Réalisation d’un onduleur monophasé avec un bras … · topologies d'onduleurs à structure...
53
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE MINISTERE DE L'ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE UNIVERSITE DES FRERES MENTOURI CONSTANTINE FACULTE DES SCIENCES DE LA TECHNOLOGIE DEPARTEMENT D'ELECTROTECHNIQUE N° d'ordre : ……..…….. Série : …………… Projet de Fin d'Etudes En vue de l’obtention du diplôme: MASTER EN ELECTROTECHNIQUE Réalisation d’un onduleur monophasé avec un bras redondant Présenté par : dirigé par Kheireddine CHETTIH Pr. A . KHEZZAR Soutenu le : 17 Juin 2015 Promotion : 2015
Transcript of Réalisation d’un onduleur monophasé avec un bras … · topologies d'onduleurs à structure...

REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIREMINISTERE DE L'ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE
SCIENTIFIQUE
UNIVERSITE DES FRERES MENTOURI CONSTANTINEFACULTE DES SCIENCES DE LA TECHNOLOGIE
DEPARTEMENT D'ELECTROTECHNIQUE
N° d'ordre : ……..……..Série : ……………
Projet de Fin d'EtudesEn vue de l’obtention du diplôme:
MASTER EN ELECTROTECHNIQUE
Réalisation d’un onduleurmonophasé avec un bras
redondantPrésenté par : dirigé par
Kheireddine CHETTIH Pr. A . KHEZZAR
Soutenu le : 17 Juin 2015Promotion : 2015

Dédicace
Je dédie ce modeste travail à :
Ma mère, Ma tante
Mes frères, ma sœur,
a Toute ma famille.
ainsi qu’a tous mes amis
qui m’ont aidé en contribuant à
l’aboutissement de ce mémoire.
Enfin je souhaite à toute la promotion 2015
un avenir prospère plein de réussite et de
succès.

Remerciements
Je remercie avant tout Dieu Tout Puissant de
m’avoir donné la santé et le courage et la patience et
surtout la volonté durant toutes ces années d’étude.
J’adresse mes profonds remercîment à mon
encadreur Pr.A. KHEZZAR ainsi qu’aux tous les
enseignants d’ELECTROTECHNIQU

SOMMAIREIntroduction Générale ............................................................................................5
Chapitre I : GENERALITE SUR LES ONDULEUR MONOPHASES
I.1. Introduction.......................................................................................................................... 11
I.2. L’onduleur de tension ........................................................................................................... 11
I.2.1 onduleur autonome ........................................................................................................ 11
I.2.2. Onduleur non autonome ............................................................................................... 11
I.3. Généralités sur les onduleurs monophasés .......................................................................... 12
I.3.1. Structure et principe de fonctionnement ...................................................................... 12
I.3.2. Choix des interrupteurs.................................................................................................. 13
I.4. Les Stratégies de commande ............................................................................................... 14
I.4.1. Commande pleine onde................................................................................................. 15
I.4.2. Commande décalée........................................................................................................ 16
I.4.3. MLI (sinus-triangle) ....................................................................................................... 16
I.4.4 La MLI Vectorielle............................................................................................................ 17
I.5. Les applications ..................................................................................................................... 17
I.5.1. Contrôle de la vitesse de rotation des machines à courant alternatif........................... 18
I.5.2. Les alimentations de secoures ....................................................................................... 18
I.5.3. Transports ferroviaires................................................................................................... 19
I.5.4. Transports aériens.......................................................................................................... 19
I.6. Conclusion............................................................................................................................. 19
Chapitre II : continuité de service des convertisseurs monophasés
II.1. Introduction ......................................................................................................................... 21
II.2. Convertisseurs à structure tension tolérant les défauts de semi-conducteurs ................... 21
II.3. étude statistique .................................................................................................................. 21
II.4. 1. Structures de connexion secours ................................................................................. 23
II.4. 2. Méthode de fonctionnement....................................................................................... 24

II.5. Détection de défaut au niveau d’un semi-conducteur à partir de la tension...................... 25
II.5.1. Défaut de type "circuit-ouvert"..................................................................................... 25
II.5.2. Défaut de type "court-circuit"...................................................................................... 26
II.5. Détection de défaut par un capteur de courant .................................................................. 27
II.6. Conclusion............................................................................................................................ 27
Chapitre III: Description sur la carte ARDUINO et la commande numérique
III 1. Introduction........................................................................................................................ 29
III 2. Types de commande .......................................................................................................... 29
III 2. 1. Commande analogique .............................................................................................. 29
III 2. 2. Commande numérique............................................................................................... 30
III 3. Description sur la carte ARDUINO...................................................................................... 31
III 3.1. Partie matérielle.......................................................................................................... 31
III 3.2. Partie logicielle ............................................................................................................ 32
III 4. La carte ARDUINO mega..................................................................................................... 32
III 4.1. Les caractéristiques de la carte ARDUINO mega......................................................... 33
III 4.2. La programmation....................................................................................................... 34
III 5. Création un signal MLI à partir de l’ARDUINO.................................................................... 35
III 5.1. Principe de création .................................................................................................... 35
III 5.2. La méthode de création .............................................................................................. 36
III 6. Conclusion .......................................................................................................................... 37
Chapitre IV : Simulation et réalisation pratique
IV.1. Introduction ........................................................................................................................ 39
IV.2. Simulation de l’onduleur par MATLAB................................................................................ 39
IV.2.1. Schéma de montage .................................................................................................... 40
IV.2.2. Résultats de simulation................................................................................................ 40
IV.2.3. Commande MLI............................................................................................................ 41
IV.2.4. Le fonctionnement de l’onduleur en présence d’un défaut CC................................... 41
Figure IV.4 : le courant et la tension de l’onduleur avant et après CC ....................................... 42

IV.2. Simulation de l’onduleur monophasé avec bras redondant par MATLAB......................... 42
IV.3. Réalisation de l’onduleur monophasé avec bras redondant.............................................. 44
IV.3.1. La structure de l’onduleur ........................................................................................... 44
IV.3.1.a. La carte de commande (génération des signaux) ..................................................... 45
IV.3.1.b. La partie commande rapprochée ............................................................................. 45
IV.3.1.b.1. Circuit d’isolation ................................................................................................... 46
IV.3.1.b.2. Circuit de commande des MOSFETs (driver) ......................................................... 46
Figure IV.12 : signaux sortent du Driver................................................................................. 47
IV.3.1.b.3. Création du temps mort ........................................................................................ 47
IV.3.1.c. La partie puissance.................................................................................................... 48
IV.4 La partie pratique................................................................................................................ 49
IV.4.1 circuit imprimé............................................................................................................. 49
IV.5. impression du circuit et construire la carte finale ............................................................. 50
IV.5. Conclusion........................................................................................................................... 50
Conclusion générale……………………………………………………………………………….……………..51
Références Bibliographiques

Introduction
Générale

Ces dernières années, les domaines de l’électronique de puissance se sont
développés considérablement et, offrent un potentiel énorme pour la conversion
d’énergie électrique. La recherche dans ce domaine considère plusieurs aspects,
notamment les topologies des convertisseurs, les structures et les performances des
interrupteurs de puissance et ainsi que les techniques de commande
Les convertisseurs statiques monophasés à structure tension sont des
éléments essentiels de nombreux systèmes d'électronique de puissance tels que les
variateurs de vitesse, les alimentations sans interruption et les filtres actifs. La sécurité de
ces systèmes, leur fiabilité, leurs performances, la qualité de l’énergie et la continuité
de service constituent aujourd’hui des préoccupations majeures dans le domaine de
l’énergie. Les défaillances d’un convertisseur statique, qu’elles proviennent des drivers
de sa commande rapprochée, d’un des composants de puissance commandables,
conduisent à la perte totale ou partielle du contrôle des courants de phase. Ces
défaillances peuvent provoquer de graves dysfonctionnements du système, voire
conduire à sa mise hors tension. En outre, si le défaut n'est pas rapidement détecté
et compensé, il peut dans certains cas mettre en danger le système. Par conséquent,
afin d'empêcher la propagation de défauts aux autres composants et assurer la
continuité de service en toutes circonstances en présence d’une défaillance du
convertisseur, des méthodes efficaces et rapides de détection et de compensation de
défaut doivent être mises en œuvre.
L’objectif principal du présent mémoire du projet de fin d'étude est l’étude d’un
convertisseur statique monophasé à structure tension. Ce convertisseur doit assurer la
continuité de service, en mode normal, en présence de défauts éventuels d’un semi-
conducteur. Ce convertisseur monophasé peut être indifféremment mis en œuvre dans
toute application de conversion de l’énergie électrique.
L’implantation de l’algorithme de commande dans ce travail est faite sur une
carte numérique ARDUINO de type MEGA 2560, celle-ci est utilisée pour générer les signaux
de commande (nous allons utiliser la commande MLI sinus-triangulaire) des interrupteurs
MOSFETs de l’onduleur.


CHAPITRE I
Généralitéssur les onduleurs monophasés

Page 11
Chapitre 1
I.1. IntroductionL'augmentation des puissances commutées, la facilité de contrôle et le coût réduit des
composants semi-conducteurs de puissance depuis moins d'une dizaine d'années ont
conduit à l'utilisation de convertisseurs de puissance dans un nombre d'applications toujours
croissant. Cette montée en puissance a également ouvert un champ de nouvelles topologies
pour les applications en électronique de puissance.
Parmi les différentes topologies de convertisseurs statiques, il y a une structure de
base dans plusieurs applications industrielles, l’onduleur de tension.
I.2. L’onduleur de tensionL’onduleur de tension est un convertisseur statique qui permet de fournir une tension
alternative d'amplitude et de fréquence réglables à partir d’une source de tension continue.
Il existe plusieurs centaines de schémas d`onduleurs, chacun correspondant à un type
d`application déterminé ou permettant des performances recherchées. il existe deux
topologies d'onduleurs à structure tension : l’onduleur à trois bras et l’onduleur à deux
bras
Les structures des convertisseurs nous conduisent à distinguer deux types d’onduleurs
Les onduleurs de tension Les onduleurs de courant
I.2.1 Onduleur autonomeUn onduleur est dit autonome s’il utilise l’énergie d’un circuit auxiliaire propre
à lui pour la commutation des IGBTs ou d’autre semi-conducteurs, dans ce cas, nous
commandons la fréquence de l’onde de tension de sortie [5, 6].I.2.2. Onduleur non autonomeC'est le nom donné au montage redresseur tout thyristors qui en commutation
naturelle assistée par le réseau auquel il est raccordé, permettent un fonctionnement
en onduleur. À la base du développement des entraînements statiques à vitesse variable
pour moteurs à courant continu et alternative, cyclo-convertisseurs, onduleurs de courant
pour machines synchrones et asynchrones, jusqu'à des puissances de plusieurs MW, ce type
de montage est progressivement supplanté, au profit de convertisseurs à IGBT ou GTO, [5,
6].

Page 12
Chapitre 1
I.3. Généralités sur les onduleurs monophasésI.3.1. Structure et principe de fonctionnementIl comporte quatre interrupteurs de puissance désignés par Q1, Q2, Q3 et Q4.
L'analyse de cette structure montre à l'évidence qu'il est possible d'imposer aux bornes de la
charge un courant et une tension u de forme alternative Le montage consiste deux
bras chaque bras est composé de deux étages d’interrupteurs. Chaque étage comporte
deux composants semi-conducteurs (transistors IGBT ou MOSFET) avec une diode en
antiparallèle comme dans la Figure I.1 où :
T1, T2, T3, T4 : Transistors de puissance.
D1, D2, D3, D4 : Diodes de puissance.
Figure I.1 : structure monophasée : a) symbole
b) onduleur en pont complet
Signaux de commande et signal de sortir
Le tableau suivant résume le fonctionnement de l’onduleur monophasé :

Page 13
Chapitre 1
Tableau 1 : fonctionnement de l’onduleur a deux bras
On doit noter qu'une telle structure permet d'imposer en fait trois niveaux de tension,
c’est-à-dire u = E, u = −E ainsi que, u = 0, ce dernier niveau de tension correspond à une
phase de roue libre, sans échange d'énergie entre les deux sources. Suivant le type de
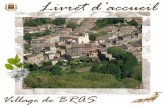
commande adopté, ce troisième niveau peut être ou non mis à contribution [1].I.3.2. Choix des interrupteursLes composants de l’électronique de puissances (interrupteurs) sont déterminés
par les niveaux de la puissance et la fréquence de commutation. En règle générale, plus les
composants sont rapides, plus la puissance commutée est faible et inversement. À titre
indicatif, les transistors MOSFET sont considérés comme des composants très rapides,
mais de puissance relativement faible.
Les transistors bipolaires sont moins rapides que les transistors MOSFET
mais davantage plus puissants (quelques kHz à une dizaine de kW). Les transistors IGBT sont
des composants de gamme standard (jusqu'à 20 kHz à une des dizaines de kW). Les
thyristors GTO commutent très lentement les grandes puissances. Ces composants sus
indiqués sont du type commandable à l’ouverture et à la fermeture; ce qui n’est pas le cas
pour le thyristor classique Figure I.2

Page 14
Chapitre 1
Figure I.2 : choix des composants selon la puissance et la
Fréquence
I.4. Les Stratégies de commandeOn peut, à présent, envisager les différentes commandes possibles pour un
onduleur de tension monophasée. Le principe de commande d’un onduleur monophasée
présenté sur la figure I.3 valable pour un bras de commutation
Figure I.3 : le principe de commande d’un bras
D’onduleur

Page 15
Chapitre 1
Le principe de la commande est de comparer un signal de modulation à
un signal de type «triangle» ou « dent de scie » notée Sp appelée la porteuse. Le résultat
de cette comparaison crée un signal de commande pour les gâchettes des interrupteurs
(MOSFET) d’une façon complémentaire. Dans ce cas, doit donc être selon toute logique de
doubler la chose pour obtenir la commande de deux bras de commutation. La commande
décrite ici est sous sa forme la plus complexe, dans la mesure où les deux bras de
commutations du convertisseur peuvent être commandés de manière indépendante.
Quand bien même la porteuse est identique pour les deux bras, deux signaux de commandes
indépendants sont générés pour commander les deux bras. Pour un onduleur de tension
monophasée, on distingue principalement deux types de modulation:
Les modulations à rapport cyclique fixe (plaine onde, décalée), ou le rapport cycliquede chacune des cellules de commutation est maintenu constant.
Les modulations de largeur d’impulsion (MLI), ou le rapport cyclique estvariable, sinusoïdalement pour un grand nombre d’applications [1].I.4.1. Commande pleine onde
Les commandes sont déduites de la comparaison entre le signal constant Scst et de
porteuse Sp Figure I.4 (a), Le résultat de cette comparaison donne un signal de
commande Scm Figure I.4 (b).
Figure I.4 : commande pleine onde
Tout croisement des signaux de Scst avec la porteuse Sp se traduit par un changement
de l’état des interrupteurs du bras de commutation.
Scst ≥ p l’interrupteur Q1 amorcé, Q2 bloqué. Scst ≤ p l’interrupteur Q2 amorcé, Q1
bloqué.
On donne la tension de la charge uc a pour valeur moyenne :

Page 16
Chapitre 1
Ucmoy = T [EαT – E( 1 − α )T] = (2α – 1) E
Où : α = rapport cycliqueI.4.2. Commande décaléeDans ce cas la Figure I.5, la commande de fermeture d’un interrupteur ne coïncide
plus avec la commande d’ouverture de l’interrupteur placé sur le même bras.
Figure I.5 : la commande décalée
Avec cette technique de commande, chaque interrupteur fonctionne pendant une
période t0 de tell sorte que on obtient une tension aux bornes de la charge de trois niveaux
comme dans la figure I.5I.4.3. MLI (sinus-triangle)Les commandes sont déduites de la comparaison entre le signal variable Svar
(sinusoïdal d’amplitude variable et de fréquence f qui détermine la fréquence de la tension
de sortie) et de porteuse Sp (triangulaire d’amplitude fixe et de fréquence très élevée).
Le résultat est un chronogramme de commande Scm Figure I.6.
Le réglage en amplitude et en fréquence de la tension de sortie de l’onduleur est défini
par le coefficient de réglage en tension (représentant le rapport de l’amplitude de la
tension de référence à la valeur crête de la porteuse), et l’indice de modulation
(donnant le rapport des fréquences de la porteuse et de la référence) [2, 3].
Pour notre projet, on va faire cette technique de commande numériquement par une
carte ARDUINO comme on expliquera dans le chapitre suivant
Page 16
Chapitre 1
Ucmoy = T [EαT – E( 1 − α )T] = (2α – 1) E
Où : α = rapport cycliqueI.4.2. Commande décaléeDans ce cas la Figure I.5, la commande de fermeture d’un interrupteur ne coïncide
plus avec la commande d’ouverture de l’interrupteur placé sur le même bras.
Figure I.5 : la commande décalée
Avec cette technique de commande, chaque interrupteur fonctionne pendant une
période t0 de tell sorte que on obtient une tension aux bornes de la charge de trois niveaux
comme dans la figure I.5I.4.3. MLI (sinus-triangle)Les commandes sont déduites de la comparaison entre le signal variable Svar
(sinusoïdal d’amplitude variable et de fréquence f qui détermine la fréquence de la tension
de sortie) et de porteuse Sp (triangulaire d’amplitude fixe et de fréquence très élevée).
Le résultat est un chronogramme de commande Scm Figure I.6.
Le réglage en amplitude et en fréquence de la tension de sortie de l’onduleur est défini
par le coefficient de réglage en tension (représentant le rapport de l’amplitude de la
tension de référence à la valeur crête de la porteuse), et l’indice de modulation
(donnant le rapport des fréquences de la porteuse et de la référence) [2, 3].
Pour notre projet, on va faire cette technique de commande numériquement par une
carte ARDUINO comme on expliquera dans le chapitre suivant
Page 16
Chapitre 1
Ucmoy = T [EαT – E( 1 − α )T] = (2α – 1) E
Où : α = rapport cycliqueI.4.2. Commande décaléeDans ce cas la Figure I.5, la commande de fermeture d’un interrupteur ne coïncide
plus avec la commande d’ouverture de l’interrupteur placé sur le même bras.
Figure I.5 : la commande décalée
Avec cette technique de commande, chaque interrupteur fonctionne pendant une
période t0 de tell sorte que on obtient une tension aux bornes de la charge de trois niveaux
comme dans la figure I.5I.4.3. MLI (sinus-triangle)Les commandes sont déduites de la comparaison entre le signal variable Svar
(sinusoïdal d’amplitude variable et de fréquence f qui détermine la fréquence de la tension
de sortie) et de porteuse Sp (triangulaire d’amplitude fixe et de fréquence très élevée).
Le résultat est un chronogramme de commande Scm Figure I.6.
Le réglage en amplitude et en fréquence de la tension de sortie de l’onduleur est défini
par le coefficient de réglage en tension (représentant le rapport de l’amplitude de la
tension de référence à la valeur crête de la porteuse), et l’indice de modulation
(donnant le rapport des fréquences de la porteuse et de la référence) [2, 3].
Pour notre projet, on va faire cette technique de commande numériquement par une
carte ARDUINO comme on expliquera dans le chapitre suivant

Page 17
Chapitre 1
Figure I.6 : la commande MLI sinus-triangleI.4.4 La MLI VectorielleL’utilisation des techniques numériques permet le recours à des stratégies de
modulation triphasée spécifiques, non déduites des techniques analogiques initialement
conçues en monophasé. Parmi ces techniques numériques on trouve la modulation
vectorielle (Space Vector Modulation). qui représente la méthode de modulation ou de
commande la plus adoptée au contrôle des machines à courant alternatif beaucoup
plus les machines asynchrones.
En effet, contrairement à la modulation sinusoïdale, la MLI vectorielle ne s’appuie pas
sur des calculs séparés des modulations pour chacun des bras de l’onduleur. Mais elle traite
les signaux directement dans le plan diphasé de la transformée de Concordia. Donc le
principe de base de cette modulation consiste à reconstruire le vecteur de tension de
sortie de l’onduleur à partir des huit vecteurs de tension correspondant aux huit états
possibles de l’onduleur de tension.
I.5. Les applicationsLes nombreux domaines à entraîner une utilisation accrue des onduleurs, on
trouve principalement Les onduleurs à fréquence fixe à commutation forcée alimentés

Page 18
Chapitre 1
directement à partir du réseau à travers un redresseur avec filtrage, soit à partir d'une
batterie d’accumulateurs, ils constituent à ce titre [4, 5]I.5.1. Contrôle de la vitesse de rotation des machines à courant alternatifLa vitesse d’un moteur à courant alternatif est fixée par la pulsation des
courants statiques. Le contrôle de la vitesse du moteur se réalise par action
simultanée sur la fréquence et sur l'amplitude de la tension (Figure I.7) Il faut donc
redresser la tension du réseau puis l’onduler à la fréquence désirée.
Figure I.7 : chaine de la commande de MS
I.5.2. Les alimentations de secouresL'onduleur est indispensable pour éviter la perte d’informations en cas de panne du
secteur pour assurer la continuité de l’alimentation des machines à partir de batteries
(Figure I.8) Il faut placer un onduleur [6].
Figure I.8 : alimentation de secoure

Page 19
Chapitre 1
I.5.3. Transports ferroviairesDans ce type de transport le constituant principal qui crée le mouvement est
les machines asynchrone. Pour contrôler la vitesse de rotation de ces dernières, on doit
faire varie la fréquence de l'alimentation, cela est réaliser par un onduleur de tension par
exemple: le TGV ou tramway [1].
I.5.4. Transports aériensTout avion produit lui-même l'énergie électrique dont il a besoin pour le
fonctionnement de ces équipements de bord. Par exemple AIRBAS 380 met en œuvre un
réseau de bord la fréquence entre 380Hz et 800Hz. Cela est réaliser par des onduleurs
I.6. ConclusionDans ce chapitre, nous avons présenté une définition générale sur les onduleurs
monophasés, sa constitution physique élémentaire, son fonctionnement, leurs
applications et nous avons présenté quelques techniques de commande.
Le fonctionnement de ces onduleurs peut être sujette à des problèmes soient au
niveau de la structure (les semi-conducteurs) soit au niveau de la commande (les signaux de
commutation), la sureté de fonctionnement est une nécessité importante pour les
applications exigeantes. Le prochain chapitre, fera le point sur ces problèmes.

Chapitre II
Continuité de service desconvertisseurs monophasés

Page 21
Chapitre 2
II.1. IntroductionDans ce chapitre, nous allons discuter les différentes méthodes permettant de
détecter rapidement les défauts éventuels des semi-conducteurs des onduleurs de tensions.
II.2. Convertisseurs à structure tension tolérant les défauts de semi-conducteurs
Comme tout système électrique, les causes de défaillance des composants et
de dysfonctionnement des différents étages de conversion sont nombreuses et très
dépendantes de l'application. Mis à part les erreurs de conception et des choix qui en
découlent (technologies, calibres des composants), la défaillance interne d'un convertisseur
est la résultante de l'application d'une contrainte excessive sur une zone de fragilité des
composants constitutifs. Les causes qui amènent, à un moment donné, sont divisées en deux
catégories :
Soit d'origine interne : impliquant le fonctionnement propre du convertisseur (il s'agitalors d'un problème de fiabilité de l'électronique de puissance et de sa commande,de la chaine de commande des interrupteurs ou du vieillissement des assemblages)
Soit d'origine externe : impliquant les sources environnantes (tension d'alimentationinsuffisamment filtrée, réseau de connexion pollué, refroidissement insuffisant) oud'une charge défaillante (surcharge prolongée, surintensité voire court-circuit, pertesd'isolement à la terre ou à la masse).
II.3. étude statistiqueLes retours d'expérience terrain sont précieux à ce niveau pour tenter de
classifier et surtout établir des statistiques sur l'origine des dysfonctionnements, Bien que
largement pratiquées par les grandes firmes industrielles du domaine. Ces références nous
apprennent que 90% des défaillances sont d'origine interne au convertisseur, 50%
proviendraient de la chaine de commande, 40% de la chaine de puissance, contre seulement
10% externes au convertisseur, à imputer à la charge et à l'alimentation [4].
L'expérience montre que la défaillance se traduit par un état transitoire anormal d'au
moins un interrupteur de puissance, un régime électrique et thermique extrême de défaut

Page 22
Chapitre 2
et un état permanent en basse impédance de cet interrupteur ou de son homologue dans
une cellule de commutation Figue II.1.a. [4].
En raison de leur faible volume et de par leur limite en température assez restreinte,
les composants semi-conducteurs sont clairement les éléments les moins robustes et donc
les plus fragiles en termes de densité de puissance admissible et d'énergie d'absorption par
rapport aux autres technologies de composants (passifs, inductances et condensateurs). Ce
mode de défaillance en basse résistance est typique des puces de puissance sur lesquelles
une contrainte extrême a été appliquée car il correspond simplement à la forte densification
d'un courant de fuite, d'un courant de court-circuit ou d'avalanche sur une zone plus ou
moins homogène de silicium donnant lieu à l'emballement thermique de la puce (quelques
dizaine de μs) Figue II.1.b.
Figue II.1.b. défaut dans un interrupteur
Page 22
Chapitre 2
et un état permanent en basse impédance de cet interrupteur ou de son homologue dans
une cellule de commutation Figue II.1.a. [4].
En raison de leur faible volume et de par leur limite en température assez restreinte,
les composants semi-conducteurs sont clairement les éléments les moins robustes et donc
les plus fragiles en termes de densité de puissance admissible et d'énergie d'absorption par
rapport aux autres technologies de composants (passifs, inductances et condensateurs). Ce
mode de défaillance en basse résistance est typique des puces de puissance sur lesquelles
une contrainte extrême a été appliquée car il correspond simplement à la forte densification
d'un courant de fuite, d'un courant de court-circuit ou d'avalanche sur une zone plus ou
moins homogène de silicium donnant lieu à l'emballement thermique de la puce (quelques
dizaine de μs) Figue II.1.b.
Figue II.1.b. défaut dans un interrupteur
Page 22
Chapitre 2
et un état permanent en basse impédance de cet interrupteur ou de son homologue dans
une cellule de commutation Figue II.1.a. [4].
En raison de leur faible volume et de par leur limite en température assez restreinte,
les composants semi-conducteurs sont clairement les éléments les moins robustes et donc
les plus fragiles en termes de densité de puissance admissible et d'énergie d'absorption par
rapport aux autres technologies de composants (passifs, inductances et condensateurs). Ce
mode de défaillance en basse résistance est typique des puces de puissance sur lesquelles
une contrainte extrême a été appliquée car il correspond simplement à la forte densification
d'un courant de fuite, d'un courant de court-circuit ou d'avalanche sur une zone plus ou
moins homogène de silicium donnant lieu à l'emballement thermique de la puce (quelques
dizaine de μs) Figue II.1.b.
Figue II.1.b. défaut dans un interrupteur

Page 23
Chapitre 2
Figue II.1 : modes de défaillance d’un bras d’un onduleur
II.4. Sécurisation et tolérance de panne en onduleur monophasé
Partant des scénarios de défaillances internes principaux présentés dans le
paragraphe précédent, nous allons ici définir la structure et le fonctionnement des dispositifs
d'isolement à inséré pour sécuriser une cellule élémentaire au sein de l'onduleur
monophasé. Cette "première" opération d'isolement électrique sera également analysée du
point de vue de sa compatibilité avec une "deuxième" fonction de connexion secourt
obtenue simplement par un point milieu actif sur le bus DC et/ou par un bras de secours en
redondance parallèle.II.4. 1. Structures de connexion secoursCette structure (figure II.2) comporte un bras supplémentaire destiné à remplacer
le bras défectueux en cas de défaillance. Pour cette topologie et après
reconfiguration, le fonctionnement du convertisseur reste inchangé car le convertisseur à la
même topologie après reconfiguration qu’avant l’apparition du défaut.
Page 23
Chapitre 2
Figue II.1 : modes de défaillance d’un bras d’un onduleur
II.4. Sécurisation et tolérance de panne en onduleur monophasé
Partant des scénarios de défaillances internes principaux présentés dans le
paragraphe précédent, nous allons ici définir la structure et le fonctionnement des dispositifs
d'isolement à inséré pour sécuriser une cellule élémentaire au sein de l'onduleur
monophasé. Cette "première" opération d'isolement électrique sera également analysée du
point de vue de sa compatibilité avec une "deuxième" fonction de connexion secourt
obtenue simplement par un point milieu actif sur le bus DC et/ou par un bras de secours en
redondance parallèle.II.4. 1. Structures de connexion secoursCette structure (figure II.2) comporte un bras supplémentaire destiné à remplacer
le bras défectueux en cas de défaillance. Pour cette topologie et après
reconfiguration, le fonctionnement du convertisseur reste inchangé car le convertisseur à la
même topologie après reconfiguration qu’avant l’apparition du défaut.
Page 23
Chapitre 2
Figue II.1 : modes de défaillance d’un bras d’un onduleur
II.4. Sécurisation et tolérance de panne en onduleur monophasé
Partant des scénarios de défaillances internes principaux présentés dans le
paragraphe précédent, nous allons ici définir la structure et le fonctionnement des dispositifs
d'isolement à inséré pour sécuriser une cellule élémentaire au sein de l'onduleur
monophasé. Cette "première" opération d'isolement électrique sera également analysée du
point de vue de sa compatibilité avec une "deuxième" fonction de connexion secourt
obtenue simplement par un point milieu actif sur le bus DC et/ou par un bras de secours en
redondance parallèle.II.4. 1. Structures de connexion secoursCette structure (figure II.2) comporte un bras supplémentaire destiné à remplacer
le bras défectueux en cas de défaillance. Pour cette topologie et après
reconfiguration, le fonctionnement du convertisseur reste inchangé car le convertisseur à la
même topologie après reconfiguration qu’avant l’apparition du défaut.

Page 24
Chapitre 2
Figure II.2 : structure du bras supplémentaireII.4. 2. Méthode de fonctionnementLorsque le semi-conducteur (S1) est défaillant, l’apparition du défaut est détectée.
Le bras défectueux doit alors être rapidement isolé.
Si le défaut détecté est circuit-ouvert ou court-circuit, l'isolation du bras défaillant est
réalisée par la mise à ‘0’ des ordres de commande des deux interrupteurs de ce bras.
Après la détection du défaut et l’isolation du bras défaillant, un module de
reconfiguration commande à la fermeture l’interrupteur bidirectionnel en tension et en
courant Tk connecté au bras k défectueux. La fermeture de cet interrupteur permet de
relier la phase défectueuse au point milieu du bras redondant
En résumé, en cas d’apparition d’un défaut au niveau du bras, la continuité de service
est réalisée selon les étapes suivantes:
1. Détection du bras défectueux2. Mise à ‘0’ des ordres de commande des deux interrupteurs de ce bras défectueux3. Commande à la fermeture de l’interrupteur bidirectionnel Tk4. application des ordres de commande des interrupteurs du bras défectueux aux deux
interrupteurs du bras redondant
Page 24
Chapitre 2
Figure II.2 : structure du bras supplémentaireII.4. 2. Méthode de fonctionnementLorsque le semi-conducteur (S1) est défaillant, l’apparition du défaut est détectée.
Le bras défectueux doit alors être rapidement isolé.
Si le défaut détecté est circuit-ouvert ou court-circuit, l'isolation du bras défaillant est
réalisée par la mise à ‘0’ des ordres de commande des deux interrupteurs de ce bras.
Après la détection du défaut et l’isolation du bras défaillant, un module de
reconfiguration commande à la fermeture l’interrupteur bidirectionnel en tension et en
courant Tk connecté au bras k défectueux. La fermeture de cet interrupteur permet de
relier la phase défectueuse au point milieu du bras redondant
En résumé, en cas d’apparition d’un défaut au niveau du bras, la continuité de service
est réalisée selon les étapes suivantes:
1. Détection du bras défectueux2. Mise à ‘0’ des ordres de commande des deux interrupteurs de ce bras défectueux3. Commande à la fermeture de l’interrupteur bidirectionnel Tk4. application des ordres de commande des interrupteurs du bras défectueux aux deux
interrupteurs du bras redondant
Page 24
Chapitre 2
Figure II.2 : structure du bras supplémentaireII.4. 2. Méthode de fonctionnementLorsque le semi-conducteur (S1) est défaillant, l’apparition du défaut est détectée.
Le bras défectueux doit alors être rapidement isolé.
Si le défaut détecté est circuit-ouvert ou court-circuit, l'isolation du bras défaillant est
réalisée par la mise à ‘0’ des ordres de commande des deux interrupteurs de ce bras.
Après la détection du défaut et l’isolation du bras défaillant, un module de
reconfiguration commande à la fermeture l’interrupteur bidirectionnel en tension et en
courant Tk connecté au bras k défectueux. La fermeture de cet interrupteur permet de
relier la phase défectueuse au point milieu du bras redondant
En résumé, en cas d’apparition d’un défaut au niveau du bras, la continuité de service
est réalisée selon les étapes suivantes:
1. Détection du bras défectueux2. Mise à ‘0’ des ordres de commande des deux interrupteurs de ce bras défectueux3. Commande à la fermeture de l’interrupteur bidirectionnel Tk4. application des ordres de commande des interrupteurs du bras défectueux aux deux
interrupteurs du bras redondant

Page 25
Chapitre 2
II.5. Détection de défaut au niveau d’un semi-conducteur à partir de latension
Cette méthode est basée sur la comparaison entre la tension Vko mesurées et
estimées, respectivement notées Vkom et Vkoes. La tension vko estimée est obtenue à partir
de la relation :
Vkoes = (2δk – 1)Vs
Où δk = 0, 1 représente l’ordre de commande envoyé à l’interrupteur Sk du haut du
bras k.
Le défaut éventuel peut alors être détecté par l'analyse de la différence entre vkom et
vkoes. Cette erreur de tension est donc définie par :
εk = vkom - vkoesII.5.1. Défaut de type "circuit-ouvert"Dans cette section, nous considérons un défaut de type "circuit-ouvert" du bras k,
suite à une défaillance au niveau de l’interrupteur Sk bloqué à l’état ouvert. Un défaut
de type "circuit-ouvert" réduit la phase k du système, la tension mesurée Vkom et l’erreur
de tension ε dépend du courant ik et de l’ordre de commande de Sk. Deux cas doivent être
considérés lors de l'analyse théorique du fonctionnement de la phase k du convertisseur lors
d’un tel défaut. Dans le premier cas, ik est considéré positif et dans le second, il est
considéré comme négatif.
La tension estimée Vkoes ne dépend que de l’ordre de commande δk et de Vc
L’expression de la tension mesurée Vkom dépend quant à elle du signe du courant si ik
>0 lors de l’apparition du défaut de type "circuit-ouvert" alors que Sk conduisait, la diode
Dk+1 se met à conduire. La tension mesurée Vkom est donc égale à –vdc/2 quel que soit
l’ordre de commande δk.
Le tableau II-1 rassemble notamment les expressions analytiques de l’erreur de
tension ε
δk D k D K+1 V kom V koes Ε
1 Bloquée Passante -Vc Vc -2Vc

Page 26
Chapitre 2
0 Bloquée Passante -Vc -Vc 0
Tableau II-1 : Etude d’un défaut de type "circuit-ouvert" au niveau du bras k lorsque ik
>0
Si le défaut se produit au niveau de l’interrupteur Sk lorsque ik <0 l’expression de
la tension mesurée Vkom dépend de l’ordre de commande δk
δk = 0 et δk+1 = 1
δk = 1 et δk+1 = 0
Le tableau II-3 rassemble notamment les expressions analytiques de l’erreur de
tension ε.
δk D k D K+1 V kom V koes Ε
1 Passante Bloquée Vc Vc 0
0 Bloquée bloquée -Vc -Vc 0
Tableau II-1 : Etude d’un défaut de type "circuit-ouvert" au niveau du bras k
lorsque ik <0II.5.2. Défaut de type "court-circuit"Dans cette section, on considère un défaut de type "court-circuit" du bras k dû à
une défaillance au niveau de l’interrupteur Sk du haut du bras k, bloqué à l’état fermé. Ce
défaut réduit la phase k du système, selon la topologie d’onduleur "fault tolerant"
considérée (topologies avec bras redondant). Le tableau II-5 rassemble les expressions
analytiques de l’erreur de tension ε juste après l'apparition du défaut, en fonction de la
valeur de δk.

Page 27
Chapitre 2
δk Vkom Vkoes Ε
1 Vc Vc 0
0 0 -Vc Vc
Tableau II-5 : Cas d’un défaut de type "court-circuit" du bras k
II.5. Détection de défaut par un capteur de courantLes mesures des courants de phase ik sont classiquement réalisées à
l’aide de capteurs. Ces capteurs se composent principalement d’un élément sensible et de
circuit de conditionnement et de traitement du signal. On désignera avec un indice m un
courant mesuré afin de différencier clairement les courants réels des courants mesurés.
La valeur absolue du courant mesuré est comparée à un seuil. Par conséquent,
quand un défaut apparaît au niveau d’un bras d’onduleur, la sortie de ce comparateur,
notée idéf, devient égale à 1. Le choix de la valeur du seuil Is dépend de la précision de la
prédiction des courants et doit être supérieure à l'erreur maximale entre les courants
mesurés et les courants prédits
II.6. ConclusionDans ce chapitre, nous avons proposé des méthodes permettant de
détecter, d’identifier et de compenser le défaut éventuel d’un semi-conducteur dans un bras
d’onduleur monophasé. Les méthodes proposées détectent l’apparition du défaut
concerné et identifient le composant défectueux. Ensuite, les modules de
compensation modifient la structure du convertisseur ou le choix des capteurs de
courant utilisés selon la nature du défaut. Ces modifications apportent des degrés de
liberté supplémentaires pour permettre au convertisseur de fonctionner en mode normal,
même en présence de défaut.
Les analyses effectuées dans la partie concernant la tolérance des défauts des
semi-conducteurs ont montré que la méthode proposée peut réduire considérablement
le temps de détection par rapport aux autres méthodes.

Chapitre III
Description
sur la carte ARDUINO et la
commande numérique

Page 29
Chapitre 3
III 1. IntroductionEn électronique de puissance, on utilise de plus en plus des convertisseurs
utilisant des interrupteurs électroniques fonctionnant soit à l’état passant (ou fermé),
soit à l’état bloqué (ou ouvert). Le passage d’un état à l’autre s’effectue périodiquement.
Les améliorations apportées à l’onduleur se situent essentiellement au niveau de la
commande, avec tout d’abord, la génération d’une onde purement sinusoïdale, mais
également la surveillance de la tension d’entrée et de la tension de sortie, Dans ce passage
on a besoin d’un générateur ou transmetteur de signal. C’est ainsi que l’on expose les
commandes des convertisseurs à partir d’un composant analogique (amplificateur
opérationnel) appeler commande analogique ou commande à base d’un (PIC,
ARDUINO, DSP ou FPGA) appeler commande numérique. On obtient ainsi les signaux qui
vont aller vers les composants de puissance.
On va utiliser dans ce projet une carte ARDUINO de type mega 2560 pour générer
des signaux de commande
III 2. Types de commandeIII 2. 1. Commande analogiqueEn première étude, il est nécessaire d’élaborer un signal (ou plusieurs signaux) de
commande pour agir sur les interrupteurs. Il s’agit le plus souvent de créer des fonctions,
triangulaire symétrique, triangulaires asymétriques ou « dents de scie » ou même
triangulaires asymétriques décalées par un montage électronique. Ces fonctions sont
obtenues sous forme de tension, Ce signal de commande est alors analogique. On fait très
souvent appel à des amplificateurs opérationnels.
On rappelle le cas considéré à la figure III 1 :

Page 30
Chapitre 3
Figure III 1 : génération d’une forme d’onde impulsionnelleIII 2. 2. Commande numériqueLa commande numérique permet également la réalisation de signaux de
commande de manière plus fiable qu’avec des montages utilisant l’électronique analogique.
Elle fait appel à des circuits intégrés programmables. Elle doit aussi inclure des « entrées »
de contrôle (Courant, Tension et de Vitesse, …) sous forme de signal logique ou numérique,
pour protéger le système commandé (Figure .III.2). On distingue deux types de circuits
programmables :
Les circuits utilisant des processeurs tels que microcontrôleur, le PIC (ProgrammableInterrupt Controler) ou le DSP (Digital Signal Processor) ou une carte ARDUINO. Cequi caractérise ces circuits, c’est que la programmation s’effectue soit enlangage assembleur, soit en langage « C ». L’architecture de ces composants étantdéjà réalisée par le constructeur, on ne peut que modifier le programme pouradapter le composant à la commande souhaitée du convertisseur de puissance.
Les circuits intégrés directement programmables de type FPGA (Field ProgrammableGate Array). Ce qui caractérise ces circuits, c’est que la programmations’effectue généralement en langage VHDL (Very High Density Language). L’utilisateur« construit » lui-même l’architecture de son composant en prévoyant lesfonctions de commande et de contrôle souhaitées.

Page 31
Chapitre 3
Figure .III.2 : principe de la commande numérique
III 3. Description sur la carte ARDUINOArduino est une plate-forme de prototypage d'objets interactifs à usage créatif
constituée d'une carte électronique et d'un environnement de programmation. Sans
tout connaître ni tout comprendre de l'électronique, cet environnement matériel et logiciel
permet à l'utilisateur de formuler ses projets par l'expérimentation directe avec l'aide de
nombreuses ressources disponibles en ligne. Pont tendu entre le monde réel et le
monde numérique, Arduino permet d'étendre les capacités de relations
humain/machine ou environnement/machine. Arduino est un projet en source ouverte : la
communauté importante d'utilisateurs et de concepteurs permet à chacun de trouver les
réponses à ses questions. Des dizaines de milliers d'artistes, de designers, d'ingénieurs, de
chercheurs, d'enseignants et même d'entreprises l'utilisent pour réaliser des projets
incroyables dans de multiples domaines:
prototypage rapide de projets innovants utilisant l'électronique. captation et analyse de données scientifiques. installations d'arts numériques. projets pédagogiques.III 3.1. Partie matérielle
La carte Arduino repose sur un circuit intégré (un miniordinateur appelé
également microcontrôleur) associée à des entrées et sorties qui permettent à l'utilisateur
de brancher différents types d'éléments externes :
Côté entrées, des capteurs qui collectent des informations sur leurenvironnement comme la variation de température via une sonde thermique, lemouvement via un détecteur de présence ou un accéléromètre, le contact via unbouton-poussoir, etc.

Page 32
Chapitre 3
Côté sorties, des actionneurs qui agissent sur le monde physique telle une petitelampe qui produit de la lumière, un moteur qui actionne un bras articulé, etc.
Comme le logiciel Arduino, le circuit électronique de cette plaquette est libre et ses
plans sont disponibles sur internet. On peut donc les étudier et créer des dérivées. Plusieurs
constructeurs proposent ainsi différents modèles de circuits électroniques programmables
et utilisables avec le logiciel Arduino.
Il existe plusieurs variétés de cartes Arduino UNO, DUE et MEGA chaque une a
des caractéristiques spécifiquesIII 3.2. Partie logicielleL'environnement de programmation ARDUINO (IDE en anglais) est une
application écrite en Java, dérivée du langage Processing. L’IDE permet d'écrire et de
modifier les codes et les convertir en une série d'instructions compréhensibles par la
carte. On y retrouve les éléments de la fenêtre de travail de Processing : intitulés des
menus, boutons, zone d'édition, console, etc. comme dans Processing, le programme est
constitué d'une série d'instructions saisie dans la fenêtre du logiciel.
Le programme qui envoyé vers la carte ARDUINO est enregistré de manière
permanente, ce programme est activé à chaque fois que l'on alimente la carte.
III 4. La carte ARDUINO megaLe modèle Mega Arduino est une carte microcontrôleur basée sur l’ATmega2560. Il
dispose de 54 broches numériques d'entrée / sortie (dont 14 peuvent être utilisées comme
sorties PWM), 16 entrées analogiques, 4 UART (ports série matériels), un oscillateur en
cristal de 16 MHz, d'une connexion USB, une prise d'alimentation, d'une embase ICSP, et un
bouton de réinitialisation. Il contient tout le nécessaire pour soutenir le microcontrôleur
suffit de le brancher à un ordinateur avec un câble USB ou de la puissance avec un
adaptateur ou la batterie AC -DC pour commencer. Le Mega est compatible avec la plupart
des blindages conçus pour l'Arduino Duemilanove ou Diecimila.

Page 33
Chapitre 3
Figure .III.3 modèle de l’ARDUINO MEGA
Programmables via un langage proche du "C" (disponible en libre téléchargement), les
modules Arduino peuvent fonctionner de façon autonome ou en communicant avec un
logiciel "tournant" sur un ordinateur (Flash, MaxMSP...).
Les modules arduino sont des plate-formes de prototypage microcontrôlées "open-
source" spécialement conçu pour les artistes, les concepteurs ou les hobistes.III 4.1. Les caractéristiques de la carte ARDUINO megaMicrocontrôleur ATmega2560
Tension de fonctionnement 5 V
Tension d'alimentation(recommandée)
7- 1 2 V
Tension d'alimentation (limites) 6 - 20V
Nombre d'E/S54 (dont 14 pouvant générer des
signaux PWM)
Nb ports"Analogique/Numérique"
16
Courant max. par E/S 40 mA
Courant pour broches 3.3 V 50 mA
Mémoire Flash256 KB (ATmega328) dont 8 KB utilisé par
le bootloader
SRAM 8 KB (ATmega328)
EEPROM 4 KB (ATmega328) Page 33
Chapitre 3
Figure .III.3 modèle de l’ARDUINO MEGA
Programmables via un langage proche du "C" (disponible en libre téléchargement), les
modules Arduino peuvent fonctionner de façon autonome ou en communicant avec un
logiciel "tournant" sur un ordinateur (Flash, MaxMSP...).
Les modules arduino sont des plate-formes de prototypage microcontrôlées "open-
source" spécialement conçu pour les artistes, les concepteurs ou les hobistes.III 4.1. Les caractéristiques de la carte ARDUINO megaMicrocontrôleur ATmega2560
Tension de fonctionnement 5 V
Tension d'alimentation(recommandée)
7- 1 2 V
Tension d'alimentation (limites) 6 - 20V
Nombre d'E/S54 (dont 14 pouvant générer des
signaux PWM)
Nb ports"Analogique/Numérique"
16
Courant max. par E/S 40 mA
Courant pour broches 3.3 V 50 mA
Mémoire Flash256 KB (ATmega328) dont 8 KB utilisé par
le bootloader
SRAM 8 KB (ATmega328)
EEPROM 4 KB (ATmega328) Page 33
Chapitre 3
Figure .III.3 modèle de l’ARDUINO MEGA
Programmables via un langage proche du "C" (disponible en libre téléchargement), les
modules Arduino peuvent fonctionner de façon autonome ou en communicant avec un
logiciel "tournant" sur un ordinateur (Flash, MaxMSP...).
Les modules arduino sont des plate-formes de prototypage microcontrôlées "open-
source" spécialement conçu pour les artistes, les concepteurs ou les hobistes.III 4.1. Les caractéristiques de la carte ARDUINO megaMicrocontrôleur ATmega2560
Tension de fonctionnement 5 V
Tension d'alimentation(recommandée)
7- 1 2 V
Tension d'alimentation (limites) 6 - 20V
Nombre d'E/S54 (dont 14 pouvant générer des
signaux PWM)
Nb ports"Analogique/Numérique"
16
Courant max. par E/S 40 mA
Courant pour broches 3.3 V 50 mA
Mémoire Flash256 KB (ATmega328) dont 8 KB utilisé par
le bootloader
SRAM 8 KB (ATmega328)
EEPROM 4 KB (ATmega328)

Page 34
Chapitre 3
Vitesse horloge 16 MHzIII 4.2. La programmationComme on a signalé précédemment la programmation de la carte ARDUINO se fait à
partir d’un logiciel ARDUINO IDE via un langage proche du C ou C++
Figure .III.4 logiciel de programmation
Le programme est lu par le micro-contrôleur de haut vers le bas, une variable doit être
déclarée avant d'être utilisée par une fonction, la structure minimale est constituée :
– en tête : déclaration des variables, des constantes, indication de l'utilisation de
bibliothèques etc...
– un setup (= initialisation) cette partie n'est lue qu'une seule fois, elle comprend les
fonctions devant être réalisée au démarrage (utilisation des broches en entrées ou en sortie,
mise en marche du midi etc.....)
– une loop (boucle) : cette partie est lue en boucle ! C'est ici que les fonctions sont
réalisées.

Page 35
Chapitre 3
En plus de cette structure minimale, on peut ajouter :
– des « sous-programmes » ou « routines » qui peuvent être appelées à tout moment
dans la boucle, très pratiqué pour réaliser des morceaux de codes répétitifs.
III 5. Création un signal MLI à partir de l’ARDUINOIII 5.1. Principe de créationCommande MLI ou PWM en anglais est une méthode très utilisée pour commander la
puissance de l'autre côté des charges. Cette méthode est très facile à mettre en œuvre et a
le rendement élevé. Signal PWM est essentiellement une onde carrée haute fréquence
(typiquement supérieure à 1 kHz). Le cycle d'utilisation de cette onde carrée est varié afin de
faire varier la puissance fournie à la charge. Le cycle est généralement indiqué en
pourcentage et il peut être exprimé par l'équation:
le cycle % Duty = ( TON / ( TON + TOFF ) ) * 100
Où TON est le temps pendant lequel l'onde carrée est en haute et TOFF est le temps
pendant lequel l'onde carrée est en basse. Où le cycle de droit est augmenté le pouvoir a
chuté à travers la charge augmentée et lorsque le cycle de service est réduit, la puissance à
travers la charge diminue. Le schéma de principe d'un système typique de commande de
puissance de PWM est représenté sur Figue III.1.
Figue III.5 : les cycles du signal PWM

Page 36
Chapitre 3
III 5.2. La méthode de créationLa méthode de création un signal PWM dans l’ARDUINO est fondée sur la comparaison
entre un signal (dent de scie) et une valeur (OCRnk), le signal dent de scie est crée à partir
d’un compteur (à partir de l’opération incrémentation décrémentation le compteur fait un
signal dent de scie)
La valeur OCRnk est comparée à la valeur dans un compteur(TimerN). Lorsque le
compteur est inférieur à la valeur OCRnk, la broche en sortie un HAUT lorsque le compteur
est supérieur à la valeur OCRnk, la broche émet un signal BAS. Dans la figure ci-dessous, une
onde carrée est générée car la broche est HAUTE à partir des chiffres 0 à 127, et LOW à
partir des chiffres 128 à 255, il est donc élevé pour la même quantité de temps qu'il est
faible
Figure .III.6 les signaux de MLI
Dans notre projet nous allons générer 4 signaux de commande chaque Timer génère
un signal MLI par un OCR et l’inverse de ce signal par l’autre OCR Comme dans la figure
suivante :

Page 37
Chapitre 3
Figure .III.7 le signal MLI et son inverse
III 6. ConclusionDans ce chapitre, nous avons exposé une description sur la carte ARDUINO MEGA
et comment l’utiliser et puis on a expliqué la technique de création un signal MLI à partir de
la carte ARDUINO.
Cette technique et réalisable grâce aux caractéristiques internes de cette carte et selon
l’utilisation, après l’écriture du programme final, on va réaliser le circuit de l’onduleur et
utiliser ce programme pour le commander, c’est ce que nous allons expliquer dans le
chapitre suivant.
Page 37
Chapitre 3
Figure .III.7 le signal MLI et son inverse
III 6. ConclusionDans ce chapitre, nous avons exposé une description sur la carte ARDUINO MEGA
et comment l’utiliser et puis on a expliqué la technique de création un signal MLI à partir de
la carte ARDUINO.
Cette technique et réalisable grâce aux caractéristiques internes de cette carte et selon
l’utilisation, après l’écriture du programme final, on va réaliser le circuit de l’onduleur et
utiliser ce programme pour le commander, c’est ce que nous allons expliquer dans le
chapitre suivant.
Page 37
Chapitre 3
Figure .III.7 le signal MLI et son inverse
III 6. ConclusionDans ce chapitre, nous avons exposé une description sur la carte ARDUINO MEGA
et comment l’utiliser et puis on a expliqué la technique de création un signal MLI à partir de
la carte ARDUINO.
Cette technique et réalisable grâce aux caractéristiques internes de cette carte et selon
l’utilisation, après l’écriture du programme final, on va réaliser le circuit de l’onduleur et
utiliser ce programme pour le commander, c’est ce que nous allons expliquer dans le
chapitre suivant.

Chapitre IV
Simulation et réalisation
pratique

Page 39
Chapitre 4
IV.1. IntroductionLe nombre de contrôleurs numériques destinés au contrôle des systèmes de
conversion de l’énergie électrique ne cesse d'augmenter, de même que leur complexité. Par
conséquent, de plus en plus d'efforts sont consacrés à la conception, la vérification et la
simulation des ces contrôleurs numériques. Les récents progrès des technologies
numériques et des outils logiciels associés permettent de concevoir des contrôleurs
numériques intégrés de plus en plus complexes, compacts et à haute performance. Grâce
au dispositif dit ARDUINO actuellement disponibles, comme par exemples les composants
UNO, MEGA, NANO, Lilypad, ….. , des contrôleurs entièrement numériques peuvent être
réalisés. Ainsi, un contrôleur numérique, voire un système de commande, qui était
auparavant implanté sur une carte électronique, peut dorénavant être intégré sur une puce
unique, offrant l'avantage d'être compact et de supporter un très grand nombre de
traitements arithmétiques. De plus, l'utilisation de composants reconfigurables tels que les
ARDUINO, FPGA…., permet le développement et le prototypage rapide du contrôleur
numérique sans modification matérielle significative [7].
Dans ce chapitre, nous présenterons une méthode pratique de la réalisation
et la commande (on utilise un carte ARDUINO de type MEGA) d’un onduleur monophasé
avec un bras redondant et nous donnerons, un algorithme permet de basculer le
fonctionnement de l’onduleur.
IV.2. Simulation de l’onduleur par MATLABDans cette partie, nous allons utiliser le logiciel MATLAB pour faire la simulation
du montage onduleur monophasé et puis nous ajoutons le bras redondant et nous allons
vérifier l’algorithme final.
Le montage onduleur monophasé est composé de quatre interrupteurs identiques
comme on a signalé dans le chapitre 1.
On utilise la commande :
1. Décalée ou adjacente ou commande à 180°2. La commande MLI sinus-triangulaire (modulation de largeur d’impulsion)

Page 40
Chapitre 4
IV.2.1. Schéma de montage
Figure IV.1 : onduleur monophasé sur MATLABIV.2.2. Résultats de simulationAprès la simulation du montage précédent on obtient les résultats suivants :
Figure IV.2 : l’allure du courant et la tension
Page 40
Chapitre 4
IV.2.1. Schéma de montage
Figure IV.1 : onduleur monophasé sur MATLABIV.2.2. Résultats de simulationAprès la simulation du montage précédent on obtient les résultats suivants :
Figure IV.2 : l’allure du courant et la tension
Page 40
Chapitre 4
IV.2.1. Schéma de montage
Figure IV.1 : onduleur monophasé sur MATLABIV.2.2. Résultats de simulationAprès la simulation du montage précédent on obtient les résultats suivants :
Figure IV.2 : l’allure du courant et la tension

Page 41
Chapitre 4
IV.2.3. Commande MLIComme on a expliqué dans le chapitre 1 la commande MLI est une technique
réalisée par la comparaison entre deux ondes (onde de forme sinusoïdale et onde de forme
dent de scie). Après la réalisation de cette commande et l’utiliser dans notre montage, on
obtient les résultats suivants :
Figure IV.3 : le courant et la tension aux bornes de la
Charge
IV.2.4. Le fonctionnement de l’onduleur en présence d’un défaut CCNous allons créer un court-circuit permanent au niveau de l’interrupteur haut du bras
principal 1 et l’on utilise Matlab pour simuler ce défaut et voir le fonctionnement du courant
et de la tension aux bornes de la sortie de l’onduleur

Page 42
Chapitre 4
Figure IV.4 : le courant et la tension de l’onduleur avant et après CCLorsque le défaut apparaît, le courant de la sortie de l’onduleur va augmenter
brusquement ce qui fait une destruction de l’interrupteur concerné de ce défaut et si l’on
ne le détecte pas et faire isolation de cette défiance l’interrupteur va exploser et puis tout le
bras ou le convertisseur
IV.2. Simulation de l’onduleur monophasé avec bras redondant parMATLAB
Nous nous rappelons qu’une nouvelle structure de redondance, mêlant un
dispositif d'isolement symétrique, passif et un couplage-aiguillage automatique vers un bras
de secours a été proposée au chapitre 2. Cette structure comprend une connexion
spontanée d'une redondance en série par les puces défaillantes elles-mêmes de très faibles
résistances (présentée dans la figure IV.4). Cette structure est initialement simulée sous le
logiciel MATLAB.
Page 42
Chapitre 4
Figure IV.4 : le courant et la tension de l’onduleur avant et après CCLorsque le défaut apparaît, le courant de la sortie de l’onduleur va augmenter
brusquement ce qui fait une destruction de l’interrupteur concerné de ce défaut et si l’on
ne le détecte pas et faire isolation de cette défiance l’interrupteur va exploser et puis tout le
bras ou le convertisseur
IV.2. Simulation de l’onduleur monophasé avec bras redondant parMATLAB
Nous nous rappelons qu’une nouvelle structure de redondance, mêlant un
dispositif d'isolement symétrique, passif et un couplage-aiguillage automatique vers un bras
de secours a été proposée au chapitre 2. Cette structure comprend une connexion
spontanée d'une redondance en série par les puces défaillantes elles-mêmes de très faibles
résistances (présentée dans la figure IV.4). Cette structure est initialement simulée sous le
logiciel MATLAB.
Page 42
Chapitre 4
Figure IV.4 : le courant et la tension de l’onduleur avant et après CCLorsque le défaut apparaît, le courant de la sortie de l’onduleur va augmenter
brusquement ce qui fait une destruction de l’interrupteur concerné de ce défaut et si l’on
ne le détecte pas et faire isolation de cette défiance l’interrupteur va exploser et puis tout le
bras ou le convertisseur
IV.2. Simulation de l’onduleur monophasé avec bras redondant parMATLAB
Nous nous rappelons qu’une nouvelle structure de redondance, mêlant un
dispositif d'isolement symétrique, passif et un couplage-aiguillage automatique vers un bras
de secours a été proposée au chapitre 2. Cette structure comprend une connexion
spontanée d'une redondance en série par les puces défaillantes elles-mêmes de très faibles
résistances (présentée dans la figure IV.4). Cette structure est initialement simulée sous le
logiciel MATLAB.

Page 43
Chapitre 4
Figure IV.5 : structure avec bras redondant
On a expliqué l’algorithme de fonctionnement en détaille au chapitre 2 et on a signalé
que le bras redondant destiné à remplacer le bras défectueux en cas de défaillance, la
stratégie de commande est résumée comme suit.
Après la détection du défaut :
5. Mise à ‘0’ des ordres de commande des deux interrupteurs de bras 16. Commande à la fermeture de l’interrupteur bidirectionnel Tk7. application des ordres de commande des interrupteurs du bras défectueux aux deux
interrupteurs du bras redondant
TK : interrupteur bidirectionnel en courant et en tension généralement on utilise le triac.
Après l’exécution on obtient les résultats suivants :
Figure IV.6 : la tension aux bornes de la charge Page 43
Chapitre 4
Figure IV.5 : structure avec bras redondant
On a expliqué l’algorithme de fonctionnement en détaille au chapitre 2 et on a signalé
que le bras redondant destiné à remplacer le bras défectueux en cas de défaillance, la
stratégie de commande est résumée comme suit.
Après la détection du défaut :
5. Mise à ‘0’ des ordres de commande des deux interrupteurs de bras 16. Commande à la fermeture de l’interrupteur bidirectionnel Tk7. application des ordres de commande des interrupteurs du bras défectueux aux deux
interrupteurs du bras redondant
TK : interrupteur bidirectionnel en courant et en tension généralement on utilise le triac.
Après l’exécution on obtient les résultats suivants :
Figure IV.6 : la tension aux bornes de la charge Page 43
Chapitre 4
Figure IV.5 : structure avec bras redondant
On a expliqué l’algorithme de fonctionnement en détaille au chapitre 2 et on a signalé
que le bras redondant destiné à remplacer le bras défectueux en cas de défaillance, la
stratégie de commande est résumée comme suit.
Après la détection du défaut :
5. Mise à ‘0’ des ordres de commande des deux interrupteurs de bras 16. Commande à la fermeture de l’interrupteur bidirectionnel Tk7. application des ordres de commande des interrupteurs du bras défectueux aux deux
interrupteurs du bras redondant
TK : interrupteur bidirectionnel en courant et en tension généralement on utilise le triac.
Après l’exécution on obtient les résultats suivants :
Figure IV.6 : la tension aux bornes de la charge

Page 44
Chapitre 4
Figure IV.7 : le courant et la tension de la sortie
Fig5 et Fig6 présentent les séquences fonctionnelles d’un onduleur avec bras
redondant : l’état normal, déconnecté du bras 1(les deux IGBTs sont mise à 0, l’amorçage du
bras redondant. On voit que le courant va augmenter (sens négatif) quand le bras 1 est mis
à 0 (l’effet du défaut) et puis quand le bras redondant amorce le courant va diminuer et
reprendre son état normal.
IV.3. Réalisation de l’onduleur monophasé avec bras redondantL’essor de notre réalisation pratique est basé sur une connaissance théorique
préalable qui permet de composer les différents circuits à partir d’une expérimentation de
test. D’après les deux chapitres précédents, on a pu avoir une idée sur le principe de
fonctionnement de l’onduleur monophasé et la commande numérique et après la phase de
simulation précédente, on a vu le comportement de l’onduleur et l’algorithme de
fonctionnement.
Dans ce dernier chapitre, on va observer les différentes étapes de différentes
parties de l’onduleur avec des multiples essais et pour cela on utilise un logiciel pratique ISIS
Proteus 8 pour faire le circuit imprimé.IV.3.1. La structure de l’onduleurL’onduleur réalisé est constitué de trois parties
a. la carte de commande (ARDUINO MEGA)
Page 44
Chapitre 4
Figure IV.7 : le courant et la tension de la sortie
Fig5 et Fig6 présentent les séquences fonctionnelles d’un onduleur avec bras
redondant : l’état normal, déconnecté du bras 1(les deux IGBTs sont mise à 0, l’amorçage du
bras redondant. On voit que le courant va augmenter (sens négatif) quand le bras 1 est mis
à 0 (l’effet du défaut) et puis quand le bras redondant amorce le courant va diminuer et
reprendre son état normal.
IV.3. Réalisation de l’onduleur monophasé avec bras redondantL’essor de notre réalisation pratique est basé sur une connaissance théorique
préalable qui permet de composer les différents circuits à partir d’une expérimentation de
test. D’après les deux chapitres précédents, on a pu avoir une idée sur le principe de
fonctionnement de l’onduleur monophasé et la commande numérique et après la phase de
simulation précédente, on a vu le comportement de l’onduleur et l’algorithme de
fonctionnement.
Dans ce dernier chapitre, on va observer les différentes étapes de différentes
parties de l’onduleur avec des multiples essais et pour cela on utilise un logiciel pratique ISIS
Proteus 8 pour faire le circuit imprimé.IV.3.1. La structure de l’onduleurL’onduleur réalisé est constitué de trois parties
a. la carte de commande (ARDUINO MEGA)
Page 44
Chapitre 4
Figure IV.7 : le courant et la tension de la sortie
Fig5 et Fig6 présentent les séquences fonctionnelles d’un onduleur avec bras
redondant : l’état normal, déconnecté du bras 1(les deux IGBTs sont mise à 0, l’amorçage du
bras redondant. On voit que le courant va augmenter (sens négatif) quand le bras 1 est mis
à 0 (l’effet du défaut) et puis quand le bras redondant amorce le courant va diminuer et
reprendre son état normal.
IV.3. Réalisation de l’onduleur monophasé avec bras redondantL’essor de notre réalisation pratique est basé sur une connaissance théorique
préalable qui permet de composer les différents circuits à partir d’une expérimentation de
test. D’après les deux chapitres précédents, on a pu avoir une idée sur le principe de
fonctionnement de l’onduleur monophasé et la commande numérique et après la phase de
simulation précédente, on a vu le comportement de l’onduleur et l’algorithme de
fonctionnement.
Dans ce dernier chapitre, on va observer les différentes étapes de différentes
parties de l’onduleur avec des multiples essais et pour cela on utilise un logiciel pratique ISIS
Proteus 8 pour faire le circuit imprimé.IV.3.1. La structure de l’onduleurL’onduleur réalisé est constitué de trois parties
a. la carte de commande (ARDUINO MEGA)

Page 45
Chapitre 4
b. la partie de commande rapprochée et circuit de protectionc. la partie de puissanceIV.3.1.a. La carte de commande (génération des signaux)
Nous avons vu dans le chapitre 2 une description sur la carte ARDUINO MEGA et
comment l’utiliser pour générer un signal numérique maintenant nous allons utiliser ce
principe pour générer quatre signaux MLI (modulation de largeur d’impulsion) de telle sorte
que chaque signal commande un interrupteur MOSFET. À l’aide des caractéristiques de la
carte ARDUINO la fréquence des signaux est convenable.
Figure IV.8 : les signaux générés par la carte ARDUINOIV.3.1.b. La partie commande rapprochéeLe signal généré par la carte ARDUINO est de type 5V logique donc il faut faire
isolation entre la carte de commande et le reste de circuit (drivers et la partie puissance)
pour cela on utilise des optocouplers ou opto-isolateur.
Figure IV.9 : schéma fonctionnel d’un onduleur
Page 45
Chapitre 4
b. la partie de commande rapprochée et circuit de protectionc. la partie de puissanceIV.3.1.a. La carte de commande (génération des signaux)
Nous avons vu dans le chapitre 2 une description sur la carte ARDUINO MEGA et
comment l’utiliser pour générer un signal numérique maintenant nous allons utiliser ce
principe pour générer quatre signaux MLI (modulation de largeur d’impulsion) de telle sorte
que chaque signal commande un interrupteur MOSFET. À l’aide des caractéristiques de la
carte ARDUINO la fréquence des signaux est convenable.
Figure IV.8 : les signaux générés par la carte ARDUINOIV.3.1.b. La partie commande rapprochéeLe signal généré par la carte ARDUINO est de type 5V logique donc il faut faire
isolation entre la carte de commande et le reste de circuit (drivers et la partie puissance)
pour cela on utilise des optocouplers ou opto-isolateur.
Figure IV.9 : schéma fonctionnel d’un onduleur
Page 45
Chapitre 4
b. la partie de commande rapprochée et circuit de protectionc. la partie de puissanceIV.3.1.a. La carte de commande (génération des signaux)
Nous avons vu dans le chapitre 2 une description sur la carte ARDUINO MEGA et
comment l’utiliser pour générer un signal numérique maintenant nous allons utiliser ce
principe pour générer quatre signaux MLI (modulation de largeur d’impulsion) de telle sorte
que chaque signal commande un interrupteur MOSFET. À l’aide des caractéristiques de la
carte ARDUINO la fréquence des signaux est convenable.
Figure IV.8 : les signaux générés par la carte ARDUINOIV.3.1.b. La partie commande rapprochéeLe signal généré par la carte ARDUINO est de type 5V logique donc il faut faire
isolation entre la carte de commande et le reste de circuit (drivers et la partie puissance)
pour cela on utilise des optocouplers ou opto-isolateur.
Figure IV.9 : schéma fonctionnel d’un onduleur

Page 46
Chapitre 4
IV.3.1.b.1. Circuit d’isolationLe problème de circuit de commande rapproché réside dans l’isolation
galvanique de toutes ses fonctions. La position du semi-conducteur impose souvent des
potentiels flottants, et la plupart du temps, il doit être isolé galvaniquement.
Notre circuit comporte trois optocouplers (le troisième pour le bras redondant) ces
optocouplers de type TPL2630 est un optocoupler capable de supporter des hautes
fréquences (>4kHz) suffisantes pour la commande MLI.
Figure IV.10 : optocoupler TPL2630IV.3.1.b.2. Circuit de commande des MOSFETs (driver)Le Driver est un circuit intégré permet de piloter en haute fréquence 2 MOSFET du
même bras, sous une tension pout atteindre à 600v, en garantissant l'isolation
électrique de chaque étage.
Dans notre projet, nous allons utiliser un Driver de type IR2113 « High voltage high
and low side driver » disponible au laboratoire.
Figure IV.11 : schéma de connexion Driver MOSFETs
Page 46
Chapitre 4
IV.3.1.b.1. Circuit d’isolationLe problème de circuit de commande rapproché réside dans l’isolation
galvanique de toutes ses fonctions. La position du semi-conducteur impose souvent des
potentiels flottants, et la plupart du temps, il doit être isolé galvaniquement.
Notre circuit comporte trois optocouplers (le troisième pour le bras redondant) ces
optocouplers de type TPL2630 est un optocoupler capable de supporter des hautes
fréquences (>4kHz) suffisantes pour la commande MLI.
Figure IV.10 : optocoupler TPL2630IV.3.1.b.2. Circuit de commande des MOSFETs (driver)Le Driver est un circuit intégré permet de piloter en haute fréquence 2 MOSFET du
même bras, sous une tension pout atteindre à 600v, en garantissant l'isolation
électrique de chaque étage.
Dans notre projet, nous allons utiliser un Driver de type IR2113 « High voltage high
and low side driver » disponible au laboratoire.
Figure IV.11 : schéma de connexion Driver MOSFETs
Page 46
Chapitre 4
IV.3.1.b.1. Circuit d’isolationLe problème de circuit de commande rapproché réside dans l’isolation
galvanique de toutes ses fonctions. La position du semi-conducteur impose souvent des
potentiels flottants, et la plupart du temps, il doit être isolé galvaniquement.
Notre circuit comporte trois optocouplers (le troisième pour le bras redondant) ces
optocouplers de type TPL2630 est un optocoupler capable de supporter des hautes
fréquences (>4kHz) suffisantes pour la commande MLI.
Figure IV.10 : optocoupler TPL2630IV.3.1.b.2. Circuit de commande des MOSFETs (driver)Le Driver est un circuit intégré permet de piloter en haute fréquence 2 MOSFET du
même bras, sous une tension pout atteindre à 600v, en garantissant l'isolation
électrique de chaque étage.
Dans notre projet, nous allons utiliser un Driver de type IR2113 « High voltage high
and low side driver » disponible au laboratoire.
Figure IV.11 : schéma de connexion Driver MOSFETs

Page 47
Chapitre 4
L’alimentation de la logique de commande de ces transistors est réalisée par
une technique dite « bootstrap » : l’électronique de commande des transistors MOSFETs
de puissance du haut est alimentée par les condensateurs C1-1 ( Figure IV.11 ) dont la
recharge est assurée par l’alimentation 15V pendant le temps où le transistor du bas
conduit, ce condensateur étant ensuite déconnecté pour servir d’alimentation
autonome lorsque le transistor du haut et son électronique de commande se trouvent
portés au potentiel haut de la source.
Dans ce montage, les condensateurs C (1-2) et C1 assurent le filtrage des
alimentations, VCC et VB. La tension VCC doit être comprise entre 10v et 20v, la tension VDD
entre 4,5v et 20v. L'alimentation VB est obtenue à partir de VCC, par charge de C1-1 à
travers D1 lorsque Q2 est saturé.
Le temps mort crée par le Driver est 100ns, pour des faibles courants on peut voir la
conduction des transistors mais il y a un risque de court-circuiter la source par
l’augmentation du courant, pour cela on va créer un temps mort suffisant pour protéger
notre circuit (Figure IV.12).
Figure IV.12 : signaux sortent du DriverIV.3.1.b.3. Création du temps mortLe temps mort c’est le retard entre le blocage d’un interrupteur et l’amorçage de
l’autre du même bras.

Page 48
Chapitre 4
Du fait, le temps mort qui nous avons le besoin est créé au niveau de la carte de
commande (ARDUINO), on a signalé dans le chapitre 3 que la carte ARDUINO permet de
générer deux signaux MLI (PWM) de telle sorte que le deuxième signal était l’inverse du
premier.
Le temps mort crée par la carte de commande entre deux signaux est suffisant
Pour commander les MOSFETs de notre onduleur (>4us)
Figure IV.13 Le temps mort entre deux signauxIV.3.1.c. La partie puissanceIl se compose d’une alimentation continue et de trois bras(deux bras principaux
et bras redondant), chacun contient deux transistors MOSFET de type IRFP470 (HEXFETs
from International Rectifier) et des diodes rapides de type A3006P pour assurer la
circulation du courant inverse (diode de roue libre)
Figure IV.14 La partie puissance dans ISIS

Page 49
Chapitre 4
Ces MOSFETs capables de supporter une tension de 500V et un courant jusqu’à 20A
(voire l’annexe), on a placé une résistance 20Ω avant chaque drain du MOSFET pour le
protéger contre les chutes de tension
Le troisième bras est le bras redondant pour remplacer le bras défectueux comme on a
signalé précédemment et le composant U7 (triac) est un interrupteur bidirectionnel en
courant et en tension pour assurer la liaison entre le bras redondant et le bras sain
IV.4 La partie pratiqueNotre réalisation ce passe par plusieurs étapes :
Simulation de circuit sous l’environnement ISIS Création de circuit imprimé sous l’environnement ARES
Impression de la carte et emplacement des composantsIV.4.1 circuit impriméOn utilise le logiciel isis pour dessiner le schéma du circuit de l’onduleur et puis
On utilise ARES pour faire le circuit imprimé comme dans la figure suivante
Figure IV.15 : circuit imprimé

Page 50
Chapitre 4
IV.5. impression du circuit et construire la carte finale
Figure IV.16 : l’onduleur réalisé
IV.5. ConclusionNous avons présenté dans cette partie la méthode pratique de la réalisation d’un
onduleur monophasé avec bras redondant et ses étapes (la conception du montage
pratique et le circuit final) et nous avons montré les déférentes parties de cet onduleur.
La carte de commande utilisée dans cette partie c’est ARDUINO Mega 2560
programmée à partir d’un logiciel ArduinoC, cette carte crée un six signaux MLI avec un
temps mort réglable pour commander les MOSFETs du convertisseur.

Conclusion générale

Ce mémoire constitue une contribution exploratoire au thème de la sûreté de
fonctionnement des convertisseurs et des systèmes de conversion électroniques de
puissance. De par la mutation au "plus électrique" que nous connaissons depuis quelques
années dans les domaines des transports et des systèmes embarqués entre autres, les
approches habituelles de haute fiabilité considérées au niveau des composants de puissance
seul doivent être complétées à l'avenir par une approche plus globale visant à sécuriser et à
rendre plus disponible tout convertisseur sur une défaillance interne.
La direction que nous proposons dans ce mémoire est tout autre puisqu'elle vise à
porter cet effort de conception de la sûreté de fonctionnement plus en amont et plus
circonscrite à l'échelle même des cellules de commutation et des structures génériques de
conversion. Par des approches croisées portant sur les circuits de commutation et la
technologie des composants, nous avons proposé un certain nombre d'idées simples et des
amorces de ruptures technologiques visant à réaliser de véritables convertisseurs génériques
intrinsèquement sécurisés et à tolérance de pannes, à coût technologique et complexité
maîtrisé.
Les tests des différents modules du système sont effectués séparément soit en
simulation soit en pratique. A ce propos certain outils logiciel que nous avons utilisé dans
note travail et qui ont été d’une importance capitale à savoir : Proteus ISIS, ARES, MATLAB.

Références bibliographiques[1] : Shahram KARIMI « Continuité de service des convertisseurs triphasés de puissance et
prototypage "FPGA in the loop": application au filtre actif parallèle »
[2] : M. Zhifeng DOU « Sûreté de fonctionnement des convertisseurs Nouvelles structures de
redondances pour onduleurs sécurisés à tolérance de pannes ».[3] : Ken Shirriff “ Secrets of Arduino PWM”[4] : TAHAR TALBI « CONCEPTION ET REALISATION D’UN ONDULEUR DE TENSION TRIPHASE
COMMANDE PAR UNE CARTE ARDUINO »
[5] : Muhammad H.Rachid. “Power Electronics, circuits, devices, and applications ’’, Prentice
Hall, Englewood CMs, New Jersey 1993”
[6] : C. Canudas. de Wit, « Modélisation, Contrôle vectoriel et DTC. Commande des moteurs
asynchrones’’ Editions Hermès ».
[7] : Onduleur de tension. «Mise en œuvre et Structures-principes applications. Techniques
d 'ingénieur».
[8] : Michel Pinard. ’’CONVERTISSEURS ET ÉLECTRONIQUE DE PUISSANCE Commande ’’,
Description Mise en œuvre, Applications avec LabVIEW, avril 2007
[9] : SOUHEIL SLIM « SYNTHÈSE D'UNE NOUVELLE STRUCTURE D'ONDULEUR MONOPHASÉ À
BRAS RÉSONNANT: PROCÉDURE DE CONCEPTION OPTIMALE ET ÉV ALUATION DES
PERFORMANCES »
[10] : Arduino Mega 2560 Datasheet