0122_Cours Mécanique des Structures B2 2012 - Oscillateur à N degrés de liberté

of 31
Transcript of 0122_Cours Mécanique des Structures B2 2012 - Oscillateur à N degrés de liberté
253
Lquation dquilibre du systme scrit sous forme matricielle:
Les matrices M, C et K ont pour dimension NxN et les vecteurs U et P pour dimension N ou N reprsente le nombre de degrs de libert du systeme (gal au nombre de nuds multipli par le nombre de dplacements possibles du nud).
254
Vibrations libres non amorties d un systmeLa vibration libre du systme est solution de l'quation MU+CU +KU=P(t) dans laquelle le terme d'amortissement est pris gal 0 et les forces extrieures appliques sont nulles : MU+KU = 0 Une solution particulire de ce systme d'quations diffrentielles est de la forme : U=Dsin(t+), il vrifie donc: (K M)D=0 Le systme matriciel n'a de solution non triviale (D0) que si, et seulement si, son dterminant est nul. Det (KM)=0 Il en rsulte que l'quation Det (KM)=0 possde N racines relles i o N est la dimension des matrices K et M, c'est--dire le nombre de degrs de libert du systme. Ces racines sont les valeurs propres du systme.
255
On nomme frquence propre du systme les quantits : qui sont au nombre de N. La plus faible frquence f1 est dnomme frquence fondamentale, f2 frquence d'ordre 2, etc.. A chaque valeur propre i est associ un vecteur propre Di. Le systme possde N vecteurs propres associs aux valeurs propres. Ces vecteurs propres sont appels modes propres du systme. Ces modes propres possedent la proprit fondamentale detre orthogonaux entre eux La solution gnrale de l'quation MU +KU = 0 s'crit alors :
o les constantes i sont dtermines par les conditions initiales et les Di sont dfinis une constante multiplicative prs.
256
Les modes propres sont dfinis une constante multiplicative prs. Cette constante peut tre choisie de faon que : le dplacement d'un noeud particulier, par exemple le noeud 1 de la structure soit toujours gal 1 dans tous les modes; le plus grand dplacement d'un noeud dans le mode considr soit gal 1 les modes propres soient normaliss par rapport la matrice K ou la matrice M.
Dans les programmes de calculs lments finis, c'est gnralement cette dernire mthode qui est retenue et le plus souvent la normalisation est effectue par rapport la matrice de masse.
257
On retiendra qu'un systme N degrs de libert possde N frquences propres relles et N modes propres associs.
258
259
260
261
262
263
264
Vibrations forces non amorties d un systmeL'quation gnrale du mouvement se rduit en l'absence de termes d'amortissement :
Du fait de la structure non diagonale de la matrice K, et bien que la matrice M puisse souvent tre considre comme diagonale, il existe un couplage entre les degrs de libert du systme : l'quation de rang i du systme fait intervenir non seulement le degr de libert ui mais galement des degrs de libert uk (ki).
265
Afin de dcoupler les quations, on utilise la proprit d'orthogonalit des modes propres. La base des modes propres constitue une base orthogonale complte qui permet d'exprimer tout dplacement U sur cette base :
o yi(t) joue le rle de coordonne gnralise et Di le rle de fonction de forme du dplacement. En Reportant l'quation la dcomposition de U dans lquation gnrale du mouvement et en pr multipliant par les deux membres de l'quation, il vient :
266
Tenant alors compte de la proprit d'orthogonalit, lquation ci dessous
En dfinissant les quantits suivantes : masse gnralise rigidit gnralise chargement gnralis
devient : On reconnat l'quation d'quilibre dynamique de l'oscillateur simple un degr de libert.267
Ainsi, l'utilisation de la base modale a permis la transformation du systme de N quations diffrentielles couples en N quations diffrentielles dcouples avec j=1,...,N). La solution yi de chacune de ces quations est obtenue par les techniques exposes prcdemment (intgrale de Duhamel, transformation de Fourier) et la solution gnrale est donne par l'quation.
268
Calcul des efforts Une fois les dplacements U dtermins, les efforts dans la structure s'obtiennent par : F=KU soit pour chaque mode propre : Tenant compte du fait que Dj est un vecteur propre: Ce qui peut galement s'crire : La rsultante globale des efforts rsulte de la superposition de tous les modes :
269
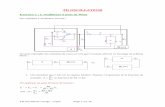
Exercice 1Considrons le portique plan ci-dessous pour lequel on admettra que les planchers sont infiniment rigides dans leur plan pour autoriser la modlisation de la structure par un modle brochette. Supposons de plus, titre de simplification, que les poteaux possdent une grande raideur axiale et de flexion. Dans ces conditions, les seuls dplacements possibles des nuds sont les translations horizontales. Le systme de la figure possde trois degrs de libert (3 noeuds x 1 dplacement possible). Les valeurs de raideur des poteaux et de masses sont indiques sur la figure. Dterminez les vibrations libres non amorties du systme en prenant comme condition initiale u1=u2=u3=0,5 Dterminez les quations dcouples de vibrations forces non amorties du systme en considrant que les 3 masses m1 m2 et m3 sont soumises respectivement trois efforts p1(t), p2(t) et p3(t).
270
Retrouvons la matrice de rigidit lmentaire dune console partir de la matrice lmentaire dune poutre bi encastre. EA 0 l 12 EI 0 l3 6 EI 0 l2 EA 0 l = 12EI 3 0 l 6 EI 0 l2 0 6 EI l2 4 EI l 0 6 EI l2 EA l 0 0 EA l 0 0 12 EI l3 6 EI 2 l 0 12 EI l3 6 EI l2 6 EI l2 2 EI l 0 6 EI 2 l 4 EI l 0
K IJ
2 EI l
0
On ne sintresse quaux forces suivant y et aux dplacements suivant y. On ne conserve donc que les 2 me et 5 me lignes et les 2 emes et 5 emes colonnes.
271
On ne conserve que les 2 me et 5 me lignes et les 2 emes et 5 emes colonnes et on obtient la matrice lmentaire cherche. =
12 EI l3
12 EI l3
K IJ
12 EI l3
12 EI l3
12
EI l3
notons la raideur des poteaux k =
272
Assemblons les matrices de rigidit lmentaires pour obtenir la matrice de rigidit de la structure: k -k -k k
Kij =
k -k K=
-k kk -k -k kk -k -k k
u1 u2 u3u4 =0
u4 tant nul, on supprime la 4eme ligne et la 4eme colonne.273
Avec les valeurs numriques de k et de m, on obtient:
274
Les frquences propres du systme sont solutions de:
275
A chaque valeur propre i est associ un vecteur propre Di solution de l'quation
Les vecteurs propres tant connus une constante prs, on prend arbitrairement la premire composante de chaque vecteur propre gale 1 et on trouve:
D1 = [1 ; 0,644 ; 0,396] D2 = [1 ; -0,601 ; -0,676] D3 = [1 ; -2,57 ; 2,47]
276
La forme dveloppe de lquation gnrale du mouvement devient:
Les quations diffrentielles sont lies, on a besoin de les dcoupler en utilisant les modes propres du systeme:
277
On cherche les grandeurs gnralises mj, kj et Pj
D1 = [1 ; 0,644 ; 0,396] D2 = [1 ; -0,601 ; 0,676] D3 = [1 ; -2,57 ; 2,47]
Les grandeurs gnralises mi et ki valent : m1=1.802, m2=2.456, m3=23.109 k1=380.045, k2=2367.227, k3=49110.480
278
Dans la base des vecteurs propres, les quations diffrentielles deviennent:
On reconnat les quations de trois oscillateurs simples que l on sait rsoudre. Il nous reste plus qu a retourner dans la base u1,u2, u3.
279
La rponse temporelle du systme, cause par l'application d'un dplacement initial, damplitude d = [0.5 0.5 0.5] correspond la somme des rponses de chaque mode reprsente. On trace ci dessous le dplacement du nud 2.
280
U1(t)
281
U2(t)
282
U3(t)
283