UPJV, Département EEA M1 EEAII Parcours ViRob
14
UPJV, Département EEA M1 EEAII Parcours ViRob Fabio MORBIDI Laboratoire MIS Équipe Perception Robotique E-mail: [email protected] Année Universitaire 2017/2018 Mardi 9h30-12h00, Mercredi 13h30-16h00, Salle 8
Transcript of UPJV, Département EEA M1 EEAII Parcours ViRob

UPJV, Département EEA
M1 EEAII Parcours ViRob
Fabio MORBIDI
Laboratoire MIS Équipe Perception Robotique
E-mail: [email protected]
Année Universitaire 2017/2018
Mardi 9h30-12h00, Mercredi 13h30-16h00, Salle 8

2
Plan du cours Chapitre 1 : Introduction
1.1 Définitions
1.2 Constituants d’un robot
1.3 Classification des robots
1.4 Caractéristiques d’un robot
1.5 Générations de robots
1.6 Programmation des robots
1.7 Utilisation des robots
Chapitre 2 : Fondements Théoriques
2.1 Positionnement
• Matrices de rotation et autres représentations de l’orientation • Matrices homogènes

3
Plan du cours
Chapitre 3 : Modélisation d’un Robot
2.2 Cinématique • Vitesse d’un solide • Vecteur vitesse de rotation • Mouvement rigide • Torseur cinématique
3.1 Modèle géométrique • Convention de Denavit-Hartenberg • Modèle géométrique direct • Modèle géométrique inverse
3.2 Modèle cinématique
• Modèle cinématique direct • Modèle cinématique inverse
3.3 Modèle dynamique • Formulation de Lagrange

4
• Le modèle dynamique d’un manipulateur est important pour: • La simulation de mouvement • L’analyse de la structure d’un robot (conception mécanique) • La synthèse d’algorithmes de commande
Modèle dynamique d’un robot

5
• Le modèle dynamique d’un manipulateur est important pour: • La simulation de mouvement • L’analyse de la structure d’un robot (conception mécanique) • La synthèse d’algorithmes de commande
• Il y a deux méthodes pour déterminer les équations du mouvement d’un manipulateur dans l’espace articulaire:
1. La méthode basée sur la formulation de Lagrange • Conceptuellement simple et systématique
2. La méthode basée sur la formulation de Newton-Euler (on trouve la résultante des forces qui s'exercent sur un segment générique du manipulateur)
• Elle produit un modèle de façon récursive • Plus avantageuse d'un point de vue computationnel que la formulation de Lagrange car elle profite de la structure ouverte de la chaîne cinématique du robot
Modèle dynamique d’un robot

6
• Le modèle dynamique d’un manipulateur est important pour: • La simulation de mouvement • L’analyse de la structure d’un robot (conception mécanique) • La synthèse d’algorithmes de commande
• Il y a deux méthodes pour déterminer les équations du mouvement d’un manipulateur dans l’espace articulaire:
1. La méthode basée sur la formulation de Lagrange • Conceptuellement simple et systématique
2. La méthode basée sur la formulation de Newton-Euler (on trouve la résultante des forces qui s'exercent sur un segment générique du manipulateur)
• Elle produit un modèle de façon récursive • Plus avantageuse d'un point de vue computationnel que la formulation de Lagrange car elle profite de la structure ouverte de la chaîne cinématique du robot
• Comme pour la modélisation géométrique et cinématique, on peut définir un: o Problème dynamique direct o Problème dynamique inverse
Modèle dynamique d’un robot

7
Le modèle dynamique d’un manipulateur fournit une description de la relation entre les couples* exercés par les actionneurs sur les articulations du robot et le mouvement de la structure
• Lorsque les variables
• Avec la formulation de Lagrange, les équations du mouvement peuvent être déterminées d’une façon systématique et indépendamment du référentiel que on a choisi
Modèle dynamique: formulation de Lagrange
ont été fixées (elles décrivent la position des segments d’un manipulateur à DDL), le lagrangien du système peut être défini en fonction des coordonnées généralisées de la manière suivante:
qi, i ∈ {1, . . . , n} : “coordonnées généralisées”
Énergie potentielle totale Énergie cinétique totale
L
L = T − U
n
*Couples (ou moments) = forces généralisées

8
• Les équations de Lagrange (ou d’Euler-Lagrange) sont exprimées par:
• Sous une forme compacte, nous pouvons réécrire les équations de Lagrange comme:
• Les contributions aux forces généralisées sont données par les forces non-conservatives dans le système:
• Les couples des actionneurs sur les articulations • Les couples de frottement sur les articulations • Les couples sur les articulations générés par les forces de contact de l’effecteur avec l’environnement
d
dt
∂ L∂ q̇i
− ∂ L∂ qi
= ξi, i ∈ {1, . . . , n}
ξi qioù est la force généralisée associée à la coordonnée généralisée
où, pour un manipulateur sériel (à chaîne ouverte), les coordonnées généralisées sont réunies dans le vecteur des variables articulaires
d
dt
(∂ L∂ q̇
)T
−(∂ L∂ q
)T
= ξ
n
q ∈ Rn
Modèle dynamique: formulation de Lagrange

9
• Les équations de Lagrange:
• Ces équations différentielles ordinaires du second ordre nous permettent de déterminer le modèle dynamique d’un robot à partir de l’énergie cinétique et potentielle du système
nous fournissent une relation entre les forces généralisées appliquées au manipulateur et les positions, vitesses et accelerations des variables articulaires, c’est-à-dire
Joseph-Louis Lagrange (1736-1813)
qi, q̇i, q̈i, i ∈ {1, . . . , n}
ξi
Mécanique Analytique, vol. I et II, 1811-15
• La paire (q, q̇)
n
est appelée état du système
Modèle dynamique: formulation de Lagrange
Remarque: Nous avons supposé que le système soit complètement actionné, à savoir où est le nombe de DDL du robot et le nombre d’actionneurs linéairement indépendants du robot (en fait, )
n = m nm
q, ξ ∈ Rn
d
dt
∂ L∂ q̇i
− ∂ L∂ qi
= ξi, i ∈ {1, . . . , n}

10
• L’action d’un système est le fonctionnel:
L'action a la dimension d'une énergie multipliée par un temps ([Js] en SI): elle est une grandeur physique qui ne se mesure pas
où les points extrêmes de la trajectoire sont donnés et définis par:
S(q(t)) =
∫ t2
t1
L(q(t), q̇(t), t) dt
q1 = q(t1), q2 = q(t2).
Principe de moindre action (ou principe de Hamilton): le trajet effectivement suivi par un système entre deux points donnés est celui qui conduit à une valeur stationnaire (un minimum, un maximum, un point-selle) de l’action. Lorsque la trajectoire reliant les deux points est suffisamment petite, cet extremum de l'action est un minimum, d'où le nom donné au principe
q2, t2
q∗(t)
q(t)
• Le principe de moindre action permet de déterminer en chaque point de la trajectoire l'équation du mouvement gouvernant le futur du système • L’action fait donc partie d’une approche alternative pour déterminer les equations du mouvement d’un système
q1, t1
Modèle dynamique: formulation de Lagrange

11
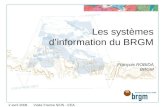
θmmoteur
: longueur de la tige [m]
: moment d'inertie du servomoteur autour de l’axe de rotation [kgm2] et son coefficient de frottement visqueux [kgm2/s]
: moment d'inertie de la tige [kgm2] et son coefficient de frottement visqueux [kgm2/s]
r
rm
: rayon des engrenages côté tige et côté moteur [m]
: position angulaire de l’axe du moteur et de l’axe de la tige (si , la tige pointe vers le bas)
: couple engendré par le moteur [Nm]
: masse de la tige [kg] et accélération de la pesanteur ( = 9.81 m/s2)
�
Im, Fm
I, F
r, rm
θ, θm
m, g
cm
kr = r/rm : rapport de transmission des engrenages
θ = 0
Exemple [Pendule inversé rigide actionné par un moteur électrique]
F
g
Fm
θ, τ
Modèle dynamique: formulation de Lagrange
mg
cm

12
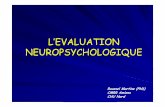
θmmoteur
Si on choisit comme coordonnée généralisée, l’énergie cinétique du système est ( ):
r
rm
θ
L’énergie potentielle du système (définie à une constante près) est:
U = mg � (1− cos θ)
F
θ̇m = kr θ̇
θ, τ
Exemple [Pendule inversé rigide actionné par un moteur électrique]
Modèle dynamique: formulation de Lagrange
Fm
T =1
2I θ̇2 +
1
2Im θ̇2m =
1
2I θ̇2 +
1
2Im k2r θ̇
2
cm
mg

13
Le lagrangien du système est donc:
Si on utilise cette expression dans l’equation de Lagrange (nous avons une seule coordonnée généralisée, l’angle ):
d
dt
∂ L∂ θ̇
− ∂ L∂ θ
= ξ
on trouve:
θ
(I + Im k2r) θ̈ + mg � sin θ = ξ
La force généralisée est donnée par plusieurs contributions: le couple d’actionnement au côté tige et les couples de frottement visqueux , (noter que le 2e couple a été reporté au côté tige)
ξ−F θ̇τ
Donc, au final:
Modèle dynamique: formulation de Lagrange
L = T − U =1
2θ̇2 (I + k2r Im) − mg (1− cos θ)
−Fm kr θ̇
ξ = τ − F θ̇ − Fm kr θ̇

14
Conclusion: Nous avons ainsi trouvé le modèle dynamique complet du pendule inversé, sous forme d’une équation différentielle ordinaire non-linéaire du second ordre:
Prochaine séance:
Calcul de l’énergie cinétique et de l’énergie potentielle d’un manipulateur générique à segments rigides et détermination du modèle dynamique grâce à la formulation de Lagrange
Segment i du robot
n
Modèle dynamique: formulation de Lagrange
(I + Im k2r) θ̈ + (F + Fm kr) θ̇ + mg � sin θ = τ