

![[PPT]Protocoles de routageautonomies.free.fr/INEADCOURSMAIL/Reseau2/Routage... · Web viewRoutage dynamique Routage dynamique les tables de routage sont mises à jour régulièrement](https://static.fdocuments.fr/doc/165x107/5ae9faa27f8b9ab24d8cba71/pptprotocoles-de-viewroutage-dynamique-routage-dynamique-les-tables-de-routage.jpg)




Langages
Pages
Légal

Promotion : 2013 – 2014
République Algérienne Démocratique Et Populaire
Ministère de l’Enseignement Supérieur et de Recherche Scientifique
Université Kasdi Merbah-Ouargla
Faculté des Nouvelles Technologies de l’Information et de la Communication
Département d'Informatique et Technologie de l'information
Mémoire Master Académique
Domaine : Informatique et Technologie de l'Information
Filière : Informatique
Spécialité : Informatique Industrielle
Présenté par : Ayoub Benchabana et Ramla Bensaci
Thème
Soutenu publiquement
Le : 12/06/2014
Devant le jury :
Président Meriem Korichi Maître-assistant, UKM Ouargla
Examinateur Oussama Zerdoumi Maître-assistant, UKM Ouargla
Halima Benhbereche Maître-assistant, UKM Ouargla
Rapporteur Dr. Ahmed korichi Maître de conférences, UKM Ouargla
REMERCIEMENTS
Nous remercions d’abord la grâce du dieu, pour nous avoir guidés et
éclairer sur la bonne voie du savoir pour continuer ce travail et atteindre les
objectifs traces.
Nous exprimons nos remerciements particulièrement et les plus sincères
à notre encadreur Docteur Ahmed Korichi de nous avoir encadré pour
réaliser ce travail par ses précieux conseils et de nous avoir donné le meilleur
de son savoir et aide.
Nous remercions vivement Meriem Korichi ,Oussama Zerdoumi et
Halima Benhbereche ; Maître-assistant à UKM Ouarglaà ,d'avoir acceptons de
faire partie de nos jury de thèse.
Nous remercions profondément tous ceux qui à faire de son mieux de
près ou de loin dans l’élaboration de ce travail, spécialement Mr. A.hakim
Herrouz.
Nous ne pouvons pas sans remercier mon parent et ma famille. Pour
moi, Ramla j’exprime ici ma reconnaissance pour mon mari Ayoub d’avoir ce
tenir et bon courage se travail.
Pour moi Ayoub j’exprime ma reconnaissance à ma mère et que mon
épouse trouvent ici ma reconnaissance.
Ramla et Ayoub
Table de matière
Analyse des protocoles de routage dans les réseaux VANET Page I
Table des matières
Résumé ....................................................................................................................................... V
Abstract ..................................................................................................................................... VI
Introduction générale............................................................................................................... VII
Chapitre n°1 : Vue d’ensemble des réseaux véhiculaire ............................................................ 9
I. Introduction ................................................................................................................................. 1
1. Les réseaux Ad Hoc et MANET .................................................................................................... 2
1.1 Définitions ........................................................................................................................ 2
1.2 Caractéristiques des réseaux Ad Hoc ............................................................................... 3
2. Les réseaux ad hoc véhiculaires .................................................................................................. 6
2.1 Les applications ................................................................................................................ 7
2.2 Les Projets de recherche des VANETs ............................................................................. 8
2.3 Les projets en cours ....................................................................................................... 10
2.4 Les Caractéristiques ....................................................................................................... 12
2.5 Travaux de standardisation et de normalisation ........................................................... 13
2.6 Architecteur de communication .................................................................................... 14
2.7 Les défis .......................................................................................................................... 16
II. Conclusion ................................................................................................................................. 18
Chapitre n°2 : Protocole de Routage dans les VANETs ............................................................ 19
I. Introduction ............................................................................................................................... 20
1. Routage dans ad hoc ................................................................................................................. 21
2. Routage dans les VANETs .......................................................................................................... 22
3. Classification des protocoles de routage dans les réseaux VANET ........................................... 22
3.1 Les protocoles de routage basés sur la topologie .......................................................... 23
3.2 Les protocoles de routage basés sur la géographique ................................................... 29
II. Conclusion ................................................................................................................................. 34
Chapitre n°3 : Simulation et VANET ......................................................................................... 35
I. Introduction ............................................................................................................................... 36
1. La simulation ............................................................................................................................. 37
2. Simulation des MANET .............................................................................................................. 37
2.1 Modélisation des couches protocolaires ....................................................................... 37
2.2 Modélisation du comportement .................................................................................... 38
Table de matière
Analyse des protocoles de routage dans les réseaux VANET Page II
3. Simulation des VANET ............................................................................................................... 39
3.1 Simulation de la mobilité dans les VANET...................................................................... 39
3.2 Simulation de la propagation radio dans les environnements véhiculaires .................. 43
4. Vue d’ensemble les simulateurs de VANET ............................................................................... 44
4.1 Comparaison entre les simulateurs : .............................................................................. 47
II. Conclusion ................................................................................................................................. 49
Chapitre n°4 : Expérimentation ................................................................................................ 50
I. Introduction ............................................................................................................................... 51
1. Le sujet et Le but ....................................................................................................................... 52
2. Implémentation ......................................................................................................................... 52
2.1 Environnement de travail: .............................................................................................. 52
3. Préparation de l’Environnement d’Implémentation : ............................................................... 56
4. Simulation des nouveaux protocoles dans VEINS ..................................................................... 57
4.1 L’environnement et le paramètre de simulation ........................................................... 57
4.1 Résultats des simulations d’un nœud de protocole....................................................... 59
II. Conclusion ................................................................................................................................. 65
Conclusion générale .................................................................................................................. IX
Perspective ................................................................................................................................. X
Bibliographie ............................................................................................................................. XI
Webographie .......................................................................................................................... XVII
.................................................................................................................................. XVIII Annexe
.......................................................................... XVIII Annexe 1 : Technologies De La Communication
.................................................................................................... XVIII Annexe 2 : Protocole de routage
....................................... XVIII Annexe 3 : Framework pour réalistes modèles de mobilité véhiculaires
Glossaire ............................................................................................................................... XXXII
Liste des figures
Analyse des protocoles de routage dans les réseaux VANET Page III
Liste des figures
Figure 1 : Un exemple de réseau Ad hoc [Bür, 2014]............................................................................... 5
Figure 2 : Un exemple des réseaux VANETS ........................................................................................... 6
Figure 3 : Dynamique autour des réseaux de véhicules [Hannes, 2008] ................................................ 9
Figure 4 : Les modes de communication dans les VANETs [Zhuo et al, 2009] ...................................... 15
Figure 5 : Les protocoles de routage dans les réseaux VANETs....................................................... 32
Figure 6 : Décomposition plus détaillée des modèles de mobilité [Ait Ali, 2012] ................................ 40
Figure 8 : Interface d’OMNET++. ........................................................................................................... 54
Figure 9 : Architecteur de Veins . .......................................................................................................... 55
Figure 10 : Environnement de simulation. ............................................................................................ 57
Figure 11 : Résultat de simulation de mobilité d’un nœud. .................................................................. 59
Figure 12 : résultat de simulation de NIC MAC d’un nœud. .................................................................. 59
Figure 13 : La représentation des couleurs dans les diagrammes. ....................................................... 60
Figure 14 : Diagramme de protocole AODV. ......................................................................................... 60
Figure 15 : Diagramme de protocole DSDV. .......................................................................................... 60
Figure 16 : Diagramme de protocole DSR. ............................................................................................ 61
Figure 17 : Diagramme de protocole OLSR. .......................................................................................... 61
Figure 18 : Diagramme de protocole GPSR. .......................................................................................... 61
Figure 19 : Diagramme de protocole AODV. ......................................................................................... 61
Figure 20: Diagramme de protocole DSDV. ........................................................................................... 61
Figure 21 : Diagramme de protocole DSR. ............................................................................................ 62
Figure 22: Diagramme de protocole OLSR. ........................................................................................... 62
Figure 23: Diagramme de protocole GPSR. ........................................................................................... 62
Figure 24 : Diagramme de protocole AODV. ......................................................................................... 62
Figure 25: Diagramme de protocole DSDV. ........................................................................................... 63
Figure 26 : Diagramme de protocole DSR. ............................................................................................ 63
Figure 27: Diagramme de protocole OLSR. ........................................................................................... 63
Figure 28 : Diagramme de protocole GPSR. .......................................................................................... 63
Figure 29 : Ensemble de technologies .................................................................................................. XIX
Figure 30 : Composants de la technologie WAVE ............................................................................... XXII
Figure 31 : La propagation du paquet ................................................................................................. XXV
Figure 32 : Le chemin pris par la requête RREP .................................................................................. XXVI

Liste des tableaux
Analyse des protocoles de routage dans les réseaux VANET Page IV
Liste des tableaux
Tableau 1 : Comparaison entre protocoles proactifs et protocoles réactifs. .................................. 28
Tableau 2 : Grille d’analyse ................................................................................................................... 33
Tableau 3 : Comparaison entre les simulateurs .................................................................................... 48
Tableau 4 : Configuration de l'ordinateur de développement. ............................................................. 52
Tableau 5 : Scénarios de mouvement utilisés. ...................................................................................... 58
Tableau 6 : Tableau récapitulatif des technologies ............................................................................ XXIII
Tableau 7 : Caractéristiques des premiers modèles de mobilité pour véhicules ................................ XXX
Tableau 8 : Comparaison des contraintes de mouvement des modèles de mobilité pour réseaux
véhiculaires ......................................................................................................................................... XXXI
Tableau 9 : Comparaison des générateurs de trafic des modèles de mobilité pour réseaux véhiculaires
............................................................................................................................................................ XXXI
Résumé
Analyse des protocoles de routage dans les réseaux VANET Page V
Résumé
Dans notre monde contemporain, les réseaux des voitures jouent un rôle
significatif. C’est un domaine très intéressant pour toutes les sociétés de recherche et
d'industrie. En effet, l'objectif de ces systèmes de transport intelligents est d'améliorer la
sécurité et la sûreté des passagers et de fournir de nombreux services et facilités aux
usagers routiers.
Ces systèmes reposent sur des protocoles qui assurent l'échange d'informations et la
communication entre les véhicules puisqu'il est évident que l'amélioration de la
communication entre les véhicules revient à la détermination de l'efficacité de ces
protocoles. Notre but dans mémoire était d'analyser ces protocoles de routage (par exemple
GPSR, OLSR, DSR, AODV et DSDV) dans VANETs, et ce, pouvoir déterminer le
protocole le plus adéquat pour garantir la meilleure efficacité pour ce réseau.
Tout d'abord, nous avons étudié les différents types de protocoles de routage et
leurs facteurs de performance dans ces réseaux afin de déterminer le meilleur protocole
pour ce type de réseaux.
Par ailleurs, nous avons simulé ces protocoles dans un micro modèle d'une ville.
L'objectif de notre recherche est d'évaluer les résultats des protocoles de routage (GPSR,
OLSR, DSR, AODV et DSDV) appliqués dans les réseaux d'un environnement (Urbain) en
utilisant Omnet++ et SOMU. Pour déterminer le meilleur protocole en termes de qualité,
efficacité et adéquation d'un tel environnement.
Mots clés : VANET, Protocole de Routage, OMNET++, SOMU, Simulation,
environnement urbain.
Abstract
Analyse des protocoles de routage dans les réseaux VANET Page VI
Abstract
Title: Analysis of Routing Protocols in VANETs
Nowadays, vehicle communication represents an interesting field for both research and
industry communities. Indeed, these systems can be used to improve road safety and provide
many other services to road users. Therefore, vehicular communications applications have
been undertaken by several consortium and research projects.
However, to optimize the communication between vehicles, it is indispensable to
define a routing protocol for each application of vehicular networks .Our objective was to
Analysis of Routing Protocols (e.g. GPSR, OLSR, DSR, AODV and DSDV) in VANETs, in
order to define the most suitable and effective protocol.
First, we studied the different kinds of routing protocol and the entire performance
factor in vehicular networks for a better understanding of these types of networks.
The second step of our work was analyzing the performances of the protocols via
simulation using Omnet++ and SOMU in an urban environment to determine the best
protocol in terms of quality, efficiency and appropriateness of such an environment
Keywords: VANET, Routing Protocol, OMNET++, SOMU, Simulation, urban
environment.
Chapitre n°I Introduction général
Analyse des protocoles de routage dans les réseaux VANET Page VII
Introduction générale
Depuis la démocratisation de l’accès à Internet, Ce dernier a évolué très rapidement.
Ses objectifs attendus l’ont fait propager jusqu'à ce qu'elle devienne un réseau mondial liant
les différentes sociétés, universités et centres de recherche. Actuellement avec l'émergence du
WWW (World Wide Web) - qui a permis l'échange d'informations entre les réseaux locaux à
travers le monde - et avec le développement de la technologie moderne des
télécommunications, les chercheurs ont commencé à voir la nécessité de développement des
réseaux sans fil afin de ne pas restreindre l'utilisateur d’Internet à une borne fixe dans le
réseau. Cela était rendu possible grâce à l’exploitation de la technologie du radio moderne
[Caterina, 2008].
Avec l'émergence de ce réseau, nous sommes devenus capable de rendre ces éléments
libres de mouvement. C’est ce que l'on appelle dans le jargon de réseau le « MANET »
(Mobile ad hoc networks) où chaque élément est capable de se déplacer dans n'importe quelle
direction et de modifier ses liens fréquemment. Chacun de ces éléments (nœuds) dans ce
réseau gère son trafic de transmission à sa manière avec ses propres propriétés, c.à.d. il joue
lui-même un rôle de routeur.
Le défi situé dans le MANET est la façon de télécharger les informations appropriées
et nécessaires pour pouvoir assurer la transmission correcte et systématique de trafic.
C'est ici que nous obtenons notre domaine de recherche le VANET, c’est une mini
partie de MANET.
En 1990, l'Organisation de transports intelligents (STI) a intégré la technologie de
l'information de la connectivité sans fil aux infrastructures de transport et de véhicules pour
améliorer le système de transportation et sa sécurité et pour résoudre ses problèmes de
circulation.
La VANET utilise les voitures comme un nœud ou un routeur permettant à ces
dernières de communiquer les unes avec les autres et de profiter de cette technologie.
Chapitre n°I Introduction général
Analyse des protocoles de routage dans les réseaux VANET Page VIII
Cette étude s’inscrit dans le cadre d’un projet de fin étude (PFE) pour l’obtention d’un
diplôme de master en Informatique Industrielle. En général les PFEs ont deux objectifs : le
premier est pédagogique visant à initier l’étudiant dans la recherche scientifique. Le second
est un objectif propre à cette étude dans laquelle nous allons essayer d’analyser les protocoles
de routage par les techniques de modélisation et simulation.
L’application des techniques de simulation dans le domaine des réseaux VANETs a
pour but l’identification des caractéristiques, des performances et des mutations des
protocoles de routage dans les VANETs.
Dans le domaine de la simulation, il est communément reconnu que pour pouvoir
utiliser correctement et intelligemment des méthodes de ce domaine, il faut disposer de
connaissances plus ou moins solides dans des domaines variés (Probabilités et Statistiques,
Modélisation, Programmation, etc.) [korichi, 2009].
Malheureusement, de part la nature distribuée de l'environnement et la topologie
complexe des réseaux véhiculaires, une mise en œuvre réelle peut être difficile aussi bien sur
le plan économique que logistique. Pour contourner ce problème, la simulation est le moyen
le plus largement utilisé. En effet, il est plus facile et moins cher, par le biais de la simulation,
de concevoir, d'analyser et d'évaluer les performances de toute solution. Un paramétrage
approprié permet de reproduire les différents scénarios de l'environnement et d'analyser leur
impact sur les protocoles et applications développés [Ait Ali, 2012] .
Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 1
I. Introduction
Les réseaux VANET ne sont qu’une application des réseaux Ad hoc mobiles
(MANET). Les réseaux véhiculaires sont une projection des systèmes de transports
intelligents (Intelligent transportation Systems - ITS). Leur objectif principal est d'améliorer la
sécurité routière par l'utilisation de la technologie des communications et de l'émergence de
dispositifs sans fil à faible coût. Pour la mise en place d’un tel réseau, certains équipements
électroniques doivent être installés au sein de véhicules tels que les dispositifs de perception
de l’environnement (radars, caméras), un système de localisation GPS, et bien sûr une
plateforme de traitement.
Dans ce chapitre, nous présentons d'abord la mise en réseau VANET, et différents
types de services de ces réseaux ainsi que les supports de communication. Enfin, nous
décrivons les différentes caractéristiques, les contraintes et les défis pour les concepteurs ainsi
qu’une description détaillée pour type de protocole réseau.

Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 2
1. Les réseaux Ad Hoc et MANET
1.1 Définitions
1.1.1 Les réseaux Ad Hoc
Les réseaux ad hoc Les réseaux ad hoc (en latin : « qui va vers ce vers quoi il doit aller
», c'est-à-dire « formé dans un but précis »), sont des réseaux sans-fil capables de s’organiser
spontanément et de manière autonome dans l'environnement dans lequel ils sont déployés
sans infrastructure définie préalablement, créés à la demande pour répondre à un besoin
spécifique. La tâche de la gestion du réseau est repartie sur l’ensemble d’entités
communicantes par liaison sans-fil, ces entités sont souvent appelées «nœuds» [Burgod,
2009].
Le groupe MANET de l’IETF fournit une définition plus précise en introduction de la
[Corson et al, 1999]: « Un réseau ad hoc comprend des plates-formes mobiles (par exemple,
un routeur interconnectant différents hôtes et équipements sans fil) appelées nœuds qui sont
libres de se déplacer sans contrainte. Un réseau ad hoc est donc un système autonome de
nœuds mobiles. Ce système peut fonctionner d’une manière isolée ou s’interfacer à des
réseaux fixes au travers de passerelles. Dans ce dernier cas, un réseau ad hoc est un réseau
d’extrémité. » Il n’en reste pas moins que la terminologie « réseau ad hoc » est relativement
peu explicite. C’est sans doute la raison pour laquelle la communauté scientifique la remplace
parfois par celle de « réseau spontané », traduction de « spontaneous network ».
1.1.2 Les réseaux MANET
Le réseau mobile ad hoc, appelé généralement MANET (Mobile Ad hoc NETwork)
est un système autonome se compose d'un nœud mobiles dynamiques interconnectés par des
liens sans fil sans l'utilisation de l'infrastructure fixe et sans gestion centralisée1 [Corson et al,
1999] . Les nœuds sont libres de se déplacer de façon aléatoire et, par conséquent, peuvent
changer la structure du réseau rapidement et de manière imprévisible.
1 http://tools.ietf.org/html/rfc2501
Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 3
Mobilité : « La mobilité des nœuds constitue à l’évidence une caractéristique très
spécifique des réseaux ad hoc. Cette mobilité est intrinsèque au fonctionnement du réseau.
Elle se distingue de la nomadicité (mobilité des seuls nœuds terminaux) ou de l’itinérance
(équipements statiques mais pouvant être déplacés). Dans un réseau ad hoc, la topologie du
réseau peut changer rapidement, de façon aléatoire et non prédictible et les techniques de
routage des réseaux classiques, basées sur des routes préétablies, ne peuvent plus fonctionner
correctement » [Corson et al, 1999] .
1.2 Caractéristiques des réseaux Ad Hoc
A partir de cette définition générale [Meraihi, 2011], il est intéressant de mettre en
avant les caractéristiques principales qui différencient un réseau ad.
Les réseaux mobiles Ad Hoc présentent plusieurs caractéristiques, à savoir :
1.2.1 Absence d’infrastructure
Les nœuds d’un réseau Ad Hoc travaillent dans un environnement pair à pair
totalement distribué, ce qui leur permet de se déplacer librement. Ces nœuds agissent en tant
que routeurs pour relayer des communications ou générer leurs propres donnés.
1.2.2 Routage par relais
Dans un réseau Ad hoc, un terminal peut communiquer directement avec les terminaux
à sa portée (ses voisins). Lorsqu’une machine veut communiquer avec une autre se trouvant
hors de sa portée, chaque nœud actif du réseau sert de routeur pour ses voisins.
1.2.3 Topologie dynamique
Une particularité très importante qui distingue les réseaux mobiles Ad Hoc des réseaux
filaires est la mobilité de ses nœuds. Les nœuds sont libres de se déplacer arbitrairement, des
routes peuvent se créer et disparaître très souvent, ce qui provoque des changements fréquents
dans la topologie du réseau. Ces modifications doivent être prises en compte par le protocole
de routage. Cette caractéristique rend la topologie de ce type du réseau sans fil très
dynamique.

Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 4
1.2.4 L’hétérogénéité des nœuds
Un nœud mobile peut être équipé d’une ou plusieurs interfaces radio ayant des
capacités de transmission variées et opérant dans des plages de fréquences différentes.
Cette hétérogénéité de capacité peut engendrer des liens asymétriques dans le réseau.
De plus, les nœuds peuvent avoir des différences en terme de capacité de traitement (CPU,
mémoire), de logiciel, de taille (petit, grand) et de mobilité (lent, rapide). Dans ce cas, une
adaptation dynamique des protocoles s’avère nécessaire pour supporter de telles situations.
1.2.5 La taille des réseaux ad hoc
Elle est souvent de petite ou moyenne taille (une centaine de nœuds) ; le réseau est
utilisé pour étendre temporairement un réseau filaire, comme pour une conférence ou des
situations où le déploiement du réseau fixe ne sont pas approprié. Cependant, certains
applications des réseaux ad hoc peuvent nécessiter une utilisation allant jusqu’à des dizaines
de milliers de nœuds.
1.2.6 Multi-sauts
Les réseaux Ad Hoc utilisent souvent des sauts multiples pour éviter les obstacles,
minimiser la consommation d’énergie ou pour joindre un nœud qui n’est pas dans la portée de
communication de l’émetteur.

Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 5
Figure 1 : Un exemple de réseau Ad hoc [Bür, 2014].
Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 6
2. Les réseaux ad hoc véhiculaires
Les réseaux véhiculaires aussi appelés VANETS (Vehicular Ad-hoc Network)
constituent une sous-classe des MANETS, sont une projection des systèmes de transports
intelligents (Intelligent transportation Systems - ITS), réalisés par la réunion d'opportunités de
plusieurs véhicules mobiles sans infrastructure préexistante pour communiquer [Ahizoune,
2011].
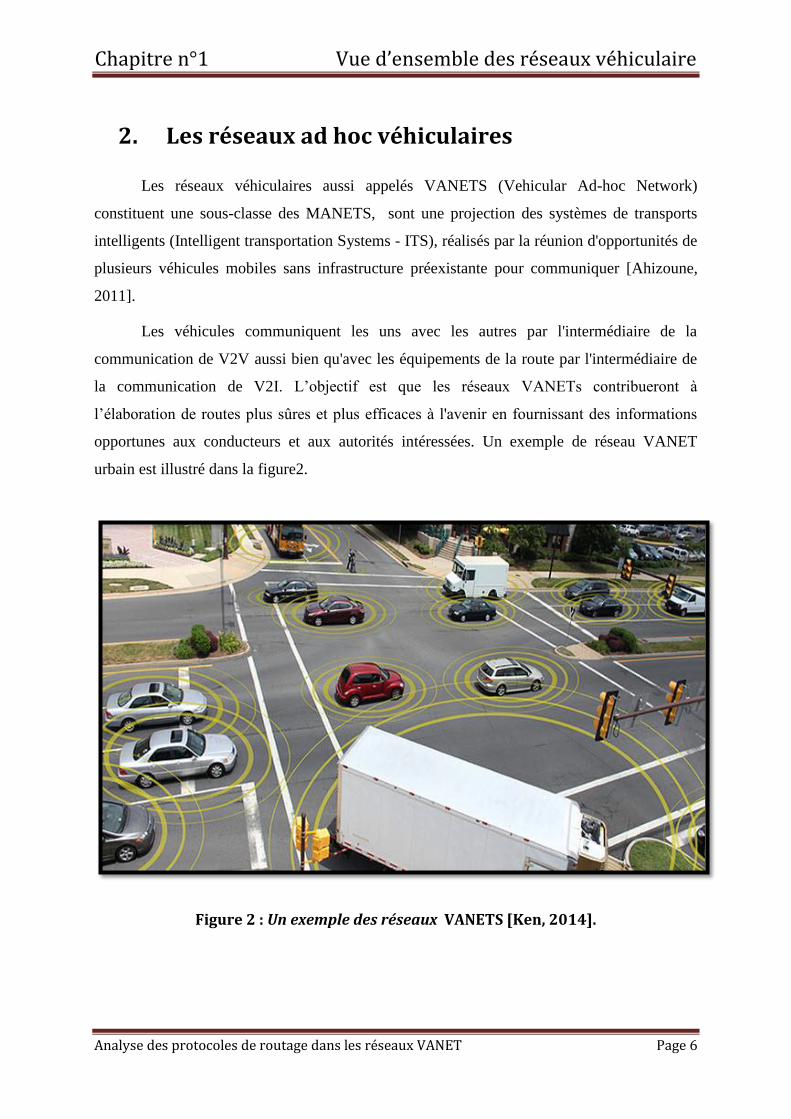
Les véhicules communiquent les uns avec les autres par l'intermédiaire de la
communication de V2V aussi bien qu'avec les équipements de la route par l'intermédiaire de
la communication de V2I. L’objectif est que les réseaux VANETs contribueront à
l’élaboration de routes plus sûres et plus efficaces à l'avenir en fournissant des informations
opportunes aux conducteurs et aux autorités intéressées. Un exemple de réseau VANET
urbain est illustré dans la figure2.
Figure 2 : Un exemple des réseaux VANETS [Ken, 2014].
Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 7
2.1 Les applications
Il existe de nombreuses applications pour les réseaux véhicules proposés [Khaleda et
all, 2009]. Et peuvent être classés en trois catégories générales.
2.1.1 Application dans la sécurité routière
Les applications de sécurité qui visent à améliorer la sécurité des passagers sur les
routes en avisant les véhicules de toute situation dangereuse. Ces applications se basent en
général sur une diffusion, périodique ou non, de messages informatifs permettant aux
conducteurs d'avoir une connaissance de l'état de la route et des véhicules voisins.
A titre d’exemple, alerter un conducteur en cas d’accidents permet d’avertir les
véhicules qui se dirigent vers le lieu de l’accident que les conditions de circulations se
trouvent modifiées et qu’il est nécessaire de redoubler de vigilance. Les messages d’alertes et
de sécurité doivent être de taille réduite pour être transmis le plus rapidement possible et
doivent être émis à des périodes régulières. La sécurité des plus importantes applications.
2.1.2 Les applications de gestion de trafic
Les applications de gestion de trafic sont axées sur l'amélioration des conditions de
circulation dans le but de réduire les embouteillages et les risques d'accidents. Elles consistent
à fournir aux conducteurs des informations leur permettant d'adapter leur parcours à la
situation du trafic routier. Ces applications visent à équilibrer la circulation des véhicules sur
les routes pour une utilisation efficace de la capacité des routes et des carrefours et à réduire
par conséquent les pertes humaines, la durée des voyages et la consommation d'énergie….etc.
Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 8
2.1.3 Les applications de confort ou de divertissement
les applications de confort ou de divertissement dont l'objectif est de rendre les
voyages plus agréables en permettant aux passagers de communiquer soit avec d'autres
véhicules ou avec des stations fixes comme l’accès à internet, la messagerie, le chat inter –
véhicule, etc. Les passagers dans la voiture peuvent jouer en réseaux, télécharger des fichiers
MP3, envoyer des cartes à des amis, etc.
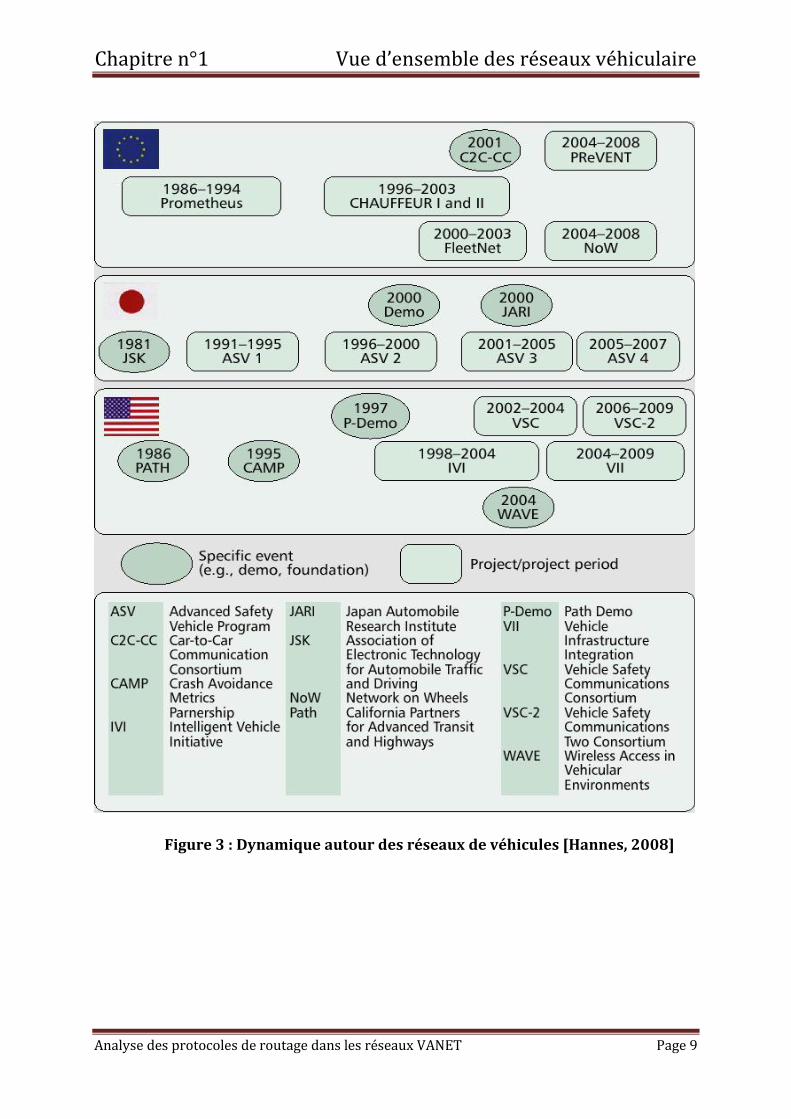
2.2 Les Projets de recherche des VANETs
A suscité de nombreuses applications impliquant des réseaux véhicules dans les
différentes institutions et organisations gouvernementales et de la normalisation, des
entreprises ou des centres de recherche. Partout dans le monde et comme le montre la figure
il existe de nombreux projets nationales / internationales qui leur sont dédiés. Nous pouvons
citer :
Le consortium VSC (Vehicle Safety Consortium, US)2 [Vehicle, 2014] CAMP
(Collision Avoidance metrics Partnership, US)3 [Collision, 2014], C2C-CC (Car-2-Car
Communication Consortium, Europe)4 [Car-to-car , 2014], ASV Program (Advanced Safety
Vehicle, Japon)5 [Advanced, 2014], beaucoup d'efforts de standardisation comme nous le
verrons plus bas et des expérimentations réelles telles que faites par le programme VII
(Vehicle Infrastructure Integration, US)6 [Vehicle , 2014].
2 http://www.car-tocar
3 http://www.its.dot.gov/cicas/cicas_current_act.htm
4 http://www.car-to-car.org
5 http://www.itslectures.ae.keio.ac.jp/2001/2001_eb_45.htm
6http://www.its.dot.gov/vii/
Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 9
Figure 3 : Dynamique autour des réseaux de véhicules [Hannes, 2008]

Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 10
2.3 Les projets en cours
Plusieurs centres de recherche, de standardisation et développement vise à avancer
dans le domaine des véhicules.
Nous vous proposons quelques-uns des grands projets qui traitent des communications
véhiculaires en Europe et partout dans le monde
PReVENT : le projet intègre européen PReVENT [Car-to-car, 2014], a pour
objectif de développer, tester et évaluer les demandes relatives à la sécurité en utilisant des
capteurs avancés et de systèmes de communication intégrés. Ces systèmes analysent la nature
et l'importance de tout danger potentiel, tout en tenant compte de la situation du conducteur.
SafeSpot est un projet intégré de recherche co-financé par [SafeSpot, 2014]
les technologies de la société d'information entre les initiatives de la Commission européenne
6e programme-cadre.
SAFESPOT crée une dynamique de réseaux de collaboration où des véhicules de
communication et l'infrastructure routière pour l'échange d'informations qui ont été recueillies
à bord et sur le côté de la route pour promouvoir la sensibilisation des conducteurs de
l'environnement du véhicule.
WATCH-OVER a commencé en Janvier 2006, un projet co-financé par les
technologies de la société information à la Commission européenne l'objectif stratégique »des
systèmes électroniques de sécurité pour le transport routier coopérative.[WATCH-OVER,
2014] L'objectif est de concevoir et développer un système de coopération pour la prévention
des accidents impliquant des usagers de la route à risque dans les zones urbaines et extérieur
des zones urbaines.

Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 11
Le concept innovant est représenté par une plateforme embarquée et un module
utilisateur. Le système repose sur la communication faible distance et les capteurs de vision
CVIS : le projet CVIS (Cooperative. Vehicle-Infrastructure Systems)
"systèmes coopératifs pour les véhicules, les infrastructures" vise à concevoir
[http://www.cvisproject.org/], et développer et tester de nouvelles technologies nécessaires
pour permettre aux véhicules de communiquer entre eux et avec l'infrastructure sur le côté de
la route à proximité.
GST : (Global System for Telematics ) [Global, 2014] Projet intégré financé
par l'Union européenne et la création d'une architecture ouverte et d'information standardisée
véhicules de services.
Le but est de créer un environnement dans lequel les services d'information innovants
peuvent être élaborés et exécutés de manière rentable, et donc d'augmenter la plage de
services d'information économique disponible pour les fabricants et les consommateurs.
NoW est un projet de recherche soutenu par le Ministère fédéral allemand de
l'Éducation et de la Recherche scientifique.
Les principaux objectifs en vue de résoudre les problèmes techniques clés sur les
protocoles de communication et de sécurité des données pour la communication de voitures -2
- véhicules et fournir les résultats des activités de normalisation des véhicules -2 - véhicules
de l'Union des télécommunications, qui est une initiative des plus grands fabricants et
fournisseurs européens de véhicules.
SeVeCom (Secure Vehicular Communication) est un projet financé par l'Union
européenne, qui se concentre sur la fourniture de la définition et de la mise en œuvre des
besoins de sécurité des véhicules de communication complètement [Secure, 2014].
SeVeCom vision est que les moyens de communication à l'avenir, et les infrastructures
pour les communications entre les véhicules et sera déployé à grande échelle afin d'obtenir la
promesse d'améliorer la sécurité routière et l'optimisation de la circulation routière.
Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 12
2.4 Les Caractéristiques
Dans [Ait Ali, 2012] la présente section, nous vous proposons les éléments clés qui
distinguent les réseaux véhicules :
Forte mobilité : c'est le premier facteur qui distingue les réseaux véhiculaires
des autres classes de réseaux sans fil. La vitesse des véhicules varie selon l'environnent, elle
est en moyenne de 50km/h en zones urbaines et peut atteindre 130km/h sur autoroute. Bien
que les mouvements des véhicules soient relativement prédictibles, l'impact de la mobilité sur
la connectivité du réseau reste l'une des difficultés majeures des réseaux véhiculaires.
Caractéristiques inhérentes au canal radio : dans les réseaux sans fil
traditionnels, les échanges de données s'effectuent généralement dans des espaces ouverts
sans obstacle ou dans des espaces clos en intérieur. Les communications dans les réseaux
véhiculaires se font en environnement externe défavorable pour l'établissement des liens radio
en raison de la multitude d'obstacles (forêts, montagnes, bâtiments . . .) notamment en zones
urbaines.
Ces obstacles causent une sévère dégradation de la qualité et de la puissance des
signauxémis.
Connectivité intermittente : une conséquence directe de la forte mobilité et
des obstacles de l'environnement est une connectivité intermittente. Un lien établi entre deux
entités du réseau peut rapidement disparaitre en raison soit de la mobilité qui éloigne les deux
entités communicantes, soit des obstacles qui empêchent la propagation du signal.
Diversité de la densité : la densité des nouds dans un réseau véhiculaire n'est
pas uniforme mais à variation spatio-temporelle. La densité en milieu urbain est par exemple
beaucoup plus élevée qu'en milieu rural. Le nombre de véhicules dans une intersection ou
dans un embouteillage est plus important que sur des routes extra-urbaines où le trafic est
souvent fluide. D'un point de vue temporel, la densité est par exemple différente selon qu'on
considère la nuit ou la journée, les heures de pointe ou les heures creuses. Cette diversité de la
densité rend difficile la conception de solutions génériques étant donné que les problèmes
rencontrés à forte densité sont différents de ceux causés par la faible densité.
Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 13
Partitionnement du réseau : le problème du partitionnement du réseau
survient essentiellement lorsque la densité des nouds est faible. Les véhicules se déplacent
alors en groupes isolés non connectés. Il devient dans ce cas difficile d'assurer les
communications de bout-en-bout.
Broadcast storm: le problème du broadcast storm an été considéré depuis
longtemps dans les réseaux MANET et diverses solutions ont été proposées [Ni et al, 1999].
Ce problème se pose en particulier dans les protocoles de routage qui inondent le réseau avec
les paquets de contrôle à la recherche de routes. Les retransmissions successives des paquets
causent de sérieuses redondances qui saturent le réseau. Dans le cas des réseaux véhiculaires,
le problème du broadcast storm se pose également au niveau application. En effet, les
principaux services proposés pour les réseaux véhiculaires sont des services de sécurité qui se
basent presque exclusivement sur les retransmissions de proche en proche des données. De
plus, le problème du broadcast storm est aggravé dans les réseaux à forte densité notamment
dans des scénarios tels les embouteillages et les files d'attente aux intersections.
2.5 Travaux de standardisation et de normalisation
2.5.1 Dedicated Short Range Communications
Les premiers standards définis pour les communications sans fil dans les STI utilisent
la bande de fréquence de 915MHz essentiellement pour assurer des services tels que, le péage
électronique, l'accréditation et la surveillance des opérations des véhicules commerciaux [Ait
Ali, 2012].
Cette bande de fréquence étant trop étroite et polluée pour supporter l'évolution
envisagée pour les applications dans les réseaux véhiculaires, l'ITSA a sollicité la FCC
(Federal Communications Commission) pour l'allocation d'une bande passante de 75MHz
dans la gamme de fréquences 5,850-5,925GHz pour les communications à courte portée
dédiées aux STI aux USA. Cette demande a été accordée par la FCC en 1999 et a donné
naissance à la technologie DSRC.

Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 14
2.5.2 La norme IEEE 802.11p
La norme IEEE 802.11p [IEEE802.11p, 2006] [Ait Ali, 2012] est un amendement du
standard IEEE802.11 que le groupe de travail IEEE (TGP : Task Group p) a commencé à
développer en 2004 pour l'accès sans l dans les systèmes de transport intelligents. Il définit les
spécifications des couches MAC et PHY dans le cadre des réseaux véhiculaires.
2.5.3 Wireless Access in Vehicular Environments
L'IEEE a développé une architecture connue sous le nom de WAVE (Wireless Access
in Vehicular Environments), pour fournir l'accès sans fil dans les environnements véhiculaires
[TGp, 2006] [Ait Ali, 2012]. Deux modes de communication sont possibles dans l'architecture
WAVE, véhicule-à-véhicule et véhicule-à-infrastructure. Les véhicules communiquent via un
dispositif installé à leur bord dit, OBU (On Board Unit)
2.6 Architecteur de communication
Dans les réseaux de véhicules, on peut distinguer trois modes de communication, les
communications Véhicule-à-Véhicule (V2V), les communications Véhicule-à-Infrastructure
(V2I) et hybride.
Dans cette section, nous présentons le principe de chaque mode :
2.6.1 Mode de communication Véhicule-à-Véhicule (V2V)
Ce mode de communication fonctionne suivant une architecture décentralisée, et
représente un cas particulier des réseaux ad hoc mobiles, Il est basé sur la simple
communication inter-véhicules ne nécessitant pas une infrastructure. En effet, un véhicule
peut communiquer directement avec un autre véhicule s’il se situe dans sa zone radio, ou bien
par le biais d’un protocole multi-sauts qui se charge de transmettre les messages de bout en
bout en utilisant les nœuds voisins qui les séparent comme des relais. Dans ce mode, les
supports de communication utilisés sont caractérisés par une petite latence et un grand débit
de transmission [Santa et al, 2008] [Xu et al, 2003]. Les communications V2V sont très
efficaces pour le transfert des informations concernant les services liés à la sécurité routière,
mais elles ne garantissent pas une connectivité permanente entre les véhicules.
Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 15
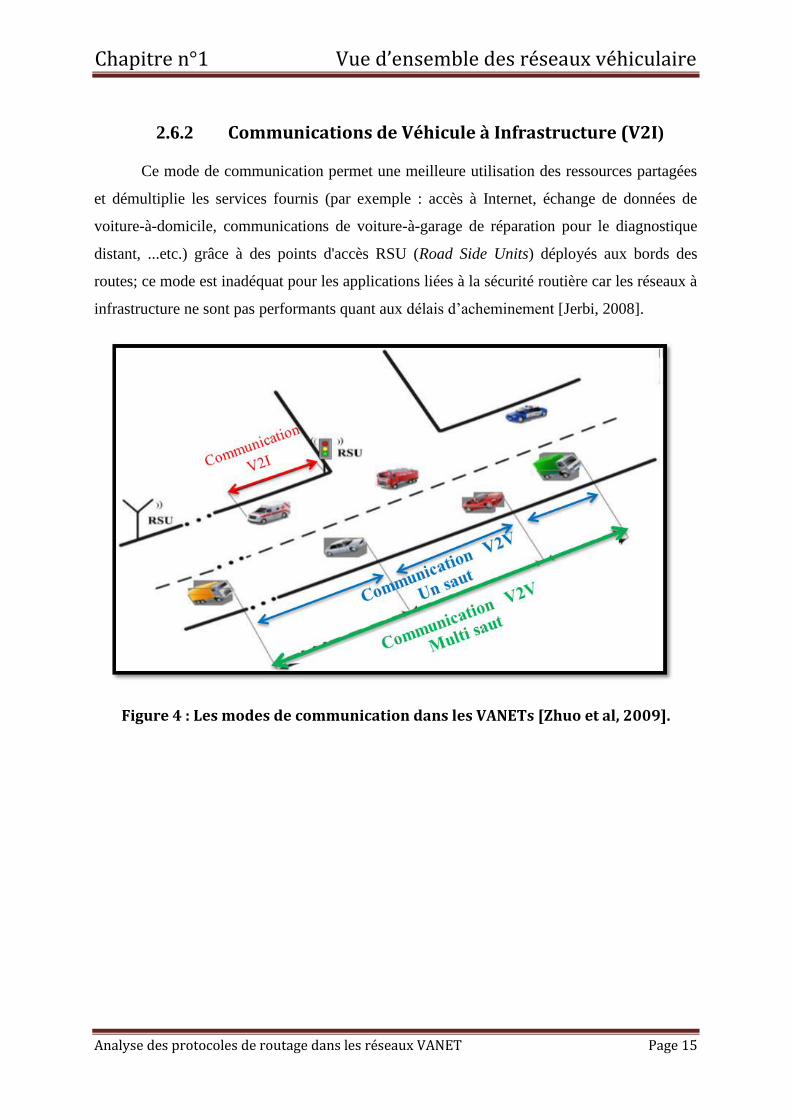
2.6.2 Communications de Véhicule à Infrastructure (V2I)
Ce mode de communication permet une meilleure utilisation des ressources partagées
et démultiplie les services fournis (par exemple : accès à Internet, échange de données de
voiture-à-domicile, communications de voiture-à-garage de réparation pour le diagnostique
distant, ...etc.) grâce à des points d'accès RSU (Road Side Units) déployés aux bords des
routes; ce mode est inadéquat pour les applications liées à la sécurité routière car les réseaux à
infrastructure ne sont pas performants quant aux délais d’acheminement [Jerbi, 2008].
Figure 4 : Les modes de communication dans les VANETs [Zhuo et al, 2009].
Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 16
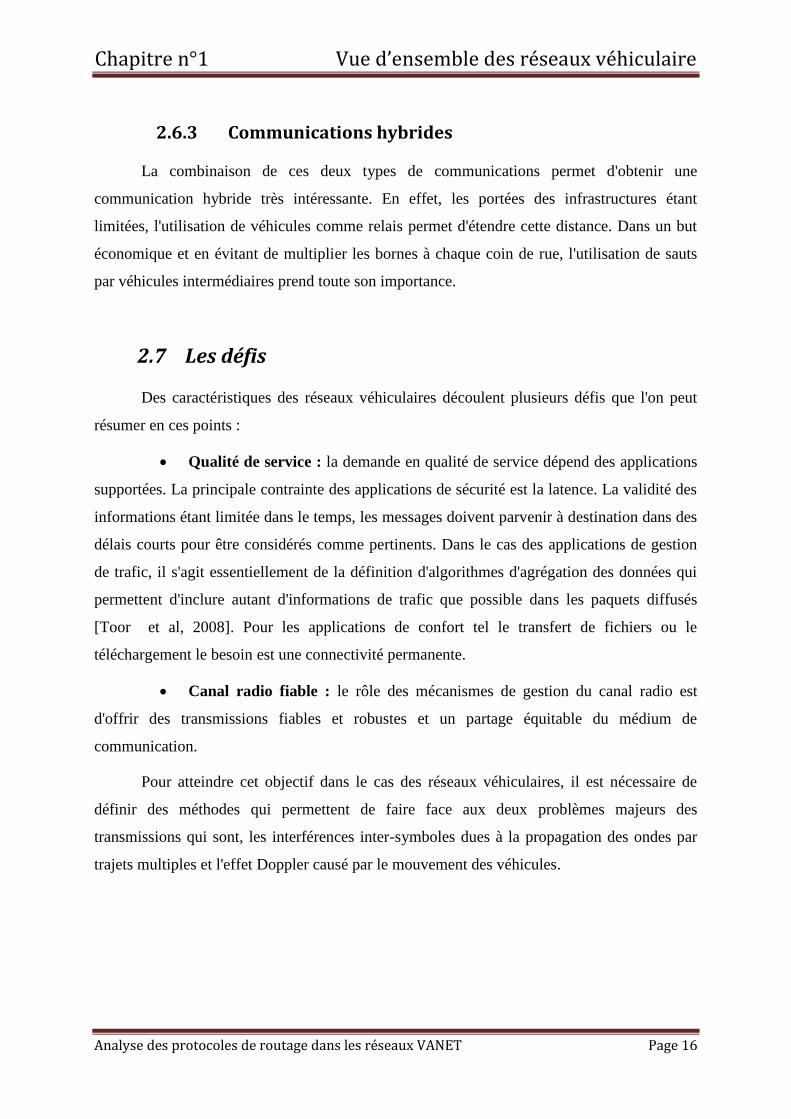
2.6.3 Communications hybrides
La combinaison de ces deux types de communications permet d'obtenir une
communication hybride très intéressante. En effet, les portées des infrastructures étant
limitées, l'utilisation de véhicules comme relais permet d'étendre cette distance. Dans un but
économique et en évitant de multiplier les bornes à chaque coin de rue, l'utilisation de sauts
par véhicules intermédiaires prend toute son importance.
2.7 Les défis
Des caractéristiques des réseaux véhiculaires découlent plusieurs défis que l'on peut
résumer en ces points :
Qualité de service : la demande en qualité de service dépend des applications
supportées. La principale contrainte des applications de sécurité est la latence. La validité des
informations étant limitée dans le temps, les messages doivent parvenir à destination dans des
délais courts pour être considérés comme pertinents. Dans le cas des applications de gestion
de trafic, il s'agit essentiellement de la définition d'algorithmes d'agrégation des données qui
permettent d'inclure autant d'informations de trafic que possible dans les paquets diffusés
[Toor et al, 2008]. Pour les applications de confort tel le transfert de fichiers ou le
téléchargement le besoin est une connectivité permanente.
Canal radio fiable : le rôle des mécanismes de gestion du canal radio est
d'offrir des transmissions fiables et robustes et un partage équitable du médium de
communication.
Pour atteindre cet objectif dans le cas des réseaux véhiculaires, il est nécessaire de
définir des méthodes qui permettent de faire face aux deux problèmes majeurs des
transmissions qui sont, les interférences inter-symboles dues à la propagation des ondes par
trajets multiples et l'effet Doppler causé par le mouvement des véhicules.
Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 17
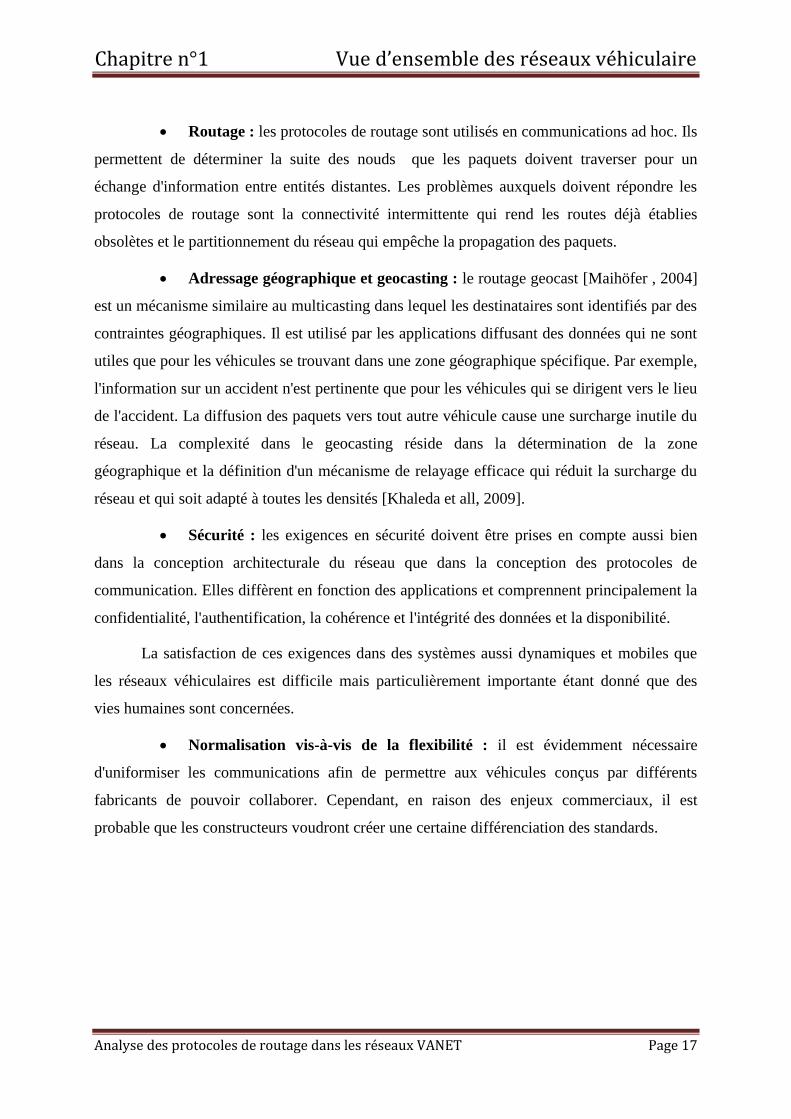
Routage : les protocoles de routage sont utilisés en communications ad hoc. Ils
permettent de déterminer la suite des nouds que les paquets doivent traverser pour un
échange d'information entre entités distantes. Les problèmes auxquels doivent répondre les
protocoles de routage sont la connectivité intermittente qui rend les routes déjà établies
obsolètes et le partitionnement du réseau qui empêche la propagation des paquets.
Adressage géographique et geocasting : le routage geocast [Maihöfer , 2004]
est un mécanisme similaire au multicasting dans lequel les destinataires sont identifiés par des
contraintes géographiques. Il est utilisé par les applications diffusant des données qui ne sont
utiles que pour les véhicules se trouvant dans une zone géographique spécifique. Par exemple,
l'information sur un accident n'est pertinente que pour les véhicules qui se dirigent vers le lieu
de l'accident. La diffusion des paquets vers tout autre véhicule cause une surcharge inutile du
réseau. La complexité dans le geocasting réside dans la détermination de la zone
géographique et la définition d'un mécanisme de relayage efficace qui réduit la surcharge du
réseau et qui soit adapté à toutes les densités [Khaleda et all, 2009].
Sécurité : les exigences en sécurité doivent être prises en compte aussi bien
dans la conception architecturale du réseau que dans la conception des protocoles de
communication. Elles diffèrent en fonction des applications et comprennent principalement la
confidentialité, l'authentification, la cohérence et l'intégrité des données et la disponibilité.
La satisfaction de ces exigences dans des systèmes aussi dynamiques et mobiles que
les réseaux véhiculaires est difficile mais particulièrement importante étant donné que des
vies humaines sont concernées.
Normalisation vis-à-vis de la flexibilité : il est évidemment nécessaire
d'uniformiser les communications afin de permettre aux véhicules conçus par différents
fabricants de pouvoir collaborer. Cependant, en raison des enjeux commerciaux, il est
probable que les constructeurs voudront créer une certaine différenciation des standards.
Chapitre n°1 Vue d’ensemble des réseaux véhiculaire
Analyse des protocoles de routage dans les réseaux VANET Page 18
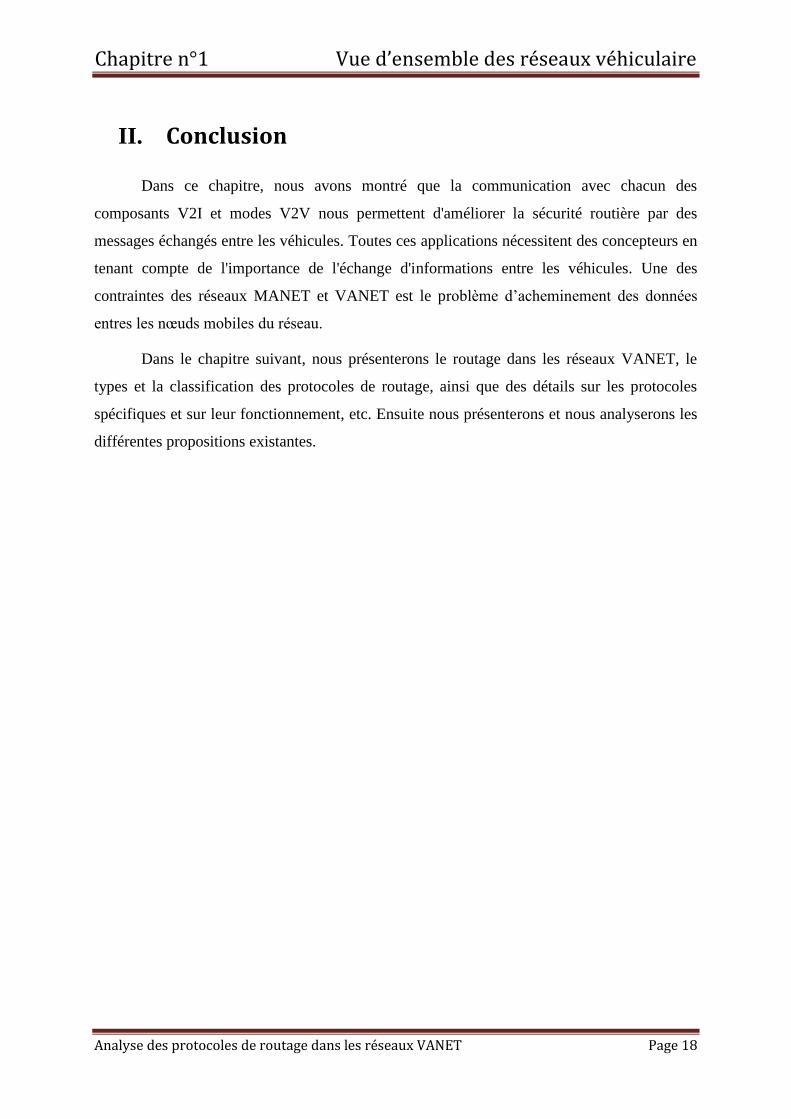
II. Conclusion
Dans ce chapitre, nous avons montré que la communication avec chacun des
composants V2I et modes V2V nous permettent d'améliorer la sécurité routière par des
messages échangés entre les véhicules. Toutes ces applications nécessitent des concepteurs en
tenant compte de l'importance de l'échange d'informations entre les véhicules. Une des
contraintes des réseaux MANET et VANET est le problème d’acheminement des données
entres les nœuds mobiles du réseau.
Dans le chapitre suivant, nous présenterons le routage dans les réseaux VANET, le
types et la classification des protocoles de routage, ainsi que des détails sur les protocoles
spécifiques et sur leur fonctionnement, etc. Ensuite nous présenterons et nous analyserons les
différentes propositions existantes.

Chapitre n°2 : Protocole de routage dans les VANETs
Analyse des protocoles de routage dans les réseaux VANE Page 20
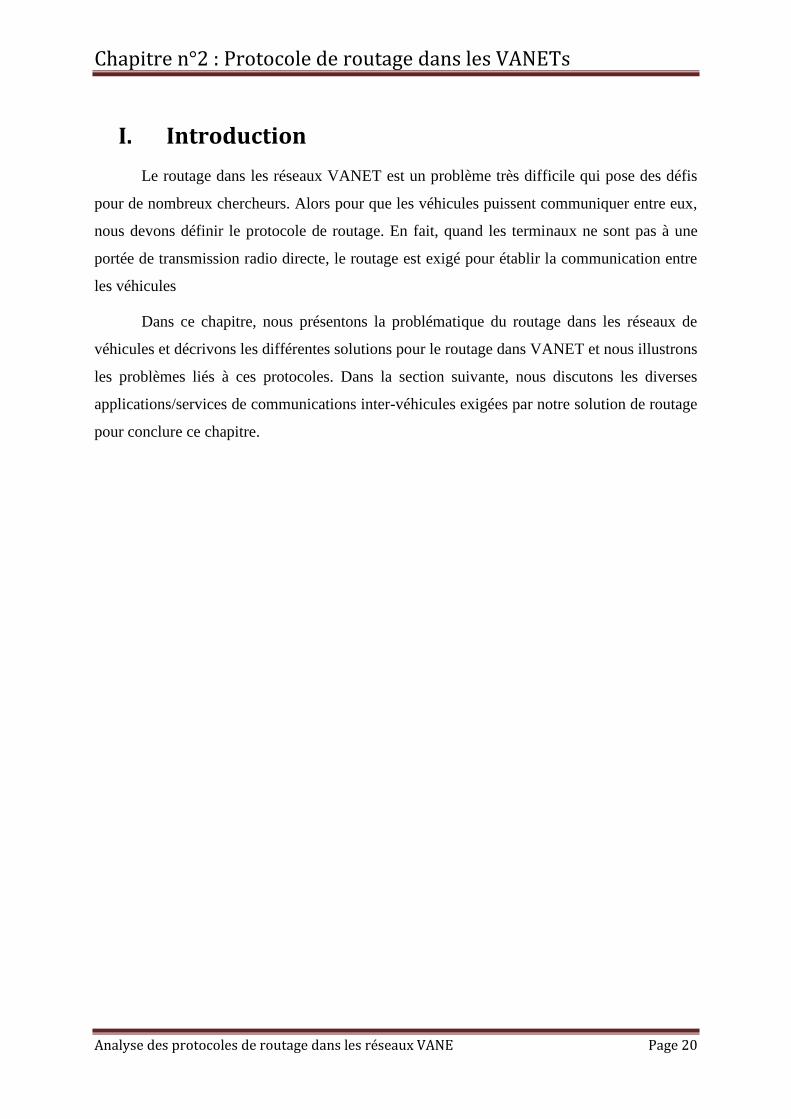
I. Introduction
Le routage dans les réseaux VANET est un problème très difficile qui pose des défis
pour de nombreux chercheurs. Alors pour que les véhicules puissent communiquer entre eux,
nous devons définir le protocole de routage. En fait, quand les terminaux ne sont pas à une
portée de transmission radio directe, le routage est exigé pour établir la communication entre
les véhicules
Dans ce chapitre, nous présentons la problématique du routage dans les réseaux de
véhicules et décrivons les différentes solutions pour le routage dans VANET et nous illustrons
les problèmes liés à ces protocoles. Dans la section suivante, nous discutons les diverses
applications/services de communications inter-véhicules exigées par notre solution de routage
pour conclure ce chapitre.

Chapitre n°2 : Protocole de routage dans les VANETs
Analyse des protocoles de routage dans les réseaux VANE Page 21
1. Routage dans ad hoc
Les réseaux ad hoc se caractérisent par une absence d'infrastructure et de gestion
centralisée. Dans ce type de réseaux, chaque élément peut bien évidemment émettre et
recevoir des messages, mais assure également un rôle de relais de l'information afin que les
messages circulent dans le réseau de proche en proche. Chaque nœud du réseau doit donc
posséder des capacités de routage, c'est le routage dit ad hoc. Grâce à ce routage, la portée
radio d'un nœud peut être virtuellement étendue en utilisant ses voisins comme relais de
l'information.
Le principal défi des réseaux ad hoc est la conception de protocoles de routage à la
fois robustes (tolérants aux pannes, adaptatifs à la mobilité des nœuds) et permettant le
passage à l’échelle. Cette propriété permet au protocole de conserver des performances
raisonnables lorsque la taille du réseau ou le nombre de nœuds augmente : limite de l’over-
head généré, délai d’acheminement, longueur des chemins, rupture des chemins [Florent et
all, 2009].
Le routage est en quelque sorte le mécanisme clé des réseaux ad hoc. C'est grâce au
mécanisme de routage que les stations formant le réseau vont pouvoir communiquer, même si
elles ne sont pas à portée directe de communication. Il est donc très important d'avoir un
protocole de routage efficace si on veut pouvoir tirer parti du potentiel des réseaux ad hoc
[Hauspie, 2005] .
Chapitre n°2 : Protocole de routage dans les VANETs
Analyse des protocoles de routage dans les réseaux VANE Page 22
2. Routage dans les VANETs
Le routage joue un rôle très important dans les VANET puisque tous les services
supportés, unicast ou multicast, se basent sur des communications multi-saut pour
l'acheminement des données. Les transferts de fichiers et les jeux. Les communications
multicast sont utilisées dans les applications de sécurité et de gestion de trafic telles que
l'avertissement de collision et le platooning. Pour réaliser les échanges, les protocoles de
routage utilisent des informations locales, sur le voisinage immédiat, ou globales, concernant
tout le réseau, an de déterminer les nouds relais qui participent à l'acheminement des données
communications unicast sont généralement utilisées dans les applications de confort telles que
le [Ait Ali, 2012].
3. Classification des protocoles de routage dans les
réseaux VANET
Les réseaux véhiculaires ont comme caractéristique principale une forte mobilité qui
entraîne une topologie très dynamique. Cette caractéristique fait que les protocoles de routage
traditionnels des MANETS sont pour la plupart in adaptée aux VANETS. En effet, dans les
VANETS, la vitesse peut être beaucoup plus élevée que les MANETS dans certains
environnements de communication comme les autoroutes. Dans [Amadou, 2011] [Qabajeh,
2009] Différentes solutions pour le routage dans les réseaux VANET ont été proposées, nous
distinguons deux classes de protocoles de routage: les protocoles basés sur la Unicast
(topologie) qui sont divisés en protocoles proactifs, réactifs et hybrides et les protocoles basés
sur la localisation (géographique) qui utilisent la position physique des nœuds mobiles pour
configurer le routage.
Chapitre n°2 : Protocole de routage dans les VANETs
Analyse des protocoles de routage dans les réseaux VANE Page 23
3.1 Les protocoles de routage basés sur la topologie
3.1.1 Les protocoles réactifs
Les protocoles réactifs adoptent des algorithmes classiques tels que le routage par
vecteur de distance. Les routes sont établies uniquement sur demande et seules les routes en
cours d’utilisation sont maintenues. Dans ce cas, un délai supplémentaire est nécessaire au
début de chaque session pour la recherche du chemin .Lorsqu’un nœud veut envoyer des
paquets, une étape de découverte de route est initiée par la diffusion d’un message de
recherche de route. Tout nœud qui reçoit ce message et qui ne dispose pas d’informations à
propos de la destination diffuse à son tour le message. Ce mécanisme est appelé mécanisme
d’inondation [Amadou, 2011].
a. Le protocole AODV
Le protocole de routage AODV (Ad hoc On-demand Distance Vector) [Guizani, 2012]
est un protocole décrit dans la [Charles et al, 2003] 7
Ce protocole crée les routes au besoin et
utilise le principe de numéro de séquence afin d’utiliser les routes les plus nouvelles, dites
encore les plus fraîches. En plus, il utilise le nombre de sauts comme métrique pour choisir
entre plusieurs routes disponibles. Trois types de paquets sont utilisés par AODV : les paquets
de requête de route RREQ (Route Request Message), les paquets de réponse de route RREP
(Route Reply Message) et les paquets d’erreur de route RERR (Route Error Message). En
plus de ces paquets, AODV invoque des paquets de contrôle HELLO qui permettent de
vérifier la connectivité des routes. AODV repose sur deux mécanismes : découverte de route
et maintenance de route. La découverte de route permet de trouver une route pour atteindre
une destination et la maintenance de route permet de détecter et signaler les coupures de
routes provoquées éventuellement par la mobilité des nœuds.
7 http://www.ietf.org/rfc/rfc3561.txt

Chapitre n°2 : Protocole de routage dans les VANETs
Analyse des protocoles de routage dans les réseaux VANE Page 24
b. Le protocole DSR
Le protocole de routage DSR (Dynamic Source Routing) [Guizani, 2012] est un
protocole qui est normalisé dans la [Johnson et al, 2007] 8 Ce protocole crée les routes à la
demande comme le protocole AODV. Il utilise la technique "routage à la source" dans
laquelle la source inclut dans l’entête du paquet la route complète par laquelle un paquet doit
passer pour atteindre sa destination. Les nœuds intermédiaires entre la source et la destination
n’ont pas besoin de maintenir à jour les informations sur la route traversée puisque la route
complète est insérée dans l’entête du paquet. DSR est composé de deux mécanismes : la
découverte de route et la maintenance de route. Le premier permet de chercher les routes
nécessaires à la demande, tandis que le second permet de s’assurer de la maintenance des
routes tout au long de leur utilisation.
3.1.2 Les protocoles proactifs
Dans [Ait Ali, 2012] les protocoles proactifs, chaque noud garde une image de la
topologie de tout le réseau. Cette image est mise à jour, périodiquement ou à chaque
modification topologique, par un échange de messages de contrôle. Les routes sont
déterminées sur la base de cette image.
a. Le protocole OLSR
Le protocole de routage OLSR (Optimized Link State Routing) [Badis et al, 2004]
[Clausen et al, 2003] [Meraihi, 2011] est un protocole de routage proactif développé dans le
cadre du projet Hypercom de l’Institut National de la Recherche en Informatique et
Automatique (INRIA) de France et proposé en tant que RFC (Request For Comment)
expérimentale à l’IETF (Internet Engineering Task Force). Il est considéré comme une
optimisation du protocole à état des liens filaires pour les réseaux mobiles Ad Hoc. Il a pour
objectif de fournir des routes de plus court chemin vers une destination en termes de nombre
de sauts en utilisant l’algorithme de Dijkstra. Son innovation réside dans sa façon
d’économiser les ressources radio lors des diffusions, ceci est réalisé grâce à l’utilisation de la
technique des relais multipoints (MPR : Multi-Point Relaying), donc le principe est que
chaque nœud construit un sous ensemble appelé MPR, parmi ses voisins, qui permet
d’atteindre tous ses voisins à deux sauts, les nœuds de cet ensemble servent à acheminer et
8 http://www.ietf.org/rfc/rfc4728.txt

Chapitre n°2 : Protocole de routage dans les VANETs
Analyse des protocoles de routage dans les réseaux VANE Page 25
retransmettre les messages qu’ils reçoivent. Les voisins d’un nœud qui ne sont pas MPRs,
lisent et traitent les paquets mais ne les retransmettent pas.
b. Le protocole DSDV
Le protocole de routage DSDV (Destination-Sequenced Distance-Vector) [Guizani,
2012] [Charles et al, 1994] est un protocole de routage de type vecteur de distance. Chaque
nœud maintient une table de routage contenant des informations sur les destinations
accessibles dans le réseau. Ces informations comprennent le nœud suivant utilisé pour
atteindre la destination, le nombre de sauts qui sépare le nœud de la destination et le numéro
de séquence estampillé par la destinataire. Ce numéro de séquence permet de distinguer les
nouvelles routes des anciennes. Chaque nœud envoie périodiquement à ses voisins la totalité
de sa table de routage. D’autres paquets de mise à jour sont aussi envoyés à la suite d’un
changement dans la topologie du réseau. Ces paquets n’incluent que les entrées de la table
affectées par le changement et ont pour objectif de propager les informations de routage aussi
rapidement que possible. Quand un nœud reçoit un paquet de mise à jour, il le compare avec
les informations existantes dans sa table de routage. Toute entrée dans la table est mise à jour
si l’information reçue est plus récente (ayant un numéro de séquence plus grand), ou si elles
ont le même numéro de séquence mais avec une distance plus courte.
Dans le protocole DSDV, une unité mobile doit attendre jusqu’à ce qu’elle reçoive la
prochaine mise à jour initiée par la destination afin de mettre à jour l’entrée associée à cette
destination dans la table de distance. De ce fait, la réaction de DSDV aux changements de la
topologie est considérée lente. D’autre part, ce protocole cause une charge de contrôle
importante dans le réseau à cause des paquets de mise à jour envoyés périodiquement ou à la
suite des événements.
c. Le protocole GSR
Le protocole GSR (Global State Routing) [Guizani, 2012] est un protocole proactif à
état de liens où chaque nœud connaît la topologie globale du réseau ce qui lui permet de
calculer les routes pour atteindre chaque destination. GSR diffère des protocoles à état de
liens dans le fait que les nœuds ne diffusent pas leurs états de liens à tout le réseau, mais ils se
limitent à l’envoyer aux voisins uniquement. Ainsi, GSR réduit le trafic des paquets de
contrôle. Le problème de GSR est la taille de ses paquets de mise à jour (table de topologie)
Chapitre n°2 : Protocole de routage dans les VANETs
Analyse des protocoles de routage dans les réseaux VANE Page 26
qui peuvent devenir considérable si le réseau contient un grand nombre de nœuds. En plus, il
a une lenteur dans la détection des changements de la topologie.
3.1.3 Protocoles hybrides
a. Le protocole ZRP
Le protocole de routage ZRP (Zone Routing Protocol) [Guizani, 2012] [Zygmunt et al,
2003a] 9 est un protocole hybride qui combine les deux approches proactives et réactive. Le
protocole ZRP divise le réseau en différentes zones. Pour chaque nœud, il définit une zone de
routage exprimée en nombre de sauts maximal σ. Ainsi, la zone de routage d’un nœud inclut
tous les nœuds qui sont à une distance au maximum de σ sauts. Les nœuds qui sont
exactement à σ sauts sont appelés nœuds périphériques.
À l’intérieur de cette zone, ZRP utilise un protocole proactif et à l’extérieur de cette
zone de routage, il fait appel à un protocole réactif.
Le protocole proactif est IARP (IntrAzone Routing Protocol) [Zygmunt et al, 2002d]
10 et celui réactif est IERP (IntErzone Routing Protocol) [Zygmunt et al, 2002c]
11 Chaque
nœud doit tout d’abord connaître ses voisins. Pour cela, ZRP utilise soit le protocole de
contrôle d’accès au support (MAC) pour connaître les voisins immédiats ou le protocole NDP
(NeighbourDiscovery Protocol) pour la transmission et la gestion des échanges de messages
HELLO. Par la suite, chaque nœud invoque le protocole IARP pour découvrir les routes vers
tous les autres nœuds qui se trouvent dans sa zone de routage. Cependant, le protocole IERP
est utilisé à la demande pour chercher les routes entre un nœud et une destination qui se
trouvent à l’extérieur de sa zone de routage. Un troisième protocole BRP (Bordercast
Resolution Protocol) [Zygmunt et al, 2002b]12
est inclus avec IERP pour guider la
propagation des requêtes de recherche de route dans le réseau. BRP utilise les données de la
topologie fournies par le protocole IARP afin de construire sa liste des nœuds de périphérie et
la façon de les atteindre.
9 http://www.ietf.org/proceedings/02nov/I-D/draft-ietf-manet-zone-zrp-04.txt
10 http://tools.ietf.org/html/draft-ietf-manet-zone-iarp-02
11 http://tools.ietf.org/html/draft-ietf-manet-zone-ierp-02
12 http://tools.ietf.org/html/draft-ietf-manet-zone-brp-02

Chapitre n°2 : Protocole de routage dans les VANETs
Analyse des protocoles de routage dans les réseaux VANE Page 27
3.1.4 Comparaison les protocoles de routage proactive et
réactive
Une comparaison entre les deux classes proactive et réactive est présentée dans
Tableau 1 [Chaidet et al, 2003]13
:
Dans un protocole de routage réactif, les mobiles ne conservent pratiquement aucune
information sur la topologie globale du réseau. Seules sont stockées les informations sur les
routes actives. Les routes sont construites à la demande et sont détruites lorsqu’elles ne sont
plus utilisées.
Dans un protocole de routage proactif, la topologie du réseau est connue de tous les
mobiles. Les routes sont disponibles immédiatement mais, en contrepartie, il faut diffuser
régulièrement des informations sur les changements de topologie du réseau.
Les protocoles réactifs génèrent a priori un volume plus faible de signalisation mais en
contrepartie engendrent un délai lors de la construction (ou de la reconstruction) des routes et
produisent plus difficilement des routes optimales (quel que soit le critère).
Les protocoles proactifs disposent en permanence d’une route pour chaque destination
dans le réseau mais génèrent en contrepartie un volume de signalisation important. De
nombreux débats ont lieu sur la performance des deux approches.
13
http://hal.inria.fr/docs/00/07/18/86/PDF/RR-4700.pdf

Chapitre n°2 : Protocole de routage dans les VANETs
Analyse des protocoles de routage dans les réseaux VANE Page 28
Routage proactif Routage réactif
Avantages inconvénients Avantages inconvénients
La topologie du réseau
est connue de tous les
mobiles. Les routes
sont disponibles
immédiatement.
Il faut diffuser régulièrement des
informations sur les
changements de
topologie du réseau.
Les mobiles ne
conservent
pratiquement aucune
information sur la
topologie globale du
réseau : seules les
informations sur les
routes actives sont
stockées.
Les protocoles
proactifs disposent en
permanence d'une
route pour chaque
destination dans le
réseau.
Un volume de
signalisations
important.
Les protocoles
réactifs génèrent à
priori un volume plus
faible de
signalisations.
Les protocoles
réactifs engendrent un
délai lors de la
construction (ou de la
reconstruction) des
routes et produisent
plus difficilement des
routes optimales.
Tableau 1 : Comparaison entre protocoles proactifs et protocoles réactifs.
L’avantage des protocoles hybrides est le fait qu’ils s’adaptent mieux aux réseaux de
grandes tailles. Cependant, ce type de protocole cumule les inconvénients des protocoles
proactifs et ceux des protocoles réactifs, tels que l’échange de paquets de contrôle réguliers et
inondation de l’ensemble de réseau pour chercher une route vers un nœud éloigné.
Chapitre n°2 : Protocole de routage dans les VANETs
Analyse des protocoles de routage dans les réseaux VANE Page 29
3.2 Les protocoles de routage basés sur la géographique
Les protocoles de routage géographiques sont les plus adaptés pour les réseaux ad hoc
de véhicules, puisque le mécanisme de routage se base sur les données géographiques des
nœuds.
a. Le protocole A-STAR
Le protocole de routage A-STAR (Anchor-based Street and Traffic Aware Routing)
[Niu et al, 2008] [Zhao et al, 2006] [Meraihi, 2011] est un protocole de routage basé sur la
localisation (position) pour un environnement de communication véhiculaire métropolitain. Il
utilise particulièrement les informations sur les itinéraires d’autobus de ville pour identifier
une route d’ancre (anchor route) avec une connectivité élevée pour l’acheminement des
paquets. A-STAR adopte une approche de routage basée sur l’ancrage (anchor based) qui tient
compte des caractéristiques des rues. Un point est associé à chaque rue en fonction de sa
capacité (grande ou petite rue qui est desservie par un nombre de bus différent). Les
informations de routes fournies par les bus donnent une idée sur la charge du réseau
véhiculaire dans chaque rue. Ce qui donne une image de la ville a des moments différents.
b. Le protocole UMB
Le protocole de routage UMB (Urban Multi hop Broadcast Protocol) [Meraihi , 2011]
C’est un protocole efficace de la norme 802.11, basé sur l’algorithme de diffusion multi saut
pour les réseaux inter véhiculaires avec support d’infrastructure, dans le but de réduire les
collisions et d’utiliser efficacement la bande passante. Contrairement aux protocoles de
diffusion par inondation, UMB confie les opérations d’envoi et de reconnaissance des paquets
aux nœuds les plus éloignés sans connaître à priori des informations sur la topologie du
réseau.
UMB est décomposé en deux phases : la première appelée diffusion directionnelle, où
le véhicule source sélectionne un nœud dans la direction de diffusion pour faire un relayage
de données sans aucune information sur la topologie. La deuxième diffusion aux intersections
pour disséminer les paquets dans toutes les directions, pour cela UMB utilise des répéteurs
installés dans les intersections pour l’envoi des paquets vers tous les segments. On suppose
que chaque véhicule est équipé par un récepteur GPS (Global Position System) et une carte

Chapitre n°2 : Protocole de routage dans les VANETs
Analyse des protocoles de routage dans les réseaux VANE Page 30
routière électronique. Le principal avantage du protocole UMB est la fiabilité de diffusion
multi-saut dans les canaux urbains [Wu et al, 2004] [Korkmaz et al, 2006].
c. Le protocole GyTAR
Le protocole de routage GyTAR (improved Greedy Traffic-Aware Routing protocol)
[Niu et al, 2008] [Amit et al, 2004] est un protocole de routage géographique basé sur la
localisation (position) et adapté aux réseaux véhiculaires capable de trouver des chemins
robustes dans un environnement urbain. L’objectif de ce protocole est de router les données
de proche en proche en considérant les différents facteurs spécifiques à ce genre
d’environnements/réseaux. Ce protocole suppose que chaque véhicule connaît sa position
courante et ceci grâce au GPS. De plus un nœud source est sensé connaître la position du
destinataire pour pouvoir prendre des décisions de routage, cette information est donnée par
un service de localisation tel que GLS (Grid Location Service) et peut déterminer la position
des intersections voisines à travers des cartes numériques.
d. Le protocole VADD
Le protocole de routage VADD (Vehicle-Assisted Data Delivery) [Zhao et al, 2006]
[Jerbi, 2008] est un protocole de routage qui prend en considération le contexte des réseaux de
véhicules et exploite le mouvement prévisible des véhicules pour décider de retransmettre ou
non le message. Il utilise particulièrement les informations sur le trafic routier au niveau d'une
route pour estimer le délai mis par un paquet pour parcourir un tel segment. Par conséquent,
les paquets seront achemines le long d'un chemin ayant le plus faible délai de bout en bout.
e. Le protocole MORA
Le protocole de routage MORA (MOvement-based Routing Algorithm) propose dans
[Granelli et al, 2006] [Jerbi, 2008] exploite la position et la direction de mouvement de
véhicules pour adapter les décisions de retransmission au contexte des véhicules et faire face
ainsi a la forte mobilité des nœuds et au changement assez fréquent de la topologie.
Chapitre n°2 : Protocole de routage dans les VANETs
Analyse des protocoles de routage dans les réseaux VANE Page 31
f. Le protocole GPSR
Le protocole de routage GPSR (Greedy Perimeter Stateless Routing) [Menouar, 2008]
est donc un protocole de routage basé sur la position, qui contient deux parties. La première
correspond à une méthode de choix du prochain noud transmetteur qui aura le rôle de
retransmettre les paquets, et cela tout en se basant sur les informations de position des voisins
(nouds candidats) et de la destination des paquets. Cette méthode consiste à choisir le
candidat qui est à une distance la plus proche à vol d'oiseau de la destination. La deuxième
partie de GPSR est en fait une méthode pour contourner les obstacles et les zones
géographiques vides, qui ne présentent aucun candidat transmetteur dans le voisinage.

Chapitre n°2 : Protocole de routage dans les VANETs
Analyse des protocoles de routage dans les réseaux VANE Page 32
Figure 5 : Les protocoles de routage dans les réseaux VANETs

Chapitre n°2 : Protocole de routage dans les VANETs
Analyse des protocoles de routage dans les réseaux VANE Page 33
Tableau 2 : Grille d’analyse
Contrainte de
performance AODV DSR OLSR DSDV GSR ZRP GPSR
Catégorie Réactif Réactif Proactif Proactif Proactif Hybride Géographique (réactif)
Type de
protocole Vecteur de
distance
Schéma à état de
lien
Schéma à état de
lien
Vecteur de
distance
Schéma à état de
lien Indéfini Vecteur de distance
Routes
maintenues dans Table de routage Table de routage Table de routage Table de routage Table de topologie Table de routage Table de position
Liberté de boucle Oui Oui Oui Oui Non Oui Non
Routes multiples Non Oui Non Oui Non Oui Oui
Multicast Oui Non Oui Oui Oui Oui Oui
Surcharge réseau Modérée Modérée Minimale Minimale Modérée Modérée Modérée
Diffusion
périodique Possible Possible Possible Possible Pas possible Possible Possible
Requiert des
séquences de
données
Oui Non Non Non Oui - NO
Méthode de
reconfiguration
des routes
Suppression des
routes &
notification à la
source
Message d’erreur
et suppression du
chemin
sauvegardé
Messages de
contrôles envoyés
en avance afin
d'augmenter la
réactivité
Des paquets de mise
à jour. Numéro de
séquence estampillé
Paquets de mise à
jour (table de
topologie)
Ce dépendent du
protocole réactif utilisé
Supprimer le noued
n’appartient pas dans sa zone
Résume
Découverte des
routes, expansion
en anneau,
recherche,
poursuite du
chemin.
routes à la
demande, routage
à la source, la
découverte de
route et la
maintenance de
route
Messages de
contrôle pour
détection de liaison,
détection des
voisins (MPR),
détection de
multiples interfaces,
calcul des routes.
Des informations
sur les destinations
numéro de
séquence. Envoie
périodiquement aux
les voisins la totalité
de table de routage.
Chaque nœud
connaît la topologie
globale. L’envoyer
aux voisins
uniquement.
Chaque nœud connaît les
voisins, IARP pour
découvrir les routes, IERP est utilisé à la
demande pour chercher
les routes, BRP utilise les
données de la topologie
fournies
Même plan. l'acheminement
des paquets de données ou de
contrôle géographiquement.
utilisé deux modes: «Greedy
Forwarding» le «Perimeter
Forwarding». détermine la
route à suivre en minimisant
les distances entre les nœuds
et la destination.

Chapitre n°2 : Protocole de routage dans les VANETs
Analyse des protocoles de routage dans les réseaux VANE Page 34
II. Conclusion
Dans ce chapitre, nous avons comparé différentes approches pour montres que la
performance de chacune dépende énormément des conditions d’utilisation. Les protocoles
construisant des routes par diffusion sont plus performants que leurs concurrents lorsque le
nombre de routes actives est faible ou lorsque la mobilité dans le réseau est élevée.
Cependant, de part la nature distribuée, l'environnement et la topologie complexe des réseaux
véhiculaires, une mise en œuvre réelle peut être difficile aussi bien sur le plan économique
que logistique.
Pour contourner ce problème, la simulation est le moyen le plus largement utilisé. En
effet, il est plus facile et moins cher, par le biais de la simulation, de concevoir, d'analyser et
d'évaluer les performances de toute solution. Un paramétrage approprié permet de reproduire
les différents scénarios de l'environnement et d'analyser leur impact sur les protocoles et
applications dans un prochain chapitre.

Chapitre n°3 Simulation et VANET
Analyse des protocoles de routage dans les réseaux VANET Page 36
I. Introduction
Toute nouvelle solution passe par un processus d'évaluation et de validation avant son
éventuel déploiement. Le moyen idéal de réaliser cette tâche est de pouvoir effectuer des tests
dans des environnements réels. Cependant, de part la nature distribuée, l'environnement et la
topologie complexe des réseaux véhiculaires et Pour contourner ce problème, la simulation
est le moyen le plus largement utilisé. En effet, il est plus facile et moins cher, par le biais de
la simulation, de concevoir, d'analyser et d'évaluer les performances de toute solution
Le chapitre présente les travaux de simulation apparentés sur les réseaux véhiculaires.
Il est consacré à la modélisation de la mobilité et de la propagation radio dans les réseaux
véhiculaires. Nous décrivons, en plus les travaux récemment réalisés dans ce contexte. Les
différentes approches de modélisation sont mises en avant ainsi que les principaux paramètres
que doivent intégrer les modèles de mobilité et de propagation radio pour atteindre le niveau
de réalisme requis et garantir la validité et la fiabilité des résultats de simulation.
Chapitre n°3 Simulation et VANET
Analyse des protocoles de routage dans les réseaux VANET Page 37
1. La simulation
La simulation est « largement reconnue comme la technique la plus efficace pour
l’analyse et la conception à la disposition des concepteurs et des gestionnaires des systèmes
complexes. Elle peut être appliquée dans divers domaines, tels que, l’analyse des systèmes de
services, les systèmes de production, les systèmes naturels, les systèmes informatiques. ..Etc.
Cette technique connaît actuellement un essor considérable. Ceci est dû aussi bien à l'intérêt
théorique que présente la modélisation des systèmes simulés, que par le besoin croissant de
simuler par VANET des réalisations de plus en plus complexes ».
La simulation utilise souvent des réseaux VANETs pour limiter les événements
causals et les actions conséquentes dans le système réel. Les statistiques sont accumulées
durant la période de simulation pour évaluer les mesures d'intérêts qui sont résumées et
rapportées à la fin de l'exécution du programme de simulation. De ce fait, on peut dire que la
simulation implique la génération d'un historique artificielle du comportement du système
[korichi, 2009], et l'observation d'un historique pareil pour connaître les caractéristiques
opératoires du système réel.
2. Simulation des MANET
Dans [Ait Ali, 2012], Deux aspects peuvent être distingués dans la simulation d'un
MANET: l'aspect protocolaire qui consiste à modéliser les protocoles et mécanismes utilisés
par les services et applications réseau et l'aspect comportement qui est axé sur la modélisation
du comportement des entités du réseau.
2.1 Modélisation des couches protocolaires
La modélisation des couches protocolaires consiste en la définition d'algorithmes
permettant de reproduire les mécanismes utilisés dans les déférentes couches qui
interviennent dans les communications réseau tels que :
L'établissement des connexions au niveau transport.
L'adressage au niveau réseau ou encore la politique d'accès au canal
D'ordonnancement au niveau liaison de données.
Chapitre n°3 Simulation et VANET
Analyse des protocoles de routage dans les réseaux VANET Page 38
2.2 Modélisation du comportement
Il s'agit de la modélisation de la mobilité des entités du réseau et de la propagation des
signaux radio dans l'environnement.
Les environnements pris en compte par les réseaux Manet sont souvent limités à des
espaces ouverts ou indoor (tel que: d’une conférence ou à l’intérieur d’un bâtiment). Les
déplacements des véhicules quant à eux sont liés aux structures des routes (intersections,
panneaux de signalisation, etc…) et aux stations de base routières (infrastructures) que se soit
dans les autoroutes ou au sein d’une zone urbaine. Il y’a aussi, les obstacles radio et les effets
de la propagation à trajets multiples (multipath) ou d’évanouissement (fading), affectent
considérablement le modèle de mobilité et la qualité des transmissions radio à prendre en
compte dans les protocoles de routage. En outre la mobilité est un facteur lié directement au
conducteur du véhicule.
Ce schéma est utilisé par les simulateurs réseaux pour créer des topologies aléatoires
basées sur la position des mobiles et les signaux radio.
Chapitre n°3 Simulation et VANET
Analyse des protocoles de routage dans les réseaux VANET Page 39
3. Simulation des VANET
La modélisation des couches protocolaires dans les réseaux véhiculaires est similaire à
celle des réseaux MANET. Les simulateurs définis pour les MANET peuvent être utilisés
pour les VANET. Cependant ces simulateurs doivent être étendus pour inclure les solutions
spécifiques aux réseaux véhiculaires tels que, la géo-localisation, les protocoles de routage
géographiques et la norme 802.11p (un système de communication pour véhicule).
La différence entre les simulateurs des réseaux MANET et ceux des réseaux VANET
réside dans la modélisation de la mobilité et de la propagation des signaux radio :
3.1 Simulation de la mobilité dans les VANET
Un modèle de mobilité décrit l'ensemble des règles qui définissent le schéma de
mouvement des mobiles. En tant que, Les déplacements des véhicules ne peuvent pas être
représentés par les modèles de mobilité définis pour les individus.
Il y a plusieurs règles qui s'appliquent (ils ne peuvent se déplacer que sur les routes et
doivent obéir aux règles de circulation, et d'autre part, par la prise en compte de l'interaction
entre véhicules.). La difficulté dans la conception de modèles de mobilité à partir de traces
réside dans l'extrapolation des schémas.
3.1.1 Les fonctionnels d'un modèles de mobilité
Selon [Fiore et al, 2007] afin de garantir sa validité par rapport à la mobilité réelle, un
modèle de mobilité doit intégrer deux niveaux, la macro-mobilité et la micro-mobilité.
La macro-mobilité consiste à modéliser les aspects macroscopiques qui
influencent le trafic véhiculaire. Il s'agit de décrire la topologie du réseau routier, les
caractéristiques de chaque route (à double sens ou à sens unique, le nombre de voies, la
vitesse limite.), les règles de dépassement et de sécurité au niveau de chaque route, les
signaux présents au niveau des intersections (feux de signalisation, panneaux stop.)...etc.
La micro-mobilité se concentre plutôt sur le comportement individuel de
chaque conducteur. Elle consiste à modéliser des caractéristiques telles que, l'accélération, la
décélération, le freinage et l'interaction du conducteur avec les autres conducteurs et avec
l'infrastructure routière.

Chapitre n°3 Simulation et VANET
Analyse des protocoles de routage dans les réseaux VANET Page 40
Dans [Härri et al, 2009] , les auteurs proposent une décomposition plus détaillée des
modèles de mobilité pour véhicules que nous résumons en quatre modules fonctionnels
représentés dans la figure ci-dessous.
Figure 6 : Décomposition plus détaillée des modèles de mobilité [Ait Ali, 2012]
3.1.2 Modèles de mobilité pour VANET
Les premiers modèles qui ont été proposés sont simplistes, ils intègrent uniquement
des contraintes géographiques dans le schéma de mobilité en restreignant le mouvement des
véhicules à un graphe qui représente une topologie de route donnée. Ces modèles accordent
peu ou pas d'attention aux interactions entre véhicules (City Section, Manhattan, Obstacle
Mobility Model).
Pour avoir plus de réalisme, SSM (Stop Sign Model) et TSM (Trafic Sign Model) se
basent sur des topologies routières réelles tirées de la base de données TIGER/Lines
auxquelles sont ajoutés des mécanismes de gestion des intersections, trouverez plus de détails
dans [Mahajan et al, 2006]. SSM définit à chaque intersection un signal Stop qui oblige le
véhicule à s'arrêter. Ce comportement est irréaliste étant donné qu'il est impossible de trouver
une région avec des signaux d'arrêt à chaque intersection. Par conséquent, les mêmes auteurs
ont proposé TSM. Dans ce modèle, les signaux d'arrêt sont remplacés par des feux de
signalisation.

Chapitre n°3 Simulation et VANET
Analyse des protocoles de routage dans les réseaux VANET Page 41
A. Simulateurs de mobilité
STRAW : Street Random Waypoint [Choffnes et al, 2005] est un modèle de
mobilité développé pour le simulateur des réseaux sans fil SWANS (Scalable Wireless Ad
hoc Network Simulator) Le modèle utilise une topologie routière extraite de la base de
données TIGER/Lines à laquelle il ajoute des intersections.
VanetMobiSim14
: est une extension du modèle CanuMobiSim développé dans
l'objectif de fournir un haut degré de réalisme dans la simulation spécifique de la mobilité des
véhicules en tenant compte à la fois des deux aspects macroscopique et microscopique de la
mobilité
MMTS : Multi-agent Microscopic Trafic Simulator [Raney et al, 2002] est un
simulateur de trafic multi-agent développé à l'ETH Zurich pour la simulation du trafic public
et privé dans toute la Suisse. Il simule le comportement d'un grand nombre de véhicules,
chacun modélisé par un agent intelligent autonome.
UDEL : [UDel, 2014] est un ensemble d'outils pour la simulation des réseaux
maillés et des réseaux véhiculaires qui implante plusieurs modèles de propagation et un
modèle de mobilité qui appartient à la catégorie des modèles développés à partir d'enquêtes de
déplacement.
14
http ://canu.informatik.uni-stuttgart.de/mobisim/
Chapitre n°3 Simulation et VANET
Analyse des protocoles de routage dans les réseaux VANET Page 42
B. Générateurs de trafic
CORSIM : Corridor Simulation [CORSIM, 2014] est un simulateur très
largement utilisé dans les STI. C'est un logiciel commercial puissant pour la simulation de
trafic développé par le département américain des transports et l'US FHWA (Federal Highway
Administration). CORSIM est un modèle de simulation microscopique conçu pour simuler la
mobilité dans les autoroutes et les routes urbaines.
VisSim15
[VisSim, 2014] : est également un simulateur de mobilité
microscopique commercial, développé par PTV AG (Planung Transport Verkehr ) en
Allemagne. Il offre une grande variété d'applications en milieu urbain et autoroutier et permet
aux utilisateurs de simuler des scénarios de trafic importants et complexes qui intègrent aussi
bien le transport public que privé.
PARAMICS : Développé et commercialisé par Quadstone Limited , une
société britannique, 1PARAMICS [Ait Ali, 2012] est une suite de modules de simulation de
trafic microscopique dont un modeleur, un estimateur, un processeur, un analyseur, un
programmeur et un moniteur.
SUMO/MOVE : Le logiciel ouvert SUMO (Simulation of Urban MObility).
est le simulateur de trafic gratuit le plus communément utilisé dans les récents travaux de
recherche sur les réseaux véhiculaires. C'est un simulateur hautement portable capable de
fournir des schémas de mobilité précis
CARISMA [Schroth et al, 2005] : est un autre simulateur de trafic gratuit et
réaliste développé par BMW. La topologie de route considérée est importée du standard ESRI
à laquelle sont ajoutés des panneaux Stop aux intersections. CARISMA détermine les points
origine-destination de manière aléatoire et en temps réel dans le sens où il intègre l'effet des
événements externes.
15
http://vision-traffic.ptvgroup.com/fileadmin/files_ptvvision/Downloads_N/0_General/2_Products/2_PTV_Vissim/EN-
US_PTV_Vissim_Brochure.pdf
Chapitre n°3 Simulation et VANET
Analyse des protocoles de routage dans les réseaux VANET Page 43
3.2 Simulation de la propagation radio dans les
environnements véhiculaires
La propagation des signaux radio en environnement externe ne peut être représentée
par des modèles simplistes qui supposent des espaces plats, ouverts et sans obstacles. Les
objets de l'environnement, les bâtiments, les forêts, les collines, etc. causent des dégradations
de la puissance des signaux transmis qui arrivent aux récepteurs avec une certaine atténuation.
Cette atténuation est généralement décrite par trois modèles complémentaires qui sont le Path
loss, le Shadowing (ou slow fading) et le Multipath fading (ou fast fading).
Le path loss représente l'affaiblissement que subit le signal en fonction de la
distance parcourue par l'onde radio, avec un exposant qui dépend de l'environnement. Les
modèles du path loss les plus communément utilisés sont le free space et le two-ray ground.
Le Shadowing enrichit le path loss en ajoutant une composante probabiliste qui
décrit la variation du path loss dans des environnements de propagation similaires. Cette
variation est communément modélisée par la loi log-normale.
Le Multipath fading résulte de la réception de plusieurs copies retardées et
atténuées du signal ayant emprunté des trajets différents. Il est souvent modélisé par des
distributions de Nakagami, Rayleigh ou Ricean. Pour plus de détails voir dans [Grau et al,
2009]16
.
16
https://www.researchgate.net/publication/242715816_Characterisation_of_IEEE802.11p_Radio_Channel_for_Vehicle2Vehicle_Communications_using_the_CVIS_Platform.

Chapitre n°3 Simulation et VANET
Analyse des protocoles de routage dans les réseaux VANET Page 44
4. Vue d’ensemble les simulateurs de VANET
Un simulateur de réseaux VANET doit intégrer à la fois les couches protocolaires et
les modèles de mobilité et de propagation radio. Deux catégories de simulateurs peuvent être
distinguées selon l'approche utilisée pour leur conception La première catégorie est celles des
nouveaux simulateurs conçus spécifiquement pour les réseaux véhiculaires intégrant la
simulation des couches protocolaires et les modèles de comportement. Ces simulateurs se
concentrent en général sur la modélisation de la mobilité et s'appuient sur des modèles
simplistes et incomplets des couches protocolaires et de la propagation radio.
La plupart des simulateurs appartiennent à la seconde catégorie. Leur idée de base
consiste à intégrer à des simulateurs réseaux existants et bien établis, tel que ns-2 et OMNET,
des modèles de mobilité et de propagation radio définis pour les environnements véhiculaires.
Le simulateur utilise le modèle de mobilité pour la modélisation des mouvements des
véhicules.
GrooveNet [Mangharam et al, 2006] 17
: est un simulateur hybride de réseau et
de mobilité qui permet la communication entre des véhicules simulés et des véhicules réels.
Trois types de nouds peuvent être simulés avec GrooveNet : (a) des véhicules capables de
communications multi-sauts sur un ou plusieurs des canaux DSRC, (b) des infrastructures
fixes, et (c) des passerelles mobiles capables de communications de véhicule à véhicule
(V2V) et de véhicule-a-infrastructure (V2I). Le modèle de mobilité utilise des topologies
routières importées de la base de données TIGER/Lines. Afin de représenter correctement les
interactions inter-véhicules, GrooveNet intègre des modèles simples de car-follwing, de
gestion des feux de signalisation et de changement de voie. Les points source-destination sont
déterminés de manière aléatoire et les itinéraires correspondent aux plus courts chemins
calculés en fonction de la vitesse sur les routes. Concernant la propagation radio, GrooveNet
modélise la zone de couverture par un cercle autour de chaque véhicule simulé. D'un point de
vue réseau, le simulateur intègre une variété de modèles de couches liaison de données et
physique et plusieurs modèles de diffusion de messages dont le broadcasting périodique par
chaque véhicule des messages sur leur position, diffusion avec priorité des messages
d'urgence et d'avertissement. L'architecture modulaire de GrooveNet permet l'ajout de
nouveaux modèles de réseau, de sécurité, d'applications, et d'interactions inter-véhicules.
17
http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.91.5381&rep=rep1&type=pdf
Chapitre n°3 Simulation et VANET
Analyse des protocoles de routage dans les réseaux VANET Page 45
NCTUns (National Chiao Tung University Network Simulator)18
: est un
simulateur et émulateur réseau extensible à haute fidélité capable de simuler différents
protocoles utilisés dans les réseaux IP filaires et sans fil. Initialement, NCTUns a été
développé comme un simulateur réseau, mais la version la plus récente intègre des
fonctionnalités pour la modélisation du mouvement des véhicules, tels que les modèles de car
following, le changement de voies, le dépassement et la gestion des intersections. Une grande
variété de cartes routières peut être conçue en utilisant différents types de segments de route
pris en charge par le simulateur (routes à sens unique, routes à voies multiples, les carrefours,
etc.). Le principal inconvénient de NCTUns est l'incorporation du code implémentant le
modèle de mobilité dans le code du simulateur réseau rendant ainsi toute extension du modèle
de mobilité difficile. L'effet des obstacles sur la propagation des signaux est simulé dans
NCTUns simplement en diminuant ou en annulant la valeur de la puissance reçue si un
obstacle existe entre les véhicules communicants.
TraNS (Tra c et Simulation Environment Network) 19
: est quasiment le
premier simulateur des VANET. C'est le premier travail qui combine un simulateur réseau,
ns-2, avec un simulateur de mobilité des véhicules, SUMO. TraNs peut fonctionner selon les
deux modes, centré-réseau et centré-applications. En mode centré-réseau, il n'y a pas de
commentaires fournis par ns-2 à SUMO, des traces de mobilité pré-calculées sont extraites de
SUMO et transmises à ns-2. Dans le mode centré-applications, la rétroaction entre ns-2 et
SUMO est assurée par une interface appelée TraCI. Dans ce mode, les deux simulateurs
(SUMO et ns-2) fonctionnent simultanément. TraCI réalise le lien entre ns-2 et SUMO en
convertissant les commandes en provenance de ns-2 en des primitives de mobilité telles que
l'arrêt, le changement de voies, le changement de vitesse qui sont envoyées à SUMO.
Cependant, l'inconvénient de TraNs est que SUMO est incapable de modifier les trajectoires
des voitures lorsque des obstacles imprévus apparaissent dans l'environnement tel qu'un
accident de circulation par exemple. De plus, en se basant sur ns-2, TraNs utilise des modèles
de propagation radio irréalistes qui ne sont pas spécifiques aux réseaux véhiculaires.
18
http ://nsl.csie.nctu.edu.tw/nctuns.html 19
http ://lca.ep_.ch/projects/trans

Chapitre n°3 Simulation et VANET
Analyse des protocoles de routage dans les réseaux VANET Page 46
AutoMesh [Vuyyuru at al, 2006] est une structure de simulation réaliste pour
les VANET composée d'un ensemble de modules qui contrôlent toutes les parties d'une
simulation. Cette structure comprend un module simulateur réseau, un module simulateur de
mobilité et un module pour la simulation de la propagation des ondes radio. Tous les modules
sont reliés entre eux par un échange d'informations afin que toute modification apportée à l'un
influence les autres. Pour la simulation des protocoles réseaux, AutoMesh est développé pour
utiliser le simulateur réseau ns-2 ou QualNet. AutoMesh contrôle l'exécution du simulateur
réseau par des fichiers de configuration et de contrôle définis par l'utilisateur de telle sorte à le
synchroniser avec le modèle de mobilité. Le module simulateur de mobilité comprend un
générateur de source-destination aléatoire, un mécanisme basique de gestion des intersections
et le modèle IDM pour la simulation du comportement des conducteurs. AutoMesh peut
interpréter les communications entre nouds du niveau réseau et changer le comportement des
conducteurs en fonction. Le module propagation radio de AutoMesh permet d'avoir une
description détaillée en 3D des objets de l'environnement à partir des données géographiques.
La description peut être utilisée pour l'intégration à AutoMesh d'un modèle de propagation
radio qui tienne compte des effets des obstacles.
NS2 : Network Simulator est un simulateur à événements discrets orienté objet,
écrit en C++ avec une interface qui utilise le langage OTcl (Object Tool Command Langage).
A travers ces deux langages il est possible de modéliser tout type de réseau et de décrire les
conditions de simulation : La topologie réseau, le type du trafic qui circule, les protocoles
utilisés, les communications qui ont lieu….etc. Le langage C++ sert à décrire le
fonctionnement interne des composants de la simulation. Pour reprendre la terminologie
objet, il sert à définir les classes. Quant au langage OTcl, il fournit un moyen flexible et
puissant de contrôle de la simulation comme le déclenchement d'événements, la configuration
du réseau, la collecte de statistiques, etc.
Veines (Vehicles in Network Simulator) est une open source Inter-Véhicules
communication (IVC) simulation framework composé d'un simulateur de réseau basé sur les
événements et un modèle de micro-trafic de la route.

Chapitre n°3 Simulation et VANET
Analyse des protocoles de routage dans les réseaux VANET Page 47
4.1 Comparaison entre les simulateurs :
Simulateur OMNeT++ NS-2
Flexibilité OMNeT++ est un simulateur flexible et
générique, il peut simuler n'importe quel
type de réseau.
Par exemple, il peut être utilisé pour
simuler les files d'attente, les systèmes
multiprocesseurs, les architectures de
matérielles (routeurs, les commutateurs
optiques, les serveurs etc.).
Plusieurs modèlent sont utilisables pour
les différents domaines (INET Fw,
Mobility Fw, OverSim, NesCT,
MACSimulator, etc.)
NS-2 a été conçu comme un
(TCP/IP) simulateur de réseau, et il
est difficile de simuler les choses
autre que paquet-commutant les
réseaux et les protocoles.
Mobilité OMNeT++ fournit plusieurs modes de
mobilités comme le Random Waypoint
Mobility Model, le Linear Mobility
Model, le Constant Speed Mobility
Model, le Basic Mobility Model, etc.
NS-2 ne fournit que le Random
Waypoint Mobility Model et le
Trajectory Based Mobility Model, ce
qui rend difficile de présenter une
mobilité linéaire.
La gestion de
modèle
Le OMNeT++ noyau de simulation est
une bibliothèque de classe, c'est à dire,
les modèles dans OMNET++ sont
indépendants du noyau de simulation.
Les chercheurs ont écrit leurs
composants (les modules simples) contre
noyau de simulation API du simulateur.
Dans les NS-2, la limite entre le
coeur de la simulation et les modèles
sont barbouillés d'encre, sans un
clair API.
Support pour Les
Modèles
Hiérarchiques
La structure hiérarchique dans
OMNET++ facilite la complexité des
méthodes.
Dans NS-2, les modèles sont plats, la
création d'un sous réseau ou
l'exécution d'un protocole complexe
(composition de plusieurs unités
indépendantes) n'est pas possible.
Support de traçage OMNeT++ peut montrer les
transmissions de paquets pendant une
simulation.
Pas de traçage.
Documentation La documentation est très bonne et
contient tous ce qu'on a besoin pour la
Bonne documentation.

Chapitre n°3 Simulation et VANET
Analyse des protocoles de routage dans les réseaux VANET Page 48
simulation (définitions, méthodes,
modules, implémentations, etc).
Habileté à courir
les grands réseaux
OMNeT++ peuvent simuler une grande
topologie de réseaux.
Les NS-2 ont beaucoup de
problèmes dans la simulation des
grandes topologies de réseaux.
Tableau 3 : Comparaison entre les simulateurs

Chapitre n°3 Simulation et VANET
Analyse des protocoles de routage dans les réseaux VANET Page 49
II. Conclusion
Dans ces chapitres, nous avons décrit la simulation dans Manet et VANET. Ensuite,
nous avons présenté un modèle de mobilité et un modèle de propagation radio pour réseaux
de véhicules. Aussi, nous présenté les différentes simulateurs dans les réseaux VANET.
Dans le dernier chapitre, nous nous sommes appuyés sur des modèles qui reproduisent
le plus fidèlement possible les mécanismes et comportement des composantes d'un réseau
véhiculaire. Tant au niveau simulation des protocoles réseaux en utilisant la version de
OMNET++ qui implémente les modèles les plus réalistes, qu'au niveau mobilité et
propagation radio ainsi que le problème de routage en intégrant à OMNET++ plusieurs
modèles de protocoles.
Chapitre n°4 Expérimentation
Analyse des protocoles de routage dans les réseaux VANET Page 51
I. Introduction
L’objectif principal de notre application est l’étude des performances des protocoles
de routage appliqués aux réseaux VANETs par la simulation dans l’environnement d’une
ville.
Dans notre cas d’étude, les tests à effectuer sont nombreux sur les protocoles de
routage AODV, DSR, OLSR, DSDV et GPSR. Ces protocoles sont implémentés sous
VEINES qui est composé de deux simulateurs distincts, OMNeT++ pour la simulation de
réseau et SUMO pour la simulation du trafic routier et ils ont déjà fait leurs preuves dans des
études précédentes, c’est pour cela que notre choix s’est porté dessus.
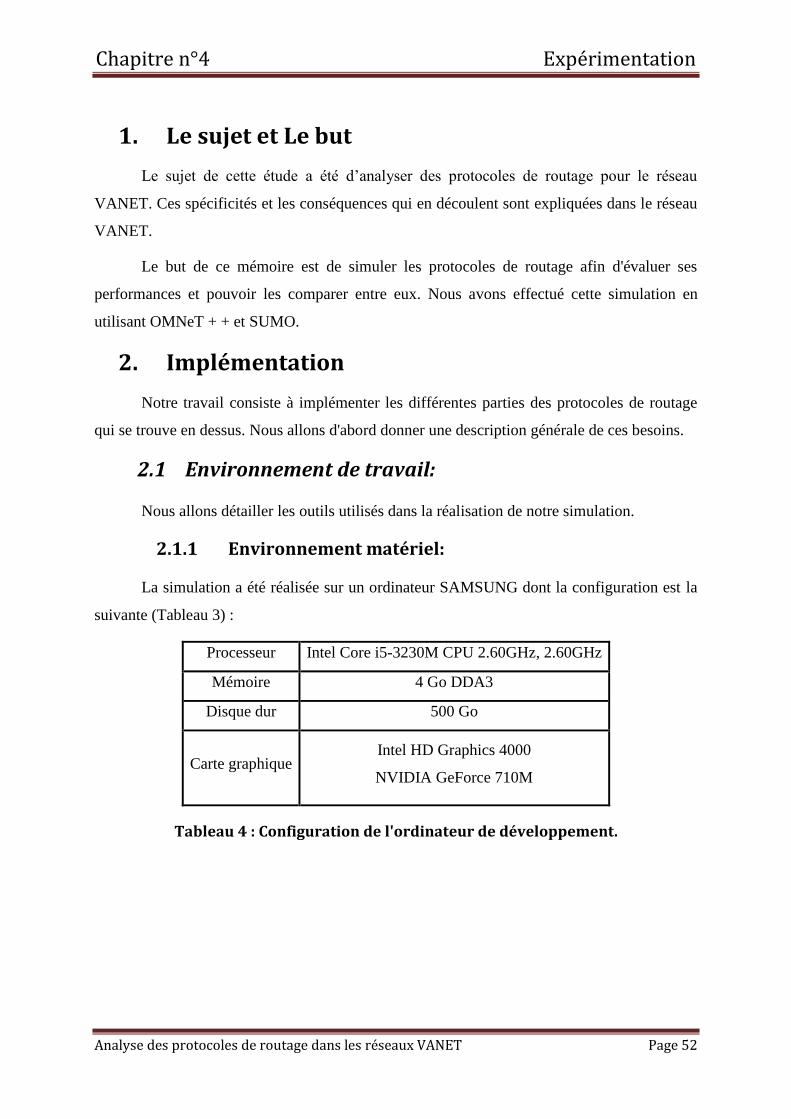
Chapitre n°4 Expérimentation
Analyse des protocoles de routage dans les réseaux VANET Page 52
1. Le sujet et Le but
Le sujet de cette étude a été d’analyser des protocoles de routage pour le réseau
VANET. Ces spécificités et les conséquences qui en découlent sont expliquées dans le réseau
VANET.
Le but de ce mémoire est de simuler les protocoles de routage afin d'évaluer ses
performances et pouvoir les comparer entre eux. Nous avons effectué cette simulation en
utilisant OMNeT + + et SUMO.
2. Implémentation
Notre travail consiste à implémenter les différentes parties des protocoles de routage
qui se trouve en dessus. Nous allons d'abord donner une description générale de ces besoins.
2.1 Environnement de travail:
Nous allons détailler les outils utilisés dans la réalisation de notre simulation.
2.1.1 Environnement matériel:
La simulation a été réalisée sur un ordinateur SAMSUNG dont la configuration est la
suivante (Tableau 3) :
Processeur Intel Core i5-3230M CPU 2.60GHz, 2.60GHz
Mémoire 4 Go DDA3
Disque dur 500 Go
Carte graphique Intel HD Graphics 4000
NVIDIA GeForce 710M
Tableau 4 : Configuration de l'ordinateur de développement.

Chapitre n°4 Expérimentation
Analyse des protocoles de routage dans les réseaux VANET Page 53
2.1.2 Environnement logiciel:
Notre simulation a été réalisée dans l'environnement logiciel suivant :
Système d'exploitation : Microsoft Windows 8.
Le simulateur OMNet++ 4.4 : C'est un simulateur Open Source des
réseaux de communication supportant des modèles de mobilités. Il est
basé sur C++ et réalise des simulations discrètes.
Le simulateur SUMO 0.19.0 : C’est un simulateur Open Source, portable,
microscopique et continu de la circulation routière. Il est conçu pour gérer
de grands réseaux routiers.
MinGW "Minimaliste GNU pour Windows", est un environnement de
développement minimaliste pour les applications natives de Microsoft
Windows.
Outils de conception.
le Simulateur SUMO (Simulation de la mobilité urbaine) : est une source ouverte,
microscopique, multi-modal. Elle permet de simuler la manière dont une demande de trafic
donnée qui se compose de véhicules individuels se déplaçant à travers un réseau routier
donné. La simulation permet de traiter un grand nombre de sujets de gestion du trafic. Il est
purement microscopique : chaque véhicule est modélisé de manière explicite, a un tracé
propre, et se déplace individuellement à travers le réseau.
le Simulateur OMNET++ : est un environnement de simulation à événements discrets.
Son domaine d'application principal est la simulation de réseaux de communication. Mais en
raison de son architecture générique et souple, est utilisé avec succès dans d'autres domaines
comme la simulation de systèmes informatiques complexes, les files d'attente des réseaux ou
des architectures matérielles.
OMNeT++ fournit une architecture de composants pour les modèles. Les composants
(modules) sont programmés en C++, puis assemblés en gros composants et des modèles en
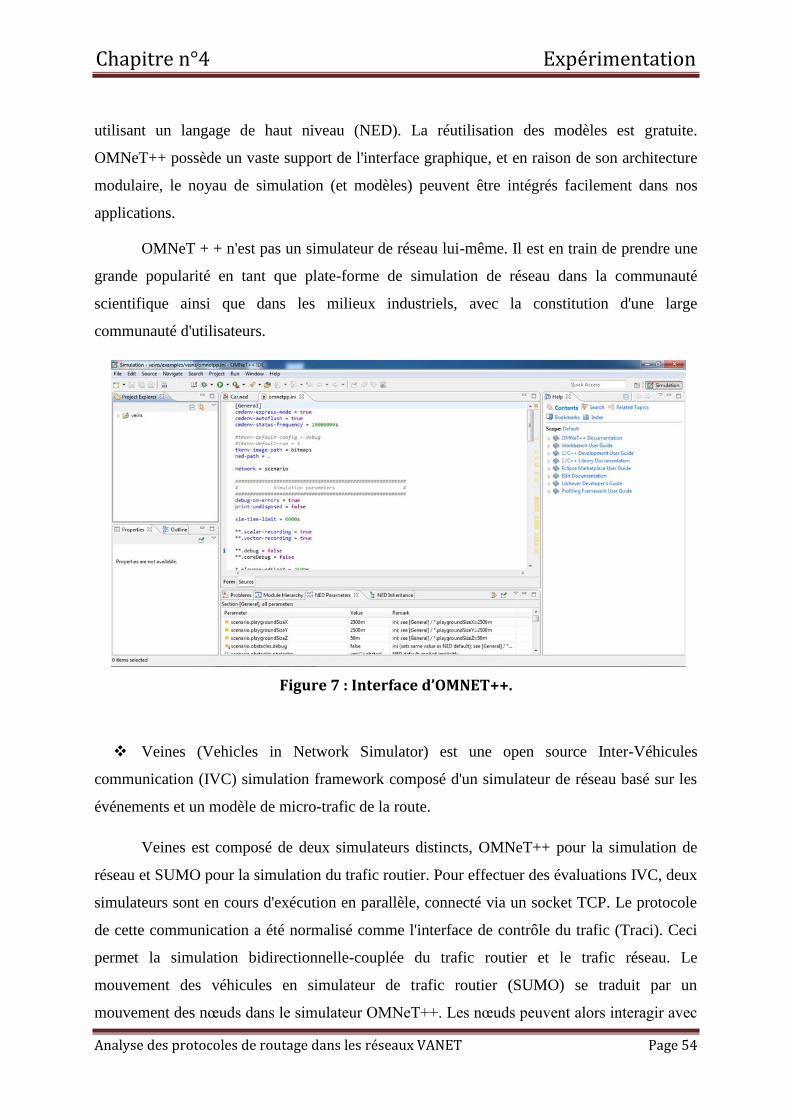
Chapitre n°4 Expérimentation
Analyse des protocoles de routage dans les réseaux VANET Page 54
utilisant un langage de haut niveau (NED). La réutilisation des modèles est gratuite.
OMNeT++ possède un vaste support de l'interface graphique, et en raison de son architecture
modulaire, le noyau de simulation (et modèles) peuvent être intégrés facilement dans nos
applications.
OMNeT + + n'est pas un simulateur de réseau lui-même. Il est en train de prendre une
grande popularité en tant que plate-forme de simulation de réseau dans la communauté
scientifique ainsi que dans les milieux industriels, avec la constitution d'une large
communauté d'utilisateurs.
Figure 7 : Interface d’OMNET++.
Veines (Vehicles in Network Simulator) est une open source Inter-Véhicules
communication (IVC) simulation framework composé d'un simulateur de réseau basé sur les
événements et un modèle de micro-trafic de la route.
Veines est composé de deux simulateurs distincts, OMNeT++ pour la simulation de
réseau et SUMO pour la simulation du trafic routier. Pour effectuer des évaluations IVC, deux
simulateurs sont en cours d'exécution en parallèle, connecté via un socket TCP. Le protocole
de cette communication a été normalisé comme l'interface de contrôle du trafic (Traci). Ceci
permet la simulation bidirectionnelle-couplée du trafic routier et le trafic réseau. Le
mouvement des véhicules en simulateur de trafic routier (SUMO) se traduit par un
mouvement des nœuds dans le simulateur OMNeT++. Les nœuds peuvent alors interagir avec
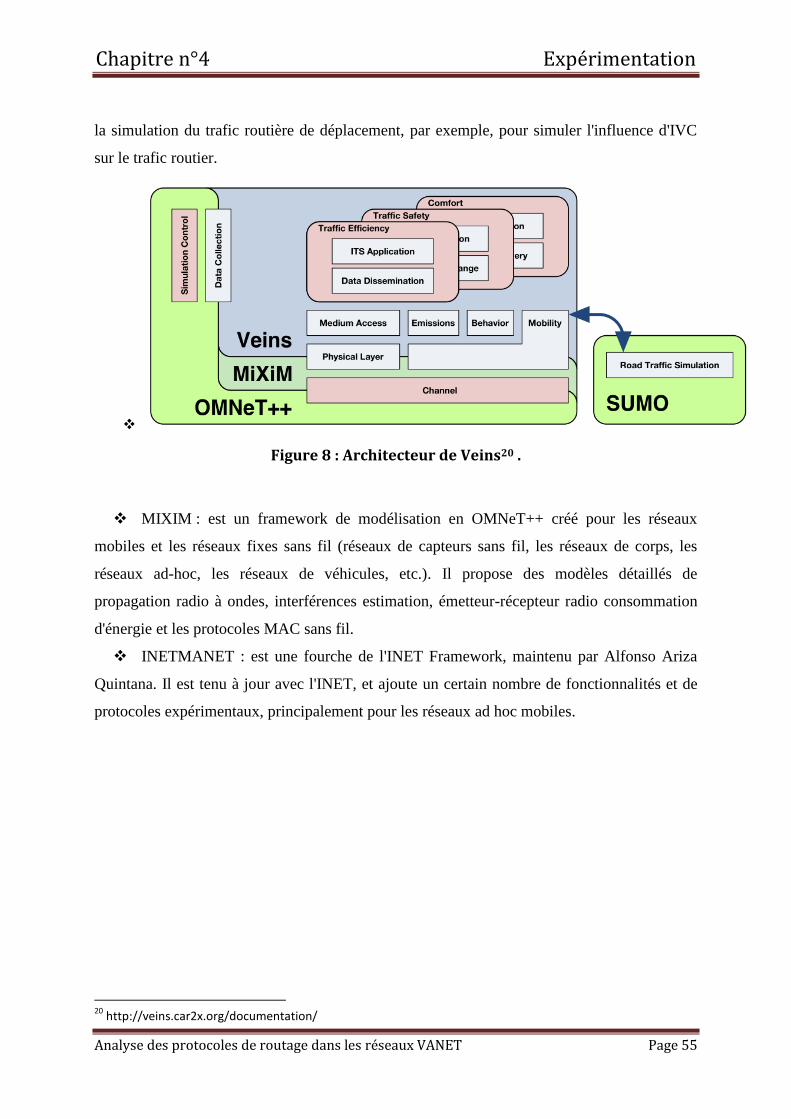
Chapitre n°4 Expérimentation
Analyse des protocoles de routage dans les réseaux VANET Page 55
la simulation du trafic routière de déplacement, par exemple, pour simuler l'influence d'IVC
sur le trafic routier.
Figure 8 : Architecteur de Veins20 .
MIXIM : est un framework de modélisation en OMNeT++ créé pour les réseaux
mobiles et les réseaux fixes sans fil (réseaux de capteurs sans fil, les réseaux de corps, les
réseaux ad-hoc, les réseaux de véhicules, etc.). Il propose des modèles détaillés de
propagation radio à ondes, interférences estimation, émetteur-récepteur radio consommation
d'énergie et les protocoles MAC sans fil.
INETMANET : est une fourche de l'INET Framework, maintenu par Alfonso Ariza
Quintana. Il est tenu à jour avec l'INET, et ajoute un certain nombre de fonctionnalités et de
protocoles expérimentaux, principalement pour les réseaux ad hoc mobiles.
20
http://veins.car2x.org/documentation/

Chapitre n°4 Expérimentation
Analyse des protocoles de routage dans les réseaux VANET Page 56
3. Préparation de l’Environnement
d’Implémentation :
La préparation de l’environnement d’implémentation consiste à :
1- installer le simulateur de réseau OMNET ++ sous le système d’exploitation
Windows Nous avons utilisé la version OMNET++ 4.4. L’installation s’effectue en étapes :
-Télécharger le code source OMNeT++ de http://omnetpp.org. Assurez-vous que vous
sélectionnez l'archive spécifique à Windows, nommé omnetpp-4.4-src-windows.zip.
- Extraire le fichier zip et sélectionnez Extraire tout dans le menu et On choisit :
mingwenv.cmd
Entrez le code:
./configure
Suivie par le code :
make
Et en fin :
omnetpp
2- Télécharger le code source SUMO 0.19.0 à partir du lien
http://sourceforge.net/projects/sumo/files/sumo/version%200.19.0/, et extraire le fichier zip.
3- Télécharger le code source Veins 2.2 à partir du lien
http://veins.car2x.org/download/veins-2.2.zip , et Extraire le fichier zip.
4- Télécharger le code source inetmanet-2.0 à partir du lien
http://github.com/aarizaq/inetmanet-2.0, et extraire le fichier zip.
5- importer les deux fichiers VEINS et INETMANET dans le simulateur OMNET++.
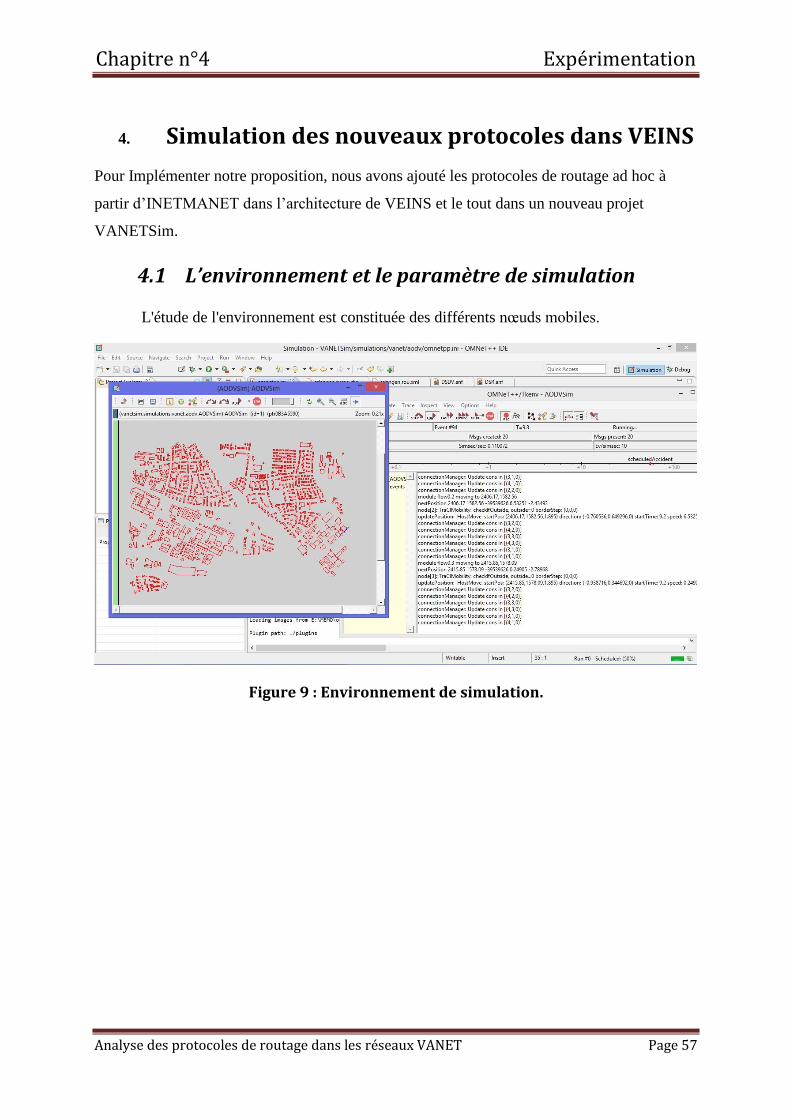
Chapitre n°4 Expérimentation
Analyse des protocoles de routage dans les réseaux VANET Page 57
4. Simulation des nouveaux protocoles dans VEINS
Pour Implémenter notre proposition, nous avons ajouté les protocoles de routage ad hoc à
partir d’INETMANET dans l’architecture de VEINS et le tout dans un nouveau projet
VANETSim.
4.1 L’environnement et le paramètre de simulation
L'étude de l'environnement est constituée des différents nœuds mobiles.
Figure 9 : Environnement de simulation.
Chapitre n°4 Expérimentation
Analyse des protocoles de routage dans les réseaux VANET Page 58
Avant de commencer les tests, nous allons présenter les scénarios de mouvement que
nous avons utilisés :
Tableau 5 : Scénarios de mouvement utilisés.
Paramètre Valeur Paramètre Valeur
Simulateur OMNET++ 4.4
Protocoles AODV, DSR, OLSR, DSDV, GPSR
Temps de simulation 100s, 300s, 600s
Nombre des nœuds 20, 60, 120
Période entre nœuds 3s
Terrain de simulation X=3000m, Y=3000m, Z=50m
MAC 1609_4
Physical Layer 802.11p
Type de Mobilité TraCIDemo11P
Zone de Trafic Urbain
véhicule max speed 14 m/s
Véhicule accélération 2.6 m/s^2
Véhicule décélération 4.5 m/s^2
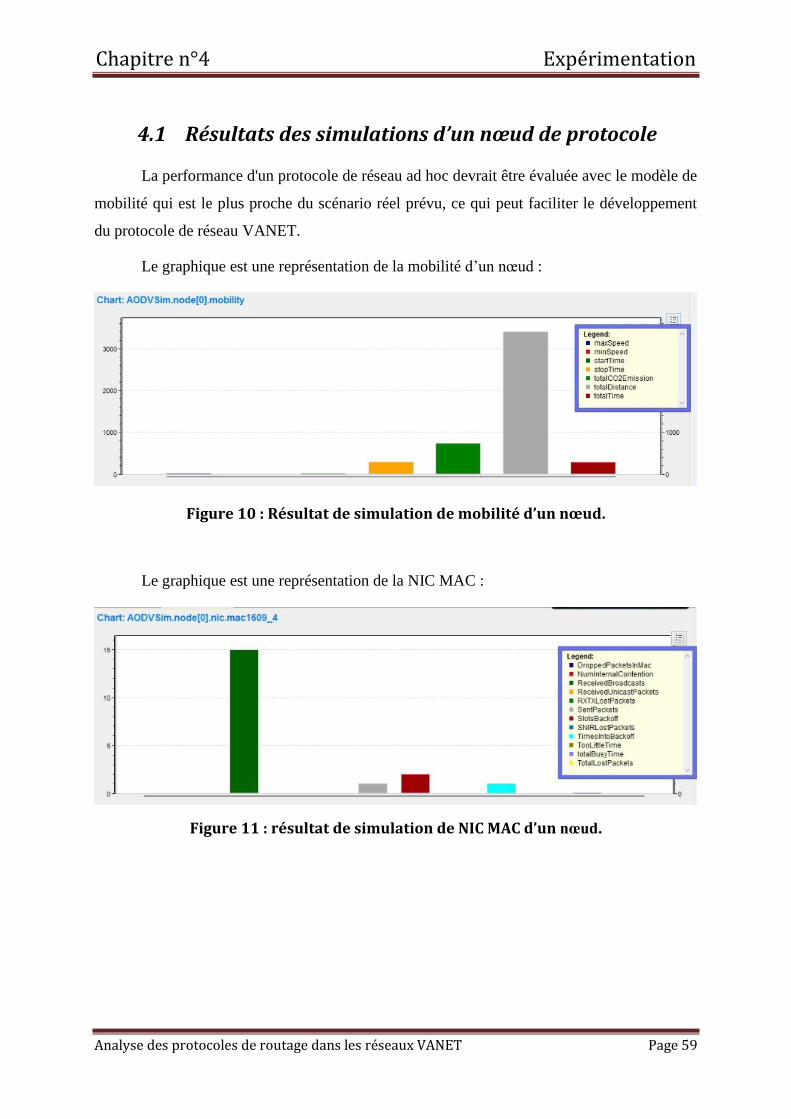
Chapitre n°4 Expérimentation
Analyse des protocoles de routage dans les réseaux VANET Page 59
4.1 Résultats des simulations d’un nœud de protocole
La performance d'un protocole de réseau ad hoc devrait être évaluée avec le modèle de
mobilité qui est le plus proche du scénario réel prévu, ce qui peut faciliter le développement
du protocole de réseau VANET.
Le graphique est une représentation de la mobilité d’un nœud :
Figure 10 : Résultat de simulation de mobilité d’un nœud.
Le graphique est une représentation de la NIC MAC :
Figure 11 : résultat de simulation de NIC MAC d’un nœud.

Chapitre n°4 Expérimentation
Analyse des protocoles de routage dans les réseaux VANET Page 60
Les couleurs représentent les différentes informations dans les graphiques suivant.
Chaque couleur exprime :
Figure 12 : La représentation des couleurs dans les diagrammes.
4.1.1 Diagramme des différents protocoles de 20 nœuds
a. AODV :
Figure 13 : Diagramme de protocole AODV.
b. DSDV :
Figure 14 : Diagramme de protocole DSDV.
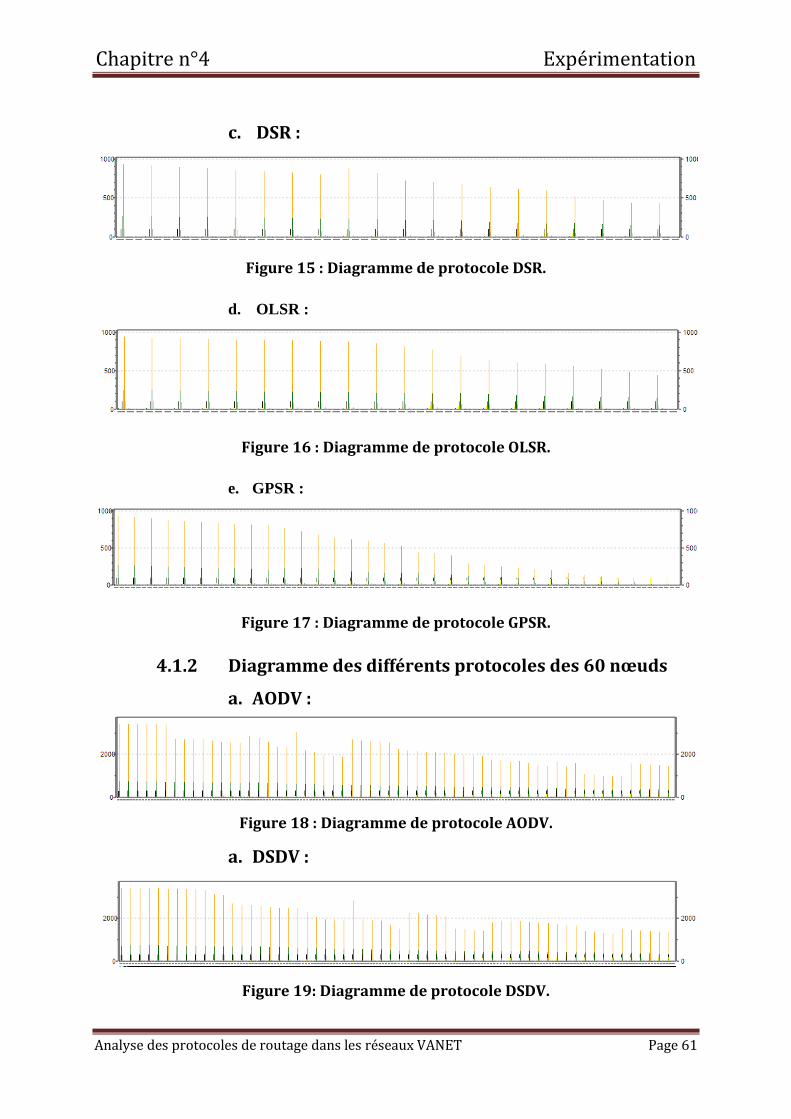
Chapitre n°4 Expérimentation
Analyse des protocoles de routage dans les réseaux VANET Page 61
c. DSR :
Figure 15 : Diagramme de protocole DSR.
d. OLSR :
Figure 16 : Diagramme de protocole OLSR.
e. GPSR :
Figure 17 : Diagramme de protocole GPSR.
4.1.2 Diagramme des différents protocoles des 60 nœuds
a. AODV :
Figure 18 : Diagramme de protocole AODV.
a. DSDV :
Figure 19: Diagramme de protocole DSDV.

Chapitre n°4 Expérimentation
Analyse des protocoles de routage dans les réseaux VANET Page 62
b. DSR :
Figure 20 : Diagramme de protocole DSR.
c. OLSR :
Figure 21: Diagramme de protocole OLSR.
d. GPSR :
Figure 22: Diagramme de protocole GPSR.
4.1.3 Diagramme des différents protocoles des 60 nœuds
a. AODV :
Figure 23 : Diagramme de protocole AODV.
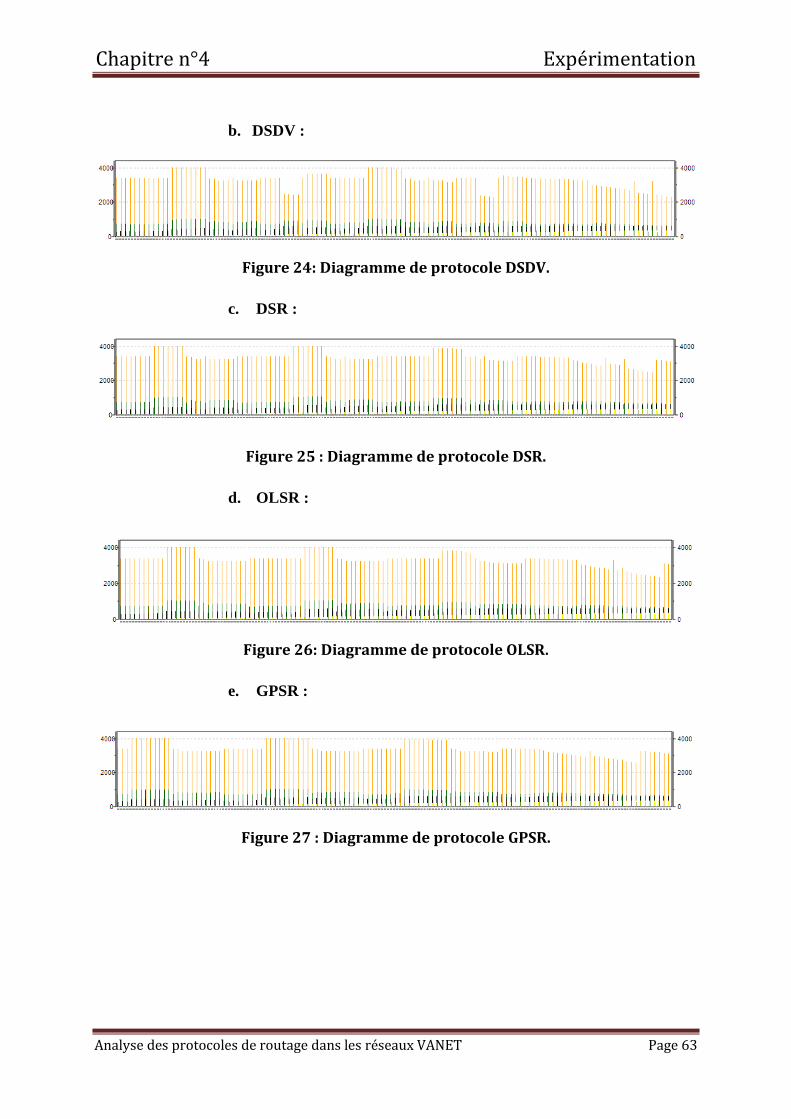
Chapitre n°4 Expérimentation
Analyse des protocoles de routage dans les réseaux VANET Page 63
b. DSDV :
Figure 24: Diagramme de protocole DSDV.
c. DSR :
Figure 25 : Diagramme de protocole DSR.
d. OLSR :
Figure 26: Diagramme de protocole OLSR.
e. GPSR :
Figure 27 : Diagramme de protocole GPSR.

Chapitre n°4 Expérimentation
Analyse des protocoles de routage dans les réseaux VANET Page 64
Respecter une différence dans ces graphes pour chaque protocole. Et également
le flux d'informations a été intense en raison de l'augmentation du nombre de nœuds.
Illustre le résultat des protocoles de routage GPSR, OLSR, DSR, DSDV et
AODV en fonction du nombre des nœuds et temps de simulation dans le réseau. Elle montre
que l’over-head du routage augmente de façon monotone pour les protocoles quand le nombre
de nœuds augmente.
A travers les simulations que nous avons faites, nous avons remarqué que le
protocole GPSR est plus d'efficace et plus rapide contrairement au reste du protocole.

Chapitre n°4 Expérimentation
Analyse des protocoles de routage dans les réseaux VANET Page 65
II. Conclusion
Dans ce chapitre nous avons testé quelque protocoles de routage dans le réseau
véhiculaire et qui nous ont révélé que l’over-head du routage augmente de façon monotone
pour les protocoles quand le nombre des nœuds augmente et que le protocole de routage basé
sur la géographique GPSR, s’est avéré plus fiable en terme de résultat de routage et temps de
réponse.
Bien que le protocole GPSR est plus fiable, le reste des protocoles de routage restent
avec une bonne performance et efficacité dans le réseau véhiculaire.
Conclusion générale et perspective
Analyse des protocoles de routage dans les réseaux VANET Page IX
Conclusion générale
Les systèmes de transport intelligents ne sont qu'à leurs balbutiements. A termes, le
développement des nouvelles technologies a favorisé une formidable évolution des réseaux
véhiculaires. Cette évolution vise à rendre les réseaux plus efficaces, plus fiables, plus sûrs
et plus écologiques aussi bien du point de vue de l’industrie automobile que des opérateurs de
réseaux et de services. Les réseaux véhiculaires sont en effet une extension des réseaux
MANET, permettant des échanges de données véhicules to véhicules ou encore véhicules et
infrastructure. Ils visent l'amélioration de la sécurité et l'efficacité du transport routier ainsi
que l’amélioration du confort de l’usager en offrant différents services tels que l’accès à
Internet, l’aide à la décision et le guidage.
Notre objectif a été d'analyser des mécanismes et des protocoles de communication
adaptés aux caractéristiques de ces réseaux de véhicules et aux applications ciblées.
Dans un premier temps, nous avons présenté les principaux concepts, spécificités et
challenges liés aux réseaux de véhicules. Nous avons également présenté la dynamique autour
de ce type de réseaux mais surtout d'assimiler les bases nécessaires qui permettent de
comprendre le fonctionnement et les mécanismes de bases des réseaux véhiculaires.
D’après les résultats qu’on a obtenus, on a déduit que le routage d’information joue un
rôle très important dans l’étude des performances d’un réseau Véhicules. C’est pourquoi, il
est nécessaire de choisir un protocole de routage pour que les résultats de la simulation soient
fiables.
Notre domaine d’étude est concentré à l’étude des performances des protocoles de
routage (OLSR et DSR ....ect) dans un réseau VANET. Pour atteindre notre objectif et obtenir
des résultats de simulation proches de la réalité, nous avons implémenté un modèle de
mobilité pour un réseau VANET et nous avons testé – dans ce réseau – le protocole AODV et
DSR de la classe des protocoles réactifs et le protocole OLSR et DSDV de la classe des
protocoles proactifs conçus pour un réseau Ad Hoc et le protocole GPSR de la classe
géographique.
Conclusion générale et perspective
Analyse des protocoles de routage dans les réseaux VANET Page X
Perspective
À travers ce mémoire, nous avons été en mesure de comprendre et assimiler les
différentes étapes par lesquelles un projet de recherche doit progresser. Nous avons également
acquis une expérience interne et un bon aperçu des méthodes de travail d'un chercheur, avec
une connaissance approfondie dans ce domaine.
Tout au long de ce travail, nous avons développé des techniques et des nouvelles idées
prometteuses qui vont nous permettre dans l'avenir proche d’élargir ce sujet de recherche et
s'attaquer aux problématiques plus pointues dans le domaine de réseau de VANET et
potentiellement autres réseaux de nature proche avec des solutions plus génériques.

Bibliographie
Analyse des protocoles de routage dans les réseaux VANETs Page XI
Bibliographie
[Ahizoune, 2011] Ahizoune Ahmed. (2011).Un protocole de diffusion des messages dans les
réseaux véhiculaires. Thèse de Maîtrise ès sciences (M. Sc.) de l’Université de
Montréal .Avril 2011. 88page.
[Ait Ali, 2012] Ait Ali Kahina. (2012). Modélisation Et Etude De Performances Dans Les
Réseaux VANET. Thèse de doctorat de l’Université de Technologie de
Belfort-Montbéliard. Mardi 16 Octobre 2012.
[Amadou,2011 ] Amadou Adama Ba. (2011). Protocole de routage basé sur des passerelles
mobiles pour un accès Internet dans les réseaux véhiculaires. Thèse de
doctorat de l'université de Montréal. Avril, 2011.
[Amit et al, 2004] Amit Kumar Saha et David B.Johnson.(2004). Modeling mobility for
vehicular ad hoc Networks . Procedings f the 1st ACM international workshop on
vehicular ad hoc networks. Internatinal conference on mobile Computing and Networking,
Philadelphia, USA . 2004.
[Badis et al, 2004] Badis Hakim, Gawedzki Ignacy et Al Agha Khaldoun. (2004). QoS Routing
in Ad Hoc Networks Using QOLSR With No Need of Explicit Reservation.
September 2004.
[Bür, 2014] Bür Kaan.(2014).mobile ad hoc networks (MANET).
http://www.eit.lth.se/index.php?uhpuid=dhs.kbr&hpuid=741 .
[Burgod, 2009] Burgod Céline.(2009).Contribution à la sécurisation du routage dans les réseaux
ad hoc. These De Doctorat De L'universite De Limoges Ecole Doctorale.
Chapitre 1 pp 7-17. 125pages.
[Caterina, 2008] Caterina Manes Gallo Maria .(2008).Communication Homme Machine et
Recherche documentaire : Le partage du sens .Communication Homme
Machine et Recherche documentaire : Le partage du sens - Articles
ducongrès 2008 dela SFSIC. EA 4195 TELEM - Université de Bordeaux.
[Chaidet et al, 2003] Chaidet Claude , Guérin Lassous Isabelle . Routage QoS et réseaux ad-
hoc : de l’état de lien à l’état de nœud» . Institut National De Recherche En
Informatique Et En Automatique . Janvier 2003.
[Charles et al, 1994] Charles E.Perkins et Pravin Bhagwat.(1994). Highly Dynamic Destination-
Sequenced Distance-Vector Routing (DSDV) for Mobile Computers. In
Proceedings of the Conference on Communications Architectures, Protocols and

Bibliographie
Analyse des protocoles de routage dans les réseaux VANETs Page XII
Applications (SIGCOMM’94), volume 24. October 1994. Pp 234–244.
[Charles et al, 2003] Charles E. Perkins, Elizabeth M. Belding-Royer et Samir Ranjan
Das.(2003). Ad hoc On-Demand Distance Vector (AODV) Routing. RFC
k3561 (Experimental). Juillet 2003.
[Choffnes et al, 2005] D.R. Choffnes et F.E. Bustamante. An integrated mobility and trafic
model for vehicular wireless networks. Proc. of the 2nd ACM international
workshop on Vehicular ad hoc networks. 2005. Pp. 69-78
[Clausen et al, 2003] Clausen Thomas et Jacquet Philippe.(2003).Optimized Link State
Routing(OLSR) . RFC 3626. October 2003.
[Corson et al, 1999] Corson Scott, Macker Joseph.(1999) .Mobile Ad hoc Networking
(MANET) : Routing Protocol Performance Issues and Evaluation
Considerations. Request for Comments (RFC) 2501, IETF . January 1999.
[Darwin, 2013] Darwin fabian astudillo salinas .(2013). Téléchargement de contenus les réseaux
véhiculaires. Thèse de doctorat de l'université de Toulouse .143 Page.
[Ducourthial et al, 2007] Ducourthial, B., Khaled, Y. e Shawky M. .(2007). Conditional
transmissions: Performance study of a new communication in VANET.
IEEE Transactions on Vehicular Technology, vol. 56, no. 6. November 2007.
[Fiore et al., 2007] M. Fiore, J. Härri, F. Filali, et C. Bonnet. (2007). Vehicular Mobility
Simulation for VANETs. Proc. of the 40th IEEE Annual Simulation Symposium,
ANSS'07. Mars 2007. Pp. 301-309.
[Florent et all, 2009] Florent Kaisser , Colette Johnen , Véronique Vèque.(2009). Vers une
modélisation robuste des protocoles de routage pour réseaux de véhicules
Manuscrit auteur. publié dans "CFIP'2009 inria-00419460, version 1 . 23 Sep
2009.
[Granelli et al, 2006] F. Granelli, G. Boato et D. Kliazovich.(2006) . MORA: a Movement-
Based Routing Algorithm for Vehicle Ad Hoc Networks. in Procedings of 1st
IEEE Workshop on Automotive Networking and Applications (AutoNet 2006), San
Francisco, USA. December 2006.
[Grau et al, 2009] Grau Gloria Pastor, Pusceddu Davide, Rea Susan, Brickley Olivia, Koubek
Martin et Pesch Dirk.. Characterisation of IEEE802.11p Radio Channel for
Vehicle-2-Vehicle Communicationsusing the CVIS Platform. in Internal
Report Centre for Adaptive Wireless Systems Cork Institute of Technology,
September 2009.

Bibliographie
Analyse des protocoles de routage dans les réseaux VANETs Page XIII
[Guizani, 2012] Guizani Badreddine.(2012). Algorithme De Clusterisation Et Protocoles De
Routage Dans Les Réseaux Ad Hoc. Thèse de doctorat de l'université de
Technologie de Belfort-Montbéliard Tunisie . 04 Avril 2012 . 176. pp 85-115.
[Hannes, 2008] Hannes Hartenstein, Kenneth P. Laberteaux. (2008). A Tutorial Survey on
Vehicular Ad Hoc Networks. IEEE Communications Magazine. June 2008.
pp.164-171.
[Härri et al., 2009] J. Härri, F. Filali et C. Bonnet. Mobility models for vehicular ad hoc
networks: a survey and taxonomy. in IEEE Communications Surveys and
Tutorials,Vol 11 N_4, ISSN : 1553-877X. Décembre 2009. Pp 19-41.
[Hauspie, 2005] Hauspie Michaël. (2005). Contributions à l'étude des gestionnaires de services
distribués dans les réseaux ad hoc. Thèse de doctorat de l’Université des
Sciences et Technologies de Lille. 14/01/2005. 108 Pages.
[IEEE802.11p, 2006] IEEE P802.11pTM/D4.0 Draft Standard for Information Technology -
Telecommunications and information exchange between systems - Local and
metropolitan area networks - Specific requirements - Part 11 : Wireless LAN
Medium Access Control (MAC) and Physical Layer (PHY) specications
Amendment 8 : Wireless Access in Vehicular Environments. 2006.
[Jerbi, 2008] Jerbi Moez.(2008). Protocoles pour les communications dans les reseaux de
vehicules en environnement urbain : Routage et GeoCast bases sur les
intersections. Thèse de doctorat de L'universite D'evry Val D'essonne . 06
Novembre 2008.
[Johnson et al, 2007] Johnson B.David , A. Maltz David et Broch Josh. (2007).The Dynamic
Source Routing Protocol (DSR) for Mobile Ad Hoc Networks for IPv4.
RFC 4728 (Experimental). février 2007.
[Khaleda et all, 2009] Khaleda Yacine, Manabu Tsukadaa, José Santab, JinHyeock Choia and
Thierry Ernsta .( 2009). A usage oriented analysis of vehicular networks:
from technologies to applications. journal of communications, vol. 4, no. 5. JUNE
2009. Pp 357-368.
[korichi, 2009]. Korichi Ahmed. (2009). TCAO et Simulation : Vers une plate-forme d’analyse
et de conception de systèmes de production orientée groupe. Thèse de
Doctorat de L’Université de Batna. 15 Janvier 2009.
[Korkmaz et al, 2006] Korkmaz Gokhan, Ekici Eylem et Ozguner Fusun.(2006). An Efficient
Fully Ad-Hoc Multi-Hop Broadcast Protocol for Inter-Vehicular
Bibliographie
Analyse des protocoles de routage dans les réseaux VANETs Page XIV
communication Systems. Department of Electrical and Computer
Engineering,The Ohio State University. 2006.
[Mahajan et al, 2006] Mahajan Atulya, Potnis Niranjan, Gopalan Kartik, et Wang An-I A.
(2006). Urban mobility models for vanets. In Proceedings of the 2nd IEEE
International Workshop on Next. Generation Wireless Networks. December 2006.
[Maihöfer , 2004] Maihöfer. A survey of geocast routing protocols. IEEE Communications
Surveys & Tutorials, vol. 6, No 2. 2004.
[Mangharam et al, 2006] R. Mangharam, D. Weller, R. Rajkumar, P. Mudalige et F.Bai.
GrooveNet : A Hybrid Simulator for Vehicle-to-Vehicle Networks Second
International Workshop on Vehicle-to-Vehicle Communications
(V2VCOM). Jul 2006.
[Menouar, 2008] Menouar Hamid. (2008).Prédiction de Mouvement pour le Routage et le
Contrôle d'Accès au Canal dans des Réseaux Sans-Fil Véhiculaires. Thèse de
doctorat de l'Ecole Nationale Supérieur des Télécommunications de Paris.
22/02/2008.
[Meraihi , 2011] Meraihi Yassine. (2011). Routage Dans Les Reseaux Vehiculaires (Vanet) Cas
D’un Environnement Type Ville .Mémoire de Magister En Genie Electrique
Universite M’Hamed Bougara – Boumerdes .2011.
[Mo et al, 2006] Z. Mo, H. Zhu, K. Makki et N. Pissinou. (2006) . MURU: A Multi-Hop
Routing Protocol for Urban Vehicular Ad Hoc Networks. MobiQuitous .2006.
[Niu et al, 2008] Niu Zeyun, Yao Wenbing, Ni Qiang et Song Yonghua. (2008). DeReQ: A
QoS Routing Algorithm for Multimedia Communications in Vehicular Ad
Hoc Networks . Department of Electronic and Computer Engineering
Brunel University, UK. 2008.
[Qabajeh, 2009] Qabajeh L. K, Kiah L. M, and Qabajeh M. M.(2009).A qualitative comparison
of position-based routing protocols for ad-Hoc networks. International Journal
of Computer Science and Network Security, vol. 9, no. 2. pp. 131-140, Feb. 2009.
[Raney et al., 2002] Baumann Raney, A. Voellmy, N. Cetin, M. Vrtic and K et Nagel.Rainer .
Towards a microscopic trafic simulation of all of switzerland. In International
Conference on Computational Science (1). 2002. Pp 371-380 .
[Santa et al, 2008] Santa J, Gómez-Skarmeta A. F et Sánchez-Artigas M. (2008). Architecture
and evaluation of a unified V2V and V2I communication system based on
cellular networks. Computer Communications, vol. 31, no. 12. Jul 2008. Pp. 2850-

Bibliographie
Analyse des protocoles de routage dans les réseaux VANETs Page XV
2861.
[Schroth et al, 2005] Q. Sun, S. Y. Tan et K. C. Teh. Analytical formulae for path loss
prediction in urban street grid microcellular environments. IEEE Transactions
on Vehicular Technology, vol. 54, no. 4. July 2005.
[TGp, 2006] Task Group p. IEEE P802.11p. Wireless access in vehicular environments
(WAVE). IEEE Computer Society. 2006.
[Toor et al, 2008] Y. Toor, P. Mühlethaler, A. Laouiti et A.D.L. .Fortelle. (2008). Vehicle ad
hoc networks : Applications and related technical issues. IEEE
Communications Surveys and Tutorials . Pp74-88. 2008.
[Vuyyuru at al, 2006] R. Vuyyuru, K. Oguchi, C. Collier and E Koch. Automesh : Flexible
Simulation Framework for Vehicular Communication. Third Annual
International Conference on Mobile and Ubiquitous Systems : Networking & Services.
2006. Pp1-6.
[Wu et al, 2004] Wu Hao, Fujimoto Richard, Guensler Randall et Hunter Michael.(2004).
MDDV: A Mobility-Centric Data Dissemination Algorithm for Vehicular
Networks. in Proceedings of the 1st ACM Workshop on Vehicular Ad hoc Networks
(VANET 2004). October 2004. Pp 47-56.
[Xu et al, 2003] Xu Q. , Jiang D.(2003). Design and analysis of highway safety communication
protocol in 5.9 GHz dedicated short range communication spectrum.
Vehicular Technology Conference. VTC 2003-Spring. The 57th IEEE Semiannual,
vol. 4. Pp 2451-2455. Apr. 2003.
[Yacine et al, 2009] Yacine Khaled , Manabu Tsukada, José Santa, JinHyeock Choi et Thierry
Ernst . A usage oriented analysis of vehicular networks: from technologies to
applications. Journal of communications, vol. 4, no 5. June 2009.
[Zhao et al, 2006] Zhao Jing et Cao Guohong.(2006). VADD: Vehicle-Assisted Data Delivery
in Vehicular Ad Hoc Networks. INFOCOM 2006. 25th IEEE International
Conference on Computer Communications. Proceedings , vol., no. Avril 2006. Pp.1-12.
[Zhuo et al, 2009] X. Zhuo, J. Hao, D. Liu et Y. Dai. (2009) .Removal of misbehaving insiders
in anonymous VANETs. in Proceedings of the 12th ACM international conference on
Modeling, analysis and simulation of wireless and mobile systems, Tenerife. 2009.
Pp106-115.
[Zygmunt et al, 2002a] Zygmunt J. Haas, Marc R. Pearlman et Prince Samar. (2002).The Zone
Routing Protocol (ZRP) for Ad Hoc Networks. Internet-draft, IETF MANET

Bibliographie
Analyse des protocoles de routage dans les réseaux VANETs Page XVI
Working Group. juillet 2002a.
[Zygmunt et al, 2002b] Zygmunt J. Haas, Marc R. Pearlman et Prince Samar. (2002). The
Bordercast Resolution Protocol (BRP) for Ad Hoc Networks. Internet-draft,
IETF MANET Working Group. juillet 2002b.
[Zygmunt et al, 2002c] Zygmunt J. Haas, Marc R. Pearlman et Prince Samar.(2002). The
Interzone Routing Protocol (IERP) for Ad Hoc Networks. Internet-draft,
IETF MANET Working Group. juillet 2002c.
[Zygmunt et al, 2002d] Zygmunt J. Haas, Marc R. Pearlman et Prince Samar. (2002). The
Intrazone Routing Protocol (IARP) for Ad Hoc Networks. Internet-draft,
IETF MANET Working Group. juillet 2002d.

Webographie
Analyse des protocoles de routage dans les réseaux VANETs Page XVII
Webographie
[Advanced, 2014] Advanced Safety Vehicle (ASV) Program.
http://www.itslectures.ae.keio.ac.jp/2001/2001_eb_45.htm. Visité en Mars
2014.
[Car-to-car , 2014] Car-to-car communication consortium C2C-CC. http://www.car-to-car.org.
visité en Mars 2014.
[Collision, 2014] Collision Avoidance Metrics Partnership – CAMP (US).
http://www.its.dot.gov/cicas/cicas_current_act.htm . visité en Mars 2014.
[CORSIM, 2014] TSIS-CORSIM Trafic Software Integrated System - Corridor Simulation.
http://mctrans.ce.ufl.edu/featured/tsis/. Visité en May 2014.
[Global, 2014] Global System for Telematics . http://www.gstforum.org/. Visité en Mars 2014.
[Ken, 2014] Ken Leonard. (2014). Connected Vehicle Pilots Coming to a Region Near You.
http://www.transportation.gov/fastlane/connected-vehicle-pilots-coming-region-
near-you. Visité en Avril 2014.
[SafeSpot, 2014] SafeSpot. http://www.safespot-eu.org/ . visité en Mars 2014.
[Secure, 2014] Secure Vehicular Communication . http://www.sevecom.org/. Visité en Mars
2014.
[UDel , 2014] UDel Models For Simulation of Urban Mobile Wireless Networks.
http://udelmodels.eecis.udel.edu/. Visité en May 2014.
[Vehicle , 2014] Vehicle Infrastructure Integration – VII. http://www.its.dot.gov/vii/. Visité en
Mars 2014.
[Vehicle, 2014] Vehicle Safety Communications (VSC) Projects. http://www.car-tocar. Visité en
Mars 2014.
[VisSim, 2014] VISSIM - State-of-the-Art Multi-Modal Simulation. http://www.ptvamerica.com/.
Visité en May 2014.
[WATCH-OVER, 2014] WATCH-OVER. http://www.watchover-eu.org/. Visité en Mars 2014.
Annexe
Analyse des protocoles de routage dans les réseaux VANET Page XVIII
Annexe
Annexe 1 : Technologies De La Communication
Annexe 2 : Protocole de routage
Annexe 3 : Framework pour réalistes modèles de mobilité véhiculaires

Annexe
Analyse des protocoles de routage dans les réseaux VANET Page XIX
Annexe 1
1. Technologies de la communication
Aujourd’hui les technologies de communication sans fil se multiplient aujourd'hui,
dans le but de substituer les connexions câblées typiques et améliorer la mobilité. Dans le
même temps, la télématique est en train d'introduire dans le domaine des véhicules, où
l'informatique et des télécommunications tentent d’améliorer la sécurité du trafic, l'efficacité
et la sécurité. Dans ce cadre, les communications sans fil sont essentielles pour relier le
véhicule avec l'environnement. L’ensemble de technologies [Yacine et al, 2009] [Darwin,
2013] dont l’application pourrait se servir est composé du satellite, les réseaux mobiles
(3G/4G), le WiFi, le WiMax, le WRAN et le Wireless Access For Véhicula Environnement
(WAVE) :
Figure 28 : Ensemble de technologies

Annexe
Analyse des protocoles de routage dans les réseaux VANET Page XX
1.1 Bluetooth
Bluetooth est une norme sans fil (802.15.1) spécialement conçu pour les
communications à courte portée entre appareils généralement reliés par les ports locaux.
cependant, il est possible de créer un réseau personnel (PAN), où plusieurs dispositifs peuvent
être connectés. Il fonctionne dans la bande des 2,4 GHz. Terminaux de Bluetooth sont
regroupés dans piconets, et ces piconets peuvent également être connectés par l'intermédiaire
scatternets.
Les propriétés de Bluetooth, il est parfait pour les réseaux véhicule .Certains
chercheurs plaident également pour l'utilisation de la technologie Bluetooth pour les
applications V2V. Cependant, cette technologie est limitée par le temps nécessaire pour
former des piconets et scatternets (de l'ordre de secondes) et globalement, la portée de
communication limitée.
1.2 Satellite
Comme nous l’avons dit auparavant, la forte mobilité est une contrainte non
négligeable lors du choix de la technologie. Les satellites peuvent présenter de grands
avantages dans le contexte que nous nous proposons d’étudier en raison de leur large
couverture. En revanche, ils sont connus pour leurs coûts potentiellement élevés. Parmi les
technologies satellite que nous pouvons utiliser, nous retenons en particulier « GEOMobile
Radio Interface (GMR) » et « DVB-Satellite services to Handhelds (DVBSH)»
1.3 Mobiles (3G/4G)
La technologie 2G/3G offre un débit de téléchargement maximal de 384Kbit/s (pour
de vitesses de 3 km/h à 100 km/h) et de 144Kbit/s (< 250 km/h) en utilisant EDGE. Avec
UMTS il est de 2Mbit/s ; en HSPA beaucoup plus et finalement la 4G offre un débit de
100Mbit/s pour les utilisateurs à forte mobilité. Ces débits sont toutefois purement théoriques,
car le support est partagé entre les utilisateurs d’une même cellule.

Annexe
Analyse des protocoles de routage dans les réseaux VANET Page XXI
1.4 WRAN
Cette architecture est définie par la norme IEEE 802.22. Cette norme regroupe les
spécifications pour la mise en oeuvre de réseaux régionaux sans fil. Elle utilise les fréquences
VHF et UHF et profite de fréquences qui ne sont pas utilisées par les canaux de télévision
(fréquences réservées). Sa portée peut aller jusqu’à la centaine de kilomètres. Son débit
minimum au niveau de la couche physique atteint 3, 74Mbit/s et au maximum 24, 96Mbit/s.rt
est partagé entre les utilisateurs d’une même cellule.
1.5 WiMax
WiMax est définie par la norme IEEE 802.16. Sa couverture peut atteindre 60 km. Son
débit minimum est de 110Mbit/s et le maximum de 365Mbit/s dans la version 2 de la norme.
Elle a été conçue pour fournir le dernier kilomètre aux clients fixes dans un premier temps.
Dans sa dernière version, la norme prend en charge les utilisateurs mobiles, mais avec un
débit maximum de 100Mbit/s. Elle pourrait être utilisée par les points d’accès et par les
véhicules comme un accès de dernier kilomètre. La latence se comporte de la même façon que
dans les WRAN, mais elle sera plus affectée par la mobilité puisque WiMax possède une
couverture moins importante que les WRAN.
1.6 WIFI
Cette technologie utilise potentiellement plusieurs normes telles que 802.11 a/b/g-
/n/ac. Elle peut être utile à des véhicules se trouvant dans une station de service, une aire de
services, un restaurant, ou bien encore, utiliser les connexions résidentielles ouvertes (sans
mécanisme d’authentification), et les hotspots (avec authentification à partir de paramètres
connus). Les utilisateurs se trouvant chez eux ou à leur travail peuvent bien évidemment
utiliser leur propre réseau WiFi. La couverture va jusqu’à une centaine de mètres en fonction
de la norme et de la configuration utilisée. Le débit peut aller de 1Mbit/s jusqu’à 11Mbit/s
pour 802.11b, de 6Mbit/s jusqu’à 54Mbit/s pour 802.11a/g, jusqu’à 300Mbit/s pour 802.11n,
et avec 802.11ac jusqu’à 1 Gbit/s.
Les véhicules, s’arrêtant quelques minutes dans les aires de services, peuvent profiter
de ces réseaux si l’alimentation électrique du véhicule n’est pas coupée. Cela permettra de
proposer aux utilisateurs le téléchargement de mises à jour, d’informations liées à l’aire de
services, de publicité, etc. Donc, la taille des contenus téléchargés est restreinte par la

Annexe
Analyse des protocoles de routage dans les réseaux VANET Page XXII
disponibilité d’un point d’accès à portée du véhicule et par le débit auquel il peut télécharger.
Cependant, s’il y a une transmission de données en broadcast en cours, le véhicule pourrait
recevoir ces informations, cette transmission pourrait être une mise à jour ou un fichier
populaire qui intéresse l’utilisateur.
1.7 WAVE
Avant de commencer à décrire cette technologie, nous allons définir deux acronymes
importants à retenir dans l’architecture WAVE. « On-Board Unit (OBU) » et Road Side Unit
(RSU). Les deux types de communications pris en charge par cette technologie, comme dans
le cas de WiFi. La communication avec infrastructure, dans laquelle l’interaction s’effectue
entre une RSU et une OBU, est connue sous le nom d’« I2V ». La communication de type ad-
hoc où les communications se déroulent entre OBUs est appelée « Véhicule à Véhicule (V2V)
». La figure 2.2 montre les composants de la technologie WAVE et les deux types de
communication possibles.
Figure 29 : Composants de la technologie WAVE
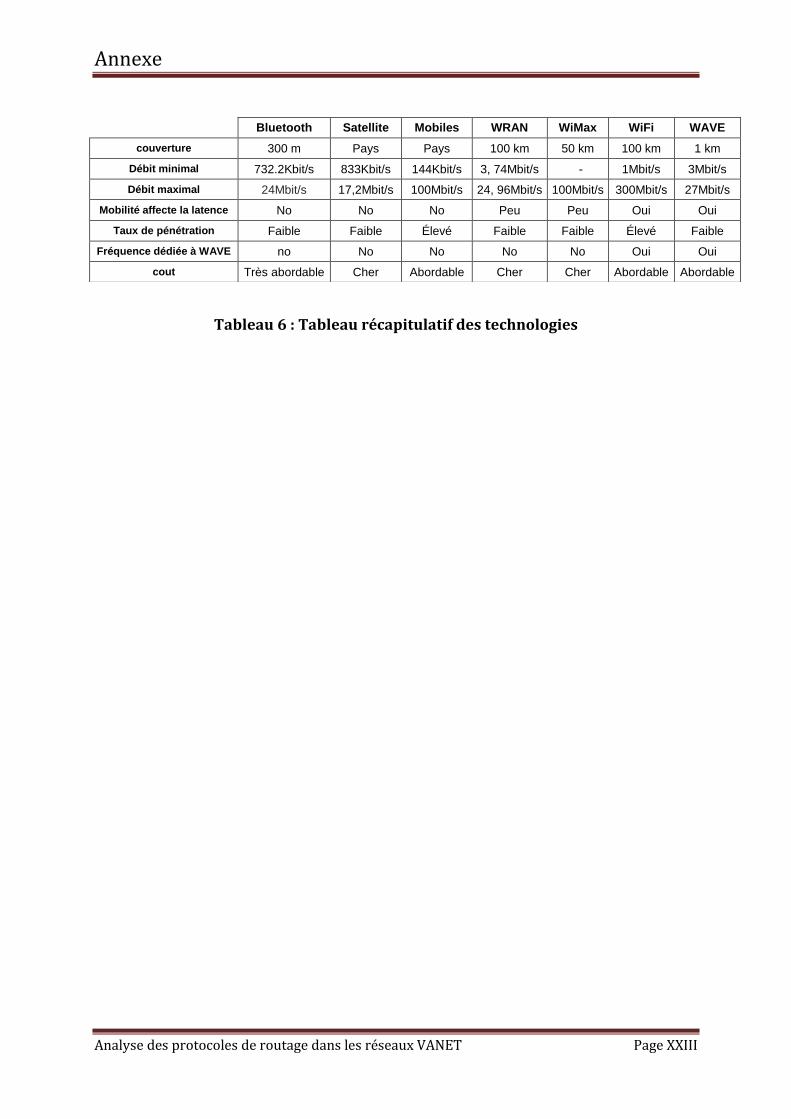
Annexe
Analyse des protocoles de routage dans les réseaux VANET Page XXIII
Tableau 6 : Tableau récapitulatif des technologies
Bluetooth Satellite Mobiles WRAN WiMax WiFi WAVE
couverture 300 m Pays Pays 100 km 50 km 100 km 1 km
Débit minimal 732.2Kbit/s 833Kbit/s 144Kbit/s 3, 74Mbit/s - 1Mbit/s 3Mbit/s
Débit maximal 24Mbit/s 17,2Mbit/s 100Mbit/s 24, 96Mbit/s 100Mbit/s 300Mbit/s 27Mbit/s
Mobilité affecte la latence No No No Peu Peu Oui Oui
Taux de pénétration Faible Faible Élevé Faible Faible Élevé Faible
Fréquence dédiée à WAVE no No No No No Oui Oui
cout Très abordable Cher Abordable Cher Cher Abordable Abordable

Annexe
Analyse des protocoles de routage dans les réseaux VANET Page XXIV
Annexe 2 : Protocole de routage
1. AODV
L’AODV maintient les chemins d’une façon distribuée en gardant une table de
routage, au niveau de chaque nœud de transit appartenant au chemin cherché. Une entrée de la
table de routage contient essentiellement :
• L’adresse de la destination.
• Le nœud suivant.
• La distance en nombre de noeud (i.e. le nombre de noeud nécessaire pour atteindre la
destination).
• Le numéro de séquence destination qui garantit qu’aucune boucle ne peut se former.
• Liste des voisins actifs (origine ou relais d’au moins un paquet pour la destination
pendant un temps donné).
• Le temps d’expiration de l’entrée de la table (temps au bout duquel l’entrée est
invalidée).
• Un tampon de requête afin qu’une seule réponse soit envoyée par requête.
A chaque utilisation d’une entrée, son temps d’expiration est remis à jour (temps
courant + active route time).
Si une nouvelle route est nécessaire, ou qu’une route disparaît, la mise à jour de ces
tables s’effectue par l’échange de trois types de messages entre les nœuds :
• RREQ Route Request, un message de demande de route.
• RREP Route Reply, un message de réponse à un RREQ.
• RERR Route Error, un message qui signale la perte d’une route.

Annexe
Analyse des protocoles de routage dans les réseaux VANET Page XXV
Format général d’une RREQ :
Format général d’une RREP :
1.1 Fonctionnalité
Un nœud diffuse une requête de route (RREQ : Route REQuest), dans le cas où il
aurait besoin de connaître une route vers une certaine destination et qu’une telle route n’est
pas disponible figure 10. Cela peut arriver si la destination n’est pas connue au préalable, ou
si le chemin existant vers la destination a expiré sa durée de vie ou il est devenu défaillant (i.e.
la métrique qui lui est associée est infinie). Le champ numéro de séquence destination du
paquet RREQ, contient la dernière valeur connue du numéro de séquence, associé au nœud
destination. Cette valeur est recopiée de la table de routage. Si le numéro de séquence n’est
pas connu, la valeur nulle sera prise par défaut. Le numéro de séquence source du paquet
RREQ contient la valeur du numéro de séquence du nœud source. Comme nous avons déjà
dit, après la diffusion du RREQ, la source attend le paquet réponse de route (RREP : Route
REPly). Si ce dernier n’est pas reçu durant une certaine période (appelée
RREP_WAIT_TIME), la source peut rediffuser une nouvelle requête RREQ.
Figure 30 : La propagation du paquet

Annexe
Analyse des protocoles de routage dans les réseaux VANET Page XXVI
Quand un nœud de transit (intermédiaire) envoie le paquet de la requête à un voisin, il
sauvegarde aussi l’identificateur du nœud à partir duquel la première copie de la requête est
reçue. Cette information est utilisée pour construire le chemin inverse figure 10, qui sera
traversé par le paquet réponse de route de manière unicast (cela veut dire qu’AODV supporte
seulement les liens symétriques). Puisque le paquet réponse de route
Figure 31 : Le chemin pris par la requête RREP
1.2 Maintenance des routes
Afin de maintenir des routes consistantes, une transmission périodique du message «
HELLO » (qui est un RREP avec un TTL de 1) est effectuée. Si trois messages « HELLO »
ne sont pas reçus consécutivement à partir d’un nœud voisin, le lien en question est considéré
défaillant. Les défaillances des liens sont, généralement, dues à la mobilité du réseau ad hoc.
Les mouvements des nœuds qui ne participent pas dans le chemin actif, n’affectent pas la
consistance des données de routage. Quand un lien, reliant un nœud p avec le nœud qui le suit
dans le chemin de routage, devient défaillant, le nœud p diffuse un paquet UNSOLICITED
RREP, avec une valeur de numéro de séquence égale à l’ancienne valeur du paquet RREP
incrémentée d’une, et une valeur infinie de la distance. Le paquet UNSOLICITED RREP est
diffusé aux voisins actifs, jusqu’à ce qu’il arrive à la source. Une fois le paquet est reçu, la
source peut initier le processus de la découverte de routes.
L’AODV maintient les adresses des voisins à travers lesquels les paquets destinés à un
certain nœud arrivent. Un voisin est considéré actif, pour une destination donnée, s’il délivre
au moins un paquet de données sans dépasser une certaine période (appelée active timeout
period). Une entrée de la table du routage est active, si elle est utilisée par un voisin actif. Le
chemin reliant la source et la destination en passant par les entrées actives des tables de
Annexe
Analyse des protocoles de routage dans les réseaux VANET Page XXVII
routage, est dit un chemin actif. Dans le cas de défaillances de liens, toutes les entrées des
tables de routage participantes dans le chemin actif et qui sont concernées par la défaillance
sont supprimées. Cela est accompli par la diffusion d’un message d’erreur entre les noeuds
actifs.
Le protocole de routage AODV, n’assure pas l’utilisation du meilleur chemin existant
entre la source et la destination. Cependant, des évaluations de performances récentes ont
montré qu’il n’y a pas de grandes différences (en terme d’optimisation) entre les chemins
utilisés par le protocole AODV et celles utilisées par les protocoles basés sur les algorithmes
de recherche des plus courts chemins. En plus de cela, le protocole AODV ne présente pas de
boucle de routage, et évite le problème « comptage à l’infini » de Bellman-Ford, ce qui offre
une convergence rapide quand la topologie du réseau ad hoc change. En effet :
Dans AODV, chaque nœud maintient une table qui contient une entrée pour chaque
destination accessible. Pour éviter le problème du comptage à l’infini de Bellman-Ford. On a
recours à l’utilisation de numéros de séquences dans les tables de routage en plus de la
distance.
Chaque nœud possède un numéro de séquence. Il est le seul habilité à l’incrémenter.
Ce numéro personnel ne peut être incrémenté que dans deux situations :
• Avant d’entreprendre un processus de recherche de route par l’envoi d’un paquet
RREQ, le nœud incrémente son numéro.
• Avant de répondre à un message RREQ par un message RREP, le numéro de
séquence doit être remplacé par la valeur maximale entre son numéro de séquence actuel et
celui contenu dans le message RREQ.
Ce numéro accompagne son adresse dans les messages de contrôle et permet aux
autres de distinguer les messages importants des messages redondants.
Annexe
Analyse des protocoles de routage dans les réseaux VANET Page XXVIII
Une mise à jour de la table de routage ne s’effectue que si les conditions suivantes sont
observées :
• Le numéro de séquence du paquet de contrôle est strictement supérieur au numéro de
séquence présent dans la table.
• Les numéros de séquence (de la table et du paquet) sont égaux mais, la distance en
nombre de sauts du paquet plus 1 est inférieure à la distance actuelle dans la table de routage.
• Le numéro de séquence pour cette destination est inconnu.
Cette façon de procéder garantit la création de route sans boucles.
Donc, Si la source se déplace, la procédure de détermination de route peut être ré
initié.
• Si un nœud intermédiaire ou la destination se déplacent, un RREP spécial est émis au
nœud source (reconstruisant la route au passage).
• Messages hello périodiques pour détecter les coupures de lien.
1.3 Gestion de la connectivité locale
Lorsqu’un nœud reçoit un paquet en Broadcast, il met à jour ses informations de
connectivité locale pour s’assurer qu’elles incluent ce voisin.
Si aucun paquet n’est émis aux voisins actifs pendant le dernier hello_interval, un
nœud va envoyer un hello (RREP non sollicité) contenant :
• son identité.
• son numéro de séquence (non modifié pour les hello).
• time to live de 1 pour ne pas être retransmis.
• liste des nœuds pour lesquels il a reçu un hello.
Après avoir explicité le fonctionnement du protocole AODV et le format de ses
paquets, l’extension de ce protocole pour garantir des exigences de la qualité de service est
traité dans le chapitre suivant

Annexe
Analyse des protocoles de routage dans les réseaux VANET Page XXIX
Annexe 3
2. Framework pour réalistes modèles de mobilité véhiculaires
Contraintes de mouvement : décrit les contraintes de mouvement à partir
desquelles sont déterminés les déplacements autorisés pour les véhicules. Ces contraintes
prennent en compte la topologie de la route et tous les paramètres qui influencent le
mouvement des véhicules sur cette topologie dont, la politique de gestion des intersections, la
limitation de vitesse, les sens interdits, les fonctionnalités multivoies et également l'effet des
pôles attracteurs. La topologie de la route peut être aléatoire, définie par l'utilisateur ou
extraite à partir de cartes réelles. Dans ce dernier cas, des bases de données telles que
TIGER21
ou GDF22
peuvent être utilisées. TIGER/Line (Topologically Integrated Geographic
Encoding and Referencing) est une base de données numérique décrivant les objets
géographiques de tous les Etats-Unis, tels que les routes, les rails, les rivières, les lacs et les
frontières politiques. GDF (Geographic Data Files) est un standard européen pour décrire les
routes et les informations associées. En France, ce type d'information est fourni par l'institut
national de l'information géographique et forestière IGN (Information Grandeur Nature)23
.
21
http ://www.census.gov/geo/www/tiger 22
International Standard Organization (ISO), Intelligent transport systems - Geographic Data Files (GDF), overall specication, ISO 14825 :2004, 2004. 23
http ://www.ign.fr/
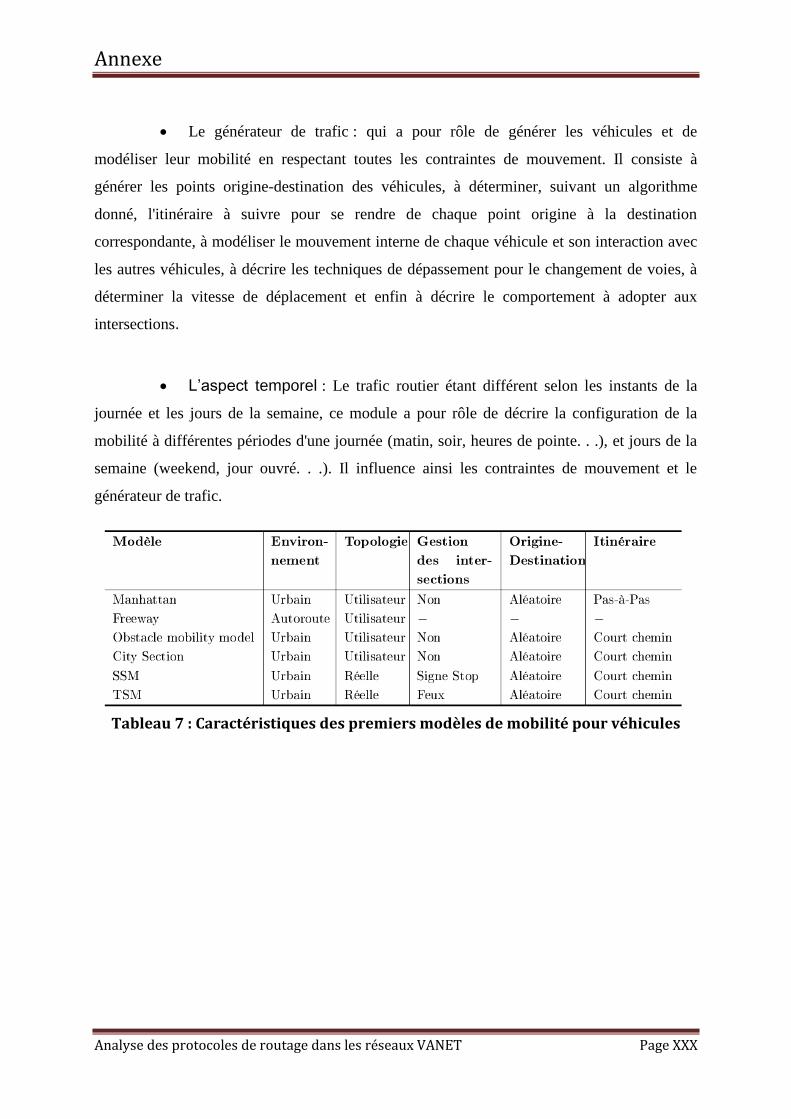
Annexe
Analyse des protocoles de routage dans les réseaux VANET Page XXX
Le générateur de trafic : qui a pour rôle de générer les véhicules et de
modéliser leur mobilité en respectant toutes les contraintes de mouvement. Il consiste à
générer les points origine-destination des véhicules, à déterminer, suivant un algorithme
donné, l'itinéraire à suivre pour se rendre de chaque point origine à la destination
correspondante, à modéliser le mouvement interne de chaque véhicule et son interaction avec
les autres véhicules, à décrire les techniques de dépassement pour le changement de voies, à
déterminer la vitesse de déplacement et enfin à décrire le comportement à adopter aux
intersections.
L’aspect temporel : Le trafic routier étant différent selon les instants de la
journée et les jours de la semaine, ce module a pour rôle de décrire la configuration de la
mobilité à différentes périodes d'une journée (matin, soir, heures de pointe. . .), et jours de la
semaine (weekend, jour ouvré. . .). Il influence ainsi les contraintes de mouvement et le
générateur de trafic.
Tableau 7 : Caractéristiques des premiers modèles de mobilité pour véhicules
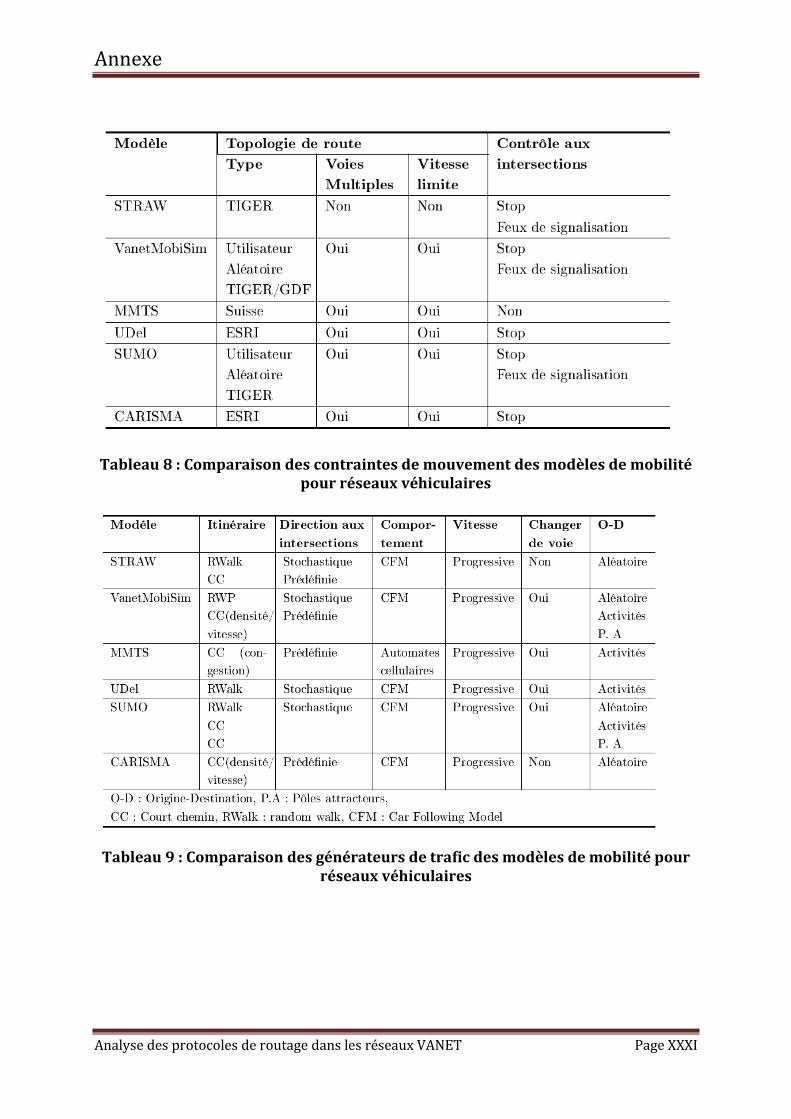
Annexe
Analyse des protocoles de routage dans les réseaux VANET Page XXXI
Tableau 8 : Comparaison des contraintes de mouvement des modèles de mobilité pour réseaux véhiculaires
Tableau 9 : Comparaison des générateurs de trafic des modèles de mobilité pour réseaux véhiculaires
Glossaire
Analyse des protocoles de routage dans les réseaux VANET Page XXXII
Glossaire
A.
AODV: Ad hoc On Demand Distance Vector, est un protocole de routage réactif pour
les réseaux ad-hoc. Il est sans boucle, s’auto configure et peut gérer un nombre important de
nœuds mobiles.
A-STAR: Anchor-based Street and Traffic Aware Routing, est un protocole de
routage basé sur la localisation.
ASV: Advanced Safety Vehicle , projet en Japon.
AutoMesh : est une structure de simulation réaliste pour les VANET.
B.
BMW : Bayerische Motoren Werke, est une société industrielle allemande
constructrice d'automobiles et de motos.
Broadcast : ou diffusion et un type de paquet qui est transmis et pris en compte par
toutes les stations du réseau.
BRP: Bordercast Resolution Protocol, est inclus avec IERP pour guider la propagation
des requêtes de recherche de route dans le réseau.
C.
C2C-CC: Car to Car - Communication Consortium, projet en Europe.
CAMP: Collision Avoidance metrics Partnership, projet en US.
CARISMA : est un autre simulateur de trafic gratuit et réaliste développé par BMW.
CORSIM : Corridor Simulation, est un simulateur très largement utilisé dans les STI.
CPU: Central Processing Unit, est le composant de l'ordinateur qui exécute les
instructions machine des programmes informatiques.
CVIS: Cooperative Vehicle-Infrastructure Systems, vise à concevoir et développer et
tester de nouvelles technologies nécessaires.

Glossaire
Analyse des protocoles de routage dans les réseaux VANET Page XXXIII
D.
DSDV : Destination-Sequenced Distance-Vector, est un protocole de routage ad-hoc
proactif basé sur l'idée de l'algorithme distribué de Bellman-Ford avec quelques
améliorations.
DSR : Dynamic Source Routing , protocole de routage ad-hoc réactif « Routage à
Source Dynamique » basé sur l'utilisation de la technique de « routage source ».
DSRC : Dedicated short-range communication, sont des communications sans fil, à
sens unique ou à double sens, et à courte ou moyenne portée, spécialement conçues pour les
ITS.
G.
Geocast : est une technique de routage de paquet (réseau) paquet sur un réseau
VANET.
GLS: Grid Location Service, mise à jour de localisation / requête pour un utilisateur
mobile.
GPS: Global Position System, est un système de géolocalisation fonctionnant au
niveau mondial
GPSR: Greedy Perimeter Stateless Routing, est donc un protocole de routage basé sur
la position.
GrooveNet : est un simulateur hybride de réseau et de mobilité qui permet la
communication entre des véhicules simulés et des véhicules réels
GSR: Global State Routing, est un protocole proactif à état de liens où chaque nœud
connaît la topologie globale du réseau.
GST: Global System for Telematics , Projet intégré financé par l'Union européenn.
GyTAR: improved Greedy Traffic-Aware Routing protocol, est un protocole de
routage géographique basé sur la localisation.

Glossaire
Analyse des protocoles de routage dans les réseaux VANET Page XXXIV
I.
IARP: IntrAzone Routing Protocol, est un protocole proactif .
IERP : IntErzone Routing Protocol, est un protocole réactif .
IETF: Internet Engineering Task Force, est un groupe informel, international, ouvert à
tout individu, qui participe à l'élaboration de standards Internet.
IP: Internet Protocol, est une famille de protocoles de communication de réseau
informatique conçus pour être utilisés par Internet.
IVC: Inter-Vehicle Communications.
M.
MAC: Media Access Control, est un identifiant physique stocké dans une carte réseau
ou une interface réseau similaire.
MANET: Mobile ad hoc networks, Un réseau ad hoc comprend des plates-formes
mobiles.
MMTS: Multi-agent Microscopic Traffic Simulator, est un simulateur de trafic multi-
agent.
MORA: MOvement-based Routing Algorithm, Le protocole de routage, exploite la
position et la direction de mouvement de véhicules pour adapter les décisions de
retransmission au contexte des véhicules.
MPR: Multi-Point Relaying, le principe est que chaque nœud construit un sous
ensemble.
N.
NCTUns: National Chiao Tung University Network Simulator, est un simulateur et
émulateur réseau extensible à haute fidélité.
NDP: NeighbourDiscovery Protocol, est un protocole utilisé par IPv6. Il opère en
couche 3 et est responsable de la découverte des autres hôtes sur le même lien, de la
détermination de leur adresse et de l'identification des routeurs présents.

Glossaire
Analyse des protocoles de routage dans les réseaux VANET Page XXXV
NS2 : Network Simulator2 , est un simulateur à événements discrets orienté objet,
écrit en C++ avec une interface qui utilise le langage OTcl .
O.
OLSR: Optimized Link State Routing, est un protocole de routage proactif développé
dans le cadre du projet Hypercom de l’Institut National de la Recherche en Informatique.
OTcl :Object Tool Command Langage.
P.
PARAMICS: Développé et commercialisé par Quadstone Limited, est une suite de
modules de simulation de trafic microscopique dont un modeleur .
PHY: couramment utilisée pour désigner la couche physique du modèle OSI (couche
de plus bas niveau).Cette couche consiste en une cellule de conversion analogique-numérique.
PReVENT: le projet intègre européen.
PTV AG: Planung Transport Verkehr, est une société allemande spécialisée dans les
solutions logicielles et des services de consultation pour le trafic et le transport, la mobilité et
la logistique.
Q.
QualNet: QualNet est une version commerciale de GloMoSim utilisé par Scalable
Network Technologies (SNT) pour leurs projets de défense savoir JTRS émulateur de réseau,
BCNIS et Stratcom Cyber.
R.
RERR: Route Error Message, les paquets d’erreur de route RERR .
RREP: Route Reply Message, les paquets de réponse de route
RREQ: Route Request Message, les paquets de requête de route.
RSU: Road Side Units, des points d'accès déployés aux bords des routes.

Glossaire
Analyse des protocoles de routage dans les réseaux VANET Page XXXVI
S.
SafeSpot: est un projet intégré de recherche co-financé.
SeVeCom: Secure Vehicular Communication, est un projet financé par l'Union
européenne.
SSM: Stop Sign Model, définit à chaque intersection un signal Stop qui oblige le
véhicule à s'arrêter.
STI: Intelligent transportation Systems, les applications des nouvelles technologies de
l'information et de la communication au domaine des transports.
STRAW: Street Random Waypoint, est un modèle de mobilité développé pour le
simulateur.
SUMO/MOVE: Simulation of Urban MObility / MOVE, SUMO est le logiciel qui
fait de la mobilité des nœuds, arêtes, etc à partir du logiciel MOVE / Move est un logiciel qui
permet de simuler les VANETs.
SWANS: Scalable Wireless Ad hoc Network Simulator , Le modèle utilise une
topologie routière extraite de la base de données TIGER/Lines à laquelle il ajoute des
intersections.
T.
TGP: Task Group p
TIGER : Base de donnée géographique permettant d'automatiser le tracé des cartes et
des travaux de nature géographique s'y rattachant, nécessaire pour les programmes statistiques
et les études du bureau américain des statistiques (U.S. Census Bureau, l'équivalent de
l'INSEE en France).
TraCI: est un protocole de cette communication a été normalisé comme l'interface de
contrôle du trafic.
TraNS: Tra c et Simulation Environment Network, est quasiment le premier
simulateur des VANET.
TSM: Traffic Sign Model.
Glossaire
Analyse des protocoles de routage dans les réseaux VANET Page XXXVII
U.
UDEL: est un ensemble d'outils pour la simulation des réseaux maillés et des réseaux
véhiculaires
UMB: Urban Multi hop Broadcast Protocol, est un protocole efficace de la norme
802.11, basé sur l’algorithme de diffusion multi saut pour les réseaux inter véhiculaires avec
support d’infrastructure.
UMTS: Universal Mobile Telecommunications System, est l'une des technologies de
téléphonie mobile de troisième génération (3G).
Unicast : type de communication qui fait intervenir une source et seulement une
destination.
V.
VADD: Vehicle-Assisted Data Delivery, est un protocole de routage qui prend en
considération le contexte des réseaux de véhicules.
VANET: Vehicular Ad-Hoc Network. Réseau sans fil ad-hoc spécifique composé de
véhicules en mouvement.
Veines: Vehicles in Network Simulator, est une open source Inter-Véhicules
communication (IVC) .
VII: Vehicle Infrastructure Integration
VSC: Vehicle Safety Consortium, Projet en US.
W.
WAVE: Wireless Access in Vehicular Environments.
Wi-Fi : pour Wireless Fidelity , est la dénomination commerciale des réseaux suivant
la norme 802.11.
WiMax: désigne un standard de communication sans fil. Aujourd'hui surtout utilisé
comme mode de transmission et d'accès à Internet haut débit, portant sur une zone
géographique étendue.

Glossaire
Analyse des protocoles de routage dans les réseaux VANET Page XXXVIII
WWW: World Wide Web, est un système hypertexte public fonctionnant sur Internet.
Z.
ZRP: Zone Routing Protocol, est un protocole hybride qui combine les deux
approches proactives et réactive.

Top Related