Signaux et systemes` - umoncton.ca · meilleure fonction mathematique´ a utiliser pour repr`...
33
Chapitre 1 Signaux et syst ` emes Ce premier chapitre sert de r´ evision des principes de base des signaux, comme par exemple les d´ efinitions de p´ eriode, phase, ainsi qu’une introduction aux syst` emes. Les concepts de signaux et syst` emes discrets y seront aussi abord´ es. On verra des signaux communs analogiques et discrets et l’application de ces signaux ` a des syst` emes simples par l’entremise de la convolution. 1.1 R´ evision des concepts de signaux On commence en premier en faisant l’analyse d’un signal sinuso¨ ıdal. Le sinus est la meilleure fonction math´ ematique ` a utiliser pour repr´ esenter des signaux, parce que tout signal p´ eriodique peut ˆ etre d´ ecompos´ e en une somme de sinuso¨ ıde, comme on verra au chapitre 3. Ce signal peut repr´ esenter n’importe quoi : la tension dans une r´ esistance, l’acc´ el´ eration d’un corps en mouvement, la voix, etc. Dans le cadre de ce cours, la source du signal n’est pas importante : on regarde les signaux en g´ en´ eral, sans s’attarder ` a leur origine. Soit un sinuso¨ ıde quelconque x(t ), qui varie selon le temps, et donn´ e par l’´ equation suivante : x(t )= A cos(ωt - φ) (1.1) o` u A est l’amplitude maximale du sinuso¨ ıde, ω est la fr´ equence radiale (rad/s), et φ est le d´ ephasage. La figure 1.1 montre ce sinuso¨ ıde, trac´ e en fonction du temps, avec un d´ ephasage nul (φ = 0). Une caract´ eristique d’une onde sinuso¨ ıdale est qu’elle se r´ ep` ete ` a tous les 2π radians 1
-
Upload
nguyenhanh -
Category
Documents
-
view
218 -
download
0
Transcript of Signaux et systemes` - umoncton.ca · meilleure fonction mathematique´ a utiliser pour repr`...

Chapitre 1Signaux et systemes
Ce premier chapitre sert de revision des principes de base des signaux, comme parexemple les definitions de periode, phase, ainsi qu’une introduction aux systemes. Lesconcepts de signaux et systemes discrets y seront aussi abordes.
On verra des signaux communs analogiques et discrets et l’application de ces signauxa des systemes simples par l’entremise de la convolution.
1.1 Revision des concepts de signaux
On commence en premier en faisant l’analyse d’un signal sinusoıdal. Le sinus est lameilleure fonction mathematique a utiliser pour representer des signaux, parce que toutsignal periodique peut etre decompose en une somme de sinusoıde, comme on verra auchapitre 3. Ce signal peut representer n’importe quoi : la tension dans une resistance,l’acceleration d’un corps en mouvement, la voix, etc. Dans le cadre de ce cours, la sourcedu signal n’est pas importante : on regarde les signaux en general, sans s’attarder a leurorigine.
Soit un sinusoıde quelconque x(t), qui varie selon le temps, et donne par l’equationsuivante :
x(t) = Acos(ωt −φ) (1.1)
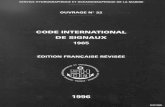
ou A est l’amplitude maximale du sinusoıde, ω est la frequence radiale (rad/s), et φ estle dephasage. La figure 1.1 montre ce sinusoıde, trace en fonction du temps, avec undephasage nul (φ = 0).
Une caracteristique d’une onde sinusoıdale est qu’elle se repete a tous les 2π radians
1
CHAPITRE 1. SIGNAUX ET SYSTEMES
−A
0
A
Temps (s)
Am
pli
tud
e
Figure 1.1 – Sinusoıde
(ou 360°). D’une autre facon, on peut dire que cos(ωt) = 1 pour ωt = n2π ou n = 1,2, . . ..La periode T est le temps necessaire pour faire un cycle, ou ωT = 2π. On obtient donc larelation suivante bien connue :
T =2πω
=1f
(1.2)
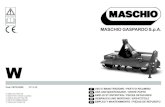
Maintenant, on peut ajouter un dephasage φ a l’onde et obtenir :
x(t) = Acos(ωt +φ) (1.3)
et on retrace cette deuxieme onde (avec un dephasage φ = −45) a la figure 1.2. La courbeen rouge dans la figure 1.2 est celle ayant un dephasage.
−A
0
A
Temps (s)
Am
pli
tud
e
Figure 1.2 – Graphe de x(t) en fonction du temps ayant un dephasage de -45°
Le dephasage est negatif dans le cas de la courbe rouge dans la figure 1.2 (φ = −45),et donc la courbe est deplacee vers la droite.
Gabriel Cormier 2 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
1.1.1 Forme complexe
La forme complexe peut etre utilise pour representer les signaux sinusoıdaux. Laforme generale pour representer un signal x(t) = Acos(2πf0t +φ) est :
x(t) = Aej(2πf0t+φ) (1.4)
ou on utilise la relation d’Euler pour changer d’une forme a l’autre.
La forme exponentielle est souvent plus utile lors de calculs mathematique impliquantles signaux.
Rappel : la relation d’Euler est :
e±jα = 1∠±α = cos(α) + j sin(α) (1.5)
avec les equivalences suivantes :
cos(α) = 0.5(ejα + e−jα) sin(α) = −j0.5(ejα − e−jα) (1.6)
On peut aussi utiliser un cercle pour representer les nombres complexes, comme a lafigure 1.3. Le cercle est de rayon 1, et l’axe horizontal represente la partie reelle, et l’axevertical represente la partie imaginaire.
<0
=j
−j
1−1
θ
Figure 1.3 – Representation des nombres complexes
Comme exemple, le nombre e−jπ/2 = −j.
1.1.2 Combinaison de signaux periodiques
La periode commune T d’une combinaison de sinusoıdes est la plus courte dureependant laquelle chaque sinusoıde complete un nombre entier de cycles. C’est le plus
Gabriel Cormier 3 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
petit commun multiple (PPCM) des periodes individuelles. La frequence fondamentalef0 est l’inverse de la periode commune T et est egale au plus grand diviseur commundes frequences. On peut seulement trouver une periode commune si le rapport entre lesperiodes est un nombre rationnel.
Exemple 1
Trouver la periode commune du signal x(t) = 2sin(23t) + 4cos(1
2t) + 4cos(13t −
15π).
La frequence radiale du premier sinusoıde est ω1 = 23 . La periode est donc :
T1 =2πω1
= 3π
La frequence radiale du deuxieme sinusoıde est ω2 = 12 . La periode est donc :
T2 =2πω2
= 4π
La frequence radiale du troisieme sinusoıde est ω3 = 13 . La periode est donc :
T3 =2πω3
= 6π
Le PPCM de 3π, 4π et 6π est 12π.
1.2 Quelques signaux analogiques communs
On verra ici quelques signaux analogiques communs, qui apparaissent souvent engenie electrique, et qui servent a approximer des signaux plus complexes.
1.2.1 Fonction echelon
La fonction echelon est une fonction tres utilisee. C’est la fonction ou il y a une dis-continuite a l’origine. Par exemple, lorsqu’on allume une source de tension DC, il y a unchangement abrupte de la tension ; c’est une fonction echelon.
La figure 1.4 illustre la fonction echelon. Elle est 0 pour t < 0, et 1 pour t > 0. Onrepresente la fonction echelon par le symbole u(t).
Gabriel Cormier 4 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
0
0
0.2
0.4
0.6
0.8
1
Temps (s)
Am
pli
tud
e
Figure 1.4 – Fonction echelon
On peut multiplier la fonction echelon par une constante K quelconque pour obtenirun echelon d’amplitude voulue. La definition mathematique de la fonction echelon est :
Ku(t) =
0 si t < 0K si t > 0
(1.7)
Si K = 1, on appelle ceci la fonction echelon unitaire.
La fonction echelon n’est pas definie a t = 0. Dans des situations ou il est necessaire dedefinir la transition entre 0− et 0+, on suppose qu’elle est lineaire, et que la valeur a t = 0est Ku(0) = 0.5K .
Une discontinuite peut avoir lieu a un endroit autre que t = 0. Dans ce cas, pour unechelon qui se produit au temps t = a, on utilise la notation Ku(t − a). Donc,
Ku(t − a) =
0 si t < aK si t > a
(1.8)
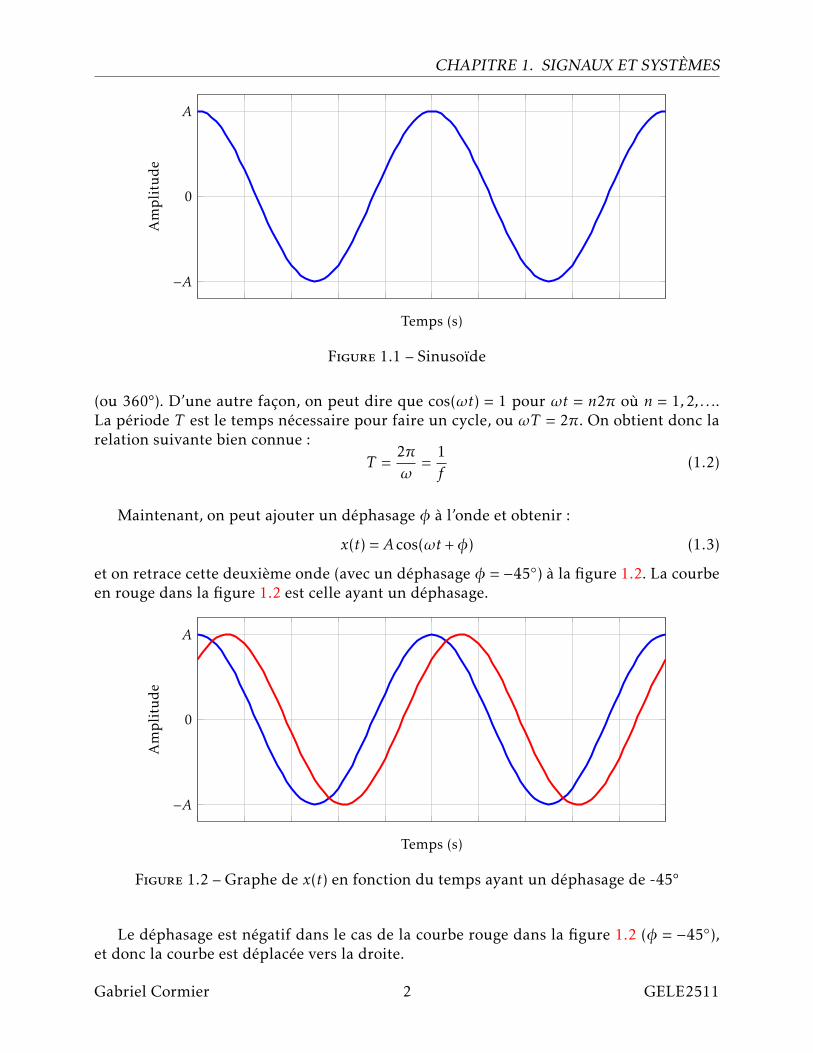
Une application de la fonction echelon est qu’elle permet d’ecrire mathematiquementl’expression d’une fonction qui est differente de 0 pour une periode fixe. Une applicationtres commune en genie electrique est un pulse de duree fixe, comme a la figure 1.5.
Dans ce cas, on peut ecrire la fonction comme f (t) = u(t−1)−u(t−3). On peut considererceci comme un echelon qu’on “allume” a t = 1 puis un deuxieme echelon negatif a t = 3qui permet “d’eteindre” le premier echelon.
Gabriel Cormier 5 GELE2511
CHAPITRE 1. SIGNAUX ET SYSTEMES
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.2
0.4
0.6
0.8
1
Temps (s)
f(t
)
Figure 1.5 – Pulse de duree fixe
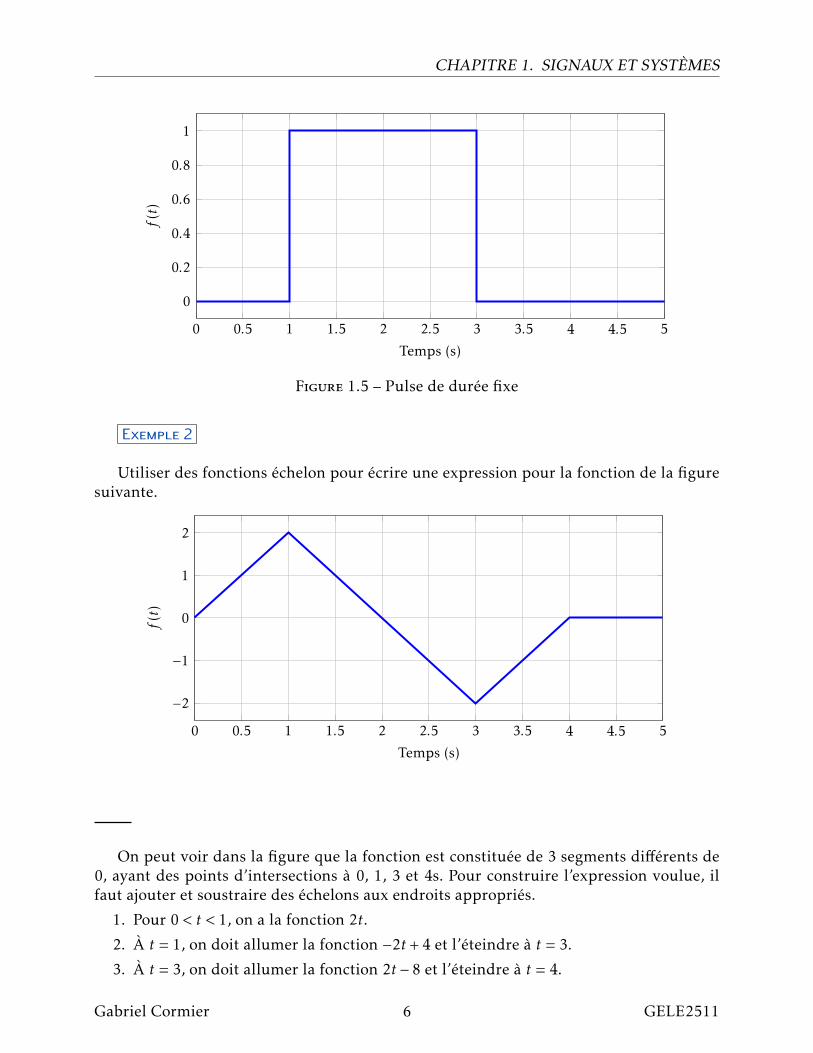
Exemple 2
Utiliser des fonctions echelon pour ecrire une expression pour la fonction de la figuresuivante.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
−2
−1
0
1
2
Temps (s)
f(t
)
On peut voir dans la figure que la fonction est constituee de 3 segments differents de0, ayant des points d’intersections a 0, 1, 3 et 4s. Pour construire l’expression voulue, ilfaut ajouter et soustraire des echelons aux endroits appropries.
1. Pour 0 < t < 1, on a la fonction 2t.
2. A t = 1, on doit allumer la fonction −2t + 4 et l’eteindre a t = 3.
3. A t = 3, on doit allumer la fonction 2t − 8 et l’eteindre a t = 4.
Gabriel Cormier 6 GELE2511
CHAPITRE 1. SIGNAUX ET SYSTEMES
On obtient alors comme fonction :
f (t) = 2t[u(t)−u(t − 1)]+ (−2t + 4)[u(t − 1)−u(t − 3)]+ (2t − 8)[u(t − 3)−u(t − 4)]
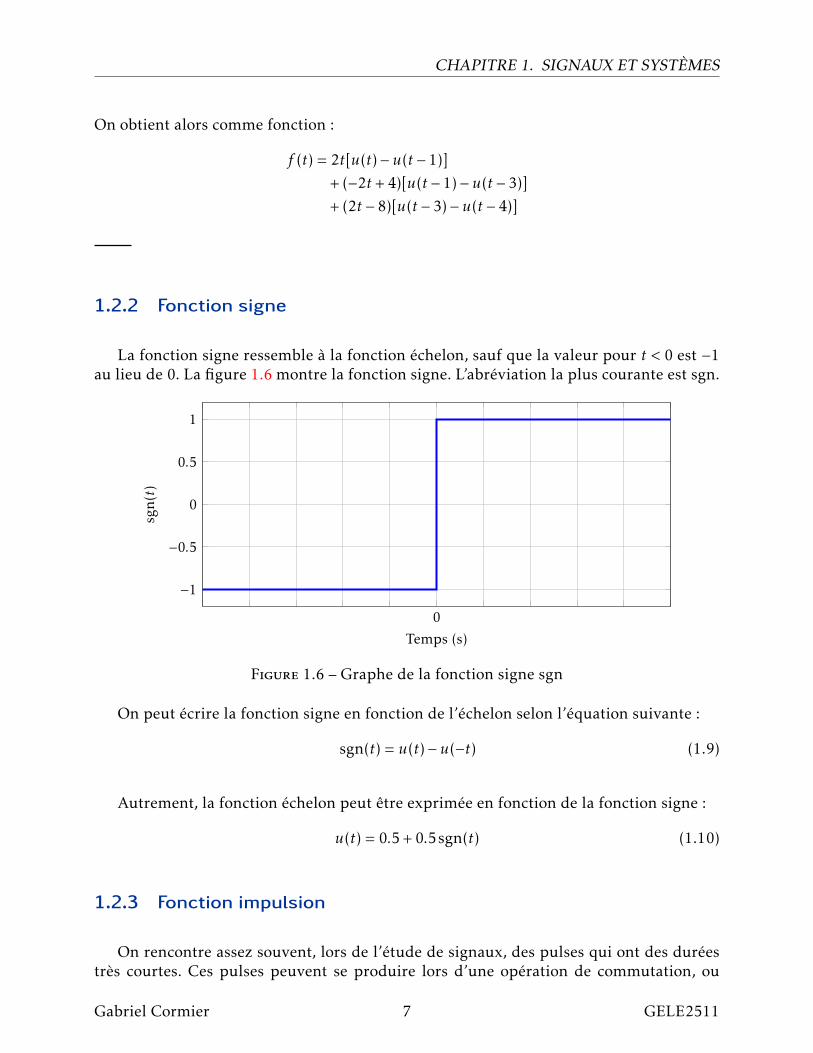
1.2.2 Fonction signe
La fonction signe ressemble a la fonction echelon, sauf que la valeur pour t < 0 est −1au lieu de 0. La figure 1.6 montre la fonction signe. L’abreviation la plus courante est sgn.
0
−1
−0.5
0
0.5
1
Temps (s)
sgn(t)
Figure 1.6 – Graphe de la fonction signe sgn
On peut ecrire la fonction signe en fonction de l’echelon selon l’equation suivante :
sgn(t) = u(t)−u(−t) (1.9)
Autrement, la fonction echelon peut etre exprimee en fonction de la fonction signe :
u(t) = 0.5 + 0.5sgn(t) (1.10)
1.2.3 Fonction impulsion
On rencontre assez souvent, lors de l’etude de signaux, des pulses qui ont des dureestres courtes. Ces pulses peuvent se produire lors d’une operation de commutation, ou
Gabriel Cormier 7 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
lorsque des circuits sont excites par des sources impulsionnelles. De plus, l’impulsion estun outil mathematique tres utile, comme on verra plus tard. Il nous faut donc une faconpour representer ce genre de signal.
Il existe plusieurs facons pour representer une impulsion ; on utilisera ici l’approched’un signal triangulaire, comme a la figure 1.7. Remarquer que le triangle est symetriquepar rapport a l’origine, et que la valeur maximale est 1/ε. Pour obtenir une vraie impul-sion, il faudra que ε→ 0.
t0
1ε
−ε ε
Figure 1.7 – Impulsion representee par un triangle
Qu’arrive-t’il alors a cette fonction triangulaire lorsque ε→ 0 ? On retrouve trois ca-racteristique importantes :
1. L’amplitude approche l’infini.
2. La duree du pulse se rapproche de 0.
3. La surface du triangle est constante et egale a 1.
On utilise la notation δ(t) pour demontrer une impulsion. Mathematiquement, la fonctionimpulsion (qu’on appelle aussi fonction de Dirac) est defini par :
∫∞−∞δ(t)dt = 1δ(t) = 0 si t , 0
(1.11)
Si l’impulsion se produit a un temps t = a, on ecrit δ(t − a).
Une propriete interessante de la fonction impulsion est qu’elle permet d’ecrire :∫ ∞−∞f (t)δ(t − a)dt = f (a) (1.12)
si f (t) est continue au point t = a. En d’autres mots, l’impulsion elimine la fonction pourtoutes les autres valeurs que celle ou l’impulsion est presente.
Exemple 3
Evaluer la fonction∫ 12
0(5t + 3)δ(t − 2) dt.
Gabriel Cormier 8 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
On applique la definition :∫ 12
0(5t + 3)δ(t − 2) dt = 5t + 3
∣∣∣∣t=2
= 5(2) + 3 = 13
On represente un pulse de Dirac par une fleche verticale qui indique son amplitude,comme a la figure 1.8.
t0 1 2 3
δ(t − 2)2
Figure 1.8 – Impulsion de Dirac
1.2.4 Fonction rectangulaire
La fonction rectangulaire est un pulse carre centre a l’origine, comme a la figure 1.9.
−T /2 0 T /2
0
0.2
0.4
0.6
0.8
1
Temps (s)
rect
(t)
Figure 1.9 – Fonction rectangulaire
Mathematiquement, on exprime la fonction rect comme suit :
rect(t/T ) =
1 |t| < T /20 |t| > T /2
= u(t + T /2)−u(t − T /2) (1.13)
Gabriel Cormier 9 GELE2511
CHAPITRE 1. SIGNAUX ET SYSTEMES
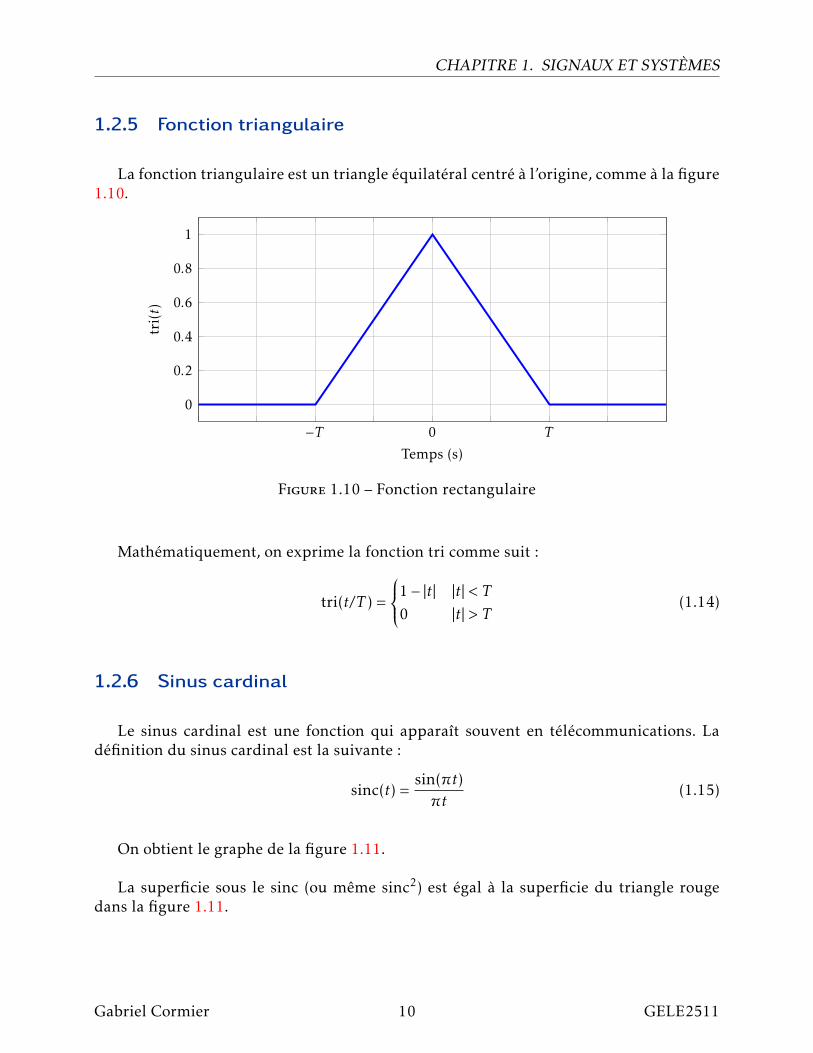
1.2.5 Fonction triangulaire
La fonction triangulaire est un triangle equilateral centre a l’origine, comme a la figure1.10.
−T 0 T
0
0.2
0.4
0.6
0.8
1
Temps (s)
tri(t)
Figure 1.10 – Fonction rectangulaire
Mathematiquement, on exprime la fonction tri comme suit :
tri(t/T ) =
1− |t| |t| < T0 |t| > T
(1.14)
1.2.6 Sinus cardinal
Le sinus cardinal est une fonction qui apparaıt souvent en telecommunications. Ladefinition du sinus cardinal est la suivante :
sinc(t) =sin(πt)πt
(1.15)
On obtient le graphe de la figure 1.11.
La superficie sous le sinc (ou meme sinc2) est egal a la superficie du triangle rougedans la figure 1.11.
Gabriel Cormier 10 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
−T 0 T
0
0.5
1
Temps (s)
sinc
(t)
Figure 1.11 – Sinus cardinal
1.3 Caracteristiques des signaux
On verra ici quelques caracteristiques les plus communes des signaux, comme la va-leur moyenne, l’energie et la puissance.
1.3.1 Valeur moyenne
La valeur moyenne d’un signal x(t) periodique est obtenue selon :
x =1T
∫ T
0x(t)dt (1.16)
1.3.2 Valeur efficace
La valeur efficace (ou RMS en anglais, Root Mean Square) est une mesure tres utile dansle calcul de puissance. C’est une mesure de l’amplitude d’un signal variable. La definitionest :
xrms =
√1T
∫ T
0x(t)2dt (1.17)
C’est la racine carree de la valeur moyenne du signal au carre.
Gabriel Cormier 11 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
Exemple 4
Calculer la valeur efficace du signal x(t) = Acos(ωt).
Il faut tout simplement appliquer la definition :
x2rms =
1T
∫ T
0x(t)2dt =
1T
∫ T
0A2 cos2(ωt)dt
=A2
T
∫ T
0
12
(1 + cos(2ωt))dt =A2
2
Donc, la valeur efficace est :
xrms =A√
2
1.3.3 Energie et puissance
Pour calculer la puissance et l’energie d’un signal, on commence par comparer avec latension dans une resistance. La puissance instantanee dans une resistance R est :
p(t) = v(t)i(t) =v2(t)R
(1.18)
et l’energie totale delivree a la resistance est :
E =∫ ∞−∞p(t)dt =
1R
∫ ∞−∞v2(t)dt (1.19)
Afin de comparer avec un signal quelconque x(t), on normalise en utilisant une resistancede 1Ω. L’energie d’un signal est donc :
E =∫ ∞−∞|x(t)|2dt (1.20)
La puissance normalisee d’un signal est la moyenne dans le temps de l’energie. Six(t) est periodique avec une periode T , la puissance du signal est l’energie moyenne parperiode :
P =1T
∫T|x(t)|2 (1.21)
Gabriel Cormier 12 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
ou on fait l’integrale sur n’importe quelle periode.
Pour un signal non periodique, on peut calculer la puissance en faisant la moyenne del’energie sur une periode de plus en plus longue, qui tend vers l’infini :
P = limT0→∞
1T0
∫T0
|x(t)|2dt (1.22)
Un signal dont l’energie est finie aura une puissance nulle, et vice-versa.
1.4 Classification des signaux
Il existe plusieurs methodes pour classifier les signaux.
1.4.1 Symetrie
La premiere methode montree ici depend de la symetrie d’un signal periodique. Il y aquatre types de symetrie :
1. Symetrie paire2. Symetrie impaire3. Symetrie demi-onde4. Symetrie quart-d’onde
Symetrie paire
Une fonction est dite paire si :f (t) = f (−t) (1.23)
c’est-a-dire qu’on peut faire une copie miroir autour de l’axe y. La figure 1.12 montre unexemple de fonction paire.
Symetrie impaire
Une fonction est dite impaire si :
f (t) = −f (−t) (1.24)
c’est-a-dire qu’on peut faire une copie miroir autour de l’axe y puis une copie miroir au-tour de l’axe x. La figure 1.13 montre un exemple de fonction impaire.
Gabriel Cormier 13 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
t0
Figure 1.12 – Exemple de fonction paire
t0
Figure 1.13 – Exemple de fonction impaire
Symetrie demi-onde
Une fonction periodique possede de la symetrie demi-onde si :
f (t) = −f (t − T /2) (1.25)
C’est-a-dire que si on deplace la fonction d’une demi-periode, puis on l’inverse (rotationautour de l’axe x) et alors que cette nouvelle fonction est identique a l’originale, il y asymetrie demi-onde. La fonction de la figure 1.13 est un exemple de figure ayant ce genrede symetrie.
Symetrie quart-d’onde
Le terme symetrie quart-d’onde decrit une fonction periodique qui a la symetrie demi-onde mais aussi de la symetrie autour du point milieu entre les demi-cycles positifs etnegatifs. La figure 1.14 a) montre un exemple de fonction periodique qui a la symetriequart-d’onde, tandis que la figure 1.14 b) n’a pas la symetrie quart-d’onde.
Une fonction periodique qui a la symetrie quart-d’onde peut toujours etre rendue soitpaire ou impaire en faisant un choix approprie de t = 0. Par exemple, la fonction de lafigure 1.14 a) est impaire et peut etre rendue paire en deplacant la fonction de T /4 vers ladroite ou la gauche.
Gabriel Cormier 14 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
t0
Symetrie quart d’onde
Symetrie
(a)
t0
Pas de symetrie quart d’onde
Pas de symetrie
(b)
Figure 1.14 – Symetrie a) quart-d’onde et b) n’a pas quart-d’onde.
Decomposition symetrique
Un signal qui est pair ne peut pas etre impair, et vice-versa : les deux sont mutuelle-ment exclusif. On peut aussi decomposer un signal x(t) en une somme d’un signal pairxe(t) et d’un signal impair xo(t) :
x(t) = xe(t) + xo(t) (1.26)
Pour decomposer un signal en ses composantes paires et impaires, on applique lesrelations suivantes :
xe(t) = 0.5(x(t) + x(−t)) (1.27)xo(t) = 0.5(x(t)− x(−t)) (1.28)
Exemple 5
Decomposer le signal suivant en ses composantes paires et impaires.
t0
x(t)
1 2
4
Gabriel Cormier 15 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
Pour decomposer le signal, il faut premierement calculer x(−t), ce qui est montre a lafigure suivante.
t0
x(t)
1 2
4
t0
x(−t)
−2 −1
4
Ensuite, pour calculer les composantes, il faut soit additionner ou soustraire les deuxgraphes precedents (puis reduire l’amplitude de moitie). On obtient donc les deux com-posantes suivantes.
t0
xe(t)
1 2−2 −1
2
t0
xo(t)
1 2−2 −1
2
−2
1.4.2 Autres classifications
D’autre classifications peuvent etre utilisee pour classifier les signaux.
1. Un signal est dit causal s’il est non nul pour t > 0 seulement. Un signal est anti-causal s’il est non nul pour t < 0 seulement.
2. Un signal est dit deterministe si on peut le decrire a l’aide d’une equation mathematique.Un signal est aleatoire ou stochastique s’il existe une incertitude sur sa valeur enfonction du temps.
1.5 Operations sur les signaux
On verra ici quelques operations sur les signaux, comme le decalage temporel oul’echelonnage. Ces operations sont utiles lors de l’application de la serie de Fourier, oules differentes transformees (Laplace, Fourier, z).
Gabriel Cormier 16 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
1.5.1 Inversion temporelle
L’inversion temporelle est simplement l’operation de faire une image miroir d’un si-gnal autour de l’origine. Mathematiquement, le nouveau signal x1(t) est obtenu a partirdu signal original x(t) selon :
x1(t) = x(τ)∣∣∣∣τ=−t
= x(−t) (1.29)
On verra plus tard que l’inversion temporelle sert lors du calcul de la sortie d’unsysteme a certaines entrees (convolution). Un exemple d’inversion temporelle est donne ala figure 1.15.
t
x(t)
0−2 −1
1 2
2
t
x1(t)
0−2 −1 1 2
2
Figure 1.15 – Exemple d’inversion temporelle
1.5.2 Echelonnage temporel
Une autre operation importante est l’echelonnage temporel : ceci permet d’etirer oucomprimer un signal dans le temps. Mathematiquement, on ecrit :
x1(t) = x(τ)∣∣∣∣τ=at
= x(at) (1.30)
ou a est une constante reelle. Un exemple d’echelonnage temporel est donne a la figure1.16.
1.5.3 Decalage temporel
Le decalage temporel est l’action d’avancer ou retarder un signal dans le temps. Mathe-matiquement, un signal decale x(t − t0) est decrit selon
x1(t) = x(τ)∣∣∣∣τ=t−t0
= x(t − t0) (1.31)
ou t0 est une constante reelle. Un exemple de decalage temporel est donne a la figure 1.17.
Gabriel Cormier 17 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
−8 −6 −4 −2 0 2 4 6 8 10 12−1
0
1
Temps (s)
Signal original
−8 −6 −4 −2 0 2 4 6 8 10 12−1
0
1
Temps (s)
Signal compresse x(2t)
−8 −6 −4 −2 0 2 4 6 8 10 12−1
0
1
Temps (s)
Signal etire x(0.25t)
Figure 1.16 – Exemple d’echelonnage temporel
1.5.4 Methode generale
On peut appliquer une methode generale pour effectuer les transformations dans letemps d’un signal. Soit un signal y(t) = x(at − b).
La premiere etape est de mettre egal a τ l’argument de la fonction : at − b = τ , puissolutionner pour t :
t =τ + ba
(1.32)
L’axe t de l’ancienne fonction (x(t)) devient un axe en fonction de τ . Le nouvel axe enfonction du temps est applique a la fonction y(t), selon l’equation obtenue auparavant.
Gabriel Cormier 18 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
−4 −3 −2 −1 0 1 2 3 4 5 6−1
0
1
Temps (s)
Signal original
−4 −3 −2 −1 0 1 2 3 4 5 6−1
0
1
Temps (s)
x(t − 2)
−4 −3 −2 −1 0 1 2 3 4 5 6−1
0
1
Temps (s)
x(t + 1)
Figure 1.17 – Exemple de decalage temporel
Exemple 6
Soit le signal x(t) suivant. Tracer le graphe de y(t) = x(t/3− 2).
t 0
2
2 1
x(t)
-1 -2
Gabriel Cormier 19 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
On effectue la transformation :
t/3− 2 = τ⇒ t = 3τ + 6
Avec cette equation, le nouvel axe est :
τ 0
2
2 1
x(t)
-1 -2
t
12 9 6 3 0
Et a l’aide du nouvel axe, on peut tracer le graphe :
t 6
2
12 9
y(t)
3 0
1.5.5 Transformations en amplitude
On peut aussi appliquer des transformations sur l’amplitude d’un signal. De facongenerale, un signal x(t) peut etre modifie en amplitude a un signal x1(t) selon :
x1(t) = Ax(t) +B (1.33)
ou A et B sont des constantes reelles.
1.6 Systemes a temps continu
Un systeme est un bloc mathematique qui permet de transformer un signal quel-conque. Le systeme de base a une entree et une sortie. Le systeme peut representer un
Gabriel Cormier 20 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
phenomene physique, comme un thermometre, ou l’entree est un signal electrique et lasortie est la chaleur. Un systeme peut aussi representer un reseau de transmission dedonnees, ou un filtre numerique dans un ordinateur. Une representation generale estdonnee a la figure 1.18.
Systemeh(t)
x(t) y(t)
Figure 1.18 – Diagramme general d’un systeme
Pour les systemes a temps continu, les equations qui relient la sortie a l’entree sonttypiquement des equations differentielles. Les systemes etudies ici sont tous des systemeslineaires. Ils possedent quelques caracteristiques tres importantes.
1.6.1 Linearite
Un systeme est dit lineaire s’il possede deux caracteristiques : homogeneite, et additi-vite. Une troisieme propriete, l’invariance dans le temps, n’est pas strictement necessairepour la linearite, mais est une composante importante dans la plupart des techniquesd’analyse de signaux.
L’homogeneite, ou proportionnalite, veut dire qu’une variation dans l’amplitude ausignal d’entree produit une meme variation d’amplitude a la sortie. C’est-a-dire, si onapplique un signal x(t) a un systeme et qu’on obtient une sortie y(t), alors une entree kx(t)produira une sortie ky(t), comme a la figure 1.19.
Systemeh(t)
Systemeh(t)
x(t) y(t)
kx(t) ky(t)
Si
Alors
Figure 1.19 – Exemple de systeme homogene
Une resistance est un bon exemple de systeme homogene et non homogene. Si on ap-plique une tension v(t) aux bornes d’une resistance, et que la sortie est i(t), alors si onapplique une tension 2v(t), on aura un courant 2 fois plus grand (2i(t)). Cependant, si la
Gabriel Cormier 21 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
sortie est la puissance consommee dans la resistance, ceci n’est pas un systeme lineaire :si on double la tension, la puissance consommee est 4 fois plus grande (p = v2/R).
L’additivite veut dire que si on applique 2 (ou plus) signaux a l’entree, la sortie estla somme individuelle de leur reponses. Ex : soit un systeme ou on applique une entreex1(t) qui produit une sortie y1(t), et une entree x2(t) produit une sortie y2(t). Si le systemepossede l’additivite, si on applique les deux entrees en meme temps, x1(t) +x2(t), la sortiesera y1(t) + y2(t). Un exemple est donne a la figure 1.20.
Systemeh(t)
Systemeh(t)
Systemeh(t)
x1(t) y1(t)
x2(t) y2(t)
Si
Alors
x1(t) + x2(t) y1(t) + y2(t)
Figure 1.20 – Exemple d’additivite des systemes lineaires
Le point important pour l’additivite est que les deux signaux n’interagissent pas en-sembles. On peut penser a une conversation telephonique : si on parle a quelqu’un autelephone, on entend quand meme la voix de quelqu’un qui parle en arriere-plan et onpeut distinguer les mots. Il n’y a pas de melange bizarre des voix qui fait qu’on ne com-prend ni l’une ni l’autre des voix.
La troisieme propriete, l’invariance dans le temps, veut dire que la sortie d’un systemene change pas si on applique la meme entree a un certain temps plus tard. Mathematiquement,si on applique un signal x(t) a un systeme et qu’on obtient une sortie y(t), alors la memeentree appliquee a un autre temps, x(t+t0), produira la meme sortie avec le meme decalagedans le temps, y(t + t0).
Linearite statique et fidelite sinusoıdale
Deux autres proprietes peuvent aider a comprendre les systemes lineaires : la linearitestatique et la fidelite sinusoıdale. Ce ne sont pas des proprietes qui aident mathematiquement
Gabriel Cormier 22 GELE2511
CHAPITRE 1. SIGNAUX ET SYSTEMES
a definir les systemes lineaires, mais elles peuvent aider un ingenieur a comprendre lecomportement des systemes lineaires.
La linearite statique definit comment un systeme reagit a des entrees qui ne varientpas. Pour un systeme lineaire, si on applique une entree DC (qui ne change pas), la sortiedoit etre l’entree multipliee par une constante.
La fidelite sinusoıdale est une propriete importante : si on applique une entree si-nusoıdale a un systeme lineaire, la sortie doit etre un sinusoıde de meme frequence. Lessinusoıdes sont les seules ondes a avoir cette propriete. Bien que la sortie est un sinusoıdede meme frequence, l’amplitude et la phase peuvent etre differents.
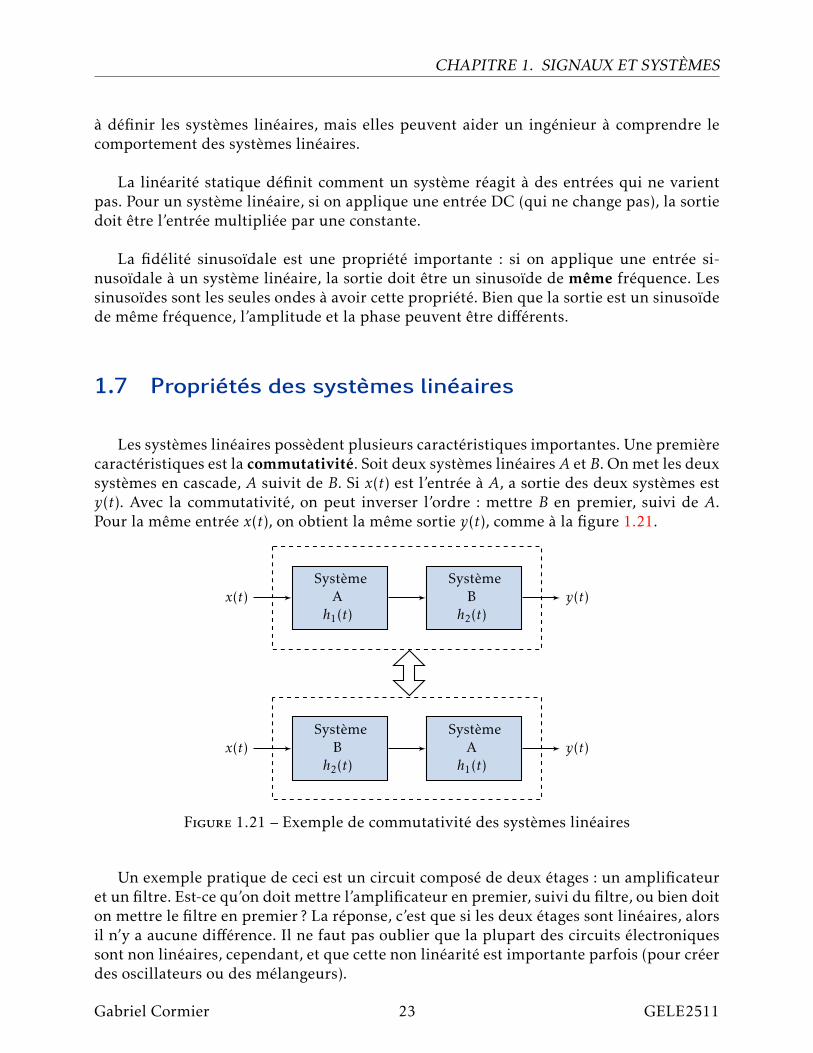
1.7 Proprietes des systemes lineaires
Les systemes lineaires possedent plusieurs caracteristiques importantes. Une premierecaracteristiques est la commutativite. Soit deux systemes lineairesA et B. On met les deuxsystemes en cascade, A suivit de B. Si x(t) est l’entree a A, a sortie des deux systemes esty(t). Avec la commutativite, on peut inverser l’ordre : mettre B en premier, suivi de A.Pour la meme entree x(t), on obtient la meme sortie y(t), comme a la figure 1.21.
SystemeAh1(t)
SystemeB
h2(t)
SystemeB
h2(t)
SystemeAh1(t)
x(t) y(t)
x(t) y(t)
Figure 1.21 – Exemple de commutativite des systemes lineaires
Un exemple pratique de ceci est un circuit compose de deux etages : un amplificateuret un filtre. Est-ce qu’on doit mettre l’amplificateur en premier, suivi du filtre, ou bien doiton mettre le filtre en premier ? La reponse, c’est que si les deux etages sont lineaires, alorsil n’y a aucune difference. Il ne faut pas oublier que la plupart des circuits electroniquessont non lineaires, cependant, et que cette non linearite est importante parfois (pour creerdes oscillateurs ou des melangeurs).
Gabriel Cormier 23 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
Superposition
Lorsqu’on travail avec des systemes lineaires, la seule facon de combiner des signauxest de faire de l’echelonnage (multiplication par une constante) puis faire une addition.On ne peut pas multiplier un signal par un autre signal. Le processus de combiner dessignaux par l’echelonnage et l’addition est appele la synthese.
La decomposition est le processus inverse : diviser un signal en ses composantes. Onen a vu un exemple lorsqu’on parlait de composante paire et impaire d’un signal. Un autreexemple est de decomposer un signal en une somme d’impulsions.
La superposition est une technique cle de l’analyse de signaux : on peut decomposerune entree en ses composantes, passer chaque composante dans le systeme, puis obtenir lareponse totale en faisant la somme (la superposition) des composantes. Le signal ainsi ob-tenu est identique a celui obtenue si on aurait fait passer l’entree au complet directementdans le systeme. La superposition est utilisee pour decomposer une entree en signaux plussimples, puis appliquer ces signaux simples au systeme. On retrouve la reponse voulue enfaisant la somme des sorties obtenues, comme a la figure 1.22. Un exemple simple de su-perposition : supposons qu’on vous demande de multiplier 2041 par 4. Il est plus simplede decomposer 2041 en trois composantes : 2000 + 40 + 1, puis faire la multiplication surchacun, et la somme, 8000 + 160 + 4 = 8164.
Systemeh(t)
Systemeh(t)
Systemeh(t)
x1(t) y1(t)
x2(t) y2(t)
x3(t) y3(t)
+
+
+
+
decomposition
x(t)
y(t)
synthese
Figure 1.22 – Exemple de superposition des systemes lineaires
Gabriel Cormier 24 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
1.7.1 Reponse Impulsionnelle
La reponse impulsionnelle est une caracteristique tres importante des systemes. Sil’entree a un systeme est un pulse δ(t), alors la sortie est appelee la reponse impulsionnelleh(t), comme a la figure 1.23. On peut demontrer que si on connaıt la reponse impulsion-nelle, on peut calculer la sortie pour n’importe quelle entree (pour un systeme lineaire).
Systemeh(t)
x(t) = δ(t) y(t) = h(t)
Figure 1.23 – Reponse impulsionnelle d’un systeme
La reponse impulsionnelle est donc tres importante pour caracteriser les systemes phy-siques. Il suffit d’envoyer un pulse de courte duree puis mesurer la reponse pour etre ca-pable de trouver la reponse a n’importe quelle entree. Un exemple de ceci est la commu-nication entre une tour et un telephone cellulaire. Pour savoir comment les signaux vontetre reflechis par les edifices, les voitures, les arbres, il faut la reponse impulsionnelle dusysteme. On envoie un pulse entre la tour et le telephone cellulaire, ce qui permet par lasuite d’eliminer les reflexions et ainsi avoir le signal original, la voix, qui est percu correc-tement par l’utilisateur. Avec la reponse impulsionnelle, on n’a pas besoin de connaıtretous les details du fonctionnement d’un systeme.
1.8 Convolution
La convolution est un outil tres important dans le calcul de la sortie d’un systeme.Pour n’importe quelle entree x(t), on peut trouver la sortie y(t) si on connaıt la reponseimpulsionnelle h(t). La convolution est donnee par :
y(t) =∫ ∞−∞h(λ)x(t −λ)dλ =
∫ ∞−∞h(t −λ)x(λ)dλ (1.34)
Remarquer le changement de variable : on fait l’integrale selon λ, mais la reponse est enfonction du temps t.
On utilise plus souvent une representation simplifiee pour noter la convolution :
y(t) = h(t) ∗ x(t) = x(t) ∗ h(t) (1.35)
ou on lit “la convolution de h(t) avec x(t)”. La notation h(t) ∗ x(t) implique qu’on utilise laforme integrale
h(t) ∗ x(t) =∫ ∞−∞h(λ)x(t −λ)dλ (1.36)
Gabriel Cormier 25 GELE2511
CHAPITRE 1. SIGNAUX ET SYSTEMES
Pour des systemes reels, la sortie est nulle pour t < 0, et on peut donc simplifierl’integrale a :
y(t) =∫ t
0h(λ)x(t −λ)dλ (1.37)
1.8.1 Explication de la convolution
On va demontrer d’ou vient l’integrale de la convolution en se servant des proprietesde l’impulsion et des proprietes des systemes lineaires. Une premiere propriete impor-tante est l’invariance dans le temps. Soit les entrees suivantes, appliquees au meme systemeh(t) :
Si x1(t) = δ(t) alors y1(t) = h(t)Si x2(t) = δ(t − 2) alors y2(t) = h(t − 2)Si x3(t) = δ(t − 5) alors y3(t) = h(t − 5)
(1.38)
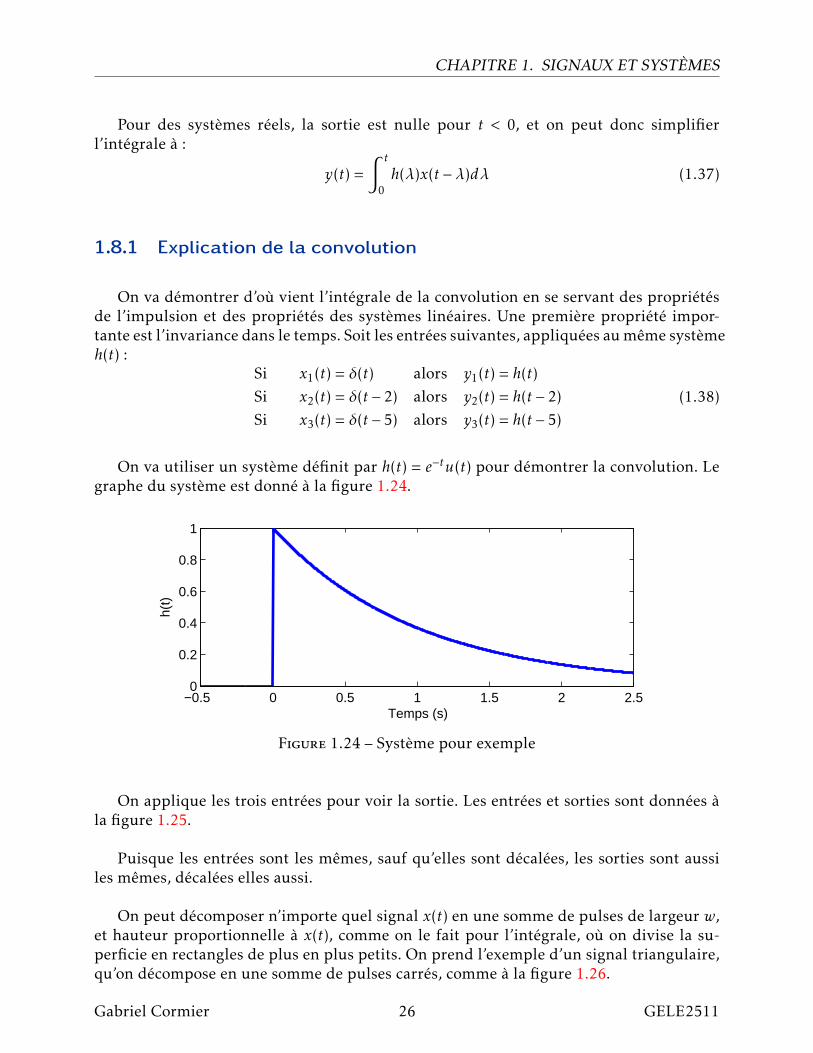
On va utiliser un systeme definit par h(t) = e−tu(t) pour demontrer la convolution. Legraphe du systeme est donne a la figure 1.24.
−0.5 0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1
Temps (s)
h(t)
Figure 1.24 – Systeme pour exemple
On applique les trois entrees pour voir la sortie. Les entrees et sorties sont donnees ala figure 1.25.
Puisque les entrees sont les memes, sauf qu’elles sont decalees, les sorties sont aussiles memes, decalees elles aussi.
On peut decomposer n’importe quel signal x(t) en une somme de pulses de largeur w,et hauteur proportionnelle a x(t), comme on le fait pour l’integrale, ou on divise la su-perficie en rectangles de plus en plus petits. On prend l’exemple d’un signal triangulaire,qu’on decompose en une somme de pulses carres, comme a la figure 1.26.
Gabriel Cormier 26 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
0 5 100
0.5
1x 1(t
) =
δ(t
−0)
0 5 100
0.5
1
y 1(t)
= h
(t−
0)
0 5 100
0.5
1
x 2(t)
= δ
(t−
2)
0 5 100
0.5
1
y 2(t)
= h
(t−
2)
0 5 100
0.5
1
x 3(t)
= δ
(t−
5)
0 5 100
0.5
1y 3(t
) =
h(t
−5)
Figure 1.25 – Application de trois pulses
Il est assez facile de voir dans la figure 1.26, que lorsque les carres sont petits, qu’ilsapproximment tres bien le triangle. Mathematiquement, on ecrit :
x(t) =∞∑
k=−∞x(kw)(u(t − (k − 0.5)w)−u(t − (k + 0.5)w)) (1.39)
ou k est l’indice du pulse. Le terme x(kw) represente l’amplitude du pulse, qu’on allumea t − (k − 0.5)w par un echelon et qu’on eteint a t − (k + 0.5)w.
Pour faciliter les choses par apres, on va faire apparaıtre la largeur du pulse dansl’equation precedente :
x(t) =∞∑
k=−∞w x(kw)
u(t − (k − 0.5)w)−u(t − (k + 0.5)w)w
(1.40)
Si un pulse carre est de duree assez courte, on peut le remplacer par une impulsion :la reponse du systeme sera la meme. On peut donc remplacer l’entree approximee parun train d’impulsions, si la largeur des pulses carres est assez faible. Au lieu d’avoir une
Gabriel Cormier 27 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
−0.5 0 0.5 1 1.5 2 2.50
0.5
1Entrée
x(t)
−0.5 0 0.5 1 1.5 2 2.50
0.5
1
w =
0.5
0
−0.5 0 0.5 1 1.5 2 2.50
0.5
1
w =
0.2
5
−0.5 0 0.5 1 1.5 2 2.50
0.5
1
w =
0.1
0
−0.5 0 0.5 1 1.5 2 2.50
0.5
1
w =
0.0
4
Figure 1.26 – Decomposition en pulses carres
somme de carres pour produire l’entree (le triangle), on a une somme de pulses. La figure1.27 permet de comparer le triangle constitue de carres et de pulses.
Un carre est approxime par une impulsion selon la relation suivante :
δ(t − kw) =du(t − kw)
dt= limw→0
u(t − (k − 0.5)w)−u(t − (k + 0.5)ww
(1.41)
L’entree x(t) peut donc etre approximee par une somme d’impulsions :
x(t) ∞∑
k=−∞w · x(kw) · δ(t − kw) (1.42)
Gabriel Cormier 28 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
0 1 20
0.5
1w
= 0
.50
0 1 20
0.5
0 1 20
0.5
1
w =
0.2
5
0 1 20
0.1
0.2
0 1 20
0.5
1
w =
0.1
0
0 1 20
0.05
0.1
0 1 20
0.5
1
w =
0.0
4
0 1 20
0.02
0.04
Figure 1.27 – Decomposition en pulses carres et en impulsions
Etant donne l’entree au systeme donnee par l’equation precedente, par invariance dansle temps (si x(t) = δ(t), y(t) = h(t)), la sortie est :
y(t) ∞∑
k=−∞w · x(kw) · h(t − kw) (1.43)
Dans la limite ou w→ 0, la somme devient une integrale,
y(t) =∫ ∞−∞h(λ)x(t −λ)dλ (1.44)
ce qui est l’equation de la convolution.
Gabriel Cormier 29 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
1.9 Convolution graphique
Une interpretation graphique de la convolution est un outil important pour com-prendre l’implantation de la convolution comme outil de calcul. On se sert d’un exemplepour illustrer.
Soit la reponse impulsionnelle de la figure 1.28 a), et l’entree au systeme, un pulse delargeur finie, de la figure 1.28 b).
t 0 1
2
(a) h(t)
t 0 2
1.5
(b) x(t)
Figure 1.28 – Formes d’ondes a) de la reponse impulsionnelle, b) de l’entree
Les equations des courbes sont :
h(t) = −2t + 2, 0 ≤ t ≤ 1 (1.45)x(t) = 1.5, 0 ≤ t ≤ 2 (1.46)
On utilise en premier la forme de l’equation 1.44. Dans les graphes, on remplace t parλ, la constante d’integration. La forme d’onde de x(t) sera modifiee a cause de ceci. Lefait de remplacer λ par −λ ne fait que tourner la fonction x(t) autour de l’axe vertical. Onobtient alors les graphes de la figure 1.29.
λ 0 1
2
(a) h(λ)
λ
0 t
1.5
t – 2
(b) x(t −λ)
Figure 1.29 – Convolution a) de la reponse impulsionnelle et b) de l’entree
Gabriel Cormier 30 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
L’equation de h(t) doit changer a h(λ), et x(t) doit changer a x(t −λ) :
h(λ) = −2λ+ 2, 0 ≤ λ ≤ 1 (1.47)x(t −λ) = 1.5, t − 2 ≤ λ ≤ t (1.48)
Il faut maintenant faire l’integrale. L’equation 1.44 implique que les deux fonctionssont multipliees ensembles. On accomplit ceci de facon graphique en faisant glisser lafonction x(t − λ) de la gauche vers la droite. On multiplie les deux courbes ensembles.L’integrale est alors l’aire comprise sous cette nouvelle courbe.
λ 0 1
2
1.5
λ 0 1
λ 0 1
1.5 1.5
2 2
t t – 2 t – 2 t – 2 t t
Figure 1.30 – Convolution graphique
Selon la figure 1.30, le graphe de la sortie y(t) sera composee de trois courbes dis-tinctes.
1. La premiere partie est lorsque x(λ) n’a pas encore depasse le point t = 1. Dans cecas-la, la superficie sous les deux courbes augmente.
2. La deuxieme partie se produit lorsque le point t a depasse t = 1, mais que le pointt −2 n’a pas encore atteint 0. La superficie sous les deux courbes est alors constante.
3. La troisieme partie arrive lorsque le point t − 2 a depasse 0.On peut calculer les intervalles. La methode est assez simple : il faut les points cri-
tiques de h(t) et x(t), puis faire la somme de ces points. Un point critique est un point oula fonction change de valeur ou d’equation. Pour h(t), les points critiques sont 0,1, etpour x(t), les points critiques sont 0,2.
On additionne tous ces points ensembles : 0 + 1, 0 + 2, 1 + 0 et 1 + 2, ce qui donne lespoints critiques suivants, 0,1,2,3. Si des points se repetent, on les prend une seule fois.
Le calcul de la convolution se fait ensuite par intervalles. Le premier intervalle est de0 a 1. Dans cet intervalle, les deux fonctions ont les valeurs et les bornes suivantes :
h(λ) = −2λ+ 2, 0 ≤ λ ≤ t (1.49)x(t −λ) = 1.5, 0 ≤ λ ≤ t (1.50)
Il faut remplacer les termes appropries dans l’equation 1.44 :
y1(t) =∫ ∞−∞h(λ)x(t −λ)dλ =
∫ t
0(−2λ+ 2)(1.5)dλ (1.51)
Gabriel Cormier 31 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
ce qui donney1(t) = 3t − 1.5t2 (1.52)
La notation y1(t) est utilisee pour indiquer qu’il s’agit de la reponse dans le premierintervalle seulement.
Dans le deuxieme intervalle, de 1 a 2, les equations sont :
h(λ) = −2λ+ 2, 0 ≤ λ ≤ 1 (1.53)x(t −λ) = 1.5, 0 ≤ λ ≤ 1 (1.54)
Comme avec le premier intervalle, on remplace dans l’equation 1.44 les termes appro-pries pour obtenir :
y2(t) =∫ 1
0(−2λ+ 2)(1.5)dλ = 1.5 (1.55)
Pour le troisieme intervalle, de 2 a 3, les equations sont :
h(λ) = −2λ+ 2, t − 2 ≤ λ ≤ 1 (1.56)x(t −λ) = 1.5, t − 2 ≤ λ ≤ 1 (1.57)
En faisant les substitutions appropriees, on obtient :
y3(t) =∫ 1
t−2(−2λ+ 2)(1.5)dλ = 1.5t2 − 9t + 13.5 (1.58)
On peut verifier les equations obtenues, puisque la convolution donne un graphesans discontinuites. Il faut que y1(1) = y2(1), et y2(2) = y3(2). En remplacant, on trouveque y1(1) = 1.5, ce qui est correct, puisque y2(1) = 1.5. On verifie aussi y3(2) = 1.5. Lesequations obtenues sont donc correctes. Le graphe du resultat final est donne a la figure1.31.
Gabriel Cormier 32 GELE2511

CHAPITRE 1. SIGNAUX ET SYSTEMES
−1 0 1 2 3 40
0.5
1
1.5
2
Temps (s)
y(t)
Figure 1.31 – Convolution graphique : resultat
Gabriel Cormier 33 GELE2511