





Langages
Pages
Légal


CONTRÔLE D’UN AVION À STABILITÉ RÉDUITE
Alexander P. Feuersänger1
Encadrants:Gilles Ferreres et Clément Toussaint
Office National d’Études et de Recherches Aérospatiales(ONERA - DCSD)
Journées de Thèses 2006–2007

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Context
Cette thèse traite de l’avion civil à stabilité naturelle réduite.Pourquoi considérer une stabilité réduite sur le plan mécanique duvol d’un avion civil ?
Une réduction de la taille des empennages réduit le poids et lasurface aérodynamique, et donc la traînée et l’utilisation dekérosène.Une plage admissible des centrages décalée en arrière permetde :
1 voler à des points de “trim” plus avantageux,2 réduire la taille de l’élévateur jusqu’à un certain point.
Ces deux pistes pour rendre l’avion plus efficace peuvent réduire lastabilité d’une manière importante.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Context
Cette thèse traite de l’avion civil à stabilité naturelle réduite.Pourquoi considérer une stabilité réduite sur le plan mécanique duvol d’un avion civil ?
Une réduction de la taille des empennages réduit le poids et lasurface aérodynamique, et donc la traînée et l’utilisation dekérosène.
Une plage admissible des centrages décalée en arrière permetde :
1 voler à des points de “trim” plus avantageux,2 réduire la taille de l’élévateur jusqu’à un certain point.
Ces deux pistes pour rendre l’avion plus efficace peuvent réduire lastabilité d’une manière importante.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Context
Cette thèse traite de l’avion civil à stabilité naturelle réduite.Pourquoi considérer une stabilité réduite sur le plan mécanique duvol d’un avion civil ?
Une réduction de la taille des empennages réduit le poids et lasurface aérodynamique, et donc la traînée et l’utilisation dekérosène.Une plage admissible des centrages décalée en arrière permetde :
1 voler à des points de “trim” plus avantageux,2 réduire la taille de l’élévateur jusqu’à un certain point.
Ces deux pistes pour rendre l’avion plus efficace peuvent réduire lastabilité d’une manière importante.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Context
Cette thèse traite de l’avion civil à stabilité naturelle réduite.Pourquoi considérer une stabilité réduite sur le plan mécanique duvol d’un avion civil ?
Une réduction de la taille des empennages réduit le poids et lasurface aérodynamique, et donc la traînée et l’utilisation dekérosène.Une plage admissible des centrages décalée en arrière permetde :
1 voler à des points de “trim” plus avantageux,2 réduire la taille de l’élévateur jusqu’à un certain point.
Ces deux pistes pour rendre l’avion plus efficace peuvent réduire lastabilité d’une manière importante.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Motivation
D’une part la réduction de la stabilité naturelle d’un avioncomporte des bénéfices pour la performance.D’autre part, pour sa certification, un avion doit respecterplusieurs normes et règlements, en particulier des critères destabilité et d’amortissement des modes.
L’analyse de ces critères est donc obligatoire dans une démarcheavant-projet.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Motivation
D’une part la réduction de la stabilité naturelle d’un avioncomporte des bénéfices pour la performance.D’autre part, pour sa certification, un avion doit respecterplusieurs normes et règlements, en particulier des critères destabilité et d’amortissement des modes.
L’analyse de ces critères est donc obligatoire dans une démarcheavant-projet.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Motivation
En conséquence, l’avion naturel (trop instable) risque de nepas réaliser les besoins pour sa certification au niveau desqualités de vol.
A ce titre, une loi de commande de type “back-up” assurant lesspécifications minimales doit être rajoutée en cas de panne desystème de commande de vol.Pour cela, une analyse approfondie de la stabilité réduite estnécessaire qui aboutit à des recommandations en phaseavant-projet.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Motivation
En conséquence, l’avion naturel (trop instable) risque de nepas réaliser les besoins pour sa certification au niveau desqualités de vol.A ce titre, une loi de commande de type “back-up” assurant lesspécifications minimales doit être rajoutée en cas de panne desystème de commande de vol.
Pour cela, une analyse approfondie de la stabilité réduite estnécessaire qui aboutit à des recommandations en phaseavant-projet.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Motivation
En conséquence, l’avion naturel (trop instable) risque de nepas réaliser les besoins pour sa certification au niveau desqualités de vol.A ce titre, une loi de commande de type “back-up” assurant lesspécifications minimales doit être rajoutée en cas de panne desystème de commande de vol.Pour cela, une analyse approfondie de la stabilité réduite estnécessaire qui aboutit à des recommandations en phaseavant-projet.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Objectifs de la thèse
Cette thèse s’inscrit donc dans une approche pluridisciplinaire.
Elle est partagée en deux parties principales avec leur propresobjectifs :
Mécanique du vol :
Identifier les potentiels d’une stabilité réduite et lescritères/règlements pouvant les limiter.Développer des outils de modélisation et analyse afind’effectuer des études paramétriques pertinentes.Pouvoir donner des recommandations pour une conception del’avion à performance améliorée. Ceci en considérant lapossibilité d’une stabilité artificiellement augmentée.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Objectifs de la thèse
Cette thèse s’inscrit donc dans une approche pluridisciplinaire.
Elle est partagée en deux parties principales avec leur propresobjectifs :
Mécanique du vol :Identifier les potentiels d’une stabilité réduite et lescritères/règlements pouvant les limiter.
Développer des outils de modélisation et analyse afind’effectuer des études paramétriques pertinentes.Pouvoir donner des recommandations pour une conception del’avion à performance améliorée. Ceci en considérant lapossibilité d’une stabilité artificiellement augmentée.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Objectifs de la thèse
Cette thèse s’inscrit donc dans une approche pluridisciplinaire.
Elle est partagée en deux parties principales avec leur propresobjectifs :
Mécanique du vol :Identifier les potentiels d’une stabilité réduite et lescritères/règlements pouvant les limiter.Développer des outils de modélisation et analyse afind’effectuer des études paramétriques pertinentes.
Pouvoir donner des recommandations pour une conception del’avion à performance améliorée. Ceci en considérant lapossibilité d’une stabilité artificiellement augmentée.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Objectifs de la thèse
Cette thèse s’inscrit donc dans une approche pluridisciplinaire.
Elle est partagée en deux parties principales avec leur propresobjectifs :
Mécanique du vol :Identifier les potentiels d’une stabilité réduite et lescritères/règlements pouvant les limiter.Développer des outils de modélisation et analyse afind’effectuer des études paramétriques pertinentes.Pouvoir donner des recommandations pour une conception del’avion à performance améliorée. Ceci en considérant lapossibilité d’une stabilité artificiellement augmentée.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Objectifs de la thèse
Automatique :
Le but principal est la définition des lois de commandelongitudinale et latérale de type ’back-up’ de l’avion à stabilitéréduite, voire négative.Cette loi doit garantir la réalisation des critères décrits dans lapremière partie.De plus, elle doit prendre en compte les caractéristiques desactionneurs :
minimisation de l’activité des actionneurs étant donné quel’avion est naturellement instable,stabilité garantie en saturation,performance acceptable avec actionneur saturé.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Objectifs de la thèse
Automatique :
Le but principal est la définition des lois de commandelongitudinale et latérale de type ’back-up’ de l’avion à stabilitéréduite, voire négative.
Cette loi doit garantir la réalisation des critères décrits dans lapremière partie.De plus, elle doit prendre en compte les caractéristiques desactionneurs :
minimisation de l’activité des actionneurs étant donné quel’avion est naturellement instable,stabilité garantie en saturation,performance acceptable avec actionneur saturé.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Objectifs de la thèse
Automatique :
Le but principal est la définition des lois de commandelongitudinale et latérale de type ’back-up’ de l’avion à stabilitéréduite, voire négative.Cette loi doit garantir la réalisation des critères décrits dans lapremière partie.
De plus, elle doit prendre en compte les caractéristiques desactionneurs :
minimisation de l’activité des actionneurs étant donné quel’avion est naturellement instable,stabilité garantie en saturation,performance acceptable avec actionneur saturé.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Objectifs de la thèse
Automatique :
Le but principal est la définition des lois de commandelongitudinale et latérale de type ’back-up’ de l’avion à stabilitéréduite, voire négative.Cette loi doit garantir la réalisation des critères décrits dans lapremière partie.De plus, elle doit prendre en compte les caractéristiques desactionneurs :
minimisation de l’activité des actionneurs étant donné quel’avion est naturellement instable,stabilité garantie en saturation,performance acceptable avec actionneur saturé.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Plan de la thèse
PARTIE I : Analyse de la mécanique et de la dynamique du vol
Stabilité réduite longitudinale
Approche analytique du mode potentiellement instableAnalyse linéaire du vol en turbulenceVers un critère pour les centrages arrièresConclusion avec recommandations en longitudinal
Stabilité réduite latérale
Étude analytique de l’équilibre à VMCOutil pour conduire des études paramétriquesAnalyse des manœuvres à VMCConclusion avec recommandations en latéral
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Plan de la thèse
PARTIE II : Synthèse d’un correcteur robuste de type ’back-up’
IntroductionRésumé des conclusions de la 1ère partie et définition desobjectifs de la loi de pilotageDiscussion des techniques possibles
Synthèse d’un correcteur robuste
La synthèse polytopiqueLa stabilité en présence des non-linéaritésUn technique de type ’anti-windup’
Conclusion sur la synthèse robuste
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Plan de la thèse
PARTIE III : Synthèse et perspectives
Résumé global et synthèseRésumé des conclusions des deux partiesLes gains en masse et en consommation de kérosène
Perspectives
ANNEXEComparaisons avec un avion classiqueRésultats complémentaires
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
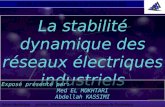
Partie mécanique et dynamique du vol - exemple longitudinal
−0.1 −0.08 −0.06 −0.04 −0.02 0 0.02 0.04 0.06 0.08 0.10
10
20
30
40
50
60
70
80
δm /
δt (
o /s)
Tact
dxg = (Xg − X
ref) / l
Activité de l’élévateur en volturbulent en boucle fermée.
−0.1 −0.08 −0.06 −0.04 −0.02 0 0.02 0.04 0.06 0.08 0.110
−4
10−3
10−2
10−1
100
101
102
103
104
dxg
Nor
mal
ised
dam
age
DN =
DX
g / D
Xre
f
Tact
fwd aft
Dommage infligé à l’actionneur dû àson activité en vol turbulent.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie mécanique et dynamique du vol - exemple longitudinal
−0.1 −0.08 −0.06 −0.04 −0.02 0 0.02 0.04 0.06 0.08 0.10
10
20
30
40
50
60
70
80
δm /
δt (
o /s)
Tact
dxg = (Xg − X
ref) / l
Activité de l’élévateur en volturbulent en boucle fermée.
−0.1 −0.08 −0.06 −0.04 −0.02 0 0.02 0.04 0.06 0.08 0.110
−4
10−3
10−2
10−1
100
101
102
103
104
dxg N
orm
alis
ed d
amag
e D
N =
DX
g / D
Xre
f
Tact
fwd aft
Dommage infligé à l’actionneur dû àson activité en vol turbulent.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie mécanique et dynamique du vol - Conclusions
Des critères pour des centrages arrières ont été établis.Les conditions et objectifs pour une loi stabilisante sont définis.Des recommandations ont été formulées : centrage, taille de ladérive, installation motrice, amortissement et fréquence desmodes dynamiques . . .
Ces informations font le lien entre mécanique du vol et automatiqueet forment la base pour la prochaine partie de cette thèse.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie mécanique et dynamique du vol - Conclusions
Des critères pour des centrages arrières ont été établis.Les conditions et objectifs pour une loi stabilisante sont définis.Des recommandations ont été formulées : centrage, taille de ladérive, installation motrice, amortissement et fréquence desmodes dynamiques . . .
Ces informations font le lien entre mécanique du vol et automatiqueet forment la base pour la prochaine partie de cette thèse.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie automatique
Une loi de commande est synthétisée donnant une performancesatisfaisante pour :
une large plage de centrages, y compris des centrages arrières,une stabilité réduite latérale due à une dérive diminuée.
Elle considère également les caractéristiques linéaires etnon-linéaires des actionneurs :
bande passante, amplitude en position et vitesse,saturations.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie automatique
Une loi de commande est synthétisée donnant une performancesatisfaisante pour :
une large plage de centrages, y compris des centrages arrières,une stabilité réduite latérale due à une dérive diminuée.
Elle considère également les caractéristiques linéaires etnon-linéaires des actionneurs :
bande passante, amplitude en position et vitesse,saturations.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie automatique
Une approche polytopique est utilisée pour synthétiser un correcteurde type retour d’état satisfaisant pour différents modèles :
des spécifications modales (placement des pôles dans unerégion du plan complexe),des contraintes H∞ afin de minimiser l’activité de l’actionneur,des contraintes de positivité pour garantir la stabilité de laboucle fermée en présence des saturations.Un correcteur de type ’anti-windup’ est ajouté afin d’améliorerles performances en boucle fermée.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie automatique
Une approche polytopique est utilisée pour synthétiser un correcteurde type retour d’état satisfaisant pour différents modèles :
des spécifications modales (placement des pôles dans unerégion du plan complexe),
des contraintes H∞ afin de minimiser l’activité de l’actionneur,des contraintes de positivité pour garantir la stabilité de laboucle fermée en présence des saturations.Un correcteur de type ’anti-windup’ est ajouté afin d’améliorerles performances en boucle fermée.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie automatique
Une approche polytopique est utilisée pour synthétiser un correcteurde type retour d’état satisfaisant pour différents modèles :
des spécifications modales (placement des pôles dans unerégion du plan complexe),des contraintes H∞ afin de minimiser l’activité de l’actionneur,
des contraintes de positivité pour garantir la stabilité de laboucle fermée en présence des saturations.Un correcteur de type ’anti-windup’ est ajouté afin d’améliorerles performances en boucle fermée.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie automatique
Une approche polytopique est utilisée pour synthétiser un correcteurde type retour d’état satisfaisant pour différents modèles :
des spécifications modales (placement des pôles dans unerégion du plan complexe),des contraintes H∞ afin de minimiser l’activité de l’actionneur,des contraintes de positivité pour garantir la stabilité de laboucle fermée en présence des saturations.
Un correcteur de type ’anti-windup’ est ajouté afin d’améliorerles performances en boucle fermée.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie automatique
Une approche polytopique est utilisée pour synthétiser un correcteurde type retour d’état satisfaisant pour différents modèles :
des spécifications modales (placement des pôles dans unerégion du plan complexe),des contraintes H∞ afin de minimiser l’activité de l’actionneur,des contraintes de positivité pour garantir la stabilité de laboucle fermée en présence des saturations.Un correcteur de type ’anti-windup’ est ajouté afin d’améliorerles performances en boucle fermée.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Notions de la synthèse polytopique
Le but est de synthétiser un retour d’état u = Kx satisfaisant descontraintes modales, H∞ et de positivité pour un ensemble demodèles linéaires.
PropositionConsidérons les modèles d’état en boucle ouverte (i ∈ [1, N ]):
x = Aix + B1,iw1 + B2,iw2 + B3,iu
z1 = C1,ix + D11,iw1 + D12,iw2 + D13,iu
z2 = C2,ix + D21,iw1 + D22,iw2 + D23,iu
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Notions de la synthèse polytopique
Le but est de synthétiser un retour d’état u = Kx satisfaisant descontraintes modales, H∞ et de positivité pour un ensemble demodèles linéaires.
PropositionConsidérons les modèles d’état en boucle ouverte (i ∈ [1, N ]):
x = Aix + B1,iw1 + B2,iw2 + B3,iu
z1 = C1,ix + D11,iw1 + D12,iw2 + D13,iu
z2 = C2,ix + D21,iw1 + D22,iw2 + D23,iu
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Contraintes et objectifs
1. Les valeurs propres de laboucle fermée Ai + B3,iK sontplacées à l’intérieur d’une régionLMI du plan complexe : λ étantle degré de stabilitéa, ξ = cos(α)un amortissement minimum et run module maximum.
aLe degré de stabilité d’une matriced’état A est −maxi Re(λi), où les λi
sont les valeurs propres de A.
Im
Re
r
α
λ
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Contraintes et objectifs
w1
z2 w2
u
[d_c’]
[d_c]
4
3z1,2
2z1,1
1y=x
x’ = Ax+Bu y = Cx+Du
state−space model
1/Tact 1s
3
2
1
2. La norme H∞ de la matrice de transfert entre w1 et z1 estinférieure à γ1.
3. La matrice de transfert Tw2→z2 entre w2 et z2 satisfait :
Tw2→z2(jω) + T ∗w2→z2(jω) > 2γ2 ∀ω ∈ [0, +∞)
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Contraintes et objectifs
w1
z2 w2
u
[d_c’]
[d_c]
4
3z1,2
2z1,1
1y=x
x’ = Ax+Bu y = Cx+Du
state−space model
1/Tact 1s
3
2
1
2. La norme H∞ de la matrice de transfert entre w1 et z1 estinférieure à γ1.3. La matrice de transfert Tw2→z2 entre w2 et z2 satisfait :
Tw2→z2(jω) + T ∗w2→z2(jω) > 2γ2 ∀ω ∈ [0, +∞)
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Proposition : condition suffisante
Une condition suffisante pour qu’il existe un retour d’état u = Kx satisfaisantles contraintes 1–3 est qu’il existe une matrice de Lyapunov X = XT > 0 etune matrice W = KX satisfaisant les LMIs :
Li(X, W ) + LTi (X, W ) + 2λX < 0„
−rX Li(X, W )? −rX
«< 0„
sin α`Li(X, W ) + LT
i (X, W )´− cos α
`Li(X, W )− LT
i (X, W )´
? sinα`Li(X, W ) + LT
i (X, W )´ «
< 00@ Li(X, W ) + LTi (X, W ) B1,i XCT
1,i + W T DT13,i
? −γ1I DT11,i
? ? −γ1I
1A < 0
„Li(X, W ) + LT
i (X, W ) B2,i −XCT2,i −W T DT
23,i
? 2γ2I −D22 −DT22
«< 0
avec Li(X, W ) = (Ai + B3,iK)X = AiX + B3,iW . ? représente la partie conjuguée
de la matrice hermitienne.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
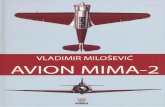
Remarques
Une technique de typeanti-windup est utilisée afind’améliorer les performances enboucle fermée (à finaliser),
la stabilité est démontrée avecdes ellipsoïdes de Lyapunov(zones d’attraction).
−50 −40 −30 −20 −10 0 10 20 30 40 50−572
−458
−343
−229
−114
0
114
229
343
458
572
nz
q, d
eg/s
dxg = − 7 % fwd
dxg = + 5 % aft
Exemple : Domaine de stabilité enfonction du centrage pour les états(nz, q) en boucle fermée (correcteurrobuste).
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Remarques
Une technique de typeanti-windup est utilisée afind’améliorer les performances enboucle fermée (à finaliser),
la stabilité est démontrée avecdes ellipsoïdes de Lyapunov(zones d’attraction).
−50 −40 −30 −20 −10 0 10 20 30 40 50−572
−458
−343
−229
−114
0
114
229
343
458
572
nz
q, d
eg/s
dxg = − 7 % fwd
dxg = + 5 % aft
Exemple : Domaine de stabilité enfonction du centrage pour les états(nz, q) en boucle fermée (correcteurrobuste).
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Conclusion de la partie automatique
Un correcteur robuste sur une large plage de centrages a étésynthétisé pour un avion avant-projet. L’approche multi-objectif :
garantit des spécifications modales minimales (qualités de vol),réduit l’activité des actionneurs,garantit la stabilité en présence des saturations desactionneurs,garantit des bonnes performances en boucle fermée.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Conclusion de la partie automatique
Un correcteur robuste sur une large plage de centrages a étésynthétisé pour un avion avant-projet. L’approche multi-objectif :
garantit des spécifications modales minimales (qualités de vol),
réduit l’activité des actionneurs,garantit la stabilité en présence des saturations desactionneurs,garantit des bonnes performances en boucle fermée.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Conclusion de la partie automatique
Un correcteur robuste sur une large plage de centrages a étésynthétisé pour un avion avant-projet. L’approche multi-objectif :
garantit des spécifications modales minimales (qualités de vol),réduit l’activité des actionneurs,
garantit la stabilité en présence des saturations desactionneurs,garantit des bonnes performances en boucle fermée.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Conclusion de la partie automatique
Un correcteur robuste sur une large plage de centrages a étésynthétisé pour un avion avant-projet. L’approche multi-objectif :
garantit des spécifications modales minimales (qualités de vol),réduit l’activité des actionneurs,garantit la stabilité en présence des saturations desactionneurs,
garantit des bonnes performances en boucle fermée.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Conclusion de la partie automatique
Un correcteur robuste sur une large plage de centrages a étésynthétisé pour un avion avant-projet. L’approche multi-objectif :
garantit des spécifications modales minimales (qualités de vol),réduit l’activité des actionneurs,garantit la stabilité en présence des saturations desactionneurs,garantit des bonnes performances en boucle fermée.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie Conclusion et perspectives
Les conclusions des deux parties mécanique du vol et automatiquepermettront de formuler une synthèse globale car :
La partie mécanique du vol a révélé les potentiels d’unestabilité réduite.Elle a alimenté directement la synthèse d’une loi de commandeen définissant les contraintes et objectifs.La partie automatique démontre la faisabilité pour uneconfiguration de l’avion à stabilité réduite en exploitant lespotentiels.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie Conclusion et perspectives
Les conclusions des deux parties mécanique du vol et automatiquepermettront de formuler une synthèse globale car :
La partie mécanique du vol a révélé les potentiels d’unestabilité réduite.Elle a alimenté directement la synthèse d’une loi de commandeen définissant les contraintes et objectifs.La partie automatique démontre la faisabilité pour uneconfiguration de l’avion à stabilité réduite en exploitant lespotentiels.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie Conclusion et perspectives
Sous l’hypothèse que l’on possède les données nécessaires onvoudrait arriver à un bilan global de type :
X % de centrage plus en arrière : Y % moins d’utilisationde kérosène.X % de diminuation de la dérive : Y % moins de masse.X % de réduction de stabilité naturelle : plusd’actionneurs ou leur redimensionnement (plus grandebande passante, plus large zone de fonctionnement) et doncplus de masse/coûts.
Il existe alors un optimum entre stabilité réduite et les gains.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie Conclusion et perspectives
Sous l’hypothèse que l’on possède les données nécessaires onvoudrait arriver à un bilan global de type :
X % de centrage plus en arrière : Y % moins d’utilisationde kérosène.
X % de diminuation de la dérive : Y % moins de masse.X % de réduction de stabilité naturelle : plusd’actionneurs ou leur redimensionnement (plus grandebande passante, plus large zone de fonctionnement) et doncplus de masse/coûts.
Il existe alors un optimum entre stabilité réduite et les gains.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie Conclusion et perspectives
Sous l’hypothèse que l’on possède les données nécessaires onvoudrait arriver à un bilan global de type :
X % de centrage plus en arrière : Y % moins d’utilisationde kérosène.X % de diminuation de la dérive : Y % moins de masse.
X % de réduction de stabilité naturelle : plusd’actionneurs ou leur redimensionnement (plus grandebande passante, plus large zone de fonctionnement) et doncplus de masse/coûts.
Il existe alors un optimum entre stabilité réduite et les gains.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie Conclusion et perspectives
Sous l’hypothèse que l’on possède les données nécessaires onvoudrait arriver à un bilan global de type :
X % de centrage plus en arrière : Y % moins d’utilisationde kérosène.X % de diminuation de la dérive : Y % moins de masse.X % de réduction de stabilité naturelle : plusd’actionneurs ou leur redimensionnement (plus grandebande passante, plus large zone de fonctionnement) et doncplus de masse/coûts.
Il existe alors un optimum entre stabilité réduite et les gains.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Partie Conclusion et perspectives
Sous l’hypothèse que l’on possède les données nécessaires onvoudrait arriver à un bilan global de type :
X % de centrage plus en arrière : Y % moins d’utilisationde kérosène.X % de diminuation de la dérive : Y % moins de masse.X % de réduction de stabilité naturelle : plusd’actionneurs ou leur redimensionnement (plus grandebande passante, plus large zone de fonctionnement) et doncplus de masse/coûts.
Il existe alors un optimum entre stabilité réduite et les gains.
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Communications
A. P. Feuersänger, C. Toussaint and C. Döll, The impact of reduced lateralstability on the VMC equilibrium and manoeuvres during early design phases ofan aircraft, Deutscher Luft-und Raumfahrtkongress, Friedrichshafen, Germany,2005
A. P. Feuersänger, C. Döll and C. Toussaint, Actuator influence on flyingqualities of a naturally unstable aircraft, ICAS, Hamburg, Germany, 2006
A. P. Feuersänger and G. Ferreres, Design of a Robust Back-Up Controller foran Aircraft with Reduced Stability, Guidance, Navigation, and ControlConference and Exhibit, Keystone, CO, USA, 2006
A. P. Feuersänger and G. Ferreres, Robust Back-Up Control Design for anAircraft with Reduced Stability and Saturated Actuators, IFAC Symposium:Automatic Control in Aerospace, Toulouse, France, 2007 (submitted paper)
A. Knauf, S. Gaulocher and A. P. Feuersänger, Innovative Controller Design forSystems with Parameter Variations, Deutscher Luft-und Raumfahrtkongress,Braunschweig, Germany, 2006
A. Knauf, S. Gaulocher and A. P. Feuersänger, Self-Scheduled ControllerDesign for Relative Motion Control of a Satellite Formation, IMSM-IMAACAMulticonference, Buenos Aires, Argentinia, 2007
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Publications prévues
A. P. Feuersänger and G. Ferreres, Robust Back-Up Control Design for anAircraft with Reduced Stability and Saturated Actuators, Journal of Guidance,Control, and Dynamics, 2007
A. Knauf, S. Gaulocher and A. P. Feuersänger, Self-Scheduled ControllerDesign for Relative Motion Control of a Satellite Formation, Aerospace Scienceand Technology, 2007
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Formations
Formations scientifiques
Nonlinear Control Systems:Transformations, Equivalence,Normalforms, Marie Curie FAPTraining-Module, Paris GraduateSchool, CNRS et Supélec, 2006
Représentation et commande dessystèmes MIMO, Supaero, 2005
Systèmes non linéaires, Supaero,2005
Formations générales
Écrire à la française, Réseauuniversitaire ToulouseMidi-Pyrénées, 2006-2007
Gestion de projet, Direction de larecherche et de la valorisation,Collège des études doctorales,2007
Management d’équipe, Directionde la recherche et de lavalorisation, Collège des étudesdoctorales, 2007
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr

IntroductionMécanique et Dynamique du vol
AutomatiqueConclusions et perspectives
Merci !
Q U E S T I O N S ?
[email protected] - A. P. Feuersänger O N E R A - www.onera.fr
Top Related