Théorie des graphes pour l’analyse de réseaux...
50
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion Théorie des graphes pour l’analyse de réseaux réels Bertrand Jouve Laboratoire ERIC - IXXI - Université Lyon 2
Transcript of Théorie des graphes pour l’analyse de réseaux...
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Théorie des graphes pour l’analyse de réseauxréels
Bertrand Jouve
Laboratoire ERIC - IXXI - Université Lyon 2
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Plan
1 Entre théorie des graphes et réseaux réels
2 Partitionnement métriqueExemple d’étude : organisation cortico-corticale
3 Décomposition en ClansExemple d’étude : procédure de vote
4 Graphes cospectrauxExemple d’étude : modélisation de réseaux sociaux anciens
5 Réduction de graphe par démontabilitéExemple d’étude : dynamique de parcellaires
6 Conclusion
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
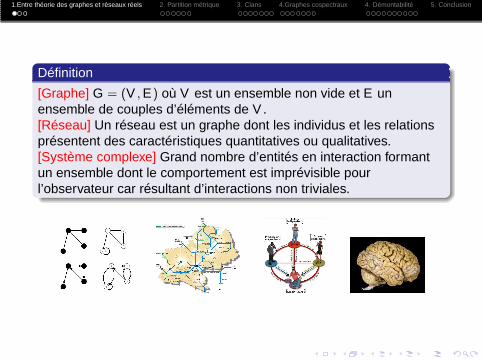
Définition
[Graphe] G = (V , E) où V est un ensemble non vide et E unensemble de couples d’éléments de V .[Réseau] Un réseau est un graphe dont les individus et les relationsprésentent des caractéristiques quantitatives ou qualitatives.[Système complexe] Grand nombre d’entités en interaction formantun ensemble dont le comportement est imprévisible pourl’observateur car résultant d’interactions non triviales.

1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Définition
[Graphe] G = (V , E) où V est un ensemble non vide et E unensemble de couples d’éléments de V .[Réseau] Un réseau est un graphe dont les individus et les relationsprésentent des caractéristiques quantitatives ou qualitatives.[Système complexe] Grand nombre d’entités en interaction formantun ensemble dont le comportement est imprévisible pourl’observateur car résultant d’interactions non triviales.
Deux objectifs pour l’étude des sytèmes complexes :DESCRIPTIFS et PREDICTIFS.
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
La démarche générale
1 Etant donné un système complexe à étudier, définir les réseauxd’interactions qui peuvent aider à sa compréhension.
2 Utiliser et enrichir l’ensemble des outils mathématiques quipermettent l’étude formelle de ces réseaux.
3 Appliquer aux systèmes à l’étude et exploiter les résultatsobtenus pour enrichir des approches SHS-centrées.
4 boucler sur 2.
en particulier les apports et limites de la théorie des graphes :analyse des données, analyse spectrale, combinatoire, topologie.
Des applications
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
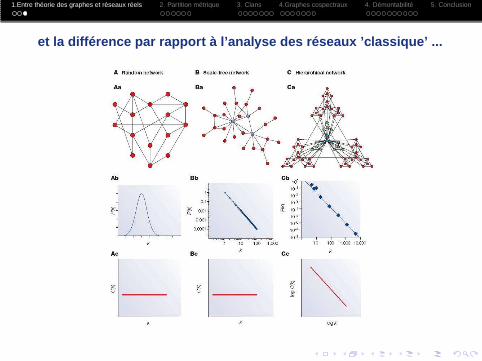
et la différence par rapport à l’analyse des réseaux ’classi que’ ...
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
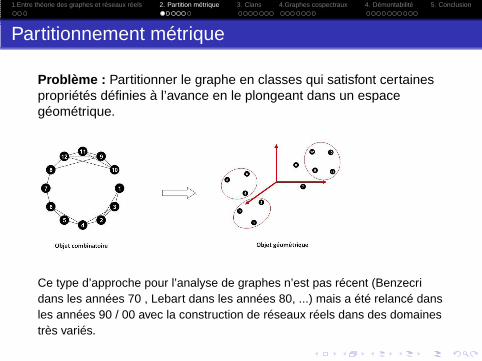
Partitionnement métrique
Problème : Partitionner le graphe en classes qui satisfont certainespropriétés définies à l’avance en le plongeant dans un espacegéométrique.
Ce type d’approche pour l’analyse de graphes n’est pas récent (Benzecridans les années 70 , Lebart dans les années 80, ...) mais a été relancé dansles années 90 / 00 avec la construction de réseaux réels dans des domainestrès variés.
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
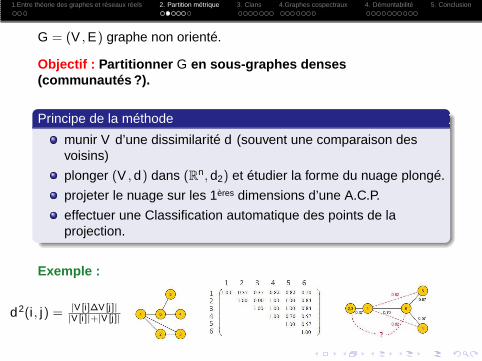
G = (V , E) graphe non orienté.
Objectif : Partitionner G en sous-graphes denses(communautés ?).
Principe de la méthode
munir V d’une dissimilarité d (souvent une comparaison desvoisins)
plonger (V , d) dans (Rn, d2) et étudier la forme du nuage plongé.
projeter le nuage sur les 1ères dimensions d’une A.C.P.
effectuer une Classification automatique des points de laprojection.
Exemple :
d2(i , j) = |V [i]∆V [j]||V [i]|+|V [j]|

1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Extension aux graphes orientés et ou pondérés.
Objectif : Partitionner G en sous-graphes denses et différencierceux qui sont des pseudo-sources ou pseudo-puits.
La distance entre deux sommets i et j s’écrit
d2(i, j) = f(
V +[i], V +[j])
+ f(
V−[i], V−[j])
ou plus généralement
f(
V +[i], V +[j], V +2[i], V +2
[j], · · ·)
+ f(
V +[i], V +[j], V +2[i], V +2
[j], · · ·)
Exemple : Si f est le carré de la métrique de Dice, d s’écrit
d2(i, j) =|V [i]∆V [j]||V [i]| + |V [j]|
d2(i, j) =|V +[i]∆V +[j]||V +[i]| + |V +[j]|
+|V−[i]∆V−[j]||V−[i]| + |V−[j]|
d est euclidienne ainsi que son extension aux graphes pondérés.
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
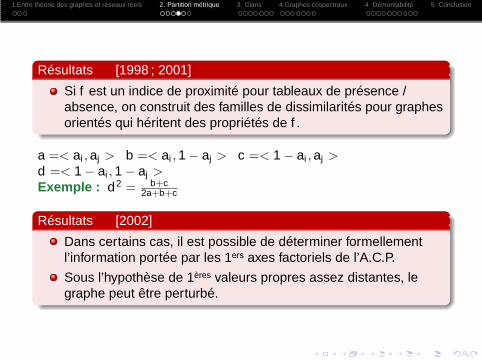
Résultats [1998 ; 2001]
Si f est un indice de proximité pour tableaux de présence /absence, on construit des familles de dissimilarités pour graphesorientés qui héritent des propriétés de f .
a =< ai , aj > b =< ai , 1 − aj > c =< 1 − ai , aj >
d =< 1 − ai , 1 − aj >
Exemple : d2 = b+c2a+b+c
Résultats [2002]
Dans certains cas, il est possible de déterminer formellementl’information portée par les 1ers axes factoriels de l’A.C.P.
Sous l’hypothèse de 1ères valeurs propres assez distantes, legraphe peut être perturbé.

1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Modèles jouets :�
Gp=3,q=3
Les p premières dimensions portent le nombre de cliquesLes p + 1 à p + q − 1 dimensions suivantes portent les couplages.
� GGAR(4, 10, 0.6, 0.2)

1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
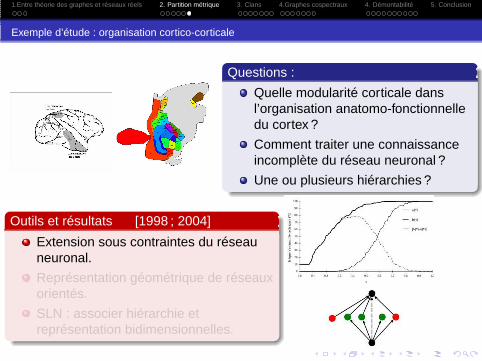
Exemple d’étude : organisation cortico-corticale
Questions :
Quelle modularité corticale dansl’organisation anatomo-fonctionnelledu cortex ?
Comment traiter une connaissanceincomplète du réseau neuronal ?
Une ou plusieurs hiérarchies ?
Outils et résultats [1998 ; 2004]
Extension sous contraintes du réseauneuronal.
Représentation géométrique de réseauxorientés.
SLN : associer hiérarchie etreprésentation bidimensionnelles.
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
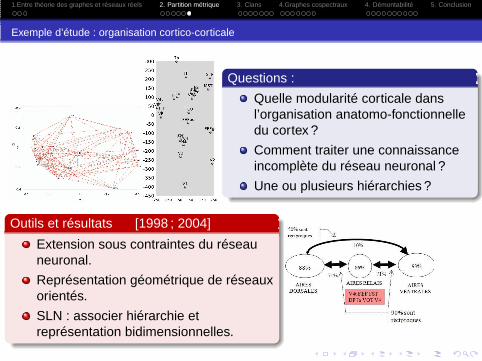
Exemple d’étude : organisation cortico-corticale
Questions :
Quelle modularité corticale dansl’organisation anatomo-fonctionnelledu cortex ?
Comment traiter une connaissanceincomplète du réseau neuronal ?
Une ou plusieurs hiérarchies ?
Outils et résultats [1998 ; 2004]
Extension sous contraintes du réseauneuronal.
Représentation géométrique de réseauxorientés.
SLN : associer hiérarchie etreprésentation bidimensionnelles.
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Exemple d’étude : organisation cortico-corticale
Questions :
Quelle modularité corticale dansl’organisation anatomo-fonctionnelledu cortex ?
Comment traiter une connaissanceincomplète du réseau neuronal ?
Une ou plusieurs hiérarchies ?
Outils et résultats [1998 ; 2004]
Extension sous contraintes du réseauneuronal.
Représentation géométrique de réseauxorientés.
SLN : associer hiérarchie etreprésentation bidimensionnelles.

1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Notion de communautés
La notion de ’communauté’ apparaît souvent centrale car elle permetune schématisation du réseau et donc une approche à un autreniveau de granulométrie. Pour autant elle n’admet pas de définitionunique. Si l’on ne regarde que la structure du graphe, les définitionssuivantes correspondent à des notions combinatoires bienétudiéees :
Les sommets d’une même communauté sont vus de la mêmemanière par un invidividu extérieur à la communauté,
Tous les éléments d’une communauté se connaissent 2 à 2,
Deux sommets d’une communauté sont ’interchangeables’.
...

1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Décomposition en clans
Un tournoi est un graphecomplet orienté.
Problème : Etant donné un tournoi (ou un graphe orienté), commentpeut-on le décomposer en ordres totaux (ou partiels) liés par desconnexions en unidirection ?
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
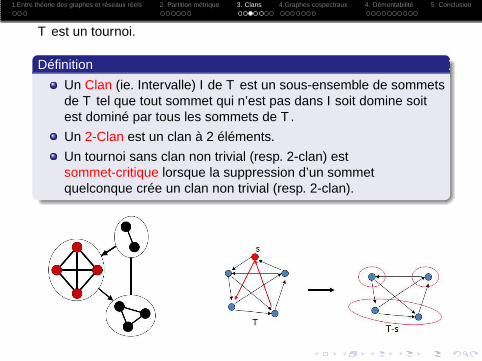
T est un tournoi.
Définition
Un Clan (ie. Intervalle) I de T est un sous-ensemble de sommetsde T tel que tout sommet qui n’est pas dans I soit domine soitest dominé par tous les sommets de T .
Un 2-Clan est un clan à 2 éléments.
Un tournoi sans clan non trivial (resp. 2-clan) estsommet-critique lorsque la suppression d’un sommetquelconque crée un clan non trivial (resp. 2-clan).

1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
T est un tournoi.
Définition
Un Clan (ie. Intervalle) I de T est un sous-ensemble de sommetsde T tel que tout sommet qui n’est pas dans I soit domine soitest dominé par tous les sommets de T .
Un 2-Clan est un clan à 2 éléments.
Un tournoi sans clan non trivial (resp. 2-clan) estsommet-critique lorsque la suppression d’un sommetquelconque crée un clan non trivial (resp. 2-clan).
Remarque :
Un tournoi dont les clans acycliques sont triviaux sont les tournoissans 2-clans et réciproquement.
Si d est bien choisie, l’approche géométrique sur un tournoiexhibe un partitionnement dont les classes sont "proches" declans acycliques [2005] : nous rigidifions le critère.
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
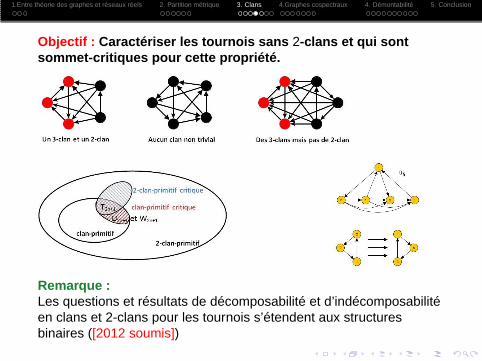
Objectif : Caractériser les tournois sans 2-clans et qui sontsommet-critiques pour cette propriété.
Remarque :Les questions et résultats de décomposabilité et d’indécomposabilitéen clans et 2-clans pour les tournois s’étendent aux structuresbinaires ([2012 soumis])

1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Etat de l’art
étudiés Tournois dont les clans sont triviaux [Schmerl andTrotter, 1993 ; Ille, 1997]
caractérisés Parmi ces tournois, ceux qui sont sommet-critiquespour cette propriété [Ille, 1997]
étudiés Les tournois dont une partition en ordres totaux admetr sous-ensembles et sommet-critiques pour cettepropriété [Neumann-Lara, 1984]
Résultats [2005 ; 2010]
caractérisés Tournois sans 2-clans (ie. tous les clans acycliquessont triviaux) et sommets critiques pour cettepropriété : T ′[
−→Ck1 ,
−→Ck2 , ...,
−→Ckp ].
Exemple :
O3[−→C3,
−→C5,
−→C7] =
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Exemple d’étude : procédure de vote
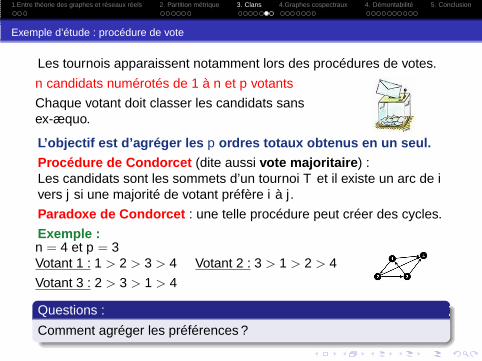
Les tournois apparaissent notamment lors des procédures de votes.
n candidats numérotés de 1 à n et p votants
Chaque votant doit classer les candidats sansex-æquo.
L’objectif est d’agréger les p ordres totaux obtenus en un seul.Procédure de Condorcet (dite aussi vote majoritaire ) :Les candidats sont les sommets d’un tournoi T et il existe un arc de ivers j si une majorité de votant préfère i à j .
Paradoxe de Condorcet : une telle procédure peut créer des cycles.
Exemple :n = 4 et p = 3Votant 1 : 1 > 2 > 3 > 4 Votant 2 : 3 > 1 > 2 > 4
Votant 3 : 2 > 3 > 1 > 4
Questions :
Comment agréger les préférences ?
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Exemple d’étude : procédure de vote
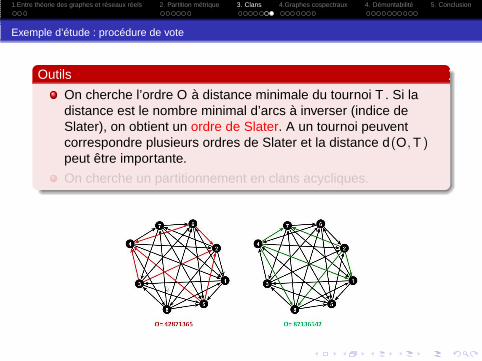
Outils
On cherche l’ordre O à distance minimale du tournoi T . Si ladistance est le nombre minimal d’arcs à inverser (indice deSlater), on obtient un ordre de Slater. A un tournoi peuventcorrespondre plusieurs ordres de Slater et la distance d(O, T )peut être importante.
On cherche un partitionnement en clans acycliques.
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Exemple d’étude : procédure de vote
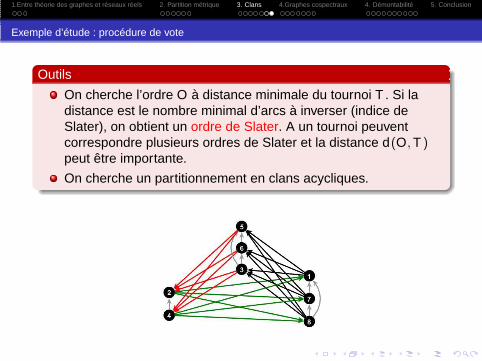
Outils
On cherche l’ordre O à distance minimale du tournoi T . Si ladistance est le nombre minimal d’arcs à inverser (indice deSlater), on obtient un ordre de Slater. A un tournoi peuventcorrespondre plusieurs ordres de Slater et la distance d(O, T )peut être importante.
On cherche un partitionnement en clans acycliques.
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
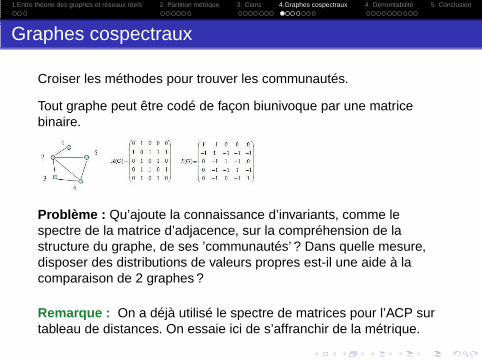
Graphes cospectraux
Croiser les méthodes pour trouver les communautés.
Tout graphe peut être codé de façon biunivoque par une matricebinaire.
Problème : Qu’ajoute la connaissance d’invariants, comme lespectre de la matrice d’adjacence, sur la compréhension de lastructure du graphe, de ses ’communautés’ ? Dans quelle mesure,disposer des distributions de valeurs propres est-il une aide à lacomparaison de 2 graphes ?
Remarque : On a déjà utilisé le spectre de matrices pour l’ACP surtableau de distances. On essaie ici de s’affranchir de la métrique.

1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Définition
Deux graphes sont dits cospectraux s’ils ont même spectre Sp(ensemble des solutions en λ de l’équation Au = λu).
Objectif : Augmenter la connaissance sur les graphescospectraux. En particulier, déterminer de nouvelles clas ses degraphes déterminés par leur spectre.
Remarque :Deux graphes isomorphes sont cospectraux mais la réciproque estfausse.Exemple :Deux graphes non isomorphes cospectraux pour la matriced’adjacence et non cospectraux pour le Laplacien L = D − A.
SpA = {−2; 0; 0; 0; 2}
Dans la suite, on parlera de spectre d’un graphe pour désigner le spectre desa matrice d’adjacence. Tous les graphes considérés sont connexes.
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
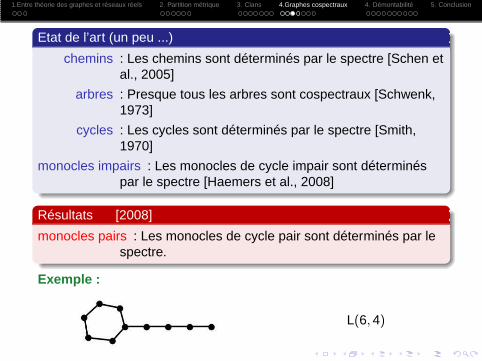
Etat de l’art (un peu ...)
chemins : Les chemins sont déterminés par le spectre [Schen etal., 2005]
arbres : Presque tous les arbres sont cospectraux [Schwenk,1973]
cycles : Les cycles sont déterminés par le spectre [Smith,1970]
monocles impairs : Les monocles de cycle impair sont déterminéspar le spectre [Haemers et al., 2008]
Résultats [2008]
monocles pairs : Les monocles de cycle pair sont déterminés par lespectre.
Exemple :
L(6, 4)
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
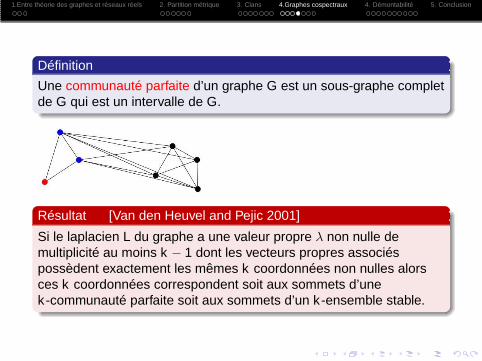
Définition
Une communauté parfaite d’un graphe G est un sous-graphe completde G qui est un intervalle de G.
Résultat [Van den Heuvel and Pejic 2001]
Si le laplacien L du graphe a une valeur propre λ non nulle demultiplicité au moins k − 1 dont les vecteurs propres associéspossèdent exactement les mêmes k coordonnées non nulles alorsces k coordonnées correspondent soit aux sommets d’unek-communauté parfaite soit aux sommets d’un k-ensemble stable.
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
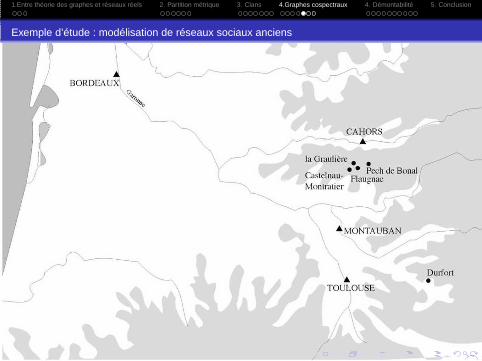
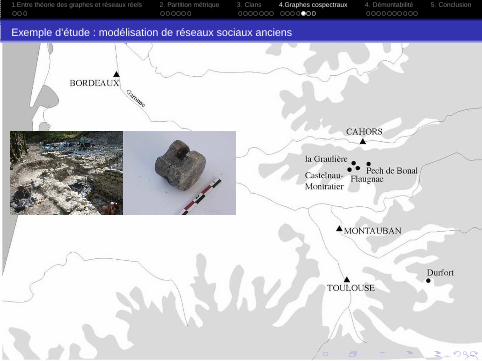
Exemple d’étude : modélisation de réseaux sociaux anciens
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Exemple d’étude : modélisation de réseaux sociaux anciens
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Exemple d’étude : modélisation de réseaux sociaux anciens
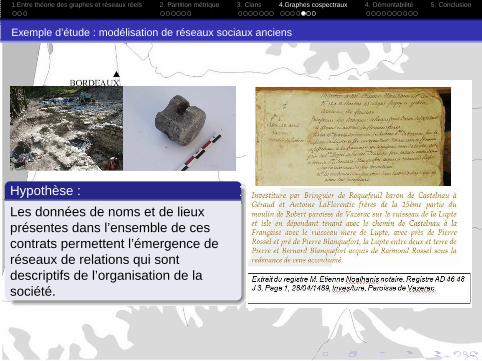
Hypothèse :
Les données de noms et de lieuxprésentes dans l’ensemble de cescontrats permettent l’émergence deréseaux de relations qui sontdescriptifs de l’organisation de lasociété.

1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Exemple d’étude : modélisation de réseaux sociaux anciens
Questions :
1 Identifier les réseaux sociauxdans le monde paysan desXIIIe-XVIe siècles.
2 Hiérarchiser les individus et leurrôle au sein de ces réseaux.
3 Analyser l’évolution de cesréseaux (passage de la guerre decent ans.
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Exemple d’étude : modélisation de réseaux sociaux anciens
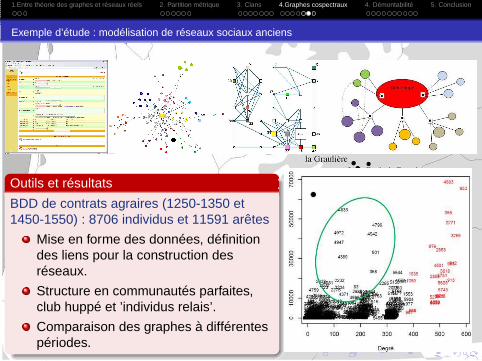
Outils et résultats
BDD de contrats agraires (1250-1350 et1450-1550) : 8706 individus et 11591 arêtes
Mise en forme des données, définitiondes liens pour la construction desréseaux.
Structure en communautés parfaites,club huppé et ’individus relais’.
Comparaison des graphes à différentespériodes.
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Exemple d’étude : modélisation de réseaux sociaux anciens
Travaux en cours : dynamique et spatialisation
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Exemple d’étude : modélisation de réseaux sociaux anciens
Travaux en cours : dynamique et spatialisation
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Réduction de graphe par démontabilité
Notion d’homotopie en topologie : deux objets sont homotopes si onpeut passer de l’un à l’autre par une déformation continue de l’objetsur lui-même.
Problème : dans quel mesure peut-on étudier la ’forme’ d’un grapheen utilisant des outils de topologie comme l’homotopie ?
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
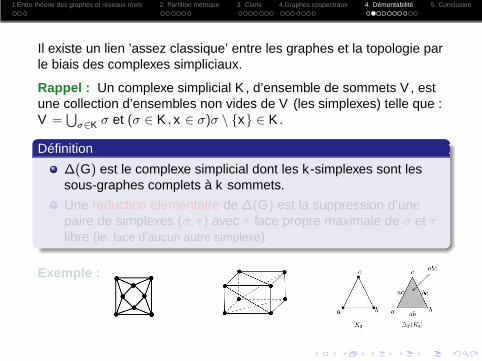
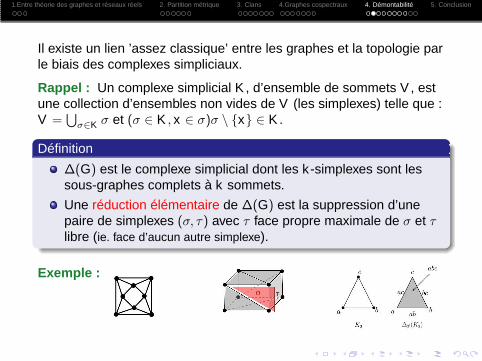
Il existe un lien ’assez classique’ entre les graphes et la topologie parle biais des complexes simpliciaux.
Rappel : Un complexe simplicial K , d’ensemble de sommets V , estune collection d’ensembles non vides de V (les simplexes) telle que :V =
⋃
σ∈K σ et (σ ∈ K , x ∈ σ)σ \ {x} ∈ K .
Définition
∆(G) est le complexe simplicial dont les k-simplexes sont lessous-graphes complets à k sommets.
Une réduction élémentaire de ∆(G) est la suppression d’unepaire de simplexes (σ, τ) avec τ face propre maximale de σ et τ
libre (ie. face d’aucun autre simplexe).
Exemple :
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
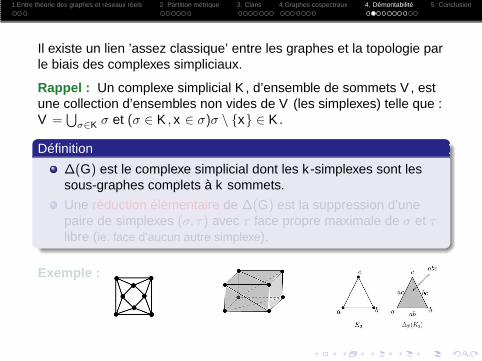
Il existe un lien ’assez classique’ entre les graphes et la topologie parle biais des complexes simpliciaux.
Rappel : Un complexe simplicial K , d’ensemble de sommets V , estune collection d’ensembles non vides de V (les simplexes) telle que :V =
⋃
σ∈K σ et (σ ∈ K , x ∈ σ)σ \ {x} ∈ K .
Définition
∆(G) est le complexe simplicial dont les k-simplexes sont lessous-graphes complets à k sommets.
Une réduction élémentaire de ∆(G) est la suppression d’unepaire de simplexes (σ, τ) avec τ face propre maximale de σ et τ
libre (ie. face d’aucun autre simplexe).
Exemple :
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Il existe un lien ’assez classique’ entre les graphes et la topologie parle biais des complexes simpliciaux.
Rappel : Un complexe simplicial K , d’ensemble de sommets V , estune collection d’ensembles non vides de V (les simplexes) telle que :V =
⋃
σ∈K σ et (σ ∈ K , x ∈ σ)σ \ {x} ∈ K .
Définition
∆(G) est le complexe simplicial dont les k-simplexes sont lessous-graphes complets à k sommets.
Une réduction élémentaire de ∆(G) est la suppression d’unepaire de simplexes (σ, τ) avec τ face propre maximale de σ et τ
libre (ie. face d’aucun autre simplexe).
Exemple :
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Il existe un lien ’assez classique’ entre les graphes et la topologie parle biais des complexes simpliciaux.
Rappel : Un complexe simplicial K , d’ensemble de sommets V , estune collection d’ensembles non vides de V (les simplexes) telle que :V =
⋃
σ∈K σ et (σ ∈ K , x ∈ σ)σ \ {x} ∈ K .
Définition
∆(G) est le complexe simplicial dont les k-simplexes sont lessous-graphes complets à k sommets.
Une réduction élémentaire de ∆(G) est la suppression d’unepaire de simplexes (σ, τ) avec τ face propre maximale de σ et τ
libre (ie. face d’aucun autre simplexe).
Objectif : construire une homotopie combinatoire sur lesgraphes identifiable à l’homotopie sur les complexessimpliciaux, qui procède par élimination de sommets.L’homotopie (simple) sur les complexes est une succession d’ajoutset de réductions élémentaires.

1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Sommet simplicial
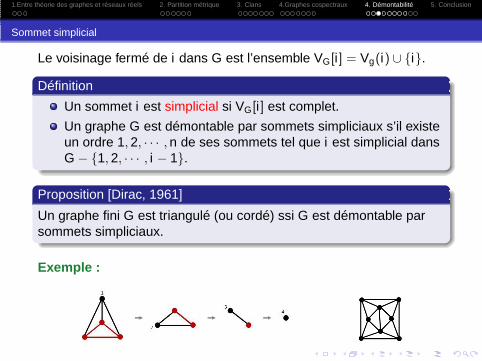
Le voisinage fermé de i dans G est l’ensemble VG[i] = Vg(i) ∪ {i}.
Définition
Un sommet i est simplicial si VG[i] est complet.
Un graphe G est démontable par sommets simpliciaux s’il existeun ordre 1, 2, · · · , n de ses sommets tel que i est simplicial dansG − {1, 2, · · · , i − 1}.
Proposition [Dirac, 1961]
Un graphe fini G est triangulé (ou cordé) ssi G est démontable parsommets simpliciaux.
Exemple :
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Sommet simplicial
Le voisinage fermé de i dans G est l’ensemble VG[i] = Vg(i) ∪ {i}.
Définition
Un sommet i est simplicial si VG[i] est complet.
Un graphe G est démontable par sommets simpliciaux s’il existeun ordre 1, 2, · · · , n de ses sommets tel que i est simplicial dansG − {1, 2, · · · , i − 1}.
Proposition [Dirac, 1961]
Un graphe fini G est triangulé (ou cordé) ssi G est démontable parsommets simpliciaux.
Exemple :
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
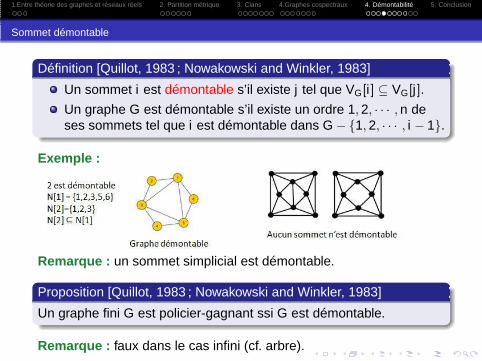
Sommet démontable
Définition [Quillot, 1983 ; Nowakowski and Winkler, 1983]
Un sommet i est démontable s’il existe j tel que VG[i] ⊆ VG[j].
Un graphe G est démontable s’il existe un ordre 1, 2, · · · , n deses sommets tel que i est démontable dans G − {1, 2, · · · , i − 1}.
Exemple :
Remarque : un sommet simplicial est démontable.
Proposition [Quillot, 1983 ; Nowakowski and Winkler, 1983]
Un graphe fini G est policier-gagnant ssi G est démontable.
Remarque : faux dans le cas infini (cf. arbre).

1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Sommet démontable
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Sommet s-démontable
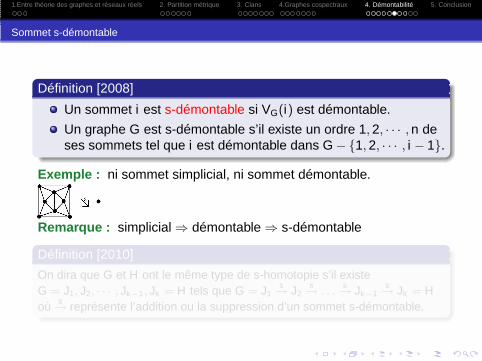
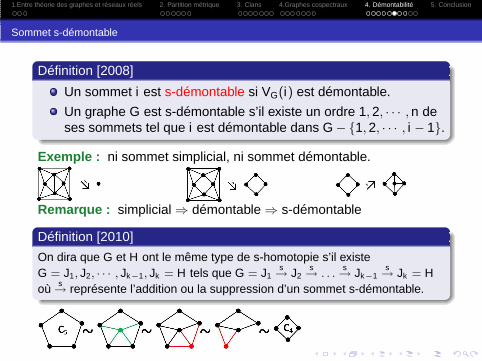
Définition [2008]
Un sommet i est s-démontable si VG(i) est démontable.
Un graphe G est s-démontable s’il existe un ordre 1, 2, · · · , n deses sommets tel que i est démontable dans G − {1, 2, · · · , i − 1}.
Exemple : ni sommet simplicial, ni sommet démontable.
Remarque : simplicial ⇒ démontable ⇒ s-démontable
Définition [2010]
On dira que G et H ont le même type de s-homotopie s’il existeG = J1, J2, · · · , Jk−1, Jk = H tels que G = J1
s→ J2
s→ . . .
s→ Jk−1
s→ Jk = H
où s→ représente l’addition ou la suppression d’un sommet s-démontable.
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Sommet s-démontable
Définition [2008]
Un sommet i est s-démontable si VG(i) est démontable.
Un graphe G est s-démontable s’il existe un ordre 1, 2, · · · , n deses sommets tel que i est démontable dans G − {1, 2, · · · , i − 1}.
Exemple : ni sommet simplicial, ni sommet démontable.
Remarque : simplicial ⇒ démontable ⇒ s-démontable
Définition [2010]
On dira que G et H ont le même type de s-homotopie s’il existeG = J1, J2, · · · , Jk−1, Jk = H tels que G = J1
s→ J2
s→ . . .
s→ Jk−1
s→ Jk = H
où s→ représente l’addition ou la suppression d’un sommet s-démontable.

1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Sommet s-démontable
Résultat [2008, 2010]
G ցs H ⇒ ∆(G) ցs ∆(H).
Exemple :
L’implication inverse est fausse :
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Sommet s-démontable
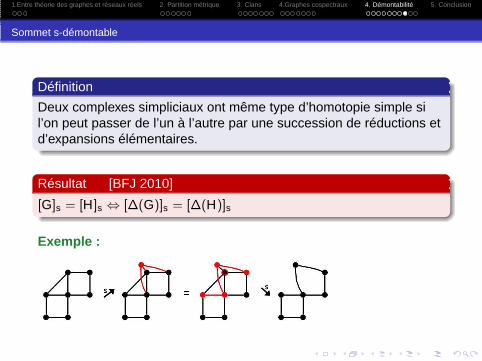
Définition
Deux complexes simpliciaux ont même type d’homotopie simple sil’on peut passer de l’un à l’autre par une succession de réductions etd’expansions élémentaires.
Résultat [BFJ 2010]
[G]s = [H]s ⇔ [∆(G)]s = [∆(H)]s
Exemple :
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
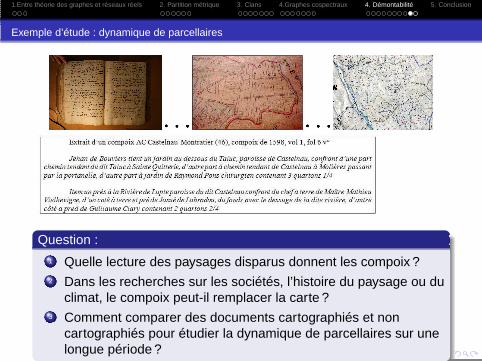
Exemple d’étude : dynamique de parcellaires
Question :
1 Quelle lecture des paysages disparus donnent les compoix ?2 Dans les recherches sur les sociétés, l’histoire du paysage ou du
climat, le compoix peut-il remplacer la carte ?3 Comment comparer des documents cartographiés et non
cartographiés pour étudier la dynamique de parcellaires sur unelongue période ?
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
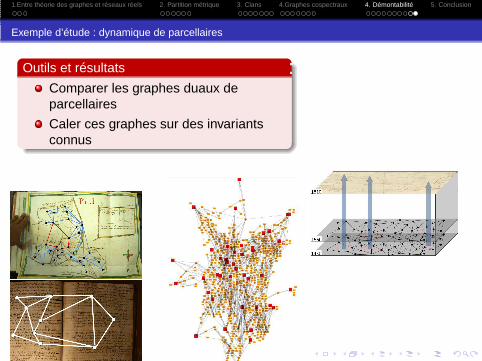
Exemple d’étude : dynamique de parcellaires
Outils et résultats
Comparer les graphes duaux deparcellaires
Caler ces graphes sur des invariantsconnus
1.Entre théorie des graphes et réseaux réels 2. Partition métrique 3. Clans 4.Graphes cospectraux 4. Démontabilité 5. Conclusion
Conclusion
Un positionnement volontaire dans le domainede la ’combinatoire appliquée’.
Comment la théorie des graphes peut s’accorder avec une’science des réseaux’ qui doit traiter de la dynamique et dumultiplexage ?