
Stabilité des schémas aux différences finies et analyse … · Le schéma d’Euler explicite...
35
Stabilité des schémas aux différences finies et analyse de von Neumann I- Schémas d’Euler explicite/implicite pour l’équation de la chaleur, étude de stabilité en (μ > 0) "
Transcript of Stabilité des schémas aux différences finies et analyse … · Le schéma d’Euler explicite...

Stabilité des schémas auxdifférences finies et analyse
de von Neumann
I- Schémas d’Euler explicite/implicite pour l’équation de la chaleur, étude de stabilité en
!
(µ > 0)
!
"

!
u0 à support compact " [#R,R], L >> R
Numériquement, on discrétise :
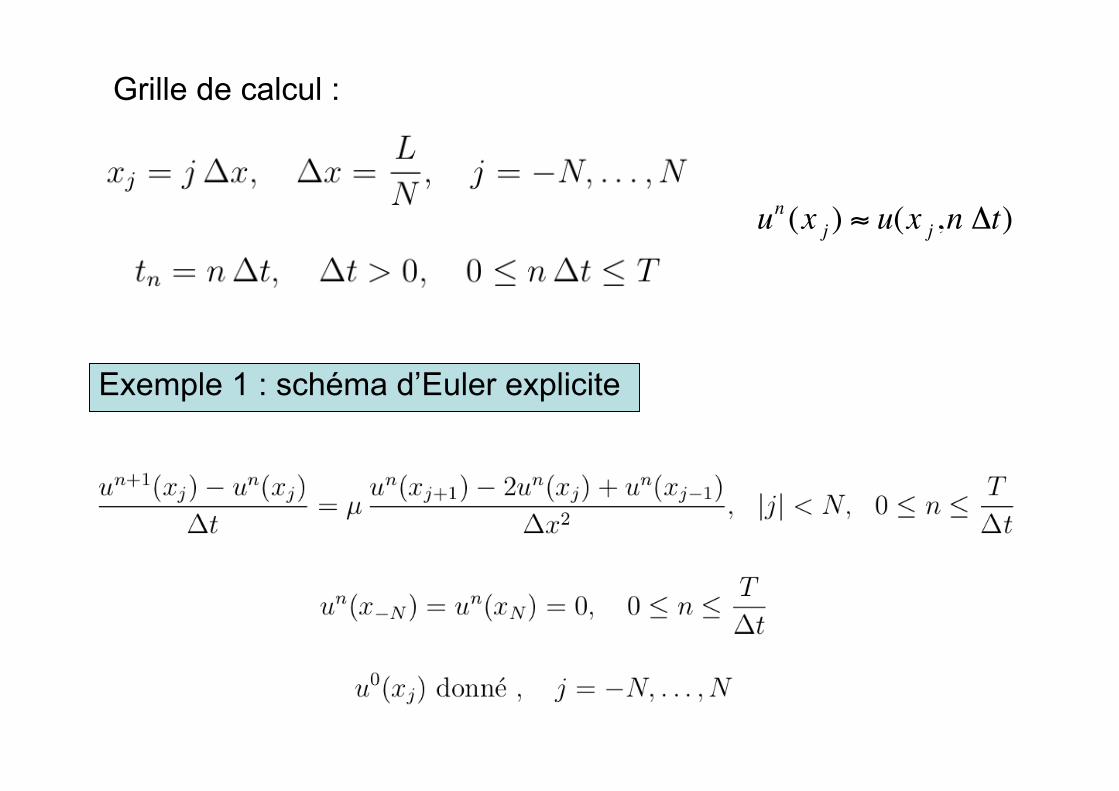
Grille de calcul :
Exemple 1 : schéma d’Euler explicite!
un(x j ) " u(x j ,n #t)
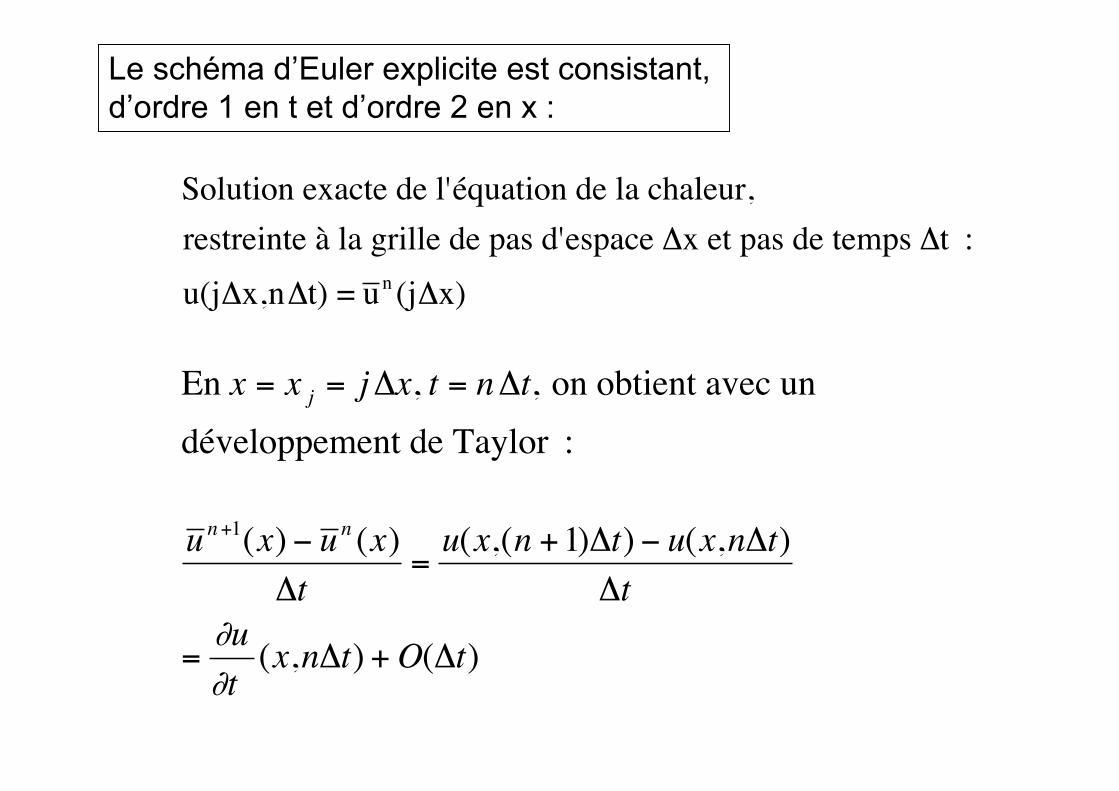
Le schéma d’Euler explicite est consistant, d’ordre 1 en t et d’ordre 2 en x :
!
Solution exacte de l'équation de la chaleur,
restreinte à la grille de pas d'espace "x et pas de temps "t :
u(j"x,n"t) = u n (j"x)
!
En x = x j = j"x, t = n"t, on obtient avec un
développement de Taylor :
!
u n +1(x) " u
n(x)
#t=
u(x,(n +1)#t) " u(x,n#t)
#t
=$u
$t(x,n#t) + O(#t)
!
u n(x + "x) # 2u
n(x) + u
n(x #"x)
"x2
=u (x + "x,n"t) + u(x #"x,n"t) # 2u(x,n"t)
"x2
=1
"x2 ( "x
2 $2u
$x2(x,n"t) + O("x
4) ) =
$ 2u
$x2(x,n"t) + O("x
2)
!
u n +1
(x) " u n(x)
#t"µ
u n(x + #x) " 2u
n(x) + u
n(x "#x)
#x2
=$u
$t(x,n#t) "µ
$ 2u
$x2
(x,n#t) + O(#t + #x2)
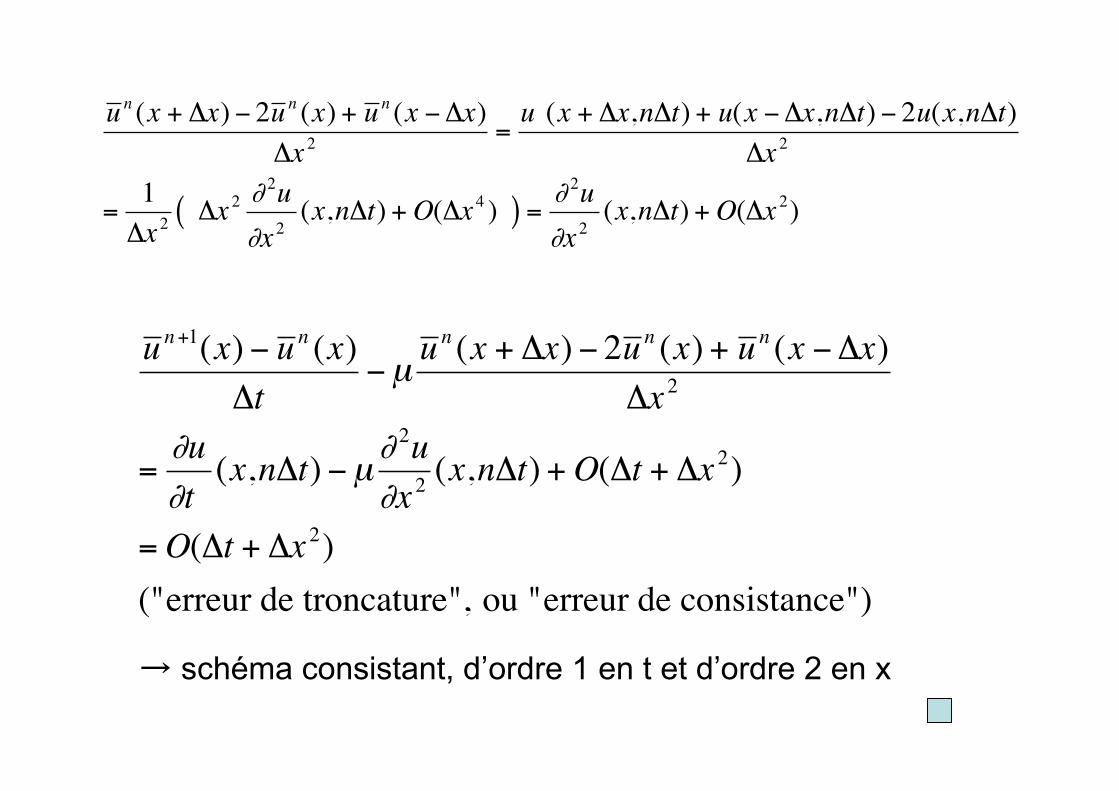
= O(#t + #x2)
("erreur de troncature", ou "erreur de consistance")
→ schéma consistant, d’ordre 1 en t et d’ordre 2 en x
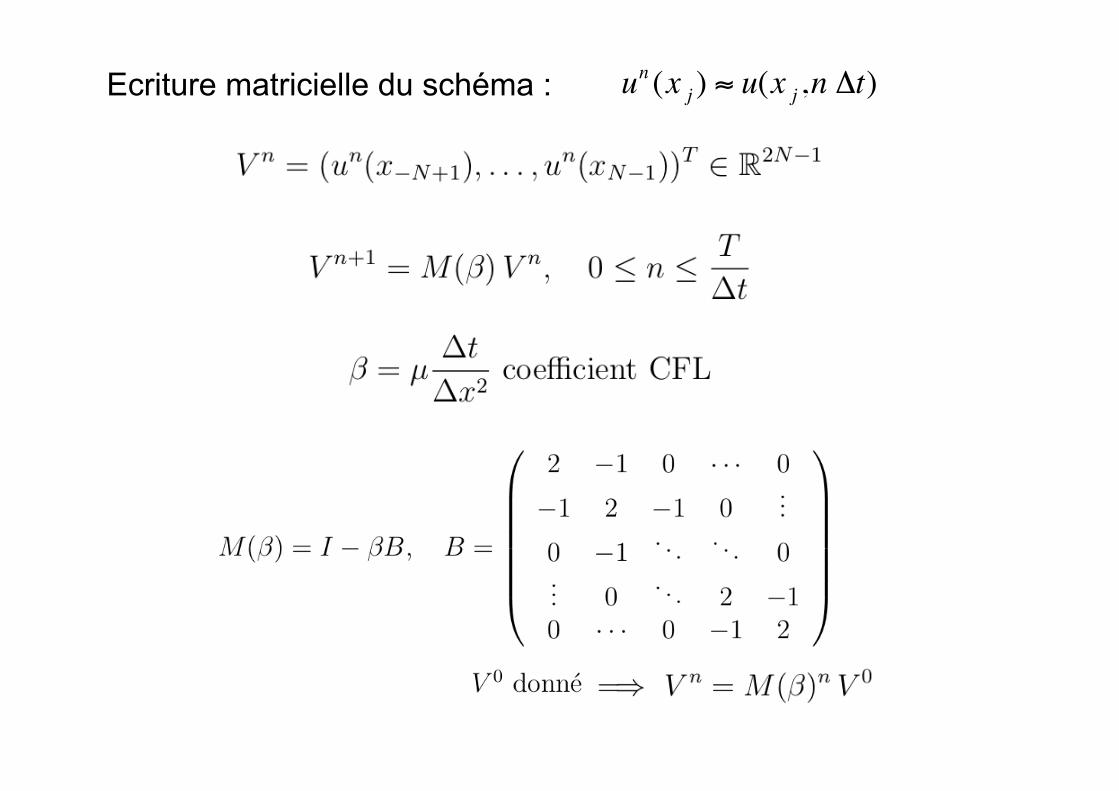
Ecriture matricielle du schéma :
!
un(x j ) " u(x j ,n #t)
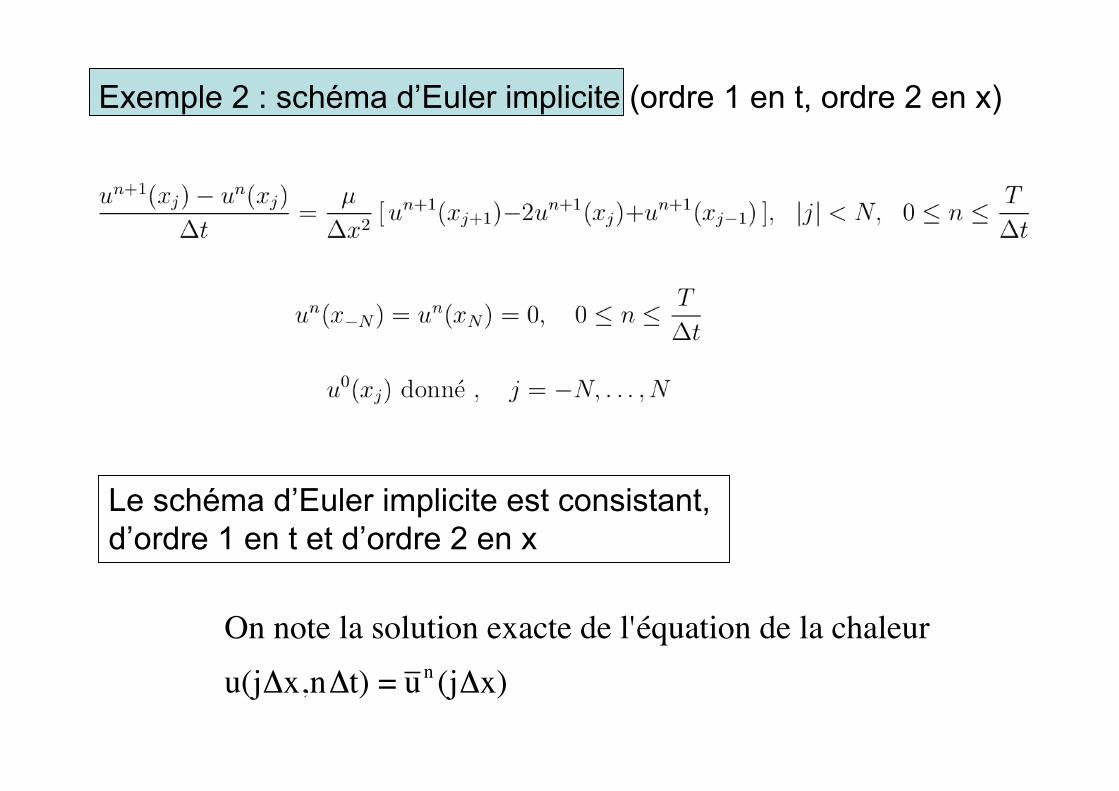
Exemple 2 : schéma d’Euler implicite (ordre 1 en t, ordre 2 en x)
Le schéma d’Euler implicite est consistant, d’ordre 1 en t et d’ordre 2 en x
!
On note la solution exacte de l'équation de la chaleur
u(j"x,n"t) = u n (j"x)
!
u n +1(x + "x) # 2u
n +1(x) + u
n +1(x #"x)
"x2
=$ 2u
$x2[x,(n +1)"t]+ O("x
2) =
$ 2u
$x2(x,n"t) + O("x
2+ "t)
!
u n +1(x) " u
n(x)
#t"µ
u n +1(x + #x) " 2u
n +1(x) + u
n +1(x "#x)
#x2
=$u
$t(x,n#t) "µ
$ 2u
$x2(x,n#t) + O(#t + #x
2)
= O(#t + #x2)
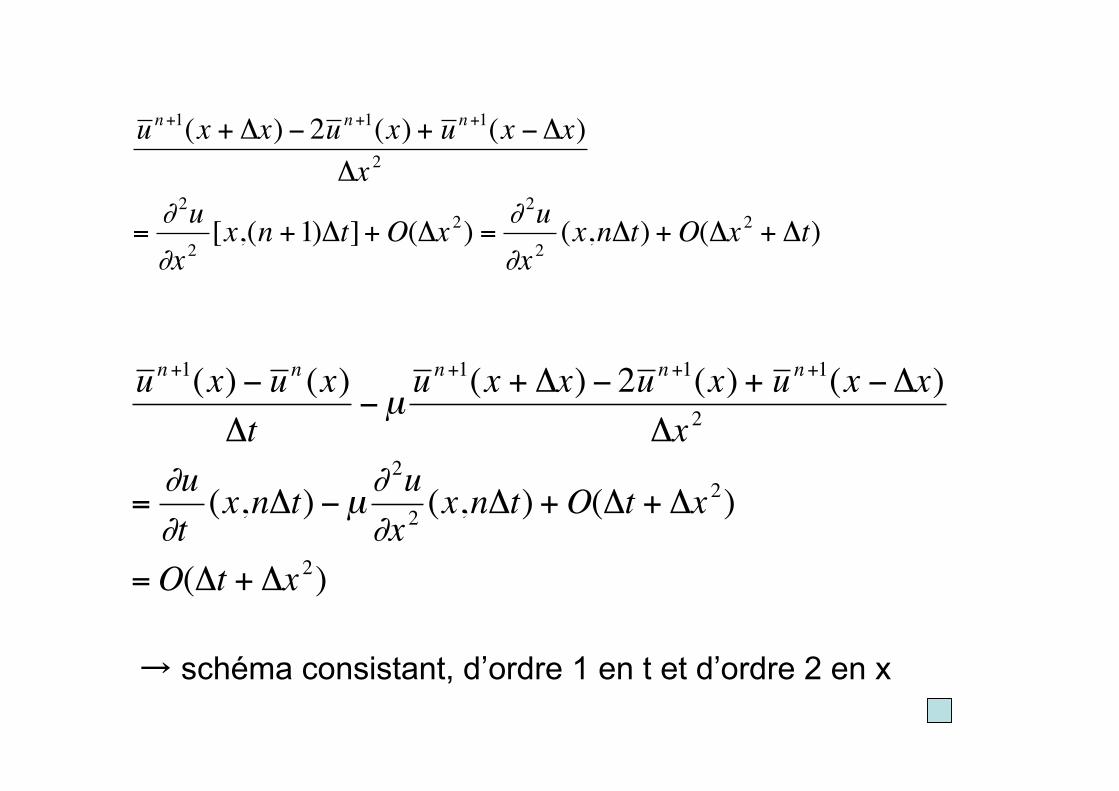
→ schéma consistant, d’ordre 1 en t et d’ordre 2 en x
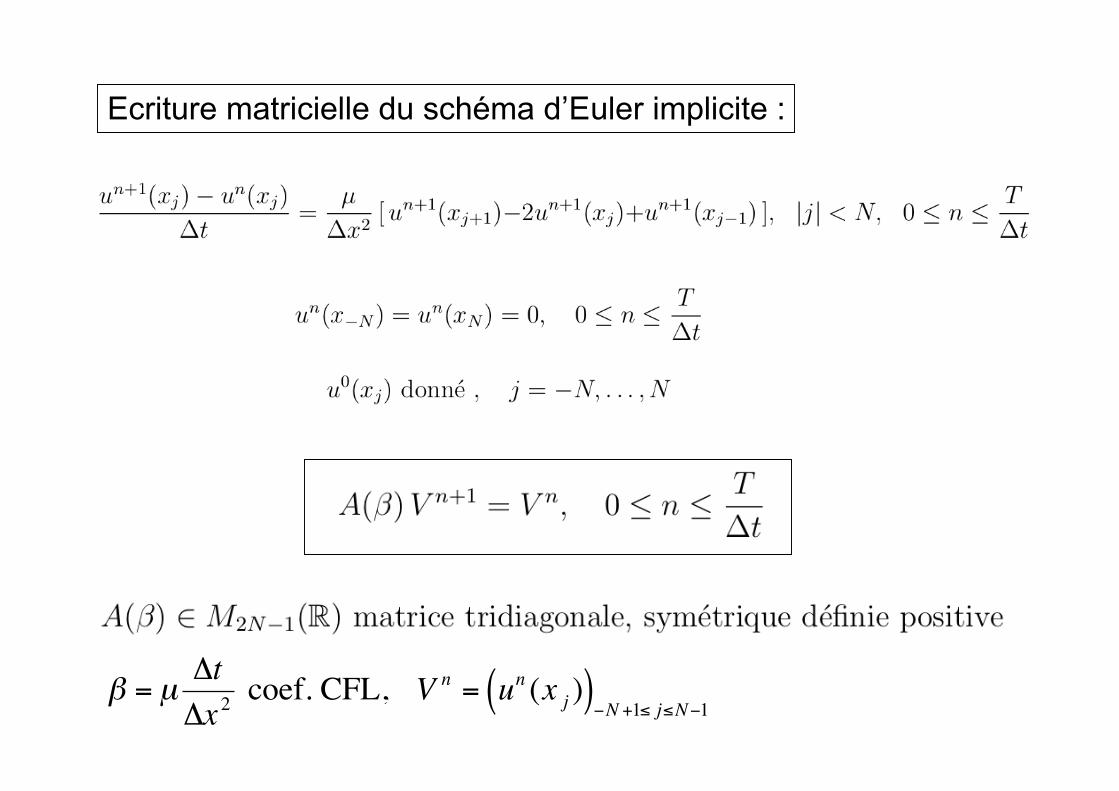
Ecriture matricielle du schéma d’Euler implicite :
!
" = µ#t
#x 2 coef. CFL, V
n = un(x j )( )
$N +1% j%N$1
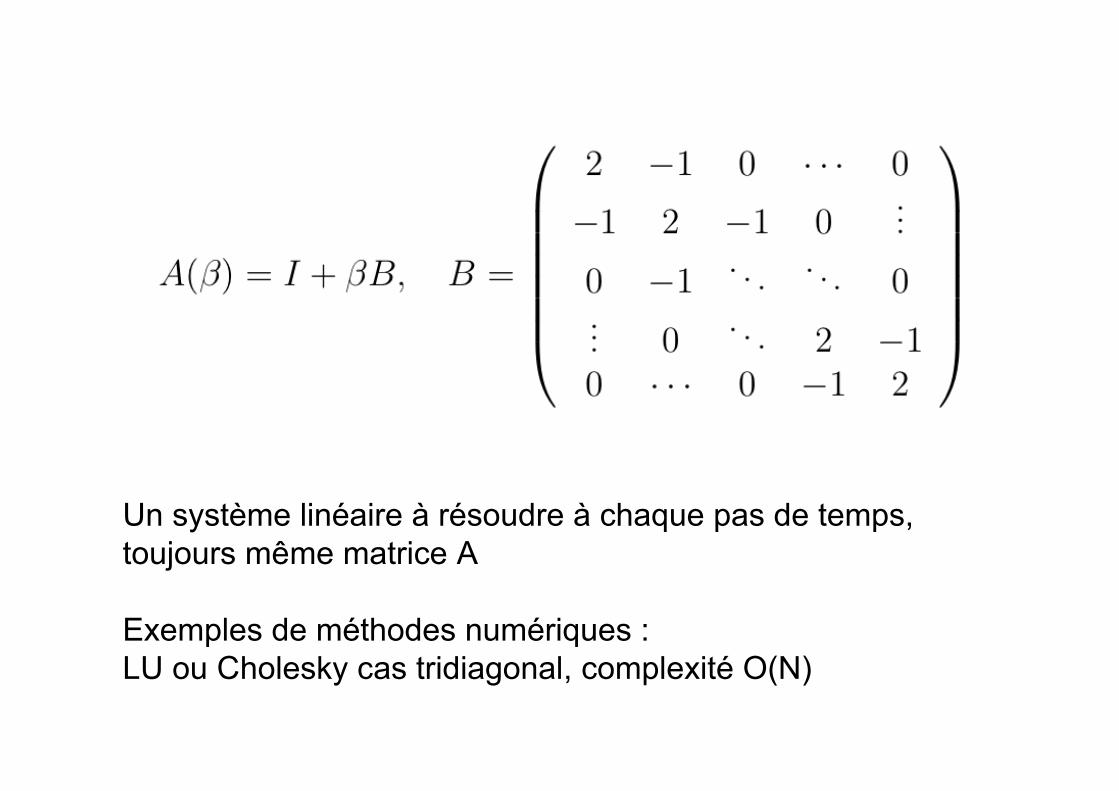
Un système linéaire à résoudre à chaque pas de temps,toujours même matrice A
Exemples de méthodes numériques :LU ou Cholesky cas tridiagonal, complexité O(N)
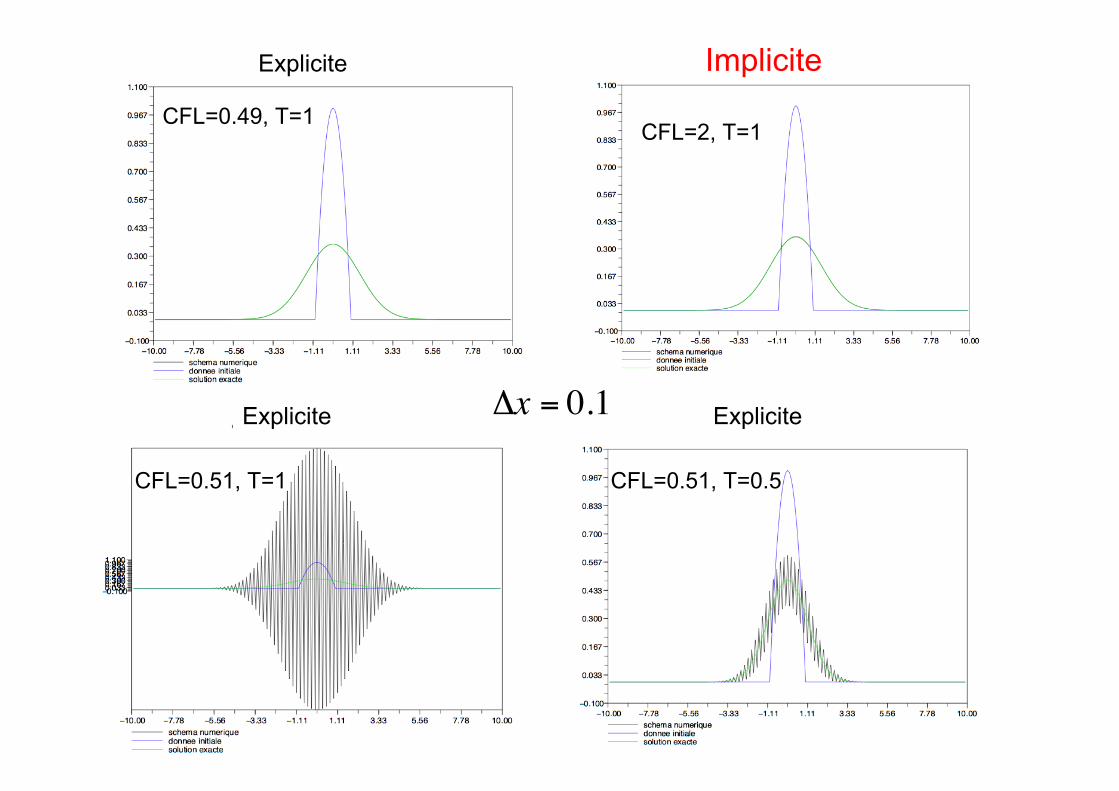
CFL=0.49, T=1
CFL=0.51, T=1
CFL=2, T=1
CFL=0.51, T=0.5
!
"x = 0.1
Explicite
Explicite Explicite
Implicite
!
||Vn||"# c ||V
0||" $n /0 # n%t # T
!
Définition de la stabilité (l") du schéma : #c > 0 tel que
pour tous $t,$x assez petits :!
" = µ#t /#x 2 est fixé, #t$ 0, #x$ 0
Euler explicite stable sous condition CFL : β ≤ 1/2
Euler implicite inconditionnellement stable
Lemme
Remarque : la taille des vecteurs et matrices tend versl’infini quand Δx→0
!
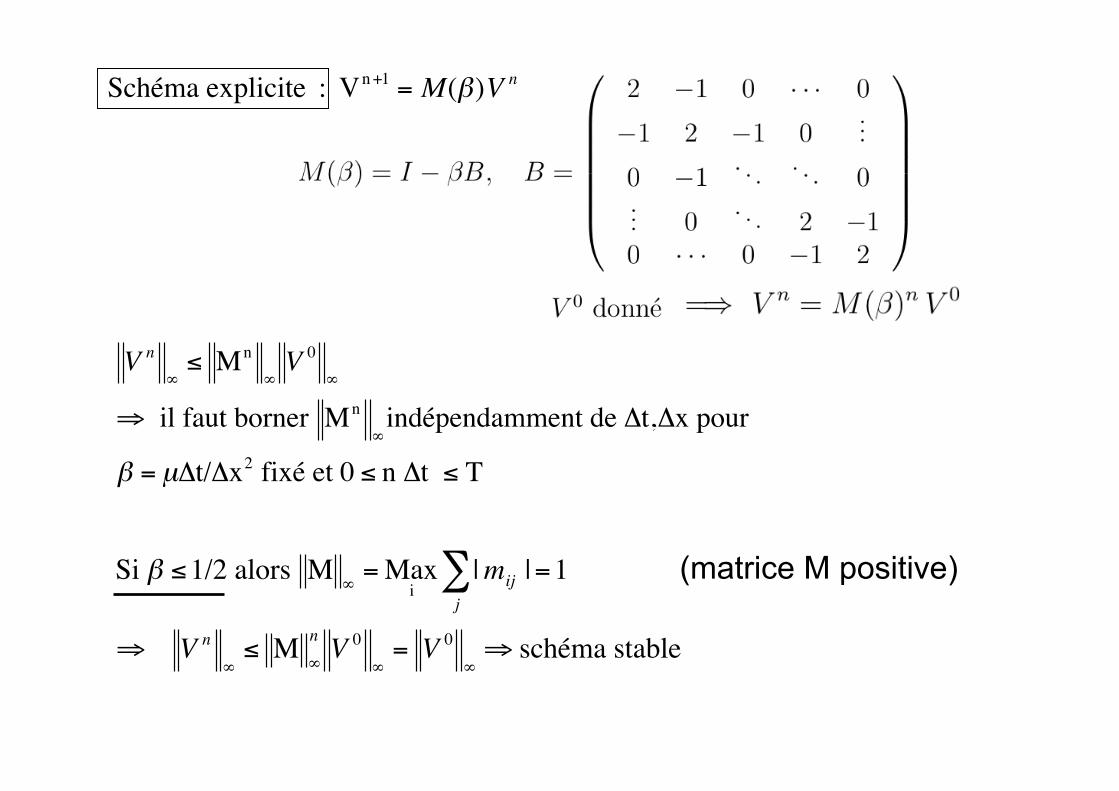
Schéma explicite : Vn +1= M(")V n
!
Si " #1/2 alors M$
= Maxi
|mij |
j
% =1
& Vn
$# M
$
nV
0
$= V
0
$& schéma stable!
Vn
"# Mn
"V
0
"
$ il faut borner Mn
"indépendamment de %t,%x pour
& = µ%t/%x2 fixé et 0 # n %t # T
(matrice M positive)
!
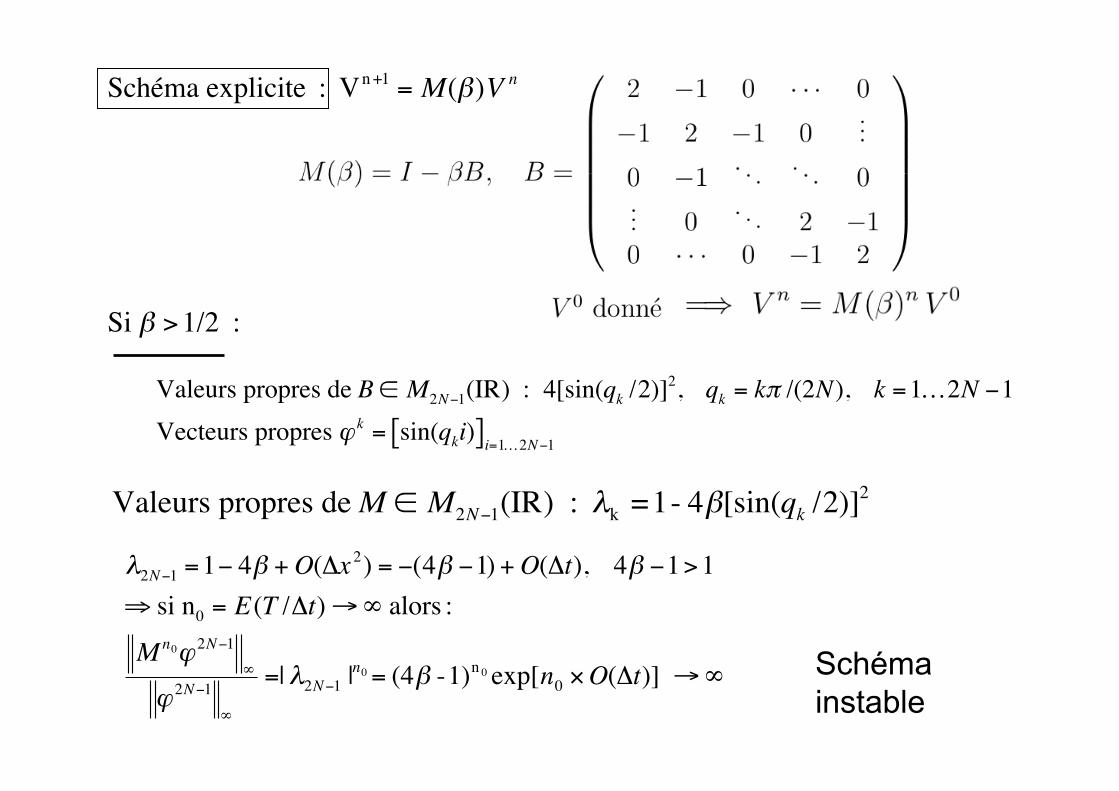
Schéma explicite : Vn +1= M(")V n
!
Si " >1/2 :
!
Valeurs propres de B " M2N#1(IR) : 4[sin(qk /2)]2, qk = k$ /(2N), k =1K2N #1
Vecteurs propres % k = sin(qki)[ ]i=1K2N#1
!
Valeurs propres de M " M2N#1(IR) : $k =1- 4%[sin(qk /2)]2
!
"2N#1 =1# 4$ +O(%x 2) = #(4$ #1) +O(%t), 4$ #1>1
& si n0 = E(T /%t)'( alors :
Mn0) 2N#1
(
) 2N#1
(
=| "2N#1 |n0 = (4$ -1)n 0 exp[n0 *O(%t)] '( Schémainstable
!
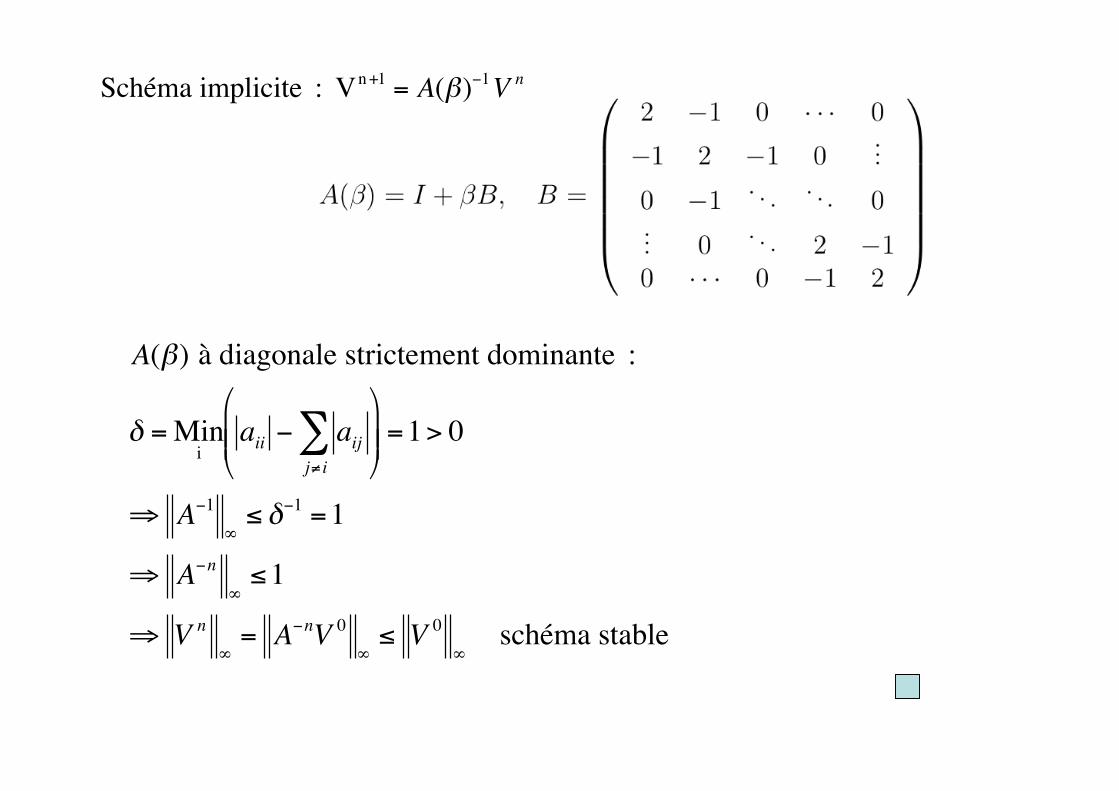
Schéma implicite : Vn +1= A(")#1
Vn
!
A(") à diagonale strictement dominante :
# = Mini
aii $ aijj% i
&'
( ) )
*
+ , , =1 > 0
- A$1
./ #$1
=1
- A$n
./1
- Vn
.= A
$nV
0
./ V
0
. schéma stable
!
En || ||" :
!
" = µ#t /#x 2 est fixé, #t$ 0, #x$ 0
Euler explicite stable sous condition CFL : β ≤ 1/2
Euler implicite inconditionnellement stable
analyse de von Neumann
(complémentaire à la notion d’équation équivalente introduite précédemment)
Bilan :
La preuve utilise des propriétés assez fortes desmatrices du schéma (positivité, valeurs propres explicites,dominance diagonale stricte)
→ besoin d’un outil plus général :
II- Méthode de von Neumann :
II-1 Idée générale :
Basée sur l’analyse de Fourier (EDP à coefs constants)
Stabilité
Néglige les conditions aux bord du domaine, où u ≈ 0
!
L2
Passage des grands vecteurs ( taille O(N) ) à des fonctions de x:
!
Vn
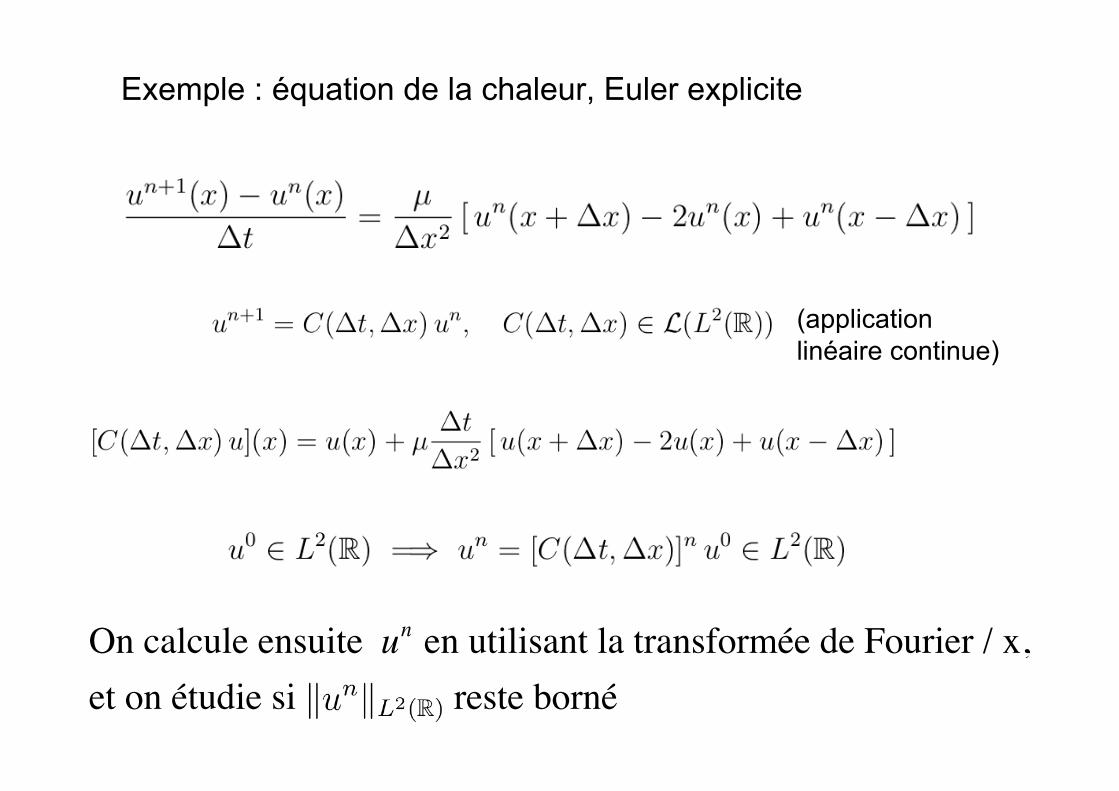
Exemple : équation de la chaleur, Euler explicite
!
On calcule ensuite un en utilisant la transformée de Fourier / x,
et on étudie si reste borné
(applicationlinéaire continue)

II-2 Reformulation explicite d’un schéma différences finies par transformée de Fourier, matrice d’amplification
!
un (x) = approximation numérique de u(x,n"t) solution d'une EDP d'évolution
x # IRd, un # [L2(IRd )]p vecteur à p composantes
Schéma différences finies discrétisant l'EDP :
Aj
| j|$q
% ("t,"x)un+1(x + j"x) = Bj
| j|$q
% ("t,"x)un (x + j"x)
j = (j1,K jd ), jk entiers naturels, | j |= j&
Aj,Bj # Mp (IR)
!
Exemple : équation de transport
schéma implicite centré : un+1(x) +c"t
2"x(un+1(x + "x) # un+1(x #"x)) = u
n (x)
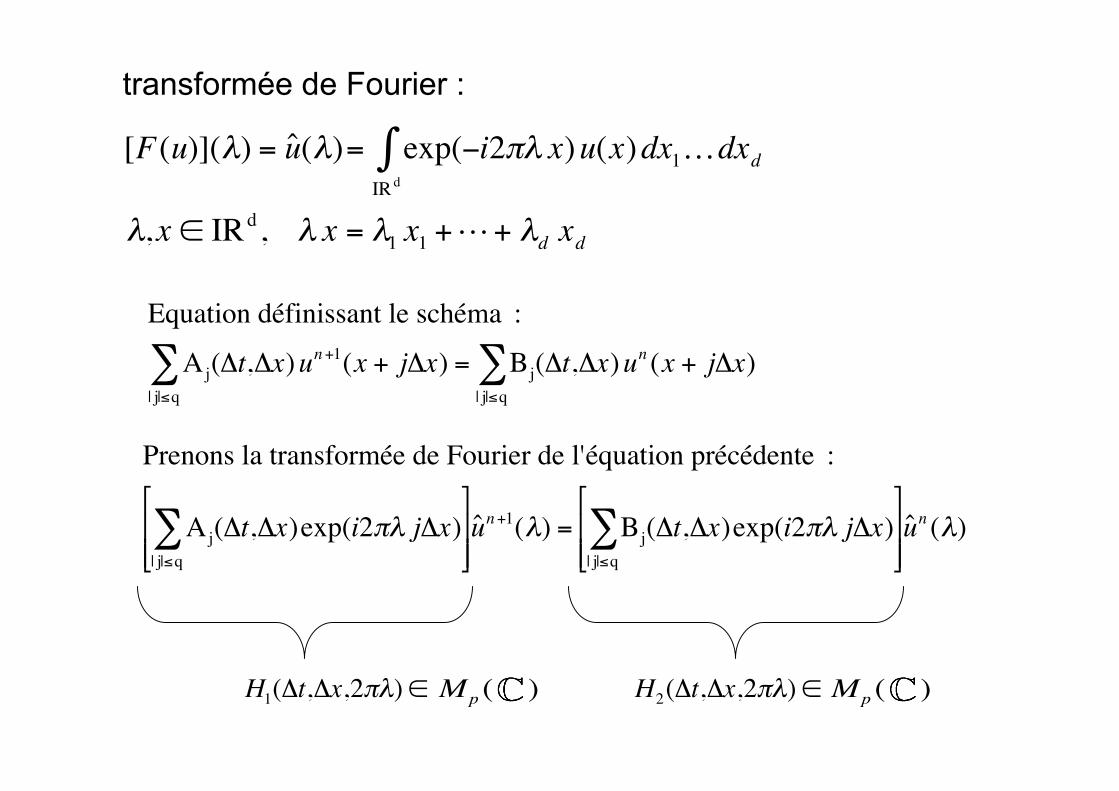
transformée de Fourier :
!
Equation définissant le schéma :
Aj
| j|"q
# ($t,$x)un+1(x + j$x) = Bj
| j|"q
# ($t,$x)un (x + j$x)
!
[F(u)](") = ˆ u (")= exp(#i2$" x) u(x) dx1Kdxd
IRd
%
",x & IRd, " x = "1 x1 +L+ "d
xd
!
Prenons la transformée de Fourier de l'équation précédente :
Aj
| j|"q
# ($t,$x)exp(i2%& j$x)'
( ) )
*
+ , , ˆ u
n +1(&) = Bj
| j|"q
# ($t,$x)exp(i2%& j$x)'
( ) )
*
+ , , ˆ u
n (&)
!
Mp ( )
!
H1("t,"x,2#$)%
!
H2("t,"x,2#$)%
!
Mp ( )
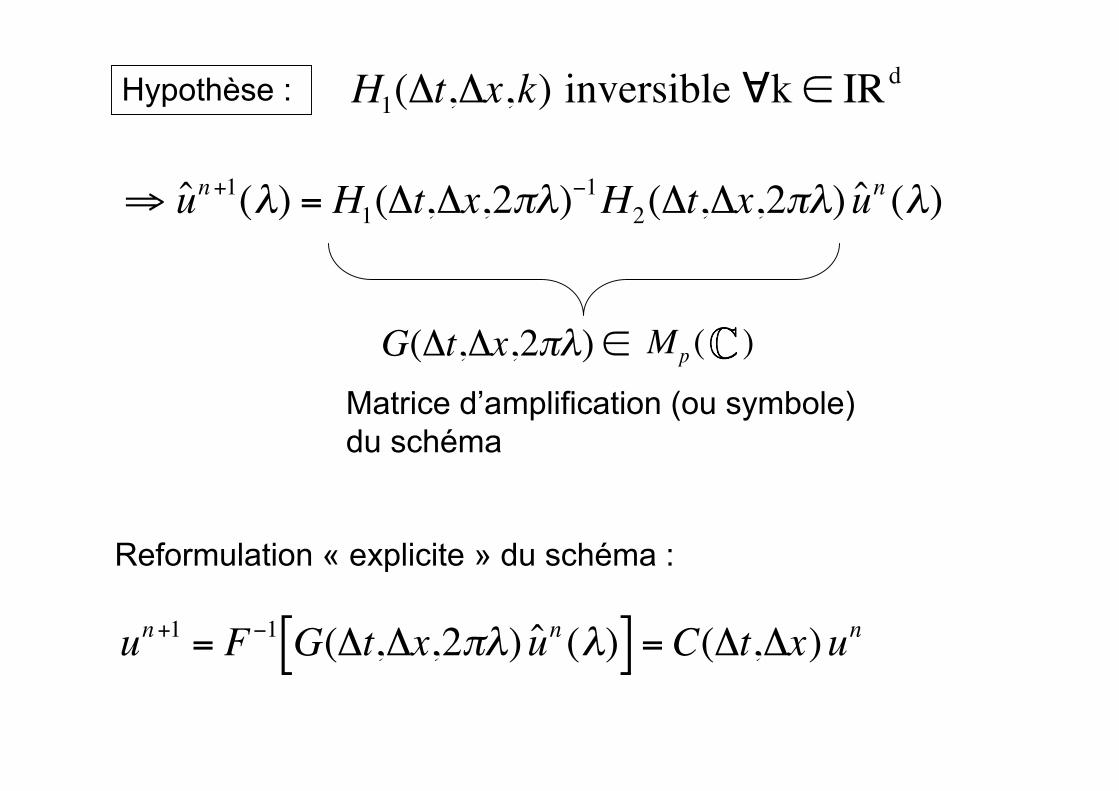
Hypothèse :
!
H1("t,"x,k) inversible #k $ IRd
!
" ˆ u n +1
(#) = H1($t,$x,2%#)
&1H
2($t,$x,2%#) ˆ u
n(#)
!
G("t,"x,2#$)%
!
Mp ( )
Matrice d’amplification (ou symbole) du schéma
!
un +1 = F
"1G(#t,#x,2$%) ˆ u
n(%)[ ] = C(#t,#x) u
n
Reformulation « explicite » du schéma :
!
Soit G : IRd" une fonction continue et bornée et
!
Mp ( )!
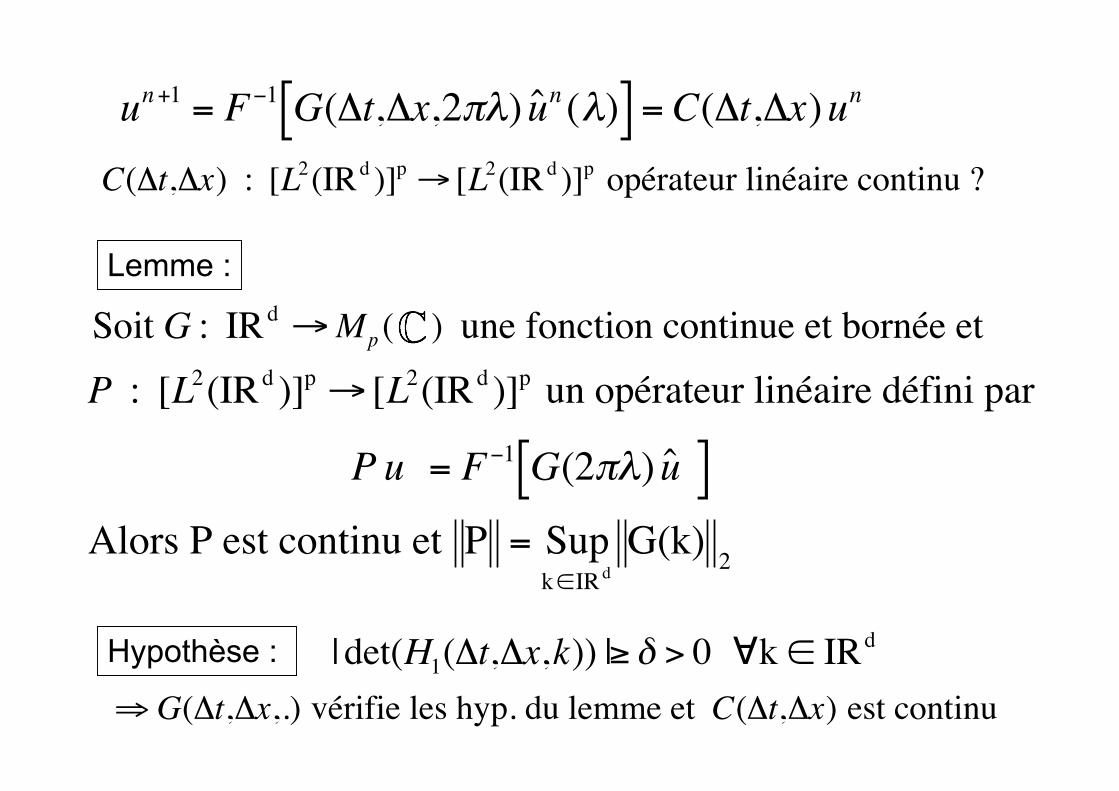
un +1 = F
"1G(#t,#x,2$%) ˆ u
n(%)[ ] = C(#t,#x) u
n
!
C("t,"x) : [L2(IRd )]p# [L2(IRd )]p opérateur linéaire continu ?
Lemme :
!
P u = F"1
G(2#$) ˆ u [ ]
!
P : [L2(IRd )]p" [L2(IRd )]p un opérateur linéaire défini par
!
Alors P est continu et P = Supk"IRd
G(k)2
Hypothèse :
!
| det(H1("t,"x,k)) |# $ > 0 %k & IRd
!
" G(#t,#x,.) vérifie les hyp. du lemme et C(#t,#x) est continu
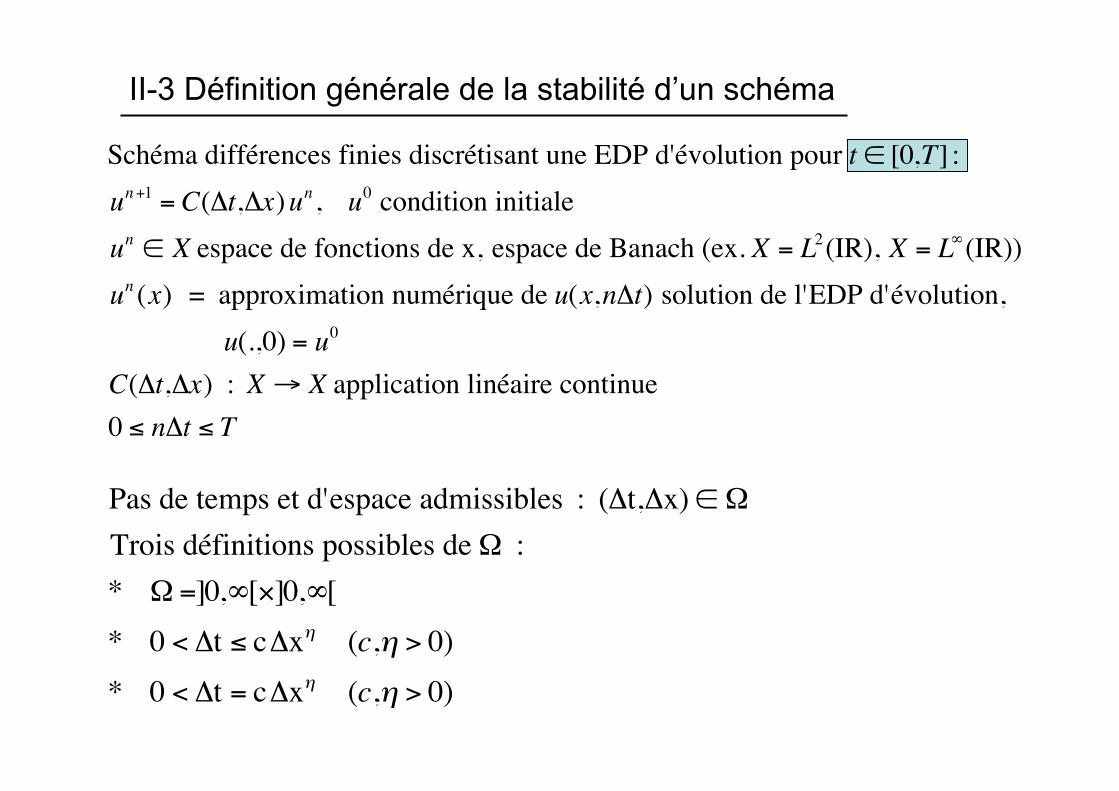
II-3 Définition générale de la stabilité d’un schéma
!
Schéma différences finies discrétisant une EDP d'évolution pour t " [0,T] :
un+1
= C(#t,#x)un, u0 condition initiale
un" X espace de fonctions de x, espace de Banach (ex. X = L
2(IR), X = L$(IR))
un (x) = approximation numérique de u(x,n#t) solution de l'EDP d'évolution,
u(.,0) = u0
C(#t,#x) : X % X application linéaire continue
0 & n#t & T
!
Pas de temps et d'espace admissibles : ("t,"x)# $
Trois définitions possibles de $ :
* $ =]0,%[&]0,%[
* 0 < "t ' c"x( (c,( > 0)
* 0 < "t = c"x( (c,( > 0)
!
Schéma (S) : un+1
= C("t,"x)un,
u0 condition initiale donnée# u
n= C("t,"x)
nu
0
!
Le schéma (S) est stable dans X si "KT > 0 tel que :
#($t,$x)% & dans un voisinage assez petit de (0,0),
#n vérifiant 0 ' n$t ' T,
C($t,$x)n 'KT
Rappel : C($t,$x)n = Supu
X=1
C($t,$x)n uX
(norme d'application linéaire continue)
Définition :
!
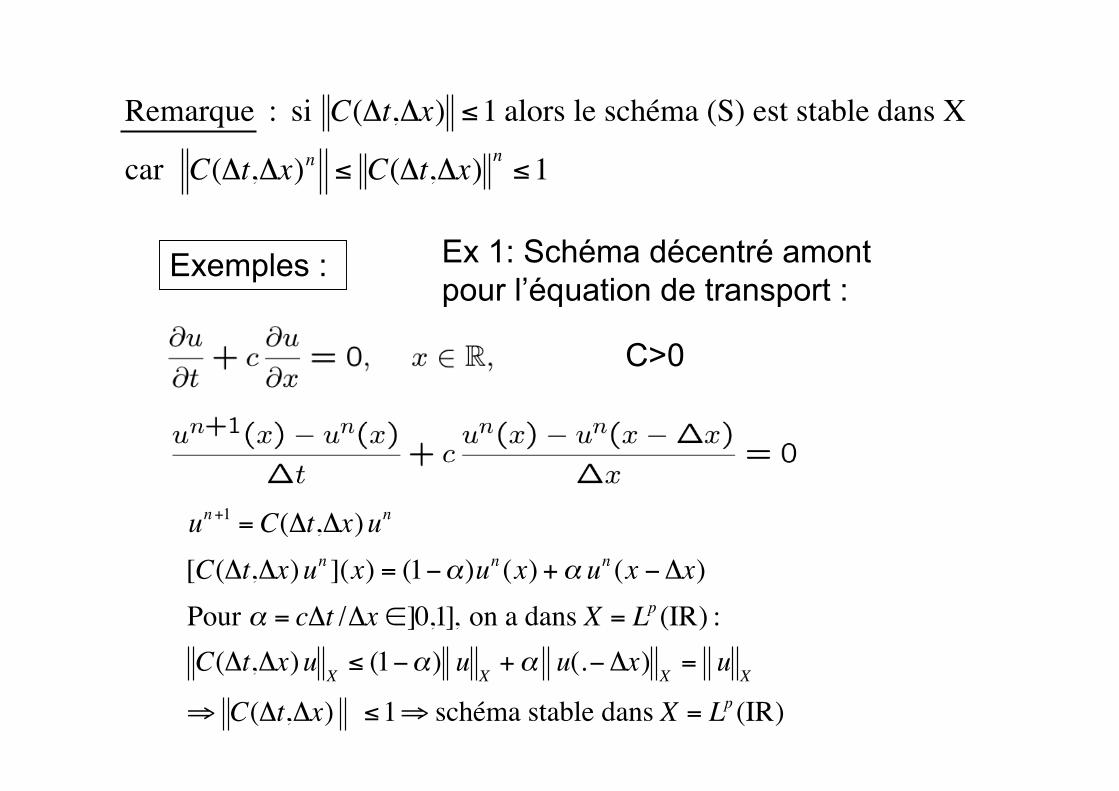
Remarque : si C("t,"x) #1 alors le schéma (S) est stable dans X
car C("t,"x)n # C("t,"x)n
#1
Exemples : Ex 1: Schéma décentré amont pour l’équation de transport :
C>0
!
un+1
= C("t,"x)un
[C("t,"x)un](x) = (1#$)u
n(x) +$ un (x #"x)
Pour $ = c"t /"x %]0,1], on a dans X = Lp(IR) :
C("t,"x)uX& (1#$) u
X+$ u(.#"x)
X= u
X
' C("t,"x) &1' schéma stable dans X = Lp(IR)
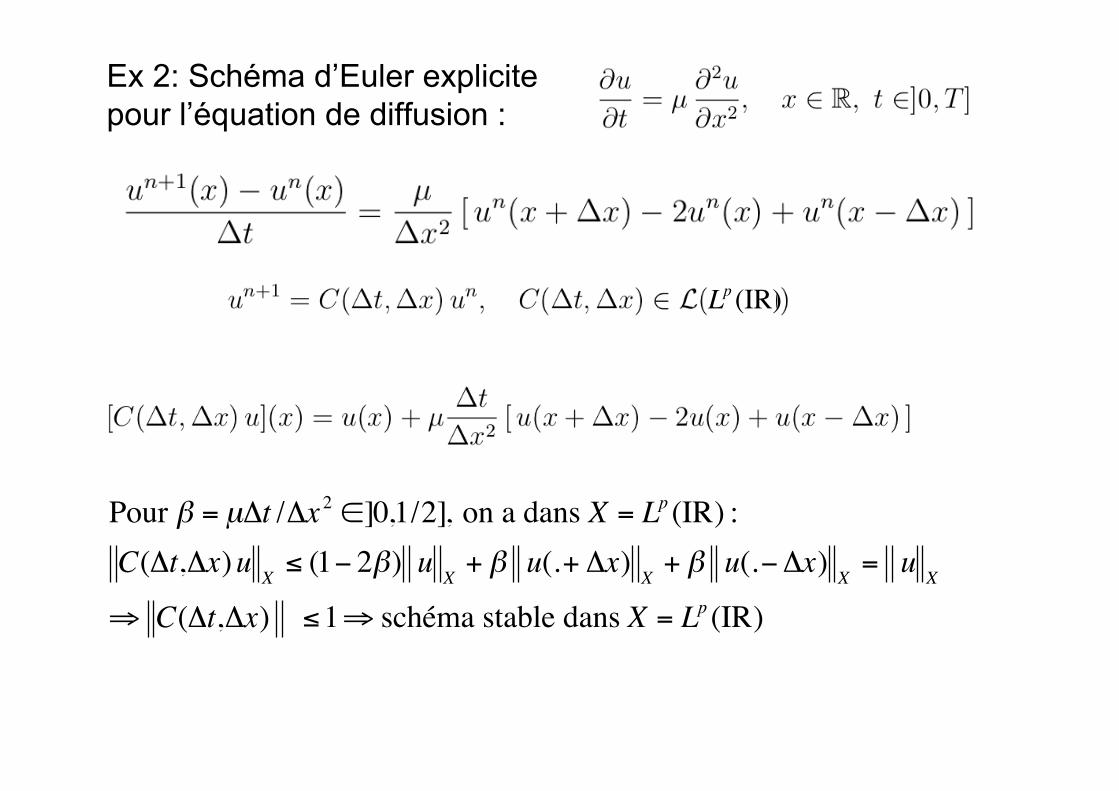
Ex 2: Schéma d’Euler explicitepour l’équation de diffusion :
!
Pour " = µ#t /#x 2 $]0,1/2], on a dans X = Lp (IR) :
C(#t,#x)uX% (1& 2") u
X+ " u(.+ #x)
X+ " u(.&#x)
X= u
X
' C(#t,#x) %1' schéma stable dans X = Lp (IR)
!
Lp(IR)
!
G("t,"x,.) : IRd# fonction continue et bornée
!
Mp ( )
!
un +1 = F
"1G(#t,#x,2$%) ˆ u
n(%)[ ] = C(#t,#x) u
n
!
C("t,"x) : [L2(IRd )]p# [L2(IRd )]p opérateur linéaire continu,
Lemme :
!
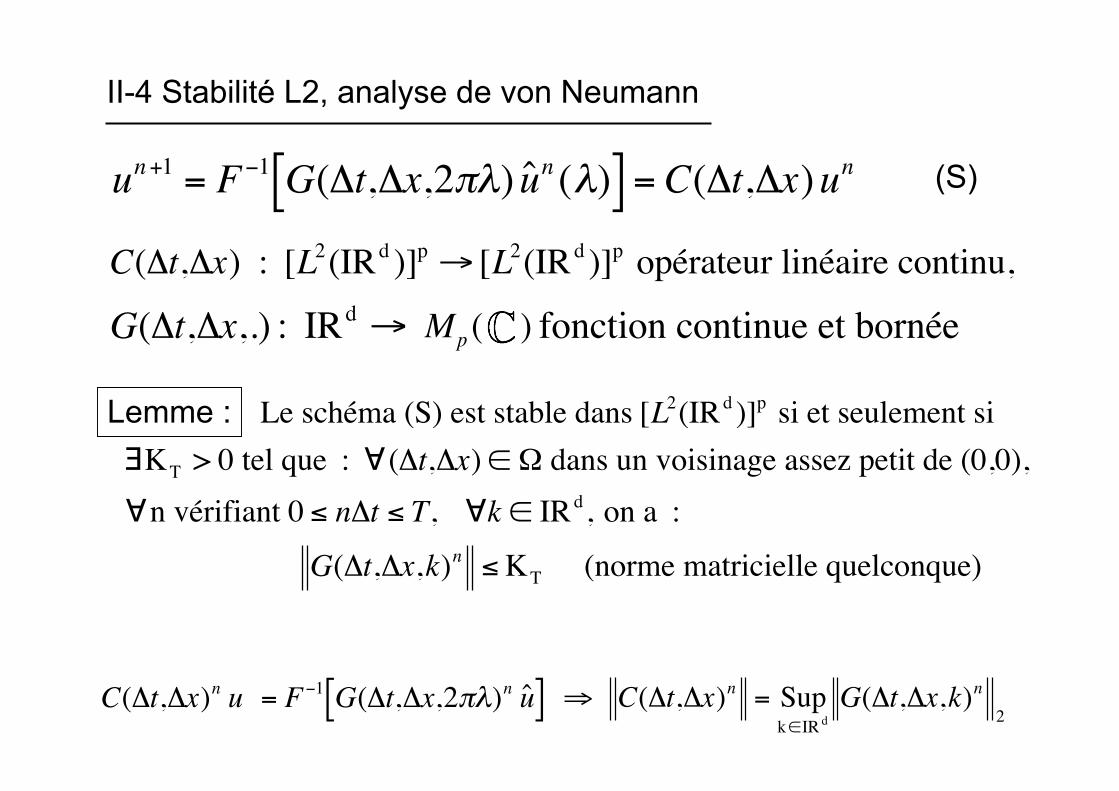
" C(#t,#x)n = Supk$IR d
G(#t,#x,k)n2
II-4 Stabilité L2, analyse de von Neumann
(S)
!
Le schéma (S) est stable dans [L2(IRd )]p si et seulement si
"KT > 0 tel que : #($t,$x)% & dans un voisinage assez petit de (0,0),
#n vérifiant 0 ' n$t ' T, #k % IRd, on a :
G($t,$x,k)n 'KT (norme matricielle quelconque)
!
C("t,"x)n
u = F#1
G("t,"x,2$%)n ˆ u [ ]
!
un +1 = F
"1G(#t,#x,2$%) ˆ u
n(%)[ ] = C(#t,#x) u
n
(S)
!
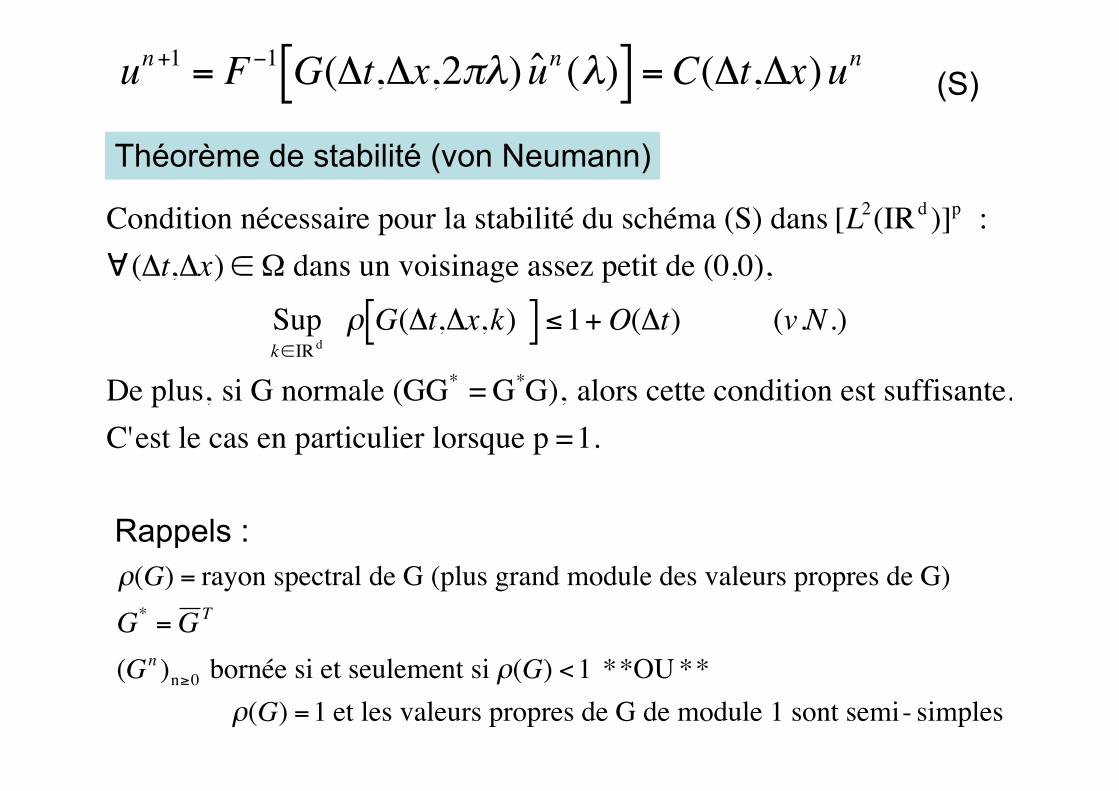
Condition nécessaire pour la stabilité du schéma (S) dans [L2(IRd )]p :
"(#t,#x)$ % dans un voisinage assez petit de (0,0),
Supk$IRd
& G(#t,#x,k)[ ] '1+O(#t) (v.N.)
De plus, si G normale (GG* = G*G), alors cette condition est suffisante.
C'est le cas en particulier lorsque p =1.
Théorème de stabilité (von Neumann)
Rappels :
!
"(G) = rayon spectral de G (plus grand module des valeurs propres de G)
!
G*
= G T
!
(Gn )n"0 bornée si et seulement si #(G) <1 **OU **
#(G) =1 et les valeurs propres de G de module 1 sont semi- simples
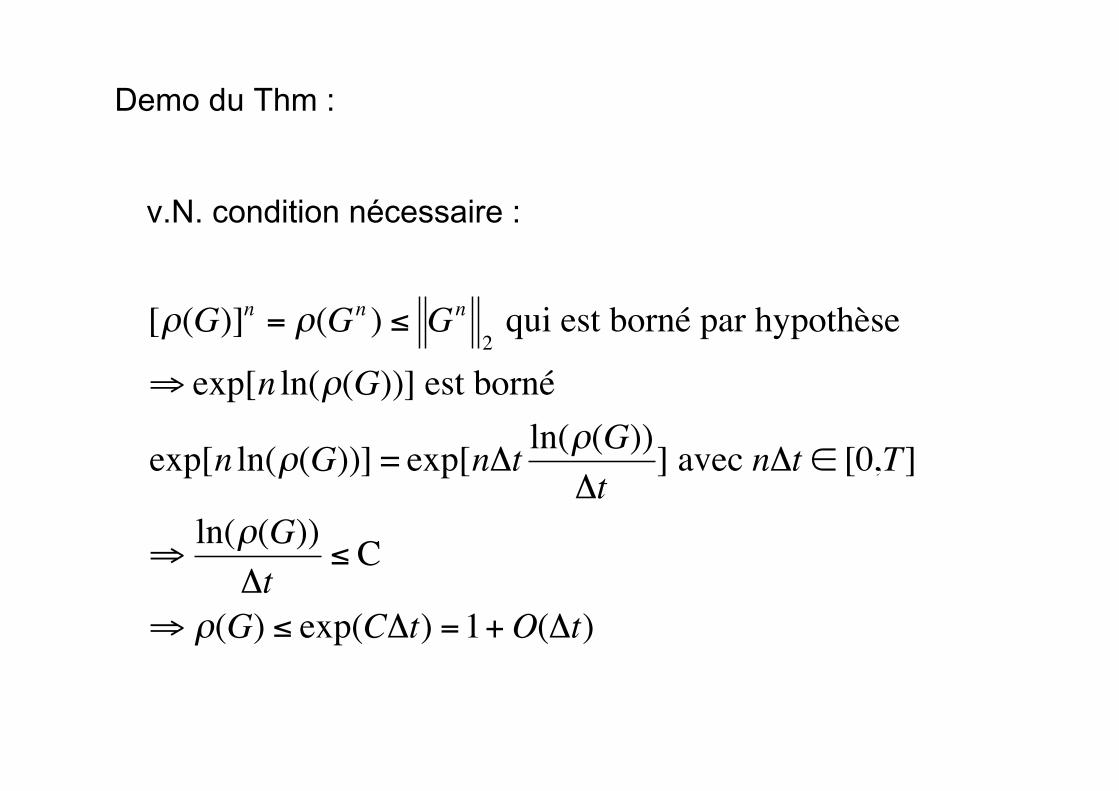
Demo du Thm :
v.N. condition nécessaire :
!
["(G)]n = "(Gn ) # Gn
2 qui est borné par hypothèse
$ exp[n ln("(G))] est borné
exp[n ln("(G))] = exp[n%tln("(G))
%t] avec n%t & [0,T]
$ln("(G))
%t# C
$ "(G) # exp(C%t) =1+O(%t)
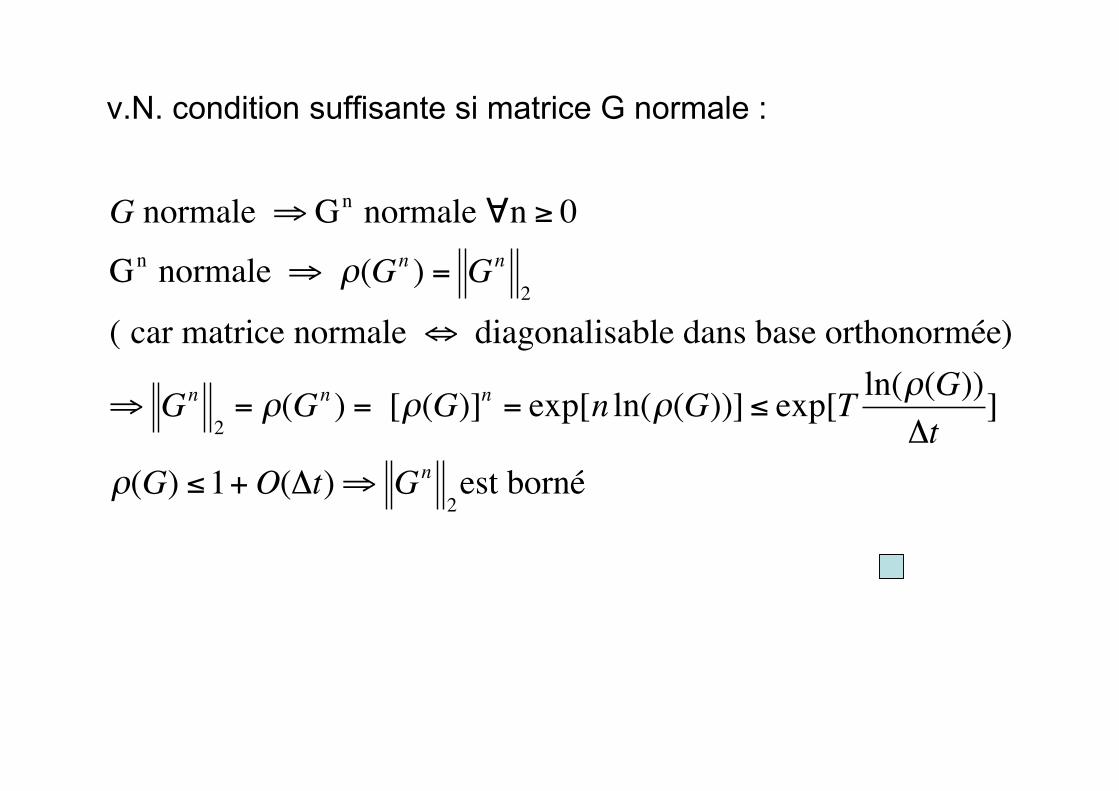
v.N. condition suffisante si matrice G normale :
!
G normale " Gn normale #n $ 0
Gn normale " %(Gn ) = Gn
2
( car matrice normale & diagonalisable dans base orthonormée)
" Gn
2= %(Gn ) = [%(G)]n = exp[n ln(%(G))] ' exp[T
ln(%(G))
(t]
%(G) '1+O((t)" Gn
2est borné
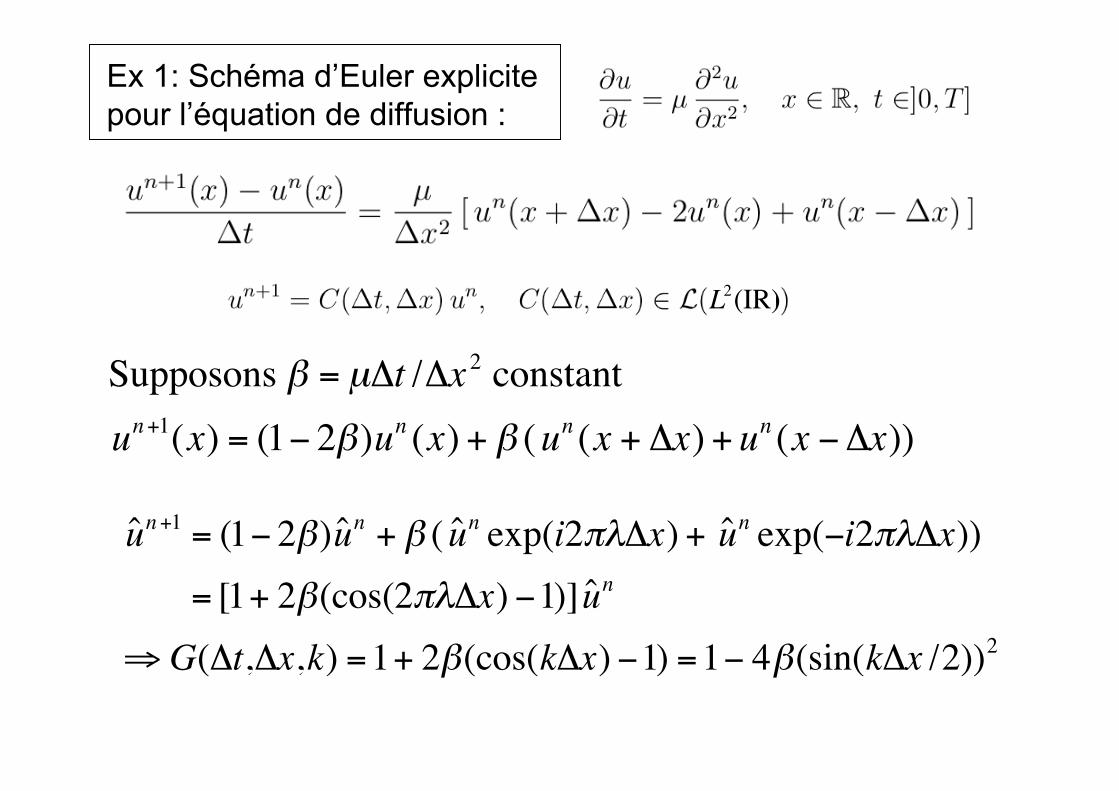
Ex 1: Schéma d’Euler explicitepour l’équation de diffusion :
!
L2(IR)
!
Supposons " = µ#t /#x 2 constant
un+1
(x) = (1$ 2")un(x) + " (u
n(x + #x) + un (x $#x))
!
ˆ u n +1
= (1" 2#) ˆ u n
+ # ( ˆ u n exp(i2$%&x) + ˆ u
n exp("i2$%&x))
= [1+ 2#(cos(2$%&x) "1)] ˆ u n
' G(&t,&x,k) =1+ 2#(cos(k&x) "1) =1" 4#(sin(k&x /2))2
!
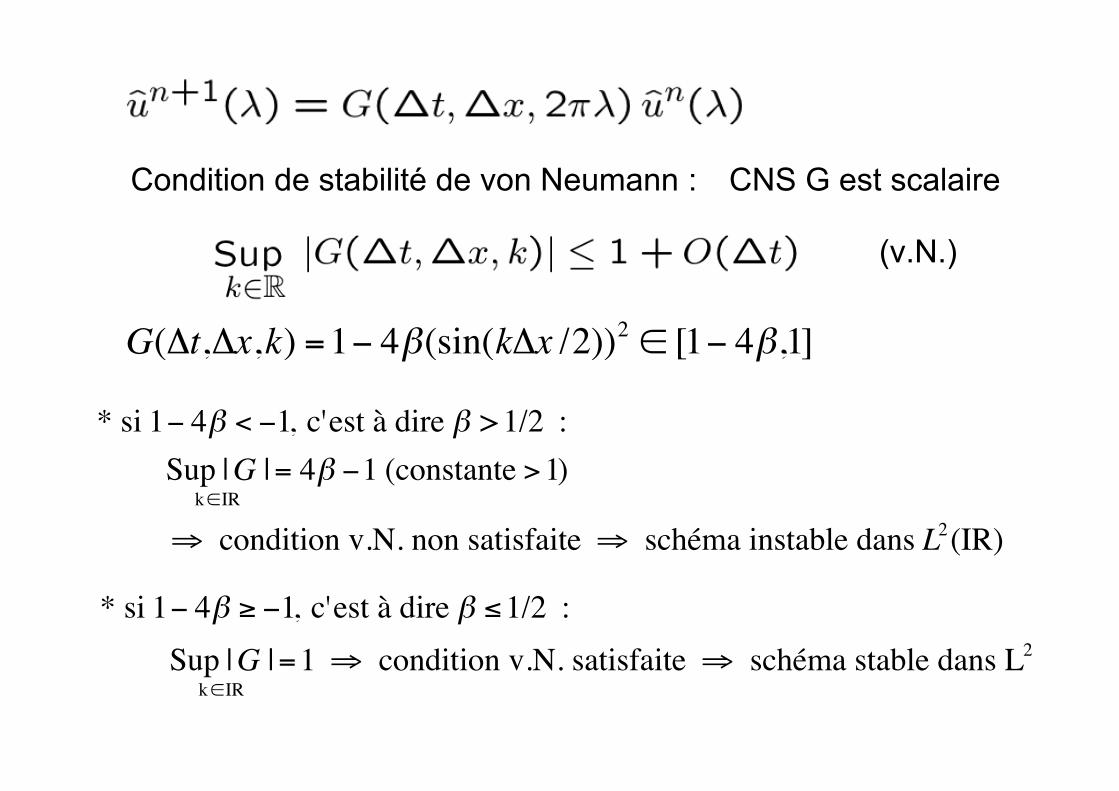
G("t,"x,k) =1# 4$(sin(k"x /2))2 % [1# 4$,1]
Condition de stabilité de von Neumann : CNS G est scalaire
!
* si 1" 4# < "1, c'est à dire # > 1/2 :
Sup |G |k$IR
= 4# "1 (constante >1)
% condition v.N. non satisfaite % schéma instable dans L2(IR)
!
* si 1" 4# $ "1, c'est à dire # %1/2 :
Sup |G |k&IR
=1 ' condition v.N. satisfaite ' schéma stable dans L2
(v.N.)
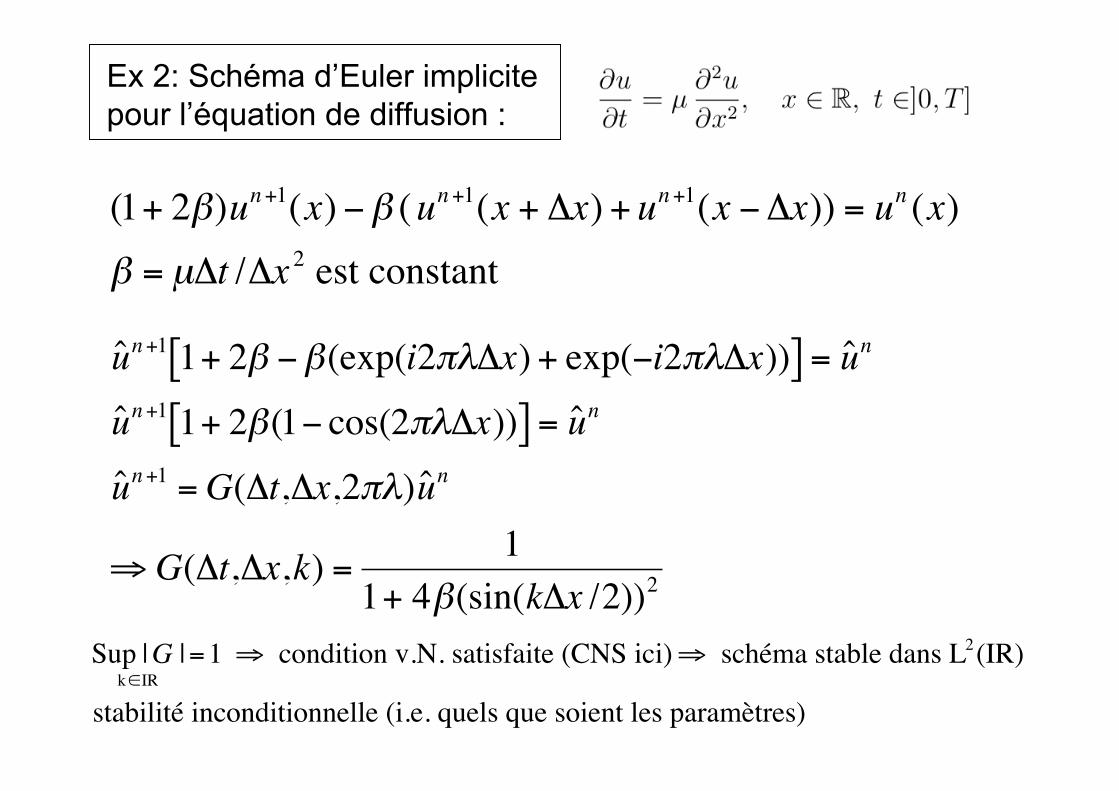
Ex 2: Schéma d’Euler implicitepour l’équation de diffusion :
!
(1+ 2")un+1
(x) #" (un+1
(x + $x) + un+1(x #$x)) = un (x)
" = µ$t /$x 2 est constant
!
ˆ u n +1 1+ 2" #"(exp(i2$%&x) + exp(#i2$%&x))[ ] = ˆ u
n
ˆ u n +1 1+ 2"(1# cos(2$%&x))[ ] = ˆ u
n
ˆ u n +1 = G(&t,&x,2$%) ˆ u
n
' G(&t,&x,k) =1
1+ 4"(sin(k&x /2))2
!
Sup |G |k"IR
=1 # condition v.N. satisfaite (CNS ici)# schéma stable dans L2(IR)
stabilité inconditionnelle (i.e. quels que soient les paramètres)
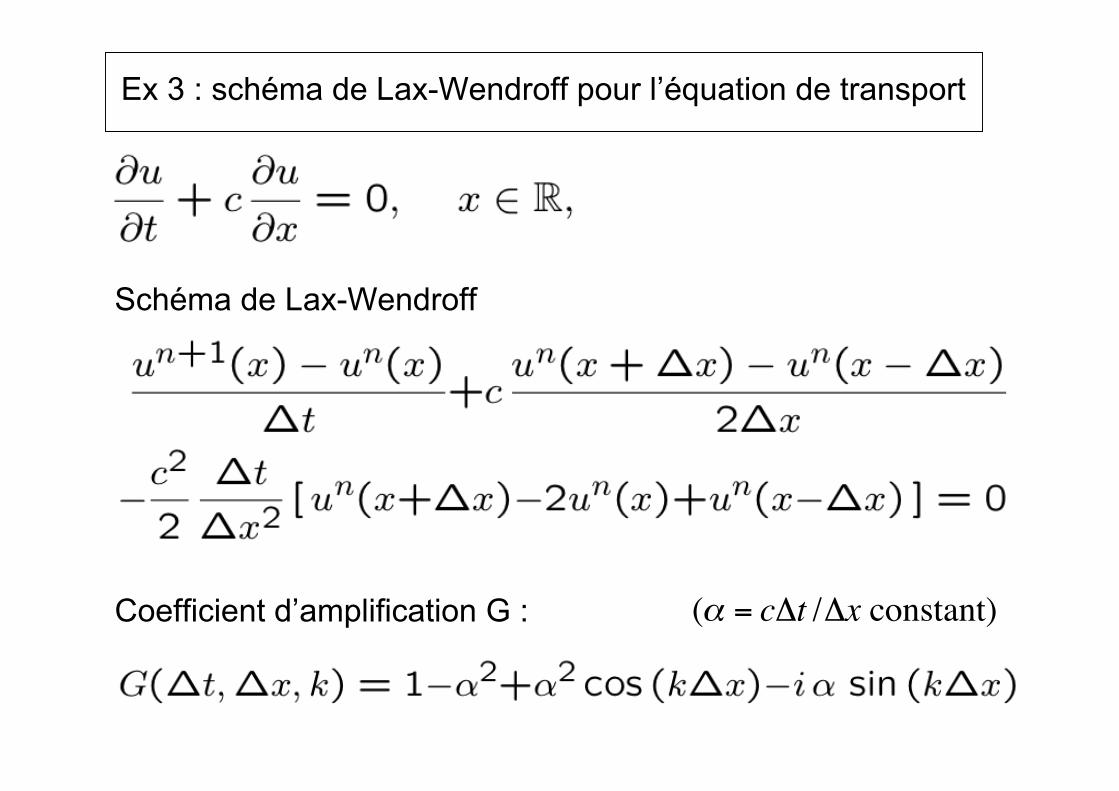
Ex 3 : schéma de Lax-Wendroff pour l’équation de transport
Schéma de Lax-Wendroff
Coefficient d’amplification G :
!
(" = c#t /#x constant)
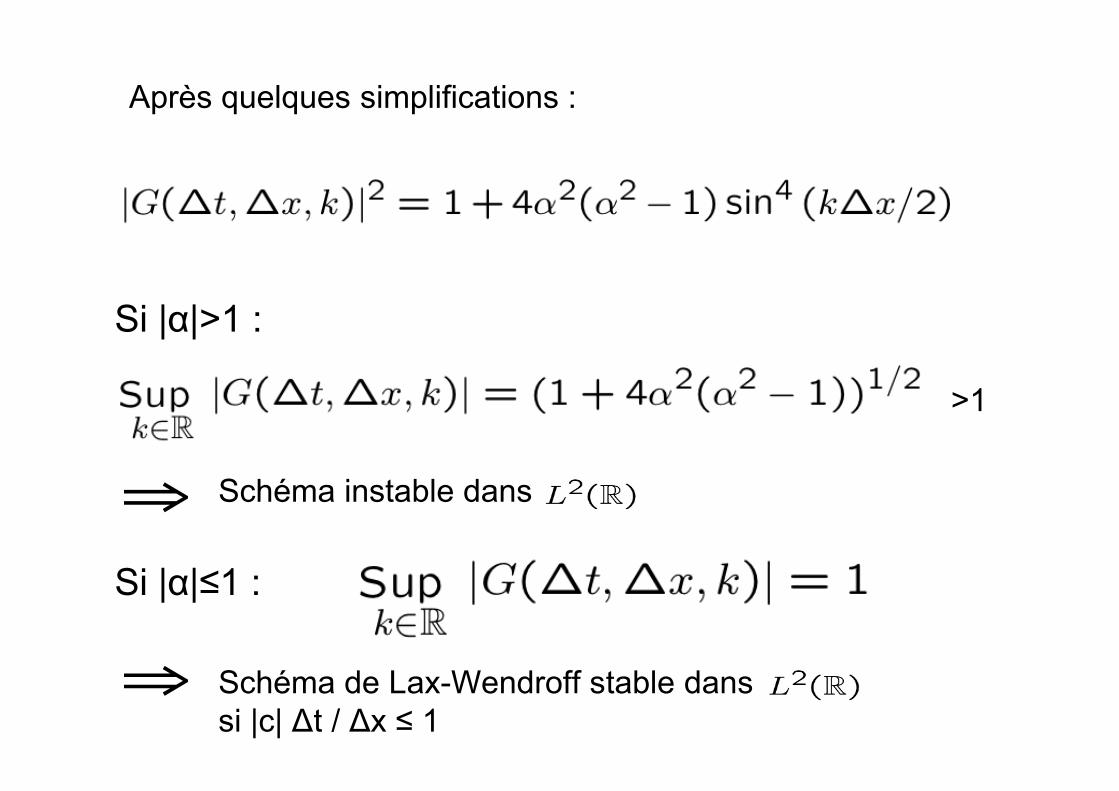
Si |α|>1 :
Si |α|≤1 :
!
" Schéma instable dans
!
" Schéma de Lax-Wendroff stable danssi |c| Δt / Δx ≤ 1
Après quelques simplifications :
>1


















