Étude et caractérisation par émission acoustique et mesures...
155
Laboratoire Matériaux, Ingénierie et Sciences Numéro d’ordre 2009ISAL0103 THÈSE Présentée devant L’INSTITUT NATIONAL DES SCIENCES APPLIQUÉES DE LYON pour obtenir le grade de Docteur École doctorale : Matériaux de Lyon par Marianne PERRIN Ingénieur ISAT Étude et caractérisation par émission acoustique et mesures électrochimiques de la fragilisation par l’hydrogène des câbles de précontrainte. Application aux ouvrages d’art soutenue publiquement le 10 décembre 2009 Composition du jury Philippe Refait Professeur, Université de La Rochelle Rapporteur Gérard Moulins Professeur, UTC-Compiègne Rapporteur Bernard Normand Professeur, INSA-Lyon Examinateur Mohammed Cherfaoui Docteur, CETIM-Senlis Examinateur Laurent Gaillet Chargé de recherche, LCPC-Nantes Conseiller Scientifique Hassane Idrissi Maître de conférences HDR, INSA-Lyon Directeur de thèse Laboratoire Central des Ponts et Chaussées Centre de Nantes
Transcript of Étude et caractérisation par émission acoustique et mesures...
Laboratoire Matériaux, Ingénierie etSciences
Numéro d’ordre 2009ISAL0103
THÈSEPrésentée devant
L’INSTITUT NATIONAL DES SCIENCES APPLIQUÉES DELYON
pour obtenir le grade de Docteur
École doctorale : Matériaux de Lyon
par
Marianne PERRINIngénieur ISAT
Étude et caractérisation par émission acoustique etmesures électrochimiques de la fragilisation par
l’hydrogène des câbles de précontrainte. Applicationaux ouvrages d’art
soutenue publiquement le 10 décembre 2009
Composition du juryPhilippe Refait Professeur, Université de La Rochelle RapporteurGérard Moulins Professeur, UTC-Compiègne RapporteurBernard Normand Professeur, INSA-Lyon ExaminateurMohammed Cherfaoui Docteur, CETIM-Senlis ExaminateurLaurent Gaillet Chargé de recherche, LCPC-Nantes Conseiller ScientifiqueHassane Idrissi Maître de conférences HDR, INSA-Lyon Directeur de thèse
Laboratoire Central des Ponts et ChausséesCentre de Nantes

ii
À Aline

iv
Remerciements
Ce travail de thèse a été réalisé au sein du Laboratoire Central des Ponts et Chausséesde Nantes dans la division MACOA (Métaux, Armatures et Câbles pour Ouvrages d’Art).Je tiens à témoigner toute ma gratitude à Monsieur Christian Tessier, adjoint au directeurtechnique ouvrage d’art, pour m’avoir accueillie au sein de sa division et m’avoir donnéun rôle à part entière dans le groupe émission acoustique du programme ANR ACTENA(Auscultation des Câbles Tendus Non Accessibles).
J’aimerais remercier Monsieur Hassane Idrissi, maître de conférences de l’INSA deLyon, pour sa disponibilité et l’attention qu’il a porté à mon travail. Je lui suis égalementreconnaissante de m’avoir accueillie à plusieurs reprises dans l’équipe RI2S (réactivitéaux interfaces et ingénierie des surfaces) du laboratoire MATEIS (Matériaux Ingénierieet Sciences) de l’INSA de Lyon.
Merci à Monsieur Laurent Gaillet, chargé de recherche au LCPC, d’avoir répondu àmes questions chaque matin et d’être resté attentif à mon travail. Je le remercie égalementde la confiance qu’il m’a accordée ainsi que de ses encouragements.
J’aimerais exprimer ma gratitude à Monsieur Philippe Refait, professeur à l’Universitéde La Rochelle, ainsi qu’à Monsieur Gérard Moulins, professeur à l’Université de Techno-logie de Compiègne (UTC), pour avoir accepté d’être rapporteurs de ce travail.
Je remercie également Monsieur Bernard Normand, professeur de l’INSA de Lyon, ainsique Monsieur Mohammed Cherfaoui, responsable du pôle EPI (Équipement sous Pres-sion et Ingénierie d’Instrumentation) au CETIM, pour leur participation au jury de thèse.
Je te remercie Olivier, de m’avoir donné confiance en mes capacités avant d’entamerce travail de thèse. Chaque jour, tu as été là pour me soutenir, me renseigner et je t’enserai à jamais reconnaissante.
On est également plus fort lorsque l’on peut compter sur des amis, alors merci Virginied’avoir été dans le bureau mitoyen et de m’avoir écoutée parler de mes essais et d’avoirsupporté mes périodes de râlage et de rouspétance.
Et pour finir, on est plus fort lorsque l’on peut compter sur les compétences d’uneéquipe. Merci à Jean-François David d’avoir fait preuve d’imagination et de pugnacitédans les épreuves que j’ai pu lui donner à surmonter. Merci à Michel Grasset de m’avoirlivré une partie de son savoir. Je remercie doublement Julien Le Mouel de m’avoir sup-
v

vi
pléée en fin de thèse pour la préparation du thiocyanate ainsi que pour ses modélisationsqui agrémentent ce mémoire. Merci aux membres de la division MACOA qui ont tous, unjour ou l’autre, partagé mes tribulations.
Pour conclure, je remercie mes parents, Jean-Claude et Marie-José Perrin, d’avoir cruen moi et de m’avoir suivi dans cette aventure. Je remercie également mémé de Rodon,Georgette Delanoue, d’avoir pris soin de ma santé et de s’être inquiétée de l’avancée demes travaux. Merci également à ma soeur Faustine, je lui souhaite bon courage et bonnechance pour sa propre thèse.
Table des matières
Remerciements v
Liste des figures xiv
Liste des tableaux xvi
Introduction générale 1
1 Bibliographie 51.1 Les ouvrages d’art : conception et pathologies . . . . . . . . . . . . . . . . 5
1.1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.2 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.3 Pathologies des ouvrages d’art en béton précontraint . . . . . . . . 10
1.2 La corrosion sous contrainte de structures métalliques . . . . . . . . . . . . 161.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.2.2 Différentes formes de corrosion sous contrainte . . . . . . . . . . . . 161.2.3 Corrosion sous contrainte des armatures de précontrainte . . . . . . 22
1.3 Application de l’EA à l’auscultation des structures . . . . . . . . . . . . . . 241.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.3.2 La technique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.3.3 Suivi des mécanismes d’endommagement des ouvrages d’art . . . . 261.3.4 Suivi de la corrosion par émission acoustique . . . . . . . . . . . . . 33
1.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2 Méthode expérimentale et mode opératoire 412.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.2 Choix d’un essai de corrosion accélérée . . . . . . . . . . . . . . . . . . . . 41
2.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.2.2 Différents choix de solutions corrosives . . . . . . . . . . . . . . . . 422.2.3 Différents types d’essais de corrosion sous contrainte . . . . . . . . . 432.2.4 Essais normalisés . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432.2.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.3 Matériau et milieu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 462.3.1 Acier tréfilé et câble de précontrainte . . . . . . . . . . . . . . . . . 462.3.2 Milieu corrosif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
2.4 Appareillages et modes opératoires . . . . . . . . . . . . . . . . . . . . . . 492.4.1 Bâtis d’essais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
vii
viii TABLE DES MATIÈRES
2.4.2 Méthodes électrochimiques . . . . . . . . . . . . . . . . . . . . . . . 512.4.3 Emission acoustique . . . . . . . . . . . . . . . . . . . . . . . . . . 532.4.4 Analyses métallurgiques . . . . . . . . . . . . . . . . . . . . . . . . 562.4.5 Essais mécaniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
2.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3 Comportement électrochimique des câbles 593.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 593.2 Mesures électrochimiques en milieu NH4SCN . . . . . . . . . . . . . . . . 59
3.2.1 Conditions d’essai . . . . . . . . . . . . . . . . . . . . . . . . . . . . 593.2.2 Caractérisation électrochimique . . . . . . . . . . . . . . . . . . . . 60
3.3 Influence des paramètres d’essai sur l’électrochimie . . . . . . . . . . . . . 623.3.1 Concentration en thiocyanate d’ammonium . . . . . . . . . . . . . . 623.3.2 Température de la solution corrosive . . . . . . . . . . . . . . . . . 643.3.3 Contrainte appliquée au câble . . . . . . . . . . . . . . . . . . . . . 673.3.4 Comparaison des paramètres concentration, température . . . . . . 68
3.4 Choix et validation des paramètres d’essai . . . . . . . . . . . . . . . . . . 693.4.1 Détermination des paramètres . . . . . . . . . . . . . . . . . . . . . 693.4.2 Observations métallographiques . . . . . . . . . . . . . . . . . . . . 723.4.3 Comparaison avec des échantillons d’ouvrages rompus . . . . . . . . 73
3.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4 Contribution de l’EA au suivi de la FpH 774.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 774.2 Suivi acoustique de la fragilisation par l’hydrogène . . . . . . . . . . . . . . 77
4.2.1 Calibration des bancs d’essai . . . . . . . . . . . . . . . . . . . . . . 774.2.2 Suivi et localisation de l’endommagement d’un fil central . . . . . . 80
4.3 Corrélation EA, microstructure et électrochimie . . . . . . . . . . . . . . . 864.3.1 Caractérisation mécanique et microstructurale des endommagements
par essais arrêtés . . . . . . . . . . . . . . . . . . . . . . . . . . . . 874.3.2 Evolution des variables électrochimiques . . . . . . . . . . . . . . . 964.3.3 Caractérisation des mécanismes d’endommagement . . . . . . . . . 98
4.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
5 Application à des dispositifs réalistes 1035.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1035.2 Suivi acoustique de la FpH à partir des ancrages . . . . . . . . . . . . . . . 103
5.2.1 Description du dispositif expérimental . . . . . . . . . . . . . . . . 1045.2.2 Endommagement d’une armature de précontrainte . . . . . . . . . . 1085.2.3 Résultats obtenus par les capteurs de référence . . . . . . . . . . . . 1125.2.4 Résultats obtenus sur l’ancrage non injecté . . . . . . . . . . . . . . 1135.2.5 Résultats obtenus sur l’ancrage injecté . . . . . . . . . . . . . . . . 115
5.3 Contrôle semi-destructif par ouverture de fenêtres . . . . . . . . . . . . . . 1175.3.1 Description du dispositif expérimental . . . . . . . . . . . . . . . . 1175.3.2 Auscultation par émission acoustique sur l’armature . . . . . . . . . 1185.3.3 Auscultation par émission acoustique sur le coulis de ciment . . . . 121
TABLE DES MATIÈRES ix
5.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Conclusion générale 123
Références 134
Annexe 1 135
Annexe 2 137

x TABLE DES MATIÈRES
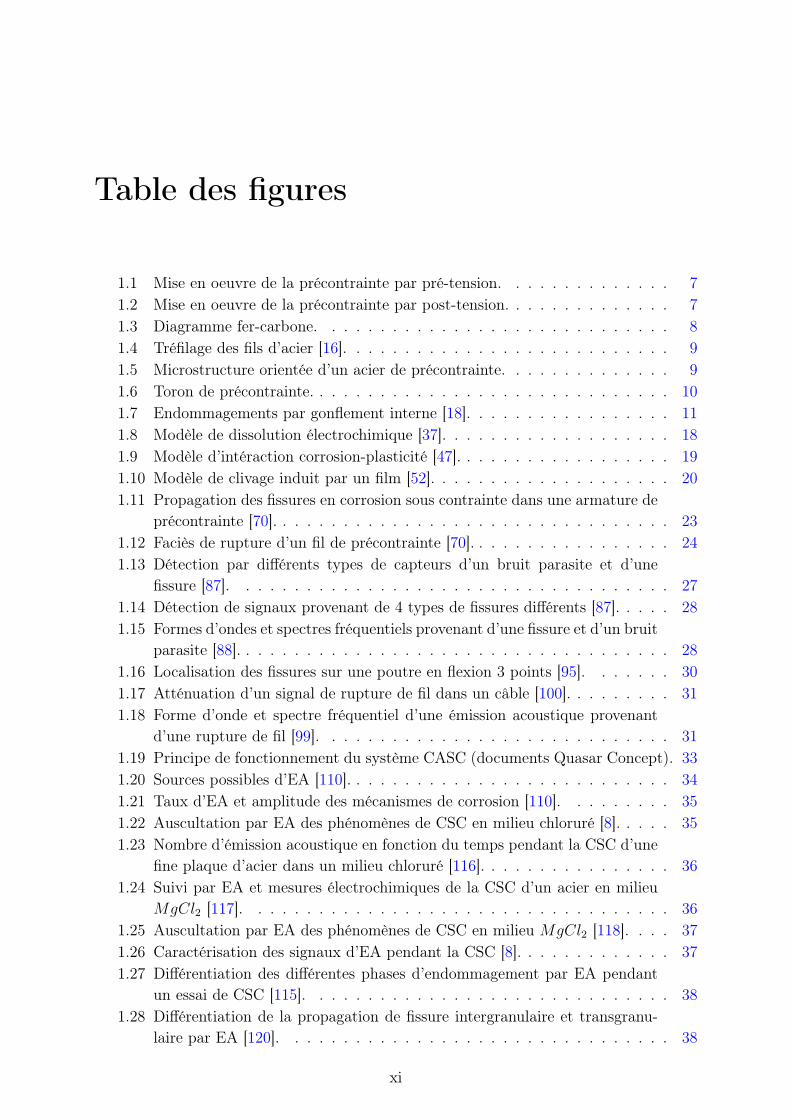
Table des figures
1.1 Mise en oeuvre de la précontrainte par pré-tension. . . . . . . . . . . . . . 71.2 Mise en oeuvre de la précontrainte par post-tension. . . . . . . . . . . . . . 71.3 Diagramme fer-carbone. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.4 Tréfilage des fils d’acier [16]. . . . . . . . . . . . . . . . . . . . . . . . . . . 91.5 Microstructure orientée d’un acier de précontrainte. . . . . . . . . . . . . . 91.6 Toron de précontrainte. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.7 Endommagements par gonflement interne [18]. . . . . . . . . . . . . . . . . 111.8 Modèle de dissolution électrochimique [37]. . . . . . . . . . . . . . . . . . . 181.9 Modèle d’intéraction corrosion-plasticité [47]. . . . . . . . . . . . . . . . . . 191.10 Modèle de clivage induit par un film [52]. . . . . . . . . . . . . . . . . . . . 201.11 Propagation des fissures en corrosion sous contrainte dans une armature de
précontrainte [70]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231.12 Faciès de rupture d’un fil de précontrainte [70]. . . . . . . . . . . . . . . . . 241.13 Détection par différents types de capteurs d’un bruit parasite et d’une
fissure [87]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271.14 Détection de signaux provenant de 4 types de fissures différents [87]. . . . . 281.15 Formes d’ondes et spectres fréquentiels provenant d’une fissure et d’un bruit
parasite [88]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281.16 Localisation des fissures sur une poutre en flexion 3 points [95]. . . . . . . 301.17 Atténuation d’un signal de rupture de fil dans un câble [100]. . . . . . . . . 311.18 Forme d’onde et spectre fréquentiel d’une émission acoustique provenant
d’une rupture de fil [99]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311.19 Principe de fonctionnement du système CASC (documents Quasar Concept). 331.20 Sources possibles d’EA [110]. . . . . . . . . . . . . . . . . . . . . . . . . . . 341.21 Taux d’EA et amplitude des mécanismes de corrosion [110]. . . . . . . . . 351.22 Auscultation par EA des phénomènes de CSC en milieu chloruré [8]. . . . . 351.23 Nombre d’émission acoustique en fonction du temps pendant la CSC d’une
fine plaque d’acier dans un milieu chloruré [116]. . . . . . . . . . . . . . . . 361.24 Suivi par EA et mesures électrochimiques de la CSC d’un acier en milieu
MgCl2 [117]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 361.25 Auscultation par EA des phénomènes de CSC en milieu MgCl2 [118]. . . . 371.26 Caractérisation des signaux d’EA pendant la CSC [8]. . . . . . . . . . . . . 371.27 Différentiation des différentes phases d’endommagement par EA pendant
un essai de CSC [115]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 381.28 Différentiation de la propagation de fissure intergranulaire et transgranu-
laire par EA [120]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
xi

xii TABLE DES FIGURES
2.1 Exemple de couples matériau-milieu susceptibles à la CSC [37]. . . . . . . . 422.2 Essai normalisé au thiocyanate d’ammonium (NF EN ISO 15630-3) [127]. . 442.3 Essai normalisé à l’eau distillée (NF A05-302) [129]. . . . . . . . . . . . . . 452.4 Microstructure de l’acier tréfilé. . . . . . . . . . . . . . . . . . . . . . . . . 472.5 Géométrie du toron T15,7. . . . . . . . . . . . . . . . . . . . . . . . . . . . 472.6 Courbe de traction à rupture d’un toron T15,7. . . . . . . . . . . . . . . . 482.7 Bâtis de corrosion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 492.8 Corps d’épreuve. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 502.9 Montage des blocs d’about. . . . . . . . . . . . . . . . . . . . . . . . . . . 502.10 Têtes d’ancrage et clavettes. . . . . . . . . . . . . . . . . . . . . . . . . . . 502.11 Principe de la méthode SIE (spectroscopie d’impédance électochimique)[131]. 522.12 Dispositif expérimental du montage à 3 électrodes. . . . . . . . . . . . . . . 532.13 Mode opératoire du collage par colle HBM X60. . . . . . . . . . . . . . . . 542.14 Mise en place de l’auscultation par EA. . . . . . . . . . . . . . . . . . . . . 552.15 Détection de fissures par magnétoscopie. . . . . . . . . . . . . . . . . . . . 562.16 Essai mécanique de traction. . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.1 Représentation de Nyquist des mesures d’impédance de l’essai de référenceau thiocyanate d’ammonium à 50. . . . . . . . . . . . . . . . . . . . . . 61
3.2 Circuit électrique équivalent. . . . . . . . . . . . . . . . . . . . . . . . . . . 613.3 Courbe de polarisation de l’essai de référence. . . . . . . . . . . . . . . . . 623.4 Influence de la concentration de la solution sur les mesures d’impédance. . 633.5 Influence de la concentration de la solution sur les courbes de polarisation. 643.6 Influence de la température de la solution sur les mesures d’impédance. . . 653.7 Influence de la température de la solution sur les courbes de polarisation. . 663.8 Influence de la tension du fil sur les mesures d’impédance. . . . . . . . . . 673.9 Influence de la tension du fil sur les courbes de polarisation. . . . . . . . . 683.10 Influence de la température et de la concentration de la solution sur les
valeurs de la résistance de transfert de charges et sur les valeurs de larésistance du film. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.11 Mesures d’impédance électrochimique effectuées pendant l’essai de réfé-rence et pendant un essai avec le jeu de paramètres que l’on a déterminé. . 71
3.12 Courbes de polarisation effectuées pendant l’essai de référence et pendantun essai avec le jeu de paramètres que l’on a déterminé. . . . . . . . . . . . 71
3.13 Observations métallographiques de l’essai de référence. . . . . . . . . . . . 723.14 Observations métallographiques de l’essai reconfiguré. . . . . . . . . . . . . 733.15 Faciès de rupture d’un échantillon prélevé sur ouvrage. . . . . . . . . . . . 733.16 Échantillons non rompus prélevés sur ouvrage. . . . . . . . . . . . . . . . . 743.17 Fissures de CSC sur la surface des échantillons prélevés sur ouvrage. . . . . 74
4.1 Mesure de la vitesse de propagation des EA. . . . . . . . . . . . . . . . . . 784.2 Distribution des amplitudes recueillies sur les trois structures. . . . . . . . 804.3 Mise en place des essais suivis par émission acoustique. . . . . . . . . . . . 814.4 Activité acoustique recueillie pendant les trois essais de FpH-SC. . . . . . . 814.5 Localisation de l’énergie des EA. . . . . . . . . . . . . . . . . . . . . . . . . 82
TABLE DES FIGURES xiii
4.6 Activité acoustique localisée sur la zone de rupture (les signaux de ruptureont été enlevés). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.7 Évolution temporelle des paramètres : a) amplitude, b) durée et c) nombred’alternances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.8 Salve acoustique et spectre fréquentiel recueillis pendant la phase 1. . . . . 864.9 Salve acoustique et spectre fréquentiel recueillis pendant la phase 3. . . . . 864.10 Positionnement des essais arrêtés sur le cycle d’endommagement du fil de
précontrainte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 874.11 Évolution des caractéristiques mécaniques de l’acier en fonction du temps
d’immersion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 884.12 Fil de précontrainte sans immersion dans la solution corrosive, a) et b)
surface du fil, c) et d) faciès de rupture. . . . . . . . . . . . . . . . . . . . . 894.13 Fil de précontrainte après 24 heures d’immersion, a) faciès de rupture, b)
microstructure du faciès de rupture, c) surface du fil proche de la rupture,d) surface du fil, e) coupe transversale, f) plaques de corrosion. . . . . . . . 91
4.14 Fil de précontrainte après 48 heures d’immersion, a) faciès de rupture, b)surface du fil, c) coupe transversale. . . . . . . . . . . . . . . . . . . . . . . 92
4.15 Fil de précontrainte après 96 heures d’immersion, a) faciès de rupture, b)zone d’amorçage, c) surface du fil, d) coupe transversale. . . . . . . . . . . 93
4.16 Fil de précontrainte à la fin de l’essai, a) faciès de rupture, b) et c) surfacedu fil. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
4.17 Fil de précontrainte non tendu après 7 jours dans une solution de thiocya-nate d’ammonium : a) et b) surface du fil, c) et d) faciès de rupture aprèsun essai de traction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
4.18 Évolution de l’impédance pendant l’essai de FpH-SC. . . . . . . . . . . . . 964.19 Évolutions de la résistance de polarisation et de la densité de courant pen-
dant l’essai de FpH-SC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 974.20 Évolution du potentiel de corrosion pendant l’essai de FpH-SC. . . . . . . . 974.21 Géométrie de la surface de fissure [75]. . . . . . . . . . . . . . . . . . . . . 984.22 Géométrie du faciès de rupture. . . . . . . . . . . . . . . . . . . . . . . . . 1004.23 Évolution de l’endommagement du fil de précontrainte. . . . . . . . . . . . 102
5.1 Dispositif expérimental. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1045.2 Photographies du montage expérimental. . . . . . . . . . . . . . . . . . . . 1045.3 Mode opératoire pour l’optimisation du choix du type de capteur et de son
emplacement sur un ancrage injecté. . . . . . . . . . . . . . . . . . . . . . 1055.4 Mode opératoire pour l’optimisation du choix du type de capteur et de son
emplacement sur un ancrage non-injecté. . . . . . . . . . . . . . . . . . . . 1065.5 Positionnement des capteurs pico sur la tête d’ancrage. . . . . . . . . . . . 1065.6 Positionnement des capteurs micro 80 sur la tête d’ancrage. . . . . . . . . . 1065.7 Positionnement des capteurs WD sur la tête d’ancrage. . . . . . . . . . . . 1075.8 Instrumentation du corps d’épreuve. . . . . . . . . . . . . . . . . . . . . . . 1085.9 Évolution du potentiel libre au cours de l’essai de FpH-SC. . . . . . . . . . 1085.10 Endommagement d’une armature de précontrainte. . . . . . . . . . . . . . 1105.12 Positionnement des fils. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1105.11 Observations métallographiques du fil rompu. . . . . . . . . . . . . . . . . 111

xiv TABLE DES FIGURES
5.13 Faciès des fils après essai de traction. . . . . . . . . . . . . . . . . . . . . . 1125.14 EA recueillies par les capteurs de référence. . . . . . . . . . . . . . . . . . . 1135.15 Instrumentation de l’ancrage et EA recueillies par les capteurs sur l’ancrage
non injecté. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1145.16 Paramètres recueillis par le capteur 10. . . . . . . . . . . . . . . . . . . . . 1155.17 Instrumentation de l’ancrage et EA recueillies par les capteurs sur l’ancrage
injecté. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1165.18 Paramètres recueillis par le capteur 4. . . . . . . . . . . . . . . . . . . . . . 1165.19 Dispositif expérimental avec ouverture de fenêtres dans la gaine. . . . . . . 1175.20 Atténuation des EA dans une armature enrobée de coulis de ciment. . . . . 1185.21 Instrumentation du corps d’épreuve. . . . . . . . . . . . . . . . . . . . . . . 1195.22 Évolution du nombre d’EA cumulées en fonction de la position du capteur. 1195.23 Évolution de l’activité acoustique dans la structure. . . . . . . . . . . . . . 1205.24 Étalonnage du capteur WD. . . . . . . . . . . . . . . . . . . . . . . . . . . 1375.25 Étalonnage du capteur micro 80. . . . . . . . . . . . . . . . . . . . . . . . 1375.26 Étalonnage du capteur pico. . . . . . . . . . . . . . . . . . . . . . . . . . . 1375.27 Étalonnage du capteur R15. . . . . . . . . . . . . . . . . . . . . . . . . . . 1385.28 Étalonnage du capteur R6. . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
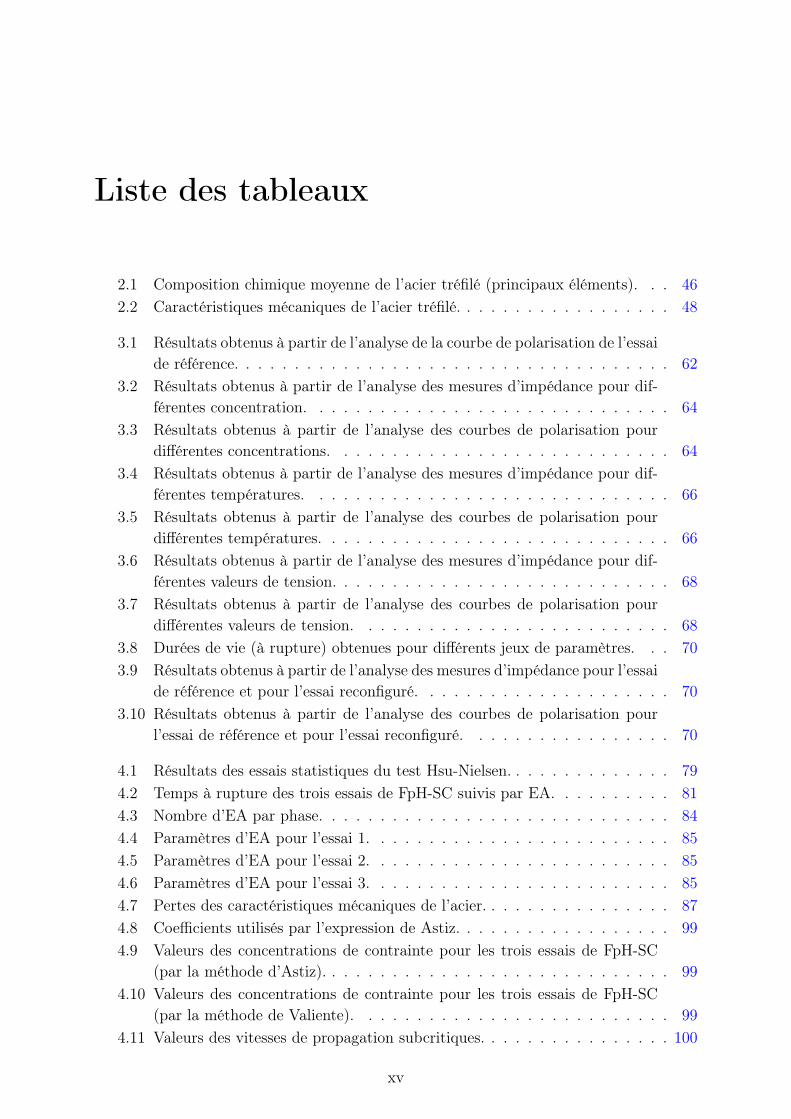
Liste des tableaux
2.1 Composition chimique moyenne de l’acier tréfilé (principaux éléments). . . 462.2 Caractéristiques mécaniques de l’acier tréfilé. . . . . . . . . . . . . . . . . . 48
3.1 Résultats obtenus à partir de l’analyse de la courbe de polarisation de l’essaide référence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.2 Résultats obtenus à partir de l’analyse des mesures d’impédance pour dif-férentes concentration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.3 Résultats obtenus à partir de l’analyse des courbes de polarisation pourdifférentes concentrations. . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.4 Résultats obtenus à partir de l’analyse des mesures d’impédance pour dif-férentes températures. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.5 Résultats obtenus à partir de l’analyse des courbes de polarisation pourdifférentes températures. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.6 Résultats obtenus à partir de l’analyse des mesures d’impédance pour dif-férentes valeurs de tension. . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.7 Résultats obtenus à partir de l’analyse des courbes de polarisation pourdifférentes valeurs de tension. . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.8 Durées de vie (à rupture) obtenues pour différents jeux de paramètres. . . 703.9 Résultats obtenus à partir de l’analyse des mesures d’impédance pour l’essai
de référence et pour l’essai reconfiguré. . . . . . . . . . . . . . . . . . . . . 703.10 Résultats obtenus à partir de l’analyse des courbes de polarisation pour
l’essai de référence et pour l’essai reconfiguré. . . . . . . . . . . . . . . . . 70
4.1 Résultats des essais statistiques du test Hsu-Nielsen. . . . . . . . . . . . . . 794.2 Temps à rupture des trois essais de FpH-SC suivis par EA. . . . . . . . . . 814.3 Nombre d’EA par phase. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 844.4 Paramètres d’EA pour l’essai 1. . . . . . . . . . . . . . . . . . . . . . . . . 854.5 Paramètres d’EA pour l’essai 2. . . . . . . . . . . . . . . . . . . . . . . . . 854.6 Paramètres d’EA pour l’essai 3. . . . . . . . . . . . . . . . . . . . . . . . . 854.7 Pertes des caractéristiques mécaniques de l’acier. . . . . . . . . . . . . . . . 874.8 Coefficients utilisés par l’expression de Astiz. . . . . . . . . . . . . . . . . . 994.9 Valeurs des concentrations de contrainte pour les trois essais de FpH-SC
(par la méthode d’Astiz). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 994.10 Valeurs des concentrations de contrainte pour les trois essais de FpH-SC
(par la méthode de Valiente). . . . . . . . . . . . . . . . . . . . . . . . . . 994.11 Valeurs des vitesses de propagation subcritiques. . . . . . . . . . . . . . . . 100
xv
xvi LISTE DES TABLEAUX
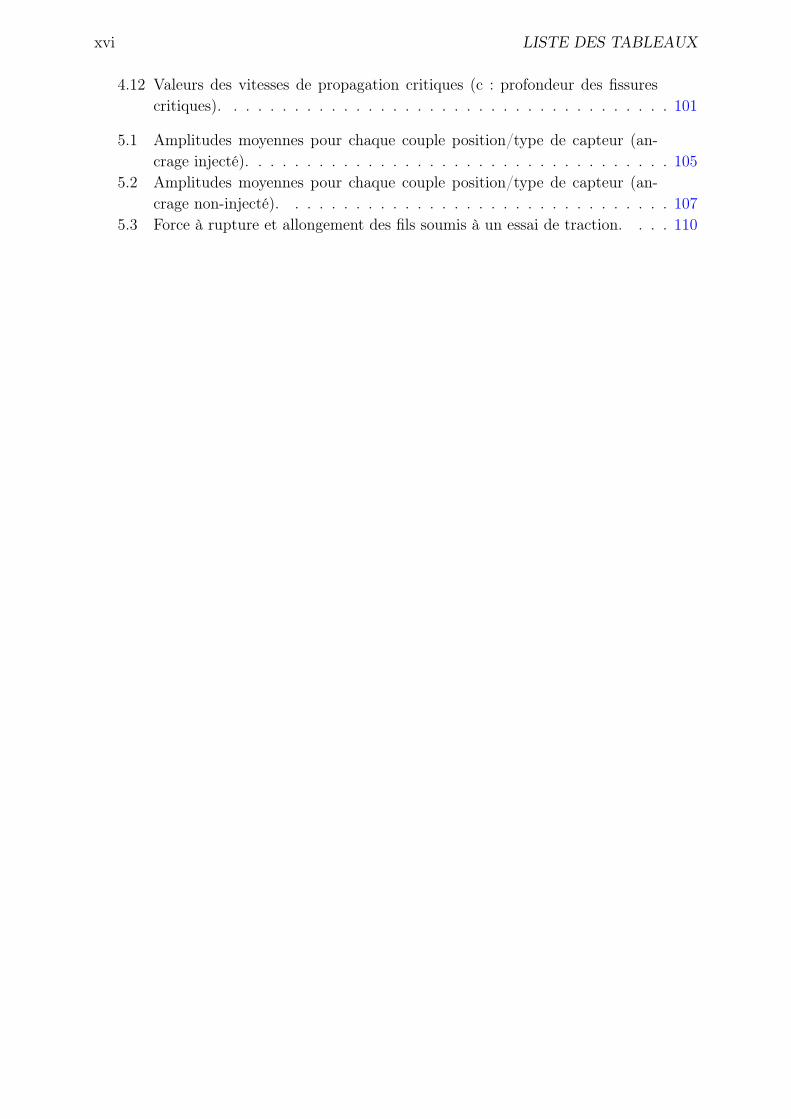
4.12 Valeurs des vitesses de propagation critiques (c : profondeur des fissurescritiques). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
5.1 Amplitudes moyennes pour chaque couple position/type de capteur (an-crage injecté). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
5.2 Amplitudes moyennes pour chaque couple position/type de capteur (an-crage non-injecté). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
5.3 Force à rupture et allongement des fils soumis à un essai de traction. . . . 110

Introduction générale
« C’est par l’expérience que la science et l’artfont leurs progrès chez les hommes. »
Aristote
La France possède un patrimoine d’ouvrages d’art très riche et varié. Pour exemple,en 2006, on ne comptait pas moins de 335 ponts uniquement à Paris. Bien que de trèsgros efforts soient fournis aujourd’hui pour mettre en place, lors de la construction d’unouvrage, les techniques les plus performantes de suivi et de diagnostic, il subsiste un parcimportant d’ouvrages vieillissants de surveillance difficile.
Dans l’optique de garantir la fiabilité de leurs ouvrages, les gestionnaires ont besoind’outils de contrôle permettant de déterminer l’état et la durée de vie des structures. Dansce cadre, les méthodes de contrôle non destructif doivent naturellement être privilégiées.
L’intégration de renforts métalliques dans des structures bétonnées de ponts est appa-rue en 1875 lors de la construction, par Joseph Monier, d’une passerelle en ciment armé(passerelle du château de Chazelet). Les premières constructions de ponts en béton armédatent véritablement de la fin du XIXème siècle. Mais la technique de béton armé trouveses limites lorsqu’il s’agit de réaliser des structures nécessitant des longueurs de travéesimportantes. Pour remédier à cela, Eugène Freyssinet imagine le béton précontraint. Ceprocédé consiste à comprimer le béton afin qu’il puisse supporter des sollicitations detraction sans s’endommager. Dans le but d’expérimenter cette théorie, Eugène Freyssi-net décide de construire, en 1908, une arche expérimentale à Moulins. Cette techniquenovatrice trouvera un véritable essor à la fin de la seconde guerre mondiale.
Les années 60 sont propices aux polémiques concernant la "maladie du béton précon-traint". En effet de nombreux ouvrages sont touchés par la corrosion des câbles servant àcomprimer le béton, notamment par la corrosion fissurante sous tension (appelée commu-nément aujourd’hui corrosion sous contrainte, CSC). Les causes de ces pathologies sontmaintenant connues mais il est encore difficile de quantifier leur importance sur ouvrage.Parallèlement, les mécanismes de corrosion sous contrainte ont fait l’objet de multiplesétudes. De nombreux modèles théoriques ont été décrits mais aucun ne réalise réellementde consensus.
Assurer une utilisation sécurisée des ouvrages d’art nécessite de pouvoir déterminerl’état de la structure et de pouvoir prédire son évolution. A l’heure actuelle, les méthodes
1
2 INTRODUCTION GENERALE
de contrôle ne donnent que des résultats modestes quant à la vérification de l’intégritédes structures. En ce qui concerne le suivi en temps réel de ces constructions, les moyensdont disposent les gestionnaires d’ouvrages sont restreints.
Aujourd’hui, de nouvelles méthodes de contrôle non destructif émergent. C’est le casde l’émission acoustique (EA). Outre sa capacité à détecter des défauts évolutifs dans unestructure, elle a montré lors de plusieurs études, son aptitude à détecter certains méca-nismes de corrosion [1, 2, 3, 4, 5, 6, 7, 8].
Ce travail de recherche est réalisé dans le cadre du programme national ACTENA(Auscultation des Câbles Tendus Non Accessibles) co-financé par l’Agence National de laRecherche (ANR) et Electricité De France (EDF). Nous nous attacherons, lors de cettethèse, à adapter l’émission acoustique aux exigences structurelles des ouvrages d’art enbéton précontraint ainsi qu’à détecter et caractériser les phénomènes corrosifs. Ce travaila pour principal objectif de mettre au point, en laboratoire, la technique de détectionsur des éléments de structure de taille réduite reprenant les dispositions constructivesrencontrées sur ouvrages ainsi que d’étoffer et valider les connaissances théoriques de ladiscipline. L’EA est également utilisée dans le but de mieux appréhender les mécanismesde fragilisation par l’hydrogène.
Le premier chapitre est consacré à l’étude bibliographique. Après avoir décrit les dif-férents types d’ouvrages d’art, et en particulier les ouvrages d’art en béton précontraint,leurs pathologies et les systèmes de détection et d’auscultation sont présentés. Nous dé-taillons également les méthodes de réparation en corrélation avec les types d’endom-magement. La seconde partie du chapitre est dédiée aux mécanismes de corrosion souscontrainte et à la fragilisation par l’hydrogène. Les processus spécifiques aux armaturesde précontrainte sont exposés. La technique d’EA, son utilisation sur ouvrage ou pourdétecter la corrosion concluent ce premier chapitre.
La méthode expérimentale et le mode opératoire utilisés font l’objet du deuxième cha-pitre. Après avoir détaillé les différents tests de corrosion sous contrainte existant dansla littérature ou dans les différentes normes, le matériau et le milieu choisis sont explici-tés. Les bâtis d’essais spécialement développés pour ce travail sont ensuite dépeints, toutcomme la mise en place et le mode opératoire du suivi acoustique et du suivi électrochi-mique.
L’étude électrochimique présentée dans le chapitre 3 a pour objectif de rapprochernotre méthode expérimentale des conditions rencontrées sur ouvrage. Dans cette optique,l’impact des différents paramètres d’essai sur le comportement électrochimique de l’acierde précontrainte dans la solution corrosive est étudié. Après avoir déterminé des para-mètres d’essai en adéquation avec la durée d’essai souhaitée, il est vérifié que ces para-mètres ne modifient pas les mécanismes d’endommagement. Finalement, les mécanismesd’endommagement recréés en laboratoire sont comparés à des prélèvements in situ.
Les mécanismes de fragilisation par l’hydrogène recréés en laboratoire sont caractéri-sés dans le quatrième chapitre en couplant l’émission acoustique, aux mesures électrochi-miques et à une caractérisation métallographique. Une analyse plus fine de ces mécanismes

3
est réalisée en procédant à des essais interrompus. L’objectif de ce chapitre est de vérifierla détectabilité des mécanismes de fragilisation par l’hydrogène par EA, de caractériserles signaux reçus par des paramètres issus de l’analyse des salves acoustiques ainsi qued’identifier les phénomènes émissifs.
Le dernier chapitre concerne l’application de l’auscultation par EA à des dispositifsproches des structures in situ. Dans un premier temps, les résultats obtenus en labora-toire sont vérifiés. Puis l’EA est utilisée dans plusieurs configurations (auscultation nondestructive ou semi-destructive des ouvrages). L’objectif est de cerner les limites de la mé-thode d’auscultation par EA, dues principalement à l’atténuation des signaux acoustiquesdans des structures complexes.

4 INTRODUCTION GENERALE
Chapitre 1
Bibliographie
1.1 Les ouvrages d’art : conception et pathologies
1.1.1 Introduction
L’objectif de ce chapitre est de décrire les différentes catégories d’ouvrages d’art ens’intéressant plus particulièrement aux ponts en béton précontraint. Les différents élé-ments constitutifs de ces structures sont évoqués en insistant sur un élément essentiel :le câble de précontrainte. Dans une seconde partie, nous nous focalisons sur les patho-logies affectant les structures précontraintes. Leurs origines et leurs manifestations sontdétaillées. Pour terminer, la détection et le suivi des pathologies ainsi que les techniquesde réparation sont étudiées.
1.1.2 Généralités
Les différents types d’ouvrages d’art
La conception des ouvrages d’art a constamment évoluée grâce aux développementsdans le domaine des matériaux et des méthodes de construction. Aujourd’hui le concep-teur peut choisir son type d’ouvrage dans un panel étendu, chaque catégorie répondantpréférentiellement à des contraintes bien définies [9].
Les ouvrages d’art sont communément classés en deux grandes familles : les ouvragesmétalliques [10] et les ouvrages en béton, bien que ces deux techniques soient de plusen plus associées (ponts mixtes) comme pour la construction du viaduc de Millau. Lesstructures métalliques ont trouvées un réel essor dans les pays anglo-saxon. Dans le parcd’ouvrages français, ce genre de constructions est majoritairement utilisé sur les lignesSNCF. On peut compter des constructions métalliques admirables comme le viaduc deGarabit imaginé par Léon Boyer en 1978-1979. Traditionnellement, les concepteurs fa-vorisent les architectures en béton. Ce matériau permet une flexibilité architecturale in-téressante mais possède des caractéristiques mécaniques qui limitent son utilisation. Unmatériau cimentaire classique fabriqué sur chantier a pour caractéristiques :
– résistance mécanique en compression : 25 à 35 MPa ;– résistance mécanique en traction : 2,1 à 2,7 MPa.
Les valeurs de résistance mécanique réduisent l’utilisation de ce matériau aux ouvrages
5
6 CHAPITRE 1. BIBLIOGRAPHIE
massifs et de petite taille. Le progrès qui a permis de développer l’utilisation du bétonpour des ouvrages de plus grande portée est l’utilisation d’éléments métalliques internesau béton pour renforcer sa tenue aux efforts de traction et de flexion. Les armaturesen aciers sont destinées à s’opposer et à reprendre les efforts de traction qui pourraientendommager l’ouvrage [11][12]. Le béton armé que l’on connaît aujourd’hui fut mis aupoint en 1886 par François Hennebique. Il est composé d’aciers à haute adhérence. Par-fois, l’importance du trafic routier est telle que les efforts transmis à l’ouvrage ne peuventplus être supportés par ces armatures passives. Cette constatation a entraîné la mise aupoint d’une technique innovante d’armatures. Eugène Freyssinet envisage dès le débutdu XXème siècle d’utiliser les capacités du béton en compression pour contrecarrer seslacunes en traction. Le brevet de cette technique astucieuse, appelée béton précontraint,sera déposé en 1928. Ce procédé reste complexe, il exige un encombrement important etengendre un coût élevé. Il est donc privilégié lors de la construction de grands ouvrages.
De nombreux développements technologiques ont permis d’alléger les squelettes enbéton en transférant les charges sur de nouveaux éléments. Il s’agit notamment de l’ap-parition des ponts suspendus et des ponts à haubans, dont les premiers en France furentimaginés et réalisés respectivement par Marc Seguin en 1822 et par Albert Caquot en1952. Les câbles métalliques sont alors chargés de supporter une partie importante desefforts.
Les éléments constitutifs d’un pont en béton précontraint
Le principe de la technique mise au point par Eugène Freyssinet consiste à tendre desarmatures en acier et à engendrer ainsi la compression du béton. Lorsque la structure estsollicitée en traction sous l’effet du traffic routier ou ferroviaire, les armatures s’allongentet libèrent ainsi le béton. Aujourd’hui la précontrainte se divise en deux grandes famillessuivant les procédés de mise en oeuvre.
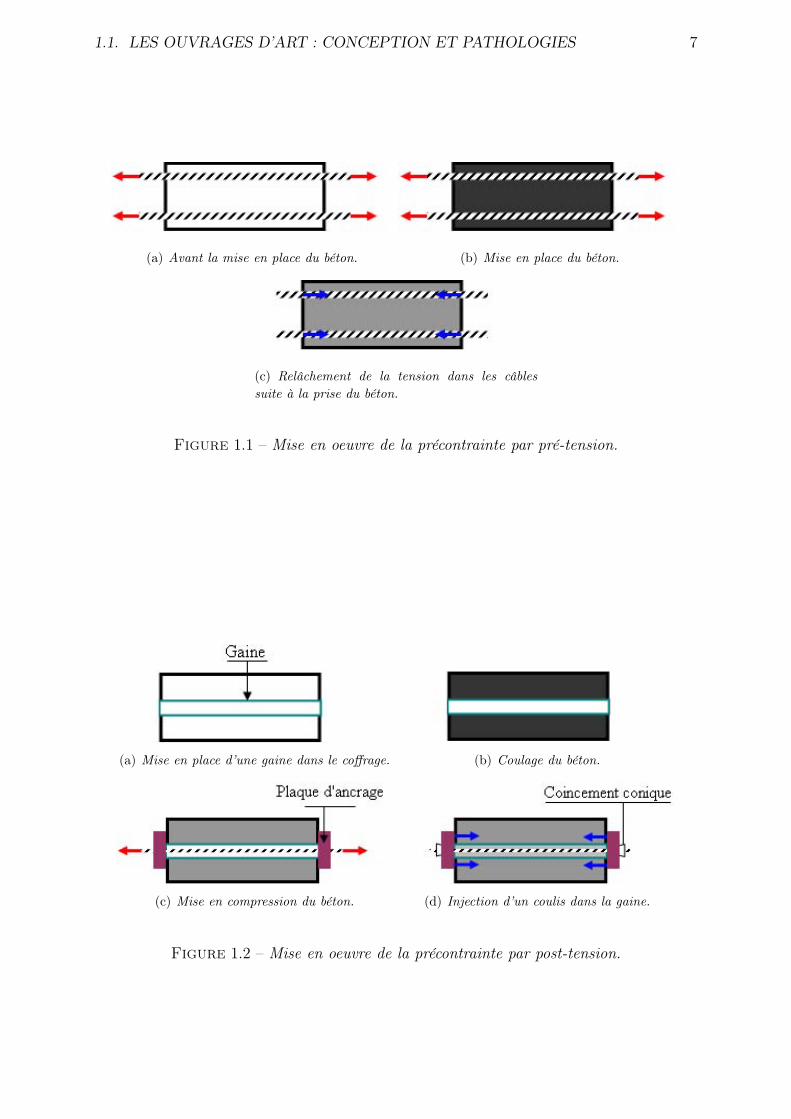
La première famille de précontrainte est la précontrainte par pré-tension (figure 1.1).La pré-tension est couramment utilisée dans le bâtiment. Les armatures tendues préala-blement au coulage du béton (figure 1.1(a) et 1.1(b)) sont relâchées suite à la prise dubéton (figure 1.1(c)). Par effet d’adhérence, le béton est maintenu en compression. Cettetechnique limite les valeurs de compression utilisables. Son utilisation dans le domainedes ouvrages d’art est donc restreinte.
La seconde technologie de précontrainte est la précontrainte par post-tension intérieure(figure 1.2) ou extérieure à l’ouvrage. En précontrainte intérieure le béton est coulé autourde gaines appelées à recevoir des câbles de précontrainte en acier (figure 1.2(a) et 1.2(b)).Quand la prise du béton est effective, les câbles sont insérés dans les gaines puis tendus àl’aide de vérins, ceci afin de comprimer la structure au repos en prenant appui sur des zonesspécialement ferraillées munies de plaques d’ancrage (figure 1.2(c))[13]. La précontrainteest maintenue à l’aide d’ancrages. Le type d’ancrage le plus classique est l’ancrage parcoincement conique (figure 1.2(d))[14].
La mise en place du système de précontrainte se termine par l’injection de la gaineavec du coulis de ciment ou, dans les techniques plus récentes, par une cire. L’injection
1.1. LES OUVRAGES D’ART : CONCEPTION ET PATHOLOGIES 7
(a) Avant la mise en place du béton. (b) Mise en place du béton.
(c) Relâchement de la tension dans les câblessuite à la prise du béton.
Figure 1.1 – Mise en oeuvre de la précontrainte par pré-tension.
(a) Mise en place d’une gaine dans le coffrage. (b) Coulage du béton.
(c) Mise en compression du béton. (d) Injection d’un coulis dans la gaine.
Figure 1.2 – Mise en oeuvre de la précontrainte par post-tension.
8 CHAPITRE 1. BIBLIOGRAPHIE
des gaines permet de garantir la protection de l’acier. Le coulis de ciment est composépresque exclusivement d’eau et de ciment avec des adjuvants afin de modifier ses propriétésrhéologiques. Son rôle est d’empêcher que le câble ne rentre en contact avec de l’air oude l’eau contenant des agents agressifs, ainsi que de passiver les armatures grâce à sonmilieu basique (le câble est alors protégé des attaques de corrosion). De plus il assure une« parfaite adhérence » du câble au béton.
La dernière précaution employée est le cachetage de l’ancrage des câbles par du mortierafin d’éviter tout écoulement d’eau préjudiciable à l’intérieur des gaines.
Dans le cas d’une précontrainte extérieure, les gaines sont positionnées à l’extérieurdes parements en béton, les câbles sont tendus par l’intermédiaire de systèmes d’ancrageet le coulis de ciment ou la cire protecteurs sont injectés à l’intérieur des gaines.
Le tracé des câbles de précontrainte à l’intérieur ou à l’extérieur de la structure peutprendre des formes courbes, ceci afin d’assurer une résistance optimale de l’ouvrage auxefforts appliqués.
Une dernière distinction peut être faite concernant les technologies de précontrainte. Sila compression initiale du béton est suffisante, le béton ne travaillant jamais en traction, onappelle ce mécanisme « précontrainte totale ». Si au contraire, au cours de son utilisationle béton est mis en tension, la précontrainte est dite partielle.
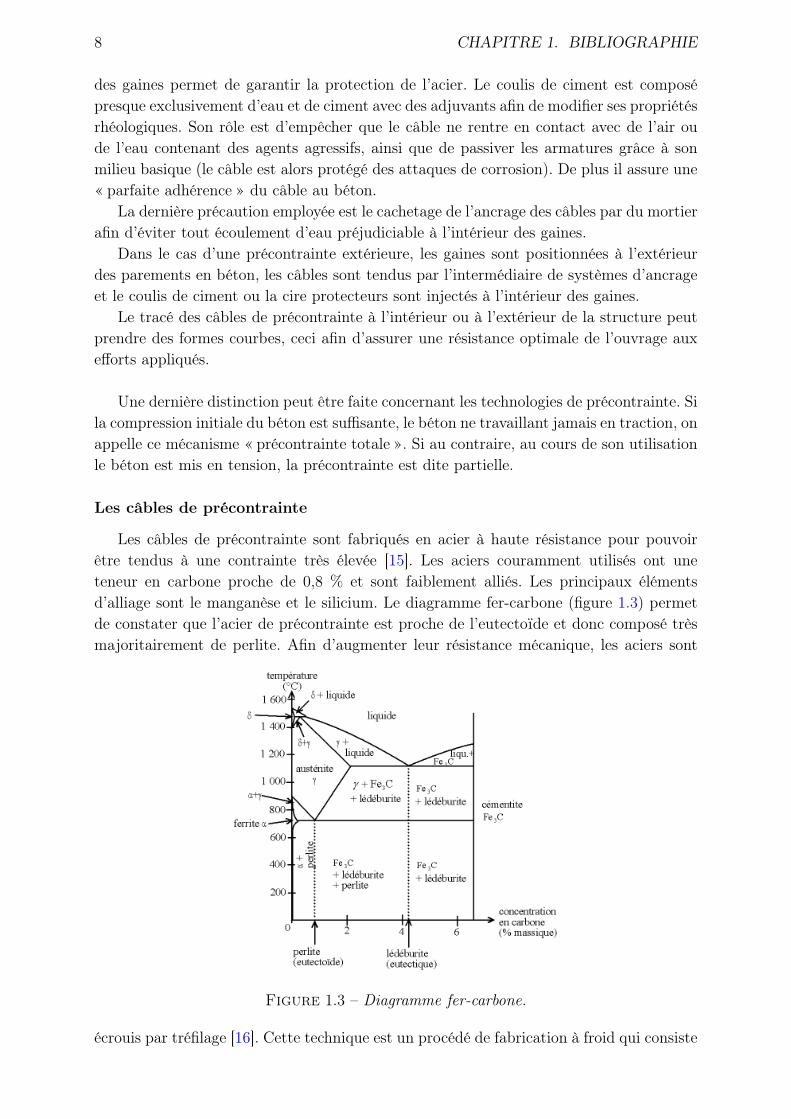
Les câbles de précontrainte
Les câbles de précontrainte sont fabriqués en acier à haute résistance pour pouvoirêtre tendus à une contrainte très élevée [15]. Les aciers couramment utilisés ont uneteneur en carbone proche de 0,8 % et sont faiblement alliés. Les principaux élémentsd’alliage sont le manganèse et le silicium. Le diagramme fer-carbone (figure 1.3) permetde constater que l’acier de précontrainte est proche de l’eutectoïde et donc composé trèsmajoritairement de perlite. Afin d’augmenter leur résistance mécanique, les aciers sont
Figure 1.3 – Diagramme fer-carbone.
écrouis par tréfilage [16]. Cette technique est un procédé de fabrication à froid qui consiste
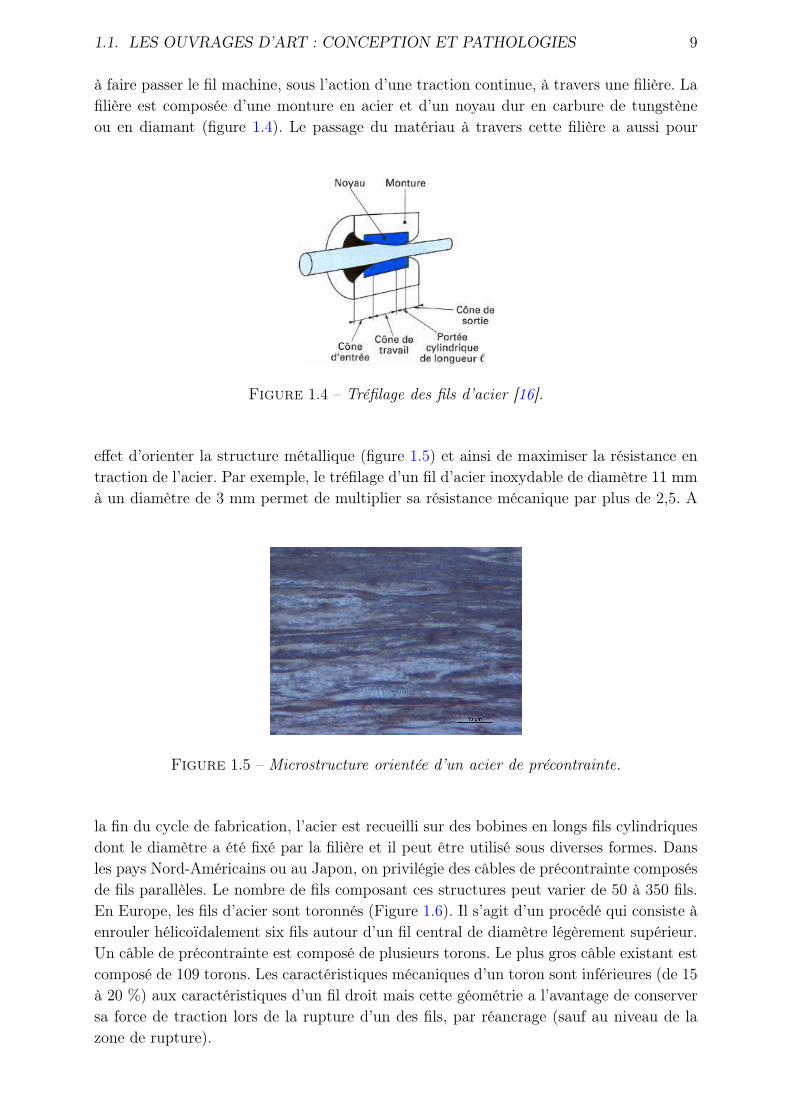
1.1. LES OUVRAGES D’ART : CONCEPTION ET PATHOLOGIES 9
à faire passer le fil machine, sous l’action d’une traction continue, à travers une filière. Lafilière est composée d’une monture en acier et d’un noyau dur en carbure de tungstèneou en diamant (figure 1.4). Le passage du matériau à travers cette filière a aussi pour
Figure 1.4 – Tréfilage des fils d’acier [16].
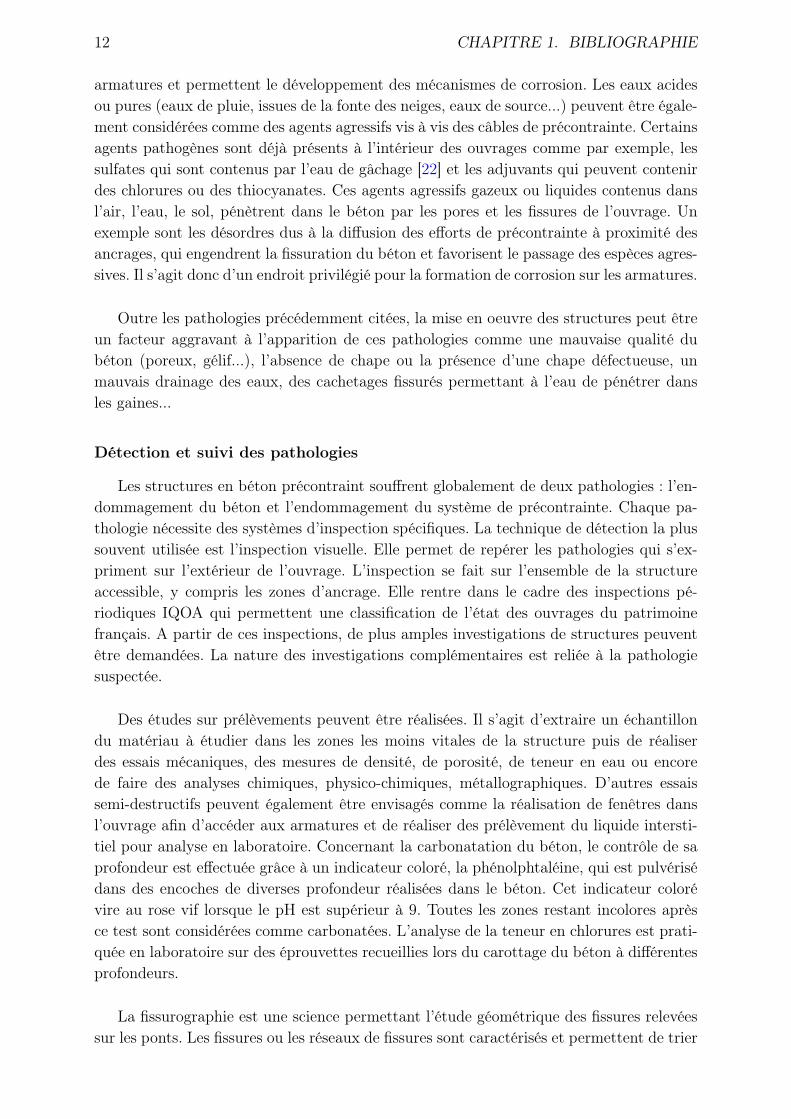
effet d’orienter la structure métallique (figure 1.5) et ainsi de maximiser la résistance entraction de l’acier. Par exemple, le tréfilage d’un fil d’acier inoxydable de diamètre 11 mmà un diamètre de 3 mm permet de multiplier sa résistance mécanique par plus de 2,5. A
Figure 1.5 – Microstructure orientée d’un acier de précontrainte.
la fin du cycle de fabrication, l’acier est recueilli sur des bobines en longs fils cylindriquesdont le diamètre a été fixé par la filière et il peut être utilisé sous diverses formes. Dansles pays Nord-Américains ou au Japon, on privilégie des câbles de précontrainte composésde fils parallèles. Le nombre de fils composant ces structures peut varier de 50 à 350 fils.En Europe, les fils d’acier sont toronnés (Figure 1.6). Il s’agit d’un procédé qui consiste àenrouler hélicoïdalement six fils autour d’un fil central de diamètre légèrement supérieur.Un câble de précontrainte est composé de plusieurs torons. Le plus gros câble existant estcomposé de 109 torons. Les caractéristiques mécaniques d’un toron sont inférieures (de 15à 20 %) aux caractéristiques d’un fil droit mais cette géométrie a l’avantage de conserversa force de traction lors de la rupture d’un des fils, par réancrage (sauf au niveau de lazone de rupture).

10 CHAPITRE 1. BIBLIOGRAPHIE
(a) Armature toronnée. (b) Coupetransversale.
Figure 1.6 – Toron de précontrainte.
1.1.3 Pathologies des ouvrages d’art en béton précontraint
Manifestations et origines des différentes pathologies
Les pathologies affectant les ponts en béton précontraint, comme tout autre typed’ouvrage, peuvent être classées dans trois catégories : les erreurs de conception, les erreursd’exécution et la dégradation des matériaux. Seule la dernière catégorie sera développéedans ce paragraphe, les deux premières étant singulières à chaque ouvrage et relevantsurtout d’erreurs humaines.
Le béton précontraint est une technique alliant les capacités en traction d’armaturesen acier aux facultés du béton en compression. Chacun de ces deux organes possède sespropres pathologies mais ils influent également l’un sur l’autre [17].
Comme tous les ponts en béton, les ouvrages en béton précontraint souffrent de dé-gradations mécaniques, physico-chimiques ou chimiques. Les dégradations mécaniquesentraînent la fissuration et/ou l’écaillage de l’ouvrage. Elles peuvent être dues aux cyclesgel/dégel, aux processus d’érosion ou d’abrasion (ouvrages en sites marins), aux chocsou encore aux surcharges qui provoquent le vieillissement prématuré de la structure. Leretrait du béton à court ou long terme peut également engendrer une altération physico-chimique du béton et sa fissuration. Les dégradations d’origine chimique sont relativementnombreuses. Les réactions sulfatiques internes ou les alcali-réactions sont un bon exemplede ces pathologies. Les conséquences de ces deux phénomènes sont similaires. Elles pro-voquent une réaction de gonflement interne du béton puis une fissuration multidirection-nelle à mailles (figure 1.7). Les causes de la réaction sulfatique interne est la formationdifférée d’ettringite (3CaO,Al2O3, 3CaSO4, 32H2O)[19]. La source de sulfate nécessaireà la fabrication d’ettringite est interne à la structure et se trouve dans l’eau de gâchage(dans les pores du béton). Normalement l’ettringite se forme au moment de la prise dubéton. Lorsque celle-ci n’a pas pu se former et qu’elle se forme ultérieurement (grâce àl’apport d’eau extérieur et à une température supérieure à 65) son expansion produitdes contraintes à l’intérieur du matériau rigide qui se fissure [20]. En ce qui concernel’alcali-réaction, il s’agit d’une réaction chimique entre les minéraux présents dans les gra-nulats et la solution interstitielle alcaline du béton [18]. Trois conditions sont nécessairespour que cette réaction puisse avoir lieu. Il faut tout d’abord que le granulat soit poten-tiellement réactif, que l’humidité relative excède 80% et que la concentration en alcalinsdépasse un seuil critique.
La pathologie la plus préoccupante concernant les ouvrages d’art en béton précontraint

1.1. LES OUVRAGES D’ART : CONCEPTION ET PATHOLOGIES 11
(a) alcali-réaction sur une poutre précontrainte. (b) fissuration multidirectionnelle à mailles.
Figure 1.7 – Endommagements par gonflement interne [18].
est la corrosion des armatures. Elle est souvent pernicieuse car peu ou pas visible depuisl’extérieur. La détérioration des câbles, pouvant aller jusqu’à la rupture d’un ou plusieursfils constitutifs du toron, a pour conséquence une baisse de leur résistance mécanique.Lorsque la contrainte admissible du câble corrodé devient inférieure à la valeur de laprécontrainte, le câble se rompt et ébranle la résistance de l’ouvrage. Cette pathologiepeut être la cause de graves catastrophes dont l’une des plus connues est la ruine dutoit du palais des congrès de Berlin le 21 mai 1980 [21]. La corrosion aqueuse d’unestructure métallique est un phénomène électrochimique faisant suite à la mise en contactd’un métal avec une atmosphère humide ou directement immergé dans un liquide appeléélectrolyte. Dans le cas des ouvrages précontraints, les câbles sont mis en contact avecle coulis de ciment qui contient de la chaux Ca(OH)2. La chaux se dissout ensuite dansl’eau de gâchage et contribue à la basicité du milieu (pH compris entre 12,4 et 13,5). Cettebasicité provoque la passivation des armatures, donc leur protection [22].
Deux principaux phénomènes sont à l’origine d’un manque ou d’une perte de protectiondes armatures. Tout d’abord, l’injection des gaines de précontrainte n’est pas toujourscorrectement réalisée. Afin de mieux répartir les efforts dans la structure, les câbles n’ontpas de trajectoire rectiligne mais passent par des points hauts (câbles relevés en travéeet aux abouts) où l’injection de coulis est parfois déficiente [23][24]. Ce manque de coulismet le câble à nu, il n’est pas passivé et peut donc subir les attaques d’agents agressifs.De plus, les zones de vide sont des lieux privilégiés pour les eaux stagnantes.
Un autre phénomène provoquant une rupture de protection des câbles est la carbona-tation du ciment. Le dioxide de carbone (CO2) présent dans l’atmosphère réagit avec lachaux du ciment suivant la réaction :
CO2 + Ca(OH)2 → CaCO3 +H2O (1.1)
La formation de carbonate de chaux (CaCO3) provoque la baisse de la basicité du mi-lieu cimentaire. Le pH baisse et la protection des armatures vis à vis de la corrosion estdiminuée. En présence d’humidité et d’oxygène, la corrosion se développe lorsque le pHdescend à 9. La carbonatation est un processus évolutif. Sa profondeur de pénétrationest en moyenne de l’ordre de 2 mm la première année, de 8 mm au bout de dix ans etde 20 à 25 mm au bout de 50 ans [17]. Les ions chlorures présents dans l’eau de mer, lesembrunts ou les sels de déverglaçage routier contribuent à la baisse du pH au voisinage des
12 CHAPITRE 1. BIBLIOGRAPHIE
armatures et permettent le développement des mécanismes de corrosion. Les eaux acidesou pures (eaux de pluie, issues de la fonte des neiges, eaux de source...) peuvent être égale-ment considérées comme des agents agressifs vis à vis des câbles de précontrainte. Certainsagents pathogènes sont déjà présents à l’intérieur des ouvrages comme par exemple, lessulfates qui sont contenus par l’eau de gâchage [22] et les adjuvants qui peuvent contenirdes chlorures ou des thiocyanates. Ces agents agressifs gazeux ou liquides contenus dansl’air, l’eau, le sol, pénètrent dans le béton par les pores et les fissures de l’ouvrage. Unexemple sont les désordres dus à la diffusion des efforts de précontrainte à proximité desancrages, qui engendrent la fissuration du béton et favorisent le passage des espèces agres-sives. Il s’agit donc d’un endroit privilégié pour la formation de corrosion sur les armatures.
Outre les pathologies précédemment citées, la mise en oeuvre des structures peut êtreun facteur aggravant à l’apparition de ces pathologies comme une mauvaise qualité dubéton (poreux, gélif...), l’absence de chape ou la présence d’une chape défectueuse, unmauvais drainage des eaux, des cachetages fissurés permettant à l’eau de pénétrer dansles gaines...
Détection et suivi des pathologies
Les structures en béton précontraint souffrent globalement de deux pathologies : l’en-dommagement du béton et l’endommagement du système de précontrainte. Chaque pa-thologie nécessite des systèmes d’inspection spécifiques. La technique de détection la plussouvent utilisée est l’inspection visuelle. Elle permet de repérer les pathologies qui s’ex-priment sur l’extérieur de l’ouvrage. L’inspection se fait sur l’ensemble de la structureaccessible, y compris les zones d’ancrage. Elle rentre dans le cadre des inspections pé-riodiques IQOA qui permettent une classification de l’état des ouvrages du patrimoinefrançais. A partir de ces inspections, de plus amples investigations de structures peuventêtre demandées. La nature des investigations complémentaires est reliée à la pathologiesuspectée.
Des études sur prélèvements peuvent être réalisées. Il s’agit d’extraire un échantillondu matériau à étudier dans les zones les moins vitales de la structure puis de réaliserdes essais mécaniques, des mesures de densité, de porosité, de teneur en eau ou encorede faire des analyses chimiques, physico-chimiques, métallographiques. D’autres essaissemi-destructifs peuvent également être envisagés comme la réalisation de fenêtres dansl’ouvrage afin d’accéder aux armatures et de réaliser des prélèvement du liquide intersti-tiel pour analyse en laboratoire. Concernant la carbonatation du béton, le contrôle de saprofondeur est effectuée grâce à un indicateur coloré, la phénolphtaléine, qui est pulvérisédans des encoches de diverses profondeur réalisées dans le béton. Cet indicateur colorévire au rose vif lorsque le pH est supérieur à 9. Toutes les zones restant incolores aprèsce test sont considérées comme carbonatées. L’analyse de la teneur en chlorures est prati-quée en laboratoire sur des éprouvettes recueillies lors du carottage du béton à différentesprofondeurs.
La fissurographie est une science permettant l’étude géométrique des fissures relevéessur les ponts. Les fissures ou les réseaux de fissures sont caractérisés et permettent de trier

1.1. LES OUVRAGES D’ART : CONCEPTION ET PATHOLOGIES 13
les ouvrages en fonction de leurs désordres et d’engager des actions plus poussées [18].Des formes particulières de fissuration peuvent être significatives de certains désordrescomme les phénomènes de gonflement interne dus aux alcali-réactions ou aux réactionssulfatiques internes.
Visuellement, la corrosion des armatures peut être détectée lorsque de l’oxyde de fercolore le béton. La présence de fissures sur les parois béton peut également être annoncia-trice de la présence de corrosion en permettant aux agents agressifs de pénétrer jusqu’auxarmatures. Lorsque des doutes surviennent suite à une inspection visuelle, des méthodesd’inspection plus sophistiquées peuvent être mises en oeuvre.
Techniques CND appliquées in situ aux câbles
Les éléments de structure principaux des ponts précontraints sont les câbles. Lessignes de désordres sont la présence de corrosion, la rupture d’un ou plusieurs fils oudes manques de coulis d’injection. Aujourd’hui la méthode de contrôle la plus perfor-mante pour connaître l’état des systèmes de précontrainte est la gammagraphie [25]. Lagammagraphie consiste à réaliser un cliché radiographique en utilisant le rayonnementélectromagnétique gamma émis par un radio-élément. Cette méthode existe depuis 1968.Les épaisseurs auscultables peuvent aller jusqu’à 50 cm et permettent de visualiser lagaine, le coulis et le câble. Son utilisation est cependant limitée car la réalisation d’uncliché est longue (quelques minutes à quelques dizaines de minutes) et les dimensionsde l’auscultation sont limitées (30 cm x 40 cm). Il est courant de pouvoir détecter desmanques de coulis mais la localisation des ruptures de fils est beaucoup plus délicate.D’autres techniques dérivées de la gammagraphie ont été développées comme la radio-graphie qui utilise les rayons X ou la radioscopie qui permet une observation en tempsréel grâce à un convertisseur fournissant une image vidéo. L’utilisation des rayons X per-met d’ausculter des épaisseurs de béton jusqu’à 1,3 m. Ce sont des méthodes qui restentrelativement lourdes à mettre en place et qui exigent un temps et des moyens maté-riels conséquents. De plus, elles nécessitent l’utilisation de moyens et de procédures deprotection importantes. La question de la gestion des sources radioactives est égalementposée. Il existe d’autres méthodes non destructives. L’auscultation radar permet de détec-ter les armatures présentes dans le béton. La méthode est basée sur la réflexion d’ondesélectromagnétiques rencontrant des hétérogénéités. L’analyse des temps d’émission et deréception permet d’identifier des milieux différents. Cette auscultation permet de carto-graphier l’ouvrage. La technique est limitée à des épaisseurs inférieures à 30 cm, de plusl’intérieur des gaines n’est auscultable que lorsqu’elles sont en plastique et le diamètre desarmatures n’est pas mesurable. L’interprétation devient extrêmement délicate lorsque ladensité de ferraillage est importante. Cependant la technique continue à évoluer [26]. Lescartographies réalisées avec la méthode radar permettent également de repérer des zonescritiques qui peuvent faire l’objet d’ouvertures de fenêtres.
Aujourd’hui aucune méthode ne donne entière satisfaction en ce qui concerne le contrôlenon destructif des structures précontraintes. Partant de cette constatation, un programmede recherche nommé ACTENA (Auscultation des Câbles TEndus Non Accessibles) co-financé par l’Agence Nationale de la Recherche (ANR) et Électricité De France (EDF),
14 CHAPITRE 1. BIBLIOGRAPHIE
propose d’étudier l’intérêt de différentes méthodes de contrôle non destructif appliquées àl’auscultation des câbles tendus non accessibles. Chaque méthode CND développée doittenir compte des contraintes d’auscultation particulières imposées par les structures pré-contraintes ainsi que des différentes pathologies à ausculter.
La détection des vides d’injection est d’un intérêt majeur puisqu’ils sont à l’originede la corrosion des armatures. Différentes méthodes peuvent être envisagées afin de dé-tecter les vides d’injection. La méthode impact-écho est basée sur l’analyse fréquentiellede la réponse d’une structure soumise à un choc, la réponse fréquentielle étant diffé-rente lorsqu’une gaine est pleine ou qu’elle présente des vides [27]. Bien que les étudesen laboratoire montrent des résultats intéressants dans des conditions de vide parfait, ladétection est plus délicate pour un manque de coulis partiel. Une seconde méthode estinvestiguée. Il s’agit de la thermographie infrarouge. Cette technique consiste à mesurer lerayonnement infrarouge, non visible à l’oeil nu, généré par l’échange thermique entre lessurfaces d’un corps et l’atmosphère. Lorsqu’un vide d’injection est présent, la cartographiethermique est différente de celle d’une gaine correctement injectée. Les premiers résultatssont encourageants et montrent que l’auscultation est possible mais les problèmes tech-niques concernant notamment le chauffage correct du système de précontrainte restent àrésoudre.
Concernant les mesures de contraintes dans les câbles et compte tenu du coulis pré-sent tout autour du câble, les méthodes classiques utilisées sur les ponts suspendus ou àhaubans ne peuvent pas être utilisées (méthodes de vibration des câbles). Dans ce cas laméthode d’acoustoélasticité est testée afin de revenir aux caractéristiques mécaniques dela précontrainte. Cette étude reste encore très théorique et mérite de nombreux tests.
L’endommagement des câbles (rupture de fils) est quand à lui déterminé à l’aidedes méthodes de réflectométrie ultrasonore [28] et électromagnétique [29]. Lorsque l’ondeguidée atteint un défaut, elle est renvoyée au capteur émetteur-récepteur. Les dernièresrecherches montrent la potentialité à détecter les ruptures franches de fils. Les travauxse poursuivent notamment pour appréhender la détection de ruptures de fils enrobés decoulis de ciment ainsi que la détection de ruptures obliques qui reste le cas classique surarmature.
La dernière pathologie à détecter est la corrosion. Elle est caractérisée par un pro-cessus relativement lent et complexe. La méthode de contrôle non destructif privilégiéepour détecter ce type d’endommagement est l’émission acoustique. Elle est basée sur laréception et l’analyse d’ondes acoustiques émises par un défaut actif. Lorsque la corrosionévolue, elle libère des signaux qui vont se propager dans les câbles. L’émission acoustiquepossède les atouts pour détecter ces signaux. Néanmoins de nombreux développementsrestent à réaliser.
Aujourd’hui seules les techniques classiques (gammagraphie, radioscopie, méthode ra-dar) sont employées sur ouvrage en tenant compte des limites exposées dans ce paragraphe.De nombreux espoirs sont fondés sur le développement de nouvelles méthodes CND appli-quées aux systèmes de précontrainte afin de faciliter la détection et le suivi des pathologiesdes ouvrages d’art.
1.1. LES OUVRAGES D’ART : CONCEPTION ET PATHOLOGIES 15
Techniques de réparation
Lorsqu’un diagnostic d’ouvrage est réalisé, il faut ensuite réfléchir aux actions correc-tives à mettre en place. La réparation de la structure doit être envisagée suivant deuxoptiques :
– reconstituer la structure ;– s’attaquer aux causes du désordre.
En effet, il est important que l’ouvrage retrouve les capacités mécaniques et les dispositionsgéométriques prévues par le cahier des charges tout en évitant que de tels désagrémentsne se reproduisent.
Malheureusement, en ce qui concerne la fissuration du béton, peu de méthodes demaintenance existent. Les désordres tels la réaction sulfatique interne ou l’alcali-réactionn’ont pas de réelles techniques permettant de lutter contre les causes de l’endommage-ment. Seule une injection des fissures avec une résine permet de reconstituer la structureet d’empêcher l’eau de pénétrer jusqu’aux câbles.
Lorsqu’un endommagement par corrosion des câbles ou qu’une rupture partielle outotale d’un câble sont détectés, deux cas de figure peuvent être envisagés. Lorsqu’il s’agitde précontrainte extérieure, les câbles sont relativement accessibles donc un changementdes câbles de précontrainte peut être possible mais reste délicat à réaliser notammentconcernant le démontage de la précontrainte. En revanche, dans le cas de la précontrainteintérieure, les câbles ne sont pas démontables et il faut recourir à une précontrainte ad-ditionnelle (extérieure) après une estimation des pertes de précontrainte afin de ne passurcomprimer le béton. Cette estimation peut s’avérer relativement délicate. La structurepeut également être renforcée en ajoutant des armatures passives qui reprennent seulementles charges d’exploitation. Il peut s’agir de tôles métalliques collées ou collées-boulonnéesou encore de tissus composites collés [30]. Ces nouvelles techniques de réparation sonten plein développement. Afin d’éviter l’expansion des mécanismes de corrosion, en pré-contrainte extérieure, les gaines peuvent être réinjectées par un coulis de ciment ou parune résine époxy. L’efficacité de cette technique peut être conditionnée par la localisationcorrecte des vides d’injection ainsi que par le remplissage correct des vides. Lorsque lesmécanismes de corrosion sont amorcés, quelques techniques permettent la réduction oul’arrêt de la corrosion. Il s’agit de la protection cathodique, des méthodes de réhabilitationélectrochimique ou encore des inhibiteurs de corrosion. Malheureusement, aujourd’hui cesméthodes ne sont pas encore utilisées car elles demandent d’être validées [31].
Les méthodes de réparation sont donc limitées et relativement compliquées et lourdesà mettre en place, c’est pourquoi des méthodes de surveillance in situ sont développées.Elles permettent d’intervenir rapidement sur la structure dès lors qu’un avertissement aété émis. C’est le cas de la surveillance acoustique. Les ruptures de câbles sont détectéespar des capteurs de type accéléromètres placés sur le parement, le long du tracé du câble[32][33]. Lorsqu’une rupture survient, une alerte est envoyée au gestionnaire de l’ouvrageafin qu’il puisse agir rapidement.
16 CHAPITRE 1. BIBLIOGRAPHIE
1.2 La corrosion sous contrainte de structures métal-liques
1.2.1 Introduction
La vocation de ce chapitre est de comprendre les mécanismes de corrosion affectantles câbles de précontrainte. Ce chapitre est particulièrement accentué sur les problèmes decorrosion sous contrainte (CSC) qui se révèlent être le mode de corrosion le plus probléma-tique sur ouvrages d’art en béton précontraint. Après avoir évoqué les différentes formesde corrosion sous contrainte, les mécanismes spécifiques aux armatures de précontraintesont définis. Nous soulignons spécialement les conditions d’amorçage de ce mécanismeainsi que son mode de propagation.
1.2.2 Différentes formes de corrosion sous contrainte
Définitions et historique
La corrosion sous contrainte (CSC), encore appelée fissuration sous contrainte, est unphénomène qui se manifeste par l’amorçage et la propagation de fissures. La CSC est liéeà l’application d’une contrainte mécanique (statique ou lentement variable) à un matériauplacé dans un environnement susceptible de provoquer une corrosion localisée sur sa sur-face initialement recouverte d’un film passif. On inclut aussi sous ce terme la fragilisationpar l’hydrogène. L’étude et la compréhension des mécanismes de CSC a débuté il y a denombreuses années. Étant donné leur complexité et le nombre de paramètres à prendreen compte, les études et les modèles se sont multipliés. De plus, tous les matériaux nesont pas susceptibles de subir la CSC. Une des étapes primordiale au développement desthéories et modèles de CSC fut d’associer à chaque matériau, un milieu favorable à sonendommagement par CSC. Les nombreuses études menées dès les années 40-50 ont permisde définir des couples matériau-milieu sensibles à la corrosion sous contrainte.
La fissuration sous contrainte se traduit par un mécanisme lent conduisant à la rup-ture mécanique brutale et fragile des pièces [34]. Au niveau macroscopique, la CSC s’ex-prime généralement par la propagation de fissures perpendiculairement à la plus grandecontrainte appliquée. Il est admis depuis les années 60-70 que le phénomène de CSC suittrois phases :
– Amorçage des fissures ;– Fissuration lente et discontinue ;– Propagation brutale et rupture fragile ou semi-fragile après avoir dépassé le coeffi-
cient de contrainte critique du matériau.Le développement de modèles de corrosion sous contrainte s’est poursuivit dans les années80 afin de pouvoir prédire le comportement des pièces mécaniques vis à vis de certainsmilieux corrosifs. Il s’agit alors de définir les aspects microscopiques de l’intéraction metal-environnement. Ces modèles se sont particulièrement intéressés au mécanisme de propaga-tion de fissure lente et discontinue (deuxième phase du mécanisme de CSC). Aujourd’huices modèles sont communément classés dans deux grandes familles [35] :
– La CSC de forme anodique ;

1.2. LA CORROSION SOUS CONTRAINTE DE STRUCTURES MÉTALLIQUES 17
– La fragilisation par l’hydrogène.
Mécanismes d’amorçage de la CSC
La première étape du mécanisme de développement de fissure est l’amorçage. Il cor-respond à une attaque initiale de corrosion localisée. Elle peut se produire au niveaude certaines imperfections de surface du réseau cristallin et engendrer la création d’unepiqûre. Cette cavité de faibles dimensions mais pouvant atteindre une profondeur im-portante est initiée par la coexistance des réactions anodiques et cathodiques suivantes.La réaction anodique est une réaction d’oxydation où les atomes métalliques passent ensolution sous forme d’ions métalliques :
M →M z+ + ze− (1.2)
Afin d’assurer l’électroneutralité de la solution, les électrons e− vont être consommés parune réaction cathodique. En milieu aqueux et suivant le pH, deux réactions cathodiquessont possibles [36] :
O2 + 2H2O + 4e− → 4OH−(pH > 7) (1.3)
H+ + e− → Hadsorbe(pH < 7) (1.4)
On se trouve maintenant en présence de deux zones de potentiel différent, donc d’unepile électrochimique. Ces réactions peuvent former des produits qui sont en général deshydroxides métalliques :
M z+ + zOH− →M(OH)z (1.5)
Les réactions cathodiques et anodiques créent donc des zones où les conditions électrochi-miques sont différentes. Si ces zones sont proches, la corrosion est uniforme. Si au contraireces zones sont éloignées, la corrosion est localisée.
Cette corrosion localisée apparaît lorsque l’environnement et/ou le matériau sont sé-lectifs. Un environnement est sélectif lorsque sa composition, son pH ou sa températurevarient localement. En ce qui concerne la sélectivité du matériau, elle peut provenir d’in-clusions métalliques, de l’association de matériaux différents ou encore d’une protectionde surface localement défectueuse. Cette protection peut être la présence d’une peintureou la formation d’une couche passive. Ces films passifs sont créés par réaction chimiquelorsque les conditions électrochimiques, thermodynamiques et cinétiques sont réunies [34].
Différents facteurs influencent la corrosion par attaque localisée [37]. Le premier facteuraggravant est le rapport des aires anodiques et cathodiques. Plus le rapport est faible, plusla vitesse de dissolution anodique est importante. Un second exemple est le phénomèned’aération différentielle que l’on rencontre fréquemment suite à une dissolution anodiqueet qui peut accélérer une attaque locale de corrosion. Le phénomène est dû à la formationd’une pile de concentration en oxygène entre les parties aérées et désaérées. A l’inverse desmécanismes précédents, la formation de films passifs au cours des réactions de corrosionest un phénomène qui peut limiter la corrosion tout comme la présence d’un film sur lasurface du métal avant l’attaque.
18 CHAPITRE 1. BIBLIOGRAPHIE
En corrosion sous contrainte, le mécanisme de corrosion décrit précédemment est as-socié à la présence d’un champ de contraintes. Une concentration de contrainte est donccréée au fond de la piqûre et peut amorcer une fissure. De nombreux facteurs peuventinfluencer cette deuxième phase de la CSC. Les modèles les plus courant seront détaillésdans les deux paragraphes suivants.
Mécanismes anodiques de propagation de fissures
Les mécanismes microscopiques à l’origine de la propagation de fissures en CSC sontnombreux et sont malheureusement souvent difficiles à mettre en lumière expérimentale-ment. Les modèles présentés dans ce paragraphe sont basés sur des mécanismes de typeanodique. En tout état de cause, aucun modèle de CSC ne permet à lui seul de caractérisertous les cas de CSC. Chaque modèle est adapté à des conditions spécifiques (structuremétallique, conditions électrochimiques...). Parfois plusieurs mécanismes peuvent interve-nir en synergie.
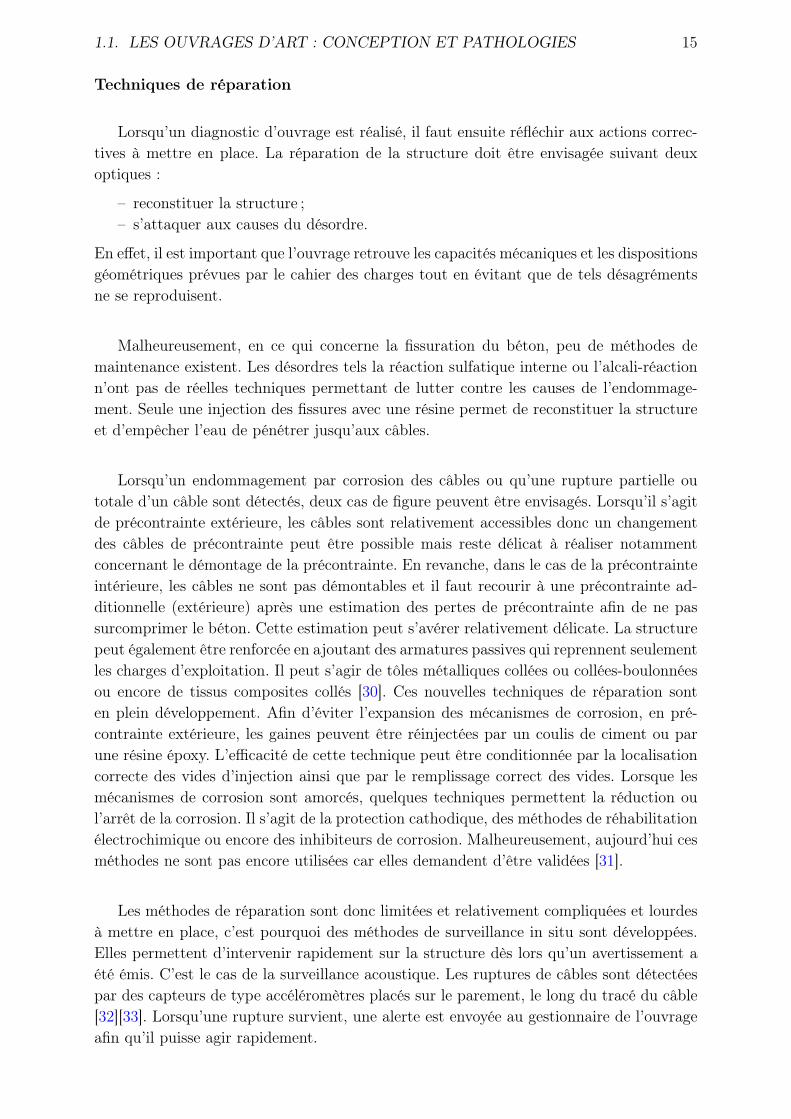
Le modèle de propagation de fissures le plus répandu est le modèle de dissolution élec-trochimique proposé par Logan [38] et Ford [39] [40] [41] en 1984. Il s’agit d’un processusitératif dont la séquence commence par la mise à nu d’une surface. Cela crée un effet depile et la dissolution localisée de cette zone active, qui fini par se repassiver (figure 1.8).Les vitesses de corrosion et de passivation vont nécessairement influencer ces itérations.
Figure 1.8 – Modèle de dissolution électrochimique [37].
Il y a trois cas possibles :– La repassivation du métal mis à nu est plus rapide que la dissolution, le phénomène
de corrosion n’a pas le temps d’être crée ;– La cinétique de dissolution du métal est plus grande que la cinétique de repassiva-
tion, la corrosion n’est plus localisée, elle atteint le matériau à plus grande échelle ;– La vitesse de repassivation et de corrosion sont sensiblement les mêmes, la dissolution
localisée est alors très importante.
1.2. LA CORROSION SOUS CONTRAINTE DE STRUCTURES MÉTALLIQUES 19
Un second modèle applicable uniquement dans le cas de la corrosion sous contrainte inter-granulaire est le modèle d’oxydation externe introduit par Scott [42] [43] dans les années90. La fissure se propage à cause de l’oxydation des joins de grains de la structure métal-lique.
Ces deux modèles font appel à des mécanismes d’enlèvement de matière en ce quiconcerne la propagation de fissures. Les trois suivants, quant à eux, sont basés sur unepropagation par rupture mécanique.
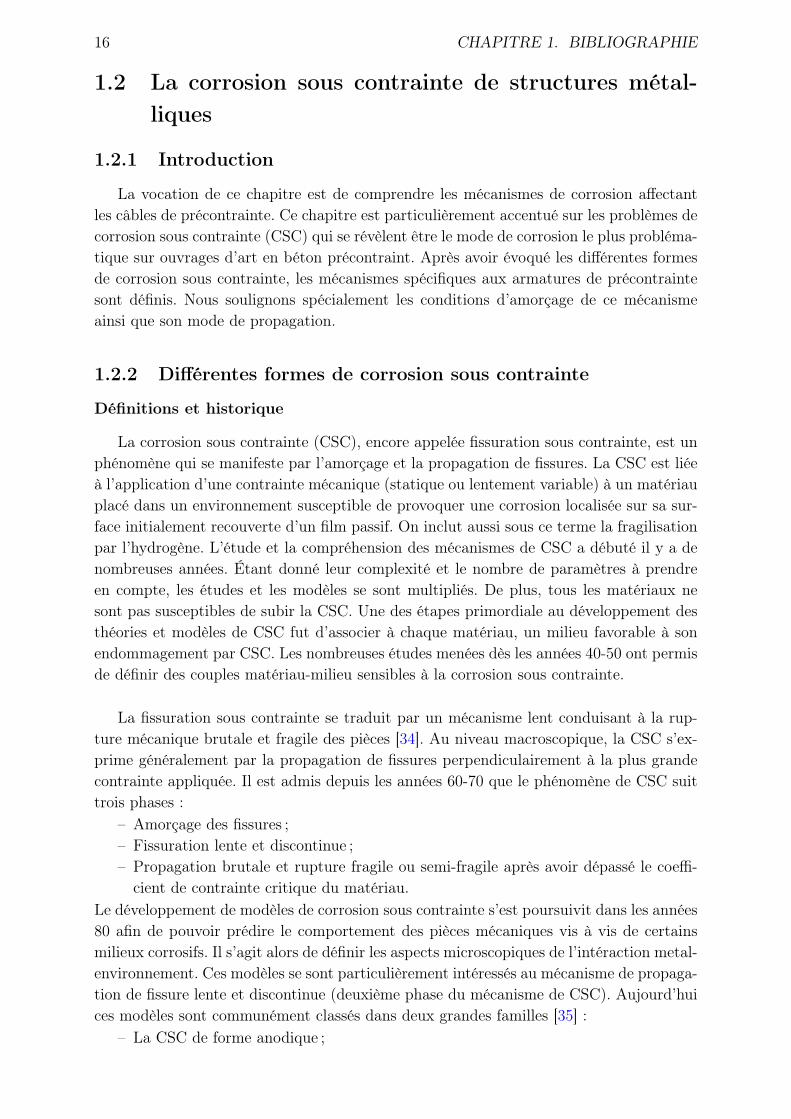
Jones [44] et Magnin [45] [46] [47] [48] [49] proposent le modèle d’interaction corrosionplasticité dans les années 85-90. L’attaque de corrosion localisée par dissolution anodiqueassociée au champ de contrainte créent une augmentation de la plasticité locale. En effet, ladissolution active la plasticité locale en permettant le mouvement plus aisé des dislocations(figure 1.9) dans une zone très proche de la fissure. Cette zone adoucie par la dissolutionpermet la propagation de la fissure.
Figure 1.9 – Modèle d’intéraction corrosion-plasticité [47].
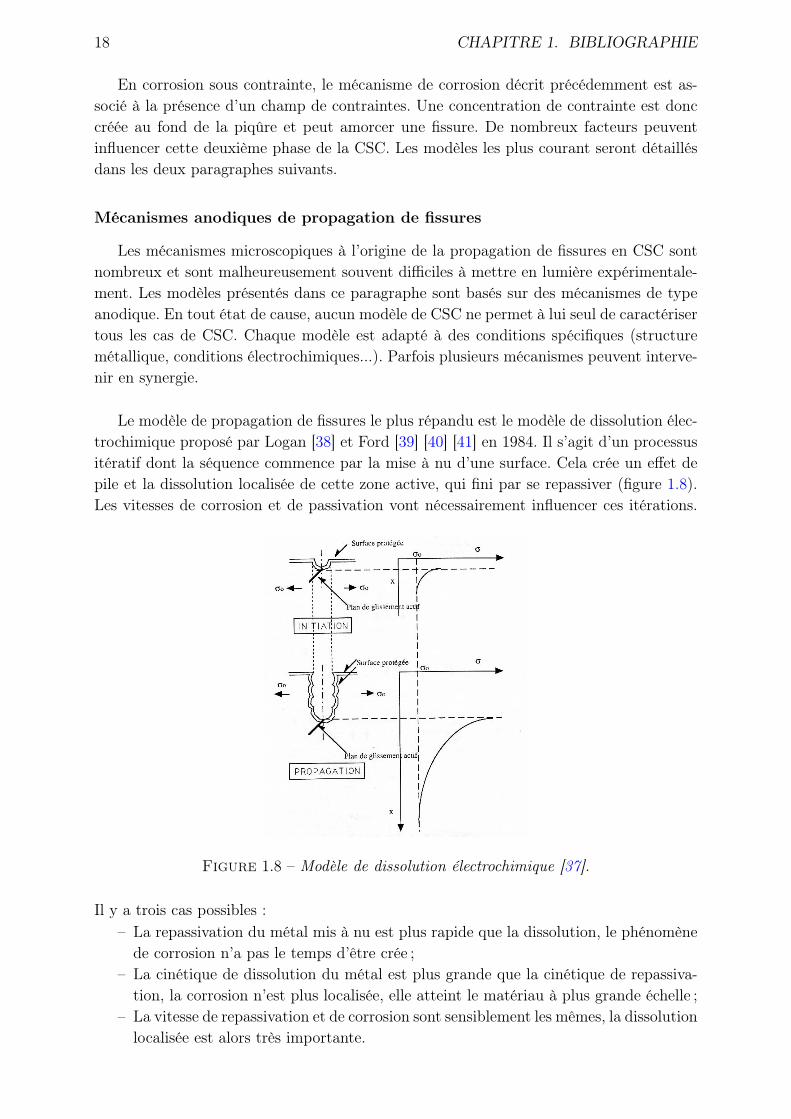
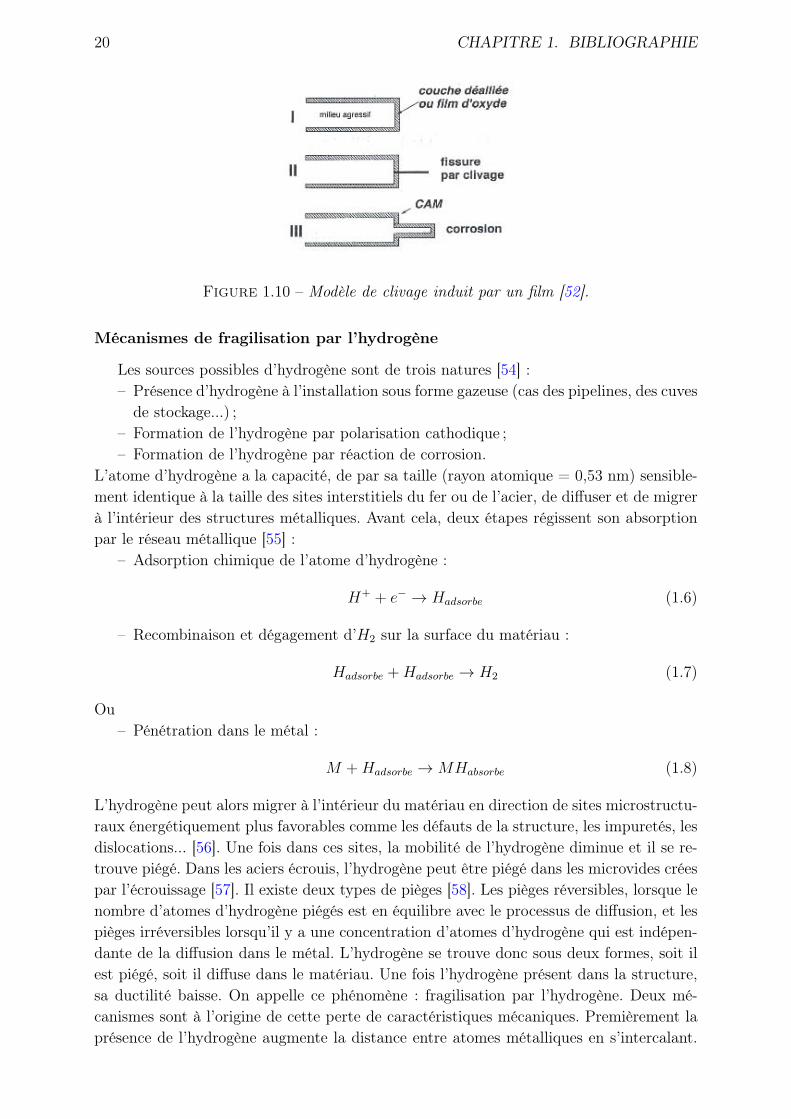
Le modèle de clivage induit par un film, proposé par Sieradzki et Newman [50] [51],s’applique principalement à la corrosion sous contrainte transgranulaire des alliages duc-tiles ayant une structure cubique à face centrée mais elle peut également être adaptée àd’autres formes de CSC ou de matériau. L’environnement forme un film en fond de fissurequi est capable d’amorcer un microclivage. Sous certaines conditions, ce microclivage peutse propager dans le matériau à travers l’interface film/métal sur plusieurs micromètres.La figure 1.10 montre que sous l’action d’une contrainte la fissure peut s’ouvrir et per-met alors au milieu de reformer le film en provoquant de nouveau l’amorce d’un nouveauclivage.
Galvele présente un autre modèle de CSC en 1987 [53] : le modèle SMM (SurfaceMobility Mechanism). Ce modèle explique qu’au niveau d’un site d’amorçage, la présenced’un champ de contraintes important réduit l’énergie libre de formation de lacunes. Pourrééquilibrer le nombre de lacunes, celles-ci diffusent le long de la surface de l’acier. Lorsquele front de fissures vient en contact avec une lacune, la fissure propage d’une distanceatomique.
Dans les mécanismes faisant appel à une propagation de fissures par rupture mé-canique, la présence d’hydrogène dans la structure métallique peut avoir une influenceimportante.
20 CHAPITRE 1. BIBLIOGRAPHIE
Figure 1.10 – Modèle de clivage induit par un film [52].
Mécanismes de fragilisation par l’hydrogène
Les sources possibles d’hydrogène sont de trois natures [54] :– Présence d’hydrogène à l’installation sous forme gazeuse (cas des pipelines, des cuves
de stockage...) ;– Formation de l’hydrogène par polarisation cathodique ;– Formation de l’hydrogène par réaction de corrosion.
L’atome d’hydrogène a la capacité, de par sa taille (rayon atomique = 0,53 nm) sensible-ment identique à la taille des sites interstitiels du fer ou de l’acier, de diffuser et de migrerà l’intérieur des structures métalliques. Avant cela, deux étapes régissent son absorptionpar le réseau métallique [55] :
– Adsorption chimique de l’atome d’hydrogène :
H+ + e− → Hadsorbe (1.6)
– Recombinaison et dégagement d’H2 sur la surface du matériau :
Hadsorbe +Hadsorbe → H2 (1.7)
Ou– Pénétration dans le métal :
M +Hadsorbe →MHabsorbe (1.8)
L’hydrogène peut alors migrer à l’intérieur du matériau en direction de sites microstructu-raux énergétiquement plus favorables comme les défauts de la structure, les impuretés, lesdislocations... [56]. Une fois dans ces sites, la mobilité de l’hydrogène diminue et il se re-trouve piégé. Dans les aciers écrouis, l’hydrogène peut être piégé dans les microvides créespar l’écrouissage [57]. Il existe deux types de pièges [58]. Les pièges réversibles, lorsque lenombre d’atomes d’hydrogène piégés est en équilibre avec le processus de diffusion, et lespièges irréversibles lorsqu’il y a une concentration d’atomes d’hydrogène qui est indépen-dante de la diffusion dans le métal. L’hydrogène se trouve donc sous deux formes, soit ilest piégé, soit il diffuse dans le matériau. Une fois l’hydrogène présent dans la structure,sa ductilité baisse. On appelle ce phénomène : fragilisation par l’hydrogène. Deux mé-canismes sont à l’origine de cette perte de caractéristiques mécaniques. Premièrement laprésence de l’hydrogène augmente la distance entre atomes métalliques en s’intercalant.
1.2. LA CORROSION SOUS CONTRAINTE DE STRUCTURES MÉTALLIQUES 21
De plus, l’atome d’hydrogène possède l’aptitude de transférer tout ou une partie de sacharge électronique aux atomes voisins ce qui modifie la structure électronique locale. Ceciengendre une réduction des forces de cohésion du réseau atomique et donc une baisse dela résistance à la fissuration. La fragilisation par l’hydrogène affecte principalement lesalliages à caractéristiques mécaniques élevées (résistance en traction supérieure à 1000MPa) [59].
De nombreux modèles ont été élaborés afin d’expliquer le rôle de l’hydrogène dans lesmécanismes de CSC. Deux grandes familles de modèles peuvent être présentées [60] :
– Fragilisation par l’hydrogène par un mécanisme de décohésion ;– Fragilisation associée aux intéractions hydrogène-dislocations.
Deux modèles de fragilisation par l’hydrogène par un mécanisme de décohésion ont étédécrits. Le premier modèle de réduction de l’énergie de surface a été développé par N.J.Petch. L’adsorption de l’hydrogène engendre une réduction de l’énergie de surface γs etdonc fragilise le matériau exposé à un environnement source d’hydrogène. La contraintenécessaire à la propagation d’une fissure est donc diminuée.
Le modèle de réduction des forces de cohésion est basé sur le même principe que lemodèle précédent mis à part que l’hydrogène est absorbé dans le matériau. La présenced’hydrogène soluble semble réduire les forces de cohésion des atomes. De plus, la concen-tration de contrainte en pointe de fissure (zone de triaxialité de contrainte) permet unenrichissement de cette zone en hydrogène et donc la propagation de la fissure. Ce mo-dèle permet d’expliquer la rupture différée des aciers à hautes caractéristiques mécaniques.
Les phénomènes de fragilisation par l’hydrogène sont souvent associés à la présence dezones plastiques dans le matériau. Le modèle d’intéraction hydrogène-déformation plas-tique a pour principe de base que l’hydrogène protonique peut être transporté et piégé parles dislocations. Il contribue alors à la création d’une microfissure au niveau de l’empile-ment des dislocations. Les premiers chercheurs a avoir proposé ce mécanisme d’intéractionhydrogène-dislocations lors de la fragilisation par l’hydrogène sont P. Bastien et P. Azou.Trois hypothèses principales permettent d’expliquer la fragilisation par l’hydrogène lors deson piégeage par les dislocations. A.N. Stroh explique la fragilisation par l’hydrogène dansles aciers par un durcissement en pointe de fissure dû à la présence d’hydrogène dissous.L’hydrogène bloque le mouvement des dislocations et augmente la contrainte d’écoule-ment. Puisque l’hydrogène a une forte mobilité, il peut ensuite suivre la propagation de lafissure. Le deuxième modèle est proposé par C.D. Beachem. Il suggère que la fragilisationpar l’hydrogène est due à de la plasticité induite par l’hydrogène. L’enrichissement dela pointe de fissure en hydrogène facilite les mécanismes de déformation plastique ce quiconduit à une rupture du matériau. Le dernier modèle proposé par S.P. Lynch semble serapprocher du modèle précédent. L’absorption de surface de l’hydrogène peut conduire àune diminution des contraintes nécessaires à la création des dislocations.
D’autres modèles ou mécanismes de fragilisation par l’hydrogène ont été décrits au filsdes études scientifiques comme la formation d’hydrures métalliques [61] ou les modèlesbasés sur la pression interne d’hydrogène [62]. Ces modèles étant éloignés des endomma-gements étudiés pendant ce travail, ils ne seront pas davantage décrits.

22 CHAPITRE 1. BIBLIOGRAPHIE
En tout état de cause, mise à part la quantité d’hydrogène présente, les facteursimportants dans le mécanisme de fragilisation par l’hydrogène sont [62] :
– Le mécanisme de piégeage de l’hydrogène ;– L’état de contrainte du matériau ;– Les déformations plastiques.
1.2.3 Corrosion sous contrainte des armatures de précontrainte
Historique et problématique
Les câbles de précontrainte peuvent être sujets à deux types de corrosion. Avant leurmise en place sur l’ouvrage les câbles sont transportés sur site et mis en attente sansque l’on juge parfois utile de les protéger. Les conditions environnementales quelquefoisdifficiles (eau de pluie, variation de température, présence d’agents chimiques et agressifs)peuvent avoir comme conséquence de provoquer la corrosion des armatures. Généralement,la corrosion généralisée n’a pas d’impact majeur sur la tenue du câble tant que sa sectionutile est supérieure à la section minimum supportant la contrainte appliquée [63].
Le mode de corrosion le plus préoccupant concernant les câbles de précontrainte estla corrosion sous contrainte puisqu’elle provoque la rupture brutale et inopinée des câblesd’acier [64]. Les premières ruptures en service d’armatures de précontrainte dues à la CSCont été observées en 1961 [65].
Mécanismes spécifiques à ces structures à câbles
Les mécanismes de CSC commencent lorsque les matériaux protégeant les armaturesde précontrainte sont altérés (carbonatation du béton, pénétration d’ions chlorures...). Lacarbonatation a pour effet de diminuer le pH du béton et donc de diminuer et détruirela couche de passivation autour de l’armature. La présence des ions chlorure favorise lesmécanismes de corrosion par piqûre car les ions chlorure modifient localement la structureet les propriétés des couches de passivation [66]. L’acier n’étant plus passivé, il peut subirl’agression d’agents pénétrants. Comme dans tout phénomène corrosif, les électrons pré-sents vont engendrer des réactions d’oxydo-réduction donc la dissolution localisée du métal[17]. Cette dissolution localisée provoque un milieu confiné où des réactions d’hydrolysevont avoir lieu [67]. Pour les aciers, par la réaction suivante :
Fe2+ + 2H2O → Fe(OH)2 + 2H+ (1.9)
Ces réactions entraînent la baisse du pH qui est alors compris entre 2 et 4. Ce milieuest aussi appelé pile d’Evans ou cellule occluse [68] puisque l’oxygène y est difficilementrenouvelée. Le confinement de l’electrolyte dans la cellule occluse a aussi comme consé-quence d’abaisser la différence de potentiel métal-solution (potentiel de dissolution) parrapport au reste de l’acier [66].Ces différents phénomènes ont pour conséquences :
– Le fond de cellule est maintenu dans un domaine actif. Il ne peut plus se repassiverce qui peut provoquer des vitesses de dissolution importantes ;
– Le milieu acide et le potentiel de dissolution bas rendent possible le dégagementd’hydrogène.
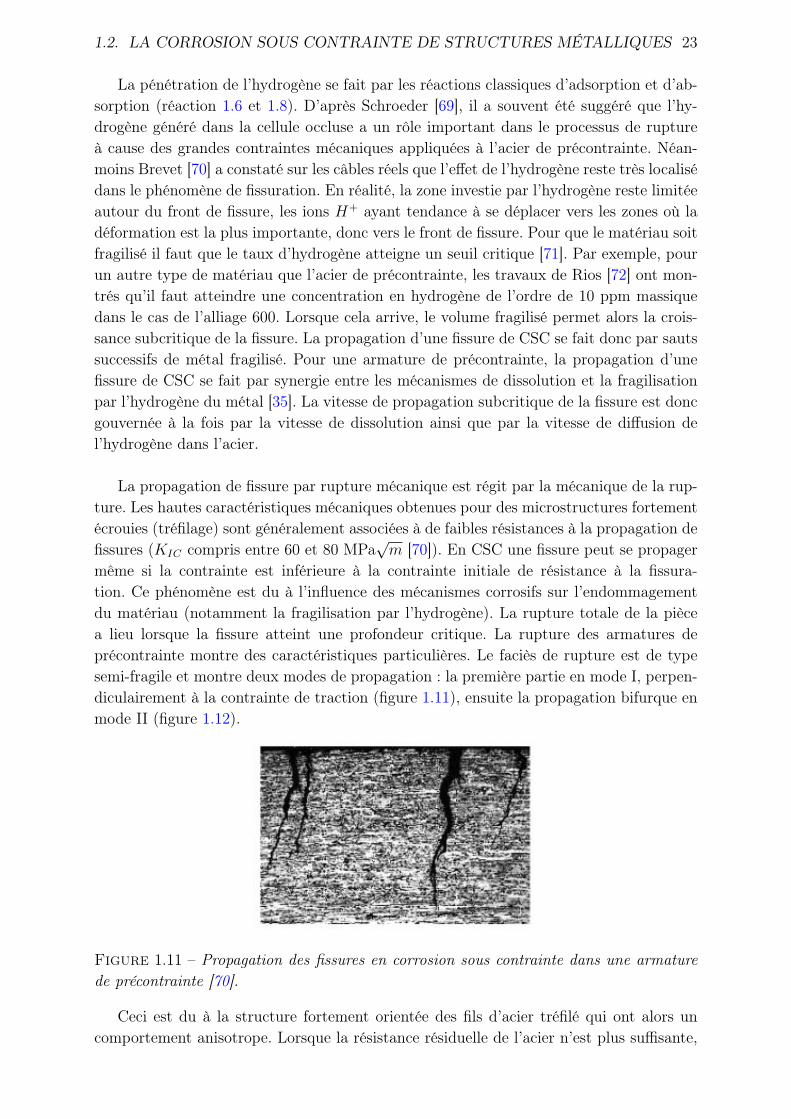
1.2. LA CORROSION SOUS CONTRAINTE DE STRUCTURES MÉTALLIQUES 23
La pénétration de l’hydrogène se fait par les réactions classiques d’adsorption et d’ab-sorption (réaction 1.6 et 1.8). D’après Schroeder [69], il a souvent été suggéré que l’hy-drogène généré dans la cellule occluse a un rôle important dans le processus de ruptureà cause des grandes contraintes mécaniques appliquées à l’acier de précontrainte. Néan-moins Brevet [70] a constaté sur les câbles réels que l’effet de l’hydrogène reste très localisédans le phénomène de fissuration. En réalité, la zone investie par l’hydrogène reste limitéeautour du front de fissure, les ions H+ ayant tendance à se déplacer vers les zones où ladéformation est la plus importante, donc vers le front de fissure. Pour que le matériau soitfragilisé il faut que le taux d’hydrogène atteigne un seuil critique [71]. Par exemple, pourun autre type de matériau que l’acier de précontrainte, les travaux de Rios [72] ont mon-trés qu’il faut atteindre une concentration en hydrogène de l’ordre de 10 ppm massiquedans le cas de l’alliage 600. Lorsque cela arrive, le volume fragilisé permet alors la crois-sance subcritique de la fissure. La propagation d’une fissure de CSC se fait donc par sautssuccessifs de métal fragilisé. Pour une armature de précontrainte, la propagation d’unefissure de CSC se fait par synergie entre les mécanismes de dissolution et la fragilisationpar l’hydrogène du métal [35]. La vitesse de propagation subcritique de la fissure est doncgouvernée à la fois par la vitesse de dissolution ainsi que par la vitesse de diffusion del’hydrogène dans l’acier.
La propagation de fissure par rupture mécanique est régit par la mécanique de la rup-ture. Les hautes caractéristiques mécaniques obtenues pour des microstructures fortementécrouies (tréfilage) sont généralement associées à de faibles résistances à la propagation defissures (KIC compris entre 60 et 80 MPa
√m [70]). En CSC une fissure peut se propager
même si la contrainte est inférieure à la contrainte initiale de résistance à la fissura-tion. Ce phénomène est du à l’influence des mécanismes corrosifs sur l’endommagementdu matériau (notamment la fragilisation par l’hydrogène). La rupture totale de la piècea lieu lorsque la fissure atteint une profondeur critique. La rupture des armatures deprécontrainte montre des caractéristiques particulières. Le faciès de rupture est de typesemi-fragile et montre deux modes de propagation : la première partie en mode I, perpen-diculairement à la contrainte de traction (figure 1.11), ensuite la propagation bifurque enmode II (figure 1.12).
Figure 1.11 – Propagation des fissures en corrosion sous contrainte dans une armaturede précontrainte [70].
Ceci est du à la structure fortement orientée des fils d’acier tréfilé qui ont alors uncomportement anisotrope. Lorsque la résistance résiduelle de l’acier n’est plus suffisante,
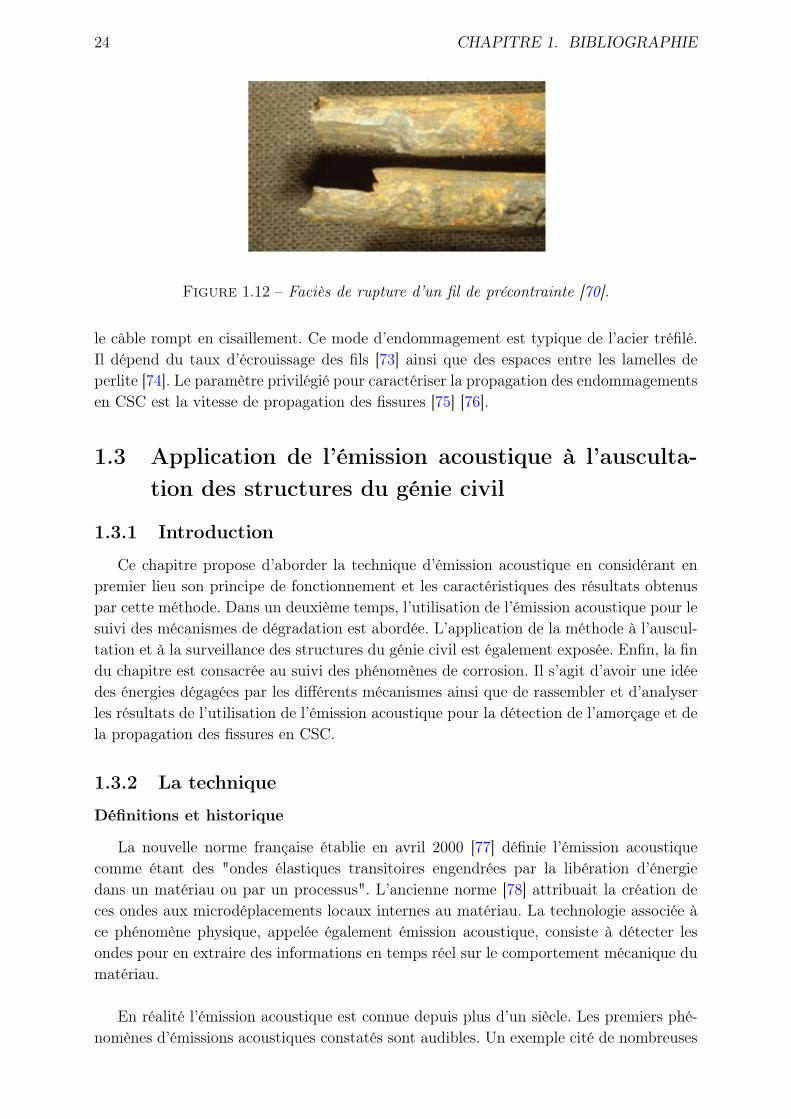
24 CHAPITRE 1. BIBLIOGRAPHIE
Figure 1.12 – Faciès de rupture d’un fil de précontrainte [70].
le câble rompt en cisaillement. Ce mode d’endommagement est typique de l’acier tréfilé.Il dépend du taux d’écrouissage des fils [73] ainsi que des espaces entre les lamelles deperlite [74]. Le paramètre privilégié pour caractériser la propagation des endommagementsen CSC est la vitesse de propagation des fissures [75] [76].
1.3 Application de l’émission acoustique à l’ausculta-tion des structures du génie civil
1.3.1 Introduction
Ce chapitre propose d’aborder la technique d’émission acoustique en considérant enpremier lieu son principe de fonctionnement et les caractéristiques des résultats obtenuspar cette méthode. Dans un deuxième temps, l’utilisation de l’émission acoustique pour lesuivi des mécanismes de dégradation est abordée. L’application de la méthode à l’auscul-tation et à la surveillance des structures du génie civil est également exposée. Enfin, la findu chapitre est consacrée au suivi des phénomènes de corrosion. Il s’agit d’avoir une idéedes énergies dégagées par les différents mécanismes ainsi que de rassembler et d’analyserles résultats de l’utilisation de l’émission acoustique pour la détection de l’amorçage et dela propagation des fissures en CSC.
1.3.2 La technique
Définitions et historique
La nouvelle norme française établie en avril 2000 [77] définie l’émission acoustiquecomme étant des "ondes élastiques transitoires engendrées par la libération d’énergiedans un matériau ou par un processus". L’ancienne norme [78] attribuait la création deces ondes aux microdéplacements locaux internes au matériau. La technologie associée àce phénomène physique, appelée également émission acoustique, consiste à détecter lesondes pour en extraire des informations en temps réel sur le comportement mécanique dumatériau.
En réalité l’émission acoustique est connue depuis plus d’un siècle. Les premiers phé-nomènes d’émissions acoustiques constatés sont audibles. Un exemple cité de nombreuses
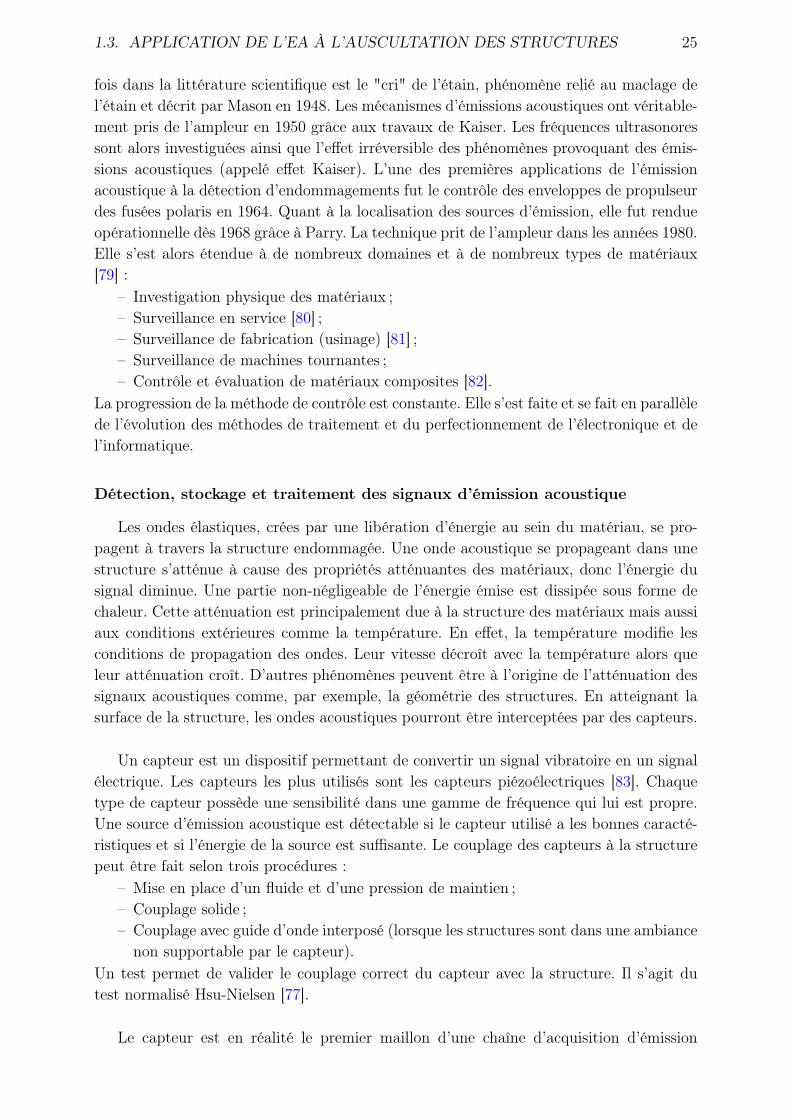
1.3. APPLICATION DE L’EA À L’AUSCULTATION DES STRUCTURES 25
fois dans la littérature scientifique est le "cri" de l’étain, phénomène relié au maclage del’étain et décrit par Mason en 1948. Les mécanismes d’émissions acoustiques ont véritable-ment pris de l’ampleur en 1950 grâce aux travaux de Kaiser. Les fréquences ultrasonoressont alors investiguées ainsi que l’effet irréversible des phénomènes provoquant des émis-sions acoustiques (appelé effet Kaiser). L’une des premières applications de l’émissionacoustique à la détection d’endommagements fut le contrôle des enveloppes de propulseurdes fusées polaris en 1964. Quant à la localisation des sources d’émission, elle fut rendueopérationnelle dès 1968 grâce à Parry. La technique prit de l’ampleur dans les années 1980.Elle s’est alors étendue à de nombreux domaines et à de nombreux types de matériaux[79] :
– Investigation physique des matériaux ;– Surveillance en service [80] ;– Surveillance de fabrication (usinage) [81] ;– Surveillance de machines tournantes ;– Contrôle et évaluation de matériaux composites [82].
La progression de la méthode de contrôle est constante. Elle s’est faite et se fait en parallèlede l’évolution des méthodes de traitement et du perfectionnement de l’électronique et del’informatique.
Détection, stockage et traitement des signaux d’émission acoustique
Les ondes élastiques, crées par une libération d’énergie au sein du matériau, se pro-pagent à travers la structure endommagée. Une onde acoustique se propageant dans unestructure s’atténue à cause des propriétés atténuantes des matériaux, donc l’énergie dusignal diminue. Une partie non-négligeable de l’énergie émise est dissipée sous forme dechaleur. Cette atténuation est principalement due à la structure des matériaux mais aussiaux conditions extérieures comme la température. En effet, la température modifie lesconditions de propagation des ondes. Leur vitesse décroît avec la température alors queleur atténuation croît. D’autres phénomènes peuvent être à l’origine de l’atténuation dessignaux acoustiques comme, par exemple, la géométrie des structures. En atteignant lasurface de la structure, les ondes acoustiques pourront être interceptées par des capteurs.
Un capteur est un dispositif permettant de convertir un signal vibratoire en un signalélectrique. Les capteurs les plus utilisés sont les capteurs piézoélectriques [83]. Chaquetype de capteur possède une sensibilité dans une gamme de fréquence qui lui est propre.Une source d’émission acoustique est détectable si le capteur utilisé a les bonnes caracté-ristiques et si l’énergie de la source est suffisante. Le couplage des capteurs à la structurepeut être fait selon trois procédures :
– Mise en place d’un fluide et d’une pression de maintien ;– Couplage solide ;– Couplage avec guide d’onde interposé (lorsque les structures sont dans une ambiance
non supportable par le capteur).Un test permet de valider le couplage correct du capteur avec la structure. Il s’agit dutest normalisé Hsu-Nielsen [77].
Le capteur est en réalité le premier maillon d’une chaîne d’acquisition d’émission
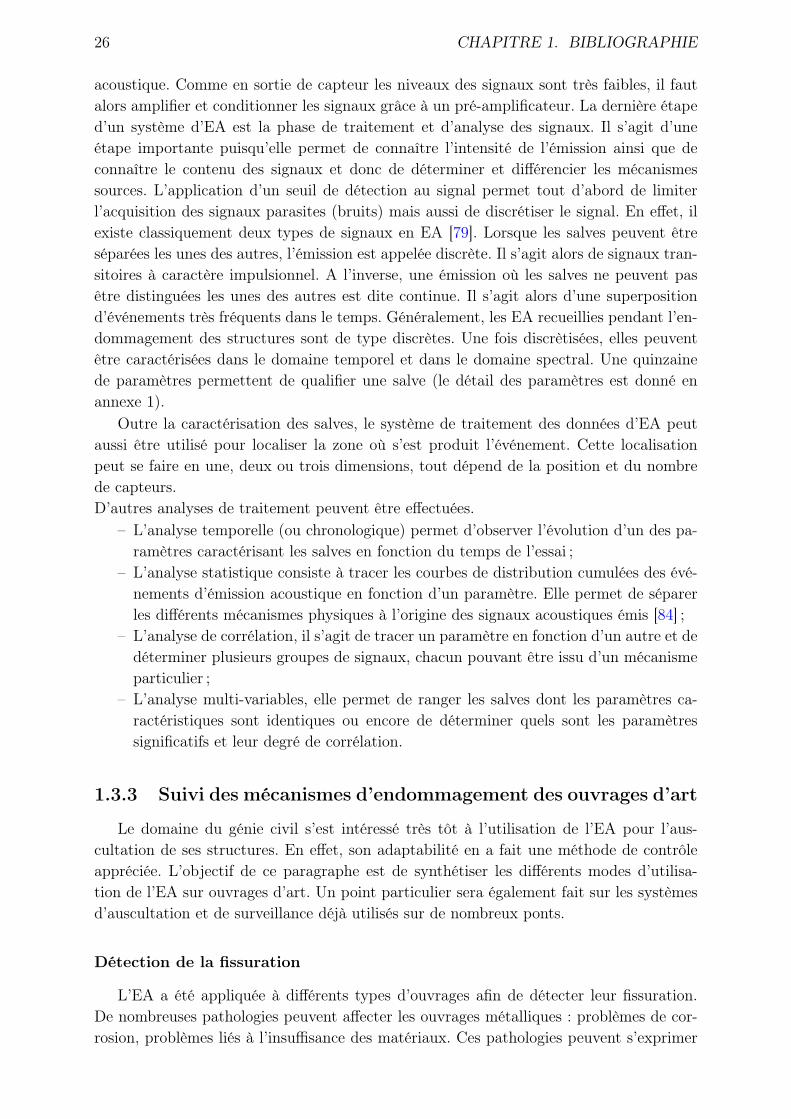
26 CHAPITRE 1. BIBLIOGRAPHIE
acoustique. Comme en sortie de capteur les niveaux des signaux sont très faibles, il fautalors amplifier et conditionner les signaux grâce à un pré-amplificateur. La dernière étaped’un système d’EA est la phase de traitement et d’analyse des signaux. Il s’agit d’uneétape importante puisqu’elle permet de connaître l’intensité de l’émission ainsi que deconnaître le contenu des signaux et donc de déterminer et différencier les mécanismessources. L’application d’un seuil de détection au signal permet tout d’abord de limiterl’acquisition des signaux parasites (bruits) mais aussi de discrétiser le signal. En effet, ilexiste classiquement deux types de signaux en EA [79]. Lorsque les salves peuvent êtreséparées les unes des autres, l’émission est appelée discrète. Il s’agit alors de signaux tran-sitoires à caractère impulsionnel. A l’inverse, une émission où les salves ne peuvent pasêtre distinguées les unes des autres est dite continue. Il s’agit alors d’une superpositiond’événements très fréquents dans le temps. Généralement, les EA recueillies pendant l’en-dommagement des structures sont de type discrètes. Une fois discrètisées, elles peuventêtre caractérisées dans le domaine temporel et dans le domaine spectral. Une quinzainede paramètres permettent de qualifier une salve (le détail des paramètres est donné enannexe 1).
Outre la caractérisation des salves, le système de traitement des données d’EA peutaussi être utilisé pour localiser la zone où s’est produit l’événement. Cette localisationpeut se faire en une, deux ou trois dimensions, tout dépend de la position et du nombrede capteurs.D’autres analyses de traitement peuvent être effectuées.
– L’analyse temporelle (ou chronologique) permet d’observer l’évolution d’un des pa-ramètres caractérisant les salves en fonction du temps de l’essai ;
– L’analyse statistique consiste à tracer les courbes de distribution cumulées des évé-nements d’émission acoustique en fonction d’un paramètre. Elle permet de séparerles différents mécanismes physiques à l’origine des signaux acoustiques émis [84] ;
– L’analyse de corrélation, il s’agit de tracer un paramètre en fonction d’un autre et dedéterminer plusieurs groupes de signaux, chacun pouvant être issu d’un mécanismeparticulier ;
– L’analyse multi-variables, elle permet de ranger les salves dont les paramètres ca-ractéristiques sont identiques ou encore de déterminer quels sont les paramètressignificatifs et leur degré de corrélation.
1.3.3 Suivi des mécanismes d’endommagement des ouvrages d’art
Le domaine du génie civil s’est intéressé très tôt à l’utilisation de l’EA pour l’aus-cultation de ses structures. En effet, son adaptabilité en a fait une méthode de contrôleappréciée. L’objectif de ce paragraphe est de synthétiser les différents modes d’utilisa-tion de l’EA sur ouvrages d’art. Un point particulier sera également fait sur les systèmesd’auscultation et de surveillance déjà utilisés sur de nombreux ponts.
Détection de la fissuration
L’EA a été appliquée à différents types d’ouvrages afin de détecter leur fissuration.De nombreuses pathologies peuvent affecter les ouvrages métalliques : problèmes de cor-rosion, problèmes liés à l’insuffisance des matériaux. Ces pathologies peuvent s’exprimer
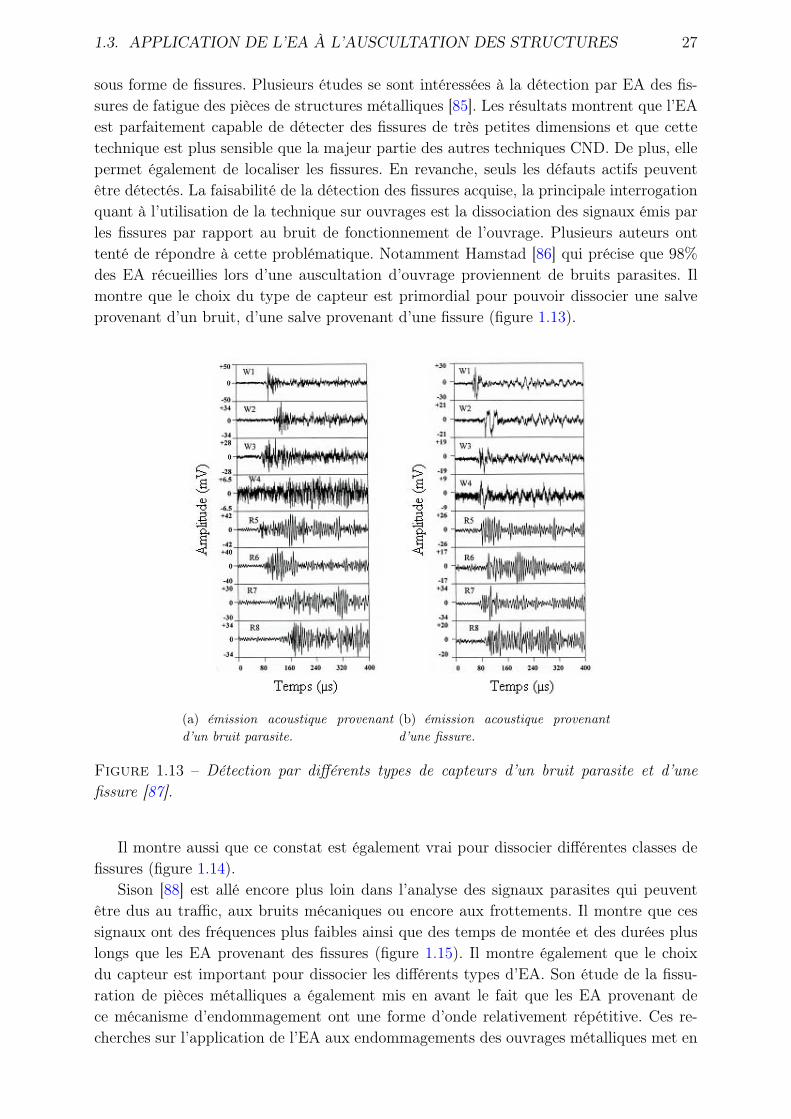
1.3. APPLICATION DE L’EA À L’AUSCULTATION DES STRUCTURES 27
sous forme de fissures. Plusieurs études se sont intéressées à la détection par EA des fis-sures de fatigue des pièces de structures métalliques [85]. Les résultats montrent que l’EAest parfaitement capable de détecter des fissures de très petites dimensions et que cettetechnique est plus sensible que la majeur partie des autres techniques CND. De plus, ellepermet également de localiser les fissures. En revanche, seuls les défauts actifs peuventêtre détectés. La faisabilité de la détection des fissures acquise, la principale interrogationquant à l’utilisation de la technique sur ouvrages est la dissociation des signaux émis parles fissures par rapport au bruit de fonctionnement de l’ouvrage. Plusieurs auteurs onttenté de répondre à cette problématique. Notamment Hamstad [86] qui précise que 98%des EA récueillies lors d’une auscultation d’ouvrage proviennent de bruits parasites. Ilmontre que le choix du type de capteur est primordial pour pouvoir dissocier une salveprovenant d’un bruit, d’une salve provenant d’une fissure (figure 1.13).
(a) émission acoustique provenantd’un bruit parasite.
(b) émission acoustique provenantd’une fissure.
Figure 1.13 – Détection par différents types de capteurs d’un bruit parasite et d’unefissure [87].
Il montre aussi que ce constat est également vrai pour dissocier différentes classes defissures (figure 1.14).
Sison [88] est allé encore plus loin dans l’analyse des signaux parasites qui peuventêtre dus au traffic, aux bruits mécaniques ou encore aux frottements. Il montre que cessignaux ont des fréquences plus faibles ainsi que des temps de montée et des durées pluslongs que les EA provenant des fissures (figure 1.15). Il montre également que le choixdu capteur est important pour dissocier les différents types d’EA. Son étude de la fissu-ration de pièces métalliques a également mis en avant le fait que les EA provenant dece mécanisme d’endommagement ont une forme d’onde relativement répétitive. Ces re-cherches sur l’application de l’EA aux endommagements des ouvrages métalliques met en
28 CHAPITRE 1. BIBLIOGRAPHIE
(a) AE recueillies par un capteur R5. (b) AE recueillies par un capteur W1.
Figure 1.14 – Détection de signaux provenant de 4 types de fissures différents [87].
(a) signaux provenant d’une fissure.
(b) signaux provenant d’un bruit parasite.
Figure 1.15 – Formes d’ondes et spectres fréquentiels provenant d’une fissure et d’unbruit parasite [88].
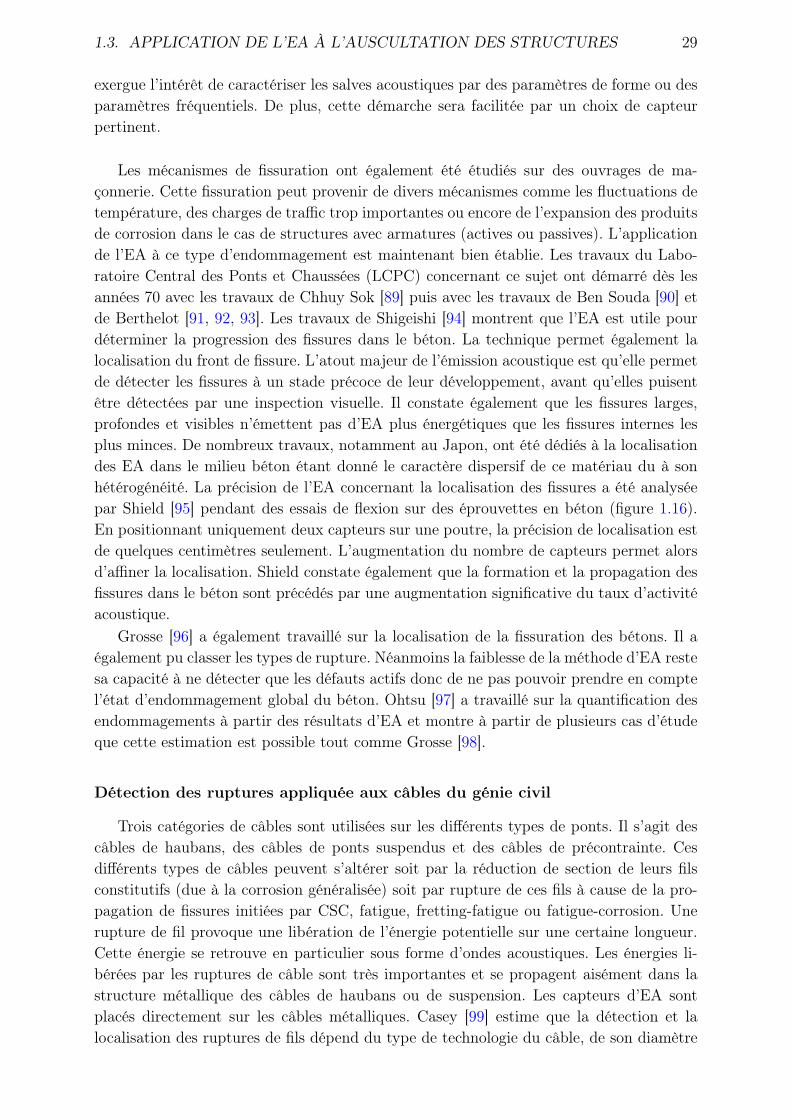
1.3. APPLICATION DE L’EA À L’AUSCULTATION DES STRUCTURES 29
exergue l’intérêt de caractériser les salves acoustiques par des paramètres de forme ou desparamètres fréquentiels. De plus, cette démarche sera facilitée par un choix de capteurpertinent.
Les mécanismes de fissuration ont également été étudiés sur des ouvrages de ma-çonnerie. Cette fissuration peut provenir de divers mécanismes comme les fluctuations detempérature, des charges de traffic trop importantes ou encore de l’expansion des produitsde corrosion dans le cas de structures avec armatures (actives ou passives). L’applicationde l’EA à ce type d’endommagement est maintenant bien établie. Les travaux du Labo-ratoire Central des Ponts et Chaussées (LCPC) concernant ce sujet ont démarré dès lesannées 70 avec les travaux de Chhuy Sok [89] puis avec les travaux de Ben Souda [90] etde Berthelot [91, 92, 93]. Les travaux de Shigeishi [94] montrent que l’EA est utile pourdéterminer la progression des fissures dans le béton. La technique permet également lalocalisation du front de fissure. L’atout majeur de l’émission acoustique est qu’elle permetde détecter les fissures à un stade précoce de leur développement, avant qu’elles puisentêtre détectées par une inspection visuelle. Il constate également que les fissures larges,profondes et visibles n’émettent pas d’EA plus énergétiques que les fissures internes lesplus minces. De nombreux travaux, notamment au Japon, ont été dédiés à la localisationdes EA dans le milieu béton étant donné le caractère dispersif de ce matériau du à sonhétérogénéité. La précision de l’EA concernant la localisation des fissures a été analyséepar Shield [95] pendant des essais de flexion sur des éprouvettes en béton (figure 1.16).En positionnant uniquement deux capteurs sur une poutre, la précision de localisation estde quelques centimètres seulement. L’augmentation du nombre de capteurs permet alorsd’affiner la localisation. Shield constate également que la formation et la propagation desfissures dans le béton sont précédés par une augmentation significative du taux d’activitéacoustique.
Grosse [96] a également travaillé sur la localisation de la fissuration des bétons. Il aégalement pu classer les types de rupture. Néanmoins la faiblesse de la méthode d’EA restesa capacité à ne détecter que les défauts actifs donc de ne pas pouvoir prendre en comptel’état d’endommagement global du béton. Ohtsu [97] a travaillé sur la quantification desendommagements à partir des résultats d’EA et montre à partir de plusieurs cas d’étudeque cette estimation est possible tout comme Grosse [98].
Détection des ruptures appliquée aux câbles du génie civil
Trois catégories de câbles sont utilisées sur les différents types de ponts. Il s’agit descâbles de haubans, des câbles de ponts suspendus et des câbles de précontrainte. Cesdifférents types de câbles peuvent s’altérer soit par la réduction de section de leurs filsconstitutifs (due à la corrosion généralisée) soit par rupture de ces fils à cause de la pro-pagation de fissures initiées par CSC, fatigue, fretting-fatigue ou fatigue-corrosion. Unerupture de fil provoque une libération de l’énergie potentielle sur une certaine longueur.Cette énergie se retrouve en particulier sous forme d’ondes acoustiques. Les énergies li-bérées par les ruptures de câble sont très importantes et se propagent aisément dans lastructure métallique des câbles de haubans ou de suspension. Les capteurs d’EA sontplacés directement sur les câbles métalliques. Casey [99] estime que la détection et lalocalisation des ruptures de fils dépend du type de technologie du câble, de son diamètre

30 CHAPITRE 1. BIBLIOGRAPHIE
(a) localisation des fissures.
(b) fissuration typique d’une poutre soumise à uneflexion 3 points.
Figure 1.16 – Localisation des fissures sur une poutre en flexion 3 points [95].
ou encore du nombre de fils rompus déjà présents. Un exemple d’atténuation d’un si-gnal acoustique provenant de la rupture d’un fil est présenté sur la figure 1.17. On peutconstater qu’à près de 50 mètres, la rupture est toujours détectable. Holford [100], quia fait cette constatation, affirme que la détection des ruptures peut se faire jusqu’à 200mètres en choisissant une instrumentation adaptée, ce qui a été confirmé par Gaillet [101].Les caractéristiques de ces signaux ont aussi été étudiées afin de pouvoir les discrimineren présence de bruits parasites (figure 1.18). Les paramètres amplitude, durée, temps demontée, fréquence dominante et énergie du signal sont les critères caractéristiques pource type de signaux. Les recherches concernant la détection des ruptures ont également étémenées sur des ouvrages en béton précontraint. Les capteurs sont alors placés directementsur le parement en béton. Yuyama [102] a constaté que les EA dues à la rupture des câblessont détectées par les capteurs à des amplitudes très importantes. Les EA dues au trafficroutier ont également été analysées et il a été constaté que la séparation des EA prove-nant des ruptures de celles provenant d’autres sources pouvait être réalisée très facilement.
En France, l’application de l’EA à la détection des ruptures de fils a notamment étéétudiée par le Laboratoire Central des Ponts et Chaussées (LCPC) [103]. Malheureusementlorsque ce genre d’inspection est réalisée, seules les ruptures effectives sont cataloguées,les ruptures plus anciennes ne pouvant pas être estimées. Cette constatation est d’autantplus vrai lorsque les zones auscultées ne peuvent pas subir d’inspection visuelle. Il estrelativement fréquent qu’au niveau des ancrages de câbles, des ruptures de fils apparaissentà cause des phénomènes de corrosion ou de fretting-fatigue. Ceci est particulièrement
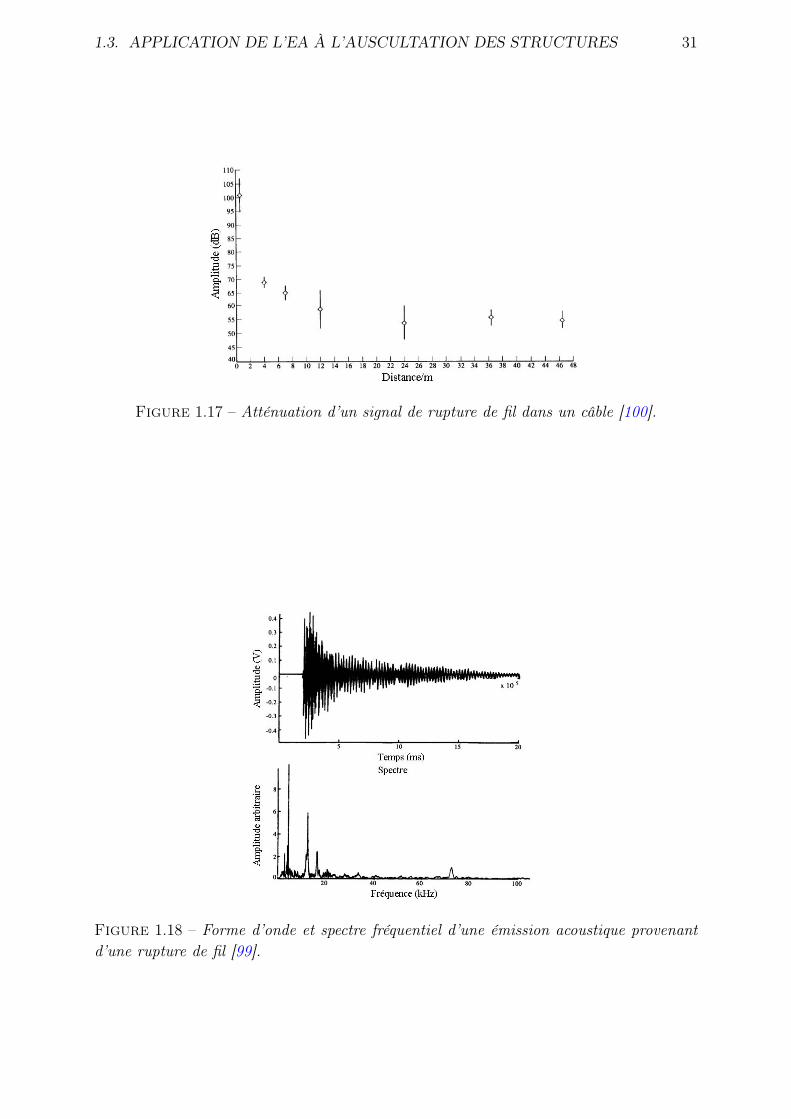
1.3. APPLICATION DE L’EA À L’AUSCULTATION DES STRUCTURES 31
Figure 1.17 – Atténuation d’un signal de rupture de fil dans un câble [100].
Figure 1.18 – Forme d’onde et spectre fréquentiel d’une émission acoustique provenantd’une rupture de fil [99].
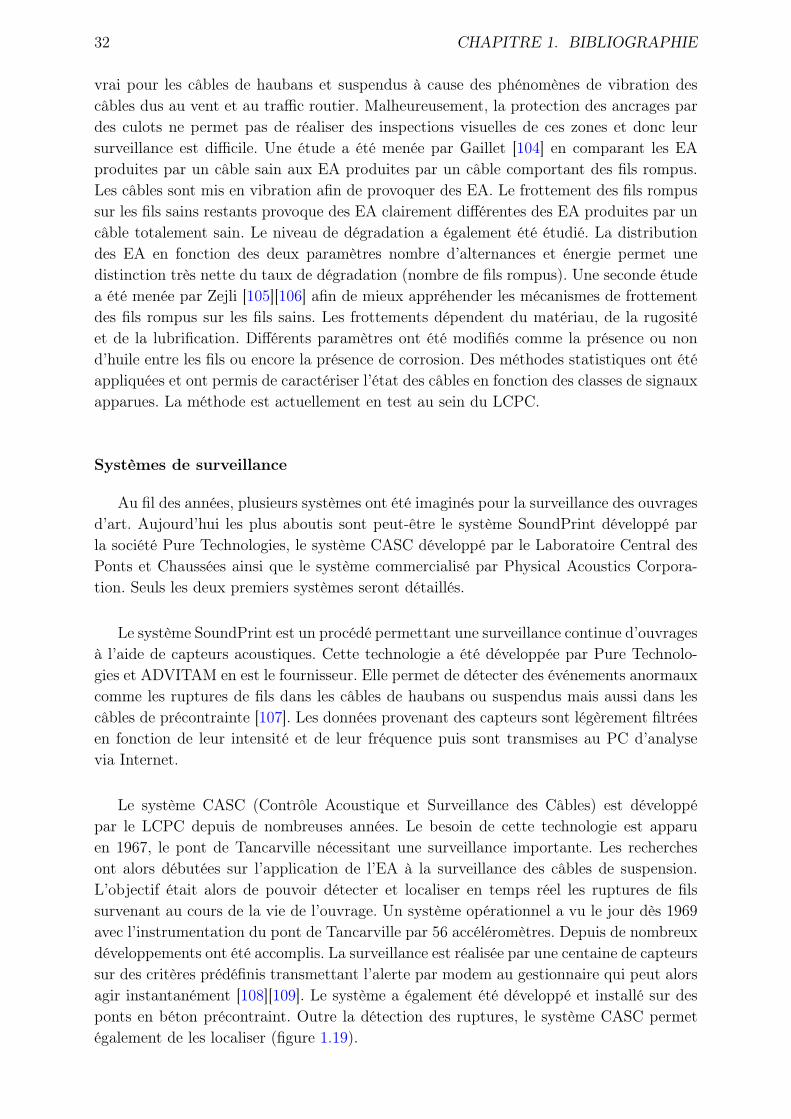
32 CHAPITRE 1. BIBLIOGRAPHIE
vrai pour les câbles de haubans et suspendus à cause des phénomènes de vibration descâbles dus au vent et au traffic routier. Malheureusement, la protection des ancrages pardes culots ne permet pas de réaliser des inspections visuelles de ces zones et donc leursurveillance est difficile. Une étude a été menée par Gaillet [104] en comparant les EAproduites par un câble sain aux EA produites par un câble comportant des fils rompus.Les câbles sont mis en vibration afin de provoquer des EA. Le frottement des fils rompussur les fils sains restants provoque des EA clairement différentes des EA produites par uncâble totalement sain. Le niveau de dégradation a également été étudié. La distributiondes EA en fonction des deux paramètres nombre d’alternances et énergie permet unedistinction très nette du taux de dégradation (nombre de fils rompus). Une seconde étudea été menée par Zejli [105][106] afin de mieux appréhender les mécanismes de frottementdes fils rompus sur les fils sains. Les frottements dépendent du matériau, de la rugositéet de la lubrification. Différents paramètres ont été modifiés comme la présence ou nond’huile entre les fils ou encore la présence de corrosion. Des méthodes statistiques ont étéappliquées et ont permis de caractériser l’état des câbles en fonction des classes de signauxapparues. La méthode est actuellement en test au sein du LCPC.
Systèmes de surveillance
Au fil des années, plusieurs systèmes ont été imaginés pour la surveillance des ouvragesd’art. Aujourd’hui les plus aboutis sont peut-être le système SoundPrint développé parla société Pure Technologies, le système CASC développé par le Laboratoire Central desPonts et Chaussées ainsi que le système commercialisé par Physical Acoustics Corpora-tion. Seuls les deux premiers systèmes seront détaillés.
Le système SoundPrint est un procédé permettant une surveillance continue d’ouvragesà l’aide de capteurs acoustiques. Cette technologie a été développée par Pure Technolo-gies et ADVITAM en est le fournisseur. Elle permet de détecter des événements anormauxcomme les ruptures de fils dans les câbles de haubans ou suspendus mais aussi dans lescâbles de précontrainte [107]. Les données provenant des capteurs sont légèrement filtréesen fonction de leur intensité et de leur fréquence puis sont transmises au PC d’analysevia Internet.
Le système CASC (Contrôle Acoustique et Surveillance des Câbles) est développépar le LCPC depuis de nombreuses années. Le besoin de cette technologie est apparuen 1967, le pont de Tancarville nécessitant une surveillance importante. Les recherchesont alors débutées sur l’application de l’EA à la surveillance des câbles de suspension.L’objectif était alors de pouvoir détecter et localiser en temps réel les ruptures de filssurvenant au cours de la vie de l’ouvrage. Un système opérationnel a vu le jour dès 1969avec l’instrumentation du pont de Tancarville par 56 accéléromètres. Depuis de nombreuxdéveloppements ont été accomplis. La surveillance est réalisée par une centaine de capteurssur des critères prédéfinis transmettant l’alerte par modem au gestionnaire qui peut alorsagir instantanément [108][109]. Le système a également été développé et installé sur desponts en béton précontraint. Outre la détection des ruptures, le système CASC permetégalement de les localiser (figure 1.19).
1.3. APPLICATION DE L’EA À L’AUSCULTATION DES STRUCTURES 33
Figure 1.19 – Principe de fonctionnement du système CASC (documents QuasarConcept).
1.3.4 Suivi de la corrosion par émission acoustique
Depuis une trentaine d’années, l’EA a été utilisée en laboratoire afin de caractériser lesdifférents mécanismes rencontrés en corrosion. Très souvent l’EA est couplée à une autreméthode de contrôle et de suivi comme l’électrochimie afin de caractériser ces mécanismes.Les paragraphes suivants sont consacrés à l’analyse de ces études. Nous verrons notammentla détectabilité des mécanismes de corrosion par EA. Nous détaillerons également les casde détection par EA de CSC. Nous finirons en analysant les paramètres caractérisant lesdifférents mécanismes.
Détectabilité des mécanismes de corrosion
La détectabilité d’un phénomène par EA est dépendante de nombreux paramètres.L’utilisation d’un matériel adéquat est naturellement la première étape à prendre enconsidération. L’instrumentation correcte de la structure (nombre de capteurs suffisant,couplage correct) associé à un choix judicieux de capteur (fréquences d’utilisation ducapteur en concordance avec la fréquence des phénomènes détectés) permet d’optimiser lesrésultats d’une auscultation par EA. Il va sans dire que les caractéristiques d’atténuationdu matériau ainsi que l’environnement dans lequel l’auscultation est faite ont égalementune importance considérable sur la détection des phénomènes. Un second volet à prendreen compte est la détectabilité des mécanismes de corrosion mis en jeu. De nombreuxtravaux expérimentaux se sont attachés à rechercher la possibilité de détecter ou nonles différents mécanismes de corrosion. Les plus connus sont ceux de Yuyama [110]. Lessources possibles d’EA lors des mécanismes de corrosion, corrosion sous contrainte etfatigue-corrosion sont nombreuses (figure 1.20). On peut néanmoins citer les phénomènessuivants :
– Initiation de fissure et propagation induite par fissuration sous contrainte et fragili-sation par l’hydrogène ;
– Dissolution du métal ;– Evolution des bulles d’hydrogène ;
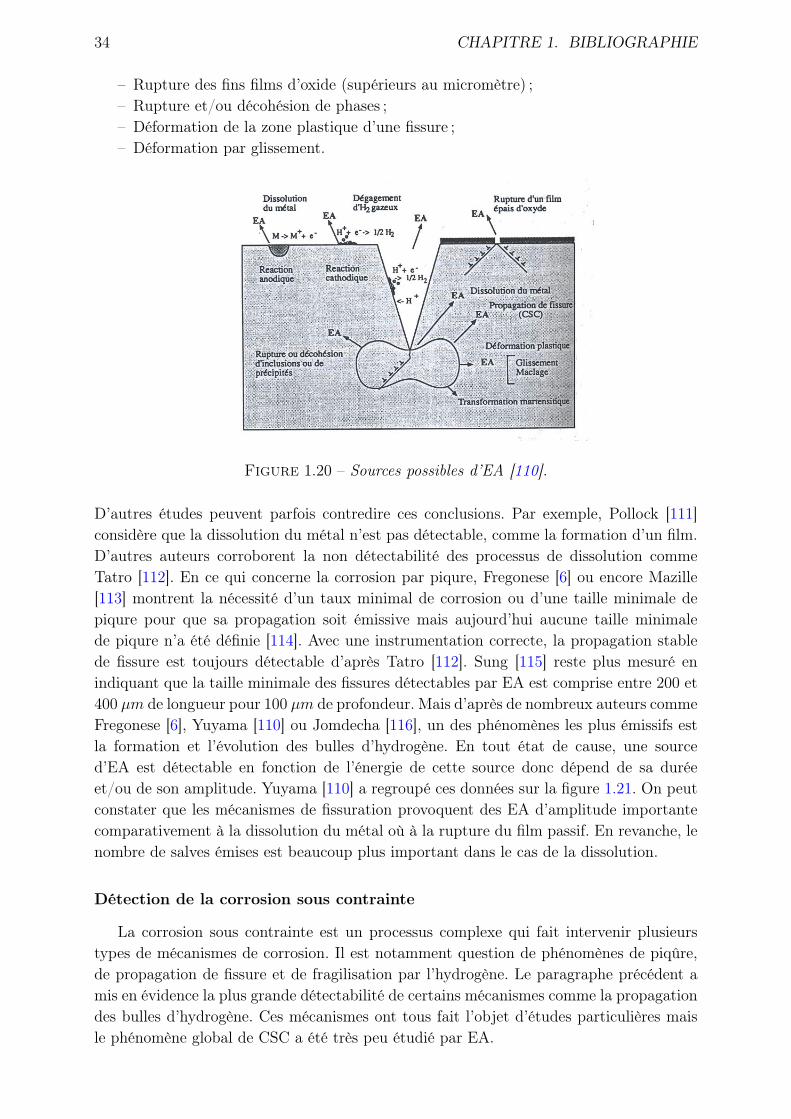
34 CHAPITRE 1. BIBLIOGRAPHIE
– Rupture des fins films d’oxide (supérieurs au micromètre) ;– Rupture et/ou décohésion de phases ;– Déformation de la zone plastique d’une fissure ;– Déformation par glissement.
Figure 1.20 – Sources possibles d’EA [110].
D’autres études peuvent parfois contredire ces conclusions. Par exemple, Pollock [111]considère que la dissolution du métal n’est pas détectable, comme la formation d’un film.D’autres auteurs corroborent la non détectabilité des processus de dissolution commeTatro [112]. En ce qui concerne la corrosion par piqure, Fregonese [6] ou encore Mazille[113] montrent la nécessité d’un taux minimal de corrosion ou d’une taille minimale depiqure pour que sa propagation soit émissive mais aujourd’hui aucune taille minimalede piqure n’a été définie [114]. Avec une instrumentation correcte, la propagation stablede fissure est toujours détectable d’après Tatro [112]. Sung [115] reste plus mesuré enindiquant que la taille minimale des fissures détectables par EA est comprise entre 200 et400 µm de longueur pour 100 µm de profondeur. Mais d’après de nombreux auteurs commeFregonese [6], Yuyama [110] ou Jomdecha [116], un des phénomènes les plus émissifs estla formation et l’évolution des bulles d’hydrogène. En tout état de cause, une sourced’EA est détectable en fonction de l’énergie de cette source donc dépend de sa duréeet/ou de son amplitude. Yuyama [110] a regroupé ces données sur la figure 1.21. On peutconstater que les mécanismes de fissuration provoquent des EA d’amplitude importantecomparativement à la dissolution du métal où à la rupture du film passif. En revanche, lenombre de salves émises est beaucoup plus important dans le cas de la dissolution.
Détection de la corrosion sous contrainte
La corrosion sous contrainte est un processus complexe qui fait intervenir plusieurstypes de mécanismes de corrosion. Il est notamment question de phénomènes de piqûre,de propagation de fissure et de fragilisation par l’hydrogène. Le paragraphe précédent amis en évidence la plus grande détectabilité de certains mécanismes comme la propagationdes bulles d’hydrogène. Ces mécanismes ont tous fait l’objet d’études particulières maisle phénomène global de CSC a été très peu étudié par EA.
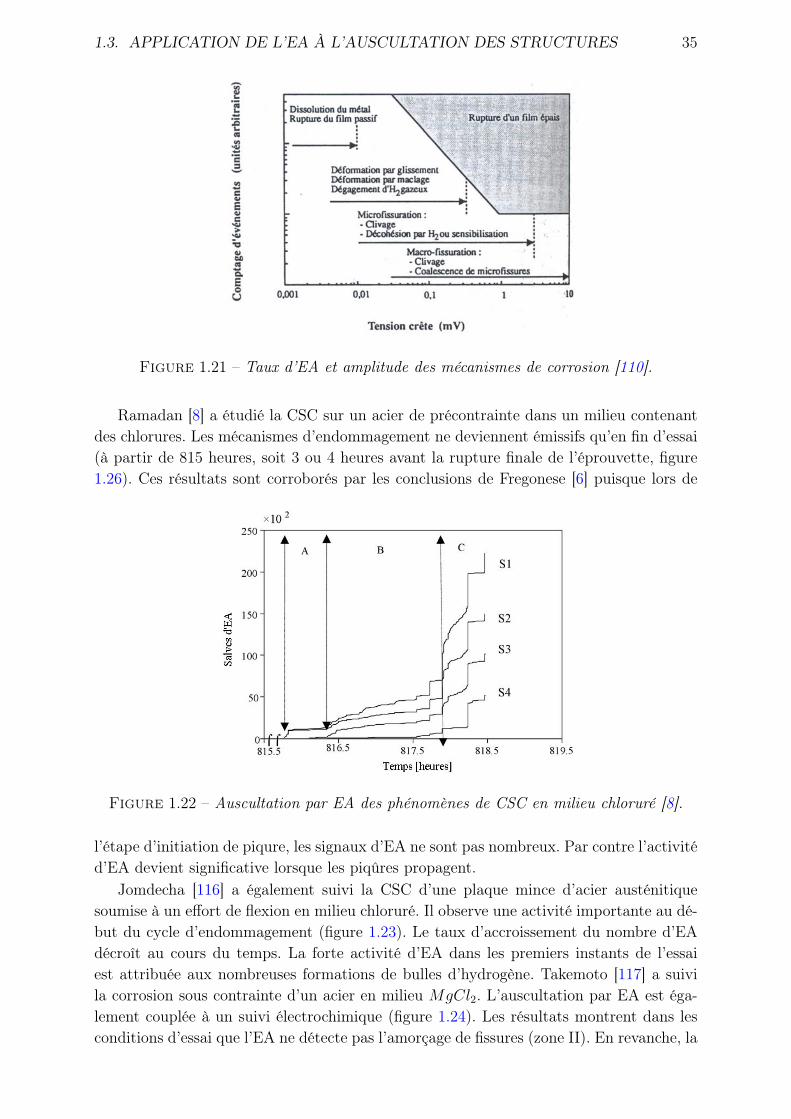
1.3. APPLICATION DE L’EA À L’AUSCULTATION DES STRUCTURES 35
Figure 1.21 – Taux d’EA et amplitude des mécanismes de corrosion [110].
Ramadan [8] a étudié la CSC sur un acier de précontrainte dans un milieu contenantdes chlorures. Les mécanismes d’endommagement ne deviennent émissifs qu’en fin d’essai(à partir de 815 heures, soit 3 ou 4 heures avant la rupture finale de l’éprouvette, figure1.26). Ces résultats sont corroborés par les conclusions de Fregonese [6] puisque lors de
Figure 1.22 – Auscultation par EA des phénomènes de CSC en milieu chloruré [8].
l’étape d’initiation de piqure, les signaux d’EA ne sont pas nombreux. Par contre l’activitéd’EA devient significative lorsque les piqûres propagent.
Jomdecha [116] a également suivi la CSC d’une plaque mince d’acier austénitiquesoumise à un effort de flexion en milieu chloruré. Il observe une activité importante au dé-but du cycle d’endommagement (figure 1.23). Le taux d’accroissement du nombre d’EAdécroît au cours du temps. La forte activité d’EA dans les premiers instants de l’essaiest attribuée aux nombreuses formations de bulles d’hydrogène. Takemoto [117] a suivila corrosion sous contrainte d’un acier en milieu MgCl2. L’auscultation par EA est éga-lement couplée à un suivi électrochimique (figure 1.24). Les résultats montrent dans lesconditions d’essai que l’EA ne détecte pas l’amorçage de fissures (zone II). En revanche, la
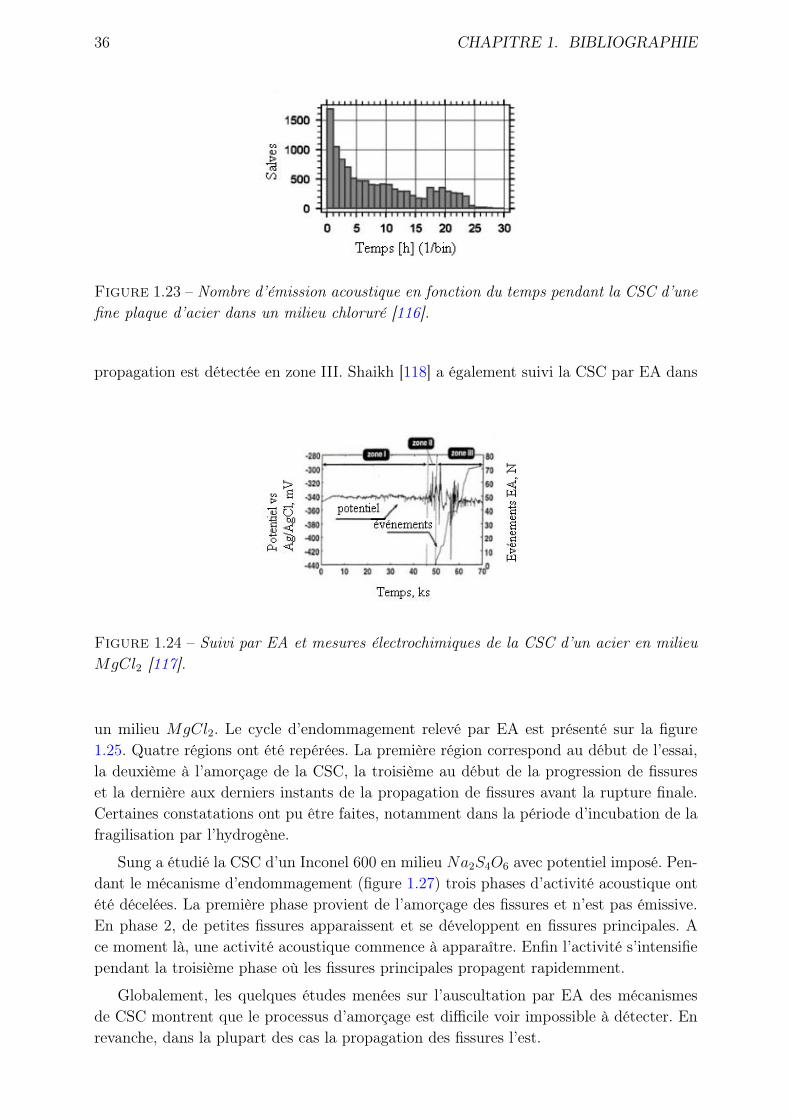
36 CHAPITRE 1. BIBLIOGRAPHIE
Figure 1.23 – Nombre d’émission acoustique en fonction du temps pendant la CSC d’unefine plaque d’acier dans un milieu chloruré [116].
propagation est détectée en zone III. Shaikh [118] a également suivi la CSC par EA dans
Figure 1.24 – Suivi par EA et mesures électrochimiques de la CSC d’un acier en milieuMgCl2 [117].
un milieu MgCl2. Le cycle d’endommagement relevé par EA est présenté sur la figure1.25. Quatre régions ont été repérées. La première région correspond au début de l’essai,la deuxième à l’amorçage de la CSC, la troisième au début de la progression de fissureset la dernière aux derniers instants de la propagation de fissures avant la rupture finale.Certaines constatations ont pu être faites, notamment dans la période d’incubation de lafragilisation par l’hydrogène.
Sung a étudié la CSC d’un Inconel 600 en milieu Na2S4O6 avec potentiel imposé. Pen-dant le mécanisme d’endommagement (figure 1.27) trois phases d’activité acoustique ontété décelées. La première phase provient de l’amorçage des fissures et n’est pas émissive.En phase 2, de petites fissures apparaissent et se développent en fissures principales. Ace moment là, une activité acoustique commence à apparaître. Enfin l’activité s’intensifiependant la troisième phase où les fissures principales propagent rapidemment.
Globalement, les quelques études menées sur l’auscultation par EA des mécanismesde CSC montrent que le processus d’amorçage est difficile voir impossible à détecter. Enrevanche, dans la plupart des cas la propagation des fissures l’est.
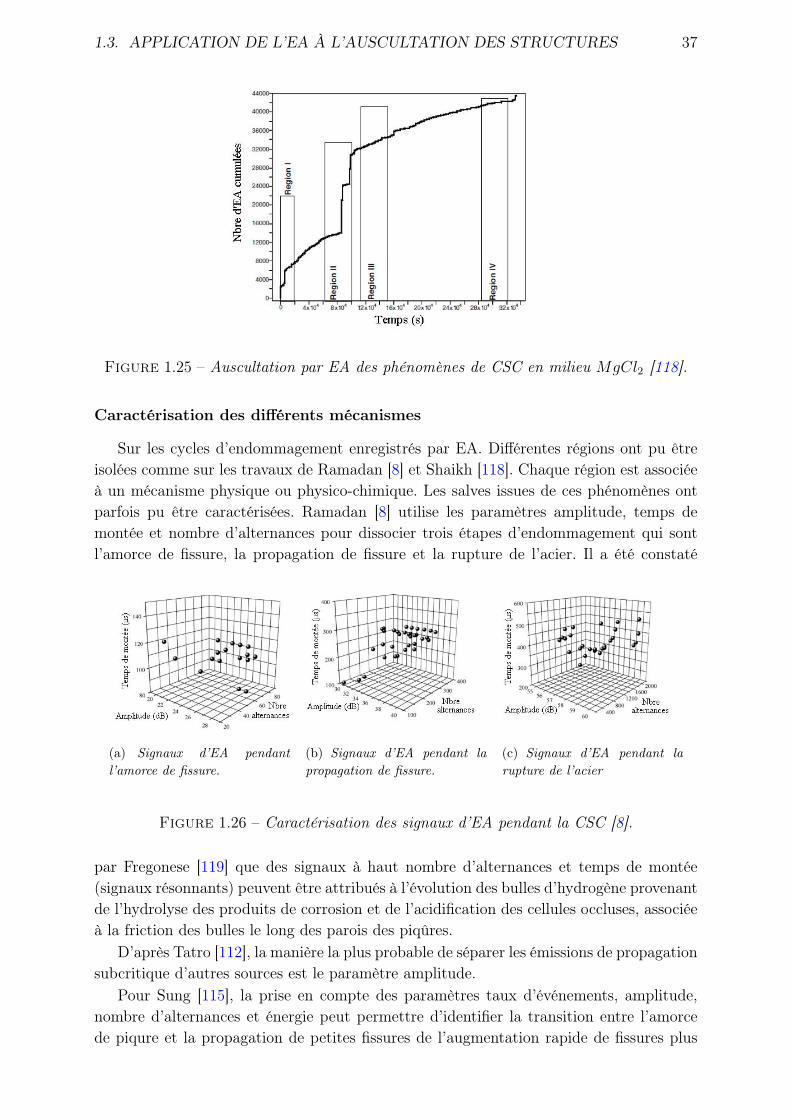
1.3. APPLICATION DE L’EA À L’AUSCULTATION DES STRUCTURES 37
Figure 1.25 – Auscultation par EA des phénomènes de CSC en milieu MgCl2 [118].
Caractérisation des différents mécanismes
Sur les cycles d’endommagement enregistrés par EA. Différentes régions ont pu êtreisolées comme sur les travaux de Ramadan [8] et Shaikh [118]. Chaque région est associéeà un mécanisme physique ou physico-chimique. Les salves issues de ces phénomènes ontparfois pu être caractérisées. Ramadan [8] utilise les paramètres amplitude, temps demontée et nombre d’alternances pour dissocier trois étapes d’endommagement qui sontl’amorce de fissure, la propagation de fissure et la rupture de l’acier. Il a été constaté
(a) Signaux d’EA pendantl’amorce de fissure.
(b) Signaux d’EA pendant lapropagation de fissure.
(c) Signaux d’EA pendant larupture de l’acier
Figure 1.26 – Caractérisation des signaux d’EA pendant la CSC [8].
par Fregonese [119] que des signaux à haut nombre d’alternances et temps de montée(signaux résonnants) peuvent être attribués à l’évolution des bulles d’hydrogène provenantde l’hydrolyse des produits de corrosion et de l’acidification des cellules occluses, associéeà la friction des bulles le long des parois des piqûres.
D’après Tatro [112], la manière la plus probable de séparer les émissions de propagationsubcritique d’autres sources est le paramètre amplitude.
Pour Sung [115], la prise en compte des paramètres taux d’événements, amplitude,nombre d’alternances et énergie peut permettre d’identifier la transition entre l’amorcede piqure et la propagation de petites fissures de l’augmentation rapide de fissures plus
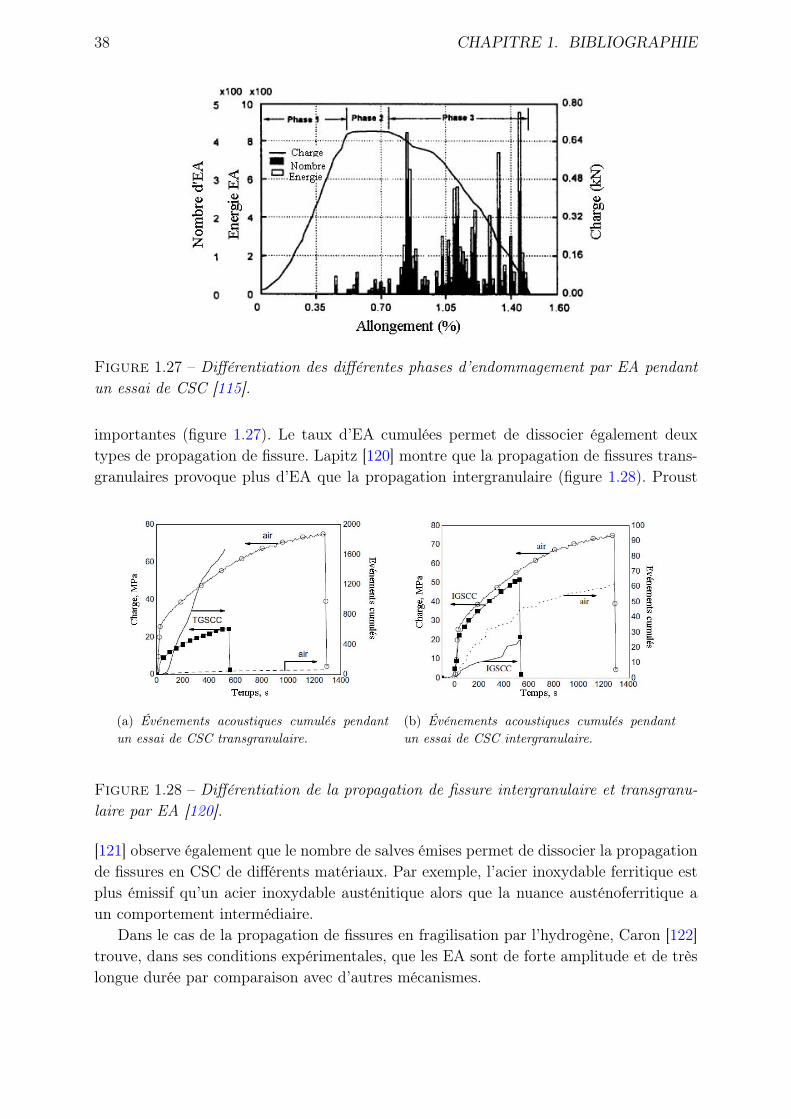
38 CHAPITRE 1. BIBLIOGRAPHIE
Figure 1.27 – Différentiation des différentes phases d’endommagement par EA pendantun essai de CSC [115].
importantes (figure 1.27). Le taux d’EA cumulées permet de dissocier également deuxtypes de propagation de fissure. Lapitz [120] montre que la propagation de fissures trans-granulaires provoque plus d’EA que la propagation intergranulaire (figure 1.28). Proust
(a) Événements acoustiques cumulés pendantun essai de CSC transgranulaire.
(b) Événements acoustiques cumulés pendantun essai de CSC intergranulaire.
Figure 1.28 – Différentiation de la propagation de fissure intergranulaire et transgranu-laire par EA [120].
[121] observe également que le nombre de salves émises permet de dissocier la propagationde fissures en CSC de différents matériaux. Par exemple, l’acier inoxydable ferritique estplus émissif qu’un acier inoxydable austénitique alors que la nuance austénoferritique aun comportement intermédiaire.
Dans le cas de la propagation de fissures en fragilisation par l’hydrogène, Caron [122]trouve, dans ses conditions expérimentales, que les EA sont de forte amplitude et de trèslongue durée par comparaison avec d’autres mécanismes.

1.4. CONCLUSION 39
1.4 Conclusion
Ce premier chapitre bibliographique a permis de comprendre toute la complexitédes phénomènes d’endommagement des ponts en béton précontraint. La corrosion souscontrainte des armatures reste le mode d’endommagement le plus défavorable, les câblesétant un élément clé de ces ouvrages. Le bref panorama des formes et des modèles d’en-dommagement a montré la difficulté à modéliser ces phénomènes qui sont multiples etpeuvent agir en synergie. Un exemple de phénomène synergique est le processus de CSCpar dissolution localisée associée au phénomène de fragilisation par l’hydrogène. Une ma-nière d’avoir une visibilité plus nette des différents processus d’endommagement peut êtrede les dissocier en choisissant l’essai de corrosion accélérée adéquat.
En France, la bonne santé du parc d’ouvrages d’art est un enjeux primordial. La néces-sité de posséder des méthodes de détection fiables et faciles à mettre en oeuvre également.Une des méthodes de contrôle non destructif mise en exergue pour la détection de la CSCest l’émission acoustique. Il s’agit d’une technique déjà connue dans le domaine des ou-vrages d’art et qui a fait ses preuves pour la détection de telles pathologies sur d’autrestypes de structures. Dans l’optique de caractériser les capacités de l’EA pour la détectionde la CSC, nous appliquerons cette technique dans le cadre d’essais de fragilisation parl’hydrogène. Le chapitre suivant concerne les méthodes expérimentales misent en oeuvreainsi que les modes opératoires qui leur sont associés.

40 CHAPITRE 1. BIBLIOGRAPHIE
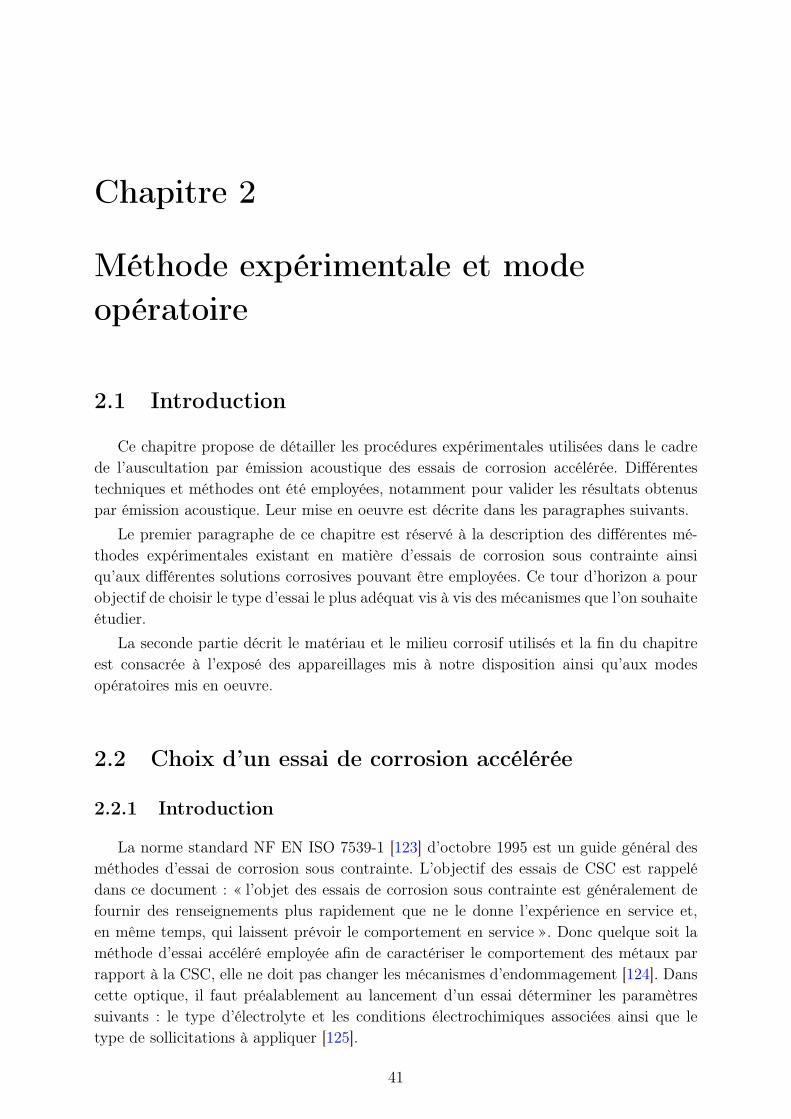
Chapitre 2
Méthode expérimentale et modeopératoire
2.1 Introduction
Ce chapitre propose de détailler les procédures expérimentales utilisées dans le cadrede l’auscultation par émission acoustique des essais de corrosion accélérée. Différentestechniques et méthodes ont été employées, notamment pour valider les résultats obtenuspar émission acoustique. Leur mise en oeuvre est décrite dans les paragraphes suivants.
Le premier paragraphe de ce chapitre est réservé à la description des différentes mé-thodes expérimentales existant en matière d’essais de corrosion sous contrainte ainsiqu’aux différentes solutions corrosives pouvant être employées. Ce tour d’horizon a pourobjectif de choisir le type d’essai le plus adéquat vis à vis des mécanismes que l’on souhaiteétudier.
La seconde partie décrit le matériau et le milieu corrosif utilisés et la fin du chapitreest consacrée à l’exposé des appareillages mis à notre disposition ainsi qu’aux modesopératoires mis en oeuvre.
2.2 Choix d’un essai de corrosion accélérée
2.2.1 Introduction
La norme standard NF EN ISO 7539-1 [123] d’octobre 1995 est un guide général desméthodes d’essai de corrosion sous contrainte. L’objectif des essais de CSC est rappelédans ce document : « l’objet des essais de corrosion sous contrainte est généralement defournir des renseignements plus rapidement que ne le donne l’expérience en service et,en même temps, qui laissent prévoir le comportement en service ». Donc quelque soit laméthode d’essai accéléré employée afin de caractériser le comportement des métaux parrapport à la CSC, elle ne doit pas changer les mécanismes d’endommagement [124]. Danscette optique, il faut préalablement au lancement d’un essai déterminer les paramètressuivants : le type d’électrolyte et les conditions électrochimiques associées ainsi que letype de sollicitations à appliquer [125].
41
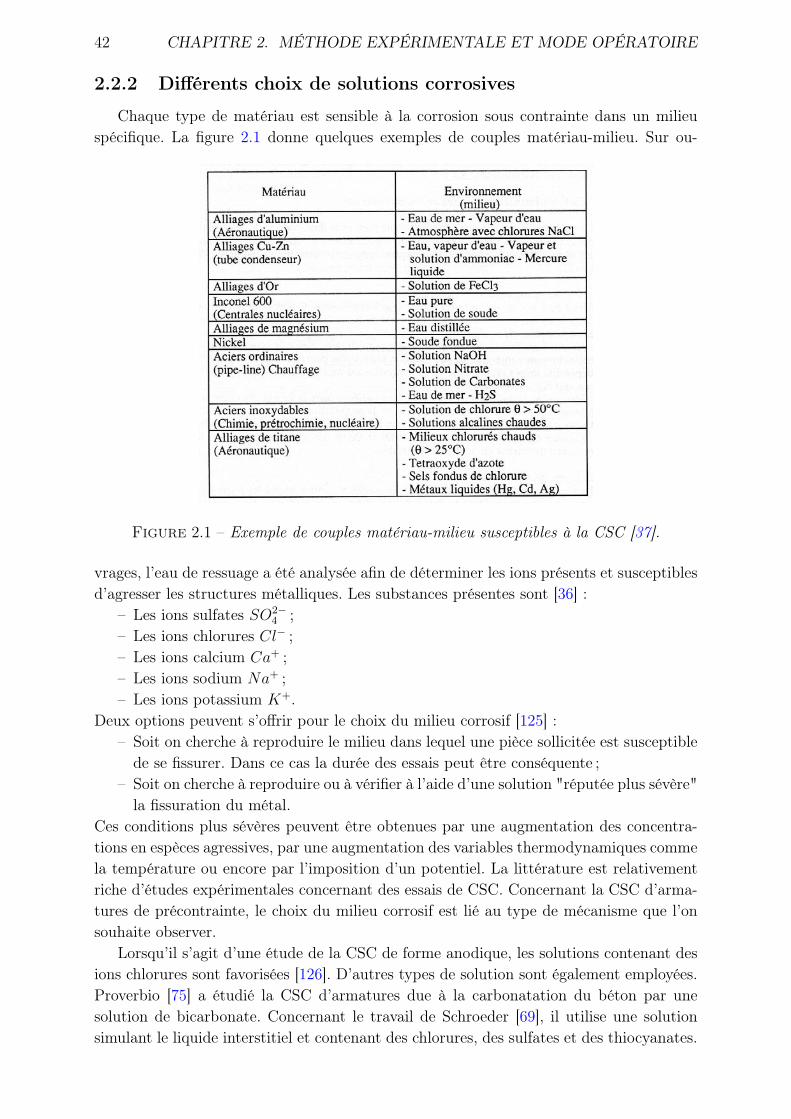
42 CHAPITRE 2. MÉTHODE EXPÉRIMENTALE ET MODE OPÉRATOIRE
2.2.2 Différents choix de solutions corrosives
Chaque type de matériau est sensible à la corrosion sous contrainte dans un milieuspécifique. La figure 2.1 donne quelques exemples de couples matériau-milieu. Sur ou-
Figure 2.1 – Exemple de couples matériau-milieu susceptibles à la CSC [37].
vrages, l’eau de ressuage a été analysée afin de déterminer les ions présents et susceptiblesd’agresser les structures métalliques. Les substances présentes sont [36] :
– Les ions sulfates SO2−4 ;
– Les ions chlorures Cl− ;– Les ions calcium Ca+ ;– Les ions sodium Na+ ;– Les ions potassium K+.
Deux options peuvent s’offrir pour le choix du milieu corrosif [125] :– Soit on cherche à reproduire le milieu dans lequel une pièce sollicitée est susceptible
de se fissurer. Dans ce cas la durée des essais peut être conséquente ;– Soit on cherche à reproduire ou à vérifier à l’aide d’une solution "réputée plus sévère"
la fissuration du métal.Ces conditions plus sévères peuvent être obtenues par une augmentation des concentra-tions en espèces agressives, par une augmentation des variables thermodynamiques commela température ou encore par l’imposition d’un potentiel. La littérature est relativementriche d’études expérimentales concernant des essais de CSC. Concernant la CSC d’arma-tures de précontrainte, le choix du milieu corrosif est lié au type de mécanisme que l’onsouhaite observer.
Lorsqu’il s’agit d’une étude de la CSC de forme anodique, les solutions contenant desions chlorures sont favorisées [126]. D’autres types de solution sont également employées.Proverbio [75] a étudié la CSC d’armatures due à la carbonatation du béton par unesolution de bicarbonate. Concernant le travail de Schroeder [69], il utilise une solutionsimulant le liquide interstitiel et contenant des chlorures, des sulfates et des thiocyanates.
2.2. CHOIX D’UN ESSAI DE CORROSION ACCÉLÉRÉE 43
La forme cathodique de la CSC peut être étudiée en utilisant des solutions d’acidesulfurique (H2SO4) mais très souvent elle est obtenue en imposant un potentiel cathodique[73].
2.2.3 Différents types d’essais de corrosion sous contrainte
La norme NF EN ISO 7539-1 [123] présente trois types de sollicitation. Le premierconcerne les essais à déformation totale constante. Il peut s’agir d’essais utilisant deséprouvettes tendues ou fléchies sous différents modes. Les éprouvettes peuvent égalementêtre de plusieurs types : éprouvettes lisses ou éprouvettes préfissurées (Double CantileverBeam, Modified Compact Tensile). Il est à noter que les éprouvettes préfissurées per-mettent une étude relativement fiable et reproductible des coefficients de contrainte etdes mécanismes de propagation de fissure. En revanche, ces études s’affranchissent desmécanismes d’amorçage ce qui ne peut convenir à notre étude. De façon générale, cesessais simulent bien les contraintes de mise en oeuvre qui sont fréquemment associées auxruptures en service.
Le second type de sollicitation sont les essais sous charge constante. Ces essais de CSCpermettent de simuler les défaillances résultant des contraintes appliquées. Lorsqu’unefissure s’amorce ou se propage, la section utile de l’éprouvette diminue et localementl’intensité de contrainte croît à l’avant de la fissure. Ces essais sont plus sévères que lesessais à déformation constante.
Le dernier type de sollicitation concerne les essais à vitesse de déformation constante.L’essai le plus courant est l’essai de traction lente. Il s’agit d’essais de traction conduits àdes vitesses de déformation très faibles (≈ 10−7s−1) [37]. Cet essai est bâti sur le principeque le paramètre prédominant en CSC est la vitesse de déformation et non la contrainte.Cet essai est relativement sévère puisqu’il force la rupture par CSC. Son principal intérêtest qu’il permet de conclure les essais dans un intervalle de temps relativement court endonnant une information sur la susceptibilité de certains matériaux vis à vis de la CSC.
2.2.4 Essais normalisés
La norme NF EN ISO 15630-3 [127] d’août 2002 regroupe l’ensemble des essais pouvantêtre réalisés sur les armatures de précontrainte. Elle fait donc également référence auxessais de corrosion sous contrainte. L’essai privilégié par cette norme internationale estl’essai au thiocyanate d’ammonium. Le principe est de maintenir une éprouvette à 80% desa force de rupture vraie sur un bâti rigide. Une cellule de corrosion est positionnée autourdu câble et remplie d’une solution corrosive contenant du thiocyanate d’ammonium (figure2.2). Deux solutions différentes peuvent être utilisées. La première est obtenue à partir de200 grammes de thiocyanate d’ammonium (NH4SCN) mélangé à 800 mL d’eau distillée.La seconde solution corrosive mélange du sulfate de potassium (K2SO4), du chlorure depotassium (KCl) et du thiocyanate de potassium (KSCN) à de l’eau distillée. Cettesolution doit contenir 5 grammes de SO2−
4 , 0,5 grammes de Cl− et 1 gramme de SCN−.Quelque soit la solution utilisée, elle est maintenue à 50. L’essai s’achève lorsqu’au moinsun des fils du câble est rompu. Le paramètre caractérisant le processus d’endommagementde l’éprouvette est le temps à rupture. Avant la mise au point et la normalisation de cetessai, des travaux ont été réalisés afin de montrer la reproductibilité et la sélectivité des
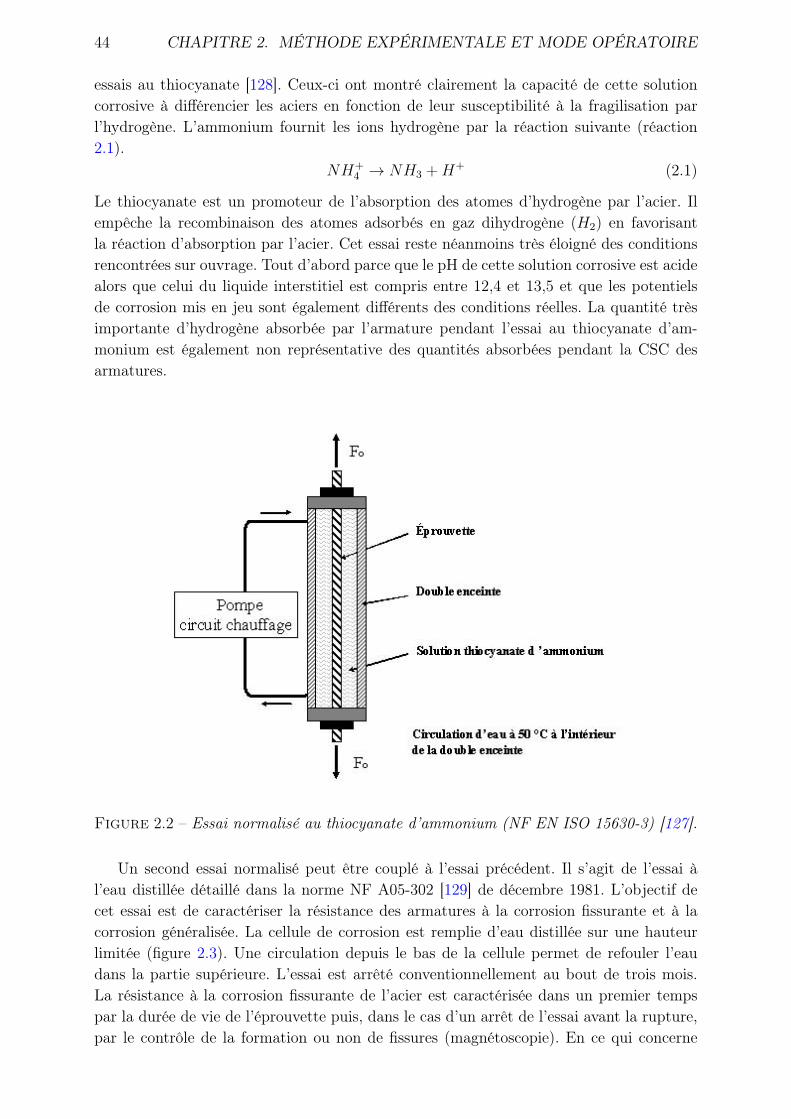
44 CHAPITRE 2. MÉTHODE EXPÉRIMENTALE ET MODE OPÉRATOIRE
essais au thiocyanate [128]. Ceux-ci ont montré clairement la capacité de cette solutioncorrosive à différencier les aciers en fonction de leur susceptibilité à la fragilisation parl’hydrogène. L’ammonium fournit les ions hydrogène par la réaction suivante (réaction2.1).
NH+4 → NH3 +H+ (2.1)
Le thiocyanate est un promoteur de l’absorption des atomes d’hydrogène par l’acier. Ilempêche la recombinaison des atomes adsorbés en gaz dihydrogène (H2) en favorisantla réaction d’absorption par l’acier. Cet essai reste néanmoins très éloigné des conditionsrencontrées sur ouvrage. Tout d’abord parce que le pH de cette solution corrosive est acidealors que celui du liquide interstitiel est compris entre 12,4 et 13,5 et que les potentielsde corrosion mis en jeu sont également différents des conditions réelles. La quantité trèsimportante d’hydrogène absorbée par l’armature pendant l’essai au thiocyanate d’am-monium est également non représentative des quantités absorbées pendant la CSC desarmatures.
Figure 2.2 – Essai normalisé au thiocyanate d’ammonium (NF EN ISO 15630-3) [127].
Un second essai normalisé peut être couplé à l’essai précédent. Il s’agit de l’essai àl’eau distillée détaillé dans la norme NF A05-302 [129] de décembre 1981. L’objectif decet essai est de caractériser la résistance des armatures à la corrosion fissurante et à lacorrosion généralisée. La cellule de corrosion est remplie d’eau distillée sur une hauteurlimitée (figure 2.3). Une circulation depuis le bas de la cellule permet de refouler l’eaudans la partie supérieure. L’essai est arrêté conventionnellement au bout de trois mois.La résistance à la corrosion fissurante de l’acier est caractérisée dans un premier tempspar la durée de vie de l’éprouvette puis, dans le cas d’un arrêt de l’essai avant la rupture,par le contrôle de la formation ou non de fissures (magnétoscopie). En ce qui concerne
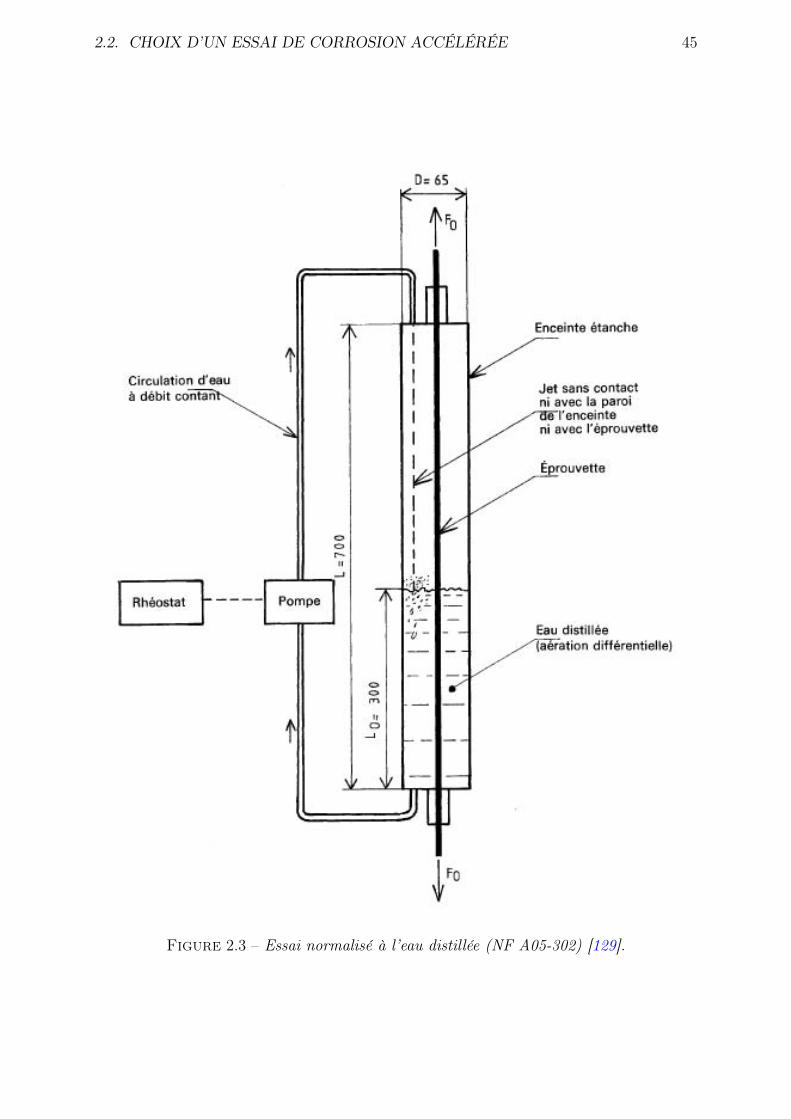
2.2. CHOIX D’UN ESSAI DE CORROSION ACCÉLÉRÉE 45
Figure 2.3 – Essai normalisé à l’eau distillée (NF A05-302) [129].

46 CHAPITRE 2. MÉTHODE EXPÉRIMENTALE ET MODE OPÉRATOIRE
la caractérisation de la résistance du câble à la corrosion généralisée, elle est réalisée encontrôlant la perte de masse de l’éprouvette à la fin de l’essai. Ce test est beaucoup plusreprésentatif des phénomènes rencontrés sur ouvrages en créant conjointement plusieursformes de corrosion.
2.2.5 Conclusion
L’objectif des essais de corrosion sous contrainte que l’on souhaite mettre en oeuvreest double :
– Mettre en évidence les mécanismes de fragilisation par l’hydrogène ;– Être le plus proche possible des conditions d’utilisation des armatures sur ouvrage.
Le choix a été fait d’adapter l’essai normalisé au thiocyanate d’ammonium puisqu’il est leseul test normalisé permettant de favoriser la fragilisation par l’hydrogène. Il s’agit d’unessai relativement sévère. Les paramètres de l’essai ont été adaptés afin de le rendre moinsdrastique (chapitre 3). Les paragraphes suivant détaillent la mise en oeuvre de nos essaisbasés sur l’essai normalisé au thiocyanate d’ammonium.
2.3 Matériau et milieu
Ce second paragraphe consiste à décrire le matériau utilisé pendant notre étude. Ils’agit d’acier tréfilé dont la mise en forme aboutit à des câbles de type toron. La natureet la microstructure de ce matériau sont relativement spécifiques. Elles sont décrites dansla première partie du paragraphe. Pour finir, le milieu corrosif utilisé est rappelé.
2.3.1 Acier tréfilé et câble de précontrainte
L’acier utilisé pour fabriquer les câbles de précontrainte est faiblement allié. Sa com-position chimique est donnée dans la table 2.1. L’acier est majoritairement composé defer, carbone, manganèse, silicium, phosphore et soufre. Le tréfilage confère à l’acier une
Table 2.1 – Composition chimique moyenne de l’acier tréfilé (principaux éléments).
Composition C (%) Mn (%) Si (%) P (%) S (%)Acier tréfilé 0,810 0,685 0,235 0,012 0,003
structure métallique particulière puisqu’elle est écrouie. Avant tréfilage, le fil machine estpréparé et sa microstructure est alors très majoritairement composée de grains de perlite.La figure 2.4 présente une coupe longitudinale d’un fil tréfilé. On peut aisément constaterque les grains de perlite sont fortement déformés et orientés dans le sens de tréfilage. Enmoyenne, un grain de perlite contenu dans cet acier tréfilé a les dimensions suivantes :
– Longueur : 50 µm ;– Largeur : 10 µm.
La figure 2.4 permet également de distinguer l’alternance des lamelles de ferrite et decémentite composant les grains de perlite. La structure métallique peut parfois faire place
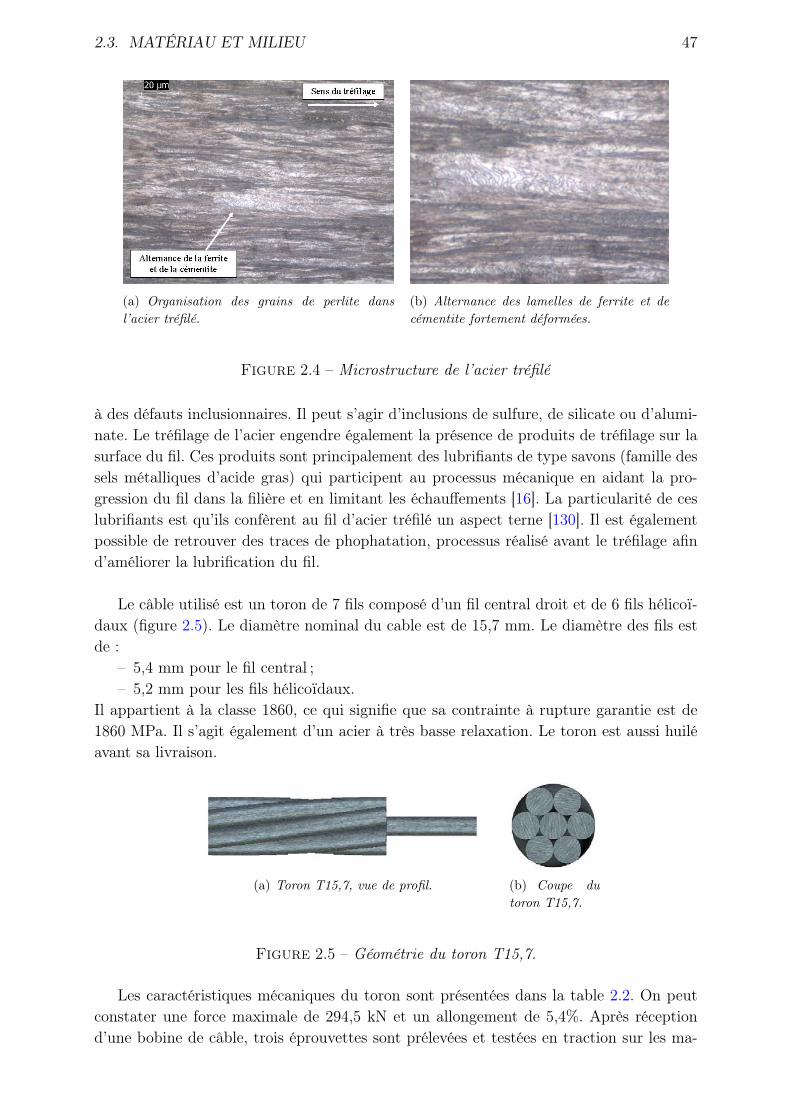
2.3. MATÉRIAU ET MILIEU 47
(a) Organisation des grains de perlite dansl’acier tréfilé.
(b) Alternance des lamelles de ferrite et decémentite fortement déformées.
Figure 2.4 – Microstructure de l’acier tréfilé
à des défauts inclusionnaires. Il peut s’agir d’inclusions de sulfure, de silicate ou d’alumi-nate. Le tréfilage de l’acier engendre également la présence de produits de tréfilage sur lasurface du fil. Ces produits sont principalement des lubrifiants de type savons (famille dessels métalliques d’acide gras) qui participent au processus mécanique en aidant la pro-gression du fil dans la filière et en limitant les échauffements [16]. La particularité de ceslubrifiants est qu’ils confèrent au fil d’acier tréfilé un aspect terne [130]. Il est égalementpossible de retrouver des traces de phophatation, processus réalisé avant le tréfilage afind’améliorer la lubrification du fil.
Le câble utilisé est un toron de 7 fils composé d’un fil central droit et de 6 fils hélicoï-daux (figure 2.5). Le diamètre nominal du cable est de 15,7 mm. Le diamètre des fils estde :
– 5,4 mm pour le fil central ;– 5,2 mm pour les fils hélicoïdaux.
Il appartient à la classe 1860, ce qui signifie que sa contrainte à rupture garantie est de1860 MPa. Il s’agit également d’un acier à très basse relaxation. Le toron est aussi huiléavant sa livraison.
(a) Toron T15,7, vue de profil. (b) Coupe dutoron T15,7.
Figure 2.5 – Géométrie du toron T15,7.
Les caractéristiques mécaniques du toron sont présentées dans la table 2.2. On peutconstater une force maximale de 294,5 kN et un allongement de 5,4%. Après réceptiond’une bobine de câble, trois éprouvettes sont prélevées et testées en traction sur les ma-
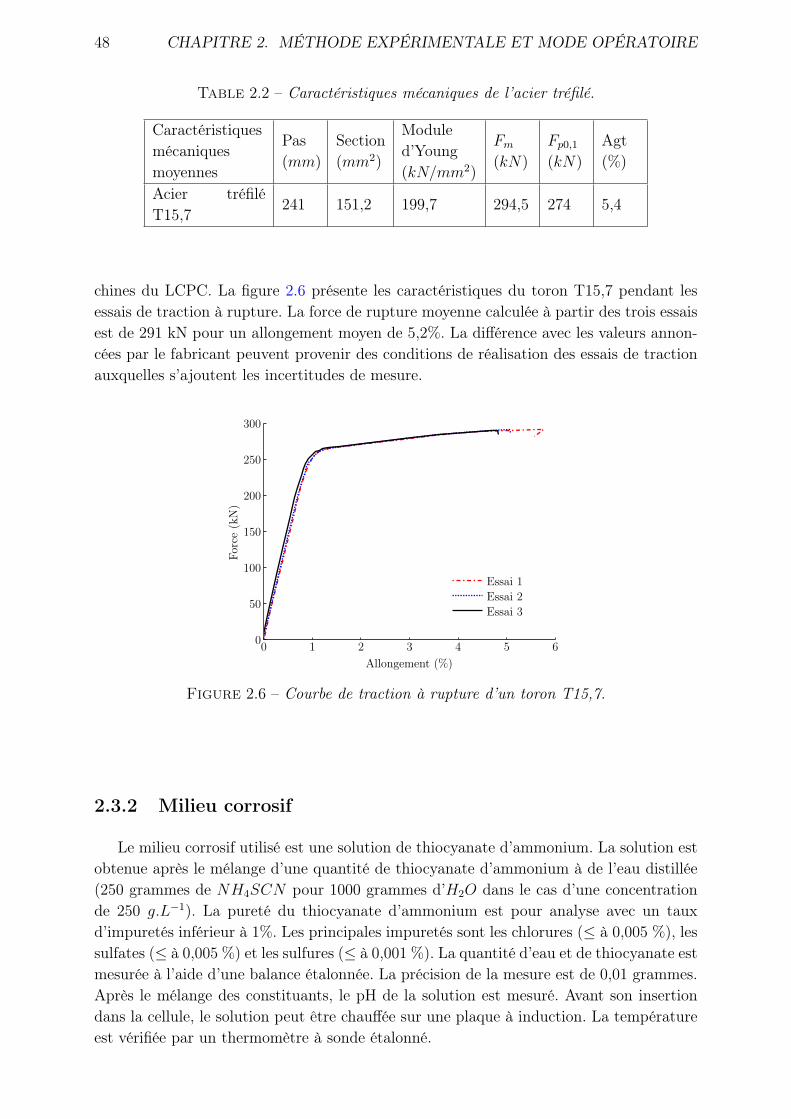
48 CHAPITRE 2. MÉTHODE EXPÉRIMENTALE ET MODE OPÉRATOIRE
Table 2.2 – Caractéristiques mécaniques de l’acier tréfilé.
Caractéristiquesmécaniquesmoyennes
Pas(mm)
Section(mm2)
Moduled’Young(kN/mm2)
Fm(kN)
Fp0,1(kN)
Agt(%)
Acier tréfiléT15,7
241 151,2 199,7 294,5 274 5,4
chines du LCPC. La figure 2.6 présente les caractéristiques du toron T15,7 pendant lesessais de traction à rupture. La force de rupture moyenne calculée à partir des trois essaisest de 291 kN pour un allongement moyen de 5,2%. La différence avec les valeurs annon-cées par le fabricant peuvent provenir des conditions de réalisation des essais de tractionauxquelles s’ajoutent les incertitudes de mesure.
0 1 2 3 4 5 60
50
100
150
200
250
300
Allongement (%)
Force(kN)
Essai 1Essai 2Essai 3
Figure 2.6 – Courbe de traction à rupture d’un toron T15,7.
2.3.2 Milieu corrosif
Le milieu corrosif utilisé est une solution de thiocyanate d’ammonium. La solution estobtenue après le mélange d’une quantité de thiocyanate d’ammonium à de l’eau distillée(250 grammes de NH4SCN pour 1000 grammes d’H2O dans le cas d’une concentrationde 250 g.L−1). La pureté du thiocyanate d’ammonium est pour analyse avec un tauxd’impuretés inférieur à 1%. Les principales impuretés sont les chlorures (≤ à 0,005 %), lessulfates (≤ à 0,005 %) et les sulfures (≤ à 0,001 %). La quantité d’eau et de thiocyanate estmesurée à l’aide d’une balance étalonnée. La précision de la mesure est de 0,01 grammes.Après le mélange des constituants, le pH de la solution est mesuré. Avant son insertiondans la cellule, le solution peut être chauffée sur une plaque à induction. La températureest vérifiée par un thermomètre à sonde étalonné.
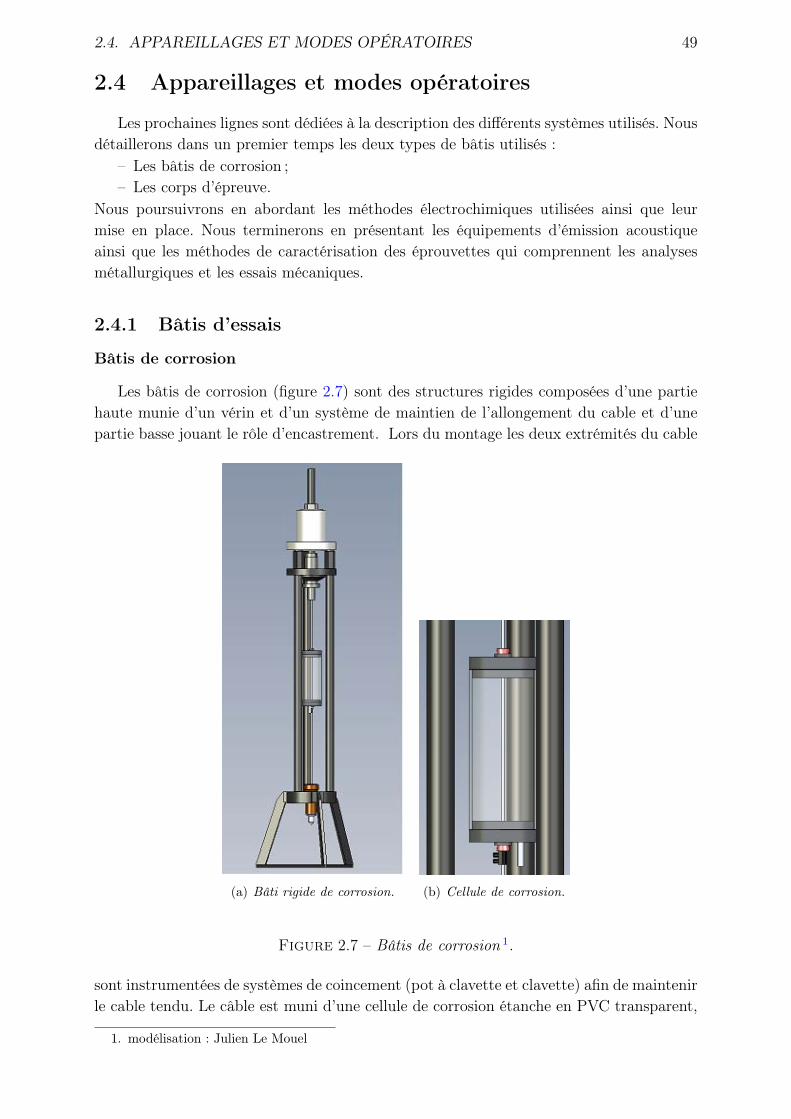
2.4. APPAREILLAGES ET MODES OPÉRATOIRES 49
2.4 Appareillages et modes opératoires
Les prochaines lignes sont dédiées à la description des différents systèmes utilisés. Nousdétaillerons dans un premier temps les deux types de bâtis utilisés :
– Les bâtis de corrosion ;– Les corps d’épreuve.
Nous poursuivrons en abordant les méthodes électrochimiques utilisées ainsi que leurmise en place. Nous terminerons en présentant les équipements d’émission acoustiqueainsi que les méthodes de caractérisation des éprouvettes qui comprennent les analysesmétallurgiques et les essais mécaniques.
2.4.1 Bâtis d’essais
Bâtis de corrosion
Les bâtis de corrosion (figure 2.7) sont des structures rigides composées d’une partiehaute munie d’un vérin et d’un système de maintien de l’allongement du cable et d’unepartie basse jouant le rôle d’encastrement. Lors du montage les deux extrémités du cable
(a) Bâti rigide de corrosion. (b) Cellule de corrosion.
Figure 2.7 – Bâtis de corrosion 1.
sont instrumentées de systèmes de coincement (pot à clavette et clavette) afin de maintenirle cable tendu. Le câble est muni d’une cellule de corrosion étanche en PVC transparent,
1. modélisation : Julien Le Mouel
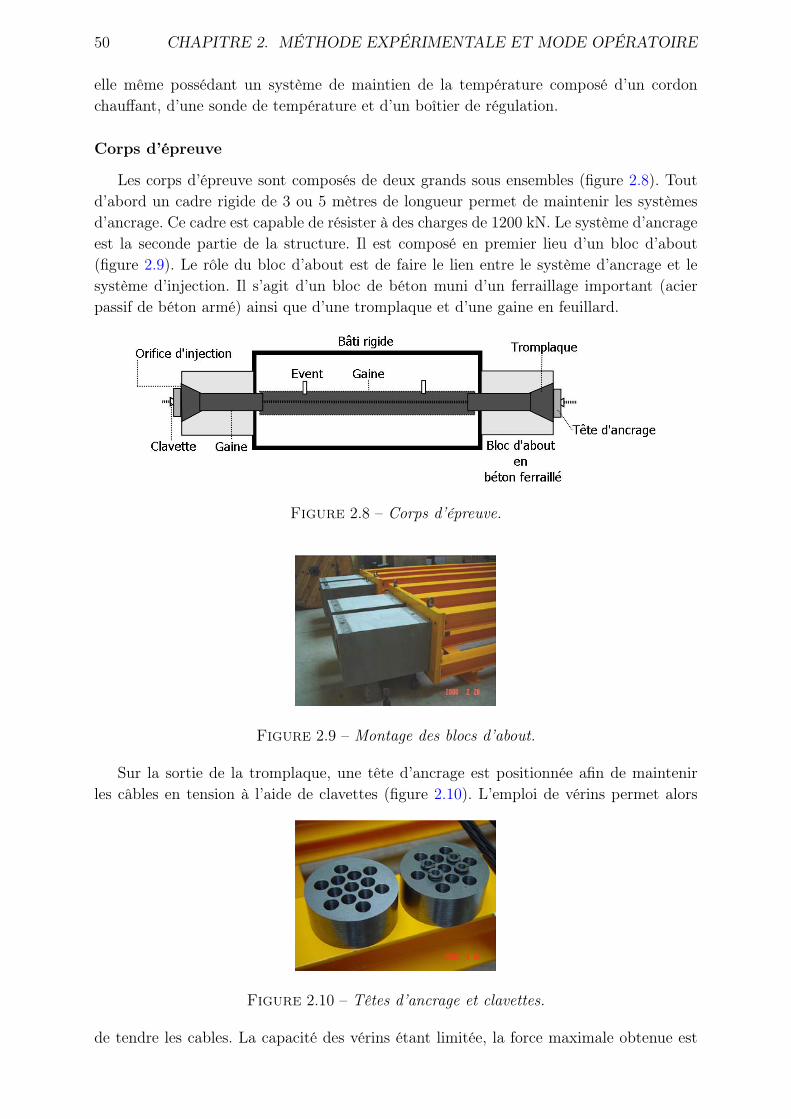
50 CHAPITRE 2. MÉTHODE EXPÉRIMENTALE ET MODE OPÉRATOIRE
elle même possédant un système de maintien de la température composé d’un cordonchauffant, d’une sonde de température et d’un boîtier de régulation.
Corps d’épreuve
Les corps d’épreuve sont composés de deux grands sous ensembles (figure 2.8). Toutd’abord un cadre rigide de 3 ou 5 mètres de longueur permet de maintenir les systèmesd’ancrage. Ce cadre est capable de résister à des charges de 1200 kN. Le système d’ancrageest la seconde partie de la structure. Il est composé en premier lieu d’un bloc d’about(figure 2.9). Le rôle du bloc d’about est de faire le lien entre le système d’ancrage et lesystème d’injection. Il s’agit d’un bloc de béton muni d’un ferraillage important (acierpassif de béton armé) ainsi que d’une tromplaque et d’une gaine en feuillard.
Figure 2.8 – Corps d’épreuve.
Figure 2.9 – Montage des blocs d’about.
Sur la sortie de la tromplaque, une tête d’ancrage est positionnée afin de maintenirles câbles en tension à l’aide de clavettes (figure 2.10). L’emploi de vérins permet alors
Figure 2.10 – Têtes d’ancrage et clavettes.
de tendre les cables. La capacité des vérins étant limitée, la force maximale obtenue est

2.4. APPAREILLAGES ET MODES OPÉRATOIRES 51
comprise entre 199 kN et 214 kN soit de 71 à 77% de la force de rupture garantie desarmatures. Comme pour les bâtis de corrosion, le cable peut être muni d’une cellule decorrosion étanche et d’un système de chauffage de la solution. Deux méthodes de chauffageont été testées. La première consiste à faire circuler un liquide dans la cellule par l’in-termédiaire d’une pompe. La solution est préalablement chauffée dans un réservoir avantd’être envoyée dans la cellule. Cette solution permet d’avoir un renouvellement constantde la solution mais engendre des pertes en ligne de température. La seconde méthode dechauffage testée et privilégiée est celle classiquement utilisée sur les bâtis de corrosiondont la cellule est munie directement de cordons chauffants.
L’atout principal de ce corps d’épreuve est qu’il permet de placer une gaine en PEHDautour du ou des cables tendus et de l’injecter avec du coulis de ciment. La gaine est miseen place sur la sortie des blocs d’about (figure 2.8). Un ou plusieurs évents sont réalisésdans la gaine afin de témoigner de son remplissage correct. La préparation du coulis deciment est réalisée en mélangeant 10,5 litres d’eau à un sac de 25 kg de poudre de ciment« superstresscem » et à un sachet d’additif. Après le mélange des produits, l’injection dela gaine est réalisée par gravité. Le coulis est inséré dans la tromplaque à partir d’orificesprévus dans le bloc d’about. Le coulis est injecté jusqu’à ce qu’il ressorte par le ou lesévents disposés dans la gaine (figure 2.8). Le temps de séchage prévu pour le coulis deciment est de 28 jours.
2.4.2 Méthodes électrochimiques
Différentes méthodes électrochimiques ont été utilisées au cours de ce travail de re-cherche.
La première consiste à tracer les courbes de polarisation. Un balayage de potentielest réalisé depuis le domaine cathodique jusqu’au domaine anodique. L’évolution du cou-rant correspondant est enregistrée. Les courbes courant-potentiel permettent ensuite ladétermination du courant et du potentiel de corrosion ainsi que des paramètres βa et βcde Tafel (coefficients directeurs des branches anodiques et cathodiques). Elles permettentégalement d’analyser les réactions matériau-milieu en fonction du domaine de potentiels.
Une seconde méthode électrochimique employée est la spectroscopie d’impédance élec-trochimique (SIE). Cette méthode est basée sur la mesure d’une fonction de transfert(Z(ω)) après que le système matériau-électrolyte ait été perturbé. Cette perturbationimposée au système prend la forme d’un sinusoïdale. En mode potentiostatique, la per-turbation ∆E(ω) est imposée à partir du potentiel E0. Il en résulte une réponse ∆I(ω) surles mesures de courant (figure 2.11). L’impédance électrochmique (Z(ω)) est alors définiecomme étant le rapport :
Z(ω) =∆E(ω)
∆I(ω)(2.2)
Cette mesure permet de caractériser l’interface électrode-électrolyte.Les mesures de résistance de polarisation sont obtenues après un balayage de potentiel
autour du potentiel de corrosion de l’éprouvette. Rp (résistance de polarisation) est alorsle rapport entre la variation de potentiel et la variation de courant induite :
Rp =∆E
∆I=
1
2, 3icorr
βa.βcβa + βc
(2.3)
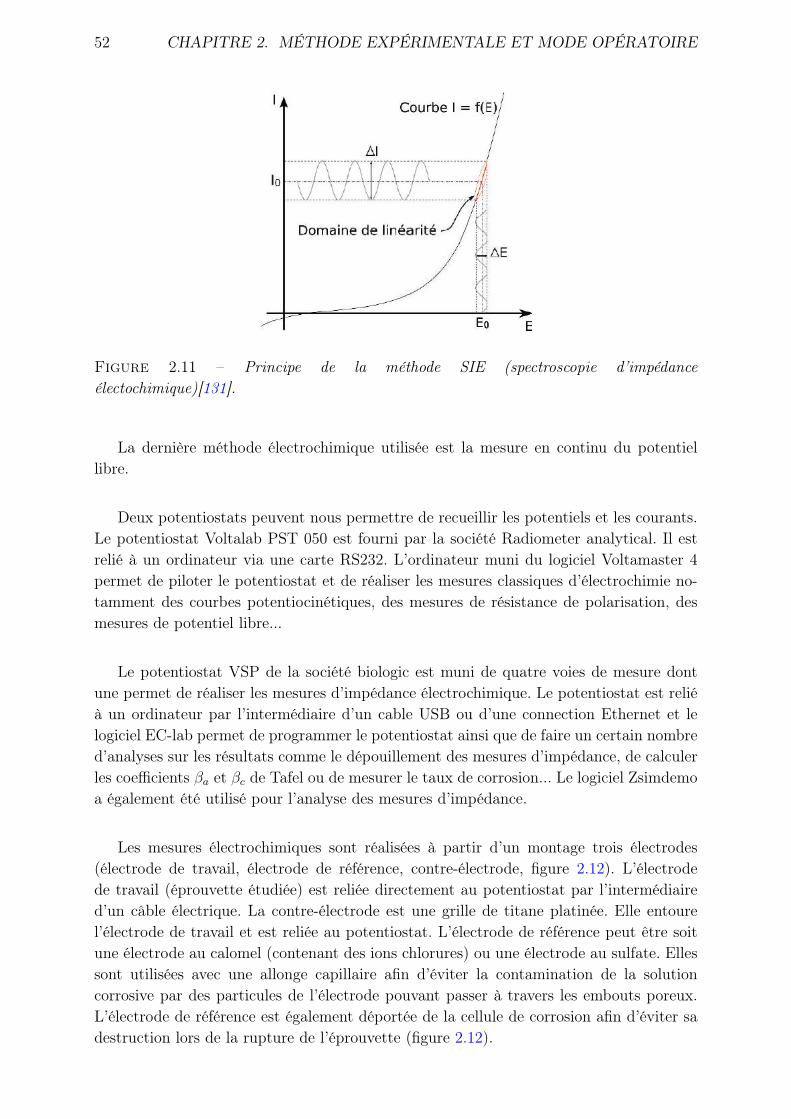
52 CHAPITRE 2. MÉTHODE EXPÉRIMENTALE ET MODE OPÉRATOIRE
Figure 2.11 – Principe de la méthode SIE (spectroscopie d’impédanceélectochimique)[131].
La dernière méthode électrochimique utilisée est la mesure en continu du potentiellibre.
Deux potentiostats peuvent nous permettre de recueillir les potentiels et les courants.Le potentiostat Voltalab PST 050 est fourni par la société Radiometer analytical. Il estrelié à un ordinateur via une carte RS232. L’ordinateur muni du logiciel Voltamaster 4permet de piloter le potentiostat et de réaliser les mesures classiques d’électrochimie no-tamment des courbes potentiocinétiques, des mesures de résistance de polarisation, desmesures de potentiel libre...
Le potentiostat VSP de la société biologic est muni de quatre voies de mesure dontune permet de réaliser les mesures d’impédance électrochimique. Le potentiostat est reliéà un ordinateur par l’intermédiaire d’un cable USB ou d’une connection Ethernet et lelogiciel EC-lab permet de programmer le potentiostat ainsi que de faire un certain nombred’analyses sur les résultats comme le dépouillement des mesures d’impédance, de calculerles coefficients βa et βc de Tafel ou de mesurer le taux de corrosion... Le logiciel Zsimdemoa également été utilisé pour l’analyse des mesures d’impédance.
Les mesures électrochimiques sont réalisées à partir d’un montage trois électrodes(électrode de travail, électrode de référence, contre-électrode, figure 2.12). L’électrodede travail (éprouvette étudiée) est reliée directement au potentiostat par l’intermédiaired’un câble électrique. La contre-électrode est une grille de titane platinée. Elle entourel’électrode de travail et est reliée au potentiostat. L’électrode de référence peut être soitune électrode au calomel (contenant des ions chlorures) ou une électrode au sulfate. Ellessont utilisées avec une allonge capillaire afin d’éviter la contamination de la solutioncorrosive par des particules de l’électrode pouvant passer à travers les embouts poreux.L’électrode de référence est également déportée de la cellule de corrosion afin d’éviter sadestruction lors de la rupture de l’éprouvette (figure 2.12).
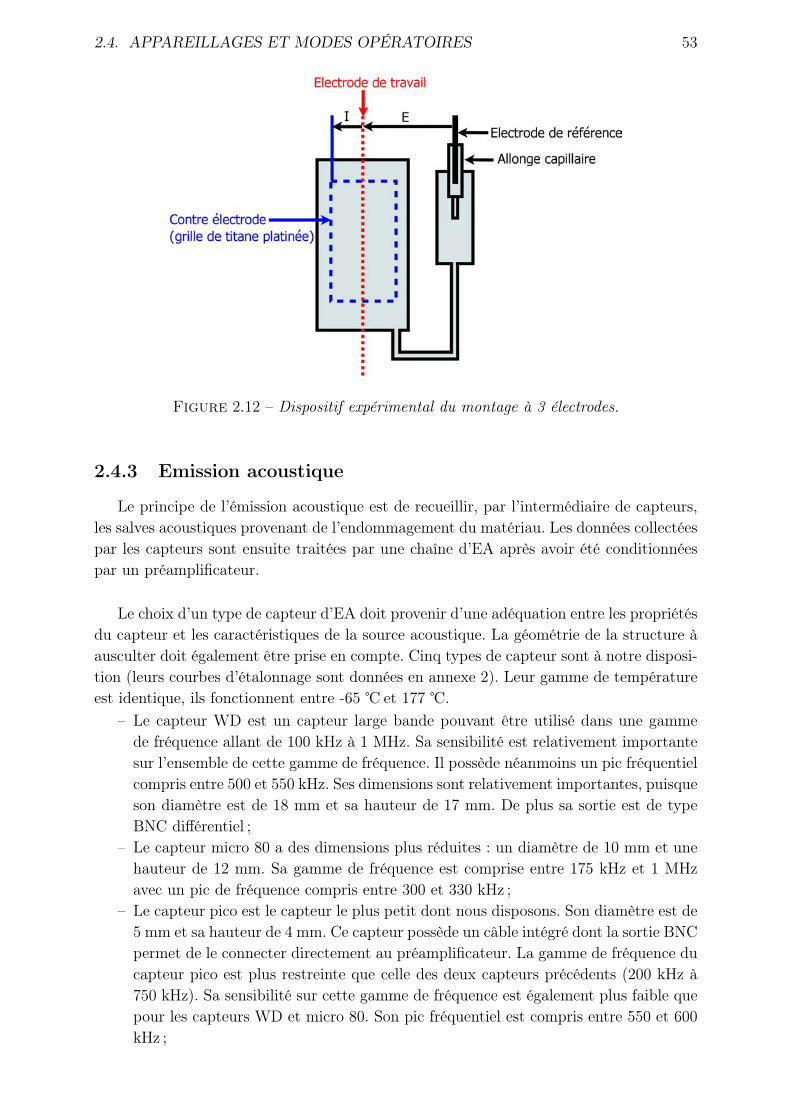
2.4. APPAREILLAGES ET MODES OPÉRATOIRES 53
Figure 2.12 – Dispositif expérimental du montage à 3 électrodes.
2.4.3 Emission acoustique
Le principe de l’émission acoustique est de recueillir, par l’intermédiaire de capteurs,les salves acoustiques provenant de l’endommagement du matériau. Les données collectéespar les capteurs sont ensuite traitées par une chaîne d’EA après avoir été conditionnéespar un préamplificateur.
Le choix d’un type de capteur d’EA doit provenir d’une adéquation entre les propriétésdu capteur et les caractéristiques de la source acoustique. La géométrie de la structure àausculter doit également être prise en compte. Cinq types de capteur sont à notre disposi-tion (leurs courbes d’étalonnage sont données en annexe 2). Leur gamme de températureest identique, ils fonctionnent entre -65 et 177 .
– Le capteur WD est un capteur large bande pouvant être utilisé dans une gammede fréquence allant de 100 kHz à 1 MHz. Sa sensibilité est relativement importantesur l’ensemble de cette gamme de fréquence. Il possède néanmoins un pic fréquentielcompris entre 500 et 550 kHz. Ses dimensions sont relativement importantes, puisqueson diamètre est de 18 mm et sa hauteur de 17 mm. De plus sa sortie est de typeBNC différentiel ;
– Le capteur micro 80 a des dimensions plus réduites : un diamètre de 10 mm et unehauteur de 12 mm. Sa gamme de fréquence est comprise entre 175 kHz et 1 MHzavec un pic de fréquence compris entre 300 et 330 kHz ;
– Le capteur pico est le capteur le plus petit dont nous disposons. Son diamètre est de5 mm et sa hauteur de 4 mm. Ce capteur possède un câble intégré dont la sortie BNCpermet de le connecter directement au préamplificateur. La gamme de fréquence ducapteur pico est plus restreinte que celle des deux capteurs précédents (200 kHz à750 kHz). Sa sensibilité sur cette gamme de fréquence est également plus faible quepour les capteurs WD et micro 80. Son pic fréquentiel est compris entre 550 et 600kHz ;

54 CHAPITRE 2. MÉTHODE EXPÉRIMENTALE ET MODE OPÉRATOIRE
– Le capteur R15 est référencé comme étant opérant entre 50 et 200 kHz ce qui estune fenêtre plutôt étroite. En regardant sa calibration on peut constater que sonutilisation peut être faite jusqu’à 650 kHz. Son pic fréquentiel est proche de 150kHz. Ses dimensions en font un capteur relativement imposant, son diamètre est de18 mm et sa hauteur de 17 mm ;
– Le dernier type de capteur en notre possession est le capteur R6. Il est assez encom-brant (diamètre de 19 mm et hauteur de 22 mm), et possède une gamme de fréquenceétroite (35 kHz à 100 kHz). Son pic fréquentiel se situe autour de 95 kHz. Ce type decapteur est plutôt réservé à l’auscultation d’ondes acoustiques se propageant dansun milieu béton où les fréquences sont relativement basses (comparativement auxondes dans un milieu métallique)[102, 132, 133].
Les modes de couplage des capteurs à la structure privilégiés pour cette étude sontles couplages pérennes. Nous favoriserons donc les couplages par collage. Sur les surfacesirrégulières comme peuvent l’être les torons, la colle X60 fournit par la société HBM estutilisée. Il s’agit d’une colle bi-composants dont la rigidité après séchage permet une bonnepropagation des ondes du cable au capteur. Préalablement à l’application de la colle HBMX60, le capteur a été muni d’une plaque en laiton collée sur la céramique du capteur avecune colle cyanolite (figure 2.13). Pour des surfaces plus planes, en particulier pour le col-
Figure 2.13 – Mode opératoire du collage par colle HBM X60.
lage sur du béton, le collage sous forme de cristaux de phényle salicylate (C13H10O3) estpréféré. Le chauffage des cristaux permet leur liquéfaction et l’application du liquide surla surface du capteur. Le contact du liquide avec une surface plus froide provoque le dur-cissement de celui-ci. La qualité du couplage est validée en réalisant plusieurs cassés demines (test Hsu Nielsen) sur la structure à quelques centimètres du capteur. Le test ASTpermet également de valider le fonctionnement des capteurs et la transmission des salvesacoustiques. A tour de rôle un des capteurs joue le rôle d’émetteur et envoie un signalpulsé. Les autres capteurs sont montés en détecteurs. Si l’amplitude reçue par les autrescapteurs est correcte, la mise en place des capteurs est considérée comme bien réalisée.
Chaque capteur est relié à un préamplificateur puis au système d’EA (figure 2.14). Lesdifférents préamplificateurs à notre disposition sont les suivants :
– Le modèle 2/4/6 dont la bande passante est comprise entre 20 et 1200 kHz. Le gainpeut être sélectionné entre 20, 40 ou 60 dB ;
– Le modèle 1220A dont la bande passante est comprise entre 20 et 1200 kHz et dontles gains sélectionnables sont de 40 ou 60 dB ;
– Le modèle ILS40S, préamplificateur miniature, dont le gain est fixé à 40 dB et dontla bande passante est comprise entre 32 et 1100 kHz.
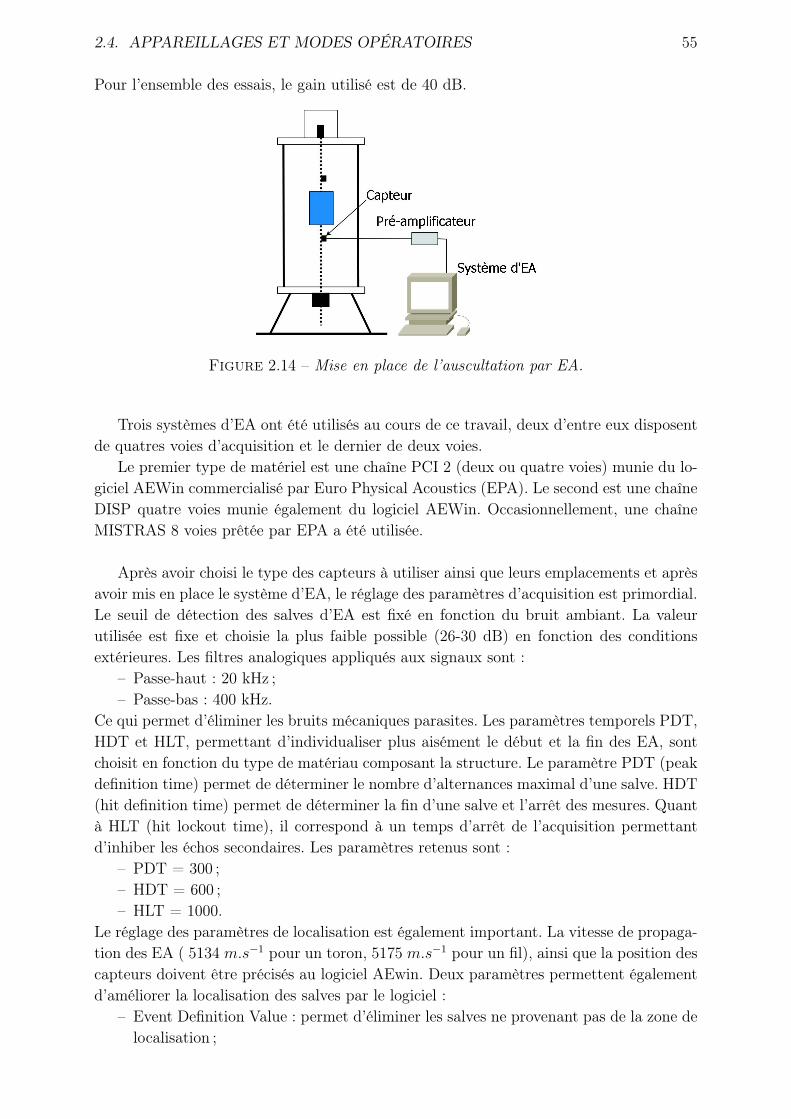
2.4. APPAREILLAGES ET MODES OPÉRATOIRES 55
Pour l’ensemble des essais, le gain utilisé est de 40 dB.
Figure 2.14 – Mise en place de l’auscultation par EA.
Trois systèmes d’EA ont été utilisés au cours de ce travail, deux d’entre eux disposentde quatres voies d’acquisition et le dernier de deux voies.
Le premier type de matériel est une chaîne PCI 2 (deux ou quatre voies) munie du lo-giciel AEWin commercialisé par Euro Physical Acoustics (EPA). Le second est une chaîneDISP quatre voies munie également du logiciel AEWin. Occasionnellement, une chaîneMISTRAS 8 voies prêtée par EPA a été utilisée.
Après avoir choisi le type des capteurs à utiliser ainsi que leurs emplacements et aprèsavoir mis en place le système d’EA, le réglage des paramètres d’acquisition est primordial.Le seuil de détection des salves d’EA est fixé en fonction du bruit ambiant. La valeurutilisée est fixe et choisie la plus faible possible (26-30 dB) en fonction des conditionsextérieures. Les filtres analogiques appliqués aux signaux sont :
– Passe-haut : 20 kHz ;– Passe-bas : 400 kHz.
Ce qui permet d’éliminer les bruits mécaniques parasites. Les paramètres temporels PDT,HDT et HLT, permettant d’individualiser plus aisément le début et la fin des EA, sontchoisit en fonction du type de matériau composant la structure. Le paramètre PDT (peakdefinition time) permet de déterminer le nombre d’alternances maximal d’une salve. HDT(hit definition time) permet de déterminer la fin d’une salve et l’arrêt des mesures. Quantà HLT (hit lockout time), il correspond à un temps d’arrêt de l’acquisition permettantd’inhiber les échos secondaires. Les paramètres retenus sont :
– PDT = 300 ;– HDT = 600 ;– HLT = 1000.
Le réglage des paramètres de localisation est également important. La vitesse de propaga-tion des EA ( 5134 m.s−1 pour un toron, 5175 m.s−1 pour un fil), ainsi que la position descapteurs doivent être précisés au logiciel AEwin. Deux paramètres permettent égalementd’améliorer la localisation des salves par le logiciel :
– Event Definition Value : permet d’éliminer les salves ne provenant pas de la zone delocalisation ;

56 CHAPITRE 2. MÉTHODE EXPÉRIMENTALE ET MODE OPÉRATOIRE
– Event Lockout Value : permet de contrôler l’intervalle entre deux événements consé-cutifs.
2.4.4 Analyses métallurgiques
Plusieurs méthodes sont à notre disposition pour l’observation des échantillons. Lamagnétoscopie est une technique permettant de détecter des fissures débouchantes et peuvisibles à l’oeil nu. Le principe de cette technique est de faire circuler un flux magnétiqueà l’intérieur du matériau ferromagnétique. La présence d’un défaut engendre une fuite dece flux et l’utilisation d’un produit révélateur permet alors de les visualiser (figure 2.15).
Figure 2.15 – Détection de fissures par magnétoscopie.
Une autre méthode permettant d’observer ces fissures ou d’autres types d’endommage-ment est la loupe binocculaire (Nikon SMZ-U). Les grossissements possibles sont comprisentre 4 et 38. Lorsque l’observation nécessite des grossissements plus importants, le micro-scope optique inversé (MeF3 Reichert-Jung) est alors la méthode d’observation utilisée.Les grossissements vont de 20 à 1000.
En ce qui concerne des observations beaucoup plus fines, un microscope électroniqueà balayage (MEB, Hitachi S570) couplé à une analyse EDS est utilisé. Le principe dumicroscope électronique à balayage est de fournir des informations concernant le maté-riau étudié sous forme d’images lumineuses. Ces images proviennent de l’intéraction d’unfaisceau d’électrons avec la surface de l’échantillon. Le MEB est constitué d’une enceintesous vide dans laquelle est placé l’échantillon étudié. Le faisceau d’électrons est alors fo-calisé sur la surface de l’échantillon. L’intéraction entre le faisceau incident et la surfaceétudiée produit l’émission d’électrons d’énergies différentes et des rayons X. Des systèmesde détections recueillent les électrons et permettent de retranscrire la topologie de l’éprou-vette. L’image complète de l’échantillon est obtenue par le balayage ligne par ligne de lasurface de l’échantillon. La détection des rayons X permet de caractériser les matériauxen déterminant leur composition élémentaire de façon qualitative. Les caractéristiques duMEB sont les suivantes :
– Pointe LAB6 ;– Sonde de diffraction d’énergie Brucker AXS avec pastille électronique.Avant toute observation des éprouvettes, elles doivent être proprement débarrassées
des dépôts de produits de corrosion afin de pouvoir observer tous les endommagements(fissures, piqûres...). Un premier nettoyage consiste à brosser la surface des câbles sousl’eau à l’aide d’une brosse en plastique. Le séchage est réalisé avec l’air comprimé. Ce
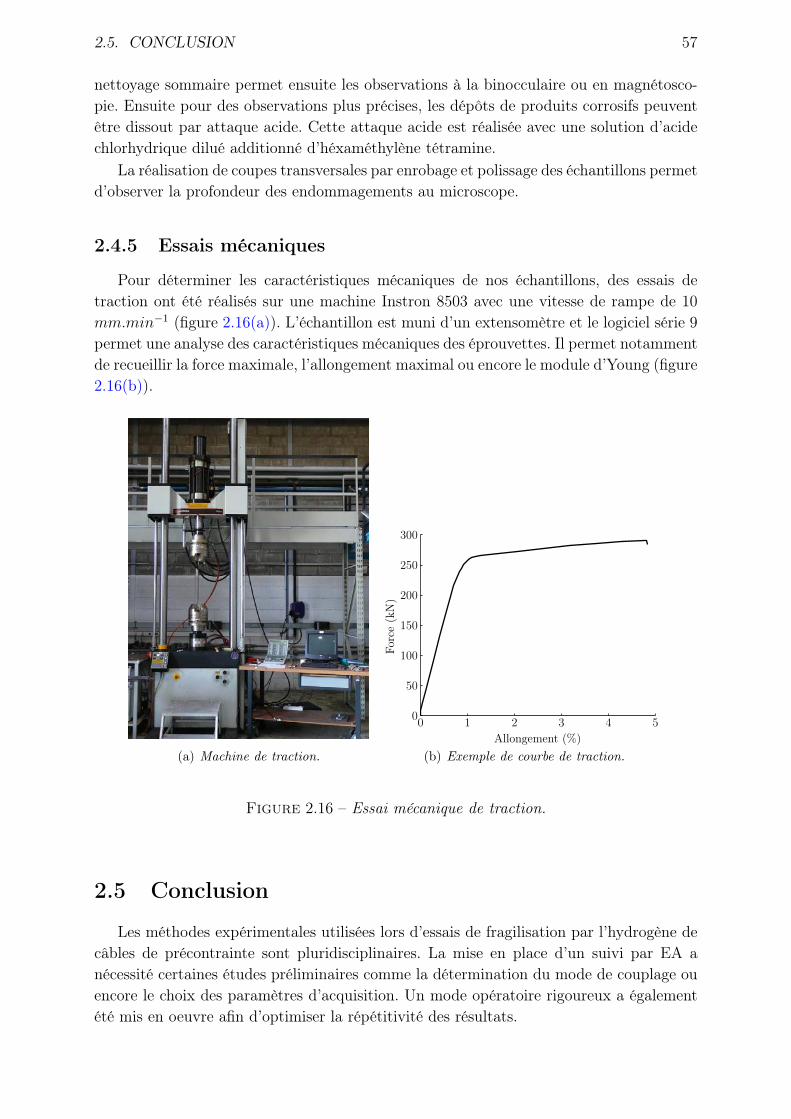
2.5. CONCLUSION 57
nettoyage sommaire permet ensuite les observations à la binocculaire ou en magnétosco-pie. Ensuite pour des observations plus précises, les dépôts de produits corrosifs peuventêtre dissout par attaque acide. Cette attaque acide est réalisée avec une solution d’acidechlorhydrique dilué additionné d’héxaméthylène tétramine.
La réalisation de coupes transversales par enrobage et polissage des échantillons permetd’observer la profondeur des endommagements au microscope.
2.4.5 Essais mécaniques
Pour déterminer les caractéristiques mécaniques de nos échantillons, des essais detraction ont été réalisés sur une machine Instron 8503 avec une vitesse de rampe de 10mm.min−1 (figure 2.16(a)). L’échantillon est muni d’un extensomètre et le logiciel série 9permet une analyse des caractéristiques mécaniques des éprouvettes. Il permet notammentde recueillir la force maximale, l’allongement maximal ou encore le module d’Young (figure2.16(b)).
(a) Machine de traction.
0 1 2 3 4 50
50
100
150
200
250
300
Allongement (%)
Force(kN)
(b) Exemple de courbe de traction.
Figure 2.16 – Essai mécanique de traction.
2.5 Conclusion
Les méthodes expérimentales utilisées lors d’essais de fragilisation par l’hydrogène decâbles de précontrainte sont pluridisciplinaires. La mise en place d’un suivi par EA anécessité certaines études préliminaires comme la détermination du mode de couplage ouencore le choix des paramètres d’acquisition. Un mode opératoire rigoureux a égalementété mis en oeuvre afin d’optimiser la répétitivité des résultats.

58 CHAPITRE 2. MÉTHODE EXPÉRIMENTALE ET MODE OPÉRATOIRE
Le chapitre suivant présente l’étude électrochimique menée afin de déterminer les pa-ramètres de l’essai au thiocyanate d’ammonium. Trois principales caractéristiques in-fluencent cet essai :
– La tension de l’armature ;– La concentration de la solution corrosive en thiocyanate d’ammonium ;– La température de la solution.
Chapitre 3
Comportement électrochimique descâbles de précontrainte lors des essaisde fragilisation par l’hydrogène
3.1 Introduction
L’objectif de ce chapitre est de mettre en évidence les paramètres influençant le com-portement électrochimique de l’armature de précontrainte dans une solution de thiocya-nate d’ammonium. Le premier paragraphe de ce chapitre présente les méthodes et mesuresélectrochimiques mises en place. Ensuite les résultats obtenus dans des conditions prochesde l’essai normalisé sont exposés. La seconde partie de ce chapitre est relatif aux résultatsobtenus en faisant varier différents paramètres comme la concentration de la solution, latempérature ou encore la contrainte appliquée. L’essai normalisé au thiocyanate d’am-monium étant relativement court (<24 heures) une adaptation des paramètres d’essai estnécessaire afin de ralentir les mécanismes et de permettre leur analyse de manière plusaisée. En outre, il est vérifié que le choix des paramètres à utiliser ne modifie pas lesmécanismes d’endommagement.
3.2 Mesures électrochimiques en milieu thiocyanate d’am-monium
3.2.1 Conditions d’essai
L’essai de référence est réalisé avec les paramètres suivants :– Tension de l’armature : 80 % de la force de rupture garantie (Frg) de l’éprouvette ;– Concentration de la solution corrosive : 250 g.L−1 ;– Température de la solution : 50.
Les essais ont été réalisés uniquement sur des fils centraux débarrassés des produits detréfilage en surface (polissage avec papier SiC P120, taille des grains : 125 µm).
Une séquence de mesures électrochimiques a été réalisée. La première phase consistea laisser l’éprouvette dans la solution corrosive jusqu’à ce que le potentiel soit stabilisé (3heures). Ensuite les mesures d’impédance sont réalisées. Un courant alternatif de 10 mV
59
60 CHAPITRE 3. COMPORTEMENT ÉLECTROCHIMIQUE DES CÂBLES
crête à crête est appliqué au fil. Les fréquences allant de 100 kHz à 10 mHz sont balayéesen réalisant 10 mesures par décades. Les résultats sont ensuite analysés avec le logicielZsimdemo. Les mesures de résistance de polarisation sont réalisées par un balayage de ±20mV autour du potentiel libre avec une vitesse de balayage de 0,5 mV.s−1. Les résultatssont analysés avec le module Rp fit du logiciel EC-Lab. La dernière phase de mesuresconsiste à obtenir une courbe de polarisation. Elle est obtenue par un balayage à 0,5mV.s−1 des potentiels de -500 mV à 1V par rapport au potentiel libre. Le module Tafelfit du logiciel EC-Lab permet ensuite d’obtenir les deux coefficients de Tafel (βa et βc), lepotentiel et le courant de corrosion.
3.2.2 Caractérisation électrochimique
Spectroscopie d’impédance électrochimique
L’impédance électrochimique obtenue en mode Nyquist est présentée sur la figure 3.1.Le rapport entre l’impedance réelle et imaginaire est le fruit de l’intéraction entre deuxarcs de cercle. Ces deux boucles symbolisent deux mécanismes (figure 3.1) : un transfertde charges à l’interface matériau-milieu (boucle haute fréquence) et la présence d’un filmpseudo-passif sur la surface de l’acier (boucle basse fréquence).
Ces échanges matériau-milieu peuvent être modélisés par le circuit équivalent de lafigure 3.2. Cette représentation montre une résistance d’électrolyte (Re) qui dépend dela concentration de la solution, du type d’ions, de la température et de la géométrie del’éprouvette. Sur l’interface électrode-électrolyte on peut également montrer l’existanced’une double couche d’ions. Le signal envoyé pendant les mesures d’impedance va entraînerla charge et la décharge de cette double-couche. Elle va alors se comporter comme uncondensateur. La valeur de la capacité de la double couche (Cdc) dépend du potentiel del’électrode, de la température, de la concentration de la solution, du type d’ions, de lacouche d’oxyde, de la rugosité de l’électrode, de l’adsorption d’impuretés. A la surfacede l’échantillon, il peut également se produire des réactions d’oxydo-réduction donc destransferts de charges. Ces manifestations s’expriment par une résistance de transfert decharges (Rtc). Un film pseudo-passif poreux est également présent sur la surface de l’acier.Il a un comportement capacitif et est caractérisé sur le schéma électrique équivalent parles paramètres Cf et Rf (capacité et résistance du film).
Les résultats obtenus à partir de la figure 3.1 sont :
– Re= 20 Ω.cm2 ;– Cdc=1300 µF.cm−2 ;– Rtc=57 Ω.cm2 ;– Cf=5130 µF.cm−2 ;– Rf=133 Ω.cm2.
La valeur de la résistance d’électrolyte est relativement importante ceci à cause de l’éloi-gnement de l’électrode de référence causant une chute ohmique non négligeable. Ces va-leurs montrent également que le système corrosif est relativement rapide car la résistancede transfert de charges est faible tout comme la résistance du film.
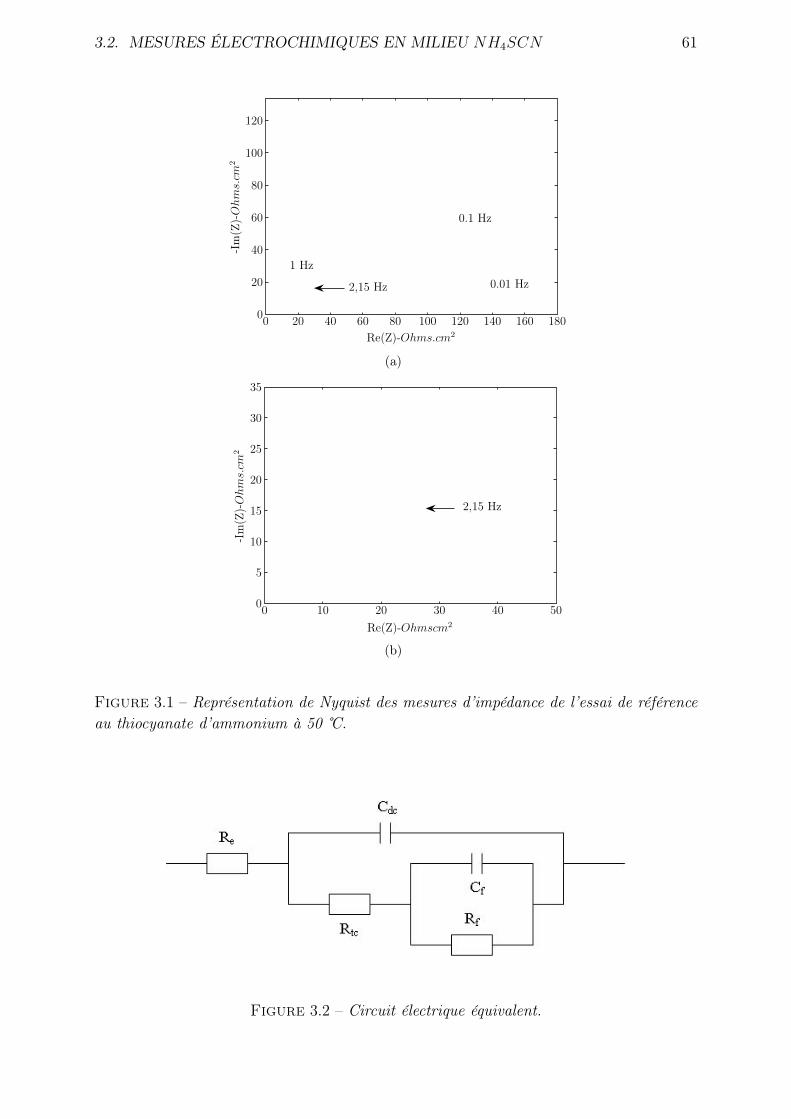
3.2. MESURES ÉLECTROCHIMIQUES EN MILIEU NH4SCN 61
0 20 40 60 80 100 120 140 160 1800
20
40
60
80
100
120
Re(Z)-Ohms.cm2
-Im(Z)-Ohms.cm
2
1 Hz
0.1 Hz
0.01 Hz2,15 Hz
(a)
0 10 20 30 40 500
5
10
15
20
25
30
35
Re(Z)-Ohmscm2
-Im(Z)-Ohms.cm
2
2,15 Hz
(b)
Figure 3.1 – Représentation de Nyquist des mesures d’impédance de l’essai de référenceau thiocyanate d’ammonium à 50 .
Figure 3.2 – Circuit électrique équivalent.

62 CHAPITRE 3. COMPORTEMENT ÉLECTROCHIMIQUE DES CÂBLES
Vitesse de corrosion, βc
Pour caractériser le comportement à la corrosion de l’acier étudié, des courbes de po-larisation (figure 3.3) ont été tracées. La construction des droites de Tafel [134] permet
−0.95 −0.9 −0.85 −0.8 −0.75 −0.7 −0.65 −0.6−4
−3
−2
−1
0
1
E (V/ECS)
log|im
A/cm
2|
Figure 3.3 – Courbe de polarisation de l’essai de référence.
d’obtenir le potentiel de corrosion, la densité du courant de corrosion et le coefficient βcqui correspond au coefficient directeur de la branche cathodique de la courbe de polarisa-tion. Quant à l’évolution de la branche anodique, elle ne permet pas, par la constructiondes droites de Tafel, de déterminer correctement βa (coefficient directeur de la brancheanodique). Les résultats sont présentés dans la table 3.1.
Table 3.1 – Résultats obtenus à partir de l’analyse de la courbe de polarisation de l’essaide référence.
Ecorr[V/ECS] -0,734icorr [µA.cm−2] 96
βc[mV ] 178
L’allure de la branche cathodique de la courbe de polarisation témoigne d’un méca-nisme typique d’activation-diffusion de l’hydrogène [135, 136].
3.3 Influence des paramètres d’essai sur les mesuresélectrochimiques
3.3.1 Concentration en thiocyanate d’ammonium
Le premier paramètre testé est la concentration en thiocyanate d’ammonium (NH4SCN)de la solution corrosive. Trois concentrations différentes ont été choisies : 25g.L−1, 100g.L−1,250g.L−1. Les autres paramètres de l’essai ont été maintenus constants par rapport à l’es-sai de référence :
– Tension de l’armature : 80% de la force de rupture garantie de l’éprouvette ;
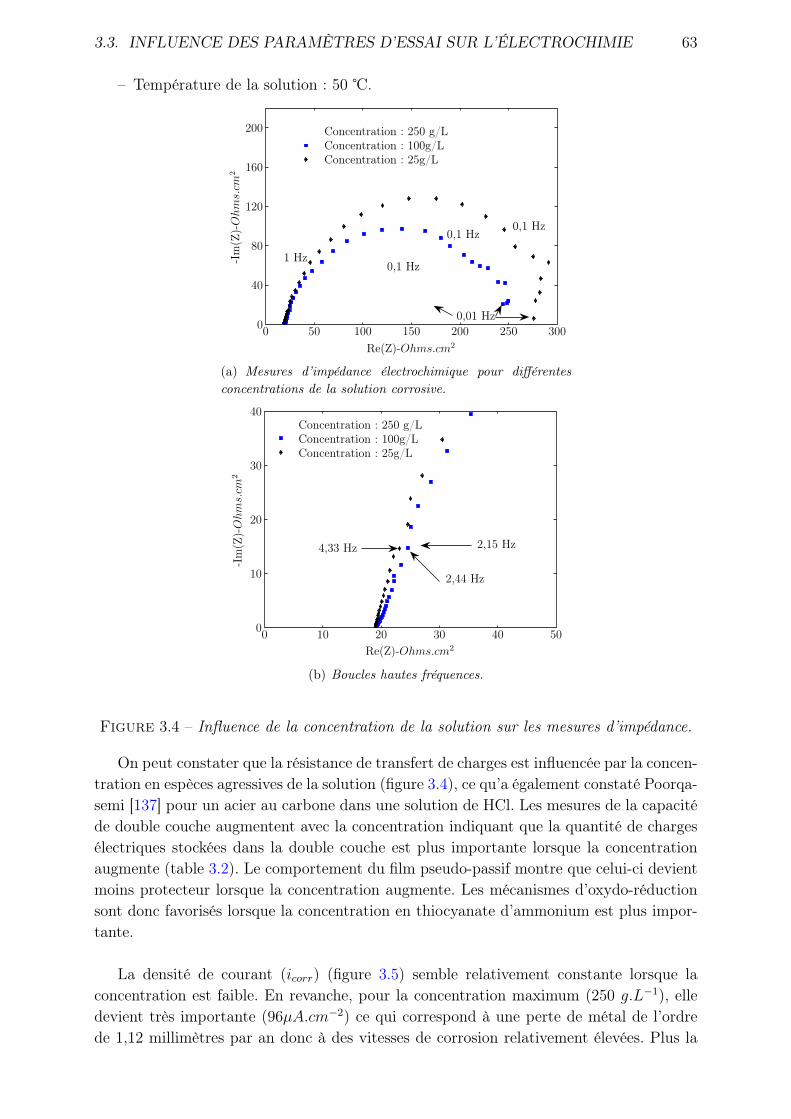
3.3. INFLUENCE DES PARAMÈTRES D’ESSAI SUR L’ÉLECTROCHIMIE 63
– Température de la solution : 50 .
0 50 100 150 200 250 3000
40
80
120
160
200
Re(Z)-Ohms.cm2
-Im(Z)-Ohms.cm
2
Concentration : 250 g/LConcentration : 100g/LConcentration : 25g/L
1 Hz
0,1 Hz
0,01 Hz
0,1 Hz
0,1 Hz
(a) Mesures d’impédance électrochimique pour différentesconcentrations de la solution corrosive.
0 10 20 30 40 500
10
20
30
40
Re(Z)-Ohms.cm2
-Im(Z)-Ohms.cm
2
Concentration : 250 g/LConcentration : 100g/LConcentration : 25g/L
4,33 Hz
2,44 Hz
2,15 Hz
(b) Boucles hautes fréquences.
Figure 3.4 – Influence de la concentration de la solution sur les mesures d’impédance.
On peut constater que la résistance de transfert de charges est influencée par la concen-tration en espèces agressives de la solution (figure 3.4), ce qu’a également constaté Poorqa-semi [137] pour un acier au carbone dans une solution de HCl. Les mesures de la capacitéde double couche augmentent avec la concentration indiquant que la quantité de chargesélectriques stockées dans la double couche est plus importante lorsque la concentrationaugmente (table 3.2). Le comportement du film pseudo-passif montre que celui-ci devientmoins protecteur lorsque la concentration augmente. Les mécanismes d’oxydo-réductionsont donc favorisés lorsque la concentration en thiocyanate d’ammonium est plus impor-tante.
La densité de courant (icorr) (figure 3.5) semble relativement constante lorsque laconcentration est faible. En revanche, pour la concentration maximum (250 g.L−1), elledevient très importante (96µA.cm−2) ce qui correspond à une perte de métal de l’ordrede 1,12 millimètres par an donc à des vitesses de corrosion relativement élevées. Plus la
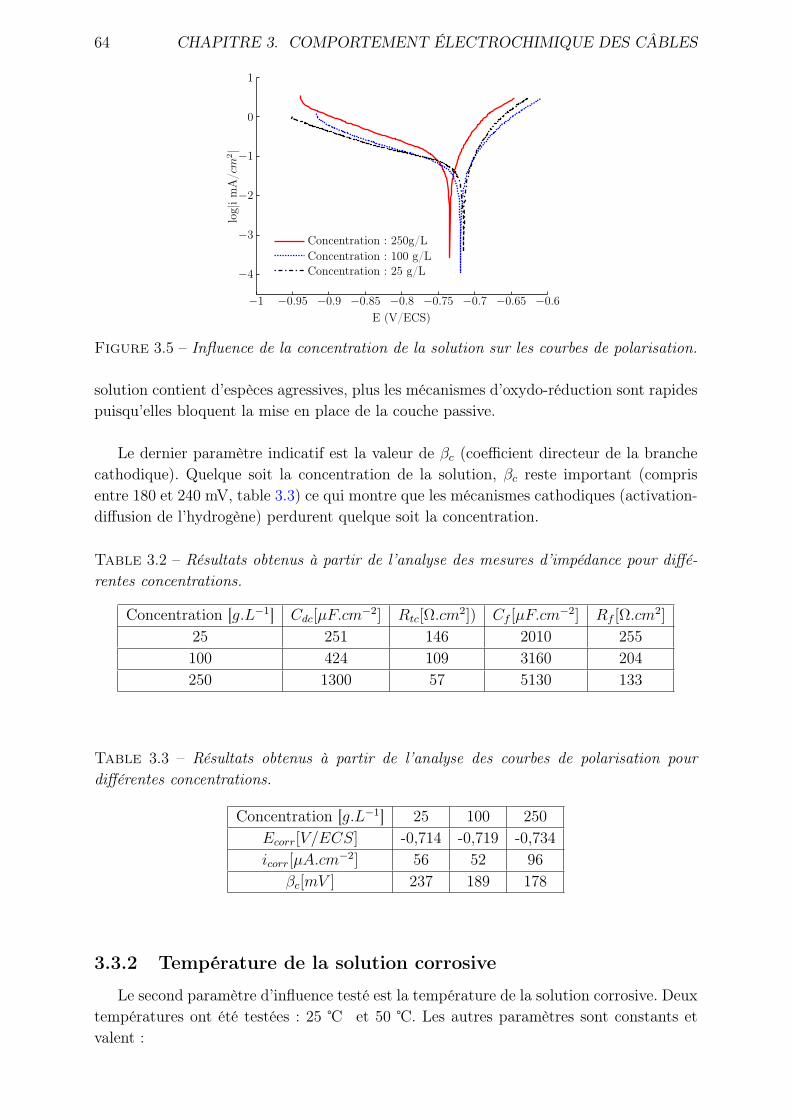
64 CHAPITRE 3. COMPORTEMENT ÉLECTROCHIMIQUE DES CÂBLES
−1 −0.95 −0.9 −0.85 −0.8 −0.75 −0.7 −0.65 −0.6
−4
−3
−2
−1
0
1
E (V/ECS)
log|im
A/cm
2|
Concentration : 250g/LConcentration : 100 g/LConcentration : 25 g/L
Figure 3.5 – Influence de la concentration de la solution sur les courbes de polarisation.
solution contient d’espèces agressives, plus les mécanismes d’oxydo-réduction sont rapidespuisqu’elles bloquent la mise en place de la couche passive.
Le dernier paramètre indicatif est la valeur de βc (coefficient directeur de la branchecathodique). Quelque soit la concentration de la solution, βc reste important (comprisentre 180 et 240 mV, table 3.3) ce qui montre que les mécanismes cathodiques (activation-diffusion de l’hydrogène) perdurent quelque soit la concentration.
Table 3.2 – Résultats obtenus à partir de l’analyse des mesures d’impédance pour diffé-rentes concentrations.
Concentration [g.L−1] Cdc[µF.cm−2] Rtc[Ω.cm
2]) Cf [µF.cm−2] Rf [Ω.cm
2]
25 251 146 2010 255100 424 109 3160 204250 1300 57 5130 133
Table 3.3 – Résultats obtenus à partir de l’analyse des courbes de polarisation pourdifférentes concentrations.
Concentration [g.L−1] 25 100 250Ecorr[V/ECS] -0,714 -0,719 -0,734icorr[µA.cm
−2] 56 52 96βc[mV ] 237 189 178
3.3.2 Température de la solution corrosive
Le second paramètre d’influence testé est la température de la solution corrosive. Deuxtempératures ont été testées : 25 et 50 . Les autres paramètres sont constants etvalent :
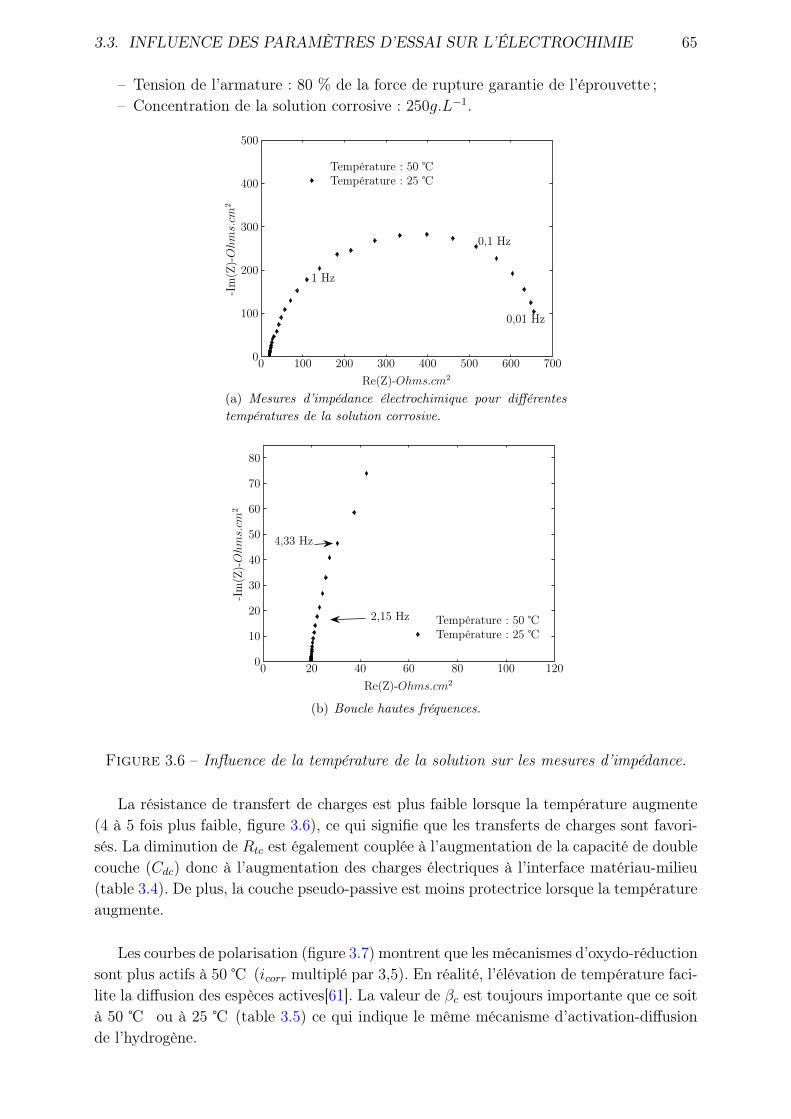
3.3. INFLUENCE DES PARAMÈTRES D’ESSAI SUR L’ÉLECTROCHIMIE 65
– Tension de l’armature : 80 % de la force de rupture garantie de l’éprouvette ;– Concentration de la solution corrosive : 250g.L−1.
0 100 200 300 400 500 600 7000
100
200
300
400
500
Re(Z)-Ohms.cm2
-Im(Z)-Ohms.cm
2
Température : 50 Température : 25
1 Hz
0,01 Hz
0,1 Hz
(a) Mesures d’impédance électrochimique pour différentestempératures de la solution corrosive.
0 20 40 60 80 100 1200
10
20
30
40
50
60
70
80
Re(Z)-Ohms.cm2
-Im(Z)-Ohms.cm
2
Température : 50 Température : 25
4,33 Hz
2,15 Hz
(b) Boucle hautes fréquences.
Figure 3.6 – Influence de la température de la solution sur les mesures d’impédance.
La résistance de transfert de charges est plus faible lorsque la température augmente(4 à 5 fois plus faible, figure 3.6), ce qui signifie que les transferts de charges sont favori-sés. La diminution de Rtc est également couplée à l’augmentation de la capacité de doublecouche (Cdc) donc à l’augmentation des charges électriques à l’interface matériau-milieu(table 3.4). De plus, la couche pseudo-passive est moins protectrice lorsque la températureaugmente.
Les courbes de polarisation (figure 3.7) montrent que les mécanismes d’oxydo-réductionsont plus actifs à 50 (icorr multiplé par 3,5). En réalité, l’élévation de température faci-lite la diffusion des espèces actives[61]. La valeur de βc est toujours importante que ce soità 50 ou à 25 (table 3.5) ce qui indique le même mécanisme d’activation-diffusionde l’hydrogène.
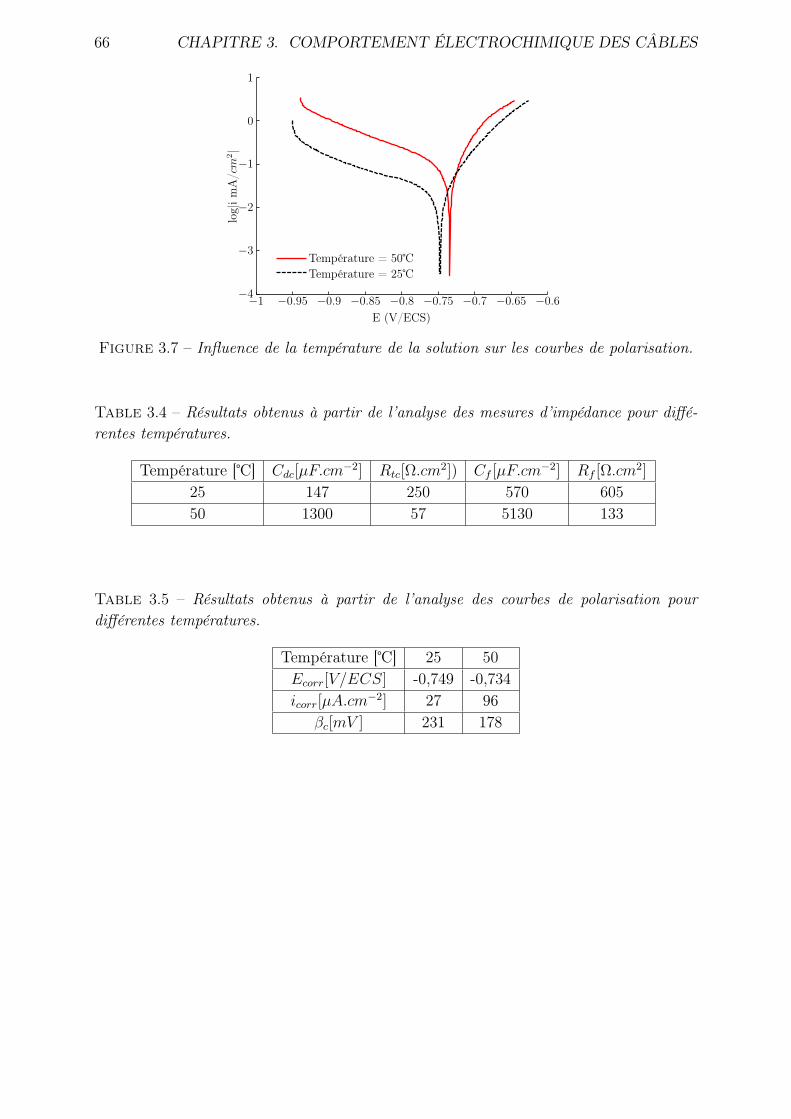
66 CHAPITRE 3. COMPORTEMENT ÉLECTROCHIMIQUE DES CÂBLES
−1 −0.95 −0.9 −0.85 −0.8 −0.75 −0.7 −0.65 −0.6−4
−3
−2
−1
0
1
E (V/ECS)
log|im
A/cm
2|
Température = 50Température = 25
Figure 3.7 – Influence de la température de la solution sur les courbes de polarisation.
Table 3.4 – Résultats obtenus à partir de l’analyse des mesures d’impédance pour diffé-rentes températures.
Température [] Cdc[µF.cm−2] Rtc[Ω.cm
2]) Cf [µF.cm−2] Rf [Ω.cm
2]
25 147 250 570 60550 1300 57 5130 133
Table 3.5 – Résultats obtenus à partir de l’analyse des courbes de polarisation pourdifférentes températures.
Température [] 25 50Ecorr[V/ECS] -0,749 -0,734icorr[µA.cm
−2] 27 96βc[mV ] 231 178
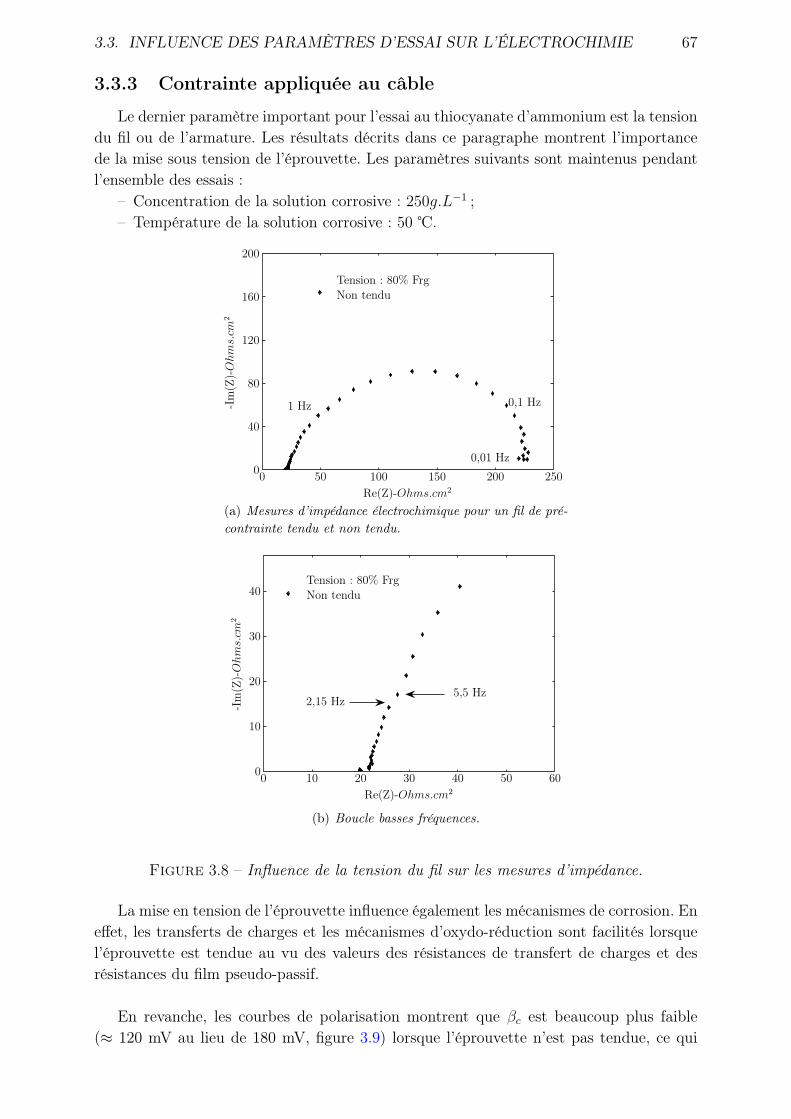
3.3. INFLUENCE DES PARAMÈTRES D’ESSAI SUR L’ÉLECTROCHIMIE 67
3.3.3 Contrainte appliquée au câble
Le dernier paramètre important pour l’essai au thiocyanate d’ammonium est la tensiondu fil ou de l’armature. Les résultats décrits dans ce paragraphe montrent l’importancede la mise sous tension de l’éprouvette. Les paramètres suivants sont maintenus pendantl’ensemble des essais :
– Concentration de la solution corrosive : 250g.L−1 ;– Température de la solution corrosive : 50 .
0 50 100 150 200 2500
40
80
120
160
200
Re(Z)-Ohms.cm2
-Im(Z)-Ohms.cm
2
Tension : 80% FrgNon tendu
0,01 Hz
0,1 Hz1 Hz
(a) Mesures d’impédance électrochimique pour un fil de pré-contrainte tendu et non tendu.
0 10 20 30 40 50 600
10
20
30
40
Re(Z)-Ohms.cm2
-Im(Z)-Ohms.cm
2
Tension : 80% FrgNon tendu
2,15 Hz5,5 Hz
(b) Boucle basses fréquences.
Figure 3.8 – Influence de la tension du fil sur les mesures d’impédance.
La mise en tension de l’éprouvette influence également les mécanismes de corrosion. Eneffet, les transferts de charges et les mécanismes d’oxydo-réduction sont facilités lorsquel’éprouvette est tendue au vu des valeurs des résistances de transfert de charges et desrésistances du film pseudo-passif.
En revanche, les courbes de polarisation montrent que βc est beaucoup plus faible(≈ 120 mV au lieu de 180 mV, figure 3.9) lorsque l’éprouvette n’est pas tendue, ce qui
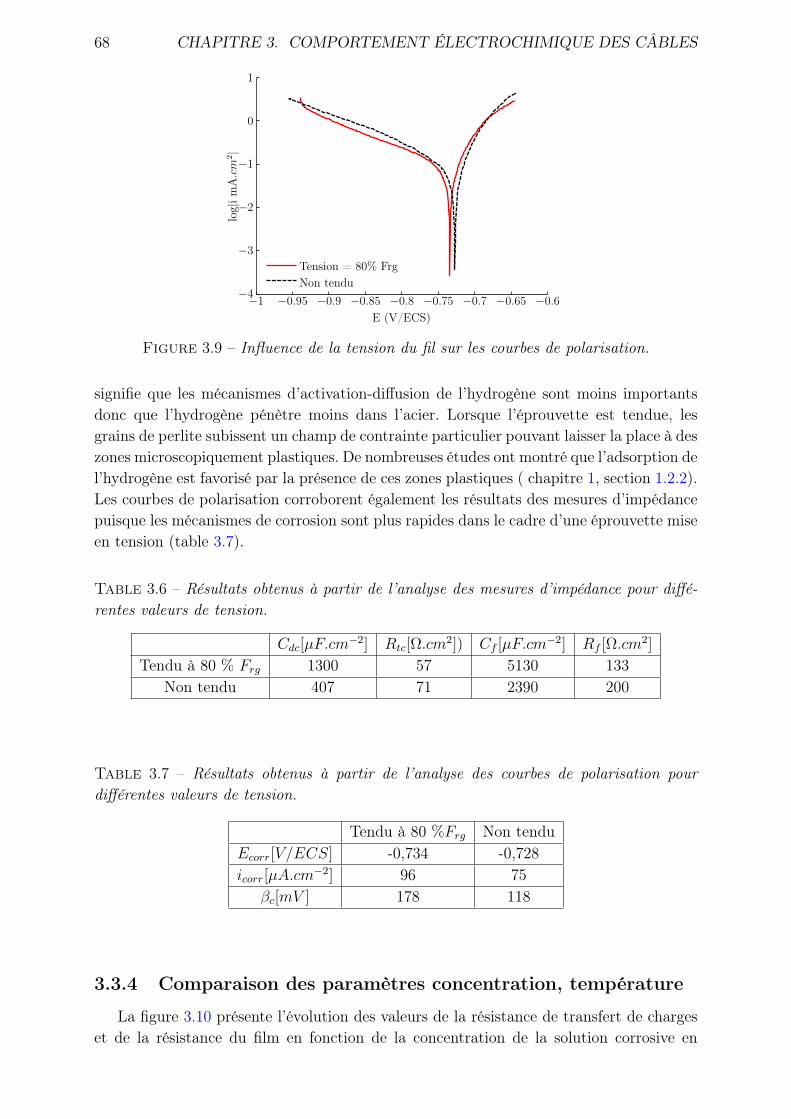
68 CHAPITRE 3. COMPORTEMENT ÉLECTROCHIMIQUE DES CÂBLES
−1 −0.95 −0.9 −0.85 −0.8 −0.75 −0.7 −0.65 −0.6−4
−3
−2
−1
0
1
E (V/ECS)
log|im
A.cm
2|
Tension = 80% FrgNon tendu
Figure 3.9 – Influence de la tension du fil sur les courbes de polarisation.
signifie que les mécanismes d’activation-diffusion de l’hydrogène sont moins importantsdonc que l’hydrogène pénètre moins dans l’acier. Lorsque l’éprouvette est tendue, lesgrains de perlite subissent un champ de contrainte particulier pouvant laisser la place à deszones microscopiquement plastiques. De nombreuses études ont montré que l’adsorption del’hydrogène est favorisé par la présence de ces zones plastiques ( chapitre 1, section 1.2.2).Les courbes de polarisation corroborent également les résultats des mesures d’impédancepuisque les mécanismes de corrosion sont plus rapides dans le cadre d’une éprouvette miseen tension (table 3.7).
Table 3.6 – Résultats obtenus à partir de l’analyse des mesures d’impédance pour diffé-rentes valeurs de tension.
Cdc[µF.cm−2] Rtc[Ω.cm
2]) Cf [µF.cm−2] Rf [Ω.cm
2]
Tendu à 80 % Frg 1300 57 5130 133Non tendu 407 71 2390 200
Table 3.7 – Résultats obtenus à partir de l’analyse des courbes de polarisation pourdifférentes valeurs de tension.
Tendu à 80 %Frg Non tenduEcorr[V/ECS] -0,734 -0,728icorr[µA.cm
−2] 96 75βc[mV ] 178 118
3.3.4 Comparaison des paramètres concentration, température
La figure 3.10 présente l’évolution des valeurs de la résistance de transfert de chargeset de la résistance du film en fonction de la concentration de la solution corrosive en
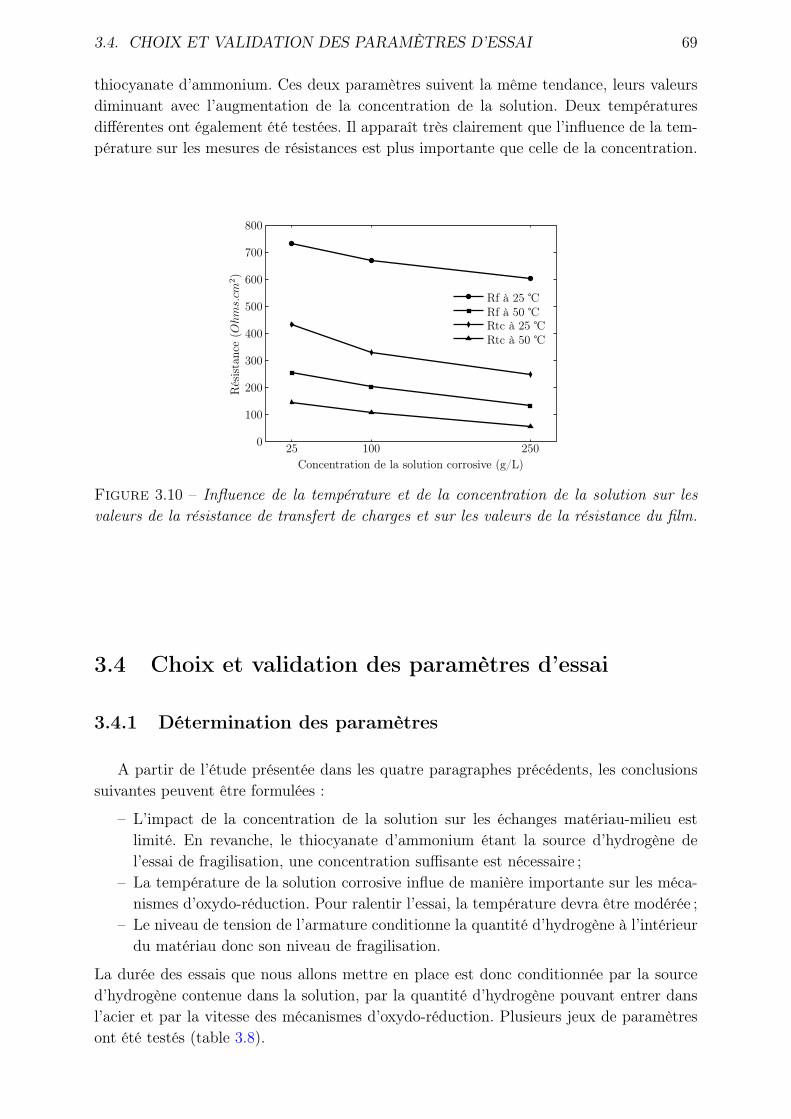
3.4. CHOIX ET VALIDATION DES PARAMÈTRES D’ESSAI 69
thiocyanate d’ammonium. Ces deux paramètres suivent la même tendance, leurs valeursdiminuant avec l’augmentation de la concentration de la solution. Deux températuresdifférentes ont également été testées. Il apparaît très clairement que l’influence de la tem-pérature sur les mesures de résistances est plus importante que celle de la concentration.
25 100 2500
100
200
300
400
500
600
700
800
Concentration de la solution corrosive (g/L)
Résistance(Ohms.cm
2)
Rf à 25 Rf à 50 Rtc à 25 Rtc à 50
Figure 3.10 – Influence de la température et de la concentration de la solution sur lesvaleurs de la résistance de transfert de charges et sur les valeurs de la résistance du film.
3.4 Choix et validation des paramètres d’essai
3.4.1 Détermination des paramètres
A partir de l’étude présentée dans les quatre paragraphes précédents, les conclusionssuivantes peuvent être formulées :
– L’impact de la concentration de la solution sur les échanges matériau-milieu estlimité. En revanche, le thiocyanate d’ammonium étant la source d’hydrogène del’essai de fragilisation, une concentration suffisante est nécessaire ;
– La température de la solution corrosive influe de manière importante sur les méca-nismes d’oxydo-réduction. Pour ralentir l’essai, la température devra être modérée ;
– Le niveau de tension de l’armature conditionne la quantité d’hydrogène à l’intérieurdu matériau donc son niveau de fragilisation.
La durée des essais que nous allons mettre en place est donc conditionnée par la sourced’hydrogène contenue dans la solution, par la quantité d’hydrogène pouvant entrer dansl’acier et par la vitesse des mécanismes d’oxydo-réduction. Plusieurs jeux de paramètresont été testés (table 3.8).

70 CHAPITRE 3. COMPORTEMENT ÉLECTROCHIMIQUE DES CÂBLES
Table 3.8 – Durées de vie (à rupture) obtenues pour différents jeux de paramètres.
Tension [% Frg] Concentration [g.L−1] Température [] Durée à rupture80 250 50 10-24 heures70 250 50 2 jours80 250 40 2 jours70 250 40 31 jours75 250 45 6-8 jours
Les valeurs suivantes ont été fixées afin d’obtenir un temps à rupture acceptable :– Tension de l’armature : 75 % de la force de rupture garantie de l’éprouvette ;– Concentration de la solution corrosive : 250g.L−1 ;– Température de la solution : 45 .
Les mesures d’impédance électrochimique (figure 3.11(a)) et les courbes de polarisation(figure 3.12) montrent que les cinétiques des mécanismes d’oxydo-réduction sont pluslentes pendant l’essai avec les nouveaux paramètres choisis. La mesure du courant decorrosion correspond alors aux deux tiers du courant mesuré pendant l’essai de référence(table 3.10). Les transferts de charges sont ralentis comme le montre les mesures desrésistances de transfert de charges (table 3.9). Les valeurs des coefficients βc pour lesdeux essais montrent que les nouveaux paramètres entraînent une plus faible adsorption-diffusion de l’hydrogène.
Table 3.9 – Résultats obtenus à partir de l’analyse des mesures d’impédance pour l’essaide référence et pour l’essai reconfiguré.
Cdc[µF.cm−2] Rtc[Ω.cm
2] Cf [µF.cm−2] Rf [Ω.cm
2]
Essai de référence 1300 57 5130 133Essai reconfiguré 387 119 1794 212
Table 3.10 – Résultats obtenus à partir de l’analyse des courbes de polarisation pourl’essai de référence et pour l’essai reconfiguré.
Essai deréférence
Essaireconfiguré
Ecorr[V/ECS] -0,734 -0,751icorr[µA.cm
−2] 96 67βc[mV ] 178 163
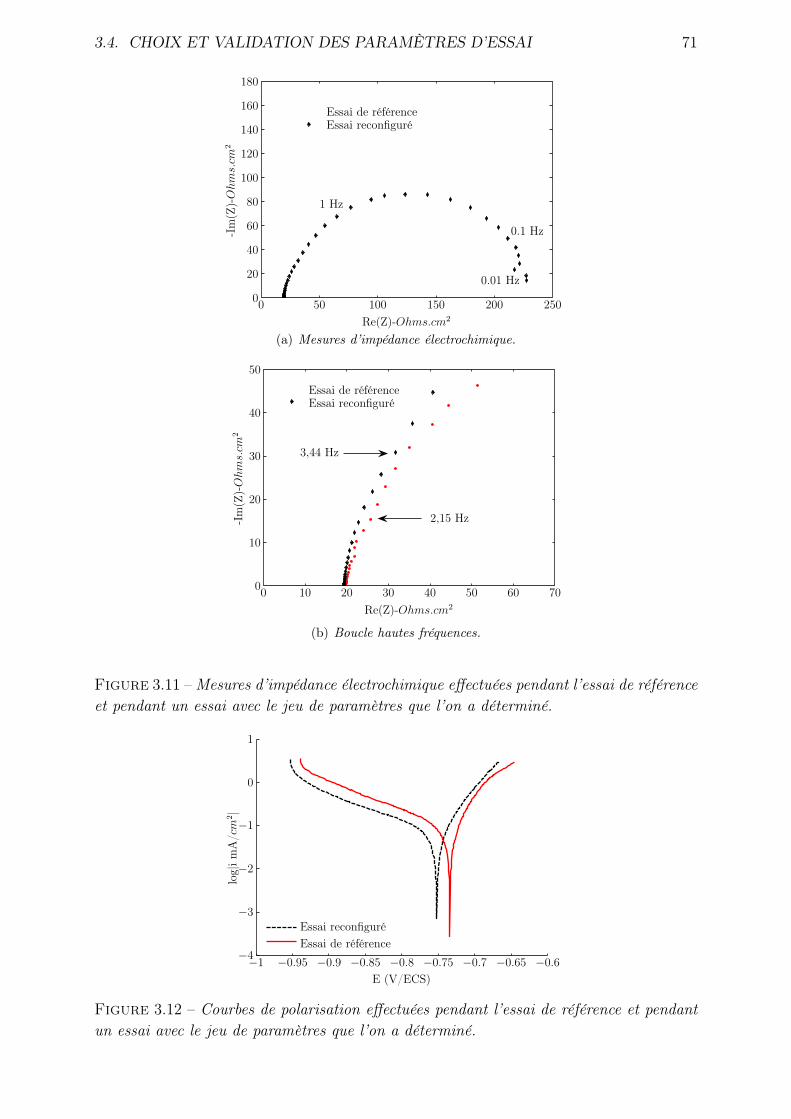
3.4. CHOIX ET VALIDATION DES PARAMÈTRES D’ESSAI 71
0 50 100 150 200 2500
20
40
60
80
100
120
140
160
180
Re(Z)-Ohms.cm2
-Im(Z)-Ohms.cm
2
Essai de référenceEssai reconfiguré
0.01 Hz
0.1 Hz
1 Hz
(a) Mesures d’impédance électrochimique.
0 10 20 30 40 50 60 700
10
20
30
40
50
Re(Z)-Ohms.cm2
-Im(Z)-Ohms.cm
2
Essai de référenceEssai reconfiguré
3,44 Hz
2,15 Hz
(b) Boucle hautes fréquences.
Figure 3.11 –Mesures d’impédance électrochimique effectuées pendant l’essai de référenceet pendant un essai avec le jeu de paramètres que l’on a déterminé.
−1 −0.95 −0.9 −0.85 −0.8 −0.75 −0.7 −0.65 −0.6−4
−3
−2
−1
0
1
E (V/ECS)
log|im
A/cm
2|
Essai reconfiguréEssai de référence
Figure 3.12 – Courbes de polarisation effectuées pendant l’essai de référence et pendantun essai avec le jeu de paramètres que l’on a déterminé.
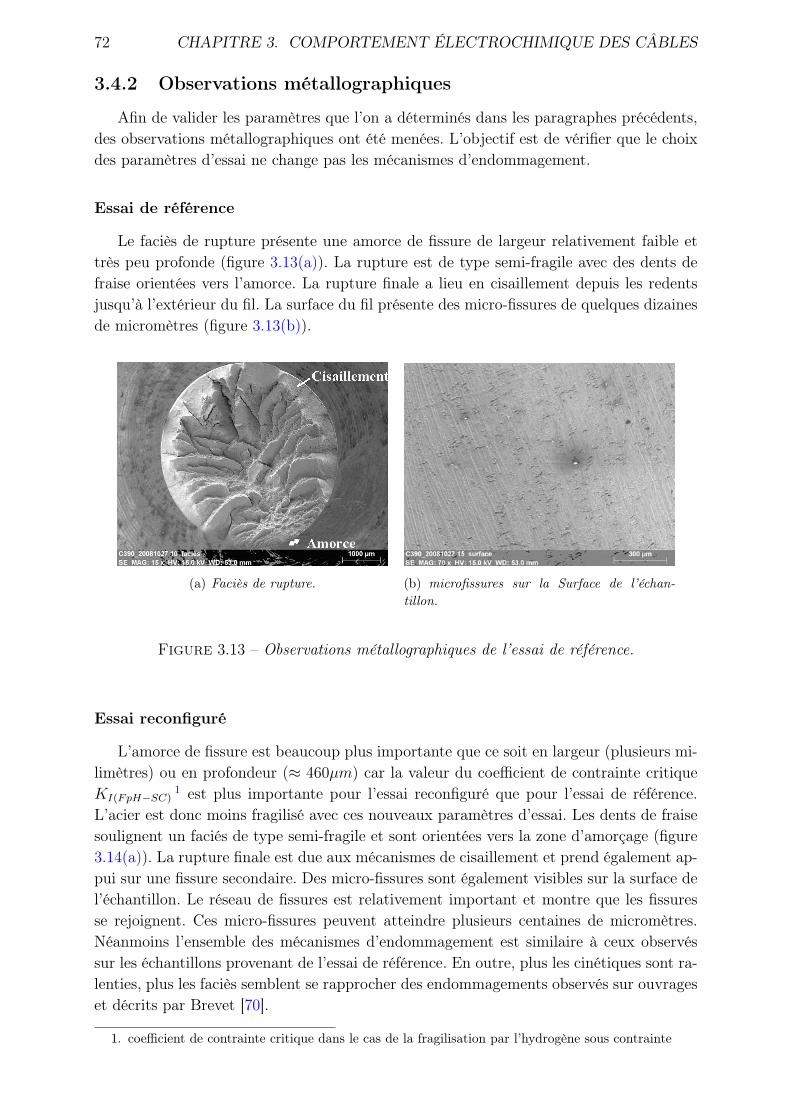
72 CHAPITRE 3. COMPORTEMENT ÉLECTROCHIMIQUE DES CÂBLES
3.4.2 Observations métallographiques
Afin de valider les paramètres que l’on a déterminés dans les paragraphes précédents,des observations métallographiques ont été menées. L’objectif est de vérifier que le choixdes paramètres d’essai ne change pas les mécanismes d’endommagement.
Essai de référence
Le faciès de rupture présente une amorce de fissure de largeur relativement faible ettrès peu profonde (figure 3.13(a)). La rupture est de type semi-fragile avec des dents defraise orientées vers l’amorce. La rupture finale a lieu en cisaillement depuis les redentsjusqu’à l’extérieur du fil. La surface du fil présente des micro-fissures de quelques dizainesde micromètres (figure 3.13(b)).
(a) Faciès de rupture. (b) microfissures sur la Surface de l’échan-tillon.
Figure 3.13 – Observations métallographiques de l’essai de référence.
Essai reconfiguré
L’amorce de fissure est beaucoup plus importante que ce soit en largeur (plusieurs mi-limètres) ou en profondeur (≈ 460µm) car la valeur du coefficient de contrainte critiqueKI(FpH−SC)
1 est plus importante pour l’essai reconfiguré que pour l’essai de référence.L’acier est donc moins fragilisé avec ces nouveaux paramètres d’essai. Les dents de fraisesoulignent un faciés de type semi-fragile et sont orientées vers la zone d’amorçage (figure3.14(a)). La rupture finale est due aux mécanismes de cisaillement et prend également ap-pui sur une fissure secondaire. Des micro-fissures sont également visibles sur la surface del’échantillon. Le réseau de fissures est relativement important et montre que les fissuresse rejoignent. Ces micro-fissures peuvent atteindre plusieurs centaines de micromètres.Néanmoins l’ensemble des mécanismes d’endommagement est similaire à ceux observéssur les échantillons provenant de l’essai de référence. En outre, plus les cinétiques sont ra-lenties, plus les faciès semblent se rapprocher des endommagements observés sur ouvrageset décrits par Brevet [70].
1. coefficient de contrainte critique dans le cas de la fragilisation par l’hydrogène sous contrainte
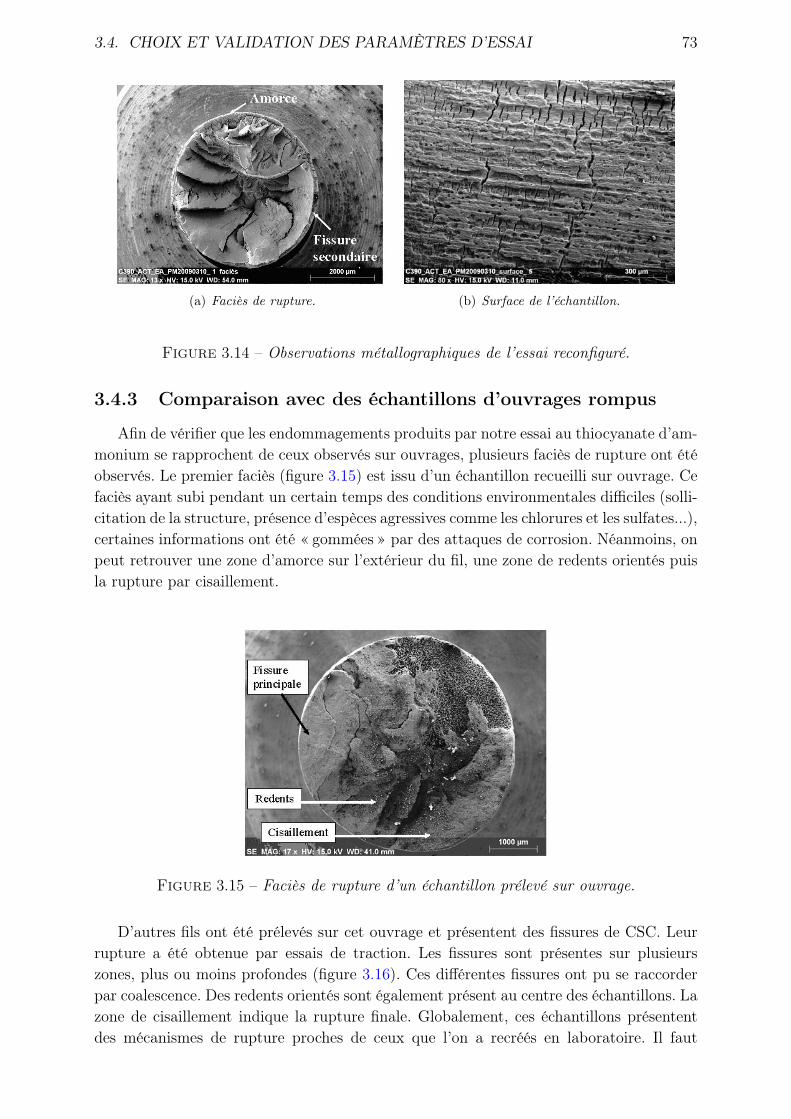
3.4. CHOIX ET VALIDATION DES PARAMÈTRES D’ESSAI 73
(a) Faciès de rupture. (b) Surface de l’échantillon.
Figure 3.14 – Observations métallographiques de l’essai reconfiguré.
3.4.3 Comparaison avec des échantillons d’ouvrages rompus
Afin de vérifier que les endommagements produits par notre essai au thiocyanate d’am-monium se rapprochent de ceux observés sur ouvrages, plusieurs faciès de rupture ont étéobservés. Le premier faciès (figure 3.15) est issu d’un échantillon recueilli sur ouvrage. Cefaciès ayant subi pendant un certain temps des conditions environmentales difficiles (solli-citation de la structure, présence d’espèces agressives comme les chlorures et les sulfates...),certaines informations ont été « gommées » par des attaques de corrosion. Néanmoins, onpeut retrouver une zone d’amorce sur l’extérieur du fil, une zone de redents orientés puisla rupture par cisaillement.
Figure 3.15 – Faciès de rupture d’un échantillon prélevé sur ouvrage.
D’autres fils ont été prélevés sur cet ouvrage et présentent des fissures de CSC. Leurrupture a été obtenue par essais de traction. Les fissures sont présentes sur plusieurszones, plus ou moins profondes (figure 3.16). Ces différentes fissures ont pu se raccorderpar coalescence. Des redents orientés sont également présent au centre des échantillons. Lazone de cisaillement indique la rupture finale. Globalement, ces échantillons présententdes mécanismes de rupture proches de ceux que l’on a recréés en laboratoire. Il faut
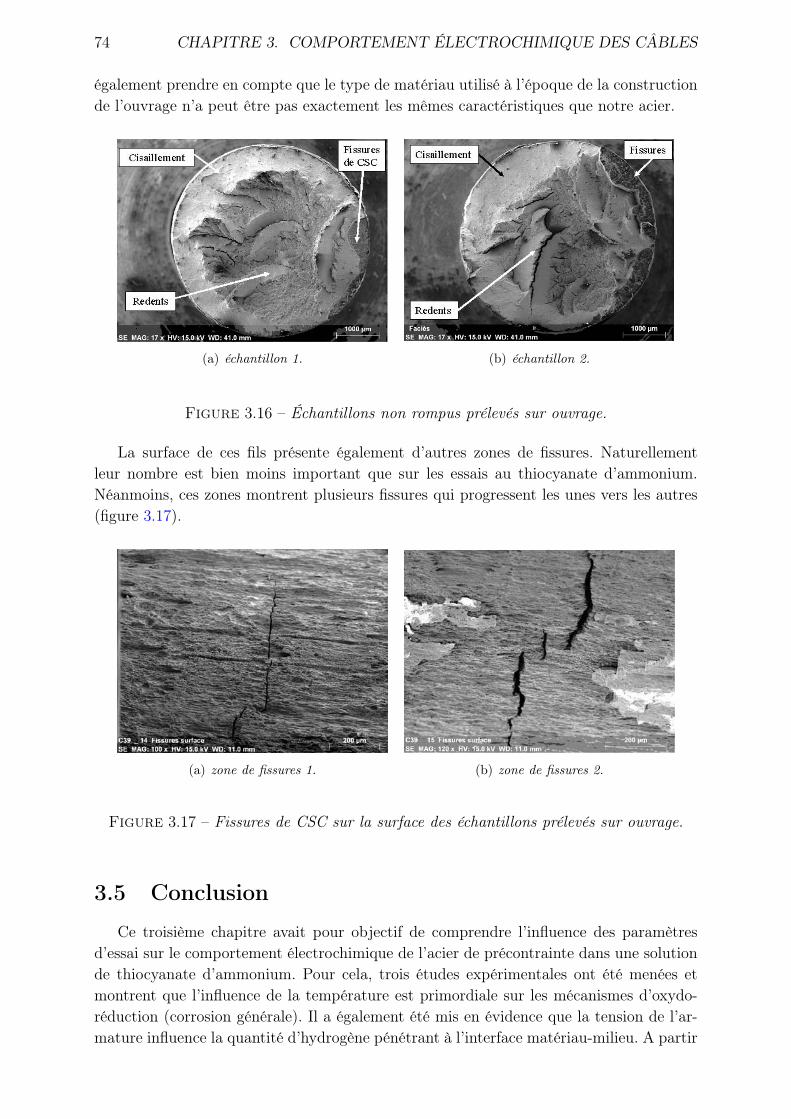
74 CHAPITRE 3. COMPORTEMENT ÉLECTROCHIMIQUE DES CÂBLES
également prendre en compte que le type de matériau utilisé à l’époque de la constructionde l’ouvrage n’a peut être pas exactement les mêmes caractéristiques que notre acier.
(a) échantillon 1. (b) échantillon 2.
Figure 3.16 – Échantillons non rompus prélevés sur ouvrage.
La surface de ces fils présente également d’autres zones de fissures. Naturellementleur nombre est bien moins important que sur les essais au thiocyanate d’ammonium.Néanmoins, ces zones montrent plusieurs fissures qui progressent les unes vers les autres(figure 3.17).
(a) zone de fissures 1. (b) zone de fissures 2.
Figure 3.17 – Fissures de CSC sur la surface des échantillons prélevés sur ouvrage.
3.5 Conclusion
Ce troisième chapitre avait pour objectif de comprendre l’influence des paramètresd’essai sur le comportement électrochimique de l’acier de précontrainte dans une solutionde thiocyanate d’ammonium. Pour cela, trois études expérimentales ont été menées etmontrent que l’influence de la température est primordiale sur les mécanismes d’oxydo-réduction (corrosion générale). Il a également été mis en évidence que la tension de l’ar-mature influence la quantité d’hydrogène pénétrant à l’interface matériau-milieu. A partir

3.5. CONCLUSION 75
de ces constatations, plusieurs paramètres ont été testés afin de trouver le meilleur com-promis température-tension pour obtenir une durée d’essai optimale. Il a également étévérifié que le changement des paramètres d’essai n’affecte pas les mécanismes d’endomma-gement. Au contraire, il semble qu’en utilisant des paramètres moins drastiques, le facièsde rupture du fil de précontrainte se rapproche de ceux observés in situ.
Dans le chapitre suivant, les mécanismes de CSC engendrés pendant l’essai reconfigurésont caractérisés par l’association de plusieurs types de techniques. Un suivi acoustiqueest couplé aux mesures électrochimiques ainsi qu’aux observations métallographiques.

76 CHAPITRE 3. COMPORTEMENT ÉLECTROCHIMIQUE DES CÂBLES
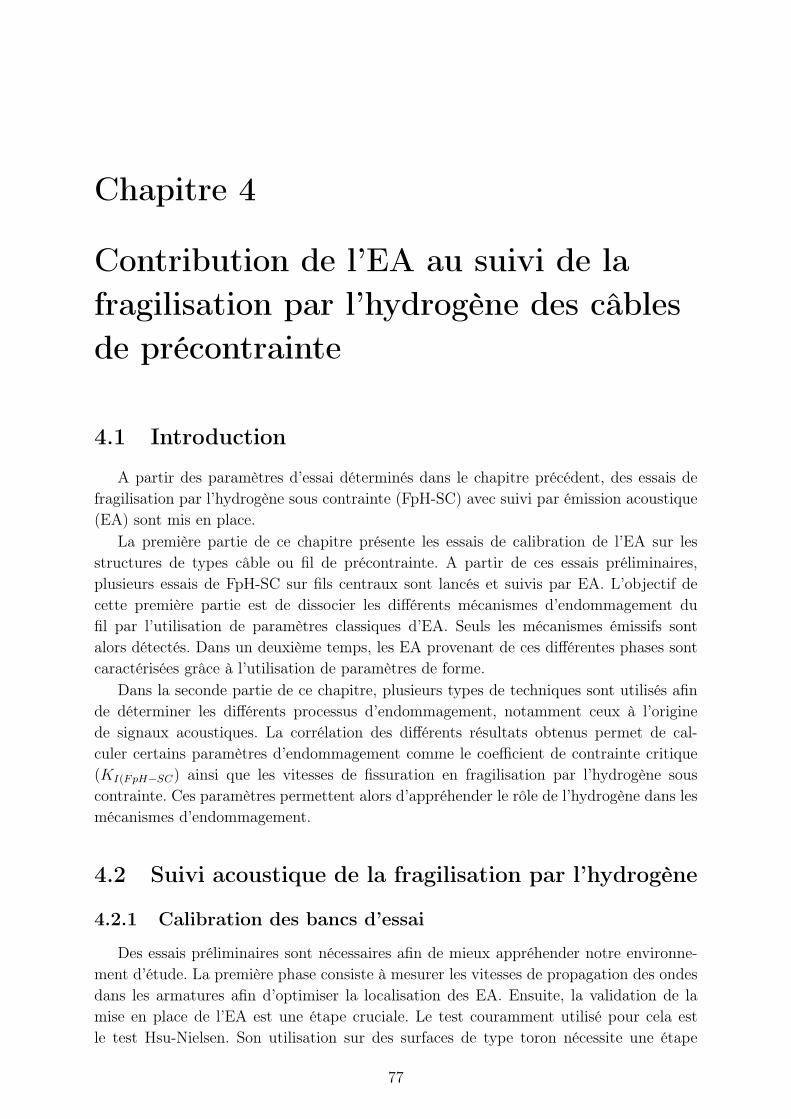
Chapitre 4
Contribution de l’EA au suivi de lafragilisation par l’hydrogène des câblesde précontrainte
4.1 Introduction
A partir des paramètres d’essai déterminés dans le chapitre précédent, des essais defragilisation par l’hydrogène sous contrainte (FpH-SC) avec suivi par émission acoustique(EA) sont mis en place.
La première partie de ce chapitre présente les essais de calibration de l’EA sur lesstructures de types câble ou fil de précontrainte. A partir de ces essais préliminaires,plusieurs essais de FpH-SC sur fils centraux sont lancés et suivis par EA. L’objectif decette première partie est de dissocier les différents mécanismes d’endommagement dufil par l’utilisation de paramètres classiques d’EA. Seuls les mécanismes émissifs sontalors détectés. Dans un deuxième temps, les EA provenant de ces différentes phases sontcaractérisées grâce à l’utilisation de paramètres de forme.
Dans la seconde partie de ce chapitre, plusieurs types de techniques sont utilisés afinde déterminer les différents processus d’endommagement, notamment ceux à l’originede signaux acoustiques. La corrélation des différents résultats obtenus permet de cal-culer certains paramètres d’endommagement comme le coefficient de contrainte critique(KI(FpH−SC) ainsi que les vitesses de fissuration en fragilisation par l’hydrogène souscontrainte. Ces paramètres permettent alors d’appréhender le rôle de l’hydrogène dans lesmécanismes d’endommagement.
4.2 Suivi acoustique de la fragilisation par l’hydrogène
4.2.1 Calibration des bancs d’essai
Des essais préliminaires sont nécessaires afin de mieux appréhender notre environne-ment d’étude. La première phase consiste à mesurer les vitesses de propagation des ondesdans les armatures afin d’optimiser la localisation des EA. Ensuite, la validation de lamise en place de l’EA est une étape cruciale. Le test couramment utilisé pour cela estle test Hsu-Nielsen. Son utilisation sur des surfaces de type toron nécessite une étape
77
78 CHAPITRE 4. CONTRIBUTION DE L’EA AU SUIVI DE LA FPH
d’homologation présentée dans les paragraphes suivants.
Vitesse de propagation des EA
La vitesse de propagation des EA dans une structure est un paramètre important,notamment pour la localisation des signaux acoustiques.
Deux capteurs ont été collés sur un toron. Ils sont distants de 440 mm. Des cassés demine ont été réalisés au dessus du capteur 1 (figure 4.1). Le temps de parcours des EAentre les deux capteurs est de 87,7 µs. La vitesse de propagation apparente des EA estdonc de 5134 m.s−1.
Le même essai a été réalisé sur un fil central. Les deux capteurs sont distants de 400mm, le temps de parcours des EA est alors de 77,3 µs. La vitesse de propagation des EAdans un fil central est de 5175 m.s−1. La différence entre la valeur obtenue pour le filcentral et celle obtenue pour le toron est principalement due à la géométrie complexe del’armature. La suite d’interfaces entre les différents fils ralentit les ondes acoustiques. Deplus, les cassés de mines ont été réalisés sur les fils hélicoïdaux alors que la distance inter-capteurs est mesurée de manière rectiligne, sans prendre en compte le tracé tortueux desfils hélicoïdaux. Il s’agit donc bien d’une vitesse apparente ou moyenne pour l’armature.
La vitesse de propagation d’ondes ultrasonores dans des structures du type câble deprécontrainte a également été déterminée par Laguerre [28]. La vitesse estimée est alors de5175±18m.s−1, valeur relativement proche de nos mesures expérimentales. Si l’on calcule
Figure 4.1 – Mesure de la vitesse de propagation des EA.
théoriquement la vitesse longitudinale (mode de propagation le plus rapide) des ondes sepropageant dans un barreau d’acier de précontrainte avec l’équation suivante (équation4.1) :
VL =
√E
ρ(4.1)
La vitesse longitudinale vaut 5056 m.s−1, avec Eacier =199660 MPa et ρ =7810 kg.m−3.Les valeurs des vitesses de propagation mesurées expérimentalement sont éloignées de
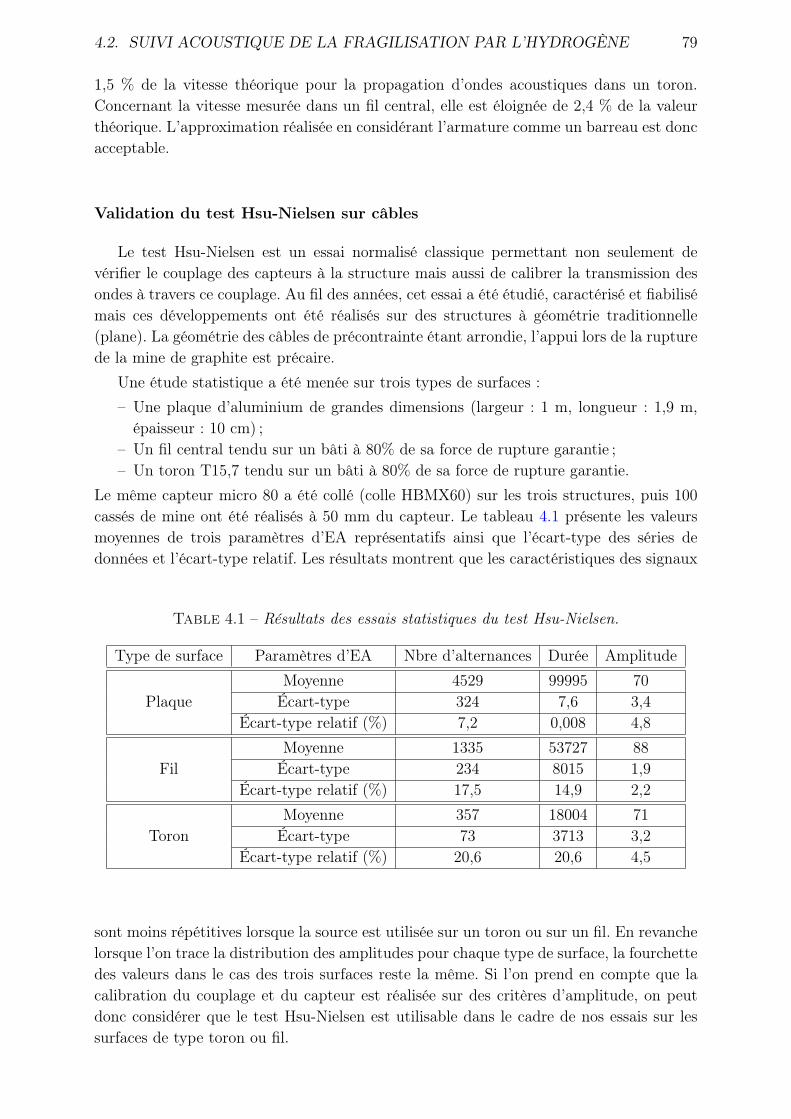
4.2. SUIVI ACOUSTIQUE DE LA FRAGILISATION PAR L’HYDROGÈNE 79
1,5 % de la vitesse théorique pour la propagation d’ondes acoustiques dans un toron.Concernant la vitesse mesurée dans un fil central, elle est éloignée de 2,4 % de la valeurthéorique. L’approximation réalisée en considérant l’armature comme un barreau est doncacceptable.
Validation du test Hsu-Nielsen sur câbles
Le test Hsu-Nielsen est un essai normalisé classique permettant non seulement devérifier le couplage des capteurs à la structure mais aussi de calibrer la transmission desondes à travers ce couplage. Au fil des années, cet essai a été étudié, caractérisé et fiabilisémais ces développements ont été réalisés sur des structures à géométrie traditionnelle(plane). La géométrie des câbles de précontrainte étant arrondie, l’appui lors de la rupturede la mine de graphite est précaire.
Une étude statistique a été menée sur trois types de surfaces :– Une plaque d’aluminium de grandes dimensions (largeur : 1 m, longueur : 1,9 m,
épaisseur : 10 cm) ;– Un fil central tendu sur un bâti à 80% de sa force de rupture garantie ;– Un toron T15,7 tendu sur un bâti à 80% de sa force de rupture garantie.
Le même capteur micro 80 a été collé (colle HBMX60) sur les trois structures, puis 100cassés de mine ont été réalisés à 50 mm du capteur. Le tableau 4.1 présente les valeursmoyennes de trois paramètres d’EA représentatifs ainsi que l’écart-type des séries dedonnées et l’écart-type relatif. Les résultats montrent que les caractéristiques des signaux
Table 4.1 – Résultats des essais statistiques du test Hsu-Nielsen.
Type de surface Paramètres d’EA Nbre d’alternances Durée Amplitude
PlaqueMoyenne 4529 99995 70Écart-type 324 7,6 3,4
Écart-type relatif (%) 7,2 0,008 4,8
FilMoyenne 1335 53727 88Écart-type 234 8015 1,9
Écart-type relatif (%) 17,5 14,9 2,2
ToronMoyenne 357 18004 71Écart-type 73 3713 3,2
Écart-type relatif (%) 20,6 20,6 4,5
sont moins répétitives lorsque la source est utilisée sur un toron ou sur un fil. En revanchelorsque l’on trace la distribution des amplitudes pour chaque type de surface, la fourchettedes valeurs dans le cas des trois surfaces reste la même. Si l’on prend en compte que lacalibration du couplage et du capteur est réalisée sur des critères d’amplitude, on peutdonc considérer que le test Hsu-Nielsen est utilisable dans le cadre de nos essais sur lessurfaces de type toron ou fil.

80 CHAPITRE 4. CONTRIBUTION DE L’EA AU SUIVI DE LA FPH
−10 −5 0 5 10 15 200
5
10
15
20
25
30
35
Ecart à la moyenne des amplitudes (dB)
Nom
brede
salves
plaquefiltoron
Figure 4.2 – Distribution des amplitudes recueillies sur les trois structures.
4.2.2 Suivi et localisation de l’endommagement d’un fil central
Conditions d’essais
Afin de simplifier à la fois les mécanismes de corrosion et la propagation des EA dansl’armature, des essais de fragilisation par l’hydrogène sous contrainte ont été réalisés surun fil central uniquement. Le fil central a été préalablement débarrassé de la couche detréfilage par un polissage grossier (grain 120, taille des grains 125 µm). Le fil est tendusur le bâti de corrosion à 75% de sa force de rupture garantie (figure 4.3).La solution de thiocyanate d’ammonium de concentration 250g.L−1 est ajoutée dans lacellule de corrosion et maintenue à 45 .Le fil central est instrumenté par deux capteurs micro 80 collés de part et d’autre de lacellule de corrosion. Chaque capteur est relié à un pré-amplificateur de gain 40 dB puisrelié au système d’EA PCI2 deux voies.
Analyse du cycle d’endommagement et répétitivité des mesures
Trois essais de fragilisation par l’hydrogène au thiocyanate d’ammonium ont été lan-cés et suivi par EA dans les mêmes conditions. L’activité acoustique cumulée recueilliependant le cycle de vie des fils de précontrainte est présentée sur la figure 4.4.
Un premier paramètre permettant de souligner la répétitivité des essais de FpH-SCest le temps à rupture. La table 4.2 montre que la durée moyenne des essais est de 164,7heures, avec un écart-type de 9,2, ce qui représente un écart de 15 % entre l’essai le pluscourt et l’essai le plus long. Ces écarts constatés peuvent provenir de plusieurs sourcesd’erreur. Outre les erreurs pouvant incomber aux incertitudes de mesures (tension, tempé-rature, concentration de la solution...), les mécanismes d’endommagement sont égalementtrès dépendants de la microstructure du matériau.
On peut constater que l’allure des trois courbes est la même. Elles présentent unepremière phase très active. Une seconde phase plus calme puis une reprise de l’activitédans la dernière portion des courbes. On peut constater également que le taux d’EA re-cueilli sur chaque essai n’est pas toujours le même. Par exemple, pendant le premier essai
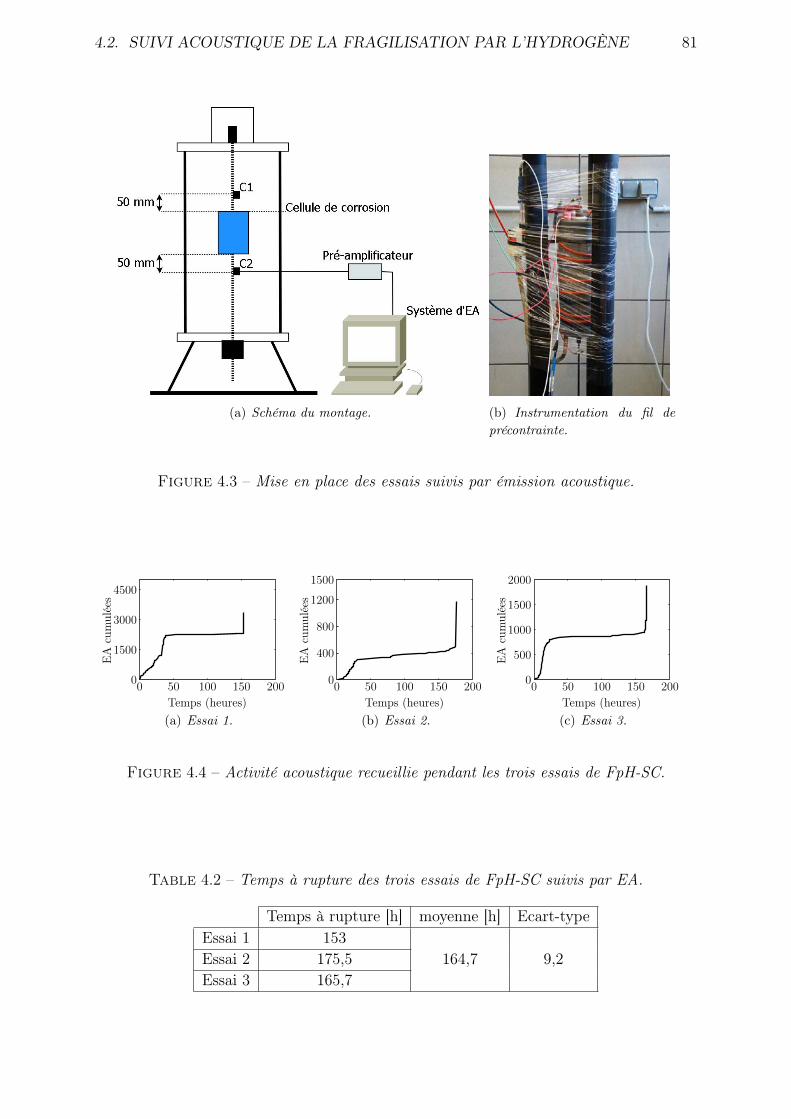
4.2. SUIVI ACOUSTIQUE DE LA FRAGILISATION PAR L’HYDROGÈNE 81
(a) Schéma du montage. (b) Instrumentation du fil deprécontrainte.
Figure 4.3 – Mise en place des essais suivis par émission acoustique.
0 50 100 150 2000
1500
3000
4500
Temps (heures)
EA
cumulées
(a) Essai 1.
0 50 100 150 2000
400
800
1200
1500
Temps (heures)
EA
cumulées
(b) Essai 2.
0 50 100 150 2000
500
1000
1500
2000
Temps (heures)
EA
cumulées
(c) Essai 3.
Figure 4.4 – Activité acoustique recueillie pendant les trois essais de FpH-SC.
Table 4.2 – Temps à rupture des trois essais de FpH-SC suivis par EA.
Temps à rupture [h] moyenne [h] Ecart-typeEssai 1 153Essai 2 175,5 164,7 9,2Essai 3 165,7
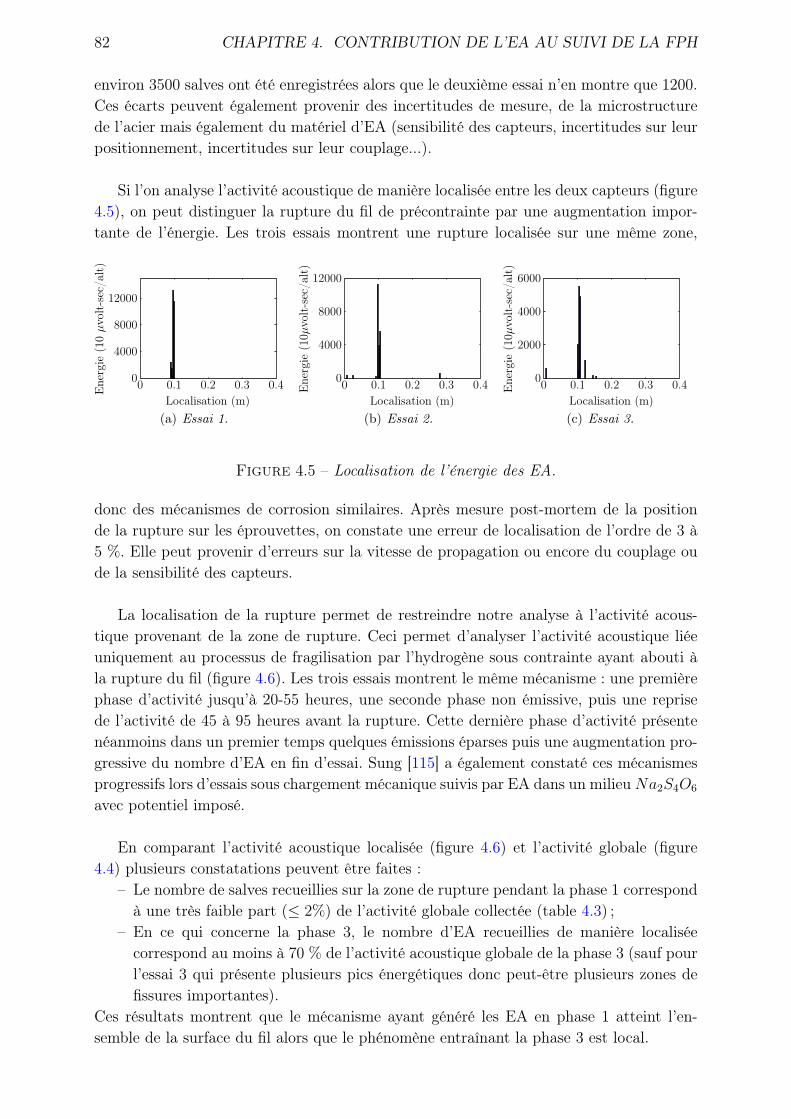
82 CHAPITRE 4. CONTRIBUTION DE L’EA AU SUIVI DE LA FPH
environ 3500 salves ont été enregistrées alors que le deuxième essai n’en montre que 1200.Ces écarts peuvent également provenir des incertitudes de mesure, de la microstructurede l’acier mais également du matériel d’EA (sensibilité des capteurs, incertitudes sur leurpositionnement, incertitudes sur leur couplage...).
Si l’on analyse l’activité acoustique de manière localisée entre les deux capteurs (figure4.5), on peut distinguer la rupture du fil de précontrainte par une augmentation impor-tante de l’énergie. Les trois essais montrent une rupture localisée sur une même zone,
0 0.1 0.2 0.3 0.40
4000
8000
12000
Localisation (m)
Energie
(10µvo
lt-sec/a
lt)
(a) Essai 1.
0 0.1 0.2 0.3 0.40
4000
8000
12000
Localisation (m)
Energie
(10µ
volt-sec/a
lt)
(b) Essai 2.
0 0.1 0.2 0.3 0.40
2000
4000
6000
Localisation (m)
Energie
(10µ
volt-sec/a
lt)
(c) Essai 3.
Figure 4.5 – Localisation de l’énergie des EA.
donc des mécanismes de corrosion similaires. Après mesure post-mortem de la positionde la rupture sur les éprouvettes, on constate une erreur de localisation de l’ordre de 3 à5 %. Elle peut provenir d’erreurs sur la vitesse de propagation ou encore du couplage oude la sensibilité des capteurs.
La localisation de la rupture permet de restreindre notre analyse à l’activité acous-tique provenant de la zone de rupture. Ceci permet d’analyser l’activité acoustique liéeuniquement au processus de fragilisation par l’hydrogène sous contrainte ayant abouti àla rupture du fil (figure 4.6). Les trois essais montrent le même mécanisme : une premièrephase d’activité jusqu’à 20-55 heures, une seconde phase non émissive, puis une reprisede l’activité de 45 à 95 heures avant la rupture. Cette dernière phase d’activité présentenéanmoins dans un premier temps quelques émissions éparses puis une augmentation pro-gressive du nombre d’EA en fin d’essai. Sung [115] a également constaté ces mécanismesprogressifs lors d’essais sous chargement mécanique suivis par EA dans un milieuNa2S4O6
avec potentiel imposé.
En comparant l’activité acoustique localisée (figure 4.6) et l’activité globale (figure4.4) plusieurs constatations peuvent être faites :
– Le nombre de salves recueillies sur la zone de rupture pendant la phase 1 correspondà une très faible part (≤ 2%) de l’activité globale collectée (table 4.3) ;
– En ce qui concerne la phase 3, le nombre d’EA recueillies de manière localiséecorrespond au moins à 70 % de l’activité acoustique globale de la phase 3 (sauf pourl’essai 3 qui présente plusieurs pics énergétiques donc peut-être plusieurs zones defissures importantes).
Ces résultats montrent que le mécanisme ayant généré les EA en phase 1 atteint l’en-semble de la surface du fil alors que le phénomène entraînant la phase 3 est local.
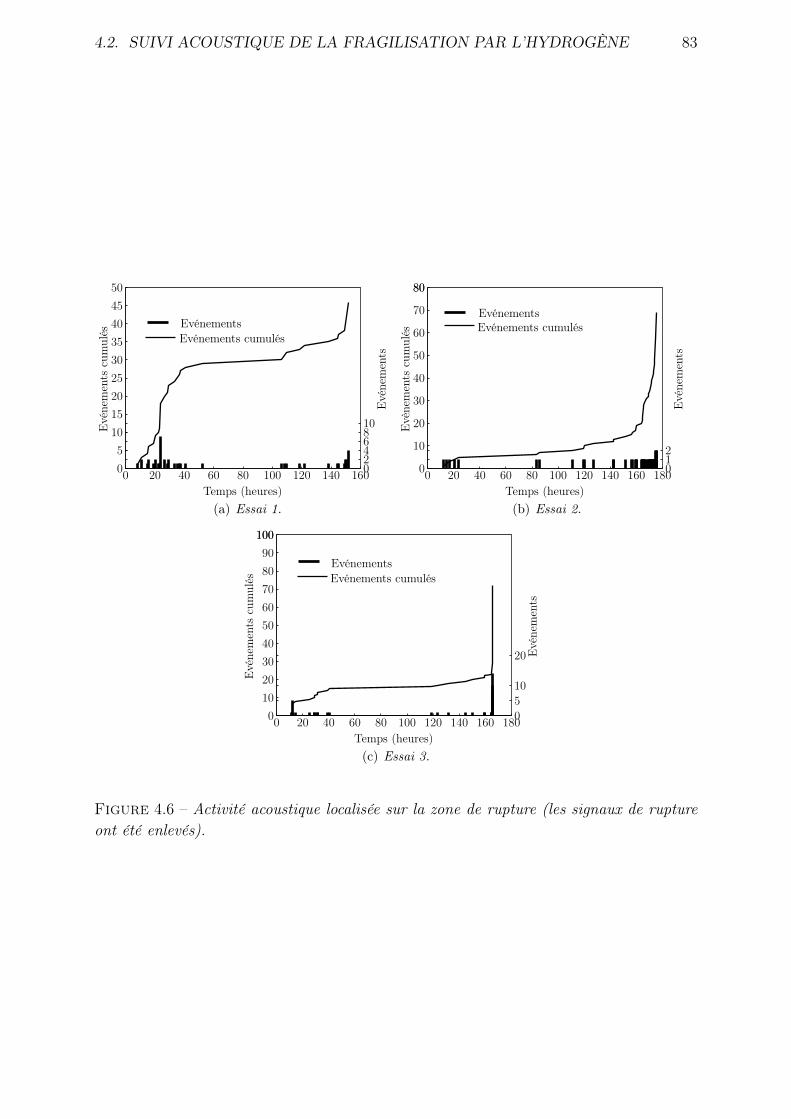
4.2. SUIVI ACOUSTIQUE DE LA FRAGILISATION PAR L’HYDROGÈNE 83
0 20 40 60 80 100 120 140 1600
5
10
15
20
25
30
35
40
45
50
Temps (heures)
Evénements
cumulés
0246810
Evénements
EvénementsEvénements cumulés
(a) Essai 1.
0 20 40 60 80 100 120 140 160 1800
10
20
30
40
50
60
70
8080
Temps (heures)
Evènements
cumulés
012
Evénements
EvénementsEvénements cumulés
(b) Essai 2.
0 20 40 60 80 100 120 140 160 1800
10
20
30
40
50
60
70
80
90
100100
Temps (heures)
Evénements
cumulés
0
5
10
20 Evénements
EvénementsEvénements cumulés
(c) Essai 3.
Figure 4.6 – Activité acoustique localisée sur la zone de rupture (les signaux de ruptureont été enlevés).
84 CHAPITRE 4. CONTRIBUTION DE L’EA AU SUIVI DE LA FPH
Table 4.3 – Nombre d’EA par phase.
Essai 1 Essai 2 Essai 3Nbre d’EA global 2230 311 838en phase 1 local 28 (1,3 %) 5 (1,6 %) 16 (1,9 %)Nbre d’EA global 1102 797 870en phase 3 local 776 (70,4 %) 592 (74,3 %) 299 (34,4 %)
Plusieurs études ont été dédiées au suivi de la CSC par émission acoustique [8, 116, 138,115, 112]. La plupart des travaux ont été réalisés dans des conditions de CSC sous formeanodique, comme ceux de Ramadan [8, 138] réalisés avec l’emploi de milieux contenant deschlorures ou encore ceux de Sung [115] dans une solution de Na2S4O6. A la différence deces travaux, les essais présentés dans les pages précédentes ont été réalisés avec une formecathodique de CSC c’est à dire par des mécanismes de fragilisation par l’hydrogène. Alorsque la plupart des études montre que seule la phase de propagation de fissures précédantla rupture de la structure est détectable par EA, le suivi de la fragilisation par l’hydrogènesous contrainte montre également une augmentation importante de l’activité acoustiqueau début de l’essai.
Caractérisation des EA
Une analyse temporelle a été réalisée afin de définir des paramètres caractérisant lestrois phases d’activité acoustique. Plusieurs paramètres se sont révélés, les trois princi-paux les plus classiques sont l’amplitude, la durée et le nombre d’alternances des EA.D’autres paramètres secondaires, fortement corrélés aux trois paramètres précédemmentcités, ont également été isolés : énergie, temps de montée, nombre d’alternances au picdes salves. Les tables 4.4, 4.5 et 4.6 présentent les valeurs des paramètres principaux pourles deux phases acoustiquement actives. Globalement, la phase 1 est caractérisée par desvaleurs relativement faibles des trois paramètres discriminants alors que leurs valeurs aug-mentent de façon importante en phase 3. On peut également constater que les valeurs deces paramètres ne sont pas homogènes en phase 3 (figure 4.7). La phase 3 débute par dessalves de faible amplitude, durée et nombre d’alternances. La valeur de ces paramètresaugmente en même temps que le nombre d’EA. En réalité, la valeur des paramètres estcorrélée à la surface de matière qui s’endommage. Plusieurs auteurs ont pu caractériserles différentes phases des mécanismes de CSC par des paramètres proches de ceux quel’on a isolé. Par exemple, Sung [115] utilise les paramètres taux d’émission, amplitude,nombre d’alternances et énergie alors que Ramadan [8, 138] exploite les paramètres tempsde montée, amplitude et nombre d’alternances. Les résultats de Ramadan ont égalementété confirmés par une étude statistique (analyse en composante principale) [138]. Tatro[112] a également montré que le paramètre amplitude est le plus adéquat pour séparer lesdifférents mécanismes d’endommagement en CSC.
La caractérisation des phases 1 et 3 peut également se faire par l’analyse des salves etdes spectres fréquentiels bien que ceux-ci soient "colorés" par le capteur d’EA. Pendant la
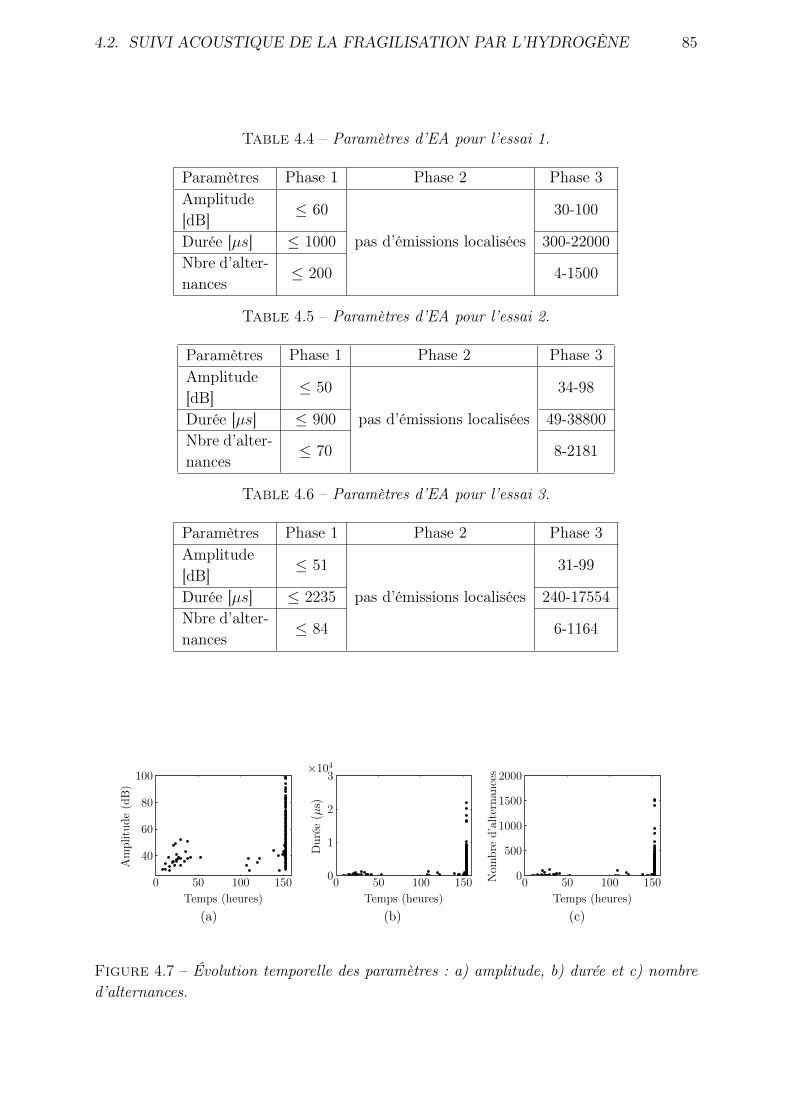
4.2. SUIVI ACOUSTIQUE DE LA FRAGILISATION PAR L’HYDROGÈNE 85
Table 4.4 – Paramètres d’EA pour l’essai 1.
Paramètres Phase 1 Phase 2 Phase 3Amplitude[dB]
≤ 60 30-100
Durée [µs] ≤ 1000 pas d’émissions localisées 300-22000Nbre d’alter-nances
≤ 200 4-1500
Table 4.5 – Paramètres d’EA pour l’essai 2.
Paramètres Phase 1 Phase 2 Phase 3Amplitude[dB]
≤ 50 34-98
Durée [µs] ≤ 900 pas d’émissions localisées 49-38800Nbre d’alter-nances
≤ 70 8-2181
Table 4.6 – Paramètres d’EA pour l’essai 3.
Paramètres Phase 1 Phase 2 Phase 3Amplitude[dB]
≤ 51 31-99
Durée [µs] ≤ 2235 pas d’émissions localisées 240-17554Nbre d’alter-nances
≤ 84 6-1164
0 50 100 150
40
60
80
100
Temps (heures)
Amplitud
e(dB)
(a)
0 50 100 1500
1
2
3×104
Temps (heures)
Durée
(µs)
(b)
0 50 100 1500
500
1000
1500
2000
Temps (heures)
Nom
bred’alternan
ces
(c)
Figure 4.7 – Évolution temporelle des paramètres : a) amplitude, b) durée et c) nombred’alternances.
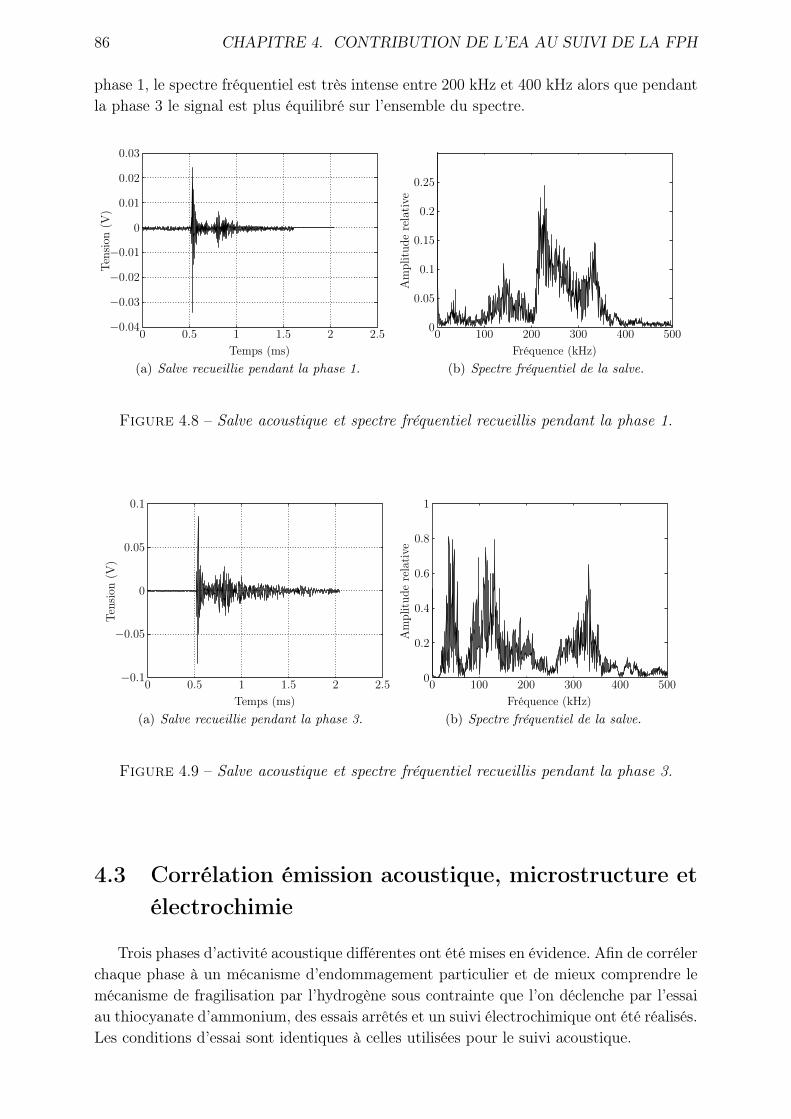
86 CHAPITRE 4. CONTRIBUTION DE L’EA AU SUIVI DE LA FPH
phase 1, le spectre fréquentiel est très intense entre 200 kHz et 400 kHz alors que pendantla phase 3 le signal est plus équilibré sur l’ensemble du spectre.
0 0.5 1 1.5 2 2.5−0.04
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
Temps (ms)
Tension(V
)
(a) Salve recueillie pendant la phase 1.
0 100 200 300 400 5000
0.05
0.1
0.15
0.2
0.25
Fréquence (kHz)
Amplitud
erelative
(b) Spectre fréquentiel de la salve.
Figure 4.8 – Salve acoustique et spectre fréquentiel recueillis pendant la phase 1.
0 0.5 1 1.5 2 2.5−0.1
−0.05
0
0.05
0.1
Temps (ms)
Tension(V
)
(a) Salve recueillie pendant la phase 3.
0 100 200 300 400 5000
0.2
0.4
0.6
0.8
1
Fréquence (kHz)
Amplitud
erelative
(b) Spectre fréquentiel de la salve.
Figure 4.9 – Salve acoustique et spectre fréquentiel recueillis pendant la phase 3.
4.3 Corrélation émission acoustique, microstructure etélectrochimie
Trois phases d’activité acoustique différentes ont été mises en évidence. Afin de corrélerchaque phase à un mécanisme d’endommagement particulier et de mieux comprendre lemécanisme de fragilisation par l’hydrogène sous contrainte que l’on déclenche par l’essaiau thiocyanate d’ammonium, des essais arrêtés et un suivi électrochimique ont été réalisés.Les conditions d’essai sont identiques à celles utilisées pour le suivi acoustique.
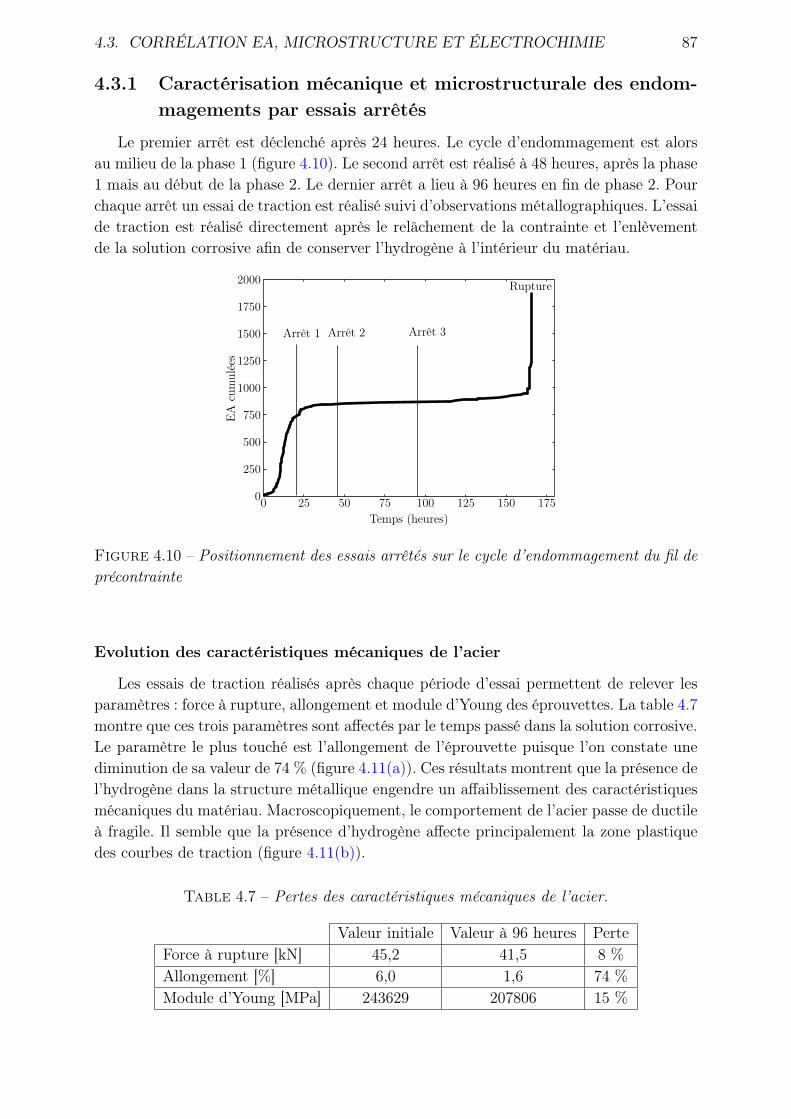
4.3. CORRÉLATION EA, MICROSTRUCTURE ET ÉLECTROCHIMIE 87
4.3.1 Caractérisation mécanique et microstructurale des endom-magements par essais arrêtés
Le premier arrêt est déclenché après 24 heures. Le cycle d’endommagement est alorsau milieu de la phase 1 (figure 4.10). Le second arrêt est réalisé à 48 heures, après la phase1 mais au début de la phase 2. Le dernier arrêt a lieu à 96 heures en fin de phase 2. Pourchaque arrêt un essai de traction est réalisé suivi d’observations métallographiques. L’essaide traction est réalisé directement après le relâchement de la contrainte et l’enlèvementde la solution corrosive afin de conserver l’hydrogène à l’intérieur du matériau.
0 25 50 75 100 125 150 1750
250
500
750
1000
1250
1500
1750
2000
Temps (heures)
EA
cumulées
Arrêt 1 Arrêt 2 Arrêt 3
Rupture
Figure 4.10 – Positionnement des essais arrêtés sur le cycle d’endommagement du fil deprécontrainte
Evolution des caractéristiques mécaniques de l’acier
Les essais de traction réalisés après chaque période d’essai permettent de relever lesparamètres : force à rupture, allongement et module d’Young des éprouvettes. La table 4.7montre que ces trois paramètres sont affectés par le temps passé dans la solution corrosive.Le paramètre le plus touché est l’allongement de l’éprouvette puisque l’on constate unediminution de sa valeur de 74 % (figure 4.11(a)). Ces résultats montrent que la présence del’hydrogène dans la structure métallique engendre un affaiblissement des caractéristiquesmécaniques du matériau. Macroscopiquement, le comportement de l’acier passe de ductileà fragile. Il semble que la présence d’hydrogène affecte principalement la zone plastiquedes courbes de traction (figure 4.11(b)).
Table 4.7 – Pertes des caractéristiques mécaniques de l’acier.
Valeur initiale Valeur à 96 heures PerteForce à rupture [kN] 45,2 41,5 8 %Allongement [%] 6,0 1,6 74 %Module d’Young [MPa] 243629 207806 15 %

88 CHAPITRE 4. CONTRIBUTION DE L’EA AU SUIVI DE LA FPH
0 20 40 60 80 1000
1
2
3
4
5
6
7
Temps (heures)
Allo
ngem
ent(%
)
24 heures
48 heures
96 heures
(a) Evolution de l’allongement de l’acier en fonc-tion du temps d’immersion.
0 1 2 3 4 5 6 70
10
20
30
40
50
Allongement (%)
Force(kN)
t=0ht=96h
(b) Courbes de traction à t=0 heure et t=96heures.
Figure 4.11 – Évolution des caractéristiques mécaniques de l’acier en fonction du tempsd’immersion.
Evolution de l’endommagement par observations métallographiques
La fragilisation par l’hydrogène de l’acier est aussi visible sur les observations métal-lographiques.
Plusieurs séries d’observations ont été réalisées sur des fils sains. La surface du fils pré-sente une structure allongée dans le sens de tréfilage (figure 4.12(a)). La mise en oeuvredes fils à travers les filières entraîne la présence d’un relief sur la surface des fils (figure4.12(b)). Le faciès de rupture de fils sains après les essais de traction présente une déco-hésion centrale puis une rupture finale avec des lèvres de cisaillement (figure 4.12(c)). Lastriction de l’échantillon est relativement importante (figure 4.12(d)), de l’ordre de 26 à28%.
Après 24 heures d’immersion dans la solution de thiocyanate d’ammonium, le facièsde rupture est complètement différent. Il présente une zone d’amorce sur l’extérieur du filainsi que des redents orientés vers cette amorce. La rupture finale a lieu en cisaillement(figure 4.13(a)). Le faciès présente une striction quasi-nulle, signe d’une rupture macrosco-piquement fragile. Néanmoins, l’aspect de la microstructure reste ductile (figure 4.13(b)).Sur la surface du fil de nombreuses microfissures sont visibles, notamment proche de lazone d’amorce. Cette amorce est due à un réseau de fissures (figure 4.13(c)). Ces micro-fissures sont perpendiculaires à l’axe du fil et leur longueur est inférieure à 40 µm (figure4.13(d)). Les coupes transversales permettent d’appréhender la profondeur de ces micro-fissures. Celles-ci ne dépassent pas 35-40 µm (figure 4.13(e)). La surface du fil présenteégalement des zones corrodées (corrosion généralisée). Cette corrosion semble se dévelop-per sous la surface du métal, qui parait encore sain puis qui se décolle en fines plaques(figure 4.13(f), épaisseur inférieure à 150 µm). Ce délaminage est favorisé par l’accumu-lation d’hydrogène dans les premiers micromètres de l’acier. Ce mode d’endommagementparticulier peut provenir de la mise en forme des fils par tréfilage. Les observations métallo-graphiques réalisées sur des échantillons non-endommagés ne montrent pas de différencesvisibles de la microstructure en surface de l’échantillon. Certaines études, en revanche,
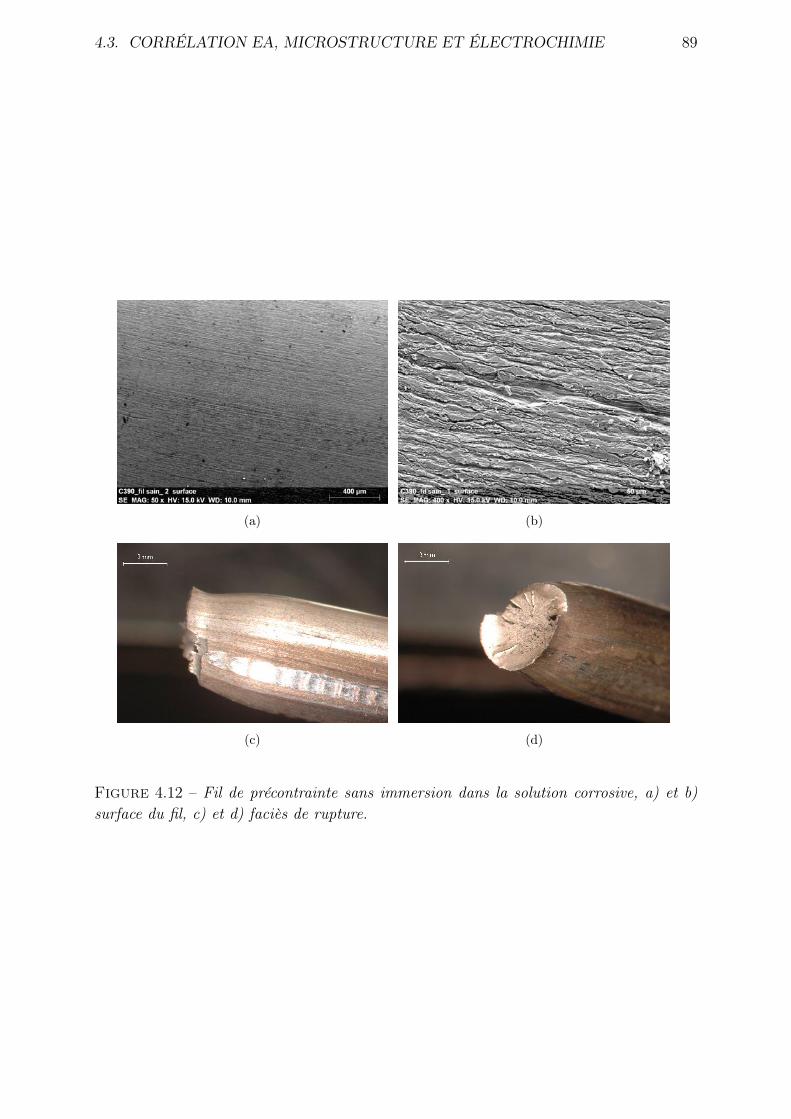
4.3. CORRÉLATION EA, MICROSTRUCTURE ET ÉLECTROCHIMIE 89
(a) (b)
(c) (d)
Figure 4.12 – Fil de précontrainte sans immersion dans la solution corrosive, a) et b)surface du fil, c) et d) faciès de rupture.
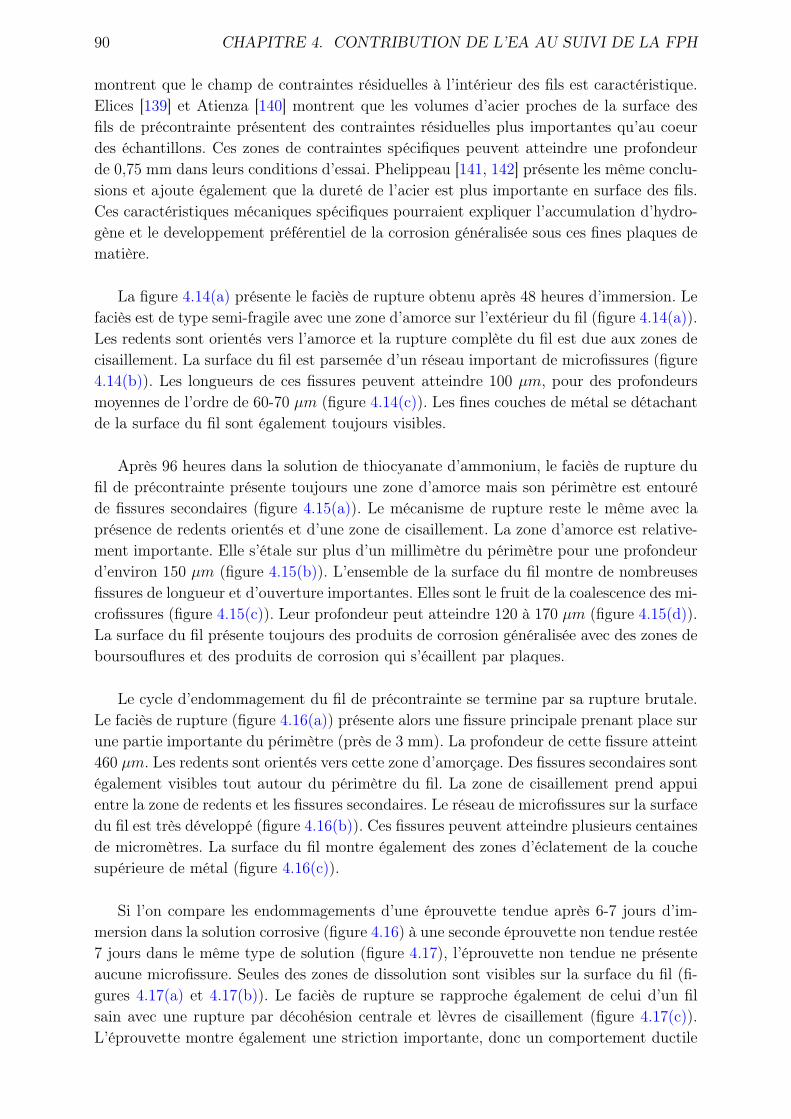
90 CHAPITRE 4. CONTRIBUTION DE L’EA AU SUIVI DE LA FPH
montrent que le champ de contraintes résiduelles à l’intérieur des fils est caractéristique.Elices [139] et Atienza [140] montrent que les volumes d’acier proches de la surface desfils de précontrainte présentent des contraintes résiduelles plus importantes qu’au coeurdes échantillons. Ces zones de contraintes spécifiques peuvent atteindre une profondeurde 0,75 mm dans leurs conditions d’essai. Phelippeau [141, 142] présente les même conclu-sions et ajoute également que la dureté de l’acier est plus importante en surface des fils.Ces caractéristiques mécaniques spécifiques pourraient expliquer l’accumulation d’hydro-gène et le developpement préférentiel de la corrosion généralisée sous ces fines plaques dematière.
La figure 4.14(a) présente le faciès de rupture obtenu après 48 heures d’immersion. Lefaciès est de type semi-fragile avec une zone d’amorce sur l’extérieur du fil (figure 4.14(a)).Les redents sont orientés vers l’amorce et la rupture complète du fil est due aux zones decisaillement. La surface du fil est parsemée d’un réseau important de microfissures (figure4.14(b)). Les longueurs de ces fissures peuvent atteindre 100 µm, pour des profondeursmoyennes de l’ordre de 60-70 µm (figure 4.14(c)). Les fines couches de métal se détachantde la surface du fil sont également toujours visibles.
Après 96 heures dans la solution de thiocyanate d’ammonium, le faciès de rupture dufil de précontrainte présente toujours une zone d’amorce mais son périmètre est entouréde fissures secondaires (figure 4.15(a)). Le mécanisme de rupture reste le même avec laprésence de redents orientés et d’une zone de cisaillement. La zone d’amorce est relative-ment importante. Elle s’étale sur plus d’un millimètre du périmètre pour une profondeurd’environ 150 µm (figure 4.15(b)). L’ensemble de la surface du fil montre de nombreusesfissures de longueur et d’ouverture importantes. Elles sont le fruit de la coalescence des mi-crofissures (figure 4.15(c)). Leur profondeur peut atteindre 120 à 170 µm (figure 4.15(d)).La surface du fil présente toujours des produits de corrosion généralisée avec des zones deboursouflures et des produits de corrosion qui s’écaillent par plaques.
Le cycle d’endommagement du fil de précontrainte se termine par sa rupture brutale.Le faciès de rupture (figure 4.16(a)) présente alors une fissure principale prenant place surune partie importante du périmètre (près de 3 mm). La profondeur de cette fissure atteint460 µm. Les redents sont orientés vers cette zone d’amorçage. Des fissures secondaires sontégalement visibles tout autour du périmètre du fil. La zone de cisaillement prend appuientre la zone de redents et les fissures secondaires. Le réseau de microfissures sur la surfacedu fil est très développé (figure 4.16(b)). Ces fissures peuvent atteindre plusieurs centainesde micromètres. La surface du fil montre également des zones d’éclatement de la couchesupérieure de métal (figure 4.16(c)).
Si l’on compare les endommagements d’une éprouvette tendue après 6-7 jours d’im-mersion dans la solution corrosive (figure 4.16) à une seconde éprouvette non tendue restée7 jours dans le même type de solution (figure 4.17), l’éprouvette non tendue ne présenteaucune microfissure. Seules des zones de dissolution sont visibles sur la surface du fil (fi-gures 4.17(a) et 4.17(b)). Le faciès de rupture se rapproche également de celui d’un filsain avec une rupture par décohésion centrale et lèvres de cisaillement (figure 4.17(c)).L’éprouvette montre également une striction importante, donc un comportement ductile
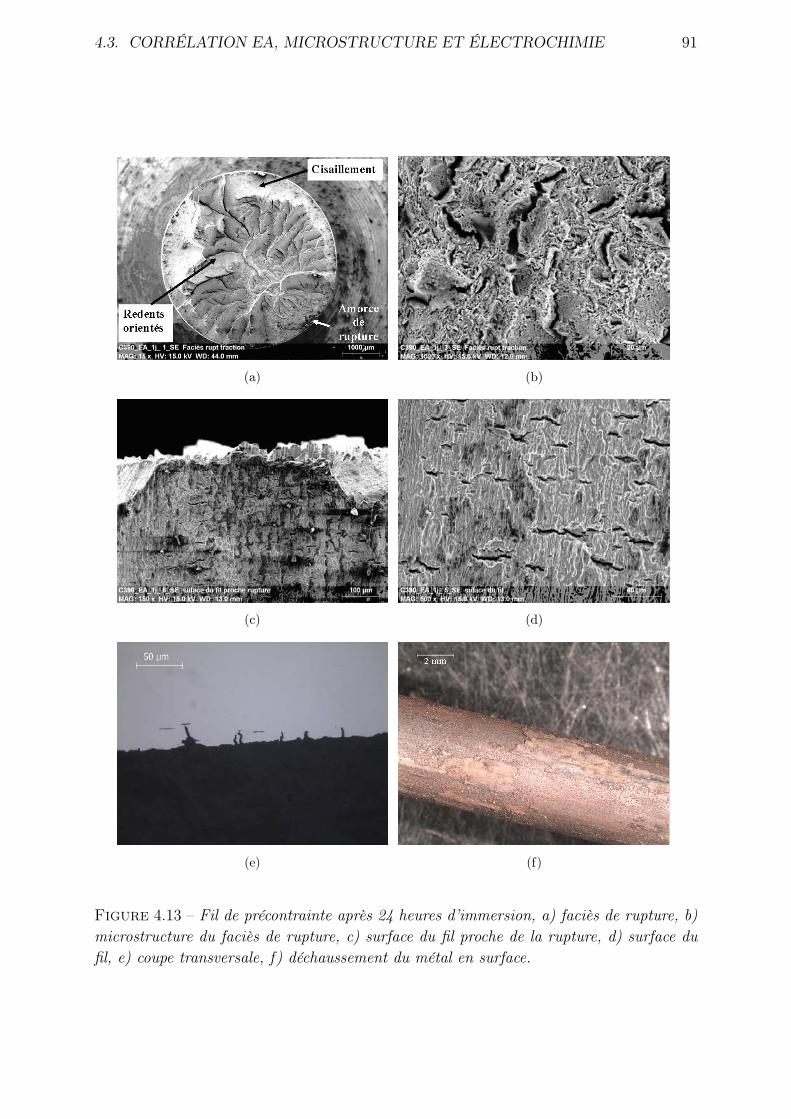
4.3. CORRÉLATION EA, MICROSTRUCTURE ET ÉLECTROCHIMIE 91
(a) (b)
(c) (d)
(e) (f)
Figure 4.13 – Fil de précontrainte après 24 heures d’immersion, a) faciès de rupture, b)microstructure du faciès de rupture, c) surface du fil proche de la rupture, d) surface dufil, e) coupe transversale, f) déchaussement du métal en surface.
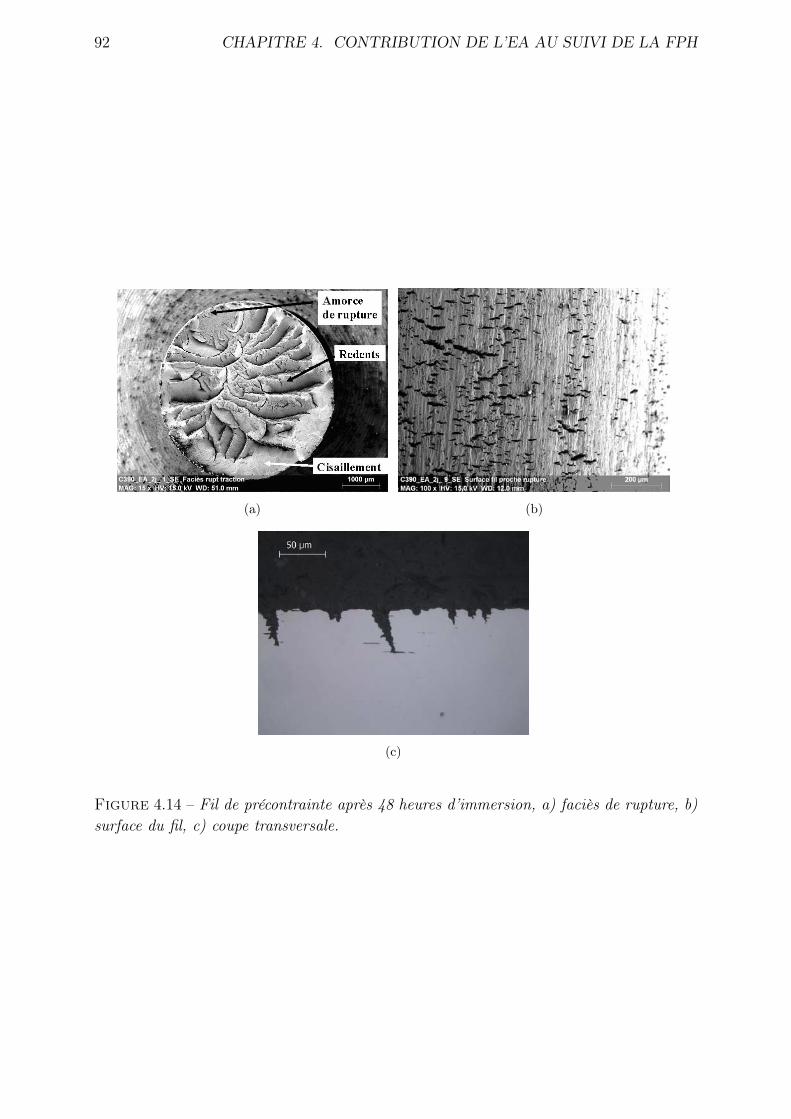
92 CHAPITRE 4. CONTRIBUTION DE L’EA AU SUIVI DE LA FPH
(a) (b)
(c)
Figure 4.14 – Fil de précontrainte après 48 heures d’immersion, a) faciès de rupture, b)surface du fil, c) coupe transversale.
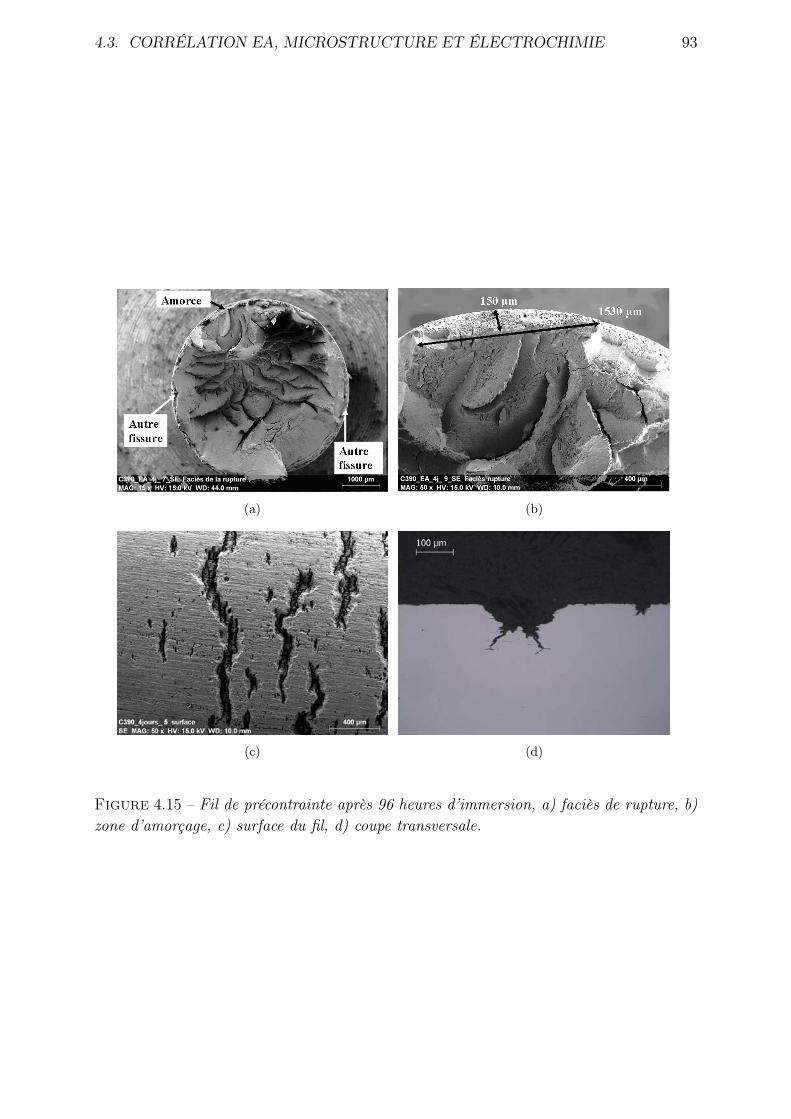
4.3. CORRÉLATION EA, MICROSTRUCTURE ET ÉLECTROCHIMIE 93
(a) (b)
(c) (d)
Figure 4.15 – Fil de précontrainte après 96 heures d’immersion, a) faciès de rupture, b)zone d’amorçage, c) surface du fil, d) coupe transversale.
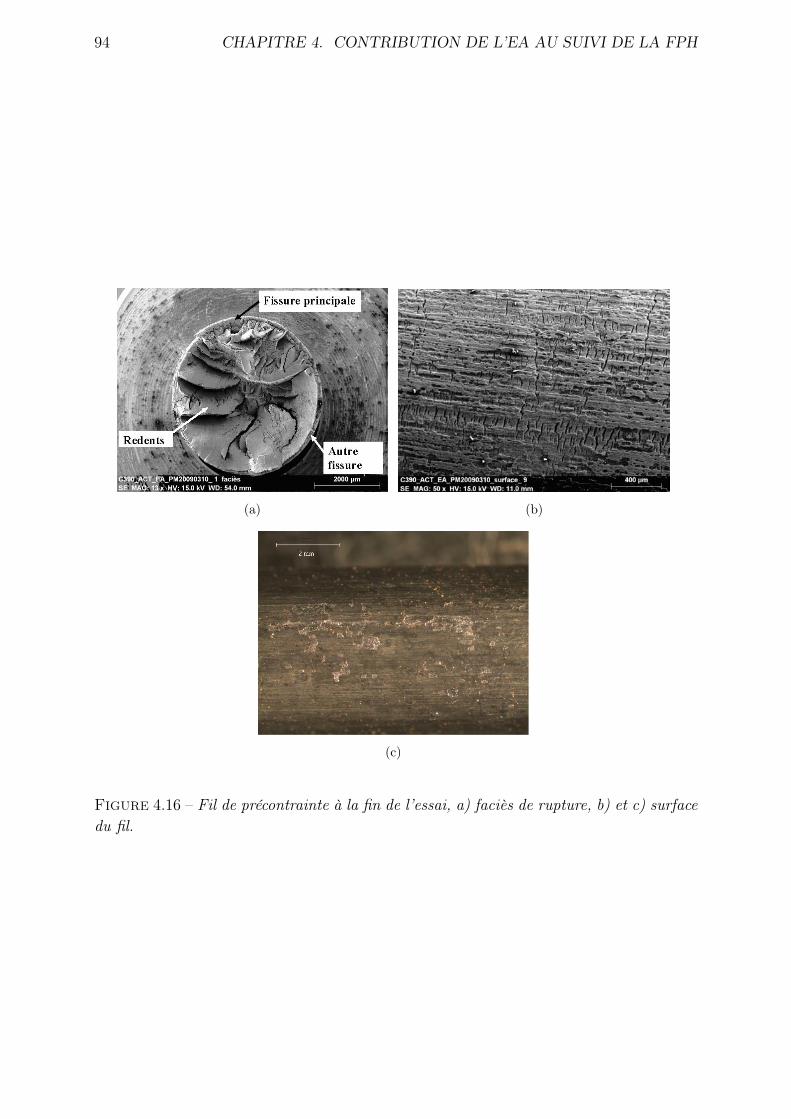
94 CHAPITRE 4. CONTRIBUTION DE L’EA AU SUIVI DE LA FPH
(a) (b)
(c)
Figure 4.16 – Fil de précontrainte à la fin de l’essai, a) faciès de rupture, b) et c) surfacedu fil.
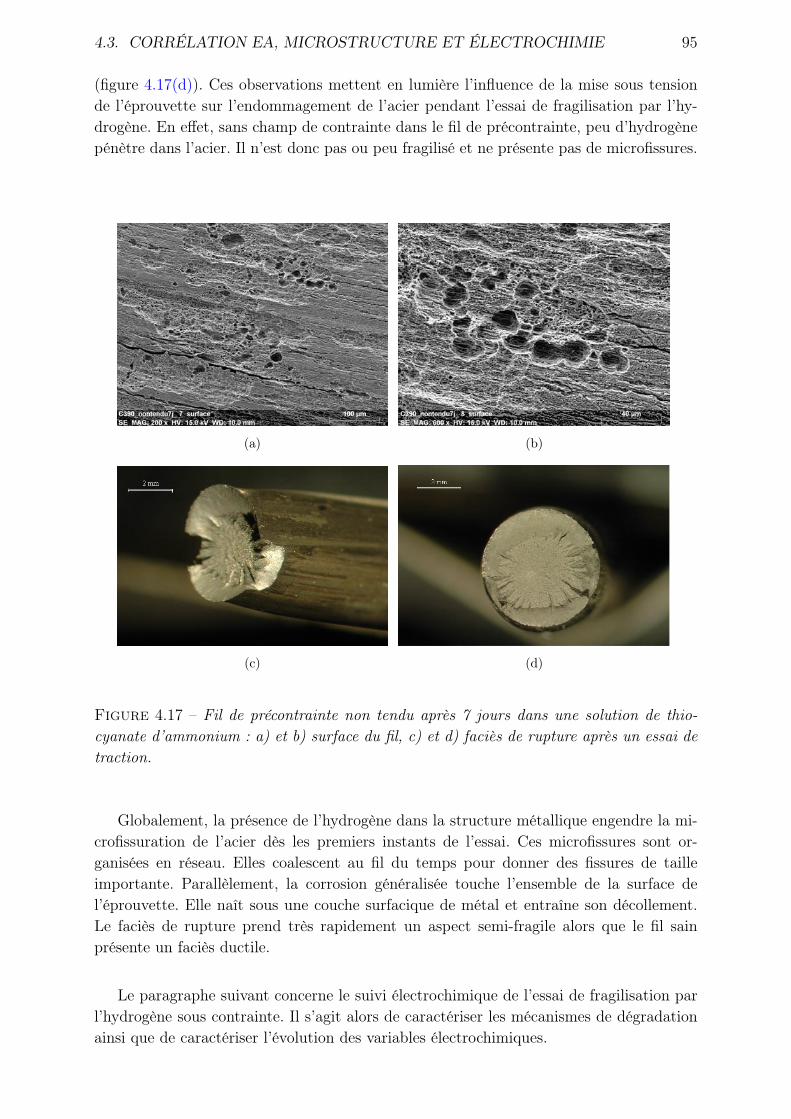
4.3. CORRÉLATION EA, MICROSTRUCTURE ET ÉLECTROCHIMIE 95
(figure 4.17(d)). Ces observations mettent en lumière l’influence de la mise sous tensionde l’éprouvette sur l’endommagement de l’acier pendant l’essai de fragilisation par l’hy-drogène. En effet, sans champ de contrainte dans le fil de précontrainte, peu d’hydrogènepénètre dans l’acier. Il n’est donc pas ou peu fragilisé et ne présente pas de microfissures.
(a) (b)
(c) (d)
Figure 4.17 – Fil de précontrainte non tendu après 7 jours dans une solution de thio-cyanate d’ammonium : a) et b) surface du fil, c) et d) faciès de rupture après un essai detraction.
Globalement, la présence de l’hydrogène dans la structure métallique engendre la mi-crofissuration de l’acier dès les premiers instants de l’essai. Ces microfissures sont or-ganisées en réseau. Elles coalescent au fil du temps pour donner des fissures de tailleimportante. Parallèlement, la corrosion généralisée touche l’ensemble de la surface del’éprouvette. Elle naît sous une couche surfacique de métal et entraîne son décollement.Le faciès de rupture prend très rapidement un aspect semi-fragile alors que le fil sainprésente un faciès ductile.
Le paragraphe suivant concerne le suivi électrochimique de l’essai de fragilisation parl’hydrogène sous contrainte. Il s’agit alors de caractériser les mécanismes de dégradationainsi que de caractériser l’évolution des variables électrochimiques.
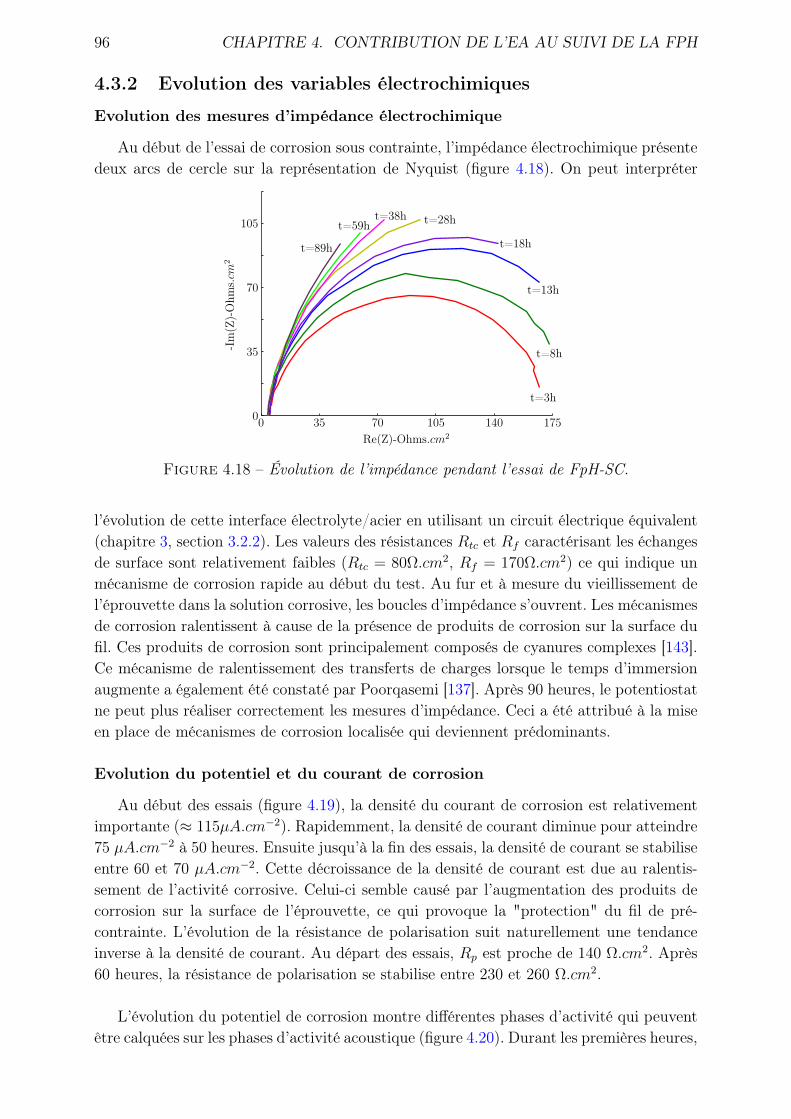
96 CHAPITRE 4. CONTRIBUTION DE L’EA AU SUIVI DE LA FPH
4.3.2 Evolution des variables électrochimiques
Evolution des mesures d’impédance électrochimique
Au début de l’essai de corrosion sous contrainte, l’impédance électrochimique présentedeux arcs de cercle sur la représentation de Nyquist (figure 4.18). On peut interpréter
0 35 70 105 140 1750
35
70
105
Re(Z)-Ohms.cm2
-Im(Z)-Ohm
s.cm
2
t=3h
t=8h
t=13h
t=18h
t=28ht=38ht=59h
t=89h
Figure 4.18 – Évolution de l’impédance pendant l’essai de FpH-SC.
l’évolution de cette interface électrolyte/acier en utilisant un circuit électrique équivalent(chapitre 3, section 3.2.2). Les valeurs des résistances Rtc et Rf caractérisant les échangesde surface sont relativement faibles (Rtc = 80Ω.cm2, Rf = 170Ω.cm2) ce qui indique unmécanisme de corrosion rapide au début du test. Au fur et à mesure du vieillissement del’éprouvette dans la solution corrosive, les boucles d’impédance s’ouvrent. Les mécanismesde corrosion ralentissent à cause de la présence de produits de corrosion sur la surface dufil. Ces produits de corrosion sont principalement composés de cyanures complexes [143].Ce mécanisme de ralentissement des transferts de charges lorsque le temps d’immersionaugmente a également été constaté par Poorqasemi [137]. Après 90 heures, le potentiostatne peut plus réaliser correctement les mesures d’impédance. Ceci a été attribué à la miseen place de mécanismes de corrosion localisée qui deviennent prédominants.
Evolution du potentiel et du courant de corrosion
Au début des essais (figure 4.19), la densité du courant de corrosion est relativementimportante (≈ 115µA.cm−2). Rapidemment, la densité de courant diminue pour atteindre75 µA.cm−2 à 50 heures. Ensuite jusqu’à la fin des essais, la densité de courant se stabiliseentre 60 et 70 µA.cm−2. Cette décroissance de la densité de courant est due au ralentis-sement de l’activité corrosive. Celui-ci semble causé par l’augmentation des produits decorrosion sur la surface de l’éprouvette, ce qui provoque la "protection" du fil de pré-contrainte. L’évolution de la résistance de polarisation suit naturellement une tendanceinverse à la densité de courant. Au départ des essais, Rp est proche de 140 Ω.cm2. Après60 heures, la résistance de polarisation se stabilise entre 230 et 260 Ω.cm2.
L’évolution du potentiel de corrosion montre différentes phases d’activité qui peuventêtre calquées sur les phases d’activité acoustique (figure 4.20). Durant les premières heures,
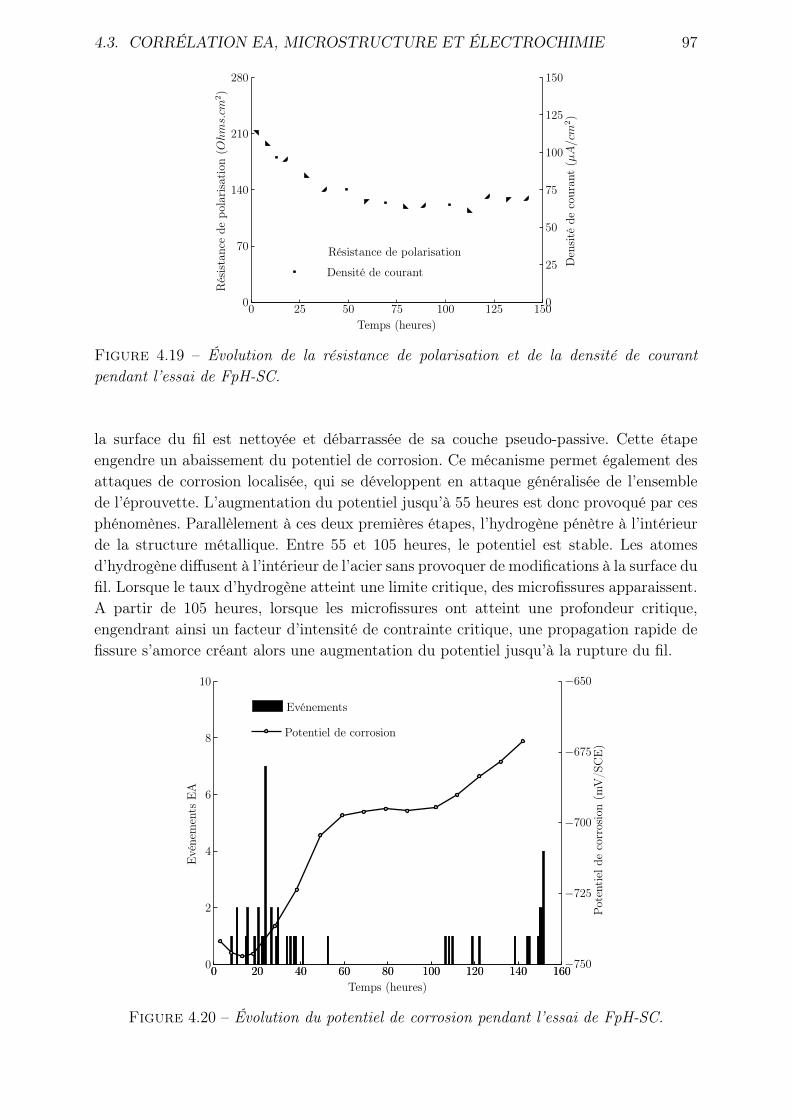
4.3. CORRÉLATION EA, MICROSTRUCTURE ET ÉLECTROCHIMIE 97
0
70
140
210
280
Résistancede
polarisation
(Ohms.cm
2)
0 25 50 75 100 125 1500
25
50
75
100
125
150
Temps (heures)
Densité
decouran
t(µA/cm
2)
Densité de courant
Résistance de polarisation
Figure 4.19 – Évolution de la résistance de polarisation et de la densité de courantpendant l’essai de FpH-SC.
la surface du fil est nettoyée et débarrassée de sa couche pseudo-passive. Cette étapeengendre un abaissement du potentiel de corrosion. Ce mécanisme permet également desattaques de corrosion localisée, qui se développent en attaque généralisée de l’ensemblede l’éprouvette. L’augmentation du potentiel jusqu’à 55 heures est donc provoqué par cesphénomènes. Parallèlement à ces deux premières étapes, l’hydrogène pénètre à l’intérieurde la structure métallique. Entre 55 et 105 heures, le potentiel est stable. Les atomesd’hydrogène diffusent à l’intérieur de l’acier sans provoquer de modifications à la surface dufil. Lorsque le taux d’hydrogène atteint une limite critique, des microfissures apparaissent.A partir de 105 heures, lorsque les microfissures ont atteint une profondeur critique,engendrant ainsi un facteur d’intensité de contrainte critique, une propagation rapide defissure s’amorce créant alors une augmentation du potentiel jusqu’à la rupture du fil.
0 20 40 60 80 100 120 140 1600
2
4
6
8
10
Temps (heures)
Evénements
EA
0 20 40 60 80 100 120 140 160−750
−725
−700
−675
−650
Potentiel
decorrosion(m
V/S
CE)
Evénements
Potentiel de corrosion
Figure 4.20 – Évolution du potentiel de corrosion pendant l’essai de FpH-SC.

98 CHAPITRE 4. CONTRIBUTION DE L’EA AU SUIVI DE LA FPH
4.3.3 Caractérisation des mécanismes d’endommagement
Calcul de KI(FpH−SC)
Le faciès de rupture des éprouvettes présente une fissure subcritique qui se propageen mode I (perpendiculairement à la contrainte appliquée). Ensuite lorsque la concentra-tion de contrainte critique est atteinte, les fissures propagent en régime critique avec unepropagation à la fois en mode I et en mode II (parallèlement à l’axe du fil) ce qui donnelieu à des dents de fraise orientées vers la fissure principale (figure 4.16(a)). Bien que lesmécanismes de rupture ne se développent pas en mode I à la fois pendant le régime sub-critique et pendant le régime critique, une approximation du coefficient de contrainte KIC
peut être réalisée. Puisque nous sommes dans le cas d’une propagation de fissure assistéepar l’environnement, le facteur d’intensité de contrainte critique est appelé KI(FpH−SC).
La littérature présente plusieurs manières de calculer le facteur d’intensité de contrainte.Pour calculer ce facteur dans le cas d’un fil de précontrainte soumis à la CSC, Proverbio[75] utilise l’expression proposée par Astiz (équation 4.2) :
KIC =4P
πD2
√πa
4∑i=0,6=1
3∑j=0
Cij
( aD
)i (ab
)j(4.2)
où P est la force appliquée, D le diamètre du fil, a la profondeur de la fissure, b sa demilongueur (figure 4.21) et Cij une combinaison de coefficients donnés dans la table 4.8
Figure 4.21 – Géométrie de la surface de fissure [75].
Pour les trois essais de FpH-SC à rupture réalisés, les valeurs du coefficient de concen-tration de contrainte obtenues sont présentées dans la table 4.9. La valeur moyenne estde 54,7 MPa
√m.
Quant à Toribio [73], il utilise l’expression suivante proposée par Valiente [144] (équa-tion 4.3) :
KIC = M (ξ)σ√πa (4.3)
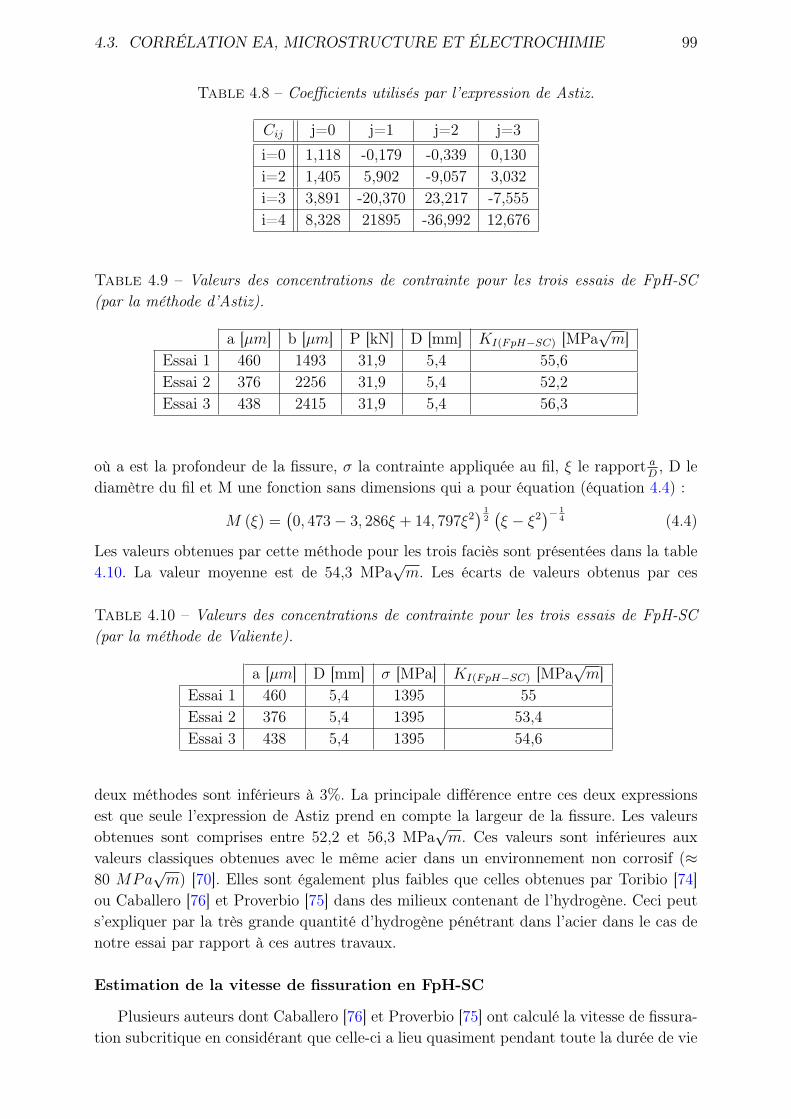
4.3. CORRÉLATION EA, MICROSTRUCTURE ET ÉLECTROCHIMIE 99
Table 4.8 – Coefficients utilisés par l’expression de Astiz.
Cij j=0 j=1 j=2 j=3i=0 1,118 -0,179 -0,339 0,130i=2 1,405 5,902 -9,057 3,032i=3 3,891 -20,370 23,217 -7,555i=4 8,328 21895 -36,992 12,676
Table 4.9 – Valeurs des concentrations de contrainte pour les trois essais de FpH-SC(par la méthode d’Astiz).
a [µm] b [µm] P [kN] D [mm] KI(FpH−SC) [MPa√m]
Essai 1 460 1493 31,9 5,4 55,6Essai 2 376 2256 31,9 5,4 52,2Essai 3 438 2415 31,9 5,4 56,3
où a est la profondeur de la fissure, σ la contrainte appliquée au fil, ξ le rapport aD, D le
diamètre du fil et M une fonction sans dimensions qui a pour équation (équation 4.4) :
M (ξ) =(0, 473− 3, 286ξ + 14, 797ξ2
) 12(ξ − ξ2
)− 14 (4.4)
Les valeurs obtenues par cette méthode pour les trois faciès sont présentées dans la table4.10. La valeur moyenne est de 54,3 MPa
√m. Les écarts de valeurs obtenus par ces
Table 4.10 – Valeurs des concentrations de contrainte pour les trois essais de FpH-SC(par la méthode de Valiente).
a [µm] D [mm] σ [MPa] KI(FpH−SC) [MPa√m]
Essai 1 460 5,4 1395 55Essai 2 376 5,4 1395 53,4Essai 3 438 5,4 1395 54,6
deux méthodes sont inférieurs à 3%. La principale différence entre ces deux expressionsest que seule l’expression de Astiz prend en compte la largeur de la fissure. Les valeursobtenues sont comprises entre 52,2 et 56,3 MPa
√m. Ces valeurs sont inférieures aux
valeurs classiques obtenues avec le même acier dans un environnement non corrosif (≈80 MPa
√m) [70]. Elles sont également plus faibles que celles obtenues par Toribio [74]
ou Caballero [76] et Proverbio [75] dans des milieux contenant de l’hydrogène. Ceci peuts’expliquer par la très grande quantité d’hydrogène pénétrant dans l’acier dans le cas denotre essai par rapport à ces autres travaux.
Estimation de la vitesse de fissuration en FpH-SC
Plusieurs auteurs dont Caballero [76] et Proverbio [75] ont calculé la vitesse de fissura-tion subcritique en considérant que celle-ci a lieu quasiment pendant toute la durée de vie

100 CHAPITRE 4. CONTRIBUTION DE L’EA AU SUIVI DE LA FPH
de l’échantillon (la propagation critique étant considérée comme très courte). En réalisantune analyse localisée des EA émises pendant les essais de FpH-SC, une estimation plusprécise de la vitesse subcritique peut être réalisée. Suite aux observations faites sur lesessais arrêtés, on peut considérer que les microfissures s’initient très rapidemment aprèsle début de l’essai. Le régime subcritique s’achève au départ de la phase 3 de l’activitéacoustique. La table 4.11 présente alors les vitesses subcritiques obtenues. Les valeurs
Table 4.11 – Valeurs des vitesses de propagation subcritiques.
a [µm] durée [heures] vitesse subcritique [m.s−1]Essai 1 460 105 1, 22.10−9
Essai 2 376 82 1, 27.10−9
Essai 3 438 120 1, 01.10−9
obtenues par Caballero [76] et Proverbio [75] pour un acier de précontrainte dans un en-vironnement hydrogène (≈ 1, 5.10−10m.s−1) sont inférieures aux vitesses que nous avonscalculées. Ceci peux s’expliquer par le taux important d’hydrogène introduit dans le maté-riau pendant nos essais de FpH-SC, donc par une fragilisation par l’hydrogène plus rapide.
La vitesse de propagation rapide de fissures (perpendiculaire à l’axe du fil, figure 4.22)peut également être estimée. Il s’agit alors d’une vitesse moyenne puisque les mesuresd’EA pendant la phase 3 montrent clairement une première partie de densité moyennepuis une seconde partie avec une densité d’EA plus importante. On peut alors imaginerune augmentation de la vitesse d’endommagement en fin de phase 3. Les vitesses moyennescalculées sont présentées dans la table 4.12.
Figure 4.22 – Géométrie du faciès de rupture.
La vitesse de propagation critique est au moins dix fois plus importante que la vitessede propagation subcritique. Des vitesses de propagation moyennes du même ordre de gran-deur que celles que nous avons calculées (6.10−8m.s−1) mesurées lors d’essais mécaniquessur un acier de précontrainte dans des conditions corrosives proches des nôtres (solutioncorrosive à 20% de thiocyanate d’ammonium, maintenue à 50) ont été obtenues parSchroeder [69].
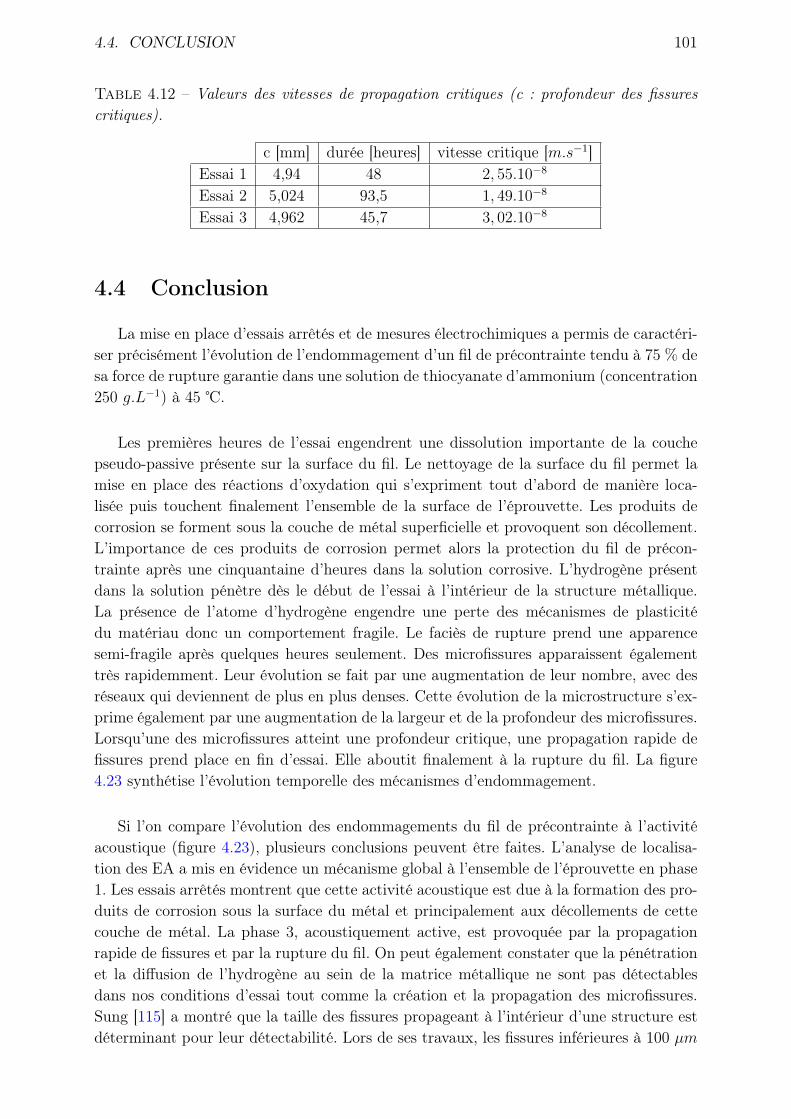
4.4. CONCLUSION 101
Table 4.12 – Valeurs des vitesses de propagation critiques (c : profondeur des fissurescritiques).
c [mm] durée [heures] vitesse critique [m.s−1]Essai 1 4,94 48 2, 55.10−8
Essai 2 5,024 93,5 1, 49.10−8
Essai 3 4,962 45,7 3, 02.10−8
4.4 Conclusion
La mise en place d’essais arrêtés et de mesures électrochimiques a permis de caractéri-ser précisément l’évolution de l’endommagement d’un fil de précontrainte tendu à 75 % desa force de rupture garantie dans une solution de thiocyanate d’ammonium (concentration250 g.L−1) à 45 .
Les premières heures de l’essai engendrent une dissolution importante de la couchepseudo-passive présente sur la surface du fil. Le nettoyage de la surface du fil permet lamise en place des réactions d’oxydation qui s’expriment tout d’abord de manière loca-lisée puis touchent finalement l’ensemble de la surface de l’éprouvette. Les produits decorrosion se forment sous la couche de métal superficielle et provoquent son décollement.L’importance de ces produits de corrosion permet alors la protection du fil de précon-trainte après une cinquantaine d’heures dans la solution corrosive. L’hydrogène présentdans la solution pénètre dès le début de l’essai à l’intérieur de la structure métallique.La présence de l’atome d’hydrogène engendre une perte des mécanismes de plasticitédu matériau donc un comportement fragile. Le faciès de rupture prend une apparencesemi-fragile après quelques heures seulement. Des microfissures apparaissent égalementtrès rapidemment. Leur évolution se fait par une augmentation de leur nombre, avec desréseaux qui deviennent de plus en plus denses. Cette évolution de la microstructure s’ex-prime également par une augmentation de la largeur et de la profondeur des microfissures.Lorsqu’une des microfissures atteint une profondeur critique, une propagation rapide defissures prend place en fin d’essai. Elle aboutit finalement à la rupture du fil. La figure4.23 synthétise l’évolution temporelle des mécanismes d’endommagement.
Si l’on compare l’évolution des endommagements du fil de précontrainte à l’activitéacoustique (figure 4.23), plusieurs conclusions peuvent être faites. L’analyse de localisa-tion des EA a mis en évidence un mécanisme global à l’ensemble de l’éprouvette en phase1. Les essais arrêtés montrent que cette activité acoustique est due à la formation des pro-duits de corrosion sous la surface du métal et principalement aux décollements de cettecouche de métal. La phase 3, acoustiquement active, est provoquée par la propagationrapide de fissures et par la rupture du fil. On peut également constater que la pénétrationet la diffusion de l’hydrogène au sein de la matrice métallique ne sont pas détectablesdans nos conditions d’essai tout comme la création et la propagation des microfissures.Sung [115] a montré que la taille des fissures propageant à l’intérieur d’une structure estdéterminant pour leur détectabilité. Lors de ses travaux, les fissures inférieures à 100 µm
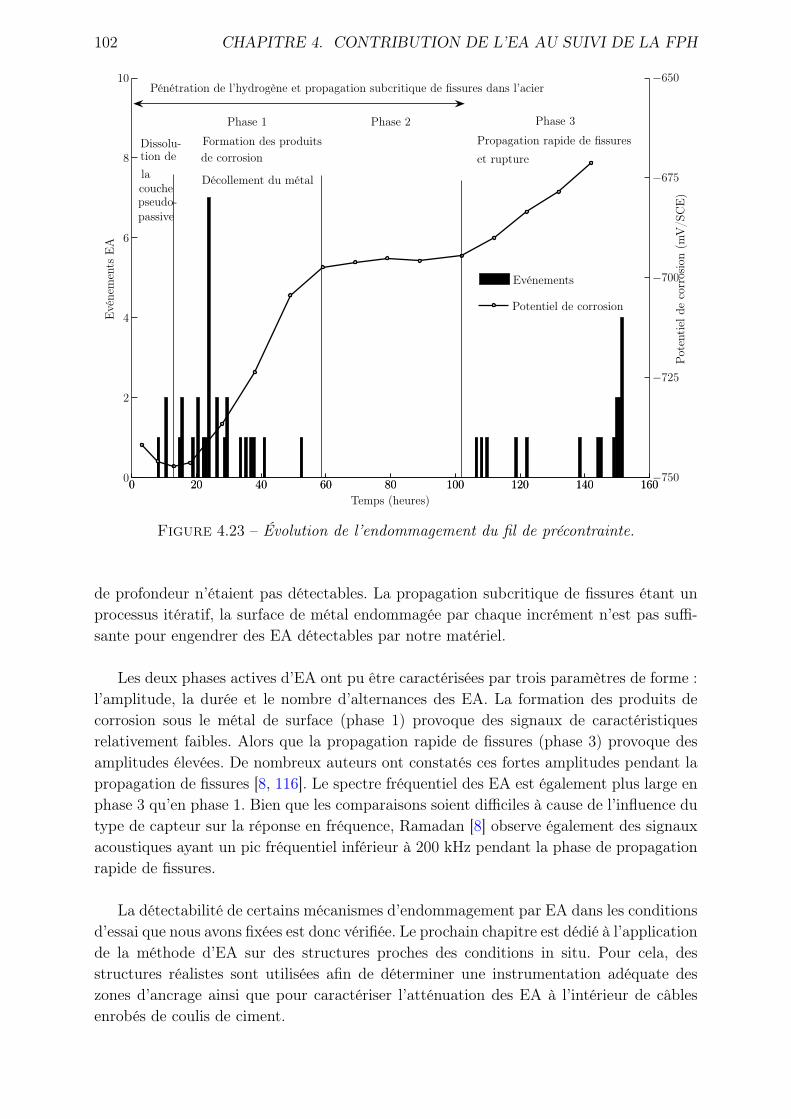
102 CHAPITRE 4. CONTRIBUTION DE L’EA AU SUIVI DE LA FPH
0 20 40 60 80 100 120 140 1600
2
4
6
8
10
Temps (heures)
Evénements
EA
0 20 40 60 80 100 120 140 160−750
−725
−700
−675
−650
Potentiel
decorrosion(m
V/S
CE)
Evénements
Potentiel de corrosion
Phase 1 Phase 2 Phase 3
Dissolu-
couche
passive
Propagation rapide de fissuresFormation des produitsde corrosion
Décollement du métal
Pénétration de l’hydrogène et propagation subcritique de fissures dans l’acier
et rupturelation de
pseudo-
Figure 4.23 – Évolution de l’endommagement du fil de précontrainte.
de profondeur n’étaient pas détectables. La propagation subcritique de fissures étant unprocessus itératif, la surface de métal endommagée par chaque incrément n’est pas suffi-sante pour engendrer des EA détectables par notre matériel.
Les deux phases actives d’EA ont pu être caractérisées par trois paramètres de forme :l’amplitude, la durée et le nombre d’alternances des EA. La formation des produits decorrosion sous le métal de surface (phase 1) provoque des signaux de caractéristiquesrelativement faibles. Alors que la propagation rapide de fissures (phase 3) provoque desamplitudes élevées. De nombreux auteurs ont constatés ces fortes amplitudes pendant lapropagation de fissures [8, 116]. Le spectre fréquentiel des EA est également plus large enphase 3 qu’en phase 1. Bien que les comparaisons soient difficiles à cause de l’influence dutype de capteur sur la réponse en fréquence, Ramadan [8] observe également des signauxacoustiques ayant un pic fréquentiel inférieur à 200 kHz pendant la phase de propagationrapide de fissures.
La détectabilité de certains mécanismes d’endommagement par EA dans les conditionsd’essai que nous avons fixées est donc vérifiée. Le prochain chapitre est dédié à l’applicationde la méthode d’EA sur des structures proches des conditions in situ. Pour cela, desstructures réalistes sont utilisées afin de déterminer une instrumentation adéquate deszones d’ancrage ainsi que pour caractériser l’atténuation des EA à l’intérieur de câblesenrobés de coulis de ciment.
Chapitre 5
Application à des dispositifs réalistes
5.1 Introduction
Le chapitre précédent a mis en évidence la capacité de l’EA à distinguer différentesphases d’activité acoustique pendant les essais de FpH-SC. Les salves acoustiques pro-venant de ces différentes phases peuvent être caractérisées par des paramètres de formequi sont l’amplitude, la durée et le nombre d’alternances des EA. Le présent chapitreest dédié à la validation des résultats sur des corps d’épreuve reprenant les dispositionsgéométriques réelles d’ancrages d’ouvrages d’art. Le second objectif de cette étude est decaractériser les limites de l’EA pour la détection de la FpH-SC de câbles de précontrainte.Ce paragraphe permettra également de s’interroger sur les adaptations de l’auscultationpar EA afin de surmonter certaines limitations.La première étape de ce travail consiste à calibrer l’utilisation de l’EA sur les corpsd’épreuve. L’optimisation de l’instrumentation ainsi que l’atténuation des ondes dans lastructure sont alors des paramètres primordiaux. Ensuite un essai de FpH-SC est réa-lisé sur une armature de précontrainte. Un suivi par mesures électrochimiques ainsi quedes observations métallographiques permettent de comparer l’endommagement d’une ar-mature 7 fils à l’endommagement d’un fil central, analysé dans le chapitre précédent.Parallèlement, un suivi par EA est réalisé à partir des zones d’ancrage afin de vérifierla faisabilité d’une telle auscultation. Le sujet de la dernière section concerne l’atténua-tion des signaux dans un câble enrobé de coulis de ciment. Cette dernière étape permetégalement de tester l’utilisation de l’EA en mode semi-destructif.
5.2 Suivi acoustique de la fragilisation par l’hydrogèneà partir des ancrages
La particularité des ouvrages d’art en béton précontraint est que l’accès aux armaturesest extrêmement limité. Les zones d’ancrage restent les parties les plus faciles d’accèsaprès avoir détruit le coulis de ciment ou la cire les protégeant de la pénétration d’agentscorrodants. Afin de simuler une auscultation d’armature à partir des zones d’ancrage, undispositif expérimental spécifique a été mis en place.
103

104 CHAPITRE 5. APPLICATION À DES DISPOSITIFS RÉALISTES
5.2.1 Description du dispositif expérimental
Montage du corps d’épreuve
Les corps d’épreuve ont été développés afin de simuler les conditions d’utilisation descâbles de précontrainte. Le dispositif mis en place a pour principal objectif de comparerles EA transmises par un câble non enrobé par rapport aux EA transmises par un câbleenrobé de coulis de ciment. Pour cela, le bâti rigide muni des deux blocs d’about (figure5.1) a été utilisé pour mettre en tension une armature tendue à 70 % de sa force de rupturegarantie (charge limite acceptable par le bâti rigide). L’allongement du câble est maintenupar l’intermédiaire des têtes d’ancrage et de clavettes. Une gaine en PEHD est installéesur la moitié de l’armature. L’ancrage B et la gaine sont injectés avec un coulis de ciment.Une cellule de corrosion étanche avec son système de chauffage est positionnée au milieude l’armature (figure 5.2). Celle-ci est remplie d’une solution de thiocyanate d’ammoniumde concentration 250 g.L−1. La solution est maintenue à une température moyenne de 53.
Figure 5.1 – Dispositif expérimental 1.
(a) Disposition du câble, de la cellule de corro-sion et de la gaine injectée
(b) Cellule de corrosion
Figure 5.2 – Photographies du montage expérimental.
1. modélisation : Julien Le Mouel

5.2. SUIVI ACOUSTIQUE DE LA FPH À PARTIR DES ANCRAGES 105
Calibration et instrumentation du corp d’épreuve
Une première phase d’optimisation de l’instrumentation a été réalisée. Il s’agit detrouver le meilleur type de capteur à positionner sur l’ancrage injecté de coulis de ci-ment. Traditionnellement dans les milieux cimentaires, les capteurs basse fréquence sontprivilégiés [102, 132, 133]. Trois variétés de capteurs ont été utilisés :
– Capteur résonnant, moyenne fréquence, micro 80 ;– Capteur résonnant, moyenne fréquence, R15 ;– Capteur résonnant, basse fréquence, R6.
Pour chaque type de capteur, trois positions différentes ont été testées. Des cassés demines (test Hsu Nielsen) ont été réalisés sur l’armature en avant du bloc d’about (figure5.3). Les amplitudes moyennes obtenues pour chaque type de capteur et pour chaqueposition sont présentées dans la table 5.1.
Figure 5.3 – Mode opératoire pour l’optimisation du choix du type de capteur et de sonemplacement sur un ancrage injecté.
Table 5.1 – Amplitudes moyennes pour chaque couple position/type de capteur (ancrageinjecté).
Amplitude moyenne [dB] Position 1 Position 2 Position 3R15 45 40 Signaux non détectés
Micro 80 32 Signaux non détectés 32R6 52 47 55
Il apparaît très clairement que pour chaque position sur la tête d’ancrage, le capteurR6 est celui qui obtient les meilleurs résultats.
Une optimisation de l’instrumentation de la tête d’ancrage non injectée a égalementété réalisée. Trois types de capteurs ont pu être testés :
– Capteur miniature, pico(figure 5.5) ;– Capteur résonnant, micro 80(figure 5.6) ;– Capteur large bande, WD(figure 5.7).
Leur pic fréquentiel étant positionné vers les hautes fréquences, ils semblent appropriés àl’auscultation de matériaux métalliques. Le dispositif expérimental utilisé est le suivant
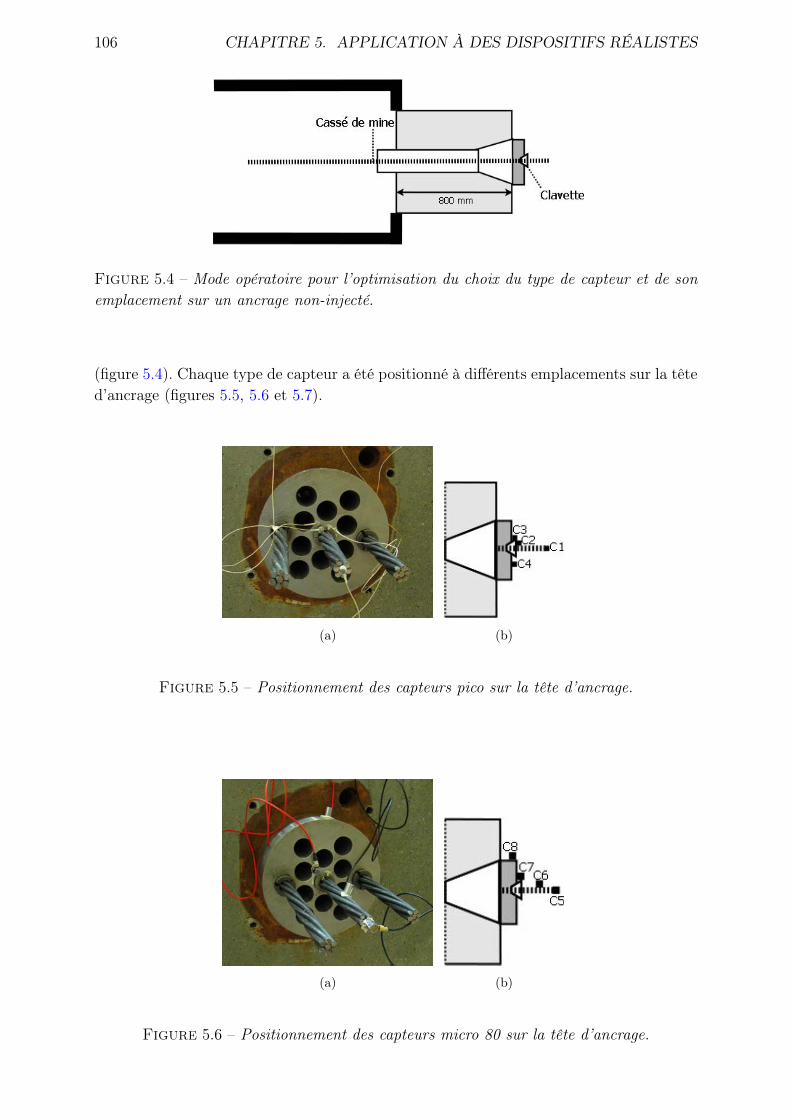
106 CHAPITRE 5. APPLICATION À DES DISPOSITIFS RÉALISTES
Figure 5.4 – Mode opératoire pour l’optimisation du choix du type de capteur et de sonemplacement sur un ancrage non-injecté.
(figure 5.4). Chaque type de capteur a été positionné à différents emplacements sur la têted’ancrage (figures 5.5, 5.6 et 5.7).
(a) (b)
Figure 5.5 – Positionnement des capteurs pico sur la tête d’ancrage.
(a) (b)
Figure 5.6 – Positionnement des capteurs micro 80 sur la tête d’ancrage.
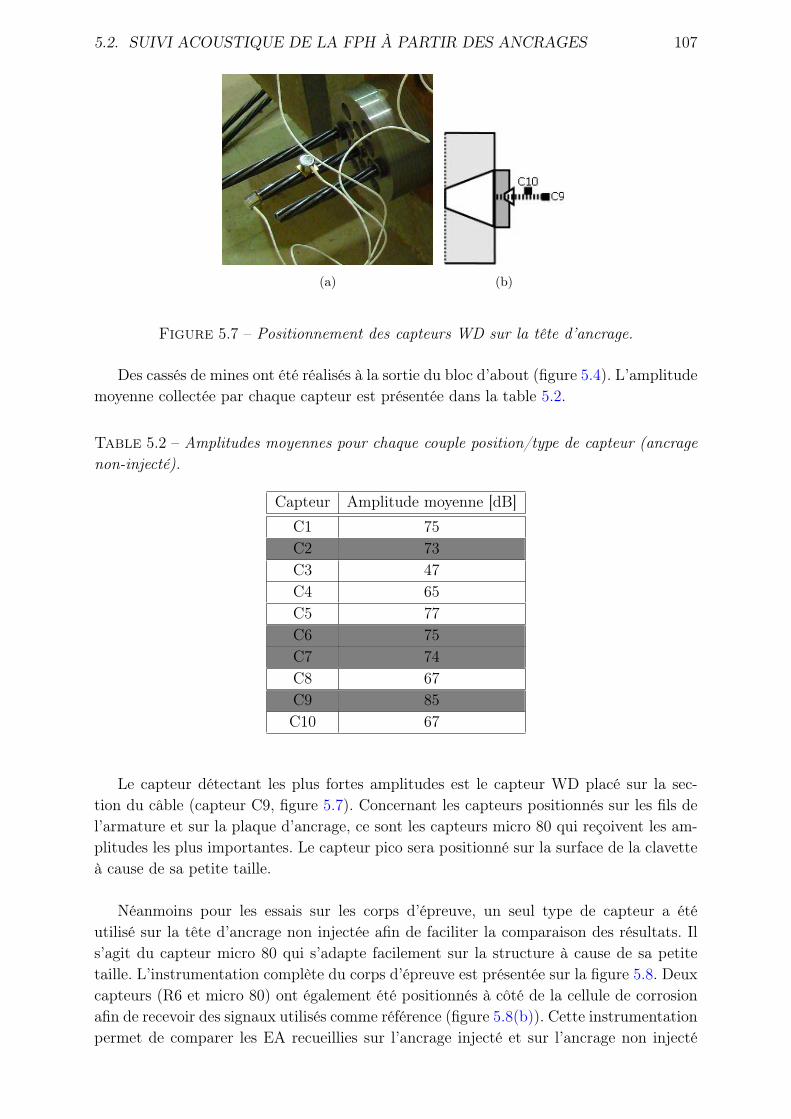
5.2. SUIVI ACOUSTIQUE DE LA FPH À PARTIR DES ANCRAGES 107
(a) (b)
Figure 5.7 – Positionnement des capteurs WD sur la tête d’ancrage.
Des cassés de mines ont été réalisés à la sortie du bloc d’about (figure 5.4). L’amplitudemoyenne collectée par chaque capteur est présentée dans la table 5.2.
Table 5.2 – Amplitudes moyennes pour chaque couple position/type de capteur (ancragenon-injecté).
Capteur Amplitude moyenne [dB]C1 75C2 73C3 47C4 65C5 77C6 75C7 74C8 67C9 85C10 67
Le capteur détectant les plus fortes amplitudes est le capteur WD placé sur la sec-tion du câble (capteur C9, figure 5.7). Concernant les capteurs positionnés sur les fils del’armature et sur la plaque d’ancrage, ce sont les capteurs micro 80 qui reçoivent les am-plitudes les plus importantes. Le capteur pico sera positionné sur la surface de la clavetteà cause de sa petite taille.
Néanmoins pour les essais sur les corps d’épreuve, un seul type de capteur a étéutilisé sur la tête d’ancrage non injectée afin de faciliter la comparaison des résultats. Ils’agit du capteur micro 80 qui s’adapte facilement sur la structure à cause de sa petitetaille. L’instrumentation complète du corps d’épreuve est présentée sur la figure 5.8. Deuxcapteurs (R6 et micro 80) ont également été positionnés à côté de la cellule de corrosionafin de recevoir des signaux utilisés comme référence (figure 5.8(b)). Cette instrumentationpermet de comparer les EA recueillies sur l’ancrage injecté et sur l’ancrage non injecté
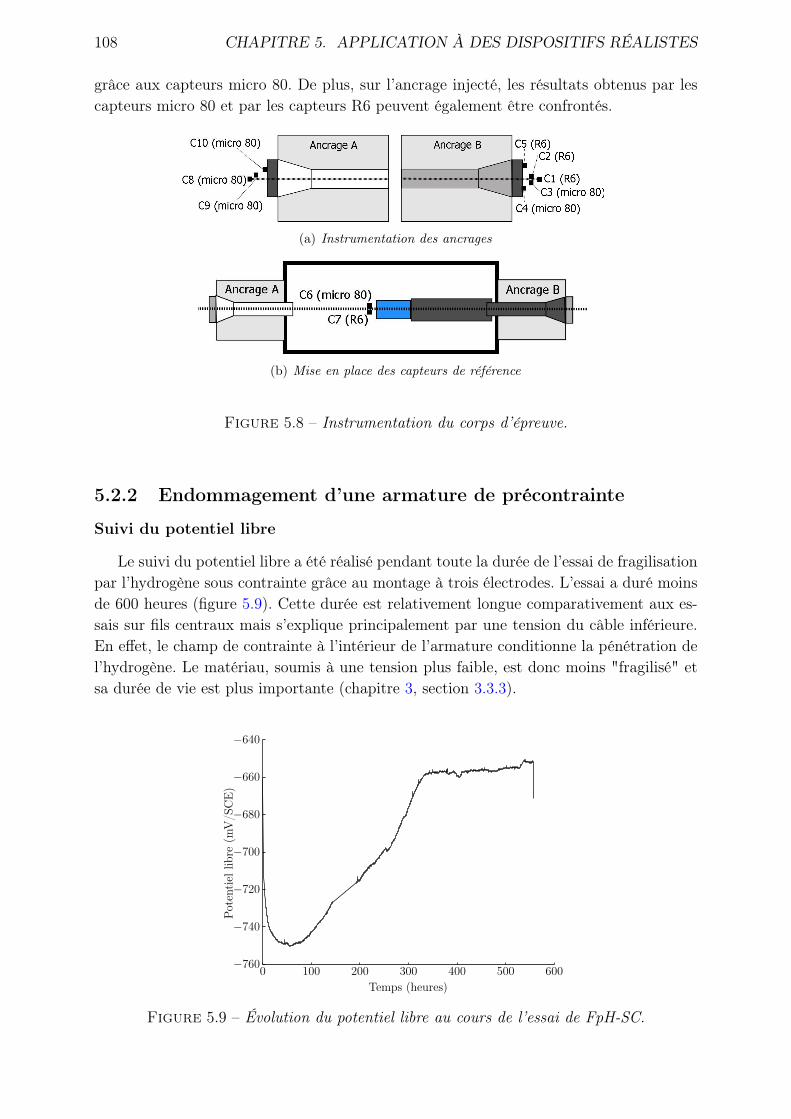
108 CHAPITRE 5. APPLICATION À DES DISPOSITIFS RÉALISTES
grâce aux capteurs micro 80. De plus, sur l’ancrage injecté, les résultats obtenus par lescapteurs micro 80 et par les capteurs R6 peuvent également être confrontés.
(a) Instrumentation des ancrages
(b) Mise en place des capteurs de référence
Figure 5.8 – Instrumentation du corps d’épreuve.
5.2.2 Endommagement d’une armature de précontrainte
Suivi du potentiel libre
Le suivi du potentiel libre a été réalisé pendant toute la durée de l’essai de fragilisationpar l’hydrogène sous contrainte grâce au montage à trois électrodes. L’essai a duré moinsde 600 heures (figure 5.9). Cette durée est relativement longue comparativement aux es-sais sur fils centraux mais s’explique principalement par une tension du câble inférieure.En effet, le champ de contrainte à l’intérieur de l’armature conditionne la pénétration del’hydrogène. Le matériau, soumis à une tension plus faible, est donc moins "fragilisé" etsa durée de vie est plus importante (chapitre 3, section 3.3.3).
0 100 200 300 400 500 600−760
−740
−720
−700
−680
−660
−640
Temps (heures)
Potentiel
libre
(mV/S
CE)
Figure 5.9 – Évolution du potentiel libre au cours de l’essai de FpH-SC.
5.2. SUIVI ACOUSTIQUE DE LA FPH À PARTIR DES ANCRAGES 109
L’évolution du potentiel montre plusieurs phases d’activité différentes qui se rap-prochent de ce que l’on a pu observer sur un fil central (chapitre 4, section 4.3.2). Ladécroissance du potentiel due à la destruction de la couche passive dure jusqu’à 60-70heures. Cette durée importante en comparaison avec la durée de cette phase observée surle fil central poli, est certainement due à la couche importante de produits de tréfilageprésents sur le toron et qui ont été conservés à la mise en place de l’essai.
Pendant la deuxième phase, le potentiel montre une augmentation importante jusqu’à320-325 heures. En plus de la pénétration et de la diffusion de l’hydrogène dans l’acier,cette phase est due à la corrosion généralisée et à la formation de produits de corrosionsur ou sous la surface de l’armature.
Le potentiel se stabilise ensuite jusqu’à 520 heures. L’armature est alors "protégée"par les produits de corrosion.
Entre 520 et 550 heures, le potentiel libre augmente légèrement à cause de la fissura-tion de l’armature et la rupture intervient vers 550 heures. L’augmentation du potentielsemble relativement faible par rapport à celle observée sur le fil central. Une explicationpeut provenir du rapport entre la surface d’acier fissuré et celle d’acier non fissuré. Eneffet, sur un fil de précontrainte en phase de fissuration rapide, le taux d’acier non fissuréest relativement faible alors que pour une armature où seul un fil est en train de s’endom-mager, la surface d’acier non fissurée est plus importante (six autres fils).Néanmoins, on peut constater que le comportement d’une armature est similaire à celuidu fil d’un point de vue électrochimique.
Observations métallographiques
La configuration géométrique d’une armature étant relativement complexe, son en-dommagement présente quelques particularités. Cependant, les mécanismes restent rela-tivement similaires au fil seul.
Seule la partie extérieure des six fils hélicoïdaux de l’armature est en contact directavec la solution corrosive. La conséquence est une présence de fissures sur ces partiesextérieures (figure 5.10(a)). On peut également constater une augmentation de la densitéde fissures à l’approche des contacts interfilaires. La surface de l’armature présente égale-ment une corrosion généralisée qui s’écaille par plaques. Les zones de contact interfilairespermettent tout de même une pénétration du thiocyanate aux abords du fil central. Tou-tefois, le fil central est relativement protégé et ne présente que peu d’endommagements(figure 5.10(b)).
La rupture d’un des fils de l’armature intervient généralement dans le bas de la cellulede corrosion, là où l’oxygène est plus rare comme pour les essais de corrosion fissuranteà l’eau distillée [129]. L’amorce de rupture est décentrée vers le contact interfilaire où onretrouve un mécanisme d’aération différentielle. Les mécanismes de rupture observés surle faciès sont très similaires à ceux observés sur fil central au chapitre 4 (figure 5.11(a)).La propagation subcritique en mode I fait place à une propagation de fissure en mode IIpuis à une zone de redents et à une rupture finale en cisaillement. Néanmoins la zone depropagation en mode II est relativement étendue par rapport à l’endommagement d’un fil(chapitre 4). La contrainte de tension étant inférieure à celle du fil, elle pourrait permettre
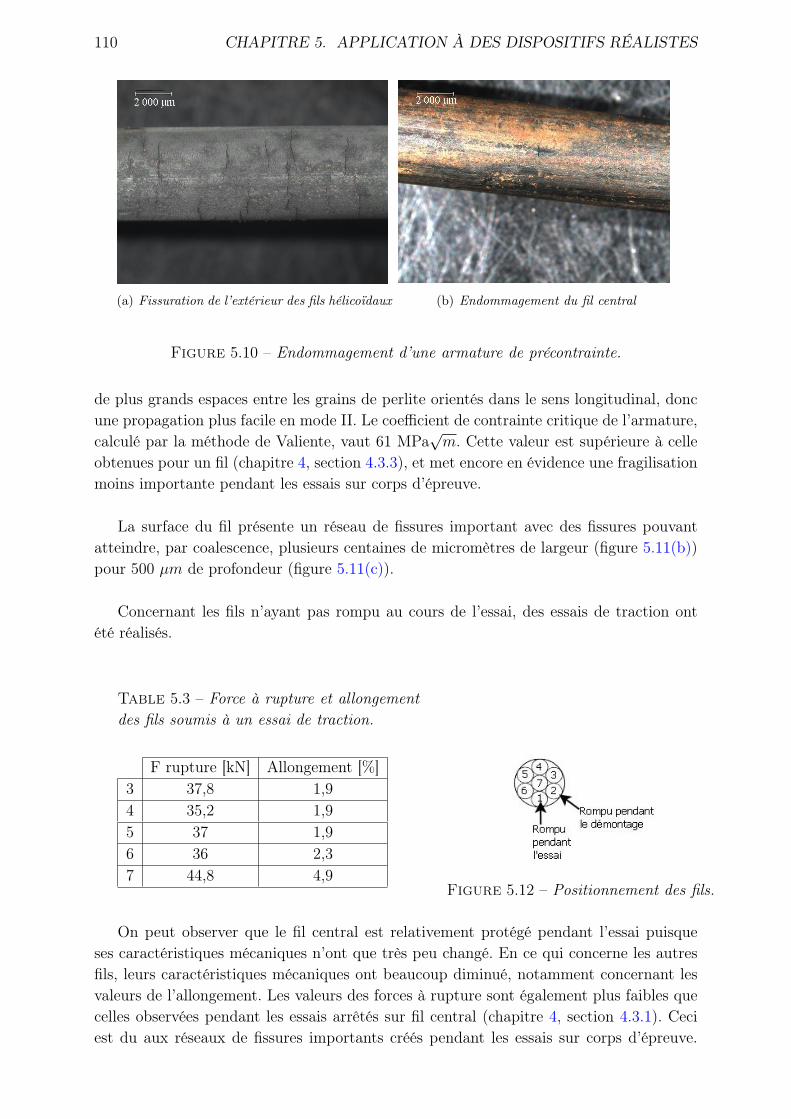
110 CHAPITRE 5. APPLICATION À DES DISPOSITIFS RÉALISTES
(a) Fissuration de l’extérieur des fils hélicoïdaux (b) Endommagement du fil central
Figure 5.10 – Endommagement d’une armature de précontrainte.
de plus grands espaces entre les grains de perlite orientés dans le sens longitudinal, doncune propagation plus facile en mode II. Le coefficient de contrainte critique de l’armature,calculé par la méthode de Valiente, vaut 61 MPa
√m. Cette valeur est supérieure à celle
obtenues pour un fil (chapitre 4, section 4.3.3), et met encore en évidence une fragilisationmoins importante pendant les essais sur corps d’épreuve.
La surface du fil présente un réseau de fissures important avec des fissures pouvantatteindre, par coalescence, plusieurs centaines de micromètres de largeur (figure 5.11(b))pour 500 µm de profondeur (figure 5.11(c)).
Concernant les fils n’ayant pas rompu au cours de l’essai, des essais de traction ontété réalisés.
Table 5.3 – Force à rupture et allongementdes fils soumis à un essai de traction.
F rupture [kN] Allongement [%]3 37,8 1,94 35,2 1,95 37 1,96 36 2,37 44,8 4,9
Figure 5.12 – Positionnement des fils.
On peut observer que le fil central est relativement protégé pendant l’essai puisqueses caractéristiques mécaniques n’ont que très peu changé. En ce qui concerne les autresfils, leurs caractéristiques mécaniques ont beaucoup diminué, notamment concernant lesvaleurs de l’allongement. Les valeurs des forces à rupture sont également plus faibles quecelles observées pendant les essais arrêtés sur fil central (chapitre 4, section 4.3.1). Ceciest du aux réseaux de fissures importants créés pendant les essais sur corps d’épreuve.
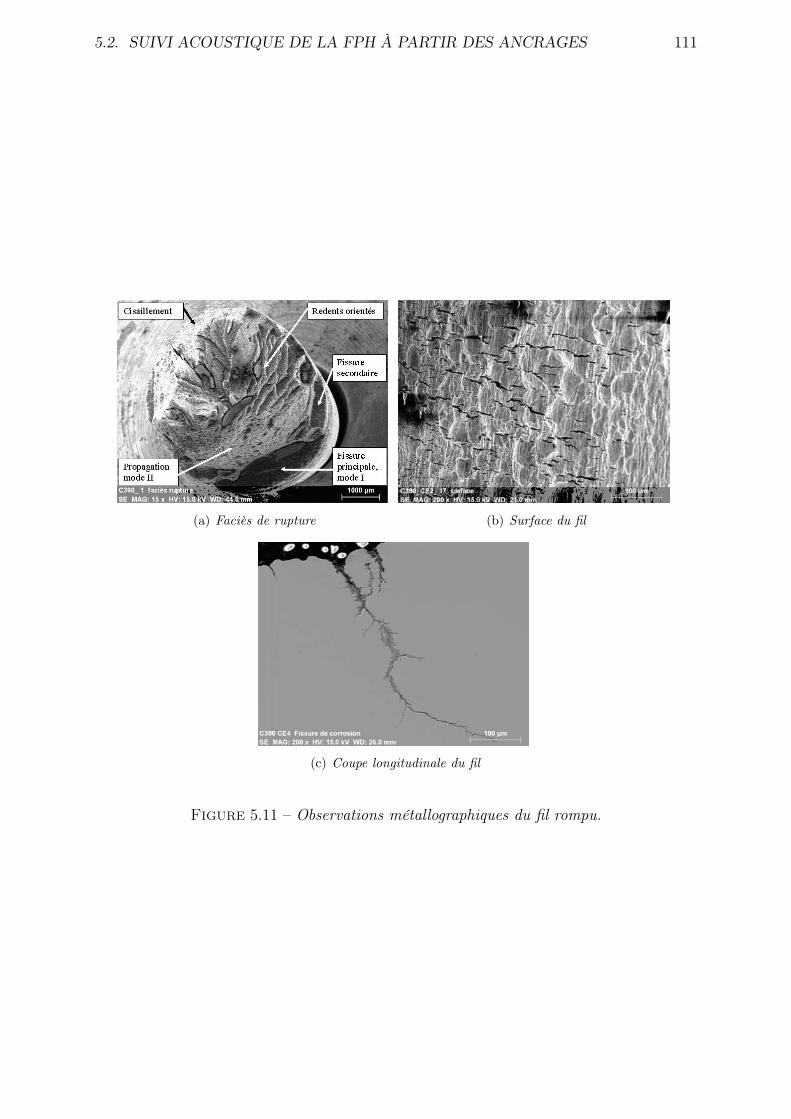
5.2. SUIVI ACOUSTIQUE DE LA FPH À PARTIR DES ANCRAGES 111
(a) Faciès de rupture (b) Surface du fil
(c) Coupe longitudinale du fil
Figure 5.11 – Observations métallographiques du fil rompu.

112 CHAPITRE 5. APPLICATION À DES DISPOSITIFS RÉALISTES
Les faciès après essais de traction montrent que tous les fils hélicoïdaux présentent desfissures plus ou moins profondes (figure 5.13(a)) et des faciès de type semi-fragile. Le filcentral présente un faciès ductile, classique d’un fil sain (figure 5.13(b)) avec la présencede striction.
(a) Faciès de rupture d’un fil hélicoïdal (b) Faciès de rupture du fil central
Figure 5.13 – Faciès des fils après essai de traction.
5.2.3 Résultats obtenus par les capteurs de référence
Les capteurs 6 et 7 positionnés au plus près de l’endommagement ont recueillis lessignaux de référence qui seront comparés dans les paragraphes suivants aux signaux re-cueillis sur les deux ancrages.
La première constatation concerne le nombre d’EA recueillies par les deux capteurs(figure 5.14). Le capteur 7, capteur basse fréquence R6, a recueilli près de 4000 signauxpendant l’essai alors que le capteur 6, capteur résonnant micro 80, n’en a reçu que 1100.Trois explications peuvent être avancées. Les caractéristiques fréquentielles des capteursétant déterminantes pour la détection des EA, celles du capteur R6 peuvent être plusadaptées aux mécanismes mis en jeu. En outre, les deux capteurs sont placés en vis àvis et le capteur R6 pourrait être mieux positionné pour recevoir les signaux. De plusla surface du capteur R6 est plus importante. Il est donc susceptible de recevoir plus designaux en étant collé sur plusieurs fils.
Le capteur 7 (R6) présente une évolution de l’activité acoustique typique d’une ar-mature de précontrainte (figure 5.14(b)). On observe un accroissement du nombre d’EApendant la première portion de la courbe. Une seconde phase plus calme mais qui pré-sente néanmoins une augmentation de l’activité avec des salves peu énergétiques. On peutconcevoir que tous les fils de l’armature ne soient pas au même stade d’endommagement.Par exemple les parties de fil dans le fond de la cellule s’endommagent d’une manière dif-férente des autres parties. La séparation des différentes phases est alors moins nette quepour un fil seul. La dernière phase d’activité débute vers 510-520 heures. Elle présente uneaugmentation importante de l’activité acoustique. Elle montre également deux périodesd’activité différentes. Une première augmentation avec des salves peu énergétiques et une
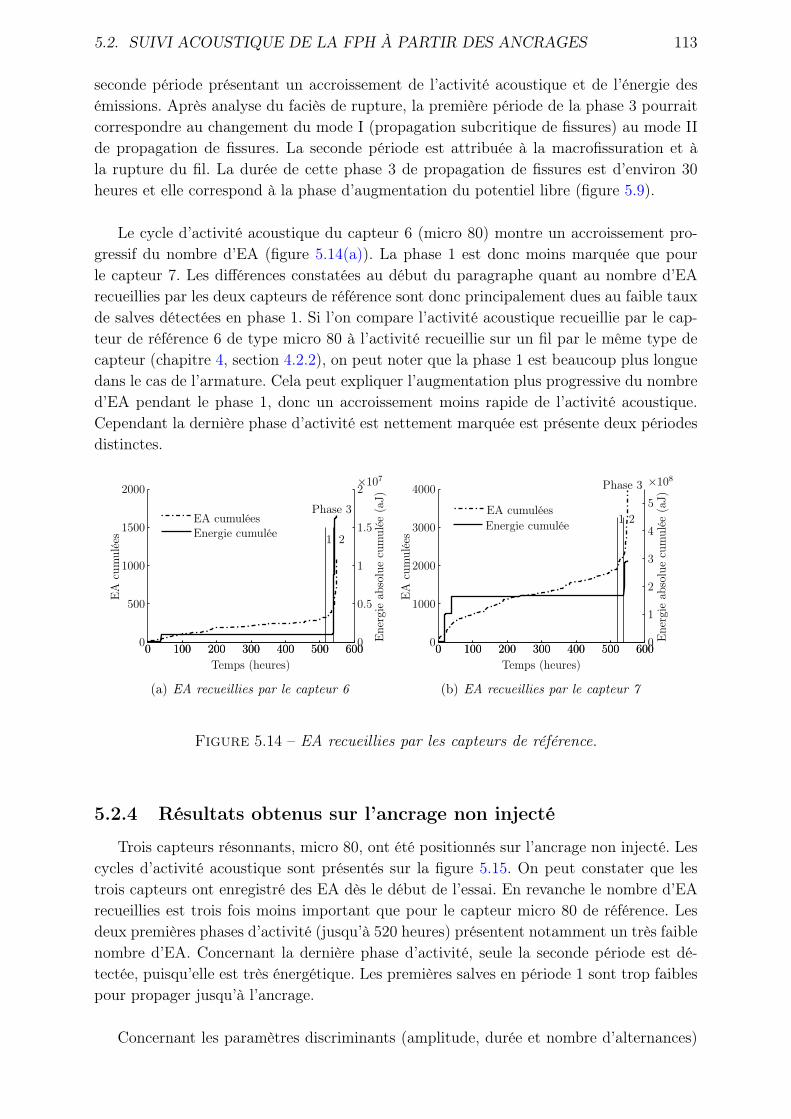
5.2. SUIVI ACOUSTIQUE DE LA FPH À PARTIR DES ANCRAGES 113
seconde période présentant un accroissement de l’activité acoustique et de l’énergie desémissions. Après analyse du faciès de rupture, la première période de la phase 3 pourraitcorrespondre au changement du mode I (propagation subcritique de fissures) au mode IIde propagation de fissures. La seconde période est attribuée à la macrofissuration et àla rupture du fil. La durée de cette phase 3 de propagation de fissures est d’environ 30heures et elle correspond à la phase d’augmentation du potentiel libre (figure 5.9).
Le cycle d’activité acoustique du capteur 6 (micro 80) montre un accroissement pro-gressif du nombre d’EA (figure 5.14(a)). La phase 1 est donc moins marquée que pourle capteur 7. Les différences constatées au début du paragraphe quant au nombre d’EArecueillies par les deux capteurs de référence sont donc principalement dues au faible tauxde salves détectées en phase 1. Si l’on compare l’activité acoustique recueillie par le cap-teur de référence 6 de type micro 80 à l’activité recueillie sur un fil par le même type decapteur (chapitre 4, section 4.2.2), on peut noter que la phase 1 est beaucoup plus longuedans le cas de l’armature. Cela peut expliquer l’augmentation plus progressive du nombred’EA pendant le phase 1, donc un accroissement moins rapide de l’activité acoustique.Cependant la dernière phase d’activité est nettement marquée est présente deux périodesdistinctes.
0 100 200 300 400 500 6000
500
1000
1500
2000
Temps (heures)
EA
cumulées
0 100 200 300 400 500 6000
0.5
1
1.5
2×107
Energie
absoluecumulée
(aJ)
EA cumuléesEnergie cumulée
Phase 3
1 2
(a) EA recueillies par le capteur 6
0 100 200 300 400 500 6000
1000
2000
3000
4000
Temps (heures)
EA
cumulées
0 100 200 300 400 500 6000
1
2
3
4
5
×108
Energie
absoluecumulée
(aJ)
EA cumuléesEnergie cumulée
Phase 3
1 2
(b) EA recueillies par le capteur 7
Figure 5.14 – EA recueillies par les capteurs de référence.
5.2.4 Résultats obtenus sur l’ancrage non injecté
Trois capteurs résonnants, micro 80, ont été positionnés sur l’ancrage non injecté. Lescycles d’activité acoustique sont présentés sur la figure 5.15. On peut constater que lestrois capteurs ont enregistré des EA dès le début de l’essai. En revanche le nombre d’EArecueillies est trois fois moins important que pour le capteur micro 80 de référence. Lesdeux premières phases d’activité (jusqu’à 520 heures) présentent notamment un très faiblenombre d’EA. Concernant la dernière phase d’activité, seule la seconde période est dé-tectée, puisqu’elle est très énergétique. Les premières salves en période 1 sont trop faiblespour propager jusqu’à l’ancrage.
Concernant les paramètres discriminants (amplitude, durée et nombre d’alternances)
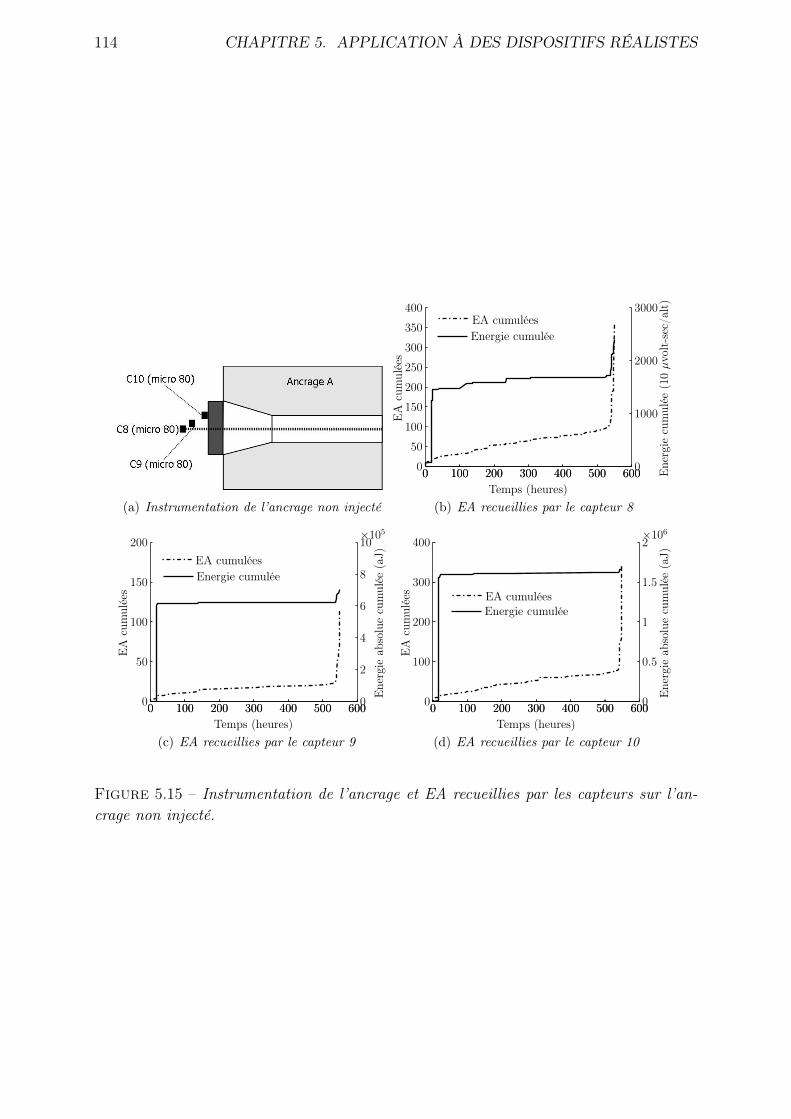
114 CHAPITRE 5. APPLICATION À DES DISPOSITIFS RÉALISTES
(a) Instrumentation de l’ancrage non injecté
0 100 200 300 400 500 6000
50
100
150
200
250
300
350
400
Temps (heures)
EA
cumulées
0 100 200 300 400 500 6000
1000
2000
3000
Energie
cumulée
(10µvo
lt-sec/a
lt)
Energie cumuléeEA cumulées
(b) EA recueillies par le capteur 8
0 100 200 300 400 500 6000
50
100
150
200
Temps (heures)
EA
cumulées
0 100 200 300 400 500 6000
2
4
6
8
10×105
Energie
absoluecumulée
(aJ)EA cumulées
Energie cumulée
(c) EA recueillies par le capteur 9
0 100 200 300 400 500 6000
100
200
300
400
Temps (heures)
EA
cumulées
0 100 200 300 400 500 6000
0.5
1
1.5
2×106
Energie
absoluecumulée
(aJ)
EA cumuléesEnergie cumulée
(d) EA recueillies par le capteur 10
Figure 5.15 – Instrumentation de l’ancrage et EA recueillies par les capteurs sur l’an-crage non injecté.
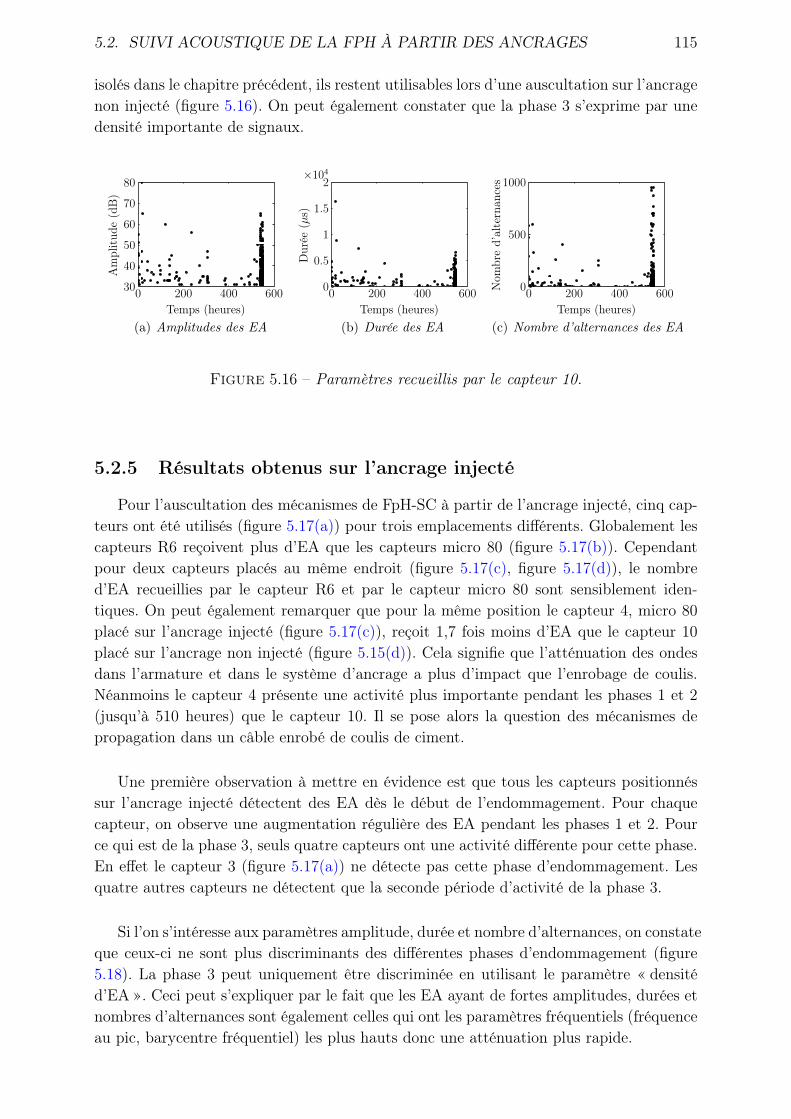
5.2. SUIVI ACOUSTIQUE DE LA FPH À PARTIR DES ANCRAGES 115
isolés dans le chapitre précédent, ils restent utilisables lors d’une auscultation sur l’ancragenon injecté (figure 5.16). On peut également constater que la phase 3 s’exprime par unedensité importante de signaux.
0 200 400 60030
40
50
60
70
80
Temps (heures)
Amplitud
e(dB)
(a) Amplitudes des EA
0 200 400 6000
0.5
1
1.5
2×104
Temps (heures)Durée
(µs)
(b) Durée des EA
0 200 400 6000
500
1000
Temps (heures)
Nom
bred’alternan
ces
(c) Nombre d’alternances des EA
Figure 5.16 – Paramètres recueillis par le capteur 10.
5.2.5 Résultats obtenus sur l’ancrage injecté
Pour l’auscultation des mécanismes de FpH-SC à partir de l’ancrage injecté, cinq cap-teurs ont été utilisés (figure 5.17(a)) pour trois emplacements différents. Globalement lescapteurs R6 reçoivent plus d’EA que les capteurs micro 80 (figure 5.17(b)). Cependantpour deux capteurs placés au même endroit (figure 5.17(c), figure 5.17(d)), le nombred’EA recueillies par le capteur R6 et par le capteur micro 80 sont sensiblement iden-tiques. On peut également remarquer que pour la même position le capteur 4, micro 80placé sur l’ancrage injecté (figure 5.17(c)), reçoit 1,7 fois moins d’EA que le capteur 10placé sur l’ancrage non injecté (figure 5.15(d)). Cela signifie que l’atténuation des ondesdans l’armature et dans le système d’ancrage a plus d’impact que l’enrobage de coulis.Néanmoins le capteur 4 présente une activité plus importante pendant les phases 1 et 2(jusqu’à 510 heures) que le capteur 10. Il se pose alors la question des mécanismes depropagation dans un câble enrobé de coulis de ciment.
Une première observation à mettre en évidence est que tous les capteurs positionnéssur l’ancrage injecté détectent des EA dès le début de l’endommagement. Pour chaquecapteur, on observe une augmentation régulière des EA pendant les phases 1 et 2. Pource qui est de la phase 3, seuls quatre capteurs ont une activité différente pour cette phase.En effet le capteur 3 (figure 5.17(a)) ne détecte pas cette phase d’endommagement. Lesquatre autres capteurs ne détectent que la seconde période d’activité de la phase 3.
Si l’on s’intéresse aux paramètres amplitude, durée et nombre d’alternances, on constateque ceux-ci ne sont plus discriminants des différentes phases d’endommagement (figure5.18). La phase 3 peut uniquement être discriminée en utilisant le paramètre « densitéd’EA ». Ceci peut s’expliquer par le fait que les EA ayant de fortes amplitudes, durées etnombres d’alternances sont également celles qui ont les paramètres fréquentiels (fréquenceau pic, barycentre fréquentiel) les plus hauts donc une atténuation plus rapide.
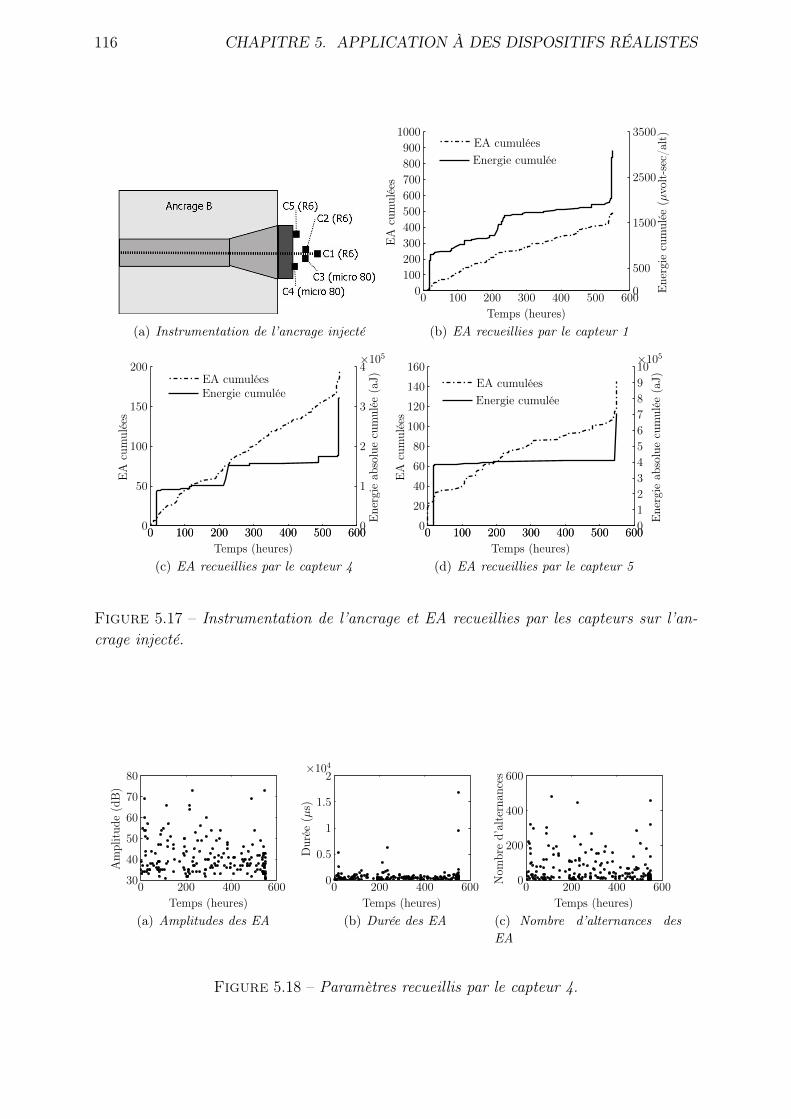
116 CHAPITRE 5. APPLICATION À DES DISPOSITIFS RÉALISTES
(a) Instrumentation de l’ancrage injecté
0 100 200 300 400 500 6000
100
200
300
400
500
600
700
800
900
1000
Temps (heures)
EA
cumulées
0
500
1500
2500
3500
Energie
cumulée
(µvo
lt-sec/a
lt)
EA cumuléesEnergie cumulée
(b) EA recueillies par le capteur 1
0 100 200 300 400 500 6000
50
100
150
200
Temps (heures)
EA
cumulées
0 100 200 300 400 500 6000
1
2
3
4×105
Energie
absoluecumulée
(aJ)
Energie cumuléeEA cumulées
(c) EA recueillies par le capteur 4
0 100 200 300 400 500 6000
20
40
60
80
100
120
140
160
Temps (heures)
EA
cumulées
0 100 200 300 400 500 6000
1
2
3
4
5
6
7
8
9
10×105
Energie
absoluecumulée
(aJ)EA cumulées
Energie cumulée
(d) EA recueillies par le capteur 5
Figure 5.17 – Instrumentation de l’ancrage et EA recueillies par les capteurs sur l’an-crage injecté.
0 200 400 60030
40
50
60
70
80
Temps (heures)
Amplitud
e(dB)
(a) Amplitudes des EA
0 200 400 6000
0.5
1
1.5
2×104
Temps (heures)
Durée
(µs)
(b) Durée des EA
0 200 400 6000
200
400
600
Temps (heures)
Nom
bred’alternan
ces
(c) Nombre d’alternances desEA
Figure 5.18 – Paramètres recueillis par le capteur 4.
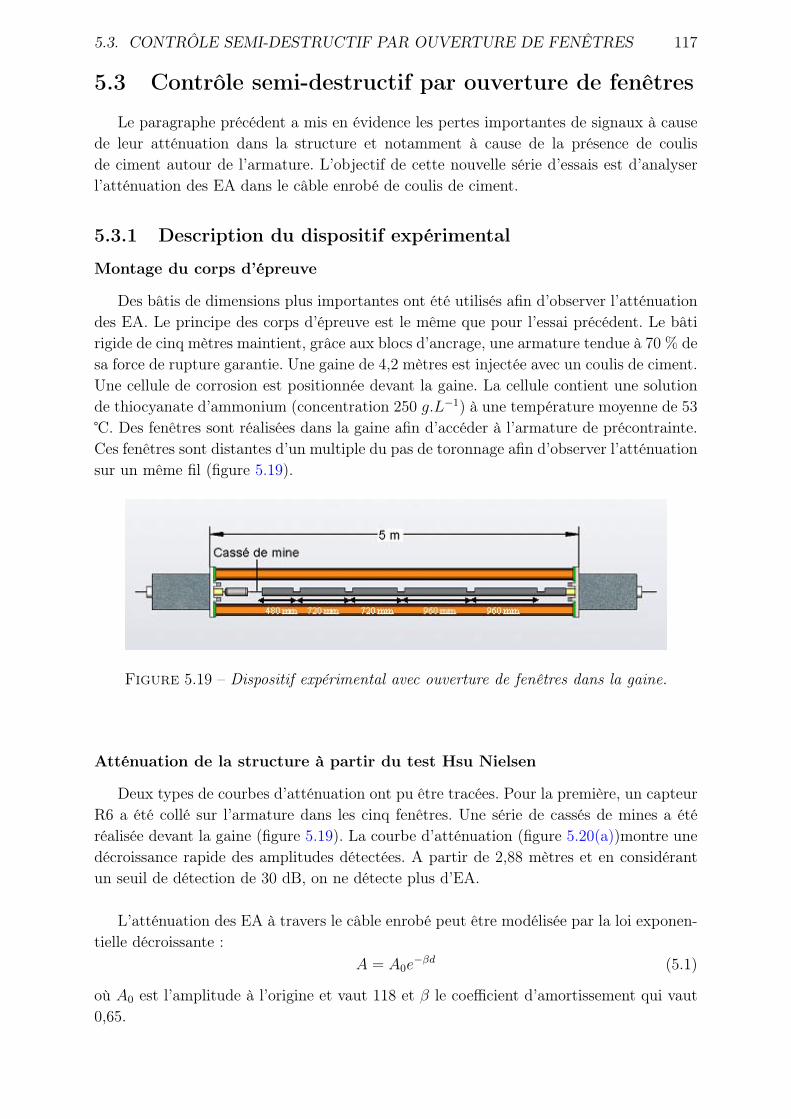
5.3. CONTRÔLE SEMI-DESTRUCTIF PAR OUVERTURE DE FENÊTRES 117
5.3 Contrôle semi-destructif par ouverture de fenêtres
Le paragraphe précédent a mis en évidence les pertes importantes de signaux à causede leur atténuation dans la structure et notamment à cause de la présence de coulisde ciment autour de l’armature. L’objectif de cette nouvelle série d’essais est d’analyserl’atténuation des EA dans le câble enrobé de coulis de ciment.
5.3.1 Description du dispositif expérimental
Montage du corps d’épreuve
Des bâtis de dimensions plus importantes ont été utilisés afin d’observer l’atténuationdes EA. Le principe des corps d’épreuve est le même que pour l’essai précédent. Le bâtirigide de cinq mètres maintient, grâce aux blocs d’ancrage, une armature tendue à 70 % desa force de rupture garantie. Une gaine de 4,2 mètres est injectée avec un coulis de ciment.Une cellule de corrosion est positionnée devant la gaine. La cellule contient une solutionde thiocyanate d’ammonium (concentration 250 g.L−1) à une température moyenne de 53. Des fenêtres sont réalisées dans la gaine afin d’accéder à l’armature de précontrainte.Ces fenêtres sont distantes d’un multiple du pas de toronnage afin d’observer l’atténuationsur un même fil (figure 5.19).
Figure 5.19 – Dispositif expérimental avec ouverture de fenêtres dans la gaine.
Atténuation de la structure à partir du test Hsu Nielsen
Deux types de courbes d’atténuation ont pu être tracées. Pour la première, un capteurR6 a été collé sur l’armature dans les cinq fenêtres. Une série de cassés de mines a étéréalisée devant la gaine (figure 5.19). La courbe d’atténuation (figure 5.20(a))montre unedécroissance rapide des amplitudes détectées. A partir de 2,88 mètres et en considérantun seuil de détection de 30 dB, on ne détecte plus d’EA.
L’atténuation des EA à travers le câble enrobé peut être modélisée par la loi exponen-tielle décroissante :
A = A0e−βd (5.1)
où A0 est l’amplitude à l’origine et vaut 118 et β le coefficient d’amortissement qui vaut0,65.
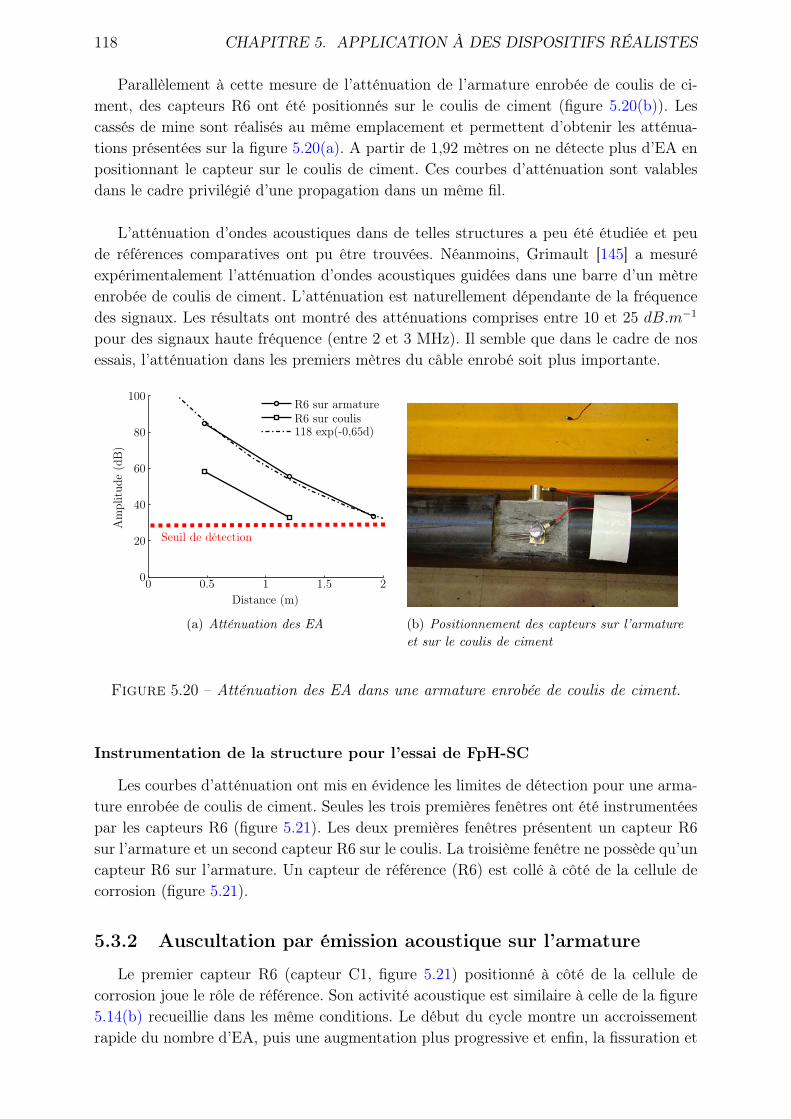
118 CHAPITRE 5. APPLICATION À DES DISPOSITIFS RÉALISTES
Parallèlement à cette mesure de l’atténuation de l’armature enrobée de coulis de ci-ment, des capteurs R6 ont été positionnés sur le coulis de ciment (figure 5.20(b)). Lescassés de mine sont réalisés au même emplacement et permettent d’obtenir les atténua-tions présentées sur la figure 5.20(a). A partir de 1,92 mètres on ne détecte plus d’EA enpositionnant le capteur sur le coulis de ciment. Ces courbes d’atténuation sont valablesdans le cadre privilégié d’une propagation dans un même fil.
L’atténuation d’ondes acoustiques dans de telles structures a peu été étudiée et peude références comparatives ont pu être trouvées. Néanmoins, Grimault [145] a mesuréexpérimentalement l’atténuation d’ondes acoustiques guidées dans une barre d’un mètreenrobée de coulis de ciment. L’atténuation est naturellement dépendante de la fréquencedes signaux. Les résultats ont montré des atténuations comprises entre 10 et 25 dB.m−1
pour des signaux haute fréquence (entre 2 et 3 MHz). Il semble que dans le cadre de nosessais, l’atténuation dans les premiers mètres du câble enrobé soit plus importante.
0 0.5 1 1.5 20
20
40
60
80
100
Distance (m)
Amplitud
e(dB)
R6 sur armatureR6 sur coulis118 exp(-0,65d)
Seuil de détection
(a) Atténuation des EA (b) Positionnement des capteurs sur l’armatureet sur le coulis de ciment
Figure 5.20 – Atténuation des EA dans une armature enrobée de coulis de ciment.
Instrumentation de la structure pour l’essai de FpH-SC
Les courbes d’atténuation ont mis en évidence les limites de détection pour une arma-ture enrobée de coulis de ciment. Seules les trois premières fenêtres ont été instrumentéespar les capteurs R6 (figure 5.21). Les deux premières fenêtres présentent un capteur R6sur l’armature et un second capteur R6 sur le coulis. La troisième fenêtre ne possède qu’uncapteur R6 sur l’armature. Un capteur de référence (R6) est collé à côté de la cellule decorrosion (figure 5.21).
5.3.2 Auscultation par émission acoustique sur l’armature
Le premier capteur R6 (capteur C1, figure 5.21) positionné à côté de la cellule decorrosion joue le rôle de référence. Son activité acoustique est similaire à celle de la figure5.14(b) recueillie dans les même conditions. Le début du cycle montre un accroissementrapide du nombre d’EA, puis une augmentation plus progressive et enfin, la fissuration et
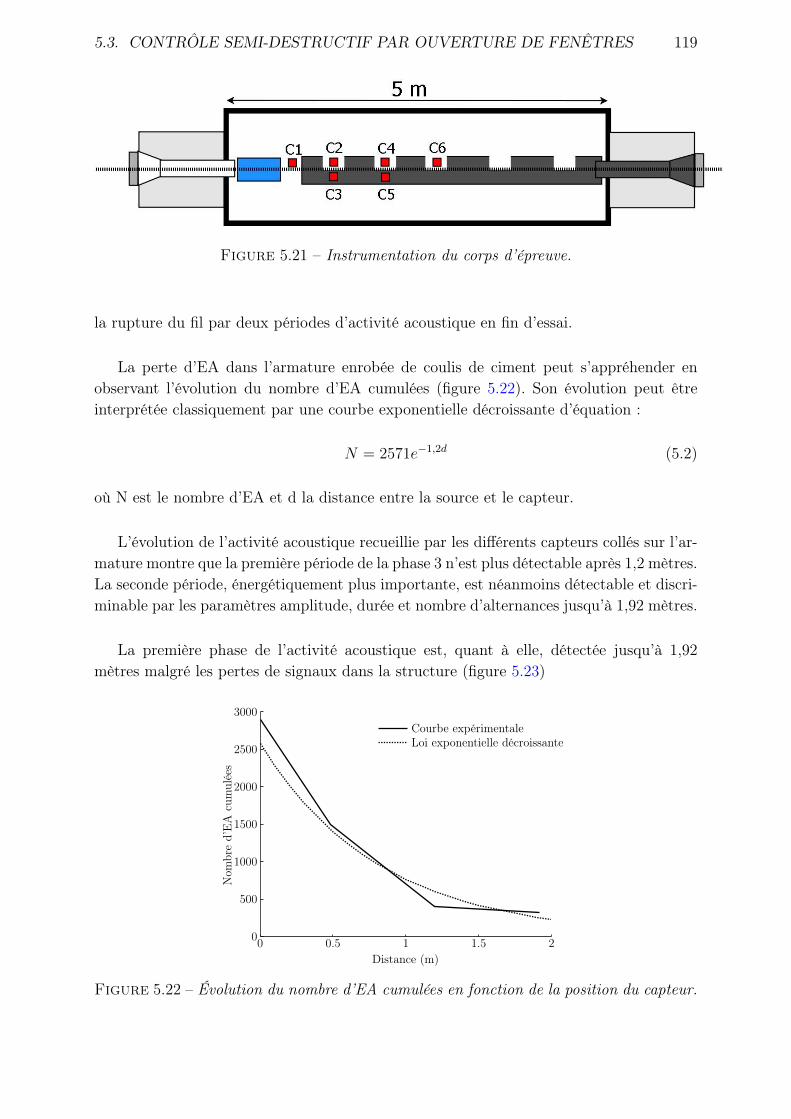
5.3. CONTRÔLE SEMI-DESTRUCTIF PAR OUVERTURE DE FENÊTRES 119
Figure 5.21 – Instrumentation du corps d’épreuve.
la rupture du fil par deux périodes d’activité acoustique en fin d’essai.
La perte d’EA dans l’armature enrobée de coulis de ciment peut s’appréhender enobservant l’évolution du nombre d’EA cumulées (figure 5.22). Son évolution peut êtreinterprétée classiquement par une courbe exponentielle décroissante d’équation :
N = 2571e−1,2d (5.2)
où N est le nombre d’EA et d la distance entre la source et le capteur.
L’évolution de l’activité acoustique recueillie par les différents capteurs collés sur l’ar-mature montre que la première période de la phase 3 n’est plus détectable après 1,2 mètres.La seconde période, énergétiquement plus importante, est néanmoins détectable et discri-minable par les paramètres amplitude, durée et nombre d’alternances jusqu’à 1,92 mètres.
La première phase de l’activité acoustique est, quant à elle, détectée jusqu’à 1,92mètres malgré les pertes de signaux dans la structure (figure 5.23)
0 0.5 1 1.5 20
500
1000
1500
2000
2500
3000
Distance (m)
Nom
bred’EA
cumulées
Courbe expérimentaleLoi exponentielle décroissante
Figure 5.22 – Évolution du nombre d’EA cumulées en fonction de la position du capteur.
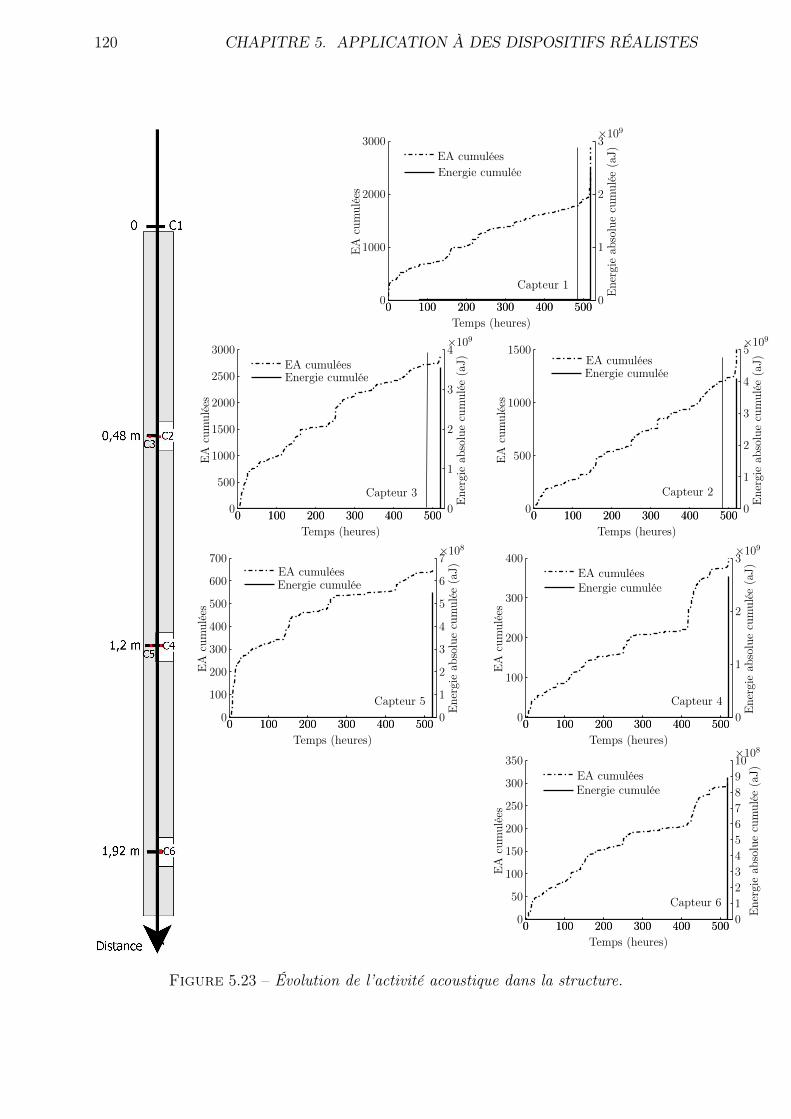
120 CHAPITRE 5. APPLICATION À DES DISPOSITIFS RÉALISTES
0 100 200 300 400 5000
1000
2000
3000
Temps (heures)
EA
cumulées
0 100 200 300 400 5000
1
2
3×109
Energie
absoluecumulée
(aJ)EA cumulées
Energie cumulée
Capteur 1
0 100 200 300 400 5000
500
1000
1500
2000
2500
3000
Temps (heures)
EA
cumulées
0 100 200 300 400 5000
1
2
3
4×109
Energie
absoluecumulée
(aJ)EA cumulées
Energie cumulée
Capteur 3
0 100 200 300 400 5000
500
1000
1500
Temps (heures)
EA
cumulées
0 100 200 300 400 5000
1
2
3
4
5×109
Energie
absoluecumulée
(aJ)EA cumulées
Energie cumulée
Capteur 2
0 100 200 300 400 5000
100
200
300
400
500
600
700
Temps (heures)
EA
cumulées
0 100 200 300 400 5000
1
2
3
4
5
6
7×108
Energie
absoluecumulée
(aJ)EA cumulées
Energie cumulée
Capteur 5
0 100 200 300 400 5000
100
200
300
400
Temps (heures)
EA
cumulées
0 100 200 300 400 5000
1
2
3×109
Energie
absoluecumulée
(aJ)EA cumulées
Energie cumulée
Capteur 4
0 100 200 300 400 5000
50
100
150
200
250
300
350
Temps (heures)
EA
cumulées
0 100 200 300 400 5000
1
2
3
4
5
6
7
8
9
10×108
Energie
absoluecumulée
(aJ)EA cumulées
Energie cumulée
Capteur 6
Figure 5.23 – Évolution de l’activité acoustique dans la structure.

5.4. CONCLUSION 121
5.3.3 Auscultation par émission acoustique sur le coulis de ciment
Les deux capteurs positionnés sur le coulis (capteurs 3 et 5) ont recueillis plus d’EAque leurs homologues positionnés sur l’armature (2800 salves pour le capteur 3 contre1400 pour le capteur 2 et 700 salves pour le capteur 5 contre 400 pour le capteur 4).Ces résultats ont été constatés à plusieurs reprises lors de nos essais en milieu "coulis deciment". Laguerre [146] a constaté, lors d’essais d’acousto-ultrasons dans une armature deprécontrainte enrobée de coulis de ciment, la fuite des ondes à travers le coulis. En plaçantles capteurs d’EA sur ce coulis, un grand nombre d’EA peuvent être recueillies en com-paraison des capteurs positionnés sur un fil de l’armature. De plus, le nombre d’interfacesque l’onde doit traverser conditionne les transmissions directes et les multi-réflexions desondes acoustiques. Plus le nombre d’interfaces est important, plus on engendre de signauxindirects. La présence du coulis de ciment autour de l’armature provoque un nombre plusimportant d’interfaces à traverser pour le signal acoustique. On peut notamment consta-ter qu’à 0,48 mètres, le nombre d’EA recueillies (capteur 3) est sensiblement le même quepour le capteur de référence.
Concernant les différents mécanismes émetteurs d’EA pendant les essais de FpH-SC,la phase 1 provoque de nombreux signaux détectables jusqu’au capteur 5. Concernant laphase 3, son début est détectée sur le capteur 3, mais à partir du capteur 5, seul le dernierpic est détectable, notamment grâce aux paramètres discriminants.
5.4 Conclusion
Ce dernier chapitre consacré à l’application de l’EA sur des structures réalistes a mon-tré tout d’abord que le choix judicieux de l’instrumentation conditionne les résultats del’auscultation. Les capteurs résonnants moyenne fréquence, type micro 80, se sont révélésadaptés aux structures métalliques alors que les capteurs plus basse fréquence, R6, ob-tiennent de meilleurs résultats en milieu cimentaire.
L’auscultation des mécanismes de corrosion sous contrainte à partir des zones d’an-crage met en évidence la perte importante de signaux dans la structure. Néanmoins dessignaux sont détectés pendant toute la durée de vie de l’armature. La perspective procheest maintenant d’être capable de « reconnaître » ces signaux parmi le « bruit » de l’ouvrage.
Une alternative à l’auscultation depuis les ancrages est l’auscultation semi-destructiveavec ouverture de fenêtres. Ce type d’auscultation pourrait être adaptée aux parties d’ou-vrages précontraints cachées par d’autres pièces de l’ouvrage. Les techniques classiques(radioscopie, radiographie...) ne peuvent alors pas être utilisées. Les premiers tests surcorps d’épreuve montrent des résultats intéressants, notamment en utilisant les capteursdirectement sur le coulis.
Néanmoins certaines interrogations restent à être élucidées comme l’impact des multi-réflexions de signaux acoustiques sur l’activité recueillie par les différents capteurs dela structure. Une étape de modélisation semble importante afin d’identifier clairement lesmécanismes de propagation et de caractériser les émissions collectées. De plus, la discrimi-
122 CHAPITRE 5. APPLICATION À DES DISPOSITIFS RÉALISTES
nation des mécanismes d’endommagement par des paramètres de forme classiques sembledélicate sur corps d’épreuve à partir de ces premiers résultats. Une analyse statistiquedoit maintenant être lancée afin de déterminer des critères distinctifs.
Conclusion générale
Ce travail de thèse s’inscrit dans l’optique d’assurer et garantir la fiabilité des struc-tures en béton précontraint par l’utilisation de méthodes de contrôle non destructif. Lechoix de la méthode d’émission acoustique pour la détection et le suivi des mécanismesd’endommagement en corrosion s’est imposé grâce à la capacité de cette technique à dé-tecter à distance des défauts évolutifs. La littérature présente également de nombreuxcas où l’EA s’est montrée efficace pour révéler la présence de corrosion, notamment dansdiverses installations industrielles.
La pathologie principale des câbles de précontrainte est la corrosion localisée. Lesconditions particulières entourant les armatures favorisent des mécanismes spécifiques.En effet, les processus de corrosion sous contrainte s’expriment par une action conjointedes phénomènes de dissolution, couplés à la fragilisation par l’hydrogène et à la mise soustension de l’acier. Ces différents mécanismes peuvent être dissociés par la mise en placed’essais appropriés. Dans cette optique des esssais au thiocyanate d’ammonium ont étéchoisis afin de favoriser l’endommagement par fragilisation par l’hydrogène.
Les mécanismes d’endommagement pendant les essais au thiocyanate d’ammoniumsont influencés par les différents paramètres d’essai comme la tension de l’armature, laconcentration et la température de la solution corrosive. L’étude de l’influence de cesdifférents paramètres sur le comportement électrochimique de l’acier a été réalisée. Ellemontre la très forte dépendance des mécanismes de fragilisation par l’hydrogène vis àvis de la tension de l’armature. Un compromis a été trouvé entre ces différents para-mètres d’essai afin d’obtenir une durée d’essai optimale sans modifier les mécanismesd’endommagement. Les faciès de rupture obtenus pendant les essais de fragilisation parl’hydrogène ont été comparés à des prélèvements sur ouvrages et montrent des similitudes.
Ce travail de recherche essaie de répondre à deux problématiques. La première concernela faisabilité de la détection de la fragilisation par l’hydrogène. En effet, l’étude en labora-toire de ce phénomène a permis de valider la faisabilité d’une telle détection. Il a égalementmis en évidence les limites de l’EA, dans nos conditions d’essai, pour détecter la péné-tration et/ou la diffusion de l’hydrogène dans la structure métallique et la propagationsubcritique de fissures dans l’acier (vitesse subcritique ≈ 1, 2.10−9m.s−1). En revanche,la formation des produits de corrosion ainsi que le décollement du métal en début d’essaisont clairement mis en évidence par EA. De même, la propagation rapide de fissures (vi-tesse critique ≈ 2, 4.10−8m.s−1) et la rupture du fil de précontrainte provoquent des EAde forte amplitude. Tous les mécanismes d’endommagement présents pendant l’essai defragilisation par l’hydrogène ne sont donc pas détectables par EA. Néanmoins, la discri-
123
124 CONCLUSION GENERALE
mination des différents mécanismes détectables a été vérifiée en utilisant des paramètresclassiques : amplitude, durée et nombre d’alternances des EA.
La seconde problématique se rapporte à l’adéquation entre la méthode d’auscultationpar EA et les dispositions constructives des ouvrages d’art en béton précontraint. Eneffet, le caractère non accessible des armatures de précontrainte nécessite de prévoir uneauscultation à partir des zones d’ancrage des ouvrages. La possibilité d’une telle réalisa-tion a été vérifiée. Une auscultation sur les ancrages d’un endommagement de l’armaturepositionné à 2,25 m montre que des EA propagent jusqu’aux ancrages. L’atténuation etla perte de signaux dans la structure restent néanmoins significatifs.L’alternative à une auscultation sur l’ancrage est l’ouverture de fenêtres dans la gaineinjectée et l’accès direct à l’armature. Les résultats obtenus pour ce genre d’auscultationsont prometteurs, malgré la nécessité d’affiner la compréhension des résultats par la mo-délisation de la propagation de signaux acoustiques dans des structures aussi complexes.
Les résultats confirment donc le potentiel de l’EA pour la détection et le suivi de lafragilisation par l’hydrogène des armatures de précontrainte. Néanmoins, la validation dela méthode nécessite des résultats complémentaires.
Les essais de corrosion mis en place ont l’avantage de recréer, en les accélérant, une par-tie des mécanismes d’endommagement spécifiques aux câbles de précontrainte. Le passagea une solution moins agressive semble important. Il permettra de valider sur des méca-nismes plus réalistes mais plus longs, les conclusions éditées dans ce mémoire. Un type detest qui pourrait être envisagé est la mise en place d’essais à partir de l’essai normalisé àl’eau distillée [129].
La mise en place de l’EA sur ouvrages d’art nécessite également d’être capable d’isolerles EA provenant de la corrosion des armatures, de signaux provenant du travail propre dela structure. Une phase de collecte et de caractérisation des EA provenant d’un ouvrageen service est indispensable. Ce type de campagnes expérimentales a déjà été réalisé parYuyama [102] dans le cadre de l’auscultation de ruptures d’armatures de précontraintepar EA. Elles montrent que la discrimination des EA de rupture, de celles provenantdes bruits de structure est facilement réalisable. Ceci reste à vérifier dans le cadre de lacorrosion localisée des armatures.
Références
[1] H. Idrissi et A. Liman : Study and characterization by acoustic emission andelectrochemical measurements of concrete deterioration caused by reinforcementsteel corrosion. NDT&E international, 36:563–569, 2003.
[2] K. Darowicki, A. Mirakowski et S. Krakowiak : Investigation of pitting corro-sion of stainless steel by means of acoustic emission and potentiodynamic methods.corrosion science, 45:1747–1756, 2003.
[3] J. Kovac, M. Leban et A. Legat : Detection of SCC on prestressing steel wire bythe simultaneous use of electrochemical noise and acoustic emission mesurements.electrochimica acta, 52:7607–7616, 2007.
[4] H. Idrissi, J. Derenne et H. Mazille : Detection of pitting corrosion of alumi-nium alloys by acoustic emission technique. Journal of acoustic emission, 18:409–416, 2000.
[5] H. Idrissi et A. Liman : Reliability of acoustic emission technique to assess corro-sion of reinforced concrete. Journal of acoustic emission, 18:417–423, 2000.
[6] M. Fregonese, H. Idrissi, H. Mazille, L. Renaud et Y. Cetre : Initiationand propagation steps in pitting corrosion of austenitic stainless steels : monitoringby acoustic emission. Corrosion Science, 43:627–641, 2001.
[7] F. Bellenger, H. Mazille et H.Idrissi : Use of acoustic emission technique forthe early detection of aluminium alloys exfoliation corrosion. NDT&E international,35:385–392, 2002.
[8] S. Ramadan, L. Gaillet, C. Tessier et H. Idrissi : Detection of stress corrosioncracking of hight-strength steel used in prestressed concrete structures by acousticemission technique. applied surface science, 254:2255–2261, 2008.
[9] G. Grattesat : Conception des ponts. Les techniques de l’ingénieur, C 615:47–68,1976.
[10] J.P Ducout : Ponts métalliques. applications spécifiques. Les techniques de l’in-génieur, C2 676:1–22, 1997.
[11] J. Perchat : Béton armé, généralités. Les techniques de l’ingénieur, C2301:1–2,1992.
[12] F.E. Turneaure et R. Edward : Principles of reinforced concrete construction.New York, J. Wiley & sons, 1907.
[13] P. Jartoux, B. Fargeot et C. Tourneur : Béton précontraint, techniques demise en oeuvre. Les techniques de l’ingénieur, C 2372:1–34, 1996.
[14] P. Le Delliou : Béton précontraint aux Eurocodes. ENTPE presses universitairesde Lyon, 2003.
125

126 RÉFÉRENCES
[15] R. Chaussin : Béton précontraint. Les techniques de l’ingénieur, C2360:1–77, 1990.
[16] Groupe d’ingénieurs des tréfileries de Conflandey : Tréfilage de l’acier.Les techniques de l’ingénieur, M645:1–11, 1982.
[17] J.A. Calgaro et R. Lacroix : Pathologie et évaluation des ponts existants. Lestechniques de l’ingénieur, C4 502:1–28, 1999.
[18] B. Godart et A. Le Roux : Alcali-réaction dans les structures en béton. mé-canismes, pathologie et prévention. les techniques de l’ingénieur, C2 252 v2:1–17,2008.
[19] L. Divet : Comment se prémunir des réactions sulfatiques dans les bétons : pointsur les normes actuelles et quelques recommandations. Bulletin de liaison des La-boratoires des Ponts et Chaussées, 240:87–94, 2002.
[20] B. Godart et L. Divet : Une nouvelle réaction de gonflement interne des bétons :la réaction sulfatique. Ouvrages d’art, 34:19–20, 2000.
[21] B. Isecke : Failure analysis of the collapse of the berlin congress hall. In Stresscorrosion of prestressing steel, proceedings of third symposium, Madrid, 1981.
[22] V. Baroghel-Bouny : Caractérisation des pâtes de ciment et des bétons : mé-thodes, analyse, interprétation. Thèse de doctorat, ENPC, 1994.
[23] D. Rouanet, R. LeRoy, N. Roussel et C. Stéfani : Vers une meilleure maîtrisede l’injection des gaines de précontrainte. Bulletin de liaison des laboratoires desPonts et Chaussées, 250-251:65–73, 2004.
[24] R. LeRoy, M. Willaert, D. Rouanet et H. Mirmand : Identification des para-mètres favorisant la formation de poches d’air et d’eau dans les coulis de ciment pourgaines de précontrainte. Bulletin de liaison des laboratoires des Ponts et Chaussées,229:53–70, 2000.
[25] R. Guinez : Contrôle non destructif des ouvrages d’art par gammagraphie, radio-graphie et radioscopie. Bulletin de liaison des Laboratoires des Ponts et Chaussées,171:83–93, 1991.
[26] X. Dérobert et O. Coffec : Localisation des armatures des ouvrages d’arten béton armé ou précontraint par les techniques radar. Bulletin de liaison deslaboratoires des Ponts et Chaussées, 230:57–65, 2001.
[27] O. Abraham et P. Côte : Méthode impact-écho basse fréquence pour la détectionde vide dans les gaines de précontrainte. Bulletin de laison des laboratoires desPonts et Chaussées, 239:41–50, 2002.
[28] L. Laguerre, M. Brissaud et J.C. Aime : Dispositif de réflectométrie ultrasonorebasse fréquence à base de transducteurs magnétoélastiques pour l’évaluation nondestructive des barres et câbles d’acier. Bulletin de liaison des laboratoires desPonts et Chaussées, 239:7–27, 2002.
[29] V. Degardin, M. Lienard, P. Degauque et D. Degardin : Techniques deréflectométrie électromagnétique pour l’auscultation des câbles de précontrainte :principe et problèmes actuels. In Diagnobéton, Aix en Provence, 2007.
[30] T. Chaussadent et J.L. Clément : Renforcement des ouvrages en béton parcollage composite (bilan de deux opérations de recherche du LCPC). Etudes et
RÉFÉRENCES 127
recherches des Laboratoires des Ponts et Chaussées. Série Ouvrages d’art, 54:1–271,2006.
[31] L. Gaillet : La corrosion des câbles de précontrainte. In THEMA-COR’2007 An-ticorrosion et Durabilité dans le bâtiment, le Génie Civil et les Ouvrages Industriels,2007.
[32] A. Chaperon et S. Fricker : Evaluation du procédé soundprint par l’ETH deZurich. In Diagnobéton, Aix en Provence, 2007.
[33] P. Brevet, J.L. Robert et C. Aubagnac : Surveillance acoustique des câbles deponts. Revue I2M, 3/1-2:79–88, 2003.
[34] D.Desjardins et R.Oltra, éditeurs. Corrosion sous contrainte, phénoménologieet mécanismes. Editions de physique, 1990.
[35] A. Raharinaivo, G. Grimaldi, G. Arliguie, T. Chaussadent, V. Pollet etG. Tache : La corrosion et la protection des aciers dans le béton. Presses de l’écolenationale des Ponts et Chaussées (ENPC), 1998.
[36] U. Nürnberger : Corrosion induced failure in prestressed concrete structures andpreventative measures. Otto Graf Journal, 9:218–250, 1998.
[37] L. Miroud : Etude par traction lente de la corrosion sous contrainte des aciers aucarbone en milieu alcalin. Rôle des inhibiteurs passivants. Thèse de doctorat, UTC,1991.
[38] H.L. Logan : Film rupture of stress corrosion. journal of research of the nationalbureau of standard, 48:99, 1952.
[39] F.P. Ford : Mechanism of environmental cracking in system peculiar to the powergeneration industry. Rapport Electric Power Research Institute (EPRI), NP-2589:22,1982.
[40] F.P. Ford : Current understanding of the mechanism of stress corrosion andcorrosion-fatigue in environment sensitive fracture : evaluation and comparison oftests methods. ASTM STP 821, page 22, 1984.
[41] F.P. Ford : Corrosion sous contrainte, phénoménologie et mécanismes : Slip dis-solution model. Editions de physique, 1990.
[42] P. Scott et M. Le Calvar : Some possible mechanisms of intergranular stresscorrosion cracking of alloy 600 in PWR primary water. In 6th international sym-posium on environmental degradation of materials in nuclear power systems-waterreactors, San Diego, USA, 1993.
[43] P. Scott et M. le Calvar : Corrosion-deformaion interactions, on the role ofoxygen in stress corrosion cracking as a function of temperature. Les éditions dephysique, 1996.
[44] D.A. Jones : A unified mechanism of stress corrosion and corrosion fatigue. me-tallurgical transaction A, 16:1133–1141, 1985.
[45] T. Magnin : Rupture fragile des matériaux ductiles : modèle physique du compor-tement en corrosion sous contrainte. Matériaux et techniques, 77:41–43, 1989.
[46] T. Magnin, R. Chierragatti et R. Oltra : Mechanism of brittle fracture in aductile 316 alloy during stress corrosion. Acta metallurgica, 38:1313–1319, 1990.
128 RÉFÉRENCES
[47] T. Magnin : Corrosion sous contrainte, phénoménologie et mécanismes : modèlesliés à la plasticité pour la rupture fragile de matériaux ductiles CFC en corroisonsous contrainte. Editions de physique, 1990.
[48] T. Magnin : Proposition d’un modèle de fissuration en corrosion sous contrainteapplicable à l’alliage 600 en milieu PWR. Cahiers d’informations techniques de larevue de métallurgie, 90:291–298, 1993.
[49] T. Magnin, A. Chambreuil et B. Bayle : The corrosion-enhanced plasticitymodel for SCC in ductile fcc alloys. Acta metallurgica, 44:1457–1470, 1996.
[50] K. Sieradzki et R.C. Newman : Stress corrosion cracking. Journal of physics andchemistry of solids, 48:1101–1113, 1987.
[51] K. Sieradzki et R.C. Newman : Brittle behaviour of ductile metals during stresscorrosion cracking. Philosophical magazine, 51:95–116, 1985.
[52] T. Cassagne : Corrosion sous contrainte, phénoménologie et mécanismes : Lemodèle de clivage induit par un film. Editions de physique, 1990.
[53] J.R. Galvele : Recent developments in the surface-mobilitty stress-corrosion-cracking mechanism. Electrochimica acta, 45:3537–3541, 2000.
[54] A.M. Brass, J. Chêne et L. Coudreuse : Fragilisation des aciers par l’hydrogène :étude et prévention. Les techniques de l’ingénieur, M 175:1–24, 2000.
[55] J. Chêne : L’hydrogène dans les matériaux métalliques en relation avec les inté-ractions plasticité-environnement. In PlastOx 2007. EDP Science, 2009.
[56] J.B. Leblond : Etude théorique et numérique de la diffusion de l’hydrogène dansles aciers. Thèse de doctorat, Université Pierre et Marie Curie Paris VI, 1984.
[57] B. Brule, M. Cornet et S. Talbot-Besnard : Dosage par chromatographieen phase gazeuse de l’hydrogène fragilisant dans le fer et les aciers. In Deuxièmecongrès international : l’hydrogène dans les métaux, 1977.
[58] V.P. Ramunni, T. De Paiva Caelho et P. De Miranda : Interaction of hydrogenwith the microstructure of low-carbon steel. Materials Science and Engineering A,435-436:504–514, 2006.
[59] F. Ropital : Interactions aciers-hydrogène dans l’industrie pétrolière : fragilisation,perméation, décarburation à haute température. In Conférence 3M CEA saclay,2007.
[60] A.M. Brass, J. Chêne et L. Coudreuse : Fragilisation des aciers par l’hydrogène :mécanismes. Les techniques de l’ingénieur, M 176:1–12, 2000.
[61] G. Beranger, G. Henry et G. Sanz : Le livre de l’acier. Technique et documen-tation, 1994.
[62] L. Coudreuse : Corrosion sous contrainte, phénoménologie et mécanismes : Fra-gilisation par l’hydrogène et corrosion sous contrainte. Editions de physique, 1990.
[63] U.Nürnberger : Corrosion induced failures of prestressing steel. Otto Graf jour-nal, 13:9–25, 2002.
[64] G.E.Monfore et G.J.Verbeck : Corrosion of prestressed wire in concrete. Jour-nal of American Concrete Institute, 57:491–516, 1960.
RÉFÉRENCES 129
[65] M. Brachet : Bilan de quelques années d’observation des phénomènes de corrosionsous tension des aciers à haute résistance. Bulletin de liaison des laboratoires desPonts et Chaussées, 45:115–129, 1970.
[66] Y. Adda, J.M. Dupouy, J. Philibert et Y. Quéré : Elements de métallurgiephysique. Tome6. Corrosion, oxydation, applications. La documentation française,1982.
[67] R. Li et M.G.S Ferreira : The thermodynamic conditions for hydrogen generationinside a stress corrosion crack. Corrosion Science, 38:317–327, 1996.
[68] W.T. Scannell et W.H. Hartt : Cathodic polarization and fracture propertyevaluation of a pretensioned steel tendon in concrete. Materials performance, 26:32–40, 1987.
[69] RM. Schroeder et IL. Müller : Stress corrosion cracking and hydrogen em-brittlement susceptibility of an eutectoïd steel employed in prestressed concrete.Corrosion science, 45:1969–1983, 2003.
[70] P. Brevet, A. Raharinaivo et D. Siegert : Microstructure et propriétés mé-caniques des aciers pour câble : synthèse des travaux du LCPC (1970-2000) : II.ténacité, fissuration sous contrainte et fatigue. Bulletin de liaison des laboratoiresdes Ponts et Chaussées, 250-251:75–92, 2004.
[71] P. Laghoutaris : Le rôle de l’hydrogène sur la CSC de l’alliage 600 en milieuREP. In Conférence 3M CEA Saclay, 2007.
[72] R. Rios : Etude des mécanismes de corrosion sous contrainte de l’alliage 600(NC15Fe) dans l’eau à haute température. Thèse de doctorat, Université des scienceset techniques de Lille, 1993.
[73] J. Toribio et E. Ovejero : Failure analysis of cold drawn prestressing steel wiressubjected to stress corrosion cracking. Engineering Failure Analysis, 12:654–661,2005.
[74] J. Toribio et E. Ovejero : Hydrogen assisted cracking in progressively drawnpearlitic steel. Corrosion Science, 49:3539–3556, 2007.
[75] E. Proverbio et P. Longo : Failure mechanisms of high strength steels in bi-carbonate solutions under anodic polarization. Corrosion Science, 45:2017–2030,2003.
[76] L. Caballero : Discussion on "failure mechanisms of high strength steels inbicarbonate solutions under anodic polarization" by E. Proverbio and P. Longo[corrosion science 45 (9) (2003) 2017]. Corrosion Science, 46:1813–1820, 2004.
[77] AFNOR : Essais non destructifs. terminologies. partie 9 : Termes utilisé en contrôlepar EA, NF EN 1330-9 :200004 (A09-020-9). Rapport technique, AFNOR, 2000.
[78] AFNOR : Vocabulaire utilisé en EA, NF A09-350. Rapport technique, AFNOR,1984.
[79] J. Roget : Essais non destructifs, l’émission acoustique. Mise en oeuvre et appli-cations. AFNOR, CETIM, 1988.
[80] G. Lackner et R. Dusek : Semi-automatic testing of gas cylinders. In 28thEuropean Conference on Acoustic Emission Testing, 2008.

130 RÉFÉRENCES
[81] T. Kek et J. Grum : Laser cutting and acoustic emission signals. In 28th EuropeanConference on Acoustic Emission Testing, 2008.
[82] O. Skawinski, P. Hulot, C.Binétruy et C. Rasche : Structural integrity evalua-tion of CNG composite cylinders by acoustic emission monitoring. In 28th EuropeanConference on Acoustic Emission Testing, 2008.
[83] J. Roget : Emission acoustique. Techniques de l’ingénieur, R3200:1–10, 1988.
[84] M. Boinet : Anodisation plasma de métaux (A1 150, AM 60) : suivi par émissionacoustique. Structure, composition et propriétés électrochimiques des revêtementsobtenus. Thèse de doctorat, Institut National Polytechnique de Grenoble, 2004.
[85] T.M. Roberts et M. Talebzadeh : Acoustic emission monitoring of fatigue crackpropagation. Journal of construction steel research, 59:695–712, 2003.
[86] M.A. Hamstad et J.D. McColskey : Wideband and narrowband acoustic emis-sion waveforms from extraneous sources during fatigue of steel. Journal of acousticemission, 15:1–18, 1997.
[87] M.A. Hamstad et J.D. McColskey : Detectability of slow crack growth in bridgesteels by acoustic emission. Materials evaluation, 57:1165–1174, 1999.
[88] M. Sison, J.C.Duke Jr, M.G. Lozev et G.G. Clemena : Analysis of acousticemissions from a steel bridge hanger. Research in non-destructive evaluation, 10:123–145, 1998.
[89] M. Chhuy Sok : Etude de la propagation d’une fissure dans un béton non armé.Bulletin de laison des laboratoires de Ponts et Chaussées, 98:78–84, 1978.
[90] M. Ben Souda : Contribution à l’analyse par émission acoustique de l’endomma-gement dans le béton. Thèse de doctorat, Université du Maine, 1989.
[91] J.M. Berthelot, M. Ben Souda et J.L. Robert : Identification des signauxd’émission acoustique dans le béton. Bulletin de liaison des Laboratoires des Pontset Chaussées, 180:35–41, 1992.
[92] J.M. Berthelot et J.L. Robert : Application de l’émission acoustique aux méca-nismes d’endommagement du béton. Bulletin de liaison des Laboratoires des Pontset Chaussées, 140:101–111, 1985.
[93] J.M. Berthelot, M. Ben Souda et J.L. Robert : Etude de l’atténuation desondes dans le béton. Bulletin de liaison des Laboratoires des Ponts et Chaussées,177:61–72, 1992.
[94] M. Shigeishi, S.Colombo, K.J. Broughton, H. Rutledge, A.J. Batchloret M.C. Forde : Acoustic emission to assess and monitor the integrity of bridges.Construction and Building Materials, 15:35–49, 2001.
[95] C.K. Shield : Comparison of acoustic emission activity in reinforced and prestressedconcrete beams under bending. Construction and Building Materials, 11:189–194,1997.
[96] C. Grosse, H. Reinhart et T. Dahm : Localization and classification of frac-ture types in concrete with quantitative acoustic emission measurements techniques.NDT&E international, 30:223–230, 1997.
[97] M. Ohtsu et H. Watanabe : Quantitative damage estimation of concrete byacoustic emission. Construction and Building Materials, 15:217–224, 2001.

RÉFÉRENCES 131
[98] C.U. Grosse et F. Finck : Quantitative evaluation of fracture processes in concreteusing signal-based acoustic emission techniques. Cement & Concrete Composites,28:330–336, 2006.
[99] N.F. Casey et P.A.A. Laura : A review of the acoustic-emission monitoring ofwire rope. Ocean Engineering, 24:935–947, 1997.
[100] M. Holford : The non-destructive testing of wire ropes by acoustic emission. Thèsede doctorat, University College Cardiff, 1987.
[101] L. Gaillet : Essai de surveillance acoustique sur des torons T15,7 de 200 m.Rapport technique, Laboratoire Central des Ponts et Chaussées, 2001.
[102] S. Yuyama, K. Yokoyama, K. Niitani, M. Ohtsu et T. Uomoto : Detectionand evaluation of failures in high-strength tendon of prestressed concrete bridges byacoustic emission. Construction and building materials, 21:491–500, 2007.
[103] R. Laloux et J.L. Robert : Les techniques d’émission acoustique appliquées auxouvrages de génie civil. Bulletin de liaison des laboratoires des Ponts et Chaussées,139:93–98, 1985.
[104] L. Gaillet, C. Tessier, D. Bruhat et R. Michel : Auscultation par émissionacoustique d’ancrages de câbles multicouches. Bulletin de liaison des Laboratoiresdes Ponts et Chaussées, 250-251:55–63, 2004.
[105] H. Zejli : Détection et localisation par émission acoustique de fils rompus dans lesancrages d’ouvrage d’art. Thèse de doctorat, UTC, 2007.
[106] H. Zejli, A. Laksimi, C. Tessier, L. Gaillet et S. Benmedakhen : Detectionof the broken wires in the cables hidden parts (anchoring) by acoustic emission.Advanced Materials Research, 13-14:345–350, 2006.
[107] D.W. Cullington, D. MacNeil, P. Paulson et J. Elliott : Continuous acous-tic monitoring of grouted post-tensioned concrete bridges. NDT&E intenational,34:95–105, 2001.
[108] J.L. Robert, D. Bruhat, J.P. Gervais, R. Laloux, N. Rumiano et M. Desmas :Surveillance acoustique des câbles. approche théorique-appareillage. Bulletin deLiaison des laboratoires des Ponts et Chaussées, 169:71–78, 1990.
[109] L. Gaillet, P. Brevet et J.L. Robert : Acoustic monitoring of prestressedconcrete bridge and other civil structures with cables. In Proceedings of the EWGAE2002, Prague, République Tchèque, 11-13 septembre 2002.
[110] S. Yuyama, T. Kishi et Y. Hisamatsu : AE analysis during corrosion, stresscorrosion cracking and corrosion fatigue processes. Journal of Acoustic Emission,2:71–93, 1983.
[111] A.A. Pollock : Corrosion monitoring in industrial plants using nondestructivetesting and electrochemical methods. ASTM, 1986.
[112] C.A. Tatro, R.G. Liptai et D.W. Moon : Acoustic emission from formation andadvancement of cracks. In International conference on stress corrosion cracking andhydrogen embrittlement of iron base alloys, Unieux-Firminy France, 1973.
[113] H. Mazille, R. Rothéa et C. Tronel : An acoustic emission technique formonitoring pitting corrosion of austenitic stainless steels. Corrosion Science, 37:1365–1375, 1995.
132 RÉFÉRENCES
[114] Y.P. Kim, M. Fregonese, H. Mazille, D. Féron et G. Santarini : Abilityof acoustic emission technique for detection and monitoring of crevice corrosion on304L austenitic stainless steel. NDT&E international, 36:553–562, 2003.
[115] K.Y. Sung, I.S. Kim et Y.K. Yoon : Characteristics of acoustic emission duringstress corrosion cracking of INCONEL 600 alloy. Scripta materialia, 37:1255–1262,1997.
[116] C. Jomdecha, A. Prateepasen et P. Kaewtrakulpong : Study on sourcelocation using acoustic emission system for various corrosion types. NDT&E inter-national, 40:584–593, 2007.
[117] M. Takemoto et H. Cho : Acoustic emission during stress corrosion cracking test.In Proceedings of the EWGAE 2004, Berlin, Germany, 15-17 septembre 2004.
[118] H. Shaikh, R. Aminthalingam, T. Anita, N. Sivaibharasi, T. Jaykumar,P. Manohar et H.S Khatak : Evaluation of stress corrosion cracking phenomenonin an AISI type 316LN stainless steel using acoustic emission technique. CorrosionScience, 49:740–765, 2007.
[119] M. Fregonese, H. Idrissi, H. Mazille, L. Renaud et Y. Cetre : Monitoringpitting corrosion of 304L and 316 L austenitic stainless steel by acoustic emission :influence of the pit morphology. European Federation of Corrosion Publications,33:292–300, 2001.
[120] P. Lapitz, J. Ruzzante et M.G. Alvarez : AE response of alpha-brass duringstress corrosion crack propagation. Corrosion Science, 49:3812–3825, 2007.
[121] A. Proust : Etude par la technique d’émission acoustique de la corrosion souscontrainte de trois nuances d’acier inoxydable (austénitique, ferritique, austénofer-ritique) en milieu chloruré chaud. Thèse de doctorat, INSA Lyon, 1992.
[122] D. Caron : Influence de l’hydrogène sur la vitesse de propagation des fissuresde corrosion sous contrainte dans l’alliage 600 en milieu primaire des réacteursnucléaires à eau sous pression. Thèse de doctorat, INSA Lyon, 2000.
[123] AFNOR : NF EN ISO 7539-1 octobre 1995 essais de corrosion sous contrainte.Rapport technique, AFNOR, 1995.
[124] J. Mietz et B. Isecke : Assessment of test methods for evaluation stress corrosioncracking susceptibility of prestressing steels. Materials and corrosion, 53:373–384,2002.
[125] C. Lemaître : Corrosion sous contrainte, phénoménologie et mécanismes : Corro-sion sous contrainte, méthodes d’essai. D. Desjardins, R. Oltra, 1990.
[126] S. Ramadan : Etude et contrôle de la corrosion sous contrainte des câbles tendusutilisés dans les ouvrages d’art en milieu chloruré. Caractérisation de l’endomma-gement par émission acoustique et techniques électrochimiques. Thèse de doctorat,INSA de Lyon, 2008.
[127] AFNOR : NF EN ISO 15630-3 août 2002 méthodes d’essais, armatures de précon-trainte. Rapport technique, AFNOR, 2002.
[128] A. Raharinaivo : Groupe corrosion du comité mixte FIP-RILEM-CEB. essais decorrosion sous tension d’aciers de précontrainte dans une solution de thiocyanated’ammonium. Rapport technique, LCPC MACOA G00884, 1974.
RÉFÉRENCES 133
[129] AFNOR : NF A05-302 décembre 1981 armatures de précontrainte essai de corrosionsous contrainte à l’eau distillée. Rapport technique, AFNOR, 1981.
[130] C. Levreau : Compréhension et modélisation des mécanismes de lubrification lorsdu tréfilage des aciers inoxydables avec les savons secs. Thèse de doctorat, EcoleNationale Supérieur des Mines de Paris, 2006.
[131] J.B. Jorcin : Spectroscopie d’impédance électrochimique locale : caractérisationde la délamination des peintures et de la corrosion des alliages al-Cu. Thèse dedoctorat, Institut National Polytechnique de Toulouse, 2007.
[132] S. Yuyama, Z.W. Li, M. Yoshizawa, T. Tomokiyo et T. Uomoto : Evalua-tion of fatigue damage in reinforced concrete slab by acoustic emission. NDT&Einternational, 34:381–387, 2001.
[133] S. Yuyama, T. Okamoto, M. Shigeishi, M. Ohtsu et T. Kishi : A proposedstandard for evaluating structural integrity of reinforced concrete beams by acousticemission. Rapport technique, American Society for Testing and Materials, 1999.
[134] F. Wenger : Etude de la corrosion de l’acier doux dans le béton par des méthodesélectrochimiques. Application au contrôle des ouvrages de génie civil. Thèse dedoctorat, Université Paris-sud, 1986.
[135] L. Elkadi, B. Mernari, M.Traisnel, F. Bentiss et M. Lagnenée : The inhi-bition action of 3,6-bid(2-methoxyphenyl)-1,2-dihydro-1,2,4,5-tetrazine on the cor-rosion of mild steel in acidic media. Corrosion Science, 42:703–719, 2000.
[136] J.L. Crolet et G. Béranger : Corrosion en milieux aqueux des métaux et alliages.Les techniques de l’ingénieur, M 150:1–21, 1998.
[137] E. Poorqasemi, O. Abootalebi, M. Peikari et F. Haqdar : Investigatingaccuracy of the tafel extrapolation method in HCl solutions. Corrosion Science,51:1043–1054, 2009.
[138] S. Ramadan, L. Gaillet, C. Tessier et H. Idrissi : Assessment of the stress cor-rosion cracking in a chloride medium of cables used in prestressed concrete structureby acoustic emission technique. Measurement Science and Technology, 19:115702,2008.
[139] M. Elices, J. Ruiz et J.M. Atienza : Influence of residual stresses on hydrogenembrittlement of cold drawn wires. Materials and Structures, 37:305–310, 2004.
[140] J.M. Atienza, M.L. Matinez-Perez, J. Ruiz-Hervias, F. Mompean,M. Garcia-Hernandez et M. Elices : Residual stresses in cold drawn ferre-tic rods. Scripta Materialia, 52:305–309, 2005.
[141] A. Phelippeau, S. Pommier, T. Tsakalakos, M. Clavel et C. Prioul : Colddrawn steel wires-processing, residual stresses and ductility-part I : metallographyand finite element analyses. Fatigue & fracture of engineering materials & structures,29:243–253, 2006.
[142] A. Phelippeau, S. Pommier, I. Zakharchenko, R. Levy-Tubiana, T. Tsa-kalakos, M. Clavel, M. Croft, Z. Zhong et C. Prioul : Cold drawn steelwires-processing, residual stresses and ductility-part II : Synchrotron and neutrondiffraction. Fatigue & fracture of engineering materials & structures, 29:255–265,2006.

134 RÉFÉRENCES
[143] Groupe corrosion du comité mixte FIP-RILEM-CEB : Essais de corrosion soustension d’aciers de précontrainte dans une solution de thiocyanate d’ammonium.Rapport technique, FIP-RILEM-CEB, 1974.
[144] A. Valiente : Criterios de fractura para alambres. Thèse de doctorat, PolytechnicUniversity of Madrid, 1980.
[145] A. Grimault : Utilisation d’ondes mécaniques guidées pour l’évaluation non des-tructive d’acier noyé. Thèse de doctorat, Ecole Centrale de Nantes, 2005.
[146] L. Laguerre, J.M. Bouhelier et A. Grimault : Application of ultrasonic guidedwaves to the evaluation of steel members integrity. In 2nd European Conference onstructural health monitoring (SHM), 2004.
Annexe 1
Paramètres d’émission acoustique
Time of test : temps d’arrivée en jour/heure/minute/seconde, par rapport au début dutestAmplitude : amplitude maximale en dBEnergy : énergie (enveloppe) en volt par secondeCounts : nombre d’alternances qui dépassent le seuil de détectionDuration : durée en micro-secondesRise time : temps de montée (entre le début et le maximum d’amplitude) en micro-secondesCounts to peak : nombre d’alternances entre le début de la salve et l’amplitude maxi-maleAverage frequency : fréquence moyenne, rapport entre le nombre d’alternances et ladurée de la salveReverberation frequency : fréquence de la décroissance de la salve, rapport entre lenombre d’alternances de la décroissance et sa duréeInitiation frequency : fréquence d’initiation, rapport entre le nombre d’alternances dela phase d’initiation et sa duréeSignal strength : intensité du signalAbsolute energy : énergie absolue, intégrale du signal au carré sur la durée de la salveThreshold : seuil de détection en dBASL : tension efficace en dBRMS : tension efficace en voltFrequency centroïd : barycentre fréquentiel de la salvePeak frequency : fréquence au maximum du pic de la transformée de FourierPartial Powers : répartition d’énergie par bande de fréquence
135

136 ANNEXE
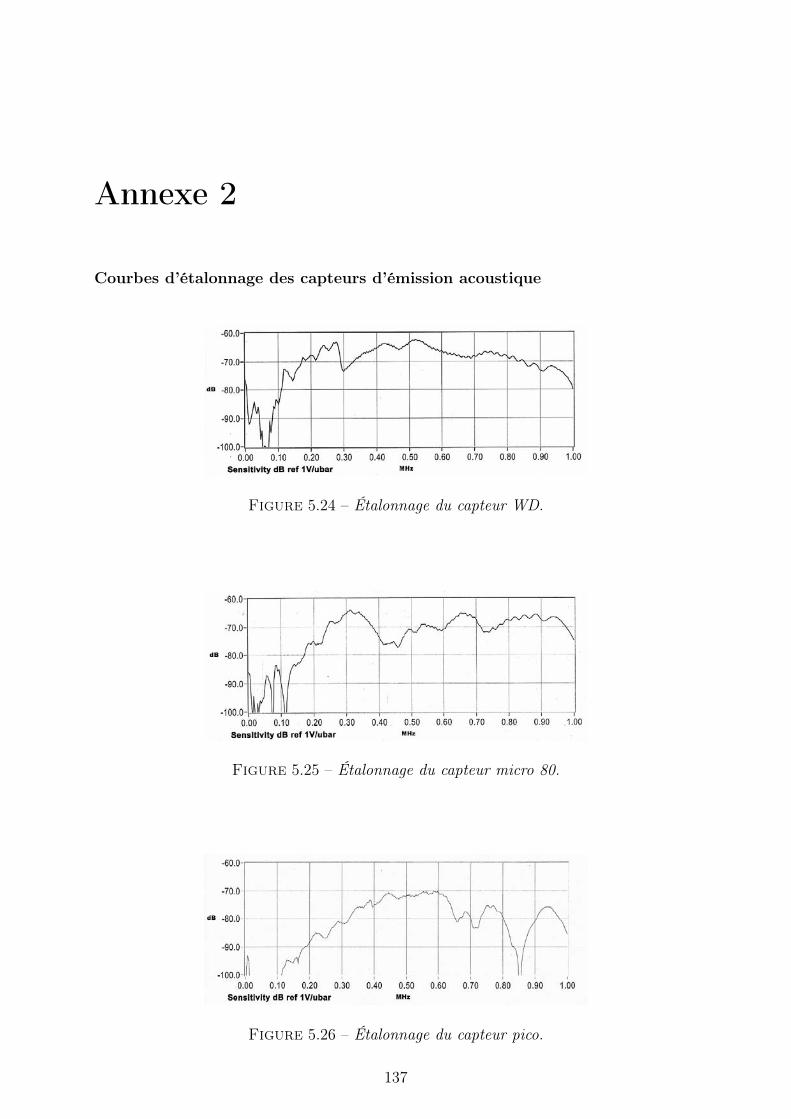
Annexe 2
Courbes d’étalonnage des capteurs d’émission acoustique
Figure 5.24 – Étalonnage du capteur WD.
Figure 5.25 – Étalonnage du capteur micro 80.
Figure 5.26 – Étalonnage du capteur pico.
137
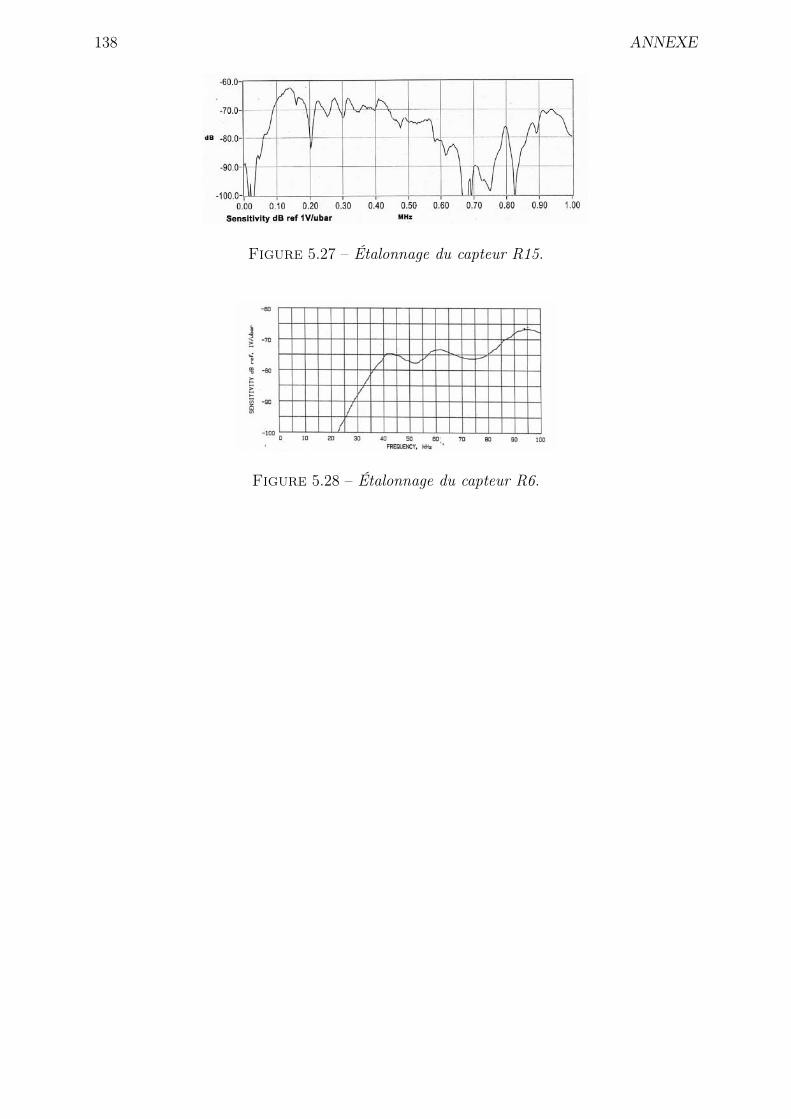
138 ANNEXE
Figure 5.27 – Étalonnage du capteur R15.
Figure 5.28 – Étalonnage du capteur R6.

Titre : Étude et caractérisation par émission acoustique et mesures électrochimiques de la fra-gilisation par l’hydrogène des câbles de précontrainte. Application aux ouvrages d’art
Mots clefs : câble de précontrainte, corrosion sous contrainte, fragilisation par l’hydrogène,émission acoustique, mesures électrochimiques
Résumé : Il existe aujourd’hui un parc important d’ouvrages d’art vieillissants dont les possibili-tés de surveillance n’ont pas été prévues dès leur construction ce qui rend leur évaluation difficile.Concernant les ouvrages en béton précontraint, l’une de leurs principales causes de dégradationest la corrosion des câbles de précontrainte en général et leur fragilisation par l’hydrogène enparticulier. Dans ce but, l’émission acoustique (EA) peut être une alternative pour l’inspectionet le contrôle de ces ouvrages.L’objectif de ce travail est non seulement d’étudier le potentiel de l’EA à détecter l’endomma-gement des armatures de précontrainte provoqué par fragilisation par l’hydrogène, mais aussid’examiner l’adaptation de cette technique d’auscultation aux exigences structurelles des ou-vrages.En couplant le suivi acoustique à des mesures électrochimiques, la validation de cette techniqueest réalisée sur des structures de laboratoire à partir d’essais normalisés et accélérés dans un mi-lieu de thiocyanate d’ammonium. Les résultats obtenus montrent que l’EA est performante pourl’étude mécanistique et le contrôle de ce mode de corrosion. Ensuite des essais pilotes sur desstructures complexes permettent de se rapprocher d’une auscultation sur ouvrage et égalementde caractériser les limites de l’EA pour son application in situ.
Title : Study and characterization with acoustic emission and electrochemical measurements ofhydrogen embrittlement of prestressing strands. Application to structures of civil engineering
Keywords : prestressing strand, stress corrosion cracking, hydrogen embrittlement, acousticemission, electrochemical measurements
Abstract : Today, there is an important amount of ageing structures whose monitoring possibi-lities have not been planed from their construction. Their evaluation is then difficult. Concerningprestressed concrete bridges, one of their main degradation forms is the corrosion of prestressingstrands, which are crucial elements of these structures. The inspection of these bridges need thedevelopment of new non destructive testing, like acoustic emission (AE).The objective of this work is dual. Firstly, the potential of AE to detect strands corrosion hasto be verify. Then, the accomodation of the monitoring technique to the geometry of bridges isexamined.The validation of the technique is realised on laboratory frames, from accelerated corrosiontests with ammonium thiocyanate. Results show that AE is efficient to detect some corrosionmechanisms on laboratory tests. Results are validated by coupling the acoustic monitoring toelectrochemical measurements. Then, the transition to more complex structures enables to beclose to a bridge monitoring but also to characterize AE limits.