







Langages
Pages
Légal

CARTOGRAPHIE MATHEMATIQUEAbdessadek ELASRI Ahmed EL ATARI Mohammed JIDAL23 Janvier 2016
M. Rachid ELHALIMIDemandé par : Réalisé par :
2PlanIntroduction
I. PARTIE 1 : Étude théorique1. Concepts de base 1.1 Géodésie 1.2 Systèmes de référence spatiale2. Cartographie 1.1 Définition 1.2 Branches de la cartographie3. Cartographie mathématique 1.1 Définition 1.2 Projection cartographique 1.3 Types de projections 1.4 déformation 1.5 Cas du Maroc
II. PARTIE 2 :Étude pratique avec le logiciel R1. Introduction2. Packages de gestion des données spatiales4. Étude de cas
Conclusion

Introduction
Partie 1: Étude théorique
1
5
Concepts de base : Géodésie
La détermination de la forme et les dimensions
de la terre.
L’étude des propriétés du champ de la
pesanteur terrestre
Établir des réseaux géodésiques
Réaliser des modèles de géoïde et étudier la variation de la gravité sur la surface terrestre
6
Concepts de base : Surfaces de référence
Ellipsoïde Sphère Géoïde
7
Concepts de base : Système de coordonnées
Un système de référence faisant appel à des règles mathématiques pour préciser des positions (endroits) sur la surface de la terre.
Système de coordonnées Géographique
Système de coordonnées Rectangulaire
Système de coordonnées
8
Concepts de base : Système de coordonnées
Exemple
• WGS84 (World Geodetic System 1984)
• RGF93 (Réseau Géodésique Français 1993)
• NTF (Nouvelle Triangulation de la France)
9
La cartographie: Définition
La science, la technique et l’art qui a pour objet la conception, la préparation, la rédaction et la réalisation de tous les types de plans et de cartes
Elle implique notamment l’étude de l’expression graphique des phénomènes, de la surface terrestre, à représenter
La cartographie est liée à l’évolution des sciences, des techniques, des mathématiques et surtout des explorations géographiques
10
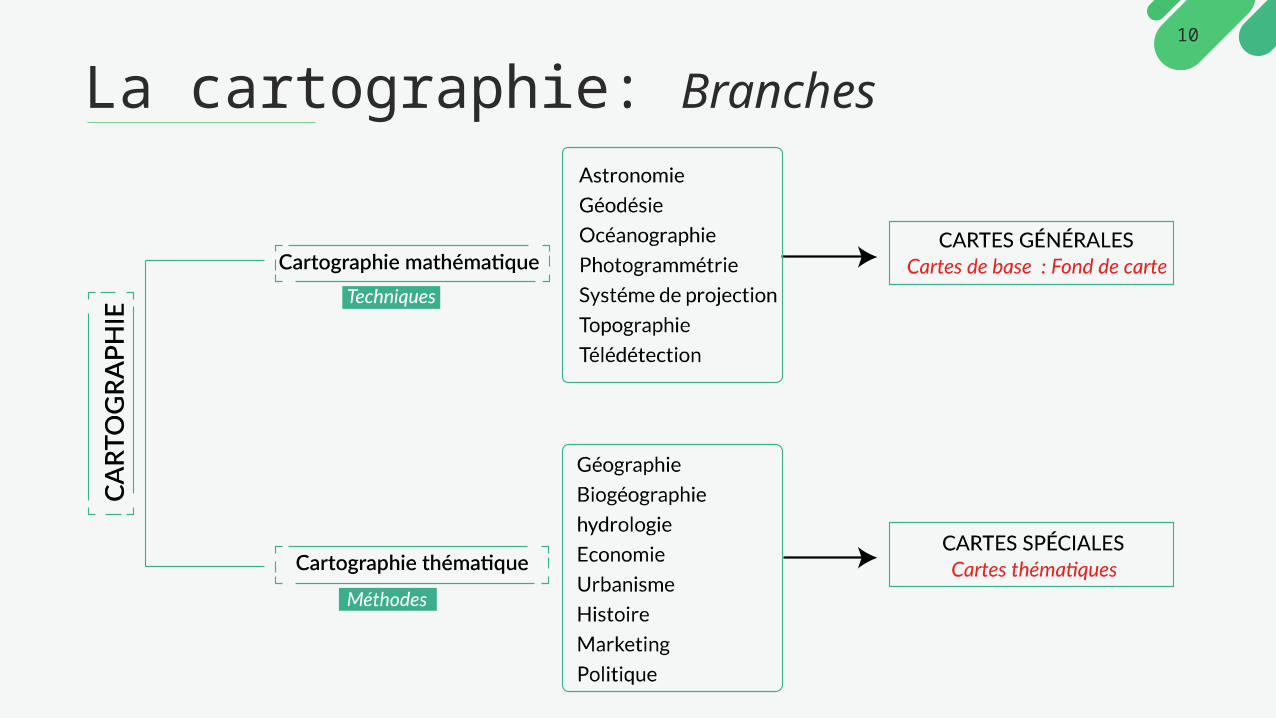
La cartographie: Branches
11
La cartographie mathématique
Branche de la cartographie qui a pour objectif d’ étudier les fondements mathématiques de la cartographie qui ont rapport aux projections de la surface de la terre sur le plan de la carte.
Elle étudie donc les différentes projections cartographiques qui permettent de passer de ce système de référence à celui des coordonnées planes.
Définition
12
La cartographie mathématique
Objectifs
Discute la théorie et les problèmes de projection
cartographique
Etudie les propriétés géométriques des produits
cartographiques
Effectue des transformations entre les surfaces,
Optimise les propriétés des projections cartographiques pour
les territoires.
13
La cartographie mathématique
Projection cartographique
Processus qui consiste à transformer et à représenter sur une surface bidimensionnelle (plane) des points situés sur la surface sphérique tridimensionnelle de la terre.
Ce processus fait appel à une méthode directe de projection géométrique ou à une méthode de transformation calculée mathématiquement.
Mathématiquement il s’agit de donner un couple de fonctions (f,g) tel que :
Qui permet de passer des coordonnées géographiques (ϕ, λ) aux coordonnées planes (X, Y). Chaque point (X, Y) doit avoir son prototype unique sur la surface de la terre qui est définie par la paire de coordonnées ϕ, λ
14
La cartographie mathématique
Techniques et Types
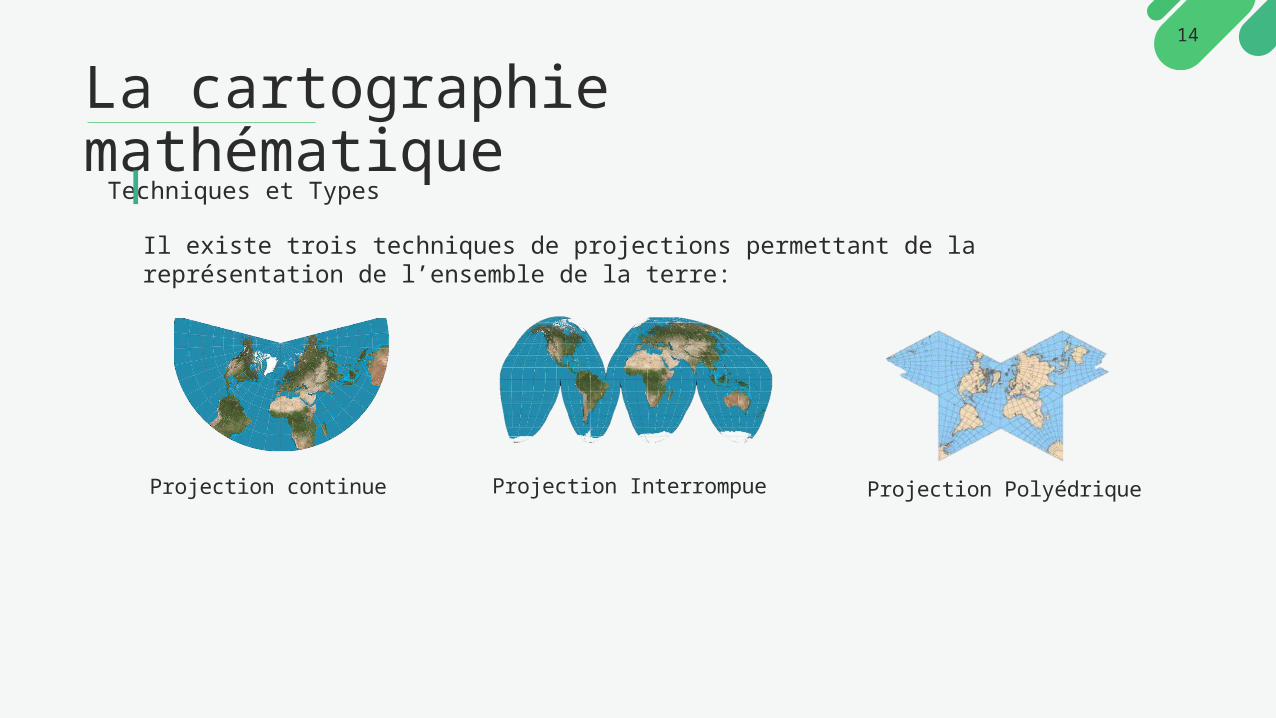
Il existe trois techniques de projections permettant de la représentation de l’ensemble de la terre:
Projection continue Projection Interrompue Projection Polyédrique
15
La cartographie mathématiqueProjection continue
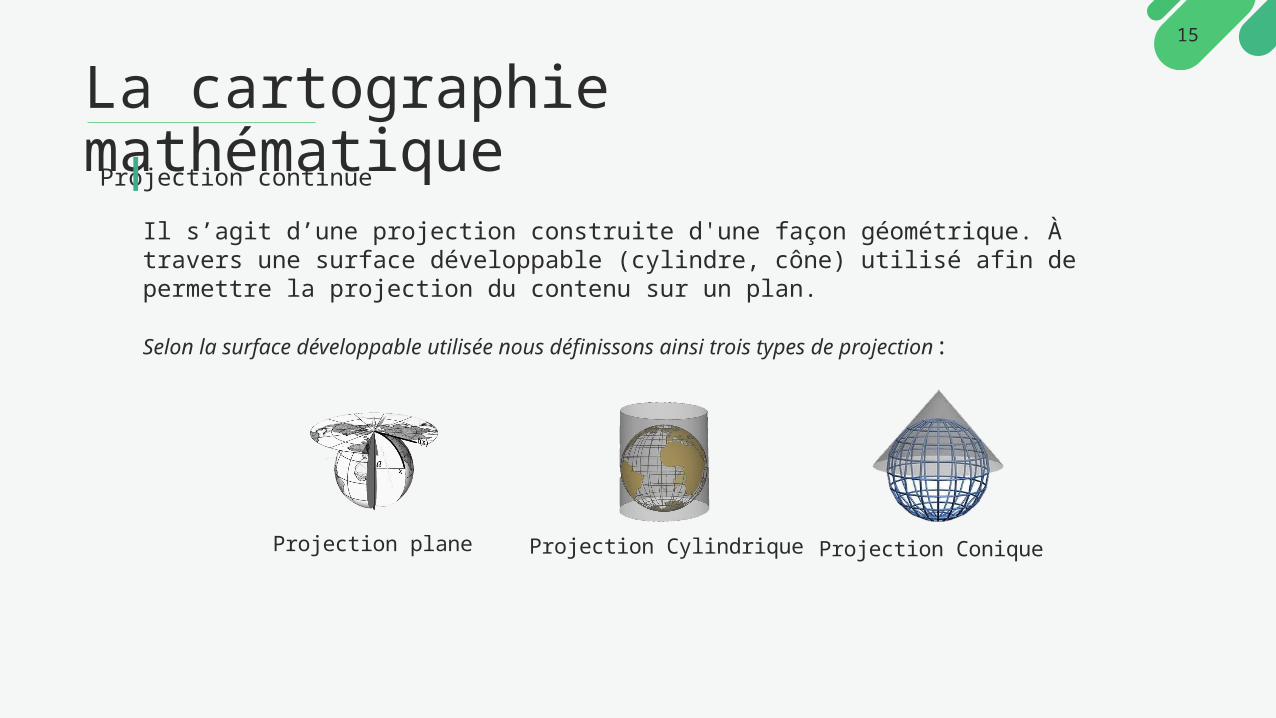
Il s’agit d’une projection construite d'une façon géométrique. À travers une surface développable (cylindre, cône) utilisé afin de permettre la projection du contenu sur un plan.
Selon la surface développable utilisée nous définissons ainsi trois types de projection:
Projection plane Projection Cylindrique Projection Conique
16
La cartographie mathématique
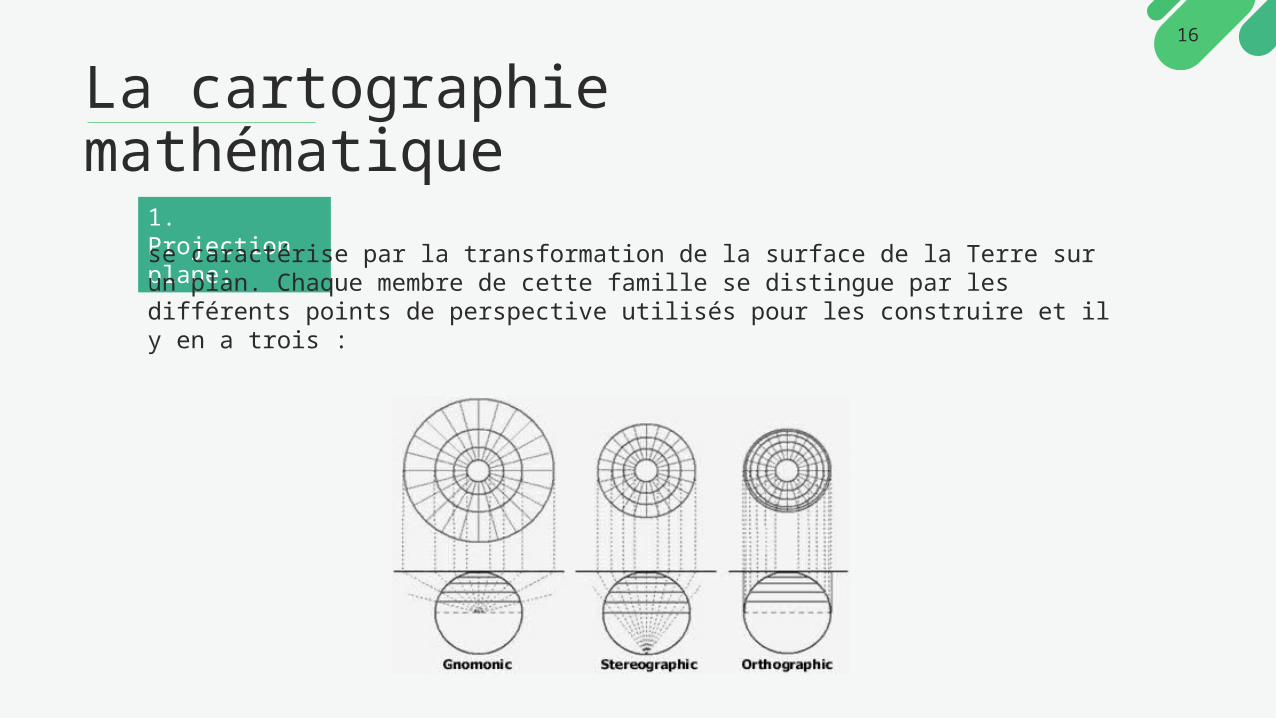
1. Projection plane:se caractérise par la transformation de la surface de la Terre sur un plan. Chaque membre de cette famille se distingue par les différents points de perspective utilisés pour les construire et il y en a trois :
17
La cartographie mathématique
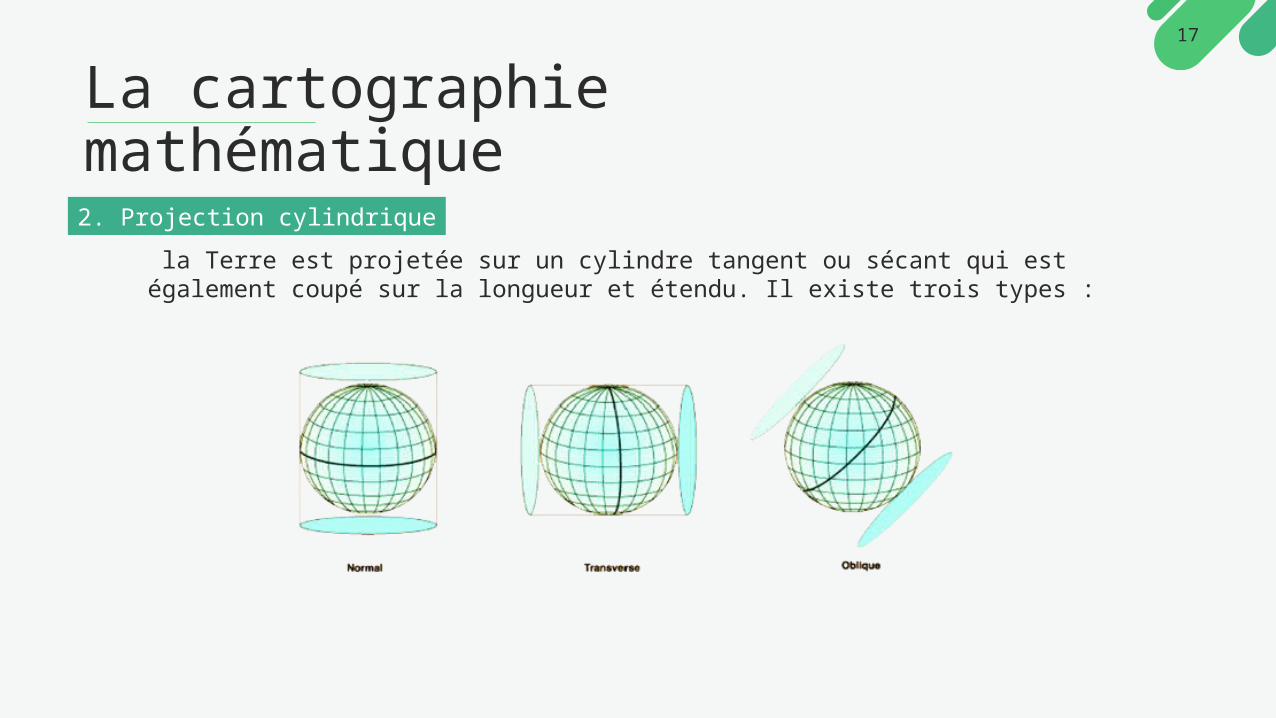
2. Projection cylindrique la Terre est projetée sur un cylindre tangent ou sécant qui est également coupé sur la longueur et étendu. Il existe trois types :
18
La cartographie mathématique
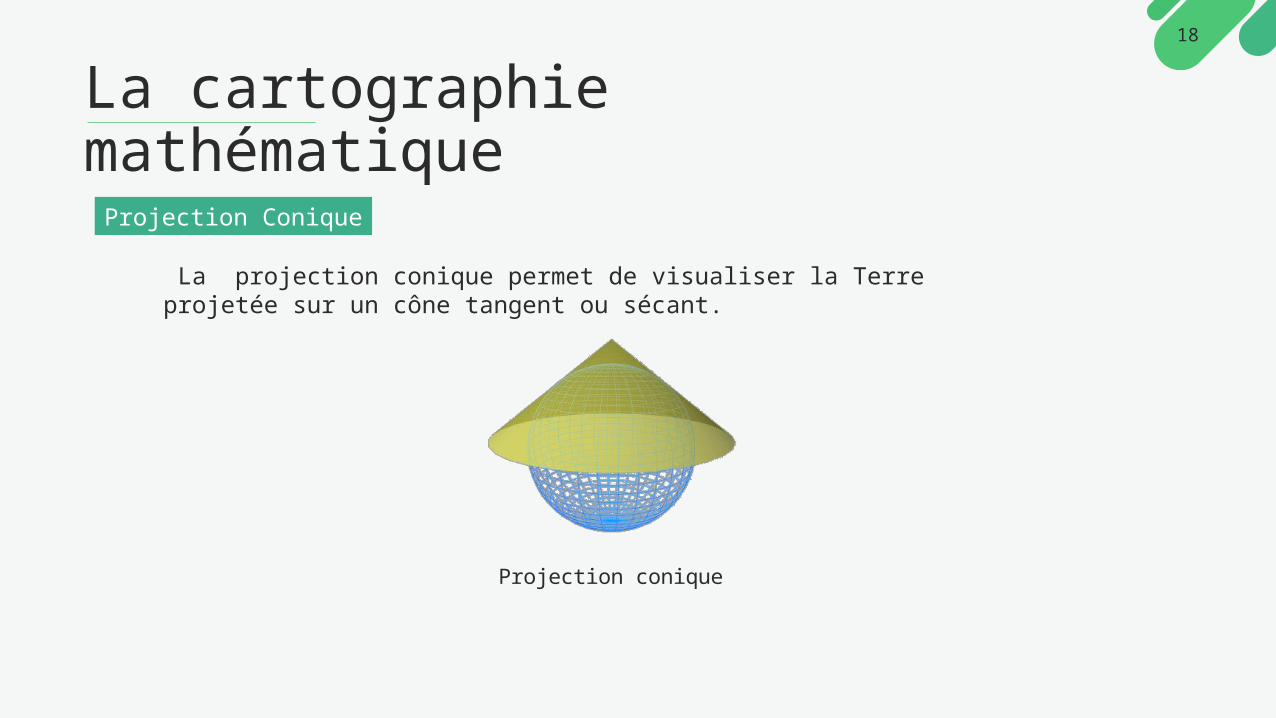
Projection Conique
La projection conique permet de visualiser la Terre projetée sur un cône tangent ou sécant.
Projection conique
19
La cartographie mathématique
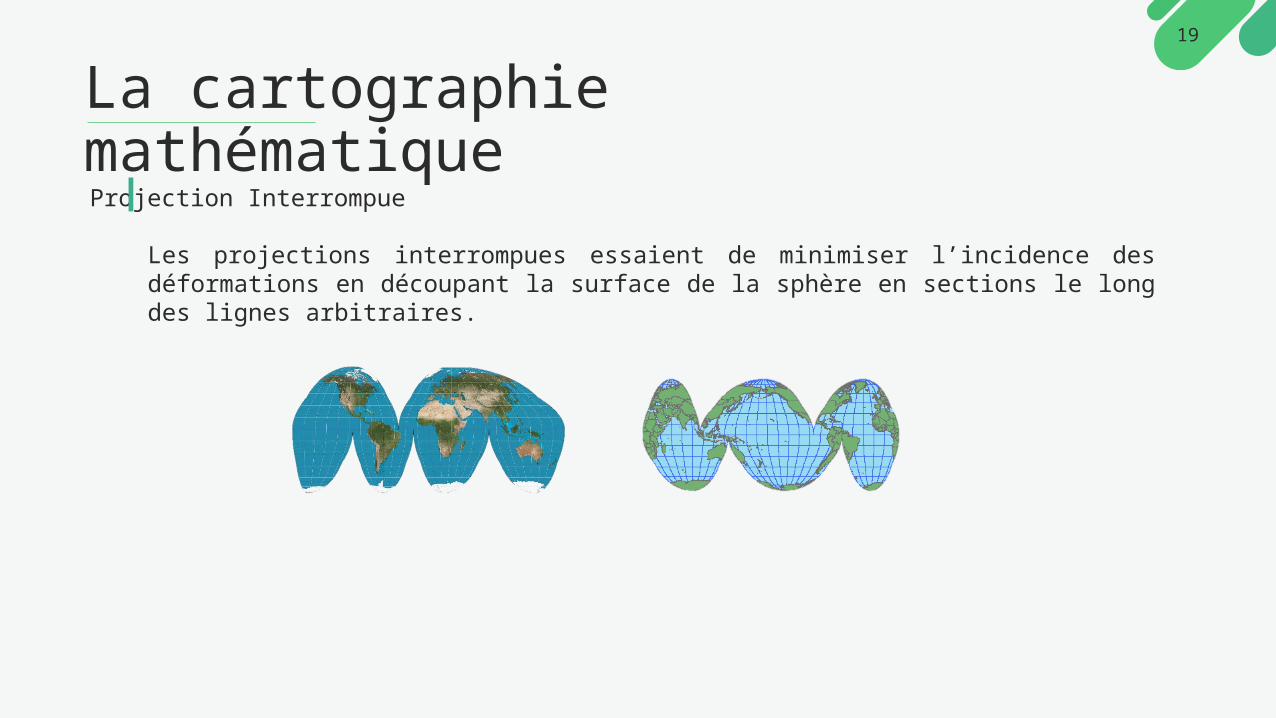
Projection Interrompue
Les projections interrompues essaient de minimiser l’incidence des déformations en découpant la surface de la sphère en sections le long des lignes arbitraires.
20
La cartographie mathématique
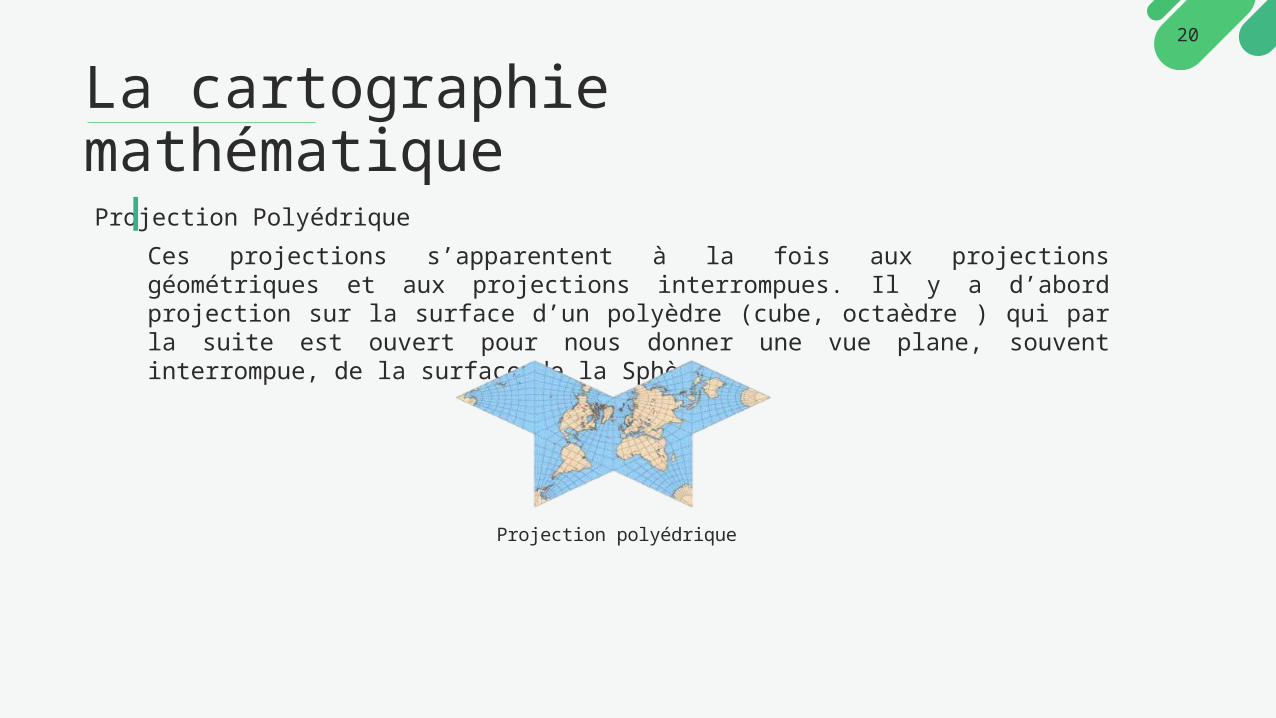
Projection PolyédriqueCes projections s’apparentent à la fois aux projections géométriques et aux projections interrompues. Il y a d’abord projection sur la surface d’un polyèdre (cube, octaèdre ) qui par la suite est ouvert pour nous donner une vue plane, souvent interrompue, de la surface de la Sphère.
Projection polyédrique
21
La cartographie mathématique
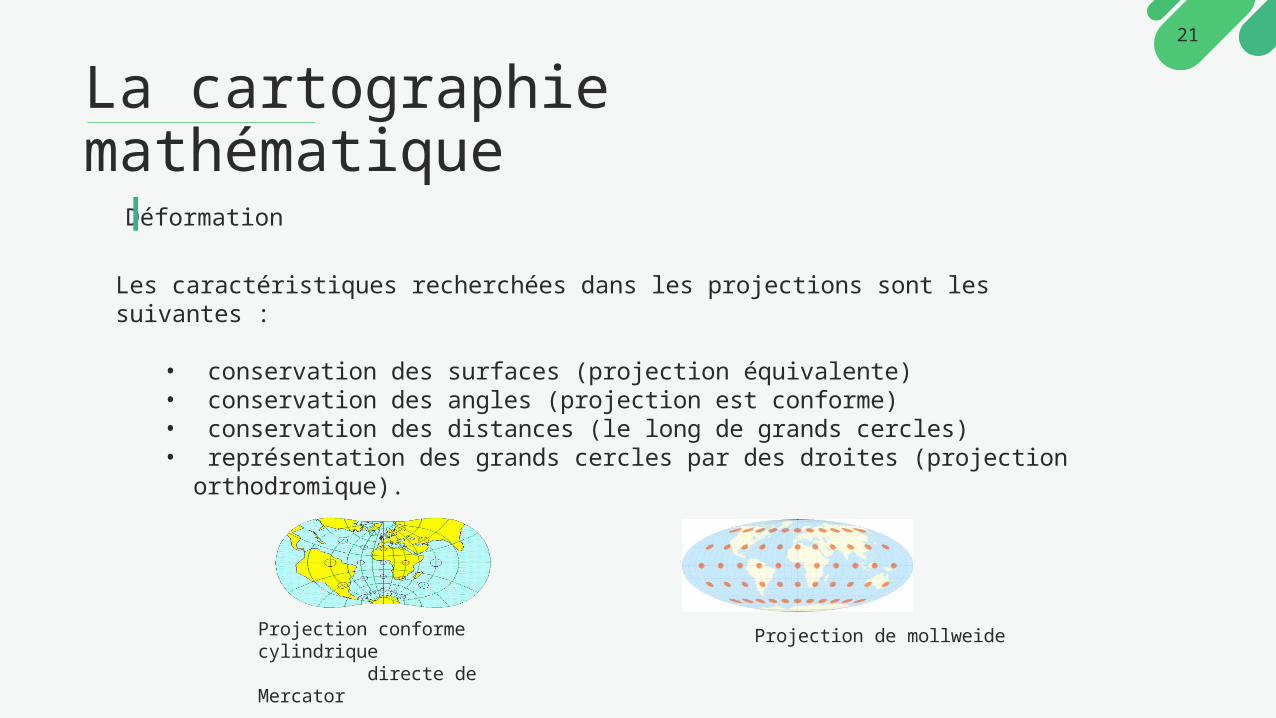
Déformation
Les caractéristiques recherchées dans les projections sont les suivantes :
• conservation des surfaces (projection équivalente)• conservation des angles (projection est conforme) • conservation des distances (le long de grands cercles) • représentation des grands cercles par des droites (projection
orthodromique).
Projection conforme cylindrique directe de Mercator
Projection de mollweide
22
La cartographie mathématique
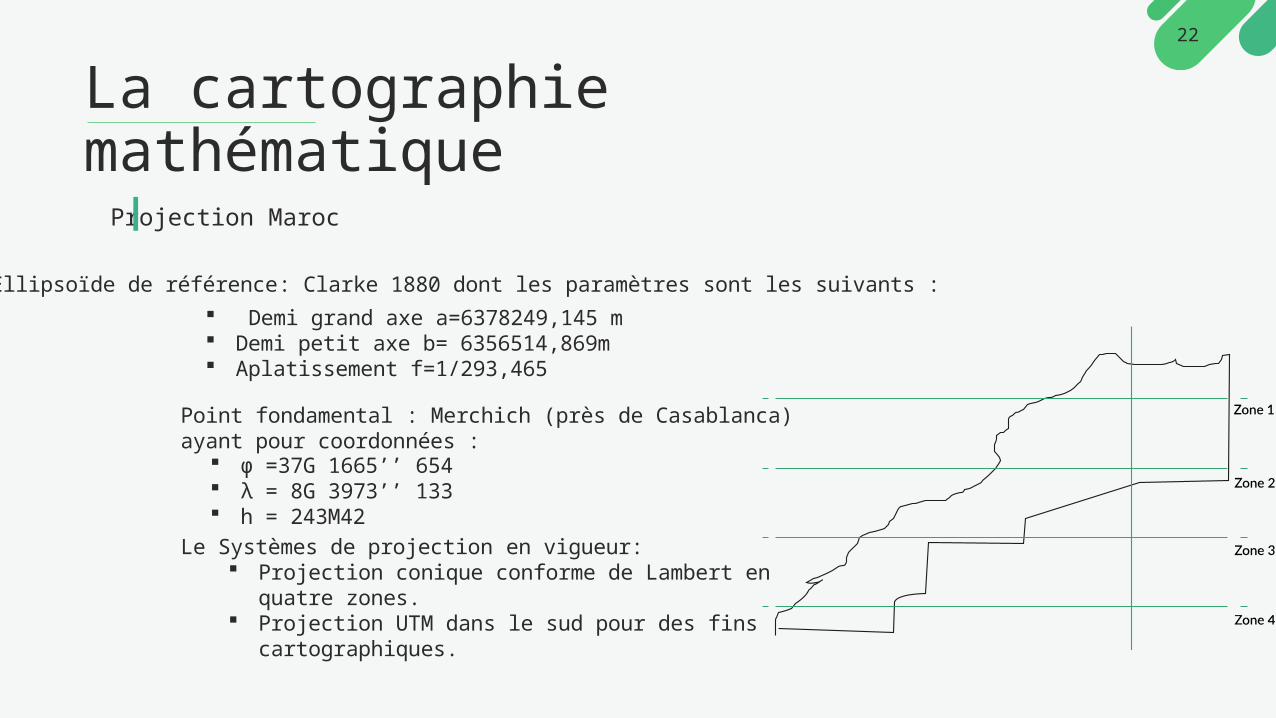
Projection Maroc
Ellipsoïde de référence: Clarke 1880 dont les paramètres sont les suivants : Demi grand axe a=6378249,145 m Demi petit axe b= 6356514,869m Aplatissement f=1/293,465
ϕ =37G 1665’’ 654 λ = 8G 3973’’ 133 h = 243M42
Le Systèmes de projection en vigueur: Projection conique conforme de Lambert en quatre
zones. Projection UTM dans le sud pour des fins
cartographiques.
Point fondamental : Merchich (près de Casablanca) ayant pour coordonnées :
Partie 2: Étude pratique avec R
2
24
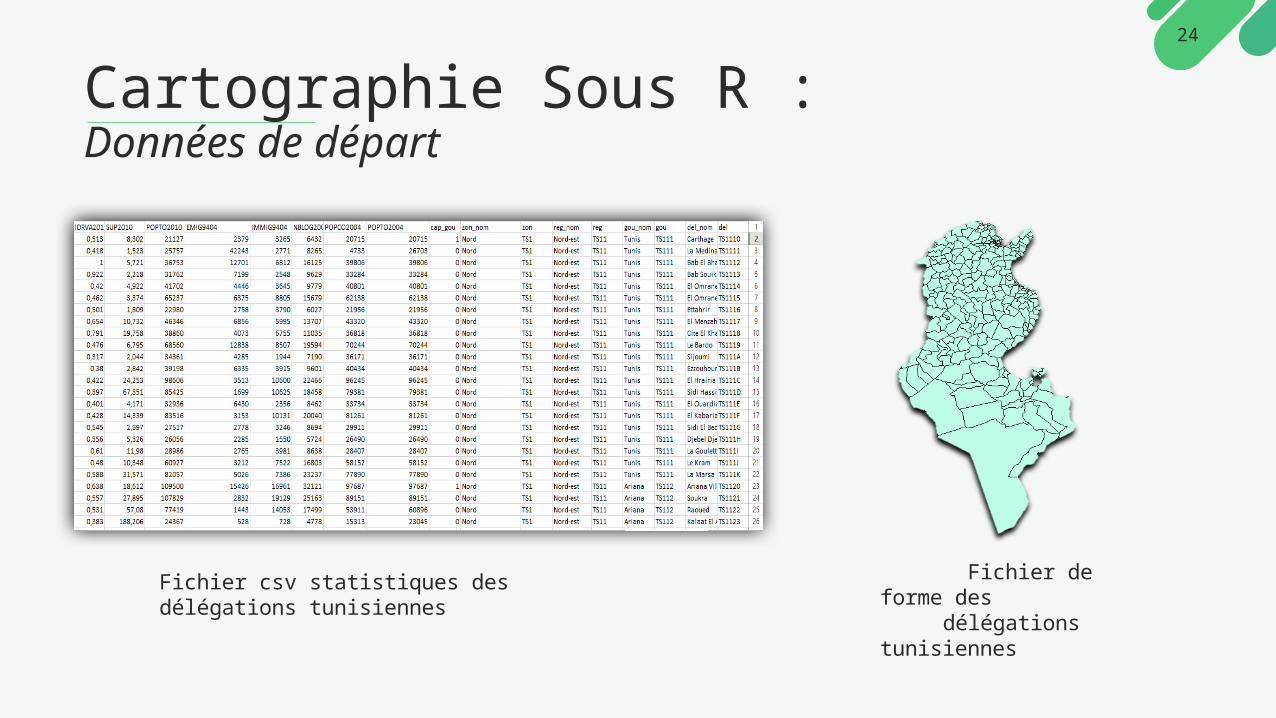
Cartographie Sous R : Données de départ
Fichier csv statistiques des délégations tunisiennes
Fichier de forme des délégations tunisiennes
25
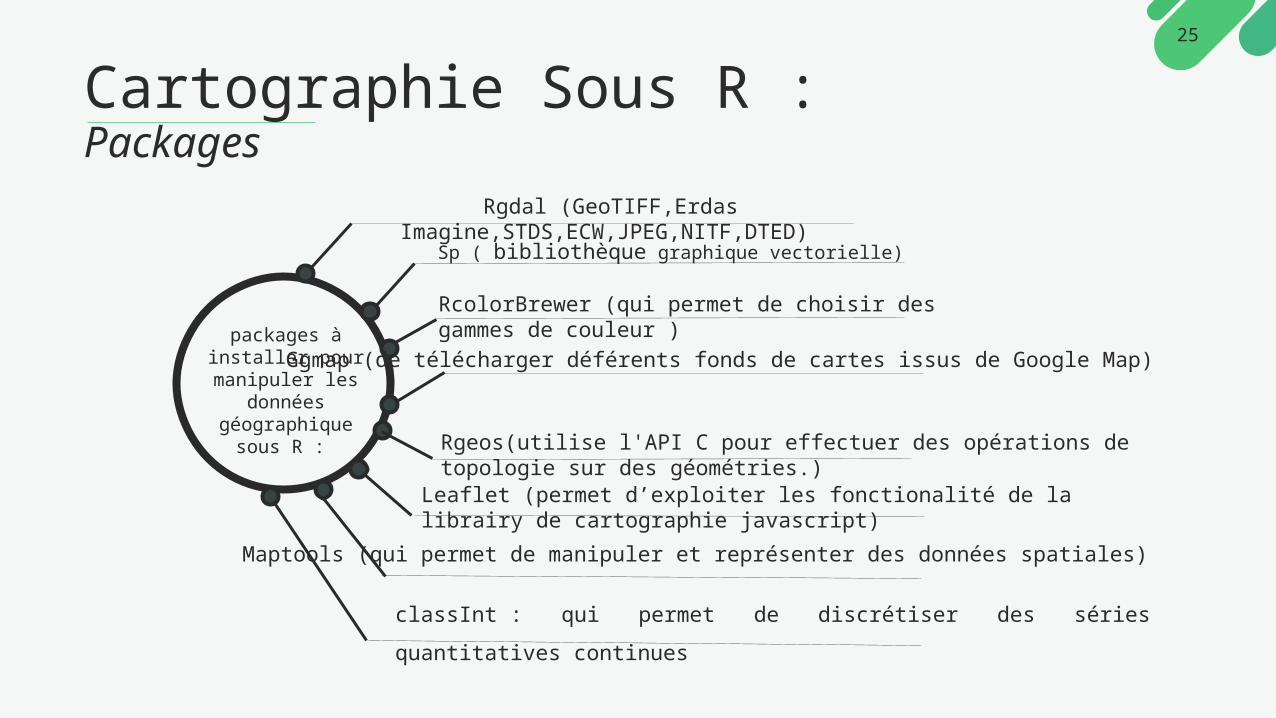
Cartographie Sous R : Packages
packages à installer pour manipuler les
données géographique sous R
:
Rgdal (GeoTIFF,Erdas Imagine,STDS,ECW,JPEG,NITF,DTED)
Sp ( bibliothèque graphique vectorielle)
Rgeos(utilise l'API C pour effectuer des opérations de topologie sur des géométries.)
Ggmap (de télécharger déférents fonds de cartes issus de Google Map)
Leaflet (permet d’exploiter les fonctionalité de la librairy de cartographie javascript)
RcolorBrewer (qui permet de choisir des gammes de couleur )
Maptools (qui permet de manipuler et représenter des données spatiales)
classInt : qui permet de discrétiser des séries quantitatives continues
26
Cartographie Sous R
1. Import du fond de carte : readShapeSpatial()2. Création d'un dataframe avec les coordonnées des centroides des délégations :
coordinates()3. Jointure entre le dataframe des coordonnées des centroides et les données à
cartographier : match()4. Création d'une variable contenant les rayons des cercles à représenter5. Tri du dataframe de manière à ce que les cercles soient dessinés du plus gros au
plus petit6. Affichage de la carte : plot() + symbols()7. Affichage de la légende (dessin)8. Titre, sous-titres, échelle, flèche nord
Méthodologie
Méthode 1: Représentation par symboles proportionnels
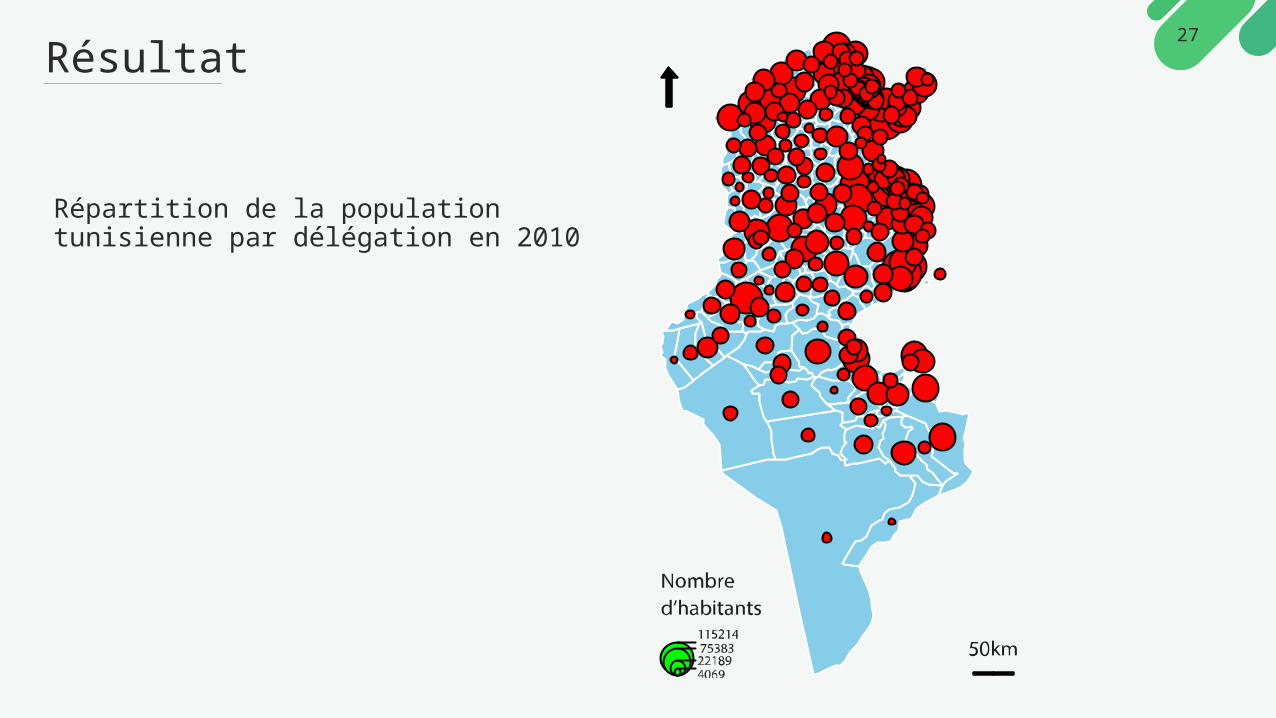
27Résultat
Répartition de la population tunisienne par délégation en 2010
28
Cartographie Sous R : Package
1. Import du fond de carte : readShapeSpatial()2. Jointure entre le dataframe des coordonnées des centroides et les données à
cartographier : match()3. Affichage de la carte : plot() + symbols()4. Affichage de la légende (dessin)5. Titre, sous-titres, échelle, flèche nord
Méthodologie
Méthode 1: Représentation de densité de points
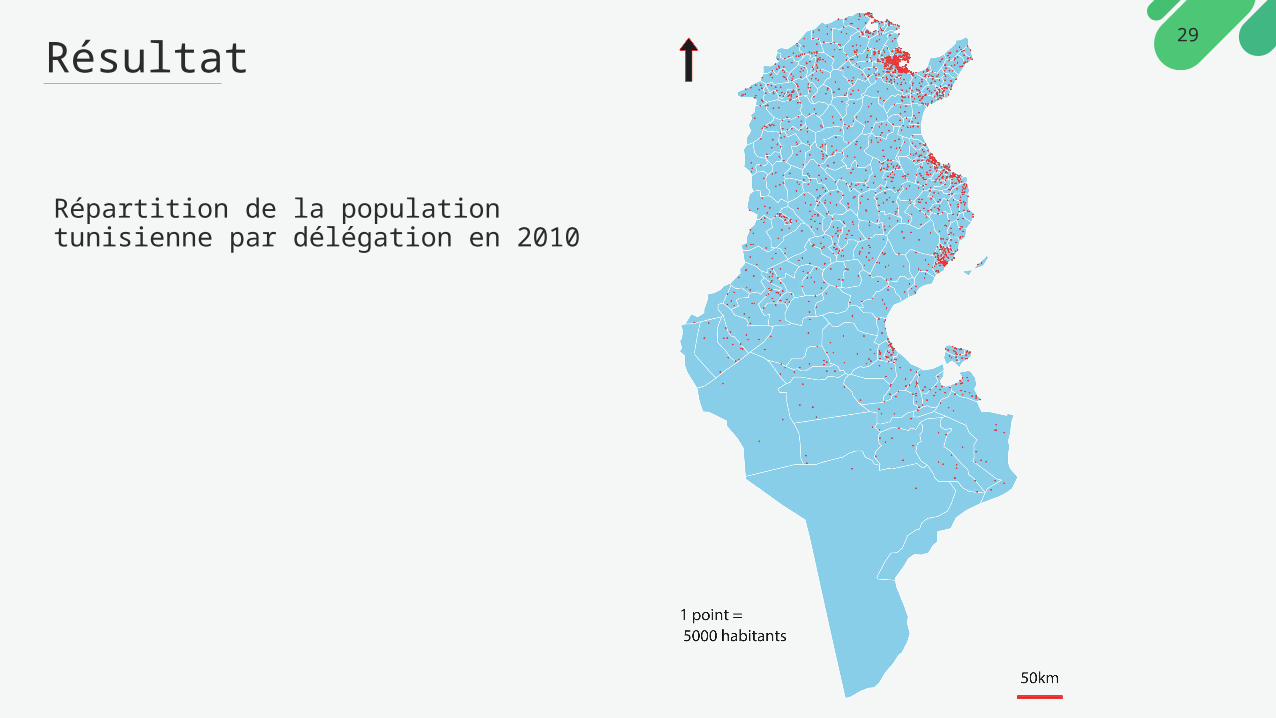
29Résultat
Répartition de la population tunisienne par délégation en 2010
Conclusion
Bibliographie Didier Poidevin , « Manuel de Cartographie » , Extrait de l’ouvrage « La
carte : moyen d’action »
François Cavayas, « Cartographie mathématique Chapitres 2 à 4 », Hiver
2009
Timothée Giraud & Nicolas Lambert, « Cartographie et Analyse Spatiale
avec R », 22 mai 2014
François Kauffman, « Cours de Cartographie en R », 2 septembre 2015
Top Related