
Université Ferhat Abbas – Sétif 2 Faculté de...
7
Université Ferhat Abbas – Sétif 2 ème Année LMD Faculté de technologie 02 Février 2011 Tronc Commun S.T. Temps alloué : 1h30 Exercice 1 : Questions de cours (05 points) Répondez avec vrai ou faux : 1. La forme générale des équations différentielles d’un système à 2 degrés de liberté, dans un couplage élastique sont de la forme : � ̈ + ̇ + = ̈ + ̈ + ̇ + = ̈ + 2. La forme générale des équations différentielles d’un système à 2 degrés de liberté, dans un couplage inertiel sont de la forme : � ̈ + ̇ + = ̈ + ̈ + ̇ + = ̈ + 3. La forme générale des équations différentielles d’un système à 2 degrés de liberté, dans un couplage visqueux sont de la forme : � ̈ + ̇ = ̇ ̈ + ̇ = ̇ 4. Les équations du mouvement d'un système à deux degrés de liberté sont couplées. 5. Dans un système à plusieurs degrés de liberté, il y a autant d’équations de Lagrange que de degrés de liberté. 6. Les modes d’oscillations ne peuvent pas être utilisés pour trouver la solution des équations différentielles. 7. Dans un système à plusieurs degrés de liberté, les valeurs propres peuvent être complexes. 8. Le couplage élastique est également connu sous le nom de "couplage dynamique" tandis que le couplage inertiel est également connu sous le nom de "couplage statique". 9. Le nombre de degrés de liberté d'un système vibratoire ne dépend que du nombre des masses. 10. Dans un système à plusieurs degrés de liberté, l'équation de Lagrange ne peut pas être utilisée pour déduire les équations du mouvement. Exercice 2(09 points) Le système de la figure N°1 est constitué d’une masse , d’un ensemble de ressorts , , et d’un amortisseur de coefficient d’amortissement visqueux . 1. Trouver le système équivalent. On donne : = , = = . I. Etude du système libre non amorti 1. Trouver l’équation différentielle du mouvement. 2. Déduire la pulsation propre et la solution de l’équation différentielle du mouvement. II. Etude du système libre amorti 1. Donner l’équation différentielle du mouvement. 2. On donne = � , calculer le facteur d’amortissement puis la pulsation des oscillations amorties . 3. Donner la solution de l’équation différentielle du mouvement dans le cas des oscillations faiblement amorties. III. Etude du système forcé amorti Le système est soumis à une force extérieure ()= appliquée à la masse . 1. Etablir l’équation différentielle du mouvement forcé amorti. 2. Donner les expressions de l’amplitude () et de la phase () de la solution particulière représentant le régime permanent. 3. Donner la solution générale de l’équation différentielle du mouvement. Exercice 3 (06 points) Un système constitué d’un disque, homogène de masse M et de rayon R, peut osciller sans frottements autour de son axe . Ce disque est relié à un bâti fixe par l’intermédiaire d’un ressort de raideur k, un amortisseur de coefficient de frottement visqueux et une masse dont le mouvement est () (Voir figure N°2). 1. Déterminer le Lagrangien du système en fonction de . 2. Donner l’équation différentielle du mouvement. 3. Donner la solution dans le cas d’un système faiblement amorti. Figure N°2 / = ² () Figure N°1 () () Contrôle de Physique 3
-
Upload
truongquynh -
Category
Documents
-
view
233 -
download
1
Transcript of Université Ferhat Abbas – Sétif 2 Faculté de...
Université Ferhat Abbas – Sétif 2èmeAnnée LMD
Faculté de technologie 02 Février 2011 Tronc Commun S.T. Temps alloué : 1h30
Exercice 1 : Questions de cours (05 points) Répondez avec vrai ou faux :
1. La forme générale des équations différentielles d’un système à 2 degrés de liberté, dans un couplage élastique sont de la forme :
�𝒂𝟏�̈�𝟏 + 𝐛𝟏 �̇�𝟏 + 𝐜𝟏𝒙𝟏 = 𝒅𝟏�̈�𝟐 + 𝒇𝟏𝒙𝟐𝒂𝟐�̈�𝟐 + 𝐛𝟐 �̇�𝟐 + 𝐜𝟐𝒙𝟐 = 𝒅𝟐�̈�𝟏 + 𝒇𝟐𝒙𝟏
�
2. La forme générale des équations différentielles d’un système à 2 degrés de liberté, dans un couplage inertiel sont de la forme :
�𝒂𝟏�̈�𝟏 + 𝐛𝟏 �̇�𝟏 + 𝐜𝟏𝒙𝟏 = 𝒅𝟏�̈�𝟐 + 𝒇𝟏𝒙𝟐𝒂𝟐�̈�𝟐 + 𝐛𝟐 �̇�𝟐 + 𝐜𝟐𝒙𝟐 = 𝒅𝟐�̈�𝟏 + 𝒇𝟐𝒙𝟏
�
3. La forme générale des équations différentielles d’un système à 2 degrés de liberté, dans un couplage visqueux sont de la forme :
�𝒂𝟏�̈�𝟏 + 𝐛𝟏 �̇�𝟏 = 𝒅𝟏�̇�𝟐𝒂𝟐�̈�𝟐 + 𝐛𝟐 �̇�𝟐 = 𝒅𝟐�̇�𝟏
�
4. Les équations du mouvement d'un système à deux degrés de liberté sont couplées. 5. Dans un système à plusieurs degrés de liberté, il y a autant d’équations de Lagrange que de degrés de liberté. 6. Les modes d’oscillations ne peuvent pas être utilisés pour trouver la solution des équations différentielles. 7. Dans un système à plusieurs degrés de liberté, les valeurs propres peuvent être complexes. 8. Le couplage élastique est également connu sous le nom de "couplage dynamique" tandis que le couplage inertiel est
également connu sous le nom de "couplage statique". 9. Le nombre de degrés de liberté d'un système vibratoire ne dépend que du nombre des masses. 10. Dans un système à plusieurs degrés de liberté, l'équation de Lagrange ne peut pas être utilisée pour déduire les
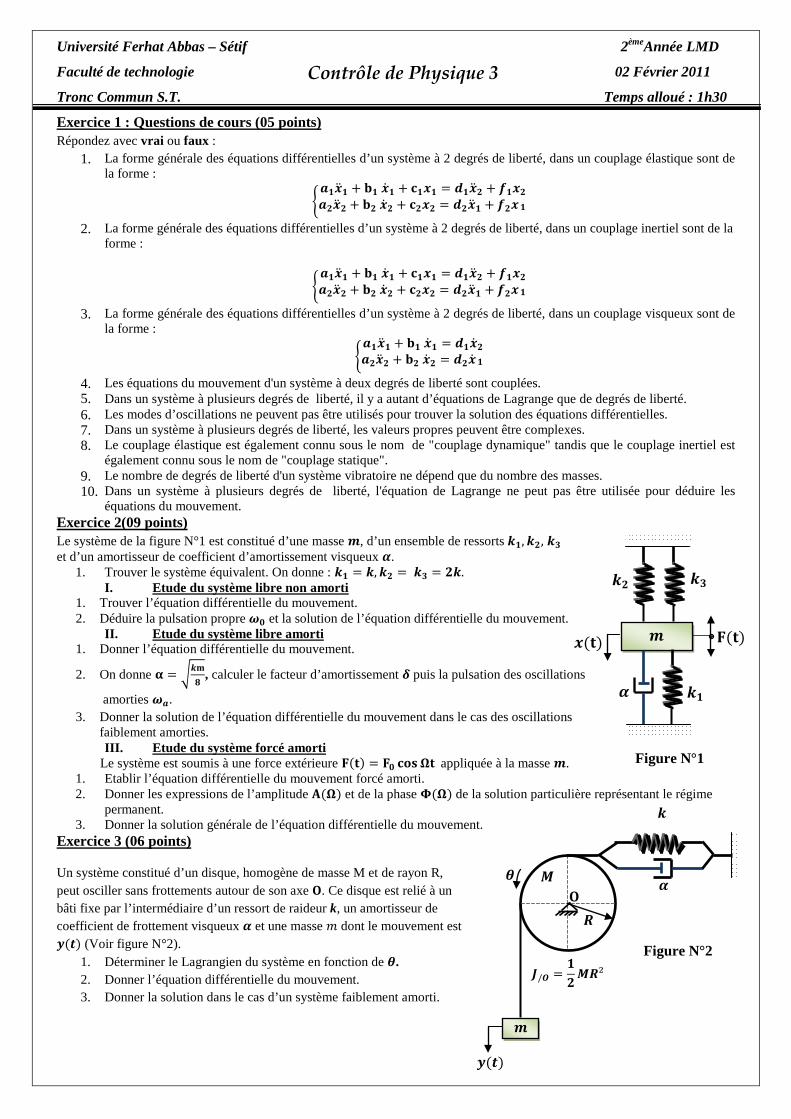
équations du mouvement. Exercice 2(09 points) Le système de la figure N°1 est constitué d’une masse 𝒎, d’un ensemble de ressorts 𝒌𝟏,𝒌𝟐, 𝒌𝟑 et d’un amortisseur de coefficient d’amortissement visqueux 𝜶.
1. Trouver le système équivalent. On donne : 𝒌𝟏 = 𝒌,𝒌𝟐 = 𝒌𝟑 = 𝟐𝒌. I. Etude du système libre non amorti
1. Trouver l’équation différentielle du mouvement. 2. Déduire la pulsation propre 𝝎𝟎 et la solution de l’équation différentielle du mouvement.
II. Etude du système libre amorti 1. Donner l’équation différentielle du mouvement.
2. On donne 𝛂 = �𝒌𝐦𝟖
, calculer le facteur d’amortissement 𝜹 puis la pulsation des oscillations
amorties 𝝎𝒂. 3. Donner la solution de l’équation différentielle du mouvement dans le cas des oscillations
faiblement amorties. III. Etude du système forcé amorti
Le système est soumis à une force extérieure 𝐅(𝐭) = 𝐅𝟎 𝐜𝐨𝐬 𝛀𝐭 appliquée à la masse 𝒎. 1. Etablir l’équation différentielle du mouvement forcé amorti. 2. Donner les expressions de l’amplitude 𝐀(𝛀) et de la phase 𝚽(𝛀) de la solution particulière représentant le régime
permanent. 3. Donner la solution générale de l’équation différentielle du mouvement.
Exercice 3 (06 points)
Un système constitué d’un disque, homogène de masse M et de rayon R, peut osciller sans frottements autour de son axe 𝐎. Ce disque est relié à un bâti fixe par l’intermédiaire d’un ressort de raideur k, un amortisseur de coefficient de frottement visqueux 𝜶 et une masse 𝑚 dont le mouvement est 𝒚(𝒕) (Voir figure N°2).
1. Déterminer le Lagrangien du système en fonction de 𝜽. 2. Donner l’équation différentielle du mouvement. 3. Donner la solution dans le cas d’un système faiblement amorti.
𝒌
Figure N°2 𝑱/𝑶 =
𝟏𝟐𝑴𝑹²
𝒚(𝒕)
𝜽 𝐎
𝑹
𝑴 𝜶
𝒎
Figure N°1
𝜶
𝒌𝟐 𝒌𝟑
𝒌𝟏
𝒎 𝐅(𝐭)
𝒙(𝐭)
Contrôle de Physique 3
Page 1 Université Ferhat Abbas – Sétif 2
èmeAnnée LMD
Faculté de technologie Correction du Contrôle de Physique 3 02 Février 2011 Tronc Commun S.T Temps alloué : 1h30
Exercice 1 : Questions de cours (5 points)
On répond avec vrai ou faux :
1-Faux
3-Vrai
5-Vrai
7-Faux
9-Faux
2-Faux
4-Vrai
6-Faux
8-Faux
10-Faux
Exercice 2(09 points)
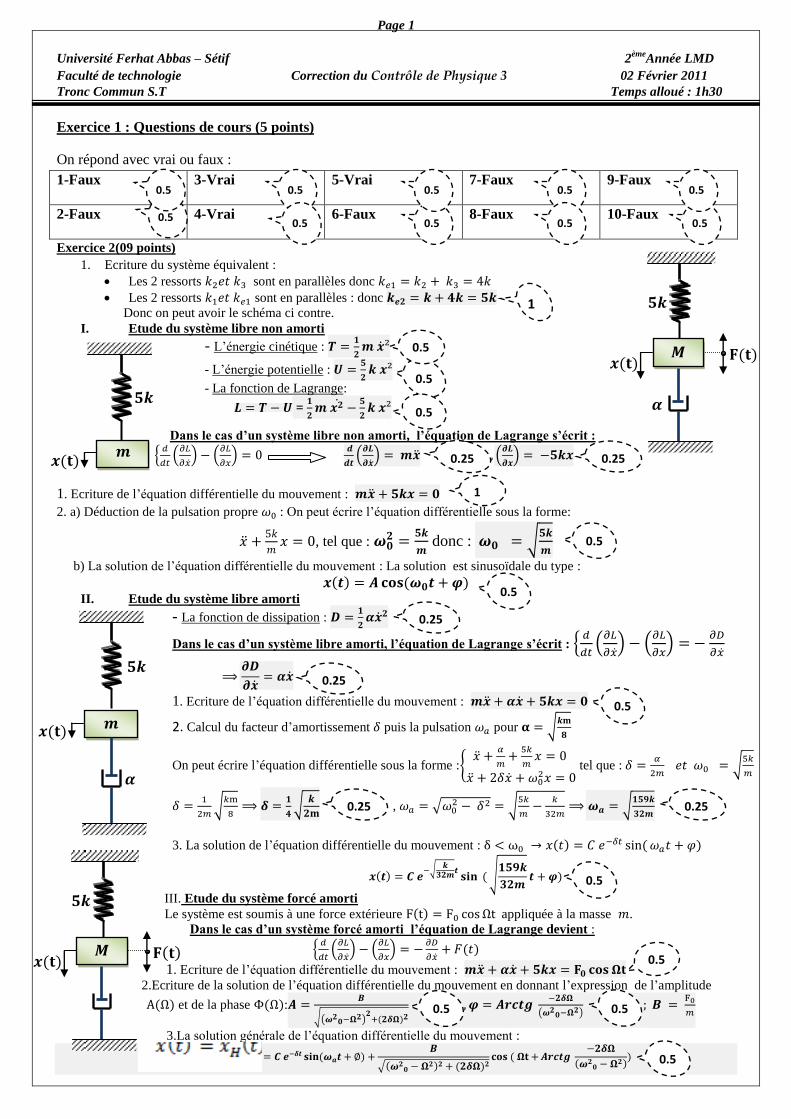
1. Ecriture du système équivalent :
Les 2 ressorts sont en parallèles donc
Les 2 ressorts sont en parallèles : donc
Donc on peut avoir le schéma ci contre.
I. Etude du système libre non amorti
Dans le cas d’un système libre non amorti, l’équation de Lagrange s’écrit :
1. Ecriture de l’équation différentielle du mouvement :
2. a) Déduction de la pulsation propre : On peut écrire l’équation différentielle sous la forme:
, tel que :
donc :
b) La solution de l’équation différentielle du mouvement : La solution est sinusoïdale du type :
II. Etude du système libre amorti
III. Etude du système forcé amorti Le système est soumis à une force extérieure appliquée à la masse .
Dans le cas d’un système forcé amorti l’équation de Lagrange devient :
1. Ecriture de l’équation différentielle du mouvement : 2.Ecriture de la solution de l’équation différentielle du mouvement en donnant l’expression de l’amplitude
et de la phase :
3.La solution générale de l’équation différentielle du mouvement :
0.5
0.5
1
0.25 0.25
1
0.5
0.5
- La fonction de dissipation :
Dans le cas d’un système libre amorti, l’équation de Lagrange s’écrit :
1. Ecriture de l’équation différentielle du mouvement :
2. Calcul du facteur d’amortissement puis la pulsation pour
On peut écrire l’équation différentielle sous la forme :
tel que :
,
3. La solution de l’équation différentielle du mouvement :
- L’énergie cinétique :
- L’énergie potentielle :
- La fonction de Lagrange:
=
0.5
0.5
0.5
0.25
0.25
0.5
0.25 0.25
0.5
0.5
0.5 0.5
0.5 0.5
0.5
0.5
0.5
0.5
0.5 0.5
0.5
Pc
Tampon

Page 2 Exercice 3 (06 points)
1. Le Lagrangien du système en fonction de
Les coordonnées des éléments du système :
Le disque effectue une rotation autour de O donc :
Le ressort k et l’amortisseur sont reliés au contour du disque :
Donc :k : :
La masse m se déplace avec
1. Détermination du Lagrangien du système en fonction de
- L’énergie cinétique du système : +
- L’énergie cinétique de la masse M :
- L’énergie cinétique de la masse m :
Donc l’énergie cinétique du système :
- L’énergie potentielle du système :
- La fonction de dissipation :
La fonction de Lagrange :
2. Ecriture de l’équation différentielle du mouvement.
L’équation de Lagrange s’écrit :
3. Ecriture de la solution dans le cas d’un système faiblement amorti :
On peut écrire l’équation comme suit :
tel que :
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.25
0.25
0.25 0.25
0.25
0.25
Pc
Zone de texte
Université Ferhat Abbas – Sétif 2èmeAnnée LMD
Faculté de technologie 16 Février2011 Tronc Commun S.T. Temps alloué : 1h30
Exercice 1 : Questions de cours (05 points)
1- Le Lagrangien d’un système mécanique est donné par : 𝐋 = 𝟏
𝟐𝒎𝟏𝒍𝟏𝟐𝜽𝟏�̇� + 𝟏
𝟐𝒎𝟐�𝒍𝟏�̇�𝟏 + 𝒍𝟐�̇�𝟐�
𝟐 + 𝒈(𝒎𝟏𝒍𝟏 + 𝒎𝟐𝒍𝟐) 𝐜𝐨𝐬𝜽𝟏 +𝒎𝟐𝒈𝒍𝟐 𝐜𝐨𝐬𝜽𝟐 a) Donnez le type de couplage. b) Ecrire les équations différentielles du mouvement.
2- Le Lagrangien d’un système mécanique est donné par :
𝐋 =𝟏𝟐𝒎𝟏𝒍𝟏𝟐𝜽𝟏�̇� +
𝟏𝟐𝒎𝟐𝒍𝟐𝟐𝜽𝟐�̇� +𝒎𝟏𝒈𝒍𝟏 𝐜𝐨𝐬𝜽𝟏 +𝒎𝟐𝒈𝒍𝟐 𝐜𝐨𝐬𝜽𝟐 −
𝟏𝟐𝒌𝒂𝟐(𝐬𝐢𝐧𝜽𝟏 − 𝐬𝐢𝐧𝜽𝟐)𝟐
a) Donnez le type de couplage. b) Ecrire les équations différentielles du mouvement
3- Donnez dans l’ordre la mise en équation d’un système couplé de 2 degrés de liberté : 1- On écrit les 2 solutions générales des équations différentielles du mouvement. 2- On fait l’hypothèse que le système admet des solutions harmoniques. 3- On substitue 𝝎𝟏 dans l'une des 2 équations et l’on obtient le 1er
4- On écrit les 2 équations différentielles en fonction des coordonnées généralisées. mode propre.
5- On obtient 2 pulsations propres 𝝎𝟏 et 𝝎𝟐. 6- On substitue 𝝎𝟐 dans l'une des 2 équations et l’on obtient le 2ème
mode propre.
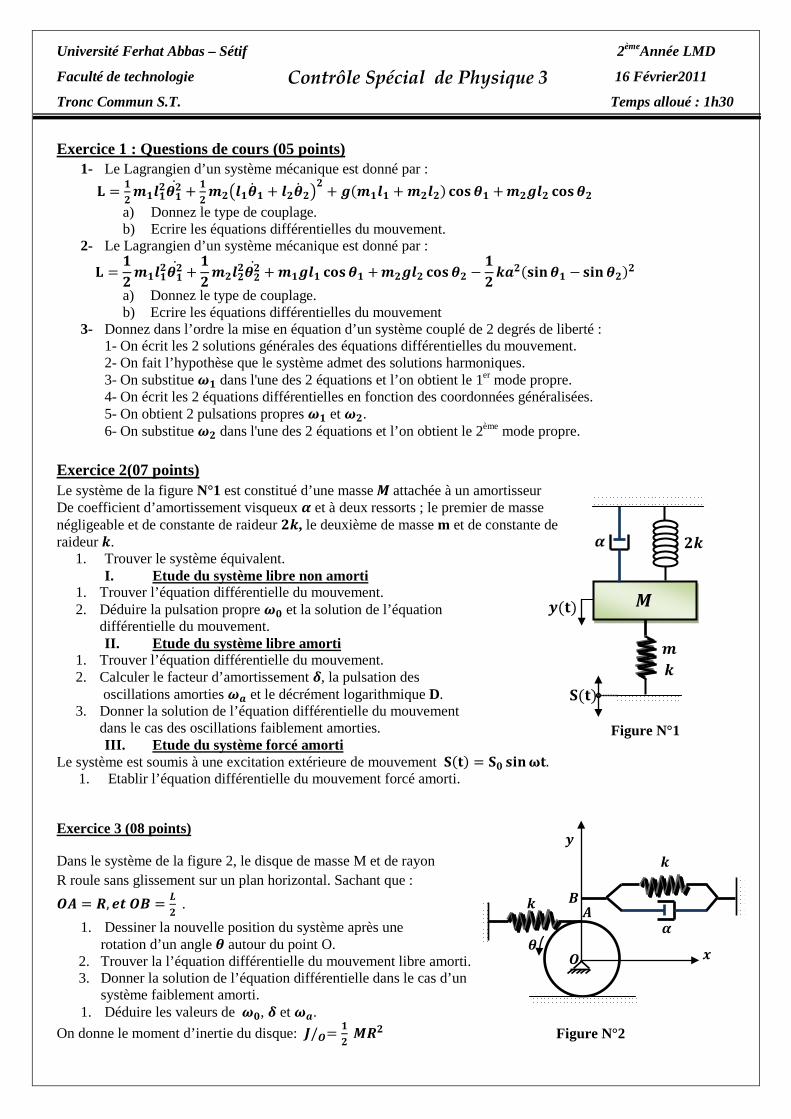
Exercice 2(07 points) Le système de la figure N°1 est constitué d’une masse 𝑴 attachée à un amortisseur De coefficient d’amortissement visqueux 𝜶 et à deux ressorts ; le premier de masse négligeable et de constante de raideur 𝟐𝒌, le deuxième de masse m et de constante de raideur 𝒌.
1. Trouver le système équivalent. I. Etude du système libre non amorti
1. Trouver l’équation différentielle du mouvement. 2. Déduire la pulsation propre 𝝎𝟎 et la solution de l’équation
différentielle du mouvement. II. Etude du système libre amorti
1. Trouver l’équation différentielle du mouvement. 2. Calculer le facteur d’amortissement 𝜹, la pulsation des
oscillations amorties 𝝎𝒂 et le décrément logarithmique D. 3. Donner la solution de l’équation différentielle du mouvement
dans le cas des oscillations faiblement amorties. III. Etude du système forcé amorti
Le système est soumis à une excitation extérieure de mouvement 𝐒(𝐭) = 𝐒𝟎 𝐬𝐢𝐧𝛚𝐭. 1. Etablir l’équation différentielle du mouvement forcé amorti.
Exercice 3 (08 points)
Dans le système de la figure 2, le disque de masse M et de rayon R roule sans glissement sur un plan horizontal. Sachant que : 𝑶𝑨 = 𝑹, 𝒆𝒕 𝑶𝑩 = 𝑳
𝟐 .
1. Dessiner la nouvelle position du système après une rotation d’un angle 𝜽 autour du point O. 2. Trouver la l’équation différentielle du mouvement libre amorti. 3. Donner la solution de l’équation différentielle dans le cas d’un système faiblement amorti.
1. Déduire les valeurs de 𝝎𝟎, 𝜹 et 𝝎𝒂. On donne le moment d’inertie du disque: 𝑱/𝑶= 𝟏
𝟐 𝑴𝑹𝟐
Contrôle Spécial de Physique 3
𝒚
𝒌
𝒙 𝑶
𝜶
𝒌
𝑩 𝑨
Figure N°2
𝜽
𝜶
𝑴 𝒚(𝐭)
𝒌
Figure N°1
𝟐𝒌
𝐒(𝐭)
𝒎
Page
1
Université Ferhat Abbas – Sétif 2èmeAnnée LMD
Faculté de technologie Tronc Commun S.T.
Exercice 01 1.a) Couplage Inertiel……………………………………………………….…..….0.5 point
b)�(𝒎𝟏+𝒎𝟐)𝒍𝟏𝟐�̈�𝟏 + 𝒈𝒍𝟏(𝒎𝟏 + 𝒎𝟐)𝜽𝟏 = −𝒎𝟐𝒍𝟏𝒍𝟐�̈�𝟐
𝒎𝟐𝒍𝟐𝟐�̈�𝟐 + 𝒎𝟐𝒈𝒍𝟐.𝜽𝟐 = −𝒎𝟐𝒍𝟐𝒍𝟏�̈�𝟏�………………….………01point
2.a) Couplage Elastique……………………………………………………..……0.5 point
b)�𝒎𝟏𝒍²𝟏�̈�𝟏 + �𝒌𝒂𝟐 + 𝒎𝟏𝒈𝒍𝟏�𝜽𝟏 = 𝒌𝒂²𝜽𝟐𝒎𝟐𝒍²𝟐�̈�𝟐 + �𝒌𝒂𝟐 + 𝒎𝟐𝒈𝒍𝟐�𝜽𝟐 = 𝒌𝒂²𝜽𝟏
�……………………………………....01point
3. La mise en équation du système couplé de 2 degrés de liberté passe par la méthode à suivre suivante :
1–On écrit les 2 équations différentielles en fonction des coordonnées généralisées...0.5 point 2–On fait l’hypothèse que le système admet des solutions harmoniques…………0.5 point 3–On obtient 2 pulsations propres 𝜔1 et 𝜔2 …………………………………………0.5 point 4–On substitue 𝜔1 dans l'une des 2 équations et l’on obtient le 1er mode propre……. 0.5 point 5–On substitue 𝜔2 dans l'une des 2 équations et l’on obtient le 2ème mode propre…...0.5 point 6–On écrit les 2 solutions générales des équations différentielles du mouvement…...0.5 point Exercice 02
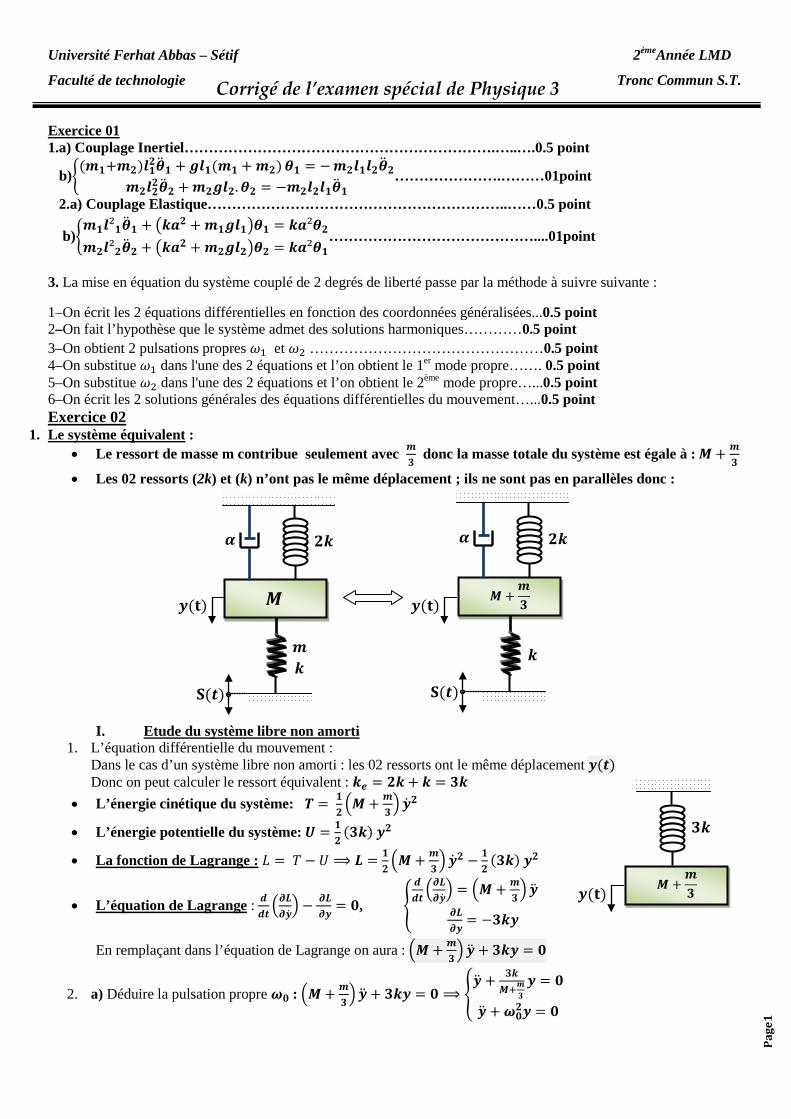
1. Le système équivalent• Le ressort de masse m contribue seulement avec 𝒎
𝟑 donc la masse totale du système est égale à : 𝑴 + 𝒎
𝟑
:
• Les 02 ressorts (2k) et (k) n’ont pas le même déplacement ; ils ne sont pas en parallèles donc :
I. Etude du système libre non amorti
1. L’équation différentielle du mouvement : Dans le cas d’un système libre non amorti : les 02 ressorts ont le même déplacement 𝒚(𝒕) Donc on peut calculer le ressort équivalent : 𝒌𝒆 = 𝟐𝒌 + 𝒌 = 𝟑𝒌
• L’énergie cinétique du système: 𝑻 = 𝟏𝟐�𝑴 + 𝒎
𝟑� �̇�𝟐
• L’énergie potentielle du système: 𝑼 = 𝟏𝟐
(𝟑𝒌) 𝒚𝟐
• La fonction de Lagrange : 𝐿 = 𝑇 − 𝑈 ⟹ 𝑳 = 𝟏𝟐�𝑴 + 𝒎
𝟑� �̇�𝟐 − 𝟏
𝟐(𝟑𝒌) 𝒚𝟐
• L’équation de Lagrange : 𝒅𝒅𝒕�𝝏𝑳𝝏�̇�� − 𝝏𝑳
𝝏𝒚= 𝟎, �
𝒅𝒅𝒕�𝝏𝑳𝝏�̇�� = �𝑴 + 𝒎
𝟑� �̈�
𝝏𝑳 𝝏𝒚
= −𝟑𝒌𝒚�
En remplaçant dans l’équation de Lagrange on aura : �𝑴 + 𝒎𝟑� �̈� + 𝟑𝒌𝒚 = 𝟎
2. a) Déduire la pulsation propre 𝝎𝟎 : �𝑴 + 𝒎𝟑� �̈� + 𝟑𝒌𝒚 = 𝟎 ⟹ �
�̈� + 𝟑𝒌𝑴+𝒎𝟑
𝒚 = 𝟎
�̈� + 𝝎𝟎𝟐𝒚 = 𝟎
�
Corrigé de l’examen spécial de Physique 3
𝑴 +𝒎𝟑
𝟑𝒌
𝒚(𝐭)
𝜶
𝑴 +𝒎𝟑
𝒌
𝟐𝒌
𝐒(𝒕)
𝒚(𝐭)
𝜶
𝑴 𝒚(𝐭)
𝒌
𝟐𝒌
𝐒(𝒕)
𝒎

Page
2
𝝎𝟎𝟐 = 𝟑𝒌
𝑴+𝒎𝟑= 𝟗𝒌
𝟑𝑴+𝒎 𝝎𝟎 = � 𝟗𝒌
𝟑𝑴+𝒎
b) La solution de l’équation différentielle du mouvement : 𝒚(𝒕) = 𝑨 𝒄𝒐𝒔 (𝝎𝟎𝒕 + 𝝋) II. Etude du système libre amorti
Dans le cas d’un système libre amorti : les 02 ressorts ont le même déplacement 𝒚(𝒕) Donc on peut calculer le ressort équivalent : 𝒌𝒆 = 𝟐𝒌 + 𝒌 = 𝟑𝒌
• L’énergie cinétique du système: 𝑻 = 𝟏𝟐�𝑴 + 𝒎
𝟑� �̇�𝟐
• L’énergie potentielle du système: 𝑼 = 𝟏𝟐
(𝟑𝒌) 𝒚𝟐
• La fonction de dissipation : 𝑫 = 𝟏𝟐𝜶�̇�²
• La fonction de Lagrange : 𝐿 = 𝑇 − 𝑈 ⟹ 𝑳 = 𝟏𝟐�𝑴 + 𝒎
𝟑� �̇�𝟐 − 𝟏
𝟐(𝟑𝒌) 𝒚𝟐
• L’équation de Lagrange : 𝒅𝒅𝒕�𝝏𝑳𝝏�̇�� − 𝝏𝑳
𝝏𝒚= −𝝏𝑫
𝝏�̇�
⎩⎪⎨
⎪⎧𝒅𝒅𝒕�𝝏𝑳𝝏�̇�� = �𝑴 + 𝒎
𝟑� �̈�
𝝏𝑳 𝝏𝒚
= −𝟑𝒌𝒚𝝏𝑫𝝏�̇�
= 𝜶�̇�
�
1. L’équation différentielle du mouvement : En remplaçant dans l’équation de Lagrange on aura :
… … . �𝑴 +𝒎𝟑� �̈� + 𝜶�̇� + 𝟑𝒌𝒚 = 𝟎
2. Le facteur d’amortissement 𝜹, la pulsation des oscillations amorties 𝝎𝒂 et le décrément logarithmique D.
�𝑴 +𝒎𝟑� �̈� + 𝜶�̇� + 𝟑𝒌𝒚 = 𝟎 ⟹ �
�̈� +𝜶
𝑴 + 𝒎𝟑�̇� +
𝟗𝒌𝟑𝑴 + 𝒎
𝒚 = 𝟎
�̈� + 𝟐𝜹�̇� + 𝝎𝟎𝟐𝒚 = 𝟎
�
Donc : 𝟐𝜹 = 𝜶𝑴+𝒎𝟑
⟹ 𝜹 = 𝟑𝜶𝟔𝑴+𝟐𝒎
, 𝜔𝑎 = �ω02 − δ2 = �( 𝟗𝒌
𝟑𝑴+𝒎)− ( 𝟑𝜶
𝟔𝑴+𝟐𝒎)2 ,
D = 𝜹𝑻𝒂 = 𝜹 𝟐𝝅𝜔𝑎
= 𝟑𝜶𝟔𝑴+𝟐𝒎
𝟐𝝅
�( 𝟗𝒌𝟑𝑴+𝒎)2−( 𝟑𝜶
𝟔𝑴+𝟐𝒎)2 ⟹ D = 𝟐𝝅�
( 𝟑𝜶𝟔𝑴+𝟐𝒎)2
( 𝟗𝒌𝟑𝑴+𝒎)−( 𝟑𝜶
𝟔𝑴+𝟐𝒎)2
3. La solution de l’équation différentielle du mouvement dans le cas des oscillations faiblement amorties.
𝜹 < ω0 : 𝒚(𝒕) = 𝑪 𝒆−𝜹𝒕 𝐬𝐢𝐧(𝝎𝒂𝒕 + 𝝋) ⟹𝒚(𝒕) = 𝑪 𝒆−( 𝟑𝜶𝟔𝑴+𝟐𝒎)𝒕 𝐬𝐢𝐧(�( 𝟗𝒌
𝟑𝑴+𝒎)− ( 𝟑𝜶
𝟔𝑴+𝟐𝒎)2 𝒕 + 𝝋)
I. Etude du système forcé amorti Le système est soumis à une excitation extérieure de mouvement 𝐒(𝐭) = 𝐒𝟎 𝐬𝐢𝐧𝛚𝐭.
• L’énergie cinétique du système: 𝑻 = 𝟏𝟐�𝑴 + 𝒎
𝟑� �̇�𝟐
• L’énergie potentielle du système: 𝑼 = 𝟏𝟐
(𝟐𝒌) 𝒚𝟐 + 𝟏𝟐𝒌 (𝒚 − 𝑺)𝟐
• La fonction de dissipation : 𝑫 = 𝟏𝟐𝜶�̇�²
• La fonction de Lagrange :
𝐿 = 𝑇 − 𝑈 ⟹ 𝑳 =𝟏𝟐�𝑴 +
𝒎𝟑� �̇�𝟐 −
𝟏𝟐
(𝟐𝒌) 𝒚𝟐 −𝟏𝟐𝒌 (𝒚 − 𝑺)𝟐
• L’équation de Lagrange : 𝒅𝒅𝒕�𝝏𝑳𝝏�̇�� − 𝝏𝑳
𝝏𝒚= −𝝏𝑫
𝝏�̇�
⎩⎪⎨
⎪⎧
𝒅𝒅𝒕�𝝏𝑳𝝏�̇�� = �𝑴 + 𝒎
𝟑� �̈�
𝝏𝑳 𝝏𝒚
= −𝟐𝒌𝒚 − 𝒌(𝒚 − 𝑺)𝝏𝑫𝝏�̇�
= 𝜶�̇�
�
1. L’équation différentielle du mouvement forcé amorti: En remplaçant dans l’équation de Lagrange on aura :
… … �𝑴 +𝒎𝟑� �̈� + 𝜶�̇� + 𝟐𝒌𝒚 + 𝒌(𝒚 − 𝑺) = 𝟎 ⟺ �𝑴 +
𝒎𝟑� �̈� + 𝜶�̇� + 𝟑𝒌𝒚 = 𝒌 𝐒𝟎 𝐬𝐢𝐧𝛚𝐭
𝜶
𝑴 +𝒎𝟑
𝟑𝒌
𝒚(𝐭)
𝜶
𝑴 +𝒎𝟑
𝒌
𝟐𝒌
𝐒(𝒕)
𝒚(𝐭)
Page
3
Exercice 3
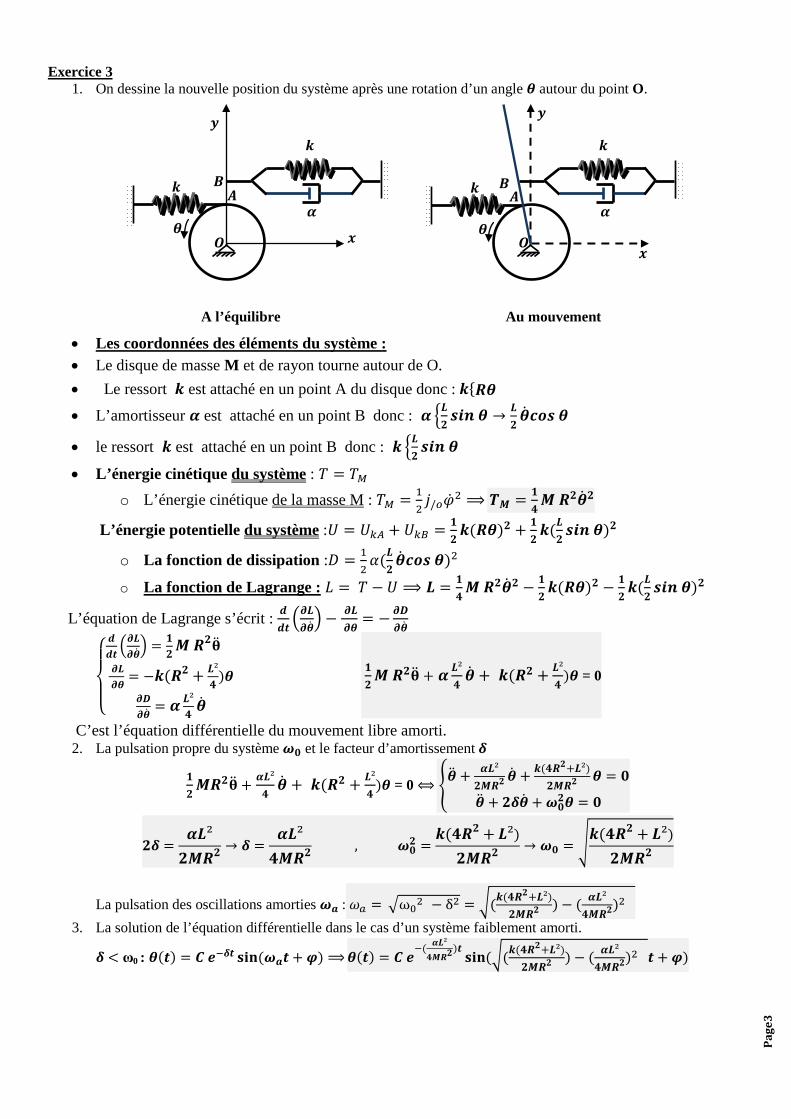
1. On dessine la nouvelle position du système après une rotation d’un angle 𝜽 autour du point O.
• Les coordonnées des éléments du système : • Le disque de masse M et de rayon tourne autour de O. • Le ressort 𝒌 est attaché en un point A du disque donc : 𝒌{𝑹𝜽� • L’amortisseur 𝜶 est attaché en un point B donc : 𝜶 �𝑳
𝟐𝒔𝒊𝒏 𝜽� → 𝑳
𝟐�̇�𝒄𝒐𝒔 𝜽
• le ressort 𝒌 est attaché en un point B donc : 𝒌 �𝑳𝟐𝒔𝒊𝒏 𝜽�
• L’énergie cinétique du système : 𝑇 = 𝑇𝑀 o L’énergie cinétique de la masse M : 𝑇𝑀 = 1
2𝑗/𝑜�̇�2 ⟹ 𝑻𝑴 = 𝟏
𝟒𝑴 𝑹𝟐�̇�𝟐
L’énergie potentielle du système :𝑈 = 𝑈𝑘𝐴 + 𝑈𝑘𝐵 = 𝟏𝟐𝒌(𝑹𝜽)𝟐 + 𝟏
𝟐𝒌(𝑳
𝟐𝒔𝒊𝒏 𝜽)𝟐
o La fonction de dissipation :𝐷 = 12𝛼(𝑳
𝟐�̇�𝒄𝒐𝒔 𝜽)2
o La fonction de Lagrange : 𝐿 = 𝑇 − 𝑈 ⟹ 𝑳 = 𝟏𝟒𝑴 𝑹𝟐�̇�𝟐 − 𝟏
𝟐𝒌(𝑹𝜽)𝟐 − 𝟏
𝟐𝒌(𝑳
𝟐𝒔𝒊𝒏 𝜽)𝟐
L’équation de Lagrange s’écrit : 𝒅𝒅𝒕�𝝏𝑳𝝏�̇�� − 𝝏𝑳
𝝏𝜽= −𝝏𝑫
𝝏�̇�
⎩⎪⎨
⎪⎧𝒅𝒅𝒕�𝝏𝑳𝝏�̇�� = 𝟏
𝟐𝑴 𝑹𝟐�̈� 𝝏𝑳 𝝏𝜽
= −𝒌(𝑹𝟐 + 𝑳²𝟒 )𝜽
𝝏𝑫𝝏�̇�
= 𝜶𝑳²𝟒 �̇�
� 𝟏𝟐𝑴 𝑹𝟐�̈� + 𝜶 𝑳²
𝟒�̇� + 𝒌(𝑹𝟐 + 𝑳²
𝟒)𝜽 = 0
C’est l’équation différentielle du mouvement libre amorti. 2. La pulsation propre du système 𝝎𝟎 et le facteur d’amortissement 𝜹
𝟏𝟐𝑴𝑹𝟐�̈� + 𝜶𝑳²
𝟒�̇� + 𝒌(𝑹𝟐 + 𝑳²
𝟒)𝜽 = 0 ⟺ ��̈� + 𝜶𝑳²
𝟐𝑴𝑹𝟐�̇� + 𝒌(𝟒𝑹𝟐+𝑳²)
𝟐𝑴𝑹𝟐𝜽 = 𝟎
�̈� + 𝟐𝜹�̇� + 𝝎𝟎𝟐𝜽 = 𝟎
�
𝟐𝜹 =𝜶𝑳²𝟐𝑴𝑹𝟐
→ 𝜹 =𝜶𝑳²𝟒𝑴𝑹𝟐
, 𝝎𝟎𝟐 =
𝒌(𝟒𝑹𝟐 + 𝑳²)𝟐𝑴𝑹𝟐
→ 𝝎𝟎 = �𝒌(𝟒𝑹𝟐 + 𝑳²)𝟐𝑴𝑹𝟐
La pulsation des oscillations amorties 𝝎𝒂 : 𝜔𝑎 = �ω02 − δ2 = �(𝒌(𝟒𝑹𝟐+𝑳²)
𝟐𝑴𝑹𝟐) − ( 𝜶𝑳²
𝟒𝑴𝑹𝟐)2
3. La solution de l’équation différentielle dans le cas d’un système faiblement amorti.
𝜹 < ω0 : 𝜽(𝒕) = 𝑪 𝒆−𝜹𝒕 𝐬𝐢𝐧(𝝎𝒂𝒕 + 𝝋) ⟹𝜽(𝒕) = 𝑪 𝒆−( 𝜶𝑳²
𝟒𝑴𝑹𝟐)𝒕𝐬𝐢𝐧(�(𝒌(𝟒𝑹𝟐+𝑳²)
𝟐𝑴𝑹𝟐) − ( 𝜶𝑳²
𝟒𝑴𝑹𝟐)2 𝒕 + 𝝋)
𝒚
𝒌
𝒙 𝑶
𝜶
𝒌
𝑩 𝑨
A l’équilibre
𝜽
𝒚
𝒌
𝒙 𝑶
𝜶
𝒌
𝑩 𝑨
Au mouvement
𝜽


















