors une astuce spécifique au cas additif qui consiste à soustraire une formeappropriée du terme de bruit à chaque pas de temps et de travailler avec l’inconnue translatée.Plus précisément, pour α > 0, considérons la suite zk
αk définie par
zk+1α + α
∆t
2zk+1
α − ∆t
2∂3
xzk+1α =
√∆tχk+1,

2.4. APPROXIMATION FAIBLE ET FORTE DE L’ÉQUATION DE LA CHALEUR 33
où on n’a pas indiqué la dépendance en n. Il est à noter qu’il ne s’agit pas de la partie linéaire del’équation. En écrivant la norme L2(R) de uk+1 en fonction de la norme de uk + zk+1
α , on arriveà la borne appropriée dans L2(R). Le point clé est de choisir un α aléatoire et de montrer desestimées précises sur zk
αk. L’idée naturelle serait d’utiliser ce processus auxiliaire avec α = 0mais il est facile de voir que la preuve des estimées L2(R) ne marche plus avec ce choix. C’estun point technique et on a besoin d’avoir zk
α petit trajectoriellement, c’est pourquoi on choisitun α aléatoire. Remarquons pour finir que l’indépendance de uk et zk+1
α est cruciale.
Un autre argument utilisé pour contrer le problème que pose le manque de formule d’Itôconsiste à injecter dans le terme de bruit de l’équation d’évolution de la norme L2(R) à la datek l’équation intégrée entre 0 et k de façon à exprimer u à la date (k + 1)∆t en fonction de u à ladate k∆t et d’un terme martingale. Cela fournit des puissances supplémentaires en ∆t très utileset permet d’obtenir les estimées voulues grâce à des inégalités de martingales. Cette techniquen’est pas spécifique au caractère additif de l’équation.
Le résultat principal est
Théorème 2.3.1 ([47]) Soient u0 et Φ tels que
u0 ∈ L2w, Φ ∈ L2(L
2(R), L2w) ∩ L2(L
2(R), Hε(R))
pour un ε > 0. La suite unn≥1 définie par (2.3.7) converge vers la solution u de (1.3.10)–(1.3.11). La convergence a lieu en probabilité dans L2([0, T ], Hs
loc) pour tout s < 1 et dansL2(Ω, L∞([0, T ], L2(R))).
2.4 Approximation faible et forte de l’équation de la chaleurstochastique
Je résume dans cette partie les travaux publiés dans [48, 134]. En fait, le cadre est un peuplus général que l’équation de la chaleur stricto sensu. On travaille dans le cadre abstrait suivant.Soit H un espace de Hilbert, on considère l’équation d’évolution suivante écrite sous la formed’Itô
(2.4.8) dXt + (AXt + f(Xt)) dt = σ(Xt)dW,
avec la donnée initiale
(2.4.9) X0 = x ∈ H,
où X est un processus à valeurs dans H , où A : D(A) ⊂ H → H désigne un opérateur positifauto-adjoint tel que D(A) s’injecte de façon compacte dans H , f une application non linéairede H dans D(A−s) pour un certain s ∈ [0, 1[ et σ une application de H dans L(H, D(A−β))pour un certain β. On spécifiera la relation entre et A et β plus bas. Ici, W (t)t≥0 désigne unprocessus de Wiener cylindrique sur H (voir paragraphe 1.1.2) défini sur un espace de probabilité(Ω,F , P, Ftt≥0).
Un tel cadre est très général. Il inclut les versions stochastiques des équations de Burgers,Navier–Stokes, Cahn–Hilliard, Ginzburg–Landau, Kuramoto–Sivashinsky ou plus généralementdes équations de réactions diffusions (si ces équations sont écrites dans un domaine borné).
Dans [134], on s’intéresse à l’approximation de (2.4.8)–(2.4.9) par un schéma semi-implicite.Soit T > 0 et N un entier. Pour un pas de temps ∆t = T/(N + 1) > 0, on construit une suited’approximation Xn0≤n≤N de la solution X par le schéma suivant
(2.4.10)
Xn+1 − Xn + ∆t(AXn+θ + f(Xn)) =
√∆tσ(Xn)χn+1,
X0 = x ∈ H,
où on a posé Xn+θ = θXn+1 + (1− θ)Xn pour un θ ∈ [0, 1] et où χn+1n≥0 est une suite i.i.d.de v.a. normales à valeurs dans H .

34 CHAPITRE 2. ÉQUATIONS AUX DÉRIVÉES PARTIELLES STOCHASTIQUES.
Concernant le schéma (2.4.10), notons que les résultats de convergence dans le cas déter-ministe (σ = 0) sont classiques. Par exemple, dans [102], l’auteur montre que le cadre de ladimension infinie impose
(2.4.11) θ > 1/2
pour la convergence. Dans ce cas, le schéma est d’ordre 1.
Le but de cette étude (dans [134]) est de généraliser la première partie du papier [76] concer-nant une non linéarité f globalement Lipschitz. Dans [76], les auteurs utilisent de façon intensivela forme explicite de la fonction de Green du problème continu. On se propose dans ce travaild’utiliser plutôt les propriétés spectrales de l’opérateur A. Ainsi, nous pouvons utiliser des ou-tils puissants déjà développés dans le cas déterministe. De plus, la fonction de Green n’est pastoujours disponible, c’est pourquoi, cette méthode semble s’appliquer à un plus grand nombrede situations.
La principale difficulté lorsque l’on étudie les schémas numériques pour des équations auxdérivées partielles stochastiques est dans le traitement de la discrétisation en temps. Nous nousrestreindrons à ce cas là.
Nous présentons deux résultats selon que f est globalement Lipschitz ou seulement localementLipschitz. Dans le premier cas, les hypothèses sur A, f et σ sont
(2.4.12) Tr(A−α) < +∞, 1 − α − 2β > 0,
(2.4.13) |f(x) − f(y)|D(A−s) ≤ Lf |x − y|H ,
(2.4.14) |σ(x) − σ(y)|L(H,D(A−β)) ≤ Lσ|x − y|H .
Théorème 2.4.1 ([134]) Soit x ∈ Lp(Ω, H) pour un entier p ≥ 2. Soit X la solution de (2.4.8)–(2.4.9) sur [0, T ]. Alors, sous les hypothèses (2.4.12)– (2.4.14), pour tout γ < min(1 − s, (1 −α)/2 − β), le schéma (2.4.10) est d’ordre fort γ dans H. Il existe une constante C(p) > 0 telleque (
E max0≤n≤N
|Xn∆t − Xn|p)1/p
≤ C(p)(∆tγ + ∆t(E|u0|p)1/p
).
Ce résultat est général et peut s’appliquer à toutes les équations aux dérivées partiellesstochastiques de type parabolique avec une non-linéarité Lipschitzienne pourvu que (2.4.12) aitlieu. Par exemple, en dimension d avec un bruit blanc (β = 0), soit A = (−∆)r/2 pour un réelpositif r > d sur un ouvert borné de R
d avec des conditions de Dirichlet ou de Neumann auxbords. Si α > d/r alors (2.4.12) est vérifiée. Si s = 0, alors on a un ordre de convergence de Xn
de 12 (1− d
r ). Pour l’équation de Cahn–Hilliard avec une non-linéarité f Lipschitzienne, si β = 0,on obtient un ordre 3/8 en dimension 1, 1/4 en dimension 2 et 1/8 en dimension 3. Si β = 1/4,la condition (2.4.12) n’a plus lieu si d = 2 ou 3. Et pour d = 1 on obtient un ordre 1/8.
Le deuxième résultat concerne les cas où σ est toujours globalement Lipschitz mais où f estseulement localement Lipschitz. On se restreint au cas de la dimension 1 de l’équation de Burgersstochastique. Dans ce cas H = L2(0, 1), s > 3/4, β = 0 et α > 1/2. Cependant cette approchereste générale et peut s’appliquer à d’autres situations. L’idée est d’imiter la preuve d’existenceet d’unicité pour le problème continu [37]. Néanmoins, on suppose une hypothèse supplémentairesur σ :
(2.4.15) ∀u ∈ L2(0, 1), |σ(u)|L(L2(0,1)) ≤ Cσ,
pour Cσ > 0.
Théorème 2.4.2 ([134]) Soit x ∈ Lp(Ω, L2(0, 1)) pour p ≥ 2. Soit X solution de (2.4.8)–(2.4.9) (version Burgers stochastique en dimension 1 sur domaine borné avec conditions auxbords Dirichlet) et soit Xnn≥0 donné par le schéma (2.4.10). Alors la suite Xn converge en

2.4. APPROXIMATION FAIBLE ET FORTE DE L’ÉQUATION DE LA CHALEUR 35
probabilité vers X. De plus, pour tout γ < 1/4, le schéma (2.4.10) est d’ordre en probabilité γdans L2(0, 1), c.-à-d.
limC→+∞
lim supτ→0
P
max
0≤n≤N|Xn∆t − Xn| ≥ C
(∆tγ + ∆t(E|u0|p)1/p
)= 0.
On considère des versions tronquées de l’équation continue et de l’équation discrète et on appliquele premier résultat.
⋄Dans [48], nous nous sommes intéressés à l’approximation en loi, dite faible, de l’équation dela chaleur stochastique. Même si l’analyse numérique des EDPS se développe assez rapidement,peu d’études abordent le cas de l’ordre faible [26, 43, 48].
On a pu établir dans [48] un ordre faible pour l’équation (2.4.8) linéaire (f = 0 et σ constante)complètement discrétisée (éléments finis en espace et schéma d’Euler en temps) sans conditionde stabilité impliquant les pas de temps et d’espace comme il est naturel de s’y attendre pourun schéma implicite. La méthode utilisée est celle dite de l’EDP développé initialement par[150, 151, 152] dans le cadre des Équations Différentielles Stochastiques (EDS) (l’analogue endimension finie). Elle consiste à estimer l’erreur à travers les solutions d’équations de Kolmogorovassociées à la diffusion.
La principale difficulté ici est la présence, du fait des dérivées partielles, d’un potentieltrès irrégulier (AX). Une astuce pour la contourner consiste à travailler avec l’inconnue Yt =exp(−(T − t)A)Xt en même temps qu’avec ses variantes discrètes. On considère donc l’équation
(2.4.16) dYt = exp(−(T − t)A)σdWt, Y0 = exp(−TA)x.
C’est une idée déjà présente dans [43]. Une autre idée, propre au cas linéaire, est de constater quel’on a une représentation de Feynman-Kac explicite de la solution de l’équation de Kolmogorovassociée à (2.4.16) :
∂v
∂t=
1
2Tr((exp(−(T − t)A)σ)⋆D2v(exp(−(T − t)A)σ)
), v(0) = ϕ,
pour ϕ une fonctionnelle suffisamment « régulière » sur H (cf. théorème 2.4.3). En fait, on a
v(T − t, y) = E ϕ
(y +
∫ T
t
exp(−(T − s)A)σ dWs
).
La même idée sert dans les approximations en temps et en espace pour les variantes discrètes deYt et v.
On décrit en quelques mots l’approximation spatiale par éléments finis : soit Vhh>0 unefamille d’éléments finis, c.-à-d. une famille de sous-espaces de dimension finie de V = D(A1/2).On désigne par Ph le projecteur orthogonal de H sur Vh par rapport au produit scalaire de H .Le schéma complètement discrétisé s’écrit
(2.4.17) (Xn+1h − Xn
h , vh) + ∆t(AXn+1h , vh) =
√∆t(Q1/2χn+1, vh), X0
h = Phx,
pour tout vh ∈ Vh. Par rapport au contexte précédent, les hypothèses changent un peu. Iciσ = Q1/2 où Q est un opérateur positif symétrique borné de H dans D(Aβ) pour β ≥ 0 tel que1 − α + β > 0. Alors, on a le théorème
Théorème 2.4.3 ([48]) Soit ϕ ∈ C2b (H), c.-à-d. une fonctionnelle réelle deux fois différentiable
définie sur H dont les dérivées premières et secondes sont bornées. Soit Xnh0≤n≤N une solution
de (2.4.17). Sous les hypothèses précédentes, il existe une constante C(T, ϕ) > 0 qui ne dépendni de h, ni de N telle que pour tout γ < 1 − α + β ≤ 1, on a
|E ϕ(XNh ) − Eϕ(XT )| ≤ C
(h2γ + ∆tγ
).

36 CHAPITRE 2. ÉQUATIONS AUX DÉRIVÉES PARTIELLES STOCHASTIQUES.
2.5 Perspectives.
2.5.1 Approximation faible des EDPS non linéaires.
Par la suite, un travail en cours, en collaboration avec Arnaud Debussche (ENS Cachan,antenne de Bretagne) s’intéresse à l’approximation faible en temps de (2.4.8) pour f non nulleet σ non constante. Il n’est pas difficile de se convaincre qu’en effet la principale difficulté seconcentre sur la partie approximation en temps.
Plusieurs difficultés se manifestent. La première concerne l’inconnue Yt qui, parce que lesemi-groupe exp(−tA) n’est pas inversible, n’est plus un processus de Markov. En effet, pourf = 0 pour simplifier, on a
dYt = exp(−(T − t)A)σ(Xt)dWt.
On ne peut donc pas parler d’EDP de Kolmogorov comme dans le paragraphe précédent.
La deuxième difficulté est également inhérente à la méthode dite de l’EDP. Pour s’en convaincre,modifions un peu le schéma en temps et considérons Xn construit de la sorte :
Xn = Xtnavec dXt + AXtdt + f(Xtn
)dt + σ(Xtn)dWt, t ∈ [tn, tn+1].
(On a figé les termes non linéaires sur un pas de temps.).
En général, la méthode de l’EDP peut se résumer à contrôler entre deux pas de temps l’erreurfaible suivante :
E ϕ(XN−n−1(X(tn+1, x))) − E ϕ(XN−n(X(tn, x))),
où X(t, x) désigne la solution de (2.4.8)–(2.4.9) et où Xk(y) désigne la valeur donnée par leschéma à la date k de donnée initiale y. Ici, l’équation de Kolmogorov qu’il revient à considérerest celle associée au schéma discret.
La propriété de Markov de Xn permet de transformer le second terme et on obtient
E ϕ
(XN−n−1
(e−∆tAX(tn, x) +
∫ tn+1
tn
e−(tn+1−s)Af(X(s, x)) ds + · · ·))
− E ϕ(XN−n−1
(X1(X(tn, x))
))
= E ϕ
(XN−n−1
(e−∆tAX(tn, x) +
∫ tn+1
tn
e−(tn+1−s)Af(X(s, x)) ds + · · ·))
− E ϕ
(XN−n−1
(e−∆tAX(tn, x) +
∫ tn+1
tn
e−(tn+1−s)Af(Xn) ds + · · ·))
.
Or le terme en f (par exemple) n’est pas « petit », du moins pas dans les topologies qui nousintéressent du point de vue de l’analyse numérique. En effet, deux applications successives de laformule d’Itô dans la formule ci-dessus nous amènent à des contrôles en |A(X(tn, x)−Xn)|H . Onretrouve donc le problème du potentiel irrégulier AX . Le problème est le même pour le termeen σ.
2.5.2 Comportement en temps long des solutions de l’équation de
Korteweg–de Vries stochastique.
Le comportement en temps long de la solution de l’équation de Korteweg–de Vries stochas-tique, pour une donnée initiale de type soliton, n’a été traité dans mon travail que d’un point devue qualitatif et pour un bruit additif (cf. [45, 46]). Signalons qu’entre temps, d’autres travauxse sont intéressés à la question de façon plus quantitative.
Dans [44], les auteurs montrent que, pour un bruit additif de taille ε > 0 et de régularitéH1, la solution, dont l’état inital est un soliton, se décompose p.s. en la somme d’un solitonde phase aléatoire et de vitesse aléatoire (une onde modulée aléatoirement) et d’un terme petit

2.5. PERSPECTIVES. 37
en norme H1 jusqu’à des temps de l’ordre de 1/ε2. De plus, sous des hypothèses de régularitéplus fortes sur le bruit (H2), le terme en premier ordre en ε tend en loi lorsque ε tend vers0 vers un processus gaussien. Cette étude théorique vient, après plusieurs études numériques[30, 132, 143], confirmer le fait que la solution issue d’une donnée initiale soliton avec un bruitadditif tend asymptotiquement, en moyenne, vers 0.
La question reste ouverte concernant le cas du bruit multiplicatif. Des expériences numériquesrécentes semblent montrer que les solutions de l’équation suivante écrite sur un intervalle bornéavec conditions aux bords périodiques tendent vers 0 p.s. lorsque t tend vers l’infini :
du +
(ε∂3u
∂x3+ u
∂u
∂x
)dt = γu ΦdW, u(x, 0) = ϕc(x),
où ϕc est un profile soliton et où Φ dW est un bruit homogène. En fait, la situtation est àrapprocher avec le comportement des solutions des EDS du type dXt = Xt dBt, X0 = 1 qui sontdes martingales exponentielles Xt = exp(Bt − t/2) et qui tendent donc vers 0.
Un travail théorique préliminaire, en collaboration avec Nicolas Fournier (Univ. Paris 12),a permis de dégager des hypothèses nécessaires pour que cela soit vrai dans le cas périodique.L’argument principal reste ici la propriété conservative L2 de la partie déterministe de l’équation.Très récemment, dans [157], l’auteur parvient au même type de résultat.

38 CHAPITRE 2. ÉQUATIONS AUX DÉRIVÉES PARTIELLES STOCHASTIQUES.

Chapitre 3
Quelques applications à la financedes méthodes de quantification.
Je résume ici les articles [8, 9, 62, 123, 124, 125, 126]. Il s’agit de collaborations avec V. Bally,E. Gobet, H. Pham et G. Pagès. Ils sont en grande partie consacrés aux aspects numériques desméthodes de quantification et leurs applications spécifiques à certains problèmes de mathéma-tiques financières : options européennes, américaines (cas « vanille ») et options « trajectoiresdépendantes » à travers le cas des options asiatiques.
Nous avons mis à disposition des grilles sur un site dédié à la quantification
www.quantize.maths-fi.com
où on peut télécharger de nombreuses grilles de quantification optimales obtenues pour la loinormale dans R
d ainsi que des grilles de quantification pour le brownien (cf. le paragraphe 1.4.5).
Notons également qu’une partie des algorithmes présentés ici a été implémentée dans lelogiciel Premia lors d’une délégation auprès de l’Institut National de Recherche en Informatiqueet Automatique (I.N.R.I.A.) :
www-rocq.inria.fr/mathfi/Premia/
3.1 Quantification optimale de vecteurs gaussiens.
Dans beaucoup de cas pratiques (options européennes dans un modèle de Black–Scholes), levecteur aléatoire qui nous intéresse, dans (1.4.23) par exemple, est la valeur en T > 0 d’un brow-nien d-dimensionnel. Si bien que modulo une dilatation appropriée, on est ramené à quantifier laloi normale N (0; Id). Dans [125], on décrit en détails quelques procédures permettant l’obtentionde grilles optimales pour la loi normale.
Tout d’abord, en dimension 1, on peut calculer explicitement, pour x ∈ RN , les quantités
telles que DXN (x), la différentielle ∇DX
N (x) ∈ RN et le Hessien N ×N , D2(DX
N (x)) en utilisant lafonction de répartition erf de la loi normale scalaire. En effet, les cellules de Voronoï des pointsxj sur R sont les intervalles ]xj−1/2, xj+1/2[ où xj±1/2 = (xj +xj±1)/2. Une méthode de Newtonpeut alors être utilisée efficacement.
(3.1.1) xN
(k + 1) = xN
(k) −[D2(DX
N )(xN
(k))]−1
· ∇(DXN (x
N(k))), x
N(0) donné.
Ceci bien sûr concerne toutes les lois en dimension 1 pour lesquelles on connaît les fonctionsde répartition.
En dimension plus grande, le même type de méthode déterministe requiert a priori unetrès bonne connaissance de la géométrie des cellules de Voronoï, ce qui peut induire une trop
39

40 CHAPITRE 3. QUANTIFICATION ET APPLICATION EN FINANCE
grande complexité quand d devient de plus en plus grand. On se tourne alors vers des procéduresd’optimisation stochastiques comme celles décrites au paragraphe 1.4.2. Nous allons aborder iciun point qui pose problème dans la méthode de gradient stochastique.
Ce point est lié à la quantification d’une loi près de ses modes, ou du moins au voisinage despoints où sa densité est stationnaire. En effet, nous n’avons pas précisé dans (1.4.22) quel choixfaire pour la suite γk+1, le pas de la descente. Dans le cas où l’on choisit un pas de la formeγk = γ/k, on sait, sous certaines hypothèses de régularité de la fonction à minimiser, disons g,que la convergence vers le quantifieur optimal x⋆ de la suite x
N(k) définie par (1.4.22) est
contrôlée par un Théorème Centrale Limite du type
xN
(k) − x⋆
√k
→ N (0; Σ),
pourvu que
γ >1
2λmin
où la matrice Σ dépend essentiellement du Hessien de la fonction g (cf. [52, 100]) et où λmin estla plus petite valeur propre du Hessien de g.
Dans le cas de la loi uniforme en dimension 1, il est facile de calculer le Hessien de la fonctionde distorsion et, après calcul, on s’aperçoit que celui-ci n’est rien d’autre que le laplacien discretobtenu par différences finies sur [0, 1] (à un facteur N près). Il est facile de calculer ses valeurspropres et on trouve
λmin =1
Nsin2
( π
2N
)≈ π2
4N3
quand N est grand. Ainsi un critère suffisant de convergence est γ > 2N3/π2. Il est au passageintéressant de noter qu’ici le caractère mal conditionné, bien connu, de la matrice du laplacien estdirectement lié à la lenteur de l’algorithme puisque γ prend des valeurs de plus en plus grandeslorsque N croît.
Pour ce qui est maintenant de la loi normale, au voisinage du point (ici 0) où la densitégaussienne est stationnaire, il semble que l’on doive spécifier comme pas celui que l’on voudraitadopter si l’on voulait quantifier la loi uniforme sur [0, 1]d. L’heuristique suivie dans [125] consisteà choisir comme pas celui qui s’imposerait si l’on quantifiait les marginales de dimension 1 de laloi uniforme, c.-à-d. la loi uniforme avec N1/d points. Ainsi le choix du pas se porte sur
γn = γ0a
a + γ0bn, a = 4N1/d, b = π2N−2/d.
Alors γn ∼ a/bn ∼ 4N3/d/π2n > 2N3/d/π2n qui est le pas critique pour la loi uniforme pouravoir un TCL pour n grand.
3.2 Intégration numérique et options européennes.
On compare dans [124, 125] les performances d’une méthode de quantification avec uneméthode de Monte Carlo sur un simple problème d’intégration numérique. Le but est de com-parer l’erreur déterministe d’une grille de quantification à N points avec l’ordre de grandeur del’écart-type d’un estimateur Monte Carlo à N points. Pour des fonctionnelles régulières, l’er-reur de quantification est en N−2/d compte tenu de l’annulation du terme du premier ordre parstationnarité du quantifieur. La dimension d = 4 semble donc une dimension critique.
Nous testons ces méthodes sur des options européennes de type put, put-spread de maturitéT > 0 sur un indice géométrique constitué de d actifs Black–Scholes indépendants. Il s’agit decalculer des espérances du type
E e−rT(K −
(S1
T · · ·SdT
)1/d)
+
ouE e−rT
(K2 −
(S1
T · · ·SdT
)1/d)
+− E e−rT
(K1 −
(S1
T · · ·SdT
)1/d)
+,

3.3. QUANTIFICATION DE CHAÎNES DE MARKOV ET OPTIONS AMÉRICAINES. 41
avec r > 0, K1 < K2 et où les actifs Sit suivent la dynamique Black–Scholes, c.-à-d. qu’à la
date T , ils ont la même loi que
(3.2.2) SiT ∼ s0 exp
((r − σ2
2
)T + σi
√TZi
), i = 1, . . . , d,
où Z = (Z1, . . . , Zd) suit une loi normale dans Rd. L’hypothèse d’indépendance des actifs n’est
pas réaliste mais c’est clairement le pire cas du point de vue de la quantification. On disposede formules exactes pour le calcul de telles espérances et on peut calculer l’erreur obtenue pourchaque grille de quantification ZN de taille N et de dimension d associée à la v.a. Z. Pour unedimension d fixée, on trace les erreurs obtenues dans un diagramme log-log. On retrouve alorsla pente prédite en −2/d. On trace par ailleurs l’écart-type d’un estimateur Monte Carlo à Npoints de la même fonction.
En conclusion, les résultats s’avèrent favorable à la quantification au moins tant que d ≤ 4.Lorsque d ≥ 5, les grilles de quantification donnent un meilleur résultat que Monte Carlo jusqu’àune taille critique N(d) qui décroît lorsque d croît. Des développements récents permettent derepousser cette limite (voir paragraphe 3.5).
3.3 Quantification de chaînes de Markov et options améri-caines.
Évaluer à la date t ≤ T le prix d’une option américaine de maturité T pour un actif continuStt∈[0,T ] (l’actif sous-jacent) consiste à résoudre un problème d’arrêt optimal associé à unobstacle. On se place ici dans le cas d’obstacle markovien (l’actif contingent) de la forme ht =h(t, St) :
(3.3.3) Vt = esssupτ∈Tt,TE e−r(τ−t)h(τ, Sτ ),
où Tt,T désigne l’ensemble des temps d’arrêt à valeurs dans [t, T ]. Ici la dynamique de St peutêtre celle d’une diffusion de type Black–Scholes dans R
d :
dSit = Si
t(r dt +∑
1≤j≤q
σi,j(St) dW jt ), Si
0 = si0, 1 ≤ i ≤ d,
où les W jt sont des mouvements browniens indépendants.
On approche l’actif en temps continu par Xk solution d’un schéma d’Euler associé à ladiffusion St de pas de temps ∆t = T/n pour n ≥ 1. Cette discrétisation en temps donne lieuà une première approximation de Vt par Vk défini pour k ∈ 0, . . . , n par
Vk = esssupθ∈ΘkE e−r(tθ−tk)h(tθ, Xθ),
où tk = k∆t, Θk = θ : Ω → k, . . . , n temps d’arrêt : il s’agit du calcul de l’enveloppe deSnell de la chaîne de Markov Xk. Il est classique de vérifier qu’elle s’obtient par la formule deprogrammation dynamique rétrograde :
(3.3.4)
Vn = h(tn, Xn),Vk = max (h(tk, Xk), E (Vk+1 | Xk)) , 0 ≤ k ≤ n − 1.
En dimension 1, une approche populaire pour discrétiser spatialement (3.3.4) est la méthode del’arbre binomiale initiée par Cox-Ross & Rubinstein qui est un maillage recombinant permettantun calcul simple de l’espérance conditionnelle. Ce fut à l’origine envisagé comme une discrétisa-tion du modèle continu de Black & Scholes. En général ce type de méthodes ne fonctionne plustrès bien dès que la dimension augmente. Or il est fréquent de considérer des produits dérivésportant sur plus d’un actif risqué.
Plus récemment, des auteurs ont cherché à dépasser le problème posé par les « grandes »dimensions. Dans [103], l’algorithme défini par Longstaff et Schwartz est basé sur l’approximation

42 CHAPITRE 3. QUANTIFICATION ET APPLICATION EN FINANCE
des espérances conditionnelles par une régression sur une famille finie de fonctions polynômialesde Xk.
Cette dernière approche fait le choix d’une approximation régulière (fonctions polynômiales)mais globale (puisque les coefficients de régression sont obtenus en intégrant sur tout le domaine).L’objectif ici est de quantifier la chaîne de Markov Xk (cf. le paragraphe 1.4.4) et de remplacerdans (3.3.4) Xk par son vecteur quantifié Xk. On propose ainsi une approximation irrégulière(fonctions continues par morceaux) mais locale. L’algorithme se lit comme suit :
(3.3.5)
Vn = h(tn, Xn),
Vk = max(h(tk, Xk), E (Vk+1 | Xk)
), 0 ≤ k ≤ n − 1.
L’espérance conditionnelle par rapport à Xk est ici justifiée par le fait que Xk n’est pas unechaîne de Markov contrairement à Xk.
Chaque vecteur de quantification Xk est ici quantifié suivant un algorithme de type gradientstochastique par exemple (cf. paragraphe 1.4.2) couplé à la simulation du schéma en temps. Oncalcule ainsi les distributions pi
k et πi,jk (voir (1.4.24)–(1.4.25)) qui permettent d’estimer les
espérances conditionnelles dans (3.3.5).
Dans le cas spécial de Black–Scholes où les marginales du processus St sont des v.a. log-normales, un autre choix possible est de quantifier les v.a. Stk
dans un premier temps en quan-tifiant la loi normale dans R
d et en appliquant une formule du type de (3.2.2). Notons toutefoisque la quantification qui en résulte dans ce cas n’est pas optimale pour ST . Ceci nous donne desgrilles Γk = xi
k1≤i≤Nkde taille Nk à chaque pas de temps ainsi que des poids (1.4.24). Il reste
ensuite à quantifier les probabilités de transition (1.4.25). Ceci est effectué en simulant sur desgrilles fixes le schéma en temps.
Le résultat sur l’approximation de (3.3.4) par (3.3.5) est le suivant :
Théorème 3.3.1 ([9]) Si les coefficients de la diffusion sont suffisamment réguliers et l’obstacleest Lipschitzien, alors
max0≤k≤n
E
(|Vk − Vk|p
)1/p
≤ C(T, p)n1+1/d
N1/d= CT,p
n
(N/n)1/d,
où N = N1 + · · · + Nn est le nombre total de points distribués sur toutes les grilles.
En pratique, on construit des fonctions vk définies sur les grilles Γk de la façon suivante
(3.3.6)
vn(xin) = h(tn, xi
n), 1 ≤ i ≤ Nn,
vk(xik) = max
h(tk, xi
k),
Nk+1∑
j=1
πi,jk vk+1(x
jk+1
1 ≤ i ≤ Nk, 0 ≤ k ≤ n − 1.
Les expériences numériques montrent qu’il est souvent nécessaire de soustraire à vk desfonctions mk plus ou moins explicites en les xi
k telles que
Nk+1∑
j=1
πi,jk mk+1(x
jk+1) ≈ mk(xi
k).
Des approximations sur la grille de l’option européenne associée à h peuvent jouer ce rôle. Cesvariables mk sont appelées, par analogie avec les techniques de réduction de variance dans lesméthodes de Monte Carlo, des variables de contrôles.
Les tests numériques sont effectués pour des options du style options d’échange sur des indicesgéométriques. On a ainsi explicitement l’option européenne associée ainsi qu’une bonne référencenumérique pour l’option américaine puisque l’on peut se ramener à un arbre binomial (1d) pourl’estimer.

3.4. QUANTIFICATION FONCTIONNELLE ET OPTIONS ASIATIQUES. 43
En conclusion, ce type de techniques semble bien adapté au cas de grandes dimensions (4 ≤d ≤ 10) pour lesquelles on sait que les méthodes déterministes sont inopérantes. De plus il permeten général de calculer et de stocker à part tout ce qui est indépendant des paramètres de l’option(ici la fonction h). C’est ce dernier point qui distingue le plus cette méthode de celle de Longstaffet Schwartz.
3.4 Quantification fonctionnelle et options asiatiques.
Dans [126], on applique la quantification fonctionnelle au problème des options asiatiques, c.-à-d. des options sur moyenne, dans un modèle de Heston. On utilise deux quantifications des deuxmouvements browniens qui gouvernent la diffusion (dans [126] on a utilisé des quantificationsproduits).
Le modèle de volatilité stochastique d’Heston fut introduit dans [81] pour modéliser la dy-namique des prix d’actifs. Sous une probabilité risque-neutre, il s’écrit :
dSt = St(r dt +√
vt dW 1t ), S0 = s0,
dvt = k(a − vt) dt + θ√
vtdW 2t , v0 > 0 avec d〈W 1, W 2〉t = ρdt,
où ρ ∈ [−1, 1] et où θ, a, k > 0 sont tels que θ2/(4ka) < 1. On considère l’option d’achat surmoyenne (Call Asiatique) de maturité T et de strike K > 0 pour lequel il n’y a pas de formuleexplicite :
e−rTE
(1
T
∫ T
0
Ss ds − K
)
+
.
Dans une première étape, on projete W 1 sur W 2 de sorte que W 1 = ρW 2 +√
1 − ρ2W 1. AlorsSt s’écrit comme
St = s0 exp
((r − 1
2vt)t + ρ
∫ t
0
√vs dW 2
s
)
= s0 exp
(ρ
θ(vt − v0) + t
((r − ρak
θ) + vt(
ρk
θ− 1
2)
))× exp
(√1 − ρ2
∫ t
0
√vs dW 1
),
où la notation v signifie v = 1t
∫ t
0 v.
Soit maintenant ΓNj = w1Nj
, . . . , wNj
Nj, j = 1, 2, deux quantifieurs du mouvement brownien.
On résout pour i = 1, . . . , N1 les équations différentielles suivantes en yi = yN1
i et si,j = sN1,N2
i,j :
yi(t) = k
(a − yi(t) −
θ2
4k
)+ θ√
yi(t) wiN1(t), yi(0) = v0,(3.4.7)
si,j(t) = si,j(t)
(r − 1
2yi(t) −
ρθ
4+√
yi(t)(ρ wi
N1(t) +√
1 − ρ2 wjN2(t)
))
en utilisant un schéma de Runge–Kutta par exemple. On considère la quantification (non Voro-noï) (N1, N2) de (vt, St) suivante
vN1t =
N1∑
i=1
yN1
i (t)1Ci(ΓN1 )(W2)
SN1,N2
t =∑
1≤i≤N1
∑
1≤j≤N2
sN1,N2
i,j (t)1Ci(ΓN1)(W2)1Cj(ΓN2 )(W
1).
Le prix de l’option est approchée par
e−rT∑
i,j
(si,j(T ) − K)+ × P(W 2 ∈ Ci(ΓN1)) × P(W 1 ∈ Cj(Γ
N2)).
La figure 3.1 donne un exemple de quantifieur non Voronoï.
L’algorithme de calcul de prix d’options asiatiques dans le modèle d’Heston a fait l’objetd’une interface graphique que l’on peut manipuler sur le site www.quantize.maths-fi.com.

44 CHAPITRE 3. QUANTIFICATION ET APPLICATION EN FINANCE
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−4
−3
−2
−1
0
1
2
3
4
Brownian motion on [0,1], N=400 points 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
Trajectoires de la volatilité Heston NX = 400. Paramètres : v0=0.01, k=2, a=0.01, theta=0.2, rho=0.5
Fig. 3.1 – Exemple de quantifieur vN1t (droite) pour N1 = 400 du processus carré de la volatilité
Heston obtenu avec le quantifieur ΓN1 de W2 (gauche). Paramètres : s0 = 100, k = 2, a = 0.01,ρ = 0.5, v0 = 10%, θ = 20%.
3.5 Perspectives.
Les deux directions de recherche suggérées ci-dessous sont des collaborations avec Gilles Pagès(Univ. Paris 6).
3.5.1 Extrapolations de Romberg.
Une première direction très prometteuse est d’appliquer les techniques d’extrapolation deRichardson-Romberg aux techniques d’intégration numériques par quantification aussi bien vec-torielle que fonctionnelle. Comparée aux méthodes de Monte Carlo, dès la dimension 5, la quan-tification vectorielle est efficace jusquà une taille critique après quoi l’écart-type Monte Carlo (enN−1/2) devient compétitif. Ce qui suit repose sur une conjecture et permet de repousser cettelimite. Soit F : H → R une fonctionnelle deux fois différentiable avec un Hessien Lipschitz D2Fet soit XNN≥1 une suite de quantifieurs optimaux quadratiques. Alors grâce à (1.4.19)
EF (X) = EF (XN ) +1
2E
(D2F (XN ) · (X − XN)⊗2
)+ O(|X − XN |3).
Quand H = Rd, sous certaines hypothèses sur la loi de X , on montre dans [106] que |X−XN |3 =
O(N−3/d), aussi conjecture-t-on
E
(D2F (XN) · (X − XN)⊗2
)=
c
N2/d+ o(
1
N3/d).
On peut alors utiliser une extrapolation pour calculer EF (X) plus précisément. Une approchesimilaire dans le cas de la dimension infinie a déjà été testée avec succès dans [126].
Un test numérique a été effectué sur des options put-spread sur indices géométriques avecles mêmes paramètres que dans [125] pp. 152 sqq. Les résultats sont montrés dans la figure 3.2.On y voit que la taille critique est très basse sinon dépassée lorsque l’on utilise les grilles dequantification pour ce nombre de points N ≤ 4000 dans ces dimensions (d ≥ 8). Par contre, laméthode d’extrapolation fournit d’excellents résultats. Il semble même que l’on puisse récupérerun vitesse en 1/N dans les deux dimensions.
3.5.2 La quantification comme technique de réduction de variance.
Un travail en collaboration avec Gilles Pagès (Univ. Paris 6) qui en est aux préliminaires pourle moment jette les bases (théoriques pour le moment) d’une méthode de stratification basée sur

3.5. PERSPECTIVES. 45
(a)
0.0001
0.001
0.01
0.1
100 1000 10000
d = 8
QTF g4 (slope -0.25)QTF g4 Romberg (slope -1.2)
MC
(b)
0.001
0.01
0.1
100 1000 10000
d = 10
QTF g4 (slope -0.23)QTF g4 Romberg (slope -0.8)
MC
Fig. 3.2 – Erreurs de quantification et écart-type comme fonctions du nombre de points Ndans un diagramme log-log. Les + désignent les erreurs de quantifications, les × les erreursconsécutives à la méthode de Romberg. Les lignes en pointillés sans croix sont les écart-typeMonte Carlo. (a) d = 8, (b) d = 10.

46 CHAPITRE 3. QUANTIFICATION ET APPLICATION EN FINANCE
la quantification afin de réduire la variance des simulations Monte Carlo. On peut le voir commeune méthode de Monte Carlo guidée ou hybride Monte Carlo/Quantification. Elle fut introduitedans [126] pour des fonctionnelles Lipschitz du mouvement brownien. Nous donnons simplementl’exemple de fonctions différentiables de différentielle Lipschitz. Si F : R
d → R désigne l’uned’elles et si XN désigne un N -quantifieur de X , on peut écrire
EF (X) = EF (X) + E
(E (F (X) − F (XN) | XN)
)
= E F (XN ) +1
M
M∑
m=1
FX,m + RM,N ,
où (FX,m)m≥1 est une suite i.i.d. de vecteurs aléatoires de lois L(E(F (X) − F (XN ) | XN)).
Alors
‖RN,M‖2 =σ(E(F (X) − F (XN) | XN))√
M
≤ σ(F (X) − F (XN )√M
.
Ceci est vrai pour toute fonction borélienne. Mais si F est régulière, alors
Var(E(F (X) − F (XN) | XN)) ≤ [D2F ]Lip‖X − XN‖24.
Le comportement asymptotique de ‖X−XN‖r quand r ≥ 2 n’est pas très bien connu (rappelonsque XN est un quantifieur optimal quadratique). Mais on peut dire dans le cas de la loi normalepar exemple que l’on a ‖X − XN‖r = O(N−1/d) quand d ≥ 3.
Par conséquent si on sait simuler efficacement la v.a. E(F (X) − F (XN) | XN), la méthodedécrite plus haut peut réduire la variance significativement. Cela revient à pouvoir simuler laloi jointe (XN ,L(X | XN )). Ceci peut être fait en dimension 1 quand on connaît la fonction derépartition de X puisque les cellules de Voronoï sont bien connues. En dimension plus grande,on peut étendre cette approche lorsque les marginales de X sont indépendantes et que XN estun quantifieur produit.

Bibliographie
[1] F. K. ABDULLAEV, S. DARMANYAN, P. KHABIBULLAEV, Optical solitons, Springer Series inNonlinear Dynamics (1993).
[2] M. J. ABLOWITZ et P. A. CLARKSON, Solitons, Nonlinear Evolution Equations and In-
verse Scattering, London Mathematical Society Lecture Note Series 149, Cambridge UniversityPress, 1991.
[3] M. J. ABLOWITZ et H. SEGUR, Solitons and the inverse scattering transform, SIAM,1981.
[4] T. R. AKYLAS, On the excitation of long nonlinear water waves by a moving pressure distribution,J. Fluid. Mech., 141 (1984), 455-466.
[5] E. J. ALLEN, S. J. NOVOSEL, Z. ZHANG, Finite element and difference approximation of somelinear stochastic partial differential equations, Stochastics Stochastics Rep. 64 (1–2), 117–142 (1998).
[6] V. BALLY et G. PAGÈS, A quantization algorithm for solving discrete time multi-dimensionaloptimal stopping problems, Bernoulli 9(6), 1003–1049 (2003).
[7] V. BALLY, G. PAGÈS et J. PRINTEMS, A stochastic quantization mezthod for nonlinear problems,Monte Carlo Methods and Appl. 7(1–2), 21–24 (2001).
[8] V. BALLY, G. PAGÈS et J. PRINTEMS, First order schemes in the numerical quantization method,Mathematical Finance 13(1), 1–16 (2003).
[9] V. BALLY, G. PAGÈS et J. PRINTEMS, A quantization tree method for pricing and hedgingmultidimensional American options, Mathematical Finance 15(1), 119–168 (2005).
[10] T. B. BENJAMIN, The stability of solitary waves, Proc. Roy. Soc. Lond. A 328 (1972), 153.
[11] T. B. BENJAMIN, J. L. BONA et J. J. MAHONY, Model equations for long waves in nonlineardispersive systems, Phil. Trans. R. Soc. Lond. A 272 (1972), 47-78.
[12] A. BENSOUSSAN et R. TEMAM, Équations aux dérivées partielles stochastiques non linéaires,Israël J. Math. 11 (1972), 95-129.
[13] A. BENSOUSSAN et R. TEMAM, Équations stochastiques du type Navier-Stokes, J. Funct. Anal.13 (1973).
[14] J. L. BONA, On the stability of solitary waves, Proc. Roy. Soc. Lond. A 344 (1975), 363-374.
[15] J. L. BONA, V. A. DOUGALIS, O. A. KARAKASHIAN, Fully discrete Galerkin methods for theKorteweg-de Vries equation, Comp. and Maths with Appl. 12 A (1986), 859-884.
[16] J. L. BONA, V.A. DOUGALIS, O. A. KARAKASHIAN, W. R. McKINNEY, Conservative, Highorder numerical schemes for the generalized Korteweg-de Vries equation, Phil. Trans. Royal Soc.London A 351 (1995), 107-164.
[17] J. L. BONA, W. G. PRITCHARD et L. R. SCOTT, Solitary-waves interaction, Phys. Fluids 23
(1980), 438-441.
[18] J.L. BONA, W.G. PRITCHARD et L.R. SCOTT, A comparison of solutions of two model equationsfor long waves, Lectures in Applied Mathematics 20, American Mathematical Society (1983), 235-267.
[19] J. BONA et R. SCOTT, Solutions of the Korteweg-de Vries equation in fractional order Sobolevspaces, Duke Math. J. 43 (1976), 87-99.
[20] J. BONA et R. SMITH, The initial value problem for the Korteweg-de Vries equation, Phil. Trans.Roy. Soc. London Ser. A 278 (1975), 555-601.
[21] J. L. BONA and B.-Y. ZHANG, The initial value problem for the forced Korteweg–de Vries equation,Proc. Roy. Soc. Edinburgh 126A (1996), 571-598.
[22] J. P. BOUCHER, Solitons magnétiques, in Les images de la Physique (1986), Le Courrier duCNRS.
47

48 BIBLIOGRAPHIE
[23] J. BOURGAIN, Fourier restriction phenomena for certain lattice subsets and applications to non-linear evolution equations, part II, Geom. Funct. Anal. 3 (1993), 209-262.
[24] J. BOUSSINESQ, Théorie de l’intumescence liquide appelée onde solitaire ou de translation sepropageant dans un canal rectangulaire, Comptes Rendus à l’Académie des Sciences 72 (1871),755-759.
[25] J. A. BUCKLEW et G. L. WISE, Multidimensional asymptotic quantization theory, with the rth
power distortion, IEEE Trans. Inform. Theory 28(2), 239–247.
[26] E. BUCKWAR et T. SHARDLOW, Weak approximation of stochastic differential delay equations,IMA J. Numer. Anal. 25(1), 57–86 (2005).
[27] Z. BRZEZNIAK, On stochastic convolution in Banach spaces, and applications, Stochastics Sto-chastics Rep. 61, 245–295 (1997).
[28] C. CARDON-WEBER, Autour d’équations aux dérivées partielles stochastiques à dérives non-Lipschitzienne, Thèse, Université de Paris 6, Paris, 2000.
[29] G. F. CAREY et Y. SHEN, Approximations of the KdV equation by least squares finite elements,Comput. Methods Appl. Mech. Engrg., 93 (1991), 1-11.
[30] H. Y. CHANG, Ch. LIEN, S. SUKARTO, S. RAYCHAUDHURY, J. HILL, E. K. TSIKIS and K.E. LONNGREN, Propagation of Ion-Acoustic solitons in a non-quiescent plasma, Plasma Phys.Controlled Fusion 28 (1986), 675-681.
[31] P. COHORT, Sur quelques problèmes de quantification, Thèse, Université de Pierre et Marie Curie,Paris, 2000.
[32] P. COHORT, Limit theorems for random normalized distortion, Ann. Appl. Probab. 14(1), 118–143(2004).
[33] S. L. COLE, Transcientwaves produced by flow past a bump, Wave motion 7 (1985), 579-587.
[34] P. CONSTANTIN, J. C. SAUT, Local smoothing properties of dispersive equations, J. Amer. Math.Soc. 1 (1988), 413-439.
[35] G. DA PRATO et A. DEBUSSCHE, Stochastic Cahn–Hilliard equations, Nonlinear Analysis 26(2),241–263 (1996).
[36] G. DA PRATO, A. DEBUSSCHE et R. TEMAM, Stochastic Burgers’ equation, Nonlinear Differ.Equ. Appl. 1(4), 389–402 (1994).
[37] G. DA PRATO et D. GATAREK, Stochastic Burgers equation with correlated noise, StochasticsStochastics Rep. 52(1–2), 29–41 (1995).
[38] G. DA PRATO et J. ZABCZYK, Stochastic equations in infinite dimensions, Encyclopediaof Mathematics and its applications, Cambridge University Press, 1992.
[39] T. DAUXOIS, M. PEYRARD et A.R. BISHOP, Dynamics and thermodynamics of a nonlinearmodel for DNA denaturation, Phys. Rev. E 47 (1993), 684-695.
[40] A. M. DAVIE et J. G. GAINES, Convergence of numerical schemes for the solution of parabolicstochastic partial differential equations, Math. of Comput. 70(233), 121–134 (2000).
[41] D. DAWSON, Stochastic evolution equations, Math. Biosci. 15 (1972).
[42] A. DEBUSSCHE et A. de BOUARD, On the stochastic Korteweg-de Vries equation, J. Funct. Anal154 (1998), 215-251.
[43] A. DEBUSSCHE et A. de BOUARD, Weak and strong order of convergence of a semidiscrete schemefor the stochastic nonlinear Schrödinger equation, Appl. Math. Optim. 54(3), 369–399 (2006).
[44] A. DEBUSSCHE et A. de BOUARD, Random modulation of solitons for the stochastic Korteweg-deVries equation, Ann. Inst. H. Poincaré Anal. Non Linéaire 24(2), 251–278 (2007).
[45] A. DEBUSSCHE et J. PRINTEMS, Numerical simulation of the stochastic Korteweg-de Vries equa-tion, Physica D 134(2), 200–226 (1999).
[46] A. DEBUSSCHE et J. PRINTEMS, Effect of a Localized Random Forcing Term on the Korteweg-DeVries Equation, J. of Comput. and Appl. Anal. 3(3), 183–206 (2001).
[47] A. DEBUSSCHE et J. PRINTEMS, Convergence of a semi-discrete scheme for the stochasticKorteweg-de Vries equation, Discrete Contin. Dyn. Syst. Ser. B 6(4), 761–781 (2006).
[48] A. DEBUSSCHE et J. PRINTEMS, On a fully discrete weak approximation of parabolic type sto-chastic partial differential equations, prépublication Laboratoire d’Analyse et de MathématiquesAppliquées, Université de Paris 12 (2007).
[49] S. DEREICH, F. FEHRINGER, A. MATOUSSI et M. SCHEUTZOW, On the link between small ballprobabilities and the quantization problem for Gaussian measures on Banach spaces, J. TheoreticalProbab. 16, 249–265 (2003).

BIBLIOGRAPHIE 49
[50] S. DEREICH et M. SCHEUTZOW, High resolution quantization and entropy coding for fractionalBrownian motions, Electron. J. Probab. 11, 700–722 (2006).
[51] P. G. DRAZIN, Solitons, London Mathematical Society Lecture Note Series 85, Cambridge Uni-versity Press, 1983.
[52] M. DUFLO, Algorithmes stochastiques, coll. Mathématiques & Applications 23, SpringerVerlag, Berlin, 1997.
[53] J. C. EILBECK, P. S. LOMDAHL et A. C. SCOTT, Soliton structure in crystalline acetanilide,Phys. Rev. B. 30 (1984), 4703-4712.
[54] K. EL DIKA, Comportement qualitatif des solutions de l’équation de Benjamin-Bona-Mahoneydéterministe et stochastique, Thèse, Université de Paris-Sud, Orsay, France (2004).
[55] J. FARAGO et M. PEYRARD, A first approach to reaction kinetics in large molecules, Physica D113 (1998), 297-306.
[56] F. FLANDOLI et D. GATAREK, Martingale and stationary solutions for stochastic Navier-Stokesequations, Probab. Theory Relat. Fields 102, 367-391 (1995).
[57] M. I. FREIDLIN, A. D. WENTZELL, Random Perturbations of Dynamical Systems, Grund-lehren der mathematischen Wissenschaften, Springer Verlag, 1984.
[58] C. S. GARDNER, J. M. GREENE, M. D. KRUSKAL et R. M. MIURA, A method for solving theKorteweg–de Vries equation, Phys. Rev. Lett. 19 (1967), 1095.
[59] A. GERSHO et R. M. GRAY, Vector Quantization and Signal Compression, Kluwer, Bos-ton, 1992.
[60] I. GIHMAN et A. SKOROHOD, The Theory of Stochastic Process I, Grundlehren dermathematischen Wissenschaften, Springer Verlag, 1980.
[61] J. GINIBRE et Y. TSUTSUMI, Uniqueness of solutions for the generalized Korteweg-de Vriesequation, SIAM J. Math. Anal., 20 (1989), 1388-1425.
[62] E. GOBET, H. PHAM, G. PAGÈS, J. PRINTEMS, Discretization and simulation of Zakai equation,SIAM, J. of Numer. Anal. 44(6), 2505–2538 (2006).
[63] I. C. GOHBERG, M. G. KREIN, Introduction to the theory of linear nonselfadjoint
operators, Transl. Math. Monogr. , 18, Amer. Math. Soc., Providence, R.I., 1969.
[64] S. GRAF, H. LUSCHGY, Foundations of Quantization for Probability Distributions, Lectures Notesin Math. 1730, Springer Verlag, Berlin, 2000.
[65] W. GRECKSCH, P.E. KLOEDEN Time-discretised Galerkin approximations of parabolic stochasticPDEs, Bull. Austral. Math. Soc. 54(1), 79–85 (1996).
[66] R. GRIMSHAW, Resonant flow of a rotating fluid past an obstacle : the general case, Stud. Appl.Math. 83 (1990), 249-269.
[67] R. GRIMSHAW, Resonant forcing of barotropic coastally trapped waves, J. Phys. Ocean 17 (1987),53-65.
[68] R. GRIMSHAW, E. PELINOVSKI et X. TIAN, Interaction of a solitary wave with an externalforce, Phys. D 77, 405–433 (1994).
[69] R. GRIMSHAW and Z. YI, Resonant generation of finite-amplitude waves by flow past topographyon a beta-plane, Stud. Appl. Math. 88 (1993), 89-112.
[70] I. GYÖNGY, Lattice approximations for stochastic quasi-linear parabolic partial differential equa-tions driven by space-time whte noise. I., Potential Anal. 9(1), 1–25 (1998).
[71] I. GYÖNGY, Lattice approximations for stochastic quasi-linear parabolic partial differential equa-tions driven by space-time whte noise. II., Potential Anal. 11(1), 1–37 (1999).
[72] I. GYÖNGY et N. V. KRYLOV, Existence of strong solutions for Itô’s stochastic equations viaapproximations, Probab. Theory Related Fields 105, 143–158 (1996).
[73] I. GYÖNGY et A. MILLET, On discretization schemes for stochastic evolution equations, PotentialAnal. 23(2), 99–134 (2005).
[74] I. GYÖNGY et A. MILLET, Rate of convergence of implicit approximations for stochastic evolutionequations, Stochastic Differential Equations : Theory and Applications. A volume in Honor ofProfessor Boris L. Rosovskii, Interdisciplinary Mathematical Sciences, Vol. 2, World Scientific, 281–310 (2007).
[75] I. GYÖNGY et A. MILLET Rate of Convergence of Space Time Approximations for stochasticevolution equations, Prépublication (2007).
[76] I. GYÖNGY et D. NUALART, Implicit scheme for stochastic parabolic partial differential equationsdriven by space-time white noise, Potential Analysis 7(4), 725–757 (1997).

50 BIBLIOGRAPHIE
[77] E. HAUSENBLAS, Numerical Analysis of semilinear stochastic evolution equations in Banachspaces, J. Comput. Appl. Math. 147(2), 485–516 (2002).
[78] E. HAUSENBLAS, Approximation for Semilinear Stochastic Evolution Equations, Potential Ana-lysis, 18(2), 141–186 (2003).
[79] R. HERMAN, The stochastic, damped Korteweg–de Vries equation, J. Phys. A : Math. Gen. 23
(1990), 1063-1084.
[80] N. IKEDA et S. WATANABE (1981), Stochastic Differential Equations and Diffusion
Process, North-Holland, Amsterdam–Oxford–New-York.
[81] S. L. HESTON, A closed-form solution for options with stochastoc volatility with an applications tobond and currency options, The Review of Financial Studies 6(2), 327–343 (1993).
[82] K. ITÔ, Differential equations determining Markov processes, Zenkoku Shijo Sugaku Danwakai1077, 1352–1400 (1942).
[83] K. ITÔ, On stochastic differential equations, Mem. Math. Am. Soc. 4 (1951).
[84] T. KATO, Quasilinear equation of evolution with applications to partial differentiel equation, Lect.Notes in Math. 448, Springer (1975), 27-50.
[85] T. KATO, On the Cauchy problem for the (generalized) Korteweg-de Vries equation, Studies inAppl. Math. Advances in Math. Suppl. Studies 8 (1983), 93-128.
[86] T. KATO, On the Korteweg-de Vries equation, Manuscripta Math. 8 (1983), 89-99.
[87] T. KAWAHARA, N. SUGIMOTO et T. KAKUTANI, Nonlinear interaction between short and longcapillary-gravity waves, J. Phys. Soc. Japan 39 (1975).
[88] T. KAWAHARA, Effect of Random Inhomogeneities on Nonlinear Propagation of Water Waves, J.Phys. Soc. Japan 41 (1976), 1402-1409.
[89] C. E. KENIG, G. P. PONCE et L. VEGA, Oscillatory integrals and regularity of dispersive equa-tions, Indiana Univ. Math. J. 40, 33–69 (1991).
[90] C. E. KENIG, G. P. PONCE et L. VEGA, Well-posedness of the initial value problem for theKorteweg-de Vries equation, J. Amer. Math. Soc., 4, 323-347 (1991).
[91] C. E. KENIG, G. P. PONCE et L. VEGA, The Cauchy problem for the Korteweg–de Vries equationin Sobolev spaces of negative indices, Duke Math. J. 71, 1–21 (1993).
[92] C. E. KENIG, G. P. PONCE et L. VEGA, A bilinear estimate with applications to the KdV equation,J. Amer. Math. Soc. 9, 573-603 (1996).
[93] J. KIEFFER, Exponential rate of convergence for the Lloyd’s Method I, IEEE Trans. Inform. Theory28(2), 205–210.
[94] P. E. KLOEDEN et E. PLATTEN, Numerical solution of stochastic differential equa-
tions, Applications of Mathematics 23, Springer Verlag, 1992.
[95] A. KOHATSU–HIGA, Weak approximation. A Malliavin calculus approach, Math. Comp. 70(223),135–172 (2001).
[96] V. V. KONOTOP et L. VASQUEZ, Nonlinear random waves, World Scientific, Singapore, 1994.
[97] D. J. KORTEWEG et G. de VRIES, On the change of form of long waves advancing in a rectangularcanal, and on a new type of long stationary waves, Phil. Mag. 39, 422-443 (1895).
[98] N. KRYLOV et B. L. ROZOVSKII, Stochastic Evolution equations, J. Sov. Math. 16, 1233–1277(1981).
[99] S. N. KRUZHKOV et A. V. FAMINSKII, Generalized solutions of the Cauchy problem for theKorteweg-de Vries equation, Math. USSR Sbornik 48 (1984), 391-421.
[100] H. J. KUSHNER et G. G. YIN, Stochastic Approximations Algorithms and Applications,Springer Verlag, New York, 1997.
[101] S.-J. LEE, G. T. YATES et T. Y. WU, Experiments and analyses of upstream-advancing solitarywaves generated by moving disturbances, J. Fluid. Mech. 199 (1989), 569-593.
[102] M.-N. LEROUX, Semidiscretization in Time for Parabolic Problems, Math. Comput. 33, 919–931(1979).
[103] F. A. Longstaff, E. S. Schwartz, Valuing American options by simulation : a simple least-squaresapproach, Review of Financial Studies 14, 113–148 (2001).
[104] J. L. LIONS, Quelques méthodes de résolution des problèmes aux limites non li-
néaires, Dunod, Paris, 2002.
[105] G. J. LORD et J. ROUGEMONT, A Numerical Scheme for Stochastic PDEs with Gevrey Regu-larity, IMA J. Num. Anal., 24(4), 587–604 (2004).

BIBLIOGRAPHIE 51
[106] H. LUSCHGY et G. PAGÈS, Functional Quantization of Gaussian processes, J. Funct. Anal.196(2), 486–531 (2002).
[107] H. LUSCHGY et G. PAGÈS, Sharp asymptotics of the functional quantization problem for Gaus-sian processes, The Annals of Probab. 32(2), 1574–1599 (2004).
[108] H. LUSCHGY et G. PAGÈS, Functional quantization for a class of Brownian diffusions : Aconstructive approach, Stoch. Proc. and Their Appl. 116, 310–336 (2006).
[109] R. S. MACKAY, S. AUBRY, Proof of existence of breathers for time-reversible or Hamiltoniannetworks of weakly coupled oscillators, Nonlinearity 7 (1994), 1623-1643.
[110] D.E. Mc CLURE, Nonlinear segmented function approximation and analysis of line patterns,Quart. Appl. Math. 33 (1975), 1–37.
[111] A. MILLET et P.-L. MORIEN, On implicit and explicit discretization schemes for parabolic SPDEsin any dimension, Stochastic Processes and their Applications 115(7), 1073–1106 (2005).
[112] G. N. MILSTEIN, Approximate integration of stochastic differential equations, Theor. Prob. Appl.19 (1974), 557-562 (traduit du russe de Teor. Verojatnost. i Primenen. 19, 583–588 (1974)).
[113] G. N. MILSTEIN, A method with second order accuracy for the integration of stochastic differentialequations, (traduit du russe de Teor. Verojatnost. i Primenen. 23(2), 414–419 (1978)).
[114] G. N. MILSTEIN, Weak approximation of solutions of systems of stochastic differential equations,Theor. Prob. Appl. 30, 750–766 (1985).
[115] G. N. MILSTEIN, Numerical integration of stochastic differential equations, Mathe-matics and its Applications 313, Kluwer Academic publisher, Dordrecht, 1995.
[116] G. N. MILSTEIN et M. V. TRETYAKOV, Stochastic numerics for mathematical physics,Scientific Computation series, Springer Verlag, 2004.
[117] H. MITSUDERA and R. GRIMSHAW, Generation of mesoscale variability by resonant interactionbetween a baroclinic current and localized topography, J. Phys. Ocean 21 (1991), 737-765.
[118] R. M. MIURA, C.S. GARDNER et M.D. KRUSKAL, Korteweg–de Vries equation and genera-lizations. II. Existence of conservations laws and constants of motions, J. Math. Phys. 9 (1968),1204.
[119] A. NACHBIN and G. C. PAPANICOLAOU, Water waves in shallow channels of rapidly varyingdepth, J. Fluid Mech. 241 (1992), 311-332.
[120] G. PAGÈS, A space vector quantization method for numerical integration, J. Comput. and Appl.Math. 89 1–38 (1997).
[121] G. PAGÈS et H. PHAM, A quantization algorithm for multidimensional stochastic control pro-blems, prépublication LPMA-697, Laboratoire de Probabilités et Modèles Aléatoires, Université deParis 6 et 7, Paris, 2001.
[122] G. PAGÈS et H. PHAM, Optimal quantization methods for nonlinear filtering with discrete-timeobservations, Bernouilli 11(5), 893–932 (2005).
[123] G. PAGÈS, H. PHAM et J. PRINTEMS, An Optimal Markovian Quantization Algorithm forMultidimensional Stochastic Control Problems, Stochastics and Dynamics 4(4), 501–545 (2004).
[124] G. PAGÈS, H. PHAM et J. PRINTEMS, Optimal quantization and applications to numericalproblems in finance, in "Handbook of Computational and Numerical Methods in Finance", éd. S.T.Rachev, Birkhauser, Boston, 2004.
[125] G. PAGÈS et J. PRINTEMS, Optimal quantization methods for numerics : the Gaussian case,Monte Carlo Methods and Appl. 9(2), 135–165 (2003).
[126] G. PAGÈS et J. PRINTEMS, Functional quantization for numerics with an application to optionpricing, Monte Carlo Methods and Appl. 11(4), 407–446 (2005).
[127] E. PARDOUX, Équations aux dérivées partielles stochastiques non linéaires monotones. Étude desolution forte de type Ito, Thèse, Université de Paris XI, Orsay, 1975.
[128] A. PATOINE and T. WARN, The interaction of long, quasi-stationary baroclinic waves with to-pography, J. Atmos. Sci. 39 (1982), 1018-1025.
[129] D. H. PEREGRINE, Calculation of the development of an undular bore, J. Fluid. Mech. 25 (1966),321-330.
[130] V. PETVIASHVILI et O. POKHOTELOV, Solitary Waves in Plasmas and in the Atmos-
phere, Gordon & Breach Science Pub. (1992).
[131] M. PEYRARD et T. DAUXOIS, Physique des solitons, EDP Sciences, Paris, France, 2004.
[132] J. PRINTEMS, Aspects théoriques et numériques de l’équation de Korteweg–de Vries stochastique,Université de Paris–Sud, Orsay, 1998.

52 BIBLIOGRAPHIE
[133] J. PRINTEMS, The stochastic Korteweg-de Vries equation in L2(R), J. Diff. Eq. 153(2), 338–373
(1999).
[134] J. PRINTEMS, On the discretization in time of parabolic stochastic partial differential equations,Math. Model. and Numer. Anal. 35(6), 1055–1078 (2001).
[135] M. I. RABINOVICH and T. D. TRUBETSKOV, Introduction to Theory of Oscillations
and Waves, Nauka, Moscow, 1984.
[136] K. RACHID, Simulation numérique des systèmes de Davey-Stewartson. Sur un système d’inter-action ondes courtes-ondes longues, Thèse, Université d’Orsay, 1993.
[137] RAYLEIGH (J. W. STRUTT, Lord), On waves, Phil. Mag. 1 (1876), 257-279.
[138] D. REVUZ et M. YOR, Continuous martingales and Brownian motion, Grundlehren dermathematischen Wissenschaften 293, 3ième édition, Springer-Verlag Berlin Heidelberg, New-York,1999.
[139] J. S. RUSSEL, Report on Waves, Report of the fourteenth meeting of the British Association forthe Advancement of Science, York (1844), pp 311-390, Plates XLVII-LVII.
[140] B. L. ROZOVSKII, Stochastic Evolutio Equations. Linear Theory and application to
Nonlinear Filtering, Kluwer, Boston, 1990.
[141] J. M. SANZ-SERNA et J. G. VERWER, Conservative and Nonconservative Schemes for the So-lution of the Nonlinear Schrödinger Equation, IMA J. Num. Anal. 6 (1986), 25-42.
[142] J. C. SAUT et R. TEMAM, Remarks on the Korteweg-de Vries equation, Israël J. Math. 24 (1976),78–87.
[143] M. SCALERANDI, A. ROMANO and C. A. CONDAT, Korteweg–de Vries solitons under additivestochastic perturbations, Phys. Review E 58 (1998), 4166-4173.
[144] K.U. SCHAUMLÖFFEL, White noise in space and time as the time-derivative of a cylindri-cal Wiener process, Proceedings of the Conference "Stochastic Partial Differential Equations andApplications II", Trento, Italy, 1–6, 1988, Lectures Notes in Mathematics 1390, Springer Ber-lin/Heidelberg, 1989.
[145] T. SHARDLOW, Numerical methods for stochastic parabolic PDEs, Numer. Funct. Anal. andAppl. 20(1–2), 121–145 (1999).
[146] B. K. SHIVAMOGGI, Introduction to Nonlinear Fluid-Plasma Waves, Kluwer AcademicPublisher, Dordrecht, 1988.
[147] G. G. STOKES, On the theory of oscillatory waves, Camb. Trans. 8 (1847), 441-473.
[148] T. R. TAHA et M. J. ABLOWITZ, Analytical and numerical aspects of certain nonlinear evolutionequations. III. Numerical, the Korteweg-de Vries equation, J. Comp. Phys., 55 (1984), 231-253.
[149] S. TAKENO, K. KISODA et A. J. SIEVERS, Intrinsic localized vibrationnal modes in anharmoniccrystals, Prog. Theor. Phys. Suppl. 94 (1988), 242-269.
[150] D. TALAY, Résolution trajectorielle et analyse numérique des équations diférentielles stochas-tiques, Stochastics 9(4), 275–306 (1983).
[151] D. TALAY, Efficient numerical schemes for the approximation of expectation of functionals ofthe solutions of an stochastic differential equation and applications, Lecture Notes in Control andInform. Sc. 61 (1984), 294-313.
[152] D. TALAY, Discrétisation d’une équation différentielle stochastique et calcul approché d’espérancede fonctionnelles de la solution, M2AN 20(1), 141-179 (1986).
[153] D. TALAY, Probabilistic numerical methods for partial differential equations : elements of analysis,Probabilistic models for nonlinear partial differential equations (Montecatini Terme, 1995), 148–196,Lecture Notes in Math. 1627, Springer, Berlin, 1996.
[154] D. TALAY et L. TUBARO, Expansion of the global error for numerical schemes solving stochasticdifferential equations, Stochastic Anal. Appl. 8(4), 483–509 (1991).
[155] R. TEMAM, Sur un problème non linéaire, J. Math. Pures Appl. 48 (1969), 159-172.
[156] R. TEMAM, Navier-Stokes equations, North-Holland, 1984.
[157] Y. TSUTSUMI, Time decay of solution for the Korteweg–de Vries equation with multiplicativespace-time noise, communication personnelle.
[158] M. VIOT, Solutions faibles aux équations aux dérivées partielles stochastiques non linéaires, Thèse,Université Pierre et Marie Curie, Paris, 1976.
[159] M. WADATI, Stochastic Korteweg-de Vries equation, J. Phys. Soc. Japan 52 (1983), 2642-2648.
[160] M. WADATI and Y. AKUTSU, Stochastic Korteweg–de Vries Equation with and without Damping,J. Phys. Soc. Japan 53 (1984), 3342.

BIBLIOGRAPHIE 53
[161] J. B. WALSH, An introduction to stochastic partial differential equations, École d’été de Probabilitéde Saint-Flour XIV-1984, ed. P.L. Hennequin, Lectures Notes in Mathematics 1180, 265–437 (1986).
[162] J. B. WALSH, Finite Elment Methods for Parabolic Stochastic PDE’s, Potential Anal. 23, 1–43(2005).
[163] T. WARN and B. BRASNETT, The amplification and capture of atmospheric solitons by topogra-phy : a theory of the onset of regional blocking, J. Atmos. Sci. 40 (1983), 28-38.
[164] G. B. WHITHAM, Linear and nonlinear waves, Pure and applied mathematics, Wiley-Interscience, John Wiley & Sons, New York, 1999.
[165] T. Y. WU, Generation of upstreamadvancing solitons by moving disturbances, J. Fluid Mech. 184
(1987), p. 75-99.
[166] T. YAMADA et S. WATANABE, On the uniqueness of solutions of stochastic differential equations,J. Math. Kyoto Univ. 11 (1971), 155-167 et 553-563.
[167] Y. YAN, Semidiscrete Galerkin approximation for a linear stochastic parabolic partial differentialequation driven by an additive noise, BIT 44 (4), 829–847 (2004).
[168] Y. YAN, Galerkin Finite Element Methods for stochastic parabolic PDE, SIAM J. Numer. Anal.43(4), 1363–1384 (2005).
[169] B. WILBERTZ, Computational aspects of functional quantization for Gaussian measures and ap-plications, Thèse, Université de Trèves, Trèves, Allemagne, 2005.
[170] T. Y. WU, Generation of upstream advancing solitons by moving disturbances, J. Fluid. Mech.184 (1987), 75-99.
[171] N. J. ZABUSKY et M. D. KRUSKAL, Interaction of « solitons » in a collisionless plasma andthe reccurence of initial states, Phys. Rev. Lett. 15 (1965), 240-243.
[172] P. L. ZADOR, Development and evaluation of procedures for quantizing multivariate distributions,Ph. D. dissertation, Stanford University, 1963.
[173] P. L. ZADOR, Asymptotic quantization error of continuous signals and the quantization dimension,IEEE Trans. Inform. Theory 28(2), 139–149 (1982).

54

Chapitre 4
Aspects théoriques et numériques dequelques problèmes issus deséquations aux dérivées partiellesstochastiques.
4.1 The stochastic KdV equation in L2(R).
L’article qui suit fut publié dans Journal of Differential Equations, vol. 153, 338–373 (1999).
55

journal of differential equations 153, 338373 (1999)
The Stochastic Kortewegde Vries Equation in L2(R)
Jacques Printems
Laboratoire d'Analyse Nume rique d'Orsay, Batiment 425, Universite Paris Sud,91405 Orsay Cedex, France
Received March 11, 1998; revised July 27, 1998
We present here two results of global existence and uniqueness of the Cauchyproblem concerning the Kortewegde Vries equation forced by a random term ofwhite noise type in the functional framework of weighted spaces on L2 (R). Thiswork is motivated by both physical experiments where a forced generation ofweakly nonlinear waves by localized disturbances was observed [1, 15] and a resultof uniqueness in weighted space in the homogeneous case [8, 14]. 1999 Academic Press
1. INTRODUCTION
It is well known that the Kortewegde Vries equation models the evolu-tion in time of long, unidirectional weakly non linear waves at the surfaceof a fluid. When the pressure above is not constant or the bottom is notflat, a forcing term is added which is either the pressure gradient or thegradient of the function whose graph defines the bottom (See [1, 15]).
This paper focuses on the case where the forcing term is random, whichis a natural approach if we assume that the outer pressure is generated bya turbulent velocity field. We furthermore assume that this random term isof white noise type, which leads us to study the following stochastic partialdifferential equation
ut
+3ux3+u
ux
=82B
t x, (1.1)
where u=u(x, t) is a real valued random process defined on R_R+ , 8 isa linear operator and B is a brownian sheet defined on R_R+ . Weemphasize the fact that here 8 does not depend on the unknown u, i.e. thenoise is assumed to be additive.
We recall that [B(t, x)] (t, x) # R+_R is a zero mean gaussian process suchthat
EB(t, x) B(s, y)=(t 7 s)(x 7 y),
Article ID jdeq.1998.3548, available online at http:www.idealibrary.com on
3380022-039699 30.00Copyright 1999 by Academic PressAll rights of reproduction in any form reserved.

for t, s0, x, y # R. We rewrite the right hand side of the equation as thetime-derivative of a cylindrical Wiener process on L2 (R) by setting
W(t)=Bx
= :i # N
;i (t)ei ,
where [ei] i # N denotes a Hilbertian basis of L2 (R) and [;i] i # N is a familyof real brownian motions mutually independent in a fixed probability space(see [5, 18]). We shall rewrite (1.1) in the Ito form
du+\3ux3+u
ux+ dt=8 dW, (1.2)
with the initial condition
u(x, 0)=u0 (x), x # R. (1.3)
Our main interest in this article is to understand the Cauchy problemassociated to (1.2)(1.3). A forthcoming article will be devoted to thenumerical study of the solution of (1.2) and to the description of theinfluence of the noise on well known phenomena such as propagation,interaction of solitons, emission of a soliton by a localized forcing term.Considering the deterministic equations, existence and uniqueness forsmooth solutions have been considered in [2, 3, 12, 17, 20]. More recently,C.E. Kenig, G.P. Ponce and L. Vega [13] have been able to prove exist-ence and uniqueness in H1 (R) using techniques from harmonic analysis.Also, J. Ginibre and Y. Tsutsumi [8], using the structure of the Airy func-tion and a smoothing effect discovered by T. Kato [11], have proveduniqueness in weighted L2 (R) spaces (see also [14]). Before describing thetheory of the stochastic Kortewegde Vries equation (1.2), we first pointout that the linear part of the Kortewegde Vries equation defines aunitary group, denoted by [S(t)]t # R . Thus, it seems difficult to obtainsolutions in H s (R) for s # R if 8 is not a HilbertSchmidt operator fromL2 (R) to H s (R). Indeed, the solution of the linear problem
du+3ux3 dt=8 dW
u(0)=0
is given by
WL (t)=|t
0S(t&) 8 dW() (1.4)
339THE STOCHASTIC KdV EQUATION

and it can be seen directly that
E |WL (t)| 2H s(R)=t |8| 2
L20(L2(R), H s(R)) ,
where | |L20(L2(R), Hs(R)) denotes the norm in the space of HilbertSchmidt
operators from L2 (R) to H s (R).A previous work [6] has generalized the techniques of C.E. Kenig, G.P.
Ponce and L. Vega [13] under the assumption that 8 is a HilbertSchmidtoperator from L2 (R) into H1 (R), proving existence and uniqueness inC([0, T], H1 (R)). In this work, we would like to consider a more generalcovariance operator 8. We notice that the physical model of forcedKortewegde Vries equations has been derived under the assumption of alocalized forcing term [1, 15]. Thus we can consider a noise which is, ina sense to be precised, localized. On the mathematical point of view, thisremark enables us to work in weighted L2 (R) spaces and to use the techni-ques of J. Ginibre and Y. Tsutsumi [8]. So that, we want to replaceregularity assumptions on 8 by a localization property. Roughly speaking,we will assume that 8 is a HilbertSchmidt operator from L2 (R) into itselfand is small at +.
To be more precise, let us introduce the following weighted spaces
X:, q ([0, T])=[h:u # Lq ([0, T], L4 (R))]
and
Y=[(1+x+)38 u # L2 (R)],
where :>0, q an integer such that 14<1q< 1
2 and h: is a C and increasingfunction which is equal to 1 if x1 and to e:x if x0.
J. Ginibre and Y. Tsutsumi have proved the following smoothing effectof [S(t)]t # R (see Proposition 2.9),
|
0S( &)
(uv)x
d X :, q([0, T])
C(T ) |u| X :, q([0, T]) |v|L83([0, T], Y ) , (1.5)
which can be used to prove uniqueness of solutions in the above spaces.However, we cannot use this property to construct a solution by a fixedpoint strategy since it implies contraction in X:, q ([0, T]) for a solution inthe second weighted space. This phenomenon comes from the assymetry ofthe weighted functions which seems to be imposed by the structure of theAiry function. This difficulty can be overcome considering a sequence ofsmooth solutions obtained with regularized data if we are able to prove an
340 JACQUES PRINTEMS

a priori estimate in Y. Then it follows easily that the sequence ofapproximation is almost surely Cauchy.
Our main assumptions are
u0 # Y, (1.6)
8 # L02 (L2 (R), Y ). (1.7)
The main difficulty is that the a priori estimate of the solution in Yrequires an estimate on WLx, the derivative of the solution of the linearequation, in L1 ([0, T], L (R)). This difficulty is due to the presence of aderivative in the nonlinear term. This particular estimate is obtained thanksto a sharp smoothing property of [S(t)]t # R discovered in [13] whichenables us to get the bound
supt # R
E \supx # R
x |t
0S(t&)8 dW()
p
+Cp |8|L20(L2(R), H=(R)) (1.8)
for any p. We note that (1.8) is an improvement of a similar estimate in[6]. Unfortunately, we get this result only when we assume the additionalproperty
8 # L02 (L2 (R), H = (R)) (1.9)
for = an arbitrary positive number. Thus, one of our main results states thatwhen (1.6), (1.7) and (1.9) hold, there exists a unique solution inC([0, T], Y ) & X:, q ([0, T]). Moreover, since a contracting argument isused, it is obtained in a constructive way.
When we only assume (1.6) and (1.7), it is still possible to proveexistence and uniqueness but we use an abstract argument based on theexistence of martingale solutions and a probabilistic argument. Indeed,using T. Kato's smoothing effect and techniques borrowed from [7], wecan derive a priori estimates in spaces of the type L2 (0, X1) where X1 is ametric space compactly embedded in another space X2 . As it is usual in thecontext of stochastic partial differential equations, this and Skohorod'sTheorem are used to construct a martingale solution, i.e. a solution of(1.2)(1.3) for another Wiener W . We prove that this solution belongs tothe above mentionned weighted spaces where we know that uniquenessholds. Then, it suffices to use an argument of T. Yamada and S. Watanabe[22], generalized by M. Viot [21], which states that existence of amartingale solution and pathwise uniqueness imply the existence of aunique solution for any given Wiener process.
The paper is organized as follows. In Section 2, after some notations andpreliminaries, we shall expose the different notions of existence of solution
341THE STOCHASTIC KdV EQUATION

that we shall need afterwards. We end this section by presenting the resultof pathwise uniqueness in weighted space using the technics developed in[8]. In Section 3, we shall expose in Theorem 3.1 the result of existence ofstrong solutions in L ([0, T], Y ) almost surely, when (1.6),(1.7) and theextra assumption (1.9) hold. We shall first prove the estimates on the linearproblem which are necessary for the proof of Theorem 3.1 which ispostponed until the end of the section. In Section 4, we shall present inTheorem 4.1 the same result but with only the assumptions (1.6) and (1.7).
We think that both results (Theorems 3.1 and 4.1) are interesting andcomplementary. Theorem 4.1 gives the same conclusion as Theorem 3.1under weaker assumptions but the method is not constructive like themethod used for Theorem 3.1. We recall that it is important to haveconstructive arguments when justifying a numerical scheme.
2. NOTATIONS AND PRELIMINARIES
2.1. Deterministic Framework
Let X be any Banach space and I any interval in R. We shall denote byL p (I, X ), 1p+, the space of functions which are Bo chner-integrablefrom I to X. When X=R, we simply use the notation L p (I ). We shall alsodenote by C([0, T], X ) (resp. C; ([0, T], X )) the space of continuous(resp. Ho lder continuous with exponent ;) functions from [0, T] to X andby Cw ([0, T], X ) the space of weakly continuous functions from [0, T] toX. We shall denote by | |Y the norm on a Banach space Y. In the case ofY=L2 (R), we will denote | | (resp. ( , )) the L2-norm (resp. the L2-innerproduct).
Given any number _, the Sobolev space H_ (R) is defined as the spaceof tempered distributions u such that
|R
(1+!2)_ |Fu(!)|2 d!<+,
where F is the Fourier transform. In Section 3, we shall use the followinglinear operators D and H (the Hilbert transform) which are defined bymeans of the Fourier transform:
Du=F&1 ( |!| Fu)
and
Hu=F&1 \ !|!|
Fu+ .
342 JACQUES PRINTEMS

We shall also use the Sobolev space in the time variable W:, p ([0, T], X )with :>0 and 1p+, which is defined as the space of functions usuch that
||[0, T]2
|u(t)&u(s)| pX
|t&s|1+:p dt ds<+.
In the frame of the spaces H_ (R), it is well known that the linear partof the KdV equation generates a unitary group [S(t)]t # R . More precisely,the solution of the linear problem
ut
+3ux3=0, (x, t) # R_R+
u(x, 0)=u0 (x), x # R
with u0 # H_ (R), _>0, is given by
u(t)=S(t) u0=F&1 (eit!3Fu0).
We mention here a useful estimate concerning the previous linearproblem anologous to the Strichartz estimates related to the Schro dingerequation (see [8, Lemma 2.1, p. 1392]).
Lemma 2.1. For any f in L2 (R) and for any pair of integers ( p, r) suchthat 2p= 1
3 (1&2r) and 2r+, there exists a constant C>0 such that
|S( ) f |Lp(R, Lr(R))C | f |L2(R) .
In Section 3, when no confusion is possible, we shall use shorter nota-tions. For example, if x # R and t # [0, T], we will use Lq
t (Lpx) as the usual
space Lq ([0, T], L p (R)).In Section 4, we shall use the local spaces H _
loc(R), _ # R. Let u a dis-tribution on R, u is in H _
loc(R) for a _>0, if and only if u is in H _ ([a, b])for any (a, b) # R2. We recall that H _
loc(R) is a complete metrizable locallyconvex space or a Fre chet space, e.g., endowed with the metric
d(u, v)= :k0
12k min( |u&v|H _([&k, k]) , 1).
We denote by H &_loc (R) with _>0, the set of the distributions u such that
for any (a, b) # R2, u is in H &_ ([a, b]), the topological dual of H _0([a, b])
itself the closure of D(]a, b[) in H_ ([a, b]). We recall that H &_loc (R) is also
a Fre chet space.
343THE STOCHASTIC KdV EQUATION

In Section 4, we shall also use the following compactness lemma whoseproof is based on a classical compact embedding theorem (see [16]), theAscoliArzela theorem, and on diagonal extraction.
Lemma 2.2. Let T>0, :>0, ;>0. Let A be a set of distributions usuch that
(i) A is bounded in L2 ([0, T], H 1loc(R)) & W:, 2 ([0, T], H &2
loc (R));
(ii) A is bounded in C; ([0, T], H &2loc (R)).
Then A is relatively compact in L2 ([0, T], H sloc(R)) & C([0, T], H &s$
loc (R)),for any s<1 and s$>2.
2.2. Definition of solutions
We call stochastic basis a system (0, G, [Gt]t # [0, T] , P, [W(t)]t # [0, T])where (0, G, P) is a probability space, [Gt]t # [0, T] a filtration and[W(t)]t # [0, T] a cylindrical Wiener process on L2 (R) adapted to this filtra-tion (see [5]). We mean by L p (0, X ), 1<p<+ the space of randomvariables u with integrable p th power on 0, with values in X and we set
E |u| pX=|
0|u(|)| p
X P(d|)<+.
We shall sometimes use shorter notations as for example L p|(X ) for the
space L p (0, X ).Let 8 be a linear operator from L2 (R) into a Hilbert space H, 8 is said
to be HilbertSchmidt iff the term
|8| 2L2
0(L2(R), H ) =def
:i0
|8ei |2H<+,
is finite where [ei]i0 is a Hilbertian basis of H. When H=H_ (R) for_>0, we shall write L0
2(L2 (R), H_ (R))=L0, _
2 and for _=0, we will simplyuse the notation L0
2 .The application of the Ito formula in the following sections will not be
always rigorously justified due to some lack of regularity (in Proposition3.2 for instance). However the results are correct and can be easily justifiedby means of a regularization. In Section 4, we shall construct martingalesolutions, or weak solutions. In order for this notion to be more precise, wefirst introduce the definition of strong solution.
Definition 2.3 [Strong Solution]. Let (0, G, [Gt]t # [0, T] , P,[W(t)]t # [0, T]) be a stochastic basis for some T>0. Let u0 # L2 (R) and8 # L0
2 . We call a strong solution of (1.2)(1.3), a stochastic process u adaptedto this basis such that
344 JACQUES PRINTEMS

(i) u # L ([0, T], L2 (R)) & C([0, T], H &#loc (R)), P a.s., for some
#>0,
(ii) u(t)&u0+ t0(
3ux3+u(ux)) d=8W(t), P a.s., t # [0, T]in the distribution sense.
A martingale solution will have a weaker sense. More precisely,
Definition 2.4 [Martingale Solution]. Let T>0. Let u0 # L2 (R) and8 # L0
2 . We call a martingale solution or weak solution of (1.2)(1.3), a pairof random functions (u~ , W ) defined on a probability space (0 , G , P ) adaptedto a filtration [G t ]t # [0, T] such that
(i) [W (t)]t # [0, T] is a cylindrical Wiener process on L2 (R);
(i) u~ # L ([0, T], L2 (R)) & C([0, T], H &#loc (R)), P a.s., for #>0;
(iii) u~ (t)&u0+ t0(3u~ x3+u~ (u~ x)) d=8W (t), P a.s., t # [0, T]
in the distribution sense.
In Section 3, we shall construct a solution u satisfying the following mildformulation, for any t # [0, T],
u(t)=S(t)u0&12 |
t
0S(t&)
u2
xd+|
t
0S(t&)8 dW().
Let us note that a strong solution such as Definition 2.1, i.e., a weak onein the partial differential equation sense, such that
x
(u2) # L1 ([0, T], L2loc(R))
satisfy the mild formulation (see [5]). Indeed, it is the case when u is suf-ficiently smooth, for instance, u # L2 ([0, T], H 1
loc(R)).In order to conclude to the existence of strong solutions according to the
sense of Definition 2.1, the following concept will be used.
Definition 2.5 [Pathwise Uniqueness]. We say that pathwise unique-ness holds for (1.2) and for a pair of Lusin space (X, Y ), if, whenever u1
and u2 are any two solutions defined on the same probability space(0, F, P), adapted to the same filtration [Ft]t0 and with the sameWiener process [Wt]t0 itself adapted to the previous filtration such thatu1 (0)=u2 (0) in X, then u1=u2 in Y a.s.
In Section 4, we will use the following theorem due to M. Viot [21],T. Yamada and S. Watanabe [22] which allows us to get strong solutionsfrom weak ones provided pathwise uniqueness holds in some space.
345THE STOCHASTIC KdV EQUATION

Theorem 2.6. Let Y a be Lusin space such that there exists a pathwiseuniqueness for initial data in some space X and such that a martingale solu-tion having values in Y can be constructed.
Then, for any stochastic basis (0, G, [Gt]t0 , P, [Wt]t0), there exists aunique solution with values in Y.
2.3. Pathwise Uniqueness
This idea of working with weighted spaces comes from the intention ofreplacing the assumptions of regularity by assumptions of localization. Thisis motivated by previous results of uniqueness of the Cauchy problem inthe homogeneous case in weighted spaces (see [8, 14]). Before discussingthese results, let us introduce the underlying weight functions. Using thesame notation as in [8], we denote by [h;
:]:0, ;0 positive and increasingsmooth functions from R into itself such that
h;
:(x)=e:x
h;:tCx;
for x0
at +
for some C>0. As regards the existence of such functions, the reader isreferred to [8] p. 1397. We shall simply use h: (resp. h;) instead of h0
:
(resp. h;0). The following property whose proof is straightforward will be
used throughout this paper.Lemma 2.7. There exist positive constants ci , i=1, ..., 3, such that
h$c1 (1+h)
h"2c2 (1+h)h$ (2.1)
h$$$c3 (1+h).
Remark 2.8. When h=h;, we shall use implicitly h; (x)$>0, for anyx # R, thus verifying inequalities (2.1) with 1+h being replaced by h.Another consequence is that
[(h;)12 u # L2 (R)]/L2 (R)
with continuous embeddding.
We are now able to introduce the following result from [8, Lemma 2.6,p. 1397]. For any T>0, for any :>0 and for any integer q, let us definethe spaces X:, q ([0, T]) and Y as
X:, q ([0, T])=[h:u # Lq ([0, T], L4(R))],
Y=[(1+x+)38u # L2 (R)].
346 JACQUES PRINTEMS

Proposition 2.9. Let :>0, q an integer such that 14<1q< 5
8 and T>0.There exists C(T )>0 such that for any u in X:, q ([0, T]) and for any v inL ([0, T], Y ), the following smoothing effect holds
|
0S( &)
(uv)x
d X :, q([0, T])
C(T ) |u| X :, q([0, T]) |v|L83([0, T], Y ) ,
where C( ) is uniformly bounded on the compact sets of R.
This proposition leads us to the result of uniqueness in weighted space.More precisely, we have
Corollary 2.10. Let T>0, :>0 and q as in Proposition 2.2. Thenthere exists at most one solution u of (1.2)(1.3) such that
u # L ([0, T], Y ), a.s. (2.2)
u # X:, q ([0, T]), a.s. (2.3)
Proof. Let u1 and u2 be two solutions of (1.2)(1.3) such that(2.2)(2.3) hold. Let w=u1&u2 . Then w verifies the equation
wt
+3wx3+
12
x
(w(u1+u2))=0
with w(0)=0. If now we write the mild form of this equation, we obtain
w(t)=|t
0S(t&)
x
((w()(u1+u2)())) d.
Let t* be such that
C(T )(t*)38 |ui | L([0, T], Y )$< 12 ,
then by Proposition 2.9, we get successively
|w|X :, q([0, t*])C(t*) |u1+u2 |L83([0, T], Y ) |w|X :, q([0, t*])
C(T )(t*)38 :i=1, 2
|u i | L([0, T], Y ) |w| X :, q([0, t*])
2$ |w|X :, q([0, t*]) .
Thus, w=0 on [0, t*]. We conclude by iterating this argument. K
347THE STOCHASTIC KdV EQUATION

3. CONSTRUCTIVE METHOD
In this section we are interested in the stochastic KdV equation with anadditive noise written in the following Ito form
du+\3ux3+u
ux+ dt=8 dW, (3.1)
for x # R, t # [0, T], T>0, with the initial condition
u(x, 0)=u0 (x), x # R. (3.2)
Here, [W(t)]t # [0, T] denotes a cylindrical Wiener process on L2 (R)adapted to a given filtration [Ft]t # [0, T] on a given probability space(0, F, P).
We assume here that 8 is a linear operator from L2 (R) into itself suchthat
(1+x+)38 8 # L02 (3.3)
and, contrary to Section 4, we take the extra assumption
8 # L0, =2 (3.4)
for some =>0.We seek a solution u of (3.1)(3.2) under the following mild form
u(t)=S(t)u0&12 |
t
0S(t&)
(u2)x
d+|t
0S(t&)8 dW(). (3.5)
To that purpose, we will prove that a sequence of approximate smoothsolutions obtained with smooth data converges almost surely to a solutionsatisfying (3.5) in X:, q ([0, T]) with :>0 and q an integer such that
14
<1q
<12
.
The main result of this section is contained in the following theorem.
Theorem 3.1. Let T>0. Let u0 be such that
u0 # Y. (3.6)
Under the assumptions (3.3), (3.4), and (3.6), there exists a uniquestochastic process u which is a global strong solution of (3.1)(3.2) such that
348 JACQUES PRINTEMS

u # X:, q ([0, T]), a.s.,
u # L ([0, T], Y ), a.s.,
ux
# L2 ([0, T], L2loc(R)), a.s.
Moreover
u # C([0, T], Y ), a.s.
The fact that here the noise is additive (i.e., 8 independent of u) allowsus to consider the following linear problem apart
du+3ux3 dt=8 dW, (3.7)
u(0)=0, (3.8)
whose solution is given by
WL (t)=|t
0S(t&)8 dW(). (3.9)
The proof of Theorem 3.6 essentially consists in deriving a prioriestimates on WL . Indeed, in order to obtain pathwise estimates on the solu-tions of (3.1)(3.2), we need to prove that WL belongs to X :, q ([0, T]) &L ([0, T], Y ) and that WLx belongs to L2 ([0, T], L (R)). This lastproperty being the most difficult to prove.
3.1. The Linear Problem
Proposition 3.2. Let h=h; for some ;>0. Let T>0 and =>0. Letfinally :>0 and q be an integer such that 2<q<4. Then there exist variousconstants Ci (T ), i=1, ..., 4 such that
E |WL | 2L([0, T], L2(R))C1 (T ) |8| 2
L20 (3.10)
E |h12WL | 2L([0, T], L2(R))C2 (T ) |h128| 2
L20 (3.11)
E |WL | 2X:, q([0, T])C3 (T ) |8| 2
L20 (3.12)
E WL
x 2
L2([0, T], L(R ))
C4 (T ) |8| 2L
20, = . (3.13)
349THE STOCHASTIC KdV EQUATION

Remark 3.3.
v When ;= 34 , (3.11) implies that WL # L ([0, T], Y ).
v As previously mentionned, the main difficulty is to prove (3.13). Itis on the proof of this estimate, and only there, that we need assumption(3.4).
Proof of (3.10). We apply the Ito formula to WL for the functional12 | | 2
L2(R) and obtain for any t # [0, T]
|WL (t)|2=2 |t
0(WL(), 8 dW())+t |8| 2
L20 .
Using a martingale inequality (see [5], Theorem 3.14), we get the result
E supt # [0, T]
|WL (t)|26E \|T
0|WL ()|2|8| 2
L20 d+
12
+T |8| 2L2
0
12
E supt # [0, T]
|WL (t)|2+C(T ) |8| 2L2
0 K
Proof of (3.11). We apply the Ito formula to WL for the functional12 |h12 | 2
L2(R) . We obtain for any t # [0, T] after several integrations byparts
12
|h12WL (t)|2+32 |
t
0d \h$
WL
x,
WL
x +=
12 |
t
0d(h$$$WL (), WL ())+|
t
0(hWL , 8 dW())+
t2
|h128| 2L2
0 .
Owing to Remark 2.2, the following inequality holds for any t # [0, T]:
12
|h12WL (t)|2c3
2 |t
0d |h12WL ()|2
+|t
0(hWL , 8dW())+
t2
|h128| 2L2
0 .
Then the Gronwall lemma yields
supt # [0, T]
|h12WL (t)| 2C(T ) \ |h128| 2L2
0+ supt # [0, T]
|t
0(hWL (), 8 dW())+ .
Using the same techniques as those in the proof of (3.10), we eventuallyget the result. K
350 JACQUES PRINTEMS

Proof of (3.12). We first have, after a Ho lder inequality with respect to| and several applications of the Fubini theorem with respect to (t, |) andto (x, |),
E \|T
0dt \|R
dx |WL (t, x)| 4+q4
+2q
\|T
0dt E \|R
dx |WL |4+q4
+2q
\|T
0dt\|R
dx E |WL |4+q4
+2q
,
since q is such that 2<q<4.As WL (t, x) is a gaussian process, we get, from the definition of the
stochastic integral, for any (x, t) # R_[0, T],
E |WL (t, x)| 4C(E |WL (t, x)| 2)2
C \ :n0
|t
0|S(t&) 8en | 2 (x) d+
2
C(T ) \ :n0
\|t
0|S(t&) 8en |4 (x) d+
12
+2
,
where a Ho lder inequality in has been used in the last term. Then anintegration on R gives, by means of the generalized Minkowski inequality,
\|R
dx E( |WL (t, x)| 4)+q4
C(T ) :n0
\|t
0|S(t&) 8en |4 d+
12
q2
L2(R)
C(T ) \ :n0 \|R
dx |t
0|S(t&) 8en |4 d+
12
+q2
C(T ) \ :n0
\|t
0|S(t&) 8en | 4
L4(R) d+12
+q2
C(T ) \ :n0
\|t
0|S(t&) 8en | 12
L4(R) d+16
+q2
for any t # [0, T]. Eventually, we integrate on [0, T] and, using again thegeneralized Minkowski inequality, we get, thanks to (3.14),
E |WL | 2Lq([0, T], L4(R))C(T ) :
n0\|
T
0dt |S(t& ) 8en | q
L12([0, t], L4(R))+2q
.
We finally obtain (3.12) by means of Lemma 2.1 with ( p, r)=(12, 4) andthe fact that h: (x)1, for any x # R. K
351THE STOCHASTIC KdV EQUATION

Proof of (3.13). This proof uses a technical lemma of interpolationwhich can be found in the appendix of [6] and a very sharp property ofsmoothness of the Airy group due to [13, (Lemma 2.1, p. 329)].
Let us first notice that
E |T
0 WL(t)x
2
L(R)
dt=|T
0E \ WL (t)
x 2
L(R)+ dt.
We shall in fact estimate
supt # [0, T] \E \WL (t)
x p
L(R)++2p
for some p2. More precisely, we shall prove that the following estimateholds
|DWL | 2Lt
(Lp| (Lx
))C |8| 2
L20, = (3.15)
for some p2.First of all, let us note that (3.4), the gaussianity of WL and the fact that
the Airy group is unitary in L2 (R) lead directly to the existence of a con-stant C( p, T )>0 such that
|D=WL | 2Lt
(L2x (Lp
|))C( p, T ) |8| 2
L20, = . (3.16)
Indeed, we have for any t # [0, T],
|R
dx |E( |D=WL (x, t)| p)| 2pCp |R
dx E( |D=WL (x, t)| 2)
=Cp :i0
|t
0d |S(t&) D=8ei |
2
C( p, T ) |8| 2L2
0, = .
Then we also have
|D1+=WL |Lt (Lx
(L|p ))C( p) |8| L2
0, = . (3.17)
Indeed, for any (x, t) # R_[0, T], thanks to the gaussianity of D1+=WL ,one has successively
(E |D1+=WL(x, t)| p)1pC( p)(E |D1+=WL (x, t)| 2)12
C( p) \|t
0:
i0
|DS(t&) D=8ei |2 d+
12
.
352 JACQUES PRINTEMS

Now, using the result previously quoted ([13]), namely
|R
dt |DS(t&) D=8ei (x)|2=C |D=8ei |2L2(R) ,
for any x # R, we obtain directly (3.17) with p2.We quote here the interpolation result from [6].
Lemma 3.4. Let X be a Banach space and u a function from R into Xsuch that, for at least one p # ]1, +[ and one _>0,
u # L p (X ) and D_u # L (X ).
Then for any : # [0, _], D:u # L p: (X ) with
1p:
=1p \1&
:_+
and there exists C>0 such that
|D:u|Lp:(X )C |u| 1&:_
Lp(X ) |D_u| :_L(X ) .
We apply the previous lemma with u=D=WL ( , t) at a fixed time t,p=2, X=L p (0) for p2. Then (3.16) and (3.17) lead to
|D:+=WL |Lt (Lx
p (Lp|))C |8| L2
0, = (3.18)
for some : # [0, 1] such that 1p= 12 (1&:).
We need one more estimate in order to conclude. It is not difficult to seethat, for the same reasons as those mentioned in the proofs of (3.16) and(3.17), we also have, after the application of Lemma 3.4,
|D:+=2WL |Lt (Lp
x (Lp|))C |8| L2
0, =2C$ |8|L20, = , (3.19)
for the same : as in (3.18).For one fixed =>0, let us now fix the constants : and p
:=1&=2
<1, (3.20)
i.e.,
p=4=
.
353THE STOCHASTIC KdV EQUATION

Thus since L px(L p
|) is isomorphic to L p|(L p
x), (3.18), (3.19) and (3.20)give
|DWL | 2Lt
(Lp| (W=2, p(R)))
C(T ) |8| 2L2
0, = (3.21)
We conclude to (3.15) thanks to (3.20), (3.21) and the Sobolev embedding
W =2, p (R)/L (R)
because =p2>1. Finally, from (3.15) we get successively
WL
x 2
Lt (Lp
| (Lx))
C |H8| 2L
20, =C$ |8| 2
L20, = ,
and thus the result (3.13) thanks to Ho lder inequality in | which ispossible since p2.
3.2. Pathwise a priori Estimates
We shall see that the estimate (3.12) on the linear problem allows us tosolve (3.1)(3.2) locally in time in X:, q ([0, T]) using Proposition 2.9. Thisproposition supposes the obtention of an a priori estimate of the solutionsin a weighted space based on L2 (R). This is the purpose of the followingpropositions.
Proposition 3.5. Let u be a mild solution of (3.1)(3.2). Then, thefollowing inequality holds for any T>0, a.s.,
|u|X :, q([0, T])C5 (T, |u| Lt (L2
x) , |u|Ltq1 (Y ) , |WL |X :, q ([0, T])), (3.22)
where q1>83, :>0 and C5 is a non-decreasing function.
Proof. I=[0, T] is divided into N intervals [Ii]1iN whereI=[si , si+1] of the same length $>0. Since 1q # ]14, 12[/]14, 58[,we can apply Proposition 2.2 together with a Ho lder inequality in time tothe nonlinear term of (3.5) on each interval Ii ,
|u|X :, q (Ii)|h:S(&si) u(si)| Lq(Ii , L4(R))+C($) |u|X :, q(Ii)
|u| Lq1(Ii , Y ) |I i | %
+ h: |
si
S( &) 8 dW() Lq(Ii , L4(R))
, (3.23)
where %=38&1q1 .
354 JACQUES PRINTEMS

The first term of the right hand side of (3.23) can be estimated usingLemma 2.1 with ( p, r)=(12, 4) and a Ho lder inequality as follows, since,clearly, h: # [0, 1],
|h: S( &si) u(si)|X :, q(Ii)C |Ii |1q&112 |u(si)|L2(R) .
We now choose $(|)>0 such that
C(T ) |u|Lq1([0, T], Y ) $(|)%= 12
and after summation of (3.23) with respect to i, we obtain
|u| qX :, q([0, T])2q&1 ( |u| q
L([0, T], L2(R))N$1&q12+2|WL | qX :, q([0, T])N ).
Using now that N(|)=T$(|), the previous choice of $ yields
|u|X :, q([0, T])C(q, T )( |u|112%Lq1([0, T], Y ) |u|L([0, T], L2(R))
+|u|1q%Lq1([0, T], Y ) |WL |X :, q([0, T])). K
Remark 3.6. A local estimate in time in X:, q ([0, T]) can also beobtained. For that, it is sufficient to write (3.23) on a small interval nearthe origin. Then we get for some T>0 and a.s. that
|u|X :, q([0, T])C5 (T, |u0 |, |u|L([0, T], Y ) , |WL |X :, q([0, T])).
Thus, thanks to (3.12), the assertion (2.3) of Corollary 2.10 can beremoved providing that we have a priori estimate in L2 (R) and in theweighted space Y([0, T]).
Proposition 3.7. Let T>0 and h=h; for some ;>0 satisfying (2.1).Then for any smooth solution u of (3.1)(3.2), we get, P a.s.
|u|Lt (L2
x)C6 \ |u0 |L2(R) , WL
x Lt1 (Lx
)
, |WL |Lt (Lx
2)+ , (3.24)
|h12u|Lt (L2
x)C7 \T, |u0 | L2(R) , |h12u0 | L2(R) , WL
x Lt1(Lx
)
, |h12WL |Lt (L2
x)+ ,
(3.25)
ux
# L2 ([0, T], L2loc(R)), (3.26)
where Ci , i=6, 7 are non-decreasing functions of their arguments.
355THE STOCHASTIC KdV EQUATION

Proof of (3.24). Let us v=u&WL , then v verify the following equation
vt
+3vx3+
12
x
(v+WL)2=0,
v(0)=u0 .
For v # L ([0, T], H3 (R)) for example, we multiply Eq. (3.27) by v andafter an integration by parts, we get
12
ddt
|v(t)|2=&|R
WLWL
xv dx&
12 |
R
WL
x2 v2 dx.
After classical computations this leads to
12
ddt
|v(t)|2 WL (t)x L(R)
|v(t)|2+12
WL (t)x L(R)
|WL (t)|2.
Then an application of the Gronwall lemma gives for any t # [0, T],
|v(t)|2|u0 |2 exp \2 |T
0d WL ()
x L(R)++|
T
0d |WL ()|2 WL ()
x L(R)
exp \2 |T
ds WL (s)
x L(R)+C \ WL
x Lt1 (Lx
)
, |u0 |, |WL | L(Lx2)+ . (3.28)
(3.24) follows immediately from (3.28) and (3.10).Proof of (3.25). Let us set again v=u&WL and assume that
v # L ([0, T], H3 (R)). We first consider the case h # C30(R, R+) and
verifies (2.1). After multiplication of (3.27) by hv and several integrationsby parts, we obtain at time t
12
ddt
|h12v|2+32 h$12 v
x 2
=12
(v, h$$$v)+12 \hv,
x
(v+WL)2+ . (3.29)
The first term of the right hand side of (3.29) can be estimated thanksto (2.1),
12
|(v, h$$$v)|c3
2|h12v|2.
356 JACQUES PRINTEMS

As regards the other ones
12 \hv,
x(v+WL)2+1
3 |R
h$v3 dx +|h12v| |h12WL| WL
x L(R)
+32
|h12v|2 WL
x L(R)
+12
|WL |L(R) |h$12v|2,
and we obtain finally
12(hv,
x(v+WL)2)|
13 |R
h$v3 dx + WL
x L(R)
[2 |h12v|2+|h12WL |2]
+c1
2|WL |L(R) |h12v|2. (3.30)
The estimate of the cubic term of (3.30) comes from Sobolev embeddingsand standard linear interpolation in the Sobolev spaces. More precisely,we get
|R
h$v3 dx \|R
h$2v4 dx+12
\|R
v2 dx+12
, (3.31)
with
|R
h$2v4 dx C |h$12v|3 |h$12v| H1(R) . (3.32)
Then, thanks to (2.1), the H1 (R)-term of (3.32) is estimated by
|h$12v| 2H 1(R)\c1+
c2
2 + |h12v| 2+2 h$12 vx
2
. (3.33)
We finally estimate the cubic term by substituting (3.31) with (3.32) and(3.33) and obtain for any '>0
|Rh$v3 dx '|v| h12 v
x2
+C' |v| |h12v|2. (3.34)
Now, thanks to (3.28), we know that
\u0 # L2 (R), \T>0, P a.s., _M(T, |u0 |, |)>0
such that for any v smooth solution, we have
|v|L([0, T], L2(R))M(T, u0 , |).
357THE STOCHASTIC KdV EQUATION

We now deduce from (3.34) that for ' such that
'3
M(T, u0 , |)12
,
one has
12
ddt
|h12v|2+ h$12 vx
2
C(T, |u0 |, h) |h12v| 2
+C WL
x L(R)
[ |h12v|2+|h12WL |2]
+C |WL | L(R) |h12v|2.
Thanks to the estimates of the linear problem (3.10)(3.13) and to theGronwall lemma, we eventually get
|h12v|2+2 |t
0 h$12 vx
2
d
|h12u0 |2+C(T, |u0 |, |, h) |t
0|h12v|2+C$(|, h) (3.35)
Hence (3.25) holds when h # C30(R). We now consider a sequence
[hn]n0 of C30(R, R+) functions such that hn verifies (2.1) uniformly with
respect to n and such that hn (x)Zh; (x) for any x # R. Then we apply(3.35) with h replaced by hn and obtain an estimate of |h12
n v|2 uniformlyin n by the Gronwall lemma. Taking the limit n + the Beppo-Levitheorem yields the required estimates for h;. K
Proof of (3.26). Estimate (3.26) comes from (3.35) and the fact thath=h; is increasing, thus making h$ greater than a positive constant on anycompact set of R. K
3.3. Proof of Theorem 3.1
First, we construct a sequence of smooth solutions [un]n0 of (3.1)(3.2). For instance, for smooth data (8n , u0, n) such that
8n # L0, 42 ,
u0, n # H 3(R),(1+x+)38 8n # L0
2 ,(1+x+)38 u0, n # L2 (R),
(3.36)
358 JACQUES PRINTEMS

with
8n 8 # L0, =2 ,
(1+x+)38 8n (1+x+)38 8 # L02 , (3.37)
u0, n u0 # L2 (R).
Standard computations lead to the existence of un solution of (3.1)(3.2),(8, u0) being replaced by (8n , u0, n). For that, we can generalize easily tothe stochastic case the techniques of construction of weak solutions inH1 (R) developped in [20] in the determinist frame, which use theinvariants of the Kortewegde Vries equation. We can also generalize thefixed point method, introduced in [10], which construct mild solutions forsmooth data.
Both methods yield the global existence of un in L ([0, T], H3 (R)), a.s.,such that
un (t)=S(t)u0, n&|t
0S(t&)
(u2n)()
xd+WL, n (t), (3.38)
where WL, n (t) is given by (3.9), 8 being replaced by 8n . Now, thanks to(3.37) and (3.12), there exists a subsequence that we shall denote again[WL, n]n0 such that
WL, n WL # X :, q ([0, T]) a.s. (3.39)
From now on we shall fix an | such that convergence (3.39) holds. Weare going to prove that [un]n0 is a Cauchy sequence in X:, q ([0, T(|)])for some T(|)>0.
Lemma 3.8. There exist T(|)>0 and C(|)0 such that for any p, qin N,
|up&uq |X :, q([0, T(|)])C(|)[ |u0, p&u0, q |+|WL, p&WL, q |X :, q([0, T(|)])].
(3.40)
Proof. Let us write up&uq using the mild formulation (3.38). We getfor any t>0
up (t)&uq (t)=S(t)(u0, p&u0, q)&12 |
t
0S(t&)
x
[(up&uq)(up+uq)] d
+WL, p (t)&WL, q (t).
359THE STOCHASTIC KdV EQUATION

We use the same techniques as in Proposition 3.5 and apply the resultof Proposition 2.9 to (3.41), and obtain
|up&uq |X :, q([0, T])CT 1q&112|u0, p&u0, q |
+C(T ) T % |up&uq |X :, q([0, T]) |up+uq |Ltq(Y )
+|WL, p&WL, q | X :, q([0, T]) . (3.42)
Thanks to the a priori estimate (3.25) and estimates (3.10)(3.13) withh=h34, there exists M(T, |u0 |Y , |)>0 such that for any T>0, for anyinteger n
|un |L([0, T], Y )M(T, |u0 |Y , |).
By choosing T(|) such that
2C(T ) T %M(T, |u0 |Y , |) 12 (3.43)
and by substituting (3.42) with (3.43), we finally obtain (3.40). K
Since [un]n0 is a Cauchy sequence in X:, q ([0, T(|)]), there exists usuch that
un u in X:, q ([0, T(|)]). (3.43)
Let now T0 be any positive real number. (3.25) then yields the existenceof a u~ such that
u~ # L ([0, T0], Y ),
and
un u~ in L ([0, T0], Y ) weak-star,
which implies that
un u~ in D$(]0, T0[_R).
Also, it is not difficult to see that (3.44) implies
un u in D$(]0, T(|)[_R)
Therefore, u~ |[0, T(|)]=u and thus |u(T(|))|Y|u~ |L([0, T0], Y ) . The inter-val in time T(|) of the local existence being estimated in term of the normof the initial condition in the weighted space Y, we can iterate the processon [T(|), T(|)+T1 (|)], T1 (|) depending on |u~ |Y and so on until[0, T0] is entirely covered.
360 JACQUES PRINTEMS

Thus we have constructed a global strong solution of (3.1)(3.2). Theuniqueness follows from Corollary 2.10. Now, it remains to prove the con-tinuity of the trajectories t [ u(t, , |) in the weighted space based onL2 (R) a.s. This result comes from an a.s. energy equality in this space andfrom the weak continuity in this space.
Lemma 3.9. Let T>0. Let u be a solution of (3.1)(3.2) such that
u # L ([0, T], L2 (R)) a.s., (3.45)
ux
# L ([0, T], L2loc(R)) a.s. (3.46)
Let h # C (R, R+) such that (2.1) holds. We furthermore assume that
h12u # L ([0, T], L2 (R)) a.s., (3.47)
(h$)12 ux
# L2 ([0, T], L2 (R)) a.s., (3.48)
h128 # L02 . (3.49)
Then, the following equality holds a.s., for any t # [0, T],
12
|h12u(t)|2+32 |
t
0|h$12 u
x 2
d
=12
|h12u0 |2+12 |
t
0|h$$$12u| 2 d+
13 |
t
0d |
R
dx h$u3
+|t
0(hu, 8 dW())+
t2
|h128| 2L0
2. (3.50)
Proof. This proof is rather similar to the proof of estimate (3.25) ofProposition 3.7. First, functions h with compact support will be used. So let[un]n0 such that
un=\n V (%u)
where [\n]n0 is a smoothing kernel that is choosen such that 1
|\n V u| |u|, \u # L2 (R) (3.51)
361THE STOCHASTIC KdV EQUATION
1 For instance, a truncature in the Fourier space.

and where % is a function of C0 (R) such that %=1 in a neighborhood of
Supp(h). un therefore verifies the following stochastic partial differentialequation
dun+\3un
x3 +12
\n V %u2
x + dt
=\n V %8 dW+\3\n V2%$ux2 &3\n V
%"ux + dt+\n V %$$$u.
Then, applying the Ito formula to un [F 1
2 R h(x) u2n(x) dx, it is not
difficult to see that, thanks to (3.45), (3.46) and (3.51), we can take thelimit in all the terms provided suitable integrations by parts have beendone. The terms which contain derivatives of % are null at the limit.
Let us take now the limit on the functions h. Let [hn]n0 be a sequenceof functions C3
0(R, R+) such that
v hn (x)Zh(x), \x # R;
v hn verifies (2.1) uniformly with respect to n;
v |h$n |c4 |h$|.
We take the limit in (3.50) with h replaced by hn either by the Beppo-Levi theorem, or by the dominated convergence theorem thanks to (3.47)and (3.48). The stochastic integral converges in L2 (0) thanks to (3.47) and(3.49), thus a subsequence converges a.s. K
The proof of the continuity of the trajectories will be achieved when theweak-continuity of the solution u in L ([0, T], Y ) is proved. First, it isnot difficult to see that
u # C([0, T], H&2 (R)).
Moreover, since u # L ([0, T], Y ) and since the embedding of theweighted space Y into H&2 (R) is dense and continuous, the weak-continuity is deduced from the Strauss Lemma (see e.g., Lemma 1.4, p. 263in [19]).
Finally, (3.50) with h=h34, which implies the continuity of the norm,together with the property of weak-continuity of u yields the result. Thisends the proof of the Theorem 3.1.
4. ABSTRACT METHOD
The purpose of this section is to obtain a result of existence and unique-ness of (3.1)(3.2) under assumptions (1.6) and (1.7) only. The method
362 JACQUES PRINTEMS

used here is similar to a compactness method for deterministic PDEs, thisbeing possible thanks to the local smoothing effects of the linear part ofthe equation (see [11, 4]). First and foremost, let us point out the essentialdifficulty of the use of such methods in the framework of stochastic partialdifferential equations. Contrary to the previous section, we can no longeruse a pathwise construction of the solution and we will first work in L2 (0).In order to give some idea of the problems encountered, let us consider Vand H two reflexive and separable Hibert spaces. Let V=L2 (0, V ) andH=L2 (0, H ). Then, if V/H with compact embedding, this is no morethe case for V and H. But, if M designates a set of Radon measure inV-weak which verifies the Prokhorov criterion of tightness, the sameshould apply in H-strong. Such a method leads via the Skorohod theoremto martingale solutions, i.e., solutions in another probability space and withanother Wiener process. The uniqueness result that appears in thepreliminaries shows us that for a given Wiener process and a given prob-ability space, there is at most one solution in L ([0, T], Y ) for initial datain Y. The conclusion follows then from Theorem 2.6.
The main result of this section is contained in the following theorem.
Theorem 4.1. Let T>0 and u0 be such that (3.6) holds. Under theassumption of localization of the noise (3.3), there exists a unique solution uof (3.1)(3.2). Moreover the following estimates hold a.s.:
u # L ([0, T], Y ), (4.1)
u # C([0, T], H &s$loc (R)), \s$>2, (4.2)
ux
# L2 ([0, T], H sloc(R), \s<0. (4.3)
Let h=h34. Let [u0, n]n0 be a sequence of elements of H3 (R) such that
h12u0, n h12u0 in L2 (R). (4.4)
Let [8n]n0 be a sequence of elements of L0, 42 such that
h128n h128 in L02 . (4.5)
A global solution un at (3.1)(3.2) can be associated to the data(u0, n , 8n) (see the begining of Subsection 3.3). Moreover, one has a.s.
un # L ([0, T], H 3 (R)).
363THE STOCHASTIC KdV EQUATION

4.1. A priori Estimates
Proposition 4.2. For any T>0,
[un]n0 is bounded in L2 (0, L([0, T], L2 (R))),
un
x =n0
is bounded in L2 (0, L2 ([0, T], L2loc(R))).
The proof of Proposition 4.6 follows from the two following lemmas.
Lemma 4.3. For any T>0, there exist positive constants C1 (T ) andC2 (T ) such that
E supt # [0, T]
|un (t)|2C1 (T )( |u0 | 2+|8| 2L
20) (4.6)
E supt # [0, T]
|un (t)| 4L2(R)C2 (T )( |u0 |4+|8| 4
L20). (4.7)
Lemma 4.4. For any T>0, there exist positive constants C3 (T ) andC4 (T ) such that
E supt # [0, T]
|un (t)| 2YC3 (T )(1+|u0 | 4+|u0 | 2
Y+|8| 4L2
0+|8| 2L
20(L2(R), Y ))
(4.8)
E |T
0 h$12 un
x 2
dC4 (T )(1+|u0 | 4+|u0 | 2Y+|8| 4
L20+|8| 2
L20(L2(R), Y )).
(4.9)
Proof of Lemma 4.3. First, let us note that the estimate (4.6) can beeasily computed using the same method than those used in the proof of(3.10) in Proposition 3.2.
Now let us prove (4.7). Since un is sufficiently smooth, Ito's formula canbe applied to un verifying (3.1) with the functional , [
F1 |,|4. Standardcomputations lead to the following of the right member.
E supt # [0, T]
|un (t)|4|u0, n |4+4E supt # [0, T] |
t
0|un ()| 2 (un (), 8n dW())
+6E |T
0|un ()| 2 |8n | 2
L20 d. (4.10)
Next, we apply a classical martingale inequality (see [5], Theorem 3.14)to the second term of the right member.
364 JACQUES PRINTEMS

E supt # [0, T] |
t
0|un ()|2 (un (), 8n dW())
3E \|T
0|un ()|6 |8n |2 d+
12
116
E supt # [0, T]
|un (t)|4+C1 (T )|8n | 4L
20 . (4.11)
Using (4.11) in (4.10), we get finally
E supt # [0, T]
|un (t)|42 |u0, n |4+C1 (T ) |8n | 4L
20 .
Then (4.4) and (4.5) give the result. K
Proof of Lemma 4.4. As previously, the Ito formula is applied to un
verifying (3.1) with the functional , [F2 1
2 |h12,| 2. We obtain the followinginequality, for any t # [0, T], a.s.:
12
|h12un (t)|2+|t
0 \hun ,3un
x3 +unun
x + d
=12
|h12u0, n | 2+|t
0(hun , 8n dW())+
t2
|h128n | 2L
20 . (4.12)
Let us note that
\hun ,3un
x3 +=32 h$12 un
x 2
&12
(un , h$$$un),
and
\hun , unun
x +=&13 |
R
h$u3n dx.
Thanks to (2.1), one has immediately for any t # [0, T]
|t
0(un , h$$$un) d c3 |
t
0|h12un |2 d. (4.13)
Let us estimate next the cubic term. The computations that follow aresimilar to those of the previous section. A Ho lder inequality with respect
365THE STOCHASTIC KdV EQUATION

to the space variable followed by a standard inequality of interpolation inthe Hilbert spaces leads to, for any t # [0, T]
13 |t
0d |
R
dx h$u3n 1
3 |t
0d |h$12un | 12
L4(R) |un |
c2
0
3 |t
0d |h$12un |32 |h$12un | 12
H1(R) |un |, (4.14)
where c0 is a positive constant such that
|h$12un |L4(R)c0 |h$12un |34 |h$12un | 14H 1(R) .
And thanks to the assumptions (2.1), we get for any t # [0, T] and a.s.
|h$12un | 2H 1(R)
c2
2|h12un | 2+|h$12un |2+ h$12 un
x 2
. (4.15)
By substituting (4.14) with (4.15) and using again the assumptions (2.1)but in the term in un x, we obtain the following inequality for anyt # [0, T]:
13 |t
0d |
R
h$u3n C \|
t
0d |un |52 |h12un |12
+|t
0d |un ()|3+|
t
0d |un |52 |h$12 un
x 12
+ .
Using (4.15) and (4.16) in (4.13), we obtain for any t # [0, T]
F2 (un (t))+32 |
t
0d h$12 un
x 2
F2 (u0, n)+c3
2 |t
0d |h12un |2
+C |t
0d |un | 52 |h12un |12+ h$12 un
x 12
=+C |
t
0d |un | 3+ |
t
0(hun (), 8n dW()) + t
2|h128n | 2
L20 .
366 JACQUES PRINTEMS

Several Ho lder's inequalities in time followed by Young's inequalitieslead to
12
F2 (un (t))+|t
0d h$12 un
x 2
F2 (u0, n)+c3
2 |t
0d F2 (un ())+C(T ) |
t
0d(1+|un |4)
+ |t
0(hun (), 8n dW()) + t
2|h128n | 2
L20 .
The Gronwall inequality then leads to the following one
12
supt # [0, T]
F2 (un (t))+|T
0 h$12 un
x()
2
C(T ) 1+ supt # [0, T]
|un (t)|4+|h128n | 2L2
0
+F2 (u0, n)+ supt # [0, T] |
t
0(hun (), 8ndW()) = .
We get (4.8) and (4.9) by the application of a martingale inequality asin the proof of estimate (3.11) and by Lemma 4.3. Since h is increasing, h$is lower-bounded by a positive constant on every compact set of R. K
We shall use now Proposition 4.6 together with the equation (3.1) inorder to get another set of estimates given by the following proposition.
Proposition 4.5. For any T>0,
[un]n0 is bounded in L2 (0, W #, 2 ([0, T], H &2loc (R)))
[un]n0 is bounded in L2 (0, C$ ([0, T], H &2loc (R)))
for any (#, $) # ]0, 12[ 2.
First of all, let us mention the following result
Lemma 4.6. For any T>0, 0<#< 12 and for any (n, p) # N, there exists
a positive constant C5 (T, p, #) such that
E |8nW |2pW #, 2p([0, T], L2 (R))C5 (T, p, #)|8n | 2p
L20 . (4.18)
367THE STOCHASTIC KdV EQUATION

Proof of Lemma 4.6. The proof directly follows the characterization ofthe Sobolev space W #, 2p ([0, T], L2 (R)) mentioned in Section 2. Indeed,one has
E |8nW |2pW #, 2p([0, T], L2 (R))=E |
T
0|
T
0
|8n W(t)&8nW(s)|2p
|t&s| 1+#p dt ds.
Using the gaussian property of [W(t)]t # [0, T] , we obtain, after theapplication of the Fubini theorem in (t, |),
E |8nW |2pW #, 2p([0, T], L2 (R))Cp |8n | 2
L20 |
T
0|
T
0dt ds |t&s|&(1+(2#&1) p).
The right member of the previous inequality being finite since #< 12, then
(4.18) is obtained thanks to (4.5). K
Proof of Proposition 4.5. We write that un is solution of (3.1) a.s., sothat
un (t)=u0, n+|t
0 \3un
x3 +unun
x + d+8n W(t). (4.19)
Thanks to a Sobolev inequality and a standard interpolation inequality,we find that for any k # N, there exists a positive constant C(k) such that
unun
x H &1(]&k, k[)
C(k) |un | 2L4(]&k, k[)
C(k) |un | 32L2(]&k, k[) |un | 12
H 1(]&k, k[) ,
that is to say, for any T>0,
E unun
x 2
L2 ([0, T], H &1(]&k, k[))
C(k) \E |T
0|un | 2
L2 (]&k, k[) d+34
_\E |T
0|un | 2
H 1(]&k, k[) d+14
.
Then Proposition 4.2 gives for any k # N
E unun
x 2
L2 ([0, T], H &1(]&k, k[))
C$(k). (4.20)
368 JACQUES PRINTEMS

We also have thanks to (4.9)
E 3un
x3 2
L2([0, T], H &2 (]&k, k[))C"(k). (4.21)
Consequently, (4.18)(4.21) (with p=1) and (4.4) lead to
E |un | 2W #, 2 ([0, T], H &2 (]&k, k[))C6 (k), (4.22)
for any k # N and for some 0<#< 12. Then choosing #>0 and p # N
such that 0<$<#&12p for a certain $ # ]0, 12[, (4.18)(4.21) and (4.4)
give, owing to the Sobolev embedding of W #, 2p ([0, T], L2 (R)) andW1, 2 ([0, T], H &2
loc (R)) in C$ ([0, T], H &2loc (R))
E |un | 2C$([0, T], H &2 (]&k, k[))C7 (k), (4.23)
for any k # N. Finally, (4.22) and (4.23) end the proof of Proposition 4.5.
4.2. Proof of Theorem 4.1
We first construct martingale solution and will conclude thanks to thepathwise uniqueness and Theorem 2.6. Let us denote by
X#, $ (T )=L2 ([0, T], H 1loc(R)) & W #, 2 ([0, T], H &2
loc (R))
& C$ ([0, T], H &2loc (R))
for some # and $ in ]0,12[ and
Ys, s$ (T )=L2 ([0, T], H sloc(R)) & C([0, T], H &s$
loc (R))
for some s<1 and s$>2.
Proposition 4.7. For any T>0, the family of laws [L(un)]n0 onX#, $ (T ) is tight in Ys, s$ (T ).
Remark 4.8. The space Ys, s$ (T ) and X#, $ (T ) are Fre chet spaces, thusmetrizable, complete and separable. Therefore the measures L(un) areinner regular.
Proof of Proposition 4.7. The family of measure [L(un)]n0 is a familyof probability measures. Therefore by the Prokhorov criterion, it is suf-ficient to prove that for any =>0, there exists a compact K= of Ys, s$ (T )such that
L(un)( cK=)= (4.24)
for any n # N.
369THE STOCHASTIC KdV EQUATION

Thus, for any =>0, let us set B= the following subset of X#, $ (T ),
B== ,k1
|u| 2L2([0, T], H 1(]&k, k[))+|u| 2
W #, 2 ([0, T], H &2 (]&k, k[))
|u| 2C$([0, T], H &2 (]&k, k[))
2k
=(C6 (k)+C7 (k)+C8 (k))=
where C8 (k)>0 is provided by Proposition 4.2, i.e. for any k # N,
E |un | 2L2 ([0, T], H 1(]&k, k[))C8 (k). (4.25)
We set now K= the closure of B= in Ys, s$ (T ). Then (4.22), (4.23) and(4.25) together with the Bienayme Tchebychev inequality and Lemma 2.2yield the result. K
From Proposition 4.7, we infer that there exists a measure + on Ys, s$ (T )and a subsequence that we denote again [L(un)]n0 such that
L(un) ( +.
The Skohorod theorem (see [9, Theorem 2.7, p. 9]) can be applied tothe previous weak-convergence and thus there exists a sequence of randomfunctions [u~ n]n0 with value in Ys, s$ (T ), a stochastic process u~ with valuein the same space, both defined on the same probability space (0 , F , P )such that
u~ n u~ in Ys, s$ (T ), P a.e., (4.26)
L(u~ n)=L(un), \k # N. (4.27)
Moreover by (4.8), u~ # L2 (0 , L ([0, T], Y )), we deduce easily thatu~ # Cw ([0, T], Y ).
We now have to prove that [u~ n]n0 verifies an equation similar to (3.1)but in another probability space, and then to take the limit.
We shall need the following result whose proof is left to the reader.
Lemma 4.9. Let T>0, s # ]12, 1[ and s$>2. Let w # H3 (R) compactly
supported. Then the application
Fw : Ys, s$ (T ) C([0, T])
Fw : v [ \v&|
0 _3vx3+v
vx& d, w+
is continuous.
370 JACQUES PRINTEMS

Next, we set
Mn (t)=un (t)&u0, n&|t
0 _3un
x3 +unun
x & d, (4.28)
M n (t)=u~ n (t)&u0, n&|t
0 _3u~ n
x3 +u~ nu~ n
x & d, (4.29)
M (t)=u~ (t)&u0&|t
0 _3u~x3+u~
u~x& d, (4.30)
By definition, for [ei]i0 a Hilbertian basis of L2 (R) that we assume tobe sufficiently smooth, we have
(Mn (t), ei)=|8n*ei | ;i (t),
where [;i (t)]t # [0, T] denotes a family of real brownian motions mutuallyindependent on (0, F, P). We then set for any (i, n) # N2 and for anyt # [0, T]
; ni (t)=
1|8n*ei |
(M n (t), ei). (4.31)
Let , be a continuous bounded function from C([0, T]) to R. By defini-tion,
E,((Mn ( ), ei))=E,(; i) |8n*ei |.
But one also has
E,((Mn ( ), ei))=E(, b Fei)(un).
Then, we deduce from the result of Lemma 4.9 and from (4.27) that forany (i, n) # N2
E,(;i)=E ,(; ni ),
and so the family of random functions defined by (4.31) is those of realbrownian motions mutually independent.
We set then
W n (t)= :j0
; nj (t)ej , (4.32)
371THE STOCHASTIC KdV EQUATION

and we have with (4.31) and (4.32),
u~ n (t)=u0, n+|t
0 _3u~ n
x3 +u~ nu~ n
x & d+8n W n (t), P a.e. (4.33)
In order to take the limit in (4.33), let us set
; i (t)=1
|8*ei |(M (t), ei). (4.34)
Thanks to the assumption of smoothness on ei , Lemma 4.9 and(4.4)(4.5), we get for any i # N
; ni ; i in C([0, T]), P a.e.
Since for a gaussian random variable, convergence almost surely impliesconvergence in L p (0 ) for any p1, we conclude that [; i (t)]t # [0, T] is afamily of real brownian motions mutually independent. We set finally
W (t)= :j0
; j (t)e j ,
and we have
u~ (t)=u0+|t
0 _3u~x3+u~
u~x& d+8W (t), P a.e. (4.35)
The pair (u~ , W ) is a martingale solution of (3.1)(3.2) according to thesense of Definition 2.4.
Thus, taking into account Remark 3.6 and the fact that u~ # Cw ([0, T], Y )which is a Lusin space, we can use Theorem 2.6 and obtain the strongexistence and uniqueness of solution of (3.1)(3.2) in the spaces mentionedin Theorem 4.1. This ends the proof of Theorem 4.1.
REFERENCES
1. T. R. Akylas, On the excitation of long nonlinear water waves by a moving pressuredistribution, J. Fluid. Mech. 141 (1984), 455466.
2. J. Bona and R. Scott, Solutions of the Kortewegde Vries equation in fractional orderSobolev spaces, Duke Math. J. 43 (1976), 8799.
3. J. Bona and R. Smith, The initial value problem for the Kortewegde Vries equation,Philos. Trans. Royal Soc. London Ser. A 278 (1975), 555601.
4. P. Constantin and J. C. Saut, Local smoothing properties of dispersive equations, J. Amer.Math. Soc. 1 (1988), 413439.
5. G. Da Prato and J. Zabczyk, Stochastic equations in infinite dimensions, in ``Encyclopediaof Mathematics and Its Applications,'' Cambridge Univ. Press, Cambridge, 1992.
372 JACQUES PRINTEMS

6. A. Debussche and A. de Bouard, On the stochastic Kortewegde Vries equation, J. Funct.Anal. 154 (1998), 215251.
7. F. Flandoli and D. Gatarek, Martingale and stationary solutions for stochastic NavierStokes equations, Prob. Theory Related Fields 102 (1995), 367391.
8. J. Ginibre and Y. Tsutsumi, Uniqueness of solutions for the generalized Kortewegde Vries equation, SIAM J. Math. Anal. 20 (1989), 13881425.
9. N. Ikeda and S. Watanabe, ``Stochastic Differential Equations and Diffusion Process,''North-Holland, AmsterdamOxfordNew York, 1981.
10. T. Kato, Quasilinear equation of evolution with applications to partial differentiel equa-tion, in ``Lecture Notes in Math., Vol. 448, pp. 2750, Springer-Verlag, BerlinNew York,1975.
11. T. Kato, On the Cauchy problem for the (generalized) Kortewegde Vries equation, Stud.Appl. Math., Adv. in Math. Suppl. Stud. 8 (1983), 93128.
12. T. Kato, On the Kortewegde Vries equation, Manuscripta Math. 8 (1983), 8999.13. C. E. Kenig, G. P. Ponce, and L. Vega, Well-posedness of the initial value problem for
the Kortewegde Vries equation, J. Amer. Math. Soc. 4 (1991), 323347.14. S. N. Kruzhkov and A. V. Faminskii, Generalized solutions of the Cauchy problem for the
Kortewegde Vries equation, Math. USSR Sb. 48 (1984), 391421.15. S. J. Lee, G. T. Yates, and T. Y. Wu, Experiments and analyses of upstream-advancing
solitary waves generated by moving disturbances, J. Fluid. Mech. 199 (1989), 569593.16. J. L. Lions, ``Quelques Me thodes de Re solution des Proble mes aux Limites Non
Line aires,'' Dunod, Paris, 1969.17. J. C. Saut and R. Temam, Remarks on the Kortewegde Vries equation, Israel J. Math.
24 (1976), 78 87.18. K. U. Schaumlo ffel, ``White Noise in Space and Time as the Time-Derivative of a
Cylindrical Wiener Process,'' Lecture Notes in Math., Vol. 1390, Springer-Verlag, BerlinNew York.
19. 19. R. Temam, ``NavierStokes Equations,'' North-Holland, Amsterdam, 1984.20. R. Temam, Sur un proble me non line aire, J. Math. Pures Appl. 48 (1969), 159172.21. M. Viot, Solutions faibles aux e quations aux de rive es partielles stochastiques non
line aires, The se, Universite Pierre et Marie Curie, Paris, 1976.22. T. Yamaha and S. Watanabe, On the uniqueness of solutions of stochastic differential
equations, J. Math. Kyoto Univ. 11 (1971), 155167, 553563.
373THE STOCHASTIC KdV EQUATION

92 CHAPITRE 4. EDPS
4.2 Numerical simulation of the stochastic KdV equation.
L’article qui suit fut publié dans Physica D : Nonlinear Phenomena, vol. 134, pp. 200–226(1999).

Physica D 134 (1999) 200–226
Numerical simulation of the stochastic Korteweg–de Vries equation
Arnaud Debusschea, Jacques Printemsb,∗a Laboratoire d’Analyse Numérique et EDP d’Orsay, Bâtiment 425, Université Paris-Sud et CNRS, 91405 Orsay, Cedex, Franceb Laboratoire d’Analyse, Géométrie et Applications, Institut Galilée, Université Paris Nord et CNRS, 93430 Villetaneuse, France
Received 10 September 1998; received in revised form 28 January 1999; accepted 24 March 1999Communicated by R. Temam
Abstract
In this work, we numerically investigate the influence of a homogeneous noise on the evolution of solitons for theKorteweg–de Vries equation. Our numerical method is based on finite elements and least-squares. We present numericalexperiments for different values of noise amplitude and describe different types of behaviours. ©1999 Elsevier Science B.V.All rights reserved.
1. Introduction
The Korteweg–de Vries equation models the propagation of weakly nonlinear dispersive waves in various fields:plasma physics [30], surface waves on the top of an incompressible irrotational inviscid fluid [18,37], beam propa-gation [27]. From a mathematical point of view, this equation is recognized as a simple canonical equation for suchphenomena since it combines some of the simplest types of dispersion with the simplest types of nonlinearity.
When using a convenient set of coordinates and after rescaling the unknown, it can be written as
∂u
∂t+ ε
∂3u
∂x3+ u
∂u
∂x= 0, (1.1)
wheret ≥ 0 andx ∈ R. This equation must be supplemented with an initial data and with boundary conditions.These can be of two types. It can be required thatu decays to zero at infinity or thatu is periodic with a given periodL.
In Eq. (1.1), no exterior influence is taken into account. When considering the propagation of ion-acoustic solitonsin a noisy plasma, it seems that a noise term has to be added. Indeed, in their experiment, Chang et al. [6] haveobserved that when a soliton wave is taken as initial condition, the average wave is damped and decays liket−α,
∗ Corresponding author.E-mail address:[email protected] (J. Printems)
0167-2789/99/$ – see front matter ©1999 Elsevier Science B.V. All rights reserved.PII: S0167-2789(99)00072-X

A. Debussche, J. Printems / Physica D 134 (1999) 200–226 201
α > 0. This behaviour has been studied theoretically by various authors who consider the stochastic Korteweg–deVries equation
∂u
∂t+ u
∂u
∂x+ ε
∂3u
∂x3= γ ξ (1.2)
when the perturbation termξ is of white-noise type. The case of a time-dependent noiseξ = ξ (t) is a particular onesince the equation is still integrable. This has been studied by Wadati [34] who proved a decay of the averaged solution〈u(x, t)〉 with α = 3/2. Using perturbation techniques, similar results have been obtained for the time-dependentnoise with damping [35]; for a multiplicative noise [15]; for space and time-dependent noise [17]. Also a numericalstudy [29] has shown that Eq. (1.2), with space–time whitenoise, seems to reproduce the behaviour observedexperimentally in [6].
In many others circumstances, apart from the theory of plasmas, the Korteweg–de Vries equation (1.1) is anidealized model in which many effects have been neglected, and it is not unreasonable to model them stochastically:when the time scales of the phenomena modeled by Eq. (1.1) are much larger than the correlations of the noise, itis justified to assume that it is of white-noise type.
Beside the physical motivations above, we think that the understanding of the perturbation of an integrableequation such as Eq. (1.1) by a noise is of great mathematical interest.
In this work, we wish to study the influence of a noise term on the propagation of soliton profile and consider moregeneral quantities than the average〈u(x, t)〉 which in our opinion does not contain enough information. Indeed, ifa soliton is considered as initial condition, it is reasonable to think that it will keep its shape for some time and itseems interesting for instance to measure the average of its maximum amplitude. Clearly the evolution of〈u(x, t)〉does not give any indication of that aspect. Similarly, we want to study the phase shift due to the collision of twosolitary waves in the presence of noise.
Many articles have also studied the derivation of the forced Korteweg–de Vries equation:
∂u
∂t+ ε
∂3u
∂x3+ u
∂u
∂x= f, (1.3)
to the modeling of the generation of waves in the presence of a moving exterior pressure field or past an obstacle andin various circumstances: surface waves [2,7,20,38]; rotating flow [11]; coastal current over a topographic feature[12,23];β-plane waves by flows other topography [13,25,36]. Equation (1.3) has been studied mathematically in[4]. In general, the forcingf is spatially localized and represents the disturbance. Again, it is reasonable to considerthe case of a small random perturbation of this equation. However, here it seems that the noise should also belocalized and the interest is in the influence of the noise on the generation of waves. This is studied in [10].
The effect of small random inhomogeneities in the bottom of a fluid has also been studied in [16] where aKorteweg–de Vries–Burgers equation is obtained. When these inhomogeneities are rapidly varying and not small,the shallow water approximation is not valid and the Korteweg–de Vries model is not used (see [24]).
The stochastic equation of interest is here
∂u
∂t+ u
∂u
∂x+ ε
∂3u
∂x3= γ ξ (1.4)
which we have obtained from Eq. (1.1) by a normalization and the addition of the noise termξ(x, t) which is aGaussian process with correlations
Eξ (x, t)ξ (y, s) = c(x − y)δt−s (1.5)

202 A. Debussche, J. Printems / Physica D 134 (1999) 200–226
with γ measuring the amplitude of the noise. It isδ-correlated in time since we shall assume that it is of white-noisetype. If it were white also in space, this would result inc(x − y) = δx−y . However, such an irregular correlationfunction is difficult to handle and a smoother correlation in space is often used.
Note that since the correlation depends only on the differencex−y, the noise is homogeneous. The mathematicalconstruction ofξ will be precisely described below.
In the case of a space-independent noise,c = 1, the noise can be removed by a simple change of coordinatesand a soliton-type solution can be given. This case has been studied in [34]. Here we are interested in the case of aspace-dependent noise. It seems difficult to obtain an explicit solution, nevertheless qualitative information couldbe obtained from a perturbation method (see [17]) but only with small noise. Therefore, we choose to use numericalsimulations to get information.
Numerical schemes for Eq. (1.1) have been developed and efficient schemes are available (see [3,31] and thereference therein). Among these, [31] proposes a scheme which keeps the integrability property of Eq. (1.1). In [3],high orders in both space and time methods are used and a very efficient scheme is developed in order to study theblow up for the generalized Korteweg–de Vries equation.
In our situation, the solution is not expected to be smooth either in space or in time, and we have chosen a schemebased on finite elements of order one and the least-squares method. This type of scheme is expected to be robust,an interesting property when dealing with noise, and has been introduced in [5]. We have improved the scheme of[5] and obtained a method which can simulate the solutions of Eq. (1.1) in a very satisfactory way.
We will present numerical results which tend to show that the presence of the noise in Eq. (1.4) creates a noisybackground in the profile of the solution. At the beginning this background is uniform but it progressively organizesitself and we observe the formation of nonlinear right-going waves. When a soliton profile is taken as initial data, itseems that it is not affected by the noise at the beginning. Then the solitary wave interacts with the waves createdby the noise and these inelastic interactions result in a modification of its amplitude and velocity. However, thewave is not destroyed and propagates for very long time as can be seen on the level curves of the solution. We haveobserved this phenomenon on several computed trajectories. Concerning the behavior before the creation of thewaves by the noise, we have been able to simulate many trajectories and to compute averages. For instance, we havecomputed the average of the velocity of the solitary waves for different values ofγ . We find a value which is veryclose to the velocity of the wave for the deterministic equation. Therefore, it seems that the noise does not affectstrongly the velocity of the soliton. We have also computed the averaged invariant quantities and the averaged phaseshift in the collision of two solitons. The noise strongly affects the invariants. We observe a linear evolution withrespect to time but it seems that the phase shift is not changed on the average. Let us recall that in the deterministictheory, the integrability of the system (1.1), which is a consequence of an infinity of conservation laws, implieselastic soliton interactions. Now, though the invariants are totally destroyed and as far as elasticity is concerned(i.e. velocity unchanged and a phase shift), the noise does not affect on average those interactions. However, thestandard deviation of the phase shift increases with the amplitude of the noise, indicating that the interaction losesits elastic aspect when we consider trajectories only.
In the case of periodic boundary conditions, the mathematical construction ofξ can be described as follows. Weintroduce a cylindrical Wiener processW onL2(]0, L[) by setting
W(t, x) =∞∑i=0
βi(t)ei(x),
where eii∈N is an orthonormal basis ofL2(]0, L[) and βii∈N is a sequence of independent brownian mo-tions. These brownian motions are random processesβi(t, ω), t ≥ 0, ω ∈ , defined on a stochastic basis(,F,P, Ft t≥0) such that for eacht ≥ s and for eachi, βi(t) − βi(s) is aFt -measurable Gaussian randomvariable independent ofFs , and therefore ofβi(s).

A. Debussche, J. Printems / Physica D 134 (1999) 200–226 203
It is well-known that the brownian motions are nowhere differentiable with respect to time. Also, it is easy to seethat the series definingW does not converge inL2(]0, L[). Formally the space–time white-noise is defined as
η(x, t) = dW
dt
and has the property of beingδ-correlated in space and time:
Eη(x, t)η(y, s) = δx−yδt−s .
For8 a linear map fromL2(]0, L[) toL2(]0, L[), we set
W = 8W =∑i∈N8eiβi,
and
ξ = dW
dt= 8η.
For instance, if8 is an operator of the form
8f =∫
]0,L[k(x, y)f (y)dy, f ∈ L2(]0, L[) (1.6)
then the correlation is given by
Eξ (x, t)ξ (y, s) = δt−s∫
]0,L[k(x, z)k(y, z)dz
and the noise is homogeneous if the kernelk is of the form
k(x, y) = k(x − y).
The mathematical form (or Ito form) of Eq. (1.4) is
du+(u∂u
∂x+ ε
∂3u
∂x3
)dt = γ8dW. (1.7)
For the boundary condition,x ∈ R andu decays at infinity, the description is the same with ]0, L[ being replacedby R. It has been shown in [9,26] that under suitable smoothness assumptions on the data, Eq. (1.7) possessesa unique solution. For instance, in [26], it is shown that, in the case of a localized noise, it suffices that8 isa Hilbert–Schmidt operator fromL2(I ) into L2(I ), whereI is the perturbed region. This assumption amountsrequiring thatk ∈ L2(I × I ) in Eq. (1.6).
Our numerical method is described in Section 2 where we show that it gives good results for the deterministicequations on known solutions: propagation of solitons, collision of solitons, splitting of a Gaussian profile. Theresults of the stochastic simulation are presented in Section 3, for the case of Eq. (1.4).
2. The numerical method
We now describe the numerical scheme which we use to simulate our stochastic equation. Due to the lack ofregularity of the noise, it is expected that solutions are smooth neither in time (not differentiable) nor in space(not H 1). Therefore, we consider low order discretization. It follows that we lose important properties such as

204 A. Debussche, J. Printems / Physica D 134 (1999) 200–226
the conservation of theL2(R) norm. However, we test our method on the deterministic equation and show that itbehaves very well. It does not introduce any numerical dissipation and it can simulate very important phenomenasuch as the evolution of a soliton, the elastic interaction of two solitons or the splitting of a profile into more thantwo solitons.
2.1. Time discretization
Not any time integrator can be taken to integrate a dispersive nonlinear equation such as the Korteweg–de Vriesequation. The main property which has to be kept is the balance between nonlinearity and dispersion (see [28]).Also it is important that the scheme does not introduce any numerical dissipation, this being in general implied bythe exact conservation of theL2 norm. Concerning the invariants, it is possible to build a scheme which is exactlyintegrable and has infinitely many invariant quantities (see [31]). However, Bona et al. [3] have shown that highorder schemes in space and time behave very well although this only conserves theL2 norm. They show that implicitand conservative Runge–Kutta schemes are very well adapted to the simulation of the Korteweg–de Vries equation.
From another point of view, it is difficult to construct high order schemes for stochastic differential equations(see [19,21,22,32,33]). Here two types of order can be considered depending on whether we want pathwise ap-proximations (strong order) or approximations of the law (weak order). Typically, a deterministic scheme used ona stochastic differential equation is of strong order 1/2 and of weak order 1. It is possible to design a high ordermethod for stochastic differential equations but complicated correction terms appear.
As regards stochastic partial differential equations, few articles have been devoted to this question. For instance,[14] has studied an Euler scheme for a stochastic parabolic equation and has shown that it is of strong order 1/4even in the case of additive noise although for stochastic differential equations it is known that the Euler scheme isof strong order 1. If we try to write a high order scheme, we obtain correction terms involving partial differentialoperators and it seems that this requires a lot of smoothness in space for the noise term.
Thus, we consider the lowest order conservative implicit Runge–Kutta scheme which turns out to be the Cranck–Nicholson scheme. When a time stepτ is chosen, the scheme is written as
un+1 − un + τ
(∂3un+(1/2)
∂x3+ 1
2
∂
∂x
(un+(1/2)
)2)
= 8(Wn+1 −Wn) (2.1)
with un+(1/2) = (1/2)(un+1 + un) andWn = W(nτ).The random term can also be written as
8(Wn+1 −Wn) =∑i≥0
(βi((n+ 1)τ )− βi(nτ))8ei
so that it can be simulated by
√τ∑i≥0
χτi,n8ei,
whereχτi,ni,n is a sequence of independent Gaussian variables with zero mean and a variance equal to one and
eii≥0 a Hilbertian basis ofL2(]0, L[).A forthcoming paper will be devoted to the numerical analysis of this scheme, i.e. the existence ofun+1 given
un and the noise and convergence whenτ → 0.

A. Debussche, J. Printems / Physica D 134 (1999) 200–226 205
2.2. Space discretization
Again, before choosing the space discretization, we emphasize that the solution is not expected to be smooth.Among the different methods available in the literature, Carey and Shen [5] have proposed to use a finite elementdiscretization with piecewise linear functions (P1) coupled with a least squares method.
This method is attractive in our situation since aP1 approximation does not require a lot of smoothness. However,the numerical experiments in [5] show that their method introduces numerical dissipation and is not able to simulatecorrectly the interaction of solitons.
We would like to keep the advantage of using piecewise linear functions and the least-squares approach. Leastsquares methods are known to be robust which is suitable when dealing with rough functions such as stochasticprocesses.
In order to use low order finite elements, we reduce the equation to a first order system of partial differentialequations by writing Eq. (2.1) as
un+1 − un + τ
((∂wn+(1/2)/∂x)+ (1/2)(∂/∂x)
(un+(1/2)
)2) = 8(Wn+1 −Wn)
∂un+(1/2)/∂x = vn+(1/2)
∂vn+(1/2)/∂x = wn+(1/2)(2.2)
Now, instead of using a least-squares formulation of Eq. (2.2), we first use a Petrov–Galerkin discretization witha piecewise linear shape function and piecewise constant test functions. Leth be a real positive andN an integersuch thath = L/N and letMh = ⋃
1≤j≤N [(j − 1)h, jh] be a mesh of the interval [0, L], V 1h (respectivelyV 0
h )be the space of piecewise linear functionsϕ such thatϕ(0) = ϕ(L) (respectively the space of piecewise constantfunctionψ) associated toMh. Then the problem amounts to findingun+1
h , vn+1h ,wn+1
h such that
un+1h =
N∑j=1
uhn+1j ϕj , vn+1
h =N∑j=1
vhn+1j ϕj , wn+1
h =N∑j=1
whn+1j ϕj
verifying the following weak formulation of Eq. (2.2)
(un+1h − unh, ψi
)+ τ
((∂w
n+(1/2)h /∂x
)+ (1/2)(∂/∂x)
(un+(1/2)h
)2, ψi
)=
(8(Wn+1h −Wn
h
), ψi
)(∂u
n+(1/2)h /∂x, ψi
)=
(vn+(1/2)h , ψi
)(∂vn+(1/2)h /∂x, ψi
)=
(wn+(1/2)h , ψi
)(2.3)
for any i ∈ 1, . . . , N, whereϕj 1≤j≤N (respectivelyψi1≤i≤N ) designates the basis ofV 1h (respectivelyV 0
h ).
In order to obtain a noise in space, we compute for each time stepn and for each nodej a random numberχh,τj,n inaccordance with a normal law and such that they form a sequence of independent random variables. Then we set
8(Wn+1h −Wn
h
)= √
τ
N∑j=1
1
‖ϕj‖L2(0,L)χh,τj,n ϕj .
The basisϕj/‖ϕj‖L2(0,L)1≤j≤N is not orthonormal, so that the resulting noise is not a whitenoise in space.However, it is homogeneous and it has a small correlation length. This can be seen from the covariance operator inspace (Fig. 1) which can be defined as follows

206 A. Debussche, J. Printems / Physica D 134 (1999) 200–226
Fig. 1. Covariance operator in space of the discretized noise.
E
[(8Wn+1 −Wn
τ,ψi
‖ψi‖L2(0,L)
)(8Wp+1 −Wp
τ,ψj
‖ψj‖L2(0,L)
)]= δn,pK(i − j)
whereδ is the delta-Kroneker symbol and
K(`) =
0 if |`| ≥ 21/(4τh) if |`| = 11/(2τh) if ` = 0
Note thatV 1h andV 0
h have the same dimension so that there are as many unknowns as there are equations. It can beshown that on the linear equation our approach is equivalent to the least-squares method of [5].
However, in [5], the system (2.3) is not solved exactly and the implicit non-linear term is replaced by a semiimplicit one. We think that this is the reason for the failure of this method and instead we use a Newton iterationmethod to solve exactly Eq. (2.3). In the next section, we will see that, indeed, our scheme is able to simulatecorrectly the deterministic equation. The scheme does exactly conserve the mass (I1 = ∫ L
0u(x)dx ) but not theL2
norm. However, we will see that it does not introduce numerical dissipation.We have chosen to work with our Petrov–Galerkin form instead of the least-squares approach because it offers
implementational advantages. Indeed, the linear systems that have to be solved at each time step are ill-conditionedand a direct method is necessary. With our form, the matrices are very easy to assemble and, since no indirectaddressing is made, it is possible to compute both the matrix and its factorization simultaneously.
2.3. Validation of the method on the deterministic equation
Although our aim is not to simulate the deterministic Korteweg–de Vries equation or to study its properties, itis important to see that the method works well in different situations such as the evolution of a single soliton, theinteraction of two solitons or the splitting of an initial profile intoN solitons. Indeed, we want to be sure that theaspects observed in the next sections are due to the noise and not due to numerical errors.
We work with the normalized equation
∂u
∂t+ ε
∂3u
∂x3+ u
∂u
∂x= 0 (2.4)
with periodic boundary conditions on the interval [0,2]. In this subsection, the parameterε is taken equal to 5×10−4
or 10−4. The time step isτ = 10−2 and the mesh size ish = 10−2. We have chosenτ andh of the same size since

A. Debussche, J. Printems / Physica D 134 (1999) 200–226 207
as already mentioned our fully discrete scheme does not conserve theL2-norm exactly and it seems reasonable toimpose a CFL stability condition.
2.3.1. Single solitonWe simulate first the initial value problem (2.4) supplemented with the initial condition
u0(x) = 3c sech2(κ(x − x0)) (2.5)
with κ = (1/2)√c/ε andx0 a starting point in [0,2]. The solution of this problem is the following solitary wave
namedsoliton
u(x, t) = 3c sech2(κ[(x − x0)− ct ]) (2.6)
traveling with speedc towards the right. In fact, Eq. (2.6) is a solution of Eqs. (2.4) and (2.5) on the real line, butwith c/ε large enough, we can consider that Eq. (2.6) is a good approximation of the solution of Eqs. (2.4) and (2.5)in the periodic case.
Numerically, we use the initial data(u0h, v
0h,w
0h) whereu0
h is theL2-projection ofu0 ontoV 1h andv0
h,w0h satisfy(
∂
∂xu0h, ψi
)= (v0
h, ψi),
(∂
∂xv0h, ψi
)= (w0
h, ψi),
for i ∈ 1, . . . , N .Now, in order to control the accuracy of our computations and using the same notation as in [3], let us define
different kinds of errors with respect to the exact solutionu. First, we defineE(t) the normalizedL2-norm error attime t as
E(n, t) = ‖unh − u(·, t)‖L2(0,L)
‖u0‖L2(0,L).
We setEn = E(n, nτ). Let t∗(n) be the time nearnτ whenE(n, t) takes its minimum value. Ifun resembles asolitary wave in shape, thent∗ is well defined. SoSn = E(n, t∗(n)) measures how farun differs from the originalprofile as regards its shape: it is by definition the normalizedL2-based shape error at time stepn. We define then theL2-based phase error asPn = nτ − t∗(n). Eventually, we compute the amplitude errorAn = (3c− |unh|L∞)/(3c).The evolution of these quantities is shown in Table 2.
Another particularity of Eq. (2.4), and a consequence of its integrable feature, is the infinity of invariant functionals,whose first four are
I1(t)=∫ L
0u(x, t)dx, I2(t) =
∫ L
0u2(x, t)dx, I3(t) =
∫ L
0
[u3(x, t)
3− ε
(∂u
∂x
)2]
dx,
I4(t)=∫ L
0
[u4
4+ 9
5ε2(∂2u
∂x2
)2
− 3εu
(∂u
∂x
)2]
dx.
In the context of our scheme, it is interesting to see whether these functionals remain invariant, thus describingthe persistence of integrability of the fully discrete scheme. The first test is done withε = 5 × 10−4. In Fig. 2,we show the evolution of the solution computed on the time interval [0,3] with c = 0.3, x0 = 0.5. Table 1 showsthe four quantitiesI1, I2, I3 andI4 at timest = 0,1,2,3. We can see that they are not exactly constant, whichis not surprising since we know that our scheme does not preserve theL2-norm. However, we can see that theyoscillate, the amplitude of the oscillation being very small: maximum amplitude of 7× 10−6 for I2, 2 × 10−5 forI3 and 4× 10−5 for I4. It is worth noticing that our numerical scheme does not introduce dissipation. This would

208 A. Debussche, J. Printems / Physica D 134 (1999) 200–226
Fig. 2. Propagation of a single soliton whose parameters arec = 0.3, x0 = 0.5 for ε = 5 × 10−4 on the time interval [0, 3].
Table 1Different values ofIi for i = 1,2,3,4 on the time interval [0,3] during the propagation of the soliton (see data in Fig. 2)
t ε = 5 × 10−4 ε = 10−4
I2 (×10−1) I3 (×10−1) I4 (×10−2) I2 (×10−1) I3 (×10−2) I4 (×10−2)
0 0.880109 0.157842 0.607138 0.390624 0.690182 0.2640531 0.880108 0.157840 0.607179 0.390635 0.690235 0.2639152 0.880110 0.157842 0.607156 0.390641 0.690289 0.2637903 0.880101 0.157838 0.607154 0.390595 0.690082 0.263996
Table 2Values ofEn, Sn, Pn, An in t = 1,2,3 for data in Fig. 2
t ε = 5 × 10−4 ε = 10−4
En Pn Sn An En P n Sn An
1 0.9351(−2) 0.2415(−2) 0.4925(−2) 0.4281(−2) 0.8082(−1) 0.1084(−1) 0.2297(−1) 0.1833(−1)2 0.1572(−1) 0.4497(−2) 0.5648(−2) 0.4955(−2) 0.1490(0) 0.2061(−1) 0.2579(−1) 0.2272(−1)3 0.2111(−1) 0.6246(−2) 0.5787(−2) 0.4389(−2) 0.2187(0) 0.3066(−1) 0.2773(−1) 0.2540(−1)4 0.2819(−1) 0.8428(−2) 0.5991(−2) 0.5662(−2) 0.2895(0) 0.4079(−1) 0.2029(−1) 0.1833(−1)
indeed create a decay of these quantities. Note that this absence of dissipation is confirmed by the evolution of theL∞-norm, which is reflected byAn given in Table 2.
Next we present in Fig. 3(a) the shape error, theL2-error and the phase error. We see that after some time-delay,the shape error becomes approximately constant. As mentioned in [3], this tells us our fully discrete scheme maypossess exact and discrete traveling-wave solutions that propagate with a shape and a phase speed that are veryclose to the given initial data:a discrete soliton. Moreover, since in Fig. 3(b) the growth of the phase error is linear,we can evaluate the shift of speed. Note that the shape error is very small.
We have performed the same test withε = 10−4 (Fig. 4), the other parameters being the same as before. Table 1and Fig. 5 report the behavior of the invariants and of the different errors. We see that the method still behaves verywell: only the fourth invariantI4 has a slightly larger variation. This is not surprising since now the soliton has asteep gradient. We also notice that the errors are small, larger than in the preceding case but again this is due to thestiffness of the solution.

A. Debussche, J. Printems / Physica D 134 (1999) 200–226 209
Fig. 3. (a) NormalizedL2-based error and normalizedL2-based shape error; (b)L2-based phase error in the case of the propagation of a singlesoliton forε = 5 × 10−4 (see data in Fig. 2).
We think that these two tests show that our method is both effective and robust: it is able to capture efficientlythe evolution of solitons with steep gradients.
2.3.2. Collision of two solitonsThe next step is to simulate the collision of two solitons. The initial condition is
u0(x) = 3c1 sech2(κ1(x − x0,1))+ 3c2 sech2(κ2(x − x0,2)), (2.7)
whereκi = (1/2)√ci/ε, i = 1,2 and where the distance|x0,2 − x0,1| between the two solitons is chosen large
enough to be certain that the interaction has not started. In our simulation,i = 1 designates the larger soliton, soκ1 > κ2. Fig. 6 shows that the scheme is able to simulate a clean interaction (no dispersive tail or supplementarysoliton are created). It is known that the interaction creates a positive (respectively a negative) shift in the phase ofthe larger soliton (respectively the smaller) which has the theoretical value (see [1])
δth,1 = 1
κ1ln
(κ1 + κ2
κ1 − κ2
),
(respectivelyδth,2 = − 1
κ2ln
(κ1 + κ2
κ1 − κ2
)).

210 A. Debussche, J. Printems / Physica D 134 (1999) 200–226
Fig. 4. Propagation of a single soliton whose parameters arec = 0.3, x0 = 0.5 for ε = 10−4 on the time interval [0, 3].
With the data from Fig. 6 wherec1 = 0.3, c2 = 0.1 andε = 4.84× 10−4, we haveδth,1 = 0.105795. With oursimulation, we have measured:δnum = 0.104. The error is of the order ofh andτ which we believe to be sufficientlyaccurate. In Table 3, the values of quantitiesI2, I3, I4 are given at different times in the interval [0,20]. We seeagain that they are not exactly constant but they do not decay and their variation has a very small amplitude. A moredetailed study indicates that,during the interaction, the invariants present larger variations : 0.07% forI2, 0.04 %for I3 and 0.9% forI4 but, what we think important is that, after the interaction, they recover their values with abetter precision. Moreover, this situation is repeated for each future interaction with exactly the same variation ofthe invariants during the interaction and with the same values before and after it.
2.3.3. Reflexionless potential caseThe last test we performed is the evolution of the initial condition
u0(x) = µp(p + 1) sech2(√
µ
6ε(x − 1)
),
whereµ is real andp is an integer. As shown in ([8], Ch. 4, Section 11), the inverse scattering method proves thatthis profile splits intop solitary waves with no dispersive tail. More precisely, the following solitary waves appear
un(x, t) = an sech2[√
µ
6εn(x − cnt)
]
wherean = 2µn2, cn = (2/3)µn2, for 1 ≤ n ≤ p.Due to the presence of step gradients both in space and time, this is one of the most difficult test for numerical
methods concerning the capture of discrete solitons. We have performed this computation in the case of threesolitons,p = 3 withµ = 1/18 so that the amplitude of the solitons are 1/9, 4/9 and 1. The value ofε is 10−4 here.
The evolution on the interval [0,4] is shown in Fig. 7 and the profiles at different instants in Fig. 8. We observeagain a very good behaviour of our method and a good agreement with the theoretical solution.

A. Debussche, J. Printems / Physica D 134 (1999) 200–226 211
Fig. 5. (a) NormalizedL2-based error and normalizedL2-based shape error; (b)L2-based phase error in the case of the propagation of a singlesoliton forε = 10−4 (see data in Fig. 4).
3. Behaviour of solitons in the presence of noise
We now present numerical experiment on Eq. (1.7). We use the numerical method described in Section 2 and thesame time and space discretization as in Section 2.3.
3.1. Study of one of the trajectories
We first investigate the evolution of a single soliton in the presence of noise. We use the soliton profile (2.5) asinitial condition.
When the noise amplitude is small,γ = 10−3, the soliton does not seem to be strongly perturbed. The evolutionof the soliton of velocityc = 0.3 whenε = 10−4 andε = 5 × 10−4 is shown in Figs. 9 and 10 on the timeinterval [0,3]. In Figs. 11 and 12, its profile is shown att = 0,5,10,15 and 20. We can see that the profile slightlychanges. Its amplitude oscillates around the amplitude of the initial profile and its shape does not present obviouschanges. Concerning its velocity, we can see that forε = 10−4 andt = 20, the profile of the soliton is centered

212 A. Debussche, J. Printems / Physica D 134 (1999) 200–226
Fig. 6. Collision of two solitons whose parameters arec1 = 0.3,x0,1 = 0.4,c2 = 0.1,x0,2 = 0.8 for ε = 4.84×10−4 on the time interval [0, 4].
Table 3Table of the different values ofIi for i = 1,2,3,4 on the time interval [0,20] during the interaction of the two solitons
t I2 I3 (×10−1) I4 (×10−2)
0 0.105175 0.169331 0.6289104 0.105183 0.169363 0.6290848 0.105175 0.169333 0.629284
12 0.105193 0.169554 0.63125516 0.105173 0.169315 0.62988120 0.105220 0.169578 0.631722
Fig. 7. Splitting of the reflexionless potential profileu0(x) = a sech2(b(x − 1)). Here,a = 2/3, b = √1/(108ε) for ε = 10−4.
aroundx = 0.55, whereas without noise it would be atx = 0.4. Thus the noise has slightly accelerated the solitonand influences the phase. A similar comment holds forε = 5 × 10−4. We observe the same phenomena for othertrajectories (i.e. if another path is chosen for the noise). The soliton is always shifted. However, it may be eitheraccelerated or slowed down.

A. Debussche, J. Printems / Physica D 134 (1999) 200–226 213
Fig. 8. Profiles at timet = 0,1,2,3,4 of Fig. 7.
In order to further investigate the stability of the soliton and the change of velocity, we have increased theamplitude of the noise toγ = 10−2 so that its effect is amplified. The initial condition is the same as above.
In Fig. 13, withε = 10−4, we see that, indeed, the noise introduces much stronger perturbations. Their amplitudesare of the same order as the soliton. However, we see that the soliton is not totally destroyed. In Fig. 14, the profile isshown at timet = 0,5,10,15 and 20. We see that att = 5, the soliton is easily recognized although it has changed

214 A. Debussche, J. Printems / Physica D 134 (1999) 200–226
Fig. 9. Single soliton with noise,γ = 10−3, c = 0.3, ε = 5 × 10−4, x0 = 0.4 on [0,3].
Fig. 10. Single soliton with noise,γ = 10−3, c = 0.3, ε = 10−4, x0 = 0.4 on [0,3].
shape; att = 10, we guess that it is aroundx = 1.7; at t = 15, it is aroundx = 1.3, but we see another peak atx = 0.3. At t = 20, the soliton is clearly atx = 1.6.
In order to have a better understanding of this evolution, it is interesting to use another type of representation. InFig. 15, we plot different level curves on the interval of timet ∈ [0,20]. For a fixed time, only the points where theamplitude of the soliton is equal to the given level (in Fig. 15, the levels are 0.5, 0.7 and 0.9) are plotted. For thisrepresentation, we restrict our simulation toε = 10−4. Indeed, in this case, the soliton is steep and we get betterfigures. The propagation of the solitary wave issued from the initial soliton profile is reflected by the main line.The slope of the line gives the velocity. We see that it is very robust and continues to evolute at a velocity which isclose to the initial one. We also notice on this figure that nonlinear waves propagating to the right are created andthat they interact with the noise. For instance, we observe two such interactions aroundt = 10 and another one att = 15. The interactions are not elastic and the velocity of the soliton is modified.

A. Debussche, J. Printems / Physica D 134 (1999) 200–226 215
Fig. 11. Single soliton with noise,γ = 10−3, c = 0.3, ε = 5 × 10−4, x0 = 0.4. Profiles att = 0,5,10,15,20.
In order to understand the origin of the nonlinear waves thus created, we have performed the same simulation asin Fig. 15 (same parameters and same path of noise) but now the initial data is null. This is represented at the bottomof the same figure. We see that thesame wavesare created. We can then conclude that only the noise is responsiblefor their existence and they are not created by a possible destruction of the soliton.
Thus a possible description of the evolution can be the following: at the beginning the noise creates a uniformbackground which progressively organizes itself and creates right propagating nonlinear waves which interact with

216 A. Debussche, J. Printems / Physica D 134 (1999) 200–226
Fig. 12. Single soliton with noise,γ = 10−3, c = 0.3, ε = 10−4, x0 = 0.4. Profiles att = 0,5,10,15,20.
the soliton and modify its shape and velocity. Keeping this in mind, we can now understand why it is difficult to seethe position of the solitary wave att = 10 in Fig. 14. This is because, at this instant there is a collision with anotherwave and the solitary wave is interacting with it. This other wave is the second peak that we observe in Fig. 14 att = 15.
In Fig. 16, we show the same simulations for larger time,t ∈ [20,37]. We see that this mechanism still applies, thesoliton still exists (indicating its robustness) but due to the many interactions, its velocity has notably changed. We

A. Debussche, J. Printems / Physica D 134 (1999) 200–226 217
Fig. 13. Single soliton with noise,γ = 10−2, c = 0.3, ε = 10−4, x0 = 0.4 on [0,3].
see in Fig. 16, that the waves created by the noise organize themselves and propagate. We also note the apparition ofleft going dispersive waves, this is due to the nonelastic interactions and due to the progressive transformations ofthe waves created by the noise to solitary waves. It seems that these dispersive waves do not affect the wave issuedfrom the initial profile.
The same experiment has been done with other paths of noise. Again, we have observed the same phenomena.In most cases, the change of the velocity of the solitary wave has resulted into an acceleration. However, we haveobserved few trajectories for which the converse happens. We have not tested enough trajectories to be able to decidewhat happens in average on such a long interval of time. This would require a very lengthy computation since manytrajectories have to be simulated. Also, for larget , the solitary wave might have a smaller amplitude than the otherwaves and it seems difficult to locate its position automatically if we wish to study its velocity. Moreover, we haveobserved that the standard deviations grow linearly with respect to time, so that, for large values oft , we would notbe able to have a good accuracy.
3.2. Study of averages on short time
We have performed such a study on the smaller intervalt ∈ [0,4]. On this interval, the noise does not haveenough time to create waves, or more precisely, we have not seen them appear. Therefore, the interest of this studyis to understand the behaviour of solitons in a noisy non-organized background.
3.2.1. Low noise levelAt a low noise level,γ = 10−3 andε = 4.84× 10−4, we have simulated 100 trajectories with a soliton profile
with velocity c = 0.3 as initial data. Fig. 17 shows the evolution of the invariantsI2, I3, I4 in average and for onesingle trajectory.
We see that they approximately grow linearly with respect to time. This is predicted from the Ito formula. Indeed,an Ito calculation shows that1
1 We denote by〈.〉 the operation of taking averages over a finite number of computed trajectories andE the mathematical expectation. Therefore,〈.〉 is an approximation ofE.

218 A. Debussche, J. Printems / Physica D 134 (1999) 200–226
Fig. 14. Single soliton with noise,γ = 10−2, c = 0.3, ε = 10−4, x0 = 0.4. Profiles att = 0,5,10,15,20.
EI2(t) = EI2(0)+ γ 2c2,8t,
wherec2,8 is equal to|8|2HS. Here|8|2HS is the Hilbert–Schmidt norm of8, if it is given by8f = ∫[0,L]k(x −
y)f (y)dy then|8|2HS = L∫
[0,L]k2(x)dx.
Since herec2,8 is of the order 102 (the inverse of the mesh size) andγ = 10−3, we should observe a slope of theorder 10−4 which is the case.

A. Debussche, J. Printems / Physica D 134 (1999) 200–226 219
Fig. 15. Level curves (top) for a single soliton as initial condition (c = 0.3, x0 = 0.4) (bottom: for null initial condition) with a homogeneousnoisy background on the time interval [0,20] at levels 0.5,0.7,0.9 and with parametersγ = 0.01 andε = 10−4.
For I3, we have
EI3(t) = EI3(0)− εγ 2c3,8t + γ 2∫
[0,L]f8(x)E
(∫ t
0u(x, s)ds
)dx
wherec3,8 is a constant which can be computed and is of the order 106 andf8 is a function depending on8. Thefirst term dominates, explaining the linear decay. A similar but more complicated formula holds forI4.
We have also computed the averaged velocity of the disturbed soliton. For each trajectory and for each time, themaximum of the solution is located and a curvexmax(t) is obtained. On a given interval of time [t1, t2] we computethe line which fits best the curve on this interval in the least squares sense. Its slope is the approximate velocity onthis interval.
In Table 4, the first column indicates the interval of time, the averaged approximated velocity〈c∗〉 is in the secondcolumn and the standard deviationσ =
√〈(c∗)2〉 − 〈c∗〉2 in the third. With 100 simulated trajectories, the precision
is of the orderσ/√
100= σ/10 which is around 2× 10−4 here. We see that the variation of the velocity is of thesame order. Thus, we conclude that, to the precision of our computation, the averaged velocity of the solitary wavein the presence of small noise is the same as in the deterministic case.

220 A. Debussche, J. Printems / Physica D 134 (1999) 200–226
Fig. 16. Level curves (top) for a single soliton as initial condition (c = 0.3, x0 = 0.4) (bottom: for null initial condition) with a homogeneousnoisy background on the time interval [20,37] at levels 0.5,0.7,0.9 and with parametersγ = 0.01 andε = 10−4.
Table 4Computation of the velocity by a linear regression in the case of a single soliton on several time intervals for two noise levels. Here,h = 0.01,τ = 0.01,c = 0.3, x0 = 0.4, ε = 4.84× 10−4
I γ = 0.001 γ = 0.01
〈c∗〉 √Var(c∗) 〈c∗〉 √
Var(c∗)
[0,1] 0.299382 0.001387 0.298111 0.011998[1,2] 0.299005 0.002335 0.302994 0.020457[2,3] 0.299365 0.003374 0.299300 0.029067[3,4] 0.299084 0.004022 0.297018 0.031043[0,4] 0.299262 0.002138 0.300070 0.016292
3.2.2. Higher noise levelWe now describe the results of the same experiments but with a noise levelγ = 10−2. The quantitiesI2, I3,
I4 are plotted in Fig. 18. Again, the averages grow linearly with respect to time which again agrees with the Itoformula. Moreover, the slope forI2 should be 100 times bigger than in Fig. 17 since onlyγ has changed and hasbeen multiplied by 10. This is indeed what we observe.

A. Debussche, J. Printems / Physica D 134 (1999) 200–226 221
Fig. 17. Average curves of the first invariants of the deterministic equation computed with 100 trajectories on [0,4] in the case of the propagationof a single soliton withc = 0.3, x0 = 0.4, γ = 10−3, ε = 4.84× 10−4. Each curve is supplemented by one trajectory curve.
Here, the curves seem much more regular than in Fig. 12. This is simply due to the fact that the variations aremuch bigger here. The irregularities due to the errors in the computation of the averages are much smaller thanthese variations, whereas in Fig. 17, they are of the same order.
We have also plotted in Fig. 18 the evolution of the average of theL∞ norm, which is equal to the amplitude ofthe solitary wave. This curve is very irregular. This is due to the fact that the top of the solitary wave is never locatedat a point of the mesh. To get rid of these artificial oscillations, we have averaged this quantity with respect to time:the second curve represents the evolution of

222 A. Debussche, J. Printems / Physica D 134 (1999) 200–226
Fig. 18. Average curves of the first invariants of the deterministic equation computed with 100 trajectories on [0,4] in the case of the propagationof a single soliton withc = 0.3, x0 = 0.4, γ = 10−2, ε = 4.84× 10−4. In (a), (b), (c), each curve is supplemented by one trajectory curve. In(d), the evolution of theL∞-norm and the average of this quantity are plotted.
1
2t0
∫ t+t0
t−t0E supx∈[0,L]
|u(x, s)| ds
wheret0 is taken as 20 times the time step.It seems that the amplitude increases. Here the standard deviation has been computed and we found that it was
of the order 10−1. Therefore, the observed variation of the amplitude is larger than the sampling error. However, itis possible that other errors cumulate here so that we cannot get a sure conclusion on that aspect.
Remark 3.1. For a low noise level, γ = 10−3, this curve is even more irregular and no conclusion at all could beextracted. Therefore, we decided to present this curve only forγ = 10−2.
Concerning the averaged velocity. Its evolution is presented in the second part of Table 4. The same conclusionsas in Section 3.2.1, can be drawn here. To the precision of our computation, we do not observe any variation of theaveraged velocity and it is equal to the velocity of the deterministic equation.
Therefore, our simulations tend to show that for a short time,t ∈ [0,4], the invariant quantities and the amplitudeof the soliton are modified by the noise, especially the invariant quantities which grow linearly with respect tot .However, the propagation does not seem to be strongly affected and the velocity has not significantly changed inaverage.

A. Debussche, J. Printems / Physica D 134 (1999) 200–226 223
Table 5Computation of the velocity of the larger soliton during the interaction by a linear regressionx = c∗t + x∗
0 for t ∈ I on 100 trajectories fordifferent values of the noise amplitudeγ . Here,h = 0.01,τ = 0.01,c1 = 0.3, x0,1 = 0.4, c2 = 0.1, x0,2 = 0.8, ε = 4.84× 10−4
I γ = 0.005 γ = 0.01 γ = 0.015 γ = 0.02
〈c∗〉 √Var(c∗) 〈c∗〉 √
Var(c∗) 〈c∗〉 √Var(c∗) 〈c∗〉 √
Var(c∗)
[0,1] 0.304 0.0077 0.304 0.018 0.308 0.0217 0.309 0.0340[1,2] 0.420 0.0181 0.417 0.034 0.408 0.0446 0.404 0.0527[2,3] 0.305 0.0144 0.303 0.029 0.309 0.0397 0.311 0.0589[3,4] 0.306 0.0178 0.304 0.033 0.307 0.0530 0.295 0.0781
Table 6Average study before and after the interaction
γ 〈1c〉 √Var(1c) 〈1x0〉
√Var(1x0) r(1c,1x0)
0.005 1.78(−3) 1.39(−2) 0.100636 2.49(−2) 0.880.010 1.14(−3) 2.58(−2) 0.101471 4.74(−2) 0.880.015 7.20(−4) 4.08(−2) 0.094355 8.46(−2) 0.900.020 −2.20(−3) 9.15(−2) 0.160241 2.27(−1) 0.95
Table 7Table of the average of the shift during the interaction in function of the noise
γ tmin 〈δ〉√
Var(d)
0.005 1.58 0.103453 0.0119040.010 1.67 0.103384 0.02209870.015 1.87 0.095702 0.03625670.020 1.66 0.100716 0.0473167
Table 8Numerical and theoretical phase shift of the larger soliton during the interaction in function ofε
ε δth δ∗
4.84× 10−4 0.105785 0.104465
3.3. Study of the interaction of two solitons in the presence of noise
We now want to study the influence of the noise on the interaction of two solitons. We reproduce the simulationof Section 2.3.2 but now a noise term is added.
In Table 5, we show the evolution of the average velocity of the larger soliton forγ = 0.005,0.010,0.015,0.020.We do not observe any significant change in the velocity, except on the interval [1,2] when the interaction happens.
In Table 6, for different values of the noise level, the average of the difference of velocity before and afterthe interaction, denoted by〈1c〉, is given. The second column gives its standard deviation. We can see that thisdifference is small for all the values ofγ .
The approximate velocity is computed thanks to a linear regression on a given intervalI . This gives a line
x = c∗(I )t + x∗0(I ),
wherec∗(I ) is the approximate velocity. The approximate shift due to the interaction can be computed from thevalue ofx∗
0 before and after the interaction. The average of this quantity, denoted by〈1x0〉, is given in the fourthcolumn of Table 6, the standard deviation in the fifth.

224 A. Debussche, J. Printems / Physica D 134 (1999) 200–226
Fig. 19. Average curves of the first invariants of the deterministic equation computed with 100 trajectories on [0,4] in the case of the interactionof two solitons withc1 = 0.3, c2 = 0.1,x0,1 = 0.4,x0,2 = 0.8,γ = 10−2, ε = 4.84× 10−4. In (a), (b), (c), each curve is supplemented by onetrajectory curve. In (d), the evolution of theL∞-norm and the average of this quantity are plotted.
We notice that the standard deviation is relatively large, indicating that the computation of the phase shift from1x0 would give a bad estimator. To remedy this problem, we can remark that the correlation between1c and1x0
is close to 1. This is given in the sixth column of Table 6. For a given path and timet , we set
δ(t) = (1c)t +1x0.
Since〈1c〉 is small, we deduce that〈δ(t)〉 depends little on time so that the average of the shift can be computedfrom δt for any value oft . We observe also that the standard deviation ofδ(t) is minimal for
t = tmin = −Cov(1c,1x0)
Var(1c),
where Cov and Var denote the covariance and the variance operators. If this time is chosen, the standard deviationis proportional to 1− r(1c,1x0), wherer(1c,1x0) is the correlation coefficient between1c and1x0 which, asshown in Table 6, is close to one. We deduce that, if〈δ(tmin)〉 is taken to approximate the average of the shift, weobtain a good estimator.
In Table 7, we give the value ofδ(tmin) for differentγ . We observe that it does not seem to depend onγ , – or thatthe variation with respect toγ is not detectable by our experiment – and that the values are close to the shift in thedeterministic case given in Table 8.

A. Debussche, J. Printems / Physica D 134 (1999) 200–226 225
Therefore, since the velocity of the soliton and the shift are not sensibly modified by the noise, we can concludethat the elasticity property of the collision is not totally destroyed by the noise. However, the standard deviationincreases linearly with respect toγ . This indicates that whenγ increases, more and more paths present nonelasticinteraction with a shift significantly different from the deterministic shift.
In Fig. 19, the evolution ofI2, I3 andI4 in average is given forγ = 0.01. Again, we observe a linear growthwhich agrees with the theoretical prediction. Hence, in this aspect, the integrability property of the Korteweg–deVries equation is totally destroyed.
The evolution of theL∞-norm and of its temporal average is shown in Fig. 19(d). The peak corresponds to theaveraged instant of the interaction. The observed value is very close to the deterministic value (which is around1.25). We also note a significant change in the amplitude of the larger soliton before and after the interaction. Thedifference is of the order 10−1 which is much larger than the sampling error. This increase of the amplitude seemsto be the same as in the case of the propagation of the larger soliton described in Section 3.2.2. Therefore, we thinkit is not due to the interaction.
To conclude, it seems that, as far as the average on the short interval of time [0,4] is concerned, the noise doesnot affect significantly the velocity of the soliton, or the phase shift resulting from the interaction. Even the instantof the interaction is not modified. However,I2, I3 andI4 are not conserved anymore and it seems that the amplitudeof the soliton increases. This last aspect might reflect a change in the shape of the wave.
Acknowledgements
The authors warmly thank Professor Y. Kutznetzov for having suggested to them the study of this problem.
References
[1] M.J. Ablowitz, H. Segur, Solitons and the Inverse Scattering Transform, SIAM, Philadelphia, PA, 1981.[2] T.R. Akylas, On the excitation of long nonlinear water waves by a moving pressure distribution, J. Fluid. Mech. 141 (1984) 455–466.[3] J.L. Bona, V.A. Dougalis, O.A. Karakashian, W.R. McKinney, Conservative, high order numerical schemes for the generalized Korteweg–de
Vries equation, Phil. Trans. R. Soc. London A 351 (1995) 107–164.[4] J.L. Bona, B.-Y. Zhang, The initial value problem for the forced Korteweg–de Vries equation, Proc. R. Soc. Edinburgh 126A (1996)
571–598.[5] G.F. Carey, Y. Shen, Approximations of the KdV equation by least squares finite elements, Comput. Methods Appl. Mech. Eng. 93 (1991)
1–11.[6] H.Y. Chang, Ch. Lien, S. Sukarto, S. Raychaudhury, J. Hill, E.K. Tsikis, K.E. Lonngren, Propagation of ion-acoustic solitons in a
non-quiescent plasma, Plasma Phys. Controlled Fusion 28 (1986) 675–681.[7] S. L. Cole, Transcient waves produced by flow past a bump, Wave Motion 7 (1985) 579–587.[8] P.G. Drazin, Solitons, in: London Mathematical Society Lecture Note Series, vol. 85, Cambridge University Press, Cambridge, 1983.[9] A. Debussche, A. de Bouard, On the stochastic Korteweg–de Vries equation, J. Funct. Anal. 154 (1998) 215–251.
[10] A. Debussche, J. Printems, Effect of a localized random forcing on the Korteweg–de Vries equation, Prépublication d’Orsay 99-02, inpress.
[11] R. Grimshaw, Resonant flow of a rotating fluid past an obstacle: the general case, Stud. Appl. Math. 83 (1990) 249–269.[12] R. Grimshaw, Resonant forcing of barotropic coastally trapped waves, J. Phys. Ocean 17 (1987) 53–65.[13] R. Grimshaw, Z. Yi, Resonant generation of finite-amplitude waves by flow past topography on a beta-plane, Stud. Appl. Math. 88 (1993)
89–112.[14] I. Gyöngy, D. Nualart, Implicit scheme for stochastic parabolic partial differential equations driven by space–time white noise, Potential
Anal. 7 (1997) 725–757.[15] R. Herman, The stochastic, damped Korteweg–de Vries equation, J. Phys. A: Math. Gen. 23 (1990) 1063–1084.[16] T. Kawahara, Effect of random inhomogeneities on nonlinear propagation of water waves, J. Phys. Soc. Jpn 41 (1976) 1402–1409.[17] V.V. Konotop, L. Vasquez, Nonlinear Random Waves, World Scientific, Singapore, 1994.[18] D.J. Korteweg, G. de Vries, On the change of form of long waves advancing in a rectangular canal, and on a new type of long stationary
waves, Phil. Mag. 39 (1895) 422–443.

226 A. Debussche, J. Printems / Physica D 134 (1999) 200–226
[19] P.E. Kloeden, E. Platten, Numerical solution of stochastic differential equations, in: Applications of Mathematics, vol. 23, Springer, Berlin,1992.
[20] S.-J. Lee, G.T. Yates, T.Y. Wu, Experiments and analyses of upstream-advancing solitary waves generated by moving disturbances, J. Fluid.Mech. 199 (1989) 569–593.
[21] Milstein, Approximate integration of stochastic differential equations, Theor. Prob. Appl. 19 (1974) 557–562.[22] Milstein, Weak approximation of solutions of systems of stochastic differential equations, Theor. Prob. Appl. 30 (1985) 750–766.[23] H. Mitsudera, R. Grimshaw, Generation of mesoscale variability by resonant interaction between a baroclinic current and localized
topography, J. Phys. Ocean 21 (1991) 737–765.[24] A. Nachbin, G.C. Papanicolaou, Water waves in shallow channels of rapidly varying depth, J. Fluid Mech. 241 (1992), 311–332.[25] A. Patoine, T. Warn, The interaction of long, quasi-stationary baroclinic waves with topography, J. Atmos. Sci. 39 (1982) 1018–1025.[26] J. Printems, The stochastic Korteweg–de Vries equation inL2(R), J. Differential Equations 153 (1999) 338–373.[27] M.I. Rabinovich, T.D. Trubetskov, Introduction to Theory of Oscillations and Waves, Nauka, Moscow, 1984.[28] J.M. Sanz-Serna, J.G. Verwer, Conservative and nonconservative schemes for the solution of the nonlinear Schrödinger equation, IMA J.
Num. Anal. 6 (1986) 25–42.[29] M. Scalerandi, A. Romano, C.A. Condat, Korteweg–de Vries solitons under additive stochastic perturbations, Phys. Rev. E 58 (1998)
4166–4173.[30] B.K. Shivamoggi, Introduction to Nonlinear Fluid–Plasma Waves, Kluwer Academic Publishers, Dordrecht, 1988.[31] T.R. Taha, M.J. Ablowitz, Analytical and numerical aspects of certain nonlinear evolution equations III. Numerical, the Korteweg–de Vries
equation, J. Comp. Phys. 55 (1984) 231–253.[32] D. Talay, Efficient numerical schemes for the approximation of expectation of functionals of the solutions of an stochastic differential
equation and applications, Lecture Notes in Control and Inform. Sc. 61 (1984), 294–313[33] D. Talay, Discrétisation d’une équation différentielle stochastique et calcul approché d’espérance de fonctionnelles de la solution, M2AN
20 (1986) 141–179.[34] M. Wadati, Stochastic Korteweg–de Vries equation, J. Phys. Soc. Jpn 52 (1983) 2642–2648.[35] M. Wadati, Y. Akutsu, Stochastic Korteweg–de Vries equation with and without damping, J. Phys. Soc. Jpn 53 (1984) 3342.[36] T. Warn, B. Brasnett, The amplification and capture of atmospheric solitons by topography: a theory of the onset of regional blocking, J.
Atmos. Sci. 40 (1983) 28–38.[37] G.B. Whitham, Linear and nonlinear waves, in: Pure and Applied Mathematics, Wiley/Interscience, New York, 1974.[38] T.Y. Wu, Generation of upstream advancing solitons by moving disturbances, J. Fluid. Mech. 184 (1987) 75–99 .

120 CHAPITRE 4. EDPS
4.3 Effect of a localized random forcing term on the Korteweg-de Vries equation.
L’article qui suit fut publié dans Journal of Computational Analysis and Applications, vol.3(3), pp. 183–206 (2001).

Eect of a Localized Random Forcing Term on the
Korteweg±De Vries Equation
Arnaud Debussche1 and Jacques Printems2;3
In this work, we numerically investigate the in¯uence of a white noise-type for-
cing on the phenomenon of forced generation of solitons by a localized moving
disturbance. Our numerical method is based on ®nite elements and least-squares.
We present numerical experiments for dierent values of noise amplitude and
Froude number, which describe some damping eects on the emission of solitons.
KEYWORDS: Korteweg±de Vries equation; solitons; least squares ®nite element
method; random waves; water waves.
1. INTRODUCTION
The forced Korteweg±de Vries has been used by many authors to model the
generation of solitary waves by an external force moving with a constant
speed. For instance, in [1,5,16,25], this equation is derived for the descrip-
tion of the propagation of long unidirectional waves on the top of a thin
layer of inviscid irrotational ¯uid in the presence of a moving disturbance, a
nonconstant exterior pressure, or a non¯at bottom. In this case, the forcing
term is localized and is the derivative of the exterior pressure p or of the
bottom topography b. If u stands for the vertical displacement of the free
surface of the ¯uid, the model proposed in [16] is, in the moving frame
associated to the disturbance,
@u
@t Fÿ 1 @u
@xÿ 3
2u@u
@xÿ "
6
@3u
@x3
2
@
@x p b; 1
1Laboratoire d'Analyse Nume rique et EDP d'Orsay, Baà timent 425, Universite Paris-Sud et
CNRS, 91405 Orsay Cedex, France.2Laboratoire d'Analyse, Ge ome trie et Applications, Institut Galile e, Universite Paris-Nord,
93430 Villetaneuse, France.3Present address: Centre de Mathe matiques de l'Universite de Paris 12, 4e e tage, Baà timent P4,
Universite de Paris-Val de Marne, 61, Avenue du Ge ne ral de Gaulle, 94010 Cre teil Cedex,
France. To whom all correspondence should be addressed. email: [email protected]
Journal of Computational Analysis and Applications, Vol. 3, No. 3, 2001
1831521-1398/01/0700-0183$19.50/0 @ 2001 Plenum Publishing Corporation

where the Froude number is the normalized velocity of the disturbance;
a=h0 measures the nonlinear eects, " h0= 2 measures the dispersiveeects, with a, being the typical amplitude, and wavelength of a wave, h0being the depth of ¯uid. As usual, this model is derived under the
assumption : O". (See [24] for the homogeneous case).Equation (1) is also derived in [12,17] to describe the generation of
internal waves by the ¯ow of a strati®ed ¯uid over an obstacle and in [9] to
describe the generation of inertial waves in rotating ¯ow past an obstacle. In
[10,18], it is also obtained as a model for the generation of coastally trapped
waves by the ¯ow of a coastal current over a topographic feature and in
[13,19,23], where it describes the generation of -plane Rossby waves by
¯ow over topography.
The forced Korteweg±de Vries equation has been studied theoretically
in [2] in the deterministic case. In the presence of noise, results of existence
and uniqueness of solutions may be found in [6,7,20].
In this work, much attention is given to the case of zero initial condition
describing the situation of an uniform ¯ow that encounters an obstacle. The
case of an initial condition, consisting of a solitary wave of the Korteweg±de
Vries equation, has also been studied in [11].
Our aim in this work is to consider the perturbation of (1) by a random
term. This randomness might be understood as an attempt to model inho-
mogeneities in the forcing or to model the neglected terms in the derivation
of (1).
We wish to study numerically an interesting phenomena displayed by
the forced Korteweg±de Vries equation (1) and extensively described in [16],
for instance. It has been observed that in the presence of such a localized
forcing term, solitary waves are periodically generated by the perturbed
region. The size of the solitons depends on the amplitude of the pressure (or
of the bottom) and on the Froude number. Here we would like to under-
stand the in¯uence of a noisy perturbation on this phenomena.
Note that the stochastic Korteweg±de Vries equation also appears in
plasma physics to model the propagation of ion-acoustic soliton in a noisy
plasma [4]. However, in this case, no deterministic forcing term is taken into
account and the interest is in the propagation of solitary waves. This has
been studied theoretically in [14,15,22] and by numerical experiments in
[8,21].
In this work, we add a white noise-type forcing to the right-hand side of
(1). Let _x; t be a gaussian process, which is white in space and localized inthe same region as the disturbance. We are interested in the simulation of
the following stochastic Korteweg-de Vries equation:
@u
@t Fÿ 1 @u
@xÿ 3
2u@u
@xÿ "
6
@3u
@x3
2
@
@x p b pm
2L _; 2
184 Debussche and Printems

where L is the length of the disturbed region, pm measures the amplitude of
the deterministic forcing p b, and is the level of noise added to the
system.
We use the same numerical method as in [8] and brie¯y recalled in
Section 2. Then, we present simulations on the deterministic Eq. (1). These
results have their own interest, since in [16], although the proposed model is
(1), all the simulations are made with the equivalent ``Benjamin±Bona±
Mahony-type'' equation in which the term @3u=@x3 is replaced by @3u=@t @x2.
This equation has a bounded-phase speed, which is not the case of (1); this
makes the numerical simulation of (1) more dicult. It is important to know
if (1) displays the same phenomena as its ``Benjamin±Bona±Mahony-type''
formulation. We recover similar phenomena as in [16]. For subcritical
Froude numbers F < 1, the generated nonlinear waves have a decaying
amplitude. The mass of one emitted wave is signi®cantly larger than the
mass of the next one. For transcritical Froude number, this decay is less and
less sensible and, for supercritical F, the amplitudes of the generated waves
are almost equal. Thus, restricting our comparison to the qualitative
behavior, we have the same description as in [16]. Since dierent numerical
methods and dierent parameters have been used here and in [16], we
cannot make a more precise comparison. This will be the object of a
forthcoming work.
In Section 4, we study the stochastic Eq. (2). We ®rst observe that,
again, solitons are emitted out of the disturbed region, but now the emission
is no longer periodic and the amplitude is no longer constant. Instead, the
instants of emission of solitons are random and ¯uctuate around an average,
which is close to the deterministic value. The solitary waves seem to have a
larger amplitude in average, which is probably due to the fact that more
energy is injected into the equation when a white noise is added. It is shown
in [16] that an increase of injected energy results in an increased soliton
amplitude. More interestingly, it seems that this amplitude always decays.
The average of that of the second emitted solitons is smaller than that of the
®rst, even for F 1:5, although this is what happens only for small Froude
number in the deterministic case. To con®rm this aspect, we have computed
the wave-resistance coecient, de®ned as the time derivative of the energy
d=dtRu2x; t dx and for any Froude number and any noise level we have
found an evolution, which resembles the one of a subcritical Froude number
in the deterministic case. We have also investigated other quantities and
almost always have observed a similar behavior, the adjunction of noise
seems to have the same eect as changing the Froude number to a lower
subcritical one. Moreover, the higher F is, the stronger the eect of the noise
is. However, the period between the emission of solitons does not behave
this way and is unchanged by the noise.
Eect of Localized Random Forcing Term on Korteweg±de Vries Equation 185

2. THE NUMERICAL METHOD
Our numerical method is based on least-squares, low-order ®nite ele-
ments and a Crank±Nicholson scheme and is inspired from a similar method
presented in [3]. As explained in [8], this is well suited to the low regularity of
the solutions of the stochastic Korteweg-de Vries equation. Several tests
have been performed in [8] and have shown that this method is able to
simulate successfully various dicult situations, such as the evolution of a
soliton, the interaction of two solitons, or the splitting of a re¯exionless
potential into several solitons.
As is usual, we simulate (1), on a large domain ÿl; l with periodic
boundary conditions. Our simulations will be correct as long as the solu-
tions vanish close to the boundary.
We rewrite (1) as a ®rst-order system by setting
ux ; x w:
We introduce the space V 1h (resp. V
0h) of piecewise linear (resp. constant)
functions associated to a mesh T h. Then, u, , and w are approximated by
uh, h, wh in V 1h, which satisfy the Petrov±Galerkin formulation with test
functions in V 0h. The discretization in time is obtained, thanks to a Crank±
Nicholson scheme.
If u nh,
nh, w
nh stand for the approximation at time t nt, our scheme is
written as
u n1h ÿ u n
h
t; h
Fÿ 1 n1=2
h ÿ "
6
@
@xw
n1=2h ÿ 3
4 u
n1=2h
2; h
2
@
@x p b; h
pm
2L
hn 1t ÿ hntt
; h
;
n1=2h ; h
@
@xun1=2h ; h
;
wn1=2h ; h
@
@xn1=2h ; h
;
8>>>>>>>>>>>>>>>><>>>>>>>>>>>>>>>>:
for any h 2 V 0h.
The increment of the noise hn 1t ÿ hnt is simulated as
follows
hn 1t ÿ hnt t
p XNi1
1
jjjjjL2ÿl;l j;nj
186 Debussche and Printems

where jj1;...;N is the nodal basis of V 1h and j;n, j 1; . . . ;N, n 0 are
independent-centered normal variables. Clearly, these increments are inde-
pendent, re¯ecting the fact that the noise is white in time. It can be seen that
the space correlation of the noise is of the order of the mesh size h.
In all our simulations, we have taken 1, " 6 (a simple scaling
allows any choice of these numbers). The deterministic part of the forcing
term is of the same type as in [16]. We have used
@
@x p b pm
@
@xsin
2
Lx
in the region 0;L and zero outside; the values L 2 and pm 2 have been
chosen. The parameter will have dierent values ranging between 0 and
0:1.
For all the simulations, the domain of integration ÿ200; 200 has beentaken. A uniform mesh is used. The mesh size and time step are t 0:5
and h 0:4. This might seem to be a coarse discretization, but considering
the size of the domain, this is reasonableÐwe have 103 points in the mesh.
We have tried to use a ®ner mesh but then a fast right-going dispersive tail
reaches the boundary before any interesting results can be obtained.
Moreover, our main point is to get a qualitative description of the in¯uence
of the noise and we do not aim at great precision. Also, the computed
solitons are clearly well captured. A ®ner mesh would require much more
memory storage and too much computing time for the stochastic compu-
tations, which require the simulation of numerous trajectories.
3. DETERMINISTIC SIMULATIONS
We recall that, as described in [16], for subcritical Froude number, one
can observe a periodic emission of solitons going to the left of the perturbed
region. Their amplitudes are not equal and decay from one emitted wave to
the next. This behavior is the same when F increases but the decay in the
amplitude is less and less sensible. For large F, it is not detectable.
The authors of [16] also point out the importance of the wave-resistance
coecient de®ned as the time derivative of the energy
CDWt d
dt
lÿlu2x; t dx
ÿlÿlpx; t @u
@xx; t dx: 3
Eect of Localized Random Forcing Term on Korteweg±de Vries Equation 187

We now present the results of our simulations. We ®rst consider the Froude
number F 0:85. The pro®le at instant t 70 is shown in Fig. 1. We see
that four solitary waves have been generated, a ®fth one is in formation. The
amplitude of these waves is given in Table I. It clearly shows that it decays;
the authors of [16] think that it either goes to zero or settles to a lower level.
A dispersive tail is propagating to the right, beyond a depression region. It
can be seen that this region grows when time evolves. In Fig. 1, only the
portion ÿ75; 175 is shown, since in the remaining part the solution is zero
or consists of the end of the dispersive tail.
The evolution of the wave-resistance coecient CDW on the time
interval 0; 70 is plotted on Fig. 2. We see that CDW oscillates and seems to
have periodical maxima and minima. It is argued in [16] that each maximum
corresponds to the generation of one solitary wave. Indeed, we can observe
four maxima and the beginning of the ®fth bump corresponds to the solitary
wave in formation.
The amplitudes cm of the maxima of CDW and the instants when they
occur are given in Table II. The third line gives the length of time between
two successive maxima. Up to the precision of our computation (recall that
t 0:5), the maxima appear periodically as suggested above. This con-
®rms that the solitary waves are generated periodically.
Similarly to the amplitudes of the emitted waves, the value of the
maxima of CDW is clearly a decreasing function of t. It seems that the
evolution of the wave-resistance coecient is damped.
Table I. Value of the Amplitude of the Emitted
Solitons at t 70 for F 0:85
as 1.3146 1.2603 1.2210 1.1642
Fig. 1. Pro®le at t 70 of the solution for F 0:85.
188 Debussche and Printems

The amplitude of the solitary waves, as well as the maxima of the wave-
resistance coecient, have been computed by interpolating the discrete
maxima of the pro®leÐor of CDWÐand its two neighbors.
Next, we choose two transcritical Froude numbers4 F 1 and F 1:2.
The pro®le at the instant t 70 is shown in Figs. 3 and 5; the evolutions of
the wave-resistance coecient are plotted in Figs. 4 and 6; the amplitudes of
Fig. 2. Evolution of the wave-resistant coecient CDW for F 0:85.
Table II. Values of the Maxima of the CDW Curve, the Instants When They
Occur, and Time Elapsed between Them (See Fig. 2)
cm 4.4809ÿ1 4.2067ÿ1 4.1463ÿ1 4.1287ÿ1 4.1209ÿ1tm 9.5560 24.4294 38.8282 53.3430 67.812
T 14.8734 14.3988 14.5148 14.4694
Fig. 3. Pro®le at t 70 of the solution for F 1.
4In [16], the Froude number F 1:2 is considered as supercritical and not transcritical. This
dierence is explained by the fact that here we have a bigger amplitude for the pressure and
thus at F 1:2 we observe a transcriptional regime.
Eect of Localized Random Forcing Term on Korteweg±de Vries Equation 189

Fig. 4. Evolution of the wave-resistant coecient CDW for F 1.
Fig. 5. Pro®le at t 70 of the solution for F 1:2.
Fig. 6. Evolution of the wave-resistant coecient CDW for F 1:2.
190 Debussche and Printems

the generating solitary waves, the values of the maxima of CDW, the cor-
responding instants, and the period are given in Tables III±VI.
The overall behavior is the same as before and solitons are again per-
iodically emitted out of the perturbed region. The evolution of CDW has also
periodical extrema, as con®rmed by the last line of Tables IV and VI.
However, changes have appeared. First, as expected, the decay in the
amplitude and in the maximum values of the wave-resistance coecient is
now smaller. For instance, the dierence between the ®rst and second
solitons is approximately 5 10ÿ2 for F 0:85 and has reduced to 4 10ÿ2
for F 1 and only 10ÿ2 for F 1:2. Similarly, the dierence between the
®rst two maxima of CDW goes from 3 10ÿ2 to 7 10ÿ3. It seems legitimateto conclude that, when F increases, the evolution is less and less damped.
Table III. Value of the Amplitude of
the Emitted Solitons at t 70 for F 1
as 1.5319 1.4931 1.4763
Table IV. Values of the Maxima of the CDW Curve, the
Instants When They Occur, and Time Elapsed between
Them (See Fig. 4)
cm 5.2488ÿ1 5.0585ÿ1 5.0390ÿ1 5.0331ÿ1tm 11.4537 27.1621 42.7039 58.3375
T 15.7083 15.5418 15.6336
Table V. Value of the Amplitude of the
Emitted Solitons at t 70 for F 1:2
as 1.8531 1.8407 1.8369
Table VI. Values of the Maxima of the CDW
Curve, the Instants When They Occur, and
Time Elapsed between Them (See Fig. 6)
cm 6.4318ÿ1 6.3624ÿ1 6.3565ÿ1tm 14.3760 32.3736 50.4193
T 17.9976 18.457
Eect of Localized Random Forcing Term on Korteweg±de Vries Equation 191

We can also observe that increasing F has an eect on the amplitudes of
the generated waves, which increase. Also, as appears when comparing Figs.
1, 3, and 5, the size of the dispersive tail has signi®cantly decreased. Thus,
the energy injected by the forcing term seems to balance dierently as F
changes. For larger F, more energy is used to generate nonlinear waves and
less is spent in the dispersive tail. Considering the instants tm when the
maxima of CDW occur, these also get larger as F increases and so does the
period T between two successive maxima. This indicates that more and more
time is necessary to generate a solitary wave.
We ®nally have made a simulation with the supercritical Froude
number F 1:5. The results are given in Figs. 7 and 8 and in Tables VII and
VIII. All the tendencies observed above are con®rmed. The generation of a
soliton is longer and only two have been emitted at t 70. The dierence in
their amplitudes is very small and we do not have enough precision to decide
whether they still decay or are now constant. The second maximum of the
Fig. 7. Pro®le at t 70 of the solution for F 1:5.
Fig. 8. Evolution of the wave-resistant coecient CDW for F 1:5.
192 Debussche and Printems

wave-resistance coecient is even larger than the ®rst, but, again, the
dierence is too small compared to the precision.
The dispersive tail is really small now. To test our assumption that
more and more energy goes into the left-going waves and less and less into
the dispersive part when F increases, we have computed the energy con-
tained in the emitted solitary waves for the dierent Froude numbersÐ
recall that the energy of a soliton is proportional to a3=2 where a is its
amplitude. We have, indeed, found that the two solitons generated for
F 1:5 contain about as much energy than for F 1:2, but more than for
F 1 or F 0:85. Note that this is not precise, since the part of the energy
corresponding to the solitons in formation has been neglected.
4. STOCHASTIC SIMULATIONS
When a noise is added to the right-hand side of (1), the solution is a
stochastic process. Figure 9 shows the pro®le of a trajectory at time t 70
with the Froude number F 1 and a noise level 0:1. We see that soli-
tary waves are still generated; these are smooth and not perturbed by the
noise; they are solitons. The action of the noise appears in the depression
region and in the dispersive tail, which are now noisy. We also show in
Fig. 10 the pro®le of a trajectory at time t 70 for F 1 and the level of
noise 0:5. This level is arti®cially high, but it clearly shows the pertur-
bation of the dispersive tail and of the depression region, and the fact that
the solitary waves have random amplitudes but are not noisy. Hence, the
irregular structure created by the noise does not propagate to the left, but
Table VII. Value of the
Amplitude of the Emitted
Solitons at t 70
for F 1:5
as 2.4219 2.4215
Table VIII. Values of the Maxima
of the CDW Curve, the Instants
When They Occur, and the
Time Elapsed between Them
(See Fig. 8)
cm 8.5558ÿ1 8.5615ÿ1tm 23.0201 49.5638
T 26.5437
Eect of Localized Random Forcing Term on Korteweg±de Vries Equation 193

only to the right. These trajectories are typical and we have observed the
same thing on several other simulated trajectories. It can be seen that the
amplitudes of two successive waves are uncorrelated, which is natural since
the noise is white in time.
If we try to generalize the notion of wave-resistance coecient by
simply de®ning it as the time derivative of the energy as in the deterministic
case, we encounter some troubles due to the noise term. Indeed, since the
forcing term is stochastic, we know from Ito calculus that the energy is only
dierentiable in the Ito sense. More precisely, we have
d
lÿlu2x; t dx ÿ p ; t; @u
@x ; t
L2ÿl;l
dt
2 u ; t; d ; t L2ÿl;l dt c dt; 4
Fig. 9. A pro®le sample at t 70 of the solution for F 1 and 10%.
Fig. 10. A pro®le sample at t 70 of the solution for F 1 and 50%.
194 Debussche and Printems

where ; L2ÿl;l denotes the L2ÿl; l inner product. The constant cdepends only on the noise; it is the trace of the covariance operator Q
associated to and de®ned by
E ; t; aL2ÿl;l ; ; s; bL2ÿl;l
Qa; bL2ÿl;l mint; s:
Here and below, E stands for the mathematical expectation.
The nonsmooth part in (4) is the so-called martingale term, which
contains the noise : 2 u ; t; d ; t L2ÿl;l . Therefore, it seems natural tode®ne the wave-resistance coecient as
CDWt ÿ p ; t; @u@x
; t
L2ÿl;l
lÿlpx; t @u
@xx; t dx: 5
Note that the expectation of the martingale term is zero. It follows that the
expectation of the energy is dierentiable and
d
dtE ju ; tj2L2ÿl;l
E CDWt c:
Since we will be interested in averages, this shows that our de®nition is a
good generalization of the deterministic case. Moreover, since we have
subtracted the highly ¯uctuating part, the averages will be computed with
better precision.
In Fig. 11, we have plotted the evolution of CDW for the same trajectory
as was shown in Fig. 9. We see that we have a similar behavior as in the
Fig. 11. Evolution of the wave-resistance coecient CDW for F 1, 10%, and for the same
trajectory of the noise than in Fig. 9.
Eect of Localized Random Forcing Term on Korteweg±de Vries Equation 195

deterministic case. But now, the curve is not smooth and it seems dicult to
locate precisely the maxima or to measure a period.
We are not able to draw any conclusion on single trajectories, such as
the one shown above, except the simple fact that the general behavior is not
drastically changed.
In order to understand better the in¯uence of the noise, we have
simulated many trajectories and computed averages. We ®rst have measured
the amplitudes of the ®rst two emitted solitons for each trajectory and
computed the averages. Tables IX and XI give the results for various values
of the noise level from 1±10% and for the Froude numbers F 1 and
F 1:2. We have denoted by ha1s i and ha2s i the averages of the amplitudes ofthe ®rst and second solitons, and by 1, 2 the corresponding standard
deviation. We ®rst note that the standard deviation is not small and a very
large number of trajectories is necessary to get a small sampling error. We
have used 100 trajectories for equal to 1±3%, 200 for equal to 4±7%,
and 300 for equal to 10%. Then, the sampling error, which we estimate by
the standard deviation divided by the square root of the number of trajec-
tories ranges from about 10ÿ3 for 10ÿ2 to 5 10ÿ3 for 10ÿ1.For both F 1 and F 1:2, ha1s i and ha2s i vary little for small and
then increase: the dependence of the average amplitude with respect to
might be stationary and 0. However, ha2s i seems to increase less than
ha1s i. We also indicate in the last column of Table IX and Table XI the
dierence between ha1s i and ha2s i. It looks, indeed, as if it increases with ,but we should remark that for F 1:2, the sampling error is not negligible
compared to this increasing.
Table XIII presents the same quantities for F 1:5 and equals 2, 5,
10, and 15%. The same comments hold.
Table IX. Mean Values of the Amplitudes of the First Two
Generated Solitons for F 1
% ha1s i 1 ha2s i 2 ha1s i ÿ ha2s i
0 1.5319 1.4931 3.88ÿ21 1.5339 7.1ÿ3 1.4937 6.3ÿ3 4.02ÿ22 1.5318 1.5ÿ2 1.4931 1.5ÿ2 3.87ÿ23 1.5341 2.7ÿ2 1.4923 1.9ÿ2 4.18ÿ24 1.5375 3.2ÿ2 1.4954 2.6ÿ2 4.21ÿ25 1.5384 3.8ÿ2 1.4926 3.3ÿ2 4.58ÿ27 1.5474 5.1ÿ2 1.4983 4.5ÿ2 4.91ÿ210 1.5743 8.3ÿ2 1.5023 7.6ÿ2 7.20ÿ2
196 Debussche and Printems

Table X. Values of the Maxima of t 7!E CDWt for F 1
% 1 2 3 4
0 11.4537 27.1621 42.7039 58.3375
5.2488ÿ1 5.0585ÿ2 5.0390ÿ1 5.0331ÿ11 11.3274 26.9738 42.6407 58.2629
5.1967ÿ1 5.0546ÿ1 5.0291ÿ2 5.0223ÿ12 11.2982 27.0642 42.6772 58.3582
5.1942ÿ1 5.0406ÿ1 5.0172ÿ1 5.0033ÿ13 11.2919 27.0741 42.6801 58.4033
5.1695ÿ1 5.0130ÿ1 4.9923ÿ1 4.9791ÿ14 11.2217 26.9165 42.5639 58.2292
5.1882ÿ1 5.0117ÿ1 4.9662ÿ1 4.9049ÿ15 11.1896 27.0664 42.5379 58.2120
5.1985ÿ1 4.9605ÿ1 4.9435ÿ1 4.9207ÿ17 11.3339 26.8587 42.5704 58.0242
5.1279ÿ1 4.9738ÿ1 4.8631ÿ1 4.8281ÿ110 10.9082 26.6594 42.1018 57.4921
5.1054ÿ1 4.8396ÿ1 4.6684ÿ1 4.5783ÿ1
0 15.7083 15.5418 15.6336
1 15.6464 15.6669 15.6222
2 15.7660 15.6130 15.6810
3 15.7822 15.6060 15.7232
4 15.6948 15.6474 15.6653
5 15.8768 15.4715 15.6741
7 15.5248 15.7117 15.4537
10 15.7512 15.4424 15.3902
Table XI. Mean Values of the Amplitudes of the First Two
Generated Solitons for F 1:2
% ha1s i 1 ha2s i 2 ha1s i ÿ ha2s i
0 1.8531 1.8407 1.24ÿ21 1.8528 8.1ÿ3 1.8419 8.3ÿ3 1.09ÿ22 1.8545 1.6ÿ2 1.8425 1.6ÿ2 1.2ÿ23 1.8531 3.1ÿ2 1.8364 2.5ÿ2 1.67ÿ24 1.8570 3.4ÿ2 1.8457 3.2ÿ2 1.13ÿ25 1.8684 4.0ÿ2 1.8577 3.8ÿ2 1.07ÿ27 1.8605 5.6ÿ2 1.8447 5.4ÿ2 1.58ÿ210 1.8826 7.2ÿ2 1.8676 6.1ÿ2 1.50ÿ2
Eect of Localized Random Forcing Term on Korteweg±de Vries Equation 197

Table XII. Values of the Maxima of t 7!E CDWt for F 1:2
% 1 2 3 4
0 14.3760 32.3736 50.4193 68.4839
6.4318ÿ1 6.3624ÿ2 6.3565ÿ1 6.3555ÿ11 14.2163 32.3168 50.3895 68.4765
6.3918ÿ1 6.3477ÿ1 6.3392ÿ2 6.3354ÿ12 14.3228 32.2833 50.2749 68.4223
6.4015ÿ1 6.3321ÿ1 6.3110ÿ1 6.3027ÿ13 14.2010 32.2951 50.3638 68.3211
6.3601ÿ1 6.2680ÿ1 6.2307ÿ1 6.1579ÿ14 14.1669 32.1866 50.1533 68.2391
6.3394ÿ1 6.2600ÿ1 6.1849ÿ1 6.1658ÿ15 13.9826 32.0111 50.0317 68.0746
6.3438ÿ1 6.1880ÿ1 6.0814ÿ1 6.0930ÿ17 14.0723 31.9358 50.0069 68.2813
6.2205ÿ1 6.0420ÿ1 5.9528ÿ1 5.8171ÿ110 14.0211 31.7059 49.3994 67.7206
6.0702ÿ1 5.7857ÿ1 5.5791ÿ1 5.4443ÿ1
0 17.9976 18.0457 18.0646
1 18.1005 18.0727 18.0870
2 17.9604 17.9917 18.1473
3 18.0941 18.0687 17.9573
4 18.0197 17.9667 18.0858
5 18.0285 18.0206 18.0429
7 17.8634 18.0712 18.2743
10 17.6847 17.6935 18.3212
Table XIII. Mean Values of the Amplitudes of the First Two
Generated Solitons for F 1:5
% ha1s i 1 ha2s i 2 ha1s ÿ a2s i
0 2.4219 2.4215 4.0ÿ42 2.4188 2.0ÿ2 2.4247 1.9ÿ2 ÿ5:9ÿ35 2.4247 4.3ÿ2 2.4244 4.2ÿ2 3.0ÿ410 2.4409 8.8ÿ2 2.4480 8.5ÿ2 ÿ7:1ÿ315 2.4660 1.4ÿ1 2.4585 1.7ÿ1 7.5ÿ3
198 Debussche and Printems

Note that in the last column of Table XIII, the computed averages of
the dierences ha2s ÿ a1s i is of the same order as the estimated error and no
conclusion can be drawn from these values.
These results indicate that the noise in¯uences the size of the ®rst
generated soliton, which increases when more noise is injected. The second
one also increases but not as much. Also, it seems that the noise has some
eect on the decay of the emitted solitons. This is clear for F 1, as the last
column of Table IX shows, but more precision would be needed before
making a statement for the other Froude numbers.
To further investigate this question, we have examined the wave-
resistance coecient. By analogy with the deterministic behavior, a stronger
decay in the amplitude of the emitted solitons corresponds to a stronger
decay in the maxima of CDW and was due to a decrease of the Froude
number.
Figures 12±14 show the evolution of the average of the wave-resistance
coecient on the interval of time t 2 0; 70 for the dierent values of andF used above. The deterministic curve corresponding to 0 is also given
as a reference. We ®rst observe that these curves are smooth and resemble
the curves presented in Section 3. We have also computed the corresponding
Fig. 12. Evolution of the mean value ECDWt on [0.70] for F 1.
Eect of Localized Random Forcing Term on Korteweg±de Vries Equation 199

standard deviation and have found that they are of the same order as the
noise level and the estimated error is similar to that for the amplitudes of
the solitary waves. However, except for F 1:5 and 0:1 or 0:15, the
averaged curve is really smooth and we believe that this indicates that the
error is, in fact, much smaller than this estimate. For this reason , we are
more con®dent in the results obtained by studying Figs. 12±14.
We can now measure the same quantities as in Section 3 now. The
results are given in Tables X, XII and XIV. For each , the ®rst line gives the
instant of the maximum and the second its amplitude. The second part of
the table gives the length of time between two maxima.
As in the deterministic case, for F 1 and F 1:2, we have four
maxima but only two for F 1:5.
Obviously, the presence of the noise has changed the behavior of the
wave-resistance coecient. In all cases, it has a strong eect on the decay of
the amplitudes, which ampli®es when increases. Even for F 1:5, where
for 0 we had a constant amplitude, we now observe a clear decay.
Also, the instant corresponding to the ®rst maximum and the corre-
sponding amplitude decays when increases at a ®xed Froude number.
Fig. 13. Evolution of the mean value ECDWt on [0.70] for F 1:2.
200 Debussche and Printems

Fig. 14. Evolution of the mean value ECDWt on [0.70] for F 1:5.
Table XIV. Values of the Maxima of
t 7!ECDWt for F 1:5
% 1 2
0 23.0201 49.5638
8.5558ÿ1 8.5615ÿ12 22.8932 49.4389
8.4646ÿ1 8.3831ÿ15 22.4260 47.3190
8.1890ÿ1 7.7321ÿ110 21.3615 46.0449
7.3800ÿ1 6.6648ÿ115 19.6076 45.9701
6.7430ÿ1 5.8281ÿ1
0 26.5437
2 26.5457
5 25.893
10 24.6834
15 26.3625
Eect of Localized Random Forcing Term on Korteweg±de Vries Equation 201

This indicates that the noise changes the behavior in the sense that for a
given Froude number, it seems that we have an evolution corresponding to a
smaller F.
However, as shown by the second parts of Tables X, XII, and XIV, the
maxima still occur periodically and the period between them does not seem
to change, which would be the case if the addition of noise amounted to a
change in the Froude number. An interesting observation, which con®rms
that the period is not aected, is that in Figs. 12±14 all the curves intersect
periodically at a point that seems to correspond to the time average of
E CDWt .Except for that aspect, increasing has a similar eect as decreasing F
on all the other measured quantities and, as shown by Figs. 12±14, it clearly
induces a damping in the evolution.
We now can try to explain what we observed on the amplitudes of the
solitons. We think that two mechanism are in competition in the presence of
noise. First, as follows from Ito formula, the noise injects some extra energy
in the evolution and it seems natural that part of this energy is used to
generate the solitary waves. However, from the above discussion, the noise
seems to have a similar eect as a decrease of the Froude number and we
have seen that for smaller Froude numbers the distribution of energy is
favorable to the dispersive right-going waves. That could explain why we
did not observe a clear change in the size of the solitons. Moreover, the noise
has a damping eect on the evolution, in a similar way as a smaller Froude
number, and this explains why the in¯uence of the noise is less detectable on
the amplitude of the second wave. In that perspective, it would be interesting
to compute the average of the third soliton in order to have a con®rmation
of this damping eect. However, this requires a very long computation,
since for many of our simulated trajectories on the time interval 0; 70, onlytwo solitons were emitted, so that we need to simulate on a longer interval.
When one looks carefully at Figs. 12±14, it seems that the same value of
has a stronger eect on large Froude numbers. To investigate this, we have
tried to de®ne a damping coecient induced by the noise. Let us denote by
c ;Ft the average of the wave-resistance coecient for ®xed and F. We
then try to ®t its evolution with that of c0;Ft multiply by eÿt where would be the damping coecient. We do not have a very good ®t, but, if we
restrict to the maxima, we obtain interesting information.
For instance, Tables XV±XVII gives the value of computed as follows
lnc ;Fft im ÿ lnc0;Ft imt im
202 Debussche and Printems

where t im (resp. ft im) is the instant corresponding to the i th deterministic
(resp. stochastic) maximum. In Table XV, a value equal to 2% is taken
and for Tables XVI and XVII, we have equal to 5±10%. We see that
although is not constant for ®xed values of F and , it is always of the
same order. For instance, for equal to 5%, is about 4 10ÿ4 at F 1,
8 10ÿ4 at F 1:2, and 2 10ÿ3 at F 1:5. These values clearly indicate
that increases with F when is ®xed so that we can state that the noise has
a stronger damping eect on large Froude numbers.
As a conclusion, we can say that, if the analogy with the deterministic
situation is correct, i.e., if the behavior of CDW gives the same information
on the generated solitons, the study of the wave-resistance coecient con-
®rms what Tables IX, XI, and XIII suggested. Because of the noise, the
amplitude of a generated wave is in average smaller than that of its pre-
decessor. This is true even for the supercritical Froude number and it seems
that the noise always implies a damping in the evolution.
Table XV. Values of for the Noise Level 0:02
for Froude Numbers 1, 1.2, and 1.5
F 1 2 3 4
1 9.1ÿ4 1.3ÿ4 1ÿ4 1ÿ41.2 3.3ÿ4 1.5ÿ4 1.4ÿ4 1.2ÿ41.5 4.6ÿ4 4.2ÿ4
Table XVI. Values of for the Noise Level
0:05 for Froude Numbers 1, 1.2, and 1.5
F 1 2 3 4
1 8.4ÿ4 3.4ÿ4 4.5ÿ4 3.9ÿ41.2 9.6ÿ4 8.6ÿ4 8.8ÿ4 6.2ÿ41.5 1.9ÿ3 2.1ÿ3
Table XVII. Values of for the Noise Level
0:1 for Froude Numbers 1, 1.2, and 1.5
F 1 2 3 4
1 2.4ÿ3 1.6ÿ3 1.8ÿ3 1.6ÿ31.2 4.0ÿ3 2.9ÿ3 1.9ÿ3 2.3ÿ31.5 6.3ÿ3 5.1ÿ3
Eect of Localized Random Forcing Term on Korteweg±de Vries Equation 203

We would like to end by noticing that this change in behavior seems to
be due to the random nature of the forcing term and not simply to its
oscillating character or to the fact that more energy is injected. Indeed,
Figs. 15 and 16 show that, when a deterministic oscillating function is added
to the pressure, we do not observe any damping. On the contrary, the
behavior is now more like the one in the case of a supercritical Froude
number. When the pressure amplitude pm is increased, we just have more
generated solitons, but we do not have any noticeable change in the beha-
vior. This can be seen on Figs. 17 and 18, which present the result of a
simulation where pm has been increased to 2:5, which represents an increase
of 25%.
Fig. 15. Pro®le at t 70 of the solution, which corresponds to the pressure
px; t pm sin2=x Ft 10 sin4x Ft at F 1:2:
Fig. 16. Evolution of the wave-resistance coecient (see Fig. 15).
204 Debussche and Printems

REFERENCES
1. T. R. Akylas, On the excitation of long nonlinear water waves by a moving pressure
distribution, J. Fluid. Mech. 141, 455±466 (1984).
2. J. L. Bona and B.-Y. Zhang, The initial value problem for the forced Korteweg±de Vries
equation, Proc. Roy. Soc. Edinburgh 126A, 571±598 (1996).
3. G. F. Carey and Y. Shen, Approximations of the KdV equation by least squares ®nite
elements, Comput. Methods Appl. Mech. Engrg. 93, 1±11 (1991).
4. H. Y. Chang, Ch. Lien, S. Sukarto, S. Raychaudhury, J. Hill, E. K. Tsikis, and K. E.
Lonngren, Propagation of ion-acoustic solitons in a non-quiescent plasma, Plasma Phys.
Controlled Fusion 28, 675±681 (1986).
5. S. L. Cole, Transcient waves produced by ¯ow past a bump, Wave motion 7, 579±587
(1985).
6. A. Debussche and A. de Bouard, On the stochastic Korteweg±de Vries equation, J. Funct.
Anal. 154, 215±251 (1998).
7. A. Debussche, A. de Bouard, and Y. Tsutsumi, White noise driven stochastic Korteweg±de
Vries equation, J. Funct. Anal. 169, 532±558 (1999).
Fig. 17. Pro®le at t 70 of the solution, which corresponds to the pressure
px; t pm sin2x Ft with pm 2:5 at F 1:2.
Fig. 18. Evolution of the wave-resistance coecient (see Fig. 17).
Eect of Localized Random Forcing Term on Korteweg±de Vries Equation 205

8. A. Debussche and J. Printems, Numerical simulation of the stochastic Korteweg±de Vries
equation, Physica D 134(2), 200±226 (1999).
9. R. Grimshaw, Resonant ¯ow of a rotating ¯uid past an obstacle: the general case, Stud.
Appl. Math. 83, 249±269 (1990).
10. R. Grimshaw, Resonant forcing of barotropic coastally trapped waves, J. Phys. Ocean. 17,
53±65 (1987).
11. R. Grimshaw, E. Pelinovsky, and X. Tian, Interaction of a solitary wave with an external
force, Physica D 77, 405±433 (1994).
12. R. Grimshaw and N. Smyth, Resonant ¯ow of a strati®ed ¯uid over topography, J. Fluid
Mech. 169, 429±464 (1986).
13. R. Grimshaw and Z. Yi, Resonant generation of ®nite-amplitude waves by ¯ow past
topography on a beta-plane, Stud. Appl. Math. 88, 89±112 (1993).
14. R. Herman, The stochastic, damped Korteweg±de Vries equation, J. Phys. A: Math. Gen.
23, 1063±1084 (1990).
15. V. V. Konotop and L. Vasquez, Nonlinear Random Waves, World Scienti®c, Singapore,
1994.
16. S.-J. Lee, G. T. Yates, and T. Y. Wu, Experiments and analyses of upstream-advancing
solitary waves generated by moving disturbances, J. Fluid. Mech. 199, 569±593 (1989).
17. W. K. Melville and K. R. Helfrich, Transcritical two-layer ¯ow over topography, J. Fluid
Mech. 178, 31±52 (1987).
18. H. Mitsudera and R. Grimshaw, Generation of mesoscale variability by resonant
interaction between a baroclinic current and localized topography, J. Phys. Ocean. 21,
737±765 (1991).
19. A. Patoine and T. Warn, The interaction of long, quasi-stationary baroclinic waves with
topography, J. Atmos. Sci. 39, 1018±1025 (1982).
20. J. Printems, The stochastic Korteweg±de Vries equation in L2R , J. Di. Equations 153,338±373 (1999).
21. M. Scalerandi, A. Romano, and C. A. Condat, Korteweg±de Vries solitons under additive
stochastic perturbations, Phys. Rev. E 58, 4166±4173 (1998).
22. M. Wadati, Stochastic Korteweg±de Vries equation, J. Phys. Soc. Jpn 52, 2642±2648
(1983).
23. T. Warn and B. Brasnett, The ampli®cation and capture of atmospheric solitons by
topography: a theory of the onset of regional blocking, J. Atmos. Sci. 40, 28±38 (1983).
24. G. B. Whitham, Linear and Nonlinear Waves (Pure and Applied Mathematics), Wiley
Interscience, New York, 1974.
25. T. Y. Wu, Generation of upstream advancing solitons by moving disturbances, J. Fluid
Mech. 184, 75±99 (1987).
206 Debussche and Printems

4.4. ON THE TIME DISCRETIZATION OF PARABOLIC SPDES 145
4.4 On the discretization in time of parabolic stochasticpartial differential equations.
L’article qui suit fut publié dans Mathematical Modelling and Numerical Analysis (M2AN),vol. 35(6), pp. 1055–1078 (2001).

Mathematical Modelling and Numerical Analysis ESAIM: M2AN
Modelisation Mathematique et Analyse Numerique M2AN, Vol. 35, No 6, 2001, pp. 1055–1078
ON THE DISCRETIZATION IN TIME OF PARABOLIC STOCHASTIC PARTIALDIFFERENTIAL EQUATIONS
Jacques Printems1
Abstract. We first generalize, in an abstract framework, results on the order of convergence of asemi-discretization in time by an implicit Euler scheme of a stochastic parabolic equation. In this part,all the coefficients are globally Lipchitz. The case when the nonlinearity is only locally Lipchitz is thentreated. For the sake of simplicity, we restrict our attention to the Burgers equation. We are not ablein this case to compute a pathwise order of the approximation, we introduce the weaker notion of orderin probability and generalize in that context the results of the globally Lipschitz case.
Mathematics Subject Classification. 60H15, 60F25, 60F99, 65C20, 60H35.
Received: July 24, 2000. Revised: January 8, 2001; September 17, 2001.
1. Introduction
Let us introduce the abstract framework of the stochastic parabolic partial differential equation which willbe treated in this paper. Let H be a Hilbert space, we will consider the following evolution equation written inthe abstract Ito form
du+ (Au+ f(u)) dt = σ(u)dW, (1.1)
with the initial condition
u(0) = u0 ∈ H, (1.2)
where u is a H-valued random process, A : D(A) ⊂ H → H denotes an unbounded, non-negative self-adjointoperator, such that D(A) is compactly embedded into H, f is a non-linear mapping from H into D(A−s) forsome s ∈ [0, 1[ and σ is a mapping from H into L(H,D(A−β)), the space of linear bounded operator from Hinto D(A−β) for some β. The interplay between A and β will be specified below. Here, W (t)t≥0 denotes acylindrical Wiener process on H (see [8]) defined on a given stochastic basis (Ω,F ,P, Ftt≥0).
Such a framework is very general. It includes the stochastic versions of the Burgers equation, the Navier–Stokes equation, the Cahn–Hilliard equation, the Ginzburg–Landau equation, the Kuramoto–Sivashinsky equa-tion or more generally reaction–diffusion equations. If theses equations are considered on a bounded domainthen they fit the above framework.
Keywords and phrases. Stochastic partial differential equations, semi-discretized scheme for stochastic partial differential equa-tions, Euler scheme.
1 Centre de Mathematiques de l’Universite de Paris 12, EA 2343, Universite de Paris 12, 61 avenue du General de Gaulle,94010 Creteil Cedex, France. e-mail: [email protected]
c© EDP Sciences, SMAI 2001

1056 J. PRINTEMS
For example, in space dimension one, let us consider the following stochastic partial differential equations
∂u(x, t)∂t
− ∂2u(x, t)∂x2
+ F (u(x, t)) = G(u(x, t))∂2W (x, t)∂x∂t
, (1.3)
or
∂u(x, t)∂t
− ∂2u(x, t)∂x2
+∂F (u(x, t))
∂x= G(u(x, t))
∂2W (x, t)∂x∂t
, (1.4)
where x ∈ (0, 1) and t > 0, with Dirichlet boundary conditions and an initial condition.Where u = u(x, t) is a R-valued random process and W (x, t) a brownian sheet on ]0, 1[×R+. We recall
that W (x, t) is a zero mean gaussian process such that
E W (x, t)W (y, s) = (x ∧ y)(t ∧ s),
for t, s and x, y. We recognize for example in equation (1.4), for F (y) = y2/2, the Burgers equation. Otherboundary conditions could be considered.
In both cases, H = L2(0, 1), A denotes the operator − ∂2
∂x2defined on D(A) = H2(0, 1) ∩ H1
0 (0, 1). For
equation (1.4), we set f(u)(x) =∂(F (u(x)))
∂xand if for instance F : R→ R is a Lipschitz function it is easy to
check that f is a Lipschitz function from H = L2(0, 1) to H−1(0, 1) = D(A−1/2) so that we take s = 1/2. We
will see in Section 4 that for the Burgers case, f(u)(x) =12∂(u(x)2)∂x
, we can take any s > 3/4.
Also, W (t) can formally be written as the space derivative of W (t, x). More precisely,
W (t) =∂W
∂x=∑i≥0
βi(t) ei,
where eii≥0 are the eigenfunctions of A and form a Hilbertian basis of L2(0, 1); βii≥1 is a family of realBrownian motions mutually independent in a fixed probability space. In the case of equations (1.3)–(1.4),
ei(x) =
√2π
sin(iπx), x ∈ (0, 1).
Also, in (1.3)–(1.4), we can consider σ(u) to be the operator given by
σ(u) : H −→ Hv 7→ G(u)v (1.5)
where G : R → R is a bounded function. In this case β = 0. Another example is provided by the stochasticCahn–Hilliard equation which in Ito form reads
du+(∆2u+ ∆f(u)
)dt = σ(u) dW, (1.6)
with Neumann boundary conditions for (x, t) ∈ D × R+, D an open bounded set on Rn, n = 1, 2, 3. HereH = L2(0, 1) and A = ∆2 on the domain H4(D). Again, if f is Lipschitz we can take s = 1/2. The noise termmay be of the same form as described in (1.5) and then β = 0. However, it is also physically relevant to considera noise of the form ∇(G(u)dW ) in which case β = 1/4. Nevertheless, some restrictions described below do notallow to treat this latter noise unless n = 1.

ON THE DISCRETIZATION IN TIME OF PARABOLIC SPDE 1057
Several authors have already considered Cauchy Problems associated to (1.1)–(1.2) or (1.3)–(1.5) (see [1, 8,16, 19, 20, 24, 25] and references therein). Results of existence and uniqueness of global strong solutions u areclassical if f and σ are globally Lipschitz. In many cases where f is only locally Lipschitz (stochastic Burgersequation, stochastic Cahn–Hilliard or stochastic Navier–Stokes), and σ is bounded, existence of global strongsolutions can also be shown (see [3, 5–7,9, 13]).
In this paper, we are interested in the approximation of (1.1)–(1.2) by a semi-implicit scheme. Let T > 0and N an integer. We set τ = T/N and construct a sequence of approximations un0≤n≤N of the solution uby the following scheme:
un+1 − un + τ(Aun+θ + f(un)) =√τσ(un)χn,
u0 = u0 ∈ H,(1.7)
where we have set un+θ = θun+1 + (1 − θ)un for some θ ∈ [0, 1] and χnn≥0 is a sequence of i.i.d. H-valuednormal random variables.
Of course, (1.7) is formal and has to be understood in the following sense
un+1 = Sτun − (I + τθA)−1f(un) + (I + τθA)−1√τσ(un)χn,
with Sτ = (I + τθA)−1(I − τ(1 − θ)A). Note that under our assumptions Sτ can be extended to an operatorbounded from H to H and since s < 1, (I + τθA)−1f(un) ∈ D(A1−s) ⊂ H for un ∈ H.
Concerning the scheme (1.7), let us note that results on the order of convergence in the deterministic case(σ = 0) are classical. For instance, in [4,17], the authors have shown that the infinite dimensional setting impliesthe restriction
θ > 1/2 (1.8)
for the convergence. In this case, they were able to show that this scheme is of order 1 in the absence of noise.Typically, since here un, u are H-valued random variables, various type of convergence and order can be
considered, either we consider pathwise approximation (strong order) or approximation of the law (weak order).In the finite dimensional case, discretization in time of stochastic differential equations have already beendiscussed by several authors [15,18,22,23]. Typically, the lack of regularity of the noise implies that the explicitEuler scheme applied to such equations is of strong order 1/2. Nevertheless, in [18], the author noted that,provided suitable assumptions on the coefficients hold and when some correction terms are introduced (whichvanish for additive noise), the explicit Euler scheme is of strong order 1 and of weak order 2 (see also [22,23]).
Available results are much weaker in the infinite dimensional case. Recently, in the case where A is theLaplacian operator on the interval (0,1) with Dirichlet boundary conditions, Gyongy and Nualart [12] havebeen able to prove the Lp(Ω) convergence for any p of the approximations un given by (1.7) to the exactsolution u in the case of equation (1.3). Moreover, by the mean of the Green function, they found a rate ofthe convergence in τγ with γ < 1/4 when f and σ are globally Lipschitz. In the case where f and σ are onlylocally bounded, continuous functions, they proved a convergence in probability of the approximation to theexact solution.
It seems difficult to use similar ideas as in [18, 22, 23] and obtain better order of convergence, this wouldrequire strong assumptions on the spatial regularity of the noise.
Our first goal in this paper is to generalize the first part of [12] concerning globally Lipschitz nonlinearity.There, the authors use extensively the explicit form of the Green function of the continuous problem. Here, wepropose to use spectral properties of the linear operator A. Thus, we can use powerful tools already developpedin the deterministic case. Also, the Green function is not always available so that we think that our methodapplies to more situations.
The main difficulty in studying numerical schemes for stochastic partial differential equations is in the treat-ment of the time discretization. For the sake of simplicity, we have prefered to describe first this part. However

1058 J. PRINTEMS
as will be exposed in a forthcoming work, our arguments extend to the analysis of a fully discretized schemewhen combined with the arguments used in the deterministic theory. For instance the tools introduced in [2,14]allow to study a discretization with finite elements on a non uniform grid. Note that in [12] a full discretizationwith finite difference is considered; there a discrete Green function is used. However, it seems that this approachis restricted to uniform grids.
In this first part, we will be able to prove the Lp-convergence of un to u with the rate γ < min(1 − s, (1 −α)/2− β). Our main assumptions are in this case
Tr(A−α) < +∞, (1.9)
for some α > 0.This trace assumption is very natural when stochastic partial differential equations of parabolic type are
concerned. It consists in assuming that the linear operator has discrete spectral values and that the p-th powerof their inverses defines a convergent series for some p. This is not very restrictive when dealing with ellipticoperator on a bounded domain.
The following assumptions are
|f(u)− f(v)|D(A−s) ≤ Lf |u− v|H , (1.10)
and
|σ(u)− σ(v)|L(H,D(A−β)) ≤ Lσ|u− v|H , (1.11)
for any (u, v) in H and for some constants Lf , Lσ > 0. The coefficients α, defined by the trace assumption (1.9),and β, the space regularity of the noise, are linked by the inequality
1− α− 2β > 0, (1.12)
which is essential when proving the Hilbert-Schmidt property of the semi-group e−tAt≥0 (cf. Lem. 2.2) inthe space L(H,D(A−β)). Concerning the nonlinearity, note that s ≥ 0 allows f to depend on some spatialderivatives of the solution. Moreover, we assume that s < 1 in order that, as it is classical in the deterministiccase, the following expression (and its discrete version) make sense∫ t
0
e−(t−τ)Af(u(τ)) dτ.
Indeed, we can note that the roles played by the nonlinearity and the noise are independant both in theassumptions and in the expression of the rate of convergence.
In this setting, the result of this section is general and can be applied to all parabolic stochastic partialdifferential equations with a Lipschitz non linearity provided (1.12) holds. For example, in dimension d with awhite noise (β = 0), let A = (−∆)r/2 for some positive real r > d on some bounded domain of Rd with Dirichletor Neumann boundary conditions. If α is any number greater than d/r then condition (1.9) holds. If s = 0, wefind that the order of convergence of un is 1
2 (1− dr ). For the Cahn–Hilliard equation (1.6) with a Lipschitz f ,
if β = 0 we obtain an order 3/8 in space dimension 1, 1/4 in space dimension 2 and 1/8 in space dimension 3.If β = 1/4, condition (1.12) cannot hold if n = 2 or 3. And for n = 1, we obtain an order 1/8.
We then treat the case where σ is still globally Lipschitz but the nonlinearity f is only locally Lipschitz. Wewill restrict ourselves to the one-dimensionnal case of the stochastic Burgers equation (Eq. (1.4) with f(y) = y2).In this case H = L2(0, 1), s > 3/4, β = 0 and α > 1/2. However our approach is general and, using the settingof the preceeding section, can be applied in many situations. The idea is to mimic the proof of existence anduniqueness for the continuous problem (see [7]). An extra assumption for σ is required
∀u ∈ L2(0, 1), |σ(u)|L(L2(0,1)) ≤ Cσ, (1.13)

ON THE DISCRETIZATION IN TIME OF PARABOLIC SPDE 1059
for some Cσ > 0. We consider truncated versions of (1.1) and (1.7) for which the results of the preceeding sectionhold. Then, we prove convergence in probability of the scheme which implies boundedness in probability. Thesetwo facts are used together to obtain that
limC→+∞
Pτ−eγ max
0≤n≤N|un − u(nτ)|H ≥ C
= 0,
for γ < 1/4, uniformly with respect to N . We say that the scheme is of order in probability γ < 1/4.This definition is quite natural. Indeed, a deterministic scheme is of order γ if
τ−eγ max0≤n≤N
|un − u(nτ)|H
is bounded. Since different notions of boundedness (almost surely, in Lp(Ω,H), in probability) can be consideredfor random variables, different notions of order of convergence naturally arise.
The paper is organized as follows. In Section 2, after some notations and preliminairies, we will present thedifferent notions of order that we will need afterwards. In Section 3, we give in Theorem 3.2 the general results inthe case of a globally Lipschitz non linearity and obtain a Lp-order of convergence γ < min(1−s, (1−α)/2−β).In Section 4, we will first recall existence and uniqueness of stochastic process solution of the Burgers equation(cf. [7]). We then give in Theorem 4.3 the result of order in probability of the scheme (1.7) in the case of theBurgers equation with the extra assumption (1.13).
These ideas are general and although we only consider the Burgers equation, our approach can be extendedto others equations: stochastic reaction diffusion equations, stochastic Navier-Stokes equation or stochasticCahn-Hilliard equation with a polynomial nonlinearity.
2. Preliminaries
2.1. Some notations
Let X be a Banach space. We will denote by | · |X the norm on the Banach space X . In the case whenX = H is a Hilbert space, we will simply use | · |. If (Ω,F ,P) denotes a probability space, we will denote byLp(Ω, X), 1 ≤ p < +∞, the space of X-valued random variables u with Bochner integrable p-th power on Ω.We set
E|u|pX =∫
Ω
|u(ω)|pXP(dω).
Now let σ be a linear operator from F into G, two Hilbert spaces, σ is said to be Hilbert-Schmidt if the followingsum is finite:
|σ|2L02(F,G)
def=∑i≥1
|σei|2G < +∞,
where eii≥1 is a Hilbertian basis of F and where the set of all Hilbert–Schmidt operators is denoted byL0
2(F,G). When F = G, we will use the notation L02(F ) and when F = G = L2(0, 1), the shorter notation L0
2
will be used.Let A be a positive, self-adjoint operator, unbounded on H, a Hilbert space. We will denote by D(A), its
domain. We assume furthermore that D(A) is compactly embedded in H. It follows that there exists a seriesof increasing real numbers λii≥1 such that
0 ≤ λ1 ≤ λ2 ≤ · · · ≤ λi −→ +∞,
which represents the eigenvalues of A. Moreover, we suppose that there exist a real positive α such that∑i≥1
λ−αi < +∞. (2.1)

1060 J. PRINTEMS
Equation (2.1) is the translation of the trace assumption (1.9). Let us recall that, as written above in theintroduction after (1.9), such assumptions are very general when bounded domains are concerned in the par-abolic context. For example, (2.1) holds when the linear operator is the realization of the Laplacian on abounded domain with Dirichlet or Neuman boundary conditions. More generally, other elliptic operators canbe considered.
A family of eigenvectors eii≥1, ei ∈ H is associated to these eigenvalues. It constitutes a Hilbertian basisof H. For any u =
∑i≥1 uiei in D(A), we get
Au =∑i≥1
λiuiei. (2.2)
We can define for any s ∈ R, the operator As and its domain D(As). We have for any u ∈ D(As)
Asu =∑i≥1
λsiuiei, (2.3)
and
D(As) =
u =∑i≥1
uiei such that |u|2D(As)def= |Asu|2H =
∑i≥1
λ2si u
2i < +∞
·It is well known that A generates a contraction semi-group on H which will be denoted by e−tAt≥0. Themain properties of such a semi-group which will be used throughout this paper are summarized in the followinglemmas.
Lemma 2.1. Let a ≥ 0, then
∀t ≥ 0,∣∣e−tA∣∣L(H)
≤ 1, (2.4)
∀t > 0,∣∣e−tA∣∣L(H,D(Aa))
≤ Ca t−a. (2.5)
Moreover, for b ∈ [0, 1], ∣∣A−b (IdH − e−tA)∣∣L(H)≤ Cb tb. (2.6)
Eventually, (2.1) will strengthen the property (2.5) as shown in the following result whose elementary proof isleft to the reader.
Lemma 2.2. For any t > 0 and for any β < (1 − α)/2, e−tA is Hilbert-Schmidt from H into D(Aβ). Moreprecisely, for any γ < γ, there exists Cγ > 0 such that
∀t > 0, |e−tA|L02(H,D(Aβ)) ≤ Ceγ
∑i≥1
λ−α−(γ−eγ)i
1/2
t(eγ−1)/2 (2.7)
where γ = 1− α− 2β > 0.
We will need below the following discrete version of the well-known Gronwall Lemma:

ON THE DISCRETIZATION IN TIME OF PARABOLIC SPDE 1061
Lemma 2.3. Let τ be a positive number and ξnn≥0, ηnn≥0 be two sequences of nonnegative real numberssuch that ξ0 = η0 = 0 and such that there exists a positive constant L such that
∀n ≥ 1, ξn ≤ Ln−1∑k=0
ξk + ηn.
Then, we have
∀n ≥ 1, ξn ≤n−1∑k=0
e(n−k−1)L(ηk+1 − ηk).
Proof. By induction with respect to n using L ≤ eL − 1.
Remark 2.4. From the Lemma 2.3, we can deduce that
∀n ≥ 1, ξn ≤ e(n−1)Lηn.
2.2. Definitions of different notions of order
We now give the definitions of orders of convergence for a numerical scheme which will be used in Section 3and 4. We first note that since we consider random variables, different notions of convergence can be taken intoaccount. Let un be a sequence of H valued random variable defined by some numerical scheme Σ and u be aH-valued stochastic process on the time interval [0, T ]. Let τ = T/N where N is an integer. We say that un
converge almost surely to u if
limN→+∞
max0≤n≤N
|(un − u(nτ))(ω)|H = 0, a.s. ω. (2.8)
Also we will say that the scheme Σ is convergent in Lp(Ω,H) for some p ≥ 1 if
limN→+∞
E max0≤n≤N
|(un − u(nτ))|pH = 0. (2.9)
Finally, we define convergence in probability of Σ when
∀ε > 0, limN→+∞
P
max0≤n≤N
|(un − u(nτ))|H ≥ ε
= 0. (2.10)
These three kinds of convergence are somewhat pathwise notions. At the opposite, in the case of convergencein law of the sequence un, we say that there is weak convergence:
limN→+∞
max0≤n≤N
E (ϕ(un)− ϕ(u(nτ))) = 0,
for any real valued measurable bounded function ϕ defined on H.These notions of convergence are connected with corresponding notions of order.
Definition 2.5 (a.s. order). Let X be a Banach space. Let un0≤n≤N a sequence of X-valued random vari-ables defined by a numerical scheme Σ and u a X-valued stochastic process on the time interval [0, T ]. We saythat the scheme Σ is of a.s. order γ > 0 in X if for a.s. ω, there exists a constant C(ω) > 0 such that
max0≤n≤N
|un − u(nτ)|X ≤ C(ω)τeγ
for any N ≥ 1.

1062 J. PRINTEMS
Definition 2.6 (Lp order). Let X be a Banach space and un0≤n≤N a sequence of X-valued random variablesdefined by a scheme Σ and u a X-valued stochastic process on the time interval [0, T ]. Let p ≥ 1 be an integer.We say that the scheme Σ is of Lp order γ > 0 in X if there exists a constant C(p) > 0 such that(
E max0≤n≤N
|un − u(nτ)|pX)1/p
≤ C(p)τeγ ,
for any N ≥ 1.
The following notion is weaker than the previous two but is still connected with pathwise approximation andcorresponds to the convergence in probability (2.10):
Definition 2.7 (Order in probability). Let X be a Banach space. Let un0≤n≤N a sequence of X-valuedrandom variables defined by a numerical scheme Σ and u a X-valued stochastic process on the time interval[0, T ]. We will say that the scheme Σ is of order in probability γ > 0 in X , if
limC→+∞
P
max0≤n≤N
|un − u(nτ)|X ≥ Cτeγ
= 0,
uniformly with respect to τ .
The connections between these notions of order can be summarized as follows
Lemma 2.8. Let un a sequence of H-valued random variables defined by some scheme Σ. Let u be a H-valuedstochastic process on the interval [0, T ]. Then, the following assertions hold
1. If Σ is of Lp-order γ with p > 1/γ, then Σ is of order in probability γ;2. If Σ is of Lp-order γ in H with p > 1/γ, then Σ is of a.s. order γ′ < γ − 1
p ;3. If Σ is of a.s. order γ then Σ is of order in probability γ;4. If Σ is of Lp-order γ > 0 for any p ≥ 2, then Σ is of a.s. order γ′ < γ.
Proof.1. It is a consequence of the Bienayme-Tchebyschev inequality.2. It can be proved using the Borel-Cantelli lemma.3. It is the Egorov lemma.4. This assertion comes from the second one.
3. The globally Lipschitz case
3.1. Setting of the problem and main result
We recall here some results on the continuous Cauchy problem which is written in the Ito form
du+ (Au+ f(u)) dt = σ(u) dW, (3.1)
supplemented with the initial condition
u(0) = u0 ∈ H. (3.2)
Here, W (t)t>0 will denote a cylindrical Wiener process defined on the Hilbert space H and A is the operatorintroduced in Section 2.

ON THE DISCRETIZATION IN TIME OF PARABOLIC SPDE 1063
The nonlinearity is denoted by f , a mapping from H into D(A−s), for some s ∈ ]0, 1[, and σ is considered asan application from H into L(H,D(A−β)) where β is such that
∃γ > 0,∑i≥1
λγ+2β−1i < +∞. (3.3)
We note that thanks to (2.1), (3.3) holds as soon as we have
β <1− α
2·
We assume furthermore that there exist real numbers Lf , Lσ > 0 such that
|A−s(f(u)− f(v))| ≤ Lf |u− v|, (3.4)
|A−sf(u)| ≤ Lf (1 + |u|) (3.5)
|A−β(σ(u)− σ(v))|L(H) ≤ Lσ|u− v|, (3.6)
|A−βσ(u)| ≤ Lσ(1 + |u|). (3.7)
for any u, v in H.Then we have the following result of existence whose proof, which consists in a contraction argument in
L∞([0, T ], Lp(Ω,H)), can be found in Theorem 7.4, p. 186 in [8].
Proposition 3.1. Let T > 0 and p an integer such that p ≥ 2. Then, under the assumptions (3.3)–(3.7), forany u0 ∈ Lp(Ω,H), there exists a unique stochastic process u solution of the Cauchy problem (3.1)–(3.2).
Moreover, there exists some constants C(T ) > 0 such that
supt∈[0,T ]
(E|u(t)|p)1/p ≤ C(T )(
1 + (E|u0|p)1/p). (3.8)
Now, assume that we are given a subdivision of the interval [0, T ] with uniform time step τ where τ = T/N foran integer N . We seek an approximation of the values u(nτ)0≤n≤N where u is the solution of (3.1)–(3.2) onthe interval [0, T ]. The following scheme is choosen
un+1 = un − τ (Aun+θ + f(un)) +√τ σ(un)χn (3.9)
where un+θ = θun+1 + (1− θ)un for θ which will be precised below and where χn0≤n≤N denotes a sequenceof independent normal random variables (χn = 1√
τ(W ((n+ 1)τ)−W (nτ))). Scheme (3.9) is formal and has to
be understood in the following sense
un+1 = Sτun − (I + τθA)−1f(un) + (I + τθA)−1
√τσ(un)χn,
with Sτ = (I + τθA)−1(I − τ(1− θ)A) bounded from H to H.We assume furthermore that
θ >12· (3.10)

1064 J. PRINTEMS
We wish to understand how un approximates u(nτ). More precisely, we set for any n ≤ N
en = un − u(nτ). (3.11)
The main result of this section is stated below.
Theorem 3.2. Let T > 0 and u0 ∈ Lp(Ω,H) for some integer p ≥ 2. Let u be the solution of (3.1)–(3.2) on[0,T] given by Proposition 3.1.
Then under assumptions (3.3)–(3.7) and (3.10), for any γ < min1− s, (1− α)/2− β, the scheme (3.9) isof Lp-order γ in H. More precisely, there exists a constant C(p) > 0 such that
(E|en|p)1/p ≤ C(p)(τeγ +
1n
(E|u0|p)1/p
),
for any n ∈ 1, . . . , N.
Remark 3.3. The term1n
(E|u0|p)1/p involves a term of order 1 in τ except for small times. Indeed, we have
1n
(E|u0|p)1/p =τ
nτ(E|u0|p)1/p ≤ τ(E|u0|p)1/p,
for nτ ≥ 1 for example. Hence, since γ < 1, the estimate of Theorem 3.2 becomes(E maxn?≤n≤N
|en|p)1/p
≤ Cτeγ ,
where n? = E(1/τ) + 1. This component of the error is purely deterministic.
3.2. Regularity in time of the solution of (3.1)–(3.2) with values in H
As in the deterministic theory, in order to prove Theorem 3.2, we need regularity in time of the continuoussolution. It is the purpose of this subsection. The proof of Theorem 3.2 is postponed to Section 3.3 while theproof of the following Proposition can be found in appendix.
Proposition 3.4. Let u be a solution of (3.1)–(3.2). Then according to (3.3)–(3.7), for any (t1, t2) ∈ [0, T ]2,for any p ≥ 2 and γ < min(1− α)/2− β, 1− s, we have
E|u(t1)− u(t2)|p ≤ C(p, T, f, σ)
(1 + sup
t∈[0,T ]
E|u(t)|p)|t1 − t2|eγp.
Corollary 3.5. Let u be the solution of (3.1)–(3.2) given by Proposition 3.1, then there exists a version of uwhose trajectories in H are almost surely γ-Holder with respect to time, for any γ < min(1− s, (1− α)/2− β).
Proof. The proof is a straightforward application of the Kolmogorov criterion (see for example Th. 3.3, p. 73in [8]).
3.3. Proof of Theorem 3.2
According to (3.9), un can be written as
un = Snτ u0 − τn−1∑k=0
Sn−k−1τ (I + τθA)−1f(uk)
+√τn−1∑k=0
Sn−k−1τ (I + τθA)−1σ(uk)χk, (3.12)

ON THE DISCRETIZATION IN TIME OF PARABOLIC SPDE 1065
where we have setSτ = (I + τθA)−1(I − τ(1− θ)A).
The solution u of (3.1)–(3.2) satisfies the following mild formulation
u(nτ) = e−nτAu0 −∫ nτ
0
e−(nτ−s)Af(u(s)) ds+∫ nτ
0
e−(nτ−s)Aσ(u(s)) dW (s). (3.13)
From (3.12) and (3.13), we get
en = (Sτ − e−nτA)u0
−n−1∑k=0
∫ (k+1)τ
kτ
[Sn−k−1τ (I + τθA)−1f(uk)− e−(nτ−s)Af(u(s))
]ds
−n−1∑k=0
∫ (k+1)τ
kτ
[Sn−k−1τ (I + τθA)−1σ(uk)− e−(nτ−s)Aσ(u(s))
]dW (s)
= A+ B+ C. (3.14)
The first term of (3.14) can be easily estimated owing to the following lemma (cf. Th. 1.1, p. 921 in [17]):
Lemma 3.6. Assuming that (3.10) holds, then there exists a constant C(θ) > 0, such that
|Snτ − e−nτA|L(H) ≤C(θ)n
, ∀n ≥ 1.
Owing to the previous lemma, for any p ≥ 2, we have
|A|Lp(Ω,H) ≤C1
n|u0|Lp(Ω,H). (3.15)
We now treat the second term of (3.14). It is further splitted into three parts
B = −n−1∑k=0
∫ (k+1)τ
kτ
Sn−k−1τ (I + τθA)−1[f(uk)− f(u(kτ))] ds
−n−1∑k=0
∫ (k+1)τ
kτ
Sn−k−1τ (I + τθA)−1[f(u(kτ)) − f(u(s))] ds
−n−1∑k=0
∫ (k+1)τ
kτ
[Sn−k−1τ (I + τθA)−1 − e−(nτ−s)A
]f(u(s)) ds
= B1 + B2 + B3. (3.16)
According to (3.4), we get for any p ≥ 2,
|B1| ≤ Lf
n−1∑k=0
τ∣∣AsSn−k−1
τ (I + τθA)−1∣∣L(H)
|ek|
≤ Lf
n−1∑k=0
τ∣∣∣As (Sn−k−1
τ − e−(n−k−1)τA)
(I + τθA)−1∣∣∣L(H)
|ek|
+Lfn−1∑k=0
τ∣∣∣Ase−(n−k−1)τA(I + τθA)−1
∣∣∣L(H)
|ek|.

1066 J. PRINTEMS
Then, Lemma 3.6 and estimate (2.5) leads to, for any p ≥ 2,
E|B1|p ≤ C1
(n−1∑k=0
τ
((n− k − 1)τ)s(E|ek|p
)1/p)p(3.17)
where we have used the Minkowski inequality in the last step.Using Proposition 3.4, the same computations leads to, for any p ≥ 2:
E|B2|p ≤ Lpf
(1 + sup
t∈[0,T ]
E|u(t)|p)(
n−1∑k=0
τ
((n− k − 1)τ)s
)pτeγp.
Since s < 1, the last sum can be estimated as follows:
n−1∑k=0
τ
((n− k − 1)τ)s≤
n−1∑k=0
∫ (k+1)τ
kτ
dtts
≤ 11− sT
1−s. (3.18)
Eventually, thanks to estimate (3.8), we get
E|B2|p ≤ c2(p,E|u0|p, T )τeγp. (3.19)
The term B3 is estimated using (3.5) first
|B3| ≤ Lf
n−1∑k=0
∫ (k+1)τ
kτ
∣∣∣As (Sn−k−1τ (I + τθA)−1 − e−(nτ−s)A
)∣∣∣L(H)
(1 + |u(s)|) ds
≤ Lf
n−1∑k=0
∫ (k+1)τ
kτ
∣∣∣As (Sn−k−1τ − e−(n−k−1)τA
)(I + τθA)−1
∣∣∣L(H)
(1 + |u(s)|) ds
+Lfn−1∑k=0
∫ (k+1)τ
kτ
∣∣∣As (e−(n−k−1)τA − e−(nτ−s)A)
(I + τθA)−1∣∣∣L(H)
(1 + |u(s)|) ds
+Lfn−1∑k=0
∫ (k+1)τ
kτ
∣∣∣Ase−(nτ−s)A((I + τθA)−1 − I)∣∣∣L(H)
(1 + |u(s)|) ds. (3.20)
Let us estimate the different L(H)-norms which appear in (3.20). Thanks to Lemma 3.6, the L(H)-norm of thefirst term of the right hand side of (3.20) can be majorized by
∣∣∣As (Sn−k−1τ − e−(n−k−1)τA
)(I + τθA)−1
∣∣∣L(H)
≤ C(θ) τ−s
n− k − 1supi≥1
((λiτ)s
1 + τθλi
)≤ C(θ) τγ1
((n− k − 1)τ)s+γ1,
where γ1 > 0 is such that γ < γ1 < 1− s which is possible since s < 1 and γ < 1− s.

ON THE DISCRETIZATION IN TIME OF PARABOLIC SPDE 1067
The following one can be estimated as follows∣∣∣As (e−(n−k−1)τA − e−(nτ−s)A)
(I + τθA)−1∣∣∣L(H)
≤ supi≥1
(1− e−((k+1)τ−s)λi
1 + τθλi
)λsi e−(n−k−1)τλi
≤ sup
i≥1
λsie−(n−k−1)τλi
≤ C(s)τγ1
((n− k − 1)τ)s+γ1
where we have used (2.5) in the second line.Finally, the third L(H)-norm of (3.20) is estimated owing to (2.5) which gives∣∣∣Ase−(nτ−s)A((I + τθA)−1 − I)
∣∣∣L(H)
≤ supi≥1
λsi e−(nτ−s)λi
(τθλi
1 + τθλi
)≤ sup
i≥1
λsi e−(n−k−1)τλi
≤ C(s)τγ1
((n− k − 1)τ)s+γ1
since s ∈]kτ, (k + 1)τ [.We take now the expectation of (3.20) to the power p ≥ 2, and we get, after substuting the last three
estimates into the new estimate in Lp(Ω,H):
E|B3|p ≤ C(p, θ, T, f, s)τγ1p(1 + E|u0|p) (3.21)
where the sum in k was estimated as in (3.18) since s+ γ1 < 1. Eventually, (3.17), (3.19) and (3.21) lead to
|B|Lp(Ω,H) ≤ C2
(τeγ +
n−1∑k=0
τ
((n− k − 1)τ)s|ek|Lp(Ω,H)
), (3.22)
for τ ≤ 1 since γ1 > γ.At last, the stochastic term in (3.14) can be estimated in Lp(Ω,H) using Burkholder-Davis-Gundy inequality:
E|C|p ≤ Cp
(n−1∑k=0
∫ (k+1)τ
kτ
(E |Dk(s)|pL0
2
)2/p
ds
)p/2, (3.23)
where we have writtenDk(s) = Sn−k−1
τ (I + τθA)−1σ(uk)− e−(nτ−s)Aσ(u(s)).Using the same ideas as in (3.16), this last term can be split into three terms:
Dk(s) = D1k(s) + D2
k(s) + D3k(s), (3.24)
where for any k and s in ]kτ, (k + 1)τ [,
D1k(s) = Sn−k−1
τ (I + τθA)−1[σ(uk)− σ(u(kτ))],
D2k(s) = Sn−k−1
τ (I + τθA)−1[σ(u(kτ)) − σ(u(s))],
D3k(s) =
[Sn−k−1τ (I + τθA)−1 − e−(nτ−s)A]σ(u(s)).

1068 J. PRINTEMS
Using (3.6), taking the L02-norm of D1
k(s) leads to(E|D1
k(s)|pL0
2
)2/p
≤ L2σ
(2∣∣∣Aβ (Sn−k−1
τ − e−(n−k−1)τA)
(I + τθA)−1∣∣∣2L0
2
+2∣∣∣Aβe−(n−k−1)τA(I + τθA)−1
∣∣∣2L0
2
)(E|ek|p)2/p
≤ (a+ b)(E|ek|p)2/p. (3.25)
Then, using Lemma 3.6, we have for γ ∈ (0, 1),
a ≤ C(θ)(n− k − 1)2
∑i≥1
λ2βi
(1 + τθλi)2
≤ C(θ)(n− k − 1)2
∑i≥1
λ2β+γ−1i
supi≥1
λ1−γi
(1 + τθλi)2
≤ C(θ)(n− k − 1)1−γ
∑i≥1
λ2β+γ−1i
supi≥1
(λiτ)1−γ
(1 + τθλi)1−γ
τγ−1,
since 1+τθλi ≥ 1 so that (1+τθλi)2 ≥ (1+τθλi)1−γ . In the same way, we have used (n−k−1)2 ≥ (n−k−1)1−γ
for every k = 0, . . . , n− 1. Finally with γ chosen such that (3.3) holds, we get
a ≤ C(θ)((n− k − 1)τ)1−γ ·
Next, (2.5) and (3.3) allow us to estimate easily b as
b ≤ C′
((n− k − 1)τ)1−γ ·
Substituting the estimate for a and b in (3.25) yields
(E|D1
k(s)|p)2/p ≤ C′′(θ)
((n− k − 1)τ)1−γ (E|ek|p)2/p. (3.26)
for γ > 0 such that (3.3) holds.Next, Proposition 3.4, estimate (3.8) and similar computations lead to
(E|D2k(s)|p)2/p ≤ C(p, σ, θ, T, |u0|Lp(Ω,H))
τ2eγ
((n− k − 1)τ)1−γ · (3.27)
Finally, using first (3.7), (E|D3k(s)|p)2/p can be estimated as follows:
(E|D3k(s)|p)2/p ≤ L2
σ
∣∣∣Aβ (Sn−k−1τ − e−(n−k−1)τA
)(I + τθA)−1
∣∣∣2L0
2
(1 + (E|u(s)|p)2/p
)+L2
σ
∣∣∣Aβ (e−(n−k−1)τA − e−(nτ−s)A)
(I + τθA)−1∣∣∣2L0
2
(1 + (E|u(s)|p)2/p
)+L2
σ
∣∣∣Aβe−(nτ−s)A((I + τθA)−1 − I)∣∣∣2L0
2
(1 + (E|u(s)|p)2/p
). (3.28)

ON THE DISCRETIZATION IN TIME OF PARABOLIC SPDE 1069
The first L02-norm in the right hand side of (3.28) has already been estimated (cf. a in (3.25)), so we get
∣∣∣Aβ (Sn−k−1τ − e−(n−k−1)τA
)(I + τθA)−1
∣∣∣2L0
2
≤ C(θ)τγ2
((n− k − 1)τ)1−γ+γ2
where γ2 > 0 is such that 2γ < γ2 < γ, which is possible since γ > 2γ.The second one can be majorized as follows
∣∣∣Aβ (e−(n−k−1)τA − e−(nτ−s)A)
(I + τθA)−1∣∣∣2L0
2
≤ C supi≥1
(1− e−((k+1)τ−s)λi
)2(1 + τθλi)2
λ1−γi e−2(n−k−1)τλi
≤ C sup
i≥1
(τλi)γ2λ1−γ
i e−2(n−k−1)τλi
≤ Cτγ2 supi≥1
λ1−γ+γ2i e−2(n−k−1)τλi
≤ C(γ)τγ2
((n− k − 1)τ)1−γ+γ2
where we have used (3.3) in the first line. In the second line, we have used the fact that for any δ in [0,1] (hereδ = γ2), there exists a constant cδ > 0 such that |e−x−e−y| ≤ cδ|x−y|δ, for all x, y ≥ 0 (cf. also (2.6)). Finally,(2.5) yields the last line.
Eventually, (2.5) and (3.3) lead to
∣∣∣Aβe−(nτ−s)A((I + τθA)−1 − I)∣∣∣2L0
2
≤ C(γ)τγ2
((n− k − 1)τ)1−γ+γ2·
After substituting the last three estimates in (3.28) and using the estimate (3.8), we get
(E|D3k(s)|p)2/p ≤ C(γ, θ, |u0|Lp(Ω,H), σ)
τ2eγ
((n− k − 1)τ)1−γ+γ2, (3.29)
for τ ≤ 1, since γ2 > 2γ.At last, (3.26), (3.27) and (3.19) can be put back together into (3.23) in order to obtain
|C|Lp(Ω) ≤ C3
τeγ +
(n−1∑k=0
τ
((n− k − 1)τ)1−γ |ek|2Lp(Ω,H)
)1/2 , (3.30)
where C3 = C(p, γ, θ, |u0|Lp(Ω,H), σ, T ). Let us note that again we have used (3.18) in order to estimate theremaining sum in k since 1− γ + γ2 < 1.
Lastly, we can estimate |en|Lp(Ω,H) by gathering (3.15), (3.22) and (3.30) and this yields
|en|Lp(Ω,H) ≤ C4
(τeγ +
1n|u0|Lp(Ω,H) +
n−1∑k=0
τ
((n− k − 1)τ)s|ek|Lp(Ω,H)
+
(n−1∑k=0
τ
((n− k − 1)τ)1−γ |ek|2Lp(Ω,H)
)1/2 . (3.31)

1070 J. PRINTEMS
We now take an integer q ≥ 1 such that 12q ≤ γ and estimate |en|2qLp(Ω,H). First, the Holder inequality in the
first sum in (3.31) leads to
n−1∑k=0
τ
((n− k − 1)τ)s|ek|Lp(Ω,H) ≤
(n−1∑k=0
τ
((n− k − 1)τ)s2q
2q−1
) 2q−12q(n−1∑k=0
τ |ek|2qLp(Ω,H)
) 12q
≤ 11− s 2q
2q−1
T2q−1
2q −s(n−1∑k=0
τ |ek|2qLp(Ω,H)
) 12q
,
where we have used (3.18) in the second line, since 1/2q ≤ γ < 1− s.Next, the second sum is majorized as
(n−1∑k=0
τ
((n− k − 1)τ)1−γ |ek|2Lp(Ω,H)
)1/2
≤(n−1∑k=0
τ
((n− k − 1)τ)(1−γ) qq−1
) q−12q(n−1∑k=0
τ |ek|2qLp(Ω,H)
) 12q
≤ 11− (1− γ) q
q−1
T (γ−1q )/2
(n−1∑k=0
τ |ek|2qLp(Ω,H)
) 12q
,
where we have used again (3.18) since 1/2q ≤ γ < γ/2. Eventually, taking the power 2q of (3.31) yields
|en|2qLp(Ω,H) ≤ C5(q, T )
((τeγ +
1n|u0|Lp(Ω,H)
)2q
+n−1∑k=0
τ |ek|2qLp(Ω,H)
). (3.32)
Applying the discrete Gronwall Lemma 2.3 with ξn = |en|2qLp(Ω,H), ηn =(τeγ + 1
n |u0|Lp(Ω,H)
)2qand L =
C5(q, T )τ , yields the result. Namely according to Remark 2.4,
|en|Lp(Ω,H) ≤ C6(q, T )(τeγ +
1n|u0|Lp(Ω,H)
)for any 0 ≤ n ≤ N . This ends the proof of Theorem 3.2.
4. The locally Lipschitz case
In this section, we deal with a non linearity f which is only locally Lipschitz. For the sake of clarity, we willtreat this case in a one-dimensional framework and
f(u) =∂
∂x
(u2
2
)(4.1)
but the ideas we introduce are general and can be applied in more general situations.We first study the following continuous Cauchy Problem: find a stochastic process u such that
du+ (Au+ f(u)) dt = σ(u) dW (4.2)
with the initial condition
u(0) = u0. (4.3)

ON THE DISCRETIZATION IN TIME OF PARABOLIC SPDE 1071
Here, A denotes the operator − ∂2
∂x2on (0, 1) with either Dirichlet or Neumann boundary conditions. We know
that A is an unbounded self-adjoint operator on H = L2(0, 1), whose domain D(A) is compactly embeddedin H. We denote in the same way as in the previous section by λii≥1 its eigenvalues and by eii≥1 itseigenfunctions. In the case of Burgers equation, we have
ei(x) =
√2π
sin(iπx), x ∈ (0, 1),
andλi = i2π2.
Let α be such that∑i≥1 λ
−αi < +∞. Then, we know that here we can take any
α >12· (4.4)
The assumptions concerning the noise is strengthened; W (t)t∈[0,T ] remains the same as in Section 3, i.e. acylindrical Wiener process on L2(0, 1) but here σ is Lipschitz continuous from L2(0, 1) into L(L2(0, 1), D(A−β))with
β = 0, (4.5)
and there exists a constant Lσ > 0 such that
|σ(u)− σ(v)|L(L2(0,1)) ≤ Lσ|u− v|. (4.6)
Moreover, we take the extra assumption
∀u ∈ L2(0, 1), |σ(u)|L(L2(0,1)) ≤ Cσ, (4.7)
for some constant Cσ > 0.
Remark 4.1. For example, we can consider the case where, σ: R → R is a bounded function and σ(u) is thepointwise multiplication by σ(u), which, with abusive notation, can be denoted again by σ(u).
The results concerning this problem can be summarized in the following proposition (see [7]).
Proposition 4.2. Let T > 0. Let p be an integer such that p ≥ 2 and u0 ∈ Lp(Ω,H). Then, under the assump-tions (4.1), (4.6) and (4.7), there exists a unique stochastic process u solution to the Cauchy Problem (4.2)–(4.3).Moreover, we have
limM→+∞
P
supt∈[0,T ]
|u(t)| ≥M
= 0.
For any positive real T and positive integer N , we set
τ =T
N,
and we denote by un0≤n≤N the sequence in H defined by the following inductionun+1 − un + τ(Aun+θ + f(un)) =
√τσ(un)χn,
u0 = u0,(4.8)
where the notations are the same as in Section 3.

1072 J. PRINTEMS
We eventually set for any n in 0, . . . , N,
en = un − u(nτ),
where u is the solution given by Proposition 4.2.The main result of this section is:
Theorem 4.3. Let T > 0 and u0 ∈ Lp(Ω, L2(0, 1)) for some integer p ≥ 2. Let u be the solution of (4.2)–(4.3)on [0, T ] given by Proposition 4.2, and unn≥0 defined by the numerical scheme (4.8).
Then, scheme (4.8) is convergent in probability to u. Moreover, for any γ < 1/4, scheme (4.8) is of order inprobability γ in L2(0, 1). Indeed, we have
limC→+∞
lim supτ→0
P
max1≤nτ≤T
|en| ≥ C(τeγ + τ(E|u0|p)1/p
)= 0, (4.9)
for any γ < 1/4.
The proof of Proposition 4.2 can be found in [7]. We will give here in the following subsection the outlineof this proof. First it consists in truncating the nonlinearity f in order to recover a Lipschitz function. Thenthe truncation is removed according to an a priori estimate of the solution of the truncated equation uniformlywith respect to the parameter of truncation.
Theorem 4.3 will be proved in the last subsection. It consists first in proving that the scheme converges inprobability. This implies boundedness in probability of the approximating sequence un and allows us to usethe results in the globally Lipschitz case.
4.1. Outline of the proof of Proposition 4.2
Let ϕ ∈ C∞0 (R), supp(ϕ) ⊂]− 2,+2[, ϕ(x) = 1, if |x| ≤ 1. For any R > 0, we put
ϕR(x) = ϕ( xR
), (4.10)
and
fR(u) = ϕR(|u|)f(u). (4.11)
Then, we have the following lemma whose proof is left to the reader.
Lemma 4.4. For any s > 3/4 and R > 0, there exists some constants C1(s), C2(s,R) > 0 such that for any(u, v) in L2(0, 1), one has
|f(u)− f(v)|D(A−s) ≤ C1(s)(|u|+ |v|) |u− v|, (4.12)|fR(u)− fR(v)|D(A−s) ≤ C2(s,R)|u− v|. (4.13)
Let the following Cauchy Problem: find uR, R > 0, such that
duR + (AuR + fR(uR)) dt = σ(uR) dW, (4.14)
with the initial condition
uR(0) = u0. (4.15)
Owing to (4.13), (4.6) and Proposition 3.1, we know that for any R > 0 and for any T > 0, there exists a uniquestochastic process uR solution of (4.14)–(4.15). The proof of Proposition 4.2 essentially consists in deriving

ON THE DISCRETIZATION IN TIME OF PARABOLIC SPDE 1073
a priori estimate on uR in L2(Ω, C([0, T ],H)) uniformly with respect to R. The first step consists in derivingsimilar estimate on the solution of the pseudo-linear problem
dzR +AzR dt = σ(uR) dW,zR(0) = 0, (4.16)
whose solution is given by
zR(t) =∫ t
0
e−(t−τ)Aσ(uR(τ))dW (τ). (4.17)
Those estimates are given in the following Proposition (see [7]):
Proposition 4.5. For any T > 0, there exists some constants Ci(T ) > 0, i = 1, 2, such that
E supt∈[0,T ]
|zR(t)| ≤ C1(T ), (4.18)
E supt∈[0,T ]
|zR(t)|4L4(0,1) ≤ C2(T ), (4.19)
where Ci(T ), i = 1, 2, are locally bounded functions of T .
Now Proposition 4.5 implies the following a priori estimate on the solution uR of the Cauchy Problem (4.2)–(4.3) (see again [7]):
Proposition 4.6. For any T > 0,
limM→+∞
lim supR→+∞
P
supt∈[0,T ]
|uR(t)| ≥M
= 0. (4.20)
Finally, existence and uniqueness of a stochastic process solution of (4.2)–(4.3) will be deduced from Proposi-tions 4.5 and 4.6. Such computations can be summarized in the following lemma (see [7]).
Lemma 4.7. Let R > 0 andτR = inft ∈ [0, T ] | |uR(t)| ≥ R ∧ T.
Then we have• τRR>0 is non-decreasing with respect to R,• limR→+∞ τR = T , a.s.,• ∀t ≤ τR, uR(t) = u(t), a.s.,
where u satisfies the mild formulation, a.s.,
u(t) = e−tAu0 −∫ t
0
e−(t−τ)A ∂
∂x
(u2
2
)dτ +
∫ t
0
e−(t−τ)Aσ(u(τ)) dW (τ). (4.21)
4.2. Proof of Theorem 4.3
Similarly as in the begining of this section, we define unR0≤n≤N for any R > 0, by the inductionun+1R − unR + τ(Aun+θ
R + fR(unR)) =√τσ(unR)χn,
u0R = u0,
(4.22)

1074 J. PRINTEMS
and we set for any n in 0, . . . , N,enR = unR − uR(nτ),
where the notations are the same as in the previous subsections.Let u and un be given respectively by Proposition 4.2 and Scheme (4.8). The proof of Theorem 4.3 relies
mainly on the following Lemma:
Lemma 4.8. Scheme (4.8) is convergent in probability to u. More precisely, for any ε in (0, 1) and R > 0, wehave
limN→+∞
P
max0≤n≤N
|en| ≥ ε
= 0, (4.23)
and
limM→+∞
lim supN→+∞
P
max0≤n≤N
|un| ≥M
= 0. (4.24)
Proof. For any ε in (0, 1), R > 0 and any integer N , similarly as in [12], we define the following randomvariables:
θR = inf t ≤ T, |u(t)| ≥ R − 1 a.s.,nε = min n ≤ N, |un − u(nτ)| ≥ ε a.s.
We have the following inclusionmax
0≤n≤N|en| ≥ ε
⊂
[θR < T ∩
max
0≤n≤N|en| ≥ ε
]∪
[θR ≥ T ∩ nετ < T ∩
max
0≤n≤N|en| ≥ ε
]∪
[θR ≥ T ∩ nετ ≥ T ∩
max
0≤n≤N|en| ≥ ε
]·
Since the last event is empty, the last inclusion can be reduced tomax
0≤n≤N|en| ≥ ε
⊂[θR < T ∪
[θR ≥ T ∩ nετ < T
]]·
On the one hand, since nτ ≤ T ≤ θR in the second event of the right hand side of the previous inclusion, wededuce that for any n ≤ N , |u(nτ)| ≤ R − 1 ≤ R. Hence thanks to Lemma 4.7, we know that u(nτ) = uR(nτ)for any n ≤ N .
On the other hand, if nε < N then |unε−1 − u((nε − 1)τ)| < ε < 1 and so |unε−1| ≤ R. Then we deducefrom (4.22) that unε = unεR . We can then replace enε by enεR . Finally, we conclude to
P
max0≤n≤N
|en| ≥ ε≤ PθR < T+ P
max
0≤n≤N|enR| ≥ ε
· (4.25)
Next, thanks to Theorem 3.2, we can take the limit in N in (4.25) by the mean of Bienayme-Tchebycheffinequality:
limN→+∞
P
max0≤n≤N
|en| ≥ ε≤ PθR < T·
Then, owing to Lemma 4.7, we can take the limit in R (τR being replaced by θR) and we eventually get (4.23).

ON THE DISCRETIZATION IN TIME OF PARABOLIC SPDE 1075
Then (4.23) and the result of boundedness in probability of Proposition 4.2 implies that un0≤n≤N isbounded in probability, uniformly with respect to N . Indeed, we have for any M > 0:
P
max0≤n≤N
|un| ≥M≤ P
max
0≤n≤N|en| ≥ ε
+ P
supt∈[0,T ]
|u(t)| ≥M − ε·
Thus, (4.23) allow us to take the supremum limit in N in the previous inequality for a fixed M ≥ 1. Then wecan take the limit with respect to M and get according to Proposition 4.2 the result (4.24).
Now, we are able to conclude the proof of Theorem 4.3. Let γ < 1/4, then we can write for some fixedM ≥ 1, N ≥ 1, τ > 0 such that Nτ = T and C > 0,
P
max1≤nτ≤T
|en| ≥ C(τeγ + τ(E|u0|p)1/p
)≤ P
max
1≤nτ≤T|enM | ≥ C
(τeγ + τ(E|u0|p)1/p
)+P
max0≤n≤N
|un| ≥M
+P
supt∈[0,T ]
|u(t)| ≥M· (4.26)
By the mean of the Bienayme-Tchebycheff inequality and Theorem 3.2, we estimate the first term of the righthand of (4.26). Hence, since γ < 1/4, (4.4), (4.5) and (4.13) lead to
P
max1≤nτ≤T
|en| ≥ C(τeγ + τ(E|u0|p)1/p
)≤ C(M,p)
Cp+ P
max
0≤n≤N|un| ≥M
+P
supt∈[0,T ]
|u(t)| ≥M, (4.27)
where the constant C(M,p) does not depend on τ or N .Next, taking the limitsup in τ towards 0 in (4.27) yields
lim supτ→0
P
max1≤nτ≤T
|en| ≥ C(τeγ + τ(E|u0|p)1/p
)≤ C(M,p)
Cp+ lim sup
τ→0P
max0≤n≤N
|un| ≥M
+P
supt∈[0,T ]
|u(t)| ≥M· (4.28)
Eventually, we take the limit in C. Equation (4.24) and estimate of Proposition 4.2 yield the result (4.9).
Appendix: Proof of Proposition 3.4
Let u be the solution of (3.1)–(3.2). Then, for any (t1, t2) in [0, T ], t2 < t1 for example, u(t1)− u(t2) can besplit into three parts, namely:
u(t1)− u(t2) = (e−t1A − e−t2A)u0
+∫ t1
0
e−(t1−s)Af(u(s)) ds−∫ t2
0
e−(t2−s)Af(u(s)) ds
+∫ t1
0
e−(t1−s)Aσ(u(s)) dW (s) −∫ t2
0
e−(t2−s)Aσ(u(s)) dW (s). (4.29)

1076 J. PRINTEMS
Let us estimate the first term in L2-norm. We take η ∈ [0, 1] and write
|(e−t1A − e−t2A)u0| = |(e−(t1−t2)A − Id)e−t2Au0|≤ C|t1 − t2|ηt−η2 |u0|,
where we have used (2.5) and (2.6) in the right hand side. The second term of the right hand side of (4.29) canbe split into two terms:∫ t1
0
e−(t1−s)Af(u(s)) ds−∫ t2
0
e−(t2−s)Af(u(s)) ds
=∫ t2
0
(e−(t1−s)A − e−(t2−s)A)f(u(s)) ds+∫ t1
t2
e−(t1−s)Af(u(s)) ds
= I + II,
where I and II can be estimated as follows. Using (2.5), (2.6) and assumption (3.5):
|I| ≤ Lf
∫ t2
0
∣∣∣As (e−(t1−s)A − e−(t2−s)A)∣∣∣ (1 + |u(s)|) ds
≤ CLf
∫ t2
0
∣∣∣As+γ1e−(t2−s)A∣∣∣ ∣∣∣A−γ1
(e−(t1−t2)A − Id
)∣∣∣ (1 + |u(s)|) ds
≤ CLf |t1 − t2|γ1
∫ t2
0
1|t2 − s|s+γ1
(1 + |u(s)|) ds,
where γ1 is such that s+ γ1 < 1.Then, for any integer p ≥ 1, we get
(E|I|p)1/p ≤ C |t1 − t2|γ1
∣∣∣∣∫ t2
0
1|t2 − s|s+γ1
(1 + |u(s)|) ds∣∣∣∣Lp(Ω)
≤ C |t1 − t2|γ1
(supt∈[0,T ]
(E|u(t)|p)1/p + 1
). (4.30)
With the same method, we get for II:
(E|II|p)1/p| ≤ C |t1 − t2|1−s(
supt∈[0,T ]
(E|u(t)|p)1/p + 1
). (4.31)
In the same manner, the third term of the right hand side of (4.29) can be written as :∫ t1
0
e−(t1−s)Aσ(u(s)) dW (s) −∫ t2
0
e−(t2−s)Aσ(u(s)) dW (s)
=∫ t2
0
(e−(t1−s)A − e−(t2−s)A)σ(u(s)) dW (s) +∫ t1
t2
e−(t1−s)Aσ(u(s)) dW (s)
= III + IV,
where III can be estimated first using Burkholder-Davis-Gundy inequality for example:
(E|III|p)1/p ≤ C(∫ t2
0
(E∣∣∣(e−(t1−s)A − e−(t2−s)A
)σ(u(s))
∣∣∣pL0
2(H)
)2/p
ds
)1/2

ON THE DISCRETIZATION IN TIME OF PARABOLIC SPDE 1077
and then owing to (3.7), (3.3) and (2.6), we are lead to
(E|III|p)1/p ≤ CLσ
(∫ t2
0
∣∣∣(e−(t1−s)A − e−(t2−s)A)Aβ∣∣∣2L0
2
(1 + (E|u(s)|p)2/p
)ds)1/2
≤ CLσ
∫ t2
0
∑i≥0
λ2βi
(e−(t1−s)λi − e−(t2−s)λi
)2
(1 + (E|u(s)|p)2/p)
ds
1/2
≤ C
2Lσ
∑i≥0
λ2β−1i
[2(
1− e−(t1−t2)λi)−(
1− e−2(t1−t2)λi)
−(e−t1λi − e−t2λi
)2](1 + sup
t∈[0,T ]
(E|u(t)|p)2/p
))1/2
≤ CLσ
∑i≥0
λ2β−1i
(1− e−(t1−t2)λi
)1/2(1 + sup
t∈[0,T ]
(E|u(t)|p)1/p
)
≤ C′|t1 − t2|γ/2(
1 + supt∈[0,T ]
(E|u(t)|p)1/p
), (4.32)
for some 0 < γ < 1− α− 2β.We estimate IV in exactly the same way and we get
(E|IV|p)1/p ≤ C(
1 + supt∈[0,T ]
(E|u(t)|p)1/p
)|t1 − t2|γ/2. (4.33)
Eventually, (4.30)–(4.33) yield the result.
Acknowledgements. The author warmly thanks Professor R. Temam for having suggested the study of this problem.
References
[1] A. Bensoussan and R. Temam, Equations stochastiques du type Navier-Stoke. J. Funct. Anal. 13 (1973) 195–222.[2] J.H. Bramble, A.H. Schatz, V. Thomee and L.B. Wahlbin, Some convergence estimates for semidiscrete Galerkin type approx-
imations for parabolic equations. SIAM J. Numer. Anal. 14 (1977) 218–241.[3] C. Cardon-Weber, Autour d’equations aux derivees partielles stochastiques a derives non-Lipschitziennes. These, Universite
Paris VI, Paris (2000).[4] M. Crouzeix and V. Thomee, On the discretization in time of semilinear parabolic equations with nonsmooth initial data.
Math. Comput. 49 (1987) 359–377.[5] G. Da Prato and A. Debussche, Stochastic Cahn-Hilliard equation. Nonlinear Anal., Theory Methods. Appl. 26 (1996) 241–263.[6] G. Da Prato, A. Debussche and R. Temam, Stochastic Burgers’ equation. Nonlinear Differ. Equ. Appl. 1 (1994) 389–402.[7] G. Da Prato and D. Gatarek, Stochastic Burgers equation with correlated noise. Stochastics Stochastics Rep. 52 (1995) 29–41.
[8] G. Da Prato and J. Zabczyk, Stochastic equations in infinite dimensions, in Encyclopedia of Mathematics and its Application.Cambridge University Press, Cambridge (1992).
[9] F. Flandoli and D. Gatarek, Martingale and stationary solutions for stochastic Navier-Stokes equations. Probab. Theory Relat.Fields 102 (1995) 367-391.
[10] I. Gyongy, Lattice approximations for stochastic quasi-linear parabolic partial differential equations driven by space-time whitenoise. I. Potential Anal. 9 (1998) 1–25.
[11] I. Gyongy, Lattice approximations for stochastic quasi-linear parabolic partial differential equations driven by space-time whitenoise. II. Potential Anal. 11 (1999) 1–37.

1078 J. PRINTEMS
[12] I. Gyongy and D. Nualart, Implicit scheme for stochastic parabolic partial differential equations driven by space-time whitenoise. Potential Anal. 7 (1997) 725–757.
[13] I. Gyongy, Existence and uniqueness results for semilinear stochastic partial differential equations. Stoch. Process Appl. 73(1998) 271–299.
[14] C. Johnson, S. Larsson, V. Thomee and L.B. Wahlbin, Error estimates for spatially discrete approximations of semilinearparabolic equations with nonsmooth initial data. Math. Comput. 49 (1987) 331–357.
[15] P.E. Kloeden and E. Platten, Numerical solution of stochastic differential equations, in Applications of Mathematics 23,Springer-Verlag, Berlin, Heidelberg, New York (1992).
[16] N. Krylov and B.L. Rozovski, Stochastic Evolution equations. J. Sov. Math. 16 (1981) 1233–1277.[17] M.-N. Le Roux, Semidiscretization in Time for Parabolic Problems. Math. Comput. 33 (1979) 919–931.[18] G.N. Milstein, Approximate integration of stochastic differential equations. Theor. Prob. Appl. 19 (1974) 557–562.
G.N. Milstein, Weak approximation of solutions of systems of stochastic differential equations. Theor. Prob. Appl. 30 (1985)750–766.
[19] E. Pardoux, Equations aux derivees partielles stochastiques non lineaires monotones. Etude de solutions fortes de type Ito.These, Universite Paris XI, Orsay (1975).
[20] B.L. Rozozski, Stochastic evolution equations. Linear theory and application to nonlinear filtering. Kluwer, Dordrecht, TheNetherlands (1990).
[21] T. Shardlow, Numerical methods for stochastic parabolic PDEs. Numer. Funct. Anal. Optimization 20 (1999) 121–145.[22] D. Talay, Efficient numerical schemes for the approximation of expectation of functionals of the solutions of an stochastic
differential equation and applications, in Lecture Notes in Control and Information Science 61, Springer, London, (1984)294–313.
[23] D. Talay, Discretisation d’une equation differentielle stochastique et calcul approche d’esperance de fonctionnelles de la solution.RAIRO Model. Math. Anal. Numer. 20 (1986) 141–179.
[24] M. Viot, Solutions faibles aux equations aux derivees partielles stochastiques non lineaires. These, Universite Pierre et MarieCurie, Paris (1976).
[25] J. B. Walsh, An introduction to stochastic partial differential equations, in Lectures Notes in Mathematics 1180 (1986) 265–437.
To access this journal online:www.edpsciences.org

170 CHAPITRE 4. EDPS
4.5 Convergence of a semi-discrete scheme for the stochas-tic Korteweg-de Vries equation.
L’article qui suit fut publié dans Discrete and Continuous Dynamical Systems, series B, vol.6(4), pp. 761–781 (2006).

Convergence of a semi-discrete scheme for the stochastic
Korteweg–de Vries equation.
Arnaud Debussche∗ Jacques Printems†
Abstract
In this article, we prove the convergence of a semi-discrete scheme applied to thestochastic Korteweg–de Vries equation driven by an additive and localized noise. It isthe Crank–Nicholson scheme for the deterministic part and is implicit. This schemewas used in previous numerical experiments on the influence of a noise on solitonpropagation [8, 9]. Its main advantage is that it is conservative in the sense thatin the absence of noise, the L2 norm is conserved. The proof of convergence uses acompactness argument in the framework of L2 weighted spaces and relies mainly onthe path-wise uniqueness in such spaces for the continuous equation. The main difficultyrelies in obtaining a priori estimates on the discrete solution. Indeed, contrary to thecontinuous case, Ito formula is not available for the discrete equation.
1 Introduction
The Korteweg–de Vries equation models the propagation of weakly nonlinear dispersivewaves in various fields: plasma physics, surfaces waves on the top of an incompressibleirrotational inviscid fluid, beam propagation, . . .
When this equation is forced by a random force of white noise type, it models for instancethe propagation of waves in a plasma and has been investigated in the physical literaturein [5, 15, 21, 22]. More recently, some numerical experiments have been devoted to thisequation in order to understand the influence of a noise on the propagation and interactionof solitons in [8, 9, 20]. The stochastic Korteweg–de Vries equation has also been studiedmathematically and various well posedness results have been obtained [1, 3, 4, 17]. Ithas been proved that there exists a unique pathwise solution for a space-time white noise,provided it is spatially localized.
The equation can be written as
∂u
∂t+
∂3u
∂x3+
∂
∂x
(u2
2
)= ξ, x ∈ R, t ≥ 0,(1.1)
where u(x, t) is a real-valued stochastic process defined on R × R+ and ξ =∂ξ
∂twith ξ
a real-valued Gaussian process. In the case of a space-time white noise, its correlation∗IRMAR et ENS de Cachan, antenne de Bretagne, Campus de Ker Lann, avenue Robert Schumann,
35170 BRUZ. [email protected]†Laboratoire d’Analyse et de Mathematiques Appliquees & CNRS UMR 8050, Universite de Paris XII–
Val de Marne, 61, avenue du General de Gaulle, 94010 CRETEIL. [email protected]
1

function is given byE ξ(t, x)ξ(s, y) = δx−y(s ∧ t).
In this article, we are interested in the numerical analysis of a semi-discrete scheme for thisequation. This scheme is given by
uk+1n − uk
n + ∆t
(∂3
xuk+1/2n +
12∂x
(uk+1/2
n
)2)
=√
∆t χk+1.(1.2)
The time step is ∆t = T/(n + 1) > 0 and√
∆t χk+1 = ξ((k + 1)∆t) − ξ(k∆t) is the noiseincrement. The unknown is thus approximated at the discrete time k∆t by uk
n. In (1.2),we have used the notation u
k+1/2n = (uk
n + uk+1n )/2.
In [8], [9], boundary conditions were used on a bounded interval since it is impossibleto discretize an equation on the real line. Moreover, a spatial discretization based on finiteelements was introduced. Here we concentrate our investigation to the time discretization.The scheme (1.2) was chosen because it is conservative for the deterministic part. Thisis very important in order to make sure that numerical dissipation does not affect theresults. Recall that the L2 norm and energy are conserved quantities for equation (1.1).The L2 norm is also conserved for the scheme (1.2). The problem is that a conservativescheme is necessarily implicit and the numerical analysis of implicit schemes for stochasticpartial differential equations is often very difficult. Moreover, we have to deal with themathematically complex structure of the Korteweg–de Vries equation.
Let us recall that existence and uniqueness results for the initial value problem associ-ated to this equation are very difficult. The main reason is that the linear part of Korteweg–de Vries equation defines a unitary group — the Airy one parameter group eit∂3
xt∈R — inHs(R), s ∈ R. In [3], the method developed by Bourgain and further improved by Kenig,Ponce and Vega has been generalized to the stochastic case. It allows to work in negativeSobolev spaces and thus is able to handle spatially rough noises. However, it seems verydifficult to adapt this method to treat our scheme and for the moment we are not able toanalyze its convergence in the case of a spatially uncorrelated noise. Here, we use anotherframework introduced in [12] and used in the stochastic case in [17]. It gives existence anduniqueness in L2(R)-weighted spaces thanks to a local smoothing effect of the Airy group.In [17], the Gaussian process ξ is a Wiener process on L2(R), with a covariance operatorΦΦ? of finite trace in a localized L2(R)-based space, i.e. in L2
w where
L2w =
(1 + x+)3/8u ∈ L2(R)
.
In fact, a little more smoothness is required if the solution is constructed by a fixed pointargument. In this setting, the numerical noise in (1.2) is given by
χk+1 =ΦW ((k + 1)∆t)− ΦW (k∆t)√
∆t, 0 ≤ k ≤ n− 1,
where W is a cylindrical Wiener process on L2(R).
Two type of results are expected in the numerical analysis of a partial differentialequation: convergence of the sequence of approximation under weak regularity assumptionson the data and order of convergence with more regularity. Here, we study the first aspectwhich in our opinion is more important for the stochastic Korteweg–de Vries equation whichhas been simulated with very irregular data in [8, 9, 20]. In these articles, the noise was
2

white in both time and space. However, the framework chosen here does not allow to treatsuch a rough noise. Future work will deal with the second aspect.
The first difficulty we have to deal with is the problem of the existence of an adaptedsolution uk+1 for a given uk and χk+1. In the deterministic case (with a vanishing righthand side), the existence (and uniqueness) of the solution at each time step requires somesmallness condition on the time step depending for example on the initial data. In thestochastic case, such a condition on the time step would be random and too restrictive.A remedy for this problem has been given in [18, 19] where it is proposed to truncate thenoise when an implicit scheme is used. However, in our numerical experiments, we neverencountered any problem and always were able to solve (1.2). Thus, we do not introduce thistruncation. In fact, there always exists at least one solution of the semi-discrete equationwhich is adapted. However, we do not know whether it is unique.
Our proof of convergence relies on a compactness method and a lemma due to Gyongyand Krylov [14]. This lemma is very useful and allows to get convergence in probability inthe original probability space provided tightness of laws of the approximating sequence anduniqueness of solution of the continuous equation can be shown. This latter point followsfrom [12] as shown in [17]. Tightness results from a priori estimates in adequate functionalspaces. In fact, using the local smoothing effect mentioned above and standard arguments,tightness is proved as soon as we get an appropriate mean square bound, uniformly withrespect to the time step, in the weighted L2 spaces. The main problem is to get a boundon the moments of the L2(R) norm. In the continuous case, an estimate of the L2(R) normis easy to obtain and results from Ito formula but this tool is not available in the discretecase.
This difficulty always appears when working with a numerical scheme applied to stochas-tic partial differential equation with non Lipschitz non linear term. In [13], this is overcomethanks to a truncation of this non linear term. The same idea has been used in [2] for thestochastic non linear Schrodinger equation. We think that this argument is not completelysatisfactory. Indeed, it is important for the numerical experiments to know that the nu-merical solutions are bounded uniformly with respect to the time step and to get explicitbounds in terms of the data. This property is a form of stability and shows that the schemehas a good behavior. When the noise is not additive as in [13] or [2], it seems that thisproperty is very difficult to prove. We use here a trick which is specific to the additivenoise and consists in subtracting an appropriate form of the noise term at each time stepand in working with a shifted unknown. More precisely, for some real α > 0, we considera sequence zk
αk defined for any k by
zk+1α + α
∆t
2zk+1α − ∆t
2∂3
xzk+1α =
√∆tχk+1,
we have removed the dependance in n for the sake of simplicity. Let us note that it is notthe linear part of the semi-discrete solution. Writing the L2(R)-norm of uk+1 in function ofthe L2(R)-norm of uk + zk+1
α , we derive the appropriate uniform bound in L2(R). The keypoint is to choose a random α and to prove precise estimate on zk
αk. The natural ideawould be to use this auxiliary process with α = 0, however it is easy to see that the proofof L2 a priori estimates fails with this choice. The problem is technical and we need that(zk
α) is small path-wise, this is the reason why we have to choose a random α. In fact, thisargument can be considered as a discrete version of an idea used in [6], [7] in the context ofthe Burgers equation. Note that the independance of uk and zk+1
α will also plays a crucialrole.
3

Another argument used in order to surround the problem of lack of Ito formula consistsin plugging in the noise term of the L2-norm evolution equation at the step k the integratedequation from 0 to step k in order to express u at time (k + 1)∆t in function of u at timek∆t and a martingale term only. This provides additional and useful powers of ∆t andallows us to get the wanted estimates thanks to martingale inequalities. Let us point outthat this method is not specific to the additive nature of the equation.
The paper is organized as follows. In Section 2 we recall after some notations thedeterministic framework of uniqueness and the theorem of existence and uniqueness of thesolution of the initial value problem obtained in [17]. Then we describe our numericalscheme and state our main result, i.e. the convergence of the sequence of approximationunn≥0 in various topologies. In Section 3, we give the details of the proof of convergenceof the scheme.
2 Main result and notations.
Let X be any Banach space and I any interval in R. We shall denote by Lp(I,X), 1 ≤ p ≤∞, the space of functions which are Bochner-integrable from I to X. When X = R, wesimply use the notation Lp(I). We shall also denote by C([0, T ], X) (resp. Cβ([0, T ], X))the space of continuous (resp. Holder continuous with exponent β) functions from [0, T ] toX. We shall denote by ‖ · ‖Y the norm on a Banach space Y . In the case of Y = L2(R),we will denote ‖ · ‖ (resp. (·, ·)) the L2-norm (resp. the L2-inner product).
Given any non negative number σ, the Sobolev space Hσ(R) is defined as the space oftempered distributions u such that∫
R(1 + ξ2)σ|Fu(ξ)|2 dξ < ∞
where F is the Fourier transform. We shall also use the local Sobolev spaces Hσloc(R)
consisting of the tempered distributions which belong to Hσ(R) when multiplied by asmooth and compactly supported function. For σ negative, Hσ(R) (resp. Hσ
loc(R)) is thetopological dual space of H−σ(R) (resp. H−σ
loc (R)).
The Sobolev space in the time variable Wα,p([0, T ], X) with α > 0 and 1 ≤ p ≤ ∞ isdefined as the space of functions u such that
∫∫[0,T ]2
|u(t)− u(s)|pX|t− s|1+αp
dtds < +∞.
Let Φ be a linear operator from L2(R) into a Hilbert space H, Φ is said to be Hilbert-Schmidt if the following term is finite:
|Φ|2L02(L2(R),H)
def=∑i≥0
|Φei|2H < +∞.
It is classical that the sum on the right hand side does not depend on the choice ofthe Hilbertian basis eii≥0 of H. We denote by L0
2(L2(R),H) the space of Hilbert-
Schmidt operators from L2(R) to H. When H = Hσ(R) for σ > 0, we shall writeL0
2(L2(R),Hσ(R)) = L0,σ
2 and for σ = 0, we will simply use the notation L2.
4

Let T > 0 and let us now consider the stochastic Korteweg–de Vries equation with anadditive noise written in the following Ito form
du +(
∂3xu +
12∂x(u2)
)dt = ΦdW,(2.3)
for x ∈ R, t ∈ [0, T ] (where we have used the notation ∂kx for the kth partial derivative with
respect to x) with the initial condition
u(x, 0) = u0(x), x ∈ R.(2.4)
Here W (t)t∈[0,T ] denotes a cylindrical Wiener process on L2(R) adapted to a given filtra-tion Ftt∈[0,T ] on a given probability space (Ω,F , P).
We work in weighted L2 spaces and assume that the initial data satisfies
(1 + x+)3/8u0 ∈ L2(R).(2.5)
Correspondingly, we assume that Φ is a linear operator from L2(R) into itself and thatmoreover
(1 + x+)3/8Φ ∈ L2.(2.6)
We also need the weak regularity assumption on the noise
Φ ∈ L0,ε2(2.7)
for some ε > 0.
Let us recall the result of existence and uniqueness of the stochastic process u solutionof (2.3)–(2.4) in the framework of L2 weighted spaces (see [17]).
Theorem 2.1 Let T > 0 and u0 such that (2.5) holds. Let W (t)t∈[0,T ] be a cylindricalWiener process adapted to a given filtration Ftt∈[0,T ] on a given probability space (Ω,F , P).Under the assumptions (2.6) and (2.7), there exists a unique stochastic process u which isa global mild solution of (2.3)–(2.4) such that
(1 + x+)3/8u ∈ L∞([0, T ], L2(R)), a.s..
Moreover, we can show that u ∈ C(0, T, L2w) ∩ L2([0, T ],H1
loc(R)), a.s..
Let us now describe our numerical scheme. From now on, we assume that Φ and u0
satisfies the assumptions of Theorem 2.1. In the sequel, following the notations of Theorem2.1, we consider a fixed positive T and we set for each integer n, ∆t = T
n+1 . We also set forany integer k such that 0 ≤ k ≤ n:
χk+1 = ΦW ((k + 1)∆t)−W (k∆t)√
∆t.
We seek for an approximation uk of u(k ∆t) for k such that 0 ≤ k ≤ n. Our semi-discretescheme is described by the following finite difference equation:
uk+1 − uk
∆t+ ∂3
xuk+1/2 +12∂x
(uk+1/2
)2=
χk+1
√∆t
,(2.8)
where we have setuk+1/2 =
12(uk + uk+1), 0 ≤ k ≤ n.
The deterministic part is second order and has the property that the L2 norm is conserved.We need the following notion.
5

Definition 2.2 (pathwise solution) We say that a function un in L∞([0, T ], L2(R)) isa solution of the difference equation (2.8) where ∆t = T/(n + 1), if un is constant on eachinterval [k∆t, (k + 1)∆t[, equal to uk
n, and if the sequence ukn0≤k≤n satisfies (2.8).
The scheme is implicit and, at each time step, a fixed point method or a Newton iterationis used to find uk+1. In the numerical experiments in [8], [9], we used the Newton iterationand we never encountered any problem with its convergence. Note that this convergence isnot implied by any theoretical arguments. We do not even know if the solution is uniquelydefined. However, arguing as in [2] section 3.1, it is possible to show the existence of apathwise solution of (2.8) according to the latter definition using Galerkin approximationsand a measurable selection theorem. We now state the main result of this paper.
Theorem 2.3 Let u0 and Φ as in Theorem 2.1. Let n0 such that T/(n0 + 1) ≤ 1, thenany sequence unn≥n0 of solutions of the numerical scheme (2.8) converges to the solutionu of (2.3)–(2.4) given by Theorem 2.1. The previous convergence holds in probability inL2(0, T, Hs
loc(R)) for any s < 1 and in L2(Ω; L∞([0, T ], L2(R))).
The proof of Theorem 2.3 is the object of next section. We will use a compactness methodtogether with the following lemma taken from [14]. This lemma allows to get the conver-gence of the approximation scheme in probability in any space in which these approxima-tions are tight. As it can be seen the uniqueness of the solution of the continuous equationis crucial.
Lemma 2.4 Let Znn≥0 be a sequence of random elements on a Polish space E endowedby its borel σ-algebra. Then Znn≥0 converges in probability to an E-valued random el-ement if and any if from every pair of subsequences (Znk
, Zmk)k≥0, one can extract
a subsequence which converges weakly to a random element supported on the diagonal(x, y) ∈ E × E, x = y.
The proof of convergence of the numerical scheme also relies on the following well-knowncompactness argument whose proof is based on a classical compact embedding theorem(see [16], Theorem 5.2 p. 61), the Ascoli-Arzela theorem, and on diagonal extraction.
Lemma 2.5 Let T > 0, α > 0, β > 0. Let A be a set of distributions u such that
(i) A is bounded in L2([0, T ],H1loc(R)) ∩Wα,2([0, T ],H−2
loc (R));
(ii) A is bounded in Cβ([0, T ],H−2loc (R)).
Then A is relatively compact in L2([0, T ],Hsloc(R)) ∩ C([0, T ],H−s′
loc (R)), for any s < 1 ands′ > 2.
Finally, we introduce a weight function used in the proof of Theorem 2.1. The idea ofworking with weighted spaces is motivated by results of uniqueness of the Cauchy problemin the deterministic case (see [12]). We consider a weight function h satisfying the followingproperties.
6

Hypothesis 1
h′ ≤ c1 max(1, h),(2.9)h′′2 ≤ c2 hh′,(2.10)h′′′ ≤ c3 h.(2.11)
where the ci’s denote positive constants.
It is easy to construct such function (see [12]).
3 Convergence of the Crank–Nicholson scheme
3.1 L2(R)-a priori estimates
Let n be a positive integer and ∆t = T/(n+1). Let un = uk0≤k≤n be an adapted solutionof the following scheme
uk+1 = uk −∆t∂3xuk+ 1
2 − ∆t
2∂x
(uk+ 1
2
)2+√
∆tχk+1,(3.12)
u0 = u0.(3.13)
where we have set χk+1 = 1√∆t
(ΦW (tk+1)− ΦW (tk)). Note that χk+1 is a gaussian randomvariable with covariance operator ΦΦ∗. Therefore, by (2.7), it takes values in Hε(R).
Let α > 0. For each integer k, we define the auxiliary random variable zk+1α by
zk+1α + α
∆t
2zk+1α − ∆t
2∂3
xzk+1α =
√∆tχk+1.(3.14)
We need in the sequel the following estimates on the random variables zk+1α .
Lemma 3.1 For any ε ∈]0, 1[, δ > 0 there exists positive constants κi > 0, i = 1, 2, 3, 4independent on n such that for any 0 ≤ k ≤ n, the following inequalities hold:
‖zk+1α ‖2 ≤ κ1 ∆t‖χk+1‖2, a.s.,(3.15)
‖∂xzk+1α ‖2 ≤ κ2 (∆t)1/3‖χk+1‖2, a.s.,(3.16)
‖∂xzk+1α ‖2
L∞(R) ≤ κ3 α−ε/3‖χk+1‖2Hε(R), a.s.,(3.17)
‖zk+1α ‖L∞(R) ≤ κ4 (∆t)2/3−δ‖χk+1‖, a.s..(3.18)
Proof.
Fourier transform applied to (3.14) leads to
F(zk+1α )(ξ) =
√∆t
1 +α∆t
2− i
ξ3∆t
2
F(χk+1).(3.19)
so that (3.15) follows easily from Plancherel equality. The proof of (3.16) uses similararguments.
7

In order to obtain (3.17), we use the following well-known Sobolev estimate. For anyε > 0, there exists a positive constant cε such that
‖∂xzk+1α ‖L∞(R) ≤ cε‖zk+1
α ‖H(3+ε)/2(R) = cε(‖zk+1α ‖2 + ‖∂3
xzk+1α ‖2
Hε/2(R))1/2.
The first term in the right hand side is bounded again thanks to Plancherel equality and(3.19):
‖zk+1α ‖2 = ∆t
∫ [(1 +
α∆t
2
)2
+∆t2ξ6
4
]−1 ∣∣∣F(χk+1)(ξ)∣∣∣2 dξ
≤ α−1
∫ ∣∣∣F(χk+1)(ξ)∣∣∣2 dξ
= α−1‖χk+1‖2,
since α∆t[(
1 + α∆t2
)2 + ∆t2ξ6
4
]−1≤ 1. To bound the second term, we first note that
∆t|ξ|3+ε[(
1 + α∆t2
)2 + ∆t2ξ6
4
]−1≤ (∆t)ε/3|ξ|2ε supx≥0 x1−ε/3
((1 + α∆t
2 )2 + x2))−1
≤ c(ε)(∆t)ε/3|ξ|2ε(1 + α∆t2 )−(1+ε/3)
≤ c(ε)α−ε/3|ξ|2ε.
Then, again by Plancherel equality and (3.19),
‖∂3xzk+1
α ‖2Hε/2(R)
= ∆t
∫|ξ|3+ε
[(1 +
α∆t
2
)2
+∆t2ξ6
4
]−1 ∣∣∣F(χk+1)(ξ)∣∣∣2 dξ
≤ c(ε)α−ε/3
∫|ξ|2ε
∣∣∣F(χk+1)(ξ)∣∣∣2 dξ
≤ c(ε)α−ε/3‖χk+1‖Hε(R).
Inequality (3.17) follows. The proof of (3.18) uses similar arguments.
We are now able to prove the following L2-estimates.
Proposition 3.2 Let n0 an integer such that T/(n0 + 1) ≤ 1. Then there exists positiveconstants κi > 0, i = 5, 6, 7, independent on n and which is a non decreasing function ofits arguments such that
max0≤k≤n
E‖ukn‖2 ≤ κ5
(T, E‖u0‖2, ‖Φ‖L0,ε
2
),(3.20)
max0≤k≤n
E‖ukn‖4 ≤ κ6
(T, E‖u0‖4, ‖Φ‖L0,ε
2
),(3.21)
E max0≤k≤n
‖ukn‖2 ≤ κ7
(T, E‖u0‖4, ‖Φ‖L0,ε
2
),(3.22)
for any n ≥ n0.
Proof of (3.20)
8

Taking the difference of (3.14) with (3.12) gives
uk+1 − v = −∆t ∂3x
(v + uk+1
2
)− ∆t
2∂x
(v + uk+1
2− zk+1
α
2
)2
+ α∆t
2zk+1α ,(3.23)
where we have setv = uk + zk+1
α .(3.24)
Multiplying (3.23) by (v+uk+1), we obtain after integration on R and suitable integrationsby parts:
‖uk+1‖2 ≤ ‖v‖2 +∆t
8‖v + uk+1‖2‖∂xzk+1
α ‖L∞(R)(3.25)
+∆t
4‖∂xzk+1
α ‖L∞(R)‖zk+1α ‖‖v + uk+1‖.
+ α∆t
2‖zk+1
α ‖‖v + uk+1‖.
The last two terms of inequality (3.25) can be majorized as follows
∆t
4‖∂xzk+1
α ‖L∞(R)‖zk+1α ‖‖v + uk+1‖ ≤ η
2∆t‖v + uk+1
2‖2 + ∆t C1(η)‖∂xzk+1
α ‖2L∞(R)‖z
k+1α ‖2,
and
α∆t
2‖zk+1
α ‖‖v + uk+1‖ ≤ η
2∆t‖v + uk+1
2‖2 + ∆tC2(η)α2‖zk+1
α ‖2
where we have used the well-known inequality |ab| ≤ ηa2 + Cηb2 for any positive real a, b
and any η > 0. Plugging these inequalities into (3.25) leads to(1− ∆t
4‖∂xzk+1
α ‖L∞(R) −η∆t
2
)‖uk+1‖2 ≤
(1 +
∆t
4‖∂xzk+1
α ‖L∞(R) +η∆t
2
)‖v‖2
+ ∆t(C1(η)‖∂xzk+1
α ‖2L∞(R) + C2(η)α2
)‖zk+1
α ‖2.(3.26)
Owing to Lemma 3.1 (estimate (3.17)) and given η > 0, we can find α = α(k, ω) =κ
3/ε3 ‖χk+1‖6/ε
Hε(R)/(2η)6/ε such that
‖∂xzk+1α ‖L∞(R) ≤ 2 η, a.s..
We deduce from (3.15) that
‖uk+1‖2 ≤ ‖v‖2
(1 + η∆t
1− η∆t
)+ (∆t)2C(ω, k), a.s.,(3.27)
withC(ω, k) = κ1‖χk+1‖2(C1(η)4η2 + α(ω, k)2C2(η)).
This latter term can be rewritten in the form
C(ω, k) = C3‖χk+1‖2 + C4‖χk+1‖12/ε+2Hε(R) ,(3.28)
for some constants C3 > 0 and C4 > 0 depending only on η and ε. Let us note that since∆t = T/(n + 1) < 1, it is easy to see that
1 + η∆t
1− η∆t≤ e
2η1−η
∆t.
9

Finally, since uk and zk+1α are independent (see (3.14)), taking the expectation of (3.27)
with η = 1/2 yields
E‖uk+1‖2 ≤ E‖uk‖2e4∆t + E‖zk+1α ‖2e4∆t + ∆t2
(C3E‖χk+1‖2 + C4E‖χk+1‖12/ε+2
Hε(R)
)≤ E‖uk‖2e4∆t + κ1∆t e4∆tE‖χk+1‖2 + ∆t2
(C3E‖χk+1‖2 + C4E‖χk+1‖12/ε+2
Hε(R)
)≤ E‖uk‖2e4∆t + C5(‖Φ‖12/ε+2
L0,ε2
+ 1),
where we have used again (3.15). Eventually, the discrete Gronwall inequality leads to(3.20).
Proof of (3.21)
We take the square of inequality (3.27) and obtain
‖uk+1‖4 ≤ ec∆t‖v‖4 + 2(∆t)2C(ω, k)‖v‖2ec∆t + (∆t)4C(ω, k)2,
≤ ec∆t‖v‖4 + 4(∆t)2C(ω, k)(‖uk‖2 + ‖zk+1
α ‖2)
ec∆t + (∆t)4C(ω, k)2, a.s.,(3.29)
where C(ω, k) > 0 is given by (3.28). Due to (3.24), the term ‖v‖4 can be split into severalparts:
‖v‖4 = ‖uk‖4 + ‖zk+1α ‖4 + 4 |(uk, zk+1
α )|2 + 2‖uk‖2‖zk+1α ‖2
+ 4‖zk+1α ‖2(uk, zk+1
α ) + 4‖uk‖2(uk, zk+1α ).
The expectation of the last term in (3.30) vanishes since again uk and zk+1α are independent.
We deduce
E‖v‖4 ≤ E‖uk‖4 + E‖zk+1α ‖4 + 6 E
(‖uk‖2‖zk+1
α ‖2)
+ 4 E(‖uk‖‖zk+1
α ‖3)
(3.30)
≤ E‖uk‖4 + C∆t‖Φ‖4
L2+ ‖Φ‖2
L2E‖uk‖2 + ‖Φ‖3
L2E‖uk‖
by (3.15). It follows
E‖uk+1‖4 ≤ ec∆t E‖uk‖4 + C∆t‖Φ‖4
L2+ ‖Φ‖2
L2E‖uk‖2 + ‖Φ‖3
L2E‖uk‖
+ C∆t
E‖uk‖2E C(ω, k) + E
(‖zk+1
α ‖2C(ω, k))
+ E C(ω, k)2
.
Eventually, the estimates (3.15),(3.17),(3.20), the Gaussianity of χk+1 and the discreteGronwall Lemma give (3.21).
Proof of (3.22)
We rewrite the equation
uk+1 = uk + ∆t∂3xuk+1/2 +
∆t
2∂x
(uk+1/2
)2+√
∆tχk+1
and take the scalar product in L2(R) with uk+1/2 to get(uk+1/2, uk+1 − uk
)=√
∆t(χk+1, uk+1/2
).(3.31)
10

Let us note that the stochastic term in the right hand side is not a martingale incrementsince the integrand uk+1/2 is not adapted. In order to get rid of this problem, we use thediscrete “mild” equation:
uk+1 = Snuk − ∆t
2
(I +
∆t
2∂3
x
)−1
∂x
(uk+1/2
)2+√
∆t
(I +
∆t
2∂3
x
)−1
χk+1.(3.32)
where
Sn =(
I +∆t
2∂3
x
)−1(I − ∆t
2∂3
x
).
Merging (3.32) and (3.31) leads to
‖uk+1‖2 − ‖uk‖2 =√
∆t(χk+1, uk + Snuk
)+√
∆t(χk+1, uk+1 − Snuk
)=√
∆t(χk+1, uk + Snuk
)+ ∆t
((I +
∆t
2∂3
x
)−1
χk+1, χk+1
)
− ∆t3/2
2
((I +
∆t
2∂3
x
)−1
∂x
(uk+1/2
)2, χk+1
).
Now, the√
∆t- term is a martingale increment involving an adapted term. Next, we sumfrom ` = 0 to ` = k − 1 with k ≤ n and obtain
‖uk‖2 − ‖u0‖2 = M(tk) + ∆t
k−1∑`=0
((I +
∆t
2∂3
x
)−1
χ`+1, χ`+1
)
− ∆t
2
k−1∑`=0
(√
∆t
(I +
∆t
2∂3
x
)−1
∂x
(u`+1/2
)2, χ`+1
),
where
M(t) =∫ t
0(Fn(s),Φ dW (s)) ,
andFn(s) = un(s) + Snun(s).
Since ∥∥∥∥∥(
I +∆t
2∂3
x
)−1∥∥∥∥∥L(L2(R))
≤ 1,
∥∥∥∥∥√∆t
(I +
∆t
2∂3
x
)−1
∂x
∥∥∥∥∥L(L1(R),L2(R))
≤ C,(3.33)
with C > 0 independent from n, we derive
max0≤k≤n
‖uk‖2 ≤ ‖u0‖2 + supt∈[0,T ]
|M(t)|+ ∆t
n−1∑`=0
‖χ`+1‖2 + C∆t
2
n−1∑`=0
‖u`+1/2‖2‖χ`+1‖, a.s.
The second inequality in (3.33) is obtained thanks to Plancherel inequality and to the factthat the Fourier transform of a function in L1(R) is bounded.
Taking the expectation of the previous inequality leads to
E max0≤k≤n
‖uk‖2 ≤ E‖u0‖2 + E supt∈[0,T ]
|M(t)|+ T‖Φ‖2L2
+ CT/2(
max0≤k≤n
E‖uk‖4
)1/2
‖Φ‖L2 .
We conclude thanks to (3.21) and a classical martingale inequality.
11

3.2 L2-weighted a priori estimates
We will first establish the following pathwise estimate concerning zk+1α k given by (3.14).
Proposition 3.3 Let h(x) = (1 + x+)3/4 and n0 such that ∆t ≤ 1. Then there exists adeterminist constant κ8 > 0 independent of n such that the following inequality holds almostsurely:
‖h1/2zk+1α ‖2 ≤ κ8 ∆t‖h1/2χk+1‖2, a.s..(3.34)
Proof.
Eq. (3.14) leads to zk+1α =
√∆tQχk+1 where Q = ((1 + α∆t)I − ∆t/2 ∂3
x)−1. It iseasy to see that Q is a bounded convolution operator from L2(R) into itself which can beexpressed by
Qf(x) =∫
Rρ(x− y)f(y) dy,
where ρ = F−1(r) with r(ξ) = (1+α∆t/2+ i∆tξ3/2)−1. The main difficulty here is that hand Q do not commute. We surround this problem with the following pointwise inequality:
|h1/2(x)ρ(x− y)h−1/2(y)| ≤ |ρ(x− y)|(1 + (x− y)+/2), for all x, y,
whose proof based on the Mean Value Theorem essentially exploits the fact that h′ ≤ 1and h ≥ 1. We have then∫
h(x)(zk+1α )2 dx = ∆t
∫ (∫h1/2(x)ρ(x− y)χk+1(y) dy
)2
dx,
≤ ∆t
∫ (∫|ρ(x− y)|(1 + (x− y)+/2)h1/2(y)χk+1(y) dy
)2
dx,(3.35)
where we have used the previous inequality. Then a Cauchy-Schwartz inequality withrespect to y applied to the right hand side of (3.35) followed by the Fubini theorem yields
‖h1/2zk+1α ‖2 ≤ ∆t
(‖ρ‖L1(R) + ‖xρ‖L1(R)/2
)2 ‖h1/2χk+1‖2.(3.36)
Eventually, the explicit computation of ρ based on the partial fraction decomposition ofr(ξ), and whose details are left to the reader, allows us to bound in (3.36) both ‖ρ‖L1(R)
and ‖xρ‖L1(R) independently of n and ω.
We now exploit the smoothing property of the linear part in weighted spaces.
Proposition 3.4 Let n0 be an integer such that T/(n0 + 1) ≤ 1/4. For any n ≥ n0,let un ∈ L∞(0, T, L2(R)) be a solution of the finite difference equation (3.12)–(3.13). Leth : R → R+ be an increasing regular function such that (2.9)–(2.11) holds. Then, thereexists positives constants κi, i = 9, 10, non-decreasing functions of theirs arguments andindependent of n such that the following inequalities hold:
max0≤k≤n
E ‖h1/2ukn‖2 ≤ κ9
(T, E ‖h1/2u0‖2, E ‖u0‖4, ‖h1/2Φ‖L0
2
),(3.37)
∆t En−1∑k=0
‖h′1/2∂xuk+1/2
n ‖2 ≤ κ9
(T, E ‖h1/2u0‖2, E ‖u0‖4, ‖h1/2Φ‖L0
2
),(3.38)
E max0≤k≤n
‖h1/2ukn‖2 ≤ κ10
(T, E ‖h1/2u0‖2, E ‖u0‖4, ‖h1/2Φ‖L0
2
).(3.39)
12

Remark 3.5 The bounds (3.37)–(3.39) with h replaced by (1 + x+)3/4 can be obtained byworking first with a sequence of smooth weighting factors hn such that (2.9)–(2.11) holduniformly with respect to n and such that hn tends to (1 + x+)1/4 uniformly in C(R, R+)(see [12] p. 1397).
Remark 3.6 Since h in Proposition 3.4 is an increasing regular function on R, its deriva-tive h′ is bounded below by a positive constant on any bounded closed interval on R. Henceestimate (3.38) implies the following local regularity
∆tEn−1∑k=0
‖∂xuk+1/2n ‖2
L2(−R,R) ≤ κ(R, T, E ‖h1/2u0‖2, E ‖u0‖4, ‖h1/2Φ‖L2
).
Proof of (3.37) and (3.38)
Let un = uk0≤k≤n be a solution of (3.12)–(3.13). Since no confusion is possible, weomit to write the dependance on n in this proof. We rewrite equation (3.12) in the followingform as in the proof of Proposition 3.2:
uk+1 = v −∆t ∂3x
(v + uk+1
2
)− ∆t
2∂x
(v + uk+1
2− zk+1
α
2
)2
+ α∆t
2zk+1α ,(3.40)
where zk+1α is defined by (3.14) for some α > 0 which will be precised later and where we
have set againv = uk + zk+1
α .(3.41)
Multiplying (3.40) by h(v + uk+1)/2, we obtain after integration on R:
12‖h1/2uk+1‖2 =
12‖h1/2v‖2 −∆t
(∂3
x
(v + uk+1
2
), h
(v + uk+1
2
))(3.42)
− ∆t
2
(∂x
(v + uk+1
2− zk+1
α
2
)2
, h
(v + uk+1
2
))
+ α∆t
2
(zk+1α , h
(v + uk+1
2
)).
Let us note that(∂3
x
(v + uk+1
2
), h
(v + uk+1
2
))=
32‖h′1/2
∂x
(v + uk+1
2
)‖2 − 1
2‖h′′′1/2
(v + uk+1
2
)‖2,
and12
(h
(v + uk+1
2
), ∂x
(v + uk+1
2
)2)
= −13
∫R
h′(
v + uk+1
2
)3
dx.
Merging the last two equalities into (3.42), we obtain after some suitable integration byparts the following inequality:
12‖h1/2uk+1‖2 +
3∆t
8‖h′1/2
∂x(v + uk+1)‖2 ≤ 12‖h1/2v‖2 +
∆t
24
∣∣∣∣∫R
h′(v + uk+1
)3dx
∣∣∣∣+
∆t
8
(1 + c3 + ‖∂xzk+1
α ‖L∞(R)
)‖h1/2(v + uk+1)‖2(3.43)
+ c1∆t
8‖zk+1
α ‖L∞(R)‖v + uk+1‖2 +∆t
16‖∂xzk+1
α ‖L∞(R)‖h1/2zk+1α ‖2
+ α2 ∆t
8‖h1/2zk+1
α ‖2,
13

where we have used several times the assumptions (2.9)–(2.11) together with the inequality:for any non negative reals a, b, we have
2ab ≤ a2 + b2.(3.44)
The cubic term of the right hand side of (3.43) is estimated owing to the followinglemma.
Lemma 3.7 There exists a positive constant κ > 0 such that for any regular function ϕ,∣∣∣∣∫R
h′ϕ3 dx
∣∣∣∣ ≤ κ‖h′1/2ϕ‖3/2‖ϕ‖
‖h1/2ϕ‖1/2 + ‖h′1/2
∂xϕ‖1/2
.(3.45)
Proof:
Thanks to the Holder inequality, we have∣∣∣∣∫R
h′ϕ3 dx
∣∣∣∣ ≤ ‖h′1/2ϕ‖2
L4(R)‖ϕ‖.
Then the continuous Sobolev embedding of L4(R) into H1/4(R) followed by a classicalinterpolation inequality leads to the inequality:
‖h′1/2ϕ‖2
L4(R) ≤ c0‖h′1/2ϕ‖3/2‖h′1/2
ϕ‖1/2H1(R)
.
Assertion (2.10) concerning the weight function h allows to estimate the H1(R)-norm by
‖h′1/2ϕ‖2
H1(R) ≤ ‖h′1/2ϕ‖2 +
c2
2‖h1/2ϕ‖2 + 2‖h′1/2
∂xϕ‖2.(3.46)
Plugging (3.46) into the former inequality leads to the result.
By Lemma 3.7 with ϕ replaced by v + uk+1, (3.43) becomes
‖h1/2uk+1‖2 +3∆t
4‖h′1/2
∂x(v + uk+1)‖2 ≤ ‖h1/2v‖2
+∆t
4‖h1/2(v + uk+1)‖2
(1 + c3 + ‖∂xzk+1
α ‖L∞(R)
)(3.47)
+ κ∆t
12‖v + uk+1‖5/2
‖h1/2(v + uk+1)‖1/2 + ‖h′1/2
∂x(v + uk+1)‖1/2
+ c1∆t
4‖zk+1
α ‖L∞(R)‖v + uk+1‖2 +∆t
8
(‖∂xzk+1
α ‖L∞(R) + 2α2)‖h1/2zk+1
α ‖2
Finally, by Young inequality, for any a, b, γ > 0, we can find a constant Cγ such that
ab ≤ γa4 + Cγb4/3.
Choosing successively
(a, b, γ) =(‖h1/2(v + uk+1)‖1/2,
κ
12‖v + uk+1‖5/2, 1/4
)and
(a, b, γ′) =(‖h′1/2
∂x(v + uk+1)‖1/2,κ
12‖v + uk+1‖5/2, 3/8
),
14

and using several times again the inequality (3.44) in order to collect terms in ‖h1/2uk+1‖and ‖h1/2v‖ leads to
‖h1/2uk+1‖2(1−∆t(1 + c32 + 1
2‖∂xzk+1α ‖L∞(R))) + 3∆t
2 ‖h′1/2∂xuk+1/2‖2
≤ ‖h1/2v‖2(1 + ∆t(1 + c32 + 1
2‖∂xzk+1α ‖L∞(R))) + C∆t‖v + uk+1‖10/3
+c1∆t4 ‖z
k+1α ‖L∞(R)‖v + uk+1‖2 + ∆t
8
(‖∂xzk+1
α ‖L∞(R) + 2α2)‖h1/2zk+1
α ‖2 + 3∆t4 ‖∂xzk+1
α ‖2,(3.48)where C = Cγ + Cγ′ > 0.
Let η = 2(1 + c3/2) ≥ 2. We now choose α = α(ω, k) = (κ3)3/ε‖χk+1‖6/εHε(R)/η6/ε in
(3.17) such that‖∂xzk+1
α ‖L∞(R) = η, a.s..
For ∆t ≤ 1/(2η) ≤ 1/4, we have 1 − η∆t ≥ 1/2 > 0 and (1 + η∆t)/(1 − η∆t) ≤ e4η∆t.Therefore, we get
‖h1/2uk+1‖2 + 3∆t ‖h′1/2∂xuk+1/2‖2 ≤ ‖h1/2v‖2e4η∆t + ∆tC(ω, k),(3.49)
with
C(ω, k) = 2C‖v + uk+1‖10/3 +c1
2‖zk+1
α ‖L∞(R)‖v + uk+1‖2 +14(η + 2α2(ω, k))‖h1/2zk+1
α ‖2
+34‖∂xzk+1
α ‖2.
Owing to (3.15), (3.16), (3.18) and (3.34), C(ω, k) can be rewritten as
C(ω, k) = C1
(‖uk+1/2‖4 + ‖χk+1‖4
)+ C2‖χk+1‖
(‖uk+1/2‖2 + ‖χk+1‖2
)+ C3‖h1/2χk+1‖2
(1 + ‖χk+1‖12/ε
)+ C4‖χk+1‖2,
where the Ci, i = 1, . . . , 4 are positive constants which depend only on η and ε. Weconclude as in the proof of estimate (3.20) owing to (2.6), (2.7), (3.20), (3.21) and theGaussianity of the noise.
Proof of (3.39)
Expanding the term ‖h1/2v‖2 in (3.49) yields first
‖h1/2uk+1‖2 ≤ e4η∆t(‖h1/2uk‖2 + ‖h1/2zk+1
α ‖2)
+ ∆t C(ω, k)(3.50)
+ 2√
∆t e4η∆t(h1/2uk, h1/2Qχk+1
),
where the operator Q has been introduced in the proof of (3.34). Here the√
∆t-term is amartingale increment. This will allow us to bound the expectation of the time supremumof the uk. Indeed, after summation with respect to k, Ineq. (3.50) leads to
‖h1/2uk‖2 ≤ e4ηk∆t‖h1/2u0‖2 + ∆tk−1∑`=0
e4η(k−`)∆t(κ8‖h1/2χk+1‖2 + C(ω, k)
)+ 2e4ηk∆tM(tk),(3.51)
15

where we have used again (3.34) and where M(t) denotes the stochastic integral
M(t) =∫ t
0
(h1/2un(s), h1/2QΦdW (s)
).
Eventually, taking the expectation of the maximum with respect to k of (3.51) leads to
E max0≤k≤n
‖h1/2uk‖2 ≤ C(T )
(E ‖h1/2u0‖2 + ∆t
k−1∑`=0
(κ8E ‖h1/2χk+1‖2 + E C(ω, k)
)+ E sup
t∈[0,T ]|M(t)|
).(3.52)
We conclude again thanks to (2.6), (2.7), (3.20), (3.21) and a classical martingale inequality.
3.3 C(0, T )-a priori estimates
In order to go further in the compactness method, we need estimates on the modulus ofcontinuity of the approximation. Classically, we introduce a piecewise interpolation of un.Let vnn be the sequence of L2(R)-valued processes defined by
vn(t) =(tk+1 − t)uk−1
n + (t− tk)ukn
tk+1 − tk, ∀t ∈ [tk, tk+1[, k ≥ 1,
andvn(t) = u0
n, ∀t ∈ [0,∆t[.
Let us note that, thanks to the shift in k, for each integer n, vn is a continuous stochasticadapted process. Moreover the previous inequalities derived on unn are easily proved tohold also for vnn.
Corollary 3.8 There exists positive constants κi = κi
(T, E ‖h1/2u0‖2, E ‖u0‖4, ‖h1/2Φ‖L0
2
),
i = 11, 12, 13 such that
E supt∈[0,T ]
‖vn(t)‖2 ≤ κ11,(3.53) ∫ T
0E ‖∂xvn(t)‖2
L2(−R,R) dt ≤ κ12(R), ∀R > 0,(3.54)
E supt∈[0,T ]
‖h1/2vn(t)‖2 ≤ κ13,(3.55)
for any weight function h satisfying assumptions (2.9)–(2.11).
The following estimates are useful to show the tightness of the laws of vn.
Proposition 3.9 There exists β > 0, γ ∈]0, 1/2[ such that for any R > 0, there existspositive constants κi = κ
(R, T, E ‖h1/2u0‖2, E ‖u0‖4, ‖h1/2Φ‖L0
2
), i = 14, 15 such that
E(‖vn‖2
Cβ(0,T,H−2(−R,R))
)≤ κ14(R),(3.56)
E(‖vn‖2
W γ,2(0,T,H−2(−R,R))
)≤ κ15(R).(3.57)
16

Proof.
The idea for proving these estimates is to write
vn(t) = u0 −∫ t
0
n∑k=1
(∂3
xuk+1/2n +
12∂x
(uk+1/2
n
)2)
1[tk,tk+1[(s) ds + Φ wn(t),(3.58)
where wn(t) is a continuous, piecewise linear adapted stochastic process on [0, T ] suchthat wn(tk) = W (tk−1) for any k ≤ n, i.e.
wn(t) =(tk+1 − t)W (tk−1) + (t− tk)W (tk)
∆t,(3.59)
for any t ∈ [tk, tk+1[. The last term of (3.58) is estimated thanks to the characterization ofthe Sobolev spaces W γ,2p(0, T, L2(R)) (see e.g. Lemma 2.1 in [10]) and we get the bound(3.57) in W γ,2p(0, T, H−2(−R,R)) for any γ < 1/2 and any integer p. Estimate (3.56) isobtained using, for p large enough, the Sobolev embedding of W γ,2p(0, T, H−2(−R,R)) intoCβ(0, T, H−2(−R,R)) when 0 < β < γ − 1/(2p).
3.4 Passage to the limit and conclusion.
We first state a tightness result for the sequence vnn≥0 and then conclude thanks to thepathwise uniqueness and Lemma 2.4. Let us denote for some γ ∈]0, 1/2[, β > 0, s < 1 ands′ > 2 the following spaces
Xγ,β(T ) = W γ,2(0, T, H−2loc (R)) ∩ L2(0, T, H1
loc(R)) ∩ Cβ(0, T, H−2loc (R)),
andYs,s′(T ) = L2(0, T, Hs
loc(R)) ∩ C(0, T, H−s′
loc (R)).
We can state now the tightness result.
Proposition 3.10 For any T > 0, s < 1 and s′ > 2, the family of laws L(vn)n≥0 onXγ,β(T ) is tight in Ys,s′(T ), for any s < 1 and s′ > 2.
Proof.
Each probability measure L(vn) is inner regular since both spaces Xγ,β(T ) and Ys,s′(T )are Frechet spaces, thus metrizable, complete and separable. Therefore, in order to applyProkhorov criterion of tightness, it is sufficient to prove that for any ε > 0, there exists acompact Kε of Ys,s′(T ) such that
L(vn)(Kε) ≥ 1− ε,
for any n ∈ N. Thus, for any ε > 0, let Bε be the following subset of Xγ,β(T ):
Bε =⋂k∈N
|ϕ|2L2(0,T,H1(−k,k)) + |ϕ|2W γ,2(0,T,H−2(−k,k))
+ |ϕ|2Cβ(0,T,H−2(−k,k)) ≤2k
ε(C8(k) + C9(k) + C10(k))
17

We then take Kε as the closure of Bε in Ys,s′(T ). Then (3.54)–(3.57) together with theBienayme–Chebyshev inequality and Lemma 2.5 yield the result.
In order to use Lemma 2.4 and get convergence in probability in the suitable spaces,we use a slightly different formulation of the previous Proposition whose proof is straight-forward.
Proposition 3.11 For any T > 0, s < 1 and s′ > 2, for any pair of subsequence (nk,mk),the family of laws L(vnk
, vmk,W )k≥0 is tight in
(Ys,s′(T ))2 × C(0, T, H−2loc ).
Owing to Proposition 3.11, we now apply Skorohod’s embedding Theorem to somesubsequence (vn`
, vm`,W ). Then there exists subsequences, which are denoted by the
same, n` and m`, a sequence of continuous stochastic processes (vn`, vm`
,W`) and atriplet of stochastic processes (v, v, W ) together with a probability space (Ω, F , P, Ftt≥0),such that the corresponding joint laws are equal:
L(vn`, vm`
,W`) = L(vn`, vm`
,W ),(3.60)
for any integer ` and such that
(vn`, vm`
) −→ (v, v), W` −→ W , P a.s.(3.61)
as ` tends to +∞, respectively in (Ys,s′(T ))2 and C(0, T, H−2loc ).
We now have to take the limit in (3.58) almost surely in the weak sense of distributions.It is the deterministic part of the proof.
We first note that both vn` and vm`
satisfies (3.58)–(3.59), in the weak sense ofdistributions, with W replaced by W`. This is true thanks to the following observations.First, the scalar product of the deterministic part of (3.58) (the drift) with any test functionϕ is continuous from Ys,s′(T ) into C(0, T ). In fact, this follows from the arguments used inthe passage to the limit in the weak sense below. Second, the time discretization (3.59) ofthe stochastic integral allows to say that the same is true for the stochastic part of (3.58),i.e. the scalar product of this stochastic part with any test function is continuous fromC(0, T, H−2(−R,R)) into C(0, T ). We deduce
vm`(t) = u0 −
∫ t
0
m∑k=1
(∂3
xvm`
(tk+1/2
)+
12∂x
(vm`
(tk+1/2
))2) 1[tk,tk+1[(s) ds
−m∑k=1
Φ(tk+1 − t)W`(tk−1) + (t− tk)W`(tk)
∆t1[tk,tk+1[(t)(3.62)
We are now able to let ` go to infinity in (3.62). We recall from (3.61) that vm`→ v
almost surely in L2(0, T, Hsloc) ∩ C(0, T, H−2
loc ) for any s < 1. It follows that
m∑k=0
∫ ·
0∂3
xvm`(tk+1/2)1[tk,tk+1[(s) ds −→
∫ ·
0∂3
xv(s) ds,
P-almost surely in L∞(0, T, Hs−3loc (R)).
18

Also concerning the nonlinear term, one has for any t ∈ [0, T ] and for any positive R:∥∥∥∥∥m∑k=0
∫ t
0
(∂xv2
m`(tk+1/2)− ∂xv2(s)
)1[tk,tk+1[(s) ds
∥∥∥∥∥H−1(−R,R)
≤ I + II
where
I =m∑k=0
∫ t
0‖∂xv2
m`(tk+1/2)− ∂xv2
m`(s)‖H−1(−R,R)1[tk,tk+1[(s) ds,
and
II =m∑k=0
∫ t
0‖∂xv2
m`(s)− ∂xv2(s)‖H−1(−R,R)1[tk,tk+1[(s) ds.
It follows from the Gagliardo–Nirenberg inequality
‖vm`(tk+1/2)− vm`
(s)‖L4(−R,R)
≤ CR‖vm`(tk+1/2)− vm`
(s)‖1/4H−2(−R,R)
‖vm`(tk+1/2)− vm`
(s)‖3/4H1(−R,R)
,
that
‖∂xv2m`
(tk+1/2)− ∂xv2m`
(s)‖H−1(−R,R)
≤ ‖vm`(tk+1/2)− vm`
(s)‖L4(−R,R)‖vm`(tk+1/2) + vm`
(s)‖L4(−R,R)
≤ CR‖vm`(tk+1/2)− vm`
(s)‖1/4H−2(−R,R)
(‖vm`
(tk+1/2)‖7/4H1(−R,R)
+ ‖vm`(s)‖7/4
H1(−R,R)
).
Hence, we get the following bound
I ≤ C(R, T )(∫ T
0‖vm`
(s)‖7/4H1(−R,R)
ds
)sup
|t−s|≤∆t‖vm`
(t)− vm`(s)‖1/4
H−2(−R,R)(3.63)
≤ C(R, T )(∫ T
0‖vm`
(s)‖7/4H1(−R,R)
ds
)∆tβ/4‖vm`
‖1/4
Cβ(0,T,H−2(−R,R)),
for any β < 1/2. The second term II is easier to estimate
II ≤ 2(∫ T
0‖v(s)‖2
Hs(−R,R) ds
)1/2(∫ T
0‖vm`
(s)− v(s)‖2Hs(−R,R) ds
)1/2
,(3.64)
for some s ∈ [1/4, 1[. Eventually, it follows from (3.61), (3.63) and (3.64) that
m∑k=0
∫ ·
0∂xv2
m`(tk+1/2)1[tk,tk+1[(s) ds −→
∫ ·
0∂xv2(s) ds
P-almost surely in L∞(0, T, H−1loc (R)) as ` tends to infinity.
As concerns the stochastic term of (3.62), the very definition of Ito stochastic integraltogether with (3.61) shows that
m∑k=1
∫ ·
0Φ
W`(tk)−W`(tk−1)∆t
1[tk,tk+1[(s) ds →∫ ·
0Φ dW (s),
P-almost surely in C(0, T, L2loc). Eventually, we have shown that
19

Lemma 3.12 The stochastic process v adapted to Ft, satisfies
v(t)− u0 +∫ t
0
(∂3
xv(s) +12∂xv2(s)
)ds =
∫ t
0Φ dW (s), t ∈ [0, T ],(3.65)
in the weak sense of distributions with
(1 + x+)3/8v ∈ L∞(0, T, L2(R)), Pa.s.,
∂xv ∈ L2(0, T, L2loc), Pa.s..
We now end the proof of Theorem 2.3. By Theorem 2.1, we know that the solutiongiven by Lemma 3.12 is unique. Hence, we know that (vm`
, vn`) tends to (u, u) in dis-
tribution, u given by Theorem 2.1. Then Lemma 2.4 implies that the whole sequencevn converges in probability u ∈ Ys,s′(T ). Now, we show that the convergence holds inL2(Ω; L∞(0, T, L2(R))). First, it is clear that (3.53) and weak convergence implies that forany t ∈ [0, T ], we have
supt∈[0,T ]
E‖u(t)‖2 ≤ lim infn
supt∈[0,T ]
E‖vn(t)‖2.(3.66)
andE sup
t∈[0,T ]‖u(t)‖2 ≤ lim inf
nE sup
t∈[0,T ]‖vn(t)‖2.(3.67)
Moreover, it is not difficult to see that owing to the convexity of the L2(R)-norm, we have,for any t ∈ [tk, tk+1[, the following inequality
‖vn(t)‖2 ≤ ‖uk−1n ‖2 +
(t− tk∆t
)(‖uk
n‖2 − ‖uk−1n ‖2
).
We deduce by (3.31) that for any t ∈ [0, T ], the following inequality holds
‖vn(t)‖2 ≤ ‖u0‖2 +2√∆t
∫ t
0
n−1∑k=0
1[tk, tk+1[(s)(uk−1/2n , χk) ds.
As in the proof of Proposition 3.2 (estimate (3.22)), we split the stochastic integral intotwo parts:
2√∆t
∫ t
0
n−1∑k=0
1[tk,tk+1[(s)(uk−1/2n , χk) ds = I + II,
where
I =1√∆t
∫ t
0
n−1∑k=0
1[tk,tk+1[(s)
(uk
n − Snuk−1n ,ΦW (tk)− ΦW (tk−1
)√
∆t,
and
II =1√∆t
∫ t
0
n−1∑k=0
1[tk,tk+1[(s)
(uk−1
n + Snuk−1n ,ΦW (tk)− ΦW (tk−1
)√
∆t.
Plugging the semi-discrete mild formulation (3.32) in I yields
I =∫ t
0
n−1∑k=1
1[tk,tk+1[(s)
−1
2
(Λn
((uk−1/2
n
)2)
, χk
)+
((I +
∆t
2∂3
x
)−1
χk, χk
)ds,
20

where
Λn =√
∆t
(I +
∆t
2∂3
x
)−1
∂x.
We have ∥∥∥∥∥√∆t
(I +
∆t
2∂3
x
)−1
∂x
∥∥∥∥∥L(L1(R),H−ε(R))
≤ C∆tε/3.
Therefore, using (3.33) for the second term,
E supt∈[0,T ]
‖I‖ ≤ C(T )∆tε/3 maxk=1,...,n
E(‖uk−1/2
n ‖2‖χk‖Hε
)+
∑k=0,...,n−1
∆t E‖χk‖2.
Thanks to (3.20) and (3.21), we derive
lim supn
supt∈[0,T ]
E‖I‖ ≤ lim supn
E supt∈[0,T ]
‖I‖ ≤ T‖Φ‖2L2
.
Since the expectation of the second term II is zero, we deduce
lim supn
supt∈[0,T ]
E‖vn(t)‖ ≤ ‖u0‖2 + T‖Φ‖2L2
= supt∈[0,T ]
E‖u(t)‖2.
Weak convergence, this inequality and (3.66) imply that vn converges to u in L∞(0, T ;L2(Ω×R)) strongly. It is then easy to use this convergence to show that
E( supt∈[0,T ]
|II − 2∫ t
0(u(s), dW (s))|) → 0
and we deduce
lim supn
E supt∈[0,T ]
‖vn(t)‖ ≤ ‖u0‖2 + T‖Φ‖2L2
+ 2E supt∈[0,T ]
∫ t
0(u(s), dW (s)) = E sup
t∈[0,T ]‖u(t)‖2.
Using (3.67) and weak convergence, the convergence in L2(Ω; L∞(0, T : L2(R))) follows.
References
[1] A. de BOUARD and A. DEBUSSCHE, On the stochastic Korteweg–de Vries equation, J. Funct. Anal.154, 215–251 (1998).
[2] A. de BOUARD and A. DEBUSSCHE, A semi-discrete scheme for the stochastic nonlinear Shrondingerequation, Numer. Math. 96(4), 733–770 (2004).
[3] A. de BOUARD, A. DEBUSSCHE and Y. TSUTSUMI, White noise driven stochastic Korteweg–deVries equation, J. Funct. Anal. 169(2), 532–558 (1999).
[4] A. de BOUARD, A. DEBUSSCHE and Y. TSUTSUMI, The stochastic Korteweg–de Vries equation:the periodic case, SIAM Journal on Math. Anal., Vol. 36, No 3, 815-855, (2004).
[5] H.Y. CHANG, Ch. LIEN, S. SUKARTO, S. RAYCHAUDHURY, J. HILL, E.K. TSIKIS and K.E. LON-NGREN, Propagation of Ion–Acoustic solitons in a non–quiescent plasma, Plasma Phys. ControlledFusion 28 (1986), 675–681.
[6] G. DA PRATO and A. DEBUSSCHE, m–dissipativity of Kolmogorov operators corresponding to Burg-ers equations with space–time white noise, preprint.
[7] G. DA PRATO, A. DEBUSSCHE and L. TUBARO, Coupling for some partial differential equationsdriven by white noise, to appear in Stoch. Proc. and Appl.
21

[8] A. DEBUSSCHE and J. PRINTEMS, Numerical simulation of the stochastic Korteweg–de Vries equa-tion, Physica D 134(2), 200–226 (1999).
[9] A. DEBUSSCHE and J. PRINTEMS, Effect of a localized random forcing on the Korteweg–de Vriesequation, J. of Comput. Anal. and Appl. (2001).
[10] F. FLANDOLI and D. GATAREK, Martingale and stationary solutions for stochastic Navier–Stokesequations, Probab. Theory Relat. Fields 102, 367–391 (1995).
[11] R. HERMAN, The stochastic, damped Korteweg–de Vries equation, J. Phys. A: Math. Gen. 23 (1990),1063–1084.
[12] J. GINIBRE and Y. TSUTSUMI, Uniqueness of solutions for the generalized Korteweg–de Vries equa-tion, SIAM J. Math. Anal. 20, 1388–1425 (1999).
[13] I. GYONGY and D. NUALART, Implicit scheme for stochastic parabolic partial differential equationsdriven by space-time white noise, Potential Anal. 7, no. 4, 725–757, (1997).
[14] I. GYONGY and N. V. KRYLOV, Existence of strong solutions for Ito’s stochastic equations viaapproximations, Probab. Theory Relat. Fields 105, 143–158 (1996).
[15] V.V. KONOTOP and L. VASQUEZ, Nonlinear random waves, World Scientific, Singapore, 1994.
[16] J.L. LIONS, Quelques methodes de resolution des problemes aux limites non lineaires,Dunod, Paris, 1969.
[17] J. PRINTEMS, The stochastic Korteweg–de Vries equation in L2(R), J. Diff. Eq. 153(2), 338–373(1999).
[18] G.N. MILSTEIN, Y.M. REPIN, M.V. TRETYAKOV, Symplectic integration of Hamiltonian systemswith additive noise, SIAM J. Numer. Anal. V. 39, No 6, 2066-2088, (2002).
[19] G.N. MILSTEIN, Y.M. REPIN, M.V. TRETYAKOV, Numerical methods for stochastic systems pre-serving symplectic structure, SIAM J. Numer. Anal. V. 40, No 4, 1583-1604, (2003).
[20] M. SCALERANDI, A. ROMANO and C.A. CONDAT, Korteweg–de Vries solitons under additivestochastic perturbations, Phys. Review E 58 (1998), 4166–4173.
[21] M. WADATI, Stochastic Korteweg–de Vries equation, J. Phys. Soc. Japan 52 (1983), 2642–2648.
[22] M. WADATI and Y. AKUTSU, Stochastic Korteweg–de Vries equation with and without damping, J.Phys. Soc. Japan 53 (1984), 3342.
22

4.6. WEAK ORDER FOR THE STOCHASTIC HEAT EQUATION 193
4.6 Weak order for the discretization of the stochastic heatequation.
L’article qui suit fait l’objet d’une prépublication.

Weak order for the discretization of the stochastic heat
equation.
Arnaud Debussche∗ Jacques Printems†
Abstract
We are dealing in this paper about the approximation of the distribution of Xt
Hilbert–valued stochastic process solution of a linear parabolic stochastic partial dif-ferential equation written in an abstract form as
dXt +AXt dt = Q1/2dWt, X0 = x ∈ H, t ∈ [0, T ],
driven by a Gaussian space time noise whose covariance operator Q is given. The mainassumptions are that A−α is a finite trace operator for some α > 0 and that Q isbounded from H into D(Aβ) for some β ≥ 0, is not supposed to be nuclear and doesnot commute with A.
The discretization is achieved thanks to finite element methods in space (parameterh > 0) and implicit Euler schemes in time (parameter ∆t = T/N). We define a discretesolution Xn
h and for suitable functions ϕ defined on H, we show that
|Eϕ(XNh )− Eϕ(XT )| = O(h2γ + ∆tγ)
where γ < 1− α+ β without any stability conditions. Let us note that as in the finitedimensional case the rate of convergence is twice the one for pathwise approximations.
1 Introduction
In this article, we study the convergence of the distributions of numerical approximations ofthe solutions of the solutions of a large class of linear parabolic stochastic partial differentialequations. The numerical analysis of stochastic partial differential equations has beenrecently the subject of many articles. (See among others [1], [8], [11], [12], [13], [14], [15],[16], [17], [18], [19], [23], [24], [27], [28], [34], [32], [33]). In all these papers, the aim is to giveestimate on the strong order of convergence for a numerical scheme. In other words, on theorder of pathwise convergence. It is well known that in the case of stochastic differentialequations in finite dimension, the so-called weak order is much better than the strong order.The weak order is the order of convergence of the law of approximations to the true solution.For instance, the standard Euler scheme is of strong order 1/2 for the approximation of astochastic differential equation while the weak order is 1. A basic tool to study the weakorder is the Kolmogorov equation associated to the stochastic equation (see [21], [25], [26][30]).∗IRMAR et ENS de Cachan, antenne de Bretagne, Campus de Ker Lann, avenue Robert Schumann,
35170 BRUZ, FRANCE. [email protected]†Laboratoire d’Analyse et de Mathematiques Appliquees, CNRS UMR 8050, Universite de Paris XII, 61,
avenue du General de Gaulle, 94010 CRETEIL, FRANCE. [email protected]
1

In infinite dimension, this problem has been studied in much less articles. In [3], the caseof a stochastic delay equations is studied. To our knowledge, only [9] considers a stochasticpartial differential equations. There the nonlinear Schrodinger equations is considered. Inthe present article, we consider the case of the full discretization of a parabolic equation.We restrict our attention to a linear equation with additive noise which contains severaldifficulties. The general case of semilinear equations with state dependent noise presentfurther difficulties and will be treated in a forthcoming article.
Note that there are essential differences between the equations treated in [3] and [9]. Indeed,no spatial difference operator appear in a delay equation. In the case of the Schrodingerequation the linear evolution defines a group and it is possible to get rid of the differentialoperator by inverting the group. Furthermore, in [9], the data are assumed to be verysmooth.
In this article, we get rid of the differential operator by a similar trick as in [9]. However,since the linear evolution operator is not invertible, this introduces extra difficulties. More-over, we consider a full discretization using an implicit Euler scheme and finite elements forthe spatial discretization. We give estimate of the weak order of convergence with minimalregularity assumptions on the data. In fact we show that as in the finite dimensional casethe weak order is twice the strong order of convergence, both in time and space.
In dimension d = 1, 2, 3, let us consider the following stochastic partial differential equation:
∂u(x, t)∂t
−∆u(x, t) = η(x, t),(1.1)
where x ∈ O, a bounded open set of Rd, and t ∈]0, T ], with Dirichlet boundary conditions
and initial data and η =∂η
∂twith η denotes a real valued Gaussian process. It is convenient
to use an abstract framework to describe the noise more precisely. Let W be a cylindrical
Wiener process on L2(O), in other words∂W
∂tis the space time white noise. Equivalently,
given an orthonormal basis of L2(O), W has the following expansion
W (t) =∑
i∈Nβi(t)ei
where (βi)i∈N is a family of independent standard brownian motions (See section 2.4 below).We consider noises of the form η(t) = Q1/2W (t) where Q is a non negative symmetricbounded linear operator on L2(O). For example1, given a function q defined on O, we cantake
η(x, t) =∫
Oq(x− y)W (y, t)dy,
Then the process η has the following correlation function:
E η(x, t)η(y, s) = c(x− y)(t ∧ s) with c(r) =∫
Oq(z + r)q(z) dz.
The operator Q is then given by Qf(x) =∫O c(x−y)f(y) dy. Note that if the q is the Dirac
mass at 0, η = W and Q = I.
Let us also set A = −∆, D(A) = H2(O) ∩H10 (O) and H = L2(O). Then A : D(A) → H
can be seen as an unbounded operator on H with domain D(A). Our main assumption1The equations describing this example are formal, it is not difficult to give a rigourous meaning. This
is not important in our context. Note that q does not need to be a function and a distribution is allowed.
2

concerning Q is that Aσ/2Q defines a bounded operator on L2(O) with σ > −1/2 if d = 1,σ > 0 if d = 2 and σ > 1/2 if d = 3. In the example above this amounts to require that(−∆)σ/2q ∈ L2(O). It is well known that theses conditions are sufficient to ensure theexistence of continuous solutions of (1.1).
If we write u(t) = u(·, t) seen as a H–valued stochastic process then (1.1) can be rewrittenunder the abstract Ito form
du(t) +Au(t) dt = Q1/2 dW (t).(1.2)
In this article, we consider such an abstract equation and study the approximation of thelaw of the solutions of (1.2) by means of finite elements of the distribution of u in H. LetVhh≥0 be a family of finite dimensional subspaces of D(A1/2). Let N ≥ 1 an integer and∆t = T/N . The numerical scheme is given by
(un+1h − unh, vh) + ∆t(Aun+θ
h , vh) =√
∆t (Q1/2χn+1, vh),(1.3)
for any vh ∈ Vh, where√
∆t χn+1 = W ((n + 1)∆t) − W (n∆t) is the noise incrementand where (·, ·) is the inner product of H. The unknown is approximated at time n∆t,0 ≤ n ≤ N by unh ∈ Vh. In (1.3), we have used the notation un+θ
h for θun+1h + (1− θ)unh for
some θ ∈ [0, 1]. We prove that an error estimate of the following form
|E(ϕ(u(n∆t))− E(ϕ(unh))| ≤ c(h2γ + ∆tγ)
for any function ϕ which is C2 and bounded on H. With the above notation, γ is requiredto be strictly less than 1− d/2 +σ/2. This is exactly twice the strong order (see [32], [34]).If d = 1 and σ = 0, the condition is γ < 1/2 and we obtain a weak order which 1/2 in timeand 1 in space.
2 Preliminaries
2.1 Functional spaces.
It is convenient to change the notations and rewrite the unknown of (1.2) as X. We thusconsider the following stochastic partial differential equation written in the abstract form
dXt +AXt dt = Q1/2dWt, X0 = x ∈ H, 0 < t ≤ T,(2.4)
where H is a Hilbert space whose inner product is denoted by (·, ·) and its associatednorm by | · |, the process Xtt∈[0,T ] is an H–valued stochastic process, A a non negativeself-adjoint unbounded operator on H whose domain D(A) is dense in H and compactlyembedded in H, Q a non negative symmetric operator on H and Wtt∈[0,T ] a cylindricalWiener process on H adapted to a given normal filtration Ftt∈[0,T ] in a given probabilityspace (Ω,F ,P).
It is well known that there exists a sequence of nondecreasing positive real numbers λnn≥1
together with enn≥1 a Hilbertian basis of H such that
Aen = λnen with limn→+∞λn = +∞.
We set for any s ≥ 0,
D(As/2) =
u =
+∞∑
n=1
unen ∈ H such that+∞∑
n=1
λsnu2n < +∞
,
3

andAsu =
∑
n≥1
λsnunen, ∀u ∈ D(As).
It is clear that D(As/2) endowed with the norm u 7→ ‖u‖s := |As/2u| is a Hilbert space. Wedefine also D(A−s/2) with s ≥ 0 as the completed space of H for the topology induced bythe norm ‖u‖−s =
∑n≥1 λ
−sn u2
n. In this case D(A−s/2) can be identified with the topologicaldual of D(As/2), i.e. the space of the linear forms on D(As/2) which are continuous withrespect to the topology induced by the norm ‖ · ‖s.Moreover, theses spaces can be obtained by interpolation between them. Indeed, for any
reals s1 ≤ s ≤ s2, one has the continuous embeddings D(As1/2) ⊂ D(As/2) ⊂ D(As2/2) andby Holder inequality
‖u‖s ≤ ‖u‖1−λs1 ‖u‖λs2 , s = (1− λ)s1 + λs2,(2.5)
for any u ∈ D(As2/2).
We denote by ‖ · ‖X the norm of a Banach space X. If X and Y denote two Banachspaces, we denote by L(X,Y ) the Banach space of bounded linear operators from X intoY endowed with the norm ‖B‖L(X,Y ) = supx∈X ‖Bx‖Y /‖x‖X . When X = Y , we use theshorter notation L(X).
If L ∈ L(H) is a nuclear operator, Tr(L) denotes the trace of the operator L, i.e.
Tr(L) =∑
i≥1
(Lei, ei) ≤ +∞.
It is well known that the previous definition does not depend on the choice of the Hilbertianbasis. Moreover, the following properties hold
Tr(LM) = Tr(ML), for any L,M ∈ L(H),(2.6)
andTr(LM) ≤ Tr(L)‖M‖L(H), for any L ∈ L+(H), M ∈ L(H),(2.7)
where L+(H) denotes the set non negative bounded linear operators on H.
Hilbert-Schmidt operators play also an important role. Given two Hilbert spaces K1, K2,an operator L ∈ L(K1,K2) is Hilbert-Schmidt if L∗L is a nuclear operator on K1 orequivalently if LL∗ is nuclear on K2. We denote by L2(K1,K2) the space of such operators.It is a Hilbert space for the norm
‖L‖L2(K1,K2) = (Tr(L∗L))1/2 = (Tr(LL∗))1/2 .
It is classical that, given four Hilbert spaces K1, K2, K3, K4, if L ∈ L2(K2,K3), M ∈L(K1,K2), N ∈ L(K3,K4) then NLM ∈ L2(K1,K4) and
‖NLM‖L2(K1,K4) ≤ ‖N‖L(K3,K4)‖L‖L2(K2,K3)‖M‖L(K1,K2).(2.8)
See [6], appendix C, or [10] for more details on nuclear and Hilbert-Schmidt operators.
If X is a Banach space, we denote by Cb(H;X) the Banach space of X-valued, continuousand bounded functions on H. We also denote by Ckb (H) the space of k-times continuouslydifferentiable real valued functions on H. The first order differential of a function ϕ ∈C1b (H) is identified with its gradient and is then considered as an element of Cb(H;H). It
is denoted by Dϕ. Similarly, the second order differential of a function ϕ ∈ C2b (H) is seen
as a function from H into the Banach space L(H) and is denoted by D2ϕ.
4

2.2 The deterministic stationary problem
We need some classical results on the deterministic stationary version of (2.4). In thiscase, special attention has to be paid to the space V = D(A1/2) ⊂ H. It is a Hilbert spacewhose embedding into H is dense and continuous. Its inner product is denoted by ((·, ·)).We have
((u, v)) = (A1/2u,A1/2v), for any u ∈ V, v ∈ V= (Au, v), for any u ∈ D(A), v ∈ H.
Then by a density argument and the uniqueness of the Riesz representation (in V ) weconclude that A is invertible from V into V ′ = D(A−1/2) or from D(A) into H. We willset T = A−1 its inverse. It is bounded and positive on H and on V .
For any f ∈ H, u = Tf is by definition the unique solution of the following problem
u ∈ V, ((u, v)) = (f, v), for any v ∈ V.(2.9)
Let Vhh>0 be a family of finite dimensional subspaces of V parametrized by a smallparameter h > 0. For any h > 0, we denote by Ph (resp. Πh) the orthogonal projectorfrom H (resp. V ) onto Vh with respect to the inner product (·, ·) (resp. ((·, ·))).For any h > 0, we denote by Ah the linear bounded operator from Vh into Vh defined by
((uh, vh)) = (Ahuh, vh) = (Auh, vh) for any uh ∈ Vh, vh ∈ Vh.(2.10)
It is clear that Ah : Vh → Vh is also invertible. Its inverse is denoted by Th. For any f ∈ H,uh = Thf is by definition the solution of the following problem :
uh ∈ Vh, ((uh, vh)) = (f, vh) = (Phf, vh), for any vh ∈ Vh.(2.11)
It is also clear that Ah and Th are positive definite symmetric bounded linear operators onVh. We denote by λi,h1≤i≤I(h) the sequence of its nonincreasing positive eigenvalues andei,h1≤i≤I(h) the associated orthonormal basis of Vh of its eigenvectors. Again, by Holderinequality, Ah satisfies the following interpolation inequality
|Ashuh| ≤ |As1h uh|λ|As2h uh|1−λ, uh ∈ Vh, s = λs1 + (1− λ)s2.(2.12)
The consequences of (2.10) are summarized in the following Lemma.
Lemma 2.1 Let Ah ∈ L(Vh) defined in (2.10). Let T and Th defined in (2.9) and (2.11).Then the following hold for any wh ∈ Vh and v ∈ V :
ThPh = ΠhT,(2.13)
|A1/2wh| = |A1/2h wh|(2.14)
|T 1/2h wh| = |T 1/2wh|,(2.15)
|T 1/2h Phv| ≤ |T 1/2v|.(2.16)
Proof
Now let f ∈ H. We consider the two solutions u and uh of (2.9) and (2.11). Since Vh ⊂ V ,we can write (2.9) with vh ∈ Vh. Then, substracting we get ((u − uh, vh)) = 0. Hence,uh = Πhu the V -orthogonal projection of u onto Vh, i.e. ThPhf = ΠhTf .
5

Equation (2.14) follows immediately from the definition (2.10) of Ah. We now prove (2.16).Equations (2.13) and (2.14) imply |A−1/2
h Phv| = ‖ThPhv‖ = ‖ΠhTv‖ ≤ ‖Tv‖ = |A−1/2v|,since Πh : V → Vh is an orthogonal projection for the inner product ‖ · ‖.As regards (2.15), on one hand (2.16) with v = wh ∈ Vh ⊂ V gives the first inequalty|T 1/2h wh| ≤ |T 1/2wh|. On the other hand, by (2.10),
|(Ahuh, vh)| = |(Auh, vh)| ≤ |A1/2uh||A1/2vh| = |A1/2uh||A1/2vh|.
So Ahuh can be considered as a continuous linear form onD(A1/2), i.e. belongs toD(A−1/2),and
|A−1/2Ahuh| ≤ |A1/2uh| = |A1/2h uh|.
Taking uh = A−1h wh gives |A−1/2wh| ≤ |A−1/2
h wh|. Eq. (2.15) follows.
Our main assumptions concerning the spaces Vh is that the corresponding linear ellipticproblem (2.11) admits an O(hr) error estimates in H and O(hr−1) in V for some r ≥ 2.It is classical to verify that these estimates hold if we suppose that Πh satisfies for someconstant κ0 > 0,
|Πhv − v| ≤ κ0 hs|As/2v|, 1 ≤ s ≤ r,(2.17)
|A1/2(Πhw − w)| ≤ κ0 hs′−1|As′/2w|, 1 ≤ s′ ≤ r − 1,(2.18)
where v ∈ D(As/2) and w ∈ D(As′/2).
Finite elements satisfying these conditions are for example Pk triangular elements ona polygonal domain or Qk rectangular finite element on a rectangular domain providedk ≥ 1. Approximation by splines can also be considered. (See [4], [29]).
2.3 The deterministic evolution problem
We recall now some results about the spatial discretization of the solution of the deter-ministic linear parabolic evolution equation:
∂u(t)∂t
+Au(t) = 0, u(0) = y,(2.19)
by the finite dimensional one
∂uh(t)∂t
+Ahuh(t) = 0, uh(0) = Phy ∈ Vh.
It is well known that, under our assumptions, (2.19) defines a contraction semi-group onH denoted by S(t) = e−tA for any t ≥ 0. Its solution can be read as u(t) = S(t)y wheret ≥ 0. The main properties of S(t) (contraction, regularization) are summed up below:
|e−tAx| ≤ |x|, for any x ∈ H,(2.20)
and|Ase−tAx| ≤ C(s)t−s|x|,(2.21)
6

for any t > 0, s ≥ 0 and x ∈ H. Such a property is based on the definition of As and thefollowing well known inequality
supx≥0
xεe−tx ≤ C(ε)t−ε, for any t > 0.(2.22)
In the same manner, we denote by Sh(t) or e−tAh the semi-group on Vh such that uh(t) =Sh(t)Phy, for any t ≥ 0.
We have various types of convergence of uh towards u depending on the regularity of theinitial data y. The optimal rates of convergences remain the same as in the correspondingstationary problems (see (2.17)–(2.18)). The estimates are not uniform in time near t = 0since the regularization of S(t) is used to prove them. The following Lemma gives twoclassical properties needed in this article.
Lemma 2.2 Let r ≥ 2 be such that (2.17) and (2.18) hold and q, q′, s, s′ such that0 ≤ s ≤ q ≤ r, s′ ≥ 0, 1 ≤ q′ + s′ ≤ r − 1 and q′ < 2. Then there exists constants κi > 0,i = 1, 2 independent on h such that for any time t > 0, one has:
‖Sh(t)Ph − S(t)‖L(D(As/2),H) ≤ κ1 hq t−(q−s)/2,(2.23)
‖Sh(t)Ph − S(t)‖L(D(As′/2),D(A1/2)) ≤ κ2 h
q′+s′ t−(q′+1)/2.(2.24)
The proof of (2.23) can be found in [2] (see also [31], Theorem 3.5, p. 45). The proofof (2.24) can be found in [20], Theorem 4.1, p. 342 (with f = 0)). In fact, we use onlys = s′ = 0 and q′ = 1 below.
2.4 Infinite dimensional stochastic integrals
In this section, we recall basic results on the stochastic integral with respect to the cylin-drical Wiener process Wt. More details can be found for instance in [6].
It is well known that Wt has the following expansion
Wt =+∞∑
i=1
βi(t)ei,
where βii≥1 denotes a family of real valued mutually independent Brownian motions on(Ω,F ,P, Ftt≥0). The sum does not converge in H and this reflects the bad regularityproperty of the cylindrical Wiener process. However, it converges a.s. and in Lp(Ω;U),p ≥ 1, for any space U such that H ⊂ U with a Hilbert-Schmidt embedding. If H = L2(O),O ⊂ Rd open and bouded, we can take U = H−s(O), s > d/2.
Such a Wiener process can be characterized by
E (Wt, u)(Ws, v) = min(t, s)(u, v)
for any t, s ≥ 0 and u, v ∈ H.
Given any predictable operator valued function t 7→ Φ(t), t ∈ [0, T ], it is possible to define∫ T0 Φ(s)dW (s) in a Hilbert space K if Φ takes values in L2(H,K) and
∫ T0 ‖Φ(s)‖2L2(H,K)ds <
7

∞ a.s. In this case∫ T
0 Φ(s)dW (s) is a well defined random variable with values in K and
∫ T
0Φ(s)dW (s) =
∞∑
i=1
∫ T
0Φ(s)eidβi(s).
Moreover, if E(∫ T
0 ‖Φ(s)‖2L2(H,K)ds)<∞, then
E(∫ T
0Φ(s)dW (s)
)= 0,
and
E
((∫ T
0Φ(s)dW (s)
)2)
= E(∫ T
0‖Φ(s)‖2L2(H,K)ds
).
We will consider below expressions of the form∫ t
0 ψ(s)Q1/2dW (s). These are then squareintegrable random variables in H with zero average if
E(∫ T
0‖ψ(s)Q1/2‖2L2(H,K)ds
)= E
∫ T
0Tr (ψ∗(s)Qψ(s)) ds <∞.
The solution of equation (2.4) can be written explicitly in terms of stochastic integrals. Inorder that these are well defined, we assume throughout this paper that there exists realnumbers α > 0 and min(α− 1, 0) ≤ β ≤ α such that
∞∑
n=1
λ−αn = ‖A−α/2‖2L2(H) = Tr(A−α) < +∞.(2.25)
andAβQ ∈ L(H).(2.26)
Condition (2.26) implies thatQ is a bounded operator fromH intoD(Aβ). By interpolation,we deduce immediately that for any λ ∈ [0, 1], AλβQλ ∈ L(H) and
‖AλβQλ‖L(H) ≤ ‖AβQ‖λL(H).(2.27)
Example 2.3 If one considers the equations described in the introduction where A is theLaplace operator with Dirichlet boundary conditions, it is well known that (2.25) holds forα > d/2.
We have the following result.
Proposition 2.4 Assume that (2.25), (2.26) hold and
1− α+ β > 0.(2.28)
Then there exists a unique Gaussian stochastic process which is the weak solution (in thePDE sense) of (2.4) continuous in time with values in L2(Ω,H). It is given by the formulawhich holds a.s. in H:
Xt = e−tAx+∫ t
0e−(t−s)AQ1/2 dWs = e−tAx+
+∞∑
i=1
(∫ t
0e−(t−s)λidβi(s)
)Q1/2ei.
8

Proof
By Theorem 5.4 p. 121 in [6], it is sufficient to see that the stochastic integral make sensein H, i.e.
∫ t
0‖e−(t−s)AQ1/2‖2L2(H)ds =
∫ t
0Tr
(e−(t−s)AQe−(t−s)A
)ds <∞,
for any t ∈ [0, T ]. We use (2.8) to estimate the Hilbert-Schmidt norm:
‖e−(t−s)AQ1/2‖L2(H) ≤ ‖Aβ/2Q1/2‖L(H)‖A−α/2‖L2(H)‖e−(t−s)AA(−β+α)/2‖L(H)
≤ c(t− s)−1/2(−β+α)
by (2.21), (2.25) and (2.27). The conclusion follows since −β + α < 1.
3 Weak convergence of an implicit scheme.
3.1 Setting of the problem and main result.
In this section, we state the weak approximation result on the full discretization of (2.4).
We first describe the numerical scheme. Let N ≥ 1 be an integer and Vhh>0 the familyof finite element spaces introduced in Section 2. Let ∆t = T/N and tn = n∆t, 0 ≤ n ≤ N .For any h > 0 and any integer n ≤ N , we seek for Xn
h , an approximation of Xtn , such thatfor any vh in Vh:
(Xn+1h −Xn
h , vh) + ∆t (AXn+θh , vh) = (Q1/2Wtn+1 −Q1/2Wtn , vh),(3.29)
with the initial condition(X0
h, vh) = (x, vh), ∀vh ∈ Vh,(3.30)
whereXn+θh = θXn+1
h + (1− θ)Xnh ,
with1/2 < θ ≤ 1.(3.31)
Recall that for θ ≤ 1/2, the scheme is in general unstable and a CFL condition is necessary.
Then (3.29)–(3.30) can be rewritten as
Xn+1h −Xn
h + ∆tAhXn+θh =
√∆tPhQ1/2χn+1,(3.32)
X0h = Phx,(3.33)
whereχn+1 =
1√∆t
(W(n+1)∆t −Wn∆t
),
and where we recall that Ph : H → Vh is the H-orthogonal projector. Hence χnn≥0 is asequence of independent and identically distributed gaussian random variables. The mainresult of this paper is stated below.
9

Theorem 3.1 Let ϕ ∈ C2b (H), i.e. a twice differentiable real valued functional defined
on H whose first and second derivatives are bounded. Let α > 0 and β ≥ 0 be such that(2.25), (2.26) and (2.28) hold. Let T ≥ 1 and Xtt∈[0,T ] be the H-valued stochastic processsolution of (2.4) given by Proposition 2.4. For any N ≥ 1, let Xn
h0≤n≤N be the solutionof the scheme (3.32)–(3.33). Then there exists a constant C = C(T, ϕ) > 0 which does notdepend on h and N such that for any γ < 1− α+ β ≤ 1, the following inequality holds
∣∣Eϕ(XNh )− Eϕ(XT )
∣∣ ≤ C (h2γ + ∆tγ
),(3.34)
where ∆t = T/N ≤ 1.
3.2 Proof of Theorem 3.1.
The scheme (3.32)–(3.33) can be rewritten as
Xnh = Snh,∆tPhx+
√∆t
n−1∑
k=0
Sn−k−1h,∆t (I + θ∆Ah)−1Phχ
k+1, 0 ≤ n ≤ N,(3.35)
where we have set for any h > 0 and N ≥ 1:
Sh,∆t = (I + θ∆tAh)−1(I − (1− θ)∆tAh).
Step 1: We introduce discrete and semi-discrete auxiliary schemes which will be usefullfor the proof of Theorem 3.1.
First, for any h > 0, let Xh(t)t∈[0,T ] be the Vh-valued stochastic process solution of thefollowing finite dimensional stochastic partial differential equation
dXh,t +AhXh,t dt = PhQ1/2dWt, Xh,0 = Phx.
It is straightforward to see that Xh,t can be written as
Xh,t = Sh(t)Phx+∫ t
0Sh(t− s)PhQ1/2dWs.(3.36)
The last stochastic integral is well defined since t 7→ Tr((Sh(t)PhQ1/2)?(Sh(t)PhQ1/2)) isintegrable on [0, T ] .
We introduce also the following Vh-valued stochastic process
Yh,t = Sh(T − t)Xh,t, t ∈ [0, T ],
which is solution of the following drift-free finite dimensional stochastic differential equation
dYh,t = Sh(T − t)PhQ1/2dWt, Yh,0 = Sh(T )Phx.(3.37)
Its discrete counterpart is given by
Y nh = SN−nh,∆t X
nh , 0 ≤ n ≤ N,(3.38)
= SNh,∆tPhx+√
∆tn−1∑
k=0
SN−k−1h,∆t (I + θ∆tAh)−1PhQ
1/2χk+1.
10

Eventually, we consider a time continuous interpolation of Y nh which is the Vh-valued
Ftt-adapted stochastic process Yh,t defined by
Yh,t = SNh,∆tPhx+∫ t
0
N−1∑
n=0
SN−n−1h,∆t (I + θ∆tAh)−11n(s)PhQ1/2dWs,(3.39)
where 1n denotes the function 1[tn,tn+1[.
It is easy to see that for any t ∈ [0, T ] and n be such that t ∈ [tn, tn+1[, we have
Yh,t = Y nh + SN−n−1
h,∆t (I + θ∆tAh)−1PhQ1/2(Wt −Wtn).
Step 2: Splitting of the error.
Let now ϕ ∈ C2b (H). The error Eϕ(XN
h )− Eϕ(XT ) can be splitted into two terms:
Eϕ(XNh )− Eϕ(XT ) = Eϕ(XN
h )− Eϕ(Xh,T ) + Eϕ(Xh,T )− Eϕ(XT )(3.40)= A+B.
The term A contains the error due to the time discretization and will be estimated uniformlywith respect to h. The term B contains the spatial error.
Step 3: Estimate of the time discretization error.
Let us now estimate the time error uniformly with respect to h. In order to do this, weconsider the solution vh : Vh → R of the following deterministic finite dimensional Cauchyproblem:
∂vh∂t
=12
Tr(
(Sh(T − t)PhQ1/2)?D2vh(Sh(T − t)PhQ1/2)),
vh(0) = ϕ.(3.41)
We have the following classical representation of the solution of (3.41) at any time t ∈ [0, T ]and for any y ∈ Vh:
vh(T − t, y) = Eϕ(y +
∫ T
tSh(T − s)PhQ1/2dWs
).(3.42)
It follows easily‖vh(t)‖C2
b (H) ≤ ‖ϕ‖C2b (H), t ∈ [0, T ].(3.43)
Now, the estimate of the time error relies mainly on the comparison of Ito formula appliedsuccessively to t 7→ vh(T − t, Yh,t) and t 7→ vh(T − t, Yh,t). First, by construction, t 7→vh(T − t, Yh,t) is a martingale. Indeed, Ito formula gives
dvh(T − t, Yh,t) =(Dvh(T − t, Yh,t), Sh(T − t)PhQ1/2dWt
).
Therefore
vh(T − t, Yh,t) = vh(T, Sh(T )Phx) +∫ t
0
(Dvh(T − s, Yh,s), Sh(T − s)PhQ1/2dWs
).
Taking t = T and the expectation implies
Eϕ(Xh,T ) = vh(T, Sh(T )Phx).(3.44)
11

On the contrary, t 7→ vh(T − t, Yh,t) is not a martingale. Nevertheless, applying Ito formulagives, thanks to (3.39),
E vh(0, Yh,T ) = E vh(T, Yh,0)− E∫ T
0
∂vh∂t
(T − t, Yh,t) dt
+12E
∫ T
0
N−1∑
n=0
Tr[(SN−n−1h,∆t Th,∆tPhQ
1/2)?D2vh
(SN−n−1h,∆t Th,∆tPhQ
1/2)]
1n(t) dt,(3.45)
where here and in equations (3.46), (3.47) below, D2vh is evaluated at (T − t, Yh,t). Alsowe have set
Th,∆t = (I + θ∆tAh)−1.
Now, plugging (3.41) into (3.45) gives:
Eϕ(XNh ) = vh(T, SNh,∆tPhx)
+12E
∫ T
0
N−1∑
n=0
Tr[(SN−n−1h,∆t Th,∆tPhQ
1/2)?D2vh
(SN−n−1h,∆t Th,∆tPhQ
1/2)
(3.46)
−(Sh(T − t)PhQ1/2
)?D2vh
(Sh(T − t)PhQ1/2
)]1n(t) dt.
At last, the comparison between (3.44) and (3.46) leads to the following decomposition ofthe time error A
Eϕ(XNh ) − Eϕ(Xh,T ) = vh(T, SNh,∆tPhx)− vh(T, Sh(T )Phx)
+12E
∫ T
0
N−1∑
n=0
Tr[ (SN−n−1h,∆t Th,∆tPhQ
1/2)?D2vh
(SN−n−1h,∆t Th,∆tPhQ
1/2)
(3.47)
−(Sh(T − t)PhQ1/2
)?D2vh
(Sh(T − t)PhQ1/2
)]1n(t) dt,
= I + II,
The term I is the pure deterministic part of the time error. Thanks to the representation(3.42), we have
I ≤ ‖ϕ‖C1b (H)‖Sh(T )Ph − SNh,∆tPh‖L(H)|x|.(3.48)
Thanks to (3.31) it is possible to bound I uniformly with respect to h. More precisely, wehave
‖(Sh(N∆t)− SNh,∆t)Ph‖L(H) = supi≥1
∣∣∣e−Nλi,h∆t − FN (λi,h∆t)∣∣∣(3.49)
≤ supz≥0
∣∣e−Nz − FN (z)∣∣
≤ κ4
N≤ κ4∆t,
for any T ≥ 1 (e.g. see Theorem 1.1, p. 921 in [22]). We have used the following notation:
F (z) =1− (1− θ)z
1 + θz, z > 0.
12

Let us now see how to estimate the term II. First, using the symmetry of D2vh, we rewritethe trace term as
Tr((SN−n−1h,∆t Th,∆tPhQ
1/2 − Sh(T − t)PhQ1/2)?D2vh
(SN−n−1h,∆t Th,∆tPhQ
1/2 − Sh(T − t)PhQ1/2))
+2 Tr((Sh(T − t)PhQ1/2
)?D2vh
(SN−n−1h,∆t Th,∆tPhQ
1/2 − Sh(T − t)PhQ1/2))
= an(t) + bn(t).
Let now α > 0 and β ≥ 0 such that (2.25) and (2.26) hold with 0 < 1 − α + β ≤ 1. Letγ > 0 and γ1 > 0 such that 0 < γ < γ1 < 1− α+ β ≤ 1.
We first estimate the term an(t). We use (2.6), (2.7), (3.43) and (2.8) to obtain
an(t) ≤ ‖D2vh(T − t)‖C2b (H)
×Tr((SN−n−1h,∆t Th,∆tPhQ
1/2 − Sh(T − t)PhQ1/2)? (
SN−n−1h,∆t Th,∆tPhQ
1/2 − Sh(T − t)PhQ1/2))
≤ ‖ϕ‖C2b (H)‖
(SN−n−1h,∆t Th,∆t − Sh(T − t)
)PhQ
1/2‖2L2(H)
≤ ‖ϕ‖C2b (H)‖
(SN−n−1h,∆t Th,∆t − Sh(T − t)
)A
(1−γ1)/2h Ph‖2L(Vh)‖A
(γ1−1)/2h PhQ
1/2‖2L2(H,Vh).
(3.50)Note that here Vh is endowed with the norm of H. Let us set
Mn(t) =∥∥∥(SN−n−1h,∆t Th,∆t − Sh(T − t)
)A
(1−γ1)/2h Ph
∥∥∥L(Vh)
= sup1≤i≤I(h)
∣∣∣∣FN−n−1(λi,h∆t)
1 + θλi,h∆t− e−λi,h(T−t)
∣∣∣∣λ(1−γ1)/2i,h .
Then we have the following bound, for n < N − 1, whose proof is postponed until the endof this article (see the appendix). Let us note that the techniques involved there are verysimilar to the ones in the proof of the strong order in [27].
Mn(t) ≤ C∆tγ/2((N − n− 1)∆t)−(1−γ1+γ)/2,(3.51)
where here and below C denotes a constant which depends only on γ1, γ, ‖ϕ‖C2b (H), ‖AβQ‖L(H)
and Tr(A−α). In particular these constants do not depend on h or ∆t.
We then estimate the last factor in (3.50). Since Vh ⊂ H and we have endowed Vh withthe norm of H, we may write
‖A(γ1−1)/2h PhQ
1/2‖L2(H,Vh) ≤ ‖A(γ1−1)/2h PhQ
1/2‖L2(H).
Using (2.8), we deduce
‖A(γ1−1)/2h PhQ
1/2‖L2(H,Vh) ≤ ‖A(γ1−1)/2h PhA
−β/2‖L2(H)‖Aβ/2Q1/2‖L(H).
Using (2.12) and (2.16), we have
‖A(γ1−1)/2h PhA
−β/2‖2L2(H) =∑
i∈N |A(γ1−1)/2h PhA
−β/2ei|2≤∑
i∈N |A−1/2h PhA
−β/2ei|2(1−γ1)|PhA−β/2ei|2γ1
≤∑i∈N |A−1/2−β/2ei|2(1−γ1)|A−β/2ei|2γ1
=∑
i∈N λ−(1−γ1+β)i .
We deduce from 1− γ1 + β > α and (2.27) that
‖A(γ1−1)/2h PhA
−β/2‖2L2(H) ≤ λ1−γ1+β−α1 ‖AβQ‖1/2L(H)Tr(A−α)
13

Plugging this and (3.51) into (3.50) yields for n < N − 1:
an(t) ≤ C∆tγ((N − n− 1)∆t)−(1−γ1+γ).(3.52)
For n = N − 1, we derive similarly,
aN−1(t) ≤ ‖ϕ‖C2b (H)‖ (Th,∆t − Sh(T − t))A(1−γ1)/2
h ‖2L(Vh)‖A(1−γ1)/2h PhQ
1/2‖2L2(H,Vh)
≤ C(‖Th,∆tA(1−γ1)/2
h ‖2L(Vh) + ‖Sh(T − t)A(1−γ1)/2h ‖2L(Vh)
)
≤ C (∆tγ1−1 + (T − t)γ1−1
)≤ C(T − t)γ1−1.
(3.53)
Concerning bn, we write
bn(t) = 2 Tr((Sh(T − t)A(1−γ1)/2
h A(γ1−1)/2h PhQ
1/2)?D2vh(
SN−n−1h,∆t Th,∆t − Sh(T − t)
)A
(1−γ1)/2h A
(γ1−1)/2h PhQ
1/2)
≤ ‖ϕ‖C2b (H)‖Sh(T − t)A(1−γ1)/2
h ‖L(Vh)‖(SN−n−1h,∆t Th,∆t − Sh(T − t)
)A
(1−γ1)/2h ‖L(Vh)
×‖A(γ1−1)/2h PhQ
1/2‖2L2(H,Vh)
Using similar argument as above, we prove
‖Sh(T − t)A(1−γ1)/2h ‖L(Vh) ≤ C(T − t)(γ1−1)/2
and, for n < N − 1,
‖(SN−n−1h,∆t Th,∆t − Sh(T − t)
)A
(1−γ1)/2h ‖L(Vh) ≤ C∆tγ((N − n− 1)∆t)−(1−γ1+γ)
so that n < N − 1:bn(t) ≤ C∆tγ((N − n− 1)∆t)−(1−γ1+γ).(3.54)
For n = N − 1, we have
bN−1(t) ≤ ‖ϕ‖C2b (H)‖Sh(T − t)A(1−γ1)/2
h ‖L(Vh)
×‖ (Th,∆t − Sh(T − t))A(1−γ1)/2h Ph‖L(Vh)‖A(1−γ1)/2
h PhQ1/2‖2L2(H,Vh)
≤ C(T − t)γ1−1
(3.55)
We are now ready to bound II in (3.47). Indeed, (3.52), (3.53), (3.54), (3.55) imply
II ≤ C
∫ T
∆t
N−2∑
n=1
∆tγ((N − n− 1)∆t)−(1−γ1+γ)1n(t) dt+∫ ∆t
0C(T − t)γ1−1dt(3.56)
≤ C∆tγ
Then, plugging (3.48) and (3.56) into (3.47) we obtain that
|A| ≤ κ4‖Dϕ‖Cb(H;H)|x|∆t+C3
2T γ1−γ∆tγ(3.57)
≤ C ∆tγ ,
for T ≥ 1, ∆t ≤ 1.
Step 4: Estimate of the space discretization error.
14

Let us now estimate the spatial error B. The method is essentially the same as above: weuse the Kolmogorov equation associated to the transformed process Yt.
We consider the following linear parabolic equation on H:
∂v
∂t(t, x) =
12
Tr(D2v(t, x)(S(T − t)Q1/2)(S(T − t)Q1/2)?
), t > 0, x ∈ H,(3.58)
together with the initial condition
v(0, x) = ϕ(x), x ∈ H,where v is a real-valued function of t and x ∈ H. We have the following representation ofv (see e.g. [7], chapter 3) at time t ∈ [0, T ] and any y ∈ H:
v(T − t, y) = Eϕ(y +
∫ T
tS(T − s)Q1/2dWs
).(3.59)
We apply the Ito formula to t 7→ v(T − t, Yt) and t 7→ v(T − t, Yh,t). We substract theresulting equations and obtain
Eϕ(XT )− Eϕ(Xh,T ) = v(T, S(T )x)− v(T, Sh(T )Phx)
+12E
∫ T
0Tr
[(Sh(T − t)PhQ1/2
)?D2v(T − t, Yh,t)
(Sh(T − t)PhQ1/2
)]dt
−12E
∫ T
0Tr
[(S(T − t)Q1/2
)?D2v(T − t, Yh,t)
(S(T − t)Q1/2
)]dt.
(3.60)
The first term on the right hand side of (3.60) is the deterministic spatial error which canbe bounded thanks to (2.23) (with s = 0 and q = 2γ < 2) and (3.59). We obtain:
|v(T, S(T )x)− v(T, Sh(T )Phx)| ≤ κ1‖ϕ‖Cb(H)1h2γT−γ |x|.(3.61)
For the second term, we use the symmetry of D2v and write
Tr[(Sh(T − t)PhQ1/2
)?D2v
(Sh(T − t)PhQ1/2
)−
(S(T − t)Q1/2
)?D2v
(S(T − t)Q1/2
)]
= Tr[(Sh(T − t)PhQ1/2 − S(T − t)Q1/2
)?D2v
(Sh(T − t)PhQ1/2 − S(T − t)Q1/2
)]
+ 2 Tr[(S(T − t)Q1/2
)?D2v
(Sh(T − t)PhQ1/2 − S(T − t)Q1/2
)]
= a+ b,
where here and below D2v is evaluated at (T − t, Yh,t).Let γ > 0 be such that (2.28) holds and γ1 > 0 such that 0 < γ < γ1 < 1 − α + β ≤ 1.
Thanks to (2.7) and (3.59), we get the following bounds:
b = 2 Tr(S(T − t)D2v(Sh(T − t)Ph − S(T − t))Q
)
= 2 Tr(Aγ1−1−βA1−γ1S(T − t)D2v(Sh(T − t)Ph − S(T − t))QAβ
)
≤ 2 ‖(Sh(T − t)Ph − S(T − t))‖L(H)‖ϕ‖C2b (H)‖A1−γ1S(T − t)‖L(H)‖QAβ‖L(H)Tr(A1−γ1−β).
15

Then, owing to (2.21), (2.23) (with s = 0 and q = 2γ < 2), we obtain
b ≤ Ch2γ(T − t)−(1+γ−γ1)(3.62)
where again C denotes a constant which depends only on γ1, γ, ‖ϕ‖C2b (H), ‖AβQ‖L(H) and
Tr(A−α) but not on h or ∆t.
As regard a, we get first thanks to (2.7) and (3.59):
a ≤ ‖ϕ‖C2b (H) Tr
(Q(Sh(T − t)Ph − S(T − t))?(Sh(T − t)Ph − S(T − t))
)
= ‖ϕ‖C2b (H)‖Q1/2(Sh(T − t)Ph − S(T − t))‖2L2(H)
≤ ‖ϕ‖C2b (H)‖Q1/2Aβ/2‖2L(H)‖A(1−γ1)/2(Sh(T − t)Ph − S(T − t))‖2L(H)‖A−(1−γ1+β)/2‖2L2(H)
≤ C‖A(1−γ1)/2(Sh(T − t)Ph − S(T − t))‖2L(H),
where we have used (2.27). If γ1 + γ ≥ 1, we interpolate (2.23) with q = (γ + γ1 − 1)/γ,s = 0 and (2.24) with s′ = 0, q′ = 1 and get
‖A(1−γ1)/2(Sh(T − t)Ph − S(T − t))‖L(H) ≤ C hγ(T − t)−(1−γ1+γ)/2.(3.63)
If γ1 + γ < 1, we interpolate (2.23) with q = 0, s = 0 and (2.24) with s′ = 0, q′ = 1 and get
‖A(1−γ1)/2(Sh(T − t)Ph − S(T − t))‖L(H) ≤ C h1−γ1(T − t)−(1−γ1).(3.64)
We use again an interpolation argument to get
‖A(1−γ1)/2(Sh(T − t)Ph − S(T − t))‖L(H)
≤ C‖(Sh(T − t)Ph − S(T − t))‖γ1
L(H)‖A1/2(Sh(T − t)Ph − S(T − t))‖1−γ1
L(H)
≤ C (‖A1/2Sh(T − t)Ph‖L(H) + ‖A1/2S(T − t)‖L(H)
)1−γ1
≤ C(T − t)(1−γ1)/2,
(3.65)
thanks to (2.21) for A and Ah and (2.14). A further interpolation between (3.64) and (3.65)gives
‖A(1−γ1)/2(Sh(T − t)Ph − S(T − t))‖L(H) ≤ C hλ(1−γ1)(T − t)−(1−γ1)(λ+(1−λ)/2).(3.66)
Taking λ = γ/(1− γ1) shows that (3.63) again holds for γ1 + γ ≤ 1.
We deducea ≤ Ch2γ(T − t)−1+γ1−γ .(3.67)
Plugging (3.61), (3.62) and (3.67) into (3.60) leads to, after time integration which isrelevant since 1− γ1 + γ < 1:
|B| ≤ C h2γ ,(3.68)
for T ≥ 1.
Conclusion: Gathering (3.57) and (3.68) in (3.40) ends the proof of Theorem 3.1.
16

References
[1] E.J. ALLEN, S.J. NOVOSEL, Z. ZHANG, Finite element and difference approximation of somelinear stochastic partial differential equations, Stochastics Stochastics Rep. 64 (1998), no 1-2,117–142.
[2] J. H. BRAMBLE, A. H. SCHATZ, V. THOMEE, L. B. WAHLBIN, Some convergence estimatesfor semidiscrete Galerkin type approximations for parabolic equations, SIAM J. Numer. Anal.14 (1977), no 2, 218–241.
[3] E. BUCKWAR, T. SHARDLOW, Weak approximation of stochastic differential delay equations,IMA J. Numer. Anal. 25 (2005), no 1, 57–86.
[4] P. G. CIARLET, The Finite Element Method for Elliptic Problems, North–Holland,Amsterdam–London–New-York, 1978.
[5] M. CROUZEIX, V. THOMEE, L. B. WAHLBIN, Error estimates for spatially discrete approx-imations of semilinear parabolic equations with initial data of low regularity, Math. Comput. 53(1989), 25–41.
[6] G. DA PRATO and J. ZABCZYK, Stochastic Equations in Infinite Dimensions, Ency-clopedia of mathematics and its applications 44, Cambridge University Press, 1992.
[7] G. DA PRATO and J. ZABCZYK, Second Order Partial Differential Equations inHilbert Spaces, London Mathematical Society, Lecture Note Series 293, Cambridge UniversityPress, 2002.
[8] A.M. DAVIE, J.G. GAINES, Convergence of numerical schemes for the solution of parabolicstochastic partial differential equations, Math. Comp. 70 (2001), no 233, 121–134
[9] A. DE BOUARD, A. DEBUSSCHE Weak and strong order of convergence of a semi discretescheme for the stochastic Nonlinear Schrodinger equation, Applied Mathematics and Optimiza-tion Journal 54 (2006), no 3, 369–399.
[10] I. C. GOKHBERG, M. G. KREIN, Introduction to the theory of linear nonselfad-joint operators in Hilbert space , Amer. Math. Soc., Providence, R. I., 1970.
[11] W. GRECKSCH, P.E. KLOEDEN Time-discretised Galerkin approximations of parabolicstochastic PDEs, Bull. Austral. Math. Soc. 54 (1996), no 1, 79–85.
[12] I. GYONGY Lattice approximations for stochastic quasi-linear parabolic partial differentialequations driven by space-time white noise. I, Potential Anal. 9 (1998), no 1, 1–25.
[13] I. GYONGY Lattice approximations for stochastic quasi-linear parabolic partial differentialequations driven by space-time white noise. II, Potential Anal. 11 (1999), no 1, 1–37
[14] I. GYONGY, A. MILLET On discretization schemes for stochastic evolution equations, Po-tential Analysis 23 (2005), no 2, 99–134.
[15] I. GYONGY, A. MILLET Rate of Convergence of Implicit Approximations for stochasticevolution equations, Stochastic Differential Equations: Theory and Applications. A volume inHonor of Professor Boris L. Rosovskii, Interdisciplinary Mathematical Sciences, Vol 2, WorldScientific (2007), 281–310.
[16] I. GYONGY, A. MILLET Rate of Convergence of Space Time Approximations for stochasticevolution equations, Preprint (2007).
[17] I. GYONGY, D. NUALART Implicit scheme for stochastic parabolic partial differential equa-tions driven by space-time white noise, Potential Anal. 7 (1997), no 4, 725–757.
[18] E. HAUSENBLAS, Approximation for Semilinear Stochastic Evolution Equations in BanachSpaces, Journal in Computational and Applied Mathematics, 147 (2002), no 2, 485–516.
[19] E. HAUSENBLAS, Approximation for Semilinear Stochastic Evolution Equations, PotentialAnalysis, 18 (2003), no 2, 141–186.
17

[20] C. JOHNSON, S. LARSSON, V. THOMEE, L. B. WALHBIN, Error estimates for spatiallydiscrete approximations of semilinear parabolic equations with non smooth initial data, Math.Comput. 49 (1987), 331–357.
[21] P.E. KLOEDEN, E. PLATEN, Numerical solution of stochastic differential equa-tions, Applications of Mathematics, 23, Springer Verlag, New York, 1992.
[22] M.-N. LE ROUX, Semidiscretization in Time for Parabolic Problems, Math. Comput. 33(1979), 919–931.
[23] G. LORD, J. ROUGEMONT, A Numerical Scheme for Stochastic PDEs with Gevrey Regu-larity, IMA J. Num. Anal., 24 (2004), no 4, 587–604.
[24] A. MILLET, P.L. MORIEN, On implicit and explicit discretization schemes for parabolicSPDEs in any dimension, Stochastic Processes and their Applications 115 (2005), no 7, 1073–1106.
[25] G. N. MILSTEIN, Numerical integration of stochastic differential equations,Mathematics and its Applications, 313, Kluwer Academic Publishers, Dordrrecht, 1995.
[26] G. N. MILSTEIN, M. V. TRETYAKOV, Stochastic numerics for mathematicalphysics, Scientific Computation series, Springer-Verlag, 2004.
[27] J. PRINTEMS, On the discretization in time of parabolic stochastic partial differential equa-tions, Math. Model. and Numer. Anal. 35 (2001), no 6, 1055–1078.
[28] T. SHARDLOW, Numerical methods for stochastic parabolic PDEs, Numer. Funct. Anal.Optim. 20 (1999), no 1-2, 121–145.
[29] G. STRANG, G.J. FIX, An Analysis of the Finite Element Method, Prentice-Hall,Englewood Cliffs, 1973,
[30] D. TALAY, Probabilistic numerical methods for partial differential equations: elements ofanalysis, Probabilistic models for nonlinear partial differential equations (Montecatini Terme,1995), 148–196, Lecture Notes in Math., 1627, Springer, Berlin, 1996.
[31] V. THOMEE, Galerkin Finite Element Methods for Parabolic Problems, SpringerVerlag, 1997.
[32] Y. YAN, Galerkin finite element methods for stochastic parabolic partial differential equations,SIAM J. Numer. Anal. 43 (2005), no 4, 1363–1384.
[33] Y. YAN, Semidiscrete Galerkin approximation for a linear stochastic parabolic partial differ-ential equation driven by an additive noise, BIT 44 (2004), no 4, 829–847.
[34] J.B. WALSH Finite element methods for parabolic stochastic PDE’s, Potential Anal. 23 (2005),no 1, 1–43.
Appendix.
We estimate Mn(t) for n < N − 1 as follows:
Mn(t) ≤ sup1≤i≤I(h)
∣∣∣∣∣FN−n−1(λi,h∆t)− e−λi,h(T−tn+1)
1 + θλi,h∆t
∣∣∣∣∣λ(1−γ1)/2i,h(3.69)
+ sup1≤i≤I(h)
∣∣∣∣∣e−λi,h(T−tn+1) − e−λi,h(T−t)
1 + θλi,h∆t
∣∣∣∣∣λ(1−γ1)/2i,h
+ sup1≤i≤I(h)
e−λi,h(T−t)(
1− 11 + θ∆tλi,h
)λ
(1−γ1)/2i,h
= a1 + a2 + a3.
18

Thanks to (3.49) with N replaced by N − n− 1 we get
a1 ≤ κ4
N − n− 1supi≥1
λ
(1−γ1)/2i,h
1 + θλi,h∆t
≤ κ4∆t(γ1−1)/2
(N − n− 1)(1−γ1+γ)/2supi≥1
((λi,h∆t)(1−γ1)/2
1 + θλi,h∆t
)
≤ κ4∆tγ/2
((N − n− 1)∆t)(1−γ1+γ)/2.
Indeed, since (1 − γ1 + γ)/2 < 1, (N − n − 1) ≥ (N − n − 1)(1−γ1+γ)/2. In the same way,we have
a2 ≤ supi≥1
(1− e−(tn+1−t)λi,h
(1 + θ∆tλi,h)λ
(1−γ1)/2i,h e−(N−n−1)∆tλi,h
)
≤ C(γ) ∆tγ/2 supi≥1
(λ
(1−γ1+γ)/2i,h e−(N−n−1)∆tλi,h
)
≤ C(γ, γ1) ∆tγ/2
((N − n− 1)∆t)(1−γ1+γ)/2,
where we have used that |t− tn+1| ≤ ∆t and the inequality |e−x − e−y| ≤ Cγ |x− y|γ/2 and(2.22). Eventually, similar computations lead to
a3 ≤ ∆tγ/2 supi≥1
(θ(∆tλi,h)1−γ/2
1 + θ∆tλi,hλ
(1−γ1+γ)/2i,h e−(T−t)λi,h
)
≤ C(γ, γ1) ∆tγ/2(T − t)−(1−γ1+γ)/2
≤ C(γ, γ1) ∆tγ((N − n− 1)∆t)−(1−γ1+γ)/2,
where we have used again the inequality (2.22).
Gathering these three estimates in (3.69) yields (3.51, for n < N − 1.
19

Chapitre 5
Méthodes de quantification etquelques applications à la finance.
5.1 First order schemes in the numerical quantization me-thod.
L’article qui suit fut publié dans Mathematical Finance, vol. 13(1), pp. 1–16 (2003).
213

Mathematical Finance, Vol. 13, No. 1 (January 2003), 1–16
FIRST-ORDER SCHEMES IN THE NUMERICALQUANTIZATION METHOD
V. BALLY
Universite du Mans et projet MathFi INRIA
G. PAGES
CNRS UMR 7599, Universite Paris 6
J. PRINTEMS
Centre de Mathematique & CNRS UMR 8050, Universite de Paris 12
The numerical quantization method is a grid method that relies on the approxima-tion of the solution to a nonlinear problem by piecewise constant functions. Its purposeis to compute a large number of conditional expectations along the path of the asso-ciated diffusion process. We give here an improvement of this method by describinga first-order scheme based on piecewise linear approximations. Main ingredients arecorrection terms in the transition probability weights. We emphasize the fact that in thecase of optimal quantization, many of these correcting terms vanish. We think that thisis a strong argument to use it. The problem of pricing and hedging American optionsis investigated and a priori estimates of the errors are proposed.
KEY WORDS: numerical quantization, American options, Malliavin calculus
1. INTRODUCTION
The numerical quantization method has been introduced in earlier work (Bally, Pages,and Printems 2001; Bally and Pages 2000, 2001). It is a grid method that is conceivedin order to solve nonlinear problems in large dimension. Since the problems we havein mind have a partial differential equation formulation, analytical methods like finitedifferences or finite elements are candidates to solve such problems but it is well knownthat implementation of these types of methods is rather difficult in dimensions largerthan three. So one would like to use some probabilistic methods of the Monte Carlotype (which have the advantage of being dimension free). But this may not be donedirectly for nonlinear problems because the resolution of such problems supposes thecomputation of a large number of conditional expectations, not just a single expectation.The numerical quantization method is in between the analytical approach and the MonteCarlo method. One uses some grids and some weights (as in the finite element method)but the weights are computed using a Monte Carlo method. Although the error depends
Address correspondence to Dr. J. Printems, Centre de Mathematique, 61 avenue du General de Gaulle,94010 Creteil, France; e-mail: [email protected].
C© 2003 Blackwell Publishing Inc., 350 Main St., Malden, MA 02148, USA, and 108 Cowley Road, Oxford,OX4 1JF, UK.
1

2 V. BALLY, G. PAGES, AND J. PRINTEMS
on the dimension as in the analytical methods, the advantage of using Monte Carlo isthat one may implement such algorithms in a dimension larger than 3 (typically up to10, beyond which the number of points needed in the grids becomes huge).
The aim of this paper is to give a more efficient version of this algorithm. Roughlyspeaking, in Bally, Pages, and Printems (2001, 2002) and Bally and Pages (2000, 2001) westudied approximation schemes of order zero and now we give approximation schemesof order one. Basically the schemes of order zero produce piecewise constant approxima-tions of the functions at hand and consequently use the information at one point only: thecenter of the cell on which the approximation of the function is constant. The schemesof order one use linear interpolation and so put to work several points: the center of thecell but also the centers of its neighbors. For example, the basic finite element method isan algorithm of order one because it is based on linear interpolations. Schemes of higherorder can be obtained by using polynomial interpolations, but of course the algorithmbecomes much more complex. In our frame we use the Malliavin integration by parts for-mula in order to compute some correctors that produce piecewise linear interpolations.The attractive thing in our approach is that although the scheme becomes more compli-cated as we pass from a zeroth-order scheme to a first-order scheme, the complexity ofthe algorithm remains of the same order and the correctors that come in are of the samenature. Consequently they may be computed rather simply by the Monte Carlo methodwith the sample used to compute the weights coming on in the original zeroth-ordermethod.
As emphasized in Section 3, there are two types of projection errors coming in our algo-rithm, say top and bottom errors. So, a priori, we need two types of correctors concerningeach of these errors. But it turns out that if we use optimal grids (in the quantizationsense) the bottom correctors naturally vanish. This is an enlightening fact concerningoptimal quantization and a strong argument to use it.
The numerical quantization represents a quite general approach to nonlinear problemsbecause its main purpose is to compute a large number of conditional expectations alongthe path of a diffusion process (see Section 3.3). But our specific initial motivation comesfrom pricing American options, which is an optimal stopping problem and so a typicalnonlinear problem. In this paper we also focus on this problem in order to illustrate themethod.
Finally, we mention that the first-order correctors are closely related to the hedgingstrategy, so we can produce as well some proxy of this hedging strategy as a by-productof this first-order scheme (see Bally et al. 2002 for an extensive discussion of hedging byquantization).
2. THE BASIC ALGORITHM FOR PRICING AMERICAN OPTIONS
2.1. The Problem
We consider a market model containing a riskless asset S0t and a d-dimensional risky
asset St ∈ Rd , 0 ≤ t ≤ T, whose dynamics read
dS0t = S0
t r dt, S00 = 1,
dSt = Diag(St) (r1 dt + σ (t, St)dBt), S0 = 1.
Here r denotes the interest rate, σ is the volatility function, and Bt is a standardd-dimensional Brownian motion on some probability space (,F, P) and (Ft)0≤t≤T is

FIRST-ORDER SCHEMES IN THE NUMERICAL QUANTIZATION METHOD 3
its standard filtration. T is a fixed time (maturity). In order to avoid some rather compli-cated formulas in our computations it is convenient to work with Xt := log St instead ofSt itself. It is easy to see that the dynamics of X obey
dXt = σ (t, Xt) dBt + b(t, Xt) dt, X0 = x := log s0
with σ (t, x) = σ (t, ex), b(t, x) = r − 12 Tr(σσ ∗)(t, ex).
Moreover, we consider a payoff function h : [0, T] × Rd → R and we want to price an
American option with payoff h. The price at time t ∈ [0, T] is given by
Yt = esssupτ∈Tt,TE(h(τ, Xτ ) |Ft),
where Tt,T denotes the set of all [t, T]-valued stopping times. This is the Snell envelope ofthe semi-martingale h(t, Xt) (if h is sufficiently smooth). It is well known that no closedformula holds for Y, so we will consider a discrete approximation. To process, we considerthe Euler scheme of step T
n ,
Xtk+1 := Xtk + b(tk, Xtk
) Tn
+ σ(tk, Xtk
)k+1, X0 := x,
where tk := kn T and k+1 := Btk+1 − Btk . In order to simplify the notation we put Xk :=
Xtk, σk(x) := σ (tk, x), and bk(x) := b(tk, x) so that we are concerned with the (Ftk)0≤k≤n
Markov chain (Xk)0≤k≤n recursively defined by
Xk+1 = Xk + bk(Xk)Tn
+ σk(Xk)k+1, X0 = x.
Then the discrete version of Y is defined by Ytk = esssupτ∈Ttk,TE(hk(Xτ ) |Ftk), where
hk(x) := h(tk, x) and Ttk,T denotes the set of all the (Fti )0≤i≤,n discrete stopping timesthat take values in k, . . . , n. We will work under two different sets of hypotheses:
Hypothesis 2.1 (H2.1).(i) b, σ are continuously differentiable with bounded derivatives and h is Lipschitz
continuous functions.(ii) σσ ∗ ≥ cId where c > 0 and Id is the identity matrix.
Hypothesis 2.2 (H2.2).(i) b, σ are continuously differentiable with bounded derivatives and h is is Lipschitz
continuous in t and semi-convex in x.(ii) σσ ∗ ≥ cId , c > 0.
A precise definition of semiconvex functions is given in Bally and Pages (2000)—in particular, Lipschitz continuous convex functions are semiconvex as well as twicedifferentiable functions with bounded derivatives. It is proved in Bally and Pages (2001)that under these hypotheses (
E maxk≤n
∣∣Ytk − Ytk
∣∣2)1/2
≤ Cnα
(2.1)
with α = 12 under H2.1 and α = 1 under H2.2 (provided one uses the true “sampled”
diffusion (Xtk)0≤k≤n as the Markov chain to be quantized instead of its Euler scheme).

4 V. BALLY, G. PAGES, AND J. PRINTEMS
Now we compute Ytk using the dynamical programming principle:
Ytn = hn(Xn)
Ytk = max(hk(Xk), E
(Ytk+1
∣∣Ftk
)).
The analytical counterpart of this scheme is obtained in the following way. One con-structs recursively the functions uk by
un(x) = hn(x)
uk(x) = max(hk(x), E (uk+1(Xk+1)
∣∣ Xk = x)).
Then Ytk = uk(Xk) and, consequently, up to the approximation of Y by Y, the price attime zero is given by u0(x) = u0(log s0).
2.2. The Basic Algorithm
We want to produce an algorithm in order to compute uk. The difficult point will beof course to design an efficient method to compute E(uk+1(Xk+1) | Xk = x), k = 0, . . . , n.It is clear that we cannot do it for every point x ∈ R
d , so we will settle some space gridsk = x1
k, . . . , xNkk ⊂ R
d , k = 0, . . . , n, one for each epoch tk = kTn . The way we choose
the size Nk of the grid and the location of the points xik of the grid k plays a crucial part,
and the numerical efficiency of the algorithm heavily depends on this choice. But theseproblems have been extensively discussed in Bally and Pages (2000) and so we leave themout here. In this paper the grids k, k = 0, . . . , n are some exogenously designed objects.Moreover, we define the Voronoi tessel of xi
k by
Cik :=
u ∈ R
d/∣∣u − xik
∣∣ ≤ inf0≤ j≤Nk
∣∣u − xjk
∣∣and we denote by k the projection on the grid k; that is, k(u) := ∑Nk
i=1 xik1Ci
k(u).
Note that Cik, i = 1, . . . , n, is not a true partition of R
d because the different tessels haveboundary hyperplanes in common. But this is just a formal disagreement because thelaws of the random variables we work with are absolutely continuous and so give no massto hyperplanes. The basic idea is to approximate
E(uk+1(Xk+1) | Xk = xi
k
) ≈ E(uk+1(k+1(Xk+1) | k(Xk) = xi
k
).(2.2)
Note that
E(uk+1(k+1(Xk+1)) | k(Xk) = xi
k
) =Nk+1∑j=1
uk+1(xj
k+1
)E
(1C j
k+1(Xk+1)
) ∣∣∣ 1Cik(Xk)
)
=Nk+1∑j=1
uk+1(xj
k+1
)π
i jk
with
πi jk := P
(Xk+1 ∈ C j
k+1, Xk ∈ Cik
)P(Xk ∈ Ci
k
)The π
i jk ’s are the weights in the algorithm and we compute them using a Monte Carlo
simulation. The important point here is that we may compute all πi jk , i = 1, . . . , Nk,

FIRST-ORDER SCHEMES IN THE NUMERICAL QUANTIZATION METHOD 5
j = 1, . . . , Nk+1, k = 0, . . . , n using the same sample (X1k)0≤k≤n, . . . , (XM
k )0≤k≤n of thechain (Xk)0≤k≤n (see Bally and Pages 2000). In fact,
πi jk ∼ π
i jk =:
∑Mm=1 1C j
k+1
(X m
k+1
)1Ci
k
(X m
k
)∑M
m=1 1Cik
(X m
k
) .(2.3)
So we avoid using different Monte Carlo procedures in order to compute the conditionalexpectation at each point, which would be extremely expensive. In this sense our algorithmmay be seen as a compressed Monte Carlo method. Now the algorithm reads
un(xi
n
) = hn(xi
n
), i = 1, . . . , Nn,
uk(xi
k
) = max
(hk
(xi
k
),
Nk+1∑j=1
πi jk uk+1
(xj
k+1
)), k = 0, . . . , n.(2.4)
Of course in true applications we do not know πi jk , so we use π
i jk . This introduces one
further error—the statistical error—which is not discussed here (see Bally and Pages2001).
This is our basic algorithm. It is an algorithm of order zero because we replace uk+1(x)by uk+1(k+1(x)) = ∑Nk+1
j=1 xjk+11C j
k+1(x) and Xk (with respect to which one takes condi-
tional expectation) by k(Xk) = ∑Nki=1 xi
k1Cik(Xk). So we work with piecewise constant
functions.
2.3. Optimal Grids and Error Estimates
We give now some error evaluations obtained in Bally and Pages (2001). First, oneproves that(
E maxk≤n
∣∣Ytk − uk(k(Xk))∣∣2
)1/2≤ C
nα+
n∑k=0
Ck(E |Xk − k(Xk)|2 )1/2
(2.5)
with α = 12 under H 2.1 and α = 1 under H 2.2.
The grids we use are optimal in the following sense. One defines the distortion of a grid := x1, . . . , xNk (with obvious notations) as
(DXk()
)2:= E|Xk − (Xk)|2 =
Nk∑i=1
E
(∣∣Xk − xi∣∣2
1Ci(Xk)
).(2.6)
A grid k is optimal if
DXk(k) = inf,||≤Nk
DXk().
A basic result from the quantization theory (the Bucklew & Wise Theorem; see Ballyand Pages 2000; Graf and Luschgy 2000; and Pages 1997 for the precise result) assertsthat, if the grid is optimal, then there exists a real constant C2 such that(
DXk(k))1/2 =
(E
(∣∣Xk − k(Xk)∣∣2
)1/2≤ C2
N1/dk
.(2.7)
Plugging (2.7) into (2.5) and using the structure of the constants Ck in (2.5) make itpossible to tune the Nk’s in an optimal way (this is achieved in Bally and Pages 2001). Since

6 V. BALLY, G. PAGES, AND J. PRINTEMS
in this paper we are simply interested in the asymptotic order, we leave out this slightlymore sophisticated analysis and express the above error in terms of N := max0≤k≤n Nk.
PROPOSITION 2.1. Assume that (2.7) holds true and Nk ≤ N, k = 1, . . . , n. Then(E max
k≤n
∣∣Ytk − uk(k(Xk))∣∣2
)1/2
≤ C(
1nα
+ nN1/d
)(2.8)
with α = 12 under Hypothesis 2.1 and α = 1 under Hypothesis 2.2.
Let us take one step beyond into the numerical properties of optimal grids. Sincek := x1
k, . . . , xNk achieves the minimum, formal derivation in (2.6) (see Pages 1997 forthe complete argument) yields
∂
∂xik
(DXk(k)
)2 = 2E((
Xk − xik
)1Ci
k(Xk)
) = 0.(2.9)
We will show in the next section that optimal grids produce an error of order N−2/d
instead of N−1/d and the relation (2.9) represents the key argument: It says that if thegrid is optimal then the terms of order one in a certain Taylor expansion of order twovanish.
3. CORRECTORS OF ORDER ONE
In the approximation presented in (2.2) there are two different projection errors corres-ponding to k (bottom) and k+1 (top). The aim of this section is to produce somecorrectors that reduce these errors. In order to enlighten the notations we put Xk =k(Xk).
3.1. The Basic Integration by Parts Formula
In our very elementary setting the Malliavin integration by parts formula reads asfollows. Given two differentiable functions f, g : R
d → R, and any real constant C,
E
(∂ f∂xi
(k+1)g(k+1))
(3.1)
= −E
(( f (k+1) + C)
(∂g∂xi
(k+1) − nT
ik+1g(k+1)
)).
The proof is obtained by a usual integration by parts (with respect to the Gaussiandistribution). It represents the starting point of the Malliavin calculus—which goes faraway, but we stop here.
It seems natural to take C = 0 in the above formula because anyway ∇( f + C) = ∇ f.But in our frame f appears as an a priori given function and the fact that we have thefreedom of choosing any C is crucial for simulation. The practical way of using thisformula is to employ the Monte Carlo method for computing the expectation in theright-hand side in order to obtain the expectation in the left-hand side. So we would liketo simulate the expectation of some variable with a small variation and consequently wewould choose, for example, C = −E( f (k+1)) if we know it.

FIRST-ORDER SCHEMES IN THE NUMERICAL QUANTIZATION METHOD 7
Now let U : Rd → R be a measurable function with polynomial growth (so that
U(Xk+1) is integrable). We define
PkU(x) := E(U(Xk+1) | Xk = x),
which represents the transition kernel of the Euler scheme. The problem is to computethe derivatives of PkU. One defines
θk(x, y) := x + bk(x)Tn
+ σk(x)y so that Xk+1 = θk(Xk, k+1)
and PkU(x) = E(U(θk(x, k+1))). Moreover, since σk is invertible, one may define
λk(x, y) := σ−1k (x) × ∇xθk(x, y)(3.2)
and
ρk(x, y) := −
d∑′=1
(∂λ′
k
∂y′(x, y) − n
Ty′λ′
k (x, y)
), = 1, . . . , d.
LEMMA 3.1. The partial derivatives of PkU are given by
∂ PkU∂x
(x) = E((U(θk(x, k+1)) − C(x))ρ
k(x, k+1)), = 1, . . . , d,(3.3)
where C is any real function.
Proof. One may assume without loss of generality that U is smooth. Note that∇y(U θk) = (∇U) θk × ∇yθk = (∇U) θk × σk and so (∇U) θk = ∇y(U θk) × σ−1
k .
It follows that
∇ PkU(x) = E((∇U) (θk(x, k+1))∇xθk(x, k+1)) = E(∇y(U θk) (x, k+1)λk(x, k+1))
and now (3.3) follows from (3.1) with C = C(x).
REMARK 3.1. Let us emphasize the simple but important example of constant volatilityσk and constant drift coefficient bk (the log-normal model corresponding to the classicalBlack-Scholes model). Then θk(x, y) = x + bk
Tn + σky, λk(x, y) = σ−1
k , and so ρk(x, y) =
nT (yσ−1
k ).
Finally we give some a priori estimates used to evaluate errors.
PROPOSITION 3.1. Assume that U is [U]1-Lipschitz continuous. Then∥∥∥∥∂ PkU∂x
∥∥∥∥∞
≤ C[U]1 and∥∥∥∥ ∂2 PkU∂x∂x′
∥∥∥∥∞
≤ C[U]1√
n, , ′ ∈ 1, . . . , d.(3.4)
Proof. The first inequality in (3.4) is obtained by direct calculation and the second isobtained using integration by parts once.

8 V. BALLY, G. PAGES, AND J. PRINTEMS
3.2. The k Projection Error (or bottom error)
We consider the same measurable function U as in the previous subsection and wewant to approximate PkU(xi
k). So, we define
φkU
(xi
k
):= E
(U(Xk+1)1Ci
k(Xk)
)P(Xk ∈ Ci
k
) .
Note that if U(x) = 1C jk+1
(x) then φkU(xi
k) = πi jk (i.e., the standard weight we use in our
algorithm). We write
E(U(Xk+1)1Ci
k(Xk)
) = E(PkU(Xk)1Ci
k(Xk)
) = PkU(xi
k
)P(Xk ∈ Ci
k
) + εik
with
Nk∑i=1
∣∣εik
∣∣ ≤ [PkU]1E |Xk − k(Xk)| ≤ C[PkU]1N1/d
,
the last inequality being a consequence of (2.7). In particular the above relation givesPkU(xi
k) = φkU(xi
k) − εik/P(Xk ∈ Ci
k) and so
E∣∣PkU(Xk) − φU
k (Xk)∣∣ =
Nk∑i=1
E
(∣∣PkU(Xk) − φUk (Xk)
∣∣ 1Xk∈Cik)
=Nk∑
i=1
∣∣PkU(xi
k
) − φUk
(xi
k
)∣∣ P(Xk ∈ Ci
k
) ≤ C[PkU]1N1/d
.
The aim of this section is to prove that, as a consequence of the optimality of the grid,the above error is of order
√n
N 2/d instead of 1N1/d .
PROPOSITION 3.2. Assume that U is Lipschitz continuous and that the grid k is optimal,so that (2.9) holds true. Then
E∣∣PkU(Xk) − φU
k (Xk)∣∣ ≤ C[U]1
√n
N2/d.(3.5)
Proof. We use the Markov property and a Taylor expansion of PkU:
E(U(Xk+1)1Ci
k(Xk)
) = E(PkU(Xk)1Ci
k(Xk)
)= PkU
(xi
k
)P(Xk ∈ Ci
k
) +d∑
=1
∂ PkU∂x
(xi
k
)E
((Xk − xi
k
)1Ci
k(Xk)
) + Rik
with (see (3.4))
Nk∑i=1
∣∣Rik
∣∣ ≤ ∥∥∂2 PkU∥∥
∞E |Xk − k(Xk)|2 ≤ C[U]1
√n
N2/d.
Since the grid is optimal, E((Xk − xik)1Ci
k(Xk)) = 0 and the proof is complete.

FIRST-ORDER SCHEMES IN THE NUMERICAL QUANTIZATION METHOD 9
3.3. The k+1 Projection Error (or top error)
The aim of this section is to compute φUk (xi
k). We cannot solve our problem for a generalmeasurable function U so we need U to have the special form
U(x) = Pk+1V(x) := E(V(Xk+2) | Xk+1 = x).
Moreover, in order to obtain reasonable error estimates, we assume that V = Pk+2Wfor some bounded measurable function W. This may be seen as a regularity propertyfor V (in particular V is Lipschitz continuous). Assume temporarily that W is Lipschitzcontinuous as well. Then, as a consequence of (3.4),∥∥∥∥ ∂2U
∂x∂x′
∥∥∥∥∞
≤ C[V]1√
n and
∥∥∥∥∂V∂xl
∥∥∥∥∞
≤ C[W]1, , ′ ∈ 1, . . . , d.(3.6)
We define the new weights by setting
π,i jrk :=
E(ρ
k+1(Xk+1, k+2)(Xk+1 − xj
k+1
)1Ci
k×C jk+1×Cr
k+2(Xk, Xk+1, Xk+2)
)P(Xk ∈ Ci
k
) ,(3.7)
= 1, . . . , d, i = 1, . . . , Nk, j = 1, . . . , Nk+1, r = 1, . . . , Nk+2,
and
PV,kU(xi
k
):=
Nk+1∑j=1
πi jk U
(xj
k+1
) +d∑
=1
Nk+1∑j=1
Nk+2∑r=1
π,i jrk
(V
(xr
k+2
) − C jV,
),(3.8)
where C jV, are arbitrary real constants to be settled in order to reduce the variance.
LEMMA 3.2. Suppose that U = Pk+1V with V = Pk+1W for some Lipschitz continuousfunction W. Then
E∣∣PkU(Xk) − PV,kU(Xk)
∣∣ ≤ C[W]1√
nN2/d
,(3.9)
where C depends on the diffusion coefficients.
Proof. The idea is similar to that in the previous section: We localize on C jk+1 and we
use a Taylor expansion
φUk
(xi
k
)×P(Xk ∈ Ci
k
) = E
(U(Xk+1)1Ci
k(Xk)
)=
Nk+1∑j=1
E
(U(Xk+1)1C j
k+1(Xk+1)1Ci
k(Xk)
)
=Nk+1∑j=1
U(xj
k+1
)E
(1C j
k+1(Xk+1)1Ci
k(Xk)
)
+Nk+1∑j=1
d∑=1
E
(∂U∂xl
(Xk+1)(Xk+1 − xj
k+1
)
× 1C jk+1
(Xk+1)1Cik(Xk)
)+Qi
k

10 V. BALLY, G. PAGES, AND J. PRINTEMS
with
Qik :=
Nk+1∑j=1
d∑,′=1
E
(∂2U
∂x∂x′(X′
k+1)(Xk+1 − xj
k+1
)
(Xk+1 − xj
k+1
)′1C j
k+1(Xk+1)1Ci
k(Xk)
)
+Nk+1∑j=1
d∑=1
E
((∂U∂x
(xj
k+1
) − ∂U∂x
(Xk+1)) (
Xk+1 − xjk+1
)1C j
k+1(Xk+1)1Ci
k(Xk)
).
Using (3.6) we obtain
Nk∑i=1
E∣∣Qi
k
∣∣ ≤ C∥∥∂2U
∥∥∞
E|Xk+1 − Xk+1|2 ≤ C[W]1√
nN2/d
.(3.10)
In order to compute ∂U∂x
(Xk+1) we use (3.3) with x = Xk+1 and we obtain
∂U∂x
(Xk+1) = E
((V(θk+1(Xk+1, k+2)) − C j
V,
)ρ
k+1(Xk+1, k+2)∣∣ Xk+1
)= E
((V(Xk+2) − C j
V,
)ρ
k+1(Xk+1, k+2)∣∣ Xk+1
).
Moreover, using the Markov property first and then localization for Xk+2 yields
E
(∂U∂x
(Xk+1)(Xk+1 − xj
k+1
)1Ci
k×C jk+1
(Xk, Xk+1))
= E
((V(Xk+2) − C j
V,
)ρ
k+1(Xk+1, k+2)(Xk+1 − xj
k+1
)1Ci
k×C jk+1
(Xk, Xk+1))
=Nk+2∑r=1
E
((V(Xk+2) − C j
V,
)ρ
k+1(Xk+1, k+2)(Xk+1 − xj
k+1
)
× 1Cik×C j
k+1×Crk+2
(Xk, Xk+1, Xk+2))
=Nk+2∑r=1
(V
(xr
k+2
) − C jV,
)E
(ρ
k+1(Xk+1, k+2)(Xk+1 − xj
k+1
)
× 1Cik×C j
k+1×Crk+2
(Xk, Xk+1, Xk+2))
+ H,i jk .
Note that both Hypotheses 2.1 and 2.2 imply that∣∣ρk(x, y)
∣∣ ≤ C(
1 + nT
|y|(1 + |y|))
,(3.11)
hence∥∥ρ
k+1(Xk+1, k+2)∥∥
2 ≤ C√
n/T since√
Tn k+2 is a standard normal distribution.
Keeping in mind that V is Lipschitz continuous yields
Nk∑i=1
Nk+1∑j=1
∣∣H,i jk
∣∣ ≤ C[V]1√
nNk∑
i=1
E
(|Xk+2 − Xk+2||Xk+1 − Xk+1|1Ci
k(Xk)
)
≤ C√
nE(|Xk+2 − Xk+2|2 + |Xk+1 − Xk+1|2
)) ≤ C√
nN2/d
.

FIRST-ORDER SCHEMES IN THE NUMERICAL QUANTIZATION METHOD 11
Finally, using the result from the previous section,
E|PkU(Xk) − PV,kU(Xk)|
≤ C[W]1√
nN2/d
+ E∣∣φU
k (Xk) − PV,kU(Xk)∣∣
≤ C[W]1√
nN2/d
+Nk∑
i=1
∣∣φUk
(xi
k
) − PV,kU(xi
k
)∣∣ × P(Xk ∈ Ci
k
)≤ C[W]1
√n
N2/d+
Nk∑i=1
E∣∣Qi
k
∣∣ +d∑
=1
Nk∑i=1
Nk+1∑j=1
∣∣H,i jk
∣∣ ≤ C[W]1√
nN2/d
.
In the algorithm we have in mind we want to compute PkU but we do not have accessto the true value of either U or V but only of some approximations U ′ : k+1 → R andV′ : k+2 → R. So we are interested in evaluating the impact of the error U − U ′ andV − V′. The functions U ′ and V′ are not related by U ′ = PV′ and this relation makesactually no sense because these functions are only defined on grids. Anyway, one maydefine PV′,kU ′(xi
k) by (3.8).
LEMMA 3.3. Let U, U ′ : k+1 → R, V, V′ : k+2 → R be some functions. For everyp∈ [1, 2), there is a real constant Cp , depending on p, on the diffusion process coefficients,and on the real constant in (2.7) such that
E |(PV,kU − PV′,kU ′)(Xk)| ≤ E |(U − U ′)(Xk+1)| + Cp
nE(|(V − V′)(Xk+2)|)(3.12)
+ Cp n(3/p)−1‖(V − V′)(Xk+2)‖p/(p−1)(3.13)
× ‖Xk+1 − Xk+1‖2/p2
.
Proof. We assume that C jV, = C j
V′, so that these terms disappear when taking thedifference. Moreover, having in mind the expression (3.7) of the weights, one obtains
E|(PV,kU − PV′,kU ′)(Xk)|
=Nk∑
i=1
∣∣(PV,kU − PV′,kU ′)(xi
k
)∣∣ P(Xk ∈ Ci
k
)≤ E|(U−U ′)(Xk+1)| + E
(|(V−V′) (Xk+2)|
d∑=1
∣∣ρk+1(Xk+1, k+2)
∣∣|Xk+1 − Xk+1|)
︸ ︷︷ ︸=:A
.
Set Zk+2 := √ nT k+2
L∼ N (0; Id ). Then (3.11) yields
A ≤ C√
nT
E(|(V − V′) (Xk+2)||Xk+1 − Xk+1|(1 + |Zk+2|)2).
Let p ∈ [1, 2) and q := pp−1 ∈ (2, +∞]. It follows from Holder and Markov inequalities
that

12 V. BALLY, G. PAGES, AND J. PRINTEMS
A ≤ CE(|(V − V′)(Xk+2)|)
+ C√
nT
‖(V − V′)(Xk+2)‖q
∥∥(Xk+1 − Xk+1) (1 + |Zk+2|)21|Xk+1−Xk+1|(1+|Zk+2|)2≥n−3/2∥∥
p
A ≤ Cn
E(|(V −V′)(Xk+2)|) + n3/p−1‖(V −V′) (Xk+2)‖q ‖Xk+1−Xk+1‖2/p2
‖(1 + |Zk+2|)4/p‖p.
The last inequality uses that Zk+2 is independent of Ftk+1 .
As an immediate consequence of the above lemmas one obtains the followingproposition.
PROPOSITION 3.3. Let U = PkV with V := Pk+1W, where W is a Lipschitz continuousfunction on R
d and let U ′ : k+1 → R and V′ : k+2 → R be some real functions. Then,for every p ∈ [1, 2), there is a real constant Cp , depending on p, on the diffusion processcoefficients, and on the constant in (2.7), such that
E|(PkU − PV′,kU ′) (Xk)| ≤ C[W]1√
nN2/d
+ E|(U − U ′) (Xk+1)| + Cp
nE|(V − V′) (Xk+2)|
+ Cp n3/p−1‖(V − V′) (Xk+2)‖q ‖Xk+1 − Xk+1‖2/p2
.
3.4. The Algorithm for the Snell Envelope
In this section we give the analogue of the algorithm in (2.4):
un(xi
n
):= hn
(xi
n
), i = 1, . . . , Nn,(3.14)
uk(xi
k
):= max
(hk
(xi
k
), Pkuk+1
(xi
k
))with Pkuk+1 := Puk+2,kuk+1, 0 ≤ k ≤ n − 2, and Pn−1un(xi
k) := ∑Nnj=1 π
i jn−1h(xj
n ). Keepin mind that
Pkuk+1(xi
k
) =Nk+1∑j=1
πi jk uk+1
(xj
k+1
) +d∑
=1
Nk+1∑j=1
Nk+2∑r=1
π,i jrk
(uk+1
(xr
k+2
) − C juk+1,
), 0 ≤ k ≤ n − 2
so that the definition of π,i jrk makes no sense for k = n − 1. The constants C j
uk+1,are to be
chosen in order to reduce the variance. Now we would like to evaluate the error induced byour algorithm. However, we deal with a nonlinear problem since uk = max(hk, Pkuk+1) =Pkuk+1 and some trouble appears—at least theoretically—in the computation of ∂ Pkuk+1
when hitting the obstacle. It seems difficult at this stage to provide an accurate descriptionof this error although this difficulty occurs rather seldom. Furthermore, the derivativesappear in the correctors, so they are already multiplied by small quantities. Anyway,numerical evidence shows that things work well.
In any case, to carry out our error estimates rigorously we will behave as if we weresolving a linear problem (namely, computing E(hn(Xn)) using a “linear” dynamic pro-gramming formula—i.e., removing the max).
A standard argument shows that, for every q ∈ (2, +∞), sup0≤k≤n,n∈N‖uk+1(Xk+1)‖q <
+ ∞ if h has linear growth (this holds for q = +∞ if h is bounded). Then Proposition3.3 applied with U := uk+1, V := uk+2, U ′ := uk+1, V′ := uk+2 leads to

FIRST-ORDER SCHEMES IN THE NUMERICAL QUANTIZATION METHOD 13
E|uk(Xk) − uk(Xk)| ≤ E|Pkuk+1(Xk) − Pkuk+1(Xk)| = E|Pkuk+1(Xk) − Puk+2,kuk+1(Xk)|
≤ C√
nN2/d
+ E|(uk+1 − uk+1) (Xk+1)| + Cp
nE|(uk+2 − uk+2) (Xk+2)|
+ Cp n(3/p)−1‖Xk+1 − Xk+1‖2/p2
(where Cp also depends on h now). Iterating the above inequality yields
∀k ∈ 0, . . . , n, E|uk(Xk) − uk(Xk)| ≤ Cn√
nN2/d
+ Cp n3p −1
n∑k′=0
‖Xk′+1 − Xk′+1‖2/p2
.
Let us evaluate the impact of this inequality. If the marginal distributions are dominatedappropriately (see Bally and Pages 2000)—at least heuristically—then the optimality ofthe grids implies that sup0≤k≤n,n∈N‖Xk+1 − Xk+1‖2 ≤ CN−1/d . This finally yields the fol-lowing global error bound: For every ε := p−1
p ∈ (0, 1/2) (including ε = 0 if h is bounded),
|Y0 − u0(x0)| ≤ Cnα
+ |u0(x0) − u0(x0)| ≤ Cnα
+ Cε
(n3
N2/d
)1−ε
(3.15)
for some real constant Cε> 0. If h is semiconvex then α = 1, and if h is simply Lipschitz
continuous then α = 12 . This leads to the conjecture that the following error bounds hold
true.
Conjecture. Let ε ∈ (0, 1/2) and suppose that N ≥ n(((3+α)/2)+ε) d . Then
|Y0 − u0(x0)| ≤ C2
nα(3.16)
where α = 1/2 under Hypothesis 2.1 and α = 1 under Hypothesis 2.2. When h is alsobounded, one may take ε = 0. The constant C
εdepends on the diffusion coefficients and
on the constant in (2.7).
COMMENTS. With the original zeroth-order algorithm, one needs N = n2d+1 in orderto get an error of order 1/n (when Hypothesis 2.2 holds true and the true diffusion (Xtk)is quantized; see Bally and Pages 2000, Thm. 5). Still with this original algorithm, oneneeds N = n((3/2) d)+1/2 in order to get an error of order 1/
√n (when Hypothesis 2.1 holds
true and the Euler scheme is quantized (see Bally and Pages 2000). So the theoreticalgain derived from the above estimate may look poor. In fact, the above theoretical errorbounds are probably not very sharp, especially because of Lemma 3.3. However, in viewof Proposition 3.2 and Lemma 3.2, which evaluate “locally” the improvements broughtby the first-order algorithm, one may hope to replace n3 in (3.15) by a smaller coefficient,possibly n
√n. Anyway, one verifies by numerical experiments that there is definitely a
significant gain, especially for medium dimensions (d ≤ 6 ).
3.5. Geometrical Interpretation
We mentioned above that schemes of order one correspond to the linear interpolationfor the function uk+1. The aim of this subsection is to make this assertion more precise.

14 V. BALLY, G. PAGES, AND J. PRINTEMS
For simplicity we consider the one-dimensional case only. So the points xjk ∈ R and we
denote Iik := [xi
k, xi+1k ). We also denote
u′,rk+1
(xj
k+1
):= uk+1
(xj+1
k+1
) − uk+1(xj
k+1
)xj+1
k+1 − xjk+1
, u′,k+1
(xj
k+1
):= uk+1
(xj
k+1
) − uk+1(xj−1
k+1
)xj
k+1 − xj−1k+1
and we think of u′,rk+1(xj
k+1) (respectively of u′,k+1(xj
k+1)) as an approximation of the right-
hand side (respectively of the left-hand side) derivative of uk+1 at xjk+1. The linear inter-
polation for uk+1(xjk+1), j = 1, . . . , Nk+1 on [x1
k+1, xNk+1k+1 ] is given by
uk+1(y) =∑
1≤ j≤Nk+1
1I jk+1
(y)(uk+1
(xj
k+1
) + u′,rk+1
(xj
k+1
) (y − xj
k+1
)).
In order to express this in terms of Voronoi tessels we denote→C
jk+1=
[xj
k+1,xj
k+1 + xj+1k+1
2
)and
←C
jk+1=
(xj−1
k+1 + xjk+1
2 , xjk+1
)so that C j
k+1 =←C
jk+1 ∪ →
Cjk+1 and I j
k+1 =→C
jk+1 ∪ ←
Cj+1k+1.
With this notation
uk+1(y) =∑
1≤ j≤Nk+1
1C jk+1
(y)uk+1(xj
k+1
)+
∑1≤ j≤Nk+1
(1→
Cjk+1
(y)u′,rk+1
(xj
k+1
)(y − xj
k+1
) + 1←C
jk+1
(y)u′,k+1
(xj
k+1
)(xj
k+1 − y))
.
As long as we are far from the free boundary, the above expressions yield
uk(xi
k
) = E(uk+1
(Btk+1
) ∣∣ Btk = xik
)=
∑1≤ j≤Nk+1
uk+1(xj
k+1
)E
(1C j
k+1
(Btk+1
) | Btk = xik
)
+∑
1≤ j≤Nk+1
E
(1→
Cjk+1
(Btk+1
)(Btk+1 − xj
k+1
) ∣∣ Btk = xik
)u′,r
k+1
(xj
k+1
)+
∑1≤ j≤Nk+1
E
(1←
Cjk+1
(Btk+1
)(xj
k+1 − Btk+1
) ∣∣ Btk = xik
)u′,
k+1
(xj
k+1
).
So the linear interpolation may be seen as a Taylor expansion of order one, with thederivative approximated by finite differences (in a different way in the left-hand side andin the right-hand side). This is exactly what we are doing in the order one schemes. Theonly difference concerns the approximation that we use for the first-order derivatives. Thereason we do not use finite differences approximations is that this kind of scheme is notavailable in the multidimensional case, when the grid is not regular (we mean hypercubes):Optimal grids are never regular.
Let us now come back to our way of computing derivatives. We stress that this is basedon the fact that uk+1(xj
k+1) is itself an expectation. The formula

FIRST-ORDER SCHEMES IN THE NUMERICAL QUANTIZATION METHOD 15
u′k+1
(xj
k+1
) = E((
uk+2(θk
(xj
k+1, k+2)) − C
)ρ1
k
(xj
k+1, k+2))
gives a pathwise interpretation of the derivative and this is the basic fact that allows usto compute the derivatives using a Monte Carlo method.
There is one more difference between our method and the linear interpolation method.In the computation of u′
k+1(xjk+1) using the finite difference method, one uses two values
of uk+1: at xjk+1 and at xj+1
k+1 (respectively in xj−1k+1 ). In our method we do not use the values
of uk+1 but of uk+2. Moreover, we use all the values (uk+2(xjk+2))1≤ j≤Nk+2 . Finally we stress
that our interpolation is piecewise linear but not continuous.
3.6. Numerical Experiments
We now present numerical experiments on pricing American exchange style optionsbased on algorithms (2.4) and (3.14) in dimension 4, 6, and 10. The obstacle chosen hereis the following exchange style payoff:
h(t, St) = (S1
t . . . Sd/2t − Sd/2+1
t . . . Sdt
)+,
where t ∈ [0, T ] and where the d-dimensional price process Stt∈[0,T] follows a standardBlack-Scholes model with null interest rate, a dividend rate vector µ = [5%, 0, . . . , 0]t,and a diagonal constant volatility matrix σ = diag(σ1, . . . , σd ) with σi = √
2/d 20%. Theinitial conditions are Si
0 = (40)2/d for i ∈ 1, . . . , d/2 and Si0 = (36)2/d for i ∈ d/2 +
1, . . . , d.In the following simulations, we have set the maximal maturity time T = 1 year and
the time step T/n with n = 24 (dimensions 4 and 6), n = 48 (dimension 10). The numberof points on the top layer is N24 = 500 (dimension 4), N24 = 1000 (dimension 6), andN48 = 1000 (dimension 10). The number of points per time layer is then fixed as explainedin Section 2.3. We have to point out here that because the price process is an explicitfunction of the Brownian motion, the computations of the weights (2.3) and (3.7) aredone for the d-dimensional Brownian motion. This part of the computation is thenparameter free and has to be done once for all. Therefore algorithms (2.4) and (3.14) canbe used for every choice of parameter (dividend rate, volatilities, initial conditions) withthe same weights. We denote by AM0(0, T) (resp. AM1(0, T) ) the price at time t = 0 andmaturity T computed with (2.4) (resp. with (3.14)). Finally, we denote by AMref (0, T) areference price performed in dimension 2 by a finite difference scheme on the associatedPDE formulation (Villeneuve and Zanette 2002) with σ1 = σ2 = 20%, µ1 = 5%, µ2 =0, S1
0 = 40, and S20 = 36.
In Table 3.1, the relative errors of AM0(0, T) and AM1(0, T) with respect to AMref (0, T)are displayed. First we observe that in every case the relative errors do not overcome 4%for 12 months and 2% for 6 months. For 6 months of maturity, the corrected weights seemsto be very pertinent in every dimension since the relative errors are reduced by factors of30 to 50. As time to maturity increases (9 and 12 months), the correction remains usefulfor d = 4 and d = 6 in order to reduce the relative error below 1%. The use of correctedterms in dimension 10 for these maturities seems not to be very relevant. Indeed, in thiscase, the optimization of the grids is very hard to achieve. Therefore the approximationof the weights is no more consistent because we have to take into account the bottomerror (see Sect. 3.2). But taking into account those corrections is practically untractable

16 V. BALLY, G. PAGES, AND J. PRINTEMS
TABLE 3.1Relative Errors of AM0 and AM1 with Respect to a Reference Price for Different
Maturities and Dimensions
Maturity: 3 months 6 months 9 months 12 monthsAMref : 4.4110 4.8969 5.2823 5.6501
Price Error (%) Price Error (%) Price Error (%) Price Error (%)
d = 4AM0 4.4076 0.08 4.9169 0.34 5.3284 0.82 5.7366 1.39AM1 4.4058 0.1 4.8991 0.04 5.2881 0.08 5.6592 0.13
d = 6AM0 4.4156 0.1 4.9276 0.63 5.3550 1.38 5.7834 2.20AM1 4.4099 0.02 4.8975 0.01 5.3004 0.34 5.6557 0.10
d = 10AM0 4.4317 0.47 4.9945 2.00 5.4350 2.89 5.8496 3.53AM1 4.4194 0.19 4.8936 0.07 5.1990 1.58 5.4486 3.56
in this dimension due to the high cost of the storage. This shows the great importance ofoptimal grids in high dimension.
REFERENCES
BALLY, V., G. PAGES, and J. PRINTEMS (2001): A Stochastic Quantization Method for NonlinearProblems, Monte Carlo Meth. Appl. 7, 1-2, 21–34.
BALLY, V., G. PAGES, and J. PRINTEMS (2002): A Quantization Tree Method for Pricing andHedging Multi-Dimensional American Options. Preprint de I’INRIA and preprint, Labo.de Proba. & Modeles aleatoires, Univ. Paris 6 (France).
BALLY, V., and G. PAGES (2000): A Quantization Algorithm for Solving Multi-DimensionalOptimal Stopping Problems. Preprint 628, Laboratoire de Probabilites & Modeles aleatoires,Universite Paris 6 (France), forthcoming in Bernouilli.
BALLY, V., and G. PAGES (2001): Error Analysis of the Quantization Algorithm for ObstacleProblems. Preprint 642, Laboratoire de Probabilites & Modeles Aleatoires, Universite Paris 6(France), forthcoming in Stoch. Process Appl.
GRAF, S., and H. LUSCHGY (2000): Foundations of Quantization for Probability Distributions,Lecture Notes in Mathematics n01730. Berlin: Springer
PAGES, G. (1997): A Space Vector Quantization Method for Numerical Integration. J. Appl.Computat. Math. 89, 1–38.
VILLENEUVE, S., and A. ZANETTE (2002): Parabolic A.D.I. Methods for Pricing American Optionon Two Stocks, Math. Oper. Res. 27(1), 121–149.

230CHAPITRE 5. MÉTHODES DE QUANTIFICATION ET QUELQUES APPLICATIONS À LA FINANCE.
5.2 Optimal quadratic quantization for numerics : the Gaus-sian case.
L’article qui suit fut publié dans Monte Carlo Methods and Applications, vol. 9(2), pp. 135–165 (2003).

Optimal quadratic quantization for numerics: the Gaussian
case
Gilles PAGES∗ Jacques PRINTEMS†
Abstract
Optimal quantization has been recently revisited in multi-dimensional numericalintegration (see [18]), multi-asset American option pricing (see [2]), control theory (see[19]) and nonlinear filtering theory (see [20]). In this paper, we enlighten some numericalprocedures in order to get some accurate optimal quadratic quantization of the Gaussiandistribution in one and higher dimensions. We study in particular Newton method inthe deterministic case (dimension d = 1) and stochastic gradient in higher dimensionalcase (d ≥ 2). Some heuristics are provided which concern the step in the stochasticgradient method. Finally numerical examples borrowed from mathematical finance areused to test the accuracy of our Gaussian optimal quantizers.
Keywords: Optimal quantization, stochastic gradient methods, numerical integration.
AMS Classification (2000): 94A29 (Secondary: 62L20, 65D30, 65D32, 90C59, 90C5291B28).
1 Introduction
Although optimal quantization has been extensively investigated for more than fifty years infields such as Signal Processing and Information Theory (see [11, 13]), it has been recentlyrevisited in the field of Numerical Probability for numerical integration in high dimension(see [18]), multi-asset American option pricing (see [2, 1, 3, 4]) but also in Control Theory(see [19]) and Nonlinear Filtering Theory (see [20])(see also [21] for a survey of applicationsof optimal quantization methods in finance). In all these fields of application, the access tosome very accurate approximation of optimal quantization is crucial. This access has beenmade possible by the increasing power of modern computers: one can now massively processon a standard personal computer some numerical methods based on massive probabilisticsimulation. The most popular one being the regular Monte Carlo method. The aim of thispaper is to enlighten the numerical procedures used to get optimal quadratic quantizationof random vectors, with a special emphasis on Gaussian vectors.
Let X be a random vector on a probability space (Ω,F ,P) taking its values in Rd.We denote by PX its distribution on Rd. Quantization consists in approximating X by arandom vector q(X) taking finitely many values in Rd. Let q(Rd) = x1, . . . , xN . Amongall Borel functions taking their values in the set x1, . . . , xN , one specifies the so-called
∗Laboratoire de Probabilites et Modeles Aleatoires, CNRS UMR 7599, Universite Paris 6, case 188, 4,pl. Jussieu, F-75252 Paris Cedex 5. E-mail: [email protected].†INRIA, MathFi project and Centre de Mathematiques, CNRS UMR 8050, Universite Paris 12, 61, av.
du General de Gaulle, F-94010 Creteil. E-mail: [email protected]
1

Voronoi N -quantizers defined by
qvor(ξ) =N∑
i=1
xi 1C(xi)(ξ), ξ ∈ Rd,
where C(xi)1≤i≤N is a Borel partition of Rd satisfying
C(xi) ⊂ ξ ∈ Rd | |ξ − xi| ≤ |ξ − xj |, j = 1, . . . , N.
Let p ≥ 1 and X ∈ Lp. One easily checks that these Voronoi N–quantizers minimizethe Lp quantization error (to the power p), i.e.
E |X − qvor(X)|p = minE |X − q(X)|p, q : Rd Borel−→ x1, . . . , xN
.
From now on, we will only consider Voronoi N–quantizers (and so we will often drop the“Voronoi” term). For these Voronoi N–quantizers, the Lp–error (to the power p) inducedby replacing X by its quantizer q(X) reads
E|X − qvor(X)|p =∫
Rdmin
1≤i≤N|xi − ξ|pPX (dξ)(1.1)
The right-hand-side of the above equality defines a (symmetric) continuous function x 7→DX,pN (x) on (Rd)N of the variable x := (x1, . . . , xN ). Such a N -tuple x will often be called
N–quantizer as well. The aim of Lp-optimal quantization is to find some optimal quantizerwhich minimizes the functionDX,p
N over (Rd)N (there is always some, see, e.g. [13]). Optimalquadratic quantization, on which we focus in this paper, stands for p = 2.
Let us illustrate by a simple example an application of optimal quantization to nu-merical integration: one can write, for a regular enough function f and a quantizer x :=(x1, . . . , xN ):
E f(X) =N∑
i=1
PX(C(xi))f(xi) +N∑
i=1
df(x) · E(
(xi −X)1C(xi)
(X))
(1.2)
+2nd order terms.
The first sum in the right-hand-side of the equality can be easily computed provided oneknows the xi’s and the PX -“mass” of their Voronoi cells. Then, one can see that, whenfor p = 2, the first order necessary condition for optimality in (1.1) implies that all theterms E((xi −X)1
C(xi)(X)), i = 1, . . . , n, are 0. This improves the numerical accuracy of
the approximation of E(f(X)).In many cases where the random vector X of interest in (1.2) is the d-dimensional
Brownian motion BT at some positive time T (e.g. the pricing of an European option in theBlack and Scholes model), the crucial step amounts, modulo an appropriate dilatation, tooptimally quantize the Normal distribution N (0; Id). The aim of this paper is to describein full details some numerical procedures performing optimal quadratic quantization ofGaussian random vectors. We mean by that to give some heuristics concerning efficientchoices for the parameters in different gradient-based optimization algorithms proposed tominimize (1.1): Newton’s method (in one dimension), a fixed point-like method known asLloyd’s method I (see [14]) and stochastic gradient method (see [8]).
Stochastic gradient methods are based on the integral representation of the gradient ofthe criterion to be minimized (this is the case of the criterion DX,2
N defined by (1.1)). The
2

rate of convergence of stochastic gradient methods is ruled by a Central Limit Theorem(CLT). The rate of convergence of stochastic gradient descents is ruled by a Central LimitTheorem (CLT). When the descent step of the procedure is settled to provide the bestpossible rate, then the variance in the CLT is proportional to the inverse of the lowesteigenvalue of the Hessian d2DX,2
N (x?) at the limiting value x?.Hence, we can see that the ill-conditioned nature of d2DX,2
N (x?) is linked to the slownessof the stochastic algorithm. One verifies that this is a crucial problem in practical imple-mentations of such stochastic gradient procedures. This is the reason why we first studiedthe case of the uniform distribution U([0, 1]) over the unit interval for which everything canbe computed analytically:
minx∈(Rd)N
DX,2N (x) = DX,2
N (x?) =1
2Nwith x? =
(2k − 1
2N
)
1≤k≤N,
and d2DX,2N (x?) is, up to a normalizing factor, the three points-discretized Laplacian oper-
ator which is known to be ill-conditioned. This tells us that the uniform law is some sensethe most difficult case for the numerical experiments. When dealing with more generaldistributions, this is a hint to explain and overcome the numerical difficulties encounteredto compute the components of an optimal quantizer close to the modes of the distribution:around these modes, the distribution behaves locally as the uniform distribution. From thisstudy, we will be in position to derive some heuristics concerning the descent step in thestochastic gradient including in higher dimension for the Normal distribution (see Section3).
The paper is organized as follows. In Section 2, after some definitions, we recall inTheorem 2.1 the asymptotic bound concerning the infimum in (1.1) when N becomes large.Then we recall general facts about the stochastic gradient algorithm and give necessaryconditions of convergence in Theorem 2.4 (see [8]). In Section 3, we proceed to the numericalimplementation of Newton’s Method for the one dimensional case and stochastic gradientin higher dimension (up to 10). In Section 4, we propose some numerical experiments withan example borrowed to mathematical finance. It consists in pricing Put and Put-SpreadEuropean options on a geometrical index of Black & Scholes assets using some optimalquadratic quantizers of a d-dimensional Normal distribution for d ∈ 2, . . . , 6. This isbased upon the above formula (1.2). Its main purposes are to test from a numerical pointof view the accuracy of the optimal quantizer obtained in Section 3. Subsequently, it is away to validate our heuristics concerning the different optimization procedures depicted inSection 3. To this end, we carry out in Section 4 a short comparison with the Monte Carlomethod. Several classes of functions are involved depending on their convexity structureand their smoothness. Indeed, as pointed out in Section 2, numerical integration of convexfunction via optimal quantizer yields a lower bound of the true value. That is why numericalintegration of the difference of two convex functions via optimal quantization must yield abetter accuracy. Our numerical experiments tend to show that being the difference of twoconvex functions is more prominent than smoothness. Moreover, in this case, the numericalintegration via optimal quantization leads to good results both in terms of relative error inpercentage and in term of absolute error when we compare it with the standard deviation ofthe Monte Carlo estimator. In fact, it successfully competes with the Monte Carlo methodup to 4-dimension as predicted by theoretical error bounds and seems quite satisfactory evenin 5-dimension. Nevertheless, we emphasize that the purpose of this section is essentiallyto test the accuracy of the optimal quantizer. It is clear that, as far as high dimensionalnumerical integration is concerned, say d ≥ 6, Monte Carlo method is especially relevant
3

when we want to balance accuracy with computational cost. The natural field of applicationof the quantization method is the computation of a huge number of integrals of regularfunctions with respect to the same distribution, in medium dimensions (say 1 ≤ d ≤ 4 ord = 5).
2 Notations and preliminaries
We denote by | · | the Euclidean norm on Rd and for every Borel set A ⊂ Rd, we denote by1A its indicator function.
2.1 Quantization of random vector
Let X be a square integrable Rd-valued random vector defined on a probability space(Ω,F ,P). Let x := (xi)1≤i≤N be a N -tuple in Rd and let q : Rd → x1, . . . , xN be anyBorel function. The x1, . . . , xN-valued random vector q(X) is called a q-quantization ofX. The induced quadratic error ‖X − q(X)‖2 is called (quadratic) q-quantization error.
One easily shows that, among all possible x1, . . . , xN-valued functions q, all thosedefined by
qvor(ξ) :=N∑
i=1
xi1C(xi)(ξ), ξ ∈ Rd,
where C(xi)1≤i≤N is a Borel partition of Rd satisfying
C(xi) ⊂ ξ ∈ Rd | |ξ − xi| ≤ |ξ − xj |, j = 1, . . . , Nminimize the quadratic quantization error. That is
‖X − qvor(X)‖2 = min‖X − q(X)‖2 , q : Rd Borel−→ x1, . . . , xN
.
Any such partition C(xi)1≤i≤N of Rd is called a Voronoi tessellation of the N -tuplex and the corresponding function qvor a Voronoi N -quantizer. When all the componentsof the N -tuple x are pairwise distinct, each cell C(xi) contains xi, its closure is convex andits boundary is included in finite union of hyperplanes. Any qvor-quantization of X whereqvor is a Voronoi N -quantizer is called a Voronoi N -quantization of X. It is denoted Xx
(or simply X when there is no ambiguity). For notational simplicity the N -tuple x itselfwill often be called (Voronoi) N -quantizer. So, such a Voronoi quantization reads
Xx :=N∑
i=1
xi1C(xi)(X).
The resulting quadratic quantization error, to the power 2, that is E |X − Xx|2, iscalled quadratic distortion (this terminology comes from Information Theory and Signalprocessing and was developed in the early 1950’s) and is denoted DX
N (x). If PX denotesthe distribution of X, it reads
DXN (x) := E|X − Xx|2 =
N∑
i=1
E(1C(xi)(X)|X − xi|2)
=∫
Rdmin
1≤i≤N|xi − ξ|2 PX (dξ).
4

The notation is consistent since the distortion only depends on the N -tuple x and (thedistribution of) X. Furthermore, when PX is continuous, the Voronoi quantization Xx
itself is P-essentially unique.One crucial feature is that the distortion function x 7→ DX
N (x) is continuous, and alwaysreaches (at least) one minimum, at some N -tuple x∗ having pairwise distinct components.Let us denote
DXN := min
x∈(Rd)NDXN (x).
Such an optimal quantizer lies in the convex hull of the support of PX . Furthermore,it is easy to establish that this minimum DX
N decreases to 0 as the size N of the optimalquantizer goes to infinity (see e.g. [13, 18] for a proof of these basic properties). The rateof convergence to 0 is a more challenging problem, elucidated in several steps by Zador,Bucklew & Wise and finally Graf & Luschgy (see [13]). It is given by the following theorem.
Theorem 2.1 Assume X ∈ L2+ε(Ω,A,P) for some ε > 0. Set ϕ := dPX
dλdthe Radon-
Nikodym density of the absolutely continuous part of PX with respect to the Lebesgue measureλd on Rd. Then
limNN2/dDX
N = Jd‖ϕ‖ dd+2
(2.1)
where ‖ϕ‖r = (∫Rd |ϕ|rdλd)1/r for any r > 0. In particular Jd is the limit when X ∼
U([0, 1]d) and satisfies Jd = minN
N2/dDU([0,1]d)N .
The true value of Jd is unknown when d ≥ 3 but one knows that Jd ∼ d2πe (J1 = 1
12 andJ2 = 5
18√
3) (see [13]).
It is of high interest to have access to a N -tuple x∗ with minimal possible distortion sinceit provides the best possible quadratic approximation of a random vector X by a randomvector taking (at most) N values. This is the purpose of optimal quantization which willneed in higher dimension to use stochastic procedure of optimization exposed below.
But before getting into these optimization procedures, let us illustrate on a simpleexample how quantization of random vectors can be used for numerics, namely numericalintegration.
2.2 Numerical integration by quantization
The idea is simply to approximate the distribution PX on Rd by that of Xx on Borelfunctions f ∈ L1(Rd,PX ) and to use the distortion to evaluate the resulting error. Thismeans comparing
E f(X) =∫
Rdf(ξ)PX (dξ) and E f(X) =
∫
Rdf(ξ)P bX (dξ) =
N∑
i=1
f(xi)PX (C(xi)).
From a computational point of view, the numerical computation of the second quantityneeds to have access not only to the (hopefully optimal) quantizer x but also to the PX -mass of the cells of its Voronoi tessellation. One must include this phase in any proceduredevised to compute an optimal quantizer (see [18]).
• The basic result is quite simple: if f is Lipschitz continuous, then∣∣∣∣∫
Rdf(ξ)PX (dξ)−
∫
Rdf(ξ)P bX (dξ)
∣∣∣∣ = |Ef(X)− Ef(X)| ≤ E|f(X)− f(X)|
5

≤ [f ]LipE|X − X|≤ [f ]Lip
√DXN (x).
This shows that if x(N), N ≥ 1, denotes a sequence optimal N -quantizers, then PX(N)
weakly converges toward PX at optimal rate. (Of course, the weak convergence also holdsfor any sequence X(N) of N -tuples such that DX
N → 0 as N goes to infinity).
•When the function f is smoother – differentiable with a Lipschitz continuous derivativeDf – this error bound can be significantly improved still using the distortion. This relieson a noticeable regularity property of the distortion DX
N (x) as a function of the N -tuplex: it is continuously differentiable on the open set of N -tuples x having pairwise distinctcomponents satisfying
PX (∪1≤i≤N∂C(xi)) = 0(2.2)
(holds for every x if PX is continuous), and
∂DXN
∂xi(x) = 2
∫
C(xi)(xi − ξ)PX (dξ), 1 ≤ i ≤ N.(2.3)
Furthermore, one shows (see [13]) that any optimal N -quantizer x∗ has pairwise distinctcomponents and satisfies (2.2) provided that |supp(PX )| ≥ N (regardless of the continuityof PX ). Consequently x∗ is a stationary quantizer i.e.
∫
C(xi)(x∗i − ξ)PX (dξ) = 0, 1 ≤ i ≤ N.(2.4)
This also holds for any locally optimal quantizer lying inside the support of PX .Numerical integration using stationary quantizers has further properties: assume that
f is continuously differentiable with a Lipschitz continuous differential df (1) and that xis a stationary quantizer. Then, the fundamental formula of calculus shows that, for everyi∈ 1, . . . , N and every u∈ C(xi)
|f(ξ)− f(xi)− df(xi).(ξ − xi)| ≤ [df ]Lip |ξ − xi|2
so that, integrating with respect to PX on every C(xi) and summing over i yields
∣∣∣∣∫
Rdf(ξ)PX (dξ) −
N∑
i=1
f(xi)PX (C(xi))−N∑
i=1
df(xi).∫
C(xi)(xi − ξ)PX (dξ)
︸ ︷︷ ︸=0
∣∣∣∣∣∣∣∣∣
≤ [df ]Lip
∫
Rdmin
1≤i≤N|ξ − xi|2PX (dξ)
so that ∣∣∣∣∣∫
Rdf(ξ)PX (dξ)−
N∑
i=1
f(xi)PX (C(xi))
∣∣∣∣∣ ≤ [df ]LipDXN (x).(2.5)
When f is twice differentiable with a bounded Hessian d2f , then the above inequalityholds with 1
2‖d2f‖∞ instead of [df ]Lip . If x is an optimal N -quantizer, then DXN (x) ¿
1The dual of Rd is identified with Rd so that dg is identified with ∇g from now on.
6

√DXN (x) for N large enough since DX
N = o(√DXN ) as N → ∞. (Also note that DX
N ≤DX
1 = Var(X).)
• A second property of stationary quantizers is of interest for numerical integration: itinvolves convex functions. One starts from the stationary equality (2.4) which also reads,if x denotes a stationary quantizer
xi =1
PX (C(xi))
∫
C(xi)ξ PX (dξ), 1 ≤ i ≤ N.(2.6)
Following the definition of Xx, this in turn reads
Xx = E(X|Xx).
Now the conditional Jensen inequality applied to any convex function f yields
N∑
i=1
f(xi)PX (C(xi)) = Ef(Xx) ≤ Ef(X).(2.7)
sinceEf(Xx) = Ef(E(X|Xx)) ≤ E (E(f(X)|Xx)) = Ef(X).
Numerical integration by quantization using a stationary quantizer always yields a lowerbound of the true value Ef(X). For some further error bounds when the function f issimply locally Lipschitz continuous, see [10].
2.3 Stochastic gradient method
Let E be a finite dimensional R-vector space, U a nonempty open subset of E and let µ bea probability measure on Rd. Suppose we are given a continuously differentiable functiong : U → R with differential dg : U → E.
Definition 2.2 We say that dg has an integral representation on U with respect to µ ifthere exists a function dG : U × Rd → E such that dG(x, .)∈ L1(µ) for every x∈ U and
dg(x) =∫
RddG(x, ξ)µ(dξ).
Usually, such a representation formula is obtained by differentiation of a representation
formula g(x) :=∫
RdG(x, ξ)µ(dξ) for g. The principle of stochastic gradient method is to
use the function dG and some independent simulated copies of µ-distributed random vectorsto approximate recursively a zero of dg. This procedure can be substituted to the standardgradient descent when the distribution µ can easily be simulated whereas the computationof dg(x) is out of reach because it requires the computation of integrals with respect to µin higher dimension. Let us be more specific now. Let (Ω,F ,P) be a probability space.Following [8] (chapter 2), we have the following definition.
Definition 2.3 Let g be a twice differentiable function from E to R such that dg has anintegral representation on E with respect to µ. We call stochastic gradient method in Efor g, a triplet of sequences ((Xn)n≥0, (ξn)n≥1, (γn)n≥1) with values respectively in E, Rdand [0,+∞[ satisfying for every n ≥ 1
7

Xn+1 = Xn − γn+1 dG(Xn, ξn+1)(2.8)
(ξn)n≥1 i.i.d. with L(ξ1) = µ(2.9)
γn > 0 for every n ≥ 1 and∑
n≥1
γn = +∞.(2.10)
The sequence (γn)n≥1 is called the step or gain parameter sequence.
This definition is motivated by the following convergence theorem. This result is classicaland many variants and generalizations can be found in the literature devoted to StochasticApproximation Theory ([8], [16], among others).
Theorem 2.4 (a) A.s. convergence: Let g : E → R+ be a continuously differentiablefunction whose differential dg admits an integral representation on E with respect to µ
dg(x) =∫
RddG(x, ξ)µ(dξ).
Assume that dg and dG satisfy
lim|x|→+∞
g(x) = +∞ and dg is Lipschitz continuous(2.11)
∫
Rd|dG(x, ξ)|2µ(dξ) = O(g(x)) as |x| → ∞.(2.12)
Let ((Xn)n≥0, (ξn)n≥1, (γn)n≥1) be a stochastic gradient method with a positive gainparameter sequence satisfying
∑
n≥1
γn = +∞ and∑
n≥1
γ2n < +∞.(2.13)
Then g(Xn) a.s. converges to some nonnegative random variable g∞ ∈ R+ and Xn a.s.converges toward some random connected component χ∗ of dg = 0 ∩ g = g∞.
In particular, if dg = 0 = x∗, then
Xn −→ x∗ a.s. as n→ +∞.(2.14)
(b) Rate of convergence (CLT): Let x∗ be an equilibrium point of dg = 0. Assumethat x∗ is attractive, that is g is is twice differentiable at x∗ and d2g(x∗) is positive definite.Assume that the “noise” is nondegenerated at x∗, namely that
Γ∗ :=∫
RddG(x∗, ξ) t(dG(x∗, ξ))µ(dξ) is positive definite,(2.15)
where tA is for transpose of A.Specify the gain parameter sequence as follows
∀n ≥ 1, γn =a
b+ nα, a, b > 0, 0 < α < 1.
If α = 1 assume furthermore that the lowest eigenvalue λmin of d2g(x∗) satisfies
8

a >1
2λmin.(2.16)
Then, the above a.s. convergence is ruled on the convergence set Xn → x∗ by the followingCentral Limit Theorem
Xn − x∗√γn
Lstably−→ N (0,Σ),(2.17)
with Σ :=∫ +∞
0e−(d2g(x∗)−ρId)uΓ∗e−(d2g(x∗)−ρId)u du and ρ = 1
2a1α=1.
The convergence in (2.17) means that for every bounded continuous function and everyA∈ F ,
E(
1Xn→x∗∩A f(Xn − x∗√
γn))n→∞−→ E
(1Xn→x∗∩A f(
√Σ ζ)
), ζ ∼ N (0; Id).
Remark 2.5 • The above formulation is derived from [8]: claim (a) is the combination ofTheorem 2.III.4 p.61 and section 3.III.2, p.102. Claim (b) comes from section III., p.160.• When g is only defined on an (open) domain U ⊂ E, the above convergence still holdswhen the gain parameter sequence (γn)n≥0 takes its values in (0, γmax] provided that U isconvex, that x 7→ x− γmaxdG(x, ξ) maps U into U for every ξ∈ Rd and that
limd(x,∂U)→0
g(x) = +∞.
This last assumption on g can be relaxed if U is bounded and if g and dg admit acontinuous extension on U and if dG(., ξ), ξ∈ Rd admit an extension on U which extendsthe representation property on U .• The matrix N (0; Σ) is the invariant distribution of the Ornstein-Uhlenbeck diffusion
dYt = −(d2g(x∗)− ρId)Yt dt+√
Γ∗ dWt.
• It follows from (2.17) that the fastest possible rate of convergence is√n. It is obtained
with step sequence γn = ab+n , n ≥ 1, a large enough: indeed
√n(Xn−x∗) weakly converges
toward N (0; aΣ). One easily checks that aΣ goes to 0 as a→∞. So the best rate of conver-gence is obtained for arbitrary large a. Except that the number of iterations needed for thisrate of convergence to show up becomes greater and greater. So, an empirical approachis necessary to fit some “reasonable” coefficient a. This could be e.g. (in 1-dimension)a = 1/g
′′(x∗) which then yields a 1/g
′′(x∗) asymptotic variance term. Unfortunately, this
quantity is usually out of reach given the fact that we are looking for x∗. Some averagingmethods can theoretically provide a solution to that problem but empirical tests were notdecisive for the optimal quadratic quantization problem we are dealing with.
Uniform distribution U([0, 1]): We will illustrate Theorem 2.4 with the quadraticdistortion for uniform distribution on [0, 1] (see [9]). Set E = RN , d = 1, and
g(x1, . . . , xN ) :=12
∫ 1
0min
1≤i≤N(xi − ξ)2 du.
9

Function g is clearly symmetric, so one may restrict on the open set U := (x1, . . . , xN ), 0 <x1 < x2 < . . . < xN < 1. On U , g is differentiable and dg has an integral representa-tion with respect to du given by (2.3). Now C(xi) = [xi−1/2, xi+1/2], 1 ≤ i ≤ N , withxi+1/2 := xi+xi+1
2 , 1 ≤ i ≤ N − 1, x1/2 = 0 and xN+1/2 = 1. With these conventions, onechecks that
dg(x1, . . . , xN ) =
(∫ xi+1/2
xi−1/2
(xi − ξ) dξ)
1≤i≤N.
These integrals can be computed so that
∂g
∂xi(x) =
18
(2xi − (xi+1 + xi−1)) (xi+1 − xi−1), 2 ≤ i ≤ N − 1,
∂g
∂x1(x) =
18
(3x1 − x2) (x1 + x2),
∂g
∂xN(x) =
18
(3xN − xN−1 − 2) (2− (xN + xN−1)).
The computation of the Hessian d2g of g is straightforward and we have for a givenN -tuple x and for any i such that 2 ≤ i ≤ N − 1 :
d2g(x)i,i−1 = −xi − xi−1
4, d2g(x)i,i+1 = −xi+1 − xi
4,
d2g(x)i,i =xi+1 − xi−1
4.
One checks that dg(x∗) = 0 iff x∗i = 2i−12N for i = 1, . . . , N . Finally, g satisfies all the
assumptions of Theorem 2.4 (with γmax = 1). Furthermore, the eigenvalues of d2g(x∗) canalso be computed and we find
λi =1N
sin2
(πi
2N
), i ∈ 1, . . . , N.
so that
λmin =1N
sin2( π
2N
)≈ π2
4N3when N is large.
Thus, Theorem 2.4 shows that a Central Limit Theorem holds for the a.s. convergenceXn → x∗ provided a > 2N3/π2.
Remark 2.6 •One checks that the Hessian d2g(x∗) at x∗ is the discrete Laplacian obtainedby finite difference on the interval [0, 1] up to a multiplicative factor N/4. Here, the ill-conditioned nature of such an operator is directly linked to the (slow) rate of convergenceof the algorithm (2.8) through Theorem 2.4. Indeed, the number n of trials necessary toget γn close to 0 increases with N .
• This example suggests that when implementing a stochastic gradient to the distortionfunction of a more general distributions, special attention has to be paid to the pointswhich are close to a mode of the (probability density function of the) distribution µ. There,roughly speaking, the distribution mimics the uniform distribution because of the lack ofinjectivity and this seems to impose as strong assumptions on the step parameter (γn)n≥1
as for the uniform distribution.
10

Partial extension to non uniform distributions on the real line: To con-clude this section, let us mention some further results about the quadratic distortion in 1-dimension. One may restrict the distortion function to the open set U := (x1, . . . , xN ), m <x1 < x2 < . . . < xN < M where m := inf supp(µ) and M := sup supp(µ).
– First, when PX is absolutely continuous with a log-concave probability density func-tion, then DX
N has a unique stationary – hence optimal – quantizer x∗ i.e. d(DXN ) = 0 =
x∗. This is e.g. the case of the Normal distribution µ(dξ) := exp(−ξ2/2)/√
2π.– If, furthermore, µ has a compact support, then the above stochastic gradient procedure
a.s. converges toward x∗ (see [14, 17]).– Some examples of non-uniqueness of the stationary quantizer can be found e.g. in [13].
For some examples of uniqueness when the probability density function is not log-concave,see [10].
– No regular a.s. convergence result holds for non compactly supported distributionsPX , essentially because the distortion does not go to infinity when |x| goes to infinity.
In higher dimension, uniqueness of stationary quantizers clearly often fails, so Theo-rem 2.4 must be applied in its general form.
3 Optimal quantization of distributions on Rd. The case ofthe Normal distribution
Let d ≥ 1, X be a Rd-valued random vector having an absolutely continuous distribution µ =PX . Let N ≥ 1 be an integer (in this section DX
Nwill always denote the distortion function
related to the distribution µ). In this section we deal with the following optimizationproblem:
(P) ≡
Find a N -tuple x∗ = (x∗1, . . . , x∗N ) s.t.
DXN
(x∗1, . . . , x∗N ) ≤ DX
N(x1, . . . , xN ), ∀x = (x1, . . . , xN ) ∈ (Rd)N ,
where DXN
: (Rd)N → R+ is defined by
DXN
(x) =N∑
i=1
∫
Rdmin
1≤i≤N|xi − ξ|2 µ(dξ) =
N∑
i=1
∫
C(xi)|xi − ξ|2 µ(dξ),(3.1)
where (C(xi))i=1,...,N denotes the Voronoi tessellation of the N -tuple x in Rd.We have seen that DX
Nis continuously differentiable on the set of N -tuples having
pairwise distinct components (see (2.3)) and that every solution x∗ of (P) is a stationaryquantizer hence satisfying (2.6).
If one looks at problem (P) from a strictly deterministic point of view, several ap-proaches can be processed essentially gradient based methods (including Newton’s method)and fixed point methods.• The gradient descent approach is classical and relies on formula (2.6) for the derivative.
One setx0 := x and xn+1 = xn − γ
nd(DX
N)(xn)
for a rate parameter γ∈ (0, 1). One may show, that under assumption (2.12) of Theorem 2.4it does converge to some zero x∗ of d(DX
N). It also does with a small enough constant step
γn = γ > 0 instead of γn (with a better rate, if convergence does occur).
11

Newton’s method (see paragraph 3.1 below for the scalar Normal distribution) requiresto compute the Hessian d2(DX
N): this is done in [9] for quite general 1 and 2-dimensional
absolutely continuous distributions.• The fixed point approach was introduced by Lloyd (in 1-dimension) and consists in
writing the following recursive algorithm (so-called Lloyd’s method I, see [14]) from thestationarity Equation (2.6): starting from a N -tuple x, one defines recursively a sequencexnn≥0 such that
x0 := x
xn+1i :=
1µ(C(xni ))
∫
C(xni )ξ µ(dξ), ∀i = 1, . . . , N.
(3.2)
(with µ = PX ). If one set Xn+1 := Xxn+1, one easily checks that Equation (3.2) implies
thatXn+1 = E(X | Xn), n ≥ 0.
The very definition of conditional expectation as an orthogonal projection on the space ofsquare integrable σ(Xn)-measurable random variables shows that
‖X − Xn+1‖2 = ‖X − E(X|Xn)‖2 = min‖X − Z‖2 , Z∈ L2(σ(Xn),P)
< ‖X − Xn‖2
(except if Xn = E(X|Xn)) i.e. n 7→ ‖X − Xn‖2 is decreasing.In 1-dimension, when µ is has a strictly log-concave density function, it is established
in [14] that x 7→(
1µ(C(xni ))
∫C(xni ) ξ µ(dξ)
)1≤i≤N
is a contraction mapping and hence admits a
unique fixed point x∗ toward which Lloyd’s method I converges exponentially fast (this wasin fact the first proof for uniqueness of the stationary quantizer in that setting). In higherdimension, the convergence of the procedure is not clearly established in the literature.
As soon as d ≥ 2, the processing of both methods described above becomes quicklyintractable since we have to compute numerically some d-dimensional integrals (on somethe elements of the Voronoi tesselation). Furthermore, one checks (see [18]) that the sta-tionary solution of (3.2) is usually not unique in dimension d ≥ 2. As suggested above, thedimension 1 can be investigated apart since, then, everything can be efficiently computedin both methods. This is the main reason why, in higher dimensions, one needs to look forstochastic procedures instead of deterministic ones.
From now on, we will focus on the Normal distribution µ = N (0; Id), defined for everyBorel set A of Rd, by
µ(A) =∫
Aexp
(−|ξ|
2
2
)λd(dξ)(2π)d/2
.
We will denote by erf(y) =1√2π
∫ y
−∞exp(−u2/2) du its distribution function in 1D.
3.1 Newton’s method for 1-dimensional Normal distribution
3.1.1 Description of the method
In this subsection, we still set d = 1, V := RN and U := (x1, . . . , xN ), x1 < x2 < . . . <xN. Let N ≥ 2. We can then compute in an pseudo-explicit way the real number DX
N(x),
the vector d(DXN
)(x)∈ RN and the N × N -matrix d2(DXN
)(x) using the tabulation of the
12

distribution function erf of the scalar Normal distribution in R (see [9] for more general1D-distributions). Set xj±1/2 := (xj + xj±1)/2, j = 1, . . . , N − 1, x1/2 = 0 and xN+1/2 = 0.Some elementary computations yield, for every x∈ RN , and every i, j∈ 1, . . . , N,
DXN
(x) =N∑
j=1
∫ xj+1/2
xj−1/2
(xj − ξ)2 exp(−ξ2/2)dξ√2π,(3.3)
=N∑
j=1
((1 + x2
j )(erf(xj+1/2)− erf(xj−1/2))
− 1√2π
(xj+1/2 exp(−x2j+1/2/2)− xj−1/2 exp(−x2
j−1/2/2))
+2√2πxj(exp(−x2
j+1/2/2)− exp(−x2j−1/2/2))
),
∂DXN
∂xi(x) = xi(erf(xi+1/2)−erf(xi−1/2))+(exp(−x2
i+1/2/2)−exp(−x2i−1/2/2))/
√2π,(3.4)
∂2DXN
∂xi∂xi−1(x) = − 1
4√
2π(xi − xi−1) exp(−x2
i−1/2/2),
∂2DXN
∂x2i
= erf(xi+1/2)− erf(xi−1/2)− 14√
2π(xi+1 − xi) exp(−x2
i+1/2/2)
− 14√
2π(xi − xi−1) exp(−x2
i−1/2/2)
∂2DXN
∂xi∂xi+1(x) = − 1
4√
2π(xi+1 − xi) exp(−x2
i+1/2/2),
(3.5)
We are now able to implement Newton’s method in order to find the (single) zero of d(DXN
)in RN . Thus, starting from x0∈ RN , we compute recursively
xn+1 = xn − [d2(DXN
)(xn)]−1 · d(DXN
)(xn)(3.6)
(so we need to invert at every step the matrix d2(DXN
)(xn)).
3.1.2 Numerical results
Computations produced N -optimal quantizers x∗ until DXN
(x∗) is equal to 0.25× 10−4 (forN ≈ 330). Then we can say that for such a size
mini6=j|x∗i − x∗j | ≤ 2
∫
Rdmin
1≤i≤N|x∗i − ξ|µ(dξ) ≤ 2
√DXN
(x∗)) ≈ 10−2,
Let us emphasize the importance of the choice of the initial conditions. Thus, we observethat, even for symmetric initial vectors, some components collapse or are rejected far fromthe others. The following choice gives good results: x0
k := −2 + 2(2k − 1)/N , 1 ≤ k ≤N . Figure 1 displays n 7→ − log10(|d(DX
N)(xn)|) for N = 300. The Frobenius norm of
d2(DXN
)(xn) is also drawn (thin lines). We can see that even if the problem (P) is not aquadratic optimization problem, it becomes quickly quadratic and then Newton’s algorithmconverges very quickly (theoretically in one step). In Figure 2 below, we check graphicallythe quality of the quantizer obtained after convergence of the method by drawing the“weight function” x∗i 7→ µ(C(x∗i )), i = 1, . . . , N (for N = 50 and N = 300). We rely on
13

the following result established in [7] which says that optimal N -quantizers of the scalarNormal distribution satisfy
µ(C(x∗i )) ∼1N
exp(−(x∗i )2/3)∫
R exp(−ξ2/3)dξas N →∞.
(uniformly on compact sets with respect to x∗i ). This result also holds for more generalscalar distributions µ with (positive) density function g and so can be used to test the
adequacy of a large size quantizer: it says that µ(C(x∗i )) ∼1N
g(x∗i )2/3
∫R g(ξ)2/3dξ
. It holds as a
conjecture in higher dimension in the following form
µ(C(x∗i )) ∼1N
g(x∗i )2/(d+2)
∫R g(ξ)2/(d+2)du
.
3.2 Stochastic methods in higher dimension
3.2.1 The CLV Q algorithm and its companion procedures
It follows from (2.3) that, if we denote by ξ a Rd-valued Normally distributed randomvariable,
d(DXN
)(x) = E (1C(xi)(ξ)(xi − ξ)).Subsequently, the (Rd)N -valued stochastic gradient procedure for DX
Nused in this subsec-
tion can be written as
Xn+1 = Xn − γn+11C(Xni )(ξ
n+1)(Xni − ξn+1)(3.7)
or, equivalently, if we define i0(n+ 1) as the integer such that ξn+1 ∈ C(Xni0(n+1)),
Xn+1i = Xn
i − γn+1(Xni − ξn+1) if i = i0(n+ 1)
Xn+1i = Xn
i if i 6= i0(n+ 1).(3.8)
This procedure is known as the Competitive Learning Vector Quantization algorithm (CLV Q).More recently, it also appeared in the literature as the Kohonen algorithm with 0 neighbour(the initialization of the procedure will be shortly discussed below in subsection 3.2.2). Itcan be decomposed in two phases:
Competitive phase: Selection of the “winning index” i0(n+ 1) using a closest neighboursearch.
Learning phase: Updating of the winning component by a homothety centered at ξn+1
with ratio (1− γn+1).
From a numerical point of view the most time consuming task is to compute the winnerindex that is the component Xn
i which is the closest to ξn+1. Some fast (approximate)procedures for the searching of this “nearest neighbour” have been designed (see [12] chap-ter 10.4, p.332 and chapter 12.16, p.479).
An attractive feature of this procedure is that, as a by-product, one can compute theµ-masses µ(C(xi)), i = 1, . . . , N of the Voronoi cells and the distortion. To evaluate them,one simply increments a counter kni as follows:
kn+1i = kni + 1i=i0(n+1), i = 1, . . . , N.
14

Then kni /n → µ(C(x∗i )) on the event Xn → x∗ as n goes to infinity. Other “on line”approximation procedure for these weights involve the gain parameter like γn
αn+1i = αni + γn+1(1i=i0(n+1) − αni ), α0
i = 1/N, i = 1, . . . , N.
which converges toward µ(C(x∗i )) on Xn → x∗ as well.Concerning the distortion, one proceeds similarly by setting
DX,n+1N
= DX,nN
+ |Xni0(n+1) − ξn+1|2, DX,0
N= 0.
so that DX,nN
/n → DXN
(x∗) on the event Xn → x∗ as n goes to infinity. One can alsoupdate using the step sequence (γn)n≥0 like for the weights.
A slowlier and less sophisticated procedure consists in freezing the CLVQ procedure forn large enough and to process afterwards a standard Monte Carlo simulation.
After the processing of the CLV Q procedure, one may refine the produced N -quantizerby processing MLloyd randomized Lloyd’s method I. By randomized Lloyd’s method I, wemean that all expectations w.r.t. to the Normal random vectors in Equation (3.2) arecomputed by a (short) Monte Carlo simulation. Usually MLloyd ≈ 10.
3.2.2 Heuristic specifications for the CLV Q procedure and illustrations
We will now turn the discussion about three kinds of problems which arise in practise.The first one concerns the quantization of a distribution near its modes (when some). Thesecond one concerns the quantization of non compactly supported distributions. The thirdproblem is the initialization of both the quantizer and the step.
Concerning the first point, it has been pointed out in Remark 2.6 that not any parametersequence (γn)n≥0 can be chosen here. In fact to take into account the mode of the Normald-dimensional distribution, one essentially specifies the step as if we wish to quantize theuniform distribution on [0, 1]d. We adopt the following heuristic: we infer from the uniformquantization of [0, 1] with N1/d points our choice of step γn for the uniform quantizationof [0, 1]d with N points. Consequently the parameter sequence (γn)n≥0 will be set equal to
γn = γ0a
a+ γ0b n,(3.9)
where a and b are equal to
a = 4N1/d, b = π2N−2/d.(3.10)
Thus γn ∼ abn ∼ 4N3/d
π2 nso that γn > 2N3/d
π2 nwhich is the critical step for the uniform
distribution to get a Central Limit Theorem for large enough n. This explains our choicefor the ratio a/b. The balance between a and b (in particular a À b) implies that theprocedure first behaves like a constant step algorithm. Now, the constant step version ofthe procedure is known to be positively (even geometrically) recurrent (see [5]) so thatit visits every open set of the state space, especially the attracting basin of the optimalquantizer. Hopefully it may remain in it when γn finally goes to 0. Some simulatedannealing version of the procedure can be implemented instead of this (almost) constantstep phase. However it seems not to give significant results. Let us illustrate the choiceof a and b in 1-dimension. In Figure 3, we have represented two different results for twodifferent choices of the parameter γn when N = 100. In both cases, we have computed 107
15

trials in order to be sure that we get convergence. The value of the distortion obtained arevery close in the two cases. In Figure 3 a), we have taken γ0 = 1, a = 400 and b = 0.1. Thecounters ki are plotted as function of the quantizer xi. We can see that the distributionobtained is far from the Normal distribution. In Figure 3 b), γ0, a are the same as abovebut now b = 10−3 which is close to π2/104.
Concerning the second problem, the simulation of points with too large norms maycause dramatic effects on the CLV Q procedure when the step is not yet small enough(cf. Eq. (3.7)). In order to avoid this, we will (first) simulate some spherically truncatedNormal variables (calibrating the threshold radius so as to keep at least 99 % of the mass).This truncation has a stabilizing effect on the procedure. Then, to get a quantization ofthe original Normal distribution, one can complete the optimization by processing once therandomized Lloyd’s method I with nontruncated Normally distributed random numbers.One verifies that, when the number of points is large, this only affects the location of theperipheral points. On the other hand, as expected, it slightly increases the distortion (butit produces more accurate results for numerical integration of course). In Figure 6 aredisplayed 2D quantizers with N = 500. In Figure 6 (a) the depicted quantizer has beenobtained using an extended splitting initialization method described below and truncatedsimulated Normal random variables. Its distortion is DX
N((a)) = 7.08(−3). The quantizer
depicted in Figure 6 (b) has been obtained from that in (a) by simply processing onerandomized Lloyd’s method I with a nontruncated Normal distribution as described in(3.2). Its distortion is DX
N((b)) = 8.55(−3).
Let us come now to the initialization of the N -quantizer in the CLV Q procedure. WhenN is small (N ≤ 10) we adopted a random initialization so that X0 ∼ (N (0; Id))⊗N (2).When N gets larger we passed to the so-called splitting initializing method, consisting inadding one further point (usually the optimal 1-quantizer i.e. the origin 0Rd) in order toobtain the starting quantizer of the CLV Q procedure with N + 1 components. This N + 1-quantizer is not optimal. So, we then processed a CLV Q algorithm (3.7). In Figure 5, wecompare the N -quantizer (N = 14) obtained from a splitting method (in (a)) based on the13-quantizer depicted in the former Figure 4 on one hand and from a random (Normal)initialization (in (b)) on the other hand. Two “pseudo”-locally optimal quantizers seem toexist simultaneously. The added component at 0Rd has moved the pentagon into a hexagonwhereas in (b) the fourteenth point has moved to the outside circle. In fact both 14-quantizers have not the same distortion: DX
N((a)) = 2.38(−1) and DX
N((b)) = 2.35(−1). So
the 14-quantizer in (a) is only a local minimum. This emphasizes that, in higher dimension,the distortion function has a more intricate shape than in 1-dimension. This also showsthat the splitting method may provide only sub-optimal stationary quantizers. Overall, itturns out to be a good compromise between stability and efficiency.
The splitting initializing method can be extended to the initialization of aN+N ′ CLV Qprocedure by simply “aggregate” an optimal N ′-quantizer to an optimal N -quantizer, N ′ ¿N . This has been done successfully up to d = 10 to cut down computation time whendealing with quantizers having many components (we set N ′ = 10 if 100 ≤ N ≤ 1000 andN ′ = 100 if N ≥ 1 000).
Finally, as far as splitting methods are concerned, the step parameter γ0 is chosen equaleither to the square root of the quadratic distortion computed at the last step or to 1 if the
2Other choices are possible taking into account some results about random quantization (see [6]) whichcould suggest to sample (X0
i )1≤i≤N following the (Gaussian) probability distribution whose density is pro-
portional to (f⊗Nd )dd+2 distribution where fd is the density of the Normal distribution on Rd.
16

distortion is greater than 1. This choice is suggested (or motivated) by the inequality
mini 6=j|xi − xj | ≤ 2E|X − xi| ≤ 2(E|X − xi|2)1/2.
As a matter of fact, since we start from an optimal N -quantizer, this choice seems quiteappropriate to preserve the past computations in the splitting method.
In Figure 8 is depicted a 1000-quantizer of N (0, I3) in 3-dimension. The distortion isDXN
= 5.45(−2).
3.2.3 Numerical and geometrical features of optimal quantizers in dimensiongreater than 4.
To evaluate the quality of a computed N -quantizer in dimension d ≥ 4 we can no longeruse the graphic approach either directly or using the µ-masses of the Voronoi cells like for1-dimensional distributions.
Concerning the purely numerical aspects, we rely on Inequality (2.7) for convex functionswhich says that
N∑
i=1
f(xi)µ(C(xi)) ≤∫fdµ
for any stationary N -quantizer x = (x1, . . . , xN ). Thus, as far as Normal distributionis concerned, i.e. µ = N (0; Id), one may choose the convex function f(x) := |x|2 andreject any N -quantizer x such that
∑1≤i≤N |xi|2 µ(C(xi)) > d. One can refine this test
by considering other convex functions like f(x) := (w|ej)2, j = 1, . . . , d where (e1, . . . , ed)denotes the canonical basis of Rd, f(x) = |x|1+ρ, etc.
Concerning the geometrical aspects, we computed the norms of each component in Rdand sorted them in increasing order. These curves are displayed in Figure 9. In (a), we candistinguish four regions of slow growth for N = 1220, the first one around 100, the secondone between 200 and 400, the third one between 500 and 800 and the last beyond 800. Itsuggests that the mass seems to be located on a finite number of spheres (4). In (b), thisnumber decreases to 3. In (c), it is 2 and in (d) there is only one flat line beyond 100. Theconclusion is that the mass of the Gaussian measure tends to be more and more localizedas dimensions increases. This is related with the fact that, by the strong Law of the LargeNumbers, if Xd ∼ N (0, Id) then |Xd|2 ∼ d as d → ∞: a χ2 distribution with d degreesof freedom tends to be concentrated (with a suitable normalization) on a sphere when dincreases.
4 Evaluation of a Put Spread European option
The aim of this section is to test the optimal quantizers that we obtained by the numericalmethods described in subsection 3.2.2 in dimensions 2 ≤ d ≤ 6. Simultaneously, we aim toillustrate the performances of vector quantization for numerical integration. That is whywe carry out a short comparison between quantization method and Monte Carlo methodon a simple numerical integration problem.
The strong Law of Large Number implies that, given a Normally distributed randomvector X and a sequence of i.i.d. random vectors (ξk)k≥1 with common Normal distributionN (0; Id),
P(dω)-a.s.f(ξ1(ω)) + · · ·+ f(ξN (ω))
N
N→+∞−→ E(f(X)) =∫
Rdf(ξ) exp (−|ξ|2/2)
dξ
(2π)d/2.
17

for every f ∈ L1(Rd,PX ). The Monte Carlo method consists in generating on a computera path (ξk(ω))k≥1 to compute the above Gaussian integral. Roughly speaking, the Law ofthe Iterated Logarithm says that if f is square integrable, the above convergence a.s. holdsat a
σ(f(X))
√log logN
N
rate where σ(f(X)) is the standard deviation of f(X). When f is twice differentiable, thisis to be compared to the error bound provided by (2.5) when using a quadratic optimalN -quantizer x∗ := (x∗1, . . . , x
∗N ), namely
[df ]LipDN (0;Id)N ≈
(J2,d(1 + 2/d)1+d/2[df ]Lip
)N−2/d.
Consequently the dimension d = 4 appears as the critical dimension for the numericalintegration of such functions by quantization for a given computational complexity (quan-tization formulae involving higher order differentials yield better rates): we assume thatthe optimal quantizers have been formerly computed and that the computation time of a(Gaussian) random number or a weight is negligible with respect to the computation of avalue of f .
The test is processed in each dimension d with four random variables gi(X), X ∼N (0; Id), i = 0, 1, 2, 3, 4 where the gi’s are five functions with compact support satisfyingrespectively
– g0 is a (bounded) interval indicator (hence discontinuous);– g1 is Lipschitz continuous and the composition of two convex functions;– g2 is twice differentiable and the composition of two convex functions;– g3 is difference of two convex functions (via Call-Put parity) and is Lipschitz contin-
uous;– g4 is difference of two convex functions (via Call-Put parity) and is twice differentiable.
The test functions are borrowed from the classical option pricing toolbox in Mathemat-ical Finance: one considers d traded assets S1, . . . , Sd, following a d-dimensional Black &Scholes dynamics. We assume that these assets are independent (this is not very realisticbut corresponds to the most defavourable case for quantization). We also assume thatS1
0 = s0 > 0, i = 1, . . . , d and that the d assets share the same volatility σi = σ > 0. It isclassical background that then, at maturity T > 0,
SiT = s0 exp(
(r − σ2
2)T + σ
√T Xi
), i = 1, . . . , d.
then one considers, still at time T , the geometric index
IT = (S1T . . . S
dT )1/d = I0 exp
((r − σ2
2d)T+
σ√T√d
X1 + · · ·+Xd
√d
)with I0 = s0 exp
(−σ
2(d− 1)2d
T
).
Then, one specifies the random variables gi(ξ) as follows
g1(X) = e−rT (K1 − IT )+ Put(K1, T ) payoff
g3(X) = e−rT (K2 − IT )+ − e−rT (K1 − IT )+, K1 < K2, Put-Spread(K1,K2, T ) payoff.
18

The random variables are the payoffs of a Put option with strike price K1 and a Put-spreadoption with strike prices K1 < K2 respectively, both on the geometric index IT . Someclosed forms for E g1(X) and E g2(X) are given by the Black & Scholes formula, namely
E g1(X) = π(I0,K1, r, σ, T ) and E g3(X) = ψ(I0,K1,K2, r, σ, T )
with π(x,K, r, σ, T ) = Ke−rT erf(−d2)− I0 erf(−d1),
d1 =log(x/K) + (r + σ2
2d )T
σ√T/d
, d2 = d1 − σ√T/d
and ψ(x,K1,K2, r, σ, T ) = π(x,K2, r, σ, T )− π(x,K1, r, σ, T ).
Then, one sets
g2(X) = e−rT/2π(IT2,K1, r, σ, T/2),
g4(X) = e−rT/2ψ(IT2,K1,K2, r, σ, T/2).
The random variables g2(X) and g4(X) have the distributions of the (discounted) premiaat time T/2 of the Put(K1, T ) and of the Put-Spread(K1,K2, T ) respectively. Functions g2
and g4 are C∞ and using the martingale property of the discounted premia yields
E g2(X) = π(I0,K1, r, σ, T ) and E g4(X) = ψ(I0,K1,K2, r, σ, T ).
Finally we specify g0 as the “hedge at maturity” function of the Put-Spread option, so that
g0(X) = −e−rT ITI0
1IT∈[K1,K2].(4.1)
The numerical specifications of the functions gi’s are as follows:
s0 = 100, K1 = 98, K2 = 102, r = 5%, σ = 20%, T = 2.(4.2)
Finally, let xN = (xNj ) be the N–optimal quantizer of X. We will compute the quantizedversions of Egi(X), i = 0, . . . , 4:
E gi(X) =N∑
j=1
PX (Cj(xN )) gi(xNj ),(4.3)
where X denotes the Voronoı quantization of ξ. The comparison with the Monte Carloestimator
E gi(X)N
=1N
N∑
k=1
gi(ξk), ξk i.i.d., ξ1 ∼ N (0; Id),(4.4)
is carried out as follows: we computed (a proxy of the) the standard deviation σ(gi)(X)N
of the above estimator (4.4) using a M = 10 000 trial Monte Carlo simulation and wecompared it with the quantization error.
• Graphical tests (dimensionality effect): one sets
Absolute error(N) = |B&S Reference value− Quantized value(N)|.
19

In the figures 10 and 11 below is drawn the graph of the N 7→ Absolute error(N) in a log-log scale for functions g2 and g4 in dimensions d = 2, 3, 4, 5, 6, its least square regressionline (dotted line) and the log(N) 7→ −1
2 log(N) + log σ(gi(X))N
(continuous line). Thetheoretical slope of the regression line should be 1/d or 2/d according to the regularityof the function gi. In the smooth case, this theoretical 2/d slope appears in the convexcase (g2, see Figure 10) but is significantly improved in the case of the difference of twoconvex functions (g4, see Figure 11). In the Lipschitz continuous setting (correspondingto functions g1 and g3 not depicted here), one observes that the slopes are closer to 2/dthan to 1/d: this is probably due to the fact that functions g1 and g3 are “essentially”smooth except for one single point. This is in fact a very common situation in applications.Furthermore, one verifies in Figure 11 (e) that, in the case of the difference of two convexfunctions, numerical quantization behaves better than the Monte Carlo method – for theaccuracy threshold set at one standard deviation – in dimension d = 6 as long as N islower than a critical number N6,c. This is a very common feature of the method which mayjustify in some special cases the use of optimal quantization for numerical integration indimensions higher than d = 4 (when many integrals have to be computed with respect tothe same distribution measure).
• Numerical tests: In Table 1 below we extract some of the above results to providenumerical values for the errors. In the second column are displayed the B&S price usingthe numerical values specified in (4.2). In the third and fourth columns are displayed thequantized values computed owing to (4.3) and the relative errors with respect to the B&Sprice. Finally, in the two last columns, we have written down a proxy of the standarddeviation of estimator (4.4) and the ratio
|B&S Reference value − Quantized value(N)|σ(gi(X))
N
to measure the error induced by the quantization in the scale of the MC estimator standarddeviation. The lines of Table 1 represent the different functions gi labelled with respect totheir structures and their smoothness.
Table 1 illustrates a phenomenon widely observed when integrating functions by quan-tization: differences of convex (DiffConv) functions behave better than (composition of)convex (Conv) functions, C1
Lip (in fact C∞) functions behave better than Lipschitz contin-uous (Lip) functions, as predicted by (2.5). These numerical tests suggest that being thedifference of two convex functions is more prominent than smoothness. The behaviour ofquantized integration along discontinuous functions (like the indicator function g0, Disc)seems to highly depend on the integrated function itself and it seems difficult to drawgeneral rules at this stage.
20

References
[1] V. Bally, G. Pages (2000). A quantization algorithm for solving multi-dimensional discretetime optimal stopping problems, pre-print n0 628, Laboratoire de Probabilites & Modelesaleatoires, Universite Paris 6 (France), to appear in Bernoulli.
[2] V. Bally, G. Pages, J. Printems (2001). A stochastic quantization method for non linearproblems, Monte Carlo Methods and Applications, 7, n01-2, pp.21-34.
[3] V. Bally, G. Pages, J. Printems (2002). A quantization tree method for pricing andhedging multi-dimensional American options, pre-print n0753, Laboratoire de Probabilites &Modeles aleatoires, Universite Paris 6 (France), submitted to Mathematical Finance.
[4] V. Bally, G. Pages, J. Printems (2003), First order schemes in the numerical quantizationmethod, Mathematical Finance, 13, n01, pp.1-16.
[5] C. Bouton, G. Pages (1997), About the multidimensional Competitive Learning VectorQuantization algorithm with constant gain, The Annals of Applied Probability, 7, n03, pp.679-710.
[6] P. Cohort (2003), Limit Theorems for the Random Normalized Distortion, forthcoming inThe Annals of Applied Probability.
[7] S. Delattre, J.C. Fort, G. Pages (2002), Local distortion and µ-mass of the cells of onedimensional asymptotically optimal quantizers, pre-print n0710, Laboratoire de Probabilites &Modeles aleatoires, Universite Paris 6 (France), submitted to Communication in Statistics.
[8] M. Duflo (1998), Algorithmes stochastiques, coll. Mathematiques & Applications, 23,Springer-Verlag, Berlin, 1996.
[9] J.C. Fort, G. Pages (1995), On the a.s. convergence of the Kohonen algorithm with a generalneighborhood function, The Ann. of Applied Proba., 5, n04, pp.1177-1216.
[10] J.C. Fort, G. Pages (2002), Asymptotics of optimal quantizers for some scalar distributions,Journal of Computational & Applied Mathematics, 146, pp.253-275.
[11] A. Gersho, R. Gray (eds.) (1982), IEEE Transactions on Information Theory, Special Issueon Quantization, 28.
[12] A. Gersho, R. Gray (1992, 6th edition, 1999), Vector Quantization and Signal Compression,Kluwer, Boston, 732p.
[13] S. Graf, H. Luschgy (2000), Foundations of quantization for probability distributions, Lec-ture Notes in Mathematics n01730, Springer, Berlin, 230p.
[14] J. Kieffer (1982) Exponential rate of Convergence for the Lloyd’s Method I, IEEE Transac-tions on Information Theory, Special issue on Quantization, 28, n02, pp.205-210.
[15] H.J. Kushner, D.S. Clark (1978), Stochastic Approximation for Constrained and Uncon-strained Systems, Applied Math. Science Series, 26, Springer.
[16] H.J. Kushner, G.G. Yin (1997) Stochastic Approximations Algorithms and Applications,Springer, New York, 1997.
[17] D. Lamberton, G. Pages (1996), On the critical points of the 1-dimensional CompetitiveLearning Vector Quantization Algorithm, Proceedings of the ESANN’96, Bruges, D Facto,Brussels, (Belgium).
[18] G. Pages (1997), A space vector quantization method for numerical integration, Journal ofComputational and Applied Mathematics, 89, pp.1-38.
[19] G. Pages, H. Pham (2001), A quantization algorithm for multidimensional stochastic con-trol problems, pre-print n0697, Laboratoire de Probabilites & Modeles aleatoires, UniversitesParis 6/7 (France), submitted to Stochastics & Dynamics.
21

[20] G. Pages, H. Pham (2002), Optimal quantization methods for nonlinear filtering withdiscrete-time observations, pre-print n0778, Laboratoire de Probabilites & Modeles aleatoires,Universites Paris 6/7 (France), submitted to Bernoulli.
[21] G. Pages, H. Pham, J. Printems (2003), Optimal quantization methods and applicationsto numerical problems in finance, pre-print n0813, Laboratoire de Probabilites & Modelesaleatoires, Universites Paris 6/7 (France), to appear in Handbook of Numerical Methods inFinance, Birkhauser.
22

2
4
6
8
10
12
14
16
0 5 10 15 20 25 30 35 40 45 50
Newton convergence | N = 300 | N(0,1)
Figure 1: n 7→ log10 |dDXN
(xn)| for N = 300.
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
-4 -3 -2 -1 0 1 2 3 4
Weights | N = 50 | N(0,1)
0
0.001
0.002
0.003
0.004
0.005
0.006
-5 -4 -3 -2 -1 0 1 2 3 4 5
Weights | N = 300 | N(0,1)
Figure 2: PX -mass of the Voronoi cells C(x∗i ) as a function of the quantizer components x∗i(¤), i = 1, . . . , N , N = 50 and 300. Functions x 7→ exp(−x2/3)/29.5 (N = 50, −−) andx 7→ exp(−x2/3)/173 (N = 300, −−).
23

(a)
20000
40000
60000
80000
100000
120000
140000
160000
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
a = 400 | b = 400 | c = 0.1 | gamma0 = 1 | N = 100
(b)
0
20000
40000
60000
80000
100000
120000
140000
160000
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
a = 400 | b = 400 | c = 10^(-4) | gamma0 = 1 | N = 100
Figure 3: (a) Counter ki plotted as a function of xi obtained in dimension 1 after 107
trials with γ0 = 1, a = 400 and b = 10−1. The value of DN (x∗) is 1.60(-2). (b) Quantizerobtained in 1-dimension after 107 trials with γ0 = 1, a = 400 and b = 10−3. The value ofDN (x∗) is 1.57(-2).
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
Figure 4: Quantizer with N = 13 obtained after 106 trials of the randomly initializedCLV Q algorithm (3.7) followed by MLloyd = 10 Lloyd’s method I. Except for the origin,its components make up a regular centered pentagon and a regular centered heptagon.
24

(a)
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
(b)
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
Figure 5: (a) Quantizer with N = 14 obtained from the one with N = 13 and the point 0after 106 trials of CLV Q algorithm (3.7) with γ0 ≈ mini6=j |xi−xj |/2 followed by 10 Lloyd’smethod I. (b) Quantizer with N = 14 obtained after 106 trials of the CLV Q algorithm (3.7)followed by MLloyd = 10 Lloyd’s methods I.
(a)
-4
-3
-2
-1
0
1
2
3
4
-4 -3 -2 -1 0 1 2 3 4
(b)
-4
-3
-2
-1
0
1
2
3
4
-4 -3 -2 -1 0 1 2 3 4
Figure 6: (a) Quantizer with N = 500. DXN
= 7.08(−3). Truncated case. (b) Quantizerwith N = 500. DX
N= 8.56(−3). Non-truncated case.
25

Figure 7: Optimal quantizer of Figure 6(a) with its Voronoi tessellation. Truncated case.
-3-2
-1 0
1 2
3 -3-2
-1 0
1 2
3
-3
-2
-1
0
1
2
3
Figure 8: 1000–quantizer of the Normal law in R3. The value of the distortion obtained isDXN
= 5.45(−2). Non truncated case.
26

(a)
0
0.5
1
1.5
2
2.5
3
0 200 400 600 800 1000 1200 1400
Distance from 0 in dimension 4 (1220 pts)
(b)
0.5
1
1.5
2
2.5
3
3.5
0 200 400 600 800 1000 1200 1400 1600 1800
Distance from 0 in dimension 6 (1800 pts)
(c)
0.5
1
1.5
2
2.5
3
0 200 400 600 800 1000 1200 1400
Distance from 0 in dimension 8 (1300 pts)
(d)
0.5
1
1.5
2
2.5
3
0 200 400 600 800 1000 1200
Distance from 0 in dimension 10 (1200 pts)
Figure 9: Radii of optimal quantizers in dimension d = 4, 6, 8, 10 with N from 1 200 to1 800. Drawing of i 7→ |xi|, we can guess 4 layers of points in dimension 4, 3 in dimension6, 2 in dimension 8 and 1 in dimension 10.
27

(a) d = 2. Slope of + plot : 0.963 ≈ 1.926/d (b) d = 3. Slope of + plot : 0.658 ≈ 1.974/d
0.01
0.1
1
10
10 100
QTF ErrorStandard deviation MC
0.01
0.1
1
10
10 100
QTF ErrorStandard deviation MC
(c) d = 4. Slope of + plot : 0.504 ≈ 2.016/d (d) d = 5. Slope of + plot : 0.417 ≈ 2.085/d
0.01
0.1
1
1000 10000
QTF ErrorStandard deviation MC
0.01
0.1
1
100 1000 10000
QTF ErrorStandard deviation MC
(e) d = 6. Slope of + plot : 0.337 ≈ 2.022/d
0.01
0.1
1
100 1000 10000
QTF ErrorStandard deviation MC
Figure 10: Linear regression in log-log scale of N 7→ |Eg2(Z) − Eg2(Z)N |. In a) d = 2; b)d = 3; c) d = 4; d) d = 5; e) d = 6.
28

(a) d = 2. Slope of + plot : 1.20 ≈ 2.40/d (b) d = 3. Slope of + plot : 0.692 ≈ 2.076/d
0.0001
0.001
0.01
0.1
1
10 100
QTF ErrorStandard deviation MC
0.001
0.01
0.1
1
10 100
QTF ErrorStandard deviation MC
(c) d = 4. Slope of + plot : 0.523 ≈ 2.092/d (d) d = 5. Slope of + plot : 0.487 ≈ 2.435/d
0.0001
0.001
0.01
0.1
1000 10000
QTF ErrorStandard deviation MC
0.001
0.01
0.1
1
100 1000 10000
QTF ErrorStandard deviation MC
(e) d = 6. Slope of + plot : 0.379 ≈ 2.274/d.
0.001
0.01
0.1
100 1000 10000
QTF ErrorStandard deviation MC
Figure 11: Linear regression in log-log scale of N 7→ |Eg4(Z) − Eg4(Z)N |. In (a) d = 2;(b) d = 3; (c) d = 4; (d) d = 5; (e) d = 6.
29

Table 1: Value of absolute error with respect to the MC standard deviation for maximalvalues of N in dimension 2, 4 and 6.
d = 2 & N = 600 B&S Quantized Relative MC Absolute Error/StDE gi(Z) Reference value value error St Dev
Lip & Conv (i = 1) 3.672905 3.66233 0.29 % 2.76(-1) 0.03827C∞ & Conv (i = 2) 3.672905 3.66776 0.14 % 1.77(-1) 0.02904
Lip & DiffConv (i = 3) 1.383143 1.38388 0.05 % 6.93(-2) 0.01063C∞ & DiffConv (i = 4) 1.383143 1.38310 0.003 % 4.21(-2) 0.00102
Disc (i = 0) −0.068907 −0.0689169 0.01 % 9.73(-3) 0.00102d = 4 & N = 6540 B&S Quantized Relative MC Absolute Error/StD
E gi(Z) Reference value error St DevLip & Conv (i = 1) 2.076954 2.04709 1.44 % 5.46(-2) 0.54762C∞ & Conv (i = 2) 2.076954 2.06092 0.77 % 3.32(-2) 0.48193
Lip & DiffConv (i = 3) 1.216210 1.21303 0.26 % 2.09(-2) 0.15215C∞ & DiffConv (i = 4) 1.216210 1.21524 0.08 % 1.18(-2) 0.08186
Disc (i = 0) −0, 093039 −0, 0908095 2.40 % 3.46(-3) -0.6446d = 6 & N = 8000 B&S Quantized Relative MC Absolute Error/StD
E gi(Z) Reference value error St DevLip & Conv (i = 1) 1.395727 1.29660 7.10 % 3.80(-2) 2.60789C∞ & Conv (i = 2) 1.395727 1.34381 3.72 % 2.14(-2) 2.42523
Lip & DiffConv (i = 3) 1.094376 1.08037 1.28 % 1.83(-2) 0.76503C∞ & DiffConv (i = 4) 1.094376 1.08436 0.91 % 1.01(-2) 0.99010
Disc (i = 0) −0.108825 −0.109751 0.85 % 3.19(-3) 0.29028
30

5.3. AN OPTIMAL MARKOVIAN QUANTIZATION ALGORITHM FOR MULTIDIMENSIONAL STOCHASTIC CONTROL PROBLEMS.261
5.3 An Optimal Markovian Quantization Algorithm for Mul-tidimensional Stochastic Control Problems.
L’article qui suit fut publié dans Stochastics and Dynamics, vol. 4(4), pp. 501–545 (2004).

An Optimal Markovian Quantization Algorithm
for Multidimensional Stochastic Control Problems
Gilles PAGESLaboratoire de Probabilites et
Modeles AleatoiresCNRS, UMR 7599Universite Paris 6
e-mail: [email protected]
Huyen PHAMLaboratoire de Probabilites et
Modeles AleatoiresCNRS, UMR 7599Universite Paris 7
e-mail: [email protected] CREST, Laboratoire de Finance-Assurance
Jacques PRINTEMSCentre de Mathematiques
CNRS, UMR 8050Universite Paris 12
e-mail: [email protected]
This version october 2003
Abstract
We propose a probabilistic numerical method based on optimal quantization tosolve some multidimensional stochastic control problems that arise, for example, inMathematical Finance for portfolio optimization. We then consider some controlleddi!usions with most control free components. The Euler scheme of the uncontrolleddi!usion part is approximated by a discrete time process obtained by a nearest neighborprojection on some grids optimally fitted to its dynamics. The resulting process isalso designed to preserve the Markov property with respect to the filtration of theEuler scheme. This Markovian quantization approach leads to an approximate controlproblem that can be solved numerically by the dynamic programming formula. Thisapproach seems promising in higher dimension. A priori Lp-error bounds are statedand we show that the spatial discretization error term is minimal at some specific grids.A simple recursive algorithm is devised to compute these optimal grids by inductionbased on a Monte Carlo simulation. Some numerical illustrations are processed forsolving a mean-variance hedging problem.
Key words: Stochastic Control, Markov chain, Euler scheme, Vector Quantization, Stochas-tic gradient descent, mean-variance hedging.
MSC Classification (2000): 65C20, 65N50, (90C39, 93E35, 91B28).
1

1 Introduction
We consider the controlled di!usion system
dXt = µ(Xt, Yt,!t)dt + "(Xt, Yt,!t)dYt, X0 := x0(1.1)
dYt = #(Yt)dt + $(Yt)dWt, Y0 = y0(1.2)
where W is an m-dimensional Brownian motion on a probability space (",F , P ) equippedwith a filtration F = (Ft)t. The set of control processes A is the set of all F-adaptedprocesses ! = (!t)t valued in A, subset of Rl. The controlled process X is valued in Rq
and the uncontrolled di!usion Y is valued in Rd. The functions µ,", #, $ satisfy conditionsspecified in the next section.
The above system admits another formulation in which X is directly written as a dif-fusion process
dXt = b(Xt, Yt,!t) dt + %(Xt, Yt,!t) dWt.(1.3)
Our initial choice for the dynamics (1.1)-(1.2) is motivated by financial applications : ifY denotes a risky asset, the value Xt at time t of a self-financed portfolio containing "t
units of in asset Y obeys the above system. Actually, we may reduce w.l.o.g. a dynamics(1.3)-(1.2) into a dynamics (1.1)-(1.2) by considering the uncontrolled part (Y,W ) insteadof Y .
Consider now the stochastic control problem in finite horizon:
v(t, x, y) = inf!!A
E
!" T
tf(Xu, Yu,!u)du + g(XT , YT )
#### (Xt, Yt) = (x, y)$
,(1.4)
for t ! [0, T ], (x, y) ! Rq " Rd, where f and g are some functions satisfying conditionsspecified later.
It is well-known (see e.g. [14]) that function v can be characterized by dynamic pro-gramming principle as solution (in the viscosity sense) of the Bellman equation:
&v
&t+ inf
a!A[Lav + f(x, y, a)] = 0,(1.5)
together with the terminal condition:
v(T, x, y) = g(x, y),(1.6)
where La is the second order di!erential operator associated to the di!usion (X,Y ):
Lav = b(x, y, a).Dxv + #(y).Dyv +12tr(%%"(x, a)D2
xxv)
+12tr($$"(y)D2
yyv) + tr($(y)%"(x, a)D2xyv),
with b(x, y, a) = µ(x, y, a) + "(x, y, a)#(y) and %(x, y, a) = "(x, y, a)$(y). Here, the sign #denotes the transposition of a matrix and the sign . is the usual inner product.
The purpose of this paper is to solve numerically the stochastic control problem (1.4)and consequently the highly non linear P.D.E. (1.5)-(1.6).
2

There are two types of numerical methods for stochastic control problems.
– Purely deterministic methods provided by Numerical Analysis consisting in discretiz-ing the partial di!erential equation (1.5): discretization by finite di!erence or finite elementmethods lead to an approximation of the value function at the points of the space-time grid.Computational methods of the discretized Bellman Equation are studied in Akian ([1]). Forsome illustrations in Financial problems, see e.g. Fitzpatrick and Fleming ([13]) or Tourinand Zariphopoulou ([25]).
– Probabilistic methods based on the dynamic programming principle for the discretizedcontrol problem. The Markov chain approximation method, introduced by Kushner in 1977([18], see also his more recent book with Dupuis [19]) consists in approximating the originalcontinuous time controlled process by an appropriate controlled Markov chain on a latticesatisfying the so-called local consistency condition. The numerical problem is then to solvethe stochastic control problem for the approximating Markov chain. The finite di!erencescheme is a typical example of a numerical scheme for an approximating Markov chain withnearest neighbor transitions. For stochastic control problems under partial observation,Runggaldier and his coauthors (see [6], [11] and [24] for a monograph on this subject) alsoconsider finite state spatial approximating Markov chain. The spatial discretization of theMarkov chain is obtained by the projection of the Markov chain on some fixed representativeelements of a partition of the state space.
In both methods described above, the required stability condition may be very restrictivein the case of controls appearing in the variance term. On the other hand, in these methods,the lattice is fixed regardless of the structure of the Markov chain. Moreover, its size isgrowing exponentially with the dimension. From a theoretical viewpoint, estimate of therate of convergence is not always available. From a computational viewpoint, their limitsare the dimension of the state space of the system (q+d in the above problem). So, althoughthe Markov chain approximation method is easily implemented, calculations can be donein practice for quite low dimension, say 1 or 2. There is a challenge to solve e#cientlynumerical stochastic control problems in higher dimension.
In this paper we propose a probabilistic method based on optimal quantization, in orderto solve numerically stochastic control problems in dimension larger than 3. Like in usualprobabilistic methods, we start from a time discretization of the controlled problem: weconsider a controlled problem similar to (1.4) in which the above process (Xt, Yt)t![0,T ]
given by (1.1)-(1.2) has been replaced by its Euler scheme, denoted (Xk, Yk) at time kT/n
(see (2.6) below). This turns out to be a consistent approximation of the value function ofthe original problem when the time discretization step T/n goes to 0 (see Proposition 2.1below). Then, and in the spirit of the Markov chain approximation method, we approximatethe Euler scheme at every date k! 0, . . . , n by a process %Xk, taking finitely many states.Furthermore, we wish to preserve a Markov structure for the process ( %Xk)0#k#n with respectto the filtration of the Euler scheme: doing so, it is possible to make use of Control Theorytechniques, especially the dynamic programming principle, to derive some a priori errorbounds. We are thus naturally led to consider an approximating Markovian procedure of
3

the form( %Xk+1, %Yk+1) = Projk+1
&Lh(( %Xk, %Yk), 'k+1)
'
derived from (1.1)-(1.2), where ('k)k is a Gaussian white noise and Projk+1 is a kind ofclosest neighbour projection on a finite subset of Rq " Rd.
One natural idea to approximate a random vector Z by a random vector taking itsvalues in a finite grid $ := z1, . . . , zN is to consider its projection (!(Z) on the gridfollowing the closest neighbour rule. The induced mean Lp-error is given by $Z%(!(Z)$p =$min1#i#N |Z % zi|$p and only depends on the distribution PZ of Z and the grid $. Forhistorical reasons, (!(Z) is often called the quantization of the r.v. Z by the grid $ and theinduced error, the Lp-mean quantization error (see [15]). This quantity has been extensivelyinvestigated in Signal Processing and Information Theory since the early 50’s. Thus, oneknows that this mean error reaches a minimum over all the possible grids $ having at mostN elements and this mean error behaves like c(PZ , p, d)N$ 1
d as N goes to infinity.
Except in some particular cases of little numerical interest, no closed form is available forthe optimal grids that achieve the minimal quantization error of a probability distribution.In fact, no rigorous result is available to precisely describe the geometric structure or“shape” of such an optimal grid. However, using the integral representation of $Z %(!Z$p
p
one may devise a stochastic gradient descent, based on simulations of Z, that convergestowards some grids which are optimal (at least locally). This makes possible the practicaluse of the optimal quantizers of a distribution along with their companion parametersfor numerical purpose (see, e.g. [21]). Simulations then confirm what could be a prioriexpected: the heavier an area is weighted by the quantized distribution, the more points itcontains.
This idea of projecting Markov chain on some grids is similar to the one of Runggaldieret al. [24] with their representative elements. Those are fixed a priori and cannot besimply adapted to take into account the fine structure of the Markov dynamics. Theirsize is growing exponentially with the dimension and in practice calculations can be doneonly for quite low dimension. Here, the main novelty is the optimal quantization part :given a total number of points to be dispatched among all the grids, we show how to getoptimal grids with respect to the Markov structure of the process. We also derive a rate ofconvergence for the value functions. As a byproduct, we may also construct approximatenearly optimal controls, as in [24]. This approach seems e#cient in medium dimension, saypossibly up to 10 dimension.
As we will see in the numerical illustrations at the end of the paper, it is possiblein many situations to implement the same (optimal) quantization for solving the wholenumerical process. Thus, if the dynamics of the di!usion Y satisfies Yt = )(t,Wt) it ispossible, at least for practical matter, to use an optimal quantization of the standard d-dimensional Brownian motion. Such quantizations, with the requested size, can be builtalmost instantly from stored optimal quantizations of the normal distributions. These werecomputed very accurately for any size and any dimension (up to d = 10) and are kept o!line (see [23]).
Discretizing multi-dimensional Markov chains using optimal quantization to solve non
4

linear problems was first investigated in [2] and [3] for Optimal Stopping with promisingresults, at least in medium dimensions. Here, we face a di!erent problem for two mainreasons, both related to the high non linearity of the problem: first we need to preservethe Markov property of %Xk to keep the benefit of the Control Theory machinery, secondlythe presence of the control in the equation that drives the couple (X,Y ) makes hopeless toimplement a global optimal quantization since the quantization then depends on the control.At this stage, the exact structure and the interpretation of the investigated model (1.1)becomes crucial: for the financial applications we have in mind, the process Yt representsthe value at time t of a basket of d traded assets, possibly with stochastic volatility and Xt
represents the value at time t of a (self-financed) portfolio made up with "(Xt, Yt,!t) units ofasset Y and µ(Xt, Yt,!t) units of the riskless asset. So, typically, Y is a multi-dimensionaluncontrolled process whereas X is usually 1- (or 2-)dimensional controlled process (thesimplest model is "(x, y,!) := !: the control !t is then the quantity invested in the riskyassets at time t).
Taking this into account, it is natural to discretize (Xk) and (Yk) di!erently:
• The q-dimensional process X will be quantized using a regular orthogonal grid of Rq,namely $X := (2*)Zq & B"!(0, R) and (!X is simply the +%-closest neighbour projectiononto this grid.
• The d-dimensional process (Yk) will be quantized by an optimal grid $k for every k !0, . . . , n and (!k is simply the closest neighbour projection on $k.
The paper is organized as follows: Section 2 is devoted to consistency of the timediscretization of the controlled problem. In Section 3, we state in (Theorem 3.1) an apriori Lp-error bounds at every x ! $X , between vk(x, Yk) and %vk(x, %Yk), value functionsat epoch k of the Euler scheme and the quantized Markov chain respectively. This boundsupon the parameters of the spatial discretization error: *, R and the (optimal) mean Lp-quantization errors of %Yl, l ' k. Section 4 provides a (partially heuristic) procedure todesign an optimal “quantization tree”, given the parameters #, $ and the global number N
of elementary quantizer to be used to quantize all the Yk’s. In Section 5, we discuss the rateof convergence of the value functions and construct approximate nearly optimal controls.Section 6 is devoted to a short discussion of possible variants of the method (startingvalues, discretizing schemes). In section 7, we provide some numerical illustrations fora mean-variance hedging problem. We also discuss the computational complexity of ouralgorithm. Finally, proof of Theorem 3.1 is postponed in Section 8.
2 Time discretization
We shall assume Lipschitz conditions on the coe#cients of the controlled di!usion (X,Y )given in (1.1)-(1.2) and governed by:
dXt = b(Xt, Yt,!t)dt + %(Xt, Yt,!t)dWt
dYt = #(Yt)dt + $(Yt)dWt.
5

(H1) There exist positive constants L1, L2 such that, for all x, x& ! Rq, y, y& ! Rd, a ! A,
|b(x, y, a) % b(x&, y&, a)| + |%(x, y, a) % %(x&, y&, a)| ( L1(|x % x&| + |y % y&|
)
|#(y) % #(y&)| + |$(y) % $(y&)| ( L2|y % y&|.
We shall assume a quadratic growth condition on the cost functions of the control problem.(H2) There exists a positive constant K such that, for all x, y, a ! Rq " Rd " A,
|f(x, y, a)| + |g(x, y)| ( K(1 + |x|2 + |y|2).
We shall also assume a continuity condition on f and g.(H3a) g is continuous and f is continuous in (x, y) uniformly in a ! A, i.e.:
supa!A
|f(x&, y&, a) % f(x, y, a)| ) 0,
as (x&, y&) ) (x, y) ! Rq " Rd.
We first approximate the di!usion (Yt)0#t#T at the discrete times t0 = 0, . . . , tn = T .We consider the Gaussian Euler scheme with step h = T/n, h ( 1. We denote by Yk thisapproximation of Ytk , tk = kh, which is then defined by:
Y0 = Y0(2.1)
Yk+1 = Yk + #(Yk)h + $(Yk)*
h 'k+1
=: Gh(Yk, 'k+1), k = 0, . . . , n % 1,(2.2)
where 'k+1 = (Wtk+1%Wtk)/*
h is a centered Gaussian random variable in Rm with varianceIm, independent of Fk := Ftk . The Euler scheme (Yk)k is then a Fk-homogeneous Markovchain.
We denote by An the set of all Fk, k = 0, . . . , n % 1-adapted processes ! = !k, k =0, . . . , n % 1 valued in A. Given ! ! An, we consider the approximation (Xk) of thecontrolled di!usion (Xt) at times tk, and defined by:
Xk+1 = Xk + µ(Xk, Yk, !k)h + "(Xk, Yk, !k)(Yk+1 % Yk)
= Hh(Xk, Yk, !k, Yk+1)
= Xk + b(Xk, Yk, !k)h + %(Xk, Yk, !k)*
h'k+1
= Fh(Xk, Yk, !k, 'k+1), k = 0, . . . , n % 1.(2.3)
Here, the functions Hh and Fh are defined on Rq "Rd "A"Rd, respectively on Rq "Rd "A " Rm, by :
Hh(x, y, a, y&) = x + µ(x, y, a)h + "(x, y, a)(y& % y),(2.4)
Fh(x, y, a, ') = Hh(x, y, a,Gh(y, ')).(2.5)
We now consider the stochastic control problem in discrete time:
vk(x, y) = inf!!An
E
*
+n$1,
j=k
hf(Xj , Yj , !j) + g(Xn, Yn)
######(Xk, Yk) = (x, y)
-
. ,(2.6)
6

for all k = 0, . . . , n and (x, y) ! Rq " Rd. We also denote
Vk(x) = vk(x, Yk), k = 0, . . . , n, x ! Rq.
We have the following convergence result from the discrete-time stochastic control pro-blem to the continuous one.
Proposition 2.1 Assume that (H1), (H2) and (H3a) hold. Then,
vk(x&, y&) %) v(t, x, y),(2.7)
as h goes to zero, tk ) t and (x&, y&) ) (x, y), uniformly on any compact of Rq " Rd.Moreover, for every p ' 1,
$Vk(x) % v(t, x, Yt)$p %) 0,(2.8)
as h goes to zero and tk goes to t, uniformly on compact sets of Rq.
This convergence result of the value function is certainly well-known. It may be provedby probabilistic arguments, using weak convergence : indeed, the approximation schemesatisfy clearly the local consistency conditions of Kushner, see [18] or [19]. However, inthese works, the costs functions f and g are assumed to be bounded. Since we couldnot find a direct reference in the literature for the more general case of quadratic growthcondition (H2), and for sake of completeness, we give in Appendix an alternative proof ofProposition 2.1, based on viscosity solutions approach.
Remark 2.1 We mention that recently, Krylov presents in [17] a di!erent method forproving the convergence which also provides an estimate of the rate of convergence of finitedi!erence approximations of Bellman’s equation.
3 Markovian Quantization
We shall assume
(H0) The function "(x, y, a) is bounded in (x, y, a) ! Rq " Rd " A.
We also strengthen condition (H3a) by assuming Lipschitz continuity of the costs functions:
(H3b) There exist positive constants [fx], [gx], [fy] and [gy], and p1 ! N such that
|f(x, y, a) % f(x&, y, a)| ( [fx]|x % x&| (1 + |y|p1)
|g(x, y) % g(x&, y)| ( [gx]|x % x&| (1 + |y|p1)
|f(x, y, a) % f(x, y&, a)| ( [fy]|y % y&| (1 + |x|p1)
|g(x, y) % g(x, y&)| ( [gy]|y % y&| (1 + |x|p1)
for all x, x& ! Rq, y, y& ! Rd, a ! A.
Note than, when p1 = 0, assumption (H3b) simply means that f and g are Lipschitzcontinuous. The main error bound in Theorem 3.1 below then becomes significantly simpler.
7

We first consider a fixed bounded uniform grid $X on the state space Rq of the controlledprocess X, with step * and size R. Namely we set $X := (2*)Zq & B%(x0, R) = x! Rq :x = 2*z, for some z ! Zq, and |x % x0| ( R where X0 = x0 and | . | denotes the +% normon Rq (this choice is motivated only by technical commodity). Furthermore, we will assumefrom now on that x0 = 0 for notational simplicity. We denote by (X the projection on thegrid $X according to the closest neighbour rule. The projection (X satisfies
|x % (X(x)| ( max(|x|% R, 0) + * for every x! Rq.(3.1)
At each discrete time tk, we consider a grid $k = y1k, . . . , y
Nkk on the state space Rd
of the uncontrolled process Y , to be determined later. We denote by (k a projection onthe grid $k (i.e. following the closest neighbour rule). We now define as a quantized Eulerscheme the following finite state space (Fk)-Markov chain:
Y0 = Y0 (= Y0 = y0),
Yk+1 = (k+1
&Gh(Yk, 'k+1)
', k = 0, . . . , n % 1.
Given ! = !k, k = 0, . . . , n % 1 ! An, we consider the finite state space controlled(Fk)-Markov chain defined by:
Xk+1 = (X&Hh(Xk, Yk, !k, Yk+1)
', k = 0, . . . , n % 1.(3.2)
We now consider the stochastic control problem in discrete time:
vk(x, y) = inf!!An
E
*
+n$1,
j=k
hf(Xj , Yj , !j) + g(Xn, Yn)
######(Xk, Yk) = (x, y)
-
. ,(3.3)
for all k = 0, . . . , n and (x, y) ! $X " $k. We also denote
Vk(x) = vk(x, Yk), k = 0, . . . , n, x ! $X .
By the dynamic programming principle, functions vk can be computed recursively by adescent algorithm on the tree induced by the grids:
vn(x, y) = g(x, y), x ! $X , y ! $n
vk(x, y) = infa!A
E/hf(x, y, a) + vk+1(X
x,y,ak+1 , Y y
k+1)0, k = 0, . . . , n % 1, x ! $X , y ! $k,
where Xx,y,ak+1 = (X(Hh(x, y, a, Y y
k+1)) and Y yk+1 = (k+1(Gh(y, 'k+1)).
More precisely, functions vk are computed whenever we know or estimate the transitionmatrix of the Markov chain (Yk)k. Indeed, by denoting pk
ij = P [Yk+1 = yjk+1|Yk = yi
k], wehave:
vk(x, yik) = inf
a!A
Nk+1,
j=1
pkij
/hf(x, yi
k, a) + vk+1((X(Hh(x, yik, a, yj
k+1)), yjk+1)
0,(3.4)
k = 0, . . . , n % 1, x ! $X , yik ! $k.
8

Our first main result provides an estimate for $Vk(x)% Vk(x)$p depending on the quan-tization error $%j$, j ' k, defined by
%j := Yj % Gh(Yj$1, 'j) = (j
&Gh(Yj$1, 'j)
'% Gh(Yj$1, 'j).(3.5)
Theorem 3.1 Assume that (H0), (H1) and (H3b) hold. Then for all p ' 1, p ' 1,p ' 2 with p > p if p1 > 0 and p ' p if p1 = 0, there exists a positive constant Cp,p,p
(independent of n) such that for all k = 0, . . . , n, for all x ! $X :
$Vk(x) % Vk(x)$p ( Cp,p,p
*
+ [fx]n
n$1,
j=k+1
&1 + $Yj$p1
q"1
'+ [gx]
&1 + $Yn$p1
q"1
'-
.
11
n1p
n$1,
l=1
(n % l)$%l$p +n,
l=k+1
$%l$p + n*
+n
Rp$1
2
1 + (n*)p + |x|p + $Yk$ppp +
2
n1$ 1pp
n,
l=1
$%l$pp
3p34
+ Cp,p,p
1[fy]n
n$1,
l=1
(n % l)$%l$p + [gy]n,
l=1
$%l$p
4
11 + (n*)p1 + |x|p1 + $Yk$p1
q1+
2n
1$ 1q1#2
n,
l=1
$%l$q1
3p14
where q&1 = pp1p/(p % p), q1 = p1p/(p % 1) and q1 = q&1 + q1 + 2.
Remark 3.1 The estimation of Theorem 3.1 consists basically in two error terms. Oneterm is due to the spatial discretization in Y :
1
n1p
n$1,
l=1
(n % l)$%l$p +n,
l=1
$%l$p,
and the second one is due to the spatial discretization in X :
n* +n
Rp$1.
Of course, one has also to bound the quantities appearing in factor of these two error terms.Classical estimates for the Euler scheme, see e.g. [16], yield that for any r ' 1,
supk=0,...,n
$Yk$r ( C,
for some positive constant C (depending on r, T , Y0 and the coe#cients of the di!usion Y )but independent of n. We shall also see in Section 4, Proposition 4.2, that for an optimaldispatching of the total number of points
5nk=1 Nk in the space grid, with respect to the
number n of points in the time grid, for any r ' 1, the quantity
n1$ 1r
n,
l=1
$%l$r
9

remains bounded by a constant depending on r, T , d, and the coe#cients of the di!usionY . By choosing also a discretization parameter * on X such that n* goes to zero, we obtainfrom Theorem 3.1 an estimation of the rate of convergence for the quantization ruled by :
$Vk(x) % Vk(x)$p ( C1
11
n1p
n$1,
l=1
(n % l)$%l$p +n,
l=1
$%l$p
4
+C2n* + C3(p)n
Rp$1,(3.6)
for some constants C1, C2 and C3(p), with C3(p) increasing exponentially with p > 1. Wesee in particular that the size R of the grid $X must satisfy n , Rp$1, or put in a moremathematical way: n/Rp$1 goes to 0 as n goes infinity. On one hand, one has interest totake p large but on the other hand, recall that the constant C3(p) increases exponentiallywith p. The first term in the r.h.s of (3.6), due to the quantization error on the spatialdiscretization of Y , will be investigated further on in Proposition 4.2.
The methods for proving the estimation in Theorem 3.1 are more and less standard andtechnical. We postpone the proof of Theorem 3.1 in Section 8.
4 Optimization of the grids of the quantized Euler scheme
4.1 Basic facts about optimal quantization of a random vector Y
In this subsection we provide a short background about optimal quantization of randomvectors. Optimal quantization has originally been conceived as a compressing data process.It was extensively investigated by specialists in Information Theory and Signal Processingsince the early 50’s. For a modern and mathematically rigorous overview of quantizationof random vectors, one may consult [15] and the references therein.
Let Y ! Lp(", Rd) be a random vector. From a probabilistic point of view, Lp-quantization (p ' 1) consists in studying the best Lp-approximation of Y by randomvectors Y & taking at most N fixed values y1, · · · , yN ! Rd. Hence, Y & reads
Y & :=N,
i=1
yi1Ai(Y ), (Ai)1#i#N Borel partition of Rd.
One easily proves that, a N -grid $ := y1, · · · , yN being fixed, the Lp-mean error $Y %Y &$p
actually reaches a minimum if the partition (Ai)1#i#N is a Voronoi tessellation (Ci($))1#i#N
related to the grid $. Let us be more specific at this stage.
A partition C1($), . . . , CN ($) of Rd is a Voronoi tessellation of the N -grid $ if, for everyi! 1, . . . , N, Ci($) is a Borel set satisfying
Ci($) -6
y! Rd / |yi % y| = min!
|y % yj |7
.
10

where | . | (usually) denotes the canonical Euclidean norm. Set for every y! Rd, (!(y) := yi
if y! Ci($). Then (! is a closest neighbour projection on the grid $ := y1, . . . , yN and
%Y ! := (!(Y ) =N,
i=1
yi1Ci(!)(Y ) (%Y ! will often be denoted %Y )
clearly satisfies $Y % %Y !$pp
= min8$Y % Y &$p
p, Y & : (",B) ) $
9.(4.1)
Next step is to find a tractable expression for this Lp-quantization error $Y % %Y $p
induced by the quantization of Y using the N -grid $. It is straightforward that
$Y % %Y $pp
=N,
i=1
E:1Ci(!)|Y %yi|p
;=E
!min
1#i#N|Y %yi|p
$="
Rd
min1#i#N
|yi % v|pPY (dv)(4.2)
where PY denotes the distribution of Y . Notice that the Lp-quantization error only de-pends on the distribution of Y whereas the random quantizer %Y only depends on $ andthe (Euclidean) distance on Rd. The expression (4.2) will be the key for the algorithmicapproach to optimal quantization.
Let us point out now a typical property of the Lp-mean quantization error that makesit attractive for our purpose 1: on one hand for every p ' 1
$Y % %Y $pp
= max8$)(Y ) % )(%Y )$p
p, ) Lipschitz continuous, [)]Lip ( 1
9
(the equality holds for the function ) : y .) min!
|y % yi|). On the other hand, from a
numerical viewpoint, E)(%Y ) reads
E )(%Y ) ="
Rd)d(!(PY ) =
N,
i=1
P (Y ! Ci($)))(yi)
Practical computation of such discrete integrals only requires to have access to– the grid $ := y1, . . . , yN and to– the related weights pi := P (Y ! Ci($)) = PY (Ci($)).
Next step is to optimize the choice of the N -grid $ so as to achieve the smallest possiblequantization error and then to evaluate how fast this error goes to 0 as N goes to infinity.
4.1.1 Optimal quantization: existence and asymptotics
The expression (4.2) for the Lp-quantization error stresses that among other usual errorbounds it behaves as a regular function of the quantizing grid $ := y1, . . . , y
N (withthe temporary convention that some elements are possibly equal so that |$| ( N). Moreprecisely, as a symmetric function of the N -tuple y := (y1, . . . , y
N ), the Lp-quantizationerror is Lipschitz continuous. One shows by induction on N that
$ .) $Y % %Y !$p still reaches an absolute minimum at some grid $" - Rd
1For a Lipschitz function ! : Rd !" R, we set [!]Lip = supx $=y|!(x)%!(y)|
|x%y| .
11

and one may always assume that $" - H(suppPY ) (H is for convex hull) (see [21] or [15],among others). Furthermore, one shows the following simple facts (see [21] or [15] andreferences therein):
– If suppPY has an infinite support, any optimal grid $" has N pairwise distinct elements.
– The minimal Lp-quantization error decreases to zero as N ) / i.e.
limN
min|!|#N
$Y % %Y !$p = 0.
As a matter of fact, let (zk)k!N denote an everywhere dense sequence in Rd and set$N := z1, . . . , zN . It is straightforward that $Y % %Y !N $p goes to zero by the LebesgueDominated Convergence Theorem. Then, min|!|#N $Y % %Y !$p goes to 0 as well.
At which rate does this convergence hold turned out to be a much more challengingquestion. The answer was completed by several authors (Zador [26], Bucklew & Wise [8]and finally Graf & Luschgy [15]). It reads as follows
Theorem 4.1 ([15]) Assume that E|Y |p+# < +/ for some # > 0. Then
limN
<N
pd min|!|#N
$Y % %Y !$pp
== Jp,d
<"
Rd)
dd+p (u)du
=1+p/d
(4.3)
where PY (dy) = )(y),d(dy) + -(dy), - 0 ,d (,d Lebesgue measure on Rd). The constantJp,d corresponds to the case of the uniform distribution on [0, 1]d.
Little is known about the true value of the constant Jp,d except in 1-dimension 1 (Jp,1 =1
2p(p+1)) and 2-dimension (e.g. J2,2 = 518
'3, see [15]). However, one shows using random
quantization techniques that Jp,d 1 (d/(2(e))p/2 as d ) +/ (see [15] or [9]).
Whatsoever, this theorem says that min|!|#N $Y % %Y !$p 1 CY,p,dN1d as N ) +/. This
is the same rate as that obtained with uniform lattice grids (i.e. homothety-translation ofi, . . . ,md when N = md ) /. However, these grids are never optimal – except forthe 1-dim uniform distribution – and optimal quantization produces significantly lowerquantization error, not only asymptotically. Furthermore, it works for any N , not only dth
powers of integers: optimal quantization yields the best possible “grid method” for a givendistribution µ.
Figure 1 below shows an optimal grid for the Normal distribution. It is obtained by theprocedure described in the next section.
4.1.2 Optimal quantization: algorithmic aspects
Following (4.2), one sets for every N -tuple y = (y1, . . . , yN )! (Rd)N
QpN
(y) := E qpN
(y, Y ) where qpN
(y, v) := min1#i#N
|v % yi|p.
so that QpN
(y) = $Y % %Y !$pp
with $ = y1, . . . , yN. Function QpN
(y) is symmetric, con-tinuous since p
>Qp
n is Lipschitz. For notational convenience, we will temporarily denoteCi(y) for Ci($) (the ith Voronoi tessel of y). One shows (see, e.g., [15] when p = 2 or
12

Figure 1: A L2-optimal 500-grid for the Normal distribution N (0; I2) with its Voronoi tesselation.
[21]) that, if p > 1, QpN
is continuously di!erentiable at every N -tuple y! (Rd)N satisfying2 i 3= j, yi 3= yj and PY
(4N
i=1&Ci(y))
= 0. Its gradient 5QpN
is obtained by formaldi!erentiation (see [21] for a rigorous proof), that is
5QpN
(y) = E:5y qp
N(y, Y )
;,
where 5y qpN
(y, v) =<& qp
N
&yi(y, v)
=
1#i#n
:= p
<yi % v
|yi % v| |yi % v|p$11Ci(y)(v)
=
1#i#n
.(4.4)
for every v! 41#i#NCi(y). Note that then, 5yqpN
(y, v) has exactly one non-zero componenti(y, v) defined by v! Ci(y,v)(y). (If PY is continuous the result still holds for p=1.)
So, the gradient of QpN
has an integral representation with respect to the distribution ofY . This strongly suggests to implement the stochastic gradient descent derived from thisrepresentation to approximate some (local) minimum of Qp
N(when d ' 2, the implementa-
tion of deterministic gradient descent is unrealistic since it would rely on the computationof many integrals with respect to PY ). This stochastic gradient descent is defined as fol-lows: let (.s)s(1 be a sequence of i.i.d. PY -distributed random variables and let (*s)s(1 bea sequence of positive steps satisfying
,
s
*s = +/ and,
s
*2s < +/.(4.5)
Then, starting from an initial grid $0 with N pairwise distinct components, set
$s+1 = $s % (*s+1/p)5 qpN
($s, .s+1)(4.6)
(this formula a.s. grants by induction that $t has pairwise distinct components). Unfortu-nately, the usual assumptions that ensure the a.s. convergence of the algorithm (see [12])are not fulfilled by Qp
N(see, e.g. [12] or [20] for an overview on stochastic approximation).
To be more specific, let us stress that QpN
(y) does not go to infinity as |y| goes to infinity
13

in (Rd)N and 5QpN
is clearly not Lipschitz continuous on (Rd)N . Some a.s. convergenceresults in the Kushner & Clark sense have been obtained in [21] for compactly supportedabsolutely continuous distributions PY , mainly in the quadratic case p = 2 (however, reg-ular a.s. convergence is established when d = 1). In fact the quadratic case is the mostcommonly implemented for applications and is known as the Competitive Learning VectorQuantization (CLVQ) algorithm.
Formulae (4.6) and (4.4) can be developed as follows if one sets $s := y1,s, . . . , yN,s,
Competitive phase : select i(s + 1) := i($s, .s+1) ! argmini|yi,s % .s+1|(4.7)
Learning phase :
?yi(s+1),s+1 := yi(s+1),s % *s+1
yi(s+1),s$$s+1
|yi(s+1),s$$s+1| |yi(s+1),s % .s+1|p$1
#[.5em]yi,s+1 := yi,s, i 3= i(s + 1).(4.8)
The competitive phase (4.7) corresponds to selecting the closest point in $s i.e. i(s+1) suchthat .s+1! Ci(s+1)($s). The learning phase (4.8) consists in updating the closest neighbourand leaving unchanged other components of the grid $s.
Furthermore, it is established in [21] that, if Y ! Lp+% (' > 0), then the sequences(Qp,s
N)s(1 and ((s
i )s(1, 1 ( i ( N , of random variables recursively defined by
Qp,s+1N
:= Qp,sN
% *s+1(Qp,sN
% |yi(s+1),s % .s+1|p), Qp,0N
:= 0,(4.9)
(s+1i := (s
i % *s+1((si % 1i=i(s+1)), (0
i := 1/N, 1 ( i ( N.(4.10)
satisfy on the event $s ) $"
Qp,sN
a.s.%) QpN
($") and (si
a.s.%) PY (Ci($")), 1 ( i ( N, as s ) /.
These “companion” – hence costless – procedures yield the parameters (weights of theVoronoi cells, Lp-mean quantization error of $") necessary to exploit the grid $" for nu-merical purpose. Note that this holds whatever the limiting grid $" is: this means that theprocedure is consistent.
Concerning practical implementations of the algorithm, it is to be noticed that, whenp = 2, at each step the grid $s+1 lives in the convex hull of $s and .s+1 which has astabilizing e!ect on the procedure. One checks on simulation that the CLVQ algorithmsdoes behave better than its non-quadratic counterparts. This follows from the cooperativeprocedure (4.8) which then simply becomes a homothety centered at .s+1 with ratio 1%*s+1.
4.2 Optimal Markovian quantization of the Euler scheme of Y
Let $k denote for every k! 0, . . . , n the state space of %Yk and Nk denote the size of $k.For simplicity of notation, we set (k := (!k the closest neighbour projection on $k. Theparameters n and Nk, 1 ( k ( n being fixed, a quantized Euler scheme (%Yk)0#k#n can beconsidered as optimal if, at each step, the Lp-error induced by the quantization e!ect isminimal. This leads to built up the grids $k recursively by setting
$1 ! argmin@$Gh(y0, '1) % (! (Gh(y0, '1)) $p , |$| = N1
A(4.11)
$k+1 ! argmin8$Gh(%Yk, '1) % (!
&Gh(%Yk, '1)
'$p , |$| = Nk+1
9(4.12)
14

(where %Yk := (k
&Gh(%Yk$1, 'k)
', h = T/n and Gh is the Euler scheme operator). The
proposition below gives an estimate for the asymptotic local quantization error induced bythe Lp-optimal grids.
Proposition 4.1 Assume that $ is (simply) elliptic ($$"(y) > 0 for every y ! Rd). Letp ' 1 and k! 1, . . . , n. Let $k denote an Lp-optimal grid. Set Nk := |$k|. Then
$%k$p = $Gh(Yk$1, 'k) % (k(Gh(Yk$1, 'k))$p 1 J1p
p,d$fk$1p
dd+p
1
|Nk|1d
as |Nk| ) +/.(4.13)
where %fk is the p.d.f of Gh(Yk$1, 'k) (see (4.14) below).
Proof: It is straightforward that Gh(Yk$1, 'k) ! Lp+1. It follows from (2.2) that hedistribution of Gh(Yk$1, 'k) is absolutely continuous with respect to ,d since 'k and Yk$1
are independent and 'k has a Gaussian distribution. Furthermore, as $$"(y) is everywhereinvertible, its p.d.f. fk given by
fk(y) = E
B
Cexp&% (y$Yk%1$h#(Yk%1))&(&&&(Yk%1))%1(y$Yk%1$h#(Yk%1))
2h
'
(2(h)d/2D
det($$")(Yk$1)
E
F .(4.14)
The result follows from the Bucklew and Wise Theorem 4.1. !
The term “local” is motivated by the fact that the above rate holds when Nk goes toinfinity, the distribution of %Yk$1 being settled.
4.3 Optimal dispatching of the grid sizes
Recall from Theorem 3.1 and Remark 3.1, that the e!ect of the quantization on the rate ofconvergence of the value function of the stochastic control problem is measured by
1
n1p
n$1,
k=1
(n % k)$%k$p +n,
k=1
$%k$p for some p ' 1.(4.15)
We also have to bound quantities in the form :
n1$ 1r
n,
k=1
$%k$r for some r ' 1.(4.16)
Then, the question of interest is : having at hand a global stack of N points, how can weassign Nk points to layer k, N1 + · · · + Nn = N , so that, producing an Lp-optimal Nk-grid$k on each layer k (inducing a mean quantization error $%k$p), provides the smallest globalquantization error (4.15)?
Furthermore, the Nk have to be settled prior to the optimization procedure of the gridsto keep the complexity of the global algorithm reasonable.
This problem has already been tackled in [3] for the original non-Markovian quantiza-tion method. A rigorous and satisfactory solution has been provided when the underlyingdi!usion is uniformly elliptic with bounded smooth coe#cient # and $ i.e. lying in C%
b (Rd).
15

In our framework it turns out that this approach no longer works stricto sensu for thedistributions of Gh(Yk$1, 'k) cannot be properly dominated by a#ne transforms of a fixeddistribution.
An obvious induction on k ' 1 using on Inequality (8.2) of Lemma 8.2 shows that
2 k! 1, . . . , n, %YkLp
%) Yk as min1#i#n
Ni ) +/.
Let fk denote the p.d.f. of the Euler scheme at time tk = kh = kT/n, k ' 1. If furthermore,$ is uniformly elliptic, then equation (4.14) implies that
2 k! 1, . . . , n, fk'da.e.&L1('d)%) fk as min
1#i#nNi ) +/.
(the L1 convergence follows from Sche!e’s Theorem). In particular, %Yk converges in varia-tion toward Yk. Consequently,
2 k! 1, . . . , n, $fk+1$ dd+p
%) $fk+1$ dd+p
.(4.17)
If, furthermore #, $! C%b (and $ still uniformly elliptic), then (see [4]), for every n ' 1,
2 k! 1, . . . , n, fk(y) ( ,exp%( |y$y0|2
2µ2tk)
(2(µ2tk)d2
(if Y0 = y0)
where the real constants , and µ only depend on T , # and $$" (especially its uniformellipticity coe#cient). Hence, a standard computation shows that
$fk(y)$ dd+p
( ,(2(µ2tk)p2 (1 + p/d)
12 ( 1
d+ 1p )
so that $fk(y)$1p
dd+p
( c#,&,T,d,p*
tk(4.18)
with c#,&,T,d,p ( e1d,
1p*
2(µ. Combining (4.17) and (4.18) one may reasonably conjecturethe existence of a real constant c#,&,T,d such that
$fk(y)$1p
dd+p
( c#,&,T,d*
tk(4.19)
(what is not rigorously established at this stage is that c#,&,T,d may be chosen not dependingon k, Nk and n). Now, plugging (4.19) in (4.13) and then in (4.15) and (4.16) yields
1
n1p
n$1,
k=1
(n % k)$%k$p +n,
k=1
$%k$p ( C#,&,T,d,p n1$ 1p
n,
k=1
&T (1 + n
1p$1)%tk
' *tk
N1dk
,(4.20)
n1$ 1r
n,
k=1
$%k$r ( C#,&,T,d,r n1$ 1r
n,
k=1
*tk
N1dk
,(4.21)
for some positive constants C#,&,T,d,p and C#,&,T,d,r.
At this stage, it is possible to choose the Nk’s in order to minimize the sum appearingat the r.h.s of (4.20) : one starts from the lemma below whose proof is left to the reader.
16

Lemma 4.1 Let a1, . . . , an! R+ and L! R+. Then
min
?n,
k=1
akx$ 1
dk , (x1, . . . , xn)! Rn
+, x1 + · · · + xn ( L
G
=
2n,
k=1
ad
d+1
k
31+ 1d
L$ 1d .
It is reached by setting xk := ad
d+1
k
2n,
l=1
ad
d+1
l
3$1
, k! 1, . . . , n.
Following the above lemma, one sets for every k! 1, . . . , n,
Nk =
*
HHHHH
&&T (1 + n
1p$1) % tk
'*tk' d
d+1N
5nj=1
&&T (1 + n
1p$1) % tj
'*tj' d
d+1
-
IIIII(4.22)
with 6x7 := mink! N, k ' x. Doing so, we have Nk ' 1 for all k and N ( N1 + · · · +Nk + · · · + Nn ( N + n. Moreover, the r.h.s. of (4.20) is estimated by :
n1$ 1p
n,
k=1
&T (1 + n
1p$1) % tk
'*tk
1
N1dk
( n2$ 1p+ 1
d
N1d
21n
n,
k=1
&(T (1 + n
1p$1) % tk)
*tk' d
d+1
31+1/d
( n2$ 1p+ 1
d (1 + o(n))
N1d
<1T
" T
0((T % u)
*u)
dd+1 du
=1+1/d
,
while the r.h.s. of (4.21) is bounded by :
n1$ 1r
n,
k=1
*tk
1
N1dk
( n2$ 1r + 1
d
N1d
1n
n,
k=1
(*
tk)1
d+1
&&T (1 + n
1p$1) % tk
'*tk' d
d+1
21n
n,
k=1
&(T (1 + n
1p$1) % tk)
*tk' d
d+1
31+1/d
( n2$ 1r + 1
d (1 + o(n))
N1d
1T
" T
0
(*
u)1
d+1
((T % u)*
u)d
d+1
du
<1T
" T
0((T % u)
*u)
dd+1 du
=1+1/d
.
We then deduce the following estimation and bound results.
Proposition 4.2 Let p, r ' 1. Assume that #, $! C%b and that $ is uniformly elliptic. If
one considers N + n points optimally dispatched among the n times layers following (4.22)into Nk-optimal grids, then :
1
n1p
n$1,
k=1
(n % k)$%k$p +n,
k=1
$%k$p ( C#,&,T,d,pn2$ 1
p
(N/n)1d
,(4.23)
n1$ 1r
n,
k=1
$%k$r ( C#,&,T,d,rn2$ 1
r
(N/n)1d
(4.24)
for some positive constants C#,&,T,d,p and C#,&,T,d,r.
17

Moreover, when N , n and N/n get large, one has the following equivalent for the Nk’s:
If p > 1 Nk 1)d( k
n)J 10 )d(v) dv
N
n, 1 ( k ( n % 1, with )d(v) = ((1 % v)
*v)
dd+1 ,
Nn 1 1J 10 /d(v) dv
1
nd(p%1)p(d+1)
N
n,
If p = 1 Nk 1/d( k
n)J 10 /d(v) dv
N
n, 1 ( k ( n, with /d(v) = ((2 % v)
*v)
dd+1 .
Remark 4.1 (about (4.23)): • One must keep in mind that the optimization of thedispatching procedure of the Nk’s described above is only a way to obtain the smallestpossible real constant C#,&,T,d,p in (4.23). If one is simply interested in obtaining the upper-
bound O( n2% 1
p
(N/n)1d), it su#ces to set Nk = 6N/n7 + 1 for every 1 ( k ( n.
• Note that functions u .) (1 % u)*
u and u .) (2 % u)*
u respectively reach theirmaximum at umax = 1/3 and umax = 2/3. This means that in this dispatching rule,for large enough n, either T/3 or 2T/3 is the more accurately quantized period of timeaccording to the value of p.
4.4 How to get the optimal grids !k and the transition matrices?
To implement the above method, one needs to have, for every k! 0, . . . , n,
• a grid $k which minimizes the Lp-quantization error $G(Yk$1, 'k)%(k(G(Yk$1, 'k))$p.This optimization is necessarily inductive since Yk$1 depends on the grid $k$1, etc;
• the transition matrices (pkij) of the (non-homogenous) Markov chain Yk, 0 ( k ( n.
Namely, if one denotes $k := y1k, . . . , y
Nkk
pkij := P (Yk+1 = yj
k+1 | Yk = yik), 1 ( i ( Nk, 1 ( j ( Nk+1
For numerical purpose, one introduces the joint distribution matrix (0kij) and the
marginal distribution vector (pki )
0kij := P (Yk+1 = yj
k+1 and Yk = yik), 1 ( i ( Nk, 1 ( j ( Nk+1,
pki := P (Yk = yi
k), 1 ( i ( Nk.
so that pkij =
0kij
pki
, 1 ( i ( Nk, 1 ( j ( Nk+1.
• The Lp-quantization error $%k$p = $Gh(Yk$1, 'k) % Yk$p, 1 ( k ( n.
We present below one method to achieve this program by simulation. It is a global approachwhich carries out all the tasks simultaneously. The algorithm is designed for a general Lp
setting, p ' 1.
The optimal quantized Euler scheme (i.e. the grids that satisfy (4.12)) is obtained by acascade of stochastic gradient descents (4.6) (or (4.7) & (4.8)) derived from the successive
18

Lp-mean quantization error functions. The companion parameters are computed recursivelyas a by-product following (4.9) and (4.10). This algorithm appears as an adaptation ofthe procedure developed in [3]. The gain parameter sequences (*k
s )s(1 of the gradientdescents may depend on the layer k (but will always satisfy the regular “decreasing step”assumption (4.5)). In practice, one sets *k
s := Ak
Bk+s, s ' 1. Theoretical optimal choice for
Ak and Bk do exist (see, e.g., [12]). They are usually out of reach on practical situations(they rely on the computation of the Hessian of the potential function, here the successiveLp-mean quantization errors Qp
N).
One starts from some initial grids $0k, 0 ( k ( n at step s = 0, and let us denote by
$sk := yi,s
k , 1 ( i ( Nk the kth grid at time s during the optimization phase ($s0 := y1
0for every s! N). Let us denote by 0k,s
i,j and pk,si the recursive estimator at step s of 0k
i,j andpk
i and by Qp,k,s the recursive estimator of the Lp-quantization error at step s. Set 0k,0i,j =
1/Nk+1, pk,0i = 1/Nk and Qp,k,0 = 0. The updating procedure of the above quantities from
s % 1 to s is as follows
• Updating $s1
1. Simulate a new trial .1,s of Gh(y10, '1) = y1
0+h #(y10)+
*h $(y1
0)'1, '1 1 N (0; Im).
2. Select the nearest neighbour in the current grid $s$11 i.e. (the lowest integer)
j1(s)! 1, . . . , N1 such that
|yj1(s),s$11 % .1,s| = min
yj,s%11 !!s%1
1
|yj,s$11 % .1,s|(4.25)
3. Update the grid $s$11 by moving yj1(s),s$1
1 by an homothety centered at .1,s withratio 1 % *1
s |yj1(s),s$11 % .1,s|p$2 whereas other components are left unchanged
(note that when p = 2 the ratio of the homothety is simply 1 % *s):
yj1(s),s1 = yj1(s),s$1
1 %*1s
yj1(s),s$11 % .1,s
|yj1(s),s$11 % .1,s|
|yj1(s),s$11 %.1,s|p$1, yj,s
1 = yj,s$11 , j 3= j1(s).
(4.26)
4. Update the joint distribution matrix [00,s$11,j ]1#j#N1 :
00,s1,j1(s)
:= 00,s$11,j1(s)
% *1s(0
0,s$11 j1(s)
% 1), 00,s1 j := 00,s$1
1 j if j 3= j1(s)(4.27)
p0,s1 := 1.(4.28)
5. Update the quantization error (like in (4.9))
Qp,1,s = Qp,1,s$1 % *1s(Q
p,1,s$1 % |yj1(s),s$11 % .1,s|p).(4.29)
• Updating $sk, 2 ( k ( n:
1. Simulate a new trial .k,s of Gh(yjk%1(s),sk$1 , 'k).
19

2. Select the nearest neighbour in the current grid $s$1k i.e. (the lowest integer)
jk(s)! 1, . . . , Nk such that
|yjk(s),s$1k % .k,s| = min
yj,s%1k !!s%1
k
|yj,s$1k % .k,s|(4.30)
3. Update the grid $s$1k by moving yjk(s),s$1
k by an homothety centered at .k,s withratio 1 % *k
s whereas other components are left unchanged :
yjk(s),sk = yjk(s),s$1
k %*ks
yjk(s),s$1k % .k,s
|yjk(s),s$1k % .k,s|
|yjk(s),s$1k %.k,s|p$1, yj,s
k = yj,s$1k , j 3= jk(s).
(4.31)
4. Update the joint distribution matrix [0k$1,s$1i j ]1#i#Nk%1,1#j#Nk and the marginal
distribution vector [pk,s$1j ]1#j#Nk
0k$1,sjk%1(s) jk(s) = 0k$1,s$1
jk%1(s) jk(s) % *ks (0k$1,s$1
jk%1(s) jk(s) % 1),(4.32)
pk,sjk(s) = pk,s$1
jk(s) % *ks (pk,s$1
jk(s) % 1)(4.33)
5. Update the quantization error
Qp,k,s = Qp,k,s$1 % *ks (Qp,k,s$1 % |yjk(s),s$1
k % .k,s|p).(4.34)
• Computation of the transition matrix after M trials
pk$1,Mi j :=
0k$1,Mi j
pk$1,Mi
, 1 ( i ( Nk$1, 1 ( j ( Nk, 1 ( k ( n.
This optimization algorithm can easily be processed on M = 106 or more trials in a fewminutes (less than 10).
Remark 4.2 One possible drawback of the above algorithm is that it carries out simul-taneously the optimization of all the grids: $k is optimized before its “ancestor” $k$1 issettled. This may cause numerical instability since $k quantizes Gh(Yk$1, 'k) where Yk$1
is $k$1-supported. A possible alternative consists in proceeding sequentially by freezingsuccessively all the layers: this means stopping the optimization procedure of $k beforestarting that of $k+1. The adaptation of the procedure is easy.
5 Convergence of the value function and approximate controls
Fix the initial conditions (x0, y0) of the continuous state process (X,Y ). Given an admis-sible control ! ! A, we denote by J(!) the cost function
J(!) = E
!" T
0f(Xu, Yu,!u)du + g(XT , YT )
$(5.1)
20

and by v0 = v(0, x0, y0) the value function at time 0 of the continuous control problem :
v0 = inf!!A
J(!).
Given a time discretization parameter n, and a control ! ! An, we denote by Jn(!) thecost function associated to the control problem (2.6) at the initial date 0 :
Jn(!) = E
*
+n$1,
j=0
hf(Xj , Yj, !j) + g(Xn, Yn)
-
. ,
and by vn0 = v0(x0, y0) its value function :
vn0 = inf
!!An
Jn(!).
Now, for Y -spatial discretization parameter N , X-spatial discretization parameters R and*, we denote for any control ! ! An, by Jn,N,R,((!) the cost function associated to thecontrol problem (3.3) at the initial date 0 :
Jn,N,R,((!) = E
*
+n$1,
j=0
hf(Xj, Yj , !j) + g(Xn, Yn)
-
. .
We denote by vn,N,R,(0 = v0(x0, y0) its value function :
vn,N,R,(0 = inf
!!An
Jn,N,R,((!).
We know from Proposition 4.2 that when the N + n points of the Y -grid are optimallydispatched among the n layers in time, for any r ' 1, we have the following bound :
n1$ 1r
n,
k=1
$%k$r ( Cn2$ 1
r
(Nn
) 1d
for some positive constant C. Now, with the notations of Theorem 3.1, choose p = 1, p =max(2, p1 + 1) (so that p = max(q1, 2)), p > 1, and n, N such that
N ' Cn1+2d$ dpp(5.2)
for some positive constant C. Hence, from the estimate of Theorem 3.1 (see also Remark3.1), and Proposition 4.2, we have the following rate of convergence for the value functions :
###vn0 % vn,N,R,(
0
### ( C1n2$ 1
p
(N/n)1d
+ C2n* + C3(p)n
Rp$1,(5.3)
with C1, C2 and C3(p) are positive constants depending on d, T, p and the coe#cients of Y .Therefore, by combining this last estimate with the convergence result of Proposition
2.1, we deduce the convergence of the value function approximated by optimal quantization :
vn,N,R,(0 %) v0,(5.4)
21

as n goes to infinity, (5.2) holds, n*, and n/Rp$1 go to zero.
The value function vn,N,R,(0 is computed recursively by the dynamic programming for-
mula (3.4). Moreover, this scheme allows us to compute at each step k an optimal controlin An by taking the infimum in (3.4) :
!k = !k(Yk), k = 0, . . . , n.
By misuse of notation, we still denote by ! the stepwise constant control process definedon [0, T ) by :
!t = !k, for t ! [tk, tk+1), k = 0, . . . , n % 1.(5.5)
Hence, ! lies in A and may be applied to the original continuous time control problem v0.Similarly as in (5.5), any control ! ! An may be interpolated into a continuous control inA. With this continuous interpolation, we have An - A. We now check that ! is '-optimalfor the original problem. This problem of approximating control has been extensivelystudied by Runggaldier et al. [24], and we closely follow their arguments. Denote by Zn
t =(Xn
t , Y nt ), 0 ( t ( T , the continuous Euler scheme associated to the di!usion (X,Y ) (X is
controlled by !! An): it is defined for all tk ( t < tk+1, k = 0, . . . , n % 1 by
Xnt = Xn
k + b(Xnk , Y n
k , !k)(t % tk) + %(Xnk , Y n
k , !k)(Wt % Wtk)
Y nt = Y n
k + #(Y nk )(t % tk) + $(Y n
k )(Wt % Wtk).
Using the Lipschitz continuous assumption (H1) (uniform with respect to the control terma), and mimicking standard methods to get Lp-error estimates on the Euler scheme (seee.g. [16]) yield for every p ' 1 :
sup!!An
E
1
supt![0,T ]
##Znt % Zt
##2p
4
(Cp,T,b,)
np,
for some positive constant Cp,T,b,). Under assumption (H3b), one easily checks that :
sup!!An
##Jn(!) % J(!)## ( sup
!!An
E
!" T
0|f(Zn
t , !t) % f(Zt, !t)|dt + |g(ZnT ) % g(ZT )|
$
%) 0,
as n goes to infinity. Moreover, by same arguments as in the proof of the convergence (5.3),we also have :
sup!!An
###Jn,N,R,((!) % J(!)### ( C1
n2$ 1p
(N/n)1d
+ C2n* + C3(p)n
Rp$1.(5.6)
Therefore, for any ' > 0, one can find n, N , R, *, such that :
sup!!An
###Jn,N,R,((!) % J(!)### ( '/2 and
###vn,N,R,(0 % v0
### ( '/2.
Now, by definition of !, we have vn,N,R,(0 = Jn,N,R,((!). We then deduce that
J(!) ( v0 + ',
which means that ! is '-optimal for the original control problem, provided n, N are su#-ciently large such that (5.2) holds and n*, n/Rp$1 are su#ciently small.
22

6 Possible variants: a short discussion
To illustrate how optimal quantization can be used as a numerical method for stochasticcontrol, some features of the problem have been specified. Some cannot be easily modified –at least from a theoretical point of view – some can without damage. Thus, to get some truea priori error bounds needs to quantize only the uncontrolled Y part of the whole process(X,Y ). The main interest of quantization is to compress and store some information on thedistribution of a Markov chain after an optimization/estimation phase (CLV Q). So the setof optimal quantizers and companion parameters must not depend upon the control. (Infact, as far as numerics are concerned, some quantized grid can probably help but not asthey are used here).
Let us pass to less crucial specifications. In the present paper, the starting value ofthe uncontrolled process has been settled to a deterministic value and the quantization hasbeen processed accordingly. This is natural given the applications we had in mind in whichY is an asset price process which value at time 0 is known, but this may appear as animportant drawback for other models in which the value function needs to be computedat several (closed) points. There are many ways to overcome this restriction. First, anyrandom starting value Y0 can be considered as well as its induced quantization grid $0.This will yield some proxies of the value functions v(0, y0) for di!erent points y0. Doingso maintains the complexity of the estimation procedure but induces a loss of accuracy.On the other hand one may also implement on appropriate computers a parallel versionof the CLV Q procedure starting from di!erent points (one can then take advantage fromthe fact that these optimal quantizations will remain closed during the closest neighboursearch phase). Finally, in some more specific examples where the di!usion Yt can be writtenas a function )(t,Wt) like in the Black & Scholes model, it is much more convenient touse an optimal quantization of the standard d-dim Brownian motion (Wt)t![0,T ] which is auniversal object computed for once and stored.
The choice of the Euler scheme can also be justified. This is a first order scheme. In1-dim, the Milshtein scheme is defined as follows
Yk+1 = Yk + #(Yk)h + $(Yk)*
h 'k+1 +12$&(Yk)$(Yk)h
('2k+1 % 1)
):= GMil
h (Yk, 'k+1),
where*
h'k := Wkh%W(k$1)h is the kth Brownian increment of time step h and $& is for thederivative of $. There is no doubt that Theorem 3.1 can be established using the Milshteinscheme instead of the Euler scheme (in any dimension). But when one looks carefully atthe proof, it appears that the rate of convergence of the scheme Yk toward the di!usion Yy
is not involved : only the Lp-Lipschitz property of the discretization functional y .) Y y1 =
Gh(y, '1) (resp. GMilh (y, '1)) and some Lp-boundedness properties do. These properties are
shared by both schemes (with much more technicalities for the second one).The main advantage of the Milshtein scheme lies in its Lp-rate of convergence toward
the underlying di!usion since – under some commutativity assumptions involving $ and itspartial derivatives in higher dimensions (see [16]) – it converges at a O(h)-rate (instead ofO(
*h)-rate for the Euler scheme). In fact, the rate of convergence of the scheme possibly
has an influence on the rate of convergence of the time discretized control problem toward
23

the continuous time control problem. But this aspect is not investigated here (only theconvergence is), one reason being that, in this phase quantization plays no role.
7 Numerical simulations
We numerically apply in this section the algorithms given in Section 3 to the portfoliooptimization problems. More precisely, we focuse on the replication of an European Putoption using self-financing strategies in a mean-variance hedging context. A stochasticvolatility model (SVM) is considered in which the process Y (see Eq. (1.2)) is 2-dimensionaland denotes the asset price together with the volatility. The process X (see Eq. (1.1)) is thewealth process. In the SVM model, the portfolio is traded with the asset price componentof Y .
Let us emphasize that, since Y does not depend on X, the quantization of Y are inthe two cases computed o!-line using methods introduced in Section 4. It means thatthe discretized semi-group (pi,j in (3.4)) and the optimal grids yi
k are kept o!-lineonce the optimal quantization has been achieved. Discretization of the wealth processx"$nX#"#nX is done according an uniform mesh in dimension 1 of step %. We willcompute the value function given by (3.4) together with the optimal control at the points(x", yi
k) for + = %nX , . . . ,+nX , i = 1, . . . , Nk, k = 0, . . . , n.For the sake of completeness, let us now describe the SVM model. Let S := (St)t![0,T ]
be a traded “risky” asset whose price process is driven by a di!usion process with stochasticvolatility given by K
LLM
LLN
dSt = %tStdW 1t , S0 := s0,
%t = |Zt + %0|,
dZt = %# Zt dt + 0dW 2t , Z0 = 0,
(7.1)
where W := (W 1,W 2) is a standard 2-dimensional Wiener process. For notational conve-nience, set Yt := (St,%t). (We assume for the sake of simplicity that the “riskless” interestrate is 0 and S is already a martingale under P ).
We are looking for the optimal quadratic risk minimization of a European Put option onS (maturity T > 0 and strike price K) using some self-financing (FS-predictable) strategies.Let !t denote the quantity of assets S held in the portfolio at time t. In order to bound therisk induced by the authorized strategies, we define the set A of admissible self-financing(FS-progressively measurable) strategies (!t)t![0,T ] by
A :=@(!t)t![0,T ] /2 t! [0, T ], !t! A := R
A.
Let x0 be the initial wealth to be invested in the replication procedure, (!t)t![0,T ] ! Aand Xx0,!
t the value of the resulting portfolio at time t. The process (Xx0,!t )t![0,T ] satisfies
dXx,!t = !t dSt =
2!t
0
3.dYt, X0 = x0 > 0.
This leads to the following stochastic control problem with horizon T :
v0(x0, s0,%0) = inf(!t)!A
E&(
Xx0,!T % (K % ST )+
)2'
24

We are interested in approximating by quantization E[v0(x0, s0,%0)] and the optimal control!opt. On the other hand, we have access to a closed form for both quantities.
Let P (t, s,%) := E[(K % ST )+ | (St,%t) = (s,%)]. Using that P (t, St,%t), one gets usingIto’s formula
(K % ST )+ = E((K % ST )+) +" T
0
&P
&S(t, St,%t)dSt + ZT .
with ZT = 0J T0
*P*) (t, St,%t)dW 2
t . Hence
E&(
Xx0,!T % (K % ST )+
)2' = (x0 % E((K % ST )+))2 + E
2" T
0
<!t %
&P
&S(t, St,%t)
=2
S2t dt
3
+ E(Z2T)
Consequently
v0(x0, s0,%0) = (x0 % E((K % ST )+)2 + C and !opt(t, St,%t) =&P
&S(t, St,%t)(7.2)
In particular the function x0 .) v0(x0, s0,%0) reaches its minimum at xmin = E((K %ST )+) and the optimal control !opt does not depend upon the initial wealth x0 (but dependson s0 and %0. A lower bound for xmin is available since, the volatility process %t beingindependent of W 1, Jensen inequality yields
xmin = E((K % ST )+) > PutB&S(s0,K, T,%0).
Let us pass to the numerical treatment of the problem. In a first time, algorithm (3.4)is rewritten as
vi,"n =
&x" %
(K % si
n
)+
'2, %nX ( + ( +nX , 1 ( i ( Nn(7.3)
vi,"k = inf
!!A
Nk+1,
j=1
pki,j vj,m
k+1, %nX ( + ( +nX , 1 ( i ( Nk(7.4)
where
m = m(i, j, +,!) =
*
++ +!&sjk+1 % si
k
'
%+ 0.5
-
. .(7.5)
The optimal control is given by
!i,"k = argmin!!A
Nk+1,
j=1
pki,jv
j,m(i,j,",!)k+1 .(7.6)
Let us note that, since we have to deal with fixed arrays, we would need to have
%nX ( m(i, j, +, a) ( +nX ,
25

for any (i, j) ! Nk "Nk+1 and a ! [%1, 1] where +(i, j, a) is defined by (7.5). We can not dothis because it would be very space consumer unless we find suitable “boundary conditions”for the values of vj,"
k+1 with |+| > nX . It is why we will work with a shifted wealth process
xi,"k = x" % P i
k, 1 ( i ( Nk, 0 ( k ( n, %nX ( + ( nX ,(7.7)
where P ik is the quantized approximation of the European price. Hence, Algorithm (7.3)–
(7.5) is rewritten:
vi,"n =
&xi,"
n
'2, %nX ( + ( +nX , 1 ( i ( Nn(7.8)
vi,"k = inf
!!A
Nk+1,
j=1
pki,j vj,m
k+1, %nX ( + ( +nX , 1 ( i ( Nk(7.9)
P in = (K % si
n)+, 1 ( i ( Nn(7.10)
P ik =
Nk+1,
j=1
pki,j P j
k+1, 1 ( i ( Nk(7.11)
where
m = m(i, j, +,!) =
*
++ +P i
k % P jk+1 + !
&sjk+1 % si
k
'
%+ 0.5
-
. .(7.12)
This choice is motivated by the expression of the optimal control in (7.2). This explainswhy the term
%(P jk+1 % P i
k) + !(sjk+1 % si
k)
should not be too large near the optimum. Nevertheless, when |m| becomes greater thannX in (7.9)–(7.12), we set
vj,mk+1 =
&xj,m
k+1
'2.(7.13)
The following computations are done with the algorithm (7.8)–(7.12) and (7.13).
O!–line computations.The parameters of the process Yt = (St,%t) (see (7.1)) used for the simulation are
(s0,%, #,0) = (100, 0.2, 1.0, 0.2). Let us note the value of the asymptotic square meandeviation of %t:
- =0*2#
8 0.14.
The main task of theses o!–line computations consists in the optimal quantization of thecouple (ln(St), Zt). This is achieved owing to the numerical methods described in Section4. We use for this M = 106 independant trials of the Euler scheme applied to (7.1)(where ln(St) is simulated instead of St) with n time steps on the time interval [0, T ]. Here(n, T ) = (25, 1).
Spatial discretization is done with N = 1 + . . . + Nn = 5746 according the dispatchingrule described in subsection 4.3.
26

This gives us the grids (ln(sik), z
ik) together with the weights pi,j where %i
k = |%0 +zik|. Figure 2 depicts such an optimal quantization (ln(si
n), zin) of the random variable
(ln(ST ), ZT ) with Nn = 300 points. The cpu time needed for the quantization of the wholeprocess with M = 106 independant trials of the Euler Scheme took 1580 seconds on aPentium III 500MHz.
On–line computations.Algorithm (7.8)–(7.12) and (7.13) is then applied. The numerical results presented here
have been obtained with the parameters nX ! 50, 100, 200, % = 5/nX and K = 100 = s0.In Figure 3 is depicted the value function v0(x0, s0,%0) as a function of x0 (See (7.2)).
Its shape is those of a parabola as expected and its minimum located at xmin = 8.55, agood approximation of the price computed by Monte-Carlo (see Table 1). Let us recall thatthe B&S price with %t = %0 is 7.96.
In Table 2 are summed up the location of the minimum of v0 and the optimal controlassociated for di!erent values of nX together with the cpu time needed for the computa-tions. As regards the prices, we see that a convergence towards the right value (8.55) seemsto arise when nX becomes large. Nevertheless the di!erent values of the optimal controlremain good approximations of the value obtained by Monte-Carlo (in Table 1) even forlow discretization.
Then, in order to test the trajectorial behaviour of the algorithm, we simulate onetrajectory of the process Y and compute at each time–step an approximation of the wealthprocess Xtk by the rule
Xk+1 = Xk + !i(+),"(+)k (Sk+1 % Sk) , X0 = x0,
where Sk is the Euler approximation of Stk and i(1), +(1) the indices of the nearest neigh-bour on the grid of (Xk, Sk,%k) at the time tk of the simulation. The initial value x0 hasbeen chosen according to the values of Table 2. Figure 4 shows the trajectories of boththe wealth process and the contingent claim obtained with nX = 200. Figure 5 shows theevolution of the associated optimal control k .) !i(+),"(+)
k .
Table 1: Monte-Carlo price and delta at t = 0 with the quantized price.
Quantized price 8.55Monte–Carlo price 8.51Monte–Carlo delta -0.457
27

Table 2: Minimum value of mean-variance x0 .) v0(x0, s0,%0) (see 7.2) at time t = 0. Seealso Figure 3.
nX min" v0,"0 !0,,
0 cpu time (sec.)50 8.158 -0.4453 319
100 8.439 -0.4609 587200 8.550 -0.4336 1127
28

Figure 2: L2 Optimal quanization 300-grid for the distribution of (ln(ST ), ZT ) describedby (7.1) at T = 1 with its Voronoi tesselation.
10
15
20
25
30
35
40
3 4 5 6 7 8 9 10 11 12 13 14
Mean-variance v0
Initial wealth x0
x0 --> v0(x0,s0,sigma0)(x-8.55)**2 + 11.06
Figure 3: Mean-variance v0 as a function of x0 the initial wealth. Here nX = 200 (see Table2).
29

0
10
20
30
40
50
60
70
0 0.2 0.4 0.6 0.8 1
t
X_k(K - S_k)_+
Figure 4: One trajectory of the wealth process t .) Xt computed with the numerical optimalcontrol together with the associated trajectory of the pay-o! function t .) (K % St)+.
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
0 0.2 0.4 0.6 0.8 1
t
t --> alpha_opt
Figure 5: The same trajectory of the associated optimal control (see Fig. 4).
30

8 Proof of Theorem 3.1
The proof of Theorem 3.1 is divided into several lemmata. Let us introduce some notations.We denote Ek the conditional expectation given Fk and Pk the associated conditionalprobability. Given ! ! An, we also denote Zk = (Xk, Yk), Zk = (Xk, Yk), and Xx
j (resp.Xx
j ), j ' k, the solution to (2.3) (resp. (3.2)) starting from x at time tk, i.e. Xxk = x (resp.
Xxk = x).
Lemma 8.1 Assume that (H1) holds. Then for every p ! [1,+/), the Euler schemeoperator Gh is Lipschitz, namely
2 y, y&! Rd, $Gh(y, '1) % Gh(y&, '1)$p ( [Gh]p|y % y&|(8.1)
with [Gh]p = 1 + hC#,&,p + O(h2) where C#,&,p = L2(1 + L2E|'1|2 max(6p/27 % 12, 1))
where 6x7 denotes the smallest integer not lower than x.
Proof. We will simply need the random vector '1 to be symmetrical and in L2r, p ( 2r andr ! N". First set OGh the Euler scheme operator associated to # 9 0 and $. Let y, y& ! Rd
and u! Rm.
| OGh(y, u) % OGh(y&, u)|2
|y % y&|2 = 1 + 2*
h
<$(y) % $(y&)
|y % y&| u
=" y % y&
|y % y&| + h
####$(y) % $(y&)
|y % y&| u
####2
( 1 + L22h|u|2 + 2
*h
<$(y) % $(y&)
|y % y&| u| y % y&
|y % y&|
=.
Hence
| OGh(y, u) % OGh(y&, u)|2r
|y % y&|2r(
r,
i=0
2r
i
3(1 + L2
2h|u|2)r$i(2*
h)i<$(y) % $(y&)
|y % y&|u| y % y&
|y % y&|
=i
.
Using the fact that '1 and %'1 have the same distribution yields :
E
1| OGh(y, '1) % OGh(y&, '1)|2r
|y % y&|2r
4
( E
*
+r,
i=0, i)0 [2]
2r
i
3(1 + L2
2h|'1|2)r$i(2*
h)i<$(y) % $(y&)
|y % y&| '1|y % y&
|y % y&|
=i-
.
( E
*
+r,
i=0, i)0 [2]
2r
i
3(1 + L2
2h|'1|2)r$i
&2*
hL2|'1|'i
-
.
=12E/(1 +
*hL2|'1|)2r + (1 %
*hL2|'1|)2r
0.
Then
$ OGh(y, '1) % OGh(y&, '1)$p ((1 + r(2r % 1)hL2
2 E|'1|2 + O(L42h
2)) 1
2r |y % y&|((1 + (r % 1/2)hL2
2 E|'1|2 + O(L42h
2))|y % y&|
since (1 + u)1/(2r) ( 1 + u/(2r) for every u ' 0. The conclusion follows from the identityGh(y, u) = h #(y) + OGh(y, u). !
31

Remark 8.1 The key fact in the above lemma is that the Lipschitz coe#cient [Gh]kp of theiterate Gk
h of Gh does not explode when h ) 0 and kh ) t! [0, T ]. As a matter of fact itconverges toward exp(C#,&,pt).
Lemma 8.2 Assume that (H1) holds. Then for all p ! [1,+/), there exists a positiveconstant Cp (independent of n) such that for every j! 1, . . . , n,
$Yj % Yj$p ( Cp
j,
l=1
$%l$p(8.2)
and soj,
l=1
$Yl % Yl$p ( Cp
j,
l=1
(j + 1 % l)$%l$p(8.3)
Proof. It follows from the above Lemma 8.1 and the obvious equality
Yj+1 % Yj+1 = Gh(Yj, 'j+1) % Gh(Yj, 'j+1) + Gh(Yj, 'j+1) % (j+1(Gh(Yj , 'j+1))
that $Yj+1 % Yj+1$p ( [Gh]p$Yj % Yj$p + $%j+1$p.
Remark 8.1 and backward induction complete the proof. !
Lemma 8.3 Assume that (H0) and (H1) hold. Then for any p ' 1, there exists a positiveconstant Cp (independent of n) such that for all k = 0, . . . , n% 1, j = k, . . . , n% 1, x ! Rq:PPPP&esssup!!An
Ek|Xxj+1|2p
'12p
PPPPp"+PPPP&esssup!!An
Ek|Hh(Xxj , Yj , !j , Yj+1)|2p
'12p
PPPPp"
( Cp
1
1+|x|+$Yk$p"+n*+n1$ 12p
j+1,
l=1
$%l$p"
4
where p& ' 2p.(8.4)
Proof. Let ! ! An and the controlled process defined on [tj, tj+1], 0 ( j ( n % 1 by :
Xt = Xj + b(Zj , !j)(t % tj) + %(Zj , !j)(Wt % Wtj ).
Applying Ito’s formula to |X |2p between tj and t, standard computations as for the estima-tion of Lp-moments of continuous Euler scheme, see e.g Chapter 5 in [7], show the existenceof a positive constant Cp dependent of p such that:
Ek|Xt|2p ( Ek|Xj |2p + Cp
" t
tj
Ek|Xu|2p + Ek
/|b(Zj , !j)|2p + |%(Zj , !j)|2p
0du.
Now, by the linear growth condition on b(x, y, a) and %(x, y, a) uniformly in a (condition(H1)), there exists a positive constant Cp (independent of !) such that:
Ek|Xt|2p ( (1 + Cph)Ek|Xj |2p + Cph&1 + Ek|Yj|2p
'+ Cp
" t
tj
Ek|Xu|2pdu.
Here and in the sequel, Cp denotes a generic positive constant depending on p but indepen-dent of ! and n, and possibly di!erent along the lines. By Gronwall’s lemma and notingthat Xtj+1 = Fh(Zj , !j , 'j+1), we obtain:
Ek|Fh(Zj , !j , 'j+1)|2p ( eCphEk|Xj |2p + Cph&1 + Ek|Yj|2p
'.(8.5)
32

Similarly as above (using Ito’s formula and Gronwall’s lemma), we have the followingclassical estimate for the Euler scheme (2.2):
Ek|Yj+1|2p ( eCphEk|Yj |2p + Cph,
and so by backward induction:
Ek|Yj|2p ( Cp(1 + |Yk|2p).(8.6)
Writing that |Yl| ( |Yl % Yl| + |Yl|, and noting that (a+ b)2p ( Cp(a2p + b2p), we have from(8.5)-(8.6):
Ek|Fh(Zj , !j , 'j+1)|2p ( eCphEk|Xj |2p + Cph&1 + |Yk|2p + Ek|Yj % Yj |2p
'.(8.7)
By definition of the functions Hh and Fh in (2.4)-(2.5), we have:
Hh(Zj , !j , Yj+1) = Fh(Zj , !j , 'j+1) + "(Zj, !j)%j+1,
so that by (H0), |Hh(Zj, !j , Yj+1)| ( |Fh(Zj , !j , 'j+1)| + C|%j+1|, for some positiveconstant C. The computations below rely on the following convexity inequality: for everyu! R+, h! [0, 1] and p ' 1/2,
(1 + hu)2p ( 1 + 22pph(1 + u2p) ( 1 + hCp + Cphu2p
so that, for every a, b! R+ and every h! [0, 1],
(a + hb)2p ( (1 + hCp) a2p + Cph b2p.
Then |Hh(Zj , !j , Yj+1)|2p (<|Fh(Zj , !j , 'j+1)| + Ch
|%j+1|h
=2p
,
( (1 + Cph)|Fh(Zj , !j , 'j+1)|2p + Cph|%j+1|2p
h2p.(8.8)
By definition of the projection (X , we have:
|Xj+1| ( |Hh(Zj , !j , Yj+1)| + *.
Then, by the same arguments as above, we have (recall that h = T/n):
|Xj+1|2p ( (1 + Cph)|Hh(Zj , !j , Yj+1)|2p + Cph(n*)2p.
By using (8.8) and (8.7), we then get:
Ek|Xj+1|2p ( (1 + Cph)2Ek|Fh(Zj , !j , 'j+1)|2p + Cph
!(n*)2p +
Ek|%j+1|2p
h2p
$
( eCphEk|Xj |2p + Cph
!1 + |Yk|2p + Ek|Yj % Yj|2p + (n*)2p +
Ek|%j+1|2p
h2p
$.
33

By backward induction, this yields:
Ek|Xj+1|2p(Cp
11+|Xk|2p+|Yk|2p+(n*)2p+h
j,
l=k
Ek|Yl % Yl|2p+hj,
l=k
Ek|%l+1|2p
h2p
4.(8.9)
Using (8.7) and (8.8), we have the same estimate:
Ek|Hh(Zj , !j , Yj+1)|2p ( Cp
/1 + |Xk|2p + |Yk|2p + (n*)2p
+hj,
l=k
Ek|Yl % Yl|2p + hj,
l=k
Ek|%l+1|2p
h2p
4.(8.10)
By noting that (a + b)12p ( a
12p + b
12p , and by Jensen’s inequality together with the law of
iterated conditional expectations, we have by (8.9):PPPP&esssup!!An
Ek|Xxj+1|2p
' 12p
PPPP2p
( Cp
1
1 + |x| + $Yk$p" + n* + h12p
j,
l=k
$Yl % Yl$2p + h12p
j,
l=k
$%l+1$2p
h
4
.
Now, by estimation (8.3) in Lemma 8.2, we have:
j,
l=k
$Yl % Yl$2p ( Cp
j,
l=1
$%l$p
h,
and this implies inequality (8.4). The same estimate holds for $ess supEk|Hh(Zj , !j , Yj+1)|2p$2p
by (8.10). !
Lemma 8.4 Assume that (H0), (H1) and (H3b) hold. Then for all p, p ' 1, thereexists a positive constant Cp,p (independent of n) such that for all k = 0, . . . , n % 1, j =k, . . . , n % 1, for all x ! Rq:
PPPPesssup!!An
&Ek|Xx
j+1 % Xxj+1|2p
' 12p
PPPP2p
( Cp,p
1n* +
1
n12p
j,
l=1
(j + 1 % l)$%l$2p +j+1,
l=k+1
$%l$2p
+n
Rp$1
B
C1 + |x|p + $Yk$p2pp + (n*)p +
2n1$ 1
2pp
j+1,
l=1
$%l$2pp
3pE
F
-
. .(8.11)
Proof. Let ! ! An and the controlled processes defined on [tj , tj+1], j = 0, . . . , n % 1 by :
Xt = Xj + b(Zj , !j)(tj % t) + %(Zj , !j)(Wt % Wtj ),
Xt = Xj + b(Zj , !j)(t % tj) + %(Zj , !j)(Wt % Wtj ),
34

and let us denote Dt = Xt%Xt. Applying Ito’s formula to |D|2p between tj and t, standardcomputation shows the existence of a positive constant Cp dependent of p such that:
Ek|Dt|2p ( Ek|Xj % Xj|2p + Cp
" t
tj
Ek|Du|2pdu
+Cp
" t
tj
Ek
/|b(Zj , !j) % b(Zj , !j)|2p + |%(Zj , !j) % %(Zj , !j)|2p
0du.
Now, from the Lipschitz condition on b(x, y, a) and %(x, y, a) uniformly in a (condition(H1)), there exists a positive constant Cp (independent of !) such that:
Ek|Dt|2p ( (1 + Cph)Ek|Xj % Xj |2p + CphEk|Yj % Yj|2p + Cp
" t
tj
Ek|Du|2pdu.
By Gronwall’s lemma, noting that Dtj+1 = Fh(Zj , !j , 'j+1) % Fh(Zj , !j , 'j+1), we get:
Ek|Fh(Zj , !j , 'j+1) % Fh(Zj , !j , 'j+1)|2p ( eCphEk|Xj % Xj |2p + CphEk|Yj % Yj|2p.(8.12)
By definition of the functions Hh and Fh in (2.4)-(2.5), and by (H0), we have:
|Hh(Zj , !j , Yj+1) % Hh(Zj , !j , Yj+1)| ( |Fh(Zj , !j , 'j+1) % Fh(Zj , !j , 'j+1)| + C|%j+1|,
for some positive constant C. By (8.12) and Minkowski inequality, we then get:&Ek|Hh(Zj , !j , Yj+1)%Hh(Zj , !j , Yj+1)|2p
) 12p
( eCph&Ek|Xj%Xj |2p
' 12p+Cph
12p
&Ek|Yj % Yj|2p
' 12p+Cp
(Ek|%j+1|2p
) 12p .(8.13)
On the other hand, using the (X projection inequality (3.1) on the grid $X yields:###Hh(Zj , !j , Yj+1) % (X
&Hh(Zj , !j , Yj+1)
'### ( * +/|Hh(Zj , !j , Yj+1)|% R
01|Hh(Zj ,!j ,Yj+1)|(R.
This implies by Minkowski inequality:
<Ek
###Hh(Zj , !j , Yj+1) % (X&Hh(Zj , !j , Yj+1)
'###2p= 1
2p
( * +&Ek
/|Hh(Zj, !j , Yj+1)|2p1|Hh(Zj ,!j ,Yj+1)|(R
0' 12p
( * +
&Ek|Hh(Zj , !j , Yj+1)|2pp
' 12p
Rp$1,(8.14)
where we used Tchebychev inequality (with exponent 2p(p%1) ' 0) in the second inequality.Now, writing that |Xj+1%Xj+1|( |Hh(Zj, !j , Yj+1) % Hh(Zj , !j , Yj+1)| + |Hh(Zj , !j , Yj+1)% (X(Hh(Zj , !j , Yj+1))|, and using again Minkowski inequality, we have by (8.13) and(8.14):
&Ek|Xj+1 % Xj+1|2p
' 12p (
&Ek|Hh(Zj , !j , Yj+1) % Hh(Zj , !j , Yj+1)|2p
' 12p
35

+&Ek|Hh(Zj , !j , Yj+1) % (X
&Hh(Zj , !j , Yj+1)
'|2p' 1
2p
( eCph&Ek|Xj % Xj |2p
' 12p + Cph
12p
&Ek|Yj % Yj |2p
' 12p
+Cp(Ek|%j+1|2p
) 12p + * +
&Ek|Hh(Zj , !j , Yj+1)|2pp
' 12p
Rp$1.
By backward induction, this yields:
&Ek|Xx
j+1 % Xxj+1|2p
' 12p ( Cp
1
h12p
j,
l=k
&Ek|Yl % Yl|2p
' 12p +
j,
l=k
(Ek|%l+1|2p
) 12p
+n* +1
Rp$1
j,
l=k
&Ek|Hh(Xx
l , Yl, !l, Yl+1)|2pp' 1
2p
4
.
We then get by the law of iterated conditional expectations and Holder inequality:PPPPesssup!!An
&Ek|Xx
j+1 % Xxj+1|2p
' 12p
PPPP2p
( Cp
1
h12p
j,
l=k
$Yl % Yl$2p +j,
l=k
$%l+1$2p + n* +
+1
Rp$1
j,
l=k
PPPP&esssup!!An
Ek|Hh(Xxl , Yl, !l, Yl+1)|2pp
' 12pp
PPPPp
2pp
4
.
We conclude with the estimations (8.3) in Lemma 8.2 and (8.4) in Lemma 8.3. !
Proof of Theorem 3.1By (2.6) and (3.3), we have:
|Vk(x)%Vk(x)| ( esssup!!AnEk
*
+n$1,
j=k
h|f(Xxj , Yj , !j) % f(Xx
j , Yj , !j)| + |g(Xxn , Yn) % g(Xx
n , Yn)|
-
. .
By condition (H3b), this implies:
|Vk(x) % Vk(x)| ( esssup!!AnEk
*
+[fx]hn$1,
j=k+1
|Xxj % Xx
j |(1 + |Yj |p1) + [gx]|Xxn % Xx
n |(1 + |Yn|p1)
+ [fy]hn$1,
j=k
|Yj % Yj|(1 + |Xxj |p1) + [gy]|Yn % Yn|(1 + |Xx
n |p1)
-
.
( [fx]hn$1,
j=k+1
esssup!!An
&Ek|Xx
j % Xxj |p' 1
p
!1 +&Ek|Yj|q1
' p1q1
$
+ [gx]esssup!!An
&Ek|Xx
n % Xxn |p' 1
p
!1 +&Ek|Yn|q1
' p1q1
$
36

+ [fy]hn$1,
j=k
&Ek|Yj % Yj|p
' 1p
!1 +&esssup!!An
Ek|Xxj |q1
' p1q1
$
+ [gy]&Ek|Yn % Yn|p
' 1p
!1 +&esssup!!An
Ek|Xxn |q1
' p1q1
$,
where we used Holder inequality. Using again Holder inequality with p& integer to be chosenbelow and 1/p& + 1/q& = 1, we obtain:
PPPVk(x) % Vk(x)PPP
p( [fx]h
n$1,
j=k+1
PPPPesssup!!An
&Ek|Xx
j % Xxj |p' 1
p
PPPPpp"
11 +PPPP&Ek|Yj |q1
' 1q1
PPPPp1
p1pq"
4
+ [gx]PPPPesssup!!A
&Ek|Xx
n % Xxn |p' 1
p
PPPPpp"
11 +PPPP&Ek|Yn|q1
' 1q1
PPPPp1
p1pq"
4
+ [fy]n$1,
j=k
PPPP&Ek|Yj % Yj|p
' 1p
PPPPpp"
11 +PPPP&esssup!!AEk|Xx
j |q1
' 1q1
PPPPp1
p1pq"
4
+ [gy]PPPP&Ek|Yn % Yn|p
' 1p
PPPPpp"
11 +PPPP&esssup!!AEk|Xx
n |q1
' 1q1
PPPPp1
p1pq"
4.
We now choose p& = p/p ' 1. Then p1pq& = q&1 ' q1. By Jensen’s inequality, we then have:
PPPVk(x) % Vk(x)PPP
p( [fx]h
n$1,
j=k+1
PPPPesssup!!A
&Ek|Xx
j % Xxj |p' 1
p
PPPPp
/1 +PPYj
PPp1
q"1
0
+[gx]PPPPesssup!!A
&Ek|Xx
n % Xxn |p' 1
p
PPPPp
/1 +PPYn
PPp1
q"1
0
+[fy]hn$1,
j=k
PPPYj % Yj
PPPp
1
1 +PPPP&esssup!!AEk|Xx
j |q1
' 1q1
PPPPp1
q"1
4
+ [gy]PPPYn % Yn
PPPp
11 +PPPP&esssup!!AEk|Xx
n |q1
' 1q1
PPPPp1
q"1
4.
Here, we use the convention that when p1 = 0 (and so p1 = 0), 1% = 1. If p1 = 0, thenthe asserted result is proved by using estimation in Lemma 8.4. If p1 > 0, then we have byHolder inequality:
PPPVk(x) % Vk(x)PPP
p( [fx]h
n$1,
j=k+1
PPPPesssup!!A
&Ek|Xx
j % Xxj |p' 1
p
PPPPp
/1 +PPYj
PPp1
q"1
0
+[gx]PPPPesssup!!A
&Ek|Xx
n % Xxn |p' 1
p
PPPPp
/1 +PPYn
PPp1
q"1
0
+[fy]hn$1,
j=k
PPPYj % Yj
PPPp
11 +PPPP&esssup!!AEk|Xx
j |q1*2' 1
q1#2
PPPPp1
q1
4
+ [gy]PPPYn % Yn
PPPp
1
1 +PPPP&esssup!!AEk|Xx
n |q1*2' 1
q1#2
PPPPp1
q1
4
,
37

where q1 = q1 + q1 + 2 (recall that p > p and so q&1, q1 < +/). We conclude with theestimations in Lemmas 8.3 and 8.4.
Appendix : Proof of Proposition 2.1
We shall use viscosity solutions methods introduced by Barles and Souganidis in [5] to provethe convergence result. First, notice that under (H1) and by classical estimates for Eulerschemes, for all p ' 1, there exists a positive constant C (independent of h) such that forall k = 0, . . . , n, j = k, . . . , n, x, y ! Rq " Rd, we have:
sup!!A
E:|Xj |2p + |Yj|2p
## (Xk, Yk) = (x, y);
( C(1 + |x|2p + |y|2p).(A.1)
Under the quadratic growth condition (H2), this implies that there exists a positive con-stant C independent of h such that for all k = 0, . . . , n, x, y ! Rq " Rd:
|vk(x, y)| ( C(1 + |x|2 + |y|2).(A.2)
In particular, the function vk belongs to the set B2(Rq " Rd) of Borel functions defined onRq " Rd with quadratic growth.
On the other hand, by the dynamic programming principle, the discrete time controlproblem (2.6) provides an approximation scheme backward in time by:
vn(x, y) = g(x, y), x ! Rq, y ! Rd(A.3)
vk(x, y) = infa!A
E:hf(x, y, a) + vk+1(X
x,y,ak+1 , Y y
k+1);,(A.4)
k = 0, . . . , n % 1, x ! Rq, y ! Rd,
where Xx,y,ak+1 = Fh(x, y, a, 'k+1) and Y y
k+1 = Gh(y, 'k+1). This can be rewritten as:
vk(x, y) = Gh(x, y, vk+1(., .)), k = 0, . . . , n % 1, x ! Rq, y ! Rd,
together with vn(x, y) = g(x, y), where Gh is the operator on Rq "Rd "B2(Rq "Rd) definedby (A.4).
Lemma A.1 Assume that (H1), (H2) and (H3a) hold. Then the discrete time approxi-mation scheme (A.3)-(A.4) is(i) monotone: for all )1, )2 ! B2(Rq " Rd) with )1 ( )2,
Gh(x, y,)1) ( Gh(x, y,)2), x, y ! Rq " Rd.
(ii) stable: the function vk is locally bounded on Rq "Rd with a bound independent of h andk = 0, . . . , n.(iii) consistent:
• for all t, x, y ! [0, T ) " Rq " Rd, for all ) smooth on [0, T ) " Rq " Rd (say in C3 withcompact support),
1h
:Gh(x&, y&,)(tk+1, ., .)) % )(tk, ., .)
;) &)
&t(t, x, y) + inf
a!A[La)(t, x, y) + f(x, y, a)] ,(A.5)
38

as h goes to zero, tk ) t and (x&, y&) ) (x, y), for all k = 0, . . . , n % 1.• for all x, y ! Rq " Rd,
lim vn$1(x&, y&) = g(x, y),(A.6)
as h goes to zero and (x&, y&) ) (x, y).
Proof. The monotonicity is obvious from the definition of Gh while the stability followsdirectly from relation (A.2).
For any k = 0, . . . , n % 1, z& = (x&, y&) ! Rq " Rd, a ! A, define the random variable:
Zz",ak+1 = z& + h
2b(z&, a)#(y&)
3
+*
h
2%(z&, a)$(y&)
3
'k+1,(A.7)
so that,
Gh(x&, y&,)(tk+1, ., .)) % )(tk, ., .) = infa!A
8hf(x&, y&, a) + E
/)(tk+1, Z
z",ak+1) % )(tk, z&)
09.
Now, by Taylor-Young formula, we have (here the sign . denotes the inner product) :
)(tk+1, Zz",ak+1) = )(tk, z&) + h
&)
&t(tk, z&) + Dz)(tk, z&).(Zz",a
k+1 % z&)
+12D2
zz)(tk, z&)(Zz",ak+1 % z&).(Zz",a
k+1 % z&) + 2k+1|Zz",ak+1 % z&|3
where 2k+1 is a bounded random variable. By (A.7), we have
E/Zz",a
k+1 % z&0
= h
2b(z&, a)#(y&)
3
E
!&Zz",a
k+1 % z&'&
Zz",ak+1 % z&
'&$= h
2%(z&, a)%"(z&, a) %(z&, a)$"(y&)$(y&)%"(z&, a) $(y&)$"(y&)
3
+h2
2b(z&, a)b"(z&, a) b(z&, a)#"(y&)#(y&)b"(z&, a) #(y&)#"(y&)
3.
Under (H1), b(z&, a), %(z&, a) are bounded in a ! A. Hence,
1h
:Gh(x&, y&,)(tk+1, ., .)) % )(tk, ., .)
;
=&)
&t(tk, z&) + inf
a!A
:La)(tk, z&) + f(z&, a)
;+ Oa,z"(h) with |Oa,z"(h)| ( C h(1 + |z&|2)
) &)
&t(t, z) + inf
a!A[La)(t, z) + f(z, a)] ,(A.8)
by condition (H3a). The consistency (A.5) in t < T is proved.We now prove the consistency (A.6) in T . Let us first suppose that g is smooth and
consider the function:
w(t, z) = K(1 + /(z))(T % t) + g(z), t ! [0, T ], z = (x, y) ! Rq " Rd,
39

where /(z) = |z|3 and K is a positive constant chosen later. We then have:
Gh(z,w(T, .)) = infa!A
E:hf(x, y, a) + g(Xx,y,a
n , Y y,an );
= w(T % h, z) % h
6K(1 + /(z)) % inf
a!AE
!f(x, y, a) +
g(Xx,y,an , Y y,a
n ) % g(x, y)h
$7
= w(T % h, z) % h
6K(1 + /(z)) % inf
a!A[f(z, a) + Lag(z)]
7+ o(h),
where the last equality follows by same arguments as in (A.8). Now from the quadraticgrowth condition on f and g and the linear growth condition on b, %, # and $, uniformlyin a ! A, and by the third order polynomial growth condition on /, we can choose K largeenough so that:
K(1 + /(z)) ' supa!A
[|f(z, a)| + |Lag(z)|] , 2z = (x, y) ! Rq " Rd.
We then deduce that for h small enough,
Ghw(T, .) ( w(T % h, z), 2z = (x, y) ! Rq " Rd.
Since w(T, .) = g(.) = vn(.), this implies by one backward induction:
vn$1(z) ( w(T % h, z), 2z = (x, y) ! Rq " Rd,
for h small enough. Similarly, by considering the function w(t, z) = %K(1 + /(z))(T % t)+ g(z), we obtain the relation w(T % h, z) ( vn$1(z). Therefore, we get the inequality
|vn$1(z&) % g(z)| ( |vn$1(z&) % g(z&)| + |g(z&) % g(z)|( K(1 + /(z&))h + |g(z&) % g(z)|,
which implies (A.6). Finally, if g is continuous with quadratic growth, a standard smoothingtechnique gives for any 0 > 0 a function g such that |g(z)% g(z)| ( 0(1 + |z|2). Let ˜vk thecorresponding value functions for the discrete time control problem. Using (A.1), we have:
|vn$1(z) % ˜vn$1(z)| ( C 0(1 + |z|2),
for all z = (x, y) ! Rq " Rd, k = 0, . . . , n (the real constant C does not depend on 0 sinceit comes from (A.2). We have shown that
limh+0,z"+z
˜vn$1(z&) = g(z).
Since 0 is arbitrary, the same is true for vn$1 and g, as required in (A.6). !
Proof of Proposition 2.1We just indicate the main steps and refer to Barles and Souganidis (1991) for completearguments.
1) Under the stability property of the scheme Gh proved in Lemma A.1, we may define
v,(t, x, y) = lim inf vk(x&, y&)
v,(t, x, y) = lim sup vk(x&, y&),
40

as h goes to zero, tk ) t, (x&, y&) ) (x, y). By the monotonicity and the consistency (A.5)of the approximation scheme Gh, v, and v, are respectively viscosity sub and supersolutionsof (1.5). By the consistency result (A.6), we also have v,(T, x, y) = v,(T, x, y) = g(x, y).
2) By the strong comparison result for viscosity solutions with quadratic growth (seeCrandall and Lions 1990), we have
v, ( v,, on [0, T ] " Rq " Rd.
3) Finally, by definition v, ( v,, and therefore
v, = v,, on [0, T ] " Rq " Rd.
This equality implies the local uniform convergence of vk to v = v, = v,, which is theunique continuous viscosity solution of (1.5)-(1.6) with quadratic growth. Hence assertion(2.7) is proved.
Moreover, it is well known that under (H1), we have a pathwise convergence result forthe Euler scheme (2.1)-(2.2):
Yk ) Yt, a.s.,
as tk ) t when n ) /. By 2.7, this implies:
vk(x, Yk) ) v(t, x, Yt), a.s.,
as tk ) t when n ) /, uniformly on compact sets of Rq. Using (A.1) and (A.2), we obtain(2.8) by the dominated convergence theorem.
References
[1] Akian M. (1990): Analyse de l’algorithme multigrille FMGH de resolution d’equationsd’Hamilton-Jacobi-Bellman, Analysis and Optimization of systems, Lect. Notes in Contr. andInf. Sciences, 144, Springer-Verlag, pp. 113-122.
[2] Bally V., Pages G., Printems J. (2001): A stochastic quantization method for non-linear pro-blems, Monte Carlo Methods and Applications, 7, n01-2, pp.21-34.
[3] Bally G., Pages G. (2000): A quantization algorithm for solving multi-dimensional discrete timeOptimal Stopping problems, to appear in Bernoulli.
[4] Bally V., Talay D. (1996): The law of the Euler scheme for stochastic di!erential equations. I:Convergence rate of the distribution function, Probab. Theory Relat. Fields, 104, No.1, pp.43-60.
[5] Barles G., Souganidis P. (1991): Convergence of approximation schemes for fully non linearsecond-order equations, Asymptotics Analysis, 4, pp.271-283.
[6] Bensoussan A., Runggaldier W. (1987) : An approximation method for stochastic control prob-lems with partial observation of the state - a method for constructing '-optimal controls, ActaApplicandae Mathematica, 10, 145-170.
[7] Bouleau N., Lepingle D. (1994) : Numerical methods for stochastic processes, Wiley Series inProbability and Mathematical Statistics.
41

[8] Bucklew J., Wise G. (1982): Multidimensional Asymptotic Quantization Theory with rth Powerdistortion Measures, IEEE on Inform. Th., Special issue on Quantization, 28, n0 2, pp.239-247.
[9] Cohort P. (2002): Limit Theorems for the random normalized distortion, forthcoming in Ann.of Appl. Proba.
[10] Crandall M., Lions P.L. (1990): Quadratic growth of solutions of fully non linear second orderequations in Rn, Di!erential Integral equations, 3, pp.601-616.
[11] Di Masi G., Runggaldier W. (1987) : An approach to discrete-time stochastic control problemsunder partial observation, SIAM Journal on Control and Optimization, 25, 38-48.
[12] Duflo M. (1998): Random Iterative systems, Berlin, Springer.
[13] Fitzpatrick B., Fleming W. (1991): Numerical methods for an optimal Investment-Consumption Model, Mathematics of Operation Research, 16, pp.823-841.
[14] Fleming W., Soner M. (1993): Controlled Markov processes and viscosity solutions, Springer-Verlag.
[15] Graf S., Luschgy H. (2000): Foundations of Quantization for Probability Distributions, LectureNotes in Mathematics n01730, Springer-Verlag, Berlin, 230p.
[16] Kloeden P., Platen E. (1999): Numerical solution of stochastic di!erential equations, Springer-Verlag, Berlin.
[17] Krylov N. (2000) : On the rate of convergence of finite di!erence approximations for Bellman’sequations with variable coe#cients, Probab. Theory Relat. Fields, 117, 1-16.
[18] Kushner H.J. (1977): Approximation and weak convergence methods for random processes, withapplications to stochastic systems theory, MIT Press Series in Signal Processing, Optimization,and Control, 6, MIT Press, Cambridge, MA, 1984, 269 pp.
[19] Kushner H.J., Dupuis P. (2001): Numerical methods for stochastic control problems in con-tinuous time, 2nd edition, Applications of Mathematics, 24, Stochastic Modelling and AppliedProbability, Springer-Verlag, New York, 475 pp.
[20] Kushner H.J., Yin G.G. (1997): Stochastic approximation algorithms and applications, Appli-cations of Mathematics, 35, Springer-Verlag, New York, 417 pp.
[21] Pages G. (1997): A space vector quantization method for numerical integration, Journal ofApplied and Computational Mathematics, 89, pp.1-38.
[22] Pages G., Pham H., Printems J.: Optimal quantization methods and applications to numericalproblems in finance, in progress.
[23] Pages G., Printems J. (2003): Optimal quadratic quantization for numerics: the Gaussian case,Monte Carlo Methods and Applications, 9, n02.
[24] Runggaldier W., Stettner L. (1994) : Approximations of discrete time partially observed controlproblems, Applied Mathematics Monographs, Giardini Editori in Pisa.
[25] Tourin A., Zariphopoulou T. (1994): Numerical schemes for investment models with singulartransactions, Computational Economics, 7, pp.287-307.
[26] Zador P. (1982): Asymptotic quantization error of continuous signals and the quantizationdimension, IEEE on Information Theory, Special issue on Quantization, 28, n0 2, pp.139-148.
42

304CHAPITRE 5. MÉTHODES DE QUANTIFICATION ET QUELQUES APPLICATIONS À LA FINANCE.
5.4 Optimal quantization and applications to numerical pro-blems in finance.
Cet article fait l’objet d’un chapitre dans "Handbook of Computational and Numerical Me-thods in Finance", ed. S.T. Rachev, Birkhauser, Boston, 2004.

Optimal quantization methods and
applications to numerical problems in finance
Gilles PAGES
Laboratoire de Probabilites et
Modeles Aleatoires
CNRS, UMR 7599
Universite Paris 6
Huyen PHAM
Laboratoire de Probabilites et
Modeles Aleatoires
CNRS, UMR 7599
Universite Paris 7
and CREST
Jacques PRINTEMS
Centre de Mathematiques
CNRS, UMR 8050
Universite Paris 12
and INRIA
April 2003
Abstract
We review optimal quantization methods for numerically solving nonlinear problemsin higher dimension associated with Markov processes. Quantization of a Markov pro-cess consists in a spatial discretization on finite grids optimally fitted to the dynamicsof the process. Two quantization methods are proposed: the first one, called marginalquantization, relies on an optimal approximation of the marginal distributions of theprocess, while the second one, called Markovian quantization, looks for an optimal ap-proximation of transition probabilities of the Markov process at some points. Optimalgrids and their associated weights can be computed by a stochastic gradient descentmethod based on Monte Carlo simulations. We illustrate this optimal quantizationapproach with four numerical applications arising in finance: European option pricing,optimal stopping problems and American option pricing, stochastic control problemsand mean-variance hedging of options and filtering in stochastic volatility models.
Key words: Quantization, Markov chain, Euler scheme, Numerical integration, Optimalstopping, option pricing, stochastic control, Non linear filtering, stochastic gradient descent.
MSC Classification (2000): 65-00 (90C39, 93E35, 91B28, 65L08, 60G35, 60G40).
1

1 Introduction
Optimal quantization of random vectors consists in finding the best possible approximation(in Lp) of a Rd-valued random vector X by a measurable function ϕ(X) where ϕ takes atmost N values in Rd. This is a very old story which starts in the early 50’s. The idea wasto use a finite number N of codes (or “quantizers”) to transmit efficiently a continuousstationary signal. Then it became essential to optimize the geometric location of thesequantizers for a given distribution of the signal and to evaluate the resulting error. In amore mathematical form, the problem is to find out a measurable function ϕ∗ (if some)such that
‖X − ϕ∗(X)‖p = inf‖X − ϕ(X)‖p , ϕ : Rd → Rd, |ϕ(Rd)| ≤ N
and then to evaluate ‖X − ϕ∗(X)‖p , especially when N goes to infinity. These problemshave been extensively investigated in information theory and signal processing (see [12]).However, from a computational point of view, optimal quantization remained essentiallylimited to one dimensional signals, the optimization process, essentially deterministic, be-coming intractable for multi-dimensional signals. The drastic cut down of massive MonteCarlo simulation cost on computers made possible the implementation of alternative pro-cedures based on probabilistic ideas (see the CLV Q algorithm below). This gave birthto many applications and extensions in various fields like automatic classification, dataanalysis and artificial neural networks. Let us mention e.g. the self-organizing maps intro-duced by Kohonen in the early 80’s (see [15]). More recently, this leads to consider optimalquantization as a possible spatial discretization method to solve multi-dimensional (dis-crete time) problems arising in numerical probability. An important motivation to tacklethese questions comes from finance since most problems arising in that field are naturallymulti-dimensional.
First, an application to numerical integration in medium dimension (1 ≤ d ≤ 4) wasdeveloped and analyzed in [18]. A second step consisted in applying optimal quantization tosolve nonlinear problems related to a (discrete time) Markovian dynamics. A first examplewas provided by discrete time optimal stopping problems (by the way of American optionpricing), still in a multi-dimensional setting (see [1], [3] and [4]). From a probabilistic pointof view, the nonlinearity usually appears through functionals of conditional expectationsthat need to be computed. From a computational point of view, the quantization approachleads to some tree algorithms in which, at every time step is associated a grid of quantizers,assumed to be optimal in some sense for the Markov chain. Then, investigating variousfields of applications like stochastic control or nonlinear filtering, it turned out that it couldbe useful to specialize the way one quantizes Markov chains according to the nature ofthe encountered problem. This gave rise to two variants of the quantization: the marginalquantization introduced in [1] that focused on the optimization of the marginal distributionsof the Markov chain and the Markovian quantization introduced in [19] that enhancesthe approximation of the conditional distributions at some points. Both approaches arepresented here with some applications to finance, along with some further developments(1st order schemes).
2

The paper is organized as follows: Section 2 is devoted to general background on optimalvector quantization of random vectors. First, the main properties concerning the existenceof an optimal quantization and its rate of convergence toward 0 as its size goes to infinity arerecalled. Then, numerical methods to get optimal quantizers and their associated weightsare described. A first application to numerical integration is presented which points outin a simple setting the main features of this spatial discretization method. In Section 3,we present the two methods used so far to quantize Markov chains, called marginal andMarkovian quantization methods. Both methods are applied to compute expectation offunctionals φ0(X0) . . . φ(Xn) of the Markov chain. Then, the main theoretical and com-putational features of both methods are discussed. In Section 4, three main applicationsto finance are described including some numerical illustrations: American option pricing,stochastic control and filtering of stochastic volatility. Finally, in Section 5 we explainon an example how one can design some first order schemes based on optimal quadraticquantization that significantly improve the rate of convergence of the above methods.
Throughout the paper, | ξ | will denote the usual canonical Euclidean norm of ξ ∈ Rd.
2 Optimal quantization of a random vector
2.1 Existence and asymptotics of optimal quantization
The basic idea of quantization is to replace a Rd-valued random vector X ∈ Lp(Ω,P) by arandom vector taking at most N values in order to minimize the induced Lp-error i.e. onewishes to solve the minimizing problem error
min‖X − Y ‖p , Y : Ω → Rd, measurable , |Y (Ω)| ≤ N
.
Let Y : Ω → Rd be such a random vector and let Γ = Y (Ω). Then, consider a closestneighbor rule projection ProjΓ : Rd → Γ and set,
XΓ := ProjΓ(X).
One easily checks that ‖X − XΓ‖p ≤ ‖X − Y ‖p . Assume |Γ| = N and Γ = x1, . . . , xN.Closest neighbor rule projections ProjΓ are in one-to-one correspondence with Voronoitessellations of Γ, that is with Borel partitions C1(Γ), . . ., CN (Γ) of Rd satisfying:
Ci(Γ) ⊂
ξ ∈ Rd : |ξ − xi| = minxj∈Γ
|ξ − xj |
, i = 1, . . . , N.
Then, one may set ProjΓ(ξ) :=∑N
i=1 xi1Ci(Γ)(ξ) so that
XΓ =N∑
i=1
xi1Ci(Γ)(X). (2.1)
In the sequel, the exponent Γ in XΓ will be often dropped.
3

The Lp-error induced by this projection – called Lp-quantization error – is given by‖X − XΓ‖p . It clearly depends on the grid Γ; in fact, one easily derives from (2.1):
‖X − XΓ‖pp
= E[
min1≤i≤N
|X − xi|p]
, (2.2)
for Γ = x1, . . . , xN. So, if one identifies a grid Γ of size N with the N -tuple x :=(x1, . . . , xN )∈ (Rd)N or any of its permutation, the pth power of the Lp-quantization erroris a symmetric function Qp
Ndefined on N -tuples with pairwise distinct components by
QpN
(x1, . . . , xN ) :=∫
qpN
(x, ξ)PX(dξ) (PX is for the distribution of X)
where qpN
(x, ξ) := min1≤i≤N
|xi − ξ|p, x = (x1, . . . , xN )∈ (Rd)N , ξ∈ Rd.
(The function p√
qpN is sometimes called local quantization error.) The extension of the
function QpN
on the whole (Rd)N is obvious.
Then two questions naturally arise: does this function reach a minimum? how doesthis minimum behave as N goes to infinity? They have been investigated for a long timeas part of quantization theory for probability distributions, first in information theory andsignal processing in the 1950’s and, more recently in probability for both numerical ortheoretical purpose (see [13, 18]). They make up the core of optimal quantization. We willnow shortly recall these main results. For a comprehensive, one may consult [13] and thereferences therein.
First, the size N being settled, the function p√
QpN is Lipschitz continuous and does reach
a minimum (although QpN
does not go to infinity as max1≤i≤N |xi| → ∞). If |X(Ω)| ≥ N ,then any N -tuple that achieves the minimum has pairwise distinct components i.e. definesa grid Γ∗ of size N satisfying
‖X − XΓ∗‖p = min‖X − Y ‖p , Y random vector in Rd, |Y (Ω)| ≤ N
. (2.3)
If |X(Ω)| is infinite, this minimum (strictly) decreases to 0 as N goes to infinity. Its rate ofconvergence is ruled by the so-called Zador theorem, completed by several authors: Zador,Bucklew & Wise (see [8]) and finally Graf & Luschgy in [13].
Theorem 2.1 (see [13]) Assume that E|X|p+ε < +∞ for some ε > 0. Then
limN
(N
pd min|Γ|≤N
‖X − XΓ‖pp
)= Jp,d
(∫
Rd
gd
d+p (ξ) dξ
)1+ pd
(2.4)
where PX (dξ) = g(ξ) λd(dξ) + ν(dξ), ν ⊥ λd (λd Lebesgue measure on Rd). The constantJp,d corresponds to the case of the uniform distribution on [0, 1]d.
Remark 2.1 In higher dimension, the true value of Jp,d is unknown except in 1 dimension
where Jp,1 = 12p(p+1) . However, one shows that J2,2 = 5
18√
3and that Jp,d ∼
(d
2πe
) p2 as d
goes to infinity (see [13] for some proofs and other results using non Euclidean norms).
4

This theorem says that min|Γ|≤N ‖X− XΓ‖p ∼ CPX ,p,dN− 1
d . This is in accordance withthe rates O(N−1/d) easily obtained with orthogonal lattice grid of size N = md for theuniform distribution U([0, 1]d) over the unit hypercube [0, 1]d. In fact, even in that veryspecific setting, these lattice grids are not optimal quantizers for U([0, 1]d) (except if d = 1).In fact optimal quantization provides for every N ≥ 1 the “best fitting” grid of size N fora given distribution PX . This grid corresponds to the real constant CPX ,p,d when N goes toinfinity.
2.2 How to get optimal quantization?
At this stage, the next question clearly is: how to get numerically an optimal N -grid witha minimal Lp-quantization error? Historically, the first attempt to solve this optimizationproblem – when p = 2 and d = 1 – is the so-called “Lloyd’s methods I”. This iterativeprocedure acts on the grids as follows: let Γ0 be a grid of size N . Then set by induction
Γs+1 = E [X |ProjΓs(X)] (Ω) = (E [X |X∈ Ci(Γs)])1≤i≤N , s ∈ N.
One shows that ‖X − ProjΓs(X)‖2 , s ∈ N is a nonincreasing sequence and that, undersome appropriate assumptions (see [14]), ProjΓs(X) converges toward some random vectorX taking N values as s goes to infinity. Moreover, X satisfies the stationary quantizerproperty
X = E[X | X] (2.5)
and is the only solution to the original optimization problem argmin ‖X − Y ‖2 , |Y (Ω)| ≤ N.When the dimension d is greater than 1, the convergence may fail. When some con-
vergence holds, the limit X is still stationary but has no reason to minimize the quadraticquantization error. In a general setting, this algorithm has two main drawbacks: it is apurely “local” procedure which does not explore the whole state space, and, furthermore,it becomes numerically intractable in its original form since it requires the computationof d-dimensional integrals
∫C . . . dPX . When the random vector X is simulatable, one can
randomize the Lloyd’s methods I by using a Monte Carlo simulation to compute the aboveintegrals. This version is sometimes used as a final step of the optimization procedure to“refine” locally the results obtained by other methods like that described below.
We will describe a procedure which partially overcomes these drawbacks, based onanother property of the Lp-quantization error function Qp
N: its smoothness. Let us tem-
porarily identify a grid Γ := x1, . . . , xN of size N with the N -tuple x = (x1, . . . , xN ) andlet us denote the Voronoi tessel of xi by Ci(x) instead of Ci(Γ).
Proposition 2.1 ([18]) Let p > 1. The function QpN
is continuously differentiable at anyN -tuple x∈ (Rd)N having pairwise distinct components and a PX -negligible Voronoi tessel-lation boundary ∪N
i=1∂Ci(x). Its gradient ∇QpN
(x) is obtained by formal differentiation:
∇QpN
(x) = E[∇x qp
N(x,X)
], (2.6)
where ∇x qpN
(x, ξ) =(
∂ qpN
∂xi(x, ξ)
)
1≤i≤N
:= p
(xi − ξ
|xi − ξ| |xi − ξ|p−11
Ci(x)(ξ)
)
1≤i≤N
.(2.7)
5

with the convention ~0|~0| = ~0. If PX is continuous the above formula (2.6) still holds for p=1.
(Note that ∇xqpN
(x, ξ) has exactly one non-zero component i(x, ξ) defined by ξ∈ Ci(x,ξ)(x).)
One shows (see [13], p.38) that any N -tuple x∗ ∈ argminQpN
satisfies the “boundary”assumption of Proposition 2.1 so that ∇Qp
N (x∗) = 0.
The integral representation (2.6) of ∇QpN
strongly suggests, as soon as independentcopies of X can be easily simulated on a computer, to implement a stochastic gradientalgorithm (or descent). It is a stochastic procedure recursively defined by
Γs+1 = Γs − (δs+1/p)∇x qpN
(Γs, ξs+1) (2.8)
where the initial grid Γ0 has N pairwise distinct components, (ξs)s≥1 is an i.i.d. sequenceof PX -distributed random vectors, and (δs)s≥1 a sequence of (0, 1)-valued step parameterssatisfying the usual conditions:
∑s
δs = +∞ and∑
s
δ2s < +∞. (2.9)
Note that (2.8) a.s. grants by induction that Γs has pairwise distinct components. In anabstract framework (see e.g. [9] or [17]), under some appropriate assumptions, a stochasticgradient descent associated to the integral representation of a so-called potential functiona.s. converges toward a local minimum of this potential function (Qp
Nin our problem).
Although these assumptions are not fulfilled by QpN
the encountered theoretical problemscan be partially overcome (see [18] for some a.s. convergence results in 1-dimension or whenPX is compactly supported). Practical implementation does provide satisfactory results (acommonly encountered situation with gradient descents). Some estimates of the companionparameters (PX -weights of the tessels and Lp-quantization errors) can be obtained as by-product of the procedure. This is discussed below.
Stationary quantizers (Back to): When p = 2, standard computations show thatEquation∇Q2
N(x) = 0 is simply the stationary quantizer property: if Γ is the corresponding
grid then, XΓ satisfies Equation (2.5). This identity has interesting applications (see thenext two paragraphs below). It also implies that, for every p∈ [1, +∞], ‖XΓ‖p ≤ ‖X‖p .
Note that non optimal quantizers may be stationary: when PX = PX1 ⊗ · · · ⊗ PXd
is aproduct measure, any “lattice grid” made up with optimal – or even stationary – quantizersof its marginal distributions P
Xi is stationary. It can also be the case of any local minimaof Q2
Nwhich are the natural targets of the above stochastic gradient descent algorithm.
Practical aspects of the optimization, companion parameters: Formula (2.8)can be developed as follows if one sets Γs := x1,s, . . . , xN,s,
Competitive phase : select i(s + 1) := i(Γs, ξs+1) ∈ argmini|xi,s − ξs+1| (2.10)
Learning phase :
xi(s+1),s+1 := xi(s+1),s − δs+1
xi(s+1),s−ξs+1
|xi(s+1),s−ξs+1| |xi(s+1),s − ξs+1|p−1
xi,s+1 := xi,s, i 6= i(s + 1).(2.11)
The competitive phase (2.10) corresponds to selecting the closest point in Γs i.e. i(s + 1)such that ξs+1 ∈ Ci(s+1)(Γs). The learning phase (2.11) consists in updating the closestneighbor and leaving still other components of the grid Γs.
6

Furthermore, it is established in [18] that, if X ∈ Lp+ε (ε > 0), then the sequences(Qr,s
N)s≥1, 0 < r ≤ p, and (πs
i )t≥1, 1 ≤ i ≤ N , of random variables recursively defined by
Qr,s+1
N:= Qr,s
N− δs+1(Qr,s
N− |xi(s+1),s − ξs+1|r), Qr,0
N:= 0, (2.12)
πs+1i := πs
i − δs+1(πsi − 1i=i(s+1)), π0
i := 1/N, 1 ≤ i ≤ N. (2.13)
satisfy on the event Γs → Γ∗Qr,s
N
a.s.−→ QrN
(Γ∗), 0<r≤p, and πsi
a.s.−→ PX (Ci(Γ∗)), 1 ≤ i ≤ N, as s →∞.
These companion procedures are essentially costless since they are steps of the grid opti-mization procedure itself and they yield the parameters of numerical interest (weights ofthe Voronoi cells, Lr-quantization errors of Γ∗, 0 < r≤ p) for the grid Γ∗. Note that thisholds whatever the limiting grid Γ∗ is: this means that the procedure is consistent.
The quadratic case p = 2 is the most commonly implemented for applications and isknown as the Competitive Learning Vector Quantization (CLVQ) algorithm. Then oneconsiders (0, 1)-valued step parameters δs so that Γs+1 lives in the convex hull of Γs andξs+1 and the cooperative procedure (2.11) becomes a simple homothety centered at ξs+1
with ratio 1−δs+1. These features have a stabilizing effect on the procedure. One checks onsimulation that the CLVQ algorithm does behave better than its non-quadratic counterpart.The numerical aspects of the CLV Q algorithm are deeply investigated in [21] when X isd-dimensional Normal vector.
Figure 1 shows an optimal grid for the bivariate standard Normal distribution with 500points. It is obtained by the CLV Q procedure described above.
2.3 Application to numerical integration
Consider a simulatable Rd-valued integrable random vector X with probability distributionPX . The quantization method for numerical integration consists in approximating theprobability distribution PX by P
X, the distribution of (one of) its closest neighbor rule
projection(s) X = ProjΓ(X) on a grid Γ = x1, . . . , xN:
PX
=N∑
i=1
pi δxi .
So, PX
is a discrete probability distribution whose weights pi are defined by
pi = P[X = xi] = PX [Ci(Γ)], 1 ≤ i ≤ N,
where δxi is the Dirac mass at xi and Ci(Γ) = Proj−1Γ (xi) denotes the Voronoi tessels of
xi ∈ Γ. Then, one approximates the expectation of a Lipschitz continuous function φ onRd w.r.t. PX , i.e.
E[φ(X)] =∫
Rd
φ(ξ)PX (dξ),
by E[φ(X)] =∫
Rd
φ(ξ)PX
(dξ) =N∑
i=1
piφ(xi).
7

The Lipschitz case: When φ is simply Lipschitz continuous, the induced error is thensimply measured by:
|E[φ(X)]− E[φ(X)]| ≤ [φ]Lip‖X − X‖1 , (2.14)
≤ [φ]Lip‖X − X‖p (p ≥ 1). (2.15)
Optimal grids (of size N) which minimize the L1-quantization error then provide aO
(N−1/d
)rate. Such a grid, its associated weights pi and the induced L1-quantization
error can be computed by the algorithm described above. It often happens, for stabilitymatter, that one implements the algorithm in the quadratic case (CLV Q) and producesan optimal quadratic grid Γ∗ and its companion parameters (the weights (p∗i )1≤i≤n and theL1-quantization error ‖X− XΓ∗‖1 as a normalized error bound estimate). Some extensionsof (2.14) to locally Lipschitz continuous functions can be found in [11].
The Lipschitz derivative case: Assume now that function φ is continuously differen-tiable with a Lipschitz continuous differential Dφ. Furthermore, assume that the quantiza-tion is carried out with an optimal quadratic grid Γ. By Taylor’s formula, we have
|φ(X)− (φ(X) + Dφ(X).(X − X))| ≤ [Dφ]Lip |X − X|2
so that∣∣∣E[φ(X)]− E[φ(X)]− E[Dφ(X).(X − X)]
∣∣∣ ≤ [Dφ]Lip‖X − X‖22,
≤ [Dφ]Lip‖X − X‖2p
(p ≥ 2).
Now, X is in particular a stationary quantizer, hence it satisfies (2.5) so that
E[Dφ(X).(X − X)] = E[Dφ(X).E[X − X | X]
]= 0,
and |E[φ(X)]−E[φ(X)]| ≤ [Dφ]Lip‖X−X‖22
= O(N−2/d
). (2.16)
The convex case: When φ is a convex function and X is a stationary quantizer satisfyingX = E[X | X], we have by Jensen’s inequality:
E[φ(X)
]= E
[φ
(E[X | X]
)]≤ E[φ(X)], (2.17)
so that E[φ(X)] is always a lower bound for E[φ(X)].
2.4 A first numerical Test (European option approximation)
The aim of this section is to test the optimal quantizers that we obtained by the numericalmethods described in subsection 2.2 in dimension d = 4. Simultaneously, we aim to illus-trate the performances of vector quantization for numerical integration. That is why wecarry out a short comparison between quantization method and Monte Carlo method on asimple numerical integration problem.
Recall that the Strong Law of Large Numbers implies that, given a sequence (Zk)k≥1
of independent copies of a random vector Z with Normal distribution N (0; Id),
P(dω)-a.s.f(Z1(ω)) + · · ·+ f(ZN (ω))
N
N→+∞−→ E(f(Z)) =∫
Rd
f(z) exp (−|z|2/2)dz
(2π)d/2.
8

for every f ∈ L1(Rd,PZ). The Monte Carlo method consists in generating on a computera path (Zk(ω))k≥1 to compute the above Gaussian integral. The Law of the IteratedLogarithm says that, if f(Z)∈ L2, this convergence a.s. holds at a
σ(f(Z))
√log log N
N
rate where σ(f(Z)) is the standard deviation of f(Z).When f is twice differentiable, this is to be compared to the error bound provided
by (2.16) when using a quadratic optimal N -quantizer x∗ := (x∗1, . . . , x∗N ), namely
[Df ]LipQ2N (x∗) ≈
(J2,d(1 + 2/d)1+d/2[Df ]Lip
)N−2/d.
Consequently, the dimension d = 4 appears as the (theoretical) critical dimension forthe numerical integration of such functions by quantization for a given computational com-plexity (quantization formulae involving higher order differentials yield better rates): oneassumes that the optimal quantizers have been formerly computed and that the computa-tion times of a (Gaussian) random number and of a weight are both negligible w.r.t. thecomputation time of a value f(z) of f .
The test is processed in each selected dimension d with five random variables gi(Z), i =0, 1, 2, 3, 4 where the gi’s are five functions with compact support such that
– g0 is an indicator function of a (bounded) interval (hence discontinuous),
– g1 is convex and Lipschitz continuous,
– g2 is convex and twice differentiable,
– g3 is difference of two convex functions and Lipschitz continuous,
– g4 is difference of two convex functions and twice differentiable.
The test functions are borrowed from classical option pricing in mathematical finance:one considers d traded assets S1, . . . , Sd, following a d-dimensional Black & Scholes dy-namics. We assume that these assets are independent (this is not very realistic butcorresponds to the most unfavorable case for quantization). We assume as well thatS1
0 = s0 > 0, i = 1, . . . , d and that the d assets share the same volatility σi = σ > 0.At maturity T > 0, we then have:
SiT = s0 exp
((r − σ2
2)T + σ
√TZi
), i = 1, . . . , d.
One considers, still at time T , the geometric index IT =(S1
T . . . SdT
) 1d satisfying
IT = I0 exp
((r − σ2
2d)T +
σ√
T√d
Z1 + · · ·+ Zd
√d
)with I0 = s0 exp
(−σ2(d− 1)
2dT
).
Then, one specifies the random variables gi(Z) for i = 1 and i = 3 as follows
g1(Z) = e−rT (K1 − IT )+ (Put(K1, T ) payoff)
g3(Z) = e−rT (K2 − IT )+ − e−rT (K1 − IT )+, K1 < K2, (Put-Spread(K1,K2T ) payoff).
9

The random variables are the payoffs of a Put option with strike price K1 and a Put-spreadoption with strike prices K1 < K2 respectively, both on the geometric index IT . Some closedforms for the premia E[g1(Z)] and E[g2(Z)] are given by the Black & Scholes formula:
E[g1(Z)] = π(I0,K1, r, σ, T ) and E[g3(Z)] = ψ(I0,K1,K2, r, σ, T ) (2.18)
with π(x,K, r, σ, T ) = Ke−rT erf(−d2)− I0 erf(−d1),
d1 =log(x/K) + (r + σ2
2d )T
σ√
T/d, d2 = d1 − σ
√T/d
and ψ(x,K1,K2, r, σ, T ) = π(x,K2, r, σ, T )− π(x,K1, r, σ, T ).
Then, one sets
g2(Z) = e−rT/2π(IT2, K1, r, σ, T/2) and g4(Z) = e−rT/2ψ(IT
2,K1,K2, r, σ, T/2).
The random variables g2(Z) and g4(Z) have the distributions of the (discounted) premiaat time T/2 of the Put(K1, T ) and of the Put-Spread(K1, K2, T ) respectively. Functions g2
and g4 are C∞ and using the martingale property of the discounted premia yields
E g2(Z) = π(I0,K1, r, σ, T ) and E g4(Z) = ψ(I0,K1, K2, r, σ, T ). (2.19)
Finally we specify g0 as the “hedge function at maturity” of the Put-Spread option:
g0(Z) = −e−rT1IT∈[K1,K2]. (2.20)
The numerical specifications of the functions gi’s are as follows:
s0 = 100, K1 = 98, K2 = 102, r = 5%, σ = 20%, T = 2.
• Numerical results in 4-dimension: The comparison with the Monte Carlo estimator
gi(Z)N
=1N
N∑
k=1
gi(Zk), Zk i.i.d., Zk ∼ N (0; Id) (2.21)
of E[gi(Z)] is presented in the last column on the right: we first computed (a proxy of) thestandard deviation σ(gi(Z)
N) of the above estimator (2.21) by a N = 10 000 trial Monte
Carlo simulation. Then, in order to measure the error induced by the quantization in thescale of the MC estimator Standard Deviation, we wrote down the ratio absolute error
σ(gi(Z)N
).
The results in Table 1 illustrate a widely observed phenomenon when integrating func-tions by quantization: difference of convex functions behave better than convex functions(this is obviously due to (2.17)), and Lipschitz derivative functions behave better than Lip-schitz continuous functions (as predicted by (2.16)). The whole tests set suggests that theconvexity feature is prominent.• Graphical comparison in dimensions d = 3, 4, 5: We focus her on the convex C2
function g2. We wish to emphasize the dimension effect (keeping unchanged the otherspecifications). So, we depict in Figure 2, in dimension d = 3, 4, 5 (in a log-log scale), boththe absolute error and the standard deviation σ(g2(Z)
N) of its Monte Carlo estimator as a
function of N (the dotted lines are the induced least square regressions)
10

d = 4 B&S Quantized Relative σ(gi(Z)N
) absolute error
& N = 6540 Reference value value error σ(gi(Z)N
)
E g0(Z) −0.093 −0, 091 2.40% 0.034 0.064E g1(Z) 2.077 2.047 1.44% 0.054 0.548E g2(Z) 2.077 2.061 0.77% 0.033 0.482E g3(Z) 1.216 1.213 0.26% 0.021 0.015E g4(Z) 1.216 1.215 0.08% 0.012 0.001
Table 1: Quantization versus Monte Carlo in 4-dimension.
Concerning the dimensionality effect, the theoretical rates for the error bounds (N−1/d
in the Lipschitz case and N−2/d for Lipschitz differential case) are confirmed: when d ≤ 4quantization overperforms more and more the Monte Carlo method as N increases. Whend > 4, this is at most true up to a critical number Nd of points (for a given trust level inthe MC method). More detailed numerical results are presented in [21].
Remark 2.2 In the above tests, we compared quantization versus Monte Carlo for thecomputation of a single integral. If one looks for a uniform error bound over an infiniteclass of Lipschitz continuous functions, the conclusion can be quite different: thus, withthe notations of the former subsection 2.3
supf, [f ]
Lip≤1
∣∣∣∣f(Z1) + · · ·+ f(ZN )
N−
∫
Rd
f(ζ)PZ(dζ)∣∣∣∣ ≥
∫
Rd
min1≤i≤N
|Zi − ζ|PZ(dζ)
≥ Q1N
(Z1, . . . , ZN )
> min(Rd)N
Q1N∼ cZ
N1d
, (cZ > 0).
This means that for every fixed N the worst behaviour of the Monte Carlo method on 1-Lipschitz functions induces a greater error than that obatined by optimal L1-quantization.This holds true in any dimension d.
3 Optimal quantization of a Markov chain
We consider an Rd-valued (Fk)-Markov chain (Xk)0≤k≤n, with probability transition Pk(x, dx′)(from time k − 1 to k) and with initial distribution µ for X0. The joint distribution of(Xk)0≤k≤n, is then equal to µ(dx0)P1(x0, dx1) . . . Pn(xn−1, dxn).
In this section, we are interested in the quantization of this Markov chain, i.e. anapproximation of the distribution of the process (Xk) by the distribution of a process(Xk) valued on finite grids taking into account the probabilistic feature of the process.The naive approach would consist in the quantization of the R(n+1)d-valued random vector(X0, . . . , Xn) following the method described in Section 2. However, by Theorem 2.1, for atotal number N of points in such a “time-space” grid, the Lp-quantization error would beof order N− 1
nd . This is of course very slow when n is large.Instead, we propose an approach based on the fact that a Markov chain is completely
characterized by its initial distribution and its transitions probabilities. The idea is then
11

to “quantize” the initial distribution of X0 and the conditional probabilities of Xk givenXk−1. We propose two different quantization methods which shall provide a better rate ofconvergence of order n1+1/d/N1/d. The first approach, based on a quantization at each timek of the random variable Xk, was introduced in [1] and is called marginal quantization. Thesecond one that enhances the preservation of the dynamics, namely the Markov property,was introduced in [19] and is called Markovian quantization.
3.1 Marginal quantization
At each time k and given a grid Γk = x1, . . . , xNk of Nk points in Rd, associated to aVoronoi tessellation C1(Γk), . . . , CNk
(Γk), we define:
Xk = ProjΓk(Xk), k = 0, . . . , n. (3.1)
Hence, in the marginal approach, the emphasis is put on the accuracy of the distributionapproximations: if at every time k, the grid Γk is Lp-optimal, then Xk is the best possibleLp-approximation of Xk by a random variable taking Nk := |Γk| points. Notice that sincethe projection on the closest neighbor is not injective, the process (Xk)k constructed in(3.1) is not a Markov chain. However, if we define the probability transition matrices [pij
k ]at times k = 1, . . ., n by:
pijk = P
[Xk = xj
k | Xk−1 = xik
]=
βijk
pik−1
, i = 1, . . . , Nk−1, j = 1, . . . , Nk,
where pik−1 = P[Xk−1 = xi
k−1] = P[Xk−1 ∈ Ci(Γk−1)]
βijk = P[Xk−1 = xi
k−1, Xk = xjk] = P[Xk−1 ∈ Ci(Γk−1), Xk ∈ Cj(Γk)].
then it is well-known that there exists a Markov chain (Xck) with initial distribution p0
and probability transition matrices [pijk ] at times k = 1, . . . , n. The marginal quantization
method consists in approximating the distribution of the Markov chain (Xk)0≤k≤n by thatof the Markov chain (Xc
k)0≤k≤n: by construction, the conditional distribution of Xck+1 given
Xck is equal to the the conditional distribution of Xk+1 given Xk, and the distribution of Xc
0
is equal to the distribution of X0. We will evaluate the rate of approximation (in distribu-tion) of Xc toward X on functions of the form (x0, x1, . . . , xn) 7→ φ0(x0)φ1(x1) . . . φn(xn),where φ0, . . ., φn are bounded Lipschitz continuous functions on Rd. First, notice thatboth quantities E[φ0(X0)φ1(X1) . . . φn(Xn)] and E[φ0(Xc
0)φ1(Xc1) . . . φn(Xc
n)] follow a dy-namic programming formula induced by the Markov property. Namely
E [φ0(X0) . . . φn(Xn)] = E [v0(X0)] and E[φ0(Xc
0) . . . φn(Xcn)
]= E
[v0(Xc
0)]
where v0(Xc0) and v0(X0) satisfy
vn(Xn) = φn(Xn), vk−1(Xk−1) = φk−1(Xk−1)E[vk(Xk) |Xk−1], k = 1, . . . , n(3.2)
vn(Xcn) = φn(Xc
n), vk−1(Xck−1) = φk−1(Xc
k−1)E[vk(Xck) | Xc
k−1], k = 1, . . . , n.(3.3)
12

This will be the key to evaluate the error induced by approximating the first expectationterm by the second one. Furthermore, the dynamic programming formula for Xc, oncewritten “in distribution”, provides a simple numerical algorithm to compute E
[v0(Xc
0)]:
vn(xin) = φn(xi
n), ∀xin ∈ Γn,
vk−1(xik−1) = φk−1(xi
k−1)E[vk(Xk) | Xk−1 = xik−1]
= φk−1(xik−1)
Nk∑
j=1
pijk vk(x
jk), ∀xi
k−1 ∈ Γk−1, k = 1, . . . , n. (3.4)
E[v0(Xc
0)]
= E[v0(X0)
]=
N0∑
i=1
pi0 v0(xi
0).
We rely on the following Lipschitz assumption on the transitions Pk of the Markov chain(Xk).
(A1) For any k = 1, . . . , n, the probability transition Pk is Lipschitz with ratio [Pk]Lip ,i.e. for any Lipschitz function φ on Rd, with ratio [φ]Lip , we have:
∣∣∣∣∫
Rd
φ(x′)Pk(x, dx′)−∫
Rd
φ(x′)Pk(x, dx′)∣∣∣∣ ≤ [Pk]Lip [φ]Lip |x− x|, ∀x, x ∈ Rd.
Then we set [P ]Lip = maxk=1,...,n[Pk]Lip . Let
BL1(Rd) =
φ : Rd → R, φ is bounded by 1 and φ is Lipschitz with ratio [φ]Lip ≤ 1
.
Theorem 3.1 Let p ≥ 1. Under (A1), we have the error estimation in the marginalquantization method: for any functions φk ∈ BL1(Rd), k = 0, . . . , n,
∣∣∣E[φ0(X0). . .φn(Xn)]− E[φ0(Xc0). . .φn(Xc
n)]∣∣∣ ≤
n∑
k=0
(1+(2−δ2,p)
[P ]n−k+1Lip
−1
[P ]Lip−1
)‖∆k‖p , (3.5)
where ‖∆k‖p = ‖Xk − Xk‖p is the Lp-quantization error at time k of Xk. In (3.5), wemake the usual convention that 1
u−1(um − 1) = m if u = 1 and m ∈ N.
Proof. We set ‖φ‖sup = maxk=0,...,n ‖φk‖sup ≤ 1 and [φ]Lip = maxk=0,...,n[φk]Lip ≤ 1. From(3.2), a standard backward induction shows that
‖vk‖sup ≤ ‖φ‖n+1−ksup
and [vk]Lip ≤ [P ]Lip‖φ‖sup [vk+1]Lip + ‖φ‖n−ksup
[φ]Lip
so that [vk]Lip ≤ ‖φ‖n−ksup
[φ]Lip
[P ]n−k+1Lip
− 1
[P ]Lip − 1.
For any bounded Borel function f on Rd, we set
Pkf(x) = E[f(Xk)|Xk−1 = x], x ∈ Rd
Pkf(x) = E[f(Xk)|Xk−1 = x], x ∈ Γk−1,
13

for k = 1, . . . , n. Hence, by (3.2) and (3.4), we have∥∥∥vk(Xk)− vk(Xk)
∥∥∥p
≤∥∥∥vk(Xk)− E[vk(Xk)|Xk]
∥∥∥p
+∥∥∥E
[(φk(Xk)− φk(Xk)
)Pk+1vk+1(Xk)
∣∣∣ Xk
]∥∥∥p
+∥∥∥φk(Xk)E
[Pk+1vk+1(Xk)− Pk+1vk+1(Xk)
∣∣∣ Xk
]∥∥∥p
.(3.6)
On one hand, notice that, for every p ≥ 1,
‖vk(Xk)− E(vk(Xk)|Xk)‖p ≤ ‖vk(Xk)− vk(Xk)‖p + ‖vk(Xk)− E(vk(Xk)|Xk)‖p
≤ 2‖vk(Xk)− vk(Xk)‖p
≤ 2[vk]Lip‖∆k‖p . (3.7)
When p = 2, the very definition of the conditional expectation as an orthogonal projectionshows that the above inequality holds without the 2 factor. On the other hand, using thatconditional expectation (given Xk) is a Lp-contraction and that Xk is σ(Xk)-measurableyields∥∥∥E
[(φk(Xk)− φk(Xk)
)Pk+1vk+1(Xk)
∣∣∣ Xk
]∥∥∥p
≤ [φ]Lip‖vk+1‖sup‖∆k‖p ≤ [φ]Lip‖φ‖n−ksup
‖∆k‖p
(3.8)and∥∥∥φk(Xk)
(E
[Pk+1vk+1(Xk)− Pk+1vk+1(Xk)
∣∣∣ Xk
])∥∥∥p
≤ ‖φ‖sup‖vk+1(Xk+1)−vk+1(Xk+1)‖p .
(3.9)Plugging inequalities (3.7), (3.8) and (3.9) in (3.6) leads to the backward induction formula
‖vk(Xk)− vk(Xk)‖p ≤ ((2− δ2,p)[vk]Lip + [φ]Lip‖φ‖n−ksup
)‖∆k‖p
+ ‖φ‖sup‖vk+1(Xk+1)− vk+1(Xk+1)‖p
≤ [φ]Lip‖φ‖n−ksup
(1 + (2− δ2,p)
[P ]n−k+1Lip
− 1
[P ]Lip − 1
)‖∆k‖p
+‖φ‖sup‖vk+1(Xk+1)− vk+1(Xk+1)‖p
with vn = vn ≡ φn. This yields the expected result after some standard computations. 2
3.2 Markovian quantization
Here, we suppose that the dynamics of the (Fk) Markov chain (Xk)k is given in the form:
Xk = Fk(Xk−1, εk), k = 1, . . . , n (3.10)
(starting from some initial state X0), where (εk)k is a sequence of identically distributedFk-measurable random variables in Rm, such that εk is independent of Fk−1, and Fk issome measurable function on Rd × Rm. Given a sequence of grids Γk = x1, . . . , xNk of
14

Nk points in Rd, associated to a Voronoi tessellation C1(Γk), . . . , CNk(Γk), k = 0, . . . , n, we
define the process (Xk)k by:
Xk = ProjΓk(Fk(Xk−1, εk)), k = 1, . . . , n, (3.11)
and X0 = ProjΓ0(X0). By construction, the process (Xk)k is still a Markov chain w.r.t.
the same filtration (Fk). Its probability transition matrix [pijk ] at times k = 1, . . . , n reads:
pijk = P
[Xk = xj
k|Xk−1 = xik
]=
βijk
pik−1
, i = 1, . . . , Nk−1, j = 1, . . . , Nk, (3.12)
where pik−1 = P[Xk−1 = xi
k−1] =
P[Fk(Xk−2, εk−1) ∈ Ci(Γk−1)], if k ≥ 2
P[X0 ∈ Ci(Γ0)] if k = 1,(3.13)
and βijk = P[Xk−1 = xi
k−1, Xk = xjk]
=
P[F (Xk−2, εk−1) ∈ Ci(Γk−1), Fk(Xk−1, εk) ∈ Cj(Γk)], if k ≥ 2
P[X0 ∈ Ci(Γ0), F (X0, ε1) ∈ Cj(Γk)], if k = 1.
We still intend to estimate the approximation of (Xk) by the Markov quantized pro-cess (Xk) along functions (x0, x1, . . . , xn) 7→ φ0(x0)φ1(x1) . . . φn(xn), φ0, . . ., where φn arebounded Lipschitz continuous functions on Rd. This time, the quantized process (Xk) it-self being a Markov chain, one may compute directly E[ φ0(X0)φ1(X1) . . . φn(Xn)]. Thisquantity can be obtained as the final result of a backward dynamic programming formulaformally identical to (3.4) but where the coefficient [pij
k ] and pi0 are given by (3.12) and (3.13)
i.e. are based on the Markov chain (Xk)0≤k≤n described in (3.11).
We will rely now on a pathwise Lipschitz assumption on the Markov chain (Xk)0≤k≤n:
(A1’) For any k = 1, . . . , n, there exists some positive constant [Fk]Lip such that:
‖Fk(x, εk)− Fk(x, εk)‖1 ≤ [Fk]Lip |x− x|, ∀x, x ∈ Rd.
We then set [F ]Lip = maxk=1,...,n[Fk]Lip .
Theorem 3.2 Under (A1’), we have the error estimation in the Markov quantizationmethod: for any functions φk ∈ BL1(Rd), k = 0, . . . , n,
∣∣∣E [φ0(X0) . . . φn(Xn)]− E[φ0(X0) . . . φn(Xn)
]∣∣∣ ≤n∑
k=0
[F ]n−k+1Lip
− 1
[F ]Lip − 1‖∆k‖1 , (3.14)
where ‖∆k‖1 = ‖Fk(Xk−1, εk)− Xk‖1 (3.15)
is the L1-quantization error at time k of Fk(Xk−1, εk). In (3.14), we make the usualconvention that 1
u−1(um − 1) = m if u = 1 and m ∈ N.
Proof. Set ‖φ‖sup = maxk=0,...,n
‖φk‖sup ≤ 1 and [φ]Lip = maxk=0,...,n
[φk]Lip ≤ 1. We also denote
Lk =k∏
j=0
φj(Xj) and Lk =k∏
j=0
φj(Xj).
15

We then have
Lk − Lk =(φk(Xk)− φk(Xk)
)Lk−1 + (Lk−1 − Lk−1)φk(Xk).
From the boundedness and Lipschitz conditions on φk, we deduce that∣∣∣Lk − Lk
∣∣∣ ≤ ‖φ‖ksup
[φ]Lip
∣∣∣Xk − Xk
∣∣∣ + ‖φ‖sup
∣∣∣Lk−1 − Lk−1
∣∣∣ ,
for all k = 1, . . . , n. By a straightforward backward induction, we get
|Ln − Ln| ≤ ‖φ‖nsup
[φ]Lip
n∑
k=0
|Xk − Xk|. (3.16)
On the other hand, from the definitions (3.10) and (3.11) of Xk and Xk, and (3.15) of∆k, we obviously get for any k ≥ 1:
‖Xk − Xk‖1 ≤ ‖Fk(Xk−1, εk)− Fk(Xk−1, εk)‖1 + ‖∆k‖1 .
By Assumption (A1’) and since εk is independent of Fk−1, we then obtain:
‖Xk − Xk‖1 ≤ [Fk]Lip‖Xk−1 − Xk−1‖1 + ‖∆k‖1 .
Recalling that ‖X0 − X0‖1 = ‖∆0‖1 , we deduce by backward induction that:
∀ k∈ 0, . . . , n, ‖Xk − Xk‖1 ≤k∑
j=0
[F ]k−jLip
‖∆j‖1. (3.17)
Finally, using (3.16) and (3.17), one completes the proof noting that∣∣∣E [φ0(X0) . . . φn(Xn)]− E
[φ0(X0) . . . φn(Xn)
]∣∣∣ ≤ ‖Ln − Ln‖1
≤ ‖φ‖nsup
[φ]Lip
n∑
k=0
k∑
j=0
[F ]k−jLip
‖∆j‖1
≤ ‖φ‖nsup
[φ]Lip
n∑
j=0
(n−j∑
k=0
[F ]kLip
)‖∆j‖
1. 2
3.3 Comparison of both methods
Theoretical aspects: The marginal and the Markovian quantization processes wereassigned two different objectives. The marginal quantization process is originally designedto optimize the marginal distribution approximation at every time step k = 0, . . . , n, namely
‖Xk −Xk‖p = min‖Y −Xk‖p , |Y (Ω)| ≤ Nk
(with in mind some algorithmic stability properties of the grid optimization). Then, at everytime k, the conditional distribution L(Xk+1 |Xk = x) = P (x, dy) for a point x ∈ Ci(Γk)(i.e. x in the tessel of xi
k) is approximated by
L(Xk+1 |Xk = x) ≈ L(ProjΓk+1(Xk+1) |ProjΓk
(Xk) = x)
=1
PXk(Ci(Γk))
∫
Ci(Γk)Pk+1(x, dy) Proj−1
Γk+1PXk
(dx). (3.18)
16

This induces a loss of the Markov property.In contrast, the Markovian quantization is designed at every time k = 0, . . . , n − 1 to
optimize the approximation of the transition Pk+1(x, dy) = Fk+1(x,Pεk+1)(dy) of the chain
at the points of the quantizing grid xik∈ Γk (in Lp(P
Xk)), namely
‖Xk+1 − Fk+1(Xk, εk+1)‖p = min‖Y − Fk+1(Xk, εk+1)‖p , |Y (Ω)| ≤ Nk+1.
In this approach, for every x∈ Ci(Γk), one approximates
L(Xk+1 |Xk = x) ≈ L(Xk+1 | Xk = xik) = Pk+1(xi
k, dy) Proj−1Γk+1
(3.19)
Then the Markov property w.r.t. the filtration of (Xk)0≤k≤n is preserved.
In the marginal quantization, the conditional distributions are not approximated by aspecific optimization process, but by averaging the transition w.r.t. the marginal distribu-tion over the Voronoi tessellation of the best possible grid. In the Markovian approach, theconditional distributions are obtained by an optimization procedure which minimizes theerror induced at the points of the grid.
One may notice by looking at the a priori estimates (3.5) and (3.14) that, provided thatAssumption (A’1) is satisfied, both approaches lead to quite similar a priori error boundstructures: they differ by the Lipschitz constants [P ]Lip in the marginal quantization and[F ]Lip in the Markovian quantization on one hand and by some multiplicative factor (in favorof the Markovian quantization) on the other hand. It is easy to prove that the inequality[F ]Lip ≤ [P ]Lip always holds and in many “regular” models (like Lipschitz mixing models,Gaussian Euler schemes of diffusions, etc), the inequality stands as an equality. On theother hand, the multiplicative factor appearing in the marginal quantization is likely tobe an artifact of the method of proof. Overall, the assets and drawbacks of both methodsessentially annihilate each other.
Then, how to discriminate between the two quantization methods?One first difference lies in the proofs: the general a priori error bounds like (3.14)
are significantly easier to get by Markovian approach and so far, provided slightly lowertheoretical constants.
When F is the Euler scheme of a diffusion process over [0, T ] with Lipschitz coefficients,then [P ]Lip ≤ [F ]Lip = 1+ cT /n, where the time step is T/n. Then, in both methods, if oneassigns N/(n + 1) elementary quantizers to each grid Γk and assumes this grid is optimal,inequalities (3.5) and (3.14) lead to the structure of a priori global error bound, namely
∀n, N ≥ 1, Error(n,N) = O
(n
(N/n)1/d
)= O
(n1+1/d
N1/d
)
In fact, without any further assumption on the probability density functions of the L(Xk)’s,the above bound is only heuristic since it is impossible to control the rates of convergencein the asymptotics of the n optimal quantization errors. So far, this control turned outto be possible with marginal quantization under some domination-scaling property (seee.g. [1] for American option pricing but has no rigorous counterpart with Markovian quan-tization (see [19] for such a situation). The preservation of the Markov property maybe
17

induces a greater degeneracy of the “innovation process”: thus, there is more randomnessin ProjΓk
(Xk) where Xk follows (3.10) than in ProjΓk(F (Xk−1, εk)) in (3.11).
So, when the choice is possible, it seems to be essentially motivated by the constraints ofthe problem: thus, the Markovian quantization, being a Markov chain w.r.t. the filtrationof the original chain Xk, seems more appropriate for control problems (for which it wasoriginally designed. . . ) whereas marginal quantization yield more satisfactory results inoptimal stopping problems (for which it was originally designed. . . ). But once again, itmay be only an artifact.
Let us mention however that the marginal quantization requires only some weak con-vergence Lipschitz assumption on the chain (namely [P ]Lip < +∞) while the Markovianquantization requires some Lp-pathwise Lipschitz assumption (namely [F ]Lip < +∞). Itmay happen that the first approach turns out to be the only available one because
[P ]Lip < +∞ = [F ]Lip .
This is, for example, the case for Markovian dynamics like
Xk+1 = F (Xk, εk+1) with F (x, ε) := sign(x− ε)G(x, ε),
where (εk)k is an i.i.d. sequence, Pε1(du) = g(u) λq(du) (λq lebesgue measure on Rq) and(x, ε) 7→ G(x, ε) is Lipschitz continuous in x uniformly in ε with ratio [G]Lip . Then, oneshows that
[P ]Lip = [G]Lip < +∞ whereas x 7→ F (x, ε1) = sign(x− ε1)G(x, ε1) is not continuous.
Computational aspects: Although, both dynamic programming formulae are formallyidentical and the fact that, in both cases, the grid optimization phase consists in processinga chain of stochastic gradient descents, one for each time step, the optimization phasesare radically different for the marginal and the Markovian quantization processes. Since,these procedures have been extensively described in [1] and [19], we refer to these papersfor details of implementation.
We wish to discuss here what make them different. First, they lead to different optimalgrids with different transition matrices (using the same set of grids to process the marginaland the Markovian methods would provide two different sets of transition matrices).
In the marginal quantization, the optimization consists in two steps
– Computation for every k = 0, . . . , n of grids Γ∗k which minimize over all grids of sizeNk, the Lp-quantization error ‖∆k‖p i.e. solving
argminΓk‖Xk − ProjΓk
(Xk)‖p , |Γk| ≤ Nk (3.20)
– Estimation of the companion parameters i.e. the resulting transition matrices [pijk ]
and the quantization errors ‖Xk − ProjΓ∗k(Xk)‖p .
At every step k, the optimization problem (3.20) only depends on the distribution of Xk.The main consequence is that if one looks carefully at the recursive stochastic algorithmdescribed in Section 2.2., the optimization of the grid Γk at the kth time step only depends
18

on the simulation of a large number M of independent copies of Xk. So if one simulateson a computer M independent paths of the whole chain (Xk)0≤k≤n, all the grids can beoptimized independently by simply implementing procedures (2.10), (2.11).
The estimation of the companion parameters can be carried out “on line” as described inthe algorithm of Section 2.2 using (2.12) and (2.13). It may be more efficient to carry on thecompanion parameter estimation after the grid optimization is achieved: once the optimalgrids are settled, the companion parameter estimation procedure becomes a standard MonteCarlo simulation.
At a first glance, in the Markovian quantization, the two steps look similar. However,since Xk = ProjΓk
(F (Xk−1, εk)), the Lp-optimization problem for the kth grid Γ∗k reads
argminΓk‖F (Xk−1, εk)− ProjΓk
(F (Xk−1, εk))‖p , |Γk| ≤ Nk. (3.21)
Consequently, the optimization of the grids Γk at time k does depend on the distributionof Xk−1, i.e. essentially upon Γ∗k−1. This means that the grid optimization phase of aquantized markov chain is deeply recursive: any optimization default at time k is propagatedat times ` ≥ k, inducing a great instability of the global optimization process.
This provides an interpretation for a usually observed phenomenon: numerical gridoptimization works much better with marginal quantization than Markovian quantization.It is in accordance with the idea that it is more difficult to estimate accurately conditionaldistributions than marginal ones.
4 Some applications in finance
4.1 Optimal stopping problems and pricing of multi-dimensional Ameri-
can options
We consider a multidimensional diffusion X = (X1, . . . , Xd)∗ governed by:
dXt = b(Xt)dt + σ(Xt)dWt, X0 = x0, (4.1)
where b, σ are functions on Rd valued in Rd and Rd×m, satisfying usual growth and Lipschitzconditions, and W is a m-dimensional standard Brownian motion on a filtered probabilityspace (Ω,F ,F = (Ft)t,P).
Given a reward process (g(t,Xt))t∈[0,T ], where g is some continuous function on [0, T ]×Rd, Lipschitz continuous in x, we consider the optimal stopping problem:
Vt = ess supτ∈Tt,T
E [g(τ, Xτ )|Ft] . (4.2)
Here Tt,T denotes the set of stopping times valued in [t, T ] and V is called the Snell envelopeof (g(t,Xt))t∈[0,T ].
We first approximate this continuous-time optimal stopping problem by a discrete-timeoptimal stopping problem where the set of possible stopping times is valued in kT/n :k = 0, . . . , n for n large. When the diffusion X is not simulatable, we approximate it by
19

a discretization scheme, and we denote by Xk this approximation at time tk = kT/n of X.For example, in the case of an Euler scheme with step T/n, we have:
X0 = x0, Xk+1 = Xk + b(Xk)T
n+ σ(Xk)
√T
nεk+1
=: F (Xk, εk+1), k = 0, . . . , n− 1,
where εk+1 = (Wtk+1−Wtk)/
√h is a centered Gaussian random variable in Rm with variance
Im, independent of Fk := Ftk . The process (Xk) is a Markov chain w.r.t. the filtration(Fk). The associated discrete-time optimal stopping problem is:
V k = ess supτ∈T k,n
E[g(τT/n,Xτ )|Fk
], (4.3)
where T k,n denotes the set of stopping times (with respect to the filtration (Fk)) valued inj : j = k, . . . , n.
We have the classical time discretization error estimation:
maxk=0,...,n
‖VkT/n − V k‖p ≤Cb,σ√
n
In fact, if g is slightly more regular, namely semi-convex and if one replaces the Eulerscheme by the diffusion itself sampled at times kT/n, the above bound holds with Cb,σ
n .
It is well-known that the Snell envelope (V k)k of (g(tk, Xk))k satisfies V k = vk(Xk),k = 0, . . . , n, where the Borel functions vk on Rd are given by the backward dynamicprogramming formula:
vn(x) = g(T, x), ∀x ∈ Rd,
vk(x) = max(g(tk, x),E[vk+1(Xk+1)|Xk = x]
), ∀x ∈ Rd, k = 0, . . . , n− 1.
This backward formula remains intractable for numerical computations since it requires tocompute at each time step k = 0, . . . , n, conditional expectations of Xk+1 given Xk = x atany point x ∈ Rd of the state space of (Xk).
The quantization approach for solving this problem is to first approximate the Markovchain (Xk) by a quantized Markov chain as described in Section 3. This means that at eachtime tk, k = 0, . . . , n, we are given an (optimal) grid Γk = x1
k, . . . , xNkk of Nk points in Rd,
and we approximate the distribution X0 by the distribution of X0 = ProjΓ0(X0), and the
conditional distribution of Xk+1 given Xk by the conditional distribution of Xk+1 given Xk:for k ≥ 1, Xk is defined by Xk = ProjΓk
(Xk) in the marginal quantization method, whileXk = ProjΓk
(F (Xk−1, εk)) in the Markovian quantization method. We then approximatethe functions vk by the functions vk defined on Γk, k = 0, . . . , n, by the backward dynamicprogramming formula or optimal quantization tree descent:
vn(xin) = g(T, xi
n), ∀xin ∈ Γn (4.4)
vk(xik) = max
(g(tk, xi
k),E[vk+1(Xk+1)|Xk = xik]
)(4.5)
= max
g(tk, xi
k),Nk+1∑
j=1
pijk+1vk+1(x
jk+1)
, xi
k ∈ Γk, k = 0, . . . , n− 1, (4.6)
20

where pijk+1 = P
[Xk+1 = xj
k+1|Xk = xik
].
Then one gets an approximation of the process (V k) by the process (Vk)k, with Vk =vk(Xk). Namely, if the diffusion is uniformly elliptic, with coefficients b and σ eitherbounded Lipschitz continuous or C∞b (Rd) and if the obstacle function g is Lipschitz over[0, T ]×Rd, then the following error estimation holds for an Lp-optimal marginal quantiza-tion (see [1]):
max0≤k≤n
‖V k − Vk‖p ≤ Cb,σ,T,pn1+1/d
N1/d, (4.7)
where N =∑n
k=0 Nk is the total number of points to be dispatched among all grids Γk.This estimate strongly relies on the sub-Gaussian upper-bound for the probability den-
sity of the diffusion density. The same bound holds if one substitutes the diffusion sampledat times tk, k = 0, . . . , n to its Euler scheme.
Numerical illustration As a numerical illustration, we consider a 2d-dimensional un-correlated Black-Scholes model with geometric dividends, i.e. for x = (x1, . . . , x2d)∗∈ R2d,b(x) = −(µ1x1, . . . , µ2dx2d), σ(x) is a 2d× 2d diagonal matrix with ith diagonal term σi x
i,where σi, i = 1, . . . , d are constant volatilities. We assume that the short-term interest rateis zero. The American option price at time t of a payoff function (g(Xt)) is given by:
Vt = ess supτ∈Tt,T
E [g(Xτ )|Ft] , (4.8)
which is computed by the above algorithm. We consider an American 2d-dim exchangeoption characterized by the payoff
g(t, x) = max(x1 . . . xd − xd+1 . . . x2d, 0
)
with the following market parameters
x10 . . . xd
0 = 36, xd+10 . . . x2d
0 = 40, σi = 20d−12 %, µ1 = 5%, µ2 = . . . = µ2d = 0.
Our reference price is obtained by a specific difference method devised in [22] for 2-dimension. We reproduce in Figures 3 and 4 for 2d = 4 and 6 the graphs θ 7→ V0(θ) whereV0(θ) denotes the premium at time 0 of the above American option when time to maturityθ runs over k/n, k = 1, . . . , n. The numerical parameters are settled as follows: n = 25,k time discretization steps when θ = k/n, and
N25 = 750 if 2d = 4 and N25 = 1 000 if 2d = 6.
The sizes Nk of the grid Γk is specified following the dispatching rule given in [1].
4.2 A stochastic control problem: mean-variance hedging of options
4.2.1 Error bounds using the Markovian quantization
We consider the following portfolio optimization problem. The dynamics of the controlledprocess is governed by:
dXt = b(Xt) dt + σ(Xt) dWt,
dYt = α∗t dXt, Y0 = y0,
21

where b, σ are functions on Rd valued in Rd and Rd × m, satisfying usual growth andLipschitz conditions, and W is a m-dimensional standard Brownian motion on a filteredprobability space (Ω,F ,F = (Ft)t,P). The control process α = (αt)t is an F-adaptedprocess valued in some subset A of Rd. We denote by A the set of such control processes.Here, X = (X1, . . . , Xd)∗ represents the dynamics of risky assets and/or volatility, Y isthe (self-financed) wealth process of an investor who can trade αt shares of risky assets attime t, and starting from some initial capital y0. The set A models the constraints on theportfolio held by the investor. For example, if A = R×0d−1, this means that the investorcan trade only in the first asset.
We are now given an option written on the risky assets, i.e. a payoff function in theform g(XT ), for some Lipschitz continuous function g on Rd, that one wants to hedge withthe available risky assets, and according to a quadratic criterion. In other words, one hasto solve the stochastic control problem:
v(t, x, y) = infα∈A
E[(g(XT )− YT )2
∣∣∣ (Xt, Yt) = (x, y)], (t, x, y) ∈ [0, T ]× Rd × R. (4.9)
We first approximate the continuous-time control problem (4.9) by a discrete-time con-trol problem at dates tk = kT/n, k = 0, . . . , n for n large. We consider an approximationEuler scheme for (Xt) with step h=T/n. The approximation Xk of Xtk is then defined by:
X0 = X0 and Xk+1 = Xk + b(Xk)T
n+ σ(Xk)
√T
nεk+1
=: F (Xk, εk+1), k = 0, . . . , n− 1,
where εk+1 = (Wtk+1− Wtk)/
√h is a centered Gaussian random variable in Rm with
variance Im, independent of Fk := Ftk . The process (Xk) is a Markov chain w.r.t. thefiltration (Fk). We denote by A the set of all Fk, k = 0, . . . , n − 1-adapted processes α
= αk, k = 0, . . . , n − 1 valued in A. Given α ∈ A, we consider the approximation (Y k)of the controlled process (Yt) at times (tk), and defined by:
Y 0 = y0 and Y k+1 = Y k + α∗k(Xk+1 −Xk)
=: G(Y k, Xk, αk, Xk+1), k = 0, . . . , n− 1.
We then consider the stochastic control problem in discrete-time:
vk(x, y) = infα∈A
E[(
g(Xn)− Y n
)2∣∣∣ (Xk, Y k) = (x, y)
], (4.10)
for all k = 0, . . . , n and (x, y) ∈ Rd × R. The convergence from the discrete-time controlproblem to the continuous one may be proved either by probabilistic arguments (see [16])or by viscosity solutions approach (see [7]):
vk(x, y) → v(t, x, y),
for all (x, y) ∈ Rd × R, as n goes to infinity and tk → t.
22

The functions vk satisfy the dynamic programming formula:
vn(x, y) = (g(x)− y)2 , (x, y) ∈ Rd × Rvk(x, y) = inf
a∈AE
[vk+1(Xk+1, Y k+1)
∣∣ (Xk, Y k) = (x, y)],
k = 0, . . . , n− 1, (x, y) ∈ Rd × R.
From a numerical viewpoint, this backward formula remains intractable since we have tocompute at each time step, conditional expectations of (Xk+1, Y k+1) given (Xk, Y k) =(x, y) at every point (x, y) of the state space Rd × R. With respect to optimal stoppingproblems, we have in addition to calculate an infimum of these conditional expectationsover the possible values of the control set A.
The starting point in the quantization approach for solving (4.10) is to discretize thecontrolled (Fk)-Markov chain (Xk, Y k)k by a controlled Markov chain (Xk, Yk)k valued ina finite state space. Here, recall that (Xk)k is an uncontrolled process while (Y k)k is one-dimensional controlled process. We shall then consider two different spatial discretizationsfor (Xk)k and (Y k)k. Moreover, we also want to keep the Markov property of the controlledquantized Markov chain w.r.t. the same filtration (Fk). This means that we wants toapproximate the control problem (4.10) by another control problem where the controls arestill adapted w.r.t. the filtration (Fk). More precisely, we shall discretize the d-dimensionalprocess (Xk) on an optimal grid Γk = x1
k, . . . , xNkk at each time k and define a Markovian
quantization of (Xk) by:
X0 = ProjΓ0(X0) and Xk+1 = ProjΓk+1
(F (Xk, εk+1)
), k = 0, . . . , n− 1.
The controlled one-dimensional process (Y k) is discretized using a regular orthogonal gridof R, namely ΓY = (2δ)Z ∪ [−R, R], and we then define:
Y0 = y0 and Yk+1 = ProjΓY
(G(Yk, Xk, αk, Xk+1)
), k = 0, . . . , n− 1.
Therefore, (Xk, Yk) is a controlled Markov chain w.r.t. (Fk). We then consider the stochas-tic control problem in discrete-time:
vk(x, y) = infα∈A
E[(
g(Xn)− Yn
)2∣∣∣∣ (Xk, Yk) = (x, y)
], (4.11)
for all k = 0, . . . , n and (x, y) ∈ Γk×ΓY . By the dynamic programming principle, functionsvk are computed recursively by:
vn(x, y) = (g(x)− y)2 , (x, y) ∈ Γn × ΓY
vk(x, y) = infa∈A
E[vk+1(Xk+1, Yk+1)
∣∣∣ (Xk, Yk) = (x, y)],
k = 0, . . . , n− 1, (x, y) ∈ Γk × ΓY .
From an algorithmic point of view, this reads:
vn(xin, y) = (g(xi
n)− y)2, ∀xin ∈ Γn, ∀y ∈ ΓY
23

vk(xik) = inf
a∈A
Nk+1∑
j=1
pijk+1vk+1
(xj
k+1,ProjΓY
(G(y, xi
k, a, xjk+1)
))
∀xik ∈ Γk, ∀ y ∈ ΓY , k = 0, . . . , n− 1,
where pijk+1 = P
[Xk+1 = xj
k+1|Xk = xik
].
It is proved in [19] that the estimation error for the value functions by this quantizationmethod is measured by:
E∣∣v0(X0, y0)− v0(X0, y0)
∣∣ ≤ C1(1 + |y0|)(
1√n
n∑
k=0
(n− k)‖∆k‖2 +n∑
k=0
‖∆k‖2
)
+C2nδ + C3(1 + |y0|p) n
Rp−1,
for all p > 1 and y0 ∈ R. Here, C1, C2 and C3 are positive constants depending on thecoefficients of the diffusion process X and
‖∆k‖2 = ‖F (Xk−1, εk)− Xk‖2
is the L2-quantization error at date k in the Markovian approach.
4.2.2 Numerical illustrations
As a numerical illustration, we consider the two following models:
A stochastic volatility model (2-dim X-process) Let X = (X1, X2) be governed by:
dX1t = X1
t X2t dW 1
t
dX2t = −η(X2
t − σ)dt + βdW 2t , X2
0 ∼ N (σ;β2
2η)
where (W 1,W 2) is a standard two-dimensional Brownian motion. Here X1 represents theprice process of one risky asset and X2 is the (stationary) stochastic volatility process ofthe risky asset. The investor trades only in the risky asset X1, i.e. A = R × 0, and hewants to hedge a put option on this asset, i.e. g(x) = (K − x1)+ for x = (x1, x2).
By projecting (K −X1T )+ on the set of stochastic integrals w.r.t. S, we have by Ito’s
formula:
(K −X1T )+ = E[(K −X1
T )+ |X20 ] +
∫ T
0αopt
s dX1s + ZT
where αoptt = ∂P
∂s (t, X1t , X2
t ), ZT = β∫ T0
∂P∂s (t,X1
t , X2t )dW 2
t with P (t, x1, x2) = E[(K −X1
T)+ | (X1
t , X2t )) = (x1, x2)].
Then, the function y0 7→ E[v0(y0, x10, X
20 )] reaches its minimum at ymin = E[(K−X1
T )+)].So, the optimal control is always αopt regardless of y. Since the volatility process X2
t isindependent of W 1, we notice by Jensen’s inequality that
E[(K −X1T )+] ≥ PutB&S(x1
0,K, T, σ).
Parameters for numerical implementation :
24

• Model parameters: T = 1, σ = 20%, η = 0.5, β = 0.05, x10 = K = 100.
• Time discretization: n = 25.• Spatial discretization (quantization grid parameters):
– Grid ΓX : 2δ = 120 , nX = 50 (i.e. |ΓX | = 2× 100 + 1), centered at I0 = 7.96.
– Grids Γk: Total numbers of points used to produce the n = 25 grids that quantizethe Euler scheme of (S, σ), N = 5 750 (N25 = 299).
– Optimization of the grids using M = 106 independent trials of the Euler scheme.• Approximation of the optimal control: dichotomy method on A = [−1, 0].
Numerical results: Figure 5 below depicts a quantization of XT = (X1T, X2
T) using
N25 := 299 points obtained as a result of an optimization process described aboveFigure 6 and Figure 7 display the computed graph of y 7→ E[v0(y, x1
0, X20 )] and the
value of the optimal control αopt0 at t = 0 respectively. The global shape of the graph
is parabolic and reaches its minimum at ymin = 8.06. This is to be compared with thepremium provided by a direct Monte Carlo simulation, namely 8.00. The optimal controlis nearly constant and its value at ymin = 8.06, αmv
0 (ymin) = −0.38, is satisfactory w.r.t.the theoretical value estimated by Monte Carlo (−0.34).
A put on a Black & Scholes geometric asset (4-dim X-process) We consider aBlack & Scholes model X = (X1, . . . , X4) in 4 dimension: b = 0 and σ(x) is the 4 × 4diagonal matrix with ith diagonal term σi(x) := σix
i. The payoff function to be hedged isa geometric put option on Jt = X1
t . . . Xdt :
g(XT ) = (K − JT )+.
The investor is allowed to trade only in the first asset X1 hence A = R× 03.So, the mean variance hedging problem of the investor at time t = 0 is
v(0, x0, y0) = minα∈A
E[(
Y y0,αT − (K − JT )+
)2]
. (4.12)
where x0 is the initial vector value risky asset. Ito’s formula then classically yields
(K − JT )+ = E[(K − JT )+] +∫ T
0Ht dJt with Ht =
∂P
∂x(T−t, Jt,K, σ), t∈ [0, T ),
where P (θ, x, K, σ) denotes the price of a one dimensional European Put option with resid-ual maturity θ, asset price x, strike price K, constant volatility σ. It follows that
E[(Y y0,α
T − (K − JT )+)2]
=(y0 − P (T, J0,K, σ)
)2+ σ2
1
∫ T
0E (JsHs − αsX
1s )2 ds
+d∑
i=2
σ2i
∫ T
0E (JsHs)2 ds.
Hence, the solution of (4.12) is given by
v0(x0, y0) =(y0 − P (T, J0, K, σ)
)2+
d∑
i=2
σ2i
∫ T
0E (JsHs)2 ds
25

using the optimal control
αoptt =
JtHt
S1t
= X2t . . . Xd
t
∂P
∂x(T − t, Jt, K, σ).
In the above model, the non correlation assumption of the assets may look not very real-istic but corresponds to the most difficult case to solve for quantization since it correspondsin some way to a “full d-dimensional problem”.
Parameters for numerical implementation:
• Model parameters: d = 4, T = 1, σ = 15%, σ1 = σ/√
2 and σi = σ/√
2(d− 1), i =2, . . . , d, Xi
0 = (100)1/d, i = 1, . . . , d, K = 100.• Spatial discretization (quantization grid parameters):
– Grid ΓY : 2δ := 110 , nY := 2 00 (i.e. |ΓX | = 2× 2 00 + 1), centered at I0 = 5.97 (B&S
premium of the put option with volatility σ).– Grids Γk: Total numbers of points used to produce the n = 20 grids that quantize
the geometric Brownian motion S: N = 22 656 (N20 := 1 540).– Optimization of the grids using M := 106 independent trials of the Euler scheme.
• Approximation of the optimal control: dichotomy method on A ⊂ [−2, 0].
Numerical results: Figure 8 and Figure 9 below display the computed graphs x0 7→v0(x0, s0) and y0 7→ αopt
0 (y0, I0). The global shape of the graph is parabolic, reaches itsminimum (equal to 25.82) at ymin = 6.27 (the true value is 5.97, B&S premium for the put).The optimal control is satisfactorily constant as expected; its value at ymin is αopt
0 (ymin) =−0.48 (true value is −0.47).
4.3 Filtering of stochastic volatility models
We consider the following filtering model. The signal (Xk) is an Rd-valued Markov chaingiven by:
Xk = F (Xk−1, εk), k ∈ N∗, (4.13)
where (εk)k is a sequence of i.i.d. random variables valued in Rm, and F is some measurablefunction on Rd × Rm. The initial distribution of X0 is known equal to µ. The observationprocess valued (Yk) valued in Rq takes the form:
Yk = G(Xk, ηk), k ∈ N, (4.14)
where (ηk)k is a sequence of i.i.d. random variables in Rl, independent of (εk)k, and G is ameasurable functions on Rd × Rl. We assume that for every x∈ Rd, the random variableG(x, η1) admits a bounded density y 7→ g(x, y) w.r.t. the Lebesgue measure on Rq.
We are interested in the computation at some time n ≥ 1, of the conditional distributionΠy,n of the signal Xn given the observations (Y0, . . . , Yn) fixed to y = (y0, . . . , yn). In otherwords, we wish to calculate the conditional expectations
Πy,nf = E [f(Xn)| (Y0, . . . , Yn) = y] (4.15)
26

for all reasonable functions f on Rd. From the Markov property of the pair (Xk, Yk) andBayes formula, we have the following expression for Πy,n:
Πy,nf =πy,nf
πy,n1where πy,nf = E
[f(Xn)
n∏
k=0
g(Xk, yk)
], (4.16)
for any f ∈ B(Rd), the set of bounded measurable functions on Rd. This can be derived bynoting that the function y = (y0, . . . , yn) ∈ (Rq)n+1 7→ πy,n1 = E[
∏nk=0 g(Xk, yk)] is actually
equal to the density φn+1 of (Y0, . . . , Yn) w.r.t. to the Lebesgue measure on (Rq)n+1.In the sequel, the observations are fixed to y = (y0, . . . , yn) and we write πn for πy,n
and Πn = Πy,n.The computation of the unnormalized filter πy,n is based on the following inductive
formula:
πkf = πk−1Hkf, k = 1, . . . , n,
where Hk is the transition kernel given by:
Hkf(x) = E [f(Xk)g(Xk, yk)|Xk−1 = x] .
Hence, the inductive formula of the unnormalized filter relies on successive computations ofconditional expectations of Xk+1 given Xk. Notice that with regard to the problems of opti-mal stopping or stochastic control problems, we have here an infinite-dimensional problem,since we have to calculate these conditional expectations for any Borel bounded functionson Rd. For solving numerically this problem, we are then suggested to approximate theconditional distributions of Xk given Xk−1 for any k = 1, . . . , n by a quantization approachas described in Section 3. We are then given, at each time k = 0, . . . , n, an (optimal) gridΓk = x1
k, . . . , xNkk of Nk points in Rd, and we approximate the distribution µ of X0 by the
distribution of X0 = ProjΓ0(X0), and the conditional distribution of Xk given Xk−1 by the
conditional distribution of Xk given Xk−1: for k ≥ 1, Xk is defined by Xk = ProjΓk(Xk)
in the marginal quantization method, while Xk = ProjΓk(F (Xk−1, εk)) in the Markovian
quantization method.We then approximate the transition kernel Hk by the transition matrix Hk defined by:
H ijk = E
[1
Xk=xjkg(Xk, yk)
∣∣∣ Xk−1 = xik−1
]
= pijk g(xj
k, yk), i = 1, . . . , Nk−1, j = 1, . . . , Nk.
Here, (pk)k is the probability transition matrix of (Xk)k, i.e.
pijk+1 = P
[Xk+1 = xj
k+1|Xk = xik
],
and p0 = (pi0)i=1,...,N0 is the probability distribution of X0, i.e. pi
0 = P[X0 = xi0]. The
unnormalized filter πn is then approximated by the discrete probability measure πn on Γn:
πn =Nn∑
`=1
π`nδx`
n,
27

where (π`k), k = 0, . . . , n, ` = 1, . . . , Nk, are computed inductively by:
π0 = p0 and πjk =
∑
1≤i≤Nk−1
H ijk πi
k−1, k = 1, . . . , n, j = 1, . . . , Nk.
The normalized filter Πn is finally approximated by the discrete probability measure Πn on Γn:
Πn =πn∑Nn`=1 π`
n
.
Under the Lipschitz assumption (A1’) on the scheme F , and assuming also that thefunction g(x, y) is Lipschitz in x, uniformly in y, with ratio [g]Lip , we have the followingestimation error for the approximate filter (see [20]): for any f ∈ BL1(Rd),
∣∣∣Πy,nf − Πy,nf∣∣∣ ≤ ‖g‖n+1
∞φn+1(y)
n∑
k=0
Cn,k‖∆k‖2 ,
where Cn,k(f) = [F ]n−k+1Lip
+ 2[g]Lip
‖g‖∞
([F ]Lip + 1[F ]Lip − 1
([F ]n−k+1Lip
− 1) + 1)
,
‖∆0‖2 = ‖X0 − X0‖2 , ‖∆k‖2 = ‖Xk − Xk‖2 in the marginal quantization method, and‖∆k‖2 = ‖F (Xk−1, εk) − Xk‖2 in the Markovian quantization, k = 1, . . . , n, are the L2-quantization errors.
Remark 4.1 • In the marginal quantization method, the constant [F ]Lip may be replacedby the constant [P ]Lip . Note that in regular examples studied here, we have [P ]Lip = [F ]Lip .
• The uniform Lipschitz condition in y of x 7→ g(x, y) may be relaxed into a nonuniformLipschitz condition in the form: |g(x, y)− g(x′, y)| ≤ [g]Lip(y)(1 + |x|+ |x′|)|x−x′|, with inthis case a more complex estimation error term.
Numerical illustrations : 1. The (familiar) Kalman-Bucy model:
Xk+1 = AXk + εk ∈ Rd
Yk = BXk + ηk ∈ Rq
for k ∈ N, and X0 is normally distributed with mean m0 = 0 and variance Σ0. Here A
and B are matrices of appropriate dimensions, and (εk)k, (ηk)k are independent centeredGaussian processes, εk ; N (0, Id) and ηk ; N (0, Λ). In this case, we have
g(x, y) =1
(2π)d/2det(Λ12 )
exp(−1
2
∣∣∣Λ− 12 (y −Bx)
∣∣∣2)
.
Of course, the filter Πy,n is explicitly known, see e.g. [10]: it is a Gaussian distribution ofmean mn and variance Σn given by the inductive equations:
Σ−1k+1 = Id −A
(A′A + Σ−1
k
)−1A′ + B′Λ−1B
(Σ−1
k+1mk+1
)= A
(A′A + Σ−1
k
)−1 (Σ−1
k mk
)+ B′Λ−
12 yk+1.
28

We will illustrate the numerical scheme in dimension d = 3. Here A and B are
A =
0.8 0 00 0.5 00 0 0.2
and B = I3.
We take Γ = (0.5)2I3. The variance Σ0 is such that (Xk) is stationary. In this case, wecan work with a single grid (1000 points). In Figure 10 is represented the 1000-optimalquantizer used for N (0, I3). Computations are carried out with its Σ0-rescaled version(which is a non optimal but straightforwardly accessible and quite efficient quantizer forN (0,Σ0)). The number n of observations is equal to 20. We compute the conditionalexpectations E[f(Xn) | Y0, . . . , Yn] with f(x) = x (the conditional mean) and f(x) = x · tx
(the conditional variance). The quantized version of the conditional mean is denoted by mn
and that given by the Kalman filter by mn. We take the same convention for the conditionalvariance Σn. We represent in Figure 11 the errors ‖mk − mk‖ and ‖Σk − Σk‖ plotted w.r.t.k ∈ 0, . . . , 20. Finally, Figure 12 depicts the three components of the conditional mean inits Kalman filter version and its quantized version. These figures shows that in this settingthe 3d Kalman filter is well captured by the quantization method.
2. A stochastic volatility model arising in financial time series: Let Sk, k ∈ N, be a positiveprocess describing the stock prices in time, and define Yk = lnSk+1− ln Sk, the log-returnsof the stock prices. A standard stochastic volatility model (SVM) is given by
Yk = σ(Xk)ηk ∈ R with Xk = ρXk−1 + εk−1 ∈ R (4.17)
where ρ is a real constant, σ(.) is a positive Borel function on R and (εk)k, (ηk)k areindependent Gaussian processes. We consider dynamics (4.17) as a time discretizationEuler scheme with step size ∆t = 1/n, of a continuous-time Ornstein-Uhlenbeck stochasticvolatility model :
dXt = −λXtdt + τdWt, 0 ≤ t ≤ 1.
We then suppose
ρ = 1− λ∆t, εk ; N (0, τ2∆t) and ηk ; N (0, ∆t),
for some positive parameters λ and τ . Typical examples of SVM are specified with σ(x) =|x|+γ, σ(x) = x2 +γ, or σ(x) = exp(x) for some positive constant γ. The filtering problemconsists in estimating the volatility σ(Xn) at step n given the observations of the prices(Y0, . . . , Yn). Here,
g(x, y) =1√
2π∆t σ(x)exp
(− y2
2σ2(x)∆t
).
The values of the parameters in our simulation are for (λ, τ, ∆t) = (1, 0.5, 1/250). TheGaussian distribution of X0 is specified so that the sequence (Xk)k is stationary i.e. X0 ∼N (0,Σ2
0) with Σ0 = τ√
∆t/(1− ρ2) ≈ τ/√
2λ = 0.35 . . .
29

There are two types of models involved here:
(ABS) ≡ σ(Xk) = γ + |Xk| and (EXP ) ≡ σ(Xk) = σ exp(Xk),
with the values (γ, σ) = (0.05, 0.2).We represent in Figure 13 the stock price simulation according (EXP) together with the
simulation of the volatility σn and its mean conditionally to Yk, 0 ≤ k ≤ n = 250. Idem inFigure 14 with (ABS).
We represent in Figure 15, the conditional variance of the volatility w.r.t. the observa-tions in the two models. Since we are here in a nonlinear model, we cannot compare ourresults with an explicit filter, but we can see that the filter captures well the dynamic ofthe stochastic volatility.
5 Toward higher order schemes in quantization methods
The aim of this section is to present in a slightly different setting the first order scheme intro-duced in [6] and successfully tested on the pricing of Exchange options in a d-dimensionalBlack& Scholes model (d = 2, 4 and 6). One comes back to the expectation computation
E [φ1(X1) . . . φn(Xn)]
along the path of a Markov chain investigated in Section 3. The idea is to try takingadvantage of the specificity of the stationary quantizers, like for the numerical integrationof smooth functions (see Section 2.3).
We deal here with marginal quantization and the approach is partially heuristic. How-ever, to enhance the quantization aspects we will essentially focus on a smooth settingwhere the φk functions are smooth, say C2
b (twice differentiable with bounded existingderivatives). We will shortly comment below how it can be somewhat relaxed.
Assume that (Xk)0≤k≤n is a homogeneous Markov chain with a transition P (x, dy)satisfying on C2
b functions:
‖D(Pf)‖∞ ≤ K‖Df‖∞ and ‖D2(Pf)‖∞ ≤ K(‖Df‖∞ + ‖D2f‖∞) (5.1)
for some real constant K > 0 (note that then P is Lipschitz with constant K as well).Such an assumption is satisfied e.g. by the transition Pt of a (simulatable) diffusion havingC2
b coefficients b and σ at any time t or by the transition of its Euler scheme. Then, thetransition P clearly maps C2
b into itself and one shows by induction that the functions vk
defined by (3.2) all lie in C2b and that their first two derivatives can be controlled using K,
‖Dφk‖∞ and ‖D2φk‖∞ .The key result to design a first order scheme is the following proposition.
Proposition 5.1 Assume that Assumption (5.1) and holds and set by induction
vn(Xn) = φn(Xn), (5.2)
vk−1(Xk−1) = φk−1(Xk−1)E(vk(Xk) + Dvk(Xk).(Xk − Xk) | Xk−1
), 1 ≤ k ≤ n. (5.3)
30

Then for every k∈ 0, . . . , n,∥∥∥E(vk(Xk) | Xk)− vk(Xk)
∥∥∥1≤ Ln+1−k
n∑
`=k
cn` (K)‖X` − X`‖2
2(5.4)
where cn` (K) =
1K − 1
(Kn−`+1
(2(n− `)− 2
K − 1
)+
12
K + 3K − 1
)if K 6= 1
6(n− ` + 1)(n− ` + 3/2) if K = 1
and max1≤k≤n
(‖φk‖∞ , ‖Dφk‖∞ , ‖D2φk‖∞) ≤ L. In particular,
|E v0(X0)− E v0(X0)| ≤ Ln+1n∑
`=0
cn` (K)‖X` − X`‖2
2.
How to use this result to design a first order scheme? First, one reads (5.3) in distributioni.e.
vk−1(xik−1) = φk−1(xi
k−1)
Nk∑
j=1
pijk vk(x
jk) + Dvk(x
jk).χ
ijk
where the Rd-valued correcting vectors χijk are defined by
χijk := E
[(Xk − Xk)1Xk=xj
k| Xk−1 = xi
k−1
]. (5.5)
The key point for numerical application is to note that these correcting vectors can easilybe estimated like the former companion parameters pij
k ’s, either on line during the gridoptimization phase or using a Monte Carlo simulation once the grids are settled.
The second step is mostly heuristic so far: the weak link in (5.3) is of course that thedifferential Dvk is involved in the computation of vk−1 and this function is not numericallyaccessible since we precisely intend approximating the functions vk. Note that if Dvk−1 hadbeen involved in (5.3), the scheme would have been definitely intractable. In its presentform, many approaches are possible.
It often happens, e.g. for diffusions or Euler schemes with smooth coefficients, thatD(Pf) = Q(Df) where Q is a simulatable integral kernel as well. So one can rely on thebackward induction formula
Dvk = Dφk Pvk+1 + φk Q(Dvk+1)
to approximate the differentials Dvk using quantization. Another approach is to use someapproximation by convolution: one approximates Dvk by (Dϕε) ∗ vk where (ϕε)ε>0 is e.g.
a Gaussian unit approximation. The practical task is to tune the band width ε.
When the functions φk are not smooth enough, one uses the regularizing propertiesof the Markov semi-group if some. When dealing with diffusions, this is when MalliavinCalculus and the Skorohod integrals come in the game like in [6]. However, some loss inthe rate of convergence is to be expected due to the singularity near the maturity n.
We present in Figure 16 a graph that emphasizes the improvement provided by this firstorder quantization tree descent versus the original one for pricing 6-dimensional American
31

exchange options, as described in paragraph 4.1. We consider an “in-the-money” caseconsisting in setting x1
0 . . . x30 = 40 and x4
0 . . . x60 = 36, all other parameters being unchanged.
For more details we refer to [6].
Acknowledgment : We thank Harald Luschgy for fruitful comments.
References
[1] V. Bally, Pages G. (2000): A quantization algorithm for solving discrete time multi-dimensionaloptimal stopping problems, forthcoming in Bernoulli,
[2] Bally V., Pages G. (2001): Error analysis of the quantization algorithm for obstacle problems,forthcoming in Stochastic Processes and their Applications,
[3] Bally V., Pages G., Printems J. (2001): A stochastic quantization method for nonlinear problems,Monte Carlo Methods and Applications, 7, n01-2, pp.21-34.
[4] Bally V., Pages G., Printems J. (2001): A quantization method for pricing and hedging multi-dimensional American style options, Preprint n0753, Laboratoire de Probabilites & modelesaleatoires, Universite Paris VI (France).
[5] Bally V. (2002): The Central Limit Theorem for a non linear algorithm based on quantization,forthcoming in Proceedings of the Royal Society.
[6] Bally V., Pages G., Printems J. (2003): First order schemes in the numerical quantizationmethod, Mathematical Finance, 13, n0 1, pp.1–16.
[7] Barles G., Souganidis P. (1991): Convergence of approximation schemes for fully nonlinearsecond-order equations, Asymptotics Analysis, 4, pp.271-283.
[8] Bucklew J., Wise G. (1982): Multidimensional Asymptotic Quantization Theory with rth Powerdistortion Measures, IEEE on Information Theory, Special issue on Quantization, 28, n0 2, pp.239-247.
[9] Duflo, M. (1997): Random Iterative Models, Coll. Applications of Mathematics, 34, Springer-Verlag, Berlin, 1997, 385p.
[10] Elliott R., Aggoun L. and J. Moore (1995): Hidden Markov Models, Estimation and Control,Springer Verlag, 361 pp.
[11] Fort J.C., Pages G. (2002): Asymptotics of optimal quantizers for some scalar distributions,Journal of Comput. and Applied Mathematics, 146, pp.253-275.
[12] Gersho A., Gray R. (eds.) (1982): IEEE on Inform. Theory, Special issue on Quantization, 28.
[13] Graf S., Luschgy H. (2000): Foundations of Quantization for Probability Distributions, LectureNotes in Mathematics n01730, Springer, Berlin, 230 pp.
[14] Kieffer J. (1982): Exponential rate of Convergence for the Lloyd’s Method I, IEEE on Infor-mation Theory, Special issue on Quantization, 28, n02, pp.205-210.
[15] Kohonen T. (1982): Analysis of simple self-organizing process, Biological Cybernetics, 44, pp.135–140.
[16] Kushner H.J., Dupuis P. (2001): Numerical methods for stochastic control problems in con-tinuous time, 2nd edition, Applications of Mathematics, 24, Stochastic Modelling and AppliedProbability, Springer-Verlag, New York, 475 pp.
32

[17] Kushner H.J., Yin G.G. (1997): Stochastic Approximation Algorithms and Applications,Springer, New York.
[18] Pages G. (1997): A space vector quantization method for numerical integration, Journal ofComputational and Applied Mathematics, 89, pp.1-38.
[19] Pages G., Pham H. (2001): A quantization algorithm for multidimensional stochastic controlproblems, Preprint PMA-697, Laboratoire de Probabilites et modeles aleatoires, Universites Paris6 & 7 (France).
[20] Pages G., Pham H. (2002): Optimal quantization methods for nonlinear filtering with discrete-time observations, Preprint PMA-778, Laboratoire de Probabilites et modeles aleatoires, Univer-sites Paris 6 & 7 (France).
[21] Pages G., Printems J.,(2002): Optimal quadratic quantization for numerics: the Gaussiancase, Preprint PMA-809, Laboratoire de Probabilites et modeles aleatoires, Universites Paris 6 &7 (France).
[22] Villeneuve S., Zanette A. (2002) Parabolic A.D.I. methods for pricing american option on twostocks, Mathematics of Operation Research, 27, n01, pp.121-149.
Figure 1: A L2-optimal 500-quantization grid for the Normal distribution N (0; I2) withits Voronoi tessellation.
33

(a)
0.01
0.1
1
10
10 100
QTF ErrorStandard deviation MC
(b)
0.01
0.1
1
1000 10000
QTF ErrorStandard deviation MC
(c)
0.01
0.1
1
100 1000 10000
QTF ErrorStandard deviation MC
Figure 2: Linear regression in log-log scale of N 7→ |Eg2(Z) − Eg2(Z)N |. In a) d = 3; b)d = 4; c) d = 5.
34

0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
0 2 4 6 8 10 12 14 16 18 20
Figure 3: American exchange option in dimension 4 (out-of-the-money case). The referenceprice is depicted by a line and the quantized price by the cross line.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
0 5 10 15 20 25
Figure 4: American exchange option in dimension 6 (out-of-the-money case). The referenceprice is depicted by a line and the quantized price by the cross line.
35

Figure 5: L2-optimal 300-quantizer of (log(X1T), X2
T) with its Voronoi tessellation.
3
3.5
4
4.5
5
5.5
6
6.5
7
7.5
8
6 6.5 7 7.5 8 8.5 9 9.5 10
Mean Variance(x-8.1)**2+3.2
Figure 6: Graph of y 7→ E[v0(y, x10, X
20 )] (dot line), closest parabola (thick line).
36

-1
-0.8
-0.6
-0.4
-0.2
0
7 7.5 8 8.5 9
Optimal Control-0.34-0.38
Figure 7: Quantized optimal control (dot line), Optimal control computed by a MonteCarlo simulation.
20
25
30
35
40
45
50
55
0 2 4 6 8 10 12
Mea
n V
aria
nce
Portfolio X
RØplication Put sur indice gØomØtrique | s0 = 100 | K = 100 | r = 0 | sigma = 15% (50 % de vol sur S1, les autres =) | Delta x = 0.1 | PrixBS = 5.97 | DeltaBS = -0.47
Figure 8: Graph of x0 7→ v0(x0, s0) (dot line), closest parabola (thick line).
37

-1
-0.5
0
0.5
1
0 2 4 6 8 10 12
Opt
imal
con
trol
Portfolio X
RØplication Put sur indice gØomØtrique | s0 = 100 | K = 100 | r = 0 | sigma = 15% (50 % de vol sur S1, les autres =) | Delta x = 0.1 | PrixBS = 5.97 | DeltaBS = -0.47
Delta BS
Figure 9: Quantized optimal control with theoretical optimal control (straight line).
-4 -3 -2 -1 0 1 2 3 -4 -3 -2 -1 0 1 2 3
-3
-2
-1
0
1
2
3
Figure 10: A L2 optimal 1 000-quantizer of N (0, I3). L2-quantization error is equal to0.233.
38

0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0 2 4 6 8 10 12 14 16 18 20
norm(mk - ^mk)norm(Sk - ^Sk)
Figure 11: Errors ‖mn − mn‖ (line) and ‖Σn − Σn‖ (dot line) plotted w.r.t. n.
39

(a)
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 2 4 6 8 10 12 14 16 18 20
(^m_k)1(m_k)1
(b)
-1.5
-1
-0.5
0
0.5
1
1.5
0 2 4 6 8 10 12 14 16 18 20
(^m_k)2(m_k)2
(c)
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
0 2 4 6 8 10 12 14 16 18 20
(^m_k)3(m_k)3
Figure 12: Components of mk (Quantized filter) (line)nd of mk (Kalman filter) (dot line).(a) x, (b) y and (c) z.
40

a)
90 92 94 96 98
100 102 104 106 108 110
0 50 100 150 200 250
S_n
n
Stock Price
b)
0.12
0.14
0.16
0.18
0.2
0.22
0.24
0 50 100 150 200 250
sigm
a
n
Conditional mean of volatilitySimulated volatility
Figure 13: a) Stock price simulated according to (EXP). b) Simulated volatility accordingto (EXP) (Thick line), Conditional mean of the volatility (Thin line).
41

a)
90
95
100
105
110
115
120
125
130
0 50 100 150 200 250
S_n
n
Stock Price
b)
0.05 0.1
0.15 0.2
0.25 0.3
0.35 0.4
0.45 0.5
0.55
0 50 100 150 200 250
sigm
a
n
Conditional mean of volatilitySimulated volatility
Figure 14: a) Stock price simulated according to (ABS). b) Simulated volatility accordingto (ABS) (Thick line), Conditional mean of the volatility (Thin line).
42

a)
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
0.0035
0.004
0.0045
0 50 100 150 200 250
n
Conditional Variance
b)
0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0 50 100 150 200 250
n
Conditional Variance
Figure 15: a) Conditional Variance of the Volatility according to (EXP). b) ConditionalVariance of the Volatility (ABS).
3.8
4
4.2
4.4
4.6
4.8
5
5.2
5.4
5.6
5.8
0 3 6 9 12 15 18 21 24
AM
pric
e
Maturity T (1 unit = 1/24 year)
d = 6 | N(top) = 1000 | 25 time layers | (S1 S2 S3 - S4 S5 S6)+
ORD 0ORD 1V & Z
Figure 16: American exchange option in dimension 6 (in-the-money case). The referenceprice is depicted by a line and the quantized prices (order 0 and order 1) by cross lines.
43

348CHAPITRE 5. MÉTHODES DE QUANTIFICATION ET QUELQUES APPLICATIONS À LA FINANCE.
5.5 A quantization tree method for pricing and hedgingmultidimensional American options.
L’article qui suit fut publié dans Mathematical Finance, vol. 15(1), pp. 119–168 (2005).

A quantization tree method for pricing and hedging
multi-dimensional American options
Vlad BALLY ∗ Gilles PAGES † Jacques PRINTEMS‡
Abstract
We present here the quantization method which is well-adapted for the pricingand hedging of American options on a basket of assets. Its purpose is to computea large number of conditional expectations by projection of the diffusion on optimalgrid designed to minimize the (square mean) projection error ([24]). An algorithmto compute such grids is described. We provide results concerning the orders of theapproximation with respect to the regularity of the payoff function and the global sizeof the grids. Numerical tests are performed in dimensions 2, 4, 6, 10 with Americanstyle exchange options. They show that theoretical orders are probably pessimistic.
Key words: American option pricing, Optimal Stopping, Snell envelope, Optimal quanti-zation, local volatility model.
2001 AMS classification: 91B28, 60G40, (65C05, 65C20, 93E23, 65 N 50).
1 Introduction and reference model
The aim of this paper is to present, to study and to test a probabilistic method for pricingand hedging American style options on multidimensional baskets of traded assets. Theasset dynamics follow a d-dimensional diffusion model between time 0 and a maturitytime T . We especially focus a classical extension of the Black & Scholes model: the localvolatility model. Nevertheless, a large part of the algorithmic aspects of this paper can beapplied to more general models.
Pricing an American option in a continuous time Markov process (St)t∈[0,T ] consistsin solving the continuous time optimal stopping problem related to an obstacle process.In this paper we are interested in “Markovian” obstacles of the form ht = h(t, St) whichare the most commonly considered in financial markets. Roughly speaking, there are twotypes of numerical methods for this purpose:
– First, some purely deterministic approaches coming from Numerical Analysis: thesolution of the optimal stopping problem admits a representation v(t, St) where v satisfies aparabolic variational inequality. So, the various discretizing techniques like finite differenceor finite element methods yield an approximation of the function v at discrete points of a∗Laboratoire d’analyse et de mathematiques appliquees & Projet MathFi (INRIA), UMR 8050, Uni-
versite de Marne-la-Vallee, Cite Descartes, 5, Bld Descartes, Champs-sur-Marne, F-77454 Marne-la-ValleeCedex 2, France. [email protected]†Labo. de Probabilites et Modeles aleatoires, CNRS UMR 7599, Universite Paris 6, case 188, 4, pl.
Jussieu, F-75252 Paris Cedex 5. [email protected]‡Centre de Mathematiques & CNRS UMR 8050, Universite Paris 12, 61, avenue du General de Gaulle,
F-94010 Creteil. [email protected]
1

time-space grid (see e.g. [33] for an application to a vanilla put option or [8] for a morecomprehensive study).
– Secondly, some probabilistic methods based on the dynamic programming formulaor on the approximation of the (lowest) optimal stopping time. In 1-dimension, the mostpopular approach to American option pricing and hedging remains the implementation ofthe dynamic programming formula on a binomial tree, originally initiated by Cox-Ross& Rubinstein as an elementary alternative to continuous time Black & Scholes model.However, let us mention the pioneering work by Kushner in 1977 (see [28] and also [29])in which Markov chain approximation was first introduced, including its links with thefinite difference method. This took place before the massive development of MathematicalFinance. Concerning the consistency of time discretization, see [34].
These methods are quite efficient to handle vanilla American options on a single assetbut they quickly become intractable as the number of underlying assets increases. Usu-ally, numerical methods become inefficient because the space grids are built regardless ofthe distributions of the asset prices. The same problem occurs for finite state Markovchain approximation “a la Kushner”. Concerning the extension from binomial to multi-nomial trees, is seems difficult to design some trees that are both compatible with thedimension/correlation constraints and the probabilistic structure of the dynamics.
More recently, the problem gave birth to an extensive literature in order to overcomethe dimensionality problem. All of them finally lead to some finite state dynamic program-ming algorithm either in its usual form or based on the backward dynamic approximationof the (lowest) optimal stopping time. In Barraquant & Martineau [7], a sub-optimal1-dimensional problem is solved: everything is designed as though the obstacle processitself had the Markov property. In [36], the algorithm devised by Longstaff & Schwartzis based on conditional expectation approximation by regression on a finite sub-family(ϕi(St))i∈I of a basis (ϕk(St))k≥1 of L2(σ(St),P). The Monte Carlo rate of convergenceof this method is deeply analyzed by Clement et al. in [16]. In [41], Tsitsiklis & Van Royuse a similar idea but for a modified Markov transition. In [11], Braodie & Glassermangenerate some random grids at each time step and compute some companion weights usingsome statistical ideas based on the importance sampling theorem.
In [21] and [22] Fournie et al. initiated a Monte Carlo approach based on Malliavincalculus to compute conditional expectations and their derivatives. This leads to a purelyprobabilistic method. In [35], Lions and Regnier extend this approach to American optionpricing (and Greek computation). The crucial step of this method is the variance reductionby localization. Optimal localization is investigated in [27] and [9].
In this paper, we develop a probabilistic method based on grids like in the original finitestate Markov chain approximation method (originally described in [5]). First, we discretizethe asset price process at times tk := kT/n, k = 0, . . . , n (if necessary, we introduce theEuler scheme of the price diffusion process, still denoted by Stk for convenience throughoutthe introduction). The key point is the following: rather than settling these grids a priori,we will use our ability to simulate large samples of (Stk)0≤k≤n to produce at each time tka grid Γ∗k of size Nk which is optimally fitted to Stk among all grids with size Nk in thefollowing sense: the closest neighbor rule projection q
Γ∗k(Stk) of Stk onto the grid Γ∗k is the
best least square approximation of Stk among all random vectors Z such that |Z(Ω)| ≤ Nk.Namely
‖Stk − qΓ∗k(Stk)‖2 = min
‖Stk − Z‖2 , Z : Ω→ Rd, |Z(Ω)| ≤ Nk
.
In that sense we will produce and then use at each time step the best possible grid of sizeNk to approximate the d-dimensional random vector Stk . For historical reasons coming
2

from Information Theory, both the function qΓ∗k
and the set qΓ∗k(Ω) are often called optimal
quantizer of Stk . The resulting error bound ‖Stk−qΓ∗k(Stk)‖2 is called the lowest (quadratic
mean) quantization error. It has been extensively investigated in Signal Processing andInformation Theory for more than 50 years (see [25] or more recently [24]). Thus, one
knows that it goes to 0 at a O(N− 1d
k ) rate as Nk →∞.Except in some specific 1-dimensional cases of little numerical interest, no closed form
is available neither for the optimal grid Γ∗k, nor for the induced lowest mean quantizationerror. In fact little is known on the geometric structure of these grids in higher dimension.However, starting from the integral representation (valid for any grid Γ)
‖Stk − qΓ(Stk)‖22
= E(
minxi∈Γ|Stk − xi|2
)
and using its regularity properties as an almost everywhere differentiable (symmetric)function of Γ, one may implement a stochastic gradient algorithm that converges to some(locally) optimal grid. Furthermore, the algorithm yields as by-products the distribution ofq
Γ∗k(Stk), i.e. the weights P(Stk =xk,∗i ), xk,∗i ∈ Γ∗k and the induced quantization error. Both
are involved in the American option pricing algorithm (see Section 2.2). Thus, Figure 1illustrates on the bivariate normal distribution how an optimal grid gets concentratedon heavily weighted areas (this grid was obtained by the CLV Q algorithm described inSection 2.4).
The paper is organized as follows. Section 2 of the paper is devoted to the description ofthe quantization tree algorithm for pricing American options and to its theoretical rate ofconvergence. Then, the tree optimization, including the algorithmic aspects, is developed.This section is partially adapted from a general discretization method devised for ReflectedBackward Stochastic Differential Equations (RBSDE) in [3].
Time discretization (Section 2.1) amounts to approximating a continuously exercis-able American option by its Bermuda counterpart to be exercised only at discrete timestk, k = 0, . . . , n. The theoretical premium of the Bermuda option satisfies a backwarddynamic programming formula. The quantization tree algorithm is defined in Section 2.2:it simply consists in plugging the optimal quantizer Stk := q
Γ∗k(Stk) of Stk in this formula.
Some weights appear that are obtained by the stochastic grid optimization procedurementioned above. In Section 2.3, the rate of convergence of this algorithm is derived forLipschitz continuous payoffs as a function of the time discretization step T/n and of theLp-mean quantization errors ‖Stk−qΓ∗
k(Stk)‖p , k = 1, . . . n. Then a short background on
optimal quantization is provided in Section 2.4. In Section 2.5, the grid optimization of thequantization tree is addressed, using a stochastic approximation recursive procedure. Thelast subsection proposes an efficient (analytic) method to design a priori the size Nk of thegrid at every time tk is proposed, given that N := N0+N1+· · ·+Nn elementary quantizersare available. In that case, we obtain some error bounds of the form C(n−1/2+n(N/n)−
1d ).
When the payoff is semi-convex the same holds true with n−1 instead of n−1/2.In Section 3, we design an approximating quantized hedging strategy following some
ideas by Follmer & Sondermann on incomplete markets. We are in a position to estimatesome bounds for the induced hedging default, called local residual risks of the quantizationtree. This is the aim of Section 4. To this end, we combine some methods borrowed fromRBSDE Theory, analytical techniques for p.d.e. and quantization theory. We obtaindifferent kinds of rates of convergence for the hedging strategy (far from and close to thematurity).
3

Section 5 is devoted to the experimental validation of the method. We present extensivenumerical results which tend to show that when the grids are optimal (in the quadraticquantization sense), the spatial order of convergence is better than that obtained withusual grid methods. The tests are carried out using multi-dimensional American exchangeoptions on (geometric) index in a standard d-dimensional decorrelated Black & Scholesmodel. This rate, actually better than forecast by theory, compensates for the draw-back of an “irregular” approximation (see below). Two settings have been selected forsimulation: one “in-the-money” and one “out-of-the-money”, both in several dimensionsd = 2, 4, 6, 10. In the worst case (d=10) case, the computed premia remain within 3, 5%of the reference price.
The main features of the quantization approach. Before going into technicali-ties, one may mention an obvious methodological difference between the quantization treealgorithm and the regression method [36]. The Longstaff-Schwartz approach makes thechoice of a smooth but global approximation whereas we privilege an irregular (piecewiseconstant) but local approximation. Among the expected advantages of the local featureof quantization approximation, a prominent one is that it may lead to higher order ap-proximations of the price, involving the spatial derivatives i.e. the hedging (see e.g. [6]for a first approach in that direction). A second asset, probably the most important foroperating applications, is that, once the asset price process has been appropriately quan-tized, it can almost instantly price all possible American (vanilla) payoffs without anyfurther Monte Carlo simulations. Finally, when the diffusion process (St) is a function ofthe Brownian motion at time t i.e. St = ϕ(t, Bt) like in the Black & Scholes model, thequantization tree algorithm may become completely parameter free: it suffices to considera quantization of the Brownian motion itself which consists of some optimal quantizationgrids of multi-variate normal distributions with the appropriate sizes. Such optimal gridscan be computed systematically in a very accurate way and then kept off line (see [39]).Quadratic optimal N -quantization of the N (0; Id) distributions has been carried out sys-tematically for various sizes N ∈ 1, . . . , 400 and dimensions d∈ 1, . . . , 10. Some filesof these optimal grids (including their weights) can be downloaded at the URLs:
• www.proba.jussieu.fr/pageperso/pages.html or• www.univ-paris12.fr/www/labos/cmup/homepages/printems.
Finally, note that this method of quantization has been implemented in the softwarepremia (see http://www-rocq.inria.fr/mathfi/Premia/index.html).
The reference model. We consider a market on which are traded d risky assetsS1, . . . , Sd and a deterministic riskless asset S0
t := ert, r ∈ R between time t := 0 and thematurity time T > 0. One typical model for the price process S := (S1, . . . , Sd) of therisky assets is the following diffusion model
dSit = Sit(r dt+∑
1≤j≤qσij(e−rtSt) dW
jt ), Si0 := si0 > 0, 1 ≤ i ≤ d, (1.1)
where W := (W 1, . . . ,W q) is a standard q-dimensional Brownian Motion defined on aprobability space (Ω,A,P) and
σ : Rd −→M(d× q) := Rd⊗q is bounded and Lipschitz continuous. (1.2)
The filtration of interest will be the natural (completed) filtration F := (FSt )t∈[0,T ] of S(which coincides with that of W as soon as σσ∗(ξ) > 0 for every ξ∈ Rd). For notationalconvenience, we introduce
c(ξ) := Diag(ξ)σ(ξ), ξ := (ξ1, . . . , ξd)∈ Rd.
4

where Diag(ξ) denotes the diagonal matrix with diagonal entry ξi at row i. The functionsc(ξ) and the drift b(ξ) := r ξ are Lipschitz continuous so that a unique strong solutionexists for (1.1) on (Ω,A,P). Furthermore, it is classical background that, for every p ≥ 1,there exists a constant Cp,T > 0 such that
Es0( supt∈[0,T ]
|St|p) < Cp,T (1 + |s0|p).
The discounted price process St := e−rtSt is then a positive P-martingale satisfying
dSt = c(St)dWt, S0 := s0, (1.3)
Here P is the so-called risk neutral probability in Mathematical Finance terminology. Aslong as q 6= d, the usual completeness of the market necessarily fails. However, fromnumerical point of view, this has no influence on the implementation of the quantizationmethod to compute the price of the derivatives: we just compute a P-price. When comingto the problem of hedging these derivatives, then the completeness assumption becomescrucial and will lead us to assume that q = d and that the diffusion coefficient c(x) isinvertible everywhere on (R∗+)d.
When q = d and σ(x) ≡ σ∈M(d×d), (1.1) is the usual d-dimensional Black & Scholesmodel: the risky assets are geometric Brownian motions given by
Sit = si0 exp
(r − 1
2|σi.|2)t+
∑
1≤j≤dσijW
jt
, 1 ≤ i ≤ d.
An American option related to a payoff process (ht)t∈[0,T ] is a contract that gives theright to receive once and only once the payoff ht at some time t∈ [0, T ] where (ht)t∈[0,T ]
is a F-adapted nonnegative process. In this paper we will always consider the sub-classof payoffs ht that only depends on (t, St) i.e. satisfying
ht := h(t, St), t ∈ [0, T ] where h : [0, T ] −→ R+ is a Lipschitz continuous. (1.4)
Such payoffs are sometimes called vanilla. Under Assumptions (1.1) and (1.4), one has
E( supt∈[0,T ]
|ht|p) < +∞ for every p ≥ 1.
One shows – in a complete market – that the fair price Vt at time t for this contract is
Vt := ertess supE(e−rτhτ | Ft), τ ∈ Tt
(1.5)
where Tt := τ : Ω → [t, T ], F-stopping time. This simply means that the discountedprice Vt := e−rtVt of the option is the Snell envelope of the discounted American payoff
ht := h(t, St) with h(t, x) := e−rth(t, ertx). (1.6)
This result is based on a hedging argument on which we will come back further on. Notethat sup
t∈[0,T ]|Vt| ≤ sup
t∈[0,T ]|ht|∈ Lp, p ≥ 1.
One shows (see [8]) using the Markov property of the diffusion process (St)t∈[0,T ] thatVt := ν(t, St) where ν solves the variational inequality
max(∂ν
∂t+ Lr,σν, ν − h
)= 0, ν(T, .) = h(T, .). (1.7)
5

where Lr,σ denotes the infinitesimal generator of the diffusion (1.1).Then, it is clear that the approximation problem for Vt appears as a special case
of the approximate computation of the Snell envelope of a d-dimensional diffusion withLipschitz coefficients. To solve this problem in 1-dimension, many methods are available.These methods can be classified in two families: the probabilistic ones based on a weakapproximation of the diffusion process (St) by purely discrete dynamics (e.g. binomialtrees, [33]) and the analytic ones based on numerical methods for solving the variationalinequality (1.7) (e.g. finite difference or finite element methods). When the dimension dof the market increases, these methods become inefficient.
At this stage, one may assume without loss of generality that the interest rate r in (1.1)is 0: this amounts to assuming that we are in a “discounted world” with S given by (1.3)and h given by (1.6) instead of (St) and h respectively.
Notations: • C∞b (Rd) denotes the set of functions infinitely differentiable with boundeddifferentials (so that they have at most linear growth).• The letters C and K denote positive real constants that may vary from line to line.• | . | will denote the Euclidean norm and “ . ” the inner product on Rd = R1⊗d. ‖M‖ :=sup|x|≤1 |Mx| will denote the operator norm of the matrix M ∈ Rd⊗q (d rows, q columns)and M∗ its transpose. In particular x.y = x∗ y.
2 Pricing an American option using a quantization tree
In this section, the specificity of the martingale diffusion dynamics proposed for the riskyassets in (1.3) (with r = 0) has little influence on the results, so it is costless to considera general drifted Brownian diffusion
St = S0 +∫ t
0b(Ss) ds+
∫ t
0c(Ss)dWs, (2.1)
where b : Rd → Rd and c : Rd → M(d × q) are Lipschitz continuous vector fields and(Wt)t∈[0,T ] is q-dimensional Brownian motion.
2.1 Time discretization: the Bermuda options
The exact simulation of a diffusion at time t is usually out of reach (e.g. when σ is notconstant in the specified model (1.1)). So one uses a (Markovian) discretization scheme,easy to simulate, e.g. the Euler scheme: set tk = kT/n and
Stk+1= Stk + b(Stk)
T
n+ c(Stk).(Wtk −Wtk−1
), S0 = s0. (2.2)
Then, the Snell envelope to be approximated by quantization is that of the Euler scheme.
Sometimes, the diffusion can be simulated simply, essentially because it appears asa closed form St := ϕ(t,Wt). This is the case of the regular multi-dimensional Black &Scholes model (set σ(x) := σ in (1.1)). Then, it is possible to consider directly the theSnell envelope of the homogeneous Markov chain (Stk)0≤k≤n for quantization purpose.
This time discretization corresponds, in the derivative terminology, to approximatingthe original continuous time American option by a Bermuda option, either on S or onS itself. By Bermuda option, one means that the set of possible exercise times is finite.Error bounds are available at these exercise times tk (see Theorem 1 below).
6

We want to quantize the Snell envelope of (Stk) or (Stk) or of any family of homoge-neous discrete time Ftk -Markov chains (X(n)
k )0≤k≤n whose transitions, denoted P (n)(x, dy),preserves Lipschitz continuity in the following sense: for every Lipschitz continuous func-tion f : Rd → R
[P (n)f ]Lip ≤ (1 + Cb,σ,TT/n)[f ]Lip where [f ]Lip := supx6=y|f(x)− f(y)||x− y| (2.3)
(see, e.g., [3] for a proof). In fact this general discrete time markovian setting is the naturalframework for the method. To alleviate notations, we drop the dependency in n and keepthe notation (Xk)0≤k≤n. The (Ftk)-Snell envelope of h(tk, Xk), denoted by (Vk)0≤k≤n, isdefined by:
Vk := ess sup E (h(θ,Xθ) | Ftk) , θ∈ Θkwhere Θk denotes the set of tk, . . . , tn-valued (Ft`)-stopping times. It satisfies the so-called backward dynamic programming formula (see [37]):
Vn := h(tn, Xn),
Vk := max (h(tk, Xk),E(Vk+1 | Ftk)) , 0 ≤ k ≤ n− 1.(2.4)
One derives using the Markov property a dynamic programming formula in distribution:Vk = vk(Xk), k∈ 0, . . . , n, where the functions vk are recursively defined by
vn := h(tn, . ),
vk := max(h(tk, .), P (n)(vk+1)
), 0 ≤ k ≤ n− 1.
(2.5)
This formula remains intractable for numerical computation since they require to com-pute at each time step a conditional expectation.
Theorem 1 below gives some Lp-error bounds that hold for Vtk − Vtk in our originaldiffusion framework. First we need to introduce some definition about the regularity of h.
Definition 1 A function h : [0, T ]×Rd −→ R is semi-convex if
∀ ξ, ξ′ ∈ Rd, ∀ t∈ R+, h(t, ξ′)− h(t, ξ) ≥ (δh(t, ξ)|ξ′ − ξ)− ρ|ξ′ − ξ|2 (2.6)
where δh is a bounded function on [0, T ]×Rd and ρ ≥ 0.
Remarks: Note that (2.6) appears as a convex assumption relaxed by −ρ|ξ′−ξ|2. In mostsituations, is used in the reverse sense i.e. h(t, ξ) − h(t, ξ′) ≤ (δh(t, ξ)|ξ − ξ′) + ρ|ξ − ξ′|2.The semi-convexity assumption is fulfilled by a wide class of functions:
– If h(t, .) is C1 for every t∈ [0, T ] and ∂h∂ξ (t, ξ) is bounded, ρ-Lipschitz in ξ, uniformly
in t then h is semi-convex (with δh(t, ξ) := ∂h∂x(t, ξ)).
– If h(t, .) is convex for every t ∈ [0, T ] with a derivative δh(t, .) (in the distributionsense) which is bounded in (t, ξ), then h is semi-convex (with ρ = 0). Thus, it embodiesmost usual payoff functions used for pricing vanilla and exotic American style options likeh(t, ξ) := e−rt(K − ϕ(ertξ))+ with ϕ Lipschitz continuous (on sets ϕ ≤ L, L > 0).
The notion of semi-convex function seems to appear in [14] for pricing one-dimensionalAmerican options. See also [32] for recent developments in a similar setting.
7

Theorem 1 Let h : [0, T ] × Rd → R be a Lipschitz continuous function and let p ∈[1,+∞). Let Xk = Stk or Stk and let (Vk)0≤k≤n denote the Snell envelope of (h(tk, Xk))0≤k≤n.(a) There is some positive real constant C depending on [b]Lip, [c]Lip, [h]Lip and p such that
∀n≥ 1, ∀ k∈ 0, . . . , n, ‖Vtk − Vk‖p ≤eCT (1 + |s0|)√
n. (2.7)
(b) If furthermore Xk = Stk , k = 0, . . . , n and if the obstacle h is semi-convex, then
∀n≥ 1, ∀ k∈ 0, . . . , n, ‖Vtk − Vk‖p ≤eCT (1 + |s0|)
n(2.8)
2.2 Spatial discretization: the quantization tree
The starting point of the method is to discretize the random variables Xk by some σ(Xk)-random variables Xk taking finitely many values in Rd. Such a random vector Xk iscalled a quantization of Xk. Equivalently, one may define a quantization of Xk by settingXk = qk(Xk) where qk : Rd → Rd is a Borel “quantizing” function such that |qk(Rd)| =|Xk(Ω)| = Nk < +∞. The elements of the set Xk(Ω) are called elementary quantizers.Let N = N0 + N1 + · · · + Nn denote the total number of elementary quantizers used toquantize the whole Markov chain (Xk)0≤k≤n.
We aim to approximate the dynamic programming formula (2.4) by a similar dynamicprogramming formula involving the sequence (Xk)0≤k≤n.
2.2.1 Quantization tree and quantized pseudo-Snell envelope
We assume in that section that for every k ∈ 0, 1, . . . , n, we have access to a se-quence of quantizations Xk = qk(Xk), k = 0, . . . , n of the Markov chain (Xk)k. Wedenote by xk1, · · · , xkNk = qk(Rd) the grid of Nk points used to quantize Xk and byxk = (xk1, . . . , x
kNk
) the induced Nk-tuple(1). The questions related to the optimal choiceof xk and qk will be addressed in Section 2.4 below. (Note that in our original settingX0 = s0, so that X0 = s0 is the best possible Lp-mean quantization of X0 and N0 = 1).
The quantized dynamic programming formula below is devised by analogy with theoriginal one (2.4): one simply replaces Xk by its quantized random vector Xk
Vn := h(tn, Xn),
Vk := max(h(tk, Xk),E(Vk+1 | Xk)
), 0 ≤ k ≤ n− 1.
(2.9)
Notation: for the sake of simplicity, from now on, we will denote Ek( . ) := E( . | Xk).
The main reason for considering conditional expectation with respect to Xk is thatthe the sequence (Xk)k∈N is not Markovian. On the other hand, even if the Nk-tuple xk
has been set up a priori for every Xk, this does not make the numerical processing ofthis algorithm possible. As a matter of fact, one needs to know the joint distributions of(Xk, Xk+1), k = 0, . . . , n − 1. This is enlightened by the proposition below whose easyproof is left to the reader.
1From now on, for convenience, we will give the priority to the N -tuple notation.
8

Proposition 1 (Quantization tree algorithm) For every k∈ 0, . . . , n, let xk := (xk1, . . . , xkNk
),qk : Rd → xk1, . . . , xkNk and Xk = qk(Xk) be a quantization of Xk. Set, for everyk∈ 0, . . . , n and every i∈ 1, . . . , Nk,
pki := P(Xk = xki ) = P(Xk∈ Ci(xk)), (2.10)
and, for every k∈ 0, . . . , n− 1, i∈ 1, . . . , Nk, j∈ 1, . . . , Nk+1
πkij := P(Xk+1 = xk+1j | Xk = xki ) = P
(Xk+1∈ Cj(xk+1) | Xk∈ Ci(xk)
)
=pkij
pkiwith pkij := P
(Xk+1∈ Cj(xk+1), Xk∈ Ci(xk)
). (2.11)
One defines by a backward induction the function vk by
vn(xni ) := hn(xni ), i∈ 1, . . . , Nn
vk(xki ) := max
h(tk, xki ),
Nk+1∑
j=1
πkij vk+1(xk+1j )
, 1 ≤ i ≤ Nk, 0 ≤ k≤, n− 1.(2.12)
Then, Vk = vk(Xk) satisfies the above dynamic programming (2.9) of the pseudo-Snellenvelope.
Remark: If Xk = Stk or Stk , then X0 = X0 = s0 and v0(X0) = v0(s0) is deterministic.In more general settings one approximates E v0(X0) by
E v0(X0) =N0∑
i=1
p0i v(x0
i ).
Implementing the quantization tree algorithm (2.12) on a computer raises two ques-tions:
– How is it possible to estimate the parameters pki and pkij involved in (2.12) ?– Is it possible to handle the complexity of such a tree structured algorithm ?
Parameter estimation (A first Monte Carlo approach): the tractability of theabove algorithm relies on the parameters πkij := pki /p
kij . So, the ability to compute them
at a reasonable cost is the key of the method. The most elementary solution is to processa wide scale Monte Carlo simulation of the Markov chain (Xk)0≤k≤n to estimate theparameters pki and pkij as defined by (2.10) and (2.11). An estimate of the (pth powerof the) Lp-mean quantization error ‖Xk − Xk‖pp = Emin1≤i≤N |Xk − xki |pp can also becomputed. When (Xk)0≤k≤n is a Euler scheme (or Black & Scholes diffusion) this makesno problem. More generally, this depends upon the ability to simulate some sample pathsof the chain starting from any x∈ Rd.
We will see further on in paragraph 2.4 how to choose the size and the geometriclocation of the Nk-tuples xk in an optimal way.
Complexity of the quantization tree: theory and practice A quick look atthe structure of the algorithm (2.12) shows that going from layer k + 1 down to layer kneeds κ×NkNk+1 elementary computations (κ is the complexity induced by a connection“i→ j”). Hence, the cost of a quantization tree descent is approximately
Complexity = κ× (N0N1 +N1N2 + · · ·+NkNk+1 + · · ·+Nn−1Nn).
9

Then an elementary optimization under constraint shows that
κN2
n+ 1≤ Complexity ≤ κN
2
4.
(Lower bound is for Nk = N/(n+1), upper bound for the unrealistic values Nk = N2 10,1).
This purely combinatorial lower bound needs to be tuned. In fact, in most examples thetransition of the Markov chain behaves in such a way that, at each layer k, many terms ofthe “transition matrix” [πkij ] are negligible because xki and xk+1
j are remote from each otherin Rd: the Monte Carlo estimates of these coefficients will be 0. Hence, the complexityof the algorithm is ν × κN rather than lower bound κN2/(n + 1), where ν denotes theaverage number of active connections above a regular node i of the tree. Thus, the costof such a “descent” is similar to that of a one dimensional binomial tree with
√ν2N time
steps (such a tree approximately contains νN points).
2.3 Convergence and rate using Lp-mean quantization error
In this paragraph we provide some a priori Lp-error bounds for ‖Vk − Vk‖p , k = 0, . . . , n,based on the Lp-mean quantization errors ‖Xk−Xk‖p , k = 0, . . . , n, where quantizer Xk isa Voronoi quantizer that takes Nk values xk1, . . . , x
kNk
. This error modulus can be obtainedas a by-product of a Monte Carlo simulation of (Xk)0≤k≤n: it only requires to compute,for every PXk -distributed simulated random vector, its distance to its closest neighbor inthe set xk1, . . . , xkNk.
The estimates in Theorem 2 below holds for any homogeneous Markov chain (Xk)0≤k≤nhaving a K-Lipschitz transition (P (x, dy))x∈Rd satisfying, for every Lipschitz function g,
[Pg]Lip ≤ K[g]Lip . (2.13)
This is the case of a diffusion and of its the Euler scheme with Lipschitz drift and diffusioncoefficient as mentioned before, see (2.3). Note that K may be lower than 1: this is, e.g.,the case if Xk is the Euler scheme of an Ornstein-Uhlenbeck process with drift b(x) :=−ax, a > 0 (and step T/n < 1/a).
Theorem 2 Assume that the transition P (x, dy) of the chain (Xk)0≤k≤n is K-Lipschitz,that h is Lipschitz continuous in x, uniformly in time and set [h]Lip := max0≤k≤n[h(tk, .)]Lip.Let (Vk)0≤k≤n and (Vk)0≤k≤n be like in (2.4) and (2.9) respectively. For every k ∈0, . . . , n, let Xk denote a quantization of Xk. Then, for every p ≥ 1,
‖Vk − Vk‖p ≤n∑
i=k
d(n)i ‖Xi − Xi‖p
with d(n)i :=(1 + (2− δp,2)(K ∨ 1)n−i)[h]Lip , 0≤ i≤n−1, d(n)
n := [h]Lip (δu,v stands for theKronecker symbol).
Proof: Step 1: We first show that the functions vk recursively defined by (2.5) areLipschitz continuous with
[vk]Lip ≤ (K ∨ 1)n−k[h]Lip . (2.14)
Clearly, [vn]Lip≤ [h]Lip and one concludes by induction, using the inequality
|max(a, b)−max(a′, b′)| ≤ max(|a− a′|, |b− b′|).
10

Step 2: Set Φk := P (vk+1) k = 0, . . . , n− 1, Φn ≡ 0 and hk := h(tk, .), k = 0, . . . , n. Thefunction Φk satisfies E(vk+1(Xk+1) | Ftk) = E(vk+1(Xk+1) | Xk) = Φk(Xk). One definessimilarly Φk by the equality Ek(vk+1(Xk+1) | Xk) := Φk(Xk), k = 0, . . . , n−1 and Φn ≡ 0.Then
|Vk − Vk| ≤ |hk(Xk)− hk(Xk)|+ |Φk(Xk)− Φk(Xk)|≤ [h]Lip |Xk − Xk|+ |Φk(Xk)− Ek(Φk(Xk))|+ |Ek(Φk(Xk))− Φk(Xk)|.(2.15)
Now |Φk(Xk)− EkΦk(Xk)| ≤ |Φk(Xk)− Φk(Xk)|+ Ek|Φk(Xk)− Φk(Xk)|
≤ [Φk]Lip
(|Xk − Xk|+ Ek|Xk − Xk|
).
Hence, ‖Φk(Xk)− EΦk(Xk)‖p ≤ 2[Φk]Lip‖Xk − Xk‖p .
When p = 2, the very definition of the conditional expectation as a projection in a Hilbertspace implies that one may remove the factor 2 in the inequality.
Now Ek(Φk(Xk))− Φk(Xk) = Ek (E(vk+1(Xk+1) | Xk))− Ek(vk+1(Xk+1)
)
= Ek(vk+1(Xk+1)− vk+1(Xk+1)
)
since Xk is σ(Xk)-measurable. Conditional expectation being a Lp-contraction, it follows
‖Ek(Φk(Xk))− Φk(Xk)‖p ≤ ‖Vk+1 − Vk+1‖p .
Finally, it follows from the above inequalities and (2.15) that
‖Vk − Vk‖p ≤ ([h]Lip + c[Φk]Lip)‖Xk − Xk‖p + ‖Vk+1 − Vk+1‖p , k∈ 0, . . . , n− 1.
On the other hand, ‖Vn − Vn‖p ≤ [h]Lip‖Xn − Xn‖p , so that
‖Vk − Vk‖p ≤n∑
i=k
([h]Lip + (2− δp,2)[Φi]Lip)‖Xi − Xi‖p
The definition of Φi and the K-Lipschitz property of P (x, dy) complete the proof since
[Φi]Lip = [P (vi+1)]Lip ≤ K[vi+1]Lip . ♦
2.4 Optimization of the quantization
We begin by a brief introduction to optimal quantization of random vectors (see [24] foron overview), then we address the problem of optimal quantization of Markov chains.
2.4.1 Optimal quantization of a random vector X
Let X∈ LpRd(Ω,A,P). From a probabilistic viewpoint, optimal Lp-mean quantization (p ≥1) consists in studying the best Lp-approximation of X by some random vectors X ′ = q(X)taking at most N values. Minimizing the Lp-mean quantization error ‖X − q(X)‖p canbe decomposed into two successive phases:
11

– Optimization phase 1. A N -tuple x = (x1, . . . , xN ) ∈ (Rd)N being set, find aquantizer qx : Rd → x1, . . . , xN (if any) such that
‖X − qx(X)‖p = inf‖X − q(X)‖p , q : Rd → x1, . . . , xN , Borel function
.
– Optimization phase 2. Find an N -tuple x∗ ∈ (Rd)N (if any) that achieves theinfimum of ‖X − qx(X)‖p over (Rd)N , i.e.
‖X − qx∗(X)‖p = inf‖X − qx(X)‖p , x∈ (Rd)N
.
The solution to the first optimization problem is purely geometric: it is the closestneighbor projections, denoted qx, induced by the Voronoi tessellations of x as definedbelow.
Definition 2 (a) Let x := (x1, · · · , xN )∈ (Rd)N . A Borel partition(2) C1(x), i = 1, . . . , Nof Rd is a Voronoi tessellation of the x if, for every i∈ 1, . . . , N, Ci(x) satisfies
Ci(x) ⊂ y∈ Rd | |xi − y| = min1≤j≤N
|y − xj |.
(b) The closest neighbor projection or Voronoi quantizer (function) qx induced by theVoronoi tessellation (Ci(x))1≤i≤n is defined for every ξ∈ Rd, by qx(ξ) =
∑1≤i≤N xi1Ci(x)(ξ).
(c) The random vectorXx = qx(X) =
∑
1≤i≤Nxi1Ci(x)(X)
is called a Voronoi quantization of X. The N -tuple x is often called an N -quantizer.
Notation: From now on, the notation Xx will always denote a Voronoi quantization ofX. When there is no ambiguity, the exponent x will often be dropped and we will denoteX instead of Xx.
Note that, the closure and the boundary of the ith cell Ci(x) are the same for anyVoronoi tessellation. This boundary is included into at most N − 1 hyperplanes. If thedistribution PX of X weights no hyperplane – that is PX (H) = 0 for every hyperplane Hof Rd – then all the Voronoi tessellations are PX - equal and all the Voronoi quantizationsXx have the same distribution.
The second optimization problem consists in minimizing on (Rd)N the (symmetric)function x 7→ ‖X − Xx‖p . First, note that the Lp-mean quantization error satisfies
‖X−Xx‖pp
=N∑
i=1
E(1Ci(x)|X−xi|p
)=E
(min
1≤i≤N|X−xi|p
)=
∫
Rdmin
1≤i≤N|xi−ξ|pPX (dξ). (2.16)
It follows that the Lp-mean quantization error depends on X through its distribution PX .The second consequence of (2.16) is an important and attractive feature of the Lp-meanquantization error compared to other usual error bounds: it is a (Lipschitz) continuousfunction of the N -quantizer x := (x1, . . . , xN ).
Hence, as soon as PX has a compact support, x 7→ ‖X − Xx‖p reaches a minimum atsome Lp-optimal N -quantizer x∗. When PX no longer has a compact support, this is stilltrue: one shows by induction on N (see [24] or [38]), that
x 7→ ‖X − Xx‖p reaches an absolute minimum on (Rd)N at some x∗∈ (Rd)N .
2In what follows, we will assume that a partition may contain the empty set: this will happen whenxi = xj for some i 6= j.
12

Proposition 2 An Lp-optimal N -quantizer x∗ for X∈ Lp(Ω,P) satisfies
‖X − Xx∗‖p = min‖X − Z‖p , Z : Ω→ Rd, random vector, |Z(Ω)| ≤ N
. (2.17)
Proof: Let Z(Ω) = z1, . . . , zN . Set z := (z1, . . . , zN ) (with possibly zi = zj). Then
‖X−Xx∗‖pp≤ ‖X−Xz‖p
p=
∫
Ωmini|X(ω)−zi|pP(dω) ≤
∫
Ωmini|X(ω)−Z(ω)|pP(dω) =‖X−Z‖p
p.♦
Moreover, the following simple facts hold true (see [24] or [38] and the references therein):– If suppPX has an infinite support, any optimal N -quantizer x∗ has pairwise distinctelements, that is |qx∗(Rd)| = |Xx∗(Ω)| = N .– The closed convex hull HX of suppPX contains at least an optimal quantizer (obtainedas the projection of any optimal quantizer on HX ). Furthermore, if suppPX is convex(i.e. equal to HX ), then the N distinct components of any optimal N -quantizer x∗ all lie
inHX . This also holds true for HX -valued locally optimal N -quantizers.
– Rate of convergence: The main function of the Lp-mean quantization errorbeing to be an error bound, it is important to elucidate the behavior of ‖X − Xx∗‖p asthe size N of the optimal N -quantizer x∗ go to infinity. The first easy fact is that it goesto 0 as N →∞ i.e.
limN
minx∈(Rd)N
‖X − Xx‖p = 0.
Indeed, let (zk)k∈N denote an everywhere dense sequence of Rd-valued vectors and setxN := z1, . . . , zN . Then ‖X − Xx
N ‖p goes to zero by the Lebesgue dominated conver-gence theorem. Furthermore 0 ≤ minx∈(Rd)N ‖X − Xx‖p ≤ ‖X − Xx
N ‖p . ♦
The rate of this convergence turns out to be a much more challenging problem. Itssolution, often referred to as Zador’s Theorem, was completed by several authors (Zador,see [25], Bucklew & Wise, see [13] and finally Graf & Luschgy see [24]).
Theorem 3 (Asymptotics) Assume that E|X|p+η < +∞ for some η > 0. Then
limN
(N
pd minx∈(Rd)N
‖X − Xx‖pp
)= Jp,d
(∫
Rdϕ(u)
dd+pdu
)1+ pd
(2.18)
where PX (du) = ϕ(u)λd(du) +ν(du), ν ⊥ λd (λd Lebesgue measure on Rd). The constantJp,d corresponds to the case of the uniform distribution on [0, 1]d.
Little is known about the true value of the constant Jp,d except in dimension 1 whereJp,1 = 1
2p(p+1) . Some geometric considerations lead to J2,2 = 518√
3(see [25] or [24]). Never-
theless, some upper and lower bounds were established, based on ball packing techniquesand on the introduction of random quantizers (see e.g. [17] and [24]). It follows thatJp,d ∼ ( d
2πe)p/2 as d→ +∞ (see [24]).
This theorem says that minx∈(Rd)N ‖X − Xx‖p = CX,p,dN− 1d + o(N−
1d ): this is in
accordance with the rates obtained with uniform product lattice grids of size N = md
for numerical integration with respect to the uniform distribution over [0, 1]d. (Even inthat very case, no such lattice grid is an optimal quantizer except when d = 1). Theconclusion is that, for any distribution PX , optimal quantization produces for every N thebest matching “N -grid” for PX . Asymptotically, a sequence of optimal quantizers yieldsthe lowest possible constant CX,p,d, with an obvious numerical interest.
13

2.5 How to get optimal quantization using simulation
Optimal quantization of a single random vector: how to get it? In fact theLp-mean quantization error function is even smoother than Lipschitz continuous. This isat the origin of an important a stochastic optimization method based on simulation. First,we consider for convenience its pth power, denoted Dp
N, defined for every x = (x1, . . . , xN )∈
(Rd)N by
DpN
(x) = ‖X − Xx‖pp
= E(
min1≤i≤N
|X − xi|p)
=∫
RddpN
(x, ξ)PX (dξ)
where dpN
(x, ξ) := min1≤i≤N
|xi − ξ|p.
The letter D refers to the word distortion used in Information Theory. The functiondpN
(x, ξ) is often called local Lp-distortion.One shows (see, e.g., [24] or [38]) that, if p > 1, Dp
Nis continuously differentiable at
every x∈ (Rd)N satisfying the admissibility condition
∀ i 6= j, xi 6= xj and PX(∪Ni=1∂Ci(x)
)= 0. (2.19)
Then, its gradient ∇DpN
(x) is obtained by formal differentiation, that is
∇DpN
(x) :=(E∂dp
N
∂xi(x,X)
)
1≤i≤n=
(∫
Rd
∂dpN
∂xi(x, ξ)PX (dξ)
)
1≤i≤n
where∂dp
N
∂xi(x, ξ) := p
xi − ξ|xi − ξ| |xi − ξ|
p−11Ci(x)(ξ), 1 ≤ i ≤ n,
with the convention 0|0| = 0. The above differentiability result still holds when p = 1 if PX
is continuous i.e. PX (ξ) = 0, ξ∈ Rd.One notes that ∇Dp
Nhas an integral representation with respect to the distribution
of X. When the distribution PX is simulatable, this strongly suggests to implement astochastic gradient descent derived from this representation to approximate some (local)minimum of Dp
N: when d ≥ 2, the implementation of deterministic gradient descent
becomes unrealistic since it would rely on the computation of many integrals with respect. . . to PX . This stochastic gradient descent is defined as follows: let (ξt)t∈N∗ be a sequenceof i.i.d. PX -distributed random variables and let (γt)t∈N∗ be a sequence of (0, 1)-valuedsteps satisfying ∑
t
γt = +∞ and∑t
γ2t < +∞. (2.20)
Set, for every admissible x∈ (Rd)N in the sense of (2.19), and every ξ∈ Rd
∇xdpN (x, ξ) :=(∂dp
N
∂xi(x, ξ)
)
1≤i≤N.
Then, starting from a deterministic initial N -tuple X0 = x0 with N pairwise distinctcomponents, one defines recursively for every t ≥ 1,
Xt = Xt−1 − γtp∇xdpN (Xt−1, ξt) (2.21)
(this formula a.s. grants by induction that xt has pairwise distinct components).From a theoretical viewpoint, the main difficulty is that the assumptions usually made
that ensure the a.s. convergence of such a procedure are not fulfilled by DpN
(see, e.g. [18]
14

or [30] for an overview on Stochastic approximation). To be more specific, let us stressthat Dp
N(x1, . . . , xN ) does not go to infinity as max1≤i≤N |xi| goes to infinity and ∇Dp
Nis
clearly not a Lipschitz function. So it is not an appropriate “Lyapunov function”. Howeversome (weaker) conditional a.s. convergence results in the Kushner & Clark sense havebeen obtained in [38] for compactly supported absolutely continuous distributions PX inthe case p = 2. In 1 dimension, regular a.s. convergence holds if furthermore the densityfunction of PX− is bounded.
The quadratic case p = 2 is the most commonly implemented for applications. It isknown in Information Theory literature as as the Competitive Learning Vector Quantiza-tion (CLV Q) algorithm.
The synthetic formula (2.21) can be detailed as follows: set Xt := (Xt1, . . . , X
tN
),
Competitive phase: select i(t+ 1) ∈ argmini|Xti − ξt+1| (2.22)
Learning phase:
Xt+1i(t+1) := Xt
i(t+1) − γt+1Xti(t+1)
−ξt+1
|Xti(t+1)
−ξt+1| |Xti(t+1) − ξt+1|p−1
∗[.6em]Xt+1i := Xt
i , i 6= i(t+ 1).(2.23)
Companion parameter procedure: Assume that X ∈ Lp(1+η) for some η∈ (0, 1] andlet (γt)t≥1 be a sequence of (0, 1)-valued steps satisfying
∑t
γt = +∞ and∑t
γ1+ηt < +∞.
Then, one defines recursively the following sequences
∀ t ≥ 0, pt+1i := pti (1− γt+1) + γt+11i=i(t+1), 1 ≤ i ≤ N,p0i := 0, 1 ≤ i ≤ N,
∀ t ≥ 0, Dr,t+1N
:= Dr,tN
(1− γt+1) + γt+1|Xti(t+1) − ξt+1|r,
Dr,0N
:= 0
where r∈ [1, p]. Then, on the event Xt → x∗,
∀ i∈ 1, . . . , N, ptia.s.−→ PX (Ci(x∗)), as t→∞, (2.24)
∀ r∈ [1, p], Dr,tN
a.s.−→ DrN
(x∗) as t→∞. (2.25)
Two natural choices for (γt)t≥1 are γt = γt and γt = 1/t (for some numerical experimentssee [39]). The proof of (2.24) and (2.25) relies on some usual martingale techniques comingfrom Stochastic Approximation (see [38] or [3] for a detailed proof in the second setting).When γt = 1/t, one has a simple synthetic expression for (2.24) and (2.24) which can beattractive for numerical purpose, namely
pti =1t
∣∣s∈ 1, . . . , t | ξs∈ Ci(Xs−1)∣∣ and Dr,tN
=1t
t∑
s=1
|Xs−1i(s) − ξs|r. (2.26)
These “companion” procedures are costless since they use some “by-products” of thecompetitive and learning phases of the procedure. They yield the parameters (PX -weightsof the Voronoi cells Ci(x∗), Lp-mean quantization error ‖X−Xx∗‖p) needed for a numericaluse of the quantizer x∗. The fact that these companion procedures work on the eventXt → x∗ (whatever the limiting N -tuple x∗ is) shows their consistency.
15

Concerning the practical implementation of the algorithm, it is to be noticed that, inthe quadratic case p = 2 (CLV Q algorithm), at each step, the N -tuple Xt+1 remains inthe convex hull of Xt and ξt+1. This induces a stabilizing effect on the procedure whichis observed on simulations which explains why the regular CLV Q algorithm is more oftenimplemented than its non-quadratic counterparts.
See [39] for an extensive numerical study of the CLV Q algorithm for Gaussian randomvectors. This lead to a large scale quantization of the multivariate normal distributions indimensions d = 1 up to d = 10 with a wide range of values of N .
Optimization of the quantization tree: the extended CLV Q algorithm Theprinciple is to modify a Monte Carlo simulation of the chain (Xk)0≤k≤n by processing aCLV Q algorithm at each time step k. One starts from a large scale Monte Carlo simu-lation of the Markov chain (Xk)0≤k≤n i.e. independent copies ξ0 := (ξ0,0, . . . , ξn,0), ξ1 :=(ξ0,1, . . . , ξn,1), . . . , ξt := (ξt0, . . . , ξ
tn), . . . of (Xk)0≤k≤n. Our aim is now to produce for
every k ∈ 0, . . . , n a quadratic optimal quantizer Xk,∗ := (xk,∗1 , . . . , xk,∗Nk) with size Nk,
with its transition kernel [π∗,kij ], the distribution (p∗,ki )0≤i≤Nk of Xx∗kk and the induced mean
Lp-quantization errors (1 ≤ p ≤ 2). Note that, if one sets
p∗,kij := P(Xk+1∈ Cj(x∗,k+1) ∩ Xk∈ Ci(x∗,k)
)
then π∗,kij =p∗,kijp∗,ki
(and p∗,ki =∑
j p∗,k−1ji ), k = 1, . . . , n. So one may focus on the estimation
of the “joint distribution matrices” [p∗,kij ].
In the presentation below of the extended CLVQ algorithm, we assume that the Markovchain starts X0 = x0∈ Rd, but other choices are possible. We also assume that
∀ k ∈ 1, . . . , n, PXk is continuous and E|Xk|2+η < +∞ (2.27)
for some η > 0. This is not a very demanding assumption when dealing with a diffusionprocess sampled at discrete times or an Euler scheme. We adopt here the setting in whichthe companion step sequence is γt = 1/t and we rely on the non-recursive expressionslike (2.26). We propose to compute the Lr-mean quantization error for a fixed r ∈ [1, 2](usually r = 1 or 2 in applications). Then the algorithm reads as follows.
1. Initialization phase (t = 0):
• Initialize the n starting Nk-tuples Xk,0 := x0,k1 , . . . , x0,k
Nk, of the n CLV Q algorithms
that will quantize the distributions PXk , k = 1, . . . , n [set N0 = 1 and X0,0 = x0].• Initialize the joint distribution counters βk,0ij := 0, i∈ 1, . . . , Nk, j ∈ 1, . . . , Nk,
k = 0, . . . , n− 1.• Initialize the marginal distribution counter αk,0i := 0, 1 ≤ i ≤ Nk, k = 1, . . . , n.• Initialize the Lr-mean quantization counter dk,0 := 0, 1 ≤ i ≤ Nk, k = 1, . . . , n.
2. Updating t ∼→ t + 1: At step t, the Nk-tuples Xk,t, 1 ≤ k ≤ n, have been obtained.We use ξt+1 := (ξ0,t+1, . . . , ξk,t+1, . . . , ξn,t+1) to carry on the optimization process at everytime step i.e. updating the grids Xk,t into Xk,t+1 as follows. For every k = 1, . . . , n:• Simulate ξk,t+1 (using ξk−1,t+1 if k ≥ 2 or x0 if k = 1).• Select the “winner” in the kth CLVQ algorithm i.e. the index ik,t+1 ∈ 1, . . . , Nk
satisfyingξk,t+1∈ Cik,t+1(Xk,t).
16

• Update the kth CLV Q algorithm:
Xk,t+1i = Xk,t
i − γt+11i=ik,t+1(Xk,ti − ξk,t+1), 1 ≤ i ≤ Nk.
• Update of the Lr-mean quantization error counter dk,t:
dk,t+1 := dk,t + |Xk,tik,t+1 − ξk,t+1|p.
• Update the distribution counters βk−1,t := (βk−1,tij )1≤i≤Nk−1,1≤j≤Nk and (αk,ti )1≤i≤Nk ,
k = 1, . . . , n (set α0,t+1 = t+ 1 and i0,t+1 := 1):
βk−1,t+1ij := βk−1,t
ij + 1i= ik−1,t+1, j= ik,t+1, 1 ≤ i ≤ Nk−1, 1 ≤ j ≤ Nk
αk,t+1i := αk,ti + 1i= ik,t+1, 1 ≤ i ≤ Nk.
One shows, like for (2.24), that for every k∈ 1, . . . , n, on the eventXk−1,t −→ xk−1,∗
∩
Xk,t −→ xk,∗
,
βk−1,tij
t
a.s.−→ p∗,kij = P(Xk−1∈ Ci(xk−1,∗), Xk∈ Cj(xk,∗)), (2.28)
1 ≤ i ≤ Nk−1, 1 ≤ j ≤ Nk,
αk,tit
a.s.−→ p∗,ki = P(Xk∈ Ci(xk,∗)), 1 ≤ i ≤ Nk, (2.29)
πk−1,tij :=
βk−1,tij
αk−1,ti
a.s.−→ π∗,k−1ij = P(Xk∈ Cj(xk,∗) | Xk−1∈ Ci(xk−1,∗)), (2.30)
1 ≤ i ≤ Nk−1, 1 ≤ j ≤ Nk,
dk,t
t
a.s.−→ DXk,2Nk
(xk,∗) as t→ +∞. (2.31)
From a practical viewpoint, this extended version has the same features as the regularCLV Q algorithm as far as convergence is concerned. One important fact is that theoptimizations of the quantizers at the successive time steps are processed simultaneouslybut independently: the quantization optimization at time step k does not affect that oftime step k + 1.
2.6 A priori error bounds in time and space
Proposition 3 below is the application of Theorem 2 to the general diffusion model (2.1)at times tk = kT/n and its Euler scheme. The error structure is the same except that thereal constant does not depend on n (optimality of the quantizers Xk is not required). Themain result of this section is Theorem 4 which addresses the last optimization problem:assuming that every quantization Xk is optimal, what is the optimal dispatching of theelementary quantizers among the n time discretization steps.
Proposition 3 Assume that the coefficients b and c of the diffusion (2.1) and the obstaclefunction h are Lipschitz continuous. Let (vk(Xk))0≤k≤n be the pseudo-Snell envelope of(h(tk, Xk))0≤k≤n defined by (2.9). For every p ∈ [1,+∞), there exists a positive realconstant C[b]
Lip,[σ]
Lip,[h]
Lip,T,p > 0 such that
∀n≥ 1, ∀ k∈ 0, . . . , n, ‖Vk − vk(Xk)‖p ≤ C[b]Lip
,[σ]Lip
,[h]Lip
,T,p
n∑
`=k
‖X` − X`‖p . (2.32)
17

One gets rid of n since the Lipschitz coefficient K(n) of both chains (Stk) and (Stk) satisfylim supn(K(n))n < +∞ (see [3] for details).
To go further we need a new kind of assumption on the marginal distributions of (Xk):we will assume that the Lp-mean quantization errors of the Xk are ϕ-dominated of inthe following sense: there exists a random vector R ∈ Lp+η(P) (η > 0) and a sequence(ϕk,n)0≤k≤n<∞ such that, for every n ≥ 1, every k∈ 0, . . . , n and every N ≥ 1,
minx∈(Rd)N
‖Xk − Xxk ‖p ≤ ϕk,n min
x∈(Rd)N‖R− Rx‖p . (2.33)
The point is that the distribution of R may depend on p but not on N , k or n. It isshown in [3] that uniformly elliptic diffusions (cc∗(x) ≥ ε0Id, ε0 > 0) satisfying either
– b, c∈ C∞b (Rd) (hence with possibly linear growth) (following [31])or
– b and c are bounded, b is differentiable, c is twice differentiable and Db, Dc and D2care bounded and Lipschitz (following [23], Theorem 5.4, p.148-149),fulfill the domination property (2.33) with ϕk,n := cb,σ,T
√k/n. We show here that the
local volatility model (1.3) also satisfies this domination property.
Proposition 4 (Local volatility model) Assume that q ≥ d and that σ : (0,+∞)d → Rd⊗qis uniformly elliptic (σσ∗(ξ)≥ε0Id, ε0>0), bounded, three times differentiable and satisfies
∀ `1, . . . , `k∈ 1, . . . , d, ∂kσij∂ξ`1 · · ·∂ξ`k (ξ1, . . . , ξd) = O
(1
ξ`1 · · ·ξ`k)
as |ξ| →+∞ (2.34)
for every k = 1, 2, 3. Then (Stk)0≤k≤n satisfies the ϕ-domination property (2.33) with
ϕk,n := cσ,T |s0|√k/n (cσ,T > 0) and R := (Z` + eZ
`)1≤`≤d, Z ∼ N (0; Id), (2.35)
Remark: Assumption (2.34) can be weakened into ξ 7→ σσ∗(eξ1, . . . , eξ
d) is bounded,
twice differentiable with bounded Lipschitz first two differentials.
Proof: One starts from the elementary inequality, valid for every ξ, ξ′ ∈ R and everyρ > 0,
|eρξ′ − eρξ| ≤ ρ|ξ′ + eξ′ − (ξ + eξ)|. (2.36)
Let Yt := (ln(S1t /s0), . . . , ln(Sdt /s0)) where S denotes a solution of (1.3) (with r = 0).
Then Y is a diffusion process solution of the SDE
dYt = δ(Yt) dt+ ϑ(Yt) dWt, Y0 = (1, . . . , 1),
with δ(y) := −12
(|σ`.(ey1
, . . . , eyd)|2
)1≤`≤d
and ϑ(y) := σ(ey1, . . . , ey
d).
It follows from Assumption (2.34) on σ that δ and ϑ are twice differentiable and thatδ, Dδ and Dk(ϑϑ∗), k = 0, 1, 2 are Lipschitz continuous and bounded. This implies(see [23], Theorem 5.4, p.148-149) that, for every t∈ (0, T ], Yt has an absolutely continuousdistribution PYt = pt(y)λd(dy) satisfying
pt(y) ≤ απ√βtZ
(y) (α, β > 0)
where π√βtZ
denotes the density function of√βtZ, Z ∼ N (0; Id).
18

Now let N ≥ 1 and let r∗ := (r∗i )1≤i≤N be an Lp-optimal N -quantizer of the randomvector R. One defines for every k = 1, . . . , n, a N -quantizer xk,∗ := (xk,∗i )1≤i≤N by
(xk,∗i )` := s`0 exp (√βtk (r∗i )
`), ` = 1, . . . , d.
Now, coming back to (St) which starts now at S0 := s0, one has for every k = 1, . . . , n,
infx∈(Rd+)N
‖Stk − Sxtk‖pp ≤ ‖Stk − Sxk,∗tk‖pp
= E(
min1≤i≤N
|(s`0eY`tk )1≤`≤d − xk,∗i |p
)
≤ αE(
min1≤i≤N
∣∣∣∣(s`0(e
√β tk Z
`tk − e
√β tk(r∗i )`
)1≤`≤d
∣∣∣∣p)
≤ α (βtk)p/2 max1≤`≤d
|s`0|pE(
min1≤i≤N
∣∣∣∣(Z + eZ)− (Z + eZ)r∗
∣∣∣∣p)
.
The last inequality follows from (2.36). This completes the proof. ♦
Assume that every quantization Xk is Lp-optimal with size Nk. Then, combining thebounds obtained in Theorem 1 (time discretization error) and Proposition 3 (spatial dis-cretization error) with Zador Theorem (Theorem 3, asymptotics of optimal quantization)yields the following error structure
C1
nθ+ C2
n∑
k=1
√tkN
− 1d
k with N1 + · · ·+Nn = N − 1 (2.37)
(time 0 is excluded since X0 = s0 perfectly quantizes S0 = s0). Minimizing the righthand of the sum is an easy optimization problem with constraint. Then, in order tominimize (2.37), one has to make a balance between the time and spatial discretizationerrors. The results are detailed in Theorem 4 below.
Theorem 4 (Optimized quantization tree and resulting error bounds) Assume that b, σand h are Lipschitz continuous, that (Stk)0≤k≤n is ϕ-dominated in the sense of (2.33) byϕk,n := c
√k/n Let n ≥ 1, N ≥ n + 1. Set X0 = S0 = s0 and assume that, for every
k∈ 1, . . . , n, Xk is an Lp-optimal (Voronoi) quantization of Xk with size
Nk = |Xk(Ω)| :=
td
2(d+1)
k (N − 1)
td
2(d+1)
1 + · · ·+ td
2(d+1)
k + · · ·+ td
2(d+1)n
, (2.38)
where dxe := mink ∈ N | k ≥ x (then N0 = 1 and N ≤ N0 + · · · + Nn ≤ N + n). Let(vk(Xk))0≤k≤n be the quantized pseudo-Snell envelope of (h(tk, Xk))0≤k≤n.(a) Diffusion: If Xk := Stk , k = 0, . . . , n, then
max0≤k≤n
‖Vtk − vk(Xk)‖p ≤ CpeCpT(
1 + |s0|nθ
+n1+ 1
d
N1d
).
with θ = 1 if h is semi-convex and θ = 1/2 otherwise.(b) Euler scheme: If Xk := Stk , k = 0, . . . , n, then
max0≤k≤n
‖Vtk − vk(Xk)‖p ≤ CpeCpT(
1 + |s0|√n
+n1+ 1
d
N1d
).
Remark: If n,N → +∞ with n = o(N) then Nk ≈ 3d+22(d+1)
(kn
) d2(d+1) N
n in (2.38).
19

3 Hedging
Tackling the question of hedging American options needs to go deeper in financial mod-eling, at least from a heuristic point of view. So, we will shortly recall the principles thatgovern the pricing and hedging of American options to justify our approach. First, wecome back to the original diffusion model (1.3) which drives the asset price process (St)(with r = 0). We assume that
q = d and ∀ ξ ∈ Rd, σσ∗(ξ) ≥ ε0Id (3.1)
so that ε0Diag((ξ1)2, . . . , (ξd)2) ≤ cc∗(ξ) ≤ ||σσ∗||∞ |ξ|2Idwhere ||σσ∗(ξ)||∞ := sup
ξ∈Rd||σσ∗(ξ)||.
Notation: For notational convenience we will make the convention throughout this sec-tion that if Xt is a continuous time process (and tk = kT/n),
∆Xtk+1:= Xtk+1
−Xtk , k = 0, . . . , n− 1.
3.1 Hedging continuous time American options
First we need to come back shortly to classical European option pricing theory. Let hT bea European contingent claim that is a nonnegative FT -measurable variable. Assume forthe sake of simplicity that it lies in L2(P,FT ). The representation theorem for Brownianmartingale shows (see [40]) that
hT = E(hT ) +∫ T
0Hs.dWs = E(hT ) +
∫ T
0Zs.dSs (3.2)
where H is a dP ⊗ dt-square integrable F-predictable process and Zs := [c(Ss)∗]−1Hs.Hence Mt := E(hT | Ft) satisfies Mt = M0 +
∫ t0Zs.dSs.
An analogy with discrete time model shows that the integral∫ T
tZs.dSs represents the
(algebraic) gain from time t up to time T provided by the strategy (Z`s)1≤`≤d,s∈[0,T ] (atevery time s∈ [t, T ] the portfolio contains exactly Z`s units of asset `). So, at time T , thevalue of the portfolio invested in risky assets S1, . . . , Sd is exactly hT monetary units: putsome way round, the portfolio Zt replicates the payoff hT ; so it is natural to define the(theoretical) premium as
Premiumt := E(hT | Ft) = E(hT ) +∫ t
0Zs.dSs. (3.3)
If hT := h(T, ST ), the Markov property of (St) implies that Premiumt := p(t, St). If h
is regular enough, then p solves the parabolic P.D.E.∂p
∂t+ Lr,σp = 0, p(T, . ) := h(T, . )
and a straightforward application of Ito formula shows that Zt = ∇xp(t, St).Let us come back to American option pricing. If one defines the premium process
(Vt)t∈[0,T ] of an American option by the P-Snell envelope of its payoff process, then thispremium process is a supermartingale that can be decomposed as the difference of a mar-tingale Mt and a nondecreasing path-continuous process Kt i.e., using the representationproperty of Brownian martingales,
Vt = Mt −Kt = V0 +∫ t
0Zs.dSs −Kt (K0 := 0).
20

So, if a trader replicates the European option related to the (unknown) European payoffMT using Zt, he is in position to be the counterpart at every time t of the owner of theoption in case of early exercise since
Mt = Vt +Kt ≥ Vt ≥ ht.
In case of an optimal exercise of his counterpart he will actually have exactly the payoffat time t since all optimal exercise times occur before the process Kt leaves 0.
If the variational inequality (1.7) admits a regular enough solution ν(t, x), then Zt =∇xν(t, St). In most deterministic numerical methods, the approximation of such a deriva-tive is usually less accurate than that of the function ν itself. So, it is hopeless to implementsuch methods for this purpose as soon as the dimension d ≥ 3.
3.2 Hedging Bermuda options
Let (V ntk
)0≤k≤n denote the theoretical premium process of the Bermuda option related to(h(tk, Stk))0≤k≤n. It is a (Ftk)0≤k≤n-supermartingale defined as a Snell envelope by
V ntk
:= ess sup Etk (h(τ, Sτ )) , τ ∈ Θnk
where Θnk denotes the set of tk, . . . , tn-valued F-stopping times.
Then, the Ftk -Doob decomposition of (V ntk
) as a the (Ftk)-supermartingale yield:
V ntk
= Mnk −Ank ,
where (Mntk
) is a Ftk -L2-martingale and (Antk) is a non-decreasing integrable Ftk -predictableprocess (An0 := 0). In fact, the increment of Ank can easily be specified since
∆Ank := Ank −Ank−1 = V ntk−1− Etk−1
V ntk
=(h(tk−1, Stk−1
)− Etk−1V ntk
)+. (3.4)
The representation theorem applied on each time interval [tk, tk+1], k = 0, . . . , n thenyields a F-progressively measurable process (Zns )s∈[0,T ] satisfying
Mnk :=
∫ tk
0Zns .dSs, 0 ≤ k ≤ n, with E
∫ T
0|c∗(Ss)Zns |2ds < +∞ (3.5)
(keep in mind that <∫ tk
0 Us.dSs >t=∫ tk
0 |c∗(Ss)Us|2ds).Now, in such a setting, continuous time hedging of a Bermuda option is unrealistic
since the approximation of an American by a Bermuda option is directly motivated bydiscrete time hedging (at times tk). So, it seems natural to look for what a trader cando best when hedging only at times tk. This leads to introduce the closed subspace Pnof L2(c∗(S.)dP ⊗ dt) := (Z)s∈[0,T ] progressively measurable,
∫ T0 |c∗(Ss)Zs|2ds < +∞
defined by
Pn =
(ζs)s∈[0,T ], ζs := ζtk , s∈ [tk, tk+1), ζtk Ftk -measurable, E∫ T
0|c∗(Ss)ζs|2ds <+∞
.
(3.6)and the induced orthogonal projection projn onto Pn (for notational simplicity a processζ∈ Pn will be often referred as (ζtk)0≤k≤n). In particular, for every U ∈ L2(c∗(S.)dP⊗ dt)
‖c∗(S.)projn(U).‖L2(dP⊗dt) ≤ ‖c∗(S.)U.‖L2(dP⊗dt).
21

Doing so, we follow classical ideas introduced by by Follmer & Sondermann ([20]) forhedging purpose in incomplete markets (see also [10]). One checks that Pn is isometricwith the set of square integrable stochastic integrals with respect to (Stk)0≤k≤n, namely
n∑
k=1
ζtk .∆Stk+1, (ζtk)0≤k≤n∈ Pn
.
Computing projn(Zn. ) amounts to minimizing E(
n∑
k=1
∫ tk+1
tk
|c∗(Ss)(Zns − ζtk)|2ds)
over
(ζk)0≤k≤n∈ Pn. Setting ζntk := projn(Zn. ) and standard computations yield
ζntk :=(Etk
∫ tk+1
tk
cc∗(Ss) ds)−1
Etk(∫ tk+1
tk
cc∗(Ss)Zns ds)
=(Etk∆Stk+1
(∆Stk+1)∗
)−1Etk(∆Mnk+1∆Stk+1
) (3.7)
=(Etk∆Stk+1
(∆Stk+1)∗
)−1Etk(∆V n
tk+1∆Stk+1
). (3.8)
The last equality follows from the fact that Ank−1 is Ftk−1-measurable and from the mar-
tingale property of (Stk). The increment
∆Rntk+1:=
∫ tk+1
tk
(Zns − ζntk).dSs = ∆Mnk+1 − ζntk .∆Stk+1
(3.9)
represents the hedging default induced by using ζntk instead of Zn. . The sequence (∆Rntk)1≤k≤nis a Ftk -martingale increment process, singular with respect to (Stk)0≤k≤n sinceEtk(∆Rtk+1
∆Stk+1) = 0. It is possible to define the local residual risk by
Etk |∆Rntk+1|2 = Etk
(∫ tk+1
tk
|c∗(Ss)(Zns − ζtk)|2ds), k∈ 0, . . . , n− 1. (3.10)
A little algebra yields the following, which is more appropriate for quantization purpose:
Etk |∆Rntk+1|2=Etk |∆V n
tk+1−Etk∆V n
tk+1|2−(Etk∆Stk+1
∆S∗tk+1)−1
(Etk∆V n
tk+1∆Stk+1
)2. (3.11)
Formulae (3.8) or (3.10), based on Stk and V ntk
have natural approximations by quantiza-tion. On the other hand, (3.7) and (3.10) are more appropriate to produce some a priorierror bounds (when simulation of the diffusion is possible).
3.3 Hedging Bermuda option on the Euler scheme
When the diffusion cannot be easily simulated, we consider the (continuous time) Eulerscheme defined by
∀ t∈ [tk, tk+1), St = Stk + c(Stk)(Wt −Wtk), S0 := s0 > 0.
This process is P-a.s. defined since it is a.s. nonzero (but it may become negative adverseto the original diffusion). Then, mimicking the above subsection, leads to define someprocesses Zn, Mn and A
n by
Vntk
:= Mnk −Ank (Doob decomposition)
Mnk :=
∫ tk
0Zns c(Ss) dWs =
∫ tk
0Zns .dSs (with s = ti if s∈ [ti, ti+1))
∆Ank := Ank −Ank−1 = V
ntk−1− Etk−1
Vntk
=(h(tk−1, Stk−1
)− Etk−1Vntk
)+.
22

and An0 := 0. The (simpler) formulae for the hedging process hold
ζntk
:= (Etk∆Stk+1∆S∗tk+1
)−1Etk(∆V ntk+1
∆Stk+1) =
1∆tk+1
Etk∫ tk+1
tk
Zns ds. (3.12)
The related hedging default and local residual risk are defined by mimicking (3.10) and (3.11):
∆Rntk+1:=
∫ tk+1
tk
(Zns − ζntk
).dSs = ∆Mnk+1 − ζ
ntk.∆Stk+1
(3.13)
Etk |∆Rntk+1|2 := Etk |∆V
ntk+1− Etk∆V n
tk+1|2−(Etk∆Stk+1
∆S∗tk+1)−1
(Etk∆V n
tk+1∆Stk+1
)2.(3.14)
3.4 Quantized hedging and local residual risks
The quantized formulae for strategies and residual risks are simply derived from formu-lae (3.8) or (3.12) by replacing Stk (Stk respectively) by their quantization Stk (Stk respec-
tively) and V nk := vnk (Stk) by V n
k := vnk (Stk) (V nk := vnk (Stk) respectively). It follows from
section 2 that V ntk
:= vk(Stk) is approximated by vnk (Stk). So, one sets (for the diffusion)
ζnk := (Etk∆Stk+1∆S∗tk+1
)−1Ek(
(vnk+1(Stk+1)− vnk (Stk))(Stk+1
− Stk)). (3.15)
|∆Rntk+1|2 := Etk |∆V n
tk+1− Etk∆V n
tk+1|2 − (Etk∆Stk+1
∆S∗tk+1)−1
(Etk∆V n
tk+1∆Stk+1
)2.(3.16)
One derives their counterparts ζnk , |∆ Rntk+1|2 for the Euler scheme by analogy. The point
to be noticed is that computing ζntk or ζnk at a given elementary quantizer xki of the kth
layer requires to invert only one matrix which does not cost much.
4 Convergence of the hedging strategies and rates
This section is devoted to the evaluation of the different errors (quantization, residualrisks) induced by time and spatial discretizations.
4.1 From Bermuda to America (time discretization)
First, one extends the definition of V nt at any time t∈ [0, T ] by setting
V nt := V n
tk+
∫ t
tk
Zns .dSs = V ntk+1−
∫ tk+1
tZns .dSs + ∆Ank+1, t∈ [tk, tk+1). (4.1)
This definition implies that, for every k∈ 0, . . . , n, the left-limit of V n satisfies
V ntk− = V n
tk+ ∆Ank+1. (4.2)
Proposition 5 Assume that the payoff process ht = h(t, St) where h is a semi-convexfunction. Assume that the diffusion coefficient c is Lipschitz continuous.(a) For every k∈ 0, . . . , n, V n
tk≤ Vtk and for every t∈ (tk, tk+1), (V n
t −Vt)+ ≤ ∆Ank+1.
Furthermore P-a.s., for every t∈ [0, T ],
|V nt − Vt| ≤ Ch,c Tn (1 + Et(maxt≤s≤T |Ss|2)),
|V nt − V n
t | ≤ [h]LipEt(maxtk≥t |Stk − Stk |).(b) The following bound holds for the hedging strategies (in the “
√cc∗ metric”)
E(∫ T
0|c∗(Ss)(Zs − Zns )|2ds
)+ E
(∫ T
0|c∗(Ss)Zns − c∗(Ss)Zns )|2ds
)≤ Ch,cT
n. (4.3)
23

Proof: (a) The inequality between V n and V at times tk is obvious since Vt is defined asa supremum over a larger set of stopping times than V n
tk. Then, using the supermartingale
property of V, equality (4.1) and Jensen inequality yield
(V nt −Vt)+ ≤ (Et(V n
tk+1)+∆Ank+1−Et(Vtk+1
))+ ≤ Et((V ntk+1−Vtk+1
+∆Ank+1)+) ≤ ∆Ank+1.
Now, using the expression (3.4) for ∆Ank+1 and V ntk≥ h(tk+1, Stk+1
) imply
∆Ank+1 = (h(tk, Stk)− EtkV ntk+1
)+ ≤ (h(tk, Stk)− Etkh(tk+1, Stk+1))+
We need at this stage to use the regularity of h (semi-convex Lipschitz continuous)
h(tk, Stk)− h(tk+1, Stk+1) = h(tk, Stk+1
)− h(tk+1, Stk+1) + h(tk, Stk)− h(tk, Stk+1
)
≤ [h]Lip∆tk+1 − δh(tk, Stk).(Stk+1− Stk) + ρh (Stk+1
− Stk)2.
Hence h(tk, Stk)−Etkh(tk+1, Stk+1) ≤ [h]Lip∆tk+1 + ρhEtk |Stk+1
− Stk |2
≤ [h]Lip∆tk+1 + ρhEtk∫ tk+1
tk
Tr(cc∗)(Ss) ds
≤ [h]Lip∆tk+1 + Cρh∆tk+1
(1 + Et( max
s∈[tk,T ]|Ss|2)
)
≤ Cc,hT
n
(1 + Etk( max
s∈[tk,T ]|Ss|2)
),
for some constant Ch,c > 0. Finally, it yields
∆Ank+1 ≤ Cc,hT
n
(1 + Etk( max
s∈[tk,T ]|Ss|2)
). (4.4)
To complete the inequality for |Vt − V nt |, we first notice that, if t∈ [tk, tk+1)
V nt = V n
tk+1−
∫ tk+1
tZns .dSs + ∆Ank+1 ≤ h(tk+1, Stk+1
)−∫ tk+1
tZns .dSs (4.5)
so that V nt = Et(V n
t ) ≥ Et(h(tk+1, Stk+1)) = h(t, St) + Et(h(tk+1, Stk+1
)− h(t, St)).
Using again the semi-convexity property of h at (t, St) finally yields that
V nt + Cc,h
T
n
(1 + Et( max
s∈[t,T ]|Ss|2)
)≥ h(t, St).
As it is a supermartingale as well, it necessarily satisfies
P-a.s. V nt + Cc,h
T
n
(1 + Et(max
s≥t|Ss|2)
)≥ Snell(h(t, St)) = Vt
which yields the expected result. The second inequality is obvious once noticed
|V nt − V n
t | ≤ maxtk≥t|h(tk, Stk)− h(tk, Stk)| ≤ [h]Lip max
tk≥t|Stk − Stk |.
(b) One considers the cadlag semi-martingale Vt − V nt = V0 − V n
0 +∫ t
0 (Zs − Zns ).dSs −(Kt −Ant ) where t := k on [tk, tk+1). It follows from Ito formula for jump processes that
∫ T
0|c∗(Ss)(Zs − Zns )|2ds +
∑
tk≤T(∆Antk)2 + (Vt − V n
t )2
24

= −2∫ T
0(Vs − V n
s−)(Zs − Zns ).dSs + 2∫ T
t(Vs − V n
s−)d(Ks −Ans ).
Now∫ T
0(Vs − V n
s−)d(Ks −Ans ) =∫ T
0(Vs − V n
s−)dKs +∫ T
t(V ns− − Vs)dAns
≤∫ T
0(Vs − V n
s )dKs +∑
tk≤T(∆Ank)2
since V ntk− = V n
tk+ ∆Ank ≤ Vtk + ∆Ank . This yields, using the inequality obtained in (a)
and (4.4),
∫ T
0(Vs − V n
s−)d(Ks −Ans ) ≤ Ch,cT
n
∫ T
0(1 + Es sup
s≤u≤T|Su|2)dKs +Ann max
t<tk≤T∆Ank
≤ Ch,cT
n
KT
(1 +sup
s∈[0,T ](Es sup
s≤u≤T|Su|2)
)+
(1 +sup
s∈[0,T ](Es sup
s≤u≤T|Su|2)
)2 .
One checks that∫ t
0 (Vs − V ns )(Zs − Zns ).dSs is a true martingale so that
E(∫ T
0|c∗(Ss)(Zs − Zns )|2ds
)≤ Ch,cT
n(‖KT ‖2 + 1) (1 + ‖ max
s∈[0,T ]|Ss|2‖2).
Now KT ∈ L2 since 0 ≤ KT ≤ V0 +∫ T
0Zs.dSs which yields the expected result.
The inequality involving the Euler scheme is obtained following the same approachusing now V n − V n.
E∫ T
0|c∗(Ss)Zns −c∗(Ss)Zns |2ds ≤ 2E
∫ T
0(V ns − V n
s )d(Kns −Kn
s ) + E(h(T, ST )− h(T, ST ))2
≤ 2[h]LipE∫ T
0Es
(maxtk≥s|Stk − Stk |
)d(Kn
s +Kns ) + [h]2
Lip‖ST − ST ‖22
≤ C E(
supt∈[0,T ]
Et(
maxtk≥t|Stk − Stk |
)(Kn
T +KnT )
)+ C‖ST − ST ‖22
≤ C‖ supt∈[0,T ]
Et maxtk≥t|Stk−Stk | ‖2
(‖KnT ‖2 + ‖Kn
T ‖2
)+ C‖ST − ST ‖22
≤ Ch,cTn
(‖KnT ‖2 + ‖Kn
T ‖2 + 1). (4.6)
Now ‖KnT ‖2 ≤ ‖V n
0 ‖2 + ‖∫ T
0(Zs − Zns ).dSs‖2 ≤ C1(1 + ‖ sup
s∈[0,T ]|Ss| ‖2) + O(1/n), hence
supn ‖KnT ‖2 < +∞. Concerning Kn
T one has
‖KnT −Kn
T ‖2 ≤ ‖V n0 ‖2 + ‖V n
0‖2 + ‖∫ T
0Zns .dSs −
∫ T
0Zns .dSs)‖2 ≤ C +O(1/
√n) by (4.6)
so that supn ‖KnT ‖2 < +∞. Plugging this back in (4.6) completes the proof. ♦
We are now in position to get a first result about the control of residual risks inducedby the use of discrete time hedging strategies. It shows that this control is essentiallyruled by the path-regularity of the process Z.
25

Theorem 5 If h and c are Lipschitz continuous and h is semi-convex, then,
‖c∗(S.)(Z. − ζn. )‖L2(dP⊗dt) ≤ ‖c∗(S.)(Z. − projn(Z).)‖L2(dP⊗dt) +C√n
(4.7)
(projn(Z) is the projection of Z on Pn). Furthermore ‖c∗(S.)(Z. − projn(Z).)‖L2(dP⊗dt)goes to 0 as n→∞.
Remark: The term ‖c∗(S.)(Z. − projn(Z).)‖L2(dP⊗dt) which rules the rate of convergenceof ‖c∗(S.)(Z. − ζn. )‖L2(dP⊗dt) clearly depends on the path-regularity of Zs. Theorem 6(c)below provides some elements about its own rate of convergence.
Proof: Set for convenience ζ := projn(Z). Minkowski inequality yields
‖c∗(S.)(Zs − ζn. )‖L2(dP⊗dt) ≤ ‖c∗(S.)(Z. − ζ.)‖L2(dP⊗dt) + ‖c∗(S.)(ζ. − ζn. )‖L2(dP⊗dt) .
Now ζ. − ζn. = projn(Z. − Zn. ) so that by Inequality (4.3) in Proposition 5(b),
‖c∗(S.)(ζ. − ζn. )‖L2(dP⊗dt) ≤ ‖c∗(S.)(Z. − Zn. )‖L2(dP⊗dt) ≤C√n.
Now, let F be a bounded adapted continuous-path process. Set Φs :=n
T
∫ tk+1
tk
Fudu, s ∈[tk, tk+1). Using the properties of projn, one gets
‖c∗(S.)(Z. − ζ.)‖L2(dP⊗dt) ≤ 2 ‖c∗(S.)(Z. − F.)‖L2(dP⊗dt) + ‖c∗(S.)(F. − projn(F ).)‖L2(dP⊗dt)
≤ 2 ‖c∗(S.)(Z. − F.)‖L2(dP⊗dt) + ‖c∗(S.)(F. − Φ.)‖L2(dP⊗dt)
≤ 2 ‖c∗(S.)(Z. − F.)‖L2(dP⊗dt) +∥∥∥∥∫ T
0||c(Ss)||2ds(w(F,
T
n) ∧ 2‖F‖∞)2
∥∥∥∥L2(P)
where w(F, δ) denotes the uniform continuity modulus of F . One concludes using thatL∞(c∗(St) dP⊗ dt) is everywhere dense in L2(c∗(St) dP⊗ dt). ♦
4.2 Hedging error induced by the (quadratic) quantization
We will focus on the error at time t = 0.
Proposition 6 Assume that σ is Lipschitz continuous, bounded and uniformly ellipticand that h is Lipschitz continuous. Assume that the dispatching rule (2.38) of the Nk
applies and that the quadratic quantization of the Stk are optimal. Assume that N and n
go to +∞ so that limnN/nd(1− 1
2(d+1))+1 = +∞. Then, for every n
|ζn0 − ζn0 | ≤C(1 + |s0|)
ε0 min1≤`≤d(s`0)2
n32
(N/n)1d
.
Proof: The hedging vectors ζn0 and ζn0 satisfy respectively
(E(∆St1∆S∗t1))ζn0 = E ((V n1 − V n
0 )∆St1) (4.8)
(E(∆St1(∆St1)∗))ζn0 = E(
(V n1 − V n
0 )∆St1)
(4.9)
where V n1 = vn1 (St1) and V n
0 = vn0 (s0), etc. The quadratic quantization St1 of St1 beingoptimal and S0 = S0 =s0 being deterministic, one has E(∆St1 | ∆St1)=∆St1 . In particular
E(∆St1)=E(∆St1) and ‖∆St1‖2 ≤ ‖∆St1‖2 =‖St1 − s0‖2 ≤ C√T/n(1 + |s0|).
26

Then E(∆St1∆S∗t1)− E(∆St1∆S∗t1) = E((∆St1 −∆St1)(∆St1 −∆St1)∗)
so that ||E(∆St1∆S∗t1)− E(∆St1∆S∗t1)|| ≤ ‖∆St1 −∆St1‖22 ≤ CN− 2d
1 .
Now |E ((V n1 − V n
0 )∆St1) − E(
(V n1 − V n
0 )∆St1)∣∣∣
≤ ‖∆St1‖2(‖V n1 − V n
1 ‖2 + |V n0 − V n
0 |) + ‖V n1 ‖2‖St1 − St1‖2
≤ C√n
(1 + |s0|) n
(N/n)1d
+C
N1d
1
One derives from (4.8) and (4.9) that∣∣∣E(∆St1∆S∗t1)(ζn0 − ζn0 )
∣∣∣ ≤∣∣∣E ((V n
1 − V n0 )∆St1)− E
((V n
1 − V n0 )∆St1
)∣∣∣
+||E(∆St1∆S∗t1)− E(∆St1∆S∗t1)|| |ζn0 |
≤ C(1 + |s0|)√n
(N/n)1d
+C
N2d
1
|ζn0 |.
Now, it follows from cc∗(ξ) ≥ ε0 (Diag(ξ))2 that
E(∆St1∆S∗t1) ≥ ε0
(∫ t1
0min
1≤`≤dE(S`s)
2ds
)Id ≥ ε0
(∫ t1
0min
1≤`≤d(ES`s)2ds
)Id =
(min
1≤`≤d(s`0)2 ε0T
n
)Id
so that ||(E(∆St1∆S∗t1))−1|| ≤ ε−10 ( min
1≤`≤ds`0)−2n/T . First, one derives from (4.8) that
|ζn0 | ≤ Cε0
√n. Hence
|ζn0 − ζn0 | ≤C n
ε0 min1≤`≤d(s`0)2
(1 + |s0|)
√n
(N/n)1d
+1
√n ∨N
1d
1
+1
n ∨N2d
1
(1 + |ζn0 |)
C n
ε0 min1≤`≤d(s`0)2
(1 + |s0|)
√n
(N/n)1d
+1
√n ∨N
1d
1
+1
n ∨N2d
1
(1 + |ζn0 − ζn0 |+1ε0
√n)
.
The dispatching rule (2.38) implies that N1 = CdNn−1− d
2(d+1) + o(N1), so that, given
the above assumption, limnN
1d1√n
= +∞ i.e. n
N2d1
goes to 0. Consequently
|ζn0 − ζn0 | ≤C n
ε0 min1≤`≤d(s`0)2
(1 + |s0|)
√n
(N/n)1d
+1
N1d
1
+√n
ε0N2d
1
.
Inspecting the three terms on the righthand side of the inequality completes the proof. ♦
Remark: The above proof points outs the fact that a quantization tree optimized for thepremium computation is not optimal at all for the hedging. So, the above error boundcould be improved if one adopts another dispatching policy, optimized for the hedging,although it will never reach the performances devoted to the premium computation.
27

4.3 Approximation of the strategy: rate of convergence
In this section we evaluate the global residual risk on time intervals [0, T ′], T ′ < T , inducedby the use of the time discretization of the diffusion with step T/n, namely
E∫ T−δ
0|c∗(Ss)(Zs − ζs)|2 ds, (4.10)
where (Zt) is defined by (3.2) and (ζt) := projn(Z) is the projection on the set Pn ofelementary predictable strategies. Our basic assumption in this section is
(Σ) ≡ (i) c∈ C∞b ((0,+∞)d), (ii) σσ∗(x) ≥ ε0 Id.
Assumption (Σ)(i) is fulfilled when σ∈ Cb((0,+∞)d) ∩ C∞b ((0,+∞)d) and
∂kσi.(x) = O(1/|xi|) as |x| → +∞, k ≥ 1, i = 1, . . . , d.
Theorem 6 Assume that (Σ) holds, that h is Lipschitz continuous and that s0∈ (0,+∞)d.(a) For every T ′ ∈ [0, T ) there exists some real constants K and θ and an integer q ≥ 2(only depending on T and on the bounds of σ and its first two derivatives) such that
E∫ T ′
0|c∗(Ss)(Zs − ζs)|2 ds ≤
(1 +
1(T − T ′)3/2
)(1 + |s0|)q K
ε5/20
eθ√
lnn
n12
. (4.11)
(b) Let δn := ρn−13 (ρ > 0). There exists some real constants K and θ and an integer
q ≥ 2 (depending on ρ, T and on the bounds of σ and its first two derivatives) such that
E∫ T−δn
0|c∗(Ss)(Zs − ζs)|2 ds ≤ K
ε5/20
(1 + |s0|)q eθ√
lnn
n16
. (4.12)
(c) If furthermore h is semi-convex. Then rates obtained in items (a) and (b) rule the rateof convergence of ‖c∗(S.)(Z. − ζn. )‖L2(Ω×[0,Tn]dP⊗dt) in Theorem 5 when Tn = T ′ < T orT ′ = T − δn respectively.
Remarks: • The term eθ√
lnn is due to the non-uniform ellipticity of S: this is the cost oftruncation around zero. One may look at that some way round: if we had worked with theuniformly elliptic diffusion X = ln(St) instead of (St), then the obstacle function wouldhave become h(t, expx), with an exponential growth. So a truncation would have beennecessary with a similar cost.• In most financial applications the obstacle h is at most Lipschitz continuous (for
example h(t, x) = e−rt(K − ertx)+ for a put of strike K). However, if the obstacle ismore regular, namely h ∈ C1,2, then no regularization is needed and the resulting error isO(eθ
√lnn/n) and O(eθ
√lnn/n1/3) in claims (a) and (b) of Theorem 6 respectively. Finally,
in case of a uniformly elliptic diffusion our method of proof would lead to O(1/n) andO(1/n1/3) rates respectively.
Some technical difficulties arise when evaluating the term in (4.10) directly, so we firstreduce the problem to a simpler one. This is done in two steps.
Lemma 1 (Step 1) Set Hs := c∗(Ss).Zs and ηs :=n
TEtk
∫ tk+1
tk
Hudu, s ∈ [tk, tk+1).
Then, under the assumptions of Theorem 6,
E∫ T
0|c∗(Ss)(Zs − ζs)|2 ds ≤ C
n+ 2E
∫ T
0|Hs − ηs|2 ds. (4.13)
28

Proof: We temporarily define zs :=1
tk+1 − tkEtk∫ tk+1
tk
Zrdr, tk ≤ s < tk+1. Note that z
is an adapted process which is piecewise constant. Since ζ is the L2−projection of Z onthe subspace of these type of processes, we have
E∫ T
0|c∗(Ss)(Zs − ζs)|2 ds ≤ E
∫ T
0|c∗(Ss)(Zs − zs)|2 ds
≤ 2E∫ T
0|Hs − ηs|2 ds+ 2E
∫ T
0|ηs − c∗(Ss)zs|2 ds.
It remains to prove that the second term in the right hand of the above inequality isdominated by C/n. We write this term as
En−1∑
k=0
∫ tk+1
tk
∣∣∣∣c∗(Ss)∆tk+1
Etk∫ tk+1
tk
Zudu− 1∆tk+1
Etk∫ tk+1
tk
c∗(Su)Zudu∣∣∣∣2
ds ≤ 2(I + J)
with I := En−1∑
k=0
∫ tk+1
tk
∣∣∣∣c∗(Ss)− c∗(Stk)
∆tk+1Etk
∫ tk+1
tk
Zudu
∣∣∣∣2
ds,
J := En−1∑
k=0
∫ tk+1
tk
∣∣∣∣1
∆tk+1Etk
∫ tk+1
tk
(c∗(Su)− c∗(Stk)).Zudu∣∣∣∣2
ds.
Let us evaluate J . Set s := tk if s ∈ [tk, tk+1). Conditional Schwartz’s inequalityimplies that
∣∣∣∣Etk∫ tk+1
tk
(c∗(Su)− c∗(Stk))Zudu∣∣∣∣2
≤ Etk∫ tk+1
tk
‖c∗(Su)− c∗(Stk)‖2duEtk∫ tk+1
tk
|Zu|2du
≤ [c∗]2Lip
∫ tk+1
tk
Etk |Su − Stk |2duEtk∫ tk+1
tk
|Zu|2du.
Now, classical results about diffusions with Lipschitz continuous coefficients yield that, forevery u∈ [tk, tk+1),
Etk |Su − Stk |2 ≤ C∆tk+1Etk((1 + supt∈[0,T ]
|St|)2).
for some positive real constant C. Consequently
J ≤ CT
nE
(n−1∑
k=0
Etk((1 + supt∈[0,T ]
|St|)2)Etk∫ tk+1
tk
|Zu|2du)
= CT
nE
((1 + sup
t∈[0,T ]|St|)2
n−1∑
k=0
Etk∫ tk+1
tk
|Zu|2du)≤ C
n
∥∥∥∥∥(1 + supt∈[0,T ]
|St|)2
∥∥∥∥∥2
∥∥∥∥∥n−1∑
k=0
Etkλk+1
∥∥∥∥∥2
where λk+1 :=∫ tk+1
tk
|Zu|2 du for every k∈ 1, . . . , n− 1. Since the λk’s are nonnegative,
n−1∑
k=0
λ2k+1 ≤
(n−1∑
k=0
λk+1
)2
29

so that E(n−1∑
k=0
Etkλk+1
)2
≤ 2E(n−1∑
k=0
(λk+1 − Etkλk+1)
)2
+ 2E(n−1∑
k=0
λk+1
)2
= 2En−1∑
k=0
(λk+1 − Etkλk+1)2 + 2E(n−1∑
k=0
λk+1
)2
≤ 4E(n−1∑
k=0
λk+1
)2
= 4E(∫ T
0|Zu|2 du
)2
.
Finally J ≤ C
n‖(1 + sup
t∈[0,T ]|St|)2‖2
∥∥∥∥∫ T
0|Zu|2 du
∥∥∥∥2
.
It is a standard result on diffusions that ‖(1 + supt∈[0,T ] |St|)2‖2 is finite. It remains toprove that the term involving Z is finite. Since cc∗(Ss) ≥ ε0 Diag((S1
s )2, . . . , (Sds )2), itfollows that |Zs|2 ≤ ε−1
0 max1≤i≤d(Sis)2 |Hs|2 so that, by Schwartz’s Inequality,
E(∫ T
0|Zs|2 ds
)2
≤(E sup
0≤t≤T
∣∣(S−1)t∣∣8
)1/2(E
(∫ T
0|Hs|2 ds
)4)1/2
≤C(E
(∫ T
0|Hs|2 ds
)4)1/2
<+∞
where (S−1)t := (1/S1t , . . . , 1/S
dt ) satisfies an SDE with bounded coefficients, so that its
supremum has finite polynomial moments. Finally, the last inequality is a standard factfrom RBSDE theory (see [19] or [2]). So we have proved that J ≤ C/n.
The term I can be treated the same way round. ♦
Step 2. The second type of difficulty which appears is due to the following two facts:– The obstacle h(t, St) is not sufficiently smooth and so we do not have a nice control
on the increasing process (Kt).– The diffusion process (St) is not uniformly elliptic (because c(0) = 0) and so we do
not have nice evaluations of the density of St.In order to overcome these difficulties we will replace S by an elliptic diffusion denoted
S and, when necessary, the obstacle h by a smoother obstacle h. Namely, let ε∈ (0, 1] andλ > 0. We consider:
– A function h ∈ C1,2(R+ ×Rd,R) using a regularization by convolution of order ε ofh. In particular, since h is Lipschitz continuous, we have
‖h− h‖∞ ≤ Ch ε and ‖(∂t + Lc)h‖∞ ≤ Ch ε−1 (4.14)
where Lc is the infinitesimal generator of the diffusion S.– A function ϕ
λ∈ C∞b (R,R) satisfying
ϕλ(ξ) := ξ if ξ ≥ e−λ, ϕ
λ(ξ) :=
e−λ
2if ξ ≤ 1
2e−λ (4.15)
and∀m ≥ 1,
∥∥∥ϕ(m)λ
∥∥∥∞≤ Cm eCmλ (4.16)
where Cm is a real constant (not depending upon λ). Then the approximating diffusioncoefficient c
λdefined for every x = (x1, . . . , xd)∈ Rd by
cλ(x) := c(ϕ
λ(x1), . . . , ϕ
λ(xd))
30

satisfiescλ∈ C∞b (Rd) and c
λc∗λ(x) ≥ ε0
4e−2λId. (4.17)
We consider now the solution Sx of the SDE
dSxt = r Sxt dt+ cλ(Sxt )dWt, Sx0 = x.
Let P t(x, dy) denote its markov semi-group defined by P tf(x) = Ef(Sxt ). We will denoteby St the solution Ss0 starting at s0∈ (0,+∞)d. The related Snell envelope
Y t = ess supτ∈TtEt h(τ, Sτ )
satisfies the RBSDE
Y t = h(T, ST ) +KT −Kt −∫ T
tHs.dWs
for some non decreasing process K and some progressively measurable dP ⊗ dt-squareintegrable process H (see [19] and [2] for this topic). We also consider the approximation
ηs
=n
TEtk
∫ tk+1
tk
Hsds, tk ≤ s < tk+1.
Lemma 2 Assume that (Σ) holds. Then
E∫ T
0|Hs − ηs|2 ds ≤ C
(ε2 + (1 + |s0|)2e−Cλ
2/T)
+ E∫ T
0
∣∣∣Hs − ηs∣∣∣2ds. (4.18)
Proof: We rely on the stability property of RBSDE (see [19] and [2]).
E∫ T
0|Hs −Hs|2 ds ≤ C E sup
0≤s≤T|h(s, Ss)− h(s, Ss)|2
≤ C
(‖h− h‖2∞ + E sup
0≤s≤T|h(s, Ss)− h(s, Ss)|2
).
Let τ := inft > 0 | St ≤ e−λ. One checks directly on model (1.1) that
P(τ ≤ T ) = P( inf0≤s≤T
Ss ≤ e−λ) = P( sup0≤s≤T
(− lnSs) ≥ λ) ≤ Ce−Cλ2/T .
Since St = St on the event t ≤ τ, we obtain
E∫ T
0|Hs −Hs|2 ds ≤ C
(‖h− h‖2∞ + E
(sup
0≤s≤T(|h(s, Ss)|2 + |h(s, Ss)|2)1τ≤T
))
≤ C(ε2 + (1 + |s0|)2
√P(τ ≤ T )
)
≤ C(ε2 + (1 + |s0|)2e−Cλ2/T ).
On the other hand since η and η are the L2(dP⊗ dt)-projections of H and H respectivelyon the space Pn of elementary predictable processes, we complete the proof by noting that
E∫ T
0
∣∣∣ηs − ηs∣∣∣2ds ≤ E
∫ T
0|Hs −Hs|2 ds. ♦
31

We need now some analytical facts that we briefly recall here (see [19] and [2]). Firstof all we have the representation
Y t = u(t, St), Ht = (c∗λ∇xu)(t, St) (4.19)
where u is the unique solution in a variational sense (see [2]) of the PDE
(∂t + Lcλ)u(t, x) + F (t, x, u(t, x)) = 0, u(T, x) = h(T, x), (4.20)
with F (t, x, u(t, x)) = ϑ(t, x)1u(t,x)=h(t,x) ((∂t + Lcλ)h(t, x))+
where ϑ is a measurable function such that 0 ≤ ϑ ≤ 1. Set Ft(x) := F (t, x, u(t, x)). It fol-lows from (4.14) that sup
0≤t≤Tsupx∈Rd
|Ft(x)| ≤ Ch/ε (where Ch is the real constant introduced
in (4.14)). With this notation (4.20) becomes
(∂t + Lc)u(t, x) + Ft(x) = 0, u(T, x) = h(T, x),
in a variational sense. Then, it is a standard fact that u satisfies the mild form of theabove PDE
u(t, x) = P T−t(hT )(x) +∫ T
tP s−t(Fs)(x)ds. (4.21)
We focus now on the semi-group P t. It is well known (see [31]) that under as-sumption (4.17), P t(x, dy) = p
t(x, y)dy and for every k ∈ N and every multi-index
α = (α1, . . . , αm)∈ Nm we have
∀x, y∈ Rd, ∀ t ∈ [0, T ],∣∣∣∂ktDα
xpt(x, y)∣∣∣ ≤ Kα,k(1+|x|)qα,k eKα,kλ
ε1+k+|α|/20
e−C|x−y|2
t
tk+|α|+d
2
(4.22)
where Dαx := ∂α1+···+αm
∂(x1)α1 ···∂(xd)αd, |α| = α1 + · · · + αd and Kα,k and qα,k are real constants
depending on α, k and C|α| (but not on λ).One derives some straightforward consequences from this evaluation. First, using that∣∣h
T(y)
∣∣ ≤ C(1 + |y|), it follows from (4.22) that there exists some constants K and q suchthat, for every t∈ (0, T ], x = (x1, . . . , xd)∈ Rd,
∣∣∣∣∂P t(hT )∂xk
(x)∣∣∣∣ ≤ C
∫
Rd
∣∣∣∣∂p
t(x, y)∂xk
∣∣∣∣ (1 + |y|) dy ≤ K
ε3/20
(1 + |x|)q eKλ
√t
(4.23)
∣∣∣∣∣∂2P t(hT )∂xk∂x`
(x)
∣∣∣∣∣ ≤K
ε20
(1 + |x|)q eKλ
t,
∣∣∣∣∣∂2P t(hT )∂t∂xk
(x)
∣∣∣∣∣ ≤K
ε5/20
(1 + |x|)q eKλ
t3/2. (4.24)
Similarly, using that ‖F‖∞ ≤ Ch/ε (and changing K for K(Ch ∨ 1)), one gets for Fs(x),
∣∣∣∣∂P t(Fs)∂xk
(x)∣∣∣∣ ≤
K
ε3/20
(1 + |x|)q eKλ
ε
1√t,
∣∣∣∣∂2P t(Fs)∂xk∂x`
(x)∣∣∣∣ ≤
K
ε20
(1 + |x|)q eKλ
ε
1t
(4.25)
and ∣∣∣∣∂2P t(Fs)∂t∂xk
(x)∣∣∣∣ ≤
K
ε5/20
(1 + |x|)q eKλ
ε
1t3/2
. (4.26)
32

Lemma 3 Set for every t ∈ [0, T ) and every x ∈ Rd, vk(t, x) := ∂u∂xk
(t, x), k = 1, . . . , d.Assume that (4.17) holds.
(i) For every t∈ (0, T ),
|vk(t, x)| ≤ K
ε3/20
(1 + |x|)qeKλ(
1ε
+1√T − t
). (4.27)
(ii) For every t, t′∈ [0, T ),∣∣vk(t, x)− vk(t′, x)
∣∣ ≤ K
ε5/20
(1 + |x|)q eKλ
ε
(√|t− t′|+ |t− t′|
(T − t ∨ t′)3/2)). (4.28)
(iii) Let δ∈ (0, T ), for every t∈ (0, T − δ),
|vk(t, x)− vk(t, x′)| ≤ K
ε20
(1 + |x|+ |x′|)q eKλ
ε
((ε
T − t + ln(T
δ
))|x− x′|+
√δ
). (4.29)
Proof: We take derivatives in the mild equation (4.21) for u and we obtain
vk(t, x) =∂P T−t(hT )
∂xk(x) +
∫ T
t
∂P s−t(Fs)∂xk
(x)ds.
Let us begin by (iii). For every t∈ [0, T ) and every x, x′∈ Rd,
vk(t, x)− vk(t, x′) =∂P T−t(hT )
∂xk(x)− ∂P T−t(hT )
∂xk(x′) +
∫ T
t
(∂P s−t(Fs)
∂xk(x)− ∂P s−t(Fs)
∂xk(x′)
)ds.
Hence, if t∈ [0, T − δ), one derives using (4.24) and (4.25) that
|vk(t, x)− vk(t, x′)| ≤∣∣∣∣∂P T−t(hT )
∂xk(x)− ∂P T−t(hT )
∂xk(x′)
∣∣∣∣ +∫ T
t+δ
∣∣∣∣∂P s−t(Fs)
∂xk(x)− ∂P s−t(Fs)
∂xk(x′)
∣∣∣∣ds
+∫ t+δ
t
∣∣∣∣∂P s−t(Fs)
∂xk(x)
∣∣∣∣ds+∫ t+δ
t
∣∣∣∣∂P s−t(Fs)
∂xk(x′)
∣∣∣∣ds
≤ K
ε20
(1 + |x|+ |x′|)qeKλ((
1T − t +
1ε
ln(T − tδ
))|x− x′|+
√δ
ε
).
which yields the second inequality. Claim (i) follows similarly. Let us come to claim (ii).Assume without loss of generality that t < t′.
vk(t′, x)− vk(t, x) =∂P T−t′(hT )
∂xk(x)− ∂P T−t(hT )
∂xk(x) +
∫ T
t′
(∂P s−t′(Fs)
∂xk(x)− ∂P s−t(Fs)
∂xk(x)
)ds
−∫ t′
t
∂P s−t(Fs)∂xk
(x)ds
so that
|vk(t′, x)− vk(t, x)| ≤∣∣∣∣∂P T−t(hT )
∂xk(x)− ∂P T−t′(hT )
∂xk(x)
∣∣∣∣ +∫ T
t′
∣∣∣∣∂P s−t(Fs)
∂xk(x)− ∂P s−t′(Fs)
∂xk(x)
∣∣∣∣ds
+∫ t′
t
∣∣∣∣∂P s−t(Fs)
∂xk(x)
∣∣∣∣ ds.
Hence, one derives using (4.24) and (4.26) that
|vk(t, x)− vk(t′, x)| ≤ K
ε5/20
(1 + |x|)q eKλ
ε
( |t− t′|(T − t′)3/2
+|t− t′|
(T − t′) +√|t− t′|
)
33

which completes the proof. ♦
The above lemma and the representation Hxt = (c∗λ∇xu)(t, Sxt ) yield
Lemma 4 (a) Let T ′∈ [0, T ] and δ∈ (0, T − T ′]. For every s, t∈ [0, T ′],(E |Hx
s −Hxt |2
)1/2≤ K(1+|x|)q+1
ε5/20 (T−T ′) 3
2
eKλ
ε
((2 +√T + ln
(T
δ
))√|t− s|+
√δ
). (4.30)
(b) Let δ∈ (0, T ). For every s, t∈ [0, T − δ), |t− s| ≤ δ,(E |Hx
s −Hxt |2
)1/2≤ K
ε5/20
(1 + |x|)q+1 eKλ
ε
(T + 2δ
√|t− s|+
√δ
). (4.31)
Proof: (a) The functions cλ
are Lipschitz continuous with [cλ]Lip ≤ CeCλ and satisfy
‖cλ(x)‖ ≤ C(1 + |x|) where the real constant C does not depend on λ, consequently
|c∗λ(x)∇xu(t, x)−c∗
λ(x′)∇xu(t′, x′)| ≤ CeCλ|∇xu(t, x)| |x−x′|+C(1+|x′|)|∇xu(t, x)−∇xu(t′, x′)|.
Combining the bounds obtained in Lemma 3 for the functions vk(t, x) leads to
|c∗λ(x)∇xu(t, x)− c∗
λ(x′)∇xu(t′, x′)|
≤ K
ε5/20
(1 + |x|+ |x′|)q eKλ
ε
((ε
T − T ′ +1√
T − T ′ + ln(T
δ
))|x− x′|+
√δ +
|t− t′|(T − T ′)3/2
)
≤ 1(T − T ′)3/2
K
ε5/20
(1 + |x|+ |x′|)q eKλ
ε
((2 + ln
(T
δ
))|x− x′|+
√δ + |t− t′|
).
Consequently, using Holder Inequality and the 1/2-Holder regularity of t 7→ Sxt from [0, T ]into L4(P) (uniformly with respect to λ), one has for every s, t∈ [0, T ],
‖Hxs −Hx
t ‖2
≤ 1(T − T ′)3/2
K
ε5/20
‖(1 + |Sxs |+ |Sxt |)q‖4
eKλ
ε
((2 + ln
(T
δ
))‖Sxs − Sxt ‖4 +
√δ + |t− s|
)
≤ 1(T − T ′)3/2
K
ε5/20
(1 + |x|)q eKλ
ε
((2 +√T + ln
(T
δ
))(1 + |x|)
√|t− s|+
√δ
).
(b) Still using the estimates Lemma 3 and, this time, ln(u) ≤ u and |t−t′|(T−t∨t′)3/2 ≤
√|t−t′|δ
yields |c∗λ(x)∇xu(t, x) − c∗
λ(x′)∇xu(t′, x′)|
≤ K
ε5/20
(1 + |x|+ |x′|)q eKλ
ε
((T + 2δ
)|x− x′|+ 2
√δ
).
One concludes the same way round. ♦
Proof of Theorem 6: (a) Using (4.30) (still using the notation q instead of q + 1)
E∫ T ′
0
∣∣∣Hs − ηs∣∣∣2ds =
∑
tk<T ′E
∫ tk+1
tk
∣∣∣∣1
∆tk+1
∫ tk+1
tk
(Hs −Hr)dr∣∣∣∣2
ds
≤∑
tk<T ′
∫ tk+1
tk
1∆tk+1
∫ tk+1
tk
E |Hs −Hr|2 drds
≤ K2
ε50(T − T ′)3
(1 + |s0|)2q e2Kλ
ε2
(ε+ ln
(T
δ
)1√n
+√δ
)2
.
34

Moreover, as a consequence of the first two lemmas,
E∫ T ′
0|c∗(Ss).(Zs − ζs)|2 ds ≤ C
n+ C (1 + |s0|)2e−Cλ
2/T + C ε2
K2(1 + |s0|)2q
ε50(T − T ′)3
e2Kλ
ε2
((2 +√T + ln
(T
δ
))1√n
+√δ
)2
.
At this stage, we choose our parameters λ, ε and δ, depending on n. We set λn :=√T
2C lnn, δn := 4/n so that,
(2 +√T + ln
(T
δn
))1√n
+√δn ≤ 4 +
√T + lnn+ ln(T/4)√
n.
Then, set A(T, T ′) := K
ε5/20 (T−T ′)3/2
(1+ |s0|)q and take the regularization parameter ε := εn
such that
ε2n :=
A(T, T ′)√C
4 +√T + lnn+ ln(T/4)√
ne2Kλn .
Consequently
E∫ T ′
0|c∗(Ss)(Zs − ζs)|2 ds ≤ C
n+ C (1 + |s0|)2e−Cλ
2n/T + 2
√CA(T, T ′)
4 + lnn+ ln(T/4)√n
e2Kλn
≤ C
n+C(1 + |s0|)2
√n
+ CA(T, T ′)lnn√ne2K T
C
√lnn
≤ C(1 + |s0|)q∨2 K
ε5/20
(1 + (T − T ′)− 32 )e2K T
C
√lnn
√n
.
(b) One carries out a similar optimization process, based this time on (4.31). One sets,for large enough n,
δn := ρn−1/3, ε2n :=
K
ε50
(1 + |s0|)qe2Kλn((T + 2)/ρ+√ρ)n−1/6, λn :=
√T
6Clnn. ♦
5 Numerical results on American style options
In this section, we present some numerical experiments concerning the pricing and thehedging of American style options in dimensions d = 2 up to 10. This study will be dividedin two parts. First, we will show how to numerically estimate the spatial accuracy in eachdimension in order to be able to produce a good choice of time and spatial discretization.Secondly, we will compute some prices and hedges following this choices.
5.1 The model
We specify the underlying asset model (1.1) into a d-dimensional Black & Scholes (B&S)model, i.e. constant volatilities σ` with constant dividend rates µ`, ` = 1, . . . , d:
dS`t = (r − µ`)S`t dt+ σ`S`t dW `
t , t ∈ [0, T ], ` = 1, . . . , d, (5.32)
where (Wt)t∈[0,T ] denotes a d-dimensional standard Brownian motion. The traded assetsvector are (eµ`tS`t ), ` = 1, . . . , d, so that the discounted price satisfies (5.32) with r = 0.
35

The assets are assumed to be independent for technical reasons: it turns out to be theworst setting for quantization, so the most appropriate to carry out convincing numericalexperiments.
Beyond its importance for applications, in the of B&S model St is a closed function of(t,Wt) since S`t = s`0 exp ((r − (µ` + σ2
` /2))t+ σ`W`t ). Therefore, one can either implement
a quantization tree for (St)t∈[0,T ] or for (Wt)t∈[0,T ]. Although the payoffs functions are,stricto sensu, no longer Lipschitz continuous as functions of W , we chose the secondapproach because of its universality: an optimal quantization of the Brownian motion canbe achieved very accurately once for all and then stored off line. Indeed, the Brownianquantization is made of optimal quantizations of the d-dim standard Normal distributionsby appropriate dilatations (see Figure 1) which are actually stored with all their companionparameters for a wide range of sizes (see [39]).
We focus on American style “geometric” exchange options which payoffs read
h(ξ) = max(ξ1 · · · ξp − ξp+1 · · · ξ2p, 0
)with d := 2p. (5.33)
It follows from the pricing formula (1.5) that the European and American premia forexchange options do not depend upon the interest rate r so we can set r = 0 w.l.g. Animportant remark is that there exists a closed form for the Black & Scholes premium of aEuropean exchange option with maturity T at time t given by
ExBS (θ, ξ, ξ′, σ, µ) := erf(d1) exp(µθ) ξ − erf(d1 − σ√θ) ξ′,
d1(ξ, ξ′, σ, θ, µ) :=ln(ξ/ξ′) + (σ2/2 + µ)θ
σ√θ
and erf(ξ) :=∫ ξ
−∞e−
u2
2du√2π
with θ := T − t, σ :=
(d∑
`=1
σ2`
)1/2
, µ :=p∑
`=1
µ`−d∑
`=p+1
µ`, ξ :=p∏
`=1
S`t , ξ′ =
d∏
`=p+1
S`t . (5.34)
We will also use some American geometric put payoffs:
h(ξ1, . . . , ξd) :=(K −
(ξ1 · · · ξd
)1/d)
+
.
In this case, the explicit formulæ for the European Put with strike K and maturity T attime t (with µi = 0 and σi = σ, i = 1, . . . , d) reads
PBS (θ,K, ξ, σ, r) := erf(−d2 + σ√θ/d) exp(−rθ)K − erf(−d2) ξ, (5.35)
d2(K, ξ, σ, θ, r) :=ln(ξ/K) + (r + σ2/(2d))θ
σ√θ/d
,
where θ = T − t and ξ =
(d∏
i=1
Sit
)1/d
exp(−σ
2(d− 1)2d
).
5.2 Specification of the numerical scheme
Let us specify now the implemented numerical scheme. As mentioned above, our approachto pricing consists first in quantizing the d-dim Brownian motion W . More precisely, letT > 0 and n, N two integers; set ∆t := T
n and tk := k∆t. Spatial discretization dependson the time tk. We use the optimized dispatching rule (2.38) “size” to the Nk-quantizerof time tk so that N0 = 1, N ≤ 1 + N1 + N2 + · · · + Nn ≤ N + n. First, we compute
36

for every k∈ 1, . . . , n an optimal (quadratic) Nk-quantizer of N (0; Id) by processing aCLV Q algorithm (2.21) (the final converging phase is refined using a randomized versionof the so-called Lloyd I fixed point procedure, see e.g. [26]). For further details about theimplementation, see [39]. As a second step, we get the optimalNk-quantizer (xki )i=1,...,Nk ofWtk by a
√tk-dilatation. All the companion parameters (weights pki , p
kij , L
2-quantizationerrors) are then estimated by a standard Monte Carlo simulation. Note that all thesequantities are universal objects that can be kept off line, once computed accurately enough.
In this very particular but important case, we only need the original CLVQ algorithmdefined by (2.22) and (2.23), not its extended version developed for general diffusions.
Finally, the quantization tree algorithm (2.12) reads
vni := hni , i = 1, . . . , Nn,
vki := max(hki ,
∑1≤j≤Nk+1
πkij vk+1j
), i = 1, . . . , Nk, k = 0, . . . , n− 1
(5.36)
where the obstacle is given by
hki := h(sk,1i , . . . , sk,di ) with sk,`i := s`0 exp(−
(µ` +
σ2`
2
)k∆t+ σ` x
ki
), ` = 1, . . . , d,
and the weights πkij are Monte-Carlo proxies of the theoretical weights i.e.
πkij :=P(Wtk+1
∈ Cj(xk+1),Wtk ∈ Ci(xk))P(Wtk ∈ Ci(xk))
.
(About the error induced by the Monte Carlo approximation, see [4] and [1]). Follow-ing (3.15) the hedging δki at xki is then computed by
δk,`i :=
Nk+1∑
j=1
πkij(vk+1j − vki )(eµ`tk+1sk+1
j,` − eµ`tkski )
Nk+1∑
j=1
πkij(eµ`tk+1sk+1,`
j − eµ`tksk,`i )2
, ` = 1, . . . , d. (5.37)
In practice, we often need to introduce in the quantization tree algorithm a sequenceof “control variate variables”. This is usually achieved by considering a FStk -martingale
Mtk := m(tk, Stk) where the function m is explicitly known.
Then one sets M ik := m(tk, ski ) so that the (explicit) sequence (Mk
i )1≤i≤Nk,1≤k≤n, i.e.approximately satisfies:
Nk+1∑
j=1
πkij Mk+1j ≈Mk
i . (5.38)
The approximation comes from the spatial discretization by quantization (in fact if theequality did hold it would be of no numerical interest). Here, an efficient choice is to take
Mki = ExBS (T − tk,
p∏
`=1
sk,`i ,d∏
`=p+1
sk,`i , σ, µ). (5.39)
Then, we use the following proxy for the premium of the American payoff (h(tk, Stk))0≤k≤n
Premiumh(tk, ski ) := m(tk, ski ) + vh−m,ki (5.40)
37

where (vh−m,ki )1≤k≤n is obtained by the scheme (5.36) with the obstacle (hik−m(tk, ski ))1≤k≤n.Let us emphasize that “control variate variables” (Mk
i ) such that (5.38) holds exactlyis useless in practice since in this case it is not difficult to see that
∀ i, k, vh−m,ki = vh,ki −Mki .
5.3 Numerical accuracy, stability
We will now estimate numerically the rate of convergence (at time t = 0) of the numeri-cal premium p(n, N) := Premiumh(0, s0) given by (5.36) using (5.40) towards a referencepth as a function of (n, N) where N := N/n (average number of points per layer). Thereference premium pth is obtained by a finite difference method for vanilla American putoptions in 1-dimension and derived from a 2-dimensional difference method due to Vil-leneuve & Zanette in higher dimensions (see [42]). The error terms both in time and inspace given by Theorem 4 are
E(n, N) = |p(n, N)− pth| ≈ c1
n+ c2
n
Nαwith α = 1/d (5.41)
for semi-convex payoffs. Two questions are raised by this error bound:– are these rates optimal?– Is it possible to compute an optimal number nopt of time steps to minimize the global
error?We are able to answer to the first one: we compute by c1 and C2 := c2N
−α by nonlinearregression of the function n 7→ E(n, N) for several fixed values of N and n.
We begin by the 1 and 2-dimension settings. The specifications of the referencemodel (5.32) are (d = 1, vanilla put, r = 0.06, σ = 0.2, S0 = 36, K = 40) and (ex-change, d = 2, σ = 0.2, µ = −0.05, S1
0 =√
40, S20 =√
36).In Table 1 are displayed numerical approximations of c1, C2 and
αi :=ln(C2(Ni+1)/C2(Ni))
ln(Ni/Ni+1), i = 1, 2, 3.
Note first that c1 does not depend upon N : this confirms the above global error struc-ture (5.41). These empirical values for α are closer to 2/d than the theoretical 1/d andstrongly suggests that α = 2/d is the true order. This can be explained by the followingheuristics: in the linear case (e.g. a European option computed by a descent of the quan-tization tree algorithm), the semi-group of the diffusion quickly regularizes the premium.Then, the second order numerical integration formula by quantization applies: let X bea square integrable random variable, x an optimal quadratic N -quantizer; if f admits aLipschitz continuous differential Df , then (see [38])
|Ef(X)−∑
1≤i≤NP(Xx=xi)f(xi)−
∑
1≤i≤NDf(xi).E((X−xi)1Ci(x))︸ ︷︷ ︸
= 0 since x is optimal
| ≤ [Df ]Lip‖X−Xx‖22, (5.42)
where ‖X− Xx‖22
= cXN−2/d+o(N−2/d) as N →∞. The optimality of x makes the term
E((X − xi) 1Ci(x)(X)) = −12
∂‖X− bXx‖22
∂xivanish. Applying rigorously this idea to American
option pricing remains an open question (however see [6]). Whatsoever this better rate ofconvergence is a strong argument in favor of optimal quantization.
From dimension 4 to 10, the storage of the matrix [πkij ] for increasing values of N andlarge n is costly and make the computations intractable. The above computations suggest
38

a spatial order of 2/d when the grids are optimal. In fact, true optimal quantizers becomeharder and harder to obtain in higher dimensions, that is why we verify that spatial orderbecomes closer and closer to 1/d rather than 2/d.
Several answers to the second question are possible according to the variables used inthe error bound. Here, we chose to compute nopt as a function of N and n (rather than Nand n). For a given value of N , one proceeds as above a nonlinear regression that yieldsnumerical values for c1 and C2 := c2N
−1/d. Finally set
nopt(d, N) :=√c1
C2.
In lower dimension (d ≤ 3), the order α can be estimated and one may set directly forevery N , nopt(d, N) =
√c1c2N1/d. In Table 2 are displayed the numerical values.
5.4 Numerical results for American style options
We now present numerical computations for American geometric exchange functions basedon the model described in Section 5.1. Namely, we present the premia of in- and out-of-themoney options as functions of the maturity T (expressed in year), T ∈ kn , 0 ≤ k ≤ n.This distinction gives an insight about the numerical influence of the free boundary.
We first settle the value of N and then read on Table 2 the optimal number n =nopt(d, N) of time steps. Space discretization is the one used for the above numericalexperiments. The model parameters and initial data are settled so that µ and σ remainconstant, equal to −5% and 20% respectively in (5.34):
µ1 := −5, µi := 0, i = 2, . . . , d, σi := 20/√d, i = 1, . . . , d, .
si0 := 402/d, i = 1, . . . , d/2, si0 := 362/d, i = d/2 + 1, . . . , d (in-the-money),
si0 := 362/d, i = 1, . . . , d/2, si0 := 402/d, i = d/2 + 1, . . . , d (out-of-the-money).
In Figure 2 are displayed the computed premia a) and hedges b) in 2-dimension attime t = 0 together with the reference ones as a function of the maturity T ∈ [0, Tmax] forTmax = 1. Figure 2 emphasizes that both premia and hedges in 2-dimension are very wellfitted with the reference premium. It also holds true in the Out-of-the-money case (notdepicted here).
In general, in the In-the-money case, we can see on Figure 3(a) and Table 3 that thecomputed premium tends to overestimate the reference one when the maturity grows.This phenomenon grows also when the dimension d increases. However, the maximalerror remains within 3,5 % in all the cases as displayed in Table 3. The same phenomenonoccurs for the computed hedges, within a similar range (hedges are not depicted here).In the Out-of-the-money setting, we can see on Figure 3(b) that very different behaviorsare observed on the premia. Indeed whatever the dimension is (from 4 to 10), the premiaseem to be well computed (dimension other than 4 are not depicted here). Figure 4depicts the quantized residual risk (at t = 0) as a function of the maturity. It suggeststhat numerical incompleteness of the market has a bigger impact “in-the-money” than“out-of-the-money”.
We will now test the influence of the European premium when used as a “control variatevariable” in the simulations. To this aim, we will price American puts on a geometricalindex in dimension d = 5. The model parameters and initial data are
µi = 0, si0 = 100, σi = 20%, i = 1, . . . , d,
39

andr = ln(1.1), K = 100.
This choice is motivated by the fact that then the European premium is significantlylower the American premium. The reference prices and hedges are computed using aBBSR algorithm (see [12]) with 1000 time steps in dimension 1 with
s0,eq = 100, σeq = σ1/√d, δeq =
σ21(d− 1)
2d,
where s0,eq, σeq and δeq are the “1d-equivalent”s spot, volatility and dividend rate. Thequantized prices are still computed using (5.40) and algorithm (5.36) where the “controlvariate variable” is known by (5.35) and the hedges are computed using (5.37).
Table 4 shows the price and hedges computed for (n,Nmax) = (10, 2800). We can seethat the price error is 0.5% and the sum of the hedge errors of each components is 0.8%.
Now, Figure 5 shows the influence of the European “control variate variable” (5.35).We have plotted the American premium computed following (5.35), (5.36) and (5.40) for an“optimal” time and space discretization found in Table 4, namely (n,Nmax) = (10, 2800).We can see that the European premium counts for a little part in the American one. Herewe can see that the quantization is able to capture by itself a significant part of the priceas the maturity T varies in [0, 1].
References
[1] V. Bally, The central limit theorem for a nonlinear algorithm based on quantization. Stochasticanalysis with applications to mathematical finance., Proc. R. Soc. Lond., 460, No 2041, 221-241,2004.
[2] V. Bally, M.E. Caballero, B. Fernandez, N. El Karoui, Reflected BSDE’s, PDE’s and Variationalinequalities. Pre-print RR-4455 INRIA, 2002.
[3] V. Bally, G. Pages, A quantization algorithm for solving discrete time multi-dimensional dis-crete time Optimal Stopping problems, Bernoulli, 9, 1003-1049, 2003.
[4] V. Bally, G. Pages, Error analysis of a quantization algorithm for obstacle problems, Stoch.Proc. and their Appl., 106, 1-40, 2003.
[5] V. Bally, G. Pages, J. Printems, A stochastic quantization method for non linear problems,Monte Carlo Meth. and Appl., 7, n01-2, 21-34, 2001.
[6] V. Bally, G. Pages, J. Printems, First order schemes in the numerical quantization method,Mathematical Finance, 13, No 1, 1-16, 2002.
[7] J. Barraquand, D. Martineau, Numerical valuation of high dimensional multivariate Americansecurities, Journal of Finance and Quantitative Analysis, 30, 1995.
[8] A. Bensoussan, J.L. Lions, Applications of the Variational Inequalities in Stochastic Control,North Holland, 1982, or Applications des inequations variationnelles en controle stochastique,Dunod, Paris, 1978.
[9] B. Bouchard, N. Touzi, Discrete-time approximation and Monte Carlo simulation of backwardstochastic differential equations, Stoch. Proc. and their Appl., 111, No 2, 175-206, 2004.
[10] N. Bouleau, D. Lamberton, Residual risks and hedging strategies in Markovian markets, Stoch.Proc. and their Appl., 33, 131-150, 1989.
[11] M. Broadie, P. Glasserman, Pricing American-Style Securities Using Simulation, Journal ofEconomic Dynamics and Control, 21, n08-9, 1323-1352, 1997.
[12] M. Broadie, J. Detemple, American option valuation: new bounds, approximations and acomparison with an existing method, Review of Financial Studies, 9, n04, 1211–1250, 1996.
40

[13] J. Bucklew, G. Wise, Multidimensional Asymptotic Quantization Theory with rth Powerdistortion Measures, IEEE Trans. on Information Theory, Special issue on Quantization, 28,n0 2, 239-247, 1982.
[14] A.P. Caverhill, N. Webber, American options: theory and numerical analysis, in Options:recent advances in theory and practice, Manchester University press, 1990.
[15] D. Chevance, Numerical methods for backward stochastic differential equations, NumericalMethods in Finance, L. Rogers and D. Talay eds., Publications of the Newton Institute series,Cambridge University Press, 1997.
[16] E. Clement, P. Protter, D. Lamberton, An analysis of a least squares regression method forAmerican option pricing, Finance & Stochastics, 6, n0 2, 449-471, 2002.
[17] P. Cohort, Limit Theorems for the Random Normalized Distortion, The Ann. of Appl. Probab.,14, No 1, 118-143, 2004.
[18] M. Duflo, Random Iterative Systems, Berlin, Springer, 1998.
[19] N. El Karoui, C. Kapoudjan, E. Pardoux, S. Peng, M.C. Quenez, Reflected solutions ofBackward Stochastic Differential Equations and related obstacle problems for PDE’s, The Ann.of Probab., 25, No 2, 702-737, 1997.
[20] H. Follmer, D. Sondermann, Hedging of non redundant contingent claims, Contributions toMathematical Economics, 205-223, North-Holland, Amsterdam, 1986.
[21] E. Fournie, J.M. Lasry, J. Lebouchoux, P.L. Lions, N. Touzi, Aplications of Malliavin calculusto Monte Carlo methods in Finance, Finance & Stochastics, 3, 391-412, 1999.
[22] E. Fournie, J.M. Lasry, J. Lebouchoux, P.L. Lions, Aplications of Malliavin calculus to MonteCarlo methods in Finance II, Finance & Stochastics, 5, 201-236, 2001.
[23] A. Friedmann, Stochastic Differential Equations and Applications, Academic Press, New York,1, 1975.
[24] S. Graf, H. Luschgy, Foundations of quantization for probability distributions, Lecture Notesin Mathematics n01730, Springer, 2000, 230p.
[25] A. Gersho, R. Gray (eds.), IEEE Trans. on Infor. Theory, Special issue on Quantization, 28,1982.
[26] J. Kieffer, Exponential rate of Convergence for the Lloyd’s Method I, IEEE Trans. on Infor-mation Theory, Special issue on Quantization, 28, n0 2, 205-210, 1982.
[27] A. Kohatsu-Higa, R. Pettersson, Variance reduction methods for simulation of densities onWiener space, SIAM J. Numer. Anal., 40 No. 2, 431-450, 2002.
[28] H.J. Kushner, Approximation and weak convergence methods for random processes, with ap-plications to stochastic systems theory, MIT Press Series in Signal Processing, Optimization,and Control, 6, MIT Press, Cambridge, MA, (1977), 1984, 269
[29] H.J. Kushner, P. Dupuis, Numerical methods for stochastic control problems in continuoustime, 2nd edition, Applications of Mathematics, 24, Stochastic Modeling and Applied Probabil-ity, Springer-Verlag, New York, 2001, 475
[30] H.J. Kushner, G.G. Yin, Stochastic Approximations Algorithms and Applications, Springer,New York, 1997.
[31] S. Kusuoka and D. Stroock, Application of the Malliavin calculus II, J. Fac. Sci. Univ. Tokyo,Sect IA Math., 32, 1-76, 1985.
[32] D. Lamberton, Brownian optimal stopping and random walks, Applied Mathematics and Op-timization, 45, 283-324, 2002.
[33] D. Lamberton, B. Lapeyre, Introduction to stochastic calculus applied to Finance, Chapman& Hall, London, 1996, 185
41

[34] D. Lamberton, G. Pages, Sur l’approximation des reduites, Ann. Inst. Poincare, 26, n02,331-355, 1990.
[35] P.L. Lions, H. Regnier, Calcul des prix et des sensibilites d’une option americaine par unemethode de Monte Carlo, working paper, 2002.
[36] F.A. Longstaff, E.S. Schwartz, Valuing American options by simulation: a simple least-squaresapproach, Review of Financial Studies, 14, 113-148, 2001.
[37] J. Neveu, Martingales a temps discret, Masson, Paris, 1971, 215p.
[38] G. Pages, A space vector quantization method for numerical integration, Journal of Comput.Appl. Math., 89, 1-38, 1997.
[39] G. Pages, J. Printems, Optimal quadratic quantization for numerics: the Gaussian case, MonteCarlo Meth. and Appl., 9, n02, 135-168, 2003.
[40] D. Revuz, M. Yor, Continuous Martingales and Brownian Motion, Springer-Verlag, 2nd edi-tion, Berlin-Heidelberg, 1991, 560p.
[41] J.N. Tsitsiklis, B. Van Roy, Optimal stopping of Markov processes: Hilbert space theory,approximation algorithms, and an application to pricing high-dimensional financial derivatives,IEEE Trans. Automat. Control, 44, n010, 1840-1851, 1999.
[42] S. Villeneuve, A. Zanette (2002), Parabolic A.D.I. methods for pricing american option ontwo stocks, Mathematics of Operation Research, 27, no1, 121-149, 2002.
Table 1: Estimation of the spatial convergence exponent α of (5.41) in dimensions d = 1, 2.
d = 1 d = 2Ni N1 = 20 N2 = 30 N3 = 40 N4 = 60 N1 = 235 N2 = 455c1 0.47 0.45 0.45 0.46 3.54(-1) 3.41(-1)C2 3.77(-3) 1.82(-3) 1.03(-3) 4.79(-4) 6.61(-4) 3.55(-4)αi 1.87 1.90 1.91 × 0.89 ×
Table 2: Estimation of the optimal number of time steps for d = 1, 2, 4, 6, 10.
d = 1 d = 2 d = 4, N = 750 d = 6, N = 1000 d = 10, N = 1000c1 0.45 0.35 8.84(-1) 1.46 2.10c2 1.12 2.05(-1) × × ×C2 × × 2.62(-3) 2.57(-3) 8.75(-4)nopt 0.63 N 1.31 N1/2 19 24 50
42

Table 3: American premium & relative error for different maturities and dimensions.
Maturity 3 months 6 months 9 months 12 monthsAMref 4.4110 4.8969 5.2823 5.6501
Price Error (%) Price Error (%) Price Error (%) Price Error (%)d = 2 4.4111 0.0023 4.8971 0.0041 5.2826 0.0057 5.6505 0.0071d = 4 4.4076 0.08 4.9169 0.34 5.3284 0.82 5.7366 1.39d = 6 4.4156 0.1 4.9276 0.63 5.3550 1.38 5.7834 2.20d = 10 4.4317 0.47 4.9945 2.00 5.4350 2.89 5.8496 3.53
Table 4: Value of an American put at time t = 0 and the hedging strategy on a geometricalindex in dimension 5 for maturity T = 1, σi = 0.2, r = ln(1.1), si0 = 100 = K, i = 1, . . . , 5.
n Nmax AM Qtf. BBSR δi Qtf. BBSR10 2800 1.576 1.584 -0.0739 -0.0779 -0.0750 -0.0751 -0.0789 -0.0756
Figure 1: A 500-tuple with its Voronoi tessellation with the lowest quadratic quantization errorfor the bi-variate normal distribution.
43

(a)
3.8
4
4.2
4.4
4.6
4.8
5
5.2
5.4
5.6
5.8
0 5 10 15 20 25
QTFV&Z
(b)
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
0 5 10 15 20 25
QTFV&Z
Figure 2: d = 2, n = 25 and N = 300. American premium as a function of the maturity: a);Hedging strategy on the first asset: b). The cross + depicts the premium obtained with the methodof quantization and – depicts the reference premium (V & Z) (cf. [42]).
(a)
3.8
4
4.2
4.4
4.6
4.8
5
5.2
5.4
5.6
5.8
0 2 4 6 8 10 12 14 16 18 20
(b)
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
0 2 4 6 8 10 12 14 16 18 20
Figure 3: d = 4. In-the-money: (a); Out-of-the-money: (b). American premium as a function ofthe maturity. + depicts the premium obtained with the method of quantization and – depicts thereference premium (V & Z) (cf. [42]).
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
0 2 4 6 8 10 12 14 16 18 20
In the moneyOut the money
Figure 4: Quantized local residual risk |∆Rnt1 |2 as a function of the maturity in 4-dimension withn = 20, N = 750 (see Table 2) (see the definition of local residual risk in (3.10) computed owingto (3.16) in the “In-the-money” case (solid line) and “Out-of-the-money” case (dash line)
44

0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6
0.2 0.4 0.6 0.8 1 year
Pric
es
Maturity
Dimension 5 | K = 100 | s0_i = 100 | sigma = 0.2 | r = ln(1.1) | n = 10 time layers | Nmax = 2800"
EURO Ref.AM Ref.AM Qtf.
Figure 5: American Put premium on a geometrical index in dimension 5 as a function of maturity.Here, si0 = 100, σi = 0.2, r = ln(1.1) and K = 100. Time and space discretization are (n,Nmax) =(10, 2800). The bold line depicts the reference price computed by a BBSR 1d–algorithm, the thinline depicts the European premium (i.e. the “control variate variable”) and the points depict thequantized American Premium at each time step.
45

394CHAPITRE 5. MÉTHODES DE QUANTIFICATION ET QUELQUES APPLICATIONS À LA FINANCE.
5.6 Functional quantization for numerics with an applica-tion to option pricing.
L’article qui suit fut publié dans Monte Carlo Methods and Applications, vol. 11(4), pp.407–446 (2005).

Functional quantization for numerics with an application
to option pricing
Gilles Pages∗ Jacques Printems†
Abstract
We investigate in this paper the numerical performances of quadratic functional quantizationwith some applications to Finance. We emphasize the role played by the so-called product quantiz-ers and the Karhunen-Loeve expansion of Gaussian processes, in particular the Brownian motion.We show how to build some efficient functional quantizers for Brownian diffusions. We proposea quadrature formula based on a Romberg log-extrapolation of “crude” functional quantizationwhich speeds up significantly the method. Numerical experiments are carried out on two Europeanoption pricing problems: vanilla and Asian Call options in a Heston stochastic volatility model.It suggests that functional quantization is a very efficient integration method for various path-dependent functionals of a diffusion processes: it produces deterministic results which outperformsMonte Carlo simulation for usual accuracy levels.
Key words: Functional quantization, Product quantizers, Romberg extrapolation, Karhunen-Loeveexpansion, Brownian motion, SDE, Asian option, stochastic volatility, Heston model.
2001 AMS classification: 60E99, 60H10.
1 Introduction
This paper is an attempt to investigate the numerical aspects of functional quantization of stochasticprocesses and their applications to the pricing of derivatives through numerical integration on path-spaces; we will mainly focus on the Brownian motion and the Brownian diffusions viewed as squareintegrable random vectors defined on a probability space (Ω,A,P) taking their values in the Hilbertspace L2
T:= L2
R([0, T ], dt) endowed with the usual norm defined by |g|L2T
= (∫ T0 g2(t)dt)1/2.
Abstract Quadratic quantization theory consists in studying the best approximation of X in(L2
H(Ω,P), ‖ . ‖2) by H-valued random vectors taking at most N values and all the induced questions:
optimization of the values, asymptotic rate of the quantization error bounds, explicit constructionof nearly optimal quantizers. The historical framework is the Euclidean one (H = Rd) comes fromInformation Theory and Signal processing and was introduced in the late 1940’s. Its aim is to pro-vide an optimal spatial discretization of a random vector-valued signal X with distribution PX bya random vector taking N values in the codebook x1, . . . , xN (the N -tuple (x1, . . . , xN ) is calleda N -quantizer). Then, instead of transmitting the complete signal X(ω) itself, one first selects thenearest codebook xi in the codebook and transmits its (binary coded) label i. After reception, aproxy X(ω) of X(ω) is reconstructed using the codebook correspondence i 7→ xi (called the codebookbible). For a given N , there is (at least) one N -quantizer which minimizes over (Rd)N the quadraticquantization error ‖X − X‖2 induced by replacing X by X. In d-dimension, this lowest quantization
∗Laboratoire de Probabilites et Modeles aleatoires, CNRS UMR 7599, Universite Paris 6, case 188, 4, pl. Jussieu,F-75252 Paris Cedex 5. [email protected] & Projet MATHFI, INRIA
†Laboratoire d’Analyse et de Mathematiques Appliquees, CNRS UMR 8050, Universite Paris 12, 61, avenue duGeneral de Gaulle, F-94010 Creteil. [email protected] & Projet MATHFI, INRIA
1

error goes to zero at a N− 1d -rate as N → +∞. Stochastic optimization procedure based on simulation
have been devised to compute these optimal quantizers. For an expository of mathematical aspects ofquantization in finite dimension we refer to [6] and the references therein. For Signal processing andalgorithmic aspects, we refer to [5], [4] and [19].
In the early 1990’, optimal quantization has been introduced in Numerical Probability to devisesome quadrature integration formulæ with respect to the distribution PX on Rd using that EF (X) ≈EF (X) if N is large enough. This approach is efficient in medium dimensions (see [15], [16] and [19])especially when many integrals need to be computed with respect to the same distribution PX : tablesof the optimal weighted N -tuples can be computed and kept off-line like for Gauss points on the unitinterval. Later, optimal quantization has been used to design some tree methods in order to solvemulti-dimensional non-linear problems involving the computation of many conditional expectations:American option pricing, non-linear filtering for stochastic volatility models, portfolio optimization(see [18] for a review of applications to computational Finance).
More recently the infinite dimensional setting has been extensively investigated from a theoreticalviewpoint with a special attention paid to functional quantization (FQ) i.e. the quantization of stochas-tic processes viewed as random vectors taking values in their path spaces such as L2
T:= L2([0, T ], dt)
(see [3],[11],[12], etc).In this paper we aim to develop some first numerical applications of FQ. As concerns theoretical
background we partially rely on [13]. We also provide some new numerically-oriented ingredients. Wewill focus on a financial framework: the pricing of path-dependent derivatives in a Heston stochasticvolatility model.
More generally what our approach can be applied to the computation of the expectation E(F (X))where X is a Brownian diffusion (with explicit coefficients) and F is an additive (integral) functionaldefined on L2
Tby ξ 7→ F (ξ) :=
∫ T0 f(t, ξ(t)) dt.
In practice, true optimal quantizers of a process X are out of reach for numerical use, but some “rateoptimal” sequences of quantizers do have some semi-closed form. So the starting point for numerics isto compute these “efficient” quantizers as well as the distribution of both their induced quantizationsX and quantization errors ‖X−X‖2 (another property – stationarity – will be needed, see sections 3.2and 4.1.2 further on). Then, the quadrature formulæ involving these N -quantizers make up an efficientdeterministic alternative to Monte Carlo simulation for the computation of EF (X).
As concerns Gaussian processes, this can be done by using an expansion of X on its Karhunen-Loeve (K-L) orthonormal basis. For Brownian diffusions, one maps the Brownian quantizers by solvingan integral equation system (see section 4.3 for a presentation or [13]).
Let us give an example of such a rate optimal sequence of stationary quantizers in the simpler casewhere X = B is the standard Brownian motion on [0, T ]. Given N , we produce some optimal valuesdN and (Nk)1≤k≤d
N– in a sense to be specified in subsection 4.1.1 – such that N1×· · ·Nn ≤ N . Then,
the quantizer used for B (at level N) is
ϕNi1,...,in(t) =
√2T
dN∑
k=1
T
π(k − 12)
sin(
π
(k − 1
2
)t
T
)x
(Nk)ik
, 1 ≤ ik ≤ Nk, 1 ≤ k ≤ dN ,
and its weight is
αNi1,...,in =
dN∏
k=1
α(Nk)ik
,
where (x(Nk)ik
, α(Nk)ik
)1≤ik≤Nkdenotes the optimal (weighted) Nk-quantizer of the one-dimensional Nor-
mal distribution (see some examples at http://perso-math.univ-mlv.fr/users/printems.jacques/Fquantiz).
2

Then EF (X) is approximated by the weighted sum by
∑
i1,...,in
αNi1,...,in
∫ T
0f(t, ϕi1,...,in(t)) dt.
However, “crude” FQ theoretically converges at a rather poor rate, usually (log N)−θ for some θdepending on the pathwise regularity of the process X (e.g. θ = 1/2 for the Brownian motion). So,hoping to compete successfully with Monte Carlo simulations needs to bet on its performances for“reasonably low” values of N (say N≤10 000). In fact to help winning this bet, we will introduce twospeeding up procedures based on specific properties of FQ: one is stationarity, the other is a Romberglike extrapolation which is introduced in section 5.2.
The paper is organized as follows: in Section 2 we provide some background on functional quan-tization of (Gaussian) processes X viewed as L2
T-valued random vectors. Section 3.1 is devoted to
stationarity and its first computational applications (one-dimensional optimal quantizers, etc). In Sec-tion 3.2 some new weighted quadrature formulæ are established for EF (X) when F is a | . |L2
Tsmooth
functional. In Section 4 we give several examples of efficient quantizers: first for Gaussian processes theKarhunen-Loeve product quantizers and some of their “non-Voronoi” variants (sections 4.1.1 and 4.2);then some explicit rate optimal sequences of quantizers are proposed for Brownian diffusions. Aprocedure is described to tabulate the optimal product quantizers. In Section 5.1, the computationprocedure of K-L product quantizers for the Brownian motion are described (as well as an extract ofthe tables available on the web). In Section 5.2, the speeding up Romberg log-extrapolation methodis made explicit. In Section 6 the results of two numerical experiments are presented: the pricing ofvanilla calls in a Heston stochastic volatility model (as a benchmark since an FFT -semi-closed formis available) and the pricing of an Asian option in the same model. The results are quite promising(although we decided not to implemented any of the usual “variance reducer”). In particular, we pointout the efficiency of the Romberg log-extrapolation (sometimes combined with a linear interpolationmethod) which numerically outperforms Monte Carlo simulation in both examples (within the rangeof tested values). In Section 7, we outline an FQ-MC method to integrate irregular functionals F (X):then FQ becomes a control variate random variable.
2 Preliminaries on quadratic functional quantization
Let (H, (. | .)H ) be a separable Hilbert space and X : (Ω,A,P) → H be a square integrable H-valuedrandom vector with distribution PX defined on H endowed with its Borel σ-field Bor(H). One denotes
by ‖ . ‖2 the usual quadratic norm on L2H
(Ω,P) defined by ‖X‖2 =√E(|X|2
H).
Let x := (x1, . . . , xN )∈ HN be an N -quantizer and let Projx : H → x1, . . . , xN be a projectionfollowing the nearest neighbour rule. It means that the Borel partition made of the so-called Voronoicells Ci(x) := Proj−1
x (xi), i = 1, . . . , N , of H satisfies
Proj−1x (xi) ⊂ ξ∈ H | |xi − ξ|H = min
1≤j≤N|xj − ξ|H, 1 ≤ i ≤ N.
The partition(Ci(x))i=1,...,N is called a Voronoi tessellation of H induced by x. One defines the Voronoiquantization of X induced by x by
Xx := Projx(X).
(the exponent x will often be dropped or replaced by its size N ). It is the best L2(P)-approximationof X by x1, . . . , xN -valued random vectors since, for any random vector X ′ : Ω → x1, . . . , xN ,
‖X −X ′‖22
=∫
Ω|X(ω)−X ′(ω)|2
HP(dω) ≥
∫min
1≤i≤N|X(ω)− xi|2HP(dω) = ‖X − Xx‖2
2
3

There are infinitely many Voronoi tessellations, all producing the same quadratic quantization error‖X − Xx‖2 . In fact the boundaries of any Voronoi tessellation are contained in the union of finitelymany median hyperplanes Hij ≡ (xi − xj | xi+xj
2 − . )H = 0 (xi 6= xj). Hence, if the distribution PX
weights no hyperplane, then Xx is P-a.s. uniquely defined.The second step of the optimization procedure is to find an N -tuple x∈ HN , if any, which minimizes
the quantization error over HN . In fact one checks by the triangular inequality that the function
QXN
: (x1, . . . , xN ) 7→ ‖X − Xx‖2 = ‖ min1≤i≤N
|X − xi|H ‖2
is Lipschitz continuous on HN . When N = 1, Q21(x) = E|X − x|2
His a strictly convex function
which reaches its minimum Var(|X|H ) at x∗ := EX. Then, one shows by induction on N (see [11] fordetails), that QX
Nalways reaches a minimum at some optimal N -quantizer x∗ := (x∗1, . . . , x
∗N
). As soonas |suppPX | ≥ N , any such optimal N -quantizer has pairwise distinct components. The key argumentis that the function QX
Nis weakly lower semi-continuous on HN . (If H = R and PX has a log-concave
density, the optimal N -quantizer is unique, up to a permutation of its components). One shows usingan everywhere dense sequence in H that minHN (QX
N)2 goes to 0 as N goes to ∞. Elucidating the rate
of this convergence is a much more demanding problem, even in finite dimension. It is elucidated fornon-singular Rd-valued random vectors by the so-called Zador Theorem (see [6]).
Theorem 1 (Zador, Bucklew & Wise, Graf & Luschgy) Assume that X∈ L2+ηRd (Ω,P) for some η > 0.
Let f denote the density of the absolutely continuous part of PX (which can be possibly 0). Then
min(Rd)N
(QXN
)2 = minx∈(Rd)N
‖X − Xx‖22
=J2,d
N2/d
(∫
Rd
fd
d+2 (ξ)dξ
)1+2/d
+ o
(1
N2d
)as N → +∞.
When f 6≡ 0, this yields a sharp rate for the quadratic quantization error since the integral in theright hand side is always finite under the assumption of the theorem. When f ≡ 0, this no longerprovides a sharp rate, although such sharp rates can be established for some special distributions (self-similar distributions on fractal sets, etc). The true value of J2,d – which corresponds to the uniformdistribution over [0, 1]d – is unknown although one knows that J2,d = d/(2πe) + o(d).
3 Numerical integration using (functional) quantization
In this section, we first recall what stationarity of an N -quantizer is, then we provide some quadratureformulæ (some of them are new) and finally we describe in details the log-Romberg speeding upprocedure (which remains partially heuristic given the present state of the art.
3.1 Stationarity quantizers
Definition 1 An N -quantizer x := (x1, . . . , xN )∈ HN is stationary if it satisfies
∀ i 6= j, xi 6= xj and P(X∈ ∪i∂Ci(x)) = 0 (3.1)
(PX -negligible boundary of the Voronoi cells) and
E(X | Xx) = Xx. (3.2)
The random vector Xx is called a stationary N -quantization of X.
4

In particular, any stationary quantizer satisfies E(X) = E(Xx). Since the σ-fields generated byXx and X∈ Ci(x), i = 1, . . . , N coincide, Equation (3.2) also reads
xi =E(1Ci(x)(X)X)P(X∈ Ci(x))
= E(X | X∈ Ci(x)), i = 1, . . . , N. (3.3)
provided P(X∈ Ci(x)) > 0, i = 1, . . . , N .In fact stationary quantizers are the critical points of (the square of) quadratic quantization er-
ror: The function x 7→ DXN
(x) := ‖X − Xx‖22
is continuously differentiable at any N -quantizer xsatisfying (3.1) and
∂DXN
∂xi(x) := 2E(1Ci(x)(X)(xi −X)) = 2
∫
Ci(x)(xi − ξ)PX (dξ), 1 ≤ i ≤ N. (3.4)
Consequently, any (local) minimum of the quantization error function is stationary. Optimal N -quantizer(s) are usually not the only stationary quantizers (see Proposition 4 below about Karhunen-Loeve product quantizers). However, in 1-dimension for log-concave one-dimensional p.d.f., there is aunique stationary N -quantizer (the optimal one).
Note that owing to (3.2) the quantization error has then a simpler expressions
E|X − Xx|2H
= E|X|2H− E|Xx|2
H= E|X|2
H−
N∑
i=1
|xi|2HP(X∈ Ci(x)). (3.5)
Similar equalities hold with the variances σ2(|X|H ) and σ2(|Xx|H ) of X and Xx since their firstmoments coincide. We will see further on (Sections 3.2, 4 and 5.2) that stationary quantizers are animportant class of quantizers for numerics.
In finite dimension, several numerical methods to compute (locally) optimal quantizers are basedon the stationary equation. In 1-dimension the stationary quantizers are obtained by a Newton-Raphson procedure. In higher dimension, we turn to stochastic gradient procedure. We refer to ([19])for detailed explanations. Thus, a tabulation of optimal N -quantizers of the N (0; 1) distribution hasbeen carried out and kept off-line. Files can be can be downloaded at any of the following the URL’swww.proba.jussieu.fr/pageperso/pages.html or perso-math.univ-mlv.fr/users/printems.jacques/n01/
It contains, for every N ∈ 1, . . . , 400,– the (unique) optimal N -quantizer xN ,
– the Pξ-masses Pξ(Ci(xN )), i = 1, . . . , N , of its Voronoi cells (i.e. the distribution of ξxN
, ξ ∼N (0; 1)),
– the induced quadratic quantization error ‖ξ − ξxN ‖2 (using (3.5)),
When X is a bi-measurable process and H = L2T, the stationarity condition in its form (3.3)
has consequences on the pathwise regularity of the elementary quantizers xi : they have (at least)the regularity of t 7→ Xt from [0, T ] into L2(Ω,A,P) (see [11, 12] for details).Furthermore, if X is acentered Gaussian process, one shows that stationary quantizers lie in the self-reproducing space of X(see [11]), like the Cameron-Martin space H1 := h ∈ L2
T/ h(t)=
∫ t0 h(s)ds, h∈ L2
T for the Brownian
motion.
3.2 Quadrature formulæ for numerical integration
The basic idea is that, on the one hand, a good quantization Xx is close to X in distribution and, onthe other hand, for every Borel functional F : H → R and every x = (x1, . . . , xN )∈ HN ,
EF (Xx) =∑
1≤i≤N
PX (Ci(x))F (xi). (3.6)
5

So if one has a numerical access to both the N -quantizer x and its “companion” distribution (PX (Ci(x)))1≤i≤N ,the computation in (3.6) is straightforward. In the proposition below are established some error boundsfor EF (X)− EF (Xx) based on Lp-quantization errors ‖X − Xx‖p (with p = 2 or 4).
Item (a) devoted to Lipschitz continuous functionals is classical, item (b) extends a second orderquadrature formula involving stationary quantizers coming from [15] (see also [19]). Other quadratureformulæ based on Lp-quantization, p 6= 2, can be derived.
Proposition 1 Let X∈ L2H(Ω,P) and let F : H → R be a Borel functional defined on H
(a) First order quadrature formula: If F is Lipschitz continuous, then
|EF (X)− EF (Xx)| ≤ [F ]Lip‖X − Xx‖2
for every N -quantizer x ∈ HN . In particular, if (xN )N≥1 denotes a sequence of quantizers such
that limN‖X − XxN ‖2 = 0, then the distribution
N∑
i=1
PX (Ci(xN ))δxNi
of XxNweakly converges to the
distribution PX of X as N → +∞.(b) Second order quadrature formulæ: Assume that x is a stationary quantizer for X.
– Let θ : H → R+ be a nonnegative convex function. If θ(X)∈ L2(P) and if F is locally Lipschitzwith at most θ-growth, i.e. |F (x)− F (y)| ≤ [F ]
Liploc|x− y| (θ(x) + θ(y)), then F (X)∈ L1(P) and
|EF (X)− EF (Xx)| ≤ 2[F ]Liploc
‖X − Xx‖2‖θ(X)‖2 . (3.7)
– If F is differentiable on H with an α-Holder differential DF (α∈ (0, 1]), then
|EF (X)− EF (Xx)| ≤ [DF ]α‖X − Xx‖1+α2
. (3.8)
When F is twice differentiable and D2F is bounded then, one may replace [DF ]1 = [DF ]Lip by12‖D2F‖∞ in (3.8).
– If DF is is locally Lipschitz with at most θ-growth, θ convex, θ(X)∈ L4(P), then
|EF (X)− EF (Xx)| ≤ 3[DF ]Liploc
‖X − Xx‖24‖θ(X)‖4 . (3.9)
(c) An inequality for convex functionals: Assume that x is a stationary quantizer. Then forany convex functional F : H → R
EF (Xx) ≤ EF (X). (3.10)
The proofs of these quadrature formulæ are postponed to an annex.
Remark: The error bound (3.9) involves ‖X − Xx‖4 about which very little is known when x is astationary (or even optimal) quadratic quantizer of X: its rate of convergence as N goes to infinityis not elucidated. So one often uses a less elegant (and probably less sharp) bound: assume thatθ(X)∈ Lp(P) for every p ≥ 1, then, for every ε∈ (0, 1],
|EF (X)− EF (Xx)| ≤ [DF ]Liploc
‖X − Xx‖2−ε2‖X − Xx‖ε
4(1 + 3‖θ(X)‖ 1
ε
). (3.11)
Examples: • The typical regular functionals defined on (L2T, | . |
L2T
) (most important example for
stochastic processes) are the integral functionals F defined by
∀ ξ ∈ L2T, F (ξ) =
∫ T
0f(t, ξ(t)) dt
6

where f : [0, T ] × R → R is a Borel function with at most linear growth in x uniformly in t. Inparticular, F is Lipschitz continuous as soon as f(t, .) is (uniformly in t), convex if f(t, .) is for everyt, etc; in particular F is differentiable with an α-Holder differential as soon as f(t, .) is differentiablefor every t∈ [0, T ] with an α-Holder partial differential ∂f
∂x (t, .) (uniformly in t). Then
∀ ξ ∈ L2T, DF (ξ) =
∫ T
0
∂f
∂x(t, ξ(t))dt.
• The functional F defined for every ξ∈ L2T
by
F (ξ) :=∫ T
0eσξ(t)+ρtdt (ρ∈ R)
is convex, locally Lipschitz with θ-linear growth, infinitely differentiable. Furthermore, using that|eu − ev| ≤ |u− v|(eu + ev) and Schwarz inequality, one derives that
[F ]Liploc
:= σeρ+T and θ(ξ) = |eσξ|L2
T
. (3.12)
4 Functional quantization revisited from the numerical viewpoint
In this section several results on functional quantization are re-visited to emphasize all the combi-natorial and computational aspects that make possible numerical applications. Of course, among allgaussian processes, the Brownian motion plays a central role. So, from now on, we will assume thatX is a bi-measurable process defined on a probability space (Ω,A,P) satisfying
E |X|2L2T
=∫ T
0E(X2
s )ds < +∞
so that it can be viewed as an L2T-valued random vector (up to a P-negligible set). However many
results below remain true in an abstract Hilbert framework.
4.1 Gaussian processes
For convenience in this section we will assume from now on that all random processes X are centeredi.e.
EX = 0H .
4.1.1 Karhunen-Loeve product quantizers
Let (en)n≥1 be an ortho-normal basis of L2T. One may expand the paths of (Xt)t∈[0,T ] on this basis
i.e.
X(ω)L2
T=∑
n≥1
(X(ω)|en)L2Ten P(dω)-a.s. (4.13)
Since X is a Gaussian process, the sequence ((X|en))n≥1 is a Gaussian sequence of random variablesso that (4.13) can be written
X(ω)L2
T=∑
n≥1
√cn ξn(ω)en P(dω)-a.s. (4.14)
where cn = Var((X|en)) and(ξn)n≥1 is a Gaussian sequence of N (0; 1)-distributed random variables,usually not mutually independent. However there is a basis which plays a special role with respect to
7

the process X: its Karhunen-Loeve (denoted K-L) basis (eX
n )n≥1 which achieves the infinite dimen-sional PCA of its covariance operator ΓX defined by
∀ f ∈ L2T, ΓX (f) :=
(t 7→
∫ T
0f(s)E(XtXs)ds
).
The operator ΓX is a non-negative self-adjoint compact operator, so it can be diagonalized in anorthonormal basis – the K-L basis – (e
X
n )n≥1 of L2T:
ΓX (eX
n ) = λneX
n , n≥ 1,
where the eigenvalues λn make up a nonincreasing sequence of nonnegative real numbers satisfying∑
n≥1
λn = E |X|2L2T
< +∞.
Without loss of generality one may assume that
∀n ≥ 1, λn > 0 (4.15)
since otherwise suppX 6= H. Then, the K-L eigenbasis is unique. (In case X is a finite dimensionalGaussian vector, most of what follows remains true by setting d := maxn ≥ 1 : λn > 0 andconsidering 1, . . . , d instead of 1, . . . , n, . . . as an index set.)
Then, it follows from the so-called “reproducing property” that
∀ f, g∈ L2T, Cov
((f |X)L2
T, (g|X)L2
T
)=
∫
[0,T ]2f(t)g(s)E(XtXs)ds dt = (f |ΓX (g))L2
T
(4.16)
so that
c2n = E (X|eX
n )2L2T) =
(e
X
n |ΓX (eX
n ))
L2T
= λn (4.17)
Cov((X|eX
n )L2T, (X|eX
m)L2T) = (e
X
n |ΓX (eX
m))L2T
= δn,mλn (4.18)
where δn,m is for Kronecker symbol. Consequently
X(ω)L2
T=∑
n≥1
√λn ξn(ω)e
X
n P(dω)-a.s. (4.19)
where the sequence
ξn :=(X|eX
n )L2T√
Var((X|eX
n )L2T), n ≥ 1
is now i.i.d. and N (0; 1)-distributed. Expansion (4.19) is known as the K-L expansion of X. Itcombines both orthonormality of the K-L basis (e
X
n )n≥1 and the mutual independence of its coordinatesξn. Furthermore, the equality (4.19) holds in L2(dP⊗dt). In particular it holds P(dω)-a.s. at dt-almostevery time t∈ [0, T ]. It is the PCA of the process X in that all d dimensional truncations of (4.19)produce the best d-dimensional approximation of X in the least square sense.
A very natural way to produce a functional quantization for Gaussian processes in L2T
using atmost N elementary quantizers is to use a product quantizer of the form
Xt =∑
n≥1
√λn ξn e
X
n (t) (4.20)
8

where ξn := ξx(Nn)
n = Projx(Nn)(ξn) is an optimal Nn-quantization of ξn and N1 × · · · × Nn ≤N, N1, . . . , Nn ≥ 1. Note that for large enough n, Nn = 1 so that ξn = 0 which makes the above seriesa finite sum. Also keep in mind that the p.d.f. of normal distribution being log-concave the optimalNn quantizer x(Nn) := (x(Nn)
1 , . . . , x(Nn)Nn
) is unique (and already tabulated as mentioned above).The N1× · · · ×Nn-quantizer χ that produces the above Voronoi quantization (4.20) is of the form
χi(t) =∑
n≥1
√λn x
(Nn)in
eX
n (t), i = (i1, . . . , in, . . .)∈∏
n≥1
1, . . . , Nn. (4.21)
Definition 2 A quantizer χ defined by (4.21) is called a K-L product quantizer. For convenienceand when there is no ambiguity concerning the reference basis we will often denote χ by
χ =√
λ⊗ x with x =∏
n≥1
x(Nn).
Furthermore, one denote by Opq(X, N) the set
Opq(X, N) := χ/ χ K-L product quantizer of size at most N as defined by (4.21)
The proposition below describes the geometric structure
Proposition 2 Let χ =√
λ⊗ x be a K-L product quantizer as defined by (4.21). Let dx := maxk :Nk > 1∈ N denote the “quantization dimension” (highest non-trivially quantized dimension).(a) Then, the quadratic quantization error induced by χ satisfies
‖X − Xχ‖22
=∑
n≥1
λn ‖ξn − ξNnn ‖2
2= E|X|2L2
T+
dx∑
n=1
λn (‖ξk − ξNnk ‖2
2− 1). (4.22)
(b) For every multi-index i∈∏
n≥1
1, . . . , Nn, the associated Voronoi cell of χ is
Ci(χ) =∏
n≥1
(√
λnCin(x(Nn))). (4.23)
Remark. In fact, both claims only rely on the orthonormality of the basis (eX
n )n≥1 and do not makeuse of the specificity of the K-L basis.
Proof. (a) One notes that ‖X − Xχ‖22
= Emini|X − χi |2 where χi is given by (4.21). Then
Emini|X − χi |2 = E
min
1≤i1≤N1,···,1≤idx≤Ndx
∣∣∣∣∣∣∑
n≥1
√λn ξnen −
dx∑
n=1
√λn x
(Nn)in
en
∣∣∣∣∣∣
2
= E
min
1≤i1≤N1,···,1≤idx≤Ndx
dx∑
n=1
λn |ξn − x(Nn)in
|2 +∑
n≥dx+1
λn ξ2n
=dx∑
n=1
λn E(
min1≤in≤Nn
|ξn − x(Nn)in
|2)
+∑
n≥dx+1
λn
=dx∑
n=1
λn E(
min1≤in≤Nn
|ξn − x(Nn)in
|2)
+ E|X|L2T−
dx∑
n=1
λn
9

The first equality follows from the fact that, for every n > dx, x(Nn) = E(ξn) = 0.(b) One may assume without loss of generality that, for every n ≥ 1, the components of x(Nn) are in anascending order i.e. i 7→ x
(Nn)i is nondecreasing. Let i := (i1, . . . , idx , 1, . . .) and j := (j1, . . . , jdx , 1, . . .).
Then, if ζ =∑
n ζnen∈ H, |ζ − χi |2 < |ζ − χj |2 if and only if
dx∑
n=1
√λn
2(x
(Nn)in
− x(Nn)jn
)(ζn√λn
− x(Nn)in
+ x(Nn)jn
2
)< 0.
Then, for every fixed n, setting jn = in±1 and jn′ = in′ if n′ 6= n implies that
x(Nn)in
+ x(Nn)in−1
2<
ζn√λn
<x
(Nn)in+1 + x
(Nn)in
2i.e.
ζn√λn∈ Cin(x(Nn)).
One checks that this condition is sufficient. ♦
Then the lowest quadratic quantization error induced by K-L product quantizers having at mostN codebooks is obtained as the solution of the following optimization problem
min
d∑
n=1
λn minRNn
‖ξ − ξNn‖22+
∑
n≥d+1
λn, N1×· · ·×Nn ≤ N, N1, . . . , Nm ≥ 2, d ≥ 1
. (4.24)
This provides an upper-bound for the lowest quantization error over all quantizers with at most Ncodebooks. This approach is the starting point for theoretical estimation of the rate of convergence ofthe quantization error in [11] (and in [12] with d-dimensional marginal blocks instead of 1-dimensionalones; this holds for any orthonormal basis of L2
Twhich is extensively exploited in these references).
Solving numerically the optimization problem (4.24) for a wide range of values of N when it ispossible is a first step to use functional quantization for numerics (see Section 5.1 for the Brownianmotion).
Now, let us come to the specific feature of the K-L expansion which makes possible numericalimplementation of the quadrature formulæ established in Section 3.2. A closed formula is availablefor the distribution of Xχ when χ is a K-L product quantizer, namely
∀ i ∈∏
n≥1
1, . . . , Nn, P(Xχ = χi) =∏
n≥1
P(ξ ∈ Cin(x(Nn))), ξ ∼ N (0; 1). (4.25)
This follows from the combination of parallelepipedic shape (4.23) of the Voronoi cells Ci and theindependence of the normal random variables ξn, n ≥ 1 in the expansion (4.19) since
P(Xχ = χi) = P(∩n≥1
√λnξn∈
√λnCin(x(Nn)
)=
∏
n≥1
P(ξn∈ Cin(x(Nn)).
The weight vector (P(ξ ∈ Ci(x(Nn))))i=1,...,Nn is simply the distribution of the optimal Nn-quantizationξNn := ξx(Nn)
, ξ ∼ N (0; 1)). hence, if one denotes by erf the distribution function of N (0; 1), one has
P(ξ ∈ Ci(x(Nn))) = erf(x
(Nn)i+1/2
)− erf
(x
(Nn)i−1/2
), i = 1, . . . , Nn
with x(Nn)i+1/2 :=
x(Nn)i+1 +x
(Nn)i
2 , i = 1, . . . , Nn − 1, x(Nn)1/2 = −∞, x
(Nn)Nn+1/2 = +∞ (They are available at the
formerly given URL’s). For our purposes here, no higher values than 100 are necessary for Nn.
10

Practical rule for numerical implementation: Numerical implementation of the functional quan-tization of a Gaussian process X is possible as soon as closed form is available for the eigensystem(e
X
n , λn)n≥1.
The most important example of an explicit K-L system is of course the Brownian motion (Wt)t∈[0,T ]
whose K-L eigensystem is given by
eW
n (t) :=
√2T
sin(
π(n− 1/2)t
T
), λn :=
(T
π(n− 1/2)
)2
, n ≥ 1. (4.26)
Other common Gaussian processes have explicit K-L expansions like the Brownian bridge (eX
n (t) :=2/T sin
(πn t
T
)and λn := (T/(π n))2). The stationary Ornstein-Uhlenbeck process admits a semi-
closed form for its K-L system (see e.g. [8], p.195).
As a conclusion to this chapter let us cite an upper-bound obtained in [11] by solving the opti-mization problem (4.24). This yields the following theoretical rate of convergence for the quantizationerror of a Gaussian process X.
Proposition 3 Let X be a Gaussian process with a K-L eigensystem (eX
n , λn)n≥1. Assume thatλn ≤ c∗ n−b, b > 1, c∗ > 0. Then
min‖X−Xχ‖2 , χ∈ Opq(X, N)
≤
(c∗
(b
2
)b−1( 1b− 1
+4 CN (0;1)
))1/21
(log N)b−12
(4.27)
where CN (0;1) := supN≥1
(N2 min
x∈RN‖ξ − ξx‖2
). In particular, for the standard Brownian motion W ,
min‖W−Wχ‖2 , χ∈ Opq(W,N)
≤ 2T
π
(1 + 4CN (0;1)
)1/2 1
(log N)12
.
Furthermore, it is also established in [11] using entropy methods that the above rate is the trueone: if λn ≥ c∗n−b (c∗ > 0) for every n ≥ 1 , then there is some real c′∗ > 0 such that
minx∈HN
‖X − Xx‖2 ≥ c′∗(log N)−b−12 , N ≥ 1. (4.28)
Consequently the O(log N)−12 )-rate is optimal for the Brownian motion and
There exists some rate optimal sequences (χN )N≥1 of K-L product quantizers for W .
Remarks. • A sharp rate based on a product quantization of X by d-dimensional marginal blocksinstead of 1-dimensional ones is established in [12] when λn = c
λn−b + o(n−b) (c∗ > 0):
minx∈HN
‖X − Xx‖2 =c
12λ b
b2
2b−12 (b− 1)
12
(log N)−b−12 + o
((log N)−
b−12
). (4.29)
• A conjecture confirmed by numerical experiments is that CN (0;1) = limN
(N2 min
x∈RN‖ξ − ξx‖2
)=
π
2
√3
(the second equality follows from Zador’s Theorem, see [12] for more details).
Extensions. • The upper-bound (4.27) remains true if one replaces mutatis mutandis the K-L eigen-system by any system (en, c2
n)n≥1 where (en)n≥1 is an orthonormal basis of L2T
and c2n = Var((X | en)L2
T)
11

(but there no explicit formula for the distribution of these product quantizations). This is a way to getthe quantization error rates for many Gaussian processes like the fractional Brownian motion usinge.g. the Haar basis (see [11] for some examples).
• The upper-bound (4.27) also remains true if one considers a system (en, c2n)n≥1 such that
∑n≥1 cnξnen
converges to X in which en is no longer orthogonal (but still normed) provided that the randomvariables ξn in (4.19) remain independent. This follows from the independence of ξn− ξNn
n , n ≥ 1 andthe stationarity property satisfied by ξNn
n , n ≥ 1 (see Section 4.2 below).
4.1.2 Stationarity of K-L product quantizer
The following proposition emphasizes a new important and typical feature of the K-L basis: that K-Lproduct quantizers are stationary. It is an important asset for numerical purposes since one may thenapply the second order quadrature formulæ established in Proposition 1(b).
Proposition 4 Let χ∈ Opq(X, N) be a K-L product quantizer of X. Then χ is stationary for X.
Proof (See also [6], Lemma 4.8). Let χ =√
λ ⊗ x. The ξn being independent in the K-L expan-sion (4.19), then the ξn are independent in (4.20) as well. Furthermore, it is obvious from (4.20) andthe identity ξn = (Xχ|eX
n )L2T/√
λn, n ≥ 1, that σ(Xχ) = σ(ξn, n ≥ 1). Consequently
E(X | Xχ) =∑
n
√λnE(ξn | ξm, m≥ 1) e
X
n =∑
n
√λnE(ξn | ξn, ξm, m ≥ 1, m 6= n) e
X
n
=∑
n
√λnE(ξn| ξn)e
X
n =∑
n
√λn ξne
X
n (stationarity of ξn),
= Xχ. ♦
4.2 An example of computable non-Voronoi rate optimal quantizers: the an-tiderivative of the Brownian motion
We will illustrate in this short paragraph how rate optimal product quantizers of the Brownian motioncan produce (non Voronoi) rate optimal quantizers of its antiderivative (nevertheless with an explicitdistribution).
First note that one can integrate a Karhunen-Loeve expansion of the Brownian motion. In fact,h 7→ ∫ .
0 h(s)ds being a Lipschitz continuous function from L2T
into (C([0, T ]), ‖ . ‖sup), one has, inL2
(C([0,T ]),‖.‖sup)(P) (and P-a.s. in L2T):
∫ t
0Wsds
L2T=
∑
n≥1
λn ξn
√2T
(1− cos
(t√λn
))with λn :=
(T
π(n− 1/2)
)2
, n ≥ 1, (4.30)
= 2
√2T
∑
n≥1
λn ξn sin2
(t
2√
λn
)(4.31)
where: – (ξn)n≥1 is i.i.d., normally distributed (and comes from the K-L expansion of W ),
– the sequence(t 7→
√2T
(1− cos
(t√λn
)))n≥1
is not orthonormal in L2T.
In fact, the expansion (4.30) converges P-a.s. and in L1(P), uniformly in t∈ [0, T ], since
supt∈[0,T ]
∣∣∣∣∣∣∑
n≥1
λn ξn sin2
(t
2√
λn
)∣∣∣∣∣∣≤
∑
n≥1
λn|ξn|.
12

The series on the right hand of the inequality lies in L1(P) since∑
n≥1 λn < +∞ and ξn ∼ ξ1∈ L1(P).The same uniform L1(P)- convergence holds for the integrated product quantizer expansion, that is
∫ .
0Wsds :=
∫ .
0Wχ
s ds = 2
√2T
∑
n≥1
λn ξn sin2
(t
2√
λn
)(4.32)
since, by stationarity of the quantizer x(Nn) of ξn, E|ξn| ≤ E|ξn| for every n ≥ 1 (the P-a.s. convergence
is trivial since ξn = 0 for large enough n). One has to be aware that ˜∫ .0 Wsds
χ
is not a Voronoiquantization since it is defined on the Voronoi tessellation of the Brownian motion. For this veryreason it is easy to compute and furthermore it satisfies a kind of stationary equation: one checks that
σ( ˜∫ .0 Wsds) = σ(W ) = σ(ξn, n ≥ 1) so that, h 7→ ∫ .
0 h(s)ds being continuous and linear on L2T,
E(∫ .
0Wsds |
∫ .
0Wsds
)= E
(∫ .
0Wsds | Wχ
)=
∫ .
0Wsds.
Proposition 5 Let χN ∈ Opq(W,N), N ≥ 1, let λn be defined by (4.30) and let ˜∫ .0 Wsds
N
:=∫ .0 Ws
χN
ds be defined by (4.32).(a) The quadratic quantization error is given by
∥∥∥∥∥∥
∫ .
0Wsds−
∫ .
0Wsds
χN∥∥∥∥∥∥
2
2
= 3∑
n≥1
λ2n
(1− (−1)n−1 4
√λn
3T
)min
x∈RNn‖ξ − ξx‖2
2. (4.33)
If (χN )N≥1 is rate optimal for W then
∥∥∥∥∥∫ .0Wsds− ˜∫ .
0WsdsχN
∥∥∥∥∥2
= O((log N)−1) which is not rate
optimal. There is a rate optimal sequence ζN ∈ Opq(W,N) for∫ .0 Wsds i.e. such that
∥∥∥∥∥∥
∫ .
0Wsds−
˜∫ .
0Wsds
ζN∥∥∥∥∥∥
2
= O((log N)−32 ).
(b) Furthermore, the L1(P)-mean ‖ . ‖sup-quantization error satisfies
E
sup
t∈[0,T ]
∣∣∣∣∣∣∣
∫ t
0Wsds−
˜∫ t
0Wsds
χN∣∣∣∣∣∣∣
≤ 2
√2T
∑
n≥1
λn minx∈RNn
‖ξ − ξx‖2 . (4.34)
Proof: (a) Temporarily set En(t) = 1− cos(
t√λn
). Then |En|2
L2T
= T(
32 − 2(−1)n−1
√λnT
)and
∣∣∣∣∣∣
∫ .
0Wsds−
∫ .
0Wsds
χN∣∣∣∣∣∣
2
L2T
=2T
∑
n,m≥1
λnλmE(ξn − ξn)(ξm − ξm) (En |Em)L2T
so that
∥∥∥∥∥∥
∫ .
0Wsds−
∫ .
0Wsds
χN∥∥∥∥∥∥
2
2
=2T
∑
n≥1
λ2nE(ξn − ξn)2|En|2
L2T
.
13

The above equality follows from the fact that the random variables ξn − ξn, n ≥ 1, are independentand centered since E(ξn − ξn) = E(E(ξn|ξn) − ξn) = 0. The first rate follows from the optimal sizeallocation for W in (4.24) then plugged in the right hand side of (4.33). The second follows from theoptimal size allocation directly in (4.33). We refer to [11] for details.
(b) easily follows from
supt∈[0,T ]
∣∣∣∣∣∣∣
∫ t
0Wsds−
˜∫ t
0Wsds
χN∣∣∣∣∣∣∣= 2
√2T
supt∈[0,T ]
∣∣∣∣∣∣∑
n≥1
λn(ξn − ξn) sin2
(t
2√
λn
)∣∣∣∣∣∣≤ 2
√2T
∑
n≥1
λn |ξn − ξn|. ♦
Remarks. • One derives similarly from (4.34) in claim (b) that the lowest L1(P)-mean L∞(dt)-quantization error goes to zero at (least at) a O
((log(N))−1
)-rate (this is not rate optimal, see [14]).
• Some rates can be obtained for higher iterated integrals (and the Brownian bridge too).
4.3 Explicit non-Voronoi rate optimal quantization of Brownian diffusions
In [13] the exact quantization error rate for a class of Brownian diffusions (including most 1-dimensionalones) is established (see also [2]). It is a constructive approach based on the Lamperti transform andstochastic calculus techniques. This rate is O((log N)−
12 ) like for the Brownian motion as soon as
the diffusion coefficient is not too degenerate. We shortly describe below how to construct an explicit(non-Voronoi) quantizer sequence that yields the rate. Let
dXt = b(Xt)dt + σ(Xt)dWt, X0 = x0 (4.35)
be a Brownian diffusion where σ is a nonvanishing function. Let (χN )N≥1 be a sequence of rateoptimal K-L product quantizers of the Brownian motion. The components of χN are explicit C∞
functions. Some quantizers for X can be designed from the sequence (χN )N≥1 as follows: let L denotethe Lamperti transform defined by
L(y) :=∫ y
0
dξ
σ(ξ)
(assumed to be real-valued and increasing). Then, Yt := L(Xt) satisfies an SDE
dYt = β(Yt)dt + dWt, Y0 = L(x0)
with a linear Brownian perturbation term (and an explicit function β specified in [13]). Then, onedefines, an N -quantizer of X by setting
xNi (t) = L−1(uN
i (t)) where uNi (t) = L(v0) +
∫ t
0β(uN
i (t))dt + χNi (t), i = 1, . . . , N
(for notational convenience, we temporarily switch to the simpler notation i for the index rather thani: here, the multi-index feature plays no role). Elementary computations show that xN = (xN
i )1≤i≤N
is solution of the system of integral equations
xNi (t) = v0 +
∫ t
0[b(xN
i (s))− 12σσ′(xN
i (s))]ds +∫ t
0σ(xN
i (s))dχNi (s), i = 1, . . . , N. (4.36)
Let us note that the Ito correction term−12σσ′ would disappear if (4.35) was written in the Stratonovich
sense.
14

When b and σ are both Lipschitz continuous the sequence (xN )N≥1 is rate optimal in LpL2
T
(Ω,P)
for every p ∈ [1, 2) (see Theorems 1 and 2 in [13]). More precisely, the sequence of non-VoronoiN -quantizations
XxN
t :=∑
1≤i≤N
xNi (t)1Ci(χN )(W ), N ≥ 1,
satisfies‖ |X − XxN |
L2T
‖p = O((log N)−1/2), p∈ [1, 2).
When p = 2 an easy adaptation of the proof of Theorem 1 in [13] yields a O((log N)−12+ε)-rate in
LpL2
T
(Ω,P) for every ε > 0.
The quantization XxNis not Voronoi since it is defined on the Voronoi tessellation of W , but
its distribution is simply the PW -weights of the cells Ci(χN ) which are known by (4.25). Numericalimplementation of these quantizers needs to use a discretization scheme of the integral system (4.36).This is done in Section 6.1 to price options in a Heston stochastic volatility model.
This approach to functional quantization of diffusion heavily relies on the Lamperti transformwhich is structurally 1-dimensional. However an extension to multi-dimensional diffusions is possiblee.g. if
σ(x) = (DS(x))−1
where S is C2-diffeomorphism on Rd (see Section 5 in [13] for details). Other specific multi-dimensionalsettings can be dealt with in a constructive way as it will be seen in Section 6.2 with the stochasticvolatility Heston model: some stochastic integrals
∫ t0 f(Zs)dWs will be approximated by functional
quantization when Z is a 1-dimensional diffusion process independent with the Brownian motion W .
5 Toward numerical implementation
5.1 Optimal product quantizers: the “blind” optimization procedure
Assume that closed forms are available for both components of the K-L eigensystem (eX
n , λn)n≥1 of aGaussian process X as it is the case for the Brownian motion (or the Brownian bridge).
Then, we are in the position to solve numerically the optimization problem (4.24) which yields forevery N ∈ 1, . . . , Nmax the best product quantizer χN
rec and its “companion parameters” (distributionof XχN
rec , quantization error ‖X − XχNrec‖2). The reason for implementing such a blind optimization
procedure is that the theoretical values which produce the exact asymptotic rate are not efficientwithin the range of values of of numerical interest. Furthermore, this “blind” optimization procedureis reasonably fast and its results can be kept off line. It is carried out in two steps.
Phase 1 (Optimization phase at fixed N): Producing the K-L product N -quantizer χNopt =√
λ⊗ xopt with minimal quadratic quantization error among all product quantizers of size exactly N .This phase is carried out by using the “library” storing the optimal Nn-quantizers x(Nn) and their
own companion parameters of the N (0; 1) distribution.In practice, Nn ≤ 100 is enough for values of N as high as 106 since decompositions (dx too small)
involving not enough factors will clearly be far from optimality.
Phase 2 (Record Selection phase): Storing for every N ∈ 1, . . . , Nmax,– the size Nrec := Nrec(N)∈ 1, . . . , N which produces the lowest quadratic quantization error,– the optimal decomposition Nrec = N rec
1 × · · ·×N recn × · · ·×N rec
drec, (with n 7→ N rec
n non-increasingand N rec
drec≥ 2, N rec
drec+1 = 1),from which one retrieves instantly
15

– the K-L product quantizer χNrec = χNrec
opt which solves the optimization problem (4.24) at level N .
– the distribution of its related quantization XχNrec (using formula (4.25)),
– the corresponding quantization error by (4.22).
Table 1 below provides Nrec, the quantization error and the record decomposition first for severaltypical values of N , namely N = 1, 10, 100, 1 000, 10 000 (the full record table, the record quantizerlist including the distributions are available at the same URL). Figure 8 show the K-L productquantizers of the Brownian motion on [0, 1] for N = 10, 48 and for the “record value” of N = 100 thatis Nrec = 96.
N Nrec Quantiz. Error Nrec Decomposition1 1 0.7071 110 10 0.3138 5 – 2100 96 0.2264 12 – 4 – 2
1 000 966 0.1881 23 – 7 – 3 – 210 000 9 984 0.1626 26 – 8 – 4 – 3 – 2 – 2100 000 97 920 0.1461 34 – 10 – 6 – 4 – 3 – 2 – 2
Table 1. Brownian motion: Some typical “record” values for numerical implementationsFigure 2 shows the graphs of both N 7→ ‖W − WχN
rec‖22
and N 7→ ‖W − WχNopt‖2
2for N ∈
1, . . . , 1 000. Figure 3 depicts N 7→ ‖W − WχNrec‖−2
2in a log-log scale which emphasizes the log N
behaviour of the distortion. The coefficients obtained by a linear regression yield
‖W − WχNopt‖−2
2≈ 4 log N + 2 i.e. ‖W − WχN
rec‖22≈ 0.25
log N + 0.5, 1 ≤ N ≤ 10 000.
The lower and upper bounds provided by (4.28) and (4.27) respectively are on [0, 1],
1π2
22
22−1(2− 1)=
2π2
≈ 0.2026 < 0.25 < 1.2040 ≈ 1π2
(1 + 2π√
3). (5.37)
confirm the above bound (5.37).Firstly, we shortly describe the operating optimization procedure to obtain optimal product quan-
tizers of size at most N for every N ≤ Nmax. Then, we propose a Romberg like extrapolation methodwhich speeds up the convergence of the functional quantization method so that it produces very ac-curate results for moderate values of N , say less than 10 000. We include it in this section since it stillrelies on some conjectures concerning F -K product quantizers.
5.2 The Romberg log-extrapolation
For convenience we will only consider the case of the Brownian motion since we have a sharp rate forits quadratic quantization error rate, but the method works with any other process for which sucha result holds. Let Ψ : (L2
T, | . |
L2T
) → R be a three times differentiable functional such that D2Ψ is
bounded and Lipschitz. Let (χN )N≥1 denote a sequence of rate optimal K-L product quantizers ofthe Brownian motion W and let WN := WχN
denote the related Voronoi quantizations. First notethat by Proposition 4 (stationarity)
E(DΨ(WN ) | W − WN )L2T
= E(DΨ(WN ) | E(W | WN )− WN )L2T
= 0.
Then, it follows from the Taylor formula that there is some bounded random vector ζ such that
E(Ψ(W )) = E(Ψ(WN )) +12E(D2Ψ(WN ).(W − WN )⊗2) + E(ζ.(W − WN )⊗3). (5.38)
16

The sequence (χN )N being rate optimal E(D2Ψ(WN ).(W−WN )⊗2) = O((log N)−1
). However, recent
finite dimensional results (see [1], Theorem 6) as well as several numerical experiments suggest a trueexpansion: this means conjecturing the existence of a real constant κΨ >0 such that
E(D2Ψ(WN ).(W − WN )⊗2) = 2 κΨ(log N)−1 + o((log N)−1) as N →∞. (5.39)
If one also assumes that E|W − WN |3L2
T
= o((log N)−1) (which also holds as a conjecture), then a
speeding up Romberg log-extrapolation can be implemented as follows: one computes E(Ψ(WM )) andE(Ψ(WN )) for some M = M(N) < N , M(N) ³ N r, r∈ (0, 1). Then solving the linear system
E(Ψ(W )) = E(Ψ(WM)) +κΨ
log M+ o((log M)−1), E(Ψ(W )) = E(Ψ(WN)) +
κΨ
log N+ o((log N)−1)
yields the Romberg log-extrapolation formula
E(Ψ(W )) =log N×E(Ψ(WN ))− log M×E(Ψ(WM ))
log N − log M+ o
((log N)−1
). (5.40)
So we passed from a O((log N)−1)-rate to an o((log N)−1
)-rate. The conjecture (supported by numer-
ical simulations not reproduced here) concerning E|W − WN |3L2
T
is that a o((log N)−( 3
2−ε)
), ε > 0,
rate holds. In fact very little is known on the Lp′-quantization error induced by Lp-optimal quantizerswhen p′ > p even in 1-dimension. If the same rate holds in (5.39), then a o
((log N)−( 3
2−ε)
)-rate holds
in (5.40).An alternative to this approach can be to replace log N by ‖W − WχN
opt‖−22
in (5.40) (and idem forM), as suggested by B. Wilbertz [23]. Some tests in [23] show that it often improves the accuracy ofthe extrapolation and has a stabilizing effect on the choice of the couples (N, M).
6 Numerical experiments using a Heston stochastic volatility model
In this section we use the functional quantization based quadrature formulæ to price vanilla Calls andAsian Calls in a Heston model. This is a stochastic volatility model introduced by Heston in 1993(see [7]) in which the squared volatility process is driven by a CIR process. Namely, the dynamics ofthe “risky” asset price process is given by
dSt = St(r dt +
√vt) dW 1
t , S0 = s0 > 0,
dvt = k(a− vt)dt + ϑ√
vt dW 2t , v0 > 0, with <W 1,W 2 >t= ρ t, ρ∈ [−1, 1],
(6.41)
where r denotes the (constant) interest rate and (vt) denotes the square stochastic volatility processand a, k, ϑ are non-negative real parameters. The equation for the (vt) has a unique (strong) pathwisecontinuous solution living in R+ (see e.g. [10] and [9], p.235). Note that in this section, we emphasizethe numerical aspects and that in many situations we have no proof yet to support rigorously theresults that we observe. This is due to the fact that the volatility process has a non Lipschitz diffu-sion coefficient. In particular the assumptions required in [13] to get some error rates for functionalquantization of diffusion are not satisfied (except in some special cases as pointed out below).
6.1 A benchmark: pricing vanilla options in a Heston model
The pricing of vanilla calls and puts is simply a benchmark to evaluate the efficiency of the methodsince a quasi-closed form for their premium is available (based on an FFT). It involves some integrals of
17

the characteristic function the couple (vt,∫ t0 vsds) for which a true closed form is available (see e.g. [10]
or [7]). We use it to compute the reference premia in our experiments (its approximate accuracy is10−2, see [7]). Our aim is to price by functional quantization (at time 0) European Calls on theunderlying asset (St) with strike price K and maturity T > 0, i.e.
CallHest(S0,K, r) = e−rTE((ST −K)+).
As a first step, we follow an approach which works for more general dynamics of the stochasticvolatility. First we project W 1 onto W 2 so that
W 1t = ρW 2
t +√
1− ρ2 W 1t ,
with W 1 a standard Brownian motion independent of W 2. Then, Ito calculus shows that
St = s0 exp(−ρ2
2vt t + ρ
∫ t
0
√vsdW 2
s
)exp
((r − 1− ρ2
2vt)t +
√1− ρ2
∫ t
0
√vsdW 1
s
)
with vt = 1t
∫ t0vsds. Consequently, using the independence of W 1 and W 2, one derives that
CallHest(S0,K, r, v0, T ) = E(e−rTE
((ST −K)+ | FW 2
T
))= E
(CallBS
(S
(v)0 ,K, r,
((1− ρ2)vT
) 12 , T
))
with S(v)0 = s0 exp
(−ρ2
2vT T + ρ
∫ T
0
√vsdW 2
s
)
where CallBS(s0,K, r, σ, T ) denotes the regular (r, σ, T )-Black-Scholes model premium function (forvanilla calls). Then the equation satisfied by (vt) yields(1)
∫ t
0
√vsdW 2
s =vt − v0 − kt(a− vt)
ϑ(6.42)
so that finally
CallHest(S0,K, r, v0, T ) = E (Φc(vT − v0, vT )) (6.43)
with Φc(v, v) = CallBS
(s0 exp
(ρT
[(k
ϑ− ρ
2
)v +
v
Tϑ− ka
ϑ
]),K, r,
((1− ρ2)v
) 12 , T
).
An analogous formula holds for PutHest(S0,K, r, v0, T ) by replacing mutatis mutandis CallBS by PutBS
in (6.43). Then function Φc is C∞ on (0, +∞)2. Note that when ρ = 0, (6.43) only depends on theL2-continuous linear functional vT .
Following the quantization procedure described in section 4.3, we set b(v) = −k(v−a) and σ(v) =ϑ√
v. Unfortunately, since the function σ is non-Lipschitz at 0, we cannot rigorously claim from [13]that solutions of the the integral system (4.36) produce a rate optimal sequence (yN ) for (vt). However,we will see (when ϑ2
4k < a) that it produces satisfactory numerical results.
A Setting: a = ϑ2
4k . This special setting will make possible to investigate the efficiency of functionalquantization for smooth functionals since, in this setting, the solutions of the integral equation (4.36)can be made explicit. Hence, there is no error due to the time discretization scheme of (4.36).
1The key point in what follows is to express the stochastic integralR t
0
√vsdW 2
s as a functional of vt, v0 and an integralfunctional of (vs). If the variance process follows a general diffusion process dvt = b(vt)dt + ϑ(vt)dW 2
t then one mayapply under appropriate regularity assumption, Ito’s formula to the function ϕ(v) :=
√v/ϑ(v) to get such an expression.
18

So, in some way it is more illustrative of the numerical performances of functional quantization.This follows from a fact pointed out by Rogers in [21]: one may assume without loss of generality thatthe process (vt) is the square of a scalar Ornstein-Uhlenbeck process
dXt = −k
2Xtdt +
ϑ
2dW 2
t , X0 =√
v0. (6.44)
Having in mind that the N -quantizers χN =√
λ⊗ x∈ Opq(W,N) given by (4.21) read
χNi (t) =
√2T
∑
n≥1
x(Nn)in
T
π(n− 1/2)sin
(π(n− 1/2)
t
T
), i = (i1, . . . , in, . . .)∈
∏
n≥1
1, . . . , Nn,
the integral system (4.36) associated to X, namely
xi(t) =√
v0 − k
2
∫ t
0xi(s) ds +
ϑ
2χN
i (t), i = (i1, . . . , in, . . .)∈∏
n≥1
1, . . . , Nn, (6.45)
has a closed form given by
xNi (t) = e−kt/2√v0 +
ϑ
2
∑
n≥1
x(n)in
cn ϕn(t) with cn :=T 2
(π(n− 1/2))2 + (kT/2)2
and ϕn(t) :=
√2T
(π
T(n− 1/2) sin
(π(n− 1/2)
t
T
)+
k
2
(cos
(π(n− 1/2)
t
T
)− e−kt/2
)).
Then, following [13], we have for every p∈ [1, 2),
‖XN −X‖p ≤ Cp,k,ϑ,T ‖W 2χN
−W 2‖2 = O((log N)−
12
)(6.46)
where XN is the non-Voronoi quantization defined by
XNt =
N∑
i=1
xNi (t)1Ci(χN )(W
2) = e−kt/2√v0 +ϑ
2
∑
n≥1
ξx(n)
n cn ϕn(t), t∈ [0, T ].
One designs a (non-Voronoi) N -quantization for the process (vt) by setting
vNt = (XN
t )2 =∑
i
(xNi (t))21Ci(χN )(W
2). (6.47)
Then, one derives from (6.46) that, for every p∈ [1, 2],
‖ |vN − v|L2
T
‖p = O((log N)−( 1
2−ε)
)for every ε > 0. (6.48)
Finally, a first approximation of CallHest(S0, K, r, v0, T ) is based on (6.43)
CrCallHest
(s0,K, T, v0, r) := E(Φc(vT − v0, vT )) (6.49)
=∑
i
Φc
((xN
i )2(T )− v0, (xNi )2(T )
)P(W 2 = χN
i )
where the probability distribution (P(W 2 = χNi ))i is given by (4.25). The notation “Cr” is for “Crude”.
19

The Call-Put parity equation provides a second proxy of the Call by setting
PrCallHest
(s0,K, T, v0, r) := s0 − e−rT K + E(Φp(vT − v0, vT )). (6.50)
When ρ 6= 0, no error bound is available for these proxies since we do not know the rate of pointwisequantization of vT by the quadratic functional quantizer vT .
When ρ = 0, Φc(vT − v0, vT ) = Φc(0, vT ) does not depend on vT and is clearly Lipschitz in vT , sothe theoretical rate of convergence is O
((log N)−( 1
2−ε)
)(without any acceleration techniques).
As concerns the Romberg log-extrapolation, one notices that both functions σ 7→ CallBS(s0,K, r, σ, T )and its Put counterpart are infinitely differentiable on (0, +∞) and u 7→ uT := 1
T
∫ T0 u(s)ds is an
L2T-continuous linear functional. On the other hand, the solution of the integral equation x(t) =
x(0) − k2
∫ t0 x(s)ds + ϑ
2 ξ(t) is also an L2T-continuous linear functional functional of ξ. Consequently,
one may writeCallHest(s0,K, T, r) = E(Ψc(W 2)) = s0 − e−rT K + E(Ψp(W 2))
where Ψp and Ψc are infinitely differentiable and Ψp is bounded with all its differentials which suggestsa favourable framework to implement the Romberg log-extrapolation.
Following the results of former experiments carried out with the Asian option in a Black & Scholesmodel (see [20]) we compute time integrals by the midpoint method with n = 20, i.e.
(xNi )2 =
1T
∫ T
0(xN
i (s))2ds ≈ 1n
n∑
k=1
(xNi (tk))2 with tk =
(2k − 1)T2n
.
The set of parameters of the Heston model is specified as follows
s0 = 50, r = 0.05, T = 1, ρ = 0.5, v0 = a = 0.01, ϑ = 0.1, k = 0.25.
Note that E vt = a, t∈ [0, T ] (and a = ϑ2/(4k)).
We carried out our numerical experiments on a whole vector of strike prices K∈ 44, 45, . . . , 55, 56(with step 1) to evaluate the performances of the method for in-, at- and out-of-the-money options.The Heston Call premium vector were computed using:
– a “crude”FQ integration using CrCallHest
(s0,K) given by formula (6.49) with optimal productN -quantizer of sizes N = Nrec = 96, 966, 9 984, 97 920.
– a Romberg log-extrapolation RbgCrCallHest
(s0, K) based on (5.40) for the three couples (N, M) =(96, 966), (966, 9984) and (9 984, 97 920). (Since ρ 6= 0, we have no theoretical evidence that it speedsup the convergence so this is just a numerical experiment).
– a K-linear interpolation method (which is purely numerical at this stage): the principle is to
interpolate RbgCrCallHest
(s0,K) and its counterpart RbgPrCallHest
(s0,K) (obtained using the model-free Call-Put parity equation) by setting for every K∈ Kmin, . . . , Kmax
IRCallHest
(s0,K) =(K −Kmin) RbgCrCall
Hest(s0,K) + (Kmax −K) RbgPrCall
Hest(s0,K)
Kmax −Kmin.
Doing so we put proportionally more weight on the “less random” variable which tends to make theglobal error smaller. It means we put more weight on the Put when K is small, on the Call, when Kis large. This is a purely heuristic approach (2)
2In a standard Monte Carlo method if two r.v. X 6= X ′ have the same expectation m there is an optimal way to tocompute m by considering independent copies of λX + (1− λ)X ′, with λ = E((X ′ −X)X ′)/E(X −X ′)2. We have noreason to do so in a FQ approach so we adopted the linear interpolation.
20

– Finally the variance of the Heston Calls were computed (by a Monte Carlo simulation) in orderto compare the accuracy of the FQ approaches with respect to MC confidence intervals.The implementation was achieved on a G5 (2.5 Ghz) Apple computer using MATLAB. The resultsare reported in Tables 2 below (relative errors) and in Figure 8 (absolute errors).
Our comments on these first set of results are the following: the rate of the “Crude FQ” approach isO(1/ log(N)) in accordance with the theoretical rate (e.g. passing from N = 96 ≈ 100 to N = 9 998 ≈1002 divides the error by two). But its absolute accuracy is not sufficient for financial applications(see Figure 8(a)).
On the other hand, the results obtained by the Romberg log-extrapolation method and the (in-duced) K-interpolation method are outstanding: for both tested couples the error lies within 0.5 cent(see Figure 8(b)-(c)). For the couple (M, N) = (966, 9 984) the error induced is lower than 0.2 centby Romberg log-extrapolation and lower than 0.1 cent by K-interpolation for all strike prices (notethat the differences with the reference price in Table 2 below are only due to rounding effect to thenearest cent). This can be considered as a good indication on the conjecture (5.39). On this veryexample the K-interpolation only yields a slight improvement. Its main asset is in fact its robustnesswith respect to time discretization (as emphasized in further simulations). From a theoretical view-point, these results plead in favour of the existence of higher order term at rate O((log N)−3/2) in theexpansion (5.40). Furthermore, a comparison between Figures 8(b) and 8(c) shows the expected effectof the K-linear interpolation of Romberg log-extrapolations on the values of the absolute errors of theHeston Call for small values of the strike K (deep in-the-money options), especially in a rough spatialdiscretization setting ((M, N) = (96, 966)).
As concerns the comparison with a “crude” Monte Carlo method, we reported in Table 2 below(third row) 2×StdN , where StdN denotes the (relative) standard deviation of a MC estimator (forN = 10 000). This quantity defines its 95.5%-confidence interval. Note that by “crude” MC, we simplymean a standard MC estimator without any variance reduction techniques.
One verifies that 2× Std10 000 is slightly higher (say 10 to 30%) than the relative error induced by“crude”FQ-integration with N = 9 984 (within brackets, fourth row).
In terms of velocity, computing the whole premium vector (13 strike prices) by functional quan-tization for (M,N) = (966, 9 984) including the Romberg log-extrapolation and the K-interpolationtakes (with n = 20) less than 0.5 second (this outperforms any Monte Carlo simulation but not the“reference” Inverse Fourier Transform method (second row) but this is not our aim at this stage sincewe use this setting as a benchmark).
K 44 45 46 47 48 49 50
Heston Call(Ref) 8.18 7.26 6.36 5.49 4.68 3.93 3.26
“Crude” Monte Carlo (2× Std10 000) (0.64%) (0.72%) (0.82%) (0.94%) (1.08%) (1.26%) (1.44%)
“crude” FQ (CrCallHest(s0, K)) 8.14 7.21 6.31 5.45 4.64 3.89 3.22
N = 9 984 (0.50%) (0.57%) (0.67%) (0.79%) (0.94%) (1.11%) (1.31%)
Romberg on “crude”FQ ( RbgCrCallHest(s0, K)) 8.18 7.25 6.36 5.49 4.68 3.93 3.26
(M,N)=(966-9984) (0.07%) (0.07%) (0.11%) (0.13%) (0.16%) (0.20%) (0.24%)
K-interpol. of RombergFQ (IRCallHest(s0, K)) 8.18 7.26 6.36 5.49 4.68 3.93 3.26
(M,N)=(966-9984) (0.00%) (0.00%) (0.02%) (0.05%) (0.08%) (0.11%) (0.15%)
21

K 51 52 53 54 55 56
Heston Call(Ref) 2.68 2.18 1.765 1.42 1.14 0.91
“Crude” Monte Carlo (2× Std10 000) (1.66%) (1.90%) (2.14%) (2.42%) (2.70%) (3.02%)
“crude” FQ (CrCallHest(s0, K)) 2.64 2.14 1.73 1.39 1.11 0.89
N = 9 984 (1.53%) (1.77%) (2.01%) (2.21%) (2.38%) (2.61%)
Romberg on “crude”FQ ( RbgCrCallHest(s0, K)) 2.68 2.18 1.765 1.42 1.14 0.91
(M,N)=(966-9984) (0.28%) (0.32%) (0.33%) (0.29%) (0.18%) (0.10%)
K-interpol. of RombergFQ (IRCallHest(s0, K)) 2.68 2.18 1.765 1.42 1.14 0.91
(M,N)=(966-9984) (0.19%) (0.23%) (0.23%) (0.22%) (0.14%) (0.10%)
Table 2. A setting: Relative Standard deviation of the 10 000 Monte Carlo estimator, Heston Call by“Crude” Functional Quantization (N = 9 984), Romberg log-extrapolation ((M,N) = (966, 9 984))
and K-linear interpolation.
Concerning the behaviour of the method with other sets of parameters, numerical experimentsnot reproduced here (see [20]) show that the smaller the correlation ρ is (in absolute value), themore efficient functional quantization is (the impact of the non L2
T-continuous pointwise functional vT
decreases). Other experiments not reproduced here either show that, as expected, the error increases(for both FQ and MC) as the volatility ϑ of the volatility process grows, but remains quite satisfactoryuntil ϑ = 30% (when a = 0.01).
B setting: ϑ2/(4k) < a. Any solution (vt) of (6.41) is positive and, once again an adaptation of theproof of Theorem 1 in [13] would show that ‖ |v− vN |
L2T
‖2 = O((log N)−12+ε). This time any numerical
implementation of this functional quantization method requires to discretize the integral system (4.36)for the process (vt)t defined by the second equation in (6.41). This means setting b(v) = k(a− v) andσ(v) = ϑ
√v. We implemented a (slightly non-homogeneous) Euler scheme defined by: yn,N
i (0) = v0,
yn,Ni (tk+1) = yn,N
i (tk) + k
(a− ϑ2
4k− yn,N
i (tk))
(∆t)k + ϑ√
yn,Ni (tk)(χN
i (tk+1)− χNi (tk)), (6.51)
k = 0, . . . , n, with t0 = 0, tk = (2k − 1)T/(2n), k = 1, . . . , n, tn+1 = T and (∆t)k = tk − tk−1. Then,one sets
yn,Ni (t) = yn,N
i (tk), t∈ ((k − 1)T/n, kT/n), k = 1, . . . , n.
This scheme is designed to optimize the computation of the integral below by a midpoint method.Then, one designs a (non-Voronoi) N -quantization for the process (vt) by setting
vn,Nt =
∑
i
yn,Ni (t)1Ci(χN )(W
2). (6.52)
The integral 1T
∫ T0 vtdt is then approximated by
1T
∫ T
0vn,Nt dt =
1n
n∑
k=1
vn,N (tk).
Since the functions yNi are positive and the functions b, σ and χN are smooth on (0, +∞), it is
classical background in numerical analysis of ODE that
yNi − yn,N
i =ζNi
n+ Oi(1/n2)
where ζNi satisfies an ODE involving b, σ and their higher order derivatives. This expansion holds for
the uniform convergence on compact sets.
22

This suggests to implement a Romberg time extrapolation to speed up the convergence of Eulerscheme. More precisely, some standard computations based on a Taylor expansion of Φc show that
2Φc(y2n,Ni − v0, y
2n,Ni )− Φc(y
n,Ni − v0, y
n,Ni ) = Φc(yN
i − v0, yNi ) +
Cn
n2(6.53)
with supnE(Cn) < +∞.The first tested method is to estimate the premium of the Heston Call by a Romberg log-
extrapolation (5.40) of the expectation of the left hand side of the above equation (6.53), still denotedRbgCrCall
Hest(s0,K). We used the same size couples (M, N) and introduced the same K-interpolated
estimator as in A setting (but the “crude” FQ approach was no longer tested given the results ofA setting). For numerical tests we set
s0 = 50, k = 2, r = 0.05, T = 1, ρ = 0.5, v0 = a = 0.01, ϑ = 0.1.
The time discretization of the integral system was processed with 2n = 64. This is finer thanin A setting but this time we do not simply evaluate some functions at the discretization times, wediscretize an integral system.
K 44 45 46 47 48 49 50
CallHest(FFT Ref. premium) 8.18 7.26 6.38 5.53 4.73 3.99 3.33
“Crude” Monte Carlo (2× Std10 000) (0.35%) (0.40%) (0.51%) (0.57%) (0.63%) (0.68%) (0.72%)
Romberg on “crude”FQ ( RbgCrCallHest
(s0, K)) 8.18 7.25 6.38 5.53 4.73 3.99 3.33(M,N)=(966-9984) (0.00%) (0.00%) (0.00%) (0.00%) (0.00%) (0.00%) (0.00%)
K-interpol. of RombergFQ (IRCallHest
(s0, K)) 8.18 7.26 6.38 5.53 4.73 3.99 3.33(966-9984) (0.00%) (0.00%) (0.00%) (0.00%) (0.00%) (0.00%) (0.00%)
K 51 52 53 54 55 56
CallHest(FFT Ref. premium) 2.74 2.23 1.795 1.43 1.13 0.89
“Crude” Monte Carlo (2× Std10 000) (0.75%) (0.75%) (0.77%) (0.77%) (0.77%) (0.77%)
Romberg on “crude”FQ (RbgCallHest
(s0, K)) 2.74 2.23 1.795 1.43 1.13 0.89(966-9984) (0.00%) (0.00%) (0.00%) (0.01%) (0.04%) (0.11%)
K-interpol. of RombergFQ (IRCallHest
(s0, K)) 2.74 2.23 1.795 1.43 1.13 0.89(966-9984) (0.01%) (0.04%) (0.11%) (0.17%) (0.27%) (0.41%)
Table 3. B setting: Relative Standard deviation of the “crude” 10 000 Monte Carlo estimator,Heston Call by Romberg log-extrapolation and K-linear interpolation with (M,N) = (966, 9 984).
Additional information of interest are the following:
CPU Time < 0.8 s, mean error (over K) = 5.10−4.
The results reported in Table 3 (relative errors) and Figure 5 (absolute errors) confirm thoseobtained in the special A setting. Again the K-linear interpolation gives better results for lowervalues of K (deep in-the-money options) as expected (see Figure 5(b)).
6.2 Pricing “Heston” Asian Call by functional quantization
The Asian Call premium is defined by
AsCallHest = e−rTE((
1T
∫ T
0Ssds−K
)
+
).
Note that here the functional is not smoother than Lipschitz and that no closed form is available forthis option. We only consider the more general case ϑ2/(4k) < a. We adopt the same notations as forthe vanilla Call.
23

First, we approximate the temporal mean by a midpoint quadrature formula i.e.
1T
∫ T
0Ssds ≈ 1
n
n∑
k=1
Stk
where tk = (2k − 1)T/(2n), k = 1, . . . , n. Following (6.41), we recall that for every t∈ [0, T ],
St = s0 exp(
(r − 12vt)t + ρ
∫ t
0
√vsdW 2
s
)exp
(√1− ρ2
∫ t
0
√vsdW 1
s
)
= s0 exp(
t
((r − ρak
ϑ) + vt(
ρk
ϑ− 1
2))
+ρ
ϑ(vt − v0)
)exp
(√1− ρ2
∫ t
0
√vsdW 1
s
).
We start from the chaining rule for conditional expectations to compute this premium i.e.
AsCallHest(s0,K) = e−rTE(E
((1T
∫ T
0Ssds−K
)
+
|σ((vt)0≤t≤T )))
. (6.54)
Then one setsSn,N
t =∑
i,j
sn,Ni,j (t)1χN
i(W 1)1χN
j(W 2) (6.55)
where the multi-indices i and j run over∏
k≥11, . . . , Nk and
sn,Ni,j (t) = s0 exp
(t
((r − ρak
ϑ) + yn,N
j (t)(ρk
ϑ− 1
2))
+ρ
ϑ(yn,N
j (t)− v0))
exp(√
1− ρ2
∫ t
0
√yn,N
j dχNi
),
where yn,Nj are obtained as in (6.51). The rest of the procedure is quite similar to that implemented for
the Heston vanilla Call: “crude” functional quantization approach directly based on (6.54) and (6.55)(and a time Romberg extrapolation). Indeed we set for a given time discretization size n
CrAsCallHest
(s0,K) = 2E(Φas(s0, K, 2n, χN ))− E(Φas(s0, K, n, χN )),
where Φas(s0,K, n, χN ) = e−rTE((
1T
∫ T
0Sn,N
t dt−K
)
+
| FcW 2
T
)
= e−rT∑
i,j
(1T
∫ T
0sn,Ni,j (t)dt−K
)
+
P(W 1∈ Ci(χN ))1χNj
(W 2)
so that E(Φas(s0,K, n, χN )) = e−rT∑
i,j
(1T
∫ T
0sn,Ni,j (t)dt−K
)
+
P(W 1∈ Ci(χN ))P(W 2∈ Cj(χN )).
Like for Heston vanilla Calls, its poor (but expected) rate of convergence leads to introduce a space
Romberg log-extrapolation RCrAsCallHest
(s0,K) and, finally, a K-linear interpolation IRAsCallHest
(s0,K)
between RCrAsCallHest
(s0, K) and its counterpart RPrAsCallHest
(s0,K) resulting from the Asian Call-Put parity equation
AsCallHest(s0,K)−AsPut(s0,K) = s01− e−rT
rT−Ke−rT .
The reference price was computed using a Monte Carlo simulation of size 108 (including a timeRomberg extrapolation with 2n = 32 and some variance reduction techniques).
24

In this framework the quantization procedure has a greater complexity since we have to sumover a bivariate functional product quantizer: namely the complexity of the quantizing procedure isapproximately N2 (since M ¿ N), but this is partially balanced by the lower volatility of the Asianpseudo-asset 1
t
∫ t0 Ssds compared to the original traded asset (St). Nevertheless, the comparison with
a crude MC simulation (through the computation of the standard deviation parameter) is made inthis framework with respect to a 106-MC estimator (using the same time Romberg extrapolation butno variance reduction).
We evaluated the method with both couples (M,N) = (96, 966) and (M, N) = (966, 9 984). Thetime discretization size is 2n = 32. The results are reported in Table 4 below (relative errors for thefirst couple only) and are depicted in Figure 6 (absolute errors).
K 44 45 46 47 48 49 50
Heston Asian Call(108-MC Reference) 6.92 5.97 5.03 4.11 3.245 2.46 1.79
“Crude” Monte Carlo (2× Std106) (0.08%) (0.10%) (0.11%) (0.14%) (0.16%) (0.20%) (0.26%)
Romberg on “crude” FQ ( RCrAsCallHest(s0, K)) 6.92 5.97 5.03 4.12 3.25 2.47 1.80
(M,N)=(96-966) (0.01%) (0.04%) (0.05%) (0.09%) (0.17%) (0.32%) (0.63%)
K-interpol. of RombergFQ ( IRAsCallHest(s0, K)) 6.92 5.97 5.03 4.11 3.24 2.46 1.79
(M,N)=(96-966) (0.01%) (0.02%) (0.02%) (0.04%) (0.05%) (0.04%) (0.03%)
K 51 52 53 54 55 56
Heston Asian Call(MC Ref) 1.25 0.84 0.54 0.34 0.21 0.125
“Crude” Monte Carlo (2× Std106) (0.31%) (0.39%) (0.50%) (0.63%) (0.81%) (1.04%)
Romberg on “crude” FQ ( RCrAsCallHest(s0, K)) 1.26 0.85 0.56 0.36 0.23 0.15
(M,N)=(96-966) (1.16%) (2.06%) (3.73%) (6.58%) (11.53%) (19.96%)
K-interpol. of RombergFQ ( IRAsCallHest(s0, K)) 1.25 0.84 0.545 0.34 0.21 0.125
(M,N)=(96-966) (0.17%) (0.37%) (0.78%) (1.37%) (2.15%) (2.84%)
Table 4. B setting: Relative Standard deviation of the 106-Monte Carlo estimator, Heston Asian Call byRomberg log-extrapolation and the induced K-linear interpolation with (M, N) = (96, 966).
Additional information of interest are the following:
(M, N) = (96, 966), CPU Time < 4.4 s, mean quadratic error (over K) = 7.51 10−4.
The main comments are the following: when (M, N) = (96, 966) the Romberg log-extrapolatedpremia are not satisfactory (although the errors remain within 2 cents and decrease when the optionsgoes out-of-the money so that the relative error remains bounded). On the other hand, the K-interpolation method produces premia with an error lying within 0.5 cent with respect to the MonteCarlo reference price. This is quite satisfactory although this may induce non vanishing relative errorsfor deep out-of-the-money options (but in practice Asian options are dealt closer to the money thanplain vanilla options). The functional quantization approach is fifteen times faster than a 106-MCsimulation having exactly the same characteristics (in particular a time Romberg extrapolation with2n = 32): CPU time is 4.4 seconds with FQ with 13 strike prices versus 66 seconds for MC (on ourdevice).
When (M,N) = (966, 9 984), the error induced by the Romberg log-extrapolation lies now within0.5 cent. As concerns the K-interpolated premia one observes a little improvement (maximal errorwithin 0.4 cent on Figure 6(b)) but the computation time is of no interest for application (close to 430seconds ≈ 7 mn) but the mean accuracy remains similar (6.35 10−4). We can see again the efficiencyof the K-linear interpolation in the low discretization setting (96, 966). It gives the same kind ofprecision as for (966, 9 984) (compare Figure 6(a)-(b)).
As a conclusion to this section, we would like to insist on the following fact: the quantizing sizeshave been selected a priori, namely Nrec for N = 100, 1 000, 10 000, 100 000. For every problem some
25

parameter dependent couples (M,N) produce significantly more accurate results. We decided not toreport these results which are not significant in view of operating applications. However, the next stepis to carry on a systematic search for some possibly globally more performing couples (M, N). Thisrequires to have more insight on the interaction between M and N in the log-Romberg extrapolation.Finally, we would like to emphasize that we decided not to implement the FQ counterpart of anyusual “control variate random variable”. When implemented they do improve the results (see [20]for the case of the Asian option in Black-Scholes model). Note that what have been proposed herestraightforwardly applies to the C.I.R. interest rate model.
7 FQ as a control variate variable in a FQ-MC method for nonsmooth functionals.
Numerical integration on the L2T-space by functional quantization turns out to performs surprisingly
well as emphasized on the two formerly investigated option pricing problems. It provides very accuratedeterministic proxies for medium values of N , say N ≈ 10 000. However, in both cases the underlyingfunctionals had some regularity on L2
T. For less regular functionals (like indicator functions, etc) it
can be interesting is to use numerical FQ for small values of N – say N ≈ 100 – as a control variaterandom variable in a Monte Carlo simulation.
We will briefly outline this approach now. Let us consider the case of a functional F (W ) of theBrownian motion W (but what follows formally applies too any Gaussian process with an explicitK-L expansion). In order to compute E(F (W )), one writes
E(F (W )) = E(F (WN )) + E(F (W )− F (WN )
)
= E(F (WN ))︸ ︷︷ ︸(a)
+1M
M∑
m=1
F (W (m))− F (W (m)N
)
︸ ︷︷ ︸(b)
+RN,M (7.56)
where (W (m))m=1,...,M are M independent copies of the standard Brownian motion and RN,M is aremainder term defined by (7.56). Term (a) is computed by quantization and Term (b) is computedby a Monte Carlo simulation of the K-L expansion of the Brownian motion. Then,
E|RN,M |2L2T≤ E|F (W )− F (WN )|2
Mand
√M RN,M
L−→ N (0; ‖F (W )− F (WN )‖2)
as M → +∞ so that if F is simply a Lipschitz functional (e.g. like the payoff of the Asian Call in aBlack-Scholes model) and if (WN )N≥1 is a rate optimal sequence of product quantization, then
‖F (W )− F (WN )‖2 ≤[F ]LipCW
(log N)12
and ‖ |RN,M |L2T
‖2 ≤[F ]LipCW
(M log N)12
.
The simulation of WN from W =∑
n≥1
√λn ξneW
n amounts to solving for every n = 1, . . . , mN ,the nearest neighbour problem for the simulated Gaussian variable ξn into the Nn-quantizer setx(N1)
1 , . . . , x(Nn)Nn
.
8 Provisional remarks
First let us mention that several speeding up procedures (especially the Romberg log-extrapolation,etc) remains partially heuristic and subsequently would need some theoretical support: this means
26

that deeper investigations on these specific theoretical aspects of functional quantization should becarried out.
On the other hand, further numerical developments to still improve the efficiency of quadratureformulæ based on functional quantization could be:
– to search for some (reasonably) “universal” good couples (M,N) that would improve the perfor-mances of our selected couples (some numerical work is in progress in that direction, see [23]). Thisneeds to have more insight on the interaction between M and N in the Romberg log-extrapolation.
– to investigate the quantization using higher dimensional marginals (see [23]).– to replace the Romberg log-extrapolation by a “three step” extrapolation method to cancel two
terms instead of one in the expansion of the error E(Ψ(W ) − ψ(W )). This requires some insight onthe rate of convergence of quantities like E(Θ(W ).(W − W )⊗3).
– the implementation of an L2T-valued extension of the CLV Q procedure used in finite dimension
to get some (locally) optimal quantizers (see [19]). The CLV Q procedure is the stochastic gradientdescent derived in d-dimension from the integral representation of the distortion gradient function(see (3.4) and [16] and [19]). However, the bounds obtained in (5.37) show that the gain to beexpected from such a stochastic optimization remains limited.
Finally, let us mention that the K-L expansion of the Brownian motion W is in fact a.s. convergingin (C([0, T ]), ‖ . ‖sup). This follows from the Kolmogorov criterion and the Levy-Ito-Nisio Theorem(see e.g. [22] p.104 and p.431 respectively). A.s. uniform convergence holds for the Schauder basisas well. This suggests to evaluate the performances of K-L product quantizers for the ‖ . ‖sup-norm(theoretically, see [14], but also numerically): the family of PW -a.s. ‖ . ‖sup-continuous functional ismuch wider than for the ‖ . ‖2-norm and contains most natural functionals (supremum, Brownianhitting times, stopped functionals, etc) involved in path-dependent options (lookback, barriers, down-and-out, etc).
Acknowledgement: We thank Harald Luschgy for helpful discussions.
References
[1] Delattre S., Luschgy H., Graf S., Pages G. (2004), Quantization of probability distributions undernorm-based distortion measures, Statistics and Decision, 22, pp.261-282.
[2] Dereich S. (2005), The quantization complexity of diffusion processes, pre-print, Technische UniversitatBerlin.
[3] Dereich S., Fehringer F., Matoussi A., Scheutzow M. (2003), On the link between small ballprobabilities and the quantization problem for Gaussian measures on Banach spaces, J. Theoretical Probab.,16, pp.249-265.
[4] Gersho A., Gray R.M. (1992), Vector Quantization and Signal Compression, Kluwer, Boston.
[5] Gersho A., Gray R.M. (1983), Special issue on Quantization, IEEE Trans. on Inf. Theory, 29, n01&2.
[6] Graf S., Luschgy H. (2000), Foundations of Quantization for Probability Distributions, Lecture Notesin Mathematics n01730, Springer, Berlin, 230 p.
[7] Heston, S.L. (1993), A closed-form solution for options with stochastic volatility with applications tobond and currency options, The review of Financial Studies, 6, n02, 327-343.
[8] Hirsch, F., Lacombe G. (1997), Elements d’analyse fonctionnelle, Masson, Paris, 339p.
[9] Ikeda N., Watanabe S. (1989), Stochastic Differential Equations and Diffusion processes, 2nd edition,North-Holland & Kodansha Ltd., Tokyo, 555p.
[10] Lamberton D., Lapeyre B. (1996), Introduction to stochastic calculus applied to Finance, Chapman &Hall/CRC, New York, 1996,185 p.
27

[11] Luschgy H., Pages G. (2002), Functional quantization of Gaussian processes, J. Funct. Anal., 196,pp.486-531.
[12] Luschgy H., Pages G. (2002), Sharp asymptotics of the functional quantization problem for Gaussianprocesses, The Annals of Probability, 32, n02, pp.1574-1599.
[13] Luschgy H., Pages G. (2005), Functional Quantization of a class of Brownian diffusions: a constructiveapproach, to appear in Stoch. Proc. and their Appl. (and pre-print LPMA-853, 2003, Univ. Paris 6, France).
[14] Luschgy H., Pages G. (2005), High-resolution product quantization for Gaussian processes under sup-norm distortion, pre-print LPMA-1010.
[15] Pages, G. (1993), Voronoi tessellation, space quantization algorithm and numerical integration, Procee-dings of the ESANN’93, M. Verleysen ed., Editions D Facto (ISBN 2-9600049-0-6), Bruxelles, pp.221-228.
[16] Pages G. (1997), A space vector quantization method for numerical integration, Journal of Computationaland Applied Mathematics, 89, pp.1-38.
[17] Pages G. (2000), Functional quantization: a first approach, Univ. Paris 12 Val de Marne, pre-print 04-00.
[18] Pages G., Pham H. and Printems J. (2004), Optimal quantization methods and applications to nu-merical methods and applications in finance, Handbook of Numerical Methods in Finance, S. Rachev, ed.,Birkhauser, Boston, pp.253-298.
[19] Pages G., Printems J. (2003), Optimal quadratic quantization for numerics: the Gaussian case, MonteCarlo Methods and Applications, 9, n02, pp.135-166.
[20] Pages G., Printems J. (2004), Pricing derivatives using functional quantization, pre-print LPMA-930,Univ. Paris 6 (France).
[21] Rogers L.C.G. (1995), Which model for the term structure of interest rates should one use? MathematicalFinance, IMA 65, pp.93-116.
[22] Van der Vart A., Wellner J. (1996), Weak Convergence and Empirical Processes, Springer-Verlag,New York, 507p.
[23] Wilbertz B. (2005), Functional Quantization of Gaussian measures and application to the Brownianmotion on L2([0, T ], dt) from a numerical point of view, Diploma thesis, Universitat Trier (Germany).
Annex: proof of the quadrature formulæ
(a) This error bounds readily follows from |F (X)− F (Xx)| ≤ [F ]Lip|X − Xx|.(b) Formula (3.7) can be derived as follows:
|F (X)− F (Xx)| ≤ [F ]Liploc|X − Xx|(θ(X) + θ(Xx)).
Hence by the Schwarz inquality
E|F (X)− F (Xx)| ≤ [F ]Liploc‖X − Xx‖2(‖θ(X)‖2 + ‖θ(Xx)‖2).
Now θ2 is convex since θ is and u 7→ u2 is increasing and convex on R+. Consequently
E θ2(Xx) = E θ2(E(X|Xx)) ≤ E(E(θ2(X)|Xx)) = E(θ2(X))
which completes the proof. Concerning (3.8), one starts from a Taylor expansion, where DF denotes thedifferential of F and ‖ . ‖ the operator norm on L(H),
|F (X)− F (Xx)− (DF (Xx), X − Xx)| ≤ supz∈(X, bXx)
‖DF (z)−DF (Xx)‖|X − Xx|
≤ [DF ]α |X − Xx|1+α.
Consequently∣∣∣EF (X)−EF (Xx)−E
((DF (Xx) |X − Xx)
)∣∣∣ ≤ [DF ]αE |X−Xx|1+α.
28

NowE
((DF (Xx) |X − Xx)
)= E
((DF (Xx) |E(X − Xx|Xx)
))= E
((DF (Xx) | 0
H
))= 0.
To establish the last quadrature formula, one notes, using the convexity of θ that
supz∈(X, bXx)
‖DF (z)−DF (Xx)‖ ≤ [DF ]Liploc|X − Xx|(θ(Xx) + supz∈(X, bXx)
θ(z))
≤ [DF ]Liploc|X − Xx|(θ(Xx) + max(θ(X), θ(Xx)))
≤ [DF ]Liploc|X − Xx|(2θ(Xx) + θ(X)).
and one concludes as above by combining Jensen and Schwarz Inequalities. ♦
29

-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Quantif Fonctionnelle du mouvement Brownien sur [0,1], N = 10 = 5 x 2 points, Distortion = 0.098446
-3
-2
-1
0
1
2
3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-3
-2
-1
0
1
2
3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Quantif Fonctionelle Brownien sur [0,1], N = 96 = 12 x 4 x 2, Distortion = 0.0513
Figure 1: The Nrec-quantizer χNrec =
√λ⊗x for N = 10 (Nrec = 2×5 = 10), N = 50 (Nrec = 12×4 =
48) and N = 100 (Nrec = 12× 4× 2 = 96).
30

0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0 200 400 600 800 1000
N --> Distortion(N)N --> min(Distortion(k), k<=N)
Figure 2: N 7→ ‖W − WχNopt‖2
2and N 7→ ‖W − WχN
rec‖22
= minχ∈Opq(W,N)
‖W − Wχ‖22, N = 1, . . . , 1 000.
0
5
10
15
20
25
30
35
40
45
50
1 10 100 1000 10000 100000
N --> 1/min(Distortion(k), k<=N)4*log(x)
Figure 3: log N 7→ 1
‖W − WχNrec‖2
2
, N = 1, . . . , 10 000.
31

(a)
44 46 48 50 52 54 56
0
0.02
0.04
0.06
0.08
0.1
N = 96
N = 966
N = 9984
N = 97920
(b)
44 46 48 50 52 54 56−0.01
−0.008
−0.006
−0.004
−0.002
0
0.002
0.004
0.006
0.008
0.01
(M,N) = (96,966)
(M,N) = (966,9984)
(c)
44 46 48 50 52 54 56−0.01
−0.008
−0.006
−0.004
−0.002
0
0.002
0.004
0.006
0.008
0.01
(M,N) = (96,966)
(M,N) = (966,9984)
Figure 4: Heston vanilla Call, A setting (absolute errors): T =1, s0 =50, k=0.250, a=0.01, ρ=0.5,ϑ=0.1.(a) K 7−→ CallHest(s0,K)− CrCall
Hest(s0,K), K∈ 44, . . . , 56.
Pricing by “crude” Functional Quantization (−−−−), N = 96, 966, 9 984, 97 920.
(b) K 7−→ CallHest(s0,K)− RbgCrCallHest
(s0,K), K∈ 44, . . . , 56.Pricing by a Romberg log-extrapolation (−−∗−−) with (M, N)=(96-966), (966-9984).
(c) K 7−→ CallHest(s0,K)− IRCAllHest
(s0,K), K∈ 44, . . . , 56.Pricing by K-linear interpolation of Romberg log-extrapolations (−−×−−) with (M,N)=(96, 966),(966, 9984).
32

(a)
44 46 48 50 52 54 56−0.01
−0.008
−0.006
−0.004
−0.002
0
0.002
0.004
0.006
0.008
0.01
(M,N) = (966,9984)
(b)
44 46 48 50 52 54 56−0.01
−0.008
−0.006
−0.004
−0.002
0
0.002
0.004
0.006
0.008
0.01
(M,N) = (966,9984)
Figure 5: Heston vanilla Call, B setting (absolute errors): T = 1, s0 = 50, k = 2, a = 0.01, ρ = 0.5,ϑ=0.1(a) K 7−→ CallHest(s0,K)− RbgCrCall
Hest(s0,K), K∈ 44, . . . , 56.
Pricing by Romberg log-extrapolation (−−∗−−), (M,N)= (966, 9984).
(b) K 7−→ CallHest(s0, K) − IRCallHest
(s0, K), K ∈ 44, . . . , 56. Pricing by K-linear interpolation ofRomberg log-extrapolations (−−×−−) with (M, N)= (966, 9984).
33

(a)
44 46 48 50 52 54 56−0.02
−0.015
−0.01
−0.005
0
0.005
0.01
0.015
0.02
(M,N) = (96−966)
(M,N) = (966−9984)
(b)
44 46 48 50 52 54 56−0.01
−0.008
−0.006
−0.004
−0.002
0
0.002
0.004
0.006
0.008
0.01
(M,N) = (966−9984)
(M,N) = (96−966)
Figure 6: Heston Asian Call, B setting (absolute errors): T = 1, s0 = 50, k = 2, a = 0.01, ρ = 0.5,ϑ=0.1(a) K 7−→ AsCallHest(s0,K)− RbgAsCall
Hest(s0, K), K∈ 44, . . . , 56.
Pricing by Romberg log-extrapolation (−−∗−−), (M, N)=(96, 966), (966, 9984).
(b) K 7−→ AsCallHest(s0, K)− IRAsCallHest
(s0,K), K∈ 44, . . . , 56.Pricing by K-linear interpolation of Romberg log-extrapolations (−−×−−) with (M, N)= (96, 966),(966, 9984).
34

5.7. DISCRETIZATION AND SIMULATION OF ZAKAI EQUATION. 429
5.7 Discretization and simulation of Zakai equation.
L’article qui suit fut publié dans SIAM, Journal of Numerical Anaysis, vol. 44(6), pp. 2505–2538 (2006).

SIAM J. NUMER. ANAL. c© 2006 Society for Industrial and Applied MathematicsVol. 44, No. 6, pp. 2505–2538
DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION∗
EMMANUEL GOBET† , GILLES PAGES‡ , HUYEN PHAM‡ , AND JACQUES PRINTEMS§
Abstract. This paper is concerned with numerical approximations for the stochastic partialdifferential Zakai equation of nonlinear filtering problems. The approximation scheme is based onthe representation of the solutions as weighted conditional distributions. We first accurately analyzethe error caused by an Euler-type scheme of time discretization. Sharp error bounds are calculated:we show that the rate of convergence is in general of order
√δ (δ is the time step), but in the
case when there is no correlation between the signal and the observation for the Zakai equation,the order of convergence becomes δ. This result is obtained by carefully employing techniques ofMalliavin calculus. In a second step, we propose a simulation of the time discretization Euler schemeby a quantization approach. Formally, this consists in an approximation of the weighted conditionaldistribution by a conditional discrete distribution on finite supports. We provide error bounds andrate of convergence in terms of the number N of the grids of this support. These errors are minimalat some optimal grids which are computed by a recursive method based on Monte Carlo simulations.Finally, we illustrate our results with some numerical experiments arising from a correlated Kalman–Bucy filter.
Key words. stochastic partial differential equations, nonlinear filtering, Zakai equation, Eulerscheme, quantization, Malliavin calculus
AMS subject classifications. 60H35, 60H15, 60G35, 60H07, 65C20
DOI. 10.1137/050623140
1. Introduction. We are interested in numerical approximation for the measure-valued process V governed by the following stochastic partial differential equations(SPDE) written in weak form: for all test functions f ∈ C2
b (Rd),
〈Vt, f〉 = 〈μ0, f〉 +
∫ t
0
〈Vs, Lf〉ds
+
∫ t
0
〈Vs, hf + γᵀ∇f〉.dWs,(1.1)
where μ0 is an initial probability measure. We denote by M(Rd) the set of finitesigned measures on R
d. Here L is the second-order differential operator,
Lf(x) =1
2
d∑i,j=1
aij(x)∂2xixj
f(x) +d∑
i=1
bi(x)∂xif(x),
W is a q-dimensional Brownian motion, a = (aij) is a d × d matrix-valued function,γ = (γil) is a d× q matrix-valued function, b = (bi) is an R
d-vector-valued function,and h = (hl) is an R
q-vector-valued function defined on Rd, in the form
a = σσᵀ + γγᵀ,
b = β + γh,
∗Received by the editors January 21, 2005; accepted for publication (in revised form) June 23,2006; published electronically December 5, 2006.
http://www.siam.org/journals/sinum/44-6/62314.html†LMC, ENSIMAG-INP Grenoble, Grenoble, France ([email protected]).‡LPMA, Universite Paris 6-Paris 7, Paris, France ([email protected], [email protected]).§LAMA, Universite Paris 12, Paris, France ([email protected]).
2505

2506 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS
for some d×d matrix-valued function σ = (σij) and Rd-vector-valued function β = (βi)
on Rd. The transpose and the scalar product are, respectively, denoted by ᵀ and a
dot. The Euclidean norm of a vector is denoted |.|, and one uses the norm |σ| =√Tr(σσᵀ) for a matrix σ.
When the distribution Vt admits a density v(t, x), one may usually rewrite (1.1)in the following form:
dv(t, x) =
⎛⎝1
2
d∑i,j=1
∂2xixj
[aij(x)v(t, x)] −d∑
i=1
∂xi [bi(x)v(t, x)]
⎞⎠ dt
+ (hᵀ(x)v(t, x) −∇[γ(x)v(t, x)]) dWt.
(1.2)
Under appropriate conditions, it is proved in [21] that the solution V to (1.1) canbe characterized through the following system of diffusions:
Xt = X0 +
∫ t
0
β(Xs)ds +
∫ t
0
σ(Xs)dBs +
∫ t
0
γ(Xs)dWs,(1.3)
X0 μ0,
ξt = exp(Zt) = exp
(∫ t
0
h(Xs).dWs −1
2
∫ t
0
|h(Xs)|2ds),(1.4)
〈Vt, f〉 = EW
[f(Xt)ξt] ,(1.5)
where B is an Rd-Brownian motion independent of W , and E
Wdenotes the condi-
tional expectation given W . We also denote by PW
the corresponding conditionalprobability.
Actually, (1.1) is the so-called Zakai equation arising from the nonlinear filteringproblem: here, X given in (1.3) is a d-dimensional signal, and W is a q-dimensionalobservation process (with correlated noise when γ = 0) given by
Wt =
∫ t
0
h(Xs)ds + Ut,
on a probability space (Ω,F , P ) equipped with filtration (Ft) under which B andU are independent Brownian motions. The nonlinear filtering problem consists inestimating the conditional distribution of X given W , i.e., we want to compute themeasure-valued process πt characterized by
〈πt, f〉 = EP [f(Xt)|FWt ],
where FWt is the filtration generated by the whole observation of W until t. Under
suitable conditions, there exists a reference probability measure Q such that
dP
dQ
∣∣∣∣Ft
= ξt = exp
(∫ t
0
h(Xs).dWs −1
2
∫ t
0
|h(Xs)|2ds),
and (B,W ) are two independent Brownian motions under Q. By the Kallianpur–Striebel formula, we have
〈πt, f〉 =〈Vt, f〉〈Vt, 1〉
,

DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION 2507
where
〈Vt, f〉 = EQW
[f(Xt)ξt]
satisfies the Zakai equation (1.1). From now on, the symbol E will denote the expec-tation with respect to the probability Q.
1.1. A short discussion of related literature. Numerical approximations ofthe Zakai equation and more generally of SPDEs have been extensively studied inthe literature. We cite the survey paper [17] and the references therein. Roughlysummarizing, one may classify the following approaches:
– Approximations based on the analytic expression (1.2) vary from finite differenceof finite elements methods, splitting up methods, or Galerkin’s approximation. Wecite, for instance, [33], [15], [16] for the finite difference method of the Zakai equationor SPDEs, and the recent paper [35] for the finite element method of SPDEs. Forthe splitting up method of the Zakai equation and SPDEs, see [4], [11], [23], [18].See also [34] for a time discretization analysis of θ-schemes of parabolic-type SPDEsdriven by a(n infinite-dimensional) Wiener process.
– A first algorithm based on some uniform quantization grids of the state processis mentioned in [20].
– Another point of view, developed and studied in [24] and [5], is based on theWiener chaos decomposition of the solution to the Zakai equation. We mention alsoWong–Zakai-type approximations considered in [19].
– The third approach is based on the probabilistic representation (1.5) of thesolution as a weighted (or unnormalized) conditional distribution. For the Zakaiequation of nonlinear filtering problem, papers [22] and [10] develop approximationmethods by replacing the signal process by a finite state Markov chain on a uniformgrid prescribed a priori. This method is somewhat equivalent to the finite differencemethod.
– The so-called particular Monte Carlo method is based on a particle approxima-tion of the conditional distribution. It has recently given rise to extensive studies; see,for instance, [8], [6], [7] for the nonlinear filtering problem. We will compare some ofour results to those obtained in [7] (in which the diffusion X does not depend on theobservation process, i.e., γ = 0).
1.2. Contribution and organization of the paper. The first contribution ofour work consists in accurately estimating the error due to time discretization on theconditional expectation (1.5). Without conditioning, classical results yield an error atmost linear w.r.t. the time step δ (see, for instance, [3]). Here, the situation is unusualbecause of the conditional expectation, and our analysis makes clear the role of thecorrelation factor between the underlying process X and the observation process W .As concerns the proof, we use Malliavin calculus techniques, but the fact that we workconditionally to W induces some specific technicalities.
In a second part, we propose a simulation algorithm for the SPDE (1.1) based onan optimal quantization approach. Basically, this means a spatial discretization of thedynamics of the Euler time discretization (Xk, Vk) of (1.3)–(1.5) optimally fitted toits probabilistic features. To be more specific, we first recall some short backgroundon optimal quantization of a random vector. Let X : (Ω,F , P ) → R
d be a randomvector and let Γ = x1, . . . , xN be a subset (or grid) of R
d having N elements. We
approximate X by one of its Borel closest neighbor projections XΓ := ProjΓ(X) onΓ. Such a projection is canonically associated to a Voronoi tessellation (Ci(Γ))1≤i≤N

2508 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS
that is a Borel partition of Rd satisfying for any i = 1, . . . , N
Ci(Γ) ⊂ξ ∈ R
d : |ξ − xi| = minj
|ξ − xj |.
Hence
XΓ = ProjΓ(X) :=N∑i=1
xi1X∈Ci(Γ).
As soon as X ∈ Lp(Ω, P,Rd) the induced Lp-quantization error is given by
‖X − XΓ‖p
=
(E min
1≤i≤N|X − xi|p
) 1p
< ∞.
The Lp-optimal N -quantization problem for X consists in finding a grid Γ∗ whichachieves the lowest Lp-quantization error among all grids of size at most N . Suchan optimal grid does exist (see [14]), and its size is exactly N if the support of Xis infinite; it is generally not unique (except in 1-dimension, where uniqueness holdswhen the distribution P
Xof X has a log-concave density). The rate of convergence of
the lowest Lp-quantization error as N → +∞ is ruled by the so-called Zador theorem(see [14]). For historical reasons, this theorem is usually stated with the pth power ofthe Lp-quantization error, known as the Lp-distortion.
Theorem 1.1. Assume that X ∈ Lp+η(Ω, P,Rd) for some η > 0. Let f denotethe probability density of the absolutely continuous part of its distribution P
X(f is
possibly 0). Then,
limN
(N
pd min
|Γ|≤N‖X − XΓ‖p
p
)= Jp,d‖f‖ d
d+p.
The constant Jp,d corresponds to the uniform distribution over [0, 1]d and in that casethe above lim
Nalso holds as an infimum.
The constant Jp,d is unknown as soon as d ≥ 3 although one knows that Jp,d ∼(d/(2πe))
p2 as d → ∞. This theorem says that the lowest Lp-quantization error goes
to 0 at an N− 1d -rate when N → ∞. For more details about these results, we refer
to [14] and the references therein.From a computational viewpoint, no closed form is available for optimal quantiza-
tion grids Γ∗ except for some very specific 1-dimensional distributions like the uniformone. Several algorithms can be implemented to compute these optimal (or at leastsome efficient locally optimal) grids. Several of them rely on the differentiability ofthe Lp-distortion function as a function of the grid (viewed as an N -tuple of (Rd)N ):if P
Xis continuous, it is differentiable at any grid of size N and its gradient admits
an integral representation with respect to the distribution of X. Consequently onemay search for optimal grids by implementing a Newton–Raphson procedure (in 1-dimension) or a stochastic gradient descent (in d-dimension). These numerical aspectshave been extensively investigated in [31] with special attention to the d-dim normaldistribution. Efficient grids for these distributions are now available for many sizes indimensions d = 1 up to 10 (which can be downloaded at www.quantification.finance-mathematique.com); the extension to the quantization of Markov chains, includingits numerical aspects, has already been discussed in several papers for various fields

DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION 2509
of applications, such as American option pricing, nonlinear filtering, or stochasticcontrol (see, e.g., [1], [28], [30], or [29]).
We now briefly explain in this introduction how to apply the vector-quantizationmethod to the Zakai SPDE (1.1). The process (Xk) is simply a time discretizationof a diffusion independent of V . In particular, given an observation W , (Xk) can beeasily simulated and the idea is to quantize optimally at each time step k the randomvector Xk by a finite distribution Xk. This provides in turn an approximation of (Vk)as the conditional distribution of Xk, weighted by a Girsanov-like term.
Let us mention that this approach can be applied to a wider family of stochasticSPDEs, e.g., when the functions h and γ (and possibly β and σ in the diffusionprocess) depend upon Vt. This is the case of the stochastic McKean–Vlasov equation,where h ≡ 0 and γ(x, V ) =
∫γ(x, v)V (dv) (V positive measure). We refer to [13] for
some theoretical and numerical developments on this equation.
Our main results concerning the rate of convergence can be summed up as follows.First we prove under some regularity assumptions that the error induced by a timediscretization with step δ is in general of order
√δ, although in the case γ = 0 the order
of convergence is improved to δ. As concerns spatial discretization error, we obtainn
32 /N
1d (where δ = T/n and N = N/n denotes the (average) size of the quantization
grids used at every time step). Finally (when γ = 0), our global error term has theform
1√n
+n
32
N1d
.
Numerical experiments carried out in section 4 suggest that a significantly better
space order holds true, such as (when d = 1) c1+c2n+o(n)N
, where c2 c1.
The finite element method applied to (1.2) would provide the same kind of rate(in [35] the Wiener process W is infinite-dimensional, which induces worst rates fortime and space discretization). However, these methods require an implicit timeintegration in order to be stable. This requires us to invert an Nd×Nd linear system(even if it is sparse) at each time step, which becomes very expensive as the dimensiond grows (say d ≥ 3 or 4).
As concerns Monte Carlo methods based on interacting particles procedures like [8]or [6], the main difference of our approach in terms of complexity is that most partsof our computations (the quantization of the d-dimensional process X) can be madeoff-line. This compensates the dependency in d of its theoretical rate of convergence,at least in medium dimensions. Since the algorithm proposed here is similar to thequantized nonlinear filters developed in [28] from a computational point of view, werefer to the detailed discussion carried out in it.
The paper is organized as follows. Section 2 is devoted to the time discretizationerror of the SPDE (1.1). The above result is established using Malliavin calculustechniques. We describe precisely in section 3 the optimal quantization algorithm forthe Zakai equation and we analyze the resulting error. Finally, we illustrate our resultsin section 4 with several simulations concerning the Zakai equation in the linear case.
2. Time discretization error. In this section, we study the error caused by atime discretization of the system (1.3)–(1.5) characterizing the solution to the SPDE(1.1) on a finite time interval [0, T ]. We consider regular discretization times tk = kδ,k = 0, . . . , n, where δ = T/n is the time step, and we denote φ(t) = suptk : tk ≤ t.

2510 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS
We then use an Euler scheme as follows:
Xδt = X0 +
∫ t
0
β(Xδφ(s))ds +
∫ t
0
σ(Xδφ(s))dBs +
∫ t
0
γ(Xδφ(s))dWs,
Zδt =
∫ t
0
h(Xδφ(s)).dWs −
1
2
∫ t
0
|h(Xδφ(s))|2ds,
〈V δt , f〉 = E
W
[f(Xδ
t ) exp(Zδt )].
By denoting Xk = Xδtk
, Vk = V δtk
, ΔBk = Btk −Btk−1, ΔWk = Wtk −Wtk−1
, theEuler scheme reads at the discretization times tk, k = 0, . . . , n,
Xk+1 = Xk + β(Xk)δ + σ(Xk)ΔBk+1 + γ(Xk)ΔWk+1,(2.1)
X0 = X0 μ0,(2.2)
〈Vk, f〉 = EW
⎡⎣f(Xk) exp
⎛⎝k−1∑j=0
g(Xj ,ΔWj+1)
⎞⎠⎤⎦,(2.3)
where
g(x,ΔW ) = h(x).ΔW − 1
2|h(x)|2δ.
Denote by Pk,W
(x, dx′) the conditional probability of Xk given W and Xk−1 = x.From (2.1), we have
Pk,W
(x, dx′) N(x + β(x)δ + γ(x)ΔWk, δσ(x)σᵀ(x)
).
As usual, we set for any f ∈ B(Rd) a set of bounded measurable functions on Rd,
Pk,W
f(x) = EW
[f(Xk)
∣∣ Xk−1 = x]
=
∫f(x′)P
k,W(x, dx′),
for any x ∈ Rd. Hence, by the distribution of iterated conditional expectations, we
have the following inductive formula for Vk, k = 0, . . . , n:
〈Vk+1, f〉 = 〈Vk, exp(g(.,ΔWk+1)
)P
k+1,Wf〉,(2.4)
V0 = μ0.(2.5)
We denote by BL1(Rd) the unit ball of bounded Lipschitz functions on R
d,
BL1(Rd) = f : R
d → R satisfying |f(x)| ≤ 1 and |f(x) − f(y)| ≤ |x− y| ∀ x, y,
and we consider the metric
ρ(V1, V2) = sup|〈V1, f〉 − 〈V2, f〉| , f ∈ BL1(R
d)
on M(Rd) for any V1, V2 ∈ M(Rd).
2.1. Main results. To simplify the following convergence analysis, we assumethat the coefficients are very smooth and that they satisfy a uniform ellipticity con-dition.
(H1) (i) The functions β, σ, and γ are of class C∞ with bounded derivatives.

DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION 2511
(ii) The function h is of class C∞ and is bounded, as are its derivatives.(iii) For some ε0 > 0, one has σσᵀ(x) ≥ ε0 Id uniformly in x.
We recall some notation from [12]. We set Xδ,λt = Xδ
t + λ(Xt − Xδt ) and
eZδT =
∫ 1
0eZ
δT +λ(ZT−Zδ
T )dλ. In addition, for any smooth function a : Rd → R
d′we
denote its derivative by a′, which is Rd′⊗R
d-valued. Finally, we repeatedly use the no-
tation a′(t) =∫ 1
0a′(Xδ,λ
t )dλ. Now, consider the unique solution of the linear equation
Et = Id +∫ t
0β′(s)Es ds +
∑dj=1
∫ t
0σ′j(s)Es dBj
s +∑q
j=1
∫ t
0γ′j(s)Es dW j
s (as usual, σj
and γj are the jth column of the matrix σ and γ). Then, Lemma 4.3 in [12] gives
Xt −Xδt = Et
∫ t
0
E−1s
[β(Xδ
s ) − β(Xδφ(s))]
−d∑
j=1
σ′j(s)[σj(X
δs ) − σj(X
δφ(s))]
−q∑
j=1
γ′j(s)[γj(X
δs ) − γj(X
δφ(s))]
ds(2.6)
+d∑
j=1
Et∫ t
0
E−1s [σj(X
δs ) − σj(X
δφ(s))] dB
js
+
q∑j=1
Et∫ t
0
E−1s [γj(X
δs ) − γj(X
δφ(s))] dW
js .
For any f ∈ BL1(Rd), we put fδ(x) = E(f(x + δBT )), where B is an extra d-
dimensional Brownian motion independent on B and W . Clearly, fδ is of class C∞b ,
‖fδ‖∞ + supx=y|fδ(x)−fδ(y)|
|x−y| ≤ C, ‖fδ − f‖∞ ≤ Cδ, both estimates being uniform in
BL1(Rd).
The main result of this section is the following.Theorem 2.1. Assume (H1). For f ∈ BL1(R
d), set
A1(f) = −eZδT f ′
δ(T )ET
[q∑
j=1
∫ T
0
(E−1s
∫ s
φ(s)
γ′j(X
δr )γ(Xδ
φ(r))dWr
)dW j
s
],
A2(f) = −eZδT f(XT )
(q∑
i=1
∫ T
0
[ ∫ s
φ(s)
h′i(X
δr )γ(Xδ
φ(r))dWr
]dW i
s
),
A3(f)
= −q∑
i,j=1
f(XT )eZδT
(∫ T
0
h′i(s)Es
(∫ s
0
E−1r
[ ∫ r
φ(r)
γ′j(X
δu)γ(Xδ
φ(u))dWu
]dW j
r
)dW i
s
),
A4(f)
=1
2eZ
δT f(XT )
∫ T
0
[(‖h‖2)′(s)Es
(q∑
j=1
∫ s
0
E−1r
(∫ r
φ(r)
γ′j(X
δu)γ(Xδ
φ(u))dWu
)dW j
r
)]ds.
Then, one has∥∥ρ(VT , VδT )∥∥
2≤ Cδ + sup
f∈BL1(Rd)
‖EW
[A1(f) + A2(f) + A3(f) + A4(f)]‖2,

2512 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS
with
supf∈BL1(Rd)
‖EW
(A1(f) + A2(f) + A3(f) + A4(f))‖2 ≤ C√δ
for some constant C.Remark 2.1. The fact that
√δ is an upper bound for the error is clear, if we use
classic Lp-estimates between X and Xδ. But we know that this argument involvingpathwise errors is not optimal when errors on laws are considered [3]. The resultabove makes clear the role of the correlation in the error on conditional expectations.
1. When there is no correlation between signal and observation, i.e., γ = 0 (whichis not really relevant in a filtering problem), the four terms Ai(f), i = 1, . . . , 4, vanishand the rate of convergence for the approximation of VT is of order δ, the timediscretization step.
2. For constant function γ, the three contributions A1(f), A3(f), A4(f) vanishand there remains A2(f) of order
√δ coming from the approximation of eZT .
3. In the general case, the error will be inexorably of order√δ. Indeed, main
contributions in the error essentially behave like∑n−1
i=0
∫ ti+1
ti(Ws−Wti)dWs = 1
2
∑n−1i=0(
[Wti+1 −Wti ]2 − [ti+1 − ti]
), where the L2-norm equals C
√δ.
2.2. Proof of Theorem 2.1. The proof relies on Malliavin calculus techniques:we refer the reader to [26], from which we borrow our notation. For technical reasons,it will be useful to work with the extended Wiener process
W =
⎛⎝ B
BW
⎞⎠ ;
all the further Malliavin calculus computations are made relative to W. Set H =L2([0, T ],R2d+q) and denote Xδ,λ
t = Xδ,λt + δ√
2Bt. For F ∈ D
1,p, we write DF =
(DBF,DBF,DWF ) for the components relative to the three Brownian motionsB, B, and W ; the partial Malliavin covariance matrix of F is denoted by γF =∫ T
0[DB
t F,DBt F, 0][DB
t F,DBt F, 0]ᵀdt =
∫ T
0DB
t F [DBt F ]ᵀdt+
∫ T
0DB
t F [DBt F ]ᵀdt (see sec-
tion 2.1 in [26]). Following section 1.3 in [26], the Skorokhod integral, i.e., the adjointoperator of D, is denoted by δ (with a boldface symbol to avoid confusion with thetime step δ). For a process u in the domain of δ, for its Skorokhod integral we write
δ(u) and∫ T
0utδWt as well.
As in section 4.5.2 of [12], a localization factor ψδT ∈ [0, 1] will be needed in
the control of residual terms to justify integration by parts formulas. It satisfies thefollowing properties:
(a) For any integers k and p, ψδT ∈ D
k,p and supδ ‖ψδT ‖Dk,p ≤ C
T q for someC, q ≥ 0.
(b) For any k ≥ 1, there are C, q ≥ 0 such that P (ψδT = 1) ≤ C
T q δk.
(c) ψδT = 0 ⊂ ∀λ ∈ [0, 1] : det(γXδ,λ
T ) ≥ 12 det(γXT ).
We omit the details of its tedious construction and we simply refer to [12] (we mentionthat the nondegeneracy condition (H1) (iii) is used to get the above estimates with1/T q, but it could also be replaced by a hypoellipticity-type assumption). To preparethe proof, we now state a series of technical results (justified later) which will help toderive a suitable stochastic analysis conditionally on W .
Lemma 2.1. In the following, Φ(W ) stands for a functional measurable w.r.t.W , which belongs to D
∞.

DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION 2513
(i) For any random variable Y ∈ L2, EW (Y ) is the unique random variablesatisfying the equality E(Y Φ(W )) = E(EW (Y )Φ(W )) for any functionalΦ(W ) ∈ D
∞.(ii) For any Φ(W ) ∈ D
∞ and F ∈ D1,2, one has Φ(W )F ∈ D
1,1, with DB(Φ(W )F )
= Φ(W )DBF and DB(Φ(W )F ) = Φ(W )DBF .(iii) For Φ(W ) and G in D
∞, g ∈ C∞b , and any multi-index α, one has⎧⎨⎩
E (Φ(W )∂αg(XT )G) = E (Φ(W )g(XT )Hα(XT , G)) ,
‖Hα(XT , G)‖2 ≤ C‖G‖Dk,p
T q
(2.7)
for some integers k, p, q. Furthermore, if G = 0 on ψδT = 0, then for any
λ ∈ [0, 1], one has⎧⎨⎩E(Φ(W )∂αg(Xδ,λ
T )G) = E(Φ(W )g(Xδ,λT )Hα(Xδ,λ
T , G)),
‖Hα(Xδ,λT , G)‖2 ≤ C
‖G‖Dk,p
T q
(2.8)
with some constants C, k, p, q uniform in δ, and λ ∈ [0, 1].The result below is one of the keys of our error analysis. The estimates of order δ
are rather surprising. Indeed, at first glance, each stochastic integral (for fixed r) inthe left-hand side of (2.9) is of order
√δ, but the mean over r helps in improving this
estimate to get δ, provided that the processes g and h satisfy some suitable controls.Its proof is postponed until the end of this section.
Proposition 2.1. For g ∈ D∞(H) and h ∈ D
∞(H), one has∫ T
0
gr
(∫ r
φ(r)
huδWu
)dr =
∫ T
0
(∫ T
0
grhu1φ(r)≤u≤rdr
)δWu
+
∫ T
0
(∫ T
0
Dugr · hu1φ(r)≤u≤rdr
)du,(2.9)
and the above random variable belongs to D∞. Under extra assumptions, both terms
in the right-hand side (r.h.s.) above are of order δ.
(i) Assume that Nk,p(g) =∑k
j=0
[E( ∫ T
0‖Djgr‖pLp([0,T ]j)dr
)]1/p< +∞ and
Nk,p(h) < +∞ for any k and p. Then, the first term in the r.h.s. of (2.9) isof order δ in D
k,p, for any k ∈ N and p > 1:∥∥∥∥∫ T
0
(∫ T
0
grhu1φ(r)≤u≤rdr
)δWu
∥∥∥∥Dk,p
≤ C Nk+1,q(g)Nk+1,q(h) δ(2.10)
for some constants C and q depending only on k and p.
(ii) Assume that Mk,p(g) =∑k
j=1 sup0≤r≤T
[E‖Djgr‖pLp([0,T ]j)
]1/p< +∞ and
Nk,p(h) < +∞ for any k and p. Then, the second term in the r.h.s. of (2.9)is of order δ in D
k,p, for any k ∈ N and p ≥ 1:
∥∥∥∥∥∫ T
0
(∫ T
0
Dugr · hu1φ(r)≤u≤rdr
)du
∥∥∥∥∥Dk,p
≤ C Mk+1,q(g) Nk,q(h) δ
(2.11)
for some constants C and q depending only on k and p.

2514 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS
Let us turn to the proof of Theorem 2.1. It consists in proving
E(Φ(W )[f(XδT )eZ
δT − f(XT )eZT ])(2.12)
= E(Φ(W )eZδT [(f − fδ)(X
δT ) − (f − fδ)(XT )])
+E(Φ(W )eZδT [fδ(X
δT ) − fδ(XT )])(2.13)
+E(Φ(W )f(XT )[eZδT − eZT ])(2.14)
= E(Φ(W )[A1(f) + A2(f) + A3(f) + A4(f) + R])
for any functional Φ(W ) ∈ D∞, with ‖R‖2 = O(δ) uniformly w.r.t. f ∈ BL1(R
d).Since ‖f − fδ‖∞ ≤ Cδ for f ∈ BL1(R
d), the term (2.12) can be neglected in ourexpansion.
In the following computations, we simply write Φ instead of Φ(W ).
2.2.1. Contribution (2.13). A Taylor’s formula combined with (2.6) and Ito’sformula between φ(s) and s gives
E(ΦeZδT [fδ(X
δT ) − fδ(XT )])(2.15)
= E
(ΦeZ
δT f ′
δ(T )ET∫ T
0
E−1s
[ ∫ s
φ(s)
α0,0(u)du
]ds
)(2.16)
+E
(ΦeZ
δT f ′
δ(T )ET∫ T
0
E−1s
[ ∫ s
φ(s)
α0,1(u)dBu
]ds
)(2.17)
+E
(ΦeZ
δT f ′
δ(T )ET∫ T
0
E−1s
[ ∫ s
φ(s)
α0,2(u)dWu
]ds
)(2.18)
+E
(ΦeZ
δT f ′
δ(T )ET∫ T
0
E−1s
[ ∫ s
φ(s)
α1,0(u)du
]dBs
)(2.19)
+d∑
i=1
E
(ΦeZ
δT f ′
δ(T )ET∫ T
0
E−1s
[ ∫ s
φ(s)
α1,1i (u)dBu
]dBi
s
)(2.20)
+d∑
i=1
E
(ΦeZ
δT f ′
δ(T )ET∫ T
0
E−1s
[ ∫ s
φ(s)
α1,2i (u)dWu
]dBi
s
)(2.21)
+E
(ΦeZ
δT f ′
δ(T )ET∫ T
0
E−1s
[ ∫ s
φ(s)
α2,0(u)du
]dWs
)(2.22)
+
q∑i=1
d∑j=1
E
(ΦeZ
δT f ′
δ(T )ET∫ T
0
E−1s
[ ∫ s
φ(s)
α2,1i,j (u)dBj
u
]dW i
s
)+ E(ΦA1(f)),(2.23)
where coefficients α.. ∈ D
∞(H) with Nk,p(α..)+Mk,p(α
.
.) < +∞ for any k, p, uniformlyw.r.t. δ (actually, this is a consequence of the stronger estimate supr∈[0,T ] ‖Dk
s1,... ,skα..
(r)‖p < ∞; see, e.g., [12]). For instance, one can easily check that α2,1i,j (u) =
−γ′i(X
δφ(u))σj(X
δφ(u)).
Terms in the factor of Φ in (2.15), (2.18), (2.21) clearly satisfy ‖R‖2 = O(δ)(recall that ‖f ′‖∞ ≤ C uniformly in f ∈ BL1(R
d)).The contributions (2.16) and (2.17) give a contribution of order δ in Lp-norm by
an application of estimates (2.10)–(2.11).

DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION 2515
Terms in (2.19) contain most of the difficulties that we have to face in this erroranalysis; here, we give detailed arguments ((2.20) is handled in the same way). Notethat fδ(x) = E(fδ/
√2(x + δ√
2BT )) as well for the derivatives; thus, each term of the
sum in (2.19) equals∫ 1
0
dλE
(Φψδ
T eZδ
T f ′δ/
√2(Xδ,λ
T )ET∫ T
0
E−1s
[ ∫ s
φ(s)
α1,1i (u)dBu
]dBi
s
)(2.24)
+
∫ 1
0
dλE
(Φ(1 − ψδ
T )eZδT f ′
δ/√
2(Xδ,λ
T )ET∫ T
0
E−1s
[ ∫ s
φ(s)
α1,1i (u)dBu
]dBi
s
).(2.25)
Since P (ψδT = 1) ≤ C δ2
T q , (2.25) provides a negligible contribution. Besides, if wetransform the Ito integral w.r.t. Bi into a Lebesgue integral, using the duality rela-tionship (see section 1.3 in [26]) and property (ii) of Lemma 2.1, we obtain that (2.24)can be rewritten in the form∫ 1
0
dλE
(Φ
∫ T
0
DBi
s [ψδT e
ZδT f ′
δ/√
2(Xδ,λ
T )ET ]E−1s
[ ∫ s
φ(s)
α1,1i (u)dBu
]ds
)
=∑
κ:|κ|=1,2
∫ 1
0
dλE
(Φ ∂κ
xfδ/√
2(Xδ,λT )
∫ T
0
α1,1κ,i(s)
[ ∫ s
φ(s)
α1,1i (u)dBu
]ds
),
where the summation holds on differentiation multi-indices κ with length equal to 1and 2. In addition, the coefficients α1,1
κ,i and α1,1κ,i satisfy Nk,p(α
1,1κ,i)+Mk,p(α
1,1κ,i) < +∞
for any k and p. If we put G =∫ T
0α1,1κ,i(s)[
∫ s
φ(s)α1,1i (u)dBu]ds, we remark that
G ∈ D∞, that G = 0 if ψδ
T = 0 because of the local property of the derivativeoperator (Proposition 1.3.7 in [26]), and that ‖G‖Dk,p ≤ Cδ by applying Proposition2.1. Thus, Lemma 2.1 completes the estimate, and the factor of Φ in (2.24) is of orderδ in L2-norm, uniformly w.r.t. f ∈ BL1(R
d).We now consider (2.22). As for (2.19), we introduce ψδ
T ; the term with 1−ψδT can
be neglected as before. Using analogous computations as above, it is straightforwardto see that we have to control∫ 1
0
dλE
(Φψδ
T eZδ
T f ′δ/
√2(Xδ,λ
T )ET∫ T
0
E−1s
[ ∫ s
φ(s)
α2,1i,j (u)dBj
u
]dW i
s
)
=
∫ 1
0
dλ
∫ T
0
∫ T
0
E(DBj
u [DW i
s [ΦψδT e
ZδT f ′
δ/√
2(Xδ,λ
T )ET ]E−1s ]1φ(s)≤u≤sα
2,1i,j (u)
)du ds
=∑
κ:|κ|=1,2
∫ 1
0
dλE
(Φ ∂κ
xfδ/√
2(Xδ,λT )
∫ T
0
∫ T
0
ακ,2,1i,j (s)1φ(s)≤u≤sα
2,1i,j (u)du ds
)(2.26)
+∑
κ:|κ|=1,2
∫ 1
0
dλE
(∫ T
0
DW i
s [Φ ∂κxfδ/
√2(X
δ,λT )]
(∫ T
0
ακ,2,1i,j (s)1φ(s)≤u≤sα
2,1i,j (u)du
)ds
).
(2.27)
For (2.26), it is enough to apply (2.8) with G =∫ T
0
∫ T
0ακ,2,1i,j (s)1φ(s)≤u≤sα
2,1i,j (u)du ds,
which clearly satisfies ‖G‖Dk,p ≤ Cδ; this proves the expected estimate of order δ. Thesame conclusion holds for each term in (2.27): indeed, they can be transformed in

2516 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS∫ 1
0dλE(Φ ∂κ
xfδ/√
2(Xδ,λT )
∫ T
0(∫ T
0ακ,2,1i,j (s)1φ(s)≤u≤sα
2,1i,j (u)du)δW i
s) and we concludewith Lemma 2.1.
2.2.2. Contribution (2.14). It can be decomposed as E(Φf(XT )[eZδT −eZT ]) =
E(Φf(XT )eZδT [Zδ
T − ZT ]), that is,
E
(Φf(XT )eZ
δT
(∫ T
0
[h(Xδφ(s)) − h(Xδ
s )].dWs
))(2.28)
+E
(Φf(XT )eZ
δT
(∫ T
0
[h(Xδs ) − h(Xs)].dWs
))(2.29)
− 1
2E
(Φf(XT )eZ
δT
(∫ T
0
[‖h‖2(Xδφ(s)) − ‖h‖2(Xδ
s )]ds
))(2.30)
− 1
2E
(Φf(XT )eZ
δT
(∫ T
0
[‖h‖2(Xδs ) − ‖h‖2(Xs)]ds
)).(2.31)
In what follows, the main idea is to use Ito’s formula and the stochastic expansion(2.6) to expand the differences h(Xδ
φ(s)) − h(Xδs ), h(Xδ
s ) − h(Xs), and so on. Itwill raise iterated stochastic integrals and, as before, the ones for which conditional
expectation w.r.t. W is of order√δ are essentially of type
∫ T
0· · · (
∫ s
φ(s)· · · dWu)dWs
(and not∫ T
0· · · (
∫ s
φ(s)· · · dBu)dWs or
∫ T
0· · · (
∫ s
φ(s)· · · dWu)dBs).
We now go into detail. Since (2.28) can be rewritten as E(Φf(XT )eZδT (∑q
i=1
∫ T
0
[hi(Xδφ(s)) − hi(X
δs )]dW i
s)), it equals
−E
(Φf(XT )eZ
δT
(q∑
i=1
∫ T
0
[ ∫ s
φ(s)
h′i(X
δr )β(Xδ
φ(r))dr
]dW i
s
))(2.32)
−E
(Φf(XT )eZ
δT
(q∑
i=1
∫ T
0
[ ∫ s
φ(s)
h′i(X
δr )σ(Xδ
φ(r))dBr
]dW i
s
))(2.33)
−E
(Φf(XT )eZ
δT
(q∑
i=1
∫ T
0
[ ∫ s
φ(s)
h′i(X
δr )γ(Xδ
φ(r))dWr
]dW i
s
)).(2.34)
The factor of Φ in (2.32) clearly satisfies the required estimate and can be ne-glected. The term (2.33) can also be discarded from the main part of the error usingthe same arguments as for (2.22). Finally, the term (2.34) gives A2(f).
Term (2.29). Owing to (2.6),∑q
i=1 E(Φf(XT )eZδT (∫ T
0[hi(X
δs ) − hi(Xs)]dW
is))
equals
−q∑
i=1
d∑j=1
E
(Φf(XT )eZ
δT
(∫ T
0
h′i(s)Es
×(∫ s
0
E−1r
[ ∫ r
φ(r)
σ′j(X
δu)σ(Xδ
φ(u))dBu
]dBj
r
)dW i
s
))

DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION 2517
−q∑
i=1
d∑j=1
E
(Φf(XT )eZ
δT
(∫ T
0
h′i(s)Es
×(∫ s
0
E−1r
[ ∫ r
φ(r)
σ′j(X
δu)γ(Xδ
φ(u))dWu
]dBj
r
)dW i
s
))
−q∑
i,j=1
E
(Φf(XT )eZ
δT
(∫ T
0
h′i(s)Es
×(∫ s
0
E−1r
[ ∫ r
φ(r)
γ′j(X
δu)σ(Xδ
φ(u))dBu
]dW j
r
)dW i
s
))(2.35)
−q∑
i,j=1
E
(Φf(XT )eZ
δT
(∫ T
0
h′i(s)Es
×(∫ s
0
E−1r
[ ∫ r
φ(r)
γ′j(X
δu)γ(Xδ
φ(u))dWu
]dW j
r
)dW i
s
))+ E(ΦR)(2.36)
with ‖R‖2 = O(δ) by estimates (2.10)–(2.11). The term (2.36) gives A3(f), whilethe other contributions can be neglected. To justify this assertion, let us consider,for instance, (2.35), with techniques being the same for the other ones. First, wecan replace f by fδ since ‖f − fδ‖∞ ≤ Cδ. Then, three applications of the dualityrelationship yield
E
(Φfδ(XT )eZ
δT
(∫ T
0
h′i(s)Es
(∫ s
0
E−1r
[ ∫ r
φ(r)
γ′j(X
δu)σ(Xδ
φ(u))dBu
]dW j
r
)dW i
s
))
=
∫ T
0
∫ T
0
∫ T
0
E(DBu [DW j
r [DW i
s [Φfδ(XT )eZδT ]h′
i(s)Es]E−1r ]
· γ′j(X
δu)σ(Xδ
φ(u))1φ(r)≤u≤r)du dr ds.
The term inside the expectation can be split into a sum involving the derivative of Φand of f . Presumably, the more difficult term to estimate is of the form∫ T
0
∫ T
0
∫ T
0
E(DW j
r [DW i
s [Φ ∂κxfδ(XT )]]α(u, r, s)1φ(r)≤u≤r)du dr ds.
We omit the details for the other ones, which are easier to handle. Two integrationsby parts with fixed W (see (iii) in Lemma 2.1) show that it equals
E
(Φ ∂κ
xfδ(XT )
∫ T
0
(∫ T
0
(∫ T
0
α(u, r, s)1φ(r)≤u≤rdu
)δW j
r
)δW i
s
).
Then, we conclude using (2.7) with ‖∫ T
0(∫ T
0(∫ T
0α(u, r, s)1φ(r)≤u≤rdu)δW j
r )δW is‖Dk,p
≤ Cδ.
Term (2.30). It yields a contribution of order δ, by an application of Ito’s formula
and inequalities (2.10)–(2.11). At last, the term (2.31) is equal to − 12
∫ T
0E(Φf(XT )eZ
δT
[‖h‖2(Xδs )−‖h‖2(Xs)])ds; in this form, the analysis is analogous to that of (2.13) and
we omit the details. It gives the contribution A4(f) and some residual terms of order δ.

2518 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS
2.2.3. Proof of Lemma 2.1. The two first statements are straightforward.Statement (i) immediately follows from the fact that any Φ(W ) ∈ L2 can be approx-imated in L2 by a sequence of D
∞-r.v. using the chaos expansion (see Theorem 1.1.1
in [26]). Statement (ii) is clear from the definition of D1,p, DB , and DB .
Statement (iii) is an integration by parts formula that puts the differentiation/integration only on B and B, but not on W . Its proof is an easy adaptation of Propo-sition 3.2.1 in [27]. The estimate (2.7) is standard using in particular ‖[γXT ]−1‖p ≤ C
T q
under the nondegeneracy condition (H1) (iii) (see Theorem 3.3.1 in [27]). We onlyprove (2.8), which is less usual because of the localization factor G. Using (ii), oneobtains the following equalities:
[DB(Φ(W )g(Xδ,λT )),DB(Φ(W )g(Xδ,λ
T ))] = Φ(W )g′(Xδ,λT )[DBXδ,λ
T ,DBXδ,λT ],∫ T
0
Dt(Φ(W )g(Xδ,λT ))[DB
t Xδ,λT ,DB
t Xδ,λT , 0]ᵀdt = Φ(W )g′(Xδ,λ
T )γXδ,λT .
Note that γXδ,λT ≥ δ2
2 Id and thus γXδ,λT is invertible (it is the purpose of the small
perturbation of Xδ,λ with δB/√
2). Then, the duality relationship leads to
E(Φ(W )∂xig(Xδ,λ
T )G)
= E
(∫ T
0
Dt(Φ(W )g(Xδ,λT ))[Gei · [γXδ,λ
T ]−1DBt Xδ,λ
T , Gei · [γXδ,λT ]−1DB
t Xδ,λT , 0]ᵀdt
)
= E
(Φ(W )g(Xδ,λ
T )
∫ T
0
[Gei · [γXδ,λT ]−1DB
t Xδ,λT , Gei · [γXδ,λ
T ]−1DBt Xδ,λ
T , 0]δWt
).
For longer multi-index α, we iterate the procedure and construct Hα(Xδ,λT , G) by the
recurrence formula Hα′+[ei]ᵀ(Xδ,λT , G) =
∫ T
0[Hα′(Xδ,λ
T , G)ei · [γXδ,λT ]−1DB
t Xδ,λT , Hα′
(Xδ,λT , G)ei · [γXδ,λ
T ]−1DBt Xδ,λ
T , 0]δWt. Concerning the estimation on ‖Hα(Xδ,λT , G)‖2,
note first that since the derivative operator and the Skorokhod integral are local(see Propositions 1.3.6 and 1.3.7 in [26]), one has Hα(Xδ,λ
T , G) = Hα(Xδ,λT , G)1ψδ
T>0
owing to the property on G. Using the standard inequality ‖Hα(Xδ,λT , G)1A‖p ≤
C‖[γXδ,λT ]−11A‖p1
q1‖Xδ,λT ‖p2
k2,q2‖G‖Dk3,q3 (Proposition 2.4 in [3]) combined with
‖[γXδ,λT ]−11ψδ
T>0‖p ≤ CT q (take into account property (c) of ψδ
T ; see section 2.2),we easily complete the expected estimation.
2.2.4. Proof of Proposition 2.1. To prove (2.9), take Ψ ∈ D∞ and write using
Fubini’s theorem twice and the duality relationship alternatively as follows:
E
(Ψ
∫ T
0
gr
(∫ r
φ(r)
huδWu
)dr
)=
∫ T
0
E
(Ψgr
(∫ r
φ(r)
huδWu
))dr
=
∫ T
0
∫ T
0
E(Du[Ψgr]1φ(r)≤u≤r · hu
)du dr
=
∫ T
0
E
(DuΨ ·
∫ T
0
grhu1φ(r)≤u≤rdr
)du

DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION 2519
+
∫ T
0
E
(Ψ
∫ T
0
Dugr · hu1φ(r)≤u≤rdr
)du
= E
(Ψ
∫ T
0
(∫ T
0
grhu1φ(r)≤u≤rdr
)δWu
)
+E
(Ψ
∫ T
0
(∫ T
0
Dugr · hu1φ(r)≤u≤rdr
)du
).
It is standard to check that∫ T
0gr(
∫ r
φ(r)huδWu)dr belongs to D
∞ (see Lemma 1.3.4
in [26]). The original feature of our result is specifically related to (2.10) and (2.11).For this, we use the following general estimates, which we prove at the end.
Lemma 2.2. For appropriately defined random variables (gr,s, hu,s, gr,s,u)r,s,u, wehave
(2.37)⎡⎣E(∫[0,T ]j
ds
∫ T
0
du
∣∣∣∣ ∫ T
0
gr,shu,s1φ(r)≤u≤rdr
∣∣∣∣2)p/2
⎤⎦1/p
≤ Cp,q(T ) δ
[E
(∫[0,T ]j+1
|hu,s|q duds
)]1/q [E
(∫[0,T ]j+1
|gr,s|q drds
)]1/q
,
⎡⎣E(∫[0,T ]j
ds
∫ T
0
du
∣∣∣∣ ∫ T
0
gr,s,uhu,s1φ(r)≤u≤rdr
∣∣∣∣2)p/2
⎤⎦1/p
(2.38)
≤ Cp,q(T )δ
[E
(∫[0,T ]j+1
|hu,s|q duds
)]1/q
sup0≤r≤T
[E
(∫[0,T ]j+1
|gr,s,u|q dsdu
)]1/q
for q large enough.We are now in a position to derive (2.10). Consider first k = 0. To control
the Lp-norms of the first term in the r.h.s. of (2.9), we invoke the continuity of theSkorokhod integral (Proposition 2.4.3 in [27]) to get
(2.39)∥∥∥∥∫ T
0
(∫ T
0
grhu1φ(r)≤u≤rdr
)δWu
∥∥∥∥p
≤ C
(∥∥∥∥∫ T
0
grh.1φ(r)≤.≤rdr
∥∥∥∥Lp(Ω,H)
+
∥∥∥∥∫ T
0
D(grh.)1φ(r)≤.≤rdr
∥∥∥∥Lp(Ω,H⊗2)
).
From (2.37), we easily get that the first term above is bounded by N0,q(h)N0,q(h)δ forq large enough. With analogous computations, the second term in the r.h.s. of (2.39)is bounded by CN1,q(h)N1,q(h)δ. Estimates (2.10) have been proved when k = 0.For k ≥ 1, the successive derivatives of the r.h.s. of (2.9) are standard to computeand can be expressed in a similar form as before. Then, analogous computations canbe performed and this proves (2.10) for any k. The derivation of (2.11) is analogous,using in addition (2.38).

2520 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS
Proof of Lemma 2.2. The Cauchy–Schwarz inequality yields∫ T
0
du
∣∣∣∣ ∫ T
0
gr,s,uhu,s1φ(r)≤u≤rdr
∣∣∣∣2≤
∫ T
0
du|hu,s|2(∫ φ(u)+δ
u
|gr,s,u| dr)2
≤[∫ T
0
du|hu,s|4]1/2[∫ T
0
du
(∫ φ(u)+δ
u
|gr,s,u| dr)4]1/2
≤ δ3/2
[∫ T
0
du|hu,s|4]1/2[∫ T
0
du
∫ φ(u)+δ
u
|gr,s,u|4 dr
]1/2
.
If g does not depend on u, the last term above is bounded by δ1/2[∫ T
0|gr,s|4 dr]1/2.
Then, the derivation of (2.37) is easy, using Holder’s inequalities. To obtain (2.38),i.e., when g depends on u, the previous computation to get the missing factor δ1/2
does not work directly; first, one has to integrate over s and ω, the other argumentsremaining unchanged.
3. Simulation of the Zakai equation and quantization error.
3.1. The quantization algorithm. In this section, we propose a quantizationapproach for the numerical implementation of formulas in (2.1), (2.3), and (2.5). Here,those formulas are written as
Xk+1 = Xk + β(Xk)δ + σ(Xk)ΔBk+1 + γ(Xk)ΔWk+1
=: Fδ(Xk,ΔBk+1,ΔWk+1),(3.1)
〈Vk+1, f〉 = 〈Vk, exp(g(.,ΔWk+1)
)P
k+1,Wf〉(3.2)
for k = 0, . . . , n− 1, with
g(x,ΔW ) = h(x).ΔW − 1
2|h(x)|2δ,(3.3)
and Pk+1,W
(x, dx′) is a normal distribution with mean x + β(x)δ + γ(x)ΔWk+1 andvariance σ(x)σᵀ(x)δ.
We construct an approximation of Vk as follows. At each time tk, k = 0, . . . , n,we are given the following grid Γk = x1
k, . . . , xNk
k of Nk points in Rd, associated to
Voronoi tessellations Ci(Γk), i = 1, . . . , Nk:
Ci(Γk) =
u ∈ R
d : |u− xik| = min
j|u− xj
k|.
We then approximate the process (Xk) by the marginal quantized process (Xk) definedas
Xk = ProjΓk(Xk) :=
Nk∑i=1
xik1Xk∈Ci(Γk).
We thus define the conditional probability Pk,W
of Xk given Xk−1 and W . In other
words, Pk,W
is a (random) probability transition matrix pijk,W
, i = 1, . . . , Nk−1, j =

DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION 2521
1, . . . , Nk characterized by
pijk,W
= PW
[Xk = xj
k
∣∣∣ Xk−1 = xik−1
].
Finally, the random measure-valued process (Vk) is approximated by the discreterandom measure process (Vk) defined by
V0 = law ofX0,
〈Vk+1, f〉 = 〈Vk, exp(g(.,ΔWk+1)
)P
k+1,Wf〉.(3.4)
From an algorithmic viewpoint, this reads as
Vk =
Nk∑i=1
vikδxik
(δx is the Dirac mass at x)
for k = 0, . . . , n, where the weights vik are computed in a forward induction as follows:
vi0 = pi0 := P [X0 = xi0] = P [X0 ∈ Ci(Γ0)], i = 1, . . . , N0,
vjk+1 =
Nk∑i=1
vikpijk+1,W
exp(g(xi
k,ΔWk+1)), j = 1, . . . , Nk+1.
The implementation of the above method requires optimally for each k = 0, . . . , n
• a grid Γk which minimizes the Lp-quantization error
‖Δk‖p = ‖Xk − Xk‖p
as well as an estimation of this error, and
• the weights of the joint distribution (Xk−1, Xk) and marginal distribution Xk−1,
rijk,W
= PW
[Xk = xj
k, Xk−1 = xik−1
]= P
W
[Xk ∈ Cj(Γk), Xk−1 ∈ Ci(Γk−1)
],
qik−1,W
= PW
[Xk−1 = xi
k
]= P
W
[Xk−1 ∈ Ci(Γk−1)
]for i = 1, . . . , Nk−1, j = 1, . . . , Nk, so that
pijk,W
=rijk,W
qik−1,W
.
This program is achieved as follows:
– Monte Carlo simulation of M independent copies (X(m)0 , . . . , X
(m)n ), m = 1,
2, . . . ,M , distributed according to (X0, . . . , Xn).
– Recursive optimization of the grids Γ0, . . . ,Γn by a competitive learning vectorquantization procedure and computation of the probability weights rij
k,Wand qi
k−1,W,
k = 1, . . . , n. As a byproduct, we also have an estimation of the L2-quantizationerrors ‖Δk‖2, k = 0, . . . , n.

2522 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS
3.2. Analysis of quantization error. The next theorem states an error esti-mation for the approximation of Vn under the following condition on the coefficientsof the SDE X:
(H2) (i) The functions β, σ, and γ are Lipschitz.(ii) The function h is bounded and Lipschitz.Theorem 3.1. Under (H2), for all p ∈ [1,+∞) and p′ > p, there exists a positive
real constant Cp,p′ such that
∥∥∥ρ(Vn, Vn)∥∥∥
p
≤ Cp,p′1√δ
n∑k=0
‖Δk‖p′ (with δ = T/n).
We first need the following classic result about the Lp-Lipschitz property of Eulerschemes.
Lemma 3.1. Let Gδ be a functional in the form
Gδ(x, ε) = x + δB(x) +√δΣ(x)ε,
where B and Σ are Lipschitz functions on Rd, and ε is a Gaussian white noise. Then,
for all p ∈ [1,∞), there exists a constant Cp such that for all x, x′ ∈ Rd,
‖Gδ(x, ε) −Gδ(x′, ε)‖p ≤ Cp(1 + δ)|x− x′|.
We refer, e.g., to [30] for a detailed proof in a slightly more general setting whereε is only symmetric and lies in Lp.
One defines for every k = 1, . . . , n the operator Hk,W by
Hk,W (f)(x) = exp g(x,ΔWk)Pk,W (f)(x) ∀f ∈ BL1(Rd), ∀x ∈ R
d,
where g is defined by (3.3). One defines
H0,W (f) = 〈μ0, f〉.
One easily checks that (with the former notations)
〈Vk, f〉 = EW
(Hk,W (f)(Xk−1)) = 〈Vk−1, Hk,W (f)〉
so that, for every k = 0, . . . , n,
〈Vk, f〉 = (H0,W H1,W · · · Hk,W )(f).
This equality can be written either in forward or backward recursive form. Thebackward form will be an important tool for proofs:
Un,W f := f,
Uk−1,W f := Hk,W (Uk,W f), k = 1, . . . n.(3.5)
Then, one checks using the Markov property and the iterated conditional expectationrule that
U0,W f = 〈Vn, f〉.

DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION 2523
For every k = 1, . . . , n, one approximates the operator Hk,W by its natural quantized
counterpart Hk,W defined on the grid Γk−1 = x1k−1, . . . , x
ik−1, . . . , x
Nk−1
k−1 by
Hk,W (f)(xik−1) := exp g(xi
k−1,ΔWk)∑j
f(xjk)PW
(Xk = xjk | Xk−1 = xi
k−1)
so that
Hk,W (f)(Xk−1) = exp g(Xk−1,ΔWk)EW(f(Xk) | Xk−1).
Then, one sets
H0,W (f) :=∑j
f(xj0)PW
(X0 = xj0).
We then notice that the approximation of Vk defined in (3.4) satisfies the following:
〈Vk, f〉 = (H0,W H1,W · · · Hk,W )(f), k = 1, . . . , n.(3.6)
Once again, this equality can be read in backward form as follows:
Un,W f(xin) := f(xi
n), i = 1, . . . , Nn,
Uk−1,W f(xik−1) := Hk,W (Uk,W f)(xi
k−1), i = 1, . . . , Nk−1, k = 1, . . . n,(3.7)
so that
〈Vn, f〉 = U0,W f.(3.8)
The proof is designed as follows: we wish to establish a backward induction be-tween the error terms ‖Uk,W f(Xk) − Uk,W f(Xk)‖p at successive times k and k + 1
involving the quantization error ‖Xk+1 − Xk+1‖pof the Euler scheme. Unfortunately
a naive approach makes the final error explode because of successive use of the Holderinequality. So we are led to introduce a process Yk starting at X0 but produced by abiased dynamics Gδ,p (instead of Fδ) which corresponds to a step-by-step discrete Gir-sanov (implicit) change of probability. Thus we can simultaneously take advantage ofthe martingale property of the Doleans exponential and of the independence propertyof the increments ΔWk; it makes it possible not to use the Holder inequality at a cru-cial step (see (3.15) below), which would cause an explosion of the constants. Finally,we use a revert Girsanov change of probability to come back to the quantization errorof the original dynamics (Xk).
Proof of Theorem 3.1. We will assume for convenience that δ = T/n ∈ (0, 1]throughout the proof.
Step 1 (backward induction on the error ‖Uk,W f(Yk) − Uk,W f(Yk)‖p). Set tem-porarily
Gδ,p(y, v, w) := Fδ(y, v, w + pδh(y))
= y + δ(β(y) + pγ(y)h(y)) + σ(y)v + γ(y)w,
Yk := Gδ,p(Yk−1,ΔBk,ΔWk), k ≥ 1,
Y0 = X0,
Yk := Fδ(Yk−1,ΔBk,ΔWk), k ≥ 1.

2524 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS
Let Fk denote the σ-field σ(ΔB,ΔW, = 1, . . . , k). Set, for every k = 0, . . . , n,
Yk := ProjΓk(Yk) and
Y k := ProjΓk
(Yk).
With these notations, one checks that for every f ∈ BL1(Rd),
Hk,W (f)(Yk−1) = exp g(Yk−1,ΔWk)EW (f(Yk) | Yk−1)(3.9)
and
Hk,W (f)(Yk−1) = exp g(Yk−1,ΔWk)EW (f(Y k) | Yk−1).(3.10)
Consequently
Uk−1,W f(Yk−1) − Uk−1,W f(Yk−1)
= Hk,W (Uk,W f)(Yk−1) − Hk,W (Uk,W f)(Yk−1)
= (Uk−1,W f)(Yk−1) − EW
((Uk−1,W f)(Yk−1) | Yk−1
)+E
W
(Hk,W (Uk,W f)(Yk−1) − Hk,W (Uk,W f)(Yk−1) | Yk−1
).
Let us deal with the above two terms successively. The random vector Yk−1 being a
function of Yk−1 and conditional expectation E( . |W, Yk−1) being an Lp-contraction,one gets ∥∥Uk−1,W f(Yk−1) − E
W
((Uk−1,W f)(Yk−1)|Yk−1
)∥∥p
≤∥∥(Uk−1,W f)(Yk−1) − (Uk−1,W f)(Yk−1)
∥∥p
+∥∥E
W
((Uk−1,W f)(Yk−1) − (Uk−1,W f)(Yk−1) | Yk−1
)∥∥p
≤ 2∥∥(Uk−1,W f)(Yk−1) − (Uk−1,W f)(Yk−1)
∥∥p.
Consequently, using the expressions (3.9) and (3.10) and once again the contractionproperty and the σ(Yk−1)-measurability of Yk−1 yields∥∥Uk−1,W f(Yk−1) − Uk−1,W f(Yk−1)
∥∥p
(3.11)
≤ 2∥∥(Uk−1,W f)(Yk−1) − (Uk−1,W f)(Yk−1)
∥∥p
+∥∥eg(Yk−1,ΔWk)(Uk,W f)(Yk) − eg(Yk−1,ΔWk)(Uk,W f)(
Y k)
∥∥p
(when p = 2, the 2 factor can be deleted). Let us deal now with the second term ofthe sum in the r.h.s. First note that∥∥eg(Yk−1,ΔWk)(Uk,W f)(Yk) − eg(Yk−1,ΔWk)(Uk,W f)(
Y k)
∥∥p
=∥∥ exp g(Yk−1,ΔWk)
(Uk,W f(Yk) − exp
(g(Yk−1,ΔWk)
− g(Yk−1,ΔWk))Uk,W f(
Y k)
)∥∥p.
Set Lp(δ) := exp ((p− 1)‖h‖2∞δ/2). A change of variable “a la Girsanov” yields
for every nonnegative Borel function Θ and every p ∈ (1,+∞)∥∥exp (g(Yk−1,ΔWk))Θ(Yk−1,ΔBk,ΔWk)∥∥p
p
≤ (Lp(δ))pE
(exp (ph(Yk−1).ΔWk − p2|h(Yk−1)|2δ/2)Θp(Yk−1,ΔBk,ΔWk)
)≤ (Lp(δ))
pE(Θp(Yk−1,ΔBk,ΔWk + pδh(Yk−1))
)

DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION 2525
so that ∥∥exp (g(Yk−1,ΔWk))Θ(Yk−1,ΔBk,ΔWk)∥∥
p(3.12)
≤ Lp(δ)‖Θ(Yk−1,ΔBk,ΔWk + pδh(Yk−1))‖p .
Applying the above inequality with Θ(y, v, w) = (Uk,W f)(Gδ,p(y, v, w)) leads to∥∥∥eg(Yk−1,ΔWk)(Uk,W f)(Yk) − eg(Yk−1,ΔWk)(Uk,W f)(Y k)
∥∥∥p
≤ Lp(δ)∥∥∥(Uk,W f(Yk) − exp
(g(Yk−1,ΔWk + pδh(Yk−1))
− g(Yk−1,ΔWk + pδh(Yk−1)))Uk,W f(Yk)
)∥∥∥p
≤ Lp(δ)∥∥∥Uk,W f(Yk) − Uk,W f(Yk)
∥∥∥p
+Lp(δ)∥∥∥(1 − exp
(g(Yk−1,ΔWk + pδh(Yk−1))
− g(Yk−1,ΔWk + pδh(Yk−1))))Uk,W (f)(Yk)
∥∥∥p
≤ Lp(δ)∥∥∥Uk,W f(Yk) − Uk,W f(Yk)
∥∥∥p
+Lp(δ)∥∥∥1 − exp
(g(Yk−1,ΔWk + pδh(Yk−1))
− g(Yk−1,ΔWk + pδh(Yk−1)))∥∥∥
rp
∥∥∥Uk,W f(Yk)∥∥∥
sp
,(3.13)
where r > 1 and s = rr−1 are conjugate Holder exponents. Now∥∥∥Uk,W f(Yk)
∥∥∥sp
=∥∥∥exp g(Yk,ΔWk) Uk+1,W f(Yk)
∥∥∥sp
.
Applying (3.12) (with sp) yields∥∥∥Uk,W f(Yk)∥∥∥
sp
≤ Lsp(δ)∥∥∥Uk+1,W f(Y
(sp)k+1 )
∥∥∥sp
for some Fk+1-measurable random vector Y(sp)k+1 which we have no need to specify
(since f is bounded). One derives by induction that∥∥∥Uk,W f(Yk)∥∥∥
sp
≤ (Lsp(δ))n−k
∥∥∥Un,W f(Y (sp)n )
∥∥∥sp
(3.14)
≤ (Lsp(δ))n−k
∥∥f∥∥∞
≤ Cp,r,‖h‖∞ ,T
∥∥f∥∥∞
with Kp,r,‖h‖∞ ,T = exp ((sp− 1)‖h‖2∞T/2).
Let us deal now with the Lrp-norm of the exponential term. First, temporarilyset Δk(h) := h(Yk) − h(Yk). Then, standard computations show that∥∥∥1 − exp
(g(Yk−1,ΔWk + p δ h(Yk−1)) − g(Yk−1,ΔWk + pδh(Yk−1))
)∥∥∥rp
=∥∥∥1 − exp
((p− 1)δh(Yk−1).Δk−1(h) + Δk−1(h)ΔWk − |Δk−1(h)|2δ/2
)∥∥∥rp
.

2526 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS
Now using the elementary inequality |ex − 1| ≤ |x|ex+ , where x+
:= max(x, 0), andthe fact that x → x
+ is nondecreasing yields∥∥1 − exp(g(Yk−1,ΔWk + p δ h(Yk−1)) − g(Yk−1,ΔWk + pδh(Yk−1))
)∥∥rp
≤∥∥|Δk−1(h)||(p− 1)δh(Yk−1) + ΔWk
− (Δk−1(h))δ/2| exp(2(p− 1)δ‖h‖2∞ + 2‖h‖∞ |ΔWk|)
∥∥rp
≤ L4p−3(δ)√δ[h]
Lip
∥∥ |Yk−1 − Yk−1|((p− 1)√δ‖h‖∞ + |Zk| + ‖h‖∞
√δ)
× exp(2‖h‖∞
√δ|Zk|)
∥∥rp,
where Zk := ΔWk√δ
is an N (0; Id) random vector independent of Fk−1. Finally,∥∥1 − exp(g(Yk−1,ΔWk + pδh(Yk−1)) − g(Yk−1,ΔWk + pδh(Yk−1))
)∥∥rp
≤ Cp,r,δ,‖h‖∞ ,T
√δ[h]Lip
∥∥Yk−1 − Yk−1
∥∥rp
(3.15)
with
Cp,r,δ,‖h‖∞ ,T = L4p−3(δ)∥∥((p− 1)
√δ‖h‖∞ + |Z| +
√δ‖h‖∞
)exp
(2‖h‖∞
√δ|Z|
)∥∥rp.
(Note that this real constant is increasing as a function of δ.) Plugging the estimatesin (3.15) and (3.14) into (3.13) yields for every k = 1, . . . , n∥∥eg(Yk−1,ΔWk)(Uk,W f)(Yk) − eg(Yk−1,ΔWk)(Uk,W f)(
Y k)
∥∥p
≤ Lp(δ)∥∥Uk,W f(Yk) − Uk,W f(Yk)
∥∥p
+ B(δ)∥∥Yk−1 − Yk−1
∥∥rp
(3.16)
with B(δ) := Cp,r,‖h‖∞ ,T
√δ[h]Lip‖f‖∞ (with Cp,r,‖h‖∞ ,T = Cp,r,1,‖h‖∞ ,TKp,r,‖h‖∞ ,T
Lp(1)).
Now let us pass to the first term in the r.h.s. of (3.11). Let (Y k,y )=k,... ,n be the
sequence obtained by iterating Gp,δ(.,ΔB,ΔW) from y at time = k, i.e.,
∀ ∈ k + 1, . . . , n, Y k,y = Gp,δ(Y
k,y−1,ΔB,ΔW), Y k,y
k := y.
The same proof as above shows that, for any couple (Zk−1, Z′k−1) of Fk−1-measurable
Lp-integrable random variables,∥∥(Uk−1,W f)(Zk−1) − (Uk−1,W f)(Z ′k−1)
∥∥p
≤ Lp(δ)∥∥Uk,W (Y
k−1,Zk−1
k ) − Uk,W (Yk−1,Z′
k−1
k )∥∥
p
+B(δ)∥∥Y k−1,Zk−1
k−1 − Yk−1,Z′
k−1
k−1
∥∥rp,
so that by induction∥∥∥(Uk−1,W f)(Yk−1) − (Uk−1,W f)(Yk−1)∥∥∥
p
≤ B(δ)n∑
=k
(Lp(δ))−k
∥∥∥Y k−1,Yk−1
−1 − Yk−1,Yk−1
−1
∥∥∥rp
+ (Lp(δ))n+1−k[f ]Lip
∥∥∥Y k−1,Yk−1n − Y k−1,Yk−1
n
∥∥∥rp
.

DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION 2527
Now, Lemma 3.1 (applied to Gδ,p) implies the existence of a real constant Crp > 0such that ∥∥∥Y k−1,Yk−1
− Yk−1,Yk−1
∥∥∥rp
≤ (1 + Crpδ)+1−k
∥∥∥Yk−1 − Yk−1
∥∥∥rp
.
Setting L′p,r(δ) = Lp(δ)(1 + Crpδ) finally yields for every k = 1, . . . , n∥∥∥(Uk−1,W f)(Yk−1) − (Uk−1,W f)(Yk−1)
∥∥∥p
≤ C(δ)∥∥∥Yk−1 − Yk−1
∥∥∥2p
with
C(δ) = Lp(T )eCrp
(Cp,r,‖h‖∞ ,T
[h]Lip‖f‖∞
√δ
L′p,r(δ) − 1
+ [f ]Lip
)(3.17)
≤ Lp(T )eCrp
(C ′
p,r,‖h‖∞ ,T
[h]Lip‖f‖∞√δ
+ [f ]Lip
).(3.18)
Plugging (3.16) and (3.17) into (3.11) finally yields the induction∥∥∥Uk−1,W f(Yk−1) − Uk−1,W f(Yk−1)∥∥∥
p
≤ Lp(δ)∥∥∥Uk,W f(Yk) − Uk,W f(Yk)
∥∥∥p
+A(δ)∥∥∥Yk−1 − Yk−1
∥∥∥rp
with
A(δ) = B(δ) + 2C(δ) ≤ C ′′p,r,‖h‖∞ ,T
([h]
Lip‖f‖∞
(√δ +
1√δ
)+ [f ]Lip
)≤
Cp,r,‖h‖∞ ,[h]Lip
,‖f‖∞ ,[f ]Lip
,T√δ
since δ∈ (0, 1]. A new induction leads to∥∥〈Vn, f〉 − 〈Vn, f〉∥∥p
=∥∥U0,W f(X0) − U0,W f(X0)
∥∥p
=∥∥U0,W f(Y0) − U0,W f(Y0)
∥∥p
≤ A(δ)n∑
k=0
(Lp(δ))k‖Yk − (Un,W f)(Yn)‖rp
+ (Lp(δ))n‖(Un,W f)(Yn) − Yk‖p
≤Cp,r,‖h‖∞ ,[h]
Lip,‖f‖∞ ,[f ]
Lip,T
√δ
n∑k=0
‖Yk − Yk‖rp
+Lp(T )[f ]Lip‖Yn − Yn‖rp
.(3.19)
Step 2 (global revert Girsanov transform). Now, we aim to come back to Xk byintroducing a revert Girsanov transform:
‖Yk − Yk‖rprp = E(Zk(Zk)−1|Yk − Yk|rp),
where
Zk = exp
(−
k∑=1
ph(Y−1).ΔW − p2|h(Y−1)|2δ
2
).

2528 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS
It follows that
E(Zk(Zk)−1|Yk − Yk|rp)
= E
(exp
(k∑
=1
ph(X−1).ΔW − p2|h(X−1)|2δ
2
)|Xk − Xk|rp
)
so that by the Holder inequality applied with two conjugate exponents r′, s′ > 1,
‖Yk − Yk‖rprp ≤(E exp
(k∑
=1
s′ph(X−1).ΔW − s′p2|h(X−1)|2δ/2))1/s′
·(E|Xk − Xk|rr
′p)1/r′
≤ exp (k(s′ − 1)p2‖h‖2∞δ/2)‖Xk − Xk‖rp
rr′p.
Finally,
‖Yk − Yk‖rp ≤ exp (kp‖h‖2∞δ/4)‖Xk − Xk‖4p ≤ Cp,r,r′,‖h‖∞ ,T ‖Xk − Xk‖rr′p .
One completes the proof by setting r = r′ =√
p′/p > 1 and plugging this lastinequality into (3.19).
3.3. Global error. Combining the results established in the former sections, weobtain the following result.
Theorem 3.2. Assume (H1)–(H2). Let p′ > 2 and let N ≥ n ≥ 1. Assume thatfor every k∈ 0, . . . , n, Γk is an Lp′
-optimal grid of size [N/(n + 1)] for Xk. Thereexists a real constant C (depending on p′ but not n) such that
‖ρ(VT, Vn)‖2 ≤ C
(1
nθ+
n32
N1d
)(3.20)
with θ = 0 if γ ≡ 0 and θ = 1/2 otherwise, and N = N/n.Proof. Combining results obtained in Theorems 2.1 and 3.1 yields the following:
‖ρ(VT, Vn)‖2 ≤ C
(1
nθ+√δ
n∑k=0
‖Δk‖p′
),
where Δk = Xk − Xk = Xk −ProjΓk(Xk). It follows from the nonparametric version
of Zador’s theorem, recently established in [25], that for every p, δ > 0 there exists auniversal real constant Cp,δ such that for every N ≥ 1 and every R
d-valued randomvector Y ,
minΓ⊂Rd,|Γ|≤N
‖Y − Y Γ‖p ≤ Cp,δ‖Y ‖p+δN− 1
d .
Applying this result to our framework yields (with δ = 1)
n∑k=0
‖Δ‖p′ ≤ Cp′ supn
max0≤k≤n
‖Xk‖p′+1(n + 1)(N/(n + 1))1d
≤ Cn32 (N/n)−
1d ,

DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION 2529
where C is a finite real constant since we know that (b and σ, γ having at most lineargrowth) the family of Euler schemes ((Xk)0≤k≤n)n≥1 satisfies supn max0≤k≤n ‖Xk‖r <+∞ for any r > 0.
Remark 3.1. • The n32 in the spatial error term of (3.20) is most likely not
optimal (see section 4). It probably comes from the specific technicalities induced byquantization. It corresponds, e.g., to the rate obtained for the “quenched error” in [7].As shown by our numerical experiments, the spatial error term most likely behavesas O(n× (N/n)−
1d ) or O((N/n)−
1d ), depending on some stability conditions between
n and N (see section 4 for a detailed explanation).• As an example, one can compare our error rate with that obtained in [7] (in the
γ ≡ 0 setting) where an error bound is of the form
1
n+
√n
M,
where M denotes the number of Monte Carlo trials obtained under some regularityassumptions on the diffusion coefficients h and f (regardless of the dimension). Inthis case, M can be compared with our N/n, i.e., the mean value of points per timelayers in our algorithm.
4. Numerical simulations and estimation of the rates of convergence.Since the expression of the global error given by (3.20) does not separate clearly thetime and space parameters, we will try in this section to investigate separately therate of convergence in time and in space in the following (linear) case:
β(x) = (A− ΓH)x, h(x) = Hx,
γ(x) = Γ, σ(x) = Σ,
where A, Γ, Σ, and H are constant matrices of appropriate dimensions. We alsosuppose that μ0 is a Gaussian law with mean m0 and covariance matrix R0. Then itis well known that the solution to the Zakai equation (1.1) is explicitly given by
〈Vt, f〉 =
[∫f(mt + R(t)
12x)
exp(− 1
2 |x|2)
(2π)d2
dx
]〈Vt, 1〉,(4.1)
where R(t) is the solution to the Riccati equation
dR
dt= AR + RAᵀ + ΣΣᵀ + ΓΓᵀ − (RHᵀ + Γ)(HR + Γᵀ),(4.2)
R(0) = R0;
mt is the solution of
dmt = Amtdt + (RHᵀ + Γ)(dWt −Hmtdt),(4.3)
m0 = m0;
and
〈Vt, 1〉 = exp
(∫ t
0
Hms.dWs −1
2
∫ t
0
|Hms|2ds).(4.4)

2530 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS
In other words, the normalized measure πt defined by
〈πt, f〉 =〈Vt, f〉〈Vt, 1〉
is a Gaussian distribution with mean mt and variance R(t).We now introduce the quantized normalized filter for a given function f ∈ BL1(R)
as
〈πδk, f〉 :=
〈Vk, f〉〈Vk, 1〉
, k = 0, . . . , n,
where we have emphasized the dependence of the filter in δ = T/n by a superscript.The unnormalized filters Vk are computed according to algorithm (3.4).
The exact normalized filter is approximated owing to (4.1) using the followingmethod. Since R is an explicitly known function (solution of (4.2)), it is sufficient toapproximate mt, the solution of the SDE (4.3) with a refined Euler scheme of step, as
δref =T
1024 δ.
Indeed, for each path of the observation W , (4.3) and (4.4) are discretized as
ml+1 = ml + δrefAml + (R(lδref )Hᵀ + Γ)(W(l+1)δref −Wlδref −Hmlδref ),(4.5)
Zl+1 = Zl + Hml.(W(l+1)δref −Wlδref ) − 1
2|Hml|2δref , ξl = exp(Zl),(4.6)
and thus a very close approximation of the exact normalized filter, in the sense that itcan be considered as the exact solution as long as δ remains considerably larger thanδref , is
〈πδreflδref
, f〉 :=
∫f(ml + R(lδref )
12x)
exp(− 1
2 |x|2)
(2π)d2
dx,
where R(t) is computed owing to an exact quadrature formula.We now estimate the rate of convergence of the scheme with respect to the spatial
and time discretization. In order to smooth undesirable time oscillations of the error,we focus on the following temporal mean of the quadratic quantization error for thenormalized filter, namely
Err(δ, N) =1
nE
n∑k=0
∣∣∣〈πδk, f〉 − 〈πδref
tk, f〉
∣∣∣2 ,(4.7)
where tk = kδ = l(k)δref and N = N/n denotes the mean number of points per timelayers. Then Err(δ, N) is simply an approximation of the squared L2([0, T ], dt)-normof the error.
We test the error for the following test functions:
f0(x) = x, f1(x) = exp(−x2), f2(x) = exp(−x).(4.8)

DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION 2531
The expectation in (4.7) is computed by a Monte Carlo method with M = 100trajectories of the observations W .
The parameters of our simulations are
Σ = 1, B = −0.5, H = 1, T = 1.
Such a choice of parameters is motivated by the fact that it provides values for R(t)that are not too small. Otherwise, there would not be enough points around m0 = 0to be able to “capture” the behavior of the signal around its mean 0.
We will also change the model a bit and consider the following equations:⎧⎨⎩dXt = BXt dt + Σ dBt + ΓdWt,
dWt = HXtdt + εdUt.(4.9)
The formulas above need to be changed as follows: Γ εΓ and H H/ε. The reasonfor introducing this new degree of freedom on the noise level may look paradoxicalsince small ε will provide large errors. But precisely, these large errors make it possibleto display the rate of convergence more efficiently than with ε = 1, which producessmaller errors. Let us take the example of the spatial order. Indeed, we will seethat as the discretization parameters N get larger and larger the error Err(δ, N) isdecreasing as a function of N until some threshold, depending a priori on δ and onthe number M of observations (i.e., paths of W ). Beyond this threshold, the errorbecomes more or less constant because the difference with the exact solution will beof the same order of the temporal discretization. Subsequently the sum of the twoerrors will become indistinguishable from the temporal one. Therefore, a small ε willprovide bigger errors and so we will have more relevant points before reaching thisthreshold.
• Estimation of the spatial discretization rate. We first estimate the spatial rateof convergence in the case Γ = 0 (no correlation between the signal process X and theobservation process W ). For four values of n = 1/δ ∈ 16, 32, 64, 256, we estimateN → Err(δ, N) with N = 2−, = 1, . . . , 7. As a first step, for each value of n andof N , we compute an optimal quantization (Xk)k of the Euler scheme (Xk)k of (4.9)(which is a version of (3.1)), according to the algorithm described in subsection 3.1.Then, for each test function f in (4.8) and each observation path of W , we computerecursively 〈V δ
k , f〉 and 〈V δk , 1〉 using (3.4) and then 〈πδ
k, f〉. On the other hand,we compute the exact solutions using (4.5), and finally we compute Err(δ, N) asdefined by (4.7) by summing up over the M trajectories sampled from the observationprocess W .
Note that since Γ = 0, the quantization optimization procedure of (Xk)k is aone-shot process which does not depend on the observations W .
The results are summarized in Figures 1 and 2. It seems to have two regimesof convergence when N becomes larger. On the one hand, Figure 1 displays theerror (4.7) for low values of n. It seems that its square root behaves like O(1/N) forthe three values of n before a threshold depending (linearly) on n; after that the errorremains unchanged.
On the other hand, for high values of n (but still below nref = 1024), Figure 2suggests a slower rate of convergence in O((N)−1/2).
This suggests, keeping in mind (3.20) and Remark 3.1, a decomposition of the

2532 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS
(a) n = 16
0.0001
0.001
0.01
0.1
1
1 10 100
Moy
enne
qua
drat
ique
sur
[0,T
] du
carr
ÿ de
l er
reur
sur
Pi_
t_f
Nmax
erreur_MODOU1_CORR_0_MODOBS2_fin1024 | MC = 100 trajectoires | eps = 0.1 | Dt = 1/16 |Pi_t_f
pi_t_f1pi_t_f2pi_t_x1/x^2
(b) n = 32
0.0001
0.001
0.01
0.1
1
1 10 100
Moy
enne
qua
drat
ique
sur
[0,T
] du
carr
ÿ de
l er
reur
sur
Pi_
t_f
Nmax
erreur_MODOU1_CORR_0_MODOBS2_fin1024 | MC = 100 trajectoires | eps = 0.1 | Dt = 1/32 |Pi_t_f
pi_t_f1pi_t_f2pi_t_x1/x^2
(c) n = 64
0.0001
0.001
0.01
0.1
1
1 10 100
Moy
enne
qua
drat
ique
sur
[0,T
] du
carr
ÿ de
l er
reur
sur
Pi_
t_f
Nmax
erreur_MODOU1_CORR_0_MODOBS2_fin1024 | MC = 100 trajectoires | eps = 0.1 | Dt = 1/64 |Pi_t_f
pi_t_f1pi_t_f2pi_t_x1/x^2
Fig. 1. Error Err(δ, N) as a function of N for several time discretizations n. The straight linedepicts N → 1/N2, and the dashed lines denote the errors computed with the different functions(4.8). Here ε = 0.1.

DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION 2533
0.0001
0.001
0.01
0.1
1
1 10 100
Nmax
pi_t_f1pi_t_f2pi_t_x
1/x
Fig. 2. Rate of convergence of (4.7) with n = 256. Here again ε = 0.1.
global error of the form
C1
n+
C2(n)
N,
where C1 > 0 and C2(n) = C2 + c2n + o(n) with C2 > 0, c2 > 0, and c2 C2.For low values of n, C2 remains constant and hence we get, obviously,
C1
n≤ C2
N⇐⇒ N ≤ Cn = N∗
1 (n),
and thus we get an order O(1/N).For high values of n, the linear part of C2 becomes larger and hence we get,
obviously, in the same manner
C1
n≤ c2n
N⇐⇒ N ≤ C ′n2 = N∗
2 (n),
and hence we have the order O((N)−1/2).In fact, this emphasizes that the scheme needs some stability criterion involving
n and N in order to converge at the true rate O(1/N).The quantization step of the algorithm can also be the cause of this rate. Indeed,
during the quantization optimization of the signal X, we need to simulate at eachtime step an Euler increment of X in (4.9). This simulation is used to compute theweights of the “quantization tree” of X (weight of the Voronoi cells and the transitionprobabilities) and to process the optimization. Here the Euler increment of X, namelyΣ√δ χ, where χ denotes a real valued normal random variable, becomes very small as
n grows; and so it is when n = 256. This implies that the Euler increment will mainly“hit” the closest cell in the upper time layer (not to mention the ability of a randomnumber generator to simulate the tail of distributions). Consequently, the transition

2534 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS
probabilities are not computed accurately enough, given the size of the simulation,and can explain the downgrading of the rate of convergence in time. One can concludethis experiment by saying that there is a CFL involving the mean spatial unit lengthand the time step parameter and a second CFL involving the time discretizationparameter and the size of the simulation (this one has been precisely analyzed in [2]).
These results clarify Remark 3.1 concerning the improvement of Theorem 3.1.• Estimation of the time discretization rate of convergence. Now we look for the
rate of convergence with respect to δ. For that purpose, we use N = 100 quantizationpoints in each time layer. The rate of convergence in time will be estimated with
Γ ∈ 0, 0.5, ε ∈ 0.1, 0.5, 1.0, δ = 2−m, m = 1, . . . , 8.
Let us see now why we used the normalized filter instead of the unnormalized one.In Figure 3 are displayed typical examples of graphs k → 〈V δ
k , f〉, t → 〈Vt, f〉, k →〈πδ
k, x〉, and t → 〈πt, x〉 for Γ = 0, ε = 0.1, δ = 1/256, and N = Nn = 100. Theexact filters are still computed using (4.5) and (4.6). We verify on that example thatthe normalized filter seems to be better computed than the unnormalized one. Itexplains why we did not use the unnormalized version of the error. Indeed, for sucha level of noise for the observations (ε = 0.1), the unnormalized filter 〈V δ
k , f〉 hasvery large values. This is true for all tested functions f and all time discretizationsδ = 1/n. Furthermore, it is also true on all sampled trajectories of W (not alldepicted). Therefore, it is difficult for numerical reasons to compute errors based on〈V δ
k , f〉 for ε = 0.1.Let us consider first the uncorrelated case (Γ = 0). Figure 4 shows the error
plotted against the time step in a log-log scale for f given by (4.8). We can see againthat for a given fixed ε, the time error decreases until a threshold and then remainsflat. We also see that this threshold grows as the inverse of the noise level ε. Beforereaching this threshold, for every ε and every function f , the rate seems to be of orderδ = 1/n as established in Theorem 2.1.
Let us emphasize that, once again in this case, the quantization procedure doesnot depend on the observations. Therefore, it can be carried out off-line. This isno longer true in the correlated case. Then (e.g., if Γ = 0.5), we will have to com-pute M = 100 quantizations (one per observation path) of the signal (Xk)k for everyn ∈ 2, 4, 8, 16, 32, 64, 128, 256, i.e., 800 optimal grids. The previous study in theuncorrelated case seems to indicate that we need a small level of noise on the obser-vations in order to display a rate with a significant number of time steps. This is whywe have chosen ε = 0.1 for the simulations. Figure 5 shows the errors obtained as afunction of n in a log-log scale for the functions (4.8). The rates of convergence arethe same in each case. A linear regression seems to indicate a rate of O(n−3/4) whichis better than the O(n−1/2) stated in Theorem 2.1. An explanation of this unexpectedbehavior could be the following one. The constant in the factor of the term n−1/2 ispresumably very small compared to the one associated to n−1; thus, small values ofn make an intermediate rate of convergence appear, while the rate n−1/2 would beobserved for larger n (in the asymptotic regime).

DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION 2535
(a)
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 0.2 0.4 0.6 0.8 1
Delta t=1/256
MODOU1_CORR_0_MODOBS2_fin1024.1
<V_t,x> par QTF<pi_t,x>*<V_t,1>=<V_t,x> exact
(b)
0
0.5
1
1.5
2
2.5
0 0.2 0.4 0.6 0.8 1
Delta t=1/256
MODOU1_CORR_0_MODOBS2_fin1024.1
<V_t,1> par QTF<V_t,1> exact
(c)
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0 0.2 0.4 0.6 0.8 1
Delta t=1/256
MODOU1_CORR_0_MODOBS2_fin1024.1
<Pi_t,x> QTF<Pi_t,x> exacte
Fig. 3. Examples of curves (a) k → 〈V δk , x〉, (b) k → 〈V δ
k , 1〉, (c) k → 〈πδk, x〉 with δ = 1/256
and Nn = 100 computed with the same trajectory of observation. Here ε = 0.1 and Γ = 0. Thethick line depicts the exact filter computed according to a time step δref = 1/1024, and the thin linedepicts the quantized filter.

2536 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS
(a)
1e-05
0.0001
0.001
0.01
0.1
1
1 10 100 1000
Moy
enne
qua
drat
ique
sur
[0,T
] du
carr
ÿ de
l er
reur
sur
Pi_
t_f1
n
erreur_MODOU1_CORR_0_MODOBSx_fin1024 | MC = 100 trajectoires | Nmax = 100 |Pi_t_f1
eps = 1.0eps = 0.1eps = 0.5
1/x^2
(b)
1e-05
0.0001
0.001
0.01
0.1
1
1 10 100 1000
Moy
enne
qua
drat
ique
sur
[0,T
] du
carr
ÿ de
l er
reur
sur
Pi_
t_f2
n
erreur_MODOU1_CORR_0_MODOBSx_fin1024 | MC = 100 trajectoires | Nmax = 100 |Pi_t_f2
eps = 1.0eps = 0.1eps = 0.5
1/x^2
(c)
1e-05
0.0001
0.001
0.01
0.1
1
1 10 100 1000
Moy
enne
qua
drat
ique
sur
[0,T
] du
carr
ÿ de
l er
reur
sur
Pi_
t_x
n
erreur_MODOU1_CORR_0_MODOBSx_fin1024 | MC = 100 trajectoires | Nmax = 100 |Pi_t_x
eps = 1.0eps = 0.1eps = 0.5
1/x^2
Fig. 4. Square of the error (4.7) where (a) f(x) = exp(−x2), (b) f(x) = exp(−x), and (c)f(x) = x as a function of the time step n in a log-log scale. Uncorrelated case.

DISCRETIZATION AND SIMULATION OF THE ZAKAI EQUATION 2537
0.001
0.01
0.1
1
1 10 100
Moy
enne
qua
drat
ique
sur
[0,T
] du
carr
ÿ de
líer
reur
sur
pi_
t_f
n
erreur_MODOU1_CORR_0.5_MODOBS2_fin1024 | MC = 100 trajectoires | pi_t_f
erreur Pi_t_f2erreur Pi_t_f1erreur Pi_t_x
1/x^(3/2)1/x
Fig. 5. Error (4.7) as a function of the time step n in a log-log scale. Correlated case. Thethree functions Id, f1(x) = exp(−x), and f2(x) = exp(−x2) are depicted.
REFERENCES
[1] V. Bally and G. Pages, A quantization algorithm for solving discrete time multi-dimensionaloptimal stopping problems, Bernoulli, 9 (2003), pp. 1003–1049.
[2] V. Bally and G. Pages, Error analysis of the optimal quantization algorithm for obstacleproblems, Stoch. Process. Appl., 106 (2003), pp. 1–40.
[3] V. Bally and D. Talay, The distribution of the Euler scheme for stochastic differentialequations: I. Convergence rate of the distribution function, Probab. Theory Related Fields,104 (1996), pp. 43–60.
[4] A. Bensoussan, R. Glowinski, and R. Rascanu, Approximation of Zakai equation by thesplitting-up method, in Stochastic Systems and Optimization, Lecture Notes in Controland Inform. Sci., Springer-Verlag, New York, 1989, pp. 257–265.
[5] A. Budhiraja and G. Kallianpur, Approximations to the solution of the Zakai equationusing multiple Wiener and Stratonovitch integral expansions, Stoch. Stoch. Rep., 56 (1996),pp. 271–315.
[6] D. Crisan and T. Lyons, A particle approximation of the solution of the Kushner-Stratonovitch equation, Probab. Theory Related Fields, 115 (1999), pp. 549–578.
[7] D. Crisan, P. Del Moral, and T. Lyons, Interacting particle systems approximations of theKushner-Stratonovitch equation, Adv. Appl. Probab., 31 (1999), pp. 819–838.
[8] P. Del Moral, Nonlinear filtering using random particles, Theory Probab. Appl., 40 (1995),pp. 690–701.
[9] L. Devroye, Non-uniform Random Variate Generation, Springer-Verlag, New York, 1986.[10] G. Di Masi, M. Pratelli, and W. Runggaldier, An Approximation for the nonlinear filtering
problem with error bounds, Stoch. Stoch. Rep., 14 (1985), pp. 247–271.[11] P. Florchinger and F. Le Gland, Time-discretization of the Zakai equation for diffusion
processes observed in correlated noise, Stoch. Stoch. Rep., 35 (1991), pp. 233–256.[12] E. Gobet and R. Munos, Sensitivity analysis using Ito–Malliavin calculus and martingales,
and application to stochastic optimal control, SIAM J. Control Optim., 43 (2005), pp. 1676–1713.
[13] E. Gobet, G. Pages, H. Pham, and J. Printems, Discretization and Simulation for a Classof SPDEs with Applications to Zakai and McKean Vlasov Equations, Preprint LPMA 958,Universite Paris 6-Paris 7, Paris, 2005.
[14] S. Graf and H. Luschgy, Foundations of Quantization for Random Vectors, Lecture Notesin Math. 1730, Springer-Verlag, New York, 2000.
[15] I. Gyongy, Lattice approximations for stochastic quasi-linear parabolic partial differentialequations driven by space-time white noise, I. Potential Anal., 9 (1998), pp. 1–25.

2538 E. GOBET, G. PAGES, H. PHAM, AND J. PRINTEMS
[16] I. Gyongy, Lattice approximations for stochastic quasi-linear parabolic partial differentialequations driven by space-time white noise, II. Potential Anal., 11 (1999), pp. 1–37.
[17] I. Gyongy, Approximations of stochastic partial differential equations, in Stochastic PartialDifferential Equations, Lecture Notes in Pure and Appl. Math. 227, Dekker, New York,2002, pp. 287–307.
[18] I. Gyongy and N. Krylov, On the splitting-up method and stochastic partial differentialequations, Ann. Probab., 31 (2003), pp. 564–591.
[19] Y. Hu, G. Kallianpur, and J. Xiong, An approximation for Zakai equation, Appl. Math.Optim., 45 (2002), pp. 23–44.
[20] H. Korezlioglu and W. J. Runggaldier, Filtering for non-linear systems driven by non-white noises: An approximation scheme, Stoch. Stoch. Rep., 44 (1993), pp. 65–102.
[21] T. Kurtz and J. Xiong, Particle representations for a class of nonlinear SPDEs, StochasticProcess. Appl., 83 (1999), pp. 103–126.
[22] H. Kushner, A robust discrete state approximation of the optimal nonlinear filter for a diffu-sion, Stoch. Stoch. Rep., 3 (1979), pp. 75–83.
[23] F. Le Gland, Splitting-up approximation for SPDEs and SDEs with application to nonlinearfiltering, in Stochastic Partial Differential Equations and Their Applications, Lecture Notesin Control and Inform. Sci., 176, Springer-Verlag, New York, 1992, pp. 177–187.
[24] S. Lototsky, R. Mikulevicius, and B. Rozovskii, Nonlinear filtering revisited: A spectralapproach, SIAM J. Control Optim., 33 (1997), pp. 1716–1730.
[25] H. Luschgy and G. Pages, Functional Quantization Rate and Mean Pathwise Regularity ofProcesses with an Application to Levy Processes, Preprint LPMA 1048, Universite Paris 6-Paris 7, Paris, 2006.
[26] D. Nualart, Malliavin Calculus and Related Topics, Springer-Verlag, New York, 1995.[27] D. Nualart, Analysis on Wiener space and anticipating stochastic calculus, in Lectures on
Probability Theory and Statistics, Springer-Verlag, Berlin, 1998, pp. 123–167.[28] G. Pages and H. Pham, Optimal quantization methods for non-linear filtering with discrete-
time observations, Bernoulli, 11 (2005), pp. 893–932.[29] G. Pages, H. Pham, and J. Printems, Optimal quantization methods and applications to
numerical problems in finance, in Handbook of Numerical Methods in Finance, S. Rachev,ed., Birkhauser Boston, Boston, 2004, pp. 253–297.
[30] G. Pages, H. Pham, and J. Printems, An optimal Markovian quantization algorithm formultidimensional stochastic control problems, Stoch. Dyn., 4 (2004), pp. 501–545.
[31] G. Pages and J. Printems, Optimal quadratic quantization for numerics: The Gaussian case,Monte Carlo Methods Appl., 9 (2003) pp. 135–166.
[32] J. Picard, Approximations of nonlinear filtering problems and order of convergence, in Fil-tering and Control of Random Processes, Lect. Notes in Control and Inform. Sci. 61,Springer-Verlag, New York, 1984, pp. 219–236.
[33] M. Piccioni, Convergence of implicit discretization schemes for linear differential equationswith application to filtering, in Stochastic Partial Differential Equations and Applications,Lecture Notes in Math. 1236, Springer-Verlag, New York, 1987, pp. 208–229.
[34] J. Printems, On the discretization in time of parabolic stochastic partial differential equations,M2AN Math. Model. Numer. Anal., 35 (2001), pp. 1055–1078.
[35] J. B. Walsh, Finite element methods for parabolic stochastic PDE’s, Potential Anal., 23 (2005),pp. 1–43.