
Systemes Lineaires v5 Sans Ar Plan
60
1 EMI - M. TAHA JANAN Position du problème = + + + = + + + = + + + m m m n 2 2 n 1 1 n 2 m m 2 2 2 2 1 1 2 1 m m 1 2 2 1 1 1 1 b x a x a x a . . . b x a x a x a b x a ...... x a x a Résoudre le système suivant : RESOLUTION NUMERIQUES DE SYSTEMS LINEAIRES D'EQUATIONS
Transcript of Systemes Lineaires v5 Sans Ar Plan
1EMI - M. TAHA JANAN
Position du problème
=+++
=+++
=+++
mmmn22n11n
2mm2222112
1mm1221111
bxaxaxa
.
.
.
bxaxaxa
bxa......xaxa
Résoudre le système suivant :
RESOLUTION NUMERIQUES DE SYSTEMS LINEAIRES D'EQUATIONS
2EMI - M. TAHA JANAN
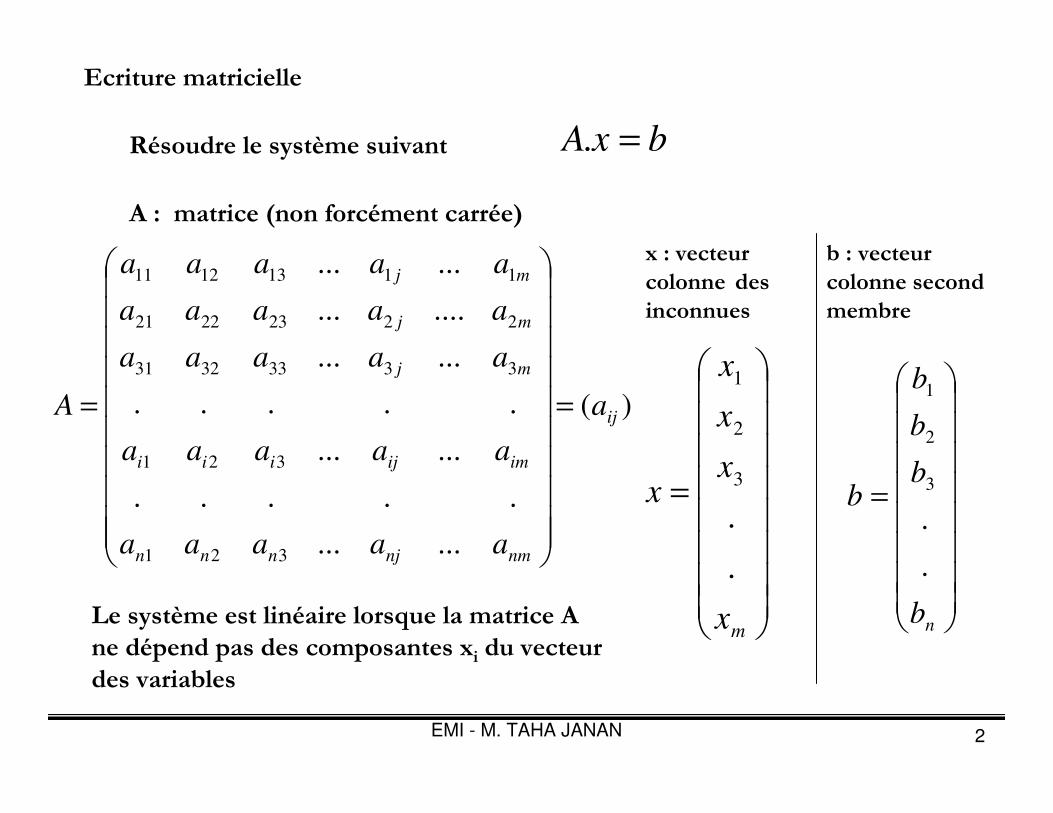
Ecriture matricielle
Résoudre le système suivant bxA =.
A : matrice (non forcément carrée)
)(
......
.....
......
.....
......
.......
......
321
321
33333231
22232221
11131211
ij
nmnjnnn
imijiii
mj
mj
mj
a
aaaaa
aaaaa
aaaaa
aaaaa
aaaaa
A =
=
b : vecteur
colonne second
membre
x : vecteur
colonne des
inconnues
=
mx
x
x
x
x
.
.
3
2
1
=
nb
b
b
b
b
.
.
3
2
1
Le système est linéaire lorsque la matrice A
ne dépend pas des composantes xi du vecteur
des variables
3EMI - M. TAHA JANAN
On distingue 3 cas :
Système surdéterminé (n>m)
Système de Cramer (n=m)
Système sous déterminé (n<m)
Méthodes de résolution :
A- Méthodes directes : pour les systèmes de petite taille
Solution déterminée après un nombre d’opérations connu à
l’avance (sans répétition)
B- Méthodes indirecte (essentiellement itératives) :
Solution déterminée par répétition d’un processus dans lequel
plusieurs valeurs intermédiaires du vecteur des inconnues sont
calculées jusqu’à convergence
4EMI - M. TAHA JANAN
A.1. Méthode de Cramer :)(Adét=∆
Si 0≠∆ : solution unique∆
∆= i
ix i = 1 à n
Si 0=∆ : deux cas
Tous les i∆ sont nuls : une infinité de solutions
Au moins un des n’est pas nul : pas de solutioni∆
Méthode utilisable lorsque le nombre d’équations est petit
Inconvénients majeurs :
- méthode difficile à programmer
- temps d’exécution très élevé
A- Méthodes directes
5EMI - M. TAHA JANAN
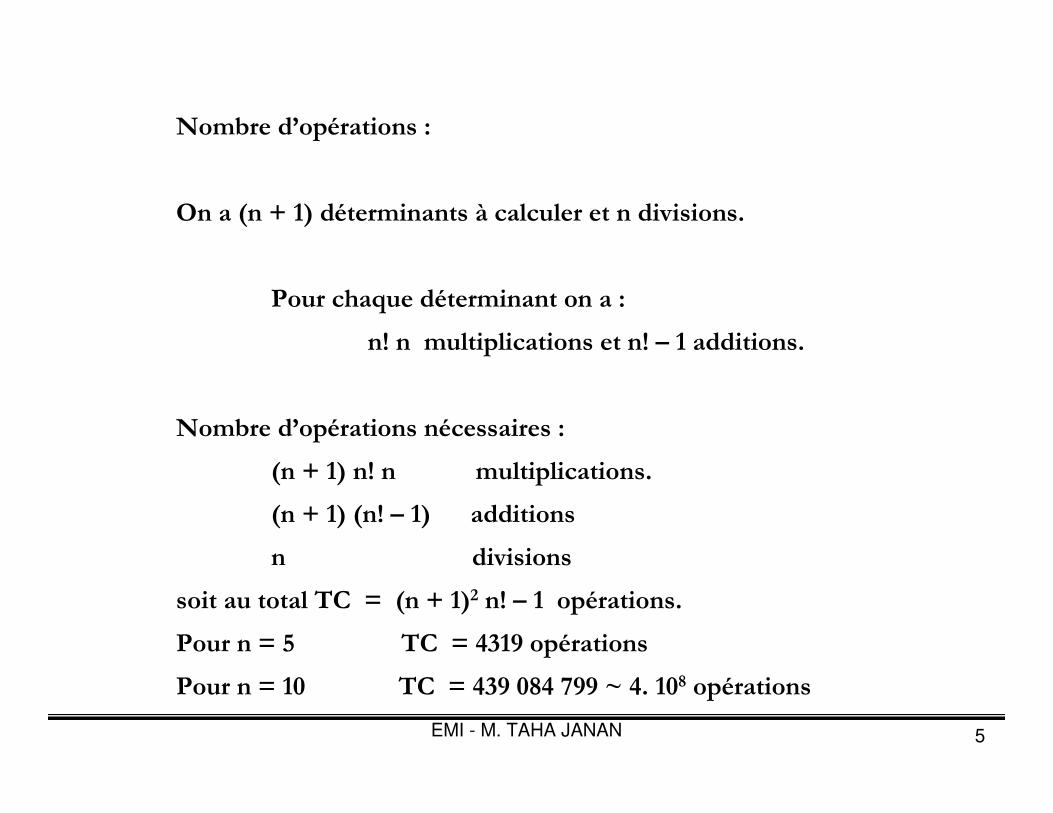
Nombre d’opérations :
On a (n + 1) déterminants à calculer et n divisions.
Pour chaque déterminant on a :
n! n multiplications et n! – 1 additions.
Nombre d’opérations nécessaires :
(n + 1) n! n multiplications.
(n + 1) (n! – 1) additions
n divisions
soit au total TC = (n + 1)2 n! – 1 opérations.
Pour n = 5 TC = 4319 opérations
Pour n = 10 TC = 439 084 799 ~ 4. 108 opérations
6EMI - M. TAHA JANAN
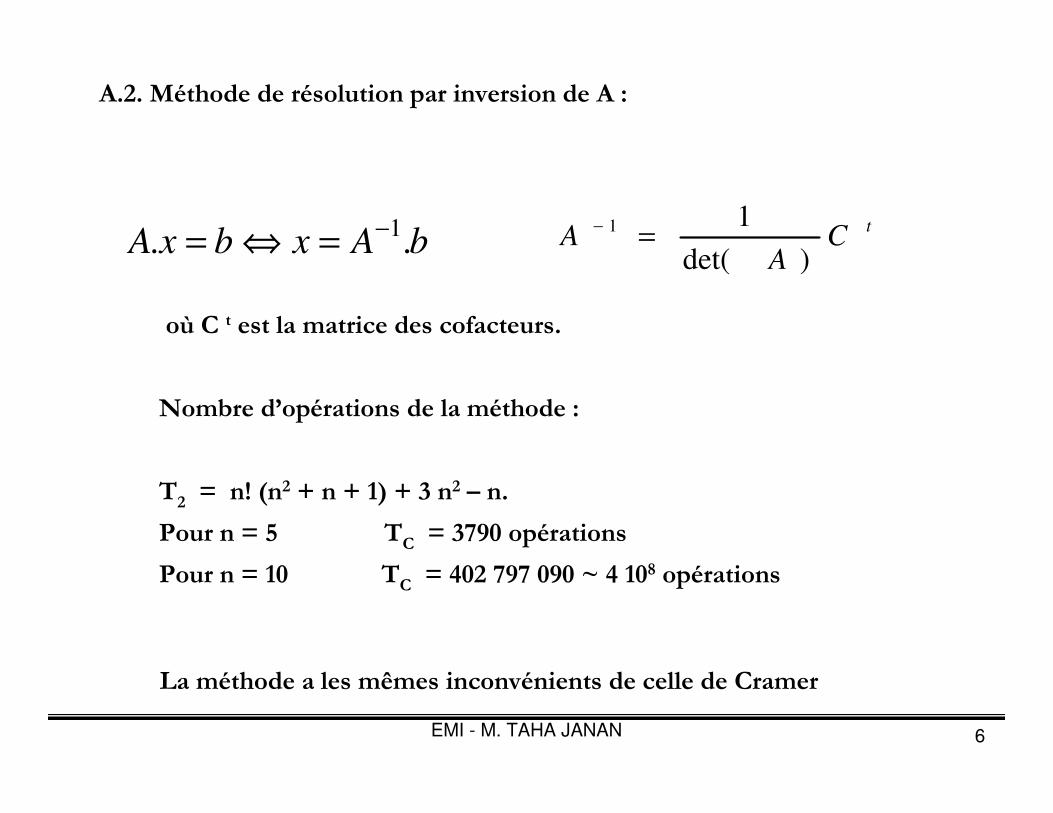
A.2. Méthode de résolution par inversion de A :
tC
AA
)det(
11 =−
où C t est la matrice des cofacteurs.
Nombre d’opérations de la méthode :
T2 = n! (n2 + n + 1) + 3 n2 – n.
Pour n = 5 TC = 3790 opérations
Pour n = 10 TC = 402 797 090 ~ 4 108 opérations
La méthode a les mêmes inconvénients de celle de Cramer
bAxbxA .. 1−=⇔=
7EMI - M. TAHA JANAN
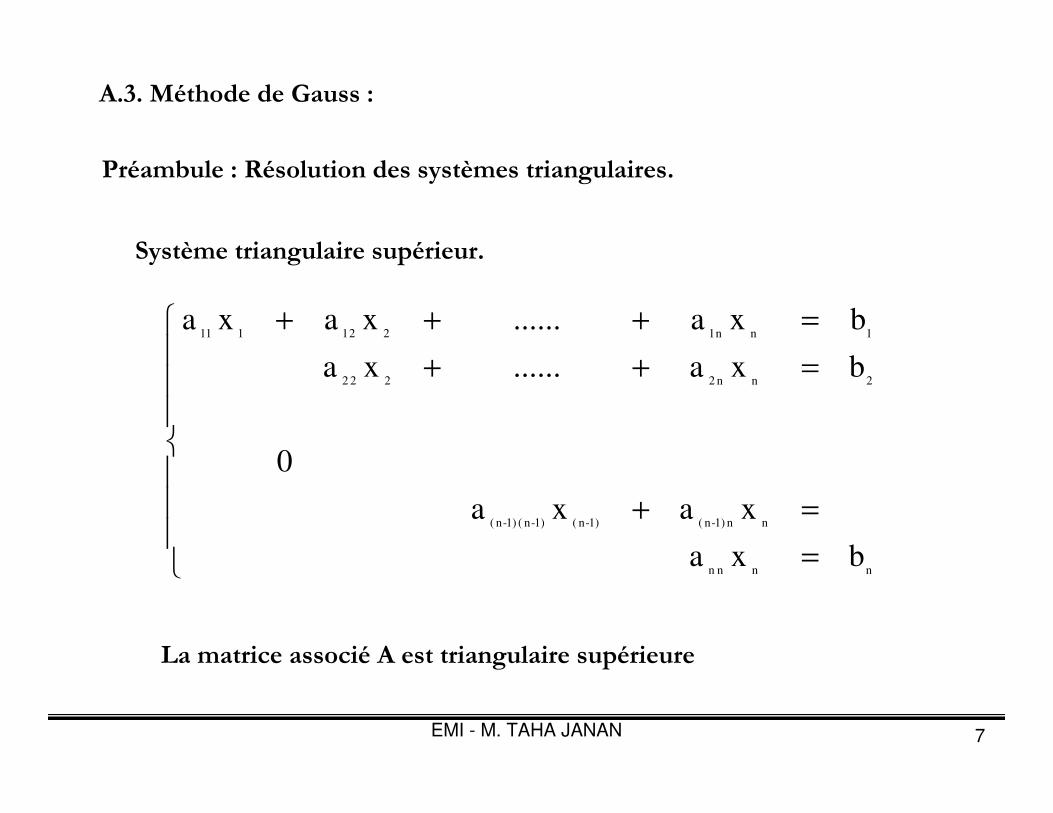
A.3. Méthode de Gauss :
Préambule : Résolution des systèmes triangulaires.
Système triangulaire supérieur.
=
=+
=++
=+++
nnnn
nn1)-n(1)-n(1)-n(1)-n(
2nn2222
1nn1221111
bxa
xaxa
0
bxa......xa
bxa......xaxa
La matrice associé A est triangulaire supérieure
8EMI - M. TAHA JANAN
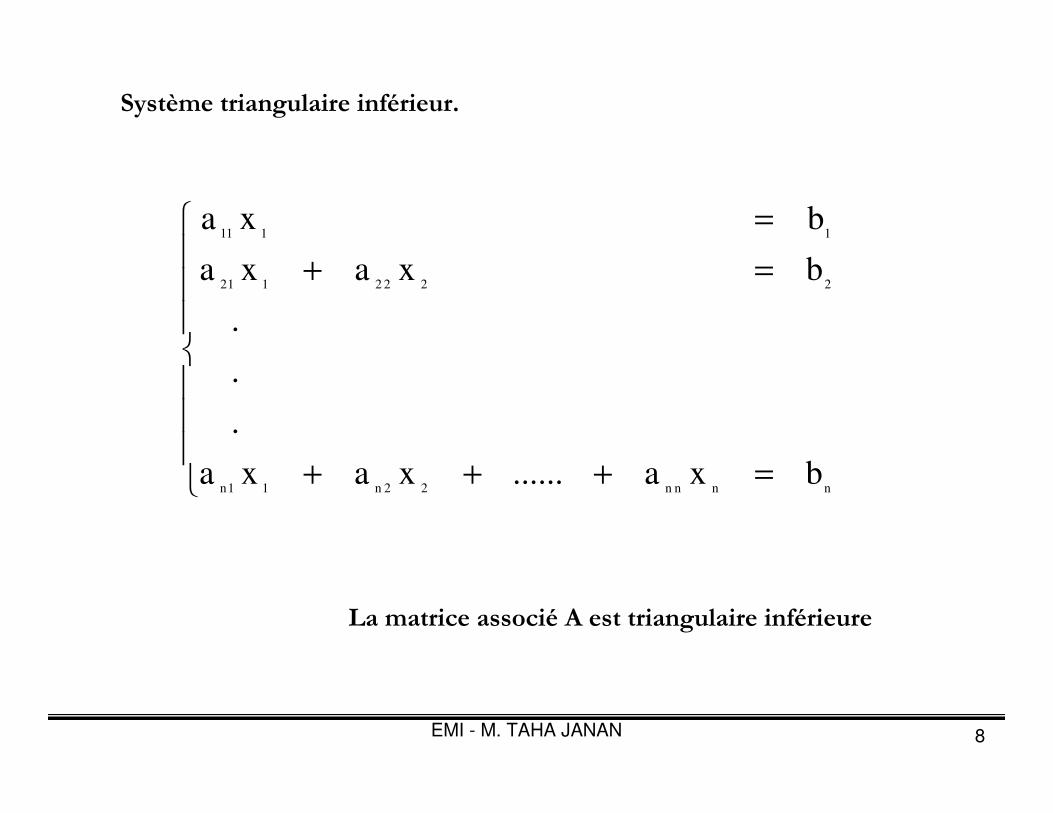
Système triangulaire inférieur.
=+++
=+
=
nnnn22n11n
2222112
1111
bxa......xaxa
.
.
.
bxaxa
bxa
La matrice associé A est triangulaire inférieure
9EMI - M. TAHA JANAN
La résolution des deux systèmes se fait de proche en proche.
Pour le deuxième système on a :
11
1
1
a
bx = i = 2,. . ., n.
Nombre d’opérations :
n divisions
1 + 2 + 3 + … + ( n – 1 ) = 2
)1n(n − multiplications
1 + 2 + 3 + … + ( n – 1 ) = 2
)1n(n − additions
Soit au total Tt = n2.
ii
j
1i
1j
iji
ia
xab
x
∑−
=
−
=
10EMI - M. TAHA JANAN
Méthode de Gauss, principe :
A l’aide d’un d’un algorithme d’élimination convenable, cette méthode
transforme le système en une suite de systèmes équivalents (ont mêmes
solutions) dont le dernier est triangulaire.
la procédure de résolution se fait alors en deux étapes :
� triangularisation par élimination.
� résolution du système triagulaire équivalent.
11EMI - M. TAHA JANAN
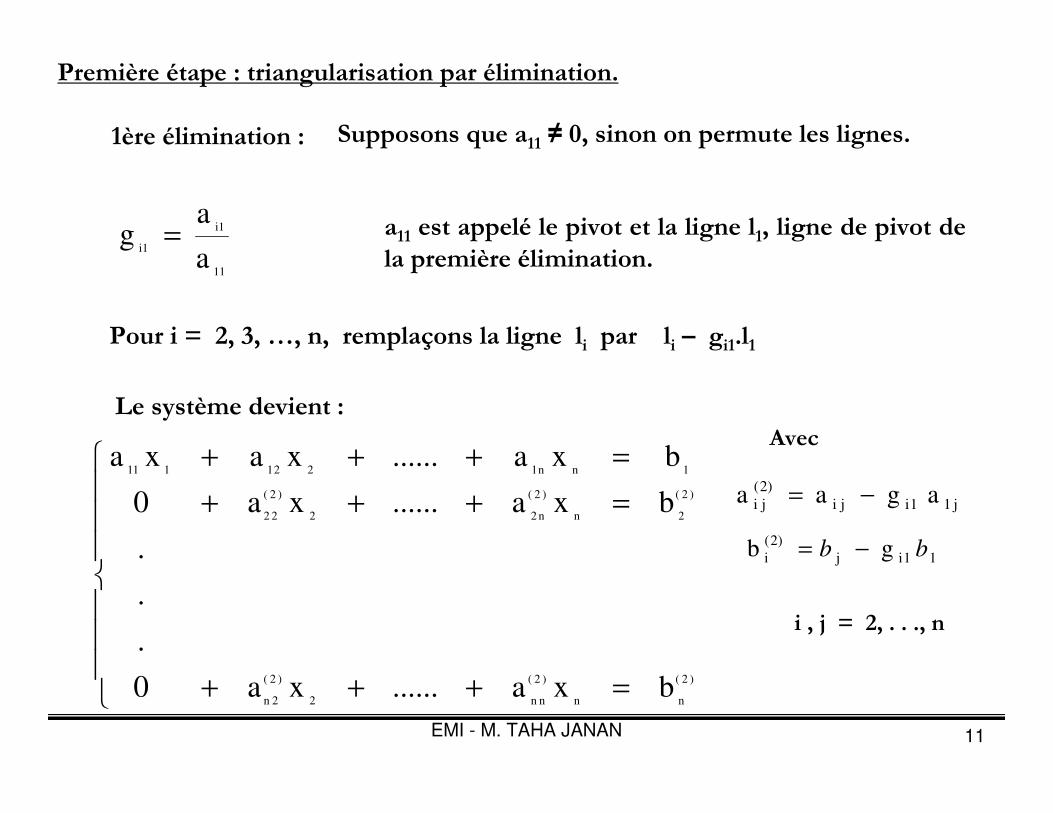
Première étape : triangularisation par élimination.
1ère élimination : Supposons que a11 ≠ 0, sinon on permute les lignes.
11
i1
i1
a
ag = a11 est appelé le pivot et la ligne l1, ligne de pivot de
la première élimination.
Pour i = 2, 3, …, n, remplaçons la ligne li par li – gi1.l1
Le système devient :
=+++
=+++
=+++
) 2 (
nn
) 2 (
nn2
) 2 (
2n
) 2 (
2n
) 2 (
n22
) 2 (
22
1n
n1221111
bxa......xa0
.
.
.
bxa......xa0
bxa......xaxaAvec
j11iji
2)(
ji agaa −=
i , j = 2, . . ., n
11ij
2)(
i gb bb −=
12EMI - M. TAHA JANAN
2ième élimination
On applique le procédé au système formé des (n – 1) dernières
lignes : a22 pivot et l2 ligne de pivot.
Les xi n’interviennent pas dans les éliminations. On considère
alors la matrice n x ( n + 1 )
Remarque
== b)(A,A~
+
+
+
)1n(n
)1n(2
)1n(1
nnn2n1
2n2221
1n1211
a
a
a
a..aa
.
.
.
a..aa
a..aa
13EMI - M. TAHA JANAN
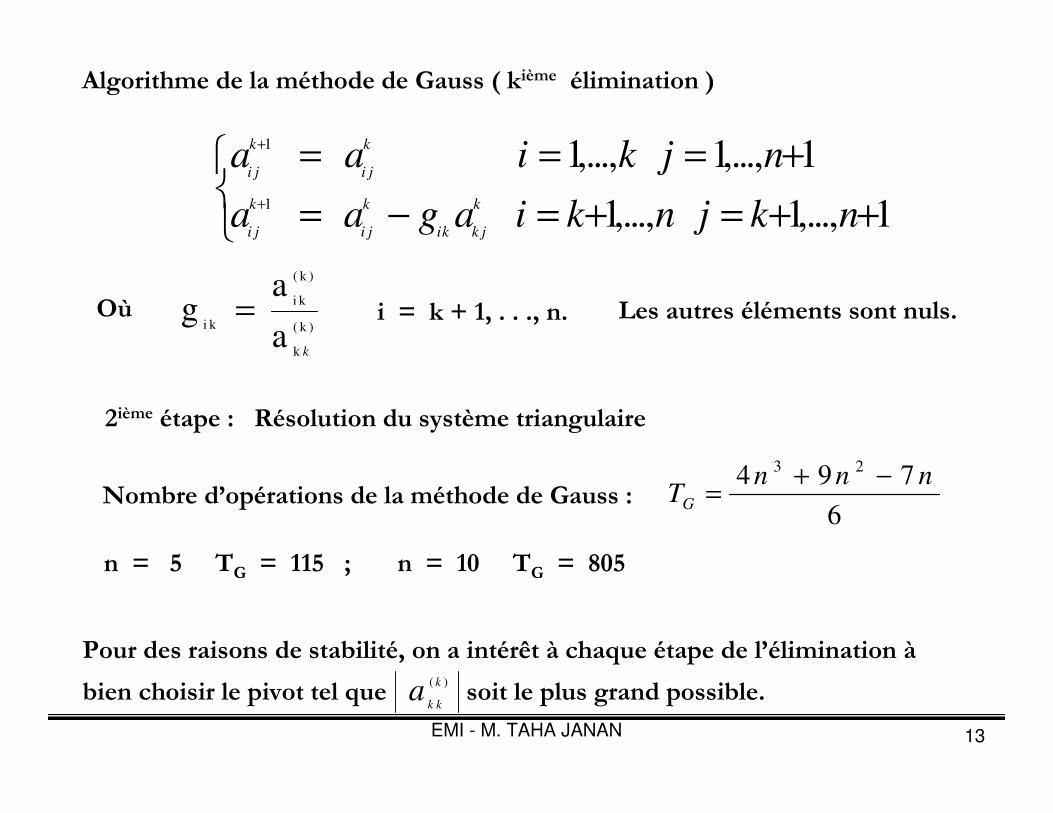
Algorithme de la méthode de Gauss ( kième élimination )
++=+=−=
+===+
+
1,...,1,...,1
1,...,1,...,11
1
nkjnkiagaa
njkiaak
jkki
k
ji
k
ji
k
ji
k
ji
Où)k(
k
)k(
ki
ki
a
ag
k
= i = k + 1, . . ., n. Les autres éléments sont nuls.
2ième étape : Résolution du système triangulaire
Nombre d’opérations de la méthode de Gauss :6
794 23nnn
TG
−+=
n = 5 TG = 115 ; n = 10 TG = 805
Pour des raisons de stabilité, on a intérêt à chaque étape de l’élimination à
bien choisir le pivot tel que soit le plus grand possible.)( k
kka
14EMI - M. TAHA JANAN
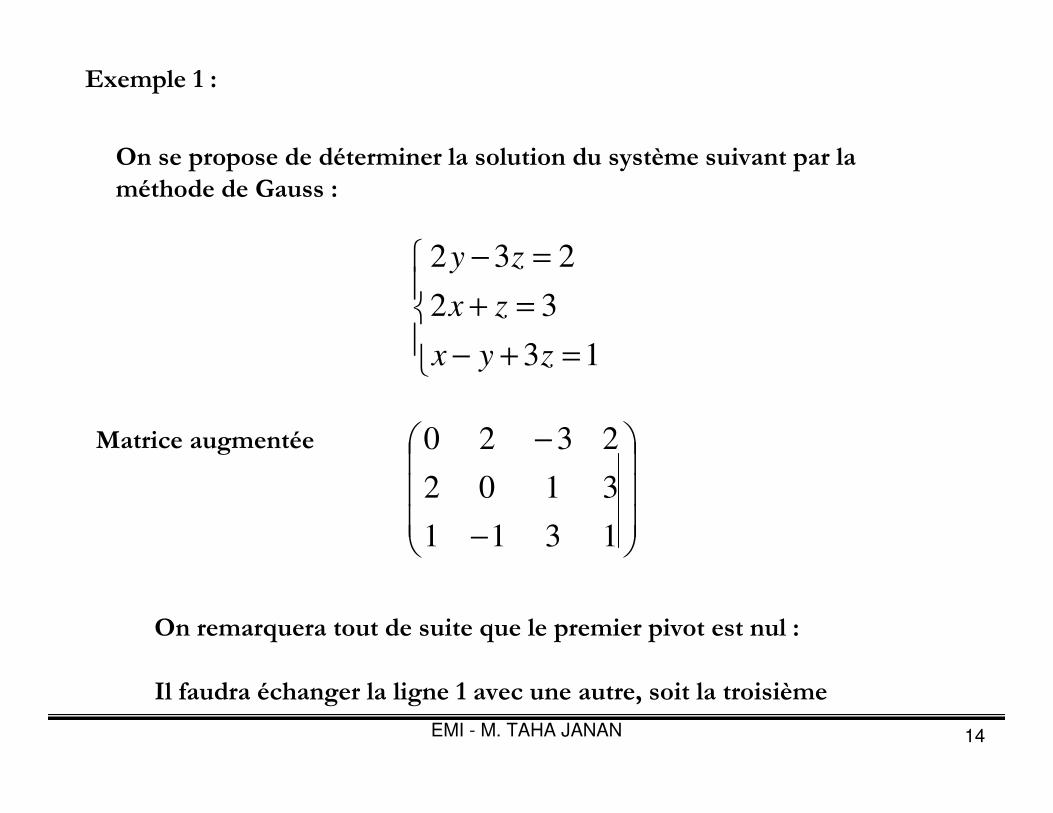
Exemple 1 :
On se propose de déterminer la solution du système suivant par la
méthode de Gauss :
=+−
=+
=−
13
32
232
zyx
zx
zy
Matrice augmentée
−
−
1311
3102
2320
On remarquera tout de suite que le premier pivot est nul :
Il faudra échanger la ligne 1 avec une autre, soit la troisième
15EMI - M. TAHA JANAN
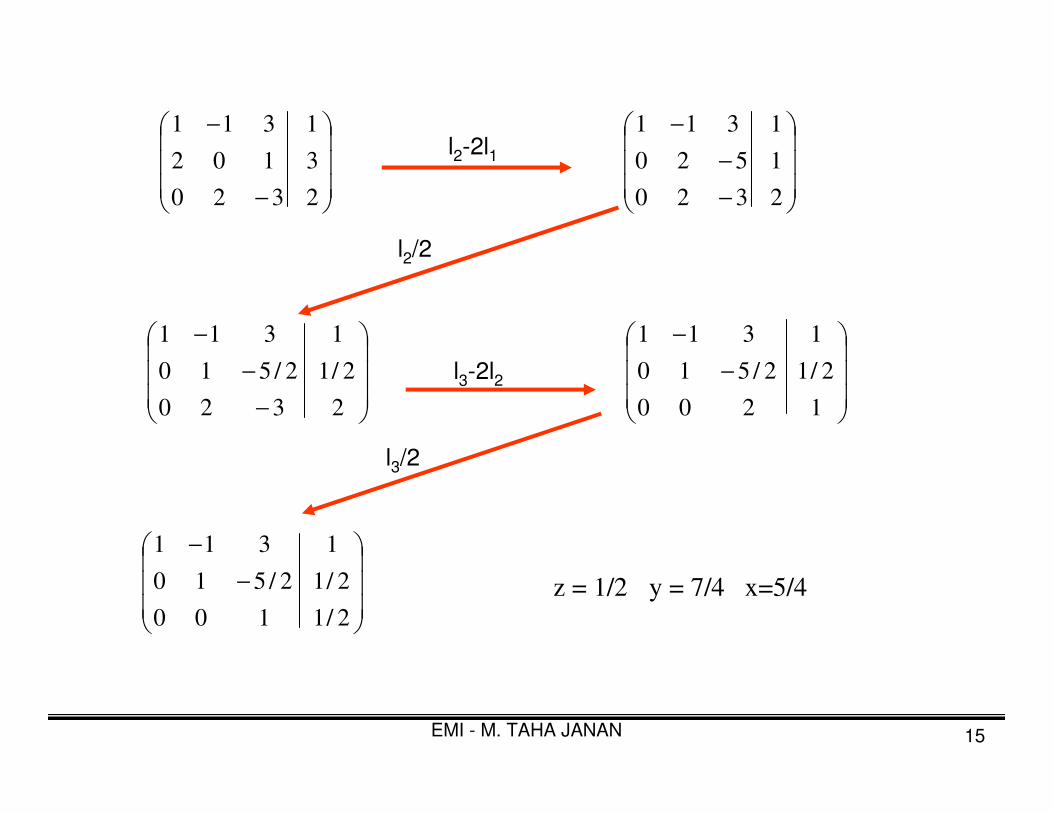
−
−
2320
3102
1311l2-2l1
−
−
−
2320
1520
1311
l2/2
−
−
−
2320
2/12/510
1311
l3-2l2
−
−
1200
2/12/510
1311
l3/2
−
−
2/1100
2/12/510
1311
z = 1/2 y = 7/4 x=5/4
16EMI - M. TAHA JANAN
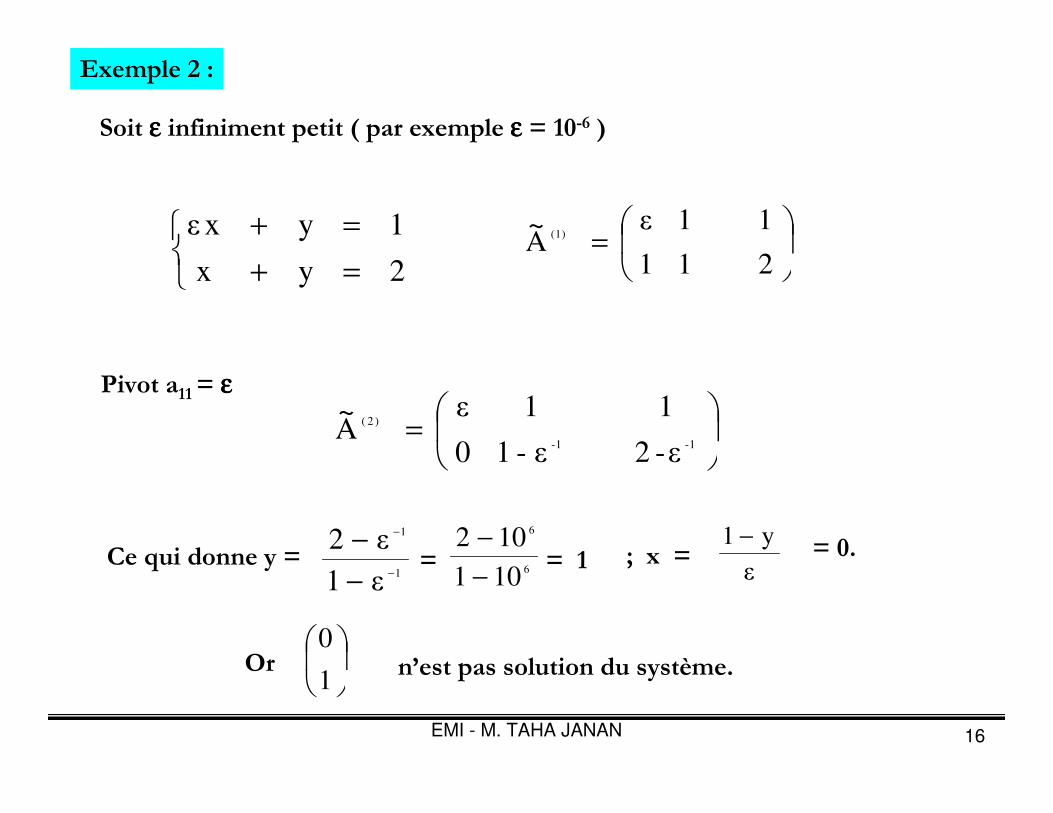
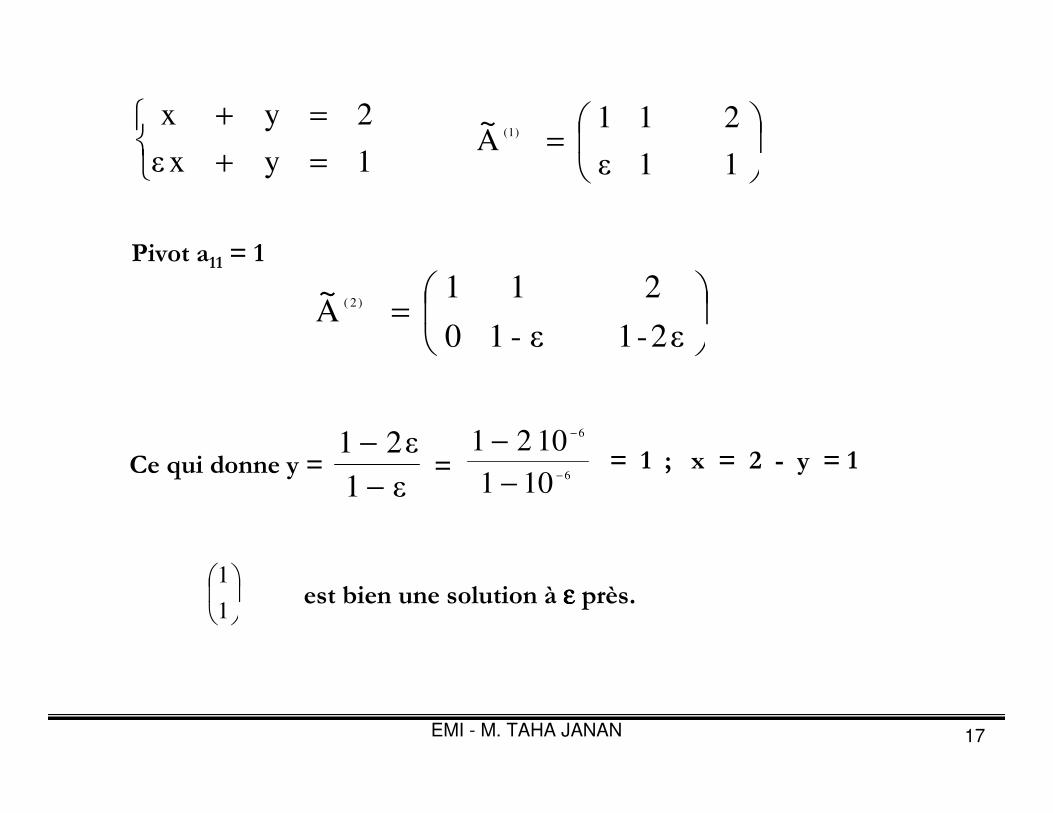
Exemple 2 :
Soit εεεε infiniment petit ( par exemple εεεε = 10-6 )
=+
=+
2yx
1yxε
=
211
11εA~ )1(
Pivot a11 = εεεε
=
1-1-
)2(
ε- 2ε-10
11εA~
1
1
ε1
ε2−
−
−
−6
6
101
102
−
−Ce qui donne y = = 1 ; x =
ε
y1 − = 0.
Or
1
0n’est pas solution du système.
=
17EMI - M. TAHA JANAN
=+
=+
1yxε
2yx
=
11ε
211A~ )1(
Pivot a11 = 1
=
ε2- 1ε-10
211A~ )2(
ε1
ε21
−
−6
6
101
1021−
−
−
−Ce qui donne y = = = 1 ; x = 2 - y = 1
1
1est bien une solution à εεεε près.
18EMI - M. TAHA JANAN
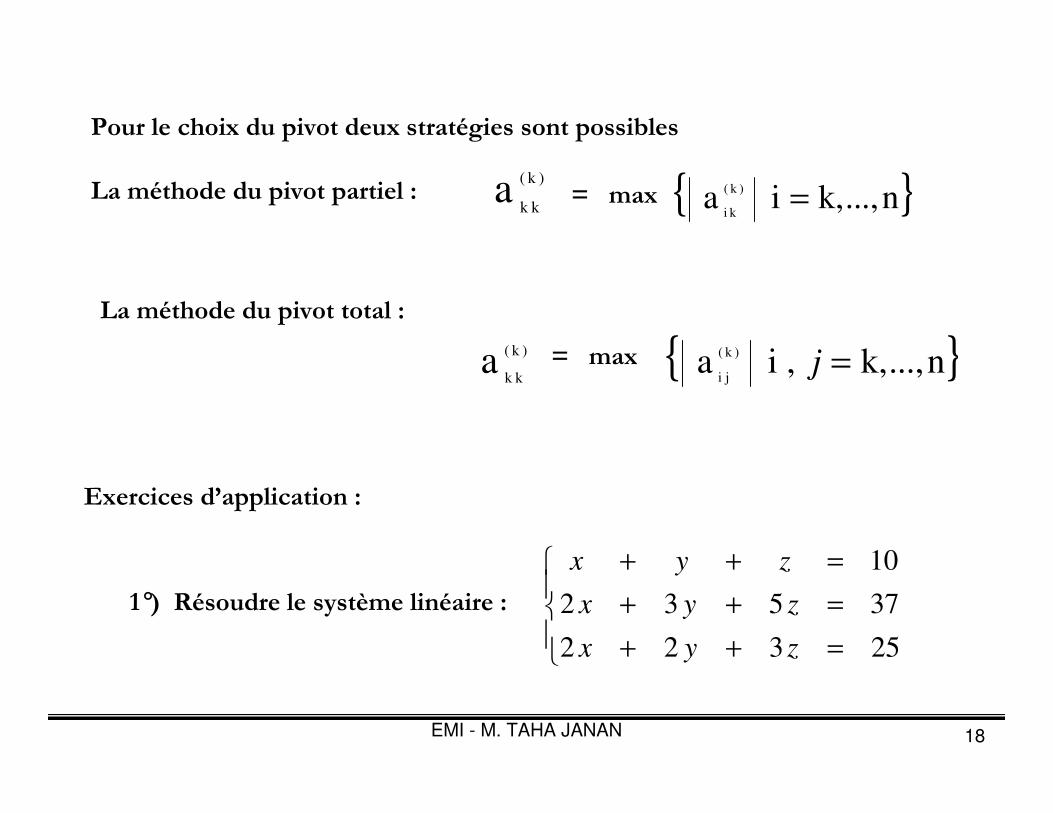
Exercices d’application :
1°) Résoudre le système linéaire :
=++
=++
=++
25322
37532
10
zyx
zyx
zyx
)k(
kka { }n.,..k,ia )k(
ki=
)k(
kka { }n.,..k,,ia )k(
ji=j
Pour le choix du pivot deux stratégies sont possibles
La méthode du pivot partiel : = max
La méthode du pivot total :
= max
19EMI - M. TAHA JANAN
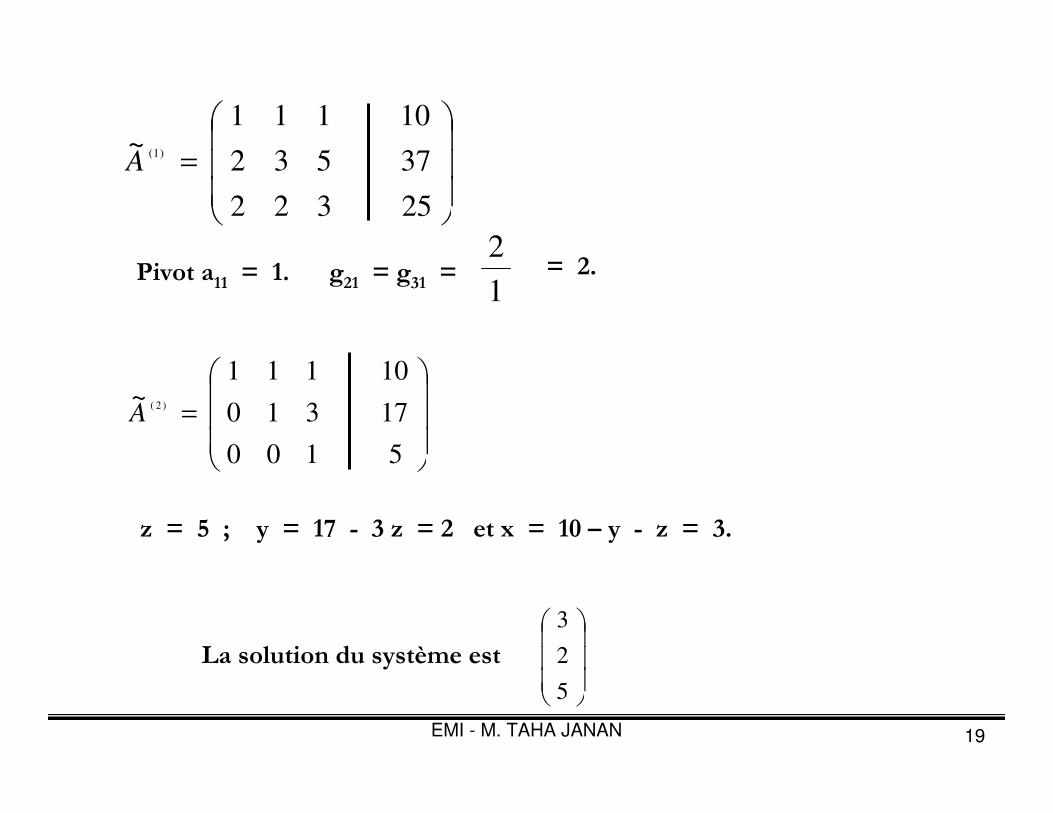
=
25322
37532
10111~ )1(
A
Pivot a11 = 1. g21 = g31 = 1
2= 2.
=
5100
17310
10111~ )2(
A
z = 5 ; y = 17 - 3 z = 2 et x = 10 – y - z = 3.
La solution du système est
5
2
3
20EMI - M. TAHA JANAN
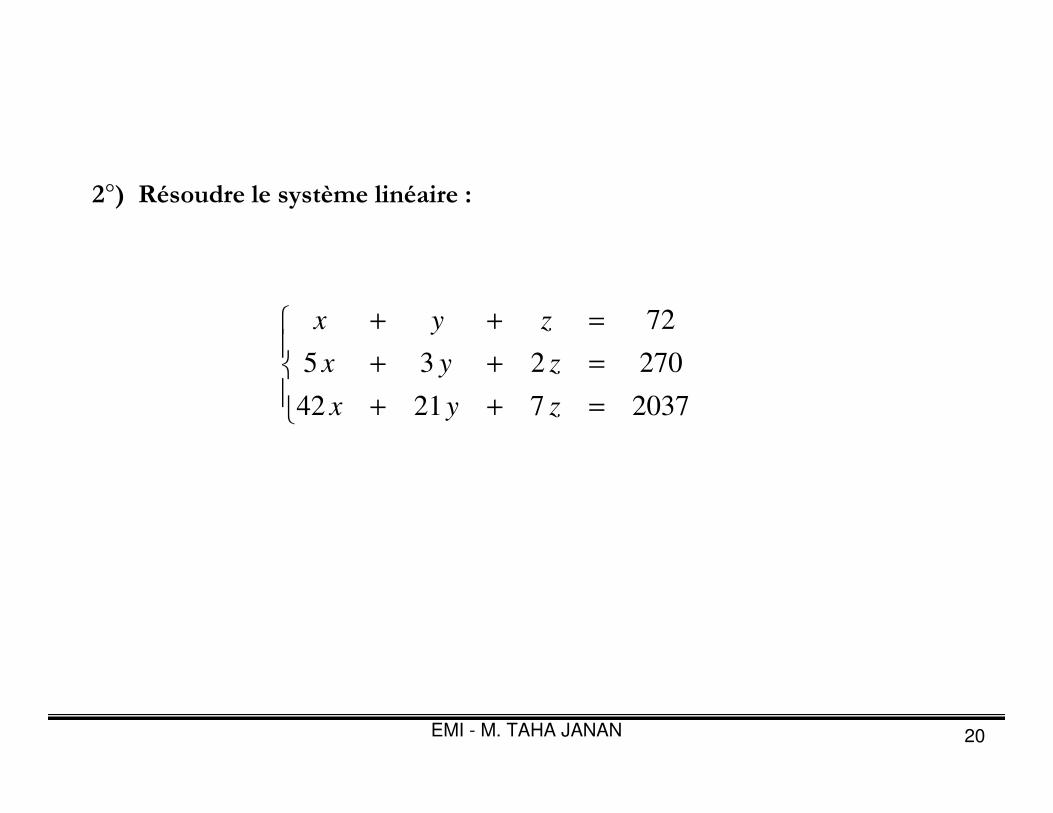
2°) Résoudre le système linéaire :
=++
=++
=++
203772142
270235
72
zyx
zyx
zyx
21EMI - M. TAHA JANAN
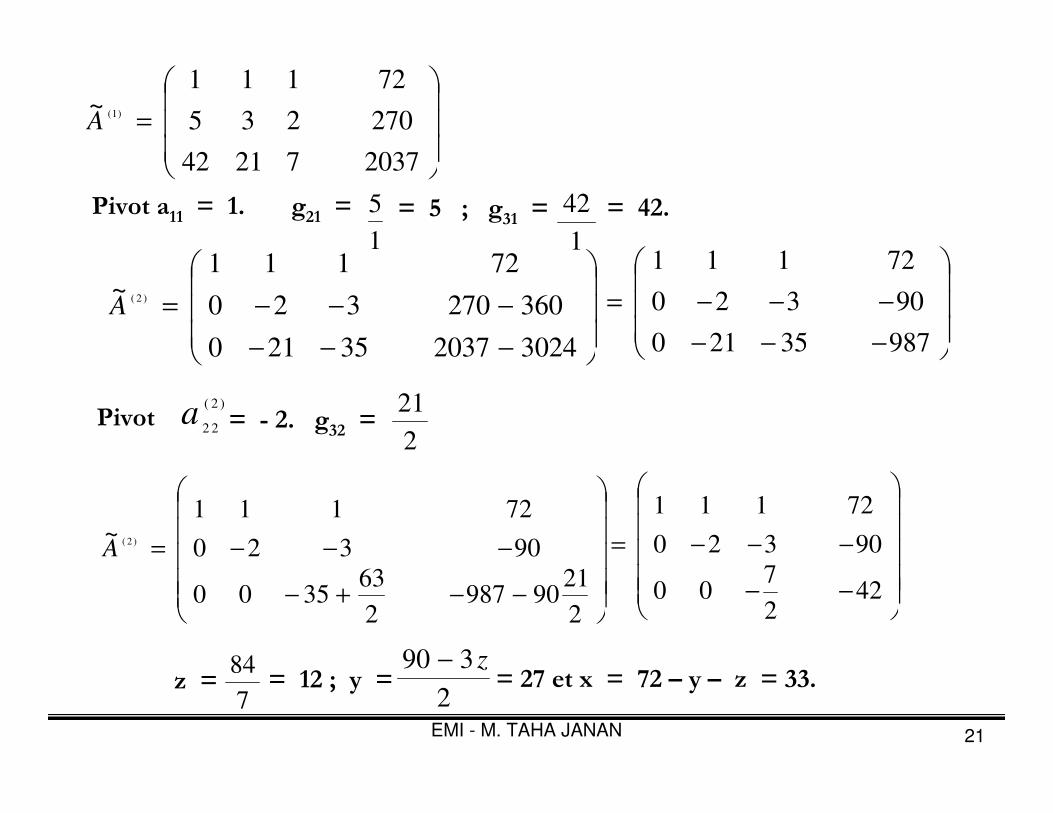
=
203772142
270235
72111~ )1(
A
1
5
1
42Pivot a11 = 1. g21 = = 5 ; g31 = = 42.
−−−
−−−=
3024203735210
360270320
72111~ )2(
A
−−−
−−−=
98735210
90320
72111
)2(
22a
2
21Pivot = - 2. g32 =
−−+−
−−−=
2
2190987
2
633500
90320
72111~ )2(
A
−−
−−−=
422
700
90320
72111
7
84
2
390 z−z = = 12 ; y = = 27 et x = 72 – y – z = 33.
22EMI - M. TAHA JANAN
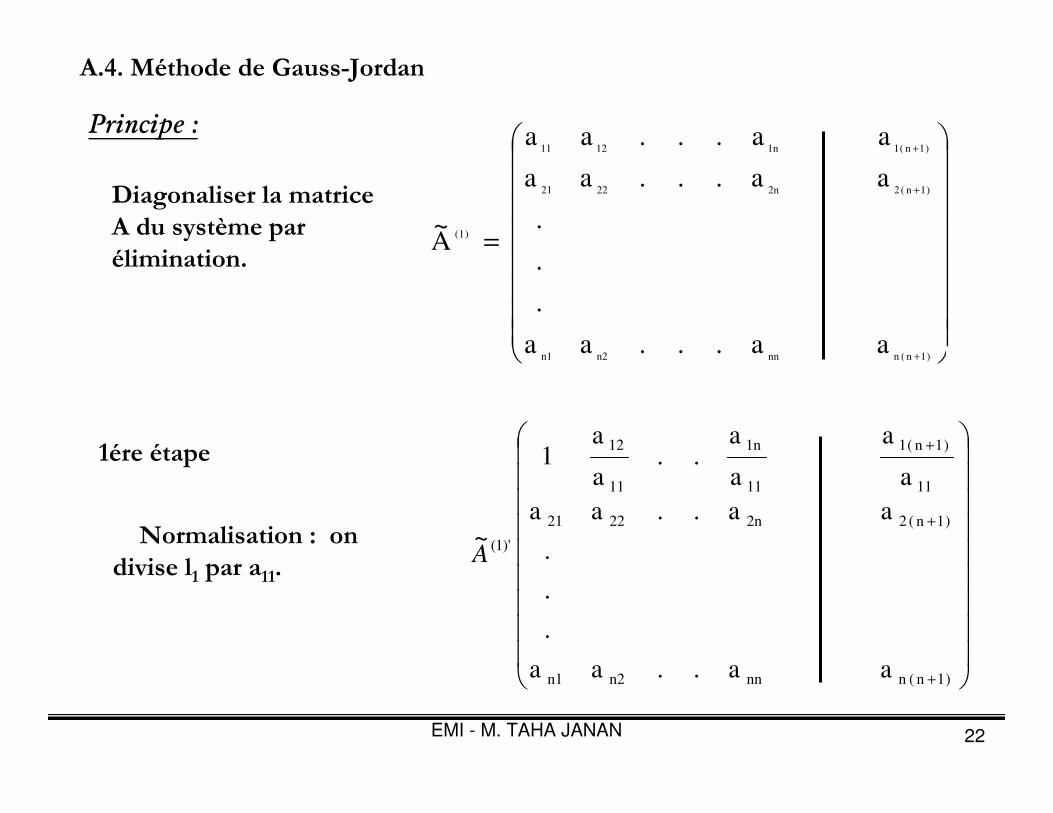
A.4. Méthode de Gauss-Jordan
Principe :
Diagonaliser la matrice
A du système par
élimination.
=
+
+
+
)1n(n
)1n(2
)1n(1
nnn2n1
2n2221
1n1211
)1(
a
a
a
a...aa
.
.
.
a...aa
a...aa
A~
1ére étape
Normalisation : on
divise l1 par a11.
+
+
+
)1n(n
)1n(2
11
)1n(1
nnn2n1
2n2221
11
1n
11
12
)'1(
a
a
a
a
a..aa
.
.
.
a..aa
a
a..
a
a1
~A
23EMI - M. TAHA JANAN
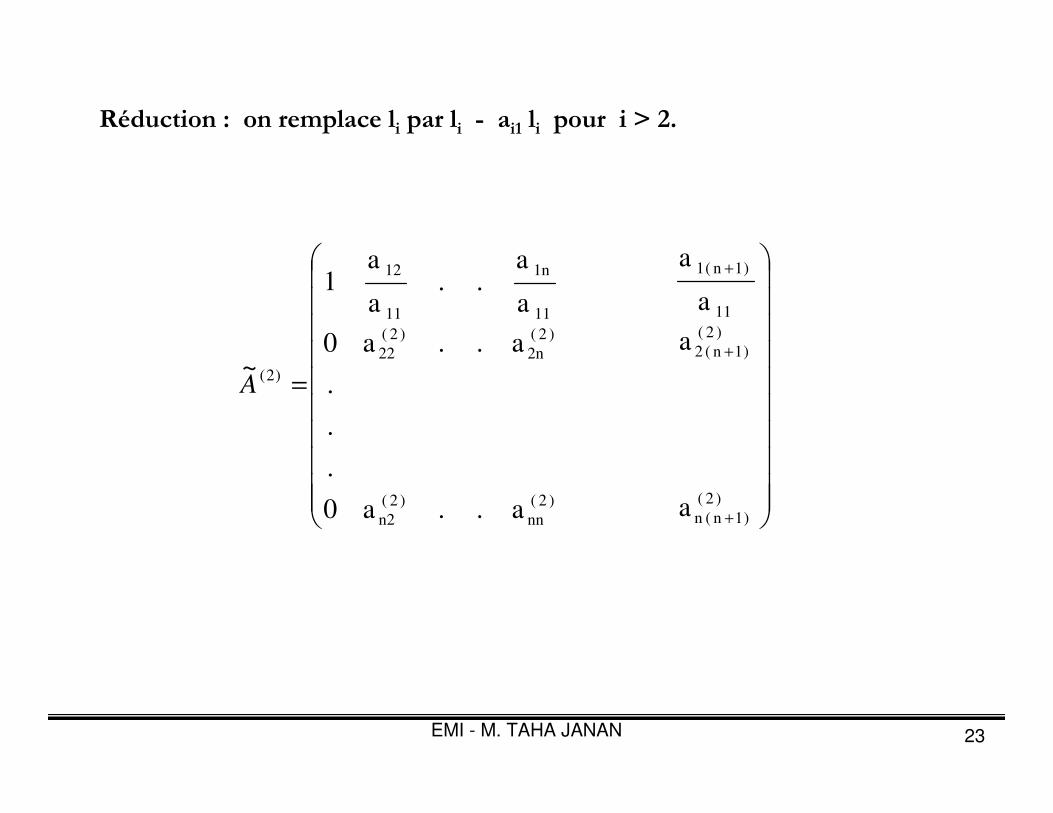
Réduction : on remplace li par li - ai1 li pour i > 2.
=
+
+
+
)2(
)1n(n
)2(
)1n(2
11
)1n(1
)2(
nn
)2(
n2
)2(
2n
)2(
22
11
1n
11
12
)2(
a
a
a
a
a..a0
.
.
.
a..a0
a
a..
a
a1
~A
24EMI - M. TAHA JANAN
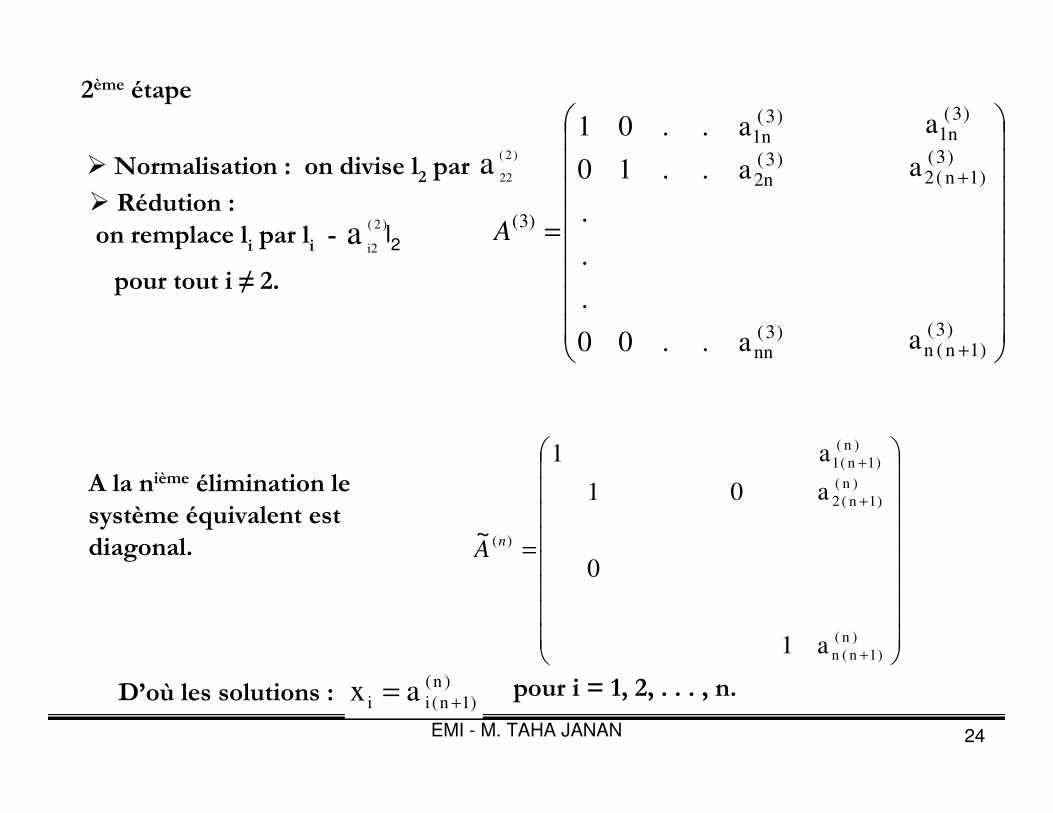
2ème étape
)2(
22a
)2(
i2a
�Normalisation : on divise l2 par
� Rédution :
on remplace li par li - l2
=
+
+
)3()1n(n
)3()1n(2
)3(1n
)3(nn
)3(2n
)3(1n
)3(
a
a
a
a..00
.
.
.
a..10
a..01
A
A la nième élimination le
système équivalent est
diagonal.
=
+
+
+
)n(
)1n(n
)n(
)1n(2
)n(
)1n(1
)(
a1
a
a
0
01
1
~ nA
pour tout i ≠ 2.
D’où les solutions : )n(
)1n(ii ax += pour i = 1, 2, . . . , n.
25EMI - M. TAHA JANAN
L’algorithme de Gauss Jordan est :
1n,...k,jn1,...,k1,k,...1,iaga )k(
jkki
)k(
ji
)1k(
ji+=+−=−=+
a
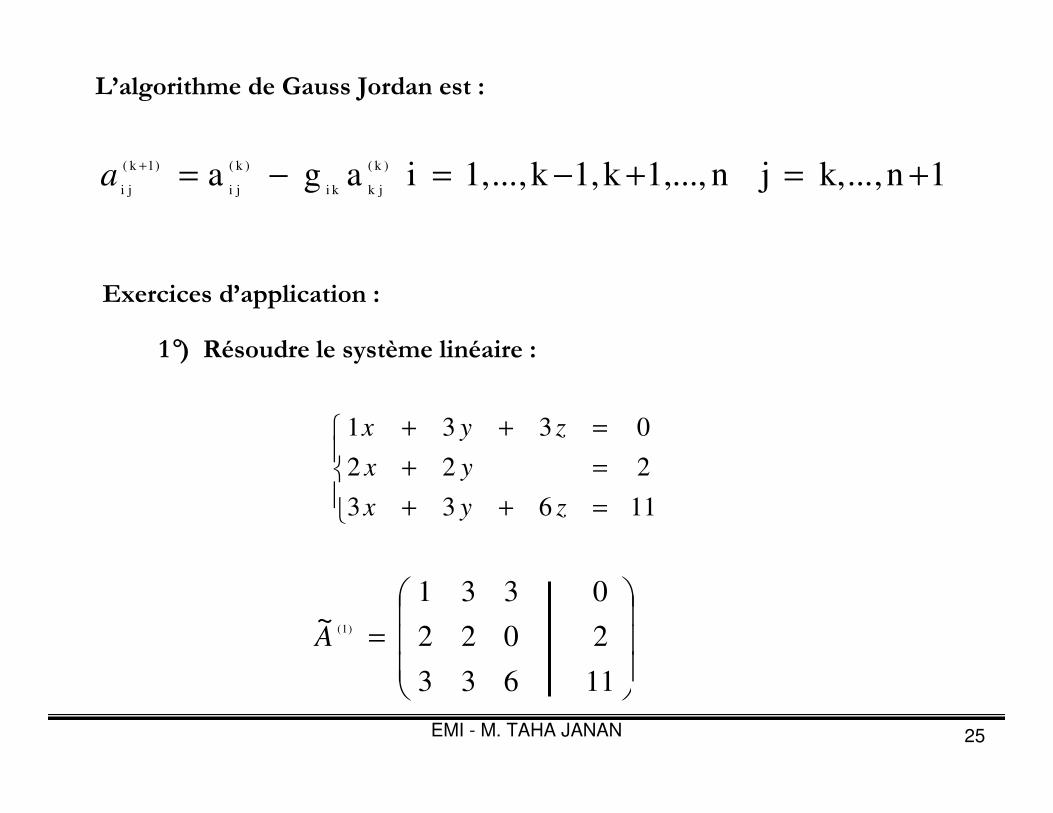
Exercices d’application :
1°) Résoudre le système linéaire :
=++
=+
=++
11633
222
0331
zyx
yx
zyx
=
11633
2022
0331~ )1(
A
26EMI - M. TAHA JANAN
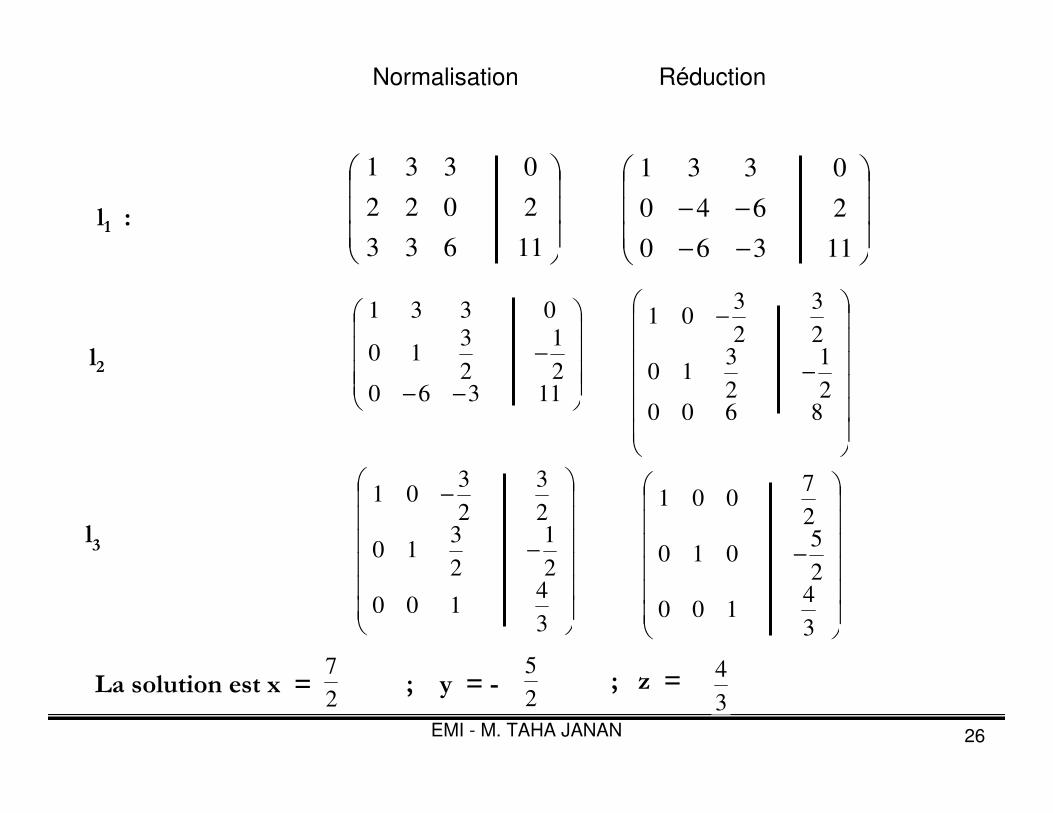
Normalisation Réduction
l1 :
11633
2022
0331
−−
−−
11360
2640
0331
−−
−
113602
1
2
310
0331
−
−
86002
1
2
310
2
3
2
301
l2
−
−
3
4100
2
1
2
310
2
3
2
301
−
3
4100
2
5010
2
7001
l3
2
7
2
5
3
4La solution est x = ; y = - ; z =
27EMI - M. TAHA JANAN
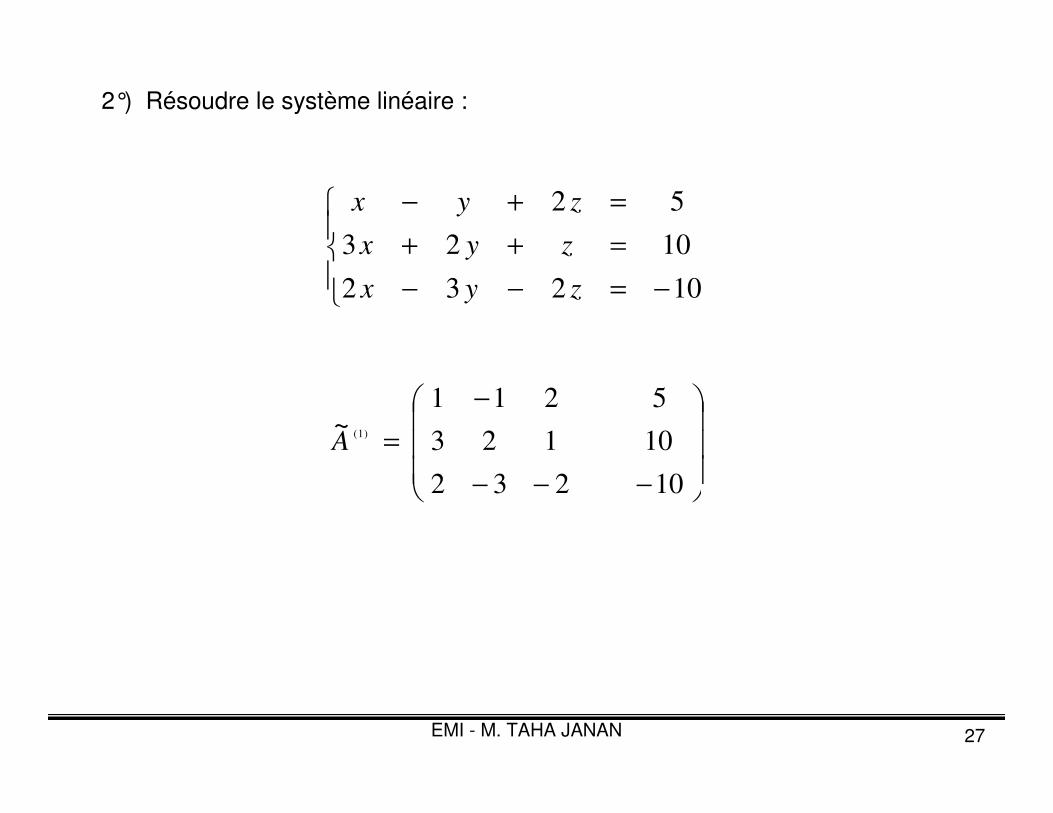
2°) Résoudre le système linéaire :
−=−−
=++
=+−
10232
1023
52
zyx
zyx
zyx
−−−
−
=
10232
10123
5211~ )1(
A
28EMI - M. TAHA JANAN
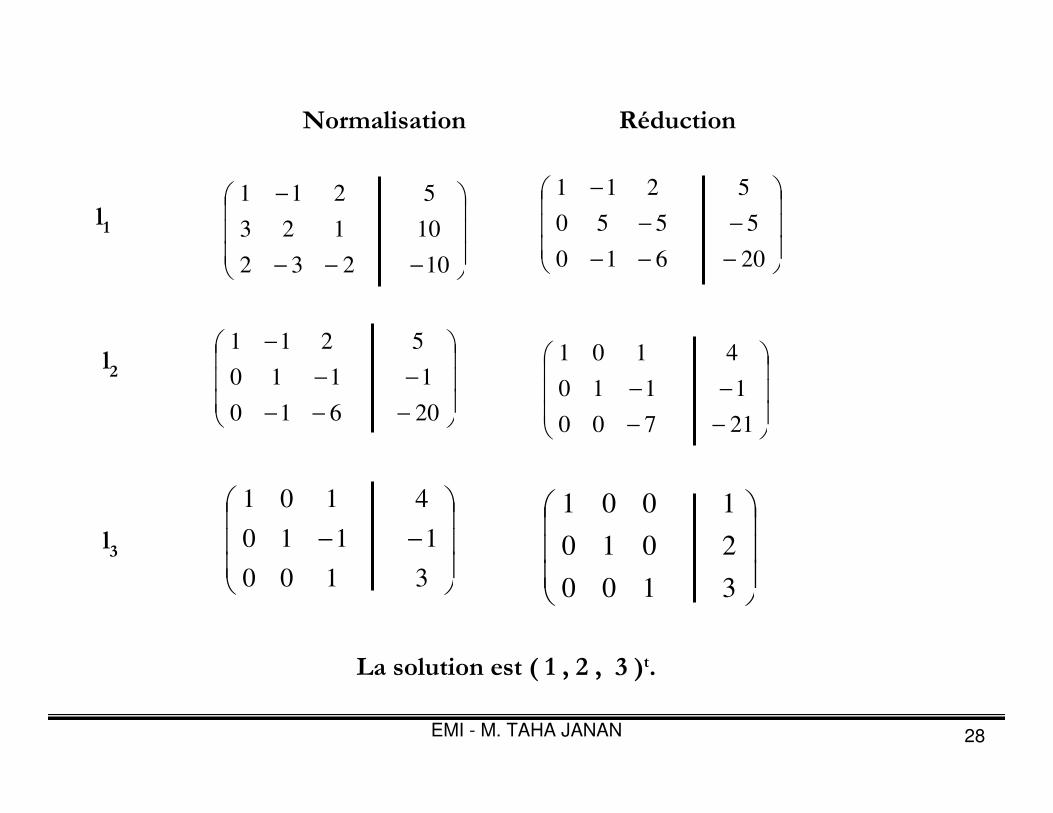
Normalisation Réduction
−−−
−
10232
10123
5211
−−−
−−
−
20610
5550
5211
−−−
−−
−
20610
1110
5211
−−
−−
21700
1110
4101
−−
3100
1110
4101
3100
2010
1001
l1
l2
l3
La solution est ( 1 , 2 , 3 )t.
29EMI - M. TAHA JANAN
3°) Résoudre le système linéaire :
=++
=++
=++
1122
21432
2865
zyx
zyx
zyx
=
11221
21432
28651~ )1(
A
30EMI - M. TAHA JANAN
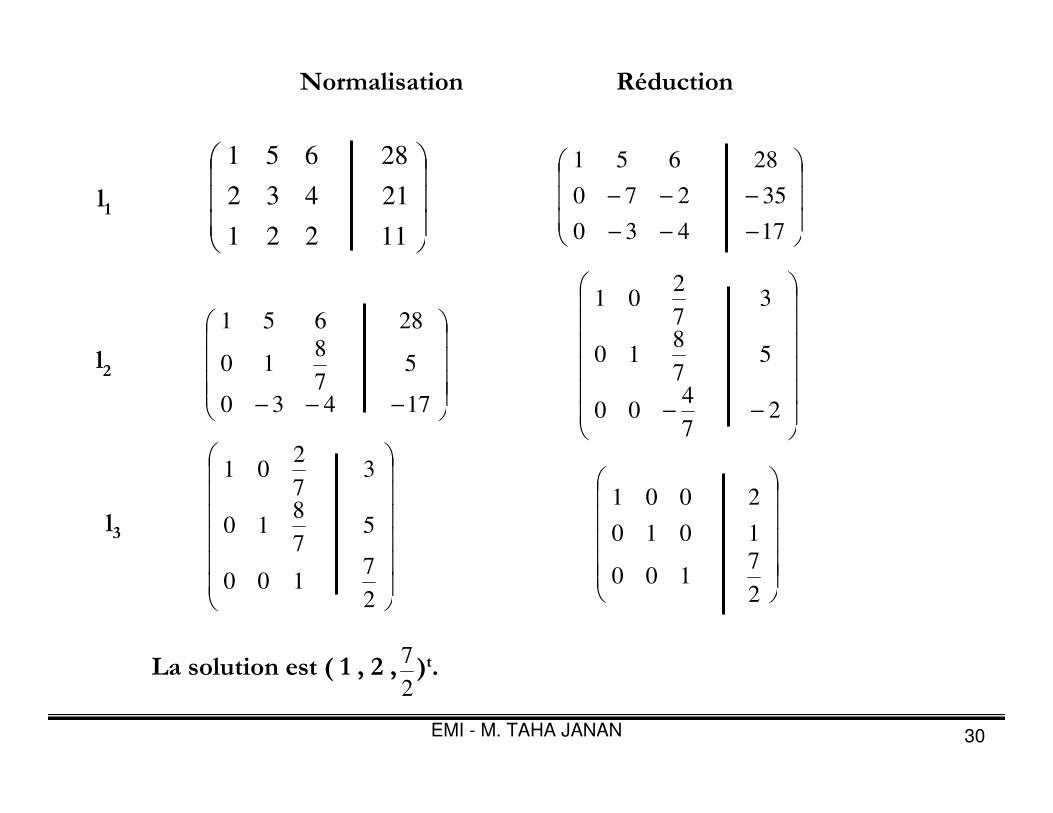
Normalisation Réduction
11221
21432
28651
−−−
−−−
17430
35270
28651
l1
−−− 17430
57
810
28651
−− 27
400
57
810
37
201
l2
l3
2
7100
57
810
37
201
2
7100
1010
2001
La solution est ( 1 , 2 , )t.2
7
31EMI - M. TAHA JANAN
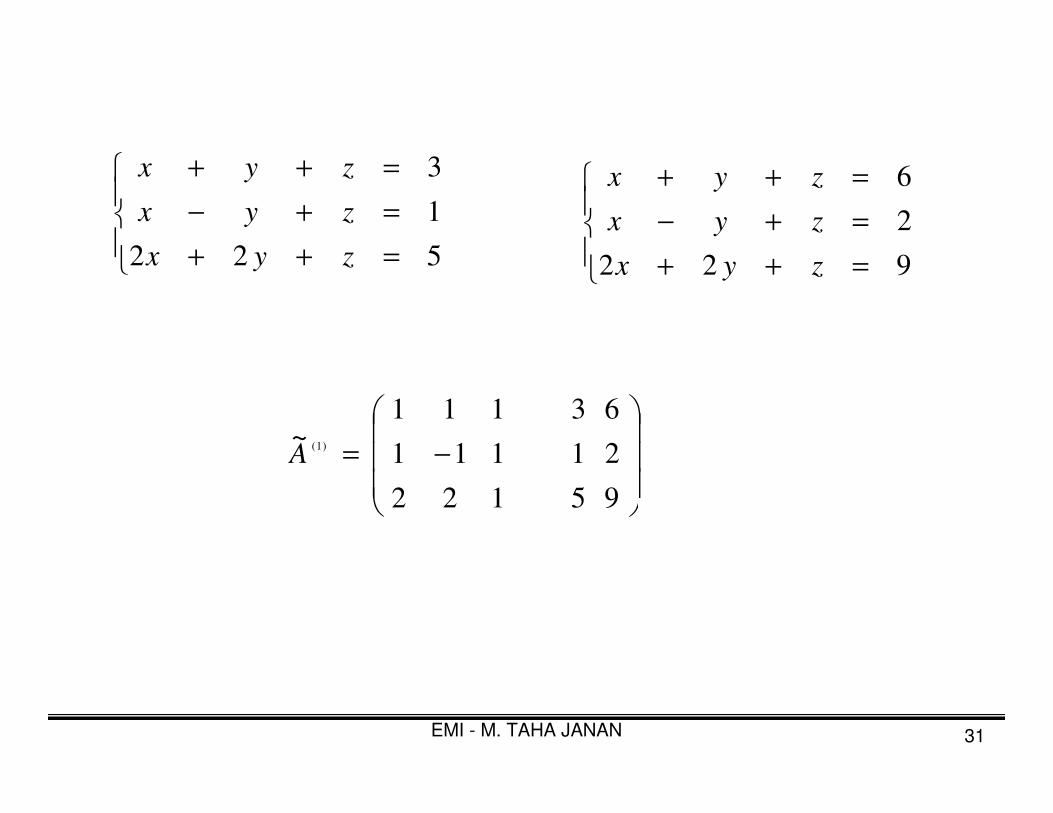
=++
=+−
=++
522
1
3
zyx
zyx
zyx
=++
=+−
=++
922
2
6
zyx
zyx
zyx
−=
9
2
6
5122
1111
3111~ )1(
A
32EMI - M. TAHA JANAN
−
9
2
6
5122
1111
3111
−
−
−−
5
4
6
3140
2020
3111
− 5
2
6
3140
1010
3111
−−− 3
2
4
1100
1010
2101
3
2
4
1100
1010
2101
3
2
1
1100
1010
1001
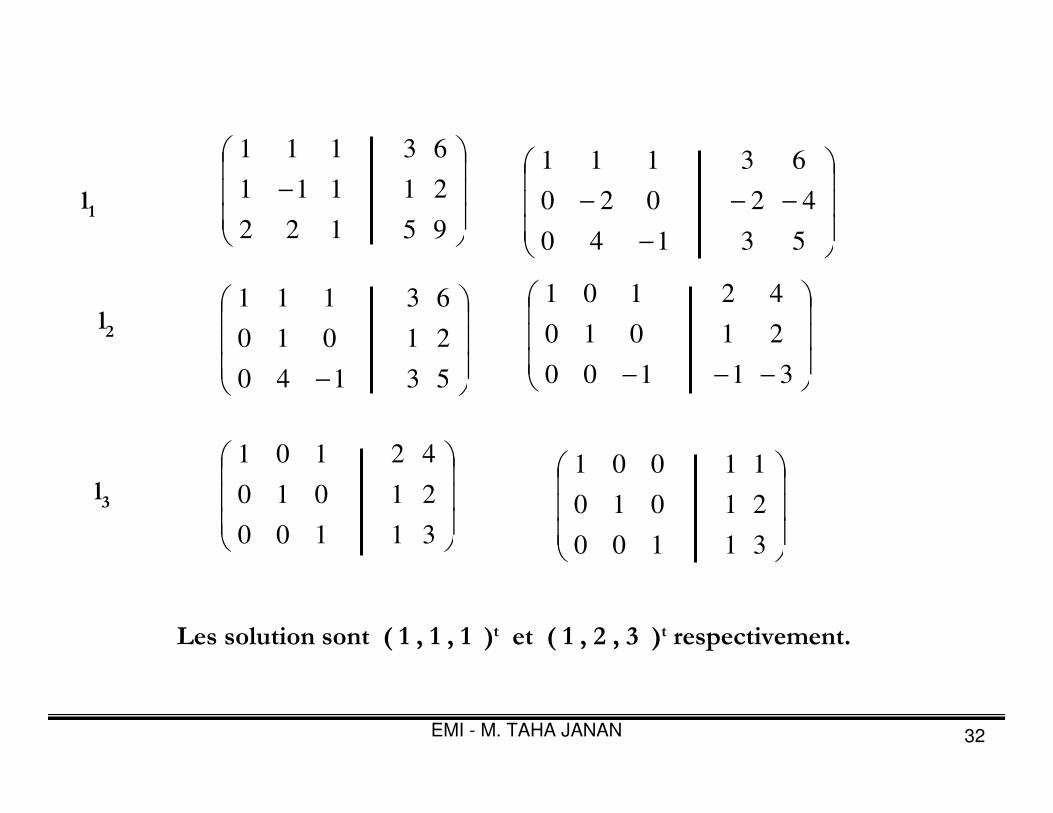
l1
l2
l3
Les solution sont ( 1 , 1 , 1 )t et ( 1 , 2 , 3 )t respectivement.
33EMI - M. TAHA JANAN
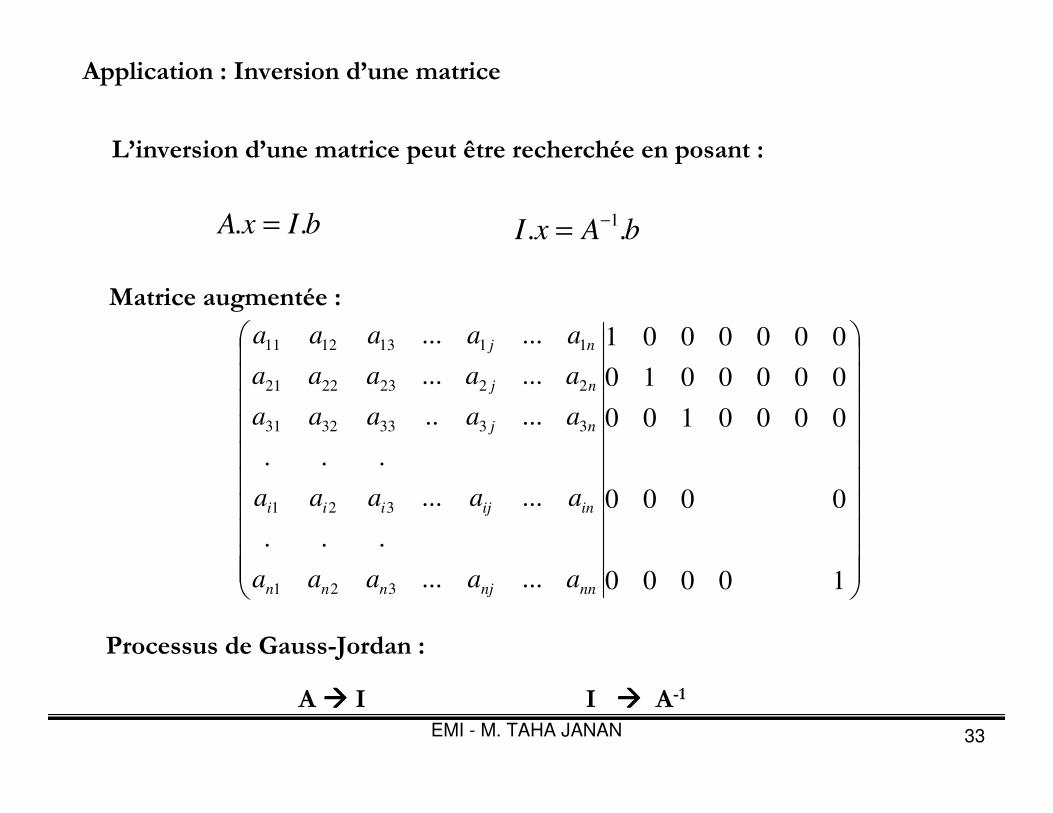
Application : Inversion d’une matrice
L’inversion d’une matrice peut être recherchée en posant :
bIxA .. = bAxI .. 1−=
Matrice augmentée :
10000
0000
0000100
0000010
0000001
......
...
......
...
.....
......
......
321
321
33333231
22232221
11131211
nnnjnnn
inijiii
nj
nj
nj
aaaaa
aaaaa
aaaaa
aaaaa
aaaaa
Processus de Gauss-Jordan :
A ���� I I ���� A-1
34EMI - M. TAHA JANAN
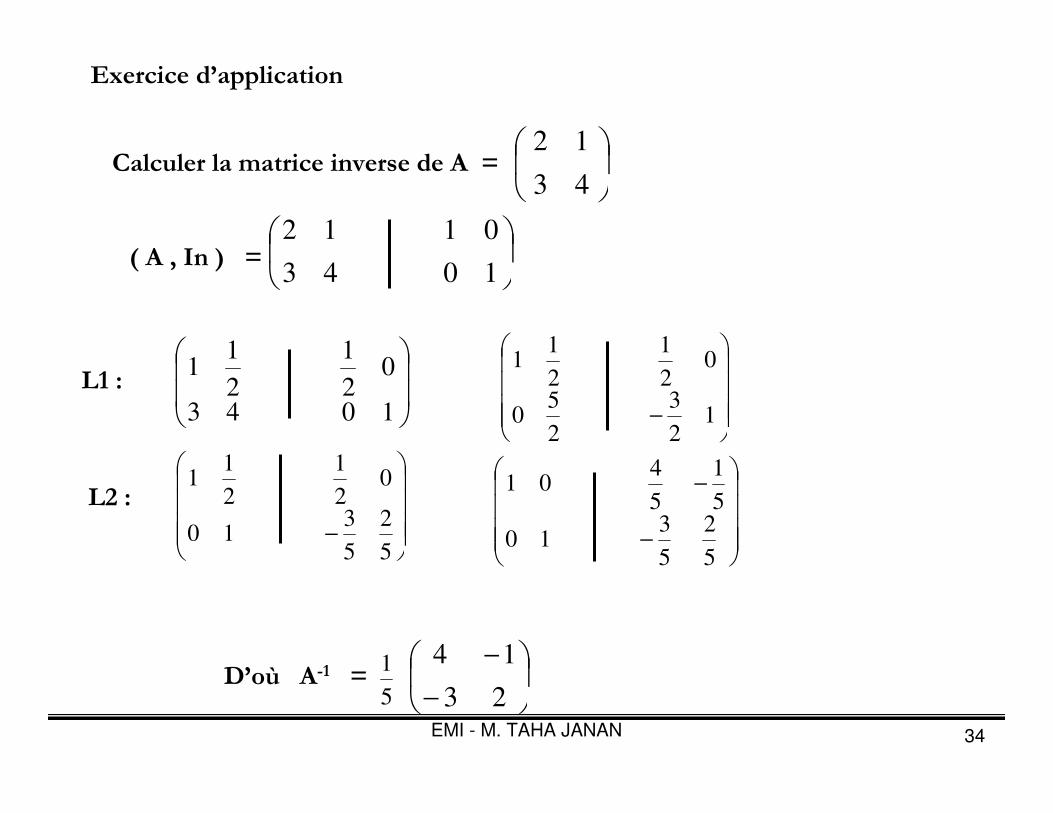
Exercice d’application
Calculer la matrice inverse de A =
43
12
( A , In ) =
1043
0112
1043
02
1
2
11
− 12
3
2
50
02
1
2
11
L1 :
−5
2
5
310
02
1
2
11
−
−
5
2
5
310
5
1
5
401
L2 :
5
1
−
−
23
14D’où A-1 =
35EMI - M. TAHA JANAN
A5 Factorisation
Principe :
Décomposer la matrice A en facteurs faciles à inverser : matrices triangulaires
Factorisations LU
U : Matrice triangulaire supérieure
L : matrice triangulaire inférieureOn pose A=L.U
36EMI - M. TAHA JANAN
A admet une décomposition L U ssi les mineurs principaux sont non nuls
det( A ) = det( L ) det( U ) ≠ 0 ( car A est inversible ).
donc L et U sont inversibles
L et U sont uniques.
Résolution : A x = b équivalent à L U x = b
Nous sommes emmené à résoudre 2 systèmes triangulaires :
=
=
yxU
byLL.y = b système triangulaire inférieur
U.x = y système triangulaire supérieur
Nombre d’opérations : TLU = (n3/3 - n/3) + n2 .
37EMI - M. TAHA JANAN
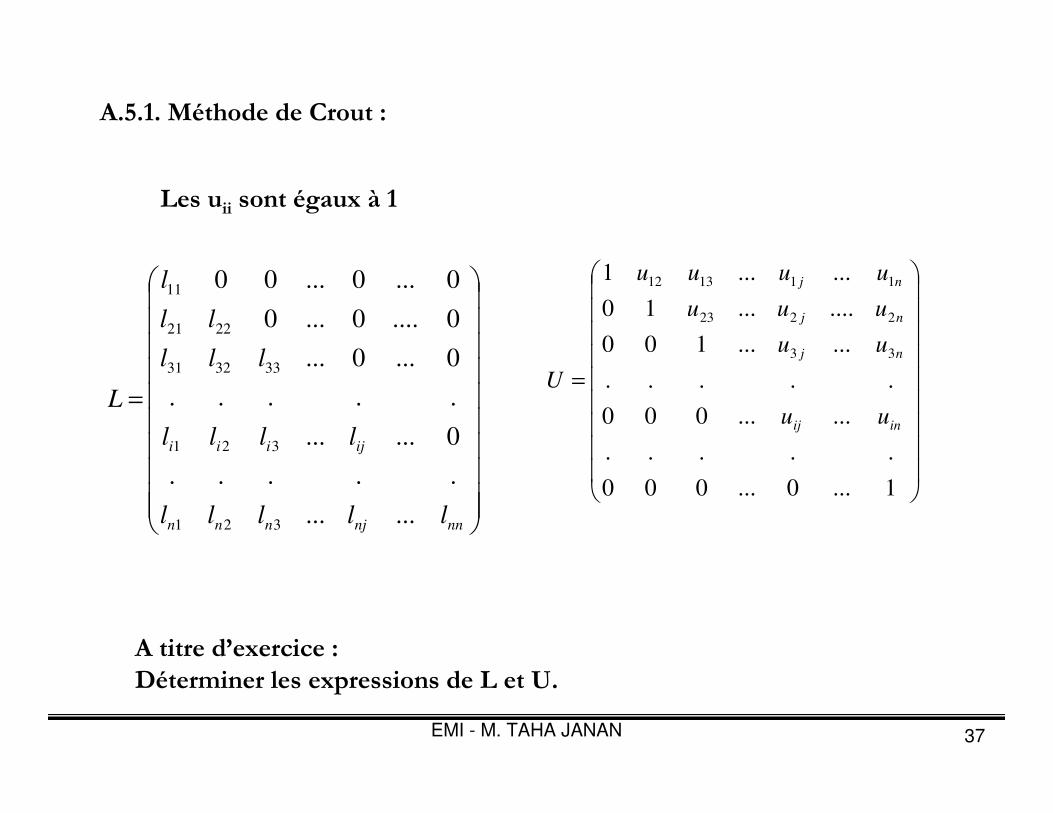
A.5.1. Méthode de Crout :
Les uii sont égaux à 1
A titre d’exercice :
Déterminer les expressions de L et U.
=
nnnjnnn
ijiii
lllll
llll
lll
ll
l
L
......
.....
0......
.....
0...0...
0....0...0
0...0...00
321
321
333231
2221
11
=
1...0...000
.....
......000
.....
......100
.......10
......1
33
2223
111312
inij
nj
nj
nj
uu
uu
uuu
uuuu
U
38EMI - M. TAHA JANAN
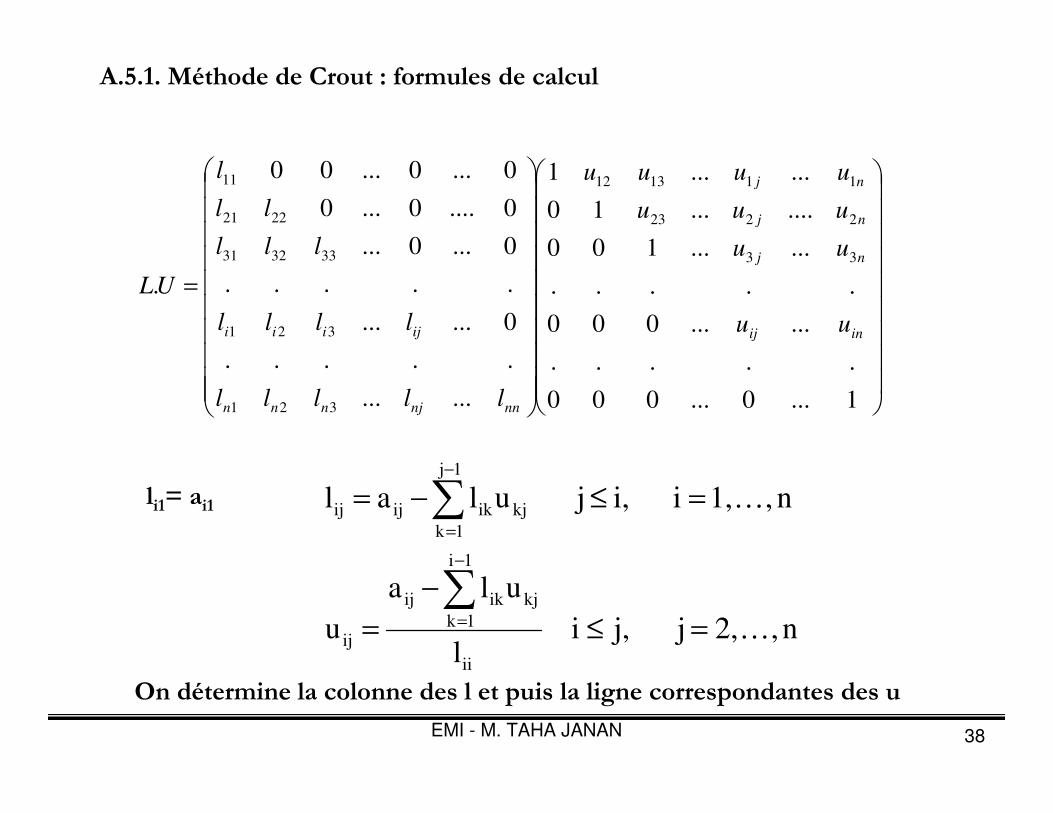
A.5.1. Méthode de Crout : formules de calcul
=
1...0...000
.....
......000
.....
......100
.......10
......1
......
.....
0......
.....
0...0...
0....0...0
0...0...00
.
33
2223
111312
321
321
333231
2221
11
inij
nj
nj
nj
nnnjnnn
ijiii uu
uu
uuu
uuuu
lllll
llll
lll
ll
l
UL
li1= ai1
n,2,j j,i l
ula
u
n,1,i i,j ulal
ii
1i
1k
kjikij
ij
1j
1k
kjikijij
K
K
=≤
−
=
=≤−=
∑
∑−
=
−
=
On détermine la colonne des l et puis la ligne correspondantes des u
39EMI - M. TAHA JANAN
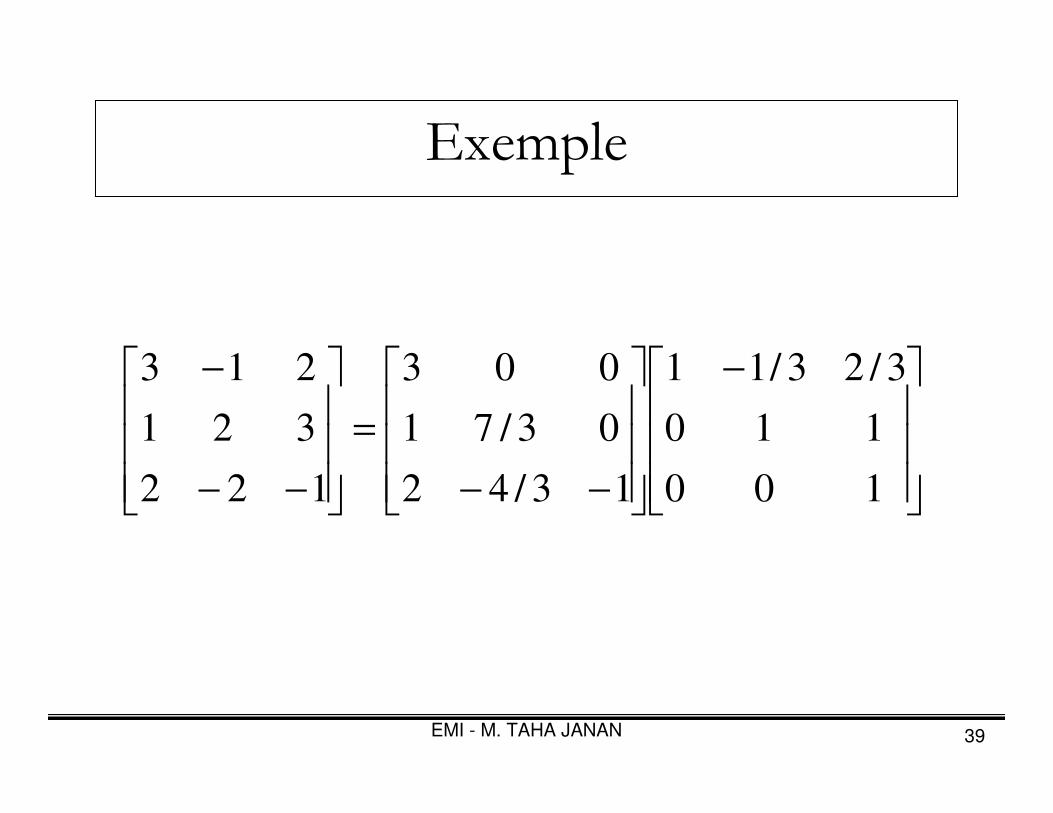
Exemple
−
−−
=
−−
−
100
110
3/23/11
13/42
03/71
003
122
321
213
40EMI - M. TAHA JANAN
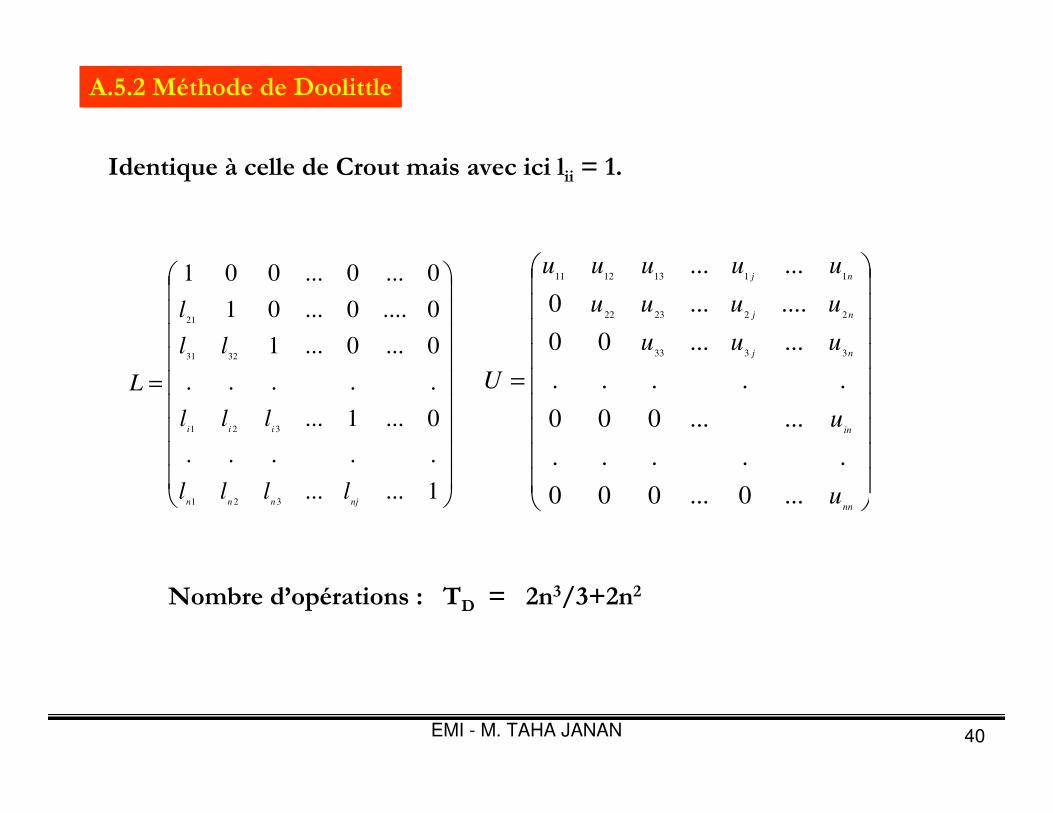
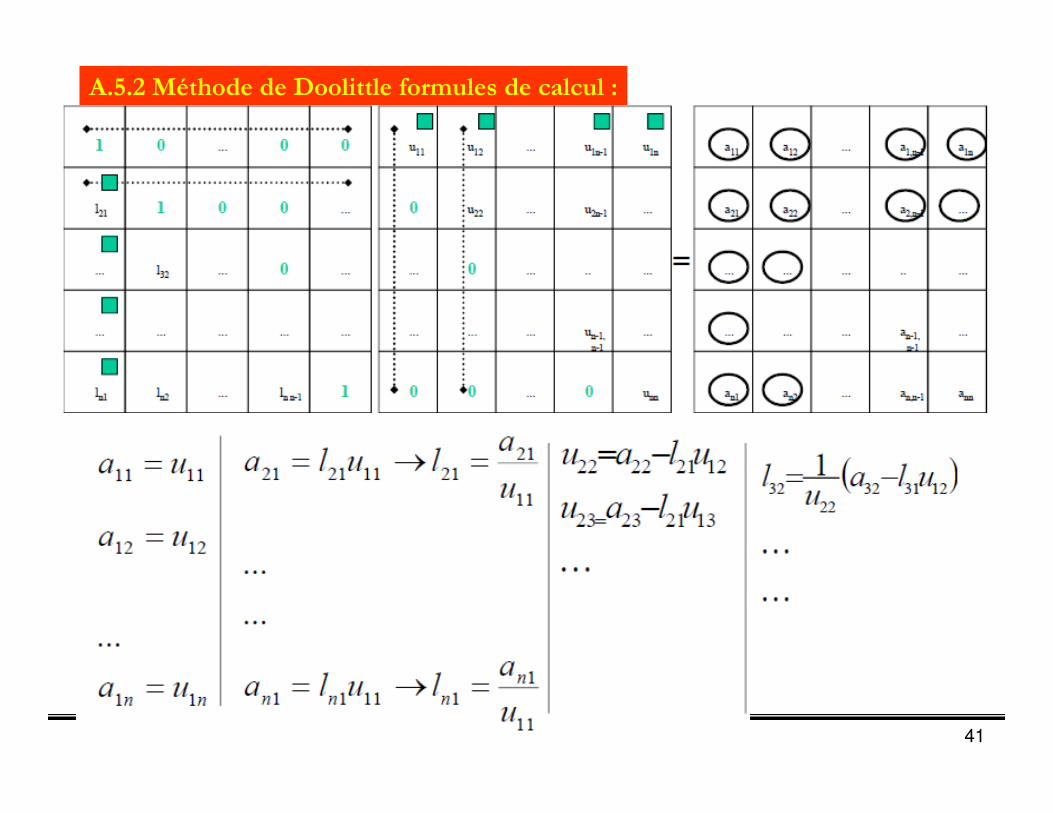
A.5.2 Méthode de Doolittle
Identique à celle de Crout mais avec ici lii = 1.
=
1......
.....
0...1...
.....
0...0...1
0....0...01
0...0...001
321
321
3231
21
njnnn
iii
llll
lll
ll
l
L
=
nn
in
nj
nj
nj
u
u
uuu
uuuu
uuuuu
U
...0...000
.....
......000
.....
......00
.......0
......
3333
222322
11131211
Nombre d’opérations : TD = 2n3/3+2n2
41EMI - M. TAHA JANAN
A.5.2 Méthode de Doolittle formules de calcul :
42EMI - M. TAHA JANAN
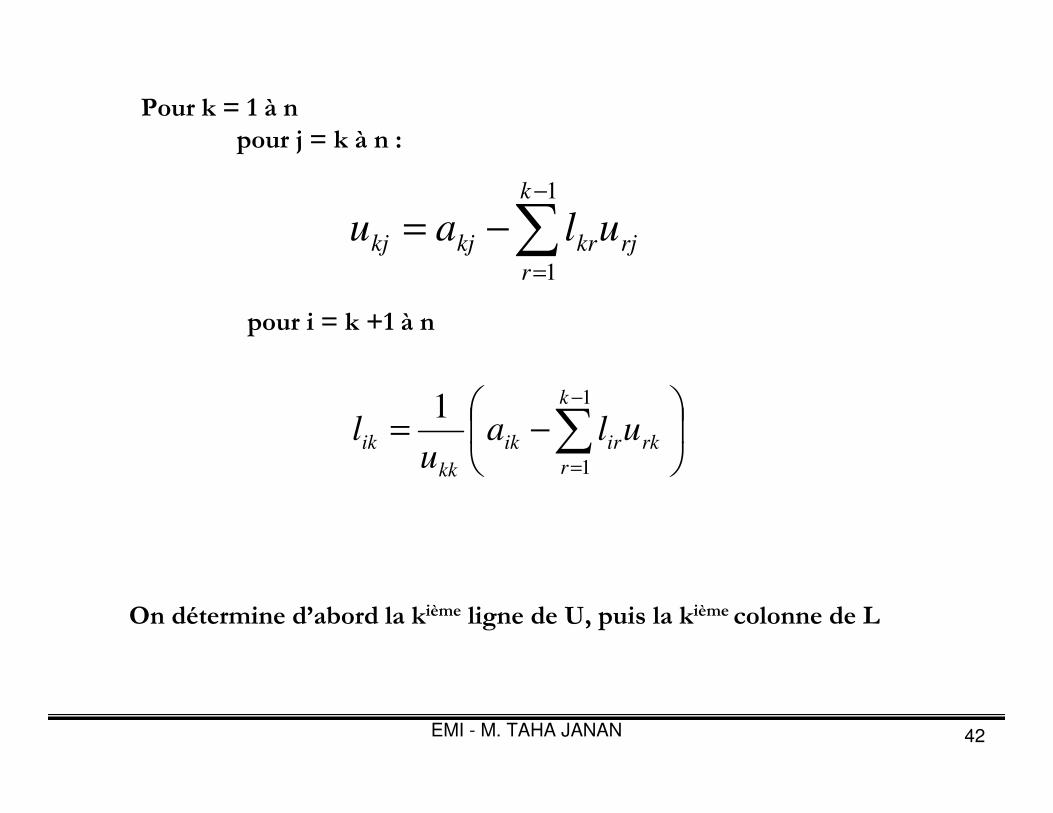
Pour k = 1 à n
pour j = k à n :
∑−
=
−=1
1
k
r
rjkrkjkj ulau
pour i = k +1 à n
−= ∑
−
=
1
1
1 k
r
rkirik
kk
ik ulau
l
On détermine d’abord la kième ligne de U, puis la kième colonne de L
43EMI - M. TAHA JANAN
A.5.3. Décomposition de Cholesky
Définition : Matrice définie positive :
Une matrice A est définie positive lorsque pour tout vecteur x non nul de
Rn on a xt.A.x > 0.
Pripriété
A définie positive ssi Tous les mineurs diagonaux > 0.
Méthode de Cholesky :
Une matrice symétrique définie positive peut être décomposée comme suit :
tLLA =
L : matrice inférieure
Lt : transposée de L
Nombre d’opérations : TCh = n3/3 + n2 +8n /3-2 ~ moitié LU
Exercice : Etablir les expressions des éléments de L.
44EMI - M. TAHA JANAN
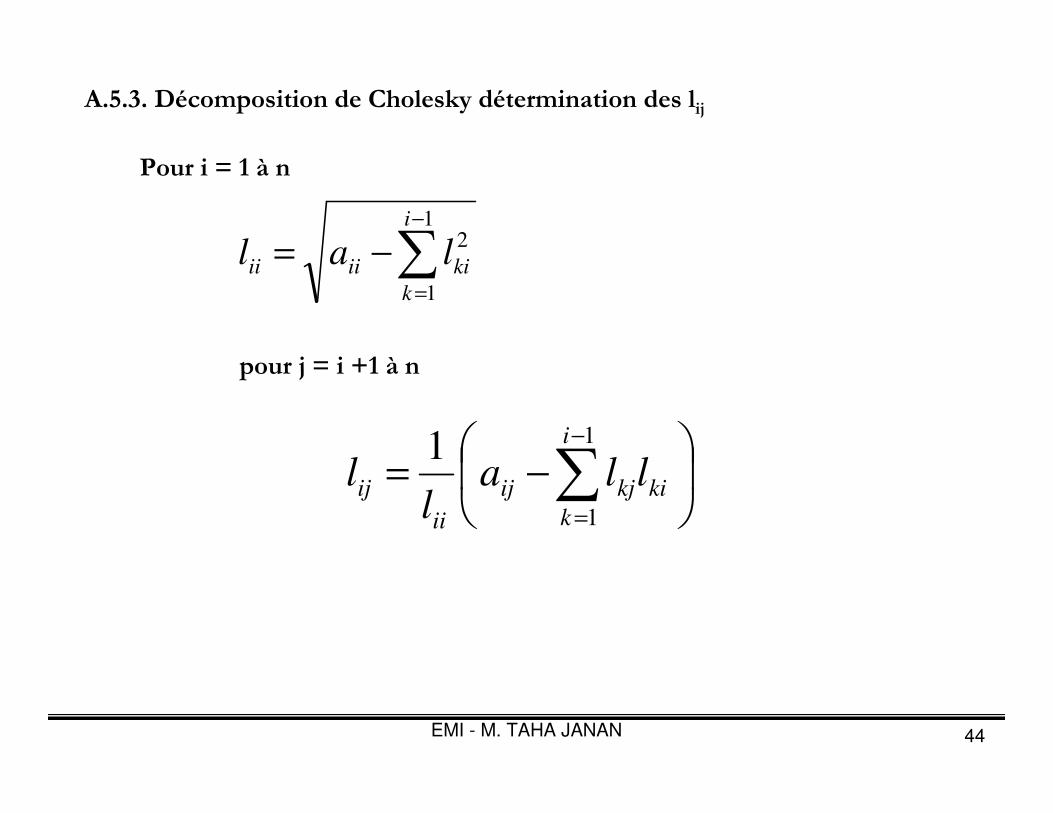
A.5.3. Décomposition de Cholesky détermination des lij
Pour i = 1 à n
∑−
=
−=1
1
2i
k
kiiiii lal
pour j = i +1 à n
−= ∑
−
=
1
1
1 i
k
kikjij
ii
ij llal
l
45EMI - M. TAHA JANAN
Méthode itérative :
Pour résoudre un système Ax=b où A est une matrice (n,n) et b ,
on construit des suites
qui vérifient la relation:
nIR∈
{ }(p) n
p INx dans IR
∈
(p+1) (p)x = Mx + c
M matrice (n,n) et c étant définis à partir de A et b.nIR∈
Dans la suite, A est supposée réelle et régulière.
B- Méthodes itératives
46EMI - M. TAHA JANAN
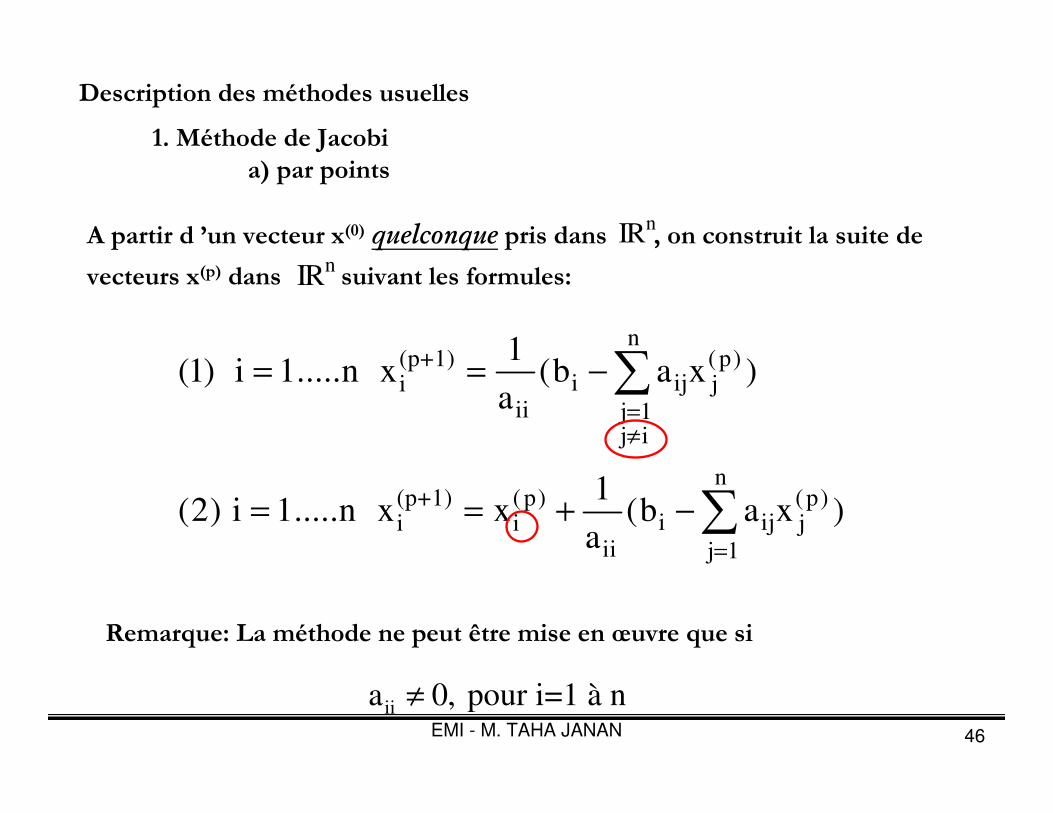
Description des méthodes usuelles
A partir d ’un vecteur x(0) quelconque pris dans , on construit la suite de
vecteurs x(p) dans suivant les formules:nIR
nIR
n(p+1) (p)
i iji jii j 1
j i
n(p+1) (p) (p)
i iji i jii j 1
1(1) i 1.....n x (b a x )
a
1(2) i 1.....n x x (b a x )
a
=≠
=
= = −
= = + −
∑
∑
1. Méthode de Jacobi
a) par points
Remarque: La méthode ne peut être mise en œuvre que si
iia 0, pour i=1 à n≠

47EMI - M. TAHA JANAN
b) par blocs
Le système Ax=b est écrit sous la forme par blocs suivante
11 12 1j 1r1 1
21 22 2 j 2r 2 2
i ii1 i2 ij ir
r rr1 r2 rj rr
A A A A X B
A A A A X B
X BA A A A
X BA A A A
=
L L
L L
M MM M M M
L L
M MM M M M
L L
Pour i=1 à r ,Aii sont des matrices carrées (mi,mi) supposées inversibles. On a
donc i im m
i iX IR et B IR .∈ ∈
48EMI - M. TAHA JANAN
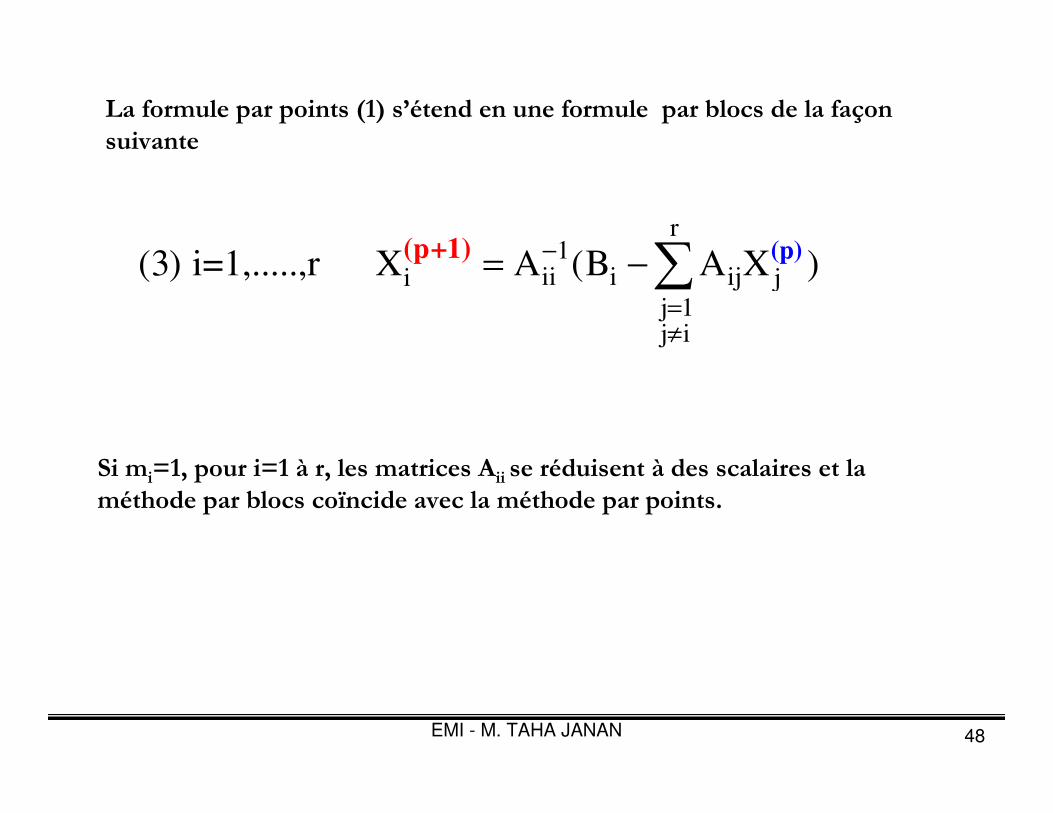
La formule par points (1) s’étend en une formule par blocs de la façon
suivante
r1
ii i iji j
j 1j i
(3) i=1,.....,r X A (B A X )−
=≠
= −∑ (p)(p+1)
Si mi=1, pour i=1 à r, les matrices Aii se réduisent à des scalaires et la
méthode par blocs coïncide avec la méthode par points.
49EMI - M. TAHA JANAN
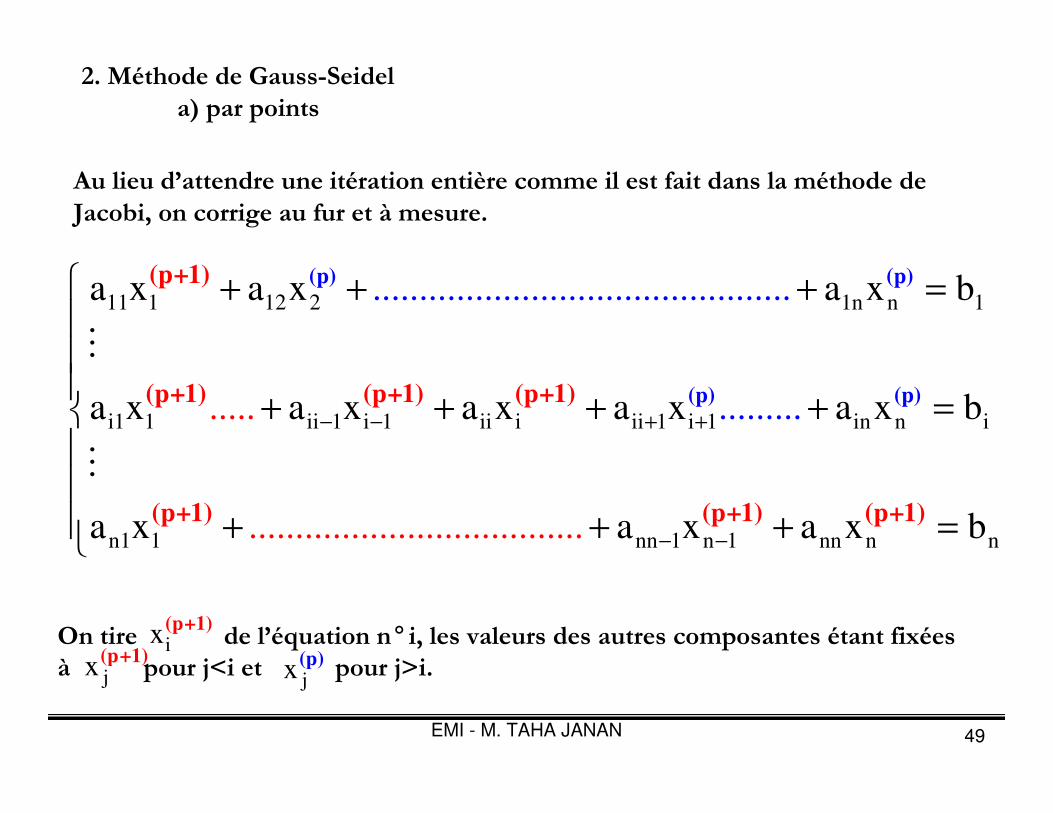
2. Méthode de Gauss-Seidel
a) par points
Au lieu d’attendre une itération entière comme il est fait dans la méthode de
Jacobi, on corrige au fur et à mesure.
11 1 12 2 1n n 1
i1 1 ii 1 i 1 ii i ii 1 i 1 in n i
n1 1
.....
.......................
..........................
.......
a x a x a x b
a x a x a x a x
...................
. a........
....
x b
a x .
− − + +
+ + + =
+ + + + =
+
(p) (p)
(p) (p)
(p+1)
(p+1) (p+1) (p+1)
(p+1)
M
M
nn 1 n 1 nn n na x a x. b− −
+ + =
(p+1) (p+1)
On tire de l’équation n°i, les valeurs des autres composantes étant fixées
à pour j<i et pour j>i. ix(p+1)
jx(p+1)
jx(p)
50EMI - M. TAHA JANAN
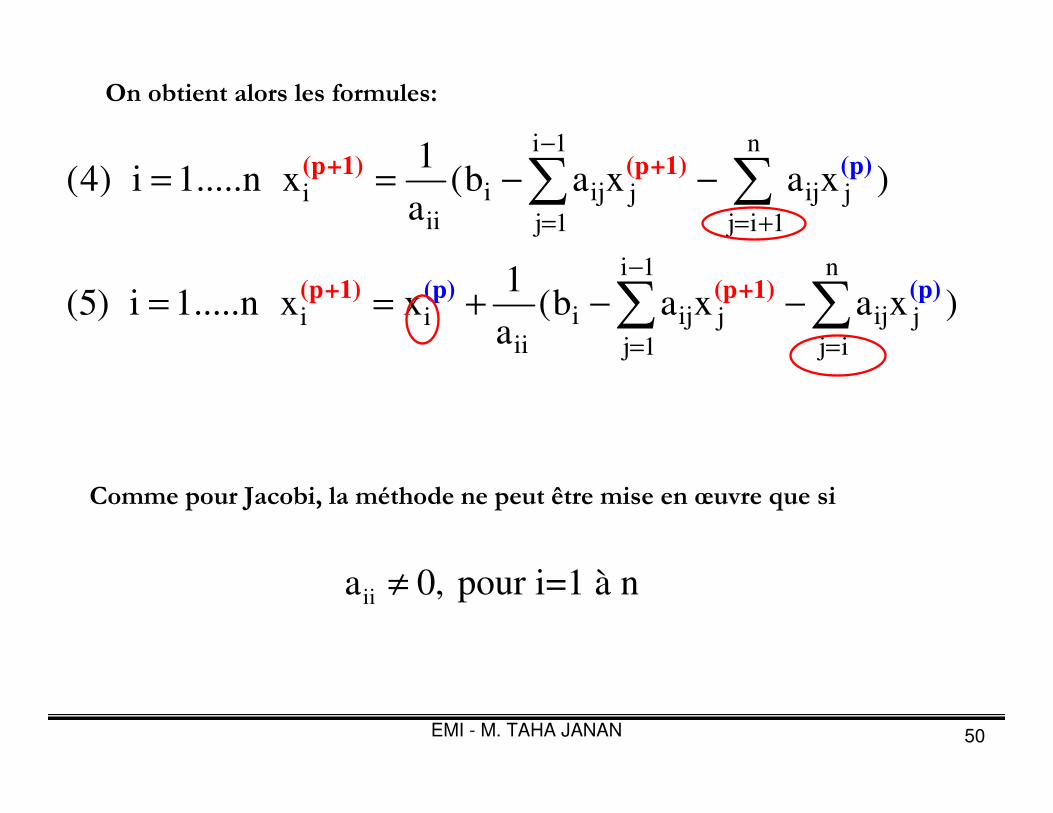
Comme pour Jacobi, la méthode ne peut être mise en œuvre que si
iia 0, pour i=1 à n≠
On obtient alors les formules:
i 1 n
i ij iji j jii j 1 j i 1
i 1 n
i ij iji i j jii j 1 j i
1(4) i 1.....n x (b a x a x )
a
1(5) i 1.....n x x (b a x a x )
a
−
= = +
−
= =
= = − −
= = + − −
∑ ∑
∑ ∑
(p+1) (p+ (1)
(p+1)
p)
(p) (p)(p+1)
51EMI - M. TAHA JANAN
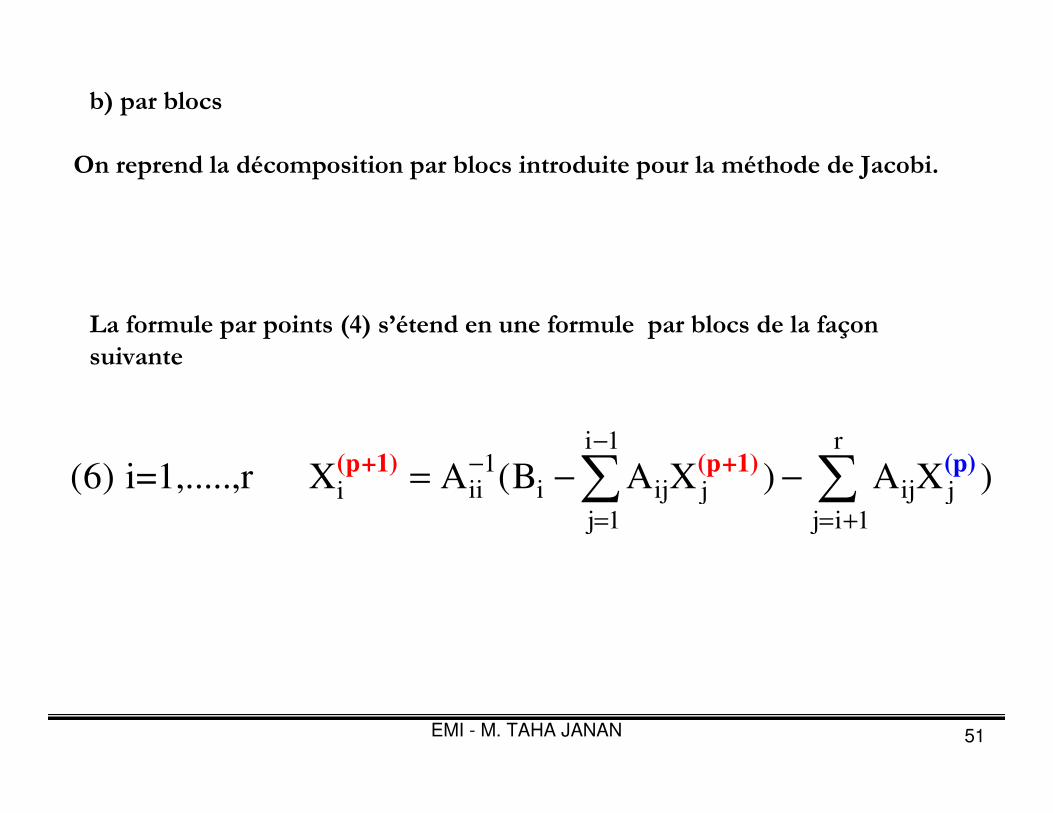
b) par blocs
On reprend la décomposition par blocs introduite pour la méthode de Jacobi.
La formule par points (4) s’étend en une formule par blocs de la façon
suivante
i 1 r1
ii i ij iji j j
j 1 j i 1
(6) i=1,.....,r X A (B A X ) A X )−
−
= = +
= − −∑ ∑ (p)(p+1) (p+1)
52EMI - M. TAHA JANAN
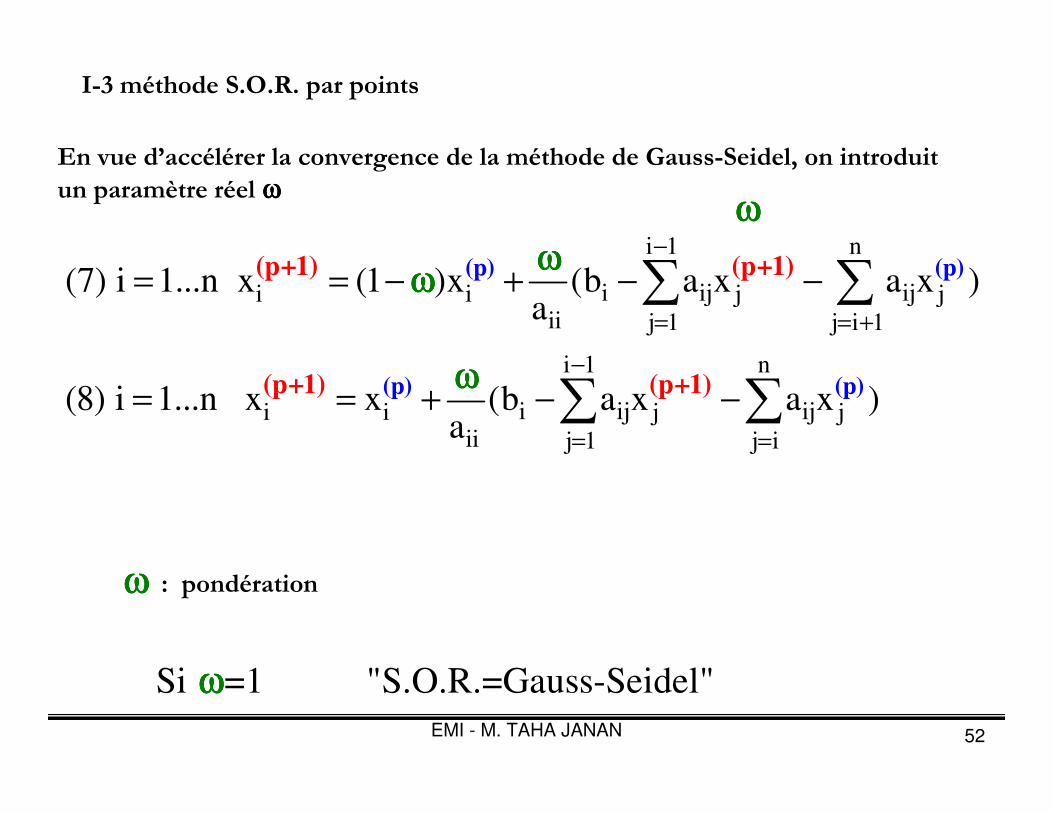
I-3 méthode S.O.R. par points
En vue d’accélérer la convergence de la méthode de Gauss-Seidel, on introduit
un paramètre réel ωωωωωωωω
i 1 n
i ij iji i j jii j 1 j i 1
i 1 n
i ij iji i j jii j 1 j i
(7) i 1...n x (1 )x (b a x a x )a
(8) i 1...n x x (b a x a x )a
−
= = +
−
= =
= = − + − −
= = + − −
∑ ∑
∑ ∑
(p) (p)
(p) (p)
(p+1) (p+1)
(p+1) (p+1)
ωωωωωωωω
ωωωω
ωωωω : pondération
Si =1 "S.O.R.=Gauss-Seidel"ωωωω
53EMI - M. TAHA JANAN
Remarques:
a) la méthode ne peut être mise en œuvre que si
iia 0, pour i=1 à n≠
b) On peut aussi définir une méthode S.O.R. par blocs.
c) En pratique, doit être pris dans . C’est une condition
nécessaire de convergence.
ω ] [0,2
54EMI - M. TAHA JANAN
I-4 Test d ’arrêt
Les méthodes directes le sont au sens où elles fournissent la solution du
système en un nombre fini d’opérations élémentaires.
Par contre, Jacobi,Gauss-Seidel et S.O.R. sont des méthodes itératives .
Pour déterminer quand on arrête l’itération, il faut introduire un test d’arrêt
basé sur un critère permettant d’estimer si on est « proche » de la solution.
Par exemple, le plus simple est un test sur le résidu.
≤(p)Ax - b ε
est une norme sur et un réel positif « petit » à choisir en fonction
du problème
nIR ε
55EMI - M. TAHA JANAN
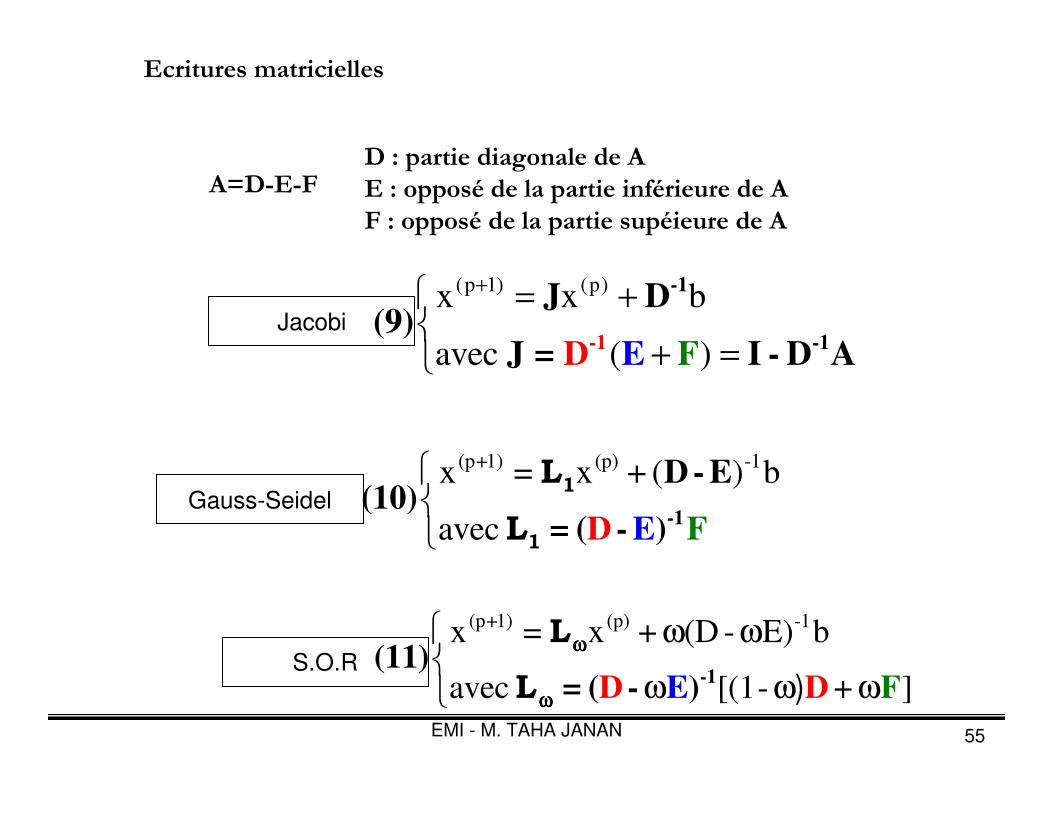
A=D-E-FD : partie diagonale de A
E : opposé de la partie inférieure de A
F : opposé de la partie supéieure de A
(p 1) (p)x x b
avec (
)
+ = +
+ =
-1
--1 1ED
J D(9)
J = AF I - DJacobi
(p+1) (p) -1x = x + ( ) b
avec
-1
D
D
- E(10)
= ( - )E F
1
1
L
L
Gauss-Seidel
(p+1) (p) -1x = x + (D - E) b
avec [(1- + ]
ω ω
ω ω ω-1ED D
(11)= ( - ) F
ωωωω
ωωωω
L
L )
S.O.R
Ecritures matricielles
56EMI - M. TAHA JANAN
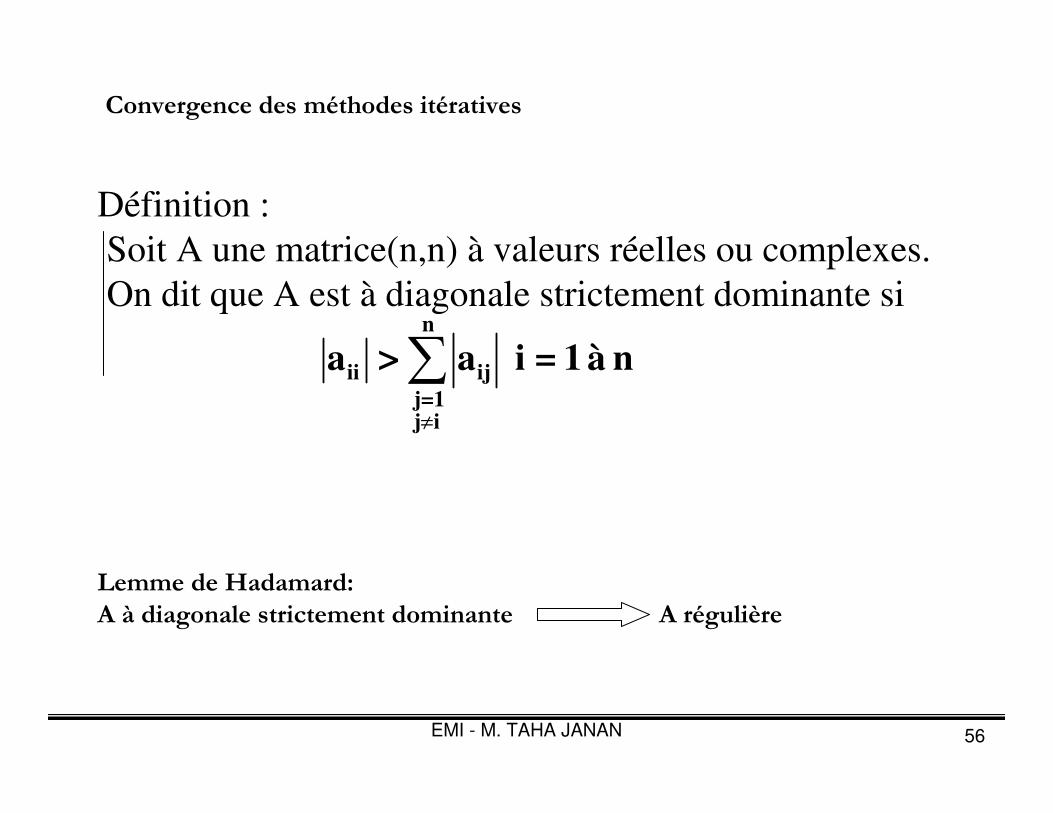
Définition :
Soit A une matrice(n,n) à valeurs réelles ou complexes.
On dit que A est à diagonale strictement dominante si
≠
∑n
ii ij
j=1j i
a > a i = 1 à n
Lemme de Hadamard:
A à diagonale strictement dominante A régulière
Convergence des méthodes itératives
57EMI - M. TAHA JANAN
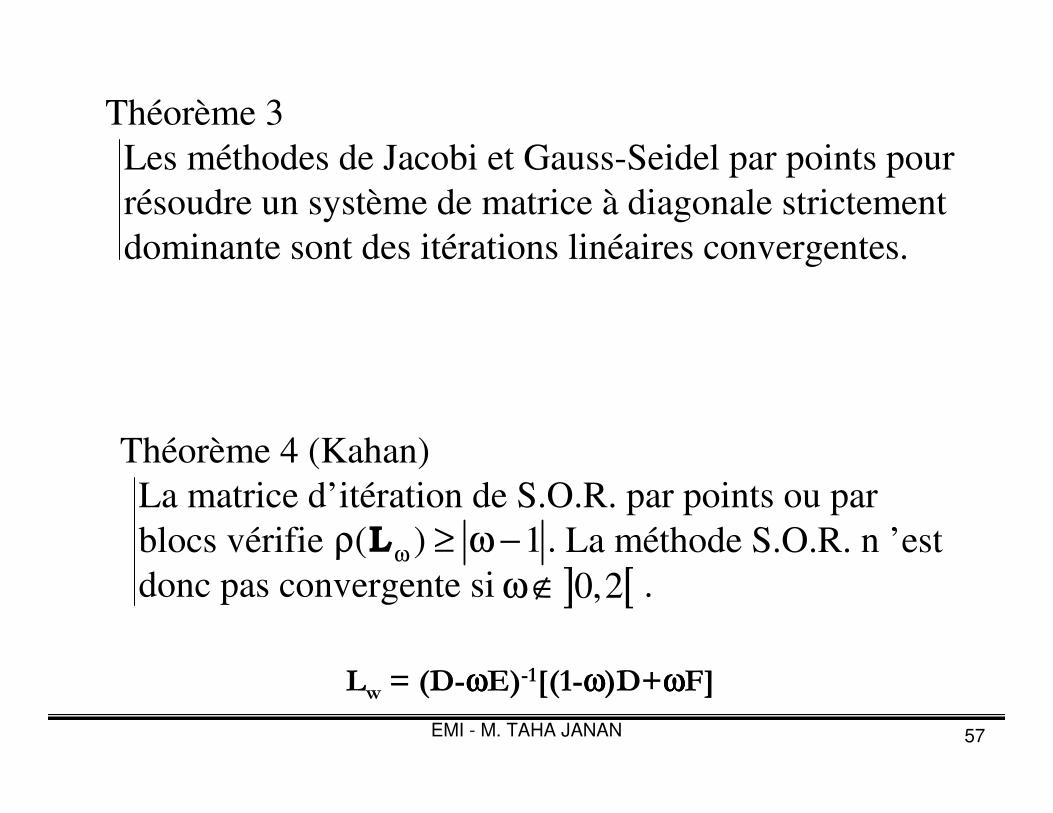
Théorème 4 (Kahan)
La matrice d’itération de S.O.R. par points ou par
blocs vérifie La méthode S.O.R. n ’est
donc pas convergente si .
( ) 1 .ωρ ≥ ω −L
] [0,2ω∉
Théorème 3
Les méthodes de Jacobi et Gauss-Seidel par points pour
résoudre un système de matrice à diagonale strictement
dominante sont des itérations linéaires convergentes.
Lw = (D-ωωωωE)-1[(1-ωωωω)D+ωωωωF]
58EMI - M. TAHA JANAN
Exemple :
Soit à résoudre le système suivant :
=+−
=++
=−+
31123
1972
34
zyx
zyx
zyx
( )( )( )
+−=
−−=
+−=
+
+
+
12/331
7/219
4/3
)()()1(
)()()1(
)()()1(
ppp
ppp
ppp
yxz
zxy
zyxJacobi :

59EMI - M. TAHA JANAN
Avec (x,y,z)(0)= (0,0,0,)
32117
32116
32,000000021,0000000115
3,000000011,999999990,9999999414
2,999999842,00000011,0000001113
2,999999761,99999930,9999997812
2,9999991221,0000028911
3,000006891,999995310,9999965510
3,000016482,000030281,000008179
3,000054222,000021550,999866898
2,999707982,00024041,000070597
2,999000421,998718060,999658376
2,996683531,998050041,006145045
3,011647891,987067741,001000924
3,05629962,052295921,01711313
3,199404762,130952380,71726192
2,583333332,714285710,751
0000
zyxitération
60EMI - M. TAHA JANAN
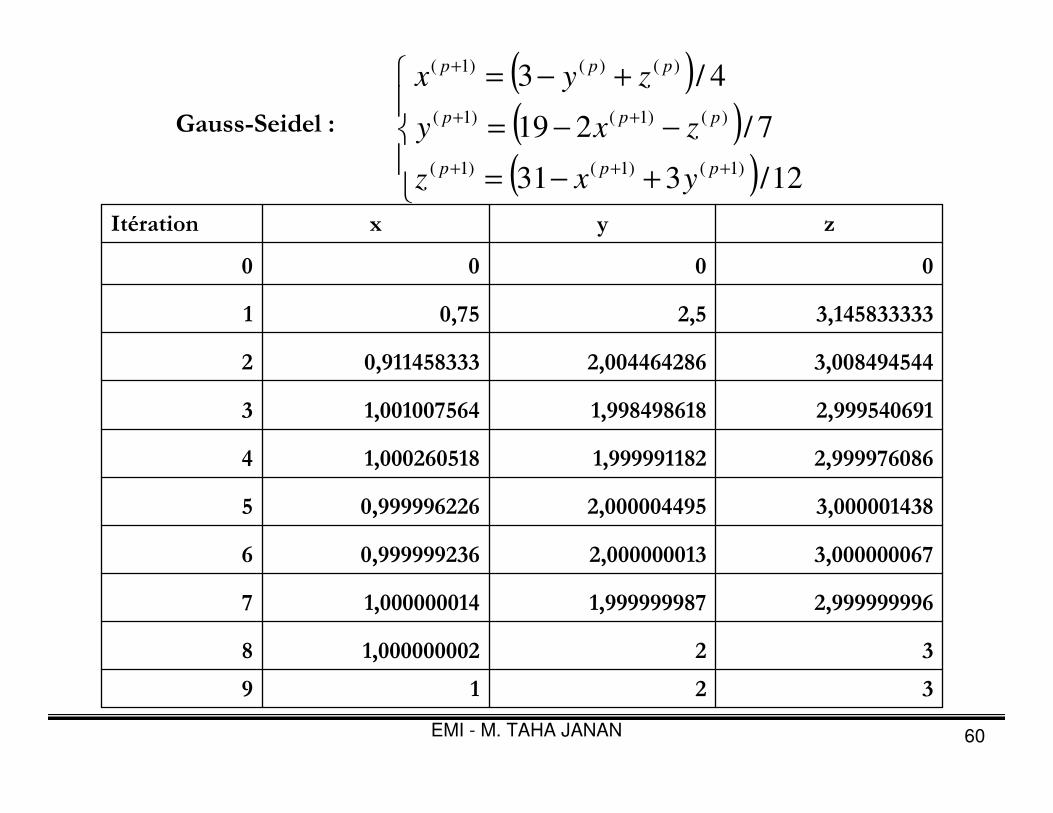
( )( )( )
+−=
−−=
+−=
+++
++
+
12/331
7/219
4/3
)1()1()1(
)()1()1(
)()()1(
ppp
ppp
ppp
yxz
zxy
zyx
Gauss-Seidel :
3219
321,0000000028
2,9999999961,9999999871,0000000147
3,0000000672,0000000130,9999992366
3,0000014382,0000044950,9999962265
2,9999760861,9999911821,0002605184
2,9995406911,9984986181,0010075643
3,0084945442,0044642860,9114583332
3,1458333332,50,751
0000
zyxItération


















