Réf. K-RM-J Détection d’obstacles
19
25 Détection d’obstacles SOMMAIRE Robot équipé de 2 motoréducteurs PropulsO, d’un pare-chocs / détecteur d’obstacles et d’une carte Picaxe MotoPilot. 2 microrupteurs connectés sur la même entrée de la carte permettent de détecter un obstacle (contacts gauche et droit indifférenciés). Permet de programmer des mouvements simples (avancer, reculer, tourner) et effectuer des manœuvres d’évitement au contact d’un obstacle. Réf. K-RM-J Dossier Technique et plans 26 à 34 Nomenclature des sous ensembles 26 Nomenclature et éclaté du moteur 27 Nomenclature et dessin de définition du châssis 28, 29 Nomenclature et dessin de définition de la platine des piles 30, 31 Nomenclature et dessin de définition du pare-chocs 32, 33 Perspective et plan de câblage de la carte MotoPilot 34 Dossier de fabrication 35 à 42 Nomenclature du kit 35, 36 Fiches de montage 37, 38 Test de fonctionnement 39 Exemples de programme 40 à 43 Châssis Carte programmable Roue Bandage de roue Motoréducteur Platine Support de piles Piles Pare choc Microrupteur
Transcript of Réf. K-RM-J Détection d’obstacles

25
Détection d’obstacles
SOMMAIRE
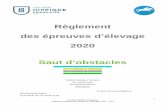
Robot équipé de 2 motoréducteurs PropulsO, d’un pare-chocs / détecteur d’obstacles et d’une carte Picaxe MotoPilot.2 microrupteurs connectés sur la même entrée de la carte permettent de détecter un obstacle (contacts gauche et droit indifférenciés).Permet de programmer des mouvements simples (avancer, reculer, tourner) et effectuer des manœuvres d’évitement au contact d’un obstacle.
Réf. K-RM-J
Dossier Technique et plans 26 à 34Nomenclature des sous ensembles 26Nomenclature et éclaté du moteur 27Nomenclature et dessin de définition du châssis 28, 29Nomenclature et dessin de définition de la platine des piles 30, 31Nomenclature et dessin de définition du pare-chocs 32, 33Perspective et plan de câblage de la carte MotoPilot 34
Dossier de fabrication 35 à 42Nomenclature du kit 35, 36Fiches de montage 37, 38Test de fonctionnement 39Exemples de programme 40 à 43
ChâssisCarte
programmable
Roue
Bandage de roue
Motoréducteur
Platine
Supportde piles
Piles
Pare choc Microrupteur

PROJET PARTIE
TITRE DU DOCUMENT
A4
Nom
ClasseCollège
Date Nomenclature
Ensemble
26
TECHNOLOGIEwww.a4.fr
REPERE DESIGNATION CARACTERISTIQUES
A 02 Moteurs Moto réducteur PropulsO.B 01 Châssis PVC expansé 6 mm.C 01 Platine et piles PVC expansé 6 mm et support de piles.D 01
NOMBRE
E 01Pare-chocs PVC expansé 6 mm.Carte programmable Carte programmable MotoPilot
EB C D A

PROJET PARTIE
TITRE DU DOCUMENT
A4
Nom
ClasseCollège
Date Nomenclature
Sous Ensemble AMotoréducteur PropulsO
27
TECHNOLOGIEwww.a4.fr
Motoréducteurdroit
Motoréducteurgauche
REPERE DESIGNATION CARACTERISTIQUES
01 02 Flanc gauche motoréducteur ABS injecté. Réf. PO-GRAP-01
02 02 Flanc droit motoréducteur ABS injecté. Réf. PO-GRAP-01
03 02 Vis sans fin ABS injecté. Réf. PO-GRAP-01
04 02 Roue dentée ABS injecté, 48 dents. Réf. PO-GRAP-01
05 02 Axe moteur Acier zingué Ø3, longueur 56 mm. Réf. AX-AC-3X330
NOMBRE
0607
04 Vis Type tôle, tête cylindrique Ø 3 x 6,5. Réf. VT-TC-3X6-100
10
02 Moteur 1,5 V à 4,5 V, Ø 21, axe de sortie Ø 2. Réf. MOT-D21-2A
1102 Condensateur CER-100nf, marqué 104.02 Fil Fil souple 2 conducteurs, longueur 120 mm. Réf. FIL-SOUP-2C-100
08 04 Roue ABS injecté Ø 48, axe de sortie Ø 3. Réf. PO-GRAP-01
09 02 Bandage de roue Elastique plat 50 x 8 mm. Réf. BRAELA-50X8-N-250G
0107020608
09 05 03 0411 10
Emmanchementde l’axeavec un maillet.
12
Tube de longueur 12qui sert de gabarit
pour l’emmanchement de l’axe
Chanfrein indispensable au 2 bouts de l’axe

PROJET PARTIE
TITRE DU DOCUMENT
A4
Nom
ClasseCollège
Date Nomenclature
Sous Ensemble BChâssis
28
TECHNOLOGIEwww.a4.fr
REPERE DESIGNATION CARACTERISTIQUES
06 01 Vis Type tôle, tête cylindrique Ø 3 x 6,5. Réf. VT-TC-3X6-100
12 01 Patin de glissement Rodelle nylon M2 Ø ext 14 mm. Réf. SK-007-4030
13 01 Plaque de châssis PVC expansé 6 mm, 160 x 126 mm.
NOMBRE
06 12 13

PROJET PARTIE
TITRE DU DOCUMENT
A4
Nom
ClasseCollège
Date Dessin de définition
Pièce 13Plaque de châssis
29
TECHNOLOGIEwww.a4.fr
Echelle 1 : 1
Châssis RoboPilotLes perçages non cotés sont de Ø 2 mm (avant-trous pour les vis de fixation).Voir fichier DXF pour import dans votre CAO (Plaque de châssis.DXF)sur le CD et sur A4.fr
279
2611
17 25
21,5
20
R 80
63
7952
6
15
23
31
43
4
30,5
022
,50Entraxe
motoréducteurPropulso
32

PROJET PARTIE
TITRE DU DOCUMENT
A4
Nom
ClasseCollège
Date Nomenclature
Sous Ensemble CPlatine et piles
30
TECHNOLOGIEwww.a4.fr
16
15
14
REPERE DESIGNATION CARACTERISTIQUES
14 01 Platine piles PVC expansé 6 mm, 95 x 80 mm.15 01 Support de piles Support 3 piles LR6, 47 x 57 x15 mm. Réf. SUP-PIL-3R06-10
16 02 Vis Type tôle, tête fraisée Ø 3 x 6,5. Réf. VBA-TF-3X6-100
NOMBRE

PROJET PARTIE
TITRE DU DOCUMENT
A4
Nom
ClasseCollège
Date Dessin de définition
Pièces 14Platine piles
31
TECHNOLOGIEwww.a4.fr
Voir fichier DXF pour import dans votre CAO (Platine piles.DXF)sur le CD et sur www.a4.fr
Echelle : 1
36
16
36
40
80
20
956
R 67,50
6
369
30 25
3,50
R 67,50
32
Trous pour support2 piles
Trous pour support3 piles Cette platine piles est utilisée
dans le RobotPilotavec un support 3 piles (voir page 31).

PROJET PARTIE
TITRE DU DOCUMENT
A4
Nom
ClasseCollège
Date Nomenclature
Sous-ensemble DPare-chocs
32
TECHNOLOGIEwww.a4.fr
REPERE DESIGNATION CARACTERISTIQUES
17 01 Pare-chocs PVC expansé 6 mm, 140 x 68 mm.18 01 Entretoise Entretoises Nylon Ø 6 x 6 mm. Réf. SK-005-3182
19 01Vis Type tôle, tête cylindrique Ø 3 x 13. Réf. VT-TC-3X13-100
NOMBRE
20 01Rondelle Acier zingué, Ø M4 x 12 mm. Réf. ROND-LA-ACZ-M4-100
17
18
19
20

PROJET PARTIE
TITRE DU DOCUMENT
A4
Nom
ClasseCollège
Date Dessin de définition
33
TECHNOLOGIEwww.a4.fr
Echelle 1:1 Pièces 17Pare-chocs
68
6
20140
120
R 89
R 78

PROJET PARTIE
TITRE DU DOCUMENT
A4
Nom
ClasseCollège
Date Perspective et plan de câblage
Sous Ensemble ECarte Motopilot
34
TECHNOLOGIEwww.a4.fr
REPERE DESIGNATION CARACTERISTIQUES
21 02 Microrupteur à galet dimensions 6 x 10 x 20 mm. Réf. MICRORUP-17M-GP
22 01 Interrupteur Micro-inverseur à glissière unipolaire. Réf. INV-GLI-C
NOMBRE
Moteur 1
Moteur 2
Microrupteur 1
Microrupteur 2Interrupteurà glissière
Coupleurde piles
2 4 IN3
0 1 IN3/ 5
2122

35
Description du kit 1/2
www.a4.fr
Nomenclature du kit (réf. K-RM-J-01)Le kit comprend toutes les pièces et composants électroniques permettant de réaliser RobotPilot.
Sous ensemble A (Moteurs)
Désignation Quantité Repère Dessin
Grappe Propulso, ABS injecté. 01
Moteur 1,5 V à 4,5 V, Ø 21. Axe moteur Ø 2. 02 07
Axe acier doux zingué Ø 3 x 166 mm. 01 05
Vis type tôle, tête cylindrique Ø 3 x 6,5. 02 06
Condensateur 104, CER-100 nf. 02 10
Elastique plat 50 x 8 mm. 02 09
Sous ensemble B (Châssis)
Désignation Quantité Repère Dessin
Châssis PVC expansé 6 mm, 160 x 126 mm. 01 13
Rondelle creuse nylon M2 Ø ext 14 mm. 01 12
Vis type tôle, tête cylindrique Ø 3 x 6,5. 02 06
Sous ensemble C (Platine dessus et supports de piles)
Désignation Quantité Repère Dessin
Platine dessus PVC expansé 6 mm, 80 x 95 mm. 01 14
Support 3 piles R6 avec sorties fils, 47 x 57 x 15 mm. 02 15
Vis Ecosyn, tête fraisée Ø 2,2 x 6 mm. 04 16
RoboTribu - 11/2014

www.a4.fr 36
Description du kit 2/2Sous ensemble D (Pare-chocs)
Désignation Quantité Repère Dessin
Pare-chocs, PVC expansé 6 mm, 140 x 68 mm. 01 17
Entretoises Nylon Ø 6 x 6,1 mm. 01 18
Vis type tôle, tête cylindrique Ø 3 x 13 mm. 01 19
Acier zingué, Ø M4 x 12 mm. 01 20
Sous ensemble E (Carte)
Désignation Quantité Repère Dessin
Cette carte prête à l’emploi est équipée d’un microcontrôleur PICAXE-08 et des borniers pour connecter facilement alimentation,moteurs et capteurs.- 1 entrée numérique.- 4 sorties 600 mA pour contrôle du sens de rotation de 2 moteurs.- Alimentation 3 à 6 V 01
Microrupteur à galet, dimensions 6 x 10 x 20 mm. 02 21
Micro-inverseur à glissière unipolaire. 01 22
Entretoises Nylon Ø 6 x 4 mm. 04 23
Vis type tôle, tête cylindrique Ø 3 x 9.5 mm. 02 24
Vis type tôle, tête cylindrique Ø 2,2 x 9,5 mm. 06 25
50 cm de fil deux conducteurs
15 cm de fil souple un conducteur
RoboTribu - 11/2014

37 www.a4.fr
Fiche de montage RobotPilot - A partir des éléments du kit K-RM-J-01
Phases Opérations10 Montage des moteurs sur le châssis
Pour le montage des motoréducteurs voir éclaté page 07.Fixer les deux motoréducteurs (sous ensemble A) avec les vis 3 x 6,5 (06) sur le châssis (13).
20 Montage du patin avantFixer la rondelle creuse (12) avec une vis 3 x 6,5 (06) dans l’avant trou prévu sur le châssis (13).
30 Montage de la carte programmablePositionner les 4 entretoises (23), mettre par dessus la carte programmable (sous ensemble E)et fixer avec quatre vis (24) et (25).
Sous ensemble A
13
06
13
06
12
Sous ensemble E
RoboTribu - 11/2014
23
2524

38www.a4.fr
Fiche de montage RobotPilot - A partir des éléments du kit K-RM-J-01
Phases Opérations40
50 Montage de la platine et du coupleur de pilesMettre en place la platine support de piles (14) à l’aide de vis (06). Mettre en place le coupleur de piles (15)sur la platine de dessus et le fixerà l’aide de 2 vis 2,2 x 6 (16).
Montage du pare choc et des microrupteurs à galetPositionner le pare-chocs (17) sur le châssis,mettre en place l’entretoise de 6 mm (18)avec la rondelle métal par dessus et maintenirle tout avec une vis 3 x 13 (20).
Mettre le côté du châssis et le côté du pare-chocsparallèle, fixer le microrupteur à galet (21)dans l’avant-trou prévu avec une vis 2,2 x 13 (25).Cette vis va servir d’axe de rotation pour réglerle microrupteur. Tourner le microrupteur pour lui faire affleurerle pare-chocs et fixer le définitivement avec la deuxième vis 2,2 x 13.
Réglage des microrupteurs à galet 19
18
17
21
2520
13
Fixer l’interupteur à glissière (22) sur l’arrièredu motoréducteur droit avec 2 vis 2,2 x 6 (16).
Fixation de l’inverseur à glissière
16
22
16
15
14
06
Ne pas se tromper de troupour mettre la première vis sur le microrupteurvoir figure ci-dessous
ParallèlePousser le pare-chocsà fond vers l’avant
RoboTribu - 11/2014

39 www.a4.fr
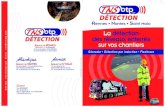
Programmation Test de fonctionnement
Robot équipé 2 mini moteurs et de 2 microrupteurs pour détecter des obstacles :La carte dispose de 4 sorties (0,1) et (2,4) permettant de piloter deux mini moteurs et d’une entrée (IN3) qui permet de brancher un capteur.Le numéro des entrées sorties est repéré au niveau des borniers latéraux.La connexion à l’entrée (IN3) est doublée. On peut ainsi connecter facilement deux microrupteurs qui partagent alors cette même entrée.
Câblage de la carte pour animer un robot à deux roues équipé de deux microrupteurs pour détection d’obstacle :
Moteur 1 Moteur 2
Microrupteur 1 Microrupteur 2
24
IN3
01
IN3/ 5
RU
NP
RO
G
Chargement d’un programme : le cavalier RUN/PROG doit être sur la position PROG
Exécution d’un programme : le cavalier RUN/PROGdoit être sur la position RUN
Ce cavalier doit être sur la position gauche.
Test de fonctionnement Charger le programme Test Robopilot.plf.
Le programme Test Robopilot.plf doit mettre en marche les deux moteurs (en marche avant), si l’un des deux capteurs (ou les deux) est activé le sens de rotation des deux moteurs s’inverse (en marche arrière) pendant 1 seconde. Ils se remettent en marche losrque les capteurs sont libérés.
Cas de pannes :
Symptôme Cause et remède possibles
Les moteurs ne tournent pas Piles usagées à remplacer.Mauvaise connexion.
Les moteurs tournent dans le mauvais sens Vérifier la connexion au niveau de la carte et inverser le branchement des deux moteurs
Les capteurs ne répondent pas Vérifier les soudures sur les microrupteurs et la connexionsur la carte.
RoboTribu - 11/2014

www.a4.fr 40
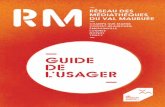
Programmation ARRET.plf
DEBUT
Faire Avancer le robot nécéssite l’activation des deux moteus dans le même sens, soitl’activation des sorties 0 et 2.
RoboTribu - 11/2014
But du programme : s’arrêter au contact d’un obstacle.
Notion de programmation abordée : Activer les moteurs, tester l’état des microrupteurs.

41 www.a4.fr
Programmation CHANGEMENTDIRECTION.plf
DEBUT
La sortie 2 permet au moteur droit d’avancer et la sortie 1 permet au moteur gauche de reculer.Cela fait tourner le robot vers la gauche.
Le temps d’attente sert à contrôler la durée de la commande “Tourner à Gauche”.
RoboTribu - 11/2014
But du programme : changer de direction au contact d’un obstacle.
Notion de programmation abordée : Activer les moteurs, tester l’état des microrupteurs, introduire un temps d’attente.

www.a4.fr 42
Programmation EVITEMENT.plf
DEBUT
Chaque actions du moteur correspond à une combinaison unique des sorties :
RoboTribu - 11/2014
But du programme : éviter un obstacle détecté par un des capteurs microrupteurs en reculant dans un premier temps pour se dégager de l’obstacle puis en changeant de direction.

43 www.a4.fr
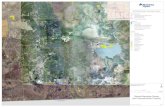
Programmation BALAYERZONE.plf
DEBUT
Tourner à droite
Tourner à gauche
Tourner à droite
RoboTribu - 11/2014
But du programme : balayer une zone délimitée par des murs
Notion de programmation abordée : utilisation d’une variable locale
La commande “Tournerà Gauche” permet de faire un demi tour dans le sens anti horaire.Le commande “Tourner à Droite” permet de faire un demi tour dans le sens horaire.La variable locale permet de déterminer lequel des sous programmes “ournerà Gauche” ou “Tourner à Droite” a été exécuté en dernier :- on affecte la valeur 1 à la variable locale A lorsque la commande “Tourner à Gauche” est exécutée.- on affecte la valeur 0 à la variable locale A lorsque la commande “Tourner à Droite” est exécutée.
A chaque fois qu’un obstacle est détecté dans le programme principal, on vérifie la valeur de la variable locale Aet on exécute le sous programme opposé afin d’inverser le sens de rotation du robot. Celui-ci se déplace alors en balayant une zone.