






Langages
Pages
Légal

1
Soutenance de projet de fin d’études
Détection des défauts mécaniques dans la Machine asynchrone par l’analyse de courant statorique
Soutenu par:
o Mohamed ARHOUJDAMo Wassima ELMAJDOUB
Devant le jury composé de:
o Mr. Elhoussine ANBARo Mr. Ettouhami Mohammed Karimo Mr. Elyoussfi Mly Hachemo Mr.Taha JANAN
LP-EMSAAnnée universitaire 2013/2014
Encadré par:
o Mr. Elhoussine ANBAR
Co-Encadré par:
o Mr. Khalid DAHI
Introduction IV. perspectives V. Conclusion
2
I. Etat de l’art
II. modélisation et simulation de la MAS à l’état sain
IV. Influence des défauts de roulement sur la MAS
V. Conclusion
Introduction
Plan
IV. Perspectives
Introduction
I. Etat de l’art II. modélisation et
simulation de la MAS à l’état sain
III: Influence des défaut
de roulement sur la MAS
3
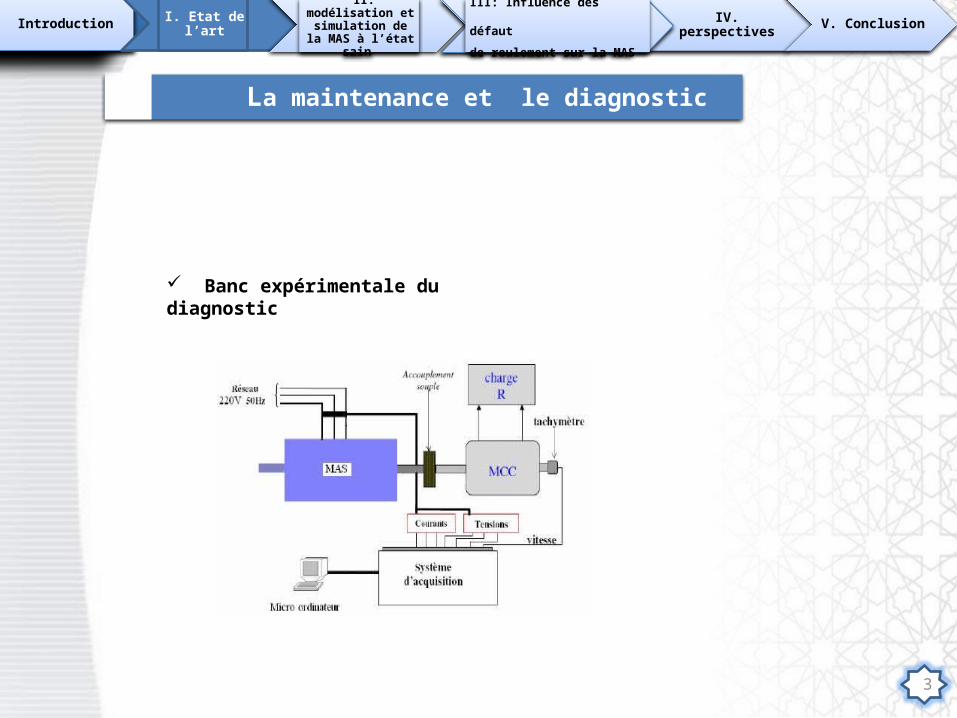
La maintenance et le diagnostic
Banc expérimentale du diagnostic
Introduction IV. perspectives V. ConclusionI. Etat de l’art
II. modélisation et simulation de la MAS
à l’état sain
III: Influence des défaut
de roulement sur la MAS
4
La machine asynchrone
Introduction IV. perspectives V. ConclusionI. Etat de l’art
II. modélisation et simulation de la MAS
à l’état sain
III: Influence des défaut
de roulement sur la MAS
5
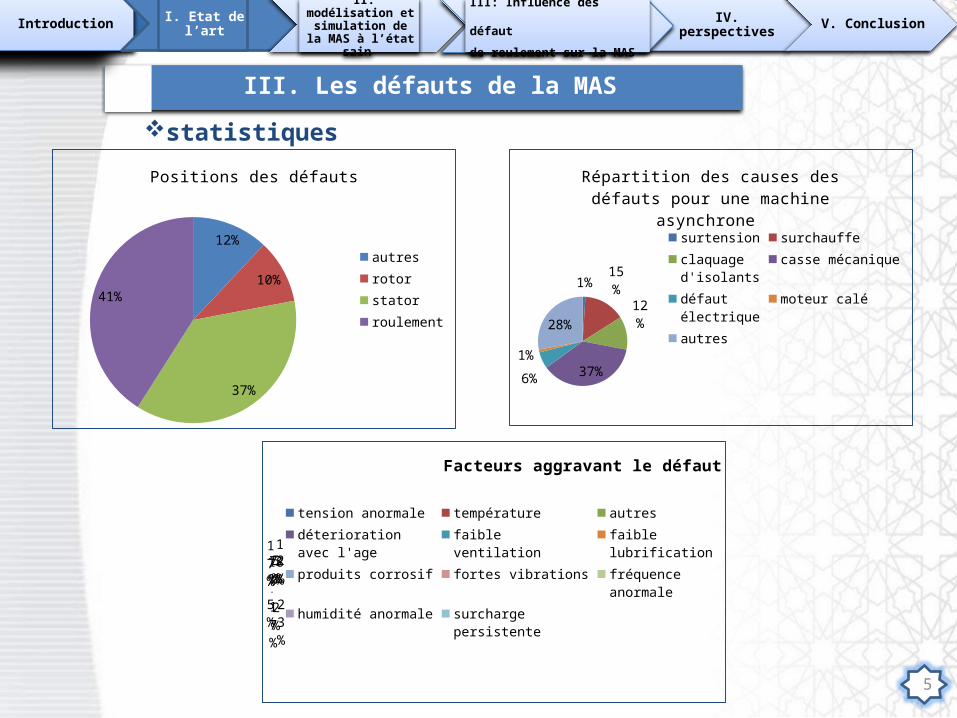
III. Les défauts de la MAS statistiques
12%
10%
37%
41%
Positions des défauts
autresrotorstatorroulement
1%
15%
12%
37%
6%1%
28%
Répartition des causes des défauts pour une machine asynchrone
surtensionsurchauffeclaquage d'isolantscasse mécaniquedéfaut électriquemoteur caléautres
2% 3%
18%
23%
2%
17%
5%
17%
1% 7%5%
Facteurs aggravant le défauttension anormaletempératureautres déterioration avec l'agefaible ventilationfaible lubrificationproduits corrosiffortes vibrationsfréquence anormalehumidité anormalesurcharge persistente
Introduction IV. perspectives V. ConclusionI. Etat de l’art
II. modélisation et simulation de la MAS
à l’état sain
III: Influence des défaut
de roulement sur la MAS
6
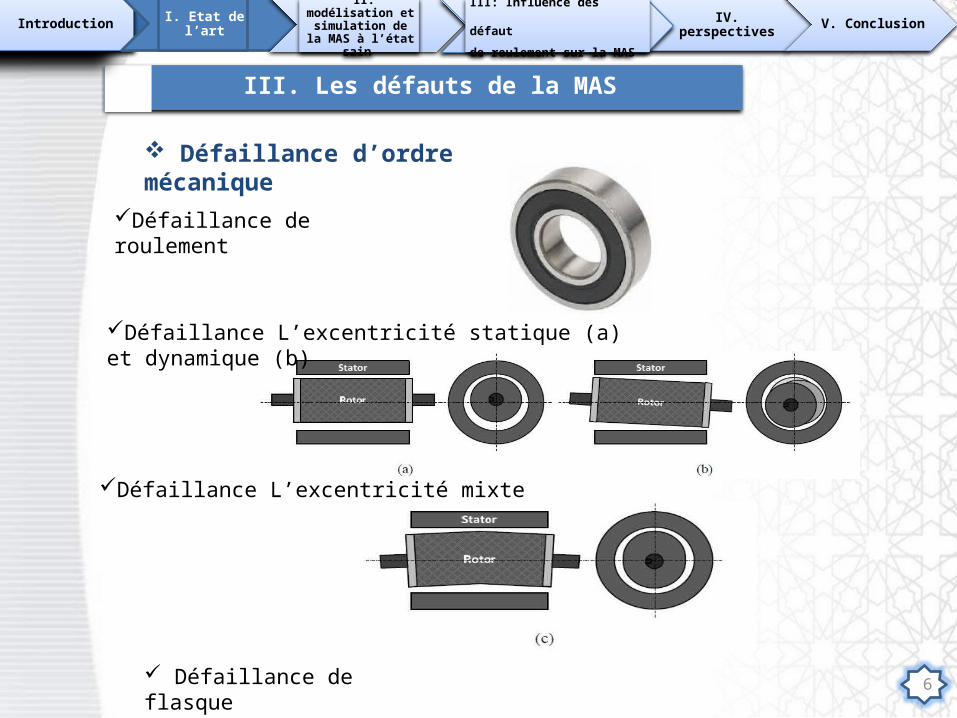
III. Les défauts de la MAS
Défaillance d’ordre mécanique
Défaillance de roulement
Défaillance L’excentricité statique (a) et dynamique (b)
Défaillance L’excentricité mixte
Défaillance de flasque
Introduction IV. perspectives V. ConclusionI. Etat de l’art
II. modélisation et simulation de la MAS
à l’état sain
III: Influence des défaut
de roulement sur la MAS
7
Les défauts de la MAS
défauts d’isolant dans un enroulement
défauts de court-circuit entre spires
défauts de court-circuit entre phases
défauts rotoriques
défaut de cassure des barres
Défaillance d’ordre électrique
Introduction IV. perspectives V. ConclusionI. Etat de l’art
II. modélisation et simulation de la MAS
à l’état sain
III: Influence des défaut
de roulement sur la MAS
8
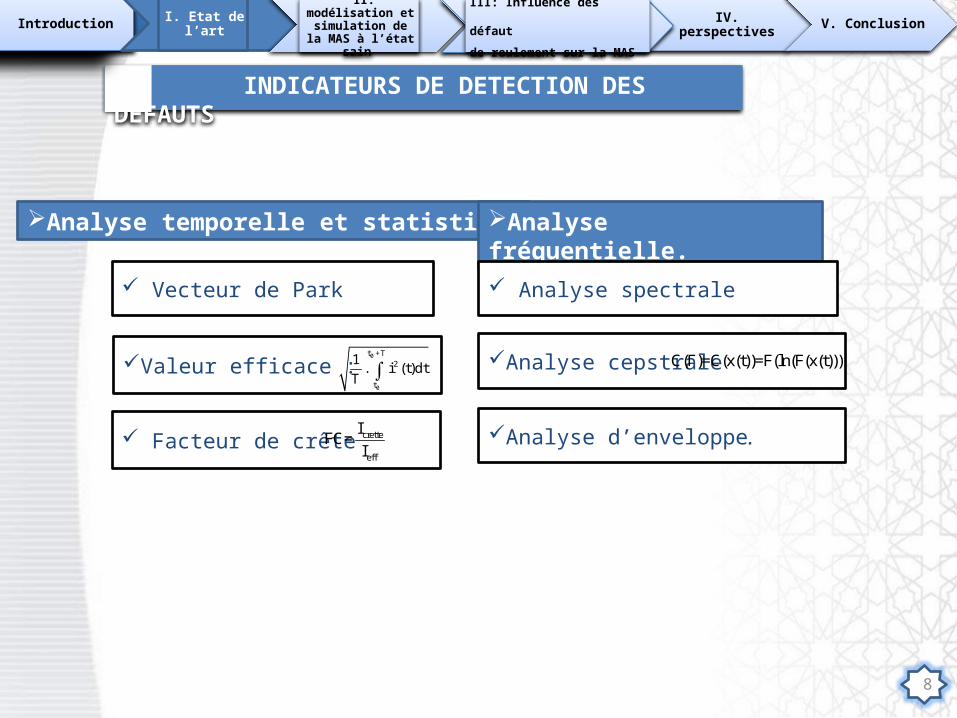
INDICATEURS DE DETECTION DES DEFAUTS
Analyse temporelle et statistique
Vecteur de Park
Analyse fréquentielle.
Analyse spectrale
Valeur efficace : Analyse cepstrale
Analyse d’enveloppe.
0
0
t +T2
t
1 . i (t)dtT
Facteur de crête crette
eff
IFC=
I
C(Γ)=C(x(t))=F(ln(F(x(t)))
Introduction IV. perspectives V. ConclusionI. Etat de l’art
II. modélisation et simulation de la MAS
à l’état sain
III: Influence des défaut
de roulement sur la MAS
9
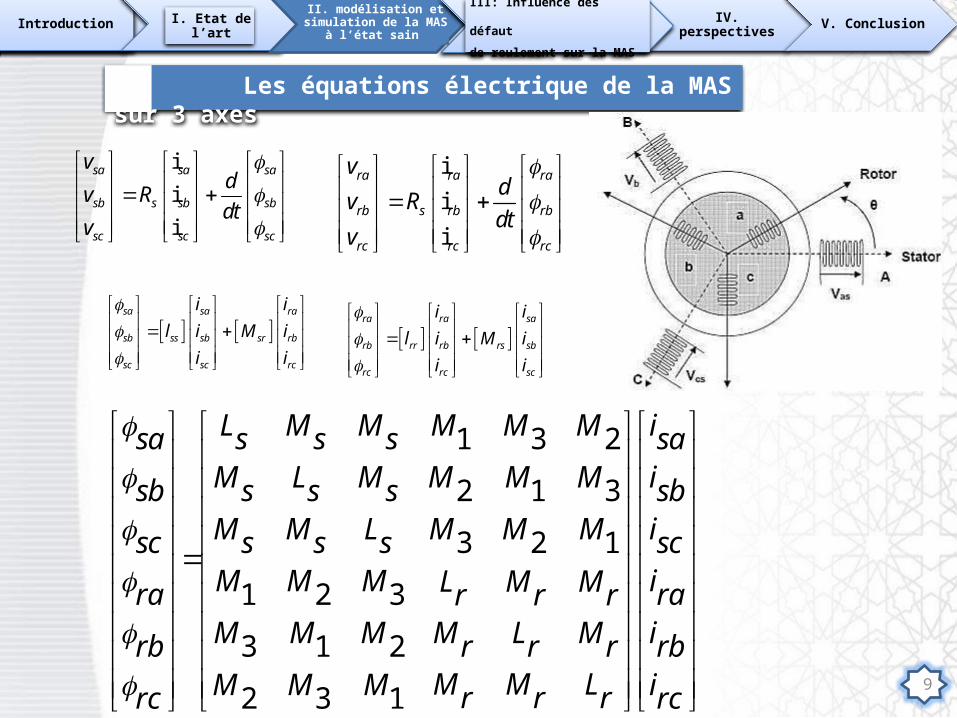
Les équations électrique de la MAS sur 3 axes
iii
sa sa sa
sb s sb sb
sc sc sc
vdv Rdt
v
sa sa ra
sb ss sb sr rb
sc sc rc
i il i M i
i i
ra ra sa
rb rr rb rs sb
rc rc sc
i il i M i
i i
1 3 2 2 1 3
3 2 1
1 2 3 3 1 2
2 3 1
L M M M M M isa s s s saM L M M M M isb s s s sbM M L M M M isc s s s scM M M iL M Mra rar r rM M M M L M irb r r r rb
M M LM M M ir r rrc rc
iii
ra ra ra
rb s rb rb
rc rc rc
vdv Rdt
v
Introduction IV. perspectives V. ConclusionI. Etat de l’art
II. modélisation et simulation de la MAS à
l’état sain III: Influence des défaut
de roulement sur la MAS
10
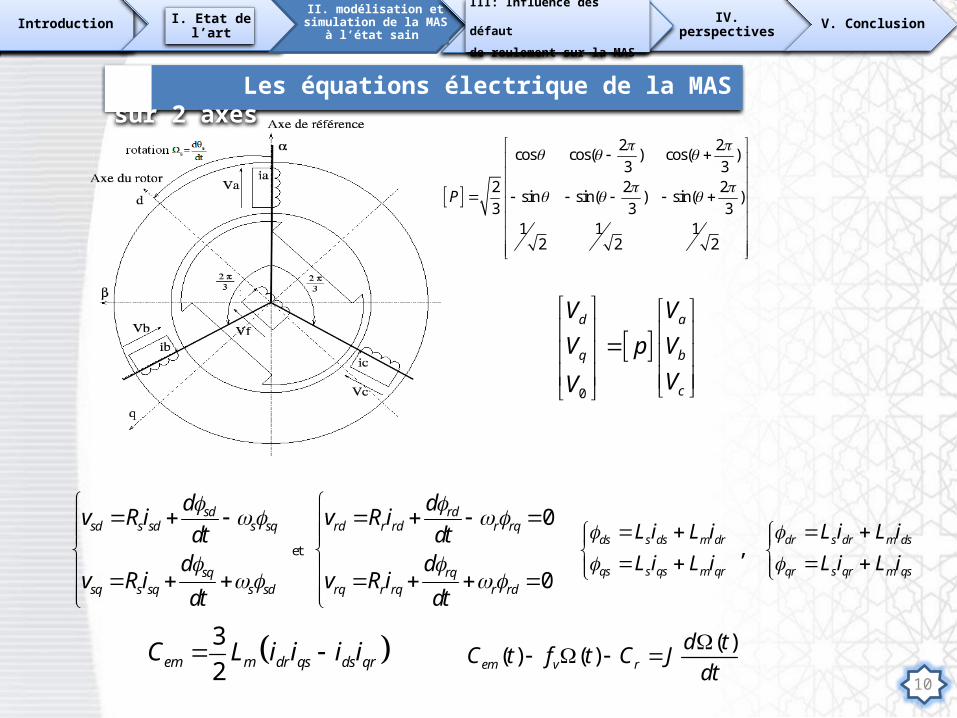
Les équations électrique de la MAS sur 2 axes
0
d a
q b
c
V VV p V
VV
2 2cos cos( ) cos( )3 3
2 2 2sin sin( ) sin( )3 3 3
1 1 12 2 2
P
et
0
0
sd rdsd s sd s sq rd r rd r rq
sq rqsq s sq s sd rq r rq r rd
d dv R i v R idt dt
d dv R i v R i
dt dt
32em m dr qs ds qrC L i i i i ( )( ) ( )em v r
d tC t f t C Jdt
, ds s ds m dr dr s dr m ds
qs s qs m qr qr s qr m qs
L i L i L i L iL i L i L i L i
Introduction IV. perspectives V. ConclusionI. Etat de l’art
II. modélisation et simulation de la MAS à
l’état sain III: Influence des défaut
de roulement sur la MAS
11
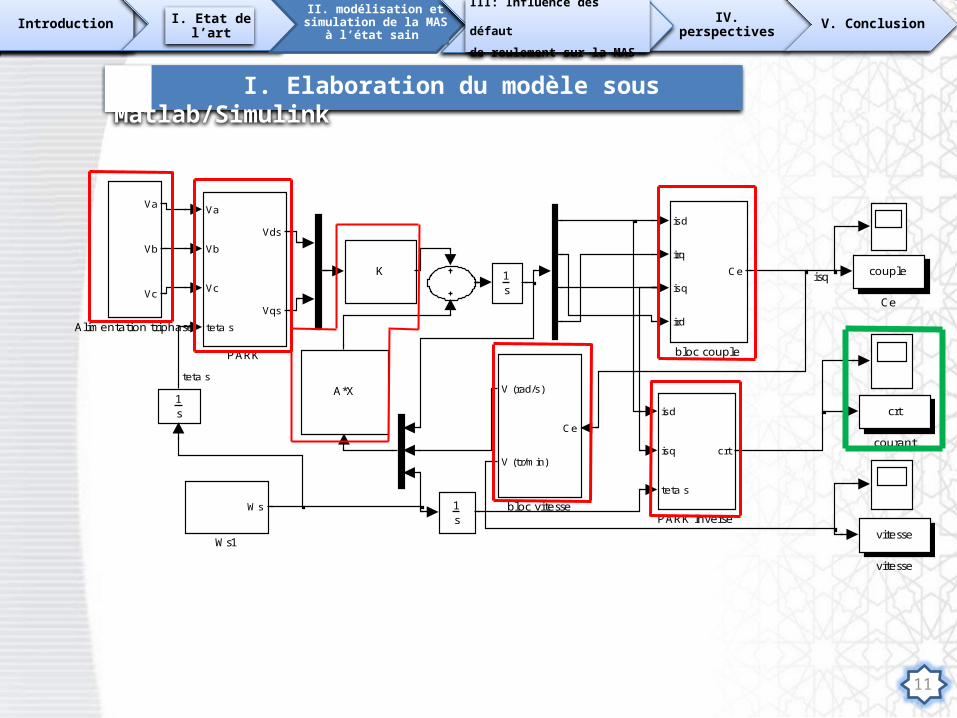
I. Elaboration du modèle sous Matlab/Simulink
isq
vitesse
vitesse
crt
courantCe
V (rad/s)
V (tr/min)
bloc vitesse
isd
irq
isq
ird
Ce
bloc couple
Ws
Ws1
isd
isq
teta s
crt
PARK Inverse
Va
Vb
Vc
teta s
Vds
Vqs
PARK
K
1s
1s
1s
A*X
couple
Ce
Va
Vb
Vc
Alimentation triphasé
teta s
Introduction IV. perspectives V. ConclusionI. Etat de l’art
II. modélisation et simulation de la MAS à
l’état sain III: Influence des défaut
de roulement sur la MAS
12
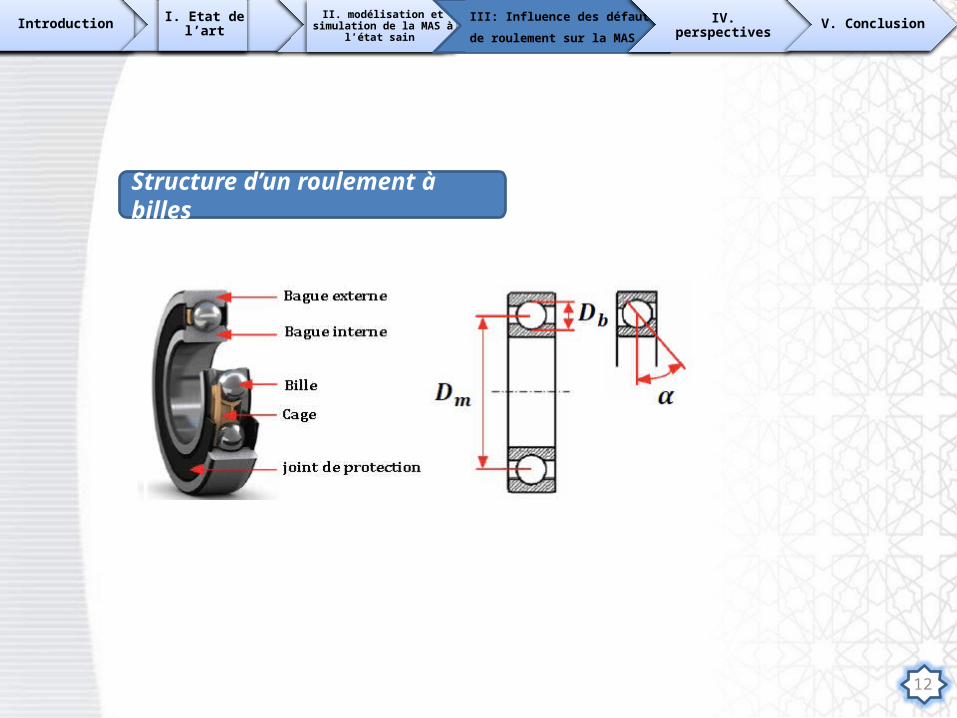
Structure d’un roulement à billes
Introduction I. Etat de l’art II. modélisation et simulation de la MAS à l’état sain
III: Influence des défaut
de roulement sur la MAS
IV. perspectives V. Conclusion
1313
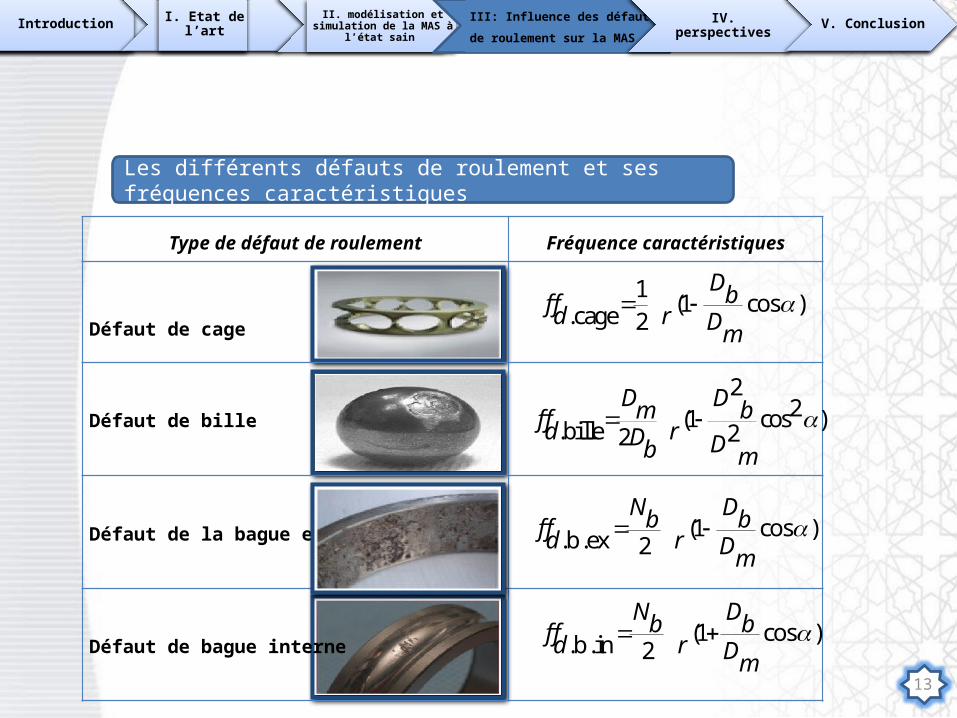
Type de défaut de roulement Fréquence caractéristiques
Défaut de cage
Défaut de bille
Défaut de la bague externe
Défaut de bague interne
1 (1 cos ).cage 2
Dbf fd r Dm
22(1 cos ).bille 22
D Dm bf fd rD Db m
(1 cos ).b.ex 2
N Db bf fd r Dm
(1 cos ).b.in 2
N Db bf fd r Dm
Les différents défauts de roulement et ses fréquences caractéristiques
Introduction I. Etat de l’art II. modélisation et simulation de la MAS à l’état sain
III: Influence des défaut
de roulement sur la MAS
IV. perspectives V. Conclusion
1414
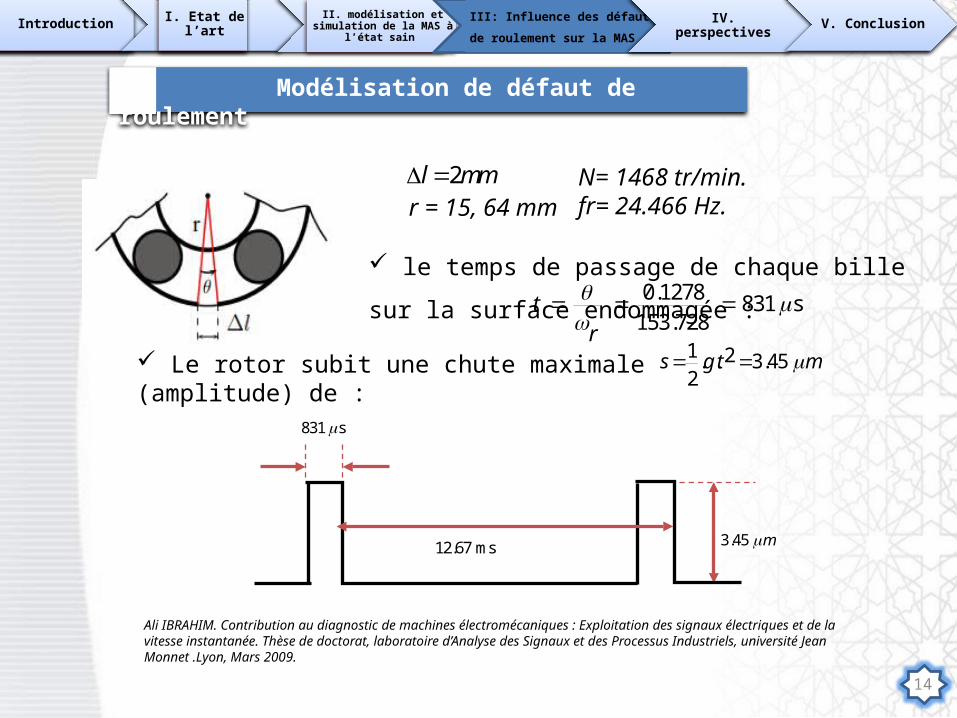
Modélisation de défaut de roulement
2l mm N= 1468 tr/min.fr= 24.466 Hz.
0.1278 831 s153.728
tr
le temps de passage de chaque bille sur la surface
endommagée :
r = 15, 64 mm
Le rotor subit une chute maximale (amplitude) de : 1 2. . 3.45 2
s g t m
831 s
12.67 ms 3.45 m
Introduction I. Etat de l’art II. modélisation et simulation de la MAS à l’état sain
III: Influence des défaut
de roulement sur la MAS
IV. perspectives V. Conclusion
Ali IBRAHIM. Contribution au diagnostic de machines électromécaniques : Exploitation des signaux électriques et de la vitesse instantanée. Thèse de doctorat, laboratoire d’Analyse des Signaux et des Processus Industriels, université Jean Monnet .Lyon, Mars 2009.
1515
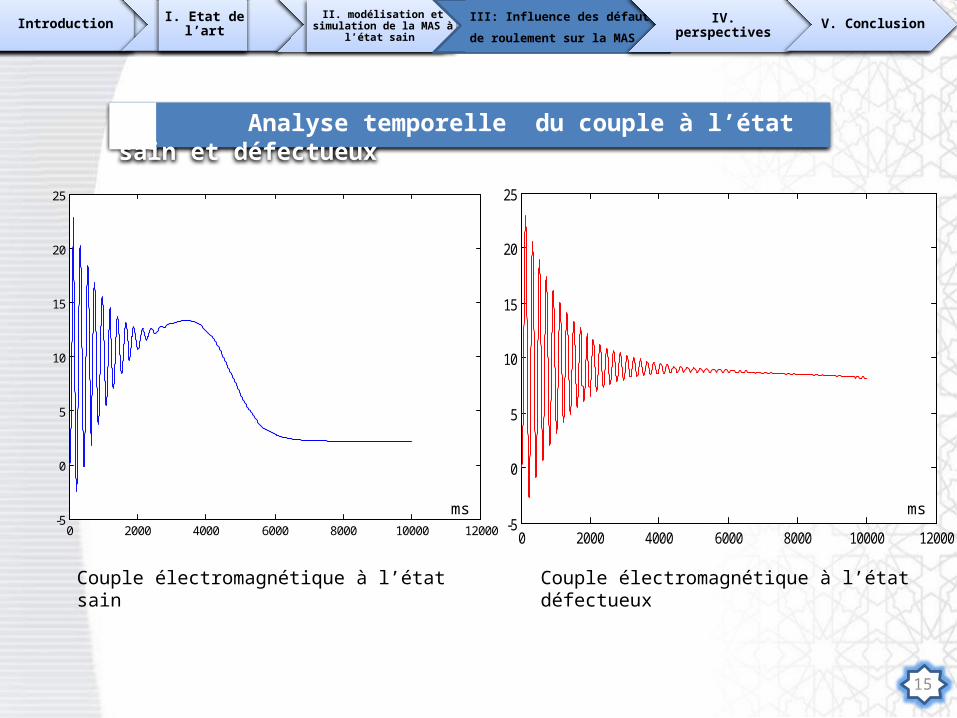
Analyse temporelle du couple à l’état sain et défectueux
0 2000 4000 6000 8000 10000 12000-5
0
5
10
15
20
25
0 2000 4000 6000 8000 10000 12000-5
0
5
10
15
20
25
msms
Couple électromagnétique à l’état sain Couple électromagnétique à l’état défectueux
Introduction I. Etat de l’art II. modélisation et simulation de la MAS à l’état sain
III: Influence des défaut
de roulement sur la MAS
IV. perspectives V. Conclusion
1616
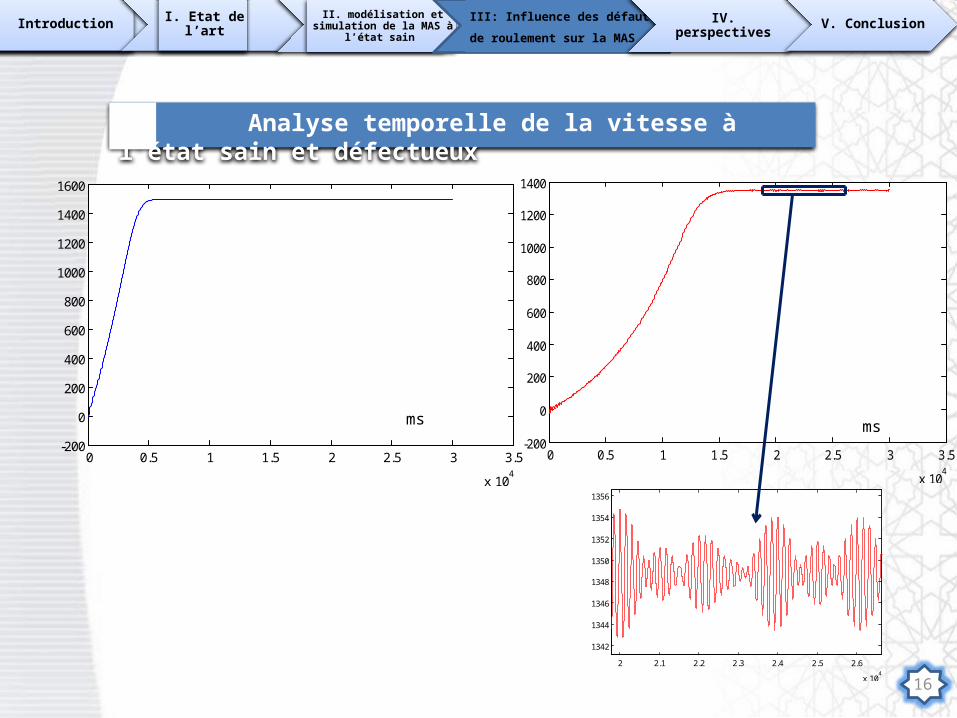
Analyse temporelle de la vitesse à l’état sain et défectueux
0 0.5 1 1.5 2 2.5 3 3.5
x 104
-200
0
200
400
600
800
1000
1200
1400
2 2.1 2.2 2.3 2.4 2.5 2.6
x 104
1342
1344
1346
1348
1350
1352
1354
1356
0 0.5 1 1.5 2 2.5 3 3.5
x 104
-200
0
200
400
600
800
1000
1200
1400
1600
msms
Introduction I. Etat de l’art II. modélisation et simulation de la MAS à l’état sain
III: Influence des défaut
de roulement sur la MAS
IV. perspectives V. Conclusion
1717
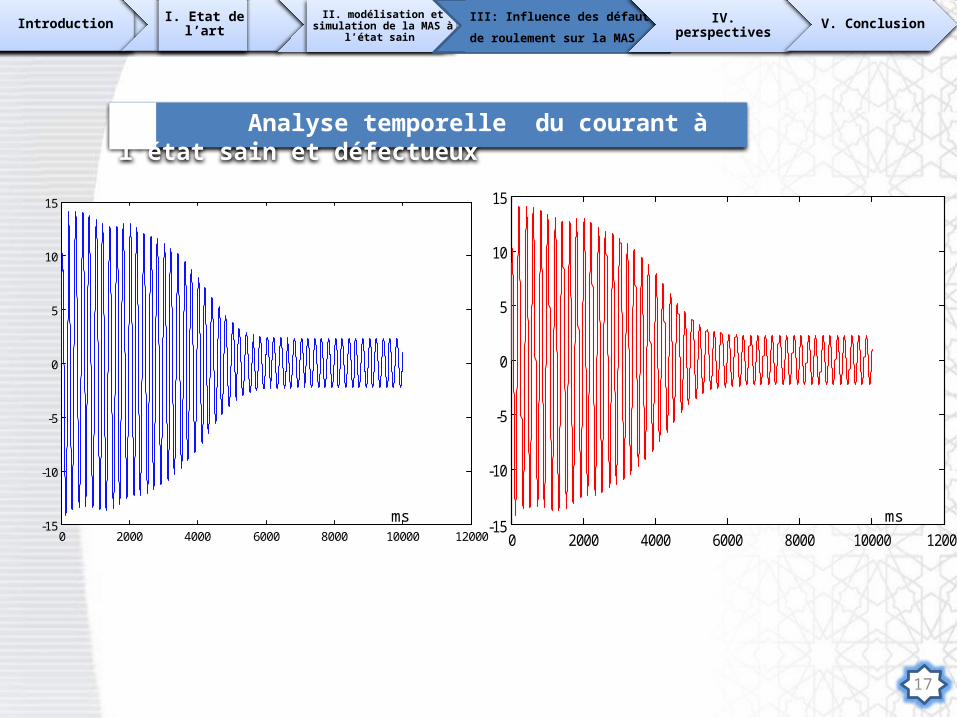
Analyse temporelle du courant à l’état sain et défectueux
0 2000 4000 6000 8000 10000 12000-15
-10
-5
0
5
10
15
0 2000 4000 6000 8000 10000 12000-15
-10
-5
0
5
10
15
msms
Introduction I. Etat de l’art II. modélisation et simulation de la MAS à l’état sain
III: Influence des défaut
de roulement sur la MAS
IV. perspectives V. Conclusion
1818
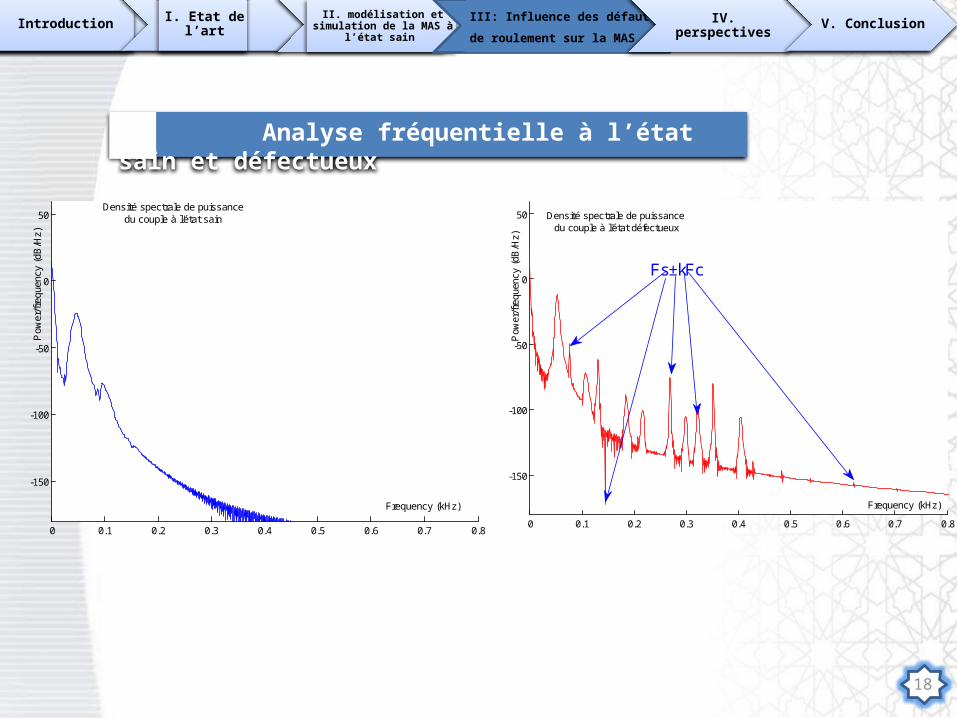
Analyse fréquentielle à l’état sain et défectueux
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-150
-100
-50
0
50
Frequency (kHz)P
ower
/freq
uenc
y (d
B/H
z)
Densité spectrale de puissance du couple à l'état défectueux
Fs±kFc
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-150
-100
-50
0
50
Frequency (kHz)
Pow
er/fr
eque
ncy
(dB
/Hz)
Densité spectrale de puissancedu couple à l'état sain
Introduction I. Etat de l’art II. modélisation et simulation de la MAS à l’état sain
III: Influence des défaut
de roulement sur la MAS
IV. perspectives V. Conclusion
1919
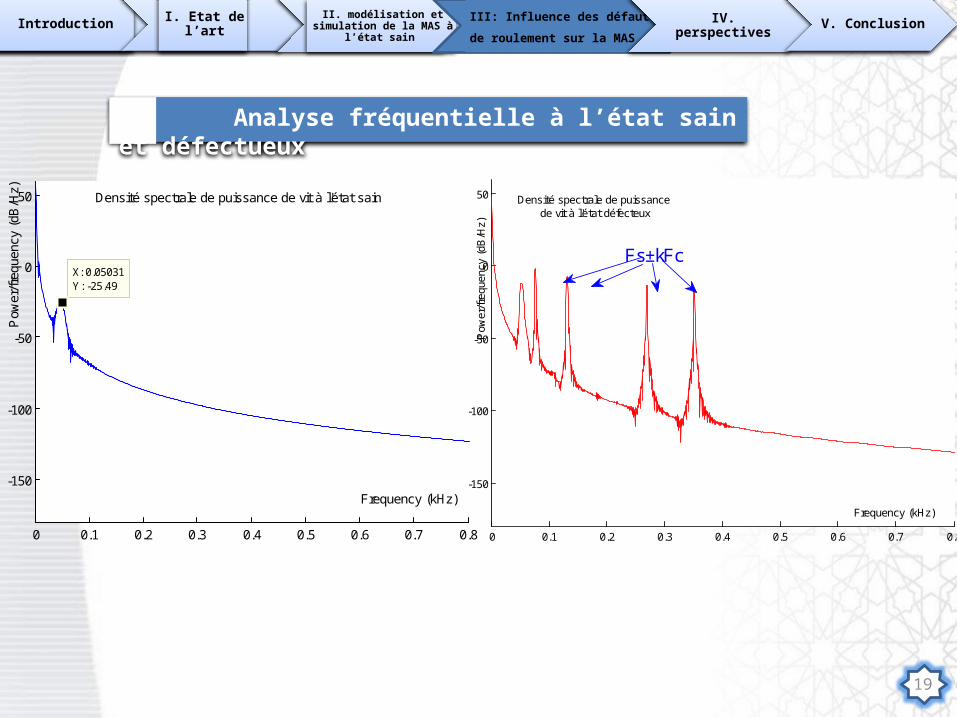
Analyse fréquentielle à l’état sain et défectueux
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-150
-100
-50
0
50
Frequency (kHz)
Pow
er/fr
eque
ncy
(dB
/Hz)
Densité spectrale de puissance de vit à l'état défecteux
Fs±kFc
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-150
-100
-50
0
50
X: 0.05031Y: -25.49
Frequency (kHz)
Pow
er/fr
eque
ncy
(dB
/Hz) Densité spectrale de puissance de vit à l'état sain
Introduction I. Etat de l’art II. modélisation et simulation de la MAS à l’état sain
III: Influence des défaut
de roulement sur la MAS
IV. perspectives V. Conclusion
2020
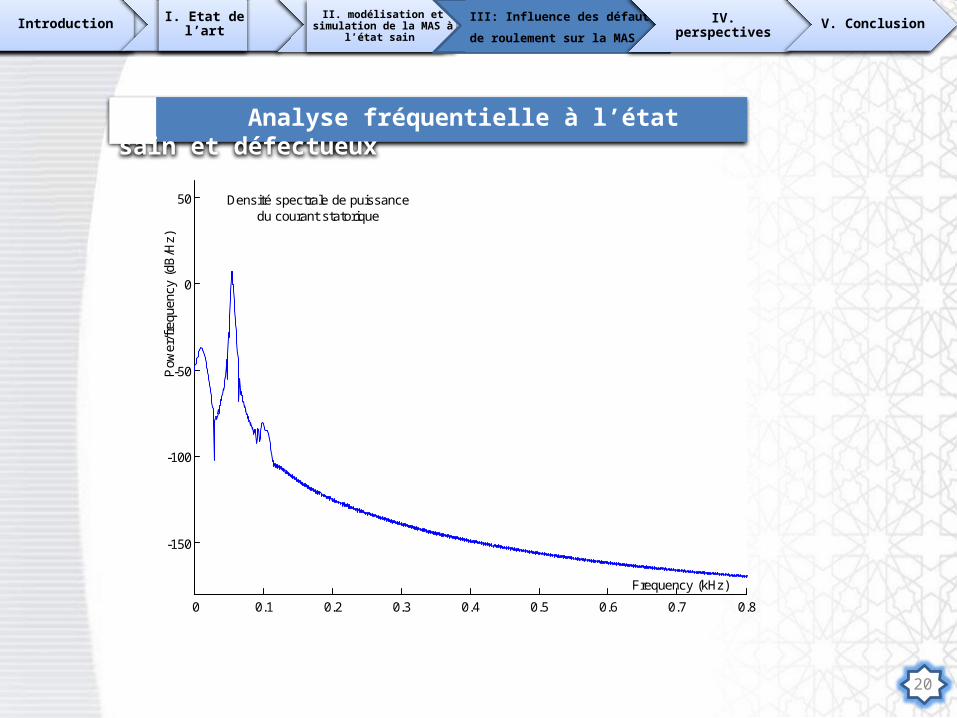
Analyse fréquentielle à l’état sain et défectueux
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-150
-100
-50
0
50
Frequency (kHz)
Pow
er/fr
eque
ncy
(dB
/Hz)
Densité spectrale de puissancedu courant statorique
Introduction I. Etat de l’art II. modélisation et simulation de la MAS à l’état sain
III: Influence des défaut
de roulement sur la MAS
IV. perspectives V. Conclusion
2121
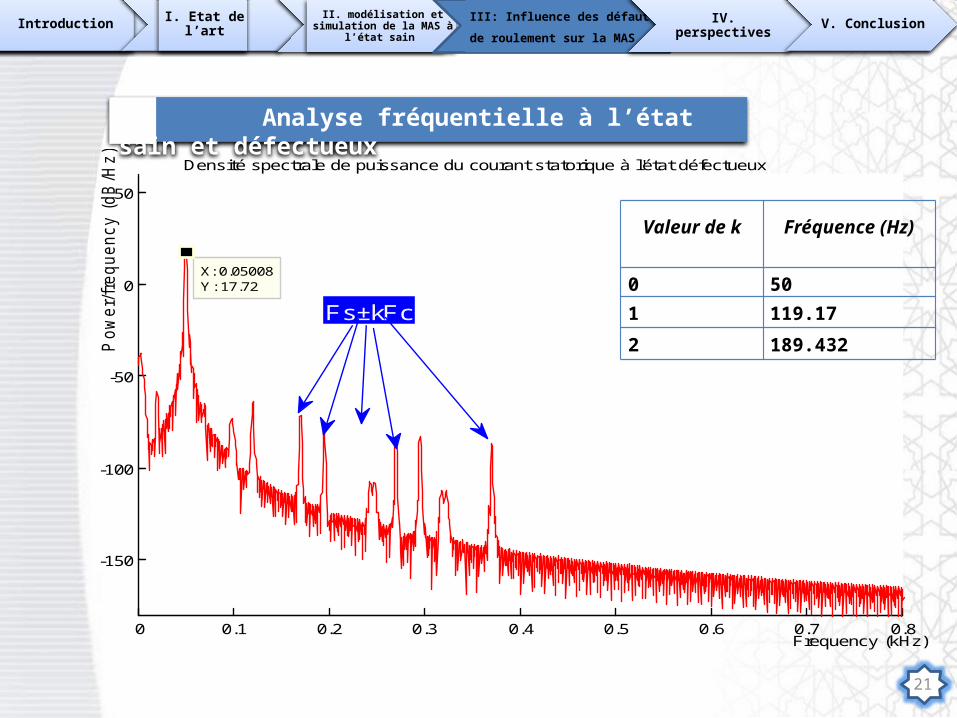
Analyse fréquentielle à l’état sain et défectueux
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-150
-100
-50
0
50
X: 0.05008Y: 17.72
Frequency (kHz)
Pow
er/fr
eque
ncy
(dB
/Hz) Densité spectrale de puissance du courant statorique à l'état défectueux
Fs±kFc
Valeur de k Fréquence (Hz)
0 501 119.17
2 189.432
Introduction I. Etat de l’art II. modélisation et simulation de la MAS à l’état sain
III: Influence des défaut
de roulement sur la MAS
IV. perspectives V. Conclusion
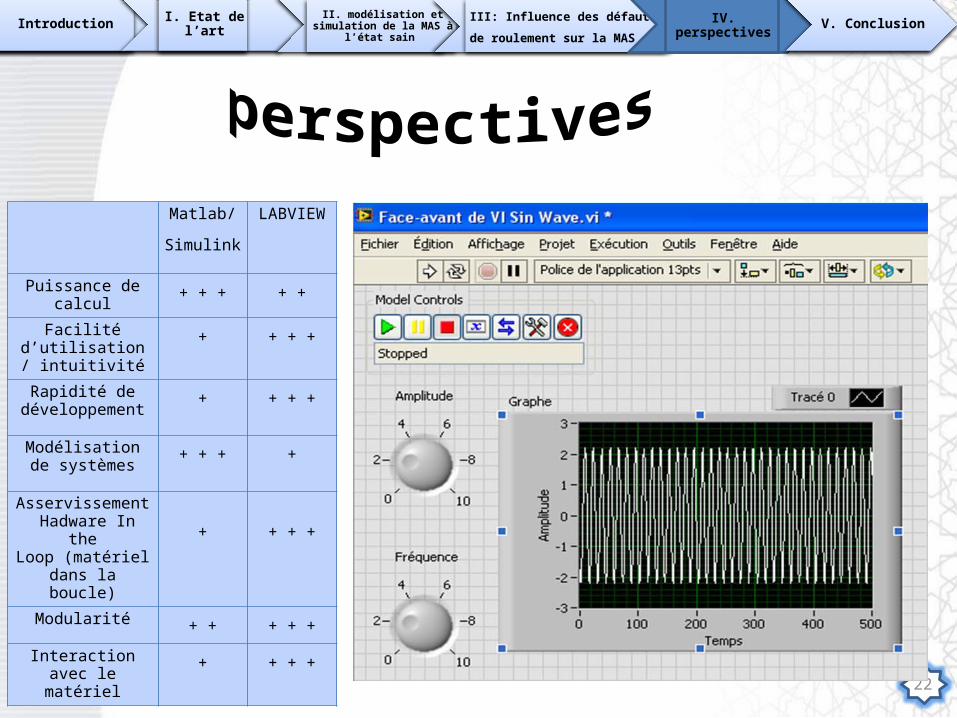
2222
Matlab/
Simulink
LABVIEW
Puissance de calcul + + + + +
Facilité d’utilisation / intuitivité
+ + + +
Rapidité de développement
+ + + +
Modélisation de systèmes
+ + + +
Asservissement Hadware In the
Loop (matériel dans la boucle)
+ + + +
Modularité + + + + +
Interaction avec le matériel
+ + + +
Introduction I. Etat de l’art II. modélisation et simulation de la MAS à l’état sain
III: Influence des défaut
de roulement sur la MAS
IV. perspectives V. Conclusion
2323
Introduction I. Etat de l’art II. modélisation et simulation de la MAS à l’état sain
III: Influence des défaut
de roulement sur la MAS
IV. perspectives V. Conclusion
Top Related