





Langages
Pages
Légal


Lecture 23

Hierarchical Spatial Domains
Ε1
Ε3 Ε4
Ε2Ε1
Ε3 Ε4
Ε2

Parameter s is determined by the box with most particles. Most boxes will be empty (ok) or have much fewer than s particles
Reducing number of levels is good Alternate strategy
Continue subdivision so that each parent box has > ℓ points and each leaf-box has ≤ ℓpoints
Consider an algorithm due to Cheng et al (J. Comput. Phys. 1999).

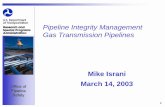
At the finest level consider evaluation at box b. It is surrounded by boxes
Coarser, Same or Finer level Already considered, in a
coarser S|R translation Divide surrounding boxes not
already considered in toL1, L2, L3, L4 domains Boxes L1 share a boundary
with box b, or they lie within the sphere of box b and need to be evaluated directly.
Boxes L2 are separated by at least one box of size of bS|R translate these
Boxes in L3 contain sourcesthat lie outside the sphere of b and are closer than boxes L2R-preFMM these
Box b lies outside the sphere of boxes in L4. but is too close to S|R. S-preFMM these

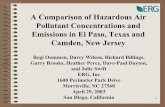
x*
xiR
S
R*
r*
r* < R*S-expansion: |y - x*| > R* > |xi - x*|R-expansion: |y - x*| < r* < |xi - x*|
For xi in L3 we can build R expansions in b

Algorithm parameters & optimization Suggest that P and l should be balanced but do not provide
an optimal choice A good project
to implement this and find out optimal choices. compare this scheme with our scheme and check efficiency Perhaps develop a combined scheme.

Outline
Review Vector analysis (Divergence & Gradient of potential) 3-D Cartesian coordinates & Spherical coordinates Laplaces equation and Helmholtz equation Green's function & Green's theorem Boundary element method FMM

Gauss Divergence theorem
In practice we can write
Ω

Integral Definitions of div, grad and curl
Elemental volume δτwith surface ∆S
τ 0∆S
τ 0∆S
τ 0∆S
1lim dSτ
1lim . dSτ1lim dSτ
δ
δ
δ
φ φδ
δ
δ
→
→
→
∇ ≡
∇⋅ ≡
∇× ≡ − ×
∫
∫
∫
n
D D n
D D n
!
!
!
n
dS
D=D(r), φ= φ(r)

Greens formula

Laplaces equation
Let G satisfy
∇2G (x) = δ (x)
Solution is
G (x) = − 1
4πrMore generally
G (x,y) = − 1
4π |x− y|

Helmholtz equation
Let G satisfy
∇2G (x) + k2G= δ (x)
Solution is
G (x) = −exp (ikr)4πr
More generally
G(x, y) = −exp(ik |x− y|)4π |x− y|

Discretize surface S into triangles Discretize`

Greens formula Recall that the impulse-response is sufficient to characterize
a linear system Solution to arbitrary forcing constructed via convolution For a linear boundary value problem we can likewise use
the solution to a delta-function forcing to solve it. Fluid flow, steady-state heat transfer, gravitational
potential, etc. can be expressed in terms of Laplacesequation
Solution to delta function forcing, without boundaries, is called free-space Greens function

Boundary Element Methods
Boundary conditions provide value of φj or qj
Becomes a linear system to solve for the other

Accelerate via FMM


Top Related