







Langages
Pages
Légal

Dynamique des structures tournantes à symétriecyclique en présence d’incertitudes aléatoires.
Application au désaccordage des roues aubagées.
Evangeline Capiez-Lernout
These dirigee par Christian Soize, Laboratoire de Mecanique
Universite de Marne-La-Vallee
Collaboration avec SNECMA MOTEURS
Soutenance de these - 14 octobre 2004 – p.1
Plan de l’exposé
I- INTRODUCTION
II- METHODOLOGIE DU PROBLEME DIRECT:
analyse dynamique du désaccordage des roues aubagées
III- METHODOLOGIE DU PROBLEME INVERSE:
caractérisation des tolérances géométriques de l’aube
IV- VALIDATION NUMERIQUE DES METHODOLOGIESPROBABILISTES SUR DES ROUES AUBAGEES
V- CONCLUSIONS ET PERSPECTIVES
Soutenance de these - 14 octobre 2004 – p.2
I- INTRODUCTION
Soutenance de these - 14 octobre 2004 – p.3
Contexte de la recherche
Soutenance de these - 14 octobre 2004 – p.4
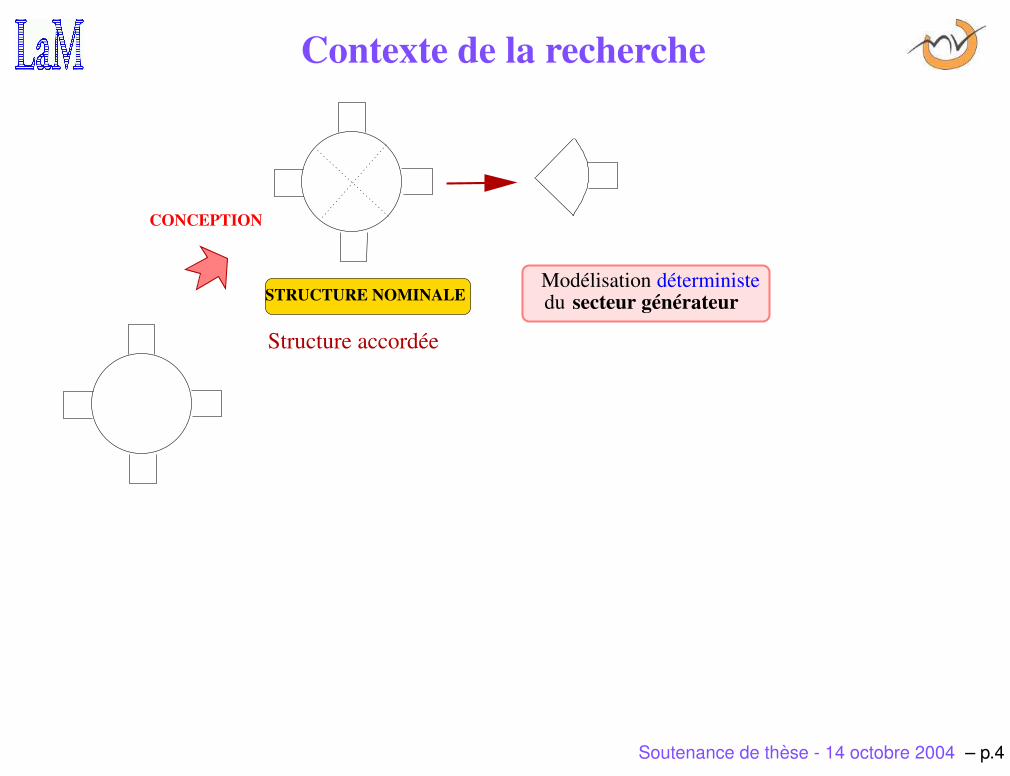
Contexte de la recherche
Structure accordée
CONCEPTION
Modélisation du
déterministesecteur générateurSTRUCTURE NOMINALE
Soutenance de these - 14 octobre 2004 – p.4
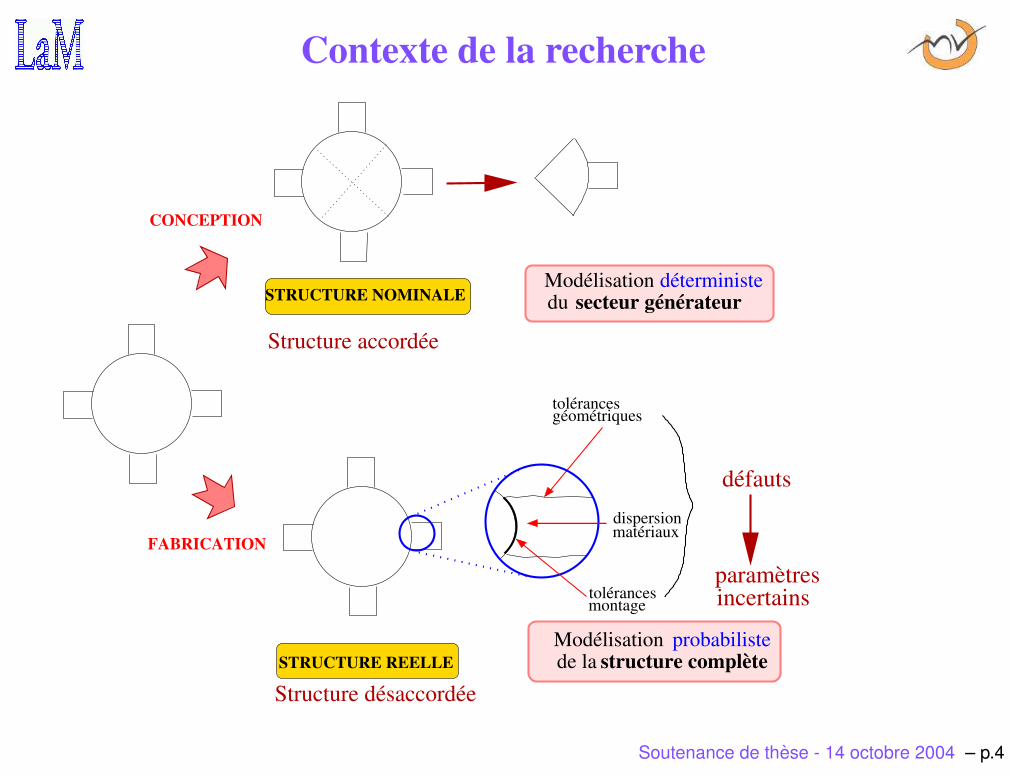
Contexte de la recherche
géométriquestolérances
Modélisation du
déterministesecteur générateur
Structure accordée
CONCEPTION
FABRICATION
tolérances montage
dispersionmatériaux
paramètresincertains
Structure désaccordée
défauts
Modélisation de la
probabilistestructure complète
STRUCTURE NOMINALE
STRUCTURE REELLE
Soutenance de these - 14 octobre 2004 – p.4
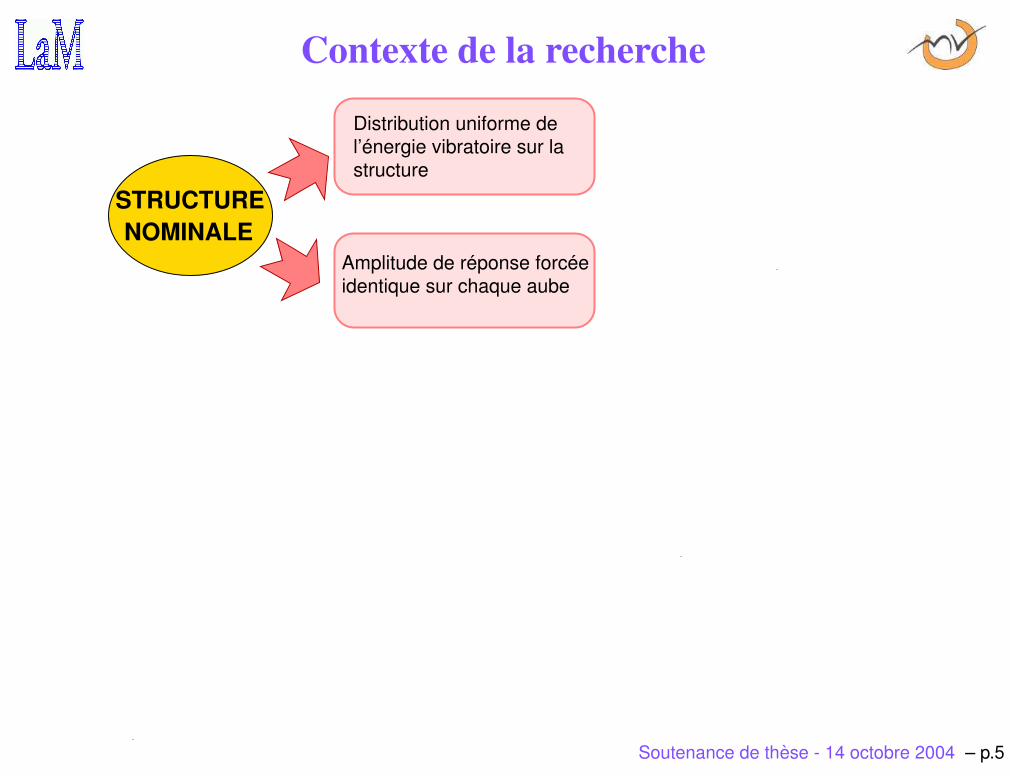
Contexte de la recherche
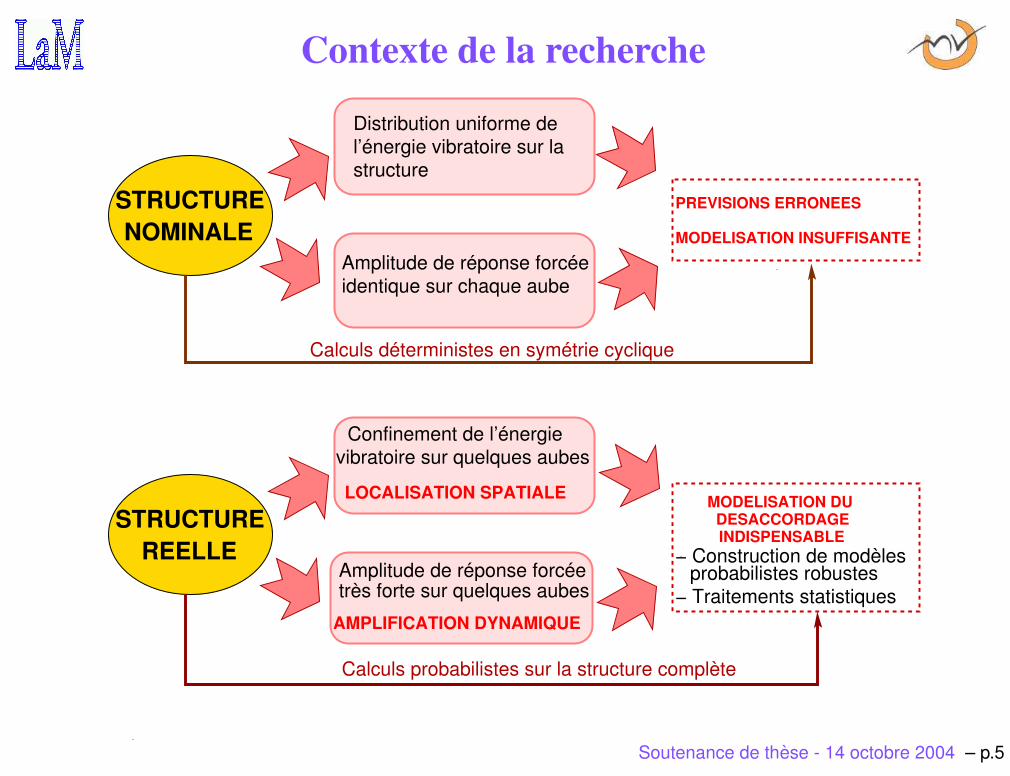
STRUCTURENOMINALE
structure
Distribution uniforme de
Amplitude de réponse forcée
l’énergie vibratoire sur la
identique sur chaque aube
Soutenance de these - 14 octobre 2004 – p.5
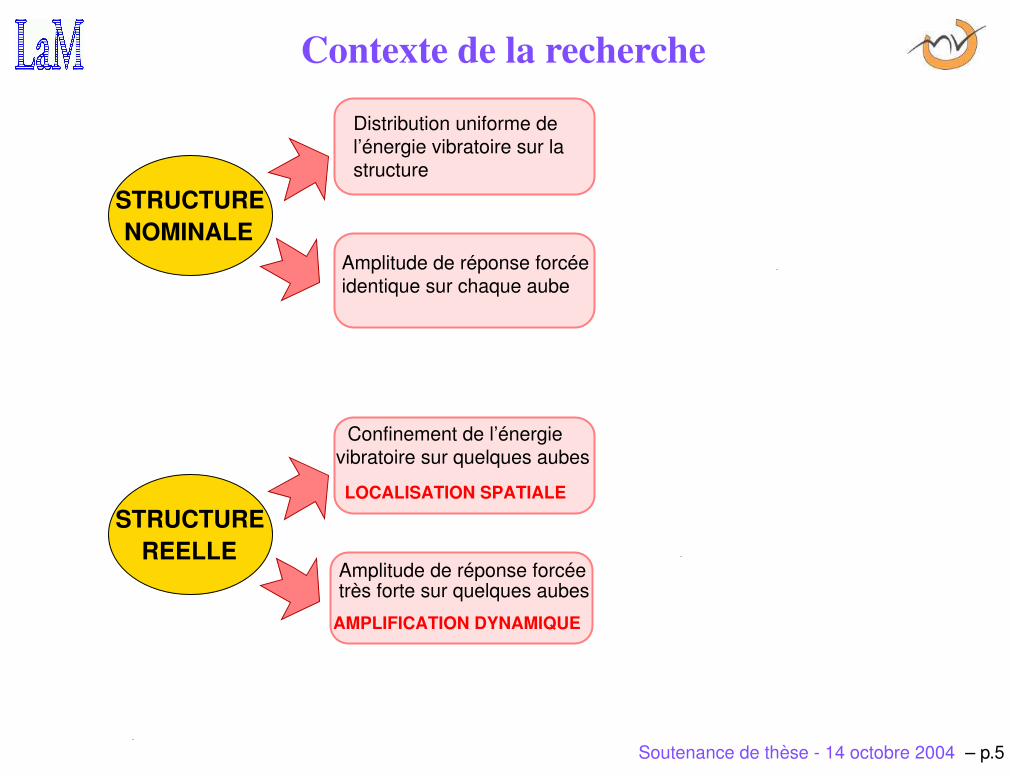
Contexte de la recherche
STRUCTURENOMINALE
REELLESTRUCTURE
structure
Distribution uniforme de
Amplitude de réponse forcée
Confinement de l’énergie
très forte sur quelques aubes
vibratoire sur quelques aubes
AMPLIFICATION DYNAMIQUE
LOCALISATION SPATIALE
Amplitude de réponse forcée
l’énergie vibratoire sur la
identique sur chaque aube
Soutenance de these - 14 octobre 2004 – p.5
Contexte de la recherche
STRUCTURENOMINALE
REELLESTRUCTURE
structure
Distribution uniforme de
Amplitude de réponse forcée
Confinement de l’énergie
très forte sur quelques aubes
MODELISATION INSUFFISANTE
MODELISATION DU DESACCORDAGEINDISPENSABLE
− Traitements statistiquesprobabilistes robustes
vibratoire sur quelques aubes
Calculs déterministes en symétrie cyclique
PREVISIONS ERRONEES
− Construction de modèles
AMPLIFICATION DYNAMIQUE
LOCALISATION SPATIALE
Amplitude de réponse forcée
l’énergie vibratoire sur la
identique sur chaque aube
Calculs probabilistes sur la structure complète
Soutenance de these - 14 octobre 2004 – p.5
Bibliographie générale
Mise en évidence du désaccordage (Ewins,D., JSV, 1969), (Whitehead,D.S., JMES,
1966)
Modélisation probabiliste du désaccordage
Modèles mécaniques simples: oscillateurs linéaires couplés
• Techniques de perturbations (Sinha,A., AIAA, 1986), (Mignolet et al., JT, 1993)
• Chaos polynomiaux (Sinha,A., 2003)
• Monte Carlo (Ottarson,G.S. et Pierre,C., 1995), (Mignolet et al., JEGTP, 2001)
Modèles mécaniques tridimensionnels
• Réduction modale (Castanier,M. et Pierre,C., JVA, 1997), (Bladh,R. et al.,
JEGTP, 2001), (Seinturier,E. et al., 2002)
Identification expérimentale (Mignolet et al., JVA, 1997; JEGTP, 2001), (Feiner,D. et
Griffin,J., JT, 2004)
Soutenance de these - 14 octobre 2004 – p.6
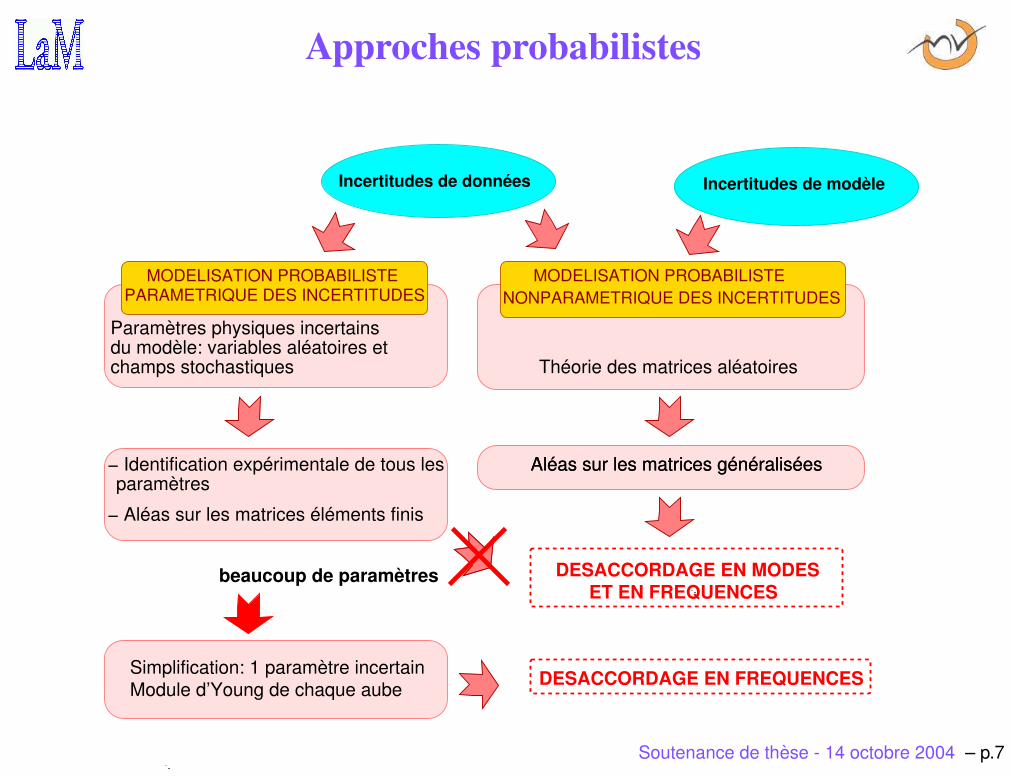
Approches probabilistes
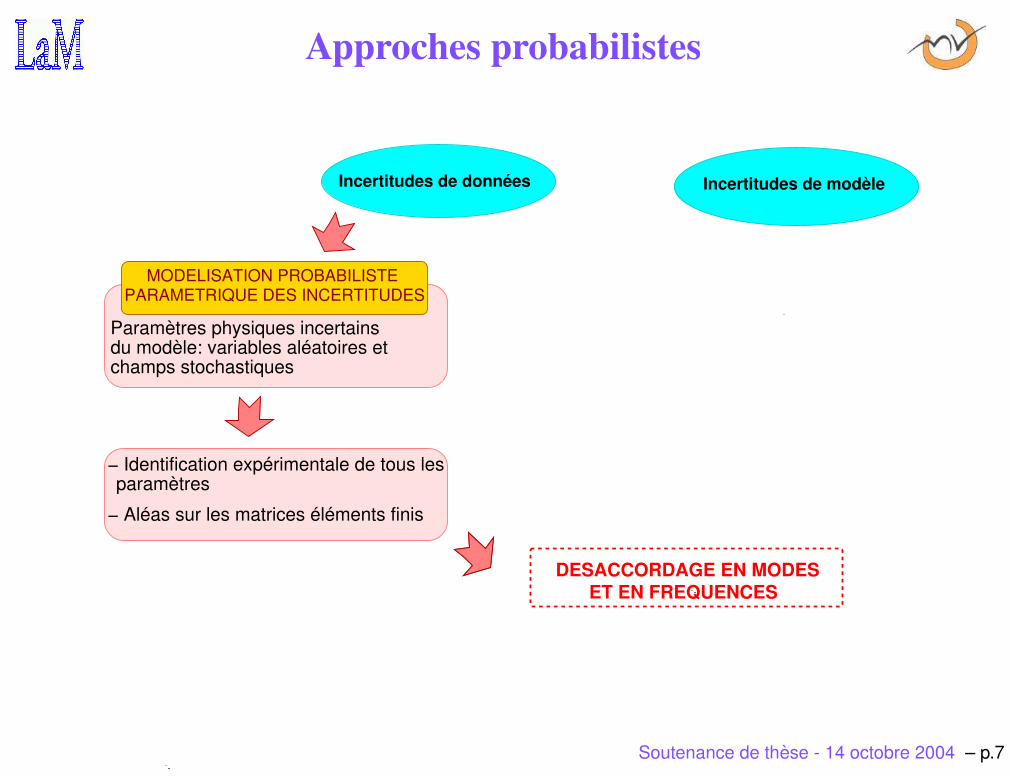
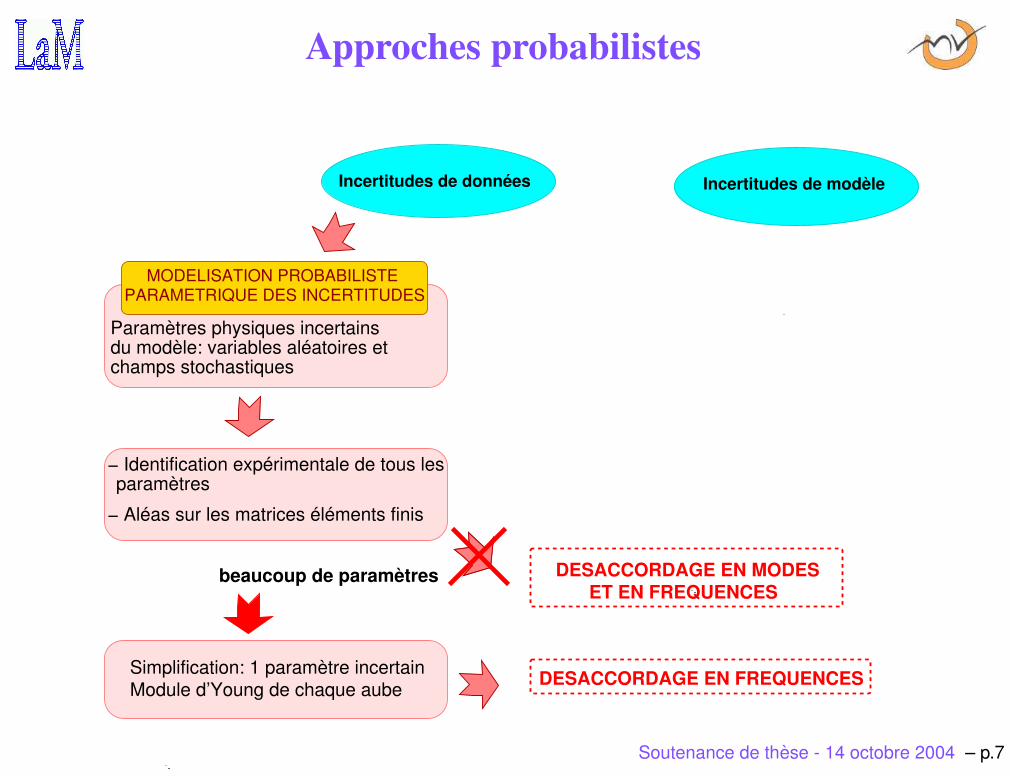
DESACCORDAGE EN MODES ET EN FREQUENCES
paramètres− Identification expérimentale de tous les
− Aléas sur les matrices éléments finis
Incertitudes de données Incertitudes de modèle
Paramètres physiques incertainsdu modèle: variables aléatoires et champs stochastiques
PARAMETRIQUE DES INCERTITUDESMODELISATION PROBABILISTE
Soutenance de these - 14 octobre 2004 – p.7
Approches probabilistes
Simplification: 1 paramètre incertainModule d’Young de chaque aube
beaucoup de paramètres
DESACCORDAGE EN FREQUENCES
DESACCORDAGE EN MODES ET EN FREQUENCES
paramètres− Identification expérimentale de tous les
− Aléas sur les matrices éléments finis
Incertitudes de données Incertitudes de modèle
Paramètres physiques incertainsdu modèle: variables aléatoires et champs stochastiques
PARAMETRIQUE DES INCERTITUDESMODELISATION PROBABILISTE
Soutenance de these - 14 octobre 2004 – p.7
Approches probabilistes
Simplification: 1 paramètre incertainModule d’Young de chaque aube
beaucoup de paramètres
DESACCORDAGE EN FREQUENCES
Aléas sur les matrices généralisées
DESACCORDAGE EN MODES ET EN FREQUENCES
Théorie des matrices aléatoires
Aléas sur les matrices généraliséesparamètres
− Identification expérimentale de tous les
− Aléas sur les matrices éléments finis
Incertitudes de données Incertitudes de modèle
Paramètres physiques incertainsdu modèle: variables aléatoires et champs stochastiques
NONPARAMETRIQUE DES INCERTITUDESMODELISATION PROBABILISTE
PARAMETRIQUE DES INCERTITUDESMODELISATION PROBABILISTE
Soutenance de these - 14 octobre 2004 – p.7
Positionnement de la recherche
Modèle probabiliste non paramétrique des incertitudes en élastodynamique basse
fréquence (Soize,C., PEM, 2000; JASA, 2001), (Soize,C. et Chebli,H., JEM, 2002)
Problème direct: adaptation de l’approche probabiliste non paramétrique à la
problématique du désaccordage (Capiez-Lernout,E. et Soize C., MI, 2003; JEGTP,
2004)
Problème inverse: spécification des tolérances géométriques de l’aube pour un niveau
d’amplification de réponse forcée donné (Capiez-Lernout,E., Soize,C. et al, JEGTP,
2005)
Soutenance de these - 14 octobre 2004 – p.8
II- METHODOLOGIE DU PROBLEME DIRECT:analyse dynamique du désaccordage des roues
aubagées
Soutenance de these - 14 octobre 2004 – p.9
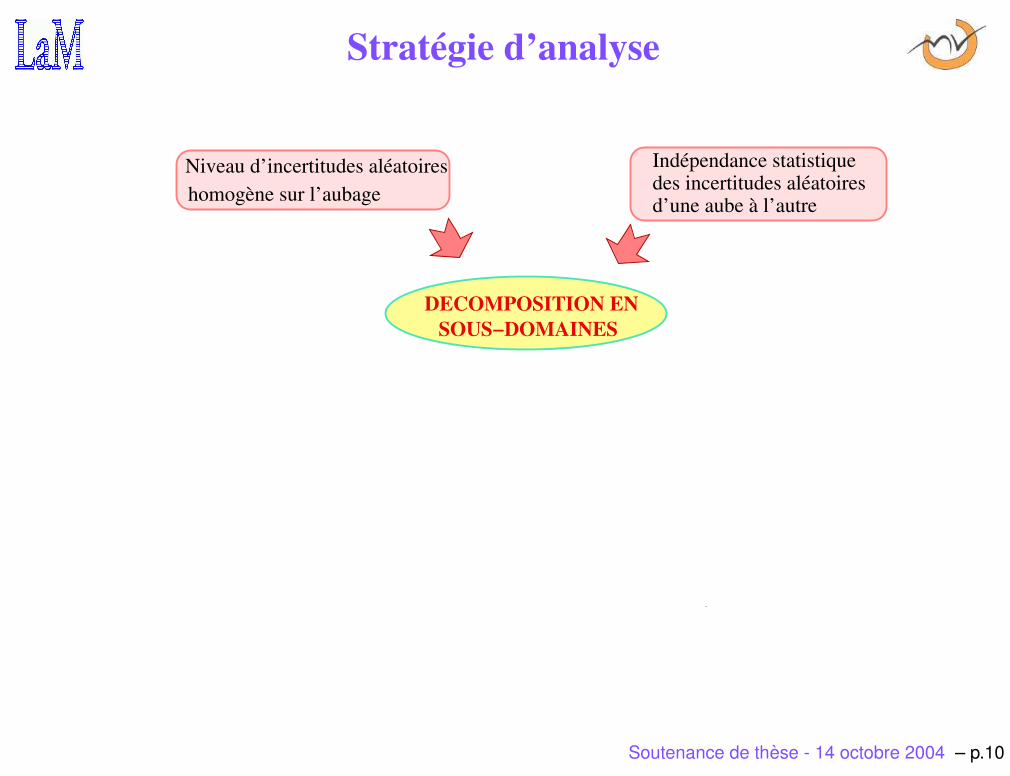
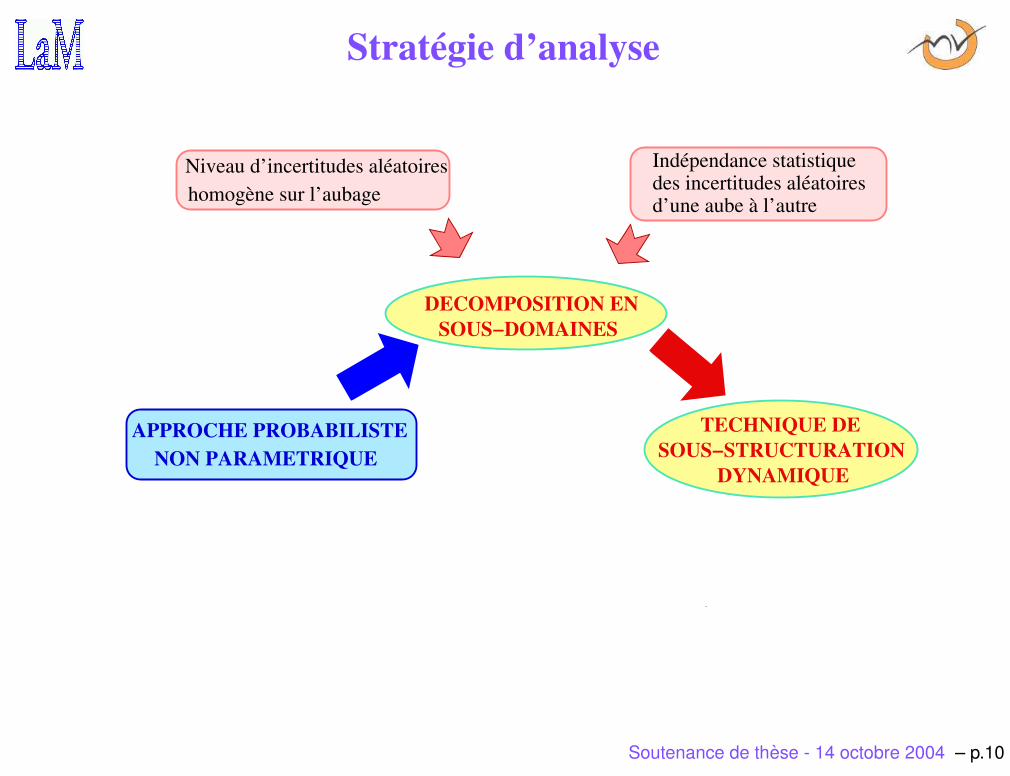
Stratégie d’analyse
SOUS−DOMAINES
Niveau d’incertitudes aléatoireshomogène sur l’aubage
Indépendance statistique
d’une aube à l’autredes incertitudes aléatoires
DECOMPOSITION EN
Soutenance de these - 14 octobre 2004 – p.10
Stratégie d’analyse
APPROCHE PROBABILISTENON PARAMETRIQUE SOUS−STRUCTURATION
DYNAMIQUE
SOUS−DOMAINES
Niveau d’incertitudes aléatoireshomogène sur l’aubage
Indépendance statistique
d’une aube à l’autredes incertitudes aléatoires
TECHNIQUE DE
DECOMPOSITION EN
Soutenance de these - 14 octobre 2004 – p.10
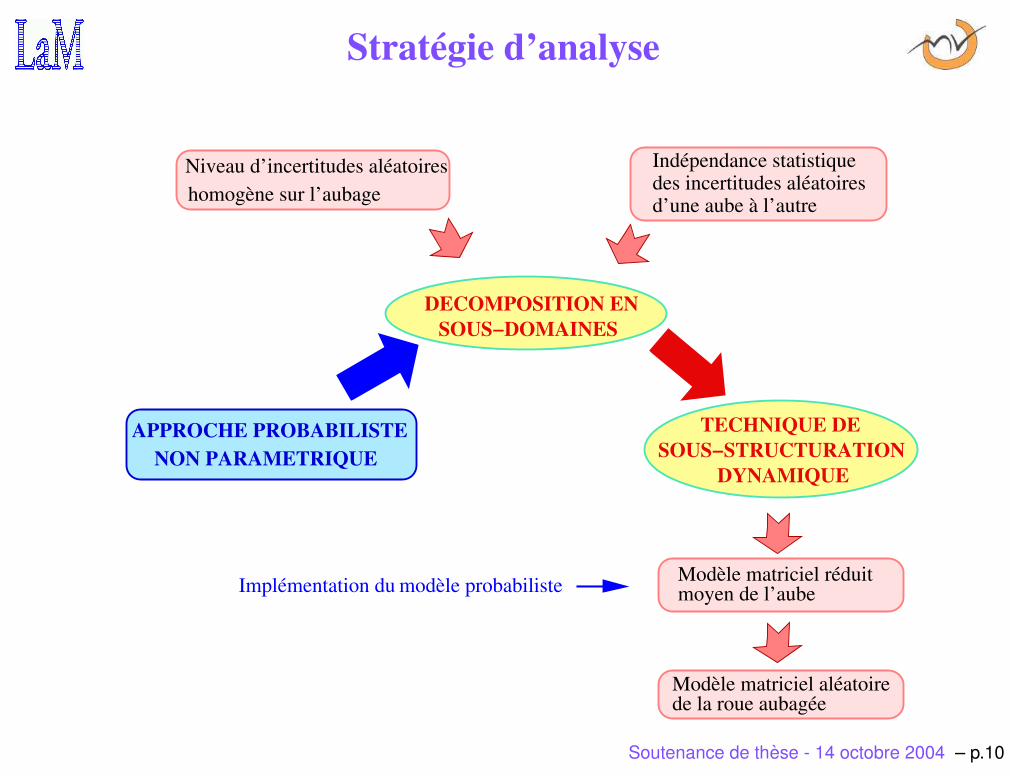
Stratégie d’analyse
APPROCHE PROBABILISTENON PARAMETRIQUE SOUS−STRUCTURATION
modèle probabiliste
Modèle matriciel aléatoire
Implémentation du Modèle matriciel réduitmoyen de l’aube
DYNAMIQUE
de la roue aubagée
SOUS−DOMAINES
Niveau d’incertitudes aléatoireshomogène sur l’aubage
Indépendance statistique
d’une aube à l’autredes incertitudes aléatoires
TECHNIQUE DE
DECOMPOSITION EN
Soutenance de these - 14 octobre 2004 – p.10
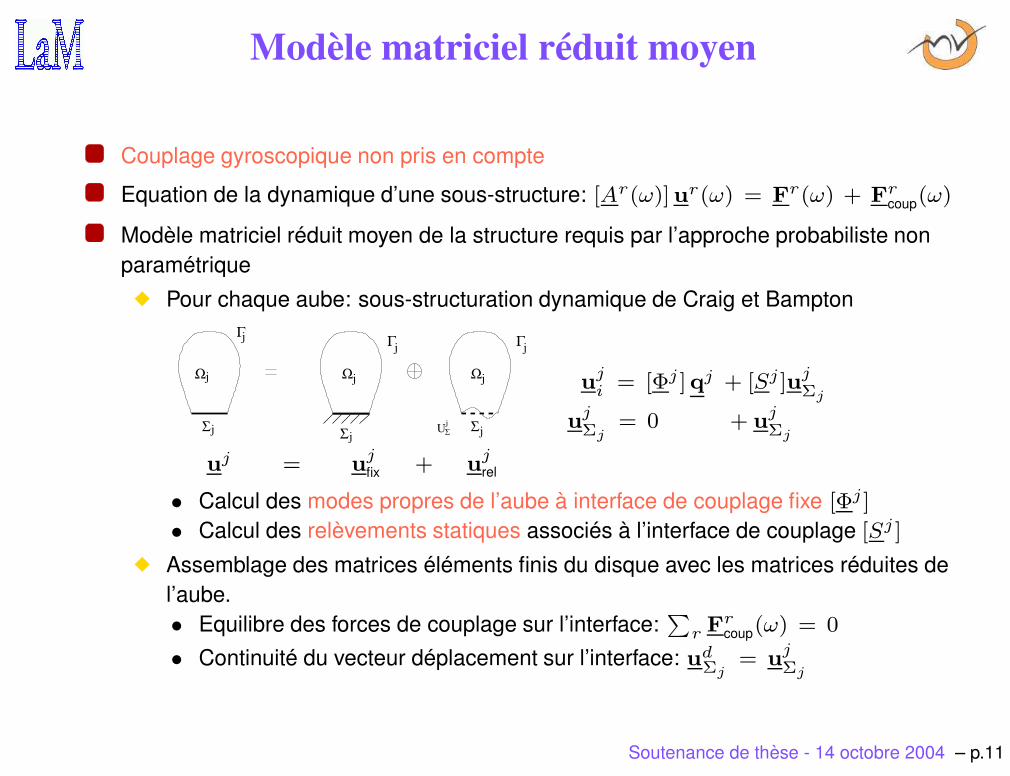
Modèle matriciel réduit moyen
Couplage gyroscopique non pris en compte
Equation de la dynamique d’une sous-structure: [Ar(ω)]ur(ω) = Fr(ω) + Frcoup(ω)
Modèle matriciel réduit moyen de la structure requis par l’approche probabiliste nonparamétrique
Pour chaque aube: sous-structuration dynamique de Craig et Bampton
Σj
Ωj
Γj
Ωj
j
Σj
Γ
j
j
Σ
Γj
Ω
jUΣ
uj = ujfix + u
jrel
uji = [Φj ]qj + [Sj ]uj
Σj
ujΣj
= 0 + ujΣj
• Calcul des modes propres de l’aube à interface de couplage fixe [Φj ]
• Calcul des relèvements statiques associés à l’interface de couplage [Sj ]
Assemblage des matrices éléments finis du disque avec les matrices réduites del’aube.• Equilibre des forces de couplage sur l’interface:
∑
r Frcoup(ω) = 0
• Continuité du vecteur déplacement sur l’interface: udΣj
= ujΣj
Soutenance de these - 14 octobre 2004 – p.11
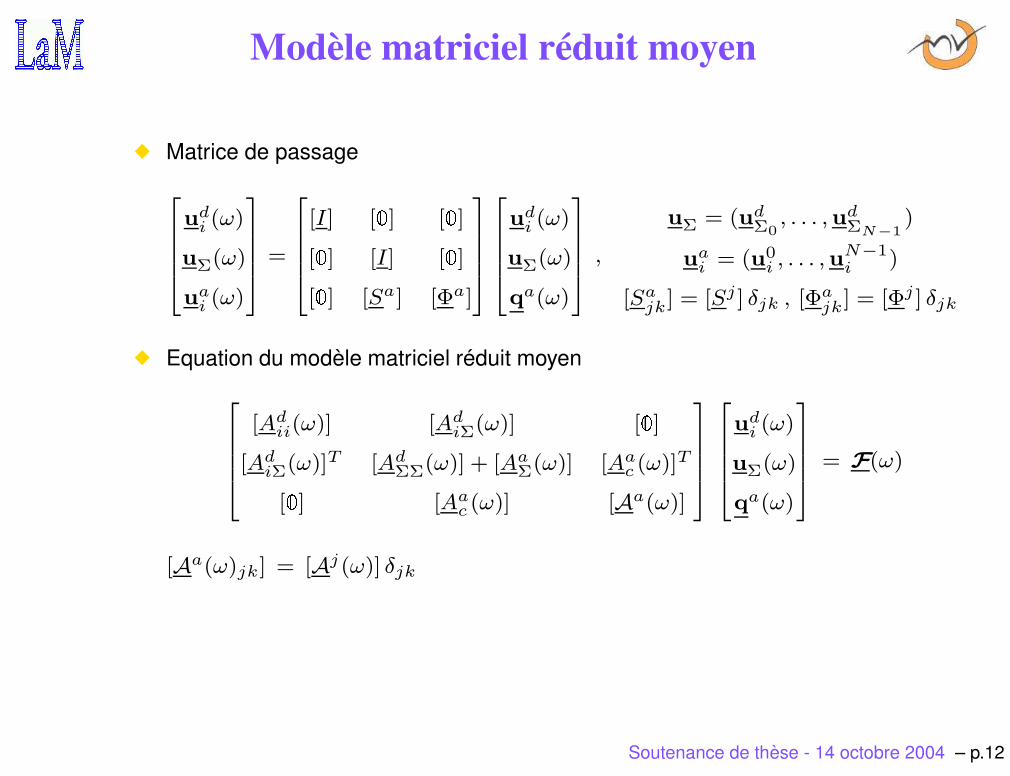
Modèle matriciel réduit moyen
Matrice de passage
udi (ω)
uΣ(ω)
uai (ω)
=
[I] [
] [
]
[
] [I] [
]
[
] [Sa] [Φa]
udi (ω)
uΣ(ω)
qa(ω)
,
uΣ = (udΣ0
, . . . ,udΣN−1
)
uai = (u0
i , . . . ,uN−1i )
[Sajk] = [Sj ] δjk , [Φa
jk] = [Φj ] δjk
Equation du modèle matriciel réduit moyen
[Adii(ω)] [Ad
iΣ(ω)] [
]
[AdiΣ(ω)]T [Ad
ΣΣ(ω)] + [AaΣ(ω)] [Aa
c (ω)]T
[
] [Aac (ω)] [Aa(ω)]
udi (ω)
uΣ(ω)
qa(ω)
= F(ω)
[Aa(ω)jk] = [Aj(ω)] δjk
Soutenance de these - 14 octobre 2004 – p.12
Modèle matriciel réduit moyen
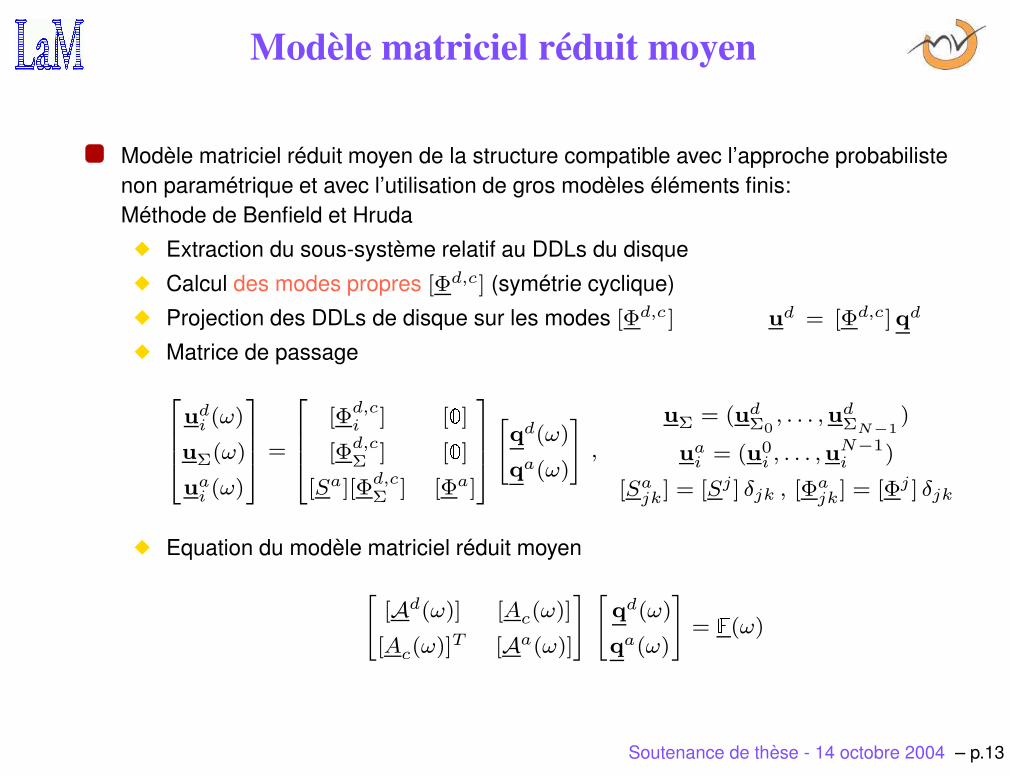
Modèle matriciel réduit moyen de la structure compatible avec l’approche probabilistenon paramétrique et avec l’utilisation de gros modèles éléments finis:Méthode de Benfield et Hruda
Extraction du sous-système relatif au DDLs du disque
Calcul des modes propres [Φd,c] (symétrie cyclique)
Projection des DDLs de disque sur les modes [Φd,c ] ud = [Φd,c]qd
Matrice de passage
udi (ω)
uΣ(ω)
uai (ω)
=
[Φd,ci ] [
]
[Φd,cΣ ] [
]
[Sa][Φd,cΣ ] [Φa]
[
qd(ω)
qa(ω)
]
,
uΣ = (udΣ0
, . . . ,udΣN−1
)
uai = (u0
i , . . . ,uN−1i )
[Sajk] = [Sj ] δjk , [Φa
jk] = [Φj ] δjk
Equation du modèle matriciel réduit moyen
[
[Ad(ω)] [Ac(ω)]
[Ac(ω)]T [Aa(ω)]
] [
qd(ω)
qa(ω)
]
=
(ω)
Soutenance de these - 14 octobre 2004 – p.13
Modèle matriciel réduit aléatoire
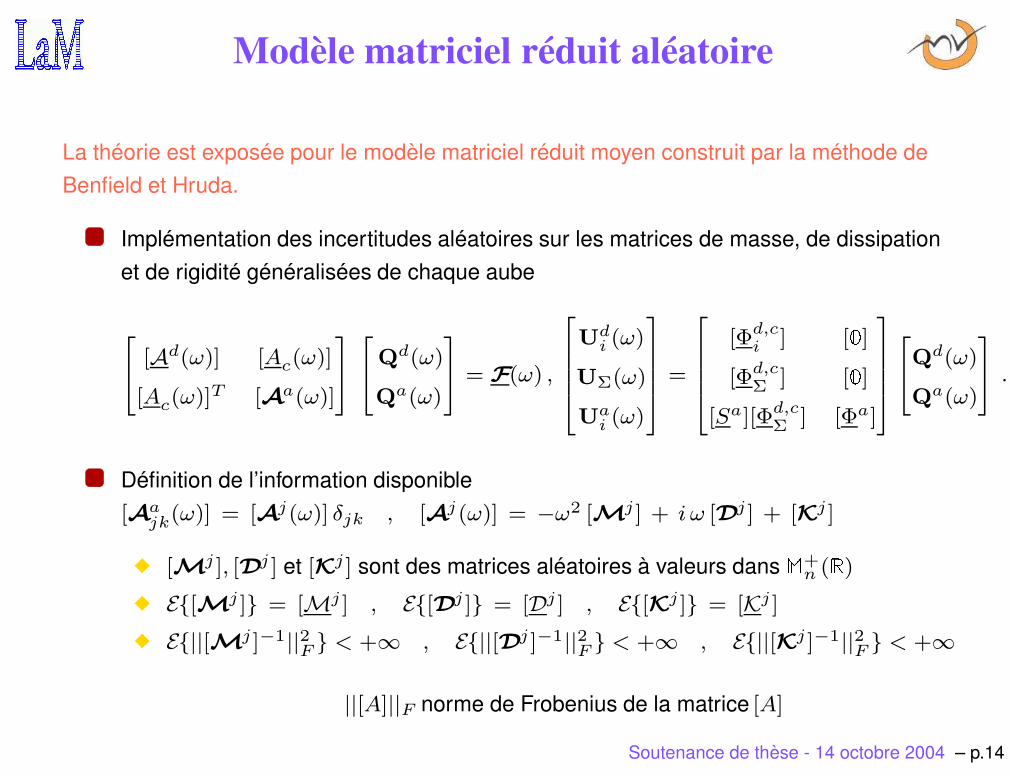
La théorie est exposée pour le modèle matriciel réduit moyen construit par la méthode deBenfield et Hruda.
Implémentation des incertitudes aléatoires sur les matrices de masse, de dissipationet de rigidité généralisées de chaque aube
[Ad(ω)] [Ac(ω)]
[Ac(ω)]T [Aa(ω)]
Qd(ω)
Qa(ω)
= F(ω) ,
Udi (ω)
UΣ(ω)
Uai (ω)
=
[Φd,ci ] [
]
[Φd,cΣ ] [
]
[Sa][Φd,cΣ ] [Φa]
Qd(ω)
Qa(ω)
.
Définition de l’information disponible[Aa
jk(ω)] = [Aj(ω)] δjk , [Aj(ω)] = −ω2 [Mj ] + i ω [Dj ] + [Kj ]
[Mj ], [Dj ] et [Kj ] sont des matrices aléatoires à valeurs dans
+n (
)
E[Mj ] = [Mj ] , E[Dj ] = [Dj ] , E[Kj ] = [Kj ]
E||[Mj ]−1||2F < +∞ , E||[Dj ]−1||2F < +∞ , E||[Kj ]−1||2F < +∞
||[A]||F norme de Frobenius de la matrice [A]
Soutenance de these - 14 octobre 2004 – p.14
Modèle probabiliste
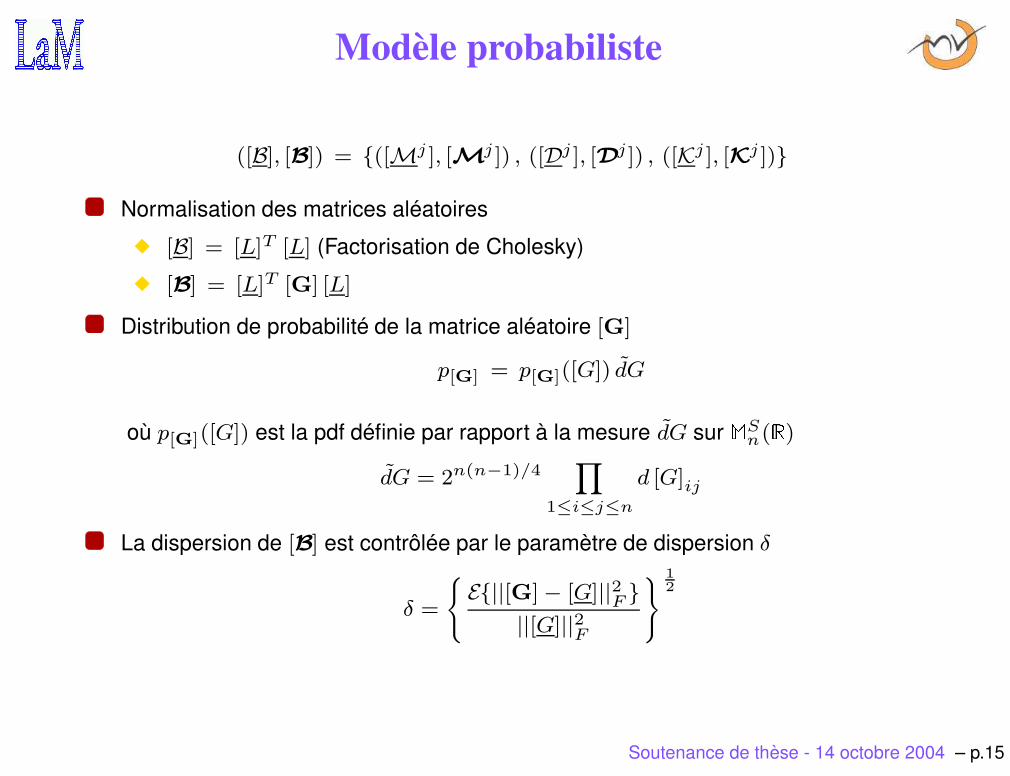
([B], [B]) = ([Mj ], [Mj ]) , ([Dj ], [Dj ]) , ([Kj ], [Kj ])
Normalisation des matrices aléatoires
[B] = [L]T [L] (Factorisation de Cholesky)
[B] = [L]T [G] [L]
Distribution de probabilité de la matrice aléatoire [G]
p[G] = p[G]([G]) dG
où p[G]([G]) est la pdf définie par rapport à la mesure dG sur
Sn(
)
dG = 2n(n−1)/4∏
1≤i≤j≤n
d [G]ij
La dispersion de [B] est contrôlée par le paramètre de dispersion δ
δ =
E||[G] − [G]||2F
||[G]||2F
12
Soutenance de these - 14 octobre 2004 – p.15
Modèle probabiliste
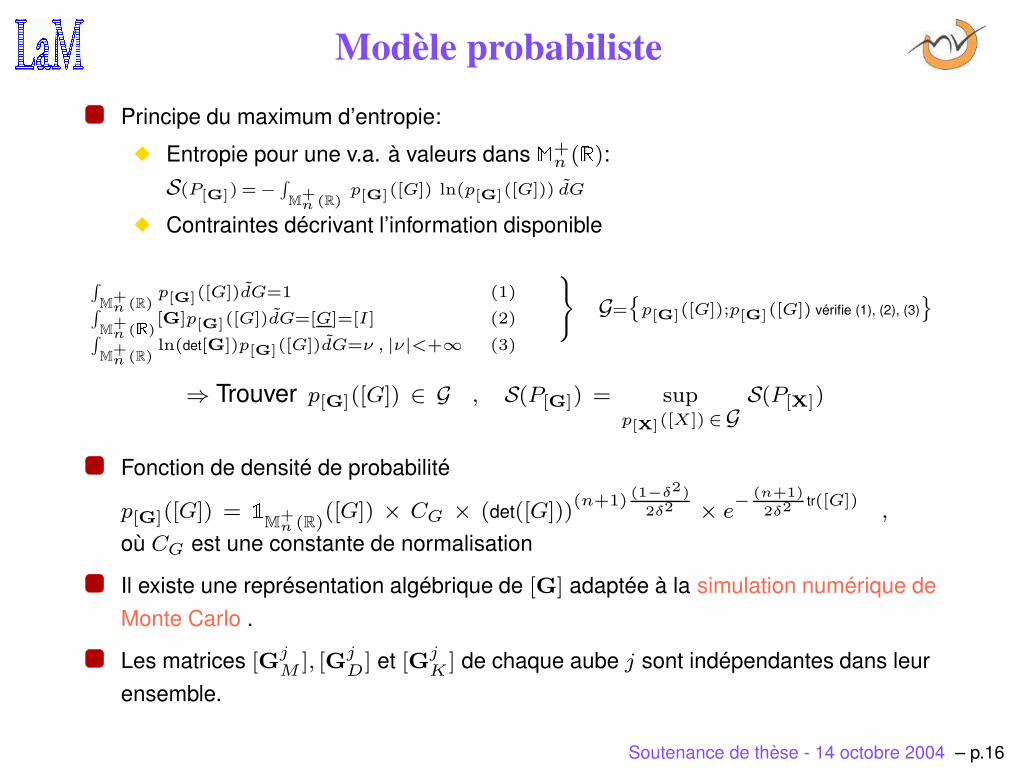
Principe du maximum d’entropie:
Entropie pour une v.a. à valeurs dans
+n (
):S(P[G]) =−
∫
M+n (R)
p[G]([G]) ln(p[G]([G])) dG
Contraintes décrivant l’information disponible
∫
M+n (R)
p[G]([G])dG=1 (1)∫
M+n (
)[G]p[G]([G])dG=[G]=[I] (2)
∫
M+n (R)
ln(det[G])p[G]([G])dG=ν , |ν|<+∞ (3)
G=
p[G]([G]);p[G]([G]) vérifie (1), (2), (3)
⇒ Trouver p[G]([G]) ∈ G , S(P[G]) = supp[X]([X])∈G
S(P[X])
Fonction de densité de probabilité
p[G]([G]) =
M+n (R)
([G]) × CG × (det([G]))(n+1)
(1−δ2)
2δ2 × e−
(n+1)
2δ2 tr([G]),
où CG est une constante de normalisation
Il existe une représentation algébrique de [G] adaptée à la simulation numérique deMonte Carlo .
Les matrices [GjM ], [Gj
D] et [GjK ] de chaque aube j sont indépendantes dans leur
ensemble.
Soutenance de these - 14 octobre 2004 – p.16
Observations
Energie élastique de l’aube j à une fréquence ω
Ej(ω) =1
2Uj(ω)∗ [Kj ]Uj(ω) , e(ω) = ej(ω) =
1
2uj(ω)∗ [Kj ]uj(ω)
Facteur d’amplification dynamique des aubes à une fréquence donnée
B(ω) =
√
E(ω)
e∞, E(ω) = sup
jEj(ω) , e∞ = sup
ω∈
e(ω)
Facteur d’amplification dynamique des aubes sur une bande d’analyse fréquentielle
B∞ =
√
E∞
e∞, E∞ = sup
ω ∈ B
E(ω)
Estimation de la fonction de répartition de la variable aléatoire B∞
P(B∞ ≤ b∞)
Soutenance de these - 14 octobre 2004 – p.17
III- METHODOLOGIE DU PROBLEME INVERSE:caractérisation des tolérances géométriques de l’aube
Soutenance de these - 14 octobre 2004 – p.18
Position du problème
Construction d’un intervalle de confiance pour les paramètres t contrôlant lagéométrie de l’aube.
Critère de spécification des tolérances: (bc , pc)
bc : facteur critique d’amplification dynamique de réponse forcée
pc : niveau de probabilité critique
⇒ Trouver [tmin; tmax] tel que P(B∞ > bc) ≤ pc
Quantifier les paramètres de dispersion δ du modèle non paramétrique de l’aube enfonction des tolérances décrites par [tmin; tmax].
Soutenance de these - 14 octobre 2004 – p.19
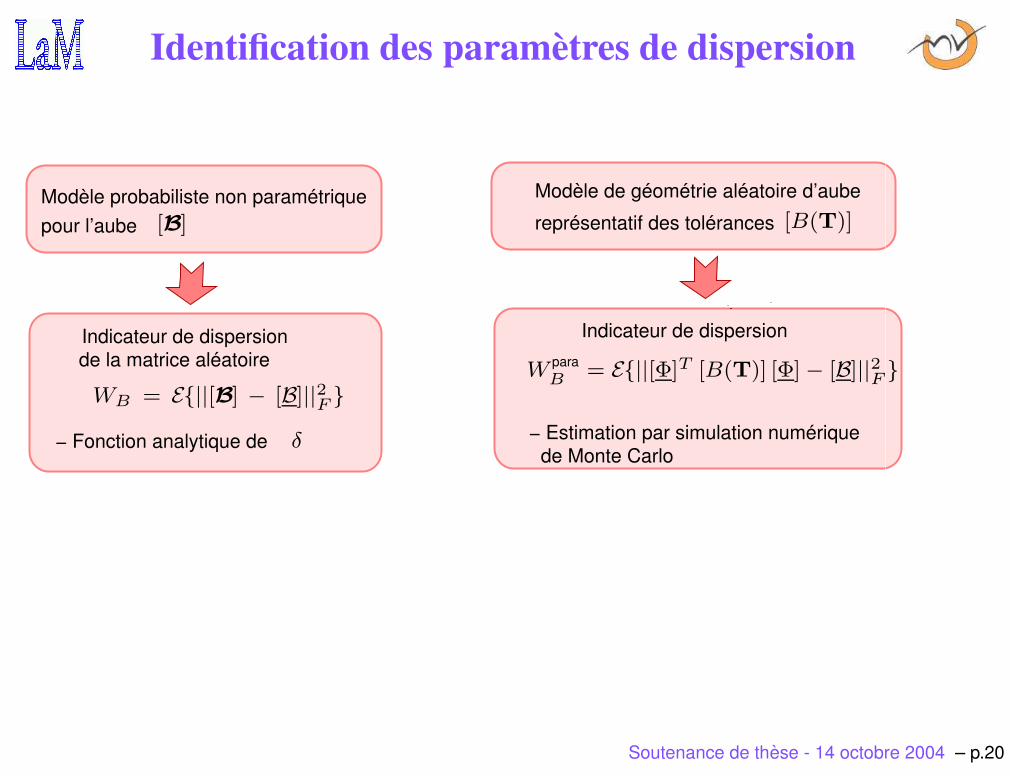
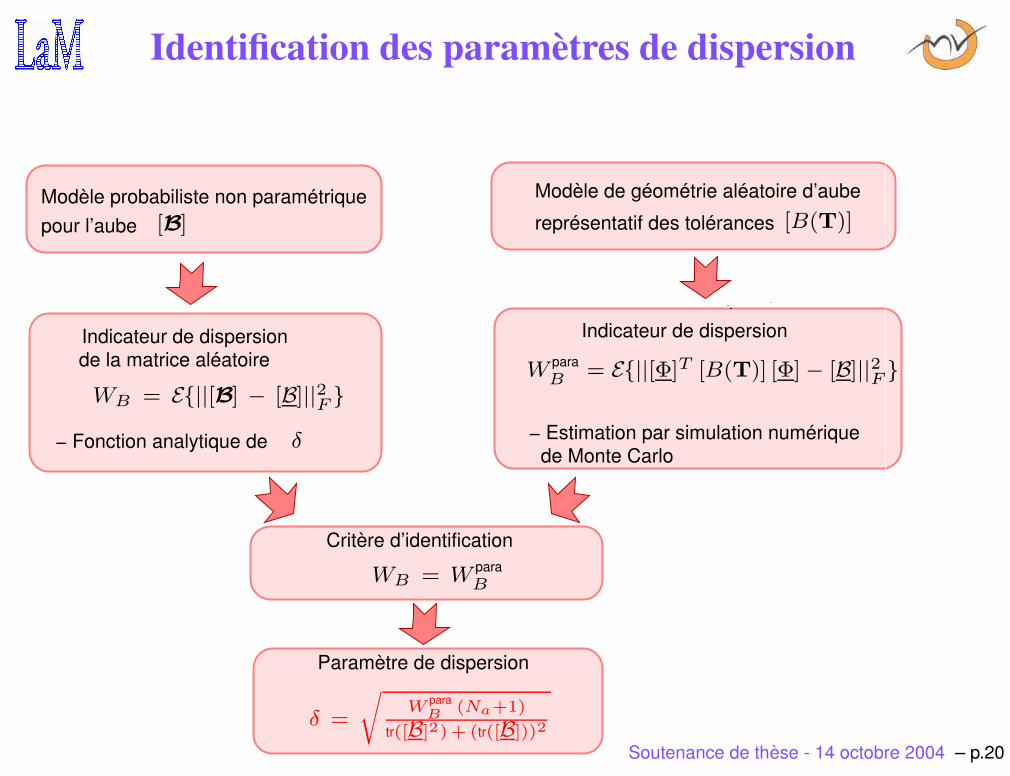
Identification des paramètres de dispersion
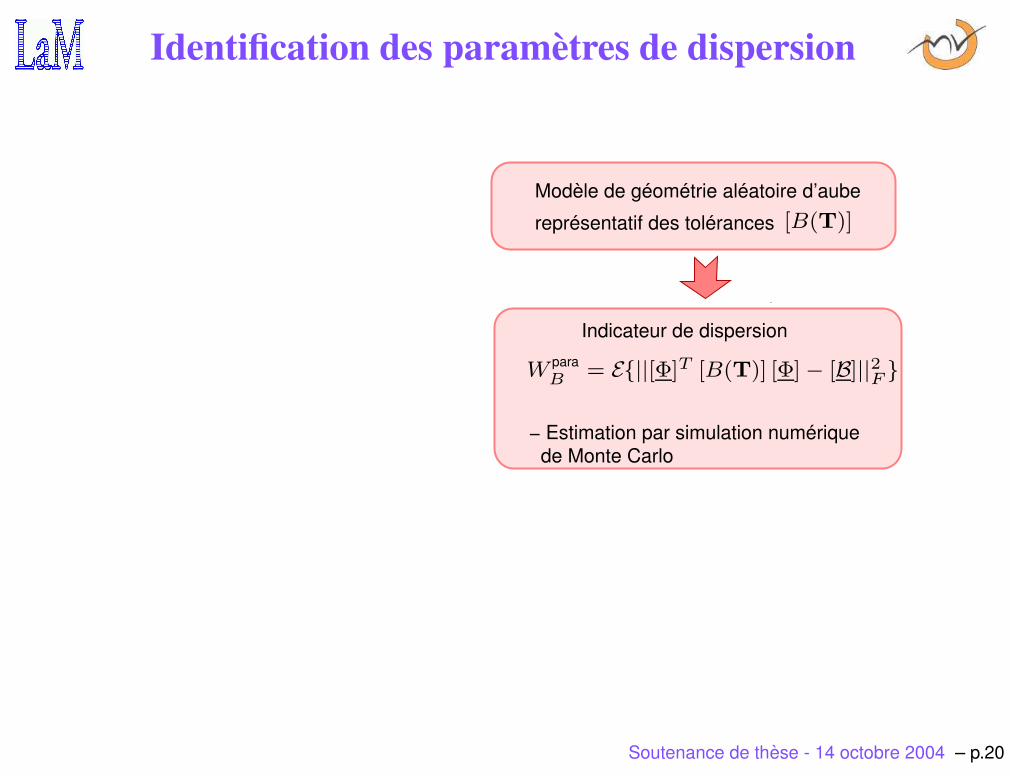
Modèle de géométrie aléatoire d’aube
Indicateur de dispersion
représentatif des tolérances
− Estimation par simulation numérique de Monte Carlo
[B(T)]
WparaB = E||[Φ]T [B(T)] [Φ] − [B]||2F
Modèle probabiliste non paramétrique pour l’aube
Indicateur de dispersionde la matrice aléatoire
− Fonction analytique de δ
[B]
WB = E||[B] − [B]||2F
Critère d’identification
Paramètre de dispersion
δ =
√
W paraB
(Na+1)
tr([B]2) + (tr([B]))2
WB = WparaB
Soutenance de these - 14 octobre 2004 – p.20
Identification des paramètres de dispersion
Modèle de géométrie aléatoire d’aube
Indicateur de dispersion
représentatif des tolérances
− Estimation par simulation numérique de Monte Carlo
[B(T)]
WparaB = E||[Φ]T [B(T)] [Φ] − [B]||2F
Modèle probabiliste non paramétrique pour l’aube
Indicateur de dispersionde la matrice aléatoire
− Fonction analytique de δ
[B]
WB = E||[B] − [B]||2F
Critère d’identification
Paramètre de dispersion
δ =
√
W paraB
(Na+1)
tr([B]2) + (tr([B]))2
WB = WparaB
Soutenance de these - 14 octobre 2004 – p.20
Identification des paramètres de dispersion
Modèle de géométrie aléatoire d’aube
Indicateur de dispersion
représentatif des tolérances
− Estimation par simulation numérique de Monte Carlo
[B(T)]
WparaB = E||[Φ]T [B(T)] [Φ] − [B]||2F
Modèle probabiliste non paramétrique pour l’aube
Indicateur de dispersionde la matrice aléatoire
− Fonction analytique de δ
[B]
WB = E||[B] − [B]||2F
Critère d’identification
Paramètre de dispersion
δ =
√
W paraB
(Na+1)
tr([B]2)+ (tr([B]))2
WB = WparaB
Soutenance de these - 14 octobre 2004 – p.20
Remarques sur la méthode d’identification
Prise en compte du biais introduit entre les valeurs nominales et les valeurs moyennesdes matrices issues du modèle aléatoire de géométrie
les moments des v.a. T sont inconnus
les matrices EF de l’aube ne dépendent pas linéairement de T.
Le modèle de géométrie aléatoire
est arbitraire
n’est pas utilisé pour l’analyse du désaccordage
permet d’estimer les valeurs des paramètres δ.
Les paramètres de dispersion sont peu sensibles à une perturbation aléatoire dumodèle probabiliste de la géométrie de l’aube.
Soutenance de these - 14 octobre 2004 – p.21
Modèle de géométrie aléatoire d’aube
Construction a priori d’une géométrie aléatoire d’aube représentatif
modèle correctement paramétré
respect des contraintes dues aux tolérances
forme géométrique de l’aube régulière
Génération du modèle de géométrie aléatoire
X = X(
) = x +r
∑
α=1
ξα bα
x : vecteur des coordonnées des noeuds du maillage nominal de l’aube
b : vecteurs de base déterministes de
ma
: vecteur aléatoire: v.a. uniformes indépendantes de support ∆ξi
Génération des matrices éléments finis aléatoires de l’aube
Soutenance de these - 14 octobre 2004 – p.22
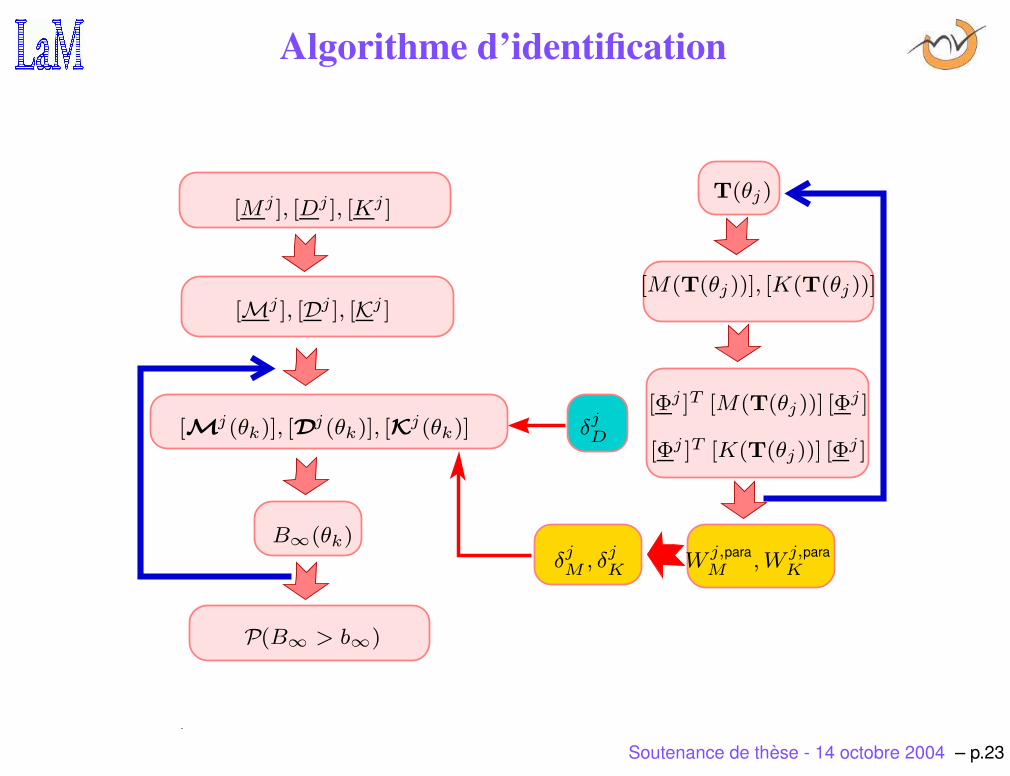
Algorithme d’identification
[Mj ], [Dj ], [Kj ]
[Mj ], [Dj ], [Kj ]
[Mj(θk)], [Dj(θk)], [Kj(θk)]
B∞(θk)
P(B∞ > b∞)
T(θj)
[M(T(θj))], [K(T(θj))]
[Φj ]T [M(T(θj))] [Φj ]
[Φj ]T [K(T(θj))] [Φj ]
Wj,paraM , W
j,paraKδ
jM , δ
jK
δjD
Soutenance de these - 14 octobre 2004 – p.23
IV- VALIDATION NUMERIQUE DESMETHODOLOGIES PROBABILISTES SUR DES
ROUES AUBAGEES
Exemple numerique simple (non presente)Comparaison avec l’approche probabiliste usuelle (non présenté)Détermination des tolérances géométriques de l’aube (non présenté)
Structure complexe (SNECMA MOTEURS)Détermination des tolérances géométriques de l’aube
Soutenance de these - 14 octobre 2004 – p.24
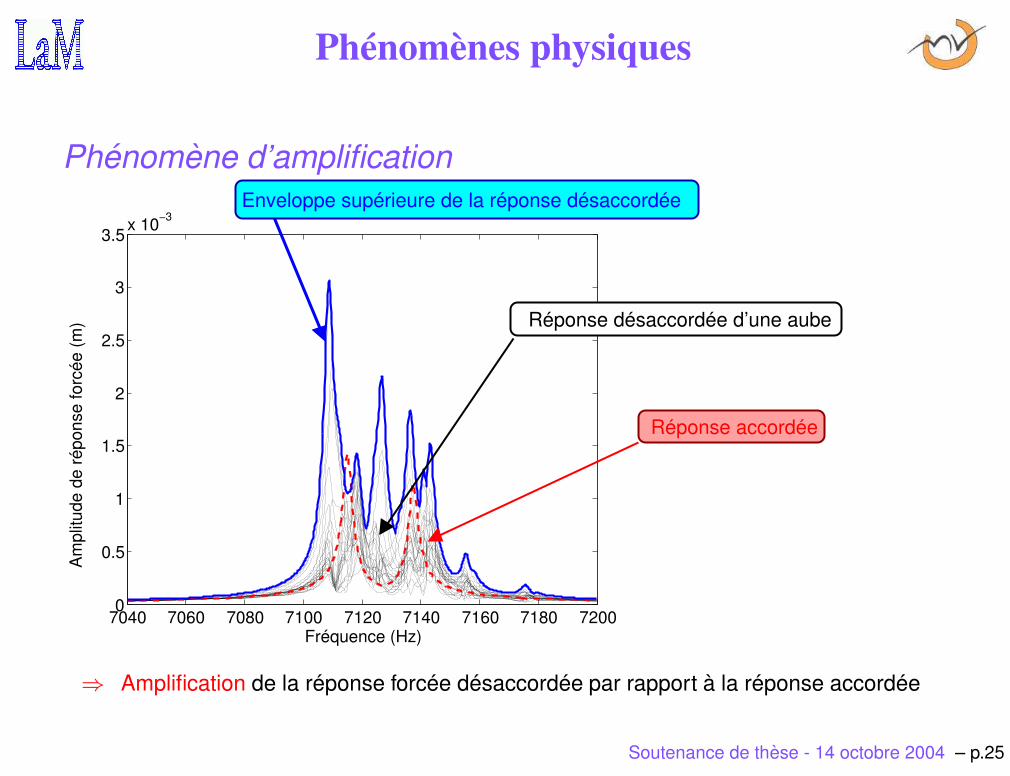
Phénomènes physiques
Phenomene d’amplification
7040 7060 7080 7100 7120 7140 7160 7180 72000
0.5
1
1.5
2
2.5
3
3.5x 10−3
Fréquence (Hz)
Am
plitu
de d
e ré
pons
e fo
rcée
(m)
Enveloppe supérieure de la réponse désaccordée
Réponse désaccordée d’une aube
Réponse accordée
⇒ Amplification de la réponse forcée désaccordée par rapport à la réponse accordée
Soutenance de these - 14 octobre 2004 – p.25
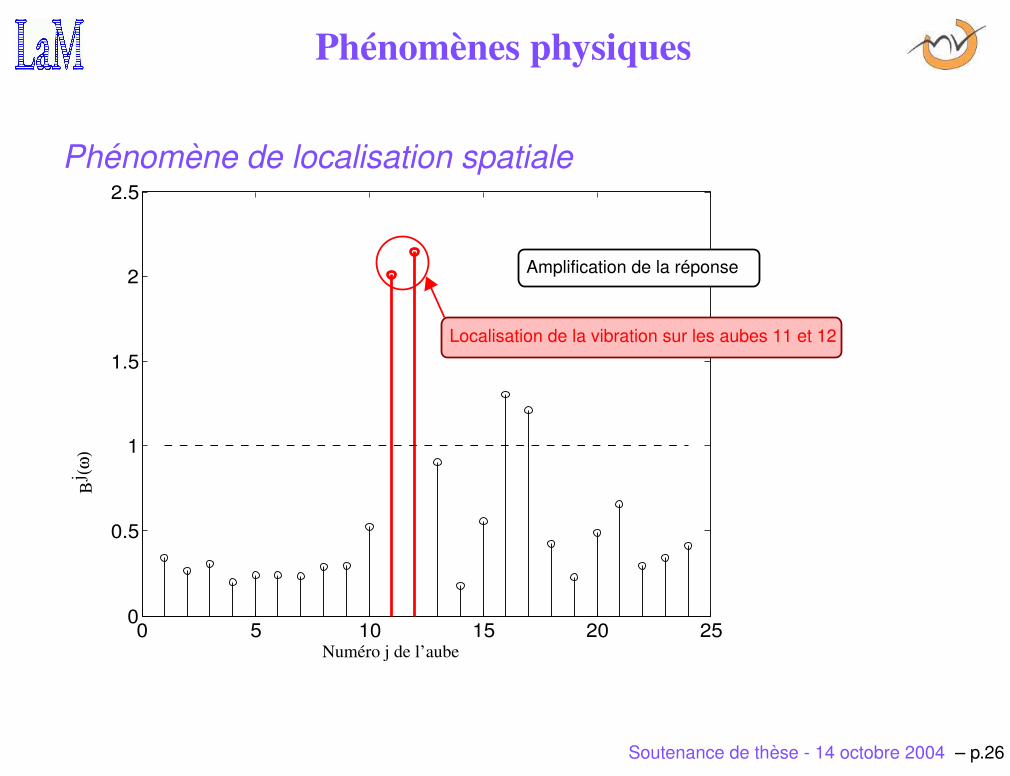
Phénomènes physiques
Phenomene de localisation spatiale
0 5 10 15 20 250
0.5
1
1.5
2
2.5
j
Bj (ω),
ω=
7108
.9 H
z
Blade number
f=71
08.9
Hz
j (ω)
B
jNuméro j de l’aube
Amplification de la réponse
Localisation de la vibration sur les aubes 11 et 12
Soutenance de these - 14 octobre 2004 – p.26
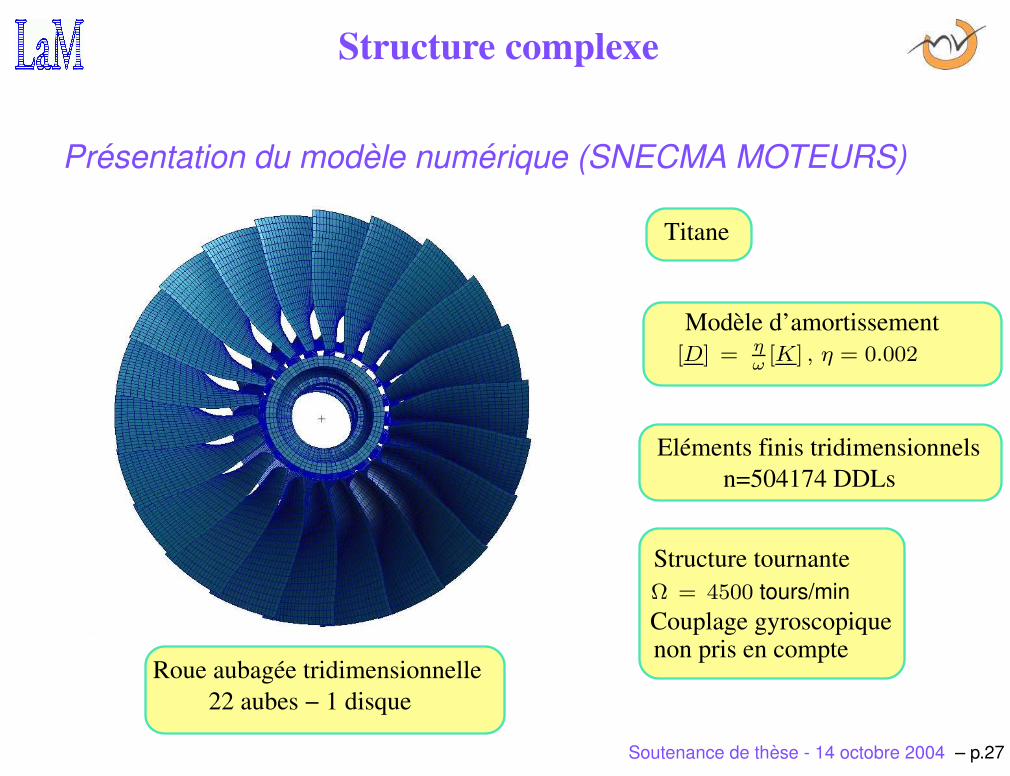
Structure complexe
Presentation du modele numerique (SNECMA MOTEURS)
Roue aubagée tridimensionnelle22 aubes − 1 disque
Modèle d’amortissement
Eléments finis tridimensionnelsn=504174 DDLs
Structure tournante
Titane
Couplage gyroscopiquenon pris en compte
Ω = 4500 tours/min
[D] = ηω
[K] , η = 0.002
Soutenance de these - 14 octobre 2004 – p.27
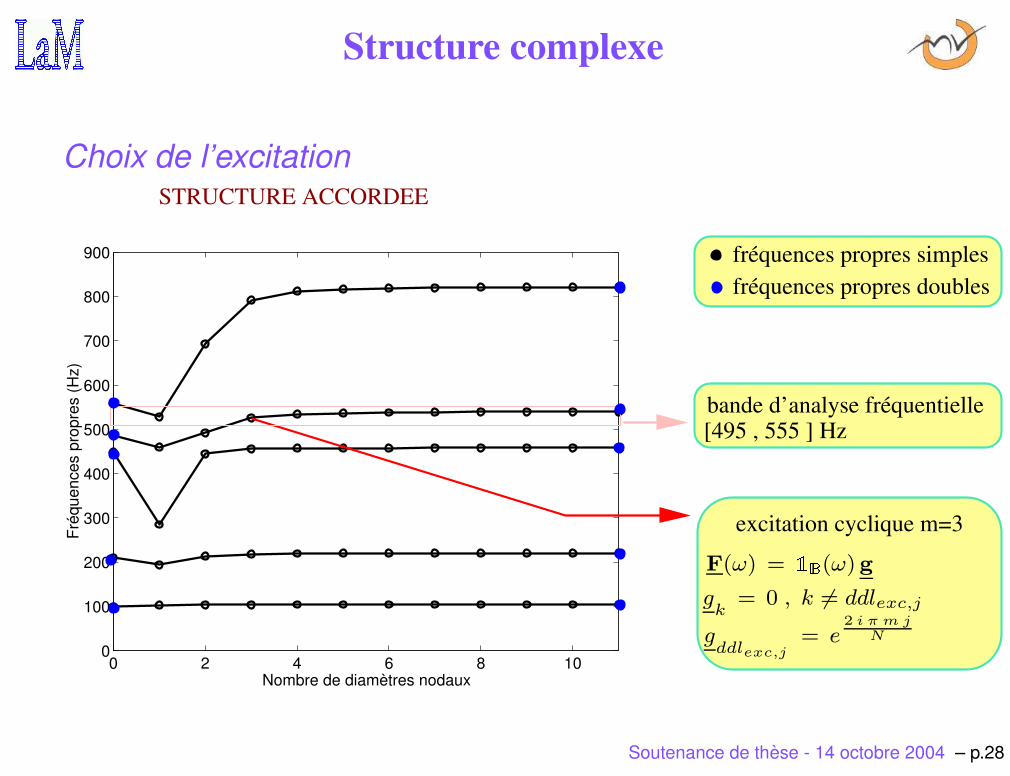
Structure complexe
Choix de l’excitation
0 2 4 6 8 100
100
200
300
400
500
600
700
800
900
Nombre de diamètres nodaux
Fréq
uenc
es p
ropr
es (H
z)
bande d’analyse fréquentielle[495 , 555 ] Hz
fréquences propres simplesfréquences propres doubles
STRUCTURE ACCORDEE
excitation cyclique m=3
F(ω) =
(ω)g
gk
= 0 , k 6= ddlexc,j
gddlexc,j
= e2 i π m j
N
Soutenance de these - 14 octobre 2004 – p.28
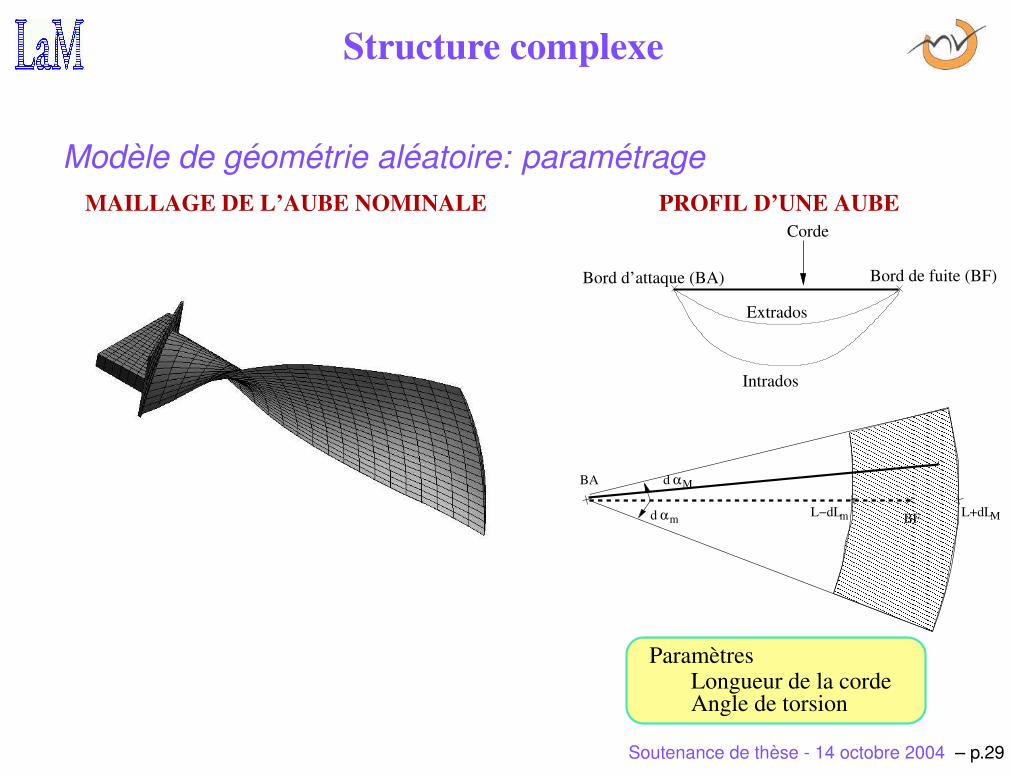
Structure complexe
Modele de geometrie aleatoire: parametrage
ParamètresLongueur de la cordeAngle de torsion
Intrados
Extrados
Corde
Bord d’attaque (BA) Bord de fuite (BF)
d αm L−dLm
d αM
L+dLM
BA
BF
PROFIL D’UNE AUBEMAILLAGE DE L’AUBE NOMINALE
Soutenance de these - 14 octobre 2004 – p.29
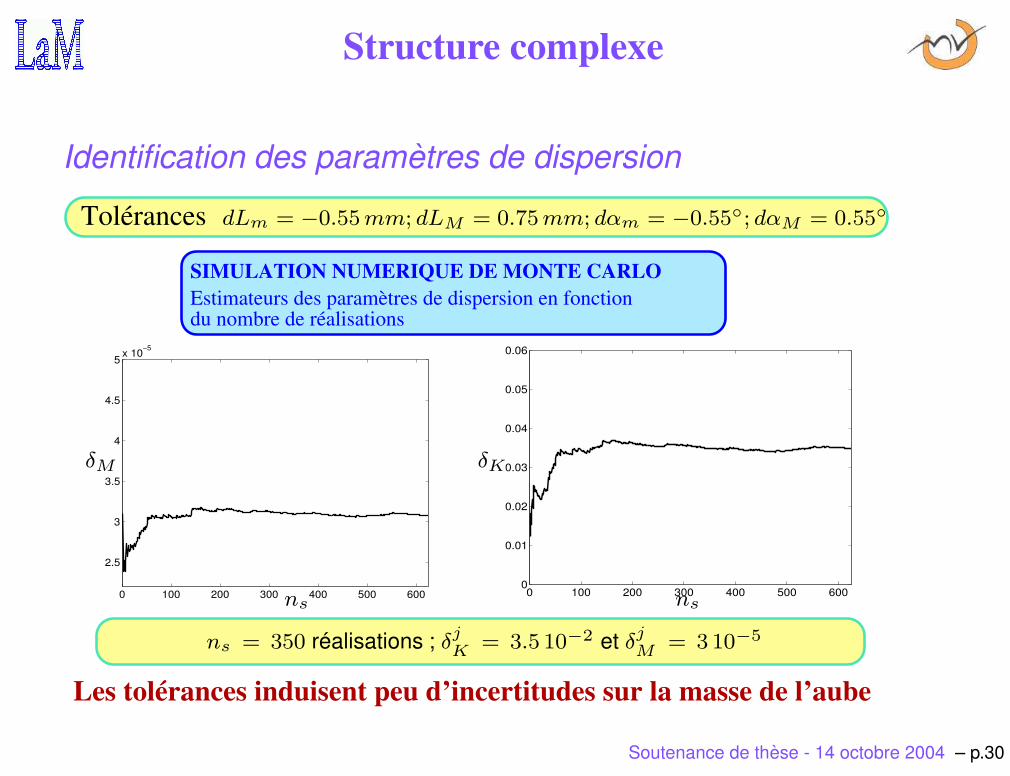
Structure complexe
Identification des parametres de dispersion
SIMULATION NUMERIQUE DE MONTE CARLOEstimateurs des paramètres de dispersion en fonctiondu nombre de réalisations
0 100 200 300 400 500 600
2.5
3
3.5
4
4.5
5x 10
−5
0 100 200 300 400 500 6000
0.01
0.02
0.03
0.04
0.05
0.06
Les tolérances induisent peu d’incertitudes sur la masse de l’aube
Tolérances
ns = 350 réalisations ; δjK = 3.5 10−2 et δ
jM = 310−5
dLm = −0.55 mm; dLM = 0.75 mm; dαm = −0.55; dαM = 0.55
δM δK
ns ns
Soutenance de these - 14 octobre 2004 – p.30
Structure complexe
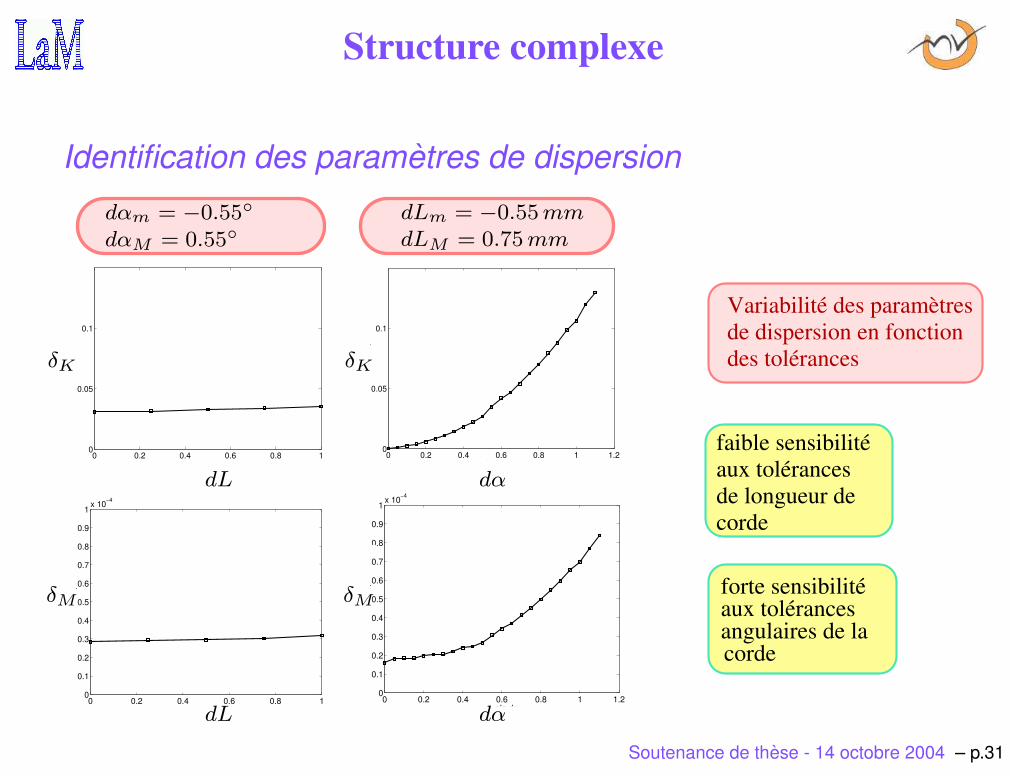
Identification des parametres de dispersion
0 0.2 0.4 0.6 0.8 10
0.05
0.1
Longueur dL
Par
amèt
re d
e di
sper
sion
δK
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1x 10
−4
Longueur dL
Par
amèt
re d
e di
sper
sion
δM
0 0.2 0.4 0.6 0.8 1 1.20
0.05
0.1
Angle dα
Par
amèt
re d
e di
sper
sion
δK
0 0.2 0.4 0.6 0.8 1 1.20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1x 10
−4
Angle dα
Par
amèt
re d
e di
sper
sion
δM
dαm = −0.55
dαM = 0.55dLm = −0.55 mm
dLM = 0.75 mm
δK
δM
δK
δM
dL dα
dL dα
Variabilité des paramètres de dispersion en fonctiondes tolérances
forte sensibilitéaux tolérancesangulaires de la
faible sensibilitéaux tolérancesde longueur decorde
corde
Soutenance de these - 14 octobre 2004 – p.31
Structure complexe
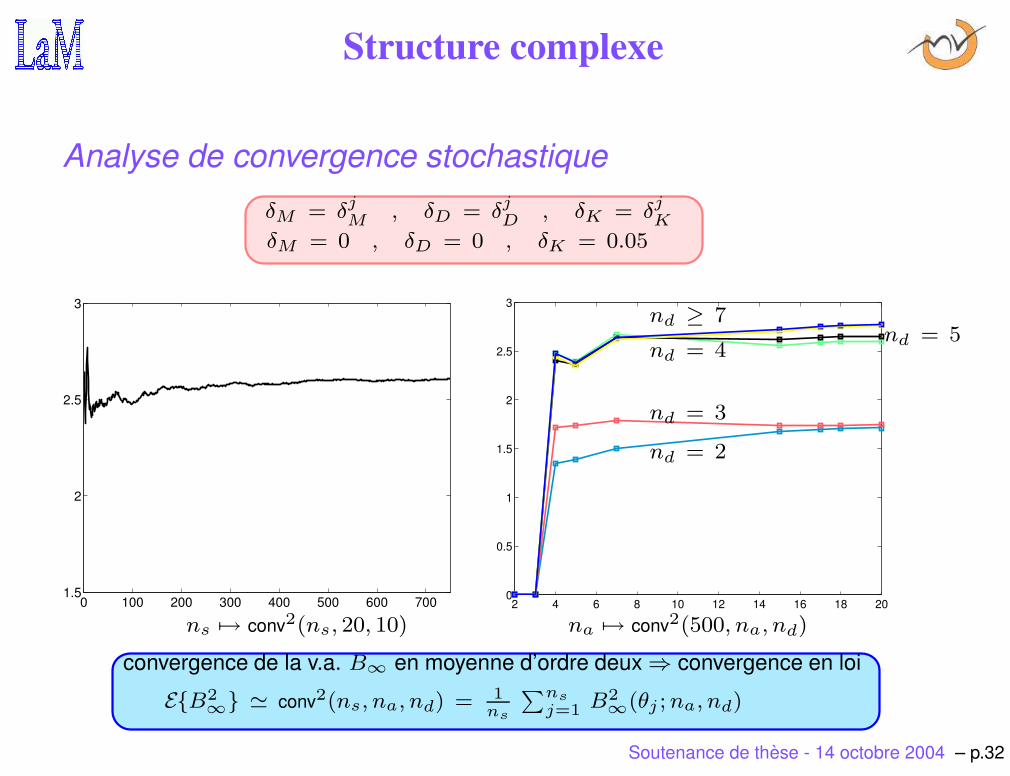
Analyse de convergence stochastique
0 100 200 300 400 500 600 7001.5
2
2.5
3
2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
3
δM = δjM , δD = δ
jD , δK = δ
jK
δM = 0 , δD = 0 , δK = 0.05
convergence de la v.a. B∞ en moyenne d’ordre deux ⇒ convergence en loi
EB2∞ ' conv2(ns, na, nd) = 1
ns
∑nsj=1 B2
∞(θj ; na, nd)
ns 7→ conv2(ns, 20, 10) na 7→ conv2(500, na, nd)
nd = 2
nd = 3
nd = 4nd = 5
nd ≥ 7
Soutenance de these - 14 octobre 2004 – p.32
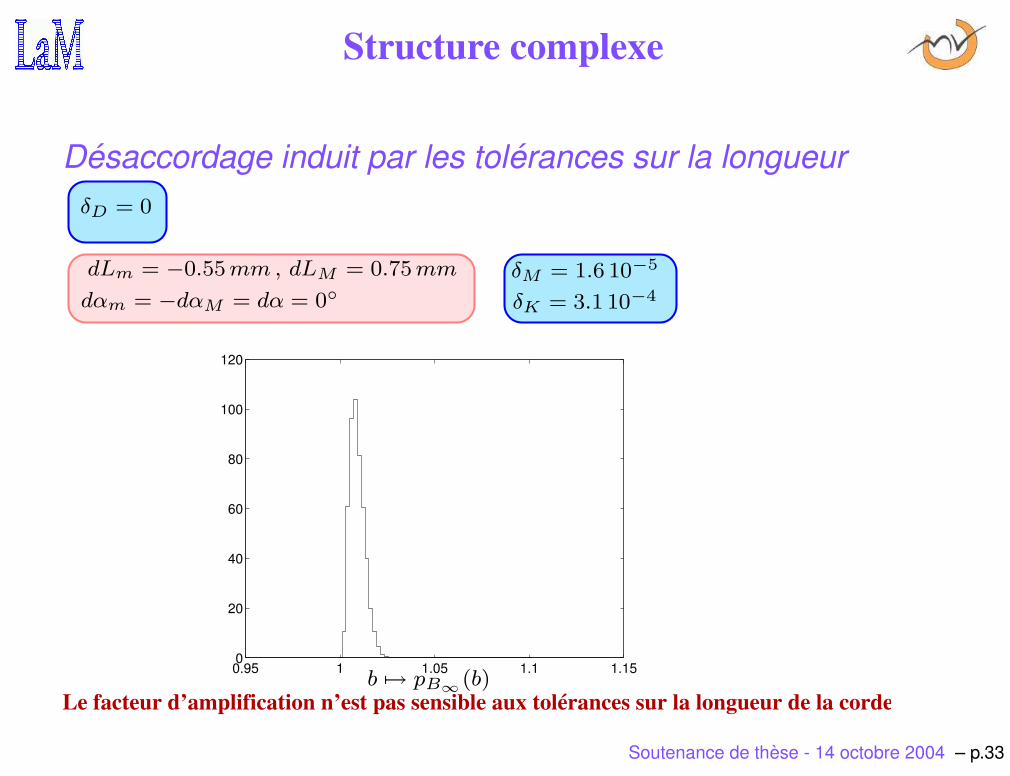
Structure complexe
Desaccordage induit par les tolerances sur la longueur
0.95 1 1.05 1.1 1.150
20
40
60
80
100
120
Le facteur d’amplification n’est pas sensible aux tolérances sur la longueur de la corde
δD = 0
dLm = −0.55 mm , dLM = 0.75 mm
dαm = −dαM = dα = 0δM = 1.6 10−5
δK = 3.1 10−4
b 7→ pB∞(b)
Soutenance de these - 14 octobre 2004 – p.33
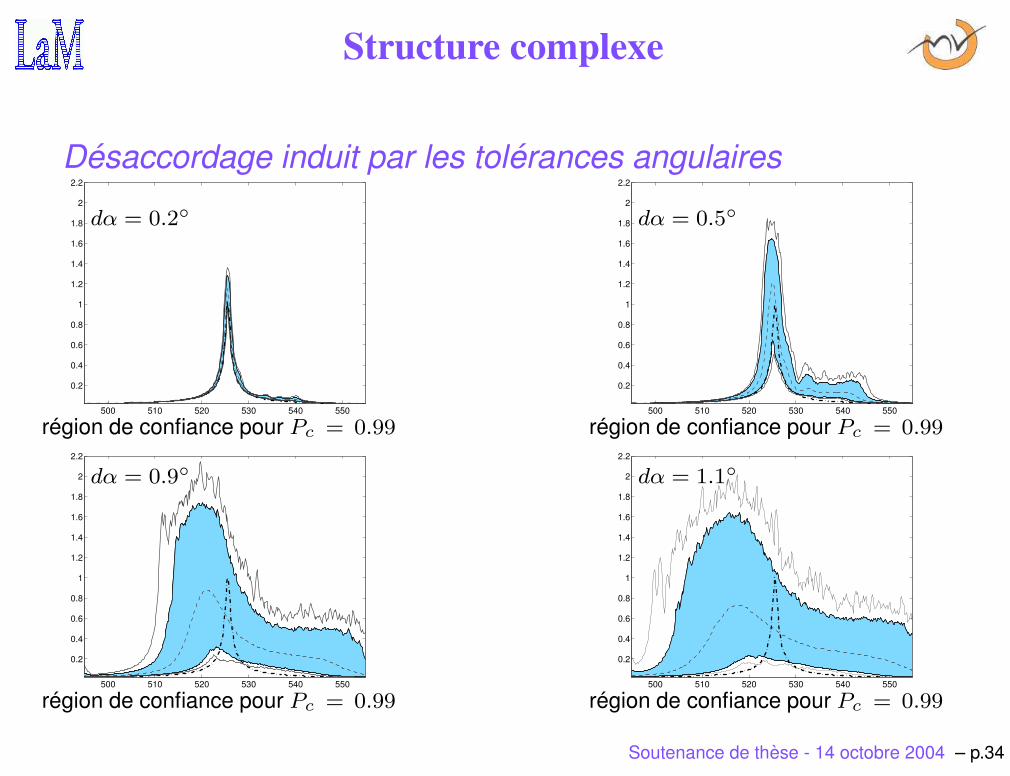
Structure complexe
Desaccordage induit par les tolerances angulaires
500 510 520 530 540 550
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
région de confiance pour Pc = 0.99
dα = 0.2
500 510 520 530 540 550
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
région de confiance pour Pc = 0.99
dα = 0.5
500 510 520 530 540 550
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
région de confiance pour Pc = 0.99
dα = 0.9
500 510 520 530 540 550
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
région de confiance pour Pc = 0.99
dα = 1.1
Soutenance de these - 14 octobre 2004 – p.34
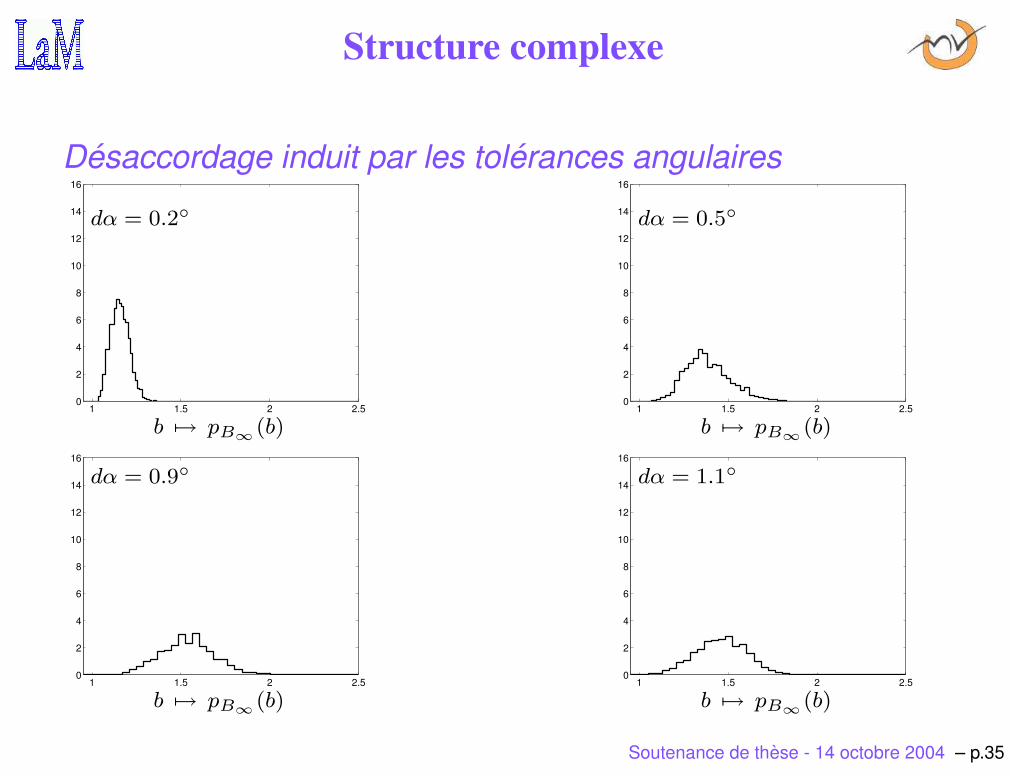
Structure complexe
Desaccordage induit par les tolerances angulaires
1 1.5 2 2.50
2
4
6
8
10
12
14
16
b 7→ pB∞(b)
dα = 0.2
1 1.5 2 2.50
2
4
6
8
10
12
14
16
b 7→ pB∞(b)
dα = 0.5
1 1.5 2 2.50
2
4
6
8
10
12
14
16
b 7→ pB∞(b)
dα = 0.9
1 1.5 2 2.50
2
4
6
8
10
12
14
16
b 7→ pB∞(b)
dα = 1.1
Soutenance de these - 14 octobre 2004 – p.35
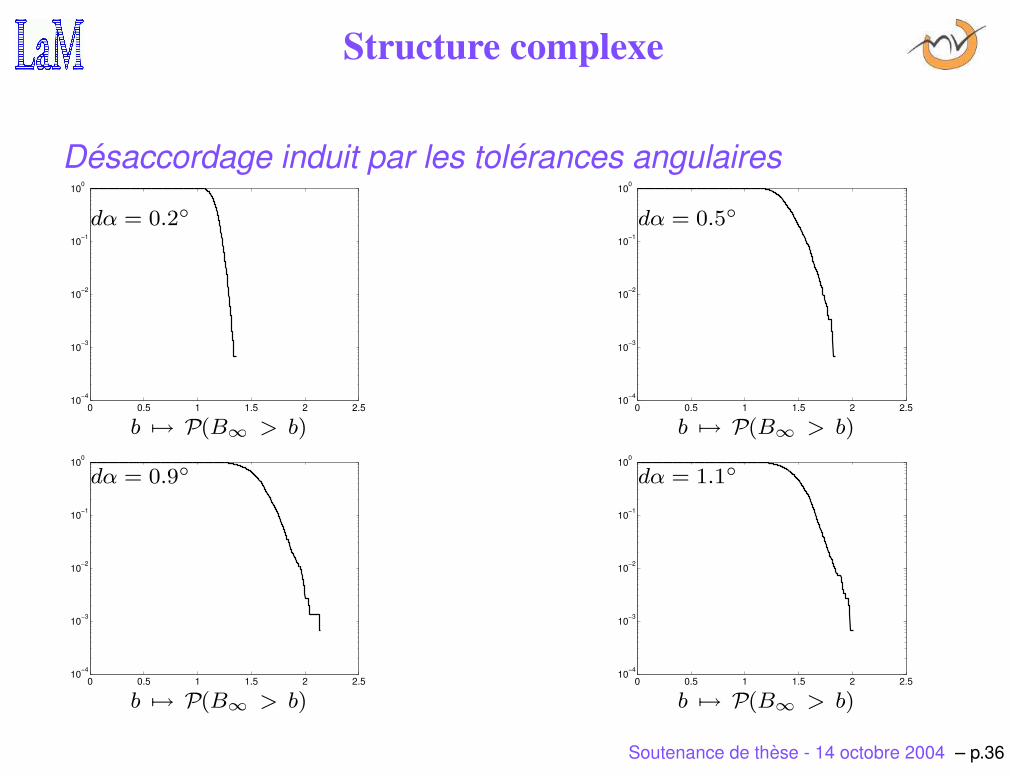
Structure complexe
Desaccordage induit par les tolerances angulaires
0 0.5 1 1.5 2 2.510
−4
10−3
10−2
10−1
100
b 7→ P(B∞ > b)
dα = 0.2
0 0.5 1 1.5 2 2.510
−4
10−3
10−2
10−1
100
b 7→ P(B∞ > b)
dα = 0.5
0 0.5 1 1.5 2 2.510
−4
10−3
10−2
10−1
100
b 7→ P(B∞ > b)
dα = 0.9
0 0.5 1 1.5 2 2.510
−4
10−3
10−2
10−1
100
b 7→ P(B∞ > b)
dα = 1.1
Soutenance de these - 14 octobre 2004 – p.36
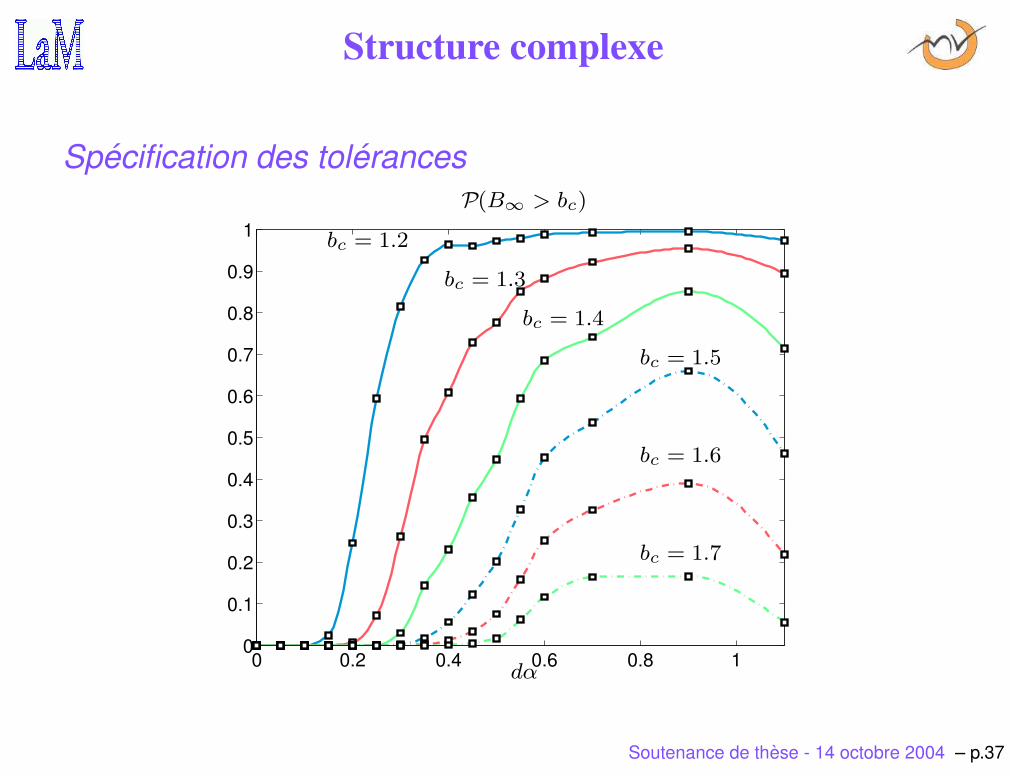
Structure complexe
Specification des tolerances
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
P(B∞ > bc)
dα
bc = 1.3
bc = 1.2
bc = 1.4
bc = 1.5
bc = 1.6
bc = 1.7
Soutenance de these - 14 octobre 2004 – p.37
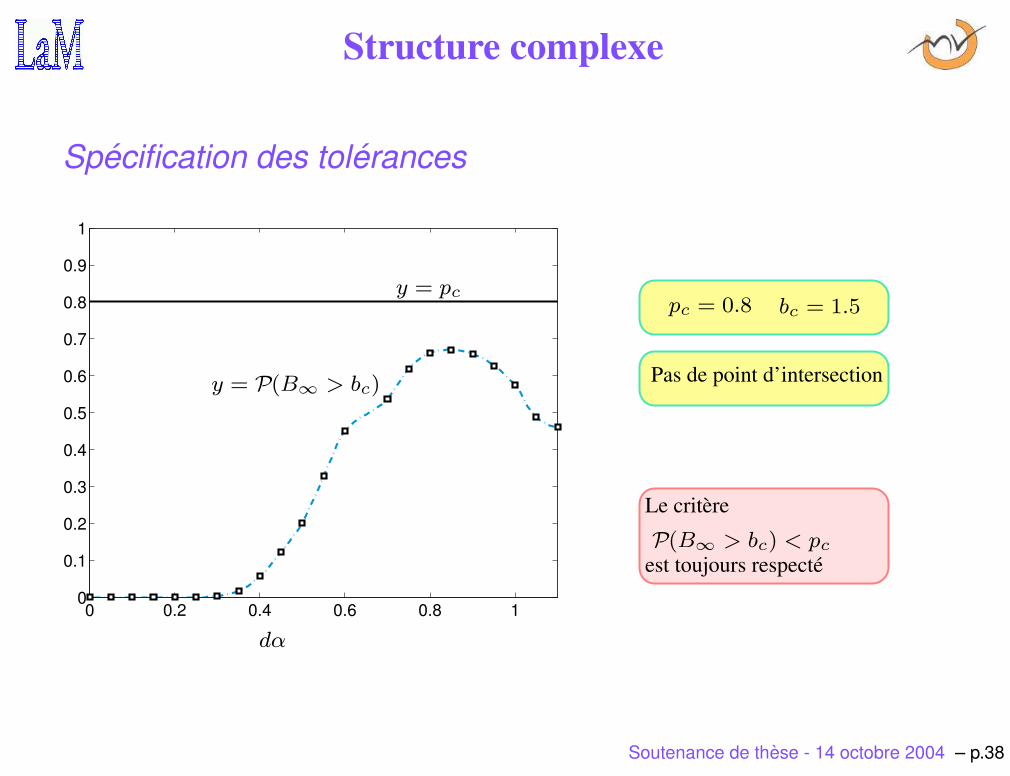
Structure complexe
Specification des tolerances
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Pas de point d’intersection
Le critère
est toujours respecté
y = P(B∞ > bc)
dα
pc = 0.8
P(B∞ > bc) < pc
bc = 1.5y = pc
Soutenance de these - 14 octobre 2004 – p.38
Structure complexe
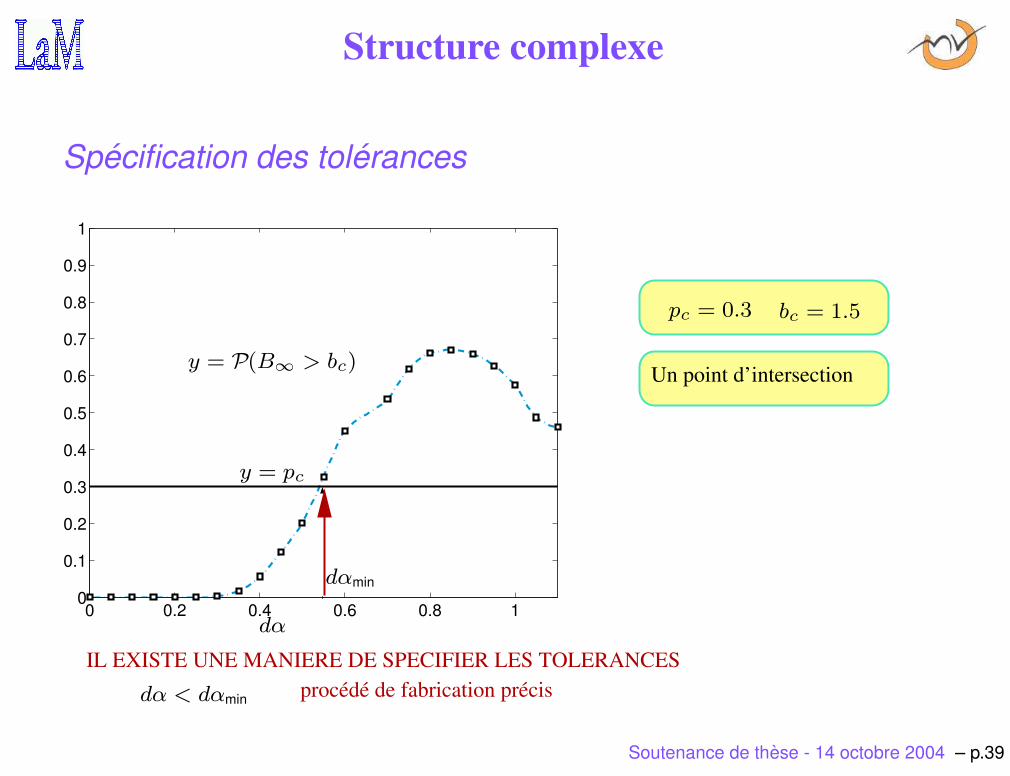
Specification des tolerances
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
dαmin
Un point d’intersection
IL EXISTE UNE MANIERE DE SPECIFIER LES TOLERANCESprocédé de fabrication précis
y = P(B∞ > bc)
dα
pc = 0.3 bc = 1.5
y = pc
dαmin
dα < dαmin
Soutenance de these - 14 octobre 2004 – p.39
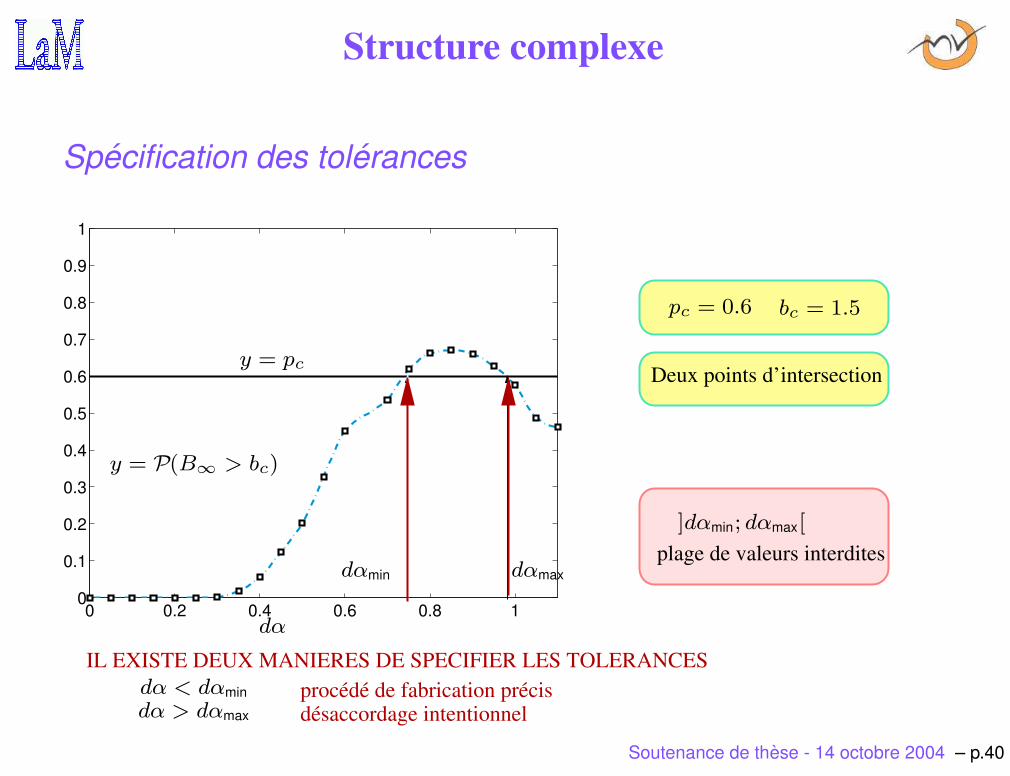
Structure complexe
Specification des tolerances
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
dαmin dαmax
Deux points d’intersection
plage de valeurs interdites
IL EXISTE DEUX MANIERES DE SPECIFIER LES TOLERANCES
désaccordage intentionnelprocédé de fabrication précis
y = P(B∞ > bc)
dα
pc = 0.6
]dαmin; dαmax[
bc = 1.5
y = pc
dαmin dαmax
dα < dαmindα > dαmax
Soutenance de these - 14 octobre 2004 – p.40

V- CONCLUSIONS ET PERSPECTIVES
Soutenance de these - 14 octobre 2004 – p.41
Les apports
Modélisation probabiliste non paramétrique des incertitudes de désaccordage desaubes des roues aubagées
Développement d’une méthodologie probabiliste directe pour l’analyse dudésaccordage
cohérente avec la théorie de la dynamique des structures linéarisée(matrices définies positives)
cohérente avec le désaccordage (incertitudes sur les fréquences propres desaubes et sur les déformées modales associées statistiquement dépendantes)
Développement d’une méthodologie probabiliste inverse pour déterminer lestolérances sur les aubes
construction d’un modèle de géométrie aléatoire d’aube représentatif
identification des paramètres de dispersion comme une fonction des paramètresdes tolérances
Validation des méthodologies sur
un exemple simple (non présenté)
un modèle complexe de roue aubagée• Méthodologies non limitées par la complexité de la structure
Soutenance de these - 14 octobre 2004 – p.42
Les perspectives de recherche
Inclures les forces gyroscopiques et les forces aéroélastiques dans les méthodologies
proposées
Prise en compte des incertitudes sur les non-linéarités de contact aube-disque
⇒ Coupler les méthodologies probabilistes paramétriques et non paramétriques
Modélisation des aubes en matériaux composites aléatoires
⇒ Approche probabiliste des incertitudes aléatoires au niveau de la microstructure.
Conception robuste: trouver les zones de design peu sensibles aux incertitudes
aléatoires.
Soutenance de these - 14 octobre 2004 – p.43
Top Related