Traitement numérique du signal - LSIS · Objectifs et prérequis • Objectifs – Acquérir les...
102
Traitement numérique du signal Eric Busvelle
-
Upload
phungthien -
Category
Documents
-
view
224 -
download
1
Transcript of Traitement numérique du signal - LSIS · Objectifs et prérequis • Objectifs – Acquérir les...
Traitement numeacuterique du signal
Eric Busvelle
Objectifs et preacuteshyrequis
bull Objectifsndash Acqueacuterir les outils matheacutematiques utiles au
traitement du signalndash Maicirctriser les techniques de traitement du
signalbull Preacuteshyrequis
ndash M6 Matheacutematiques pour le signal discretndash TR1 Modulations numeacuteriques et notions de
compression
Sommaire PPN
bull Notions de signaux aleacuteatoires (bruit)bull Correacutelation orthogonaliteacutebull Transformeacutee de Fourier discregravete 1D2Dbull Rappels sur la transformeacutee en Zbull Filtrage numeacuteriquebull Applications agrave la compression audiovideacuteo
Mots cleacutes FFT filtrage numeacuterique compression
Indications de mise en oeuvre
bull Applications aux DSP(Digital Signal Processor)
bull Logiciels de calcul numeacuteriquendash Matlabndash Scilabndash Octave
Supports de cours
Deacutebuter en traitement numeacuterique du signal Application au filtrage et au traitement des sonsJeanshyNoeumll MartinProf Agrave lrsquoIUT drsquoAnnecy
Analyse et controcircle numeacuterique du signal
Philippe Destuynder Prof CNAMFranccediloise Santi Prof CNAM
Pour aller plus loinhellipOndelettes pour le signal numeacuteriqueFreacutedeacuteric Truchetet Prof agrave lrsquouB
The DSP handbookAlgorithms
Applications and design techniques
Bateman Bateman and PatersonshyStephens
Introduction
bull Pourquoi numeacuteriser un signalndash le stockerdupliquertransmettre sans perte ou au
contraire pour le compresserndash lui faire subir des traitements numeacuteriques (filtrage
analyse preacutedictionhellip)ndash meacutelanger diffeacuterents signaux de diffeacuterentes natures sur
de mecircmes supports (multimeacutedia son imagehellip)bull Avantages de la numeacuterisation
ndash preacutecision et stabiliteacute dans le temps et dans la productionndash souplesse polyvalence modulariteacute et eacutevolutiviteacute
Chaicircne de transformations
Locuteur Signal acoustique
Signal eacutelectrique
Signal numeacuterique
Auditeur
Signal continu
Micro
Signal continu
Hautshyparleur
Signal eacutechantillonneacute
CAN
Signal eacutechantillonneacute
CNA
Signal numeacuteriqueSignal compresseacute
Compression
Signal compresseacute
Deacutecompression
Des compeacutetences varieacutees
Monde exteacuterieur
Signal continu
Capteur Actionneur
Signal eacutechantillonneacute
CAN CNA
Signal compresseacute
Compression Deacutecompression
bull PhysiqueElectroniquendash Capteursndash Filtresndash DSP
bull Informatiquendash Programmation Matlab (RampD)
C assembleur hellipbull Matheacutematiques
ndash Probabiliteacutesndash Analyse de Fourierndash Transformeacutee (Z Laplace)
Plan du cours
bull I Eacutechantillonnagebull II Conversion Analogique Numeacuteriqueharr
bull III Analyse des systegravemes numeacuteriquesbull IV Filtrage numeacuteriquebull V Application Traitement numeacuterique des sons (TPs)
La structure du cours reprend les eacutetapes de traitement
Echantillonneurshybloqueur
Signal continu
gtgt N1=1000gtgt [xfs]=gensig(N1 16000 [30 40 45] [000]shy80)
function [xfs]=gensig(NFeFRRb) Geacutenegravere un signal qui est une somme de sinusoiumldes aux freacutequences F et avec des niveaux deacutenergie R Exemple raquo x=gensig(102416000[500 1000 1500 2000 2500][0shy5shy10shy15shy20]shy10) N=1024Fe=16000Hzf=500Hz 1000Hz 1500Hz 2000Hz et 2500Hz A= shy5dBshy10dBshy15dB et shy20dB le niveau de bruit est shy10dBTe=1Fe t=((1N)Fe)x=zeros(size(t)) E0=1for k=1length(F)
E=10^(R(k)20)E0 Leacutenergie dune sinusoiumlde est lieacutee agrave lamplitude par E=A^22A=sqrt(2E)x=x+Asin(2pitF(k))end
b=randn(size(t)) Jajoute un bruit blanc deacutenergie shy20dB par rapport agrave E0Eb=norm(b)^2N b=bsqrt(Eb)sqrt(10^(Rb20)E0) x=x+bE=norm(x)^2N Finallement je norme le signal en lui donnant une eacutenergie totale de 1x=xsqrt(E)p=N Je choisis de systeacutematiquement normaliser la TFDy=fft(xp)pf=((0(p2shy1))pFe)s=abs(y(1(p2)))
Echantillonneurshybloqueur
Signal bloqueacute
gtgt N0=15 gtgt dN=50 gtgt xb=x gtgt for i=N0dNshy1gtgt xb(idNN1) =xb(N0dNN1)gtgt end
Echantillonneurshybloqueur
Signal eacutechantillonneacute
gtgt xd=xb(N0dNN1)
ReconstructionSignal eacutechantillonneacute
ReconstructionSignal bloqueacute reconstruit
gtgt for i=1dNgtgt xr(idNN1)=xdgtgt end
ReconstructionSignal filtreacute
Synthegravese du filtre numeacuterique passeshybas (Chebyshev)
gtgt Fc=200gtgt Rp=05gtgt Wn=1dNgtgt [ba] =cheby1(9RpWn)
Filtrage
gtgt xf=filter(baxr)
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Objectifs et preacuteshyrequis
bull Objectifsndash Acqueacuterir les outils matheacutematiques utiles au
traitement du signalndash Maicirctriser les techniques de traitement du
signalbull Preacuteshyrequis
ndash M6 Matheacutematiques pour le signal discretndash TR1 Modulations numeacuteriques et notions de
compression
Sommaire PPN
bull Notions de signaux aleacuteatoires (bruit)bull Correacutelation orthogonaliteacutebull Transformeacutee de Fourier discregravete 1D2Dbull Rappels sur la transformeacutee en Zbull Filtrage numeacuteriquebull Applications agrave la compression audiovideacuteo
Mots cleacutes FFT filtrage numeacuterique compression
Indications de mise en oeuvre
bull Applications aux DSP(Digital Signal Processor)
bull Logiciels de calcul numeacuteriquendash Matlabndash Scilabndash Octave
Supports de cours
Deacutebuter en traitement numeacuterique du signal Application au filtrage et au traitement des sonsJeanshyNoeumll MartinProf Agrave lrsquoIUT drsquoAnnecy
Analyse et controcircle numeacuterique du signal
Philippe Destuynder Prof CNAMFranccediloise Santi Prof CNAM
Pour aller plus loinhellipOndelettes pour le signal numeacuteriqueFreacutedeacuteric Truchetet Prof agrave lrsquouB
The DSP handbookAlgorithms
Applications and design techniques
Bateman Bateman and PatersonshyStephens
Introduction
bull Pourquoi numeacuteriser un signalndash le stockerdupliquertransmettre sans perte ou au
contraire pour le compresserndash lui faire subir des traitements numeacuteriques (filtrage
analyse preacutedictionhellip)ndash meacutelanger diffeacuterents signaux de diffeacuterentes natures sur
de mecircmes supports (multimeacutedia son imagehellip)bull Avantages de la numeacuterisation
ndash preacutecision et stabiliteacute dans le temps et dans la productionndash souplesse polyvalence modulariteacute et eacutevolutiviteacute
Chaicircne de transformations
Locuteur Signal acoustique
Signal eacutelectrique
Signal numeacuterique
Auditeur
Signal continu
Micro
Signal continu
Hautshyparleur
Signal eacutechantillonneacute
CAN
Signal eacutechantillonneacute
CNA
Signal numeacuteriqueSignal compresseacute
Compression
Signal compresseacute
Deacutecompression
Des compeacutetences varieacutees
Monde exteacuterieur
Signal continu
Capteur Actionneur
Signal eacutechantillonneacute
CAN CNA
Signal compresseacute
Compression Deacutecompression
bull PhysiqueElectroniquendash Capteursndash Filtresndash DSP
bull Informatiquendash Programmation Matlab (RampD)
C assembleur hellipbull Matheacutematiques
ndash Probabiliteacutesndash Analyse de Fourierndash Transformeacutee (Z Laplace)
Plan du cours
bull I Eacutechantillonnagebull II Conversion Analogique Numeacuteriqueharr
bull III Analyse des systegravemes numeacuteriquesbull IV Filtrage numeacuteriquebull V Application Traitement numeacuterique des sons (TPs)
La structure du cours reprend les eacutetapes de traitement
Echantillonneurshybloqueur
Signal continu
gtgt N1=1000gtgt [xfs]=gensig(N1 16000 [30 40 45] [000]shy80)
function [xfs]=gensig(NFeFRRb) Geacutenegravere un signal qui est une somme de sinusoiumldes aux freacutequences F et avec des niveaux deacutenergie R Exemple raquo x=gensig(102416000[500 1000 1500 2000 2500][0shy5shy10shy15shy20]shy10) N=1024Fe=16000Hzf=500Hz 1000Hz 1500Hz 2000Hz et 2500Hz A= shy5dBshy10dBshy15dB et shy20dB le niveau de bruit est shy10dBTe=1Fe t=((1N)Fe)x=zeros(size(t)) E0=1for k=1length(F)
E=10^(R(k)20)E0 Leacutenergie dune sinusoiumlde est lieacutee agrave lamplitude par E=A^22A=sqrt(2E)x=x+Asin(2pitF(k))end
b=randn(size(t)) Jajoute un bruit blanc deacutenergie shy20dB par rapport agrave E0Eb=norm(b)^2N b=bsqrt(Eb)sqrt(10^(Rb20)E0) x=x+bE=norm(x)^2N Finallement je norme le signal en lui donnant une eacutenergie totale de 1x=xsqrt(E)p=N Je choisis de systeacutematiquement normaliser la TFDy=fft(xp)pf=((0(p2shy1))pFe)s=abs(y(1(p2)))
Echantillonneurshybloqueur
Signal bloqueacute
gtgt N0=15 gtgt dN=50 gtgt xb=x gtgt for i=N0dNshy1gtgt xb(idNN1) =xb(N0dNN1)gtgt end
Echantillonneurshybloqueur
Signal eacutechantillonneacute
gtgt xd=xb(N0dNN1)
ReconstructionSignal eacutechantillonneacute
ReconstructionSignal bloqueacute reconstruit
gtgt for i=1dNgtgt xr(idNN1)=xdgtgt end
ReconstructionSignal filtreacute
Synthegravese du filtre numeacuterique passeshybas (Chebyshev)
gtgt Fc=200gtgt Rp=05gtgt Wn=1dNgtgt [ba] =cheby1(9RpWn)
Filtrage
gtgt xf=filter(baxr)
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Sommaire PPN
bull Notions de signaux aleacuteatoires (bruit)bull Correacutelation orthogonaliteacutebull Transformeacutee de Fourier discregravete 1D2Dbull Rappels sur la transformeacutee en Zbull Filtrage numeacuteriquebull Applications agrave la compression audiovideacuteo
Mots cleacutes FFT filtrage numeacuterique compression
Indications de mise en oeuvre
bull Applications aux DSP(Digital Signal Processor)
bull Logiciels de calcul numeacuteriquendash Matlabndash Scilabndash Octave
Supports de cours
Deacutebuter en traitement numeacuterique du signal Application au filtrage et au traitement des sonsJeanshyNoeumll MartinProf Agrave lrsquoIUT drsquoAnnecy
Analyse et controcircle numeacuterique du signal
Philippe Destuynder Prof CNAMFranccediloise Santi Prof CNAM
Pour aller plus loinhellipOndelettes pour le signal numeacuteriqueFreacutedeacuteric Truchetet Prof agrave lrsquouB
The DSP handbookAlgorithms
Applications and design techniques
Bateman Bateman and PatersonshyStephens
Introduction
bull Pourquoi numeacuteriser un signalndash le stockerdupliquertransmettre sans perte ou au
contraire pour le compresserndash lui faire subir des traitements numeacuteriques (filtrage
analyse preacutedictionhellip)ndash meacutelanger diffeacuterents signaux de diffeacuterentes natures sur
de mecircmes supports (multimeacutedia son imagehellip)bull Avantages de la numeacuterisation
ndash preacutecision et stabiliteacute dans le temps et dans la productionndash souplesse polyvalence modulariteacute et eacutevolutiviteacute
Chaicircne de transformations
Locuteur Signal acoustique
Signal eacutelectrique
Signal numeacuterique
Auditeur
Signal continu
Micro
Signal continu
Hautshyparleur
Signal eacutechantillonneacute
CAN
Signal eacutechantillonneacute
CNA
Signal numeacuteriqueSignal compresseacute
Compression
Signal compresseacute
Deacutecompression
Des compeacutetences varieacutees
Monde exteacuterieur
Signal continu
Capteur Actionneur
Signal eacutechantillonneacute
CAN CNA
Signal compresseacute
Compression Deacutecompression
bull PhysiqueElectroniquendash Capteursndash Filtresndash DSP
bull Informatiquendash Programmation Matlab (RampD)
C assembleur hellipbull Matheacutematiques
ndash Probabiliteacutesndash Analyse de Fourierndash Transformeacutee (Z Laplace)
Plan du cours
bull I Eacutechantillonnagebull II Conversion Analogique Numeacuteriqueharr
bull III Analyse des systegravemes numeacuteriquesbull IV Filtrage numeacuteriquebull V Application Traitement numeacuterique des sons (TPs)
La structure du cours reprend les eacutetapes de traitement
Echantillonneurshybloqueur
Signal continu
gtgt N1=1000gtgt [xfs]=gensig(N1 16000 [30 40 45] [000]shy80)
function [xfs]=gensig(NFeFRRb) Geacutenegravere un signal qui est une somme de sinusoiumldes aux freacutequences F et avec des niveaux deacutenergie R Exemple raquo x=gensig(102416000[500 1000 1500 2000 2500][0shy5shy10shy15shy20]shy10) N=1024Fe=16000Hzf=500Hz 1000Hz 1500Hz 2000Hz et 2500Hz A= shy5dBshy10dBshy15dB et shy20dB le niveau de bruit est shy10dBTe=1Fe t=((1N)Fe)x=zeros(size(t)) E0=1for k=1length(F)
E=10^(R(k)20)E0 Leacutenergie dune sinusoiumlde est lieacutee agrave lamplitude par E=A^22A=sqrt(2E)x=x+Asin(2pitF(k))end
b=randn(size(t)) Jajoute un bruit blanc deacutenergie shy20dB par rapport agrave E0Eb=norm(b)^2N b=bsqrt(Eb)sqrt(10^(Rb20)E0) x=x+bE=norm(x)^2N Finallement je norme le signal en lui donnant une eacutenergie totale de 1x=xsqrt(E)p=N Je choisis de systeacutematiquement normaliser la TFDy=fft(xp)pf=((0(p2shy1))pFe)s=abs(y(1(p2)))
Echantillonneurshybloqueur
Signal bloqueacute
gtgt N0=15 gtgt dN=50 gtgt xb=x gtgt for i=N0dNshy1gtgt xb(idNN1) =xb(N0dNN1)gtgt end
Echantillonneurshybloqueur
Signal eacutechantillonneacute
gtgt xd=xb(N0dNN1)
ReconstructionSignal eacutechantillonneacute
ReconstructionSignal bloqueacute reconstruit
gtgt for i=1dNgtgt xr(idNN1)=xdgtgt end
ReconstructionSignal filtreacute
Synthegravese du filtre numeacuterique passeshybas (Chebyshev)
gtgt Fc=200gtgt Rp=05gtgt Wn=1dNgtgt [ba] =cheby1(9RpWn)
Filtrage
gtgt xf=filter(baxr)
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Indications de mise en oeuvre
bull Applications aux DSP(Digital Signal Processor)
bull Logiciels de calcul numeacuteriquendash Matlabndash Scilabndash Octave
Supports de cours
Deacutebuter en traitement numeacuterique du signal Application au filtrage et au traitement des sonsJeanshyNoeumll MartinProf Agrave lrsquoIUT drsquoAnnecy
Analyse et controcircle numeacuterique du signal
Philippe Destuynder Prof CNAMFranccediloise Santi Prof CNAM
Pour aller plus loinhellipOndelettes pour le signal numeacuteriqueFreacutedeacuteric Truchetet Prof agrave lrsquouB
The DSP handbookAlgorithms
Applications and design techniques
Bateman Bateman and PatersonshyStephens
Introduction
bull Pourquoi numeacuteriser un signalndash le stockerdupliquertransmettre sans perte ou au
contraire pour le compresserndash lui faire subir des traitements numeacuteriques (filtrage
analyse preacutedictionhellip)ndash meacutelanger diffeacuterents signaux de diffeacuterentes natures sur
de mecircmes supports (multimeacutedia son imagehellip)bull Avantages de la numeacuterisation
ndash preacutecision et stabiliteacute dans le temps et dans la productionndash souplesse polyvalence modulariteacute et eacutevolutiviteacute
Chaicircne de transformations
Locuteur Signal acoustique
Signal eacutelectrique
Signal numeacuterique
Auditeur
Signal continu
Micro
Signal continu
Hautshyparleur
Signal eacutechantillonneacute
CAN
Signal eacutechantillonneacute
CNA
Signal numeacuteriqueSignal compresseacute
Compression
Signal compresseacute
Deacutecompression
Des compeacutetences varieacutees
Monde exteacuterieur
Signal continu
Capteur Actionneur
Signal eacutechantillonneacute
CAN CNA
Signal compresseacute
Compression Deacutecompression
bull PhysiqueElectroniquendash Capteursndash Filtresndash DSP
bull Informatiquendash Programmation Matlab (RampD)
C assembleur hellipbull Matheacutematiques
ndash Probabiliteacutesndash Analyse de Fourierndash Transformeacutee (Z Laplace)
Plan du cours
bull I Eacutechantillonnagebull II Conversion Analogique Numeacuteriqueharr
bull III Analyse des systegravemes numeacuteriquesbull IV Filtrage numeacuteriquebull V Application Traitement numeacuterique des sons (TPs)
La structure du cours reprend les eacutetapes de traitement
Echantillonneurshybloqueur
Signal continu
gtgt N1=1000gtgt [xfs]=gensig(N1 16000 [30 40 45] [000]shy80)
function [xfs]=gensig(NFeFRRb) Geacutenegravere un signal qui est une somme de sinusoiumldes aux freacutequences F et avec des niveaux deacutenergie R Exemple raquo x=gensig(102416000[500 1000 1500 2000 2500][0shy5shy10shy15shy20]shy10) N=1024Fe=16000Hzf=500Hz 1000Hz 1500Hz 2000Hz et 2500Hz A= shy5dBshy10dBshy15dB et shy20dB le niveau de bruit est shy10dBTe=1Fe t=((1N)Fe)x=zeros(size(t)) E0=1for k=1length(F)
E=10^(R(k)20)E0 Leacutenergie dune sinusoiumlde est lieacutee agrave lamplitude par E=A^22A=sqrt(2E)x=x+Asin(2pitF(k))end
b=randn(size(t)) Jajoute un bruit blanc deacutenergie shy20dB par rapport agrave E0Eb=norm(b)^2N b=bsqrt(Eb)sqrt(10^(Rb20)E0) x=x+bE=norm(x)^2N Finallement je norme le signal en lui donnant une eacutenergie totale de 1x=xsqrt(E)p=N Je choisis de systeacutematiquement normaliser la TFDy=fft(xp)pf=((0(p2shy1))pFe)s=abs(y(1(p2)))
Echantillonneurshybloqueur
Signal bloqueacute
gtgt N0=15 gtgt dN=50 gtgt xb=x gtgt for i=N0dNshy1gtgt xb(idNN1) =xb(N0dNN1)gtgt end
Echantillonneurshybloqueur
Signal eacutechantillonneacute
gtgt xd=xb(N0dNN1)
ReconstructionSignal eacutechantillonneacute
ReconstructionSignal bloqueacute reconstruit
gtgt for i=1dNgtgt xr(idNN1)=xdgtgt end
ReconstructionSignal filtreacute
Synthegravese du filtre numeacuterique passeshybas (Chebyshev)
gtgt Fc=200gtgt Rp=05gtgt Wn=1dNgtgt [ba] =cheby1(9RpWn)
Filtrage
gtgt xf=filter(baxr)
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Supports de cours
Deacutebuter en traitement numeacuterique du signal Application au filtrage et au traitement des sonsJeanshyNoeumll MartinProf Agrave lrsquoIUT drsquoAnnecy
Analyse et controcircle numeacuterique du signal
Philippe Destuynder Prof CNAMFranccediloise Santi Prof CNAM
Pour aller plus loinhellipOndelettes pour le signal numeacuteriqueFreacutedeacuteric Truchetet Prof agrave lrsquouB
The DSP handbookAlgorithms
Applications and design techniques
Bateman Bateman and PatersonshyStephens
Introduction
bull Pourquoi numeacuteriser un signalndash le stockerdupliquertransmettre sans perte ou au
contraire pour le compresserndash lui faire subir des traitements numeacuteriques (filtrage
analyse preacutedictionhellip)ndash meacutelanger diffeacuterents signaux de diffeacuterentes natures sur
de mecircmes supports (multimeacutedia son imagehellip)bull Avantages de la numeacuterisation
ndash preacutecision et stabiliteacute dans le temps et dans la productionndash souplesse polyvalence modulariteacute et eacutevolutiviteacute
Chaicircne de transformations
Locuteur Signal acoustique
Signal eacutelectrique
Signal numeacuterique
Auditeur
Signal continu
Micro
Signal continu
Hautshyparleur
Signal eacutechantillonneacute
CAN
Signal eacutechantillonneacute
CNA
Signal numeacuteriqueSignal compresseacute
Compression
Signal compresseacute
Deacutecompression
Des compeacutetences varieacutees
Monde exteacuterieur
Signal continu
Capteur Actionneur
Signal eacutechantillonneacute
CAN CNA
Signal compresseacute
Compression Deacutecompression
bull PhysiqueElectroniquendash Capteursndash Filtresndash DSP
bull Informatiquendash Programmation Matlab (RampD)
C assembleur hellipbull Matheacutematiques
ndash Probabiliteacutesndash Analyse de Fourierndash Transformeacutee (Z Laplace)
Plan du cours
bull I Eacutechantillonnagebull II Conversion Analogique Numeacuteriqueharr
bull III Analyse des systegravemes numeacuteriquesbull IV Filtrage numeacuteriquebull V Application Traitement numeacuterique des sons (TPs)
La structure du cours reprend les eacutetapes de traitement
Echantillonneurshybloqueur
Signal continu
gtgt N1=1000gtgt [xfs]=gensig(N1 16000 [30 40 45] [000]shy80)
function [xfs]=gensig(NFeFRRb) Geacutenegravere un signal qui est une somme de sinusoiumldes aux freacutequences F et avec des niveaux deacutenergie R Exemple raquo x=gensig(102416000[500 1000 1500 2000 2500][0shy5shy10shy15shy20]shy10) N=1024Fe=16000Hzf=500Hz 1000Hz 1500Hz 2000Hz et 2500Hz A= shy5dBshy10dBshy15dB et shy20dB le niveau de bruit est shy10dBTe=1Fe t=((1N)Fe)x=zeros(size(t)) E0=1for k=1length(F)
E=10^(R(k)20)E0 Leacutenergie dune sinusoiumlde est lieacutee agrave lamplitude par E=A^22A=sqrt(2E)x=x+Asin(2pitF(k))end
b=randn(size(t)) Jajoute un bruit blanc deacutenergie shy20dB par rapport agrave E0Eb=norm(b)^2N b=bsqrt(Eb)sqrt(10^(Rb20)E0) x=x+bE=norm(x)^2N Finallement je norme le signal en lui donnant une eacutenergie totale de 1x=xsqrt(E)p=N Je choisis de systeacutematiquement normaliser la TFDy=fft(xp)pf=((0(p2shy1))pFe)s=abs(y(1(p2)))
Echantillonneurshybloqueur
Signal bloqueacute
gtgt N0=15 gtgt dN=50 gtgt xb=x gtgt for i=N0dNshy1gtgt xb(idNN1) =xb(N0dNN1)gtgt end
Echantillonneurshybloqueur
Signal eacutechantillonneacute
gtgt xd=xb(N0dNN1)
ReconstructionSignal eacutechantillonneacute
ReconstructionSignal bloqueacute reconstruit
gtgt for i=1dNgtgt xr(idNN1)=xdgtgt end
ReconstructionSignal filtreacute
Synthegravese du filtre numeacuterique passeshybas (Chebyshev)
gtgt Fc=200gtgt Rp=05gtgt Wn=1dNgtgt [ba] =cheby1(9RpWn)
Filtrage
gtgt xf=filter(baxr)
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Pour aller plus loinhellipOndelettes pour le signal numeacuteriqueFreacutedeacuteric Truchetet Prof agrave lrsquouB
The DSP handbookAlgorithms
Applications and design techniques
Bateman Bateman and PatersonshyStephens
Introduction
bull Pourquoi numeacuteriser un signalndash le stockerdupliquertransmettre sans perte ou au
contraire pour le compresserndash lui faire subir des traitements numeacuteriques (filtrage
analyse preacutedictionhellip)ndash meacutelanger diffeacuterents signaux de diffeacuterentes natures sur
de mecircmes supports (multimeacutedia son imagehellip)bull Avantages de la numeacuterisation
ndash preacutecision et stabiliteacute dans le temps et dans la productionndash souplesse polyvalence modulariteacute et eacutevolutiviteacute
Chaicircne de transformations
Locuteur Signal acoustique
Signal eacutelectrique
Signal numeacuterique
Auditeur
Signal continu
Micro
Signal continu
Hautshyparleur
Signal eacutechantillonneacute
CAN
Signal eacutechantillonneacute
CNA
Signal numeacuteriqueSignal compresseacute
Compression
Signal compresseacute
Deacutecompression
Des compeacutetences varieacutees
Monde exteacuterieur
Signal continu
Capteur Actionneur
Signal eacutechantillonneacute
CAN CNA
Signal compresseacute
Compression Deacutecompression
bull PhysiqueElectroniquendash Capteursndash Filtresndash DSP
bull Informatiquendash Programmation Matlab (RampD)
C assembleur hellipbull Matheacutematiques
ndash Probabiliteacutesndash Analyse de Fourierndash Transformeacutee (Z Laplace)
Plan du cours
bull I Eacutechantillonnagebull II Conversion Analogique Numeacuteriqueharr
bull III Analyse des systegravemes numeacuteriquesbull IV Filtrage numeacuteriquebull V Application Traitement numeacuterique des sons (TPs)
La structure du cours reprend les eacutetapes de traitement
Echantillonneurshybloqueur
Signal continu
gtgt N1=1000gtgt [xfs]=gensig(N1 16000 [30 40 45] [000]shy80)
function [xfs]=gensig(NFeFRRb) Geacutenegravere un signal qui est une somme de sinusoiumldes aux freacutequences F et avec des niveaux deacutenergie R Exemple raquo x=gensig(102416000[500 1000 1500 2000 2500][0shy5shy10shy15shy20]shy10) N=1024Fe=16000Hzf=500Hz 1000Hz 1500Hz 2000Hz et 2500Hz A= shy5dBshy10dBshy15dB et shy20dB le niveau de bruit est shy10dBTe=1Fe t=((1N)Fe)x=zeros(size(t)) E0=1for k=1length(F)
E=10^(R(k)20)E0 Leacutenergie dune sinusoiumlde est lieacutee agrave lamplitude par E=A^22A=sqrt(2E)x=x+Asin(2pitF(k))end
b=randn(size(t)) Jajoute un bruit blanc deacutenergie shy20dB par rapport agrave E0Eb=norm(b)^2N b=bsqrt(Eb)sqrt(10^(Rb20)E0) x=x+bE=norm(x)^2N Finallement je norme le signal en lui donnant une eacutenergie totale de 1x=xsqrt(E)p=N Je choisis de systeacutematiquement normaliser la TFDy=fft(xp)pf=((0(p2shy1))pFe)s=abs(y(1(p2)))
Echantillonneurshybloqueur
Signal bloqueacute
gtgt N0=15 gtgt dN=50 gtgt xb=x gtgt for i=N0dNshy1gtgt xb(idNN1) =xb(N0dNN1)gtgt end
Echantillonneurshybloqueur
Signal eacutechantillonneacute
gtgt xd=xb(N0dNN1)
ReconstructionSignal eacutechantillonneacute
ReconstructionSignal bloqueacute reconstruit
gtgt for i=1dNgtgt xr(idNN1)=xdgtgt end
ReconstructionSignal filtreacute
Synthegravese du filtre numeacuterique passeshybas (Chebyshev)
gtgt Fc=200gtgt Rp=05gtgt Wn=1dNgtgt [ba] =cheby1(9RpWn)
Filtrage
gtgt xf=filter(baxr)
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Introduction
bull Pourquoi numeacuteriser un signalndash le stockerdupliquertransmettre sans perte ou au
contraire pour le compresserndash lui faire subir des traitements numeacuteriques (filtrage
analyse preacutedictionhellip)ndash meacutelanger diffeacuterents signaux de diffeacuterentes natures sur
de mecircmes supports (multimeacutedia son imagehellip)bull Avantages de la numeacuterisation
ndash preacutecision et stabiliteacute dans le temps et dans la productionndash souplesse polyvalence modulariteacute et eacutevolutiviteacute
Chaicircne de transformations
Locuteur Signal acoustique
Signal eacutelectrique
Signal numeacuterique
Auditeur
Signal continu
Micro
Signal continu
Hautshyparleur
Signal eacutechantillonneacute
CAN
Signal eacutechantillonneacute
CNA
Signal numeacuteriqueSignal compresseacute
Compression
Signal compresseacute
Deacutecompression
Des compeacutetences varieacutees
Monde exteacuterieur
Signal continu
Capteur Actionneur
Signal eacutechantillonneacute
CAN CNA
Signal compresseacute
Compression Deacutecompression
bull PhysiqueElectroniquendash Capteursndash Filtresndash DSP
bull Informatiquendash Programmation Matlab (RampD)
C assembleur hellipbull Matheacutematiques
ndash Probabiliteacutesndash Analyse de Fourierndash Transformeacutee (Z Laplace)
Plan du cours
bull I Eacutechantillonnagebull II Conversion Analogique Numeacuteriqueharr
bull III Analyse des systegravemes numeacuteriquesbull IV Filtrage numeacuteriquebull V Application Traitement numeacuterique des sons (TPs)
La structure du cours reprend les eacutetapes de traitement
Echantillonneurshybloqueur
Signal continu
gtgt N1=1000gtgt [xfs]=gensig(N1 16000 [30 40 45] [000]shy80)
function [xfs]=gensig(NFeFRRb) Geacutenegravere un signal qui est une somme de sinusoiumldes aux freacutequences F et avec des niveaux deacutenergie R Exemple raquo x=gensig(102416000[500 1000 1500 2000 2500][0shy5shy10shy15shy20]shy10) N=1024Fe=16000Hzf=500Hz 1000Hz 1500Hz 2000Hz et 2500Hz A= shy5dBshy10dBshy15dB et shy20dB le niveau de bruit est shy10dBTe=1Fe t=((1N)Fe)x=zeros(size(t)) E0=1for k=1length(F)
E=10^(R(k)20)E0 Leacutenergie dune sinusoiumlde est lieacutee agrave lamplitude par E=A^22A=sqrt(2E)x=x+Asin(2pitF(k))end
b=randn(size(t)) Jajoute un bruit blanc deacutenergie shy20dB par rapport agrave E0Eb=norm(b)^2N b=bsqrt(Eb)sqrt(10^(Rb20)E0) x=x+bE=norm(x)^2N Finallement je norme le signal en lui donnant une eacutenergie totale de 1x=xsqrt(E)p=N Je choisis de systeacutematiquement normaliser la TFDy=fft(xp)pf=((0(p2shy1))pFe)s=abs(y(1(p2)))
Echantillonneurshybloqueur
Signal bloqueacute
gtgt N0=15 gtgt dN=50 gtgt xb=x gtgt for i=N0dNshy1gtgt xb(idNN1) =xb(N0dNN1)gtgt end
Echantillonneurshybloqueur
Signal eacutechantillonneacute
gtgt xd=xb(N0dNN1)
ReconstructionSignal eacutechantillonneacute
ReconstructionSignal bloqueacute reconstruit
gtgt for i=1dNgtgt xr(idNN1)=xdgtgt end
ReconstructionSignal filtreacute
Synthegravese du filtre numeacuterique passeshybas (Chebyshev)
gtgt Fc=200gtgt Rp=05gtgt Wn=1dNgtgt [ba] =cheby1(9RpWn)
Filtrage
gtgt xf=filter(baxr)
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
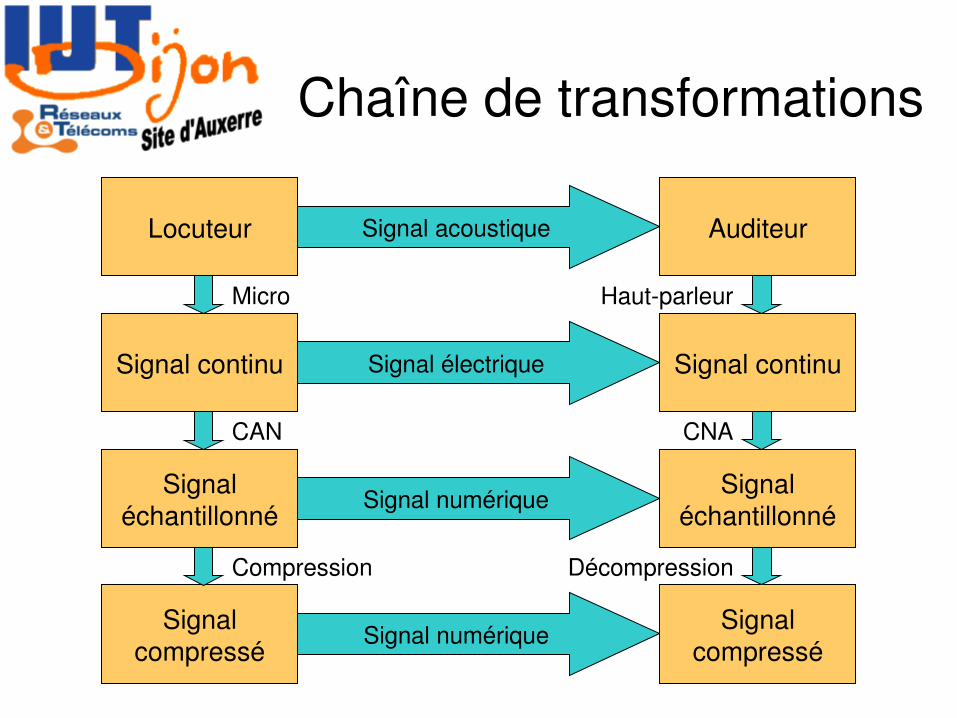
Chaicircne de transformations
Locuteur Signal acoustique
Signal eacutelectrique
Signal numeacuterique
Auditeur
Signal continu
Micro
Signal continu
Hautshyparleur
Signal eacutechantillonneacute
CAN
Signal eacutechantillonneacute
CNA
Signal numeacuteriqueSignal compresseacute
Compression
Signal compresseacute
Deacutecompression
Des compeacutetences varieacutees
Monde exteacuterieur
Signal continu
Capteur Actionneur
Signal eacutechantillonneacute
CAN CNA
Signal compresseacute
Compression Deacutecompression
bull PhysiqueElectroniquendash Capteursndash Filtresndash DSP
bull Informatiquendash Programmation Matlab (RampD)
C assembleur hellipbull Matheacutematiques
ndash Probabiliteacutesndash Analyse de Fourierndash Transformeacutee (Z Laplace)
Plan du cours
bull I Eacutechantillonnagebull II Conversion Analogique Numeacuteriqueharr
bull III Analyse des systegravemes numeacuteriquesbull IV Filtrage numeacuteriquebull V Application Traitement numeacuterique des sons (TPs)
La structure du cours reprend les eacutetapes de traitement
Echantillonneurshybloqueur
Signal continu
gtgt N1=1000gtgt [xfs]=gensig(N1 16000 [30 40 45] [000]shy80)
function [xfs]=gensig(NFeFRRb) Geacutenegravere un signal qui est une somme de sinusoiumldes aux freacutequences F et avec des niveaux deacutenergie R Exemple raquo x=gensig(102416000[500 1000 1500 2000 2500][0shy5shy10shy15shy20]shy10) N=1024Fe=16000Hzf=500Hz 1000Hz 1500Hz 2000Hz et 2500Hz A= shy5dBshy10dBshy15dB et shy20dB le niveau de bruit est shy10dBTe=1Fe t=((1N)Fe)x=zeros(size(t)) E0=1for k=1length(F)
E=10^(R(k)20)E0 Leacutenergie dune sinusoiumlde est lieacutee agrave lamplitude par E=A^22A=sqrt(2E)x=x+Asin(2pitF(k))end
b=randn(size(t)) Jajoute un bruit blanc deacutenergie shy20dB par rapport agrave E0Eb=norm(b)^2N b=bsqrt(Eb)sqrt(10^(Rb20)E0) x=x+bE=norm(x)^2N Finallement je norme le signal en lui donnant une eacutenergie totale de 1x=xsqrt(E)p=N Je choisis de systeacutematiquement normaliser la TFDy=fft(xp)pf=((0(p2shy1))pFe)s=abs(y(1(p2)))
Echantillonneurshybloqueur
Signal bloqueacute
gtgt N0=15 gtgt dN=50 gtgt xb=x gtgt for i=N0dNshy1gtgt xb(idNN1) =xb(N0dNN1)gtgt end
Echantillonneurshybloqueur
Signal eacutechantillonneacute
gtgt xd=xb(N0dNN1)
ReconstructionSignal eacutechantillonneacute
ReconstructionSignal bloqueacute reconstruit
gtgt for i=1dNgtgt xr(idNN1)=xdgtgt end
ReconstructionSignal filtreacute
Synthegravese du filtre numeacuterique passeshybas (Chebyshev)
gtgt Fc=200gtgt Rp=05gtgt Wn=1dNgtgt [ba] =cheby1(9RpWn)
Filtrage
gtgt xf=filter(baxr)
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
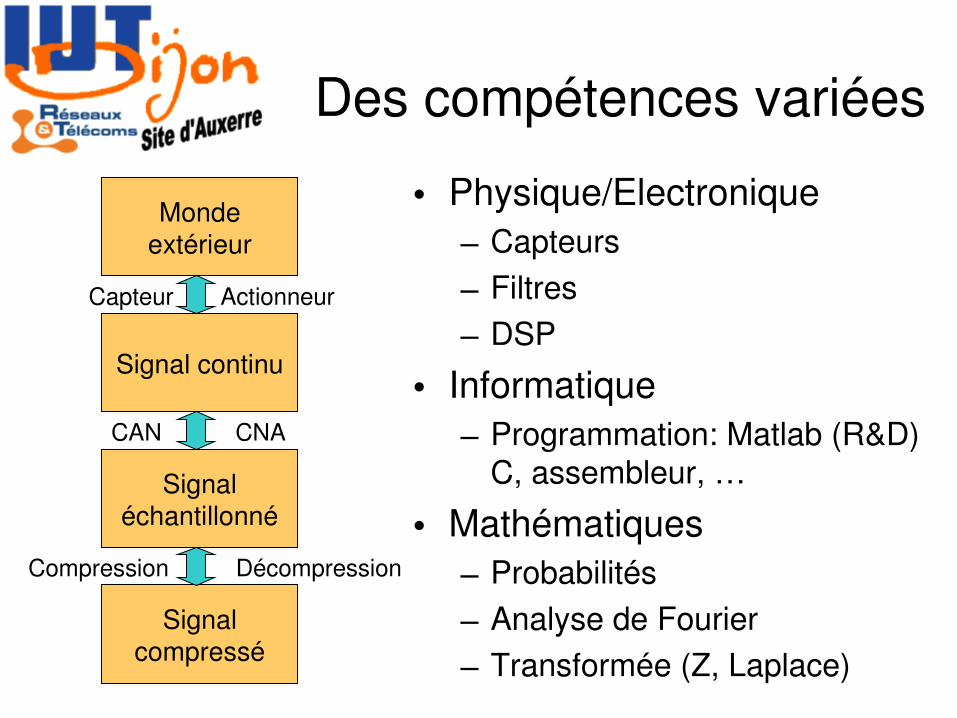
Des compeacutetences varieacutees
Monde exteacuterieur
Signal continu
Capteur Actionneur
Signal eacutechantillonneacute
CAN CNA
Signal compresseacute
Compression Deacutecompression
bull PhysiqueElectroniquendash Capteursndash Filtresndash DSP
bull Informatiquendash Programmation Matlab (RampD)
C assembleur hellipbull Matheacutematiques
ndash Probabiliteacutesndash Analyse de Fourierndash Transformeacutee (Z Laplace)
Plan du cours
bull I Eacutechantillonnagebull II Conversion Analogique Numeacuteriqueharr
bull III Analyse des systegravemes numeacuteriquesbull IV Filtrage numeacuteriquebull V Application Traitement numeacuterique des sons (TPs)
La structure du cours reprend les eacutetapes de traitement
Echantillonneurshybloqueur
Signal continu
gtgt N1=1000gtgt [xfs]=gensig(N1 16000 [30 40 45] [000]shy80)
function [xfs]=gensig(NFeFRRb) Geacutenegravere un signal qui est une somme de sinusoiumldes aux freacutequences F et avec des niveaux deacutenergie R Exemple raquo x=gensig(102416000[500 1000 1500 2000 2500][0shy5shy10shy15shy20]shy10) N=1024Fe=16000Hzf=500Hz 1000Hz 1500Hz 2000Hz et 2500Hz A= shy5dBshy10dBshy15dB et shy20dB le niveau de bruit est shy10dBTe=1Fe t=((1N)Fe)x=zeros(size(t)) E0=1for k=1length(F)
E=10^(R(k)20)E0 Leacutenergie dune sinusoiumlde est lieacutee agrave lamplitude par E=A^22A=sqrt(2E)x=x+Asin(2pitF(k))end
b=randn(size(t)) Jajoute un bruit blanc deacutenergie shy20dB par rapport agrave E0Eb=norm(b)^2N b=bsqrt(Eb)sqrt(10^(Rb20)E0) x=x+bE=norm(x)^2N Finallement je norme le signal en lui donnant une eacutenergie totale de 1x=xsqrt(E)p=N Je choisis de systeacutematiquement normaliser la TFDy=fft(xp)pf=((0(p2shy1))pFe)s=abs(y(1(p2)))
Echantillonneurshybloqueur
Signal bloqueacute
gtgt N0=15 gtgt dN=50 gtgt xb=x gtgt for i=N0dNshy1gtgt xb(idNN1) =xb(N0dNN1)gtgt end
Echantillonneurshybloqueur
Signal eacutechantillonneacute
gtgt xd=xb(N0dNN1)
ReconstructionSignal eacutechantillonneacute
ReconstructionSignal bloqueacute reconstruit
gtgt for i=1dNgtgt xr(idNN1)=xdgtgt end
ReconstructionSignal filtreacute
Synthegravese du filtre numeacuterique passeshybas (Chebyshev)
gtgt Fc=200gtgt Rp=05gtgt Wn=1dNgtgt [ba] =cheby1(9RpWn)
Filtrage
gtgt xf=filter(baxr)
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Plan du cours
bull I Eacutechantillonnagebull II Conversion Analogique Numeacuteriqueharr
bull III Analyse des systegravemes numeacuteriquesbull IV Filtrage numeacuteriquebull V Application Traitement numeacuterique des sons (TPs)
La structure du cours reprend les eacutetapes de traitement
Echantillonneurshybloqueur
Signal continu
gtgt N1=1000gtgt [xfs]=gensig(N1 16000 [30 40 45] [000]shy80)
function [xfs]=gensig(NFeFRRb) Geacutenegravere un signal qui est une somme de sinusoiumldes aux freacutequences F et avec des niveaux deacutenergie R Exemple raquo x=gensig(102416000[500 1000 1500 2000 2500][0shy5shy10shy15shy20]shy10) N=1024Fe=16000Hzf=500Hz 1000Hz 1500Hz 2000Hz et 2500Hz A= shy5dBshy10dBshy15dB et shy20dB le niveau de bruit est shy10dBTe=1Fe t=((1N)Fe)x=zeros(size(t)) E0=1for k=1length(F)
E=10^(R(k)20)E0 Leacutenergie dune sinusoiumlde est lieacutee agrave lamplitude par E=A^22A=sqrt(2E)x=x+Asin(2pitF(k))end
b=randn(size(t)) Jajoute un bruit blanc deacutenergie shy20dB par rapport agrave E0Eb=norm(b)^2N b=bsqrt(Eb)sqrt(10^(Rb20)E0) x=x+bE=norm(x)^2N Finallement je norme le signal en lui donnant une eacutenergie totale de 1x=xsqrt(E)p=N Je choisis de systeacutematiquement normaliser la TFDy=fft(xp)pf=((0(p2shy1))pFe)s=abs(y(1(p2)))
Echantillonneurshybloqueur
Signal bloqueacute
gtgt N0=15 gtgt dN=50 gtgt xb=x gtgt for i=N0dNshy1gtgt xb(idNN1) =xb(N0dNN1)gtgt end
Echantillonneurshybloqueur
Signal eacutechantillonneacute
gtgt xd=xb(N0dNN1)
ReconstructionSignal eacutechantillonneacute
ReconstructionSignal bloqueacute reconstruit
gtgt for i=1dNgtgt xr(idNN1)=xdgtgt end
ReconstructionSignal filtreacute
Synthegravese du filtre numeacuterique passeshybas (Chebyshev)
gtgt Fc=200gtgt Rp=05gtgt Wn=1dNgtgt [ba] =cheby1(9RpWn)
Filtrage
gtgt xf=filter(baxr)
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
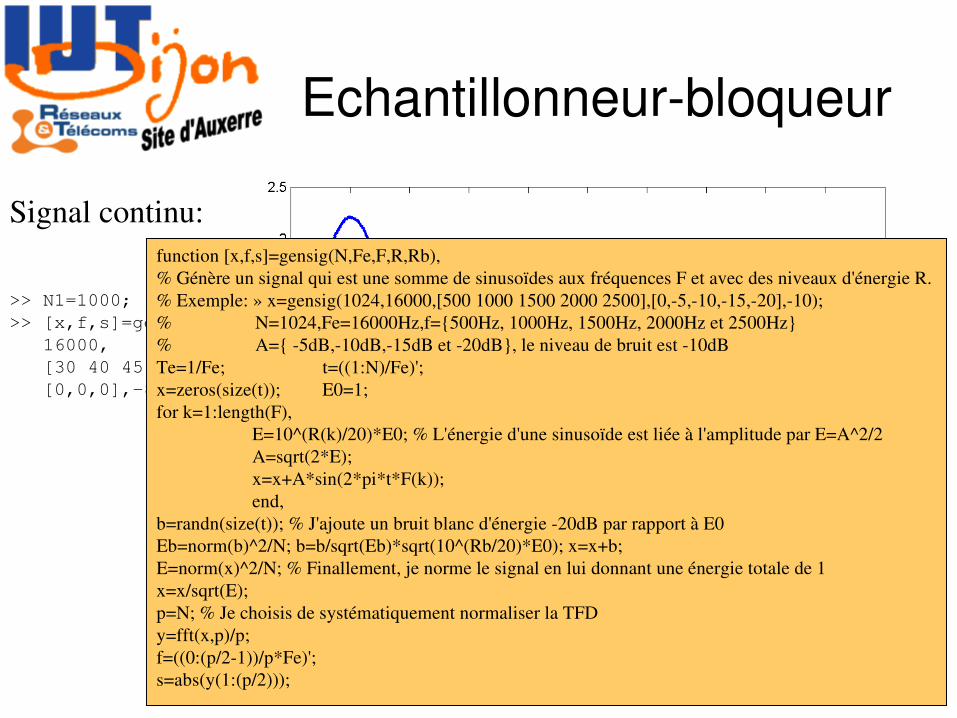
Echantillonneurshybloqueur
Signal continu
gtgt N1=1000gtgt [xfs]=gensig(N1 16000 [30 40 45] [000]shy80)
function [xfs]=gensig(NFeFRRb) Geacutenegravere un signal qui est une somme de sinusoiumldes aux freacutequences F et avec des niveaux deacutenergie R Exemple raquo x=gensig(102416000[500 1000 1500 2000 2500][0shy5shy10shy15shy20]shy10) N=1024Fe=16000Hzf=500Hz 1000Hz 1500Hz 2000Hz et 2500Hz A= shy5dBshy10dBshy15dB et shy20dB le niveau de bruit est shy10dBTe=1Fe t=((1N)Fe)x=zeros(size(t)) E0=1for k=1length(F)
E=10^(R(k)20)E0 Leacutenergie dune sinusoiumlde est lieacutee agrave lamplitude par E=A^22A=sqrt(2E)x=x+Asin(2pitF(k))end
b=randn(size(t)) Jajoute un bruit blanc deacutenergie shy20dB par rapport agrave E0Eb=norm(b)^2N b=bsqrt(Eb)sqrt(10^(Rb20)E0) x=x+bE=norm(x)^2N Finallement je norme le signal en lui donnant une eacutenergie totale de 1x=xsqrt(E)p=N Je choisis de systeacutematiquement normaliser la TFDy=fft(xp)pf=((0(p2shy1))pFe)s=abs(y(1(p2)))
Echantillonneurshybloqueur
Signal bloqueacute
gtgt N0=15 gtgt dN=50 gtgt xb=x gtgt for i=N0dNshy1gtgt xb(idNN1) =xb(N0dNN1)gtgt end
Echantillonneurshybloqueur
Signal eacutechantillonneacute
gtgt xd=xb(N0dNN1)
ReconstructionSignal eacutechantillonneacute
ReconstructionSignal bloqueacute reconstruit
gtgt for i=1dNgtgt xr(idNN1)=xdgtgt end
ReconstructionSignal filtreacute
Synthegravese du filtre numeacuterique passeshybas (Chebyshev)
gtgt Fc=200gtgt Rp=05gtgt Wn=1dNgtgt [ba] =cheby1(9RpWn)
Filtrage
gtgt xf=filter(baxr)
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
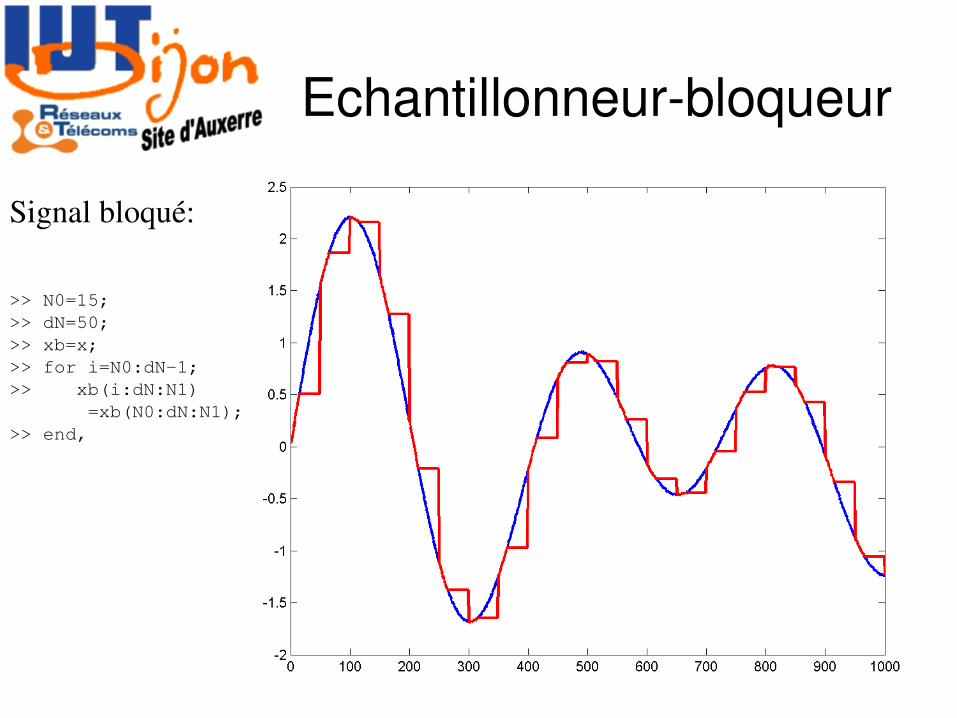
Echantillonneurshybloqueur
Signal bloqueacute
gtgt N0=15 gtgt dN=50 gtgt xb=x gtgt for i=N0dNshy1gtgt xb(idNN1) =xb(N0dNN1)gtgt end
Echantillonneurshybloqueur
Signal eacutechantillonneacute
gtgt xd=xb(N0dNN1)
ReconstructionSignal eacutechantillonneacute
ReconstructionSignal bloqueacute reconstruit
gtgt for i=1dNgtgt xr(idNN1)=xdgtgt end
ReconstructionSignal filtreacute
Synthegravese du filtre numeacuterique passeshybas (Chebyshev)
gtgt Fc=200gtgt Rp=05gtgt Wn=1dNgtgt [ba] =cheby1(9RpWn)
Filtrage
gtgt xf=filter(baxr)
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
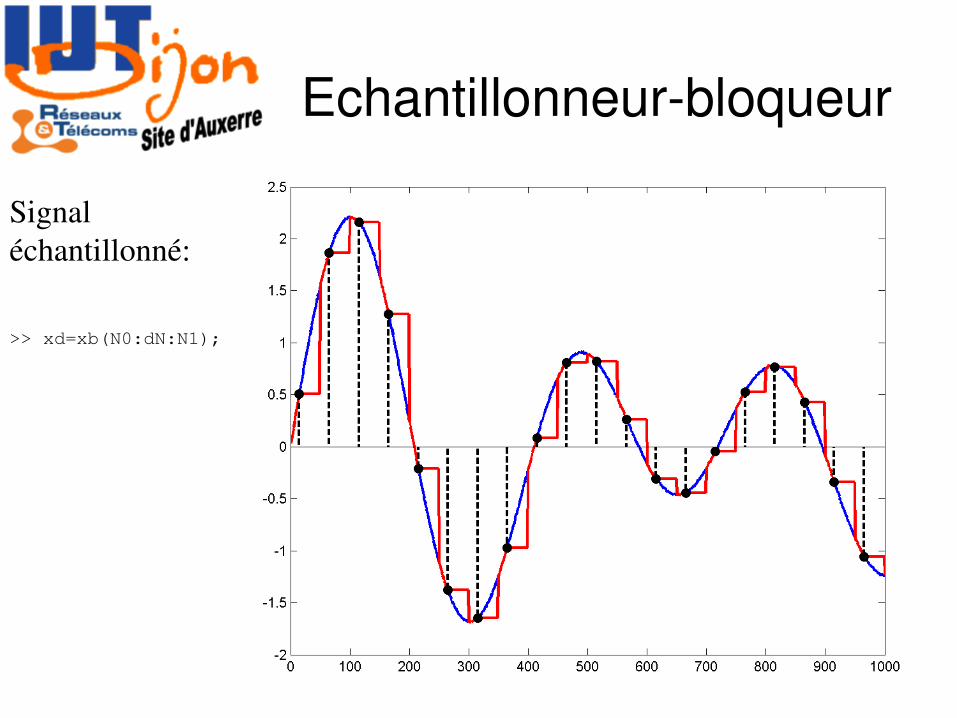
Echantillonneurshybloqueur
Signal eacutechantillonneacute
gtgt xd=xb(N0dNN1)
ReconstructionSignal eacutechantillonneacute
ReconstructionSignal bloqueacute reconstruit
gtgt for i=1dNgtgt xr(idNN1)=xdgtgt end
ReconstructionSignal filtreacute
Synthegravese du filtre numeacuterique passeshybas (Chebyshev)
gtgt Fc=200gtgt Rp=05gtgt Wn=1dNgtgt [ba] =cheby1(9RpWn)
Filtrage
gtgt xf=filter(baxr)
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
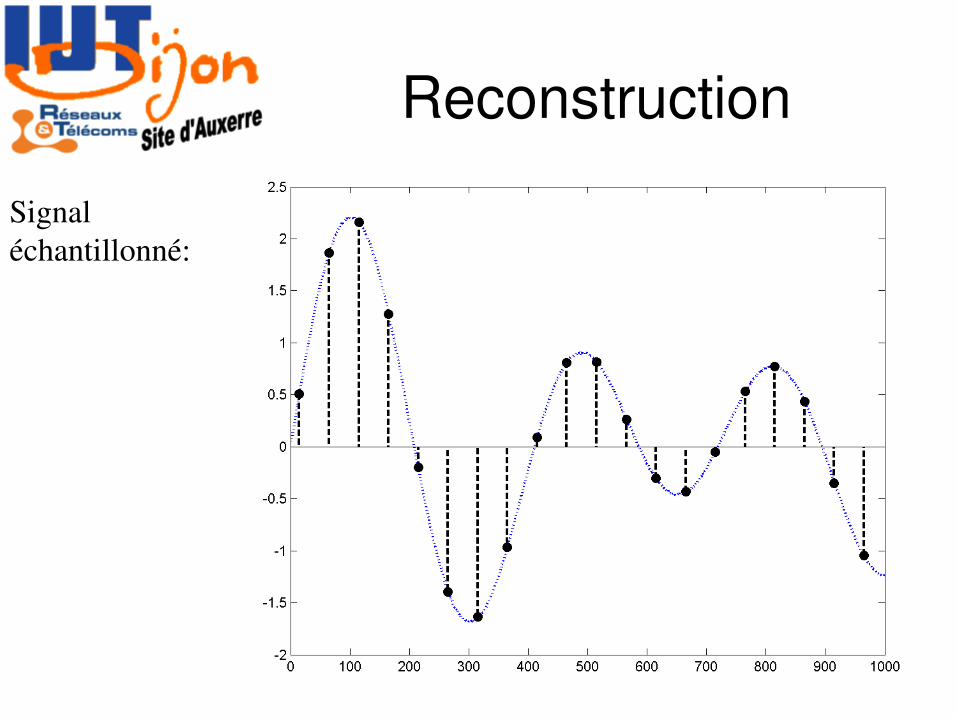
ReconstructionSignal eacutechantillonneacute
ReconstructionSignal bloqueacute reconstruit
gtgt for i=1dNgtgt xr(idNN1)=xdgtgt end
ReconstructionSignal filtreacute
Synthegravese du filtre numeacuterique passeshybas (Chebyshev)
gtgt Fc=200gtgt Rp=05gtgt Wn=1dNgtgt [ba] =cheby1(9RpWn)
Filtrage
gtgt xf=filter(baxr)
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT

ReconstructionSignal bloqueacute reconstruit
gtgt for i=1dNgtgt xr(idNN1)=xdgtgt end
ReconstructionSignal filtreacute
Synthegravese du filtre numeacuterique passeshybas (Chebyshev)
gtgt Fc=200gtgt Rp=05gtgt Wn=1dNgtgt [ba] =cheby1(9RpWn)
Filtrage
gtgt xf=filter(baxr)
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT

ReconstructionSignal filtreacute
Synthegravese du filtre numeacuterique passeshybas (Chebyshev)
gtgt Fc=200gtgt Rp=05gtgt Wn=1dNgtgt [ba] =cheby1(9RpWn)
Filtrage
gtgt xf=filter(baxr)
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
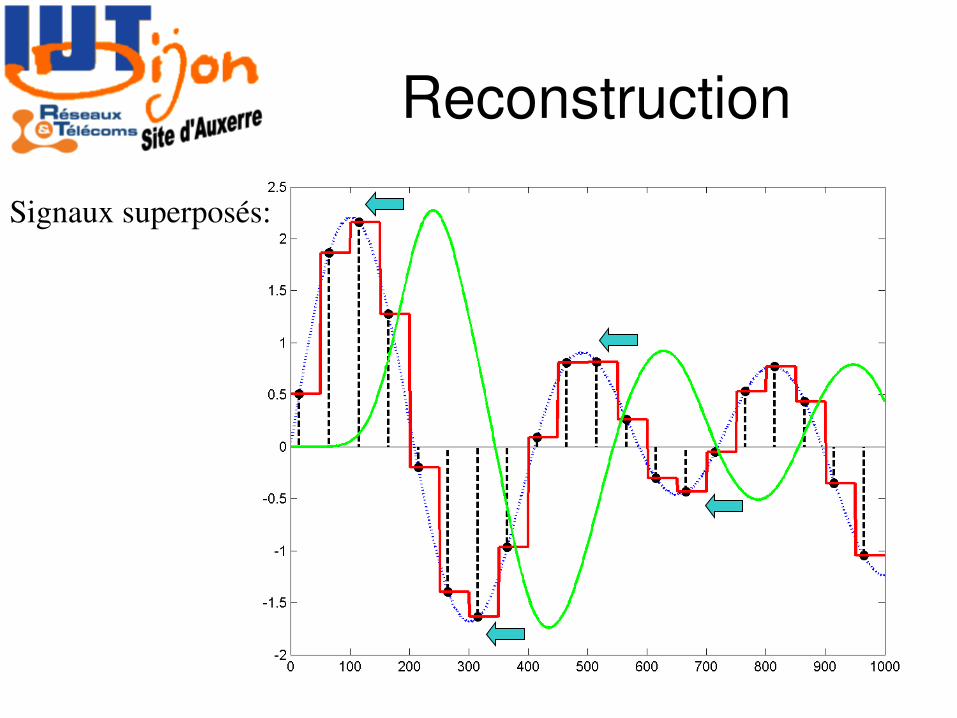
ReconstructionSignaux superposeacutes
ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT

ReconstructionReacutesultat final
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
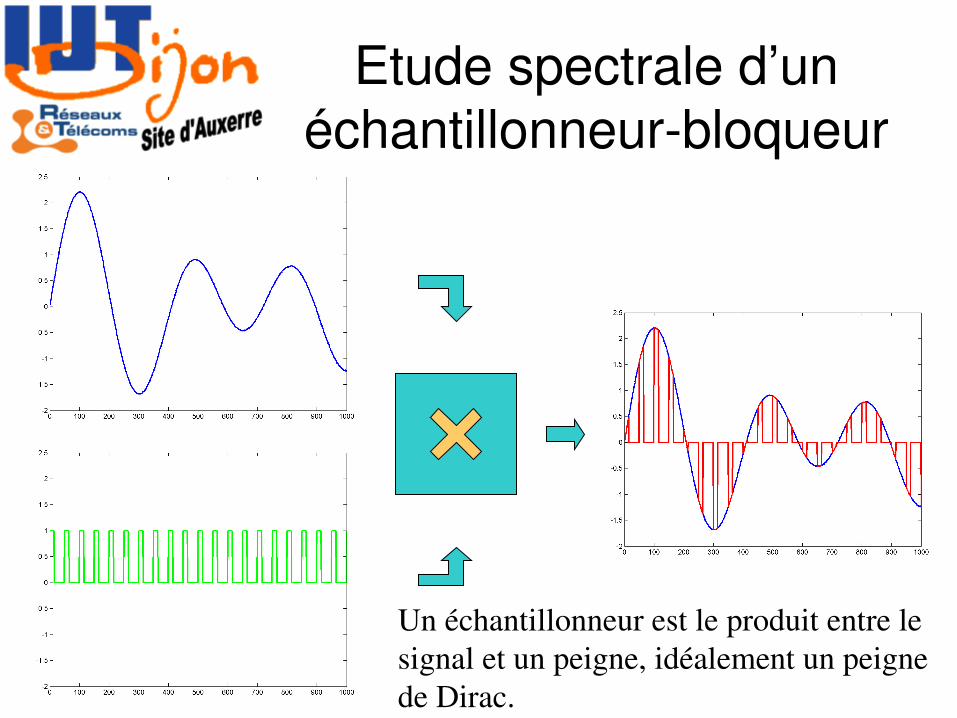
Etude spectrale drsquoun eacutechantillonneurshybloqueur
Un eacutechantillonneur est le produit entre le signal et un peigne ideacutealement un peigne de Dirac
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
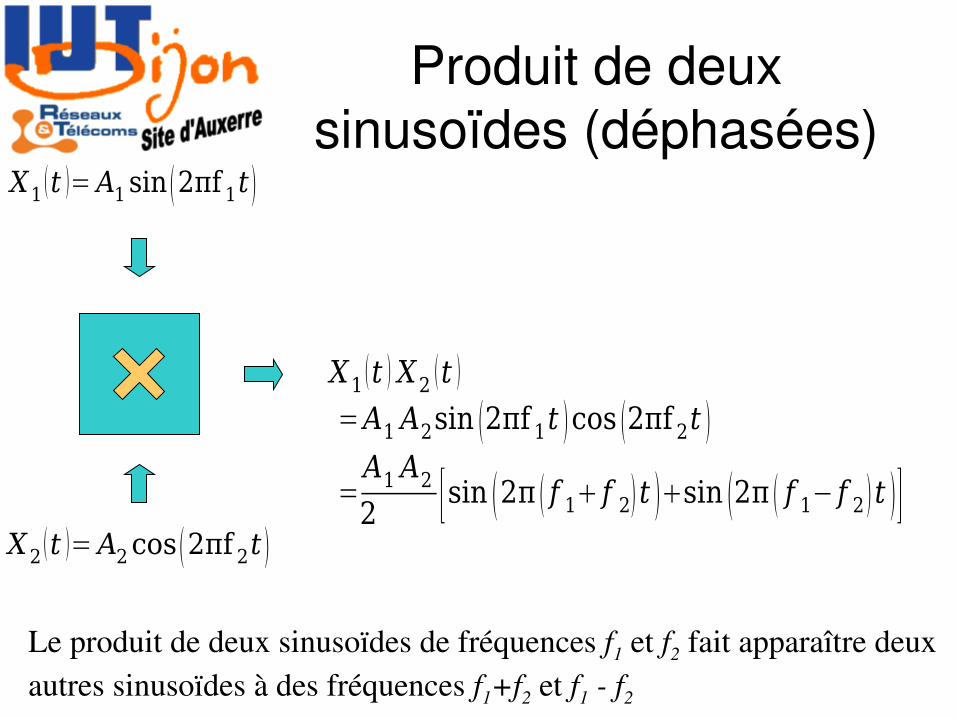
Produit de deux sinusoiumldes (deacutephaseacutees)
X1 t =A1 sin 2πf 1t
X2 t =A2 cos 2πf 2t
X1 t X2 t
=A1A2sin 2πf 1t cos 2πf 2t
=A1A2
2 [sin 2π f 1 f 2t sin 2π f 1minus f 2 t ]
Le produit de deux sinusoiumldes de freacutequences f1 et f2 fait apparaicirctre deux autres sinusoiumldes agrave des freacutequences f1+f2 et f1 shy f2
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
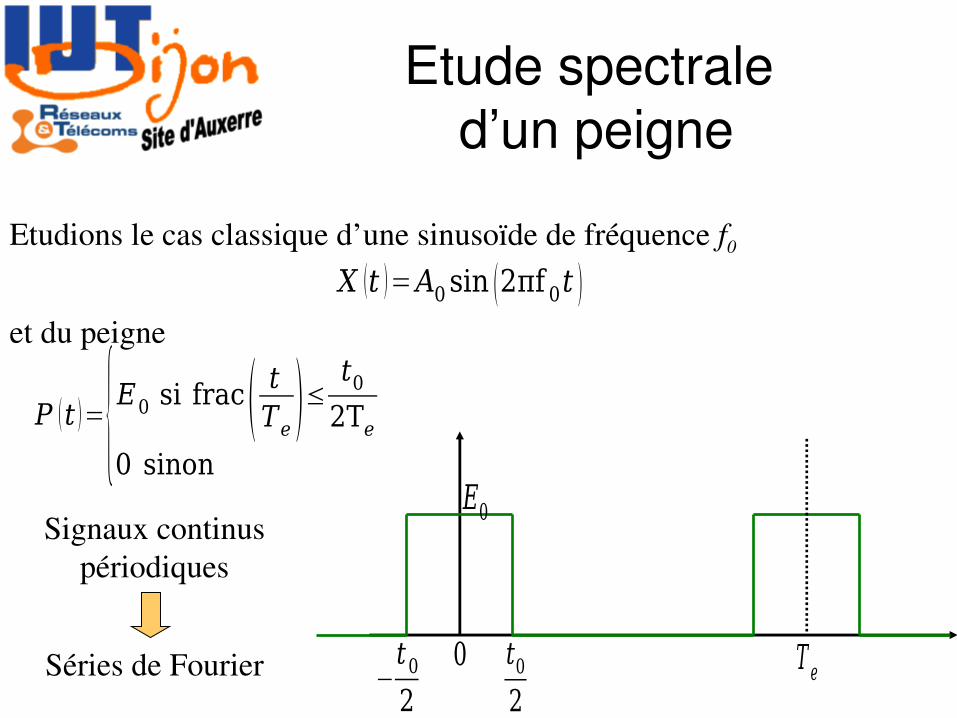
Etude spectrale drsquoun peigne
X t =A0 sin 2πf 0t
P t =E0 si frac tTe let0
2Te
0 sinon
Etudions le cas classique drsquoune sinusoiumlde de freacutequence f0
et du peigne
0 t0
2minust0
2T e
Signaux continus peacuteriodiques
Seacuteries de Fourier
E0
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Deacuteveloppement en seacuterie de Fourier
X t =a0sumk=1
infin
akcos 2πkf 0 t bksin 2πkf 0 t
a0=1T 0int0
T0 X t dt
ak=2T 0int0
T0 X t cos 2πkf 0 t dt
bk=2T 0int0
T0 X t sin 2πkf 0t dt
Le deacuteveloppement en seacuterie de Fourier preacutesente un instrument drsquoanalyse des signaux analogiques T0shypeacuteriodiques
Convention f 0=1T0
et ω0=2πf 0Joseph Fourier neacute agrave Auxerre en 1768
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Deacuteveloppement en seacuterie de Fourier
X t = sumk=minusinfin
infin
ckexp 2iπkf 0 t avec ck=1T 0int0
T 0
X t exp minus2iπkf 0t dt
La seacuterie de Fourier peut aussi srsquoexprimer sous la forme eacutequivalente
ck=a0 si k=0
akminusbk i
2 si kge1
cminusk sinon
avec les relations entre les deux deacutefinitions
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Identiteacute de Parseval
int0
T 0
∣X t ∣2dt=a0
12sumk=1
infin
ak2bk
2=sumk=minusinfin
infin
∣ck∣2
Si le signal est drsquoeacutenergie finie int0
T 0
∣X t ∣2dtinfin on a les relations
Remarque Pour un signal entre a et b on a en posant
X t = sumk=minusinfin
infin
ckexp2iπktminusmbminusa avec ck=
1bminusainta
b
X t expminus2iπktminuscbminusa dt
c=ab2
Exercice Trouver la formule eacutequivalente pour la deacutefinition en sinusshycosinus
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
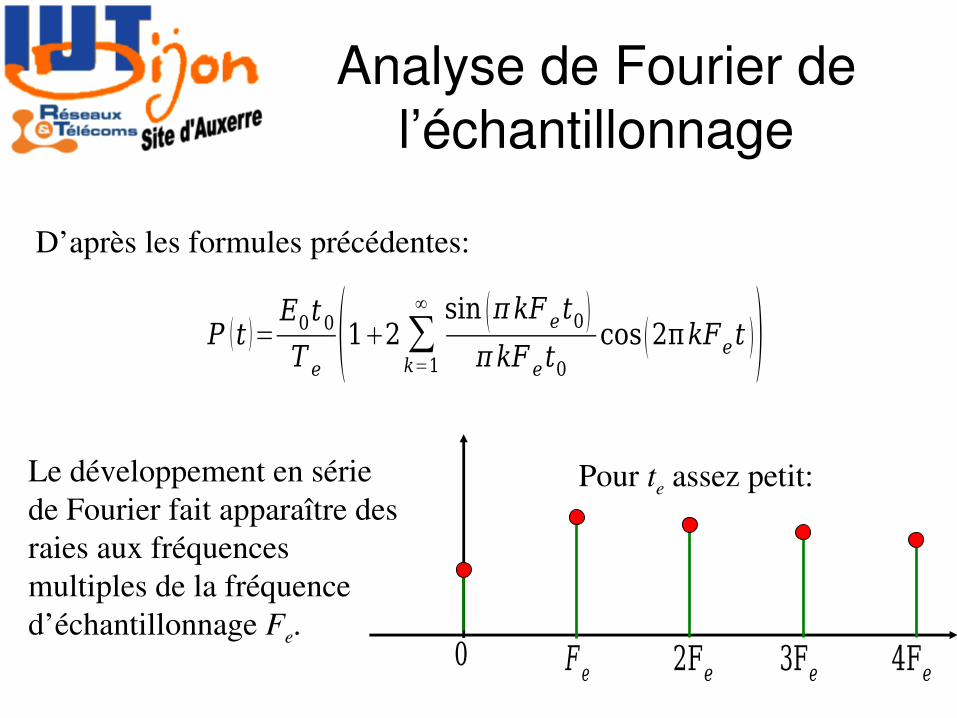
Analyse de Fourier de lrsquoeacutechantillonnage
P t =E0t0
T e12sum
k=1
infin sin πkF et0 πkF et0
cos 2πkFet Drsquoapregraves les formules preacuteceacutedentes
Le deacuteveloppement en seacuterie de Fourier fait apparaicirctre des raies aux freacutequences multiples de la freacutequence drsquoeacutechantillonnage Fe
0 F e 2Fe 3Fe 4Fe
Pour te assez petit
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
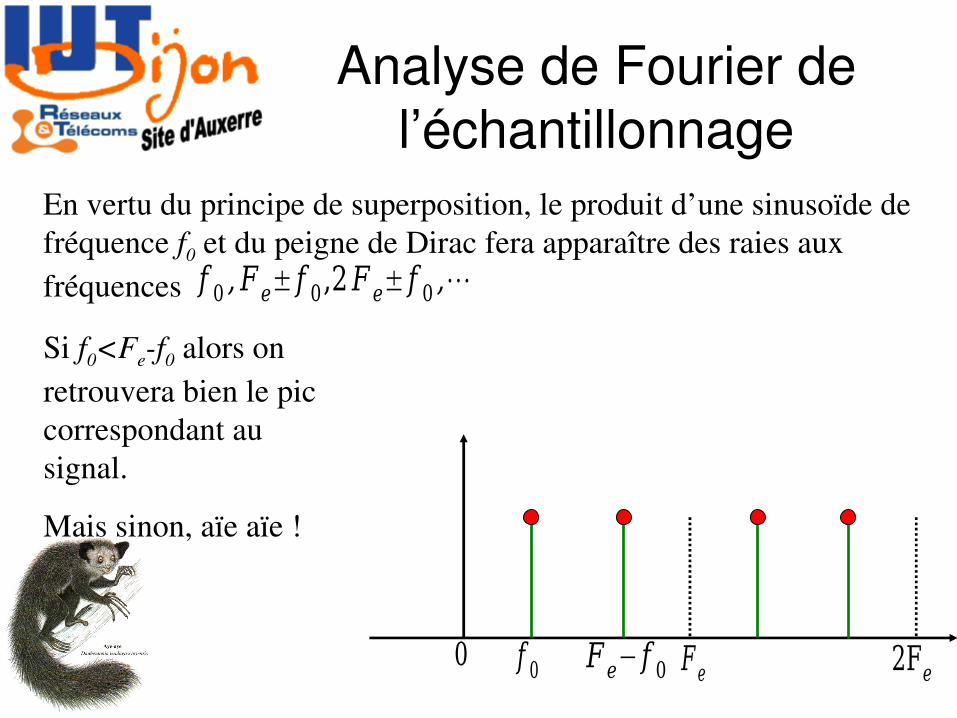
Analyse de Fourier de lrsquoeacutechantillonnage
0 F e 2Fe
En vertu du principe de superposition le produit drsquoune sinusoiumlde de freacutequence f0 et du peigne de Dirac fera apparaicirctre des raies aux freacutequences f 0 F eplusmn f 02F eplusmn f 0 ⋯
f 0 F eminus f 0
Si f0ltFeshyf0 alors on retrouvera bien le pic correspondant au signal
Mais sinon aiumle aiumle
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
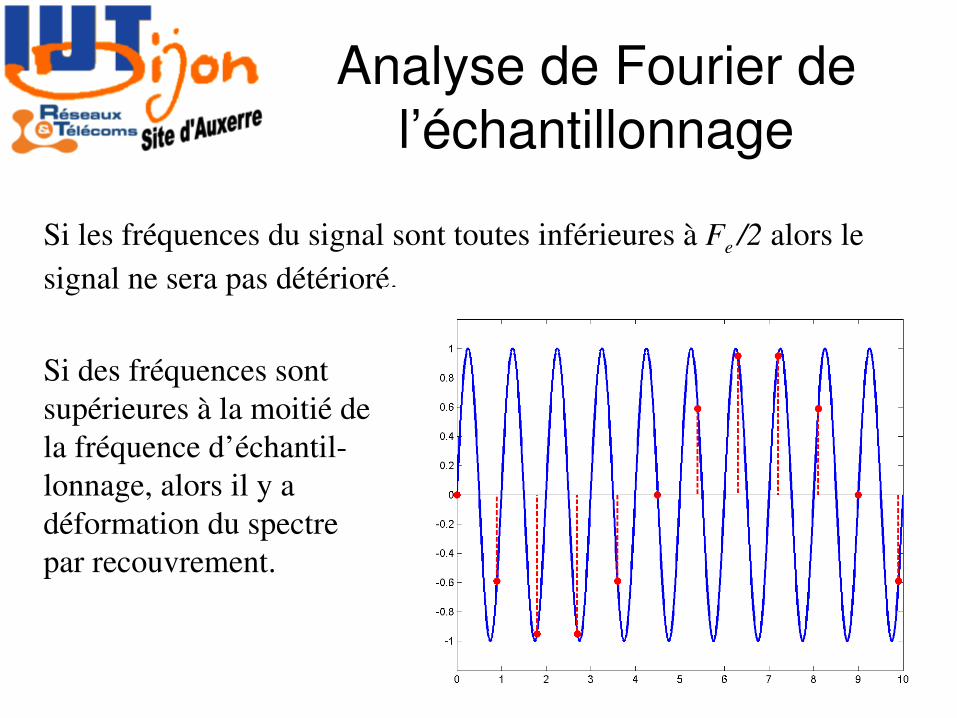
Analyse de Fourier de lrsquoeacutechantillonnage
Si les freacutequences du signal sont toutes infeacuterieures agrave Fe 2 alors le signal ne sera pas deacuteteacuterioreacute
Si des freacutequences sont supeacuterieures agrave la moitieacute dela freacutequence drsquoeacutechantilshylonnage alors il y a deacuteformation du spectre par recouvrement
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
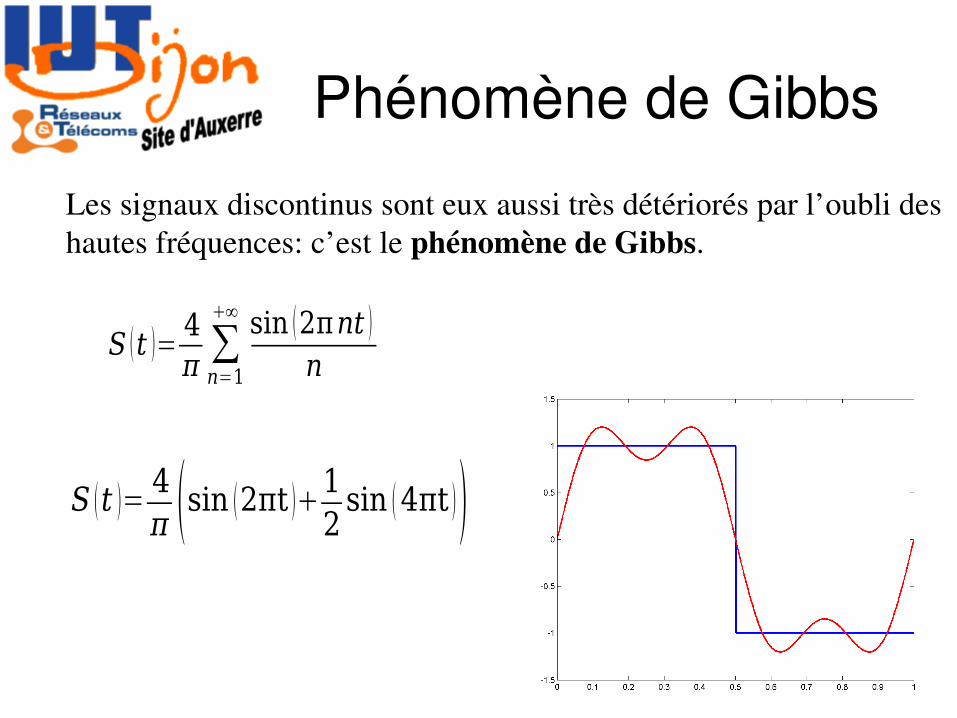
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sin 2πt
12
sin 4πt
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
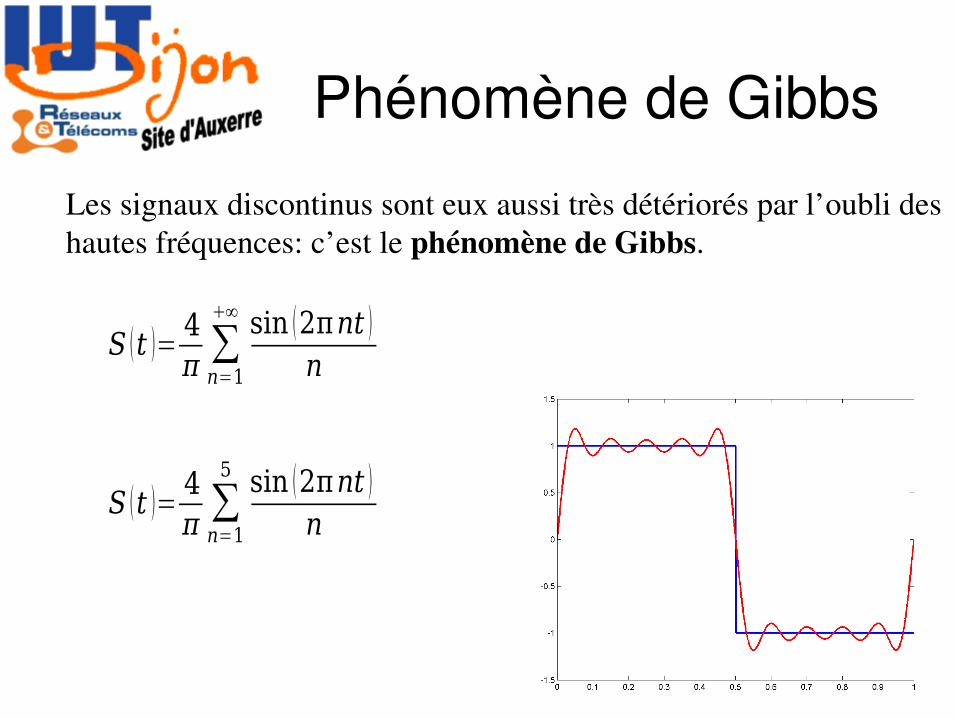
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
5 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
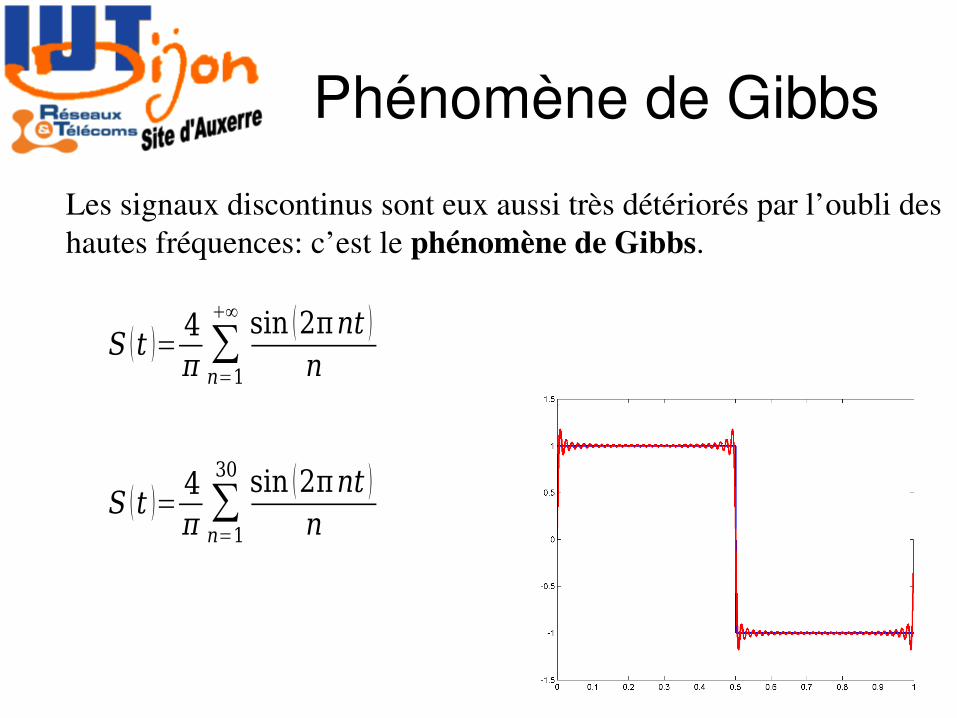
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
30 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
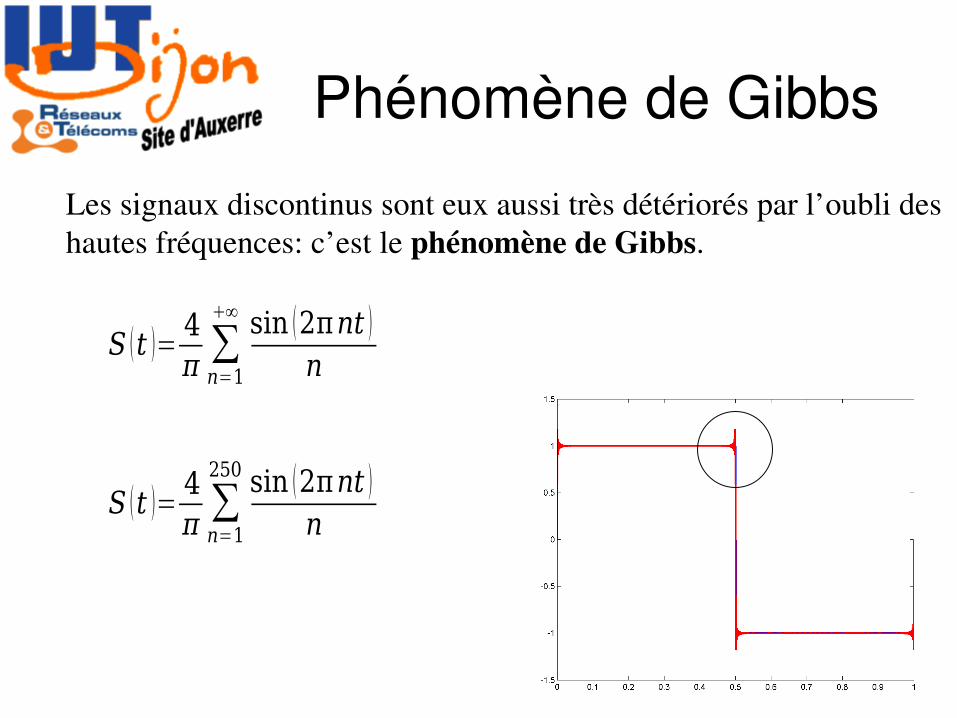
Pheacutenomegravene de GibbsLes signaux discontinus sont eux aussi tregraves deacuteteacuterioreacutes par lrsquooubli des hautes freacutequences crsquoest le pheacutenomegravene de Gibbs
S t =4π sumn=1
250 sin 2πnt n
S t =4π sumn=1
infin sin 2πnt n
Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT

Theacuteoregraveme de ShannonshyNyquist
X t = sumn=minusinfin
infin
X nT esin 2πf tminusnT e
2πf tminusnT e
Reacuteciproquement si la freacutequence drsquoeacutechantillonnage est assez grande par rapport au signal eacutetudieacute on a le theacuteoregraveme fondamental
Theacuteoregraveme Soit X(t) une fonction telle que toutes les freacutequences sont infeacuterieures agrave f Soit Fe une freacutequence drsquoeacutechantillonnage telle que Fegt2fAlors
Conclusion Il est impeacuteratif de faire passer le signal par un filtre passeshybas analogique dont la freacutequence de coupure est infeacuterieure agrave la moitieacute de la freacutequence drsquoeacutechantillonnage avant drsquoeacutechantillonner
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
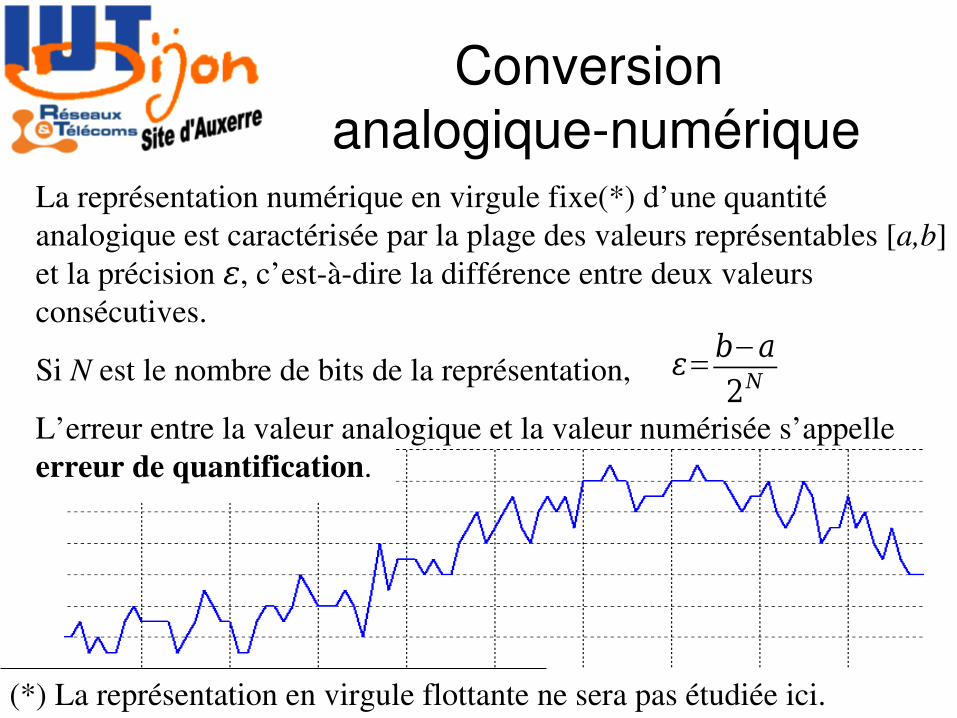
Conversion analogiqueshynumeacuterique
ε=bminusa2N
() La repreacutesentation en virgule flottante ne sera pas eacutetudieacutee ici
La repreacutesentation numeacuterique en virgule fixe() drsquoune quantiteacute analogique est caracteacuteriseacutee par la plage des valeurs repreacutesentables [ab] et la preacutecision ε crsquoestshyagraveshydire la diffeacuterence entre deux valeurs conseacutecutives
Si N est le nombre de bits de la repreacutesentation
Lrsquoerreur entre la valeur analogique et la valeur numeacuteriseacutee srsquoappelle erreur de quantification
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Conversion analogiqueshynumeacuterique
bull Biais systeacutematique (erreur sur a)bull Erreur de gain (erreur sur bshya)bull Nonshylineacuteariteacutes (distorsion de la fonction lineacuteaire)
En plus des erreurs de quantification un CAN
peut preacutesenter les erreurs suivantes
b=int 2N yminusabminusa
yb
La conversion reacuteciproque CNA peut preacutesenter le mecircme type drsquoerreur
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
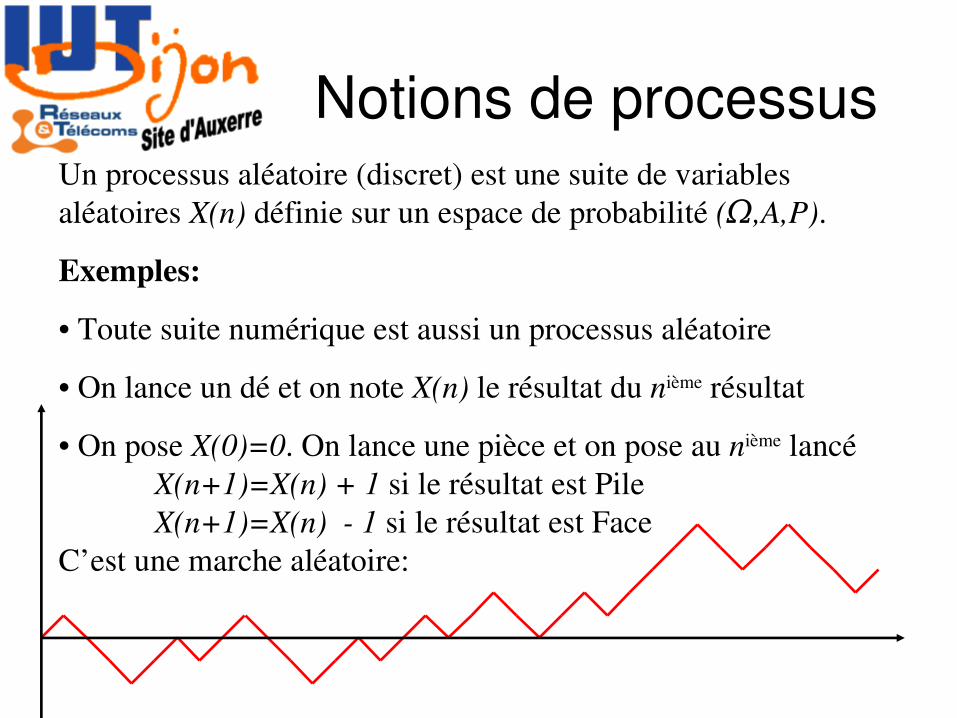
Notions de processusUn processus aleacuteatoire (discret) est une suite de variables aleacuteatoires X(n) deacutefinie sur un espace de probabiliteacute (ΩAP)
Exemplesbull Toute suite numeacuterique est aussi un processus aleacuteatoire
bull On lance un deacute et on note X(n) le reacutesultat du niegraveme reacutesultat
bull On pose X(0)=0 On lance une piegravece et on pose au niegraveme lanceacute X(n+1)=X(n) + 1 si le reacutesultat est Pile
X(n+1)=X(n) shy 1 si le reacutesultat est Face Crsquoest une marche aleacuteatoire
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Notions de processus
Exemples (suite)bull On note X(n) le nombre de requecirctes arrivant sur un serveur par uniteacute de temps Crsquoest un cas de loi de Poisson
bull On note X(n) le temps drsquoattente avant lrsquoarriveacutee de la niegraveme requecircte sur un serveur Crsquoest la loi exponentielle
P X n =k = λk
keminusλ
P aleX nb =λinta
b
eminusλx dx pour 0leab
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
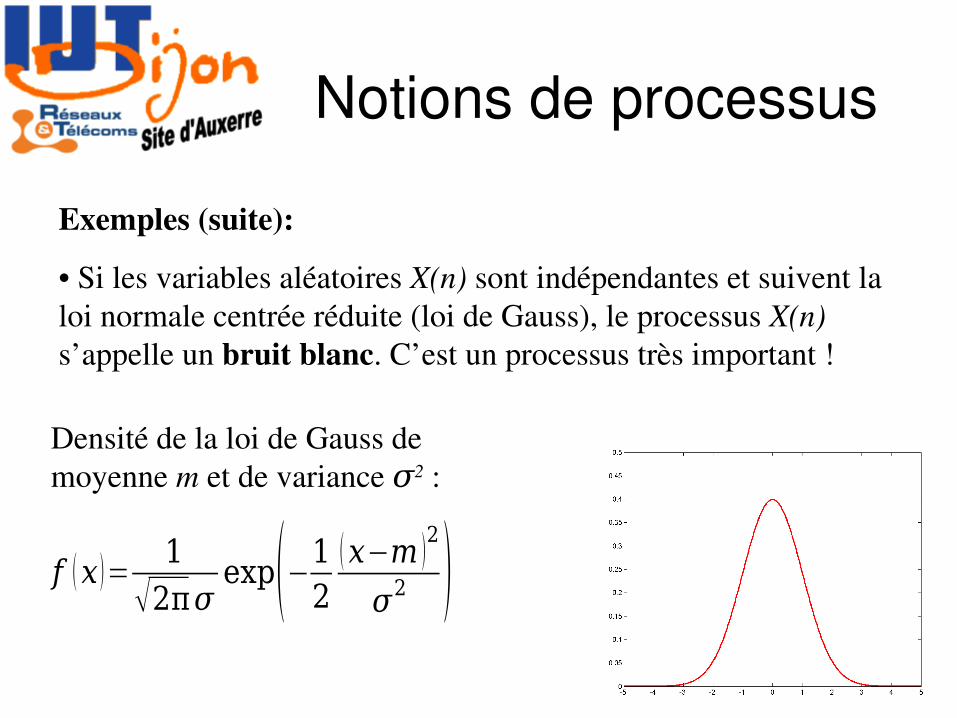
Notions de processus
Exemples (suite)bull Si les variables aleacuteatoires X(n) sont indeacutependantes et suivent la loi normale centreacutee reacuteduite (loi de Gauss) le processus X(n) srsquoappelle un bruit blanc Crsquoest un processus tregraves important
f x =1
2πσexpminus1
2xminusm
2
σ2
Densiteacute de la loi de Gauss de moyenne m et de variance σ2
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
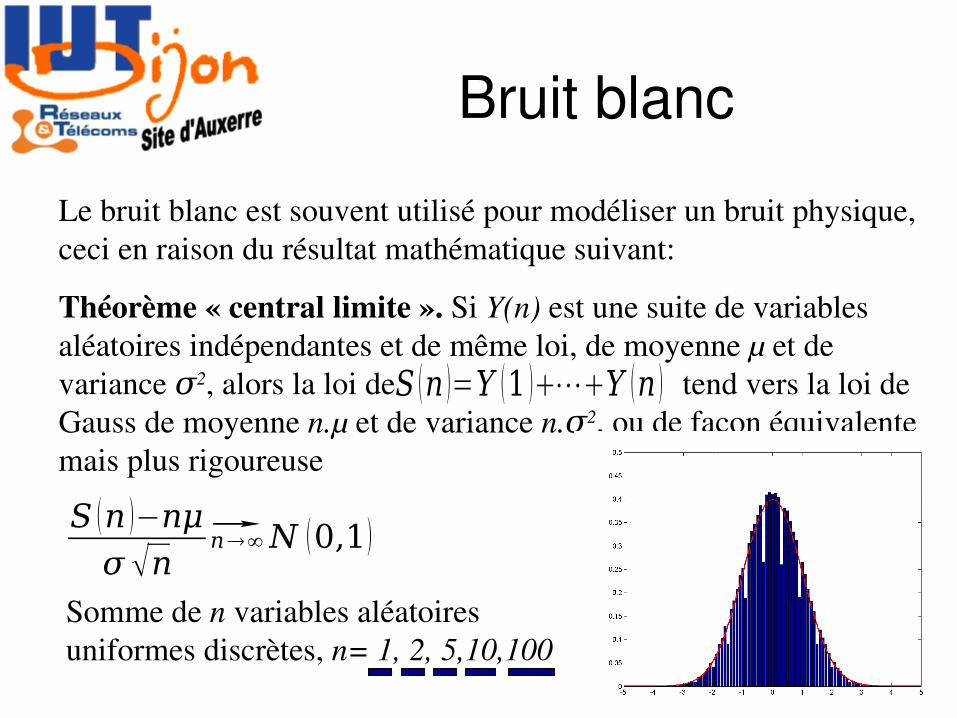
Bruit blancLe bruit blanc est souvent utiliseacute pour modeacuteliser un bruit physique ceci en raison du reacutesultat matheacutematique suivant
Theacuteoregraveme laquo central limite raquo Si Y(n) est une suite de variables aleacuteatoires indeacutependantes et de mecircme loi de moyenne micro et de variance σ2 alors la loi de tend vers la loi de Gauss de moyenne nmicro et de variance nσ2 ou de faccedilon eacutequivalente mais plus rigoureuse
S n =Y 1 ⋯Y n
S n minusnμσ nninfinN 01
Somme de n variables aleacuteatoires uniformes discregravetes n= 1 2 510100
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
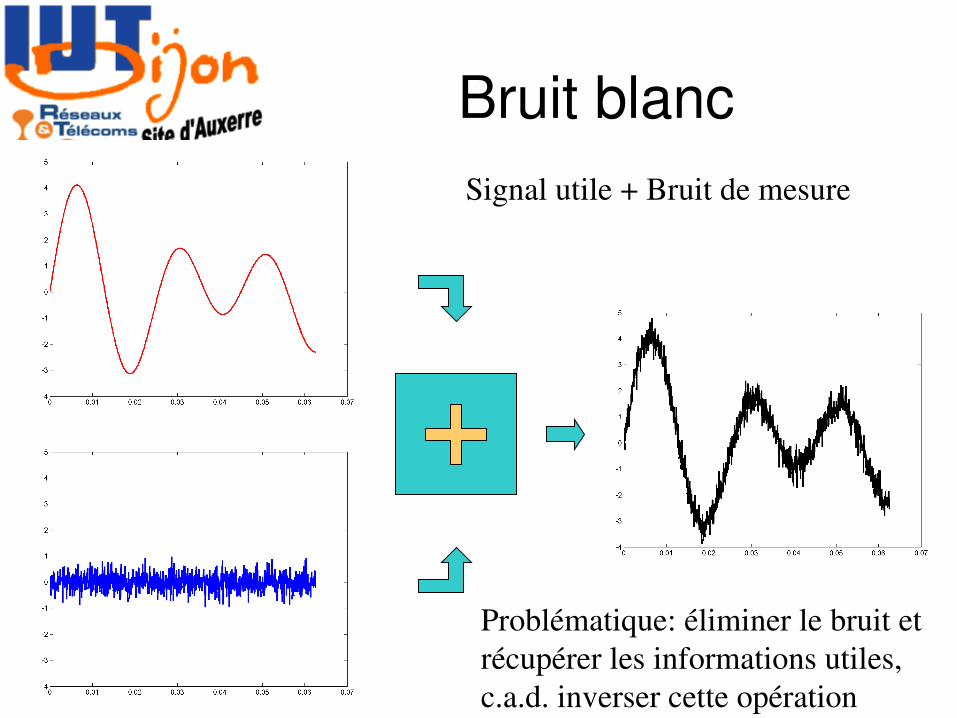
Bruit blancSignal utile + Bruit de mesure
Probleacutematique eacuteliminer le bruit et reacutecupeacuterer les informations utilescad inverser cette opeacuteration
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Processus stationnaires
On dit drsquoun processus aleacuteatoire X(n) qursquoil est stationnaire si la loi de X(n) ne deacutepend pas de n
On dit que X(n) est stationnaire du 1er ordre siexiste et est indeacutependant de n
On dit que X(n) est stationnaire du 2nd ordre srsquoil est stationnaire du 1er ordre etexiste et ne deacutepend pas de n
Theacuteoregraveme
E [X n ]=micro
E [ X i minusmicro X j minusmicro ]=γ ∣iminus j∣
Stationnaire rArr Stationnaire du 2nd ordrerArr Stationnaire du 1er ordre
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Autocovarianceet autocorreacutelation
Pour un processus stationnaire du 2nd ordre on note pour tout entier naturel k
et ΓX(k) (indeacutependant de i) srsquoappelle lrsquoautocovariance de X
On deacutefini aussi lrsquoautocorreacutelation de X la normalisation de lrsquoautocovariance par la variance de X
de sorte que γX(0)=1
Γ X k =E [ X i minusmicro X iminusk minusmicro ]lowast
γ X k =ΓX k
σ2
On a noteacute micro=E [ X n ] et σ2=E [ X nminusmicro
2 ]()
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
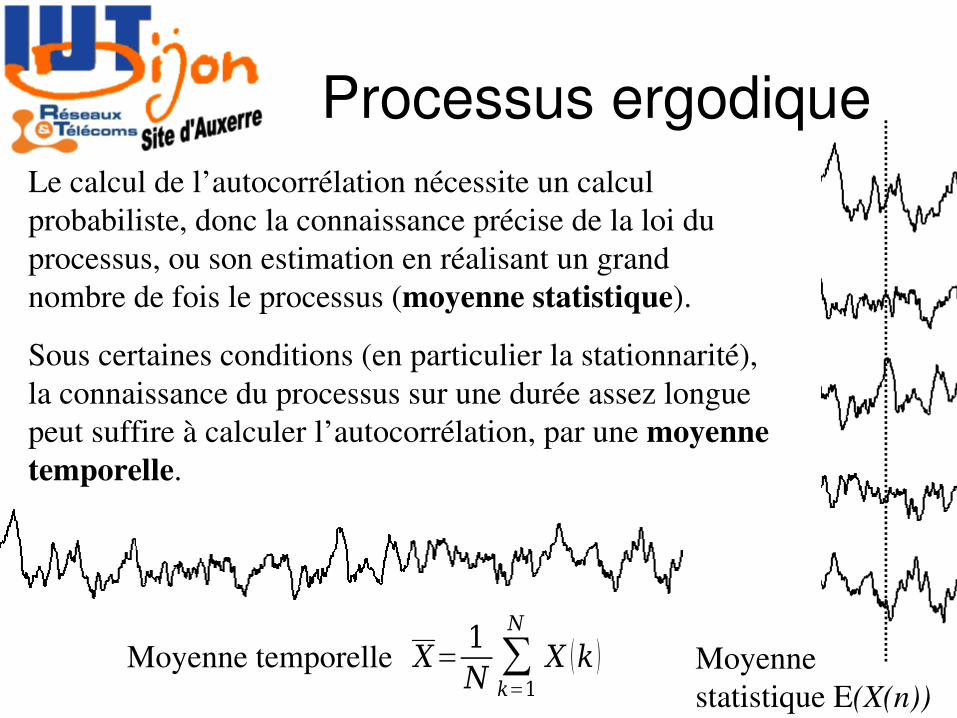
Processus ergodiqueLe calcul de lrsquoautocorreacutelation neacutecessite un calcul probabiliste donc la connaissance preacutecise de la loi du processus ou son estimation en reacutealisant un grand nombre de fois le processus (moyenne statistique)
Sous certaines conditions (en particulier la stationnariteacute) la connaissance du processus sur une dureacutee assez longue peut suffire agrave calculer lrsquoautocorreacutelation par une moyenne temporelle
Moyenne temporelle Moyennestatistique E(X(n))
X=1N sumk=1
N
X k
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
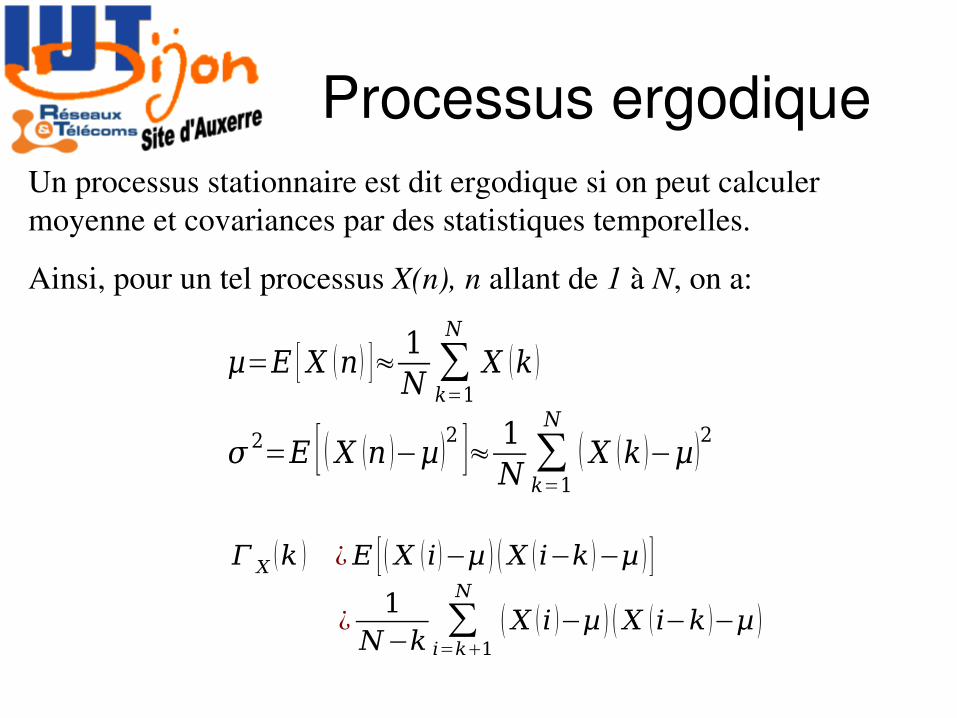
Processus ergodiqueUn processus stationnaire est dit ergodique si on peut calculer moyenne et covariances par des statistiques temporelles
Ainsi pour un tel processus X(n) n allant de 1 agrave N on a
Γ X k iquestE [ X i minusmicro X iminusk minusmicro ]
iquest1
Nminusksum
i=k1
N
X i minusmicro X iminusk minusmicro
micro=E [X n ]asymp1N sumk=1
N
X k
σ 2=E [ X n minusmicro
2 ]asymp 1N sumk=1
N
X k minusmicro2
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
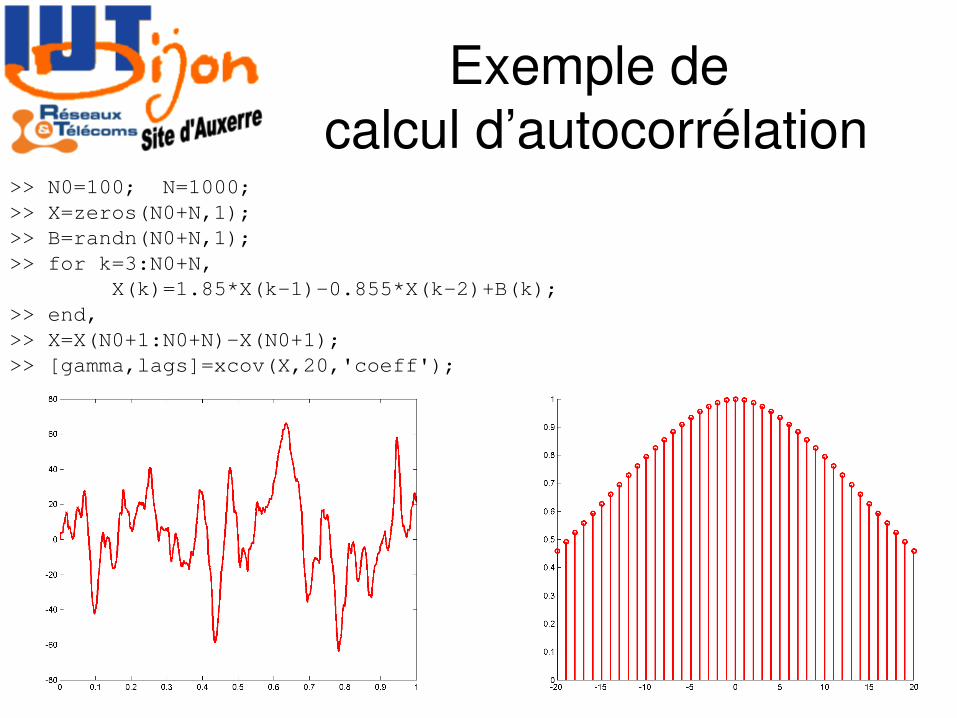
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=185X(kshy1)shy0855X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
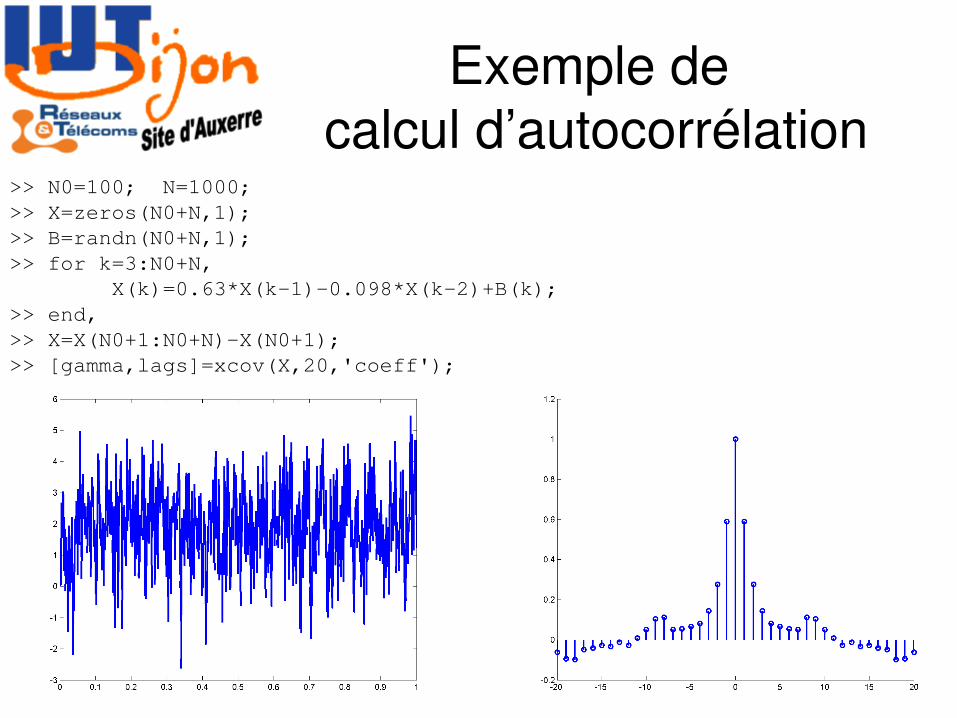
Exemple de calcul drsquoautocorreacutelation
gtgt N0=100 N=1000gtgt X=zeros(N0+N1)gtgt B=randn(N0+N1)gtgt for k=3N0+N X(k)=063X(kshy1)shy0098X(kshy2)+B(k)gtgt endgtgt X=X(N0+1N0+N)shyX(N0+1)gtgt [gammalags]=xcov(X20coeff)
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
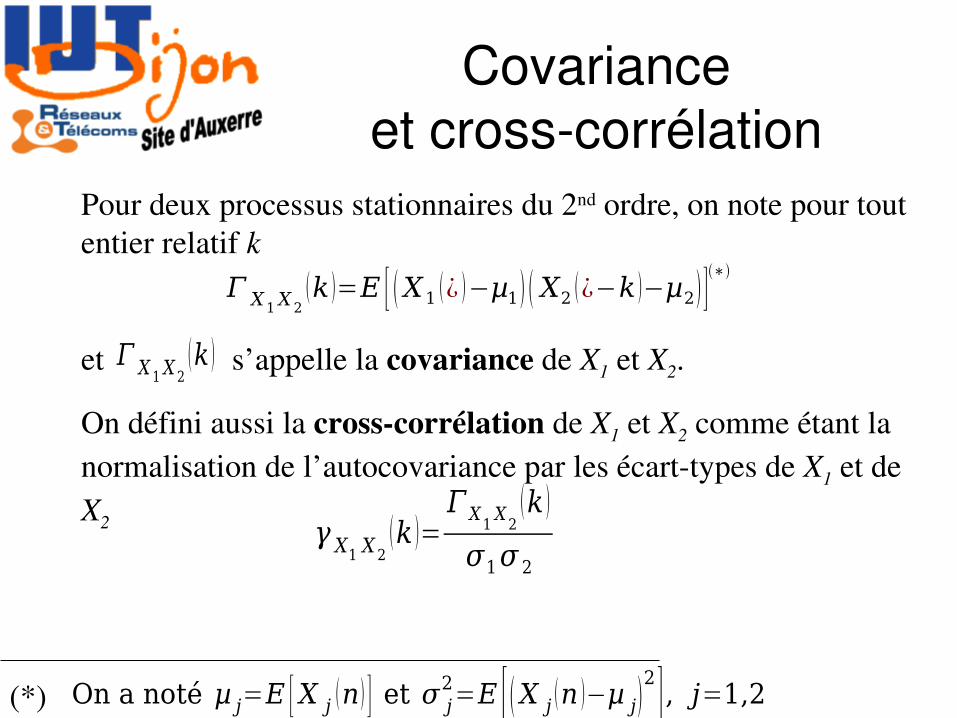
Covarianceet crossshycorreacutelation
Pour deux processus stationnaires du 2nd ordre on note pour tout entier relatif k
et srsquoappelle la covariance de X1 et X2
On deacutefini aussi la crossshycorreacutelation de X1 et X2 comme eacutetant la normalisation de lrsquoautocovariance par les eacutecartshytypes de X1 et de X2
Γ X1X2k =E [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
lowast
γ X1 X2k =
ΓX1X
2k
σ1σ 2
On a noteacute micro j=E [X j n ] et σ j2=E [ X j n minusmicro j
2 ] j=12()
Γ X1X2k
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
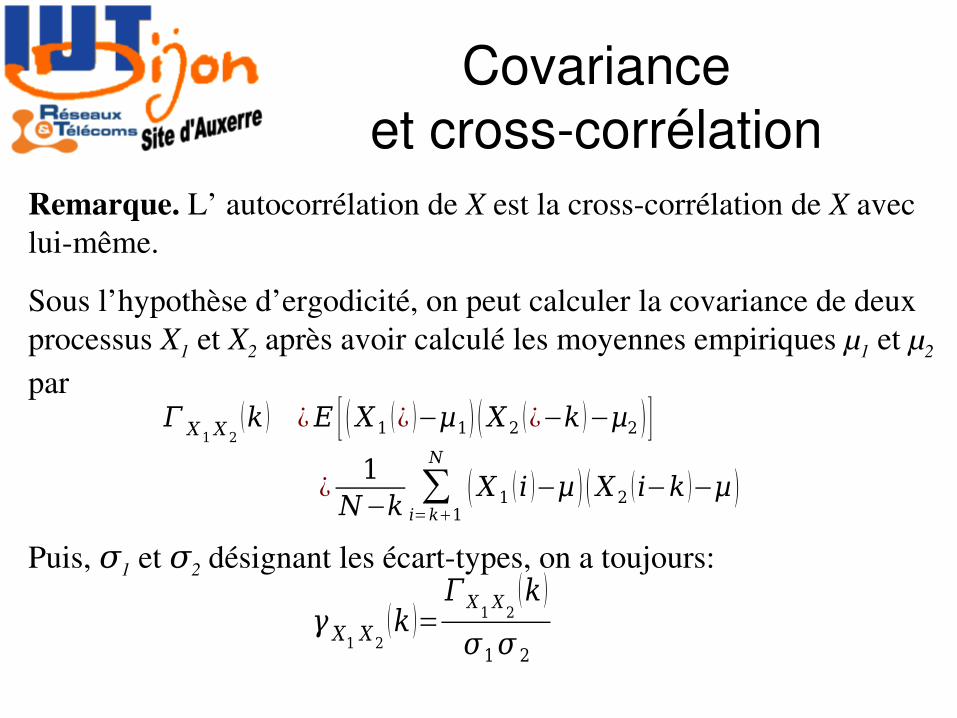
Covarianceet crossshycorreacutelation
Remarque Lrsquo autocorreacutelation de X est la crossshycorreacutelation de X avec luishymecircme
Sous lrsquohypothegravese drsquoergodiciteacute on peut calculer la covariance de deux processus X1 et X2 apregraves avoir calculeacute les moyennes empiriques micro1 et micro2 par
Puis σ1 et σ2 deacutesignant les eacutecartshytypes on a toujours
Γ X1X2k iquestE [ X1 iquest minusmicro1 X2 iquestminusk minusmicro2 ]
iquest1
Nminusk sumi=k1
N
X1 i minusmicro X2 iminusk minusmicro
γ X1 X2k =
ΓX1X
2k
σ1σ 2
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Applicationsbull Geacuteologie Deacutetecter la profondeur des couches geacuteologiques
(autocorreacutelation)bull GPS calculer le deacutelai de propagation entre deux signaux eacutemis
par deux satellites (crossshycorreacutelation)bull Sonar Deacutetecter la distance drsquoune surface quelconque
(autocorreacutelation)bull Economie Repeacuterer les correacutelations entre plusieurs variables
eacuteconomiques (crossshycorreacutelation)bull FBI localiser un signal particulier dans un enregistrement plus
long ou dans un ensemble drsquoenregistrements (convolution)bull Reacuteseau estimer des retards de propagation (autocorreacutelation)
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
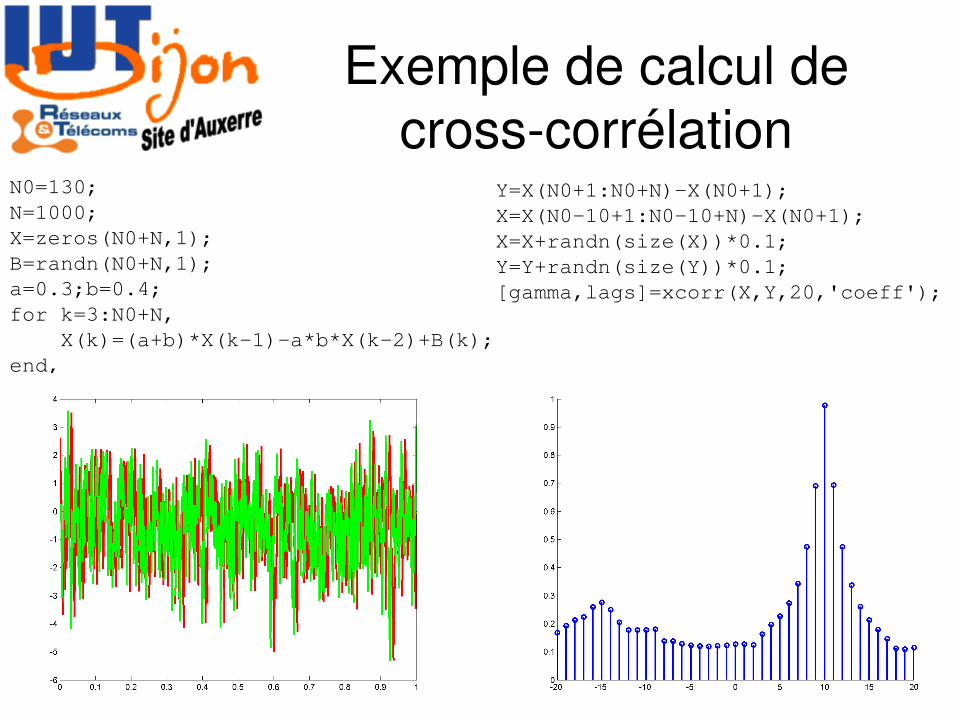
Exemple de calcul de crossshycorreacutelation
N0=130N=1000X=zeros(N0+N1)B=randn(N0+N1)a=03b=04for k=3N0+N X(k)=(a+b)X(kshy1)shyabX(kshy2)+B(k)end
Y=X(N0+1N0+N)shyX(N0+1)X=X(N0shy10+1N0shy10+N)shyX(N0+1)X=X+randn(size(X))01Y=Y+randn(size(Y))01[gammalags]=xcorr(XY20coeff)
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Filtre de WienerLe filtre de Wiener est un outil permettant drsquoestimer une variable aleacuteatoire ou un processus aleacuteatoire entacheacute de bruit en supprimant autant que possible le bruit (on laquo filtre raquo le bruit)
Ce nrsquoest par neacutecessairement un filtre passeshybas crsquoest une meacutethodologie permettant de syntheacutetiser des filtres de tous ordres
Vous avez tous un filtre de Wiener dans votre poche
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Filtre de Wiener exemples
bull Problegravemes drsquoeacutegalisation de canal (deacuteconvolution)ndash X(n)=S(n)+W(n) ougrave S(n) est le signal et W(n) est le bruit
On mesure X(n) et on veut estimer S(n)ndash X(n)=S(n)shy2S(nshy1)+S(nshy2)+W(n)
bull Calcul de moyenne reacutecursifndash X(n)=θ+W(n)
bull Reacutegeacuteneacuteration drsquoun signal binaire bndash X(n)=b(n)+α b(nshy1)+W(n)
bull Annulation drsquoeacutechondash X(n)=(h0S(n))+W(n)
Lrsquooreillette Bluetooth 11 Nokia BHshy602 appartient au milieu de gamme et offre 11 heures dautonomie avec une qualiteacute audio profitant de son DSP ( Digital Signal Processing ) dannulation deacutecho et de reacuteduction de bruitpour des conversations plus nettes
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Filtre de WienerSoit X(n) un processus aleacuteatoire quelconque que lrsquoon suppose centreacute (sinon on remplacerait X(n) par X(n)shymicro)On suppose que θ est une variable aleacuteatoire inconnue mais que lrsquoon veut estimer lineacuteairement agrave partir des p+1 reacutecentes valeurs de X(n)
On cherche les paramegravetres a0a1hellipapOn suppose pouvoir calculer
pour k=0hellipp ougrave on note
θ=a0 X n a1 X nminus1 ⋯ap X nminusp
Γ X k et Γ Xθ k
ΓθX k =E [θ X nminusk ]
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
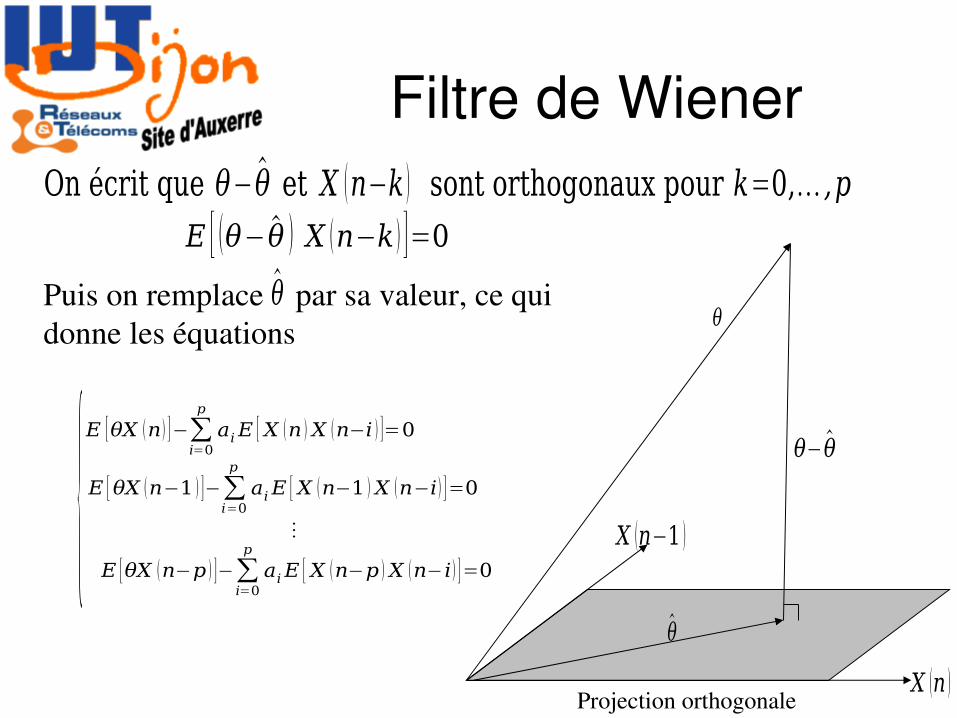
Filtre de Wiener
θ
θ
X n
X nminus1
θminus θ
Projection orthogonale
On eacutecrit que θminus θ et X nminusk sont orthogonaux pour k=0 pE [ θminus θ X nminusk ]=0
Puis on remplace par sa valeur ce qui donne les eacutequations
θ
E [θX n ]minussum
i=0
p
aiE [X n X nminusi ]=0
E [θX nminus1 ]minussumi=0
p
aiE [X nminus1 X nminusi ]=0
⋮
E [θX nminusp ]minussumi=0
p
aiE [X nminusp X nminusi ]=0
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
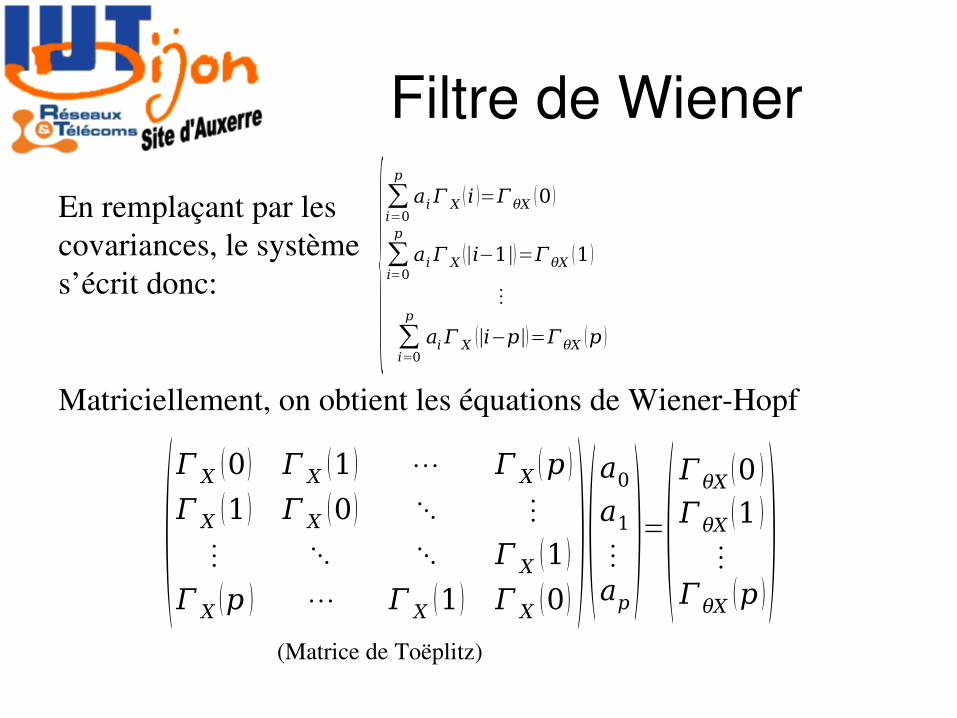
Filtre de Wiener
sumi=0
p
aiΓ X i =Γ θX 0
sumi=0
p
aiΓ X ∣iminus1∣=ΓθX 1
⋮
sumi=0
p
aiΓ X ∣iminusp∣=Γ θX p
En remplaccedilant par les covariances le systegraveme srsquoeacutecrit donc
Matriciellement on obtient les eacutequations de WienershyHopf
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 a0
a1
⋮
ap=
Γ θX 0
Γ θX 1
⋮
Γ θX p
(Matrice de Toeumlplitz)
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
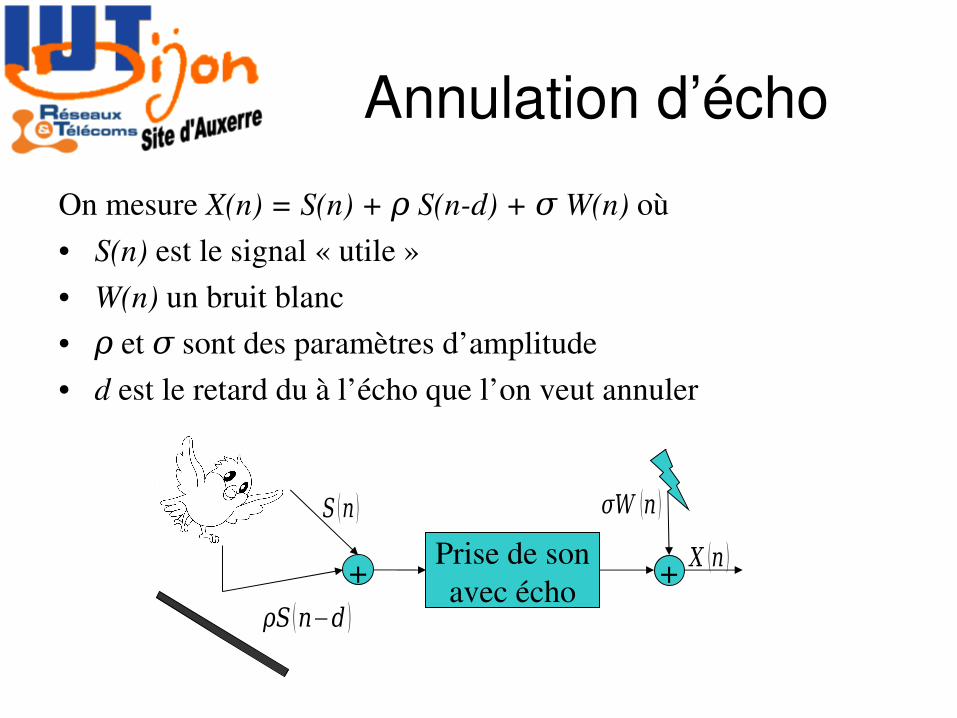
Annulation drsquoeacutechoOn mesure X(n) = S(n) + ρ S(nshyd) + σ W(n) ougrave bull S(n) est le signal laquo utile raquobull W(n) un bruit blancbull ρ et σ sont des paramegravetres drsquoamplitudebull d est le retard du agrave lrsquoeacutecho que lrsquoon veut annuler
Prise de sonavec eacutecho +
S n
+ρS nminusd
X n
σW n
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
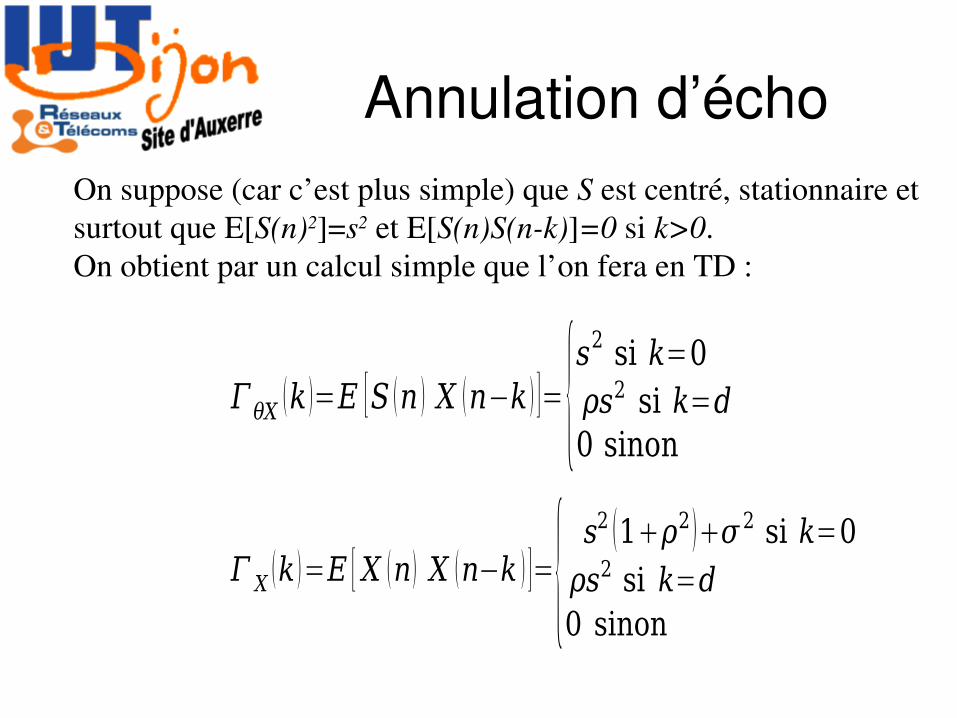
Annulation drsquoeacutecho
ΓθX k =E [S n X nminusk ]=s2 si k=0 ρs2 si k=d0 sinon
Γ X k =E [ X n X nminusk ]=s2 1ρ2 σ 2 si k=0ρs2 si k=d 0 sinon
On suppose (car crsquoest plus simple) que S est centreacute stationnaire et surtout que E[S(n)2]=s2 et E[S(n)S(nshyk)]=0 si kgt0On obtient par un calcul simple que lrsquoon fera en TD
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
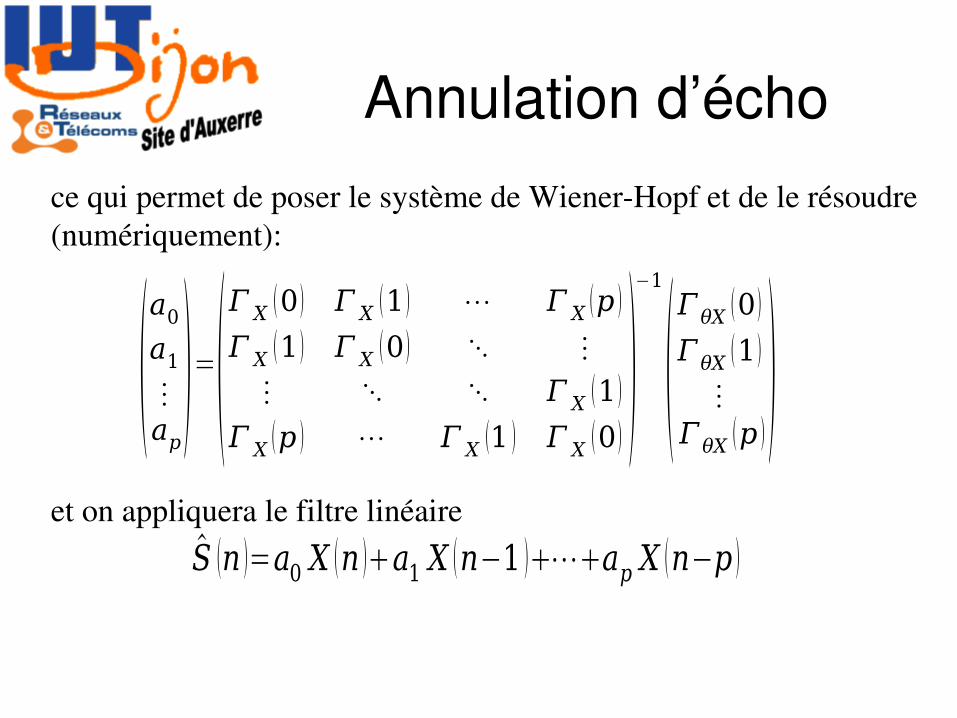
Annulation drsquoeacutecho
a0
a1
⋮
ap=
Γ X 0 Γ X 1 ⋯ Γ X p
Γ X 1 Γ X 0 ⋱ ⋮
⋮ ⋱ ⋱ Γ X 1
Γ X p ⋯ Γ X 1 Γ X 0 minus1
ΓθX 0
ΓθX 1
⋮
ΓθX p
S n =a0 X n a1 X nminus1 ⋯ap X nminusp
ce qui permet de poser le systegraveme de WienershyHopf et de le reacutesoudre (numeacuteriquement)
et on appliquera le filtre lineacuteaire
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
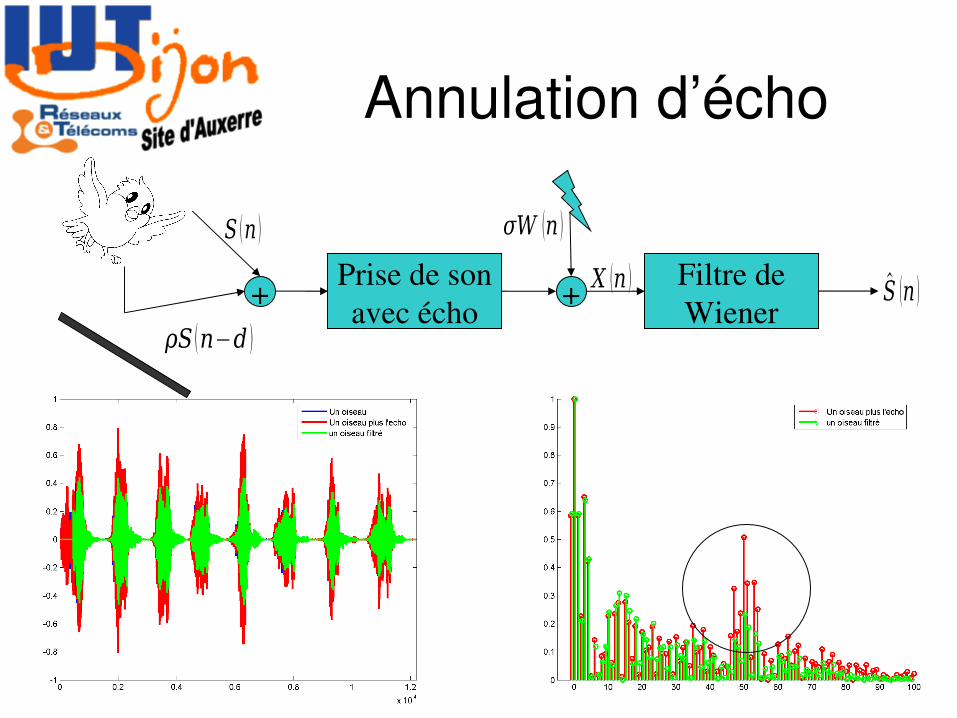
Annulation drsquoeacutecho
Prise de sonavec eacutecho + Filtre de
Wiener
S n
+ρS nminusd
X n
σW n
S n
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Rappels sur la DFT(Discrete Fourier Transform)
La transformeacutee de Fourier discregravete est lrsquoanalogue pour les signaux numeacuteriques de la transformeacutee de Fourier continue utiliseacutee pour les signaux analogiques (et dont on ne parlera donc pas dans ce cours)
x k =sumn=0
Nminus1
x n expminus2iπknN
x n =1N sumk=0
Nminus1
x k exp2iπnkN
La TFD est une meacutethode drsquoanalyse dans le domaine freacutequentiel tregraves puissante Elle est aussi agrave la base de la compression de signaux (audio et videacuteo)
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
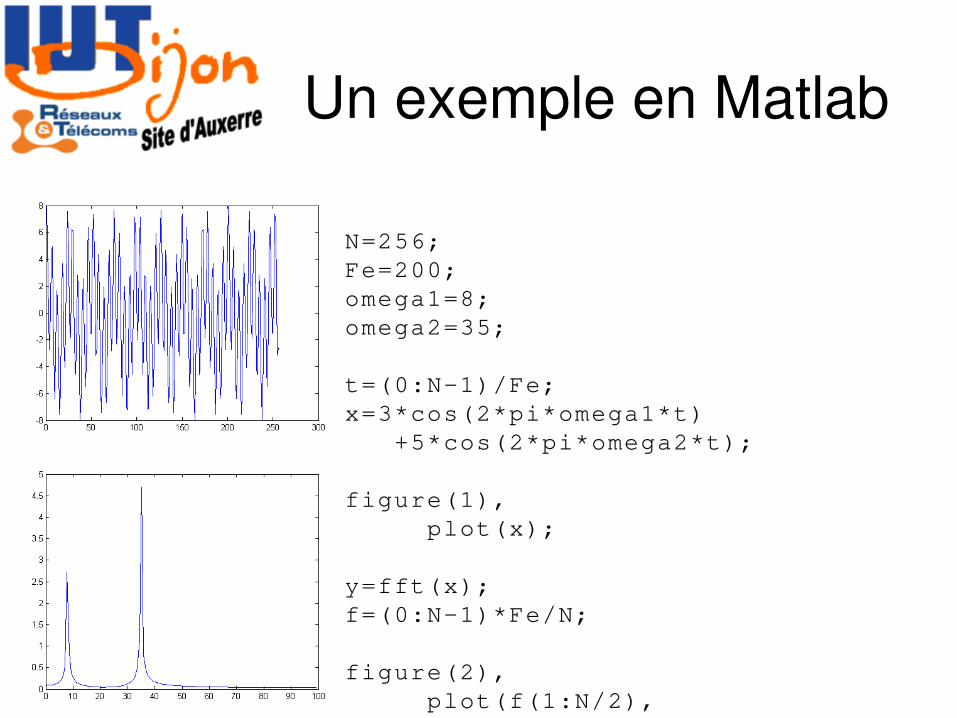
Un exemple en Matlab
N=256Fe=200omega1=8omega2=35
t=(0Nshy1)Fex=3cos(2piomega1t) +5cos(2piomega2t)
figure(1) plot(x)
y=fft(x)f=(0Nshy1)FeN
figure(2) plot(f(1N2)2abs(y(1N2))N)
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
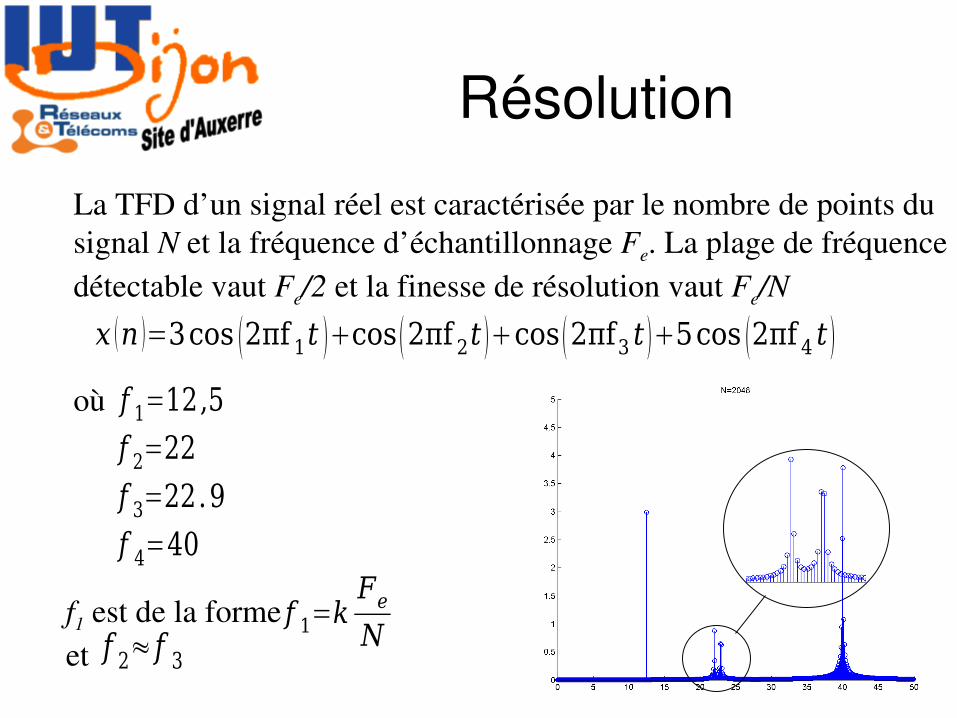
ReacutesolutionLa TFD drsquoun signal reacuteel est caracteacuteriseacutee par le nombre de points du signal N et la freacutequence drsquoeacutechantillonnage Fe La plage de freacutequence deacutetectable vaut Fe2 et la finesse de reacutesolution vaut FeN x n =3cos 2πf 1t cos 2πf 2t cos 2πf3 t 5cos 2πf 4 t
f 1=125
f 2=22
f 3=229
f 4=40
ougrave
f1 est de la formeet f 2asymp f 3
f 1=kFe
N
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Extension la DTFT
La transformeacutee de Fourier en temps discret (Discrete time Fourier Transform) est un outil plus theacuteorique
ougrave
On a la formule drsquoinversion
x ω = sumn=minusinfin
infin
x n exp minusiωn
x n =12π intminusπ
π
x ω exp iωn dω
ωisin[minusπ π [
Puisque N est infini la finesse de reacutesolution est nulle et les freacutequences sont toutes distinguables
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Algorithme FFT
La transformeacutee de Fourier rapide (Fast Fourier Transform FFT) est un algorithme de calcul de la transformeacutee de Fourier discregraveteCet algorithme a permis de rendre possible le calcul de TFD dans des applications embarqueacutees et on deacutesigne souvent la TFD par FFT
Exemple numeacuterique Un signal audio de 1 seconde eacutechantillonneacute agrave 40KHz neacutecessite 40000 valeurs numeacuteriquesLe calcul de sa FFT prend un temps de lrsquoordre de 400 ms ()La TFD classique prend un temps de lrsquoordre de 26 minutes
() agrave raison drsquoune opeacuteration pas millishyseconde
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
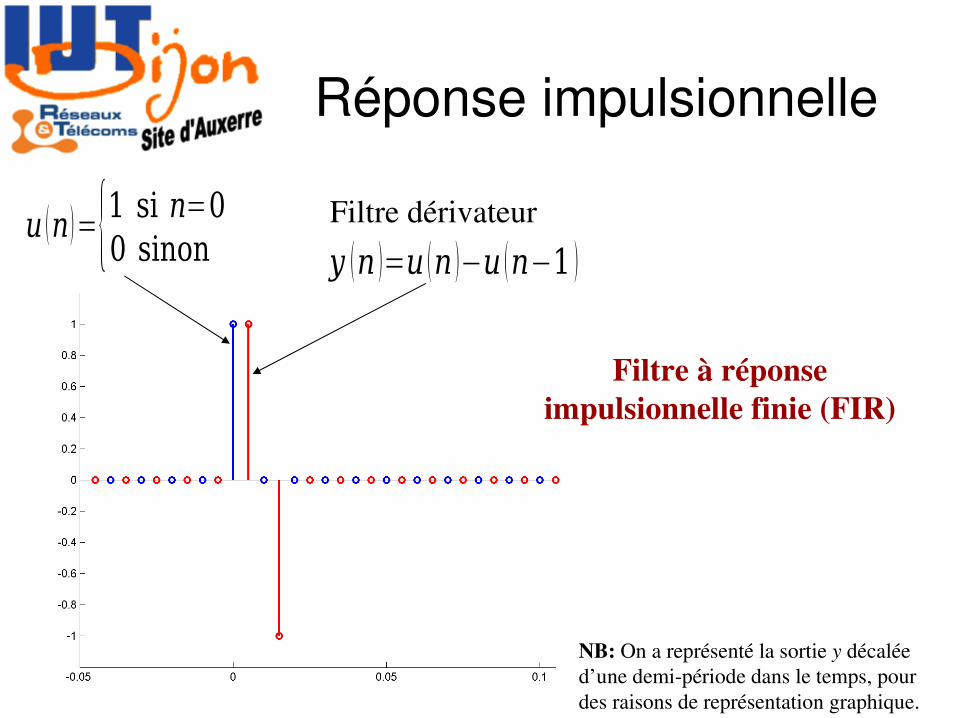
Reacuteponse impulsionnelle
u n=1 si n=00 sinon y n =u n minusu nminus1
NB On a repreacutesenteacute la sortie y deacutecaleacutee drsquoune demishypeacuteriode dans le temps pour des raisons de repreacutesentation graphique
Filtre deacuterivateur
Filtre agrave reacuteponse impulsionnelle finie (FIR)
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
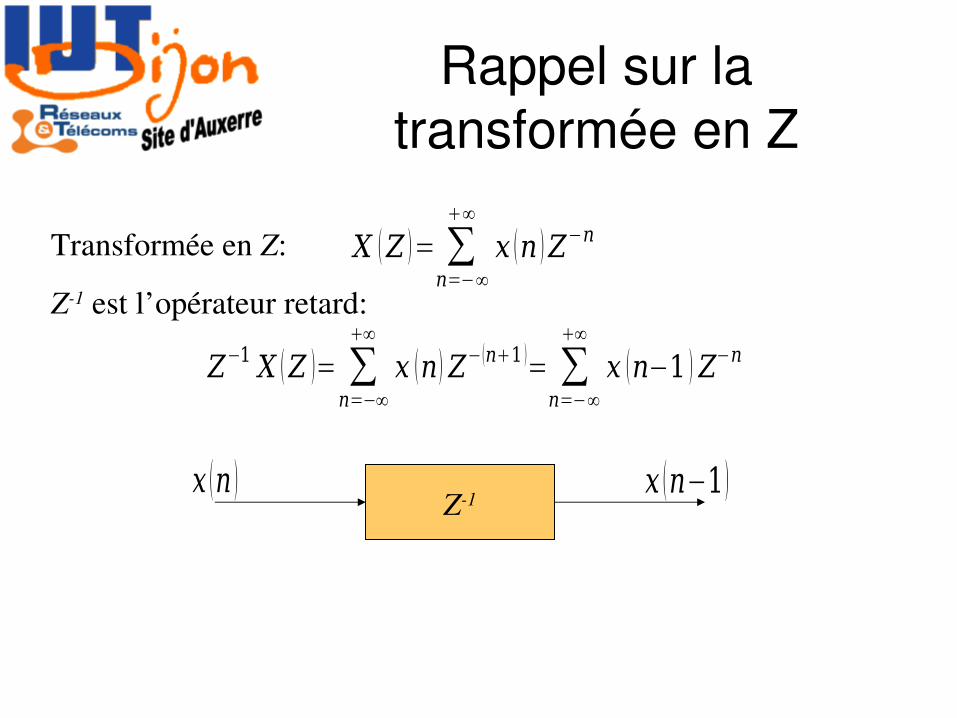
Rappel sur la transformeacutee en Z
Transformeacutee en Z
Zshy1 est lrsquoopeacuterateur retard
X Z = sumn=minusinfin
infin
x n Zminusn
Zshy1x n x nminus1
Zminus1 X Z = sumn=minusinfin
infin
x n Zminus n1 = sumn=minusinfin
infin
x nminus1 Zminusn
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
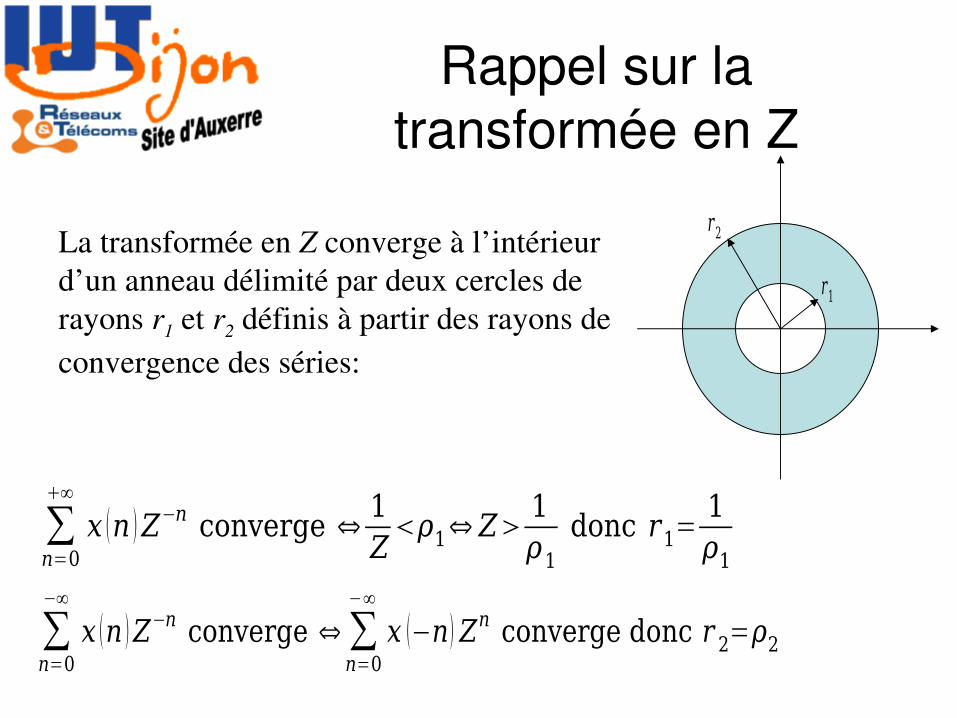
Rappel sur la transformeacutee en Z
La transformeacutee en Z converge agrave lrsquointeacuterieur drsquoun anneau deacutelimiteacute par deux cercles de rayons r1 et r2 deacutefinis agrave partir des rayons de convergence des seacuteries
sumn=0
infin
x n Zminusn converge hArr1Zρ1hArrZ
1ρ1
donc r1=1ρ1
r1
r2
sumn=0
minusinfin
x n Zminusn converge hArrsumn=0
minusinfin
x minusn Zn converge donc r 2=ρ2
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
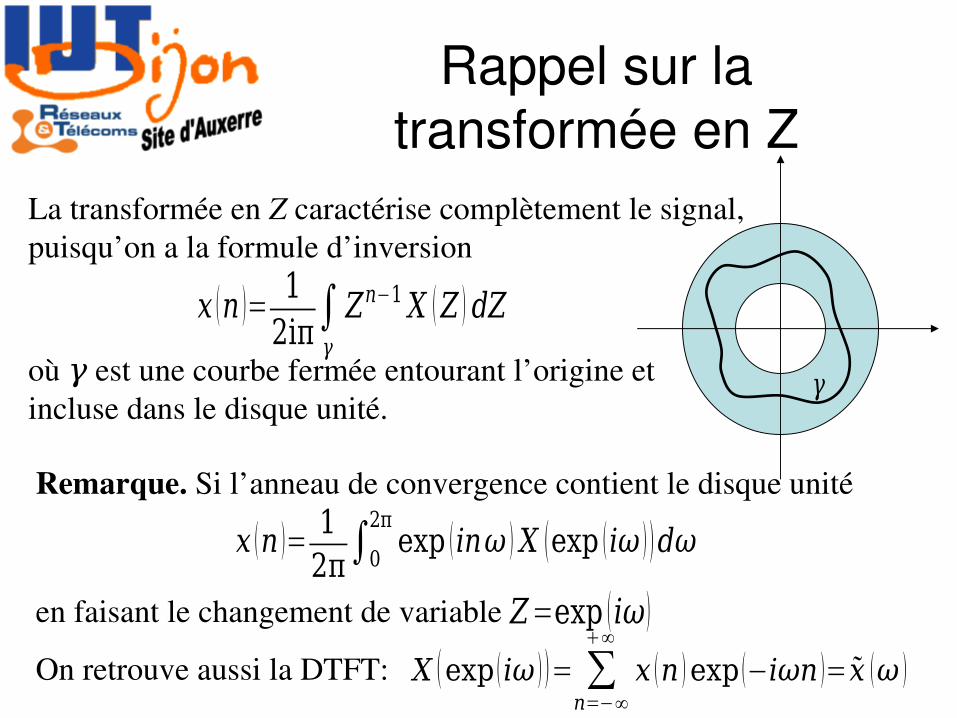
Rappel sur la transformeacutee en Z
La transformeacutee en Z caracteacuterise complegravetement le signal puisqursquoon a la formule drsquoinversion
x n = 12iπintγ
Znminus1X Z dZ
ougrave γ est une courbe fermeacutee entourant lrsquoorigine et incluse dans le disque uniteacute
γ
Remarque Si lrsquoanneau de convergence contient le disque uniteacute
x n = 12πint0
2πexp inω X exp iω dω
Z=exp iωen faisant le changement de variable
On retrouve aussi la DTFT X exp iω = sumn=minusinfin
infin
x n exp minusiωn = x ω
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
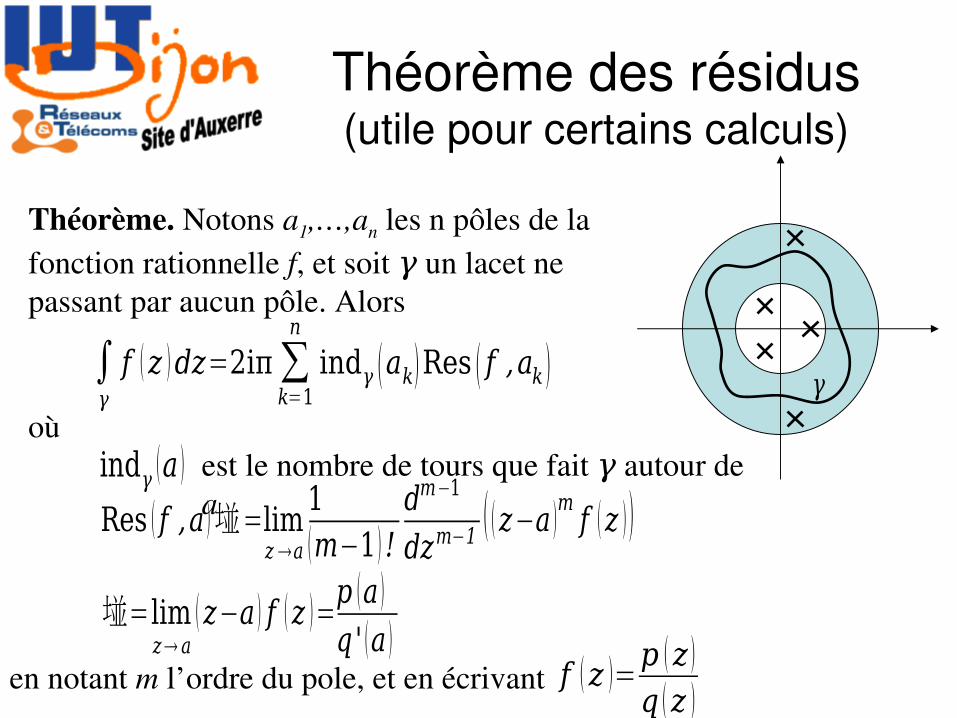
Theacuteoregraveme des reacutesidus(utile pour certains calculs)
intγ
f z dz=2iπsumk=1
n
indγ akRes f ak
Theacuteoregraveme Notons a1hellipan les n pocircles de la fonction rationnelle f et soit γ un lacet ne passant par aucun pocircle Alors
γougrave
indγ a
Res f a =limza
1mminus1
dmminus1
dzmminus1 zminusa m f z
=limz a
zminusa f z =p a q a
est le nombre de tours que fait γ autour de a
en notant m lrsquoordre du pole et en eacutecrivant f z =p z q z
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
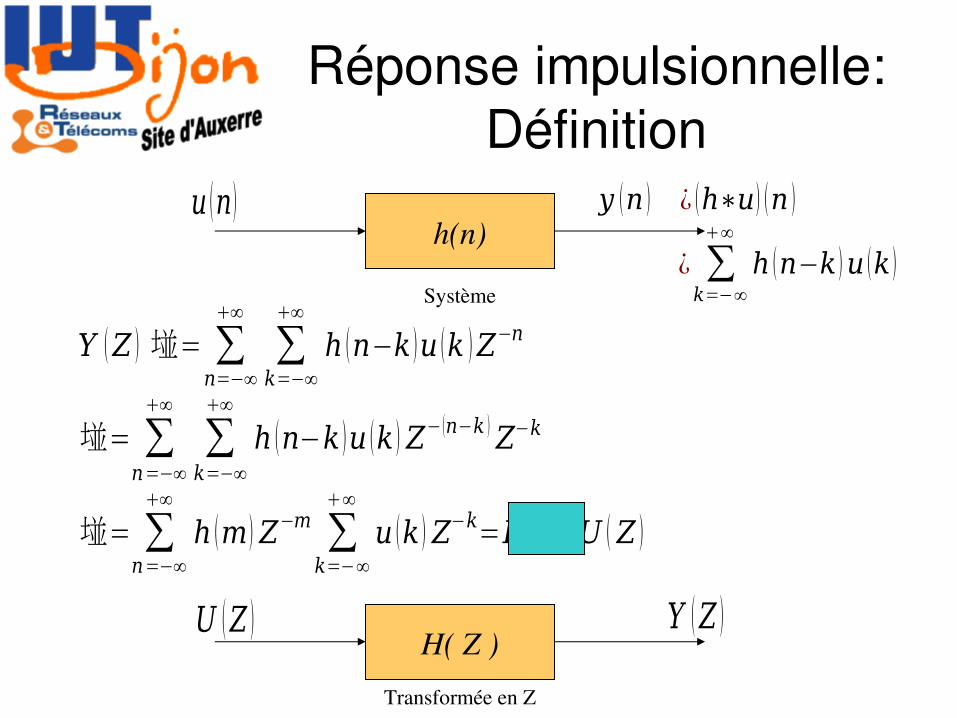
Reacuteponse impulsionnelleDeacutefinition
h(n)y n iquest hlowastu n
iquest sumk=minusinfin
infin
h nminusk u k
u n
H( Z )
Y Z = sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminusn
= sumn=minusinfin
infin
sumk=minusinfin
infin
h nminusk u k Zminus nminusk Zminusk
= sumn=minusinfin
infin
h m Zminusm sumk=minusinfin
infin
u k Zminusk=H Z U Z
U Z Y Z
Systegraveme
Transformeacutee en Z
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
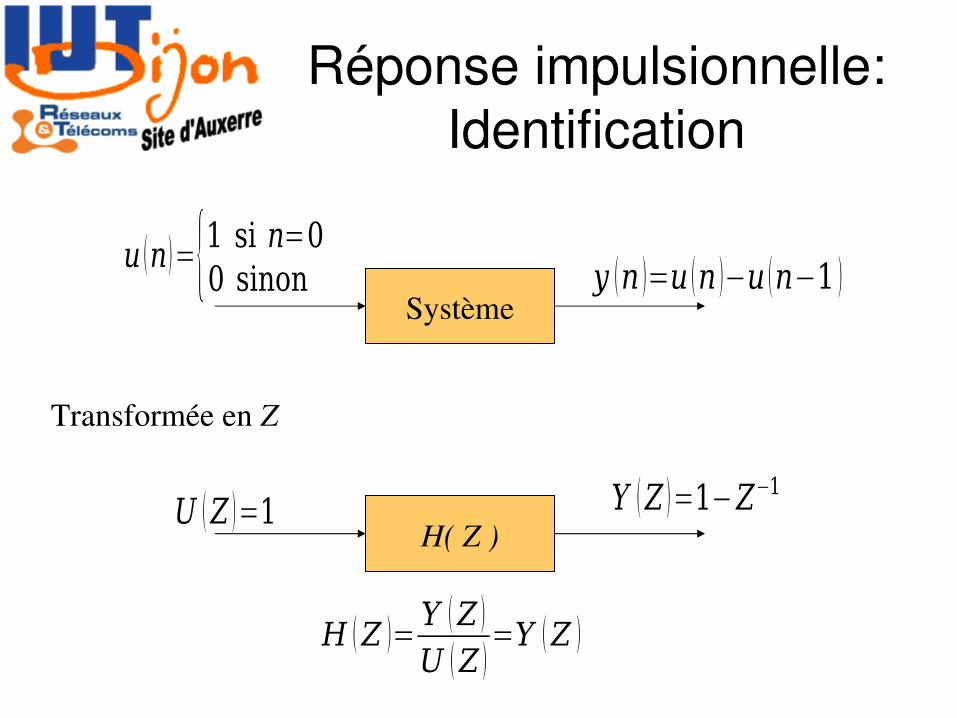
Reacuteponse impulsionnelleIdentification
Systegravemey n =u n minusu nminus1
u n=1 si n=00 sinon
H( Z )
H Z =Y Z U Z
=Y Z
U Z =1
Transformeacutee en Z
Y Z =1minusZminus1
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
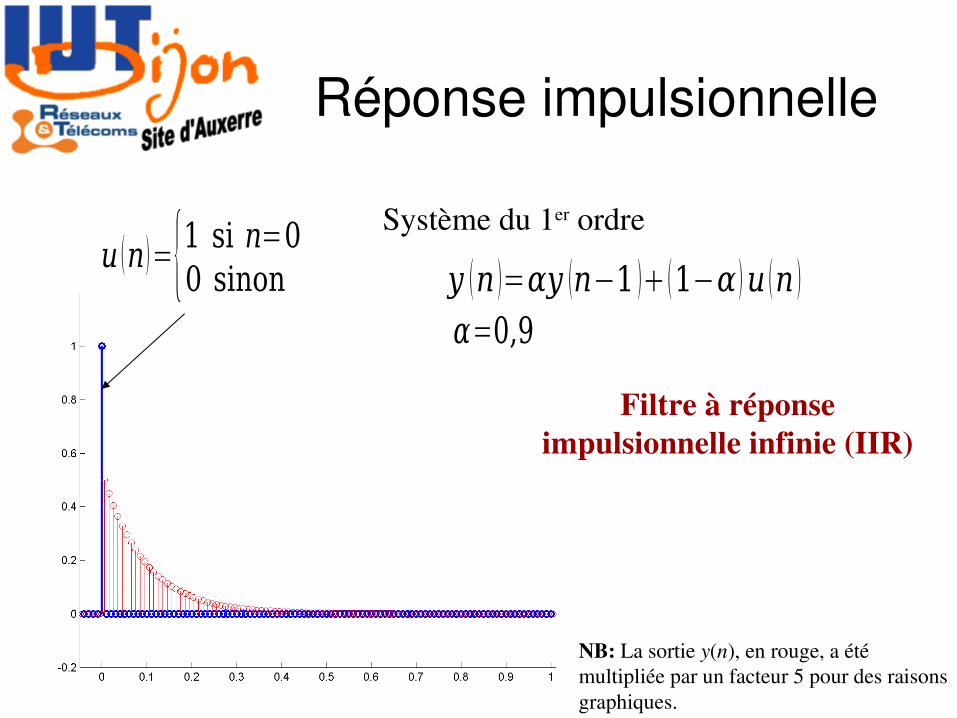
Reacuteponse impulsionnelle
NB La sortie y(n) en rouge a eacuteteacute multiplieacutee par un facteur 5 pour des raisons graphiques
u n=1 si n=00 sinon y n =αy nminus1 1minusα u n
α=09
Systegraveme du 1er ordre
Filtre agrave reacuteponse impulsionnelle infinie (IIR)
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Reacuteponse impulsionnelle1egravere meacutethode de calcul
1) Equation sans second membre (ssm)y n =αy nminus1
Solution de la forme y n =arn
arn=αarnminus1hArrr=α (eacutequation caracteacuteristique)2) Reacuteponse agrave lrsquoentreacutee u(0)=1
y 0 =a=αy minus1 1minusα u 0 =1minusα
drsquoougrave y n = 1minusα αn si nge0
0 sinon
donc H Z =Y Z =sumn=0
infin
1minusα αnZminusn=1minusα
1minusαZminus1
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Reacuteponse impulsionnelle2nde meacutethode de calcul
On utilise la transformeacutee en Z
y n =αy nminus1 1minusα u n
Y Z =αZminus1Y Z 1minusα U Z
hArr 1minusαZminus1 Y Z = 1minusα U Z
hArrY Z U Z
=1minusα
1minusαZminus1=H Z
puis on raisonne laquo formellement raquo
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
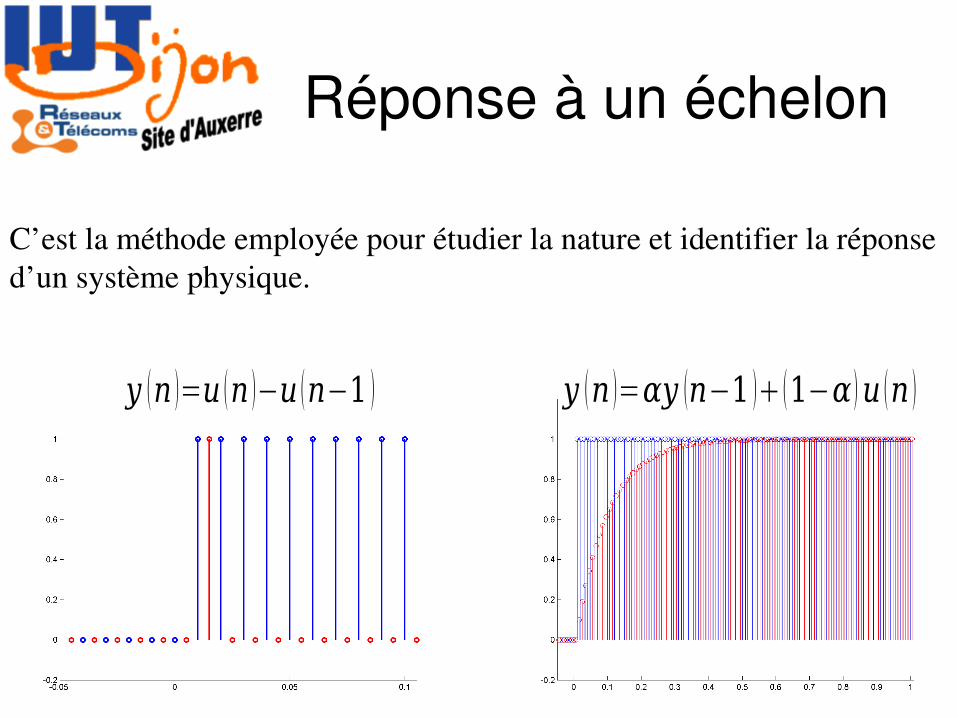
Reacuteponse agrave un eacutechelon
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest la meacutethode employeacutee pour eacutetudier la nature et identifier la reacuteponse drsquoun systegraveme physique
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Etude de la reacuteponse du second systegraveme
y n =αy nminus1 1minusα =α2 y nminus2 α 1minusα 1minusα =αn y 0 αnminus1 1minusα ⋯α 1minusα 1minusα =αn 1minusα αnminus1 1minusα ⋯α 1minusα 1minusα
= 1minusα sumk=0
nαk=1minusα
1minusαn1
1minusα=1minusαn1
drsquoougrave la forme exponentielle de la reacuteponse caracteacuteristique drsquoun 1er ordre
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
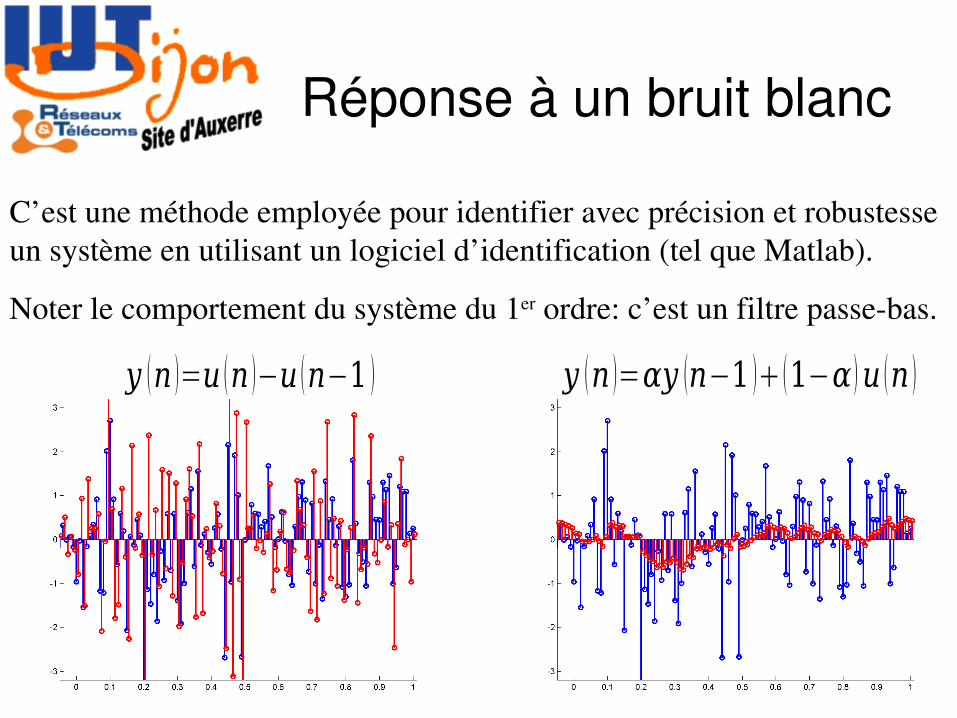
Reacuteponse agrave un bruit blanc
y n =αy nminus1 1minusα u n y n =u n minusu nminus1
Crsquoest une meacutethode employeacutee pour identifier avec preacutecision et robustesse un systegraveme en utilisant un logiciel drsquoidentification (tel que Matlab)
Noter le comportement du systegraveme du 1er ordre crsquoest un filtre passeshybas
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
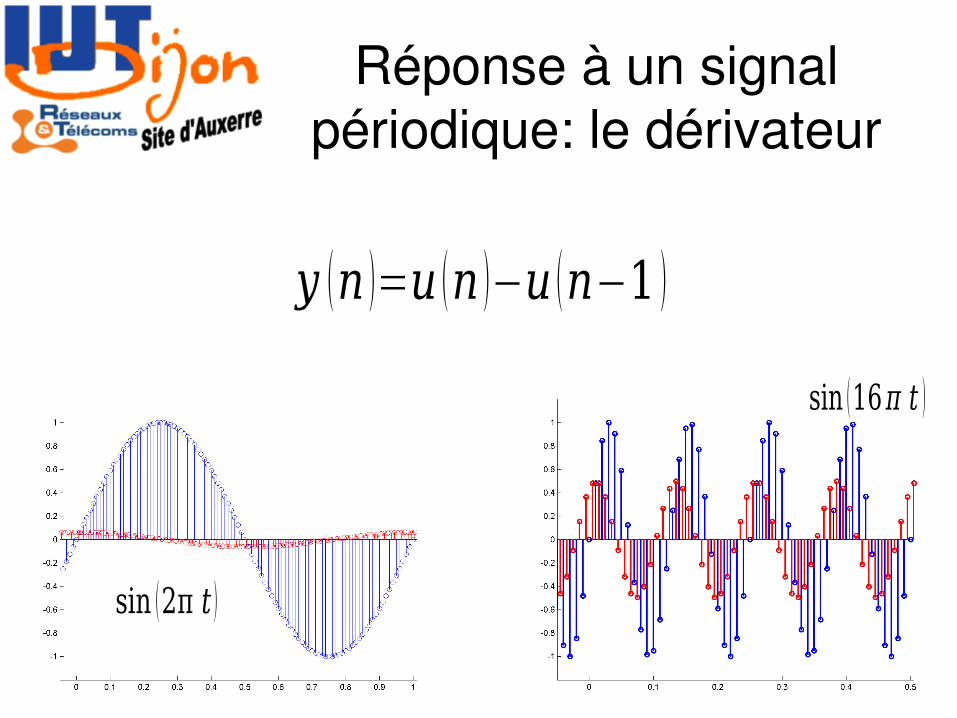
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1
sin 2π t
sin 16π t
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
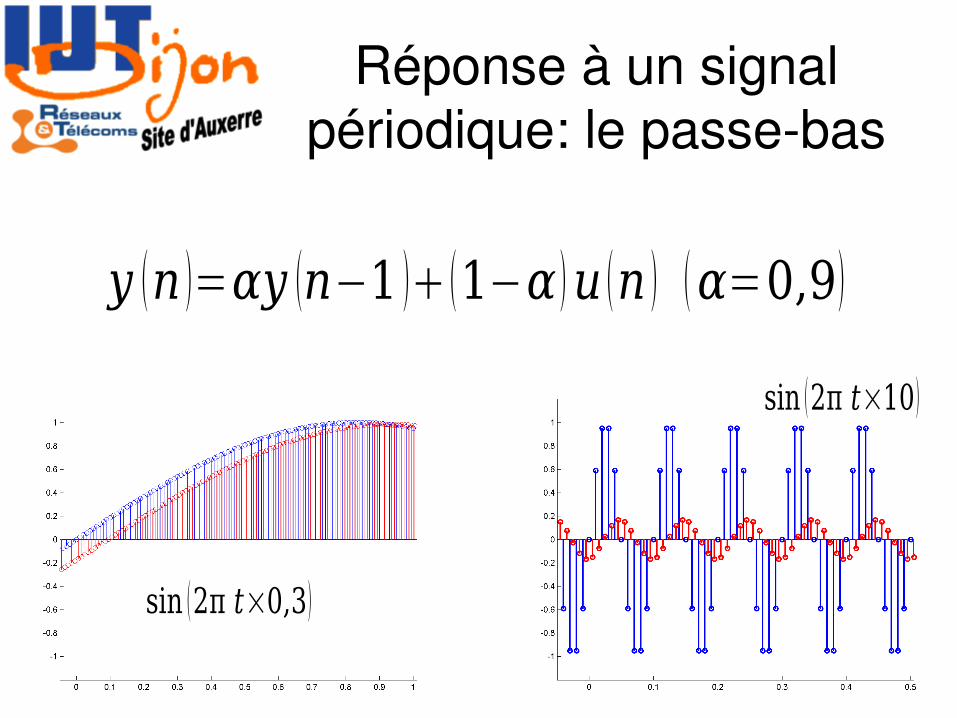
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=09
sin 2π ttimes03
sin 2π ttimes10
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
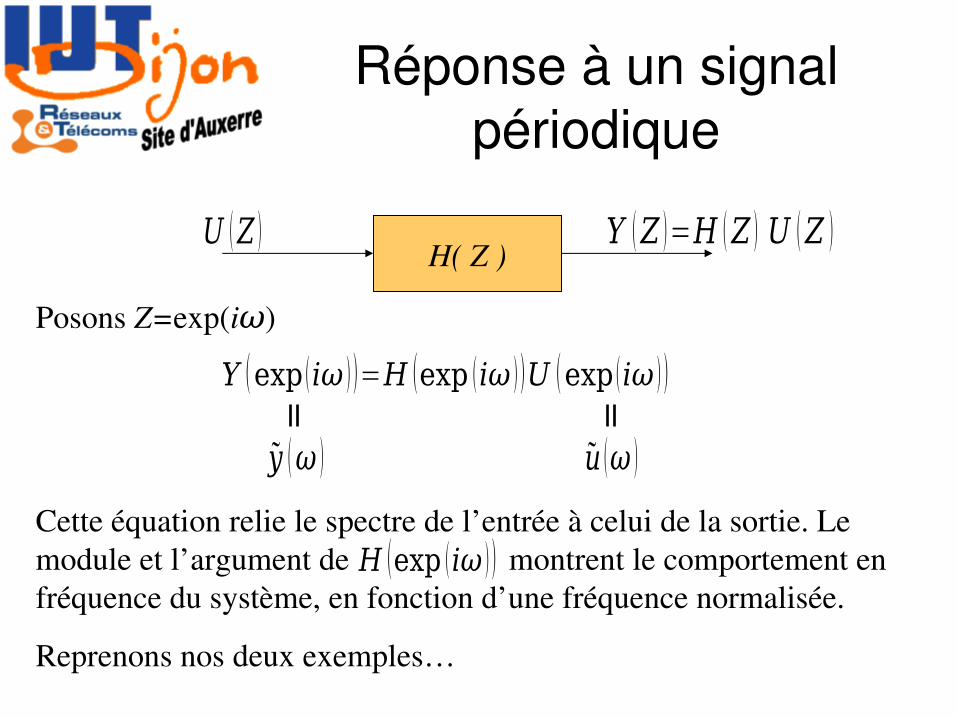
Reacuteponse agrave un signal peacuteriodique
H( Z )U Z Y Z =H Z U Z
Posons Z=exp(iω)
Y exp iω =H exp iω U exp iω
y ω u ω
Cette eacutequation relie le spectre de lrsquoentreacutee agrave celui de la sortie Le module et lrsquoargument de montrent le comportement en freacutequence du systegraveme en fonction drsquoune freacutequence normaliseacutee
Reprenons nos deux exempleshellip
H exp iω
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
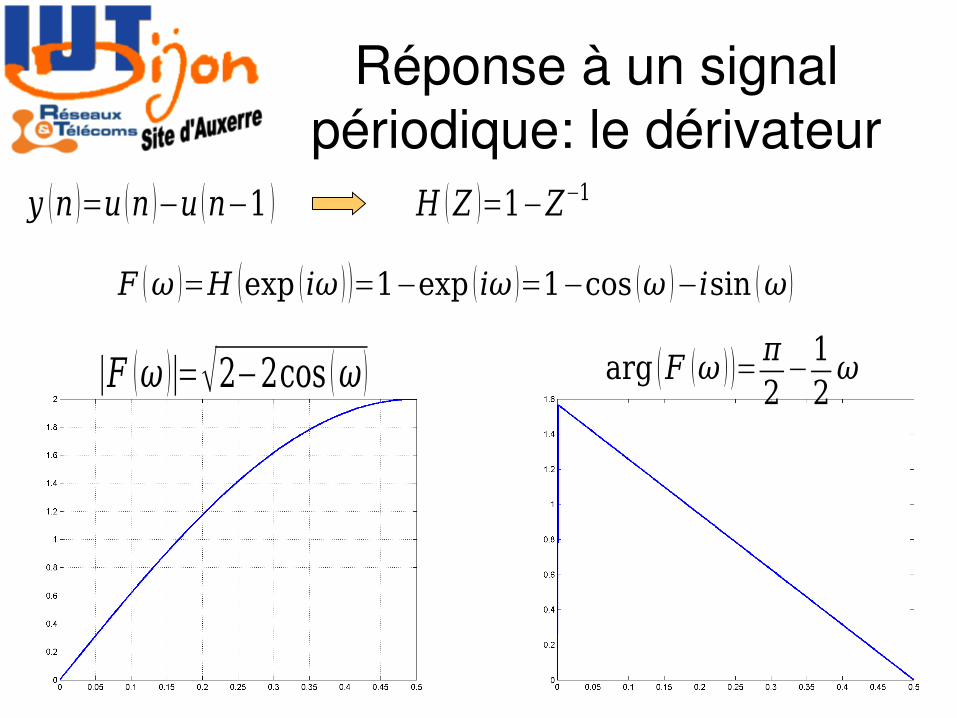
Reacuteponse agrave un signal peacuteriodique le deacuterivateur
y n =u n minusu nminus1 H Z =1minusZminus1
F ω =H exp iω =1minusexp iω =1minuscos ω minusisin ω
∣F ω ∣=2minus2cos ω arg F ω = π2minus
12ω
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
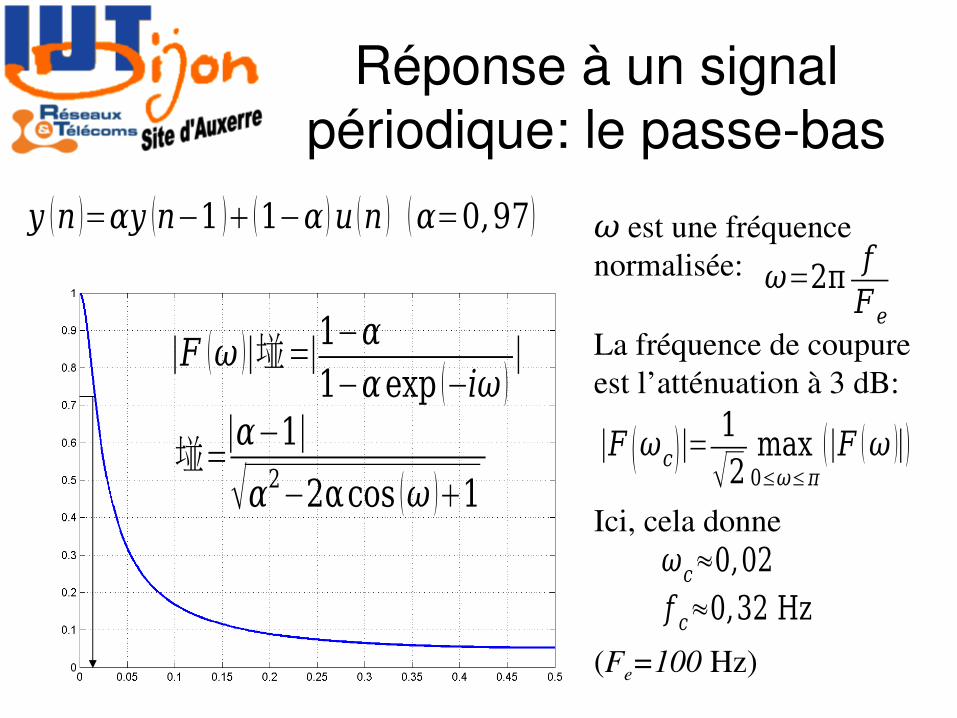
Reacuteponse agrave un signal peacuteriodique le passeshybas
y n =αy nminus1 1minusα u n α=097
∣F ω ∣=∣1minusα1minusαexp minusiω
∣
=∣αminus1∣
α2minus2αcos ω 1
ω est une freacutequence normaliseacutee ω=2π f
F eLa freacutequence de coupure est lrsquoatteacutenuation agrave 3 dB
∣F ωc ∣=1
2max
0leωleπ∣F ω ∣
Ici cela donneωcasymp002f casymp032 Hz
(Fe=100 Hz)
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
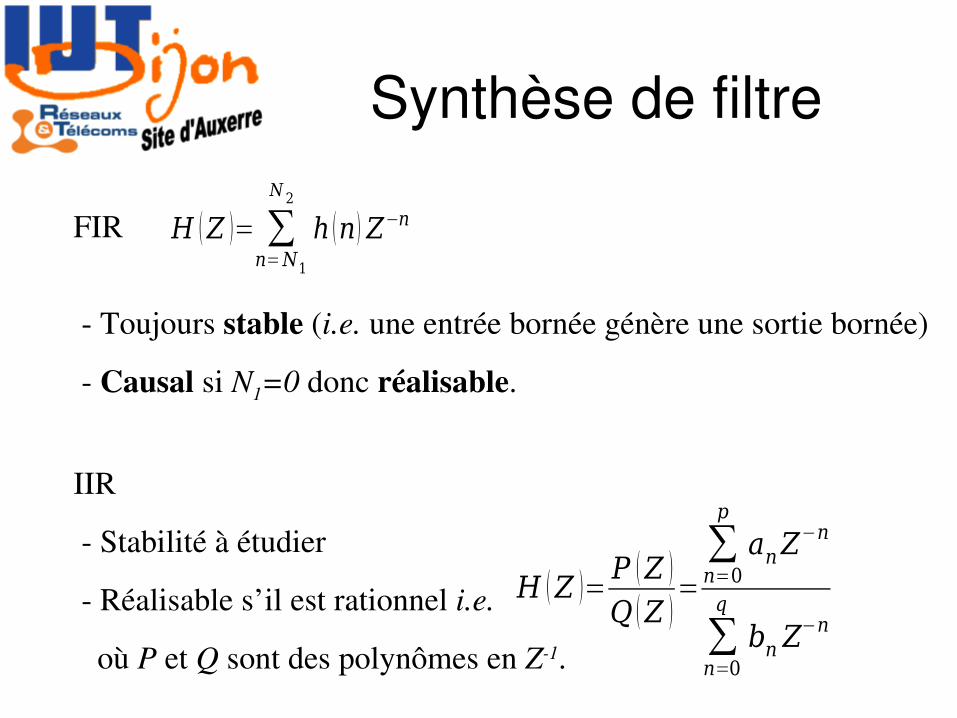
Synthegravese de filtre
FIR
shy Toujours stable (ie une entreacutee borneacutee geacutenegravere une sortie borneacutee)
shy Causal si N1=0 donc reacutealisable
IIR
shy Stabiliteacute agrave eacutetudier
shy Reacutealisable srsquoil est rationnel ie
ougrave P et Q sont des polynocircmes en Zshy1
H Z = sumn=N1
N 2
h n Zminusn
H Z =P Z Q Z
=
sumn=0
p
anZminusn
sumn=0
q
bnZminusn
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Synthegravese de filtre
H Z =P Z Q Z
Si un filtre IIR a une fonction de traansfert rationnellealors on appelle
shy zeacuteros de H les racines (complexes) du polynocircme P
shy pocircles de H les racines du polynocircme Q
Ce type de filtre est stable si les pocircles de H sont inclus dans le disque uniteacute
Exemple le systegraveme du 1er ordrea pour fonction de transfert
Il est stable ssi
H Z = 1minusα1minusαZminus1
y n =αy nminus1 1minusα u n
∣α∣1
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
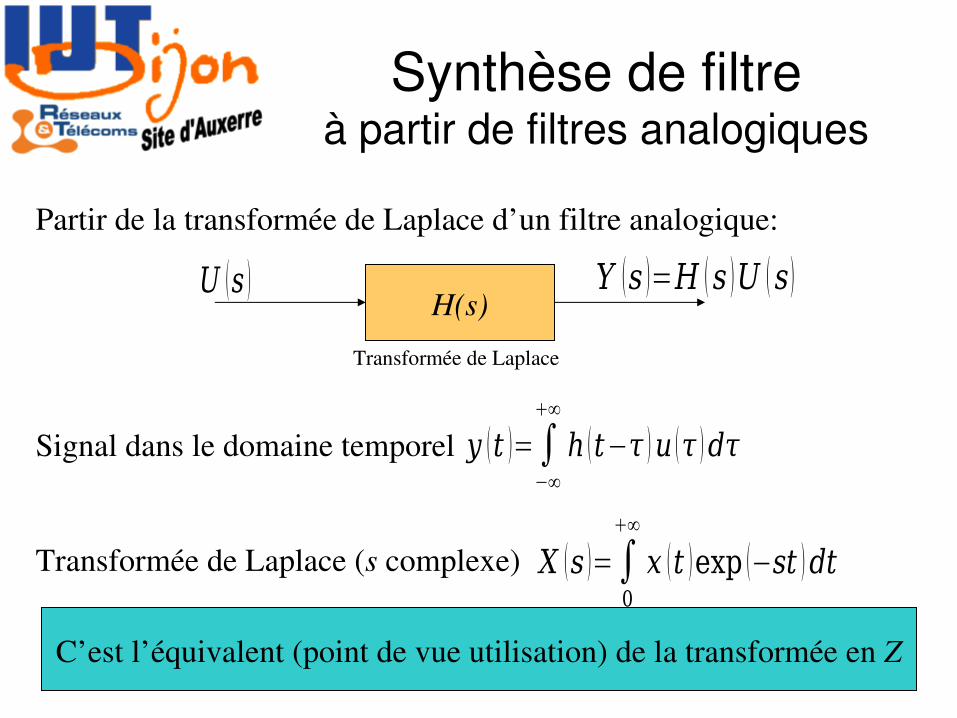
Synthegravese de filtreagrave partir de filtres analogiques
Partir de la transformeacutee de Laplace drsquoun filtre analogique
H(s)U s Y s =H s U s
Transformeacutee de Laplace
y t =intminusinfin
infin
h tminusτ u τ dτ
X s =int0
infin
x t exp minusst dt
Signal dans le domaine temporel
Transformeacutee de Laplace (s complexe)
Crsquoest lrsquoeacutequivalent (point de vue utilisation) de la transformeacutee en Z
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
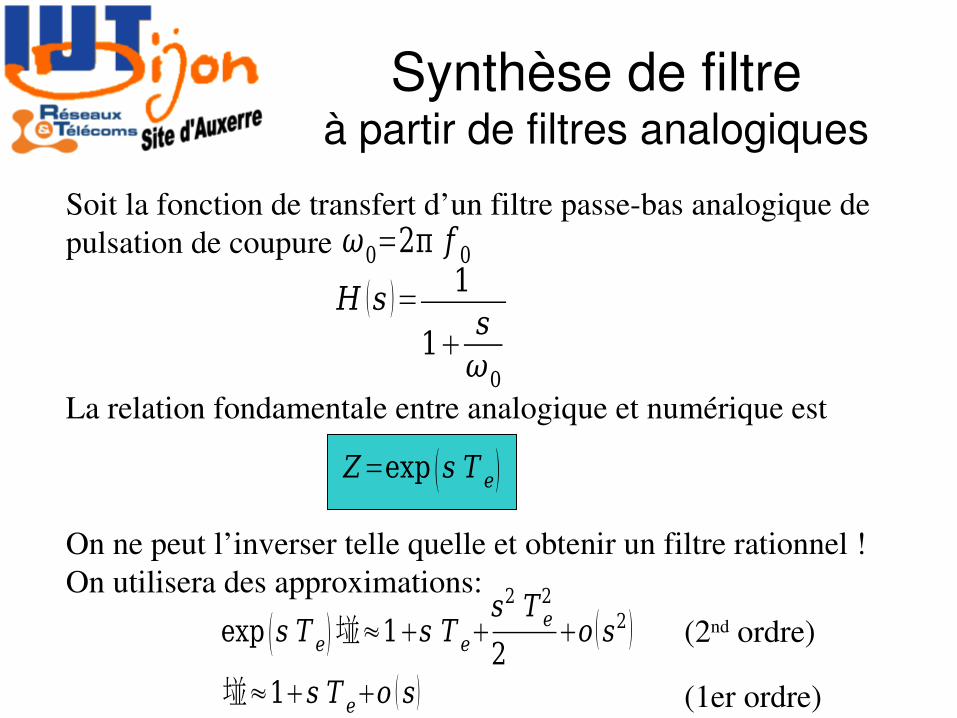
Synthegravese de filtreagrave partir de filtres analogiques
Soit la fonction de transfert drsquoun filtre passeshybas analogique de pulsation de coupure
H s = 1
1sω0
La relation fondamentale entre analogique et numeacuterique est
Z=exp s T e
On ne peut lrsquoinverser telle quelle et obtenir un filtre rationnel On utilisera des approximations
exp s T easymp1s T es2 T e
2
2o s2
asymp1s T eo s
(2nd ordre)
(1er ordre)
ω0=2π f 0
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
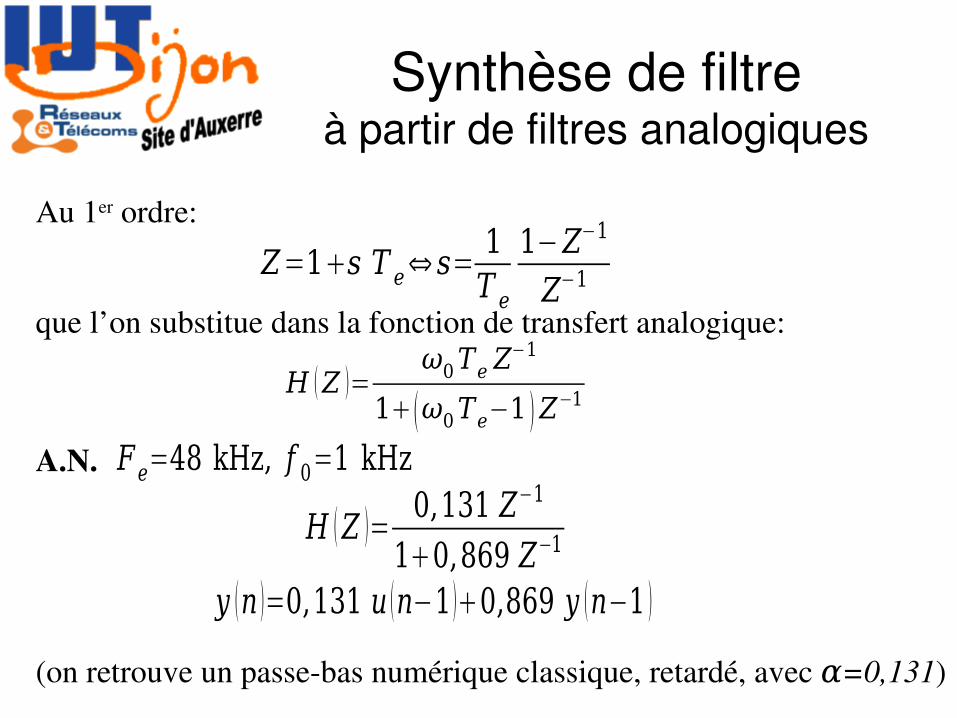
Synthegravese de filtreagrave partir de filtres analogiques
Z=1s T ehArrs=1T e
1minusZminus1
Zminus1
Au 1er ordre
que lrsquoon substitue dans la fonction de transfert analogique
H Z =ω0Te Z
minus1
1 ω0Teminus1 Zminus1
AN F e=48 kHz f 0=1 kHz
H Z =0131 Zminus1
10869 Zminus1
y n =0131 u nminus1 0869 y nminus1
(on retrouve un passeshybas numeacuterique classique retardeacute avec α=0131)
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
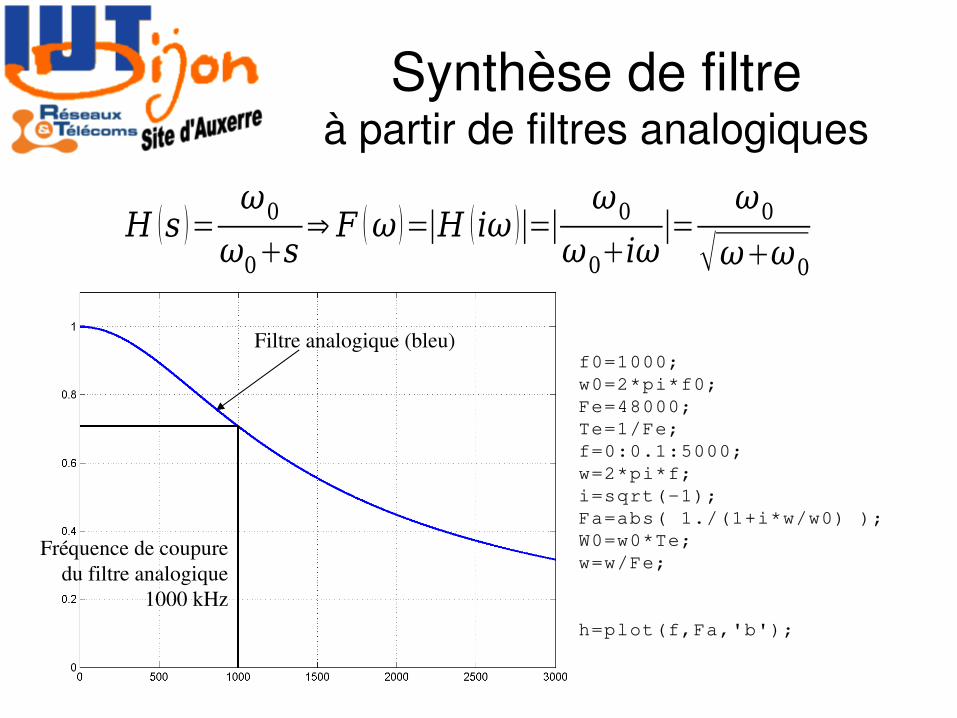
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFe
h=plot(fFab)
Filtre analogique (bleu)
Freacutequence de coupuredu filtre analogique
1000 kHz
H s =ω0
ω0srArrF ω =∣H iω ∣=∣
ω0
ω0iω∣=
ω0
ωω0
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
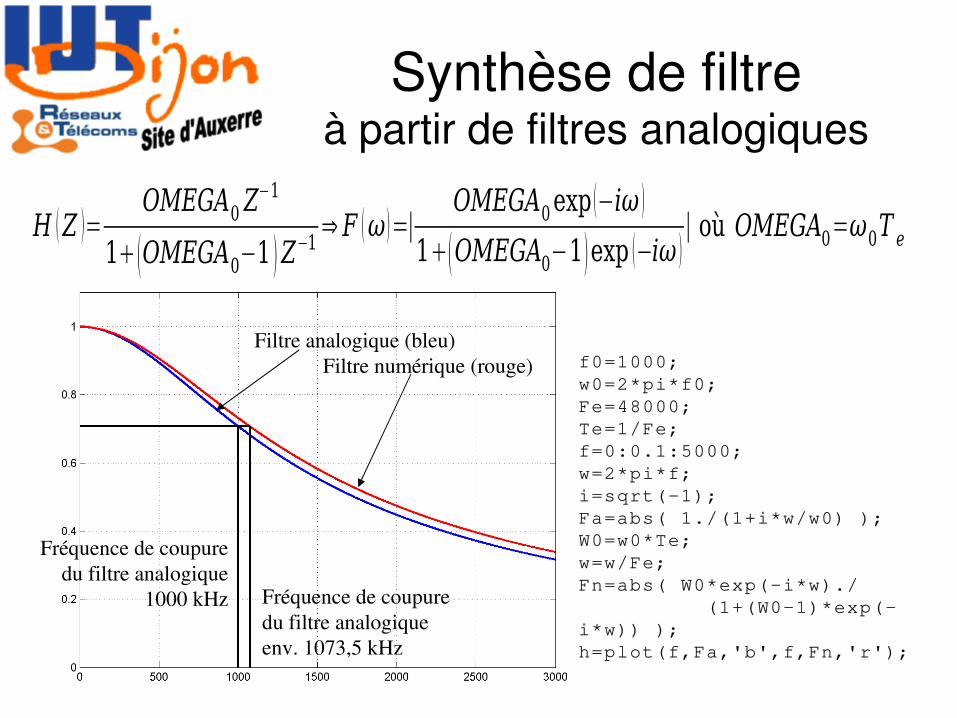
Synthegravese de filtreagrave partir de filtres analogiques
f0=1000w0=2pif0Fe=48000Te=1Fef=0015000w=2pifi=sqrt(shy1)Fa=abs( 1(1+iww0) )W0=w0Tew=wFeFn=abs( W0exp(shyiw) (1+(W0shy1)exp(shyiw)) )h=plot(fFabfFnr)
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
H Z =OMEGA0Z
minus1
1 OMEGA0minus1 Zminus1rArrF ω =∣
OMEGA0 exp minusiω
1OMEGA0minus1exp minusiω ∣ ougrave OMEGA0=ω0T e
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
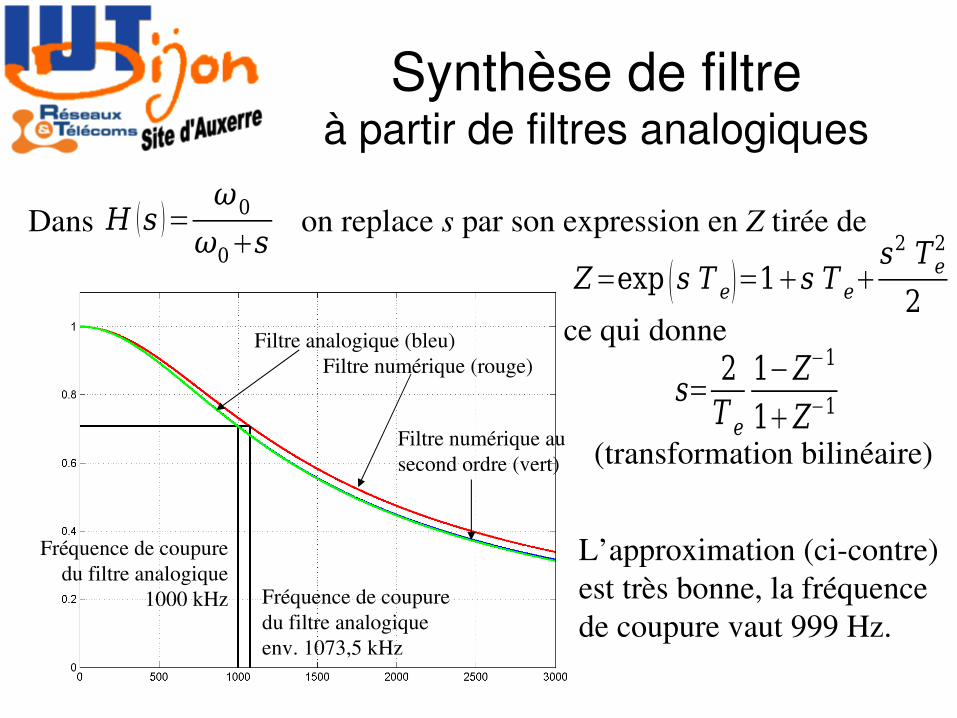
Synthegravese de filtreagrave partir de filtres analogiques
Filtre analogique (bleu) Filtre numeacuterique (rouge)
Freacutequence de coupuredu filtre analogique
1000 kHz Freacutequence de coupuredu filtre analogiqueenv 10735 kHz
Filtre numeacuterique au second ordre (vert)
H s =ω0
ω0s
s=2T e
1minusZminus1
1Zminus1
Z=exp s T e=1s T es2 Te
2
2
Dans on replace s par son expression en Z tireacutee de
ce qui donne
(transformation bilineacuteaire)
Lrsquoapproximation (cishycontre) est tregraves bonne la freacutequence de coupure vaut 999 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
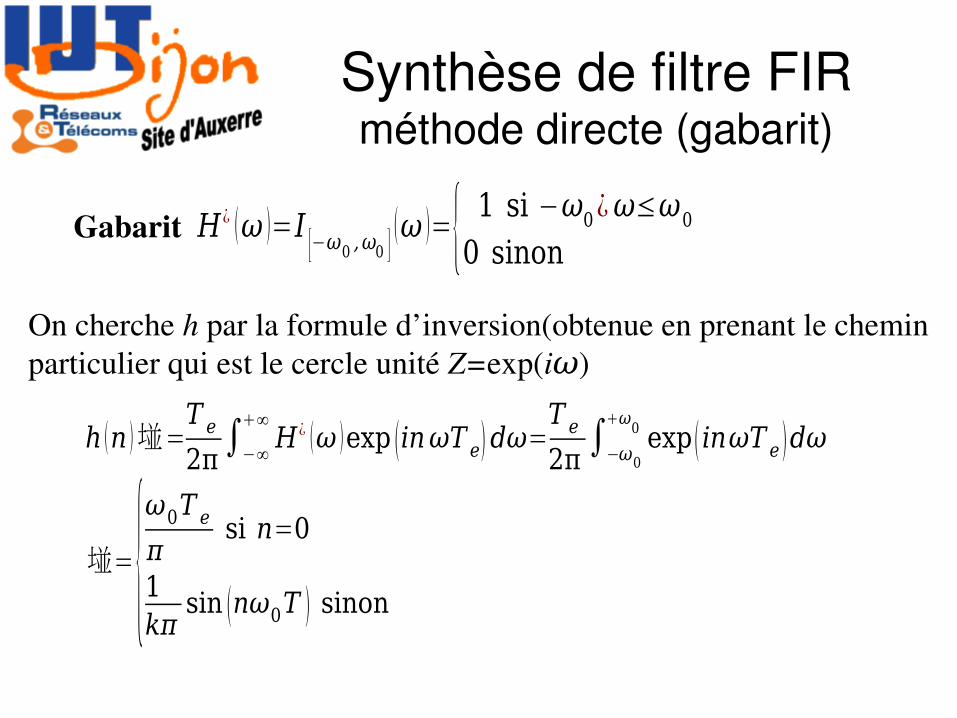
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Hiquest ω =I[minusω0 ω0 ]
ω = 1 si minusω0iquestωleω0
0 sinon Gabarit
On cherche h par la formule drsquoinversion(obtenue en prenant le chemin particulier qui est le cercle uniteacute Z=exp(iω)
h n =T e
2πintminusinfininfinHiquest ω exp inωT edω=
T e
2πintminusω0
ω0 exp inωT e dω
=ω0T e
π si n=0
1kπ
sin nω0T sinon
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
21egravere essai la freacutequence de Nyquist
h n =ω0T e
π=1 si n=0
1kπ
sin nω0T =0 sinon
Calcul trivial
ie y n =u n
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Synthegravese de filtre FIRmeacutethode directe (gabarit)
ω0=2πf 0 avec f 0=F e
42nd essai
h n =12
si n=0
0 si n est pair non nul
1nπ
minus1 nminus1
2 si n est impair
Calcul eacuteleacutementaire
ie filtre non causal et non rationnel shy Il faut tronquer la seacuterie risque drsquoapparition du pheacutenomegravene de Gibbs
shy Il faut mettre un retard pas trop probleacutematique en geacuteneacuteralhellip
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
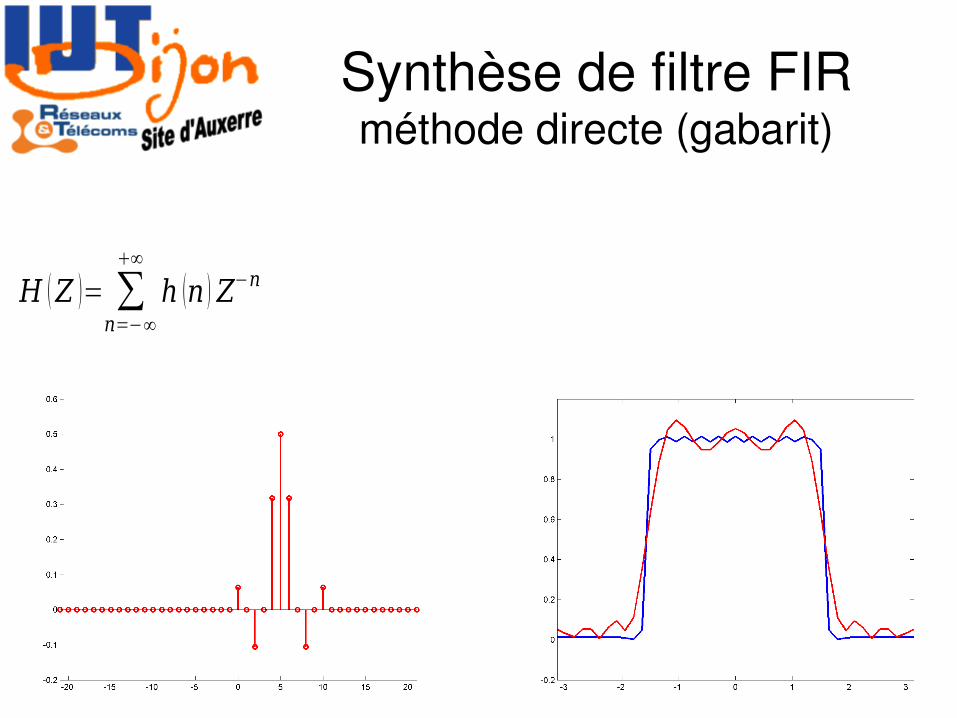
Synthegravese de filtre FIRmeacutethode directe (gabarit)
H Z = sumn=minusinfin
infin
h n Zminusn ZminusN sumn=minusN
N
h n Zminusn=sumn=0
2N
h nminusN Zminusn sumn=minusN
N
h n Zminusn
Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT

Synthegravese de filtre FIRmeacutethode directe (gabarit)
Fenecirctre de Von Hann Hiquest ω =12 1cos ωT e si minusω0leωleω0
0 sinon
h n =12
si n=0
14
si n=plusmn1
0 sinon
ω0=2πf 0 avec f 0=F e
2Pour
on obtient
Freacutequence de coupuredu filtre182 Hz
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
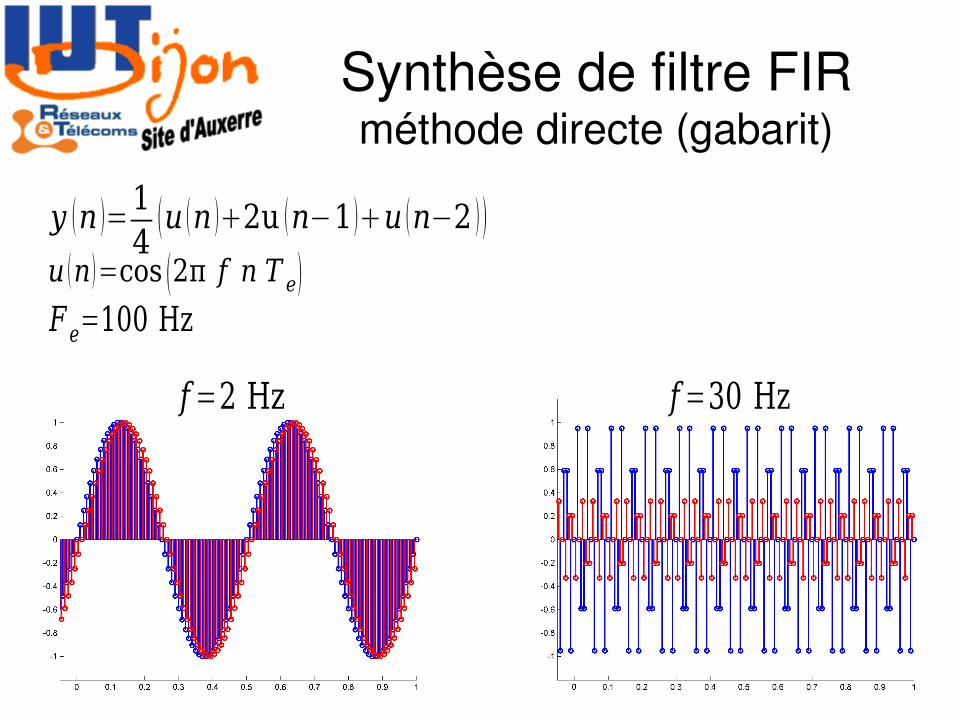
Synthegravese de filtre FIRmeacutethode directe (gabarit)
y n =14u n 2u nminus1 u nminus2
F e=100 Hz
f=2 Hz f=30 Hz
u n=cos 2π f n T e
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
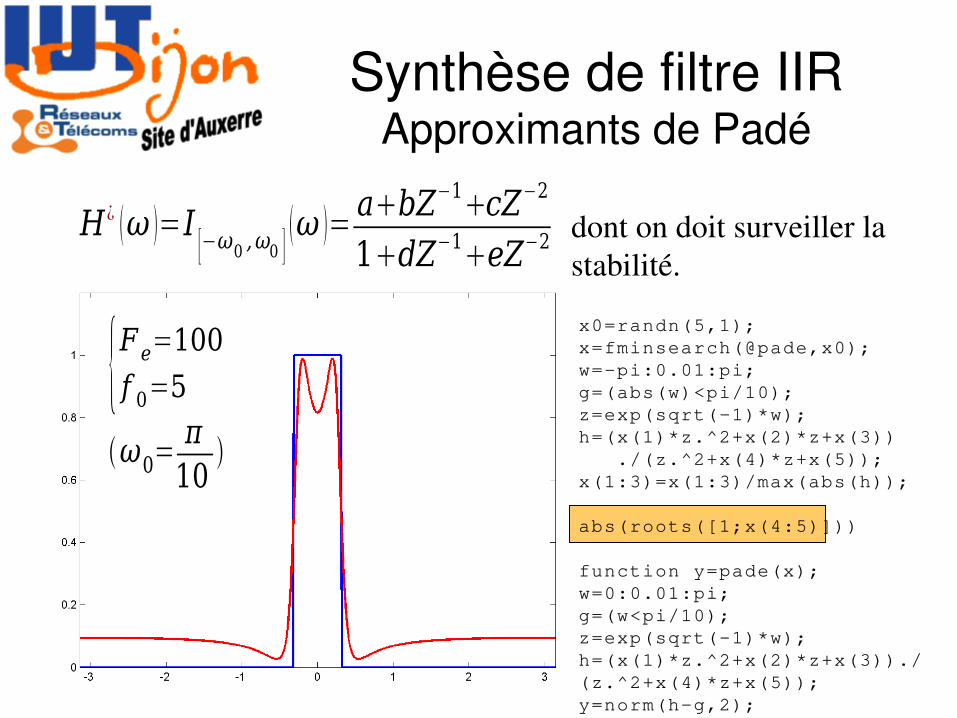
Synthegravese de filtre IIRApproximants de Padeacute
Hiquest ω =I[minusω0 ω0 ]
ω =abZminus1
cZminus2
1dZminus1eZminus2
x0=randn(51)x=fminsearch(padex0)w=shypi001pig=(abs(w)ltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3)) (z^2+x(4)z+x(5))x(13)=x(13)max(abs(h))
abs(roots([1x(45)]))
function y=pade(x)w=0001pig=(wltpi10)z=exp(sqrt(shy1)w)h=(x(1)z^2+x(2)z+x(3))(z^2+x(4)z+x(5))y=norm(hshyg2)
dont on doit surveiller la stabiliteacute
F e=100
f 0=5
ω0=π
10
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
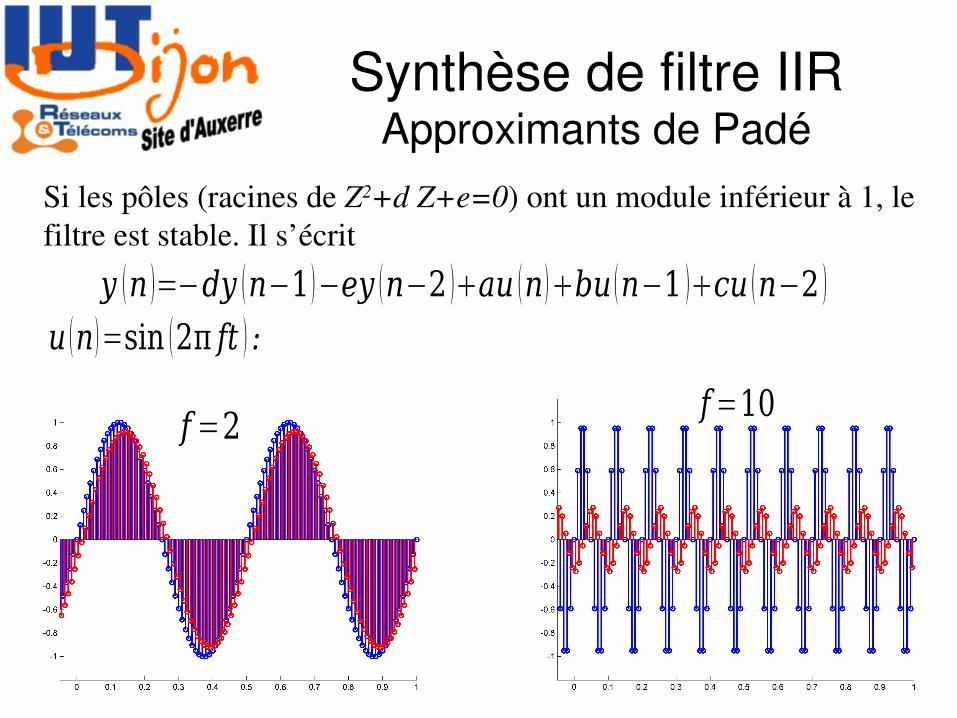
Synthegravese de filtre IIRApproximants de Padeacute
Si les pocircles (racines de Z2+d Z+e=0) ont un module infeacuterieur agrave 1 le filtre est stable Il srsquoeacutecrit
y n =minusdy nminus1 minusey nminus2 au n bu nminus1 cu nminus2 u n=sin 2π ft
f=2f=10
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Compression MP3
bull 20 Codage de Huffman (compression sans perte de donneacutees binaires)
bull 80 Modegravele psychoshyacoustiquendash Filtres passe bande pour reacutecupeacuterer 32 signauxndash Changement de repreacutesentation MDCT (Modified Discrete
Cosine Transform) proche DTFTndash Suppression des freacutequences inaudiblesndash Meacutelange des freacutequences indistinguables
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
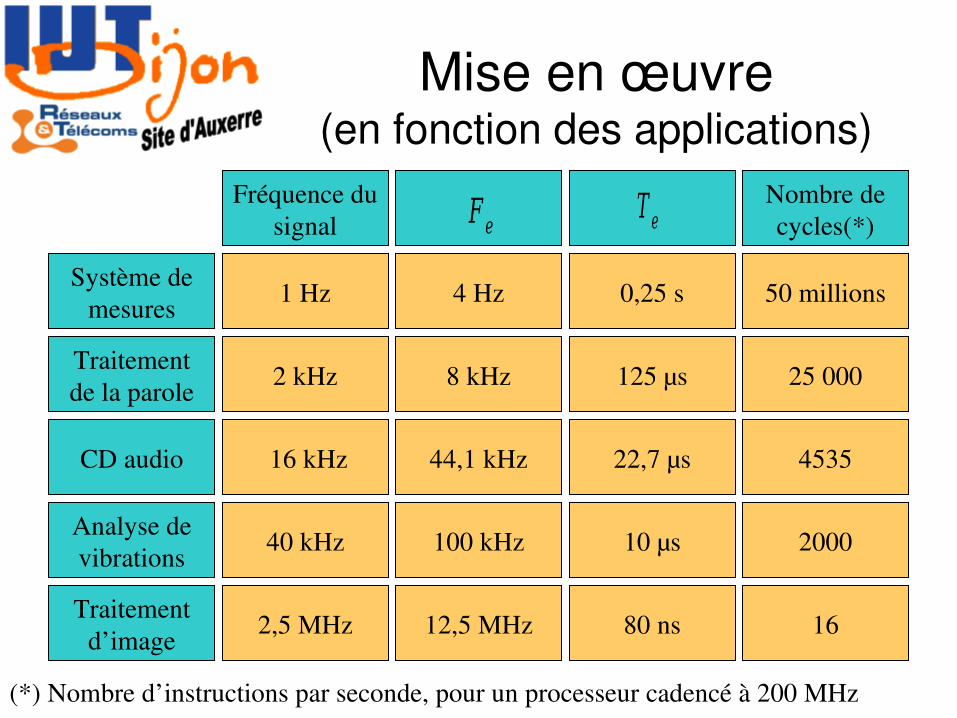
Mise en œuvre(en fonction des applications)
1 Hz 4 Hz 025 s 50 millionsSystegraveme de mesures
2 kHz 8 kHz 125 micros 25 000Traitement de la parole
16 kHz 441 kHz 227 micros 4535CD audio
40 kHz 100 kHz 10 micros 2000Analyse de vibrations
25 MHz 125 MHz 80 ns 16Traitement drsquoimage
Freacutequence du signal
Nombre de cycles()F e
T e
() Nombre drsquoinstructions par seconde pour un processeur cadenceacute agrave 200 MHz
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
Mise en œuvre(en fonction des applications)
bull PCbull Microcontrocircleurs
ndash traitement de la parolebull DSP agrave virgule fixe quantification en nombre de bits vitesse en Mips
ex TMS320C64x (Texas Instrument) 4800 Mips 32 bitsndash traitement drsquoimagendash analyse de vibrations
bull DSP agrave virgule flottante quantification en nombre de bits vitesse en MFlops ex TMS320C67x (Texas Instrument) 1350 Mflops 64 bitsndash cartes sonndash lecteurs CDndash teacuteleacutephones portablesndash hellip
bull FPGA (FieldshyProgrammable Gate Array)ndash Applications deacutedieacutees
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
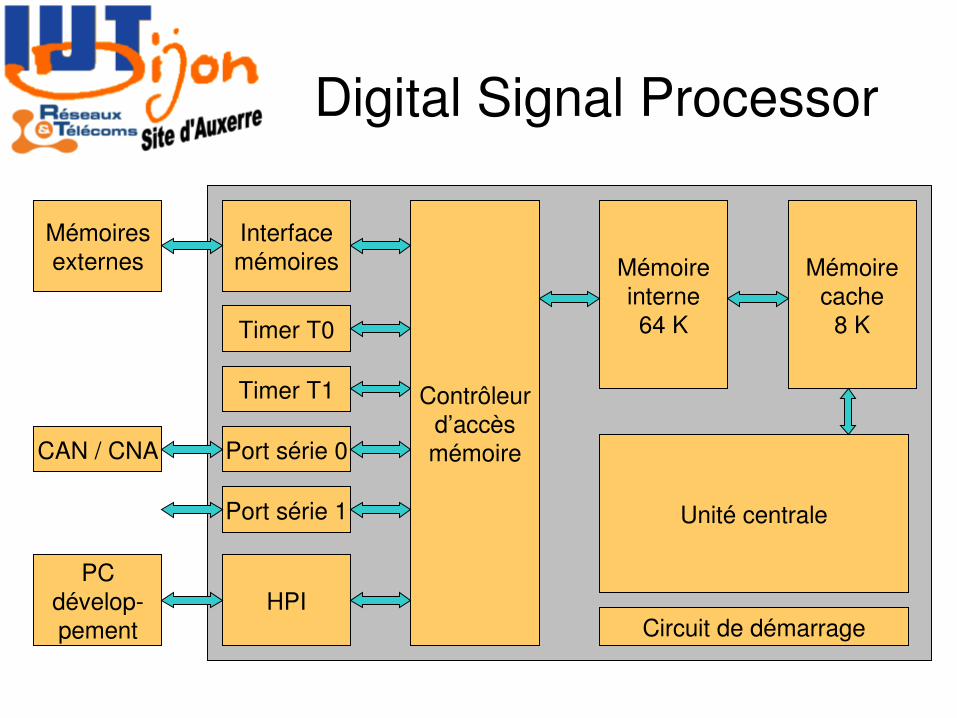
Digital Signal Processor
Interfacemeacutemoires
Timer T0
Timer T1
Port seacuterie 0
Port seacuterie 1
HPI
Controcircleurdrsquoaccegravesmeacutemoire
Meacutemoireinterne64 K
Meacutemoirecache
8 K
Uniteacute centrale
Circuit de deacutemarrage
Meacutemoiresexternes
PCdeacutevelopshypement
CAN CNA
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT
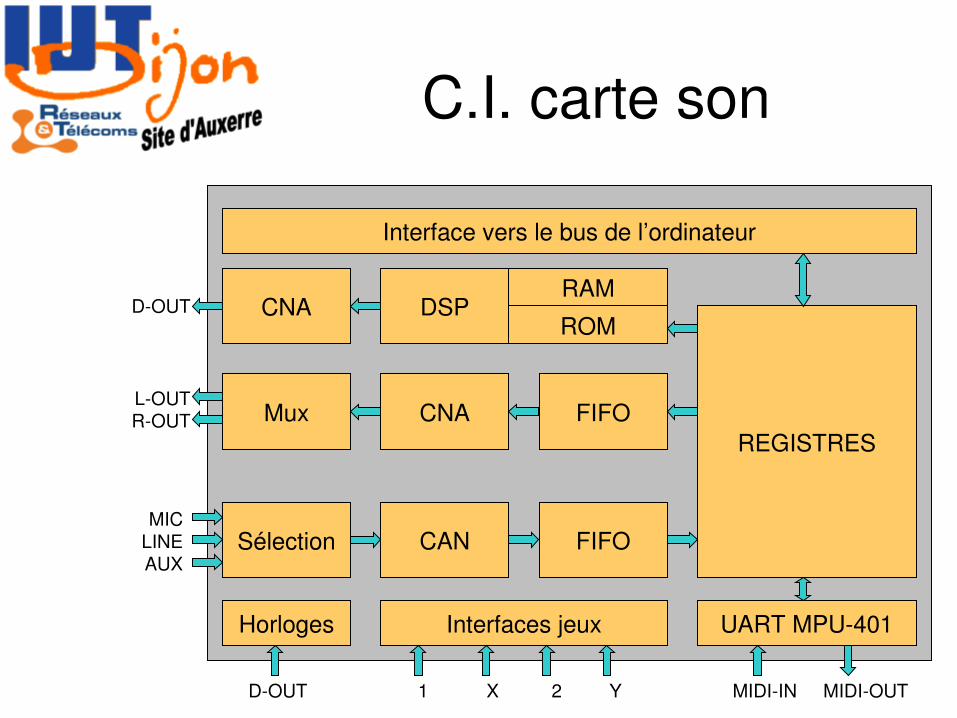
CI carte son
Horloges
REGISTRES
UART MPUshy401
CANSeacutelection FIFO
CNAMux FIFO
DSPCNARAM
Interfaces jeux
Interface vers le bus de lrsquoordinateur
ROM
MICLINEAUX
LshyOUTRshyOUT
DshyOUT
DshyOUT 1 X 2 Y MIDIshyIN MIDIshyOUT