
TP2_LF
4
Centre universitaire D’AIN‐TEMOUCHENT TP OMA Institut des sciences et de la technologie RETHT MASTER 1 Département Génie Electrique M r Ayache Z Page 1 sur 4 TP Logique floue 2/3 1. But de TP Ce TP a pour but la création d’un système flou avec ses fonctions d’appartenance, ses règles d’agrégation sous MATLAB. 2. Rappelle sur les systèmes flous. Nous rappelons que chaque système basé sur la logique floue est composé de quatre blocs principaux Base de connaissance (règles et paramètres des fonctions d’appartenance). Bloc de décision ou le moteur d’inférence (inférence des opérations sur les règles) Fuzzification (transformation des entrées précises en degrés d’appartenance) Defuzzification (transformation des résultats flous en sorties précises) 3. Etapes de création d’un système flou sous MATLAB a. Création d’un système flou (SF) Pour créer un SF sous Matlab la commande suivante est utilisée : A=Newfis(nom_du_SF) Après avoir créé le SF on peut afficher ses caractéristiques avec la commande ²suivante : Showfis(A) ou bien getfis(A), où, A représenté le système Fis dans l’espace MATLAB Exemple Si nous voulons crée un SF nommé ROPOT et afficher les caractéristiques du SF ROBOT on utilise les instructions suivantes SF=Newfis(‘ ROBOT ’) ;
description
hekoo
Transcript of TP2_LF

Centre universitaire D’AIN‐TEMOUCHENT TP OMA Institut des sciences et de la technologie RETHT MASTER 1 Département Génie Electrique Mr Ayache Z
Page 1 sur 4
TPLogiquefloue2/3
1. ButdeTP
CeTPapourbutlacréationd’unsystèmeflouavecsesfonctionsd’appartenance,sesrèglesd’agrégationsousMATLAB.
2. Rappellesurlessystèmesflous.
Nousrappelonsquechaquesystèmebasésurlalogiquefloueestcomposédequatreblocsprincipaux
Basedeconnaissance(règlesetparamètresdesfonctionsd’appartenance). Blocdedécisionoulemoteurd’inférence(inférencedesopérationssurlesrègles) Fuzzification(transformationdesentréesprécisesendegrésd’appartenance) Defuzzification(transformationdesrésultatsflousensortiesprécises)
3. Etapesdecréationd’unsystèmeflousousMATLAB
a. Créationd’unsystèmeflou(SF)PourcréerunSFsousMatlablacommandesuivanteestutilisée:A=Newfis(nom_du_SF)AprèsavoircrééleSFonpeutaffichersescaractéristiquesaveclacommande²suivante:Showfis(A)oubiengetfis(A),où,AreprésentélesystèmeFisdansl’espaceMATLABExempleSinousvoulonscréeunSFnomméROPOTetafficherlescaractéristiquesduSFROBOTonutiliselesinstructionssuivantesSF=Newfis(‘ROBOT’);
Centre universitaire D’AIN‐TEMOUCHENT TP OMA Institut des sciences et de la technologie RETHT MASTER 1 Département Génie Electrique Mr Ayache Z
Page 2 sur 4
etpourafficherlescaractéristiquedeSFnomméROBOTonutiliseunedesdeuxcommandevuesprécédemmentenchoisiparexemplegetfis(SF)MATLABretournelescaractéristiquesuivantegetfis(SF)Name=robot nomduSF=ROBOTType=mamdani typed’inférence=mamdaniNumInputs=0 nombredevariabled’entré=0InLabels= Nomdevariabled’entrée=indéfiniNumOutputs=0 nombredevariabledesortie=0OutLabels= Nomdevariabledesortie=indéfiniNumRules=0 Nombrederègle=0AndMethod=min leET=minOrMethod=max leOU=maxImpMethod=min Méthoded’implicationAggMethod=max Méthoded’agrégation=maxDefuzzMethod=centroid Méthodededefuzzification=Centredegravité
OnvoitclairementquenotreSFn’apasde:entrée,sortie,règles.Ilfautdoncluiajoutertouscequ’illuimanque.
b. Ajouterdesvariableslinguistiquesd’entréesauSF.1. Pourajouterdesvariablesd’entéeslacommandesuivanteestutilisée:
A=Addvar(A,’Input’,’nondelavariable’,[universdediscours]);
2. Pourcréerlessous‐ensembles(SEF)delavariabled’entréelacommandesuivanteestutilisée:
A=addmf(A,‘Input’,1,’nonduSEF’,typedefonctionSEF’,[paramétrédelafonction]);
c. Ajouterdesvariableslinguistiquesdesortie1. Demêmepourajouterdesvariablesdesortielacommandeaddvarestutilisée:
A=Addvar(A,’Output’,’nondelavariable’,[universdediscours]);
2. Pourcréerlessous‐ensembles(SEF)delavariabledesortieslacommandesuivanteestutilisée:
A=addmf(A,‘output’,1,’nonduSEF’,‘typedefonctionSEF’,[paramétrédelafonction]);
3. Posederèglesfloues
Apresavoirdéterminélesvariablesd’entréesetdesortiesetfuzzifiersesdernières.IlrestemaintenantàajouterlesrèglesflousànotreS.Cesrèglessontdonnéessousformedematricequicontient:m 2colonnesoùlacolonnemreprésentelesindexesdesSEFd’entrées.LacolonnenlesindexesdesSEFdesortie,lacolonnem+n+1contientlepoidsquidoitêtreappliquéàlarègleetenfinlacolonnem+n+2indexedel’opérateurflousutilisépourchaquerèglefloueEToubienOU,sionutiliseleETl’indexest1,siparcontreleOUl’indexest2

Centre universitaire D’AIN‐TEMOUCHENT TP OMA Institut des sciences et de la technologie RETHT MASTER 1 Département Génie Electrique Mr Ayache Z
Page 3 sur 4
Exemple
SionaunSFavec2entréesetuneseulsortie,lesdeuxentréescontiennechacune3SEFetlasortieelleaussicontient3SEF,onobtiendralalistederèglesuivante:
Liste_de_règle=[ 11111(Règle1) 12211];(Règle2) mmnm+n+1m+n+2
Cettematricecontientdeuxrègles,ainsilapremièrerèglereprésentéeparla1ligne,setraduitcommesuivant:Sientrée1estSEF1ETentrée2estSEF1,Alorssortie1estSEF1.
LacommandesuivantenouspermetajoutéesesrèglesànotreSF:
A=addrule(A,liste_de_règle)
Pourvoirlesrèglesenutiliselacommandesuivante:A=Showrule(A,numerodelarègle,’forme‘)
Laformepeutêtreverbale(verbose),Symbolique(symbolic)etindexé(indexed).
d. SauvegardesousformeFIS(fuzzyinférencesystème)
Lacommandewritefispermetdesauvegardéeunprogrammequiestcréédanslastructureespacedetravailmatlabdansunfichierquial’extension.fis
Writefis(A,nomdusystèmeflou),pourappelerseSF.fisonutiliselacommande
A=readfis(nomduSF).
Remarque:
Souscetteforme.fisleprogrammepeutêtreutilisédansSimulink
VoirlesrèglesdenotreSF
PourvoirlecomportementdenotreSFenutiliselacommandesuivante
Ruleview(A)oubiensousformedesurfaceavecsurfview(A)
1.4Travailàfaire
1.4.1 PARTIE I
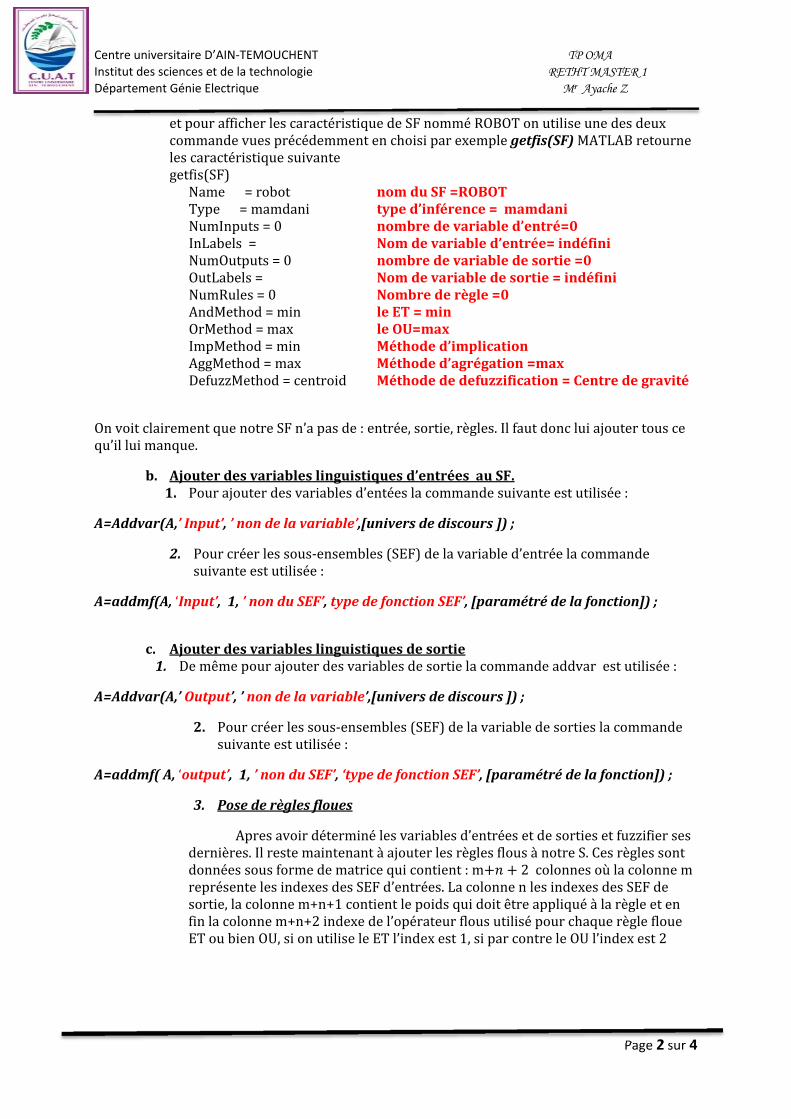
Nousallonsreprendrel’exempleduROBOT.Supposonsquel’onveuilledéplacerunrobotmobile(fig.2.2)enutilisantunalgorithmederéglagetrèssimple.Lepremierpasdanslaconceptiond’unrégulateurbasésurlalogiquefloue(toutcommeclassique)estlechoixdesvariableslinguistiques.Dansnotrecaslavariabled’entréeestladistanceentrelerobotetl’obstacle(d)etlavariabledesortieestlavaleurdel’anglederouedirectricedurobot(α).
Dansleraisonnementbasésurlalogiquefloue,onvaétablirlesrègleslinguistiques,floues(fig.2.3):
Siladistanceestpetite,ilfauttourneràgauche(anglenégatif). Siladistanceestautoursde10cm,ilfautgarderladirection.
Centre universitaire D’AIN‐TEMOUCHENT TP OMA Institut des sciences et de la technologie RETHT MASTER 1 Département Génie Electrique Mr Ayache Z
Page 4 sur 4
Siladistanceestgrande,ilfauttourneràdroite(anglepositif).
Question
1. CréerleSFappeléROBOT,etaffichersescaractéristiques2. Ajouterlesvariablesd’entéesetdesortiesetlesfonctionsSEFàcesvariableson
s’inspirantdelafig.2.3ettracerleurcourbeenutilisantlacommandesubplot(m,n,p)3. Ajouterlesrèglesd’appartenanceetafficherlesrèglessousdéférentesformes(verbale,
symbolique,etindexé.4. Afficherlesnouvelles
caractéristiquesduSFROBOT5. Sauvegarderlesystèmeavec
l’extension.fis6. Afficherlesrègles.
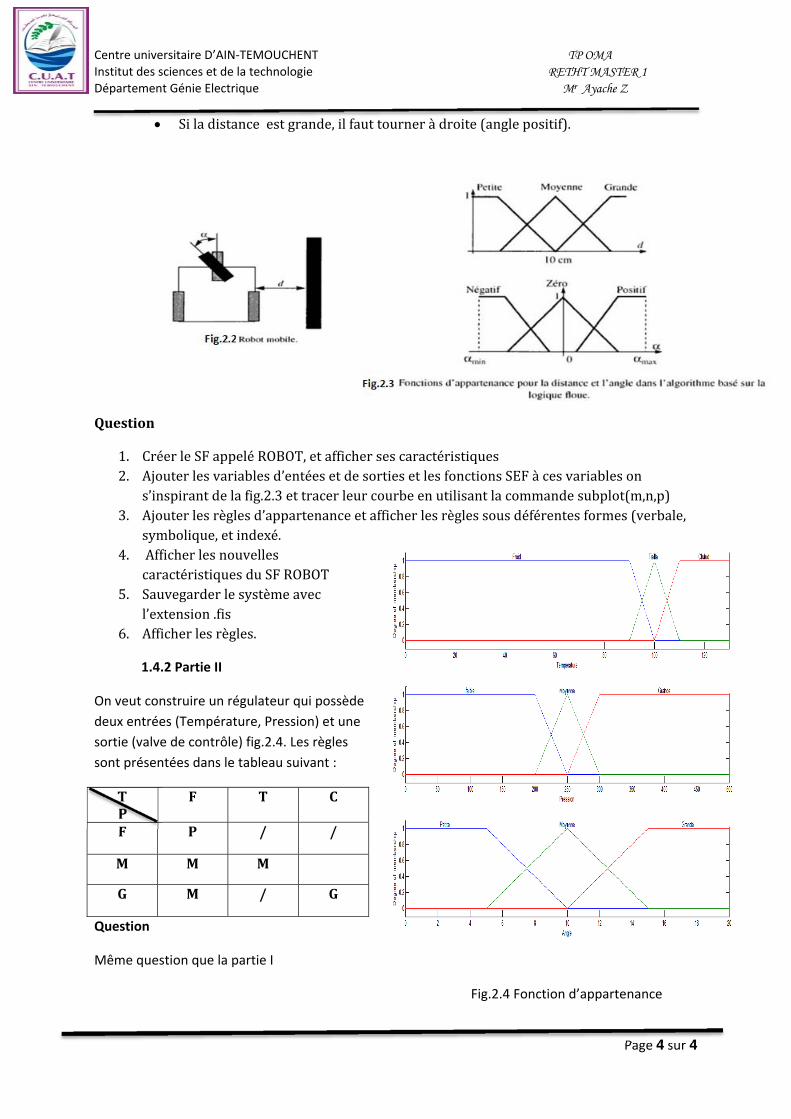
1.4.2 Partie II
On veut construire un régulateur qui possède
deux entrées (Température, Pression) et une
sortie (valve de contrôle) fig.2.4. Les règles
sont présentées dans le tableau suivant :
TP
F T C
F P / /
M M M
G M / G
Question
Même question que la partie I
Fig.2.4 Fonction d’appartenance


















