







Langages
Pages
Légal

Synthèse logique séquentielle
-FIPMECA 1-
Table des matièresI. Introduction.......................................................................................................................... 5
I.1. La variable "secondaire" ou "interne"............................................................................ 6
I.2. L'intérêt de l'introduction d'une variable secondaire illustré avec un système d'auto-maintien.............................................................................................................................. 6
I.3. Les fonctions mémoires................................................................................................ 7
I.3.1. La bascule RS :..................................................................................................... 7
I.3.2. La bascule D......................................................................................................... 8
I.3.3. La bascule JK........................................................................................................ 9
I.4. Les deux catégories de systèmes séquentiels............................................................ 10
I.4.1. Systèmes séquentielles asynchrones ................................................................ 10
I.4.2. Systèmes séquentielles synchrones .................................................................. 10
II. La modélisation des systèmes séquentiels....................................................................... 11
II.1. Le graphe de fluence................................................................................................. 11
II.2. Le tableau d'état........................................................................................................ 12
II.3. Le réseau de Pétri..................................................................................................... 12
II.3.1. Representation graphique ................................................................................. 12
II.3.3. Evolution temporelle d'un réseau de Pétri.......................................................... 13
II.3.5. Les règles générales d’évolution temporelle d’un réseau de Pétri...................... 14
II.4. Le GRAFCET............................................................................................................. 14
III. GRAFCET : notions de base............................................................................................ 15
III.1. Définition du GRAFCET............................................................................................ 15
III.2. Historique du GRAFCET........................................................................................... 15
III.3. Les deux principaux points de vue :.......................................................................... 15
partie opérative: GRAFCET fonctionnel ou de niveau I ............................................... 15
partie commande : GRAFCET technologique ou de niveau II...................................... 15
sur un exemple, la fraiseuse........................................................................................ 16
III.4. Les notions essentielles............................................................................................ 17
III.4.1. L'étape.............................................................................................................. 17
III.4.2. L'action.............................................................................................................. 17
III.4.3. La transition....................................................................................................... 19
III.4.4. La réceptivité..................................................................................................... 20
III.4.5. Schéma récapitulatif de la symbolisation GRAFCET......................................... 20
IV. GRAFCET : Règles d'évolution et notions complémentaires........................................... 21
IV.1. Les règles d'évolution............................................................................................... 21
Règle 1 : La situation initiale........................................................................................ 21
Règle 2 : Franchissement d'une transition .................................................................. 21
Règle 3 : Evolution des étapes actives ........................................................................ 22
Règle 4 : Evolution simultanée .................................................................................... 22
Règle 5 : Activation et désactivation simultanée d'une étape ...................................... 22
IV.2. La séquence............................................................................................................. 23
IV.3. La sélection de séquence ou l'aiguillage.................................................................. 23
IV.4. Les séquences simultanées ou le parallélisme......................................................... 24
V. GRAFCET : Notions avancées......................................................................................... 26
V.1. La sélection exclusive, le partage de ressources ou la sémaphore........................... 26
V.2. La synchronisation avancée...................................................................................... 27
Synchronisation avec étapes d'attentes....................................................................... 28
Parallélisme de synchronisation................................................................................... 28
Synchronisme de franchissement ............................................................................... 28
Grafcet de diallogue en Appel/Réponse....................................................................... 28
Deux types d'autorisation en Appel/Réponse............................................................... 28
V.3. Notions de maître et d'esclave ................................................................................. 29
V.3.1. Macro-étapes..................................................................................................... 29
V.3.2. Macro-tâches..................................................................................................... 30
V.3.3. Le grafcet partiel................................................................................................ 31
V.3.4. Le forcage.......................................................................................................... 31
VI. GRAFCET : Mise en œuvre............................................................................................. 32
VI.1. Mise en équation d'une étape................................................................................... 32
VI.2. Câblage d'une étape par portes logiques................................................................. 32
VI.3. Câblage d'une étape par bascules RS..................................................................... 33
VI.4. Utilisation de séquenceurs électriques..................................................................... 33
VI.5. Utilisation de séquenceurs pneumatiques................................................................ 34
VI.6. Utilisation des automates programmables................................................................ 34
VI.7. Critères de choix de technologies............................................................................. 35

I. Introduction
La différence essentielle entre les sytèmes combinatoires et les systèmes séquentiels réside dans le fait que la fonction de sortie de ces derniers dépend à la fois des variables d'entrée et du temps. Le notion de temps introduite peut présenter deux aspects :
• celui de l'ordre dans lequel les opérations se déroulent, • celui de la durée de chaque opération.
C'est surtout la première notion à laquelle on fait appel pour étudier les circuits séquentiels. Pour appréhender un tel système, il convient de mettre en évidence l'ordre de succession des opérations, autrement dit les séquences des opérations. Les 2 conséquences immédiates de ces considérations sont: l'introduction à côté des variables bolléennes classiques dite "primaires", des variables internes ou secondaires traduisant l'état du système à un instant donné; et l'ajout de fonctions mémoires à la panoplie des fonctions logiques de bases (ET, OU, NON,...) pour garder la trace des sorties précédentes et imposer un ordre prédéterminé.
Source : Lagasse, J., 1969, Logique Combinatoire et séquentielle, Maîtrise d'EEA, C3-Automatique, Dunod, Paris.
I.1. La variable "secondaire" ou "interne"
Dans la logique séquentielle, la connaissance des variables d’entrées ne suffit pas à déterminer la valeur de la sortie car des variables secondaires interviennent : ces variables évoluent au cours du temps et traduisent l’état du système.
Source : http://comelec.enst.fr/tpsp/eni/poly/enich6.html
I.2. L'intérêt de l'introduction d'une variable secondaire illustré avec un système d'auto-maintien
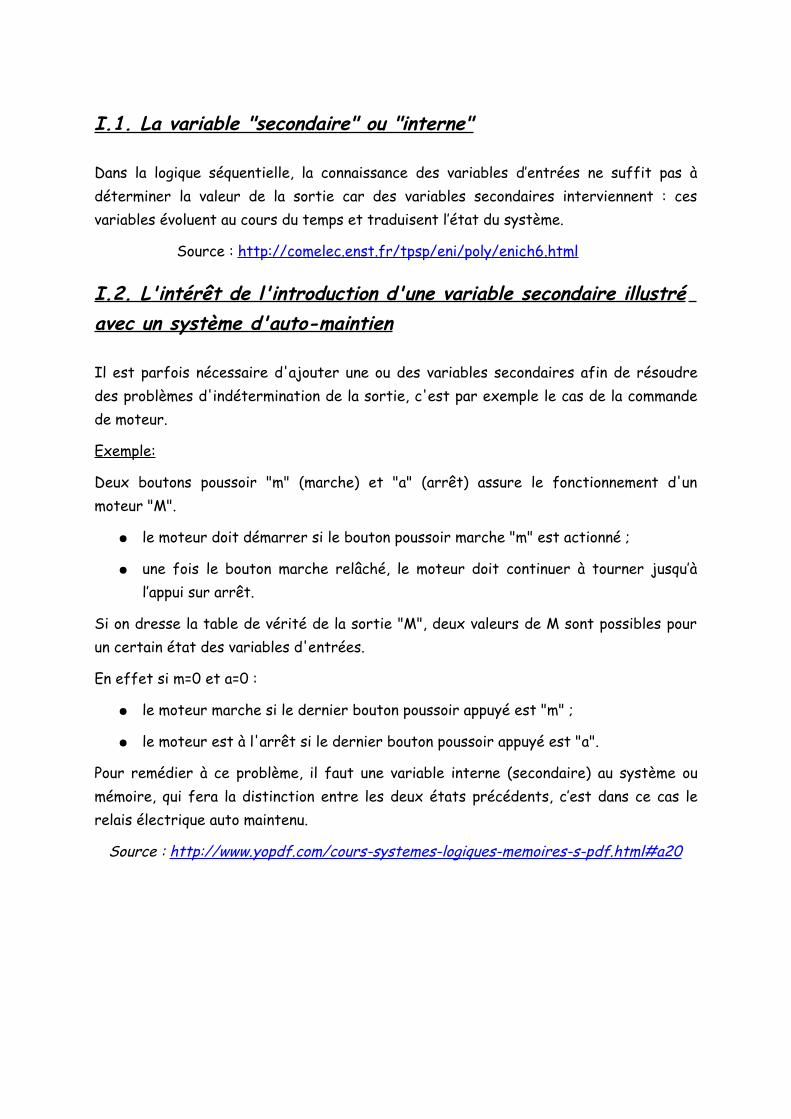
Il est parfois nécessaire d'ajouter une ou des variables secondaires afin de résoudre des problèmes d'indétermination de la sortie, c'est par exemple le cas de la commande de moteur.
Exemple:
Deux boutons poussoir "m" (marche) et "a" (arrêt) assure le fonctionnement d'un moteur "M".
● le moteur doit démarrer si le bouton poussoir marche "m" est actionné ;
● une fois le bouton marche relâché, le moteur doit continuer à tourner jusqu’à l’appui sur arrêt.
Si on dresse la table de vérité de la sortie "M", deux valeurs de M sont possibles pour un certain état des variables d'entrées.
En effet si m=0 et a=0 :
● le moteur marche si le dernier bouton poussoir appuyé est "m" ;
● le moteur est à l'arrêt si le dernier bouton poussoir appuyé est "a".
Pour remédier à ce problème, il faut une variable interne (secondaire) au système ou mémoire, qui fera la distinction entre les deux états précédents, c’est dans ce cas le relais électrique auto maintenu.
Source : http://www.yopdf.com/cours-systemes-logiques-memoires-s-pdf.html#a20
I.3. Les fonctions mémoires
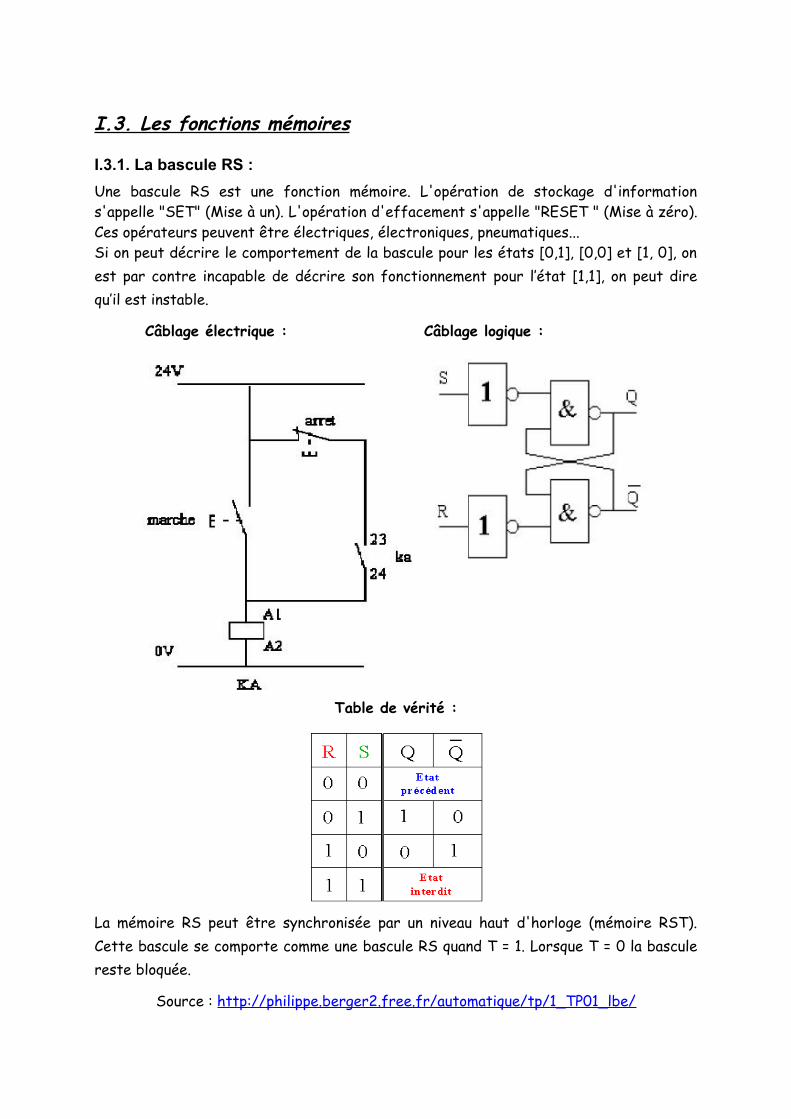
I.3.1. La bascule RS :Une bascule RS est une fonction mémoire. L'opération de stockage d'information s'appelle "SET" (Mise à un). L'opération d'effacement s'appelle "RESET " (Mise à zéro). Ces opérateurs peuvent être électriques, électroniques, pneumatiques...Si on peut décrire le comportement de la bascule pour les états [0,1], [0,0] et [1, 0], on est par contre incapable de décrire son fonctionnement pour l’état [1,1], on peut dire qu’il est instable.
Câblage électrique : Câblage logique :
Table de vérité :
La mémoire RS peut être synchronisée par un niveau haut d'horloge (mémoire RST). Cette bascule se comporte comme une bascule RS quand T = 1. Lorsque T = 0 la bascule reste bloquée.
Source : http://philippe.berger2.free.fr/automatique/tp/1_TP01_lbe/
I.3.2. La bascule DLe fonctionnement en bascule D, est un fonctionnement synchrone.
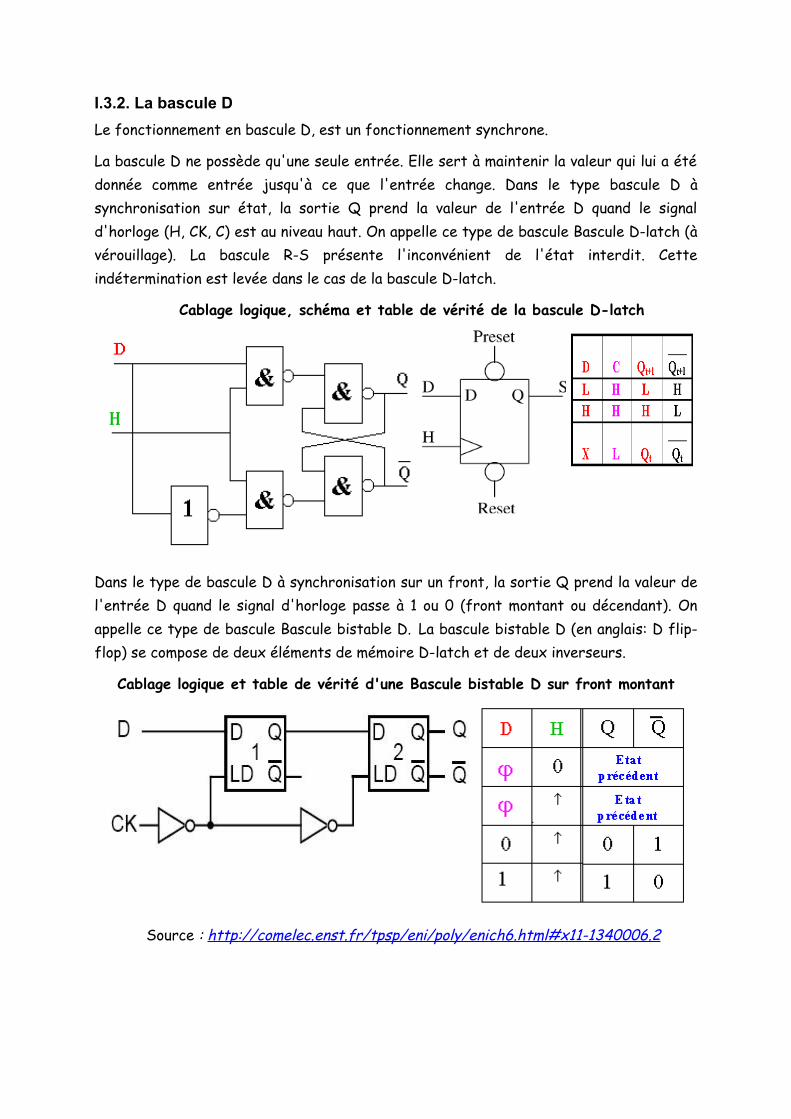
La bascule D ne possède qu'une seule entrée. Elle sert à maintenir la valeur qui lui a été donnée comme entrée jusqu'à ce que l'entrée change. Dans le type bascule D à synchronisation sur état, la sortie Q prend la valeur de l'entrée D quand le signal d'horloge (H, CK, C) est au niveau haut. On appelle ce type de bascule Bascule D-latch (à vérouillage). La bascule R-S présente l'inconvénient de l'état interdit. Cette indétermination est levée dans le cas de la bascule D-latch.
Cablage logique, schéma et table de vérité de la bascule D-latch
Dans le type de bascule D à synchronisation sur un front, la sortie Q prend la valeur de l'entrée D quand le signal d'horloge passe à 1 ou 0 (front montant ou décendant). On appelle ce type de bascule Bascule bistable D. La bascule bistable D (en anglais: D flip-flop) se compose de deux éléments de mémoire D-latch et de deux inverseurs.
Cablage logique et table de vérité d'une Bascule bistable D sur front montant
Source : http://comelec.enst.fr/tpsp/eni/poly/enich6.html#x11-1340006.2
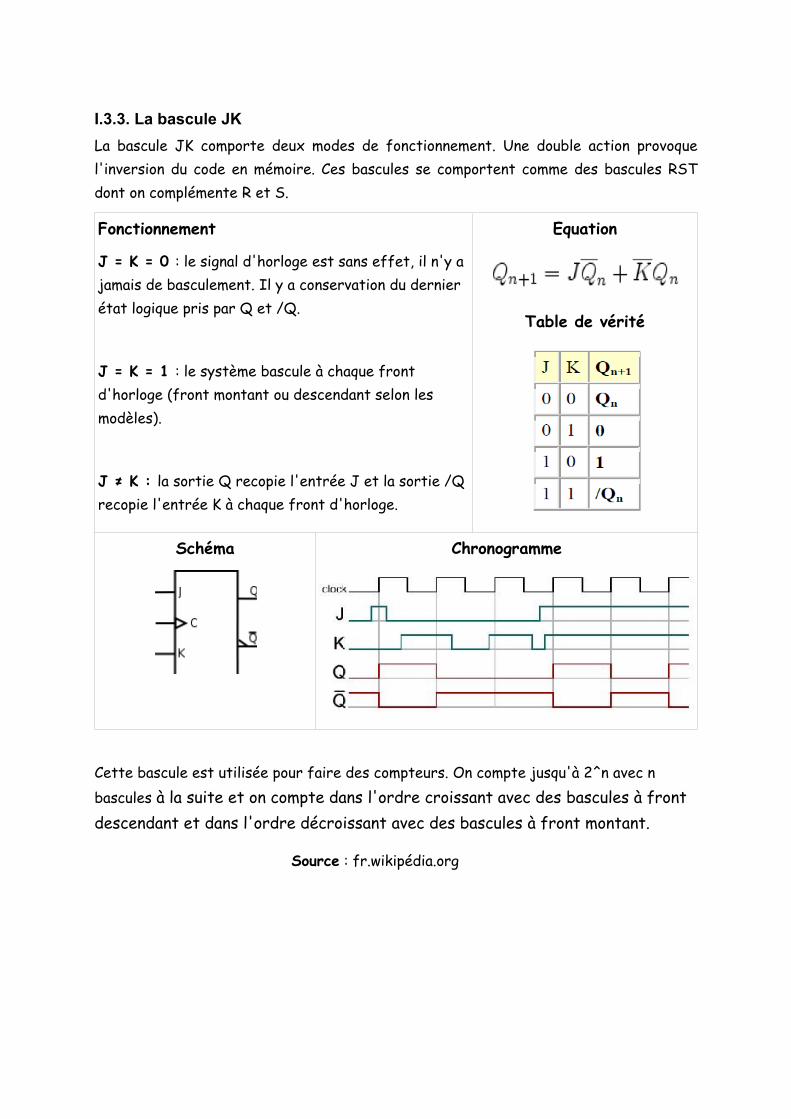
I.3.3. La bascule JKLa bascule JK comporte deux modes de fonctionnement. Une double action provoque l'inversion du code en mémoire. Ces bascules se comportent comme des bascules RST dont on complémente R et S.
Fonctionnement
J = K = 0 : le signal d'horloge est sans effet, il n'y a jamais de basculement. Il y a conservation du dernier état logique pris par Q et /Q.
J = K = 1 : le système bascule à chaque front d'horloge (front montant ou descendant selon les modèles).
J ≠ K : la sortie Q recopie l'entrée J et la sortie /Q recopie l'entrée K à chaque front d'horloge.
Equation
Table de vérité
Schéma Chronogramme
Cette bascule est utilisée pour faire des compteurs. On compte jusqu'à 2^n avec n bascules à la suite et on compte dans l'ordre croissant avec des bascules à front descendant et dans l'ordre décroissant avec des bascules à front montant.
Source : fr.wikipédia.org
I.4. Les deux catégories de systèmes séquentielsLes systèmes logiques peuvent être synchrones ou asynchrones.
I.4.1. Systèmes séquentielles asynchrones On distingue les circuits séquentiels asynchrones pour lesquels il n’existe pas de référence de temps, c'est-à-dire que l’action des entrées est prise en compte dès leur changement d’état.
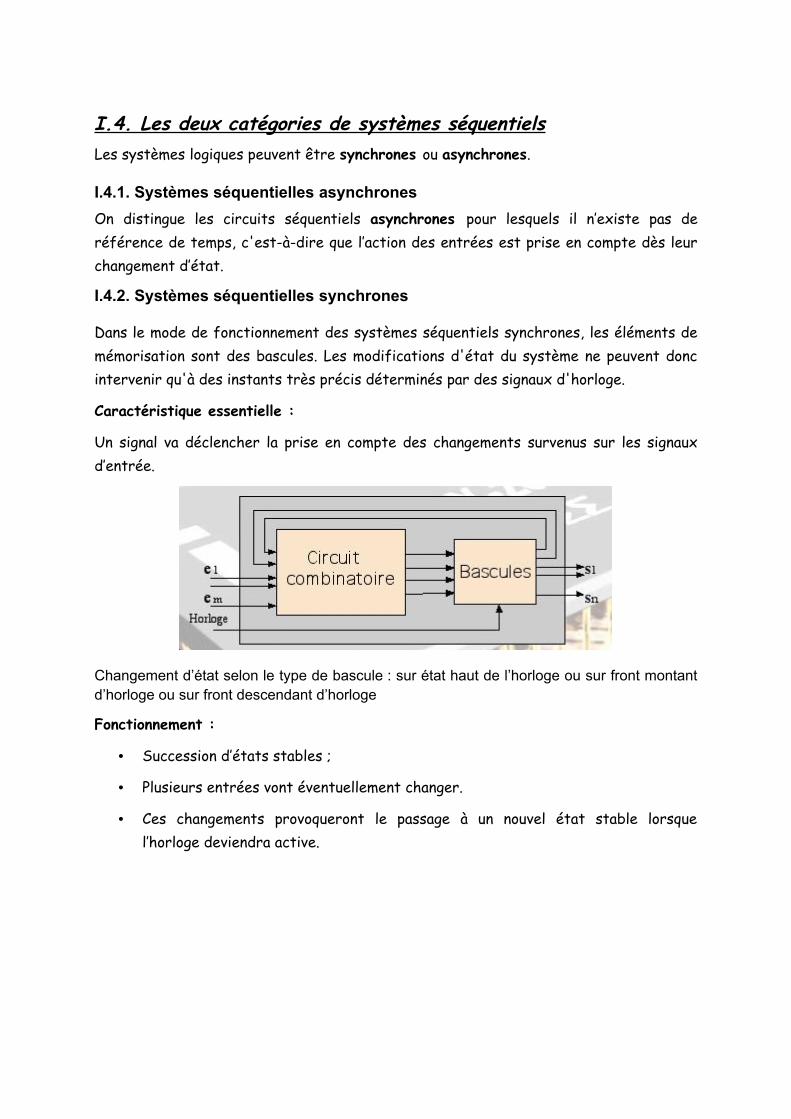
I.4.2. Systèmes séquentielles synchrones
Dans le mode de fonctionnement des systèmes séquentiels synchrones, les éléments de mémorisation sont des bascules. Les modifications d'état du système ne peuvent donc intervenir qu'à des instants très précis déterminés par des signaux d'horloge.
Caractéristique essentielle :
Un signal va déclencher la prise en compte des changements survenus sur les signaux d’entrée.
Changement d’état selon le type de bascule : sur état haut de l’horloge ou sur front montant d’horloge ou sur front descendant d’horloge
Fonctionnement :
• Succession d’états stables ;
• Plusieurs entrées vont éventuellement changer.
• Ces changements provoqueront le passage à un nouvel état stable lorsque l’horloge deviendra active.
II. La modélisation des systèmes séquentielsA partir du cahier des charges décrivant le fonctionnement désiré du système à automatiser, il est recommandé de le traduire en un formalisme ne permettant aucune erreur d'interprétation. Ce formalisme dépend du type de modélisation que l'on applique au système désiré. Les modèles ainsi obtenus permettent d'analyser et de valider le cahier des charges et ainsi d'orienter l'élaboration matérielle de la commande du système à automatiser.
II.1. Le graphe de fluence
C’est une traduction graphique du cahier des charges.
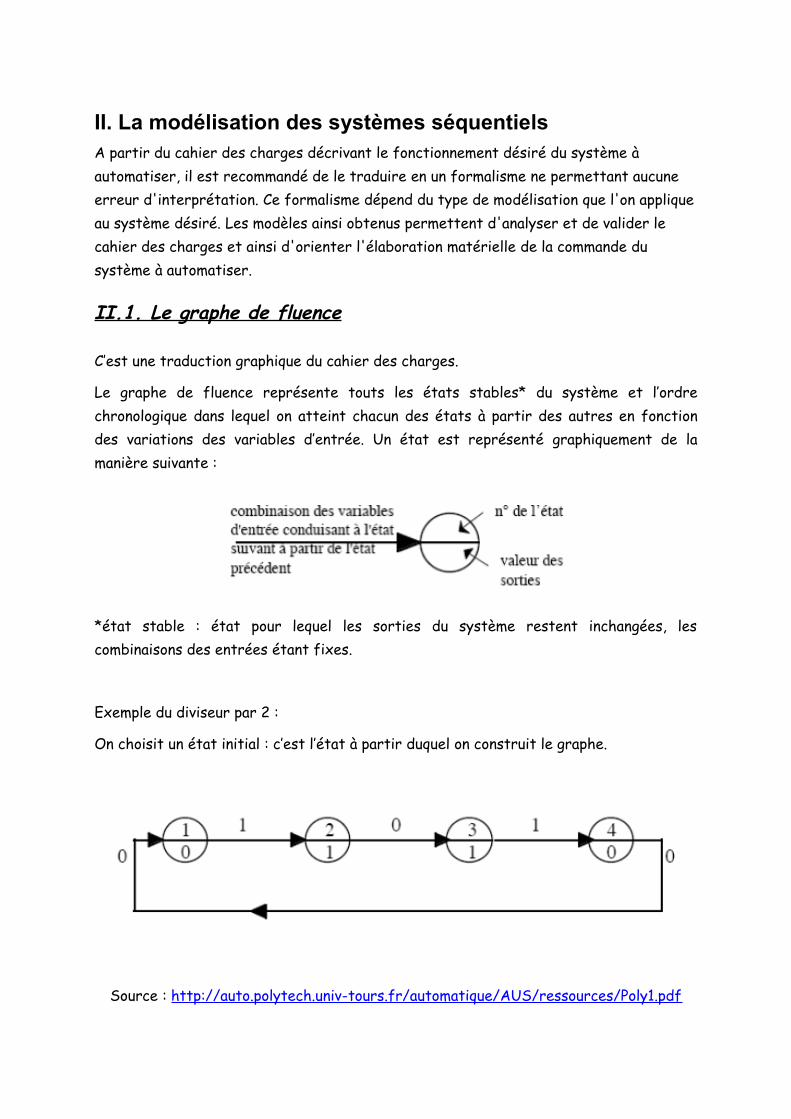
Le graphe de fluence représente touts les états stables* du système et l’ordre chronologique dans lequel on atteint chacun des états à partir des autres en fonction des variations des variables d’entrée. Un état est représenté graphiquement de la manière suivante :
*état stable : état pour lequel les sorties du système restent inchangées, les combinaisons des entrées étant fixes.
Exemple du diviseur par 2 :
On choisit un état initial : c’est l’état à partir duquel on construit le graphe.
Source : http://auto.polytech.univ-tours.fr/automatique/AUS/ressources/Poly1.pdf

II.2. Le tableau d'état
Les colonnes de ce tableau Correspondent aux combinaisons des variables d'entrée du système. Les lignes correspondent aux différents états.
Les valeurs des sorties sont associées à chaque état.
Exemple:
Les chiffres en gras correspondent aux états stables du système. Les autres correspondent aux états transitoires, c'est-à-dire au passage d'un état stable vers l'état stable suivant. Cette transition est provoquée par la variation de l'entrée.
L'évolution se fait toujours horizontalement puis verticalement.
Source : http://auto.polytech.univ--‐tours.fr/automatique/AUS/ressources/Poly1.pdf
II.3. Le réseau de Pétri
II.3.1. Representation graphique Les places Pi et les transitions Ti d'un réseau de Pétri, en nombre fini et non nul, sont reliées par des arcs orientés. Un réseau de Pétri est dit graphe biparti alterné, c'est-à-dire qu'il y a alternance des types de noeuds : tout arc, qui doit obligatoirement avoir un noeud à chacune de ses extrémités, relie soit une place à une transition soit une transition à une place.
Exemple de réseau de Pétri comportant 7 places, 6 transitions et 15 arcs orientés
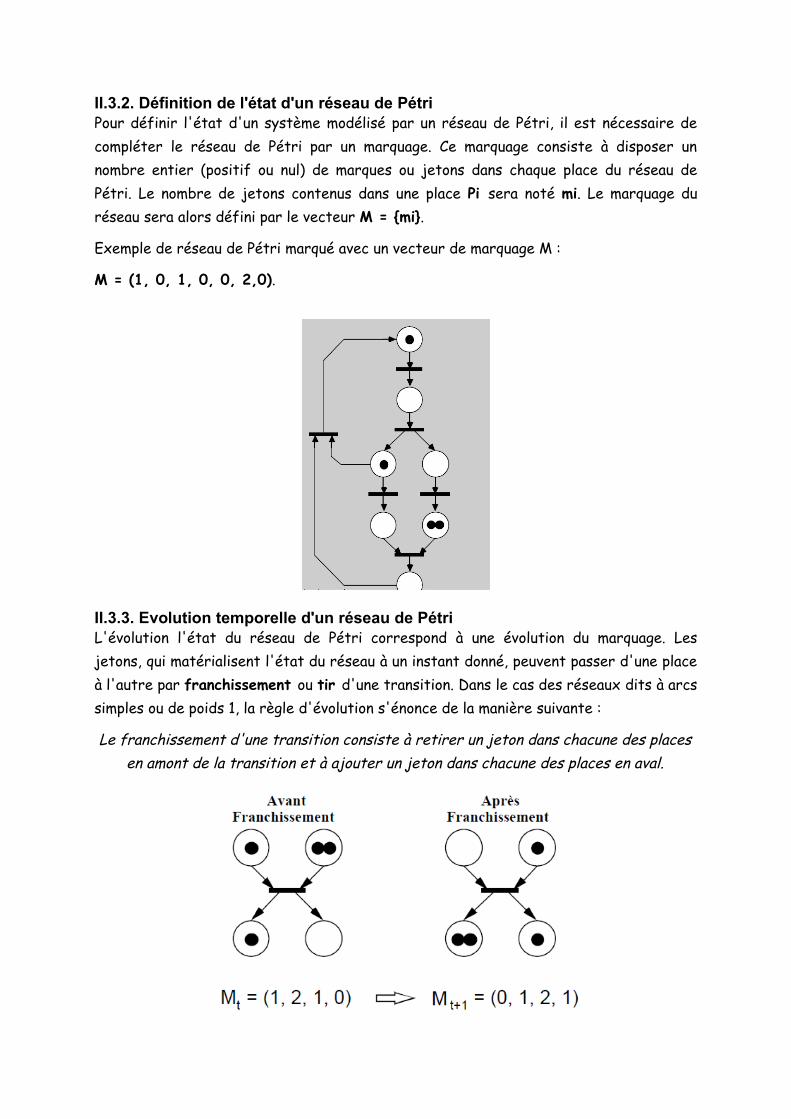
II.3.2. Définition de l'état d'un réseau de PétriPour définir l'état d'un système modélisé par un réseau de Pétri, il est nécessaire de compléter le réseau de Pétri par un marquage. Ce marquage consiste à disposer un nombre entier (positif ou nul) de marques ou jetons dans chaque place du réseau de Pétri. Le nombre de jetons contenus dans une place Pi sera noté mi. Le marquage du réseau sera alors défini par le vecteur M = {mi}.
Exemple de réseau de Pétri marqué avec un vecteur de marquage M :
M = (1, 0, 1, 0, 0, 2,0).
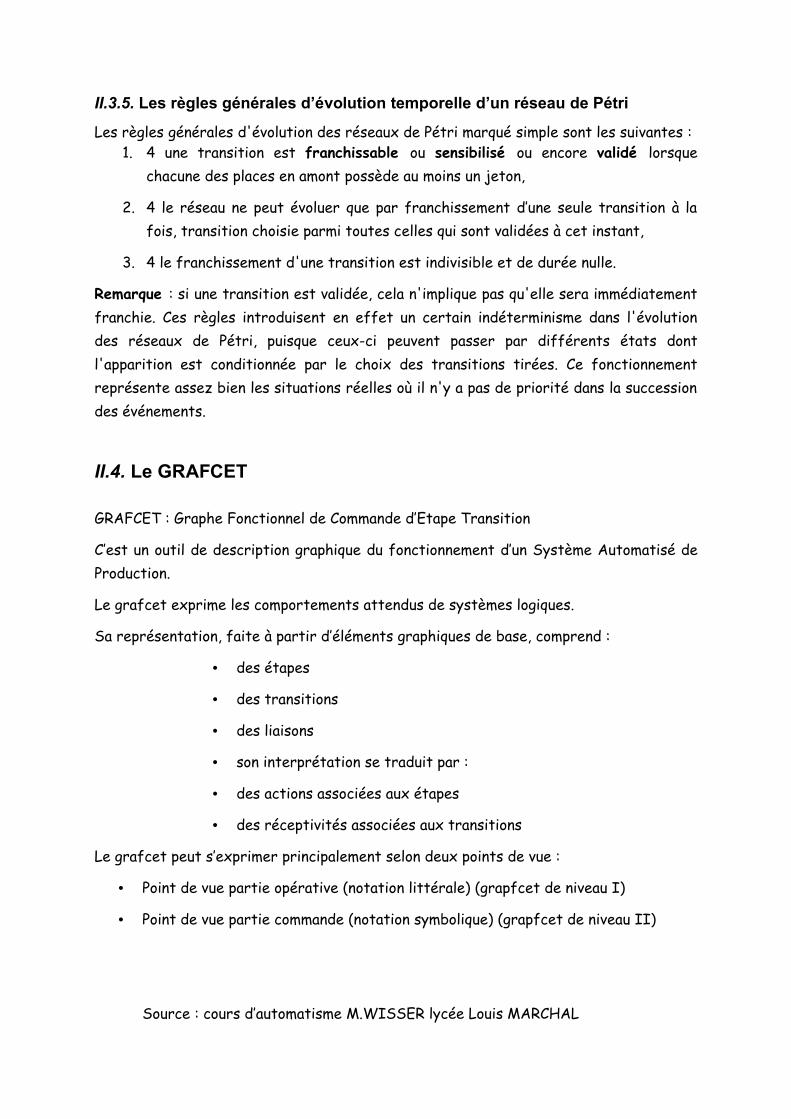
II.3.3. Evolution temporelle d'un réseau de PétriL'évolution l'état du réseau de Pétri correspond à une évolution du marquage. Les jetons, qui matérialisent l'état du réseau à un instant donné, peuvent passer d'une place à l'autre par franchissement ou tir d'une transition. Dans le cas des réseaux dits à arcs simples ou de poids 1, la règle d'évolution s'énonce de la manière suivante :
Le franchissement d'une transition consiste à retirer un jeton dans chacune des places en amont de la transition et à ajouter un jeton dans chacune des places en aval.
II.3.5. Les règles générales d’évolution temporelle d’un réseau de Pétri
Les règles générales d'évolution des réseaux de Pétri marqué simple sont les suivantes :1. 4 une transition est franchissable ou sensibilisé ou encore validé lorsque
chacune des places en amont possède au moins un jeton,
2. 4 le réseau ne peut évoluer que par franchissement d’une seule transition à la fois, transition choisie parmi toutes celles qui sont validées à cet instant,
3. 4 le franchissement d'une transition est indivisible et de durée nulle.
Remarque : si une transition est validée, cela n'implique pas qu'elle sera immédiatement franchie. Ces règles introduisent en effet un certain indéterminisme dans l'évolution des réseaux de Pétri, puisque ceux-ci peuvent passer par différents états dont l'apparition est conditionnée par le choix des transitions tirées. Ce fonctionnement représente assez bien les situations réelles où il n'y a pas de priorité dans la succession des événements.
II.4. Le GRAFCET
GRAFCET : Graphe Fonctionnel de Commande d’Etape Transition
C’est un outil de description graphique du fonctionnement d’un Système Automatisé de Production.
Le grafcet exprime les comportements attendus de systèmes logiques.
Sa représentation, faite à partir d’éléments graphiques de base, comprend :
• des étapes
• des transitions
• des liaisons
• son interprétation se traduit par :
• des actions associées aux étapes
• des réceptivités associées aux transitions
Le grafcet peut s’exprimer principalement selon deux points de vue :
• Point de vue partie opérative (notation littérale) (grapfcet de niveau I)
• Point de vue partie commande (notation symbolique) (grapfcet de niveau II)
Source : cours d’automatisme M.WISSER lycée Louis MARCHAL
III. GRAFCET : notions de baseIII.1. Définition du GRAFCET
Le GRAFCET (GRAphe Fonctionnel de Commande des étapes et Transitions) est l'outil de représentation graphique d'un cahier des charges.
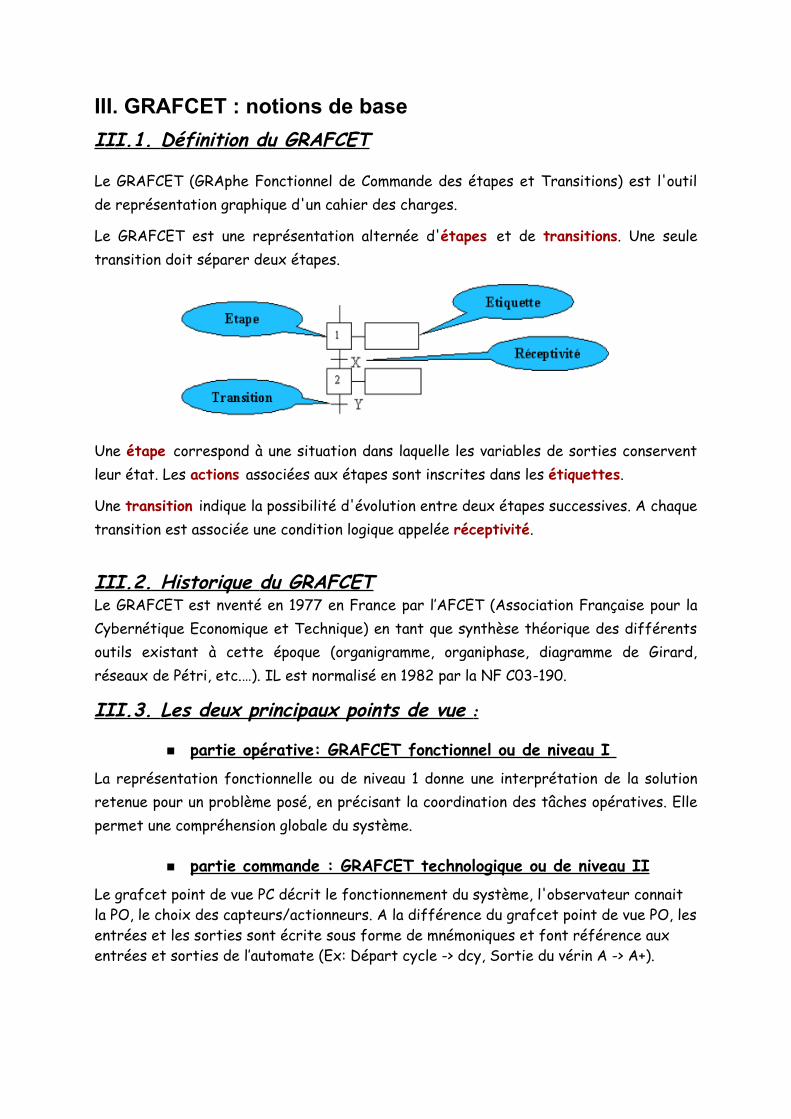
Le GRAFCET est une représentation alternée d'étapes et de transitions. Une seule transition doit séparer deux étapes.
Une étape correspond à une situation dans laquelle les variables de sorties conservent leur état. Les actions associées aux étapes sont inscrites dans les étiquettes.
Une transition indique la possibilité d'évolution entre deux étapes successives. A chaque transition est associée une condition logique appelée réceptivité.
III.2. Historique du GRAFCET Le GRAFCET est nventé en 1977 en France par l’AFCET (Association Française pour la Cybernétique Economique et Technique) en tant que synthèse théorique des différents outils existant à cette époque (organigramme, organiphase, diagramme de Girard, réseaux de Pétri, etc.…). IL est normalisé en 1982 par la NF C03-190.
III.3. Les deux principaux points de vue :
■ partie opérative: GRAFCET fonctionnel ou de niveau I
La représentation fonctionnelle ou de niveau 1 donne une interprétation de la solution retenue pour un problème posé, en précisant la coordination des tâches opératives. Elle permet une compréhension globale du système.
■ partie commande : GRAFCET technologique ou de niveau II
Le grafcet point de vue PC décrit le fonctionnement du système, l'observateur connait la PO, le choix des capteurs/actionneurs. A la différence du grafcet point de vue PO, les entrées et les sorties sont écrite sous forme de mnémoniques et font référence aux entrées et sorties de l’automate (Ex: Départ cycle -> dcy, Sortie du vérin A -> A+).
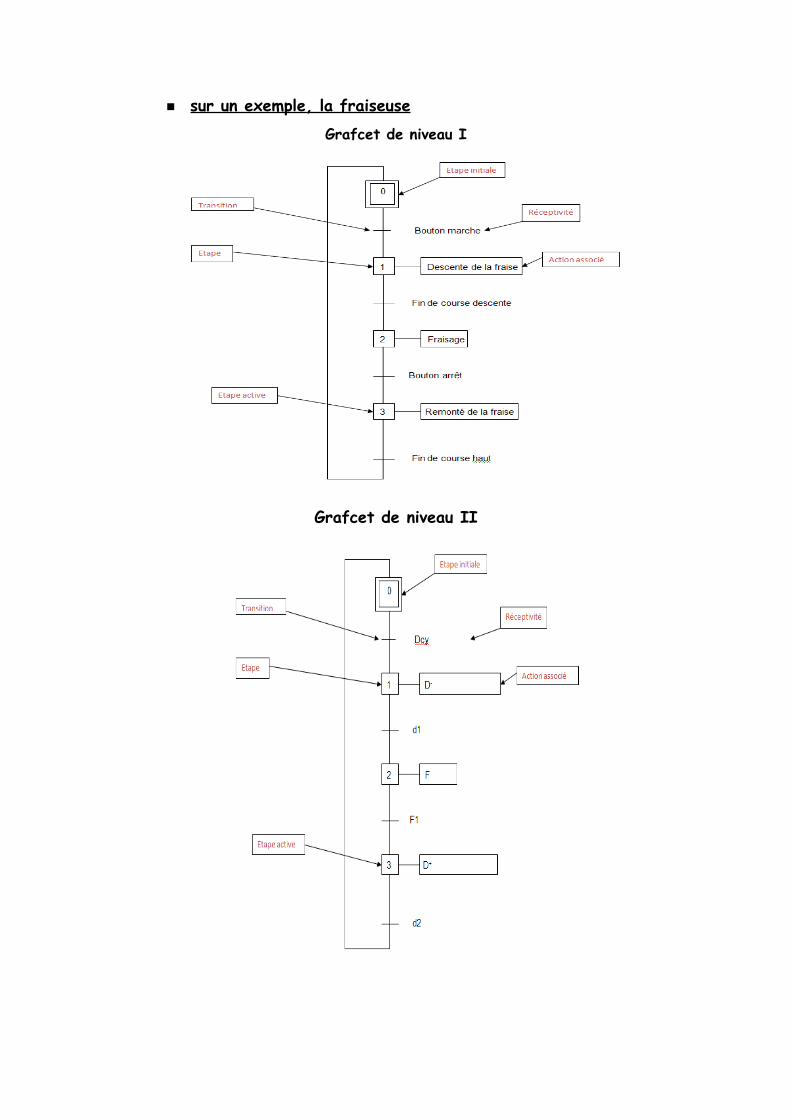
■ sur un exemple, la fraiseuse
Grafcet de niveau I
Grafcet de niveau II

III.4. Les notions essentielles
III.4.1. L'étapeUne ETAPE correspond à une phase durant laquelle on effectue une ACTION pendant une certaine DUREE (même faible mais jamais nulle).
On représente chaque étape par un carré, l'action est représentée dans un rectangle à droite, l'entrée se fait par le haut et la sortie par le bas. On numérote chaque étape par un entier positif.
Source : http://www-- ‐ ipst.u-- ‐ strasbg.fr/pat/autom/grafcet.htm
III.4.2. L'actionLes actions associées à une étape sont inscrites dans un rectangle d’action de façon à mettre en évidence ce qui s’exécute lorsque cette étape est active. Souvent, il s’agira de commande d’actionneurs (vérins, moteurs, …), de commande de fonctions auxiliaires d’automates (compteur, tempos, …)ou de déscription des liens avec d’autres systèmes logiques ou analogiques (changement de vitesse moteur par exemple).
Action continue : L’action n’est effectuée que pendant l’activation de l’étape
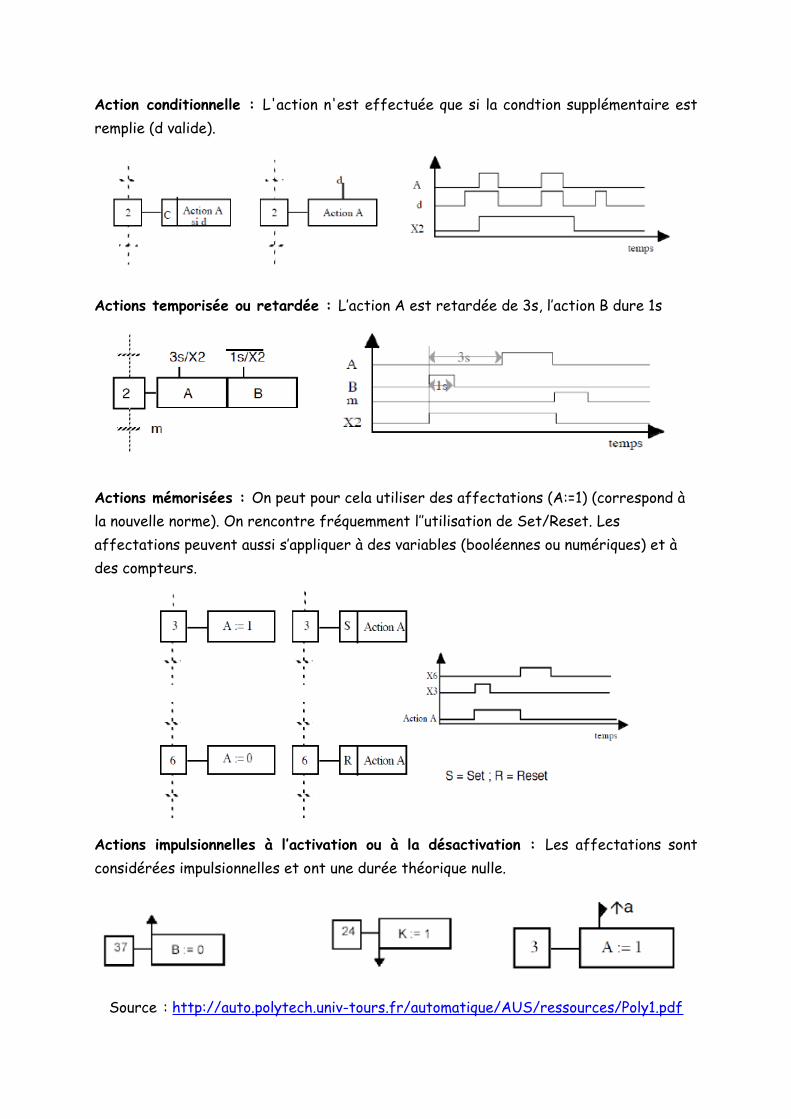
Action conditionnelle : L'action n'est effectuée que si la condtion supplémentaire est remplie (d valide).
Actions temporisée ou retardée : L’action A est retardée de 3s, l’action B dure 1s
Actions mémorisées : On peut pour cela utiliser des affectations (A:=1) (correspond à la nouvelle norme). On rencontre fréquemment l’’utilisation de Set/Reset. Les affectations peuvent aussi s’appliquer à des variables (booléennes ou numériques) et à des compteurs.
Actions impulsionnelles à l’activation ou à la désactivation : Les affectations sont considérées impulsionnelles et ont une durée théorique nulle.
Source : http://auto.polytech.univ-tours.fr/automatique/AUS/ressources/Poly1.pdf
III.4.3. La transitionUne transition indique la possibilité de passer d'une étape à l'étape suivante. A chaque transition on associe une, ou des conditions logiques (booléennes) qui traduisent la notion de réceptivité.
La réceptivité est une fonction combinatoire d'informations booléennes représentant l’état de capteurs, l’impulsion sur un bouton poussoir, l’action d'un temporisateur, d'un compteur, l’état actif ou inactif d'autres étapes, etc.
Si cette réceptivité est vrai, la transition est validé on passe donc à l’étape suivante.
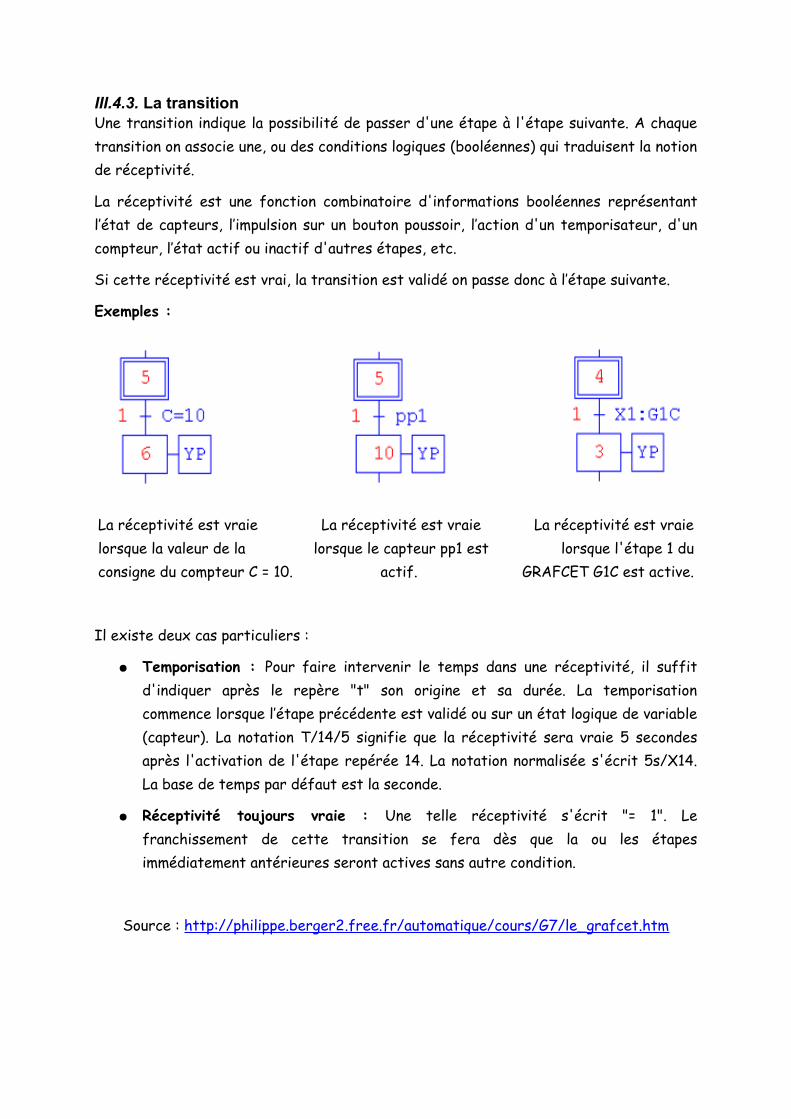
Exemples :
La réceptivité est vraie lorsque la valeur de la consigne du compteur C = 10.
La réceptivité est vraie lorsque le capteur pp1 est
actif.
La réceptivité est vraie lorsque l'étape 1 du
GRAFCET G1C est active.
Il existe deux cas particuliers :
● Temporisation : Pour faire intervenir le temps dans une réceptivité, il suffit d'indiquer après le repère "t" son origine et sa durée. La temporisation commence lorsque l’étape précédente est validé ou sur un état logique de variable (capteur). La notation T/14/5 signifie que la réceptivité sera vraie 5 secondes après l'activation de l'étape repérée 14. La notation normalisée s'écrit 5s/X14. La base de temps par défaut est la seconde.
● Réceptivité toujours vraie : Une telle réceptivité s'écrit "= 1". Le franchissement de cette transition se fera dès que la ou les étapes immédiatement antérieures seront actives sans autre condition.
Source : http://philippe.berger2.free.fr/automatique/cours/G7/le_grafcet.htm
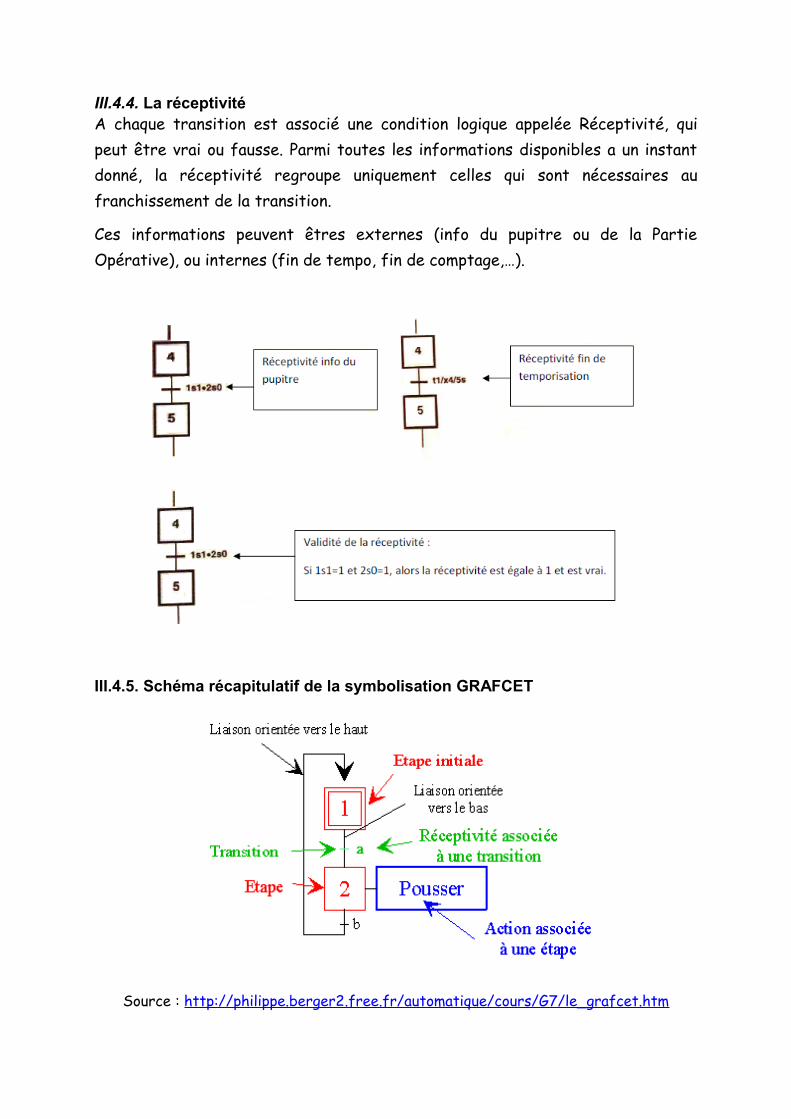
III.4.4. La réceptivitéA chaque transition est associé une condition logique appelée Réceptivité, qui peut être vrai ou fausse. Parmi toutes les informations disponibles a un instant donné, la réceptivité regroupe uniquement celles qui sont nécessaires au franchissement de la transition.
Ces informations peuvent êtres externes (info du pupitre ou de la Partie Opérative), ou internes (fin de tempo, fin de comptage,…).
III.4.5. Schéma récapitulatif de la symbolisation GRAFCET
Source : http://philippe.berger2.free.fr/automatique/cours/G7/le_grafcet.htm
IV. GRAFCET : Règles d'évolution et notions complémentairesIV.1. Les règles d'évolution
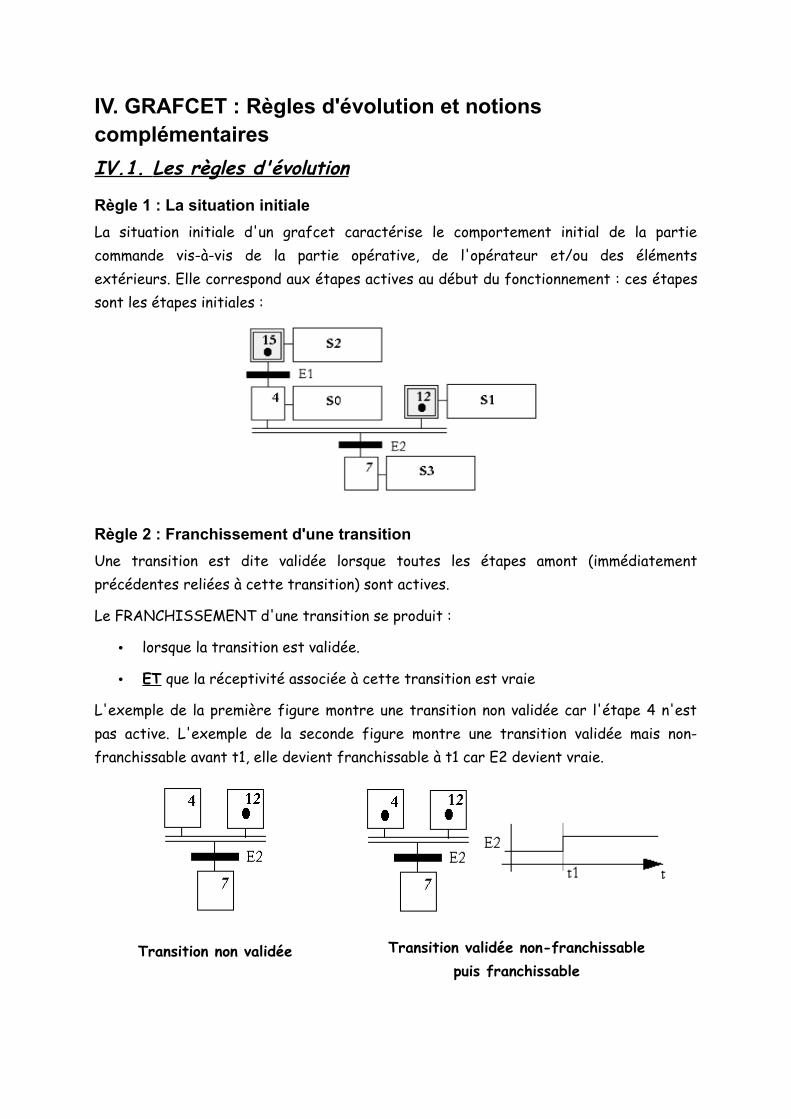
Règle 1 : La situation initialeLa situation initiale d'un grafcet caractérise le comportement initial de la partie commande vis-à-vis de la partie opérative, de l'opérateur et/ou des éléments extérieurs. Elle correspond aux étapes actives au début du fonctionnement : ces étapes sont les étapes initiales :
Règle 2 : Franchissement d'une transition Une transition est dite validée lorsque toutes les étapes amont (immédiatement précédentes reliées à cette transition) sont actives.
Le FRANCHISSEMENT d'une transition se produit :
• lorsque la transition est validée.
• ET que la réceptivité associée à cette transition est vraie
L'exemple de la première figure montre une transition non validée car l'étape 4 n'est pas active. L'exemple de la seconde figure montre une transition validée mais non-franchissable avant t1, elle devient franchissable à t1 car E2 devient vraie.
Transition non validée Transition validée non-franchissablepuis franchissable
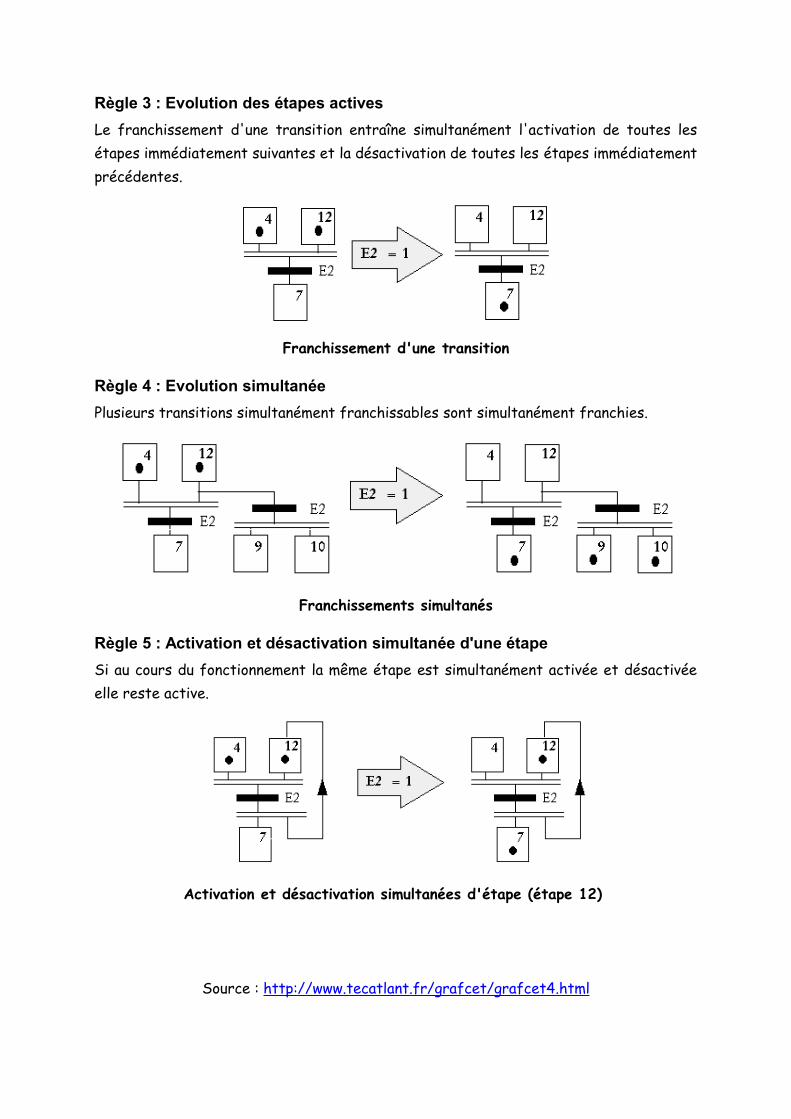
Règle 3 : Evolution des étapes actives Le franchissement d'une transition entraîne simultanément l'activation de toutes les étapes immédiatement suivantes et la désactivation de toutes les étapes immédiatement précédentes.
Franchissement d'une transition
Règle 4 : Evolution simultanée Plusieurs transitions simultanément franchissables sont simultanément franchies.
Franchissements simultanés
Règle 5 : Activation et désactivation simultanée d'une étape Si au cours du fonctionnement la même étape est simultanément activée et désactivée elle reste active.
Activation et désactivation simultanées d'étape (étape 12)
Source : http://www.tecatlant.fr/grafcet/grafcet4.html

IV.2. La séquence
Elle est composée d’une suite d’étapes qui peuvent être activées les unes après les autres.
Dans cette structure, chaque étape n’est suivie que par une transition et chaque transition est suivie que par une seule étape.
Un GRAFCET qui ne contient qu’une seule succession possible de situations est un GRAFCET à séquence unique. On parle alors d’un GRAFCET linéaire.
Exemple :
IV.3. La sélection de séquence ou l'aiguillage
La sélection de séquence est composée d’une divergence en OU de séquences et d’une convergence OU de séquences.
Divergence en OU
Si 1 active et si a seul, alors désactivation de 1 et activation de 2, 3 inchangé.
Si a et b puis 1 active alors désactivation 1, activation 2 et 3 quel que soit leur état précédent. (règle 4) .
Convergence en OU
Si 1 active et a sans b, alors activation de 3
et désactivation de 1, 2 reste inchangé
Si 1 et 2 et a et b alors 3 seule active
On appelle BARRE DE OU la barre symbolisant les entrées / sorties multiples d'étapes.
Si les conditions de franchissement de la transition a et b sont exclusives l’une de l’autre, elles permettent d’obtenir une sélection exclusive entre les deux séquences.
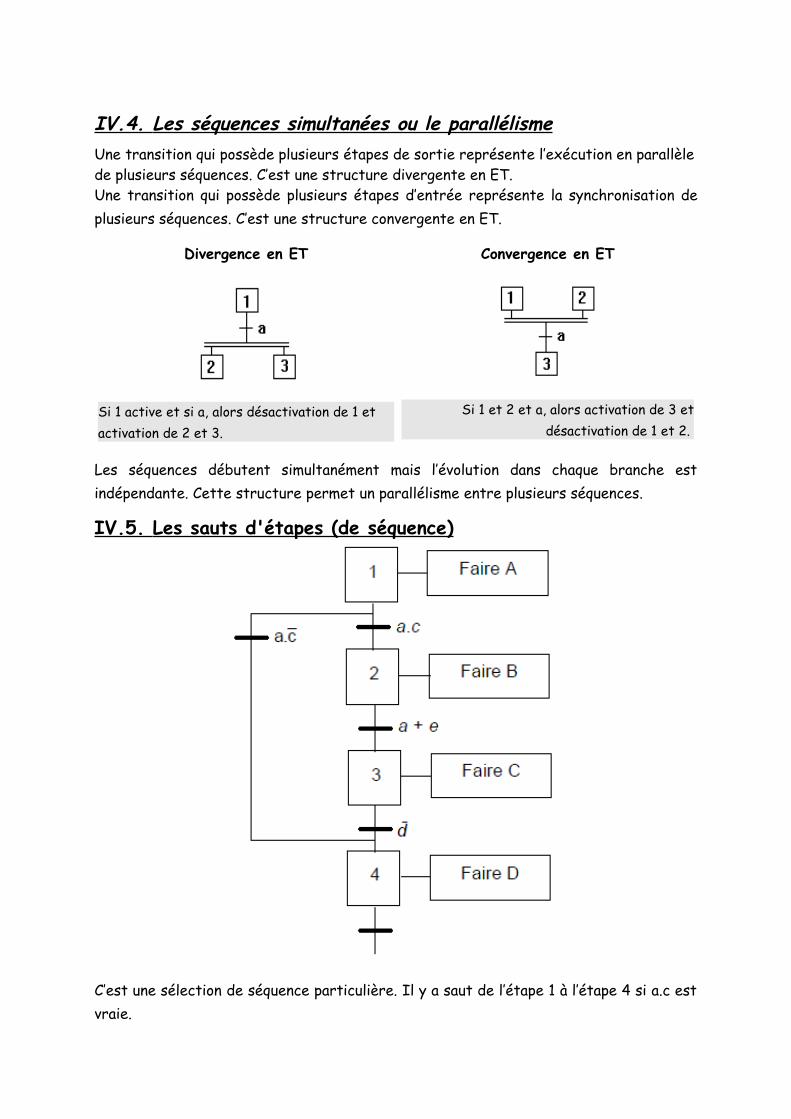
IV.4. Les séquences simultanées ou le parallélisme Une transition qui possède plusieurs étapes de sortie représente l’exécution en parallèle de plusieurs séquences. C’est une structure divergente en ET.Une transition qui possède plusieurs étapes d’entrée représente la synchronisation de plusieurs séquences. C’est une structure convergente en ET.
Divergence en ET
Si 1 active et si a, alors désactivation de 1 et activation de 2 et 3.
Convergence en ET
Si 1 et 2 et a, alors activation de 3 et désactivation de 1 et 2.
Les séquences débutent simultanément mais l’évolution dans chaque branche est indépendante. Cette structure permet un parallélisme entre plusieurs séquences.
IV.5. Les sauts d'étapes (de séquence)
C’est une sélection de séquence particulière. Il y a saut de l’étape 1 à l’étape 4 si a.c est vraie.
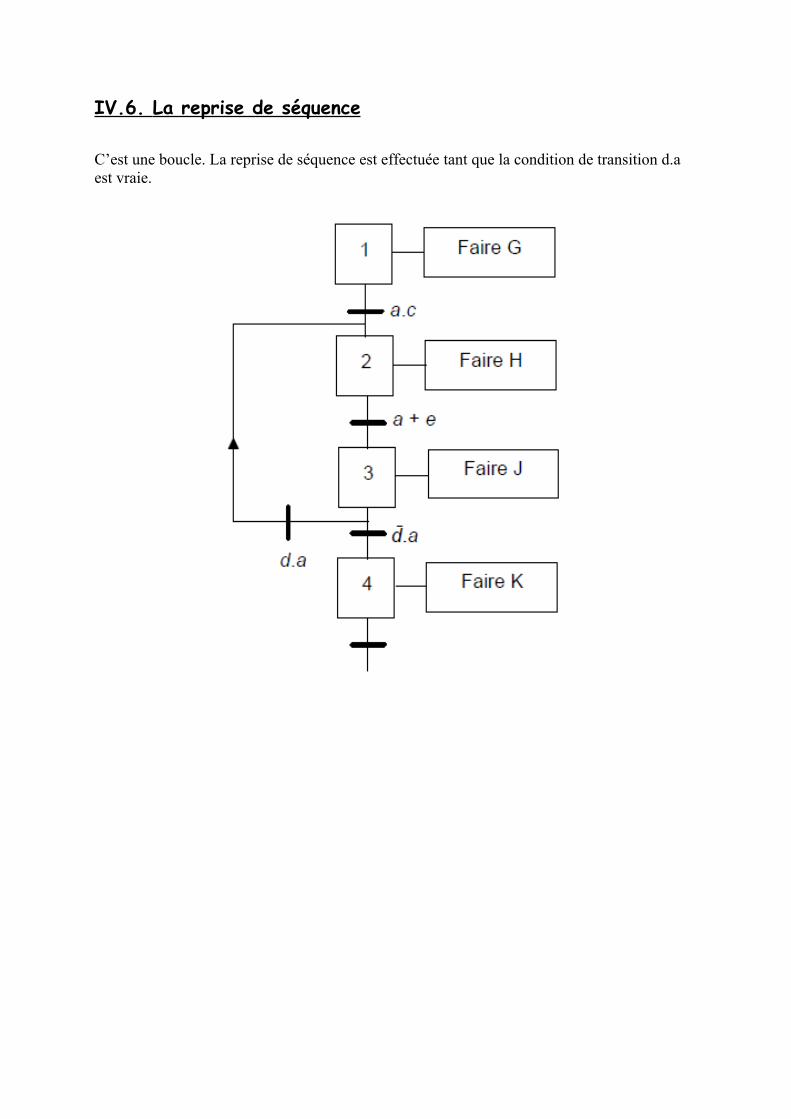
IV.6. La reprise de séquence
C’est une boucle. La reprise de séquence est effectuée tant que la condition de transition d.a est vraie.
V. GRAFCET : Notions avancées
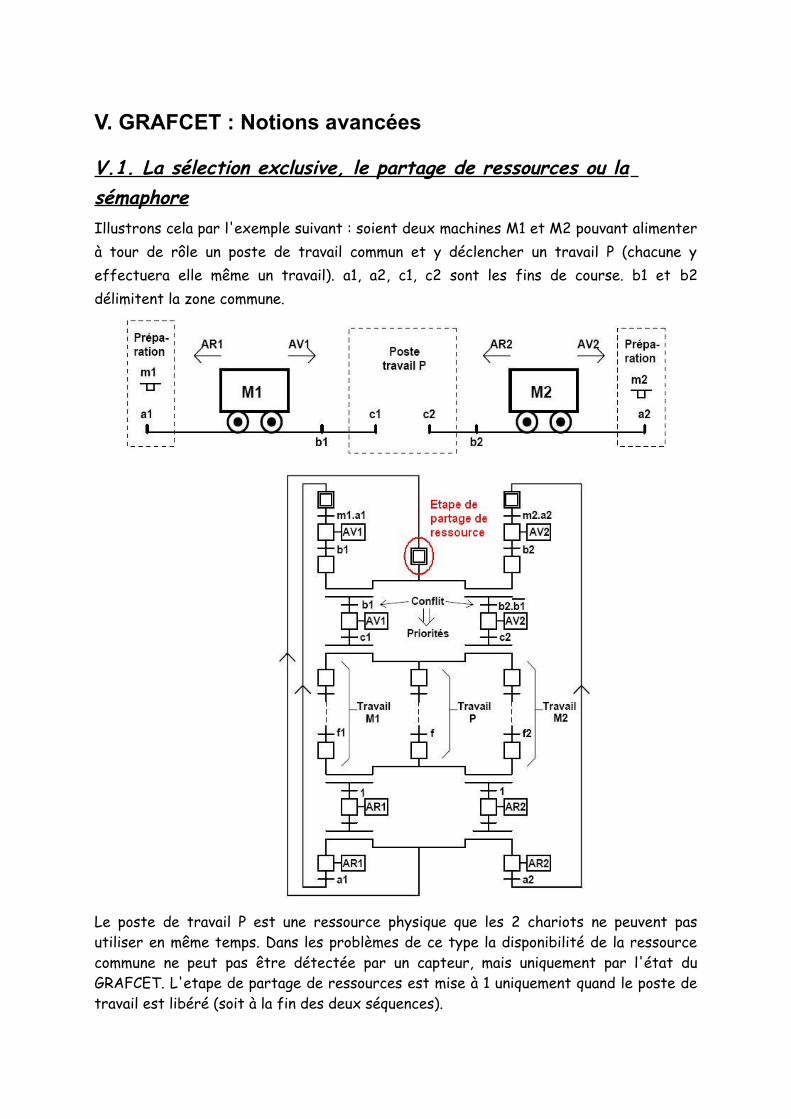
V.1. La sélection exclusive, le partage de ressources ou la sémaphoreIllustrons cela par l'exemple suivant : soient deux machines M1 et M2 pouvant alimenter à tour de rôle un poste de travail commun et y déclencher un travail P (chacune y effectuera elle même un travail). a1, a2, c1, c2 sont les fins de course. b1 et b2 délimitent la zone commune.
Le poste de travail P est une ressource physique que les 2 chariots ne peuvent pas utiliser en même temps. Dans les problèmes de ce type la disponibilité de la ressource commune ne peut pas être détectée par un capteur, mais uniquement par l'état du GRAFCET. L'etape de partage de ressources est mise à 1 uniquement quand le poste de travail est libéré (soit à la fin des deux séquences).
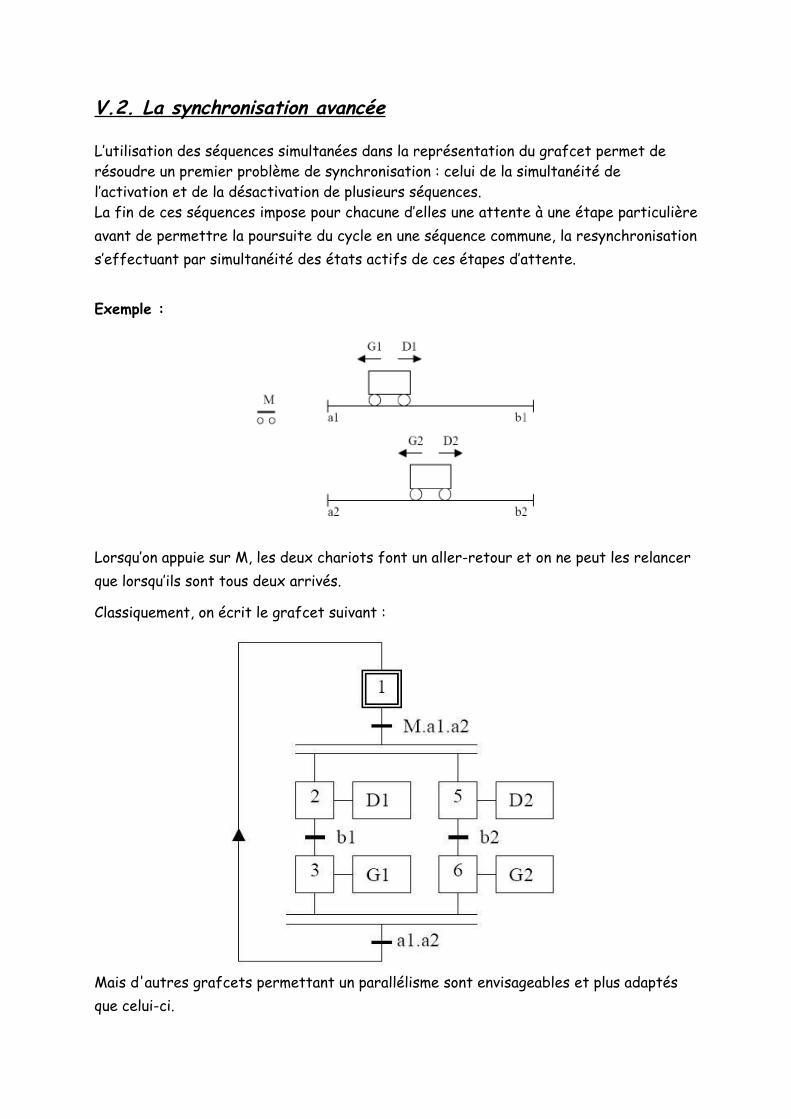
V.2. La synchronisation avancée
L’utilisation des séquences simultanées dans la représentation du grafcet permet de résoudre un premier problème de synchronisation : celui de la simultanéité de l’activation et de la désactivation de plusieurs séquences.La fin de ces séquences impose pour chacune d’elles une attente à une étape particulière avant de permettre la poursuite du cycle en une séquence commune, la resynchronisation s’effectuant par simultanéité des états actifs de ces étapes d’attente.
Exemple :
Lorsqu’on appuie sur M, les deux chariots font un aller-retour et on ne peut les relancer que lorsqu’ils sont tous deux arrivés.
Classiquement, on écrit le grafcet suivant :
Mais d'autres grafcets permettant un parallélisme sont envisageables et plus adaptés que celui-ci.
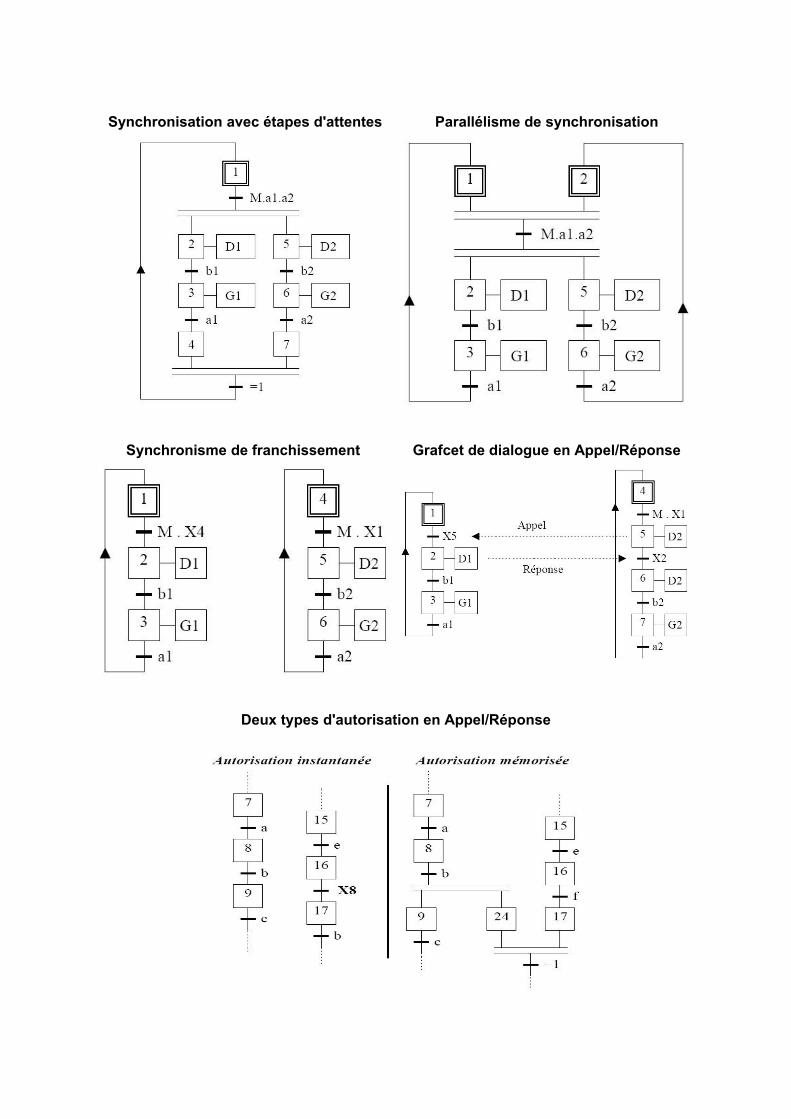
Synchronisation avec étapes d'attentes Parallélisme de synchronisation
Synchronisme de franchissement Grafcet de dialogue en Appel/Réponse
Deux types d'autorisation en Appel/Réponse
V.3. Notions de maître et d'esclave
V.3.1. Macro-étapesLe concept de macro-étape permet des descriptions par raffinement successifs. Ainsi plusieurs niveaux de représentation peuvent être mis en œuvre. Le premier niveau exprimant globalement la fonction à remplir sans se soucier de tous les détails superflus qui seront décrit dans les niveaux suivants, correspondant à une analyse plus fine.
Finalement le dernier niveau pourra être celui correspondant à l'implémentation de la partie commande dont on spécifie le comportement.
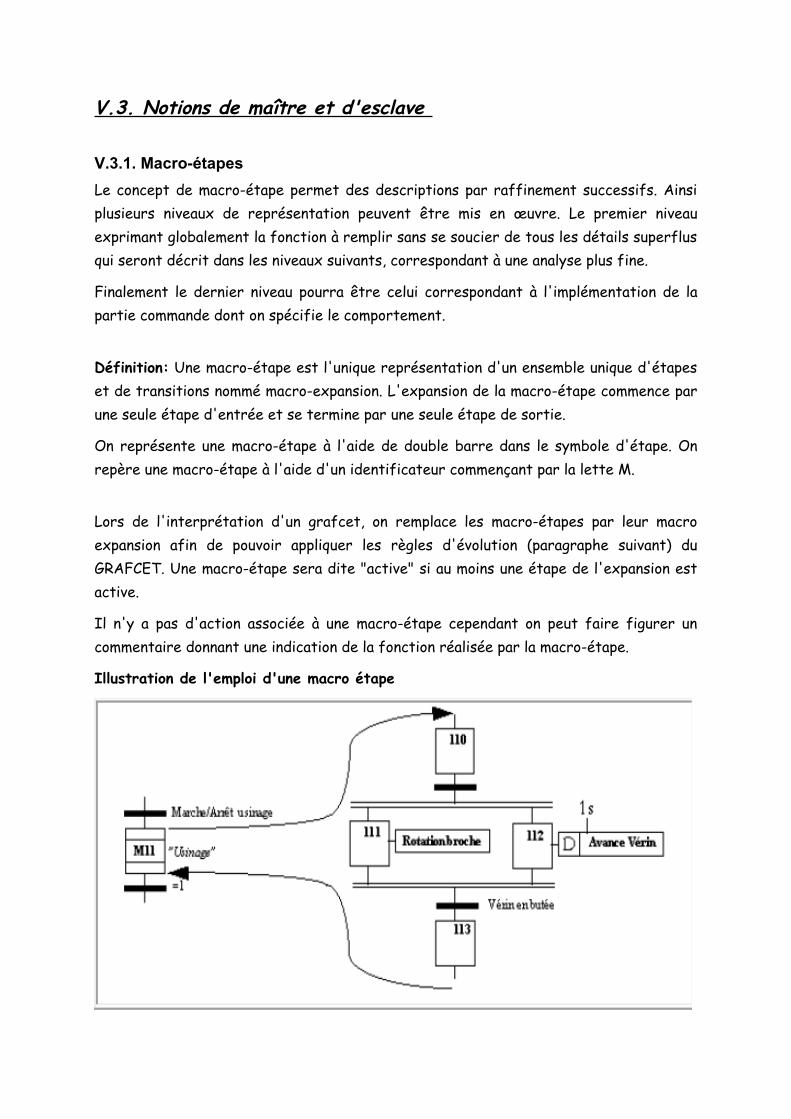
Définition: Une macro-étape est l'unique représentation d'un ensemble unique d'étapes et de transitions nommé macro-expansion. L'expansion de la macro-étape commence par une seule étape d'entrée et se termine par une seule étape de sortie.
On représente une macro-étape à l'aide de double barre dans le symbole d'étape. On repère une macro-étape à l'aide d'un identificateur commençant par la lette M.
Lors de l'interprétation d'un grafcet, on remplace les macro-étapes par leur macro expansion afin de pouvoir appliquer les règles d'évolution (paragraphe suivant) du GRAFCET. Une macro-étape sera dite "active" si au moins une étape de l'expansion est active.
Il n'y a pas d'action associée à une macro-étape cependant on peut faire figurer un commentaire donnant une indication de la fonction réalisée par la macro-étape.
Illustration de l'emploi d'une macro étape
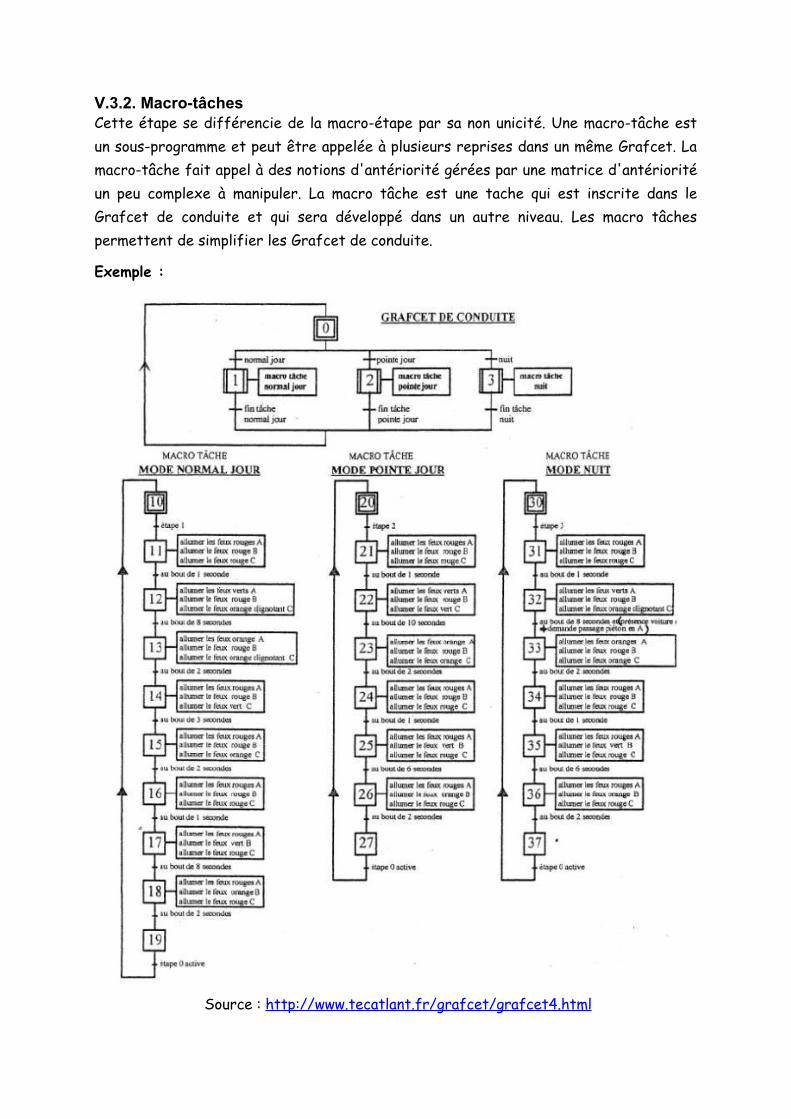
V.3.2. Macro-tâchesCette étape se différencie de la macro-étape par sa non unicité. Une macro-tâche est un sous-programme et peut être appelée à plusieurs reprises dans un même Grafcet. La macro-tâche fait appel à des notions d'antériorité gérées par une matrice d'antériorité un peu complexe à manipuler. La macro tâche est une tache qui est inscrite dans le Grafcet de conduite et qui sera développé dans un autre niveau. Les macro tâches permettent de simplifier les Grafcet de conduite.
Exemple :
Source : http://www.tecatlant.fr/grafcet/grafcet4.html
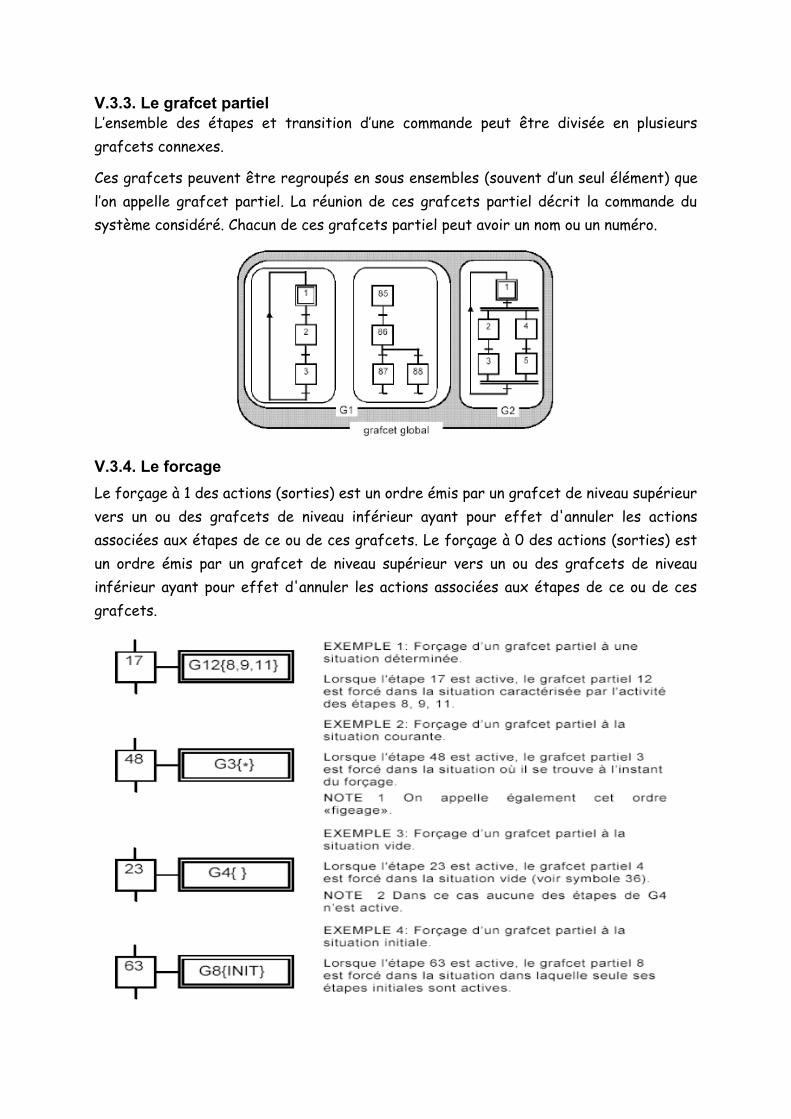
V.3.3. Le grafcet partielL’ensemble des étapes et transition d’une commande peut être divisée en plusieurs grafcets connexes.
Ces grafcets peuvent être regroupés en sous ensembles (souvent d’un seul élément) que l’on appelle grafcet partiel. La réunion de ces grafcets partiel décrit la commande du système considéré. Chacun de ces grafcets partiel peut avoir un nom ou un numéro.
V.3.4. Le forcageLe forçage à 1 des actions (sorties) est un ordre émis par un grafcet de niveau supérieur vers un ou des grafcets de niveau inférieur ayant pour effet d'annuler les actions associées aux étapes de ce ou de ces grafcets. Le forçage à 0 des actions (sorties) est un ordre émis par un grafcet de niveau supérieur vers un ou des grafcets de niveau inférieur ayant pour effet d'annuler les actions associées aux étapes de ce ou de ces grafcets.
VI. GRAFCET : Mise en œuvreVI.1. Mise en équation d'une étapeBut : Déterminer les variables qui interviennent dans l’activité de l’étape n : Xn = f ( ?)
1ére règle : Une transition est soit validée, soit non validée. Elle est validée lorsque toutes les étapes immédiatement précédentes sont actives. Elle ne peut être franchie que : Lorsqu’elle est validée ET que la réceptivité associée à la transition est VRAIE
La traduction de cette règle donne la Condition d’Activation de l’étape n :
2éme règle : Le franchissement d’une transition entraîne l’activation de toutes étapes suivantes et la désactivation de toutes étapes précédentes.
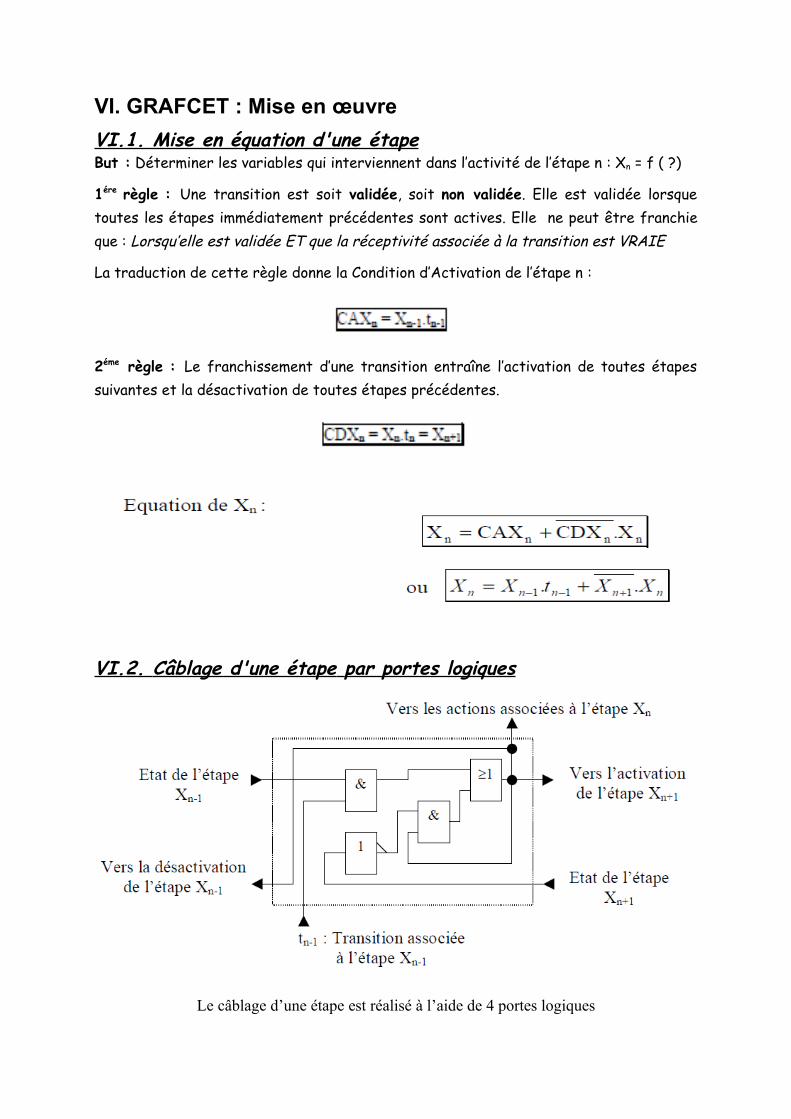
VI.2. Câblage d'une étape par portes logiques
Le câblage d’une étape est réalisé à l’aide de 4 portes logiques
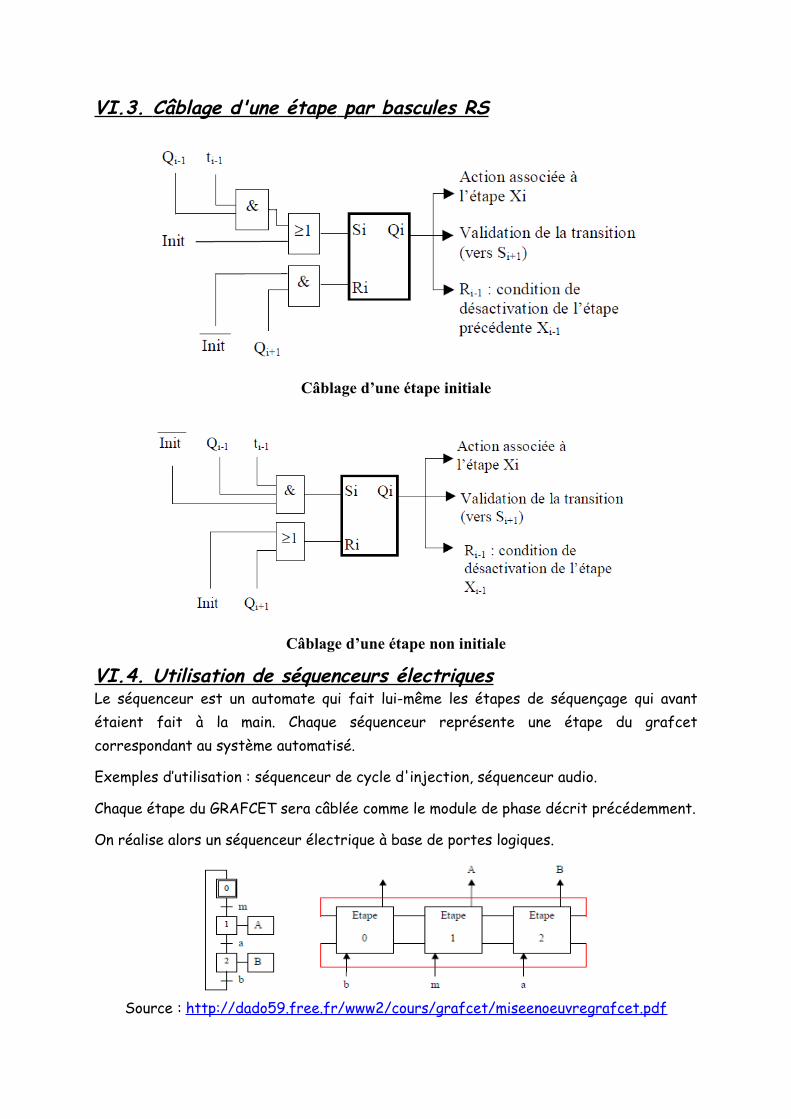
VI.3. Câblage d'une étape par bascules RS
Câblage d’une étape initiale
Câblage d’une étape non initiale
VI.4. Utilisation de séquenceurs électriquesLe séquenceur est un automate qui fait lui-même les étapes de séquençage qui avant étaient fait à la main. Chaque séquenceur représente une étape du grafcet correspondant au système automatisé.
Exemples d’utilisation : séquenceur de cycle d'injection, séquenceur audio.
Chaque étape du GRAFCET sera câblée comme le module de phase décrit précédemment.
On réalise alors un séquenceur électrique à base de portes logiques.
Source : http://dado59.free.fr/www2/cours/grafcet/miseenoeuvregrafcet.pdf
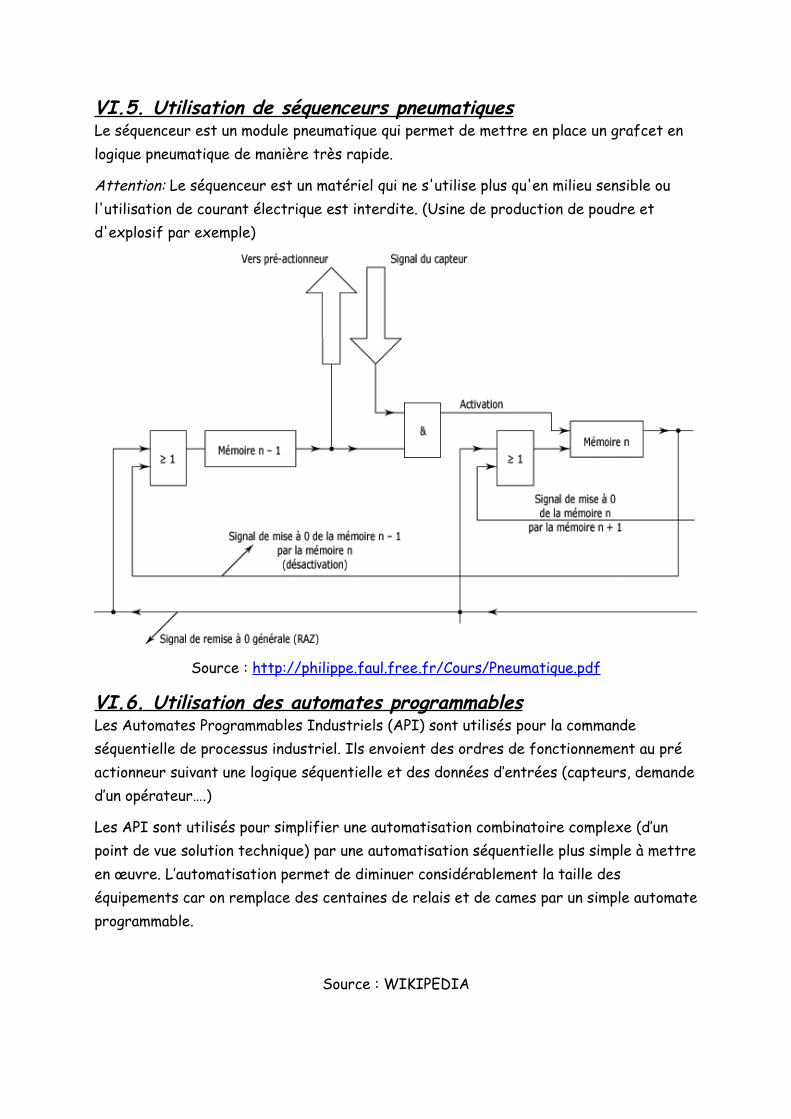
VI.5. Utilisation de séquenceurs pneumatiquesLe séquenceur est un module pneumatique qui permet de mettre en place un grafcet en logique pneumatique de manière très rapide.
Attention: Le séquenceur est un matériel qui ne s'utilise plus qu'en milieu sensible ou l'utilisation de courant électrique est interdite. (Usine de production de poudre et d'explosif par exemple)
Source : http://philippe.faul.free.fr/Cours/Pneumatique.pdf
VI.6. Utilisation des automates programmablesLes Automates Programmables Industriels (API) sont utilisés pour la commande séquentielle de processus industriel. Ils envoient des ordres de fonctionnement au pré actionneur suivant une logique séquentielle et des données d’entrées (capteurs, demande d’un opérateur….)
Les API sont utilisés pour simplifier une automatisation combinatoire complexe (d’un point de vue solution technique) par une automatisation séquentielle plus simple à mettre en œuvre. L’automatisation permet de diminuer considérablement la taille des équipements car on remplace des centaines de relais et de cames par un simple automate programmable.
Source : WIKIPEDIA
VI.7. Critères de choix de technologiesLe choix ne dépend que de critères économiques, le Grafcet n'imposant aucune solution.
En cas de réalisation unitaire, comportant de nombreuses entrées / sorties, nécessitant des modifications de temps en temps (par exemple partie de ligne de production automatique), on choisira un automate programmable (API), programmé directement en Grafcet à l'aide d'un console de programmation (actuellement on utilise un PC, ce qui permet de saisir et simuler l'automatisme au calme, avant le test in situ).Cette solution semble assez chère dans l'absolu, mais reste économique relativement au prix des parties opératives mises en œuvre.
C'est de plus la solution qui minimise le prix des modifications (tant que la partie opérative n'a pas à être fortement modifiée).
* En cas de réalisation en petite série, de matériels qui devront être personnalisés pour chaque client (par exemple machine à emballer), on choisira comme précédemment un automate, programmable en Grafcet à l'aide d'une console (ou même par une connexion réseau).
Ceci permet une production de matériels uniformes (ou en tous cas moins variables), la personnalisation se fera uniquement sur la console.
On pourra vendre le produit avec l'automate seul (sans la console, qui vaut en général très cher), assorti d'un service après−vente pour les modifications ou évolutions.
* En cas de réalisation unitaire d'un petit automatisme (par exemple un transfert de pièces à l'aide d'un tapis et quelques vérins), on choisira un automate d'entrée de gamme, programmable uniquement dans un langage simple (ET, OU, mémoires...).
La programmation sera aisée (voir mon document sur la programmation d'un Grafcet) mais la modification sera souvent plus simple en réécrivant complètement le nouveau programme.
* Si l'on produit en série un système automatique, avec un fonctionnement prédéfini et figé mais pas trop compliqué (machine à laver par exemple), la solution la plus économique est le câblage : une carte électronique avec une bascule par étape, les seuls éléments coûteux sont les interfaces (donc le prix dépendra surtout du nombre d'entrées − sorties).
Si un fabriquant de machines à laver me lit, qu'il m'explique pourquoi ils continuent à utiliser des programmateurs mécaniques qui sont plus chers et plus fragiles.
*Pour un système avec un fonctionnement complexe, où la rapidité est nécessaire, ou bien s'il nécessite également un peu de calcul numérique, on choisira une carte avec un micro−contrôleur (ou microprocesseur si les besoins sont plus importants), assorti d'une interface comme dans le cas précédent. La programmation est aisée (voir mon document sur la programmation d'un Grafcet), une fois que l'on connaît bien le matériel.
Le coût du matériel est dérisoire (une dizaine d’euro pour un micro−contrôleur ST62 avec un peu de RAM, de ROM, une vingtaine d'entrées − sorties ToR et un port analogique), par contre le matériel de développement revient très cher, son acquisition n'est envisageable que si l'on prévoit de créer un certain nombre de systèmes (sinon on se rabattra sur le câblage ou l'API, ou la sous−traitance).
*Dans les cas où le système est incompatible avec l'électronique (champs magnétiques, parasites, ambiance humide...), on peut utiliser une partie commande dans la même énergie que celle de la partie opérative : pneumatique ou électrique. Dans ce cas une seule solution est possible, le câblage.
On utilisera la même méthode que pour le câblage électronique, il suffit de savoir réaliser les fonctions combinatoires (ET, OU...) et un bistable équivalent à une bascule (distributeur bistable, relais auto−alimenté...).
Un séquenceur est une telle bascule prévue pour représenter une étape, avec un brochage facilitant le chaînage d'étapes. Ce n'est presque jamais la solution la plus économique.
Top Related