On characteristic classes in the framework of Gelfand-Fuks ...

Advances in Intelligent Systems and Computing 351
Roman SzewczykCezary ZielińskiMałgorzata Kaliczyńska Editors
Progress in Automation, Robotics and Measuring TechniquesVolume 2 Robotics

Advances in Intelligent Systems and Computing
Volume 351
Series editor
Janusz Kacprzyk, Polish Academy of Sciences, Warsaw, Polande-mail: [email protected]

About this Series
The series “Advances in Intelligent Systems and Computing” contains publications on theory,applications, and design methods of Intelligent Systems and Intelligent Computing. Virtually alldisciplines such as engineering, natural sciences, computer and information science, ICT, eco-nomics, business, e-commerce, environment, healthcare, life science are covered. The list of top-ics spans all the areas of modern intelligent systems and computing.
The publications within “Advances in Intelligent Systems and Computing” are primarilytextbooks and proceedings of important conferences, symposia and congresses. They cover sig-nificant recent developments in the field, both of a foundational and applicable character. Animportant characteristic feature of the series is the short publication time and world-wide distri-bution. This permits a rapid and broad dissemination of research results.
Advisory Board
Chairman
Nikhil R. Pal, Indian Statistical Institute, Kolkata, Indiae-mail: [email protected]
Members
Rafael Bello, Universidad Central “Marta Abreu” de Las Villas, Santa Clara, Cubae-mail: [email protected]
Emilio S. Corchado, University of Salamanca, Salamanca, Spaine-mail: [email protected]
Hani Hagras, University of Essex, Colchester, UKe-mail: [email protected]
László T. Kóczy, Széchenyi István University, Gyor, Hungarye-mail: [email protected]
Vladik Kreinovich, University of Texas at El Paso, El Paso, USAe-mail: [email protected]
Chin-Teng Lin, National Chiao Tung University, Hsinchu, Taiwane-mail: [email protected]
Jie Lu, University of Technology, Sydney, Australiae-mail: [email protected]
Patricia Melin, Tijuana Institute of Technology, Tijuana, Mexicoe-mail: [email protected]
Nadia Nedjah, State University of Rio de Janeiro, Rio de Janeiro, Brazile-mail: [email protected]
Ngoc Thanh Nguyen, Wroclaw University of Technology, Wroclaw, Polande-mail: [email protected]
Jun Wang, The Chinese University of Hong Kong, Shatin, Hong Konge-mail: [email protected]
More information about this series at http://www.springer.com/series/11156

Roman Szewczyk · Cezary ZielinskiMałgorzata KaliczynskaEditors
Progress in Automation,Robotics and MeasuringTechniquesVolume 2 Robotics
ABC

EditorsRoman SzewczykIndustrial Research Institute for Automation
and Measurements PIAPWarsawPoland
Cezary ZielinskiIndustrial Research Institute for Automation
and Measurements PIAPWarsawPoland
Małgorzata KaliczynskaIndustrial Research Institute for Automation
and Measurements PIAPWarsawPoland
ISSN 2194-5357 ISSN 2194-5365 (electronic)Advances in Intelligent Systems and ComputingISBN 978-3-319-15846-4 ISBN 978-3-319-15847-1 (eBook)DOI 10.1007/978-3-319-15847-1
Library of Congress Control Number: 2015931809
Springer Cham Heidelberg New York Dordrecht Londonc© Springer International Publishing Switzerland 2015
This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or part of thematerial is concerned, specifically the rights of translation, reprinting, reuse of illustrations, recitation, broad-casting, reproduction on microfilms or in any other physical way, and transmission or information storageand retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now knownor hereafter developed.The use of general descriptive names, registered names, trademarks, service marks, etc. in this publicationdoes not imply, even in the absence of a specific statement, that such names are exempt from the relevantprotective laws and regulations and therefore free for general use.The publisher, the authors and the editors are safe to assume that the advice and information in this bookare believed to be true and accurate at the date of publication. Neither the publisher nor the authors or theeditors give a warranty, express or implied, with respect to the material contained herein or for any errors oromissions that may have been made.
Printed on acid-free paper
Springer International Publishing AG Switzerland is part of Springer Science+Business Media(www.springer.com)

Foreword
Control, automation, robotics and measuring techniques have been paramount to thedevelopment of industry in the last few decades. As currently the process of reindustri-alization of European Union has gained importance, so have the mentioned disciplines.For this reason, both theoretical and application oriented developments in automation,robotics and measuring techniques are at the focus of interest of the scientific and engi-neering community.
It should be underscored that automation, robotics and measuring techniques havea significant innovative potential. In the case of automation and control, currently thispotential is mainly connected with discrete systems, emergence of new actuators andsensors, new diagnostic methods, as well as modern design approaches exemplified byfuzzy logic, evolutionary computation, neural networks, probabilistic methods etc.
Development of field and service robots is still the most important part of theoret-ical and application development in widely perceived robotics. Crucial problems andchallenges are associated with control of mechatronic systems in general, perception,navigation, manipulation and grasping, locomotion and reasoning.
Elements of measuring systems are recently developed on the base of such mod-ern and advanced materials as graphene. Moreover, increase in computational power ofmodern computers fosters new approaches to advanced signal processing and experi-mental verification of sophisticated problems of the theory of metrology.
This book presents the recent progress in control, automation, robotics, and measur-ing techniques that are jointly trying to meet those challenges and to fulfil technological,economic and social needs of European Union. It presents the contributions of expertsin those fields. Their work is concerned both with theory and industrial practice. In-dividual chapters present the theoretical analysis of specific technical problems, oftensupplemented by numerical analysis and simulation and real experiments on prototypes.The implementation of the research results in industrial practice is also reported.

VI Foreword
We hope that the presented progress in theoretical analysis and practical solutionswill be useful to both the researchers working in the area of engineering sciences andto practitioners solving industrial problems.
Warsaw, January 2015 Roman SzewczykCezary Zielinski
Małgorzata Kaliczynska

Contents
Forming of Operational Characteristics of an Orthotic Robot byInfluencing Parameters of Its Drive Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . 1Karol Baginski, Jakub Wierciak
Lightweight RGB-D SLAM System for Search and Rescue Robots . . . . . . . . 11Dominik Belter, Michał Nowicki, Piotr Skrzypczynski, Krzysztof Walas,Jan Wietrzykowski
Affordable Multi-legged Robots for Research and STEM Education:A Case Study of Design and Technological Aspects . . . . . . . . . . . . . . . . . . . . . . 23Dominik Belter, Piotr Skrzypczynski, Krzysztof Walas, Donald Wlodkowic
Falcon: A Compact Multirotor Flying Platform with HighLoad Capability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Adam Bondyra, Stanisław Gardecki, Przemysław Gasior, Andrzej Kasinski
TAPAS: A Robotic Platform for Autonomous Navigation in OutdoorEnvironments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45Adam Bondyra, Michał Nowicki, Jan Wietrzykowski
NAO-mark vs QR-code Recognition by NAO Robot Vision . . . . . . . . . . . . . . . 55Jan Figat, Włodzimierz Kasprzak
Hive Collective Intelligence for Cloud Robotics: A Hybrid DistributedRobotic Controller Design for Learning and Adaptation . . . . . . . . . . . . . . . . . 65Alexandros Gkiokas, Emmanouil G. Tsardoulias, Pericles A. Mitkas
The Autonomous Return Control System for Mobile Platform, Used inCBRN Hazards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79Robert Głebocki, Antoni Kopyt
Navigation Module for Mobile Robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87Robert Głebocki, Antoni Kopyt, Paweł Kicman

VIII Contents
An Efficient PSO-Based Method for an Identification of a QuadrotorModel Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95Jarosław Goslinski, Stanisław Gardecki, Wojciech Giernacki
User Needs and Requirements for the Mobility Assistance and ActivityMonitoring Scenario within the RAPP Project . . . . . . . . . . . . . . . . . . . . . . . . . 105Miren Iturburu, Eneko Goiburu, Javier Yanguas, Edurne Andueza,Elia Corral, Cristina Alderete, Ana Orbegozo, David Daney, Vincent Prunet,Jean-Pierre Merlet
Safety Module Based on Gyroscopie in the System for Verticalization andAiding Motion of the Disabled . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119Danuta Jasinska-Choromanska, Marcin Matyjewicz-Maciejewicz
Gait Trajectory Planing for CIE Exoskeleton . . . . . . . . . . . . . . . . . . . . . . . . . . 129Rafał Kabacinski, Piotr Kaczmarek, Mateusz Kowalski
Specification of Abstract Robot Skills in Terms of Control SystemBehaviours . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139Tomasz Kornuta, Tomasz Winiarski, Cezary Zielinski
Construction and Signal Filtering in Quadrotor . . . . . . . . . . . . . . . . . . . . . . . . 153Arkadiusz Kubacki, Piotr Owczarek, Adam Owczarkowski,Arkadiusz Jakubowski
Adaptive Optical Inspection System with Use of ReconfigurableManipulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163Jordan Mezyk, Piotr Garbacz, Wojciech Mizak
Assistive Robots as Future Caregivers: The RAPP Approach . . . . . . . . . . . . . 171Pericles A. Mitkas
Simulation-Based Evaluation of Robot-Assisted Wireless SensorsPositioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181Ewa Niewiadomska-Szynkiewicz, Andrzej Sikora
Small Remotely Operated Screw-Propelled Vehicle . . . . . . . . . . . . . . . . . . . . . 191Dymitr Osinski, Ksawery Szykiedans
HMI with Vision System to Control Manipulator by Operator HandMovement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201Piotr Owczarek, Dominik Rybarczyk, Dariusz Sedziak, Michal Kašpárek
A Comparison of Control Strategies for 4DoF Model of UnmannedBicycle Robot Stabilised by Inertial Wheel . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211Adam Owczarkowski, Dariusz Horla

Contents IX
Integration of Qualitative and Quantitative Spatial Data within aSemantic Map for Service Robots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223Maciej Przybylski, Daniel Koguciuk, Barbara Siemiatkowska,Bogdan Harasymowicz-Boggio, Łukasz Chechlinski
Social Inclusion with Robots: A RAPP Case Study Using NAO forTechnology Illiterate Elderly at Ormylia Foundation . . . . . . . . . . . . . . . . . . . . 233Sofia Reppou, George Karagiannis
On the Application of QR Codes for Robust Self-localization of MobileRobots in Various Application Scenarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243Marta Rostkowska, Michał Topolski
Reconfigurable Agent Architecture for Robots UtilisingCloud Computing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253Marcin Szlenk, Cezary Zielinski, Maksym Figat, Tomasz Kornuta
Kinematic Interactions Between Orthotic Robot and a Human . . . . . . . . . . . 265Ksawery Szykiedans
CIE-Hand towards Prosthetic Limb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275Jakub Tomczynski, Tomasz Mankowski, Krzysztof Walas, Piotr Kaczmarek
Merging Robotics and AAL Ontologies: The RAPP Methodology . . . . . . . . . 285Emmanouil G. Tsardoulias, Cezary Zielinski, Włodzimierz Kasprzak,Sofia Reppou, Andreas L. Symeonidis, Pericles A. Mitkas, George Karagiannis
In-Motion Balance Recovery of a Humanoid Robot under SevereExternal Disturbances . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 299Mikołaj Wasielica
Exploring OpenStreetMap Publicly Available Information forAutonomous Robot Navigation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309Jan Wietrzykowski, Michał Nowicki, Adam Bondyra
Two Mode Impedance Control of Velma Service Robot Redundant Arm . . . 319Tomasz Winiarski, Konrad Banachowicz, Dawid Seredynski
The Social Construction of Creativity in Educational Robotics . . . . . . . . . . . . 329Karolina Zawieska, Brian R. Duffy
Author Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339

About the Editors
Professor Roman Szewczyk received both his PhD and DSc in the field of mechatron-ics. He is specializing in the modelling of properties of magnetic materials as well as insensors and sensor interfacing, in particular magnetic sensors for security applications.He is the leading the development of a sensing unit for a mobile robot developed forthe Polish Police Central Forensic Laboratory and of methods of non-destructive test-ing based on the magnetoelastic effect. Professor Szewczyk was involved in over 10European Union funded research projects within the FP6 and FP7 as well as projects fi-nanced by the European Defence Organization. Moreover, he was leading two regionaland national scale technological foresight projects and was active in the organizationand implementation of technological transfer between companies and research insti-tutes. Roman Szewczyk is Secretary for Scientific Affairs in the Industrial ResearchInstitute for Automation and Measurements (PIAP). He is also Associate Professor atthe Faculty of Mechatronics, Warsaw University of Technology and a Vice-chairman ofthe Academy of Young Researchers of the Polish Academy of Sciences.
Professor Cezary Zielinski received his M.Sc./Eng. degree in control in 1982, Ph.D.degree in control and robotics in 1988, the D.Sc. (habilitation) degree in control androbotics in 1996, all from the Faculty of Electronics and Information Technology, War-saw University of Technology, Warsaw, Poland, and Professorship in 2012. Currentlyhe is Professor both in the Industrial Research Institute for Automation and Measure-ment (PIAP) and the Warsaw University of Technology, where he is Director of theInstitute of Control and Computation Engineering. Since 2007 he has been a memberof the Committee for Automatic Control and Robotics, the Polish Academy of Sci-ences. Professor Zielinski is Head of the Robotics Group in the Institute of Control andComputation Engineering working on robot control and programming methods. Hisresearch interests focus on robotics in general and in particular include: robot program-ming methods, formal approach to the specification of architectures of multi-effectorand multi-receptor systems, robot kinematics, robot position-force control, visual servocontrol, and design of digital circuits. He is the author/coauthor of over 180 confer-ence and journal papers as well as books concerned with the above mentioned researchsubjects.

XII About the Editors
Dr. Małgorzata Kaliczynska received her M.Sc. Eng. degree in cybernetics from theFaculty of Electronics, Wrocław University of Technology, and her Ph.D. degree inthe field of fluid mechanics from the Faculty of Mechanical and Power Engineering inthis same university. Now she is Assistant Professor in the Industrial Research Institutefor Automation and Measurement (PIAP) and Editor of the scientific and technolog-ical magazine “Measurements, Automation, Robotics”. Her areas of research interestinclude distributed control systems, Internet of Things, information retrieval and webo-metrics.

© Springer International Publishing Switzerland 2015 R. Szewczyk et al. (eds.), Progress in Automation, Robotics and Measuring Techniques,
1
Advances in Intelligent Systems and Computing 351, DOI: 10.1007/978-3-319-15847-1_1
Forming of Operational Characteristics of an Orthotic Robot by Influencing Parameters of Its Drive Systems
Karol Bagiński and Jakub Wierciak
Warsaw University of Technology, Faculty of Mechatronics, Warsaw, Poland k.baginski,[email protected]
Abstract. Power consumption is an important feature of an orthotic robot as it is supplied by batteries of a limited energy capacity. Reduction of the power consumption is obtained by proper selection of actuators, usually electrical, as well as parameters of a transmission. A simulation model of such robot was de-veloped in order to evaluate various solutions of its drives. The model is based on a principle of reduction of loads to the drives. Active and inertial loads result from mechanical structure of the robot and parts of the human body. The drives are controlled in such a way as to reconstruct the assumed movement profiles in the joints. Simulations experiments upon the model revealed an influence of pa-rameters of the electric motor as well as the gear employed on the robot charac-teristics. One of the key conclusions is that control of the gear ratio can be an effective method of trimming the power demand of the actuators. The per-formed calculations proved that an energetic gain at the level of 35% can be achieved.
Keywords: orthotic robots, drive systems, modeling, simulation study.
1 Introduction
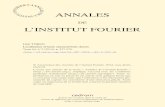
Orthotic robots constitute the most sophisticated, with regard to the manufacturing technology, group of devices designed for aiding or even restoring motor functions of man that have been lost in some way [1, 2]. Fig. 1 presents a system designed and build at the Division of Design of Precision Devices (DDPD), Warsaw University of Technology (WUT) [3]. Motion of the lower limbs of the user is forced by electrically driven actuators. Batteries and a controller of the system are placed in a backpack. A special panel for imputing data and informing the patient on a current state of the system is attached to his forearm. In order to keep the balance, the user uses addition-al orthopedic devices in a form of crutches or a walking frame. Additionally, the sys-tem is to be equipped with a safety module [4], which includes a tilt sensor based on MEMS accelerometers [5, 6]. Movements of the driven limbs of the patient are rea-lized by a software, according to a set motion profiles at particular joints (Fig. 2). In the case of gait function, these profiles are based on a so-called standard of a gait of a healthy man [7]. The most important functional characteristic of the robot is its capa-bility to realize the assumed motion profiles corresponding to particular motor activi-ties of man. Among operational characteristic, the key role is played by energy

2 K. Bagiński and J. Wierciak
demand of the robot. It decides on how often, during operation of the system, the user is made to discontinue the motion in order to charge the dead batteries. Design of actuators of the robot, which are responsible for forcing the motion and at the same time are the main receiver of the energy, has a decisive influence on the aforementioned characteristics. In order to aid the designed works, it had been planned to carry out a simulation study of the robot using a model created especially for this purpose [8].
Fig. 1. Orthotic robot designed at the DDPD WUT
Fig. 2. Exemplary course of the bending angle at the knee articulation within a single gait cycle [9]: black line – measurement data, red line (dotted) – approximation for control needs

Forming of Operational Characteristics of an Orthotic Robot by Influencing Parameters 3
2 Model of the Robot
While creating the simulation model of the robot, the following simplifying assump-tions were accepted:
• The kinematic structure of the robot consists of two identical chains of arms (one for each limb separately) that are interconnected by means of articulations,
• The mechanism driving each limb is a planar one, therefore connections of its arms are of the type of cylindrical joints with axes perpendicular to the sagittal plane,
• Articulations corresponding to the hip and knee joints are driven electrically, • The drive units realize rotational movements within the articulations according to
set profiles that reconstruct bending of joints of a healthy man, • Body members of the user are rigid bodies, • Vertical position of the patient’s trunk is forced by means of additional constraints,
and movements of the system do not influence them in any way.
The model has been created with accordance to a principle of reducing the me-chanical loads to the driving units. The source of active and passive loads are the driven elements of the mechanical structure of the robot, which force movements of the body members of the user. Models of the drives realize motion profiles created on a basis of experimental data. Additional fragments of the model are responsible for keeping the physical balance of the user and generation of the reaction of the ground, respectively. The MATLAB/Simulink/SimMechanics software was chosen as the environment for modeling, since it is predestined especially for building models and simulating operation of mechanical multi-body systems, in particular biped robots [10]. Figure 3 presents components of the model and their main interconnections.
Fig. 3. Scheme of the simulation model
Model of human
body
Model of
mechanism
Model of drive
HL
Model of drive
KL
Modelof drive
KR
DC driveMechanical gears
Controller
Gait pattern
Thermal model
Model of environment
Model of drive HR
Balancingsystem
Cycle length
Model of loads

4 K. Bagiński and J. Wierciak
In order to actuate the four active articulations: two knee and two hip articulations, 4 identical actuators were applied in the modeled robot (Fig. 4). A DC motor drives a screw gear converting rotary motion into linear one by means of a synchronous belt transmission. Flexible tie fixed to a movable nut turns a roll coupled with the driven articulation. The driving motors are controlled by means of proportional-plus-integral-plus-derivative controllers operating with position feedbacks (Fig. 5). Vari-ous position transducers can be employed in this case, either absolute or incremental. If directly integrated with the motor, a current sensor can be used to detect related commutation phenomena in order to determine angular displacement of the rotor [11].
Fig. 4. The actuator [12]
Fig. 5. Schematic of the drive system [3]
3 Simulation Study of the Robot Actuators
The model that has been described made it possible to carry out a pilot testing aimed at revealing possible dependencies between design features of the robot and its basic functional and operational characteristics. An influence of gait parameters on these characteristics was studied also. Figure 6 presents a dependency of an error of recon-structing an assumed motion profile at the hip joint on the length of the gait cycle. A maximal instantaneous difference between the assumed and the realized bending

Forming of Operational Characteristics of an Orthotic Robot by Influencing Parameters 5
angle at the joint has been accepted as a measure of the error. The course that has been obtained clearly indicates a decisive importance of dynamic phenomena, which take place in the case of short cycles corresponding to a fast gait, with regard to accuracy of the reconstruction.
Fig. 6. Error of reconstructing the standard gait profile at different gait speeds
A key role in operation of the robot is played by the motion actuators, which are not only responsible for the quality of realizing the motor functions [13], but also decide on the rate of consumption of the energy accumulated in the batteries. Many simulation studies were carried out, which were aimed at finding solutions that de-creased the energy demand of the actuators of the robot. Among other things, an in-fluence of gait parameters on energy consumption was studied. These simulations revealed interesting relations, which were quite unexpected (Fig. 7).
Fig. 7. Effect of gait parameters on energy consumption of the hip actuator [9]
Later, it was found that at determined gait algorithms, appropriate for the state of health and the physical condition of a given patient, the energy consumption of the
0,01
0,1
1
10
1 2 3 4 5 6 7 8
Erro
r of
rec
onst
ruct
ing
the
stan
dard
gai
t pro
file Δα
[°]
Period of the gait cycle T0 [s]
0
100
200
300
400
500
0,18 0,23 0,28 0,33 0,38 0,43 0,48
Ener
gy c
onsu
mpt
ion
E h[J
]
Gait speed υ [m/s]
0,72 m0,46 m0,33 m0,24 m

6 K. Bagiński and J. Wierciak
actuators was influenced the most significantly by parameters of their driving units. Fig. 8 presents a dependency of the electric energy consumed by a driving unit of the hip joint within a single gait cycle in the case of two drive units that differ in parame-ters of the applied motors. The study was carried out for various total ratios ip of a reduction gear contained within the range of 100 to 700. The obtained curves indicate a possibility of decreasing the energy consumption by the way of selecting an appropriate gear ratio.
Fig. 8. Effect of the gear ratio on energy demand during one cycle of the gait, acc. to [14]
4 Application of a Gear with a Controlled Ratio
Results of the study became an inspiration for the authors to consider application of a gear with a controlled ratio in the actuators. There were analyzed considerably vari-able courses of torque and velocity in the driven articulations, indicating occurrence of fragments of the courses corresponding to both motor- as well as generator-operation of the drives (Fig. 9). Searching for solutions characterized by a low energy consumption, operation of the drive was studied, where the ratio was being changed in such a way as to maintain a constant value of the motor efficiency during its motor-operation. The current ratio was calculated as
· ·· · , (1)
where: Mm – loading torque [Nm], KT – torque constant of the motor [Nm/A], i – mo-tor current [A], ip – instantaneous gear ratio, ωm – required angular velocity of the given articulation [rad/s], ωs – angular velocity of motor [rad/s], KE – back EMF con-stant of the motor [V/rad/s], Rt – terminal resistance of the motor [Ω], η – the assumed efficiency of the motor. Figure 10 presents characteristic courses of the controlled quantities: voltage and ratio as well as the motor current.
0
100
200
300
400
500
100 200 300 400 500 600 700
Ener
gy c
onsu
mpt
ion
Eh
[J]
Gear ratio ip
Dunkermotoren GR63Sx55Maxon EC-4pole 30

Forming of Operational Characteristics of an Orthotic Robot by Influencing Parameters 7
Fig. 9. Mechanical trajectory of the drive for the hip articulation during a gait with cycle period T0 = 3 s and step length l = 0.46 m [1]
Fig. 10. From the top: courses of ratio ip, voltage U and current input i of the motor in the case of maintaining efficiency of a Dunkermotoren motor at η = 0.9
A stepwise, easy to be technically realized, change of the gear ratio within the gait cycle has been proposed on this basis. There were carried out simulations with a mod-el of a drive that had been modified this way. Figure 11 presents a comparison of the courses of electric power Pe1 and Pe2 consumed by a drive unit of the hip joint with a gear of constant ratio i1 equal to 167, consistent with the real one, and a unit with a ratio i2 being changed stepwise within the range of 380 to 100. Values of the energy Eh consumed within a single gait cycle by each of the driving units were Eh1 = 76.8 J and Eh2 = 49.2 J, respectively, what results in an energetic gain at the level of 35%.
-1,4
-1,2
-1
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
-100 -50 0 50 100 150 200
Ang
ular
vel
ocit
y ω
m
[rad
/s]
Motor torque Mm [Nm]
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8
0-2-4-6
0
-10
-20
-30
800600400200
0
Time t [s]
Curr
ent
i[A
]G
earr
atio
i pVo
ltage
U[V
]

8 K. Bagiński and J. Wierciak
Fig. 11. Comparison between gear with constant and varying ratio
5 Summary
The presented study is but a portion of works aimed at improving the design of the orthotic robot that has been built. They make it possible to formulate the following conclusions.
• Simulation study of the robot is an effective tool aiding design works aimed at improvement of its operational characteristics.
• Results of simulations of drives with a controlled ratio indicate that this direction of works is worth continuing; it is planned to build and test a technical model of a drive with a controlled ratio.
• Aiming the study at obtaining an advantageous energetic effect cannot result in neglecting other important characteristics of the robot, especially precision of the movements, user safety or system reliability.
Acknowledgments. The presented works have been financed within a UE Research Project “ECO-Mobilność” No. UDA-POIG.01.03.01-14-154/09-00.
References
1. Mohammed, S., Amirat, Y.: Towards Intelligent Lower Limb Wearable Robots: Challenges and Perspectives – State of the Art. In: Proc. IEEE Int. Conf. ROBIO 2008, pp. 312–317 (2009)
2. Pons, J.L.: Wearable Robots: Biomechatronic Exoskeletons. John Wiley & Sons, Chiche-ster (2008)
3. Jasińska–Choromańska, D., Szykiedans, K., Wierciak, J., et al.: Mechatronic system for verticalization and aiding the motion of the disabled. Bulletin of the Polish Academy of Sciences: Technical Sciences 61(2), 419–431 (2013)
i2=380
i2=100
i1=167 Eh1=76,8 J
Eh2=49,2 J
Energy consumed
-40
0
40
80
120
160
200
0 20 40 60 80 100Inst
anta
neou
sele
ctric
pow
erP e
[W]
Relative time within the cycle τc [%]
Pe1 Pe2

Forming of Operational Characteristics of an Orthotic Robot by Influencing Parameters 9
4. Jasińska-Choromańska, D., Kabziński, B., Matyjewicz-Maciejewicz, M., Kołodziej, D.: Safety Module for the System of Verticalization and Aiding Motion of the Disabled. In: Březina, T., Jabloński, R. (eds.) Mechatronics 2013, vol. 143, pp. 79–85. Springer, Heidelberg (2014)
5. Łuczak, S.: Effects of Misalignments of MEMS Accelerometers in Tilt Measurements. In: Březina, T., Jabloński, R. (eds.) Mechatronics 2013, vol. 143, pp. 393–400. Springer, Heidelberg (2014)
6. Łuczak, S.: Guidelines for Tilt Measurements Realized by MEMS Accelerometers. Int. J. Precis. Eng. Manuf. 15, 489–496 (2014)
7. Winter, D.A.: The biomechanics and motor control of human gait: Normal, elderly and pa-thological. Univeristy of Waterloo Press (1991)
8. Bagiński, K., Jasińska–Choromańska, D., Wierciak, J.: Modeling and simulation of a system for verticalization and aiding the motion of individuals suffering from paresis of the lower limbs. Bulletin of the Polish Academy of Sciences: Technical Sciences 61(4), 919–928 (2013)
9. Bagiński, K., Cegielska, A., Wierciak, J.: Modelowanie chodu robota ortotycznego przy różnych długościach kroku. Przegląd Elektrotechniczny 2014(5), 82–85 (2014)
10. Zezula, P., Vlachy, D., Grepl, R.: Simulation modeling, optimalization and stabilisation of biped robot. In: Jabloński, R., Březina, T. (eds.) International Conference on Mechatronics, Recent Advances in Mechatronics, pp. 120–125. Springer, Heidelberg (2007)
11. Bodnicki, M., Hawłas, H.J.: Commutation Phenomena in DC Micromotor as Source Signal of Angular Position Transducer. In: Březina, T., Jabloński, R. (eds.) Recent Advances in Mechatronics 2008-2009, pp. 263–268. Springer, Heidelberg (2009)
12. Jasińska–Choromańska, D., Credo, W., Szykiedans, K.: Making use of anthropometric data while designing drive units of an orthotic robot. Machine Dynamics Research 36(1), 90–98 (2012)
13. Bagiński, K., Wierciak, J.: Selection of drives for orthotic robot based on simulation studies. Machine Dynamics Research 36(1), 5–14 (2012)
14. Bagiński, K., Wierciak, J.: Effect of gear ratio on energy consumption of actuators used in orthotic robot. In: Březina, T., Jabloński, R. (eds.) Mechatronics 2013, vol. 143, pp. 511–518. Springer, Heidelberg (2013)

Lightweight RGB-D SLAM System for Search
and Rescue Robots
Dominik Belter, Michal Nowicki, Piotr Skrzypczynski,Krzysztof Walas, and Jan Wietrzykowski
Institute of Control and Information Engineering, Poznan University of Technology,ul. Piotrowo 3A, 60-965 Poznan, Poland
dominik.belter,michal.nowicki,piotr.skrzypczynski,[email protected], [email protected]
Abstract. Search and rescue robots ought to be autonomous, as it en-ables to keep the human personnel out of dangerous areas. To achievedesirable level of the autonomy both environment mapping and reliableself-localization have to be implemented. In this paper we analyse theapplication of a fast, lightweight RGB-D Simultaneous Localization andMapping (SLAM) system for robots involved in indoor/outdoor searchand rescue missions. We demonstrate that under some conditions theRGB-D sensors provide data reliable enough even for outdoor, real-timeSLAM. Experiments are performed on a legged robot and a wheeledrobot, using two representative RGB-D sensors: the Asus Xtion Pro Liveand the recently introduced Microsoft Kinect ver. 2.
Keywords: Pose-based SLAM, RGB-D sensors, USAR, evaluation.
1 Introduction
In recent years the researchers in Simultaneous Localization and Mapping(SLAM) gradually shift their focus towards more challenging tasks and robotclasses. In particular, robots moving in three-dimensional environments requirethree-dimensional perception and six degrees of freedom (d.o.f.) positioning.SLAM in 6-d.o.f. is particularly important for robots that explore challenging,GPS-denied and previously unseen areas, which is typical of Urban Search andRescue (USAR) missions.
Looking for an approach yielding precise pose estimates we tested in prac-tice a simplified self-localization procedure based on 2D laser scanner data[14], and the full 6-d.o.f., vision-based Parallel Tracking and Mapping (PTAM)algorithm [3]. While the monocular, PTAM-based self-localization system on thewalking robot was fast and precise, it was unreliable in many environments dueto the lack of enough visually salient features. Alternatively, stereo vision can beemployed, also for walking robots as demonstrated in [15], but the on-board pro-cessing of stereo images is computationally expensive. There exist RGB-D visualodometry [18] and SLAM [19] systems that achieve impressive pose estimationaccuracy, even over long trajectories. They are, however, based upon the idea
c© Springer International Publishing Switzerland 2015 11R. Szewczyk et al. (eds.), Progress in Automation, Robotics and Measuring Techniques,Advances in Intelligent Systems and Computing 351, DOI: 10.1007/978-3-319-15847-1_2

12 D. Belter et al.
BAXtion
Xtion
Kinect 2
Fig. 1. Mobile robots: Messor II the compact walking robot (A), and the outdoorwheeled platform TAPAS (B)
of establishing correspondences between all the available 3D points, which re-quires a parallellised implementation, as the depth data stream is very intensive.Thus, systems like the Kintinuous 2.0 [18] that employ massive parallel process-ing are not really suitable for small robots, due to the power consumption of thehigh-end GPGPU.
Being aware of the need to reduce the amount of processed depth data wehave implemented in a walking robot a self-localization system that employsdiscrete point features extracted directly from the Kinect depth measurements,in order to establish correspondence between two point clouds [9]. This methoddemonstrated ability to register point clouds for large translation and rotationincrements, but it was too slow for real-time on-board operation, due to the timeconsumed by the extraction of features from 3D data. Therefore, we switched topoint features (keypoints) detected on the RGB images obtained from the RGB-D camera, that can be easily located in 3D thanks to the readily available depthinformation [10]. Although the general concept of RGB-D data registration byemploying visual features is not new [1,6,16], our contribution lies in combiningthis approach with the feature tracking known from classic visual odometry[7], and in the careful selection of the building blocks of the whole system,in order to minimize the computational effort. This approach yields a fast andlightweight RGB-D visual odometry system that can be used in real-time withoutany GPGPU, on a PC computer that can be easily mounted on-board.
This paper focuses on the practical aspects of the use of our approach insmall USAR robots. The visual odometry algorithm described in [10] has beenupgraded to a full pose-based SLAM system by implementing a loop closuremechanism and optimization of the resulting pose-graph. We present results ofthe experiments1. with this system in various configurations on two publiclyavailable indoor RGB-D data sets. Then, we test our system outdoors on twodifferent robotic platforms: the compact walking robot Messor II [4] (Fig. 1A),and a slightly bigger, four-wheeled skid steering robot called TAPAS (Fig. 1B).
1 A video is available at http://lrm.cie.put.poznan.pl/aut15slam.wmv

Lightweight RGB-D SLAM System for Search and Rescue Robots 13
depth dataassociation
FASTkeypointsdetection
managementof visualfeatures
KLTtracking of
visual features
stoptracking
? NO
n:=
n+
1
YES
depth dataassociation
kRGB
image
kDepthimage
k+nRGB
image
k+nDepthimage
frame k frame k+n
TRACKING FRONT-END
YES R,tRANSACmodeltesting
stopRANSAC
?
NO
simpleconcatenationof estimates
x(k)
x(k+n)
3-D to 3-Dmotion
estimation
v2
v3
v4
v5
vn5
BACK-END
kRGB
image
kDepthimage
k+nRGB
image
k+nDepthimage
depth dataassociation
managementof visualfeatures
detectionof salientkeypoints
depth dataassociation
detectionof salientkeypoints
managementof visualfeatures
descriptionof features
descriptionof features
matchingof local
descriptors
frame k frame k+n
MATCHING FRONT-END YES R,tRANSACmodeltesting
stopRANSAC
?
NO
simpleconcatenationof estimates
x(k)
x(k+n)
3-D to 3-Dmotion
estimation
v2
v3
v4
v5
vn5
BACK-END
A
B
Fig. 2. Block diagrams of the PUT RGB-D SLAM front-end in two variants: based ontracking (A), and on matching (B)
2 Pose-Based RGB-D SLAM
The pose-based SLAM system is divided into the front-end, which is an imple-mentation of the visual odometry (VO) concept, and the back-end that performsthe loop closure detection and pose-graph optimization. The front-end and theback-end are implemented in separate threads, and run asynchronously, exchang-ing only the necessary data: the pose-graph, and the local descriptors of featuresfor loop closure.
In the front-end we rely on feature-based visual odometry techniques to es-timate the frame-to-frame motion of the sensor. The front-end is proposed intwo versions. The difference is in the approach to establish the correspondencesbetween the 2D features in the RGB images. As we want to estimate the motionbetween the first image Ik and the last image Ik+n in a sequence of n images,we can detect the keypoints only in Ik, and then track these points throughthe n images (Fig. 2A), or we can simply match the detected local descriptorsof the features in Ik and Ik+n to obtain the correspondences (Fig. 2B). In oursystem, tracking is based on the pyramid implementation of the Lucas-Kanadealgorithm [13]. The tracked features are initialized with points from the FASTdetector [11]. In the matching-based version of the front-end two types of de-tectors and descriptors are implemented: ORB [12] and SURF [2] that can beused alternatively. The implementation of matching rejects non-unique and weakmatches.

14 D. Belter et al.
When the correspondences between Ik and Ik+n are established, the depth dataare associated to the keypoints, resulting in two sets of matched 3D features.Having the direct depth measurements from the RGB-D sensor we consider the3D-to-3D feature correspondences for frame-to-frame motion estimation [7]. Theparameters of motion estimates between the point sets extracted from the twoframes are estimated using the Umeyama algorithm [17]. Because imperfect track-ing or wrong feature matches may lead to outliers in the feature sets, we performthe estimation procedure in the RANSAC scheme to get rid of with these outliersand make the estimation robust. Computing the transformations for the consec-utive short sequences of frames, and then compounding the local transformationshead-to-tail we estimate the whole trajectory in the front-end. However, due tounavoidable estimation errors, this trajectory is only locally consistent.
Although combining the coordinates of the salient point features with thedepth information we obtain 3D positions of the point features w.r.t. the globalcoordinate system, we do not keep the 3D features in any form of a map. Thisdecision is motivated by the computational burden imposed by the maintenanceof a map containing a large number of features. As investigated in [6] addingthe point features from RGB-D data provides only minor improvements to thetrajectory estimates, but substantially increases the optimization time in theback-end. The lack of persistent 3D features makes it impossible to performwindowed bundle adjustment to reduce the trajectory drift in the front-end,but our system reduces locally the trajectory drift by constructing a pose-graphfrom m last sensor poses, and then by estimating the motion constraints betweenthe RGB-D frame attached to the current pose, and the remaining m frames.Then, we apply the graph optimization provided by the back-end to this localpose-graph.
The back-end for pose-graph optimization is based on the open-source g2osoftware package for least squares optimization [8]. This software takes a pose-graph produced by the front-end as input, and performs minimization of anon-linear error function that is represented by constraints in this graph. Weemploy the back-end in two roles: to optimize small pose-graphs over a movingconstant-length window for a local trajectory correction, and to optimize theglobal pose-graph, representing the whole recovered trajectory. The global op-timization occurs whenever a loop closure is discovered. The loop closures aredetected on RGB images by matching features in the images attached to posesthat are positioned far enough along the trajectory. If a significant similarityof the local feature descriptors (either ORB or SURF) between these frames isdiscovered a transformation is computed between these frames, and added as aconstraint to the pose-graph.
3 Experimental Evaluation
3.1 Publicly Available Data Sets
On the basis of our recent experimental results on publicly available RGB-Ddata sets [5] we selected three basic configurations of our system for thorough

Lightweight RGB-D SLAM System for Search and Rescue Robots 15
A B C
Fig. 3. Example TUM data set trajectories recovered by PUT RGB-D SLAM:fr1/room sequence estimated by the tracking-based version (A), and two sequencesfr2/robot slam3 (B) and fr3 long office household (C) estimated by the matching-based version
evaluation in the context of USAR robotics: the tracking-based front-end withloop closure (LC) using the ORB detector-descriptor pair (LC/ORB), and thematching-based front-end in two variants, with either the ORB or the more pow-erful, but much slower SURF detector-descriptor pair. In the matching-based con-figuration, always the samef detector-descriptor pair is used in the front-end andin the loop closure. If the front-end is used without the graph-based back-end, thePUT RGB-D SLAM is effectively reduced to a RGB-D visual odometry system.
In order to demonstrate the trajectory estimation precision that is achievablewith the different PUT RGB-D SLAM variants under study, we evaluate thesesystems on data sets that provide ground truth trajectories of the sensor. Theused sequences come from the widely used TUM RGB-D benchmark [16]. We alsouse the evaluation methodology proposed in [16], and the tools provided with theTUM RGB-D benchmark. The error metric being used is the Absolute TrajectoryErrors (ATE), which shows the difference between the estimated trajectory ofthe sensor/robot and the ground truth trajectory (Fig. 3). The Relative PoseError (RPE) shows the local drift of the front-end.
Table 1. Trajectory estimation results for three configurations of the PUT RGB-DSLAM system on two representative TUM sequences
PUT RGB-D SLAM fr1/room fr2/pioneer slam3
system configuration ATE RPE Orient. FPS ATE RPE Orient. FPSfront-end + back-end [m] [m] [deg.] [Hz] [m] [m] [deg.] [Hz]
Tracking+LC/ORB 0.113 0.024 1.383 35.6 7.673 7.893 56.528 34.7Matching/ORB+LC/ORB 0.107 0.026 1.258 32.3 4.51 3.220 38.083 32.3Matching/SURF+LC/SURF 0.103 0.019 0.837 16.7 0.513 0.049 3.264 20.3
Figure 3A shows the result obtained for the TUM fr1/room sequence by thematching/ORB with LC variant of the PUT RGB-D SLAM system. For thissequence all variants of our system obtained the ATE errors of approx. 10 cm,along the whole trajectory. This result is comparable to the performance of other

16 D. Belter et al.
A
x [m]
y [m]
z [m]
B
A
-3.5-3
-2.5-2
-1.5-1
-0.50
-0.5
0
0.5
1
1.5
2
2.5
3
0.5
1
0
B C
Fig. 4. Outdoor experiment on flat terrain – rectangular trajectory: example of suc-cessful frame-to-frame matching (A), example of frames with few useful features (B),and the trajectory recovered by the tracking-based PUT RGB-D SLAM (C)
RGB-D SLAM systems on this benchmark sequence [6,19], but is achieved withup to 35 Hz, while the system described in [6], which is based on a similar concept,works at 14 Hz. Although the errors obtained for the TUM fr2/pioneer slam3
sequence are much bigger, the estimated trajectory is still reasonable (Fig. 3B)and enables the robot to have a sense of its global pose. The larger errors in thiscase are caused by the fact that the fr2/pioneer slam3 sequence was registeredin a large industrial-like hall, where objects in the field of view of the RGB-D sensor were often beyond the range of the depth camera. Whenever enoughfeatures with valid depth are available, like in the fr3 long office household
sequence, the ATE error is small, even on a long trajectory as shown in Fig. 3C.The performance of our system for two TUM sequences is summarized in Tab. 1– errors are given as RMSE values.
3.2 Outdoor Experiments with Asus Xtion
An example of the robotic platform that can benefit from the lightweight RGB-DSLAM is the Messor II six-legged robot [4]. This robot has been designed withthe USAR applications in mind, and is equipped with the Asus Xtion Pro LiveRGB-D sensor that is located in the middle of the robot’s body and tilted slightlydownward. We tested if the PUT RGB-D SLAM system can work outdoors withthe Xtion sensor that is intended for indoor use. Being aware that the sunlightreduces the contrast of the infrared light pattern emitted by the sensor, oftenmaking the range measurements unavailable [9], we performed the experimentsat cloudy weather, in an area that was in a shadow of a large building.
The experiment depicted in Fig. 4 involved a simple, rectangular path thatenabled to make a rough assessment of the correctness of the recovered robottrajectory in absence of any ground truth trajectory, which could not be obtainedoutdoors (even by a GPS that didn’t work correctly between tall buildings).First results of this experiment were disappointing, as many RGB-D framescontained only few point features, and any reliable inter-frame motion estimationwas impossible. While in some parts of the path there were enough point featureson the ground to estimate the motion, as shown in Fig. 4A, in other areas theground plane within the area of valid depth measurements (shown in white) wastoo homogeneous, while there were only few visually salient objects in the field

Lightweight RGB-D SLAM System for Search and Rescue Robots 17
x [m]
y [m]
z [m]
FRAME 1
FRAME 2
FRAME 3
-4.5-4
-3.5-3
-2.5-2
-1.5-1
-0.50
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
0.4
0.6
0.8
1
BA
Fig. 5. Outdoor experiment on uneven terrain: example view of the site with the MessorII robot (A), and the trajectory recovered by the PUT RGB-D SLAM system (B)
of view (Fig. 4B). In this situation the tracking-based front-end turned out tobe more reliable. Apparently, the Lucas-Kanade tracker, once initializing thekeypoints, was able to track them even if they became temporarily undetectable(e.g. due to shadows) by the ORB or SURF detector used in the matching-basedversion. Eventually, in this experiment the tracking-based version of the PUTRGB-D SLAM recovered a trajectory that was qualitatively very close to thepath executed in the experiment (Fig. 4C).
Another experiment performed with the Messor II walking robot involveda more realistic scenario, in an environment resembling a construction site,with varying, uneven terrain and some debris in the field of view. Althoughthe trajectory was irregular, as the robot had to move around the pile of bricks(Fig. 5A), it was a semi-loop with the return to the same line (defined by a curb),where the robot has started. Again the most reliable variant of the PUT RGB-DSLAM was the one based on tracking. The trajectory estimated by this systemis shown in Fig. 5B, while Fig. 6 depicts three example RGB-D frames acquiredduring this experiment – the location of these frames on the trajectory is denotedin Fig. 5B by the small rectangular patches. The examples demonstrate that theareas of images that are richest in visual features (e.g. vegetation) usually donot have valid depth readouts. This problem forced the front-end to work with
FRAME 1 (RGB)
FRAME 1 (DEPTH)
FRAME 2 (RGB)
FRAME 2 (DEPTH)
FRAME 3 (RGB)
FRAME 3 (DEPTH)
Fig. 6. Examples of RGB-D frames used for feature tracking in the outdoor experimenton uneven terrain

18 D. Belter et al.
a small number of features and promoted the tracking-based approach, whichdidn’t need to re-establish features at each frame.
3.3 Outdoor Experiment with the Kinect ver. 2
The conclusions drawn from the experiments with Asus Xtion as data sourcefor the RGB-D SLAM in outdoor environments were twofold: (i) the structured-light-based sensor is very prone to the changing light conditions, and may beused only at cloudy weather or at twilight; (ii) the relatively small range of thedepth measurements makes a significant part of the salient visual features un-usable, as they are detected on objects located beyond the range of the depthcamera. In order to test if the PUT RGB-D SLAM can benefit from the use of adepth sensor that is more reliable when using outdoors we evaluated our systemwith the data obtained from Microsoft Kinect ver. 2. This is the second gener-ation of this affordable RGB-D sensor, introduced very recently to the market.Unlike the original Kinect it uses a time-of-flight depth camera, instead of thestructured light principle. The Kinect v2 was mounted on the TAPAS wheeledrobot together with the Xtion. The transformation between the coordinate sys-tems of both s ensors has been obtained by calibration to enable registrationof robot trajectories in a common coordinate system. The PUT RGB-D SLAMsoftware was used without any changes other than those made to the RGB-Dsensor hardware interface.
Results of one of the preliminary experiments with the Kinect v2 used withour RGB-D SLAM system are shown in Fig. 7A. The roughly L-shaped pathwas executed by the tele-operated TAPAS robot in a grass covered area withfew trees and bushes, and some buildings located nearby. However, only onewall was within the range of the depth cameras mounted on the robot. In shouldbe noted that unlike the experiments with the Xtion sensor on Messor II, thisexperiment has been conducted at quite sunny summer day. Although there is noground truth trajectory for this experiment, the trajectory (green line) recoveredby the PUT RGB-D SLAM from the Kinect v2 data qualitatively resembles thepath taken by the robot. This is not the case for the other trajectory (red line)estimated from RGB-D data provided by the Xtion sensor mounted on boardand acquiring data in the same time. This one is completely wrong, as most ofthe depth images acquired at the sunny day contained no valid depth data.
The trajectory shown in Fig. 7A was obtained by using the matching-basedversion of our system with the SURF detector-descriptor pair. This time resultsfor the tracking-based version and the version using ORB were unsatisfactory.This is attributed to the high discriminative power of the SURF detector thatenabled correct matching of visually similar point features. The Kinect v2 is morereliable w.r.t. the ambient light conditions, but the range of its depth cameraseems to be limited to about 4.5 metres, a value similar to the one achievedby the RGB-D sensors based on the PrimeSense technology. While this range issatisfactory for indoor navigation, in an outdoor scene with vegetation most ofthe point features are located on trees or on far objects, like buildings (Fig. 7B),and thus do not have valid depth readouts (Fig. 7C). The remaining features are

Lightweight RGB-D SLAM System for Search and Rescue Robots 19
A
B
C
D
x [m] y [m]
z [m]
-6
-5
-4
-3
-2
-1
0
0
1
2
3
4
5
6
7
-0.2
0
0.2
Kinect ver. 2
Asus Xtion Pro
Fig. 7. Trajectories recovered in an outdoor experiment with the TAPAS robot (A),and FAST keypoints detected on the Kinect v2 RGB image (B), Kinect v2 depth image(C), and the accepted keypoints with valid depth values (D)
located mostly on the ground (Fig. 7D), and are hardly distinguishable, as thegrass or the pavement often form a repetitive pattern.
4 Conclusions
This paper presented an experimental evaluation of the pose-based RGB-DSLAM system for the use in USAR robots. We have shown on publicly availabledata sets that PUT RGB-D SLAM achieves trajectory estimation results thatare comparable to the published results of state-of-the-art systems for RGB-Ddata registration [6,16,19], while being very fast and suitable for implementationon real robots (no GPGPU required). Then, we demonstrated, that while theapproach to SLAM based on the RGB-D data is attractive, due to the use of acompact and affordable sensor, and moderate requirements as to the processingpower, it has a number of practical limitations when applied in real-world sce-narios. These limitations are mostly related to the quite limited field of view andmeasurement range of the contemporary depth cameras. Because of these limi-tations the RGB-D SLAM can be used only in environments containing enoughvisual features in the proximity of the robot. The very fast tracking-based ver-sion of PUT RGB-D SLAM is less precise than the matching-based version,but the tracking procedure seems to be more resillent to the changing/degradedRGB data quality, as it does not need to re-establish features at each frame.In contrast, the matching-based variant with SURF may be recommended forscenarios where many visually similar features appear in the field of view.
As the main drawback of the available RGB-D sensors seems to be the limiteddepth measurements range, our further work aims to combine the PUT RGB-DSLAM front-end with a pure visual odometry approach based on bundle adjust-ment on a limited number of locally persistent 3D features, including those thatdo not have direct depth measurements.


![Euler characteristic Galerkin scheme with recovery€¦ · Osher and Chakravarthy [14]). Under an appropriate condition (see (4.4)), the ECG scheme with continuous linear recovery](https://static.fdocuments.fr/doc/165x107/5fc19190bab6265c132edcc8/euler-characteristic-galerkin-scheme-with-recovery-osher-and-chakravarthy-14.jpg)










![Disperse two-phase ows, with applications to geophysical ...One of the characteristic features of geophysical ows (see for instance [8]) is strati cation (the other one is rotation).](https://static.fdocuments.fr/doc/165x107/5fdde480271236080d480065/disperse-two-phase-ows-with-applications-to-geophysical-one-of-the-characteristic.jpg)