






Langages
Pages
Légal

Page 1/11
TP S.I.I. Cycle 6 : Etude du comportement
statique des systèmes mécaniques
Lycée Ferdinand
Buisson
Cinématique PTSI
Cycle 6 :
Etude du comportement statique des systèmes
Résolution d’un problème de statique graphique
Compétences : B2, C
Ilot: 01 – Maxpid
Activités Contenu Compétences
1 Etude du modèle de comportement C
2 Etude du modèle de connaissance C
3 Etude du modèle de simulé C
4 Analyse des écarts et conclusion C
Page 2/11
Etude statique des systèmes mécaniques
Objectifs à atteindre Résolution d’un problème de statique avec frottement
Volume horaire du module en présentiel
2h30
Compétences professionnelles visées
Etre capable :
de comprendre modéliser un système mécanique
de mesurer sur le système des efforts et moments
d’étudier le modèle de connaissance
de simulé sous solidworks
analyser les écarts
Bases théoriques Cours statique des systèmes mécaniques
Activités pédagogiques TP
Systèmes mis en œuvre Maxpid
Logiciels utilisés Solidworks
Le thème de ce module repose sur le système Maxpid
Page 3/11
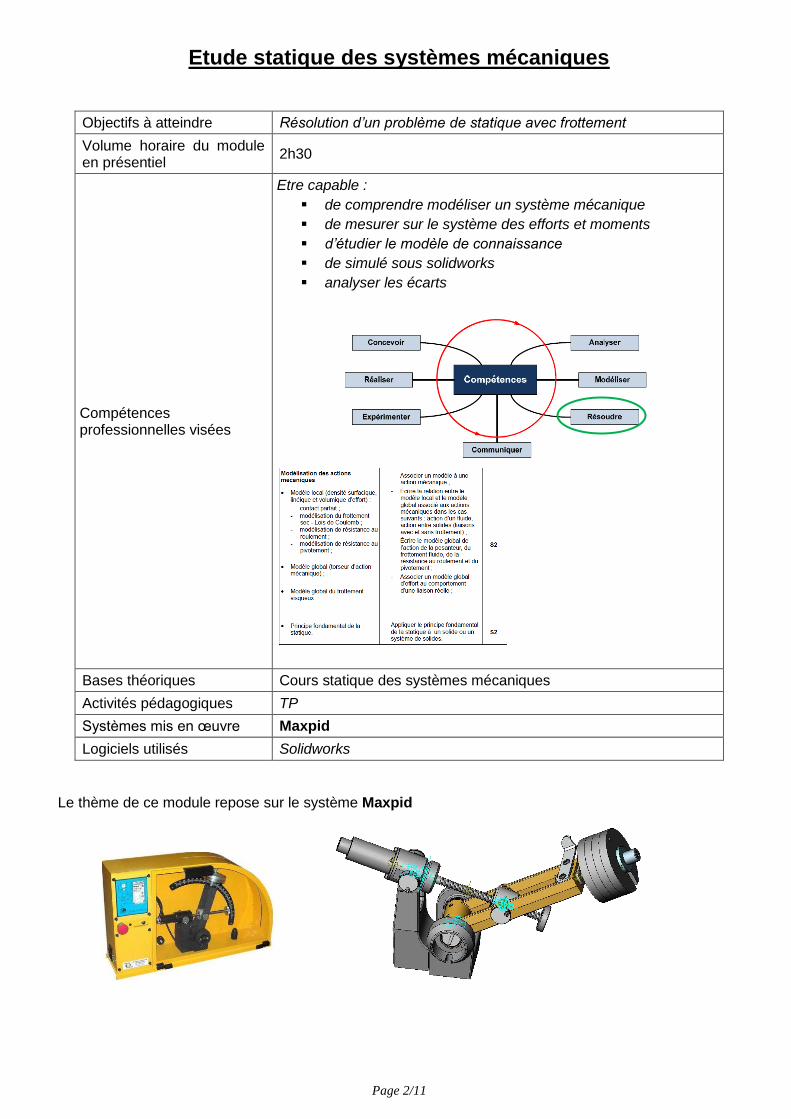
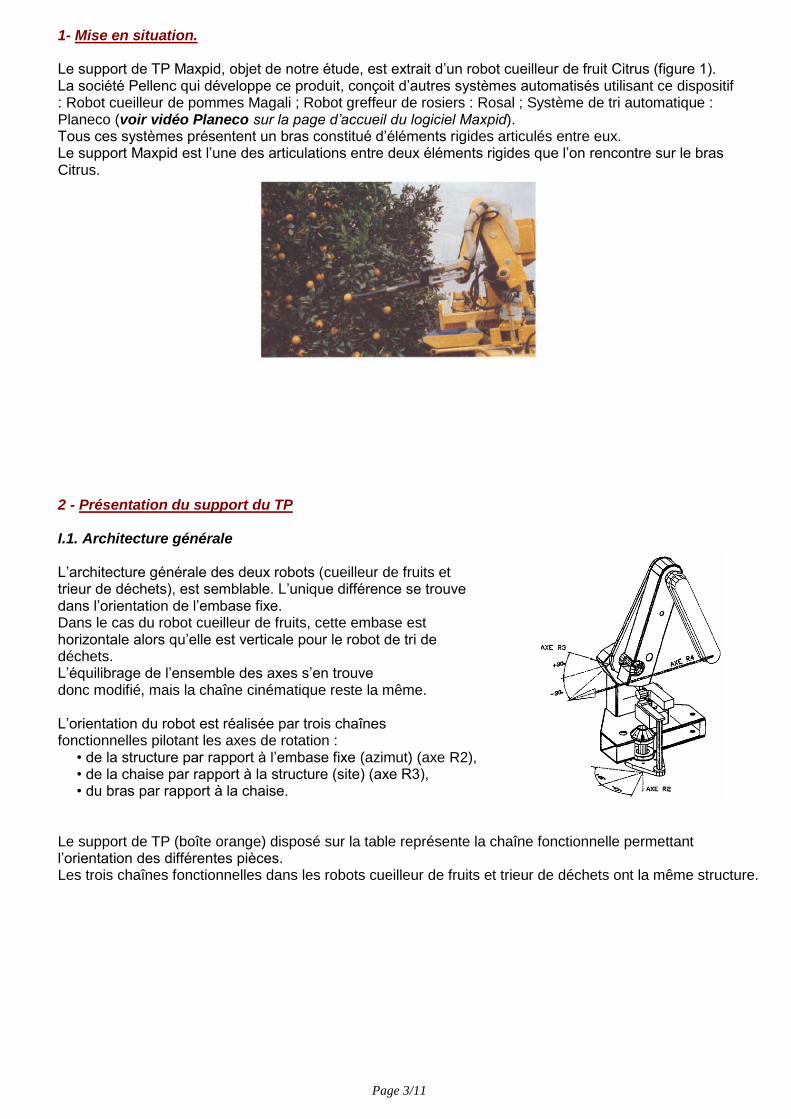
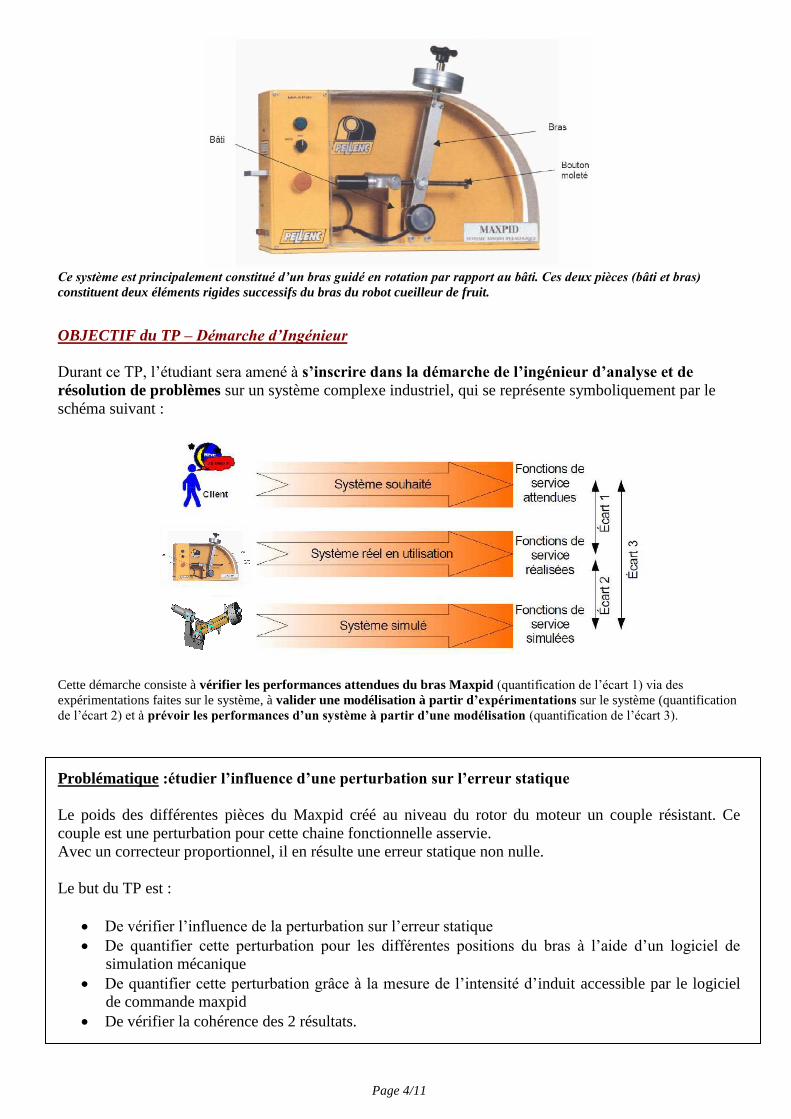
1- Mise en situation. Le support de TP Maxpid, objet de notre étude, est extrait d’un robot cueilleur de fruit Citrus (figure 1). La société Pellenc qui développe ce produit, conçoit d’autres systèmes automatisés utilisant ce dispositif : Robot cueilleur de pommes Magali ; Robot greffeur de rosiers : Rosal ; Système de tri automatique : Planeco (voir vidéo Planeco sur la page d’accueil du logiciel Maxpid). Tous ces systèmes présentent un bras constitué d’éléments rigides articulés entre eux. Le support Maxpid est l’une des articulations entre deux éléments rigides que l’on rencontre sur le bras Citrus.
2 - Présentation du support du TP I.1. Architecture générale L’architecture générale des deux robots (cueilleur de fruits et trieur de déchets), est semblable. L’unique différence se trouve dans l’orientation de l’embase fixe. Dans le cas du robot cueilleur de fruits, cette embase est horizontale alors qu’elle est verticale pour le robot de tri de déchets. L’équilibrage de l’ensemble des axes s’en trouve donc modifié, mais la chaîne cinématique reste la même. L’orientation du robot est réalisée par trois chaînes fonctionnelles pilotant les axes de rotation :
• de la structure par rapport à l’embase fixe (azimut) (axe R2), • de la chaise par rapport à la structure (site) (axe R3), • du bras par rapport à la chaise.
Le support de TP (boîte orange) disposé sur la table représente la chaîne fonctionnelle permettant l’orientation des différentes pièces. Les trois chaînes fonctionnelles dans les robots cueilleur de fruits et trieur de déchets ont la même structure.
Page 4/11
Ce système est principalement constitué d’un bras guidé en rotation par rapport au bâti. Ces deux pièces (bâti et bras)
constituent deux éléments rigides successifs du bras du robot cueilleur de fruit.
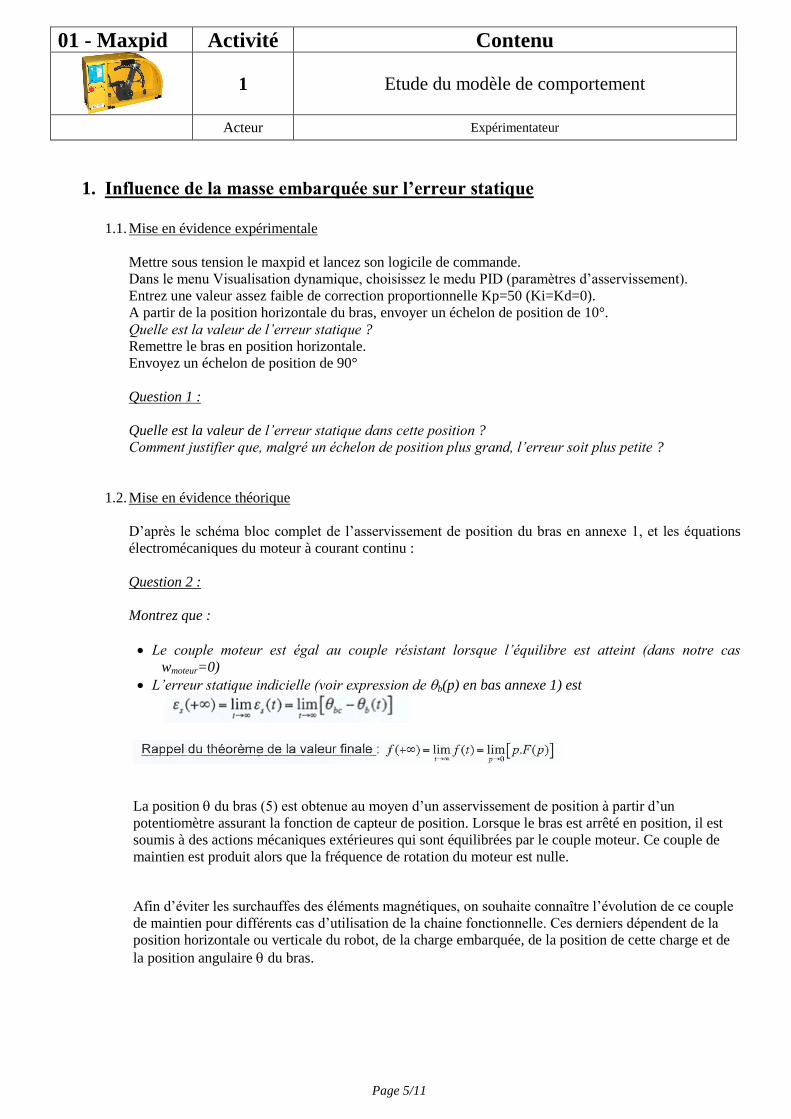
OBJECTIF du TP – Démarche d’Ingénieur
Durant ce TP, l’étudiant sera amené à s’inscrire dans la démarche de l’ingénieur d’analyse et de
résolution de problèmes sur un système complexe industriel, qui se représente symboliquement par le
schéma suivant :
Cette démarche consiste à vérifier les performances attendues du bras Maxpid (quantification de l’écart 1) via des
expérimentations faites sur le système, à valider une modélisation à partir d’expérimentations sur le système (quantification
de l’écart 2) et à prévoir les performances d’un système à partir d’une modélisation (quantification de l’écart 3).
Problématique :étudier l’influence d’une perturbation sur l’erreur statique
Le poids des différentes pièces du Maxpid créé au niveau du rotor du moteur un couple résistant. Ce
couple est une perturbation pour cette chaine fonctionnelle asservie.
Avec un correcteur proportionnel, il en résulte une erreur statique non nulle.
Le but du TP est :
De vérifier l’influence de la perturbation sur l’erreur statique
De quantifier cette perturbation pour les différentes positions du bras à l’aide d’un logiciel de
simulation mécanique
De quantifier cette perturbation grâce à la mesure de l’intensité d’induit accessible par le logiciel
de commande maxpid
De vérifier la cohérence des 2 résultats.
Page 5/11
01 - Maxpid Activité Contenu
1 Etude du modèle de comportement
Acteur Expérimentateur
1. Influence de la masse embarquée sur l’erreur statique
1.1. Mise en évidence expérimentale
Mettre sous tension le maxpid et lancez son logicile de commande.
Dans le menu Visualisation dynamique, choisissez le medu PID (paramètres d’asservissement).
Entrez une valeur assez faible de correction proportionnelle Kp=50 (Ki=Kd=0).
A partir de la position horizontale du bras, envoyer un échelon de position de 10°.
Quelle est la valeur de l’erreur statique ?
Remettre le bras en position horizontale.
Envoyez un échelon de position de 90°
Question 1 :
Quelle est la valeur de l’erreur statique dans cette position ?
Comment justifier que, malgré un échelon de position plus grand, l’erreur soit plus petite ?
1.2. Mise en évidence théorique
D’après le schéma bloc complet de l’asservissement de position du bras en annexe 1, et les équations
électromécaniques du moteur à courant continu :
Question 2 :
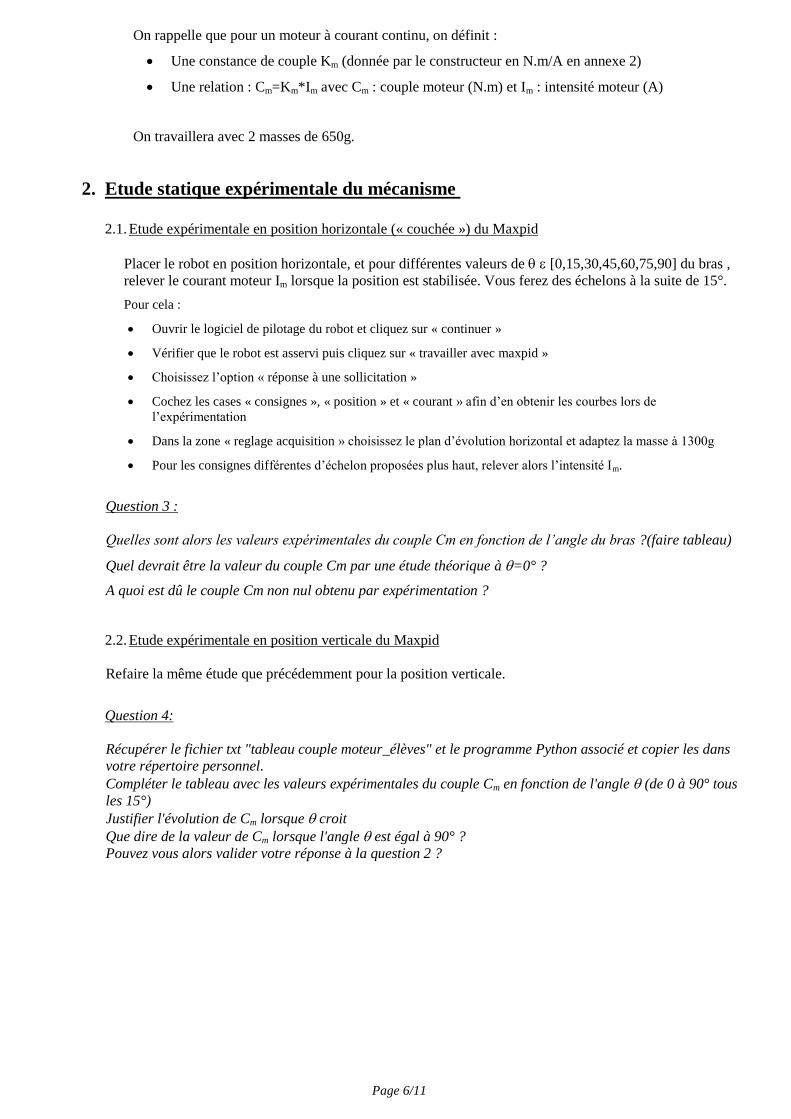
Montrez que :
Le couple moteur est égal au couple résistant lorsque l’équilibre est atteint (dans notre cas
wmoteur=0)
L’erreur statique indicielle (voir expression de b(p) en bas annexe 1) est
La position du bras (5) est obtenue au moyen d’un asservissement de position à partir d’un
potentiomètre assurant la fonction de capteur de position. Lorsque le bras est arrêté en position, il est
soumis à des actions mécaniques extérieures qui sont équilibrées par le couple moteur. Ce couple de
maintien est produit alors que la fréquence de rotation du moteur est nulle.
Afin d’éviter les surchauffes des éléments magnétiques, on souhaite connaître l’évolution de ce couple
de maintien pour différents cas d’utilisation de la chaine fonctionnelle. Ces derniers dépendent de la
position horizontale ou verticale du robot, de la charge embarquée, de la position de cette charge et de
la position angulaire du bras.
Page 6/11
On rappelle que pour un moteur à courant continu, on définit :
Une constance de couple Km (donnée par le constructeur en N.m/A en annexe 2)
Une relation : Cm=Km*Im avec Cm : couple moteur (N.m) et Im : intensité moteur (A)
On travaillera avec 2 masses de 650g.
2. Etude statique expérimentale du mécanisme
2.1. Etude expérimentale en position horizontale (« couchée ») du Maxpid
Placer le robot en position horizontale, et pour différentes valeurs de [0,15,30,45,60,75,90] du bras ,
relever le courant moteur Im lorsque la position est stabilisée. Vous ferez des échelons à la suite de 15°.
Pour cela :
Ouvrir le logiciel de pilotage du robot et cliquez sur « continuer »
Vérifier que le robot est asservi puis cliquez sur « travailler avec maxpid »
Choisissez l’option « réponse à une sollicitation »
Cochez les cases « consignes », « position » et « courant » afin d’en obtenir les courbes lors de
l’expérimentation
Dans la zone « reglage acquisition » choisissez le plan d’évolution horizontal et adaptez la masse à 1300g
Pour les consignes différentes d’échelon proposées plus haut, relever alors l’intensité Im.
Question 3 :
Quelles sont alors les valeurs expérimentales du couple Cm en fonction de l’angle du bras ?(faire tableau)
Quel devrait être la valeur du couple Cm par une étude théorique à =0° ?
A quoi est dû le couple Cm non nul obtenu par expérimentation ?
2.2. Etude expérimentale en position verticale du Maxpid
Refaire la même étude que précédemment pour la position verticale.
Question 4:
Récupérer le fichier txt "tableau couple moteur_élèves" et le programme Python associé et copier les dans
votre répertoire personnel.
Compléter le tableau avec les valeurs expérimentales du couple Cm en fonction de l'angle (de 0 à 90° tous
les 15°)
Justifier l'évolution de Cm lorsque croit
Que dire de la valeur de Cm lorsque l'angle est égal à 90° ?
Pouvez vous alors valider votre réponse à la question 2 ?
Page 7/11
01 - Maxpid Activité Contenu
2 Etude du modèle de connaissance
Acteur Pilote de projet
3. Etude statique théorique du mécanisme dans la position verticale
3.1. Résolution analytique
On donne en annexe 2 les résultats d’une étude statique analytique permettant de calculer le couple
moteur Cm.
Question 5 :
Comparer le modèle cinématique proposé par rapport au réel
Définir le degré d’hyperstaticité du modèle proposé.
Justifier le choix de ce modèle pour l’étude statique
Question 6 :
En considérant l’ensemble maxpid isolé, définir les actions mécaniques extérieures qui lui sont
appliquées, autres que celles issues des liaisons mécaniques
01 - Maxpid Activité Contenu
3 Etude du modèle simulé
Acteur Modélisateur
3.2. Etude théorique à l’aide d’un logiciel de simulation mécanique
Le modèle numérique proposé du Maxpid est constitué de solides indéformables en liaisons parfaites.
Seul le poids des 2 masselottes est pris en compte.
Lancer Solidworks et ouvrez l’assemblage du « Maxpid statique élève » situé dans le répertoire « maxpid
SDW »
Tester la mobilité en rotation du bras. Puis, rajouter une contrainte d’angle nul entre le bras et
l’horizontale du bâti pour le mettre en position initiale.
Ouvrir ensuite méca 3d.
Question 7 : étude cinématique
Observer les liaisons proposées. Quelles sont les différences avec le modèle théorique ?
Page 8/11
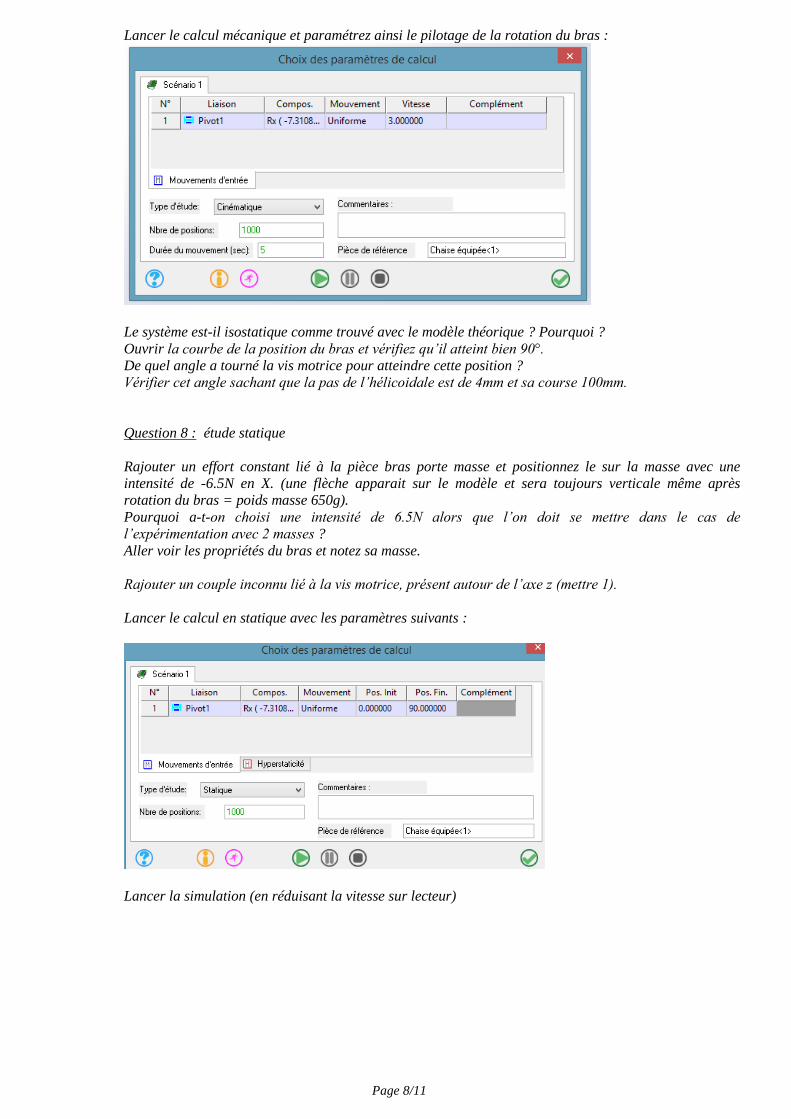
Lancer le calcul mécanique et paramétrez ainsi le pilotage de la rotation du bras :
Le système est-il isostatique comme trouvé avec le modèle théorique ? Pourquoi ?
Ouvrir la courbe de la position du bras et vérifiez qu’il atteint bien 90°.
De quel angle a tourné la vis motrice pour atteindre cette position ?
Vérifier cet angle sachant que la pas de l’hélicoidale est de 4mm et sa course 100mm.
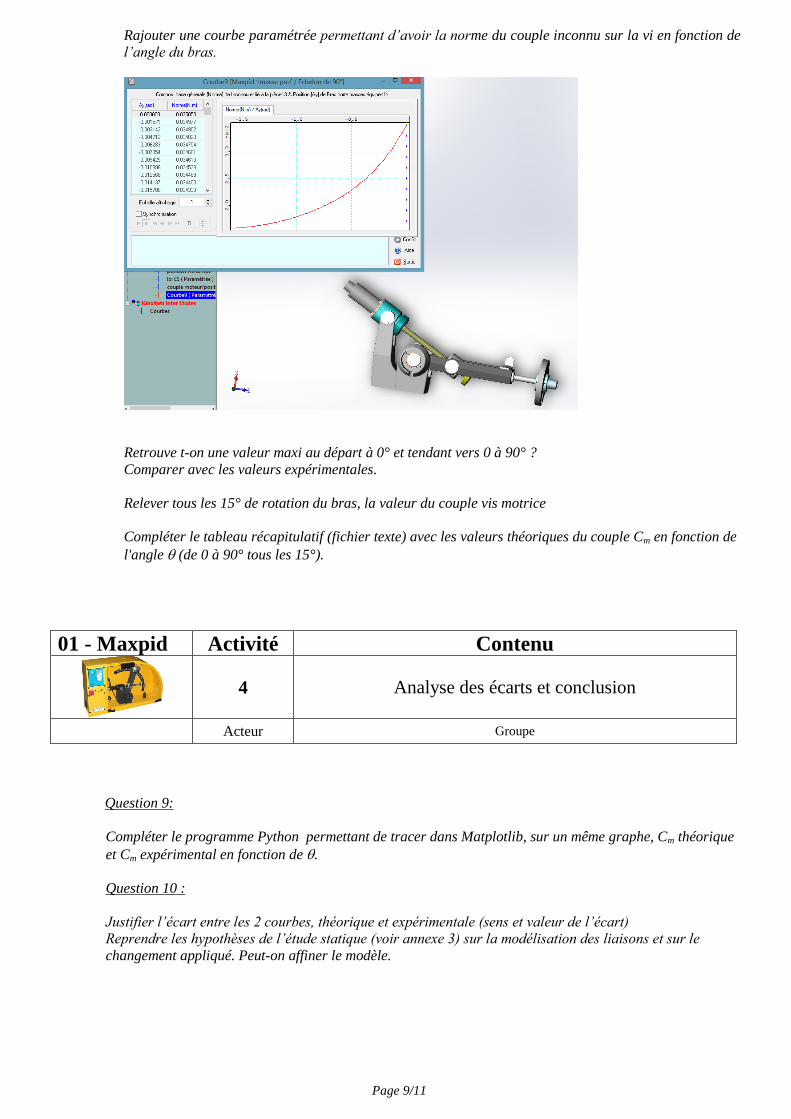
Question 8 : étude statique
Rajouter un effort constant lié à la pièce bras porte masse et positionnez le sur la masse avec une
intensité de -6.5N en X. (une flèche apparait sur le modèle et sera toujours verticale même après
rotation du bras = poids masse 650g).
Pourquoi a-t-on choisi une intensité de 6.5N alors que l’on doit se mettre dans le cas de
l’expérimentation avec 2 masses ?
Aller voir les propriétés du bras et notez sa masse.
Rajouter un couple inconnu lié à la vis motrice, présent autour de l’axe z (mettre 1).
Lancer le calcul en statique avec les paramètres suivants :
Lancer la simulation (en réduisant la vitesse sur lecteur)
Page 9/11
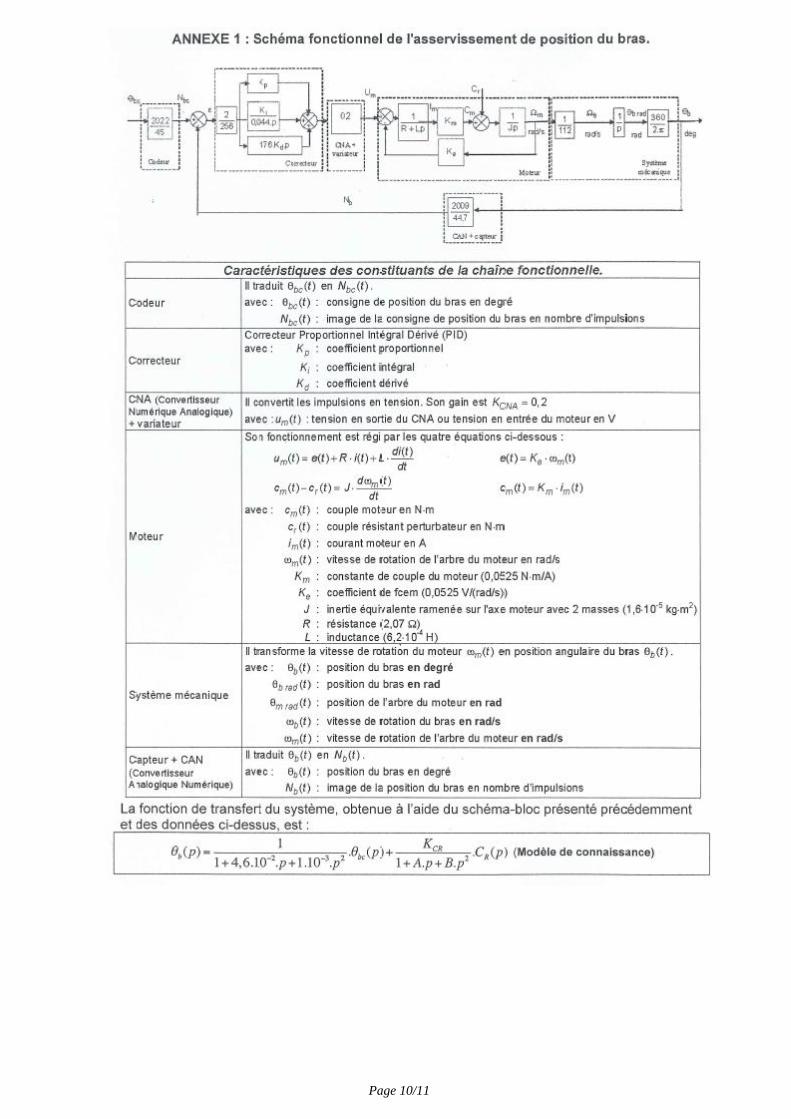
Rajouter une courbe paramétrée permettant d’avoir la norme du couple inconnu sur la vi en fonction de
l’angle du bras.
Retrouve t-on une valeur maxi au départ à 0° et tendant vers 0 à 90° ?
Comparer avec les valeurs expérimentales.
Relever tous les 15° de rotation du bras, la valeur du couple vis motrice
Compléter le tableau récapitulatif (fichier texte) avec les valeurs théoriques du couple Cm en fonction de
l'angle (de 0 à 90° tous les 15°).
01 - Maxpid Activité Contenu
4 Analyse des écarts et conclusion
Acteur Groupe
Question 9:
Compléter le programme Python permettant de tracer dans Matplotlib, sur un même graphe, Cm théorique
et Cm expérimental en fonction de .
Question 10 :
Justifier l’écart entre les 2 courbes, théorique et expérimentale (sens et valeur de l’écart)
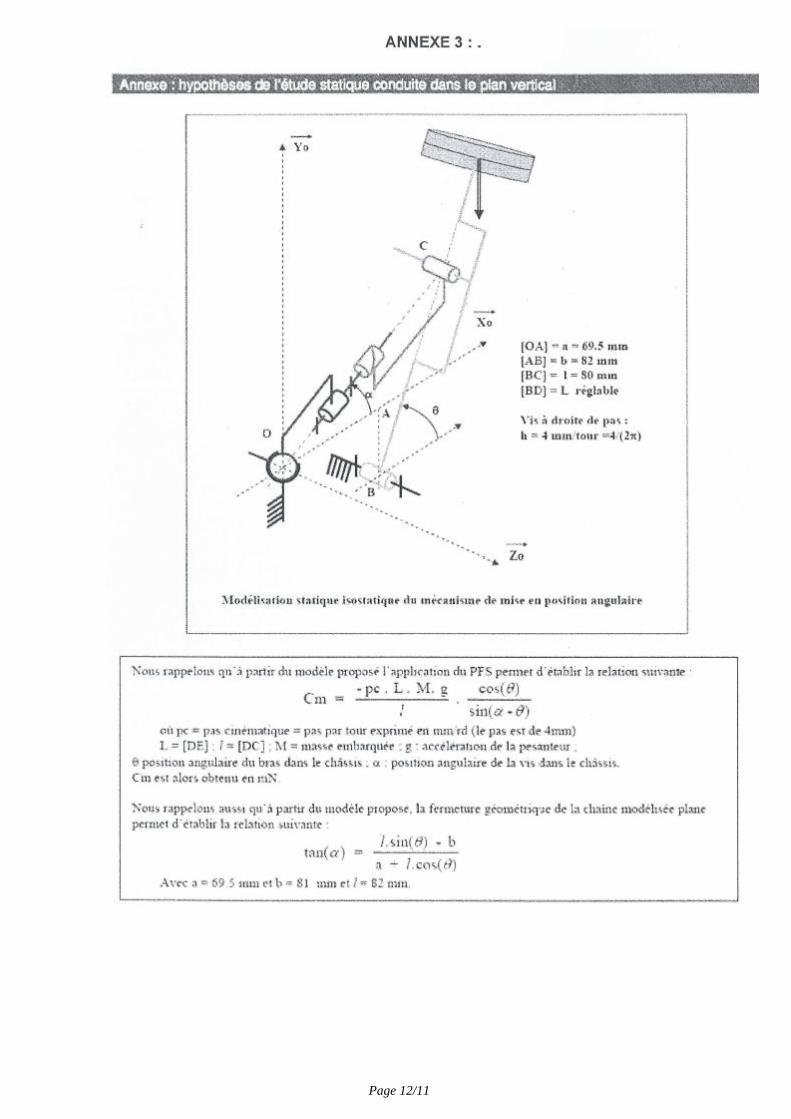
Reprendre les hypothèses de l’étude statique (voir annexe 3) sur la modélisation des liaisons et sur le
changement appliqué. Peut-on affiner le modèle.
Page 10/11
Page 11/11
Page 12/11
Top Related