







Langages
Pages
Légal

GOL 510, Cours 02 aOrganisation flexible de la production (4cr.)
Session : AUTOMNE 2013
Capteurs, actionneurs et autres
composantes d’un système de commande
Programme de baccalauréat en génie des opérations et de la logistique
École de technologie supérieure, Montréal, QC.

Bibliographie
“Automation, Production Systems, and
Computer-Integrated Manufacturing”,
Mikell P. Groover
Source de cette présentation:
Plan de la présentation
Introduction
Capteurs
Actionneurs
Conversion analogique-numérique
Conversion numérique-analogique
Conclusions
Introduction
Pour la commande d’un système automatisé, un ordinateur doit collecter des données et transmettre des signaux au processus de production
Les paramètres et variables d’un processus peuvent être continus ou discrets; alors qu’un ordinateur opère exclusivement avec des données discrètes (binaires)
Nécessité d’adaptation (conversion) entre des données numériques et des données analogiques à l’interface ordinateur-processus

Introduction
Les composantes d’une telle interface
Capteurs pour la mesure de variables continues etdiscrètes
Actionneurs qui pilotent les paramètres continuset discrets du processus
Dispositifs de conversion
D’un signal analogique en données numériques
D’une donnée numérique en signaux analogiques
Périphériques d’entrée / sortie pour desdonnées discrètes

Capteurs
Généralement, un dispositif de mesure est composé d’un Capteur: détecte la variable physique visée
Transducteur: convertit la variable physique en une autre forme (signal électrique)
Un étalonnage est souvent nécessaire pour que le signal délivré corresponde à lamesure de la variable; il constitue l’un des critères de choix du capteur
Caractéristique désirée Définitions et commentaires
Grande exactitude Erreurs systématiques minimes
Grande précision La variabilité aléatoire ou le bruit dans la mesure sont minimes
Large plage de fonctionnement Exactitude et précision pour un large éventail de valeurs mesurées
Vitesse de réponse élevée Capacité du système à répondre rapidement aux changements dans la valeur
de la variable physique mesurée
Facilité d’étalonnage Étalonnage rapide et facile
Dérapage minimal La perte de précision avec le temps doit être minime
Grande fiabilité Le moins de pannes et de dysfonctionnements possibles. Bon fonctionnement
dans les conditions défavorables
Coût peu élevé Coût moins élevé que les données fournies par le capteur

Capteurs - classification -
Dispositif de mesure
Analogique Discret
Binaire Numérique
Signal continu
analogique
Ex. couple
thermoélectrique
Signal ne pouvant
avoir que certaines
valeurs discrètes
Signal du type
On/Off
Ex. commutateur
de proximité
Signal du type bits
d’état parallèles, ou
série d’impulsions
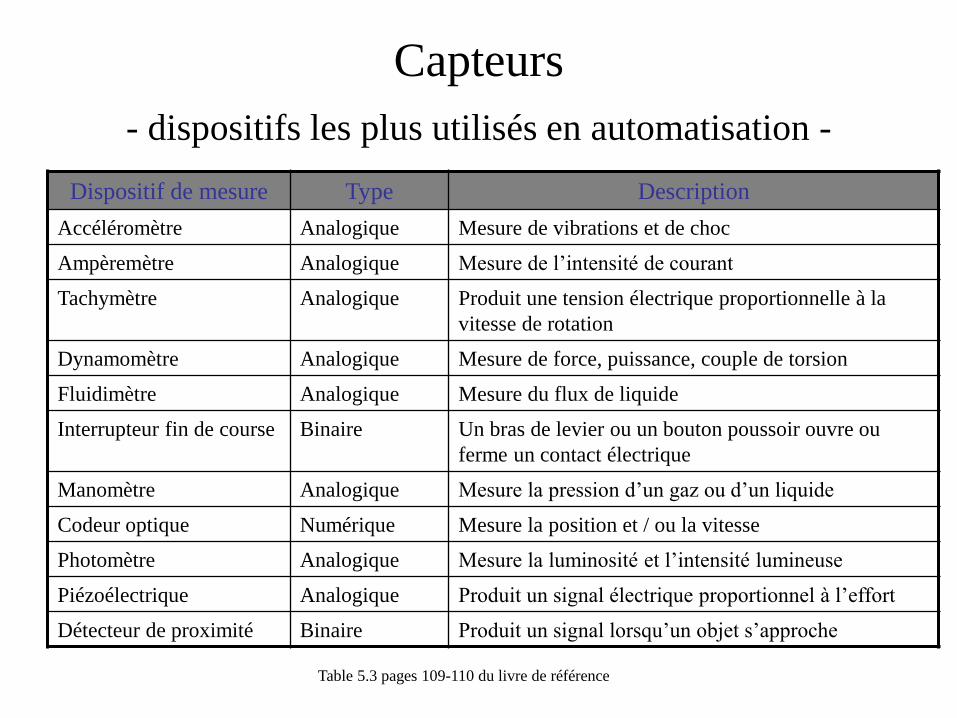
Capteurs
- dispositifs les plus utilisés en automatisation -
Dispositif de mesure Type Description
Accéléromètre Analogique Mesure de vibrations et de choc
Ampèremètre Analogique Mesure de l’intensité de courant
Tachymètre Analogique Produit une tension électrique proportionnelle à la
vitesse de rotation
Dynamomètre Analogique Mesure de force, puissance, couple de torsion
Fluidimètre Analogique Mesure du flux de liquide
Interrupteur fin de course Binaire Un bras de levier ou un bouton poussoir ouvre ou
ferme un contact électrique
Manomètre Analogique Mesure la pression d’un gaz ou d’un liquide
Codeur optique Numérique Mesure la position et / ou la vitesse
Photomètre Analogique Mesure la luminosité et l’intensité lumineuse
Piézoélectrique Analogique Produit un signal électrique proportionnel à l’effort
Détecteur de proximité Binaire Produit un signal lorsqu’un objet s’approche
Table 5.3 pages 109-110 du livre de référence
Généralités sur les capteurs, actionneurs et autres composantes de système de contrôle
Capteurs : Dans la conception d’un système automatisée, les capteurs sont les éléments sensorielles qui permettre à la mécanique du système de connaitre sont environnement et de s’y adaptés.
Il existe principalement 2 familles de capteurs : les capteurs d’état et de position. Ces capteurs peuvent transmettre des signaux discret (On/Off) ou variable (analogique ou digital).
Type de capteurs les plus couramment utilisé :
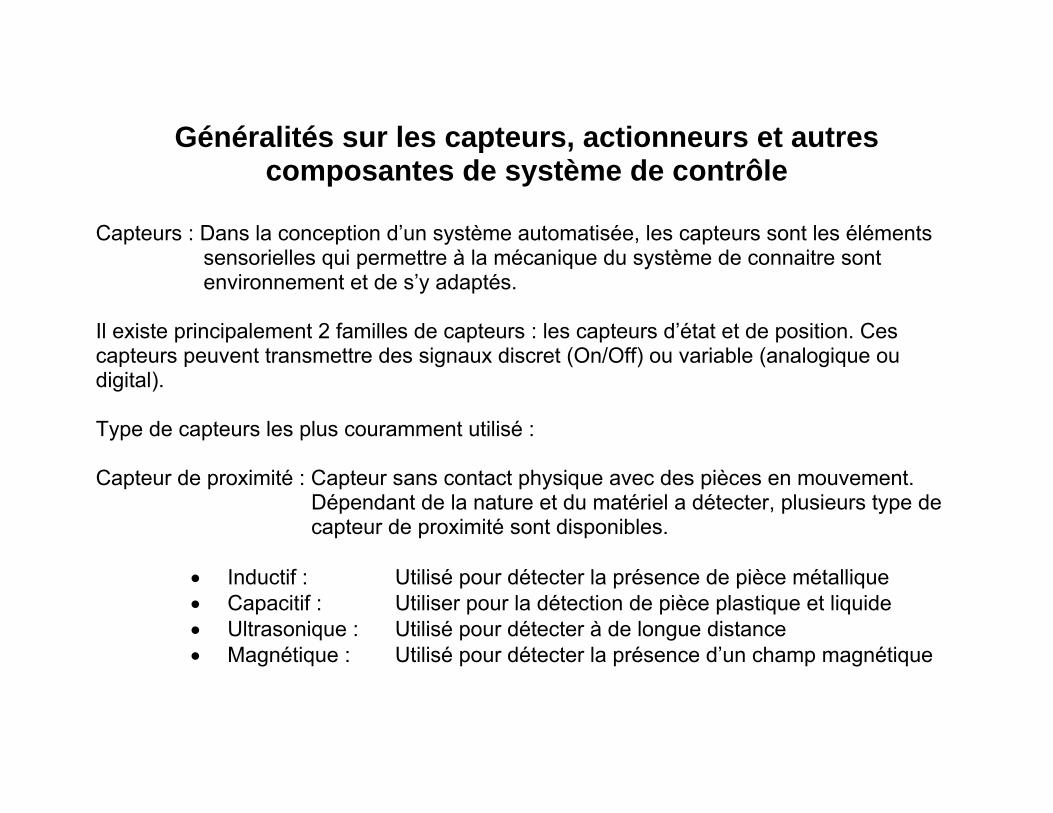
Capteur de proximité : Capteur sans contact physique avec des pièces en mouvement. Dépendant de la nature et du matériel a détecter, plusieurs type de capteur de proximité sont disponibles.
Inductif : Utilisé pour détecter la présence de pièce métallique Capacitif : Utiliser pour la détection de pièce plastique et liquide Ultrasonique : Utilisé pour détecter à de longue distance Magnétique : Utilisé pour détecter la présence d’un champ magnétique

Capteur de proximité
Inductif et capacitif, aspect extérieur similaire
Capteur ultrason
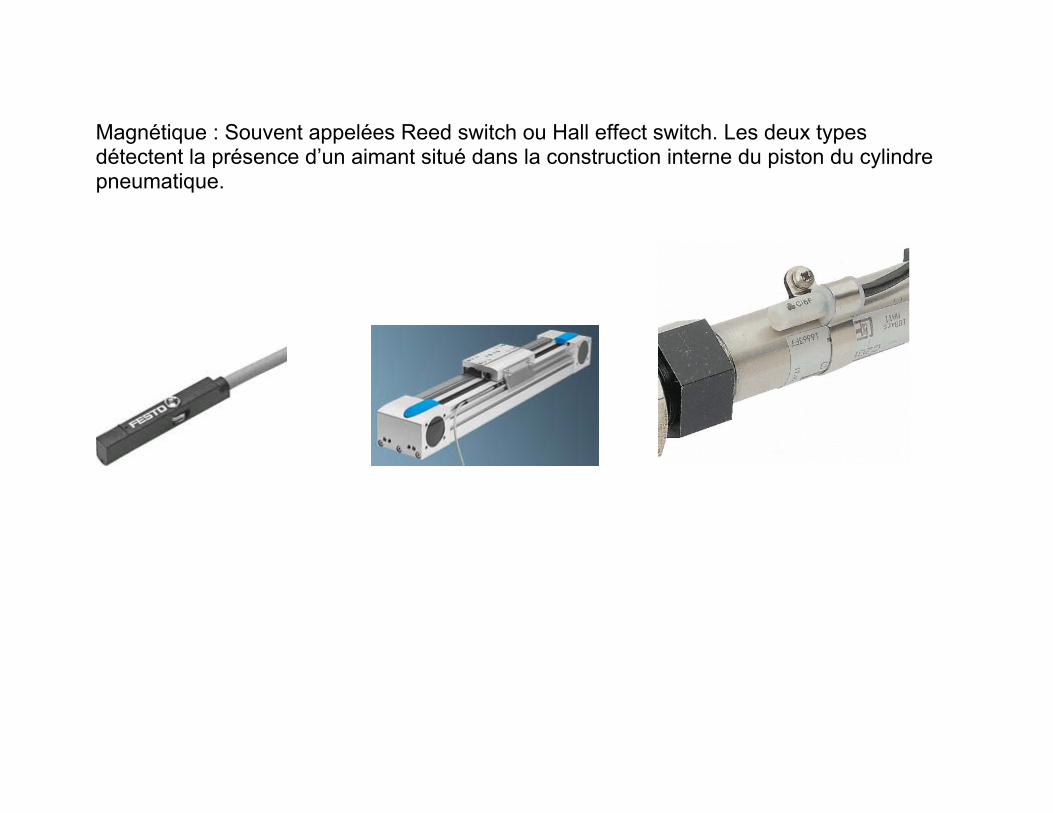
Magnétique : Souvent appelées Reed switch ou Hall effect switch. Les deux types détectent la présence d’un aimant situé dans la construction interne du piston du cylindre pneumatique.
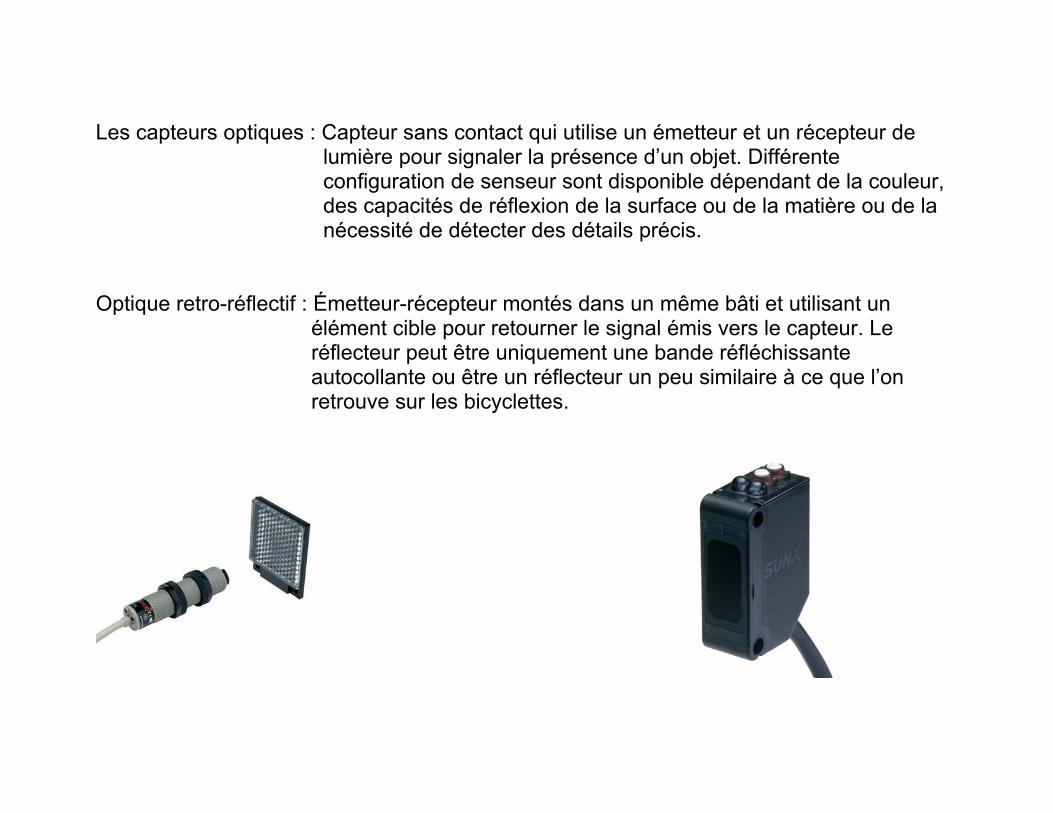
Les capteurs optiques : Capteur sans contact qui utilise un émetteur et un récepteur de lumière pour signaler la présence d’un objet. Différente configuration de senseur sont disponible dépendant de la couleur, des capacités de réflexion de la surface ou de la matière ou de la nécessité de détecter des détails précis.
Optique retro-réflectif : Émetteur-récepteur montés dans un même bâti et utilisant un élément cible pour retourner le signal émis vers le capteur. Le réflecteur peut être uniquement une bande réfléchissante autocollante ou être un réflecteur un peu similaire à ce que l’on retrouve sur les bicyclettes.

Optique réflectif : Émetteur-récepteur montés dans un même bâti. Utilise les capacités de réflexion de la lumière par la surface de la pièce. Ce système fonctionne relativement bien avec presque toutes les pièces. Occasionnellement, ces capteurs vont être utilisés en logique inverse si les propriétés de réflexion de la pièce sont pauvres.

Optique barrage (thru-beam) : Système de capteur le plus fiable pour la détection optique, cependant comme l’émetteur et le récepteur sont placer dans deux bâtis séparés, il y a plus de pièce à installer sur l’équipement de production.

Fibre Optique : les trois types de capteur photo-électrique sont disponibles en version fibre-optique. L’utilisation de la fibre optique permet l’installation du capteur dans des endroits difficiles d’accès et ou le mouvement du capteur dans l’opération de la machine pourrait provoquer des bris ou un manque de fiabilité.

Optique laser : précision pouvant aller jusqu’à 0,4μm et une vitesse d’échantillonnage de 50 ms.

Les capteurs mécaniques : Les capteur mécanique sont principalement utilisé pour capteur de fin de course sur les composant mécanique de base. Elle seront souvent utlisé comme capteur de sécurité ultime. Levier

Plongeur
Palpeur

Actionneurs
Un actionneur est un dispositif matériel qui convertitun signal de commande en changement d’unparamètre physique; ce dernier est souvent mécanique(position, vitesse)
Un actionneur est un transducteur; en effet, il changeune quantité physique d’un type à un autre type dequantité physique (électrique → vitesse rotationnelle)
Le signal de commande étant faible, un amplificateurest souvent nécessaire avec l’actionneur
Actionneurs
Classification des actionneurs
ÉlectriquesLes plus utilisés, peuvent être linéaires ou rotationnels (ex. moteurs AC et DC)
HydrauliquesUtilisent des fluides pour amplifier le signal de commande, peuvent être linéaires
ou rotationnels, utilisés lorsqu’on a besoin d’un très grand effort
PneumatiquesUtilisent l’air comprimé pour amplifier le signal de commande, peuvent être
linéaires ou rotationnels, utilisés pour des applications demandant des efforts relativement bas (par comparaison avec les actionneurs hydrauliques)

Actionneurs - dispositifs les plus utilisés en automatisation -
Actionneur description Moteur à courant continu Moteur rotatif électromagnétique utilisant un courant continu en
entrée. Délivre un mouvement de rotation
Piston hydraulique Piston dans un cylindre exerçant une force et fournissant un
mouvement linéaire dû à la pression hydraulique
Moteur asynchrone Moteur rotatif électromagnétique utilisant un courant alternatif en
entrée. Délivre un mouvement de rotation
Moteur à induction linéaire Moteur électromagnétique linéaire. Utilise un courant alternatif
en entrée
Vérin pneumatique Piston dans un cylindre exerçant une force et fournissant un
mouvement linéaire dû à la pression de l’air
Commutateur à relais Commutateur de type (on/off). Ouvre et ferme selon la force
magnétique
Solénoïde Électro-aimant à noyau plongeur qui commande, lorsqu'il est
alimenté, le déplacement du lanceur et la mise sous tension du
démarreur
Moteur pas à pas Moteur rotatif électromagnétique. L’angle de rotation est
proportionnel aux impulsions reçues

Actionneurs
Moteur à courant continu
Piston hydraulique
Moteur asynchrone
Moteur à induction linéaire Moteur pas-à-pas

Conversion analogique-numérique
Analog-to-digital Conversion (ADC) Les signaux analogiques du processus doivent être convertis
en valeurs numériques en vue d’être utilisés par l’ordinateur
La procédure de conversion nécessite les dispositifs et les étapes suivantes: Capteur et transducteur
C’est le dispositif de mesure générant le signal analogique
Prétraitement du signal Tel que le filtrage du bruit ou la conversion en signal électrique
Multiplexeur Dispositif de commutation entre plusieurs signaux analogiques
Amplificateur Dispositif utilisé pour ajuster le signal d’entrée en vue d’être compatible avec la gamme tolérée par
le ADC
Convertisseur analogique-numérique Convertit le signal d’entrée en signal numérique

Conversion analogique-numérique
Processus 1
2 3 5
Capteur et transducteur
Prétraitement du signal
Autres signaux
Multiplexeur
4
Amplificateur
Convertisseur ADC
Signal numérique
vers l’ordinateur

Conversion analogique-numérique
La conversion analogique numérique se fait en trois (3) phases Échantillonnage
Convertit le signal continu en une série de signaux analogiques discrets à des intervalles de temps donnés
Quantification Chaque signal analogique discret est assigné à l’un des niveaux d’amplitude définis
Codage Convertit les niveaux d’amplitude discrets obtenus lors de la quantification en code numérique représentant le
niveau d’amplitude comme une séquence de chiffres binaires
Signal analogique
Temps
Variable
Signal discret
échantillonné
Échantillonnage d’un signal analogique
Conversion analogique-numérique
Les facteurs à prendre en compte lors du choix d’un
convertisseur analogique-numérique:
Fréquence d’échantillonnage Intervalle entre les relevés de valeur du signal continu
Temps de conversion Temps écoulé entre la réception du signal d’entrée et la détermination de la valeur
numérique
Résolution Précision de l’évaluation du signal d’entrée, influencée par le nombre de niveaux de
quantification
Méthode de conversion La méthode qui permet d’encoder le signal analogique en signal numérique
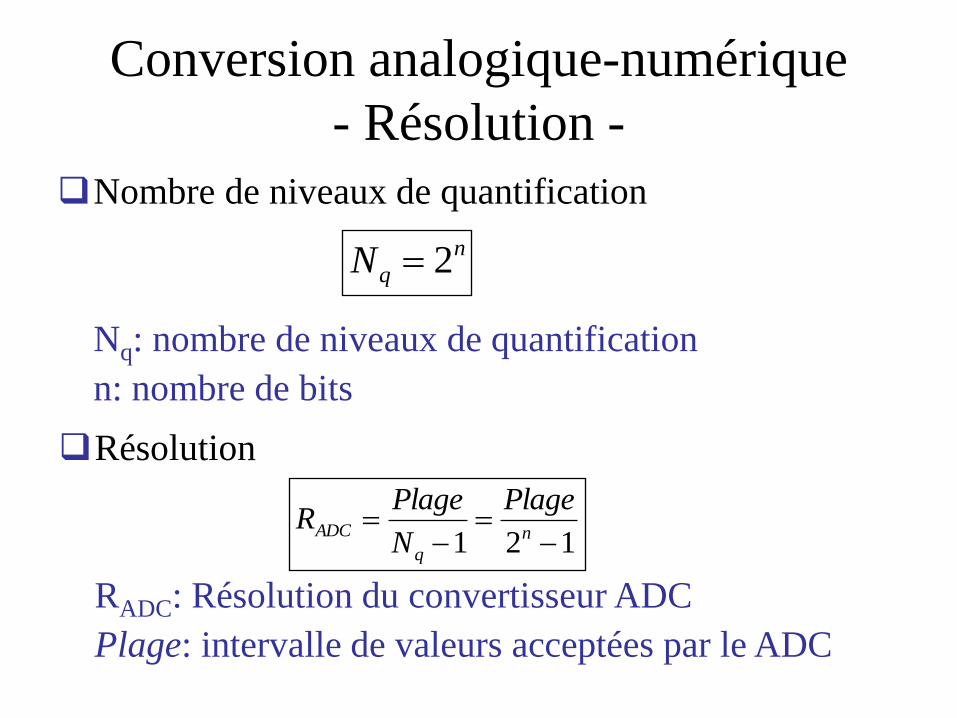
Conversion analogique-numérique
- Résolution -
Nombre de niveaux de quantification
Nq: nombre de niveaux de quantification
n: nombre de bits
n
qN 2
Résolution
RADC: Résolution du convertisseur ADC
Plage: intervalle de valeurs acceptées par le ADC
121
n
q
ADC
Plage
N
PlageR
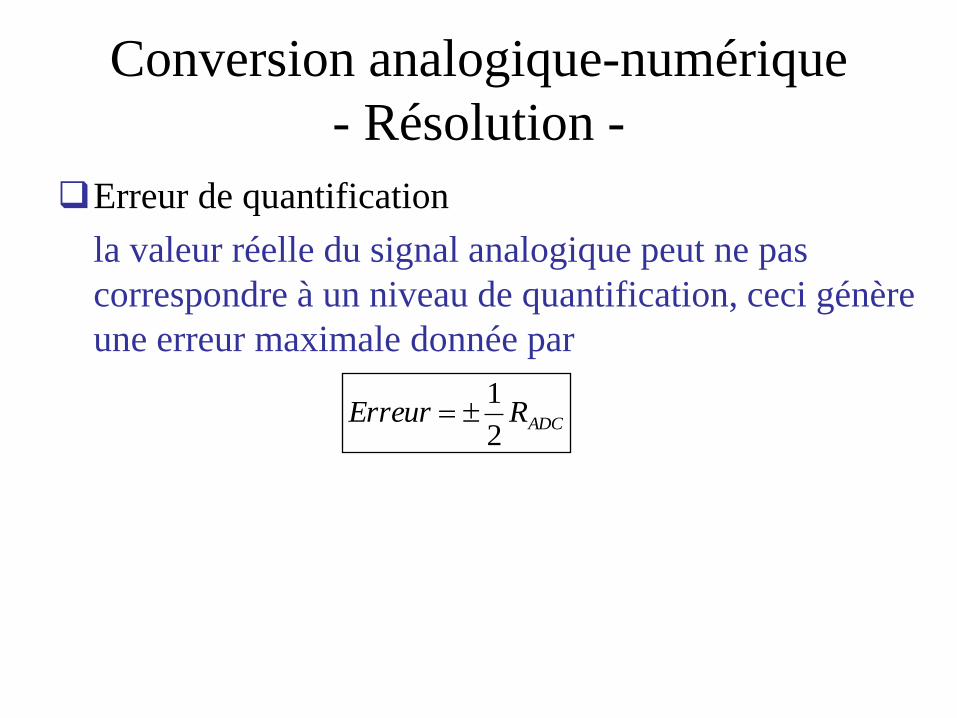
Conversion analogique-numérique
- Résolution -
Erreur de quantification
la valeur réelle du signal analogique peut ne pas
correspondre à un niveau de quantification, ceci génère
une erreur maximale donnée par
ADCRErreur2
1

Conversion analogique-numérique
Méthodes de conversion (exemple)
La méthode dite d’approximation successive est la plus utilisée
Une série de valeurs de voltage est successivement comparée à lavaleur connue du signal d’entrée
Le nombre d’essais (comparaisons) est égal au nombre de bits utiliséspour le codage
La première valeur du voltage est la moitié de la plage de valeurssupportées par le convertisseur
La valeur de voltage suivante est la moitié de la valeur précédente
Les restes sont comparés à la valeur du voltagereste > valeur de voltage → bit = 1
reste < valeur de voltage → bit = 0
Les valeurs successives des bits ainsi obtenus multipliées par lesvaleurs de voltages correspondantes donnent la valeur codée du signald’entrée

Conversion analogique-numérique
- Exemple -
Données
Signal d’entrée = 6.8V
Codage en six (6) bits (registre de 6 bits)
La plage du convertisseur ADC = 10V
Codage avec la méthode d’approximations successives
Solution
Codage en six bits => six (6) essais
Plage du ADC=10 V => la valeur du voltage au premier essai est de 5
V
Les valeurs des voltages successifs sont 2.5, 1.25, 0.625, 0.312 et 0.156
V

Conversion analogique-numérique
- Exemple - Solution
Essai Valeur de
voltage (V)
Reste
Comparaison Bit
(0 ou 1)
1 5 6.8 6.8 > 5 1
2 2.5 6.8–5=1.8 1.8 < 2.5 0
3 1.25 1.8 1.8 > 1.25 1
4 0.625 1.8–1.25=0.55 0.55 < 0.625 0
5 0.312 0.55 0.55 > 0.312 1
6 0.156 0.55-0.312=0.238 0.238 > 0.238 1
La valeur numérique est donc 101011
La valeur codée est: 1*5+0*2.5+1*1.25+0*0.325+1*0.312+1*0.156=6.718
Conversion numérique-analogique
Digital-to-Analog Conversion (DAC)
Les signaux numériques de l’ordinateur doivent être
convertis en valeurs analogiques en vue d’être utilisés
l’actionneur ou tout autre dispositif analogique
La procédure de conversion se fait en deux étapes
Décodage Le signal numérique de l’ordinateur est converti en une série de de valeurs analogiques
discrètes
Maintien de données Chaque série de valeurs est convertie en un signal continu

Conversion numérique-analogique
- Décodage -
Le voltage correspondant au code dans le registre est
donné par
E0: voltage issu de l’étape de décodage
Eref: voltage de référence
B1, B2,…, Bn: bits successifs du registre (0 ou 1)
n: nombre de bits dans le registre
n
n
ref BBBBEE 2...125.025.05.0 3210 (E1)
Conversion numérique-analogique
- Maintien de données -
Approximation de l’enveloppe formée par les séries de données
Utilisation de méthodes d’extrapolation
Maintien d’ordre zéro
le voltage entre les intervalles d’échantillonnage est une série de signaux-
échelons
E(t): voltage en fonction du temps durant un intervalle
d’échantillonnage (V)
E0: voltage issu de l’étape de décodage (déterminé par E1)
0)( EtE

Conversion numérique-analogique
- Maintien de données -
Utilisation de méthodes d’extrapolation Maintien d’ordre un
le voltage entre les intervalles d’échantillonnage change avec une pente constante sur l’intervalle
E(t): voltage en fonction du temps durant un intervalle
d’échantillonnage (V)
E0: voltage issu de l’étape de décodage (déterminé par E1) au début de l’intervalle considéré
α: pente déterminée par
0( )E t E t
0 0 ( )E E
0 ( )E Valeur du voltage calculée avec (E1) au début de l’intervalle
d’échantillonnage précédent
Temps entre les instants d’échantillonnage

Conversion numérique-analogique
- Exemple -
Données
Voltage de référence = 100V
Codage en six (6) bits (registre de 6 bits)
Trois (3) instants d’échantillonnage séparés de 0.5 sec
Il s’agit de déterminer
Le voltage aux trois (3) instants d’échantillonnage
Le voltage entre les instants 2 et 3 en utilisant un maintien d’ordre 0, puis d’ordre 1
Instant Données binaires
1 101000
2 101010
3 101101

Conversion numérique-analogique
- Exemple -
Solution
Voltages aux instants d’échantillonnage
Voltages entre les instants t2 et t3
Avec un maintien d’ordre 0
Avec un maintien d’ordre 1
0 1
0 1
0 2
0 2
0 3
( ) 100 0.5(1) 0.25(0) 0.125(1) 0.0625(0) 0.03125(0) 0.015625(0)
( ) 62.50
( ) 100 0.5(1) 0.25(0) 0.125(1) 0.0625(0) 0.03125(1) 0.015625(0)
( ) 65.63
( ) 100 0.5(1) 0.25(0) 0.125
E t
E t V
E t
E t V
E t
0 3
(1) 0.0625(1) 0.03125(0) 0.015625(1)
( ) 70.31E t V
( ) 65.63E t V
65.63 62.506.25
0.5
( ) 65.63 6.25E t t

Conclusion
Lecture suggérée: Livre de référence (chapitre 6,
pages 114 à 133)
Top Related