UE de Télécommunicationsexvacuo.free.fr/div/Sciences/Cours/Electro(tech)nique/Transmission... ·...
92
Université Pierre et Marie Curie MENTION Science De l’Ingénieur *** Spécialité / Parcours UE de Télécommunications Transmission numérique en bande de base (2005) Anne Migan Dubois (LGEP)
-
Upload
truongmien -
Category
Documents
-
view
213 -
download
0
Transcript of UE de Télécommunicationsexvacuo.free.fr/div/Sciences/Cours/Electro(tech)nique/Transmission... ·...

Université Pierre et Marie Curie
MENTION Science De l’Ingénieur
***
Spécialité / Parcours
UE de Télécommunications
Transmission numérique en bande de base
(2005)
Anne Migan Dubois (LGEP)


Table des matières
I.Table des matières........................................................................................................................................... 3Chapitre I : Principes de Base............................................................................................................................ 1II.Introduction.................................................................................................................................................... 1
II.1.Nature des informations transmises...............................................................................................1II.2.Nature des transmissions............................................................................................................... 1II.3.Exemples d’informations à transmettre......................................................................................... 2II.4.Définition de la qualité de service.................................................................................................3II.5.Conclusion.....................................................................................................................................4
III.Constitution d’une liaison............................................................................................................................. 4III.1.Caractéristiques d’une transmission à distance............................................................................4III.2.Eléments de base..........................................................................................................................4III.3.Caractéristiques du support de transmission................................................................................ 5III.4.Les supports de transmission....................................................................................................... 5III.5.Utilisation des différentes gammes de fréquences....................................................................... 7
IV.Techniques de transmission.......................................................................................................................... 7IV.1.Transmission synchrone...............................................................................................................7IV.2.Transmission asynchrone.............................................................................................................7IV.3.Transmission en bande de base....................................................................................................9
V.Conclusion......................................................................................................................................................9Chapitre II : Echantillonnage et Quantification................................................................................................10I.Echantillonnage..............................................................................................................................................10
V.1.Théorème de l’échantillonnage................................................................................................... 10V.2.Echantillonnage naturel...............................................................................................................10V.3.Echantillonnage idéal.................................................................................................................. 11V.4.Echantillonneur-bloqueur............................................................................................................12
VI.Quantification..............................................................................................................................................12VI.1.Quantification linéaire............................................................................................................... 12VI.2.Quantification non linéaire........................................................................................................ 13
VII.Restitution du signal.................................................................................................................................. 16VII.1.Interpolation idéale...................................................................................................................16VII.2.Restitution par maintien et filtrage........................................................................................... 16VII.3.Effet de la restitution par maintien et filtrage...........................................................................17VII.4.Limitation des effets de la restitution par maintien et filtrage.................................................. 17
Chapitre III : Techniques de Codage............................................................................................................... 18I.Paramètres......................................................................................................................................................18VIII.Les principaux codes à deux états............................................................................................................ 19
VIII.1.Le code NRZ...........................................................................................................................19VIII.2.Code NRZI avec ″bit stuffing″................................................................................................20VIII.3.Le code RZ..............................................................................................................................20VIII.4.Code biphase, ou diphasé, ou Manchester.............................................................................. 20VIII.5.Code Manchester différentiel..................................................................................................21VIII.6.Code de Miller........................................................................................................................ 21VIII.7.Code CMI................................................................................................................................22
IX.Les principaux codes à trois états............................................................................................................... 22IX.1.Code bipolaire simple ou code AMI..........................................................................................22IX.2.Code HDBn............................................................................................................................... 23IX.3.Codes xByT (x Binaires – y Ternaires)..................................................................................... 23IX.4.Codes duobinaires......................................................................................................................24IX.5.Code MLT3............................................................................................................................... 25
X.Les codes à quatre états : le 2B1Q (2 binaires – 1 quaternaire)................................................................... 25XI.Choix des codes.......................................................................................................................................... 26XII.Brouillage.................................................................................................................................................. 27
XII.1.Principe.....................................................................................................................................27XII.2.Rappel : Générateur pseudo-aléatoire...................................................................................... 27
XIII.Régénération du signal............................................................................................................................. 28XIII.1.Principe................................................................................................................................... 28

XIII.2.Filtre adapté.............................................................................................................................28XIII.3.Transmission sans IES : canal de Nyquist...............................................................................30XIII.4.Egalisation...............................................................................................................................35XIII.5.Restitution d’horloge...............................................................................................................36
Chapitre IV : Modulations Numériques........................................................................................................... 37I.Buts de la modulation.................................................................................................................................... 37
XIII.6.Exemples................................................................................................................................. 37XIII.7.Modulations successives......................................................................................................... 37
XIV.Représentation des signaux modulés........................................................................................................38XIV.1.Phaseur....................................................................................................................................38XIV.2.Signal primaire........................................................................................................................39XIV.3.Porteuse...................................................................................................................................39XIV.4.Puissance du signal modulé.................................................................................................... 39
XV.Modulation d’amplitude (ASK).................................................................................................................40XV.1.Principe.................................................................................................................................... 40XV.2.Occupation spectrale................................................................................................................ 40XV.3.Circuits de modulation et de démodulation..............................................................................41XV.4.Avantages et inconvénients...................................................................................................... 41
XVI.Modulation de phase (PSK)..................................................................................................................... 42XVI.1.Modulation BPSK...................................................................................................................42XVI.2.Modulation DBPSK................................................................................................................43XVI.3.Modulation QPSK...................................................................................................................43XVI.4.Modulation OQPSK................................................................................................................46XVI.5.Modulation DQPSK................................................................................................................46
XVII.Modulation Quadrature Amplitude Modulation (QAM)........................................................................ 47XVII.1.Principe..................................................................................................................................47XVII.2.Applications...........................................................................................................................48
XVIII.Modulation de fréquence (FSK)............................................................................................................48XVIII.1.Principe................................................................................................................................ 48XVIII.2.Occupation spectrale............................................................................................................ 49XVIII.3.Circuits de modulation et de démodulation..........................................................................49XVIII.4.Avantages et inconvénients.................................................................................................. 49XVIII.5.Modulation de fréquence à phase continue (CPFSK).......................................................... 49XVIII.6.Modulation Minimum Shift Keying..................................................................................... 51XVIII.7.Modulation Gaussian Minimum Shift Keying......................................................................52XVIII.8.Circuits de modulation et de démodulation..........................................................................53XVIII.9.Avantages et inconvénients.................................................................................................. 54XVIII.10.Comparaison des performances des modulations...............................................................54
XIX.Le multiplexage........................................................................................................................................55XIX.1.Multiplexage fréquentiel......................................................................................................... 55XIX.2.Multiplexage temporel............................................................................................................ 56XIX.3.Multiplexage par codage.........................................................................................................56XIX.4.Conclusion.............................................................................................................................. 57
XX.Synthèse.....................................................................................................................................................57Chapitre V : Filtrage Numérique......................................................................................................................58I.Systèmes linéaires discrets invariants dans le temps......................................................................................59
XX.1.Définitions................................................................................................................................59XX.2.Réponse impulsionnelle........................................................................................................... 59XX.3.Relation d’entrée-sortie, convolution discrète..........................................................................60XX.4.Réponse fréquentielle...............................................................................................................60XX.5.Fonction de transfert en z......................................................................................................... 61
XXI.Quelques rappels sur la transformée en z.................................................................................................62XXI.1.Domaine de convergence........................................................................................................ 62XXI.2.Linéarité.................................................................................................................................. 63XXI.3.Théorème du retard.................................................................................................................63XXI.4.Théorème de la convolution....................................................................................................63XXI.5.Théorème de Parseval.............................................................................................................63XXI.6.Théorème de la valeur initiale et de la valeur finale............................................................... 63XXI.7.Intégration et dérivation..........................................................................................................64XXI.8.Inversion de la transformée en z............................................................................................. 64
XXII.Fonctions de transfert rationnelles en z, FIR et IIR................................................................................ 64

XXII.1.Calcul de la réponse impulsionnelle d’un filtre RII...............................................................65XXIII.Causalité et stabilité...............................................................................................................................67
XXIII.1.Causalité............................................................................................................................... 67XXIII.2.Stabilité................................................................................................................................ 67
XXIV.Etude des filtres numériques élémentaires............................................................................................ 69XXIV.1.Introduction..........................................................................................................................69XXIV.2.Etude des zéros de transmission...........................................................................................69XXIV.3.Cellule FIR d’ordre 1........................................................................................................... 70XXIV.4.Cellule FIR d’ordre 2........................................................................................................... 72XXIV.5.Cellule IIR d’ordre 1............................................................................................................76XXIV.6.Cellule IIR d’ordre 2............................................................................................................78
XXV.Structure des filtres numériques............................................................................................................. 81XXV.1.Structures directes................................................................................................................. 81XXV.2.Structures directes non canoniques....................................................................................... 82XXV.3.Structures directes canoniques DN et ND............................................................................. 82XXV.4.Structure décomposées.......................................................................................................... 83
Bibliographie....................................................................................................................................................85Ouvrages :........................................................................................................................................................ 85Sites web :........................................................................................................................................................ 85


CHAPITRE I : PRINCIPES DE BASE
I. Introduction
Aujourd’hui, tous les nouveaux systèmes de transmission sont numériques. Pour des raisons essentiellementhistoriques, mais aussi technologiques, les systèmes analogiques sont très largement minoritaires, mais existentencore.
Les temps ont beaucoup changé depuis l’invention du téléphone par Antonio Meucci en 1889 (invention quifut ensuite volée par Alexander Graham Bell), puis du télégraphe sans fil par Guglielmo Marconi en 1901(premières expériences réalisées au bord de La Brague, sur l’actuel par de Sophia-Antipolis), ce qui lui valu leprix Nobel en 1909. Les communications numériques nécessitent aujourd’hui des compétences multiples :antennes (physique et propagation), modulation et égalisation (traitement du signal), réseau (informatique etsystèmes distribués), micro-électronique (architectures logicielle et matérielle). Le présent cours est focalisé surles aspects Traitement du Signal, autrement dit la couche physique des télécommunications.
I.1. Nature des informations transmises
La nature des informations échangées peut être très variée : Parole humaine et son haute fidélité ; Données alphanumériques, textes et autres données structurées en un ensemble de caractères ; Images fixes en noir et blanc ou en couleur ; Images animées, images de télévision par exemple ; Informations multimédia qui intègrent plusieurs moyens de représentation de l’information…Par nature même, certaines informations sont analogiques, c’est-à-dire qu’elles correspondent à des signaux
qui varient continûment dans le temps et qui peuvent prendre une infinité de valeurs distinctes. La parole, lamusique, les images animées de la télévision sont des informations de nature analogique.
D’autres informations sont par nature numériques. D’une façon générale, on peut considérer qu’ellescorrespondent à des signaux qui varient d’une manière discrète dans le temps et qui peuvent prendre un ensemblefini de valeurs distinctes. Par exemple, un texte est une suite de caractères appartenant à un alphabet d’un nombrefini de symboles : c’est une information de nature numérique.
Les informations numériques sont facilement transformées en une suite de données binaires grâce à uneopération de codage qui fait correspondre à chaque symbole de l’alphabet une configuration binaire particulière.Plusieurs codes existent pour l’ensemble des caractères courants (les 26 lettres de l’alphabet, les chiffres, lessymboles de ponctuation, les symboles mathématiques…). On peut également en imaginer pour des symbolesgraphiques afin de créer des images fixes.
I.2. Nature des transmissions
La transmission des informations sur un support peut être analogique ou numérique selon que le signaltransporté varie de manière continue ou discrète dans le temps, et que son espace de valeurs est infini ou non.
Un signal de parole peut moduler de manière analogique l’amplitude ou la fréquence d’une onde porteuseavec des variations dans le temps qui sont continues. On parle de transmission analogique.
Une suite de données binaires permet de construire un signal qui prend, par exemple, deux valeurs 0 et 1, etqui varie dans le temps à des intervalles de temps réguliers kT où k est un entier. On parle de transmissionnumérique.
Mais la correspondance entre la nature de l’information et la nature de la transmission ne se réduit pas à unetelle bijection. Il est en particulier possible de transformer une information analogique pour la mettre sous formenumérique et ensuite la transmettre. Cette opération s’applique aussi bien à un signal de parole qu’à une imagefixe, une bande son haute fidélité ou des images de télévision animées et en couleur.
Aujourd’hui, la quasi-totalité des transmissions sont numériques. Seul l’accès au réseau téléphonique, c’est-à-dire la liaison entre le poste téléphonique et le réseau, est encore majoritairement analogique.
Chapitre I : Principe de base p. 1 2004-2005

I.3. Exemples d’informations à transmettre
I.3.a. Données alphanumériques La transmission de données alphanumériques répond à de multiples besoins. Dans le cadre du courrier
électronique, on cherche à transmettre le plus souvent de courts textes constitués de caractères. La méthode laplus simple pour le codage consiste à associer à chaque caractère un mot de 7 ou 8 bits comme avec le codeASCII. Si un caractère est codé par un octet, un courrier électronique de 40 lignes de 40 caractères tient en 1600octets, soit 12,8 kbits. Une page de textes d’un livre imprimé fait typiquement 2400 octets. Un chapitre de livred’une trentaine de page est codé en environ 600 kbits, sans considérer la mise en forme. Le roman ″Lesmisérables″ comprend de l’ordre de 3 millions de caractères, soit 24 Mbits.
On voit donc que la taille de l’information peut considérablement varier. Dans certains cas, il peut êtreintéressant d’utiliser des techniques de compression pour réduire la taille des données à transmettre. Dansd’autres cas, on désire privilégier la simplicité comme le code ASCII sans compression.
I.3.b. La voix La voix est une onde sonore dont les fréquences sont inférieures à 4000 Hz. Un microphone transforme cette
onde en un signal électrique de même fréquence. Ce signal varie continûment dans le temps (analogique). Lapremière étape de numérisation consiste à échantillonner, c’est-à-dire prendre en compte seulement l’amplitudedu signal à des intervalles de temps réguliers T. La fréquence d’échantillonnage est donc de f = 1/T. Pour êtrecapable de reconstituer le signal d’origine, le théorème de l’échantillonnage fourni par la théorie du signal dit quela fréquence d’échantillonnage doit être supérieure ou égale à 2fmax, soit, dans notre exemple, 8000 Hz. Lapériode d’échantillonnage est donc de 1/8 ms, soit 125 µs. Il faut ensuite quantifier le signal échantillonné, c’est-à-dire lui associer une valeur parmi un ensemble fini de valeurs. La quantification peut se faire sur 256 niveaux,le codage du niveau est finalement effectué sur 1 octet. La numérisation d’un signal vocal produit donc un fluxrégulier d’information numériques de 1 octet toutes les 1/8 ms, soit un débit de 64 kbits/s. Cette technique estappelée Modulation par Impulsion et Codage ou MIC. Elle est utilisée dans le réseau téléphonique.
Une étude approfondie des caractéristiques de la voix montre qu’il est possible de la numériser à beaucoupplus faible débit. On peut par exemple modéliser le conduit vocal comme un filtre excité par un signal. Lanumérisation consiste alors à rechercher la valeur des paramètres du filtre et du signal excitant. Dans les réseauxde téléphonie mobile, la voix est codée à 13 kbits/s. Des codeurs plus récents permettent d’atteindre 8 kbits/savec une bonne qualité de restitution, voire 2,4 kbits/s pour des applications militaires où les contraintes dequalité sont moindres. De plus, au cours d’une conversation, un interlocuteur parle la moitié du temps. Lespauses au sein des phrases, le détachement des syllabes, montrent que le signal vocal est fréquemment réduit à unsilence. La voix n’est donc plus numérisée comme un flux continu d’informations mais comme un fluxsporadique : des périodes d’activités durant en moyenne 1,4 s, suivies de silence de 1,75 s en moyenne. Avec uncodage à 8 kbits/s, le flux obtenu a ainsi un débit moyen d’environ 4 kbits/s.
I.3.c. Images fixes Une image est une information de type analogique qui est facilement numérisable par découpage en pixels,
puis association d’un niveau de gris ou d’une couleur à chaque pixel. La taille d’un pixel est de 21×21 µm2 pourrendre la numérisation non détectable (résolution utilisée par les journaux). Une photographie de 15×10 cm2
contient donc 7000×4700 pixels environ.Le codage le plus simple, appelé bit-map, consiste à associer à chaque pixel un niveau de gris ou une
couleur. En supposant la couleur codée sur 8 bits, notre photographie tient sur 260 Mbits environ ! Si une qualitémoyenne acceptée (taille du pixel plus importante), le codage est réduit à 1 Mbit.
Un écran d’ordinateur 800×600 contient 480000 pixels. Si chaque pixel est codé sur 24 bits (8 bits pourchaque couleur rouge, vert et bleu), une image sur tout l’écran est numérisée en 11,5 Mbits. Nous voyons que lataille des données peut être considérable, mais, de même que pour la voix, des techniques de compression sontpossibles. En général, la couleur d’un pixel est corrélée avec la couleur du pixel voisin. De façon très simplifiée,il est plus économique de coder la différence de couleur entre un pixel et son voisin plutôt que la couleur decelui-ci. La norme JPEG (Joint Photographic Experts Group) permet de coder des images fixes de qualitéphotographique en réduisant la taille de l’image d’un facteur 20 par rapport à un codage simple.
I.3.d. Images animées Les séquences animées sont obtenues par une succession d’images fixes à un rythme typique de 25 images
par seconde. Celui-ci est suffisamment rapide pour donner à l’œil une impression de variation continue. Enprenant une image non compressée à 1,5 Mbit, la séquence animée produit alors 25×11,5 = 288 Mbits/s. Le débitnécessaire est considérable. En utilisant les techniques de compression de type JPEG combinés avecl’exploitation des corrélations temporelles, la norme MPEG-1 (Motion Picture Experts Group) permet de réduirele débit produit à 1,2 Mbits/s. Si les images varient rapidement, le flux d’information est plus important. Si lesimages sont quasiment fixes, le flux est moins important.
2004-2005 p. 2 Chapitre I : Principe de base

I.4. Définition de la qualité de service
Le transfert d’information élémentaire entre deux équipements peut faire intervenir de multiples autreséquipements et provoquer la transmission de signaux de nature variée sur des supports également variés. Lagrande réussite des télécommunications est celle de la transparence : l’utilisateur final ne connaît pas la naturedes supports de transmission utilisés, il n’est concerné que par la qualité du service qui lui est offert et peutexprimer des exigences dans ce domaine.
Quelques éléments de qualité de service peuvent être donnés : La disponibilité des moyens de transfert de l’information qui est liée au taux de panne des équipements et
des liaisons ; Le taux d’erreur binaire maximal, exprimé comme le rapport entre le nombre de bits dont la valeur est
modifiée par la transmission sur le nombre total de bits d’information émis ; Le débit de transfert ; Le délai, c’est-à-dire la durée entre la décision d’émettre l’information et la réception par le destinataire.
La qualité de service n’est pas une notion absolue. Elle est généralement liée à la nature des informationstransmises et du type de besoin. Les exemples suivants illustrent la notion de qualité de service.
I.4.a. Données alphanumériques, textes et images fixes Un courrier électronique est une information en général courte. Il n’y a pas de contraintes de débit
importantes. De plus, on tolère que le courrier mette plusieurs minutes à être transmis. En revanche, l’usagerexige que son message ne soit pas perdu par suite de la défaillance d’un équipement.
Imaginons que Victor Hugo écrive de nos jours ″Les misérables″ sur son ordinateur personnel et letransmette sous forme d’un fichier texte à son éditeur. Le fichier a une taille de 24 Mbits, sans compression.Supposons qu’il utilise un moyen de télécommunication dont le taux d’erreur binaire soit 10-6. Si au cours de latransmission, un seul élément binaire est mal reçu, le texte est modifié. La probabilité que l’ensemble du livresoit bien transmis en une seule fois est de (1 – 10-6)24000000 = 4.10-11. Il est pratiquement certain qu’il y a une ouplusieurs erreurs dans le texte reçu par l’éditeur, si aucune vérification n’est faite. Si Victor Hugo transfert lefichier pendant la nuit, un débit modéré peut convenir : à 9600 bits/s, le transfert dure une quarantaine deminutes. Le moyen de télécommunication peut rajouter un délai de plusieurs dizaines de minutes sans impactimportant pour l’éditeur. Cet exemple illustre que le taux d’erreur est en général le facteur principal de qualité deservice pour la transmission de fichiers et que le délai n’a pas d’importance.
Les journaux sont maintenant composés directement par ordinateur. Ils comportent du texte et des imagesfixes, mais dans certaines parutions, textes comme photographies sont considérées comme des images et transmistels quels (bit-map). Un quotidien tient ainsi sur 220 Mo, soit 1,8 Gbits. Comme dans l’exemple précédent, il y anécessité que l’information soit correctement transmise de l’atelier de composition à l’imprimeur. Notonscependant que la solution bit-map permet de supporter des erreurs de transmission isolées : un pixel erroné parmides pixels corrects est non détectable. Un taux d’erreur de 10-6 est acceptable. L’exigence principale s’exprime enterme de disponibilité : l’impression ne doit pas être retardée à cause de l’indisponibilité du réseau informatique.La qualité de service prend en compte ce facteur. Le transfert doit de plus être rapide, il faut donc un débit assezélevé : avec une liaison à 2 Mbits/s, le transfert du quotidien demande environ 15 minutes.
Lorsque l’on consulte un serveur Web, on est dans le cas d’une application interactive : on transmet quelquesinformations pour demander d’afficher une page d’écran que le serveur transfère ensuite. La qualité de servicedépend de plusieurs paramètres : disponibilité, délai, rapidité de transmission de la page. Notons que les fluxgénérés sont largement dissymétriques : une commande transmise vers le serveur peut être codée sur quelquesdizaines d’octets. En revanche, le chargement de la page peut demander la transmission de plusieurs centaines dekilo-octets s’il y a des images (à 64 kbits/s, le chargement est de 13 secondes pour 100 ko). Les flux sont de plustrès sporadiques : on demande le chargement d’une page, puis on la regarde pendant quelques minutes au boutdesquelles on consulte une nouvelle page. Le débit moyen exigé peut être faible (environ 500 bit/s si l’usagercharge une page de 100 ko toutes les deux minutes) mais le débit instantané doit être relativement important si onne veut pas impatienter l’usager !
Chapitre I : Principe de base p. 3 2004-2005
I.4.b. La voix La voix est un flux produit par une source (le locuteur) puis numérisé. Le débit produit peut être faible, si
des techniques de compression sont utilisées. Il est essentiel que le flux soit régénéré à l’arrivée avec le mêmerythme, sans quoi la conversation est inaudible. Cependant, on peut tolérer un taux d’erreur assez important enconservant une bonne compréhension : l’auditeur entend, par exemple, des claquements subits ou un sonmétallique qui peuvent être désagréables mais n’empêchent pas la communication.
Dans le cas d’une communication téléphonique, le délai doit être le plus réduit possible. Dans le cas, parexemple, d’une diffusion d’émission radiophonique, il peut avoir une valeur plus élevée, mais ce délai doit êtreconstant.
Un autre élément de la qualité de service pour les communications téléphoniques est la disponibilité desmoyens de transmission. Un usager peut être empêché de téléphoner à cause de la panne d’un équipement maisaussi par manque de ressource dans le réseau. Pour faire un appel depuis un portable, il faut disposer d’un canalradio. Si au moment où on tente de faire l’appel aucun canal n’est disponible, l’appel échoue. La probabilitéd’échec d’un appel intervient ici fortement dans la qualité de service.
I.4.c. Les images animées De la même façon que pour la voix, la transmission d’images animées exige que le flux d’origine soit restitué
au même rythme. Il y a donc des contraintes de délais. En revanche, le débit requis est beaucoup plus important.
I.5. Conclusion
En conclusion, définir la qualité de service nécessite une analyse précise du type d’utilisation recherchée etde la nature des informations à transmettre. La qualité de service dépend généralement de la disponibilité, dudébit, du délai, du taux d’erreur mais l’importance respective de chaque aspect peut grandement varier suivant lesapplications.
II. Constitution d’une liaison
II.1. Caractéristiques d’une transmission à distance
Le problème de la transmission à distance est de produire un échange en introduisant un moyen detransporter l’information sur des dizaines ou des milliers de kilomètres. On utilise un support de transmission etun signal qui doit transporter, sous une forme ou sous une autre, les informations.
L’introduction du support a de nombreuses conséquences : Le support est généralement une ressource chère que l’on cherchera à rentabiliser au maximum. Un support
de transmission unique doit véhiculer, en série, toutes sortes d’informations. Le support a une bande passante limitée, il ne peut pas transmettre n’importe quels signaux, ni n’importe
quelle quantité d’information sur ces signaux. Le support n’est pas parfait. Même si les signaux sont correctement adaptés à la bande passante, ils sont
toujours affectés par des distorsions, des affaiblissements et surtout du bruit, qui perturbent leur propagationet créent une qualité de réception nettement moindre. Il faudra donc imaginer un moyen de détecter leserreurs de transmission et les corriger, si le taux d’erreur sur le support est insupportable pour l’application :Une liaison téléphonique peut être considérée de très bonne qualité pour transmettre de la parole et serévéler de médiocre qualité pour la transmission de données bancaires.
La transmission des signaux sur n’importe quel support suppose un certain délai de propagation,incompressible, qui peut atteindre des valeurs très grandes (des centaines de millisecondes dans le cas detransmission par satellite).
2004-2005 p. 4 Chapitre I : Principe de base

II.2. Eléments de base
Figure I. 1 – Schéma général d’une transmission numérique
Chaque élément de base d’une transmission numérique a une fonction bien précise : CAN : Représentation numérique du message analogique
- Echantillonnage- Quantification- Format / Codage
Codage de source : Compression du message numérique- Adaptation de l’alphabet du message au canal- Suppression de la redondance du message ou suppression d’informations peu significatives
Codage de canal :- Ajout d’information pour immuniser le message aux erreurs du canal
Modulation :- Conversion du message numérique en un message analogique transportable sans distorsionpar le canal
A la réception, les opérations inverses sont effectuées afin de retrouver le message analogique initial.
II.3. Caractéristiques du support de transmission
Les supports de transmission (canal), quels qu’ils soient, ne sont malheureusement pas parfaits. Ils ont unebande passante limitée, supportent divers bruits et ont de ce fait une capacité à transmettre les signaux limités.
II.3.a. Bande passante Ils ont une bande passante limitée, c’est-à-dire que certains signaux se propagent correctement dans le
support (ils sont affaiblis et déformés mais encore reconnaissables à l’autre extrémité), mais d’autres ne letraversent pas du tout (ils sont tellement affaiblis ou déformés qu’on ne les retrouve plus à la sortie). La bandepassante d’un support est la bande de fréquences des signaux dont la puissance à la sortie, après traversée dusupport, est supérieure à un seuil donné. On caractérise un support par sa bande à 3 dB, c’est-à-dire par la plagedes fréquences à l’intérieur de laquelle la puissance de sortie d’un signal sinusoïdal est, au pire, divisé par deux.Plus un support a une bande passante large, plus il pourra transporter d’information par unité de temps.
II.3.b. Bruits et distorsions Les supports de transmission déforment les signaux qu’ils transportent même lorsque ceux-ci ont des
fréquences adaptées. En effet, plusieurs sources de bruit perturbent les signaux et des distorsions peuvents’avérer gênantes pour la reconnaissance des signaux en sortie. Par ailleurs, la distance est un facteurd’affaiblissement, particulièrement important pour les liaisons par satellite et un facteur de distorsion importantpour les liaisons par fibres optiques. Enfin, certaines perturbations de l’environnement peuvent égalementintroduire des bruits. Même lorsque les signaux sont adaptés aux supports de transmission, on ne pourra pasgarantir à 100 % leur exactitude à la réception.
Chapitre I : Principe de base p. 5 2004-2005
II.3.c. Capacité limitée L’ensemble des caractéristiques que nous venons de voir fait que la capacité d’un support de transmission
est limitée. Nous avons déjà étudié des canaux et exprimé leur capacité dans le chapitre précédent (Théorie del’information).
Une loi, due à Hartley et à Shannon, permet de connaître la borne maximale de cette capacité, d’une manièreplus pratique que ce que nous avons vu précédemment :
+×=
NS
1logBC 2
B est la bande passante, exprimée en Hz, S/N est le rapport signal sur bruit, la base du logarithme est deuxservant à exprimer l’information en bit, la capacité est donc exprimée en bits/s.
A titre d’exemple, une liaison téléphonique a une bande passante de 3,10 kHz et un rapport signal à bruit de32 dB. Sa capacité est :
( )s/kbits33C
101log3100C 10322
=+×=
II.4. Les supports de transmission
II.4.a. La paire torsadée Une paire torsadée non blindée est composée de deux conducteurs en cuivre, isolés l’un de l’autre et
enroulés de façon hélicoïdale autour de l’axe de symétrie longitudinal. Cet enroulement permet de réduire lesconséquences des inductions électromagnétiques parasites provenant de l’environnement. L’utilisation la pluscourante de la paire torsadée réside dans la desserte des usagers du service téléphonique. Ces fils sont en cuivre,parfois en aluminium.
Le principal inconvénient des fils métalliques téléphoniques est leur affaiblissement. En outre, lorsqueplusieurs paires sont rassemblées dans un même câble, les signaux électriques qu’elles transportent interfèrentplus ou moins les uns avec les autres par rayonnement. C’est la diaphonie. La bande passante d’une liaisontéléphonique est d’environ 3,1 kHz entre les fréquences 300 et 3400 Hz. Les débits permis par les liaisonstéléphoniques sont de l’ordre de 10 à 15 kbits/s. L’utilisation de techniques d’adaptation dynamique auxcaractéristiques réelles de la liaison permet d’atteindre un débit de 28,8 voire 56 kbits/s. Sur des distancesrelativement courtes de quelques dizaines de kilomètres, par une transmission en bande de base, on atteint 72kbits/s. Si on se limite à une distance de plusieurs centaines de mètres, le débit peut atteindre quelques centainesde Mbits/s. A l’extrême, sur les bus d’ordinateurs, des centaines de Mo/s peuvent être obtenus facilement.
Les avantages de la paire torsadée sont : technique très bien connue, facilité de connexion, ajout denouvelles entrées sans problème, coût faible…
II.4.b. Les câbles coaxiaux Pour éviter les perturbations dues aux bruits externes, on utilise souvent deux conducteurs cylindriques de
même axe, séparés par un isolant, et qui forment un ensemble appelé câble coaxial. L’atténuation varie de 2 à 18dB/km suivant le type de câble et les fréquences utilisées.
Le câble coaxial présente de meilleures caractéristiques que le câble à paire torsadée. Il offre en outre un boncompromis entre la largeur de bande passante qu’il présente et la protection contre les rayonnementsélectromagnétiques parasites.
Sa bande passante dépend des caractéristiques des conducteurs et des isolants et de sa longueur utile. Pourles câbles utilisés en transmission en bande de base, il est possible d’atteindre un débit de 10 Mbits/s sur unelongueur d’un kilomètre. Des débits plus élevés peuvent être obtenus sur des distances plus courtes. De même, ilest possible de transmettre à des débits inférieurs à 10 kbits/s sur des distances supérieures à 10 km.
II.4.c. La fibre optique Une fibre optique est constituée d’un fil de verre très fin (quelques micromètres) à base de silice qui
constitue le cœur dans lequel se propage la lumière, d’une gaine en silice dopée et d’un revêtement de protectionen polymère. Une impulsion lumineuse représente l’information binaire 1 tandis que l’absence de lumièrereprésente l’information binaire 0.
Les avantages de la fibre optique sont nombreux. Le diamètre extérieur est de l’ordre de 0,1 mm et son poidsde quelques grammes au kilomètre, rendant son utilisation facile. La largeur de bande passante utilisable et de 15THz, qui permet le multiplexage sur un même support de très nombreux canaux de télévision, de téléphone…Lafaible atténuation des fibres conduit à un espacement plus important des points d’amplification du signaltransmis. Les meilleures fibres optiques présentent une atténuation de 0,22 dB/km.
2004-2005 p. 6 Chapitre I : Principe de base

De plus, l’insensibilité des fibres aux parasites électromagnétiques constitue un avantage particulier pour latransmission de données, dans la mesure où elle leur permet de supporter sans difficulté la proximité d’émetteursradioélectriques.
L’inconvénient des fibres optiques tient aux coûts.
II.4.d. L’ether L’utilisation des ondes électromagnétiques permet la transmission de signaux sur un support immatériel,
désigné par le terme d’éther, qui peut-être l’atmosphère ou le vide. Elle est pratiquement indispensable dans lecas de liaisons très longues distances. De plus, l’absence de support matériel permet d’apporter une certainesouplesse et convient bien aux applications ponctuelles. Ce type de transmission comprend principalement lesfaisceaux hertziens, les rayons infrarouges et les rayons laser.
La transmission par rayons laser ou infrarouge sont entièrement numériques et à faisceaux très directifs, cequi les protège contre la plupart des interceptions frauduleuses. Toutefois, les conditions météorologiquespeuvent, selon les fréquences de travail choisies, altérer la qualité des communications.
Les faisceaux hertziens reposent sur l’utilisation de fréquences très élevées (de 2 GHz à 15 GHz voirejusqu’à 40 GHz qui correspondent à des longueurs d’onde centimétriques à décimétriques) et de faisceauxdirectifs, produits par des antennes rayonnant principalement dans une direction donnée. La propagation estlimitée à l’horizon optique. La transmission se fait entre des stations placées en hauteur (par exemple sur unetour) pour éviter les obstacles dus aux constructions environnantes. Dans les fréquences élevées (> 12 GHz), lapluie et la neige introduisent un affaiblissement supplémentaire. Les faisceaux hertziens sont utilisés pour latransmission de chaînes de télévisions, pour constituer des artères de transmission longue distance dans lesréseaux téléphoniques sans avoir recours à la pose coûteuse de câble, dans les transmissions par satellites …
Les ondes dites radioélectriques correspondent à des fréquences comprises entre 10 kHz et 2 GHz. Cesondes sont diffusées, c’est-à-dire que, d’un émetteur, on peut les capter avec des récepteurs dispersésgéographiquement. Contrairement aux faisceaux hertziens, il n’est pas nécessaire d’avoir une visibilité directeentre l’émetteur et le récepteur car le récepteur utilise l’ensemble des ondes réfléchies et diffractées. En revanche,la qualité de la transmission est faible.
II.5. Utilisation des différentes gammes de fréquences
Une bonne manière de classifier les canaux de transmission est de les répertorier en fonction de la bande defréquence dans laquelle ils sont exploitables.
Canaux guidésPaire torsadée (téléphone) 300 Hz – 300 kHzPaire torsadée (ADSL) 26 kHz – 1 MHzCâble coaxial (éthernet) 300 kHZ – 1 GHzGuide d’onde 1 GHZ – 300 GHzFibre optique 30 THz – 1000 THz
Canaux sans filVLF 3 kHz – 30 kHzLF 30 kHZ – 300 kHzMF 300 kHz – 3 MHzHF 3 MHz – 30 MHzVHF 30 MHZ – 300 MHzUHF 300 MHz – 3 GHzSHF 3 GHz – 30 GHzEHF 30 GHz – 300 GHzOptique 30 THz – 1000 THz
Acoustique sous-marineULF 15 Hz – 150 HzVLF 150 Hz – 1,5 kHzLF 1,5 kHz – 15 kHzMF 15 kHz – 150 kHzHF 150 kHz – 1,5 MHzVHF 1,5 MHz – 15 MHzUHF 15 MHz – 150 MHzSHF 150 MHz – 1,5 GHzTableau I. 1 – Utilisation des différentes gammes de fréquences.
Chapitre I : Principe de base p. 7 2004-2005

III. Techniques de transmission
Pour une transmission, les caractères sont accolés les uns à la suite des autres, en une succession régulière,dans le temps, de symboles binaires, sous forme d’un signal électrique bivalent appelé message de donnéessynchrones. Les caractères peuvent aussi être séparés par des intervalles de temps variables et aléatoires pourlesquels la durée de chaque état est multiple ou non d’un intervalle de temps élémentaire. Le message de donnéessera dit asynchrone.
III.1. Transmission synchrone
Un signal numérique est dit synchrone si les intervalles de temps alloués à chaque symbole sont égaux etcoïncident avec les périodes successives d’un signal appelé base de temps ou horloge. Le signal d’horlogeassocié est indispensable à l’interprétation du signal de données. L’interprétation est effectuée en échantillonnantle signal de données aux instants qui coïncident avec les fronts du signal d’horloge. Ce signal est périodique, depériode T.
Les transmissions synchrones sont utilisées pour acheminer des volumes importants d’information (transfertde fichiers par exemple). En transmission synchrone, la synchronisation se fait au niveau des éléments binaires etéventuellement, au niveau des caractères. Elle est alors fondée sur l’utilisation de combinaisons spéciales : lescaractères de synchronisation.
Figure I. 2 – Transmission synchrone.
III.2. Transmission asynchrone
Lorsque la source produit des caractères à faible débit et à des instants aléatoires, il est parfois plus simplede transmettre ces caractères au moment où la source les délivre, sans tenir compte des caractères précédents ousuivants. On a alors des successions de trains de symboles binaires synchrones pour la durée de transmission d’uncaractère, qui se succèdent à des instants aléatoires.
Figure I. 3 – Transmission asynchrone.
Au repos, la ligne de transmission est à l’état 1, utilisé comme état d’inactivité. Il est nécessaire d’adjoindreau caractère des délimiteurs de début (START) et de fin (STOP) permettant une reconnaissance du caractère. Ledélimiteur START correspond à un état actif 0 pendant un temps-bit : il provoque nécessairement une transitionqui marque ainsi le début de transmission. Le délimiteur STOP correspond à un état inactif 1 pendant un ou deuxtemps-bits, suivant la configuration choisie : il permet de s’assurer que la ligne revient bien au repos à la fin ducaractère. Il est possible d’intervertir les états 1 et 0 et d’utiliser l’état 0 comme inactif entre les caractères. Maisla première configuration est la plus courante. Le caractère lui-même est généralement transmis en commençantpar les bits de poids faible. Une telle transmission est dite asynchrone ou arythmique ou START/STOP.L’avantage d’une telle transmission est sa simplicité. L’inconvénient majeur provient de l’allongement du délaide transmission : pour chaque caractère, il faut transmettre au moins deux bits supplémentaires.
2004-2005 p. 8 Chapitre I : Principe de base

III.3. Transmission en bande de base
L’opération qui transforme un élément binaire en un signal s’appelle le codage de ligne. Les supports detransmission sont caractérisés par le fait qu’ils ont une bande passante limitée. Certains peuvent être assimilés àdes filtres passe-bas, c’est-à-dire qu’ils ne laissent passer que les basses fréquences, d’autres se comportentcomme des filtres passe-bande, c’est-à-dire qu’ils ne laissent passer les fréquences que dans un certain intervalle.
Lorsqu’un signal numérique traverse un filtre, il subit des modifications qui ont pour effet, entre autre,d’atténuer la raideur des fronts. Ces déformations ne sont pas gênantes si l’information contenue dans les signauxreçus permet de régénérer localement des signaux identiques aux signaux originaux. La condition pour que cetteestimation soit correcte est qu’en échantillonnant les signaux à un rythme correspondant aux intervallessignificatifs, on mesure sans ambiguïté des valeurs égales à celles des impulsions qui constituent le signal initial.
Certains supports de transmission autorisent la transmission directe des signaux numériques, ditetransmission en bande de base, qui conduit à des réalisation simples et économiques.
Les principales difficultés rencontrées dans la transmission directe d’une information en ligne sont dues à lalimitation de la bande passante dans les basses et les hautes fréquences ainsi qu’à la transparence vis-à-vis desdonnées. Par ailleurs, le signal d’horloge associé aux données doit pouvoir être correctement reconstitué, quelleque soit la séquence de données binaires transmise. Les distorsions d’amplitudes et de phase doivent pouvoir êtrecorrigées.
La transmission du signal d’horloge peut être réalisée soit indépendamment du signal de données, soit enutilisant les transitions du signal codé.
Suivant le type de canal, le type de transmission, la récupération ou non de l’horloge, différents types decodages peuvent être mis en œuvre.
IV. Conclusion
Nous allons voir dans les chapitres suivants, les étapes nécessaires pour la réalisation d’une transmission enbande de base (cf. Figure I. 1), à savoir, la numérisation d’un signal analogique (échantillonnage etquantification), la mise en forme (format ou code) et la modulation numérique.
Chapitre I : Principe de base p. 9 2004-2005

CHAPITRE II : ECHANTILLONNAGE ET QUANTIFICATION
Les opérations d’échantillonnage et de quantification sont souvent indûment confondues. L’échantillonnageest l’opération qui consiste à prendre une toute petite partie du signal périodiquement. L’échantillonnage peuttrès bien se faire de manière analogique. La quantification est l’opération qui consiste à convertir un échantillonanalogique en grandeur numérique. Si l’échantillonnage est linéaire, on va le quantifier en donnant soit le nombren de bits, soit le nombre total de niveaux N. Souvent (mais pas toujours), on a N = 2n. Par exemple, unconvertisseur linéaire 8 bits fournit 256 niveaux de reconnaissance.
La confusion entre échantillonnage et quantification tient au fait que les convertisseurs analogique-numérique (CAN) effectuent les deux opérations en même temps. Pourtant, dans la réalisé, tout CAN séparesoigneusement ces deux opérations.
I. Echantillonnage
IV.1. Théorème de l’échantillonnage
Quand un signal est émis en bande de base, ou par modulation sinusoïdale, tous les points de ce signal sonteffectivement transmis (signal continu). Pour des signaux dont le spectre est limité, il n’est cependant pasnécessaire de transmettre tous les points du signal.
Ceci découle du théorème d’échantillonnage qui stipule :
Soit un signal possédant un spectre en bande de base limité à une fréquence B. Si ce signal est échantillonné àune fréquence constante fe telle que fe > 2B, alors les échantillons transmis permettront de régénérercomplètement et sans erreur le signal émis, même entre les instants d’échantillonnage.
La fréquence limite B = fe/2 est appelée fréquence de Nyquist. Ce théorème est fondamental pour latransmission numérique des signaux analogiques. En effet, l’information ne devant pas être transmise de manièrecontinue, il est donc possible : De transmettre les échantillons sous forme codée (transmission numérique), c’est-à-dire d’éléments binaires
émis en série, avec l’avantage de rendre l’information moins sensible au bruit. De multiplexer les signaux dans le temps en utilisant l’intervalle de temps entre deux échantillons pour
transmettre des échantillons de plusieurs signaux.
IV.2. Echantillonnage naturel
Considérons la chaîne de transmission de la figure suivante composée : D’un échantillonneur de type commutateur qui se ferme périodiquement à la fréquence fe pendant une durée
t<<Te ; Du canal qui transmet les impulsions de l’échantillonneur ; D’un filtre passe-bas de largeur B, égale à la largeur spectrale du signal primaire.
Figure II. 1 – Chaîne d’échantillonnage.
L’opération d’échantillonnage naturel est équivalente à la multiplication par un signal d’échantillonnage e(t)qui est une suite périodique d’impulsions rectangulaires de durée τ, de période Te = 1/fe et d’amplitude unitaire.Un exemple d’échantillonnage naturel est illustré par la figure suivante :
2004-2005 p. 10 Chapitre II : Echantillonnage et quantification

Figure II. 2 – Echantillonnage naturel.
On a : xe(t) = x(t).e(t). La transformée de Fourier du signal échantillonneur e(t) est un sinus cardinal. Nousnoterons Ck les coefficients de pondération de la série de Fourier :
( ) ( ) ( ) ( )∑∑+∞
−∞=
+∞
−∞=
−δ⋅=−δ⋅
τ⋅τ=→k
ekk
eee
TF kCkT
kcsinT
Et fffffe .
Le spectre du signal original x(t) après échantillonnage xe(t) est représenté sur la figure suivante (énergie finie) :
Figure II. 3 – Spectre d’un signal échantillonné de type naturel.
On constate que, si les hypothèses du théorème d’échantillonnage sont satisfaites (bande primaire B limitéeet fe > 2B), il sera possible, avec un filtre passe-bas de réception, d’isoler le lobe central du spectre Xe(f). Ce loben’est autre que le spectre X(f) du signal primaire, à un facteur multiplicatif près.
Par contre, si fe < 2B, il y a recouvrement des spectres. L’effet est aussi appelé repliement et le signal à lasortie du filtre n’est plus égal au signal transmis. Il est formé, en fait, du signal utile et d’une perturbation dans lehaut de la bande (chuchotement aigu pour les signaux de parole). Le phénomène de recouvrement est illustré parla figure suivante :
Figure II. 4 – Spectre d’un signal échantillonné avec recouvrement.
Chapitre II : Echantillonnage et quantification p. 11 2004-2005

IV.3. Echantillonnage idéal
L’échantillonnage idéal est la représentation théorique de l’échantillonnage. Le postulat de base est qu’à tousles instants périodique Te, on prend la valeur exacte de x(t) sur un laps de temps infiniment court. Comme pourtoute forme d’échantillonnage, on a une multiplication :
( ) ( ) ( )( ) ( )
( ) ( ) ( ) ( ) ( )∑∑
∑∞+
−∞=
∞+
−∞=
∞+
−∞=
−δ⋅=−δ⋅=
−δ=
⋅=
nee
nee
ne
e
nTtnTxnTttxtx
nTtt
ttxtx
e
e
Le signal e(t) est un train périodique d’impulsions de Dirac (peigne de Dirac). Dans le domaine temporel,l’échantillonnage idéal est illustré par la figure suivante :
Figure II. 5 – Echantillonnage idéal.
La transformée de Fourier d’un peigne de Dirac est un peigne de Dirac d’amplitude 1/Te :
( ) ( ) ( )∑+∞
−∞=
⋅−δ⋅=→k
eeTF kEt ffffe
La figure suivante illustre les effets de l’échantillonnage sur le spectre du signal x(t) :
Figure II. 6 – Spectre d’un signal échantillonné de type idéal.
Le facteur d’amplitude (fe) qui apparaît lors de la transformation de Fourier disparaît à la restitution du signal(cf. §. VI)
2004-2005 p. 12 Chapitre II : Echantillonnage et quantification

IV.4. Echantillonneur-bloqueur
Dans la pratique, l’échantillonnage se fait au moyen d’un échantillonneur-bloqueur dont le schéma estillustré par la figure suivante :
Figure II. 7 – Schéma d’un échantillonneur-bloqueur.
IV.4.a. Fonctionnement 1. L’interrupteur est ouvert : le signal de sortie est bloqué pendant la durée nécessaire à la conversion (Te) ;2. L’interrupteur est fermé : après un régime transitoire pour rattraper l’entrée, le signal de sortie suit le signald’entrée.
Figure II. 8 – Echantillonneur-bloqueur.
IV.4.b. Principaux paramètres d’un échantillonneur-bloqueur Slew rate : pente maximale pendant le rattrapage ; Aperture jitter : incertitude du retard à l’ouverture (en français : gigue) ; Settling time : temps d’amortissement des transitoires ; Drift : dérive due aux courants de fuite.
V. Quantification
La quantification est l’opération qui consiste à associer un code numérique à une valeur de signal.
V.1. Quantification linéaire
La quantification est dite linéaire ou uniforme si la plage d’entrée du convertisseur est divisée en Nintervalles égaux, N étant en principe une puissance de 2.
Soit x(t) le signal (tension) à l’entrée du convertisseur, Umax et Umin les limites de la plage de conversion etUtot la plage totale de conversion. Celle-ci n’est pas forcément symétrique autour de zéro.
Le pas de quantification ∆ est donné par le rapport de la plage totale sur le nombre de pas :
NU tot=∆ (en V)
A chaque intervalle correspond un code numérique. Attention, il existe plusieurs manières de coder ! LaFigure II. 9 illustre un convertisseur 3 bits avec deux manières différentes de coder. L’abscisse x représente l’axeanalogique alors que l’ordonnée xq représente l’axe numérique. A noter la problématique du 0V, qui n’est pastout à fait compris entre Umax et Umin si la dynamique est parfaitement symétrique (Umin = –Umax), il y a un décalagede ∆/2.
Chapitre II : Echantillonnage et quantification p. 13 2004-2005

Figure II. 9 – Quantification linéaire.
Un convertisseur idéal avec un pas de quantification infiniment fin (∆ 0) aurait une courbe qui tendraitvers la ligne pointillée de la Figure II. 9.
V.1.a. Bruit de quantification On définit le bruit de quantification bq(t) de la manière suivante :
( ) ( ) ( )txtxtb q−=
En codant sur n bits, la dynamique de tension passe à N = 2n niveaux possibles. On a donc une perte de précision.Cette perte peut être assimilée à un bruit qui, ajouté au signal codé xq(t), permettrait de retrouver le signaloriginal x(t). Ce bruit est à distribution équi-répartie entre –∆/2 et ∆/2. La puissance du bruit de quantification est∆2/12. En principe, le bruit de quantification n’a pas de composante continue.
Le codage linéaire, utilisé en électronique industrielle, est mal adapté aux signaux audio. En outre, ajouter un bitde résolution augmente la sensibilité de la tension d’un facteur 2, donc de la puissance d’un facteur 4.
V.2. Quantification non linéaire
On cherche à obtenir un rapport signal sur bruit de quantification supérieur à 35 dB en faisant varier le pasde quantification en fonction de la valeur instantanée x(t). Pour les faibles valeurs de x, il faut des pas dequantification rapprochés et vice versa, ce qui revient théoriquement à comprimer le signal x(t) avant de le coderlinéairement.
La figure suivante illustre ce principe de compression avec : x(t) : signal original normalisé (-1 < x(t) < 1) ; xco(t) : signal compressé ; xq(t) : signal compressé échantillonné.
Figure II. 10 – Quantification non-linéaire.
2004-2005 p. 14 Chapitre II : Echantillonnage et quantification

Deux lois de compression ont été normalisées par l’UIT (on considère uniquement le quadrant 0 ≤ x ≤ 1) :
Loi A (Europe) Loi µ (USA, Japon)
( )( )
( )
>+
⋅+
≤⋅+=
A1
xsiAln1
xAln1A1
xsixAln1
A
x co
( )( )µ1ln
xµ1lnx co +⋅+=
A = 87,6 donc : µ = 255, donc :
( )
>⋅+
≤⋅= −
−
2
2
co 10.14,1xsi473,5
x6,87ln110.14,1xsix16
x( )
545,5x2551lnx co
⋅+=
Ces deux lois apparaissent très proches quand on les observe dans l’intervalle 0 ≤ x ≤ 1 :
Figure II. 11 – Comparaison des lois A et µ dans l’intervalle 0 < x < 1.
Or ces deux lois sont suffisamment différentes pour être incompatibles l’une avec l’autre. Lorsque x est très petit,on a :
Loi A : xco = 16.x (x << 1)Loi µ : xco = 46.x (x << 1)
La loi µ favorise encore plus les petites amplitudes.
En téléphonie, on code sur 8 bits. Pour la loi A, le facteur 16 correspond à 4 bits. Cela signifie que pour lespetites amplitudes (x < 1,14.10-2), la résolution est de 12 bits.Pour les plus grandes valeurs de x, calculons la variation du pas :
>∆⋅
≤∆⋅=∆⋅
∂∂
=∆ −
−
2
2
coco 10.14,1xsix
x473,51
10.14,1xsix16x
xx
x
Donc pour un pas cox∆ fixe, on obtient le pas variable ∆x :
>∆⋅⋅
≤∆=∆
−
−
2
2co
10.14,1xsixx473,5
10.14,1xsi16x
x
Ainsi : Pour les petites amplitudes (x ≤ 0,183), la compression selon la loi A est favorable : le pas de quantification
variable ∆x est plus fin que le pas fixe ∆xco. Pour x ≈ 0, on a ∆x ≈ ∆xco/16.
Chapitre II : Echantillonnage et quantification p. 15 2004-2005
Pour les grandes amplitudes (x > 0,183), la compression selon la loi A n’est pas favorable : le pas dequantification variable ∆x est plus grossier que le pas fixe ∆xco. Pour x ≈ 1, on a ∆x ≈ 5,4∆xco.
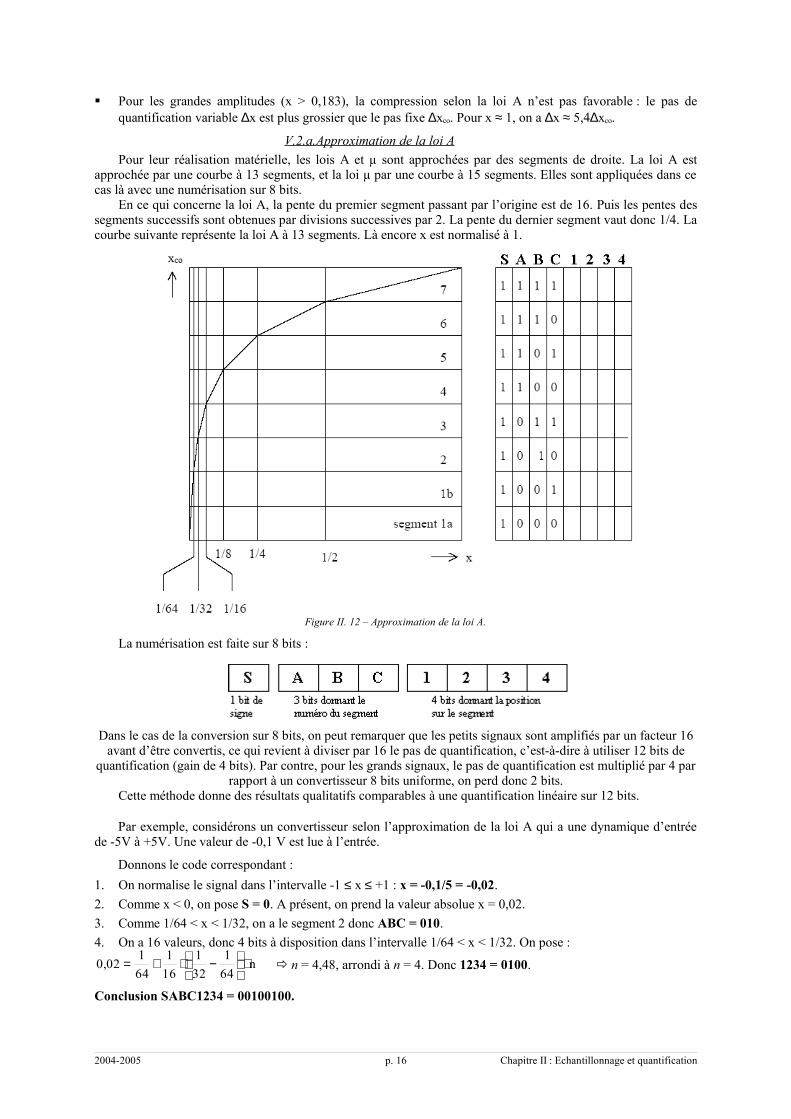
V.2.a. Approximation de la loi A Pour leur réalisation matérielle, les lois A et µ sont approchées par des segments de droite. La loi A est
approchée par une courbe à 13 segments, et la loi µ par une courbe à 15 segments. Elles sont appliquées dans cecas là avec une numérisation sur 8 bits.
En ce qui concerne la loi A, la pente du premier segment passant par l’origine est de 16. Puis les pentes dessegments successifs sont obtenues par divisions successives par 2. La pente du dernier segment vaut donc 1/4. Lacourbe suivante représente la loi A à 13 segments. Là encore x est normalisé à 1.
Figure II. 12 – Approximation de la loi A.
La numérisation est faite sur 8 bits :
Dans le cas de la conversion sur 8 bits, on peut remarquer que les petits signaux sont amplifiés par un facteur 16avant d’être convertis, ce qui revient à diviser par 16 le pas de quantification, c’est-à-dire à utiliser 12 bits de
quantification (gain de 4 bits). Par contre, pour les grands signaux, le pas de quantification est multiplié par 4 parrapport à un convertisseur 8 bits uniforme, on perd donc 2 bits.
Cette méthode donne des résultats qualitatifs comparables à une quantification linéaire sur 12 bits.
Par exemple, considérons un convertisseur selon l’approximation de la loi A qui a une dynamique d’entréede -5V à +5V. Une valeur de -0,1 V est lue à l’entrée.
Donnons le code correspondant :1. On normalise le signal dans l’intervalle -1 ≤ x ≤ +1 : x = -0,1/5 = -0,02.2. Comme x < 0, on pose S = 0. A présent, on prend la valeur absolue x = 0,02.3. Comme 1/64 < x < 1/32, on a le segment 2 donc ABC = 010.4. On a 16 valeurs, donc 4 bits à disposition dans l’intervalle 1/64 < x < 1/32. On pose :
n641
321
161
641
02,0 ⋅
−⋅+= n = 4,48, arrondi à n = 4. Donc 1234 = 0100.
Conclusion SABC1234 = 00100100.
2004-2005 p. 16 Chapitre II : Echantillonnage et quantification

VI. Restitution du signal
VI.1. Interpolation idéale
D’après le spectre du signal avec un échantillonnage idéal (Figure II. 6), on constate qu’il suffit de filtrer cesignal pour ne garder que la partie à l’origine. Le filtre idéal est un filtre passe-bas rectangulaire avec unefréquence de coupure à B = fe/2 et un gain de 1/fe.
La figure suivante illustre la situation :
Figure II. 13 – Interpolation linéaire.
La fonction de transfert du filtre passe-bas vaut donc : ( ) ( )ff
f fectRe1H
e
⋅=
La réponse impulsionnelle de ce filtre vaut : ( ) ( )tcsinth e ⋅= f
Le signal échantillonné vaut : ( ) ( ) ( )en
ee n Ttn Txtx −δ⋅= ∑+ ∞
− ∞=
On retrouve le signal original x(t) après filtrage :
( ) ( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( )( )
( ) ( ) ( )ntcsinnTxtx
nTtcsinnTxtx
nTtnTxtcsintx
XHX
en
e
een
e
en
ee
e
−⋅⋅=
−⋅⋅=
−δ⋅∗⋅=
⋅=
∑
∑
∑
∞+
−∞=
∞+
−∞=
∞+
−∞=
f
f
f
fff
Ce résultat montre que le signal d’origine peut être interpolé parfaitement à partir des échantillons x(nTe).
VI.2. Restitution par maintien et filtrage
La restitution par maintien et filtrage est la plus simple et la plus utilisée : c’est le principe des convertisseursCNA classiques.
Considérons la situation suivante :
Figure II. 14 – Exemple de signal échantillonné et bloqué.
Chapitre II : Echantillonnage et quantification p. 17 2004-2005

On a donc :( ) ( ) ( )
( ) ( ) ( ) eTee
TF
e
e
em
eTcsinTHT
2TtctReth
thtxtx
fjff π−⋅⋅⋅=→
−=
∗=
En passant le signal xe(t) dans un filtre virtuel H(f) dont la réponse impulsionnelle est h(t), on obtient le signalmaintenu xm(t). Dans le domaine fréquentiel, on a : Xm(f) = Xe(f).H(f)Le filtre peut être détaillé avec ses réponses en amplitude et en phase :
( ) ( )
( )( )
⋅⋅π−=
⋅=⋅⋅=
e
eeee
THArg
csin1TcsinTH
ff
ff
fff
La réponse en phase indique un retard de τ = Te/2 : il n’y a pas de distorsion de phase. On peut développerencore :
( ) ( )
( ) ( )
⋅
⋅
⋅−=
⋅
⋅⋅
⋅−⋅=
π−∞+
−∞=
π−+∞
−∞=
∑
∑
e
e
T
ekem
T
eekeem
ecsinkfXX
ecsin1kfXX
fj
fj
ffff
ff
ffff
Cela donne la situation illustrée par la figure suivante :
Figure II. 15 – Spectre des signaux de la Figure II. 14
Le spectre Xm(f) va de -∞ à +∞ : il faut absolument filtrer ce signal avec un filtre analogique passe-bas dont labande passante Bf est comprise dans l’intervalle Bsig < Bf < fe/2 et dont la bande de réfection fstop est comprisedans l’intervalle Bf < fstop < (fe – Bsig).Le signal échantillonné avait un gain non désiré fe. Comme le filtre a un gain de 1/fe, ce problème disparaît de lui-même.
VI.3. Effet de la restitution par maintien et filtrage
Même si le filtre analogique de restitution va supprimer les parties du spectre non désirées, on a de ladistorsion dans la bande passante du signal.
Par rapport au signal original x(t), le signal filtré x2(t) a subi une distorsion d’amplitude mais pas dedistorsion de phase, seulement un retard.
VI.4. Limitation des effets de la restitution par maintien et filtrage
Il existe deux variantes pour limiter, voire corriger entièrement les effets indésirables de la restitution parmaintien et filtrage : Filtre d’adaptation : Avant de restituer le signal, on le fait passer dans un filtre numérique FIR, sans
distorsion de phase. Cette mesure a l’avantage de corriger quasi entièrement les effets non désirés de larestitution par maintien et filtrage.
Sur-échantillonnage. Avant de restituer le signal, on effectue un sur-échantillonnage numérique, de tellesorte que fe >> Bsig, donc sinc(f/fe) ≈ 1 pour –Bsig < f < Bsig. Cette mesure ne corrige pas totalement les effetsnon désirés de la restitution par maintien et filtrage, mais elle permet de faire en sorte que le filtrage derestitution soit assez simple à réaliser.
2004-2005 p. 18 Chapitre II : Echantillonnage et quantification

CHAPITRE III : TECHNIQUES DE CODAGE
Comme nous l’avons déjà dit précédemment, le codage en bande de base, ou codage par mode consiste àfaire correspondre une forme de signal électrique ou optique à un ou plusieurs éléments binaires de la source. Lecodeur transforme une suite de bits {ai} en une suite de symboles {dk} pris dans un alphabet de q symboles. Lesdk ont, en principe, tous la même durée.
Les raisons de coder l’information par modes sont : De produire un signal sans composante continue qui puisse être transmis sur les lignes. D’enrichir le signal en transitions pour faciliter la récupération d’horloge dans les régénérateurs. Les longues
suites de 0 ou de 1 doivent donc être codées pour éviter des états durables sans transition. De concentrer ou de déplacer la puissance dans une plage spectrale adaptée au milieu de transmission. Même
sans composante continue, un signal numérique synchrone non codé a une densité spectrale concentrée sur lafréquence nulle, plage qui n’est pas transmise convenablement dans certains canaux (forte distorsion).
Le codage par mode est aussi appelé codage de ligne puisqu’il consiste à adapter la forme du signal à laligne, ou plus généralement au milieu de propagation.
I. Paramètres
Efficacité spectrale : Elle s’exprime en bits/s/Hz et est définie par : B
Db=η où Db désigne le débit binaire et
B, la bande de fréquence du canal.
Le rapport signal sur bruit : 0
b
NE=ρ où Eb désigne la quantité d’énergie par bit, exprimée en nombre de
Joules par bit, et N0/2, la densité spectrale du bruit additif, blanc sur le canal, exprimée en W/Hz. On endéduit que la puissance moyenne du signal est donnée par Pe = Eb.Db et que la puissance du bruit dans labande B est donnée par Pb = N0.B. On en déduit le rapport signal sur bruit en puissance :
η⋅=η= ρ0
b
b
s
NE
PP
La probabilité d’erreur par symbole définie par { }kke aaPrP ≠= où ka désigne la valeur choisie par lerécepteur et ak, le symbole émis.
On considère aussi le taux d’erreur binaire (TEB). Dans le cas où le rapport signal sur bruit est grand, uneexpression du TEB est donnée par :
( )MlogPTEB2
e≈
Ce qui est remarquable, c’est que, au-dessous d’une certaine valeur du débit, et donc de l’efficacité, il estpossible de rendre Pe aussi faible que l’on veut. Ainsi, sur un canal gaussien sans mémoire, la courbe :
( )η−
=⇔η⋅+=ηη 12
1log2 ρρ
donne la limite fondamentale aux transmissions sûres. La figure suivante représente la courbe donnant ρ en dB,en fonction de η en bits/s/Hz. Pour les points situés au-dessus de la courbe, il existe un système decommunication dont la probabilité d’erreur peut être rendue aussi faible que l’on veut (2nd théorème de Shanonou théorème du codage de canal) :
Chapitre III : Techniques de codage p. 19 2004-2005

-5
0
5
10
15
20
25
0 2 4 6 8 10η (bits/s/Hz)
ρ (d
B)
Figure III. 1 – Limite fondamentale de transmission sur le canal àbruit additif blanc gaussien.
VII. Les principaux codes à deux états
VII.1. Le code NRZ
Le code NRZ (Non Retour à Zéro) est le code le plus simple :″0″ –A″1″ +A
Un exemple de codage NRZ est illustré sur la figure suivante :
Figure III. 2 – Exemple de codage NRZ.
VII.1.a. Caractéristiques : Comp. continue : Nulle si les états hauts et bas sont équidistribués. Bande passante : B = 1/Tb
DSP : Centrée autour de la fréquence nulle (91 % de la puissance est comprise dans l’intervalle [-1/Tb ;1/Tb]. Ce code est donc mal adapté aux milieux qui ne passent pas les basses fréquences et le continu.
( ) ( ) ( )fAfTcsinATfDSP 2b
22b δ+π=
Récup. Horloge : Pas garantie, puisque ce code n’évite pas les longues suites sans transition. Pourremédier à ce problème, il faut soit brouiller les données, soit être sûr que les bits transmis sont bien″brassés″.
2004-2005 p. 20 Chapitre III : Techniques de codage
VII.1.b. Utilisation : Les signaux transmis selon les normes V24, RS232, RS421, RS422, RS485… utilisent le code NRZ.
VII.2. Code NRZI avec ″ bit stuffing ″
C’est le code du bus USB. Le code commence en ″idle state″ (état haut). Chaque fois qu’un bit est ″1″, il n’ya pas de changement de l’état de la ligne. Chaque fois qu’un bit est ″0″, la ligne change d’état (toggle). Lorsquesix ″1″ consécutifs sont transmis, un ″0″ artificiel est inséré afin de garantir la récupération d’horloge (stuffing).
VII.2.a. Exemple : Soient –A et +A les états respectifs bas et haut de la ligne. Voici comment serait codé un message binaire :
1 1 1 1 0 1 0 0 1 1 1 1 1 1 1 0 1+A +A +A +A –A –A +A –A –A –A –A –A –A –A +A +A –A –A
stuff
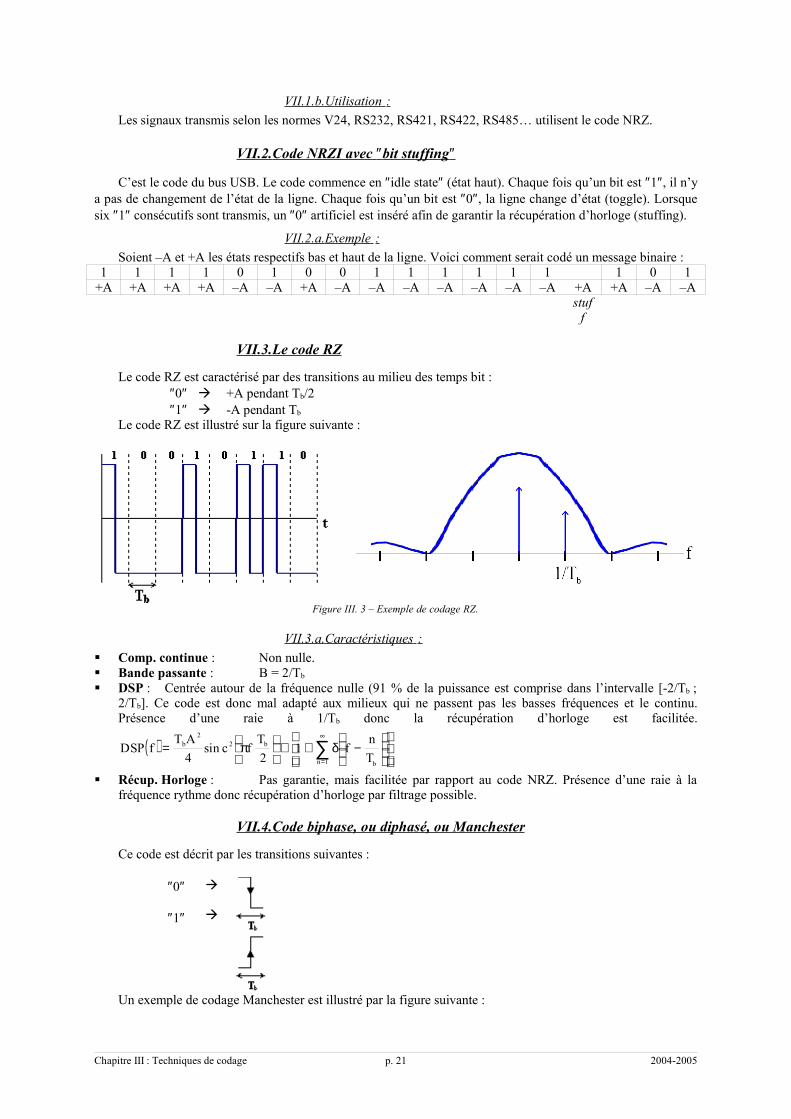
VII.3. Le code RZ
Le code RZ est caractérisé par des transitions au milieu des temps bit :″0″ +A pendant Tb/2″1″ -A pendant Tb
Le code RZ est illustré sur la figure suivante :
Figure III. 3 – Exemple de codage RZ.
VII.3.a. Caractéristiques : Comp. continue : Non nulle. Bande passante : B = 2/Tb
DSP : Centrée autour de la fréquence nulle (91 % de la puissance est comprise dans l’intervalle [-2/Tb ;2/Tb]. Ce code est donc mal adapté aux milieux qui ne passent pas les basses fréquences et le continu.Présence d’une raie à 1/Tb donc la récupération d’horloge est facilitée.
( )
−δ++
π= ∑
∞
=1n b
b22
b
Tn
f12T
fcsin4AT
fDSP
Récup. Horloge : Pas garantie, mais facilitée par rapport au code NRZ. Présence d’une raie à lafréquence rythme donc récupération d’horloge par filtrage possible.
VII.4. Code biphase, ou diphasé, ou Manchester
Ce code est décrit par les transitions suivantes :
″0″
″1″
Un exemple de codage Manchester est illustré par la figure suivante :
Chapitre III : Techniques de codage p. 21 2004-2005

Figure III. 4 – Exemple de codage Manchester.
VII.4.a. Caractéristiques : Comp. continue : Nulle. Bande passante : B = 2/Tb
DSP : Centrée autour de f = 1/Tb. Ce code est donc bien adapté à un milieu qui ne passe pas les bassesfréquences ni le continu, au prix d’une bande passante doublée par rapport au codage NRZ.
( )
π
π=
2T
fsin2
TfcsinATfDSP b2b22
b
Récup. Horloge : Aucun problème puisque ce code garantie au moins une transition par période Tb.
VII.4.b. Utilisation : Ethernet (IEEE 802.3) sur câble coaxial ; Profibus (Process Field BUS), transmission MBP (Manchester Bus Powered)…
VII.5. Code Manchester différentiel
En se basant sur le code Manchester, on créé la correspondance suivante :″0″ v(t) = v(t – Tb) L’état précédent est répété″1″ v(t) = -v(t – Tb) L’état précédent est inversé
VII.5.a. Utilisation : Token ring (technologie d'accès au réseau basé sur le principe de la communication au tour à tour) ; Codage du signal RDS (Radio Data System). Le signal numérique biphase module ensuit la sous-
porteuse à 57 kHz
VII.6. Code de Miller
Ce code est obtenu à partir du code biphase. Les transitions positives de celui-ci font basculer le flip-flop. Cecode est illustré par la figure suivante :
Figure III. 5 – Exemple de codage de Miller.
VII.6.a. Caractéristiques : Décodage : Une transition au milieu d’un intervalle Tb signifie que l’on a un état haut. Sinon, un zéro. Comp. continue : Nulle. Bande passante : B = 1/Tb
DSP : Plus étroite mais ne s’annule pas en f = 0 ni en f = 1/Tb. Le spectre permet de transmettre, à largeurde bande égale, environ deux fois plus vite qu’en code biphase.
Récup. Horloge : Aucun problème.
2004-2005 p. 22 Chapitre III : Techniques de codage
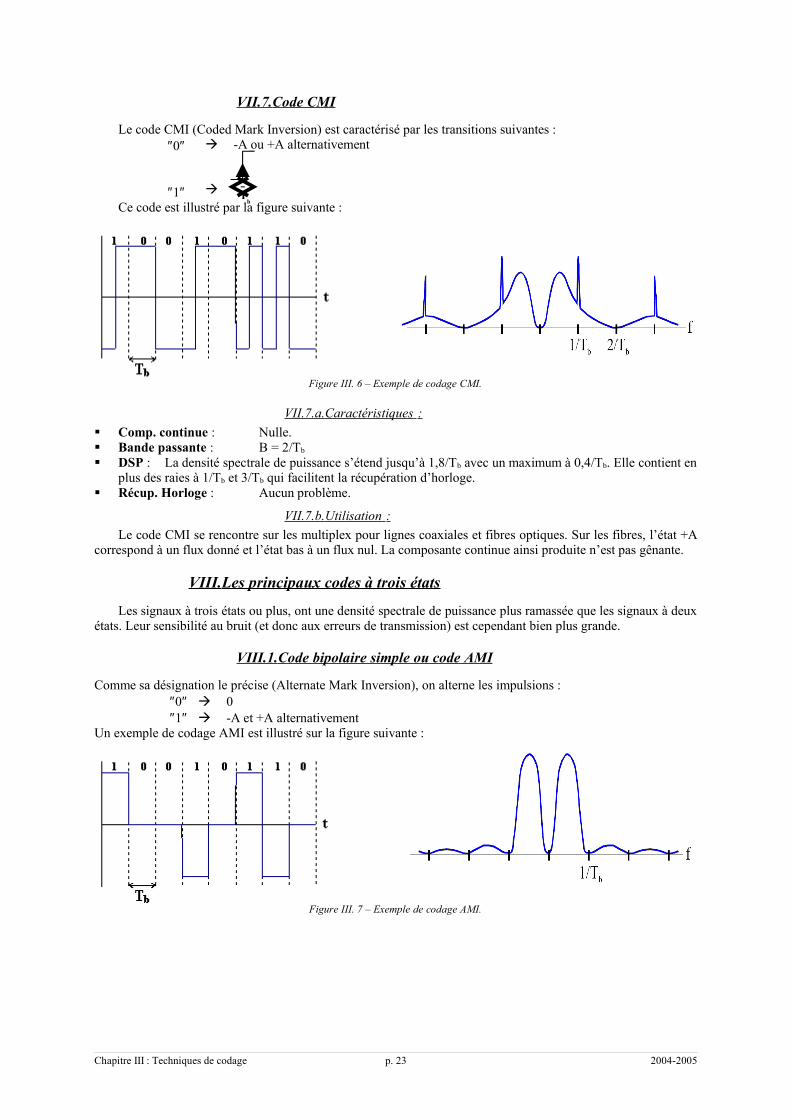
VII.7. Code CMI
Le code CMI (Coded Mark Inversion) est caractérisé par les transitions suivantes :″0″
″1″
-A ou +A alternativement
Ce code est illustré par la figure suivante :
Figure III. 6 – Exemple de codage CMI.
VII.7.a. Caractéristiques : Comp. continue : Nulle. Bande passante : B = 2/Tb
DSP : La densité spectrale de puissance s’étend jusqu’à 1,8/Tb avec un maximum à 0,4/Tb. Elle contient enplus des raies à 1/Tb et 3/Tb qui facilitent la récupération d’horloge.
Récup. Horloge : Aucun problème.
VII.7.b. Utilisation : Le code CMI se rencontre sur les multiplex pour lignes coaxiales et fibres optiques. Sur les fibres, l’état +A
correspond à un flux donné et l’état bas à un flux nul. La composante continue ainsi produite n’est pas gênante.
VIII. Les principaux codes à trois états
Les signaux à trois états ou plus, ont une densité spectrale de puissance plus ramassée que les signaux à deuxétats. Leur sensibilité au bruit (et donc aux erreurs de transmission) est cependant bien plus grande.
VIII.1. Code bipolaire simple ou code AMI
Comme sa désignation le précise (Alternate Mark Inversion), on alterne les impulsions :″0″ 0″1″ -A et +A alternativement
Un exemple de codage AMI est illustré sur la figure suivante :
Figure III. 7 – Exemple de codage AMI.
Chapitre III : Techniques de codage p. 23 2004-2005
Tb
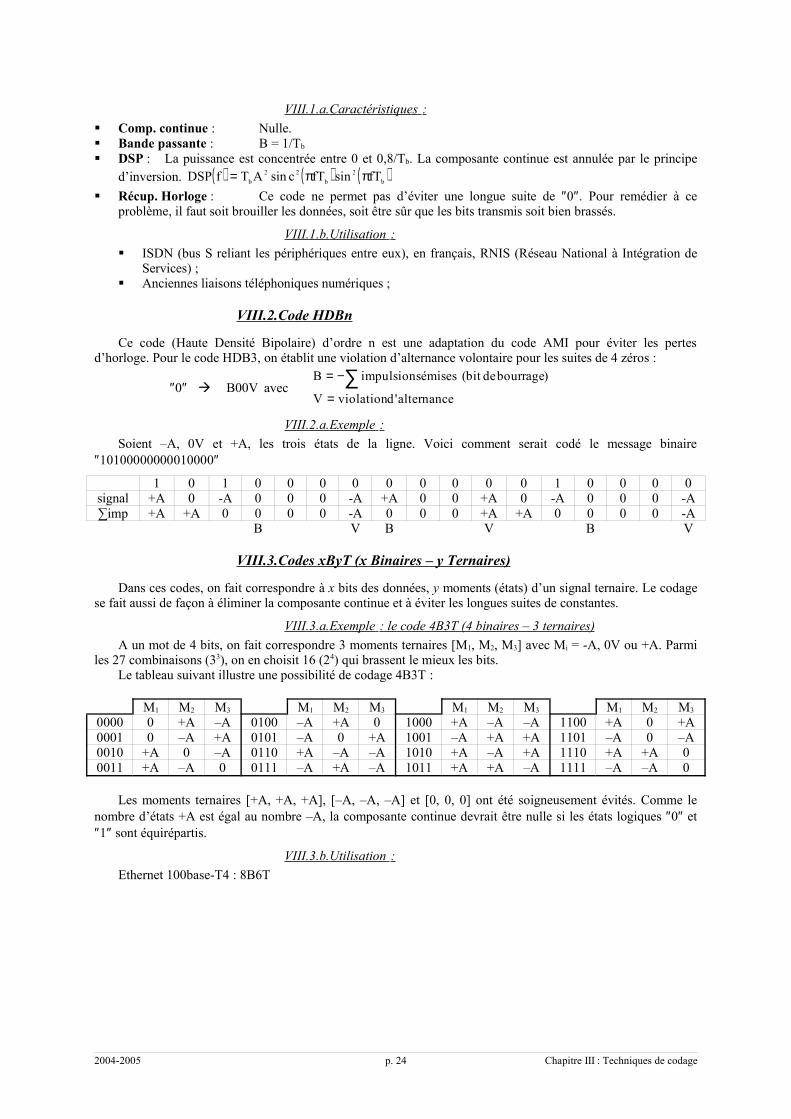
VIII.1.a. Caractéristiques : Comp. continue : Nulle. Bande passante : B = 1/Tb
DSP : La puissance est concentrée entre 0 et 0,8/Tb. La composante continue est annulée par le principed’inversion. ( ) ( ) ( )b
2b
22b fTsinfTcsinATfDSP ππ=
Récup. Horloge : Ce code ne permet pas d’éviter une longue suite de ″0″. Pour remédier à ceproblème, il faut soit brouiller les données, soit être sûr que les bits transmis soit bien brassés.
VIII.1.b. Utilisation : ISDN (bus S reliant les périphériques entre eux), en français, RNIS (Réseau National à Intégration de
Services) ; Anciennes liaisons téléphoniques numériques ;
VIII.2. Code HDBn
Ce code (Haute Densité Bipolaire) d’ordre n est une adaptation du code AMI pour éviter les pertesd’horloge. Pour le code HDB3, on établit une violation d’alternance volontaire pour les suites de 4 zéros :
″0″ B00V avecalternance'dviolationV
)bourragedebit(émisesimpulsionsB
=
−= ∑
VIII.2.a. Exemple : Soient –A, 0V et +A, les trois états de la ligne. Voici comment serait codé le message binaire
″10100000000010000″
1 0 1 0 0 0 0 0 0 0 0 0 1 0 0 0 0signal +A 0 -A 0 0 0 -A +A 0 0 +A 0 -A 0 0 0 -A∑imp +A +A 0 0 0 0 -A 0 0 0 +A +A 0 0 0 0 -A
B V B V B V
VIII.3. Codes xByT (x Binaires – y Ternaires)
Dans ces codes, on fait correspondre à x bits des données, y moments (états) d’un signal ternaire. Le codagese fait aussi de façon à éliminer la composante continue et à éviter les longues suites de constantes.
VIII.3.a. Exemple : le code 4B3T (4 binaires – 3 ternaires) A un mot de 4 bits, on fait correspondre 3 moments ternaires [M1, M2, M3] avec Mi = -A, 0V ou +A. Parmi
les 27 combinaisons (33), on en choisit 16 (24) qui brassent le mieux les bits.Le tableau suivant illustre une possibilité de codage 4B3T :
M1 M2 M3 M1 M2 M3 M1 M2 M3 M1 M2 M3
0000 0 +A –A 0100 –A +A 0 1000 +A –A –A 1100 +A 0 +A0001 0 –A +A 0101 –A 0 +A 1001 –A +A +A 1101 –A 0 –A0010 +A 0 –A 0110 +A –A –A 1010 +A –A +A 1110 +A +A 00011 +A –A 0 0111 –A +A –A 1011 +A +A –A 1111 –A –A 0
Les moments ternaires [+A, +A, +A], [–A, –A, –A] et [0, 0, 0] ont été soigneusement évités. Comme lenombre d’états +A est égal au nombre –A, la composante continue devrait être nulle si les états logiques ″0″ et″1″ sont équirépartis.
VIII.3.b. Utilisation : Ethernet 100base-T4 : 8B6T
2004-2005 p. 24 Chapitre III : Techniques de codage
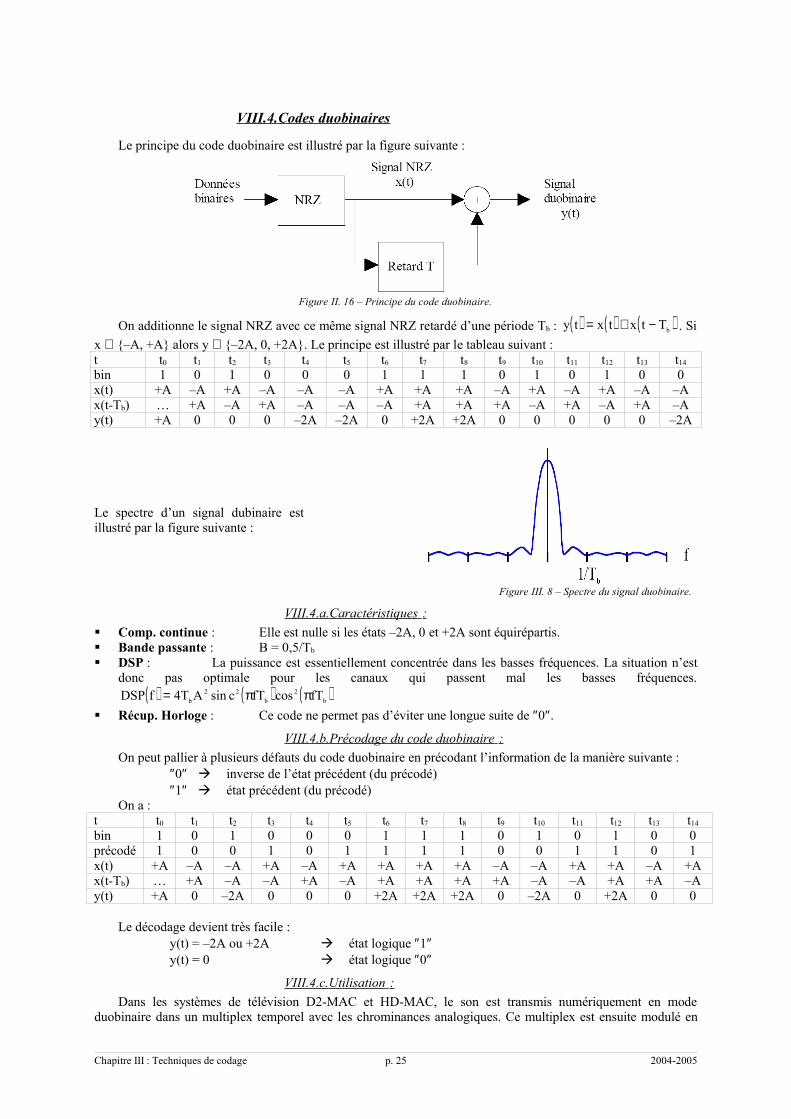
VIII.4. Codes duobinaires
Le principe du code duobinaire est illustré par la figure suivante :
Figure II. 16 – Principe du code duobinaire.
On additionne le signal NRZ avec ce même signal NRZ retardé d’une période Tb : ( ) ( ) ( )bTtxtxty −+= . Six ∈ {–A, +A} alors y ∈ {–2A, 0, +2A}. Le principe est illustré par le tableau suivant :t t0 t1 t2 t3 t4 t5 t6 t7 t8 t9 t10 t11 t12 t13 t14
bin 1 0 1 0 0 0 1 1 1 0 1 0 1 0 0x(t) +A –A +A –A –A –A +A +A +A –A +A –A +A –A –Ax(t-Tb) … +A –A +A –A –A –A +A +A +A –A +A –A +A –Ay(t) +A 0 0 0 –2A –2A 0 +2A +2A 0 0 0 0 0 –2A
Le spectre d’un signal dubinaire estillustré par la figure suivante :
Figure III. 8 – Spectre du signal duobinaire.
VIII.4.a. Caractéristiques : Comp. continue : Elle est nulle si les états –2A, 0 et +2A sont équirépartis. Bande passante : B = 0,5/Tb
DSP : La puissance est essentiellement concentrée dans les basses fréquences. La situation n’estdonc pas optimale pour les canaux qui passent mal les basses fréquences.
( ) ( ) ( )b2
b22
b fTcosfTcsinAT4fDSP ππ= Récup. Horloge : Ce code ne permet pas d’éviter une longue suite de ″0″.
VIII.4.b. Précodage du code duobinaire : On peut pallier à plusieurs défauts du code duobinaire en précodant l’information de la manière suivante :
″0″ inverse de l’état précédent (du précodé)″1″ état précédent (du précodé)
On a :t t0 t1 t2 t3 t4 t5 t6 t7 t8 t9 t10 t11 t12 t13 t14
bin 1 0 1 0 0 0 1 1 1 0 1 0 1 0 0précodé 1 0 0 1 0 1 1 1 1 0 0 1 1 0 1x(t) +A –A –A +A –A +A +A +A +A –A –A +A +A –A +Ax(t-Tb) … +A –A –A +A –A +A +A +A +A –A –A +A +A –Ay(t) +A 0 –2A 0 0 0 +2A +2A +2A 0 –2A 0 +2A 0 0
Le décodage devient très facile :y(t) = –2A ou +2A état logique ″1″y(t) = 0 état logique ″0″
VIII.4.c. Utilisation : Dans les systèmes de télévision D2-MAC et HD-MAC, le son est transmis numériquement en mode
duobinaire dans un multiplex temporel avec les chrominances analogiques. Ce multiplex est ensuite modulé en
Chapitre III : Techniques de codage p. 25 2004-2005
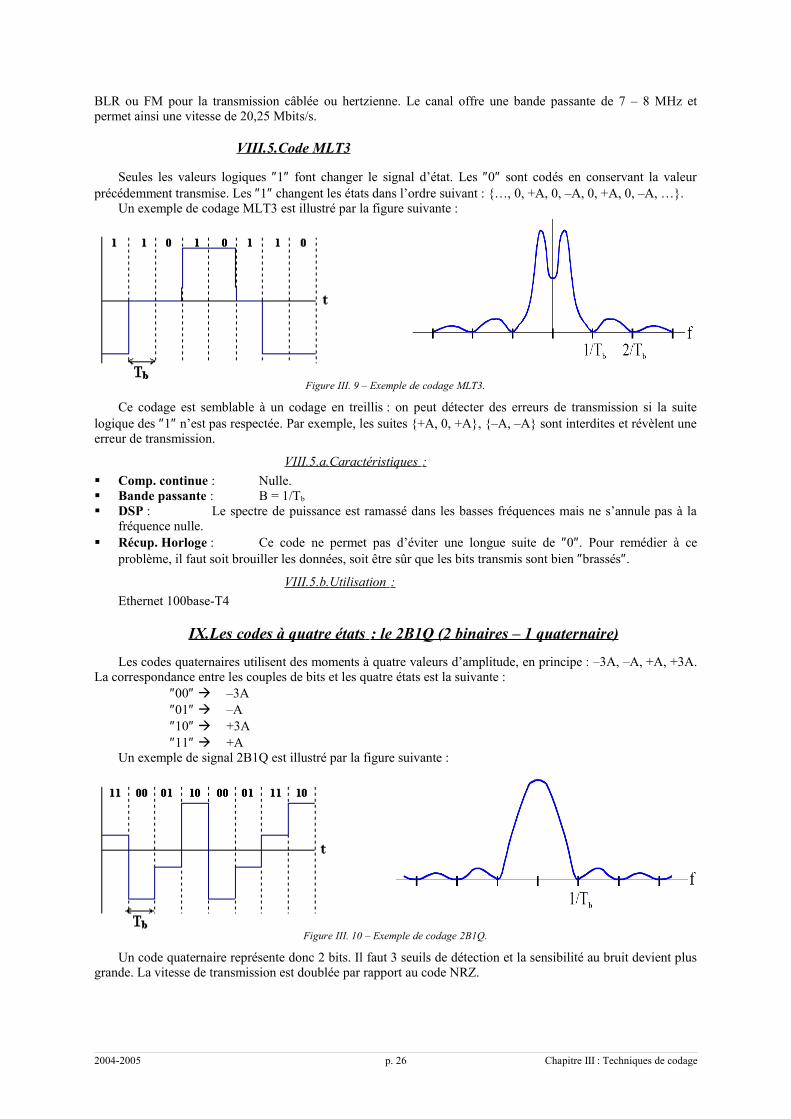
BLR ou FM pour la transmission câblée ou hertzienne. Le canal offre une bande passante de 7 – 8 MHz etpermet ainsi une vitesse de 20,25 Mbits/s.
VIII.5. Code MLT3
Seules les valeurs logiques ″1″ font changer le signal d’état. Les ″0″ sont codés en conservant la valeurprécédemment transmise. Les ″1″ changent les états dans l’ordre suivant : {…, 0, +A, 0, –A, 0, +A, 0, –A, …}.
Un exemple de codage MLT3 est illustré par la figure suivante :
Figure III. 9 – Exemple de codage MLT3.
Ce codage est semblable à un codage en treillis : on peut détecter des erreurs de transmission si la suitelogique des ″1″ n’est pas respectée. Par exemple, les suites {+A, 0, +A}, {–A, –A} sont interdites et révèlent uneerreur de transmission.
VIII.5.a. Caractéristiques : Comp. continue : Nulle. Bande passante : B = 1/Tb
DSP : Le spectre de puissance est ramassé dans les basses fréquences mais ne s’annule pas à lafréquence nulle.
Récup. Horloge : Ce code ne permet pas d’éviter une longue suite de ″0″. Pour remédier à ceproblème, il faut soit brouiller les données, soit être sûr que les bits transmis sont bien ″brassés″.
VIII.5.b. Utilisation : Ethernet 100base-T4
IX. Les codes à quatre états : le 2B1Q (2 binaires – 1 quaternaire)
Les codes quaternaires utilisent des moments à quatre valeurs d’amplitude, en principe : –3A, –A, +A, +3A.La correspondance entre les couples de bits et les quatre états est la suivante :
″00″ –3A″01″ –A″10″ +3A″11″ +A
Un exemple de signal 2B1Q est illustré par la figure suivante :
Figure III. 10 – Exemple de codage 2B1Q.
Un code quaternaire représente donc 2 bits. Il faut 3 seuils de détection et la sensibilité au bruit devient plusgrande. La vitesse de transmission est doublée par rapport au code NRZ.
2004-2005 p. 26 Chapitre III : Techniques de codage

IX.1.a. Caractéristiques : Comp. continue : Elle est nulle si les états –3A, –A, A et 3A sont équirépartis. Bande passante : B = 1/Tb. Cela dit, on émet deux bits par moment ! DSP : La densité spectrale de puissance est centrée autour de la fréquence nulle. Ce code est donc mal
adapté aux milieux qui ne passent pas les basses fréquences ni le continu. ( ) ( )b22
b fTcsinAT5fDSP π= Récup. Horloge : La récupération d’horloge par une PLL n’est pas garantie puisque ce code n’évite
pas une longue suite sans transition.
IX.1.b. Utilisation : ISDNBrouillage
X. Choix des codes
Le choix de l’un des codes dépend des caractéristiques du canal utilisé :
Contraintes d’occupation spectrale ; Possibilité de transmettre séparément l’horloge ; Présence d’une raie à la fréquence rythme ; Présence d’énergie à la fréquence nulle ; Présence de bruit sur la ligne ;
Afin d’éviter de longues suites de symboles identiques, on peut brouiller les données. C’est ce que nousallons voir dans le paragraphe suivant.
Chapitre III : Techniques de codage p. 27 2004-2005
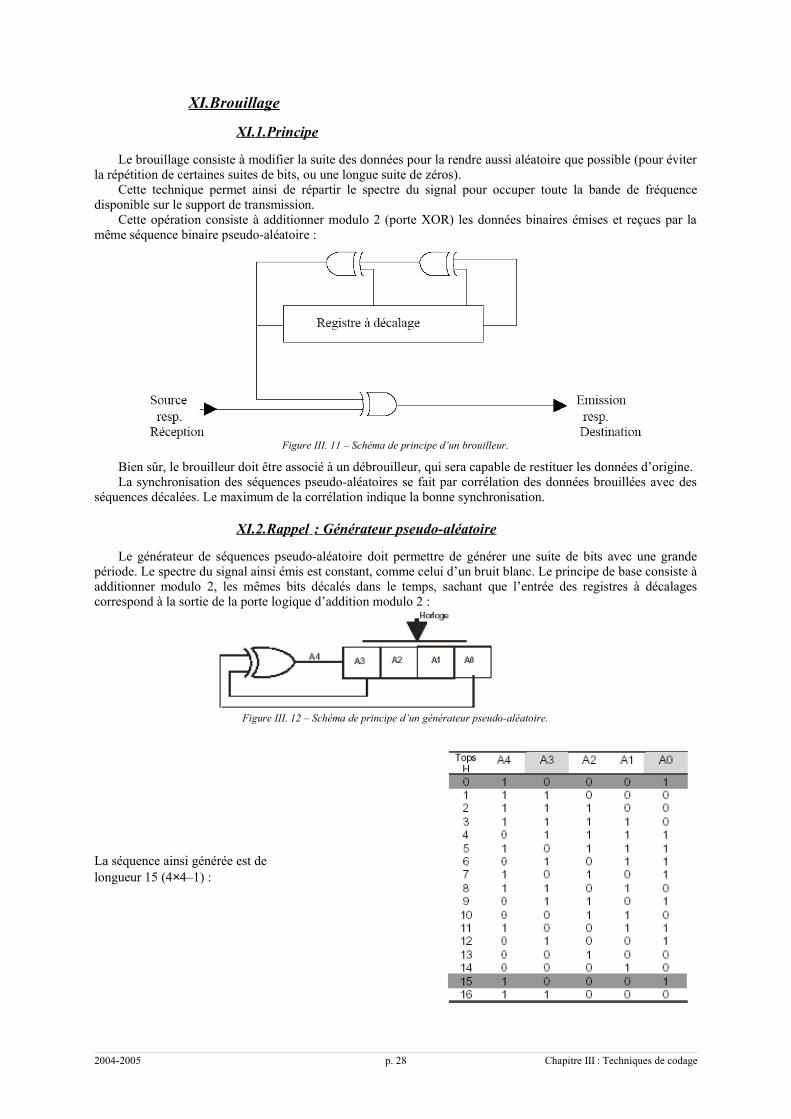
XI. Brouillage
XI.1. Principe
Le brouillage consiste à modifier la suite des données pour la rendre aussi aléatoire que possible (pour éviterla répétition de certaines suites de bits, ou une longue suite de zéros).
Cette technique permet ainsi de répartir le spectre du signal pour occuper toute la bande de fréquencedisponible sur le support de transmission.
Cette opération consiste à additionner modulo 2 (porte XOR) les données binaires émises et reçues par lamême séquence binaire pseudo-aléatoire :
Figure III. 11 – Schéma de principe d’un brouilleur.
Bien sûr, le brouilleur doit être associé à un débrouilleur, qui sera capable de restituer les données d’origine.La synchronisation des séquences pseudo-aléatoires se fait par corrélation des données brouillées avec des
séquences décalées. Le maximum de la corrélation indique la bonne synchronisation.
XI.2. Rappel : Générateur pseudo-aléatoire
Le générateur de séquences pseudo-aléatoire doit permettre de générer une suite de bits avec une grandepériode. Le spectre du signal ainsi émis est constant, comme celui d’un bruit blanc. Le principe de base consiste àadditionner modulo 2, les mêmes bits décalés dans le temps, sachant que l’entrée des registres à décalagescorrespond à la sortie de la porte logique d’addition modulo 2 :
Figure III. 12 – Schéma de principe d’un générateur pseudo-aléatoire.
La séquence ainsi générée est delongueur 15 (4×4–1) :
2004-2005 p. 28 Chapitre III : Techniques de codage

Tous ces codes doivent être suivis, à la réception, d’un décodeur. Mais avant, il faut régénérer le signal qui aété atténué, bruité, distordu par la canal de transmission.
XII. Régénération du signal
Le support de transmission présente un affaiblissement proportionnel à f. La vitesse de propagation dessignaux dépend aussi de leur fréquence. Ainsi, les signaux de fréquence élevée seront plus affaiblis et plusretardés que les signaux de basse fréquence.
La propagation d’un créneau de tension sur un support de transmission provoque un aplatissement, unélargissement et un retard :
Figure III. 13 – Déformation d’un créneau se propageant sur unsupport de transmission.
Sur un signal de données numériques, il peut se produire des interférences entre symboles (IES) :
Figure III. 14 – Déformation d’un signal numérique se propageantsur un support de transmission.
Le niveau logique zéro qui est au milieu des deux niveaux hauts est masqué, en fin de propagation, par lescréneaux déformés.
Il faut aussi penser que le canal est bruité, donc le signal reçu, en plus d’être déformé, est bruité.
Figure III. 15 – Effet du bruit sur la transmission d’un créneau.
Voici le synoptique général d’un système de transmission en bande de base :
Chapitre III : Techniques de codage p. 29 2004-2005

2004-2005 p. 30 Chapitre III : Techniques de codage
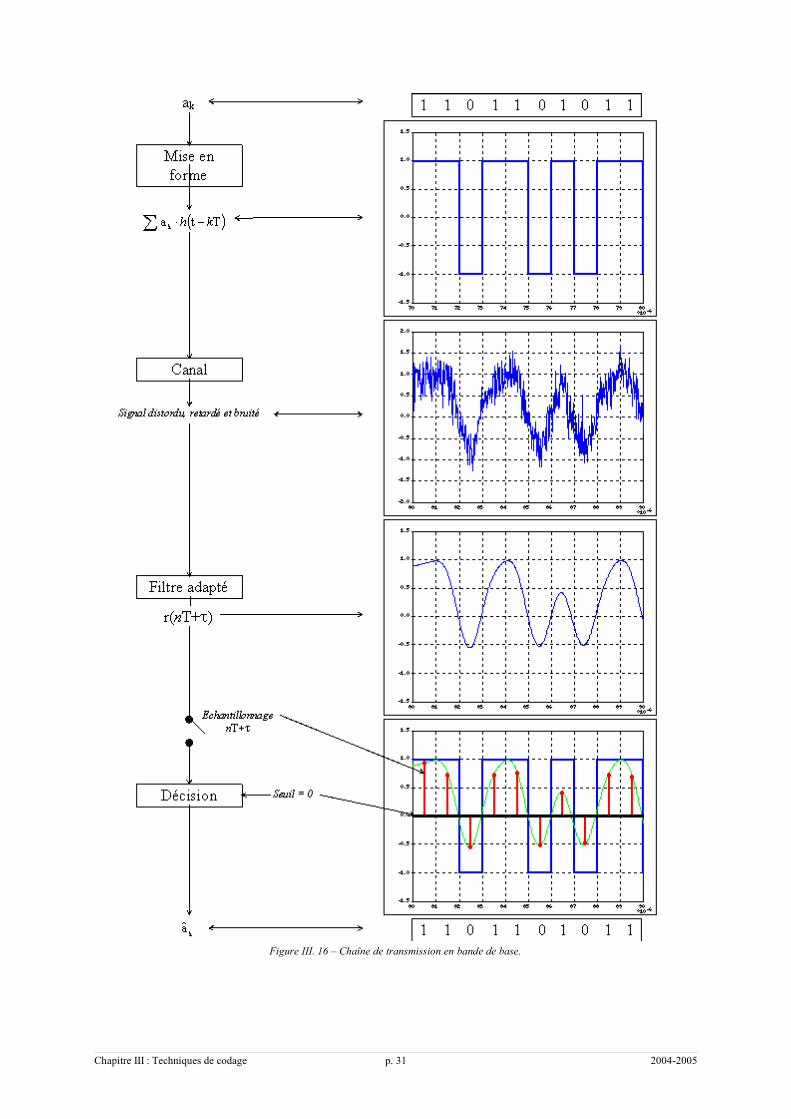
Figure III. 16 – Chaîne de transmission en bande de base.
Chapitre III : Techniques de codage p. 31 2004-2005

XII.1. Principe
Afin de pouvoir récupérer le signal, il faut faire une régénération avant la lecture du message. Cerégénérateur va être constitué d’un filtre et/ou un égaliseur permettant de minimiser l’IES, d’une récupérationd’horloge permettant de décoder les données et d’un organe de décision permettant de définir si un ″0″ ou un ″1″a été reçu et donc d’éliminer le bruit, comme le montre la figure suivante :
Égalisation filtrage
Décision
Récupération
Horloge
Signal régénéré
Signal déformé
élimination interférence intersymbole
extraction horloge / codage
définition des ‘1’ et ‘0’ / horloge
Égalisation filtrage
Décision
Récupération
Horloge
Signal régénéré
Signal déformé
élimination interférence intersymbole
extraction horloge / codage
définition des ‘1’ et ‘0’ / horloge
Figure III. 17 – Synoptique général d’un régénérateur de signal.
Ce signal régénéré peut ensuite être transmis au décodeur. Nous allons étudier, par la suite, chaque blocconstitutif du récepteur.
XII.2. Filtre adapté
Considérons le signal se propageant suivant : ( ) ( )∑ −⋅=k
k kTthatx . La transmission se fait à travers un
canal non distordant, à bande limitée B, soumis à un bruit b(t) additif, blanc, gaussien, de densité spectrale depuissance N0/2. Le signal reçu est : ( ) ( ) ( )ttxtz b+= .
Avant d’aborder cette étude, remarquons sur la Figure III. 16, que en opérant une décision symbole parsymbole, par comparaison des échantillons à 0 (opération que nous justifierons plus loin), la présence de bruitpeut conduire à un certain nombre d’erreurs.
Dans ce paragraphe, nous allons précisément considérer le problème du choix du filtre, de l’instantd’échantillonnage et de la valeur du seuil qui rendent minimale la probabilité d’erreur en effectuant la décisionuniquement sur les échantillons prélevés à la cadence T, en sortie du filtre.
A l’émission, la mise en forme des signaux, peut-être représentée par un filtre de réponse impulsionnelle h
(t). En effet, le signal ( ) ( )∑ −⋅=k
k kTthatx est obtenu par convolution discrète entre les données et h(t).
Le filtre de réception permettant de rendre minimale la probabilité d’erreur en effectuant la décision sur leséchantillons prélevés à la cadence T est définit par sa réponse impulsionnellee hR(t), telle que :
( ) ( ) ( ) ( ) τπ−∗∗ ⋅=⇔−τ= fj2RR efHfHthth
La valeur de τ est choisie de façon à ce que l’impulsion hR(t) soit nulle pour t < 0. Ce filtre est appelé filtreadapté (sous-entendu à la forme de l’impulsion h(t), en anglais matched filter). Ce qu’il y a de remarquable, dansce résultat est que l’on a remplacé le signal r(t), à temps continu, par une suite de valeurs, à temps discret, sansperte de performances. Quant au fait que l’optimalité est obtenue par un dispositif linéaire, cela tient précisémentau caractère gaussien du canal.
Partant de ce résultat, il faut ensuite déterminer, à partir de la suite des observations en sortie du filtreadapté, la suite des symboles émis qui minimise la probabilité d’erreur. Dans le cas général, l’organe de décisionest compliqué et fait appel à un algorithme de Viterbi. Il existe toutefois une situation particulièrement simple etimportante en pratique où la décision peut être prise symbole par symbole, c’est-à-dire au fur et à mesure que lesvaleurs en sortie du filtre adapté sont observées. C’est cette situation que nous allons étudier en détail.
2004-2005 p. 32 Chapitre III : Techniques de codage

XII.3. Transmission sans IES : canal de Nyquist
Déterminons l’expression des échantillons en sortie du filtre de réception. Pour cela, posons
( ) ( ) ( ) ( ) ( )∫+∞
∞−
∗∗ −⋅=−∗= dutuhuhththtp
En désignant par H(f), la transformée de Fourier de h(t) et en utilisant les propriétés de la transformation deFourier, on a :
( ) ( ) ( ) ( ) ( ) 2
R
2 HHHH fffffP ==⋅= ∗
L’observation r(t) en sortie du filtre adapté a alors pour expression :
( ) ( ) ( )[ ] ( ) ( ) ( ) ( ) ( )thtduuthTuhathttxtr RR ∗++−τ⋅−=∗+= ∑ ∫+∞
∞−
∗ bkbk
k
En effectuant un changement de variables : v = u – kT et en utilisant la définition de p(t), on obtient :
( ) ( ) ( )( )( )
( ) ( )
( ) ( ) ( ) ( )thtTtatr
thtdvTtvhvhatr
R
R
Tt
∗+−τ−=
∗++τ−−⋅=
∑
∑ ∫−τ−
+∞
∞−
∗
bkp
bk
kk
kkp
k
En sortie de l’échantillonneur, on a alors, aux instants tn = nT + τ :
( ) ( ) ( )( ) nnk
kn wknppn +−+=τ+ ∑≠
Ta0aTr
où wn désigne une variable aléatoire scalaire, représentant la valeur échantillonnée en sortie du filtre adapté etcorrespondant au bruit seul.
Dans l’expression donnant la valeur de l’échantillon r(nT + τ), observé à l’instant (nT + τ), il apparaît troistermes : Le premier est relatif au symbole qui a été émis à l’instant nT ; Le second est relatif à tous les autres symboles, autres que celui qui a été émis à l’instant nT. Pour cette
raison, il porte le nom d’Interférences Entre Symboles (IES, en anglais Inter Symbol Interferences, IIS) ; Le troisième est relatif au bruit additif sur le canal.
La figure suivante schématise l’IES :
La présence du terme d’IES, qui contient de l’information utile sur plusieurs symboles émis, ne permet pasd’effectuer une décision symbole par symbole qui soit optimale. Pour résoudre le problème, une premièreapproche consiste à faire en sorte que ce terme soit nul. Elle aboutit à la définition d’un canal de Nyquist, quenous allons étudier. Toutefois, cette approche présente des faiblesses, dans la mesure où elle ne permet pas detirer au mieux profit de la bande disponible. La deuxième approche consiste soit à effectuer un algorithme dedéconvolution, pour réduire l’IES à un niveau tel que l’on puisse effectuer une décision symbole par symbole,soit utiliser un algorithme à décision optimale (type algorithme de Viterbi). Cette deuxième approche ne sera pastraitée dans ce cours.
Chapitre III : Techniques de codage p. 33 2004-2005

XII.3.a. Critère de Nyquist Supposons que les symboles soient statistiquement indépendants et que la condition p(mT) = 0 pour m ≠ 0
soit vérifiée. Alors le second terme d’IES est nul et l’échantillon prélevé à l’instant (nT + τ) ne dépendstatistiquement que du symbole émis à l’instant nT. On dit qu’il y a suppression de l’IES aux instantsd’échantillonnage. Cette condition s’appelle condition de Nyquist et le canal correspondant est le canal idéal deNyquist. Elle permet d’effectuer une décision symbole par symbole.
Remarquons que la condition de Nyquist est automatiquement satisfaite si l’impulsion h(t) est de duréeinférieure à T. En effet, dans ce cas, il ne peut y avoir d’IES, puisque l’impulsion correspondant au nième symboleest nulle avant même que l’impulsion correspondant au (n + 1)ième symbole ne commence. Le calcul le montrebien, puisque l’impulsion p(t) est alors de durée inférieure à 2T et vérifie donc la condition de Nyquist.Prenons l’exemple du canal téléphonique, pour lequel le temps bit est de 10 ms (T = 10 ms). La liaisontéléphonique requiert une rapidité de modulation de 2400 baud, soit une largeur d’impulsion de 1/2400 = 42 ms.Ainsi, la condition 42 ms < 2×10 ms n’est par vérifiée, donc il n’y a pas de liaison téléphonique sans IES.
La condition de Nyquist donnée précédemment porte sur la forme temporelle du signal p(t). Si on note P(f),la transformée de Fourier de p(t), la formule de Poisson1 fournit la condition équivalente suivante :
( ) tetancons0TT
=⋅=
−∑ p
kfP
k
On en déduit qu’une condition nécessaire pour rendre possible une transmission sans IES sur un canal de bandeB est que le débit symbole vérifie :
B2R ≤Le cas limite correspond à un spectre P(f) rectangulaire. Mais un filtre rectangulaire n’est pas réalisable. Aussi,une forme largement utilisée est celle des impulsions dites en cosinus surélevé donnée par :
( ) ( )
α+>
α+<<α−
−
απ−
α−<
=α
T21pour0
T21
T21pourT21Tsin1
2T
T21
pourT
C
f
ff
f
f
Nous avons représenté sur la figure suivante, Cα(f)/T pour α = 0, α = 0,3 et α = 1, pour f > 0. L’axe desfréquences, en abscisse est gradué en R = 1/T :
Figure III. 18 – Transformée de Fourier de l’impulsion en cosinus surélevé pour α = 0, 0,3 et 1. Enabscisses, l’axe des fréquences est gradué en 1/T. On voit que la bande occupée est B = (1 + α)/2T.
1 Soit φ(t) un signal de module intégrable et dont la transformée de Fourier Φ(f) est elle-même de module intégrable. On a, pour tout T>0 :
( ) Tt2eTT
1Tt kj
kn
kn π−
+∞
−∞=
+∞
−∞=∑∑
Φ=−φ
2004-2005 p. 34 Chapitre III : Techniques de codage

Le paramètre α s’appelle le facteur de débordement (ou coefficient d’arrondi, roll-off en anglais). Il varieentre 0 et 1. Plus il est grand, plus la bande en fréquence nécessaire pour transmettre est grande. Elle est donnéepar :
( ) ( )Mlog2D
1T2
1B
2
bα+=α+
=
En contrepartie, l’impulsion Cα(t) a les lobes secondaires de moindre amplitude.
Figure III. 19 – Impulsion en cosinus-surélevé pour α = 0, 0,3 et 1. En abscisses, l’axe des tempsest gradué en T. On voit que plus α est grand, plus les lobes secondaires sont de faibles amplitudes.
Il s’en suit que, lors d’un décalage de l’horloge d’échantillonnage, l’amplitude de l’IES est d’autant plusfaible que α est grand.
XII.3.b. Répartition du filtrage : racine carré de Nyquist En conclusion, les résultats précédents montrent que l’on doit répartir à part égale l’impulsion en cosinus
surélevé entre émission et réception suivant :
( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( )( )
=⋅==
=
αα
∗
fCHHqueafinfCHH
adaptéfiltrefHH
ReR
R
ffff
f
Si Cα(f) est définit comme précédemment, on montre par un calcul long mais sans difficulté, que la fonction :
( )( ) ( )
2
22
Tt161
tT1sin
t4T
tT1cos
T4tg
α−
πα−
α+
πα+
πα=α
vérifie précisément ( ) ( ) ( )tctgtg α=−∗ ou cα(t) est la transformée de Fourier inverse de Cα(f). Par continuité, onobtient aussi ( ) ( ) ( ) ( )γπ+γ−=α sin4cos5,04Tg avec ( ) αα+π=γ 41 . En pratique, cette expression peut êtreutilisée pour engendrer sur microprocesseur, les échantillons du signal numérique, à une cadence suffisante pourêtre ensuite mis à l’entrée d’un convertisseur numérique-analogique qui délivre le signal numérique modulé.Remarquons que les filtres ainsi calculés, sont définis à une phase prés Φ (f) = -ΦR(f), qui est choisie, en général,de façon à introduire peu de distorsion, en particulier en s’approchant autant que possible d’une phase linéaire(retard pur).
Chapitre III : Techniques de codage p. 35 2004-2005

XII.3.c. Diagramme de l’œil Un moyen pratique, très largement utilisé, pour ″évaluer″ la situation de non interférence entre symboles
dans une transmission, est l’observation du diagramme de l’œil.Considérons une transmission binaire, d’alphabet {–1, +1}. Lors d’une suite de symboles successifs, le
signal numérique observé en l’absence de bruit est la somme algébrique d’impulsions p(t) émises à la cadence Tet multipliées par l’une des deux valeurs –1 ou +1. Si la durée de l’impulsion de p(t) est supérieure à 2T, ils’ensuit que le symbole émis à l’instant kT interfère avec les symboles précédents. Si à présent, les séquences debits sont également probables, on observera, dans les intervalles de temps de longueur T, toutes les formespossibles de signaux. Si maintenant, on superpose toutes ces formes et que l’on ne conserve que deux intervallessuccessifs, on obtient le diagramme de l’œil. Pour obtenir cette superposition, on observe à l’oscilloscope lesignal numérique en se synchronisant sur le temps T.
Les figures suivantes représentent la forme du diagramme de l’œil pour une impulsion p(t) en cosinussurélevé avec α = 0,3 pour M = 2 et M = 4, sans bruit. On notera la forme caractéristique du diagramme de l’œil,lorsque le critère de Nyquist est vérifié : les trajectoires concourent aux instants kT, ce qui a pour conséquence derendre l’œil très ouvert verticalement à ces instants.
Figure III. 20 – Diagramme de l’œil sur le canal de Nyquist pour α = 0,3 et M = 2, sans bruit.
Figure III. 21 – Diagramme de l’œil sur le canal de Nyquist pour α = 0,3 et M = 4, sans bruit.
2004-2005 p. 36 Chapitre III : Techniques de codage

L’observation du diagramme de l’œil fournit les indications suivantes : L’ouverture verticale mesure les performances contre le bruit. Plus l’œil est ouvert en hauteur, plus il est
facile de discriminer les symboles en présence de bruit, donc plus la probabilité d’erreur est faible. Si lediagramme manifeste la présence d’une IES (faible), et que l’on souhaite continuer à utiliser une détection àseuil (solution sous optimale), il faudra venir échantillonner le signale aux instants où l’œil a une ouverturemaximale.
L’ouverture horizontale indique une résistance à un décalage des instants d’échantillonnage. Ainsi, plus l’œilest ouvert en largeur, plus les lobes secondaires de la réponse en temps seront faibles et plus l’accumulationdes interférences dues au décalage des instants d’échantillonnage aura une influence moindre en terme deprobabilité d’erreur. C’est le cas pour les fonctions en cosinus surélevé lorsque α augmente.
Sur la figure suivante est représenté le diagramme de l’œil, sur le canal de Nyquist, pour α = 0,3 et M = 2,avec un rapport signal sur bruit de 7 dB. On remarquera que la décision symbole par symbole sera la meilleure làoù l’œil est le plus ouvert verticalement. Malgré le bruit, les niveaux significatifs des deux symboles restentrelativement bien discriminables.
Figure III. 22 – Diagramme de l’œil sur le canal de Nyquist pour α= 0,3 et M = 2, avec un rapport signal sur bruit de 7 dB.
XII.3.d. Performances d’une transmission sur le canal de Nyquist Revenons au schéma général de la chaîne de transmission de la Figure III. 16 où nous supposons que le
critère de Nyquist est vérifié et envisageons une transmission binaire en bande de base. Nous avons alors leshypothèses suivantes : an est une suite aléatoire, c’est-à-dire à valeurs dans {–1, +1} avec Pr{an = 0}= Pr{an = 1} = 0,5 ; h(t) est réelle et est telle que p(t) = h(t)*h(-t) vérifie le critère de Nyquist ; le bruit est blanc, gaussien et indépendant de an.
D’après le critère de Nyquist, les échantillons en sortie du filtre adapté ont pour expression :
( ) ( ) nn pn w0aTr +=τ+
D’après les hypothèses an et wn sont indépendantes. Les variables aléatoires wn sont gaussiennes, centrées, non
corrélées, de variance ( )2
N0 02 p=σ . L’indépendance des variables aléatoires wn et wk est essentielle pour
assurer qu’une décision symbole par symbole est optimale.En conclusion, l’observation de ( ) ( ) nnn pn w0aTrY +=τ+= , en sortie du filtre adapté, est une variable aléatoire
gaussienne, de variance ( )2
N0 02 p=σ et de moyenne p(0) (resp.-p(0)) si le symbole an est +1 (resp. –1). Les lois
de l’observation conditionnellement à an ont donc pour densités respectives :
Chapitre III : Techniques de codage p. 37 2004-2005

( ) ( )( )
( ) ( )( )
σ
−−
πσ=
σ
+−
πσ=
+=
−=
2
2
1aY
2
2
1aY
20y
exp2
1y
20y
exp2
1y
p
p
nn
nn
P
P
On choisit un seuil s et on prend comme décision :
<−>+
=ss
n
nn Ysi1
Ysi1a
La probabilité d’erreur moyenne s’écrit :
{ } { }
{ } { }1aYPr211aYPr
21P
1a1aPr21
1a1aPr21
P
e
e
+=<+−=>=
+=−=+−=+==
nnnn
nnnn
ss
Il est immédiat que le seuil qui minimise Pe est s = 0 et que la probabilité d’erreur obtenue est alors donnée par :
( ) ( )
σ=== ∫∫
∞+ −∞+
−=
0Qdteπ2
1dyyP0
2t
0 1aYe
2
pnn
P
La fonction Q(x) est définie par ( ) ∫+∞ −
=x
2t
dteπ2
1xQ2
Comme les deux symboles sont supposés équiprobables et transportent un bit, l’énergie moyenne par bit est
( ) ( ) 22
b 0dtthE ∫ == p . Ainsi
=
0
be N
E2QP . On vérifie que Pe est une fonction décroissante de Eb/N0.
XII.4. Egalisation
Comme nous venons de le voir, en principe, si le canal est parfaitement connu, il est possible de rendrel’interférence entre symbole arbitrairement faible, ou même de l’éliminer complètement, en utilisant une paire defiltres d’émission et de réception, c’est-à-dire que la chaîne complète vérifie le critère de Nyquist.
En pratique, cependant, on ne connaît que très rarement les caractéristiques exactes du canal, et tout au plus,des valeurs moyennes. Par ailleurs, il subsiste des erreurs dans la correction de l’IES en raison des imperfectionssur l’implantation de ces filtres. Enfin, le canal peut ne pas être stationnaire, c’est-à-dire que ces caractéristiquesvarient au cours du temps.
L’effet de ces différents facteurs est une IES (éventuellement résiduelle), qu’il faut compenser à l’aide d’undispositif appelé égaliseur, ce dispositif pouvant également être variable dans le temps.
En bande de base, si les filtres d’émission et de réception sont fixés (et forment ensemble un filtre deNyquist), le rôle de l’égaliseur est simplement de compenser la réponse du canal C(f). En notant ainsi e(t) laréponse impulsionnelle de l’égaliseur et E(f) sa fonction de transfert, il faut obtenir :
( ) ( ) [ ]B,BsurC
1 −=f
fE
Comme la paire de filtres d’émission et de réception forment un filtre de Nyquist, on peut parfaitementreconstituer la séquence d’entrée {an}. Du point de vue spectrale, on a ″égalisé″ la réponse du canal.
Voici, pour information, une liste non exhaustive de structures classiques d’égalisation : Egaliseur transverse : - Egaliseur par zero forcing ;
- Egaliseur à erreur quadratique minimale ;- Egaliseur à maximum de vraisemblance (algorithme de Viterbi) ;- Egaliseur transverse adaptatif.
Egaliseur récursif à retour de décision Egaliseur autodidacte
Pour éviter une détérioration des performances, il faut que le récepteur et l’émetteur soient synchrones, c’est-à-dire que les différents oscillateurs et horloges de l’émetteur et du récepteur soient parfaitement synchrones.Nous allons donc maintenant aborder le problème de la récupération d’horloge.
2004-2005 p. 38 Chapitre III : Techniques de codage

XII.5. Restitution d’horloge
Le récepteur de signal en bande de base a besoin de l’horloge pour décoder les données. Sur la ligne, on netransmet que le signal de données codées, pas l’horloge. Il faut donc restituer un signal d’horloge synchronisé surles données.
La régénération d’horloge dépend du format du code utilisé. En effet, dans certains types de codes, il fautdétecter les fronts alors qu’il existe des codes dont le spectre possède une raie à la fréquence rythme et un filtragesuffit.
XII.5.a. Détection des fronts La récupération d’horloge se fait en synchronisant un oscillateur sur les fronts (ou transitions) observés sur le
signal en ligne. Le circuit qui effectue cette tâche est, en général, une boucle à verrouillage de phase (PLL : PhaseLocked Loop) :
Figure III. 23 – Schéma général d’un circuit de récupération d’horloge par détection desfronts.
Le comparateur de phase produit une tension qui dépend du déphasage entre les impulsions extraites dusignal (entrée haute sur le schéma) et le signal de l’oscillateur (entrée basse). Cette tension est filtrée, puis ellevient corriger la fréquence de l’oscillateur pour qu’il soit toujours en phase avec le signal de données.
Si le signal de données ne contient pas assez de transitions (par exemple une longue suite de zéros en NRZ),on peut perdre la synchronisation. D’où l’intérêt des codages qui produisent suffisamment de transitions.
D’autre part, en limitant le nombre de transitions, on réduit le spectre du signal en ligne, d’où un débitpossible plus grand. Il faut donc trouver un compromis.
XII.5.b. Récupération du rythme Pour le codage de type RZ, un simple filtrage passe-bande permet de récupérer la fréquence rythme puisque
le spectre des données a une raie à 1/Tb. On peut aussi utiliser une boucle à verrouillage de phase, mais unelongue suite de zéros provoquera le décrochage de la PLL.
Chapitre III : Techniques de codage p. 39 2004-2005
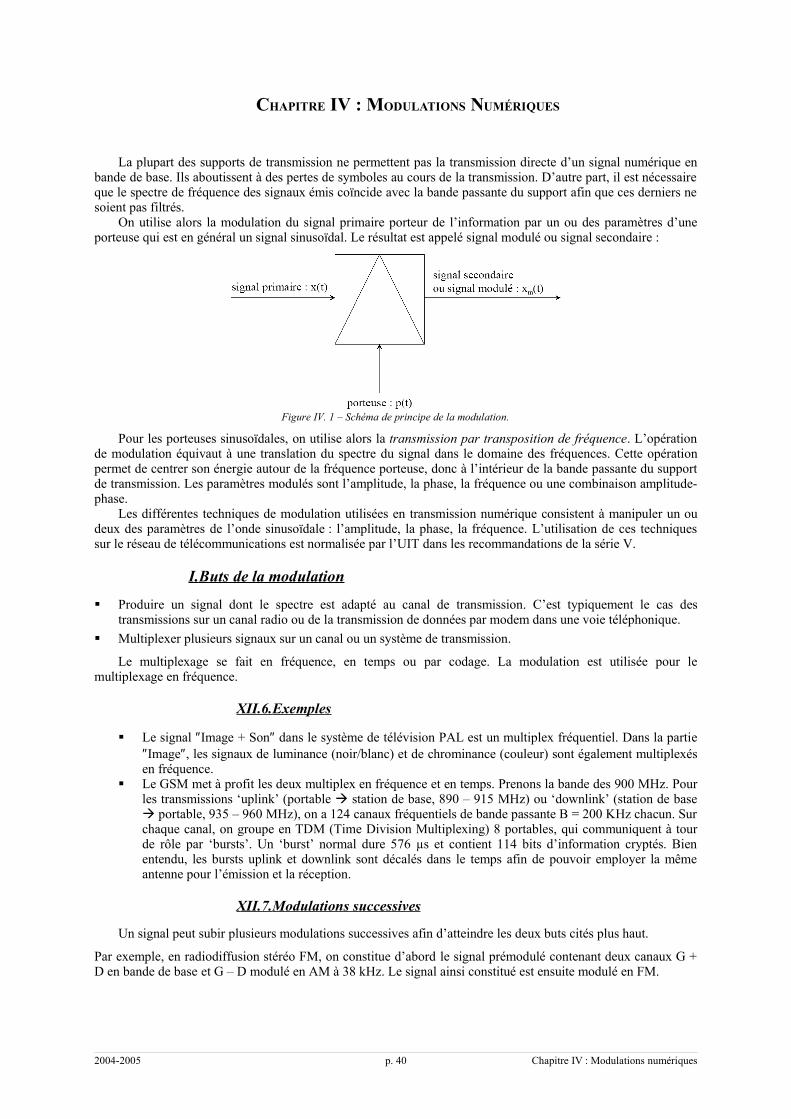
CHAPITRE IV : MODULATIONS NUMÉRIQUES
La plupart des supports de transmission ne permettent pas la transmission directe d’un signal numérique enbande de base. Ils aboutissent à des pertes de symboles au cours de la transmission. D’autre part, il est nécessaireque le spectre de fréquence des signaux émis coïncide avec la bande passante du support afin que ces derniers nesoient pas filtrés.
On utilise alors la modulation du signal primaire porteur de l’information par un ou des paramètres d’uneporteuse qui est en général un signal sinusoïdal. Le résultat est appelé signal modulé ou signal secondaire :
Figure IV. 1 – Schéma de principe de la modulation.
Pour les porteuses sinusoïdales, on utilise alors la transmission par transposition de fréquence. L’opérationde modulation équivaut à une translation du spectre du signal dans le domaine des fréquences. Cette opérationpermet de centrer son énergie autour de la fréquence porteuse, donc à l’intérieur de la bande passante du supportde transmission. Les paramètres modulés sont l’amplitude, la phase, la fréquence ou une combinaison amplitude-phase.
Les différentes techniques de modulation utilisées en transmission numérique consistent à manipuler un oudeux des paramètres de l’onde sinusoïdale : l’amplitude, la phase, la fréquence. L’utilisation de ces techniquessur le réseau de télécommunications est normalisée par l’UIT dans les recommandations de la série V.
I. Buts de la modulation
Produire un signal dont le spectre est adapté au canal de transmission. C’est typiquement le cas destransmissions sur un canal radio ou de la transmission de données par modem dans une voie téléphonique.
Multiplexer plusieurs signaux sur un canal ou un système de transmission.
Le multiplexage se fait en fréquence, en temps ou par codage. La modulation est utilisée pour lemultiplexage en fréquence.
XII.6. Exemples
Le signal ″Image + Son″ dans le système de télévision PAL est un multiplex fréquentiel. Dans la partie″Image″, les signaux de luminance (noir/blanc) et de chrominance (couleur) sont également multiplexésen fréquence.
Le GSM met à profit les deux multiplex en fréquence et en temps. Prenons la bande des 900 MHz. Pourles transmissions ‘uplink’ (portable station de base, 890 – 915 MHz) ou ‘downlink’ (station de base portable, 935 – 960 MHz), on a 124 canaux fréquentiels de bande passante B = 200 KHz chacun. Surchaque canal, on groupe en TDM (Time Division Multiplexing) 8 portables, qui communiquent à tourde rôle par ‘bursts’. Un ‘burst’ normal dure 576 µs et contient 114 bits d’information cryptés. Bienentendu, les bursts uplink et downlink sont décalés dans le temps afin de pouvoir employer la mêmeantenne pour l’émission et la réception.
XII.7. Modulations successives
Un signal peut subir plusieurs modulations successives afin d’atteindre les deux buts cités plus haut.
Par exemple, en radiodiffusion stéréo FM, on constitue d’abord le signal prémodulé contenant deux canaux G +D en bande de base et G – D modulé en AM à 38 kHz. Le signal ainsi constitué est ensuite modulé en FM.
2004-2005 p. 40 Chapitre IV : Modulations numériques

XIII. Représentation des signaux modulés
XIII.1. Phaseur
Quelque soit le type de modulation, le signal modulé peut s’écrire :
( ) ( ) ( )( )tt.f.2cos.tRtx pm ϕ+π= Eq. 1
où : R(t) est l’amplitude du signal modulé|R(t)| est l’enveloppe du signal moduléfp est la fréquence de la porteuseϕ(t) est la phase instantanée
( )( )dtd
21ftt.f.2
dtd
21f ppinst
ϕ×π
+=ϕ+π×π
= est la fréquence instantanée
On introduit le phaseur :
( ) ( ) ( )tjm e.tRtX ϕ= Eq. 2
Contrairement aux signaux sinusoïdaux non modulés, ce phaseur dépend encore du temps, mais seulementpar les grandeurs liées au signal primaire (amplitude et phase). Avec cette notation, le signal xm(t) est lié auphaseur par :
( ) ( )( )t.f.2.jmm
pe.tXRetx π=
Dans la théorie, on utilise principalement le phaseur car cela permet de s’affranchir de la porteuse. On parlealors de modulation en bande de base.
Remarques importantes : Si R(t) est variable et ϕ(t) est constant, on parle de modulation d’amplitude Si ϕ(t) est variable et R(t) est constant, on parle de modulation de phase ou modulation de fréquence.
L’équation 2 décrit le phaseur sous forme exponentielle. Sous forme algébrique, on a :
( ) ( ) ( )tQ.jtItX m += Eq. 3
où I(t) est le signal en phase (inphase signal) et Q(t), le signal en quadrature (quadrature signal).
On illustre très souvent le parcours du phaseur dans le plan complexe :
Figure IV. 2 – Parcours du phaseur dans le plan complexe.
Les formules de transformation sont les suivantes :
( ) ( ) ( )( )( ) ( ) ( )( )
ϕ=ϕ=
tsin.tRtQtcos.tRtI
et ( ) ( ) ( )( ) ( )
( )
=ϕ
+=
tItQtanArct
tQtItR 22
Eq. 4
Chapitre IV : Modulations numériques p. 41 2004-2005

La forme exponentielle du signal xm(t) est donné par l’équation 1. Si on veut la forme algébrique, on doitintroduire l’équation 4 dans l’équation 3. On obtient :
( ) ( ) ( )( ) ( ) ( )( )[ ]( ) ( ) ( ) ( ) ( )t.f.2sin.tQt.f.2cos.tItx
t.f.2sin.jt.f.2costQ.jtIRetx
ppm
ppm
π−π=
π+π×+=Eq. 5
En général, les appareils de modulation ont comme entrée les signaux I et Q. Le schéma de modulation estdonné par :
Figure IV. 3 – Modulateur ayant les signaux en phase et en quadrature commeentrées.
XIII.2. Signal primaire
Le signal primaire x(t) qui transporte l’information est, par définition, un signal normalisé, sans unité :
( ) ( )max
x
Utu
tx = (sans unité) Eq. 6
avec ux(t) Signal électrique, en Volt, à moduler.Umax Tension maximale à l’entrée du modulateur.
On a ( ) 1tx1 ≤≤−
La puissance est elle aussi normalisée :
( )[ ] ( )∫ ===∞→ T 2
max
x2
T
2x U
Pdttx
T1limtxEP u (sans unité) Eq. 7
On a 1Px ≤
Le signal x(t) est limité en fréquence et sa bande est Bx.
XIII.3. Porteuse
La porteuse non modulée s’écrit :
( ) ( )t.f.2cos.Atp pp π= (V) Eq. 8
La puissance de la porteuse vaut :
2A
P2p
p = (V2) Eq. 9
XIII.4. Puissance du signal modulé
On considère le signal en bande de base. On rappelle que ( ) ( ) ( )( )tt.f.2cos.tRtx pm ϕ+π=On montre que la puissance du signal modulé vaut :
( )[ ]txEP 2mx m
= avec ( )[ ] ( )∫∞→==
T
2
T
2r dttR
T1limtREP Eq. 10
2004-2005 p. 42 Chapitre IV : Modulations numériques
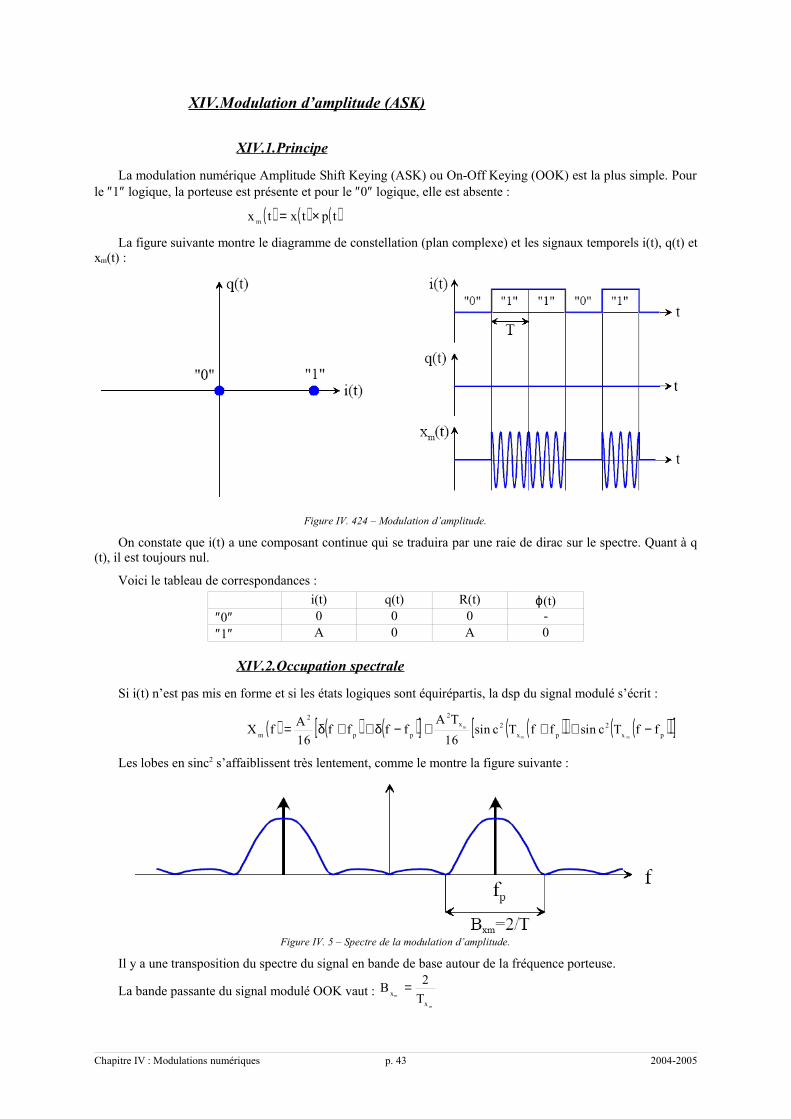
XIV. Modulation d’amplitude (ASK)
XIV.1. Principe
La modulation numérique Amplitude Shift Keying (ASK) ou On-Off Keying (OOK) est la plus simple. Pourle ″1″ logique, la porteuse est présente et pour le ″0″ logique, elle est absente :
( ) ( ) ( )tptxtx m ×=
La figure suivante montre le diagramme de constellation (plan complexe) et les signaux temporels i(t), q(t) etxm(t) :
Figure IV. 424 – Modulation d’amplitude.
On constate que i(t) a une composant continue qui se traduira par une raie de dirac sur le spectre. Quant à q(t), il est toujours nul.
Voici le tableau de correspondances :i(t) q(t) R(t) ϕ(t)
″0″ 0 0 0 -″1″ A 0 A 0
XIV.2. Occupation spectrale
Si i(t) n’est pas mis en forme et si les états logiques sont équirépartis, la dsp du signal modulé s’écrit :
( ) ( ) ( )[ ] ( )( ) ( )( )[ ]px2
px2x
2
pp
2
m ffTcsinffTcsin16TA
ffff16AfX
mm
m −+++−δ++δ=
Les lobes en sinc2 s’affaiblissent très lentement, comme le montre la figure suivante :
Figure IV. 5 – Spectre de la modulation d’amplitude.
Il y a une transposition du spectre du signal en bande de base autour de la fréquence porteuse.
La bande passante du signal modulé OOK vaut : m
m
xx T
2B =
Chapitre IV : Modulations numériques p. 43 2004-2005

L’efficacité spectrale du signal OOK est faible. Elle vaut : η = 0,5
XIV.3. Circuits de modulation et de démodulation
Pour cette raison, et ceci est vrai pour toutes les modulations numériques, on met en forme les signaux i(t) etq(t) afin de limiter la bande passante du signal modulé
mxB . Cette mise en forme est effectuée généralement pardes filtres de type ″cosinus surélevé″, ou mieux encore, des filtres en ″racine de cosinus surélevé″. La bandepassante dépend alors du roll-off choisi, lequel représente un compromis entre la bande passante et le diagrammede l’œil (facilité de décodage en présence de bruit).
∼
Multiplieur AmplificateurOscillateur local
Signal entrée NRZ
FPB
Signal modulé ASK∼
Multiplieur AmplificateurOscillateur local
Signal entrée NRZ
FPB
Signal modulé ASK
Figure IV. 6 – Modulateur d’amplitude.
Quelque soit le roll-off et donc le type de mise en forme choisi, la bande passante du signal modulé esttoujours égale au double de la bande passant de i(t) en bande de base. C’est pourquoi, on l’appelle aussi lamodulation d’amplitude double bande (DB). Elle n’est pas utilisée ainsi dans les transmissions numériques, maisessentiellement pour la transmission de radiodiffusion analogique (et la transmission du son de la télévisionhertzienne) car la fabrication d’un récepteur est extrêmement simple.
Il existe deux types de démodulations : la démodulation synchrone et la démodulation asynchrone.
Signal NRZ reçu
seuil
Signal modulé ASK
Détecteur enveloppe Circuit de décision
Signal NRZ reçu
seuil
Signal modulé ASK
Détecteur enveloppe Circuit de décision
Figure III. 25 – Démodulateur d’amplitude asynchrone.
∼ Oscillateur local
Signal NRZ reçu
seuil
Circuit de décision
Signal ASK
∼ Oscillateur local
Signal NRZ reçu
seuil
Circuit de décision
Signal ASK
Figure IV. 7 – Démodulateur d’amplitude synchrone.
XIV.4. Avantages et inconvénients
Avantages : Simplicité Faible coût Modulation grand public : Emetteur-Récepteur à 224 MHz et 433,92 MHz Modulation optique
Inconvénients : Faible efficacité spectrale
2004-2005 p. 44 Chapitre IV : Modulations numériques
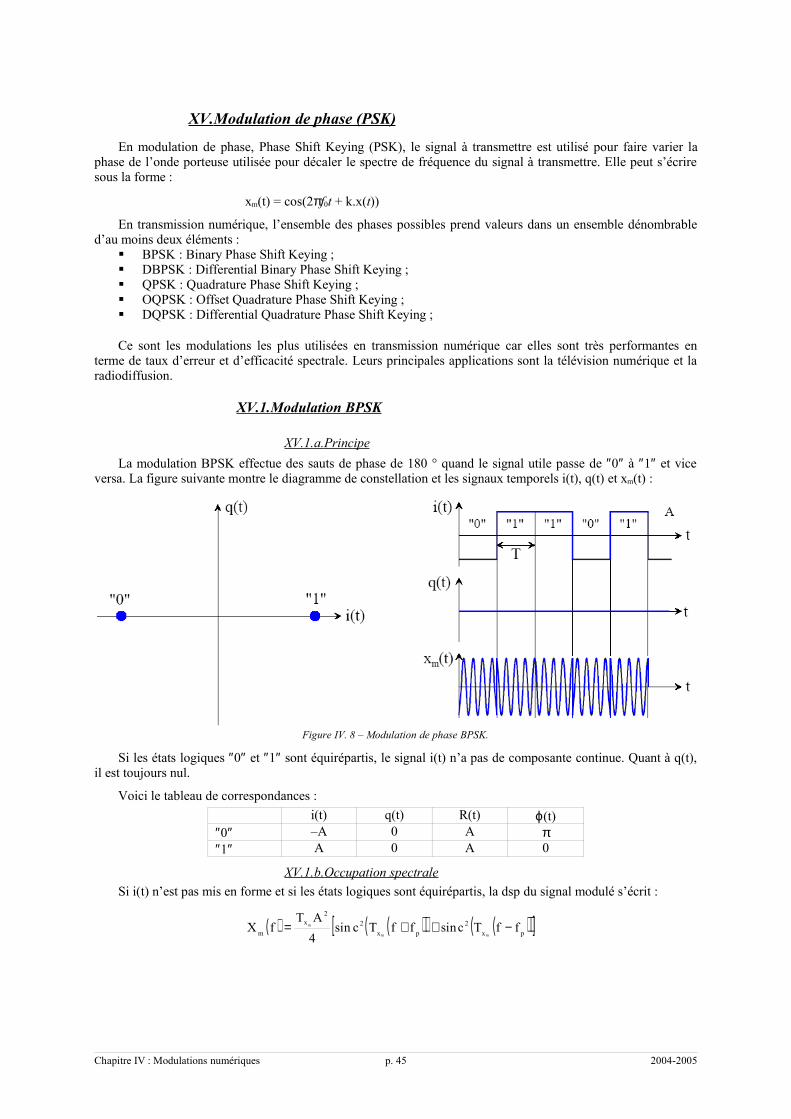
XV. Modulation de phase (PSK)
En modulation de phase, Phase Shift Keying (PSK), le signal à transmettre est utilisé pour faire varier laphase de l’onde porteuse utilisée pour décaler le spectre de fréquence du signal à transmettre. Elle peut s’écriresous la forme :
xm(t) = cos(2πf0t + k.x(t))
En transmission numérique, l’ensemble des phases possibles prend valeurs dans un ensemble dénombrabled’au moins deux éléments :
BPSK : Binary Phase Shift Keying ; DBPSK : Differential Binary Phase Shift Keying ; QPSK : Quadrature Phase Shift Keying ; OQPSK : Offset Quadrature Phase Shift Keying ; DQPSK : Differential Quadrature Phase Shift Keying ;
Ce sont les modulations les plus utilisées en transmission numérique car elles sont très performantes enterme de taux d’erreur et d’efficacité spectrale. Leurs principales applications sont la télévision numérique et laradiodiffusion.
XV.1. Modulation BPSK
XV.1.a. Principe La modulation BPSK effectue des sauts de phase de 180 ° quand le signal utile passe de ″0″ à ″1″ et vice
versa. La figure suivante montre le diagramme de constellation et les signaux temporels i(t), q(t) et xm(t) :
Figure IV. 8 – Modulation de phase BPSK.
Si les états logiques ″0″ et ″1″ sont équirépartis, le signal i(t) n’a pas de composante continue. Quant à q(t),il est toujours nul.
Voici le tableau de correspondances :i(t) q(t) R(t) ϕ(t)
″0″ –A 0 A π″1″ A 0 A 0
XV.1.b. Occupation spectrale Si i(t) n’est pas mis en forme et si les états logiques sont équirépartis, la dsp du signal modulé s’écrit :
( ) ( )( ) ( )( )[ ]px2
px2
2x
m ffTcsinffTcsin4AT
fXmm
m −++=
Chapitre IV : Modulations numériques p. 45 2004-2005

Figure IV. 9 – Spectre de la modulation de phase BPSK.
Il n’y a pas de raie à la fréquence porteuse.
La bande passante du signal BPSK vaut m
m
xx T
2B = autour de la porteuse.
L’efficacité spectrale est : η = 2.
XV.1.c. Circuits de modulation et de démodulation Le modulateur peut être réalisé soit par un multiplieur analogique par ±1, soit par un modulateur en anneaux
(cf. modulation analogique).Dans le démodulateur synchrone, la boucle à verrouillage de phase permet de récupérer la porteuse, avec une
phase modulo π. Ainsi, le signal démodulé peut être inversé par rapport au signal utile.
Figure IV. 10 – Démodulateur de phase BPSK synchrone.
XV.2. Modulation DBPSK
Pour pallier à cet inconvénient de phase, on utilise généralement la modulation DBPSK (differential BPSK).L’opération de modulation consiste alors à comparer deux bits successifs : si les deux bits sont identiques, on
transmet un ″0″, sinon, on transmet un ″1″. Le tableau suivant présente un exemple :
Message 0 1 1 1 0 1 0 0 0 1 1Codage 1 0 1 0 0 1 1 1 0 0 1 0Phase BPSK π 0 π 0 0 π π π 0 0 π 0
Parfois, un bit complémentaire est inséré en début de séquence pour permettre l’initialisation du registre àdécalage utilisé lors de la modulation :
2004-2005 p. 46 Chapitre IV : Modulations numériques
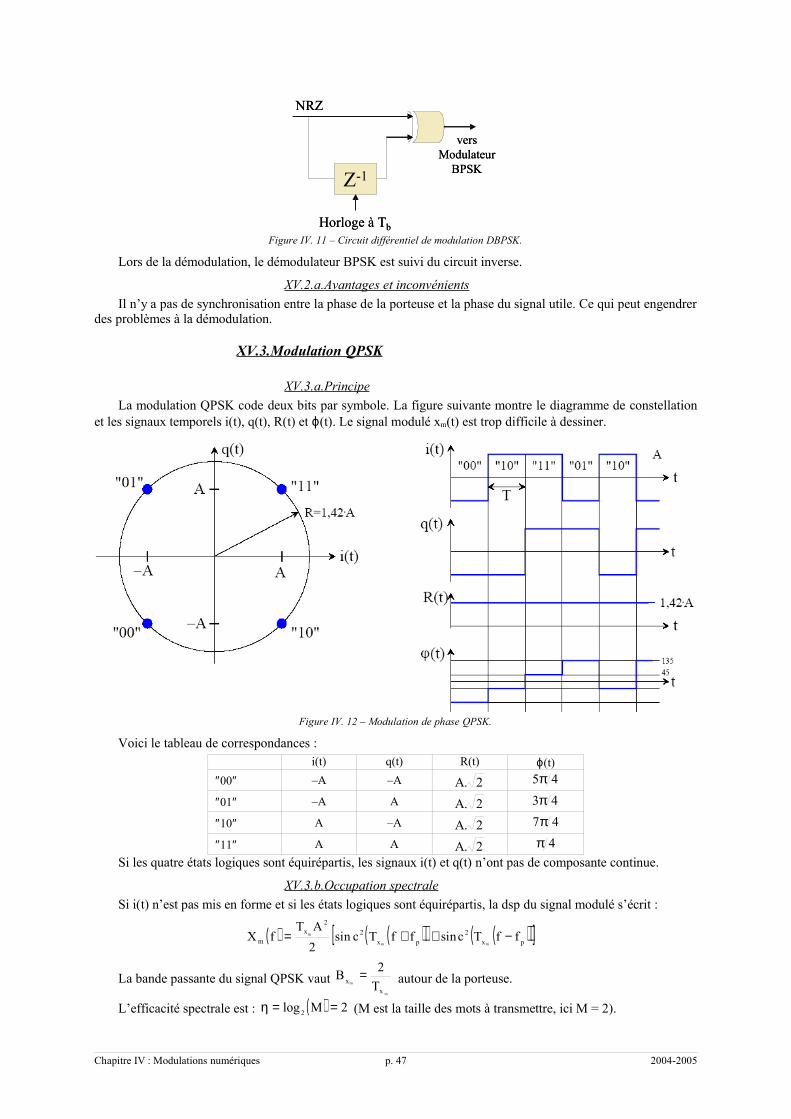
Z-1
Horloge à Tb
NRZ
versModulateur
BPSKZ-1
Horloge à Tb
NRZ
versModulateur
BPSK
Figure IV. 11 – Circuit différentiel de modulation DBPSK.
Lors de la démodulation, le démodulateur BPSK est suivi du circuit inverse.
XV.2.a. Avantages et inconvénients Il n’y a pas de synchronisation entre la phase de la porteuse et la phase du signal utile. Ce qui peut engendrer
des problèmes à la démodulation.
XV.3. Modulation QPSK
XV.3.a. Principe La modulation QPSK code deux bits par symbole. La figure suivante montre le diagramme de constellation
et les signaux temporels i(t), q(t), R(t) et ϕ(t). Le signal modulé xm(t) est trop difficile à dessiner.
Figure IV. 12 – Modulation de phase QPSK.
Voici le tableau de correspondances :i(t) q(t) R(t) ϕ(t)
″00″ –A –A 2.A 45π
″01″ –A A 2.A 43π
″10″ A –A 2.A 47π
″11″ A A 2.A 4πSi les quatre états logiques sont équirépartis, les signaux i(t) et q(t) n’ont pas de composante continue.
XV.3.b. Occupation spectrale Si i(t) n’est pas mis en forme et si les états logiques sont équirépartis, la dsp du signal modulé s’écrit :
( ) ( )( ) ( )( )[ ]px2
px2
2x
m ffTcsinffTcsin2AT
fXmm
m −++=
La bande passante du signal QPSK vaut m
m
xx T
2B = autour de la porteuse.
L’efficacité spectrale est : ( ) 2Mlog 2 ==η (M est la taille des mots à transmettre, ici M = 2).
Chapitre IV : Modulations numériques p. 47 2004-2005

XV.3.c. Circuits de modulation et de démodulation La figure suivante présente une structure simple de modulateur IQ :
OL
π/2
IIn phase
QPSK
QIn quadrature
OL
π/2
IIn phase
QPSK
QIn quadrature
Figure IV. 13 – Modulateur de phase QPSK.
Le démodulateur le plus basique est représenté sur la figure suivante :
OL
π/2
I
QPSK
reçuQ
OL
π/2
I
QPSK
reçuQ
Figure III. 26 – Démodulateur de phase QPSK.
Les démodulateurs les plus courants sont des boucles de Costas :
Figure IV. 14 – Démodulateur de phase QPSK à boucle de Costas.
XV.3.d. Avantages et inconvénients Cette modulation permet d’augmenter l’efficacité spectrale sans modifier la bande passante allouée.
2004-2005 p. 48 Chapitre IV : Modulations numériques
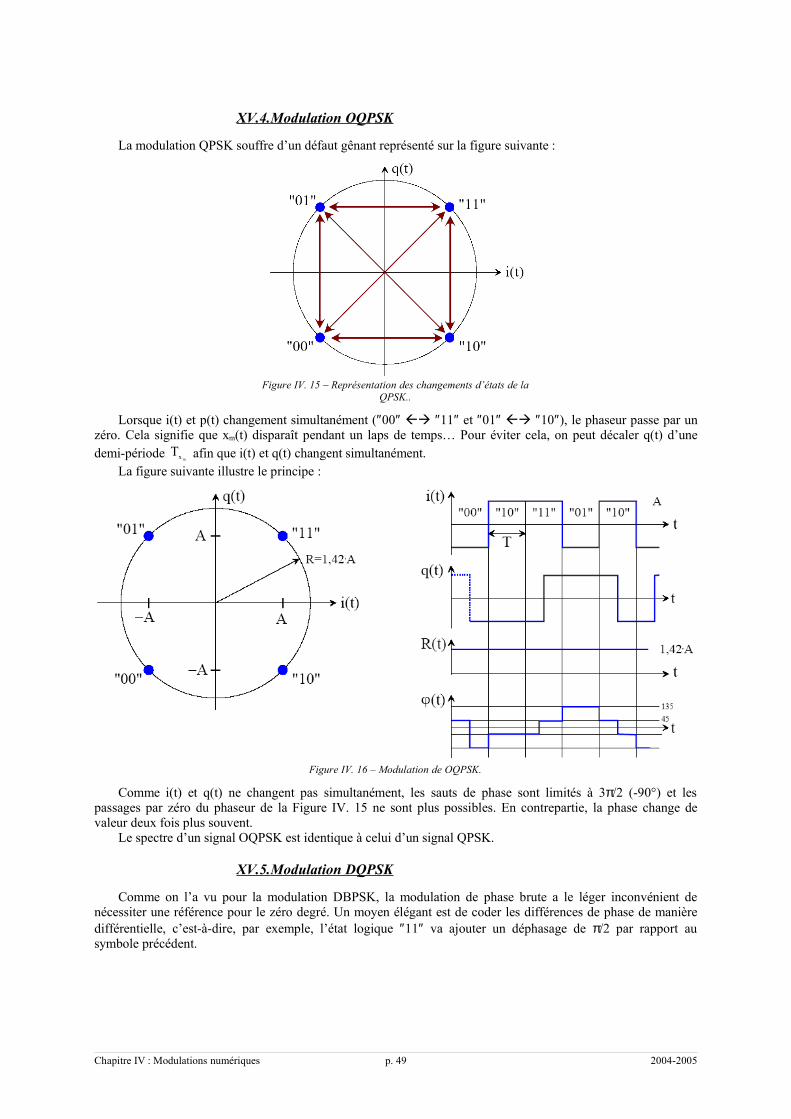
XV.4. Modulation OQPSK
La modulation QPSK souffre d’un défaut gênant représenté sur la figure suivante :
Figure IV. 15 – Représentation des changements d’états de laQPSK..
Lorsque i(t) et p(t) changement simultanément (″00″ ″11″ et ″01″ ″10″), le phaseur passe par unzéro. Cela signifie que xm(t) disparaît pendant un laps de temps… Pour éviter cela, on peut décaler q(t) d’unedemi-période
mxT afin que i(t) et q(t) changent simultanément.La figure suivante illustre le principe :
Figure IV. 16 – Modulation de OQPSK.
Comme i(t) et q(t) ne changent pas simultanément, les sauts de phase sont limités à 3π/2 (-90°) et lespassages par zéro du phaseur de la Figure IV. 15 ne sont plus possibles. En contrepartie, la phase change devaleur deux fois plus souvent.
Le spectre d’un signal OQPSK est identique à celui d’un signal QPSK.
XV.5. Modulation DQPSK
Comme on l’a vu pour la modulation DBPSK, la modulation de phase brute a le léger inconvénient denécessiter une référence pour le zéro degré. Un moyen élégant est de coder les différences de phase de manièredifférentielle, c’est-à-dire, par exemple, l’état logique ″11″ va ajouter un déphasage de π/2 par rapport ausymbole précédent.
Chapitre IV : Modulations numériques p. 49 2004-2005

XVI. Modulation Quadrature Amplitude Modulation (QAM)
Dans ce paragraphe, nous nous intéresserons uniquement à la modulation à 16 états (16QAM). Les autres(32QAM, 256QAM…) peuvent être déduites facilement de cet exemple.
XVI.1. Principe
La figure suivante montre le diagramme de constellation et les signaux temporels i(t), q(t), R(t) et ϕ(t) :
Figure III. 27 – Modulation de QAM.
Voici une possibilité de tableau de correspondance parmi d’autres :i(t) q(t) R(t) ϕ(t)
″0000″ –3A –3A A.22 45π
″0001″ –3A –A 3,16.A 89π
″0010″ –3A A 3,16.A 87π
″0011″ –3A 3A A.22 43π
″0100″ –A –3A 3,16.A 811π
″0101″ –A –A A.2 45π
″0110″ –A A A.2 43π
″0111″ –A 3A 3,16.A 85π
″1000″ A –3A 3,16.A 813π
″1001″ A –A A.2 47π
″1010″ A A A.2 4π
″1011″ A 3A 3,16.A 83π
″1100″ 3A –3A A.22 47π
″1101″ 3A –A 3,16.A 815π
″1110″ 3A A 3,16.A 8π
″1111″ 3A 3A A.22 4π
Les signaux i(t) et q(t) sont deux signaux à quatre états. Dans la pratique, on les met en forme pour limiter labande passante. La figure suivante illustre l’allure d’un signal modulé en 16QAM :
2004-2005 p. 50 Chapitre IV : Modulations numériques

Figure IV. 17 – Signal modulé QAM.
Si on veut une modulation 32QAM, il faut doubler le nombre d’états (pour gagner un bit par rapport à16QAM). La sensibilité au bruit devient beaucoup plus forte.
XVI.2. Applications
Dans la norme V32, à 14,4 kbits/s, par exemple, on code en 128 QAM (7 bits par symbole). Les signaux i(t)et q(t) ont un débit binaire de 2400 symboles/s avec un roll-off de β = 0,25. Il en résulte une bande passante enbande de base de 1500 Hz. Les deux signaux i(t) et q(t) sont modulés en quadrature avec une porteuse defp=1800 Hz, ce qui donne un spectre qui va de 1800±1500 Hz, donc de 300 Hz à 3300 Hz.
La norme V34 est bien plus compliquée encore, avec un diagramme de constellation comprenantl’équivalent de plus de 1000 états. On atteint des débits de 28,8 et 33,6 kbits/s.
XVII. Modulation de fréquence (FSK)
XVII.1. Principe
En modulation de fréquence (Frequency Shift Keying), les niveaux logiques sont représentés par la variationde la fréquence porteuse.
m(t) = cos(2π[f0+k.x(t)]t+ϕ)
La figure suivante montre un signal modulé à deux fréquences porteuses :
Figure IV. 18 – Modulation de fréquence FSK.
Chapitre IV : Modulations numériques p. 51 2004-2005
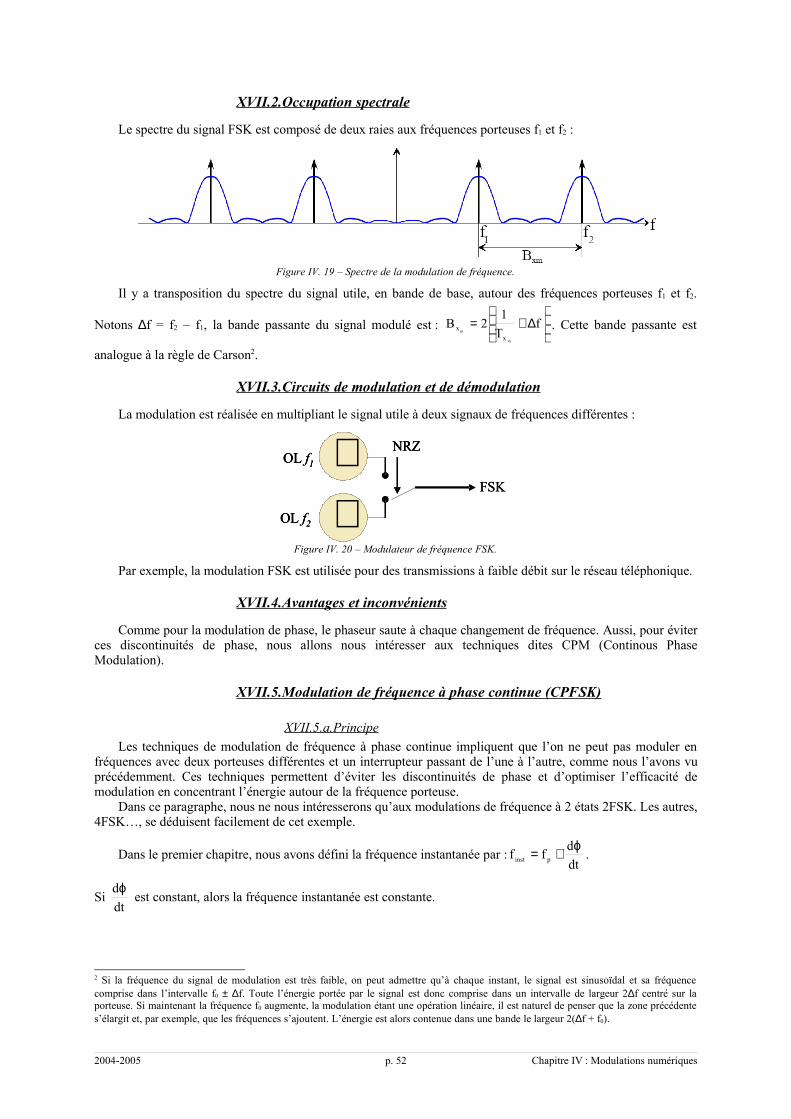
XVII.2. Occupation spectrale
Le spectre du signal FSK est composé de deux raies aux fréquences porteuses f1 et f2 :
Figure IV. 19 – Spectre de la modulation de fréquence.
Il y a transposition du spectre du signal utile, en bande de base, autour des fréquences porteuses f1 et f2.
Notons ∆f = f2 – f1, la bande passante du signal modulé est :
∆+= f
T1
2Bm
m
xx . Cette bande passante est
analogue à la règle de Carson2.
XVII.3. Circuits de modulation et de démodulation
La modulation est réalisée en multipliant le signal utile à deux signaux de fréquences différentes :
FSK
∼OL f1
∼OL f2
NRZ
FSK
∼OL f1
∼OL f2
NRZ∼∼OL f1
∼∼OL f2
NRZ
Figure IV. 20 – Modulateur de fréquence FSK.
Par exemple, la modulation FSK est utilisée pour des transmissions à faible débit sur le réseau téléphonique.
XVII.4. Avantages et inconvénients
Comme pour la modulation de phase, le phaseur saute à chaque changement de fréquence. Aussi, pour éviterces discontinuités de phase, nous allons nous intéresser aux techniques dites CPM (Continous PhaseModulation).
XVII.5. Modulation de fréquence à phase continue (CPFSK)
XVII.5.a. Principe Les techniques de modulation de fréquence à phase continue impliquent que l’on ne peut pas moduler en
fréquences avec deux porteuses différentes et un interrupteur passant de l’une à l’autre, comme nous l’avons vuprécédemment. Ces techniques permettent d’éviter les discontinuités de phase et d’optimiser l’efficacité demodulation en concentrant l’énergie autour de la fréquence porteuse.
Dans ce paragraphe, nous ne nous intéresserons qu’aux modulations de fréquence à 2 états 2FSK. Les autres,4FSK…, se déduisent facilement de cet exemple.
Dans le premier chapitre, nous avons défini la fréquence instantanée par :dtdff pinst
ϕ+= .
Si dtdϕ
est constant, alors la fréquence instantanée est constante.
2 Si la fréquence du signal de modulation est très faible, on peut admettre qu’à chaque instant, le signal est sinusoïdal et sa fréquencecomprise dans l’intervalle f0 ± ∆f. Toute l’énergie portée par le signal est donc comprise dans un intervalle de largeur 2∆f centré sur laporteuse. Si maintenant la fréquence f0 augmente, la modulation étant une opération linéaire, il est naturel de penser que la zone précédentes’élargit et, par exemple, que les fréquences s’ajoutent. L’énergie est alors contenue dans une bande le largeur 2(∆f + f0).
2004-2005 p. 52 Chapitre IV : Modulations numériques
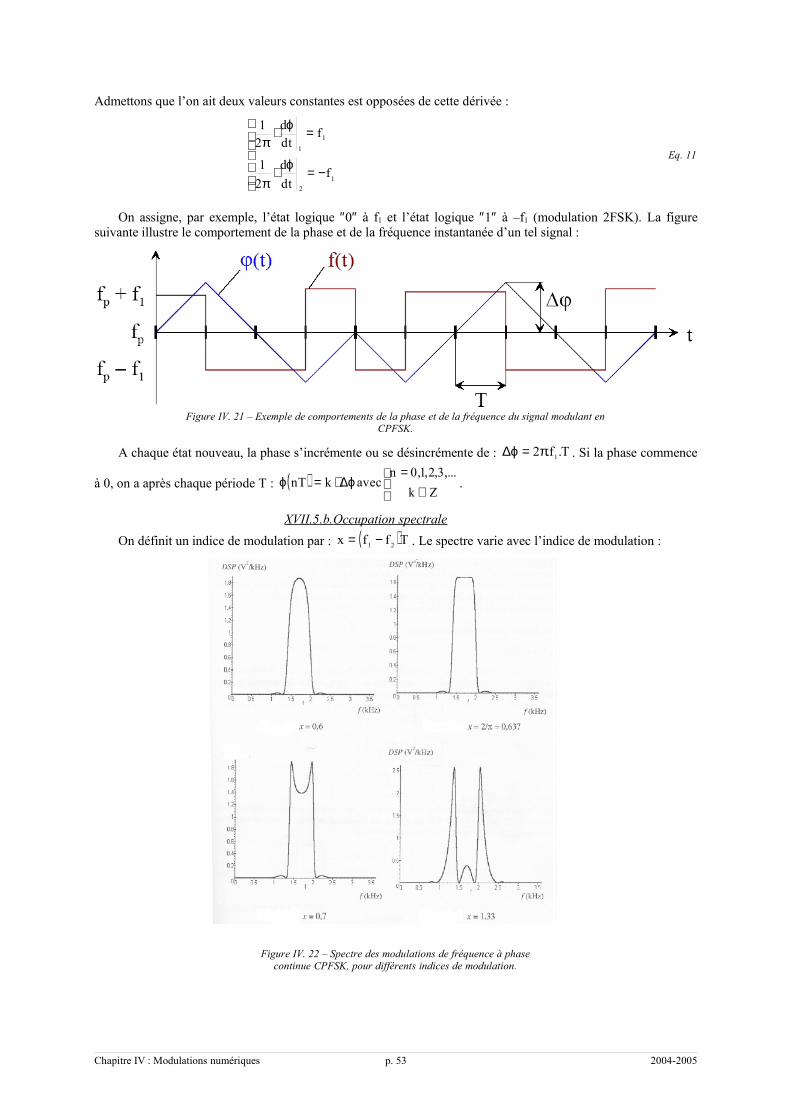
Admettons que l’on ait deux valeurs constantes est opposées de cette dérivée :
−=ϕ⋅π
=ϕ⋅π
12
11
fdtd
21
fdtd
21
Eq. 11
On assigne, par exemple, l’état logique ″0″ à f1 et l’état logique ″1″ à –f1 (modulation 2FSK). La figuresuivante illustre le comportement de la phase et de la fréquence instantanée d’un tel signal :
Figure IV. 21 – Exemple de comportements de la phase et de la fréquence du signal modulant enCPFSK.
A chaque état nouveau, la phase s’incrémente ou se désincrémente de : T.f.2 1π=ϕ∆ . Si la phase commence
à 0, on a après chaque période T : ( )
∈=
ϕ∆⋅=ϕZk
,...3,2,1,0navecknT .
XVII.5.b. Occupation spectrale On définit un indice de modulation par : ( )Tffx 21 −= . Le spectre varie avec l’indice de modulation :
Figure IV. 22 – Spectre des modulations de fréquence à phasecontinue CPFSK, pour différents indices de modulation.
Chapitre IV : Modulations numériques p. 53 2004-2005

XVII.6. Modulation Minimum Shift Keying
XVII.6.a. Principe Un exemple très répandu de modulation 2FSK est la modulation MSK. C’est une modulation pour laquelle
l’indice de modulation est égal à x = 0,5. Ce qui signifie que :
2π=ϕ∆ et donc
41Tf1 = Eq. 12
Le diagramme de constellation ne reflète plus des états fixes (comme pour la modulation de phase), mais deschangements d’états. La figure suivante illustre un diagramme de constellation avec les parcours de i(t) et q(t) :
Figure IV. 23 – Modulation de fréquence MSK.
On a :
( )
⋅π−ϕ
⋅π
+ϕ=ϕ
"0"siTt
2
"1"siTt
2tlast
last
Eq. 13
( ) ( )[ ]( ) ( )[ ]
ϕ=ϕ=
tsin.Atqtcos.Ati
Eq. 14
C’est ainsi que i(t) et q(t) sont composés de lobes de cosinus (de période égale à 4T). Lorsque l’on a quatre″1″ de suite (respectivement quatre ″0″), on a une période sinusoïdale complète pour i(t) et q(t). C’est normal,puisque la phase a fait une fois le tour du quadrant.
XVII.6.b. Occupation spectrale La densité spectrale de puissance est :
( ) ( )( )( )
( )( )( )
−−
−π+
+−
+π⋅
π=
2
2p
2
p
2
2p
2
p2
2
m ffT161
ffT2cos
ffT161
ffT2cosTA4fX Eq. 15
Cette modulation MSK est utilisée dans les modems de première génération, à quelques centaines de kbits/sdans les systèmes radio-mobiles…
2004-2005 p. 54 Chapitre IV : Modulations numériques
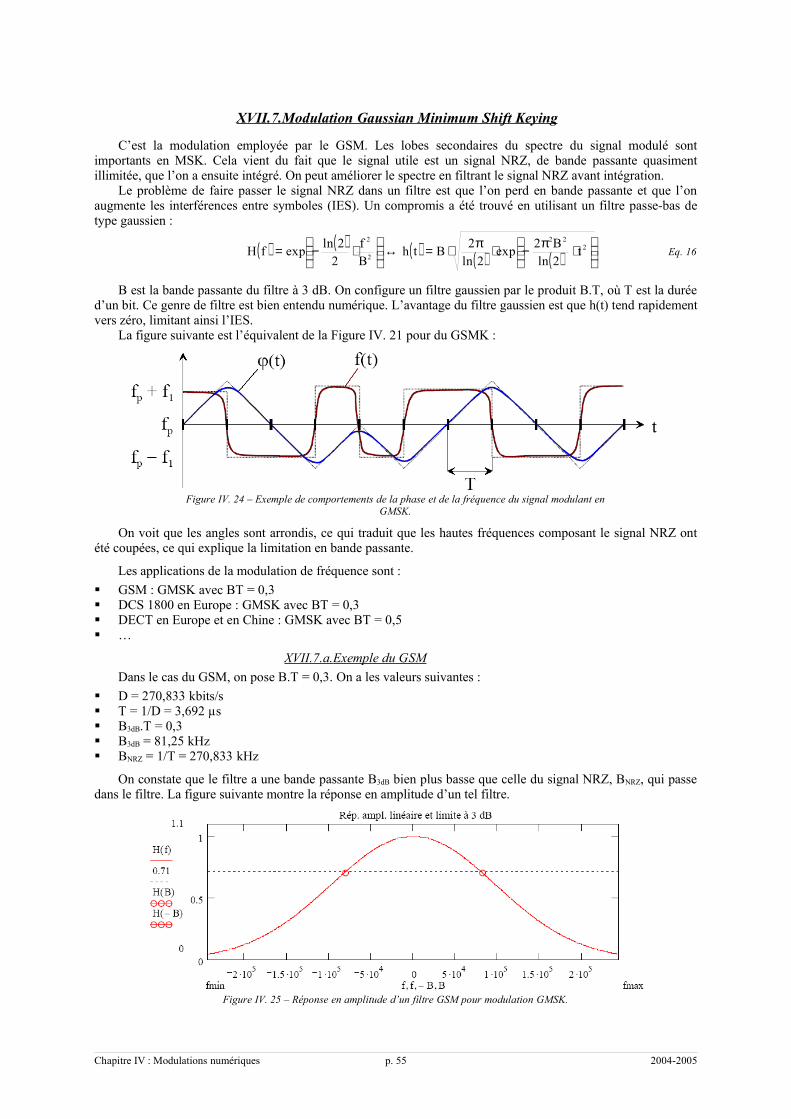
XVII.7. Modulation Gaussian Minimum Shift Keying
C’est la modulation employée par le GSM. Les lobes secondaires du spectre du signal modulé sontimportants en MSK. Cela vient du fait que le signal utile est un signal NRZ, de bande passante quasimentillimitée, que l’on a ensuite intégré. On peut améliorer le spectre en filtrant le signal NRZ avant intégration.
Le problème de faire passer le signal NRZ dans un filtre est que l’on perd en bande passante et que l’onaugmente les interférences entre symboles (IES). Un compromis a été trouvé en utilisant un filtre passe-bas detype gaussien :
( ) ( ) ( ) ( ) ( )
⋅π−⋅π⋅=↔
⋅−= 2
22
2
2
t2lnB2exp
2ln2Bth
Bf
22lnexpfH Eq. 16
B est la bande passante du filtre à 3 dB. On configure un filtre gaussien par le produit B.T, où T est la duréed’un bit. Ce genre de filtre est bien entendu numérique. L’avantage du filtre gaussien est que h(t) tend rapidementvers zéro, limitant ainsi l’IES.
La figure suivante est l’équivalent de la Figure IV. 21 pour du GSMK :
Figure IV. 24 – Exemple de comportements de la phase et de la fréquence du signal modulant enGMSK.
On voit que les angles sont arrondis, ce qui traduit que les hautes fréquences composant le signal NRZ ontété coupées, ce qui explique la limitation en bande passante.
Les applications de la modulation de fréquence sont : GSM : GMSK avec BT = 0,3 DCS 1800 en Europe : GMSK avec BT = 0,3 DECT en Europe et en Chine : GMSK avec BT = 0,5 …
XVII.7.a. Exemple du GSM Dans le cas du GSM, on pose B.T = 0,3. On a les valeurs suivantes :
D = 270,833 kbits/s T = 1/D = 3,692 µs B3dB.T = 0,3 B3dB = 81,25 kHz BNRZ = 1/T = 270,833 kHz
On constate que le filtre a une bande passante B3dB bien plus basse que celle du signal NRZ, BNRZ, qui passedans le filtre. La figure suivante montre la réponse en amplitude d’un tel filtre.
Figure IV. 25 – Réponse en amplitude d’un filtre GSM pour modulation GMSK.
Chapitre IV : Modulations numériques p. 55 2004-2005
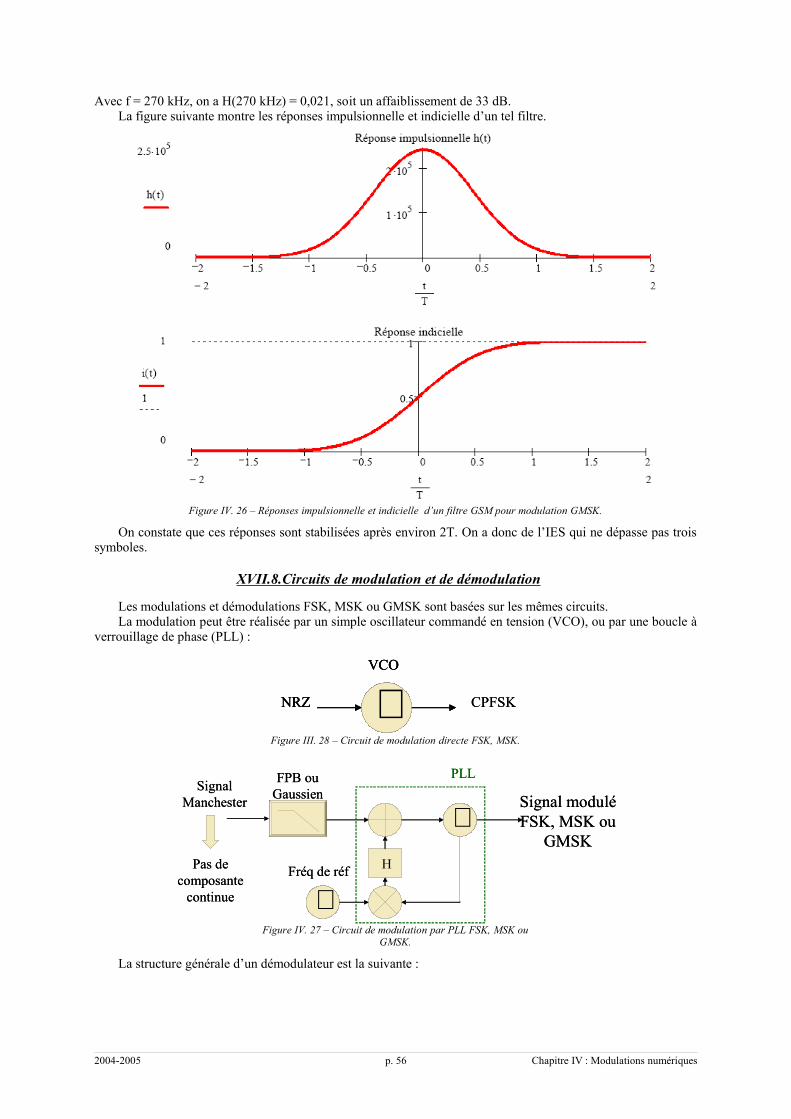
Avec f = 270 kHz, on a H(270 kHz) = 0,021, soit un affaiblissement de 33 dB.La figure suivante montre les réponses impulsionnelle et indicielle d’un tel filtre.
Figure IV. 26 – Réponses impulsionnelle et indicielle d’un filtre GSM pour modulation GMSK.
On constate que ces réponses sont stabilisées après environ 2T. On a donc de l’IES qui ne dépasse pas troissymboles.
XVII.8. Circuits de modulation et de démodulation
Les modulations et démodulations FSK, MSK ou GMSK sont basées sur les mêmes circuits.La modulation peut être réalisée par un simple oscillateur commandé en tension (VCO), ou par une boucle à
verrouillage de phase (PLL) :
CPFSK∼VCO
NRZ CPFSK∼VCO
NRZ ∼∼VCO
NRZ
Figure III. 28 – Circuit de modulation directe FSK, MSK.
∼
Signal Manchester
FPB ou Gaussien Signal modulé
FSK, MSK ou GMSK
∼
Fréq de réf H
PLL
Pas de composante
continue ∼∼
Signal Manchester
FPB ou Gaussien Signal modulé
FSK, MSK ou GMSK
∼∼
Fréq de réf H
PLL
Pas de composante
continue
Figure IV. 27 – Circuit de modulation par PLL FSK, MSK ouGMSK.
La structure générale d’un démodulateur est la suivante :
2004-2005 p. 56 Chapitre IV : Modulations numériques

Signal NRZ démodulé
Signal modulé FSK
Circuit de décision
Détecteur
DétecteurFPB à f1
FPB à f2
Signal NRZ démodulé
Signal modulé FSK
Circuit de décision
DétecteurDétecteurDétecteur
DétecteurFPB à f1DétecteurDétecteurDétecteurFPB à f1
FPB à f2
Figure IV. 28 – Synoptique général d’un circuit de démodulation FSK, MSK ou GMSK.
Lorsque le détecteur est de type compteur, on parle de démodulation asynchrone. Si le détecteur est de typePLL, on a un démodulateur synchrone.
XVII.9. Avantages et inconvénients
La modulation de fréquence FSK a les avantages suivants : Pas de connaissances nécessaires sur le débit ; Liaison synchrone ou asynchrone.
En revanche, l’efficacité spectrale de ce type de modulation reste faible.
XVII.10. Comparaison des performances des modulations
XVII.10.a. Efficacité spectrale Modulation Efficacité (bits/s/Hz)
MSK 1BPSK 1QPSK 2
16QAM 432QAM 564QAM 6128QAM 8
XVII.10.b. Taux d’erreur binaire
Chapitre IV : Modulations numériques p. 57 2004-2005

XVIII. Le multiplexage
Lorsque la bande passante d’un support est nettement plus large que le spectre du signal à transmettre, il estintéressant d’utiliser un même support pour transmettre parallèlement plusieurs signaux. On parle demultiplexage. Le démultiplexage consiste à reconstituer les différents signaux à partir du signal multiplexé.
XVIII.1. Multiplexage fréquentiel
Le multiplexage fréquentiel est utilisable dans les transmissions analogiques et numériques. Il consiste àtransposer les n signaux d’entrée (ce qui revient à une modulation), chacun ayant une fréquence porteusedifférente. On parle alors d’Accès Multiple à Répartition de Fréquence (AMRF ou FDMA en anglais).
Figure IV. 29 – Principe de l’AMRF.
Le multiplexage fréquentiel est utilisé pour les transmissions sur fibre optique où les opérations demultiplexage et de démultiplexage peuvent se faire de manière complètement optique. On parle alors demultiplexage en longueur d’onde (WDM : Wavelengh Division Multiplexing).
XVIII.2. Multiplexage temporel
Le multiplexage temporel est appelé Accès Multiple à Répartition dans le Temps (AMRT ou TDMA enanglais).
Si on considère n signaux numériques, le multiplexage consiste à transmettre d’abord un ou plusieurs bits dela voie 1, puis de la voie 2 et ainsi de suite jusqu’à la voie n pour former une trame TDMA. Le signal multiplexéest composé de plusieurs trames. Si le débit des entrées est D bits/s, alors le débit du multiplex est de n×D, ce quisignifie que le spectre de ce multiplex est étalé. Pour pouvoir démultiplexer, il est nécessaire de transmettre deséléments de synchronisation afin de réaffecter correctement l’entrée à la voie correspondante.
Figure IV. 30 – Principe de l’AMRT.
L’AMRT est utilisé dans le réseau téléphonique. On parle alors de voie MIC, Modulation par Impulsions etCodage (ou PCM, Pulse Code Modulation). La voix humaine est numérisée sous la forme d’un signal à 64kbits/s, soit 1 octet transmis toutes les 125 µs, puis codée en bande de base. En Europe, on multiplexetemporellement 30 voies. Le signal multiplexé contient 30 intervalles de temps ou IT contenant chacun une voie.A ces 30 IT, on ajoute un élément de synchronisation (IT0) et un élément de signalisation (en général IT16). Onobtient donc un total de 32 IT et un débit brut de 32×64 = 2048 kbits/s, capable de transporter 30communications.
2004-2005 p. 58 Chapitre IV : Modulations numériques

Figure IV. 31 – Exemple de trame AMRT : Signal RNIS. Les voies 1 à 15 sontplacées dans les IT1 à IT15 et les voies 16 à 30 dans les IT17 à IT31.
Il est possible de multiplexer plusieurs voies déjà multiplexées si le support est capable de transmettre desdébits plus élevés. Dans le cadre du réseau téléphonique, différents niveaux de multiplexage sont définis, enmultiples de 2,048 Mbits/s, produisant une hiérarchie de muliplexage.
XVIII.3. Multiplexage par codage
Une troisième méthode de multiplexage et d’accès, envisageable en particulier dans les réseaux dedistribution, est l’Accès Multiple à Répartition par Code (AMRC ou Code Division Multiple Access, CDMA).
Ce multiplexage est basé sur l’affectation d’un code à chaque utilisateur. Chaque bit correspondant au ″1″est remplacé par une séquence de M créneaux, différente pour chaque utilisateur et définie comme la signature decelui-ci. Seul le destinataire possédant la bonne clé pourra décoder le signal qui lui est adressé parmi toutes lesinformations transmises :
Figure IV. 32 – Principe de l’AMRC.
Cette technique connaît un véritable essor dans le domaine de la téléphonie mobile et des recherches sont encours pour l’appliquer dans le domaine optique.
XVIII.4. Conclusion
Le multiplexage de n signaux, occupant chacun une largeur de bande B, génère un signal de largeursupérieure ou égale à n×B, pour le multiplexage fréquentiel comme pour le multiplexage temporel. Il n’y aaucune économie faite sur la bande consommée mais seulement sur l’aspect matériel (un seul support au lieu den).
XIX. Synthèse
Les supports de transmission sont de nature très différente les uns des autres : paires métalliques, câblescoaxiaux, fibre optique, ether. Ils sont caractérisés par leur bande passante qui limite le débit maximal auquel onpeut transmettre et le taux d’erreur qu’ils introduisent sur les signaux transportés. Les techniques de transmission(en bande de base et par transposition de fréquence) ont pour objet d’adapter au mieux les signaux auxcaractéristiques de ces supports. Elles sont normalisées au niveau international et mises en œuvre par un modem.Ce dernier est relié aux équipements informatiques par une interface elle-même normalisée. La plus classique estV24, alias RS232C.
Chapitre IV : Modulations numériques p. 59 2004-2005

CHAPITRE V : FILTRAGE NUMÉRIQUE
Ce chapitre définit la notion de filtrage numérique et présente les propriétés générales des filtres numériques.Il étudie par ailleurs les cellules de filtrage élémentaires d’ordre 1 et 2.
On appelle filtre numérique un système discret, linéaire et invariant dans le temps, opérant sur des signauxdiscrets. Un signal discret (xn) est une suite prenant ses valeurs dans R, le plus souvent, parfois C.
Les premiers filtres ont servi à simuler des filtres analogiques sur ordinateurs. Les suites d’entrée et de sortiedu filtre sont alors dépourvues de tout support physique.
Puis, on a réalisé des systèmes discrets travaillant sur des signaux physiques échantillonnés et numérisés. Dans cecas, en notant Te la période d’échantillonnage, les valeurs de la suite (xn) valent xn = x(n.Te) :
Il faut alors que les performances attendues du filtre numérique soient cohérentes avec la précision de laconversion analogique-numérique.
Si la fréquence d’échantillonnage,fe, est peu supérieure à 2fmax, fréquence maximale du signal x(t), le filtreantirepliement de spectre peut être assez difficile à réaliser. Il pourra alors être intéressant de suréchantillonnerl’entrée analogique, ce qui simplifie le filtre antirepliement analogique, en élargissant sa bande de transition. Onsous-échantillonnera ensuite le signal numérique en lui appliquant un filtre antirepliement numérique.
Les principaux avantages des filtres numériques sont : Ils sont reproductibles sans réglage ; Ils sont programmables ; Ils ne dérivent pas, ni en temps, ni en température ; On peut les rendre facilement adaptatifs (dans ce cas, le système n’est plus invariant dans le temps) ; Ils permettent de réaliser des filtres à phase parfaitement linéaire.
Les principaux inconvénients sont : Leur consommation ; Leur limitation en fréquence : ils sont limités par la vitesse des opérateurs de calcul numérique ; Leur coût.
Les fonctions des filtres numériques sont analogues à celles des filtres analogiques. On les utilise en généraldans le but d’atténuer une ou plusieurs bandes de fréquences. On parle de : Filtre passe-bas lorsque l’on atténue les hautes fréquences ; Filtre passe-haut lorsque l’on atténue les basses fréquences ; Filtre coupe-bande lorsque l’on atténue une bande de fréquences ; Filtre passe-bande lorsque l’on favorise une bande fréquences ;
Un autre rôle des filtres est de corriger la fonction de transfert d’un canal qui introduit de la distorsion. Dansce cas, le canal est dit dispersif et le filtre est appelé égaliseur.
On trouve essentiellement deux grandes familles de filtres numériques :Filtres RIF : Réponse Impulsionnelle Finie (FIR en anglais)
Avantages : Toujours stables Phase linéaire si les coefficients sont symétriques Pas de distorsion de phase Possibilité de réaliser toutes sortes de filtres en dessinant simplement des
gabarits de réponse en amplitude ( )fK et en calculant la transformée deFourier inverse k(t).
2004-2005 p. 60 Chapitre V : Filtrage numérique
Filtre numériquexn
yn
CAN
CNA
Filtre anti-repliement
Filtre de lissage
fe
x(t) y(t)
Filtre numériquex
ny
n

Inconvénients : Beaucoup de calculs par rapport à un IIR équivalent au niveau desperformances.
Le retard du filtre (de groupe ou de phase) peut être important si le nombre de″taps″ est élevé.
Filtres RII : Réponse Impulsionnelle Infinie (IIR, en anglais)Avantage : Beaucoup moins de calculs par rapport à un FIR équivalent au niveau des
performances.Inconvénients : Il faut vérifier la stabilité.
Phase non linéaire distorsion de phase.
I. Systèmes linéaires discrets invariants dans le temps
XIX.1. Définitions
Un filtre numérique est un système discret linéaire invariant dans le temps. Il associe à la suite d’entrée (xn)une suite de sortie (yn).
XIX.1.a. Linéarité Soient deux suites x1(n) et x2(n) avec les sorties correspondantes y1(n) et y2(n). Un système est linéaire si et
seulement si :
( ) ( ) ( ) ( )nynynxnx 221122112
1 λ+λ→λ+λ
ℜ∈λ∀ℜ∈λ∀
Eq. IV. 1
XIX.1.b. Invariance dans le temps Soit la suite x(n) et la sortie correspondante y(n), dire que le système est invariant dans le temps signifie qu’à
la suite x(n – n0) correspond la sortie y(n – n0), et ceci quelque soit n0.
XIX.2. Réponse impulsionnelle
La réponse impulsionnelle d’un système discret linéaire dans le temps est la réponse du filtre à une entréeimpulsion un. Cette réponse impulsionnelle est généralement notée hn.
La suite impulsion un est définie par :
Chapitre V : Filtrage numérique p. 61 2004-2005
Filtre numériqueu
nh
nn = 0
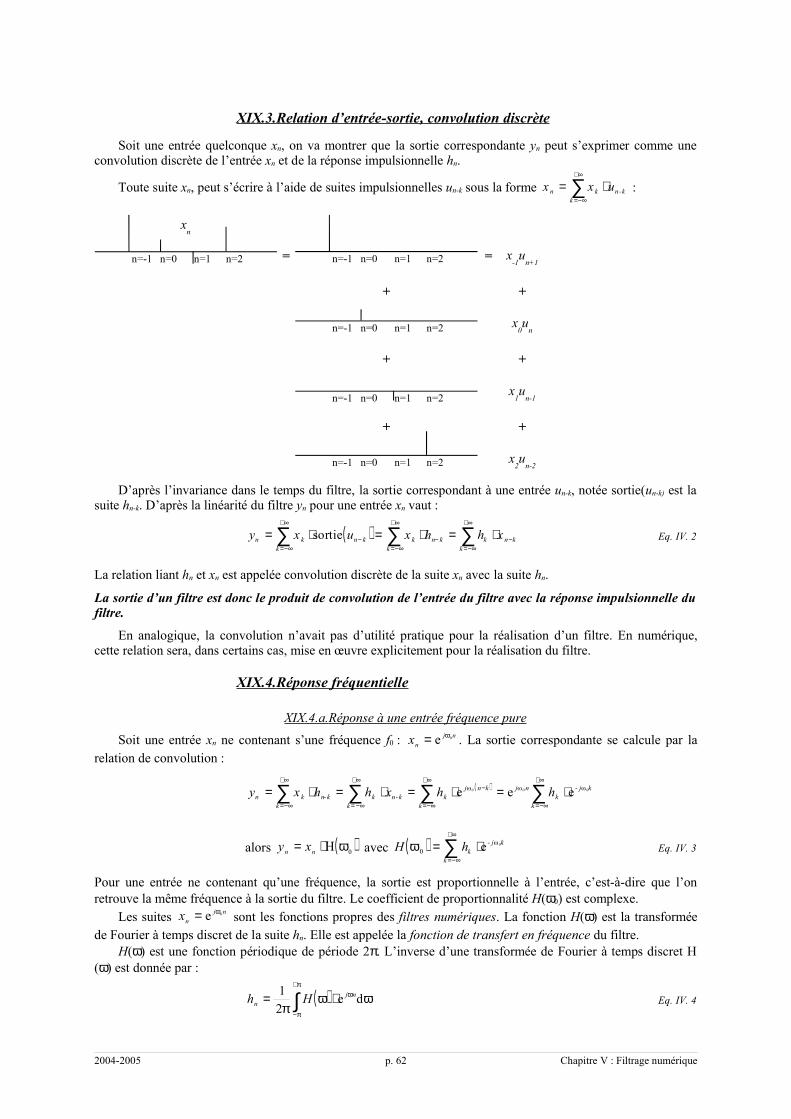
XIX.3. Relation d’entrée-sortie, convolution discrète
Soit une entrée quelconque xn, on va montrer que la sortie correspondante yn peut s’exprimer comme uneconvolution discrète de l’entrée xn et de la réponse impulsionnelle hn.
Toute suite xn, peut s’écrire à l’aide de suites impulsionnelles un-k sous la forme ∑+∞
−∞=
⋅=k
k-nkn uxx :
D’après l’invariance dans le temps du filtre, la sortie correspondant à une entrée un-k, notée sortie(un-k) est lasuite hn-k. D’après la linéarité du filtre yn pour une entrée xn vaut :
( ) ∑∑∑+∞
−∞=−
+∞
−∞=−
+∞
−∞=− ⋅=⋅=⋅=
kknk
kknk
kknkn xhhxuxy sortie Eq. IV. 2
La relation liant hn et xn est appelée convolution discrète de la suite xn avec la suite hn.
La sortie d’un filtre est donc le produit de convolution de l’entrée du filtre avec la réponse impulsionnelle dufiltre.
En analogique, la convolution n’avait pas d’utilité pratique pour la réalisation d’un filtre. En numérique,cette relation sera, dans certains cas, mise en œuvre explicitement pour la réalisation du filtre.
XIX.4. Réponse fréquentielle
XIX.4.a. Réponse à une entrée fréquence pure Soit une entrée xn ne contenant s’une fréquence f0 : nj
nx 0e ω= . La sortie correspondante se calcule par larelation de convolution :
( ) ∑∑∑∑+∞
−∞=
+∞
−∞=
−+∞
−∞=
+∞
−∞=
⋅=⋅=⋅=⋅=k
kj-k
nj
k
knjk
kk-nk
kk-nkn
000 hhxhhxy ωωω eee
alors ( )0H ω⋅= nn xy avec ( ) ∑+∞
−∞=
⋅=ωk
kj-k
0hH ω0 e Eq. IV. 3
Pour une entrée ne contenant qu’une fréquence, la sortie est proportionnelle à l’entrée, c’est-à-dire que l’onretrouve la même fréquence à la sortie du filtre. Le coefficient de proportionnalité H(ω0) est complexe.
Les suites njnx 0e ω= sont les fonctions propres des filtres numériques. La fonction H(ω) est la transformée
de Fourier à temps discret de la suite hn. Elle est appelée la fonction de transfert en fréquence du filtre.H(ω) est une fonction périodique de période 2π. L’inverse d’une transformée de Fourier à temps discret H
(ω) est donnée par :
( )∫π+
π−
ω ω⋅ωπ
= de21 nj
n Hh Eq. IV. 4
2004-2005 p. 62 Chapitre V : Filtrage numérique
n=-1 n=0 n=1 n=2 = n=-1 n=0 n=1 n=2
n=-1 n=0 n=1 n=2
+
n=-1 n=0 n=1 n=2
+
n=-1 n=0 n=1 n=2
+
xn
+
+
+
x-1u
n+1
x0u
n
x1u
n-1
x2u
n-2
=

XIX.4.b. Relation entre les transformées de Fourier de l’entrée et de la sortie Soit une suite d’entrée xn quelconque et sa transformée de Fourier X(ω). La sortie yn a pour transformée de
Fourier Y(ω).
∑+∞
−∞=
⋅=k
k-nkn xhy
( ) ∑+∞
−∞=
ω⋅=ωn
nj-n exX et ( ) ∑
+∞
−∞=
ω⋅=ωn
nj-n eyY
( ) ( )∑∑∑∑∑+∞
−∞=
+∞
∞=
ωω+∞
−∞=
+∞
∞=
ω+∞
−∞=
ω ⋅⋅⋅=⋅⋅=⋅=ωn -k
kj-k-nj-k-nk
n -k
nj-k-nk
n
nj-n eexhexheyY
( ) ( ) ( ) ( )ω⋅ω=
⋅×
⋅=ω ω
+∞
∞=
+∞
−∞=
ω ∑∑ XHexehY k-nj-
-k-nk-n
k
kj-k
( ) ( ) ( )ω⋅ω=ω XHY Eq. IV. 5
On peut donc caractériser un filtre numérique soit par sa réponse impulsionnelle hn, soit par sa fonction detransfert en fréquence H(ω), qui est la transformée de Fourier de la suite hn. En pratique, on s’intéressera souventau module de la fonction de transfert H, ce module caractérisant l’atténuation ou le gain du filtre pour chaquefréquence.
Le filtre introduit un déphasage pour chaque fréquence : ( ) ( )( )ω=ωΦ HArg .Lorsque ce déphasage est proportionnel à w, ( ) ω=ωΦ k , alors le filtre numérique ne déforme pas les
signaux dans la bande passante. Soit, par exemple, ( ) ( )222111 2cos.a2cos.a Φ+π+Φ+π= nfnfxn . En supposantque f1 et f2 soient dans la bande passante du filtre avec un gain unité pour la fonction de transfert, on peut écrire :
( )( ) ( )( )( ) ( )
( )( ) ( )( )222111
22221111
22221111
2cos.a2cos.a22cos.a22cos.a
2cos.a2cos.a
Φ++π+Φ++π=π+Φ+π+π+Φ+π=
Φ+Φ+π+Φ+Φ+π=
knfknfyfknffknfyfnffnfy
n
n
n
La sortie est donc égale à l’entrée retardée de –k échantillons.
On appelle retard de groupe cette valeur de –k. Dans le cas général, on définit le retard de groupe τ(ω) par :
( ) ( )ω∂ωΦ∂−=ωτ Eq. IV. 6
Le retard de groupe représente un retard introduit par le filtre pour chaque fréquence. Lorsque la phase estlinéaire, le retard de groupe est constant.
Dans de nombreuses applications, en particulier en transmission de données, il est important de ne pasdéformer le signale utile et on utilisera des filtres à phase linéaire.
Dans d’autres cas, on cherchera à obtenir un retard de groupe aussi petit que possible.
XIX.5. Fonction de transfert en z
XIX.5.a. Définition On étudie les propriétés d’un filtre analogique à l’aide de H(p), sa fonction de transfert en p, qui est la
transformée de Laplace de sa réponse impulsionnelle. De même, on étudie les propriétés d’un filtre numérique, àl’aide de H(z), sa fonction de transfert en z, qui est la transformée en z de sa réponse impulsionnelle hn.
( ) ∑+∞
−∞=
⋅=n
n-nhH zz
On remarquera que H(ω) est la restriction de H(z) au cercle unité (|z| = 1) :
( ) ( ) ω=
+∞
−∞=
ω− =⋅=ω ∑ j
n
jnnhH
ezzHe
Chapitre V : Filtrage numérique p. 63 2004-2005

XIX.5.b. Relation entre les transformées en z de l’entrée et de la sortie du filtre
On rappelle que la transformée en z d’une suite xn est définie comme la limite d’une série de Laurent lorsquecette série converge. On notera respectivement X(z), Y(z) et H(z), les transformées en z de l’entrée xn, de la sortieyn et de la réponse impulsionnelle hn.
( ) ∑+∞
−∞=
⋅=n
n-nxX zz ; ( ) ∑
+∞
−∞=
⋅=n
n-nhH zz et ( ) ∑
+∞
−∞=
⋅=n
n-nyY zz
( ) ( )
( ) ( ) ( )z.zzzz
zzzz
HXxhY
xhxhY
xhy
-k-nm
mm
-k
kk
n
k-nk
-kk-nk
n
n
-kk-nk
kk-nkn
=
⋅×
⋅=
⋅
⋅=
⋅=
⋅=
∑∑
∑ ∑∑ ∑
∑
∞+
∞==
−∞+
∞=
−
∞+
−∞=
−−∞+
∞=
∞+
−∞=
−∞+
∞=
+∞
−∞=
( ) ( ) ( )z.zz HXY =
En résumé, pour un filtre numérique, on peut écrire :
( ) ( ) ( )( ) ( ) ( )z.zz HXY
XHY
xhhxyk
k-nkk
k-nkn
=ω⋅ω=ω
⋅=⋅= ∑∑+∞
−∞=
+∞
−∞=
XX. Quelques rappels sur la transformée en z
XX.1. Domaine de convergence
Le critère de Cauchy permet d’étudier l’existence de la transformée en z :
+∞<< ∑∑+∞
=
+∞
= 00 nn
nn xx si 1lim
1
<∞→
nnn
x
XX.1.a. Séquences causales Une séquence xn est dite causale si elle est nulle pour n < 0. Pour une séquence causale, la transformée en z
est monolatérale :
( ) ∑+∞
=
⋅=0
zn
n-n zxX
X(z) existe si 1zlim1
<⋅ −
∞→nn
nnx c’est-à-dire si 1zlim 11
<−
∞→n
nnx soit n
nnx
1
limRz∞→+ => .
La transformée en z d’une suite causale est donc définit à l’extérieur d’un cercle de rayon R+.
XX.1.b. Séquences anticausales Une séquence xn est dite anticausale si elle est nulle pour n ≥ 0. Pour une séquence anticausale, la
transformée en z s’écrit :
( ) ∑∑+∞
=
−
−∞=
⋅=⋅=1
1
zn
nn-
n
n-n zxzxX
X(z) existe si 1zlim1
<⋅∞→
nnn-n
x c’est-à-dire si 1zlim1
<∞→
nn-n
x soit nn-n
x1
limRz∞→− => .
La transformée en z d’une suite causale est donc définit à l’intérieur d’un cercle de rayon R –.
2004-2005 p. 64 Chapitre V : Filtrage numérique

XX.1.c. Suites quelconques Une suite quelconque xn est la somme d’une suite causale x+ et d’une suite anticausale x– :
−+ += nnn xxxavec : nn xx =+ si 0≥n
0=+nx si 0<n
et nn xx =− si 0<n0=−
nx si 0≥n
La transformée en z d’une suite quelconque est donc définie dans une couronne −+ << RzR , quand cettecouronne existe.
XX.2. Linéarité
( ) ( ) ( )( ) ( )( ) ( )( )nxnxnxnx 2211221121 TZTZTZ, ⋅λ+⋅λ=λ+λλλ∀
XX.3. Théorème du retard
XX.3.a. Cas de la transformée en z bilatérale
( )
( ) ( ) ( ) ( )zzTZzTZ
zz
XxXx
xX
kk-nn
n
n-n
⋅=⇒=
⋅=
−
+∞
−∞=∑
XX.3.b. Cas de la transformée en z monolatérale
( )
( ) ( ) ( ) ( )
( ) ( )
( ) ( ) ∑
∑
∑∑
∑
=
−−
+
−=
−−−
∞+
−=
−−∞+
=
−−−
−
+∞
=
⋅+⋅=
⋅⋅+⋅=
⋅⋅=
⋅⋅=⇒=
⋅=
k
n
knn
kk-n
km
mm
kkk-n
km
mm
k
n
knkn
kk-nn
n
n-n
xXx
xXx
xxxXx
xX
1-
1
0
0
zzzTZ
zzzzTZ
zzzzTZzTZ
zz
XX.4. Théorème de la convolution
Soit zn, la suite obtenue par convolution de 2 suites xn et yn : nnn yxz ∗= . On utilise les notations( ) ( )nxX TZz = , ( ) ( )nyY TZz = et ( ) ( )nzZ TZz = où TZ signifie transformée en z monolatérale. On montre
facilement que :
( ) ( ) ( )zzz YXZyxz nnn
⋅=∗=
XX.5. Théorème de Parseval
( ) ( ) ( )∫∫∑−
−−∞+
−∞=
=⋅⋅π
=2
2
2
eunitécercle
112
e
e
d1dzzzz2
1f
fnn ffX
fXX
jx
XX.6. Théorème de la valeur initiale et de la valeur finale
( )zlimlim0
Xxznn +∞→→
= pour une suite causale
( ) ( )z-z1limlim 1-
1Xx
znn →+∞→= pour une suite anticausale
Chapitre V : Filtrage numérique p. 65 2004-2005

XX.7. Intégration et dérivation
( )
( ) ( ) ( )zz1TZ
zz1
1TZ
11
1
Xxx
Xx
nn
n
ii
⋅−=−−
=
−−
−−∞=
∑
XX.8. Inversion de la transformée en z
L’inverse de la transformée en z est donnée par : ( )∫ −⋅π
=unitécercle
1dzzz2
1 nn X
jx
Démonstration :
Calculons ∫ −
C
dzz n où C représente le cercle unité, en posant jθerz ⋅= , avec r = 1, et θjθdedz = :
∫∫π
−− =2
0
deedzz θj jθjnθn
C
Si n ≠ 1, alors :( )
( ) 01
1edee21--2
0
=−
−=ππ
−∫ njjθj
njjθjnθ
Si n = 1, alors π== ∫∫ππ
− jθjθj jθjθ 2ddee2
0
2
0
En conclusion :1si0dzz
1si2dzz
≠=
=π=
∫
∫−
−
n
nj
n
n
C
C
D’où pour X(z) : ( ) nkn
kk
k
nk-k
n xjxxX π=⋅=⋅⋅=⋅ ∫∑∫ ∑∫+∞
−∞=
+∞
−∞=
− 2dzzdzzzdzzz 1--1-1
CCC
D’où : ( )∫ −⋅π
=C
nn X
jx dzzz
21 1
XXI. Fonctions de transfert rationnelles en z, FIR et IIR
En général, on utilisera des filtres dont la fonction de transfert est rationnelle. H(z) s’écrit alors comme lerapport d’un numérateur N(z) et d’un dénominateur D(z) polynômes en z-1 :
( ) ( )( ) ∑
∑
=
−
=
−
⋅+
⋅== P
1
Q
0
za1
zb
zzz
k
kk
i
ii
DNH
On a normalisé a0 à 1. Dans la suite de ce cours, on se limitera, sauf exception, à ces filtres. Ils sont simples àréaliser. La sortie yn s’écrit en fonction des entrées et des sorties précédentes à l’aide d’une équation derécurrence à coefficients constants. En effet :
( ) ( )( )
( )( ) ( ) ( ) ( ) ( )
( ) ( ) ( )∑∑=
−
=
− ⋅⋅=⋅⋅+
⋅=⋅⇒==
Q
0
P
1
zzbzzaz
zzzzzz
zz
z
i
ii
k
kk XYY
NXDYXY
DN
H
D’où par transformée en z inverse :
∑∑==
⋅=⋅+Q
0-
P
1- ba
iini
kknkn xyy
∑∑==
⋅−⋅=P
1-
Q
0- ab
kknk
iinin yxy
2004-2005 p. 66 Chapitre V : Filtrage numérique

Cette équation de récurrence à coefficients constants permet de réaliser simplement le filtre. Il y a bien sûrd’autres structures de réalisations possibles, mais elles utilisent, de même, des multiplieurs, des additionneurs etdes mémoires.
La figure suivante représente une cellule de filtrage d’ordre 2 (P = Q = 2).
Figure IV. 33 – Exemple de cellule de filtrage d’ordre 2.
On aurait pu considérer de façon plus générale, des fonctions de transfert H(z) rationnelles contenant despuissances de z positives, ce qui correspondrait à des filtres non causaux.
On distingue deux types de filtres : les filtres RII à Réponse Impulsionnelle Infinie (ou IIR) et les filtres RIFà Réponse Impulsionnelle Finie (ou FIR).
Les filtres RII ont la forme générale : ( ) ( )( )zzz
DNH = avec ( ) 1z ≠D . Ces filtres sont dits récursifs car le calcul
de la sortie yn à l’instant n fait intervenir les valeurs de P sorties précédentes yn-k. Ils sont caractérisés par les pôleset les zéros de leur fonction de transfert H(z).
Les filtres RIF ont un dénominateur D(z) égal à 1. Ils sont caractérisés par leurs seuls zéros. La réponseimpulsionnelle des filtres RIF est de longueur finie puisque :
( ) [ ][ ]
=−∈∀=−∉∀
⇒⋅=⋅= ∑∑+∞
−∞=
−
=
−
nn
n
n
nn
i
ii bhn
hnH
1Q,001Q,0
zhzbzQ
0
La réponse impulsionnelle hn d’un filtre RIF n’a donc qu’un nombre fini de valeurs non nulles, et hn coïncideavec les coefficients bn de l’équation de récurrence. En conclusion, pour un filtre RIF :
( )
∑
∑
=−
=
−
⋅=
⋅=
Q
0
Q
0
b
zbz
iinin
i
ii
xy
H
XXI.1. Calcul de la réponse impulsionnelle d’un filtre RII
On peut, quand le filtre est de type RII, calculer sa réponse impulsionnelle de différentes façons : Soit en appliquant la formule de la transformée en z inverse et utilisant le théorème des résidus ; Soit en effectuant une division polynomiale de N(z) par D(z) ; Soit, quand les pôles de D(z) sont simples, en utilisant la somme de la série géométrique :
1qpour1
10
<−
=∑+∞
n
n
Chapitre V : Filtrage numérique p. 67 2004-2005

XXI.1.a. Rappels sur le théorème des résidus L’intégrale sur un contour fermé C d’une fonction complexe holomorphe F(z) rationnelle vaut :
( ) ( )∑∫ ×π=CC danszpôles i
zRésidu2dzzF ij
Où zi est un pôle de F(z).
Pour ( ) ( )
( )( )
( )∏=
−⋅−== P
1
1zz1
zzzzF
ii
NDN
Si zi est un pôle simple : ( ) ( ) ( )zFzzlimzRésiduzz ii
i
−=→
Si zi est un pôle multiple d’ordre k : ( ) ( )( ) ( )( )
1
1
zz zzFzz
!11limzRésidu −
−
→ ∂⋅−∂
−= k
ki
k
i ki
Exemple :
Soit ( )1
1za11z
−+=H
1. Calcul de hn par identification avec une série géométrique : Lorsque |a1| < 1 (on verra par la suite que cette condition est nécessaire pour que le filtre soit stable) on peutécrire :
( ) ( )
( ) ∑
∑∞+
−∞=
−
+∞
=
−−
=
−=+
=
n
nn
n
hH
H
zz
zaza1
1z
0
n111
1
Et par identification :
( )
≥−=<=
0poura0pour0
1 nhnh
nn
n
2. Calcul de hn par transformée en z inverse : Pour cet exemple, la formue de la transformée inverse nous donne :
( ) ( )( ) ( ) ( )[ ] ( ) nnnnn HHH
jh 1
11az
1apour
1 azzazlimzzRésidudzzz2
11
1−=⋅⋅+=⋅=⋅
π= −
→
−−
−∫C
XXII. Causalité et stabilité
XXII.1. Causalité
Un filtre numérique est dit causal, si sa réponse impulsionnelle hn est nulle pour n < 0. Sa transformée en zconverge alors à l’extérieur d’un cercle.
Un filtre numérique est dit anticausal, si sa réponse impulsionnelle hn est nulle pour n ≥ 0. Sa transformée enz converge alors à l’intérieur d’un cercle.
XXII.2. Stabilité
On dira qu’un filtre numérique est stable, si à toute entrée bornée xn correspond une sortie yn bornée. Pourtoute suite (xn) bornée :
'M,,'M,,M <∀∃⇒<∀∃ nn ynnxn
2004-2005 p. 68 Chapitre V : Filtrage numérique

XXII.2.a. Première condition nécessaire et suffisante de stabilité Une condition nécessaire est suffisante de stabilité s’écrit :
A<∑+∞
−∞=nnh
C’est une condition suffisante car :
∑+∞
−∞=−⋅=
kknkn xhy
∑∑+∞
−∞=−
+∞
−∞=− ⋅≤⋅=
kknk
kknkn xhxhy
AMMM ⋅<⋅<⇒< ∑+∞
−∞=kknn hyx
C’est une condition nécessaire car : Un contre exemple suffit à le montrer. Ainsi, l’entrée bornée xn, égale à 1si h-n est positif et à -1 si h-n est négatif, génère une sortie y0 non bornée :
Si ( )nn hx −= Signe alors ∑∑+∞
−∞=
+∞
−∞=
=⋅=n
nn
nn hhxy --0 non bornée.
XXII.2.b. Deuxième condition nécessaire et suffisante de stabilité
Lorsque le filtre est causal et que sa fonction de transfert est rationnelle,il existe une autre condition nécessaire et suffisante de stabilité : Il fautet il suffit que tous les pôles de H(z) soient à l’intérieur du cercle unité.
Réciproquement pour un filtre anticausal de fonction de transfertrationnelle, une condition nécessaire et suffisante de stabilité est quetous les pôles de H(z) soient à l’extérieur du cercle unité.
Démonstration dans le cas causal :H(z) rationnelle peut se décomposer en K éléments simples correspondant à des pôles simples ou multiples. Laréponse impulsionnelle h(n) est la somme de K termes hi(n) égaux aux transformées en z inverses des élémentsde la décomposition pour les pôles zi.
Pour un pôle simple zi, en notant 1zz1 −− i
iA l’élément correspondant de la décomposition de H(z) en éléments
simples, on a :
( ) ( ) nii
i
iii AAnh
i
zzz1
zzlim1zz
⋅=
−
−=−→
Et la somme des valeurs absolues de hi(n) est bornée si et seulement si |zi| < 1.
De même pour un pôle zi multiple, d’ordre k, en notant ( )
( ) ki
iA1zz1
z−−
l’élément correspondant de la décomposition
de H(z) en éléments simples, on a :
( ) ( )( )( ) ( )iik
kni
1-k
i BA
knh z
zzz
!11
1-
1
=∂
∂⋅
−=
−+
Bi(zi) est un polynôme de degré (n+k-1) au maximum. La somme des valeurs absolues de hi(n) est bornée si etseulement si |zi| < 1
XXII.2.c. Stabilité des FIR On remarquera que les filtres FIR ont comme seul pôle z = 0 et que ce pôle est à l’intérieur du cercle unité.
Les FIR sont toujours stables. C’est une des raisons pour lesquelles ils sont très utilisés en filtrage adaptatif. Eneffet, les coefficients d’un filtre adaptatif varient à chaque nouvel échantillon, il faut donc vérifier la stabilité dufiltre à chaque nouvel échantillon. Mais pour un filtre FIR, cette vérification est inutile.
Chapitre V : Filtrage numérique p. 69 2004-2005

XXIII. Etude des filtres numériques élémentaires
XXIII.1. Introduction
Ce paragraphe présente les caractéristiques des cellules élémentaires de filtrage FIR et IIR d’ordre un etdeux. La connaissance du comportement de ces filtres est importante car très souvent, les filtres d’ordre élevé,sont réalisés par l’association en cascade ou en parallèle de ces cellules élémentaires.
Dans les tracés de fonction de transfert, l’axe des fréquences sera limité à la plage [0, fe/2] et on normaliserafe/2 à 1.
Avant d’étudier les cellules élémentaires de filtrage, le paragraphe commence par une analyse des zéros detransmission.
XXIII.2. Etude des zéros de transmission
Les filtres FIR et IIR possédant un numérateur peuvent présenter des zéros de transmission, c'est-à-dire queleur fonction de transfert fréquentiel peut s’annuler pour certaines valeurs de fréquence.
La fonction de transfert en fréquence correspond aux valeurs prises par la fonction de transfert en z lorsque zévolue sur le cercle unité. Un zéro de transmission correspond aussi à un zéro de la fonction de transfert et cezéro, noté zi, est situé sur le cercle unité. Son module vaut 1 et son argument vaut θi : ijθ
i ez = . Cet argument θi
correspond à un zéro de transmission pour une pulsation ω et une fréquence f telles que :
e
T2T
2zz
eez ee
fθf ii
fjj
π=⇒=
== πω
XXIII.2.a. Cas d’une cellule d’ordre 1 Dans le cas d’une cellule FIR d’ordre 1 ou d’un numérateur d’ordre 1 pour une cellule IIR, le polynôme en z-
1 s’écrit :
( ) 110 zbbz −+=N
Le zéro de N(z) vaut 0
10 b
bz −= . Il est réel. Comme le module de z0 vaut 1, les seules solutions sont z0=1 et z0=-1.
Les zéros de transmission ne peuvent avoir lieu qu’à la fréquence nulle ou à la fréquence fe/2. Les seulspolynômes d’ordre 1 présentant des zéros de transmission sont de la forme :
( ) ( )( ) ( )1
0
10
z1bzz1bz
−
−
−=+=
NN
Les figures suivantes représentent les zéros de H(z) dans le plan z, pour les deux types de fonction à zéros detransmission à l’ordre 1 et les deux fonctions de transfert possibles (en module) à l’ordre 1, possédant un zéro detransmission soit en f = 0, soit en f = fe/2 :
Figure V. 1 – Fonction de transfert et zéros de transmission pour unecellule d’ordre 1.
2004-2005 p. 70 Chapitre V : Filtrage numérique

XXIII.2.b. Cas d’une cellule d’ordre 2 Dans le cas des cellules FIR d’ordre 2 ou d’un numérateur d’ordre 2 pour un filtre IIR, le polynôme d’ordre
2 en z-1 s’écrit :
( ) 22
110 zbzbbz −− ++=N
Les coefficients de N(z) sont réels, les zéros sont donc imaginaires conjugués et s’écrivent :
1
1
jθ-
jθ
ezzez
12
1
===
Et
( ) ( )( )( ) ( )( )21
10
11
110
zzcos21bzzz1zz1bz
−−
−−
+−=−−=
θNN
La figure suivante représente le cas de 2 zéros d’arguments 31
π=θ et 32
π−=θ , ce qui correspond à un zéro
de transmission en 6
ef .
Figure V. 2 – Fonction de transfert et zéros de transmission pour une cellule d’ordre2.
XXIII.3. Cellule FIR d’ordre 1
XXIII.3.a. Généralités La cellule causale FIR d’ordre 1 a pour fonction de transfert en z, le polynôme H(z) suivant :
( ) 110 zbbz −+=H
La fonction H(z) n’a pas de pôle à l’extérieur du cercle unité, elle est donc stable.Comme pour tous les FIR, la réponse impulsionnelle est facile à calculer par identification avec la définition :
( ) 110
P
0
zbbzz −
=
− +== ∑n
nnhH
On en déduit que nn bhn =∀ et en particulier ici :
h0 = b0
h1 = b1
hn = 0 si n ∉ [0,1]
La fonction de transfert en fréquence est obtenue à partir de H(z) par la relation ( ) ( )ee Tπ2Tπ2 e
zze fjfj HH == . Cette
fonction sera notée abusivement H(f) par la suite :
( ) eT210 ebb fjfH π−+=
Chapitre V : Filtrage numérique p. 71 2004-2005
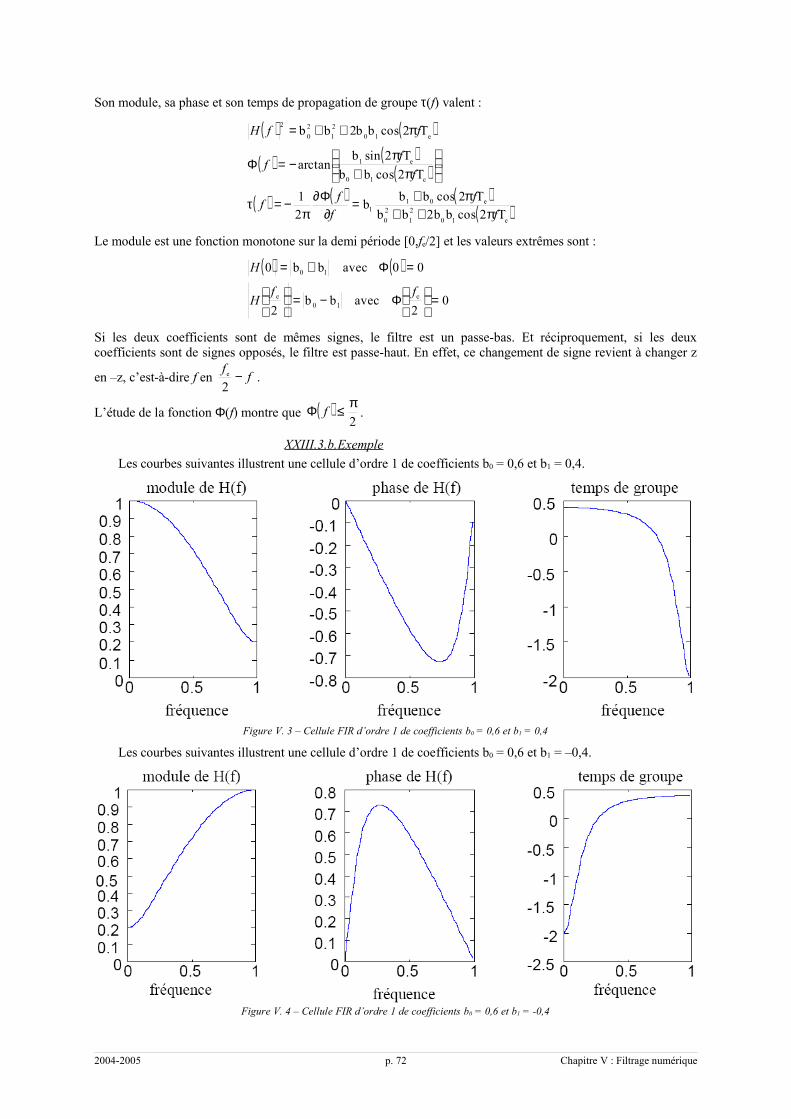
Son module, sa phase et son temps de propagation de groupe τ(f) valent :
( ) ( )
( ) ( )( )
( ) ( ) ( )( )e10
21
20
e011
e10
e1
e1021
20
2
T2cosbb2bbT2cosbbb
21
T2cosbbT2sinb
arctan
T2cosbb2bb
ff
fff
ff
f
ffH
π++π+=
∂Φ∂
π−=τ
π+
π−=Φ
π++=
Le module est une fonction monotone sur la demi période [0,fe/2] et les valeurs extrêmes sont :
( ) ( )
02
avecbb2
00avecbb0
e10
e
10
=
Φ−=
=Φ+=
ffH
H
Si les deux coefficients sont de mêmes signes, le filtre est un passe-bas. Et réciproquement, si les deuxcoefficients sont de signes opposés, le filtre est passe-haut. En effet, ce changement de signe revient à changer z
en –z, c’est-à-dire f en ff −2
e .
L’étude de la fonction Φ(f) montre que ( )2π≤Φ f .
XXIII.3.b. Exemple Les courbes suivantes illustrent une cellule d’ordre 1 de coefficients b0 = 0,6 et b1 = 0,4.
Figure V. 3 – Cellule FIR d’ordre 1 de coefficients b0 = 0,6 et b1 = 0,4
Les courbes suivantes illustrent une cellule d’ordre 1 de coefficients b0 = 0,6 et b1 = –0,4.
Figure V. 4 – Cellule FIR d’ordre 1 de coefficients b0 = 0,6 et b1 = -0,4
2004-2005 p. 72 Chapitre V : Filtrage numérique

XXIII.3.c. Cellules spéciales Deux cellules d’ordre 1 sont particulièrement intéressantes parce qu’elles possèdent des zéros de
transmission : ( ) ( )10 z1bz −+=H qui s’annule pour la fréquence fe/2 et ( ) ( )1
0 z1bz −−=H qui s’annule pour lafréquence 0.
D’autre part, si b0 = –b1, la phase s’écrit ( ) eT2
ff π−π=Φ . Le temps de propagation de groupe est constant et
vaut ( )2Te=τ f .
Si b0 = b1, la phase est linéaire et s’écrit ( ) eTff π−=Φ . Le temps de propagation de groupe est constant et vaut
( )2Te=τ f .
XXIII.4. Cellule FIR d’ordre 2
XXIII.4.a. Généralités La cellule causale FIR d’ordre 2 a pour fonction de transfert en z, le polynôme suivant :
( ) 22
110 zbzbbz −− ++=H
La fonction H(z) n’a pas de pôle à l’extérieur du cercle unité, elle est donc stable.Comme pour tous les filtres FIR, la réponse impulsionnelle est facile à calculer par identification avec ladéfinition :
( ) 22
110
P
0
zbzbbzz −−
=
− ++== ∑n
nnhH
On en déduit que nn bhn =∀ et en particulier ici :
h0 = b0
h1 = b1
h2 = b2
hn = 0 si n ∉ [0,1,2]
La fonction de transfert en fréquence est obtenue à partir de H(z) par la relation ( ) ( )eT2
e
ez
T2 ze fjHH fjπ=
π = . Cettefonction sera notée abusivement H(f) par la suite :
( ) ee T42
T210 ebebb fjfjfH π−π− ++=
Le polynôme H(z) en z-1 possède deux zéros. Si les deux zéros sont réels, le filtre peut être considéré commeformé de deux cellules d’ordre 1 en cascade. Nous nous intéresserons, dans ce paragraphe, simplement au casd’une ″vraie″ cellule d’ordre 2, possédant deux zéros complexes. Comme les coefficients bi sont réels, ces zérossont complexes conjugués. Appelons les z1 et z2. On peut les écrire en coordonnées polaires sous la forme :
( ) ( )( )12
110
112
11
zz1zz1bzerzz
erz1
1
−− −−===
=
H
jθ-
jθ
En identifiant les deux écritures de H(z), on déduit les relations liant les coefficients bi aux coordonnées polairesdes zéros :
( ) ( )2
101102
1101101
rbzzbb
cosrb2zzbb
==
−=+= θ
Son module, sa phase et son temps de propagation de groupe τ(f) valent :
( )( ) ( ) ( )
( ) ( )( ) ( )( )1e12
11e12
120
2
2T21
2T21
20
2
2T21
2T21
20
2
T2cosr2r1T2cosr2r1b
er1er1b
ez1ez1b
1e1e
ee
θfθffH
fH
fHθfjθfj
fjfj
+π−+−π−+=
−−=
−−=+π−−π−
π−π−
Chapitre V : Filtrage numérique p. 73 2004-2005

( ) ( )( )
( )( )
( ) ( )
( ) ( ) ( ) ( )[ ] ( ) ( ) ( ) ( )[ ]( )[ ] ( )[ ]1e1
211e1
21
e111e11e12
11
1e1
1e1
1e1
1e1
T2cosr2r1T2cosr2r1T2coscosr22cosT4cosrrT2coscosr1
r2
21
T2cosr1T2sinr
arctanT2cosr1
T2sinrarctan
θfθffθθffθ
f
fff
θfθf
θfθf
f
+π−+−π−+π−+π−−π+
−=τ
∂Φ∂
π−=τ
+π−
+π−
−π−
−π=Φ
Pour la cellule d’ordre 2, la fonction Φ(f) est, en valeur absolue, inférieure à π.
XXIII.4.b. Etude des extrema du module de la fonction de transfert en fréquence
Pour étudier les extrema de |H(f)|, il faut étudier sa dérivée par rapport à f. Lorsque cette dérivée s’annule, lefonction |H(f)| passe par un extremum. Pour trouver les valeurs de f ou la dérivée est nulle, on dérive |H(f)|2 et onétudie pour quelles valeurs de f cette dérivée s’annule, sans que H(f) ne soit nulle.
( ) ( ) ( ) ( ) ( ) ( ) ( )[ ]e112
1e1e20
2
T2cosr2cosr1T2sinrT4b2 fθff
fHfH
ffH
π−+ππ=∂
∂=
∂∂
Dans l’intervalle [0,fe/2], cette dérivée s’annule lorsque :
- Soit sin(2πfTe) s’annule, c’est-à-dire pour f = 0 et f = fe/2 ;
- Soit ( ) ( ) ( )e112
1 T2cosr2cosr1 fθ π−+ s’annule, c’est-à-dire pour une fréquence fR
telle que : ( ) ( ) ( ) ( )02
120
1
12
1eR bb4
bbbr2cosr1
T2cos+
−=+
=πθ
f
Ce dernier cas n’est possible que si ( ) ( ) 1
r2cosr1
1
12
1 ≤+ θ, c’est-à-dire si
( ) 1bb4
bbb
02
120 ≤+. Ces zéros sont des zéros
de ( )f
fH∂
∂ et non de ( )fH , sauf dans le cas trivial où r1 = 1 et θ1 = 0.
D’autre part, la dérivée de H(f) par rapport à f est négative pour f < fR puis positive pour f > fR. La fréquencefR, quand elle existe, correspond donc forcement à un minimum de ( )fH . Une cellule FIR d’ordre 2 peut doncprésenter une antirésonance.
Si r1 est proche de 1, la fréquence fR est proche de π2
e1 fθ. Il y a égalité si r1 = 1.
La valeur de ( )fH pour f = fR est : ( ) ( ) ( )12
10 sinr1b θfH −=
Comme on l’a vu précédemment, si r1 = 1, la cellule possède un zéro de transmission qui correspond au minimumde ( )fH . Soit BR la largeur de bande à mi-hauteur de cette antirésonance : −+ −= ffBR . f– et f+ sont lesfréquences pour lesquelles |H(f)|2 = 2|H(fR)|2, lorsque ces deux fréquences existent. On peut écrire |H(f)|2 sous laforme d’un polynôme d’ordre 2 en cos(2πfTe) :
( ) ( ) ( ) ( ) ( ) ( ) ( ) 2211
21e1
211e
221
2 r12cosr2T2coscosr1r4T2cosr4 +++π+−π= θfθffH
Pour ( ) ( ) ( )1222
1
2 sinr1 θfH −= , le discriminent du polynôme est nul et on retrouve la solution correspondant à la
fréquence de résonance ( ) ( ) ( )1
12
1eR r2
cosr1T2cos
θf
+=π .
Pour ( ) ( ) ( ) ( )1222
1
2
R
2 sinr122 θfHfH −== , le polynôme s’écrit :
( ) ( ) ( ) ( ) ( ) ( ) 0r2r12cosT2coscosr1r4T2cosr4 21
411e1
211e
221 =++++π+−π θfθf
le discriminent s’écrit ( ) ( ) ( ) ( )( ) ( ) ( )1222
12
12
14
112
11222
12
1 sinr1r16r2r12cosr16cosr1r16 θθθ −=+++−+=∆ , il est positifet on en déduit deux expressions pour les racines potentielles :
2004-2005 p. 74 Chapitre V : Filtrage numérique

( ) ( ) ( ) ( )
( ) ( ) ( ) ( )1
12
1eRe
1
12
1eRe
r2sinr1T2cosT2cos
r2sinr1T2cosT2cos
θff
θff
−+π=π
−−π=π
−
+
Ces deux racines n’existent que si :
( ) ( ) ( )
( ) ( ) ( ) 1r2sinr1T2cos
1r2sinr1T2cos
1
12
1eR
1
12
1eR
≤−+π
≤−−π
θf
θf
Toutes les situations sont possibles : les deux racines existent, une seule racine existe, ou bien aucune racinen’existe. Dans le cas où les deux conditions sont vérifiées, c’est-à-dire où les deux racines existent, on peutcalculer une approximation de la largeur de bande de l’antirésonance. A partir des valeurs de cos(2πf+Te) et cos(2πf–Te), on en déduit que pour r1 ≈ 1 :
( ) ( ) ( ) ( ) ( )1
12
1eRe
RRee r2
sinr12TBsinT2
B2sin2T2cosT2cos θfff −−≈π
+π−=π−π −+
D’où
e1
R
r1B fπ−≈
XXIII.4.c. Inversion du module des zéros, polynôme réciproque de H(z) Les cellules FIR d’ordre 2 définies par les fonctions de transfert H(z) et Hr(z) = z-2H(z-1) possèdent des pôles
de mêmes arguments θ1 et – θ1 mais de modules inverses r1 et 1/r1. Elles présentent (si les conditionsd’antirésonance sont vérifiées) une antirésonance pour la même fréquence fR. Ces deux fonctions de transfert ontle même module mais :
( ) ( )( ) ( )ff
fffτ−=τ
Φ−π−=Φ
er
er
T2T4
Les filtres numériques dont les zéros sont à l’intérieur du cercle unité sont dits à phase minimale.
XXIII.4.d. Exemple Les figures suivantes représentent la fonction de transfert H(f) en module, en phase, en temps de propagation
de groupe ainsi que la position des zéros de H(z), pour les valeurs de r1 = 0,95 et θ1 = π/3, ce qui correspond à( ) 21 z9025,0z95,01z −− +−=H .
La fréquence d’antirésonance fR est telle que 2πfRTe=1,0464, ce que l’on peut comparer à θ1=π/3=1,0472.
Chapitre V : Filtrage numérique p. 75 2004-2005

Figure V. 5 – Exemple de cellule RIF d’ordre 2 avec r1 = 0,95 et θ1 =π/3.
XXIII.4.e. Changement du signe du coefficient b 1, changement de z en –zSi l’on change le signe de b1, ou, ce qui revient au même, z en –z, le filtre change de type. Les valeurs de H
(0) et de H(fe/2) sont inversées. Dans l’exemple ci-dessus, le filtre est plutôt un passe-haut (dans le sens que H(f =0)<H(f = fe/2). Si on remplace b1 = –0,95 par b1 = 0,95, le filtre résultant est un passe-bas. Changer le signe de b1
revient à remplacer θ1 par π – θ1. Si les angles des zéros (en valeur absolue) sont inférieurs à π/2, le filtre est unpasse-haut. Si les angles des zéros (en valeur absolue) sont supérieurs à π/2, le filtre est un passe-bas.
En fait, changer z en –z, revient à multiplier z par ejπ. Dans le domaine fréquentiel, multiplier eT2e fj π par ejπ,revient à remplacer eT2e fj π par ( ) ee T22e ffj +π Remplacer z par –z est donc équivalent à une translation de –fe/2 dansle domaine fréquentiel, et ceci quelque soit H(z). Un passe-bas devient un passe-haut et réciproquement.
2004-2005 p. 76 Chapitre V : Filtrage numérique
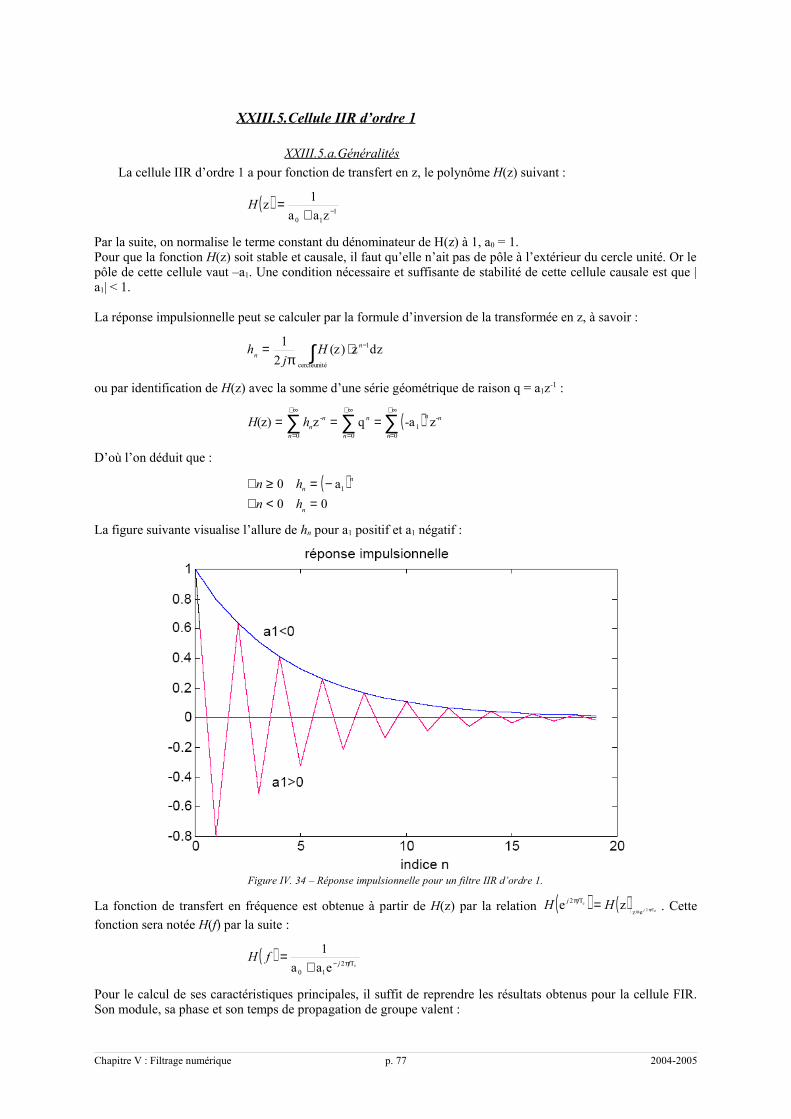
XXIII.5. Cellule IIR d’ordre 1
XXIII.5.a. Généralités La cellule IIR d’ordre 1 a pour fonction de transfert en z, le polynôme H(z) suivant :
( )1
10 zaa1z
−+=H
Par la suite, on normalise le terme constant du dénominateur de H(z) à 1, a0 = 1.Pour que la fonction H(z) soit stable et causale, il faut qu’elle n’ait pas de pôle à l’extérieur du cercle unité. Or lepôle de cette cellule vaut –a1. Une condition nécessaire et suffisante de stabilité de cette cellule causale est que |a1| < 1.
La réponse impulsionnelle peut se calculer par la formule d’inversion de la transformée en z, à savoir :
∫ −⋅π
=unitécercle
1dzz)z(2
1 nn H
jh
ou par identification de H(z) avec la somme d’une série géométrique de raison q = a1z-1 :
( )∑∑∑+∞
=
+∞
=
+∞
=
===0
-1
00
- z-aqz(z)n
nn
n
n
n
nnhH
D’où l’on déduit que :
( )00
a0 1
=<∀−=≥∀
n
nn
hnhn
La figure suivante visualise l’allure de hn pour a1 positif et a1 négatif :
Figure IV. 34 – Réponse impulsionnelle pour un filtre IIR d’ordre 1.
La fonction de transfert en fréquence est obtenue à partir de H(z) par la relation ( ) ( )eT2
e
ez
T2 ze fjHH fjπ=
π = . Cettefonction sera notée H(f) par la suite :
( )eT2
10 eaa1
fjfH
π−+=
Pour le calcul de ses caractéristiques principales, il suffit de reprendre les résultats obtenus pour la cellule FIR.Son module, sa phase et son temps de propagation de groupe valent :
Chapitre V : Filtrage numérique p. 77 2004-2005
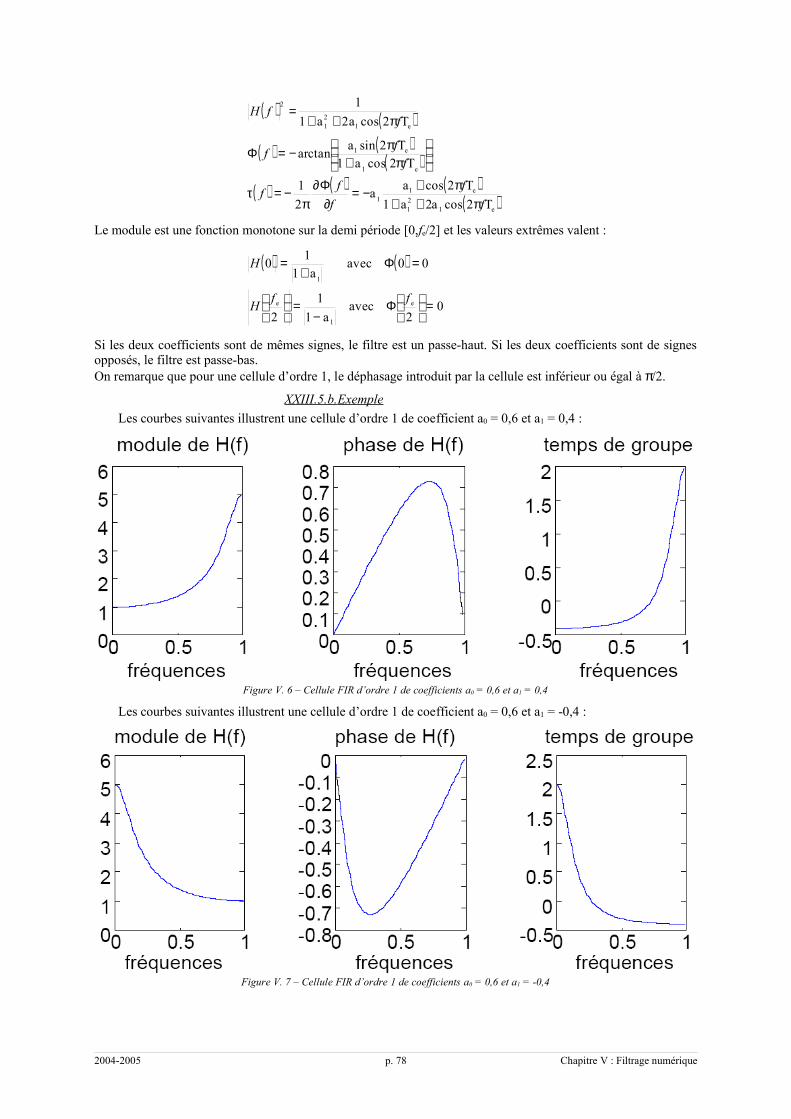
( ) ( )
( ) ( )( )
( ) ( ) ( )( )e1
21
e11
e1
e1
e121
2
T2cosa2a1T2cosaa
21
T2cosa1T2sinaarctan
T2cosa2a11
ff
fff
fff
ffH
π++π+−=
∂Φ∂
π−=τ
π+
π−=Φ
π++=
Le module est une fonction monotone sur la demi période [0,fe/2] et les valeurs extrêmes valent :
( ) ( )
02
aveca1
12
00aveca1
10
e
1
e
1
=
Φ
−=
=Φ+
=
ffH
H
Si les deux coefficients sont de mêmes signes, le filtre est un passe-haut. Si les deux coefficients sont de signesopposés, le filtre est passe-bas.On remarque que pour une cellule d’ordre 1, le déphasage introduit par la cellule est inférieur ou égal à π/2.
XXIII.5.b. Exemple Les courbes suivantes illustrent une cellule d’ordre 1 de coefficient a0 = 0,6 et a1 = 0,4 :
Figure V. 6 – Cellule FIR d’ordre 1 de coefficients a0 = 0,6 et a1 = 0,4
Les courbes suivantes illustrent une cellule d’ordre 1 de coefficient a0 = 0,6 et a1 = -0,4 :
Figure V. 7 – Cellule FIR d’ordre 1 de coefficients a0 = 0,6 et a1 = -0,4
2004-2005 p. 78 Chapitre V : Filtrage numérique

XXIII.6. Cellule IIR d’ordre 2
XXIII.6.a. Généralités La cellule causale IIR d’ordre 2 a pour fonction de transfert en z, le polynôme H(z) suivant :
( ) 22
110 zazaa
1z −− ++
=H
On a, comme pour la cellule d’ordre 1, normalisé a0 à 1.La fonction H(z) causale est stable si et seulement si ses pôles sont à l’intérieur du cercle unité, c’est-à-dire quesont module est inférieur à 1.La fonction H(z) possède deux pôles. Si les deux pôles sont réels, le filtre peut être considéré comme formé dedeux cellules d’ordre 1 en cascade. Nous nous intéresserons, dans ce paragraphe, seulement au cas d’une ″vraie″cellule d’ordre 2 possédant deux pôles complexes. Comme les coefficients ai sont réels, ces pôles sont complexesconjugués. Appelons z1 et z2 ces pôles. On peut les écrire en coordonnées polaires sous la forme :
( ) ( ) ( )12
11
112
11
zz1zz11
z
erzzerz
1
1
−− −−=
===
H
jθ-
jθ
En identifiant les deux écritures de H(z), on déduit les relations liant les coefficients ai aux coordonnées polairesdes pôles :
( ) ( )2
1112
11111
rzzacosr2zza
==−=+= θ
La réponse impulsionnelle peut se calculer par la formule d’inversion de la transformée en z, ou par identificationde H(z) avec des sommes de séries géométriques :
( ) ( )( )( )( )
( )
( )( )( )
00n
sin1sinr
zzz
zzz0n
zzrésidus
dzzz1zz1
z2
1dzzz
21
1
11
11
11
11
11
zdepôles
1
unitécercle1
21
1
1
unitécercle
1
=<∀
+=
−
+−
=≥∀
⋅=
−−π=⋅
π=
++
−
−−
−−
∑∫∫
n
nn
n
H
nn
nn
n
h
θθnh
Hh
jH
jh
La figure suivante représente les réponses impulsionnelles pour r1 = 0,95 et θ1 = π/3 (ce qui correspond à uncoefficient a1 < 0), ainsi que pour r1 = 0,95 et θ1 = 2π/3 (ce qui correspond à un coefficient a1 > 0) :
Figure V. 8 – Exemples de filtre IIR d’ordre 2 pour lesquelsr1 = 0,95 et θ1 = π/3 ; r1 = 0,95 et θ1 = 2π/3.
Chapitre V : Filtrage numérique p. 79 2004-2005

La fonction de transfert en fréquence est obtenue à partir de H(z) par la relation : ( ) ( )eTπ2
e
ez
Tπ2 ze fjHH fj
== . Comme
précédemment, cette fonction sera notée H(f).
( )ee Tπ4
2Tπ2
10 eaeaa1
fj-fj-fH
++=
Le module, la phase et le temps de propagation de groupe de la fonction de transfert en fréquence peuvents’exprimer en fonction des coordonnées polaires des pôles, il suffit de reprendre et de modifier correctement lesrésultats obtenus pour la cellule FIR. Ils valent :
( )
( )( ) ( )
( ) ( )( ) ( )( )1e12
11e12
1
2
2T21
2T21
2
2T21
2T21
2
T2cosr2r1T2cosr2r11
er1er11
ez1ez11
1e1e
ee
θfθffH
fH
fH
θfjθfj
fjfj
+π−+−π−+=
−−=
−−=
+π−−π−
π−π−
( ) ( )( )
( )( )
( ) ( )
( ) ( ) ( ) ( )[ ] ( ) ( ) ( ) ( )[ ]( )[ ] ( )[ ]1e1
211e1
21
e111e11e12
11
1e1
1e1
1e1
1e1
T2cosr2r1T2cosr2r1T2coscosr22cosT4cosrrT2coscosr1
r2
21
T2cosr1T2sinr
arctanT2cosr1
T2sinrarctan
θfθffθθffθ
f
fff
θfθf
θfθf
f
+π−+−π−+π−+π−−π+
−=τ
∂Φ∂
π−=τ
+π−
+π−
−π−
−π−=Φ
XXIII.6.b. Etude des extrema du module de la fonction de transfert en fréquence
Les calculs qui ont déjà été faits pour la cellule FIR dans le paragraphe précédent peuvent être repris ici. Ladérivée de |H(f)| par rapport à f s’écrit :
( ) ( ) ( ) ( ) ( ) ( ) ( )[ ]( )( ) ( )( )2
1e12
1
2
1e12
1
e112
1e1e
2
T2cosr2r1T2cosr2r1T2cosr2cosr12T2sinrT4
2θfθf
fθff
fHfH
ffH
+π−+−π−+π−+ππ
−=∂
∂=
∂∂
Dans l’intervalle [0,fe], cette dérivée s’annule lorsque :
- Soit sin(2πfTe) s’annule, c’est-à-dire pour f = 0 et f = fe/2 ;
- Soit ( ) ( ) ( )e112
1 T2cosr2cosr12 fθ π−+ s’annule, c’est-à-dire pour une fréquence fR
telle que : ( ) ( ) ( )1
12
1eR r
cosr1T2cos
θf
+=π
Ce dernier cas n’est possible que si ( ) ( ) 1
rcosr1
1
12
1 ≤+ θ.
D’autre part, inversement au cas des FIR, la dérivée de |H(f)| par rapport à f est positive pour f < fR puisnégative pour f > fR. La fréquence fR, quand elle existe, correspond donc forcement à un maximum de ( )fH .Une cellule IIR d’ordre 2 ne peut donc présenter qu’une résonance, alors qu’une cellule FIR d’ordre 2 ne peutprésenter qu’une antirésonance. La fréquence fR est appelée fréquence de résonance.
Si r1 est proche de 1, la fréquence fR est proche de π2
e1 fθ. Il y a égalité si r1 = 1.
La valeur de ( )fH pour f = fR est : ( )( ) ( )1
21 sinr1
1θ
fH−
=
Si r1 = 1, la cellule est un résonateur pur ou oscillateur, à la limite de stabilité (cette stabilité étant définie par lefait qu’à une entrée bornée correspond une sortie bornée).Soit BR la largeur de bande à mi-hauteur de cette antirésonance : −+ −= ffBR . f– et f+ sont les fréquences pour
lesquelles 2
)|(| )|(|2
R2 fHfH = :
2004-2005 p. 80 Chapitre V : Filtrage numérique

( ) ( ) ( ) ( )
( ) ( ) ( ) ( )1
12
1eRe
1
12
1eRe
r2sinr1T2cosT2cos
r2sinr1T2cosT2cos
θff
θff
−+π=π
−−π=π
−
+
D’où l’on en déduit (comme pour les FIR d’ordre 2) que pour r1 ≈ 1 : e1
R
r1B fπ−≈
XXIII.6.c. Inversion du module des zéros, polynôme réciproque de H(z) La cellule IIR d’ordre 2 ayant des pôles de même argument et de module 1/r1 présentera une résonance pour
la même fréquence fR. En fait, cette cellule a une fonction de transfert Hr(z) en z-1 qui est le polynôme réciproquede H(z) :
( ) ( )zzzzaa
1z 221
12r HH −
−−=
++=
H(f) et Hr(f) ont le même module mais :( ) ( )
( ) ( )fffff
τ−=τΦ−π−=Φ
er
er
T2T4
XXIII.6.d. Exemple Les figures suivantes représentent la fonction de transfert H(f) en module, en phase, en temps de propagation
de groupe ainsi que la position des zéros de H(z), pour les valeurs de r1 = 0,95 et θ1 = π/3, ce qui correspond à( )
21 z9025,0z95,011z
−− +−=H .
La fréquence de résonance fR est telle que 2πfRTe=1,0464, ce que l’on peut comparer à θ1=π/3=1,0472.
Figure V. 9 – Exemple de cellule IIF d’ordre 2 avec r1 = 0,95 et θ1 = π/3.
Chapitre V : Filtrage numérique p. 81 2004-2005
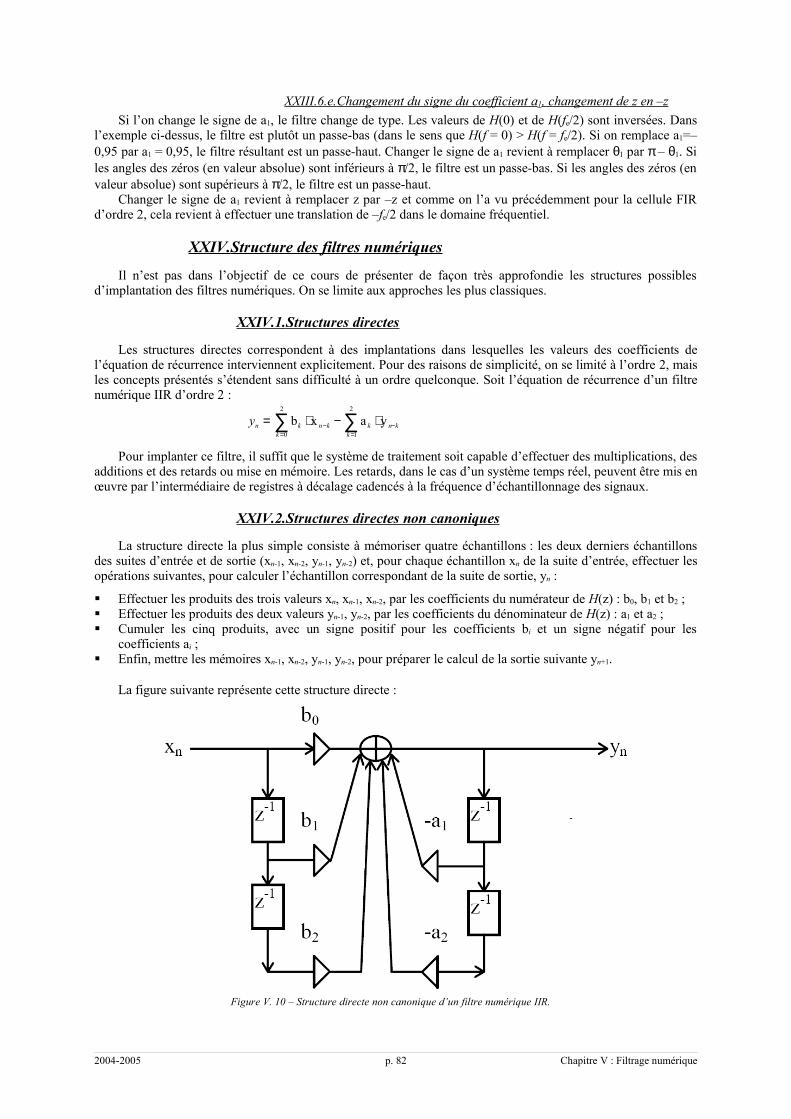
XXIII.6.e. Changement du signe du coefficient a 1, changement de z en –zSi l’on change le signe de a1, le filtre change de type. Les valeurs de H(0) et de H(fe/2) sont inversées. Dans
l’exemple ci-dessus, le filtre est plutôt un passe-bas (dans le sens que H(f = 0) > H(f = fe/2). Si on remplace a1=–0,95 par a1 = 0,95, le filtre résultant est un passe-haut. Changer le signe de a1 revient à remplacer θ1 par π – θ1. Siles angles des zéros (en valeur absolue) sont inférieurs à π/2, le filtre est un passe-bas. Si les angles des zéros (envaleur absolue) sont supérieurs à π/2, le filtre est un passe-haut.
Changer le signe de a1 revient à remplacer z par –z et comme on l’a vu précédemment pour la cellule FIRd’ordre 2, cela revient à effectuer une translation de –fe/2 dans le domaine fréquentiel.
XXIV. Structure des filtres numériques
Il n’est pas dans l’objectif de ce cours de présenter de façon très approfondie les structures possiblesd’implantation des filtres numériques. On se limite aux approches les plus classiques.
XXIV.1. Structures directes
Les structures directes correspondent à des implantations dans lesquelles les valeurs des coefficients del’équation de récurrence interviennent explicitement. Pour des raisons de simplicité, on se limité à l’ordre 2, maisles concepts présentés s’étendent sans difficulté à un ordre quelconque. Soit l’équation de récurrence d’un filtrenumérique IIR d’ordre 2 :
∑∑=
−=
− ⋅−⋅=2
1
2
0
yaxbk
knkk
knkny
Pour implanter ce filtre, il suffit que le système de traitement soit capable d’effectuer des multiplications, desadditions et des retards ou mise en mémoire. Les retards, dans le cas d’un système temps réel, peuvent être mis enœuvre par l’intermédiaire de registres à décalage cadencés à la fréquence d’échantillonnage des signaux.
XXIV.2. Structures directes non canoniques
La structure directe la plus simple consiste à mémoriser quatre échantillons : les deux derniers échantillonsdes suites d’entrée et de sortie (xn-1, xn-2, yn-1, yn-2) et, pour chaque échantillon xn de la suite d’entrée, effectuer lesopérations suivantes, pour calculer l’échantillon correspondant de la suite de sortie, yn :
Effectuer les produits des trois valeurs xn, xn-1, xn-2, par les coefficients du numérateur de H(z) : b0, b1 et b2 ; Effectuer les produits des deux valeurs yn-1, yn-2, par les coefficients du dénominateur de H(z) : a1 et a2 ; Cumuler les cinq produits, avec un signe positif pour les coefficients bi et un signe négatif pour les
coefficients ai ; Enfin, mettre les mémoires xn-1, xn-2, yn-1, yn-2, pour préparer le calcul de la sortie suivante yn+1.
La figure suivante représente cette structure directe :
Figure V. 10 – Structure directe non canonique d’un filtre numérique IIR.
2004-2005 p. 82 Chapitre V : Filtrage numérique

XXIV.3. Structures directes canoniques DN et ND
La structure directe présentée ci-dessus n’est pas canonique, dans le sens où elle n’utilise pas un nombreminimum de mémoires.
Il est possible de réaliser le même filtre d’ordre 2 avec seulement deux cases mémoires. Les structurescanoniques DN et ND sont des structures directes utilisant explicitement les coefficients ai et bi et ne nécessitantque deux cases mémoires pour un filtre d’ordre 2.
XXIV.3.a. Structure canonique DN La structure canonique DN réalise le filtre en calculant d’abord la sortie du filtre de fonction de transfert
( )zD1
, puis la sortie du filtre de fonction de transfert N(z). D’où le nom de structure DN. On peut écrire :
( ) ( ) ( )( ) ( )
( ) ( )
( ) ( )( ) ( )zNzDzX
zY
zXzDzNzY
zXzzY
⋅=
⋅=
⋅= H
Soit
( ) ( )( )
( ) ( ) ( )zNzWzYzDzX
zW
⋅=
=
Ces relations peuvent se résumer par le schéma suivant :
Figure V. 11 – Structure directe canonique DN d’un filtre d’ordre 2.
La structure canonique DN correspond finalement à l’implantation suivante :
Figure V. 12 – Structure directe canonique DN d’un filtre numérique IIR.
XXIV.3.b. Structure canonique ND La structure canonique ND est la structure duale (au sens de la théorie des graphes) de la structure DN. Elle
soit son nom au fait que les coefficients du numérateur bi interviennent en amont des coefficients dudénominateur ai.
Les équations qui caractérisent cette structure sont :
2-n1-nnn
nnn
nnn
vuxyyxvyxu
++=−=−=
0
22
11
babab
La structure canonique ND correspond finalement à l’implantation suivante :
Chapitre V : Filtrage numérique p. 83 2004-2005
1/D(z) N(z)xn
wn
yn

Figure V. 13 – Structure directe canonique ND d’un filtre numérique IIR.
Cette structure est la plus fréquemment utilisée dans les circuits intégrés spécifiques pour le filtrage numérique.
XXIV.4. Structure décomposées
Les structures décomposées n’utilisent pas explicitement les coefficients ai et bi dans l’implantation du filtre.Elles se caractérisent par une décomposition de la fonction de transfert H(z) de degré N, en éléments de degréplus faible, 1 ou 2 en général.
Ces structures peuvent permettre d’obtenir de meilleures performances pour une implantation en précisionfinie, en terme de sensibilité à la quantification des coefficients ou en terme de bruit de calcul.
XXIV.4.a. Structures cascade La structure cascade se caractérise par une décomposition de H(z) en un produit de termes Hi(z) d’ordre 1 ou
2, selon que les pôles sont réels ou complexes. La fonction globale de filtrage H(z) est réalisée par une cascadede cellules de filtrage Hi(z) d’ordre 1 ou 2 :
( ) ( )∏=
=K
iiHH
0
zz avec
( ) 22,
11,
22,
11,0,
zaza1zbzbb
z −−
−−
++++
=ii
iiiiH
Les cellules Hi(z) sont implantées sous une forme canonique DN ou ND. La figure suivante représentel’implantation cascade d’un filtre d’ordre 5, dont le dénominateur possède un pôle réel et deux pôles complexesconjugués :
Figure V. 14 – Structure décomposée cascade d’un filtre numérique d’ordre 5.
XXIV.4.b. Structures parallèles La structure parallèle se caractérise par une décomposition de H(z) en une somme d’éléments simples Hk(z)
d’ordre 1 ou 2, selon que les pôles sont réels ou complexes. La fonction globale de filtrage H(z) est réalisée parune somme de sortie de cellules de filtrage Hk(z) d’ordre 1 ou 2, attaquées par la même entrée xn.
( ) ( )∑=
=L
kkHH
0
zz avec
( ) 22,
11,
11,0,
zaza1zbb
z −−
−
+++
=kk
kkkH
2004-2005 p. 84 Chapitre V : Filtrage numérique
H1(z) H
2(z) H
3(z)
xn
yn
H(z)

Les cellules Hk(z) sont implantées sous une forme canonique DN ou ND. La figure suivante représentel’implantation parallèle d’un filtre d’ordre 5, dont le dénominateur possède un pôle réel et deux pôles complexesconjugués.
Figure V. 15 – Structure décomposée parallèle d’un filtre numérique d’ordre 5.
XXIV.4.c. Comparaison Les structures cascade et parallèle ont des performances assez proches pour une implantation en précision
fine. Toutefois, on peut remarquer que la structure parallèle ne permet pas aussi facilement que la structurecascade de conserver les zéros de transmission après quantification des coefficients des cellules Hi(z).
La structure cascade se prête bien à une implantation séquentielle. La structure parallèle permet uneimplantation parallèle des opérateurs de calcul conduisant à une plus grande vitesse d’exécution.
Il existe de nombreuses autres structures décomposées, comme la structure treillis, ou les filtres d’ondes. Cesstructures ne sont pas développées ici. La théorie de la représentation d’état permet de comprendre le passaged’une structure à une autre et de comparer ces structures.
Chapitre V : Filtrage numérique p. 85 2004-2005
H1(z)
H2(z)
H3(z)
xn
yn+
H(z)

BIBLIOGRAPHIE
Ouvrages :
[1]J.M. Brossier, Signal et Communication Numérique, Hermès, 1997.
[2]M. Charbit et G. Blanchet, Eléments de traitement numérique du signal, Techniques de l’Ingénieur, 1998.
[3]M. Joindot et A. Glavieux, Introduction aux Communications Numériques, Collection Pédagogique deTélécommunication, Ellipses, 1995.
[4]J.G. Proakis, Digital Communications (4ème édition), McGraw Hill, 2000.
Sites web :
[1]http://www.esiee.fr/~bercherj/New/polys
[2]http://perso.wanadoo.fr/jkopff/index.html
[3]http://www.eiaj.ch/v2/support%5Fde%5Fcours/
[4]http://www.ulg.ac.be/telecom/teaching/notes/total0/elen036/index.html
[5]http://www.tsi.enst.fr/~charbit/
[6]http://www.commentcamarche.net/transmission/transintro.php3
[7]http://deptinfo.cnam.fr/Memoires/LUSTEAU.Franck/Pages/Sujet_du_probatoire.htm
2004-2005 p. 86 Bibliographie