
SIMATIC PID Temperature Control -...
102
s Préface, Sommaire Introduction 1 Régulateur de température continu FB 58 "TCONT_CP" 2 Optimisation du régulateur dans le FB 58 "TCONT_CP" 3 Régulateur thermique pas à pas FB 59 "TCONT_S" 4 Mise en route (Getting Started) 5 Exemples d'utilisation des régulateurs de température 6 Annexe A Abréviations B Index SIMATIC PID Temperature Control Manuel Edition 12/2003 A5E00125040-02
Transcript of SIMATIC PID Temperature Control -...
s Préface, Sommaire
Introduction 1 Régulateur de température continu FB 58 "TCONT_CP" 2 Optimisation du régulateur dans le FB 58 "TCONT_CP" 3 Régulateur thermique pas à pas FB 59 "TCONT_S" 4 Mise en route (Getting Started) 5 Exemples d'utilisation des régulateurs de température 6 Annexe A Abréviations B Index
SIMATIC
PID Temperature Control Manuel
Edition 12/2003 A5E00125040-02
Copyright © Siemens AG 2001-2003 Tous droits réservés Exclusion de responsabilité
Toute communication et reproduction de ce support d'information, toute exploitation ou communication de son contenu sont interdites, sauf autorisation expresse. Tout manquement à cette règle est illicite et expose son auteur au versement de dommages et intérêts. Tous nos droits sont réservés, notamment pour le cas de la délivrance d'un brevet ou celui de l'enregistrement d'un modèle d'utilité. Siemens AG Bereich Automatisierungs- und Antriebstechnik Geschaeftsgebiet Industrie-Automatisierungssysteme Postfach 4848, D-90327 Nuernberg
Nous avons vérifié la conformité du contenu du présent manuel avec le matériel et le logiciel qui y sont décrits. Or des divergences n'étant pas exclues, nous ne pouvons pas nous porter garants pour la conformité intégrale. Si l'usage de ce manuel devait révéler des erreurs, nous en tiendrons compte et apporterons les corrections nécessaires dès la prochaine édition. Veuillez nous faire part de vos suggestions. © Siemens AG 2001-2003 Sous réserve de modifications techniques
Siemens Aktiengesellschaft A5E00125040
Consignes de sécurité
Ce manuel donne des consignes que vous devez respecter pour votre propre sécurité ainsi que pour
éviter des dommages matériels. Elles sont mises en évidence par un triangle d'avertissement et sont
présentées, selon le risque encouru, de la façon suivante :
! Danger signifie que la non-application des mesures de sécurité appropriées conduit à la mort, à des lésions corporelles graves ou à un dommage matériel important.
! Précaution signifie que la non-application des mesures de sécurité appropriées peut conduire à la mort, à des lésions corporelles graves ou à un dommage matériel important.
! Avertissement signifie que la non-application des mesures de sécurité appropriées peut conduire à des lésions corporelles légères.
Avertissement
signifie que la non-application des mesures de sécurité appropriées peut conduire à un dommage matériel.
Attention doit vous rendre tout particulièrement attentif à des informations importantes sur le produit, aux manipulations à effectuer avec le produit ou à la partie de la documentation correspondante.
Personnel qualifié
La mise en service et l'utilisation de l'appareil ne doivent être effectuées que conformément au manuel.
Seules des personnes qualifiées sont autorisées à effectuer des interventions sur l'appareil. Il s'agit de
personnes qui ont l'autorisation de mettre en service, de mettre à la terre et de repérer des appareils,
des systèmes et circuits électriques conformément aux règles de sécurité en vigueur.
Utilisation conforme
Tenez compte des points suivants :
! Attention
L'appareil, le système ou le composant ne doit être utilisé que pour les applications spécifiées dans le catalogue ou dans la description technique, et exclusivement avec des périphériques et composants recommandés par Siemens.
Le transport, le stockage, le montage, la mise en service ainsi que l'utilisation et la maintenance adéquats de l'appareil sont les conditions indispensables pour garantir son fonctionnement correct et sûr.
Marque de fabrique
SIMATIC®, SIMATIC NET® et SIMATIC HMI® sont des marques déposées par SIEMENS AG.
Les autres désignations dans ce document peuvent être des marques dont l'utilisation par des tiers à
leurs propres fins peut enfreindre les droits des propriétaires desdites marques.
PID Temperature Control A5E00125040-02 iii
Préface
Objet du présent manuel
Ce manuel vous explique comment utiliser les blocs de régulation de température de la bibliothèque Standard Library > PID Control en vous familiarisant avec leur fonctionnement, notamment avec leur optimisation et avec l'appel de l'interface de paramétrage des blocs. Un programme d'assistance en ligne spécifique aux blocs et à l'interface permet de paramétrer dans les meilleures conditions.
Ce manuel s'adresse aux techniciens qualifiés intervenant au niveau de la programmation, de la configuration, de la mise en service et du support des automates programmables.
Nous vous recommandons de vous familiariser avec les exemples du chapitre 6 "Exemples de régulateurs de température", afin de mieux savoir les adapter à vos besoins.
Connaissances requises
L'utilisation de ce manuel suppose des connaissances générales en technique d'automatisation et de régulation.
Il faut en outre savoir utiliser un ordinateur personnel ou tout autre ordinateur comparable (p. ex. les consoles de programmation) fonctionnant sous Windows 95/98/NT/2000 ou Me). Etant donné que votre programme "PID Temperature Control" s'appuie sur le logiciel de base STEP 7, il est également recommandé de se familiariser avec le manuel "Programmer avec STEP 7 V5.1".
Domaine d'application de ce manuel
Ce manuel est valable pour les régulateurs de température de la bibliothèque Standard Library > PID Control du logiciel de programmation STEP 7, à partir de la version V5.1, Servicepack 3.
Préface
PID Temperature Control iv A5E00125040-02
Classification du manuel
Ce manuel fait partie du jeu de documentation "STEP 7 Connaissances de base".
Manuels Objet Numéro de référence
STEP 7 - Connaissances de base avec
• STEP 7 V5.1-Getting started
• Programmer avec STEP 7 V5.1
• Configuration matérielle et communication dans STEP 7 V5.1
• Pour une transition facile de S5 à S7
Présentation générale à l'intention des opérateurs ; description de la procédure à suivre en vue de la réalisation de fonctions de commande avec STEP 7 et S7-300/400.
6ES7810-4CA05-8CA0
STEP 7-Manuels de référence
• Manuels CONT/LOG/LIST pour S7-300/400
• Fonctions système et standard pour S7-300/400
Ouvrage de référence décrivant, en complément de la présentation générale de STEP 7, les langages de programmation CONT, LOG et LIST ainsi que les fonctions standards et fonctions système.
6ES7810-4CA05-8CR0
Manuel électronique
• PID Temperature Control
Ce manuel décrit les régulateurs de température de la bibliothèque "Standard Library > PID Control".
Partie du progiciel STEP 7
Assistance en ligne Objet Numéro de référence
Aide de STEP 7 Aide en ligne fournissant les connaissances de base pour la programmation et la configuration matérielle avec STEP 7.
Partie du progiciel STEP 7
Aide de référence de
• LIST/CONT/LOG
• SFB/SFC
• Blocs d'organisation
• PID Temperature Control
Aide de référence contextuelle Partie du progiciel STEP 7
Autres produits sur la régulation dans SIMATIC S7
• Manuels d'utilisation SIMATIC S7 : Standard PID Control, Modular PID Control, PID Self-Tuner, FM355/455 PID Control
• Jürgen Müller, "Régulation avec SIMATIC – Manuel de pratique pour les régulations avec SIMATIC S7 et PCS7" publié aux éditions MCI Publicis ISBN 3-89578-147-9
Préface
PID Temperature Control A5E00125040-02 v
Assistance supplémentaire
Si des questions sont restées sans réponse dans ce manuel, veuillez vous adresser à votre interlocuteur Siemens dans la filiale ou l'agence de votre région.
Vous trouvez votre interloculeur sous :
http://www.ad.siemens.de/partner
Centre de formation SIMATIC Nous proposons des cours de formation pour vous faciliter l'apprentissage des automates programmables SIMATIC S7. Veuillez vous adresser à votre centre de formation régional ou au centre principal à D 90327 Nuremberg.
Téléphone : +49 (911) 895-3200.
Internet: http://www.sitrain.com
Site de documentation SIMATIC
Siemens vous offre un accès gratuit à sa documentation sur l'Internet, à l'adresse suivante :
http://www.adsiemens.de/support
Utilisez le gestionnaire de documentation (Knowledge Manager) pour identifier rapidement la documentation adéquate. Vous pouvez adresser vos questions et suggestions au groupe de discussion de notre forum Internet.
Préface
PID Temperature Control vi A5E00125040-02
A&D Technical Support
Accessible dans le monde entier à toute heure :
Beijing
Nuernberg
Johnson City
Worldwide (Nuernberg)
Technical Support
Heure locale : 0h à 24h / 365 jours
Tél. : +49 (180) 5050-222
Fax: +49 (180) 5050-223
E-Mail: adsupport@ siemens.com
GMT: +1:00
Europe / Africa (Nuernberg)
Authorization
Heure locale : lu-ve. 8h à 17h
Tél. : +49 (180) 5050-222
Fax: +49 (180) 5050-223
E-Mail: adsupport@ siemens.com
GMT: +1:00
United States (Johnson City)
Technical Support and Authorization
Heure locale : lu-ve 8h à 17h
Tél. : +1 (423) 262 2522
Fax: +1 (423) 262 2289
E-Mail: simatic.hotline@
sea.siemens.com
GMT: -5:00
Asia / Australia (Beijing)
Technical Support and Authorization
Heure locale : lu-ve 8h à 17h
Tél. : +86 10 64 75 75 75
Fax: +86 10 64 74 74 74
E-Mail: adsupport.asia@
siemens.com
GMT: +8:00
Les langues parlées au Technical Support et sur la Hotline des autorisations sont généralement l'Allemand et l'Anglais.
Préface
PID Temperature Control A5E00125040-02 vii
Service & Support sur Internet
En plus de la documentation offerte, vous trouvez la totalité de notre savoir-faire en ligne sur Internet à l'adresse suivante :
http://www.siemens.com/automation/service&support
Vous y trouvez :
• le bulletin d'informations qui vous fournit constamment les dernières informations sur le produit,
• les documents dont vous avez besoin à l'aide de la fonction de recherche du Service & Support,
• le forum où utilisateurs et spécialistes peuvent échanger informations,
• votre interlocuteur Automation & Drives sur place,
• des informations sur le service après-vente, les réparations, les pièces de rechange à la rubrique "Service".

Préface
PID Temperature Control viii A5E00125040-02
PID Temperature Control A5E00125040-02 ix
Sommaire
1 Introduction 1-1
1.1 FB 58 "TCONT_CP"..........................................................................................1-3 1.2 FB 59 "TCONT_S" ............................................................................................1-4
2 Régulateur de température continu FB 58 "TCONT_CP" 2-1
2.1 Régulation .........................................................................................................2-1 2.1.1 Formation du signal d'écart .............................................................................. 2-1 2.1.2 Algorithme PID ................................................................................................. 2-4 2.1.3 Calcul de la valeur réglante.............................................................................. 2-6 2.1.4 Enregistrement et rechargement des paramètres du régulateur ..................... 2-9 2.3 Schéma fonctionnel.........................................................................................2-13 2.4 Intégration au programme utilisateur ..............................................................2-14 2.4.1 Appel du bloc de régulation............................................................................ 2-14 2.4.2 Appel sans mise en forme des impulsions (régulateur continu) .................... 2-15 2.4.3 Appel avec mise en forme des impulsions (régulateur impulsionnel)............ 2-15 2.4.4 Initialisation..................................................................................................... 2-18
3 Optimisation du régulateur dans le FB 58 "TCONT_CP" 3-1
3.1 Introduction........................................................................................................3-1 3.2 Types de systèmes ...........................................................................................3-2 3.3 Domaine d'application .......................................................................................3-3 3.4 Procédure d'optimisation du régulateur ............................................................3-4 3.5 Préparatifs .........................................................................................................3-6 3.6 Démarrage de l'optimisation (phase 1 -> 2) ......................................................3-8 3.7 Recherche du point d'inflexion (phase 2)
et calcul des paramètres du régulateur (phases 3, 4, 5).................................3-10 3.8 Vérification du type de système (phase 7) ......................................................3-10 3.10 Annulation de l'optimisation par l'opérateur ....................................................3-11 3.11 Erreurs possibles et comment y remédier.......................................................3-12 3.12 Optimisation manuelle ultérieure en mode régulation.....................................3-15 3.13 Optimisation parallèle de voies de régulation .................................................3-18
4 Régulateur thermique pas à pas FB 59 "TCONT_S" 4-1
4.1 Régulation .........................................................................................................4-1 4.1.1 Formation du signal d'écart .............................................................................. 4-1 4.1.2 Algorithme du régulateur PI pas à pas............................................................. 4-4 4.2 Schéma fonctionnel...........................................................................................4-5 4.3 Intégration au programme utilisateur ................................................................4-6 4.3.1 Appel du bloc de régulation.............................................................................. 4-6 4.3.2 Période d'échantillonnage du régulateur.......................................................... 4-7 4.3.3 Initialisation....................................................................................................... 4-7
5 Mise en route (Getting Started) 5-1
Sommaire
PID Temperature Control x A5E00125040-02
6 Exemples d'utilisation des régulateurs de température 6-1
6.1 Introduction........................................................................................................6-1 6.2 Exemple avec le FB 58 "TCONT_CP" (régulation à impulsions)......................6-2 6.3 Exemples de programmation du FB 58 "TCONT_CP"
avec base de temps courte ...............................................................................6-6 6.4 Exemple de programmation du FB 58 "TCONT_CP"
(régulation à action continue)............................................................................6-7 6.5 Exemple de programmation du FB 59 "TCONT_S" (régulation pas à pas)....6-11
A Annexe A-1
A.1 Caractéristiques techniques............................................................................. A-1 A.2 Temps d'exécution ........................................................................................... A-1 A.3.1 DB d'instance du FB 58 "TCONT_CP" ............................................................ A-2 A.3.2 DB d'instance du FB 59 "TCONT_S" ............................................................. A-14 A.4 Liste des messages en retour de l'optimisation ............................................. A-18
B Abréviations B-1
Index
PID Temperature Control A5E00125040-02 1-1
1 Introduction
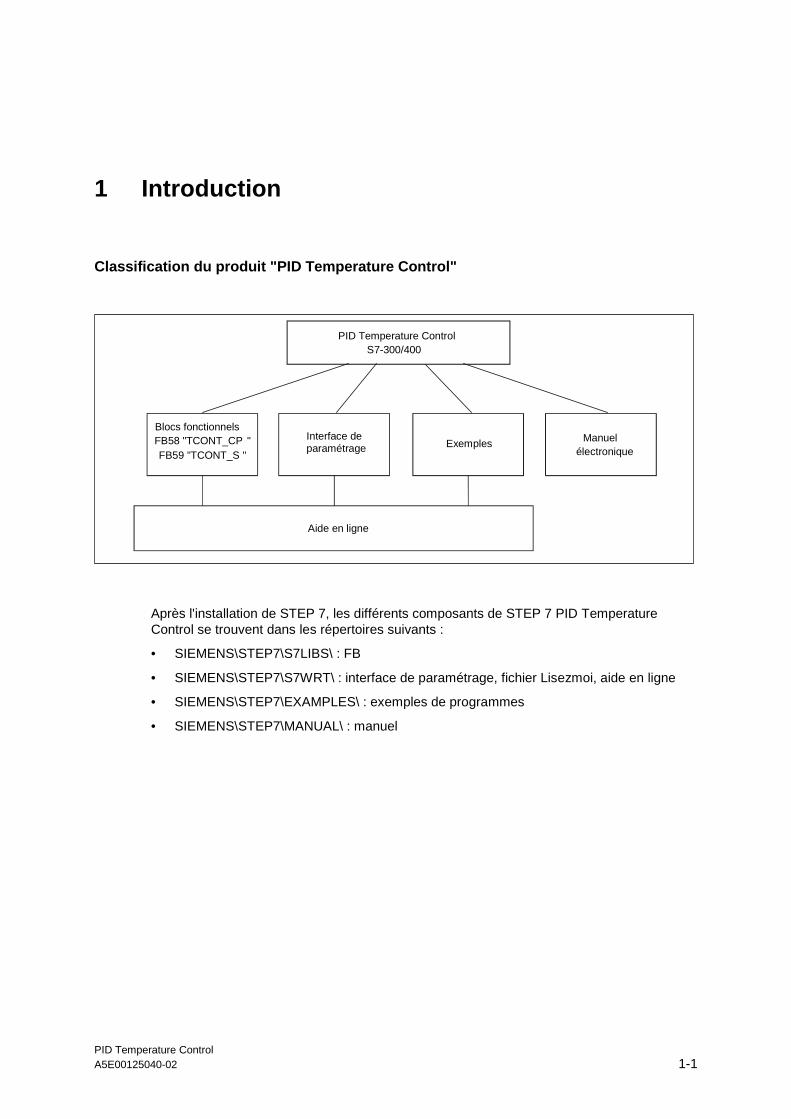
Classification du produit "PID Temperature Control"
PID Temperature ControlS7-300/400
Interface deparamétrage
Blocs fonctionnelsFB58 "TCONT_CP "FB59 "TCONT_S "
Manuelélectronique
Exemples
Aide en ligne
Après l'installation de STEP 7, les différents composants de STEP 7 PID Temperature Control se trouvent dans les répertoires suivants :
• SIEMENS\STEP7\S7LIBS\ : FB
• SIEMENS\STEP7\S7WRT\ : interface de paramétrage, fichier Lisezmoi, aide en ligne
• SIEMENS\STEP7\EXAMPLES\ : exemples de programmes
• SIEMENS\STEP7\MANUAL\ : manuel
Introduction
PID Temperature Control 1-2 A5E00125040-02
Blocs fonctionnels
La bibliothèque "Standard Library PID Control" contient deux régulateurs de température :
1. FB 58 "TCONT_CP" : Régulateur de température pour actionneurs à signal d'entrée continu ou impulsionnel. Ce bloc de régulation contient également une fonction d'auto-optimisation des paramètres PI/PID.
2. FB 59 "TCONT_S" : Régulateur de température pas à pas pour actionneurs à action par intégration, comme p. ex. les servomoteurs.
Les blocs de régulation assurent une régulation purement logicielle, chaque bloc comportant la fonctionnalité complète d'un régulateur. Les données nécessaires au calcul cyclique se trouvent dans les blocs de données d'instance correspondants.
Interface de paramétrage
L'interface de paramétrage vous permet de paramétrer et d'optimiser le régulateur. Les paramètres définis sont enregistrés dans le DB d'instance correspondant. Vous appelez l'interface de paramétrage en effectuant un double-clic sur le bloc de données d'instance respectif.
Aide en ligne
La description de l'interface de paramétrage et des blocs fonctionnels est fournie dans l'aide en ligne respective.
Lecture du fichier Lisezmoi
Vous trouverez des informations récentes et importantes sur le logiciel fourni dans un fichier lisezmoi. Ce fichier vous est proposé dans la fenêtre d'accueil de SIMATIC Manager.
Introduction
PID Temperature Control A5E00125040-02 1-3
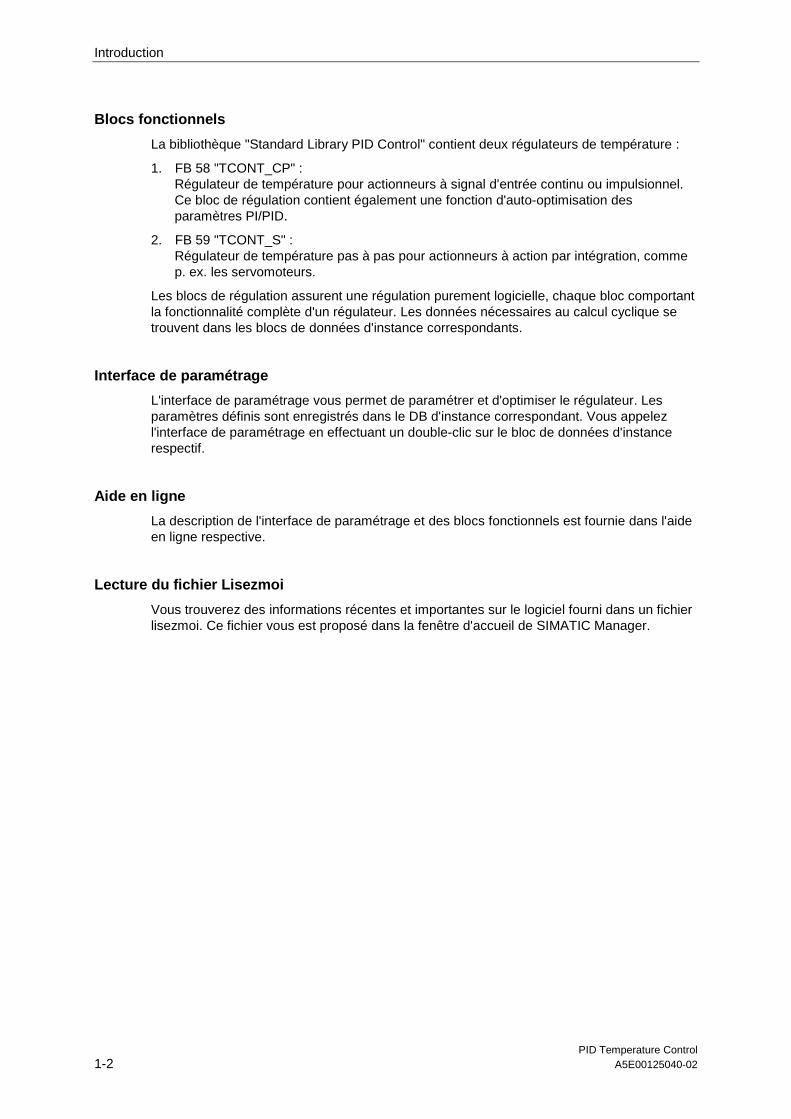
1.1 FB 58 "TCONT_CP"
Le FB 58 "TCONT_CP" sert à la régulation de processus thermiques au moyen d'une commande continue ou impulsionnelle. En paramétrant ce bloc, vous pouvez activer ou désactiver des fonctions partielles du régulateur PID afin de l'adapter au système réglé. Il suffit pour cela d'utiliser l'outil de paramétrage. Vous appelez ce dernier dans le projet, en effectuant un double-clic sur le DB d'instance dans SIMATIC Manager. Pour accéder au manuel électronique, choisissez la commande Démarrer > Simatic > Documentation > Français > PID Temperature Control.
Utilisation
Le FB 58 fonctionne suivant un algorithme de régulation PID complété par des fonctions spécifiques aux processus thermiques. Le régulateur fournit des valeurs réglantes analogiques ainsi que des signaux de réglage à modulation de largeur d'impulsion. Il ne dessert qu'un seul actionneur, c'est-à-dire qu'il permet, soit uniquement de chauffer, soit uniquement de refroidir.
Utilisation du régulateur dans un processus de chauffage et de refroidissement
Le FB TCONT_CP peut être utilisé dans des systèmes destinés uniquement à chauffer ou uniquement à refroidir. Dans le cas d'un processus de refroidissement, vous devez affecter une valeur négative au paramètre GAIN. La conséquence de cette inversion de régulation est qu'en cas d'augmentation de température p. ex., la valeur réglante LMN et donc la puissance de refroidissement augmentent.
Schéma fonctionnel
PID Temperature Control• Plage de régulation
Générateurd’impulsion
Valeur de réglageLMN
ConsigneSP_INT
Signal de lade réglagevaleur
QPULSE
MesurePV_PERPV_IN
Optimisation du régulateur• Paramètres PI/PID
Largeur plage de réglagePeriode d’échantillonnage
Réponse indicielleoptimisée-
Introduction
PID Temperature Control 1-4 A5E00125040-02
Description
Non seulement ce FB réalise les fonctions spécifiques aux branches de consigne et de mesure, mais en outre il constitue un régulateur de température PID complet à sortie de valeurs réglantes en mode continu ou binaire. Une plage de régulation et une fonction de réduction de la composante P en cas d'échelon de consigne permettent d'optimiser la régulation. Grâce à son module d'optimisation, le bloc est capable de régler lui-même les paramètres PI/PID.
1.2 FB 59 "TCONT_S"
Le FB 59 "TCONT_S" sert à la régulation de processus thermiques techniques avec signaux de sortie binaires pour actionneurs à intégration dans les systèmes d'automatisation SIMATIC S7. En paramétrant ce bloc, vous pouvez activer ou désactiver des fonctions partielles du régulateur pas à pas PI afin de l'adapter au système réglé. Il suffit pour cela d'utiliser l'interface de paramétrage. Vous appelez cette dernière dans le projet, en effectuant un double-clic sur le DB d'instance dans SIMATIC Manager. Pour accéder au manuel électronique, choisissez la commande Démarrer > Simatic > Documentation > Français > PID Temperature Control.
Utilisation
Le FB 59 fonctionne suivant l'algorithme de régulation PI du régulateur à échantillonnage. Cet algorithme est complété par les opérateurs fonctionnels permettant de générer le signal de sortie binaire à partir du signal de réglage analogique.
Vous pouvez également intégrer ce bloc fonctionnel dans une régulation en cascade, comme régulateur de position de niveau inférieur. Vous spécifiez la position de l'actionneur grâce à l'entrée de consigne SP_INT. Dans ce cas, vous devez mettre l'entrée de mesure et le paramètre TI (temps d'intégration) à zéro. Exemple d'application : réglage de température par régulation d'un système chauffage sous forme de commandes impulsions - pause, ou régulation d'un système de refroidissement par commande d'une soupape. La fermeture complète du clapet intervient lorsque la variable réglante (ER*GAIN) devient négative.
Description
Non seulement le FB 59 "TCONT_S" réalise les fonctions spécifiques à la branche de consigne, mais en outre il constitue un régulateur PI complet à sortie de valeurs réglantes en mode binaire et possibilité de correction manuelle des signaux de valeurs réglantes. Ce régulateur pas à pas fonctionne sans signalisation de position.
PID Temperature Control A5E00125040-02 2-1
2 Régulateur de température continu FB 58 "TCONT_CP"
2.1 Régulation
2.1.1 Formation du signal d'écart
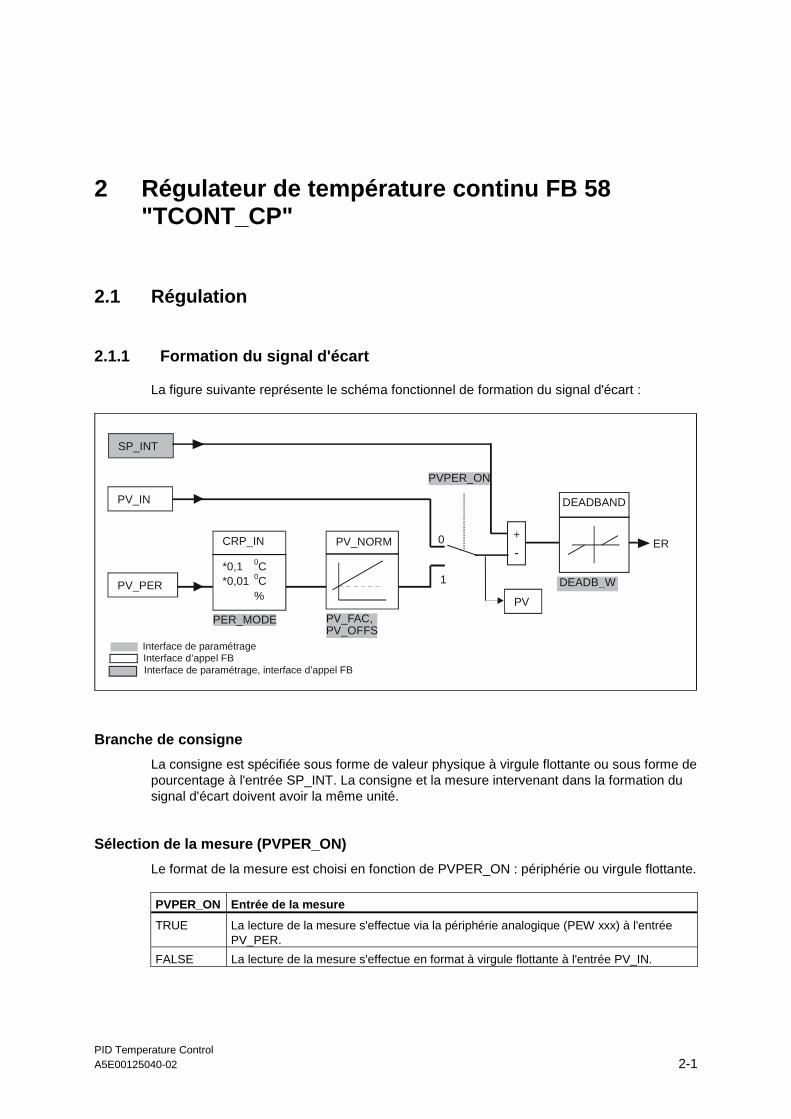
La figure suivante représente le schéma fonctionnel de formation du signal d'écart :
SP_INT
PV_IN
PV_PER
CRP_IN
PER_MODE
PV_NORM
PV_FAC,PV_OFFS
*0,1 0C*0,01 0C %
1
0
PVPER_ON
Interface de paramétrage
Interface de paramétrage, interface d’appel FBInterface d’appel FB
PV
DEADBAND
DEADB_W
ER+
Branche de consigne
La consigne est spécifiée sous forme de valeur physique à virgule flottante ou sous forme de pourcentage à l'entrée SP_INT. La consigne et la mesure intervenant dans la formation du signal d'écart doivent avoir la même unité.
Sélection de la mesure (PVPER_ON)
Le format de la mesure est choisi en fonction de PVPER_ON : périphérie ou virgule flottante.
PVPER_ON Entrée de la mesure
TRUE La lecture de la mesure s'effectue via la périphérie analogique (PEW xxx) à l'entrée PV_PER.
FALSE La lecture de la mesure s'effectue en format à virgule flottante à l'entrée PV_IN.
Régulateur de température continu FB 58 "TCONT_CP"
PID Temperature Control 2-2 A5E00125040-02
Conversion du format de la mesure CRP_IN (PER_MODE)
La fonction CPR_IN convertit la valeur de périphérie en fonction du commutateur PER_MODE au format virgule flottante selon la règle suivante :
PER_MODE Sortie de CRP_IN Type d'entrée analogique Unité
0 PV_PER * 0.1 Thermocouples ; PT100/NI100 ; standard °C ; °F
1 PV_PER * 0.01 PT100/NI100 ; climat ; °C ; °F
2 PV_PER * 100/27648
Tension/courant %
Normalisation de la mesure PV_NORM (PF_FAC, PV_OFFS)
La fonction PV_NORM calcule la sortie CRP_IN d'après la règle suivante :
"Sortie de PV_NORM" = "Sortie de CPR_IN" * PV_FAC PV_OFFS ;
Domaine d'application de cette règle :
• Conversion de la mesure avec PV_FAC comme facteur de mesure et PV_OFFS comme décalage de mesure
• Normalisation d'une température en pourcentage Vous souhaitez entrer la consigne sous forme de pourcentage et devez à présent convertir la valeur de température mesurée en pourcentage.
• Normalisation d'un pourcentage en température Vous souhaitez entrer la consigne sous forme de la grandeur physique température et devez à présent convertir la valeur de tension/courant mesurée en température.
Calcul des paramètres :
• PV_FAC = plage des valeurs possibles de PV_NORM/plage des valeurs possibles de CRP_IN ;
• PV_OFFS = LI(PV_NORM) - PV_FAC * UG(CRP_IN) ; avec UG : limite inférieure
Les valeurs par défaut (PV_FAC = 1.0 et PV_OFFS = 0.0) permettent de désactiver la normalisation. La mesure effective est fournie à la sortie PV.
Nota
Dans le cas de la régulation à impulsions, la mesure doit être transmise au bloc dans l'appel d'impulsion rapide (explication : calcul de la valeur moyenne). Dans le cas contraire, la qualité de la régulation risque de se détériorer.
Régulateur de température continu FB 58 "TCONT_CP"
PID Temperature Control A5E00125040-02 2-3
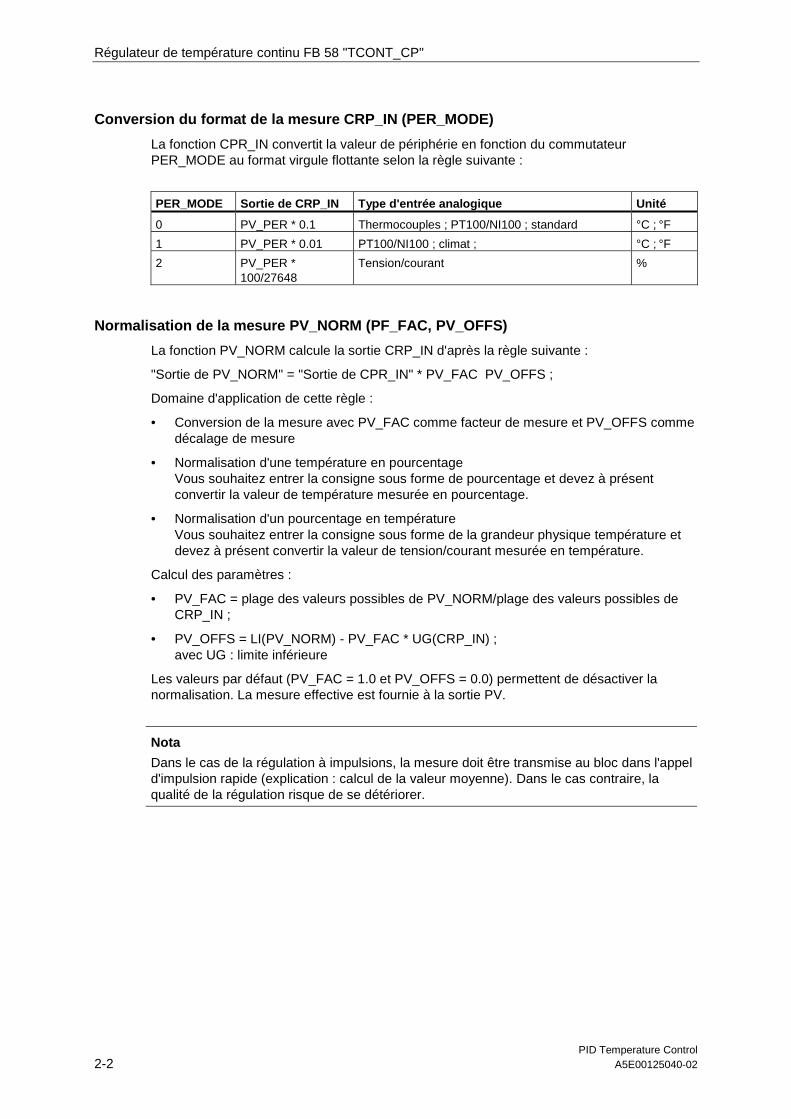
Exemple de normalisation de la mesure
Pour entrer la consigne sous forme de pourcentage, il faut convertir la plage de températures -20 à 85 °C connectée à CRP_IN en pourcentage.
La figure suivante présente un exemple de conversion de la plage de températures -20 à 85 °C en pourcentage interne 0 à 100 % :
PV_NORM [%]
100
75
50
25
-20 20 40 60 80 85 [°c]CRP_IN
PV_OFFS = 0-0.9524*(-20)
PV_FAC = 100/(85-(-20)) = 0.9524
= 19.05
Formation du signal d'écart
Le signal d'écart précédant la zone morte correspond à la différence entre la valeur de consigne et la mesure. La valeur de consigne et la mesure doivent avoir la même unité.
Zone morte (DEADB_W)
Le signal d'écart comprend une zone morte (DEADBAND) qui permet de supprimer une faible oscillation entretenue due à la quantification des grandeurs réglantes (p. ex. en cas de modulation de largeur d'impulsion PULSEGEN). Lorsque DEADB_W = 0.0, la zone morte est désactivée. Le signal d'écart effectif est indiqué par le paramètre ER.
ER
SP_INT - PV
ER = (SP_INT - PV) - DEAD_WER = (SP_INT - PV) + DEAD_W
DEADB_W
Régulateur de température continu FB 58 "TCONT_CP"
PID Temperature Control 2-4 A5E00125040-02
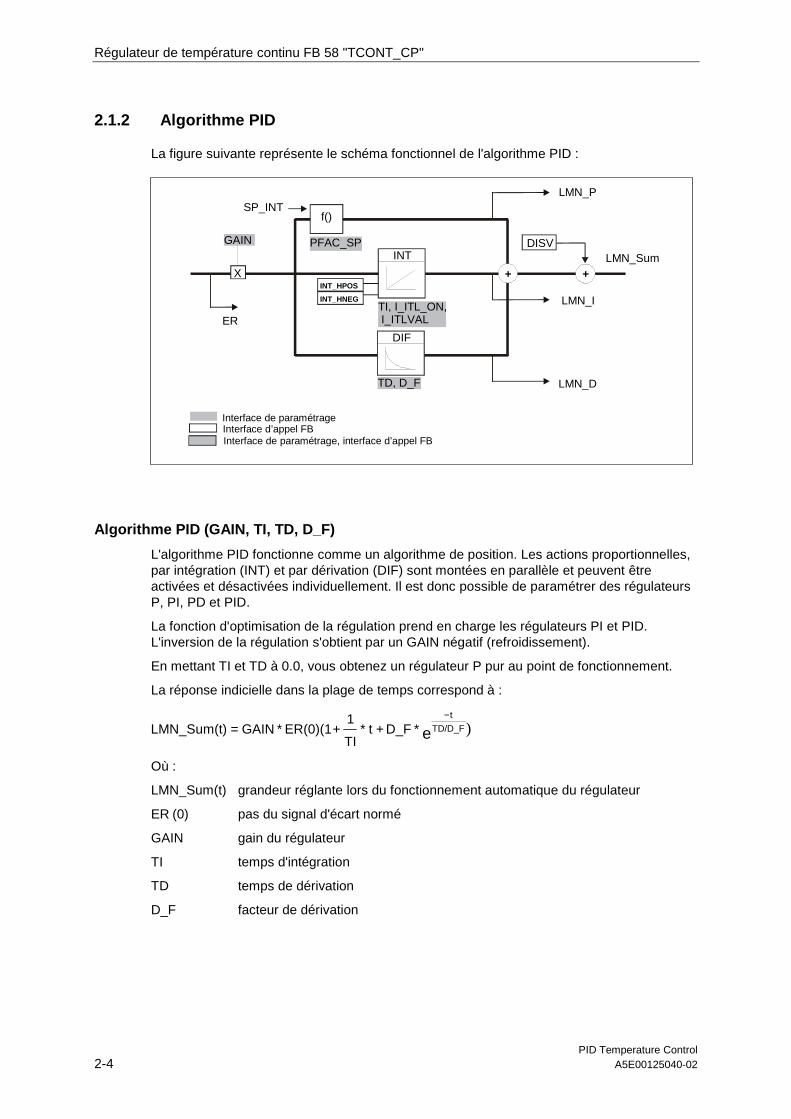
2.1.2 Algorithme PID
La figure suivante représente le schéma fonctionnel de l'algorithme PID :
Interface de paramétrage
Interface de paramétrage, interface d’appel FBInterface d’appel FB
X
ER
INT
DIF
+ +
LMN_P
LMN_I
LMN_D
SP_INTf()
LMN_Sum
GAIN PFAC_SP
TD, D_F
INT_HPOS
INT_HNEGTI, I_ITL_ON, I_ITLVAL
DISV
Algorithme PID (GAIN, TI, TD, D_F)
L'algorithme PID fonctionne comme un algorithme de position. Les actions proportionnelles, par intégration (INT) et par dérivation (DIF) sont montées en parallèle et peuvent être activées et désactivées individuellement. Il est donc possible de paramétrer des régulateurs P, PI, PD et PID.
La fonction d'optimisation de la régulation prend en charge les régulateurs PI et PID. L'inversion de la régulation s'obtient par un GAIN négatif (refroidissement).
En mettant TI et TD à 0.0, vous obtenez un régulateur P pur au point de fonctionnement.
La réponse indicielle dans la plage de temps correspond à :
Où :
LMN_Sum(t) grandeur réglante lors du fonctionnement automatique du régulateur
ER (0) pas du signal d'écart normé
GAIN gain du régulateur
TI temps d'intégration
TD temps de dérivation
D_F facteur de dérivation
)eTD/D_F
t
*D_Ft*TI
1ER(0)(1*GAINLMN_Sum(t)
−
++=
Régulateur de température continu FB 58 "TCONT_CP"
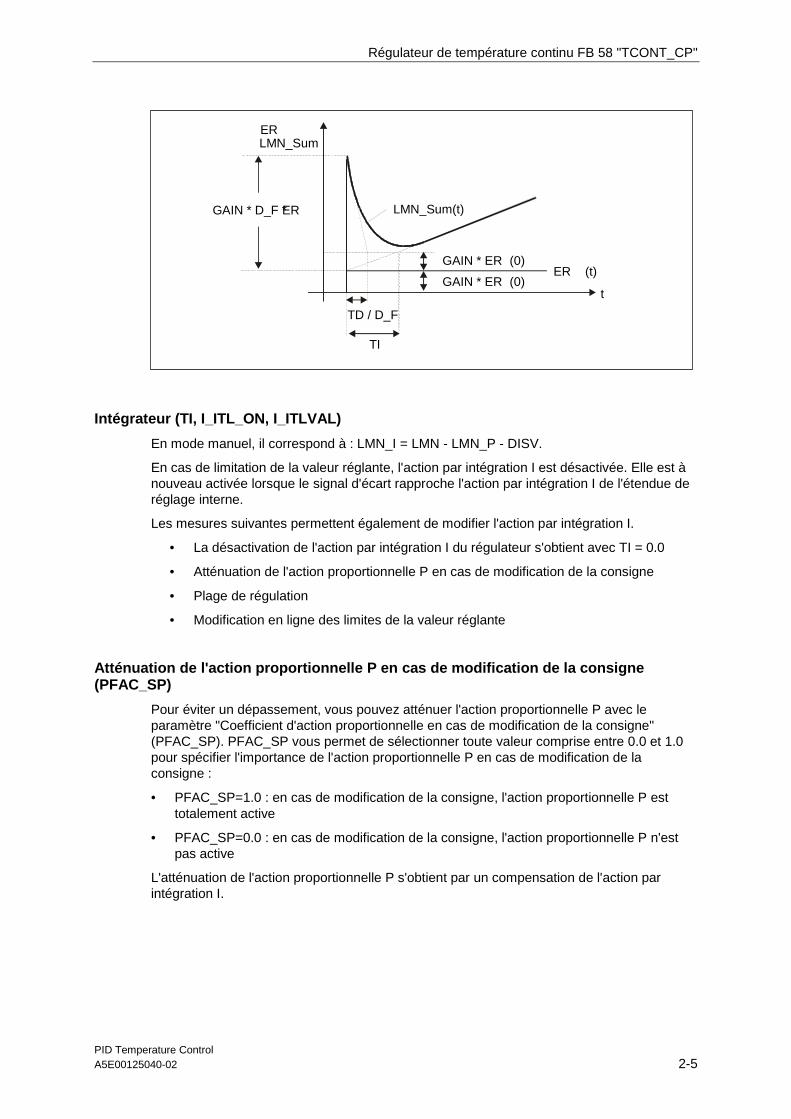
PID Temperature Control A5E00125040-02 2-5
ER (t)GAIN * ER (0)
GAIN * ER (0)
ER
LMN_Sum(t)
t
TD / D_F
LMN_Sum
TI
GAIN * D_F ER*
Intégrateur (TI, I_ITL_ON, I_ITLVAL)
En mode manuel, il correspond à : LMN_I = LMN - LMN_P - DISV.
En cas de limitation de la valeur réglante, l'action par intégration I est désactivée. Elle est à nouveau activée lorsque le signal d'écart rapproche l'action par intégration I de l'étendue de réglage interne.
Les mesures suivantes permettent également de modifier l'action par intégration I.
• La désactivation de l'action par intégration I du régulateur s'obtient avec TI = 0.0
• Atténuation de l'action proportionnelle P en cas de modification de la consigne
• Plage de régulation
• Modification en ligne des limites de la valeur réglante
Atténuation de l'action proportionnelle P en cas de modification de la consigne (PFAC_SP)
Pour éviter un dépassement, vous pouvez atténuer l'action proportionnelle P avec le paramètre "Coefficient d'action proportionnelle en cas de modification de la consigne" (PFAC_SP). PFAC_SP vous permet de sélectionner toute valeur comprise entre 0.0 et 1.0 pour spécifier l'importance de l'action proportionnelle P en cas de modification de la consigne :
• PFAC_SP=1.0 : en cas de modification de la consigne, l'action proportionnelle P est totalement active
• PFAC_SP=0.0 : en cas de modification de la consigne, l'action proportionnelle P n'est pas active
L'atténuation de l'action proportionnelle P s'obtient par un compensation de l'action par intégration I.
Régulateur de température continu FB 58 "TCONT_CP"
PID Temperature Control 2-6 A5E00125040-02
Dérivateur (TD, D_F)
• La désactivation de l'action par dérivation D du régulateur s'obtient avec TD = 0.0
• Lorsque l'action par dérivation D est activée, l'équation suivante doit être respectée : TD ≥ 0.5 * CYCLE * D_F
Paramétrage d'un régulateur P ou PD avec point de fonctionnement
Dans l'interface de paramétrage, désactivez l'action par intégration I (TI = 0.0) et le cas échéant, l'action par dérivation D (TD = 0.0). Effectuez également le paramétrage suivant :
• I_ITL_ON = TRUE
• I_ITLVAL = point de fonctionnement ;
Action anticipatrice (DISV)
Vous pouvez paramétrer une action anticipatrice à l'entrée DISV.
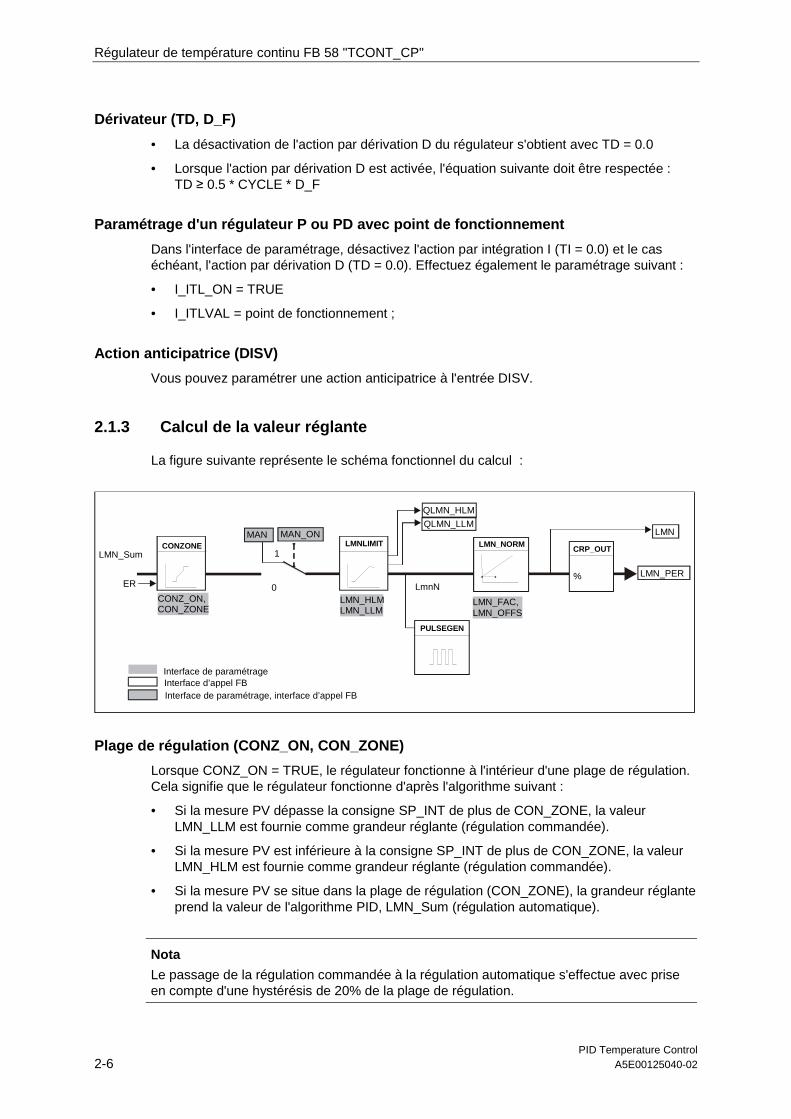
2.1.3 Calcul de la valeur réglante
La figure suivante représente le schéma fonctionnel du calcul :
LMN_PER
LMN_Sum
0
1 CRP_OUT
%
LMN_NORM
ER LmnN
MAN MAN_ON
CONZ_ON,CON_ZONE
QLMN_HLM
QLMN_LLM
LMN_HLMLMN_LLM
LMN_FAC,LMN_OFFS
LMN
Interface de paramétrage
Interface de paramétrage, interface d’appel FBInterface d’appel FB
CONZONE LMNLIMIT
PULSEGEN
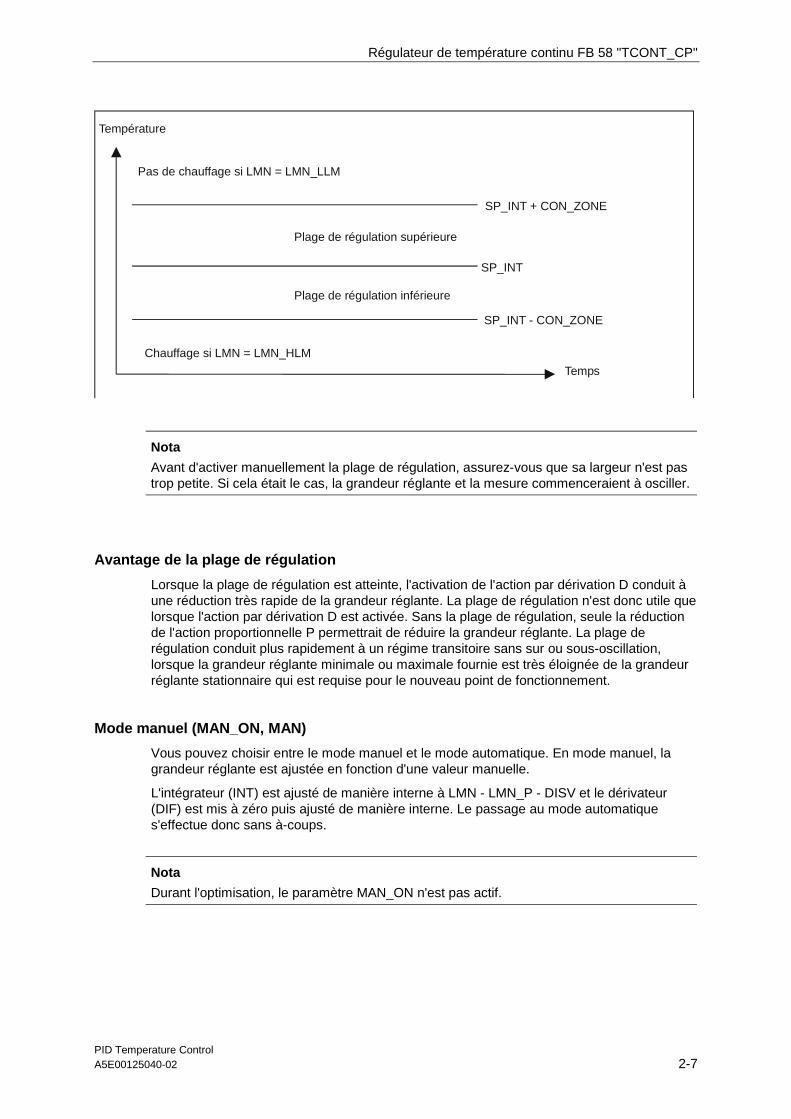
Plage de régulation (CONZ_ON, CON_ZONE)
Lorsque CONZ_ON = TRUE, le régulateur fonctionne à l'intérieur d'une plage de régulation. Cela signifie que le régulateur fonctionne d'après l'algorithme suivant :
• Si la mesure PV dépasse la consigne SP_INT de plus de CON_ZONE, la valeur LMN_LLM est fournie comme grandeur réglante (régulation commandée).
• Si la mesure PV est inférieure à la consigne SP_INT de plus de CON_ZONE, la valeur LMN_HLM est fournie comme grandeur réglante (régulation commandée).
• Si la mesure PV se situe dans la plage de régulation (CON_ZONE), la grandeur réglante prend la valeur de l'algorithme PID, LMN_Sum (régulation automatique).
Nota
Le passage de la régulation commandée à la régulation automatique s'effectue avec prise en compte d'une hystérésis de 20% de la plage de régulation.
Régulateur de température continu FB 58 "TCONT_CP"
PID Temperature Control A5E00125040-02 2-7
SP_INT
Plage de régulation inférieure
Plage de régulation supérieure
Temps
SP_INT + CON_ZONE
SP_INT - CON_ZONE
Pas de chauffage si LMN = LMN_LLM
Chauffage si LMN = LMN_HLM
Température
Nota
Avant d'activer manuellement la plage de régulation, assurez-vous que sa largeur n'est pas trop petite. Si cela était le cas, la grandeur réglante et la mesure commenceraient à osciller.
Avantage de la plage de régulation
Lorsque la plage de régulation est atteinte, l'activation de l'action par dérivation D conduit à une réduction très rapide de la grandeur réglante. La plage de régulation n'est donc utile que lorsque l'action par dérivation D est activée. Sans la plage de régulation, seule la réduction de l'action proportionnelle P permettrait de réduire la grandeur réglante. La plage de régulation conduit plus rapidement à un régime transitoire sans sur ou sous-oscillation, lorsque la grandeur réglante minimale ou maximale fournie est très éloignée de la grandeur réglante stationnaire qui est requise pour le nouveau point de fonctionnement.
Mode manuel (MAN_ON, MAN)
Vous pouvez choisir entre le mode manuel et le mode automatique. En mode manuel, la grandeur réglante est ajustée en fonction d'une valeur manuelle.
L'intégrateur (INT) est ajusté de manière interne à LMN - LMN_P - DISV et le dérivateur (DIF) est mis à zéro puis ajusté de manière interne. Le passage au mode automatique s'effectue donc sans à-coups.
Nota
Durant l'optimisation, le paramètre MAN_ON n'est pas actif.
Régulateur de température continu FB 58 "TCONT_CP"
PID Temperature Control 2-8 A5E00125040-02
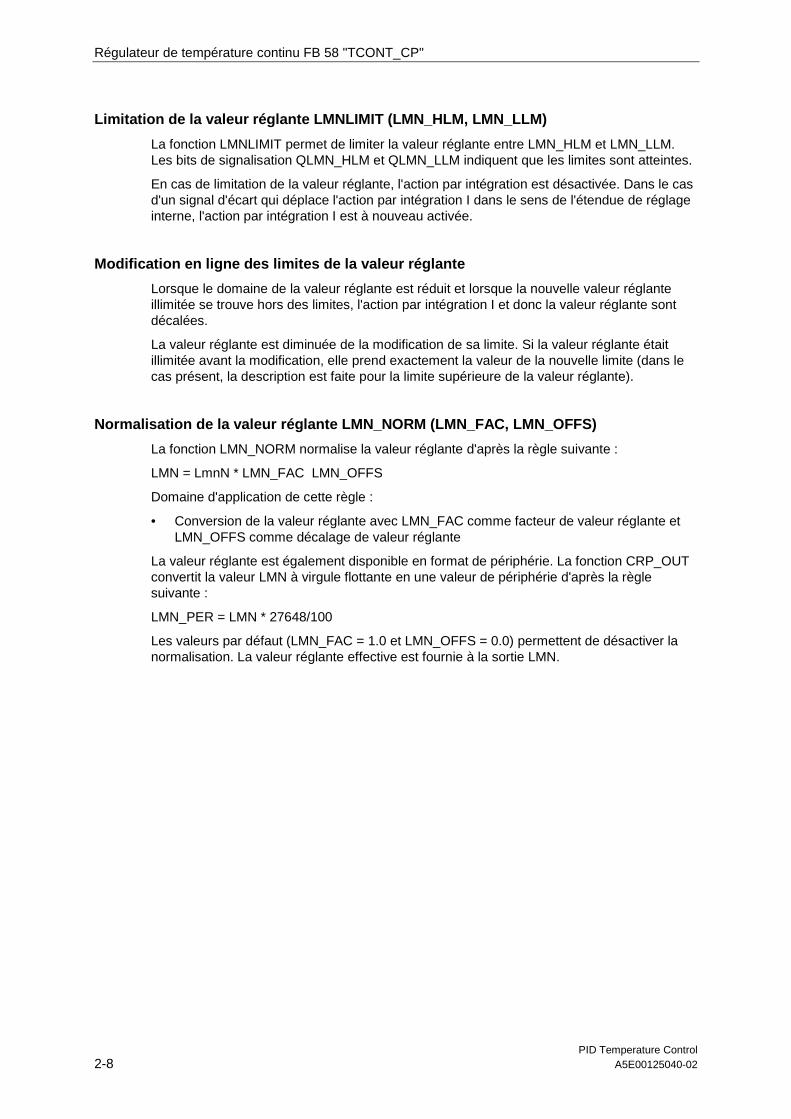
Limitation de la valeur réglante LMNLIMIT (LMN_HLM, LMN_LLM)
La fonction LMNLIMIT permet de limiter la valeur réglante entre LMN_HLM et LMN_LLM. Les bits de signalisation QLMN_HLM et QLMN_LLM indiquent que les limites sont atteintes.
En cas de limitation de la valeur réglante, l'action par intégration est désactivée. Dans le cas d'un signal d'écart qui déplace l'action par intégration I dans le sens de l'étendue de réglage interne, l'action par intégration I est à nouveau activée.
Modification en ligne des limites de la valeur réglante
Lorsque le domaine de la valeur réglante est réduit et lorsque la nouvelle valeur réglante illimitée se trouve hors des limites, l'action par intégration I et donc la valeur réglante sont décalées.
La valeur réglante est diminuée de la modification de sa limite. Si la valeur réglante était illimitée avant la modification, elle prend exactement la valeur de la nouvelle limite (dans le cas présent, la description est faite pour la limite supérieure de la valeur réglante).
Normalisation de la valeur réglante LMN_NORM (LMN_FAC, LMN_OFFS)
La fonction LMN_NORM normalise la valeur réglante d'après la règle suivante :
LMN = LmnN * LMN_FAC LMN_OFFS
Domaine d'application de cette règle :
• Conversion de la valeur réglante avec LMN_FAC comme facteur de valeur réglante et LMN_OFFS comme décalage de valeur réglante
La valeur réglante est également disponible en format de périphérie. La fonction CRP_OUT convertit la valeur LMN à virgule flottante en une valeur de périphérie d'après la règle suivante :
LMN_PER = LMN * 27648/100
Les valeurs par défaut (LMN_FAC = 1.0 et LMN_OFFS = 0.0) permettent de désactiver la normalisation. La valeur réglante effective est fournie à la sortie LMN.
Régulateur de température continu FB 58 "TCONT_CP"
PID Temperature Control A5E00125040-02 2-9
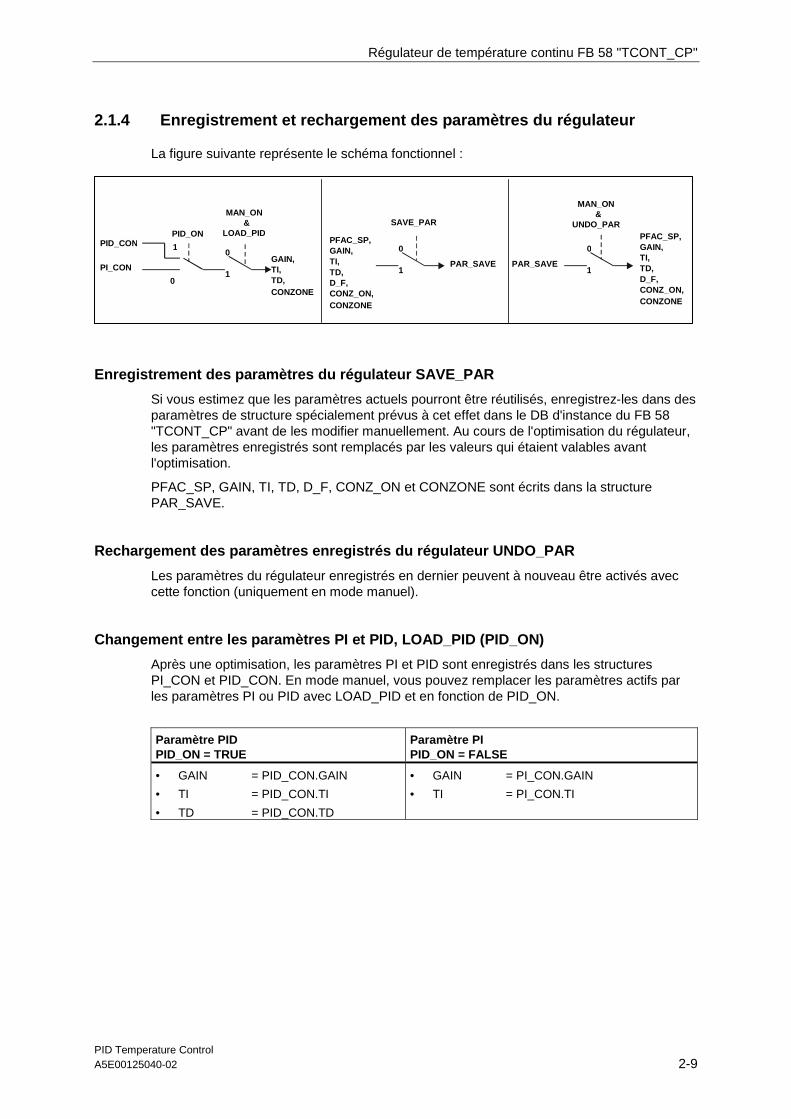
2.1.4 Enregistrement et rechargement des paramètres du régulateur
La figure suivante représente le schéma fonctionnel :
0
1PID_CONPID_ON
PI_CON
MAN_ON &
LOAD_PID
GAIN,TI,TD,CONZONE
0
1
SAVE_PAR
0
1PAR_SAVE
PFAC_SP,GAIN,TI,TD,D_F,CONZ_ON,CONZONE
0
1PAR_SAVE
PFAC_SP,GAIN,TI,TD,D_F,CONZ_ON,CONZONE
MAN_ON &
UNDO_PAR
Enregistrement des paramètres du régulateur SAVE_PAR
Si vous estimez que les paramètres actuels pourront être réutilisés, enregistrez-les dans des paramètres de structure spécialement prévus à cet effet dans le DB d'instance du FB 58 "TCONT_CP" avant de les modifier manuellement. Au cours de l'optimisation du régulateur, les paramètres enregistrés sont remplacés par les valeurs qui étaient valables avant l'optimisation.
PFAC_SP, GAIN, TI, TD, D_F, CONZ_ON et CONZONE sont écrits dans la structure PAR_SAVE.
Rechargement des paramètres enregistrés du régulateur UNDO_PAR
Les paramètres du régulateur enregistrés en dernier peuvent à nouveau être activés avec cette fonction (uniquement en mode manuel).
Changement entre les paramètres PI et PID, LOAD_PID (PID_ON)
Après une optimisation, les paramètres PI et PID sont enregistrés dans les structures PI_CON et PID_CON. En mode manuel, vous pouvez remplacer les paramètres actifs par les paramètres PI ou PID avec LOAD_PID et en fonction de PID_ON.
Paramètre PID PID_ON = TRUE
Paramètre PI PID_ON = FALSE
• GAIN = PID_CON.GAIN
• TI = PID_CON.TI
• TD = PID_CON.TD
• GAIN = PI_CON.GAIN
• TI = PI_CON.TI
Régulateur de température continu FB 58 "TCONT_CP"
PID Temperature Control 2-10 A5E00125040-02
Nota
• Les paramètres du régulateur ne peuvent être restitués avec UNDO_PAR ou LOAD_PID, qu'à condition que le gain du régulateur soit différent de zéro : Les paramètres de LOAD_PID ne peuvent être copiés qu'à condition que le GAIN respectif soit différent de zéro (paramètres provenant des jeux de paramètres PI ou PID). Ceci permet de tenir compte du cas où aucune optimisation n'a été faite, ainsi que de l'absence éventuelle de paramètres PID. Si PID_ON = TRUE et PID.GAIN = FALSE, PID_ON prend la valeur FALSE et les paramètres PI sont copiés.
• D_F, PFAC_SP sont présélectionnés automatiquement du fait de l'optimisation. Ils peuvent être modifiés ensuite par l'utilisateur. L'exécution de LOAD_PID ne modifie pas ces paramètres.
• Avec LOAD_PID, la plage de régulation est systématiquement recalculée (CON_ZONE = 250/GAIN), même si CONZ_ON = FALSE.
Régulateur de température continu FB 58 "TCONT_CP"
PID Temperature Control A5E00125040-02 2-11
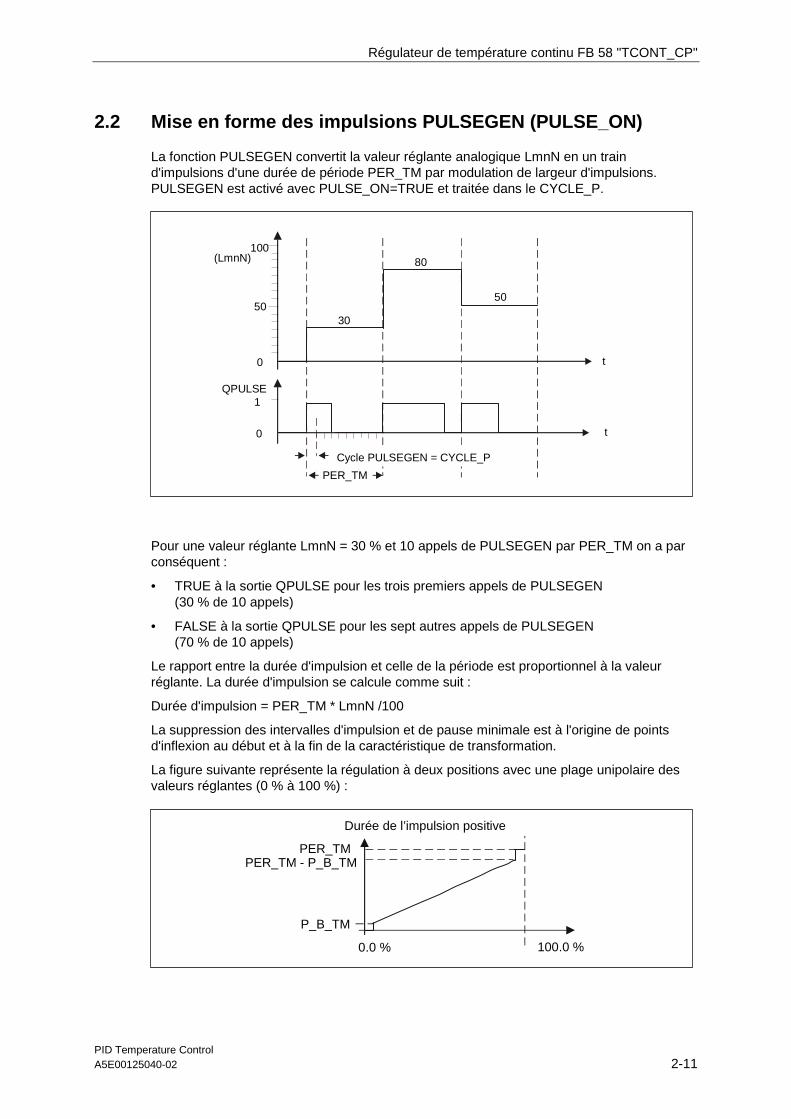
2.2 Mise en forme des impulsions PULSEGEN (PULSE_ON)
La fonction PULSEGEN convertit la valeur réglante analogique LmnN en un train d'impulsions d'une durée de période PER_TM par modulation de largeur d'impulsions. PULSEGEN est activé avec PULSE_ON=TRUE et traitée dans le CYCLE_P.
t
QPULSE
(LmnN)
0
50
100
1
0 t
PER_TM
30
50
80
Cycle PULSEGEN = CYCLE_P
Pour une valeur réglante LmnN = 30 % et 10 appels de PULSEGEN par PER_TM on a par conséquent :
• TRUE à la sortie QPULSE pour les trois premiers appels de PULSEGEN (30 % de 10 appels)
• FALSE à la sortie QPULSE pour les sept autres appels de PULSEGEN (70 % de 10 appels)
Le rapport entre la durée d'impulsion et celle de la période est proportionnel à la valeur réglante. La durée d'impulsion se calcule comme suit :
Durée d'impulsion = PER_TM * LmnN /100
La suppression des intervalles d'impulsion et de pause minimale est à l'origine de points d'inflexion au début et à la fin de la caractéristique de transformation.
La figure suivante représente la régulation à deux positions avec une plage unipolaire des valeurs réglantes (0 % à 100 %) :
Durée de l’impulsion positive
100.0 %
PER_TMPER_TM - P_B_TM
P_B_TM
0.0 %
Régulateur de température continu FB 58 "TCONT_CP"
PID Temperature Control 2-12 A5E00125040-02
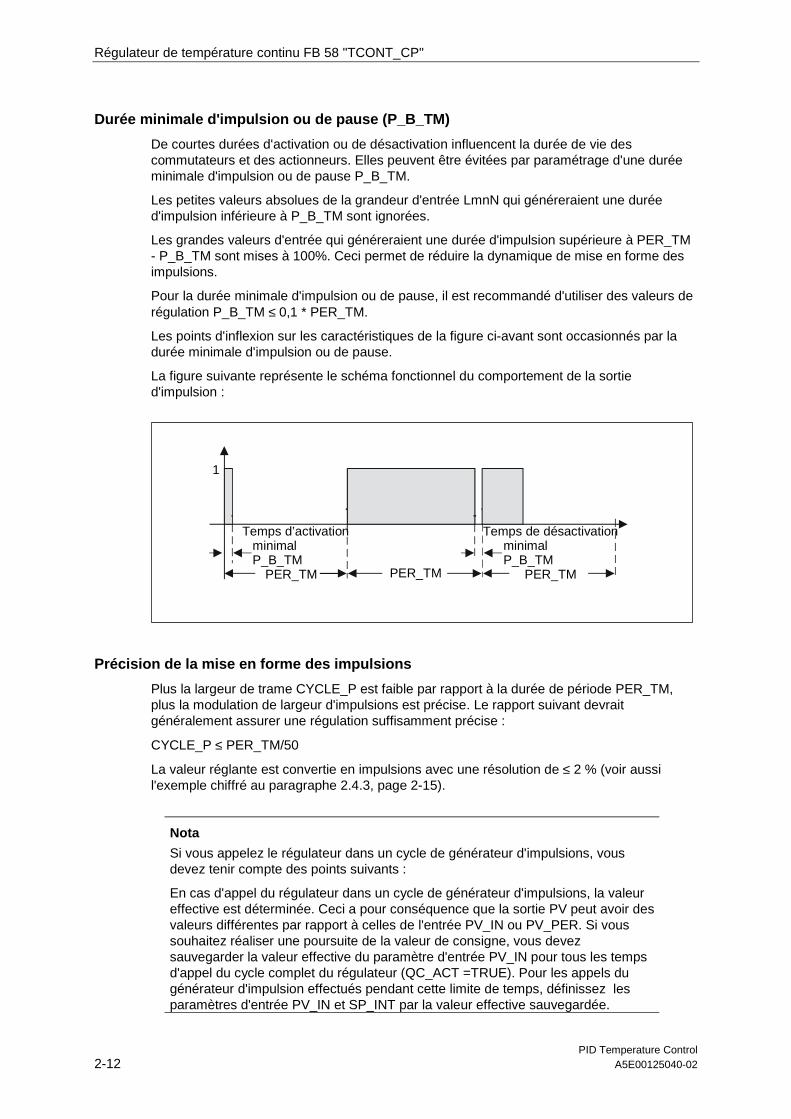
Durée minimale d'impulsion ou de pause (P_B_TM)
De courtes durées d'activation ou de désactivation influencent la durée de vie des commutateurs et des actionneurs. Elles peuvent être évitées par paramétrage d'une durée minimale d'impulsion ou de pause P_B_TM.
Les petites valeurs absolues de la grandeur d'entrée LmnN qui généreraient une durée d'impulsion inférieure à P_B_TM sont ignorées.
Les grandes valeurs d'entrée qui généreraient une durée d'impulsion supérieure à PER_TM - P_B_TM sont mises à 100%. Ceci permet de réduire la dynamique de mise en forme des impulsions.
Pour la durée minimale d'impulsion ou de pause, il est recommandé d'utiliser des valeurs de régulation P_B_TM ≤ 0,1 * PER_TM.
Les points d'inflexion sur les caractéristiques de la figure ci-avant sont occasionnés par la durée minimale d'impulsion ou de pause.
La figure suivante représente le schéma fonctionnel du comportement de la sortie d'impulsion :
PER_TM PER_TM
Temps d’activationminimalP_B_TM
Temps de désactivationminimalP_B_TM
1
PER_TM
Précision de la mise en forme des impulsions
Plus la largeur de trame CYCLE_P est faible par rapport à la durée de période PER_TM, plus la modulation de largeur d'impulsions est précise. Le rapport suivant devrait généralement assurer une régulation suffisamment précise :
CYCLE_P ≤ PER_TM/50
La valeur réglante est convertie en impulsions avec une résolution de ≤ 2 % (voir aussi l'exemple chiffré au paragraphe 2.4.3, page 2-15).
Nota
Si vous appelez le régulateur dans un cycle de générateur d'impulsions, vous devez tenir compte des points suivants :
En cas d'appel du régulateur dans un cycle de générateur d'impulsions, la valeur effective est déterminée. Ceci a pour conséquence que la sortie PV peut avoir des valeurs différentes par rapport à celles de l'entrée PV_IN ou PV_PER. Si vous souhaitez réaliser une poursuite de la valeur de consigne, vous devez sauvegarder la valeur effective du paramètre d'entrée PV_IN pour tous les temps d'appel du cycle complet du régulateur (QC_ACT =TRUE). Pour les appels du générateur d'impulsion effectués pendant cette limite de temps, définissez les paramètres d'entrée PV_IN et SP_INT par la valeur effective sauvegardée.
Régulateur de température continu FB 58 "TCONT_CP"
PID Temperature Control A5E00125040-02 2-13
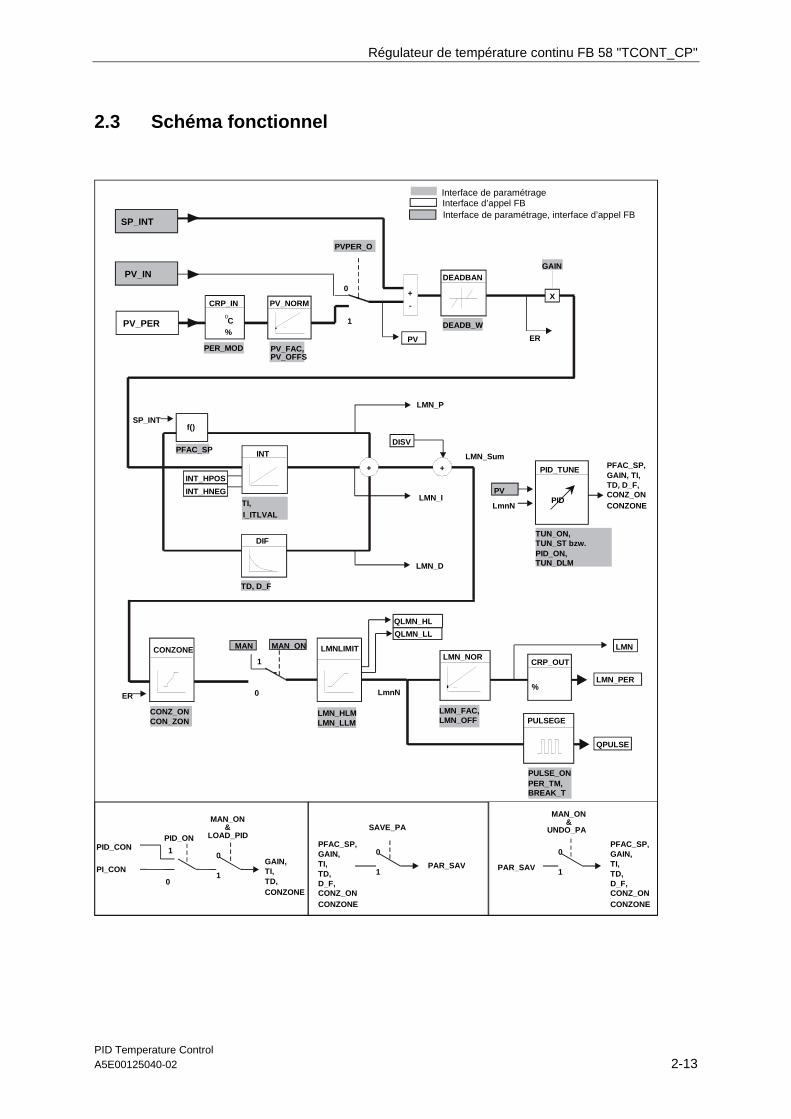
2.3 Schéma fonctionnel
-
+
ER
0
1
LMN_P
LMN_I
LMN_D
0
1
ER
PID_TUNER
PFAC_SP,GAIN, TI,TD, D_F,CONZ_ON,CONZONELmnN
LmnN
PID
0
1PID_CONPID_ON
PI_CONGAIN,TI,TD,CONZONE
0
1
SAVE_PAR
0
1PAR_SAVE
PFAC_SP,GAIN,TI,TD,D_F,CONZ_ON,CONZONE
0
1PAR_SAVE
PFAC_SP,GAIN,TI,TD,D_F,CONZ_ON,CONZONE
SP_INT
LMN_Sum
GAIN
PFAC_SP
TD, D_F
INT_HPOS
INT_HNEGTI,I_ITL_ON,
MAN MAN_ON
CONZ_ON,CON_ZONE
QLMN_HLMQLMN_LLM
DISV
LMN_HLMLMN_LLM
LMN_FAC,LMN_OFFS
LMN
LMN_PER
QPULSE
PULSE_ON,PER_TM,BREAK_TM
TUN_ON,TUN_ST bzw.SP_INT,PID_ON,TUN_DLMN
SP_INT
PV_IN
PV_PER
PER_MODE
PV_FAC,PV_OFFS
PVPER_ON
DEADB_W
PV
PV
Interface de paramétrage
Interface de paramétrage, interface d’appel FBInterface d’appel FB
CRP_IN
0C
%
PV_NORM
DEADBAND
X
INT
+
DIF
CONZONE LMNLIMIT
PULSEGEN
CRP_OUT
%
LMN_NORM
+
f()
MAN_ON &
UNDO_PAR
MAN_ON &
LOAD_PID
I_ITLVAL
Régulateur de température continu FB 58 "TCONT_CP"
PID Temperature Control 2-14 A5E00125040-02
2.4 Intégration au programme utilisateur
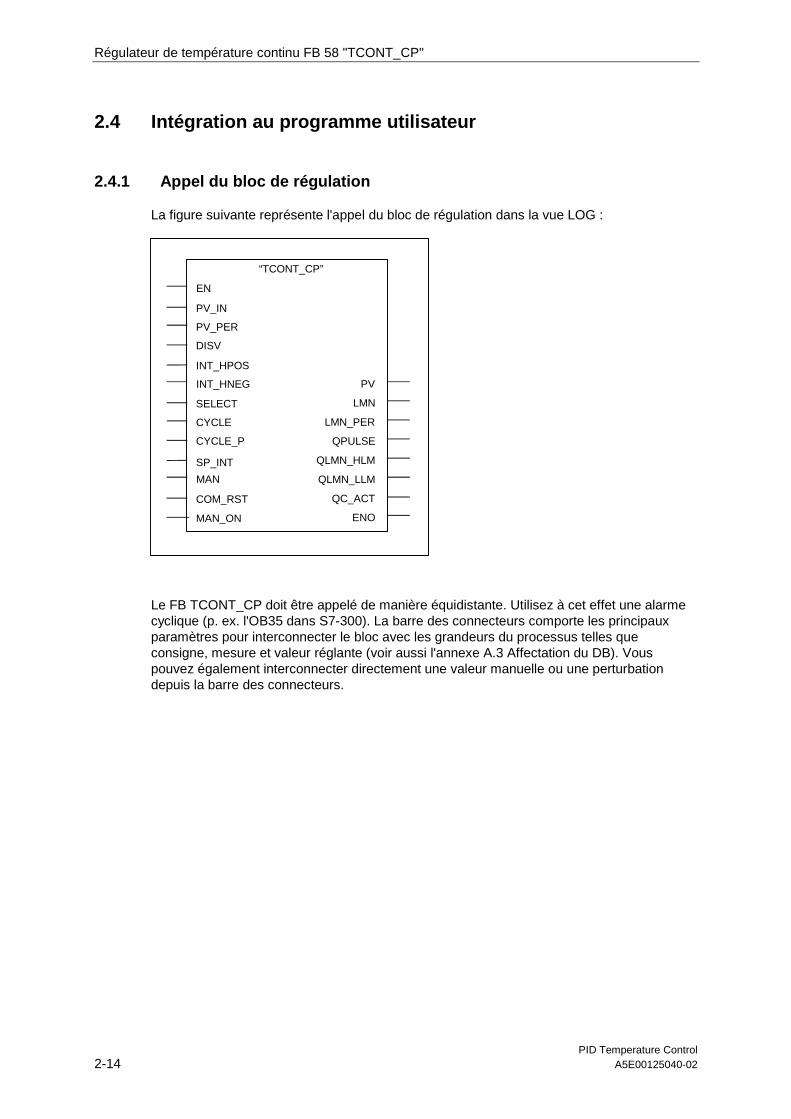
2.4.1 Appel du bloc de régulation
La figure suivante représente l'appel du bloc de régulation dans la vue LOG :
EN
“TCONT_CP”
DISV
PV_IN
INT_HPOS
PV_PER
INT_HNEG
CYCLE_P
SELECT
SP_INT
CYCLE
MAN
COM_RST
LMN_PER
QPULSE
QLMN_HLM
QLMN_LLM
QC_ACT
MAN_ON
LMN
PV
ENO
Le FB TCONT_CP doit être appelé de manière équidistante. Utilisez à cet effet une alarme cyclique (p. ex. l'OB35 dans S7-300). La barre des connecteurs comporte les principaux paramètres pour interconnecter le bloc avec les grandeurs du processus telles que consigne, mesure et valeur réglante (voir aussi l'annexe A.3 Affectation du DB). Vous pouvez également interconnecter directement une valeur manuelle ou une perturbation depuis la barre des connecteurs.
Régulateur de température continu FB 58 "TCONT_CP"
PID Temperature Control A5E00125040-02 2-15
2.4.2 Appel sans mise en forme des impulsions (régulateur continu)
Période d'échantillonnage CYCLE du régulateur
Vous paramétrez la période d'échantillonnage avec le paramètre CYCLE. Vous pouvez également la définir dans l'outil de paramétrage. La période d'échantillonnage CYCLE doit correspondre à la différence de temps entre deux appels (temps de cycle de l'OB d'alarme cyclique avec prise en compte des réductions).
Lorsque vous utilisez l'optimisation de la régulation, le bloc mesure les temps entre les appels et les compare avec la valeur paramétrée de CYCLE. Si une différence >5% est signalée, l'optimisation est annulée et STATUS_H = 30005 est mis à 1.
Règle empirique relative à la période d'échantillonnage CYCLE du régulateur
La période d'échantillonnage du régulateur ne devrait pas dépasser 10 % du temps d'intégration (TI) déterminé pour le régulateur : CYCLE ≤ TI/10
2.4.3 Appel avec mise en forme des impulsions (régulateur impulsionnel)
Période d'échantillonnage CYCLE du régulateur et largeur de trame d'impulsion CYCLE_P
Si vous avez activé le conformateur d'impulsions (PULSE_ON = TRUE), vous devez entrer deux périodes d'échantillonnage.
• A l'entrée CYCLE_P, vous spécifiez la période d'échantillonnage de la mise en forme des impulsions. Elle doit correspondre à l'intervalle de l'OB d'alarme cyclique appelant. La durée de l'impulsion générée représente toujours un multiple entier de cette valeur.
• A l'entrée CYCLE, vous spécifiez la période d'échantillonnage pour les autres fonctions de régulation du FB 58 "TCONT_CP".
Lorsque vous utilisez l'optimisation de la régulation, le bloc mesure les temps entre les appels etet les compare avec la valeur paramétrée de CYCLE. Si une différence >5% est signalée, l'optimisation est annulée et STATUS_H = 30005 est mis à 1.
FB 58 "TCONT_CP" détermine la réduction de temps et exécute les fonctions de régulation avec la période d'échantillonnage CYCLE. Vous devez veiller à ce que CYCLE soit toujours un multiple entier de CYCLE_P.
Vous pouvez choisir un paramètre CYCLE inférieur à la durée de période PER_TM. Ceci s'avère utile lorsque, d'une part vous souhaitez une durée de période aussi grande que possible afin de protéger les actionneurs et d'autre part une courte période d'échantillonnage en raison d'un système réglé rapide.
Régulateur de température continu FB 58 "TCONT_CP"
PID Temperature Control 2-16 A5E00125040-02
Règle empirique relative aux périodes d'échantillonnage CYCLE et CYCLE_P
La période d'échantillonnage du régulateur ne devrait pas dépasser 10 % du temps d'intégration (TI) déterminé pour le régulateur : CYCLE ≤ TI/10
Le rapport suivant devrait généralement assurer une résolution de la valeur réglante suffisamment précise : CYCLE_P ≤ PER_TM/50.
Règle empirique relative à la durée de période PER_TM
La durée de période ne devrait pas dépasser 20 % du temps d'intégration (TI) déterminé pour le régulateur : PER_TM ≤ TI/5
Exemple des effets des paramètres CYCLE_P, CYCLE et PER_TM :
PER_TM = 10 s, CYCLE = 1 s, CYCLE_P = 100 ms.
Une nouvelle valeur réglante est calculée chaque seconde ; toutes les 100 ms, la valeur réglante est comparée aux durées d'impulsion ou de pause déjà générées.
• Lorsqu'une impulsion est générée, il existe deux possibilités :
- La valeur réglante calculée dépasse la durée d'impulsion/PER_TM précédente. Dans ce cas, l'impulsion est prolongée.
- La valeur réglante calculée est inférieure ou égale à la durée d'impulsion/PER_TM précédente. Aucun signal d'impulsion supplémentaire n'est alors généré.
• Si aucune impulsion n'est générée, il existe également deux cas de figure :
- La valeur (valeur réglante calculée à 100 %) est supérieure à la durée de pause/ PER_TM précédente. La pause est alors prolongée.
- La valeur (valeur réglante calculée à 100 %) est inférieure ou égale à la durée de pause/ PER_TM précédente. Un signal d'impulsion est généré.
Régulateur de température continu FB 58 "TCONT_CP"
PID Temperature Control A5E00125040-02 2-17
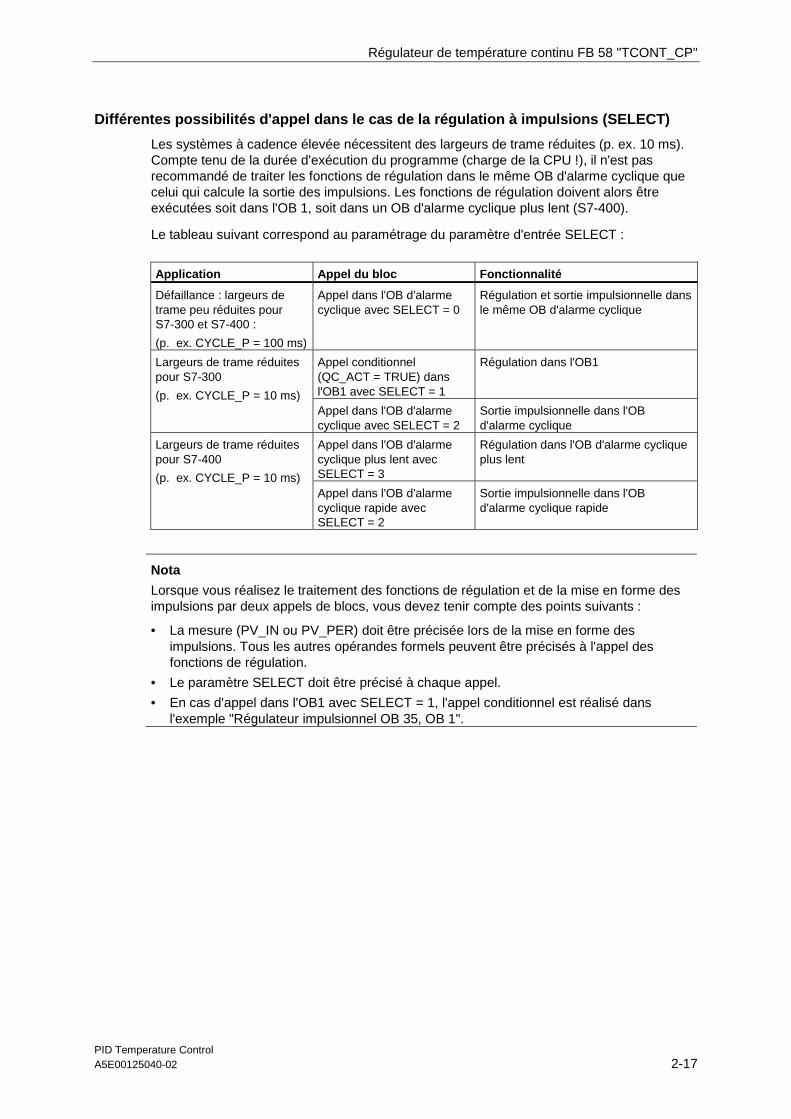
Différentes possibilités d'appel dans le cas de la régulation à impulsions (SELECT)
Les systèmes à cadence élevée nécessitent des largeurs de trame réduites (p. ex. 10 ms). Compte tenu de la durée d'exécution du programme (charge de la CPU !), il n'est pas recommandé de traiter les fonctions de régulation dans le même OB d'alarme cyclique que celui qui calcule la sortie des impulsions. Les fonctions de régulation doivent alors être exécutées soit dans l'OB 1, soit dans un OB d'alarme cyclique plus lent (S7-400).
Le tableau suivant correspond au paramétrage du paramètre d'entrée SELECT :
Application Appel du bloc Fonctionnalité
Défaillance : largeurs de trame peu réduites pour S7-300 et S7-400 :
(p. ex. CYCLE_P = 100 ms)
Appel dans l'OB d'alarme cyclique avec SELECT = 0
Régulation et sortie impulsionnelle dans le même OB d'alarme cyclique
Appel conditionnel (QC_ACT = TRUE) dans l'OB1 avec SELECT = 1
Régulation dans l'OB1 Largeurs de trame réduites pour S7-300
(p. ex. CYCLE_P = 10 ms) Appel dans l'OB d'alarme cyclique avec SELECT = 2
Sortie impulsionnelle dans l'OB d'alarme cyclique
Appel dans l'OB d'alarme cyclique plus lent avec SELECT = 3
Régulation dans l'OB d'alarme cyclique plus lent
Largeurs de trame réduites pour S7-400
(p. ex. CYCLE_P = 10 ms) Appel dans l'OB d'alarme cyclique rapide avec SELECT = 2
Sortie impulsionnelle dans l'OB d'alarme cyclique rapide
Nota
Lorsque vous réalisez le traitement des fonctions de régulation et de la mise en forme des impulsions par deux appels de blocs, vous devez tenir compte des points suivants :
• La mesure (PV_IN ou PV_PER) doit être précisée lors de la mise en forme des impulsions. Tous les autres opérandes formels peuvent être précisés à l'appel des fonctions de régulation.
• Le paramètre SELECT doit être précisé à chaque appel.
• En cas d'appel dans l'OB1 avec SELECT = 1, l'appel conditionnel est réalisé dans l'exemple "Régulateur impulsionnel OB 35, OB 1".
Régulateur de température continu FB 58 "TCONT_CP"
PID Temperature Control 2-18 A5E00125040-02
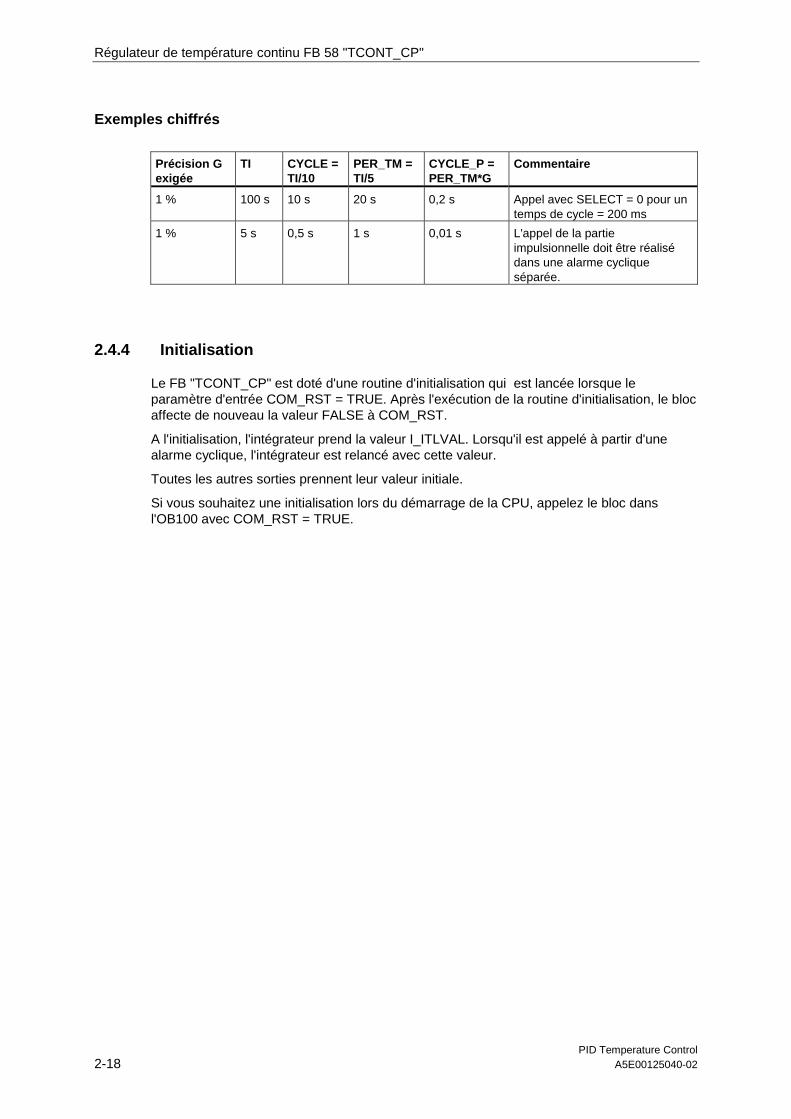
Exemples chiffrés
Précision G exigée
TI CYCLE = TI/10
PER_TM = TI/5
CYCLE_P = PER_TM*G
Commentaire
1 % 100 s 10 s 20 s 0,2 s Appel avec SELECT = 0 pour un temps de cycle = 200 ms
1 % 5 s 0,5 s 1 s 0,01 s L'appel de la partie impulsionnelle doit être réalisé dans une alarme cyclique séparée.
2.4.4 Initialisation
Le FB "TCONT_CP" est doté d'une routine d'initialisation qui est lancée lorsque le paramètre d'entrée COM_RST = TRUE. Après l'exécution de la routine d'initialisation, le bloc affecte de nouveau la valeur FALSE à COM_RST.
A l'initialisation, l'intégrateur prend la valeur I_ITLVAL. Lorsqu'il est appelé à partir d'une alarme cyclique, l'intégrateur est relancé avec cette valeur.
Toutes les autres sorties prennent leur valeur initiale.
Si vous souhaitez une initialisation lors du démarrage de la CPU, appelez le bloc dans l'OB100 avec COM_RST = TRUE.
PID Temperature Control A5E00125040-02 3-1
3 Optimisation du régulateur dans le FB 58 "TCONT_CP"
3.1 Introduction
L'optimisation du régulateur n'est utilisable que pour des procéssus uniquement de chauffage ou de refroidissement.
L'optimisation du régulateur dans le FB 58 "TCONT_CP" permet le paramétrage automatique des paramètres de régulation PI/PID. Il existe deux possibilités d'optimisation :
• Optimisation par accostage du point de fonctionnement avec échelon de consigne
• Optimisation au point de fonctionnement par mise à 1 d'un bit de démarrage
Dans les deux cas, le processus est activé par un échelon de valeur réglante paramétrable. Après détection d'un point d'inflexion, les paramètres de régulation PI/PID sont disponibles ; le régulateur passe en mode automatique et poursuit la régulation avec ces paramètres.
Vous pouvez procéder à l'optimisation du régulateur dans l'interface de paramétrage en utilisant l'assistant.
Optimisation de la réponse indicielle
Le régulateur a été conçu pour adopter un comportement optimal face aux perturbations. Les paramètres aggressifs qui en résultent entraîneraient des dépassements de 10 % à 40 % des échelons spécifiés pour les consignes. Afin d'éviter ces dépassements, l'action proportionnelle P des échelons de consigne est atténuée par le paramètre PFAC_SP. De plus, dans les systèmes thermiques typiques, il est également possible de réduire dépassements pour des échelons de consigne importants au moyen de valeurs réglantes minimales ou maximales commandées provisoires (régulation commandée).
Mesure des temps de cycle CYCLE et CYCLE_P
Au début de l'optimisation, la période d'échantillonnage CYCLE du régulateur et, dans le cas d'une régulation à impulsions, également la période d'échantillonnage CYCLE_P de la mise en forme des impulsions sont mesurées. Si une différence >5% est signalée, l'optimisation du régulateur est annulée et STATUS_H = 30005 est mis à 1.
Enregistrement des paramètres du régulateur (SAVE_PAR ou UNDO_PAR)
En cas d'optimisation du régulateur, les paramètres sont enregistrés avant le début de l'optimisation. Après l'optimisation, vous pouvez réactiver les paramètres précédents avec UNDO_PAR.
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control 3-2 A5E00125040-02
3.2 Types de systèmes
Types de systèmes
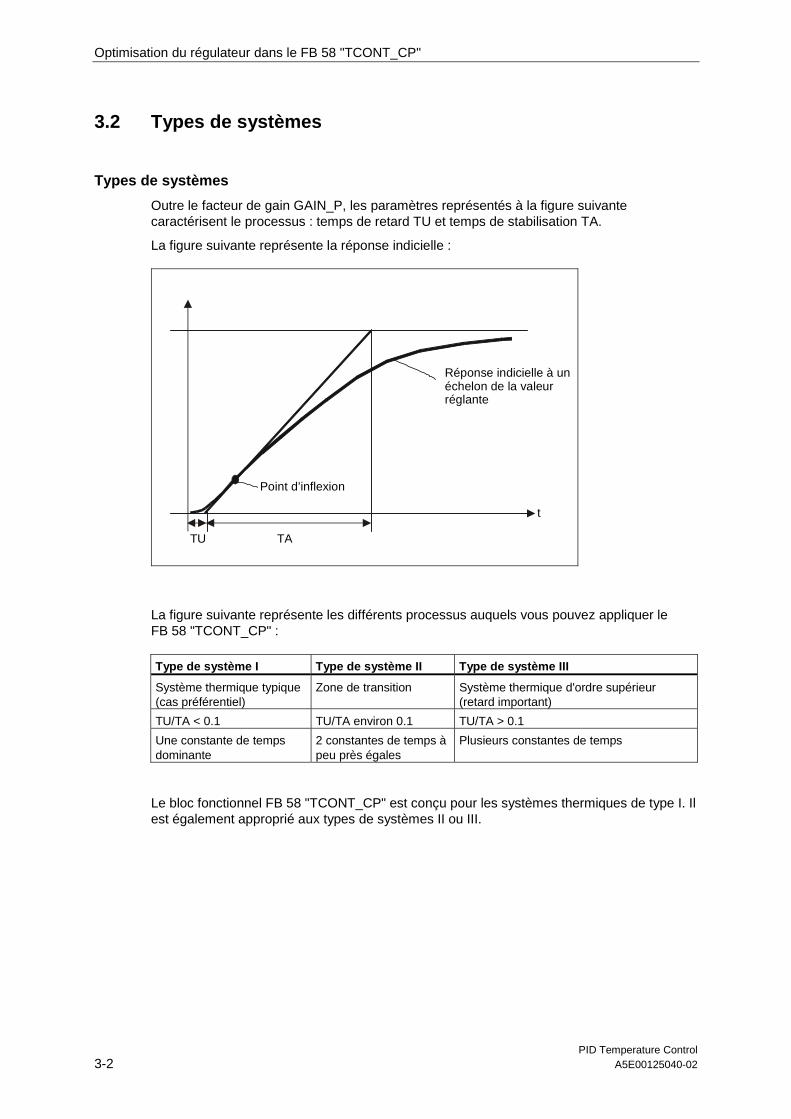
Outre le facteur de gain GAIN_P, les paramètres représentés à la figure suivante caractérisent le processus : temps de retard TU et temps de stabilisation TA.
La figure suivante représente la réponse indicielle :
t
TA
Point d’inflexion
Réponse indicielle à unéchelon de la valeurréglante
TU
La figure suivante représente les différents processus auquels vous pouvez appliquer le FB 58 "TCONT_CP" : Type de système I Type de système II Type de système III
Système thermique typique (cas préférentiel)
Zone de transition Système thermique d'ordre supérieur (retard important)
TU/TA < 0.1 TU/TA environ 0.1 TU/TA > 0.1
Une constante de temps dominante
2 constantes de temps à peu près égales
Plusieurs constantes de temps
Le bloc fonctionnel FB 58 "TCONT_CP" est conçu pour les systèmes thermiques de type I. Il est également approprié aux types de systèmes II ou III.
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control A5E00125040-02 3-3
3.3 Domaine d'application
Comportement en régime transitoire
En régime transitoire, le comportement du processus doit être stable, retardé et asymptotique.
Après un échelon de la variable réglante, la mesure doit reprendre un état stationnaire. Les processus présentant un comportement oscillant à l'état non réglé ainsi que les systèmes réglés sans compensation (intégrateur dans le système) sont donc exclus.
Linéarité et étendue d'action
Le processus doit présenter un comportement linéaire dans son étendue d'action. Atitre d'exemple, un changement de l'état physique peut être à l'origine d'un comportement non linéaire. L'optimisation doit intervenir dans une partie linéaire de l'étendue d'action.
Cela signifie que les effets non linéaires doivent y rester négligeables tant pendant l'optimisation qu'en mode de régulation normal. Si ce n'est pas le cas, il est quand même possible d'optimiser à nouveau le processus lors du changement du point de fonctionnement si cette optimisation ne concerne qu'une plage réduite autour de ce nouveau point et que les parties non linéaires ne sont pas touchées.
Si certaines non-linéarités statiques (p. ex. caractéristiques de soupape) sont connues, il est recommandé de compenser celles-ci à l'aide d'un tracé polygonal afin de linéariser le comportement du processus.
Perturbations des processus thermiques
Les perturbations telles que la transmission de chaleur aux systèmes voisins ne doivent pas, globalement, exercer une influence importante sur le processus thermique. A titre d'exemple, pour optimiser certaines parties d'une extrudeuse, toutes les parties doivent être chauffées simultanément.
Pour ce qui est de la mesure du bruit et des perturbations basse fréquence voir le paragraphe 3.11, page 3-12.
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control 3-4 A5E00125040-02
3.4 Procédure d'optimisation du régulateur
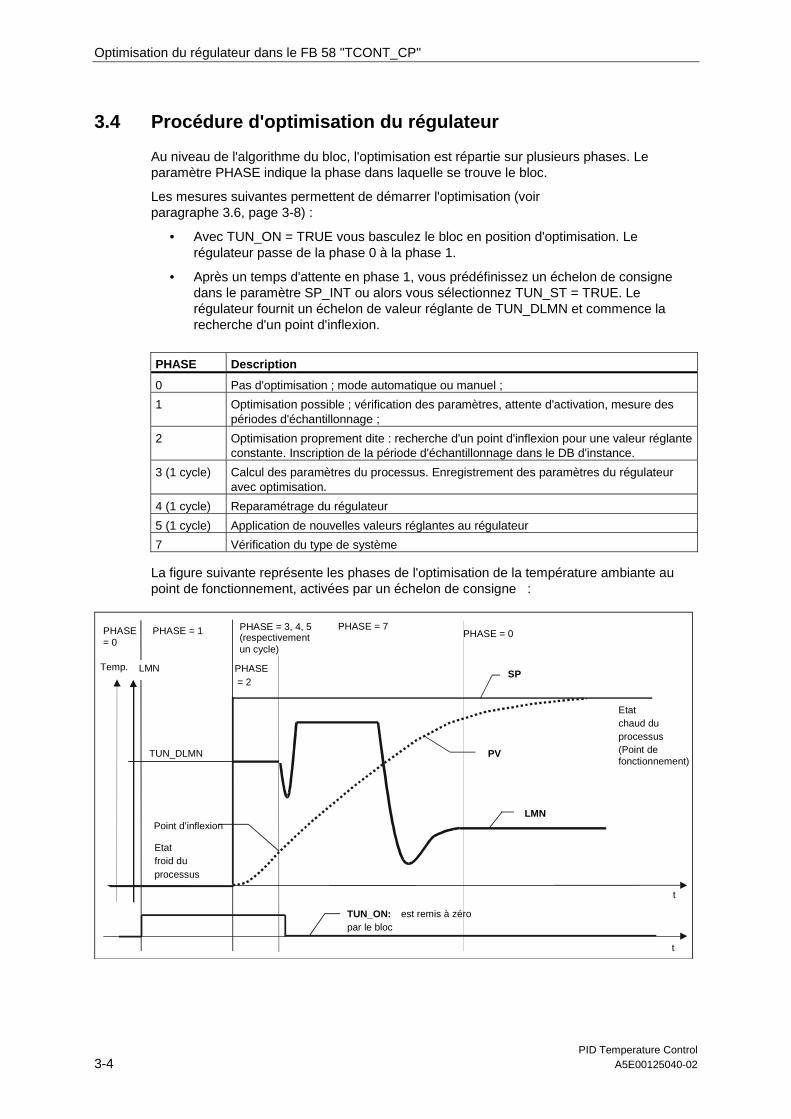
Au niveau de l'algorithme du bloc, l'optimisation est répartie sur plusieurs phases. Le paramètre PHASE indique la phase dans laquelle se trouve le bloc.
Les mesures suivantes permettent de démarrer l'optimisation (voir paragraphe 3.6, page 3-8) :
• Avec TUN_ON = TRUE vous basculez le bloc en position d'optimisation. Le régulateur passe de la phase 0 à la phase 1.
• Après un temps d'attente en phase 1, vous prédéfinissez un échelon de consigne dans le paramètre SP_INT ou alors vous sélectionnez TUN_ST = TRUE. Le régulateur fournit un échelon de valeur réglante de TUN_DLMN et commence la recherche d'un point d'inflexion.
PHASE Description
0 Pas d'optimisation ; mode automatique ou manuel ;
1 Optimisation possible ; vérification des paramètres, attente d'activation, mesure des périodes d'échantillonnage ;
2 Optimisation proprement dite : recherche d'un point d'inflexion pour une valeur réglante constante. Inscription de la période d'échantillonnage dans le DB d'instance.
3 (1 cycle) Calcul des paramètres du processus. Enregistrement des paramètres du régulateur avec optimisation.
4 (1 cycle) Reparamétrage du régulateur
5 (1 cycle) Application de nouvelles valeurs réglantes au régulateur
7 Vérification du type de système
La figure suivante représente les phases de l'optimisation de la température ambiante au point de fonctionnement, activées par un échelon de consigne :
TUN_DLMN
t
Point d’inflexion
PV
PHASE = 1
PHASE = 2
t
TUN_ON: est remis à zéro par le bloc
SP
Etat froid du processus
Etat chaud du processus (Point de fonctionnement)
Temp. LMN
LMN
PHASE = 7 PHASE = 3, 4, 5 (respectivement un cycle)
PHASE = 0 PHASE = 0
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control A5E00125040-02 3-5
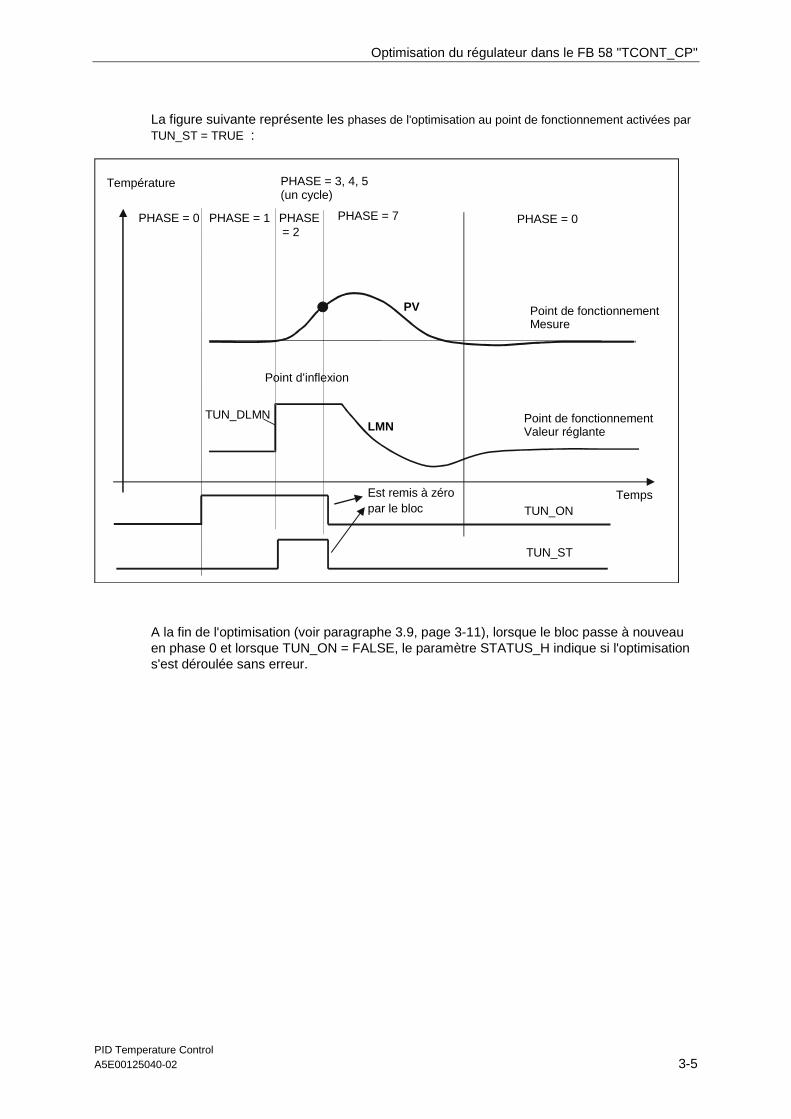
La figure suivante représente les phases de l'optimisation au point de fonctionnement activées par TUN_ST = TRUE :
PHASE = 1 PHASE = 2
TUN_DLMN LMN
PV
Point d’inflexion
PHASE = 3, 4, 5 (un cycle)
PHASE = 7
Température
Temps
Point de fonctionnement Valeur réglante
Point de fonctionnement Mesure
TUN_ON
TUN_ST
PHASE = 0 PHASE = 0
Est remis à zéro par le bloc
A la fin de l'optimisation (voir paragraphe 3.9, page 3-11), lorsque le bloc passe à nouveau en phase 0 et lorsque TUN_ON = FALSE, le paramètre STATUS_H indique si l'optimisation s'est déroulée sans erreur.
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control 3-6 A5E00125040-02
3.5 Préparatifs
SIMATIC et le régulateur
L'optimisation est déclenchée par les paramètres d'E/S TUN_ON, TUN_ST ou SP_INT. Spécification des paramètres :
• à partir de l'interface de paramétrage,
• à l'aide d'un appareil de contrôle-commande,
• à partir de votre programme utilisateur.
Ne spécifiez les paramètres d'E/S que pour un seul cycle, car le FB 58 "TCONT_CP" les remet automatiquement à zéro.
! Attention
Il existe des risques pouvant entraîner la mort, de graves blessures corporelles ou des dégâts matériels importants.
En phase d'optimisation, le paramètre MAN_ON n'est pas actif. La valeur réglante ou la mesure peuvent prendre des valeurs éventuellement extrêmes non désirées.
La valeur réglante est prédéfinie par l'optimisation. Pour interrompre l'optimisation, vous devez d'abord paramétrer TUN_ON = FALSE. Ceci permet d'activer à nouveau le paramètre MAN_ON.
Contrôle de l'état initial quasi stationnaire (phase 0)
Si la grandeur réglante présente des oscillations basse fréquence, p. ex. en raison d'un paramétrage inadéquat, le début de l'optimisation doit être précédé d'une phase de conduite manuelle, jusqu'à ce que l'oscillation ait disparue. Une alternative consisterait à sélectionner une régulation PI non aggressive (faible gain de boucle, temps d'intégration élevé).
A présent, vous devez attendre que l'état stationnaire soit atteint, c'est-à-dire jusqu'à ce que la mesure et la valeur réglante aient atteint l'état transitoire. Un régime transitoire asymptotique ou une dérivation lente de la mesure (état quasi stationnaire, voir figure suivante) sont également possibles. La valeur réglante doit être constante ou varier autour d'une valeur moyenne constante.
Nota
Evitez de modifier la valeur réglante juste avant le début de l'optimisation. Une modification par inadvertance risque également de se produire, p. ex. en cours de préparation d'un essai (p. ex. fermeture d'une porte de four) ! Si cela était le cas, vous devriez au moins attendre que la mesure parvienne de manière asymptotique à un état stable. Cependant, le résultat sera meilleur si vous attendez que la phase transitoire soit complètement terminée.
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control A5E00125040-02 3-7
Contrôle des conditions nécessaires à l'optimisation (phase 0 -> 1)
Vous pouvez démarrer l'optimisation en mode manuel ou en mode automatique.
Mettez le paramètre TUN_ON = TRUE. Le FB 58 "TCONT_CP" est alors prêt pour l'optimisation (phase 1). Le bit TUN_ON ne doit être mis à 1 qu'après l'établissement de l'état stationnaire ou en régime transitoire.
Si l'état quasi stationnaire évolue après la mise à 1du bit TUN_ON, le nouvel état quasi stationnaire doit être signalé au FB 58 "TCONT_CP" par la remise, d'abord à zéro, ensuite à 1, de ce même bit.
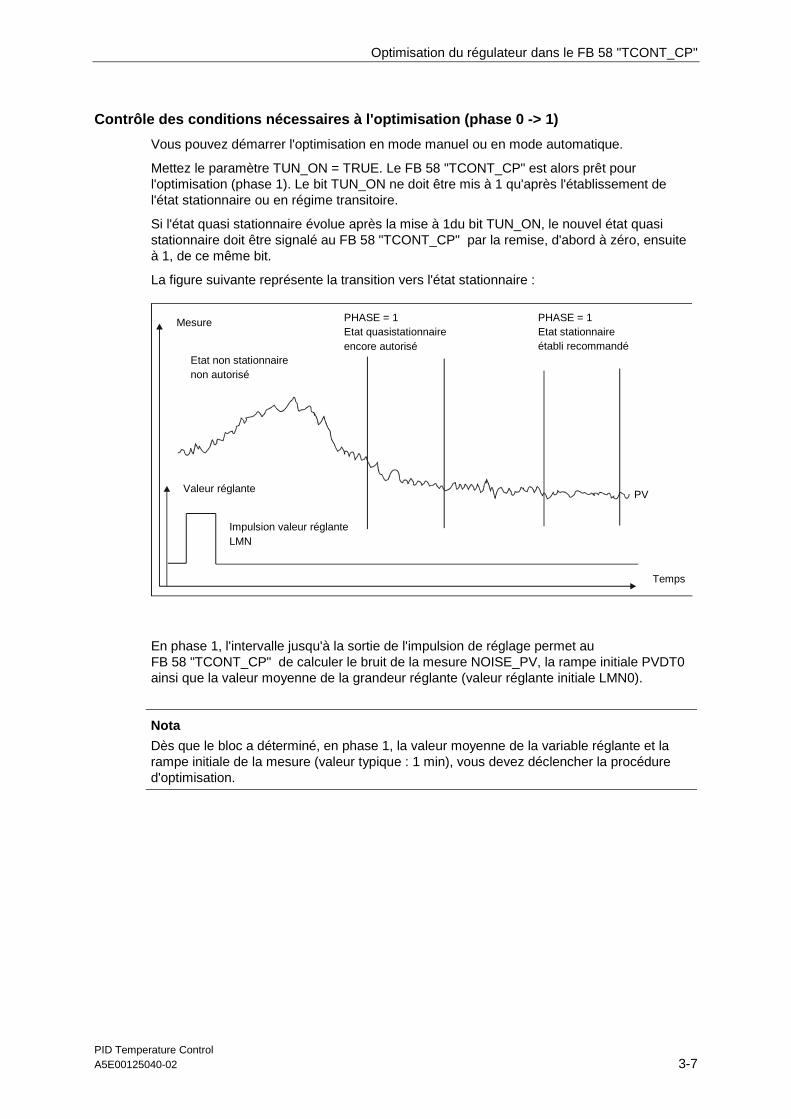
La figure suivante représente la transition vers l'état stationnaire :
Temps
PV
PHASE = 1Etat quasistationnaireencore autorisé
PHASE = 1Etat stationnaireétabli recommandé
Etat non stationnairenon autorisé
Impulsion valeur réglanteLMN
Mesure
Valeur réglante
En phase 1, l'intervalle jusqu'à la sortie de l'impulsion de réglage permet au FB 58 "TCONT_CP" de calculer le bruit de la mesure NOISE_PV, la rampe initiale PVDT0 ainsi que la valeur moyenne de la grandeur réglante (valeur réglante initiale LMN0).
Nota
Dès que le bloc a déterminé, en phase 1, la valeur moyenne de la variable réglante et la rampe initiale de la mesure (valeur typique : 1 min), vous devez déclencher la procédure d'optimisation.
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control 3-8 A5E00125040-02
La période d'échantillonnage CYCLE du régulateur ainsi que la période d'échantillonnage CYCLE_P de la mise en forme des impulsions sont mesurées en phase 1, puis inscrites dans les paramètres d'E/S respectifs en début de phase 2. En cas de régulation sans mise en forme des impulsions, CYCLE_P = CYCLE.
Nota
Lors de l'appel du régulateur impulsionnel via SELECT = 0 ou 1, vous devez prédéfinir le rapport CYCLE/CYCLE_P souhaité avant la mise à 1 de TUN_ON par les paramètres CYCLE et CYCLE_P.
3.6 Démarrage de l'optimisation (phase 1 -> 2)
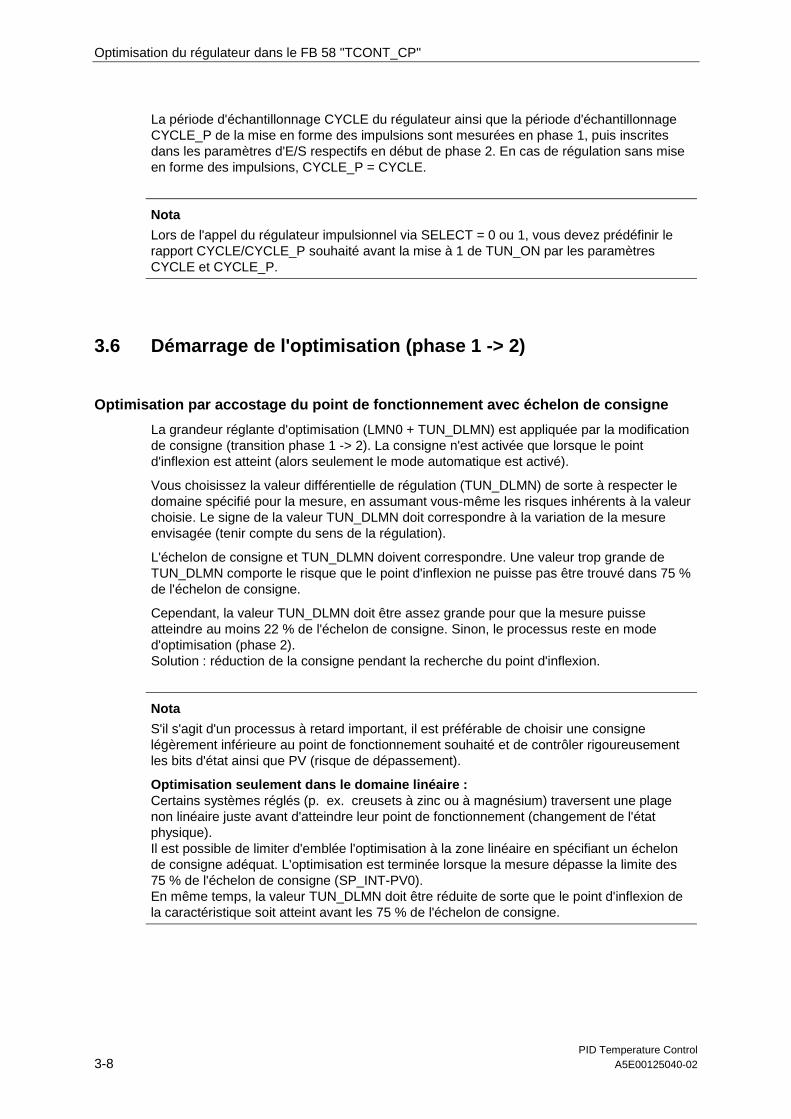
Optimisation par accostage du point de fonctionnement avec échelon de consigne
La grandeur réglante d'optimisation (LMN0 + TUN_DLMN) est appliquée par la modification de consigne (transition phase 1 -> 2). La consigne n'est activée que lorsque le point d'inflexion est atteint (alors seulement le mode automatique est activé).
Vous choisissez la valeur différentielle de régulation (TUN_DLMN) de sorte à respecter le domaine spécifié pour la mesure, en assumant vous-même les risques inhérents à la valeur choisie. Le signe de la valeur TUN_DLMN doit correspondre à la variation de la mesure envisagée (tenir compte du sens de la régulation).
L'échelon de consigne et TUN_DLMN doivent correspondre. Une valeur trop grande de TUN_DLMN comporte le risque que le point d'inflexion ne puisse pas être trouvé dans 75 % de l'échelon de consigne.
Cependant, la valeur TUN_DLMN doit être assez grande pour que la mesure puisse atteindre au moins 22 % de l'échelon de consigne. Sinon, le processus reste en mode d'optimisation (phase 2). Solution : réduction de la consigne pendant la recherche du point d'inflexion.
Nota
S'il s'agit d'un processus à retard important, il est préférable de choisir une consigne légèrement inférieure au point de fonctionnement souhaité et de contrôler rigoureusement les bits d'état ainsi que PV (risque de dépassement).
Optimisation seulement dans le domaine linéaire : Certains systèmes réglés (p. ex. creusets à zinc ou à magnésium) traversent une plage non linéaire juste avant d'atteindre leur point de fonctionnement (changement de l'état physique). Il est possible de limiter d'emblée l'optimisation à la zone linéaire en spécifiant un échelon de consigne adéquat. L'optimisation est terminée lorsque la mesure dépasse la limite des 75 % de l'échelon de consigne (SP_INT-PV0). En même temps, la valeur TUN_DLMN doit être réduite de sorte que le point d'inflexion de la caractéristique soit atteint avant les 75 % de l'échelon de consigne.
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control A5E00125040-02 3-9
Optimisation au point de fonctionnement sans échelon de consigne
La grandeur réglante d'optimisation (LMN0 + TUN_DLMN) est appliquée par la mise à 1 du bit de démarrage TUN_ST (transition phase 1 -> 2). Si vous modifiez la consigne, la nouvelle consigne ne sera effective que lorsque le point d'inflexion est atteint (alors seulement le mode automatique est activé).
Vous choisissez la valeur différentielle de réglage (TUN_DLMN) de sorte à respecter le domaine spécifié pour la mesure, en assumant vous-même les risques inhérents à la valeur choisie. Le signe de la valeur TUN_DLMN doit correspondre à la variation de la mesure envisagée (tenir compte du sens de la régulation).
Nota
En cas de déclenchement par TUN_ST, il n'existe pas d'arrêt de sécurité à 75 %. L'optimisation est terminée lorsque le point d'inflexion est atteint. En cas de bruit trop important, le point d'inflexion risque cependant d'être considérablement dépassé.
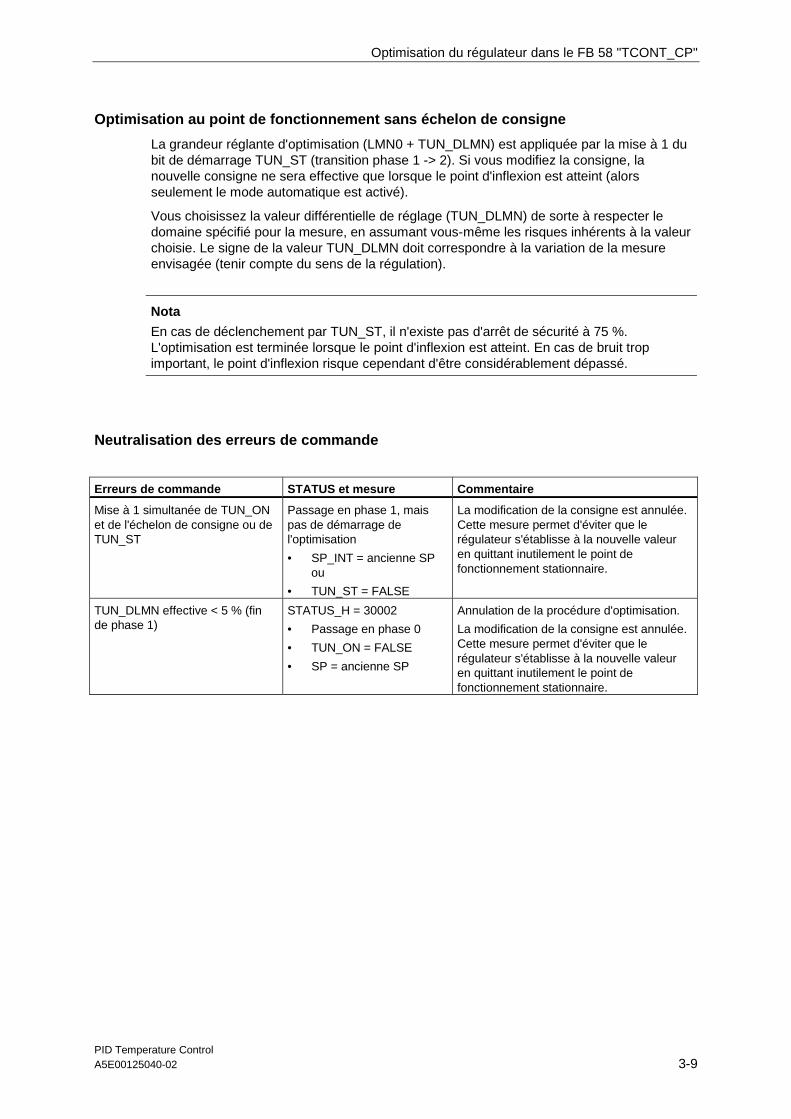
Neutralisation des erreurs de commande
Erreurs de commande STATUS et mesure Commentaire
Mise à 1 simultanée de TUN_ON et de l'échelon de consigne ou de TUN_ST
Passage en phase 1, mais pas de démarrage de l'optimisation
• SP_INT = ancienne SP ou
• TUN_ST = FALSE
La modification de la consigne est annulée. Cette mesure permet d'éviter que le régulateur s'établisse à la nouvelle valeur en quittant inutilement le point de fonctionnement stationnaire.
TUN_DLMN effective < 5 % (fin de phase 1)
STATUS_H = 30002
• Passage en phase 0
• TUN_ON = FALSE
• SP = ancienne SP
Annulation de la procédure d'optimisation.
La modification de la consigne est annulée. Cette mesure permet d'éviter que le régulateur s'établisse à la nouvelle valeur en quittant inutilement le point de fonctionnement stationnaire.
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control 3-10 A5E00125040-02
3.7 Recherche du point d'inflexion (phase 2) et calcul des paramètres du régulateur (phases 3, 4, 5)
La recherche du point d'inflexion débute en phase 2, après stabilisation de la valeur réglante. Cette mesure permet d'éviter que le point d'inflexion ne soit détecté trop tôt en raison d'un niveau de bruit PV trop important.
Dans le cas d'un régulateur impulsionnel, le bloc fonctionnel établit la moyenne de la valeur de PV sur N cycles et transmet le résultat à la partie régulation. La moyenne des valeurs de PV est établie à nouveau par la partie régulation : au début de la procédure, cette fonction reste inactive, c'est-à-dire que la moyenne n'est établie que sur un seul cycle. Le nombre de cycles reste dédoublé jusqu'à ce que le bruit du paramètre PV passe en-dessous d'une limite déterminée.
La durée de la période et l'amplitude du bruit sont déterminées. C'est seulement lorsque le gradient reste constamment inférieur à la rampe maximale durant la période estimée, que la recherche du point d'inflexion est annulée et la phase 2 terminée. TU et T_P_INF sont cependant calculées au point d'inflexion effectif.
L'optimisation s'achève cependant seulement lorsque les deux conditions suivantes sont également remplies :
1. L'écart entre la mesure et le point d'inflexion est supérieur à 2*NOISE_PV.
2. La mesure a dépassé le point d'inflexion de 20 %.
Nota
Si la procédure a été déclenchée par un échelon de consigne, l'optimisation est terminée au plus tard lorsque la mesure dépasse 75 % de l'échelon de consigne (SP_INT-PV0) - voir plus bas.
Ensuite, les phases 3, 4 et 5 sont exécutées, chacune une seule fois. Letype de système est ensuite vérifié en phase 7. La procédure d'optimisation est alors terminée et le FB 58 "TCONT_CP" repasse en phase 0. Le régulateur démarre systématiquement en mode automatique, avec LMN = LMN0 + 0.75*TUN_DLMN (même si vous aviez choisi le mode manuel avant le début de la procédure).
3.8 Vérification du type de système (phase 7)
D'où la nécessité de vérifier le type de système en phase 7. Cette vérification se déroule en mode automatique avec les nouveaux paramètres de réglage calculés et se termine au plus tard 0,35*TA (temps de stabilisation) après le point d'inflexion. Si l'ordre du processus diffère plus de la valeur estimée, les praramètres du régulateur sont de nouveau calculés et STATUS_D est incrémenté de1, sinon les paramètres du régulateurs sont conservés.
Nota
En cas d'interruption de la phase 7 par TUN_ON=FALSE, les paramètres du régulateur déjà calculés restent en vigueur.
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control A5E00125040-02 3-11
3.9 Résultat de la procédure d'optimisation
Le chiffre de gauche de STATUS_H indique l'état de l'optimisation (un tableau complet est donné en annexe A.4, page A-22) :
STATUS_H Résultat
0 Défaut ou aucun paramètre du régulateur n'a (encore) été trouvé.
10000 Paramètres du régulateur adéquats trouvés
2xxxx Paramètres du régulateur identifiés à l'aide de valeurs approximatives ; vérifiez le comportement du régulateur ou affichez le message de diagnostic STATUS_H et répétez la procédure d'optimisation.
3xxxx Une erreur de commande est survenue ; affichez le message de diagnostic STATUS_H et répétez la procédure d'optimisation.
Les paramètres suivants du régulateur sont mis à jour dans le FB 58 "TCONT_CP" :
• Facteur atténuation de l'action proportionnelle PFAC_SP = 0.8
• Gain du régulateur GAIN
• Temps d'intégration TI
• Temps de dérivation TD
• Facteur du dérivateur D_F = 5.0
• Activation/Désactivation de la plage de régulation CONZ_ON
• Largeur plage de régulation CON_ZONE
La plage de régulation n'est activée que lorsque le type de système est correct (type de système I et II) et pour un régulateur PID (CONZ_ON = TRUE).
En fonction de PID_ON, il s'agit d'un régulateur PI ou PID. Les anciens paramètres sont enregistrés et peuvent être réactivés par UNDO_PAR. De plus, un jeu de paramètres PI et PID est enregistré dans les structures PI_CON et PID_CON. Il est ainsi possible de sélectionner ultérieurement les paramètres PI ou PID optimisés via le paramètre LOAD_PID et la mise à 1 de PID_ON.
Les périodes d'échantillonnage CYCLE et CYCLE_P ont déjà été vérifiées en phase 1.
3.10 Annulation de l'optimisation par l'opérateur
Annulation de la procédure d'optimisation
En phase 1, 2 ou 3, TUN_ON = FALSE vous permet d'annuler la procédure d'optimisation sans que de nouveaux paramètres soient calculés. Le régulateur démarre en mode automatique avec LMN = LMN0 + TUN_DLMN. Si le régulateur fonctionnait en mode manuel avant le début de la procédure d'optimisation, la valeur réglante manuelle est fournie.
Si en phase 4, 5 ou 7, la procédure d'optimisation est interrompue avec TUN_ON = FALSE, les paramètres du régulateurs déjà déterminés restent conservés.
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control 3-12 A5E00125040-02
3.11 Erreurs possibles et comment y remédier
Le point d'inflexion n'a pas été atteint (uniquement en cas d'application de l'échelon de consigne)
L'optimisation est terminée au plus tard lorsque la mesure dépasse 75 % de l'échelon de consigne (SP_INT-PV0). Ceci est signalé par le message suivant dans STATUS_H (2xx2x) : "Point d'inflexion non atteint".
La consigne actuelle paramétrée est toujours valable. Une réduction de la consigne permet donc d'annuler plus tôt la procédure d'optimisation.
S'il s'agit d'un système thermique typique, l'annulation de l'optimisation à 75 % de l'échelon de consigne suffit en règle générale pour éviter un dépassement. Il convient d'être plus prudent s'il s'agit de systèmes à retard plus important (TU/TA > 0.1, type de système III). Si la rampe de réglage initiale est trop importante par rapport à l'échelon de consigne, la mesure risque de dépasser la limite supérieure de façon considérable (jusqu'au triple).
Si le point d'inflexion d'un système à caractéristique d'ordre supérieur est encore très éloigné après le passage de 75 % de la consigne, la mesure dépassera nettement la limite supérieure de l'étendue de réglage. Les paramètres de réglage seront en outre trop aggressifs. Choisissez d'autres paramètres ou répétez la procédure.
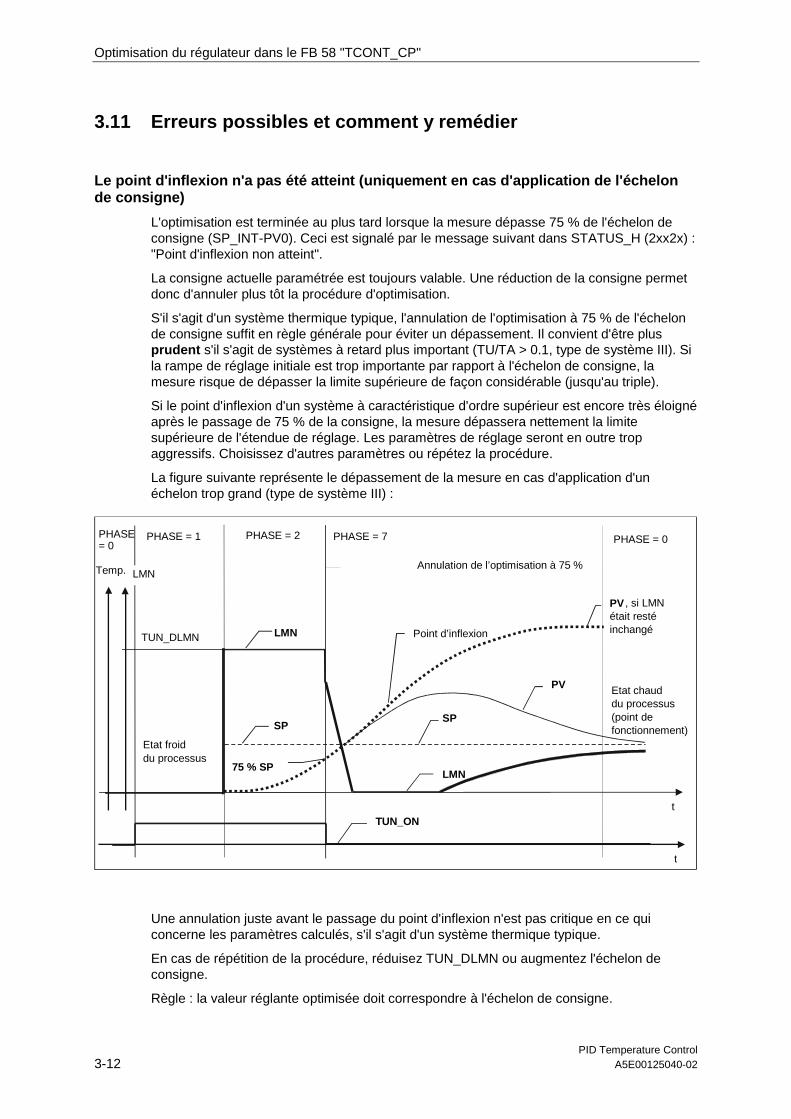
La figure suivante représente le dépassement de la mesure en cas d'application d'un échelon trop grand (type de système III) :
PHASE
TUN_DLMN
t
PHASE = 1 PHASE = 2
t
TUN_ON
Etat froid du processus
Etat chaud du processus (point de fonctionnement)
LMN
LMN
PHASE = 7 PHASE = 0
SP
Point d’inflexion
SP
LMN
PV
Annulation de l’optimisation à 75 %
PV , si LMN était resté inchangé
75 % SP
Temp.
= 0
Une annulation juste avant le passage du point d'inflexion n'est pas critique en ce qui concerne les paramètres calculés, s'il s'agit d'un système thermique typique.
En cas de répétition de la procédure, réduisez TUN_DLMN ou augmentez l'échelon de consigne.
Règle : la valeur réglante optimisée doit correspondre à l'échelon de consigne.
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control A5E00125040-02 3-13
Erreur d'approximation du temps de retard ou de l'ordre du système
Le temps de retard (STATUS_H = 2x1xx ou 2x3xx) ou l'ordre (STATUS_H = 21xxx ou 22xxx) n'ont pas pu être déterminés correctement. Le régulateur continue d'utiliser une valeur approximative qui ne permettra pas d'optimiser les paramètres.
Répétez l'optimisation et veillez à ce que la mesure ne subisse aucune perturbation.
Nota
Le cas particulier d'un système exclusivement PT1 est également signalé par STATUS_H = 2x1xx (TU <= 3*CYCLE). Il n'est alors pas nécessaire de répéter la tentative. Atténuez les paramètres du régulateur si la régulation oscille.
Qualité des signaux de mesure (bruit de mesure, perturbations basse fréquence)
Le résultat de la procédure d'optimisation a peut-être subi une altération due au bruit de mesure ou à des perturbations basse fréquence. Recommandations :
• Si vous constatez un bruit de mesure relativement important, choisissez une fréquence d'échantillonnage plutôt élevée. La mesure doit être balayée au moins deux fois au cours d'une période de bruit. En mode impulsionnel, le filtrage des valeurs moyennes par intégration est alors très utile. Ce filtrage suppose que la mesure PV soit transmise au bloc durant le cycle d'impulsions rapide. Le bruit ne doit pas dépasser 5 % de la variation du signal utile.
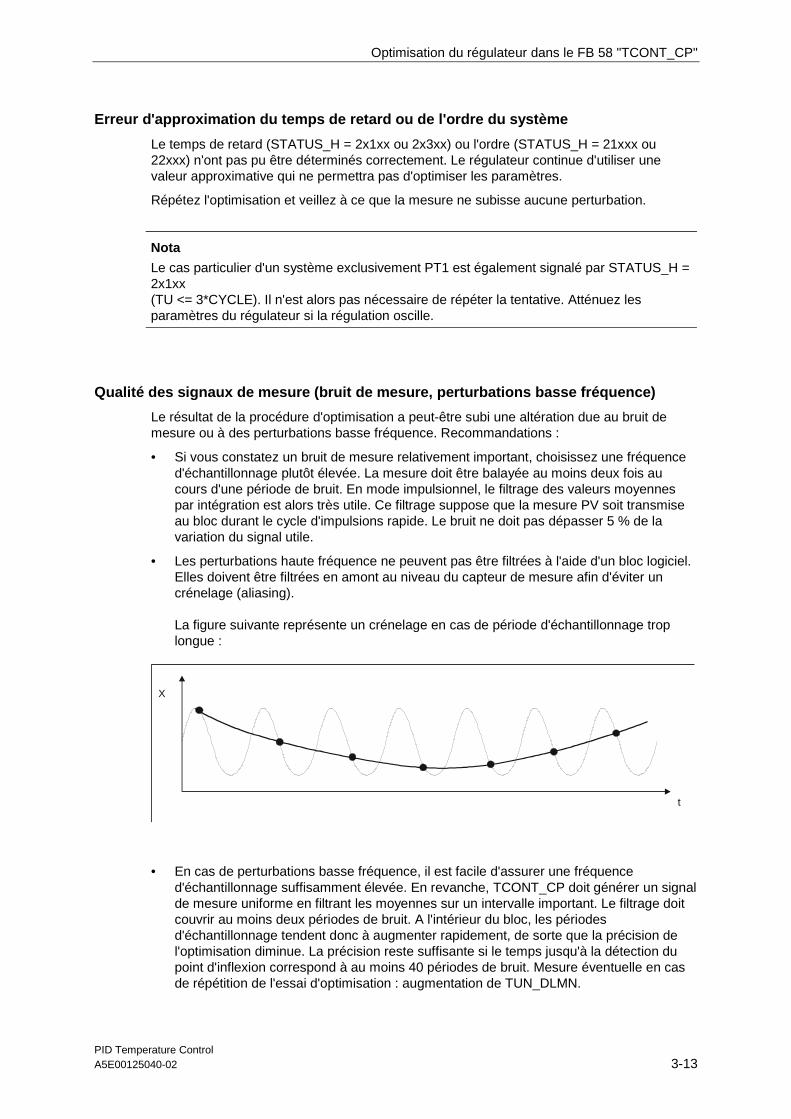
• Les perturbations haute fréquence ne peuvent pas être filtrées à l'aide d'un bloc logiciel. Elles doivent être filtrées en amont au niveau du capteur de mesure afin d'éviter un crénelage (aliasing). La figure suivante représente un crénelage en cas de période d'échantillonnage trop longue :
t
X
• En cas de perturbations basse fréquence, il est facile d'assurer une fréquence d'échantillonnage suffisamment élevée. En revanche, TCONT_CP doit générer un signal de mesure uniforme en filtrant les moyennes sur un intervalle important. Le filtrage doit couvrir au moins deux périodes de bruit. A l'intérieur du bloc, les périodes d'échantillonnage tendent donc à augmenter rapidement, de sorte que la précision de l'optimisation diminue. La précision reste suffisante si le temps jusqu'à la détection du point d'inflexion correspond à au moins 40 périodes de bruit. Mesure éventuelle en cas de répétition de l'essai d'optimisation : augmentation de TUN_DLMN.
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control 3-14 A5E00125040-02
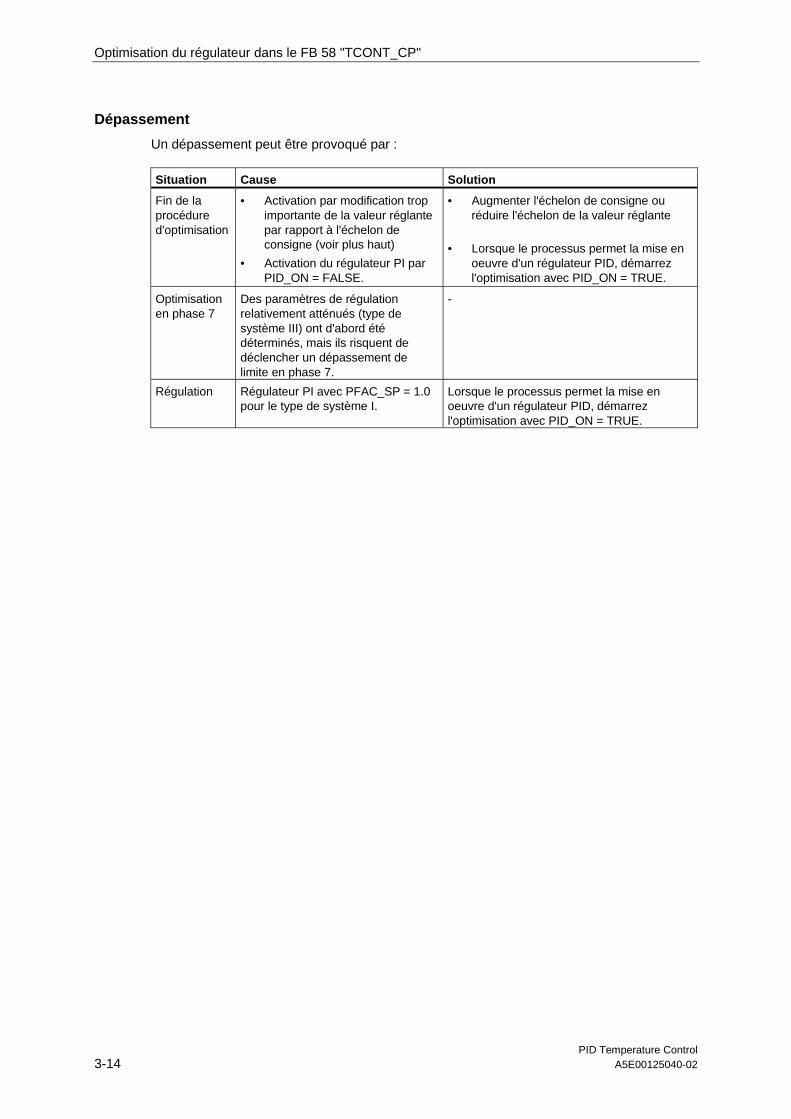
Dépassement
Un dépassement peut être provoqué par :
Situation Cause Solution
Fin de la procédure d'optimisation
• Activation par modification trop importante de la valeur réglante par rapport à l'échelon de consigne (voir plus haut)
• Activation du régulateur PI par PID_ON = FALSE.
• Augmenter l'échelon de consigne ou réduire l'échelon de la valeur réglante
• Lorsque le processus permet la mise en oeuvre d'un régulateur PID, démarrez l'optimisation avec PID_ON = TRUE.
Optimisation en phase 7
Des paramètres de régulation relativement atténués (type de système III) ont d'abord été déterminés, mais ils risquent de déclencher un dépassement de limite en phase 7.
-
Régulation Régulateur PI avec PFAC_SP = 1.0 pour le type de système I.
Lorsque le processus permet la mise en oeuvre d'un régulateur PID, démarrez l'optimisation avec PID_ON = TRUE.
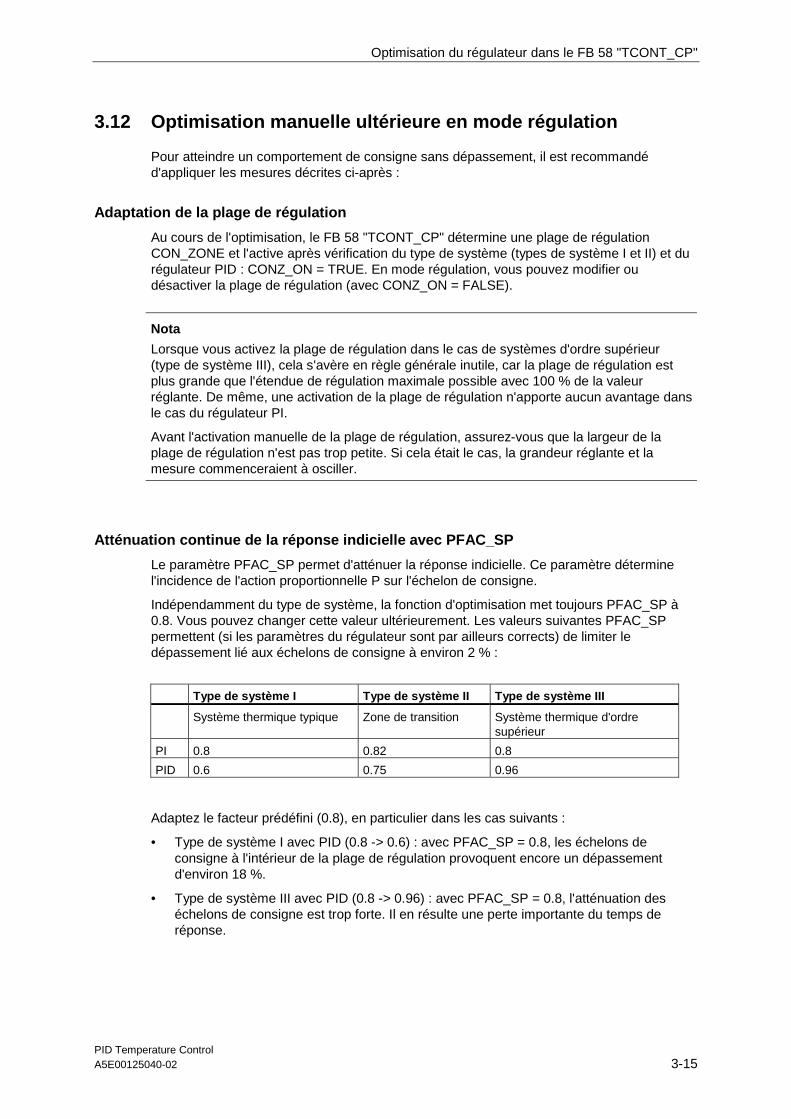
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control A5E00125040-02 3-15
3.12 Optimisation manuelle ultérieure en mode régulation
Pour atteindre un comportement de consigne sans dépassement, il est recommandé d'appliquer les mesures décrites ci-après :
Adaptation de la plage de régulation
Au cours de l'optimisation, le FB 58 "TCONT_CP" détermine une plage de régulation CON_ZONE et l'active après vérification du type de système (types de système I et II) et du régulateur PID : CONZ_ON = TRUE. En mode régulation, vous pouvez modifier ou désactiver la plage de régulation (avec CONZ_ON = FALSE).
Nota
Lorsque vous activez la plage de régulation dans le cas de systèmes d'ordre supérieur (type de système III), cela s'avère en règle générale inutile, car la plage de régulation est plus grande que l'étendue de régulation maximale possible avec 100 % de la valeur réglante. De même, une activation de la plage de régulation n'apporte aucun avantage dans le cas du régulateur PI.
Avant l'activation manuelle de la plage de régulation, assurez-vous que la largeur de la plage de régulation n'est pas trop petite. Si cela était le cas, la grandeur réglante et la mesure commenceraient à osciller.
Atténuation continue de la réponse indicielle avec PFAC_SP
Le paramètre PFAC_SP permet d'atténuer la réponse indicielle. Ce paramètre détermine l'incidence de l'action proportionnelle P sur l'échelon de consigne.
Indépendamment du type de système, la fonction d'optimisation met toujours PFAC_SP à 0.8. Vous pouvez changer cette valeur ultérieurement. Les valeurs suivantes PFAC_SP permettent (si les paramètres du régulateur sont par ailleurs corrects) de limiter le dépassement lié aux échelons de consigne à environ 2 % :
Type de système I Type de système II Type de système III
Système thermique typique Zone de transition Système thermique d'ordre supérieur
PI 0.8 0.82 0.8
PID 0.6 0.75 0.96
Adaptez le facteur prédéfini (0.8), en particulier dans les cas suivants :
• Type de système I avec PID (0.8 -> 0.6) : avec PFAC_SP = 0.8, les échelons de consigne à l'intérieur de la plage de régulation provoquent encore un dépassement d'environ 18 %.
• Type de système III avec PID (0.8 -> 0.96) : avec PFAC_SP = 0.8, l'atténuation des échelons de consigne est trop forte. Il en résulte une perte importante du temps de réponse.
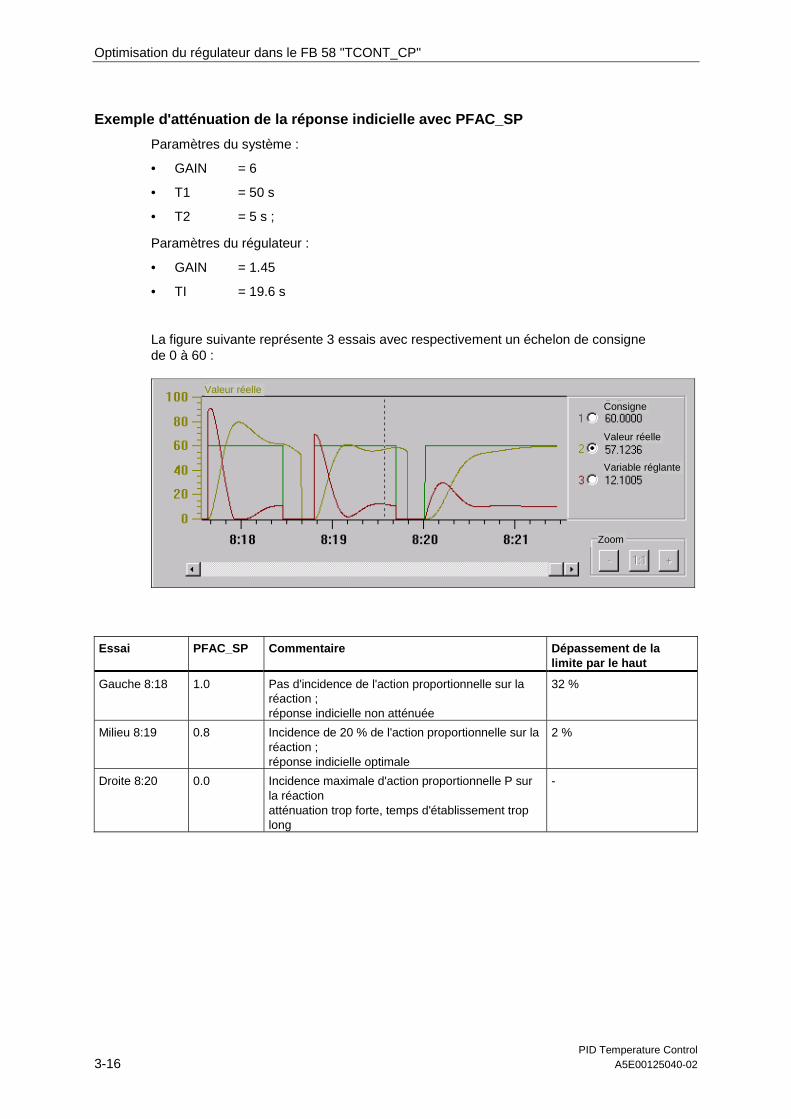
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control 3-16 A5E00125040-02
Exemple d'atténuation de la réponse indicielle avec PFAC_SP
Paramètres du système :
• GAIN = 6
• T1 = 50 s
• T2 = 5 s ;
Paramètres du régulateur :
• GAIN = 1.45
• TI = 19.6 s
La figure suivante représente 3 essais avec respectivement un échelon de consigne de 0 à 60 :
Consigne
Valeur réelle
Variable réglante
Zoom
Valeur réelle
Essai PFAC_SP Commentaire Dépassement de la limite par le haut
Gauche 8:18 1.0 Pas d'incidence de l'action proportionnelle sur la réaction ; réponse indicielle non atténuée
32 %
Milieu 8:19 0.8 Incidence de 20 % de l'action proportionnelle sur la réaction ; réponse indicielle optimale
2 %
Droite 8:20 0.0 Incidence maximale d'action proportionnelle P sur la réaction atténuation trop forte, temps d'établissement trop long
-
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control A5E00125040-02 3-17
Atténuation des paramètres du régulateur
Si des oscillations se produisent dans la boucle de régulation fermée ou si des dépassements sont constatés après vérification de la consigne, vous pouvez réduire le GAIN du régulateur (p. ex. à 80 % de la valeur initiale) et augmenter le temps d'intégration TI (p. ex. à 150 % de la valeur initiale). Si la grandeur réglante analogique du régulateur à action continue est convertie en signaux de réglage binaires avec mise en forme des impulsions, les effets de quantification peuvent donner lieu à de faibles oscillations permanentes. Vous pouvez éliminer ces oscillations par un agrandissement de la zone morte DEADB_W du régulateur .
Modification des paramètres du régulateur
Pour modifier les paramètres du régulateur, procédez de la manière suivante :
1. Enregistrez les paramètres actuels avec SAVE_PAR.
2. Modifiez les paramètres.
3. Testez le comportement du régulateur.
Si les nouveaux paramètres se révèlent moins concluants que les précédents, restituez ces derniers avec UNDO_PAR.
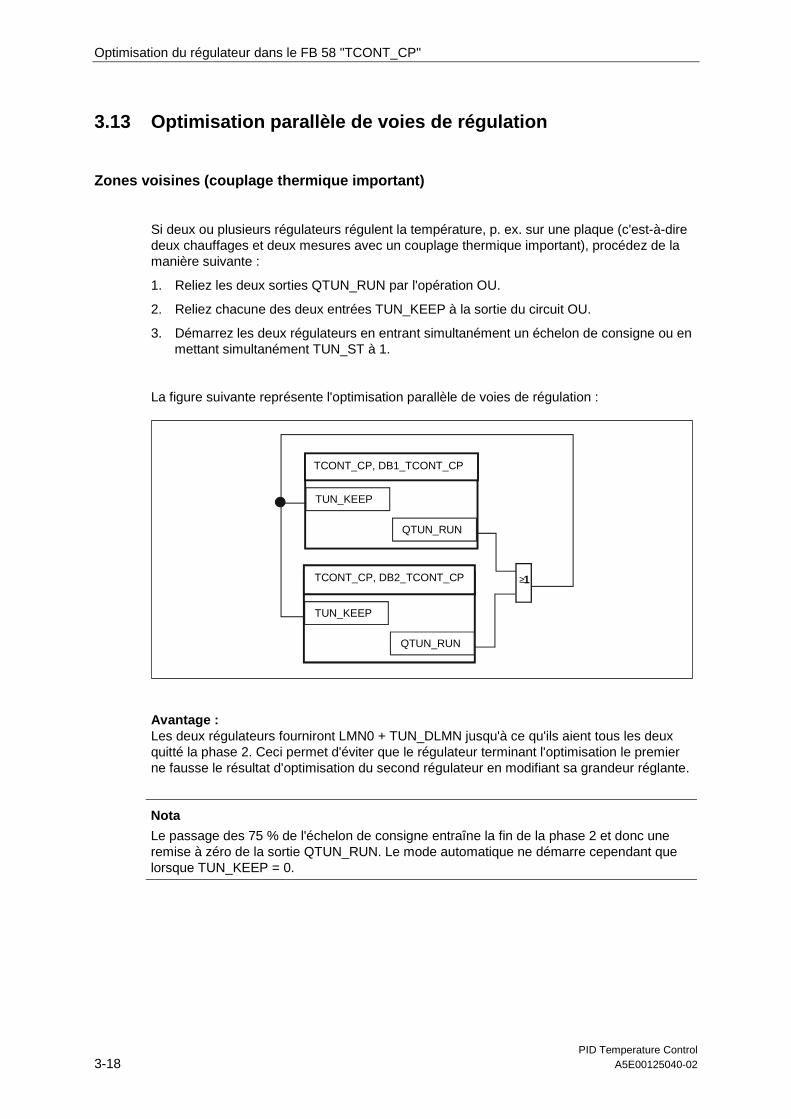
Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control 3-18 A5E00125040-02
3.13 Optimisation parallèle de voies de régulation
Zones voisines (couplage thermique important)
Si deux ou plusieurs régulateurs régulent la température, p. ex. sur une plaque (c'est-à-dire deux chauffages et deux mesures avec un couplage thermique important), procédez de la manière suivante :
1. Reliez les deux sorties QTUN_RUN par l'opération OU.
2. Reliez chacune des deux entrées TUN_KEEP à la sortie du circuit OU.
3. Démarrez les deux régulateurs en entrant simultanément un échelon de consigne ou en mettant simultanément TUN_ST à 1.
La figure suivante représente l'optimisation parallèle de voies de régulation :
≥1
QTUN_RUN
TUN_KEEP
TCONT_CP, DB2_TCONT_CP
QTUN_RUN
TUN_KEEP
TCONT_CP, DB1_TCONT_CP
Avantage : Les deux régulateurs fourniront LMN0 + TUN_DLMN jusqu'à ce qu'ils aient tous les deux quitté la phase 2. Ceci permet d'éviter que le régulateur terminant l'optimisation le premier ne fausse le résultat d'optimisation du second régulateur en modifiant sa grandeur réglante.
Nota
Le passage des 75 % de l'échelon de consigne entraîne la fin de la phase 2 et donc une remise à zéro de la sortie QTUN_RUN. Le mode automatique ne démarre cependant que lorsque TUN_KEEP = 0.

Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control A5E00125040-02 3-19
Zones voisines du système (couplage thermique faible)
Par principe, l'optimisation doit correspondre au réglage souhaité. Si les zones du système fonctionnent en parallèle, de sorte à ce que les différences de température entre elles restent stables, il faut également procéder à l'optimisation en parallèle, en tenant compte du niveau de température des parties voisines.
Les différences de température constatées au début de l'essai ne sont pas importantes, étant donné qu'elles sont compensées par un chauffage initial en conséquence (augmentation initiale = 0).

Optimisation du régulateur dans le FB 58 "TCONT_CP"
PID Temperature Control 3-20 A5E00125040-02
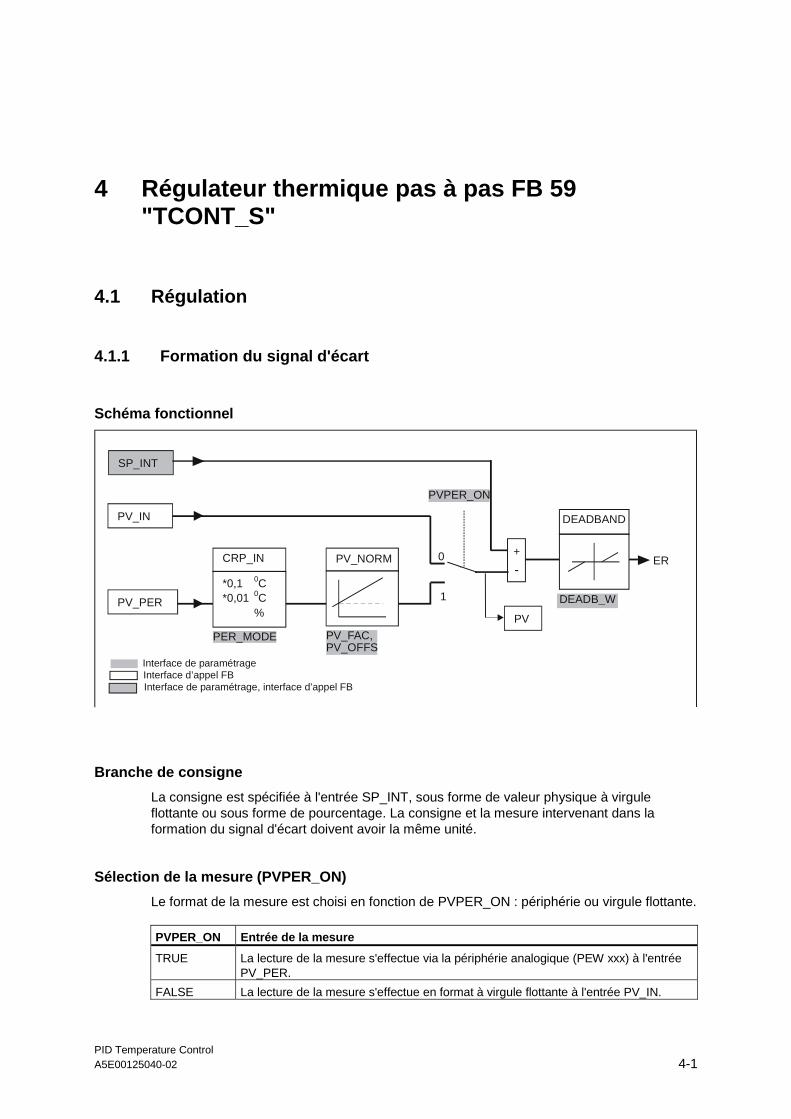
PID Temperature Control A5E00125040-02 4-1
4 Régulateur thermique pas à pas FB 59 "TCONT_S"
4.1 Régulation
4.1.1 Formation du signal d'écart
Schéma fonctionnel
SP_INT
PV_IN
PV_PER
CRP_IN
PER_MODE
PV_NORM
PV_FAC,PV_OFFS
*0,1 0C*0,01 0C %
1
0
PVPER_ON
Interface de paramétrage
Interface de paramétrage, interface d’appel FBInterface d’appel FB
PV
DEADBAND
DEADB_W
ER+
Branche de consigne
La consigne est spécifiée à l'entrée SP_INT, sous forme de valeur physique à virgule flottante ou sous forme de pourcentage. La consigne et la mesure intervenant dans la formation du signal d'écart doivent avoir la même unité.
Sélection de la mesure (PVPER_ON)
Le format de la mesure est choisi en fonction de PVPER_ON : périphérie ou virgule flottante. PVPER_ON Entrée de la mesure
TRUE La lecture de la mesure s'effectue via la périphérie analogique (PEW xxx) à l'entrée PV_PER.
FALSE La lecture de la mesure s'effectue en format à virgule flottante à l'entrée PV_IN.
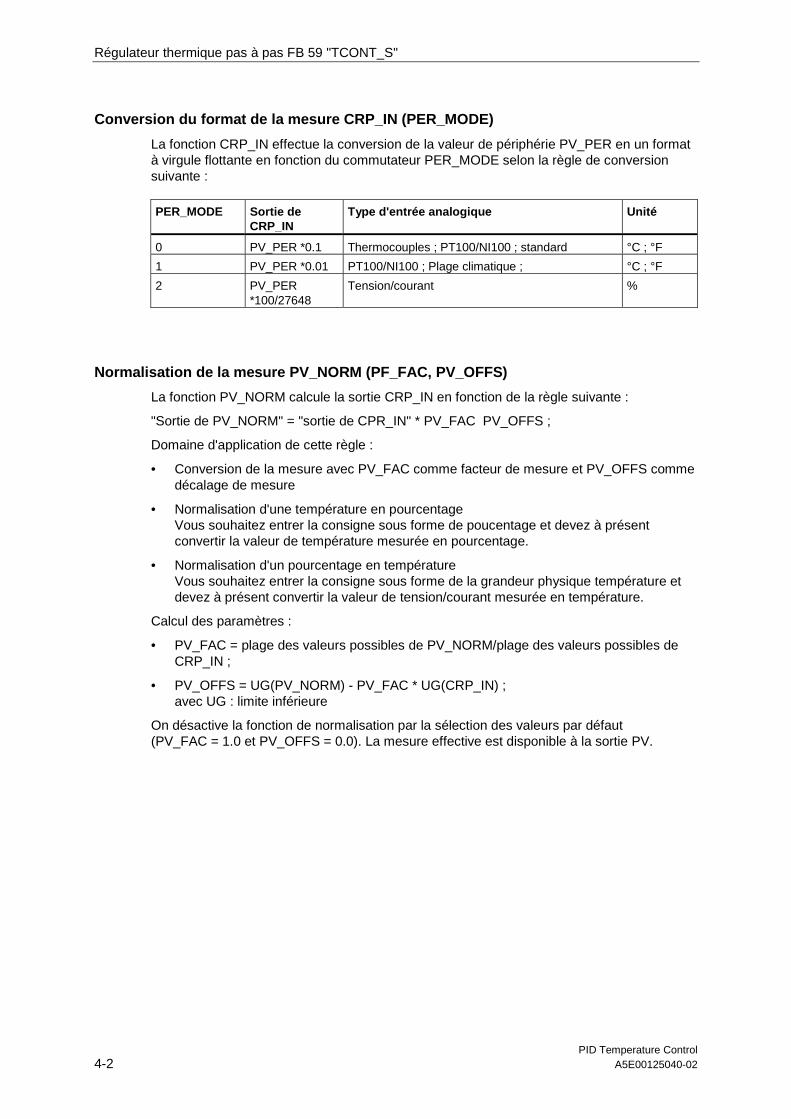
Régulateur thermique pas à pas FB 59 "TCONT_S"
PID Temperature Control 4-2 A5E00125040-02
Conversion du format de la mesure CRP_IN (PER_MODE)
La fonction CRP_IN effectue la conversion de la valeur de périphérie PV_PER en un format à virgule flottante en fonction du commutateur PER_MODE selon la règle de conversion suivante : PER_MODE Sortie de
CRP_IN Type d'entrée analogique Unité
0 PV_PER *0.1 Thermocouples ; PT100/NI100 ; standard °C ; °F
1 PV_PER *0.01 PT100/NI100 ; Plage climatique ; °C ; °F
2 PV_PER *100/27648
Tension/courant %
Normalisation de la mesure PV_NORM (PF_FAC, PV_OFFS)
La fonction PV_NORM calcule la sortie CRP_IN en fonction de la règle suivante :
"Sortie de PV_NORM" = "sortie de CPR_IN" * PV_FAC PV_OFFS ;
Domaine d'application de cette règle :
• Conversion de la mesure avec PV_FAC comme facteur de mesure et PV_OFFS comme décalage de mesure
• Normalisation d'une température en pourcentage Vous souhaitez entrer la consigne sous forme de poucentage et devez à présent convertir la valeur de température mesurée en pourcentage.
• Normalisation d'un pourcentage en température Vous souhaitez entrer la consigne sous forme de la grandeur physique température et devez à présent convertir la valeur de tension/courant mesurée en température.
Calcul des paramètres :
• PV_FAC = plage des valeurs possibles de PV_NORM/plage des valeurs possibles de CRP_IN ;
• PV_OFFS = UG(PV_NORM) - PV_FAC * UG(CRP_IN) ; avec UG : limite inférieure
On désactive la fonction de normalisation par la sélection des valeurs par défaut (PV_FAC = 1.0 et PV_OFFS = 0.0). La mesure effective est disponible à la sortie PV.
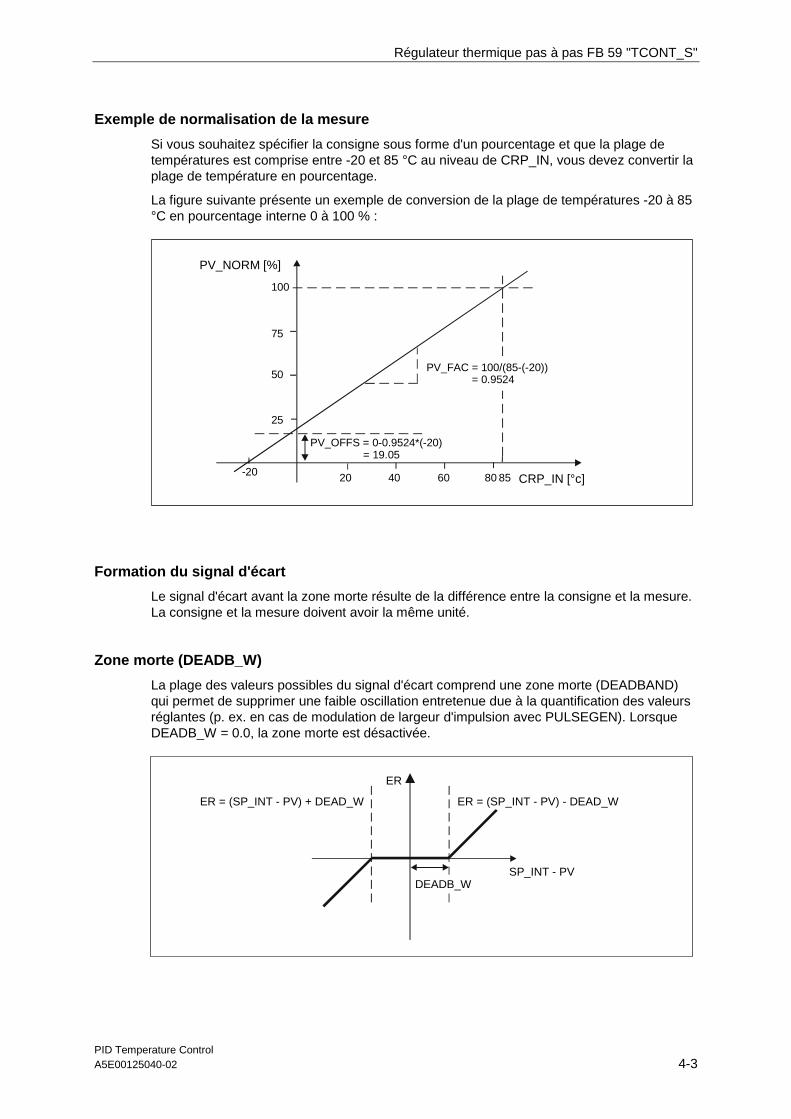
Régulateur thermique pas à pas FB 59 "TCONT_S"
PID Temperature Control A5E00125040-02 4-3
Exemple de normalisation de la mesure
Si vous souhaitez spécifier la consigne sous forme d'un pourcentage et que la plage de températures est comprise entre -20 et 85 °C au niveau de CRP_IN, vous devez convertir la plage de température en pourcentage.
La figure suivante présente un exemple de conversion de la plage de températures -20 à 85 °C en pourcentage interne 0 à 100 % :
PV_NORM [%]
100
75
50
25
-20 20 40 60 80 85 [°c]CRP_IN
PV_OFFS = 0-0.9524*(-20)
PV_FAC = 100/(85-(-20)) = 0.9524
= 19.05
Formation du signal d'écart
Le signal d'écart avant la zone morte résulte de la différence entre la consigne et la mesure. La consigne et la mesure doivent avoir la même unité.
Zone morte (DEADB_W)
La plage des valeurs possibles du signal d'écart comprend une zone morte (DEADBAND) qui permet de supprimer une faible oscillation entretenue due à la quantification des valeurs réglantes (p. ex. en cas de modulation de largeur d'impulsion avec PULSEGEN). Lorsque DEADB_W = 0.0, la zone morte est désactivée.
ER
SP_INT - PV
ER = (SP_INT - PV) - DEAD_WER = (SP_INT - PV) + DEAD_W
DEADB_W
Régulateur thermique pas à pas FB 59 "TCONT_S"
PID Temperature Control 4-4 A5E00125040-02
4.1.2 Algorithme du régulateur PI pas à pas
Le FB 59 "TCONT_S" fonctionne sans signalisation de position (voir schéma fonctionnel au paragraphe 4.2, page 4-5). L'action par intégration I de l'algorithme PI et la signalisation de position sont calculées dans un intégrateur (INT) et comparées, comme valeurs de réaction, à l'action proportionnelle P restante. La différence est transmise à un élément fonctionnel à trois échelons (THREE_ST) ainsi qu'au formateur des impulsions (PULSEOUT) pour la soupape de régulation. La fréquence de commutation du régulateur peut être réduite par l'adaptation du seuil d'action de l'élément fonctionnel à trois échelons.
Atténuation de l'action proportionnelle P en cas de modification de la consigne (PFAC_SP)
Pour éviter un dépassement, vous pouvez réduire l'action proportionnelle P en intervenant sur le paramètre "Coefficient d'action proportionnelle en cas de modification de la consigne" (PFAC_SP). PFAC_SP vous permet de sélectionner toute valeur comprise entre 0.0 et 1.0 pour spécifier l'importance de l'action proportionnelle P en cas de modification de la consigne :
• PFAC_SP = 1.0 : en cas de modification de la consigne, l'action proportionnelle P est totalement active
• PFAC_SP = 0.0 : en cas de modification de la consigne, pas d'action proportionnelle P
Comme c'est le cas du régulateur à action continue, une valeur PFAC_SP < 1.0 peut réduire les dépassements si le temps de marche du moteur MTR_TM est relativement court par rapport au temps de stabilisation TA et si le rapport TU/TA < 0.2. Lorsque MTR_TM atteint 20 % de TA, les possibilités d'optimisation sont relativement faibles.
Action anticipatrice
Une perturbation additionnelle peut être appliquée à l'entrée DISV.
Mode manuel (LMNS_ON, LMNUP, LMNDN)
LMNS_ON permet de commuter entre les modes manuel et automatique. En mode manuel, l'actionneur est arrêté et l'intégrateur (INT) est mis à zéro par le système. LMNUP et LMNDN permettent d'ouvrir et de fermer l'actionneur. Le passage au mode automatique s'accompagne d'à-coups. Le signal d'écart existant produit un échelon de la valeur réglante interne par l'intermédiaire de GAIN. Au niveau de l'actionneur réglé par intégration, cet échelon ne se traduit cependant que par une commande du processus en forme de rampe.
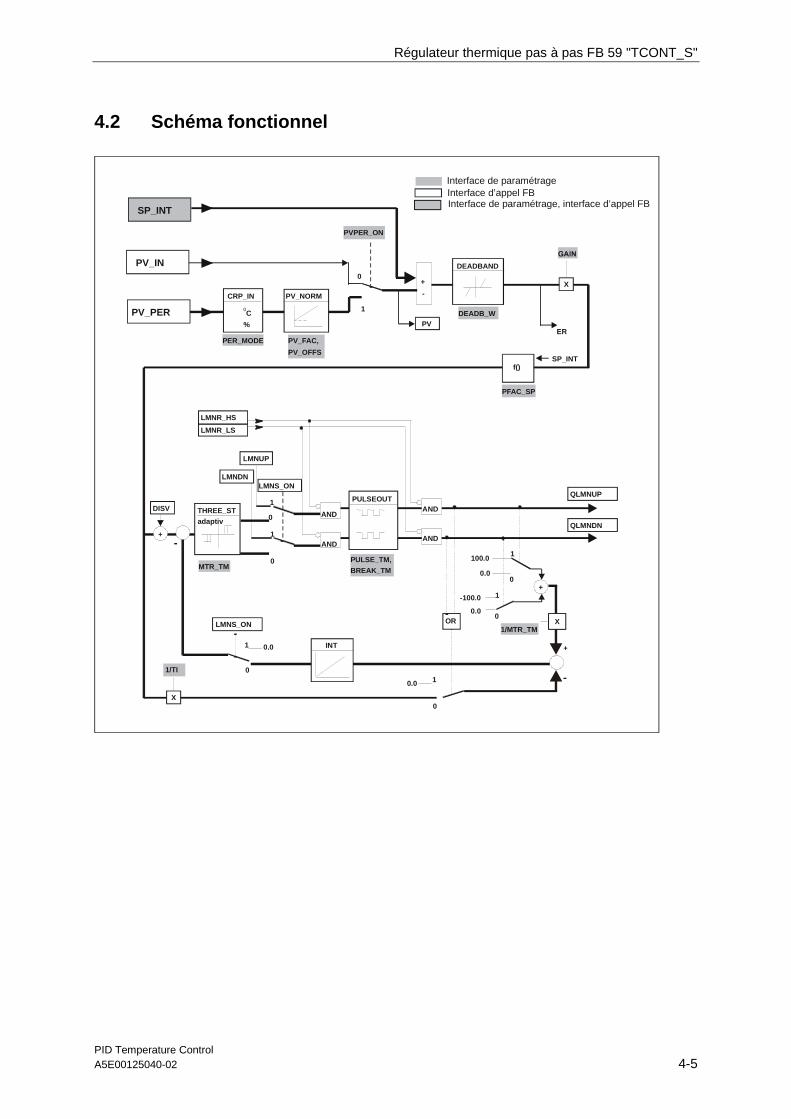
Régulateur thermique pas à pas FB 59 "TCONT_S"
PID Temperature Control A5E00125040-02 4-5
4.2 Schéma fonctionnel
+
THREE_ST
PULSEOUT
AND
AND
AND
AND
100.0
0.0
-100.0
0.0X
INT
OR
10.0
+
-
0.0
0
1
0
1
0
0
1
1
0X
1
0
+-
adaptiv
CRP_IN
0C
%
PV_NORM -
+ X
ER
0
1
SP_INT
PV_IN
PV_PER
PER_MODE PV_FAC,
PV_OFFS
PVPER_ON
DEADB_WPV
Interface de paramétrage
Interface de paramétrage, interface d’appel FBInterface d’appel FB
LMNR_HS
LMNR_LS
LMNUP
LMNDNLMNS_ON
DISV
MTR_TMPULSE_TM,BREAK_TM
QLMNUP
QLMNDN
LMNS_ON
1/TI
1/MTR_TM
DEADBAND
SP_INT
PFAC_SP
f()
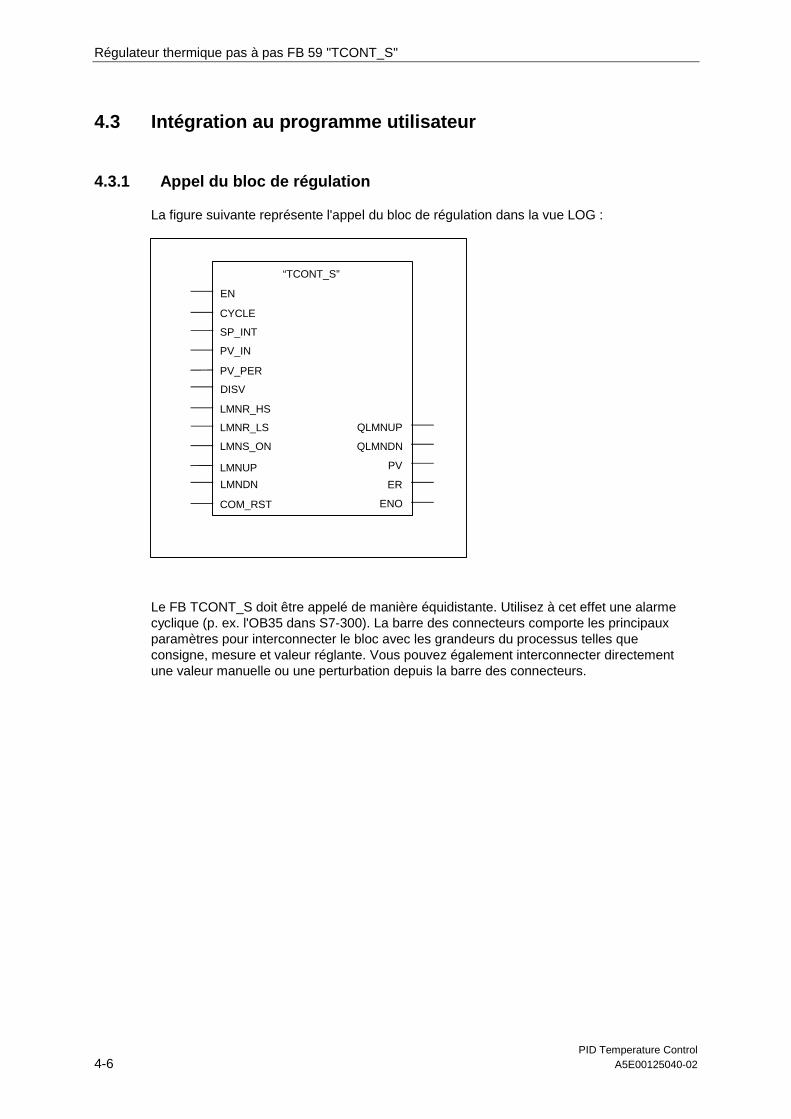
Régulateur thermique pas à pas FB 59 "TCONT_S"
PID Temperature Control 4-6 A5E00125040-02
4.3 Intégration au programme utilisateur
4.3.1 Appel du bloc de régulation
La figure suivante représente l'appel du bloc de régulation dans la vue LOG :
EN
“TCONT_S”
PV_IN
CYCLE
PV_PER
SP_INT
DISV
LMNS_ON
LMNR_HS
LMNUP
LMNR_LS
LMNDN
COM_RST
QLMNUP
QLMNDN
PV
ER
ENO
Le FB TCONT_S doit être appelé de manière équidistante. Utilisez à cet effet une alarme cyclique (p. ex. l'OB35 dans S7-300). La barre des connecteurs comporte les principaux paramètres pour interconnecter le bloc avec les grandeurs du processus telles que consigne, mesure et valeur réglante. Vous pouvez également interconnecter directement une valeur manuelle ou une perturbation depuis la barre des connecteurs.
Régulateur thermique pas à pas FB 59 "TCONT_S"
PID Temperature Control A5E00125040-02 4-7
4.3.2 Période d'échantillonnage du régulateur
Vous paramétrez la période d'échantillonnage avec le paramètre CYCLE. Vous pouvez également la définir dans l'outil de paramétrage. La période d'échantillonnage CYCLE doit correspondre à la différence de temps entre deux appels (temps de cycle de l'OB d'alarme cyclique avec prise en compte des réductions).
Règle empirique relative à la période d'échantillonnage CYCLE du régulateur
La période d'échantillonnage du régulateur ne devrait pas dépasser 10 % du temps d'intégration (TI) déterminé pour le régulateur. En règle générale, vous devez cependant choisir une période d'échantillonnage bien plus courte pour obtenir la précision spécifiée du régulateur pas à pas (voir exemple chiffré ci-dessous).
Exemple chiffré
Précision P exigée
MTR_TM CYCLE = MTR_TM*P Commentaire
0,5 % 10 s 0,05 s La période d'échantillonnage est déterminée par la précision requise du régulateur pas à pas.
4.3.3 Initialisation
Le FB "TCONT_S" est doté d'une routine d'initialisation qui est lancée lorsque le paramètre d'entrée COM_RST = TRUE. Après l'exécution de la routine d'initialisation, le bloc affecte de nouveau la valeur FALSE à COM_RST.
Toutes les sorties prennent leur valeur initiale.
Si vous souhaitez une initialisation lors du démarrage de la CPU, appelez le bloc dans l'OB100 avec COM_RST = TRUE.

Régulateur thermique pas à pas FB 59 "TCONT_S"
PID Temperature Control 4-8 A5E00125040-02
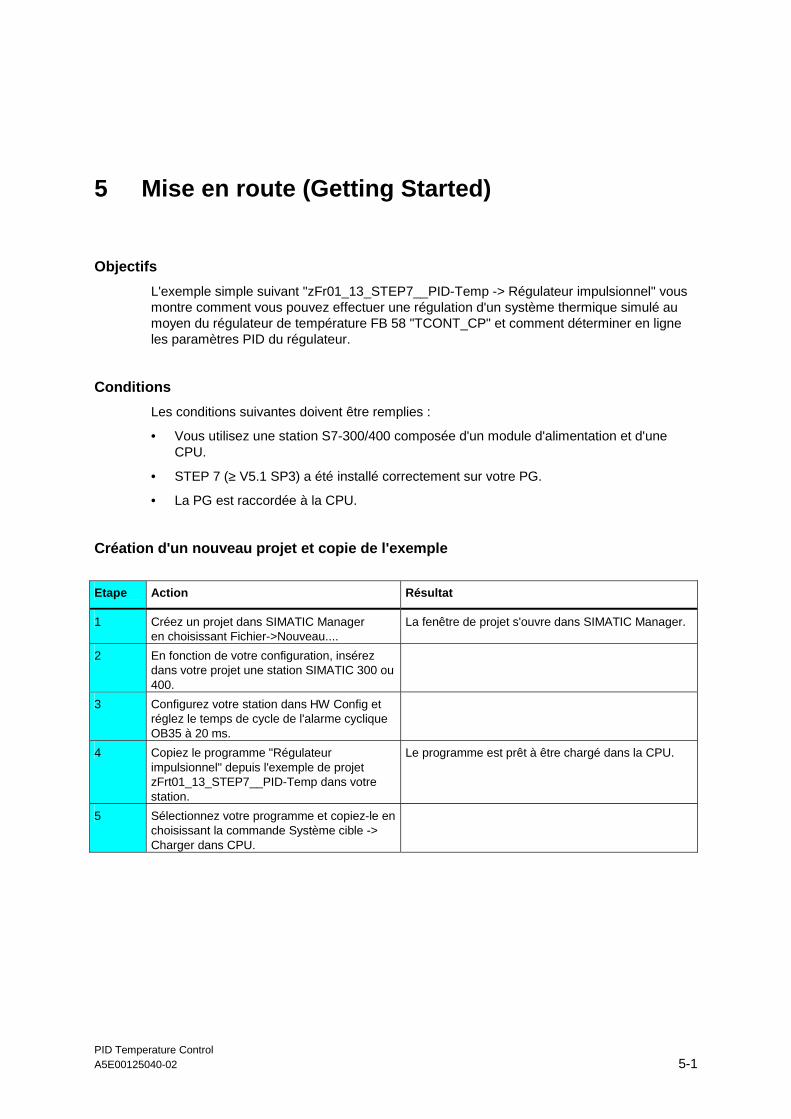
PID Temperature Control A5E00125040-02 5-1
5 Mise en route (Getting Started)
Objectifs
L'exemple simple suivant "zFr01_13_STEP7__PID-Temp -> Régulateur impulsionnel" vous montre comment vous pouvez effectuer une régulation d'un système thermique simulé au moyen du régulateur de température FB 58 "TCONT_CP" et comment déterminer en ligne les paramètres PID du régulateur.
Conditions
Les conditions suivantes doivent être remplies :
• Vous utilisez une station S7-300/400 composée d'un module d'alimentation et d'une CPU.
• STEP 7 (≥ V5.1 SP3) a été installé correctement sur votre PG.
• La PG est raccordée à la CPU.
Création d'un nouveau projet et copie de l'exemple
Etape Action Résultat
1 Créez un projet dans SIMATIC Manager en choisissant Fichier->Nouveau....
La fenêtre de projet s'ouvre dans SIMATIC Manager.
2 En fonction de votre configuration, insérez dans votre projet une station SIMATIC 300 ou 400.
3 Configurez votre station dans HW Config et réglez le temps de cycle de l'alarme cyclique OB35 à 20 ms.
4 Copiez le programme "Régulateur impulsionnel" depuis l'exemple de projet zFrt01_13_STEP7__PID-Temp dans votre station.
Le programme est prêt à être chargé dans la CPU.
5 Sélectionnez votre programme et copiez-le en choisissant la commande Système cible -> Charger dans CPU.
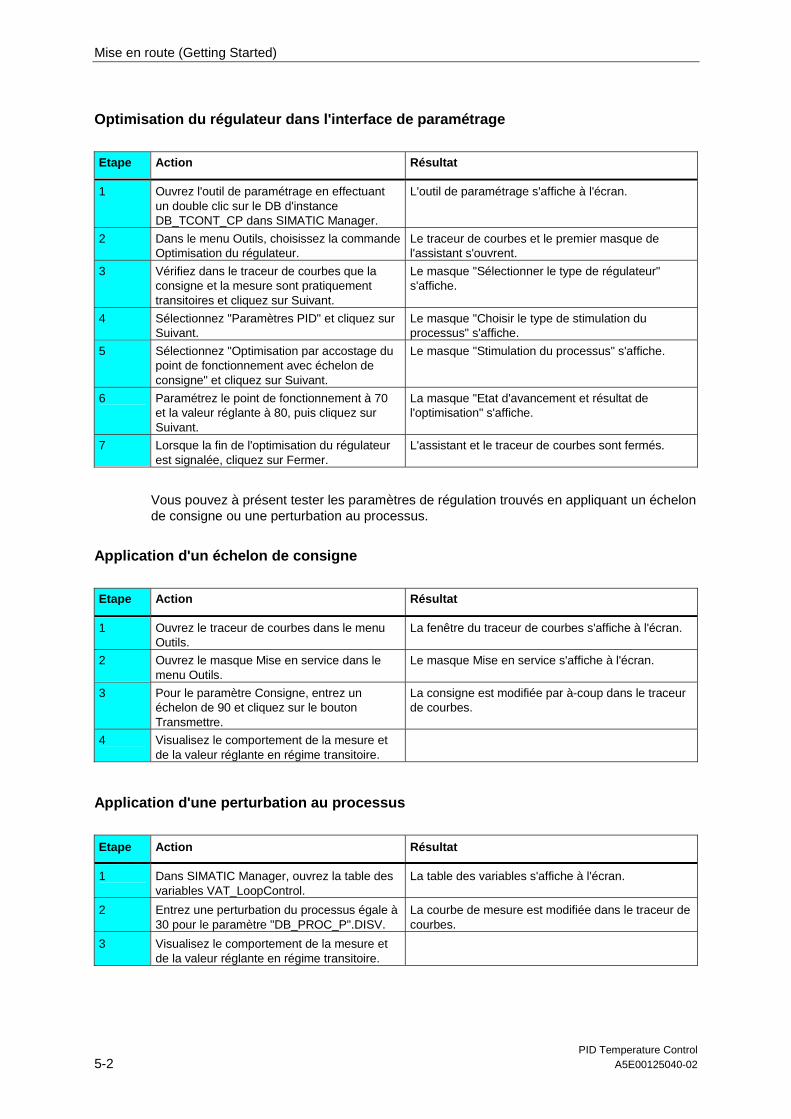
Mise en route (Getting Started)
PID Temperature Control 5-2 A5E00125040-02
Optimisation du régulateur dans l'interface de paramétrage
Etape Action Résultat
1 Ouvrez l'outil de paramétrage en effectuant un double clic sur le DB d'instance DB_TCONT_CP dans SIMATIC Manager.
L'outil de paramétrage s'affiche à l'écran.
2 Dans le menu Outils, choisissez la commande Optimisation du régulateur.
Le traceur de courbes et le premier masque de l'assistant s'ouvrent.
3 Vérifiez dans le traceur de courbes que la consigne et la mesure sont pratiquement transitoires et cliquez sur Suivant.
Le masque "Sélectionner le type de régulateur" s'affiche.
4 Sélectionnez "Paramètres PID" et cliquez sur Suivant.
Le masque "Choisir le type de stimulation du processus" s'affiche.
5 Sélectionnez "Optimisation par accostage du point de fonctionnement avec échelon de consigne" et cliquez sur Suivant.
Le masque "Stimulation du processus" s'affiche.
6 Paramétrez le point de fonctionnement à 70 et la valeur réglante à 80, puis cliquez sur Suivant.
La masque "Etat d'avancement et résultat de l'optimisation" s'affiche.
7 Lorsque la fin de l'optimisation du régulateur est signalée, cliquez sur Fermer.
L'assistant et le traceur de courbes sont fermés.
Vous pouvez à présent tester les paramètres de régulation trouvés en appliquant un échelon de consigne ou une perturbation au processus.
Application d'un échelon de consigne
Etape Action Résultat
1 Ouvrez le traceur de courbes dans le menu Outils.
La fenêtre du traceur de courbes s'affiche à l'écran.
2 Ouvrez le masque Mise en service dans le menu Outils.
Le masque Mise en service s'affiche à l'écran.
3 Pour le paramètre Consigne, entrez un échelon de 90 et cliquez sur le bouton Transmettre.
La consigne est modifiée par à-coup dans le traceur de courbes.
4 Visualisez le comportement de la mesure et de la valeur réglante en régime transitoire.
Application d'une perturbation au processus
Etape Action Résultat
1 Dans SIMATIC Manager, ouvrez la table des variables VAT_LoopControl.
La table des variables s'affiche à l'écran.
2 Entrez une perturbation du processus égale à 30 pour le paramètre "DB_PROC_P".DISV.
La courbe de mesure est modifiée dans le traceur de courbes.
3 Visualisez le comportement de la mesure et de la valeur réglante en régime transitoire.
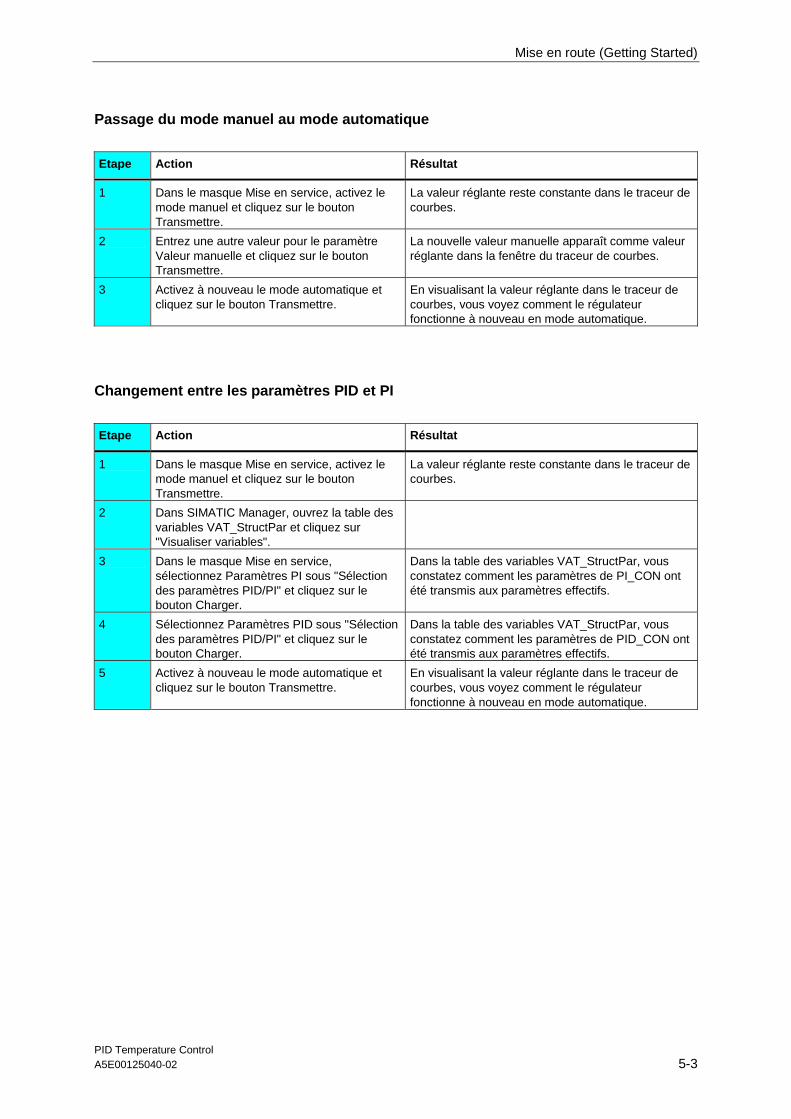
Mise en route (Getting Started)
PID Temperature Control A5E00125040-02 5-3
Passage du mode manuel au mode automatique
Etape Action Résultat
1 Dans le masque Mise en service, activez le mode manuel et cliquez sur le bouton Transmettre.
La valeur réglante reste constante dans le traceur de courbes.
2 Entrez une autre valeur pour le paramètre Valeur manuelle et cliquez sur le bouton Transmettre.
La nouvelle valeur manuelle apparaît comme valeur réglante dans la fenêtre du traceur de courbes.
3 Activez à nouveau le mode automatique et cliquez sur le bouton Transmettre.
En visualisant la valeur réglante dans le traceur de courbes, vous voyez comment le régulateur fonctionne à nouveau en mode automatique.
Changement entre les paramètres PID et PI
Etape Action Résultat
1 Dans le masque Mise en service, activez le mode manuel et cliquez sur le bouton Transmettre.
La valeur réglante reste constante dans le traceur de courbes.
2 Dans SIMATIC Manager, ouvrez la table des variables VAT_StructPar et cliquez sur "Visualiser variables".
3 Dans le masque Mise en service, sélectionnez Paramètres PI sous "Sélection des paramètres PID/PI" et cliquez sur le bouton Charger.
Dans la table des variables VAT_StructPar, vous constatez comment les paramètres de PI_CON ont été transmis aux paramètres effectifs.
4 Sélectionnez Paramètres PID sous "Sélection des paramètres PID/PI" et cliquez sur le bouton Charger.
Dans la table des variables VAT_StructPar, vous constatez comment les paramètres de PID_CON ont été transmis aux paramètres effectifs.
5 Activez à nouveau le mode automatique et cliquez sur le bouton Transmettre.
En visualisant la valeur réglante dans le traceur de courbes, vous voyez comment le régulateur fonctionne à nouveau en mode automatique.
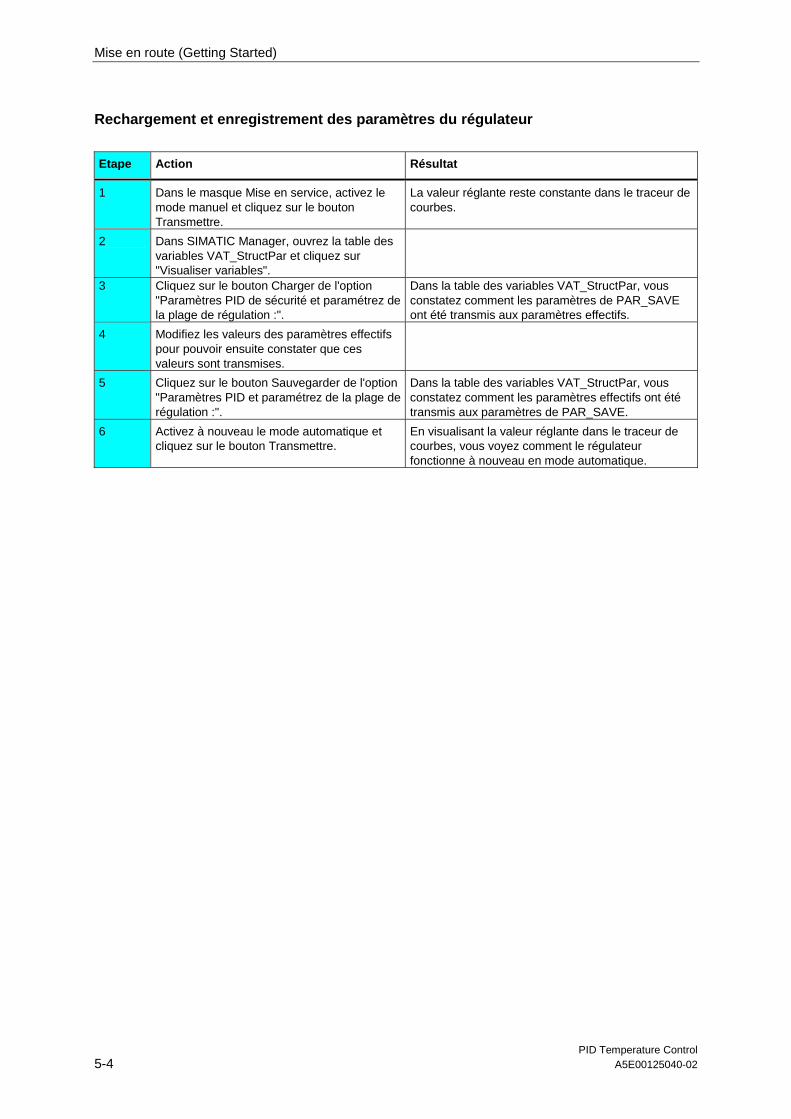
Mise en route (Getting Started)
PID Temperature Control 5-4 A5E00125040-02
Rechargement et enregistrement des paramètres du régulateur
Etape Action Résultat
1 Dans le masque Mise en service, activez le mode manuel et cliquez sur le bouton Transmettre.
La valeur réglante reste constante dans le traceur de courbes.
2 Dans SIMATIC Manager, ouvrez la table des variables VAT_StructPar et cliquez sur "Visualiser variables".
3 Cliquez sur le bouton Charger de l'option "Paramètres PID de sécurité et paramétrez de la plage de régulation :".
Dans la table des variables VAT_StructPar, vous constatez comment les paramètres de PAR_SAVE ont été transmis aux paramètres effectifs.
4 Modifiez les valeurs des paramètres effectifs pour pouvoir ensuite constater que ces valeurs sont transmises.
5 Cliquez sur le bouton Sauvegarder de l'option "Paramètres PID et paramétrez de la plage de régulation :".
Dans la table des variables VAT_StructPar, vous constatez comment les paramètres effectifs ont été transmis aux paramètres de PAR_SAVE.
6 Activez à nouveau le mode automatique et cliquez sur le bouton Transmettre.
En visualisant la valeur réglante dans le traceur de courbes, vous voyez comment le régulateur fonctionne à nouveau en mode automatique.
PID Temperature Control A5E00125040-02 6-1
6 Exemples d'utilisation des régulateurs de température
6.1 Introduction
Généralités
Ce chapitre présente des exemples d'application exécutables pour les régulateurs de température FB 58 "TCONT_CP" et FB 59 "TCONT_S" ainsi qu'une simulation du processus.
Ces exemples sont disponibles dans le répertoire ...\STEP7\EXAMPLES.
Conditions
• Vous disposez d'une station S7 dans laquelle un module d'alimentation et une CPU sont enfichés et câblés.
• STEP 7 (à partir de version V5.1 + Service Pack 3) est installé sur votre console de programmation.
• La PG est raccordée à la CPU.
Préparation des exemples
1. Ouvrez l'exemple de projet zFr01_13_STEP7__PID-Temp dans le répertoire ...\STEP7\EXAMPLES avec SIMATIC Manager et copiez-le dans votre répertoire de projet sous un nom judicieusement choisi (Fichier > Enregistrer sous). Utilisez le mode d'affichage Affichage > Détails pour visualiser les informations complètes.
2. Insérez dans votre projet une station correspondant à la configuration matérielle de votre système.
3. Sélectionnez un exemple de programme et copiez-le dans le programme de cette station.
4. Effectuez la configuration matérielle dans HW Config.
5. Enregistrez la configuration matérielle et chargez-la dans la CPU.
6. Chargez le dossier des blocs dans la CPU.
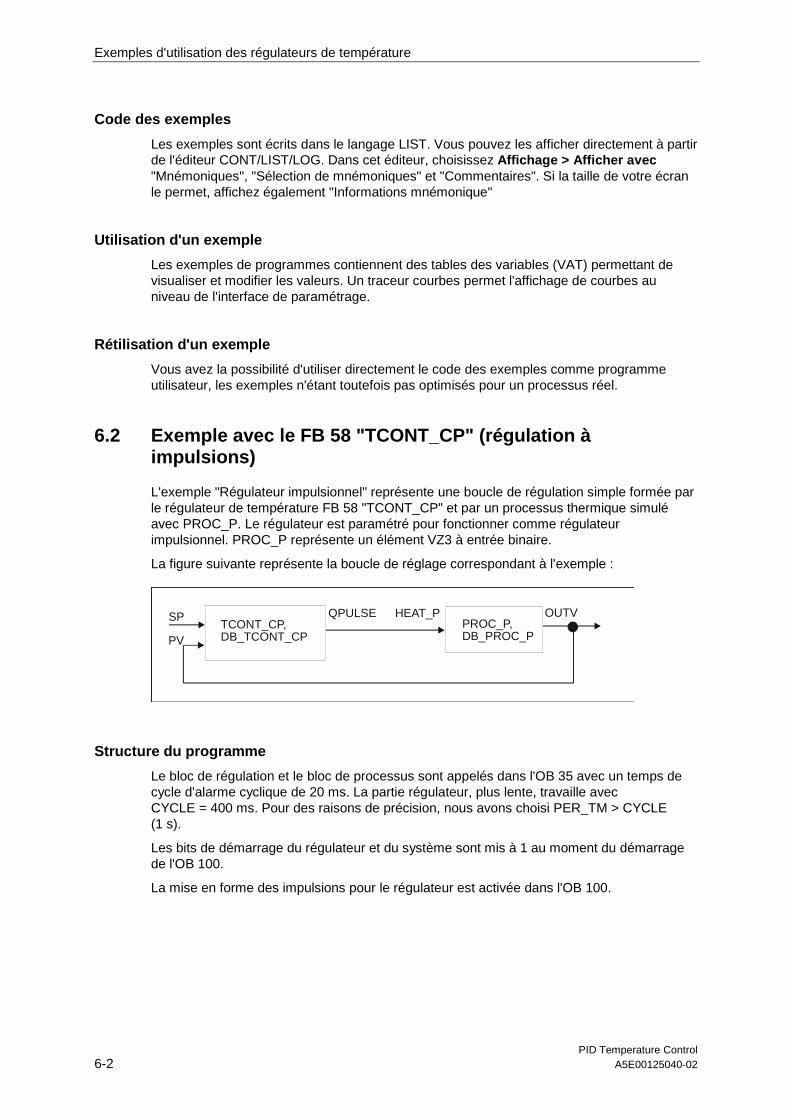
Exemples d'utilisation des régulateurs de température
PID Temperature Control 6-2 A5E00125040-02
Code des exemples
Les exemples sont écrits dans le langage LIST. Vous pouvez les afficher directement à partir de l'éditeur CONT/LIST/LOG. Dans cet éditeur, choisissez Affichage > Afficher avec "Mnémoniques", "Sélection de mnémoniques" et "Commentaires". Si la taille de votre écran le permet, affichez également "Informations mnémonique"
Utilisation d'un exemple
Les exemples de programmes contiennent des tables des variables (VAT) permettant de visualiser et modifier les valeurs. Un traceur courbes permet l'affichage de courbes au niveau de l'interface de paramétrage.
Rétilisation d'un exemple
Vous avez la possibilité d'utiliser directement le code des exemples comme programme utilisateur, les exemples n'étant toutefois pas optimisés pour un processus réel.
6.2 Exemple avec le FB 58 "TCONT_CP" (régulation à impulsions)
L'exemple "Régulateur impulsionnel" représente une boucle de régulation simple formée par le régulateur de température FB 58 "TCONT_CP" et par un processus thermique simulé avec PROC_P. Le régulateur est paramétré pour fonctionner comme régulateur impulsionnel. PROC_P représente un élément VZ3 à entrée binaire.
La figure suivante représente la boucle de réglage correspondant à l'exemple :
TCONT_CP,DB_TCONT_CP
PROC_P,DB_PROC_P
OUTVSP QPULSE
PV
HEAT_P
Structure du programme
Le bloc de régulation et le bloc de processus sont appelés dans l'OB 35 avec un temps de cycle d'alarme cyclique de 20 ms. La partie régulateur, plus lente, travaille avec CYCLE = 400 ms. Pour des raisons de précision, nous avons choisi PER_TM > CYCLE (1 s).
Les bits de démarrage du régulateur et du système sont mis à 1 au moment du démarrage de l'OB 100.
La mise en forme des impulsions pour le régulateur est activée dans l'OB 100.
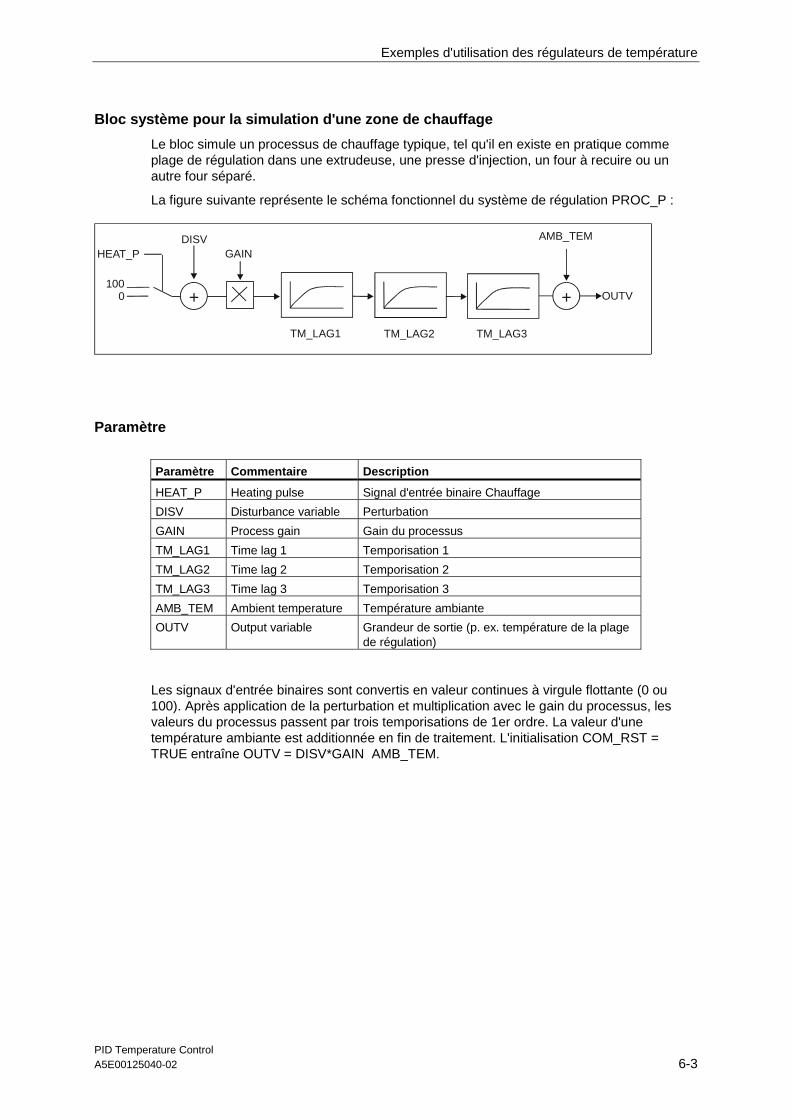
Exemples d'utilisation des régulateurs de température
PID Temperature Control A5E00125040-02 6-3
Bloc système pour la simulation d'une zone de chauffage
Le bloc simule un processus de chauffage typique, tel qu'il en existe en pratique comme plage de régulation dans une extrudeuse, une presse d'injection, un four à recuire ou un autre four séparé.
La figure suivante représente le schéma fonctionnel du système de régulation PROC_P :
TM_LAG2 TM_LAG3
GAIN
1000 OUTV
DISVHEAT_P
AMB_TEM
TM_LAG1
+ +
Paramètre
Paramètre Commentaire Description
HEAT_P Heating pulse Signal d'entrée binaire Chauffage
DISV Disturbance variable Perturbation
GAIN Process gain Gain du processus
TM_LAG1 Time lag 1 Temporisation 1
TM_LAG2 Time lag 2 Temporisation 2
TM_LAG3 Time lag 3 Temporisation 3
AMB_TEM Ambient temperature Température ambiante
OUTV Output variable Grandeur de sortie (p. ex. température de la plage de régulation)
Les signaux d'entrée binaires sont convertis en valeur continues à virgule flottante (0 ou 100). Après application de la perturbation et multiplication avec le gain du processus, les valeurs du processus passent par trois temporisations de 1er ordre. La valeur d'une température ambiante est additionnée en fin de traitement. L'initialisation COM_RST = TRUE entraîne OUTV = DISV*GAIN AMB_TEM.
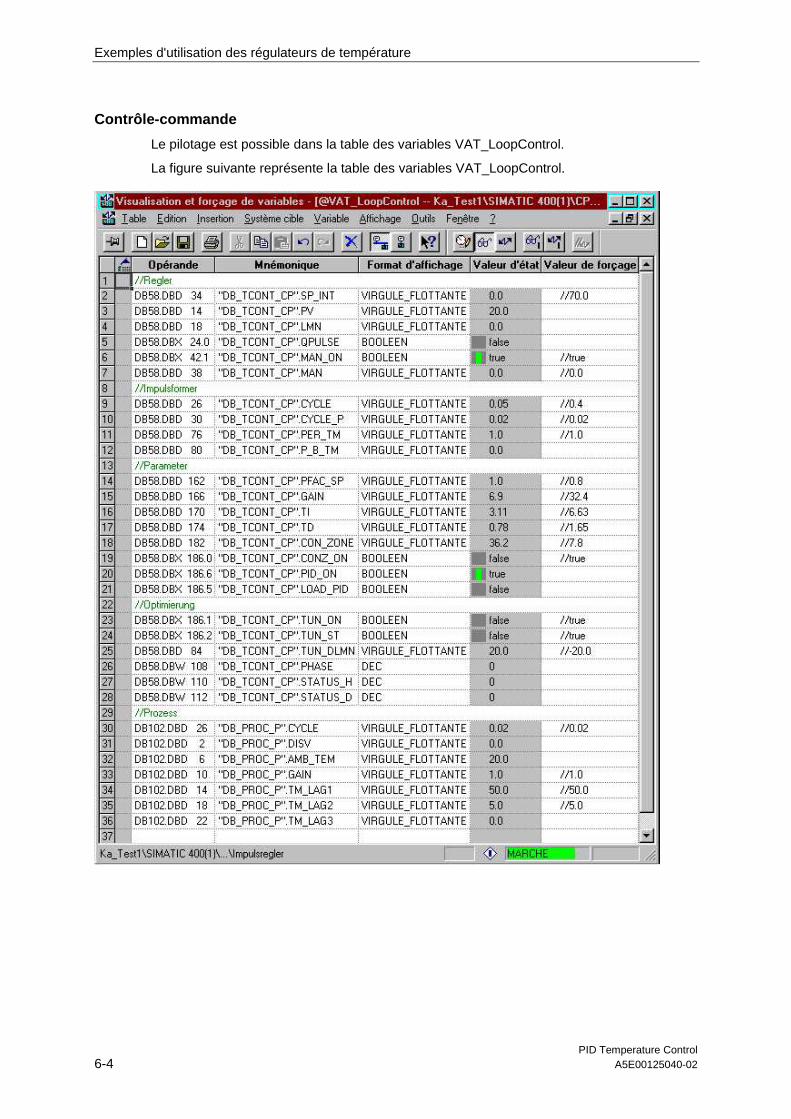
Exemples d'utilisation des régulateurs de température
PID Temperature Control 6-4 A5E00125040-02
Contrôle-commande
Le pilotage est possible dans la table des variables VAT_LoopControl.
La figure suivante représente la table des variables VAT_LoopControl.
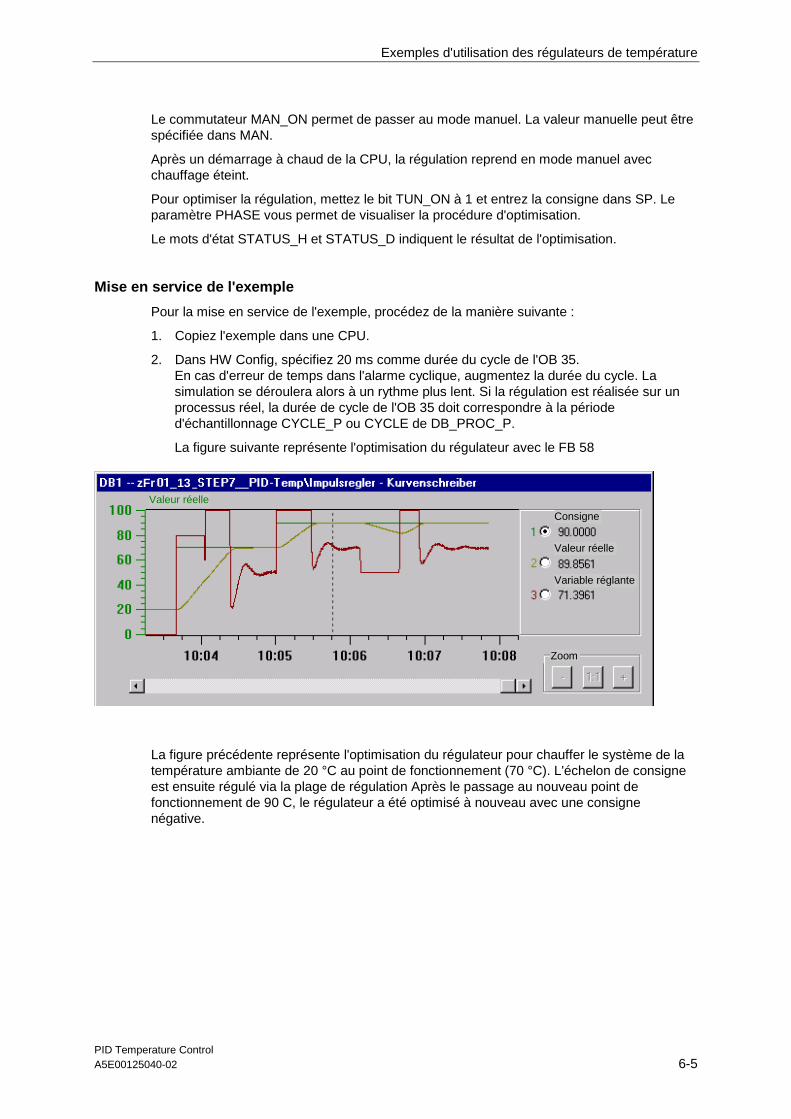
Exemples d'utilisation des régulateurs de température
PID Temperature Control A5E00125040-02 6-5
Le commutateur MAN_ON permet de passer au mode manuel. La valeur manuelle peut être spécifiée dans MAN.
Après un démarrage à chaud de la CPU, la régulation reprend en mode manuel avec chauffage éteint.
Pour optimiser la régulation, mettez le bit TUN_ON à 1 et entrez la consigne dans SP. Le paramètre PHASE vous permet de visualiser la procédure d'optimisation.
Le mots d'état STATUS_H et STATUS_D indiquent le résultat de l'optimisation.
Mise en service de l'exemple
Pour la mise en service de l'exemple, procédez de la manière suivante :
1. Copiez l'exemple dans une CPU.
2. Dans HW Config, spécifiez 20 ms comme durée du cycle de l'OB 35. En cas d'erreur de temps dans l'alarme cyclique, augmentez la durée du cycle. La simulation se déroulera alors à un rythme plus lent. Si la régulation est réalisée sur un processus réel, la durée de cycle de l'OB 35 doit correspondre à la période d'échantillonnage CYCLE_P ou CYCLE de DB_PROC_P.
La figure suivante représente l'optimisation du régulateur avec le FB 58
13
Zoom
Valeur réelle
Consigne
Valeur réelle
Variable réglante
zFr
La figure précédente représente l'optimisation du régulateur pour chauffer le système de la température ambiante de 20 °C au point de fonctionnement (70 °C). L'échelon de consigne est ensuite régulé via la plage de régulation Après le passage au nouveau point de fonctionnement de 90 C, le régulateur a été optimisé à nouveau avec une consigne négative.
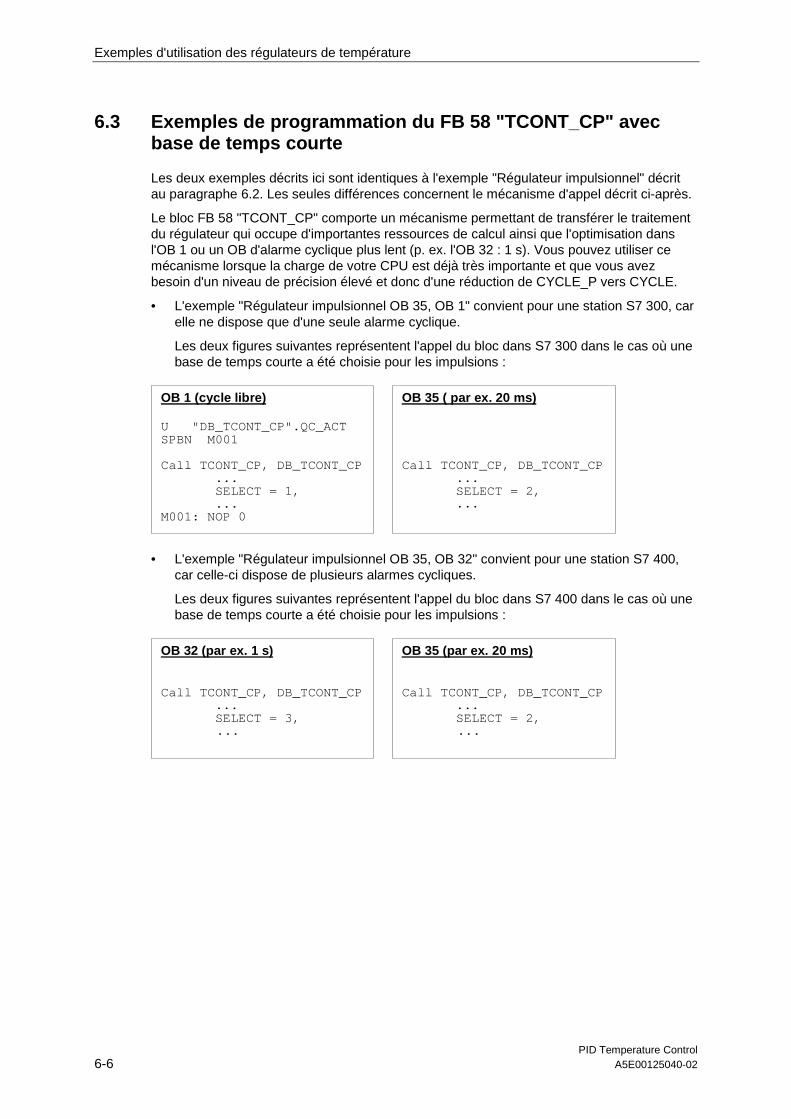
Exemples d'utilisation des régulateurs de température
PID Temperature Control 6-6 A5E00125040-02
6.3 Exemples de programmation du FB 58 "TCONT_CP" avec base de temps courte
Les deux exemples décrits ici sont identiques à l'exemple "Régulateur impulsionnel" décrit au paragraphe 6.2. Les seules différences concernent le mécanisme d'appel décrit ci-après.
Le bloc FB 58 "TCONT_CP" comporte un mécanisme permettant de transférer le traitement du régulateur qui occupe d'importantes ressources de calcul ainsi que l'optimisation dans l'OB 1 ou un OB d'alarme cyclique plus lent (p. ex. l'OB 32 : 1 s). Vous pouvez utiliser ce mécanisme lorsque la charge de votre CPU est déjà très importante et que vous avez besoin d'un niveau de précision élevé et donc d'une réduction de CYCLE_P vers CYCLE.
• L'exemple "Régulateur impulsionnel OB 35, OB 1" convient pour une station S7 300, car elle ne dispose que d'une seule alarme cyclique.
Les deux figures suivantes représentent l'appel du bloc dans S7 300 dans le cas où une base de temps courte a été choisie pour les impulsions :
OB 1 (cycle libre)
U "DB_TCONT_CP".QC_ACTSPBN M001
Call TCONT_CP, DB_TCONT_CP ... SELECT = 1, ...M001: NOP 0
OB 35 ( par ex. 20 ms)
Call TCONT_CP, DB_TCONT_CP ... SELECT = 2, ...
• L'exemple "Régulateur impulsionnel OB 35, OB 32" convient pour une station S7 400, car celle-ci dispose de plusieurs alarmes cycliques.
Les deux figures suivantes représentent l'appel du bloc dans S7 400 dans le cas où une base de temps courte a été choisie pour les impulsions :
OB 32 (par ex. 1 s)
Call TCONT_CP, DB_TCONT_CP ... SELECT = 3, ...
OB 35 (par ex. 20 ms)
Call TCONT_CP, DB_TCONT_CP ... SELECT = 2, ...
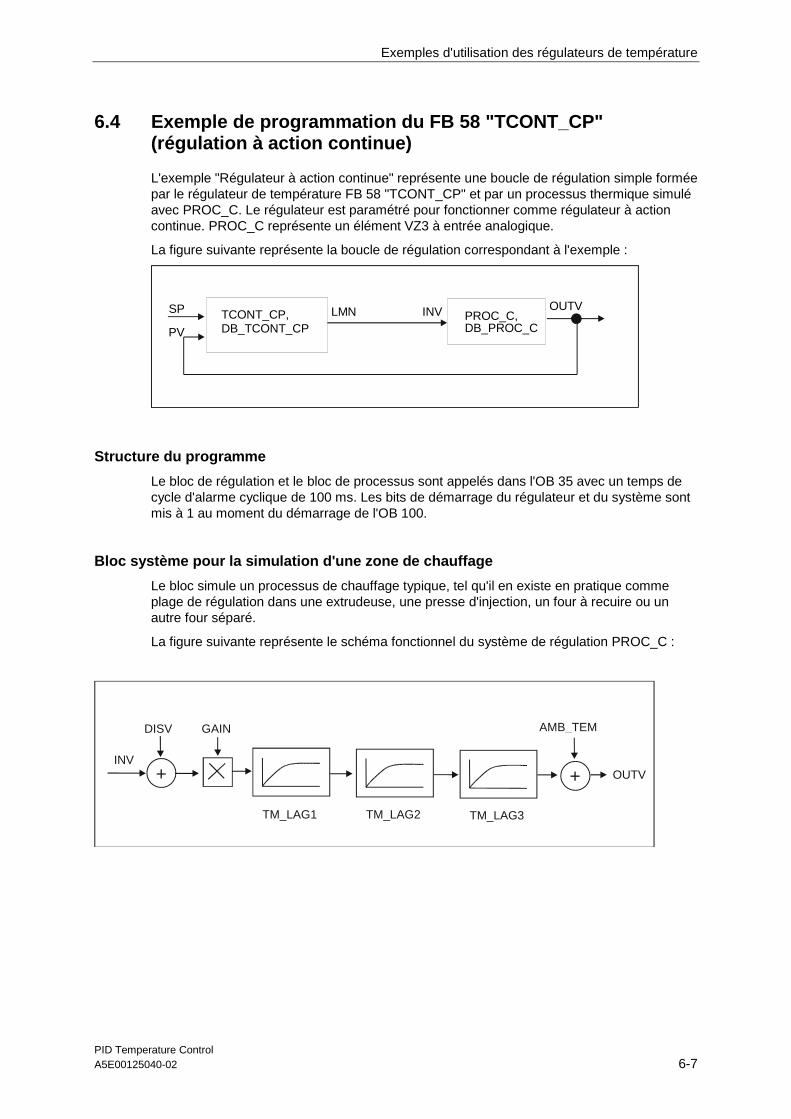
Exemples d'utilisation des régulateurs de température
PID Temperature Control A5E00125040-02 6-7
6.4 Exemple de programmation du FB 58 "TCONT_CP" (régulation à action continue)
L'exemple "Régulateur à action continue" représente une boucle de régulation simple formée par le régulateur de température FB 58 "TCONT_CP" et par un processus thermique simulé avec PROC_C. Le régulateur est paramétré pour fonctionner comme régulateur à action continue. PROC_C représente un élément VZ3 à entrée analogique.
La figure suivante représente la boucle de régulation correspondant à l'exemple :
TCONT_CP,DB_TCONT_CP
PROC_C,DB_PROC_C
OUTVSP LMN
PV
INV
Structure du programme
Le bloc de régulation et le bloc de processus sont appelés dans l'OB 35 avec un temps de cycle d'alarme cyclique de 100 ms. Les bits de démarrage du régulateur et du système sont mis à 1 au moment du démarrage de l'OB 100.
Bloc système pour la simulation d'une zone de chauffage
Le bloc simule un processus de chauffage typique, tel qu'il en existe en pratique comme plage de régulation dans une extrudeuse, une presse d'injection, un four à recuire ou un autre four séparé.
La figure suivante représente le schéma fonctionnel du système de régulation PROC_C :
TM_LAG1 TM_LAG2
DISV GAIN
TM_LAG3
OUTV
AMB_TEM
INV+ +
Exemples d'utilisation des régulateurs de température
PID Temperature Control 6-8 A5E00125040-02
Paramètre
Paramètre Commentaire Description
INV input variable Grandeur d'entrée (valeur réglante du régulateur)
DISV Disturbance variable Perturbation
GAIN Process gain Gain du processus
TM_LAG1 Time lag 1 Temporisation 1
TM_LAG2 Time lag 2 Temporisation 2
TM_LAG3 Time lag 3 Temporisation 3
AMB_TEM Ambient temperature Température ambiante
OUTV Output variable Grandeur de sortie (p. ex. température de la plage de régulation)
Après l'addition du signal d'entrée analogique et d'une perturbation, suivie par la multiplication du résultat avec le gain du processus, les valeurs du processus sont traitées par trois temporisations de 1er ordre. La valeur d'une température ambiante est additionnée en fin de traitement.
Lorsque l'on initialise COM_RST = TRUE, la grandeur de sortie prend la valeur OUTV = (INV + DISV) * GAIN + AMB_TEM.
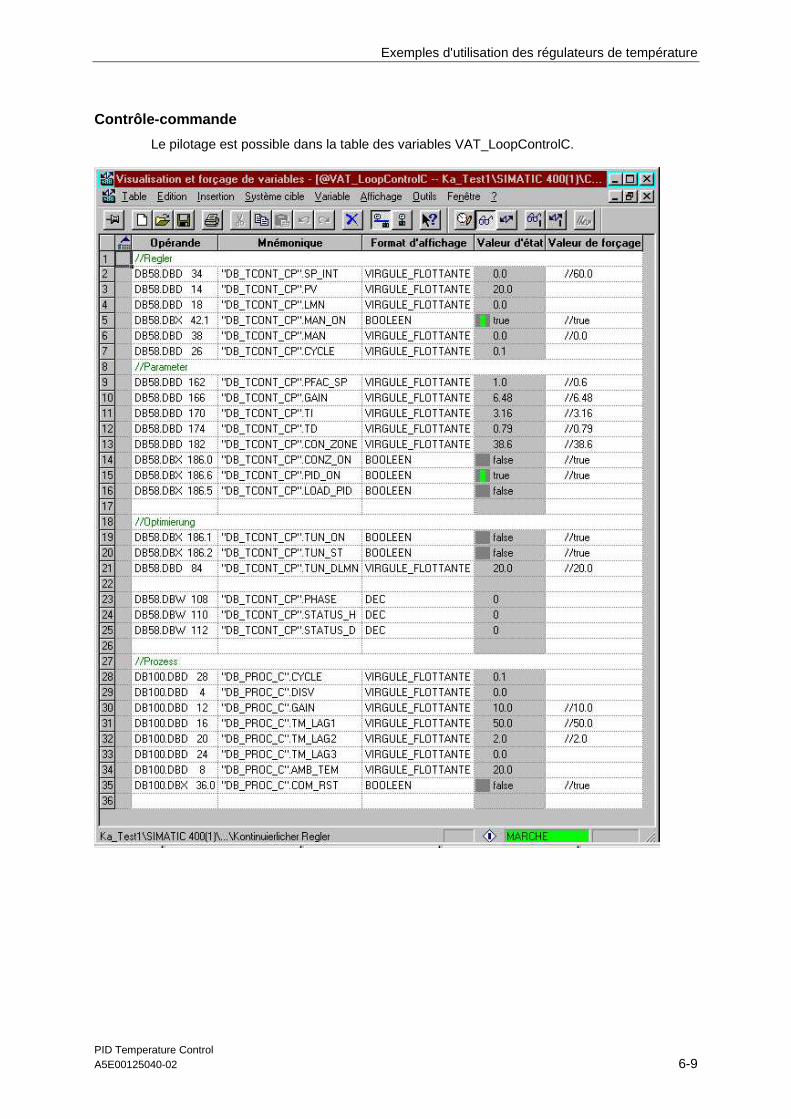
Exemples d'utilisation des régulateurs de température
PID Temperature Control A5E00125040-02 6-9
Contrôle-commande
Le pilotage est possible dans la table des variables VAT_LoopControlC.
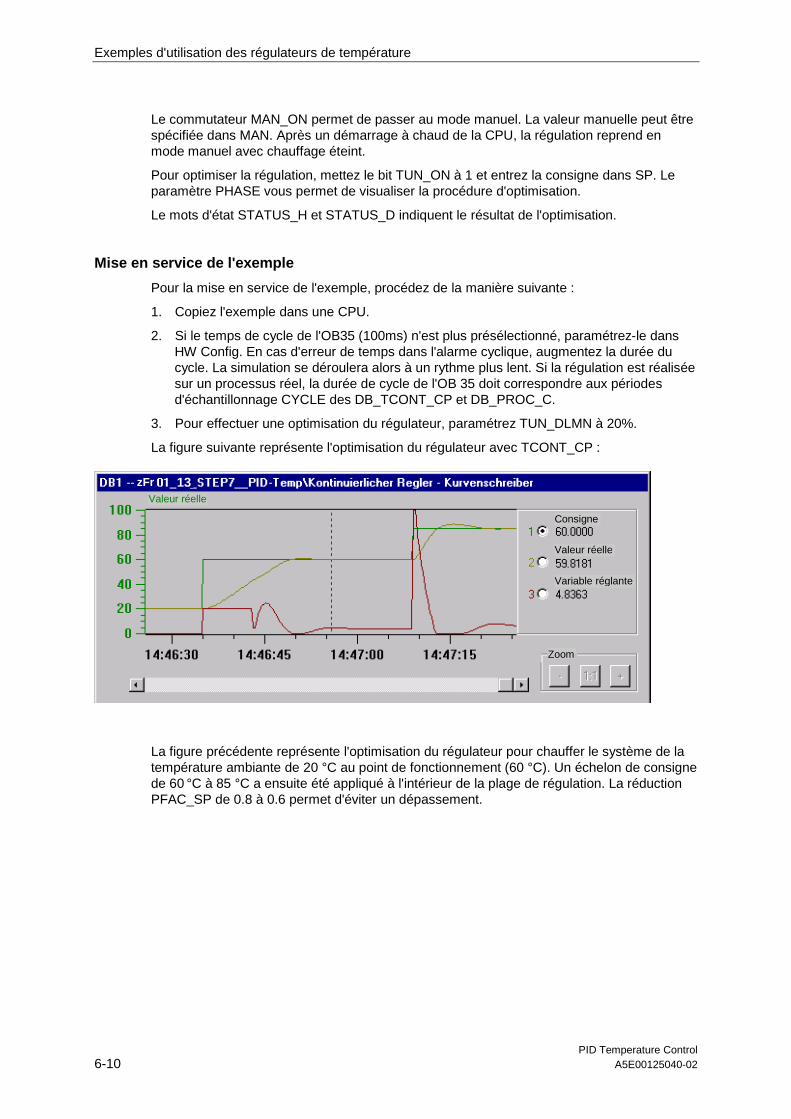
Exemples d'utilisation des régulateurs de température
PID Temperature Control 6-10 A5E00125040-02
Le commutateur MAN_ON permet de passer au mode manuel. La valeur manuelle peut être spécifiée dans MAN. Après un démarrage à chaud de la CPU, la régulation reprend en mode manuel avec chauffage éteint.
Pour optimiser la régulation, mettez le bit TUN_ON à 1 et entrez la consigne dans SP. Le paramètre PHASE vous permet de visualiser la procédure d'optimisation.
Le mots d'état STATUS_H et STATUS_D indiquent le résultat de l'optimisation.
Mise en service de l'exemple
Pour la mise en service de l'exemple, procédez de la manière suivante :
1. Copiez l'exemple dans une CPU.
2. Si le temps de cycle de l'OB35 (100ms) n'est plus présélectionné, paramétrez-le dans HW Config. En cas d'erreur de temps dans l'alarme cyclique, augmentez la durée du cycle. La simulation se déroulera alors à un rythme plus lent. Si la régulation est réalisée sur un processus réel, la durée de cycle de l'OB 35 doit correspondre aux périodes d'échantillonnage CYCLE des DB_TCONT_CP et DB_PROC_C.
3. Pour effectuer une optimisation du régulateur, paramétrez TUN_DLMN à 20%.
La figure suivante représente l'optimisation du régulateur avec TCONT_CP :
13
Zoom
Valeur réelle
Consigne
Valeur réelle
Variable réglante
zFr
La figure précédente représente l'optimisation du régulateur pour chauffer le système de la température ambiante de 20 °C au point de fonctionnement (60 °C). Un échelon de consigne de 60 °C à 85 °C a ensuite été appliqué à l'intérieur de la plage de régulation. La réduction PFAC_SP de 0.8 à 0.6 permet d'éviter un dépassement.
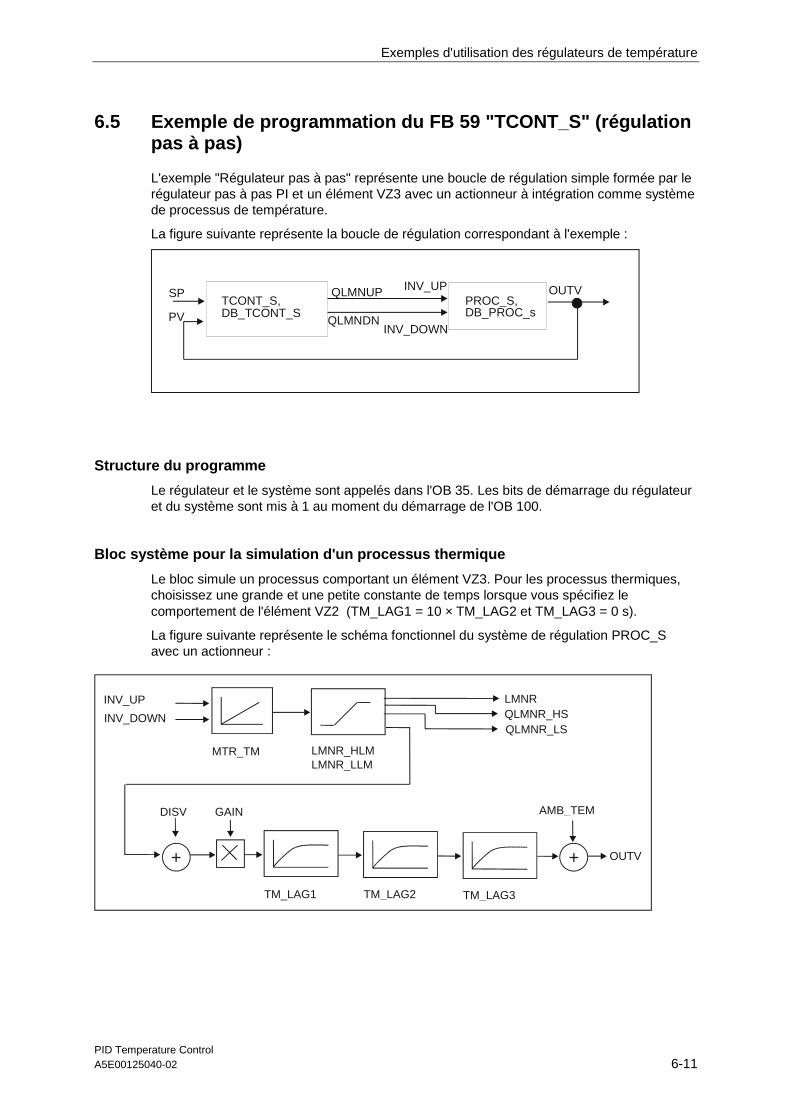
Exemples d'utilisation des régulateurs de température
PID Temperature Control A5E00125040-02 6-11
6.5 Exemple de programmation du FB 59 "TCONT_S" (régulation pas à pas)
L'exemple "Régulateur pas à pas" représente une boucle de régulation simple formée par le régulateur pas à pas PI et un élément VZ3 avec un actionneur à intégration comme système de processus de température.
La figure suivante représente la boucle de régulation correspondant à l'exemple :
TCONT_S,DB_TCONT_S DB_PROC_s
OUTVSP QLMNUP
PVINV_DOWN
QLMNDN
INV_UPPROC_S,
Structure du programme
Le régulateur et le système sont appelés dans l'OB 35. Les bits de démarrage du régulateur et du système sont mis à 1 au moment du démarrage de l'OB 100.
Bloc système pour la simulation d'un processus thermique
Le bloc simule un processus comportant un élément VZ3. Pour les processus thermiques, choisissez une grande et une petite constante de temps lorsque vous spécifiez le comportement de l'élément VZ2 (TM_LAG1 = 10 × TM_LAG2 et TM_LAG3 = 0 s).
La figure suivante représente le schéma fonctionnel du système de régulation PROC_S avec un actionneur :
TM_LAG1 TM_LAG2
DISV GAIN
TM_LAG3
OUTV
MTR_TM LMNR_HLMLMNR_LLM
LMNRQLMNR_HSQLMNR_LS
INV_UP
INV_DOWN
AMB_TEM
++
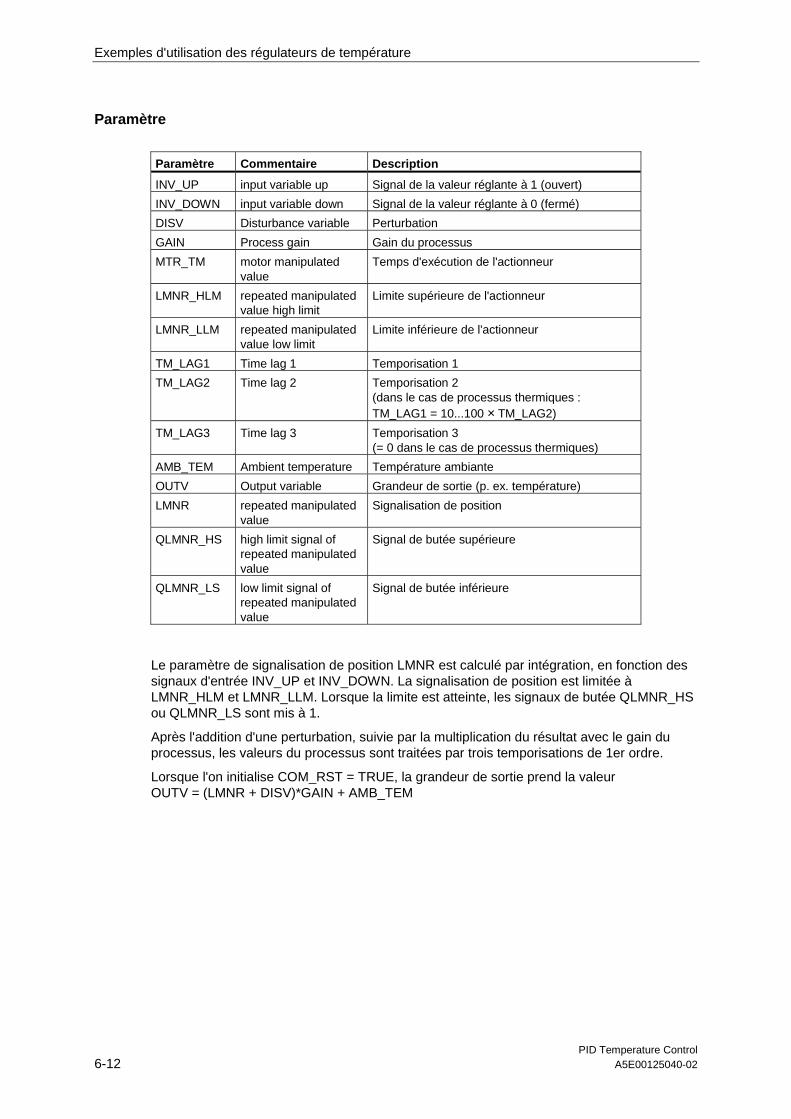
Exemples d'utilisation des régulateurs de température
PID Temperature Control 6-12 A5E00125040-02
Paramètre
Paramètre Commentaire Description
INV_UP input variable up Signal de la valeur réglante à 1 (ouvert)
INV_DOWN input variable down Signal de la valeur réglante à 0 (fermé)
DISV Disturbance variable Perturbation
GAIN Process gain Gain du processus
MTR_TM motor manipulated value
Temps d'exécution de l'actionneur
LMNR_HLM repeated manipulated value high limit
Limite supérieure de l'actionneur
LMNR_LLM repeated manipulated value low limit
Limite inférieure de l'actionneur
TM_LAG1 Time lag 1 Temporisation 1
TM_LAG2 Time lag 2 Temporisation 2 (dans le cas de processus thermiques : TM_LAG1 = 10...100 × TM_LAG2)
TM_LAG3 Time lag 3 Temporisation 3 (= 0 dans le cas de processus thermiques)
AMB_TEM Ambient temperature Température ambiante
OUTV Output variable Grandeur de sortie (p. ex. température)
LMNR repeated manipulated value
Signalisation de position
QLMNR_HS high limit signal of repeated manipulated value
Signal de butée supérieure
QLMNR_LS low limit signal of repeated manipulated value
Signal de butée inférieure
Le paramètre de signalisation de position LMNR est calculé par intégration, en fonction des signaux d'entrée INV_UP et INV_DOWN. La signalisation de position est limitée à LMNR_HLM et LMNR_LLM. Lorsque la limite est atteinte, les signaux de butée QLMNR_HS ou QLMNR_LS sont mis à 1.
Après l'addition d'une perturbation, suivie par la multiplication du résultat avec le gain du processus, les valeurs du processus sont traitées par trois temporisations de 1er ordre.
Lorsque l'on initialise COM_RST = TRUE, la grandeur de sortie prend la valeur OUTV = (LMNR + DISV)*GAIN + AMB_TEM
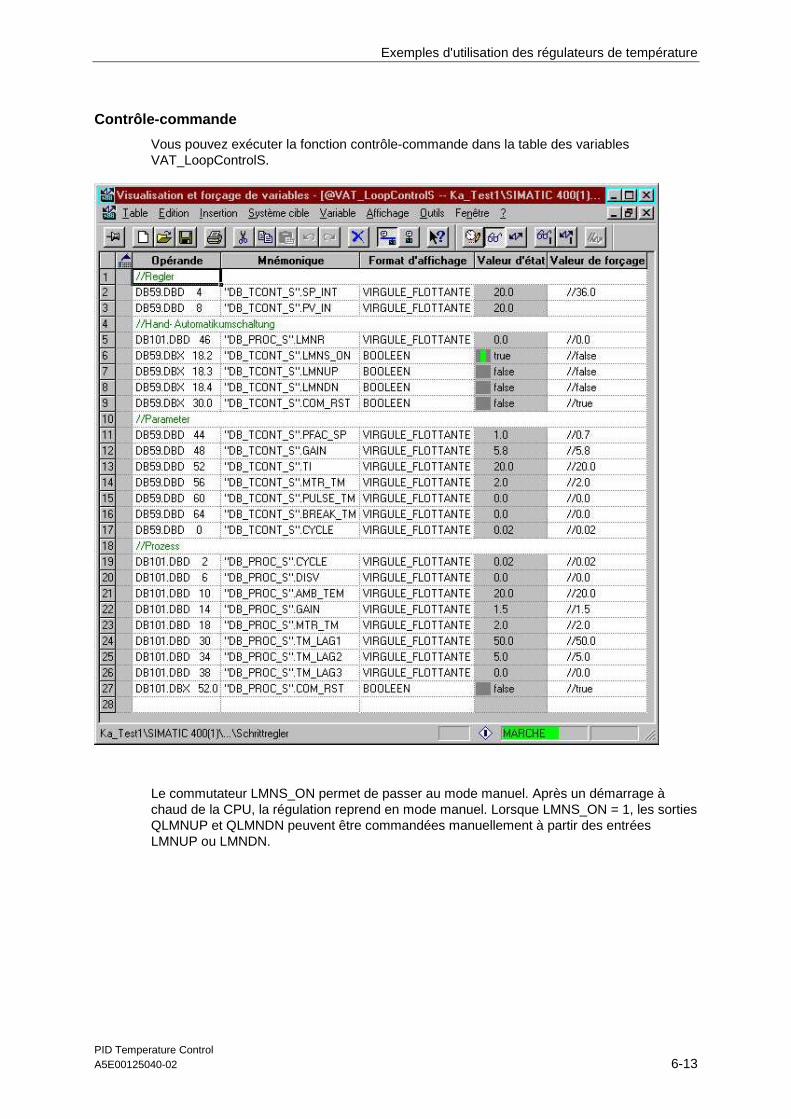
Exemples d'utilisation des régulateurs de température
PID Temperature Control A5E00125040-02 6-13
Contrôle-commande
Vous pouvez exécuter la fonction contrôle-commande dans la table des variables VAT_LoopControlS.
Le commutateur LMNS_ON permet de passer au mode manuel. Après un démarrage à chaud de la CPU, la régulation reprend en mode manuel. Lorsque LMNS_ON = 1, les sorties QLMNUP et QLMNDN peuvent être commandées manuellement à partir des entrées LMNUP ou LMNDN.
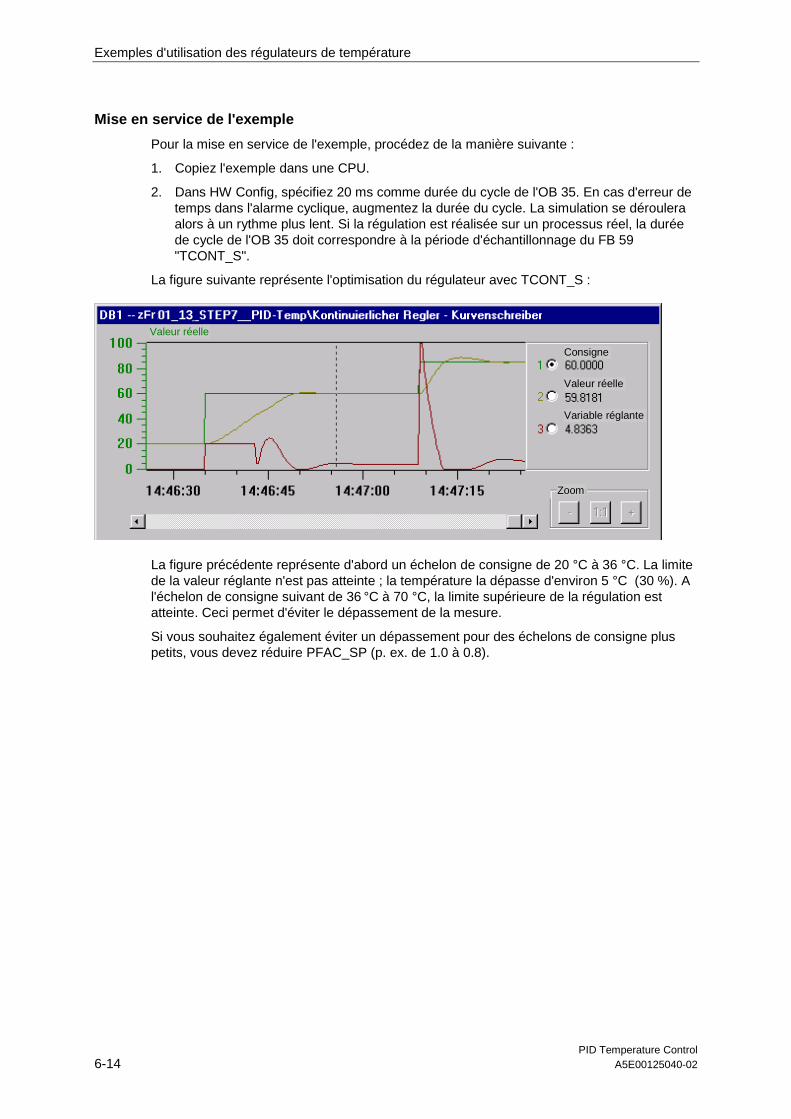
Exemples d'utilisation des régulateurs de température
PID Temperature Control 6-14 A5E00125040-02
Mise en service de l'exemple
Pour la mise en service de l'exemple, procédez de la manière suivante :
1. Copiez l'exemple dans une CPU.
2. Dans HW Config, spécifiez 20 ms comme durée du cycle de l'OB 35. En cas d'erreur de temps dans l'alarme cyclique, augmentez la durée du cycle. La simulation se déroulera alors à un rythme plus lent. Si la régulation est réalisée sur un processus réel, la durée de cycle de l'OB 35 doit correspondre à la période d'échantillonnage du FB 59 "TCONT_S".
La figure suivante représente l'optimisation du régulateur avec TCONT_S :
13
Zoom
Valeur réelle
Consigne
Valeur réelle
Variable réglante
zFr
La figure précédente représente d'abord un échelon de consigne de 20 °C à 36 °C. La limite de la valeur réglante n'est pas atteinte ; la température la dépasse d'environ 5 °C (30 %). A l'échelon de consigne suivant de 36 °C à 70 °C, la limite supérieure de la régulation est atteinte. Ceci permet d'éviter le dépassement de la mesure.
Si vous souhaitez également éviter un dépassement pour des échelons de consigne plus petits, vous devez réduire PFAC_SP (p. ex. de 1.0 à 0.8).
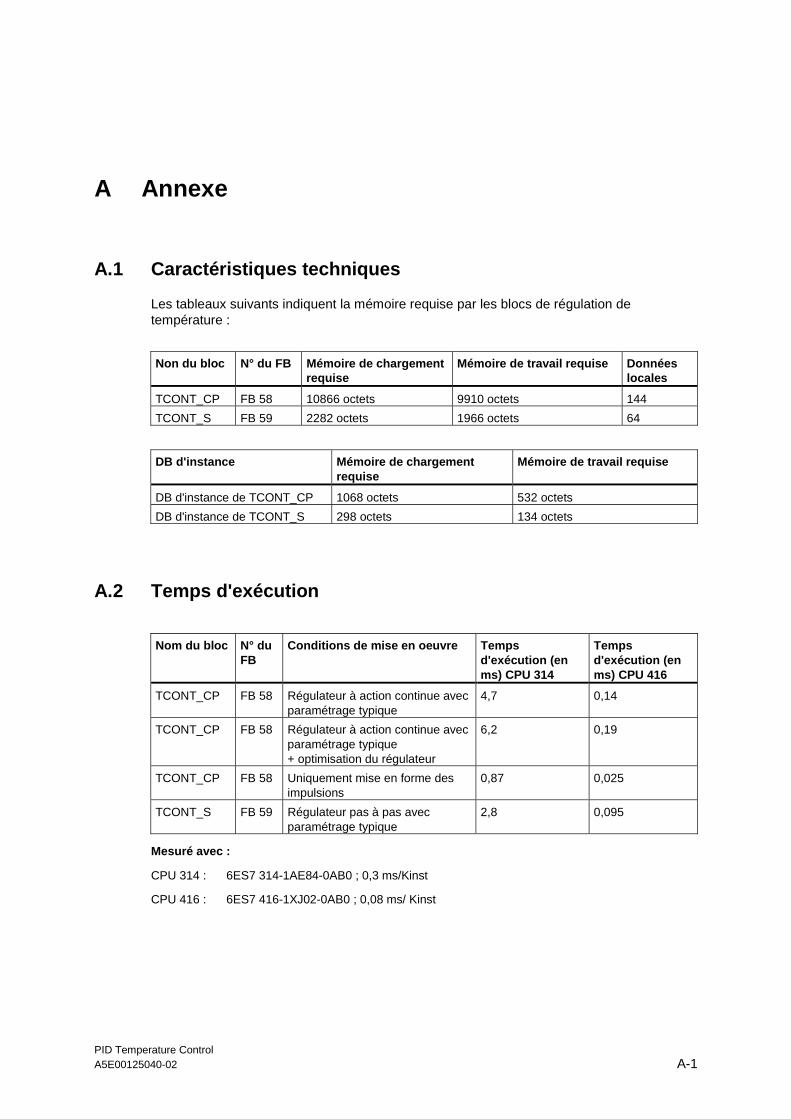
PID Temperature Control A5E00125040-02 A-1
A Annexe
A.1 Caractéristiques techniques
Les tableaux suivants indiquent la mémoire requise par les blocs de régulation de température :
Non du bloc N° du FB Mémoire de chargement requise
Mémoire de travail requise Données locales
TCONT_CP FB 58 10866 octets 9910 octets 144
TCONT_S FB 59 2282 octets 1966 octets 64
DB d'instance Mémoire de chargement requise
Mémoire de travail requise
DB d'instance de TCONT_CP 1068 octets 532 octets
DB d'instance de TCONT_S 298 octets 134 octets
A.2 Temps d'exécution
Nom du bloc N° du FB
Conditions de mise en oeuvre Temps d'exécution (en ms) CPU 314
Temps d'exécution (en ms) CPU 416
TCONT_CP FB 58 Régulateur à action continue avec paramétrage typique
4,7 0,14
TCONT_CP FB 58 Régulateur à action continue avec paramétrage typique + optimisation du régulateur
6,2 0,19
TCONT_CP FB 58 Uniquement mise en forme des impulsions
0,87 0,025
TCONT_S FB 59 Régulateur pas à pas avec paramétrage typique
2,8 0,095
Mesuré avec :
CPU 314 : 6ES7 314-1AE84-0AB0 ; 0,3 ms/Kinst
CPU 416 : 6ES7 416-1XJ02-0AB0 ; 0,08 ms/ Kinst
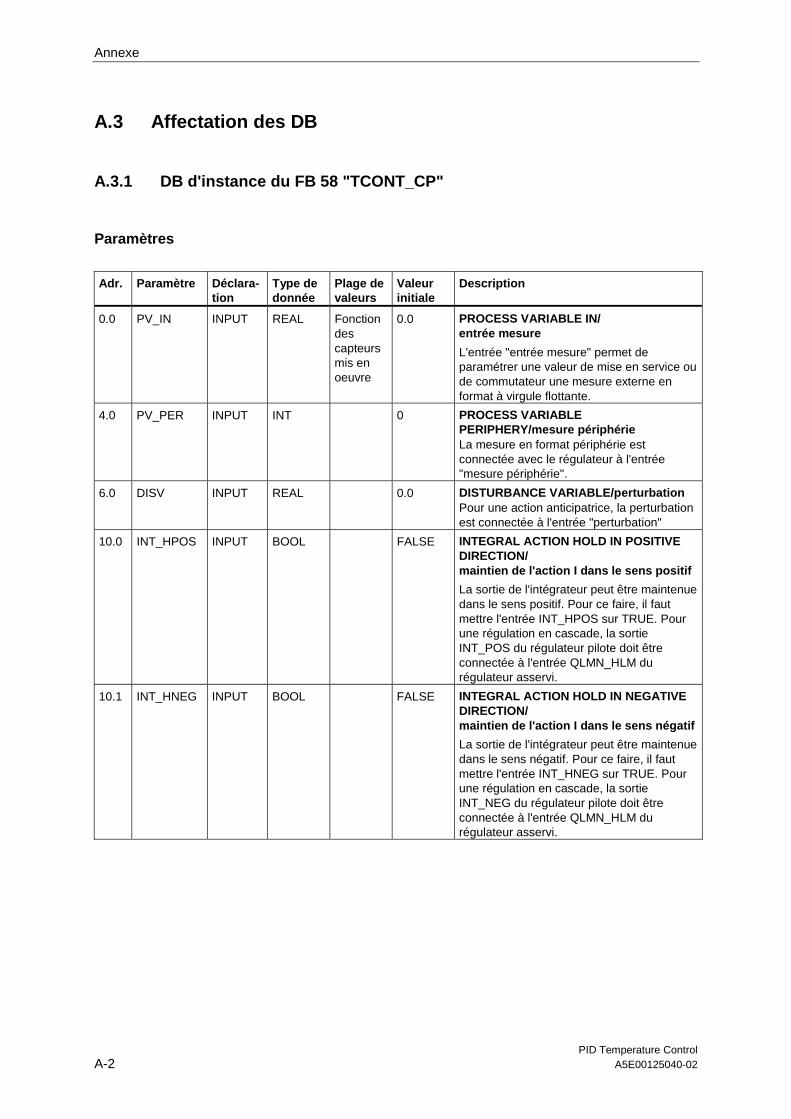
Annexe
PID Temperature Control A-2 A5E00125040-02
A.3 Affectation des DB
A.3.1 DB d'instance du FB 58 "TCONT_CP"
Paramètres
Adr. Paramètre Déclara-tion
Type de donnée
Plage de valeurs
Valeur initiale
Description
0.0 PV_IN INPUT REAL Fonction des capteurs mis en oeuvre
0.0 PROCESS VARIABLE IN/ entrée mesure
L'entrée "entrée mesure" permet de paramétrer une valeur de mise en service ou de commutateur une mesure externe en format à virgule flottante.
4.0 PV_PER INPUT INT 0 PROCESS VARIABLE PERIPHERY/mesure périphérie La mesure en format périphérie est connectée avec le régulateur à l'entrée "mesure périphérie".
6.0 DISV INPUT REAL 0.0 DISTURBANCE VARIABLE/perturbation Pour une action anticipatrice, la perturbation est connectée à l'entrée "perturbation"
10.0 INT_HPOS INPUT BOOL FALSE INTEGRAL ACTION HOLD IN POSITIVE DIRECTION/ maintien de l'action I dans le sens positif
La sortie de l'intégrateur peut être maintenue dans le sens positif. Pour ce faire, il faut mettre l'entrée INT_HPOS sur TRUE. Pour une régulation en cascade, la sortie INT_POS du régulateur pilote doit être connectée à l'entrée QLMN_HLM du régulateur asservi.
10.1 INT_HNEG INPUT BOOL FALSE INTEGRAL ACTION HOLD IN NEGATIVE DIRECTION/ maintien de l'action I dans le sens négatif
La sortie de l'intégrateur peut être maintenue dans le sens négatif. Pour ce faire, il faut mettre l'entrée INT_HNEG sur TRUE. Pour une régulation en cascade, la sortie INT_NEG du régulateur pilote doit être connectée à l'entrée QLMN_HLM du régulateur asservi.
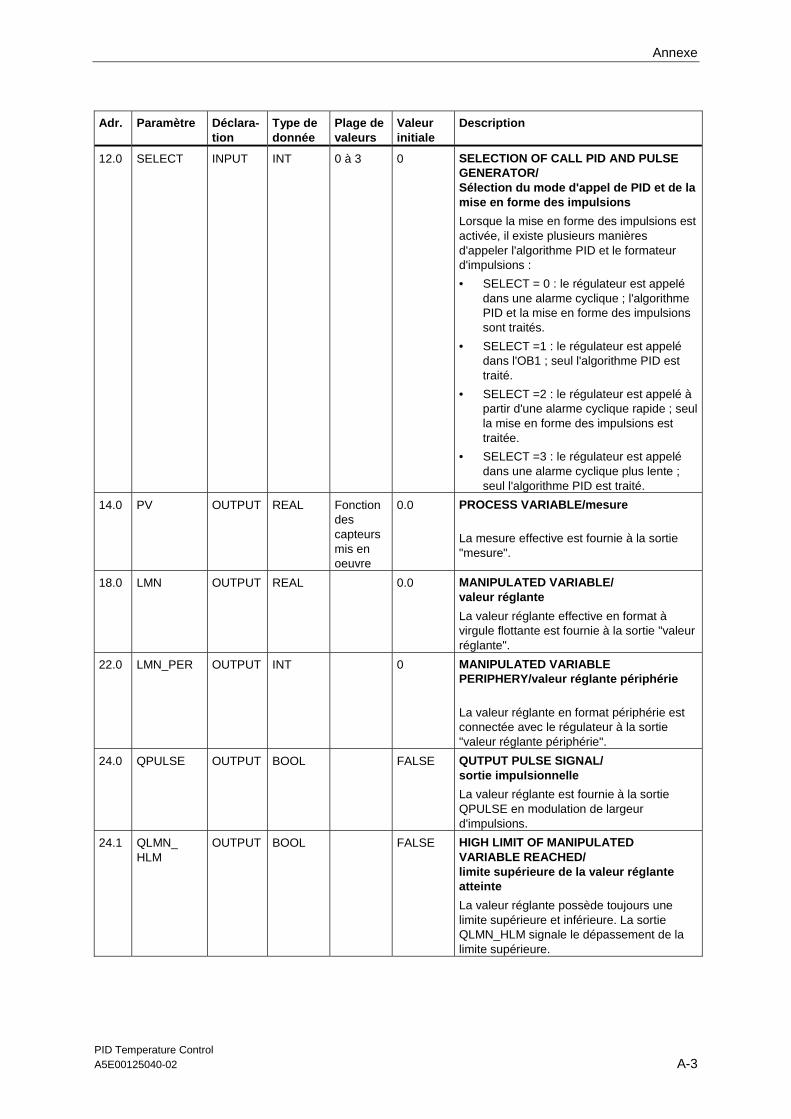
Annexe
PID Temperature Control A5E00125040-02 A-3
Adr. Paramètre Déclara-tion
Type de donnée
Plage de valeurs
Valeur initiale
Description
12.0 SELECT INPUT INT 0 à 3 0 SELECTION OF CALL PID AND PULSE GENERATOR/ Sélection du mode d'appel de PID et de la mise en forme des impulsions
Lorsque la mise en forme des impulsions est activée, il existe plusieurs manières d'appeler l'algorithme PID et le formateur d'impulsions :
• SELECT = 0 : le régulateur est appelé dans une alarme cyclique ; l'algorithme PID et la mise en forme des impulsions sont traités.
• SELECT =1 : le régulateur est appelé dans l'OB1 ; seul l'algorithme PID est traité.
• SELECT =2 : le régulateur est appelé à partir d'une alarme cyclique rapide ; seul la mise en forme des impulsions est traitée.
• SELECT =3 : le régulateur est appelé dans une alarme cyclique plus lente ; seul l'algorithme PID est traité.
14.0 PV OUTPUT REAL Fonction des capteurs mis en oeuvre
0.0 PROCESS VARIABLE/mesure
La mesure effective est fournie à la sortie "mesure".
18.0 LMN OUTPUT REAL 0.0 MANIPULATED VARIABLE/ valeur réglante
La valeur réglante effective en format à virgule flottante est fournie à la sortie "valeur réglante".
22.0 LMN_PER OUTPUT INT 0 MANIPULATED VARIABLE PERIPHERY/valeur réglante périphérie
La valeur réglante en format périphérie est connectée avec le régulateur à la sortie "valeur réglante périphérie".
24.0 QPULSE OUTPUT BOOL FALSE QUTPUT PULSE SIGNAL/ sortie impulsionnelle
La valeur réglante est fournie à la sortie QPULSE en modulation de largeur d'impulsions.
24.1 QLMN_ HLM
OUTPUT BOOL FALSE HIGH LIMIT OF MANIPULATED VARIABLE REACHED/ limite supérieure de la valeur réglante atteinte
La valeur réglante possède toujours une limite supérieure et inférieure. La sortie QLMN_HLM signale le dépassement de la limite supérieure.
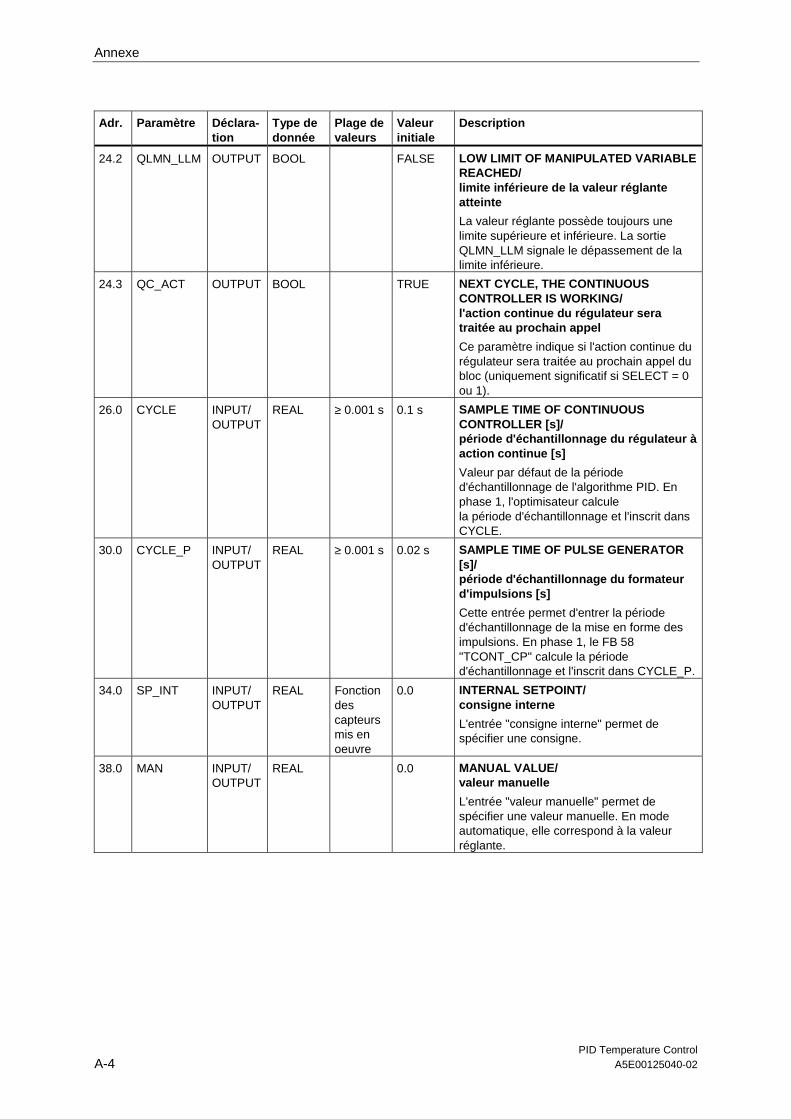
Annexe
PID Temperature Control A-4 A5E00125040-02
Adr. Paramètre Déclara-tion
Type de donnée
Plage de valeurs
Valeur initiale
Description
24.2 QLMN_LLM OUTPUT BOOL FALSE LOW LIMIT OF MANIPULATED VARIABLE REACHED/ limite inférieure de la valeur réglante atteinte
La valeur réglante possède toujours une limite supérieure et inférieure. La sortie QLMN_LLM signale le dépassement de la limite inférieure.
24.3 QC_ACT OUTPUT BOOL TRUE NEXT CYCLE, THE CONTINUOUS CONTROLLER IS WORKING/ l'action continue du régulateur sera traitée au prochain appel
Ce paramètre indique si l'action continue du régulateur sera traitée au prochain appel du bloc (uniquement significatif si SELECT = 0 ou 1).
26.0 CYCLE INPUT/ OUTPUT
REAL ≥ 0.001 s 0.1 s SAMPLE TIME OF CONTINUOUS CONTROLLER [s]/ période d'échantillonnage du régulateur à action continue [s]
Valeur par défaut de la période d'échantillonnage de l'algorithme PID. En phase 1, l'optimisateur calcule la période d'échantillonnage et l'inscrit dans CYCLE.
30.0 CYCLE_P INPUT/ OUTPUT
REAL ≥ 0.001 s 0.02 s SAMPLE TIME OF PULSE GENERATOR [s]/ période d'échantillonnage du formateur d'impulsions [s]
Cette entrée permet d'entrer la période d'échantillonnage de la mise en forme des impulsions. En phase 1, le FB 58 "TCONT_CP" calcule la période d'échantillonnage et l'inscrit dans CYCLE_P.
34.0 SP_INT INPUT/ OUTPUT
REAL Fonction des capteurs mis en oeuvre
0.0 INTERNAL SETPOINT/ consigne interne
L'entrée "consigne interne" permet de spécifier une consigne.
38.0 MAN INPUT/ OUTPUT
REAL 0.0 MANUAL VALUE/ valeur manuelle
L'entrée "valeur manuelle" permet de spécifier une valeur manuelle. En mode automatique, elle correspond à la valeur réglante.
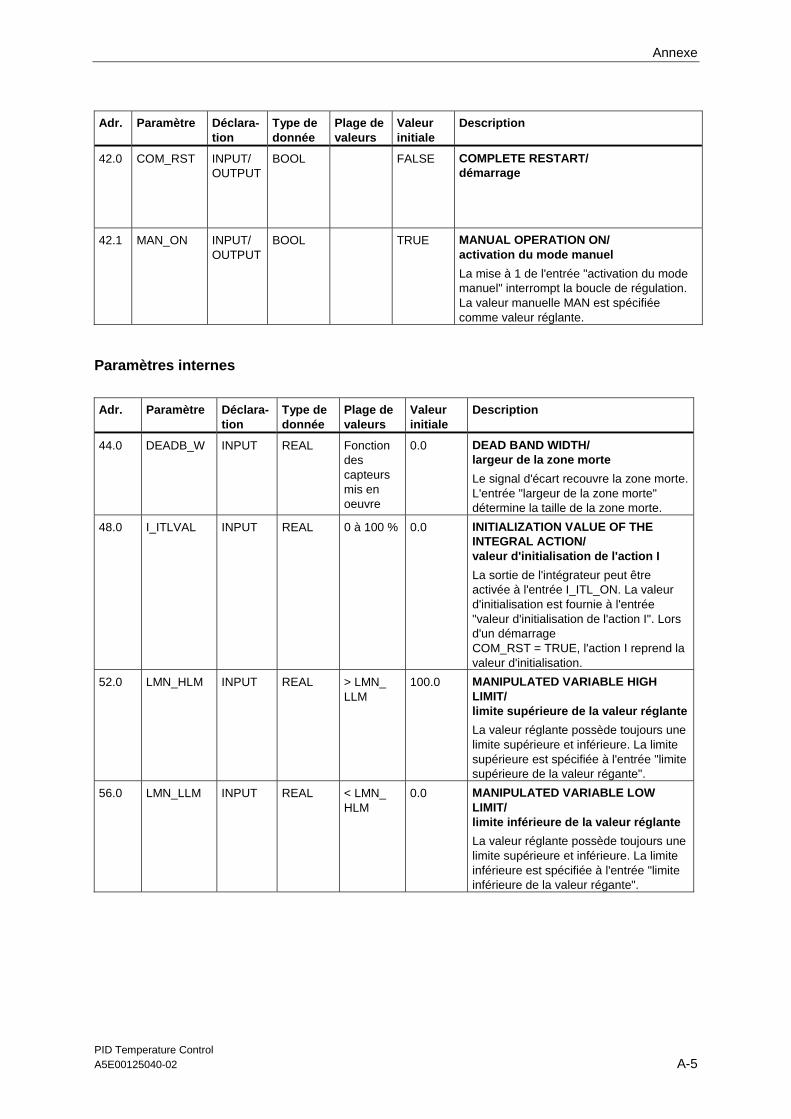
Annexe
PID Temperature Control A5E00125040-02 A-5
Adr. Paramètre Déclara-tion
Type de donnée
Plage de valeurs
Valeur initiale
Description
42.0 COM_RST INPUT/ OUTPUT
BOOL FALSE COMPLETE RESTART/ démarrage
42.1 MAN_ON INPUT/ OUTPUT
BOOL TRUE MANUAL OPERATION ON/ activation du mode manuel
La mise à 1 de l'entrée "activation du mode manuel" interrompt la boucle de régulation. La valeur manuelle MAN est spécifiée comme valeur réglante.
Paramètres internes
Adr. Paramètre Déclara-tion
Type de donnée
Plage de valeurs
Valeur initiale
Description
44.0 DEADB_W INPUT
REAL
Fonction des capteurs mis en oeuvre
0.0 DEAD BAND WIDTH/ largeur de la zone morte
Le signal d'écart recouvre la zone morte. L'entrée "largeur de la zone morte" détermine la taille de la zone morte.
48.0 I_ITLVAL INPUT REAL 0 à 100 % 0.0 INITIALIZATION VALUE OF THE INTEGRAL ACTION/ valeur d'initialisation de l'action I
La sortie de l'intégrateur peut être activée à l'entrée I_ITL_ON. La valeur d'initialisation est fournie à l'entrée "valeur d'initialisation de l'action I". Lors d'un démarrage COM_RST = TRUE, l'action I reprend la valeur d'initialisation.
52.0 LMN_HLM INPUT REAL > LMN_ LLM
100.0 MANIPULATED VARIABLE HIGH LIMIT/ limite supérieure de la valeur réglante
La valeur réglante possède toujours une limite supérieure et inférieure. La limite supérieure est spécifiée à l'entrée "limite supérieure de la valeur régante".
56.0 LMN_LLM INPUT REAL < LMN_ HLM
0.0 MANIPULATED VARIABLE LOW LIMIT/ limite inférieure de la valeur réglante
La valeur réglante possède toujours une limite supérieure et inférieure. La limite inférieure est spécifiée à l'entrée "limite inférieure de la valeur régante".
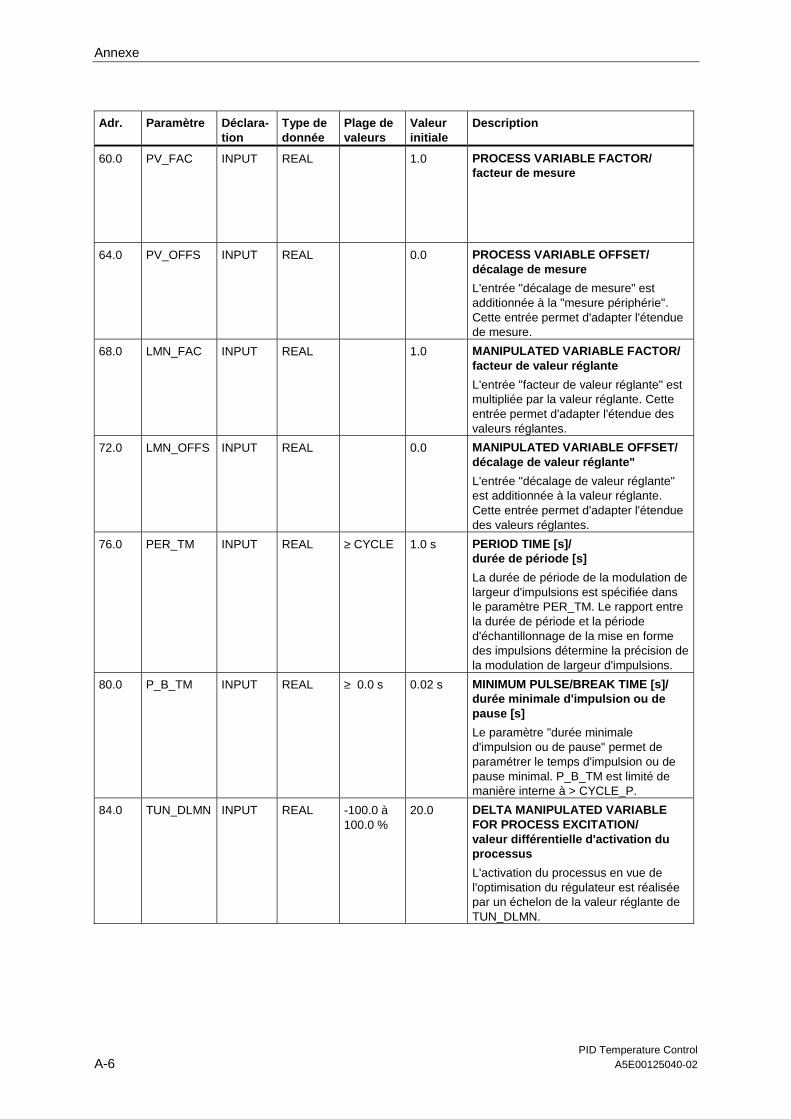
Annexe
PID Temperature Control A-6 A5E00125040-02
Adr. Paramètre Déclara-tion
Type de donnée
Plage de valeurs
Valeur initiale
Description
60.0 PV_FAC INPUT REAL 1.0 PROCESS VARIABLE FACTOR/ facteur de mesure
64.0 PV_OFFS INPUT REAL 0.0 PROCESS VARIABLE OFFSET/ décalage de mesure
L'entrée "décalage de mesure" est additionnée à la "mesure périphérie". Cette entrée permet d'adapter l'étendue de mesure.
68.0 LMN_FAC INPUT REAL 1.0 MANIPULATED VARIABLE FACTOR/ facteur de valeur réglante
L'entrée "facteur de valeur réglante" est multipliée par la valeur réglante. Cette entrée permet d'adapter l'étendue des valeurs réglantes.
72.0 LMN_OFFS INPUT REAL 0.0 MANIPULATED VARIABLE OFFSET/ décalage de valeur réglante"
L'entrée "décalage de valeur réglante" est additionnée à la valeur réglante. Cette entrée permet d'adapter l'étendue des valeurs réglantes.
76.0 PER_TM INPUT REAL ≥ CYCLE 1.0 s PERIOD TIME [s]/ durée de période [s]
La durée de période de la modulation de largeur d'impulsions est spécifiée dans le paramètre PER_TM. Le rapport entre la durée de période et la période d'échantillonnage de la mise en forme des impulsions détermine la précision de la modulation de largeur d'impulsions.
80.0 P_B_TM INPUT REAL ≥ 0.0 s 0.02 s MINIMUM PULSE/BREAK TIME [s]/ durée minimale d'impulsion ou de pause [s]
Le paramètre "durée minimale d'impulsion ou de pause" permet de paramétrer le temps d'impulsion ou de pause minimal. P_B_TM est limité de manière interne à > CYCLE_P.
84.0 TUN_DLMN INPUT REAL -100.0 à 100.0 %
20.0 DELTA MANIPULATED VARIABLE FOR PROCESS EXCITATION/ valeur différentielle d'activation du processus
L'activation du processus en vue de l'optimisation du régulateur est réalisée par un échelon de la valeur réglante de TUN_DLMN.
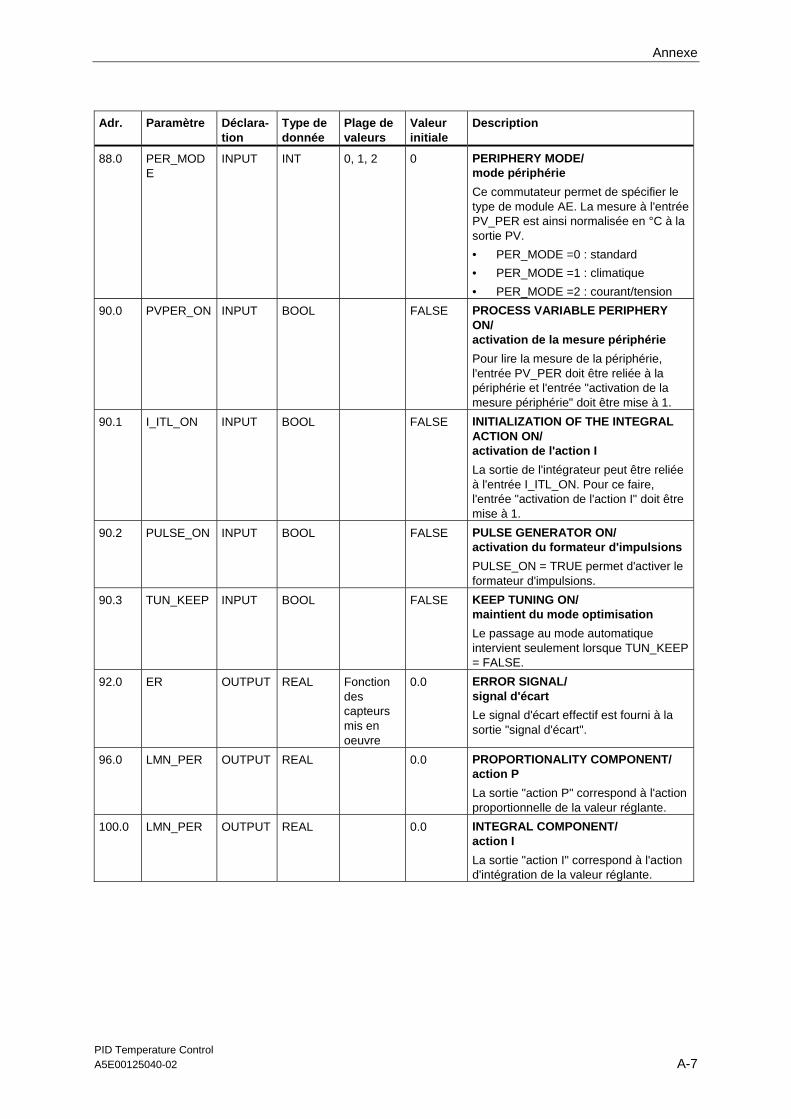
Annexe
PID Temperature Control A5E00125040-02 A-7
Adr. Paramètre Déclara-tion
Type de donnée
Plage de valeurs
Valeur initiale
Description
88.0 PER_MODE
INPUT INT 0, 1, 2 0 PERIPHERY MODE/ mode périphérie
Ce commutateur permet de spécifier le type de module AE. La mesure à l'entrée PV_PER est ainsi normalisée en °C à la sortie PV.
• PER_MODE =0 : standard
• PER_MODE =1 : climatique
• PER_MODE =2 : courant/tension
90.0 PVPER_ON INPUT BOOL FALSE PROCESS VARIABLE PERIPHERY ON/ activation de la mesure périphérie
Pour lire la mesure de la périphérie, l'entrée PV_PER doit être reliée à la périphérie et l'entrée "activation de la mesure périphérie" doit être mise à 1.
90.1 I_ITL_ON INPUT BOOL FALSE INITIALIZATION OF THE INTEGRAL ACTION ON/ activation de l'action I
La sortie de l'intégrateur peut être reliée à l'entrée I_ITL_ON. Pour ce faire, l'entrée "activation de l'action I" doit être mise à 1.
90.2 PULSE_ON INPUT BOOL FALSE PULSE GENERATOR ON/ activation du formateur d'impulsions
PULSE_ON = TRUE permet d'activer le formateur d'impulsions.
90.3 TUN_KEEP INPUT BOOL FALSE KEEP TUNING ON/ maintient du mode optimisation
Le passage au mode automatique intervient seulement lorsque TUN_KEEP = FALSE.
92.0 ER OUTPUT REAL Fonction des capteurs mis en oeuvre
0.0 ERROR SIGNAL/ signal d'écart
Le signal d'écart effectif est fourni à la sortie "signal d'écart".
96.0 LMN_PER OUTPUT REAL 0.0 PROPORTIONALITY COMPONENT/ action P
La sortie "action P" correspond à l'action proportionnelle de la valeur réglante.
100.0 LMN_PER OUTPUT REAL 0.0 INTEGRAL COMPONENT/ action I
La sortie "action I" correspond à l'action d'intégration de la valeur réglante.
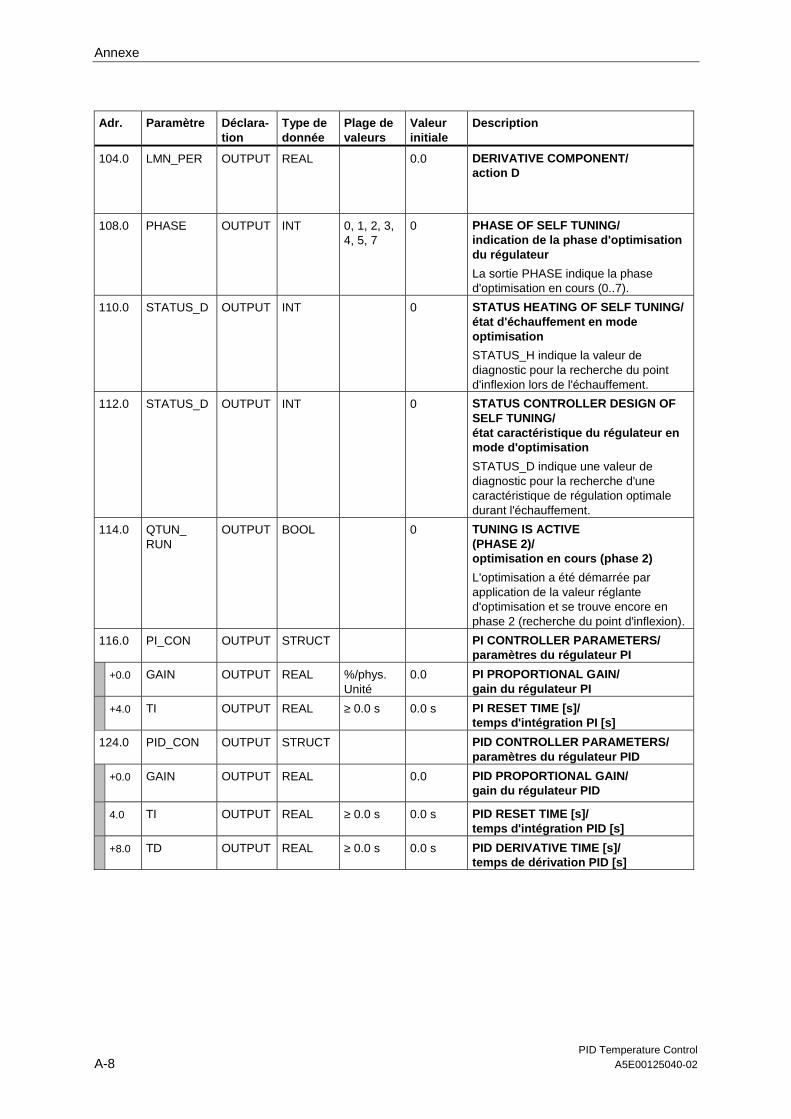
Annexe
PID Temperature Control A-8 A5E00125040-02
Adr. Paramètre Déclara-tion
Type de donnée
Plage de valeurs
Valeur initiale
Description
104.0 LMN_PER OUTPUT REAL 0.0 DERIVATIVE COMPONENT/ action D
108.0 PHASE OUTPUT INT 0, 1, 2, 3, 4, 5, 7
0 PHASE OF SELF TUNING/ indication de la phase d'optimisation du régulateur
La sortie PHASE indique la phase d'optimisation en cours (0..7).
110.0 STATUS_D OUTPUT INT 0 STATUS HEATING OF SELF TUNING/ état d'échauffement en mode optimisation
STATUS_H indique la valeur de diagnostic pour la recherche du point d'inflexion lors de l'échauffement.
112.0 STATUS_D OUTPUT INT 0 STATUS CONTROLLER DESIGN OF SELF TUNING/ état caractéristique du régulateur en mode d'optimisation
STATUS_D indique une valeur de diagnostic pour la recherche d'une caractéristique de régulation optimale durant l'échauffement.
114.0 QTUN_ RUN
OUTPUT BOOL 0 TUNING IS ACTIVE (PHASE 2)/ optimisation en cours (phase 2)
L'optimisation a été démarrée par application de la valeur réglante d'optimisation et se trouve encore en phase 2 (recherche du point d'inflexion).
116.0 PI_CON OUTPUT STRUCT PI CONTROLLER PARAMETERS/ paramètres du régulateur PI
+0.0 GAIN OUTPUT REAL %/phys. Unité
0.0 PI PROPORTIONAL GAIN/ gain du régulateur PI
+4.0 TI OUTPUT REAL ≥ 0.0 s 0.0 s PI RESET TIME [s]/ temps d'intégration PI [s]
124.0 PID_CON OUTPUT STRUCT PID CONTROLLER PARAMETERS/ paramètres du régulateur PID
+0.0
GAIN OUTPUT REAL 0.0 PID PROPORTIONAL GAIN/ gain du régulateur PID
4.0 TI OUTPUT REAL ≥ 0.0 s 0.0 s PID RESET TIME [s]/ temps d'intégration PID [s]
+8.0 TD OUTPUT REAL ≥ 0.0 s 0.0 s PID DERIVATIVE TIME [s]/ temps de dérivation PID [s]
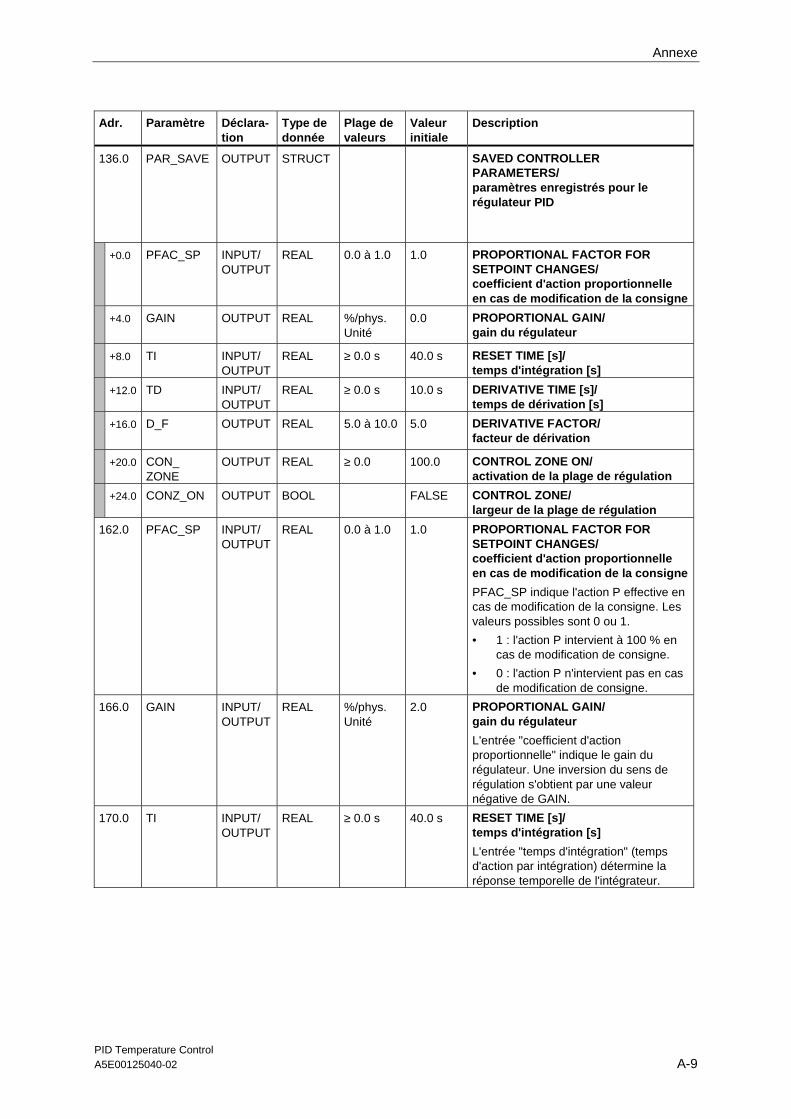
Annexe
PID Temperature Control A5E00125040-02 A-9
Adr. Paramètre Déclara-tion
Type de donnée
Plage de valeurs
Valeur initiale
Description
136.0 PAR_SAVE OUTPUT STRUCT SAVED CONTROLLER PARAMETERS/ paramètres enregistrés pour le régulateur PID
+0.0
PFAC_SP INPUT/ OUTPUT
REAL 0.0 à 1.0 1.0 PROPORTIONAL FACTOR FOR SETPOINT CHANGES/ coefficient d'action proportionnelle en cas de modification de la consigne
+4.0
GAIN OUTPUT REAL %/phys. Unité
0.0 PROPORTIONAL GAIN/ gain du régulateur
+8.0 TI INPUT/ OUTPUT
REAL ≥ 0.0 s 40.0 s RESET TIME [s]/ temps d'intégration [s]
+12.0 TD INPUT/ OUTPUT
REAL ≥ 0.0 s 10.0 s DERIVATIVE TIME [s]/ temps de dérivation [s]
+16.0
D_F OUTPUT REAL 5.0 à 10.0 5.0 DERIVATIVE FACTOR/ facteur de dérivation
+20.0 CON_ ZONE
OUTPUT REAL ≥ 0.0 100.0 CONTROL ZONE ON/ activation de la plage de régulation
+24.0 CONZ_ON OUTPUT BOOL FALSE CONTROL ZONE/ largeur de la plage de régulation
162.0 PFAC_SP INPUT/ OUTPUT
REAL 0.0 à 1.0 1.0 PROPORTIONAL FACTOR FOR SETPOINT CHANGES/ coefficient d'action proportionnelle en cas de modification de la consigne
PFAC_SP indique l'action P effective en cas de modification de la consigne. Les valeurs possibles sont 0 ou 1.
• 1 : l'action P intervient à 100 % en cas de modification de consigne.
• 0 : l'action P n'intervient pas en cas de modification de consigne.
166.0 GAIN INPUT/ OUTPUT
REAL %/phys. Unité
2.0 PROPORTIONAL GAIN/ gain du régulateur
L'entrée "coefficient d'action proportionnelle" indique le gain du régulateur. Une inversion du sens de régulation s'obtient par une valeur négative de GAIN.
170.0 TI INPUT/ OUTPUT
REAL ≥ 0.0 s 40.0 s RESET TIME [s]/ temps d'intégration [s]
L'entrée "temps d'intégration" (temps d'action par intégration) détermine la réponse temporelle de l'intégrateur.
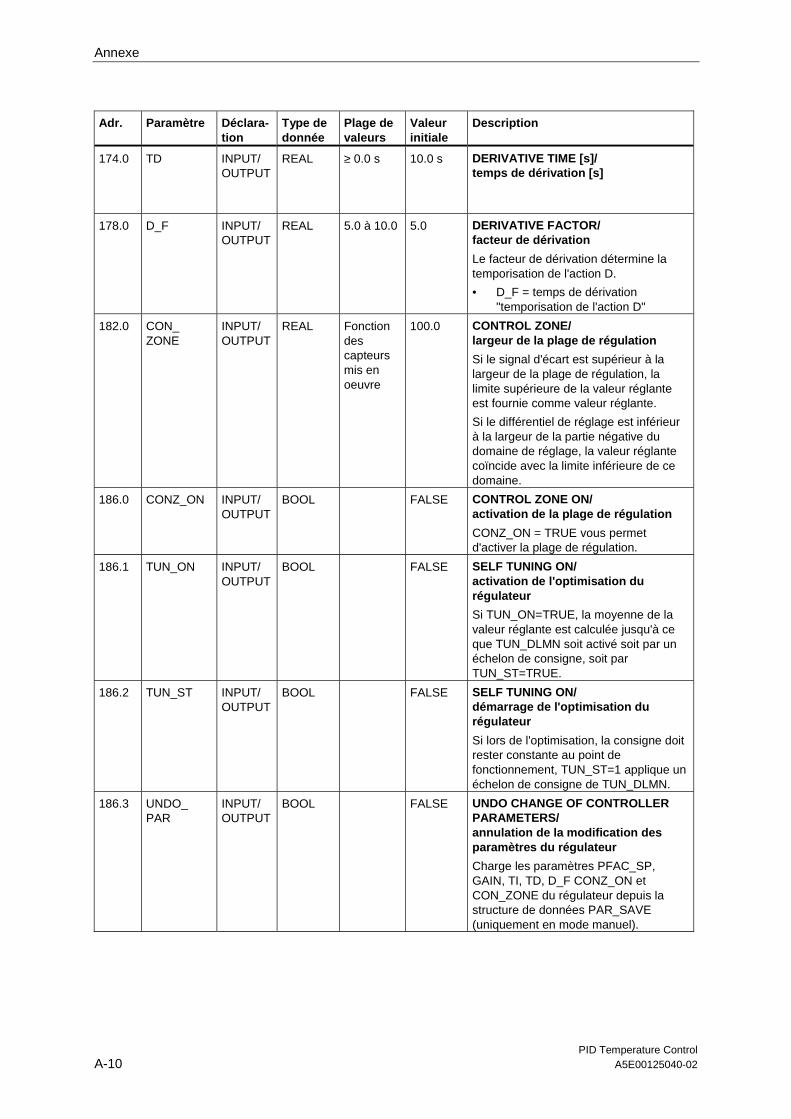
Annexe
PID Temperature Control A-10 A5E00125040-02
Adr. Paramètre Déclara-tion
Type de donnée
Plage de valeurs
Valeur initiale
Description
174.0 TD INPUT/ OUTPUT
REAL ≥ 0.0 s 10.0 s DERIVATIVE TIME [s]/ temps de dérivation [s]
178.0 D_F INPUT/ OUTPUT
REAL 5.0 à 10.0 5.0 DERIVATIVE FACTOR/ facteur de dérivation
Le facteur de dérivation détermine la temporisation de l'action D.
• D_F = temps de dérivation "temporisation de l'action D"
182.0 CON_ ZONE
INPUT/ OUTPUT
REAL Fonction des capteurs mis en oeuvre
100.0 CONTROL ZONE/ largeur de la plage de régulation
Si le signal d'écart est supérieur à la largeur de la plage de régulation, la limite supérieure de la valeur réglante est fournie comme valeur réglante.
Si le différentiel de réglage est inférieur à la largeur de la partie négative du domaine de réglage, la valeur réglante coïncide avec la limite inférieure de ce domaine.
186.0 CONZ_ON INPUT/ OUTPUT
BOOL FALSE CONTROL ZONE ON/ activation de la plage de régulation
CONZ_ON = TRUE vous permet d'activer la plage de régulation.
186.1 TUN_ON INPUT/ OUTPUT
BOOL FALSE SELF TUNING ON/ activation de l'optimisation du régulateur
Si TUN_ON=TRUE, la moyenne de la valeur réglante est calculée jusqu'à ce que TUN_DLMN soit activé soit par un échelon de consigne, soit par TUN_ST=TRUE.
186.2 TUN_ST INPUT/ OUTPUT
BOOL FALSE SELF TUNING ON/ démarrage de l'optimisation du régulateur
Si lors de l'optimisation, la consigne doit rester constante au point de fonctionnement, TUN_ST=1 applique un échelon de consigne de TUN_DLMN.
186.3 UNDO_ PAR
INPUT/ OUTPUT
BOOL FALSE UNDO CHANGE OF CONTROLLER PARAMETERS/ annulation de la modification des paramètres du régulateur
Charge les paramètres PFAC_SP, GAIN, TI, TD, D_F CONZ_ON et CON_ZONE du régulateur depuis la structure de données PAR_SAVE (uniquement en mode manuel).
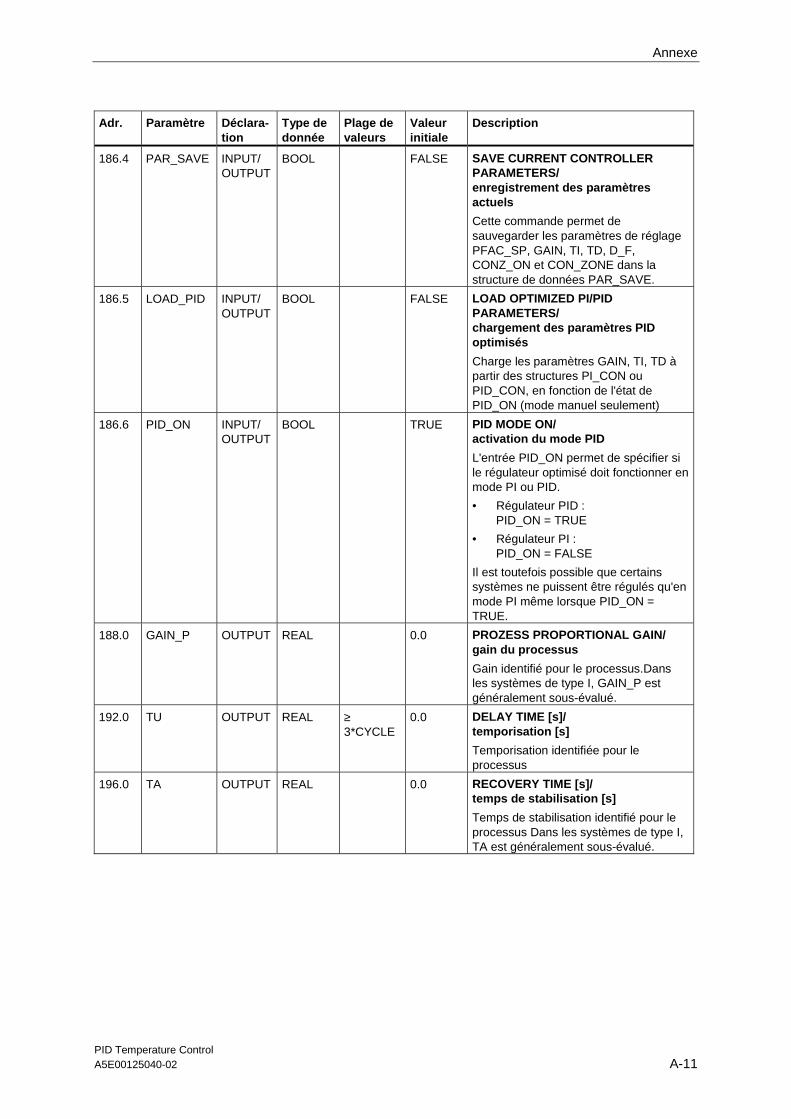
Annexe
PID Temperature Control A5E00125040-02 A-11
Adr. Paramètre Déclara-tion
Type de donnée
Plage de valeurs
Valeur initiale
Description
186.4 PAR_SAVE INPUT/ OUTPUT
BOOL FALSE SAVE CURRENT CONTROLLER PARAMETERS/ enregistrement des paramètres actuels
Cette commande permet de sauvegarder les paramètres de réglage PFAC_SP, GAIN, TI, TD, D_F, CONZ_ON et CON_ZONE dans la structure de données PAR_SAVE.
186.5 LOAD_PID INPUT/ OUTPUT
BOOL FALSE LOAD OPTIMIZED PI/PID PARAMETERS/ chargement des paramètres PID optimisés
Charge les paramètres GAIN, TI, TD à partir des structures PI_CON ou PID_CON, en fonction de l'état de PID_ON (mode manuel seulement)
186.6 PID_ON INPUT/ OUTPUT
BOOL TRUE PID MODE ON/ activation du mode PID
L'entrée PID_ON permet de spécifier si le régulateur optimisé doit fonctionner en mode PI ou PID.
• Régulateur PID : PID_ON = TRUE
• Régulateur PI : PID_ON = FALSE
Il est toutefois possible que certains systèmes ne puissent être régulés qu'en mode PI même lorsque PID_ON = TRUE.
188.0 GAIN_P OUTPUT REAL 0.0 PROZESS PROPORTIONAL GAIN/ gain du processus
Gain identifié pour le processus.Dans les systèmes de type I, GAIN_P est généralement sous-évalué.
192.0 TU OUTPUT REAL ≥ 3*CYCLE
0.0 DELAY TIME [s]/ temporisation [s]
Temporisation identifiée pour le processus
196.0 TA OUTPUT REAL 0.0 RECOVERY TIME [s]/ temps de stabilisation [s]
Temps de stabilisation identifié pour le processus Dans les systèmes de type I, TA est généralement sous-évalué.
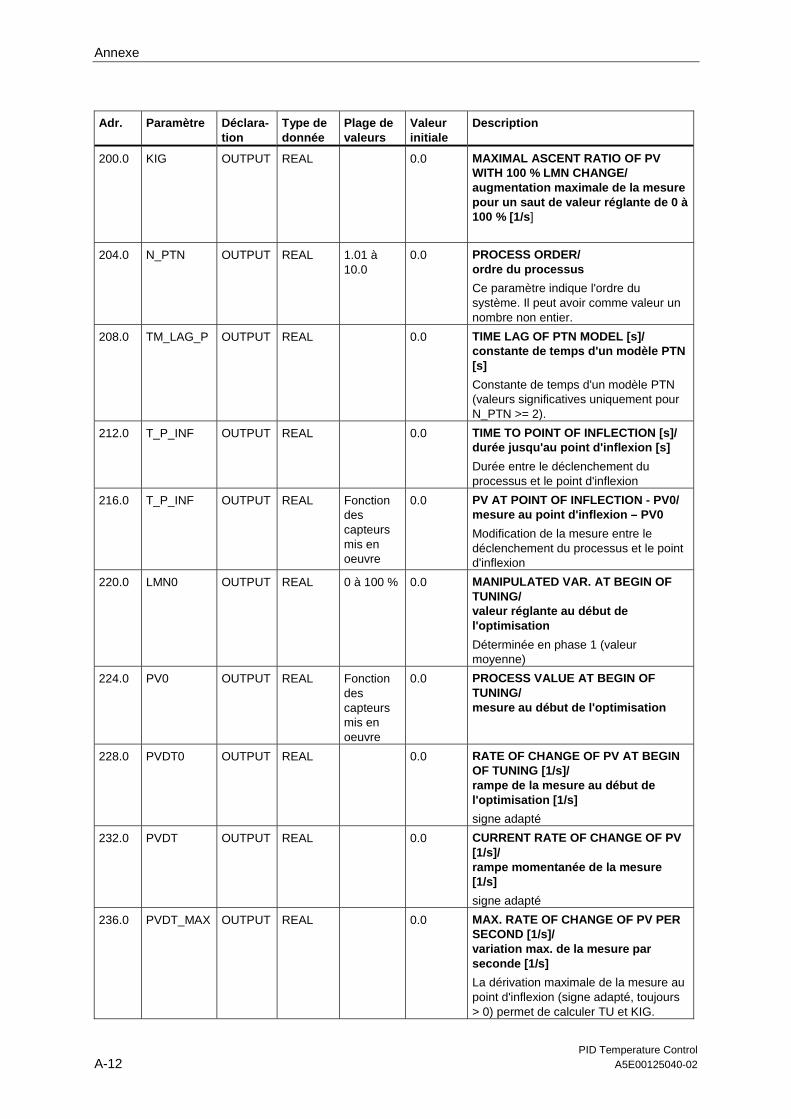
Annexe
PID Temperature Control A-12 A5E00125040-02
Adr. Paramètre Déclara-tion
Type de donnée
Plage de valeurs
Valeur initiale
Description
200.0 KIG OUTPUT REAL 0.0 MAXIMAL ASCENT RATIO OF PV WITH 100 % LMN CHANGE/ augmentation maximale de la mesure pour un saut de valeur réglante de 0 à 100 % [1/s]
204.0 N_PTN OUTPUT REAL 1.01 à 10.0
0.0 PROCESS ORDER/ ordre du processus
Ce paramètre indique l'ordre du système. Il peut avoir comme valeur un nombre non entier.
208.0 TM_LAG_P OUTPUT REAL 0.0 TIME LAG OF PTN MODEL [s]/ constante de temps d'un modèle PTN [s]
Constante de temps d'un modèle PTN (valeurs significatives uniquement pour N_PTN >= 2).
212.0 T_P_INF OUTPUT REAL 0.0 TIME TO POINT OF INFLECTION [s]/ durée jusqu'au point d'inflexion [s]
Durée entre le déclenchement du processus et le point d'inflexion
216.0 T_P_INF OUTPUT REAL Fonction des capteurs mis en oeuvre
0.0 PV AT POINT OF INFLECTION - PV0/ mesure au point d'inflexion – PV0
Modification de la mesure entre le déclenchement du processus et le point d'inflexion
220.0 LMN0 OUTPUT REAL 0 à 100 % 0.0 MANIPULATED VAR. AT BEGIN OF TUNING/ valeur réglante au début de l'optimisation
Déterminée en phase 1 (valeur moyenne)
224.0 PV0 OUTPUT REAL Fonction des capteurs mis en oeuvre
0.0 PROCESS VALUE AT BEGIN OF TUNING/ mesure au début de l'optimisation
228.0 PVDT0 OUTPUT REAL 0.0 RATE OF CHANGE OF PV AT BEGIN OF TUNING [1/s]/ rampe de la mesure au début de l'optimisation [1/s]
signe adapté
232.0 PVDT OUTPUT REAL 0.0 CURRENT RATE OF CHANGE OF PV [1/s]/ rampe momentanée de la mesure [1/s]
signe adapté
236.0 PVDT_MAX OUTPUT REAL 0.0 MAX. RATE OF CHANGE OF PV PER SECOND [1/s]/ variation max. de la mesure par seconde [1/s]
La dérivation maximale de la mesure au point d'inflexion (signe adapté, toujours > 0) permet de calculer TU et KIG.
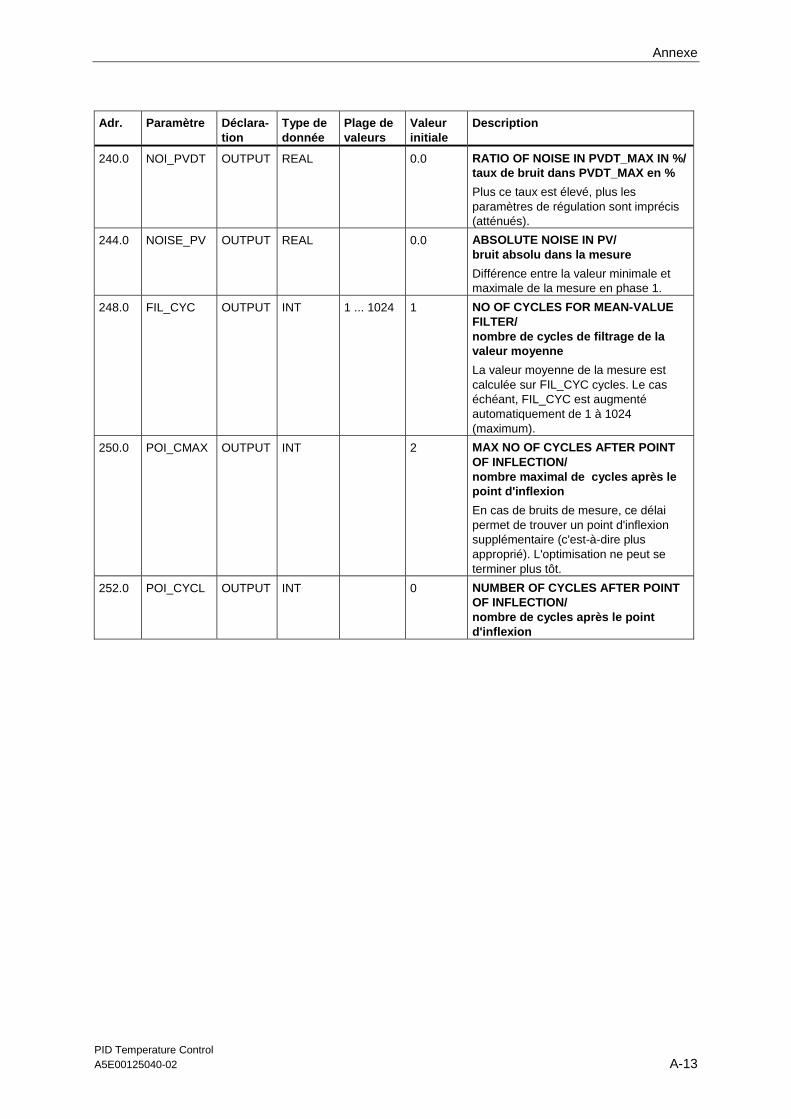
Annexe
PID Temperature Control A5E00125040-02 A-13
Adr. Paramètre Déclara-tion
Type de donnée
Plage de valeurs
Valeur initiale
Description
240.0 NOI_PVDT OUTPUT REAL 0.0 RATIO OF NOISE IN PVDT_MAX IN %/ taux de bruit dans PVDT_MAX en %
Plus ce taux est élevé, plus les paramètres de régulation sont imprécis (atténués).
244.0 NOISE_PV OUTPUT REAL 0.0 ABSOLUTE NOISE IN PV/ bruit absolu dans la mesure
Différence entre la valeur minimale et maximale de la mesure en phase 1.
248.0 FIL_CYC OUTPUT INT 1 ... 1024 1 NO OF CYCLES FOR MEAN-VALUE FILTER/ nombre de cycles de filtrage de la valeur moyenne
La valeur moyenne de la mesure est calculée sur FIL_CYC cycles. Le cas échéant, FIL_CYC est augmenté automatiquement de 1 à 1024 (maximum).
250.0 POI_CMAX OUTPUT INT 2 MAX NO OF CYCLES AFTER POINT OF INFLECTION/ nombre maximal de cycles après le point d'inflexion
En cas de bruits de mesure, ce délai permet de trouver un point d'inflexion supplémentaire (c'est-à-dire plus approprié). L'optimisation ne peut se terminer plus tôt.
252.0 POI_CYCL OUTPUT INT 0 NUMBER OF CYCLES AFTER POINT OF INFLECTION/ nombre de cycles après le point d'inflexion
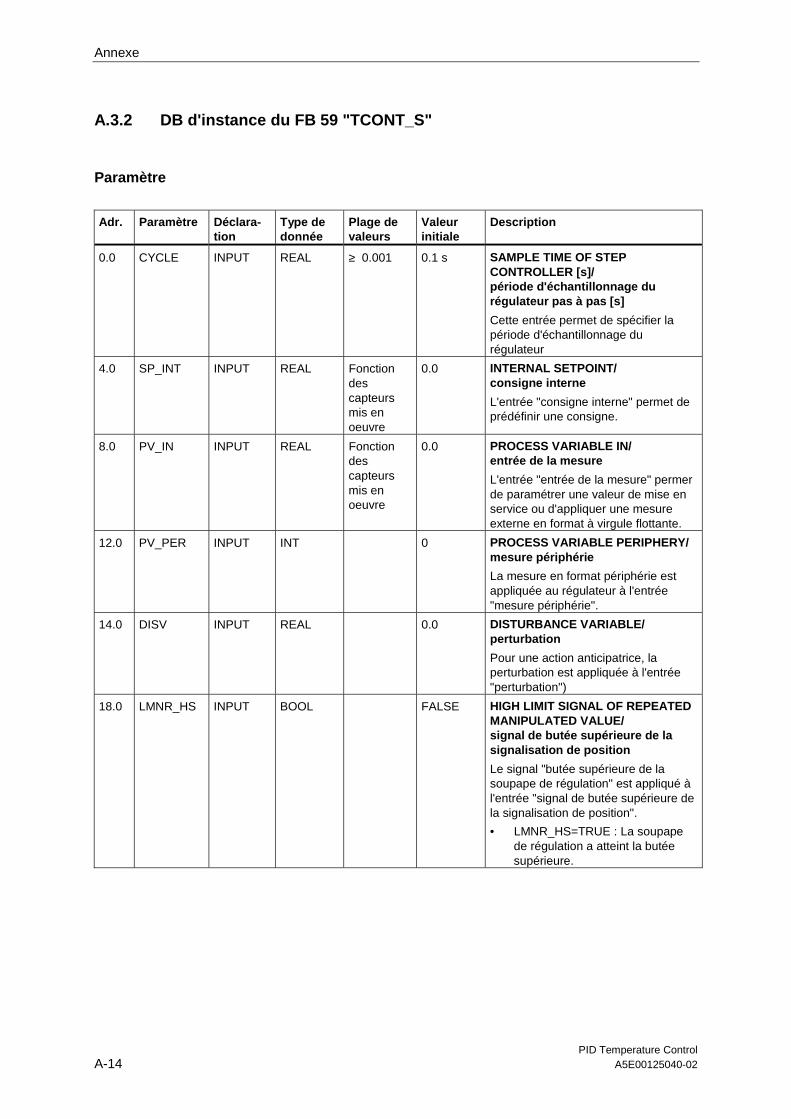
Annexe
PID Temperature Control A-14 A5E00125040-02
A.3.2 DB d'instance du FB 59 "TCONT_S"
Paramètre
Adr. Paramètre Déclara-tion
Type de donnée
Plage de valeurs
Valeur initiale
Description
0.0 CYCLE INPUT REAL ≥ 0.001 0.1 s SAMPLE TIME OF STEP CONTROLLER [s]/ période d'échantillonnage du régulateur pas à pas [s]
Cette entrée permet de spécifier la période d'échantillonnage du régulateur
4.0 SP_INT INPUT REAL Fonction des capteurs mis en oeuvre
0.0 INTERNAL SETPOINT/ consigne interne
L'entrée "consigne interne" permet de prédéfinir une consigne.
8.0 PV_IN INPUT REAL Fonction des capteurs mis en oeuvre
0.0 PROCESS VARIABLE IN/ entrée de la mesure
L'entrée "entrée de la mesure" permer de paramétrer une valeur de mise en service ou d'appliquer une mesure externe en format à virgule flottante.
12.0 PV_PER INPUT INT 0 PROCESS VARIABLE PERIPHERY/ mesure périphérie
La mesure en format périphérie est appliquée au régulateur à l'entrée "mesure périphérie".
14.0 DISV INPUT REAL 0.0 DISTURBANCE VARIABLE/ perturbation
Pour une action anticipatrice, la perturbation est appliquée à l'entrée "perturbation")
18.0 LMNR_HS INPUT BOOL FALSE HIGH LIMIT SIGNAL OF REPEATED MANIPULATED VALUE/ signal de butée supérieure de la signalisation de position
Le signal "butée supérieure de la soupape de régulation" est appliqué à l'entrée "signal de butée supérieure de la signalisation de position".
• LMNR_HS=TRUE : La soupape de régulation a atteint la butée supérieure.
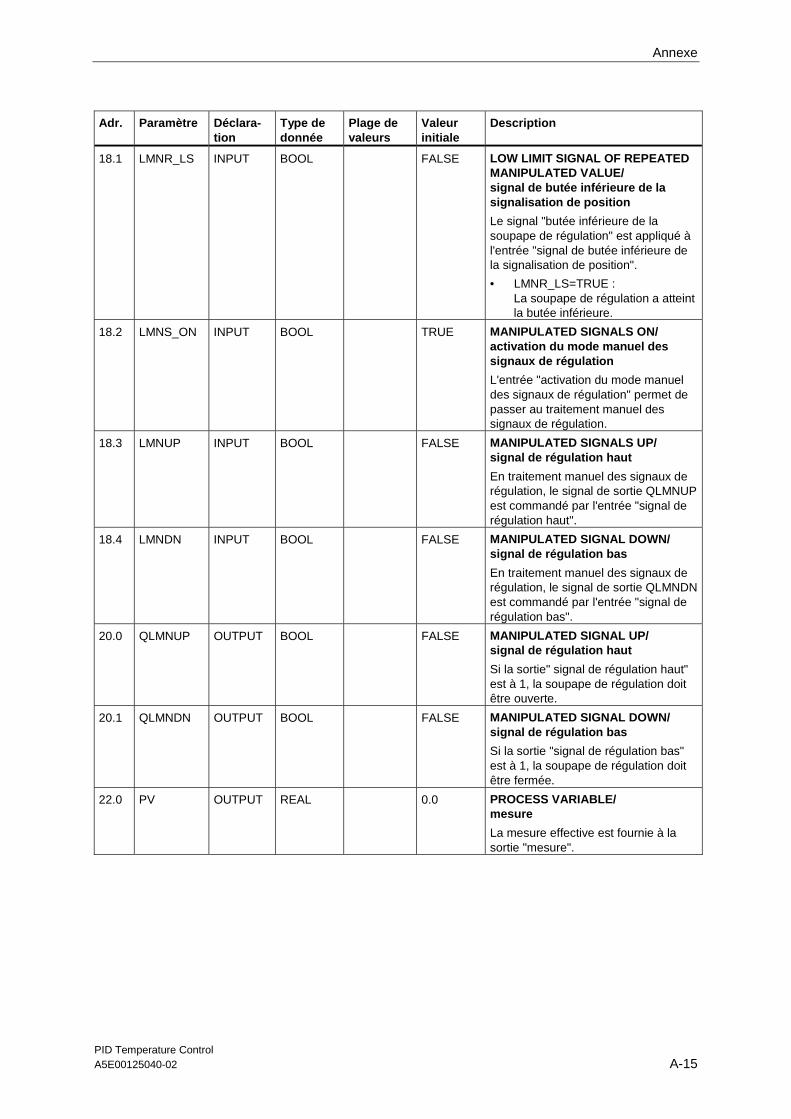
Annexe
PID Temperature Control A5E00125040-02 A-15
Adr. Paramètre Déclara-tion
Type de donnée
Plage de valeurs
Valeur initiale
Description
18.1 LMNR_LS INPUT BOOL FALSE LOW LIMIT SIGNAL OF REPEATED MANIPULATED VALUE/ signal de butée inférieure de la signalisation de position
Le signal "butée inférieure de la soupape de régulation" est appliqué à l'entrée "signal de butée inférieure de la signalisation de position".
• LMNR_LS=TRUE : La soupape de régulation a atteint la butée inférieure.
18.2 LMNS_ON INPUT BOOL TRUE MANIPULATED SIGNALS ON/ activation du mode manuel des signaux de régulation
L'entrée "activation du mode manuel des signaux de régulation" permet de passer au traitement manuel des signaux de régulation.
18.3 LMNUP INPUT BOOL FALSE MANIPULATED SIGNALS UP/ signal de régulation haut
En traitement manuel des signaux de régulation, le signal de sortie QLMNUP est commandé par l'entrée "signal de régulation haut".
18.4 LMNDN INPUT BOOL FALSE MANIPULATED SIGNAL DOWN/ signal de régulation bas
En traitement manuel des signaux de régulation, le signal de sortie QLMNDN est commandé par l'entrée "signal de régulation bas".
20.0 QLMNUP OUTPUT BOOL FALSE MANIPULATED SIGNAL UP/ signal de régulation haut
Si la sortie" signal de régulation haut" est à 1, la soupape de régulation doit être ouverte.
20.1 QLMNDN OUTPUT BOOL FALSE MANIPULATED SIGNAL DOWN/ signal de régulation bas
Si la sortie "signal de régulation bas" est à 1, la soupape de régulation doit être fermée.
22.0 PV OUTPUT REAL 0.0 PROCESS VARIABLE/ mesure
La mesure effective est fournie à la sortie "mesure".
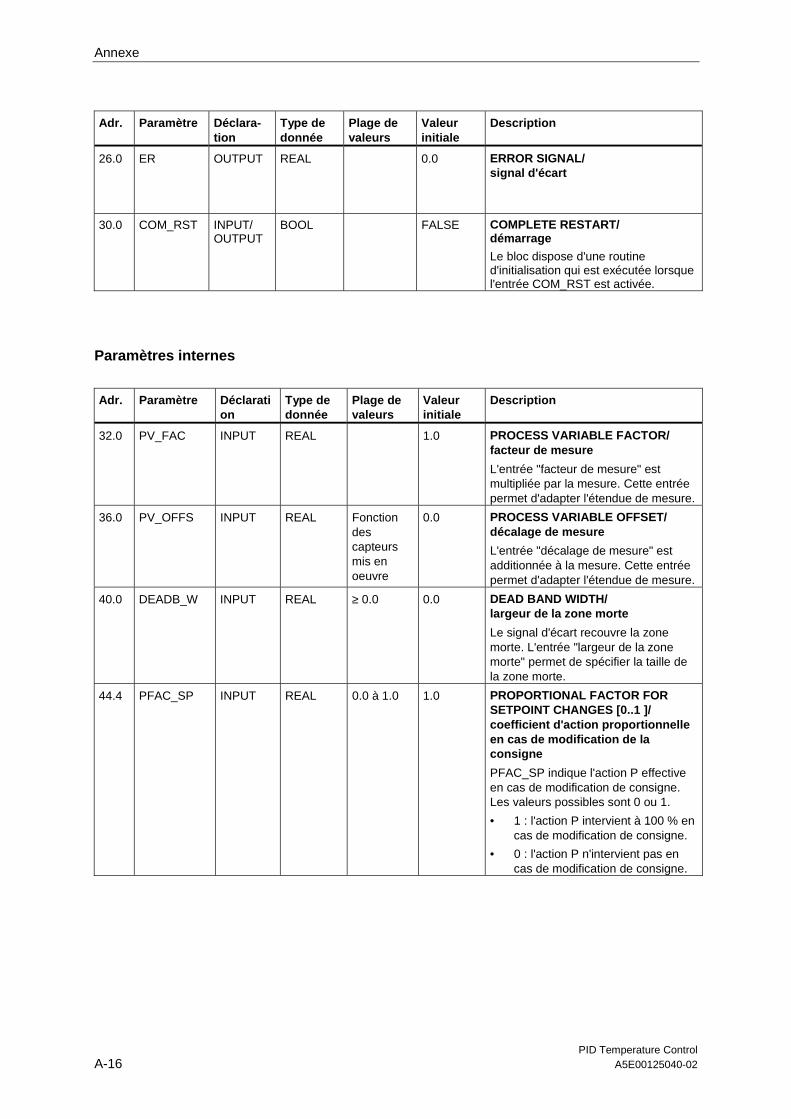
Annexe
PID Temperature Control A-16 A5E00125040-02
Adr. Paramètre Déclara-tion
Type de donnée
Plage de valeurs
Valeur initiale
Description
26.0 ER OUTPUT REAL 0.0 ERROR SIGNAL/ signal d'écart
30.0 COM_RST INPUT/ OUTPUT
BOOL FALSE COMPLETE RESTART/ démarrage
Le bloc dispose d'une routine d'initialisation qui est exécutée lorsque l'entrée COM_RST est activée.
Paramètres internes
Adr. Paramètre Déclaration
Type de donnée
Plage de valeurs
Valeur initiale
Description
32.0 PV_FAC INPUT REAL 1.0 PROCESS VARIABLE FACTOR/ facteur de mesure
L'entrée "facteur de mesure" est multipliée par la mesure. Cette entrée permet d'adapter l'étendue de mesure.
36.0 PV_OFFS INPUT REAL Fonction des capteurs mis en oeuvre
0.0 PROCESS VARIABLE OFFSET/ décalage de mesure
L'entrée "décalage de mesure" est additionnée à la mesure. Cette entrée permet d'adapter l'étendue de mesure.
40.0 DEADB_W INPUT REAL ≥ 0.0 0.0 DEAD BAND WIDTH/ largeur de la zone morte
Le signal d'écart recouvre la zone morte. L'entrée "largeur de la zone morte" permet de spécifier la taille de la zone morte.
44.4 PFAC_SP INPUT REAL 0.0 à 1.0 1.0 PROPORTIONAL FACTOR FOR SETPOINT CHANGES [0..1 ]/ coefficient d'action proportionnelle en cas de modification de la consigne
PFAC_SP indique l'action P effective en cas de modification de consigne. Les valeurs possibles sont 0 ou 1.
• 1 : l'action P intervient à 100 % en cas de modification de consigne.
• 0 : l'action P n'intervient pas en cas de modification de consigne.
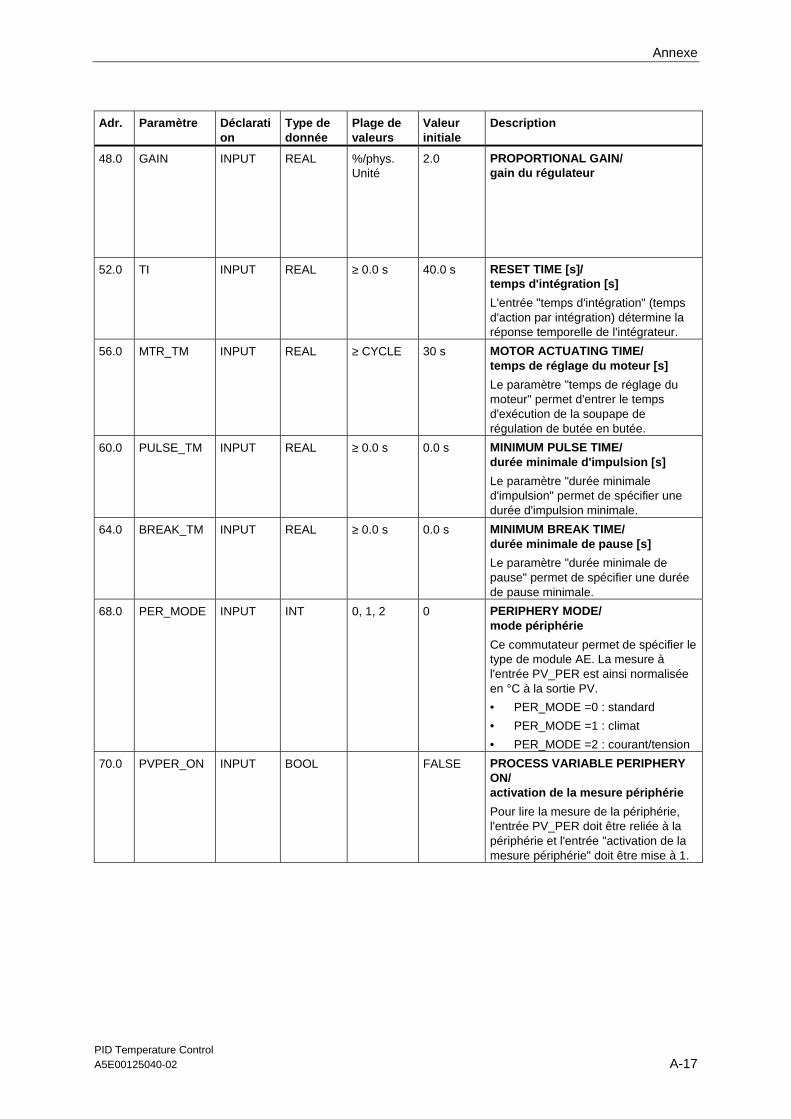
Annexe
PID Temperature Control A5E00125040-02 A-17
Adr. Paramètre Déclaration
Type de donnée
Plage de valeurs
Valeur initiale
Description
48.0 GAIN INPUT REAL %/phys. Unité
2.0 PROPORTIONAL GAIN/ gain du régulateur
52.0 TI INPUT REAL ≥ 0.0 s 40.0 s RESET TIME [s]/ temps d'intégration [s]
L'entrée "temps d'intégration" (temps d'action par intégration) détermine la réponse temporelle de l'intégrateur.
56.0 MTR_TM INPUT REAL ≥ CYCLE 30 s MOTOR ACTUATING TIME/ temps de réglage du moteur [s]
Le paramètre "temps de réglage du moteur" permet d'entrer le temps d'exécution de la soupape de régulation de butée en butée.
60.0 PULSE_TM INPUT REAL ≥ 0.0 s 0.0 s MINIMUM PULSE TIME/ durée minimale d'impulsion [s]
Le paramètre "durée minimale d'impulsion" permet de spécifier une durée d'impulsion minimale.
64.0 BREAK_TM INPUT REAL ≥ 0.0 s 0.0 s MINIMUM BREAK TIME/ durée minimale de pause [s]
Le paramètre "durée minimale de pause" permet de spécifier une durée de pause minimale.
68.0 PER_MODE
INPUT INT 0, 1, 2 0 PERIPHERY MODE/ mode périphérie
Ce commutateur permet de spécifier le type de module AE. La mesure à l'entrée PV_PER est ainsi normalisée en °C à la sortie PV.
• PER_MODE =0 : standard
• PER_MODE =1 : climat
• PER_MODE =2 : courant/tension
70.0 PVPER_ON INPUT BOOL FALSE PROCESS VARIABLE PERIPHERY ON/ activation de la mesure périphérie
Pour lire la mesure de la périphérie, l'entrée PV_PER doit être reliée à la périphérie et l'entrée "activation de la mesure périphérie" doit être mise à 1.
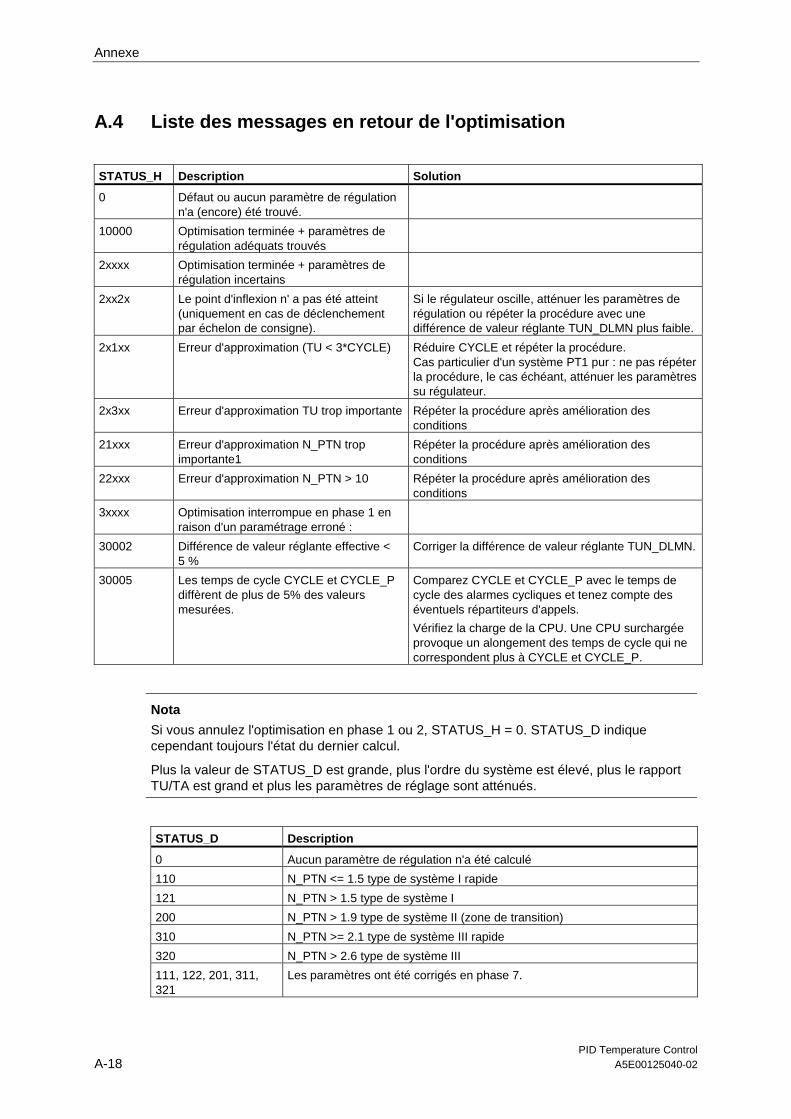
Annexe
PID Temperature Control A-18 A5E00125040-02
A.4 Liste des messages en retour de l'optimisation
STATUS_H Description Solution
0 Défaut ou aucun paramètre de régulation n'a (encore) été trouvé.
10000 Optimisation terminée + paramètres de régulation adéquats trouvés
2xxxx Optimisation terminée + paramètres de régulation incertains
2xx2x Le point d'inflexion n' a pas été atteint (uniquement en cas de déclenchement par échelon de consigne).
Si le régulateur oscille, atténuer les paramètres de régulation ou répéter la procédure avec une différence de valeur réglante TUN_DLMN plus faible.
2x1xx Erreur d'approximation (TU < 3*CYCLE) Réduire CYCLE et répéter la procédure. Cas particulier d'un système PT1 pur : ne pas répéter la procédure, le cas échéant, atténuer les paramètres su régulateur.
2x3xx Erreur d'approximation TU trop importante Répéter la procédure après amélioration des conditions
21xxx Erreur d'approximation N_PTN trop importante1
Répéter la procédure après amélioration des conditions
22xxx Erreur d'approximation N_PTN > 10 Répéter la procédure après amélioration des conditions
3xxxx Optimisation interrompue en phase 1 en raison d'un paramétrage erroné :
30002 Différence de valeur réglante effective < 5 %
Corriger la différence de valeur réglante TUN_DLMN.
30005 Les temps de cycle CYCLE et CYCLE_P diffèrent de plus de 5% des valeurs mesurées.
Comparez CYCLE et CYCLE_P avec le temps de cycle des alarmes cycliques et tenez compte des éventuels répartiteurs d'appels.
Vérifiez la charge de la CPU. Une CPU surchargée provoque un alongement des temps de cycle qui ne correspondent plus à CYCLE et CYCLE_P.
Nota
Si vous annulez l'optimisation en phase 1 ou 2, STATUS_H = 0. STATUS_D indique cependant toujours l'état du dernier calcul.
Plus la valeur de STATUS_D est grande, plus l'ordre du système est élevé, plus le rapport TU/TA est grand et plus les paramètres de réglage sont atténués.
STATUS_D Description
0 Aucun paramètre de régulation n'a été calculé
110 N_PTN <= 1.5 type de système I rapide
121 N_PTN > 1.5 type de système I
200 N_PTN > 1.9 type de système II (zone de transition)
310 N_PTN >= 2.1 type de système III rapide
320 N_PTN > 2.6 type de système III
111, 122, 201, 311, 321
Les paramètres ont été corrigés en phase 7.
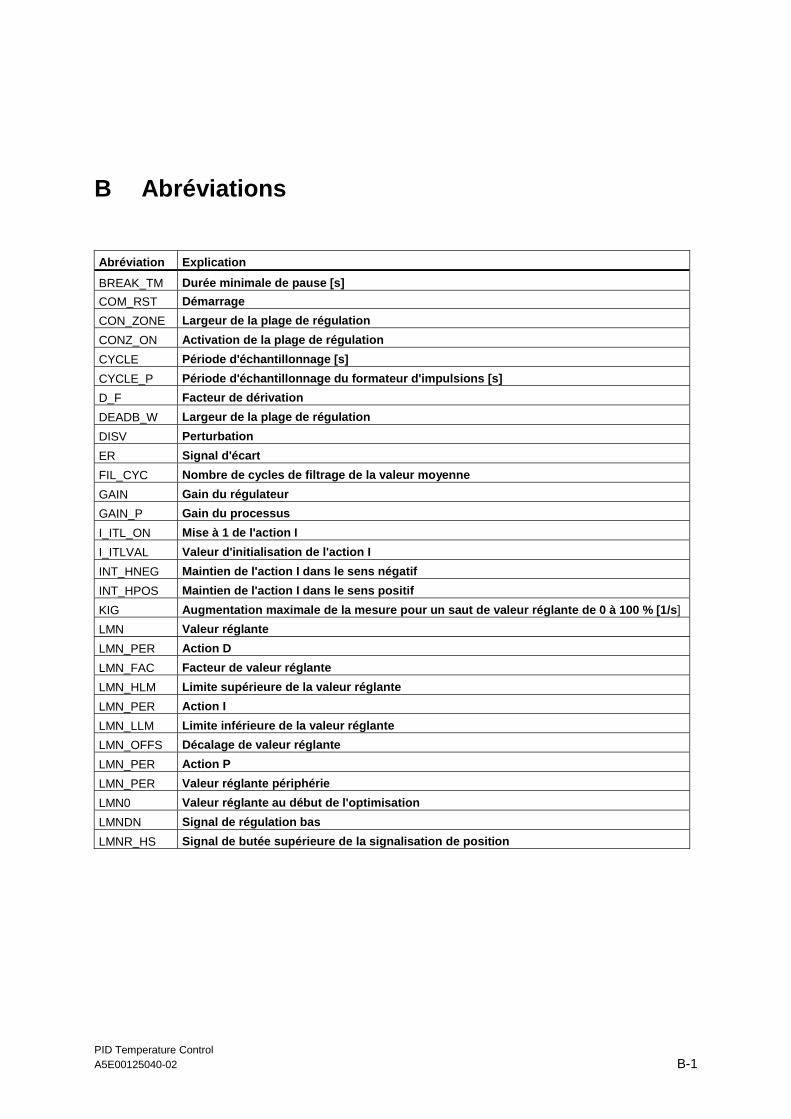
PID Temperature Control A5E00125040-02 B-1
B Abréviations
Abréviation Explication
BREAK_TM Durée minimale de pause [s]
COM_RST Démarrage
CON_ZONE Largeur de la plage de régulation
CONZ_ON Activation de la plage de régulation
CYCLE Période d'échantillonnage [s]
CYCLE_P Période d'échantillonnage du formateur d'impulsions [s]
D_F Facteur de dérivation
DEADB_W Largeur de la plage de régulation
DISV Perturbation
ER Signal d'écart
FIL_CYC Nombre de cycles de filtrage de la valeur moyenne
GAIN Gain du régulateur
GAIN_P Gain du processus
I_ITL_ON Mise à 1 de l'action I
I_ITLVAL Valeur d'initialisation de l'action I
INT_HNEG Maintien de l'action I dans le sens négatif
INT_HPOS Maintien de l'action I dans le sens positif
KIG Augmentation maximale de la mesure pour un saut de valeur réglante de 0 à 100 % [1/s]
LMN Valeur réglante
LMN_PER Action D
LMN_FAC Facteur de valeur réglante
LMN_HLM Limite supérieure de la valeur réglante
LMN_PER Action I
LMN_LLM Limite inférieure de la valeur réglante
LMN_OFFS Décalage de valeur réglante
LMN_PER Action P
LMN_PER Valeur réglante périphérie
LMN0 Valeur réglante au début de l'optimisation
LMNDN Signal de régulation bas
LMNR_HS Signal de butée supérieure de la signalisation de position
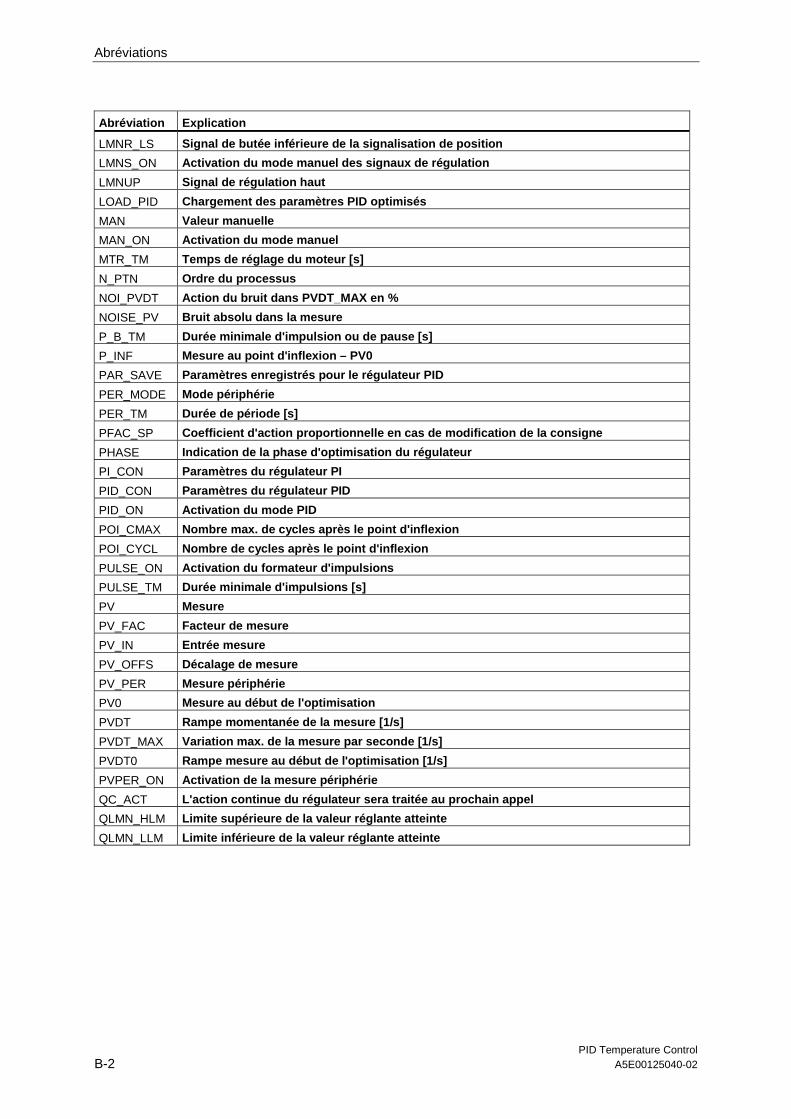
Abréviations
PID Temperature Control B-2 A5E00125040-02
Abréviation Explication
LMNR_LS Signal de butée inférieure de la signalisation de position
LMNS_ON Activation du mode manuel des signaux de régulation
LMNUP Signal de régulation haut
LOAD_PID Chargement des paramètres PID optimisés
MAN Valeur manuelle
MAN_ON Activation du mode manuel
MTR_TM Temps de réglage du moteur [s]
N_PTN Ordre du processus
NOI_PVDT Action du bruit dans PVDT_MAX en %
NOISE_PV Bruit absolu dans la mesure
P_B_TM Durée minimale d'impulsion ou de pause [s]
P_INF Mesure au point d'inflexion – PV0
PAR_SAVE Paramètres enregistrés pour le régulateur PID
PER_MODE Mode périphérie
PER_TM Durée de période [s]
PFAC_SP Coefficient d'action proportionnelle en cas de modification de la consigne
PHASE Indication de la phase d'optimisation du régulateur
PI_CON Paramètres du régulateur PI
PID_CON Paramètres du régulateur PID
PID_ON Activation du mode PID
POI_CMAX Nombre max. de cycles après le point d'inflexion
POI_CYCL Nombre de cycles après le point d'inflexion
PULSE_ON Activation du formateur d'impulsions
PULSE_TM Durée minimale d'impulsions [s]
PV Mesure
PV_FAC Facteur de mesure
PV_IN Entrée mesure
PV_OFFS Décalage de mesure
PV_PER Mesure périphérie
PV0 Mesure au début de l'optimisation
PVDT Rampe momentanée de la mesure [1/s]
PVDT_MAX Variation max. de la mesure par seconde [1/s]
PVDT0 Rampe mesure au début de l'optimisation [1/s]
PVPER_ON Activation de la mesure périphérie
QC_ACT L'action continue du régulateur sera traitée au prochain appel
QLMN_HLM Limite supérieure de la valeur réglante atteinte
QLMN_LLM Limite inférieure de la valeur réglante atteinte
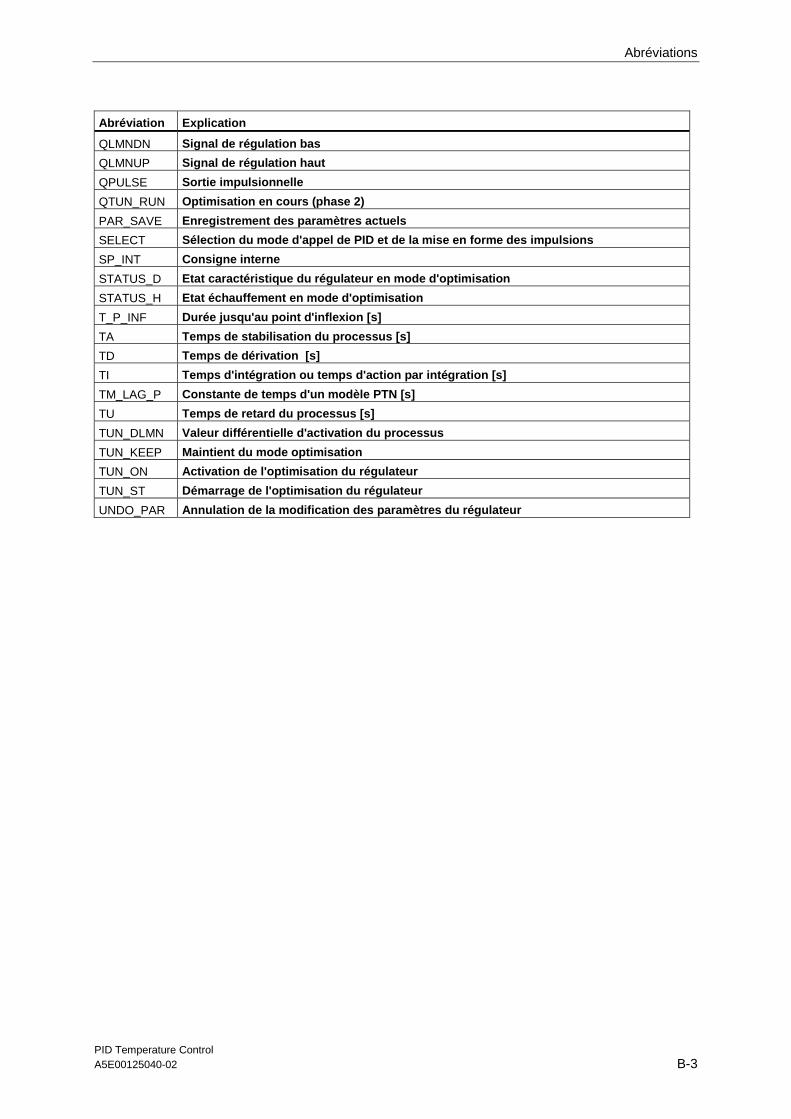
Abréviations
PID Temperature Control A5E00125040-02 B-3
Abréviation Explication
QLMNDN Signal de régulation bas
QLMNUP Signal de régulation haut
QPULSE Sortie impulsionnelle
QTUN_RUN Optimisation en cours (phase 2)
PAR_SAVE Enregistrement des paramètres actuels
SELECT Sélection du mode d'appel de PID et de la mise en forme des impulsions
SP_INT Consigne interne
STATUS_D Etat caractéristique du régulateur en mode d'optimisation
STATUS_H Etat échauffement en mode d'optimisation
T_P_INF Durée jusqu'au point d'inflexion [s]
TA Temps de stabilisation du processus [s]
TD Temps de dérivation [s]
TI Temps d'intégration ou temps d'action par intégration [s]
TM_LAG_P Constante de temps d'un modèle PTN [s]
TU Temps de retard du processus [s]
TUN_DLMN Valeur différentielle d'activation du processus
TUN_KEEP Maintient du mode optimisation
TUN_ON Activation de l'optimisation du régulateur
TUN_ST Démarrage de l'optimisation du régulateur
UNDO_PAR Annulation de la modification des paramètres du régulateur

Abréviations
PID Temperature Control B-4 A5E00125040-02
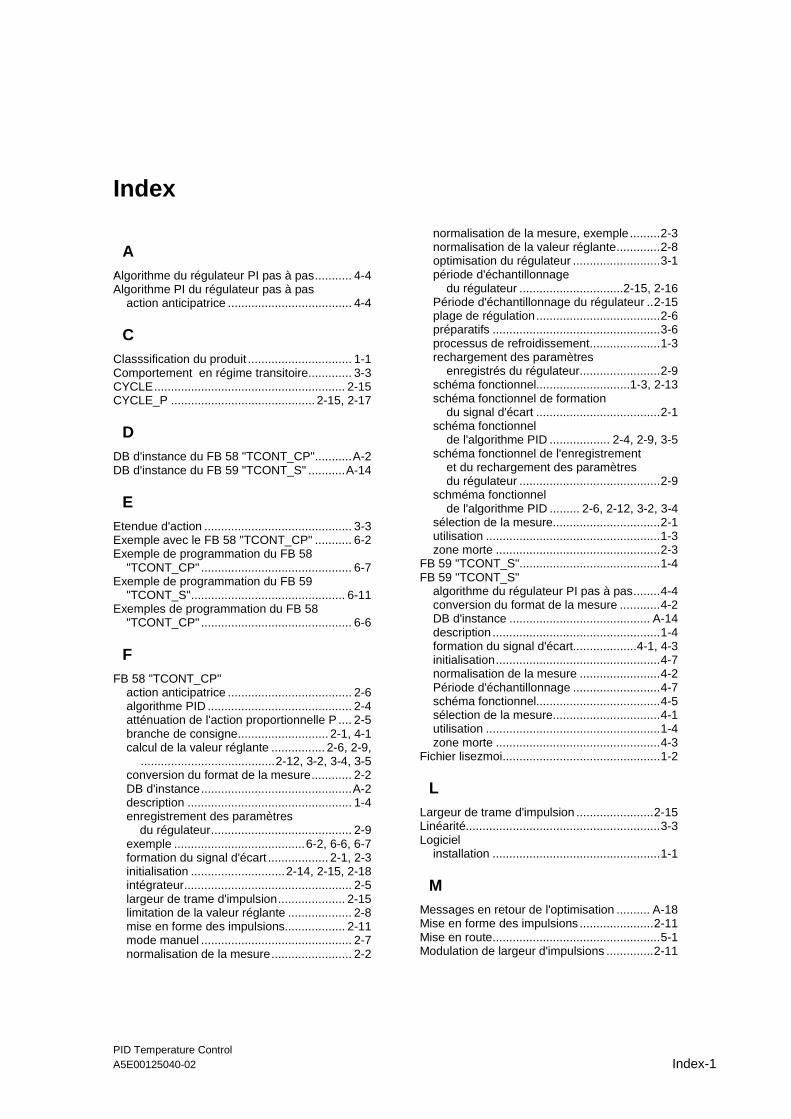
PID Temperature Control A5E00125040-02 Index-1
Index
. A
Algorithme du régulateur PI pas à pas........... 4-4 Algorithme PI du régulateur pas à pas
action anticipatrice ..................................... 4-4
C Classsification du produit ............................... 1-1 Comportement en régime transitoire............. 3-3 CYCLE......................................................... 2-15 CYCLE_P ........................................... 2-15, 2-17
D DB d'instance du FB 58 "TCONT_CP"...........A-2 DB d'instance du FB 59 "TCONT_S" ...........A-14
E Etendue d'action ............................................ 3-3 Exemple avec le FB 58 "TCONT_CP" ........... 6-2 Exemple de programmation du FB 58
"TCONT_CP" ............................................. 6-7 Exemple de programmation du FB 59
"TCONT_S".............................................. 6-11 Exemples de programmation du FB 58
"TCONT_CP" ............................................. 6-6
F FB 58 "TCONT_CP"
action anticipatrice ..................................... 2-6 algorithme PID ........................................... 2-4 atténuation de l'action proportionnelle P .... 2-5 branche de consigne........................... 2-1, 4-1 calcul de la valeur réglante ................ 2-6, 2-9,
........................................2-12, 3-2, 3-4, 3-5 conversion du format de la mesure............ 2-2 DB d'instance.............................................A-2 description ................................................. 1-4 enregistrement des paramètres
du régulateur.......................................... 2-9 exemple .......................................6-2, 6-6, 6-7 formation du signal d'écart .................. 2-1, 2-3 initialisation ............................2-14, 2-15, 2-18 intégrateur.................................................. 2-5 largeur de trame d'impulsion.................... 2-15 limitation de la valeur réglante ................... 2-8 mise en forme des impulsions.................. 2-11 mode manuel ............................................. 2-7 normalisation de la mesure........................ 2-2
normalisation de la mesure, exemple.........2-3 normalisation de la valeur réglante.............2-8 optimisation du régulateur ..........................3-1 période d'échantillonnage
du régulateur ...............................2-15, 2-16 Période d'échantillonnage du régulateur ..2-15 plage de régulation.....................................2-6 préparatifs ..................................................3-6 processus de refroidissement.....................1-3 rechargement des paramètres
enregistrés du régulateur........................2-9 schéma fonctionnel............................1-3, 2-13 schéma fonctionnel de formation
du signal d'écart .....................................2-1 schéma fonctionnel
de l'algorithme PID .................. 2-4, 2-9, 3-5 schéma fonctionnel de l'enregistrement
et du rechargement des paramètres du régulateur ..........................................2-9
schméma fonctionnel de l'algorithme PID ......... 2-6, 2-12, 3-2, 3-4
sélection de la mesure................................2-1 utilisation ....................................................1-3 zone morte .................................................2-3
FB 59 "TCONT_S"..........................................1-4 FB 59 "TCONT_S"
algorithme du régulateur PI pas à pas........4-4 conversion du format de la mesure ............4-2 DB d'instance .......................................... A-14 description ..................................................1-4 formation du signal d'écart...................4-1, 4-3 initialisation.................................................4-7 normalisation de la mesure ........................4-2 Période d'échantillonnage ..........................4-7 schéma fonctionnel.....................................4-5 sélection de la mesure................................4-1 utilisation ....................................................1-4 zone morte .................................................4-3
Fichier lisezmoi...............................................1-2
L Largeur de trame d'impulsion .......................2-15 Linéarité..........................................................3-3 Logiciel
installation ..................................................1-1
M Messages en retour de l'optimisation .......... A-18 Mise en forme des impulsions ......................2-11 Mise en route..................................................5-1 Modulation de largeur d'impulsions ..............2-11
Index
PID Temperature Control Index-2 A5E00125040-02
M Messages en retour de l'optimisation...........A-18 Mise en forme des impulsions ..................... 2-11 Mise en route ................................................. 5-1 Modulation de largeur d'impulsions.............. 2-11
O Optimisation du régulateur............................. 3-1 Optimisation du régulateur
annulation ................................................ 3-11 correction ................................................. 3-15 couplage thermique faible........................ 3-19 couplage thermique important.................. 3-18 démarrage ................................................. 3-8 messages en retour .................................A-18 problèmes ................................................ 3-12 procédure................................................... 3-4 résultat ..................................................... 3-11
Optimisation manuelle ultérieure en mode régulation .................................. 3-15
P Période d'échantillonnage
du régulateur ........................... 2-15, 2-16, 4-7 Perturbations ..................................................3-3 Processus de refroidissement ........................1-3 PULSEGEN..................................................2-11
R Régulateurs ....................................................6-1
S STATUS_H.................................................. A-18 Système de refroidissement ...........................1-3
T Type de système
vérification ................................................3-10 Types de systèmes ........................................3-2


















