
TD_Regul_2005
21
◦ * 2 Y (p) Y (p)= p 2 + p +9 p(p 2 + 9) Y (p)= 4p + 12 p 2 +8p + 16 Y (p)= -3p 2 +6p - 24 (p - 1)(p - 2) 2 Y (p)= e -p (p 2 +6p + 13) p(p + 3) 2 Y (p)= 5p 2 - 15p - 11 (p + 1) 2 (p - 2) 2 *
Transcript of TD_Regul_2005

T.D. n◦1 : Transformée de Laplace et Modélisation∗
I.U.T. Génie Chimique & Génie des Procédés -2ème année
Prérequis : manipulation des fractions, décomposition en éléments simples etquelques lois élémentaires de physique.
Objectifs du T.D. : les trois premiers exercices ont pour but de vous familiariseravec la transformée de Laplace qui est, certes, un outil mais un outil essentiel enrégulation. Les exercices ont tous un but di�érent mais l'idée majeure est de réécrireles équations sous une forme adéquate et directement exploitable avec les tablesde transformées de Laplace données en cours. Nous verrons ensuite une premièreapplication de la transformée de Laplace en modélisation de systèmes.
1 Transformée de Laplace1.1 Calculs de transformées inverses
Retrouver le signal temporel à partir de la transformée de LaplaceY (p) :1.
Y (p) =p2 + p + 9
p(p2 + 9)
2.Y (p) =
4p + 12
p2 + 8p + 16
3.Y (p) =
−3p2 + 6p− 24
(p− 1)(p− 2)2
4.Y (p) =
e−p(p2 + 6p + 13)
p(p + 3)2
5.Y (p) =
5p2 − 15p− 11
(p + 1)2(p− 2)2
∗Pour toutes questions, e-mail : {msekher,eric.magarotto}@greyc.ismra.fr
1

1.2 Résolution d'équations di�érentielles par la transforméede Laplace
Résoudre les équations di�érentielles suivantes :1.
y − 4y + 8y = 0
y(0) = 3
y(0) = 7
2. {y − 2y = sin(t)
y(0) = 1
3.
y + y = t
y(0) = 2
y(0) = 1
4.
y + 3y − 4y = e−2t
y(0) = 1
y(0) = 1
1.3 Transformée de Laplace de signauxCalculer la transformée de Laplace du signal suivant.
A
T T1 2
2 ModélisationIllustration de la notion de fonction de transfert avec résistance et ressort.
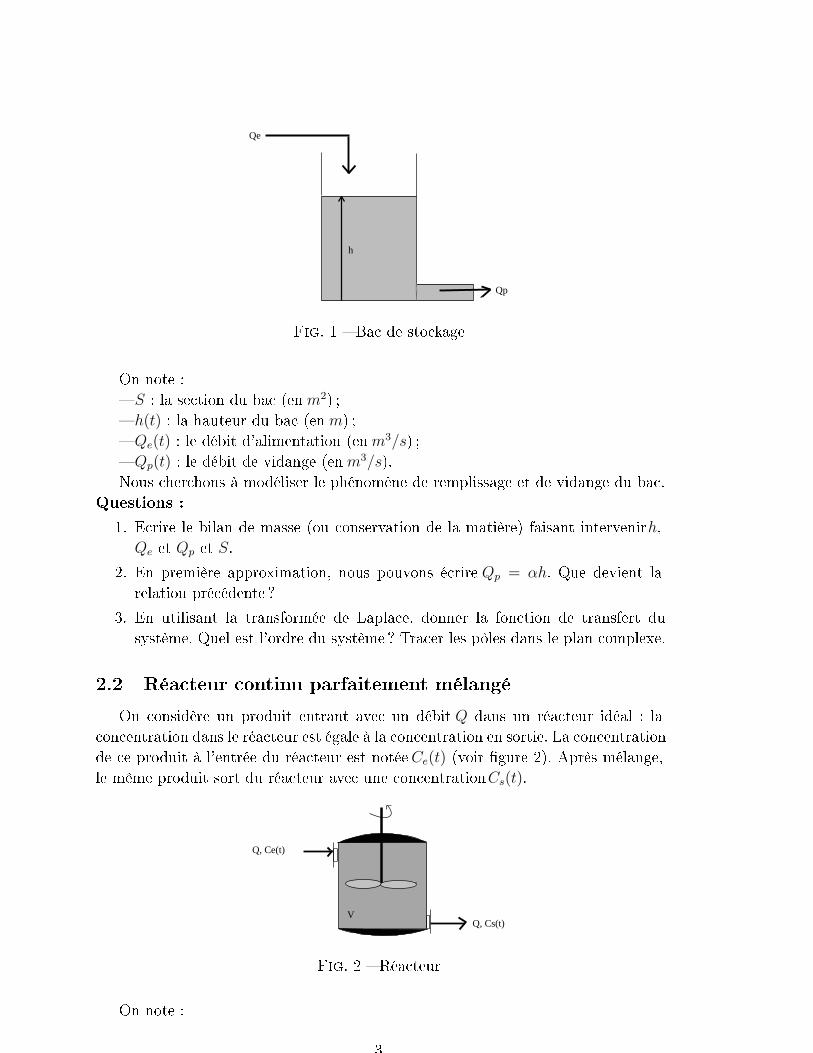
2.1 Bac de remplissageConsidérons le système de la �gure 1. Il s'agit d'un bac que l'on remplit avec un
débit Qe (débit d'entrée) et qui se vide par un ori�ce situé dans le fond (débitQp
de sortie).
2
Qe
Qp
h
Fig. 1 � Bac de stockage
On note :� S : la section du bac (en m2) ;� h(t) : la hauteur du bac (en m) ;� Qe(t) : le débit d'alimentation (en m3/s) ;� Qp(t) : le débit de vidange (en m3/s).Nous cherchons à modéliser le phénomène de remplissage et de vidange du bac.
Questions :1. Ecrire le bilan de masse (ou conservation de la matière) faisant intervenirh,
Qe et Qp et S.2. En première approximation, nous pouvons écrire Qp = αh. Que devient la
relation précédente ?3. En utilisant la transformée de Laplace, donner la fonction de transfert du
système. Quel est l'ordre du système ? Tracer les pôles dans le plan complexe.
2.2 Réacteur continu parfaitement mélangéOn considère un produit entrant avec un débit Q dans un réacteur idéal : la
concentration dans le réacteur est égale à la concentration en sortie. La concentrationde ce produit à l'entrée du réacteur est notéeCe(t) (voir �gure 2). Après mélange,le même produit sort du réacteur avec une concentrationCs(t).
Q, Ce(t)
Q, Cs(t)V
Fig. 2 � Réacteur
On note :
3
� Ce(t) : la concentration initiale du produit (mole/m3) ;� Cs(t) : la concentration �nale du produit (mole/m3) ;� Q : le débit du produit (en m3/s) ;� V : le volume du réacteur (en m3).Questions :1. Ecrire le bilan de masse faisant intervenirQ, Ce et Cs et V .2. Notons F (p) la fonction de transfert liant Cs(p) à Ce(p), c'est à dire Cs(p) =
F (p)Ce(p). En utilisant la transformée de Laplace, exprimerF (p).3. Quel est l'ordre du système ? Tracer les pôles dans le plan complexe.
2.3 AmortisseurUn amortisseur peut être considéré comme un système masse-ressort décrit dans
la �gure 3. On cherche à modéliser ce système.
Fig. 3 � Système Masse-Ressort
On note :� K la constante de raideur du ressort (enN/m) ;� f la constante de frottement visqueux du vérin (enNs/m) ;� u(t) la force exercée sur la masse (en N) : c'est l'entrée du système ;� y(t) le déplacement engendré par u(t) (en m) : c'est la sortie du système.
Questions :1. Appliquer la relation fondamentale de la dynamique (pomme des forces =
masse × accélération).2. Exprimer la fonction de transfert du système.3. Quel est l'ordre du système ? Tracer les pôles dans le plan complexe.
4

TD n◦2 : schémas-blocs ∗
I.U.T. Génie Chimique & Génie des Procédés - 2ème année
Prérequis : rien si ce n'est d'avoir assisté au cours.Objectif du T.D. : pour savoir si une boucle fermée répond bien aux critères de
stabilité, précision et rapidité, il est important de savoir comment ce dernier réagit faceà une entrée donnée. Pour cela, il faut déterminer la relation entre la sortie du systèmeet la dite entrée. La manipulation et la simpli�cation de schémas-bloc permet de trouverrapidement cette relation.
� l'exercice 1, facultatif, demande de trouver le schéma-bloc descriptif (descriptif dansle sens où il est demandé de donner les blocs et leur description enfrançais) corres-pondant au texte donné ;
� l'exercice 2 demande de trouver la relation entrée/sortie des systèmes représentéssous forme de schémas-blocs.
1 Schéma-bloc physiquePour l'exemple qui suit, identi�er tous les éléments typiques d'une boucle (à savoir le
processus, le capteur, l'actionneur et le correcteur). Déterminer aussi quelle est la consigne.
Exemple : prenons le cas d'un réfrigérateur : ce système consiste à refroidir l'air grâce àun moteur. Un thermomètre indique la température, celle-ci est comparée à la températuredésirée. Un circuit électrique met en route le moteur si la température est supérieure à celledemandée ; sinon le circuit électrique arrête le moteur.
2 Réduction de schémas-blocsAprès simpli�cation du schéma-bloc, calculer la fonction de transfertF (p) liant X(p)
à Y (p), c'est-à-dire Y (p) = F (p)X(p).
∗pour toutes questions, e-mails : {msekher, eric.magarotto}@greyc.ismra.fr
1

1.
C(p) -G(p)- - Y (p)
¾H(p)
66-X(p) +−
2.
10p + 1
1p
2
?
66- -
¾
X(p) Y (p)+
+ +
−
3.
1p + 10
1p
2p + 3
0.1
?
66
- -X(p) Y (p)+
+ +
−
?¾¾
K
+ +
4.
G1(p) G2(p) G3(p)
H1(p)
H2(p)
- - - -?
- -
66
X(p) Y (p)-+ + +
− −
−
2

�� �◦ �� �� � � � � � �� � �� � � � � � � ∗
�� � � �� ��� �� �� �� ��� � ��� �� ! �" #$% &� ! � " ' 2 ()* +� � � �
, -./ 01 02/ 34 51 6 71 58 5 0 51
9:; < = >?@ :; < AB <C < D EF B >?G @ = DH I@ A I J:; G D =:; > B D@ I; < JB@ D <K =L I; D BM F (p) =3
1 + 10p.NOP Q R STU QV
WX Y? D B@ F =; B@ ABZ I =; < D I D =[ K B
K
B D A IG :; < D I; D B > B D B F H <
τ
> K <C < D EF B X
\X ]@ IG B@ A^ I A AK @ B > B A I@ ? H :; <B =; > =G =B A AB B; H @ B; I; DG : F F B B; D@ ? B
u(t) = 2 , t ≥ 0X_X 9 I AG K AB@
tr
AB D B F H < > B @ ? H :; < B `
95%X
a b1 c8 3 3d e. 51 / 3 4 51 6 71 58 5 0 51
f I gZ K @ B W@ B H @ ? < B; D B A I@ ? H :; < B =; > =G = B A AB K ; = D I =@ B h
u(t) = 1
i > B > B Kj <C < D EF B <
F1(p)
`Z IK G k B
B D
F2(p)
` >@ : = D B X
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Step Response
Time (sec)
Am
plitu
de
temps (sec.)
Am
plitu
de
réponse indicielle
0 1 2 3 4 5 6 7 8 9 10 11 12 13 140
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
3
lmno Wp q? H :; < B =; > =G =B A AB
NOP Q R STU QV
WX r ^ IZ = Ds = A > B <C < D EF B < >K H @ B F = B@ : @ >@ B t
\X r = : K =u >? D B@ F =; B@ AB K @ J:; G D =:; > B D@ I; < JB@ DX
∗ v wxy z wx z{| } x {| z ~ w� |� �� �� ��� � � �� � �� ��� �� ��� ��� � �� � �� �� � � �� �� �� �� �� ��
W
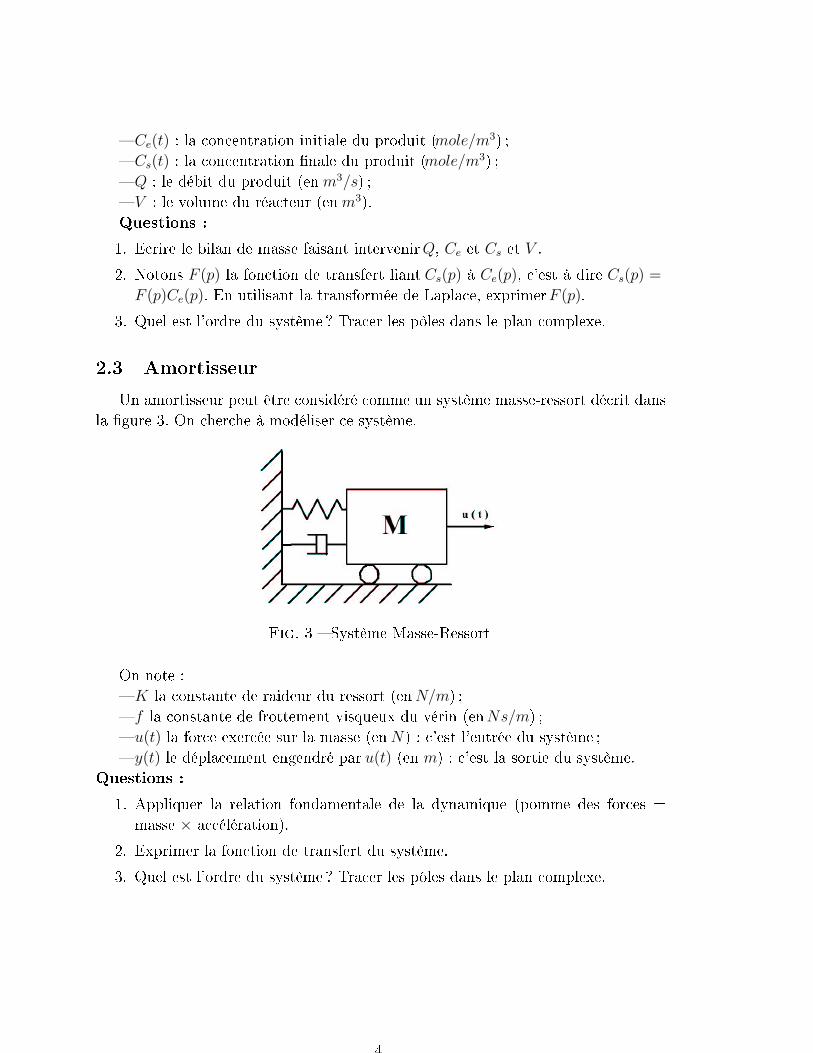
� � 7� . 7 3� / 1 5/ 34 51 6 71 5 8 5 0 51 4 d 5 �d 5 �4 8 3 � 1 7 3 0 7 c 71 � �1
f B < gZ K @ B <@ B H @ ? <B; D B; D AB <@ ? H :; < B < ` K ; ?G k B A:; > ^ IF H A = D K > B 2
> B H AK < = B K @ < <C < D EF B <X Y? D B@ F =s
; B@ [ K B A AB gZ K @ B G : @ @ B <H :; > ` [ K B A <C < D EF B > B J:; G D =:; > B D@ I; < JB@ DM F1(p) = 0.51+1p
u F2(p) = 11+3p
u
F3(p) = 11+1p
u F4(p) = 0.51+3p
X
0 2 4 6 8 10 12 14 16 180
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Step Response
Time (sec)
Am
plitu
de
0 2 4 6 8 10 12 14 16 180
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Step Response
Time (sec)
Am
plitu
de
0 2 4 6 8 10 12 14 16 180
50
100
150
200
250
300
350
400
450
Step Response
Time (sec)
Am
plitu
de
0 2 4 6 8 10 12 14 16 180
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Step Response
Time (sec)
Am
plitu
de
0 2 4 6 8 10 12 14 16 180
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Step Response
Time (sec)
Am
plitu
de
0 2 4 6 8 10 12 14 16 180
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Step Response
Time (sec)
Am
plitu
de
\
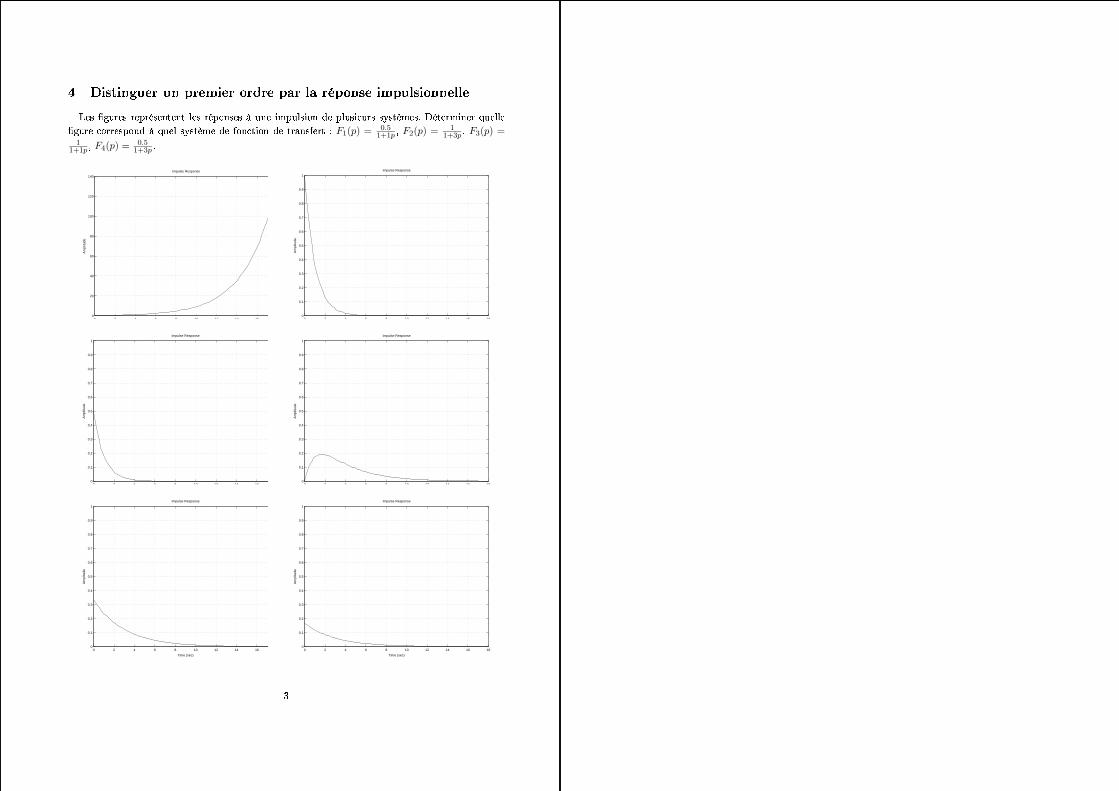
� � 7� . 7 3� / 1 5/ 34 51 6 71 5 8 5 0 51 4 d 5 �d 5 �4 8 3 � 1 7 64 / �� 78 3 3 1 � �1
f B < gZ K @ B <@ B H @ ? <B; D B; D AB <@ ? H :; < B < ` K ; B =F H K A < =:; > B H AK < = B K @ < <C < D EF B <X Y? D B@ F =; B@ [ K B A AB
gZ K @ B G : @ @ B <H :; > ` [ K B A <C < D EF B > B J:; G D =:; > B D@ I; < JB@ DM F1(p) = 0.51+1p
u F2(p) = 11+3p
u F3(p) =1
1+1p
u F4(p) = 0.51+3p
X
0 2 4 6 8 10 12 14 16 180
20
40
60
80
100
120
140
Impulse Response
Time (sec)
Am
plitu
de
0 2 4 6 8 10 12 14 16 180
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Impulse Response
Time (sec)
Am
plitu
de
0 2 4 6 8 10 12 14 16 180
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Impulse Response
Time (sec)
Am
plitu
de
0 2 4 6 8 10 12 14 16 180
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Impulse Response
Time (sec)
Am
plitu
de
0 2 4 6 8 10 12 14 16 180
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Impulse Response
Time (sec)
Am
plitu
de
0 2 4 6 8 10 12 14 16 180
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Impulse Response
Time (sec)
Am
plitu
de
_
�� � ◦ �� �� � � � � � �� �� � � �� �� � ∗
�� � � �� ��� �� �� �� ��� � � ��� �� �! "#$ %� � ! & 2 '() *� � � �
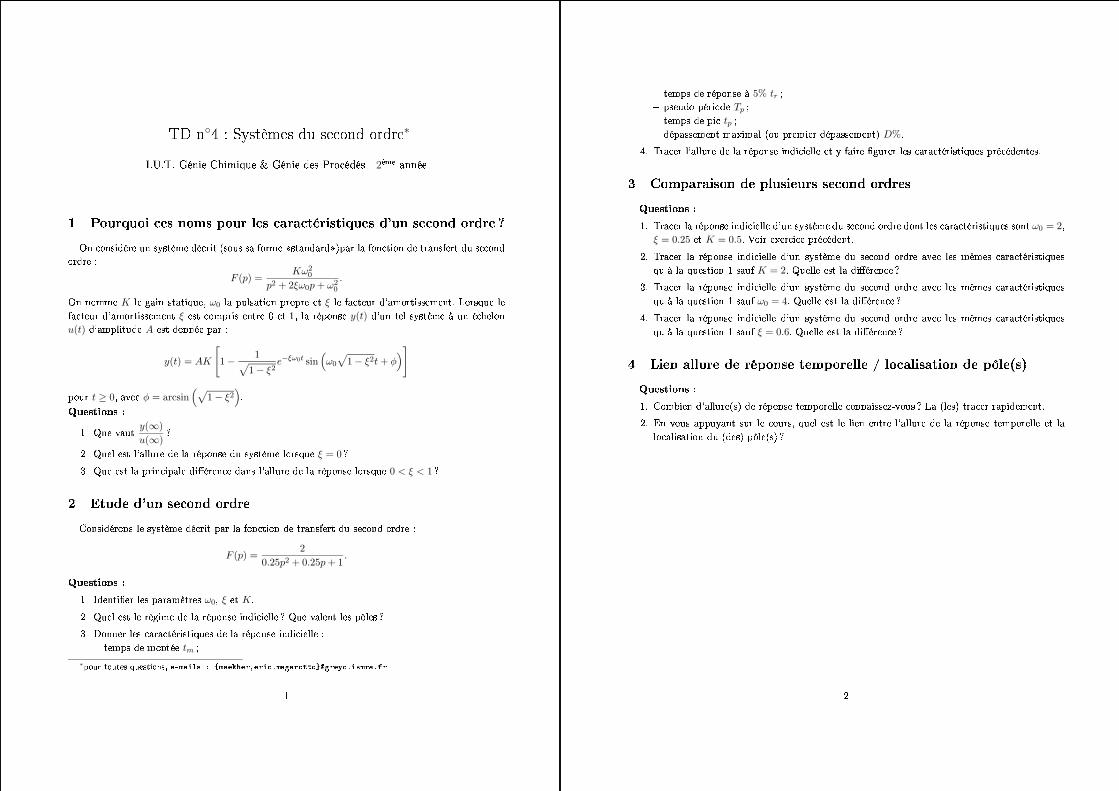
+ ,- ./ 0 . - 12 34 5 - 6 4 7 - ./ 8 34 2 9/ 92 : ;/ 14 : 1 0 . 3 4 <= . 5 4 32 - 5 < - / < / 3 >
?@A B@C D EFGH I@ C JC KFL H EMA G D K NC B IC C O P BG L H QC K O@ E OG ER ST OG U O P B@A K D B@ EH KG O@C PH G K E IC H A B@ E
BG EGH V
F (p) =Kω2
0
p2 + 2ξω0p+ ω20
.
?@ @ BL L H
K
UH W O D@ C K O K DX IH Y ω0
U O T I UC O K D B@ T G BT GH H K
ξ
UH P OA KH IG EZ OL BG K DC C H L H @ K[ \ BG C X IH UH
P OA KH IG E Z OL BG K DC C H L H @ K
ξH C KA BL T G DC H @ KGH ]H K ^ Y U OG M T B@ C H y(t)
EZ I @ KH UC JC KFL H _ I@ MA `H U B@
u(t)
EZ OL T U D K I EH
A
H C K E B@ @ MH T OG V
y(t) = AK
[
1−1
√
1− ξ2e−ξω0t sin
(
ω0
√
1− ξ2t+ φ)
]
T B IG
t ≥ 0 Y OaH A
φ = arcsin(
√
1− ξ2)[bcd e f ghi ej
^ [ k IH a O I K y(∞)
u(∞)
l
m[ k IH UH C K UZ O U U IG H EH U OG M T B@ C H E IC JC KFL H U BG C X IH
ξ = 0
l
n[ k IH H C K U O T G D@A DT O UH E D oMGH @A H E O@C UZ O U U IGH EH U OG M T B@ C H U BG C X IH 0 < ξ < 1
l
p q : . < 3 < = . 5 4 32 - 5 < - / < / 3
r B@ C D EMG B@ C UH C JC KFL H EMA G D K T OG U O P B@A K D B@ EH KG O@ C PH G K E IC H A B@ E BG EGH V
F (p) =2
0.25p2 + 0.25p+ 1.
bcd e f ghi ej
^ [ s EH @ K D tH G UH C T OG OL F KGH C ω0 Y ξH K
K [
m[ k IH UH C K UH G M W DL H EH U OG M T B@ C H D@ E DA DH U UH l k IH a O UH @ K UH C T u UH C l
n[ v B@ @H G UH C A OG OA KMG DC K DX IH C EH U OG M T B@ C H D@ E DA DH U UH V
w KH L T C EH L B@ KMH
tm
x
∗ y z{| } z{ }~� � { ~� } � z� �� �� �� ��� � � �� � �� ��� �� ��� ��� � �� � �� �� � � �� �� �� �� �� ��
^
w KH L T C EH G M T B@ C H _
5% tr
x
w T C H I E B� T MG D B EH
Tp
x
w KH L T C EH T DA
tp
x
w EM T OC C H L H @ KL O� DL O U N B I T GH L DH G EM T OC C H L H @ K S
D%[
�[ �G OA H G UZ O U U IG H EH U OG M T B@ C H D@ E DA DH U UH H K J P O DGH t W IGH G UH C A OG OA KMG DC K DX IH C T G MA M EH @ KH C [
� � - 6 7 9/ 9 14 - 5 < 3 7 8 . 4 1 3 . / 4 4 32 - 5 < - / < / 34
bcd e f ghi ej
^ [ �G OA H G U OG M T B@ C H D@ E DA DH U UH EZ I @ C JC KFL H E IC H A B@ E BG EGH E B@ K UH C A OG OA KMG DC K DX IH C C B@ K
ω0 = 2 Y
ξ = 0.25H K
K = 0.5[ B DG H �H GA DA H T G MA M EH @ K [
m[ �G OA H G U OG M T B@C H D@ E DA DH U UH E Z I@ C JC KFL H E IC H A B@ E BG EGH OaH A UH C L ¡L H C A OG OA KMG DC K DX IH C
X I Z _ U O X IH C K D B@ ^C O I P
K = 2[ k IH U UH H C K U O E D oMG H @A H l
n[ �G OA H G U OG M T B@C H D@ E DA DH U UH E Z I@ C JC KFL H E IC H A B@ E BG EGH OaH A UH C L ¡L H C A OG OA KMG DC K DX IH C
X I Z _ U O X IH C K D B@ ^C O I P
ω0 = 4[ k IH U UH H C K U O E D oMGH @A H l
�[ �G OA H G U OG M T B@C H D@ E DA DH U UH E Z I@ C JC KFL H E IC H A B@ E BG EGH OaH A UH C L ¡L H C A OG OA KMG DC K DX IH C
X I Z _ U O X IH C K D B@ ^C O I P
ξ = 0.6[ k IH U UH H C K U O E D oMG H @A H l
¢ £ 1 3 5 9 8 8 ./ 3 < 3 / ; 7 - 5 4 3 : 3 6 7 - / 3 8 8 3 ¤ 8- 2 9 8 14 9 : 1 - 5 < 3 7 ¥ 8 3 ¦ 4 §
bcd e f ghi ej
^ [ r BL ¨ DH @ E Z O U U IGH NC S EH G M T B@C H KH L T BG H U UH A B@ @ O DC C H ©� a B IC l \ O N UH C S KG OA H G G OT D EH L H @ K [
m[ ª@ a B IC OT T I J O@ KC IG UH A B IG C Y X IH UH C K UH U DH @ H @ KG H UZ O U U IG H EH U OG M T B@C H KH L T BG H U UH H K U O
U BA O U DC O K D B@ E I N EH C S T u UH NC S l
m

�� �◦ �� �� � � � � � � �� �� � � �∗
�� � � � � ��� �� �� �� ��� � �� � �� ! �" #$% &� ! � " ' 2 ()* +� � � �
,-. / - 01 21 / 34. /5 64 789 78 1 3 / 3 :;< => ?@ < A> B@ C4. . D. / EF 4. G H9 5 /4. 24. I- 8 - I / 38 1. / 1J 5 4.
3 / - 0 214. 79 5 8 24. . D. / E F 4. C5 784 F 14 8 4 /. 4 I9 6 C9 8 C 84 KL - 1 6. /- / 1J 5 4M /4 F 7. C4 8 3 79 6. 4 G G G N 64
. 9 6 /O - 2- 0 24. J 5 4 . 1 24 . D. / EF 4 4. /. /- 0 24 G P 6 I Q4 8 I Q4 8 - C9 6 I /9 5 R9 5 8. S. / - 0 1 21. 4 8 5 6. D. / EF 4
- O - 6 / /9 5 /4 - 5 /84 I Q9. 4 G T84 69 6. 2U4 V4 F 7 24 C U5 6 - O 19 6 J 5 1. 4 8 - 1 / 1 6. / - 0 24 4 / 1 F - L 1 69 6. 2-
I- / -. / 89 7 Q4 J 5 1 79 5 8 8 - 1 / - 8 8 1O 4 8 G G G
W XY Z [\] \ Y ^ _`a a ba Y cd `a ^] ^d ` eY Z\f `a
g9 1 / 24 . D. / EF 4 C5 784 F 14 8 9 8 C 84 C4 h9 6 I / 19 6 C4 /8 - 6. h4 8 /i
F (p) =k
ap + b.
P 6. 5 7 79. 4 J 5 4
a
4 /
b
. 9 6 / /9 5 . 69 6 65 2. G j 7 7 21J 5 4 8 24 I8 1 / E84 C4 k9 5 / Q4 / C 3 /4 8 F 1 64 8 2-
I9 6 C 1 / 19 6 C4 . /- 0 1 21 / 3 C4 F (p) Gg9 1 / 24 . D. / EF 4 C5 . 4 I9 6 C9 8 C 84 C4 h9 6 I / 19 6 C4 /8 - 6. h4 8 /i
F (p) =k
ap2 + bp + c.
P 6. 5 7 79. 4 J 5 4
aM b
4 /
c
. 9 6 / /9 5 . 69 6 65 2. G j 7 7 21J 5 4 8 24 I8 1 / E84 C4 k9 5 / Q4 / C 3 /4 8 F 1 64 8 2-
I9 6 C 1 / 19 6 C4 . /- 0 1 21 / 3 C4
F (p) G
l XY Z [\] \ Y ^ _mn ea ba Y cd ` _n on ZY f \ cd ` pf _f `
q 3 /4 8 F 1 64 8 2-. / - 01 21 / 3 C4. . D. / EF 4. C4 h9 6 I / 19 6. C4 / 8 - 6. h4 8 /. . 5 1O - 6 /4. i
r F (p) = p−10
p4+2p3+2p2+4p+3r F (p) = 1
p4+3p3+2p2+6p+1
G
s XY Z [\] \ Y ^ _` a t u ^d Za ^] ^d ` eY Z\f ` a
v9 6. 1 C 389 6. C4 5 V. D. / EF 4. C4 h9 6 I / 19 6. C4 /8 - 6. h4 8 /
F1(p)4 /
F2(p) G P 6 I9 6. /85 1 / C4 5 V
. D. / EF 4. C4 h9 6 I / 19 6. C4 / 8 - 6. h4 8 /
F1(p) + F2(p)4 /
F1(p)F2(p) G q4. . 1 64 8 24. C4 5 V. I Q 3F -. w0 29 I. I9 8 84. 79 6 C- 6 / G x5 4 C 1 84 C4 2-. /- 0 1 21 / 3 C4 I4. . D. / EF 4. C- 6. 24. /89 1. I-. 9 yi
z G F1(p)4 /
F2(p). 9 6 /. /- 0 24. {
| G F1(p)4. /. / - 0 24M F - 1.
F2(p)4. / 1 6. / - 0 24 {
} G F1(p)4 /
F2(p). 9 6 / 1 6. / - 0 24. {
∗ ~ ��� � �� ��� �� �� � � �� �� �� �� ��� � � �� � �� ��� �� ��� ��� � �� � �� �� � � �� �� �� � �� � ��� ��
z
XY Z [\] \a ZY \ p e _mn ea ba Y c d ` \ ea Y Z [] ` ¡ Zf [ pn t] Z¢ `
g9 1 / 24 . D. / EF 4 C4 h9 6 I / 19 6 C4 /8 - 6. h4 8 / i
F (p) =p2 + 2p + 2
p4 + 2p3 + 2p2− 2p− 3
q 3 /4 8 F 1 64 8. 1 I4 . D. / EF 4 4. /. / - 0 24 7- 8 - 7 7 21 I- / 19 6 C5 I8 1 / E84 C4 k9 5 / Q GP 6 I9 6. 1 C E84 F - 1 6 /4 6 - 6 / 24 09 5 I 2- L 4 C4 2- £ L 5 84 . 5 1O - 6 /4 i
C - F (p) -66
-- w¤
X(p) Y (p)
¥¦§¨ z r ©9 5 I 2- L 4 - O 4 I5 6 L - 1 6 I9 6. /- 6 /
9 y
C
4. /5 6 L - 1 6 I9 6. /- 6 / G T9 5 8C = 2M C 3 /4 8 F 1 64 8. 1 2- 09 5 I 24 h4 8 F 34 4. /. /- 0 24 G x5 4 2 24
4. / 2- I9 6 C 1 / 19 6 C4 . /- 0 1 21 / 3. 5 8C
{
ª « ^a Y Z [\ ] \a ZY \ p e _m n ea ba Y cd ` a Y Z [] ` ¡ Zf [ pn t] Z¢ `
g9 1 / 24 . D. / EF 4 C4 h9 6 I / 19 6 C4 /8 - 6. h4 8 / i
F (p) =1
p4 + 4p3 + 8p2 + 8s + 3.
q 3 /4 8 F 1 64 8. 1 I4 . D. / EF 4 4. /. / - 0 24 7- 8 - 7 7 21 I- / 19 6 C5 I8 1 / E84 C4 k9 5 / Q GP 6 I9 6. 1 C E84 F - 1 6 /4 6 - 6 / 24 09 5 I 2- L 4 C4 2- £ L 5 84 z 9 y
C
4. /5 6 L - 1 6 I9 6. /- 6 / G T9 5 8
C = 10M C 3 /4 8 F 1 64 8. 1 2- 09 5 I 24 h4 8 F 34 4. /. /- 0 24 G x5 4 2 24 4. / 2- I9 6 C 1 / 19 6 C4 . / - 0 1 21 / 3. 5 8
C
{
|
TD n◦6 : Erreur et precision en regime permanent∗
I.U.T. Genie Chimique & Genie des Procedes - 2eme annee
1 Interet de la boucle fermee
Dans le TD precedent, nous avons vu que la boucle fermee est interessante car elle permet
entre autre de stabiliser un systeme instable. En meme temps, il est important de prendre
des precautions car la boucle fermee peut aussi destabiliser un systeme stable. Rappelons
que la stabilite est une propriete essentielle qu’il tient de toujours verifier avant toute autre
chose. Nous allons voir dans cet exercice un autre interet de la boucle fermee.
Considerons un refrigerateur que l’on modelise par la fonction de transfert suivante :
G(p) =2
1 + 1000p.
Cette modelisation est approximative, mais c’est pour donner une idee et pouvoir faire un
exemple simple. Examinons d’abord le systeme :
G(p)- -u y
L’entree u est une tension qui fait tourner un moteur (ce qui refroidit l’air a l’interieur du
refrigerateur), alors que la sortie y represente la temperature interieure du refrigerateur.
N’oublions pas que lorsque l’on ouvre le refrigerateur pour prendre quelque chose, de l’air
rentre a l’interieur, modifiant la temperature interieure du refrigerateur. C’est ce que l’on
appelle une perturbation. Ceci peut se presenter comme dans le schema suivant :
G(p)- yu - -?
H(p)?
d
+ +
ou d represente la temperature dans la piece ou se trouve le refrigerateur. La fonction de
transfert H(p) represente la dynamique d’echange de chaleur entre l’interieur et l’exterieur
du refrigerateur : l’echange n’est pas instantane. Nous prendrons un exemple simple pour
H(p) :
H(p) =1
1 + 1000p.
∗pour toutes questions, e-mails : {msekher, eric.magarotto}@greyc.ensicaen.fr
1
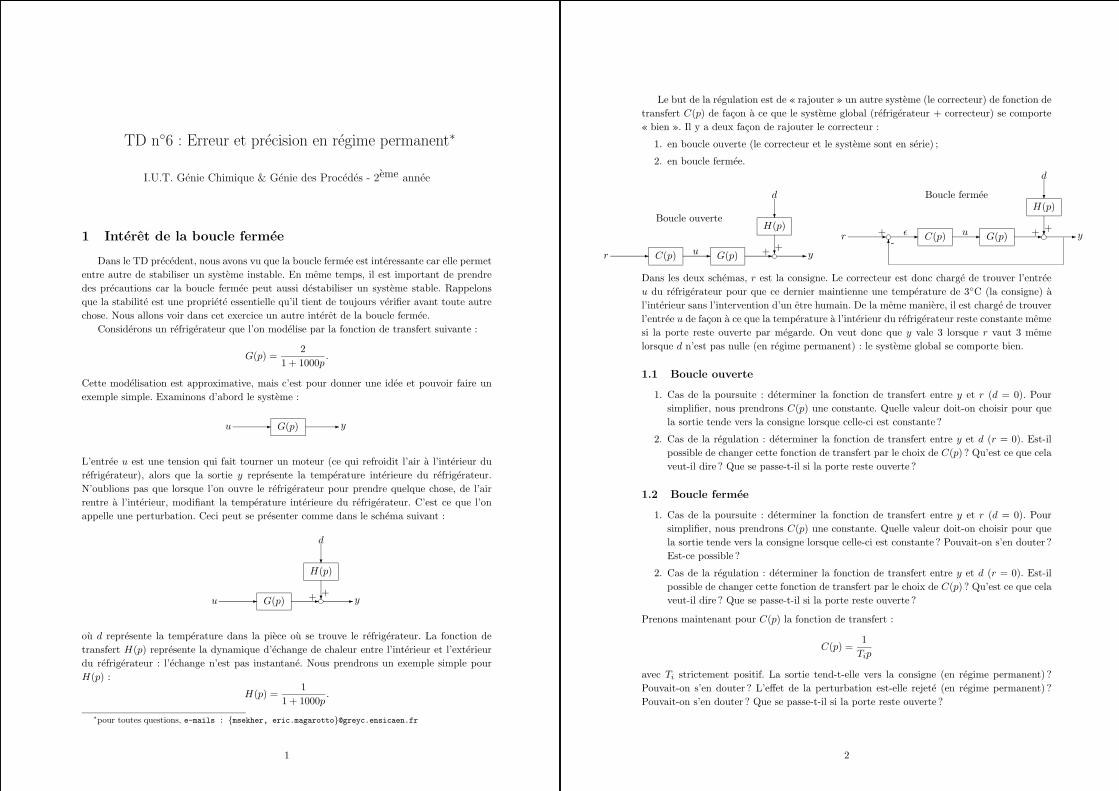
Le but de la regulation est de « rajouter » un autre systeme (le correcteur) de fonction de
transfert C(p) de facon a ce que le systeme global (refrigerateur + correcteur) se comporte
« bien ». Il y a deux facon de rajouter le correcteur :
1. en boucle ouverte (le correcteur et le systeme sont en serie) ;
2. en boucle fermee.
G(p)- yu - -?
H(p)?
d
C(p) -r + +
Boucle ouverte
G(p)- yu - -?
H(p)?
d
C(p) -r + +-
6+
-ε
Boucle fermee
Dans les deux schemas, r est la consigne. Le correcteur est donc charge de trouver l’entree
u du refrigerateur pour que ce dernier maintienne une temperature de 3◦C (la consigne) a
l’interieur sans l’intervention d’un etre humain. De la meme maniere, il est charge de trouver
l’entree u de facon a ce que la temperature a l’interieur du refrigerateur reste constante meme
si la porte reste ouverte par megarde. On veut donc que y vale 3 lorsque r vaut 3 meme
lorsque d n’est pas nulle (en regime permanent) : le systeme global se comporte bien.
1.1 Boucle ouverte
1. Cas de la poursuite : determiner la fonction de transfert entre y et r (d = 0). Pour
simplifier, nous prendrons C(p) une constante. Quelle valeur doit-on choisir pour que
la sortie tende vers la consigne lorsque celle-ci est constante ?
2. Cas de la regulation : determiner la fonction de transfert entre y et d (r = 0). Est-il
possible de changer cette fonction de transfert par le choix de C(p) ? Qu’est ce que cela
veut-il dire ? Que se passe-t-il si la porte reste ouverte ?
1.2 Boucle fermee
1. Cas de la poursuite : determiner la fonction de transfert entre y et r (d = 0). Pour
simplifier, nous prendrons C(p) une constante. Quelle valeur doit-on choisir pour que
la sortie tende vers la consigne lorsque celle-ci est constante ? Pouvait-on s’en douter ?
Est-ce possible ?
2. Cas de la regulation : determiner la fonction de transfert entre y et d (r = 0). Est-il
possible de changer cette fonction de transfert par le choix de C(p) ? Qu’est ce que cela
veut-il dire ? Que se passe-t-il si la porte reste ouverte ?
Prenons maintenant pour C(p) la fonction de transfert :
C(p) =1
Tip
avec Ti strictement positif. La sortie tend-t-elle vers la consigne (en regime permanent) ?
Pouvait-on s’en douter ? L’effet de la perturbation est-elle rejete (en regime permanent) ?
Pouvait-on s’en douter ? Que se passe-t-il si la porte reste ouverte ?
2

2 Choix du correcteur pour la garantir precision et rapidite
Soit le systeme :
C - G(p) -
6
---
+X(p) Y (p)ε(p) U(p)
avec G(p) = A1+τp
.
1. Calculer la fonction de transfert en boucle fermee appelee GBF1(p). Montrer qu’elle
correspond a un nouveau systeme du premier ordre dont on precisera le nouveau gain
statique A1 et la nouvelle constante de temps T1. Ces deux parametres seront exprimes
en fonction de A et τ .
2. Calculer la valeur de l’erreur de position ε1(∞) (en fonction de A et P ) lorsque le signal
d’entree est un echelon unitaire.
3. Calculer la valeur de l’erreur de vitesse ε2(∞) (en fonction de A et P ) lorsque le signal
d’entree est une rampe unitaire.
4. Quelle valeur doit-on donner a P si l’on veut que le systeme en boucle fermee soit 5
fois plus rapide. P s’exprimera en fonction de A.
5. Calculer alors la nouvelle valeur de l’erreur de position lorsque l’entree est un echelon
unitaire. On exprimera cette valeur en
Application numerique : A = 2, τ = 4.
3 Choix du correcteur pour la precision
Soit le systeme :
C(p) - G(p) -
6
---
+X(p) Y (p)ε(p) U(p)
avec C(p) qui possede la fonction de transfert C(p) = Kpet G(p) = 10
(p+1)(p+10) . Determiner
K tel que le systeme en boucle fermee soit stable et l’erreur de vitesse inferieure a 10%.
4 reglage successif de correcteur, partie du probleme de l’exa-
men 2002
Soit le systeme :
3
C(p) - G(p) -
6
---
+X(p) Y (p)ε(p) U(p)
avec G(p) = Y (p)U(p) = 1
p2+9p−10.
4.1 etude preliminaire
1. Mettre G(p) sous la forme pole/zero (faisant apparaıtre des produits de facteurs au
denominateur).
2. En deduire la valeur des poles. Ce systeme est-il stable ?
3. Peut-on parler de gain statique ? Justifiez.
4.2 etude en boucle fermee
Dans un premier temps, on ferme la boucle sans correcteur (C(p) = 1).
1. Calculez la fonction de transfert en boucle fermee F1(p) = Y (p)X(p) .
2. Le fait de fermer la boucle suffit-il pour assurer la stabilite ? Justifiez.
On cherche maintenant a determiner un correcteur proportionnel C(p) = P pour ameliorer
la rapidite tout en assurant la stabilite.
1. Calculez la fonction de transfert en boucle fermee F2(p) = Y (s)X(p) en fonction de P .
2. Determinez la condition de stabilite sur P pour obtenir un systeme stable en boucle
fermee.
3. Mettre F2(p) sous forme standard et exprimez ses parametres caracteristiques en fonc-
tion de P .
4. Calculez la valeur limite de P pour que la reponse indicielle reste en regime aperiodique.
On fixera cette valeur obtenue a la valeur entiere la plus proche.
5. Determinez la meilleure erreur de position possible en reponse a un echelon unitaire et
garantissant un regime aperiodique. Exprimez cette valeur en pourcentage.
4

��� � � �◦ �� �� � � �� � �� �� �� � � � � �� � �� �� � � �
� � �� � � � � � �� ∗
��� � � ��� � ! "# $% "& "'( # ) � ! "# * #+ ,-. / * + 0 2
1& # 2! ! #
345 67 8 9: ;<=> ? @AB <=> CD> E> F GH D @ D CI JKL B D MN O C> P I K ? F @ PL = QIR SL D C P <= B D HT C ? F
IU DR L = @A Q ? F
Qe
V @A Q ? F @ P D= FB A D W D F SL ?> D U ? @ DT IB L = <B ? JR D> ? FL A @ I=> CD X<= @N
Qe
Qp
h
YZ[\ M] ^ IR @ D> F <R _I K D
`L B R D> E> F GH Da <= U DL FB A KL CDB CI b IL F DL B @ P D IL h(t)
cL = D b IL F DL B @ D Md cma> < ? F d a d M mN e<L B R D XI ?B Da CI> DL CDT <> > ? Q ? C ? FA SL D = <L > I E<=> D> F @ D f <L DB > L B CD @A Q ? F@ P D= FB A D Qe(t)
gR P D> F CI R < H H I= @ D N
hi jk l 9mn 8 9io ` <L > C P b ET < F b G> D SL D Qp(t) = αh(t)a = <L > IU <=> U L @ I= > CD pN qN MSL D R D> E> F GH D I @ H D FR < H H D H < @A C ?> I F ?<= T IB X<= R F ?<= @ D FB I=> XDB F g
G(p) =H(p)
Qe(p)=
1
α
1 + Sαp
< r S D> F CI> DR F ?<= @L QIR V D= m2
Wa h(t)
CI b IL F DL B @L QIR V D= m
Wa Qe(t)
CD @A Q ? F@ P I C ?H D= F I F ?<= V D= m3/s
Wa Qp(t)
CD @A Q ? F @ D U ? @ I= K D V D= m3/s
WN eB D= <=> α D F S @ D
> < B F D SL D g
G(p) =0, 5
1 + 4p.
∗
stuv w tu wxyz u xy w {t| y} ~� �� ��� � �� ~ �� ~�� ~� ��� � � � � �� � �� �� �� ~� � � ~� � �� � ~�� ��
M
�� 6� 9� � 6� i m m 94 9 l 9 8k eB D= <=> R < H H D R < H H I= @ D L = AR b D C<= @ P I HT C ? FL @ D 0, 02Nq D> > ?= DB CI B AT <=> D F D HT < B D C CD @ D h(t)N
� 6�� 9� � 6� i m m 94 9 l 9 8k eB D= <=> R < H H D R < H H I= @ D F <L F @ P I Q < B @L = AR b D C<= @ P I H�T C ? FL @ D 0, 1N eL ?> C< B> SL D CI b IL F DL B @ P D IL h(t) I F F D ?= F M d
cma <= T B D= @T <L B R < H�H I= @ D Qe(t) = 0, 02 m3/sN q D> > ?= DB > L B CI JKL B D CI B AT <=> D F D HT <B D C CD @ D h(t)N
� io 7 l� m 9io O C D> F @ <= R T <> > ? Q CD @ P I F F D ?= @B D CI b IL F DL B @ P D IL @A> ?B A DT CL > <L H < ?=>
U ? F D> D C<= CI R < H H I= @ D N e <L B L F ? C ?> DB CI @ DL � ? GH D T <> > ? Q ? C ? FA a = <L > IU <=> Q D> < ?=@ D> I U < ?B SL I= @ CI b IL F DL B @ P D IL I F F D ?= F CI U I CDL B @A> ?B A D N = IT T D C CD C P DB B DL B @ D
> L ?U ? @ D FB I f DR F < ?B D CD> ?K = I C g b IL F DL B @ P D IL @A> ?B A D � b IL F DL B @ P D IL B A D C CD N ¡ <L >@ DU <=> @ <= R > I U < ?B SL I= @ C P DB B DL B @ D> L ?U ? @ D FB I f DR F < ?B D D> F= L C CD N ¡ <L > L F ? C ?> <=>
R D F F D ?= X<B H I F ?<= T <L B R b I= K DB CI R < H H I= @ D N ; P D> F CI = < F ?<= @ D ¢ Q <L R CD XDB H A D £N¤ D B D CI F ?<= D= FB D C P DB B DL B @ D> L ?U ? @ D FB I f DR F < ?B D D F CI R < H H I= @ D D> F IT T D CA D C< ? @ D
R < H H I= @ D <L R < B B DR F DL B N
� i � � 67 8 6� � l 9o k n 9� 6 O C D> FR CI ?B SL D CD R <B B DR F DL B @ D CI @ DL � ? GH DT <> > ? Q ? C ? FA = P D> F
T I> C ?= A I ?B D N ¥> F� R D F <L f <L B> T <> > ? Q CD @ D B D= @B DT CL > B IT ? @ D CI B AT <=> D @ D h(t) IU DRL = R <B B DR F DL B C ?= A I ?B D ¦^ <L R C<=> R D> E> F GH D IU DR L = K I ?= R <=> F I= F
CT <> ? F ? XR < H H D CD H <= FB D CI JKL B D
> L ?U I= F D NC - G(p) -
6
--�§
X(p) Y (p)ε(p) U(p)
;I CR L CDB CI X<= R F ?<= @ D FB I= > XDB F D= Q <L R CD XDB H A D F (p)N eB D= <=> C = 2N ¤ IQ <L R CD XDB H A D D> F� D C CD> F I Q CD ¦¨ L D C CD D> F CI R <=> F I= F D @ D F D HT > @ D CI Q <L R CD XDB H A D ¦¥> F� ? CT <> > ? Q CD @ D @ ?H ?= L DB R D F F D R <=> F I= F D @ D F D HT > a R P D> F� c� @ ?B D B D= @B D CI Q <L R CDXDB H A DT CL > B IT ? @ Da T I B CD R b < ? � @ PL = D IL FB D U I CDL B @ D C
¦ q <= = DB L = D F D C CD U I CDL B@ D CN
©

TD n◦8 : Correction P et PI ∗
I.U.T. Génie Chimique 2ème année
On considère un système dont la fonction de transfert estG(p).
G(p) y(t)- -u(t)
Fig. 1 � système
L'objectif de la régulation est d'imposer une trajectoire particulière au signal de sortiey(t).Au lieu d'analyser le comportement de la sortie à partir des équations di�érentielles il est plusfacile d'utiliser les transformée de Laplace (voir TD1, partie Transformée de Laplace).
L'idée ici pour maîtriser la sortie y(t) est d'utiliser une boucle de régulation (�gure 2). Le blocC(p) est appelé le régulateur. Il génère le signal u(t) qui va permettre d'obtenir le signal y(t)
désiré.D'après le TD5 on ne peut choisir C(p) n'importe comment, sous peine de rendre la boucle
instable. De plus si on veut que la sortie y(t) suive la signal de consigne x(t) il faut placer plus oumoins d'intégrateurs dans la boucle de régulation (cf TD6). Quant à la rapidité, les trois actions(proportionnel, intégrateur et dérivateur) peuvent être utiles.
L'étude de quelques procédés (cf TD1, partie Modélissation) a permis de montrer que le com-portement de système parfois relativement complexe peut être analysé à partir de modèle dupremier ou second ordre.
L'objectif de ce TD est de présenter 2 régulateurs possibles : P et PI. Le comportement de cesrégulateurs est présenté sur des systèmes du premier et second ordre.
1 Exercice 1 : correcteur proportionnel sur un premier ordre.On considère la boucle de régulation de la �gure 2. x(t) est le signal de référence, y(t) est le
signal de sortie. u(t) est le signal généré par le régulateur C(p) a�n de d'avoir ε(t) = x(t) − y(t)
qui soit nul en régime permanent.Le modèle G(p) est de la forme :
G(p) =A
1 + Tp
∗pour toutes questions, e-mails : {msekher,eric.magarotto}@greyc.ensicaen.fr
1

C(p) G(p)- y(t)- -6
--
+x(t)ε(t) u(t)
Fig. 2 � système bouclé
Dans cet exercice on e�ectue une correction proportionnelle en utilisant :
C(p) = K.
1. Calculer la fonction de transfert entreX(p) et ε(p). Montrer qu'il s'agit d'un premier ordreet donner sa constante de temps T ′.
2. Déterminer l'erreur statique de la boucle lorsque l'entréex(t) est un échelon. Théoriquementpour quelle valeur de K cette erreur est elle nulle ?
3. Pour la valeur de K précédente il peut apparaitre quelques problèmes. Pour le comprendrecalculer la fonction de transfert entreX(p) et U(p). Déterminer ensuite l'expression tempo-relle de u(t) lorsque x(t) est un échelon et tracer l'allure de u(t). Conclusion ?
4. Application : A = 2, T = 3. On suppose que u(t) ne peut dépaser une valeur de 10. Lorsquel'entrée x(t) est un échelon unitaire, en déduire la valeur maximum deK. Calculer alors lesvaleurs de T ′ et de l'erreur statique.
2 Exercice 2 : correcteur proportionnel-integral sur un per-mier ordre.
On considère ici la même boucle que dans l'exercice précédent (�gure 2). On choisi maintenantun correcteur de type proportionnel-intégral :
C(p) = K
(1 +
1
Tip
)
1. Calculer la fonction de transfert entre X(p) et ε(p). Montrer qu'il s'agit d'un second ordreet donner les expressions de ξ et ωo en fonction des di�érents paramètres de la boucle :A,T , K et Ti.
2. Discuter de la stabilité de la boucle si tous les coe�cientsA, T , K et Ti sont positifs.3. Déterminer l'erreur statique de la boucle lorsque l'entréex(t) est un échelon.4. D'après la question précédente, la présence d'un intégrateur sur C(p) assure une erreur
statique nulle pour une entrée en échelon. Maintenant il s'agit de voir l'in�uence d'uneperturbation d(t) appliquée sur le signal de sortie y(t) (�gure 3).
2

C(p) G(p)- y(t)-6
--
+x(t)ε(t)
u(t)- -?++
d(t)
Fig. 3 � système bouclé avec perturbation
Calculer la fonction de transfert entre D(p) et Y (p). Lorsque cette perturbation est unéchelon, déterminer l'in�uence sur y(t) à l'in�ni, c'est à dire déterminer limt→∞y(t).
5. Application : A = 2, T = 3 et K = 1. On veut ξ = 1. En déduire Ti. Déterminer l'expressionde y(t). Calculer le maximum de y(t) et l'instant de ce maximum.
3 Exercice 3 : asservissement d'une température.On considère un réacteur dont la températureT (t) est commandée par une tension u(t) selon
la relation suivante :d2
dt2T (t) + (4 + a)
d
dtT (t) + 4aT (t) = 4u(t)
La valeur de a n'est pas connue avec précision, elle est comprise entre 18 et 22. On supposeque les conditions initiales du système sont nulles.
1. Déterminer la fonction de transfertG(p) = T (p)U(p)
.Le système G(p) est asservi avec un correcteur proportionnel de gain K suivant la �gure 4.
C(p) = K
C(p) G(p)- T (t)- -6
--
+Tref (t)ε(t) u(t)
Fig. 4 � asservissement de température
2. Donner l'expression de la fonction de transfert en boucle ferméeF (p) = T (p)Tref (p)
du système.3. Calculer la plage de variation deK pour que le système soit stable.4. On désire régler notre système avec un facteur d'amortissement de0, 5 . Calculer l'expression
de K en fonction de a.5. On suppose maintenant que a = 20, calculer l'erreur statique en % si on envoie un échelon
de température de 10◦ (application numérique).
3

6. On souhaite améliorer cet asservissement en supprimant l'erreur de position. Dans ce but,on remplace le correcteur proportionnel par un correcteur PI de fonction de transfertC(p)
C(p) = K
(1 +
1
Tip
)
Donner l'expression de la nouvelle fonction de transfert en boucle ferméeF (p) = T (p)Tref (p)
dusystème.
7. On suppose K > 0. Calculer la plage de variation de Ti pour que le système soit stable.8. calculer l'erreur statique pour ce type de régulateur si on envoie un échelon surTref .
4

T.D. n◦9 : Exemples de régulation∗
I.U.T. Génie Chimique 2ème année
1 AmortisseurOn considère un amortisseur. D'après le T.D. sur la modélisation (T.D. 1), on sait qu'il s'agit
d'un système du second ordre. Sa fonction de transfert est donc du type :
G(p) =Aω2
0
p2 + 2ξω0p + ω20
où A est le gain statique, ξ le facteur d'amortissement et ω0 la pulsation propre. Mais on neconnaît pas les valeurs de A, ξ et ω0. La seule information disponible est la réponse indicielle dece système donnée par la �gure 1.
Step Response
Time (sec)
Ampli
tude
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Fig. 1 � Réponse du système à un échelon unitaire
1. Déterminer les valeurs de A, ξ et ω0.2. A partir de la �gure 1, on peut voir que le système oscille beaucoup : le premier dépas-
sement est de plus de plus 50%. Ceci n'est pas acceptable pour un amortisseur. On veutréduire les oscillations sur la sortie du système. Pour cela, on e�ectue une régulation de typeproportionnel comme le montre la �gure 2.Calculer la fonction de transfertF (p) entre X(p) et Y (p). Il s'agit d'une fonction de transfertdu second ordre : la mettre sous forme standard. Déterminer la plage de valeurs deP pourlaquelle le système bouclé F (p) est stable.
∗pour toutes questions, e-mails : {msekher,eric.magarotto}@greyc.ensicaen.fr
1

P G(p)- Y (p)- -
6
--
+X(p)
Fig. 2 � Système bouclé
3. A partir de maintenant, on choisira la valeur deP pour que le système bouclé soit stable.Déterminer alors les valeurs du gain statique A′, du facteur d'amortissement ξ′ et de lapulsation propre ω′0 du système bouclé F (p).
4. Suivant les valeurs du gain P , les pôles de F (p) sont soit réelles, soit complexes. Calculer lespôles de F (p). Tracer l'évolution dans le plan complexe de la position des pôles en fonctiondu gain de correction P .
5. On veut ξ′ < 1, déterminer alors la contrainte sur P .6. On veut que le premier dépassement dey(t) pour une entrée en échelon de x(t) soit inférieur
à 20%, déterminer alors la contrainte sur P .
2 Régulation industrielle de températureL'oxydation catalytique d'un mélange gazeux est réalisée dans un four électrique porté à la
température Te. Le thermocouple e�ectuant la mesure de température Te se situe au centre dufour. Le gaz circule à la température initialeT1 et sort à une température admise égale à celle dufour : soit Te. T2 est la température ambiante extérieure au four etϕ est la puissance électriquetransformée en chaleur.
A partir d'un bilan thermique du four qui ne sera pas détaillé ici, l'équation di�érentielle quilie la puissance fournie à la température Te dans le four est donnée par la relation suivante :
ϕ(t)− 800dTe(t)
dt+ 3, 8T1(t)− 4Te(t) + 0, 2T2(t) = 0.
1. Montrer que l'on peut mettre cette expression sous forme du schéma fonctionnel décrit en�gure 3 (les notations sont implicites). Déterminer les expressions deG′(p), G′′(p) et G′′′(p).
ϕ(p) +
G′′′(p)
G′′(p)
G′(p)-
-
-
- - -? ?
T1(p)
T2(p)
Te(p)+
++
Fig. 3 � schéma fonctionnel
Montrer que G′(p), G′′(p) et G′′′(p) sont tous les trois stables : on notera K1, K2 et K3 lesgains statiques et τ la constante de temps.
2

2. Pour l'instant, on considère la boucle de régulation de la �gure 4 : les perturbations liées àT1 et T2 sont négligées (T1(t) = T2(t) = 0). Pour concevoir un correcteurC(p) et ajuster ses
C(p) G′(p)- Te(p)- -
6
--
+Tc(p)ε(p) ϕ(p)
Fig. 4 � boucle de régulation
paramètres, il faut d'une part connaître le modèle du procédé et d'autre part spéci�er lesperformances : la boucle devra se comporter comme un système du premier ordre, l'entréeet la sortie de ce système bouclé sont représentées �gure 5. En observant la �gure 5, en
-
6
Tc(t)
t
50%
-
6
Te(t)
50%
t
±........................................τo
Fig. 5 � tracé de Tc et Te
déduire l'expression de la fonction de transfertF (p) entre Tc(p) et Te(p). Déterminer l'erreurstatique du système en boucle fermée.
3. Calculer l'expression de F (p) en fonction de C(p) et de G′(p). En déduire l'expression deC(p) en fonction de G′(p) et F (p).
4. Montrer que C(p) est un régulateur PI de fonction de transfert :
C(s) = K(1 +
1
Tis
).
Calculer alors les valeurs de K et de Ti en fonction de τ , τo et K1.5. On désire que le système réponde à l'échelon aussi vite en boucle fermée qu'en boucle ouverte
c'est-à-dire τ = τo. Dans ces conditions calculer K et Ti.6. Calculer la fonction de transfert H(p) entre Tc(p) et ϕ(p). Donner l'expression de ϕ(t) en
fonction de Tc(t).7. Les valeurs maximales de la consigne Tc(t), de la mesure Te(t) et de la puissance ϕ(t) sont
de 100%. Quelle est alors la valeur maximale de consigne Vc admissible pour démarrerl'installation sans saturer ni la commande, c'est à dire la puissanceϕ(t), ni la sortie, c'est-à-dire Te(t).
3
C(p) G′(p)- Te(p)-
-
-
6
--
+Tc(p)ε(p) ϕ(p)
G′′(p)
-?
T1(p)
++
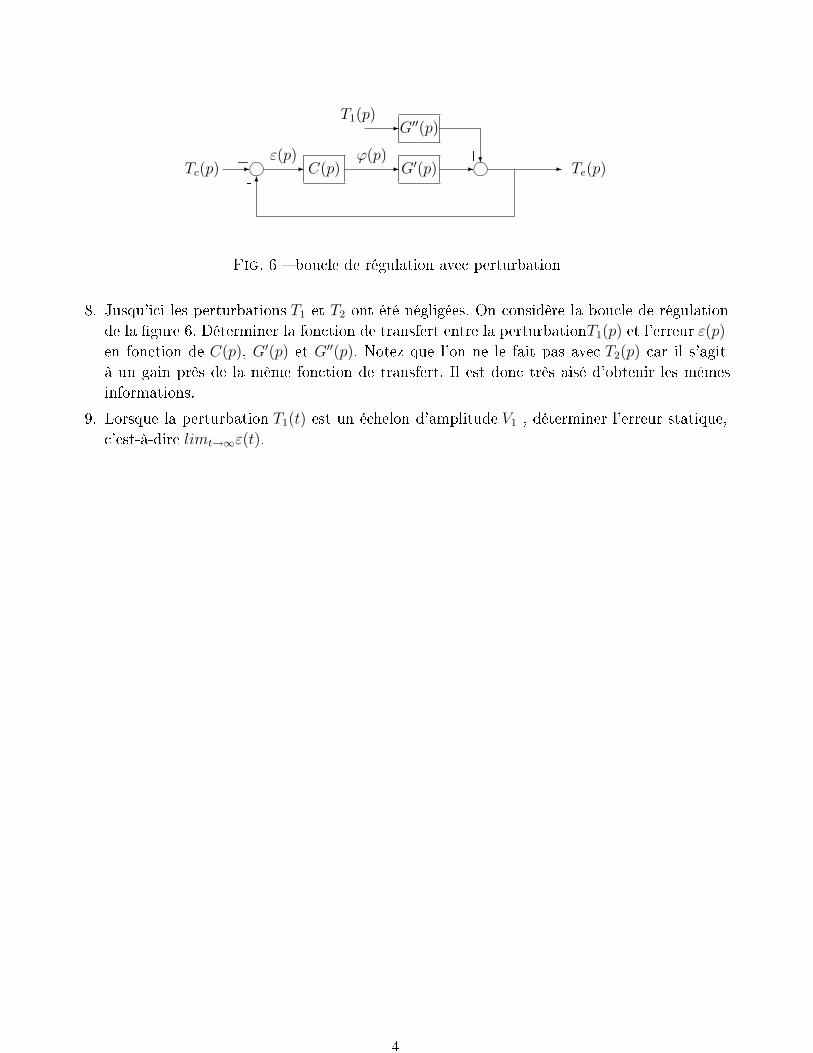
Fig. 6 � boucle de régulation avec perturbation
8. Jusqu'ici les perturbations T1 et T2 ont été négligées. On considère la boucle de régulationde la �gure 6. Déterminer la fonction de transfert entre la perturbationT1(p) et l'erreur ε(p)
en fonction de C(p), G′(p) et G′′(p). Notez que l'on ne le fait pas avec T2(p) car il s'agità un gain près de la même fonction de transfert. Il est donc très aisé d'obtenir les mêmesinformations.
9. Lorsque la perturbation T1(t) est un échelon d'amplitude V1 , déterminer l'erreur statique,c'est-à-dire limt→∞ε(t).
4


















