Reconnaissance d’empreinte digitale par réseaux de neurones
85
République Algérienne Démocratique et Populaire Ministère de l’enseignement Supérieur et de la Recherche scientifique Université Larbi Ben M'hidi Oum El Bouaghi Faculté des Sciences Exactes et Sciences de la Nature et de la Vie Département des Mathématiques et Informatique Filière : Informatique Option : Vision artificielle Mémoire de Fin d’Etudes En vue de l’obtention du diplôme : MASTER Thème Présenté par : Proposé par : • Chebira nabila Dr Berkane Mohamed • Betina narimane Année universitaire : 2015 / 2016 Reconnaissance d’empreinte digitale par réseaux de neurones
Transcript of Reconnaissance d’empreinte digitale par réseaux de neurones

République Algérienne Démocratique et Populaire Ministère de l’enseignement Supérieur et de la Rech erche scientifique
Université Larbi Ben M'hidi Oum El Bouaghi
Faculté des Sciences Exactes et Sciences de la Nature et de la Vie Département des Mathématiques et Informatique
Filière : Informatique
Option : Vision artificielle
Mémoire de Fin d’Etudes En vue de l’obtention du diplôme :
MASTER
Thème
Présenté par : Proposé par :
•••• Chebira nabila Dr Berkane Mohamed
•••• Betina narimane
Année universitaire : 2015 / 2016
Reconnaissance d’empreinte digitale
par réseaux de neurones


Je dédie ce travail, que le bon Dieu nous a énormément aidé à le
faire.
A mes chers parents, pour leur patience et leur soutien pendant
toute ma vie, ce qui n’est pas une mince affaire,
dont le rêve était de me voir toujours réussir
Mes chers parents je vous dis merci parce que tout simplement sans
vous, sans votre conseils et amour, rien de tout cela n’aurait pu être
réalisé.
A mes chères sœurs « Dounia» et « Lina »
A mon chère frère « Hamza »
A mon fiancé « Youcef »
pour leurs
encouragements et leur confiance en moi.
J’adresse également mes plus sincères remerciements à tous mes
oncles et tantes.
A toutes les personnes que j’ai eu la chance d’avoir comme amis.
A tous ceux qui sont venus à mon aide de près ou de loin
Et tous ceux que j'ai oubliés et que mon coeur
N'oubliera jamais.
Et à tous ceux que j’aime.
Narimane

Je dédie ce travail au Noble « Allah» Dieu le tout puissant qui m’a
donné le
Courage, la force et la patience pour réaliser ce
travail.
À celui qui a attendu avec patience les fruits de sa bonne
éducation…
Merci mon Père.
À celle qui m’a entouré de tous soins imaginables pour arriver
à cet aboutissement…
Merci ma Mère
J’exprime ma gratitude à mes sœurs « Rayen»,
« Ikram » et « Nourhan »,
À mon petit frère « Mouhammed » pour la joie qu’il me procure et
l’ambiance qui crée dans la maison.
J’adresse également mes plus sincères remerciements à tous mes
proches.
À tous mes amis qui m’ont toujours soutenu et encouragé au cours
de la réalisation
de ce mémoire,
Et à tous ceux que j’aime.
Nabila

Remerciements
C’est avec l’aide de DIEU tout puissant qui
nous a donné l’opportunité de mener à bien ce travail
et sans que ce mémoire n’aurait jamais vu le jour.
En préambule à ce mémoire, nous souhaitons adresser ici tous
nos remerciements à notre encadreur
Dr Barkane Mohamed
pour l’aide et le temps qu’il a bien voulu nous consacrer
nous remerciement profondément Mm Chebout et Mr Ramech
d’avoir accepté de juger ce travail.
Nous exprimons notre gratitude à tous les enseignants du
département « mathématique et informatique » de l’université
d’Oum El Bouaghi qui n’ont pas
ménagé leurs efforts pour nous assurer une bonne formation.
Nous tenons également à remercier tous ceux et celles qui, de
Près ou de loin, ont contribué de à l’aboutissement de ce
mémoire.
Narimane et Nabila

Table des matières
1 Introduction générale .......................................................................................................... 1
Chapitre 1 : La Biométrie 1 Introduction ......................................................................................................................... 5
2 Biométrie ............................................................................................................................ 5
2.1 Définition ..................................................................................................................... 5
2.2 Fonctionnement de la biométrie .................................................................................. 6
2.2.1 La biométrie par vérification ................................................................................ 6
2.2.2 La biométrie par identification ............................................................................. 6
2.3 Modalités biométriques ............................................................................................... 6
� Les caractéristiques morphologiques (physiologiques) ............................................... 7
2.3.1 Empreinte digitale ................................................................................................ 8
2.3.2 Visage (reconnaissance faciale) ........................................................................... 9
2.3.3 Iris ......................................................................................................................... 9
2.3.4 Géométries de la main ........................................................................................ 10
� Les caractéristiques comportementales ..................................................................... 10
2.3.5 Dynamique de la frappe (au clavier) .................................................................. 10
2.3.6 Dynamique du tracé de la signature ................................................................... 11
2.3.7 Voix .................................................................................................................... 11
2.4 Le marché de la biométrie ......................................................................................... 11
2.5 Domaines d’applications ........................................................................................... 12
2.5.1 Applications commerciales ................................................................................ 12
2.5.2 Applications gouvernementales ......................................................................... 12
2.5.3 Applications légales ........................................................................................... 13
3 Reconnaissance des formes............................................................................................... 13
3.1 Saisie (Numérisation) ................................................................................................ 13
3.2 Prétraitement .............................................................................................................. 14
3.2.1 Suppression du bruit ........................................................................................... 14
� Binarisation ................................................................................................................ 14

� Filtrage ....................................................................................................................... 14
3.2.2 Normalisation ..................................................................................................... 15
3.2.3 Squelettisation .................................................................................................... 15
3.3 Extraction des caractéristiques .................................................................................. 15
3.4 Reconnaissance .......................................................................................................... 15
3.4.1 L’apprentissage .................................................................................................. 15
3.4.2 Décision .............................................................................................................. 16
3.5 Classification ............................................................................................................. 16
3.6 Post-traitement ........................................................................................................... 16
4 Empreinte digitale ............................................................................................................. 16
4.1 Caractéristiques d’une empreinte digitales et différenciation ................................... 16
4.1.1 Motif ................................................................................................................... 17
4.1.2 Points singuliers ................................................................................................. 18
5 Structure d’un système de reconnaissance d’empreinte digitale ...................................... 19
5.1 Acquisition d’empreinte digitale ............................................................................... 19
5.1.1 L'empreinte acquise par encre (inkedfingerprint) .............................................. 19
5.1.2 Les empreintes latentes ...................................................................................... 20
5.2 Prétraitement .............................................................................................................. 22
5.3 Squelettisation ........................................................................................................... 22
5.4 Extraction des caractéristiques .................................................................................. 23
5.5 Comparaison : ............................................................................................................ 24
6 Méthodes de reconnaissance d’empreinte digitale : ......................................................... 25
6.1 Approche basé sur corrélation ................................................................................... 26
6.2 Approche basé sur minuties ....................................................................................... 26
6.2.1 Park et al. (2008) ................................................................................................ 26
6.2.2 Lumini et al. (2008) ............................................................................................ 26
6.2.3 Jain et al. (1997) ................................................................................................. 27
6.3 Approche basé sur rides ............................................................................................. 27
6.4 Approche basé sur l’image ........................................................................................ 27
6.4.1 Jin et al. (2004) ................................................................................................... 27
6.5 Approche neuronale ................................................................................................... 28
6.5.1 Gupta et al .......................................................................................................... 28
6.5.2 Umamaheswaril et al. (2007) ............................................................................. 28

6.5.3 Tan et al. (2005) ................................................................................................. 29
7 Conclusion ........................................................................................................................ 29
Chapitre 2 : Réseaux de neurone
1 Introduction ....................................................................................................................... 31
2 Historique .......................................................................................................................... 31
3 Le Neurone Biologique ..................................................................................................... 32
4 Le Neurone Formel ........................................................................................................... 33
5 Les Réseaux de Neurones ................................................................................................. 34
5.1 La structure ................................................................................................................ 34
5.2 Apprentissage à l’aide d’un réseau de neurones ........................................................ 34
5.2.1 Type d’apprentissage .......................................................................................... 35
5.3 Applications des réseaux de neurones ....................................................................... 35
5.4 Les grands types de réseaux ...................................................................................... 36
5.4.1 Les Perceptrons Multicouches ........................................................................... 36
5.4.2 Les Réseaux de Kohonen (SOM: Self Organizing Map ) .................................. 36
5.4.3 Les Réseaux de Hopfield .................................................................................... 37
6 Les Réseaux de Kohonen .............................................................................. 38
6.1 Le Principe ................................................................................................................ 38
6.2 Utilisation de la carte ................................................................................................. 39
6.3 Apprentissage ............................................................................................................ 40
7 Conclusion ........................................................................................................................ 40
Chapitre 3 : La reconnaissance des empreintes digitales
1 Introduction ....................................................................................................................... 42
2 Description du système ..................................................................................................... 42
2.1 Organigramme ........................................................................................................... 42
2.2 Acquisition de l’empreinte : ...................................................................................... 43
2.3 Niveau de gris ............................................................................................................ 43
2.4 Homothétie ................................................................................................................ 43
2.5 Les Prétraitements : ................................................................................................... 43
2.5.1 Filtrage ............................................................................................................... 43
2.5.2 Binaraisation ....................................................................................................... 43
2.5.3 Squelettisation de l'empreinte............................................................................. 44

2.6 Extraction des Les minuties ....................................................................................... 45
2.7 Classification à base la carte de kohonen : ................................................................ 47
2.7.1 Apprentissage : ................................................................................................... 47
2.7.2 Algorithme d’apprentissage ............................................................................... 49
2.7.3 Décision : ............................................................................................................ 49
3 Conclusion ........................................................................................................................ 50
Chapitre 4 : Conception et impélementation
1 Introduction ....................................................................................................................... 52
2 L’environnement de développement ................................................................................ 52
2.1 L’environnement matériel : ....................................................................................... 52
2.2 Environnement Logiciel : .......................................................................................... 52
2.2.1 NetBeans ............................................................................................................ 53
2.2.2 Environnement de Développement Intégré Java ................................................ 54
2.2.3 Bref Historique de NetBeans .............................................................................. 54
3 Présentation de travail: ...................................................................................................... 54
4 Base de données d’empreinte digitale............................................................................... 54
5 Présentation de l’interface homme-machine :................................................................... 55
5.1 Authentification de l'utilisateur ................................................................................. 55
5.1.1 Le nom et mot de passe ...................................................................................... 56
5.2 Fenêtre principale de l’application (Accueil) ............................................................ 57
5.2.1 Composants de menu de barre ........................................................................... 58
5.2.2 Chargement de l’empreinte digitale : ................................................................. 62
5.2.3 Homothétie ......................................................................................................... 62
5.2.4 Transformation en niveaux de gris ..................................................................... 63
5.2.5 Les prétraitements .............................................................................................. 62
5.2.6 Extraction des points : ........................................................................................ 65
5.2.7 Test ..................................................................................................................... 66
6 Conclusion ........................................................................................................................ 66
Conclusion général ................................................................................................................... 67

Liste de figures
Figure 1 : Exemple des techniques biométriques : (A), (B), (C), (D), (E), (F), (G), (H). ........ 7
Figure 2 : Les caractéristiques physiques de certaines parties de corps humain. ....................... 8
Figure 3: Empreintes digitales de différents individus. .............................................................. 8
Figure 4 : Reconnaissance par Visage. ....................................................................................... 9
Figure 5 : Capteur de l’image d’un iris. ..................................................................................... 9
Figure 6 : Dispositif de reconnaissance par géométrie de la main. .......................................... 10
Figure 7 : La frappe au clavier. ................................................................................................ 10
Figure 8 : capture de signature. ............................................................................................... 11
Figure 9: Spectre d’un signal voix. .......................................................................................... 11
Figure 10: Répartition des techniques biométriques 2012. ...................................................... 12
Figure 11: Schéma général d’un système de reconnaissance des formes. ............................... 13
Figure 12 : Effets de certaines opérations de prétraitement sur un mot arabe. ........................ 14
Figure 13 : empreinte digitale. ................................................................................................. 16
Figure 14: types d’empreintes. ................................................................................................. 17
Figure 15: Empreinte avec deux spirales. ................................................................................ 17
Figure 16: types de minuties. ................................................................................................... 18
Figure 17: Points singuliers d’une empreinte digitale. ............................................................. 18
Figure 18: Schéma général d’un système de reconnaissance d’empreinte digitale. ................ 19
Figure 19: capteur optique. ....................................................................................................... 20
Figure 20: Capteur thermique. ................................................................................................. 21
Figure 21: capteur a ultrasons. ................................................................................................. 21
Figure 22: capteur silicium. ...................................................................................................... 21
Figure 23: binarisation. ............................................................................................................ 22
Figure 24: filtrage (exemple d’un filtrage linéaire). ................................................................. 22
Figure 25: squelettisation. ........................................................................................................ 23
Figure 26: extraction des caractéristiques. ............................................................................... 23
Figure 27: exemple de comparaison. ........................................................................................ 25
Figure 28: Représentation schématique d’un neurone. ............................................................ 33

Figure 29 : Le neurone formel .................................................................................................. 33
Figure 30: Réseau de neurones artificiel. ................................................................................. 34
Figure 31: Un perceptron multicouche. .................................................................................... 36
Figure 32: la carte de kohonen. ................................................................................................ 37
Figure 33: Le réseau de Hopfield. ............................................................................................ 37
Figure 34: Le réseau de Kohonen ............................................................................................ 38
Figure 35: Carte topologique. ................................................................................................... 39
Figure 36: Système de reconnaissance. .................................................................................... 42
Figure 37 : Binarisation de l’empreinte digitale. ...................................................................... 44
Figure 38: Ensemble des configurations de points inessentiels. .............................................. 45
Figure 39: Squelettisation de l’empreinte digitale. .................................................................. 45
Figure 40: Extraction des minuties. .......................................................................................... 46
Figure 41: Les minuties en empreinte digitale. ........................................................................ 47
Figure 42 : Les terminaisons et les bifurcations. ...................................................................... 47
Figure 43 : Logo de NetBeans. ................................................................................................. 53
Figure 44: Netbeans 8.0. .......................................................................................................... 53
Figure 45: Echantillon d’empreintes d’une personne de la base BD1 et BD2. ........................ 55
Figure 46: Information valide. ................................................................................................. 56
Figure 47: Boite de dialogue (erreur). ...................................................................................... 57
Figure 48: fenêtre principale de l’application (Accueil). ......................................................... 58
Figure 49: Menu fichier. ........................................................................................................... 59
Figure 50:Menu reconnaissance. .............................................................................................. 59
Figure 51 : Menu de traitement. ............................................................................................... 60
Figure 52: Menu Carte de Kohonen. ........................................................................................ 61
Figure 53: Boite de dialogue (information). ............................................................................. 61
Figure 54: Chargement d’une image d’empreinte digitale. ...................................................... 62
Figure 55: Homothétie. ............................................................................................................ 62
Figure 56: Mise en niveaux de gris. ......................................................................................... 63
Figure 57: Filtrage de l'empreinte. ........................................................................................... 63
Figure 58: Binarisation d’empreinte. ....................................................................................... 64
Figure 59 : Squelettisation de l’empreinte ............................................................................... 65
Figure 60:Extraction des minuties. ........................................................................................... 65
Figure 61: Fiche d’authentification de la personne. ................................................................. 66

Liste de Tableaux
Tableau 1: Identification d’une minutie à partir du calcul de CN. ........................................... 46
Tableau 2: Information sur les bases de données. .................................................................... 55

Introduction générale
1
1 Introduction générale
La biométrie est la technique qui permet de reconnaître des personnes à partir de leurs
caractéristiques physiques et comportementales. L’utilisation des parties du corps humain
pour reconnaître les personnes est un procédé ancien. Dans une cave dont l’âge est estimé à
31millénaires, des murs jonchés de dessins d’empreintes de la main ont été découverts. Au
VIème siècle avant JC, les babyloniens utilisaient déjà l’empreinte du pouce laissée sur une
poterie d’argile pour sceller des accords commerciaux. La chine antique en faisait de même
quasiment au même moment où les parents chinois utilisaient tant l’empreinte digitale de la
main que celle du pied pour différencier leurs enfants. Les égyptiens utilisaient les
descriptions physiques des commerciaux pour différencier ceux qui sont connus de ceux qui
sont nouveaux sur le marché. La couleur des yeux est aussi utilisée dans de nombreuses
civilisations antiques pour reconnaître des personnes et c’est aussi le cas dans les prisons
françaises au XVIème siècle pour reconnaître les prisonniers.
Le XIXème siècle a connu la naissance de l’anthropométrie, véritable ancêtre de la
biométrie. Avec la rapide croissance des cités, les besoins de reconnaître les personnes
devinrent de plus en plus importants. Alphonse Bertillon (1853-1914) père de l’anthropologie,
instaura un système de reconnaissance des personnes basé sur la mesure de différents
paramètres du corps humain. Après la publication de plusieurs travaux stipulant qu’il était
possible d’utiliser les empreintes digitales pour identifier des personnes, ce procédé émergea
en Asie, en Afrique du Sud et en Europe. En Inde, Edward Henry développa une méthode
robuste de reconnaissance à base d’empreintes digitales. Sir Francis Galton publia des travaux
détaillés sur la reconnaissance par l’empreinte digitale basés sur des caractéristiques
particulières de la texture de l’empreinte, les minuties. Ces caractéristiques sont encore
utilisées dans les systèmes automatiques de nos jours. Alors que la méthode de Bertillon
connut plusieurs ratés, l’enregistrement systématique des empreintes connut en revanche un
essor mondial. Les prisons américaines commencèrent à rendre obligatoire l’enregistrement
des empreintes des détenus dès 1903. La même année la police parisienne réussit l’exploit de
confondre un criminel en utilisant ses empreintes digitales. Dans les années 30, un
ophtalmologiste, FrankBurch, proposa le concept de la texture de l’iris pour reconnaître des
personnes; cette méthode sera considérée bien des années plus tard, comme la plus

Introduction générale
2
performante du domaine biométrique. Avec l’avènement des ordinateurs, l’idée d’une
reconnaissance automatique est née ; c’est le début de la biométrie moderne. Dans les années
60, plusieurs travaux sur des algorithmes automatiques ou semi automatiques furent publiés ;
citons le cas du visage, de la signature, de la voix et bien sûr des empreintes digitales. Grâce à
cet élan de recherche et ces travaux très prometteurs, le FBI (Federal Building Investigation)
lança en 1969 une campagne scientifique afin de développer un système automatique de
reconnaissance par les empreintes digitales. La géométrie de la main dont les balbutiements
remontent au milieu du XIXème siècle connut dans les années 70 un regain d’intérêt avec la
commercialisation du premier produit biométrique de contrôle d’accès et d’identification [1].
Il existe différents moyens physiques ou comportementaux qui permettent une
reconnaissance de l’individu. Comme déjà cité, l’empreinte, l’iris, le visage et la forme de la
main sont des moyens physiques appelés ‘modalités biométriques’. On peut aussi citer
l’exemple de la veine de la main et de la rétine. Pour ce qui est des modalités
comportementale son peuvent citer la signature (dynamique ou statique), la démarche…Dans
ce mémoire, nous nous sommes intéressés uniquement aux problématiques liées à la modalité
de l’empreinte digitale.
Résumé
Notre objectif est de mettre en œuvre un système de reconnaissance d’individus à base
d’empreintes digitales en utilisant les cartes auto-organisatrice de Kohonen.
Le travail s’est focalisé autour des points suivants : premièrement, nous avons préparé
la base de données : des empreintes digitales. Une fois le traitement préliminaire sur les
empreintes digitale est effectué, les points caractéristiques de l’empreinte digitale dites
minuties ont été localisés et classifiés. Dans une dernière étape l’identification des individus
est réalisée en utilisant une classification à base d’un réseau de neurones : carte auto-
organisatrice de Kohonen.
Mots clés : Reconnaissance d’empreintes digitales, réseau de neurones, les cartes auto-
organisatrice de Kohonen.

Introduction générale
3
Plan du mémoire
Notre mémoire est présenté en quatre chapitres présentés comme suit :
Le premier chapitre est consacré à la présentation générale de la biométrie. Il décrit
tout d’abord les différentes modalités existantes. Ensuite la place de la reconnaissance
d’empreinte digitale parmi les autres techniques biométriques. Nous expliquerons ainsi
l’architecture d’un système de vérification par l’empreinte digitale. Dans le deuxième
chapitre nous présenterons les réseaux de neurones et ce dont ils sont capables. Nous
étudierons surtout l’utilisation des réseaux de Kohonen comme outil de classification. Le
troisième chapitre est consacré à la description de la méthode développée dans ce projet à
savoir le prétraitement, l’extraction des caractéristiques et la classification. Dans le dernier
chapitre, nous présentons décrivant la phase d’implémentation autrement dit nous présentons
l’environnement matériel, logiciel ainsi que les résultats intermédiaires et les résultats finaux.
Enfin, la conclusion générale résumera notre contribution et donnera quelques suggestions et
perspectives sur les futurs travaux.

Chapitre 1 La Biométrie et les empreintes digitales
4
Chapitre 1
La biométrie et les empreintes digitales

Chapitre 1 La Biométrie et les empreintes digitales
5
Chapitre 1
La biométrie et les empreintes digitales
1 Introduction
De nos jours on parle de plus de l’insécurité dans divers secteurs ainsi que des moyens
informatiques à mettre en œuvre pour contrer cette tendance : le contrôle d’accès aux
ordinateurs, l’e-commerce, les opérations bancaires basées sur l’identification du demandeur,
etc. Il existe traditionnellement deux manières d’identifier un individu. La première méthode
est basée sur une connaissance à priori de la personne telle que la connaissance de son mot de
passe. La seconde méthode est basée sur la possession d’un objet. Il peut s’agir d’une pièce
d’identité, d’une clé, d’un badge, etc. Ces deux modes l’identification peuvent être utilisée de
manière complémentaire afin d’obtenir une sécurité accrue. Cependant, elles ont chaque leurs
faiblesses. Dans le premier cas, mot de passe peut être oublié par son utilisateur ou bien
deviné par une autre personne. Dans le second cas, le badge, la pièce d’identité ou la clé peut
être perdu ou volé. Pour remédier à ces inconvénients, la biométrie a été proposée comme une
solution alternative aux deux modes l’identification précédents. L’avantage de la biométrie
est qu’elle utilise des caractéristiques biométriques qui sont unique à l’individu et il y a peu
de possibilité que d’autres individus peuvent remplacer ces caractéristiques, donc les
technologies biométriques sont considérées les plus puissantes en termes de sécurité.
La biométrie possède des applications très intéressantes dans le domaine de la sécurité.
Elle permet en effet de s’assurer de l’identité d’une personne et de contrôler ainsi les accès
aux lieux et données sensibles. On cité par exemple l’empreinte digitale.
2 Biométrie 2.1 Définition
La biométrie consiste à identifier une personne à partir d’une ou de plusieurs
caractéristiques physiologiques (empreintes digitales, visage, iris, contour de la main, etc.), ou
comportementales (signature, démarche, etc.). Etymologiquement, la biométrie humaine est
synonyme d’anthropologie physique. Une autre définition de la biométrie est donnée par

Chapitre 1 La Biométrie et les empreintes digitales
6
Roethenbaugh « La biométrie s'applique à des particularités ou des caractères humains uniques
en leur genre et mesurables, permettant de reconnaître ou de vérifier automatiquement l'identité
». Aussi, la biométrie représente d’une certaine manière, l’analyse mathématique des
caractéristiques biologiques sus citées dans le but de déterminer l’identité d’une personne de
manière irréfutable. [2][3]
Depuis quelques années Le système biométrique ont pris un essor considérable.
L’apparition de l’ordinateur et sa capacité à traiter et à stocker les données ont permis la création
des systèmes biométriques informatisés. Il existe plusieurs caractéristiques physiques uniques
pour un individu, ce qui explique la diversité des systèmes appliquant la biométrie. [4]
2.2 Fonctionnement de la biométrie
2.2.1 La biométrie par vérification L’employé s’identifie tout d’abord par un badge ou un code, puis la pointeuse compare
l’empreinte de l’utilisateur avec l’empreinte sauvegarde pour ce badge ou ce code. Temps de
vérification 1 seconde.
2.2.2 La biométrie par identification
Sans badge ou code, le lecteur compare l’empreinte a toutes les empreintes stockées
dans la pointeuse. Temps d’identification 2-3 secondes.
2.3 Modalités biométriques
Les différents systèmes biométriques sont basée sur des caractéristiques soit physiques
comme la forme empreintes digitales, géométrie de la main, la rétine et l’iris ; Soit sur des
caractéristiques comportementales comme la voix et la signature. Les modalités biométriques
utilisées sont représentées ci-dessous :

Chapitre 1 La Biométrie et les empreintes digitales
7
� Les caractéristiques morphologiques (physiologiques)
Elle est basée sur l'identification de traits physiques particuliers qui, pour toute
personne, sont uniques et permanents. Cette catégorie regroupe l'iris de l'œil, le réseau veineux
de la rétine, la forme de la main, les empreintes digitales, les traits du visage, les veines de la
main, etc. [4]
La biométrie utilise les caractéristiques physiques de certaines parties du corps humain. On
trouve parmi les plus courantes : empreintes digitales, visage, contour de la main, la rétine et iris.
[5]
A : empreint digitale. B : iris . C : main.
D: frappe clavier. E : voix. F : Signature.
H : visage. G : ADN
Figure 1 : Exemple des techniques biométriques : (A), (B), (C), (D), (E), (F), (G), (H).

Chapitre 1 La Biométrie et les empreintes digitales
8
Figure 2 : Les caractéristiques physiques de certaines parties de corps humain.
2.3.1 Empreinte digitale La reconnaissance des empreintes digitales est la méthode biométrique la plus utilisée.
Les empreintes digitales sont composées de ligne localement parallèles présentant des points
singuliers et constituent un motif unique, universel et permanent. Pour obtenir une image de
l'empreinte d'un doigt, les avancées technologiques ont permis d'automatiser la tâche au moyen
de capteurs intégrés, remplaçant ainsi l'utilisation classique de l'encre et du papier [4].
Figure 3: Empreintes digitales de différents individus.
� La reconnaissance des empreintes digitales possède plusieurs avantages sur les autres
technologies biométriques : petite taille facilitant son intégration dans la majorité des
applications (téléphones portables, ordinateurs portables), faible coûts des grâce aux nouveaux
capteurs, facile à utiliser.

Chapitre 1 La Biométrie et les empreintes digitales
9
2.3.2 Visage (reconnaissance faciale)
La reconnaissance à partir du visage se base sur les caractéristiques jugées
significatives comme l’écart entre les yeux, la forme de la bouche, le tour du visage, la position
des oreilles, la longueur du nez, etc.
Il existe plus de 60 critères fondamentaux, une méthode consiste à décomposer le
visage selon plusieurs images en différentes nuances de gris : chaque image met en évidence une
caractéristique particulière. [6]
Le problème de cette méthode vient des possibles perturbations pouvant transformer le
visage (maquillage, faible luminosité, d’une barbe ou d’une lunette, changement avec
l’âge…..).[7]
2.3.3 Iris
L’iris est une technique extrêmement fiable car il contient une infinité de points
caractéristiques (ensemble fractal), la fraude étant néanmoins possible en utilisant des lentilles.
L’acquisition de l’iris est effectuée au moyen d’une caméra pour pallier aux mouvements
inévitables de la pupille. Elle est très sensible (précision, reflet…) et relativement désagréable
pour l’utilisateur car l’œil doit rester grand ouvert et il est éclairé par une source lumineuse pour
assurer un contraste correct. [2][8]
Figure 4 : Reconnaissance par Visage.
Figure 5 : Capteur de l’image d’un iris.

Chapitre 1 La Biométrie et les empreintes digitales
10
2.3.4 Géométries de la main Jusqu’à 90 caractéristiques de la main sont mesurées (forme de la main et des
articulations, longueur et largeur des doits, longueur inter articulations…). [8]
Le taux d’erreur dans la reconnaissance est assez élevé, en particulier pour des
jumeaux ou d’autres membres de la même famille en raison d’une forte ressemblance. De plus la
forme de la main évolue beaucoup avec l’âge. [7]
� Les caractéristiques comportementales
Elle se base sur l'analyse de certains comportements d'une personne. Cette catégorie
regroupe la reconnaissance vocale, la dynamique de frappe au clavier, la dynamique de la
signature, l'analyse de la démarche, etc. [4]
2.3.5 Dynamique de la frappe (au clavier)
La reconnaissance biométrique accueille une nouvelle technologie, basée sur la
dynamique de frappe des touches sur un clavier. En analysant la façon dont on tape un texte sur
un clavier, cet outil biométrique remplacera peut être un jour l'analyse graphologique, et
permettra de garantir la validité d'un mot de passe. [9]
Figure 6 : Dispositif de reconnaissance par géométrie de la main.
Figure 7 : La frappe au clavier.

Chapitre 1 2.3.6 Dynamique du tracé de la signature
Il s’agit d’une analyse comportementale où
ordre d’écriture, pression exercée, accélération…) sont mesurés lors de la signature. La
falsification est possible en passant par une phase d’apprentissage, la signature peut carier selon
le stress de l’utilisateur. [2]
2.3.7 Voix
La voix humaine est une caractéristique biométrique intéressante, puisqu’elle dépend
de la structure anatomique de l’individu ainsi que de l’apprentissage du langage fait lors de
l’enfance. La capture de la voix est relativement facile à effectuer, à l’aid
mais elle est susceptible à être corrompue par les bruits ambiants. [8]
2.4 Le marché de la biométrie
Selon « l’International Biometric Group
celles d’identification automatique d’empreintes totalisent à elles seules presque 75% du
marché mondial de la biométrie (respectivement 263,1 et 421,9 millions de dollars). Suivent
ensuite la reconnaissance faciale (57,5 millions), la reconnaissance de la main (50,7 millions),
Figure
Figure
La Biométrie et les empreintes
du tracé de la signature
Il s’agit d’une analyse comportementale où différents éléments (mesure da la vitesse,
ordre d’écriture, pression exercée, accélération…) sont mesurés lors de la signature. La
falsification est possible en passant par une phase d’apprentissage, la signature peut carier selon
La voix humaine est une caractéristique biométrique intéressante, puisqu’elle dépend
de la structure anatomique de l’individu ainsi que de l’apprentissage du langage fait lors de
l’enfance. La capture de la voix est relativement facile à effectuer, à l’aide d’un microphone,
mais elle est susceptible à être corrompue par les bruits ambiants. [8]
Le marché de la biométrie
l’International Biometric Group », les seules techniques de scan d’empreintes et
celles d’identification automatique d’empreintes totalisent à elles seules presque 75% du
marché mondial de la biométrie (respectivement 263,1 et 421,9 millions de dollars). Suivent
faciale (57,5 millions), la reconnaissance de la main (50,7 millions),
Figure 8 : capture de signature.
Figure 9: Spectre d’un signal voix.
et les empreintes digitales
11
différents éléments (mesure da la vitesse,
ordre d’écriture, pression exercée, accélération…) sont mesurés lors de la signature. La
falsification est possible en passant par une phase d’apprentissage, la signature peut carier selon
La voix humaine est une caractéristique biométrique intéressante, puisqu’elle dépend
de la structure anatomique de l’individu ainsi que de l’apprentissage du langage fait lors de
e d’un microphone,
, les seules techniques de scan d’empreintes et
celles d’identification automatique d’empreintes totalisent à elles seules presque 75% du
marché mondial de la biométrie (respectivement 263,1 et 421,9 millions de dollars). Suivent
faciale (57,5 millions), la reconnaissance de la main (50,7 millions),

Chapitre 1 La Biométrie et les empreintes digitales
12
celle de l’iris (37,1) et celle de la voix (20,8). Pour finir, l’analyse des signatures et de la
façon de taper au clavier atteignent respectivement 12,2 et 1,7 millions de dollars.
Les empreintes digitales continuent à être la principale technologie biométrique en termes de
part de marché, près de 50% du chiffre d’affaires total. [14]
2.5 Domaines d’applications
Les différents domaines dans lesquels s’exercent ces professionnels sont :
2.5.1 Applications commerciales
Telles que l'ouverture de réseau informatique, la sécurité de données électroniques, l'e-
commerce, l'accès Internet, la carte de crédit, le contrôle d'accès physique, le téléphone
cellulaire, la gestion des registres médicaux, le verrouillage des équipements de communication,
l'étude à distance, etc.
2.5.2 Applications gouvernementales
Telles que la carte d'identité nationale, le permis de conduire, la sécurité sociale, le
contrôle des frontières, le contrôle des passeports, etc.
Figure 10: Répartition des techniques biométriques 2012.

Chapitre 1 La Biométrie et les empreintes digitales
13
2.5.3 Applications légales
Telles que l'identification de corps, recherche criminelle, identification de terroriste.
[8]
3 Reconnaissance des formes
La reconnaissance des formes peut être définie comme l’ensemble des techniques
informatiques de représentation et de décision permettant aux machines d'associer une étiquette à
une donnée qui peut se présenter sous forme d'une image ou d'un signal. Des données différentes
peuvent recevoir la même étiquette, ces données sont les réalisations ou les exemplaires de la
classe identifiée par l'étiquette [10]. L'objectif de la reconnaissance des formes est de réaliser des
systèmes informatisés qui simulent les activités humaines de perception, de reconnaissance et de
compréhension : reconnaissance de l'écrit, de la parole, d’empreinte digitale, interprétation de
scènes, robotique. [11]
Le schéma de la reconnaissance des formes peut être représenté selon le schéma suivant :
Classe
Monde réel Espace des formes Espace de représentation Espace des classes
3.1 Saisie (Numérisation)
À partir des informations du monde physique, il s’agit de construire une représentation
des données directement manipulable par la machine. Des capteurs (microphone, caméra,
instruments de mesure) convertissent les signaux reçus du monde réel en une représentation
numérique discrète en effectuant un échantillonnage et une quantification. [11]
Saisie Prétraitements Extraction de
Caractéristiques
Apprentissage
Décision
Post-traitements
Figure 11: Schéma général d’un système de reconnaissance des formes.

Chapitre 1 La Biométrie et les empreintes digitales
14
3.2 Prétraitement
Les prétraitements sont utiles pour la normalisation et l’amélioration des contrastes et
aussi pour éliminer des bruits qui peuvent être dus au capteur ou à des interférences avec
d’autres sources de signaux (la parole au milieu sonore, l’encre du verso qui traverse le papier et
dont la trace est visible sur la feuille du manuscrit ; les fonds d’images des chèques ...) [11]
3.2.1 Suppression du bruit
Le bruit est une erreur aléatoire dans la valeur d’un pixel, elle se produit
habituellement lors de la numérisation de la forme, ou elle peut être due à la forme originale
même. Parmi les méthodes de suppression de bruit les plus courantes, on retrouve La
binarisation et le lissage. [10]
� Binarisation
C'est le passage d'une image en couleur ou définie par plusieurs niveaux de gris en
image bitonale (composée de deux valeurs 0 et 1) qui permet une classification entre le fond
(image du support papier en blanc) et la forme (traits des gravures et des caractères en noir).
� Filtrage
L'image des caractères peut être entachée de bruits dus aux artefacts de l'acquisition et
à la qualité du document, conduisant soit à une absence de points ou à une surcharge de points.
Les techniques de filtrage permettent de résoudre ces problèmes par des opérations locales qu'on
appelle opérations de bouchage et de nettoyage. [11]
Figure 12 : Effets de certaines opérations de prétraitement sur un mot arabe.

Chapitre 1 La Biométrie et les empreintes digitales
15
3.2.2 Normalisation
Le principe de la normalisation est d'essayer de normaliser localement différentes
parties du mot, de manière à augmenter la ressemblance d'une image à une autre.
Après la normalisation de la taille, les images de tous les caractères se retrouvent
définies dans une matrice de même taille, Pour faciliter les traitements ultérieurs.
3.2.3 Squelettisation
Le but de cette technique est de simplifier l'image du caractère en une image à « ligne
» plus facile à traiter en la réduisant au tracé du caractère. Les algorithmes de squelettisation se
basent sur des méthodes itératives. Le processus s'effectue par passes successives pour
déterminer si un tel ou tel pixel est essentiel pour le garder ou non dans le tracé. [12]
3.3 Extraction des caractéristiques
L’étape d’extraction de caractéristiques appelée étape d’analyse est l’une des étapes les
plus importantes et délicates dans la construction d’un système de reconnaissance des formes.
Son but est de concentrer l’information présente dans la forme en un ensemble réduit de
données, stable et représentatif. Le résultat de cette étape est un ensemble de paramètres
caractérisant la forme.
Les caractéristiques extraites, doivent répondre à des critères bien précis, pour garantir
l’efficacité de la décision sur la forme à classifier. [10]
3.4 Reconnaissance
La reconnaissance regroupe deux tâches importantes dans tout système de
reconnaissance des formes se sont : d apprentissage et de décision
3.4.1 L’apprentissage
L’apprentissage se charge d’acquérir des connaissances sur les formes pour tenter de
définir des modèles de référence ou de caractériser des classes de décision.

Chapitre 1 La Biométrie et les empreintes digitales
16
L’apprentissage dépend de la méthode choisie pour la reconnaissance ainsi que le type
du problème à traiter, mais peut être effectué selon deux façons : apprentissage supervisé,
apprentissage non supervisé.
3.4.2 Décision
Le rôle est d’identifier la forme test à partir de l’apprentissage réalisé.
3.5 Classification
Cette phase est le noyau de la reconnaissance des formes. En utilisant les modèles
(paramètres) obtenus lors de l’apprentissage, le classificateur assigne à chaque forme inconnue
sa ou ses formes les plus probables. [11]
3.6 Post-traitement
Cette phase a pour but de corriger les résultats de la classification en utilisant des outils
spécifiques au domaine d’application. Bien que facultative, cette phase permet d’améliorer
considérablement la qualité de la reconnaissance. [11]
4 Empreinte digitale
Une empreinte digitale appelées aussi dermatoglyphes est le dessin formé par les lignes
de la peau des doigts, est la caractéristique d'un doigt. Elles sont uniques et immuables (sauf par
accident comme une brûlure par exemple).
La probabilité de trouver deux empreintes digitales similaires est de 10-24 .[13]
4.1 Caractéristiques d’une empreinte digitales et différenciation
Figure 13 : empreinte digitale.

Chapitre 1 La Biométrie et les empreintes digitales
17
4.1.1 Motif
Les empreintes digitales possèdent des motifs différents. Il existe 3 grandes familles
d’empreintes qui regroupent à elles seules 95% des doigts humains :
-Les arcs ou les arches.
-Les boucles (à droite ou à gauche).
- Les tourbillons.
A : boucle B : tourbillon C : arche
Figure 14: types d’empreintes.
� Boucle
Sont les motifs les plus répandus qui représentent 60% des doigts humains. Dans ce
type d’empreinte les lignes se replient sur elles même soit vers la droite, soit vers la gauche.
� Tourbillons
Qui correspondent à 30% des doigts humains. Cette empreinte, dite en verticille,
comprend des lignes qui viennent s’enrouler autour d’un point, formant un genre de tourbillon.
Les arches : sont les motifs les moins répandus qui regroupent seulement 5% des doigts
humains .Cette empreinte, en arc, contient des lignes disposées les unes au-dessus des autres qui
forment des A.
Des dessins beaucoup plus rares sont par exemple des doubles boucles imbriquées ou
double spirales
Figure 15: Empreinte avec deux spirales.

Chapitre 1 La Biométrie et les empreintes digitales
18
4.1.2 Points singuliers
Deux éléments permettent de différencier deux empreintes digitales ayant le même
motif :
� Points singuliers globaux
Le noyau, ou centre de l'empreinte (le lieu de convergence des stries) et son delta (le
lieu de divergence des stries).
� Points singuliers locaux, ou minuties
Celles-ci sont des points d'irrégularité se trouvant sur les lignes capillaires. Il existe
plusieurs types de minuties, chaque empreinte en compte environ une centaine, mais les
contrôles ne sont effectués qu'à partir de 12 points.
L’image ci-dessous représente les points singuliers globaux (en rouge) et les points
singuliers locaux (en bleu). [14][15]
Figure 16: types de minuties.
Figure 17: Points singuliers d’une empreinte digitale.

Chapitre 1 La Biométrie et les empreintes digitales
19
5 Structure d’un système de reconnaissance d’empreinte digitale
Le système de reconnaissance d’empreinte digitale est un cas particulier du RDF. Un
système automatique complet de reconnaissance d’empreinte digitale est une chaine de processus
qui a partir du doigt d’un utilisateur en entrée renvoi un résultat en sortie permettant ainsi a
l’utilisateur d’accéder ou non a des élément nécessitant une protection.
5.1 Acquisition d’empreinte digitale
La première phase d’un système de reconnaissance consiste à obtenir une image de
l’empreinte du doigt.
La capture de l'image d'une empreinte digitale consiste à trouver les lignes tracées par
les crêtes (en contact avec le capteur) et les vallées (creux). [16]
5.1.1 L'empreinte acquise par encre (inkedfingerprint)
Après l'avoir enduit d'encre, le doigt est imprimé sur un bout de papier. Ce papier
passe ensuite au scanner standard pour être numérisé. Cette ancienne technique a perduré
pendant environ un siècle. L'image ainsi prise présente de larges crêtes mais souffre d'une grande
Figure 18: Schéma général d’un système de reconnaissance d’empreinte digitale.

Chapitre 1 La Biométrie et les empreintes digitales
20
déformation due à la nature du processus d'acquisition. Il est clair que cette méthode n'est pas
adaptée aux procédés automatiques temps réel.
5.1.2 Les empreintes latentes
Elles sont formées suite à une légère trace laissée sur un objet due à la sécrétion
constante de la sueur. Les services de sécurité décèlent ce genre de détails sur les lieux de crime
à l'aide d'une poudre spéciale. En l'occurrence un dispositif spécial est utilisé, les capteurs dont
voici une énumération des différents types :
� Le capteur optique
La technologie la plus répondue dans les systèmes d'acquisition par capteur est celle qui
utilise le principe de la réflexion de la lumière. Un prix acceptable constitue l'avantage principal
des systèmes optiques ; leur inconvénient est qu'ils sont faciles à détourner. Les scanners
optiques sont facilement intégrables dans diverses applications telles que les ordinateurs
portables, les cellulaires et les mémentos électroniques.
� Le capteur thermique
La méthode thermique est moins habituelle. Actuellement, le seul capteur thermique est le
FingerChip fabriqué par Atmel. Cette méthode donne une image d'excellence qualité même sur
des empreintes de qualité médiocre ; permettant ainsi au FingerChip d'être l'une des capteurs le
plus résistant par rapport aux autres technologies.
Figure 19: capteur optique.

Chapitre 1 La Biométrie et les empreintes digitales
21
� Le capteur à ultrasons
La lecture par ultrasons d'empreinte n'est pas courante. C'est une sorte d'échographie du
doigt. La lecture par ultrasons requiert un assez gros dispositif et est assez chère. Ce n'est pas une
technique commode pour de la production de volume à faible coût. Son principal intérêt réside
dans la lecture du derme, sous la surface.
� Le capteur intégré au silicium
Les puces siliciums (électronique) peuvent être vus comme une variante des caméras
CMOS : au lieu d'utiliser les photons, un autre effet physique est utilisé. [4]
Figure 20: Capteur thermique.
Figure 21: capteur a ultrasons.
Figure 22: capteur silicium.

Chapitre 1 La Biométrie et les empreintes digitales
22
5.2 Prétraitement
Pour rehausser la qualité de l'image des empreintes digitales et éliminer le bruit.
� Binarisation
� Filtrage
5.3 Squelettisation
Dans l'image binarisée, les lignes se voient clairement mais elles ont des tailles différentes.
Pour pouvoir détecter rapidement les minuties, il est nécessaire d'obtenir une image plus
schématique de l'empreinte, dans laquelle toutes les lignes ont la même épaisseur (1 pixel).
[16]
Figure 23: binarisation.
Figure 24: filtrage (exemple d’un filtrage linéaire).

Chapitre 1 La Biométrie et les empreintes digitales
23
5.4 Extraction des caractéristiques
C'est la dernière étape qui complète l'obtention de la "signature" de l'empreinte (empreinte
qui va être comparée). A partir d'une image de l'empreinte préalablement traitée, on extrait
grâce à différents algorithmes une structure de donnée.
La signature retenue pour caractériser l'empreinte est basée sur un ensemble suffisant et
fiable de minuties. On entend par suffisant, le nombre minimum de minuties nécessaires pour
pouvoir établir des comparaisons fiables entre empreintes. Ce minimum se situe à 12 minuties
vis-à-vis de la loi, voire moins pour beaucoup d'entre eux (jusqu'à 8 minimum). Le nombre 12
provient de la règle des 12 points selon laquelle il est statistiquement impossible de trouver 2
individus présentant les mêmes 12 points caractéristiques, même en considérant une population
de plusieurs dizaines de millions de personnes. [17]
Figure 25: squelettisation.
Figure 26: extraction des caractéristiques.

Chapitre 1 La Biométrie et les empreintes digitales
24
5.5 Comparaison :
Le système de vérification d'identité est basé sur la comparaison de deux ensembles de
minuties, correspondants respectivement à deux doigts à comparer. Pour déterminer sideux
ensembles de minuties extraits de deux images correspondent à des empreintes du même
doigt, il est nécessaire d'adopter un système de comparaison qui soit insensible à d'éventuelles
translations, rotations et déformations qui affectent systématiquement les empreintes digitales.
A partir de deux ensembles de minuties extraites, le système est capable de donner un
indice de similitude ou de correspondance qui vaut :
� 0 % si les empreintes sont totalement différentes.
� 100 % si les empreintes viennent de la même image.
Deux fichiers « signature » calculées à partir de la même empreinte ne donneront jamais
100 % de ressemblance du fait des différences qui existent lors de l'acquisition de deux
images (petites déformations ou déplacements), ils donneront cependant toujours un niveau
élevé de similitude.
La décision à partir de cet indice de similitude de savoir si deux empreintes sont issues du
même doigt est une question purement statistique. Pour décider d'accepter la similitude entre
deux "signatures", il faut établir un seuil d'acceptation.
A : empreinte 1. B : empreinte 2.

Chapitre 1 La Biométrie et les empreintes digitales
25
C : alignement.
6 Méthodes de reconnaissance d’empreinte digitale :
Il est très difficile pour assortir sûrement deux empreintes digitales. La cause principale
c'est la variabilité dans différentes impressions du même doigt.
Les facteurs principaux responsables des variations d'intra-classe sont : déplacement,
rotation, déformation non-linéaire, variation des pressions, changement d'état de peau, bruit,
D : rotation/translation.
Figure 27: exemple de comparaison.

Chapitre 1 La Biométrie et les empreintes digitales
26
erreurs d'extraction des caractéristiques etc... Pour résoudre ce problème, il existe plusieurs types
d'approches et ils sont classifiés en 5 catégories principales :
6.1 Approche basé sur corrélation
Cette approche est basée sur la corrélation des pixels de deux empreintes digitales.
Deux images d'empreintes digitales sont superposées et la corrélation (au niveau d'intensité)
entre les pixels correspondants est calculée pour différents alignements (par exemple
déplacements et rotations). Cette approche est assez facile à réaliser mais son résultat dépend de
la capacité du chercheur d'établir un point commun d'enregistrement sur les deux images dans la
comparaison et compenser toute variation dans la rotation ou la qualité d'image.
6.2 Approche basé sur minuties
C'est l'approche la plus utilisée dans la littérature, des minuties sont extraites à partir des
deux empreintes digitales et stockées sous forme d'un ensemble de points dans le plan de deux
dimensions. L'assortiment basé sur les minuties essentiellement se compose de trouver
l'alignement entre les minuties du motif et les minuties d'entrée. Le résultat est le nombre
maximum des paires de minuties. Mais le problème majeur rencontré lors de l’extraction de ces
points se manifeste dans les images de mauvaises qualités. [18] Parmi les travaux publiés on cite
les suivants :
6.2.1 Park et al. (2008)
Ont montré que la fusion de deux représentations (codes) de l’empreinte digitale:
minutie et Scale Invariant Feature Transformation (SIFT) a donné de meilleur résultat que
l’utilisation d’une seule de ces caractéristiques. Avant l’extraction de ces caractéristiques, les
auteurs procèdent par une étape de prétraitement dans laquelle la distribution sera ajustée en
mesurant l’intensité dans la surface centrale et l’ajustement de l’histogramme et la suppression
des les points de caractéristiques bruyants. La correspondance est réalisée en comparant chaque
extrema local sur la base des descripteurs associés. Le score de correspondance entre deux
images peut être décidé en fonction du nombre de points correspondants et leur configuration
géométrique.
6.2.2 Lumini et al. (2008)
Ont proposé une méthode, basée sur les minuties, de reconnaissance d’image
d’empreinte digitale. Un ensemble de caractéristiques artificielles doit être extrait. Mais un sous-

Chapitre 1 La Biométrie et les empreintes digitales
27
ensemble de ces caractéristiques est sélectionné en utilisant la méthode de sélection séquentielle
flottante. Ce sous–ensemble sera combiné avec les caractéristiques originales. Pour calculer la
similarité entre deux empreintes digitales, les auteurs se sont basés sur l’approche de machine
d’apprentissage. Pour ce fait, Le vecteur du support de machine SVM a été utilisé. Ce système a
été évalué sur la base FVC2002 contenant 4 bases d’images d’empreintes digitales.
6.2.3 Jain et al. (1997)
Ce système est basé sur l’extraction des minuties pour la reconnaissance de l’image
acquise en ligne. L’image de l’empreinte digitale, passe après acquisition par l’algorithme
d’extraction de minuties pour permettre de la comparer avec les caractéristiques des modèles
sauvegardés dans la base de données. L'algorithme d'extraction des caractéristiques procède à
estimer l’orientation présente dans l’image, puis, un algorithme de segmentation est utilisé pour
la localisation de la région de l’empreinte digitale dans l’image acquise. Par la suite, les rides
sont extraites en cherchant à détecter le niveau de gris maximum des directions locales pour les
rides locaux. Ensuite, l’image de l’empreinte digitale sera amincie ce qui permettra de détecter
les minuties. Ces minuties seront détectées et utilisées dans la phase de comparaison et de prise
de décision. Une phase d’assortiment comprend deux étapes : une pour l’alignement des pointes
de la forme et une autre pour l’assortiment des points alignés. [19]
6.3 Approche basé sur rides
Dans cette approche, on utilise des caractéristiques extraites des rides (orientation,
texture, forme de ride, etc.) pour comparer d'empreintes digitales. L'avantage de cette approche
c'est que les caractéristiques de rides peuvent être extraites plus sûrement. [18]
6.4 Approche basé sur l’image
Cette approche basée sur l’appariement entre les caractéristiques globales de l’image
entière de l’image d’empreinte :
6.4.1 Jin et al. (2004)
Ont proposé un système de vérification d’empreinte digitale utilisant la méthode basée
image et intégrant les caractéristiques de la transformée en ondelette et de Fourrier Mellin
(WFMT). Ce système est constitué par deux phases. Une phase d’apprentissage et une phase de
vérification. Dans la phase d’apprentissage, ce système procède à représenter les images modèles

Chapitre 1 La Biométrie et les empreintes digitales
28
de références par les caractéristiques WFMT. Alors qu’au niveau de la phase de vérification,
l’image en entrée devra être représentée par les caractéristiques WFMT. Puis, comparer cette
image avec le modèle de référence. Donc un score de dissemblance sera calculé afin de le
comparer avec un score prédéfini et prendre la décision finale de ce système. Après avoir évalué
ce système sur la base de FVC 2002, le taux d’ERR ne dépasse pas 5.66%.[19]
6.5 Approche neuronale
L'approche neuronale se résume, par conséquent, à une tâche de classification. Un modèle se
présente sous la forme d'un ou plusieurs réseaux de neurones. Différents types de modèles de
réseaux sont proposés dans la littérature ; Lors de la reconnaissance, la vraisemblance pour
qu'une séquence de vecteurs de test soit produite par un réseau de neurones est calculée. Le
principal inconvénient de l'approche connexionniste est la complexité d'apprentissage. En
outre, elle pose le problème de l'ajout d'un nouveau client qui nécessite dans la majorité des
cas le réapprentissage de tous les modèles. [20] Par la suite on cite quelques travaux existants
sur la reconnaissance par empreinte digitale :
6.5.1 Gupta et al
Ont proposé l’extraction des minuties par un réseau de neurones pour réaliser la
correspondance des empreintes. La méthode a démontrée sa robustesse et efficacité.
6.5.2 Umamaheswaril et al. (2007)
Ce système procède par la normalisation de l’image de l’empreinte digitale. Puis,
Passe à amincir les rides de l’image. Après l’amincissement, ce système procède à extraire les
caractéristiques de l’empreinte digitale. En utilisant ce vecteur de caractéristique, ce système
passe à l’étape de classification de l’image en un des cinq classes (Loop, arche, tente, droite,
gauche) à la base de l’algorithme de réseau neuronaux qui se base sur le flux des rides. La
propagation feedback du réseau neuronaux et le vecteur de caractéristiques d’apprentissage sont
utilisés pour tester et apprendre les images d’empreintes digitales. Pour reconnaître l’identité de
l’image de l’empreinte digitale d’origine, l’algorithme des K plus proche voisins a été utilisé.
Donc l’image classée dans une position plus proche. Ce système a été évalué sur une base de 200
images et a utilisé une base d’apprentissage de 700 images. Le taux de reconnaissance était de
97,4%.

Chapitre 1 La Biométrie et les empreintes digitales
29
6.5.3 Tan et al. (2005)
Ont proposé un système de reconnaissance (vérification) d’empreintes digitales basé
sur l’algorithme génétique. Ce système procède à extraire les caractéristiques des deux
empreintes digitales: celle en question et celle de la base. En fait, la première étape de
l’algorithme génétique est la représentation des deux images de l’empreinte digitale. Cette
représentation dite chromosomique. L’algorithme génétique procède à générer la population en
utilisant la sélection, la mutation et le croisement afin de générer la solution optimale. Une valeur
sera calculée pour chaque individu (image) de la population. Si cette valeur satisfait la condition
de terminaison, alors cette valeur sera comparée avec un seuil déjà défini. Si cette valeur dépasse
le seuil, la réponse du système de vérification sera positive et négative dans le cas contraire. En
fait, si la valeur déterminée ne vérifie pas la condition de terminaison, l’algorithme génétique
générera une nouvelle population d’image d’empreintes digitales. [19]
7 Conclusion
Dans ce chapitre nous avons présentées la biométrie et leurs différentes modalités ainsi
que la structure globale d’un système de reconnaissance d’empreinte digitale. Nous avons
détaillées aussi la modalité la plus utilisé l’empreinte digitale et leur caractéristiques, et en
fin les méthodes et les approches d’empreinte existante.
. Dans la suite de ce travail nous nous intéresserons à un système complet de vérification
d’empreinte digitale basé sur les réseaux de neurones mais Avant d’arriver à ce système nous
parlons un peu de généralité sur les Réseaux de neurones artificiels.

Chapitre 2 Les Réseaux de Neurones
30
Chapitre 2
Les Réseaux de neurones

Chapitre 2 Les Réseaux de Neurones
31
Chapitre 2 :
Réseaux de neurones
1 Introduction Dans le contexte de la reconnaissance automatique de forme, il est nécessaire de
disposer d’un algorithme simple et efficace surtout lorsqu’il s’agit d’explorer une grande base
de données. L'objectif principal de reconnaissance est de faire correspondre d’empreinte
digitale inconnue avec l’empreinte digitale stockée préalablement dans la base de données.
Les réseaux de neurones artificiels, nés il y a environ une cinquantaine d’années, sont
toujours en cours de développement. Cet axe de recherche a tiré l’attention de beaucoup de
chercheurs de différentes disciplines. Ces réseaux de neurones artificiels (RNA) sont issus de
la combinaison entre la neurobiologie comme idée de base, la physique comme champs
d’application et les mathématiques avec l’informatique en tant que moyens de réalisation.
Nous présentons dans ce qui suit un bref historique des réseaux de neurone artificiels.
2 Historique
1943: J. McCulloch & W. Pitts [21]
� Proposent un modèle simple de neurone capable de reproduire la machine de
Turing.
� Démontrent qu'un assemblage synchrone de tels neurones est une machine
universelle de calcul (c’est-à-dire que toute fonction logique peut être représentée
par des unités à seuil).
1948: D. Hebb
� Propose une règle d'apprentissage pour des réseaux de neurones. The Organization
of Behaviour, Wiley, New York 1949.
1958: F. Rosenblatt
� Propose le modèle du perceptron et démontre son théorème de convergence.

Chapitre 2 Les Réseaux de Neurones
32
1969: M. Minsky & S. Papert [22]
� Démontrent les limitations du modèle du perceptron. Perceptrons, the MIT Press,
Cambridge 1969.
1972 :T. Kohonen
� Présente ses travaux sur les mémoires associatives.
� Propose des applications à la reconnaissance de formes.
1982: J.J. Hopfield [23]
� Présente une théorie de fonctionnement et des possibilités des réseaux de neurones.
Neural Networks and Physical Systems with Emergent Collective Computational
Abilities, Proceedings of the National Academy of Sciences, USA, 1982, pp. 2,554.
1986: D.E. Rumelhart et al [24]
� Apprentissage par rétro-propagation pour les réseaux multicouches.
Learning representations by back-propagating errors, Nature, vol. 323 (1986).
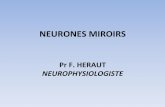
3 Le Neurone Biologique
Avant de pouvoir comprendre ce c’est qu’un réseau de neurones, il faut d’abord
comprendre le concept d’un neurone seul en voici donc la description.
Le neurone est une cellule composée d’un corps cellulaire nommé « Somma » et d’un noyau,
le corps cellulaire se ramifie pour former ce que l’on nomme « les dendrites », ces dernières
sont responsables de l’acheminement de l’information de l’extérieur vers le somma.
Une fois l’information est traitée par le neurone, elle est transmise aux autres neurones qui
communiquent entre eux via les « Axones ». Cette transmission n’est pas directe, ce qui
revient à dire que les neurones ne sont pas directement attachés aux autres, il existe un espace
intercellulaire qui sépare entre l’axone du neurone afférent et les dendrites du neurone
efférent, cette jonction est appelée « Synapse ». Voir figure 27. [38][25]

Chapitre 2 Les Réseaux de Neurones
D’une manière très réductrice, un neurone biologique est une cellule qui se caractérise par :
- Des synapses, les points des connexions avec les autres neurones, fibres nerveuses ;
- Les dendrites, les entrées du neurone ;
- L’axone, ‘ la sortie’ du neurone vers d’autres neurones ou fibres musculaires ;
- Le noyau qui active la sortie en fonction des stimuli en entrée.
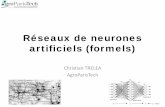
4 Le Neurone Formel
Un neurone formel (artificiel) est une unité de traitement qui reçoit
sous la forme d’un vecteur, et produit une sortie réelle cette sortie est une fonction des
et des poids des connexions.
structure des neurones biologiques [26
Figure
Chapitre 2 Les Réseaux de Neurones
D’une manière très réductrice, un neurone biologique est une cellule qui se caractérise par :
Des synapses, les points des connexions avec les autres neurones, fibres nerveuses ;
du neurone ;
L’axone, ‘ la sortie’ du neurone vers d’autres neurones ou fibres musculaires ;
Le noyau qui active la sortie en fonction des stimuli en entrée. [39]
formel (artificiel) est une unité de traitement qui reçoit des donnes en
et produit une sortie réelle cette sortie est une fonction des
connexions. La structure d’un neurone artificiel est en
structure des neurones biologiques [26]
Figure 28: Représentation schématique d’un neurone.
Figure 29 : Le neurone formel
Chapitre 2 Les Réseaux de Neurones
33
D’une manière très réductrice, un neurone biologique est une cellule qui se caractérise par :
Des synapses, les points des connexions avec les autres neurones, fibres nerveuses ;
L’axone, ‘ la sortie’ du neurone vers d’autres neurones ou fibres musculaires ;
des donnes en entrée,
et produit une sortie réelle cette sortie est une fonction des entrées
La structure d’un neurone artificiel est en fait copiée sur la
: Représentation schématique d’un neurone.

Chapitre 2 Les Réseaux de Neurones 5 Les Réseaux de Neurones
Quelque soit le domaine adopté, les réseaux de neurones
suit : Les RNAs sont des modèles statistiques adaptatifs, basés sur une analogie avec le
cerveau humain. Leur adaptabilité revient du fait qu’ils peuvent apprendre à estimer les
paramètres d’un ensemble de données en utilisant un nombre d’exemples. Dans sa structure
de base, un réseau de neurone est
les neurones ou les cellules, ces dernières sont inter liées à l’aide d’un ensemble de
connexions pondérées, chaque unité code ou correspond à une caractéristique d
analyser.
5.1 La structure
Les réseaux de neurones sont généralement organisés en couches, la première couche
est la couche d’entrée et la dernière est la couche de sortie, les couches intermédiaires sont les
couches cachées, le nombre de ces cou
L’information à analyser est transmise au réseau via la couche d’entrée, elle sera propagée par
la suite vers les couches internes (couches cachées), la réponse du réseau qui est le résultat
finale qui sera transmis vers la couche de sortie
5.2 Apprentissage à l’aide d’un réseau de neurones
L’apprentissage est une phase de développement d’un réseau de neurones durant
laquelle le comportement du réseau est modifié jusqu’à l’obtention du comportement désiré.
Figure
Chapitre 2 Les Réseaux de Neurones
Les Réseaux de Neurones
Quelque soit le domaine adopté, les réseaux de neurones peuvent être définis comme
RNAs sont des modèles statistiques adaptatifs, basés sur une analogie avec le
cerveau humain. Leur adaptabilité revient du fait qu’ils peuvent apprendre à estimer les
paramètres d’un ensemble de données en utilisant un nombre d’exemples. Dans sa structure
de base, un réseau de neurone est constituée d’un ensemble d’unités simples, qu’on appelle
les neurones ou les cellules, ces dernières sont inter liées à l’aide d’un ensemble de
connexions pondérées, chaque unité code ou correspond à une caractéristique d
Les réseaux de neurones sont généralement organisés en couches, la première couche
est la couche d’entrée et la dernière est la couche de sortie, les couches intermédiaires sont les
couches cachées, le nombre de ces couches est défini selon le type du problème à résoudre.
L’information à analyser est transmise au réseau via la couche d’entrée, elle sera propagée par
la suite vers les couches internes (couches cachées), la réponse du réseau qui est le résultat
sera transmis vers la couche de sortie. [39][40][41][42]
Apprentissage à l’aide d’un réseau de neurones
L’apprentissage est une phase de développement d’un réseau de neurones durant
laquelle le comportement du réseau est modifié jusqu’à l’obtention du comportement désiré.
Figure 30: Réseau de neurones artificiel.
Chapitre 2 Les Réseaux de Neurones
34
peuvent être définis comme
RNAs sont des modèles statistiques adaptatifs, basés sur une analogie avec le
cerveau humain. Leur adaptabilité revient du fait qu’ils peuvent apprendre à estimer les
paramètres d’un ensemble de données en utilisant un nombre d’exemples. Dans sa structure
d’un ensemble d’unités simples, qu’on appelle
les neurones ou les cellules, ces dernières sont inter liées à l’aide d’un ensemble de
connexions pondérées, chaque unité code ou correspond à une caractéristique d’une forme à
Les réseaux de neurones sont généralement organisés en couches, la première couche
est la couche d’entrée et la dernière est la couche de sortie, les couches intermédiaires sont les
ches est défini selon le type du problème à résoudre.
L’information à analyser est transmise au réseau via la couche d’entrée, elle sera propagée par
la suite vers les couches internes (couches cachées), la réponse du réseau qui est le résultat
L’apprentissage est une phase de développement d’un réseau de neurones durant
laquelle le comportement du réseau est modifié jusqu’à l’obtention du comportement désiré.

Chapitre 2 Les Réseaux de Neurones
35
L’apprentissage neuronal fait appel à des exemples de comportement. Durant cette phase les
poids synaptiques seront modifiés, donc d’une manière plus simple, on peut dire que
l’apprentissage est la modification des poids des connexions dans l’optique d’accorder la
réponse du réseau aux exemples présentés et à l’expérience.
5.2.1 Type d’apprentissage
Selon le critère d’apprentissage les réseaux de neurones se subdivisent en deux classes, les
réseaux à apprentissage supervisé (Supervised learning) et les réseaux à apprentissage non
supervisé (Unsupervised Learning) [29] [30].
1. Pour les réseaux à apprentissage supervisé : on présente au réseau des entrées et au
même temps les sorties que l'on désirerait pour cette entrée. Le réseau doit alors se
reconfigurer. C’est-à-dire calculer ses poids afin que la sortie qu'il donne corresponde
bien à la sortie désirée.
2. Pour les réseaux à apprentissage non supervisé, on présente une entrée au réseau et on
le laisse évoluer librement jusqu'à ce qu'il se stabilise.
L'apprentissage non supervisé est généralement utilisé pour la classification
automatique des entrées, où le réseau apprend les caractéristiques des données d'entrée.
Il existe aussi des réseaux à apprentissage dit semi supervisé (reinforcement Learning) qui ne
tiennent compte que d'une évaluation partielle ou qualitative des sorties.
5.3 Applications des réseaux de neurones
Aujourd'hui, les réseaux de neurones ont de nombreuses applications dans des
domaines très variés :
• Traitement d'image : compression d'images, reconnaissance de caractères et de
signatures, reconnaissance de formes et de motifs, cryptage, reconnaissance
d’empreinte digital, classification, ...
• Traitement du signal : traitement de la parole, identification de sources, filtrage,
classification, ...
• Contrôle : diagnostic de pannes, commande de processus, contrôle qualité, ...
• Optimisation : allocation de ressources, planification, régulation de trafic, gestion,
finance,

Chapitre 2 Les Réseaux de Neurones
36
•••• Simulation : simulation boîte noire
•••• Classification d'espèces animales étant donnée une analyse ADN
•••• Modélisation de l'apprentissage et perfectionnement des méthodes de
l'enseignement. [31]
5.4 Les grands types de réseaux
Il n'est pas possible d'énumérer l'ensemble des types de réseaux de neurones
disponibles à ce jour. Cependant, à titre illustratif sont présentés familles parmi les plus
populaires. Les chercheurs n'ont de cesse que d'inventer de nouveaux types de réseaux
toujours mieux adaptés à la recherche de solutions de problèmes particuliers. [32]
5.4.1 Les Perceptrons Multicouches
Le perceptron multicouche est sans doute le plus simple et le plus connu des réseaux de
neurones. La structure est relativement simple : une couche d'entrée, une couche de sortie et
une ou plusieurs couches cachées. Chaque neurone n'est relié qu'aux neurones des couches
précédentes, mais à tous les neurones de la couche précédente. La fonction d'activation
utilisée est en générale une somme pondérée. [32]
5.4.2 Les Réseaux de Kohonen (SOM: Self Organizing Map )
Les SOM sont des travaux de Fausett (1994) et Kohonen (1995). Ces réseaux sont très
utilisés pour l'analyse de données. Ils permettent de cartographier en deux dimensions et de
distinguer des groupes dans des ensembles de données. [32]
Figure 31: Un perceptron multicouche.

Chapitre 2 Les Réseaux de Neurones
5.4.3 Les Réseaux de Hopfield
Le modèle de Hopfield est la version la plus simple des «
Elle est proposée en 1982 par le physicien John Hopfield. Il s’agit d’une structure dite
complètement connectée puisque chaque neurone est connecté à tous les autres. Ainsi, le
neurone ne possède ni couche d’entrée, ni couche de sortie.
la reconnaissance de formes. Ces réseaux sont un peu plus complexes que les
multicouches. [33]
On peut ici constater que tous les neurones reçoivent l’input, il n’y a pas de « couches »
comme dans la plupart des autres réseaux.
Figure
Chapitre 2 Les Réseaux de Neurones
Les Réseaux de Hopfield
Le modèle de Hopfield est la version la plus simple des « réseaux neuronaux récurrents
Elle est proposée en 1982 par le physicien John Hopfield. Il s’agit d’une structure dite
omplètement connectée puisque chaque neurone est connecté à tous les autres. Ainsi, le
neurone ne possède ni couche d’entrée, ni couche de sortie. Ces réseaux sont bien adaptés à
la reconnaissance de formes. Ces réseaux sont un peu plus complexes que les
On peut ici constater que tous les neurones reçoivent l’input, il n’y a pas de « couches »
comme dans la plupart des autres réseaux.
Figure 32: la carte de kohonen.
Figure 33: Le réseau de Hopfield.
Chapitre 2 Les Réseaux de Neurones
37
réseaux neuronaux récurrents ».
Elle est proposée en 1982 par le physicien John Hopfield. Il s’agit d’une structure dite
omplètement connectée puisque chaque neurone est connecté à tous les autres. Ainsi, le
Ces réseaux sont bien adaptés à
la reconnaissance de formes. Ces réseaux sont un peu plus complexes que les perceptrons
On peut ici constater que tous les neurones reçoivent l’input, il n’y a pas de « couches »

Chapitre 2 Les Réseaux de Neurones
38
6 Les Réseaux de Kohonen
Les réseaux de neurones à auto-organisation, et en particulier les cartes auto-
organisatrices de Kohonen sont des réseaux à apprentissage non supervisé qui constituent une
classe importante des réseaux de neurones. [37]
Le réseau de kohonen est généralement constitué d’une grille régulière de neurones en
deux dimensions. Chacun des neurones j de cette grille est également connecté à des neurones
d’entrée i, chaque connexion ayant un poid particulier wi;j. [34]
6.1 Le Principe
La carte de Kohonen est une carte topologique auto-adaptative, qui cherche à
partitionner l’ensemble des observations en groupements similaires.
La structure peut être représentée comme un réseau de neurones avec une couche d’entrée, qui
correspond à l’observation z = (Z1, Z2,..., Zn) de dimension n, et une couche de sortie, qui est
composée d’un ensemble de neurones interconnectés et liés entre eux par une structure de
graphe non orienté, noté C. Cette dernière définie une structure de voisinage entre les
neurones. [35]
Figure 34: Le réseau de Kohonen

Chapitre 2 Les Réseaux de Neurones
39
Cette couche de traitement est appelée carte. Les neurones de la couche d’entrée sont
entièrement connectés aux neurones de la carte, et les états de la couche d’entrée sont forcés
aux valeurs des signaux d’entrée. [35]
Les neurones de la carte sont donc répartis aux nœuds d’un maillage bidimensionnel, ces
nœuds étant indexés par des nombres entiers qui définissent une relation de voisinage entre
les neurones. La topologie de la carte est calculée (ou « apprise ») par un algorithme de
gradient stochastique, appelé « algorithme de Kohonen.
6.2 Utilisation de la carte
Une fois la carte apprise, on l’utilise pour classer le jeu de données, en calculant
simplement les distances euclidiennes entre le vecteur à n dimensions caractérisant une
donnée (individu) et les vecteurs (également à n dimensions) représentant les neurones de la
carte. L’individu est alors attribué au neurone dont il est le plus proche au sens de cette
distance. On effectue cette opération pour tous les individus, et on obtient ainsi un classement
du jeu de données.
De plus, la carte permet de visualiser la proximité entre les classes obtenues (et donc aussi
entre les individus de ces classes). [35]
Figure 35: Carte topologique.

Chapitre 2 Les Réseaux de Neurones
6.3 Apprentissage
Le principe de l'apprentissage par SOM est de mettre en correspondance l'espace
contenant les données avec la carte en conservant la topologie des données, c'est
adaptant les poids de telle manière que des exemples proches dans l'espace d'entrée soient
associés au même neurone ou à des neurones proches.
7 Conclusion
Dans ce chapitre nous
l’aide a ce réseau ainsi que leur domaine d’application
des cartes auto-organisatrice de Kohonen pour la
Dans le chapitre suivant nous avons
d’empreinte digitale basé sur les réseaux de neurones
organisatrice de Kohonen.
Chapitre 2 Les Réseaux de Neurones
Le principe de l'apprentissage par SOM est de mettre en correspondance l'espace
contenant les données avec la carte en conservant la topologie des données, c'est
de telle manière que des exemples proches dans l'espace d'entrée soient
associés au même neurone ou à des neurones proches. [36]
nous avons présentées les réseaux de neurones et l’apprentissage
l’aide a ce réseau ainsi que leur domaine d’application. Nous étudierons surtout l'application
organisatrice de Kohonen pour la classification.
le chapitre suivant nous avons représentées le système complet de vérification
e digitale basé sur les réseaux de neurones, nous avons utilisée
Chapitre 2 Les Réseaux de Neurones
40
Le principe de l'apprentissage par SOM est de mettre en correspondance l'espace
contenant les données avec la carte en conservant la topologie des données, c'est-à-dire an
de telle manière que des exemples proches dans l'espace d'entrée soient
et l’apprentissage à
. Nous étudierons surtout l'application
le système complet de vérification
utilisées la cartes auto-

Chapitre 3 Reconnaissance des empreintes digitales
41
Chapitre 3
La Reconnaissance des empreintes digitales

Chapitre 3 Reconnaissance des empreintes digitales
42
Chapitre 3 :
Reconnaissance Des Empreintes Digitale
1 Introduction
Ce chapitre donne une explication de notre méthode de Reconnaissance d’empreinte
digitale par le réseau de neurone. Cela se compose de trois étapes principales
(prétraitements, extraction des minuties et la dernière c’est la classification par la carte de
kohonen). La description du système s’explique de la façon suivante (voir si dessous).
2 Description du système 2.1 Organigramme
Cet Organigramme représente notre système d’identification et de vérification
d’individus, qui permet de vérifier si une personne appartient à la base de données du
système, et de l’identifier si c’est le cas. On peut représenter par le diagramme suivant :
Vecteur de minuties
Figure 36: Système de reconnaissance.
Comme l’indique la figure précédente, un système de reconnaissance passe par plusieurs
étapes qui sont:
Acquisition d’empreinte
Extraction des
Minuties
Les Prétraitements
Identification Carte de kohonen
Monde Extérieur

Chapitre 3 Reconnaissance des empreintes digitales
43
2.2 Acquisition de l’empreinte :
C’est l’opération qui permet d’extraire du monde réel une représentation
bidimensionnelle pour des objets en 3D, cette opération peut être statique (Capteur, Appareil
Photo, Scanner…etc.)
2.3 Les Prétraitements :
2.3.1 Niveau de gris Tout d'abord pour chaque pixel de l'image il faut extraire ses trois composantes (R, V, B).
Ensuite là il existe plusieurs formules pour calculer la valeur en niveau de gris. Nous avons
utilisé la formule suivante: Gris = 0.2126 Rouge + 0.7152 Vert + 0.0722 Bleu
On peut représenter ce principe par l'algorithme suivant :
Pour chaque position P(colonne/ligne) du image original faire
modifier la couleur de P(colonne/ligne)
finpour;
Fin.
2.3.2 Homothétie De nombreux algorithmes de traitement d'image nécessitent de calculer la valeur d'un niveau
sur un point qui ne coïncide pas avec un pixel. Cette valeur peut être obtenue par interpolation
bilinéaire avec les 4 pixels voisins les plus proches du pixel inconnu, en donnant un poids
évalué à partir de la distance du point calculé aux voisins.
2.3.3 Filtrage
Dans notre application en utilisons le filtre gaussien, c’est un filtre de traitement d'image
appliqué par convolution (utilise un masque (matrice) appliqué à chaque pixel) Ce type de
filtre est utilisé pour diminuer le bruit si sigma < 1 ou appliquer un flou si sigma > 1 sur une
image.
2.3.4 Binaraisation
Nous choisissons un seuil S, et tous les pixels ayant des valeurs inférieures à celui-ci
deviennent noirs, tous ceux de valeurs supérieures deviennent blancs. Ainsi, on peut
représenter ce principe par l'algorithme suivant :

Chapitre 3 Reconnaissance des empreintes digitales
44
Si la valeur du pixel courant > Seuil alors
Valeur du pixel courant = 255
Sinon
Valeur du pixel courant = 0;
Finsi ;
Fin.
Le résulta obtenu :
2.3.5 Squelettisation de l'empreinte
Il faut effectuer la squelettisation sur une image binaire. Il existe, principalement, deux
classes d’algorithme de squelettisation : les algorithmes parallèles et les algorithmes
séquentiels. Les algorithmes parallèles opèrent sur tous les pixels de l’image simultanément.
En revanche, les algorithmes séquentiels examinent les pixels et les transforment selon les
résultats obtenus précédemment. Dans ce qui suit, nous détaillerons l’algorithme qui nous
allons utilisons : l’algorithme de Thomé (type parallèle).
Algorithme de Thomé
Cet algorithme extrait de la figure originale un squelette composé de points
inessentiels. Un point p inessentiel a au moins un 0 dans son voisinage en 4-connexité. Mais
ceci n'est pas suffisant. Il faut en plus que l'ensemble des 1 du voisinage en 8-connexité soit 8-
Figure 37 : Binarisation de l’empreinte digitale.
Empreinte en gris

Chapitre 3 Reconnaissance des empreintes digitales
45
connexe et l'ensemble des 0 du voisinage en 8-connexité soit 4-connexe. Les 16
configurations suivantes sont un résumé de l'ensemble de toutes les configurations où p est
inessentiel. [38]
2.4 Extraction des Les minuties
C'est le processus final qui complète l'obtention de la "signature" de l'empreinte. A
partir d'une image de l'empreinte préalablement traitée, on extrait grâce à différents
algorithmes une structure de données ou signature. La signature retenue pour caractériser
l'empreinte est basée sur un ensemble suffisant et fiable de minuties.
Figure 38: Ensemble des configurations de points inessentiels.
Figure 39: Squelettisation de l’empreinte digitale.

Chapitre 3 Reconnaissance des empreintes digitales
46
Nous somment extraites les minuties de l’empreinte digitale à partir de son squelette
en calculant la «connectivité » CN en chaque point de l’image de la manière suivante :
CN = ∑ |Pi −��� P��| /2
P9 = P1, Pi est la valeur des pixels dans le voisinage 3*3 de P
En effet le coefficient CN présente des caractéristiques qui permettent d’identifier la
nature d’une minutie en fonction du résultat obtenu lors du calcul de CN. [39]
CN Nature de la minutie en P
0 Erreur ===> Point isolé
1 Terminaison
2 Erreur ===> point appartient sillon
3 Bifurcation
4 Erreur ===> Minutie à 4 branches
Tableau 1: Identification d’une minutie à partir du calcul de CN.
Figure 40: Extraction des minuties.

Chapitre 3 Reconnaissance des empreintes digitales
47
Le résulta obtenu :
Les points rouges : fin de ligne (Terminaison).
Les points blues : intersection de deux lignes (Bifurcation).
2.5 Classification à base la carte de kohonen :
2.5.1 Apprentissage :
Le réseau de kohonen est un réseau auto-organisateur. L’apprentissage se réalise
simplement en lui présentant les données d’entrée dans un ordre aléatoire, sans autre
information et en appliquant une procédure de modification des poids.
Figure 41: Les minuties en empreinte digitale.
Figure 42 : Les terminaisons et les bifurcations.

Chapitre 3
Reconnaissance des empreintes digitales
Les dimensions de la carte : nombr
en largeur est 4, et en hauteur est 4 dons en a
une matrice 4*4, en a 16 personnes.
Reconnaissance des empreintes digitales
48
nombre de neurones
hauteur est 4 dons en a
4, en a 16 personnes.

Chapitre 3 Reconnaissance des empreintes digitales
49
2.5.2 Algorithme d’apprentissage
Algorithme de traitement (WTA)
•••• Initialisation
Initialisation des poids à des valeurs aléatoires, du rayon de voisinage et de son pas et période de mise à jour.
•••• Apprentissage
Répéter : Pour chaque vecteur d’apprentissage(Minuties) xr
•••• Calculer la distance au carré de chacun des neurones j par rapport à xr
( ) ( )∑=
−=n
iijij xwwxD
1
2,rr
•••• Sélectionner le neurone J qui présente la plus courte distance entre xr
et wr
( ) ( )[ ]jJ wxDwxDrrrr
,min, =
•••• Adapter les poids du neurone J
ijw = [ ]jiiij wxw −+α
•••• modifier α (fonction monotone décroissante)
α(t)= T- t / T
Jusqu’à convergence
2.5.3 Décision : La décision est la partie du système ou on tranche sur l’appartenance d’un individu à
l’ensemble des empreintes ou pas, si oui, quelle est son identité. Donc la décision c’est
l’aboutissement du processus. On peut la valorisée par un taux de reconnaissance (fiabilité)
qui est déterminé par le taux de justesse de la décision.

Chapitre 3 Reconnaissance des empreintes digitales
50
3 Conclusion
Dans ce chapitre nous avons représentées notre méthode développée on utilise
l’algorithme « Organisation Carte Self (SOM) ». Le principal avantage de cette méthode, par
rapport aux autres méthodes de reconnaissance d'empreintes digitales fondée sur les minuties,
est que la méthode est tolérante aux erreurs dans l'estimation des minuties de l'image de
modèle. Ceci est une question de grande importance puisque l'estimation précise de minuties
est une tâche difficile, surtout pour les images d'empreintes digitales de faible qualité.

Chapitre 4 Conception et implémentation
51
Chapitre 4
Conception et Implémentation

Chapitre 4 Conception et implémentation
52
Chapitre 4 :
Conception Et Implémentation
1 Introduction
Notre application consiste à développer un système biométrique de reconnaissance des
individus par leurs empreintes digitales basé sur le réseau de kohonen tel que présenté dans le
chapitre précédent.
Dans ce dernier chapitre, nous présentons les différentes étapes réalisées durant le
développement de notre application, nous commençons tout d’abord par la présentation du
L’environnement matériel et logiciel ensuite, nous définissons les fonctionnalités de notre
application avec des captures d’écran de l’interface.
2 L’environnement de développement
2.1 L’environnement matériel :
Pour développer cette application nous avons utilisé une machine ayant la configuration
suivante :
� Pc portable acer.
� Mémoire Vive : 4 Go.
� Disque Dur : 500 Go.
� Processeur : Intel (R) Core (TM) I 3-3217U (1.8 GHz, 3MB L3 cache).
� Type de système : Windows 7
2.2 Environnement Logiciel :
Lors du développement de cette application, nous avons utilisées le logiciel suivant:
� Netbeans. Version 8.0.

Chapitre 4
2.2.1 NetBeans
Est (EDI) , placé en open source
développement intégréin 2000
License).
NetBeans est disponible sous
systèmes d'exploitation (requérant une machine virtuelle Java
langues.
Il comprend toutes les caractéristiques d'un IDE moderne (coloration syntaxique, projets
multi-langage, refactoring, éditeur graphique d'interfaces et de pages web,
Notre application est écrit
Netbeans par ce qu’il permet principalement le développement des applications en java, et
facilite la création des interfaces graphiques.
Figure
Conception et implémentation
open source par Sun Microsystems en ju un
in 2000 sous licence CDDL (Common Development and Distribution
NetBeans est disponible sous Windows, Linux, Solaris ou sous une version indépendante des
systèmes d'exploitation (requérant une machine virtuelle Java). NetBeans est disponible en 23
Il comprend toutes les caractéristiques d'un IDE moderne (coloration syntaxique, projets
langage, refactoring, éditeur graphique d'interfaces et de pages web, etc.
est écrite en Netbeans version 8.0 sous Windows. Le choix de
Netbeans par ce qu’il permet principalement le développement des applications en java, et
facilite la création des interfaces graphiques.
Figure 44: Netbeans 8.0.
Figure 43 : Logo de NetBeans.
Conception et implémentation
53
un environnement de
Common Development and Distribution
ou sous une version indépendante des
NetBeans est disponible en 23
Il comprend toutes les caractéristiques d'un IDE moderne (coloration syntaxique, projets
etc.). [44]
en Netbeans version 8.0 sous Windows. Le choix de
Netbeans par ce qu’il permet principalement le développement des applications en java, et

Chapitre 4 Conception et implémentation
54
2.2.2 Environnement de Développement Intégré Java
Les IDE sont des programmes qui regroupent un ensemble d'outils pour le
développement de logiciels. De façon générale, un IDE contient un éditeur de texte, un
compilateur, des outils automatiques de fabrication, et très souvent un débogueur.
Il existe des IDE pour de nombreux langages, cependant il est très courant qu’un IDE soit
conçu pour un seul langage de programmation. Il est également possible qu’un IDE dispose
d’un système de gestion de versions et différents outils pour faciliter la création des interfaces
graphiques.[45]
2.2.3 Bref Historique de NetBeans
NetBeans a vu le jour en tant que projet d'étudiant en République Tchèque (appelé à
l'origine Xelfi), en 1996. Le but était d'écrire un EDI Java semblable à Delphi, mais en Java.
Une companie fut créée autours de ce projet, nommé NetBeans. Il y a eu deux versions
commerciales de NetBeans, appelées Developer 2.0 et Developer 2.1. Aux alentours de mai
1999, NetBeans sorti une version béta de ce qui aurait du être Developer 3.0. Quelques mois
plus tard, en octobre 1999, NetBeans fut racheté par Sun Microsystems. Après quelques
temps de développement supplémentaires, Sun sortit l'EDI Forté Fro Java, Edition
Communauté - le même EDI qui avait été en béta comme NetBeans Developer 3.0.
En juin 2000, Sun mis l'EDI NetBeans en open-source.
En avril 2011 : La sortie de la version 7.0.
En novembre 2015 : La dernière version 8.1. [43]
3 Présentation de travail:
Nous avons données une vue globale sur les différentes traitements réalisées et le
déroulement de notre système, donc nous avons décri les grandes démarches réalisées, et les
principes suivies pour le bon fonctionnement de notre application.
4 Base de données d’empreinte digitale
Notre base d’empreintes est composées de deux sous base BD1 (base de donnée 1) et BD2
(base de donnée 2).
Nous avons choisi deux bases de donnes car la base de donnée 1 est insuffisante.

Chapitre 4 Conception et implémentation
55
SFINGE (Fingerprint Générateur synthétique) : est un nouveau procédé pour la génération
d'images d'empreintes digitales de synthèse ("sfinge" est l’italien de "sphinx").
Type de capteur Taille de l'image Résolution Nbr de personnes
BD1 Capteur optique 640x480 pixels 500 dpi 10 Personnes
BD2 SFinGe v3.0 288x384 pixels 500 dpi 6 Personnes
Tableau 2: Information sur les bases de données.
Donc en a 16 personnes et chaque personne a contribué par 6 images de l’empreinte de son
indexe dans des positions différentes plus 3 empreintes du test.
La figure suivante montre un exemple d'image de chaque base de données:
D’après cet exemple nous remarquons que les deux bases n’ont pas la même taille s’est pour
ce la que nous avons faire correspondre la taille BD2 à celle de BD1.
Les formats des cette images et de type TIF, nous avons changé cette format en PNG car
elles n’ont pas compatible avec notre environnement logiciel.
La qualité de ces images sont mauvaises, Nous avons souffert dans ce travail à cause de
cette qualité, malheureusement nous n’avons pas un capteur pour faire notre base de donnes sinon
on aurait prendre notre propre enchantions.
5 Présentation de l’interface homme-machine :
5.1 Authentification de l'utilisateur
Elle se compose en 2 parties :
1. Le nom et le mot de passe valide.
Figure 45: Echantillon d’empreintes d’une personne de la base BD1 et BD2.

Chapitre 4 Conception et implémentation
56
2. Le nom et le mot de passe invalide.
5.1.1 Le nom et mot de passe � Valide
Pour entrer dans l’application il est nécessaire d’introduire le nom et le mot de passe correct.
� Invalide
Dans ce cas il apparait une boite de dialogue pour réinitialise les informations
d’authentification.
Figure 46: Information valide.

Chapitre 4 Conception et implémentation
57
5.2 Fenêtre principale de l’application (Accueil)
Cette fenêtre permet une première interaction de l'utilisateur avec notre système. Elle se doit
d'être maniable et facile à utiliser. Elle se compose en 6 parties :
1. les composent de la barre de menu.
2. La phase d’apprentissage.
3. Zone pour chargement de l’empreinte digitale.
4. Homothétie et le niveau de gris d’empreinte.
5. Les traitements faits sur l’empreinte (Filtre, Binarisation, squelettisation).
6. Extractions des Minuties.
7. Reconnaissance de l’individu.
8. Zone pour les traitements nécessaire dans la base de données (afficher l’individu).
.
Figure 47: Boite de dialogue (erreur).

Chapitre 4 Conception et implémentation
58
En a deux emplacements pour les images dans l’une en trouvent l’empreinte originale et dans
la 2émé en trouvent le résultat.
5.2.1 Composants de menu de barre
Dans cette section, nous allons présenter les différents éléments de notre application
avec une brève description de leurs fonctions.
� Menu Fichier : selon la figure 49 il contient les fonctions ouvrir (pour choisir une
empreinte), enregistrer sous (pour sauvegarder le résultat d’un traitement) et quitter
(pour quitter l’application).
Figure 48: fenêtre principale de l’application (Accueil).

Chapitre 4 Conception et implémentation
59
Menu Prétraitements : il contient les prétraitements faits sur l’empreinte (Homothetie, Niveau de gris, Filtre, Binarisation, squelettisation).
Figure 49: Menu fichier.
Figure 50:Menu reconnaissance.

Chapitre 4 Conception et implémentation
60
Menu Traitement : il contient l’étape d’extraction des caractéristiques après les prétraitements d’empreintes.
Menu Carte de Kohonen: d’après la figure 52 il contient la phase d’apprentissage et la phase de teste.
La 1ère étape de fonctionnement de l’application consiste à faire l’apprentissage.
Figure 51 : Menu de traitement.

Chapitre 4 Conception et implémentation
61
Figure 52: Menu Carte de Kohonen.
Après une boite de dialogue qui informe que l’apprentissage est terminé.
Figure 53: Boite de dialogue (information).

Chapitre 4 Conception et implémentation
62
5.2.2 Chargement de l’empreinte digitale :
La 2ème étape de fonctionnement de l’application consiste à charger une empreinte
digitale a partir de la base de données qui contient des images des empreintes. Pour cela, on
clique sur le sous-menu [Ouvrir].La fenêtre suivante nous permet de choisir l’image à charger.
5.2.3 Les prétraitements
� Homothétie
Figure 54: Chargement d’une image d’empreinte digitale.
Figure 55: Homothétie.

Chapitre 4 Conception et implémentation
63
� Transformation en niveaux de gris :
Les images de notre base sont en niveaux de gris. Lorsqu’on introduit une image
couleur il suffit de clique sur le sous-menu [ NivdeGris ] pour rendre en gris.
� Filtrage : Dans cette étape en applique le filtre gaussien.
Figure 57: Filtrage de l'empreinte.
Figure 56: Mise en niveaux de gris.

Chapitre 4 Conception et implémentation
64
� Binarisation
Dans cette étape de binarisation où les pixels de l’image sont partagés par un seul
seuil. Pour effectuer cette opération on clique sur le sous-menu [ Binarisation ].
� Squelettisation:
La squelettisation est un traitement nécessaire qui suivre l’étape de binarisation. En
sélectionnant le bouton Squellettisation l'image binarisé sera squelettisé, en
conséquence toutes les crêtes auront la même taille qui est égale à 1.
Figure 58: Binarisation d’empreinte.

Chapitre 4 Conception et implémentation
65
5.2.4 Extraction des points :
on clique sur le sous-menu [traitement] pour faire extraire les points associés à l’image
d’empreinte digitale chargée.
Figure 59 : Squelettisation de l’empreinte
Figure 60:Extraction des minuties.

Chapitre 4 Conception et implémentation
66
5.2.5 Test Après l’extraction des minutiers, si l’empreinte digitale est déjà existe dans la base de
donnée ; Lorsque l’utilisateur clique sur le sous-menu [test] les information de cette personne
sera affiché.
6 Conclusion
Dans ce chapitre, nous avons présenté les différentes interfaces de l’application.
La partie de réalisation détermine une idée plus claire sur les taches qui sont réalisé dans cette
application par la présentation des interfaces graphiques. Enfin par ce chapitre nous avons
terminé la phase de développement de notre application.
Figure 61: Fiche d’authentification de la personne.

Chapitre 4 Conception et implémentation
67
Conclusion général
La biométrie est un domaine à la fois passionnant et complexe. Elle tente, par des
outils mathématiques souvent très évolués, de faire la distinction entre des individus, nous
obligeant à travailler dans un contexte de très grande diversité. Cette diversité se retrouve
également dans le nombre considérable d'algorithmes qui ont été proposés en reconnaissance
des empreintes digitales.
Les réseaux de neurones reposent à présent sur des bases mathématiques solides qui
permettent d’envisager des applications dans presque tous les domaines notamment dans le
domaine de la classification.
Notre projet de fin d’étude consiste à concevoir une application de reconnaissance des
empreintes digitales par le réseau de neurone(carte de kohonen) qui permet de réaliser un
système biométrique qui fait l’authentification des individus selon leurs empreintes digitales.
Au cours de ce mémoire, nous avons présentées les différentes étapes de la conception et la
réalisation de notre application, et approcher les différentes méthodes de traitement d’images
et de classification.
Nous estimons avoir réalisé un système répondant à l'objectif que nous nous sommes fixés au
départ, à savoir la mise en œuvre un système de reconnaissance d’individus à base
d’empreintes digitales en utilisant les cartes auto-organisatrice de Kohonen .

Chapitre 4 Conception et implémentation
68
Bibliographie
Référence Détail Bibliographique
[1]
Christel -Loïc TISSE. ‘‘Contribution à la vérification biométrique de personnes par
reconnaissance de l’iris ”.Thèse de doctorat de l’université de Montpellier II, Octobre
2003.
[2]
www.ummto.dz/IMG/pdf/ahmed_zaid_aghiles.pdf.
[3]
http://www.biblio.univ-evry.fr/theses/2008/2008EVRY0032.pdf.
[4]
Mémoire online : Conception et mise en place d'une plateforme de sécurisation par
Synthèse et reconnaissance biométrique de documents de trafic.
Présenté par : Andrey MURHULA.
Promotion : 2015.
[5]
Introduction à la biométrie
ww2.ac-poitiers.fr/electronique/IMG/doc/introduction _a_la_biometrie.doc.
[6]
www.clusir-rha.fr/sites/default/.../ClusirGestionIdentites20051214.pdf.
[7]
Mémoire de fin d’étude : conception et réalisation d’une authentification des
l’empreintes digitale par les réseaux de neurones.
Présenté par : Boukraa sarah.
Université de : université mentouri de Constantine.
Promotion : 2012.

Chapitre 4 Conception et implémentation
69
[8]
Mémoire de fin d’étude : Extraction des caractéristiques pour l’analyse biométrique d’un
visage.
Présenté par : BETTAHAR-SABER.
Université de : université kasdi merbah Ouargla.
Promotion : 2014.
[9]
Reconnaissance biométrique frappe au clavier
www.nouvellestechnologies.net/reconnaissance-biometrique-frappe
[10]
Mémoire de fin d’étude : Reconnaissance des empreintes digitale.
Présenté par : Mohamed Lamine.
Université de : université Larbi Ben M'hidi Oum El Bouaghi.
Promotion : 2011.
[11]
Cours : La Reconnaissance des Fourmes
Préparer par : Mm chabout.
[12]
http://www.memoireonline.com/09/09/2694/Systeme-de-reconnaissance-hors-ligne-des-
mots-manuscrits-arabe-pour-multi-scripteurs.html.
[13]
Reconnaissance automatique des empreintes digitales
http://www.isir.upmc.fr/UserFiles/File/LPrevost/Biometrie%20Empreintes.pdf.
[14]
Pierre Jolicour, Introduction à la biométrie, 32,78 €

Chapitre 4 Conception et implémentation
70
[15]
http://empreintesdigitales.free.fr/index.php?page=grand1
[16]
http://www.biometrie-online.net/
[17]
http://dspace.univ-tlemcen.dz/bitstream/112/5500/7/chapitre3.pdf .
[18]
Mémoire online : Conception et réalisation d'un système de vote électronique pour le
parlement: "cas du sénat congolais".
Présenté par : Gérard et Patrick.
Université de Kinshasa RDC.
Promotion : 2011.
www.memoireonline.com › Informatique et Télécommunications.
[19]
https://hal.archives-ouvertes.fr/tel-01206294/documen .
Identification de personnes par fusion de différentes modalités biométriques.
[20]
Titre : Reconnaissance Automatique du Locuteur -Approche connexionniste-
Thèse de Doctorat préparée par Mr Sayoud Halim,
sous la direction de Mme Malika Boudraa.
Septembre 2003.
[21]
Mémoire de fin d’étude : Identification des Visages Humains par Réseaux de Neurones.
Présenté par : Lemmouchi Mansoura
Université de Batna.
Promotion : 2011.
[21]
W.S. McCulloch and W. Pitts, “A logical calculus of ideas immanent in nervous
activity”, Bull. Mathematical Bio-physics, Vol. 5, 1943, pp. 115-133.

Chapitre 4 Conception et implémentation
71
[22]
M. Minsky and S. Papert, “Perceptrons: An introduction to computational geometry”,
MIT Press, Cambridge. Mass, 1969.
[23]
J.J. Hopfield, “Neural networks and physical systems with emergent collective
computational abilities”, in Roc. Nat, Academy of Sciences, USA 79, 1982, pp. 2,554
2,558.
[24]
D.E. Rumelhart and J.L. McClelland, “Parallel distributed processing: Exploration in the
microstructure of cognition”, MIT Press, Cambridge. Mass, 1986.
[25]
Jain A. K, Mao J, Muhiuddin K. M, “Artificial Neural Networks: A tutorial”, IEEE,
pp.31-44, March 1996,
[26]
Réseaux de neurones.
www.uqtr.uquebec.ca/~biskri/Personnel/mol/RRN.doc .
[27]
Résumé : Réseaux de neurones
Marc-Olivier LaBarre
Mais 2002.
[29]
D.E. Rumelhart and J.L. McClelland, “Parallel distributed processing: Exploration in the
microstructure of cognition”, MIT Press, Cambridge. Mass, 1986.
[30]
S. Siu, G.J. Gibson,and C.F.N. Cowan, “ Decision feedback equalisation using neural
network structures and performance comparison with standard architecture”, IEEE
Proceedings, Vol.137, Pt. I, No. 4, pp.221-225, August 1990

Chapitre 4 Conception et implémentation
72
[31]
Réseaux de neurones : Applications des réseaux de neurones
https://fr.wikiversity.org/wiki/R%C3%A9seaux_de_neurones/Applications_des_r%C3%
A9seaux_de_neurones
[32]
Introduction aux Réseaux de Neurones.
Sylvain Barthélémy, Juin 2000.
www.sylbarth.com/nn.php.
[33]
Loi de Hebb & modèle de Hopfield | TPE 2012.
https://tpebrodinserise.wordpress.com/hebb-modele-hopfield/ .
[34]
Projet informatique - Réseau de Kohonen.
David Filliat - ENSTA ParisTech.
www.ensta-paristech.fr/~filliat /Courses/Polys/IN104_CarteKohonen_slides.pdf.
[35]
Rapport de stage
Sujet : Systèmes d’apprentissage non supervisé connexionnistes et stochastiques pour la
fouille de données structurées en séquences.
Présenté par par : Melle. Nicoleta Rogovschi.
présenté le 29 septembre 2006.
UNIVERSITE PARIS 13.
[37]
Kohonen T. – “Analysis of a simple self-organizing process.” Biol.
Cybern., n 44, 1982, pp. 135-140, 1982
[38]
Veelenturf L. P. J, “Analysis and Applications of Artificial Neural Networks”, Book,
Prntice Hall Edition, 1995.
[39]
Abdi H, “Neural Network”, Lewis -Beck M, Bryman. A, Futing T (Eds.), Encyclopedia of Social Sciences Research Methods, Thousand Oaks (CA ): Sage , 2003

Chapitre 4 Conception et implémentation
73
[40] DAYAN P, ABBOTT L. F, “ THEORETICAL NEUROSCIENCE”, BOOK, 2000
[41] DREYFUS G, MARTINEZ J-M, SAMUELIDES M, GORDON M. B, “RESEAUX DE
NEURONES METHODOLOGIES ET APPLICATION”, S. THIRIA , L HERAULT (EDS.), GROUPE
EYROLLES, ISBN : 2- 212-11464-8, 2004.
[42] FREEMAN J. A, SHAPRIUA D.M, “N EURAL NETWORKS: ALGORITHMS, APPLICATION
AND PROGRAMMING TECHNIQUES”, BOOK, ADDISON WESLEY PUBLISHING COMPANY, INC, 1991.
[43] https://netbeans.org/about/history_fr.html.
[44] http://general.developpez.com/edi/.
[45] www.aonet.fr/projects/IR3/.../AcciR%20-%20DDODT%20-%20Partie%20IDE.docx