Voie de roulement de robot RTT 1400L/2400L
62
Manuel du Produit Voie de roulement de robot RTT 1400L/2400L M2004, IRC5 3HEA 801 230-004 Rév. A, Novembre 2005
Transcript of Voie de roulement de robot RTT 1400L/2400L

Manuel du ProduitVoie de roulement de robot
RTT 1400L/2400LM2004, IRC5
3HEA 801 230-004 Rév. A, Novembre 2005
Les informations contenues dans ce document peuvent être modifiées sans préavis et ne doivent pas être considérées comme un engagement de la part de ABB Automation Technologies AB. ABB Automation Technologies AB réfute toute responsabilité quant aux erreurs éventuelles contenues dans de document.
En aucun cas, ABB Automation Technologies AB ne peut être tenu responsable des dommages pouvant découler de l’utilisation de ce document ou des logiciels ou matériels décrits dans ce document.
Ce document ne doit pas être reproduit ni copié, intégralement ou en partie, sans l’autorisation de ABB Automation Technologies AB. Il ne doit pas non plus être ni communiqué à des tiers ni utilisé à des fins non autorisées. Toute transgression donnera lieu aux poursuites judiciaires prévues par la loi en vigueur.
D’autres exemplaires de ce document peuvent être obtenus auprès de ABB Automation Technologies AB au prix actuel.
© 2005 ABB Automation Technologies AB
ABB Automation Technologies ABRobotics & Manufacturing
SE-69582 LaxåSuède
3HEA 801 230-004 Rév. A, Novembre 2005 i
Sommaire
Manuel du produitVoie de roulement de robotRTT 1400/2400L
Caractéristiques Intercalaire 1:
Description 1
Instructions de sécurité 5
Caractéristiques et exigences techniques 9
Modèles et options 13
Installation et utilisation Intercalaire 2 :
Installation et utilisation 1
Mise en service 11
Maintenance Intercalaire 3:
Calendrier de maintenance 1
Reservdelar/Spare parts 5

ii 3HEA 801 230-004 Rév. A, Novembre 2005
3HEA 801 230-004 Rév. A, Novembre 2005 Caractéristiques i
Car
acté
rist
iqu
es
Intercalaire 1:Caractéristiques1 Description 1
1.1 Généralités 1
1.2 Conception principale 21.2.1 Termes et concepts 4
2 Instructions de sécurité 5
2.1 Description 5
2.2 Sécurité au cours du Déballage et de la manipulation 6
2.3 Sécurité au cours de l’Installation mécanique 62.3.1 Sécurité au cours de l’Assemblage du chemin de
câbles et du manipulateur 62.3.2 Sécurité au cours de l’Installation électrique 62.3.3 Sécurité au cours de la Mise en service 72.3.4 Sécurité au cours de l’Installation mécanique 7
3 Caractéristiques et exigences techniques 9
3.1 Caractéristiques techniques 93.1.1 Performances 93.1.2 Dimensions 10
4 Modèles et options 13
4.1 Modèles et options pour les RTT 1400/2400L 13

Caractéristiques ii 3HEA 801 230-004 Rév. A, Novembre 2005
Caractéristiq
ues
DescriptionGénéralités
3HEA 801 230-004 Rév. A, Novembre 2005 1-1
Car
acté
rist
iqu
es
1 Description
1.1 Généralités
RTT 1400/2400L est un porte-robot à un seul axe pour un IRB 1400/2400L avec ou sans un Marathon Pac avec électrode. Il est commandé et positionné comme un axe externe du système de commande du robot.Les supports de l’équipement de refroidissement et de l’équipement de nettoyage des projections ne sont pas compris.
Longueur de déplacement
La Voie de roulement est disponible avec une longueur de déplacement allant de 1,7 m à 11,7 m par incréments de 1 m.
Description
Conception principale
1-2 3HEA 801 230-004 Rév. A, Novembre 2005
Caractéristiq
ues 1.2 Conception principale
Voie de roulement avec Marathon Pac
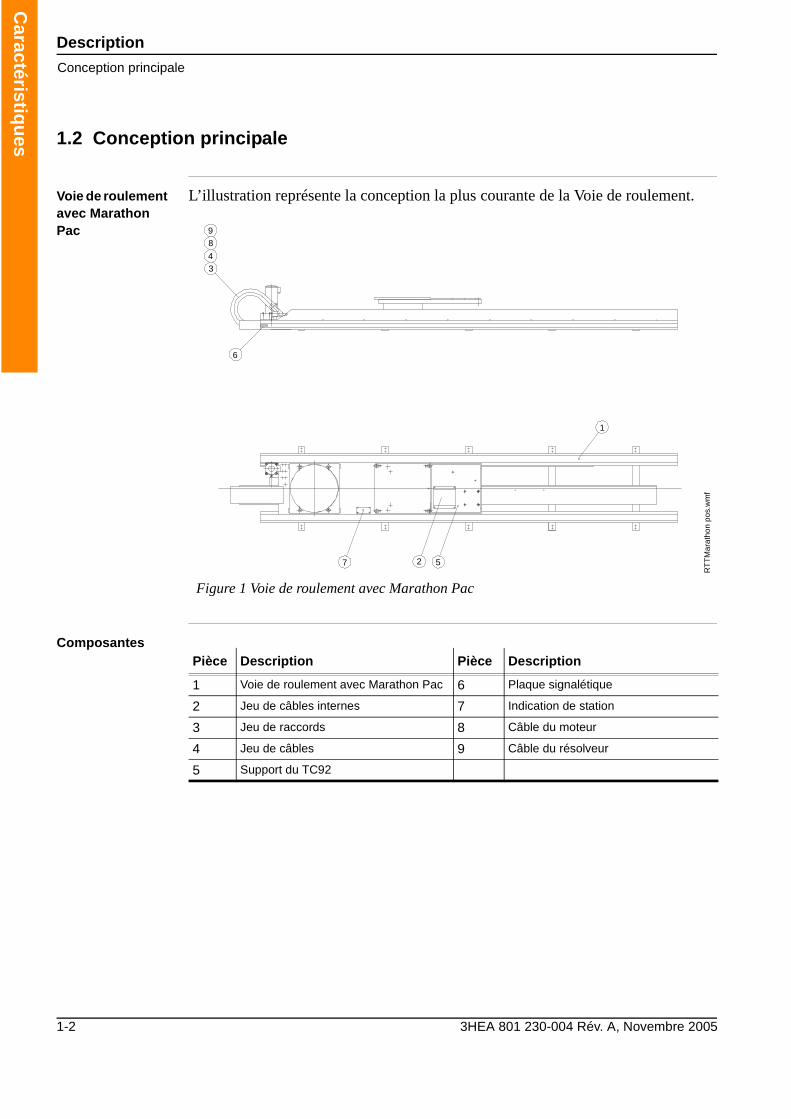
L’illustration représente la conception la plus courante de la Voie de roulement.
Composantes
RT
TM
arat
hon
pos.
wm
f
Figure 1 Voie de roulement avec Marathon Pac
3
4
6
1
57 2
8
9
Pièce Description Pièce Description
1 Voie de roulement avec Marathon Pac 6 Plaque signalétique
2 Jeu de câbles internes 7 Indication de station
3 Jeu de raccords 8 Câble du moteur
4 Jeu de câbles 9 Câble du résolveur
5 Support du TC92
DescriptionConception principale
3HEA 801 230-004 Rév. A, Novembre 2005 1-3
Car
acté
rist
iqu
es
Voie de roulement avec bobine
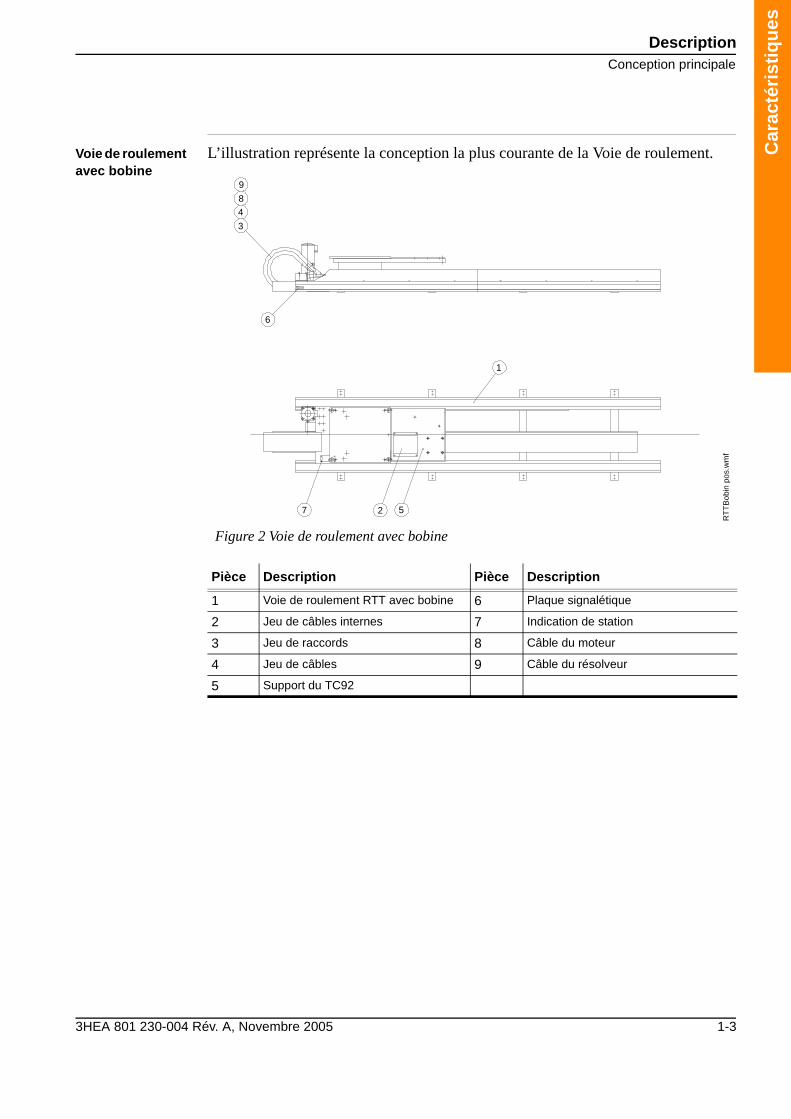
L’illustration représente la conception la plus courante de la Voie de roulement.
RT
TB
obin
pos
.wm
f
Figure 2 Voie de roulement avec bobine
Pièce Description Pièce Description
1 Voie de roulement RTT avec bobine 6 Plaque signalétique
2 Jeu de câbles internes 7 Indication de station
3 Jeu de raccords 8 Câble du moteur
4 Jeu de câbles 9 Câble du résolveur
5 Support du TC92
5
6
3
4
1
7 2
8
9
Description
Termes et concepts
1-4 3HEA 801 230-004 Rév. A, Novembre 2005
Caractéristiq
ues 1.2.1 Termes et concepts
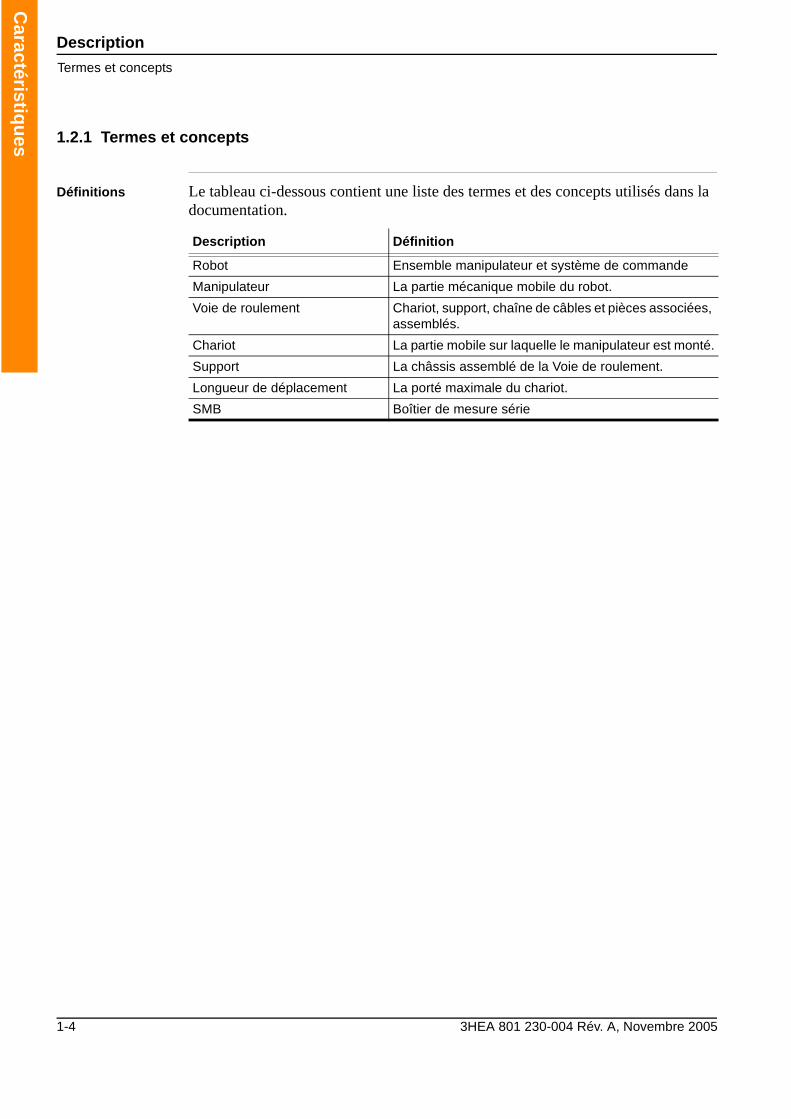
Définitions Le tableau ci-dessous contient une liste des termes et des concepts utilisés dans la documentation.
Description Définition
Robot Ensemble manipulateur et système de commande
Manipulateur La partie mécanique mobile du robot.
Voie de roulement Chariot, support, chaîne de câbles et pièces associées, assemblés.
Chariot La partie mobile sur laquelle le manipulateur est monté.
Support La châssis assemblé de la Voie de roulement.
Longueur de déplacement La porté maximale du chariot.
SMB Boîtier de mesure série

Instructions de sécuritéDescription
3HEA 801 230-004 Rév. A, Novembre 2005 1-5
Car
acté
rist
iqu
es
2 Instructions de sécurité
2.1 Description
Ce chapitre contient des instructions de sécurité pour toutes les étapes représentant un risque de blessure ou de dommage. Elles sont aussi indiquées à côté des instructions relatives à chaque étape.Les avertissements généraux ayant pour objectif d’éviter des difficultés ne sont indiqués qu’au niveau des instructions concernées.
Explication des symboles
Les différents types d’avertissements sont marqués de symboles décrits dans le tableau ci-dessous :
Symbole Nom Signification
!Danger Risque de blessure grave ou mortelle et/ou de dommage
important si les instructions ne sont pas suivies.
Avertissement Risque de blessure ou de dommage important. Suivez toujours les instructions associées à ce symbole.
Décharge électrique
Risque de décharge électrique pouvant causer des blessures graves ou mortelles. Suivez toujours les instructions associées à ce symbole.
Attention Attire votre attention sur le fait que le produit peut être endommagé si une action est omise ou n’est pas effectuée correctement.
Électricité statique, ESD
Ce symbole indique le risque de décharge électrostatique pouvant endommager gravement le produit.
Remarques Information sur des détails importants.
Conseil Ce symbole est associé à des instructions contenant des informations complémentaires sur une certaine procédure.
Instructions de sécurité
Sécurité au cours du Déballage et de la manipulation
1-6 3HEA 801 230-004 Rév. A, Novembre 2005
Caractéristiq
ues 2.2 Sécurité au cours du Déballage et de la manipulation
Lisez attentivement les instructions de sécurité avant de déballer et d’installer la Voie de roulement.
Instructions de levage
Seules les unités de 6 mètres ou moins peuvent être soulevées. Si les unités sont jointes, les raccords doivent être prémontés à la livraison.
2.3 Sécurité au cours de l’Installation mécanique
Réglage du niveau
La distance entre les boulons de mise à niveau et le bord supérieur des plaques de base doit être d’au moins 10 mm.
2.3.1 Sécurité au cours de l’Assemblage du chemin de câbles et du manipulateur
Montage du manipulateur
Consultez toujours la documentation du manipulateur quand il doit être soulevé.
2.3.2 Sécurité au cours de l’Installation électrique
Faisceau de câbles du robot
Veillez à ce que le faisceau de câbles ne puisse pas entrer en contact avec des pièces mobiles.
Instructions de sécuritéSécurité au cours de la Mise en service
3HEA 801 230-004 Rév. A, Novembre 2005 1-7
Car
acté
rist
iqu
es
2.3.3 Sécurité au cours de la Mise en service
Étalonnage
Assurez-vous que personne ne se trouve sur la Voie de roulement quand le chariot est en mouvement. Assurez-vous aussi que les plaques de recouvrement de la Voie de roulement sont exemptes d’objets pouvant se coincer entre le chariot et les plaques.
Contrôle de la zone de travail
La zone de travail de la Voie de roulement doit être inspectée avant la mise en marche du système.
2.3.4 Sécurité au cours de l’Installation mécanique
Remplissage de lubrifiant
N’utilisez que des injecteurs de graisse avec une réserve de 3 mois au plus.

Instructions de sécurité
Sécurité au cours de l’Installation mécanique
1-8 3HEA 801 230-004 Rév. A, Novembre 2005
Caractéristiq
ues
Caractéristiques et exigences techniquesCaractéristiques techniques
3HEA 801 230-004 Rév. A, Novembre 2005 1-9
Car
acté
rist
iqu
es
3 Caractéristiques et exigences techniques
3.1 Caractéristiques techniques
3.1.1 Performances
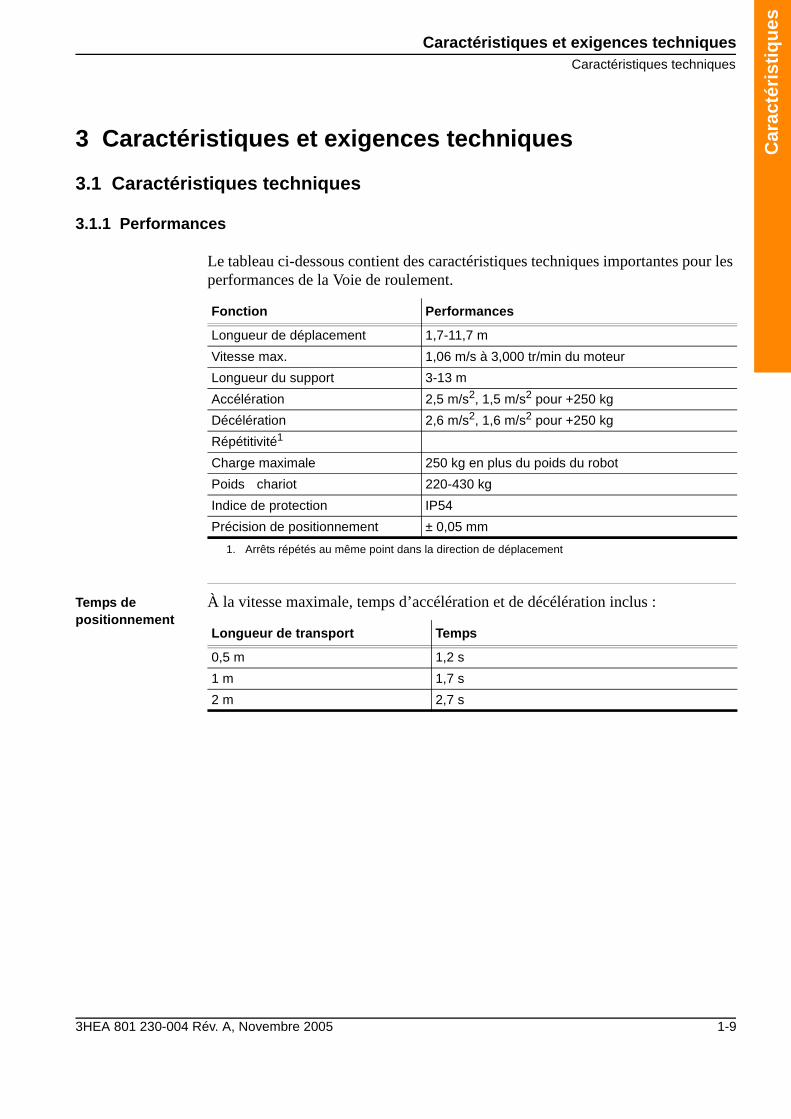
Le tableau ci-dessous contient des caractéristiques techniques importantes pour les performances de la Voie de roulement.
Temps de positionnement
À la vitesse maximale, temps d’accélération et de décélération inclus :
Fonction Performances
Longueur de déplacement 1,7-11,7 m
Vitesse max. 1,06 m/s à 3,000 tr/min du moteur
Longueur du support 3-13 m
Accélération 2,5 m/s2, 1,5 m/s2 pour +250 kg
Décélération 2,6 m/s2, 1,6 m/s2 pour +250 kg
Répétitivité1
1. Arrêts répétés au même point dans la direction de déplacement
Charge maximale 250 kg en plus du poids du robot
Poids chariot 220-430 kg
Indice de protection IP54
Précision de positionnement ± 0,05 mm
Longueur de transport Temps
0,5 m 1,2 s
1 m 1,7 s
2 m 2,7 s
Caractéristiques et exigences techniques
Dimensions
1-10 3HEA 801 230-004 Rév. A, Novembre 2005
Caractéristiq
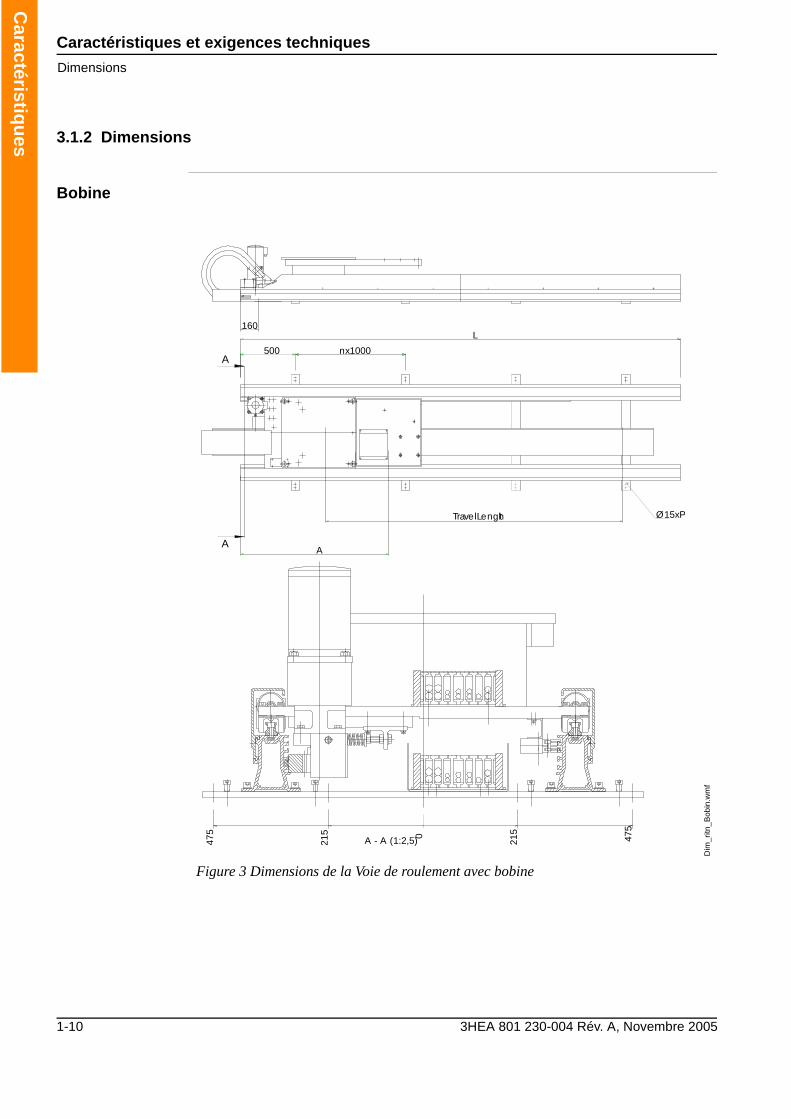
ues 3.1.2 Dimensions
Bobine
Dim
_ritn
_Bob
in.w
mf
Figure 3 Dimensions de la Voie de roulement avec bobine
2150
475
215
475
160L
nx1000500
TravelLength
A
Ø15xP
A
A
A - A (1:2,5)

Caractéristiques et exigences techniquesDimensions
3HEA 801 230-004 Rév. A, Novembre 2005 1-11
Car
acté
rist
iqu
es
Marathon Pac
Dim
_ritn
_Mar
atho
n.w
mf
Figure 4 Dimensions de la Voie de roulement avec Marathon Pac
475
475
215
215
A - A (1:2,5)
0
L
nx1000500
160
Ø15xP
Travel lengthAA
A

Caractéristiques et exigences techniques
Dimensions
1-12 3HEA 801 230-004 Rév. A, Novembre 2005
Caractéristiq
ues
Chaîne de câbles
RT
T_c
hain
.wm
f
Figure 5 Dimensions pour la chaîne de câbles

Modèles et optionsModèles et options pour les RTT 1400/2400L
3HEA 801 230-004 Rév. A, Novembre 2005 1-13
Car
acté
rist
iqu
es
4 Modèles et options
4.1 Modèles et options pour les RTT 1400/2400L
Câble de connexion
Les câbles standard du robot peuvent être utilisés pour connecter la Voie de roulement au système de commande.
Câble de puissance
La longueur du câble de puissance du septième axe est de 7, 15 ou 22 mètres à partir du point de connexion au centre de l’unité.
Modèles Les tableaux décrivent les modèles et les options pouvant être commandés pour les RTT 1400/2400L. Veuillez prendre contact avec ABB pour d’avantage d’informations.Le dernier chiffre de la référence est remplacé par « x » car les références varient avec la longueur de la Voie de roulement.
Modèles Référence
IRB 1400
Voie de roulement avec bobine, complète 3HEA 801 208-x
Voie de roulement avec Marathon Pac, complète 3HEA 801 206-x
IRB 2400
Voie de roulement avec bobine, complète 3HEA 801 209-x
Voie de roulement avec Marathon Pac, complète 3HEA 801 207-x
Longueur de déplacement x
1,7 m 001
2,7 m 002
3,7 m 003
4,7 m 004
etc.

Modèles et options
Modèles et options pour les RTT 1400/2400L
1-14 3HEA 801 230-004 Rév. A, Novembre 2005
Caractéristiq
ues
3HEA 801 230-004 Rév. A, Novembre 2005 Installation et utilisation i
Inst
alla
tio
n e
t u
tilis
atio
n
Intercalaire 2 : Installation et utilisation1 Installation et utilisation 1
1.1 Déballage et manipulation 11.1.1 Instructions de levage 11.1.2 Inspection pour l’acceptation 3
1.2 Installation mécanique 41.2.1 Fondation 41.2.2 Installation de la Voie de roulement 81.2.3 Réglage 91.2.4 Installation du manipulateur sur la Voie de roulement 9
1.3 Installation électrique 10
2 Mise en service 11
2.1 Préparations 112.1.1 Configurez l’équipement de commande 112.1.2 Mise à jour 112.1.3 Contrôle de la zone de travail 12

Installation et utilisation ii 3HEA 801 230-004 Rév. A, Novembre 2005
Installatio
n et u
tilisation
Installation et utilisationDéballage et manipulation
3HEA 801 230-004 Rév. A, Novembre 2005 2-1
Inst
alla
tio
n e
t u
tilis
atio
n
1 Installation et utilisation
1.1 Déballage et manipulation
1.1.1 Instructions de levage
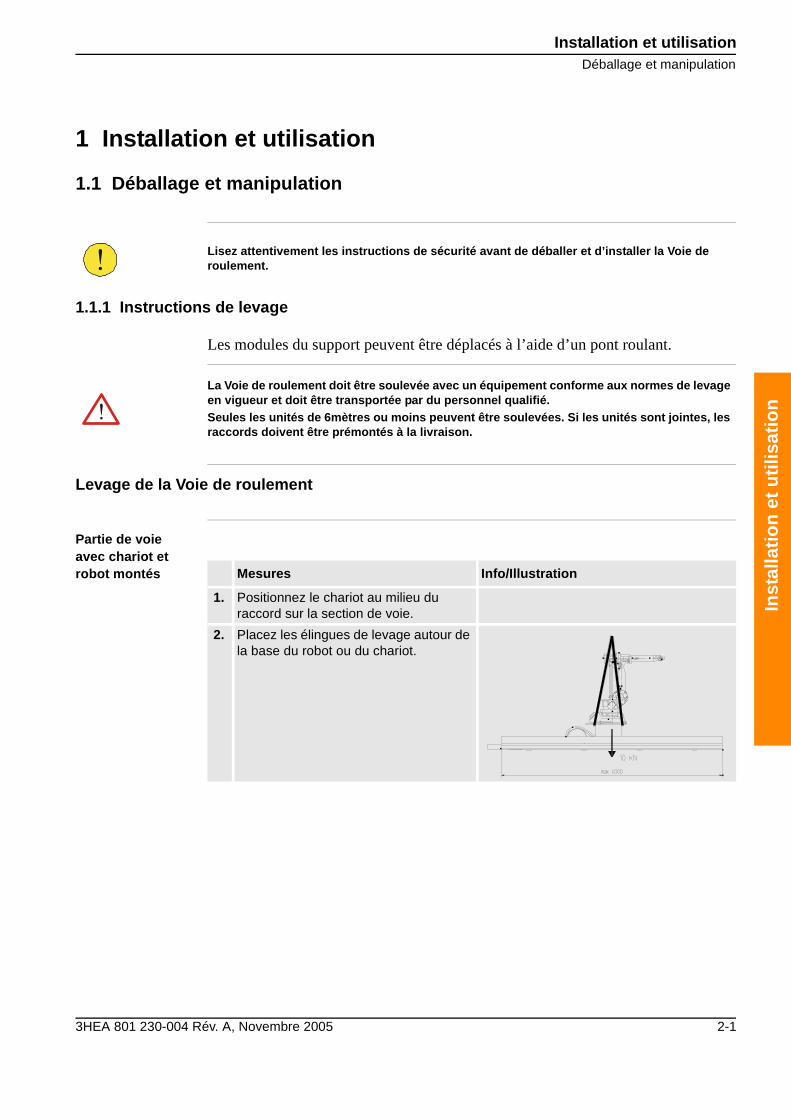
Les modules du support peuvent être déplacés à l’aide d’un pont roulant.
Levage de la Voie de roulement
Partie de voie avec chariot et robot montés
Lisez attentivement les instructions de sécurité avant de déballer et d’installer la Voie de roulement.
La Voie de roulement doit être soulevée avec un équipement conforme aux normes de levage en vigueur et doit être transportée par du personnel qualifié.Seules les unités de 6mètres ou moins peuvent être soulevées. Si les unités sont jointes, les raccords doivent être prémontés à la livraison.
Mesures Info/Illustration
1. Positionnez le chariot au milieu du raccord sur la section de voie.
2. Placez les élingues de levage autour de la base du robot ou du chariot.

Installation et utilisation
Instructions de levage
2-2 3HEA 801 230-004 Rév. A, Novembre 2005
Installatio
n et u
tilisation
Partie de voie sans chariot ni robot montés Mesures Info/Illustration
1. Placez les élingues de levage de chaque côté du raccord sur la section de voie.

Installation et utilisationInspection pour l’acceptation
3HEA 801 230-004 Rév. A, Novembre 2005 2-3
Inst
alla
tio
n e
t u
tilis
atio
n
1.1.2 Inspection pour l’acceptation
Identification Les plaques d’identification se trouvent au niveau du (X) et indiquent le type de chariot, le numéro de série, la date de livraison, etc.
Contenu En standard, la Voie de roulement est livrée avec les éléments suivants :
• Un chariot avec une unité d’entraînement.Le chariot pèse :
• Modules du support et chaîne de câblesLes voies de roulement d’une longueur de déplacement supérieure à 4,7 m sont constituées de plusieurs modules de support qui sont interconnectés au cours de l’installation.
• Boulons de montage et manchons de guidageBoulons de montage avec rondelles et manchons de guidage pour le robot.
Inspection Déballez l’équipement et contrôlez l’absence de dommages dus au transport. En cas de dommage, prenez contact avec ABB.
Nettoyage Avant d’être emballé pour le transport, l’équipement est recouvert d’un fin film d’huile pour le protéger contre la rouille. Ce film d’huile doit être essuyé avant l’installation.
Mär
ksky
lt.w
mf
Figure 1 Plaques d’identifications (X)
X
Marathon Pac 346-433 kg
Bobine 220-280 kg
Mesures
1. Essuyez tout excès d’huile à l’aide d’un chiffon non pelucheux.
Installation et utilisation
Installation mécanique
2-4 3HEA 801 230-004 Rév. A, Novembre 2005
Installatio
n et u
tilisation
1.2 Installation mécanique
Consultez l’agencement de la station pour obtenir un alignement correct de la Voie de roulement.Avant la mise en marche, lubrifiez les roues dentées et la crémaillère avec de la graisse, voir le tableau page 3 - 2.
1.2.1 Fondation
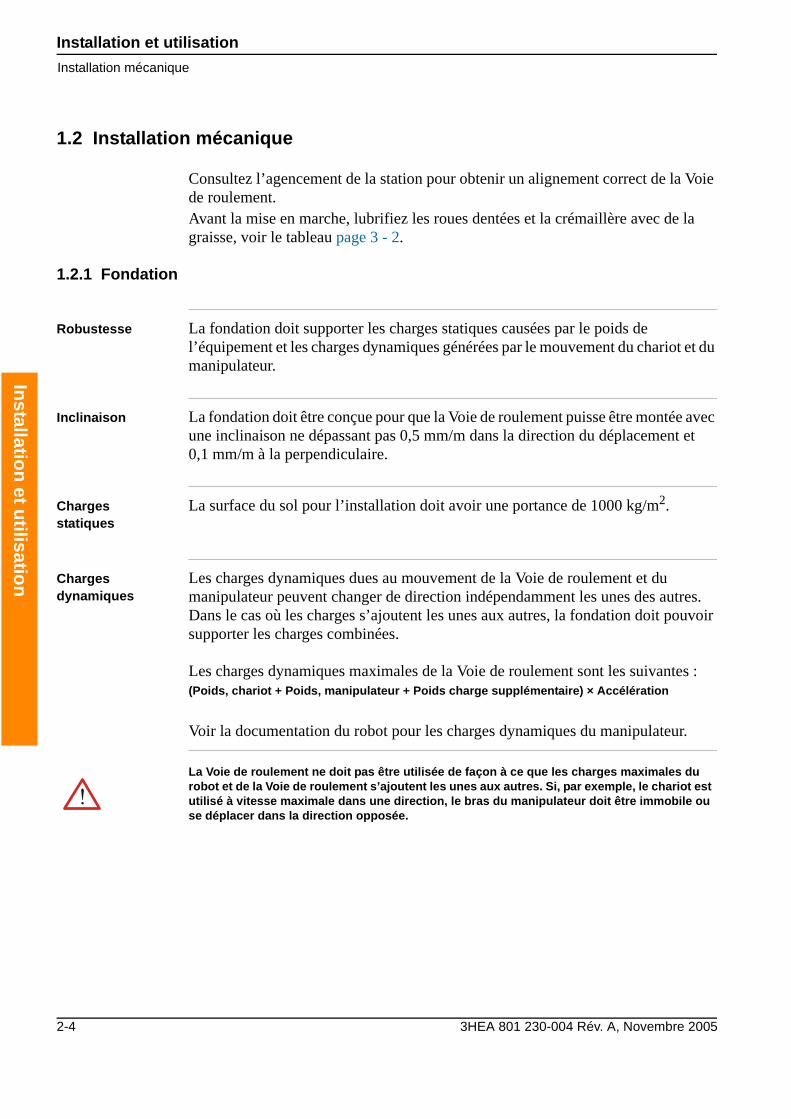
Robustesse La fondation doit supporter les charges statiques causées par le poids de l’équipement et les charges dynamiques générées par le mouvement du chariot et du manipulateur.
Inclinaison La fondation doit être conçue pour que la Voie de roulement puisse être montée avec une inclinaison ne dépassant pas 0,5 mm/m dans la direction du déplacement et 0,1 mm/m à la perpendiculaire.
Charges statiques
La surface du sol pour l’installation doit avoir une portance de 1000 kg/m2.
Charges dynamiques
Les charges dynamiques dues au mouvement de la Voie de roulement et du manipulateur peuvent changer de direction indépendamment les unes des autres. Dans le cas où les charges s’ajoutent les unes aux autres, la fondation doit pouvoir supporter les charges combinées.
Les charges dynamiques maximales de la Voie de roulement sont les suivantes :(Poids, chariot + Poids, manipulateur + Poids charge supplémentaire) × Accélération
Voir la documentation du robot pour les charges dynamiques du manipulateur.
La Voie de roulement ne doit pas être utilisée de façon à ce que les charges maximales du robot et de la Voie de roulement s’ajoutent les unes aux autres. Si, par exemple, le chariot est utilisé à vitesse maximale dans une direction, le bras du manipulateur doit être immobile ou se déplacer dans la direction opposée.

Installation et utilisationFondation
3HEA 801 230-004 Rév. A, Novembre 2005 2-5
Inst
alla
tio
n e
t u
tilis
atio
n
Fixation Il est recommandé d’utiliser des boulons d’ancrage chimiques pour fixer la Voie de roulement au sol. Toutefois, les boulons de montage ne sont pas fournis car ils doivent être choisis en fonction du matériau de la fondation.
Mesures Info/Illustration
1. Boulonnez la Voie de roulement à la fondation.
2. Avant de finaliser la fixation, la voie doit être alignée à l’aide des boulons de mise à niveau. Pour obtenir une fixation stable, utilisez des cales des deux côtés des boulons de mise à niveau.
3. Proposition de cales.
4. Les dimensions des boulons de fondation (fournis par le client) sont les suivantes.
Installation et utilisation
Fondation
2-6 3HEA 801 230-004 Rév. A, Novembre 2005
Installatio
n et u
tilisation
Configuration des trous
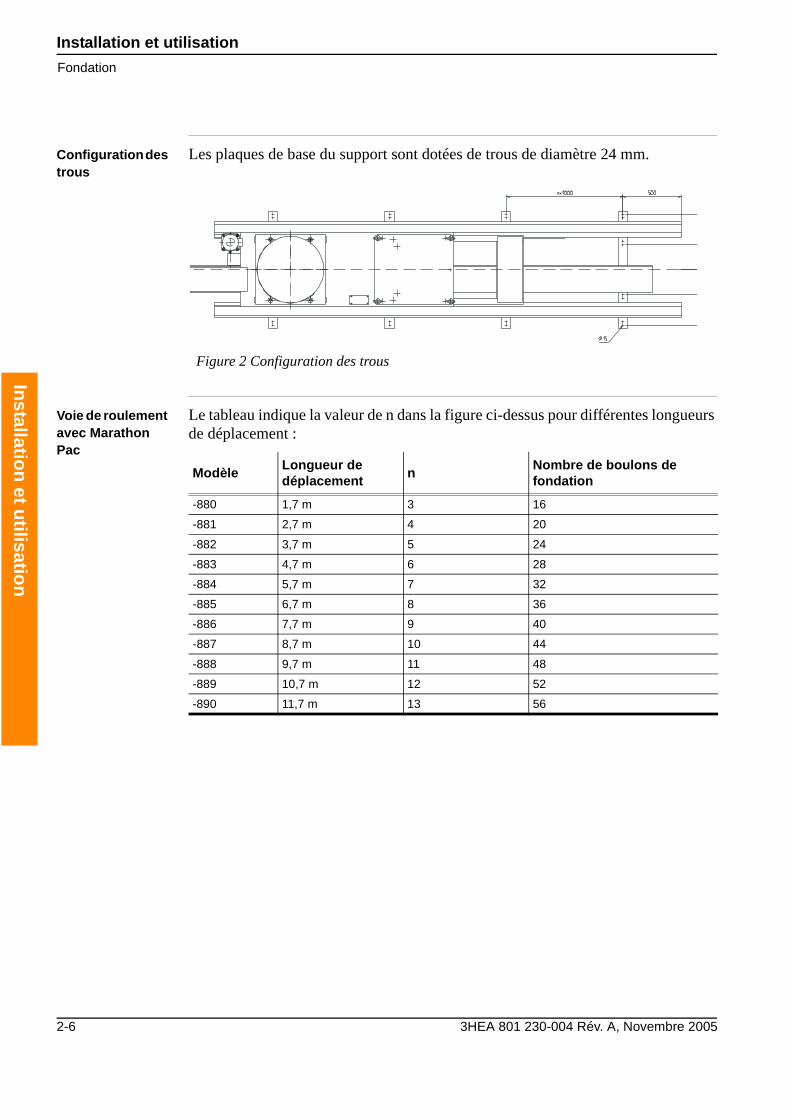
Les plaques de base du support sont dotées de trous de diamètre 24 mm.
Voie de roulement avec Marathon Pac
Le tableau indique la valeur de n dans la figure ci-dessus pour différentes longueurs de déplacement :
Figure 2 Configuration des trous
ModèleLongueur de déplacement
nNombre de boulons de fondation
-880 1,7 m 3 16
-881 2,7 m 4 20
-882 3,7 m 5 24
-883 4,7 m 6 28
-884 5,7 m 7 32
-885 6,7 m 8 36
-886 7,7 m 9 40
-887 8,7 m 10 44
-888 9,7 m 11 48
-889 10,7 m 12 52
-890 11,7 m 13 56
Installation et utilisationFondation
3HEA 801 230-004 Rév. A, Novembre 2005 2-7
Inst
alla
tio
n e
t u
tilis
atio
n
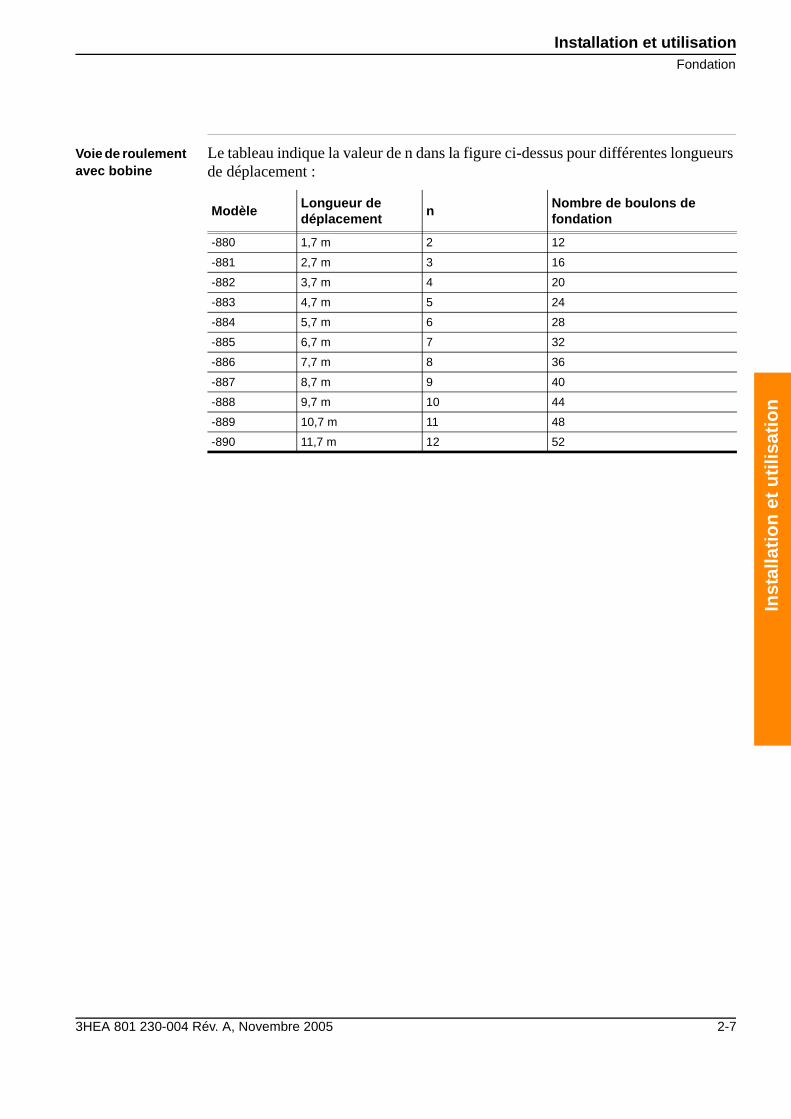
Voie de roulement avec bobine
Le tableau indique la valeur de n dans la figure ci-dessus pour différentes longueurs de déplacement :
ModèleLongueur de déplacement
nNombre de boulons de fondation
-880 1,7 m 2 12
-881 2,7 m 3 16
-882 3,7 m 4 20
-883 4,7 m 5 24
-884 5,7 m 6 28
-885 6,7 m 7 32
-886 7,7 m 8 36
-887 8,7 m 9 40
-888 9,7 m 10 44
-889 10,7 m 11 48
-890 11,7 m 12 52

Installation et utilisation
Installation de la Voie de roulement
2-8 3HEA 801 230-004 Rév. A, Novembre 2005
Installatio
n et u
tilisation
1.2.2 Installation de la Voie de roulement
La longueur de la Voie de roulement est normalement de 6 m maximum et les voies de longueur de déplacement supérieure à 4,7 m sont jointes lors de l’installation :
Mesures Info/Illustration
1. Positionnez la partie de voie avec le chariot et le robot correctement alignés par rapport au plan de fondation.
2. Retirez les protections sur les rails de guidage.
3. Montez la partie de voie à joindre de façon à ce que les rails de guidage et la crémaillère correspondent à la section précédente.
4. Vissez ferment le rail de guidage et la crémaillère.
• Dévissez une des crémaillères avec les vis pour qu’elle puisse légèrement glisser sur le côté.
• Déplacez le chariot pour que la roue dentée passe le raccord vers l’avant et vers l’arrière.
• Serrez légèrement les vis et déplacez de nouveau le chariot vers l’avant et vers l’arrière. Répétez jusqu’à ce que la roue dentée passe le raccord sans faire de bruit.
• Serrez la crémaillère.
5. Remettez les protections sur les rails de guidage. (1) Crémaillère. (2) Rail de guidage. 1
2
Installation et utilisationRéglage
3HEA 801 230-004 Rév. A, Novembre 2005 2-9
Inst
alla
tio
n e
t u
tilis
atio
n
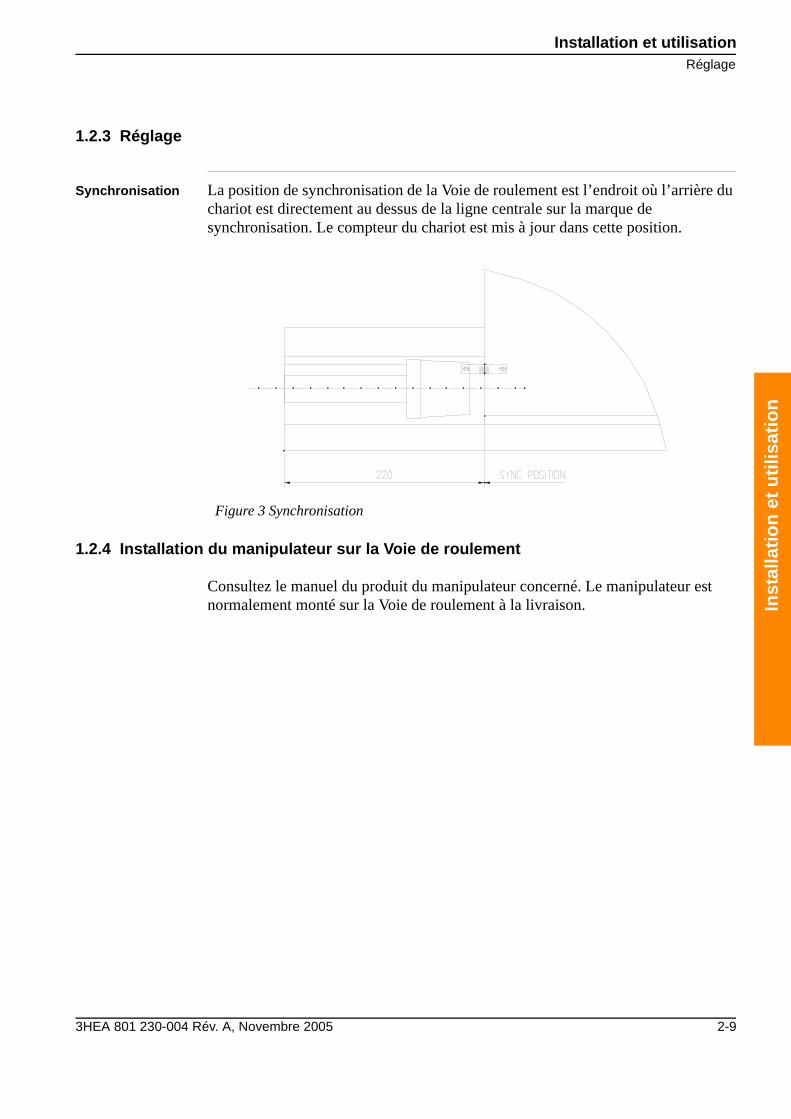
1.2.3 Réglage
Synchronisation La position de synchronisation de la Voie de roulement est l’endroit où l’arrière du chariot est directement au dessus de la ligne centrale sur la marque de synchronisation. Le compteur du chariot est mis à jour dans cette position.
1.2.4 Installation du manipulateur sur la Voie de roulement
Consultez le manuel du produit du manipulateur concerné. Le manipulateur est normalement monté sur la Voie de roulement à la livraison.
Figure 3 Synchronisation

Installation et utilisation
Installation électrique
2-10 3HEA 801 230-004 Rév. A, Novembre 2005
Installatio
n et u
tilisation
1.3 Installation électrique
Faisceau de câbles du robot
Le faisceau de câble du robot est assez long pour l’installation dans une des deux positions sur le chariot. Tout excès doit être placé dans une chaîne de câbles sur le sol en fonction des conditions locales.
Voir le schéma électrique et le schéma fonctionnel de l’installation complète.Voir les paramètres du manipulateur pour les paramètres des axes externes.
Veillez à ce que la chaîne de câbles ne puisse pas entrer en contact avec des pièces mobiles.
Mise en servicePréparations
3HEA 801 230-004 Rév. A, Novembre 2005 2-11
Inst
alla
tio
n e
t u
tilis
atio
n
2 Mise en service
2.1 Préparations
Le système doit être préparé avant la mise en service de la Voie de roulement. Les étapes suivantes doivent être effectuées avant de démarrer la Voie de roulement :
2.1.1 Configurez l’équipement de commande
Longueur de déplacement
Les zones de travail des différentes longueurs de déplacement sont définies sur la base du repère d’étalonnage. La longueur de déplacement est définie à son maximum dans le fichier de paramètres pour la longueur de déplacement commandée.
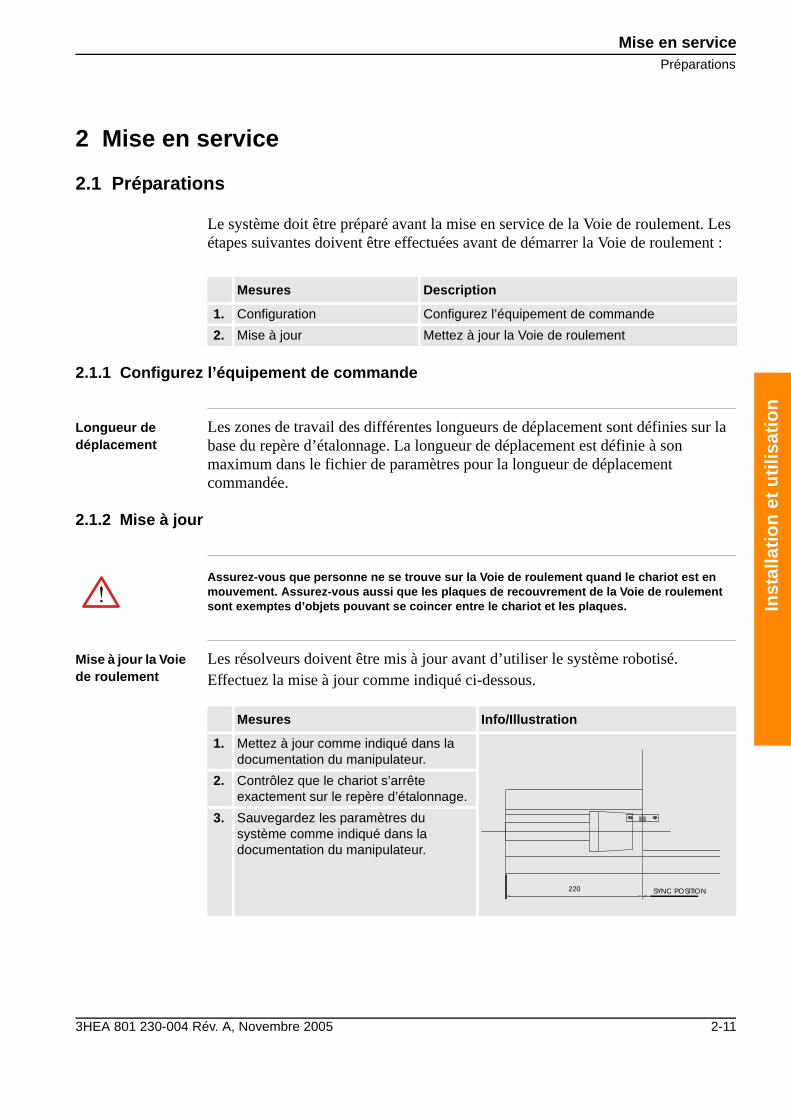
2.1.2 Mise à jour
Mise à jour la Voie de roulement
Les résolveurs doivent être mis à jour avant d’utiliser le système robotisé.Effectuez la mise à jour comme indiqué ci-dessous.
Mesures Description
1. Configuration Configurez l’équipement de commande
2. Mise à jour Mettez à jour la Voie de roulement
Assurez-vous que personne ne se trouve sur la Voie de roulement quand le chariot est en mouvement. Assurez-vous aussi que les plaques de recouvrement de la Voie de roulement sont exemptes d’objets pouvant se coincer entre le chariot et les plaques.
Mesures Info/Illustration
1. Mettez à jour comme indiqué dans la documentation du manipulateur.
2. Contrôlez que le chariot s’arrête exactement sur le repère d’étalonnage.
3. Sauvegardez les paramètres du système comme indiqué dans la documentation du manipulateur.
220 SYNC POSITION

Mise en service
Contrôle de la zone de travail
2-12 3HEA 801 230-004 Rév. A, Novembre 2005
Installatio
n et u
tilisation
2.1.3 Contrôle de la zone de travail
Faites fonctionner le système manuellement à l’aide du joystick et contrôlez que :
• Il peut se déplacer dans les deux directions.
• Il peut atteindre ses deux extrémités.
La zone de travail de la Voie de roulement doit être inspectée avant la mise en marche du système.
3HEA 801 230-004 Rév. A, Novembre 2005 Maintenance i
Mai
nte
nan
ce
Intercalaire 3:Maintenance1 Calendrier de maintenance 1
1.1 Contrôles de routine et maintenance préventive 1
2 Reservdelar/Spare parts 5
2.1 Beställning/Order 5
2.2 Åkbana Bobin/Travel Track Bobbin 62.2.1 IRB 1400 Komplett/Complete 62.2.2 IRB 2400 Komplett/Complete 82.2.3 Åkbana (Bas)/Travel Track (Base) 102.2.4 Vagn Bobin/Carriage Bobbin 13
2.3 Åkbana/Travel Track, Marathon Pac 152.3.1 IRB 1400 Komplett/Complete 152.3.2 IRB 2400 Komplett/Complete 172.3.3 Åkbana (Bas)/Travel Track (Base) 192.3.4 Vagn/Carriage, Marathon Pac 22

Maintenance ii 3HEA 801 230-004 Rév. A, Novembre 2005
Main
tenan
ce

Calendrier de maintenanceContrôles de routine et maintenance préventive
3HEA 801 230-004 Rév. A, Novembre 2005 3-1
Mai
nte
nan
ce
1 Calendrier de maintenance
1.1 Contrôles de routine et maintenance préventive
Schéma de maintenance
La Voie de roulement est conçue pour nécessiter un minimum de maintenance. Toutefois, des contrôles de routine et une maintenance préventive doivent être effectués à intervalles réguliers.Le schéma de maintenance décrit la maintenance et les contrôles de routine dans un ordre chronologique.
Fréquence Pièce Maintenance
Tous les mois(toutes les 160 heures de fonctionnement)
Engrenage Contrôlez l’absence de fuite d’huile au niveau de l’engrenage.
Unité d'entraînement Contrôlez toutes les vis de fixation.
Rails de guidage Contrôlez toutes les vis de fixation.
Roue dentée et crémaillère
Contrôlez le contact entre la roue dentée et la crémaillère.
Contrôlez la pression de la roue dentée sur la crémaillère en mesurant le ressort : il doit être comprimé à une longueur de 40 mm.
Nettoyez la roue dentée et la crémaillère et lubrifiez avec de la graisse.
Conduite de câbles Nettoyez la conduite de câbles
Fonctionnement électrique
Contrôlez toutes les fonctions électriques.
Câbles et connecteurs Contrôlez les câbles visibles
Chaîne de câbles Contrôlez la chaîne de câbles visible.
Boîtiers de connexion Contrôlez
Moteur d’entraînement Contrôlez
Tous les trois mois (500 heures de fonctionnement)
Rails de guidage Contrôlez les rails de guidage.
Chariots des rails de guidage
Contrôlez et lubrifiez les chariots des rails de guidage.
Guides linéaires Nettoyez les guides linéaires.
Tous les 5 ans Batterie de secours Changez la batterie si elle semble être déchargée.

Calendrier de maintenance
Contrôles de routine et maintenance préventive
3-2 3HEA 801 230-004 Rév. A, Novembre 2005
Main
tenan
ce
Maintenance mécanique
Nettoyage et lubrification de la roue dentée et de la crémaillère
Nettoyez et lubrifiez manuellement les roues dentées et les crémaillères avec un des lubrifiants suivants :
Lubrification dans des environnements extrêmement sales
Il est recommandé d’utiliser un lubrifiant spécial repoussant la poussière et la saleté s’il existe un risque d’étincelles de soudage ou d’autres particules dans l’air qui peuvent se coller à la crémaillère lubrifiée :
Lubrifiez les chariots de rails de guidage
Nettoyez et lubrifiez manuellement les chariots des rails de guidage avec le lubrifiant suivant :
Fabricant Lubrifiant
BP Energol OGL 461 F
SHELL Graisse pour roue dentée SHELL (nouvelle) ou Maleus GL 205
MOBIL OIL Mobiltac 81
Fabricant Lubrifiant
OPTIMOL VISCOGEN EPL
Lubrifiant
Graisse à base de lithium de consistance NLGI2 selon DIN 51818
Calendrier de maintenanceContrôles de routine et maintenance préventive
3HEA 801 230-004 Rév. A, Novembre 2005 3-3
Mai
nte
nan
ce
Maintenance électrique
Inspection des fonctions électriques
Les points suivants doivent être contrôlés tous les mois sur la Voie de roulement :
• Toutes les fonctions électriques
• Les positions extrêmes :Faites fonctionner la Voie de roulement et contrôlez qu’elle atteint ses positions extrêmes.
Contrôlez l’arrêt d’urgence
Le fonctionnement de l’arrêt d’urgence doit être contrôlé tous les mois comme suit :
Contrôle du câblage
Contrôlez tous les mois :
Contrôle des connecteurs
Contrôlez tous les mois :
• Que tous les connecteurs sont correctement montés et qu’il n’existe aucun risque de mauvais contact.
Contrôle de la chaîne de câbles
Contrôlez tous les mois la partie visible de la chaîne de câbles en ce qui concerne :
• Le système de liaison, remplacez-le si nécessaire.
• Points de fixation, remplacez si nécessaire.
Mesures
1. Permettez un arrêt de la Voie de roulement.
2. Appuyez sur l’arrêt d’urgence.
3. Essayez de démarrer la Voie de roulement.
Si un câble... alors...
est usé ou pincé remplacez le câble.
frotte contre des bords acérés positionnez le câble pour qu’il soit libre.
Calendrier de maintenance
Contrôles de routine et maintenance préventive
3-4 3HEA 801 230-004 Rév. A, Novembre 2005
Main
tenan
ce
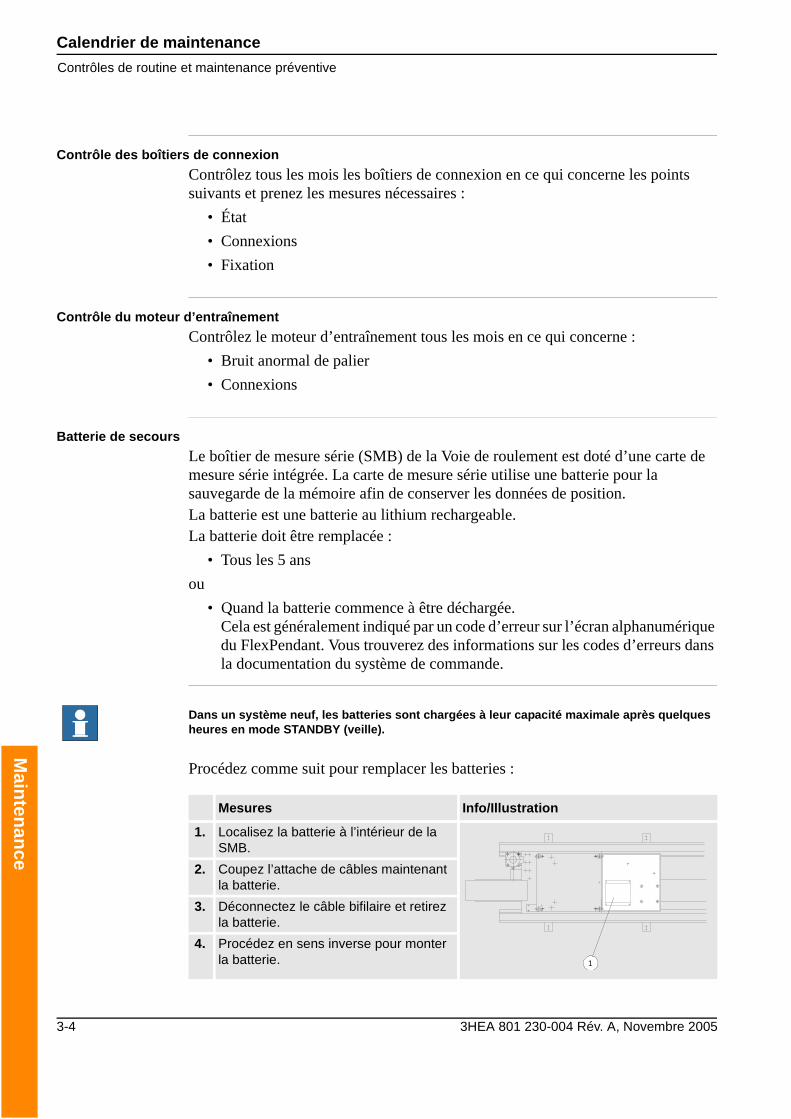
Contrôle des boîtiers de connexion
Contrôlez tous les mois les boîtiers de connexion en ce qui concerne les points suivants et prenez les mesures nécessaires :
• État
• Connexions
• Fixation
Contrôle du moteur d’entraînement
Contrôlez le moteur d’entraînement tous les mois en ce qui concerne :
• Bruit anormal de palier
• Connexions
Batterie de secours
Le boîtier de mesure série (SMB) de la Voie de roulement est doté d’une carte de mesure série intégrée. La carte de mesure série utilise une batterie pour la sauvegarde de la mémoire afin de conserver les données de position.La batterie est une batterie au lithium rechargeable.La batterie doit être remplacée :
• Tous les 5 ans
ou
• Quand la batterie commence à être déchargée.Cela est généralement indiqué par un code d’erreur sur l’écran alphanumérique du FlexPendant. Vous trouverez des informations sur les codes d’erreurs dans la documentation du système de commande.
Procédez comme suit pour remplacer les batteries :
Dans un système neuf, les batteries sont chargées à leur capacité maximale après quelques heures en mode STANDBY (veille).
Mesures Info/Illustration
1. Localisez la batterie à l’intérieur de la SMB.
2. Coupez l’attache de câbles maintenant la batterie.
3. Déconnectez le câble bifilaire et retirez la batterie.
4. Procédez en sens inverse pour monter la batterie. 1

Reservdelar/Spare partsBeställning/Order
3HEA 801 230-004 Rév. A, Novembre 2005 3-5
Mai
nte
nan
ce
2 Reservdelar/Spare parts
2.1 Beställning/Order
Reservdelar beställs genom ABB Automation Technologies AB. Vid beställning var vänlig uppge typ och tillverkningsnummer samt benämningar och beställningsnum-mer enligt reservdelsförteckningen.Rätt till ändring av specifikationer utan avisering förbehålles.
Spare parts are to be ordered from ABB Automation Technologies AB. Kindly indi-cate type of unit, serial number, denominations and ordering number according to the spare parts list.Rights reserved to alter specifications without notice.
Byt ut x i artikelnumret enligt efterföljande tabell.Replace x in the article number according to the following table.
Reservdelar/Spare parts
Åkbana Bobin/Travel Track Bobbin
3-6 3HEA 801 230-004 Rév. A, Novembre 2005
Main
tenan
ce
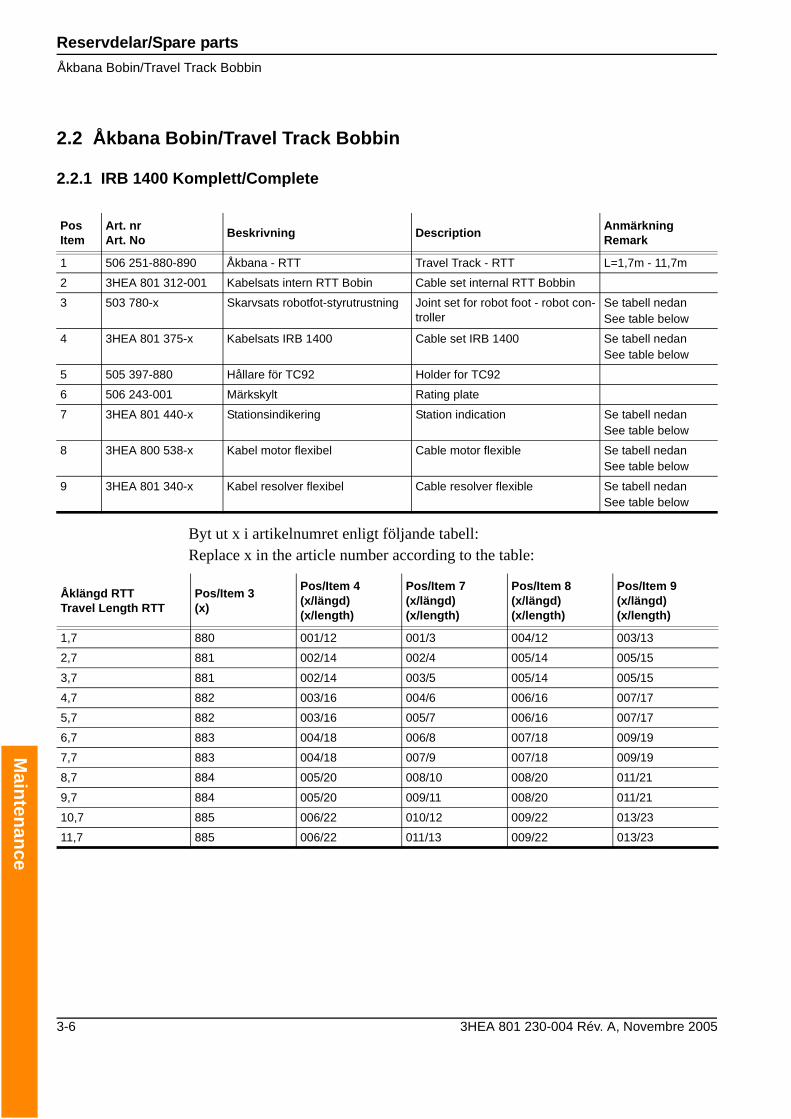
2.2 Åkbana Bobin/Travel Track Bobbin
2.2.1 IRB 1400 Komplett/Complete
Byt ut x i artikelnumret enligt följande tabell:Replace x in the article number according to the table:
PosItem
Art. nrArt. No
Beskrivning DescriptionAnmärkningRemark
1 506 251-880-890 Åkbana - RTT Travel Track - RTT L=1,7m - 11,7m
2 3HEA 801 312-001 Kabelsats intern RTT Bobin Cable set internal RTT Bobbin
3 503 780-x Skarvsats robotfot-styrutrustning Joint set for robot foot - robot con-troller
Se tabell nedanSee table below
4 3HEA 801 375-x Kabelsats IRB 1400 Cable set IRB 1400 Se tabell nedanSee table below
5 505 397-880 Hållare för TC92 Holder for TC92
6 506 243-001 Märkskylt Rating plate
7 3HEA 801 440-x Stationsindikering Station indication Se tabell nedanSee table below
8 3HEA 800 538-x Kabel motor flexibel Cable motor flexible Se tabell nedanSee table below
9 3HEA 801 340-x Kabel resolver flexibel Cable resolver flexible Se tabell nedanSee table below
Åklängd RTTTravel Length RTT
Pos/Item 3(x)
Pos/Item 4(x/längd)(x/length)
Pos/Item 7(x/längd)(x/length)
Pos/Item 8(x/längd)(x/length)
Pos/Item 9(x/längd)(x/length)
1,7 880 001/12 001/3 004/12 003/13
2,7 881 002/14 002/4 005/14 005/15
3,7 881 002/14 003/5 005/14 005/15
4,7 882 003/16 004/6 006/16 007/17
5,7 882 003/16 005/7 006/16 007/17
6,7 883 004/18 006/8 007/18 009/19
7,7 883 004/18 007/9 007/18 009/19
8,7 884 005/20 008/10 008/20 011/21
9,7 884 005/20 009/11 008/20 011/21
10,7 885 006/22 010/12 009/22 013/23
11,7 885 006/22 011/13 009/22 013/23

Reservdelar/Spare partsIRB 1400 Komplett/Complete
3HEA 801 230-004 Rév. A, Novembre 2005 3-7
Mai
nte
nan
ce
RT
TB
obin
pos
.wm
f
5
6
3
4
1
7 2
8
9

Reservdelar/Spare parts
IRB 2400 Komplett/Complete
3-8 3HEA 801 230-004 Rév. A, Novembre 2005
Main
tenan
ce
2.2.2 IRB 2400 Komplett/Complete
Byt ut x i artikelnumret enligt följande tabell:Replace x in the article number according to the table:
PosItem
Art. nrArt. No
Beskrivning DescriptionAnmärkningRemark
1 506 251-880-890 Åkbana - RTT Travel Track - RTT L=1,7m - 11,7m
2 3HEA 801 312-001 Kabelsats intern RTT Bobin Cable set internal RTT Bobbin
3 503 780-x Skarvsats robotfot-styrutrustning Joint set for robot foot - robot con-troller
Se tabell nedanSee table below
4 3HEA 801 377-x Kabelsats Cable set Se tabell nedanSee table below
5 505 397-880 Hållare för TC92 Holder for TC92
6 506 248-001 Märkskylt Rating plate
7 3HEA 801 440-x Stationsindikering Station indication Se tabell nedanSee table below
8 3HEA 800 538-x Kabel motor flexibel Cable motor flexible Se tabell nedanSee table below
9 3HEA 801 340-x Kabel resolver flexibel Cable resolver flexible Se tabell nedanSee table below
Åklängd RTTTravel length RTT
Pos/Item 3(x)
Pos/Item 4(x/längd)(x/length)
Pos/Item 7(x/längd)(x/length)
Pos/Item 8(x/längd)(x/length)
Pos/Item 9(x/längd)(x/length)
1,7 880 001/12 001/3 004/12 003/13
2,7 881 002/14 002/4 005/14 005/15
3,7 881 002/14 003/5 005/14 005/15
4,7 882 003/16 004/6 006/16 007/17
5,7 882 003/16 005/7 006/16 007/17
6,7 883 004/18 006/8 007/18 009/19
7,7 883 004/18 007/9 007/18 009/19
8,7 884 005/20 008/10 008/20 011/21
9,7 884 005/20 009/11 008/20 011/21
10,7 885 006/22 010/12 009/22 013/23
11,7 885 006/22 011/13 009/22 013/23

Reservdelar/Spare partsIRB 2400 Komplett/Complete
3HEA 801 230-004 Rév. A, Novembre 2005 3-9
Mai
nte
nan
ce
RT
TB
obin
pos
.wm
f
5
6
3
4
1
7 2
8
9

Reservdelar/Spare parts
Åkbana (Bas)/Travel Track (Base)
3-10 3HEA 801 230-004 Rév. A, Novembre 2005
Main
tenan
ce
2.2.3 Åkbana (Bas)/Travel Track (Base)
Pos/Item 4 551 151-x
PosItem
AntalQty
Art. nrArt. No
Beskrivning DescriptionAnmärkningRemark
4 551 151-x Banprofil Track profile Se tabell nedanSee table below
7 551 153-x Skyddsprofil Cover profile Se tabell nedanSee table below
9 x 553 818-001 Syll Sole Se tabell nedanSee table below
11 553 810-x Kabelränna Cable chute Se tabell nedanSee table below
13 435 565-x Kuggstång Rack Se tabell nedanSee table below
20 439 029-x Styrskena Guide rail Se tabell nedanSee table below
24 4 550 541-001 Styrvagn Guide carriage
25 1 506 252-880 Drivenhet Drive unit
27 553 811-x Kabelskydd Cable cover Se tabell nedanSee table below
32 4 551 165-880 Bufferfäste Buffer holder
33 4 551 166-001 Gummibuffert Rubber buffer
34 503 917-x Kabelsläpkedja Cable chain Se tabell nedanSee table below
54 551 168-002 Mutterlist Nut bar M6
56 551 168-001 Mutterlist Nut bar M8
64 2111 029-73 Pinne Pin D6×40
65 1 413 588-001 Synkskylt Sign
70 4 2183 010-04 Lyftögla Lifting eye
73 4 551 179-001 Smörjnippel Nipple
74 2 500 077-002 Stålklamma Clamp
75 1 553 817-001 Smörjmedel Lubricant Molycote D321 R
Antal vid olika åklängder/Qty at different track lengths
LängdLength
Art. nrArt no
1,7m 2,7m 3,7m 4,7m 5,7m 6,7m 7,7m 8,7m 9,7m 10,7m 11,7m
2m -001 1
3m -002 1 1 1 1
4m -005 1
5m -003 1 1 1 2 1 2
6m -004 1 1 1 2
Reservdelar/Spare partsÅkbana (Bas)/Travel Track (Base)
3HEA 801 230-004 Rév. A, Novembre 2005 3-11
Mai
nte
nan
ce
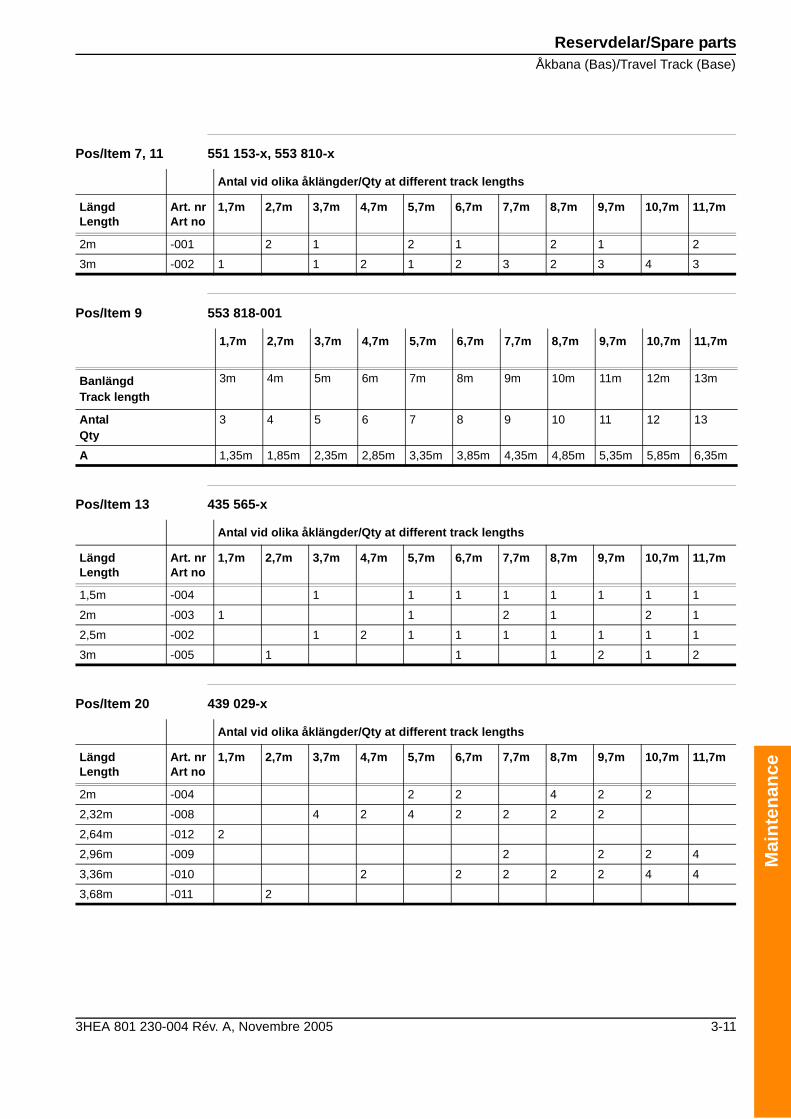
Pos/Item 7, 11 551 153-x, 553 810-x
Pos/Item 9 553 818-001
Pos/Item 13 435 565-x
Pos/Item 20 439 029-x
Antal vid olika åklängder/Qty at different track lengths
LängdLength
Art. nrArt no
1,7m 2,7m 3,7m 4,7m 5,7m 6,7m 7,7m 8,7m 9,7m 10,7m 11,7m
2m -001 2 1 2 1 2 1 2
3m -002 1 1 2 1 2 3 2 3 4 3
1,7m 2,7m 3,7m 4,7m 5,7m 6,7m 7,7m 8,7m 9,7m 10,7m 11,7m
BanlängdTrack length
3m 4m 5m 6m 7m 8m 9m 10m 11m 12m 13m
AntalQty
3 4 5 6 7 8 9 10 11 12 13
A 1,35m 1,85m 2,35m 2,85m 3,35m 3,85m 4,35m 4,85m 5,35m 5,85m 6,35m
Antal vid olika åklängder/Qty at different track lengths
LängdLength
Art. nrArt no
1,7m 2,7m 3,7m 4,7m 5,7m 6,7m 7,7m 8,7m 9,7m 10,7m 11,7m
1,5m -004 1 1 1 1 1 1 1 1
2m -003 1 1 2 1 2 1
2,5m -002 1 2 1 1 1 1 1 1 1
3m -005 1 1 1 2 1 2
Antal vid olika åklängder/Qty at different track lengths
LängdLength
Art. nrArt no
1,7m 2,7m 3,7m 4,7m 5,7m 6,7m 7,7m 8,7m 9,7m 10,7m 11,7m
2m -004 2 2 4 2 2
2,32m -008 4 2 4 2 2 2 2
2,64m -012 2
2,96m -009 2 2 2 4
3,36m -010 2 2 2 2 2 4 4
3,68m -011 2

Reservdelar/Spare parts
Åkbana (Bas)/Travel Track (Base)
3-12 3HEA 801 230-004 Rév. A, Novembre 2005
Main
tenan
ce
Pos/Item 27 553 811-x
Pos/Item 34 503 917-x
Antal vid olika åklängder/Qty at different track lengths
LängdLength
Art. nrArt no
1,7m 2,7m 3,7m 4,7m 5,7m 6,7m 7,7m 8,7m 9,7m 10,7m 11,7m
1m -003 1 1
1,5m -004 1 1 1
2m -001 1 1 1 1 1 1 2
2,5m -005 1
3m -002 1 1 1 1 1 1 1 1
1,7m 2,7m 3,7m 4,7m 5,7m 6,7m 7,7m 8,7m 9,7m 10,7m 11,7m
LängdLength
2,37m 2,87m 3,37m 3,87m 4,37m 4,87m 5,37m 5,87m 6,37m 6,87m 7,37m
Art nrArt no
-002 -003 -004 -005 -006 -007 -008 -009 -010 -011 -012
Reservdelar/Spare partsVagn Bobin/Carriage Bobbin
3HEA 801 230-004 Rév. A, Novembre 2005 3-13
Mai
nte
nan
ce
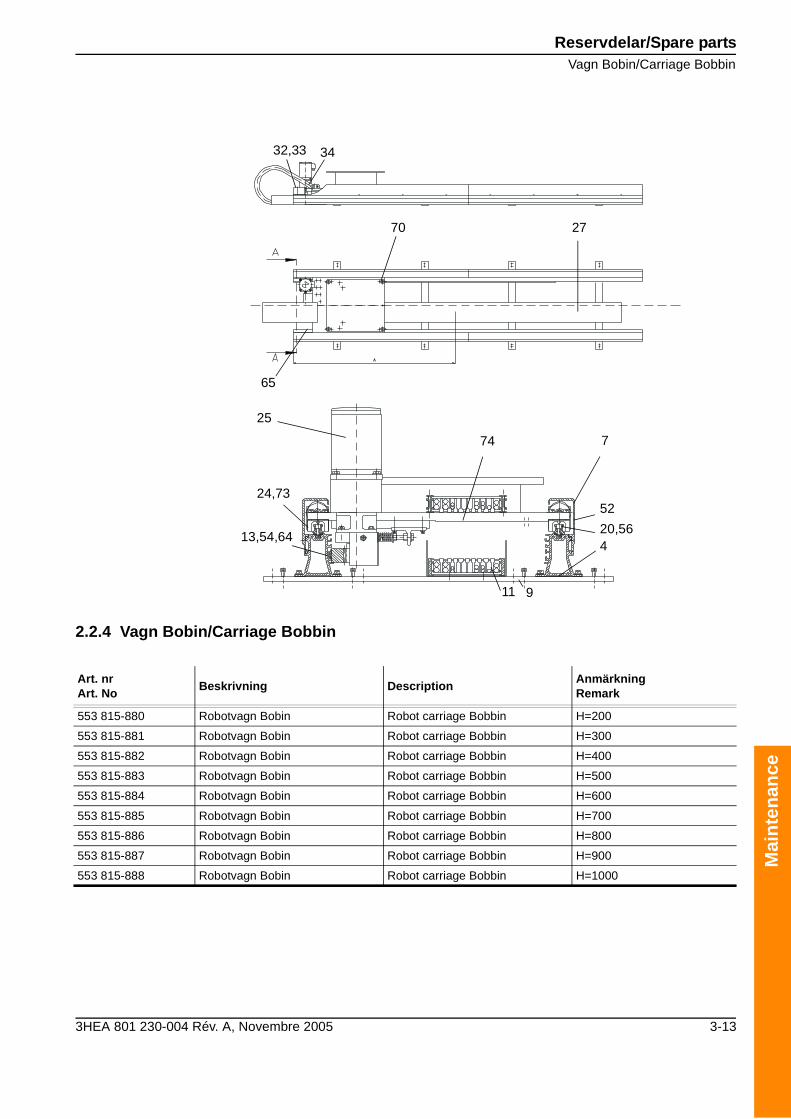
2.2.4 Vagn Bobin/Carriage Bobbin
3432,33
70 27
25
24,73
13,54,64
74
11 9
4
7
52
20,56
65
Art. nrArt. No
Beskrivning DescriptionAnmärkningRemark
553 815-880 Robotvagn Bobin Robot carriage Bobbin H=200
553 815-881 Robotvagn Bobin Robot carriage Bobbin H=300
553 815-882 Robotvagn Bobin Robot carriage Bobbin H=400
553 815-883 Robotvagn Bobin Robot carriage Bobbin H=500
553 815-884 Robotvagn Bobin Robot carriage Bobbin H=600
553 815-885 Robotvagn Bobin Robot carriage Bobbin H=700
553 815-886 Robotvagn Bobin Robot carriage Bobbin H=800
553 815-887 Robotvagn Bobin Robot carriage Bobbin H=900
553 815-888 Robotvagn Bobin Robot carriage Bobbin H=1000

Reservdelar/Spare parts
Vagn Bobin/Carriage Bobbin
3-14 3HEA 801 230-004 Rév. A, Novembre 2005
Main
tenan
ce
IRB 1400
IRB 2400
Reservdelar/Spare partsÅkbana/Travel Track, Marathon Pac
3HEA 801 230-004 Rév. A, Novembre 2005 3-15
Mai
nte
nan
ce
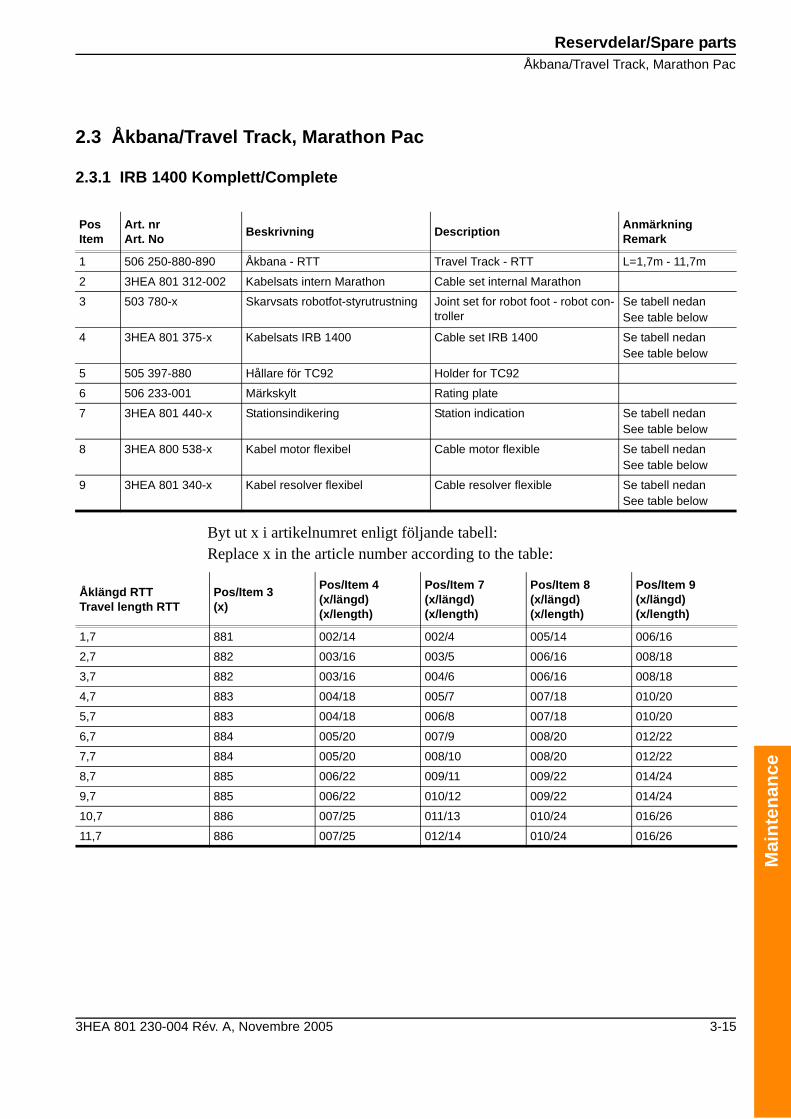
2.3 Åkbana/Travel Track, Marathon Pac
2.3.1 IRB 1400 Komplett/Complete
Byt ut x i artikelnumret enligt följande tabell:Replace x in the article number according to the table:
PosItem
Art. nrArt. No
Beskrivning DescriptionAnmärkningRemark
1 506 250-880-890 Åkbana - RTT Travel Track - RTT L=1,7m - 11,7m
2 3HEA 801 312-002 Kabelsats intern Marathon Cable set internal Marathon
3 503 780-x Skarvsats robotfot-styrutrustning Joint set for robot foot - robot con-troller
Se tabell nedanSee table below
4 3HEA 801 375-x Kabelsats IRB 1400 Cable set IRB 1400 Se tabell nedanSee table below
5 505 397-880 Hållare för TC92 Holder for TC92
6 506 233-001 Märkskylt Rating plate
7 3HEA 801 440-x Stationsindikering Station indication Se tabell nedanSee table below
8 3HEA 800 538-x Kabel motor flexibel Cable motor flexible Se tabell nedanSee table below
9 3HEA 801 340-x Kabel resolver flexibel Cable resolver flexible Se tabell nedanSee table below
Åklängd RTTTravel length RTT
Pos/Item 3(x)
Pos/Item 4(x/längd)(x/length)
Pos/Item 7(x/längd)(x/length)
Pos/Item 8(x/längd)(x/length)
Pos/Item 9(x/längd)(x/length)
1,7 881 002/14 002/4 005/14 006/16
2,7 882 003/16 003/5 006/16 008/18
3,7 882 003/16 004/6 006/16 008/18
4,7 883 004/18 005/7 007/18 010/20
5,7 883 004/18 006/8 007/18 010/20
6,7 884 005/20 007/9 008/20 012/22
7,7 884 005/20 008/10 008/20 012/22
8,7 885 006/22 009/11 009/22 014/24
9,7 885 006/22 010/12 009/22 014/24
10,7 886 007/25 011/13 010/24 016/26
11,7 886 007/25 012/14 010/24 016/26
Reservdelar/Spare parts
IRB 1400 Komplett/Complete
3-16 3HEA 801 230-004 Rév. A, Novembre 2005
Main
tenan
ce
RT
TM
arat
hon
pos.
wm
f
3
4
6
1
57 2
8
9

Reservdelar/Spare partsIRB 2400 Komplett/Complete
3HEA 801 230-004 Rév. A, Novembre 2005 3-17
Mai
nte
nan
ce
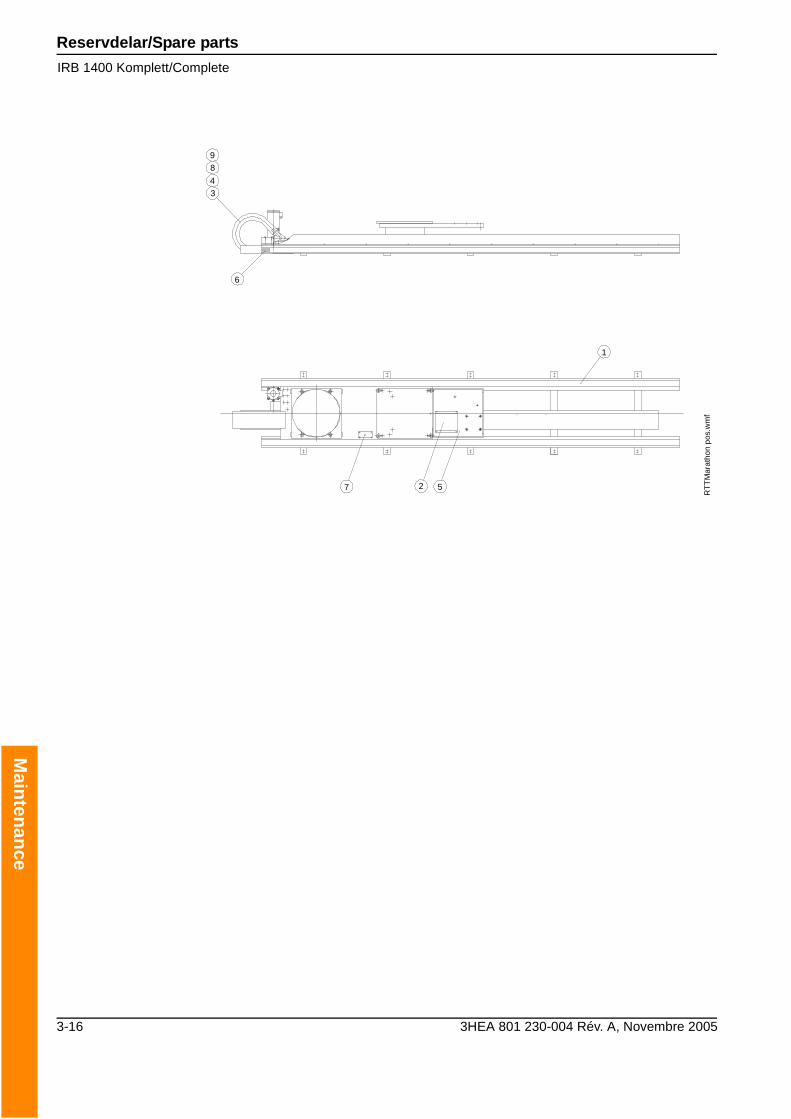
2.3.2 IRB 2400 Komplett/Complete
Byt ut x i artikelnumret enligt följande tabell:Replace x in the article number according to the table:
PosItem
Art. nrArt. No
Beskrivning DescriptionAnmärkningRemark
1 506 250-880-890 Åkbana - RTT Travel Track - RTT L=1,7m - 11,7m
2 3HEA 801 312-002 Kabelsats intern Marathon Cable set internal Marathon
3 503 780-x Skarvsats robotfot-styrutrustning Joint set for robot foot - robot con-troller
Se tabell nedanSee table below
4 3HEA 801 377-x Kabelsats IRB 1400 Cable set IRB 1400 Se tabell nedanSee table below
5 505 397-880 Hållare för TC92 Holder for TC92
6 506 238-001 Märkskylt Rating plate
7 3HEA 801 440-x Stationsindikering Station indication Se tabell nedanSee table below
8 3HEA 800 538-x Kabel motor flexibel Cable motor flexible Se tabell nedanSee table below
9 3HEA 801 340-x Kabel resolver flexibel Cable resolver flexible Se tabell nedanSee table below
Åklängd RTTTravel Length RTT
Pos/Item 3(x)
Pos/Item 4(x/längd)(x/length)
Pos/Item 7(x/längd)(x/length)
Pos/Item 8(x/längd)(x/length)
Pos/Item 9(x/längd)(x/length)
1,7 881 002/14 002/4 005/14 006/16
2,7 882 003/16 003/5 006/16 008/18
3,7 882 003/16 004/6 006/16 008/18
4,7 883 004/18 005/7 007/18 010/20
5,7 883 004/18 006/8 007/18 010/20
6,7 884 005/20 007/9 008/20 012/22
7,7 884 005/20 008/10 008/20 012/22
8,7 885 006/22 009/11 009/22 014/24
9,7 885 006/22 010/12 009/22 014/24
10,7 886 007/25 011/13 010/24 016/26
11,7 886 007/25 012/14 010/24 016/26
Reservdelar/Spare parts
IRB 2400 Komplett/Complete
3-18 3HEA 801 230-004 Rév. A, Novembre 2005
Main
tenan
ce
RT
TM
arat
hon
pos.
wm
f
3
4
6
1
57 2
8
9

Reservdelar/Spare partsÅkbana (Bas)/Travel Track (Base)
3HEA 801 230-004 Rév. A, Novembre 2005 3-19
Mai
nte
nan
ce
2.3.3 Åkbana (Bas)/Travel Track (Base)
Pos/Item 4 551 151-x
PosItem
AntalQty
Art. nrArt. No
Beskrivning DescriptionAnmärkningRemark
4 551 151-x Banprofil Track profile Se tabell nedanSee table below
7 551 153-x Skyddsprofil Cover profile Se tabell nedanSee table below
9 x 553 818-001 Syll Sole Se tabell nedanSee table below
11 553 810-x Kabelränna Cable chute Se tabell nedanSee table below
13 435 565-x Kuggstång Rack Se tabell nedanSee table below
20 439 029-x Styrskena Guide rail Se tabell nedanSee table below
24 4 550 541-001 Styrvagn Guide carriage
25 1 506 252-880 Drivenhet Drive unit
27 553 811-x Kabelskydd Cable cover Se tabell nedanSee table below
32 4 551 165-880 Bufferfäste Buffer holder
33 4 551 166-001 Gummibuffert Rubber buffer
34 503 917-x Kabelsläpkedja Cable chain Se tabell nedanSee table below
54 551 168-002 Mutterlist Nut bar M6
56 551 168-001 Mutterlist Nut bar M8
64 2111 029-73 Pinne Pin D6×40
65 1 413 588-001 Synkskylt Sign
70 4 2183 010-04 Lyftögla Lifting eye
73 4 551 179-001 Smörjnippel Nipple
74 2 500 077-002 Stålklamma Clamp
75 1 553 817-001 Smörjmedel Lubricant Molycote D321 R
Antal vid olika åklängder/Qty at different track lengths
LängdLength
Art. nrArt no
1,7m 2,7m 3,7m 4,7m 5,7m 6,7m 7,7m 8,7m 9,7m 10,7m 11,7m
2m -001 1
3m -002 1 1 1 1
4m -005 1
5m -003 1 1 1 2 1 2 1
6m -004 1 1 1 2 1
Reservdelar/Spare parts
Åkbana (Bas)/Travel Track (Base)
3-20 3HEA 801 230-004 Rév. A, Novembre 2005
Main
tenan
ce
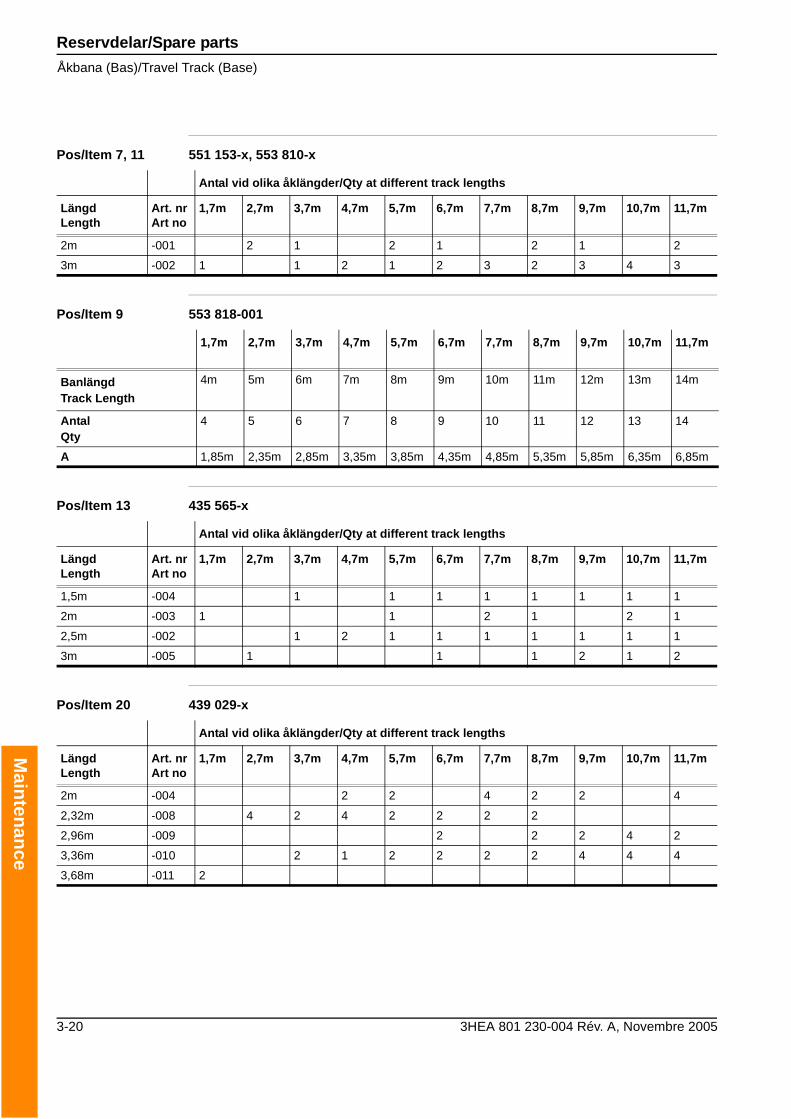
Pos/Item 7, 11 551 153-x, 553 810-x
Pos/Item 9 553 818-001
Pos/Item 13 435 565-x
Pos/Item 20 439 029-x
Antal vid olika åklängder/Qty at different track lengths
LängdLength
Art. nrArt no
1,7m 2,7m 3,7m 4,7m 5,7m 6,7m 7,7m 8,7m 9,7m 10,7m 11,7m
2m -001 2 1 2 1 2 1 2
3m -002 1 1 2 1 2 3 2 3 4 3
1,7m 2,7m 3,7m 4,7m 5,7m 6,7m 7,7m 8,7m 9,7m 10,7m 11,7m
BanlängdTrack Length
4m 5m 6m 7m 8m 9m 10m 11m 12m 13m 14m
AntalQty
4 5 6 7 8 9 10 11 12 13 14
A 1,85m 2,35m 2,85m 3,35m 3,85m 4,35m 4,85m 5,35m 5,85m 6,35m 6,85m
Antal vid olika åklängder/Qty at different track lengths
LängdLength
Art. nrArt no
1,7m 2,7m 3,7m 4,7m 5,7m 6,7m 7,7m 8,7m 9,7m 10,7m 11,7m
1,5m -004 1 1 1 1 1 1 1 1
2m -003 1 1 2 1 2 1
2,5m -002 1 2 1 1 1 1 1 1 1
3m -005 1 1 1 2 1 2
Antal vid olika åklängder/Qty at different track lengths
LängdLength
Art. nrArt no
1,7m 2,7m 3,7m 4,7m 5,7m 6,7m 7,7m 8,7m 9,7m 10,7m 11,7m
2m -004 2 2 4 2 2 4
2,32m -008 4 2 4 2 2 2 2
2,96m -009 2 2 2 4 2
3,36m -010 2 1 2 2 2 2 4 4 4
3,68m -011 2
Reservdelar/Spare partsÅkbana (Bas)/Travel Track (Base)
3HEA 801 230-004 Rév. A, Novembre 2005 3-21
Mai
nte
nan
ce
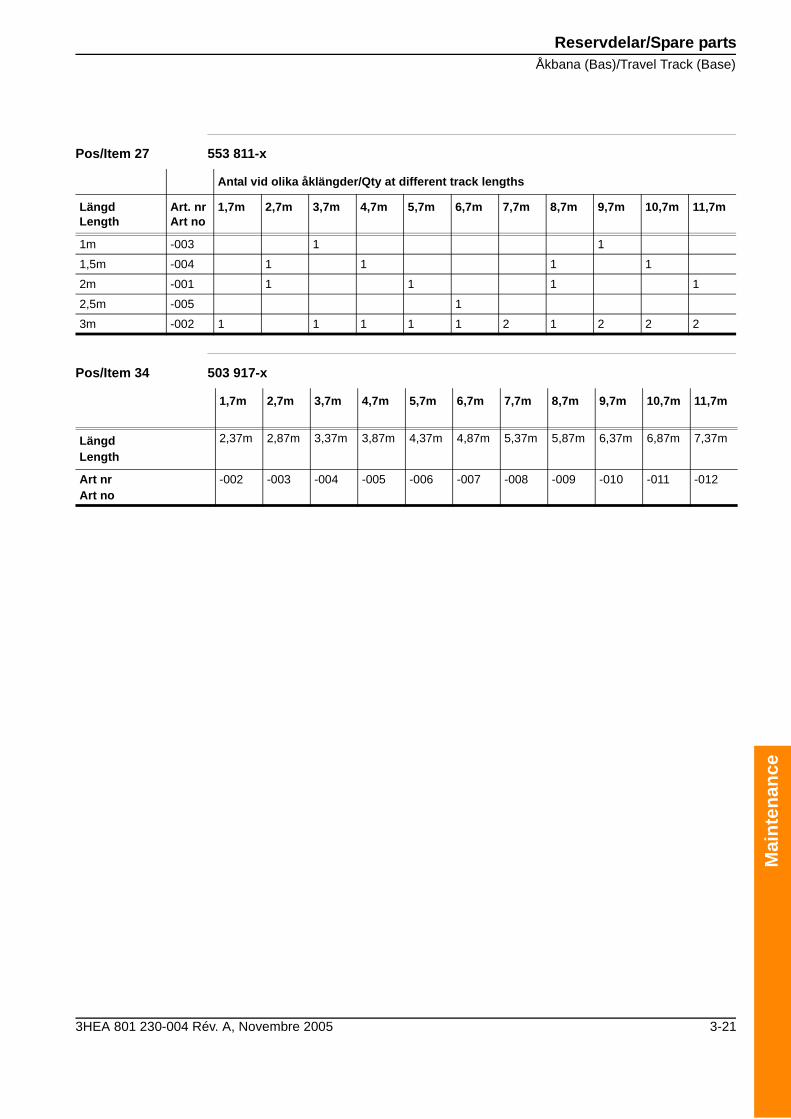
Pos/Item 27 553 811-x
Pos/Item 34 503 917-x
Antal vid olika åklängder/Qty at different track lengths
LängdLength
Art. nrArt no
1,7m 2,7m 3,7m 4,7m 5,7m 6,7m 7,7m 8,7m 9,7m 10,7m 11,7m
1m -003 1 1
1,5m -004 1 1 1 1
2m -001 1 1 1 1
2,5m -005 1
3m -002 1 1 1 1 1 2 1 2 2 2
1,7m 2,7m 3,7m 4,7m 5,7m 6,7m 7,7m 8,7m 9,7m 10,7m 11,7m
LängdLength
2,37m 2,87m 3,37m 3,87m 4,37m 4,87m 5,37m 5,87m 6,37m 6,87m 7,37m
Art nrArt no
-002 -003 -004 -005 -006 -007 -008 -009 -010 -011 -012
Reservdelar/Spare parts
Vagn/Carriage, Marathon Pac
3-22 3HEA 801 230-004 Rév. A, Novembre 2005
Main
tenan
ce
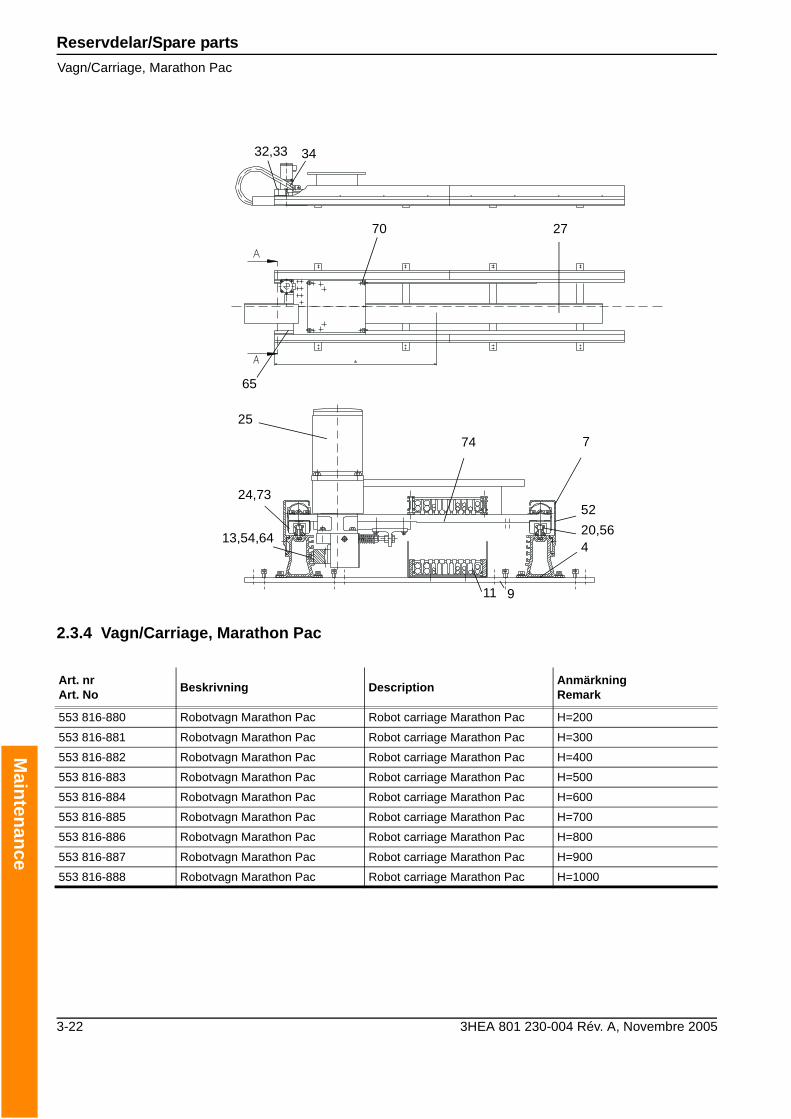
2.3.4 Vagn/Carriage, Marathon Pac
3432,33
70 27
25
24,73
13,54,64
74
11 9
4
7
52
20,56
65
Art. nrArt. No
Beskrivning DescriptionAnmärkningRemark
553 816-880 Robotvagn Marathon Pac Robot carriage Marathon Pac H=200
553 816-881 Robotvagn Marathon Pac Robot carriage Marathon Pac H=300
553 816-882 Robotvagn Marathon Pac Robot carriage Marathon Pac H=400
553 816-883 Robotvagn Marathon Pac Robot carriage Marathon Pac H=500
553 816-884 Robotvagn Marathon Pac Robot carriage Marathon Pac H=600
553 816-885 Robotvagn Marathon Pac Robot carriage Marathon Pac H=700
553 816-886 Robotvagn Marathon Pac Robot carriage Marathon Pac H=800
553 816-887 Robotvagn Marathon Pac Robot carriage Marathon Pac H=900
553 816-888 Robotvagn Marathon Pac Robot carriage Marathon Pac H=1000

Reservdelar/Spare partsVagn/Carriage, Marathon Pac
3HEA 801 230-004 Rév. A, Novembre 2005 3-23
Mai
nte
nan
ce
IRB 1400
IRB 2400

Reservdelar/Spare parts
Vagn/Carriage, Marathon Pac
3-24 3HEA 801 230-004 Rév. A, Novembre 2005
Main
tenan
ce


3HEA 801 230-004 Rév. A, Novembre 2005
���