
Sujet mines PTSI
40
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 1/12 CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES ENONCE SUJET Instructions générales : Vous devez vérifier que les documents remis comprennent : • Un énoncé de sujet pages 1 à 12 • Les documents annexes DOCUMENTS 1 à 12 • Un document réponse pages 1 à 16 Vous devez répondre aux questions en utilisant le document réponse. Aucun autre document ne sera accepté. Attention : Vous devez impérativement inscrire votre code candidat sur chaque page du document réponse. En fin d’épreuve, vous ne devez rendre que le document réponse sur lequel vous aurez collé l’étiquette correspondante. Instructions particulières : Il est fortement conseillé au candidat de lire la totalité du sujet avant de composer. Toutes les parties sont indépendantes ( elles peuvent être traitées dans n’importe quel ordre ). La répartition du temps à consacrer à chaque partie est environ la suivante : • Lecture du sujet : 20 mn • Partie A : 40 mn • Partie B : 20 mn • Partie C : 40 mn • Partie D : 40 mn • Partie E : 40 mn • Partie F : 40 mn AUCUN DOCUMENT N’EST AUTORISE Epreuve spécifique de Sciences Industrielles pour l’Ingénieur Filière PTSI Vendredi 12 mai 2006 de 8h00 à 12h00 Usage de la calculatrice interdit
Transcript of Sujet mines PTSI
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 1/12
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES
ENONCE SUJET Instructions générales : Vous devez vérifier que les documents remis comprennent :
• Un énoncé de sujet pages 1 à 12 • Les documents annexes DOCUMENTS 1 à 12 • Un document réponse pages 1 à 16
Vous devez répondre aux questions en utilisant le document réponse. Aucun autre document ne sera accepté. Attention : Vous devez impérativement inscrire votre code candidat sur chaque page du document
réponse. En fin d’épreuve, vous ne devez rendre que le document réponse sur lequel vous aurez collé l’étiquette correspondante.
Instructions particulières : Il est fortement conseillé au candidat de lire la totalité du sujet avant de composer. Toutes les parties sont indépendantes ( elles peuvent être traitées dans n’importe quel ordre ). La répartition du temps à consacrer à chaque partie est environ la suivante :
• Lecture du sujet : 20 mn • Partie A : 40 mn • Partie B : 20 mn • Partie C : 40 mn • Partie D : 40 mn • Partie E : 40 mn • Partie F : 40 mn
AUCUN DOCUMENT N’EST AUTORISE
Epreuve spécifique de Sciences Industrielles pour l’Ingénieur
Filière PTSI
Vendredi 12 mai 2006 de 8h00 à 12h00
Usage de la calculatrice interdit
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 2/12
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 3/12
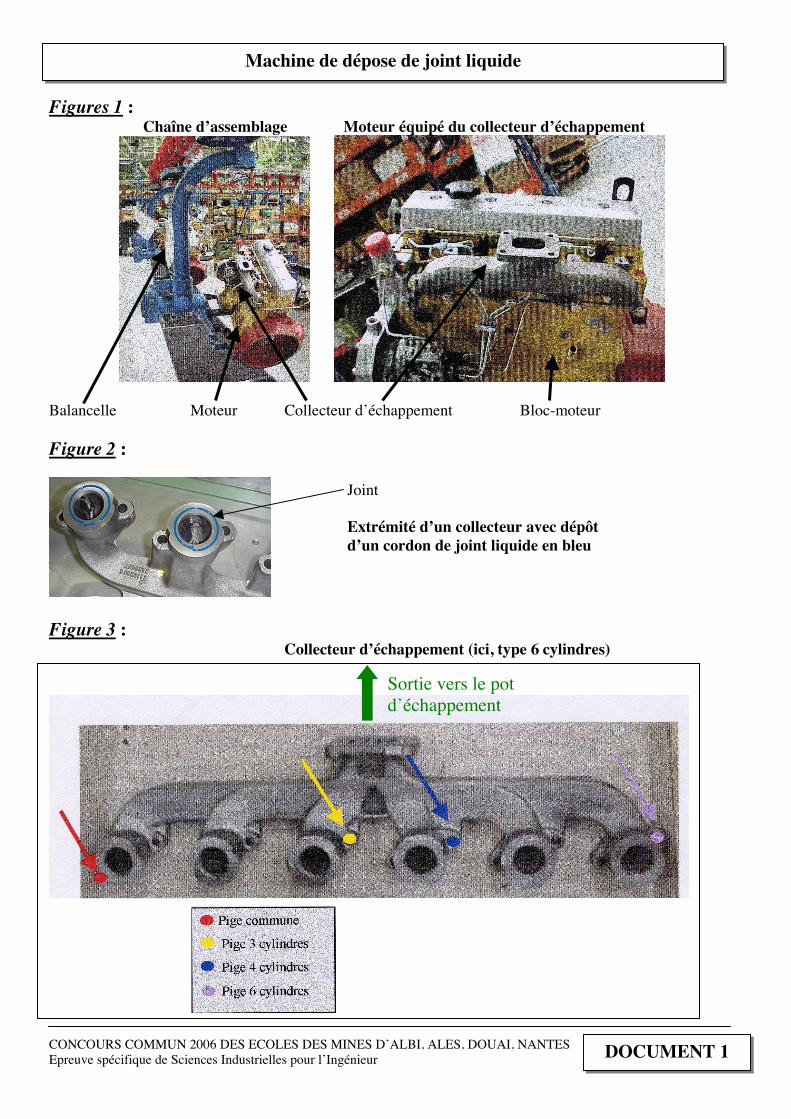
A – PRESENTATION GENERALE A – 1. Mise en situation ( voir DOCUMENT 1 ) La société John Deere conçoit et fabrique du matériel agricole. L’usine, située dans le Loiret, est chargée de la fabrication et du montage des moteurs Diesel de 3, 4, ou 6 cylindres. Les photos (voir figures 1 doc 1) montrent la chaîne d’assemblage des moteurs, ceux-ci étant maintenus sur des balancelles. La pièce qui a pour fonction principale de collecter les gaz d’échappement issus des cylindres pour les envoyer vers le pot d’échappement s’appelle le collecteur d’échappement. Le sujet a pour thème l’étude du poste de dépose du joint liquide sur le collecteur d’échappement du moteur. A – 2. Machine de dépose de joint liquide ( voir DOCUMENTS 1 et 2 ) Initialement, l’étanchéité aux gaz d’échappement entre le moteur et le collecteur d’échappement était réalisée par des joints métalliques. Leur mise en place était compliquée, l’étanchéité n’était pas optimale. C’est pourquoi, après plusieurs essais, la société John Deere a souhaité appliquer un nouveau procédé d’étanchéité réalisé par la dépose d’un joint liquide effectué sur une machine de dépose automatisée. Ces joints sont 10 fois moins onéreux, sont plus efficaces, et nécessitent une moins bonne qualité de surface des zones de contact entre moteur et collecteur.(figure 2 document 1) A – 3. Fonctionnement du poste de dépose de joint liquide : ( DOC 1, 2, 3, 4, 5 ) 1. L’opérateur prend le collecteur (3, 4, ou 6 cylindres) correspondant au moteur arrivé au poste, prend une pige dans le magasin (fig 5 doc 3) et il place une pige de maintien sur le montage en face de chacun des deux trous suivants du collecteur : (voir figure 3 doc 1)
• Une pige commune en face du trou repéré en rouge • Une pige en face du trou correspondant au type de collecteur :
- 3 cylindres : trou repéré en jaune - 4 cylindres : trou repéré en bleu - 6 cylindres : trou repéré en violet
2. L’opérateur fixe le collecteur dans la machine de dépose en le positionnant sur les 2 piges et en le fixant à l’aide du système de maintien, en agissant sur la poignée rouge (côté gauche) ou noire (côté droit) (voir figure 6 doc 3). Cahier des charges n°1 : Collecteur 3 cylindres 3. L’opérateur fait pivoter manuellement la table (fig 4 doc 2 et fig 7 doc 3) pour placer le collecteur coté dépose du joint sous le robot. Une butée réalise la fin de course qui est détectée par un capteur de position (réceptivité :b). Ce capteur déclenche la sortie de tige
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 4/12
d’un vérin d’indexage qui verrouille le plateau (fig 7 doc 3). Un capteur photoélectrique détecte la présence du collecteur du côté dépose (réceptivité : c). (fig 4 doc 2) 4. Le cycle de dépose de joint liquide peut commencer si l’opérateur appuie sur le bouton départ de cycle du robot (réceptivité:dcy), si le vérin d’indexage a sa tige sortie (réceptivité : is) et si le capteur photoélectrique de présence détecte un collecteur d’échappement du côté dépose du joint liquide (réceptivité : c). Alors l’automate programmable gère ce cycle et commande le robot 6 axes. 5. Le robot se déplace vers le premier trou (pige commune rouge et coordonnées connues et identiques quel que soit le type de collecteur) . C’est l’action : déplacer robot trajectoire 1. (voir figures 9 et 10 doc 4) L’extrémité du bras du robot entre dans le premier trou et un capteur de métaux détecte la présence de métal au fond du premier trou (tous les trous sont borgnes). La réceptivité est notée : p (présence de métal). (voir figures 8 doc 3) 6. Si p est vraie, l’extrémité du robot se dirige vers le premier point du cercle à décrire. C’est l’action déplacer robot trajectoire 2. Un capteur de distance situé sur la tête de dépose détecte la surface plane sur laquelle on dépose le joint liquide : sa réceptivité d est vraie si la distance entre la surface de dépose et la buse vaut 1 ± 0,1 mm . Lorsque d est vraie, le cycle de dépose du joint liquide peut commencer : action déplacer robot trajectoire 3. L’automate gère alors les mouvements du robot et l’arrivée du joint par la buse. On n’étudiera pas la commande de cet automate. 7. Au cours de cette étape, la buse dépose le joint autour des 3 premiers trous. La fin de cette opération est signalée par la réceptivité : fin 3 cylindres. Le robot revient alors en position initiale (pi) et la tige du vérin d’indexage est rentrée (ir). L’opérateur dépose le collecteur précédemment muni de joint liquide. Cette étape marque la fin du grafcet donné sur le doc 5 dans le cas d’une série de collecteurs 3 cylindres. Complément au cahier des charges n°1 : 8. Dans le cas d’une dépose de joint liquide sur une série de collecteurs de type 3, 4 ou 6 cylindres, le robot ne revient pas en position initiale à l’étape 8, mais se dirige alors vers le quatrième trou éventuel : c’est l’action déplacer robot trajectoire 4. La fin de cette action est définie par la réceptivité : fin trajectoire 4. Si aucune matière n’est détectée par le capteur de métal ( p ), c’est que l’on est en présence d’un collecteur 3 cylindres. Le robot revient alors en position initiale (pi) et la tige du vérin d’indexage est rentrée (ir). L’opérateur fait pivoter la table manuellement d’un demi-tour, il dépose le collecteur. Comme pour le premier trou, si le capteur détecte la matière au fond du trou, la réceptivité p est vraie. L’extrémité du robot se dirige alors vers le premier point du 4 ème cercle à décrire. C’est l’action déplacer robot trajectoire 5. Lorsque d est vraie, le cycle de dépose du joint liquide peut commencer : action déplacer robot trajectoire 6. L’automate gère alors les mouvements du robot et l’arrivée du joint par la buse.
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 5/12
9. La fin de l’opération précédente est signalée par la réceptivité : fin 4 cylindres. Le robot se dirige alors vers le cinquième trou éventuel: c’est l’action déplacer robot trajectoire 7. La fin de cette action est définie par la réceptivité : fin trajectoire 7. Comme pour le premier trou, si le capteur détecte la matière au fond du trou, la réceptivité p est vraie. L’extrémité du robot se dirige vers le premier point du 5ème cercle à décrire. C’est l’action déplacer robot trajectoire 8. Lorsque d est vraie, le cycle de dépose du joint liquide peut commencer : action déplacer robot trajectoire 9. L’automate gère alors les mouvements du robot et l’arrivée du joint par la buse, et le joint est alors déposé autour des trous 5 et 6. La fin de cette opération est signalée par la réceptivité : fin 6 cylindres . Le robot revient alors en position initiale (pi), la tige du vérin d’indexage est rentrée (ir). L’opérateur fait pivoter la table manuellement d’un demi-tour, il dépose le collecteur.. Si aucune matière n’est détectée par le capteur de métal, c’est que l’on est en présence d’un collecteur 4 cylindres. Le cycle s’arrête alors, Le robot revient alors en position initiale (pi) et la tige du vérin d’indexage est rentrée (ir). L’opérateur dépose le collecteur précédemment muni de joint liquide prêt à être monté sur le moteur. Question A1 : La forme du joint n’est pas parfaitement circulaire, sur les schémas donnés
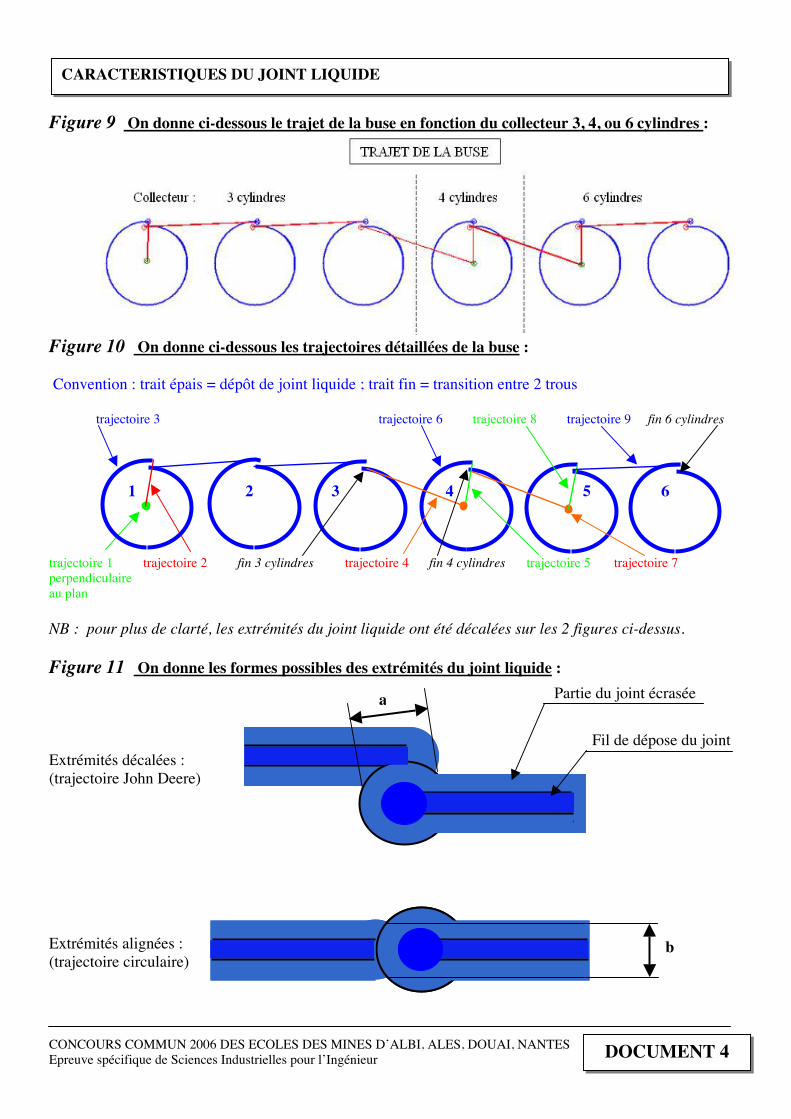
figures 9, 10 et 11 doc 4. Comparer la distance « b » d’une forme circulaire de joint et la distance « a » d’une forme de joint adoptée par John Deere, et comparer les zones de recouvrement du joint : Pour quelle(s) raison(s) donne-t-on au joint cette forme là ? Donner au moins une raison.
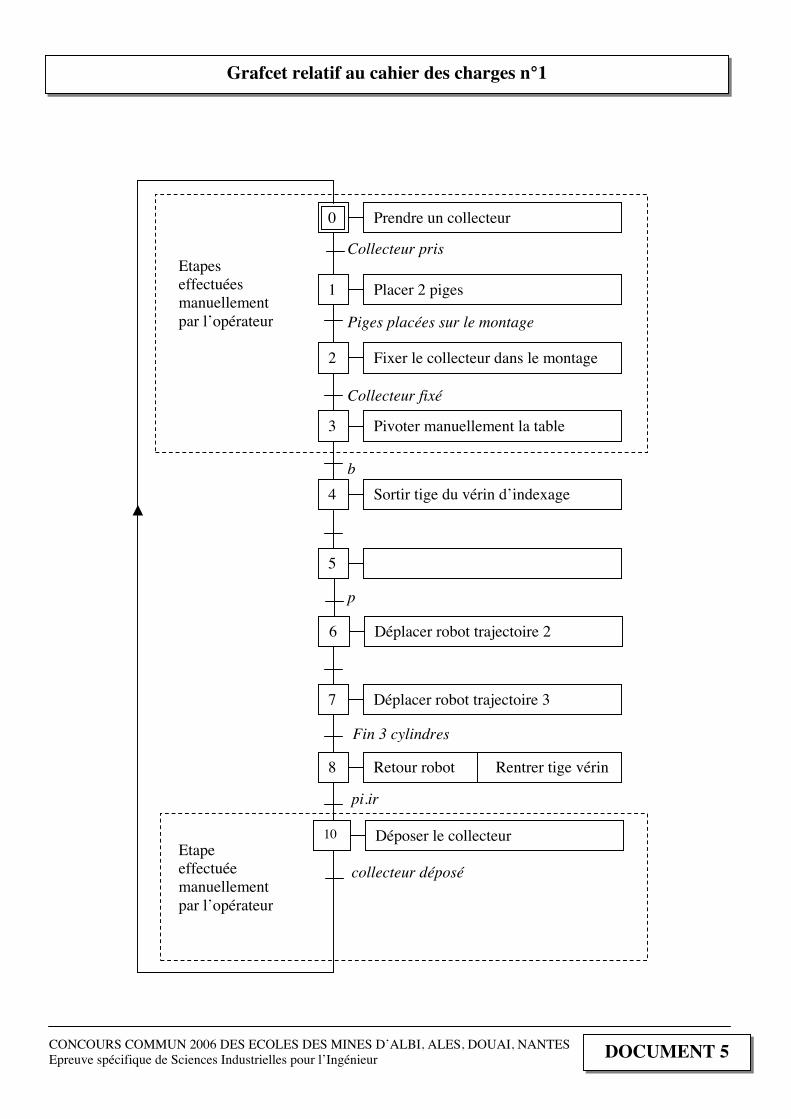
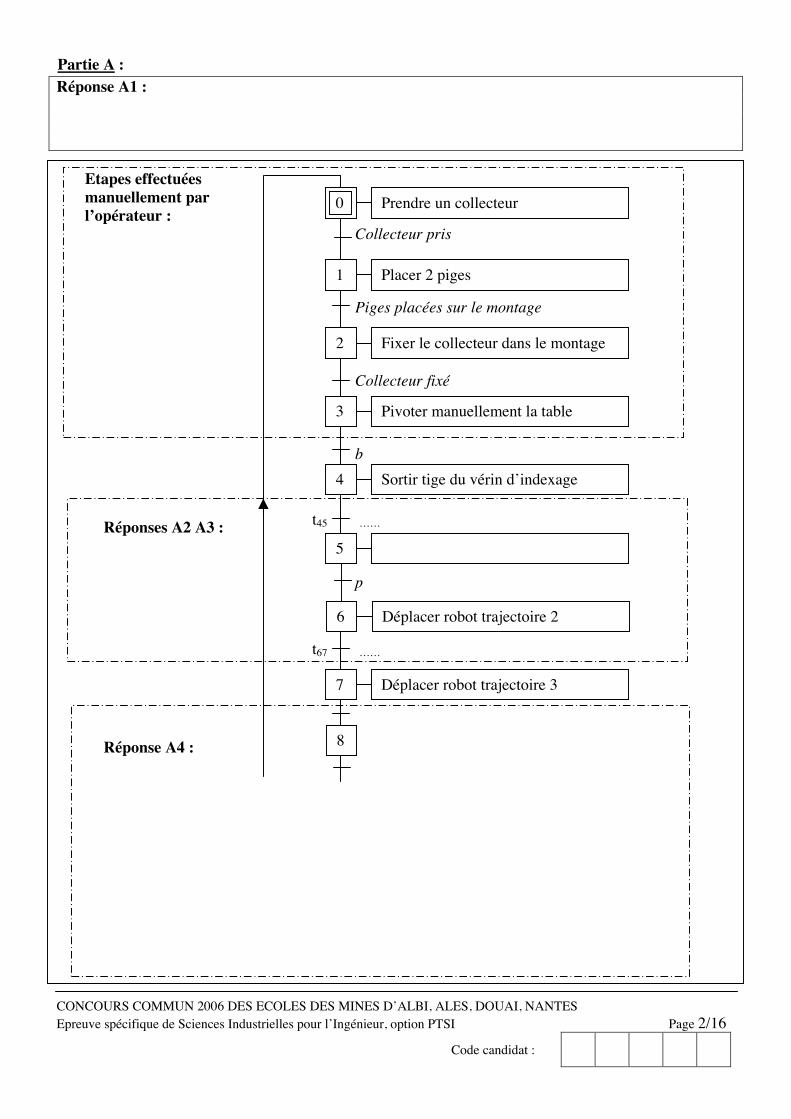
On donne sur le document 5, le grafcet relatif au cahier des charges n°1. Question A2 : Compléter les réceptivités t45 et t67 du grafcet du cahier des charges n°1,
donné sur le document réponse, relatif à la dépose d’un joint liquide sur un collecteur 3 cylindres.
Question A3 : Compléter l’action de l’étape 5. Question A4 : Si le robot revient en position initiale immédiatement après la dépose de
joint liquide, le joint n’a pas le temps de sécher avant le montage du collecteur sur le bloc-moteur, et il s’en suit des problèmes de fiabilité. Modifier le grafcet du cahier des charges n°1 de manière à prendre en compte un temps de séchage du joint liquide de 15 s.
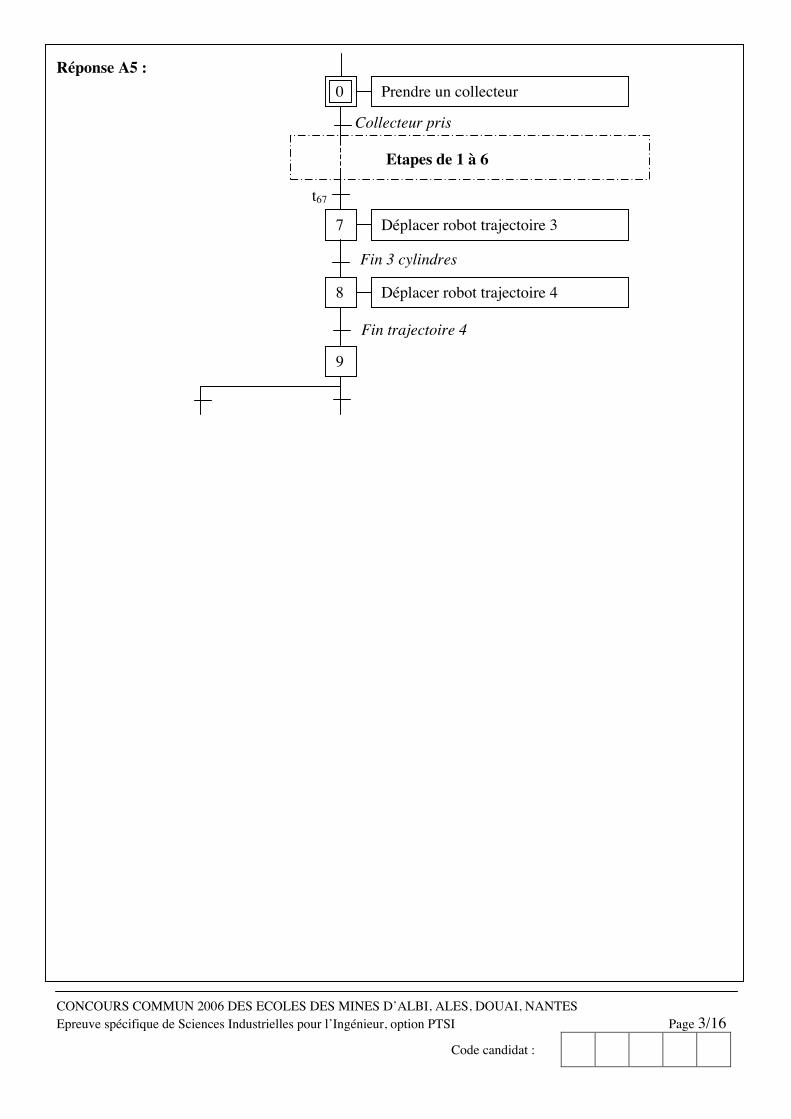
Question A5 : Compléter le grafcet du document réponse de manière à prendre en
compte le fonctionnement relatif à la dépose d’un joint liquide sur des collecteurs de type 3, 4 ou 6 cylindres, en rapport avec le complément au cahier des charges n°1.
Ne pas prendre en compte le séchage du joint liquide. Rappel : on ne s’intéresse pas à la programmation de chaque trajectoire, ni à l’arrivée du
joint liquide.
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 6/12
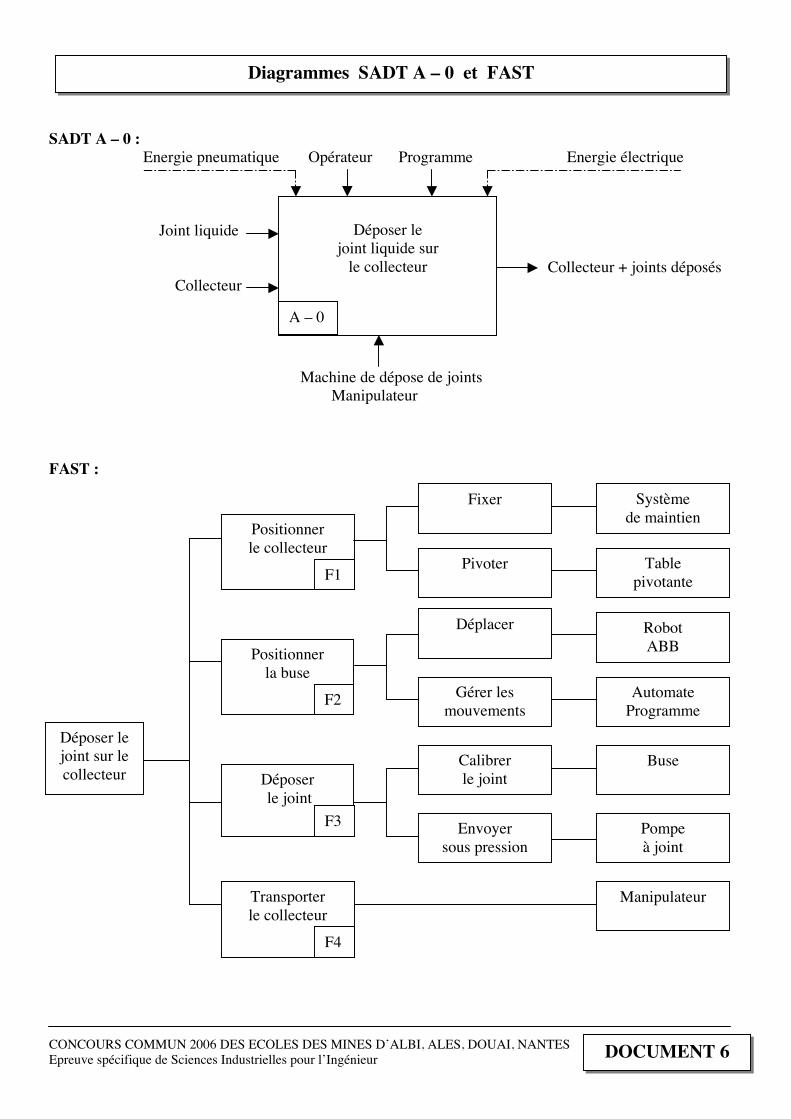
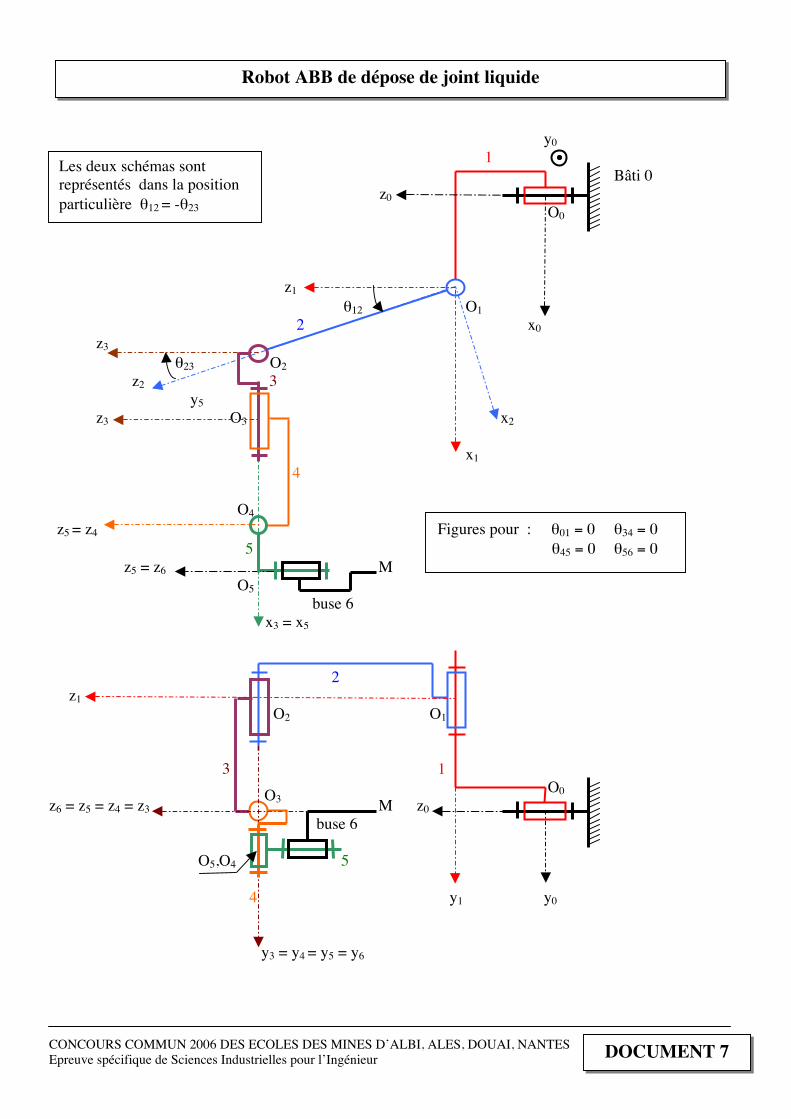
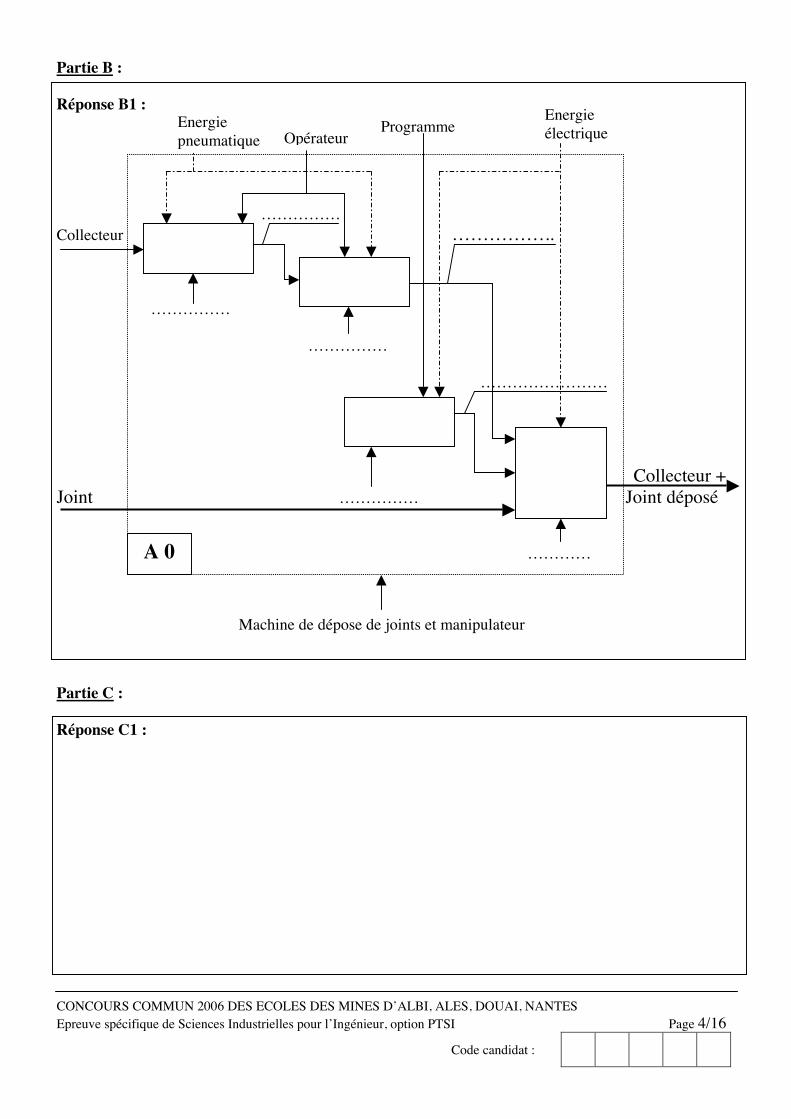
B – ANALYSE DES SYSTEMES ( voir DOCUMENT 6 ) Le DOCUMENT 6 donne les diagrammes SADT A – 0 et FAST de la machine de dépose de joint liquide à laquelle est associée un manipulateur (doc 8). En effet, ce manipulateur aide l’ouvrier à prendre le collecteur (masse de 17 kg), pour placer ou enlever le collecteur de la machine de dépose de joint liquide. Question B1 : Compléter le diagramme SADT A0 du document réponse. C – ANALYSE GEOMETRIQUE DU ROBOT : Fonction F2 ( voir DOCUMENT 7 ) C – 1. Présentation du robot ABB Le robot ABB dont le bras supporte la buse de dépose du joint liquide est représenté sur le
DOCUMENT 7 en 2 vues : • Vue de face. • Vue de dessus.
Dans ces 2 vues, on a représenté le robot avec : θ01 = θ34 = θ45 = θ56 = 0 et θ12 = − θ23 . Question C1 : Effectuer le graphe des liaisons du robot ABB de la pièce 0 à 6. Préciser pourquoi on nomme un tel robot, un robot 6 axes. C – 2. Robot en position « parking »
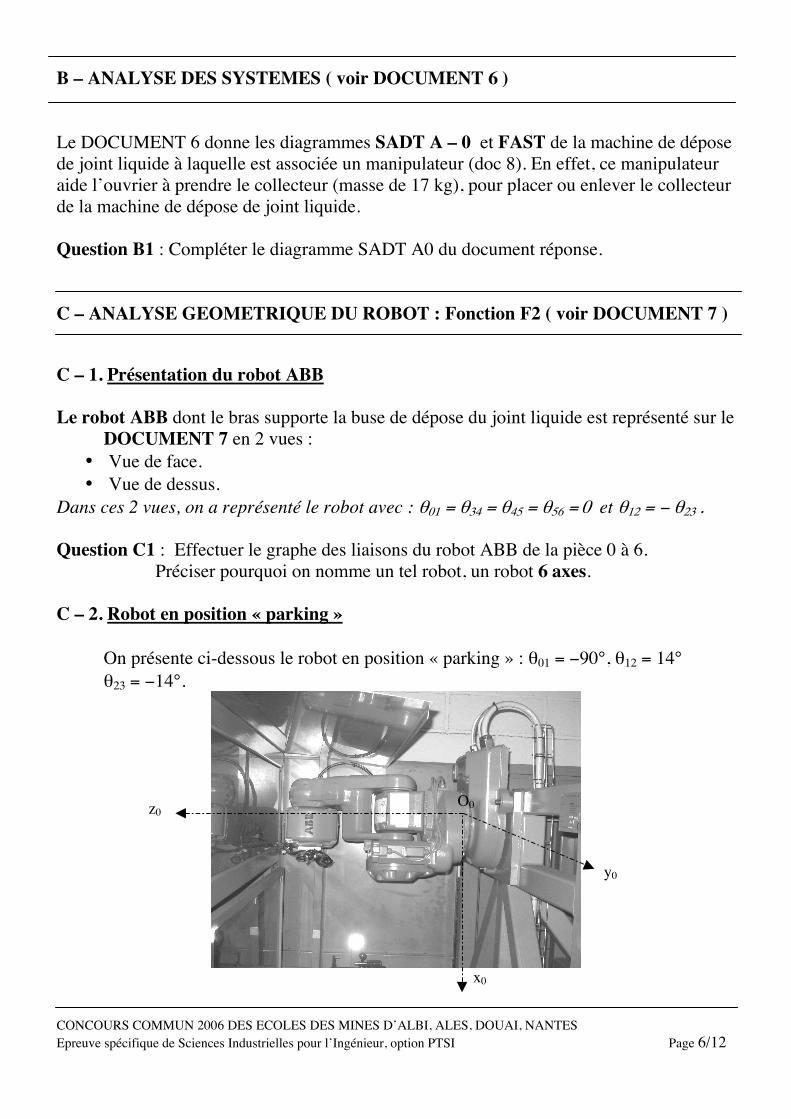
On présente ci-dessous le robot en position « parking » : θ01 = −90°, θ12 = 14°
θ23 = −14°.
x0
y0
z0 O0
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 7/12
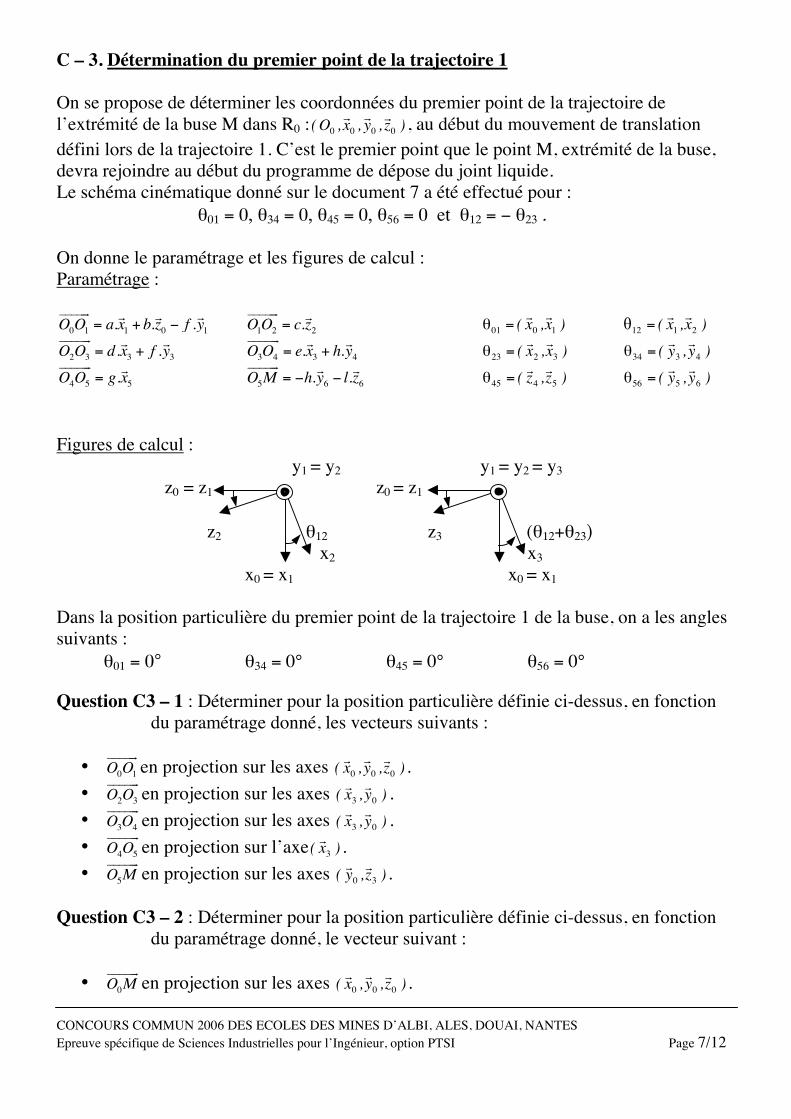
C – 3. Détermination du premier point de la trajectoire 1 On se propose de déterminer les coordonnées du premier point de la trajectoire de l’extrémité de la buse M dans R0 : )z,y,x,O( 0000
rrr , au début du mouvement de translation défini lors de la trajectoire 1. C’est le premier point que le point M, extrémité de la buse, devra rejoindre au début du programme de dépose du joint liquide. Le schéma cinématique donné sur le document 7 a été effectué pour :
θ01 = 0, θ34 = 0, θ45 = 0, θ56 = 0 et θ12 = − θ23 . On donne le paramétrage et les figures de calcul : Paramétrage :
0 1 1 0 1. . .O O a x b z f y= + −uuuuur r rr 1 2 2.O O c z=
uuuuur r )x,x( 1001rr
=θ )x,x( 2112θrr
= 2 3 3 3. .O O d x f y= +
uuuuur r r 3 4 3 4. .O O e x h y= +uuuuur r r )x,x( 3223
rr=θ )y,y( 4334
rr=θ
4 5 5.O O g x=uuuuur r 5 6 6. .O M h y l z= − −
uuuuur r r )z,z( 5445rr
=θ )y,y( 6556rr
=θ Figures de calcul : y1 = y2 y1 = y2 = y3 z0 = z1 z0 = z1 z2 θ12 z3 (θ12+θ23) x2 x3 x0 = x1 x0 = x1 Dans la position particulière du premier point de la trajectoire 1 de la buse, on a les angles suivants :
θ01 = 0° θ34 = 0° θ45 = 0° θ56 = 0° Question C3 – 1 : Déterminer pour la position particulière définie ci-dessus, en fonction
du paramétrage donné, les vecteurs suivants :
• 0 1O Ouuuuur
en projection sur les axes )z,y,x( 000rrr .
• 2 3O Ouuuuur
en projection sur les axes )y,x( 03rr .
• 3 4O Ouuuuur
en projection sur les axes )y,x( 03rr .
• 4 5O Ouuuuur
en projection sur l’axe )x( 3r .
• 5O Muuuuur
en projection sur les axes )z,y( 30rr .
Question C3 – 2 : Déterminer pour la position particulière définie ci-dessus, en fonction
du paramétrage donné, le vecteur suivant :
• 0O Muuuuur
en projection sur les axes )z,y,x( 000rrr .
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 8/12
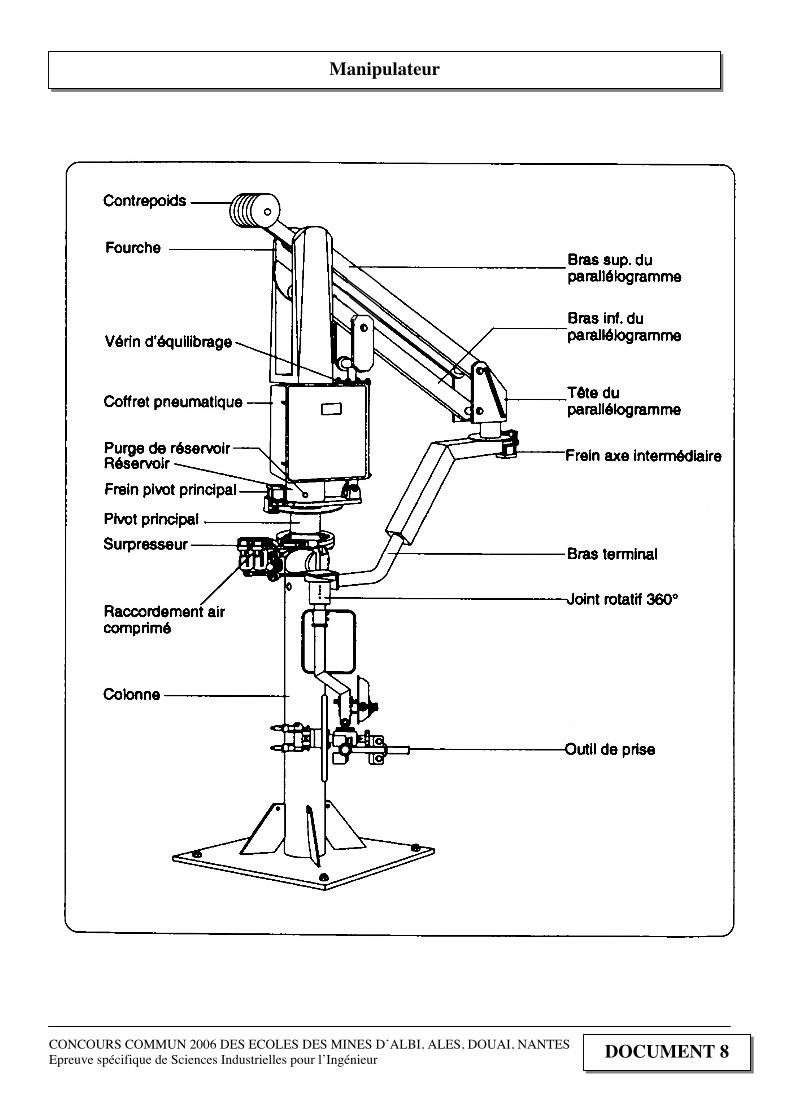
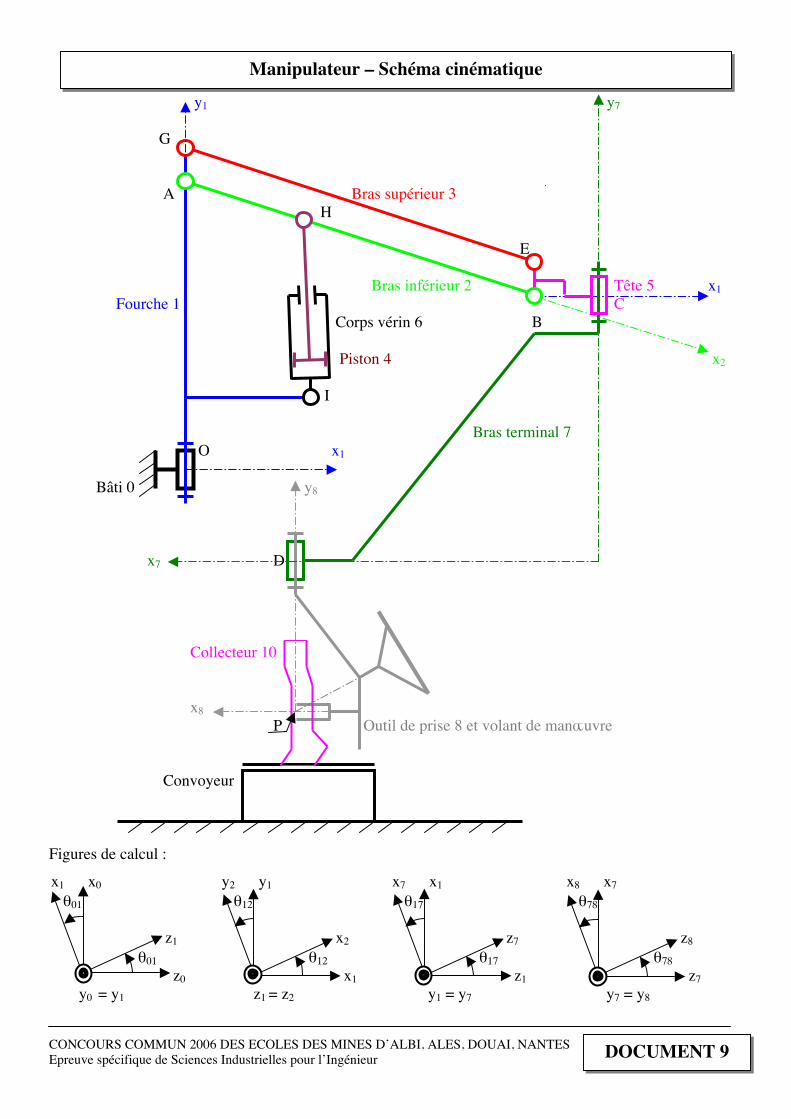
D – ANALYSE CINEMATIQUE DU MANIPULATEUR : Fonction F4 ( voir DOCUMENTS 8 , 9 )
Le manipulateur aide l’ouvrier dans la prise du collecteur (masse de 17 kg pour les collecteurs 6 cylindres). La préhension du collecteur est effectuée par l’outil de prise. Un vérin d’équilibrage alimenté par de l’air comprimé à 0,70 MPa, fournit un effort qui compense le poids du collecteur. L’utilisateur maintient l’outil de prise et peut commander le vérin d’équilibrage, qui n’agit que lors d’un mouvement de montée ou de descente. Les autres mouvements possibles sont assurés manuellement par l’ouvrier. Le DOCUMENT 8 représente un dessin du manipulateur dans une position repliée, lors de la prise de pièce, le collecteur d’échappement étant au départ sur un convoyeur. On se propose d’effectuer une étude cinématique du manipulateur dans cette même position, laquelle est paramétrée sur le schéma cinématique donné DOCUMENT 9. CINEMATIQUE ANALYTIQUE : Notation : On note j/iMV ∈
r le vecteur vitesse d’un point M appartenant à une pièce i en mouvement par
rapport à une pièce j. Paramétrage : voir les figures de calcul sur le document 9.
)x,x( 1001rr
=θ )x,x( 2112θrr
= )x,x( 7117rr
=θ )x,x( 8778rr
=θ
2 2.AB l x=uuur r 5 1.BC l x=
uuur r 7 7 7 7.CD l x h y= −uuur r r 78.PD l y=
uuur r Question D1 : Déterminer 12 /BV ∈
ren fonction de l2 , 12θ& en projection sur )z,y,x( 222
rrr . Question D2 : Au cours du mouvement du manipulateur, BC reste horizontal, orienté selon 1xr . Justifier. Quel est alors le mouvement de 5/1 ? En déduire 17 /CV ∈
r en projection sur )z,y,x( 222
rrr . Question D3 : Déterminer 17 /DV ∈
r en fonction de l2 , l7 , 12θ& , 17θ& en projection sur 2yr et 7zr .
Question D4 : Déterminer 18 /PV ∈
r en fonction de l2 , l7 , 12θ& , 17θ& en projection sur 2yr et 7zr .
Question D5 : Exprimer 08 /PV ∈
ren fonction de 1/8∈PV
r et du vecteur rotation 01 /Ω
r.
Question D6 : Déterminer 08 /PV ∈
r en fonction de l2 , l5 , l7 , 12θ& , 17θ& , 01θ& , 12θ en projection sur
2yr , 1zr , 7zr .
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 9/12
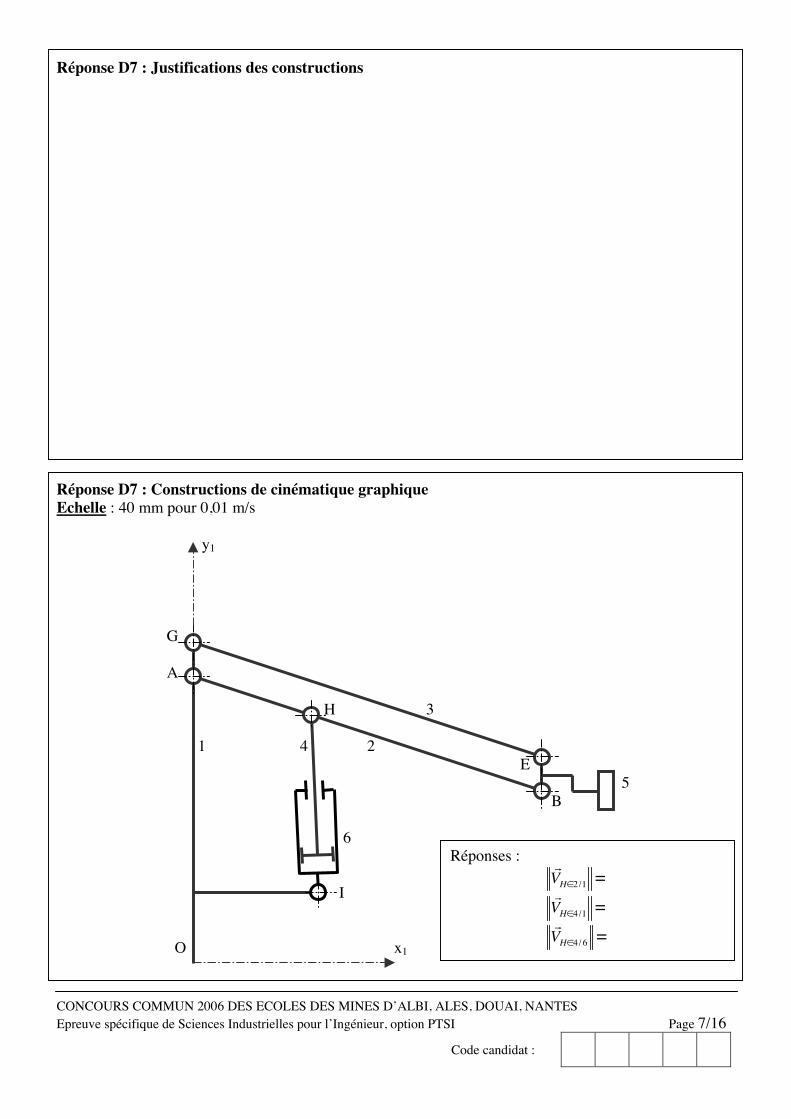
CINEMATIQUE GRAPHIQUE : Hypothèses :
• Le mécanisme est dans la position définie sur le document réponse D7 page 7/16. • Le système est plan dans 1 1( , , )O x yr r . • Echelle pour les vitesses : 4 cm pour 0,01 m/s
Question D7 : On donne 02012 ,V /B =∈
rm/s , on suppose que le collecteur est dans une phase
de montée. Déterminer graphiquement 2/1HV ∈
ren justifiant les tracés dans le cadre réservé,
en déduire 4/1HV ∈
r.
Déterminer les directions de 6/1HV ∈
r et 4/ 6HV ∈
r, en déduire 4/ 6HV ∈
r.
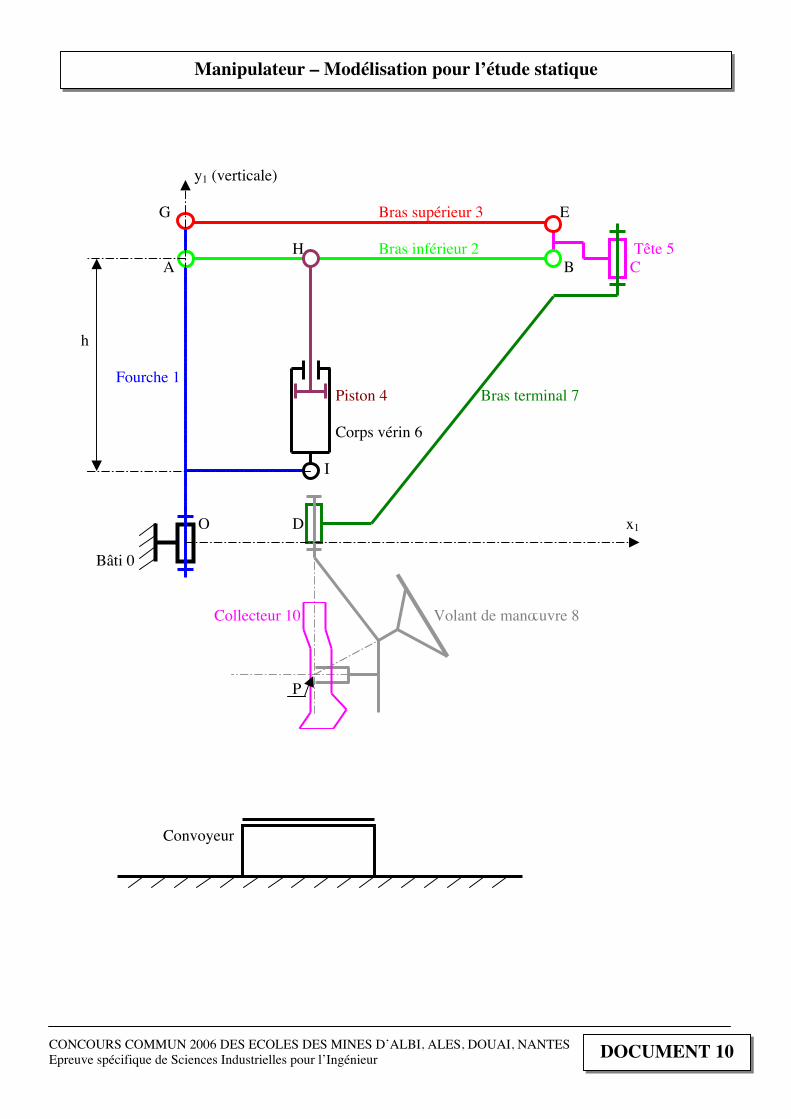
E – ANALYSE STATIQUE DU MANIPULATEUR : Fonction F4 ( voir
DOCUMENTS 8 et 10 ) L’opérateur utilise le manipulateur pour prendre le collecteur sur le convoyeur. Il remonte ensuite le collecteur jusqu’à une position où lui-même est debout. Il pourra ainsi plus facilement faire tourner le collecteur pour le placer sur la machine de dépose de joint liquide. On se place dans cette position stabilisée où le vérin d’équilibrage compense les actions dues au poids du collecteur, juste avant que l’ouvrier ne fasse pivoter le collecteur. Cette position particulière du manipulateur est telle que les bras 2 et 3 soient horizontaux. Hypothèses : Système simplifié.
• Les bras 2 et 3 sont horizontaux. Le vérin 4-6 est vertical. • Les liaisons sont parfaites. • Les poids des différents bras sont négligeables devant celui du collecteur 10. • Pour cette étude statique, on utilisera donc la modélisation donnée sur le
DOCUMENT 10. • L’ensemble du manipulateur est en équilibre, et l’opérateur n’agit pas sur le volant
de manœuvre. • Le collecteur a un centre de gravité placé au point P. On notera 10P
r le poids du
collecteur 10. On prendra : g = 10 m.s-2 . • Le problème est plan, dans le plan )y,x( 11
rr de la figure du document 10. Le torseur des actions mécaniques en M d’une pièce i sur une pièce j en projection dans le
repère )z,y,x( 111rrr sera noté : { }
)z,y,x,M(ji
ji
ji
Mji
NYX
111rrr
−
−
−
=
→
→
→
→F

CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 10/12
But de l’étude statique : Déterminer graphiquement l’effort dans le vérin d’équilibrage pour une masse transportée de 17 kg.
Question E1 : Connaissant la masse du collecteur transporté soit 17 kg, on voudrait
déterminer l’effort 4 2H →
r , action du piston 4 sur le bras inférieur 2 appliquée
au point H. Donner l’ordre d’isolement des solides ou des systèmes de solides et la méthode graphique pour obtenir 4 2H →
r. En déduire le support
des efforts 4 2H →
r , 35→E
r.
Question E2 : On isole {4, 6}. Par le calcul, en utilisant l’outil torseur, en posant IH = h ,
en précisant le principe utilisé, déterminer la forme du torseur statique en H des actions de 4 sur 2 en fonction de 24→Y .
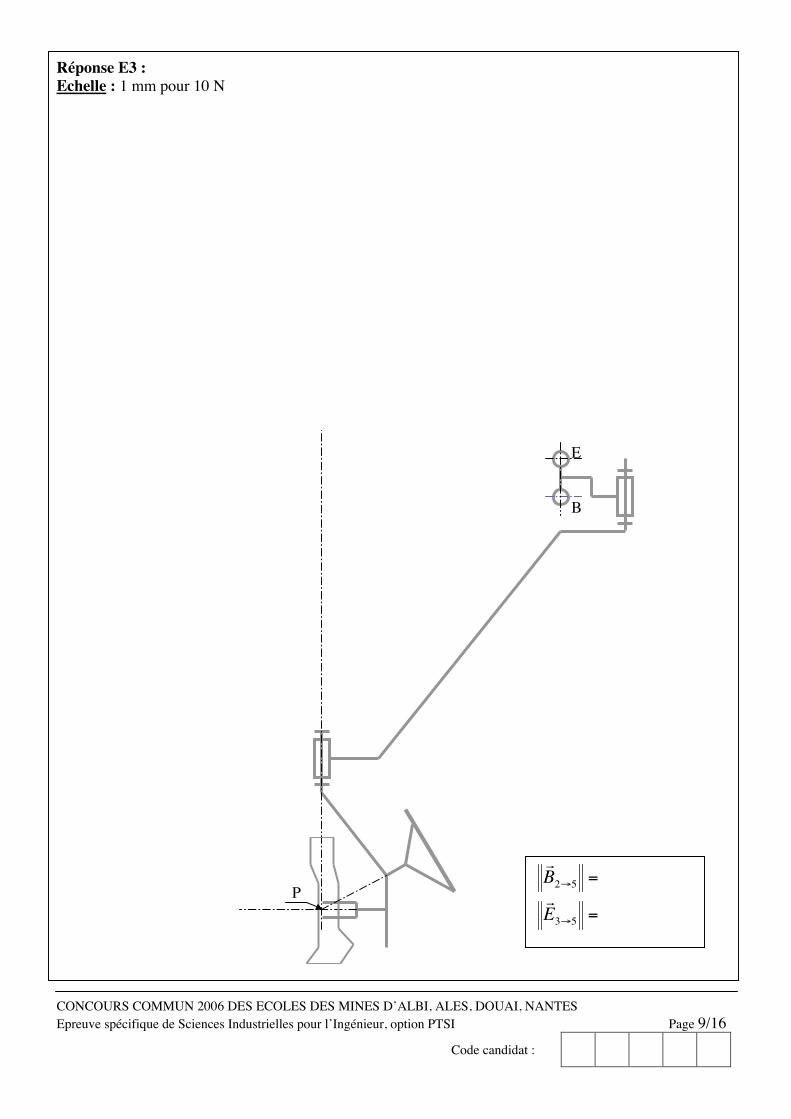
Question E3 : On isole {5, 7, 8, 10} . Déterminer graphiquement sur le document
réponse les actions mécaniques 53→Er
et 52→Br
. Echelle : 1 mm pour 10 N. Question E4 : On isole {2}. Pour éviter les éventuelles erreurs dues à l’imprécision d’une
méthode graphique, on préfère dans cette question utiliser une méthode analytique.
Une étude expérimentale a donné le torseur : { }
)z,y,x,A(
A YX
1110
21
21
21
rrr
−
−
−
= →
→
→F
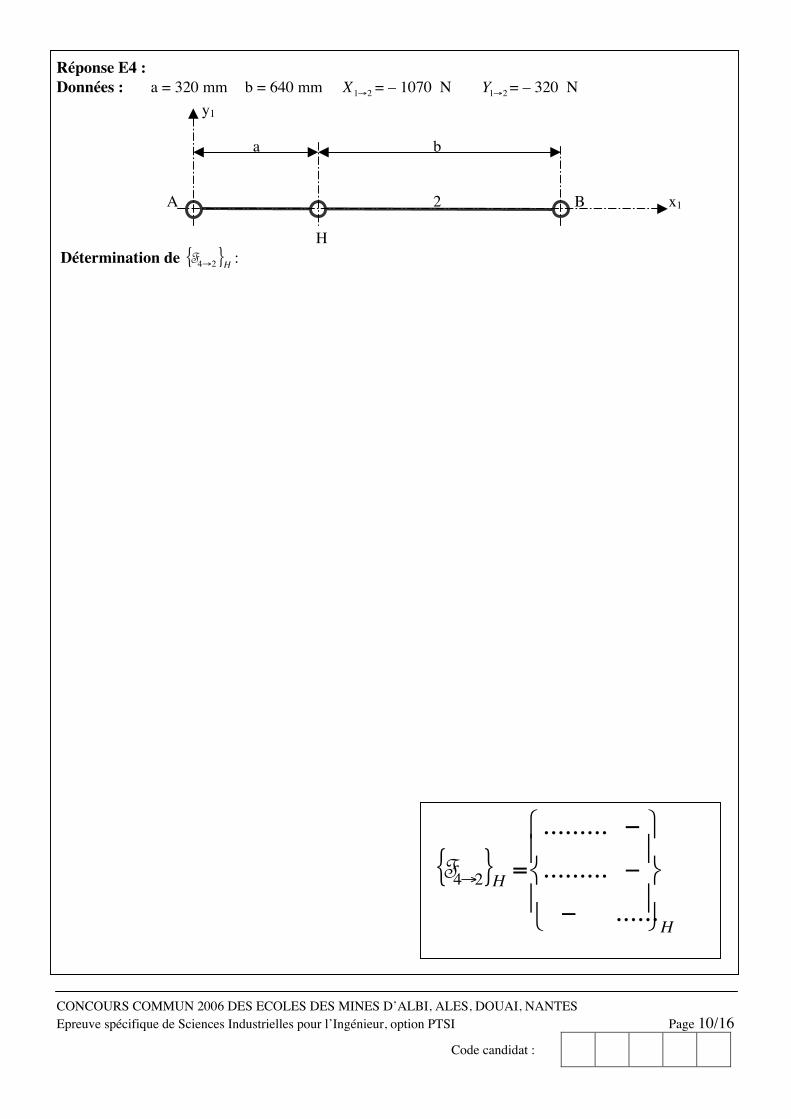
Les relevés donnent : 12112121 y.Yx.XR rrr→→→ += avec 21→X = – 1070 N et 21→Y = – 320 N
Déterminer par le calcul sur le document réponse le torseur des actions de 4 sur 2 au point H noté { }H24→F en fonction des longueurs a , b et de 21→Y .
Question E5 : Application numérique : a = 320 mm b = 640 mm. Calculer 24→Hr
. Question E6 : Le cahier des charges stipule que la charge maxi transportable avec le
manipulateur est de 70 kg. On considère que l’on a alors : 4 2H → =r
2100 N . Quelle doit être la section mini du vérin en mm² si l’alimentation en air comprimé est de 0,7 Mpa ?
Donner alors un ordre de grandeur du diamètre d du piston du vérin. piston 4 Pression négligée dans cette chambre d Pression d’air comprimé = 0,7 Mpa Corps vérin 6
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 11/12
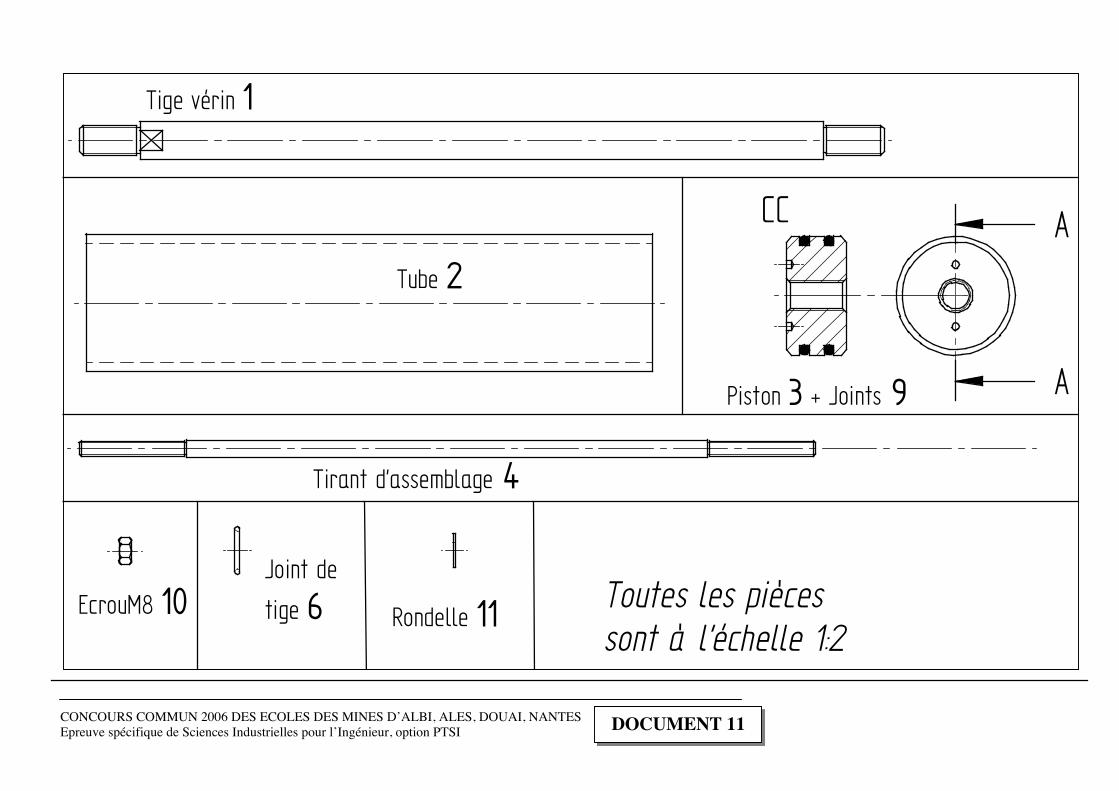
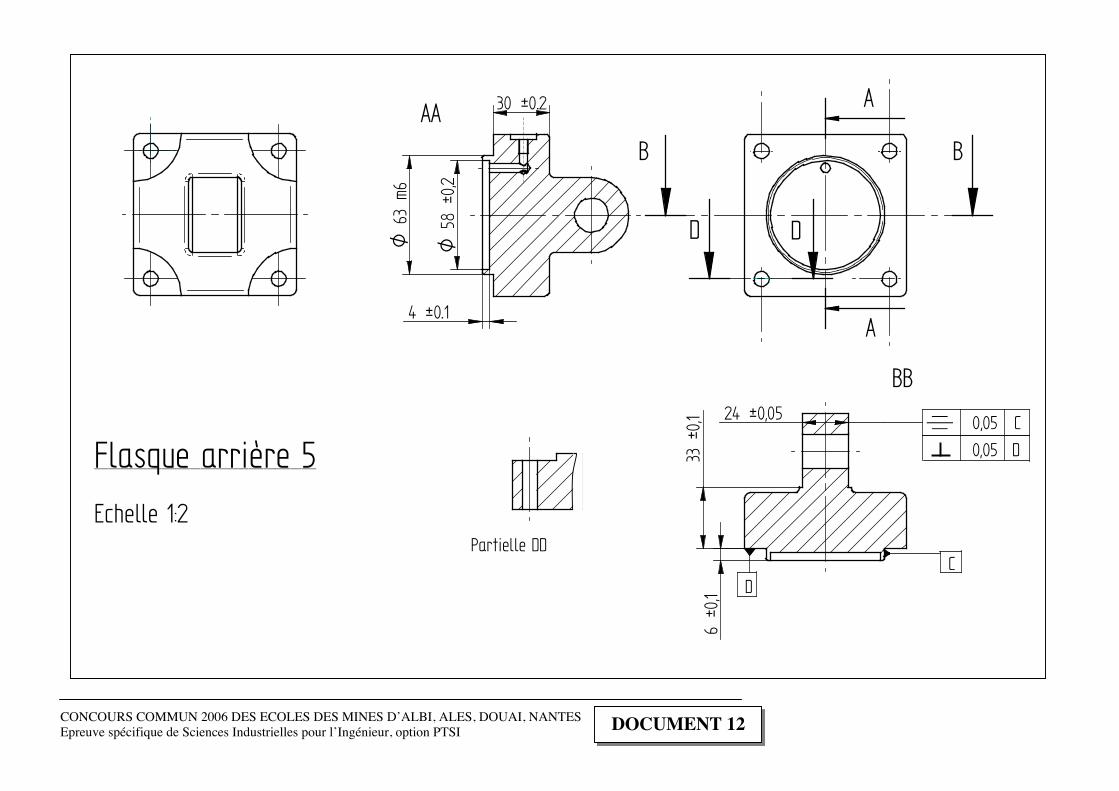
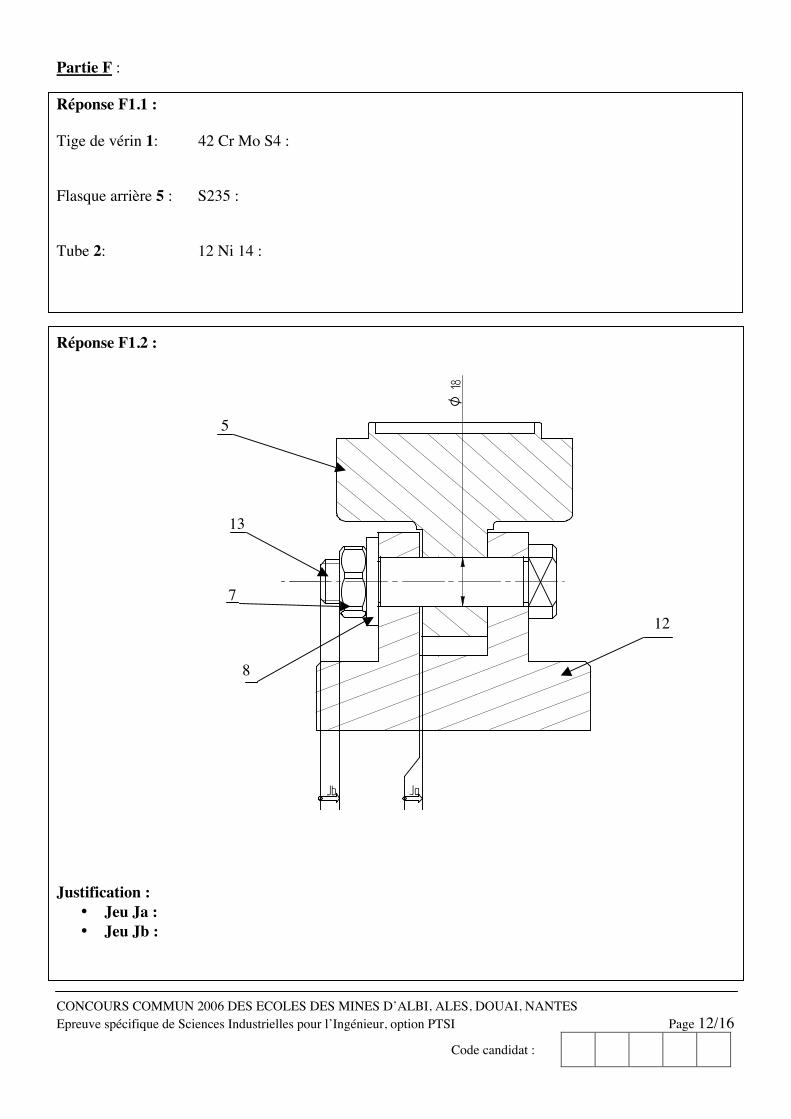
F – ETUDE DE CONCEPTION ET DE FABRICATION. Le vérin d’équilibrage est un vérin pneumatique. Il est composé de deux flasques (avant 6 et arrière 5), d’une tige 1 vissée sur le piston 3 qui glisse à l’intérieur du tube 2. Le tout est maintenu serré par quatre tirants d’assemblages 4 avec écrous 10 et rondelles plates 11. F.1 Etude technologique On donne les différentes pièces du vérin d’équilibrage (DOCUMENT 11 et 12) sauf le flasque avant 6 à concevoir (question F2). Question F1.1 : Préciser la signification des abréviations matière pour les trois pièces suivantes :
• la tige vérin 1 : 42 Cr Mo S4 • le flasque arrière 5 : S235 • le tube 2 : 12 Ni 14
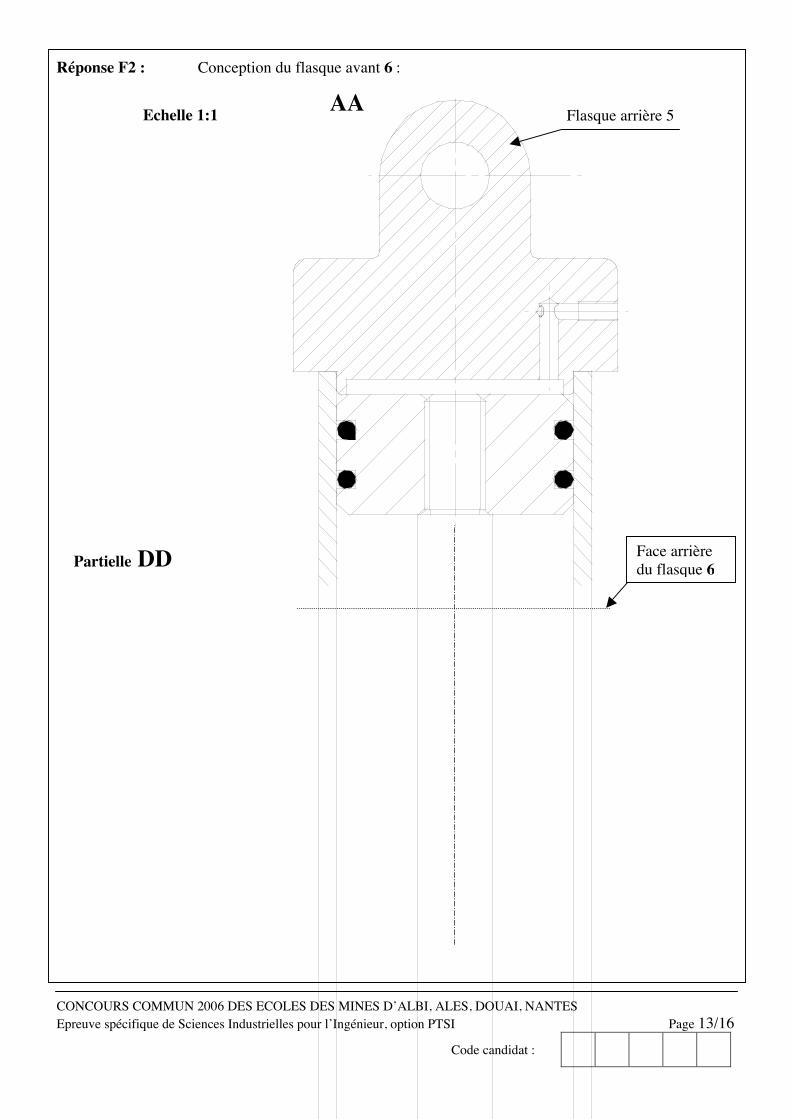
Question F1.2 : Le flasque arrière 5 est guidé sur le bâti du manipulateur par l’intermédiaire d’un étrier 12 (voir doc réponse page 12). Justifier les jeux JA et JB . Proposer un ajustement sur le diamètre 18 entre l’axe 13 et le flasque arrière 5. F.2 Etude de conception Question F2 : Concevoir le flasque avant 6 du vérin pneumatique, à l’échelle 1:1, en respectant les consignes suivantes :
• S’inspirer du flasque arrière 5 pour les épaisseurs. • Le brut de cette pièce est moulé. • Le guidage de la tige aura une longueur mini égale à 2 fois son diamètre. • Un joint de tige 6 sera monté pour assurer l’étanchéité entre la tige 1 et le flasque 6. • Prévoir l’orifice d’alimentation en air. • Ne représenter qu’un seul tirant 4 en coupe partielle DD. • Ne pas représenter les arêtes cachées.
F.3 Etude de fabrication On donne le dessin de définition du flasque arrière 5 (DOCUMENT 12). Question F3.1 : Que représente le symbole
0,05 C
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 12/12
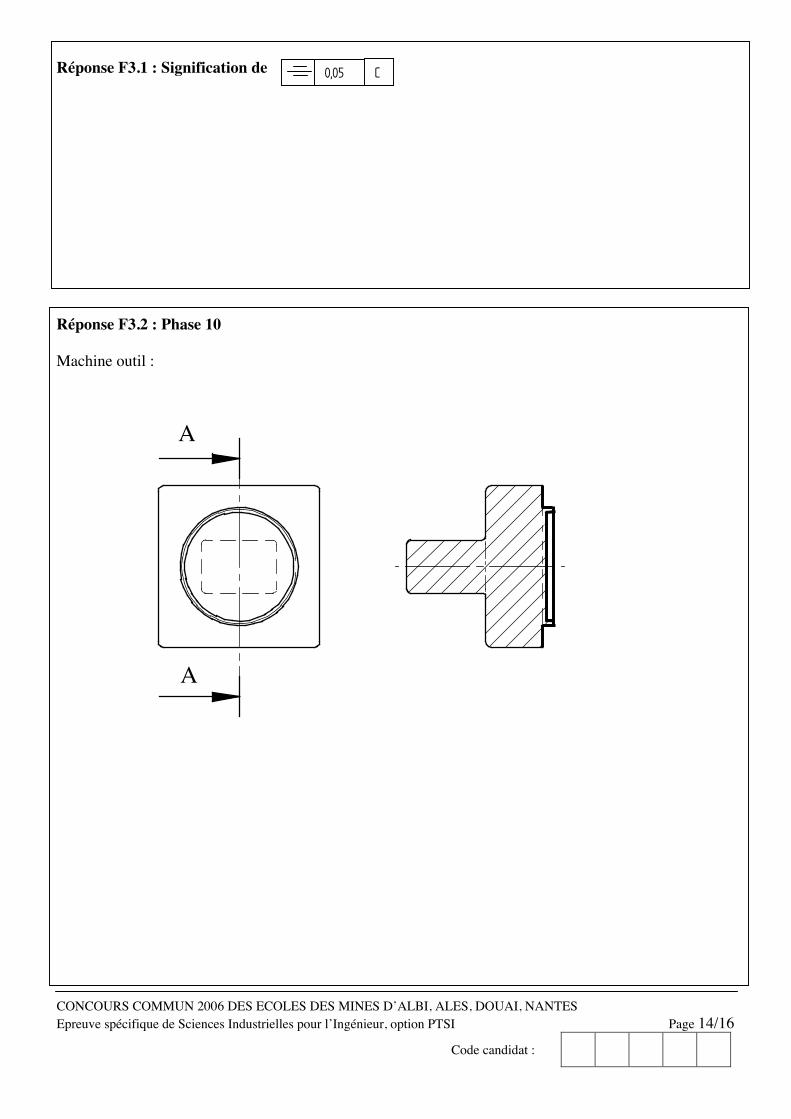
Contrat de phases d’usinage : Question F3.2 : Phase 10 : Pour les surfaces repérées sur le flasque arrière en traits forts (doc réponse page 14) :
• proposer une machine outil • mettre en place les symboles de mise en position géométrique pour la pièce à
usiner. • proposer un outil d’usinage (dessiner l’outil en position de travail) • donner les cotes fonctionnelles réalisées.
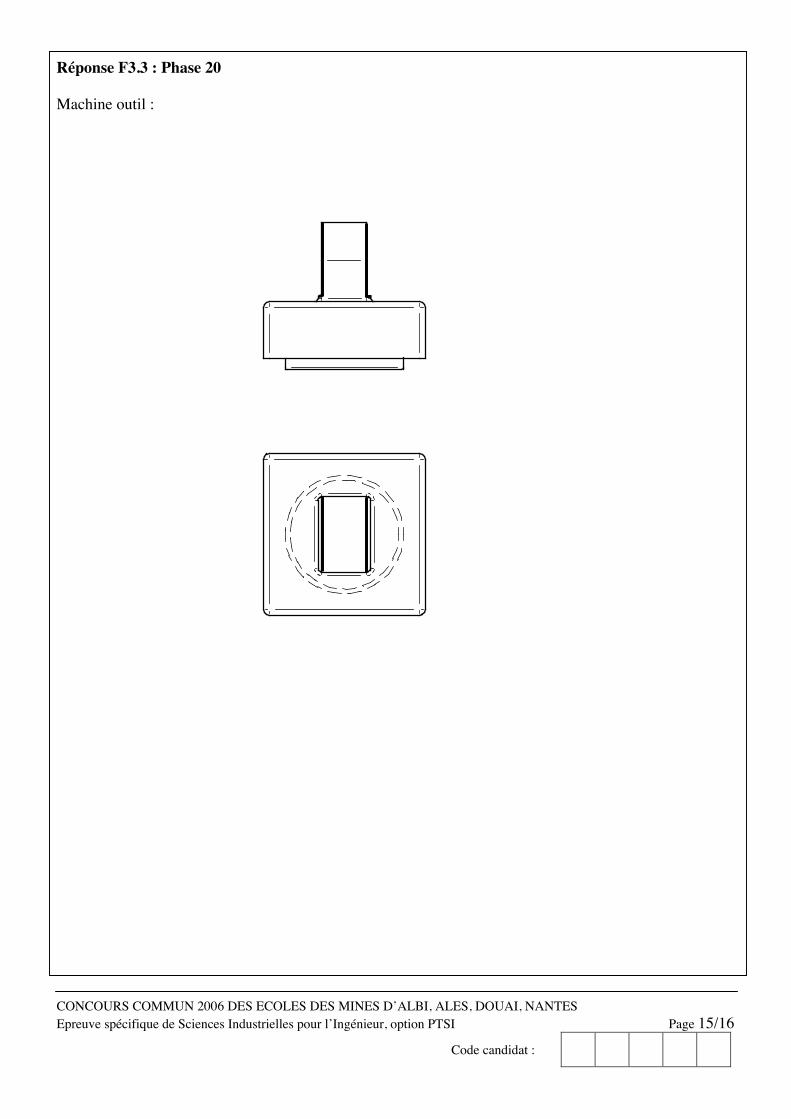
Question F3.3 : Phase 20 : Pour les surfaces repérées sur le flasque arrière en traits forts (doc réponse page 15) :
• proposer une machine outil • mettre en place les symboles de mise en position géométrique pour la pièce à
usiner. • proposer un outil d’usinage (dessiner l’outil en position de travail) • donner les cotes fonctionnelles réalisées.
Définition du brut : Question F3.4 : Dessiner à main levé le brut du flasque arrière 5 et son moule. Le tracé de l’angle de dépouille sera exagéré, le plan de joint sera bien spécifié et les deux parties du moule seront coloriées différemment.
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur DOCUMENT 1
Figures 1 :
Chaîne d’assemblage Moteur équipé du collecteur d’échappement
Balancelle Moteur Collecteur d’échappement Bloc-moteur Figure 2 :
Figure 3 : Collecteur d’échappement (ici, type 6 cylindres)
Machine de dépose de joint liquide
Joint Extrémité d’un collecteur avec dépôt d’un cordon de joint liquide en bleu
Sortie vers le pot d’échappement
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur DOCUMENT 2
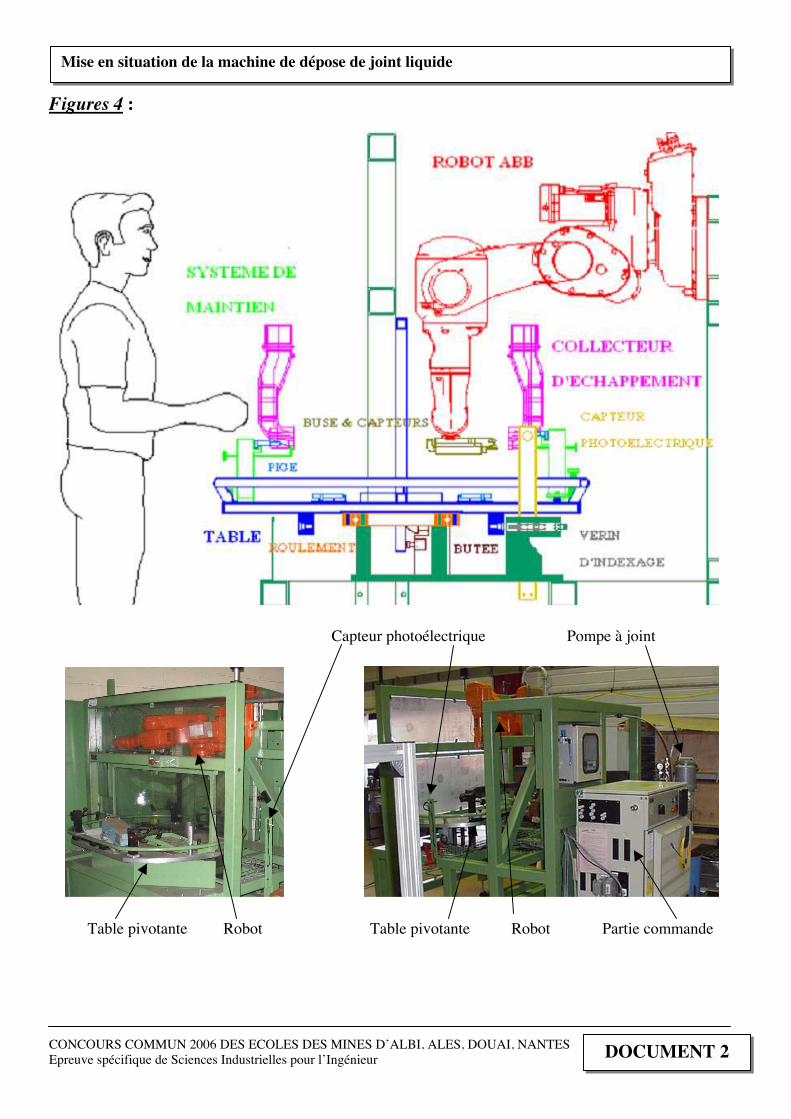
Figures 4 :
Capteur photoélectrique Pompe à joint
Mise en situation de la machine de dépose de joint liquide
Table pivotante Robot Table pivotante Robot Partie commande
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur DOCUMENT 3
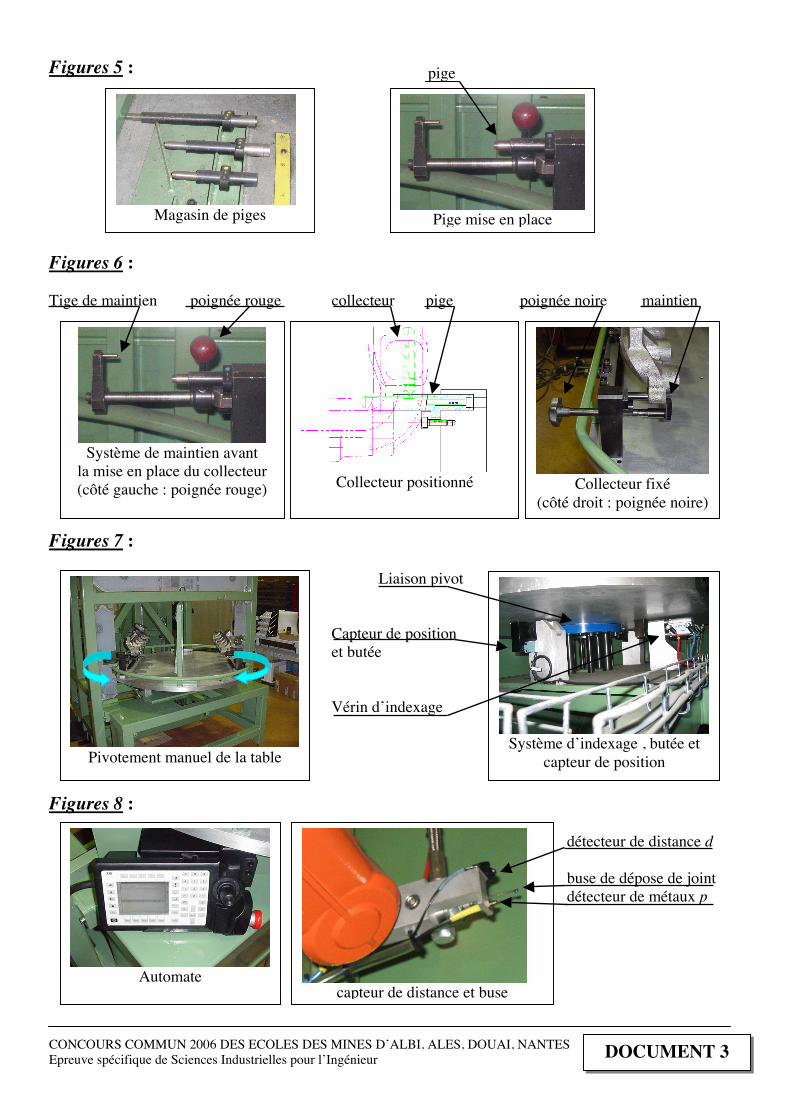
Figures 5 :
Figures 6 : Tige de maintien poignée rouge collecteur pige poignée noire maintien
Figures 7 : Liaison pivot Capteur de position et butée Vérin d’indexage Figures 8 : détecteur de distance d buse de dépose de joint détecteur de métaux p
Magasin de piges Pige mise en place
pige
Système de maintien avant
la mise en place du collecteur (côté gauche : poignée rouge)
Collecteur positionné Collecteur fixé
(côté droit : poignée noire)
Pivotement manuel de la table
Système d’indexage , butée et
capteur de position
Automate capteur de distance et buse
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur DOCUMENT 4
Figure 9 On donne ci-dessous le trajet de la buse en fonction du collecteur 3, 4, ou 6 cylindres :
Figure 10 On donne ci-dessous les trajectoires détaillées de la buse : Convention : trait épais = dépôt de joint liquide ; trait fin = transition entre 2 trous trajectoire 3 trajectoire 6 trajectoire 8 trajectoire 9 fin 6 cylindres
1 2 3 4 5 6 trajectoire 1 trajectoire 2 fin 3 cylindres trajectoire 4 fin 4 cylindres trajectoire 5 trajectoire 7 perpendiculaire au plan NB : pour plus de clarté, les extrémités du joint liquide ont été décalées sur les 2 figures ci-dessus. Figure 11 On donne les formes possibles des extrémités du joint liquide : Extrémités décalées : (trajectoire John Deere) Extrémités alignées : (trajectoire circulaire)
CARACTERISTIQUES DU JOINT LIQUIDE
a
b
Partie du joint écrasée
Fil de dépose du joint
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur DOCUMENT 5
Collecteur pris Piges placées sur le montage Collecteur fixé b p pi.ir collecteur déposé
Prendre un collecteur 0
Placer 2 piges 1
Fixer le collecteur dans le montage 2
Pivoter manuellement la table 3
Sortir tige du vérin d’indexage 4
Grafcet relatif au cahier des charges n°1
5
Déplacer robot trajectoire 2 6
Déplacer robot trajectoire 3 7
Retour robot Rentrer tige vérin 8
Fin 3 cylindres
Etapes effectuées manuellement par l’opérateur
Déposer le collecteur 10 Etape effectuée manuellement par l’opérateur
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur DOCUMENT 6
SADT A – 0 : Energie pneumatique Opérateur Programme Energie électrique Joint liquide Collecteur + joints déposés Collecteur Machine de dépose de joints Manipulateur FAST :
Diagrammes SADT A – 0 et FAST
Déposer le
joint liquide sur le collecteur
A – 0
Déposer le joint sur le collecteur
Positionner le collecteur
Positionner la buse
Déposer le joint
Transporter le collecteur
Pivoter
Fixer
Déplacer
Gérer les mouvements
Calibrer le joint
Envoyer sous pression
Pompe à joint
Buse
Automate Programme
Robot ABB
Table pivotante
Système de maintien
Manipulateur
F1
F2
F3
F4
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur DOCUMENT 7
y0 1 Bâti 0 z0 O0 z1 θ12 O1 2 x0 z3 θ23 O2 z2 3 y5 z3 O3 x2 x1 4 O4 z5 = z4 Figures pour : θ01 = 0 θ34 = 0 5 θ45 = 0 θ56 = 0 z5 = z6 M O5 buse 6 x3 = x5 2 z1 O2 O1 3 1 O0 z6 = z5 = z4 = z3 M z0 buse 6 O5,O4 5
4 y1 y0 y3 = y4 = y5 = y6
Robot ABB de dépose de joint liquide
Les deux schémas sont représentés dans la position particulière θ12 = -θ23
O3
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur DOCUMENT 8
Manipulateur
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur DOCUMENT 9
y1 y7 G A Bras supérieur 3 H E Bras inférieur 2 Tête 5 x1
Fourche 1 C Corps vérin 6 B Piston 4 x2 I Bras terminal 7 O x1 Bâti 0 y8 x7 D Collecteur 10 x8 P Outil de prise 8 et volant de manœuvre Convoyeur Figures de calcul :
Manipulateur – Schéma cinématique
x1 x0 θ01
z1 θ01
z0 y0 = y1
y2 y1 θ12
x2 θ12
x1 z1 = z2
x7 x1 θ17
z7 θ17
z1 y1 = y7
x8 x7 θ78
z8 θ78
z7 y7 = y8
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur DOCUMENT 10
y1 (verticale) G Bras supérieur 3 E H Bras inférieur 2 Tête 5 A B C h
Fourche 1 Piston 4 Bras terminal 7 Corps vérin 6 I O D x1 Bâti 0 Collecteur 10 Volant de manœuvre 8 P Convoyeur
Manipulateur – Modélisation pour l’étude statique
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI DOCUMENT 11
Tige vérin 1
Tirant d'assemblage 4
EcrouM8 10
Tube 2
Piston 3 + Joints 9
Toutes les piècessont à l'échelle 1:2
Joint de
tige 6
CC
Rondelle 11
A
A
Pièces désasemblées
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI DOCUMENT 12
63O
m6
4 u0.1
30 u0.2
24 u0,05
33u0
,1
Partielle DD
Flasque arrière 5
Echelle 1:2
D D
B B
A
A
d 0,05 C
DC
AA
BB
0,05 D
6u0
,1
58O
u0,2
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 1/16
Code candidat :
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES
DOCUMENT REPONSE
Attention : Vous devez impérativement inscrire votre code candidat sur chaque page du document
réponse. En fin d’épreuve, vous ne devez rendre que le document réponse sur lequel vous aurez collé l’étiquette correspondante.
Instructions particulières : Il est fortement conseillé au candidat de lire la totalité du sujet avant de composer. Toutes les parties sont indépendantes ( elles peuvent être traitées dans n’importe quel ordre ). La répartition du temps à consacrer à chaque partie est environ la suivante :
• Lecture du sujet : 20 mn • Partie A : 40 mn • Partie B : 20 mn • Partie C : 40 mn • Partie D : 40 mn • Partie E : 40 mn • Partie F : 40 mm
AUCUN DOCUMENT N’EST AUTORISE
Epreuve spécifique de Sciences Industrielles pour l’Ingénieur
Filière PTSI
Vendredi 12 mai 2006 de 8h00 à 12h00
Coller ici l’étiquette correspondant à l’épreuve spécifique
Compléter de plus en bas de chaque page, la rubrique code candidat
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 2/16
Code candidat :
Réponse A1 :
Etapes effectuées manuellement par l’opérateur :
Collecteur pris Piges placées sur le montage Collecteur fixé b
Réponses A2 A3 : p
Réponse A4 :
Prendre un collecteur 0
Placer 2 piges 1
Fixer le collecteur dans le montage 2
Pivoter manuellement la table 3
Sortir tige du vérin d’indexage 4
5
Déplacer robot trajectoire 2 6
Déplacer robot trajectoire 3 7
8
t45 ……
t67 ……
Partie A :
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 3/16
Code candidat :
Réponse A5 : Collecteur pris Etapes de 1 à 6 t67
Prendre un collecteur 0
Déplacer robot trajectoire 3 7
Déplacer robot trajectoire 4 8
Fin 3 cylindres
Fin trajectoire 4
9
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 4/16
Code candidat :
Partie B : Réponse B1 :
…………… Collecteur …………….. …………… …………… …………………… Collecteur + Joint …………… Joint déposé
…………
Partie C : Réponse C1 :
A 0
Energie pneumatique Opérateur
Energie électrique
Machine de dépose de joints et manipulateur
Programme
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 5/16
Code candidat :
Réponse C3 – 1 : Réponse C3 – 2 : Partie D : Réponse D1 : Réponse D2 :
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 6/16
Code candidat :
Réponse D3 : Réponse D4 : Réponse D5 : Réponse D6 :
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 7/16
Code candidat :
Réponse D7 : Justifications des constructions Réponse D7 : Constructions de cinématique graphique Echelle : 40 mm pour 0,01 m/s y1 G A H 3 1 4 2 E 5 B 6 I O x1
Réponses : 2 /1HV ∈
r=
4/1HV ∈
r=
4/ 6HV ∈
r=
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 8/16
Code candidat :
Partie E : Réponse E1 : Réponse E2 :
{ }
H
H
..................
−
−
−
=→24F
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 9/16
Code candidat :
Réponse E3 : Echelle : 1 mm pour 10 N E B P
=
=
→
→
53
52
E
Br
r
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 10/16
Code candidat :
Réponse E4 : Données : a = 320 mm b = 640 mm 21→X = – 1070 N 21→Y = – 320 N y1 a b
A 2 B x1 H Détermination de { }H24→F :
{ }
H
H
........................
−
−
−
=→24F
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 11/16
Code candidat :
Réponse E5 : Réponse E6 :
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 12/16
Code candidat :
Partie F : Réponse F1.1 : Tige de vérin 1: 42 Cr Mo S4 : Flasque arrière 5 : S235 : Tube 2: 12 Ni 14 : Réponse F1.2 :
Jb Ja
18O
Justification :
• Jeu Ja : • Jeu Jb :
5
13
7
8
12
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 13/16
Code candidat :
Réponse F2 : Conception du flasque avant 6 :
Flasque arrière 5
Partielle DD Face arrière du flasque 6
AA Echelle 1:1
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 14/16
Code candidat :
Réponse F3.1 : Signification de Réponse F3.2 : Phase 10 Machine outil :
A
A
0,05 C
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 15/16
Code candidat :
Réponse F3.3 : Phase 20 Machine outil :
CONCOURS COMMUN 2006 DES ECOLES DES MINES D’ALBI, ALES, DOUAI, NANTES Epreuve spécifique de Sciences Industrielles pour l’Ingénieur, option PTSI Page 16/16
Code candidat :
Réponse F3.4 : Dessin à main levé du brut du flasque arrière 5 et de son moule.


















