Rdm General
186
Transcript of Rdm General
1
Université Paul Sabatier Toulouse 3
POLYCOPIE DE
CALCUL DES OUVRAGES
THÉORIE DES POUTRES
Erick Ringot
Université Paul Sabatier, Toulouse 3
Mention SCIENCES POUR L'INGÉNIEURDépartement d'Ingénierie UPSSITECH - L3 GCGEOFaculté des Sciences et Ingénierie - L3 Génie Civil
Université Paul Sabatier Toulouse III - Université de Toulouse118, route de Narbonne - FR 31062 Toulouse France
chantier NHU Zinchang, ChineAvril 2012
e-mail : [email protected]
Avant-Propos
révision
n° date auteur - correcteur nature de la modication1.0 mars 2013 E.Ringot -2.0 février 2014 E.Ringot chap. poutres - cercle de Mohr des inerties
acquisition de compétences
La théorie des poutres est le contexte général du calcul des ouvrages. Cette théorie s'appuie en amont surla théorie de la mécanique des milieux continus et trouve son prolongement, en aval, dans les codes deconstruction et notamment la famille des Eurocodes EC0 à EC9.
contenu
Ce cours aborde les sujets suivants :
1. une introduction sur la place de la théorie des poutres dans les missions de l'ingénieur civil ;
2. un chapitre de rappel sur les torseurs et, en particulier, le torseur cinématique et le torseur des systèmesde force ;
3. la théorie des poutres ;
4. la théorie du cisaillement de exion ;
5. la théorie de la torsion de Saint-Venant ;
6. le principe des puissances virtuelles ;
7. les théorèmes dits énergétiques ;
8. la méthode des forces ;
9. la méthode des déplacements ;
10. une introduction aux problèmes de stabilité (à venir).
On trouvera les mises à jour de ce cours et de ses annexes à l'adresse :
https ://sites.google.com/site/sciencespourlingenieur/
prérequis
Comme pour toute science dure, la mécanique adopte les mathématiques comme langage. Le niveau demathématique requis pour la bonne compréhension de ce cours est celui du programme de mathématiquespour l'ingénieur dispensé jusqu'au niveau L2 de l'enseignement supérieur (classes préparatoires aux grandesécoles et licences es sciences). De courts rappels émaillent ci ou là le présent polycopié lorsque le rédacteur l'ajugé utile sans que cela présente le caractère de rigueur et d'exhaustivité d'une démonstration mathématique.
2

3
Les lecteurs sont donc invités à compléter leurs connaissances, le cas échéant, par la lecture et la pratiqued'exercices dans des ouvrages de mathématiques appropriés 1.
Les mathématiques élémentaires comme les règles de proportionnalité, la résolution de systèmes d'équa-tions linéaires, la trigonométrie, les propriétés du cercle, l'arithmétique, la géométrie Euclidienne, etc... sontlégitiment supposées connues.
mathématiques
Espaces vectoriels et anes. Calcul matriciel : matrice, produit de matrices, associativité, transposée, inverse,déterminant, polynôme caractéristique, valeurs et vecteurs propres. Géométrie Euclidienne élémentaire : tri-angle rectangle, cercle, trigonométrie. Équations et représentations paramétriques de lignes dans le plan etdans l'espace tridimensionnel. Courbure et torsion, centres associés, repère de Frenet. Droite : vecteur direc-teur, vecteur normal, distance à une droite. Représentation paramétrique et équation de la droite et du cercledans le plan. Équations et représentations paramétriques du plan et de surfaces en 3D, vecteur normal à unesurface. Produit vectoriel, produit scalaire, produit mixte. Fonction, dérivée. Fonctions de plusieurs variables,dérivées partielles, diérentielle, accroissement, dérivée dans une direction donnée. Primitive d'une fonction.Intégrales dénies, intégrales simples et multiples, intégrale curviligne, intégrales de surface et de volume.Analyse vectorielle, gradient, divergence, rotationnel, laplacien, transformation d'intégrales, théorème de ladivergence, Stockes, Ostrogradsky.
mécanique
Torseurs, invariants, comoment. Force, couple, moment d'une force, torseur. Mécanique du solide indéfor-mable : vitesse, vitesse de rotation, torseur cinématique, torseur dynamique. Principe fondamental de ladynamique. Statique. Puissance d'une force, d'un couple. Travail.
1. La bibliographie est abondante. L'auteur recommande la lecture des ouvrages de ses collègues de l'Université des Sciencesde Toulouse : Techniques mathématiques pour la physique 1er cycle Vol. 1 et Vol. 2 de Gabriel Soum, Raymond Jagut, PierreDubouix particulièrement pédagogiques et bien illustrés.
Table des matières
1 Discours liminaire 19
1.1 Ouvrage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.2 Typologie des éléments de structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.2.1 Éléments 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.2.2 Éléments 2D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.2.3 Éléments 1D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.3 Contexte règlementaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.4 Les exigences du calcul des ouvrages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.4.1 Équilibre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.4.1.1 Dénition de l'équilibre statique . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.4.1.2 Critère d'équilibre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.4.1.3 En pratique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.4.2 Stabilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.4.2.1 Stabilité des systèmes dynamiques . . . . . . . . . . . . . . . . . . . . . . . . 27
1.4.2.2 Stabilité des systèmes statiques . . . . . . . . . . . . . . . . . . . . . . . . . . 28
1.4.3 Résistance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
1.4.4 Déformabilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
1.5 Rappels sur les forces et les grandeurs associées . . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.5.1 Origine des forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.5.2 Caractère vectoriel d'une force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
1.5.2.1 Eort ponctuel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
1.5.2.2 Action-Réaction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
1.5.2.3 Représentation conventionnelle . . . . . . . . . . . . . . . . . . . . . . . . . . 36
1.5.3 Moment d'une force en un point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
1.5.3.1 Cas général en trois dimensions . . . . . . . . . . . . . . . . . . . . . . . . . 36
1.5.3.2 Cas particulier en deux dimensions . . . . . . . . . . . . . . . . . . . . . . . . 37
1.5.4 Couple de force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
1.5.5 Torseur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
1.5.5.1 Le torseur en tant qu'objet mathématique (3D) . . . . . . . . . . . . . . . . 39
1.5.5.2 Equiprojectivité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
1.5.5.3 Automoment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4
TABLE DES MATIÈRES 5
1.5.5.4 Comoment de deux torseurs . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
1.5.5.5 Axe central & moment central . . . . . . . . . . . . . . . . . . . . . . . . . . 40
1.5.5.6 Torseurs particuliers : Torseur nul, Glisseur & Couple . . . . . . . . . . . . . 41
1.5.6 Torseur de force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
1.5.6.1 Torseur de force associé à un ensemble discret de vecteurs liés et de couplesde force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
1.5.6.2 Torseur de force associé à des eorts répartis . . . . . . . . . . . . . . . . . . 42
1.5.6.3 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
1.5.6.4 Discussion sur l'équivalence des torseurs de force entre eux . . . . . . . . . . 44
1.6 Rappels sur les vitesses et déplacements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
1.6.1 Dénition du solide indéformable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
1.6.2 Mouvement d'un solide indéformable . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
1.6.3 Torseur cinématique (des vitesses) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
1.6.4 Torseur cinématique des petits déplacements . . . . . . . . . . . . . . . . . . . . . . . 46
1.6.5 Epure cinématique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
1.6.5.1 Transformation cinématique . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
1.6.5.2 Expression graphique de l'équiprojectivité . . . . . . . . . . . . . . . . . . . . 48
1.6.5.3 Détermination de la vitesse de rotation partant de la vitesse de deux points . 49
1.6.5.4 Application aux mécanismes . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
1.7 Puissance, travail, énergie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
1.7.1 puissance et travail d'une force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
1.7.2 puissance d'un système de forces agissant sur un solide indéformable . . . . . . . . . . 51
1.7.3 généralisation à la puissance d'un torseur de force . . . . . . . . . . . . . . . . . . . . 52
2 Théorie des poutres 53
2.1 Objet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.2 Dénition d'une poutre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.3 Hypothèses HPP et conséquences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
2.3.1 petits déplacements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
2.3.2 petites déformations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
2.4 Hypothèses sur le matériau constitutif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.5 Hypothèse de Timoshemko . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.5.1 expérience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.5.2 conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.5.3 formalisation du champ de déplacement . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.5.4 Hypothèse dégradée de Navier-Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . 56
2.5.5 champ de déformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
2.5.5.1 expression des composantes de déformation . . . . . . . . . . . . . . . . . . . 57
2.5.5.2 interprétation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
2.6 Hypothèse de Saint-Venant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
6 TABLE DES MATIÈRES
2.6.1 Énoncé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2.6.2 Interprétation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2.6.3 Conséquences sur la forme du tenseur des contraintes . . . . . . . . . . . . . . . . . . 59
2.7 Contradictions introduites par les hypothèses . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2.7.1 Contradiction sur les cisaillements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2.7.2 Contradiction sur la contrainte normale . . . . . . . . . . . . . . . . . . . . . . . . . . 60
2.7.3 Conséquences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
2.8 Sollicitations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
2.8.1 objet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
2.8.2 Contraintes généralisées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
2.8.3 Singularisation du repère : sollicitations normales . . . . . . . . . . . . . . . . . . . . . 61
2.8.4 exion plane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
2.8.5 cas particuliers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
2.8.5.1 traction pure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
2.8.5.2 compression pure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
2.8.5.3 torsion pure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
2.8.5.4 exion pure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
2.8.5.5 exion simple (2D) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
2.8.5.6 exion composée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
2.8.5.7 exion déviée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
2.8.6 caractéristiques géométriques d'un plan de section droite . . . . . . . . . . . . . . . . . 65
2.8.6.1 aire de section droite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
2.8.6.2 position du centre de gravité ou centre d'inertie - moments statiques . . . . . 66
2.8.6.3 orientation du repère principal et inerties principales - cercle de Mohr desinerties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
2.8.6.4 Représentation de Mohr alternative . . . . . . . . . . . . . . . . . . . . . . . 71
2.8.7 équations de l'équilibre local d'une poutre . . . . . . . . . . . . . . . . . . . . . . . . . 72
2.8.7.1 poutre 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
2.8.7.2 poutre 2D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
2.9 Lois de comportement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
2.9.1 Sollicitations normales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
2.9.2 Extension aux sollicitations transversales . . . . . . . . . . . . . . . . . . . . . . . . . 74
2.10 Champ de déplacement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
2.10.1 objet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
2.10.2 rotation axiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
2.10.3 autres rotations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
2.10.4 déplacement axial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
2.10.5 déplacements transversaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
2.11 Expression de la contrainte normale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
2.12 Puissance & Énergie élastique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
TABLE DES MATIÈRES 7
2.12.1 Objet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
2.12.2 Rappels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
2.12.2.1 puissance et travail d'une force . . . . . . . . . . . . . . . . . . . . . . . . . . 77
2.12.2.2 puissance et travail d'un torseur . . . . . . . . . . . . . . . . . . . . . . . . . 78
2.12.3 Densité de puissance d'une poutre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
2.12.4 Densité d'énergie élastique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
2.12.5 Énergie élastique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
2.13 Résumé du chapitre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
3 Cisaillement de exion 83
3.1 Objet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.2 Équilibre d'une calotte de poutre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.3 Formule de Bredt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
3.3.1 expression générale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
3.3.2 cas où la coupure (AB) est parallèle à Gz . . . . . . . . . . . . . . . . . . . . . . . . 86
3.3.3 exemple de la section rectangulaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
3.4 Prol mince . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
3.4.1 Dénition d'un prol mince . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
3.4.2 Prol mince ouvert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
3.4.2.1 Relation générale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
3.4.2.2 Flux de cisaillement nul . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3.4.2.3 Flux de cisaillement de exion maximal . . . . . . . . . . . . . . . . . . . . . 89
3.4.2.4 Exemple du prol en I (type IPE) . . . . . . . . . . . . . . . . . . . . . . . . 89
3.4.2.5 Sur la conservation du ux de cisaillement . . . . . . . . . . . . . . . . . 91
3.4.3 Prol mince fermé à simple cavité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
3.4.3.1 Expression générale du ux de cisaillement . . . . . . . . . . . . . . . . . . . 92
3.4.3.2 Détermination du ux à l'origine Φf0 . . . . . . . . . . . . . . . . . . . . . . 93
3.4.4 Circulation du vecteur cisaillement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
3.4.5 Prol mince fermé à cavités multiples . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
3.5 Sections réduites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
3.5.1 Expression de w1 par la mmc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
3.5.2 Expression de w1 par la théorie des poutres (rappel) . . . . . . . . . . . . . . . . . . . 100
3.5.3 Prol mince fermé / ouvert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
3.5.3.1 Section mince fermée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
3.5.3.2 Section mince ouverte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
3.6 Torseur des contraintes de cisaillement de exion . . . . . . . . . . . . . . . . . . . . . . . . . 101
3.6.1 résultante des contraintes τf (s) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
3.6.2 moment en Q des contraintes τf (s) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
3.6.3 Centre de exion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
3.6.3.1 Dénition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
8 TABLE DES MATIÈRES
3.6.3.2 Conséquence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
3.6.3.3 Détermination de la position du centre de exion C (cas général) . . . . . . . 104
3.6.3.4 Position du centre de exion (quelques cas particuliers) . . . . . . . . . . . . 105
3.6.3.5 Propriétés du centre de exion . . . . . . . . . . . . . . . . . . . . . . . . . . 105
3.6.4 Dénition complétée des sollicitations . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4 Torsion 106
4.1 Objet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
4.2 Phénoménologie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
4.2.1 Hypothèses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
4.2.2 Description du phénomène observé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
4.3 Théorie générale de la torsion de Saint-Venant . . . . . . . . . . . . . . . . . . . . . . . . . 107
4.3.1 Équilibre d'un tronçon de poutre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
4.3.2 Hypothèses sur le tenseur des contraintes . . . . . . . . . . . . . . . . . . . . . . . . . 107
4.3.3 Équilibre local . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
4.3.4 Élasticité : Loi de Hooke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
4.3.5 Centre de torsion & champ de déplacement . . . . . . . . . . . . . . . . . . . . . . . . 109
4.3.6 Sur le centre de torsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
4.3.7 Fonction de torsion de Prandtl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
4.3.7.1 Dénition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
4.3.7.2 Équation de la torsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
4.3.7.3 Condition à la périphérie du PSD . . . . . . . . . . . . . . . . . . . . . . . . 113
4.3.8 Torseur des contraintes de cisaillement de torsion . . . . . . . . . . . . . . . . . . . . . 114
4.3.9 Rigidité à la torsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
4.3.10 Résumé de la théorie de torsion de Saint-Venant . . . . . . . . . . . . . . . . . . . . 115
4.3.11 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
4.3.11.1 Torsion de la section circulaire pleine . . . . . . . . . . . . . . . . . . . . . . 115
4.3.11.2 Torsion de la section annulaire . . . . . . . . . . . . . . . . . . . . . . . . . . 116
4.3.11.3 Torsion de la section rectangulaire pleine . . . . . . . . . . . . . . . . . . . . 117
4.3.11.4 Approximation sur la fonction de Prandtl . . . . . . . . . . . . . . . . . . . 119
4.4 Torsion de Saint-Venant des prols minces . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
4.4.1 dénitions et concepts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
4.4.1.1 Géométrie de prol mince . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
4.4.1.2 Flux de cisaillement de torsion . . . . . . . . . . . . . . . . . . . . . . . . . . 121
4.4.2 prols minces ouverts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
4.4.2.1 Expression de la contrainte de cisaillement de torsion . . . . . . . . . . . . . 121
4.4.2.2 Expression de l'inertie de torsion . . . . . . . . . . . . . . . . . . . . . . . . . 122
4.4.2.3 Remarque quant au moment de torsion . . . . . . . . . . . . . . . . . . . . . 123
4.4.2.4 Sections ouvertes composites . . . . . . . . . . . . . . . . . . . . . . . . . 123
4.4.3 Torsion des prols fermés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
TABLE DES MATIÈRES 9
4.4.3.1 Contraintes de cisaillement de torsion . . . . . . . . . . . . . . . . . . . . . . 124
4.4.3.2 Inertie de torsion d'un prol mince et fermé . . . . . . . . . . . . . . . . . . 125
4.4.3.3 Circulation du vecteur cisaillement . . . . . . . . . . . . . . . . . . . . . . . . 126
4.4.4 Prols fermés multiplement connexes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
4.5 Torseur équivalent à la distribution des contraintes de cisaillement de torsion . . . . . . . . . 129
5 Principe des puissances virtuelles PPV∗ 130
5.1 Objet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
5.2 Champs de vitesse virtuelle v∗ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
5.2.1 Dénition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
5.2.2 Champ de déformation virtuelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
5.2.3 Composantes implicites du champ de vitesse virtuelle . . . . . . . . . . . . . . . . 132
5.2.4 Champs remarquables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
5.2.4.1 Champs cinématiquement admissibles . . . . . . . . . . . . . . . . . . . . . . 132
5.2.4.2 Champs rigidiants par morceau . . . . . . . . . . . . . . . . . . . . . . . . . 133
5.3 Puissances virtuelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
5.3.1 Puissance virtuelle des forces externes P∗e . . . . . . . . . . . . . . . . . . . . . . . . . 134
5.3.2 Puissance virtuelle d'accélération P∗a . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
5.3.3 Puissance virtuelle des forces internes . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
5.3.3.1 Puissance virtuelle interne de cohésion . . . . . . . . . . . . . . . . . . . . . . 136
5.3.3.2 Puissance virtuelle interne de liaison . . . . . . . . . . . . . . . . . . . . . . . 136
5.3.3.3 Puissance virtuelle interne . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
5.4 Énoncé du PPV∗ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
5.4.1 Enoncé du principe (des puissances virtuelles) . . . . . . . . . . . . . . . . . . . . . . 138
5.4.2 Démonstration du théorème (des puissances virtuelles) . . . . . . . . . . . . . . . . . . 138
5.4.3 Réciproquement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
5.5 Application au calcul des structures isostatiques . . . . . . . . . . . . . . . . . . . . . . . . . 141
5.5.1 Rappel sur les structures isostatiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
5.5.2 Méthodologie générale pour la détermination d'une sollicitation . . . . . . . . . . . . . 141
5.5.3 Exemple 1 - détermination d'un moment échissant . . . . . . . . . . . . . . . . . . . 141
5.5.4 Application à la détermination du champ de sollicitations . . . . . . . . . . . . . . . . 142
5.5.5 Exemple d'une poutre Cantilever isostatique . . . . . . . . . . . . . . . . . . . . . . 142
5.5.6 Treillis isostatique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
5.5.7 Exemple de calcul d'un eort normal dans un treillis isostatique . . . . . . . . . . . . 144
5.6 Application au calcul des déplacements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
5.6.1 méthode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
5.6.2 Exemple de calcul de déplacement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
5.7 Théorèmes dits de l'énergie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
5.7.1 Théorème de l'énergie cinétique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
5.7.2 Conservation du travail . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
10 TABLE DES MATIÈRES
5.7.3 Expression du travail des forces extérieures . . . . . . . . . . . . . . . . . . . . . . . . 147
5.7.4 Coecients d'inuence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
5.7.4.1 dénition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
5.7.4.2 interprétation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
5.7.4.3 calcul des coecients d'inuence . . . . . . . . . . . . . . . . . . . . . . . . . 148
5.7.4.4 réciprocité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
5.7.5 Théorème de réciprocité de Maxwell-Betti . . . . . . . . . . . . . . . . . . . . . . 149
5.7.6 Théorème de Castigliano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
5.7.6.1 Enoncé et démonstration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
5.7.6.2 Application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
5.8 Lignes d'inuence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
6 Méthode des forces 152
6.1 Objet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
6.2 Hypothèses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
6.3 Hyperstaticité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
6.3.1 Dénition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
6.3.2 Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
6.3.3 Degré d'hyperstaticité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
6.4 Structure isostatique associée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
6.5 Décomposition de la structure isostatique associée . . . . . . . . . . . . . . . . . . . . . . . . 154
6.6 Algorithme d'étude d'une structure par la méthode des forces . . . . . . . . . . . . . . . . . . 157
6.7 Cas spéciaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
6.7.1 Dénivellation d'appui . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
6.7.2 Appui élastique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
6.7.3 Chargement thermique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
6.7.4 Précontrainte externe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
7 Méthode des déplacements 158
7.1 Objet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
7.2 Hypothèses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
7.3 Dénitions & conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
7.3.1 Géométrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
7.3.1.1 Repère global . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
7.3.1.2 Repères locaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
7.3.1.3 Vue éclatée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
7.3.2 Déplacements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
7.3.2.1 Deux types de déplacements . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
7.3.2.2 Dépendance entre les translations . . . . . . . . . . . . . . . . . . . . . . . . 161
7.3.2.3 Dépendance entre les rotations . . . . . . . . . . . . . . . . . . . . . . . . . . 162
7.3.2.4 Degré de liberté (DDL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
TABLE DES MATIÈRES 11
7.3.3 Forces - Eorts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
7.3.3.1 Actions extérieures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
7.3.3.2 Forces nodales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
7.3.3.3 Sollicitations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
7.4 Équations intrinsèques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
7.4.1 En l'absence d'action agissant sur la barre . . . . . . . . . . . . . . . . . . . . . . . . . 165
7.4.1.1 Sollicitations produites par les forces nodales . . . . . . . . . . . . . . . . . . 165
7.4.1.2 Relation forces nodales - déplacements . . . . . . . . . . . . . . . . . . . . . . 165
7.4.1.3 Matrice de rigidité élémentaire . . . . . . . . . . . . . . . . . . . . . . . . . . 167
7.4.2 En présence d'action agissant sur la barre . . . . . . . . . . . . . . . . . . . . . . . . . 168
7.4.2.1 Dénition des forces de blocage . . . . . . . . . . . . . . . . . . . . . . . . . . 168
7.4.2.2 Calcul des forces de blocage . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
7.4.2.3 Exemples de forces de blocage . . . . . . . . . . . . . . . . . . . . . . . . . . 170
7.4.2.4 Prise en compte des forces de blocage . . . . . . . . . . . . . . . . . . . . . . 171
7.4.3 Énergie élastique emmagasinée dans une barre . . . . . . . . . . . . . . . . . . . . . . 172
7.5 Condensation statique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
7.6 Équations d'équilibre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
7.6.1 Cas où ε (x) est prise en compte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
7.6.2 Cas où ε (x) n'est pas prise en compte . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
7.7 Assemblage matriciel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
7.7.1 Cas où ε (x) est prise en compte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
7.7.1.1 Dénombrement des DDL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
7.7.1.2 Équations d'équilibre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
7.7.2 Cas où ε (x) est négligée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
7.7.2.1 Réduction du nombre de DDL . . . . . . . . . . . . . . . . . . . . . . . . . . 176
7.7.2.2 Équations d'équilibre complémentaires . . . . . . . . . . . . . . . . . . . 177
7.8 Algorithme d'étude . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
7.9 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
7.9.1 Petit treillis rectangulaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
7.9.2 Demi-portique soumis à un champ de température . . . . . . . . . . . . . . . . . . . . 181
7.9.3 Portique à jambage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
Table des gures
1.1.1 La tour Eiel peut être considérée en première approximation en tant que poutre de 324m dehaut ou, alternativement, en tant qu'assemblage de plus de 18000 pièces métalliques. . . . . . 19
1.1.2 Le viaduc de Millau et sa structure très aérienne. . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.2.1 Le massif de fondation d'une éolienne (à gauche) et un corbeau en béton (à droite) sont despièces compactes (éléments 3D). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.2.2 La voute du métro de Lille et ce réservoir à eau cylindrique sont des éléments de coque (élé-ments 2D gauches). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
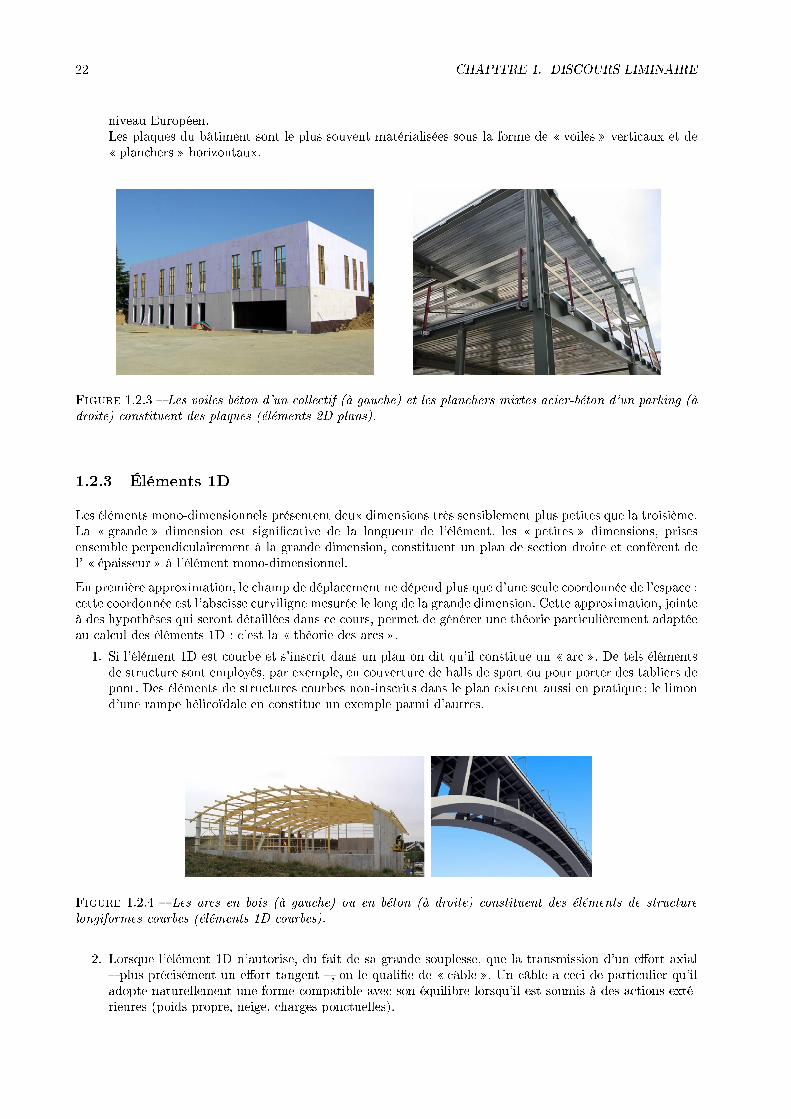
1.2.3 Les voiles béton d'un collectif (à gauche) et les planchers mixtes acier-béton d'un parking (àdroite) constituent des plaques (éléments 2D plans). . . . . . . . . . . . . . . . . . . . . . . . 22
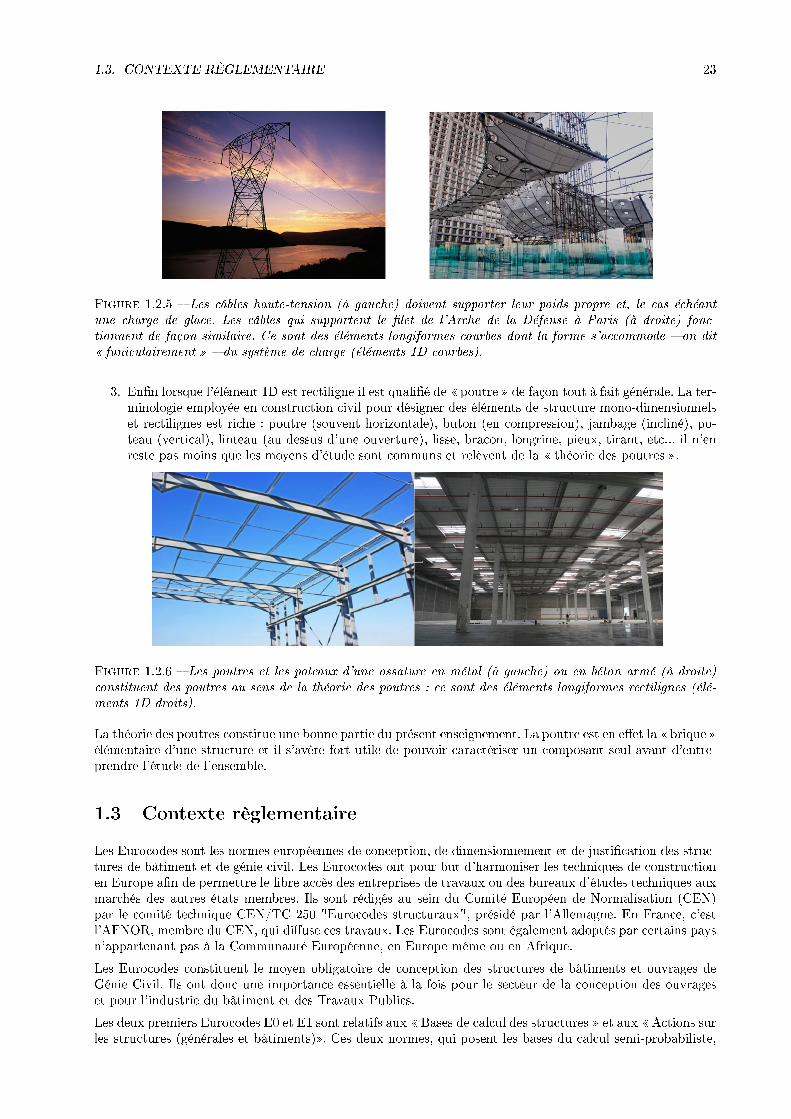
1.2.4 Les arcs en bois (à gauche) ou en béton (à droite) constituent des éléments de structurelongiformes courbes (éléments 1D courbes). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
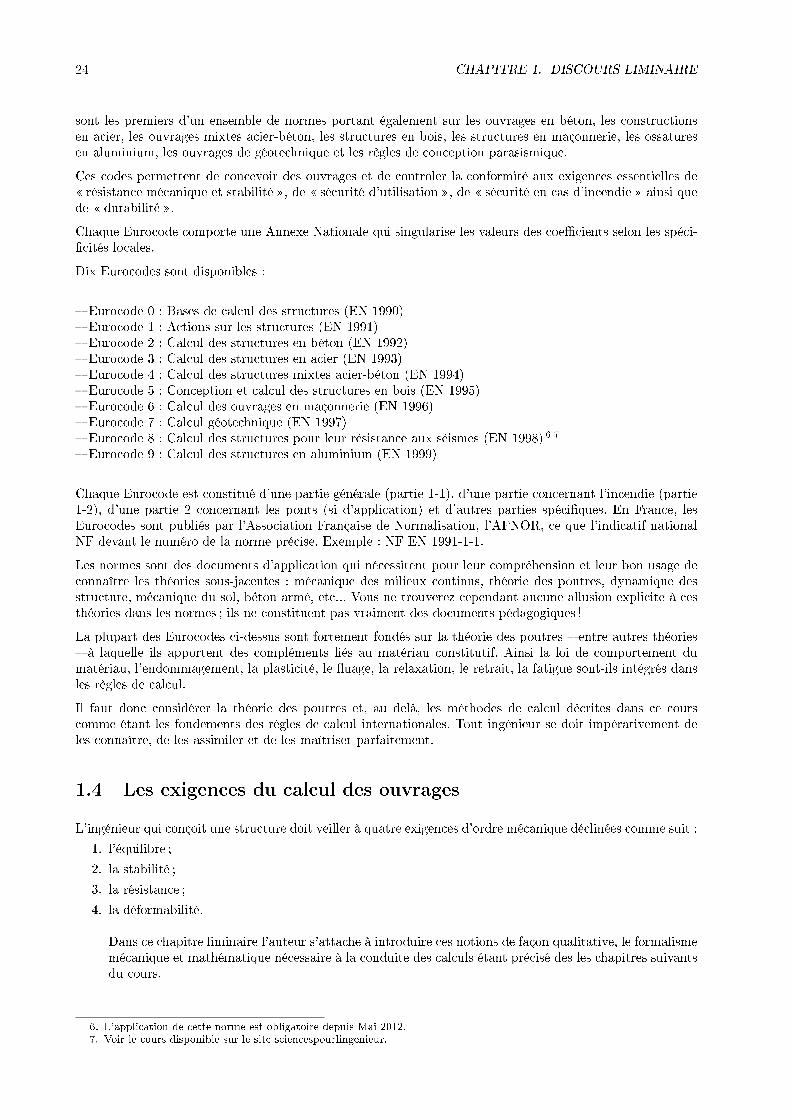
1.2.5 Les câbles haute-tension (à gauche) doivent supporter leur poids propre et, le cas échéantune charge de glace. Les câbles qui supportent le let de l'Arche de la Défense à Paris (àdroite) fonctionnent de façon similaire. Ce sont des éléments longiformes courbes dont laforme s'accommode on dit funiculairement du système de charge (éléments 1D courbes). 23
1.2.6 Les poutres et les poteaux d'une ossature en métal (à gauche) ou en béton armé (à droite)constituent des poutres au sens de la théorie des poutres : ce sont des éléments longiformesrectilignes (éléments 1D droits). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.4.1 La poutre repose sur deux appuis sur lesquels elle s'assoit du fait de la charge répartie quireprésente son poids propre. L'application de la force supplémentaire en bout de console peut,si elle est susante, provoquer la rupture de l'équilibre : la poutre bascule. . . . . . . . . . . . 27
1.4.2 Ensembles géométriques obtenus par résolution itérative de l'équation z6 = 1. Les six ensemblesne sont pas séparés par une frontière bien franche comme pourrait le suggérer l'intuition. Lessix domaines sont séparés par un bord complexe mêlant des sous-domaines attachés à deszéros diérents. Quelle que soit l'échelle à laquelle le plan complexe est observé, la complexitéperdure indéniment en révélant son auto-similarité. . . . . . . . . . . . . . . . . . . . . . . . 28
1.4.3 Ensemble de Mandelbrot (en noir) à diérentes échelles : c'est l'ensemble des points c duplan complexe tels que le processus itératif zm+1 = z2
m + c (avec z0 = c) ne tende pas versl'inni. Dans l'ensemble complémentaire, les couleurs arbitraires sont fonction du nombred'itérations nécessaires pour observer la divergence. Programme 'mandelbrot' disponible sur lesite 'sciencespourlingenieur'. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
1.4.4 Congurations d'équilibre possibles d'une bille. La conguration (2), stable, est remarquable ence qu'une perturbation fournit de l'énergie au système (le travail élémentaire de la force per-turbatrice est positif). Lorsque la perturbation ~δp cesse, la bille retourne spontanément (aprèsquelques oscillations) à sa conguration d'équilibre. Ce n'est pas le cas de l'état d'équilibre (1)où la perturbation s'accompagne d'une restitution d'énergie consommée dans un changementde conguration géométrique, la bille bifurquant vers la position (2). La conguration (3) estindiérente quant à elle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
1.4.5Mécanisme formé par deux éléments indéformables initialement alignés, reliés par un ressortde torsion et simplement appuyés au sol. A gauche la conguration initiale rectiligne , àdroite la conguration brisée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
12
TABLE DES FIGURES 13
1.4.6 Phénomène de ambement d'une poutre droite. A gauche la conguration rectiligne initialeet, à droite, une conguration curviligne d'équilibre possible. . . . . . . . . . . . . . . . . . . . 31
1.4.7Manifestation du phénomène d'instabilité en construction métallique. De gauche à droite :ambement d'un poteau, cloquage d'une coque cylindrique, voilement de l'âme d'une poutre.C'est le déplacement induit par la bifurcation d'équilibre qui a généré les irréversibilités plas-tiques visibles sur ces photographies. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
1.4.8 Deux situations de rupture par dépassement des états limites ultimes. A gauche eondrementd'un plancher d'immeuble dans une situation de projet sismique. A droite : eondrementdramatique du terminal 2E de l'aéroport Charles de Gaulle à Roissy en mai 2004 . . . . . . . 33
1.4.9 La poutre repose sur ses deux appuis. Son poids propre G combiné à la charge d'exploitationQ peut provoquer la ruine de la poutre au delà de l'état limite ultime supportable dépendantde la résistance du matériau et de la forme et des dimensions transversales de la poutre. . . . 33
1.4.10La poutre de lancement (à gauche) et le portique de levage (à droite) doivent conserver unedéformabilité maîtrisée pour rester opérationnels . . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.4.11La poutre repose sur ses deux appuis. Son poids propre G combiné à la charge d'exploitationQ peut provoquer une déformation réversible au delà de l'état limite de service compatible avecle bon fonctionnement de l'ouvrage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.5.1 Deux solides interagissent entre eux au point de contact. L'action de (2) sur (1) est représentéepar un vecteur force. Il en est de même pour l'action réciproque qu'exerce (1) sur (2). . . 35
1.5.2 (a) Représentation conventionnelle d'une force adoptée dans ce cours. (b) ces deux forces sontopposées car elles ont les mêmes intensités algébriques mais sont portées par des vecteurs uni-taires opposés. (c) ces deux forces sont également opposées car elles sont portées par le mêmevecteur unitaire mais possèdent des valeurs algébriques opposées. Enn, (d), ces deux forcessont égales car portées par des vecteurs opposés en ayant des valeurs algébriques égalementopposées. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
1.5.3 A gauche, une série de fermes inscrites dans des plans parallèles. A droite : le moment enP d'une force dans le plan se calcule en multipliant l'intensité algébrique F de la force parla hauteur h obtenue par projection du point P sur la direction ∆ support de la force. Onmultiplie ensuite le résultat par +1 si le vecteur directeur tourne dans le sens direct autour deP et par −1 sinon. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
1.5.4 Un couple peut être initialement déni à partir de deux forces opposées agissant sur des droitesparallèles distinctes. Lorsque les droites se confondent, le couple seul subsiste comme entité àpart entière. Un couple dans l'espace tridimensionnel est représenté par une èche double. . . 38
1.5.5 En 2D les couples sont représentés par des èches curvilignes. . . . . . . . . . . . . . . . . . . 38
1.5.6 (a) illustration du théorème d'équiprojectivité. (b) construction de l'axe central, lieu de momentminimal et parallèle à la résultante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
1.5.7 (a) Forces et couples concentrés. (b) Forces réparties. . . . . . . . . . . . . . . . . . . . . . . . 42
1.5.8 (a) Forces et couples concentrés. (b) Forces réparties. . . . . . . . . . . . . . . . . . . . . . . . 43
1.6.1 Solide indéformable en mouvement. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
1.6.2Mouvement de rotation d'un solide (S) autour du point A - (a) grands déplacements : le pointP décrit un cercle autour du centre de rotation A. (b) petits déplacements : l'arc PP' décritpar le point P est assimilable à la corde. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
1.6.3 (a) Plan réel et (b) Plan cinématique. L'image d'un point P du solide (S) est le point p telque −→op =
−→VP . L'équiprojectivité du champ de vitesse entre les point A et B se traduit par
l'orthogonalité des droites (AB) et (ab). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
1.6.4 Construction du camp de vitesse d'un mécanisme à 1 degré de liberté. . . . . . . . . . . . . . 49
1.7.1 Conguration instantanée d'une force sur le parcours (AB). . . . . . . . . . . . . . . . . . . . 50
1.7.2 La puissance d'un couple agissant sur un solide en rotation. . . . . . . . . . . . . . . . . . . . 52
14 TABLE DES FIGURES
2.5.1 poutre équipée de billes d'acier et déformètre (illustration Ginger-CEBTP). . . . . . . . . . . 55
2.5.2 Illustration des déformations d'un tronçon de poutre délimité par deux PSD inniment voisins.La gure est restreinte au plan xy : (a) la déformation axiale εx trouve son origine dansl'éloignement ou le rapprochement des deux PSD ; (b) la distorsion γy résulte du glissementrelatif des deux PSD ; (c) la courbure χz provient de la rotation diérentielle des deux PSD(ici autour de l'axe z). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.8.1 Divers cas de sollicitations : (a) traction pure ; (b) compression pure ; (c) torsion pure ; (d)exion pure ; (e) exion simple ; (f) exion composée ; (g) exion déviée. . . . . . . . . . . . . 63
2.8.2 Plan de section droite. A gauche : repère quelconque rs centré en O et repère uv , parallèle auprécédent, centré au centre d'inertie G. A droite : rotation du repère uv autour de Gx d'unangle α0 pour former le système d'axes principaux d'inertie Gyz. . . . . . . . . . . . . . . . . 65
2.8.3 Plan de section droite en forme de cornière. (a) A gauche : cornière épaisse. (b) A droite :cornière mince. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
2.8.4 Cercle de Mohr des inerties. uv est un repère centré au CdG choisi arbitrairement ou pourdes considérations de simplicité géométrique tandis que yz est le système d'axes principal.Par exemple, dans le cas d'une cornière, il est simple d'adopter des axes u et v parallèles auxailes mais ces axes ne sont pas principaux et sont donc inappropriés pour dénir les sollicitations. 71
2.8.5 Tronçon de poutre et actions agissant sur lui. . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
2.12.1Conguration instantanée d'une force sur le parcours (AB). . . . . . . . . . . . . . . . . . . . 77
2.12.2La puissance d'un couple agissant sur un solide en rotation. . . . . . . . . . . . . . . . . . . . 78
2.12.3Tronçon de poutre : actions (à gauche) et déplacements (à droite). . . . . . . . . . . . . . . . 79
3.2.1 tronçon de poutre et découpage par une ligne (AB) . . . . . . . . . . . . . . . . . . . . . . . . 84
3.2.2 calotte de poutre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
3.2.3 bilan des contraintes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
3.3.1 calotte délimitée par une coupure rectiligne parallèle à Gy ; à droite le cas particulier d'unesection de forme rectangulaire et la distribution de contrainte de cisaillement parabolique as-sociée (voir 3.3.3). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
3.4.1 Prols minces : (a) et (b) ouverts, (c) fermé simplement connexe, (d) fermé doublementconnexe. (e) paramétrage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
3.4.2 prol mince ouvert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
3.4.3 exemple de prol mince : le prol en I. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3.4.4 prol mince en I : étude du moment statique. . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
3.4.5 prol en I (IPE) - distribution des contraintes de cisaillement de exion sous l'eet d'un eorttranchant Ty positif (au facteur × T
eh près) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
3.4.6 Conservation des ux : à gauche, un prol ouvert comportant trois branches arbitrairementorientées et convergeant au même noeud ; à droite, le voisinage immédiat du noeud (dont l'aireest considérée comme nulle) est isolé. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
3.4.7 Prols minces fermés. De gauche à droite : un voussoir de pont, un tube métallique, un voussoirde plafond multiplement connexe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
3.4.8 prol mince fermé (tube) - tronçon de tube - calotte (PoP). . . . . . . . . . . . . . . . . . . . 92
3.4.9 bilan de forces surfaciques sur une calotte extraite d'un tronçon de tube. . . . . . . . . . . . . 93
3.4.10Illustration du théorème de Castigliano. (S) est un solide élastique ; la dérivée partielle del'énergie élastique We =
´(S)
12σ : εdV due à l'ensemble des forces agissant sur lui par rapport
à la force F est égale au déplacement u du point d'application de cette force dans sa direction :u = ∂We
∂F . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
TABLE DES FIGURES 15
3.4.11Un prol fermé est le siège d'un ux de cisaillement de exion (à gauche). Si une coupure estpratiquée en P0 (origine de l'abscisse curviligne s), les lèvres de cette coupure subissent unglissement relatif δu (à droite). L'action du ux à l'origine Φf0 est justement de neutraliserce glissement : δu = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
3.4.12un prol fermé symétrique et symétriquement chargé se traite comme le même prol ouvertdans son plan de symétrie ou alternativement comme un demi-prol soumis au demi-eorttranchant. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
3.4.13Circulation de la contrainte de cisaillement de exion le long du contour moyen fermé. . . . . 96
3.4.14A gauche (x) Prol mince fermé multiplement connexe. (a) Illustration de la loi de branche.(b) Illustration de la loi de noeud. (c) Illustration de la loi de maille. . . . . . . . . . . . . . . 97
3.5.1 élément d'aire dΣ de la section droite d'un prol mince. . . . . . . . . . . . . . . . . . . . . . 100
3.6.1 paramétrage d'un prol mince ouvert en vue du calcul du torseur équivalent au ux de cisaille-ment de exion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
3.6.2 élément d'aire sectorielle par rapport à un pôle (ici le pôle Q). . . . . . . . . . . . . . . . . . . 103
3.6.3 Exemples de prols minces et position de leur centre de exion . . . . . . . . . . . . . . . . . 105
3.6.4 exion + torsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4.2.1 Torsion d'une poutre droite : description du phénomène. . . . . . . . . . . . . . . . . . . . . . 107
4.3.1 Torsion d'une poutre droite : distorsions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
4.3.2 Centre de exion (à gauche) et centre de torsion (à droite) d'un plan de section droite. . . . . 111
4.3.3 Torsion d'une section droite (Σ) : la fonction de Prandtl est nulle sur le contour extérieur(∂Σ) et égale une constante le long de chacun des contours intérieurs (∂Σi) délimitant lescavités (Σi). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
4.3.4 Torsion d'une section circulaire pleine : les contraintes de cisaillement sont orthoradiales etleur intensité est proportionnelle au rayon polaire. . . . . . . . . . . . . . . . . . . . . . . . . 116
4.3.5 Torsion d'une section annulaire. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
4.3.6 Torsion d'une section rectangulaire pleine : symétrie/antisymétrie des contraintes de cisaille-ment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
4.3.7 Torsion du prol longiforme d'épaisseur variable petite devant la longueur. La distribution descontraintes de cisaillement de torsion est linéaire. La contrainte maximale se développe aubord du prol. Le ux de cisaillement est nul. . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
4.4.1 Torsion du prol ouvert : le ux de cisaillement ne peut être équilibré ; il est donc nul. la dis-tribution des contraintes de cisaillement de torsion est linéaire antisymétrique dans l'épaisseurdu prol. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
4.4.2 Torsion du prol mince longiforme : à gauche la distribution des contraintes de cisaillementtransverses et, à droite, celle des contraintes de cisaillement longitudinales (cas où e=1mmet L=20mm). On voit que les contraintes transversales ne se développent qu'aux extrémitésdu prol ; bien que négligeables elles contribuent néanmoins pour moitié au moment de tor-sion. Calculs réalisés par le Pr. Rached El Fatmi Université de Tunis, École Nationale desIngénieurs de Tunis (avril 2012). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
4.4.3 Torsion du prol ouvert composite. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
4.4.4 Torsion du prol fermé : le ux de cisaillement est uniforme et non nul. La distribution descontraintes de cisaillement de torsion est uniforme dans l'épaisseur du prol. . . . . . . . . . 125
4.4.5 Circulation de la contrainte de cisaillement de torsion le long du contour moyen fermé. . . . 126
4.4.6 A gauche ( x) Prol mince fermé multiplement connexe. ( a) Illustration de la loi de branche.(b) Illustration de la loi de noeud. (d) Illustration de la notion de ux de maille. . . . . . . . 128
16 TABLE DES FIGURES
5.2.1 Structure 2D, champ de contraintes vraies, champ de sollicitations vraies. Le système d'axesglobal XY Z (en majuscules) est tel que le plan moyen de l'ossature est déni par XY .Chaque poutre possède son propre système d'axes local xyz (en minuscules) , toutes lesdirections z étant confondues avec Z. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
5.2.2 Structure 2D et son champ de vitesse virtuelle arbitraire ; illustration des composantes devitesse virtuelle (en haut à droite) et des taux de déformation virtuelle au sens de la théoriedes poutres (en bas) avec : l'élongation virtuelle ε∗, la distorsion virtuelle γ∗ et la courburevirtuelle χ∗. A noter que, dans le cas présent les composantes instantanées de vitesse virtuellesont dénies dans la conguration initiale de l'ossature. . . . . . . . . . . . . . . . . . . . . . 132
5.2.3 Exemples de champs de vitesse virtuelle : (a) v∗ est continu et CA de plus ω∗B = 0 ce champ
de vitesse virtuel pourrait être un bon candidat en tant que champ de déplacement réel ; (b)v∗ est discontinu et CA ; (c) v∗ est continu mais pas CA ; (d) v∗ est continu et CA bien queω∗B 6= 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
5.2.4 Exemples de champs de vitesse virtuelle RMP : (e) v∗ est discontinu et CA ; (f) v∗ est continumais non CA ; (g) v∗ est continu mais pas CA à noter que ω∗ est discontinu ce qui crée des articulations virtuelles ; (h) v∗ est discontinu et non CA . . . . . . . . . . . . . . . . . . . 133
5.3.1 Puissance virtuelle d'une force concentrée ou d'un couple concentré . . . . . . . . . . . . . . . 134
5.3.2 Puissance virtuelle d'accélération : cas d'une masse concentrée et d'un solide d'inertie. . . . . 135
5.3.3 Illustration de la contribution de chaque sollicitation à la densité linéaire de puissance internede cohésion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
5.3.4 Illustration de la contribution de chaque sollicitation la puissance interne de liaison en pré-sence de discontinuités des composantes de vitesse virtuelle. De gauche à droite : (a) discon-tinuité virtuelle de rotation, (b) discontinuité de translation transversal ou glissement virtuel,(c) discontinuité de translation axiale ou séparation virtuelle. . . . . . . . . . . . . . . . . . . 137
5.3.5 Discontinuités : sens et signes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
5.4.1 Illustration de la démonstration du théorème fondamental de la dynamique à partir du principedes puissances virtuelles. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
5.5.1 Structure isostatique ; on cherche la valeur du moment MC . . . . . . . . . . . . . . . . . . . . 142
5.5.2 Poutre Cantilever. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
5.5.3 Allure du moment échissant. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
5.5.4Mécanisme virtuel (S1*) et son champ de vitesse virtuel RPM. . . . . . . . . . . . . . . . . . 143
5.5.5Mécanisme virtuel (S2*) et son champ de vitesse virtuel RPM. . . . . . . . . . . . . . . . . . 144
5.5.6Mécanisme virtuel (S1*) et son champ de vitesse virtuel RPM. . . . . . . . . . . . . . . . . . 144
5.5.7Moment échissant quantitatif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
5.5.8 Eort tranchant quantitatif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
6.4.1 Structure 2D hypserstatique (S) d'ordre h = 3 et la structure isostatique associée (Siso). Lesdeux structures ont les mêmes champs de sollicitations, de déformations et de déplacements.On passe de (S) à (Siso) en libérant 3 liaisons surabondantes et en imposant des eortscompensateurs qui deviennent visibles en tant qu'inconnues hyperstatiques. . . . . . . . . 153
6.4.2 Poutre hyperstatique d'ordre h = 1 et trois choix de structures isostatiques associées : (1)l'inconnue hypertatique est la réaction d'appui ; (2) l'inconnue hyperstatique est le momentéchissant à l'encastrement ; (3) l'inconnue hyperstatique est le moment échissant en milieude travée. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
6.5.1 Poutre hyperstatique d'ordre h = 2 , structure isostatique associée et sa décomposition en 3structures. Les diagrammes de moment sont représentés en ligrane. . . . . . . . . . . . . . . 155
7.3.1 Exemples de structure en portique. A gauche : q désigne une force distribuée, F une forceconcentrée, ∆T un gradient de température, C un couple. On remarque le repère global XY et les repères locaux xyi. Le champ de déplacement transversal est tracé en pointillé. Adroite la vue éclatée où barres et n÷uds sont discriminés. . . . . . . . . . . . . . . . . . . 159
TABLE DES FIGURES 17
7.3.2 Diérents types d'appui. (A) appui simple horizontal : VA = 0. (B) appui simple incliné :V ′A = 0 ⇒ VA cosα− UA sinα = 0. (C) appui simple avec une inclinaison négative - à noterque les deux barres sont rigidement liées quant à elles. (D) appui articulé. (E) appui encastréou encastrement. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
7.3.3 Appuis élastiques. A gauche : ressort de torsion, le moment de liaison est proportionnel àla rotation. A droite : ressort compression-extension, l'eort transmis dans la direction duressort est proportionnel à son élongation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
7.3.4 Déplacements des extrémités d'une barre (à gauche) et déplacements d'un n÷ud (à droite). . . 162
7.3.5 Exemples de liaisons en construction métallique. De gauche à droite : (a) liaison rigide entrele poteau et l'arbalétrier (le gousset et le raidissement d'âme permettent une transmission dumoment échissant et assure la solidarité de la rotation des extrémités des éléments) ; (b)articulation d'un raidisseur (les ailes du prolé en U ne sont pas liées au pied du poteau, parconséquent seuls les eorts normaux et tranchants sont transmis) ; (c) pied de poteau articulé(de nouveau les ailes du prol HEA ne sont pas solidarisées avec la fondation). . . . . . . . . 162
7.3.6 Exemples d'actions extérieures A. (a) force uniformément répartie projetée dans le repèrelocal. (b) force uniformément répartie agissant sur la projection horizontale de la barre. (c)force répartie axiale. (d) force concentrée agissant selon le repère local. (e) couple concentré.(f) champ de température. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
7.3.7 Illustration des Forces nodales . Elles agissent sur les extrémités de la barre et sont projetéesdans le système local à celle-ci. Une force nodale est notée Xnm où X désigne la nature del'eort : axial N , transversal T et couple M . Le 1er indice n est celui du n÷ud sur lequel lesforces nodales agissent et le second indice est celui de l'autre n÷ud de la barre. . . . . . . . . 164
7.3.8 Sollicitations dans une barre orientée. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
7.4.1 Barre isolée et non soumise à des actions extérieures. Seule les actions nodales agissent surelle et sont à l'origine du champ de déplacement et donc des déplacements d'extrémités. . . . 165
7.4.2 Champ de sollicitations dans une poutre non soumise à des actions extérieures. . . . . . . . . 166
7.4.3 Poutres virtuelles utilisées pour l'élaboration des relations intrinsèques. . . . . . . . . . . . . . 166
7.4.4 Illustration des forces de blocage de la poutre [AiAj ]. (a) La poutre est extraite de la structure(S) et est placée entre deux encastrements qui neutralisent les déplacements d'extrémité ; lesdéplacements en travée persistent quant à eux (champ 1). (b) Les encastrements de la situationprécédente sont remplacés par les eorts de blocage qui sont les réactions aux encastrements.168
7.4.5 Calcul des forces de blocage de la poutre [AiAj ] par la méthode des forces. (S1) Poutre bi-encastrée. (Siso) poutre isostatique associée. (S0) poutre isostatique uniquement soumise auchargement extérieur ; les déformations libres sont gurées. (Si∗) poutre soumise à unmoment unitaire en Ai. (Sj∗) poutre soumise à un moment unitaire en Aj. (SN∗) poutresoumise à un eort axial unitaire en Aj. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
7.4.6 Exemples d'actions transversales agissant en travée de poutre. (a) force transversale uniformé-ment répartie. (b) force transversale concentrée centrée. (c) champ de température. En pointilléest guré l'allure du champ de déplacement transversal (nul dans le cas du chargement ther-mique). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
7.4.7 Prise en compte des forces de blocage. La poutre [AiAj ], notée (B) est extraite de la structure(S) ; elle est soumise à la fois aux forces nodales Xij et aux actions en travée A. Ondécompose l'ensemble de ces forces et actions en deux chargements : dans (B0) sont appliquéesles actions en travée neutralisées par les forces de blocage X0
ij et dans (B1) sont appliquéesles forces nodales Xij complétées par l'opposée −X0
ij des forces de blocage. . . . . . . . . . . . 172
7.6.1 Principe du bilan des eorts et de l'équilibre d'un n÷ud de l'ossature. Le n÷ud est soumis(a) aux actions extérieures directement appliquées sur lui et (b) à l'opposé des forces nodalesprovenant des barres qui y sont connectées. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
7.9.1 Petit treillis rectangulaire isostatique. A droite : bilan des forces pour équilibre des noeuds libres.180
7.9.2 Demi-portique hyperstatique soumis à un champ de température. . . . . . . . . . . . . . . . . 181

18 TABLE DES FIGURES
7.9.3 Diagramme de moment échissant dans le demi-portique soumis à un champ de température. 182
7.9.4 Portique à jambage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
Le présent document a été rédigé à l'aide de LYX+MiKTeK (version interactive wysiwyg de LATEX). Les dessins ont été réaliséspar l'auteur à l'aide de la composante graphique Draw de OpenOce. La plupart des photographies sont extraites du domainepublic. Toute réclamation éventuelle quant au droit d'auteur est à adresser au rédacteur du présent document qui en prendrale plus grand compte.
Ce support de cours est mis à la disposition de la communauté francophone libre de droit. L'auteur appréciera d'être cité si
l'une ou l'autre de ses pages est utilisée pour illustrer un enseignement ou documenter un calcul.
Chapitre 1
Discours liminaire
Mise à jour du 17 février 2014
1.1 Ouvrage
Le présent cours porte sur le calcul des ouvrages ; il s'adresse aux étudiants inscrits dans une lière deformation de génie civil. Un ouvrage peut désigner diérents types de constructions : ponts, soutènements,barrages, tunnels, stades, bâtiments, infrastructures électriques, pour citer les principaux.
Figure 1.1.1 La tour Eiel peut être considérée en première approximation en tant que poutre de 324mde haut ou, alternativement, en tant qu'assemblage de plus de 18000 pièces métalliques.
Un ouvrage possède une fonction principale pour laquelle il est érigé : abriter du public et des ÷uvres (dansun musée, une bibliothèque), assurer le trac (pont, tunnel), contenir les eaux (barrage, réservoir), etc...
A cette fonction principale s'adjoignent des fonctions secondaires : protéger du froid, du bruit, des intempé-ries, fournir un confort thermique, de l'éclairage, garantir des ux d'information, etc... Ces fonctions sont,pour la plupart, assurées par des équipements dont l'étude n'est pas couverte par cet enseignement (voirpour cela le cours de thermique, d'éclairagisme, de conditionnement d'air).
Sont ainsi distingués :
1. La structure de l'ouvrageson rôle est de reprendre les charges d'origine mécanique (ou parfois thermique) et de transmettreces eorts au sol. Naturellement sa durabilité doit être assurée de sorte à résister aux agressionsphysicochimiques de son environnement ;
19
20 CHAPITRE 1. DISCOURS LIMINAIRE
Figure 1.1.2 Le viaduc de Millau et sa structure très aérienne.
2. L'enveloppeson rôle est de fermer l'ouvrage et d'en assurer l'étanchéité à l'air et à l'eau pour en protéger le contenuet en assurer pour partie le confort thermique et acoustique. Il arrive parfois que l'enveloppe assureaussi une fonction structurale (par exemple une voute peut assurer le report de son poids et des chargesclimatiques vers le sol tout en garantissant une bonne étanchéité) ;
3. Les équipementsqui pourvoient aux fonctions de ventilation, de climatisation, d'éclairage, de fourniture d'électricité etd'eau, de sécurité, de gestion des déchets et des eaux usées, etc...
La portée du présent cours est celle du calcul des structures.
1.2 Typologie des éléments de structure
Les éléments de structure peuvent être classés selon leur typologie géométrique. Cette approche est pertinentedans la mesure où chaque typologie conduit à une méthode (une théorie ) particulière. Sont ainsi distinguésdes éléments de structure tridimensionnels, bidimensionnels et mono-dimensionnels.
1.2.1 Éléments 3D
Les éléments tridimensionnels sont des parties de structure compactes dont les trois dimensions sont dumême ordre de grandeur. Il en est ainsi des massifs de fondation supercielle dont le rôle est de transmettreau sol les eorts supportés par l'ossature. Un autre exemple de pièce 3D est le corbeau dont la fonction estde constituer un appui de poutre. Le sol, enn, en tant que massif semi-inni, peut être considéré en tantqu'élément tridimensionnel.
Le calcul de ces pièces massives et compactes relève de la mécanique des milieux continus (mmc) 1 qui permetd'évaluer le champ de contrainte régnant en leur sein. Naturellement, en pratique, cette théorie de la mmcest aménagée pour tenir compte de la spécicité du matériau constructif : les règles de calcul du bétonarmé propres au calcul des fondations et, pour le sol, les règles de la mécanique des sols devront alors êtreappliquées.
1.2.2 Éléments 2D
Les éléments de structure bidimensionnels présentent une dimension notablement plus petite que les deuxautres. De tels éléments forment une surface assortie d'une épaisseur.
Les éléments 2D sont très courants en construction civile. On peut encore les distinguer par leur forme :
1. Voir, par exemple, le polycopié de mmc disponible sur le site sciencespourlingenieur.
1.2. TYPOLOGIE DES ÉLÉMENTS DE STRUCTURE 21
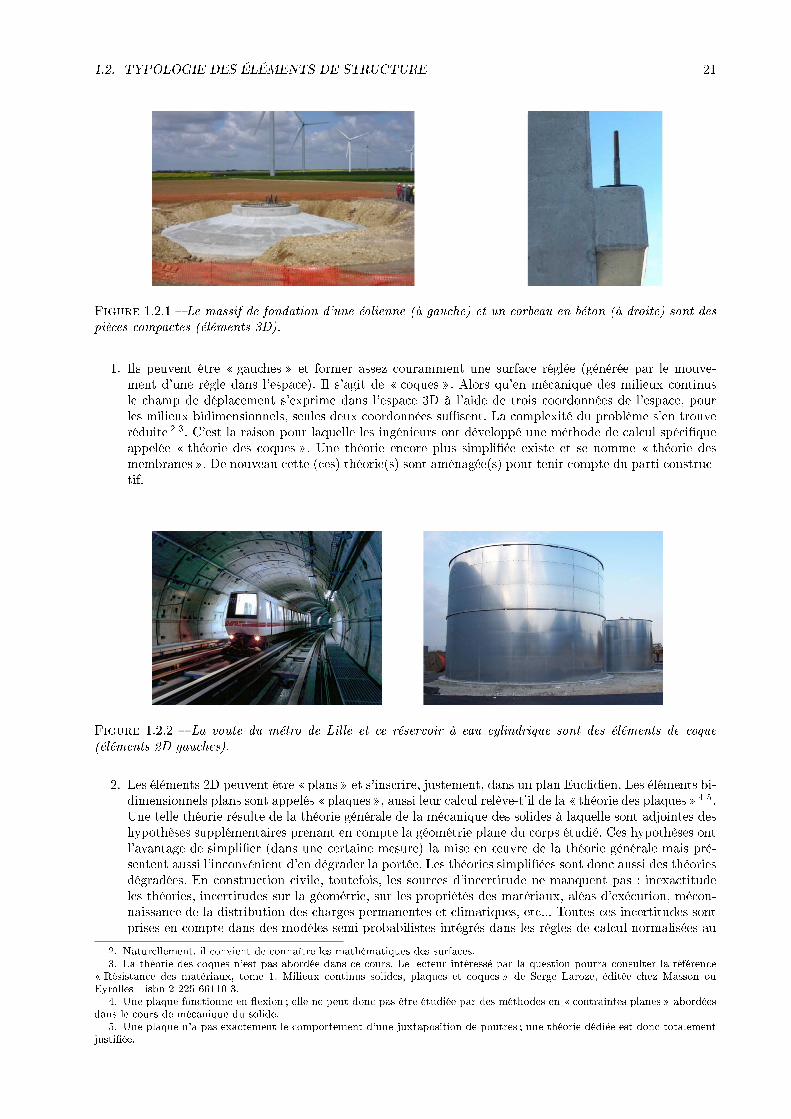
Figure 1.2.1 Le massif de fondation d'une éolienne (à gauche) et un corbeau en béton (à droite) sont despièces compactes (éléments 3D).
1. Ils peuvent être gauches et former assez couramment une surface réglée (générée par le mouve-ment d'une règle dans l'espace). Il s'agit de coques . Alors qu'en mécanique des milieux continusle champ de déplacement s'exprime dans l'espace 3D à l'aide de trois coordonnées de l'espace, pourles milieux bidimensionnels, seules deux coordonnées susent. La complexité du problème s'en trouveréduite 2 3. C'est la raison pour laquelle les ingénieurs ont développé une méthode de calcul spéciqueappelée théorie des coques . Une théorie encore plus simpliée existe et se nomme théorie desmembranes . De nouveau cette (ces) théorie(s) sont aménagée(s) pour tenir compte du parti construc-tif.
Figure 1.2.2 La voute du métro de Lille et ce réservoir à eau cylindrique sont des éléments de coque(éléments 2D gauches).
2. Les éléments 2D peuvent être plans et s'inscrire, justement, dans un plan Euclidien. Les éléments bi-dimensionnels plans sont appelés plaques , aussi leur calcul relève-t'il de la théorie des plaques 4 5.Une telle théorie résulte de la théorie générale de la mécanique des solides à laquelle sont adjointes deshypothèses supplémentaires prenant en compte la géométrie plane du corps étudié. Ces hypothèses ontl'avantage de simplier (dans une certaine mesure) la mise en ÷uvre de la théorie générale mais pré-sentent aussi l'inconvénient d'en dégrader la portée. Les théories simpliées sont donc aussi des théoriesdégradées. En construction civile, toutefois, les sources d'incertitude ne manquent pas : inexactitudeles théories, incertitudes sur la géométrie, sur les propriétés des matériaux, aléas d'exécution, mécon-naissance de la distribution des charges permanentes et climatiques, etc... Toutes ces incertitudes sontprises en compte dans des modèles semi-probabilistes intégrés dans les règles de calcul normalisées au
2. Naturellement, il convient de connaître les mathématiques des surfaces.3. La théorie des coques n'est pas abordée dans ce cours. Le lecteur intéressé par la question pourra consulter la référence
Résistance des matériaux, tome 1. Milieux continus solides, plaques et coques de Serge Laroze, éditée chez Masson ouEyrolles - isbn 2-225-66110-3.
4. Une plaque fonctionne en exion ; elle ne peut donc pas être étudiée par des méthodes en contraintes planes abordéesdans le cours de mécanique du solide.
5. Une plaque n'a pas exactement le comportement d'une juxtaposition de poutres ; une théorie dédiée est donc totalementjustiée.
22 CHAPITRE 1. DISCOURS LIMINAIRE
niveau Européen.Les plaques du bâtiment sont le plus souvent matérialisées sous la forme de voiles verticaux et de planchers horizontaux.
Figure 1.2.3 Les voiles béton d'un collectif (à gauche) et les planchers mixtes acier-béton d'un parking (àdroite) constituent des plaques (éléments 2D plans).
1.2.3 Éléments 1D
Les éléments mono-dimensionnels présentent deux dimensions très sensiblement plus petites que la troisième.La grande dimension est signicative de la longueur de l'élément. les petites dimensions, prisesensemble perpendiculairement à la grande dimension, constituent un plan de section droite et confèrent del' épaisseur à l'élément mono-dimensionnel.
En première approximation, le champ de déplacement ne dépend plus que d'une seule coordonnée de l'espace :cette coordonnée est l'abscisse curviligne mesurée le long de la grande dimension. Cette approximation, jointeà des hypothèses qui seront détaillées dans ce cours, permet de générer une théorie particulièrement adaptéeau calcul des éléments 1D : c'est la théorie des arcs .
1. Si l'élément 1D est courbe et s'inscrit dans un plan on dit qu'il constitue un arc . De tels élémentsde structure sont employés, par exemple, en couverture de halls de sport ou pour porter des tabliers depont. Des éléments de structures courbes non-inscrits dans le plan existent aussi en pratique ; le limond'une rampe hélicoïdale en constitue un exemple parmi d'autres.
Figure 1.2.4 Les arcs en bois (à gauche) ou en béton (à droite) constituent des éléments de structurelongiformes courbes (éléments 1D courbes).
2. Lorsque l'élément 1D n'autorise, du fait de sa grande souplesse, que la transmission d'un eort axial plus précisément un eort tangent , on le qualie de câble . Un câble a ceci de particulier qu'iladopte naturellement une forme compatible avec son équilibre lorsqu'il est soumis à des actions exté-rieures (poids propre, neige, charges ponctuelles).
1.3. CONTEXTE RÈGLEMENTAIRE 23
Figure 1.2.5 Les câbles haute-tension (à gauche) doivent supporter leur poids propre et, le cas échéantune charge de glace. Les câbles qui supportent le let de l'Arche de la Défense à Paris (à droite) fonc-tionnent de façon similaire. Ce sont des éléments longiformes courbes dont la forme s'accommode on dit funiculairement du système de charge (éléments 1D courbes).
3. Enn lorsque l'élément 1D est rectiligne il est qualié de poutre de façon tout à fait générale. La ter-minologie employée en construction civil pour désigner des éléments de structure mono-dimensionnelset rectilignes est riche : poutre (souvent horizontale), buton (en compression), jambage (incliné), po-teau (vertical), linteau (au dessus d'une ouverture), lisse, bracon, longrine, pieux, tirant, etc... il n'enreste pas moins que les moyens d'étude sont communs et relèvent de la théorie des poutres .
Figure 1.2.6 Les poutres et les poteaux d'une ossature en métal (à gauche) ou en béton armé (à droite)constituent des poutres au sens de la théorie des poutres : ce sont des éléments longiformes rectilignes (élé-ments 1D droits).
La théorie des poutres constitue une bonne partie du présent enseignement. La poutre est en eet la brique élémentaire d'une structure et il s'avère fort utile de pouvoir caractériser un composant seul avant d'entre-prendre l'étude de l'ensemble.
1.3 Contexte règlementaire
Les Eurocodes sont les normes européennes de conception, de dimensionnement et de justication des struc-tures de bâtiment et de génie civil. Les Eurocodes ont pour but d'harmoniser les techniques de constructionen Europe an de permettre le libre accès des entreprises de travaux ou des bureaux d'études techniques auxmarchés des autres états membres. Ils sont rédigés au sein du Comité Européen de Normalisation (CEN)par le comité technique CEN/TC 250 "Eurocodes structuraux", présidé par l'Allemagne. En France, c'estl'AFNOR, membre du CEN, qui diuse ces travaux. Les Eurocodes sont également adoptés par certains paysn'appartenant pas à la Communauté Européenne, en Europe même ou en Afrique.
Les Eurocodes constituent le moyen obligatoire de conception des structures de bâtiments et ouvrages deGénie Civil. Ils ont donc une importance essentielle à la fois pour le secteur de la conception des ouvrageset pour l'industrie du bâtiment et des Travaux Publics.
Les deux premiers Eurocodes E0 et E1 sont relatifs aux Bases de calcul des structures et aux Actions surles structures (générales et bâtiments). Ces deux normes, qui posent les bases du calcul semi-probabiliste,
24 CHAPITRE 1. DISCOURS LIMINAIRE
sont les premiers d'un ensemble de normes portant également sur les ouvrages en béton, les constructionsen acier, les ouvrages mixtes acier-béton, les structures en bois, les structures en maçonnerie, les ossaturesen aluminium, les ouvrages de géotechnique et les règles de conception parasismique.
Ces codes permettent de concevoir des ouvrages et de contrôler la conformité aux exigences essentielles de résistance mécanique et stabilité , de sécurité d'utilisation , de sécurité en cas d'incendie ainsi quede durabilité .
Chaque Eurocode comporte une Annexe Nationale qui singularise les valeurs des coecients selon les spéci-cités locales.
Dix Eurocodes sont disponibles :
Eurocode 0 : Bases de calcul des structures (EN 1990) Eurocode 1 : Actions sur les structures (EN 1991) Eurocode 2 : Calcul des structures en béton (EN 1992) Eurocode 3 : Calcul des structures en acier (EN 1993) Eurocode 4 : Calcul des structures mixtes acier-béton (EN 1994) Eurocode 5 : Conception et calcul des structures en bois (EN 1995) Eurocode 6 : Calcul des ouvrages en maçonnerie (EN 1996) Eurocode 7 : Calcul géotechnique (EN 1997) Eurocode 8 : Calcul des structures pour leur résistance aux séismes (EN 1998) 6 7
Eurocode 9 : Calcul des structures en aluminium (EN 1999)
Chaque Eurocode est constitué d'une partie générale (partie 1-1), d'une partie concernant l'incendie (partie1-2), d'une partie 2 concernant les ponts (si d'application) et d'autres parties spéciques. En France, lesEurocodes sont publiés par l'Association Française de Normalisation, l'AFNOR, ce que l'indicatif nationalNF devant le numéro de la norme précise. Exemple : NF EN 1991-1-1.
Les normes sont des documents d'application qui nécessitent pour leur compréhension et leur bon usage deconnaître les théories sous-jacentes : mécanique des milieux continus, théorie des poutres, dynamique desstructure, mécanique du sol, béton armé, etc... Vous ne trouverez cependant aucune allusion explicite à cesthéories dans les normes ; ils ne constituent pas vraiment des documents pédagogiques !
La plupart des Eurocodes ci-dessus sont fortement fondés sur la théorie des poutres entre autres théories à laquelle ils apportent des compléments liés au matériau constitutif. Ainsi la loi de comportement dumatériau, l'endommagement, la plasticité, le uage, la relaxation, le retrait, la fatigue sont-ils intégrés dansles règles de calcul.
Il faut donc considérer la théorie des poutres et, au delà, les méthodes de calcul décrites dans ce courscomme étant les fondements des règles de calcul internationales. Tout ingénieur se doit impérativement deles connaître, de les assimiler et de les maîtriser parfaitement.
1.4 Les exigences du calcul des ouvrages
L'ingénieur qui conçoit une structure doit veiller à quatre exigences d'ordre mécanique déclinées comme suit :
1. l'équilibre ;
2. la stabilité ;
3. la résistance ;
4. la déformabilité.
Dans ce chapitre liminaire l'auteur s'attache à introduire ces notions de façon qualitative, le formalismemécanique et mathématique nécessaire à la conduite des calculs étant précisé des les chapitres suivantsdu cours.
6. L'application de cette norme est obligatoire depuis Mai 2012.7. Voir le cours disponible sur le site sciencespourlingenieur.
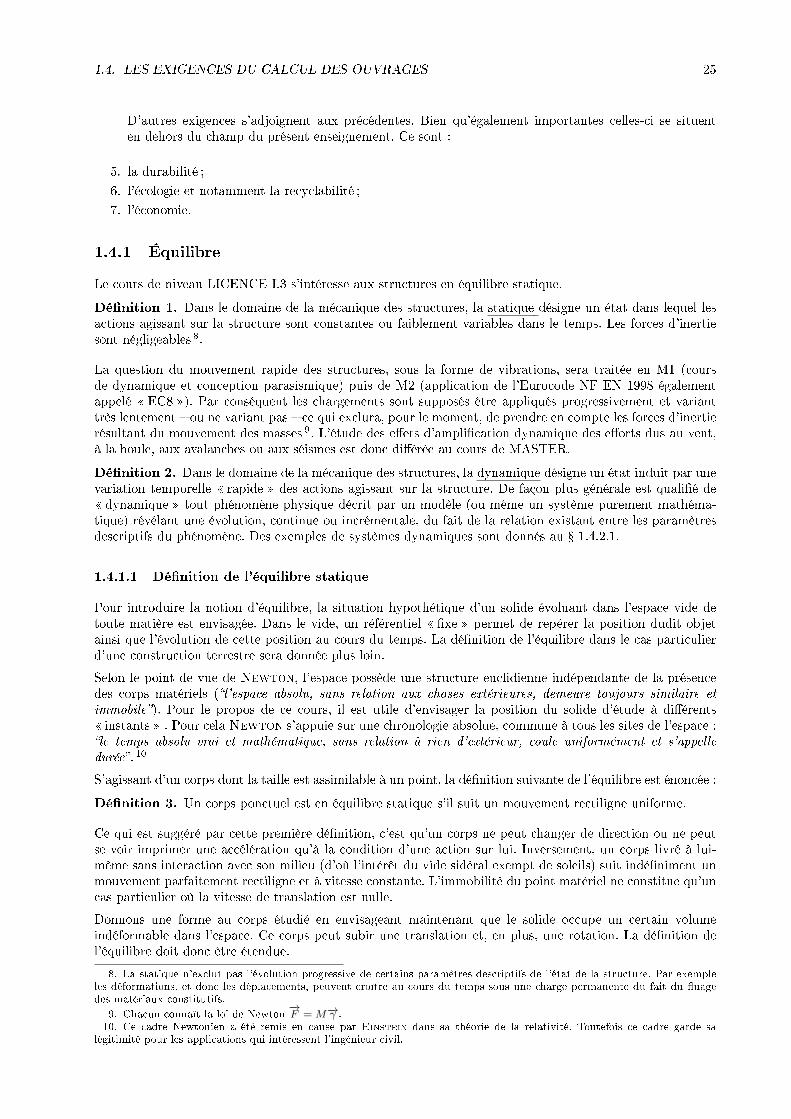
1.4. LES EXIGENCES DU CALCUL DES OUVRAGES 25
D'autres exigences s'adjoignent aux précédentes. Bien qu'également importantes celles-ci se situenten dehors du champ du présent enseignement. Ce sont :
5. la durabilité ;
6. l'écologie et notamment la recyclabilité ;
7. l'économie.
1.4.1 Équilibre
Le cours de niveau LICENCE L3 s'intéresse aux structures en équilibre statique.
Dénition 1. Dans le domaine de la mécanique des structures, la statique désigne un état dans lequel lesactions agissant sur la structure sont constantes ou faiblement variables dans le temps. Les forces d'inertiesont négligeables 8.
La question du mouvement rapide des structures, sous la forme de vibrations, sera traitée en M1 (coursde dynamique et conception parasismique) puis de M2 (application de l'Eurocode NF EN 1998 égalementappelé EC8 ). Par conséquent les chargements sont supposés être appliqués progressivement et varianttrès lentement ou ne variant pas ce qui exclura, pour le moment, de prendre en compte les forces d'inertierésultant du mouvement des masses 9. L'étude des eets d'amplication dynamique des eorts dus au vent,à la houle, aux avalanches ou aux séismes est donc diérée au cours de MASTER.
Dénition 2. Dans le domaine de la mécanique des structures, la dynamique désigne un état induit par unevariation temporelle rapide des actions agissant sur la structure. De façon plus générale est qualié de dynamique tout phénomène physique décrit par un modèle (ou même un système purement mathéma-tique) révélant une évolution, continue ou incrémentale, du fait de la relation existant entre les paramètresdescriptifs du phénomène. Des exemples de systèmes dynamiques sont donnés au 1.4.2.1.
1.4.1.1 Dénition de l'équilibre statique
Pour introduire la notion d'équilibre, la situation hypothétique d'un solide évoluant dans l'espace vide detoute matière est envisagée. Dans le vide, un référentiel xe permet de repérer la position dudit objetainsi que l'évolution de cette position au cours du temps. La dénition de l'équilibre dans le cas particulierd'une construction terrestre sera donnée plus loin.
Selon le point de vue de Newton, l'espace possède une structure euclidienne indépendante de la présencedes corps matériels (l'espace absolu, sans relation aux choses extérieures, demeure toujours similaire etimmobile). Pour le propos de ce cours, il est utile d'envisager la position du solide d'étude à diérents instants . Pour cela Newton s'appuie sur une chronologie absolue, commune à tous les sites de l'espace :le temps absolu vrai et mathématique, sans relation à rien d'extérieur, coule uniformément et s'appelledurée. 10
S'agissant d'un corps dont la taille est assimilable à un point, la dénition suivante de l'équilibre est énoncée :
Dénition 3. Un corps ponctuel est en équilibre statique s'il suit un mouvement rectiligne uniforme.
Ce qui est suggéré par cette première dénition, c'est qu'un corps ne peut changer de direction ou ne peutse voir imprimer une accélération qu'à la condition d'une action sur lui. Inversement, un corps livré à lui-même sans interaction avec son milieu (d'où l'intérêt du vide sidéral exempt de soleils) suit indéniment unmouvement parfaitement rectiligne et à vitesse constante. L'immobilité du point matériel ne constitue qu'uncas particulier où la vitesse de translation est nulle.
Donnons une forme au corps étudié en envisageant maintenant que le solide occupe un certain volumeindéformable dans l'espace. Ce corps peut subir une translation et, en plus, une rotation. La dénition del'équilibre doit donc être étendue.
8. La statique n'exclut pas l'évolution progressive de certains paramètres descriptifs de l'état de la structure. Par exempleles déformations, et donc les déplacements, peuvent croître au cours du temps sous une charge permanente du fait du uagedes matériaux constitutifs.
9. Chacun connaît la loi de Newton−→F = M−→γ .
10. Ce cadre Newtonien a été remis en cause par Einstein dans sa théorie de la relativité. Toutefois ce cadre garde salégitimité pour les applications qui intéressent l'ingénieur civil.
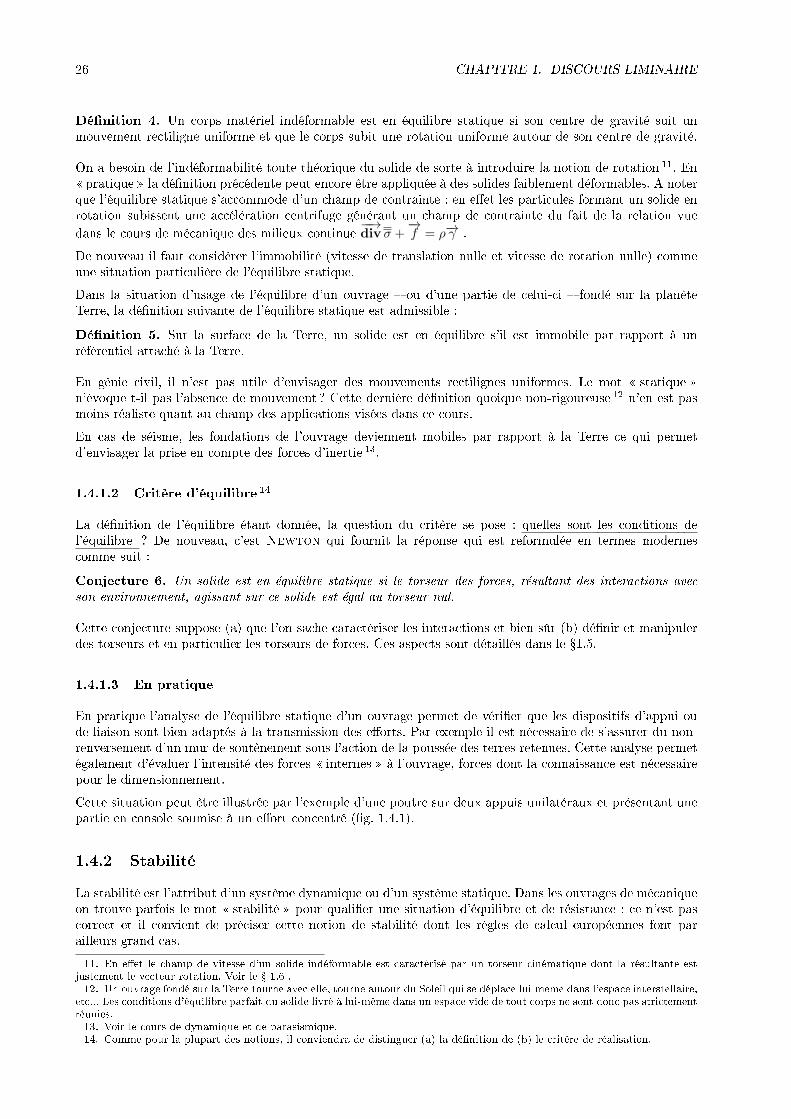
26 CHAPITRE 1. DISCOURS LIMINAIRE
Dénition 4. Un corps matériel indéformable est en équilibre statique si son centre de gravité suit unmouvement rectiligne uniforme et que le corps subit une rotation uniforme autour de son centre de gravité.
On a besoin de l'indéformabilité toute théorique du solide de sorte à introduire la notion de rotation 11. En pratique la dénition précédente peut encore être appliquée à des solides faiblement déformables. A noterque l'équilibre statique s'accommode d'un champ de contrainte : en eet les particules formant un solide enrotation subissent une accélération centrifuge générant un champ de contrainte du fait de la relation vuedans le cours de mécanique des milieux continue
−−→div σ +
−→f = ρ−→γ .
De nouveau il faut considérer l'immobilité (vitesse de translation nulle et vitesse de rotation nulle) commeune situation particulière de l'équilibre statique.
Dans la situation d'usage de l'équilibre d'un ouvrage ou d'une partie de celui-ci fondé sur la planèteTerre, la dénition suivante de l'équilibre statique est admissible :
Dénition 5. Sur la surface de la Terre, un solide est en équilibre s'il est immobile par rapport à unréférentiel attaché à la Terre.
En génie civil, il n'est pas utile d'envisager des mouvements rectilignes uniformes. Le mot statique n'évoque t-il pas l'absence de mouvement ? Cette dernière dénition quoique non-rigoureuse 12 n'en est pasmoins réaliste quant au champ des applications visées dans ce cours.
En cas de séisme, les fondations de l'ouvrage deviennent mobiles par rapport à la Terre ce qui permetd'envisager la prise en compte des forces d'inertie 13.
1.4.1.2 Critère d'équilibre 14
La dénition de l'équilibre étant donnée, la question du critère se pose : quelles sont les conditions del'équilibre ? De nouveau, c'est Newton qui fournit la réponse qui est reformulée en termes modernescomme suit :
Conjecture 6. Un solide est en équilibre statique si le torseur des forces, résultant des interactions avecson environnement, agissant sur ce solide est égal au torseur nul.
Cette conjecture suppose (a) que l'on sache caractériser les interactions et bien sûr (b) dénir et manipulerdes torseurs et en particulier les torseurs de forces. Ces aspects sont détaillés dans le 1.5.
1.4.1.3 En pratique
En pratique l'analyse de l'équilibre statique d'un ouvrage permet de vérier que les dispositifs d'appui oude liaison sont bien adaptés à la transmission des eorts. Par exemple il est nécessaire de s'assurer du non-renversement d'un mur de soutènement sous l'action de la poussée des terres retenues. Cette analyse permetégalement d'évaluer l'intensité des forces internes à l'ouvrage, forces dont la connaissance est nécessairepour le dimensionnement.
Cette situation peut être illustrée par l'exemple d'une poutre sur deux appuis unilatéraux et présentant unepartie en console soumise à un eort concentré (g. 1.4.1).
1.4.2 Stabilité
La stabilité est l'attribut d'un système dynamique ou d'un système statique. Dans les ouvrages de mécaniqueon trouve parfois le mot stabilité pour qualier une situation d'équilibre et de résistance : ce n'est pascorrect et il convient de préciser cette notion de stabilité dont les règles de calcul européennes font parailleurs grand cas.
11. En eet le champ de vitesse d'un solide indéformable est caractérisé par un torseur cinématique dont la résultante estjustement le vecteur rotation. Voir le 1.6 .12. Un ouvrage fondé sur la Terre tourne avec elle, tourne autour du Soleil qui se déplace lui-même dans l'espace interstellaire,
etc... Les conditions d'équilibre parfait du solide livré à lui-même dans un espace vide de tout corps ne sont donc pas strictementréunies.13. Voir le cours de dynamique et de parasismique.14. Comme pour la plupart des notions, il conviendra de distinguer (a) la dénition de (b) le critère de réalisation.
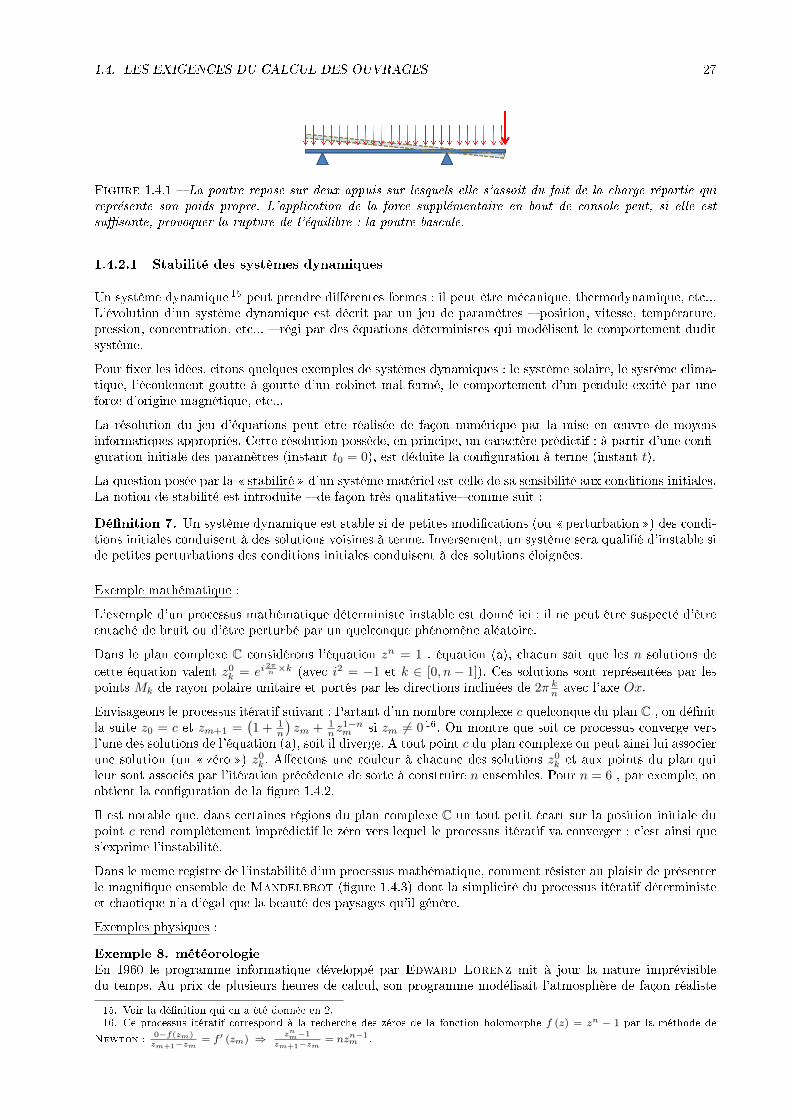
1.4. LES EXIGENCES DU CALCUL DES OUVRAGES 27
Figure 1.4.1 La poutre repose sur deux appuis sur lesquels elle s'assoit du fait de la charge répartie quireprésente son poids propre. L'application de la force supplémentaire en bout de console peut, si elle estsusante, provoquer la rupture de l'équilibre : la poutre bascule.
1.4.2.1 Stabilité des systèmes dynamiques
Un système dynamique 15 peut prendre diérentes formes : il peut être mécanique, thermodynamique, etc...L'évolution d'un système dynamique est décrit par un jeu de paramètres position, vitesse, température,pression, concentration, etc... régi par des équations déterministes qui modélisent le comportement duditsystème.
Pour xer les idées, citons quelques exemples de systèmes dynamiques : le système solaire, le système clima-tique, l'écoulement goutte à goutte d'un robinet mal fermé, le comportement d'un pendule excité par uneforce d'origine magnétique, etc...
La résolution du jeu d'équations peut être réalisée de façon numérique par la mise en ÷uvre de moyensinformatiques appropriés. Cette résolution possède, en principe, un caractère prédictif : à partir d'une con-guration initiale des paramètres (instant t0 = 0), est déduite la conguration à terme (instant t).
La question posée par la stabilité d'un système matériel est celle de sa sensibilité aux conditions initiales.La notion de stabilité est introduite de façon très qualitative comme suit :
Dénition 7. Un système dynamique est stable si de petites modications (ou perturbation ) des condi-tions initiales conduisent à des solutions voisines à terme. Inversement, un système sera qualié d'instable side petites perturbations des conditions initiales conduisent à des solutions éloignées.
Exemple mathématique :
L'exemple d'un processus mathématique déterministe instable est donné ici : il ne peut être suspecté d'êtreentaché de bruit ou d'être perturbé par un quelconque phénomène aléatoire.
Dans le plan complexe C considérons l'équation zn = 1 , équation (a), chacun sait que les n solutions decette équation valent z0
k = ei2πn ×k (avec i2 = −1 et k ∈ [0, n− 1]). Ces solutions sont représentées par les
points Mk de rayon polaire unitaire et portés par les directions inclinées de 2π kn avec l'axe Ox.
Envisageons le processus itératif suivant : Partant d'un nombre complexe c quelconque du plan C , on dénitla suite z0 = c et zm+1 =
(1 + 1
n
)zm + 1
nz1−nm si zm 6= 0 16. On montre que soit ce processus converge vers
l'une des solutions de l'équation (a), soit il diverge. A tout point c du plan complexe on peut ainsi lui associerune solution (un zéro ) z0
k. Aectons une couleur à chacune des solutions z0k et aux points du plan qui
leur sont associés par l'itération précédente de sorte à construire n ensembles. Pour n = 6 , par exemple, onobtient la conguration de la gure 1.4.2.
Il est notable que, dans certaines régions du plan complexe C un tout petit écart sur la position initiale dupoint c rend complètement imprédictif le zéro vers lequel le processus itératif va converger : c'est ainsi ques'exprime l'instabilité.
Dans le même registre de l'instabilité d'un processus mathématique, comment résister au plaisir de présenterle magnique ensemble de Mandelbrot (gure 1.4.3) dont la simplicité du processus itératif déterministeet chaotique n'a d'égal que la beauté des paysages qu'il génère.
Exemples physiques :
Exemple 8. météorologieEn 1960 le programme informatique développé par Edward Lorenz mit à jour la nature imprévisibledu temps. Au prix de plusieurs heures de calcul, son programme modélisait l'atmosphère de façon réaliste
15. Voir la dénition qui en a été donnée en 2.16. Ce processus itératif correspond à la recherche des zéros de la fonction holomorphe f (z) = zn − 1 par la méthode de
Newton : 0−f(zm)zm+1−zm
= f ′ (zm) ⇒ znm−1
zm+1−zm= nzn−1
m .
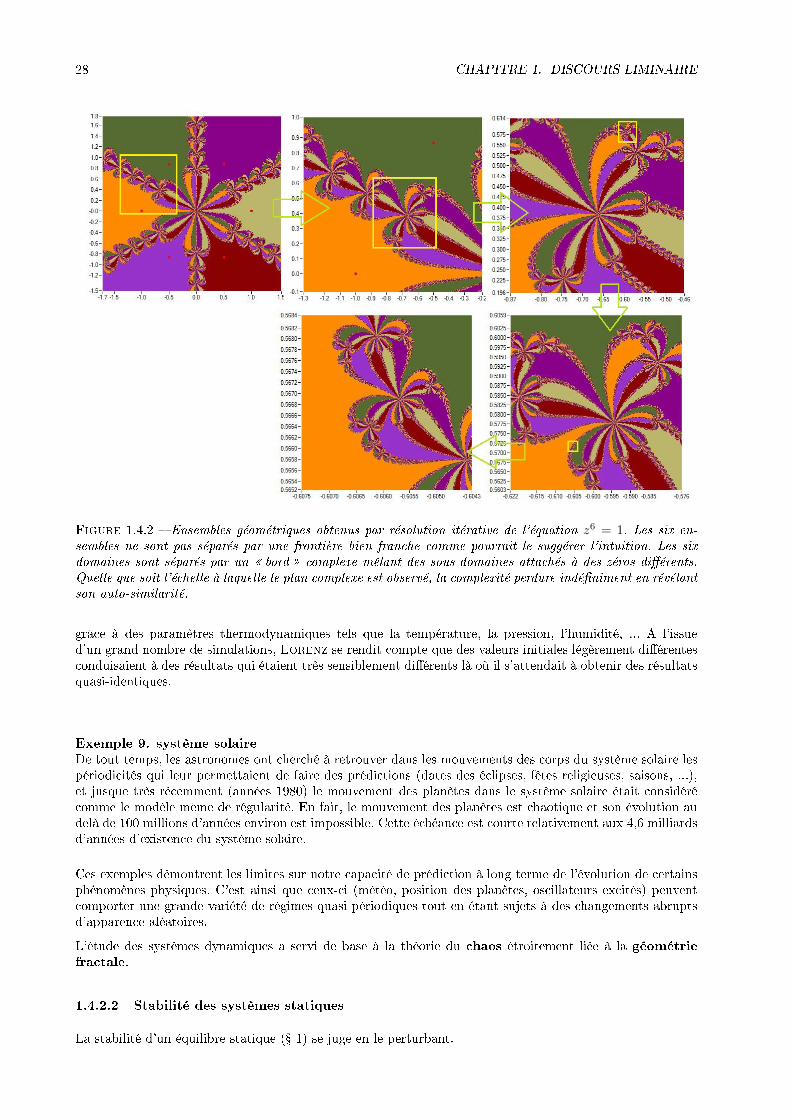
28 CHAPITRE 1. DISCOURS LIMINAIRE
Figure 1.4.2 Ensembles géométriques obtenus par résolution itérative de l'équation z6 = 1. Les six en-sembles ne sont pas séparés par une frontière bien franche comme pourrait le suggérer l'intuition. Les sixdomaines sont séparés par un bord complexe mêlant des sous-domaines attachés à des zéros diérents.Quelle que soit l'échelle à laquelle le plan complexe est observé, la complexité perdure indéniment en révélantson auto-similarité.
grâce à des paramètres thermodynamiques tels que la température, la pression, l'humidité, ... A l'issued'un grand nombre de simulations, Lorenz se rendit compte que des valeurs initiales légèrement diérentesconduisaient à des résultats qui étaient très sensiblement diérents là où il s'attendait à obtenir des résultatsquasi-identiques.
Exemple 9. système solaireDe tout temps, les astronomes ont cherché à retrouver dans les mouvements des corps du système solaire lespériodicités qui leur permettaient de faire des prédictions (dates des éclipses, fêtes religieuses, saisons, ...),et jusque très récemment (années 1980) le mouvement des planètes dans le système solaire était considérécomme le modèle même de régularité. En fait, le mouvement des planètes est chaotique et son évolution audelà de 100 millions d'années environ est impossible. Cette échéance est courte relativement aux 4,6 milliardsd'années d'existence du système solaire.
Ces exemples démontrent les limites sur notre capacité de prédiction à long terme de l'évolution de certainsphénomènes physiques. C'est ainsi que ceux-ci (météo, position des planètes, oscillateurs excités) peuventcomporter une grande variété de régimes quasi-périodiques tout en étant sujets à des changements abruptsd'apparence aléatoires.
L'étude des systèmes dynamiques a servi de base à la théorie du chaos étroitement liée à la géométriefractale.
1.4.2.2 Stabilité des systèmes statiques
La stabilité d'un équilibre statique ( 1) se juge en le perturbant.
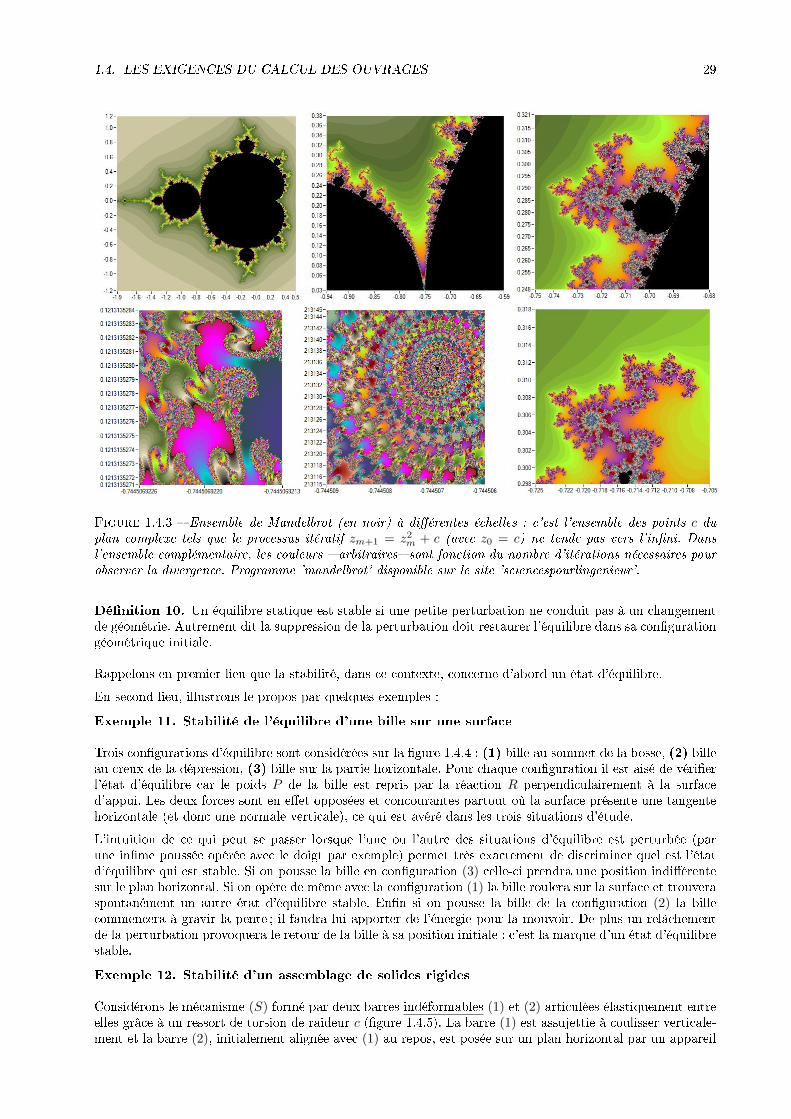
1.4. LES EXIGENCES DU CALCUL DES OUVRAGES 29
Figure 1.4.3 Ensemble de Mandelbrot (en noir) à diérentes échelles : c'est l'ensemble des points c duplan complexe tels que le processus itératif zm+1 = z2
m + c (avec z0 = c) ne tende pas vers l'inni. Dansl'ensemble complémentaire, les couleurs arbitraires sont fonction du nombre d'itérations nécessaires pourobserver la divergence. Programme 'mandelbrot' disponible sur le site 'sciencespourlingenieur'.
Dénition 10. Un équilibre statique est stable si une petite perturbation ne conduit pas à un changementde géométrie. Autrement dit la suppression de la perturbation doit restaurer l'équilibre dans sa congurationgéométrique initiale.
Rappelons en premier lieu que la stabilité, dans ce contexte, concerne d'abord un état d'équilibre.
En second lieu, illustrons le propos par quelques exemples :
Exemple 11. Stabilité de l'équilibre d'une bille sur une surface
Trois congurations d'équilibre sont considérées sur la gure 1.4.4 : (1) bille au sommet de la bosse, (2) billeau creux de la dépression, (3) bille sur la partie horizontale. Pour chaque conguration il est aisé de vérierl'état d'équilibre car le poids P de la bille est repris par la réaction R perpendiculairement à la surfaced'appui. Les deux forces sont en eet opposées et concourantes partout où la surface présente une tangentehorizontale (et donc une normale verticale), ce qui est avéré dans les trois situations d'étude.
L'intuition de ce qui peut se passer lorsque l'une ou l'autre des situations d'équilibre est perturbée (parune inme poussée opérée avec le doigt par exemple) permet très exactement de discriminer quel est l'étatd'équilibre qui est stable. Si on pousse la bille en conguration (3) celle-ci prendra une position indiérentesur le plan horizontal. Si on opère de même avec la conguration (1) la bille roulera sur la surface et trouveraspontanément un autre état d'équilibre stable. Enn si on pousse la bille de la conguration (2) la billecommencera à gravir la pente ; il faudra lui apporter de l'énergie pour la mouvoir. De plus un relâchementde la perturbation provoquera le retour de la bille à sa position initiale : c'est la marque d'un état d'équilibrestable.
Exemple 12. Stabilité d'un assemblage de solides rigides
Considérons le mécanisme (S) formé par deux barres indéformables (1) et (2) articulées élastiquement entreelles grâce à un ressort de torsion de raideur c (gure 1.4.5). La barre (1) est assujettie à coulisser verticale-ment et la barre (2), initialement alignée avec (1) au repos, est posée sur un plan horizontal par un appareil
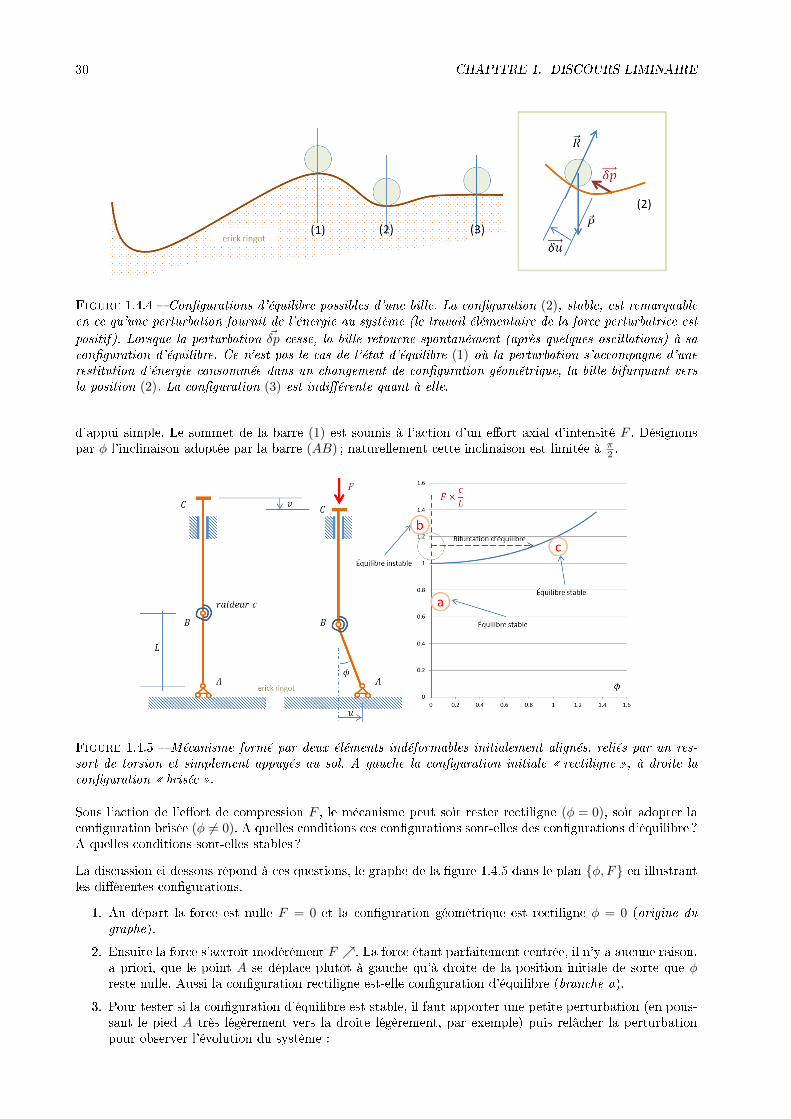
30 CHAPITRE 1. DISCOURS LIMINAIRE
Figure 1.4.4 Congurations d'équilibre possibles d'une bille. La conguration (2), stable, est remarquableen ce qu'une perturbation fournit de l'énergie au système (le travail élémentaire de la force perturbatrice estpositif). Lorsque la perturbation ~δp cesse, la bille retourne spontanément (après quelques oscillations) à saconguration d'équilibre. Ce n'est pas le cas de l'état d'équilibre (1) où la perturbation s'accompagne d'unerestitution d'énergie consommée dans un changement de conguration géométrique, la bille bifurquant versla position (2). La conguration (3) est indiérente quant à elle.
d'appui simple. Le sommet de la barre (1) est soumis à l'action d'un eort axial d'intensité F . Désignonspar φ l'inclinaison adoptée par la barre (AB) ; naturellement cette inclinaison est limitée à π
2 .
Figure 1.4.5 Mécanisme formé par deux éléments indéformables initialement alignés, reliés par un res-sort de torsion et simplement appuyés au sol. A gauche la conguration initiale rectiligne , à droite laconguration brisée .
Sous l'action de l'eort de compression F , le mécanisme peut soit rester rectiligne (φ = 0), soit adopter laconguration brisée (φ 6= 0). A quelles conditions ces congurations sont-elles des congurations d'équilibre ?A quelles conditions sont-elles stables ?
La discussion ci-dessous répond à ces questions, le graphe de la gure 1.4.5 dans le plan φ, F en illustrantles diérentes congurations.
1. Au départ la force est nulle F = 0 et la conguration géométrique est rectiligne φ = 0 (origine dugraphe).
2. Ensuite la force s'accroît modérément F . La force étant parfaitement centrée, il n'y a aucune raison,a priori, que le point A se déplace plutôt à gauche qu'à droite de la position initiale de sorte que φreste nulle. Aussi la conguration rectiligne est-elle conguration d'équilibre (branche a).
3. Pour tester si la conguration d'équilibre est stable, il faut apporter une petite perturbation (en pous-sant le pied A très légèrement vers la droite légèrement, par exemple) puis relâcher la perturbationpour observer l'évolution du système :

1.4. LES EXIGENCES DU CALCUL DES OUVRAGES 31
(a) tant que la force appliquée est inférieure à une valeur seuil appelée force critique Fc 17, l'uniqueconguration d'équilibre est la conguration rectiligne. Cette conguration est stable et le relâ-chement de la perturbation ramène le système à cette conguration rectiligne ;
(b) lorsque la force appliquée dépasse la force critique Fc deux congurations d'équilibre coexistent :
i. la conguration rectiligne, instable (branche b). Toute perturbation provoque une bifurca-tion d'équilibre vers l'état stable décrit ci-après ;
ii. la conguration brisée, stable (branche c) 18.Cette étude qualitative a permis d'introduire la notion de force critique et celle de bifurcation d'équilibre.En pratique, dans le domaine de la construction, l'ingénieur doit s'attacher à ne pas solliciter les structuresou les éléments de structure au delà de leur force critique 19.
Exemple 13. Poutre déformable soumise à un eort de compression
Cet exemple est semblable au précédent à ceci près que l'élasticité, au lieu d'être concentrée en un seulressort, est ici répartie tout au long de la poutre.
Figure 1.4.6 Phénomène de ambement d'une poutre droite. A gauche la conguration rectiligne initialeet, à droite, une conguration curviligne d'équilibre possible.
Pour des forces axiales F croissantes, relevons la réponse statique de la poutre caractérisée par sa ècheu. Deux étapes de chargement doivent être distinguées :
1. Tant que l'eort reste inférieur à la valeur critique Fc = π2EIL2 l'unique conguration d'équilibre est la
conguration rectiligne ; cette conguration est stable ;
2. Lorsque l'eort appliqué croît au delà de la force critique :
(a) la conguration d'équilibre rectiligne est possible théoriquement mais celle-ci est instable ;
(b) la conguration d'équilibre curviligne alternative devient possible et, qui plus est, constitue laconguration d'équilibre stable.
En pratique (courbe verte pointillée de la gure 1.4.6) :1. la conguration rectiligne parfaitement centrée est dicilement réalisable et on observe une évolution
du déplacement latéral avant même que la force critique ne soit atteinte ;
2. lorsque la force critique est atteinte, du fait des imperfections géométriques et des défauts d'alignementde l'eort, la poutre cherche à atteindre spontanément la conguration d'équilibre stable. Or il estremarquable (courbe de la gure 1.4.6), qu'un petit accroissement de la force au delà de la forcecritique s'accompagne d'un déplacement transversal signicatif car la pente de la fonction F (u) estnulle. En pratique un grand déplacement est donc nécessaire à l'établissement de l'équilibre stable post-critique ; de ce fait la bifurcation d'équilibre s'accompagne généralement de déformations plastiques(rotule plastique) conduisant à la ruine de la poutre. Le phénomène d'instabilité de forme d'une poutresoumise à un eort compressif est appelé ambement .
17. Pour information, cette force critique vaut ici Fc = cL.
18. L'équation de la branche d'équilibre stable post-critique est F = Fcφ
sinφ; sa pente est nulle au voisinage de φ = 0.
19. L'étude systématique de la stabilité des structures est abordée dans le cours de MASTER 1.
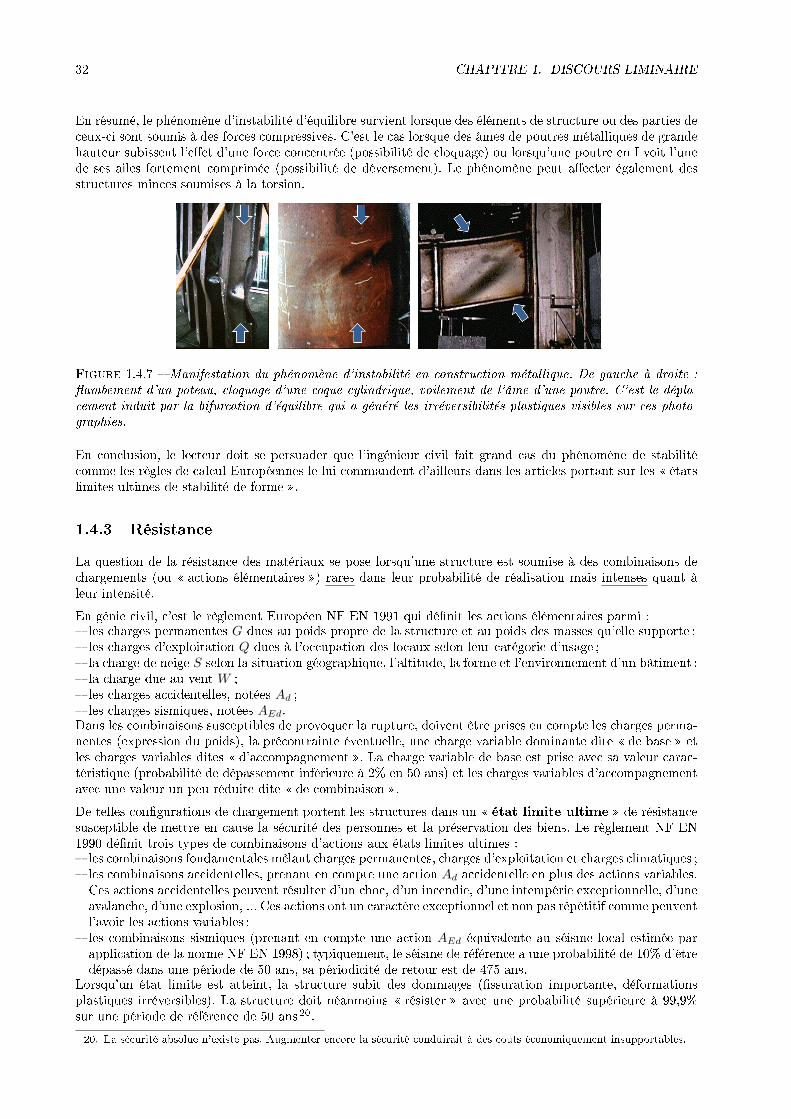
32 CHAPITRE 1. DISCOURS LIMINAIRE
En résumé, le phénomène d'instabilité d'équilibre survient lorsque des éléments de structure ou des parties deceux-ci sont soumis à des forces compressives. C'est le cas lorsque des âmes de poutres métalliques de grandehauteur subissent l'eet d'une force concentrée (possibilité de cloquage) ou lorsqu'une poutre en I voit l'unede ses ailes fortement comprimée (possibilité de déversement). Le phénomène peut aecter également desstructures minces soumises à la torsion.
Figure 1.4.7 Manifestation du phénomène d'instabilité en construction métallique. De gauche à droite :ambement d'un poteau, cloquage d'une coque cylindrique, voilement de l'âme d'une poutre. C'est le dépla-cement induit par la bifurcation d'équilibre qui a généré les irréversibilités plastiques visibles sur ces photo-graphies.
En conclusion, le lecteur doit se persuader que l'ingénieur civil fait grand cas du phénomène de stabilitécomme les règles de calcul Européennes le lui commandent d'ailleurs dans les articles portant sur les étatslimites ultimes de stabilité de forme .
1.4.3 Résistance
La question de la résistance des matériaux se pose lorsqu'une structure est soumise à des combinaisons dechargements (ou actions élémentaires ) rares dans leur probabilité de réalisation mais intenses quant àleur intensité.
En génie civil, c'est le règlement Européen NF EN 1991 qui dénit les actions élémentaires parmi : les charges permanentes G dues au poids propre de la structure et au poids des masses qu'elle supporte ; les charges d'exploitation Q dues à l'occupation des locaux selon leur catégorie d'usage ; la charge de neige S selon la situation géographique, l'altitude, la forme et l'environnement d'un bâtiment ; la charge due au vent W ; les charges accidentelles, notées Ad ; les charges sismiques, notées AEd.Dans les combinaisons susceptibles de provoquer la rupture, doivent être prises en compte les charges perma-nentes (expression du poids), la précontrainte éventuelle, une charge variable dominante dite de base etles charges variables dites d'accompagnement . La charge variable de base est prise avec sa valeur carac-téristique (probabilité de dépassement inférieure à 2% en 50 ans) et les charges variables d'accompagnementavec une valeur un peu réduite dite de combinaison .
De telles congurations de chargement portent les structures dans un état limite ultime de résistancesusceptible de mettre en cause la sécurité des personnes et la préservation des biens. Le règlement NF EN1990 dénit trois types de combinaisons d'actions aux états limites ultimes : les combinaisons fondamentales mêlant charges permanentes, charges d'exploitation et charges climatiques ; les combinaisons accidentelles, prenant en compte une action Ad accidentelle en plus des actions variables.Ces actions accidentelles peuvent résulter d'un choc, d'un incendie, d'une intempérie exceptionnelle, d'uneavalanche, d'une explosion, ... Ces actions ont un caractère exceptionnel et non pas répétitif comme peuventl'avoir les actions variables ;
les combinaisons sismiques (prenant en compte une action AEd équivalente au séisme local estimée parapplication de la norme NF EN 1998) ; typiquement, le séisme de référence a une probabilité de 10% d'êtredépassé dans une période de 50 ans, sa périodicité de retour est de 475 ans.
Lorsqu'un état limite est atteint, la structure subit des dommages (ssuration importante, déformationsplastiques irréversibles). La structure doit néanmoins résister avec une probabilité supérieure à 99,9%sur une période de référence de 50 ans 20.
20. La sécurité absolue n'existe pas. Augmenter encore la sécurité conduirait à des coûts économiquement insupportables.
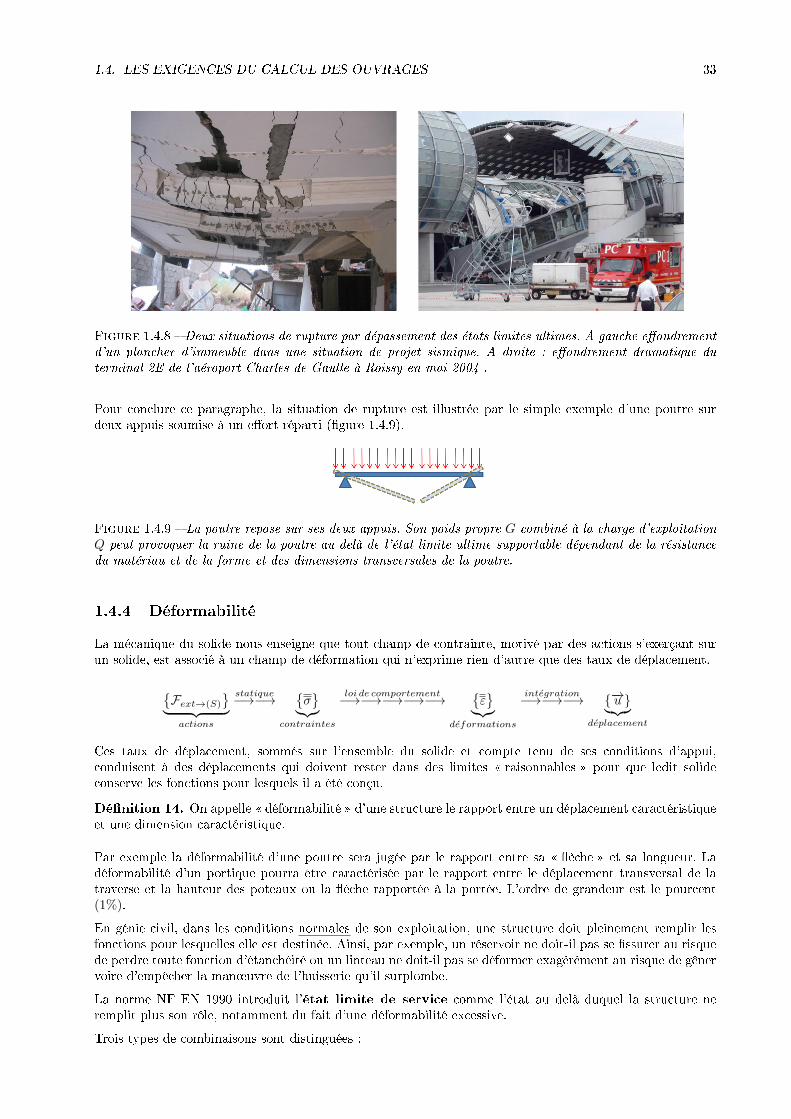
1.4. LES EXIGENCES DU CALCUL DES OUVRAGES 33
Figure 1.4.8 Deux situations de rupture par dépassement des états limites ultimes. A gauche eondrementd'un plancher d'immeuble dans une situation de projet sismique. A droite : eondrement dramatique duterminal 2E de l'aéroport Charles de Gaulle à Roissy en mai 2004 .
Pour conclure ce paragraphe, la situation de rupture est illustrée par le simple exemple d'une poutre surdeux appuis soumise à un eort réparti (gure 1.4.9).
Figure 1.4.9 La poutre repose sur ses deux appuis. Son poids propre G combiné à la charge d'exploitationQ peut provoquer la ruine de la poutre au delà de l'état limite ultime supportable dépendant de la résistancedu matériau et de la forme et des dimensions transversales de la poutre.
1.4.4 Déformabilité
La mécanique du solide nous enseigne que tout champ de contrainte, motivé par des actions s'exerçant surun solide, est associé à un champ de déformation qui n'exprime rien d'autre que des taux de déplacement.
Fext→(S)
︸ ︷︷ ︸actions
statique−→−→σ︸︷︷︸
contraintes
loi de comportement−→−→−→−→−→ε︸︷︷︸
deformations
integration−→−→−→ −→u ︸︷︷︸deplacement
Ces taux de déplacement, sommés sur l'ensemble du solide et compte tenu de ses conditions d'appui,conduisent à des déplacements qui doivent rester dans des limites raisonnables pour que ledit solideconserve les fonctions pour lesquels il a été conçu.
Dénition 14. On appelle déformabilité d'une structure le rapport entre un déplacement caractéristiqueet une dimension caractéristique.
Par exemple la déformabilité d'une poutre sera jugée par le rapport entre sa èche et sa longueur. Ladéformabilité d'un portique pourra être caractérisée par le rapport entre le déplacement transversal de latraverse et la hauteur des poteaux ou la èche rapportée à la portée. L'ordre de grandeur est le pourcent(1%).
En génie civil, dans les conditions normales de son exploitation, une structure doit pleinement remplir lesfonctions pour lesquelles elle est destinée. Ainsi, par exemple, un réservoir ne doit-il pas se ssurer au risquede perdre toute fonction d'étanchéité ou un linteau ne doit-il pas se déformer exagérément au risque de gênervoire d'empêcher la man÷uvre de l'huisserie qu'il surplombe.
La norme NF EN 1990 introduit l'état limite de service comme l'état au delà duquel la structure neremplit plus son rôle, notamment du fait d'une déformabilité excessive.
Trois types de combinaisons sont distinguées :

34 CHAPITRE 1. DISCOURS LIMINAIRE
Figure 1.4.10 La poutre de lancement (à gauche) et le portique de levage (à droite) doivent conserver unedéformabilité maîtrisée pour rester opérationnels .
les combinaisons caractéristiques ; les combinaisons fréquentes ; les combinaisons quasi-permanentes.Le calcul des déformation en situation ordinaire s'eectue en régime élastique : ni la ruine de l'ouvrage, nil'apparition de dommages irréversibles ne sont envisagées.
On peut schématiser la situation de déformabilité par l'exemple d'une poutre sur deux appuis soumise à uneort réparti.
Figure 1.4.11 La poutre repose sur ses deux appuis. Son poids propre G combiné à la charge d'exploita-tion Q peut provoquer une déformation réversible au delà de l'état limite de service compatible avec le bonfonctionnement de l'ouvrage.
1.5 Rappels sur les forces et les grandeurs associées
1.5.1 Origine des forces
Les forces entre solides (ou entre les diérentes parties d'un même solide) résultent principalement de deuxtypes d'interaction entre les particules constitutives de ces solides parmi quatre types d'interaction connus(table 1.1). Ces interactions sont véhiculées au niveau quantique par des particules appelées bosons d'inter-action 21.
En mécanique classique, ne sont considérés que deux types d'interactions 22 :
1. les forces de contact : répulsives et d'origine électromagnétique ;
2. les forces à distance : uniquement attractives et d'origine gravitationnelle 23. En génie civil, seulesles interactions avec le corps massif que représente la Terre sont prises en compte sous la forme du poids .
Les forces ont un caractère vectoriel. Plus précisément, un ensemble de forces peut être réduit, du point devue mathématique, à un torseur 24.
21. Voir Sous l'atome les particules, Etienne Klein, collection Domino, Editions Flammarion, isbn 2 08 035187 7.22. NDLA : Les forces dites centrifuges ou encore les forces de Corriolis n'apparaissent que si les équations de la
dynamique sont écrites dans des repères non-galiléens (ce que l'auteur du présent document ne recommande pas).23. Bien que la constante de couplage de l'interaction gravitationnelle soit 1036 fois plus petite que la constante de couplage
électromagnétique, les forces gravitationnelles (poids) doivent souvent être prises en compte du fait que cette interaction estuniquement attractive et possède une longue portée.24. Mieux vaut le préciser : ne pas confondre tenseur et torseur .
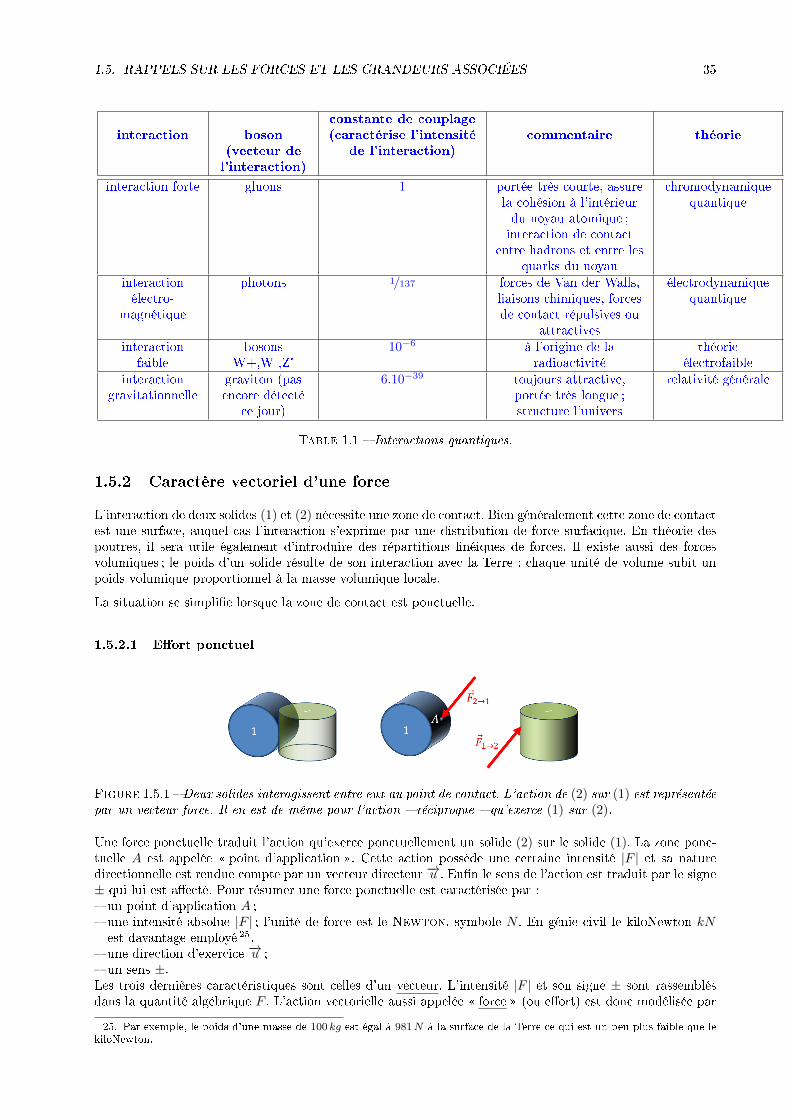
1.5. RAPPELS SUR LES FORCES ET LES GRANDEURS ASSOCIÉES 35
interaction boson(vecteur del'interaction)
constante de couplage(caractérise l'intensité
de l'interaction)commentaire théorie
interaction forte gluons 1 portée très courte, assurela cohésion à l'intérieurdu noyau atomique ;interaction de contact
entre hadrons et entre lesquarks du noyau
chromodynamiquequantique
interactionélectro-
magnétique
photons 1/137 forces de Van der Walls,liaisons chimiques, forcesde contact répulsives ou
attractives
électrodynamiquequantique
interactionfaible
bosonsW+,W-,Z°
10−6 à l'origine de laradioactivité
théorieélectrofaible
interactiongravitationnelle
graviton (pasencore détecté
ce jour)
6.10−39 toujours attractive,portée très longue ;structure l'univers
relativité générale
Table 1.1 Interactions quantiques.
1.5.2 Caractère vectoriel d'une force
L'interaction de deux solides (1) et (2) nécessite une zone de contact. Bien généralement cette zone de contactest une surface, auquel cas l'interaction s'exprime par une distribution de force surfacique. En théorie despoutres, il sera utile également d'introduire des répartitions linéiques de forces. Il existe aussi des forcesvolumiques ; le poids d'un solide résulte de son interaction avec la Terre : chaque unité de volume subit unpoids volumique proportionnel à la masse volumique locale.
La situation se simplie lorsque la zone de contact est ponctuelle.
1.5.2.1 Eort ponctuel
Figure 1.5.1 Deux solides interagissent entre eux au point de contact. L'action de (2) sur (1) est représentéepar un vecteur force. Il en est de même pour l'action réciproque qu'exerce (1) sur (2).
Une force ponctuelle traduit l'action qu'exerce ponctuellement un solide (2) sur le solide (1). La zone ponc-tuelle A est appelée point d'application . Cette action possède une certaine intensité |F | et sa naturedirectionnelle est rendue compte par un vecteur directeur −→u . Enn le sens de l'action est traduit par le signe± qui lui est aecté. Pour résumer une force ponctuelle est caractérisée par : un point d'application A ; une intensité absolue |F | ; l'unité de force est le Newton, symbole N . En génie civil le kiloNewton kNest davantage employé 25.
une direction d'exercice −→u ; un sens ±.Les trois dernières caractéristiques sont celles d'un vecteur. L'intensité |F | et son signe ± sont rassemblésdans la quantité algébrique F . L'action vectorielle aussi appelée force (ou eort) est donc modélisée par
25. Par exemple, le poids d'une masse de 100 kg est égal à 981N à la surface de la Terre ce qui est un peu plus faible que lekiloNewton.
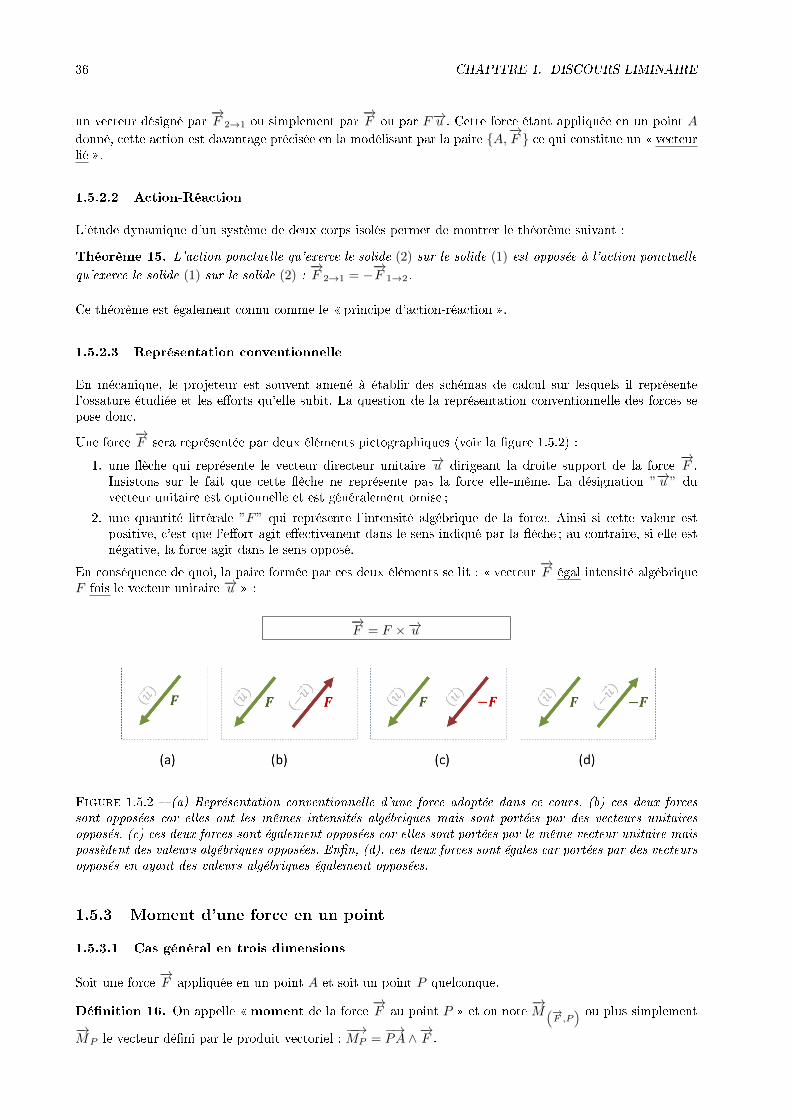
36 CHAPITRE 1. DISCOURS LIMINAIRE
un vecteur désigné par−→F 2→1 ou simplement par
−→F ou par F−→u . Cette force étant appliquée en un point A
donné, cette action est davantage précisée en la modélisant par la paire A,−→F ce qui constitue un vecteur
lié .
1.5.2.2 Action-Réaction
L'étude dynamique d'un système de deux corps isolés permet de montrer le théorème suivant :
Théorème 15. L'action ponctuelle qu'exerce le solide (2) sur le solide (1) est opposée à l'action ponctuellequ'exerce le solide (1) sur le solide (2) :
−→F 2→1 = −
−→F 1→2.
Ce théorème est également connu comme le principe d'action-réaction .
1.5.2.3 Représentation conventionnelle
En mécanique, le projeteur est souvent amené à établir des schémas de calcul sur lesquels il représentel'ossature étudiée et les eorts qu'elle subit. La question de la représentation conventionnelle des forces sepose donc.
Une force−→F sera représentée par deux éléments pictographiques (voir la gure 1.5.2) :
1. une èche qui représente le vecteur directeur unitaire −→u dirigeant la droite support de la force−→F .
Insistons sur le fait que cette èche ne représente pas la force elle-même. La désignation ”−→u ” duvecteur unitaire est optionnelle et est généralement omise ;
2. une quantité littérale ”F” qui représente l'intensité algébrique de la force. Ainsi si cette valeur estpositive, c'est que l'eort agit eectivement dans le sens indiqué par la èche ; au contraire, si elle estnégative, la force agit dans le sens opposé.
En conséquence de quoi, la paire formée par ces deux éléments se lit : vecteur−→F égal intensité algébrique
F fois le vecteur unitaire −→u :
−→F = F ×−→u
Figure 1.5.2 (a) Représentation conventionnelle d'une force adoptée dans ce cours. (b) ces deux forcessont opposées car elles ont les mêmes intensités algébriques mais sont portées par des vecteurs unitairesopposés. (c) ces deux forces sont également opposées car elles sont portées par le même vecteur unitaire maispossèdent des valeurs algébriques opposées. Enn, (d), ces deux forces sont égales car portées par des vecteursopposés en ayant des valeurs algébriques également opposées.
1.5.3 Moment d'une force en un point
1.5.3.1 Cas général en trois dimensions
Soit une force−→F appliquée en un point A et soit un point P quelconque.
Dénition 16. On appelle moment de la force−→F au point P et on note
−→M(−→
F ,P) ou plus simplement
−→MP le vecteur déni par le produit vectoriel :
−−→MP =
−→PA ∧
−→F .
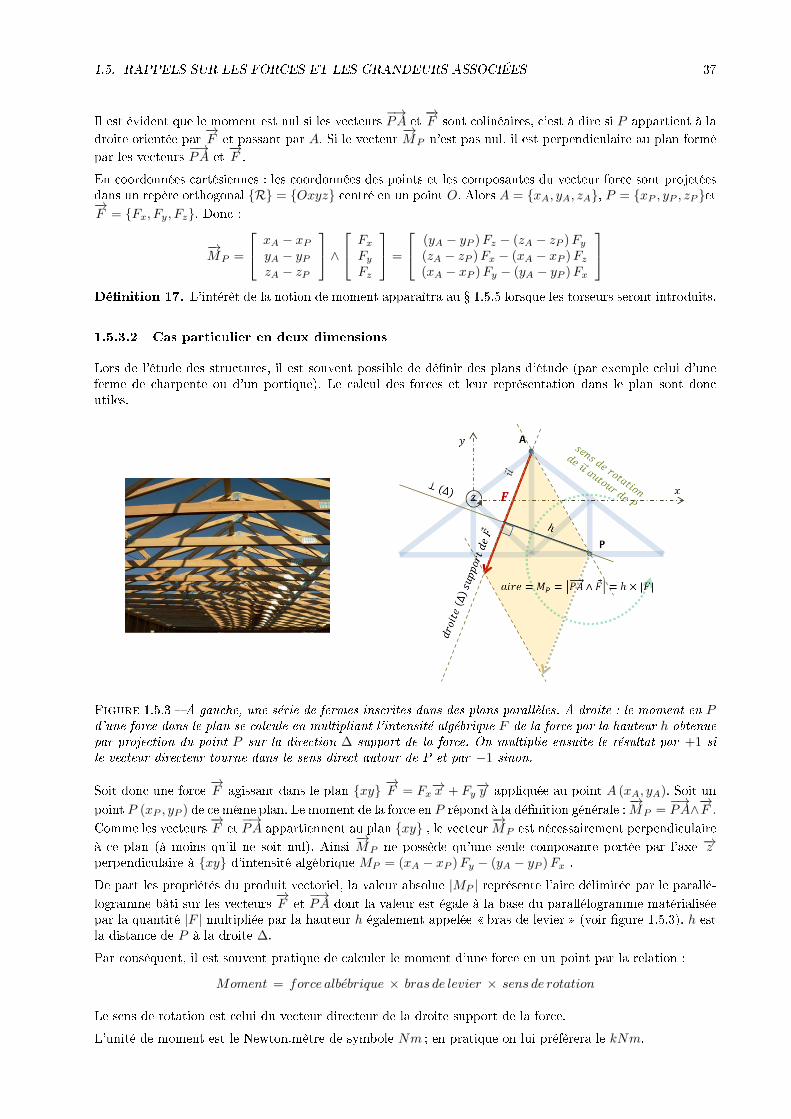
1.5. RAPPELS SUR LES FORCES ET LES GRANDEURS ASSOCIÉES 37
Il est évident que le moment est nul si les vecteurs−→PA et
−→F sont colinéaires, c'est à dire si P appartient à la
droite orientée par−→F et passant par A. Si le vecteur
−→MP n'est pas nul, il est perpendiculaire au plan formé
par les vecteurs−→PA et
−→F .
En coordonnées cartésiennes : les coordonnées des points et les composantes du vecteur force sont projetéesdans un repère orthogonal R = Oxyz centré en un point O. Alors A = xA, yA, zA, P = xP , yP , zP et−→F = Fx, Fy, Fz. Donc :
−→MP =
xA − xPyA − yPzA − zP
∧ FxFyFz
=
(yA − yP )Fz − (zA − zP )Fy(zA − zP )Fx − (xA − xP )Fz(xA − xP )Fy − (yA − yP )Fx
Dénition 17. L'intérêt de la notion de moment apparaîtra au 1.5.5 lorsque les torseurs seront introduits.
1.5.3.2 Cas particulier en deux dimensions
Lors de l'étude des structures, il est souvent possible de dénir des plans d'étude (par exemple celui d'uneferme de charpente ou d'un portique). Le calcul des forces et leur représentation dans le plan sont doncutiles.
Figure 1.5.3 A gauche, une série de fermes inscrites dans des plans parallèles. A droite : le moment en Pd'une force dans le plan se calcule en multipliant l'intensité algébrique F de la force par la hauteur h obtenuepar projection du point P sur la direction ∆ support de la force. On multiplie ensuite le résultat par +1 sile vecteur directeur tourne dans le sens direct autour de P et par −1 sinon.
Soit donc une force−→F agissant dans le plan xy
−→F = Fx
−→x + Fy−→y appliquée au point A (xA, yA). Soit un
point P (xP , yP ) de ce même plan. Le moment de la force en P répond à la dénition générale :−→MP =
−→PA∧
−→F .
Comme les vecteurs−→F et
−→PA appartiennent au plan xy , le vecteur
−→MP est nécessairement perpendiculaire
à ce plan (à moins qu'il ne soit nul). Ainsi−→MP ne possède qu'une seule composante portée par l'axe −→z
perpendiculaire à xy d'intensité algébrique MP = (xA − xP )Fy − (yA − yP )Fx .
De part les propriétés du produit vectoriel, la valeur absolue |MP | représente l'aire délimitée par le parallé-
logramme bâti sur les vecteurs−→F et
−→PA dont la valeur est égale à la base du parallélogramme matérialisée
par la quantité |F | multipliée par la hauteur h également appelée bras de levier (voir gure 1.5.3). h estla distance de P à la droite ∆.
Par conséquent, il est souvent pratique de calculer le moment d'une force en un point par la relation :
Moment = force albebrique × bras de levier × sens de rotation
Le sens de rotation est celui du vecteur directeur de la droite support de la force.
L'unité de moment est le Newton.mètre de symbole Nm ; en pratique on lui préfèrera le kNm.
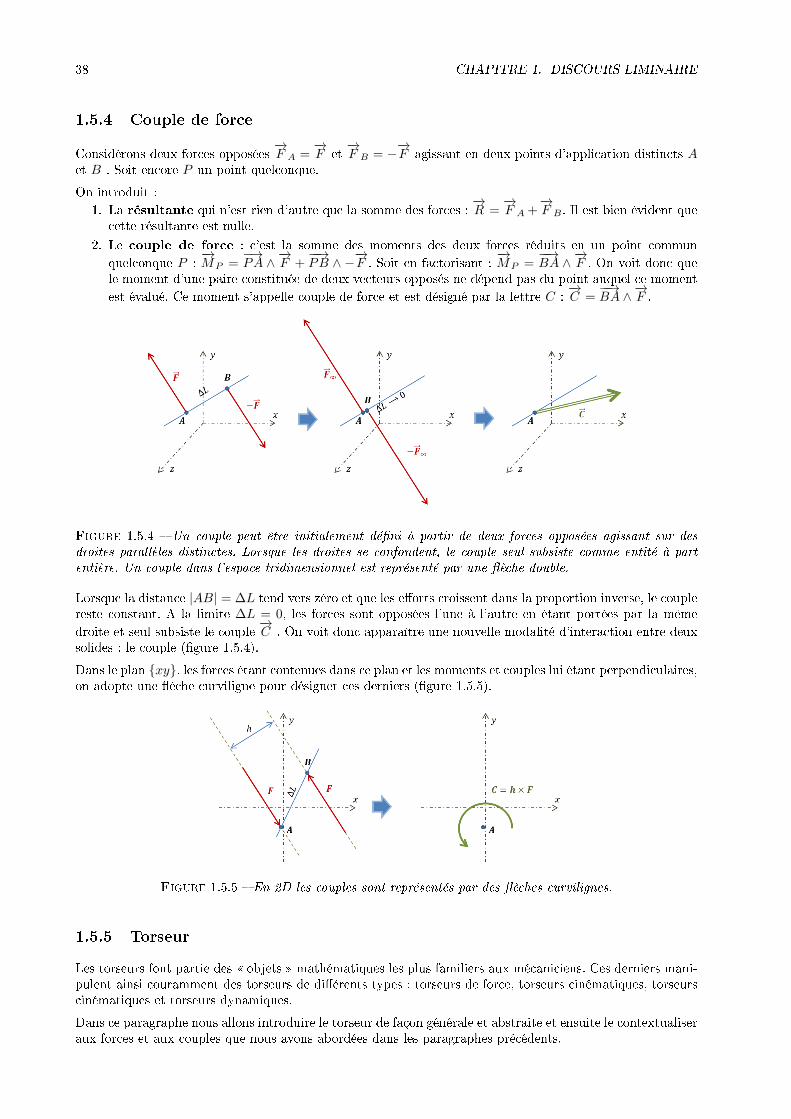
38 CHAPITRE 1. DISCOURS LIMINAIRE
1.5.4 Couple de force
Considérons deux forces opposées−→F A =
−→F et
−→F B = −
−→F agissant en deux points d'application distincts A
et B . Soit encore P un point quelconque.
On introduit :1. La résultante qui n'est rien d'autre que la somme des forces :
−→R =
−→F A +
−→F B . Il est bien évident que
cette résultante est nulle.
2. Le couple de force : c'est la somme des moments des deux forces réduits en un point communquelconque P :
−→MP =
−→PA ∧
−→F +
−−→PB ∧ −
−→F . Soit en factorisant :
−→MP =
−−→BA ∧
−→F . On voit donc que
le moment d'une paire constituée de deux vecteurs opposés ne dépend pas du point auquel ce momentest évalué. Ce moment s'appelle couple de force et est désigné par la lettre C :
−→C =
−−→BA ∧
−→F .
Figure 1.5.4 Un couple peut être initialement déni à partir de deux forces opposées agissant sur desdroites parallèles distinctes. Lorsque les droites se confondent, le couple seul subsiste comme entité à partentière. Un couple dans l'espace tridimensionnel est représenté par une èche double.
Lorsque la distance |AB| = ∆L tend vers zéro et que les eorts croissent dans la proportion inverse, le couplereste constant. A la limite ∆L = 0, les forces sont opposées l'une à l'autre en étant portées par la mêmedroite et seul subsiste le couple
−→C . On voit donc apparaître une nouvelle modalité d'interaction entre deux
solides : le couple (gure 1.5.4).
Dans le plan xy, les forces étant contenues dans ce plan et les moments et couples lui étant perpendiculaires,on adopte une èche curviligne pour désigner ces derniers (gure 1.5.5).
Figure 1.5.5 En 2D les couples sont représentés par des èches curvilignes.
1.5.5 Torseur
Les torseurs font partie des objets mathématiques les plus familiers aux mécaniciens. Ces derniers mani-pulent ainsi couramment des torseurs de diérents types : torseurs de force, torseurs cinématiques, torseurscinématiques et torseurs dynamiques.
Dans ce paragraphe nous allons introduire le torseur de façon générale et abstraite et ensuite le contextualiseraux forces et aux couples que nous avons abordées dans les paragraphes précédents.

1.5. RAPPELS SUR LES FORCES ET LES GRANDEURS ASSOCIÉES 39
1.5.5.1 Le torseur en tant qu'objet mathématique (3D)
Dénition 18. Soit R3 l'espace ane tridimensionnel et l'espace vectoriel associé. On appelle torseur T une paire de champs vectoriels −→r ,−→mP tels que :• Le champ −→r est uniforme sur l'espace ane (il est indépendant du point P ∈ R3) ; −→r est appelé résul-tante du torseur T ;• Le champ −→m vérie la propriété : ∀P,Q ∈ R3 −→m (Q) = −→m (P ) +
−−→QP ∧−→r ; −→m (P ) est appelé moment
du torseur T au point P . Le moment en P est aussi noté −→mP .
Retenons donc qu'un torseur est formé d'une résultante uniforme −→r et d'un moment −→m vériant 26 :
−→mP = −→mQ +−−→PQ ∧ −→r ou aussi −→mP = −→mQ +−→r ∧
−−→QP (1.5.1)
Remarque 19. La résultante −→r constitue un invariant du torseur T dans la mesure où −→r ne dépendpas du point du plan ane où elle est évaluée.
Dénition 20. la résultante −→r et le moment −→mP sont appelés éléments de réduction du torseur T au point P . On écrit :
T P =
−→r−→mP
P
1.5.5.2 Equiprojectivité
Calculons le produit scalaire −→mP ·−−→PQ : il vient −→mP ·
−−→PQ=
(−→mQ +−−→PQ ∧ −→r
)·−−→PQ = −→mQ ·
−−→PQ ; par conséquent :
Théorème 21. la projection du moment −→mP sur la droite (ΓPQ) passant par P et Q est égale à la projectiondu moment −→mQ sur la même droite. C'est le théorème d'équiprojectivité du champ de moment d'un torseur.
Voir l'illustration de la gure 1.5.6a. Inversement, on peut montrer qu'un champ de vecteur équiprojectif estle champ de moment d'un torseur.
1.5.5.3 Automoment
Dénition 22. On appelle automoment A d'un torseur le produit scalaire de ses éléments de réduction :A = −→r · −→mQ
Théorème 23. L'automoment est un invariant : A ne dépend pas du point de réduction du torseur.
En eet, si nous prenons P comme point de réduction alors : A = −→r ·−→mP = −→r ·(−→mQ +
−−→PQ ∧ −→r
)= −→r ·−→mQ
1.5.5.4 Comoment de deux torseurs
Dénition 24. Soient T1 et T2 deux torseurs 27, on appelle comoment des torseurs T1 = −→r 1−→m1P
P
et T2 =
−→r 2−→m2P
P
la quantité :
T1 ⊗ T2 = −→r 1 · −→m2P +−→r 2 · −→m1P
Dans le calcul du comoment, les éléments de réductions sont calculés au même point de réduction. Larésultante du 1er torseur est multipliée par le moment de second, la résultante du 2ème torseur est multipliéepar le moment du premier, les deux quantités sont sommées.
Théorème 25. Le comoment de deux torseurs est un invariant.
La démonstration de ce théorème est évidente. A noter que l'automoment d'un torseur est égal à la moitiédu comoment par lui-même :
A =1
2T ⊗ T
26. Cette relation se rencontre dans la littérature comme étant la formule de transport des moments .27. Ces torseurs peuvent être de même nature ou non.

40 CHAPITRE 1. DISCOURS LIMINAIRE
1.5.5.5 Axe central & moment central
Dénition 26. Soit T un torseur de résultante non-nulle : −→r 6= −→0 , on appelle axe central (∆)l'ensemble des points P de R3 tels que le moment −→mP est colinéaire à −→r . (∆) =
P ∈ R3 /−→mp = λ−→r
.
Théorème 27. Le facteur λ est uniforme le long de l'axe central ; il est appelé pas du torseur . Équationaux dimensions : [λ] = [L]. Unité : metre.
En eet si P ∈ (∆) c'est que −→mP = λP−→r et si Q ∈ (∆) c'est que −→mQ = λQ
−→r . Or −→mP = −→mQ +−−→PQ ∧ −→r .
Par substitution : λP−→r = λQ
−→r +−−→PQ ∧ −→r . Eectuons le produit scalaire par −→r , il reste λP r2 = λQr
2 soitλP = λQ
28. Pour calculer le pas λ, il sut de s'appuyer sur l'automoment qui est invariant :A = −→mP−→r = λr2
d'où :
λ =Ar2
Théorème 28. Le moment −→mP est uniforme le long de l'axe central ; il est appelé moment central .
En eet si P ∈ (∆) c'est que −→mP = λ−→r , or λ est uniforme le long de (∆). c'est que −→mP = λ−→r est égalementinvariant.
Théorème 29. Le module du moment central est le module minimal parmi tous les moments.
En eet, supposons que Q soit sur l'axe central et non pas P , alors :
−→mP = λ−→r︸︷︷︸‖−→r
+−−→PQ ∧ −→r︸ ︷︷ ︸⊥−→r
⇒ ‖−→mP ‖2
= λ2r2 +∥∥∥−−→PQ ∧ −→r ∥∥∥2
donc ‖−→mP ‖ ≥ |λ| ‖−→r ‖ minimal . On peut donc également dénir l'axe central comme lieu des moments demodule minimal.
Théorème 30. L'axe central (∆) d'un torseur est colinéaire à sa résultante −→r .
Prenons deux points de l'axe central : P,Q ∈ (∆) alors −→mP = −→mQ = λ−→r . Comme −→mP = −→mQ +−−→PQ ∧ −→r
alors λ−→r = λ−→r +−−→PQ ∧ −→r . Par conséquent
−−→PQ ∧ −→r =
−→0 . C'est donc bien que −→r est colinéaire à
−−→PQ et
donc à (∆) .
La représentation paramétrique de l'axe central s'obtient comme suit : Soit O l'origine de l'espace ane R3
et P un point de l'axe central (∆) alors −→mP = λ−→r = −→mO −−−→OP ∧ −→r , et donc
−−→OP ∧ −→r = −→mO − λ−→r .
Décomposons le vecteur−−→OP en
−−→OP =
−−→OH +
−−→HP où H est la projection du point O sur l'axe central (∆).
Comme P est également sur l'axe central et que celui-ci est orienté par −→r , on peut écrire que−−→HP = α−→r
(le paramètre α permet de repérer le point P à partir de H). Quant à−−→OH, il est perpendiculaire à −→r par
dénition et satisfait l'équation−−→OH ∧ −→r = −→mO − λ−→r . Multiplions vectoriellement cette relation par −→r
alors 29 : (−−→OH ∧ −→r
)∧ −→r =
(−−→OH · −→r
)︸ ︷︷ ︸
0
−→r − (−→r · −→r )︸ ︷︷ ︸r2
−−→OH = −→mO ∧ −→r ⇒
−−→OH = −
−→mO ∧ −→rr2
Par conséquent :
∀P ∈ (∆)−−→OP =
−→r ∧ −→mO
r2+ α−→r
Voir la gure 1.5.6b pour l'illustration graphique de cette construction. A noter qu'un torseur de résultantenulle possède un moment uniforme sur tout l'espace R3 et n'admet donc pas d'axe central.
28. On note r2 =∥∥−→r ∥∥2
29. On rappelle la formule du double produit vectoriel :(−→u ∧ −→v ) ∧ −→w =
(−→u · −→w )−→u − (−→v · −→w )−→u .

1.5. RAPPELS SUR LES FORCES ET LES GRANDEURS ASSOCIÉES 41
Figure 1.5.6 (a) illustration du théorème d'équiprojectivité. (b) construction de l'axe central, lieu demoment minimal et parallèle à la résultante.
1.5.5.6 Torseurs particuliers : Torseur nul, Glisseur & Couple
Dénition 31. On appelle torseur nul un torseur de résultante nulle −→r =−→0 tel qu'il existe au moins un
point A de R3 où le moment est nul : −→mA =−→0 .
Conséquences :
1. Les éléments de réduction du torseur nul sont uniformément nuls sur R3 ;
2. Le torseur nul ne possède pas d'axe central.
Dénition 32. On appelle glisseur un torseur de résultante non-nulle −→r 6= −→0 tel qu'il existe au moins unpoint A de R3 où le moment est nul : −→mA =
−→0 .
Conséquences :
1. le moment central d'un glisseur est nul ;
2. l'axe central (∆) est la droite orientée par −→r passant par A ;
3. le glisseur est équivalent à un vecteur glissant le long de l'axe central.
Dénition 33. On appelle couple un torseur de résultante nulle −→r =−→0 tel qu'il existe au moins un point
A de R3 où le moment n'est pas nul : −→mA 6=−→0 .
Conséquences :
1. un couple ne possède pas d'axe central ;
2. le moment d'un couple est uniforme sur R3.
Théorème 34. Tout torseur peut se décomposer en un glisseur et un couple.
En eet :
∀P ∈ R3 T P =
−→r−→mP
P
=
−→r−→0
P︸ ︷︷ ︸
glisseur
+
−→0−→mP
P︸ ︷︷ ︸
couple
La décomposition dépend du point P .
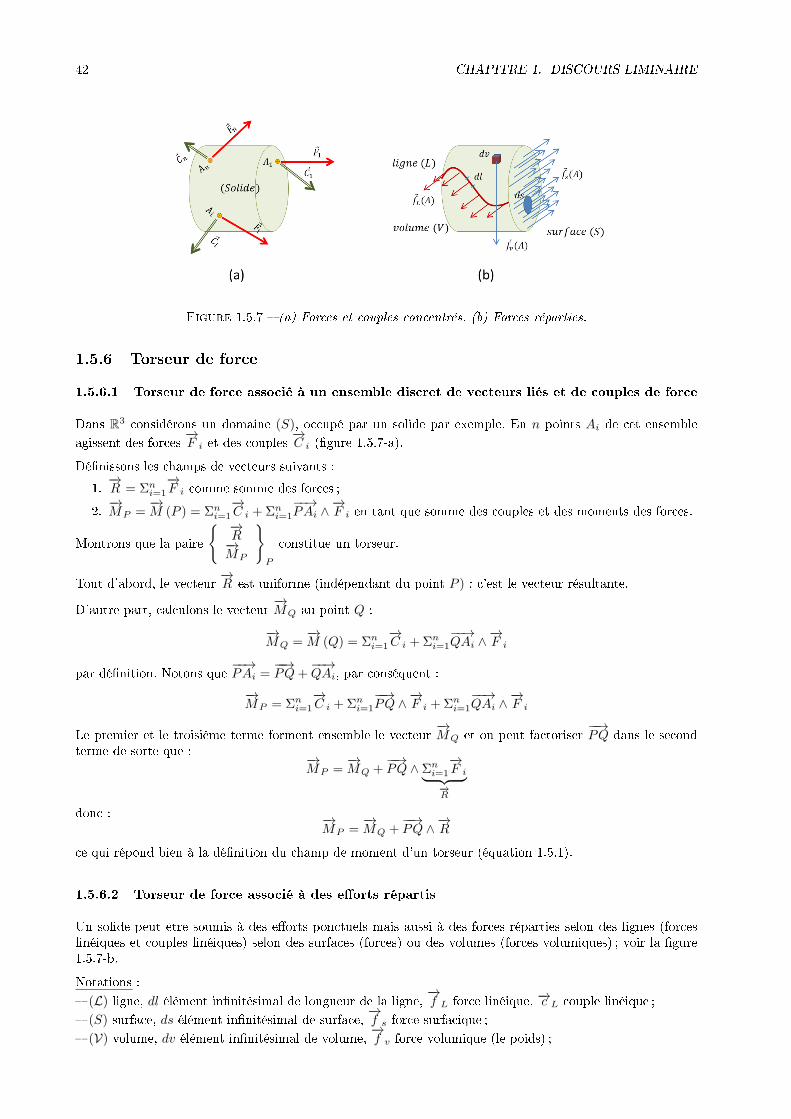
42 CHAPITRE 1. DISCOURS LIMINAIRE
Figure 1.5.7 (a) Forces et couples concentrés. (b) Forces réparties.
1.5.6 Torseur de force
1.5.6.1 Torseur de force associé à un ensemble discret de vecteurs liés et de couples de force
Dans R3 considérons un domaine (S), occupé par un solide par exemple. En n points Ai de cet ensemble
agissent des forces−→F i et des couples
−→C i (gure 1.5.7-a).
Dénissons les champs de vecteurs suivants :
1.−→R = Σni=1
−→F i comme somme des forces ;
2.−→MP =
−→M (P ) = Σni=1
−→C i + Σni=1
−−→PAi ∧
−→F i en tant que somme des couples et des moments des forces.
Montrons que la paire
−→R−→MP
P
constitue un torseur.
Tout d'abord, le vecteur−→R est uniforme (indépendant du point P ) : c'est le vecteur résultante.
D'autre part, calculons le vecteur−→MQ au point Q :
−→MQ =
−→M (Q) = Σni=1
−→C i + Σni=1
−−→QAi ∧
−→F i
par dénition. Notons que−−→PAi =
−−→PQ+
−−→QAi, par conséquent :
−→MP = Σni=1
−→C i + Σni=1
−−→PQ ∧
−→F i + Σni=1
−−→QAi ∧
−→F i
Le premier et le troisième terme forment ensemble le vecteur−→MQ et on peut factoriser
−−→PQ dans le second
terme de sorte que : −→MP =
−→MQ +
−−→PQ ∧ Σni=1
−→F i︸ ︷︷ ︸
−→R
donc : −→MP =
−→MQ +
−−→PQ ∧
−→R
ce qui répond bien à la dénition du champ de moment d'un torseur (équation 1.5.1).
1.5.6.2 Torseur de force associé à des eorts répartis
Un solide peut être soumis à des eorts ponctuels mais aussi à des forces réparties selon des lignes (forceslinéiques et couples linéiques) selon des surfaces (forces) ou des volumes (forces volumiques) ; voir la gure1.5.7-b.
Notations :
(L) ligne, dl élément innitésimal de longueur de la ligne,−→f L force linéique, −→c L couple linéique ;
(S) surface, ds élément innitésimal de surface,−→f s force surfacique ;
(V) volume, dv élément innitésimal de volume,−→f v force volumique (le poids) ;
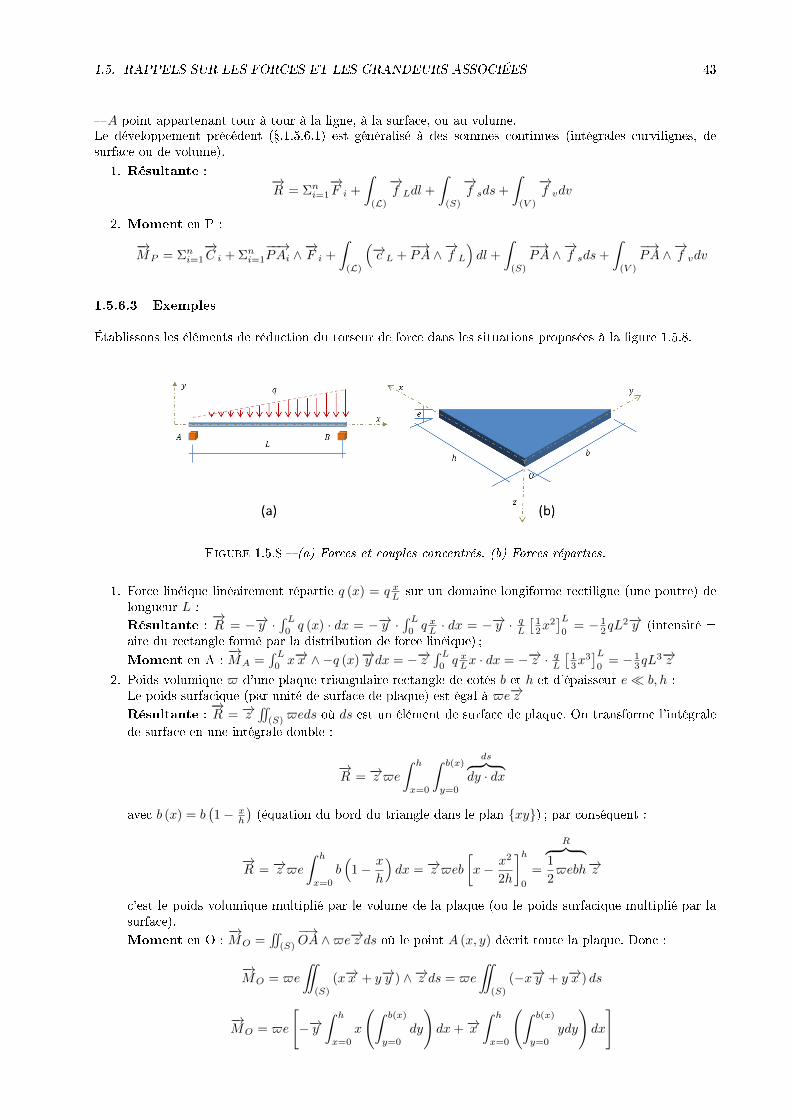
1.5. RAPPELS SUR LES FORCES ET LES GRANDEURS ASSOCIÉES 43
A point appartenant tour à tour à la ligne, à la surface, ou au volume.Le développement précédent (.1.5.6.1) est généralisé à des sommes continues (intégrales curvilignes, desurface ou de volume).
1. Résultante :−→R = Σni=1
−→F i +
ˆ(L)
−→f Ldl +
ˆ(S)
−→f sds+
ˆ(V )
−→f vdv
2. Moment en P :
−→MP = Σni=1
−→C i + Σni=1
−−→PAi ∧
−→F i +
ˆ(L)
(−→c L +−→PA ∧
−→f L
)dl +
ˆ(S)
−→PA ∧
−→f sds+
ˆ(V )
−→PA ∧
−→f vdv
1.5.6.3 Exemples
Établissons les éléments de réduction du torseur de force dans les situations proposées à la gure 1.5.8.
Figure 1.5.8 (a) Forces et couples concentrés. (b) Forces réparties.
1. Force linéique linéairement répartie q (x) = q xL sur un domaine longiforme rectiligne (une poutre) delongueur L :Résultante :
−→R = −−→y ·
´ L0q (x) · dx = −−→y ·
´ L0q xL · dx = −−→y · qL
[12x
2]L0
= − 12qL
2−→y (intensité =aire du rectangle formé par la distribution de force linéique) ;
Moment en A :−→MA =
´ L0x−→x ∧ −q (x)−→y dx = −−→z
´ L0q xLx · dx = −−→z · qL
[13x
3]L0
= − 13qL
3−→z2. Poids volumique $ d'une plaque triangulaire rectangle de cotés b et h et d'épaisseur e b, h :
Le poids surfacique (par unité de surface de plaque) est égal à $e−→zRésultante :
−→R = −→z
˜(S)
$eds où ds est un élément de surface de plaque. On transforme l'intégralede surface en une intégrale double :
−→R = −→z $e
ˆ h
x=0
ˆ b(x)
y=0
ds︷ ︸︸ ︷dy · dx
avec b (x) = b(1− x
h
)(équation du bord du triangle dans le plan xy) ; par conséquent :
−→R = −→z $e
ˆ h
x=0
b(
1− x
h
)dx = −→z $eb
[x− x2
2h
]h0
=
R︷ ︸︸ ︷1
2$ebh−→z
c'est le poids volumique multiplié par le volume de la plaque (ou le poids surfacique multiplié par lasurface).
Moment en O :−→MO =
˜(S)
−→OA ∧$e−→z ds où le point A (x, y) décrit toute la plaque. Donc :
−→MO = $e
¨(S)
(x−→x + y−→y ) ∧ −→z ds = $e
¨(S)
(−x−→y + y−→x ) ds
−→MO = $e
[−−→yˆ h
x=0
x
(ˆ b(x)
y=0
dy
)dx+−→x
ˆ h
x=0
(ˆ b(x)
y=0
ydy
)dx
]

44 CHAPITRE 1. DISCOURS LIMINAIRE
−→MO = $e
−−→yˆ h
x=0
xb(
1− x
h
)dx︸ ︷︷ ︸
b[h2
2 −h3
3
]= bh2
6
+−→xˆ h
x=0
1
2b2(
1− x
h
)2
dx︸ ︷︷ ︸12 b
2[h−h+ 13h]=
b2h6
et donc :
−→MO = $e
[−h
3
bh
2−→y +
b
3
bh
2−→x]
=1
3R (b−→x − h−→y )
1.5.6.4 Discussion sur l'équivalence des torseurs de force entre eux
*** A DÉVELOPPER
1.6 Rappels sur les vitesses et déplacements
Dans ce paragraphe, il est question de solides indéformables. Ce peut sembler curieux, a priori, que l'étudedes solides indéformables gure dans un cours de calcul des ouvrages, ces derniers étant déformables paressence. Nous verrons toutefois deux situations de recours aux solides indéformables :
1. dans l'expression de l'hypothèse de Navier-Bernoulli (chapitre théorie des poutres ) ;
2. dans l'expression du principe des puissances virtuelles où des champs de vitesse virtuels rigidiants parmorceau seront choisis (chapitre principe des puissances virtuelles ) ;
Rappelons enn que la déformation d'un solide s'eectue en référence aux mouvements d'un solide indéfor-mable (voir le cours de mécanique des milieux continus).
1.6.1 Dénition du solide indéformable
Tous les solides se déforment sous l'eet d'actions mécaniques ou de variations de température.
Lorsque ces déformations impactent peu sur la géométrie du solide la part des déplacements résultant desdéformations restant très petite devant les dimensions générales du solide on convient de considérer lesolide comme (quasi-)indéformable.
A noter qu'en résistance des matériaux il est fréquent de considérer qu'une structure est indéformable dansla phase de calcul des sollicitations 30 puis après seulement d'envisager l'évaluation de ses déformations.
Un solide est souvent considéré en tant que portion de l'espace tridimensionnel R3 occupé par de la matière.Ce pourra également être une portion de l'espace bidimensionnel R2 .
Dénition 35. Un solide (S) est dit indéformable si la distance mutuelle de deux points quelconques Aet B de ce solide est indépendante du temps t et donc des mouvements subis par le solide :
∀A,B ∈ (S) ,∀t : ‖AB‖ = constante
Conséquence : à tout solide indéformable(S) on peut attacher un repère R lié ; dans ce repère les coordon-nées des points du solide sont constantes.
Les angles formés sur un solide indéformable ne subissent aucune distorsion.
1.6.2 Mouvement d'un solide indéformable
On considère un solide (S) et son repère attaché R = A,−→x ,−→y ,−→z d'origine A en mouvement dans unrepère R0 = O,−→x 0,
−→y 0,−→z 0 d'origine O de R3. La position d'un point P quelconque de (S) est donnée
par le vecteur position−−→OP =
−→OA+
−→AP avec
−→AP = x−→x + y−→y + z−→z .
30. Sauf si les eets dits du second ordre doivent être étudiés.

1.6. RAPPELS SUR LES VITESSES ET DÉPLACEMENTS 45
Figure 1.6.1 Solide indéformable en mouvement.
La vitesse instantanée de ce point dans le repère R0 est donnée par :
−→V (P ∈ (S) /R0) =
(d−−→OP
dt
)R0
L'indice R0 de la dérivation par rapport au temps signie que, dans le calcul de la vitesse, les vecteurs debase −→x 0,
−→y 0,−→z 0de R0 sont invariants, de même que son origine O. Par conséquent :(
d−−→OP
dt
)R0
=
(d−→OA
dt
)R0
+ x
(d−→xdt
)R0
+ y
(d−→ydt
)R0
+ z
(d−→zdt
)R0
(1.6.1)
Pour le calcul de la dérivée des vecteurs de base, écrivons que leur module unitaire reste invariant au coursdu mouvement de sorte que :
‖−→x ‖2 = −→x · −→x = 1 ⇒ −→x d−→xdt
= 0 ⇒ d−→xdt⊥−→x ⇒ d−→x
dt= a−→y + b−→z
De même, on montre que :d−→ydt
= c−→x + d−→z etd−→zdt
= e−→x + f−→y
D'autre part les angles droits des vecteurs de base sont conservés en cours de mouvement donc :
d
dt(−→x · −→y )⇒ d−→x
dt−→y +
d−→ydt−→x = 0 ⇒ a+ c = 0
De même, on montre que :b+ e = 0 et d+ f = 0
Ainsi : d−→xdtd−→ydtd−→zdt
=
a−→y − e−→z−a−→x + d−→ze−→x − d−→y
=
0 a −e−a 0 de −d 0
· −→x−→y−→z
La relation entre le triplet des vecteurs de base et le triplet de leurs dérivées est une relation linéaireantisymétrique qui peut être également exprimée à l'aide d'un produit vectoriel. En eet, introduisons le
vecteur−→Ω (S/R0) de composantes d, e, a, il apparaît clairement que :
d−→xdt
= −
dea
∧ 1
00
=
0−ae
d−→ydt
= −
dea
∧ 0
10
=
a0−d
d−→zdt
= −
dea
∧ 0
01
=
−ed0

46 CHAPITRE 1. DISCOURS LIMINAIRE
Le vecteur−→Ω (S/R0) = −
dea
s'appelle vecteur vitesse de rotation du solide (S) en mouvement
dans le repère R0 ; ses composantes dans le repère mobile R sont désignées par :
−→Ω (S/R0) =
ωxωyωz
R
A noter que le vecteur vitesse de rotation est unique et donc uniforme pour tout le solide indéformable(S). Ce vecteur rotation permet le calcul des vitesses des vecteurs de base du repère R :
d−→xdt
=−→Ω ∧ −→x d−→y
dt=−→Ω ∧ −→y d−→z
dt=−→Ω ∧ −→z (1.6.2)
1.6.3 Torseur cinématique (des vitesses)
Supposons connue la vitesse du point A du solide (S) :−→V A =
(d−−→OAdt
)R0
et calculons la vitesse d'un point P
quelconque du même solide (S). Partant de l'équation 1.6.1 et compte tenu des relations 1.6.2, il vient :
−→V P =
−→V A +
[x−→Ω ∧ −→x + y
−→Ω ∧ −→y + z
−→Ω ∧ −→z
]=−→V A +
−→Ω ∧ [x−→x + y−→y + z−→z ]
donc :−→V P =
−→V A +
−→Ω ∧−→AP
On voit ainsi que le champ de vitesse d'un solide indéformable vérie l'équation de transport des moments
d'un torseur (éq 1.5.1) à condition de convenir que la résultante vaut−→Ω . D'où le théorème :
Théorème 36. Le champ de vitesse instantané d'un solide indéformable (S) dans un repère R0 constituele champ de moment d'un torseur appelé torseur cinématique C ayant le vecteur vitesse de rotationpour résultante.
Les éléments de réduction du torseur cinématique au point A sont ainsi :
CA =
resultante = vecteur vitesse de rotation =
−→Ω
moment = vecteur vitesse =−→V A
A
Ces quantités sont instantanées et dépendent de l'instant t. La vitesse de rotation s'exprime en rad/s ; La vitesse de translation s'exprime en m/sLe torseur cinématique jouit de toutes les propriétés des torseurs vues au 1.5.5 et en particulier de l'équi-projectivité.
1.6.4 Torseur cinématique des petits déplacements
Au cours d'un intervalle innitésimal de temps dt, la rotation du solide est égale à d−→Ω =
−→Ω · dt et le point
P quelconque s'est déplacé de la quantité−→dP =
−→V P · dt.
Au cours d'un intervalle de temps ni ∆t, le solide subira donc une rotation−→Ω =
´∆t
t=0
−→Ω · dt et le point P
suivra une translation−→U P =
´∆t
t=0
−→V P · dt
Si l'amplitude de la rotation et du déplacement sont petits devant les dimensions du solide lui-même, onadmettra la simplication :
−→Ω =
−→Ω ∆t et
−→U P =
−→V P∆t
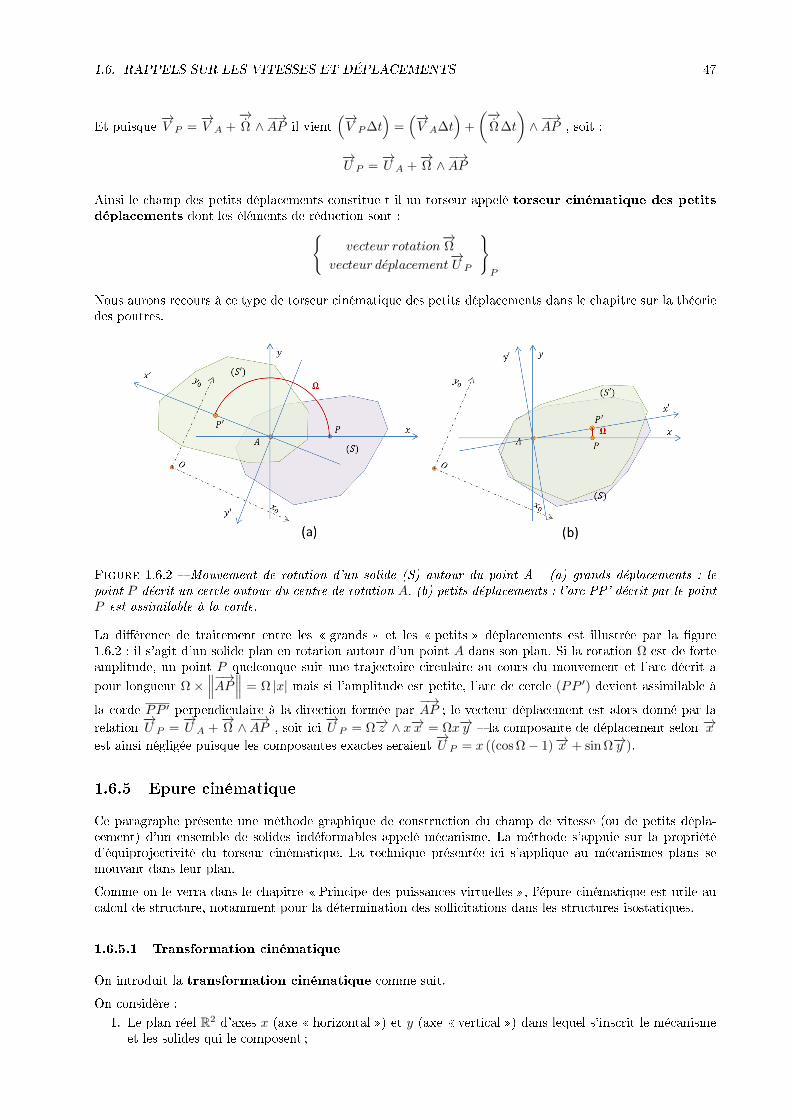
1.6. RAPPELS SUR LES VITESSES ET DÉPLACEMENTS 47
Et puisque−→V P =
−→V A +
−→Ω ∧−→AP il vient
(−→V P∆t
)=(−→V A∆t
)+
(−→Ω ∆t
)∧−→AP , soit :
−→U P =
−→U A +
−→Ω ∧−→AP
Ainsi le champ des petits déplacements constitue t-il un torseur appelé torseur cinématique des petitsdéplacements dont les éléments de réduction sont :
vecteur rotation−→Ω
vecteur deplacement−→U P
P
Nous aurons recours à ce type de torseur cinématique des petits déplacements dans le chapitre sur la théoriedes poutres.
Figure 1.6.2 Mouvement de rotation d'un solide (S) autour du point A - (a) grands déplacements : lepoint P décrit un cercle autour du centre de rotation A. (b) petits déplacements : l'arc PP' décrit par le pointP est assimilable à la corde.
La diérence de traitement entre les grands et les petits déplacements est illustrée par la gure1.6.2 : il s'agit d'un solide plan en rotation autour d'un point A dans son plan. Si la rotation Ω est de forteamplitude, un point P quelconque suit une trajectoire circulaire au cours du mouvement et l'arc décrit a
pour longueur Ω ×∥∥∥−→AP∥∥∥ = Ω |x| mais si l'amplitude est petite, l'arc de cercle (PP ′) devient assimilable à
la corde PP ′ perpendiculaire à la direction formée par−→AP ; le vecteur déplacement est alors donné par la
relation−→U P =
−→U A +
−→Ω ∧−→AP , soit ici
−→U P = Ω−→z ∧ x−→x = Ωx−→y la composante de déplacement selon −→x
est ainsi négligée puisque les composantes exactes seraient−→U P = x ((cos Ω− 1)−→x + sin Ω−→y ).
1.6.5 Epure cinématique
Ce paragraphe présente une méthode graphique de construction du champ de vitesse (ou de petits dépla-cement) d'un ensemble de solides indéformables appelé mécanisme. La méthode s'appuie sur la propriétéd'équiprojectivité du torseur cinématique. La technique présentée ici s'applique au mécanismes plans semouvant dans leur plan.
Comme on le verra dans le chapitre Principe des puissances virtuelles , l'épure cinématique est utile aucalcul de structure, notamment pour la détermination des sollicitations dans les structures isostatiques.
1.6.5.1 Transformation cinématique
On introduit la transformation cinématique comme suit.
On considère :
1. Le plan réel R2 d'axes x (axe horizontal ) et y (axe vertical ) dans lequel s'inscrit le mécanismeet les solides qui le composent ;
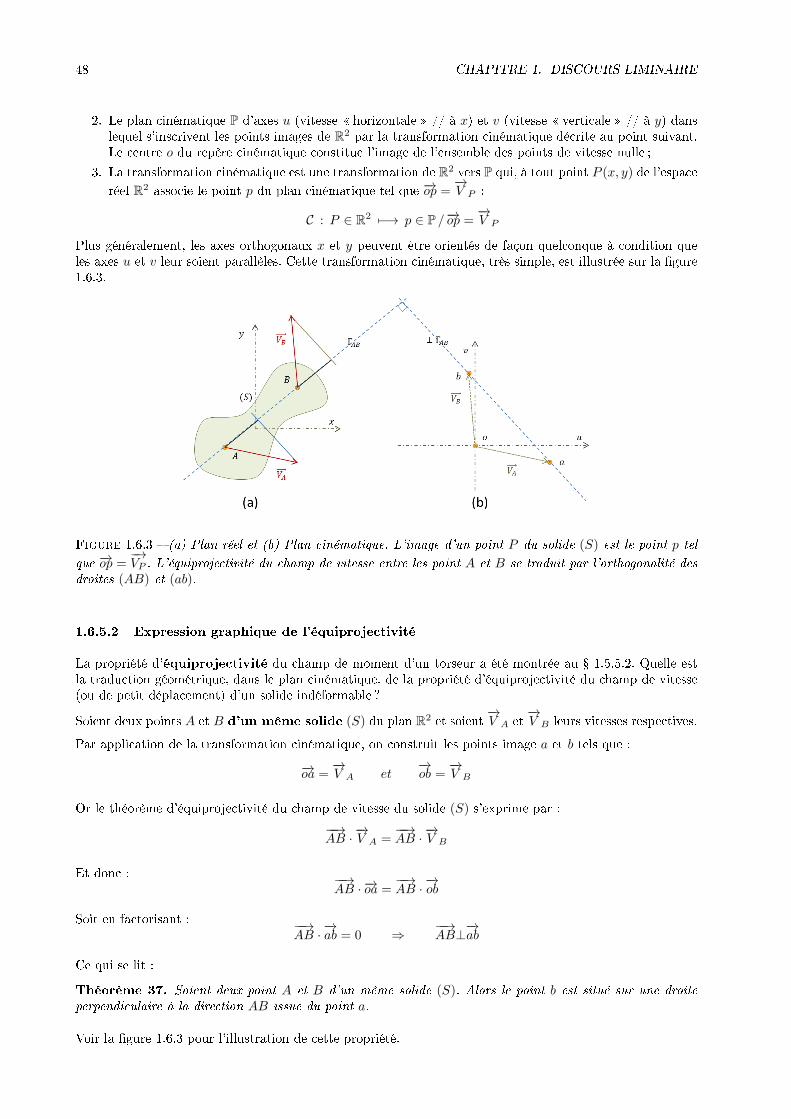
48 CHAPITRE 1. DISCOURS LIMINAIRE
2. Le plan cinématique P d'axes u (vitesse horizontale // à x) et v (vitesse verticale // à y) danslequel s'inscrivent les points images de R2 par la transformation cinématique décrite au point suivant.Le centre o du repère cinématique constitue l'image de l'ensemble des points de vitesse nulle ;
3. La transformation cinématique est une transformation de R2 vers P qui, à tout point P (x, y) de l'espace
réel R2 associe le point p du plan cinématique tel que −→op =−→V P :
C : P ∈ R2 7−→ p ∈ P /−→op =−→V P
Plus généralement, les axes orthogonaux x et y peuvent être orientés de façon quelconque à condition queles axes u et v leur soient parallèles. Cette transformation cinématique, très simple, est illustrée sur la gure1.6.3.
Figure 1.6.3 (a) Plan réel et (b) Plan cinématique. L'image d'un point P du solide (S) est le point p telque −→op =
−→VP . L'équiprojectivité du champ de vitesse entre les point A et B se traduit par l'orthogonalité des
droites (AB) et (ab).
1.6.5.2 Expression graphique de l'équiprojectivité
La propriété d'équiprojectivité du champ de moment d'un torseur a été montrée au 1.5.5.2. Quelle estla traduction géométrique, dans le plan cinématique, de la propriété d'équiprojectivité du champ de vitesse(ou de petit déplacement) d'un solide indéformable ?
Soient deux points A et B d'un même solide (S) du plan R2 et soient−→V A et
−→V B leurs vitesses respectives.
Par application de la transformation cinématique, on construit les points image a et b tels que :
−→oa =−→V A et
−→ob =
−→V B
Or le théorème d'équiprojectivité du champ de vitesse du solide (S) s'exprime par :
−−→AB ·
−→V A =
−−→AB ·
−→V B
Et donc : −−→AB · −→oa =
−−→AB ·
−→ob
Soit en factorisant : −−→AB ·
−→ab = 0 ⇒
−−→AB⊥
−→ab
Ce qui se lit :
Théorème 37. Soient deux point A et B d'un même solide (S). Alors le point b est situé sur une droiteperpendiculaire à la direction AB issue du point a.
Voir la gure 1.6.3 pour l'illustration de cette propriété.
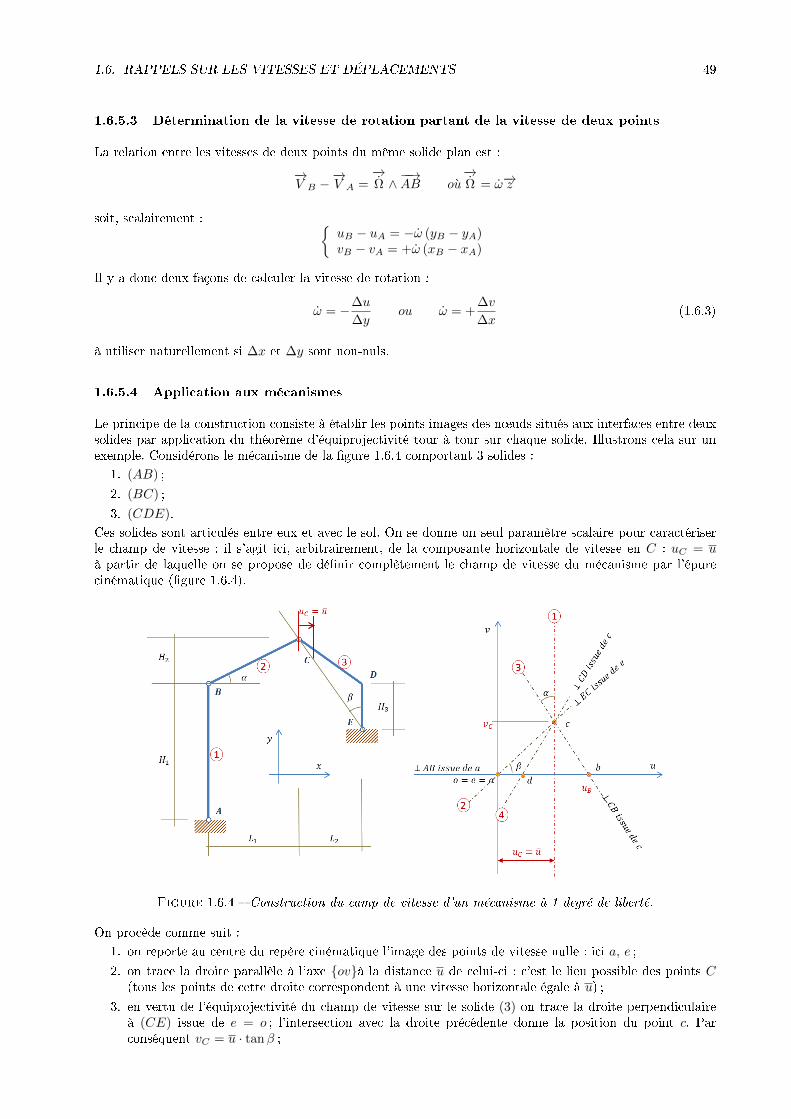
1.6. RAPPELS SUR LES VITESSES ET DÉPLACEMENTS 49
1.6.5.3 Détermination de la vitesse de rotation partant de la vitesse de deux points
La relation entre les vitesses de deux points du même solide plan est :
−→V B −
−→V A =
−→Ω ∧−−→AB ou
−→Ω = ω−→z
soit, scalairement : uB − uA = −ω (yB − yA)vB − vA = +ω (xB − xA)
Il y a donc deux façons de calculer la vitesse de rotation :
ω = −∆u
∆you ω = +
∆v
∆x(1.6.3)
à utiliser naturellement si ∆x et ∆y sont non-nuls.
1.6.5.4 Application aux mécanismes
Le principe de la construction consiste à établir les points images des n÷uds situés aux interfaces entre deuxsolides par application du théorème d'équiprojectivité tour à tour sur chaque solide. Illustrons cela sur unexemple. Considérons le mécanisme de la gure 1.6.4 comportant 3 solides :
1. (AB) ;
2. (BC) ;
3. (CDE).
Ces solides sont articulés entre eux et avec le sol. On se donne un seul paramètre scalaire pour caractériserle champ de vitesse : il s'agit ici, arbitrairement, de la composante horizontale de vitesse en C : uC = uà partir de laquelle on se propose de dénir complètement le champ de vitesse du mécanisme par l'épurecinématique (gure 1.6.4).
Figure 1.6.4 Construction du camp de vitesse d'un mécanisme à 1 degré de liberté.
On procède comme suit :
1. on reporte au centre du repère cinématique l'image des points de vitesse nulle : ici a, e ;
2. on trace la droite parallèle à l'axe ovà la distance u de celui-ci : c'est le lieu possible des points C(tous les points de cette droite correspondent à une vitesse horizontale égale à u) ;
3. en vertu de l'équiprojectivité du champ de vitesse sur le solide (3) on trace la droite perpendiculaireà (CE) issue de e = o ; l'intersection avec la droite précédente donne la position du point c. Parconséquent vC = u · tanβ ;

50 CHAPITRE 1. DISCOURS LIMINAIRE
4. en vertu de l'équiprojectivité du champ de vitesse sur le solide (2) on trace la droite perpendiculaire à(CB) issue de c : c'est le lieu des points b possibles ;
5. en vertu de l'équiprojectivité du champ de vitesse sur le solide (1) on trace la droite perpendiculaireà (AB) issue de a : c'est l'axe ou, c'est aussi le lieu des points b possibles ; Le point b est situéà l'intersection de ces deux dernières droites. Par conséquent : uB = uC + vC · tanα soit uB =u (1 + tanβ tanα).
6. le point d peut également être trouvé par application du théorème d'équiprojectivité deux fois au seindu même solide (3) : entre E et D puis entre D et C .
7. Les rotations des trois solides s'établissent comme suit :
(a) solide (1) : ω1 = −∆u∆y = −uB−uAyB−yA = −u(1+tan β·tanα)
H1;
(b) solide (2) : ω2 = + ∆v∆x = vC−vB
xC−xB = u·tan βL1
; alternativement : ω2 = −∆u∆y = −uC−uByC−yB = −−vC tanα
H2
soit enn ω2 = vC tanαL1 tanα = u tan β
L1(idem) ;
(c) solide (3) : ω3 = −∆u∆y = −uE−uCyE−yC = − 0−u
−H1= − u
H1.
1.7 Puissance, travail, énergie
Non non, le titre de ce paragraphe n'est pas un slogan politique ni une devise nationale (on n'ose imaginerla nature du régime adoptant ce slogan).
A partir du chapitre 5, de nouveaux outils de calcul seront mis en place qui s'appuieront largement sur lanotion de puissance dans une formulation scalaire et non plus vectorielle de l'équilibre. Cela permettrad'introduire également le travail des forces agissant sur les poutres dans le chapitre 2 et plus tard d'énoncerdes théorèmes généraux introduisant l'énergie élastique.
Dans le cours de dynamique de MASTER1 nous aurons besoin, en plus, de recourir à l'énergie cinétiquepour rendre compte des eets inertiels dans les structures en mouvement, notamment lorsqu'elles sont sou-mises à des séismes.
1.7.1 puissance et travail d'une force
On considère une force ponctuelle−→F (t) variable dans le temps dont le point d'application P décrit une
courbe [AB] pendant l'intervalle de temps ∆t. Soit−→V (t) =
−→dPdt la vitesse du point P à l'instant t ∈ [0,∆t] 31.
Figure 1.7.1 Conguration instantanée d'une force sur le parcours (AB).
Dénition 38. On appelle puissance de la force −→F au temps t la quantité scalaire P =
−→F ·−→V (force ×
vitesse).
L'unité de puissance est le Watt : 1W = 1N.m/s
Dénition 39. On appelle travail élémentaire de la force−→F pendant l'intervalle innitésimal de temps
dt, la quantité dW = P · dt
31.−→dP ou
−→dl est la distance vectorielle parcourue par le point P dans l'intervalle de temps dt.

1.7. PUISSANCE, TRAVAIL, ÉNERGIE 51
L'unité de travail est le Joule : 1J = 1W.s = 1N.m
Dénition 40. On appelle travail de la force−→F entre A et B (ou pendant l'intervalle de temps ∆t), la
somme des travaux élémentaires lorsque le point P décrit la courbe [AB] (ou que le temps s'écoule de ∆t) :
W =
∆tˆ
0
dW =
∆tˆ
0
Pdt =
∆tˆ
0
−→F ·−→V dt =
∆tˆ
0
−→F ·−→dl
La puissance est une grandeur extensive : ainsi la puissance d'un ensemble de forces est-elle égale à la sommedes puissances de chaque force. Il en est de même du travail.
1.7.2 puissance d'un système de forces agissant sur un solide indéformable
Considérons un solide indéformable (S) sur lequel agissent un système de forces ponctuelles−→F i appliquées
aux points Ai. D'après le paragraphe précédent, la puissance instantanée développée par l'ensemble des ceseorts au cours du mouvement de (S) est dénie par :
P = Σni=1
−→F i ·−→V i
Considérons un point B quelconque de (S), le solide étant indéformable la vitesse au point Ai est corrélée àcelle de B par la relation :
−→V i =
−→V B +
−→Ω ∧−−→BAi
Par conséquent la puissance peut être exprimée par :
P = Σni=1
−→F i ·
(−→V B +
−→Ω ∧−−→BAi
)=−→V B ·
−→R︷ ︸︸ ︷
Σni=1
−→F i +Σni=1
produitmixte︷ ︸︸ ︷−→F i ·
(−→Ω ∧−−→BAi
)
Par propriété d' invariance par permutation circulaire des opérandes du produit mixte 32 :
P =−→V B ·
−→R +
−→Ω ·
moment du systeme de forces︷ ︸︸ ︷Σni=1
−−→BAi ∧
−→F i =
−→V B ·
−→R +
−→Ω ·−→MB
La puissance du système de force est donc égale à la somme de deux termes :
1. produit scalaire de la résultante des forces par la vitesse au point B ;
2. produit scalaire du vecteur vitesse de rotation par le moment des forces au point B .
On reconnaît le comoment ( 1.5.5.4) du torseur des forces et du torseur cinématique. Rappelons qu'il s'agitd'un invariant : il ne dépend pas du point de réduction B.
Si le solide est soumis à des forces réparties plutôt que des forces concentrées, cela ne change rien au résultat,les sommes à écrire pour le calcul de la résultante et du moment devenant simplement des sommes intégralesau lieu de sommes discrètes.
Si le torseur de force est réductible à un glisseur−→R de droite support (∆), la puissance développée est égale
au produit scalaire de−→R par la vitesse de n'importe quel point du solide appartenant à l'axe central (∆) et,
ceci, en vertu de l'équiprojectivité du champ de vitesse.
32. La produit mixte de 3 vecteurs −→u , −→v et −→w exprimés dans la même base orthonormée est un scalaire noté(−→u ,−→v ,−→w ) et
valant −→u ·(−→v ∧ −→w ). Sa valeur absolue est égale au volume du parallélépipède bâti sur les trois vecteurs. La valeur algébrique
du produit mixte est égale au déterminant formé par les composantes des trois vecteurs. On montre que ce produit ternaire(ou triadique) est invariant par permutation circulaire :
(−→u ,−→v ,−→w ) =(−→v ,−→w ,−→u ) =
(−→w ,−→u ,−→v ) ou, ce qui revient au même :−→u ·
(−→v ∧ −→w ) = −→v ·(−→w ∧ −→u ) = −→w ·
(−→u ∧ −→v ).

52 CHAPITRE 1. DISCOURS LIMINAIRE
1.7.3 généralisation à la puissance d'un torseur de force
On considère un torseur de force déni par ses éléments de réduction en un point A : FA =
−→R−−→MA
A
On suppose que le torseur agit sur un solide (S) indéformable (notamment un plan de section droite depoutre) dont le champ de vitesse est déni par un torseur cinématique également déni par ses éléments de
réductions en A : CA =
−→Ω−→uA
A
. A noter que, selon ces notations,−→Ω et
−→uA désignent respectivement le
vecteur vitesse de rotation du solide (S) et la vitesse du point A ∈ (S) 33.
Figure 1.7.2 La puissance d'un couple agissant sur un solide en rotation.
Dénition 41. La puissance instantanée à l'instant t du torseur de force agissant sur le solide (S) est égaleau comoment de ce torseur de force par le torseur cinématique 34 :
P = FA ⊗ CA =−→R · −→uA +
−−→MA ·
−→Ω
A noter que les deux puissances sont dimensionnellement homogènes : d'un coté force×vitesse donne l'équa-tion aux dimensions [F ]
[L.T−1
], de l'autre moment× vitesse de rotation donne l'équation aux dimensions
[F.L][T−1
].
Dénition 42. Le travail du torseur résulte de l'intégrale de sa puissance instantanée dans l'intervalle detemps ∆t :
W =
∆tˆ
0
FA ⊗ CA · dt =
∆tˆ
0
−→R ·−−→duA +
−−→MA ·
−→dΩ
E.Ringot 2013
33. De façon générale, on notera x la dérivée de x par rapport au temps.34. Le comoment de deux torseurs est égal au produit de la résultante du premier torseur par le moment du second ajouté
au produit de la résultante du second torseur par le moment du premier. Naturellement ce calcul s'eectue avec les élémentsde réduction au même point pour les deux torseurs. On voit que la puissance d'un couple est égale au produit scalaire duditcouple par la vitesse de rotation du solide sur lequel il agit. Le comoment est commutatif. Le comomoment est un invariant (savaleur ne dépend pas du centre de réduction A choisi, ni du système de projection).
Chapitre 2
Théorie des poutres
Version du 26 février 2014.
2.1 Objet
Poutres en béton précontraint.
Les poutres dont il est question dans ce cours sontdes solides longiformes soumis à des actions ex-térieures. Ces solides, assemblés entre eux, consti-tuent des structures. Dans ce chapitre, néanmoins,on considèrera l'une quelconque de ces poutres priseséparément an de dégager des lois utiles à l'ana-lyse de structures.
L'ingénieur se pose la question de l'équilibre dechaque poutre, de la stabilité de cet équilibre, dela résistance des matériaux et de la déformabilité.En particulier il cherche à déterminer la réponse d'une poutre à des actions. Cette réponse est ca-ractérisée par le champ de déplacement −→u (P ) despoints appartenant à la poutre. C'est un problèmede mécanique des milieux continus (mmc) complexeauquel la théorie des poutres apporte une réponsesimpliée mais approchée.
La théorie des poutres résulte ainsi de la mmc àlaquelle des hypothèses supplémentaires et simpli-catrices sont adjointes. Il s'agit en quelque sorte d'une théorie dégradée mais dont la validité est conrméepar l'expérience.
L'étude des structures en tant qu'assemblage de poutres est abordée dans d'autres chapitres de ce cours.
2.2 Dénition d'une poutre
On considère en premier lieu l'espace plan (Σ) délimité par le contour fermé (∂Σ) du planyz de l'espacetridimensionnel.
En second lieu on considère le volume engendré par la translation de (Σ) selon la direction x perpendiculai-rement à yzéventuellement accompagnée d'une rotation autour des axes y et/ou z . On considère un pointcaractéristique noté G dans le plan (Σ) servant d'origine aux axes y et z et dont la position sera préciséeultérieurement comme le sera aussi l'orientation des axes y et z autour de x .
Un tel volume, une fois empli d'un matériau solide, est appelé poutre à condition :
53
54 CHAPITRE 2. THÉORIE DES POUTRES
1. que les dimensions transversales de (Σ) soient petites devant la longueur générée lors de sa translation ; 1
2. que les variations de forme de (Σ) soient progressives ; 2
DÉFINITIONS ET TERMINOLOGIE
Si le volume est généré sans rotation de (Σ) la poutre est dite droite sinon elle est dite courbe etconstitue un arc.
La portion de plan (Σ) est appelée Plan de Section Droite que nous abrévierons en PSD par la suite.
Le lieu des points G d'une poutre droite est appelé axe de la poutre ou axe moyen ; pour une poutrecourbe ce lieu est désigné par bre moyenne .
Une poutre est orientée du fait de l'existence d'une origine A et d'une extrémité B le long de x ; cetteorientation est choisie par le calculateur. Pour les poutres droites cette orientation est xée par le choix duvecteur −→x directeur de l'axe moyen. Pour les poutres courbes on choisit également un sens de parcours, uneabscisse curviligne et un vecteur directeur tangent.
Une poutre est représentée schématiquement par sa bre ou axe moyen en précisant l'orientation du vecteurdirecteur −→x et, en 3D, l'orientation des axes y et z. Le repère xyz forme un trièdre direct.
2.3 Hypothèses HPP et conséquences
L'étude des poutres porte sur leur comportement sous des actions extérieures (eorts ou variation de tem-pérature). On fera l'hypothèse des petites perturbations ( HPP en abrégé) telle qu'expliquée ci-après.
2.3.1 petits déplacements
Proposition 43. Au cours du chargement de la poutre les déplacements restent faibles devant les dimensionsde la poutre. De même on considèrera que les rotations que nous introduirons plus loin sont petites devantl'unité.
Corollaire 44. L'étude statique (répartition des eorts internes) de la poutre est eectuée dans sa congu-ration initiale.
Remarque 45. Il s'agit là d'une approximation paradoxale puisqu'on s'intéresse à des solides déformables. Dece fait leur équilibre s'établit alors qu'ils adoptent une conguration déformée qu'il conviendrait, en touterigueur, de respecter pour étudier l'équilibre. Ce qui est suggéré par l'hypothèse des petits déplacementsc'est d'étudier l'équilibre des poutres comme si elles étaient indéformables et, ensuite seulement, de se poserla question de leur déformabilité.
Corollaire 46. On distingue le calcul du 1er ordre, eectué dans la conguration initiale, du calcul dusecond ordre, réalisé dans la conguration déformée. A noter que seul le calcul du second ordre permet destatuer sur la stabilité de l'équilibre. Les déformations sont calculées par la théorie du premier gradient
ε = 12
(grad−→u + grad T−→u
). Se référer au cours de mécanique des milieux continus à ce propos.
2.3.2 petites déformations
Proposition 47. Les déformations (élongations et distorsions) sont réputées petites devant l'unité.
Corollaire 48. On admet le comportement élastique linéaire du matériau.
Remarque 49. Les règles de calcul de la construction civile, en particulier les Eurocodes, permettent le calculdes structures dont les matériaux sont hétérogènes et anélastiques. S'agissant du calcul de poutres, ces règless'appuient sur la théorie des poutres en y apportant les aménagements ad hoc. On peut donc considérer lathéorie des poutres comme une théorie générique dont les règles de béton armé, de béton précontraint, deconstruction métallique, de construction bois sont en grande partie issues.
1. on admet que cette hypothèse est satisfaite lorsque la longueur est au moins supérieure à 10 fois la plus grande dimensiontransversale environ. En deçà du rapport 1/10 le modèle conduit à une approximation du champ de contraintes ; un modèle plusélaboré, la mécanique des milieux continus, peut être employé pour une meilleure précision.
2. ceci an de ne pas entrainer de concentrations de contraintes.
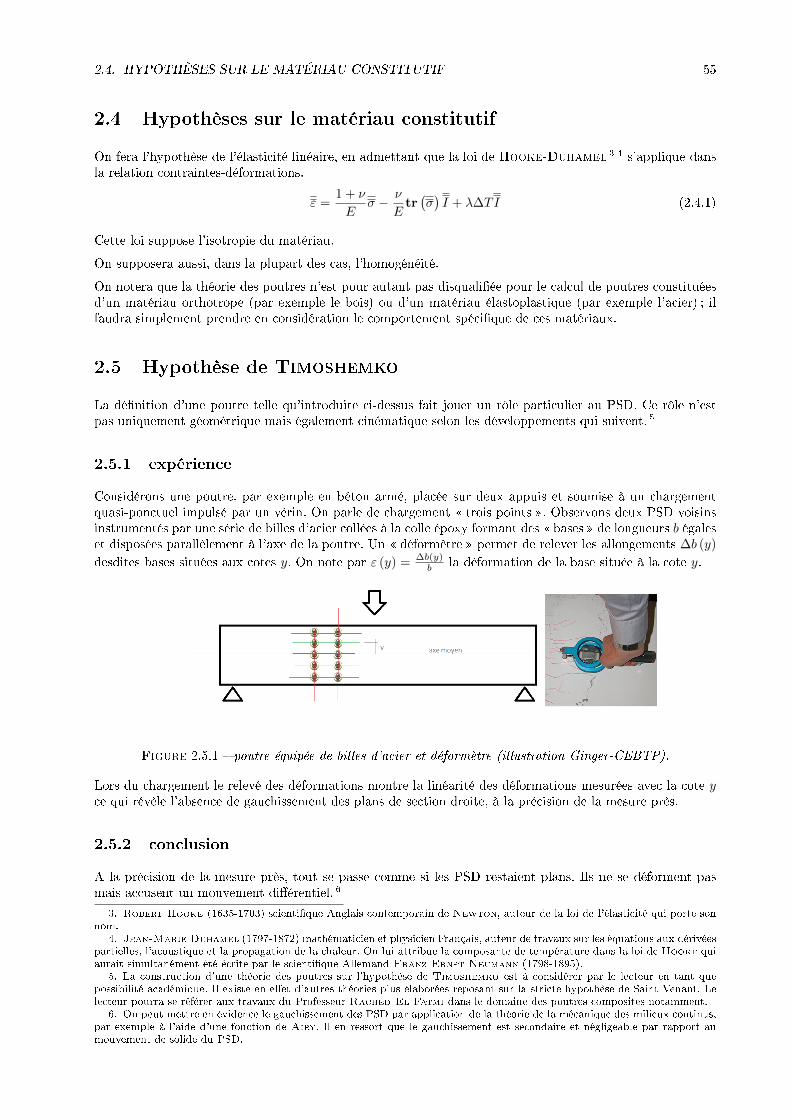
2.4. HYPOTHÈSES SUR LE MATÉRIAU CONSTITUTIF 55
2.4 Hypothèses sur le matériau constitutif
On fera l'hypothèse de l'élasticité linéaire, en admettant que la loi de Hooke-Duhamel 3 4 s'applique dansla relation contraintes-déformations.
ε =1 + ν
Eσ − ν
Etr(σ)I + λ∆TI (2.4.1)
Cette loi suppose l'isotropie du matériau.
On supposera aussi, dans la plupart des cas, l'homogénéité.
On notera que la théorie des poutres n'est pour autant pas disqualiée pour le calcul de poutres constituéesd'un matériau orthotrope (par exemple le bois) ou d'un matériau élastoplastique (par exemple l'acier) ; ilfaudra simplement prendre en considération le comportement spécique de ces matériaux.
2.5 Hypothèse de Timoshemko
La dénition d'une poutre telle qu'introduite ci-dessus fait jouer un rôle particulier au PSD. Ce rôle n'estpas uniquement géométrique mais également cinématique selon les développements qui suivent. 5
2.5.1 expérience
Considérons une poutre, par exemple en béton armé, placée sur deux appuis et soumise à un chargementquasi-ponctuel impulsé par un vérin. On parle de chargement trois points . Observons deux PSD voisinsinstrumentés par une série de billes d'acier collées à la colle époxy formant des bases de longueurs b égaleset disposées parallèlement à l'axe de la poutre. Un déformètre permet de relever les allongements ∆b (y)
desdites bases situées aux cotes y. On note par ε (y) = ∆b(y)b la déformation de la base située à la cote y.
Figure 2.5.1 poutre équipée de billes d'acier et déformètre (illustration Ginger-CEBTP).
Lors du chargement le relevé des déformations montre la linéarité des déformations mesurées avec la cote yce qui révèle l'absence de gauchissement des plans de section droite, à la précision de la mesure près.
2.5.2 conclusion
A la précision de la mesure près, tout se passe comme si les PSD restaient plans. Ils ne se déforment pasmais accusent un mouvement diérentiel. 6
3. Robert Hooke (1635-1703) scientique Anglais contemporain de Newton, auteur de la loi de l'élasticité qui porte sonnom.
4. Jean-Marie Duhamel (1797-1872) mathématicien et physicien Français, auteur de travaux sur les équations aux dérivéespartielles, l'acoustique et la propagation de la chaleur. On lui attribue la composante de température dans la loi de Hooke quiaurait simultanément été écrite par le scientique Allemand Franz Ernst Neumann (1798-1895).
5. La construction d'une théorie des poutres sur l'hypothèse de Timoshemko est à considérer par le lecteur en tant quepossibilité académique. Il existe en eet d'autres théories plus élaborées reposant sur la stricte hypothèse de Saint-Venant. Lelecteur pourra se référer aux travaux du Professeur Rached El Fatmi dans le domaine des poutres composites notamment.
6. On peut mettre en évidence le gauchissement des PSD par application de la théorie de la mécanique des milieux continus,par exemple à l'aide d'une fonction de Airy. Il en ressort que le gauchissement est secondaire et négligeable par rapport aumouvement de solide du PSD.
56 CHAPITRE 2. THÉORIE DES POUTRES
2.5.3 formalisation du champ de déplacement
Proposition 50. dite hypothèse de Timoshemko 7. Au cours du chargement d'une poutre, les PSDrestent plans.
ou, ÉNONCE 2 : Au cours du chargement d'une poutre , les PSD subissent le mouvement d'un solideindéformable.
ou, ÉNONCE 3 : Le mouvement de chaque PSD constitutif d'une poutre est caractérisé, dans la congurationinitiale, par un torseur cinématique des petits déplacements.
Remarque 51. Pris séparément, les PSD subissent un mouvement de solide indéformable ; la poutre dans sonensemble, par contre, se déforme du seul fait des mouvements diérentiels des PSD les uns par rapport auxautres.
Le champ de déplacement est caractérisé par les éléments de réduction du torseur cinématique des petitsdéplacements réduit, pour chaque PSD (Σ (x)), au point caractéristique G (x). Ces éléments de réductionsont :
1. la résultante cinématique appelée vecteur des (petites) rotations et notée−→Ω (x)
2. le moment cinématique établi au point caractéristique G appelé vecteur déplacement du point Get noté −→u G (x)
De ce fait, les inconnues scalaires de l'étude, en terme de déplacement, sont donc au nombre de six :
u (x) , v (x) , w (x)Ωx (x) ,Ωy (x) ,Ωz (x)
Ce qui est notablement plus simple que la recherche du champ de déplacement au sens de la mmc où il yaurait trois composantes fonctions de trois variables à chercher.
Le champ de déplacement, en tout point P de la poutre est donné par la relation :
−→u P = −→u G +−→Ω ∧−−→GP ⇐⇒
uvw
=
uGvGwG
+
ΩxΩyΩz
∧ 0yz
Soit, en coordonnées cartésiennes :
u (x, y, z) = uG (x)− yΩz (x) + zΩy (x)v (x, y, z) = vG (x)− zΩx (x)w (x, y, z) = wG (x) + yΩx (x)
2.5.4 Hypothèse dégradée de Navier-Bernoulli
Il serait possible de considérer une hypothèse encore plus restrictive que celle de Timoshemko en supposantnon-plus seulement que les PSD restent plans mais en plus qu'ils restent perpendiculaires à la bre moyennede la poutre.
Proposition 52. dite hypothèse de Navier-Bernoulli 8 9. Au cours du chargement d'une poutre, lesPSD restent droits.
Dans ces conditions les rotations Ωy et Ωz correspondent aussi aux rotations subies par la bre moyenne dela poutre. Par conséquent :
tan Ωz =dvGdx
et tan Ωy = −dwGdx
7. XXX Timoshemko (xxx-xxx) biblio.8. Henri Navier (1785-1836) ingénieur des ponts, enseignant à l'Ecole Polytechnique et aux Ponts & Chaussées, auteur
avec Cauchy de la théorie générale de l'élasticité.9. Daniel Bernoulli (1700-1782) médecin, physicien et mathématicien Suisse, auteur de travaux sur les équations diéren-
tielles, la théorie du risque et en mécanique des uides, élasticité, vibrations.

2.5. HYPOTHÈSE DE TIMOSHEMKO 57
Et si les rotations sont faibles, on admet alors que :
Ωz =dvGdx
et Ωy = −dwGdx
Le nombre de paramètres cinématiques est donc réduit de deux unités puis que les rotations autour des axesy et z sont directement liées aux déplacements selon les axes perpendiculaires.
Naturellement, cette restriction a un coût dans la mesure où elle ne permet pas d'appréhender certainsphénomènes liés aux déformations de cisaillement.
2.5.5 champ de déformation
Le champ de déformation dérive du champ de déplacement par son premier gradient : ε = 12
(grad−→u + grad T−→u
)
2.5.5.1 expression des composantes de déformation
Les six composantes de déformation sont ainsi :
εxx = ∂u∂x = duG
dx − ydΩzdx + z
dΩydx
εxy = 12
[∂u∂y + ∂v
∂x
]= 1
2
[−Ωz + dvG
dx − zdΩxdx
]εxz = 1
2
[∂u∂z + ∂w
∂x
]= 1
2
[Ωy + dwG
dx + y dΩxdx
]εyy = dv
dy = 0
εyz = 12
[dvdz + dw
dy
]= 1
2 [−Ωx + Ωx] = 0
εzz = dwdz = 0
On observe donc que les composantes de déformation du plan yz sont nulles ce qui est normal comptetenu de l'hypothèse initiale.
2.5.5.2 interprétation
Déformation axiale : Le terme duGdx représente la déformation axiale au niveau du point caractéristique
ou centre G 10. On posera εGxx = duGdx . Un tronçon de poutre de longueur dx s'allongera (ou se raccourcira
si εGxx est négative) de la quantité εGxx · dx.
Courbure : Supposons εGxx nul et considérons un tronçon de poutre de longueur dx délimité par deuxPSD aux abscisses x (centre G) et x + dx (centre G′), la rotation diérentielle autour de l'axe z vaut dΩz.Supposons, pour l'illustration que dΩz soit positive ; alors cette rotation diérentielle produit un raccour-cissement des bres de la poutre situées aux coordonnées y positives (au dessus de G) et, au contraire, unallongement des bres situées aux cotes négatives (en dessous de G). Dans le plan xy, prolongeons les PSDjusqu'à ce qu'ils s'interceptent en un point C à une distance Rz de G. Alors, dans le triangle CGG′ on établitfacilement la relation : dx ' Rz ·dΩz. La distance Rz est appelée rayon de courbure ; naturellement, saufcas particulier, elle dépend de x. L'inverse de ce rayon est appelé courbure et on note χz = 1
Rz= dΩz
dx .
De la même façon on introduit la courbure dans le plan xz autour de l'axe y et telle que χy = 1Ry
=dΩydx .
10. Nous préciserons plus loin ce qu'est ce centre .
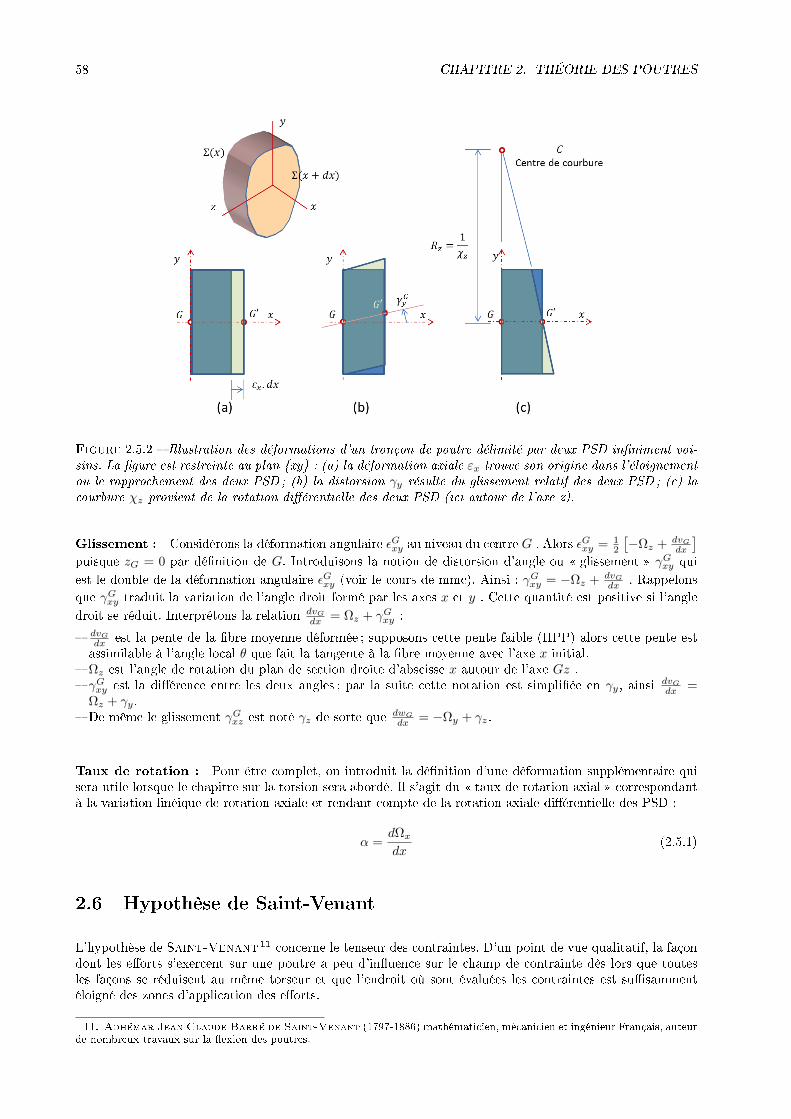
58 CHAPITRE 2. THÉORIE DES POUTRES
Figure 2.5.2 Illustration des déformations d'un tronçon de poutre délimité par deux PSD inniment voi-sins. La gure est restreinte au plan xy : (a) la déformation axiale εx trouve son origine dans l'éloignementou le rapprochement des deux PSD ; (b) la distorsion γy résulte du glissement relatif des deux PSD ; (c) lacourbure χz provient de la rotation diérentielle des deux PSD (ici autour de l'axe z).
Glissement : Considérons la déformation angulaire εGxy au niveau du centre G . Alors εGxy = 12
[−Ωz + dvG
dx
]puisque zG = 0 par dénition de G. Introduisons la notion de distorsion d'angle ou glissement γGxy quiest le double de la déformation angulaire εGxy (voir le cours de mmc). Ainsi : γGxy = −Ωz + dvG
dx . Rappelonsque γGxy traduit la variation de l'angle droit formé par les axes x et y . Cette quantité est positive si l'angledroit se réduit. Interprétons la relation dvG
dx = Ωz + γGxy :
dvGdx est la pente de la bre moyenne déformée ; supposons cette pente faible (HPP) alors cette pente estassimilable à l'angle local θ que fait la tangente à la bre moyenne avec l'axe x initial.
Ωz est l'angle de rotation du plan de section droite d'abscisse x autour de l'axe Gz . γGxy est la diérence entre les deux angles ; par la suite cette notation est simpliée en γy, ainsi
dvGdx =
Ωz + γy. De même le glissement γGxz est noté γz de sorte que
dwGdx = −Ωy + γz.
Taux de rotation : Pour être complet, on introduit la dénition d'une déformation supplémentaire quisera utile lorsque le chapitre sur la torsion sera abordé. Il s'agit du taux de rotation axial correspondantà la variation linéique de rotation axiale et rendant compte de la rotation axiale diérentielle des PSD :
α =dΩxdx
(2.5.1)
2.6 Hypothèse de Saint-Venant
L'hypothèse de Saint-Venant 11 concerne le tenseur des contraintes. D'un point de vue qualitatif, la façondont les eorts s'exercent sur une poutre a peu d'inuence sur le champ de contrainte dès lors que toutesles façons se réduisent au même torseur et que l'endroit où sont évaluées les contraintes est susammentéloigné des zones d'application des eorts.
11. Adhémar Jean Claude Barré de Saint-Venant (1797-1886) mathématicien, mécanicien et ingénieur Français, auteurde nombreux travaux sur la exion des poutres.

2.7. CONTRADICTIONS INTRODUITES PAR LES HYPOTHÈSES 59
2.6.1 Énoncé
Proposition 53. Loin des zones d'application des charges (forces et couples concentrés, réactions d'appui)l'état de contrainte est totalement déni par le torseur des forces agissant dans le plan de section droite.
2.6.2 Interprétation
Les éléments de réduction du torseur des forces agissant dans un plan de section droite (Σ) ne dépendentque des vecteurs contraintes agissants sur ledit plan :
−→T (P,−→x ) = σ (P ) · −→x =
σxx σxy σxz... σyy σyz
. ..· · · σzz
· 1
00
=
σxxσxyσxz
Les composantes du tenseur de contrainte non impliquées dans cette relation sont réputées nulles : σyy =σzz = σyz = 0.
2.6.3 Conséquences sur la forme du tenseur des contraintes
σ (P ) '
σxx σxy σxzσxy 0 0σxz 0 0
2.7 Contradictions introduites par les hypothèses
2.7.1 Contradiction sur les cisaillements
La relation d'élasticité entre le tenseur des contraintes et celui des déformations est donnée par la loi deHooke (ou Hooke & Duhamel) :
ε =1 + ν
Eσ − ν
EΣ ou Σ = tr
(σ)
Par substitution :
εxx εxy εxzεxy 0 0εxz 0 0
=1 + ν
E
σxx σxy σxzσxy 0 0σxz 0 0
− ν
Eσxx
Donc :
σxx = Eεxx σxy =E
1 + νεxy σxz =
E
1 + νεxz
Soit :σxx = E · εxx τxy = σxy = G · γxy τxz = σxz = G · γxz
Or, en l'absence de torsion, les distorsions issues de la théorie des poutres ( 2.5.5.1) sont :
γxy = −Ωz +dvGdx
γxz = Ωy +dwGdx

60 CHAPITRE 2. THÉORIE DES POUTRES
c'est-à-dire sont constantes à l'intérieur du même plan de section droite Σ (x). Il en va donc de même descontraintes de cisaillement. Or la réciprocité des contraintes de cisaillement (voir le cours de mmc) ne permetpas d'avoir des composantes de cisaillement perpendiculairement au bord du plan de section droite : il y alà une première contradiction manifeste.
2.7.2 Contradiction sur la contrainte normale
En l'absence de force de volume (cas d'une poutre soumise à des forces de surface), l'équation locale de
l'équilibre se réduit à−−→div σ =
−→0 dont la projection sur l'axe −→x est ∂σxx
∂x +∂σxy∂y + ∂σxz
∂z = 0. Comme lescontraintes de cisaillement ne dépendent, selon la théorie des poutres, ni de y ni de z, il faudrait en déduireque la contrainte normale σxx ne dépend pas de x ! Là encore ce résultat n'est pas conforme à la réalité.
2.7.3 Conséquences
Les contradictions ci-dessus montrent que la théorie des poutres fondée sur l'hypothèse de Timoshemko nepermet pas d'atteindre les contraintes de cisaillement de façon able. On va donc renoncer temporairement àles établir dans le cadre strict de cette théorie. On sera amené à développer deux théories dévolues au calculdes contraintes de cisaillement : la première pour ce qui concerne le cisaillement de exion (chap. 3 page 83)et la seconde pour le cisaillement de torsion (chap. 4 page 106).
On retiendra donc les relations suivantes :
σxx (x, y, z) = Eεxx (x, y, z)
εxx =∂u
∂x=duGdx− y dΩz
dx+ z
dΩydx
σxx = E ·(duGdx− y dΩz
dx+ z
dΩydx
)= σxx = E · (εG − yχz + zχy) (2.7.1)
2.8 Sollicitations
2.8.1 objet
Dans ce paragraphe on cherche à résumer l'état de contrainte, et plus exactement, le champ des vecteurscontraintes agissant sur un plan de section droite, par les éléments de réductions d'un torseur de force agissantsur les PSD.
2.8.2 Contraintes généralisées
Considérons le plan de section droite (Σ) orienté par le vecteur directeur −→x . Calculons les éléments de
réduction du torseur des forces agissant sur ce plan de section droite. Les vecteurs contraintes−→T (P,−→x )
agissant en tout point P de (Σ) constitue une densité surfacique de forces que l'on peut intégrer.
La résultante est ainsi désignée par :−→R =
˜Ω
−→T (P,−→x ) dΣ où dΣ représente un élément d'aire centré en P .
Le moment en G vaut :−→MG =
˜Ω
−−→GP ∧
−→T (P,−→x ) dΣ
En composantes, on écrit−→T (P,−→x ) = σxx (P )−→x + σxy (P )−→y + σxz (P )−→z
Il est d'usage d'utiliser les notations rdm simpliées :−→T (P,−→x ) = σ (P )−→x + τy (P )−→y + τz (P )−→z 12
12. On note σxx = σ, σxy = τy et σxz = τz . En théorie des poutres, lorsqu'on parle de contraintes normales , il s'agitimplicitement des contraintes normales agissant sur un plan de section droite celles-ci étant simplement désignées par la lettreσ .

2.8. SOLLICITATIONS 61
G possède les coordonnées
x00
dans le repère Oxyz par dénition de G.
P possède les coordonnées
xyz
dans le même repère .
Par conséquent on peut calculer la résultante sous la forme :
−→R = −→x
¨Σ
σ (x, y, z) dΣ +−→y¨
Σ
τy (x, y, z) dΣ +−→z¨
Σ
τz (x, y, z) dΣ
On introduit ainsi les 3 composantes de la résultante :1. axiale : N =
˜Σσ (x, y, z) dΣ
2. transversale selon y : Ty =˜
Στy (x, y, z) dΣ
3. transversale selon z : Tz =˜
Στz (x, y, z) dΣ
En ce qui concerne le moment, on l'écrit sous forme matricielle :−→MG =
Mx
My
Mz
=˜
Ω
0yz
∧ στyτz
dΣ
Soit :1. moment axial : Mx =
˜Σ
[yτz (x, y, z)− zτy (x, y, z)] dΣ
2. moment porté par y : My =˜
Σzσ (x, y, z) dΣ
3. moment porté par z : Mz =˜
Σ−yσ (x, y, z) dΣ
Les quantités N,Ty, Tz,Mx,My,Mz sont appelées contraintes généralisées .
On distingue :1. les contraintes généralisées normales qui ne dépendent que des contraintes normales σ = σxx ; elles sont
au nombre de 3 :
(a) Eort axial : N =˜
Σσ (x, y, z) dΣ
(b) Moment porté par y : My =˜
Σzσ (x, y, z) dΣ
(c) Moment porté par z : Mz =˜
Σ−yσ (x, y, z) dΣ
2. les contraintes généralisées transversales qui ne dépendent que des contraintes de cisaillementτy = σxyet τyz = σxz ; elles sont également au nombre de 3 :
(a) Moment axial : Mx =˜
Σ[yτz (x, y, z)− zτy (x, y, z)] dΣ
(b) Eort transversal selon y : Ty =˜
Στy (x, y, z) dΣ
(c) Eort transversal selon z : Tz =˜
Στz (x, y, z) dΣ
2.8.3 Singularisation du repère : sollicitations normales
Rassemblons les contraintes généralisée dépendant uniquement de la contrainte normale. Compte tenu de larelation 2.7.1 : N =
˜ΣE · (εG − yχz + zχy) dΣ
My =˜
Σz · E · (εG − yχz + zχy) dΣ
Mz =˜
Σ−y · E · (εG − yχz + zχy) dΣ
Par distribution et commutativité : N = εG˜
ΣEdΣ + χy
˜ΣzEdΣ− χz
˜ΣyEdΣ
My = εG˜
ΣzEdΣ + χy
˜Σz2EdΣ− χz
˜ΣzyEdΣ
Mz = −εG˜
ΣyEdΣ− χy
˜ΣyzEdΣ + χz
˜Σy2EdΣ
On voit donc que les contraintes généralisées sont des fonctions linéaires des déformations. Ce que l'on metsous forme matricielle : N
My
Mz
=
˜ΣEdΣ
˜ΣzEdΣ −
˜ΣyEdΣ˜
ΣzEdΣ
˜Σz2EdΣ −
˜ΣzyEdΣ
−˜
ΣyEdΣ −
˜ΣzyEdΣ
˜Σy2EdΣ
· εGχyχz

62 CHAPITRE 2. THÉORIE DES POUTRES
On remarquera la symétrie de ce système. Le temps est venu de particulariser à la fois la position du centreG et l'orientation des axes y et z autour de x .
1. Choisissons G comme centre d'inertie de la section droite. De ce fait :¨Σ
zEdΣ =
¨Σ
yEdΣ = 0
2. Choisissons l'orientation des axes de sorte qu'ils soient principaux 13 et satisfont la condition :¨
Σ
zyEdΣ = 0
Dans ces conditions le système matriciel se réduit à un système diagonal : N = εG˜
ΣEdΣ
My = χy˜
Σz2EdΣ
Mz = χz˜
Σy2EdΣ
Le choix d'un système principal d'inertie découple les relations entre sollicitations et défor-mations. A une sollicitation correspond ainsi une et une seule déformation et réciproque-ment 14.
Si, de plus, le matériau constitutif de la poutre est homogène, le module E ne dépend pas des coordonnéesx, y, z : N = εGE
˜ΣdΣ = EAεG
My = χyE˜
Σz2dΣ = EIyχy
Mz = χzE˜
Σy2dΣ = EIzχz
(2.8.1)
expressions dans lesquelles 15 :
A =˜
ΣdΣ aire de section droite
Iy =˜
Σz2dΣ inertie quadratique autour deGy
Iz =˜
Σy2dΣ inertie quadratique autour deGz
sont les caractéristiques géométriques intrinsèques du PSD sur lesquelles nous reviendrons au 2.8.6.
Dénition 54. On appelle sollicitations normales les éléments de réduction du torseur des forces produitpar les seules contraintes normales, réduits au centre de gravité G du PSD et projetés dans le système d'axesprincipaux d'inertie. Les sollicitations normales sont au nombre de trois et sont : N =
˜Σσ (x, y, z) dΣ EffortNormal (N)
My =˜
Σz · σ (x, y, z) dΣ MomentF lechissant autour de y (N.m)
Mz =˜
Σ−y · σ (x, y, z) dΣ MomentF lechissant autour de z (N.m)
2.8.4 exion plane
Lorsqu'une poutre droite présente un plan de symétrie, d'une part, et que les actions sur cette poutre agissentdans le plan de symétrie, d'autre part, le problème de poutre est simplié du fait de la symétrie du tenseurdes contraintes, de celui des déformations et du champ de déplacement.
Supposons que Oxy soit plan de symétrie. Alors σ (x, y, z) = σ (x, y,−z) , τxy (x, y, z) = τxy (x, y,−z) etτxz (x, y, z) = −τxz (x, y,−z) ; de ce fait le momentMz est nul ainsi que l'eort tranchant Tz et le moment detorsion Mx. Du point de vue des sollicitations, seules subsistent l'eort normal N (x), le moment de exionMz (x) et l'eort tranchant Tz (x).
Du point de vue des déplacements les inconnues sont uniquement vG (x), Ωz (x) et uG (x). La bre moyennede la poutre reste ainsi connée dans le plan de symétrie de la poutre : on dit que la exion est plane.
13. Le système d'axes xyz est qualié de système principal d'inertie.14. Il convient de noter que ce découplage dont il est question ici repose sur l'homogénéité du matériau constitutif de la
poutre. S'agissant de poutres en matériaux composites formés de couches ou de bres, les règles de découplage se trouventcomplexiées. Voir les travaux de Pr. Rached El Fatmi à ce sujet.15. Les notations employées dans ce cours n'ont pas de caractère universel et ne sont pas strictement en accord avec la norme
NF EN 1990.
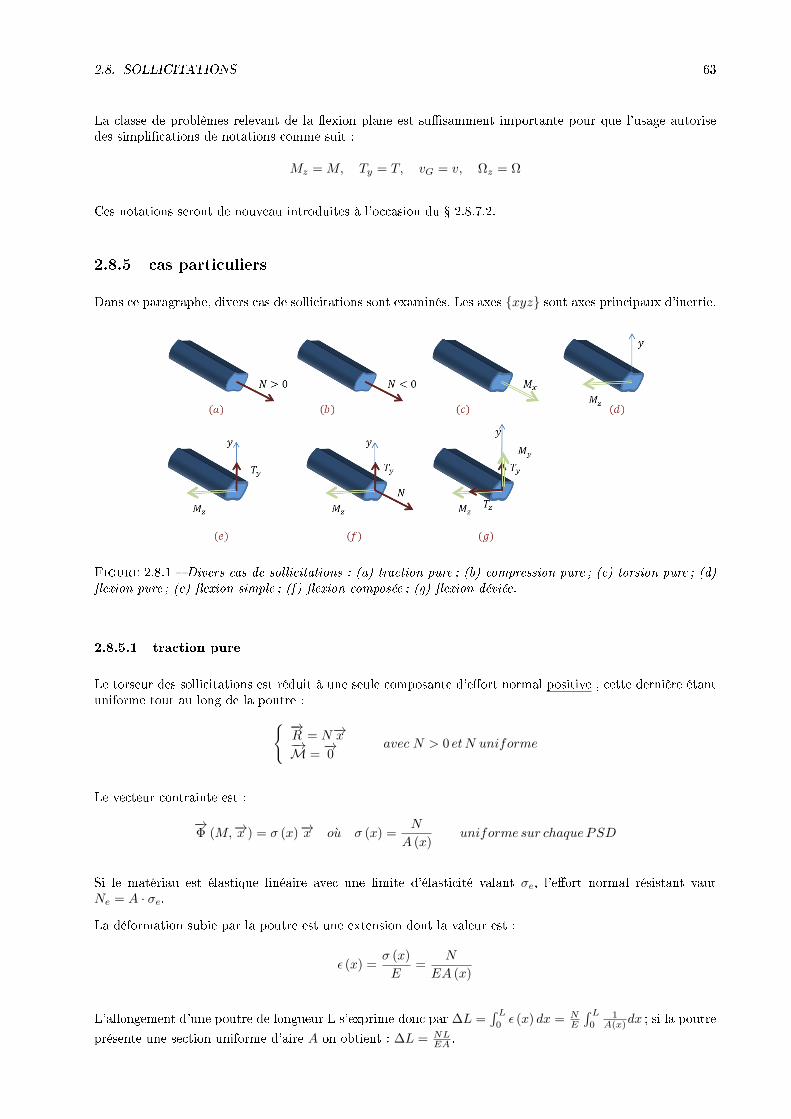
2.8. SOLLICITATIONS 63
La classe de problèmes relevant de la exion plane est susamment importante pour que l'usage autorisedes simplications de notations comme suit :
Mz = M, Ty = T, vG = v, Ωz = Ω
Ces notations seront de nouveau introduites à l'occasion du 2.8.7.2.
2.8.5 cas particuliers
Dans ce paragraphe, divers cas de sollicitations sont examinés. Les axes xyz sont axes principaux d'inertie.
Figure 2.8.1 Divers cas de sollicitations : (a) traction pure ; (b) compression pure ; (c) torsion pure ; (d)exion pure ; (e) exion simple ; (f) exion composée ; (g) exion déviée.
2.8.5.1 traction pure
Le torseur des sollicitations est réduit à une seule composante d'eort normal positive , cette dernière étantuniforme tout au long de la poutre : −→
R = N−→x−→M =
−→0
avec N > 0 etN uniforme
Le vecteur contrainte est :
−→Φ (M,−→x ) = σ (x)−→x ou σ (x) =
N
A (x)uniforme sur chaquePSD
Si le matériau est élastique linéaire avec une limite d'élasticité valant σe, l'eort normal résistant vautNe = A · σe.
La déformation subie par la poutre est une extension dont la valeur est :
ε (x) =σ (x)
E=
N
EA (x)
L'allongement d'une poutre de longueur L s'exprime donc par ∆L =´ L
0ε (x) dx = N
E
´ L0
1A(x)dx ; si la poutre
présente une section uniforme d'aire A on obtient : ∆L = NLEA .

64 CHAPITRE 2. THÉORIE DES POUTRES
2.8.5.2 compression pure
Le torseur des sollicitations est réduit à une seule composante d'eort normal négative , cette dernière étantuniforme tout au long de la poutre : −→
R = N−→x−−→MG =
−→0
avec N < 0 etN uniforme
Sauf à vérier que l'eort normal, en valeur absolue, reste inférieur à une valeur critique Nc, la poutre peutêtre aectée par un phénomène d'instabilité de forme appelé ambement . Dans les structures, les poteauxsont les plus susceptibles de compression.
Les phénomènes de stabilité (ambement, cloquage, déversement, instabilité d'ensemble d'une ossature) sonttraités complètement dans le cours de stabilité du Master de Génie Civil.
2.8.5.3 torsion pure
Le torseur des sollicitations est réduit à une seule composante axiale de moment , cette dernière étantuniforme tout au long de la poutre : −→
R =−→0
−−→MG = Mx
−→xavec Mx uniforme
La distribution des contraintes de cisaillement de torsion est abordée dans le chapitre TORSION .
2.8.5.4 exion pure
Le torseur des sollicitations est réduit à une seule composante transversale de moment selon une directionprincipale (ici z), cette composante étant uniforme tout au long de la poutre : −→
R =−→0
−−→MG = Mz
−→zavec Mz uniforme
En absence de sollicitation transversale, les contraintes de cisaillement sont nulles. Seule subsiste unecontrainte normale fonction de la variable y selon la loi σxx (x, y, z) = σ (y) = −MI y où la quantité Idésigne le moment d'inertie quadratique I = Iz de la section autour de l'axe principal Gz.
Comme le moment échissant est uniforme, il en est de même quant à la courbure de la poutre déforméedans le plan xy : χ = M
EI est uniforme si la poutre possède une inertie constante. La déformée adopte donc laforme d'une courbe de courbure uniforme, c'est-à-dire la forme d'un arc de cercle de rayon R = 1
χ d'autantplus petit que le moment échissant est accentué. C'est la raison pour laquelle la exion pure est aussi parfoisqualiée de circulaire.
2.8.5.5 exion simple (2D)
La exion simple correspond à la situation de la exion plane ( 2.8.4) en l'absence d'eort normal. Insistonssur le fait que les actions agissant sur la poutre s'exercent selon un plan de symétrie qui est nécessairementplan principal d'inertie.
Le torseur des sollicitations est réduit à une composante transversale de moment selon la direction principalez, adjointe à une composante d'eort tranchant selon l'axe y : −→
R = Ty (x)−→y = T (x)−→y−−→MG = Mz (x)−→z = M (x)−→z
La distribution de contrainte normale dans un plan de section droite dépend du moment échissant dansladite section (fonction de x) et est une fonction linéaire de la variable y (voir le 2.5.5.1) : σxx (x, y, z) =
σ (x, y) = −M(x)I y . A noter qu'une contrainte normale positive agissant sur une facette située à une cote
y positive contribue négativement au moment échissant d'ensemble. La distribution des contraintes de cisaillement −→τ (x, y, z) = τy (x, y, z)−→y + τz (x, y, z)−→z dues à la exionest détaillée dans le chapitre CISAILLEMENT DE FLEXION dans ce cours.

2.8. SOLLICITATIONS 65
2.8.5.6 exion composée
La exion composée combine un état de exion simple tel qu'envisagé ci-dessus avec un état de traction-compression. Le torseur des sollicitations s'écrit :
−→R = N (x)−→x + Ty (x)−→y = N (x)−→x + T (x)−→y−−→MG = Mz (x)−→z = M (x)−→z
Il dière de celui de la exion simple par la présence de l'eort normal, ce dernier contribuant à l'expressionde la contrainte normale : σxx (x, y, z) = σ (x, y) = N(x)
A − M(x)I y .
2.8.5.7 exion déviée
La exion déviée associe les exions dans les deux plans xy et xz. Dans chaque plan le moment échissantest naturellement associé à son eort tranchant.
Le torseur des sollicitations s'écrit donc :
−→R = Ty (x)−→y + Tz (x)−→z−−→MG = My (x)−→y +Mz (x)−→z
Les moments échissants contribuent au développement de la contrainte normale ( 2.5.5.1) et les eortstranchants à celui des contraintes de cisaillement de exion (chapitre 3).
2.8.6 caractéristiques géométriques d'un plan de section droite
Il convient d'insister ici sur le fait que les sollicitations, en particulier les sollicitations normales, sont dé-nies dans le système d'axes principaux d'inertie de la poutre. Le calcul des sollicitations normales requiertl'évaluation de certaines caractéristiques géométriques du PSD 16 : l'aire de section droite A et les inertiesprincipales Iy et Iz. L'évaluation de ces deux dernières grandeurs nécessite la détermination de la positiondu centre d'inertie G et l'orientation des axes principaux d'inertie.
Des illustrations des développements qui suivent, sous forme d'exercices corrigés, se trouvent sur le sitesciencespourlingenieur.
L'objectif de ce paragraphe est de donner une méthode de détermination de ces caractéristiques.
Figure 2.8.2 Plan de section droite. A gauche : repère quelconque rs centré en O et repère uv , parallèleau précédent, centré au centre d'inertie G. A droite : rotation du repère uv autour de Gx d'un angle α0 pourformer le système d'axes principaux d'inertie Gyz.
16. NOTE : Le calcul des sollicitations transverses nécessitera le calcul d'autres caractéristiques comme cela sera vu dans leschapitres consacrés au cisaillement.

66 CHAPITRE 2. THÉORIE DES POUTRES
2.8.6.1 aire de section droite
Dénition 55. L'aire de section droite A est simplement la somme des petits éléments de surface dΣcomposant le PSD. Le résultat est un invariant et ne dépend pas du système de projection. D'un point devue formel on écrit :
A =
¨
Σ
dΣ
Par exemple, A =˜
Σdr · ds dans le système Ors. On rappelle que l'intégrale de surface se calcule comme
une intégrale double, puis comme une double intégrale, après avoir précisé les bornes d'intégration. Dans lerepère cartésien Ors on aurait une intégrale de la forme :
A =
smaxˆ
smin
rsup(s)ˆ
rinf (s)
dr
ds =
smaxˆ
smin
[rsup (s)− rinf (s)] ds
Dans la plupart des situations le PSD (Σ) se décompose en gures géométriques simples (rectangulaires leplus souvent) et le cumul des aires de ces gures permet d'éviter de manipuler des intégrales doubles.
Figure 2.8.3 Plan de section droite en forme de cornière. (a) A gauche : cornière épaisse. (b) A droite :cornière mince.
Considérons la gure 2.8.3 représentant une cornière ; celle-ci est composée de deux rectangles. Dans lecas général (a) l'aire A vaut A = b1 × h1 + b2 × h2. Mais dans le cas du prol mince où l'épaisseur e estnégligeable devant la longueur L (e L) on peut écrire A = L1 × e1 + L2 × e2 sans se préoccuper du petitrectangle d'aire e1 × e2 situé à l'intersection des deux ailes parce qu'il forme un inniment petit d'ordresupérieur.
2.8.6.2 position du centre de gravité ou centre d'inertie - moments statiques
Dénition 56. Le centre de gravité G (ou centre d'inertie lorsque la section est homogène) est le point duPSD de moment statique nul : ¨
Σ
−−→GP · dΣ =
−→0
Par exemple, supposons la géométrie du PSD dénie dans le système d'axes Ors centré sur O danslequel les coordonnées de G sont (rG, sG). Alors la relation précédente peut être ré-écrite sous la forme˜
Σ
(−−→GO +
−−→OP)· dΣ =
−→0 . Par conséquent :
−−→OG =
1
A
¨
Σ
−−→OP · dΣ
2.8. SOLLICITATIONS 67
Ce qui détermine les coordonnées de G : rG = 1A
˜Σr · dΣ et sG = 1
A
˜Σs · dΣ . Dans ces expressions les
deux intégrales Ss =˜
Σr · dΣ et Sr =
˜Σs · dΣ représentent respectivement les moments statiques du PSD
par rapport aux axes Gs et Gr.
Théorème 57. 1er théorème de Huygens 17 : le moment statique d'un PSD par rapport à un axe est égalau produit de l'aire du PSD par la distance (algébrique) qui sépare le CD dudit axe.
Ss = rG ×A et Sr = sG ×A
De nouveau, dans le cas où le PSD résulte de la juxtaposition de formes simples, on peut s'aranchir ducalcul des intégrales doubles. Il sut de cumuler les moments statiques (autour du même axe) des diérentesparties composant le PSD. Pour illustrer cela, on se rapporte à l'exemple donné par la cornière de la gure2.8.3.
1. Cas de la cornière épaisse : Ss = Ss1 + Ss2 (somme des moments statiques de chaque rectangle).Ss1 = A1 × h1
2 et Ss2 = A2 × h2
2 avec A1 = h1 × b1 et A2 = h2 × b2 de sorte que Ss = 12
(b1h
21 + b2h
22
)et, par voie de conséquence, rG = Ss
A = 12 ×
b1h21+b2h
22
b1h1+b2h2. On procède de même pour sG.
2. Cas de la cornière mince : Ss2 = 12e2L
22 et Ss1 ' 0 (terme en L1e
21 négligeable devant le terme L2
2e2).
Donc rG = 12 ×
e2L22
e1L1+e2L2.
2.8.6.3 orientation du repère principal et inerties principales - cercle de Mohr des inerties
Dénition 58. Le repère principal d'inertie est le repère yz centré sur le centre d'inertie G tel que leproduit d'inertie Πyz soit nul 18 :
Πyz =
¨
Σ
yz · dΣ = 0
Remarque 59. Un axe de symétrie est obligatoirement axe principal 19.
Dans ce paragraphe on s'attache, en l'absence de symétrie, à la détermination de l'orientation des axesprincipaux yz par rapport à des axes uv choisis arbitrairement ainsi qu'à la détermination des inertiesprincipales. Pour se faire, il faudra passer d'un repère à l'autre (voir la gure 2.8.2). Changement d'axe par translation : on considère les systèmes d'axes parallèles rs et uv respectivementcentrés en O choisi et G centre d'inertie. La position d'un point P quelconque s'établit dans le 1er systèmepar le vecteur
−−→OP = r−→u + s−→v et dans le second par le vecteur
−−→GP = u−→u +v−→v . Comme
−−→GP =
−−→OP −
−−→OG,
on voit que u = r − rG et v = s − sG. Ces deux dernières relations expriment la transformation descoordonnées de P par translation de base. Calculons l'inertie du PSD autour de Os, alors Is =
˜Σr2dΣ ;
soit :
Is =
¨
Σ
(rG + u)2dΣ = r2
G
¨
Σ
dΣ + 2rG
¨
Σ
udΣ +
¨
Σ
u2dΣ
Puisque G est centre d'inertie, la seconde intégrale est nulle et donc :
Is = Iv + r2G ×A
On démontrerait une relation analogue pour l'inertie autour de Or 20.
Ir = Iu + s2G ×A
Ces deux dernières relations montrent que les moments d'inertie sont minimaux lorsque les axes par rapportauxquels ils sont calculés passent par le centre d'inertie. Cette remarque permettrait de dénir le centred'inertie en tant que point de concours des axes d'inerties minimales.
17. Christiaan Huygens (1629-1695) mathématicien, astronome et mécanicien Néerlandais à l'origine de la notion de quan-tité de mouvement ou, selon l'expression de l'époque, des forces vives .18. Dans ce paragraphe on adopte la notation : Πst =
˜Σ st · dΣ
19. La démonstration est immédiate puisque la symétrie du PSD par rapport à un axe rend la coordonnée transversaleimpaire ; de ce fait les intégrales calculées sur chaque moitié de PSD sont opposées.20. On remarquera que les inerties calculées par rapport aux axes passant par le centre d'inertie sont minimales

68 CHAPITRE 2. THÉORIE DES POUTRES
Théorème 60. 2ème théorème de Huygens : L'inertie d'un PSD par rapport à un axe ∆ est égal à l'inertiedu PSD par rapport à l'axe δ parallèle et passant par le CdG augmentée du produit de l'aire du PSD par lecarré de la distance des deux axes.
Is = Iv + r2G ×A et Ir = Iu + s2
G ×A
Déterminons la relation de changement d'axes par translation pour ce qui concerne le produit d'inertie :
Πrs =
¨
Σ
rsdΣ =
¨
Σ
(rG + u) (sG + v) dΣ = rGsG
¨
Σ
dΣ
︸ ︷︷ ︸A
+rG
¨
Σ
vdΣ
︸ ︷︷ ︸Su=0
+sG
¨
Σ
udΣ
︸ ︷︷ ︸Sv=0
+
¨
Σ
uvdΣ
︸ ︷︷ ︸Πuv
parmi ces intégrales, on reconnaît, dans l'ordre : l'aire de section droite, les moments statiques par rapportaux axes Gu et Gv et le produit d'inertie par rapport à ces mêmes axes. Puisque G est centre d'inertieles moments statiques sont nuls. Il reste donc :
Πrs = Πuv + rGsG ×A
chacun des termes, hormis A, pouvant être négatif. Changement d'axe par rotation : On considère le système d'axes Guv centré sur le centre d'inertie entant que repère de référence. Soit Gyz le repère obtenu par rotation d'un angle α autour de Gx durepère Guv.Considérons un point P quelconque du PSD. Le vecteur
−−→GP peut être exprimé soit dans le repère de
référence Guv, soit dans le repère pivoté Gyz. Pour cela il faut exprimer les vecteurs de la premièrebase dans la seconde : −→y = cosα−→u + sinα−→v
−→z = − sinα−→u + cosα−→v ou
−→y = c−→u + s−→v−→z = −s−→u + c−→v en posant s = sinα et c = cosα
Comme−−→GP = u−→u + v−→v = y−→y + z−→z , il vient :
u = cy − szv = sy + cz
⇔y = cu+ svz = −su+ cv
On peut maintenant évaluer l'inertie par rapport à Gy, l'inertie par rapport à Gz et le produit d'inertiepar rapport aux axes orthogonaux directs yz .
Tout d'abord calculons l'inertie Iz = Λyy autour de Gz 21 :
Iz = Λyy =
¨
Σ
y2dΣ
Par changement de base :
Λyy =
¨
Σ
(cu+ sv)2dΣ = c2
¨
Σ
u2dΣ + 2cs
¨
Σ
uvdΣ + s2
¨
Σ
v2dΣ
On voit apparaître les termes suivants : Iv = Λuu =˜
Σu2dΣ inertie autour deGv
Iu = Λvv =˜
Σv2dΣ inertie autour deGu
Πuv =˜
ΣuvdΣ produit d′inertie par rapport aux axesGuv
soit :Λyy = c2Λuu + s2Λvv + 2csΠuv
21. On adopte la notation 'lambda' Λuu =˜
Σ u2dΣ lorsque l'intégrande est formé avec le carré de la variable u et la notation
'pi' Πuv =˜
Σ uvdΣ quand les deux variables u et v sont diérentes (et transverses). Par conséquent Λuu est le moment d'inertiepar rapport à l'axe transverse à u et donc Λuu = Iv et, naturellement Πuv correspond au produit d'inertie.

2.8. SOLLICITATIONS 69
et on montrerait de la même manière que :
Λzz = s2Λuu + c2Λvv − 2csΠuv
Le terme 2cs = 2 cosα sinα évoque immanquablement l'angle double 2α. En eet, on se rappelle lesrelations dites de l'angle double comme suit :
sin 2α = 2 sinα cosα = 2cscos 2α = cos2 α− sin2 α = c2 − s2 et donc : c2 =
1
2(1 + cos 2α) et s2 =
1
2(1− cos 2α)
Ce qui permet d'exprimer, eectivement Λyy en fonction de l'angle double :
Λyy =1
2(Λuu + Λvv) +
a︷ ︸︸ ︷
1
2(Λuu − Λvv) cos 2α+
b︷︸︸︷Πuv sin 2α
Le groupe formé par les deux derniers termes, dans le crochet, prend la forme :
a cos 2α+ b sin 2α ou a =1
2(Λuu − Λvv) et b = Πuv
que l'on ré-écrit de la façon suivante :
a cos 2α+ b sin 2α =√a2 + b2
(a√
a2 + b2cos 2α+
b√a2 + b2
sin 2α
)On introduit l'angle α0 tel que :
cos 2α0 =a√
a2 + b2et sin 2α0 =
b√a2 + b2
et, donc, tan 2α0 =b
a
Par conséquent le groupe a cos 2α+ b sin 2α devient 22 :
a cos 2α+ b sin 2α =√a2 + b2 (cos 2α cos 2α0 + sin 2α sin 2α0) =
R︷ ︸︸ ︷√a2 + b2 cos (2α0 − 2α)
En résumé, en supposant que Λuu 6= Λvv :
Λyy = I0 +R cos (2α0 − 2α) ou
I0 = 1
2 (Λuu + Λvv) > 0
R = 12
√(Λuu − Λvv)
2+ (2Πuv)
2
tan 2α0 = 2ΠuvΛuu−Λvv
> 0
De la même façon calculons calculons le produit d'inertie Πyz23 :
Πyz =
¨
Σ
yzdΣ =
¨
Σ
(cu+ sv) (−su+ cv) dΣ
soit :
Πyz = −cs
¨
Σ
u2dΣ
︸ ︷︷ ︸Λuu
−¨
Σ
v2dΣ
︸ ︷︷ ︸Λvv
+(c2 − s2
)¨Σ
uvdΣ
︸ ︷︷ ︸Πuv
employons de nouveau l'angle double 24 :
Πyz = − sin 2α×1
2(Λuu − Λvv)︸ ︷︷ ︸
a
+ cos 2αΠuv︸︷︷︸b
=√a2 + b2 (− sin 2α cos 2α0 + cos 2α sin 2α0) =
√a2 + b2 sin (2α0 − 2α)
et, donc :Πyz = R sin (2α0 − 2α)
22. On rappelle que : cos (α− β) = cosα cosβ + sinα sinβ23. Noter qu'un produit d'inertie peut être négatif.24. On rappelle que : sin (α− β) = sinα cosβ − cosα sinβ

70 CHAPITRE 2. THÉORIE DES POUTRES
A partir des résultats qui précèdent, introduisons la transformée de MohrM de la façon suivante :A tout repère Gyz incliné de l'angle α par rapport au repère de référence Guv on associe un point Pdu plan ane image (∆) dont les coordonnées sont formées par l'inertie Λyy autour de Gz (abscisse) et leproduit d'inertie Πyz par rapport à l'axe Gy et par rapport à l'axe orthogonal direct Gz (ordonnée) :
M : α 7−→ P ∈ (∆) tq P (α) =
(Λyy (α)Πyz (α)
)Λ,Π
Les coordonnées du point P (α) sont donc :
P (α) =
(Λyy = I0 +R cos (2α0 − 2α)Πyz = R sin (2α0 − 2α)
)avec
I0 = 1
2 (Λuu + Λvv)
R = 12
√(Λuu − Λvv)
2+ (2Πuv)
2
tan 2α0 = 2ΠuvΛuu−Λvv
Par conséquent, le point P décrit un cercle de centre C (I0, 0) sur l'axe Π et de rayon R lorsque l'angleα varie 25. Ce cercle s'appelle cercle de Mohr des inerties. Quand le repère Gyz tourne d'un angle αdans le sens direct, le point représentatif correspondant P (α) tourne le long de la circonférence du cercled'un angle égal à −2α (donc dans le sens opposé).Le point P0 correspondant au repère initial Guv correspond à l'angle α = 0 ; il a pour coordonnées :
P0 = P (0) =
(Λuu = I0 +R cos 2α0
Πuv = R sin 2α0
)Le point P1 correspondant à l'angle α = π
2 est associé au repère Gv,−u 26. Ses coordonnées sont :
P1 = P(π
2
)=
(I0 +R cos (2α0 − π)R sin (2α0 − π)
)=
(Λzz = I0 −R cos 2α0
−R sin 2α0
)car on montre très aisément que :
Iy = Λzz = I0 −R cos 2α0
Ces deux points sont diamétralement opposés et dénissent totalement le cercle de Mohr.
Inerties principales : elles correspondent aux points de produit d'inertie nul : Πyz = R sin (2α0 − 2α) = 0donc quand 2 (α0 − α) = kπ c'est à dire quand
α = α0 − kπ
2
On voit ainsi que les axes principaux sont orthogonaux entre eux. Dans ces conditions les inerties principalessont respectivement maximale et minimale. Elles correspondent aux abscisses des points d'intersection ducercle de Mohr avec l'axe Π :
Λmax = I0 +R et Λmin = I0 −R
Ces valeurs mini et maxi sont aectées aux axes principaux Gyz.
Théorème 61. Les axes principaux d'inertie sont orthogonaux entre eux. Les inerties principales sontmaximale et minimale.
Construction pratique du cercle de Mohr des inerties :Note : La construction qui suit est proposée dans le cas où Λuu > Λvv et Πuv > 0.
1. tracer les axes Λ(abscisses) et Π (ordonnées), choisir une échelle (en mm pour m4) ;
2. calculer l'inertie Iv = Λuu par rapport à l'axe Gv ainsi que le produit d'inertie Πuv ; reporter le pointP de coordonnées Λuu,Πuv dans le plan de Mohr ;
3. calculer l'inertie Iu = Λvv par rapport à l'axe Gu ; reporter le point P ′ de coordonnées Λvv,−Πuvdans le plan de Mohr ;
25. On voit en eet que les coordonnées du point P satisfont l'équation [Λyy − I0]2 + Π2yz = R2.
26. En eet si le repère Guv tourne de +π2, l'axe u est rabattu sur v mais l'axe v est rabattu sur −u ! !

2.8. SOLLICITATIONS 71
Figure 2.8.4 Cercle de Mohr des inerties. uv est un repère centré au CdG choisi arbitrairement ou pourdes considérations de simplicité géométrique tandis que yz est le système d'axes principal. Par exemple,dans le cas d'une cornière, il est simple d'adopter des axes u et v parallèles aux ailes mais ces axes ne sontpas principaux et sont donc inappropriés pour dénir les sollicitations.
4. déterminer le centre du cercle de Mohr P0 en tant que milieu du segment [PP ′] ; celui-ci est obliga-toirement situé sur l'axe des Λ ; son abscisse vaut I0 = 1
2 (Λuu + Λvv) ;
5. tracer le cercle de Mohr de centre P0 et de rayon R = |P0P | = 12
√(Λuu − Λvv)
2+ (2Πuv)
2 ;
6. le cercle de Mohr intercepte l'axe des Λ en deux endroits correspondant aux inerties principalesIz = Λyy et Iy = Λzz ;
7. relever l'inclinaison de [P0P ] avec l'axe Λ ; c'est, au signe près, le double de l'inclinaison des axesprincipaux d'inertie par rapport au système d'axes uv initial.
8. par diverses projections et relations élémentaires dans des triangles-rectangles déduire toute autregrandeur utile le cas échéant.
2.8.6.4 Représentation de Mohr alternative
Nous avons déni la transformation de Mohr par :
M : α 7−→ P ∈ (∆) tq P (α) =
(Iz = Λyy (α)Πyz (α)
)Λ,Π
Nous aurions pû prendre cette autre convention :
M′ : α 7−→ P ∈ (∆) tq P (α) =
(Iy = Λzz (α)Πyz (α)
)Λ,Π
Les coordonnées du point P (α) guratif du repère yz incliné de α par rapport au repère de référence uvseraient alors :
P (α) =
(Λyy = I0 +R cos (2α0 + 2α)Πyz = R sin (2α0 + 2α)
)avec les mêmes dénitions que précédemment pour les grandeurs I0, R mais avec α0 déni par :
tan 2α0 =Πuv
Iu − Iv=
Πuv
Λvv − Λuu
Par conséquent, le point P décrit encore un cercle de Mohr de centre C (I0, 0) sur l'axe Π et de rayon Rlorsque l'angle α varie mais, cette fois, quand le repère Gyz tourne d'un angle α dans le sens direct, le point
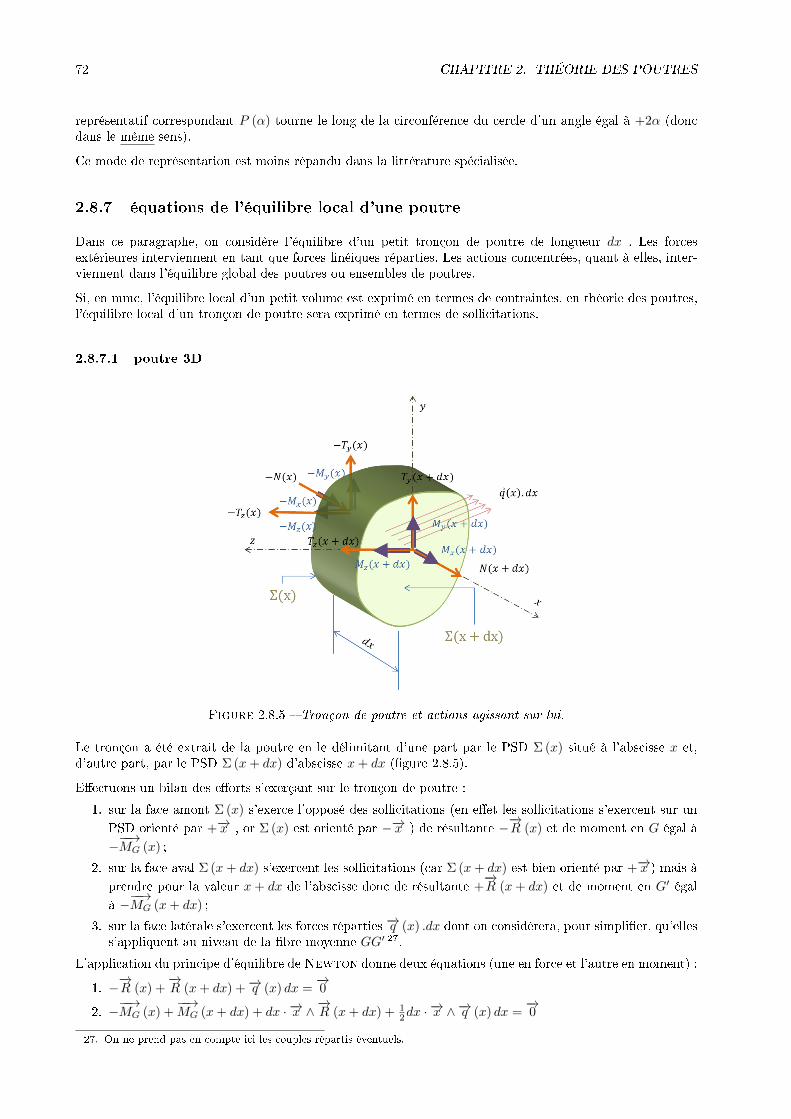
72 CHAPITRE 2. THÉORIE DES POUTRES
représentatif correspondant P (α) tourne le long de la circonférence du cercle d'un angle égal à +2α (doncdans le même sens).
Ce mode de représentation est moins répandu dans la littérature spécialisée.
2.8.7 équations de l'équilibre local d'une poutre
Dans ce paragraphe, on considère l'équilibre d'un petit tronçon de poutre de longueur dx . Les forcesextérieures interviennent en tant que forces linéiques réparties. Les actions concentrées, quant à elles, inter-viennent dans l'équilibre global des poutres ou ensembles de poutres.
Si, en mmc, l'équilibre local d'un petit volume est exprimé en termes de contraintes, en théorie des poutres,l'équilibre local d'un tronçon de poutre sera exprimé en termes de sollicitations.
2.8.7.1 poutre 3D
Figure 2.8.5 Tronçon de poutre et actions agissant sur lui.
Le tronçon a été extrait de la poutre en le délimitant d'une part par le PSD Σ (x) situé à l'abscisse x et,d'autre part, par le PSD Σ (x+ dx) d'abscisse x+ dx (gure 2.8.5).
Eectuons un bilan des eorts s'exerçant sur le tronçon de poutre :
1. sur la face amont Σ (x) s'exerce l'opposé des sollicitations (en eet les sollicitations s'exercent sur un
PSD orienté par +−→x , or Σ (x) est orienté par −−→x ) de résultante −−→R (x) et de moment en G égal à
−−−→MG (x) ;
2. sur la face aval Σ (x+ dx) s'exercent les sollicitations (car Σ (x+ dx) est bien orienté par +−→x ) mais à
prendre pour la valeur x + dx de l'abscisse donc de résultante +−→R (x+ dx) et de moment en G′ égal
à −−−→MG (x+ dx) ;
3. sur la face latérale s'exercent les forces réparties −→q (x) .dx dont on considèrera, pour simplier, qu'elless'appliquent au niveau de la bre moyenne GG′ 27.
L'application du principe d'équilibre de Newton donne deux équations (une en force et l'autre en moment) :
1. −−→R (x) +
−→R (x+ dx) +−→q (x) dx =
−→0
2. −−−→MG (x) +
−−→MG (x+ dx) + dx · −→x ∧
−→R (x+ dx) + 1
2dx ·−→x ∧ −→q (x) dx =
−→0
27. On ne prend pas en compte ici les couples répartis éventuels.

2.9. LOIS DE COMPORTEMENT 73
où−→R = N−→x + Ty
−→y + Tz−→z et
−−→MG = Mx
−→x +My−→y +Mz
−→z sont des fonctions vectorielles de la variable x .
En éliminant les inniment petits d'ordre supérieur, il vient 28 :
d−→Rdx +−→q =
−→0
d−−→MG
dx +−→x ∧−→R =
−→0
(2.8.2)
soit, scalairement :dNdx + qx = 0dTydx + qy = 0dTzdx + qz = 0dMx
dx = 0dMy
dx − Tz = 0dMz
dx + Ty = 0
(2.8.3)
Ces six équations régissent les conditions de l'équilibre statique local des poutres. Elles doivent êtreconsidérées comme le pendant de l'équation
−−→div σ+
−→fv =
−→0 qui prévaut en mécanique des milieux continus.
2.8.7.2 poutre 2D
En deux dimensions, dans le plan xy, le nombre de sollicitations est réduit à 3 (eort normal, eorttranchant et moment échissant) ; aussi les notations sont-elles simpliées :
NTy = TTz = 0Mx = 0My = 0Mz = M
Le nombre d'équations d'équilibre est également réduit à 3 :
dNdx + qx = 0dTdx + qy = 0dMdx + T = 0
(2.8.4)
Les deux dernières équations se combinent en d2Mdx2 = qy et par voie de conséquence :
si la distribution de force répartie transversale est uniforme alors le diagramme de moment échissantprend une forme parabolique. La courbure est de même signe que la distribution des eorts.
si la distribution de force est nulle alors le diagramme de moment échissant est linéaire.
2.9 Lois de comportement
En théorie des poutres, une loi de comportement associe une sollicitation à la déformation associée.
2.9.1 Sollicitations normales
Les lois de comportement concernant les sollicitations normales ont déjà été établies au paragraphe 2.8.3(équations 2.8.1). Le résultat est résumé sous forme de tableau ci-dessous.
sollicitation déformation module de Young 29 caractéristique géométrique relation (linéaire)
N εG E aire section droite : A N = EAεGMy χy E inertie autour de y : Iy My = EIyχyMz χz E inertie autour de z : Iz Mz = EIzχz
28. On rappelle l'expression générique dfdu
= limdu→0
f(u+du)−f(u)du
⇒ f (u+ du)− f (u) ' df .

74 CHAPITRE 2. THÉORIE DES POUTRES
2.9.2 Extension aux sollicitations transversales
Le tableau précédent montre, qu'en théorie des poutres, une loi de comportement prend la forme : sollicitation =module × caracteristique × deformation. Bien qu'à l'état actuel de nos développements nous ne sachionspas encore calculer les sollicitations transversales, puisqu'elles dépendent des contraintes de cisaillementdont nous ignorons tout, nous allons généraliser la forme des lois de comportement aux dites sollicitationstransversales de la façon suivante.
sollicitation déformation module de cisaillement caractéristique géométrique relation (linéaire)
Ty γy G section réduite selon y : A′y Ty = GA′yγyTz γz G section réduite selon z : A′z Tz = GA′zγzMx α G inertie de torsion autour de x : J Mx = GJα
Trois nouvelles caractéristiques géométriques sont ainsi introduites mais non pas encore explicitées. Il s'agit dedeux sections réduites homogènes à une aire comme leur nom le suggère et l'inertie de torsion homogèneen[L4]. Le calcul de ces caractéristiques sera détaillé dans les chapitres cisaillement de exion puis
torsion .
2.10 Champ de déplacement
2.10.1 objet
On s'intéresse à la façon de calculer le champ de déplacement dans une poutre en supposant les sollicitationsconnues.
La méthode est commune aux diérentes composantes de déplacement :
1. on pose la relation déplacement - déformation
2. on utilise la ou les lois de comportement
3. on déduit une relation diérentielle portant sur la composante de déplacement d'intérêt.
2.10.2 rotation axiale
Le taux de rotation a été déni par α = dΩxdx (relation 2.5.1)
D'autre part la loi de comportement d'intérêt s'écrit : Mx = GJα
Par conséquent :dΩxdx
=Mx
GJ(2.10.1)
Cette équation s'intègre en
Ωx (x)− Ω0x =
ˆ x
0
Mx (u)
GJ (u)du
où u est une variable muette d'intégration 30.
Si la poutre est homogène et d'inertie de torsion constante alors :
Ωx (x) = Ω0x +
1
GJ
ˆ x
0
Mx (u) du
Par exemple si le moment de torsion Mx est uniforme tout au long de la poutre et que cette dernière estencastrée à son origine de sorte que Ω0
x = 0, il vient Ωx (x) = Mx
GJ x.
30. Il n'est pas correct d'adopter la même notation pour la variable d'intégration et pour la borne supérieure de l'intégrale.La variable d'intégration disparaît du résultat puisqu'elle ne sert qu'à eectuer la sommation, elle peut donc être remplacée partoute autre notation (ici u) en tant que variable muette . On notera d'ailleurs l'analogie rencontrée avec les sommes discrètespour lesquelles on peut écrire indiéremment : ΣNi=1ai ou ΣNk=1ak pour désigner la même somme.

2.10. CHAMP DE DÉPLACEMENT 75
2.10.3 autres rotations
Autour de l'axe z, dans le plan xy, la courbure est dénie par χz = dΩzdx
La loi de comportement moment échissant - courbure s'écrit : Mz = EIzχz
Par conséquent :dΩzdx
=Mz
EIz(2.10.2)
Équation qui s'intègre en :
Ωz (x) = Ω0z +
ˆ x
0
Mz (u)
EIz (u)du
Et dans l'autre plan :dΩydx
=My
EIy(2.10.3)
et donc :
Ωy (x) = Ω0y +
ˆ x
0
My (u)
EIy (u)du
2.10.4 déplacement axial
La déformation axiale de la poutre au niveau du centre d'inertie G est εGx = duGdx
La loi de comportement en eort normal s'écrit : N = EAεGx
Par voie de conséquence :duGdx
=N
EA
Relation qui s'intègre en
uG (x) = u0G +
ˆ x
0
N (u)
EA (u)du
ou encore
uG (x) = u0G +
1
EA
ˆ x
0
N (u) du
dans le cas d'une poutre homogène de d'aire de section droite constante.
2.10.5 déplacements transversaux
Dans le plan xy le déplacement transversal dépend de deux déformations : dvGdx = Ωz + γGy
Il nous faut donc mobiliser deux lois de comportement : χz = Mz
EIzet γGy =
TyGA′y
Par dérivation et substitution :d2vGdx2
=Mz
EIz+
d
dx
[TyGA′y
]
Et dans l'autre plan :d2wGdx2
= −My
EIy+
d
dx
[TzGA′z
]

76 CHAPITRE 2. THÉORIE DES POUTRES
cas particulier où les distorsions sont négligeables Dans le cas de la exion dans le plan xy, si lasection réduite A′y est grande, il est légitime de négliger le terme γGy devant Ωz de sorte que, en premièreapproximation, on puisse écrire dvG
dx ' Ωz31. La pente de la ligne moyenne déformée est égale à la rotation
du plan de section droite ; ce qui s'énonce par au cours de la déformation de la poutre les PSD restentdroits . dans ce cas, on admet la relation approchée 32 suivante :
d2vGdx2
' Mz
EIz
Une première intégration entre 0 et x donne :
dvGdx− Ω0
z =
xˆ
t=0
Mz (t)
EIz (t)dt
Supposons la poutre à inertie constante alors :
dvGdx− Ω0
z =1
EIz
xˆ
t=0
Mz (t) dt
Intégrons de nouveau :
vG (x)− v0G − Ω0
zx =1
EIz
xˆ
0
uˆ
0
Mz (t) dt · du
Intégrons par partie :
vG (x)− v0G − Ω0
zx =1
EIz
u · uˆ
0
Mz (t) dt
x0
−xˆ
0
u ·Mz (u) du
Soit :
vG (x) = v0G + Ω0
zx+1
EIz
x · xˆ
0
Mz (u) du−xˆ
0
u ·Mz (u) du
ou :
vG (x) = v0G + Ω0
zx+1
EIz
xˆ
0
(x− u)Mz (u) du (2.10.4)
relation connue sous formule de Bresse 33 .
31. On retombe sur l'hypothèse de Bernoulli selon laquelle les plans de section droite de la poutre restent droits aucours de la déformaton d'ensemble.32. Il faut se souvenir que cette relation a été établie avec une hypothèse de petits déplacements ce qui implique aussi de
faibles pentes et courbures. En toute rigueur, lorsque la distorsion est nulle, la courbure χz n'est pas égale à d2vGdx2 mais à
χexactez =
d2vGdx2√
1 +(dvGdx
)23
Dans la plupart des situations, la relation approchée est acceptable (ce qui revient à considérer la pente comme faible devantl'unité). Toutefois l'emploi de la formule approchée dans le traitement des problèmes de stabilité peut entraîner des singularitésmathématiques comme c'est le cas, par exemple, dans le traitement des problèmes de ambement par la méthode d'Euler (voirle cours de stabilité pour plus d'information).33. Jacques Antoine Charles Bresse (1822-1883) ingénieur en chef des Ponts et Chaussées auteur des équations du même
nom et de travaux sur la exion des poutres et des arcs.
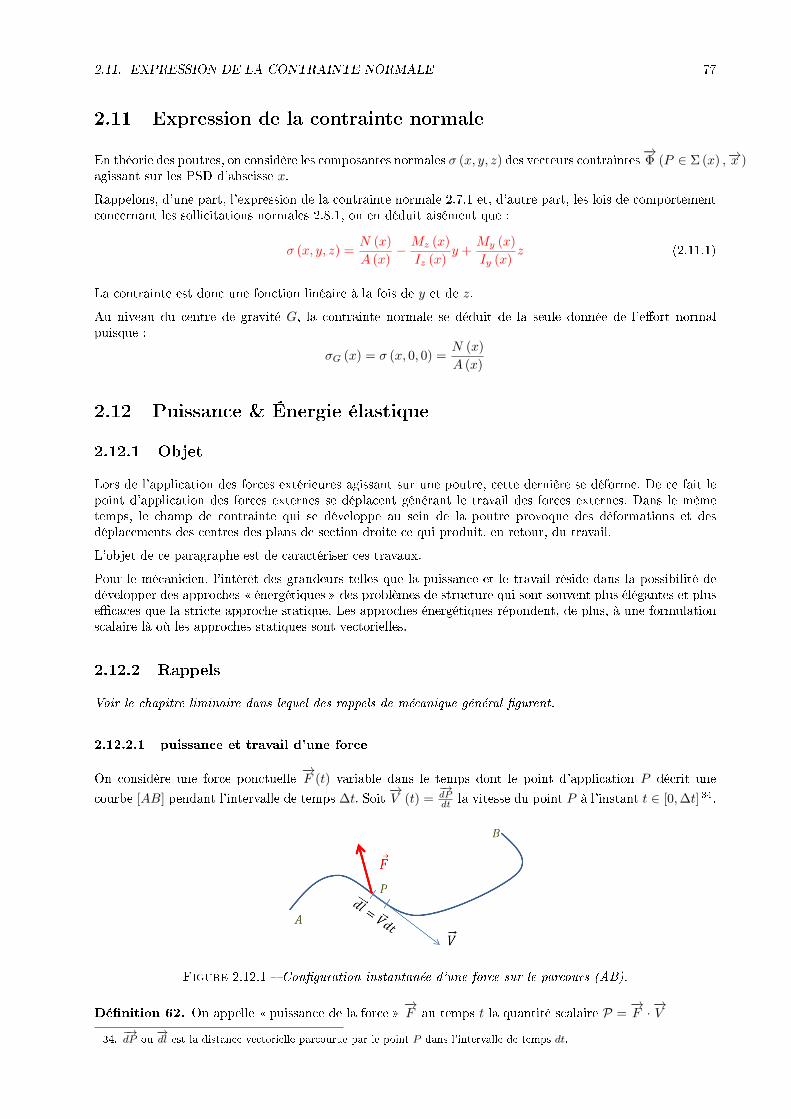
2.11. EXPRESSION DE LA CONTRAINTE NORMALE 77
2.11 Expression de la contrainte normale
En théorie des poutres, on considère les composantes normales σ (x, y, z) des vecteurs contraintes−→Φ (P ∈ Σ (x) ,−→x )
agissant sur les PSD d'abscisse x.
Rappelons, d'une part, l'expression de la contrainte normale 2.7.1 et, d'autre part, les lois de comportementconcernant les sollicitations normales 2.8.1, on en déduit aisément que :
σ (x, y, z) =N (x)
A (x)− Mz (x)
Iz (x)y +
My (x)
Iy (x)z (2.11.1)
La contrainte est donc une fonction linéaire à la fois de y et de z.
Au niveau du centre de gravité G, la contrainte normale se déduit de la seule donnée de l'eort normalpuisque :
σG (x) = σ (x, 0, 0) =N (x)
A (x)
2.12 Puissance & Énergie élastique
2.12.1 Objet
Lors de l'application des forces extérieures agissant sur une poutre, cette dernière se déforme. De ce fait lepoint d'application des forces externes se déplacent générant le travail des forces externes. Dans le mêmetemps, le champ de contrainte qui se développe au sein de la poutre provoque des déformations et desdéplacements des centres des plans de section droite ce qui produit, en retour, du travail.
L'objet de ce paragraphe est de caractériser ces travaux.
Pour le mécanicien, l'intérêt des grandeurs telles que la puissance et le travail réside dans la possibilité dedévelopper des approches énergétiques des problèmes de structure qui sont souvent plus élégantes et plusecaces que la stricte approche statique. Les approches énergétiques répondent, de plus, à une formulationscalaire là où les approches statiques sont vectorielles.
2.12.2 Rappels
Voir le chapitre liminaire dans lequel des rappels de mécanique général gurent.
2.12.2.1 puissance et travail d'une force
On considère une force ponctuelle−→F (t) variable dans le temps dont le point d'application P décrit une
courbe [AB] pendant l'intervalle de temps ∆t. Soit−→V (t) =
−→dPdt la vitesse du point P à l'instant t ∈ [0,∆t] 34.
Figure 2.12.1 Conguration instantanée d'une force sur le parcours (AB).
Dénition 62. On appelle puissance de la force −→F au temps t la quantité scalaire P =
−→F ·−→V
34.−→dP ou
−→dl est la distance vectorielle parcourue par le point P dans l'intervalle de temps dt.

78 CHAPITRE 2. THÉORIE DES POUTRES
L'unité de puissance est le Watt 35 : 1W = 1N.m/s
Dénition 63. On appelle travail élémentaire de la force−→F pendant l'intervalle innitésimal de temps
dt, la quantité dW = P · dt
L'unité de travail est le Joule 36 : 1J = 1W.s = 1N.m
Dénition 64. On appelle travail de la force−→F entre A et B (ou pendant l'intervalle de temps ∆t), la
somme des travaux élémentaires lorsque le point P décrit la courbe [AB] (ou que le temps s'écoule de ∆t) :
W =
∆tˆ
0
dW =
∆tˆ
0
Pdt =
∆tˆ
0
−→F ·−→V dt =
∆tˆ
0
−→F ·−→dl
2.12.2.2 puissance et travail d'un torseur
On considère un torseur de force déni par ses éléments de réduction en un point A : FA =
−→R−−→MA
A
On suppose que le torseur agit sur un solide (S) indéformable (notamment un plan de section droite depoutre) dont le champ de vitesse est déni par un torseur cinématique également déni par ses éléments de
réductions en A : CA =
−→Ω−→uA
A
. A noter que, selon ces notations,−→Ω et
−→uA désignent respectivement le
vecteur vitesse de rotation du solide (S) et la vitesse du point A ∈ (S) 37.
Figure 2.12.2 La puissance d'un couple agissant sur un solide en rotation.
Dénition 65. La puissance instantanée à l'instant t du torseur de force agissant sur le solide (S) est égaleau comoment de ce torseur de force par le torseur cinématique 38 :
P = FA ⊗ CA =−→R · −→uA +
−−→MA ·
−→Ω
A noter que les deux puissances sont dimensionnellement homogènes : d'un coté force×vitesse donne l'équa-tion aux dimensions [F ]
[L.T−1
], de l'autre moment× vitesse de rotation donne l'équation aux dimensions
[F.L][T−1
].
35. L'unité tire son nom de James Watt (1736-1819) ingénieur Anglais auteur de contributions majeures dans le domainedes machines à vapeur.36. James Prescott Joule (1818-1889) physicien Anglais, découvreur de l'eet du même nom en électrocinétique.37. De façon générale, on notera x la dérivée de x par rapport au temps.38. Le comoment de deux torseurs est égal au produit de la résultante du premier torseur par le moment du second ajouté
au produit de la résultante du second torseur par le moment du premier. Naturellement ce calcul s'eectue avec les élémentsde réduction au même point pour les deux torseurs. On voit que la puissance d'un couple est égale au produit scalaire duditcouple par la vitesse de rotation du solide sur lequel il agit. Le comoment est commutatif. Le comomoment est un invariant (savaleur ne dépend pas du centre de réduction A choisi, ni du système de projection).

2.12. PUISSANCE & ÉNERGIE ÉLASTIQUE 79
Dénition 66. Le travail du torseur résulte de l'intégrale de sa puissance instantanée dans l'intervalle detemps ∆t :
W =
∆tˆ
0
FA ⊗ CA · dt =
∆tˆ
0
−→R ·−−→duA +
−−→MA ·
−→dΩ
2.12.3 Densité de puissance d'une poutre
Dans ce paragraphe, on considère un tronçon de poutre comme nous l'avions vu dans le 2.8.7 (gure 2.8.5),mais cette fois, non seulement nous considérons les eorts agissant sur ce tronçon mais aussi les déplacementsproduits par ces forces.
A partir de la gure 2.12.3on peut résumer les informations pertinentes aux développements qui suivent sousla forme d'un tableau.
surface torseur de force torseur cinématique
Σ (x)
−−→R (x)
−−−→MG (x)
G
−→Ω (x)−→UG (x)
G
Σ (x+ dx)
−→R (x+ dx)−−→MG (x+ dx)
G′
−→Ω (x+ dx)−→UG (x+ dx)
G′
Γsurface latérale
−→q (x) dx−→0
G”
−→Ω(x+ dx
2
)−→UG(x+ dx
2
)G”
Le tronçon de poutre est délimité par 3 surfaces : Σ (x) est la face arrière orientée par −−→x de centre G d'abscisse x ; Σ (x) est la face avant orientée par +−→x de centre G′ d'abscisse x+ dx ; Γ est la surface latérale à laquelle on substitue le morceau de bre moyenne [GG′] de milieu G” d'abscissex+ dx
2 . Ce segment est soumis au glisseur de résultante −→q (x) dx appliqué en G”.Dans ce tableau les torseurs cinématiques sont exprimés en termes de vitesse instantanée.
Figure 2.12.3 Tronçon de poutre : actions (à gauche) et déplacements (à droite).
La puissance développée par l'ensemble des torseurs agissant sur le tronçon de poutre de longueur dx estnotée dP = pdx . La quantité p est appelée densité de puissance (c'est la puissance par unité de longueurde poutre). dP est cumulative et résulte de la somme des puissances de chacun des torseurs :
dP = −−→R (x)
−→UG (x)−
−−→MG (x)
−→Ω (x)+
−→R (x+ dx)
−→UG (x+ dx)+
−−→MG (x+ dx)
−→Ω (x+ dx)+−→q (x) dx·
−→UG
(x+
dx
2
)

80 CHAPITRE 2. THÉORIE DES POUTRES
Ce qui s'écrit aussi, en négligeant l'inniment petit d'ordre inférieur en[dx2]39 :
dP = d
[−→R−→UG +
−−→MG
−→Ω
]+−→q dx ·
−→UG
Par conséquent 40 :
p =dPdx
=
d−→Rdx +−→q︸ ︷︷ ︸=−→0
−→UG +−→Rd−→UGdx
+d−−→MG
dx︸ ︷︷ ︸=−−→x ∧
−→R
−→Ω +
−−→MG
d−→Ω
dx
On se rappellera les équations de l'équilibre local (équations 2.8.2 et accolades ci-dessus) qui permettent legroupement suivant 41 :
p =dPdx
=−→Rd−→UGdx
+−→Ω(−−→x ∧
−→R)
+−−→MG
d−→Ω
dx=−→R
d−→UGdx
+−→x ∧−→Ω
+−−→MG
d−→Ω
dx
Matriciellement :
p =
NTyTz
d ˙uGdxd ˙vGdxdwGdx
+
100
∧ Ωx
ΩyΩz
+
Mx
My
Mz
dΩydxdΩydxdΩzdx
Soit, compte tenu des relations déjà établies en 2.5.5.2 :
p =
NTyTz
εG = duGdx
γy = dvGdx − Ωz
γz = dwGdx + Ωy
+
Mx
My
Mz
α =
dΩydx
χy =dΩydx
χy = dΩzdx
Il apparaît donc que la densité de puissance instantanée due à la déformation d'une poutre est égale à lasomme des produits sollicitation × vitesse de deformation associee ce qui peut être résumé à la fois dansun tableau et par la formule générale ci-dessous (en gras gurent les sollicitations en 2D).
sollicitation taux de déformation puissance
eort normal N élongation εG N × εGeort tranchant Ty distorsion γy Ty × γyeort tranchant Tz distorsion γz Tz × γz
moment de torsion Mx taux angulaire α Mx × αmoment échissant My courbure χy My × χy
moment échissant Mz courbure χz Mz × χz
p = NεG + Tyγy + Tz γz +Mxα+Myχy +Mzχz (2.12.1)
En deux dimensions et en notations simpliées ( 2.8.7.2) :
p = NεG + T γ +Mχ (2.12.2)
39. car, selon les notations usuelles en physique : f (x+ dx)− f (x) = df . Ceci étant applicable alors même que la fonction fs'exprimerait comme le produit de deux fonctions h et g. Ainsi h (x+ dx) g (x+ dx)− h (x) g (x) = d (hg).40. il est bien connu que d (hg) = h · dg + g · dh et donc que d
dx(hg) = h · d
dxg + g · d
dxh .
41. Rappelons la propriété d'invariance par permutation circulaire du produit mixte : −→x(−→y ∧ −→z ) = −→y
(−→z ∧ −→x ) =−→z(−→x ∧ −→y ).

2.12. PUISSANCE & ÉNERGIE ÉLASTIQUE 81
2.12.4 Densité d'énergie élastique
A partir de la densité de puissance, on passe à la densité de travail par une simple intégration dans l'intervallede temps [0,∆t] pendant lequel la poutre passe de sa conguration initiale au repos à sa conguration nale.On désigne par w (minuscule) cette densité de travail :
w =
∆tˆ
0
p · dt =
∆tˆ
0
(NεG + Tyγy + Tz γz +Mxα+Myχy +Mzχz) dt
Que l'on ré-écrit sous la forme :
w =
∆t (config finale)ˆ
0 (config initiale)
N · dεG + Ty · dγy + Tz · dγz +Mx · dα+My · dχy +Mz · dχz
Tenons compte des lois de comportement élastique établies au 2.9 :
w =
∆t (config finale)ˆ
0 (config initiale)
EAεG · dεG +GA′yγy · dγy +GA′zγz · dγz +GJα · dα+ EIyχy · dχy + EIzχz · dχz
Que l'on intègre aisément en :
w =1
2
[EAε2G +GA′yγ
2y +GA′zγ
2z +GJα2 + EIyχ
2y + EIzχ
2z
]config finaleconfig initiale
Si l'on convient qu'à l'instant initial t = 0 la poutre n'est pas déformée, cette expression est réduite à 42 :
w =1
2
(EAε2G +GA′yγ
2y +GA′zγ
2z +GJα2 + EIyχ
2y + EIzχ
2z
)(2.12.3)
Comme cette densité de travail est imputable aux forces intérieures (les sollicitations) liées linéairement auxdéformations, la quantité w est appelée densité d'énergie élastique . On notera la structure de chaqueterme de densité d'énergie élastique : 1/2×module× (deformation)
2 . Le coecient 1/2 est la signature de l'élasticité linéaire. L'expression 2.12.3 est formulée en termes de déformation mais, grâce aux lois decomportement déjà vues à plusieurs reprises, on peut aussi exprimer la densité d'énergie élastique en termesde sollicitations ou même de façon mixte :
w =1
2(NεG + Tyγy + Tzγz +Mxα+Myχy +Mzχz) (2.12.4)
w =1
2
N2
EA︸︷︷︸effort normal
+T 2y
GA′y+
T 2z
GA′z︸ ︷︷ ︸cisaillement de flexion
+M2x
GJ+M2y
EIy︸ ︷︷ ︸moments flechissants︸ ︷︷ ︸
FLEXION
+M2z
EIz︸︷︷︸cisaillement de torsion
(2.12.5)
En deux dimensions la densité d'énergie (ou énergie linéique) s'exprime plus simplement par :
w =1
2
(EAε2G +GA′γ2 + EIχ2
)=
1
2(NεG + Tγ +Mχ) =
1
2
(N2
EA+
T 2
GA′+M2
EI
)(2.12.6)
C'est une fonction de la variable x.
42. Les valeurs des déformations apparaissant dans cette expression correspondent aux valeurs nales (on omet d'indiquerexplicitement, par exemple, que α vaut en réalité αfinale).

82 CHAPITRE 2. THÉORIE DES POUTRES
2.12.5 Énergie élastique
L'énergie élastique, désignée parW majuscule, d'une poutre ou d'un ensemble de poutres est tout simplementégale à la somme des énergies élastiques de ses parties. Il en résulte que :
W =
ˆ
(S)
w (x) · dx
W =
ˆ
(S)
1
2
(N2
EA+
T 2y
GA′y+
T 2z
GA′z+M2x
GJ+M2y
EIy+M2z
EIz
)· dx (2.12.7)
Et en 2 dimensions :
W =
ˆ
(S)
1
2
(N2
EA+
T 2
GA′+M2
EI
)· dx (2.12.8)
L'intérêt du concept d'énergie élastique et des formules associées apparaîtra plus clairement dans les chapitresconcernant le calcul des structures.
2.13 Résumé du chapitre
*** A DÉVELOPPER ***

Chapitre 3
Cisaillement de exion
Mise à jour du 17 février 2014.
3.1 Objet
La théorie des poutres abordée dans le chapitre précédent n'apporte pas d'éléments d'information concernantla distribution des contraintes de cisaillement dans les plans de section droite. Toutefois :
1. les contraintes de cisaillement existent et contribuent à former deux composantes d'eort tranchant etun moment de torsion
Ty =˜
ΣτydΣ
Tz =˜
ΣτzdΣ
Mx =˜
Σ[yτz − zτy] dΣ
Ce chapitre supposera l'absence de torsion et ne portera que sur le cisaillement de exion. La questionde l'existence et des conditions de la exion sans torsion est donc posée.
2. on a introduit la notion de section réduite permettant de lier la distorsion au niveau du centre degravité avec l'eort tranchant :
Ty = GA′yγGy
Tz = GA′zγGz
Il y a donc lieu de pouvoir calculer les caractéristiques de sections réduites.
3.2 Équilibre d'une calotte de poutre
On a vu, pour ce qui concerne les contraintes de cisaillement, que la théorie des poutre pêchait parce qu'ellecontredisait les équations de l'équilibre local de la mmc. De ce fait, on aborde la question de l'équilibre d'un morceau de poutre sous contraintes tout en s'appuyant sur la réciprocité des contraintes de cisaillement.
On considère ainsi un tronçon de poutre délimitée par deux plans de section droite Σ (x) et Σ (x+ dx)inniment voisins et distants de dx.
Dans une seconde étape on découpe ce tronçon par une ligne (AB) et on considère l'une des parties ainsiobtenues et que l'on désigne par calotte de poutre.
La calotte est délimitée par :
1. la fraction Ω = Ω (x) du plan de section droite Σ (x) orienté par −−→x , tronqué par la courbe (AB) ;
2. la fraction Ω′ = Ω (x+ dx) du plan de section droite Σ (x+ dx) orienté par +−→x , également tronquépar la courbe (AB) ;
3. la surface latérale naturelle (Λ) de la calotte générée par le bord libre Σ (x) dans sa translation de dxdans la direction −→x ;
83
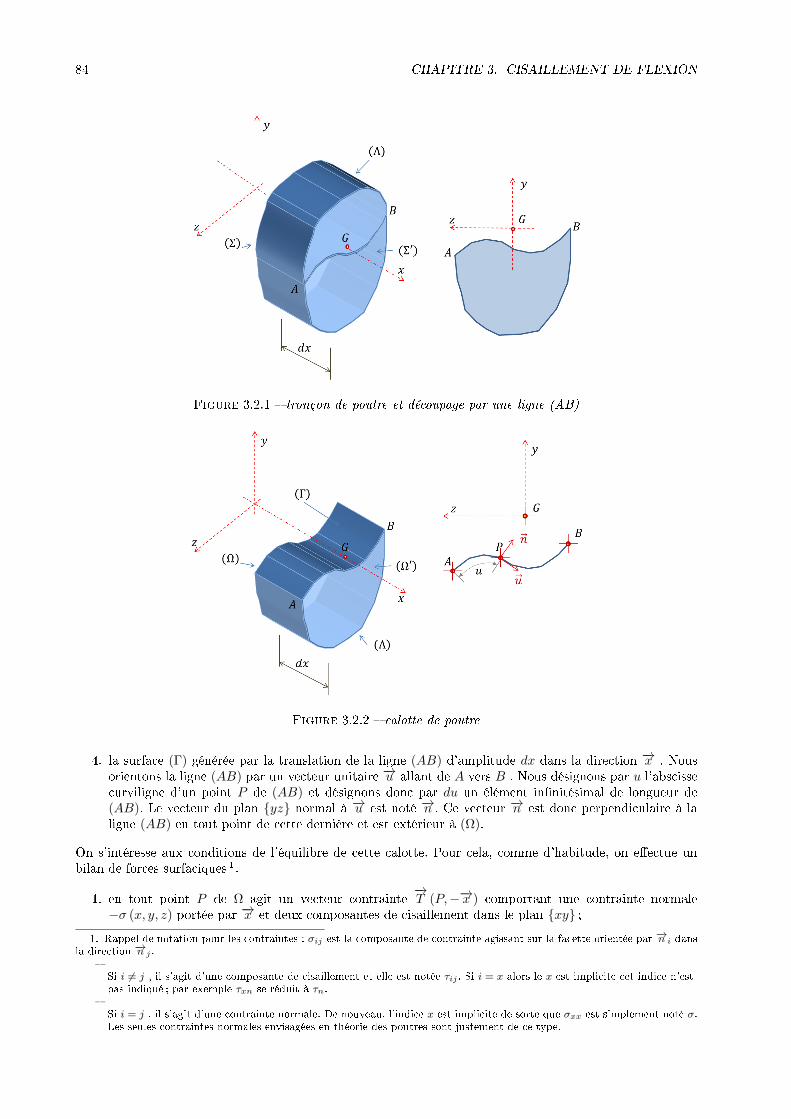
84 CHAPITRE 3. CISAILLEMENT DE FLEXION
Figure 3.2.1 tronçon de poutre et découpage par une ligne (AB)
Figure 3.2.2 calotte de poutre
4. la surface (Γ) générée par la translation de la ligne (AB) d'amplitude dx dans la direction −→x . Nousorientons la ligne (AB) par un vecteur unitaire −→u allant de A vers B . Nous désignons par u l'abscissecurviligne d'un point P de (AB) et désignons donc par du un élément innitésimal de longueur de(AB). Le vecteur du plan yz normal à −→u est noté −→n . Ce vecteur −→n est donc perpendiculaire à laligne (AB) en tout point de cette dernière et est extérieur à (Ω).
On s'intéresse aux conditions de l'équilibre de cette calotte. Pour cela, comme d'habitude, on eectue unbilan de forces surfaciques 1.
1. en tout point P de Ω agit un vecteur contrainte−→T (P,−−→x ) comportant une contrainte normale
−σ (x, y, z) portée par −→x et deux composantes de cisaillement dans le plan xy ;
1. Rappel de notation pour les contraintes : σij est la composante de contrainte agissant sur la facette orientée par −→n i dansla direction −→n j .
Si i 6= j , il s'agit d'une composante de cisaillement et elle est notée τij . Si i = x alors le x est implicite cet indice n'estpas indiqué ; par exemple τxn se réduit à τn.
Si i = j , il s'agit d'une contrainte normale. De nouveau, l'indice x est implicite de sorte que σxx est simplement noté σ.Les seules contraintes normales envisagées en théorie des poutres sont justement de ce type.
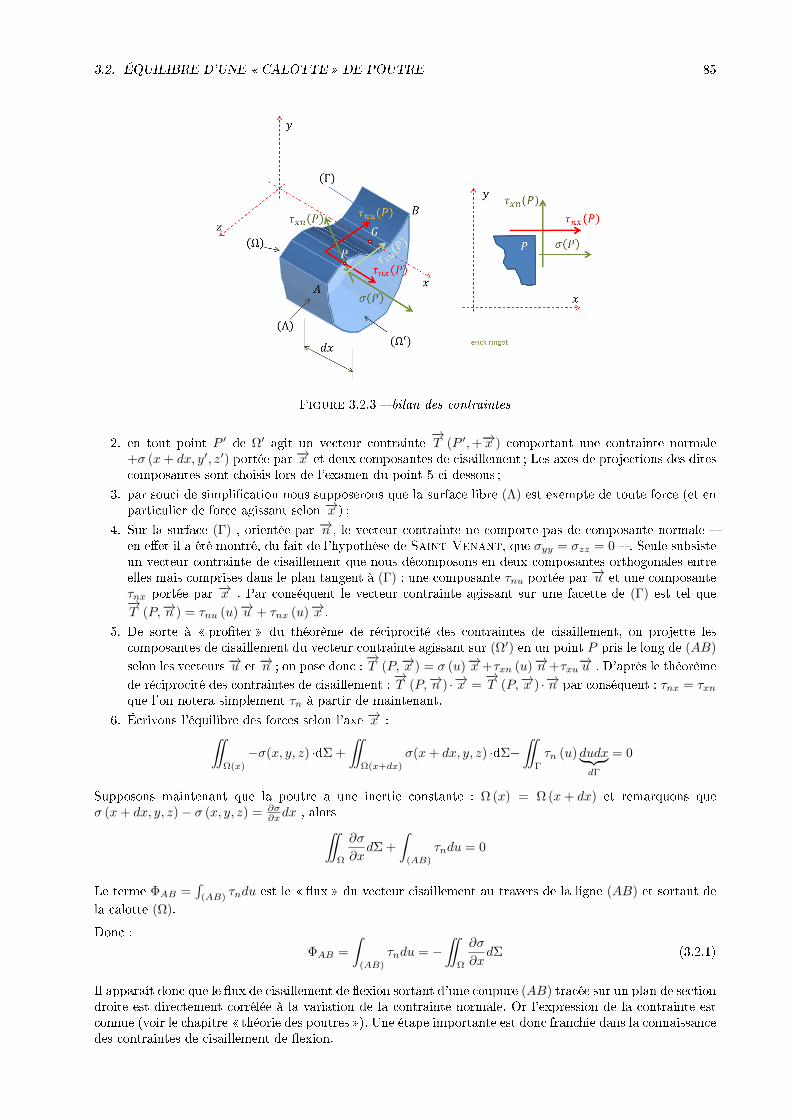
3.2. ÉQUILIBRE D'UNE CALOTTE DE POUTRE 85
Figure 3.2.3 bilan des contraintes
2. en tout point P ′ de Ω′ agit un vecteur contrainte−→T (P ′,+−→x ) comportant une contrainte normale
+σ (x+ dx, y′, z′) portée par −→x et deux composantes de cisaillement ; Les axes de projections des ditescomposantes sont choisis lors de l'examen du point 5 ci-dessous ;
3. par souci de simplication nous supposerons que la surface libre (Λ) est exempte de toute force (et enparticulier de force agissant selon −→x ) ;
4. Sur la surface (Γ) , orientée par −→n , le vecteur contrainte ne comporte pas de composante normale en eet il a été montré, du fait de l'hypothèse de Saint-Venant, que σyy = σzz = 0 . Seule subsisteun vecteur contrainte de cisaillement que nous décomposons en deux composantes orthogonales entreelles mais comprises dans le plan tangent à (Γ) : une composante τnu portée par −→u et une composanteτnx portée par −→x . Par conséquent le vecteur contrainte agissant sur une facette de (Γ) est tel que−→T (P,−→n ) = τnu (u)−→u + τnx (u)−→x .
5. De sorte à proter du théorème de réciprocité des contraintes de cisaillement, on projette lescomposantes de cisaillement du vecteur contrainte agissant sur (Ω′) en un point P pris le long de (AB)
selon les vecteurs −→u et −→n ; on pose donc :−→T (P,−→x ) = σ (u)−→x +τxn (u)−→n +τxu
−→u . D'après le théorème
de réciprocité des contraintes de cisaillement :−→T (P,−→n ) ·−→x =
−→T (P,−→x ) ·−→n par conséquent : τnx = τxn
que l'on notera simplement τn à partir de maintenant.
6. Écrivons l'équilibre des forces selon l'axe −→x :¨Ω(x)
−σ(x, y, z) ·dΣ +
¨Ω(x+dx)
σ(x+ dx, y, z) ·dΣ+¨
Γ
τn (u) dudx︸ ︷︷ ︸dΓ
= 0
Supposons maintenant que la poutre a une inertie constante : Ω (x) = Ω (x+ dx) et remarquons queσ (x+ dx, y, z)− σ (x, y, z) = ∂σ
∂xdx , alors¨
Ω
∂σ
∂xdΣ +
ˆ(AB)
τndu = 0
Le terme ΦAB =´
(AB)τndu est le ux du vecteur cisaillement au travers de la ligne (AB) et sortant de
la calotte (Ω).
Donc :
ΦAB =
ˆ(AB)
τndu = −¨
Ω
∂σ
∂xdΣ (3.2.1)
Il apparaît donc que le ux de cisaillement de exion sortant d'une coupure (AB) tracée sur un plan de sectiondroite est directement corrélée à la variation de la contrainte normale. Or l'expression de la contrainte estconnue (voir le chapitre théorie des poutres ). Une étape importante est donc franchie dans la connaissancedes contraintes de cisaillement de exion.

86 CHAPITRE 3. CISAILLEMENT DE FLEXION
3.3 Formule de Bredt
3.3.1 expression générale
Rappelons la relation contrainte normale - sollicitations 2 :
σ (x, y, z) =N (x)
A− Mz (x)
Izy +
My (x)
Iyz
Calculons-en la dérivée par rapport à x et prenons les équations de l'équilibre local de la poutre 3 en consi-dération :
∂σ
∂x(x, y, z) =
Ty (x)
Izy +
Tz (x)
Iyz (3.3.1)
Substituons cette expression dans l'équation 3.2.1, alors :
ΦAB = −¨
Ω
[TyIzy +
TzIyz
]dΣ = −
(TyIz
˜ΩydΣ + Tz
Iy
˜ΩzdΣ
)
On reconnaît les moments statiques de la section partielle (Ω) autour des axes z et y : on pose Sy (Ω) =˜ΩzdΣ et Sz (Ω) =
˜ΩydΣ.
D'où la formule de Bredt :
ΦAB = −(Ty
Sz(Ω)Iz
+ TzSy(Ω)Iy
)ou (Ω) est delimite par (AB) (3.3.2)
3.3.2 cas où la coupure (AB) est parallèle à Gz
Figure 3.3.1 calotte délimitée par une coupure rectiligne parallèle à Gy ; à droite le cas particulierd'une section de forme rectangulaire et la distribution de contrainte de cisaillement parabolique associée(voir 3.3.3).
Si la coupure (AB) est parallèle à l'axe Gz et est orientée par le vecteur −→y , alors le ux de cisaillementΦf est porté par −→y et vaut :
Φy (y) = −(Ty
Sz(y)Iz
+ TzSy(y)Iy
)(3.3.3)
2. En l'absence de forces axiales qx appliquées à la surface de la poutre, notons que l'eort normal est constant et que, parconséquent, dN
dx= 0
3. Rappelons que dMzdx
= −Ty et quedMydx
= Tz
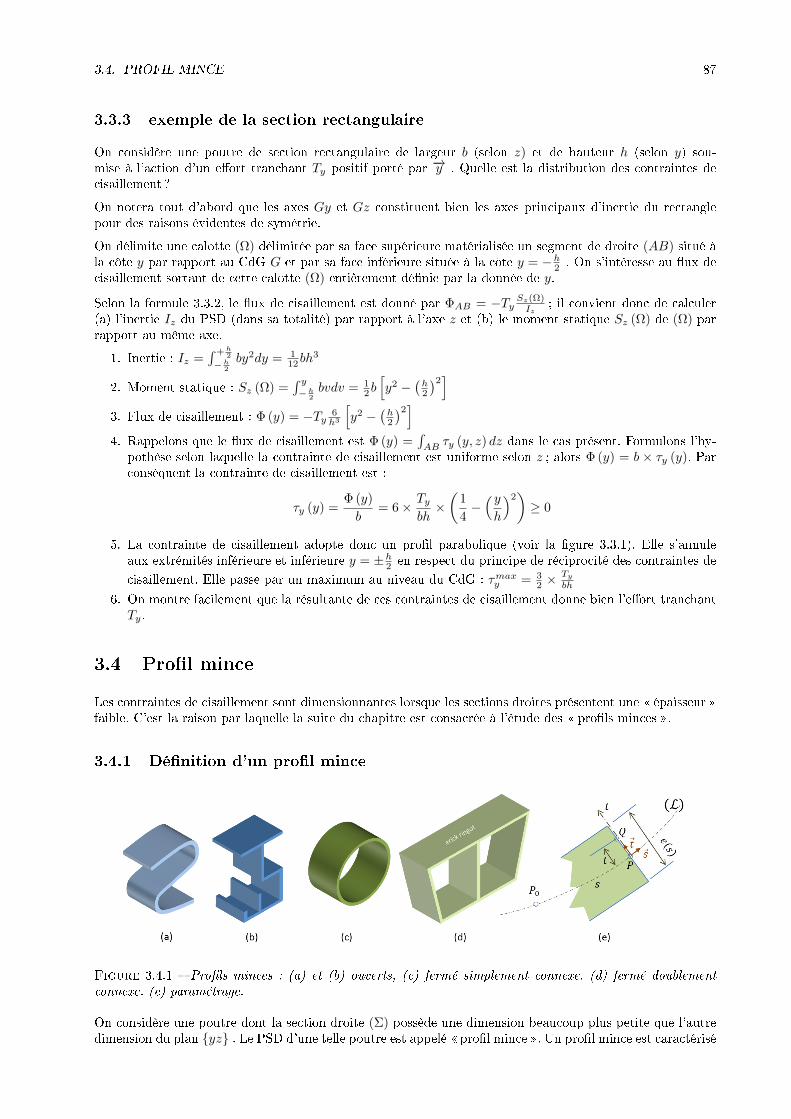
3.4. PROFIL MINCE 87
3.3.3 exemple de la section rectangulaire
On considère une poutre de section rectangulaire de largeur b (selon z) et de hauteur h (selon y) sou-mise à l'action d'un eort tranchant Ty positif porté par −→y . Quelle est la distribution des contraintes decisaillement ?
On notera tout d'abord que les axes Gy et Gz constituent bien les axes principaux d'inertie du rectanglepour des raisons évidentes de symétrie.
On délimite une calotte (Ω) délimitée par sa face supérieure matérialisée un segment de droite (AB) situé àla côte y par rapport au CdG G et par sa face inférieure située à la côte y = −h2 . On s'intéresse au ux decisaillement sortant de cette calotte (Ω) entièrement dénie par la donnée de y.
Selon la formule 3.3.2, le ux de cisaillement est donné par ΦAB = −Ty Sz(Ω)Iz
; il convient donc de calculer(a) l'inertie Iz du PSD (dans sa totalité) par rapport à l'axe z et (b) le moment statique Sz (Ω) de (Ω) parrapport au même axe.
1. Inertie : Iz =´ +h
2
−h2by2dy = 1
12bh3
2. Moment statique : Sz (Ω) =´ y−h2
bvdv = 12b[y2 −
(h2
)2]3. Flux de cisaillement : Φ (y) = −Ty 6
h3
[y2 −
(h2
)2]4. Rappelons que le ux de cisaillement est Φ (y) =
´AB
τy (y, z) dz dans le cas présent. Formulons l'hy-pothèse selon laquelle la contrainte de cisaillement est uniforme selon z ; alors Φ (y) = b × τy (y). Parconséquent la contrainte de cisaillement est :
τy (y) =Φ (y)
b= 6× Ty
bh×(
1
4−(yh
)2)≥ 0
5. La contrainte de cisaillement adopte donc un prol parabolique (voir la gure 3.3.1). Elle s'annuleaux extrémités inférieure et inférieure y = ±h2 en respect du principe de réciprocité des contraintes de
cisaillement. Elle passe par un maximum au niveau du CdG : τmaxy = 32 ×
Tybh
6. On montre facilement que la résultante de ces contraintes de cisaillement donne bien l'eort tranchantTy.
3.4 Prol mince
Les contraintes de cisaillement sont dimensionnantes lorsque les sections droites présentent une épaisseur faible. C'est la raison par laquelle la suite du chapitre est consacrée à l'étude des prols minces .
3.4.1 Dénition d'un prol mince
Figure 3.4.1 Prols minces : (a) et (b) ouverts, (c) fermé simplement connexe, (d) fermé doublementconnexe. (e) paramétrage.
On considère une poutre dont la section droite (Σ) possède une dimension beaucoup plus petite que l'autredimension du plan yz . Le PSD d'une telle poutre est appelé prol mince . Un prol mince est caractérisé
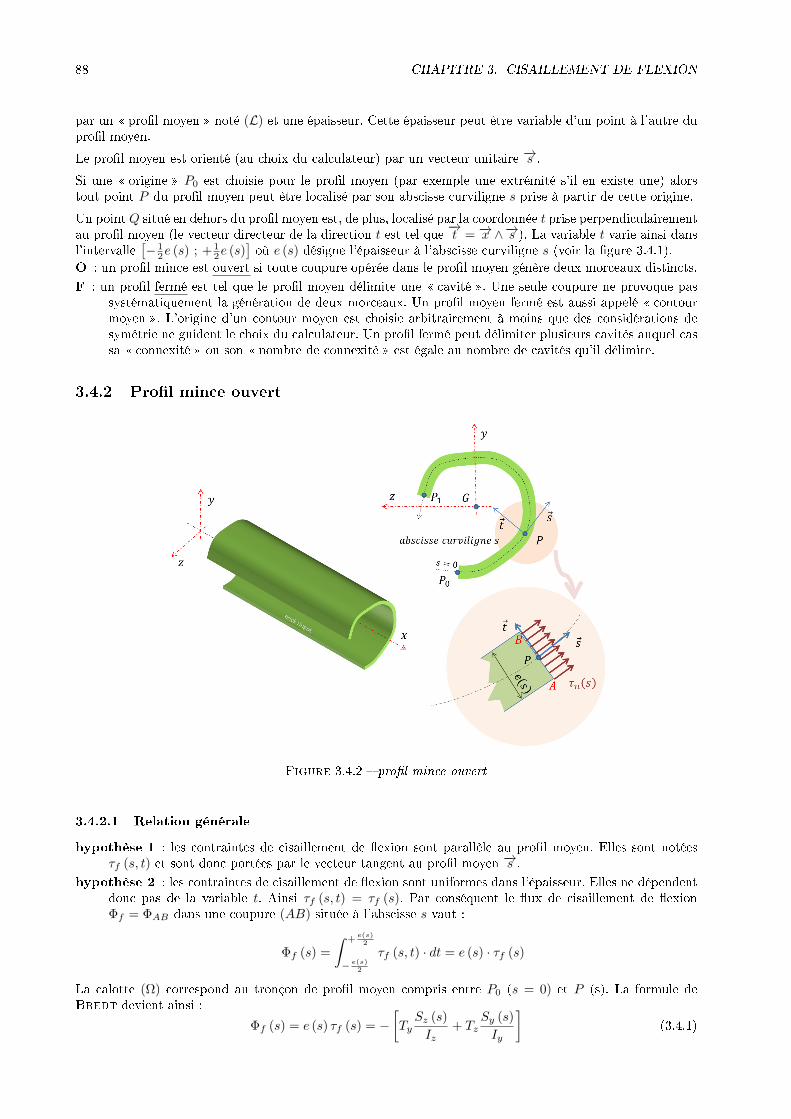
88 CHAPITRE 3. CISAILLEMENT DE FLEXION
par un prol moyen noté (L) et une épaisseur. Cette épaisseur peut être variable d'un point à l'autre duprol moyen.
Le prol moyen est orienté (au choix du calculateur) par un vecteur unitaire −→s .Si une origine P0 est choisie pour le prol moyen (par exemple une extrémité s'il en existe une) alorstout point P du prol moyen peut être localisé par son abscisse curviligne s prise à partir de cette origine.
Un point Q situé en dehors du prol moyen est, de plus, localisé par la coordonnée t prise perpendiculairementau prol moyen (le vecteur directeur de la direction t est tel que
−→t = −→x ∧−→s ). La variable t varie ainsi dans
l'intervalle[− 1
2e (s) ; +12e (s)
]où e (s) désigne l'épaisseur à l'abscisse curviligne s (voir la gure 3.4.1).
O : un prol mince est ouvert si toute coupure opérée dans le prol moyen génère deux morceaux distincts.
F : un prol fermé est tel que le prol moyen délimite une cavité . Une seule coupure ne provoque passystématiquement la génération de deux morceaux. Un prol moyen fermé est aussi appelé contourmoyen . L'origine d'un contour moyen est choisie arbitrairement à moins que des considérations desymétrie ne guident le choix du calculateur. Un prol fermé peut délimiter plusieurs cavités auquel cassa connexité ou son nombre de connexité est égale au nombre de cavités qu'il délimite.
3.4.2 Prol mince ouvert
Figure 3.4.2 prol mince ouvert
3.4.2.1 Relation générale
hypothèse 1 : les contraintes de cisaillement de exion sont parallèle au prol moyen. Elles sont notéesτf (s, t) et sont donc portées par le vecteur tangent au prol moyen −→s .
hypothèse 2 : les contraintes de cisaillement de exion sont uniformes dans l'épaisseur. Elles ne dépendentdonc pas de la variable t. Ainsi τf (s, t) = τf (s). Par conséquent le ux de cisaillement de exionΦf = ΦAB dans une coupure (AB) située à l'abscisse s vaut :
Φf (s) =
ˆ +e(s)
2
− e(s)2
τf (s, t) · dt = e (s) · τf (s)
La calotte (Ω) correspond au tronçon de prol moyen compris entre P0 (s = 0) et P (s). La formule deBredt devient ainsi :
Φf (s) = e (s) τf (s) = −[TySz (s)
Iz+ Tz
Sy (s)
Iy
](3.4.1)
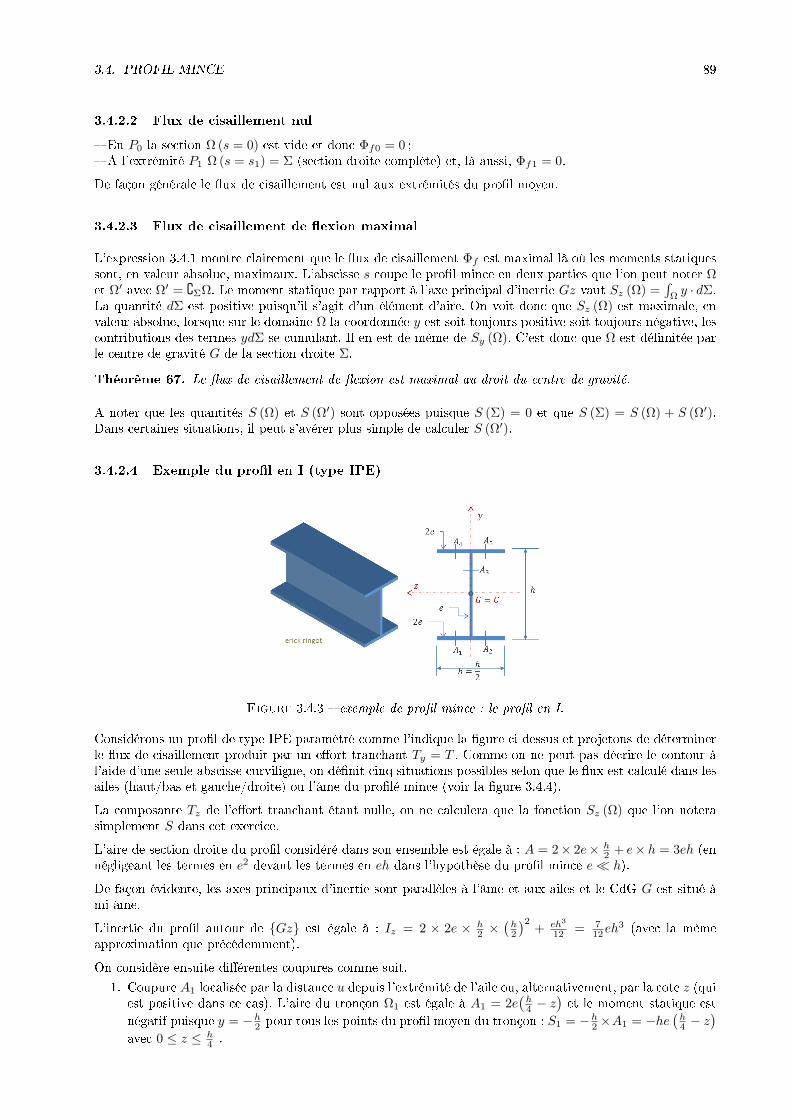
3.4. PROFIL MINCE 89
3.4.2.2 Flux de cisaillement nul
En P0 la section Ω (s = 0) est vide et donc Φf0 = 0 ; A l'extrémité P1 Ω (s = s1) = Σ (section droite complète) et, là aussi, Φf1 = 0.
De façon générale le ux de cisaillement est nul aux extrémités du prol moyen.
3.4.2.3 Flux de cisaillement de exion maximal
L'expression 3.4.1 montre clairement que le ux de cisaillement Φf est maximal là où les moments statiquessont, en valeur absolue, maximaux. L'abscisse s coupe le prol mince en deux parties que l'on peut noter Ωet Ω′ avec Ω′ = ΣΩ. Le moment statique par rapport à l'axe principal d'inertie Gz vaut Sz (Ω) =
´Ωy · dΣ.
La quantité dΣ est positive puisqu'il s'agit d'un élément d'aire. On voit donc que Sz (Ω) est maximale, envaleur absolue, lorsque sur le domaine Ω la coordonnée y est soit toujours positive soit toujours négative, lescontributions des termes ydΣ se cumulant. Il en est de même de Sy (Ω). C'est donc que Ω est délimitée parle centre de gravité G de la section droite Σ.
Théorème 67. Le ux de cisaillement de exion est maximal au droit du centre de gravité.
A noter que les quantités S (Ω) et S (Ω′) sont opposées puisque S (Σ) = 0 et que S (Σ) = S (Ω) + S (Ω′).Dans certaines situations, il peut s'avérer plus simple de calculer S (Ω′).
3.4.2.4 Exemple du prol en I (type IPE)
Figure 3.4.3 exemple de prol mince : le prol en I.
Considérons un prol de type IPE paramétré comme l'indique la gure ci-dessus et projetons de déterminerle ux de cisaillement produit par un eort tranchant Ty = T . Comme on ne peut pas décrire le contour àl'aide d'une seule abscisse curviligne, on dénit cinq situations possibles selon que le ux est calculé dans lesailes (haut/bas et gauche/droite) ou l'âme du prolé mince (voir la gure 3.4.4).
La composante Tz de l'eort tranchant étant nulle, on ne calculera que la fonction Sz (Ω) que l'on noterasimplement S dans cet exercice.
L'aire de section droite du prol considéré dans son ensemble est égale à : A = 2× 2e× h2 + e× h = 3eh (en
négligeant les termes en e2 devant les termes en eh dans l'hypothèse du prol mince e h).
De façon évidente, les axes principaux d'inertie sont parallèles à l'âme et aux ailes et le CdG G est situé àmi-âme.
L'inertie du prol autour de Gz est égale à : Iz = 2 × 2e × h2 ×
(h2
)2+ eh3
12 = 712eh
3 (avec la mêmeapproximation que précédemment).
On considère ensuite diérentes coupures comme suit.
1. Coupure A1 localisée par la distance u depuis l'extrémité de l'aile ou, alternativement, par la cote z (quiest positive dans ce cas). L'aire du tronçon Ω1 est égale à A1 = 2e
(h4 − z
)et le moment statique est
négatif puisque y = −h2 pour tous les points du prol moyen du tronçon : S1 = −h2 ×A1 = −he(h4 − z
)avec 0 ≤ z ≤ h
4 .
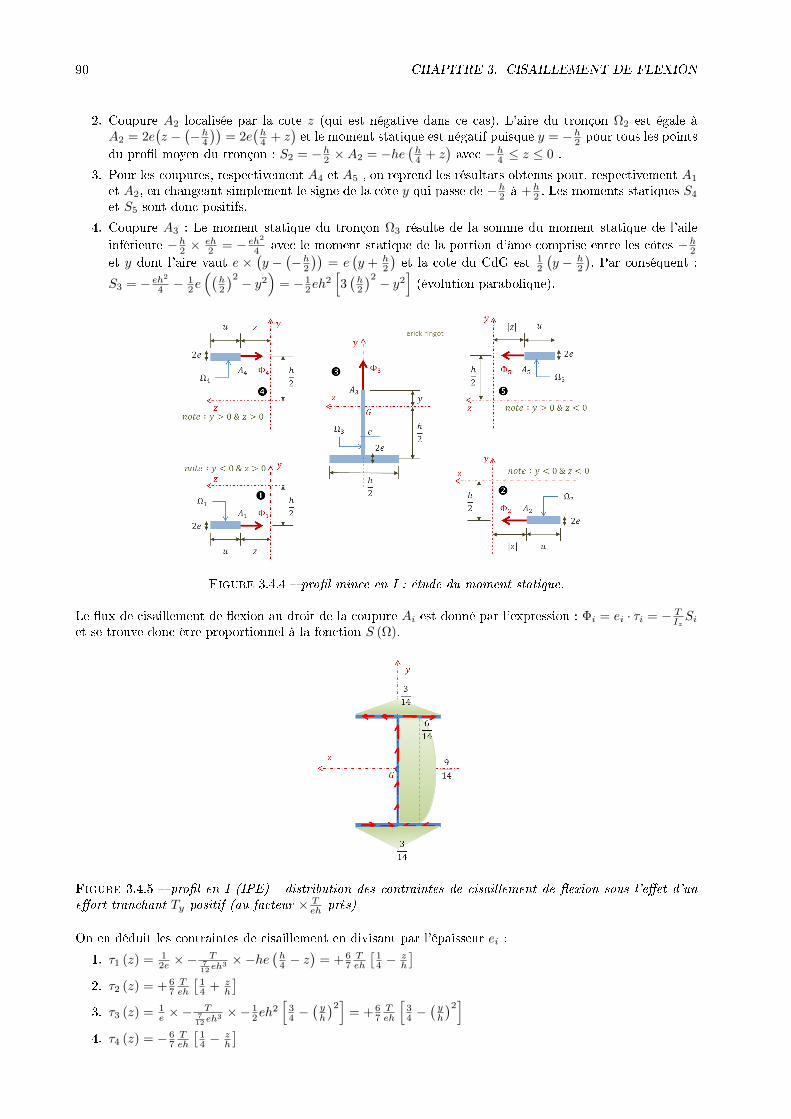
90 CHAPITRE 3. CISAILLEMENT DE FLEXION
2. Coupure A2 localisée par la cote z (qui est négative dans ce cas). L'aire du tronçon Ω2 est égale àA2 = 2e
(z −
(−h4))
= 2e(h4 + z
)et le moment statique est négatif puisque y = −h2 pour tous les points
du prol moyen du tronçon : S2 = −h2 ×A2 = −he(h4 + z
)avec −h4 ≤ z ≤ 0 .
3. Pour les coupures, respectivement A4 et A5 , on reprend les résultats obtenus pour, respectivement A1
et A2, en changeant simplement le signe de la côte y qui passe de −h2 à +h2 . Les moments statiques S4
et S5 sont donc positifs.
4. Coupure A3 : Le moment statique du tronçon Ω3 résulte de la somme du moment statique de l'aileinférieure −h2 ×
eh2 = − eh
2
4 avec le moment statique de la portion d'âme comprise entre les côtes −h2et y dont l'aire vaut e ×
(y −
(−h2))
= e(y + h
2
)et la cote du CdG est 1
2
(y − h
2
). Par conséquent :
S3 = − eh2
4 −12e((
h2
)2 − y2)
= − 12eh
2[3(h2
)2 − y2](évolution parabolique).
Figure 3.4.4 prol mince en I : étude du moment statique.
Le ux de cisaillement de exion au droit de la coupure Ai est donné par l'expression : Φi = ei · τi = − TIzSi
et se trouve donc être proportionnel à la fonction S (Ω).
Figure 3.4.5 prol en I (IPE) - distribution des contraintes de cisaillement de exion sous l'eet d'uneort tranchant Ty positif (au facteur × T
eh près)
On en déduit les contraintes de cisaillement en divisant par l'épaisseur ei :
1. τ1 (z) = 12e ×−
T712 eh
3 ×−he(h4 − z
)= + 6
7Teh
[14 −
zh
]2. τ2 (z) = +6
7Teh
[14 + z
h
]3. τ3 (z) = 1
e ×−T
712 eh
3 ×− 12eh
2[
34 −
(yh
)2]= + 6
7Teh
[34 −
(yh
)2]4. τ4 (z) = − 6
7Teh
[14 −
zh
]

3.4. PROFIL MINCE 91
5. τ5 (z) = − 67Teh
[14 + z
h
]On peut ensuite tracer le diagramme des contraintes de cisaillement de exion ; sur le diagramme de la gure3.4.5 le sens réel du ux de cisaillement est représenté dans l'hypothèse où l'eort tranchant T est positif.
3.4.2.5 Sur la conservation du ux de cisaillement
Certains auteurs introduisent le concept de conservation du ux de cisaillement. Le propos de ce paragrapheest de donner un fondement théorique à ce concept.
Figure 3.4.6 Conservation des ux : à gauche, un prol ouvert comportant trois branches arbitrairementorientées et convergeant au même noeud ; à droite, le voisinage immédiat du noeud (dont l'aire est considéréecomme nulle) est isolé.
Considérons pour cela un noeud de prol mince sur lequel plusieurs membrures se connectent (gure3.4.6). Le voisinage du noeud étant isolé, le bilan des eorts s'exerçant sur ce voisinage fait apparaître :
1. les ux de cisaillement dans le plan de section droite portés par les vecteurs directeurs locaux à chacunedes branches ;
2. les ux de cisaillement réciproques portés par l'axe x ;
3. les contraintes normales agissant perpendiculairement au plan du voisinage mais dont l'eet est négligélorsque l'aire dudit voisinage tend vers zéro.
L'équilibre du noeud dans la direction x , compte tenu du choix fait pour l'orientation des vecteurs unitairesdes branches 1, 2, 3 fait apparaître que :
ΦAf1 + ΦAf2 + ΦAf3 = 0
De façon générale :±ΦAf1 ± ΦAf2 ± ΦAf3 = 0 (3.4.2)
selon le choix eectif du sens de parcours des branches. L'équation 3.4.2 est ainsi appelée équation deconservation des ux . On voit que cette équation se formule diéremment selon que les parcours choisissont centripètes ou centrifuges.
Comme la formule de Bredt stipule que
Φf = − TyIzz
Sz (Ω)− TzIyy
Sy (Ω)
La conservation des ux n'est autre que l'illustration de la conservation des moments statiques. Cettedernière résulte elle-même du caractère extensif du moment statique 4 :
1. le moment statique de l'union de deux parties sans intersection est égale à la somme des momentsstatiques de chacune des parties
S(
Ω1
⋃Ω2
)= S (Ω1) + S (Ω2) si Ω1
⋂Ω2 = Ø
2. le moment statique de l'ensemble du plan de section droite est nul et donc :
S (Σ) = 0 ⇒ S(ΣΩ
)= −S (Ω) ∀Ω ⊂ Σ
4. Rappelons qu'il s'agit des moments statiques par rapport aux axes Gy et Gz où G est le centre de gravité de l'ensembledu plan de section droite (Σ) et Gy, Gz sont axes principaux d'inertie de (Σ).
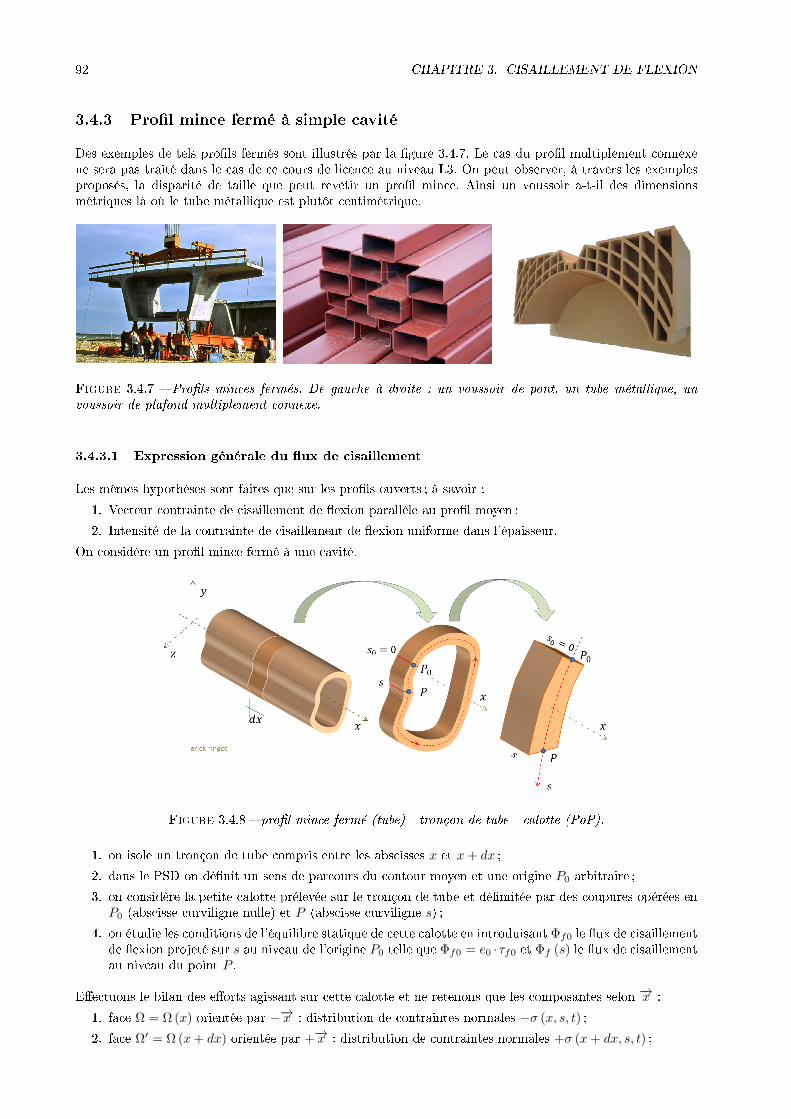
92 CHAPITRE 3. CISAILLEMENT DE FLEXION
3.4.3 Prol mince fermé à simple cavité
Des exemples de tels prols fermés sont illustrés par la gure 3.4.7. Le cas du prol multiplement connexene sera pas traité dans le cas de ce cours de licence au niveau L3. On peut observer, à travers les exemplesproposés, la disparité de taille que peut revêtir un prol mince. Ainsi un voussoir a-t-il des dimensionsmétriques là où le tube métallique est plutôt centimétrique.
Figure 3.4.7 Prols minces fermés. De gauche à droite : un voussoir de pont, un tube métallique, unvoussoir de plafond multiplement connexe.
3.4.3.1 Expression générale du ux de cisaillement
Les mêmes hypothèses sont faites que sur les prols ouverts ; à savoir :
1. Vecteur contrainte de cisaillement de exion parallèle au prol moyen ;
2. Intensité de la contrainte de cisaillement de exion uniforme dans l'épaisseur.
On considère un prol mince fermé à une cavité.
Figure 3.4.8 prol mince fermé (tube) - tronçon de tube - calotte (PoP).
1. on isole un tronçon de tube compris entre les abscisses x et x+ dx ;
2. dans le PSD on dénit un sens de parcours du contour moyen et une origine P0 arbitraire ;
3. on considère la petite calotte prélevée sur le tronçon de tube et délimitée par des coupures opérées enP0 (abscisse curviligne nulle) et P (abscisse curviligne s) ;
4. on étudie les conditions de l'équilibre statique de cette calotte en introduisant Φf0 le ux de cisaillementde exion projeté sur s au niveau de l'origine P0 telle que Φf0 = e0 ·τf0 et Φf (s) le ux de cisaillementau niveau du point P .
Eectuons le bilan des eorts agissant sur cette calotte et ne retenons que les composantes selon −→x :
1. face Ω = Ω (x) orientée par −−→x : distribution de contraintes normales −σ (x, s, t) ;
2. face Ω′ = Ω (x+ dx) orientée par +−→x : distribution de contraintes normales +σ (x+ dx, s, t) ;
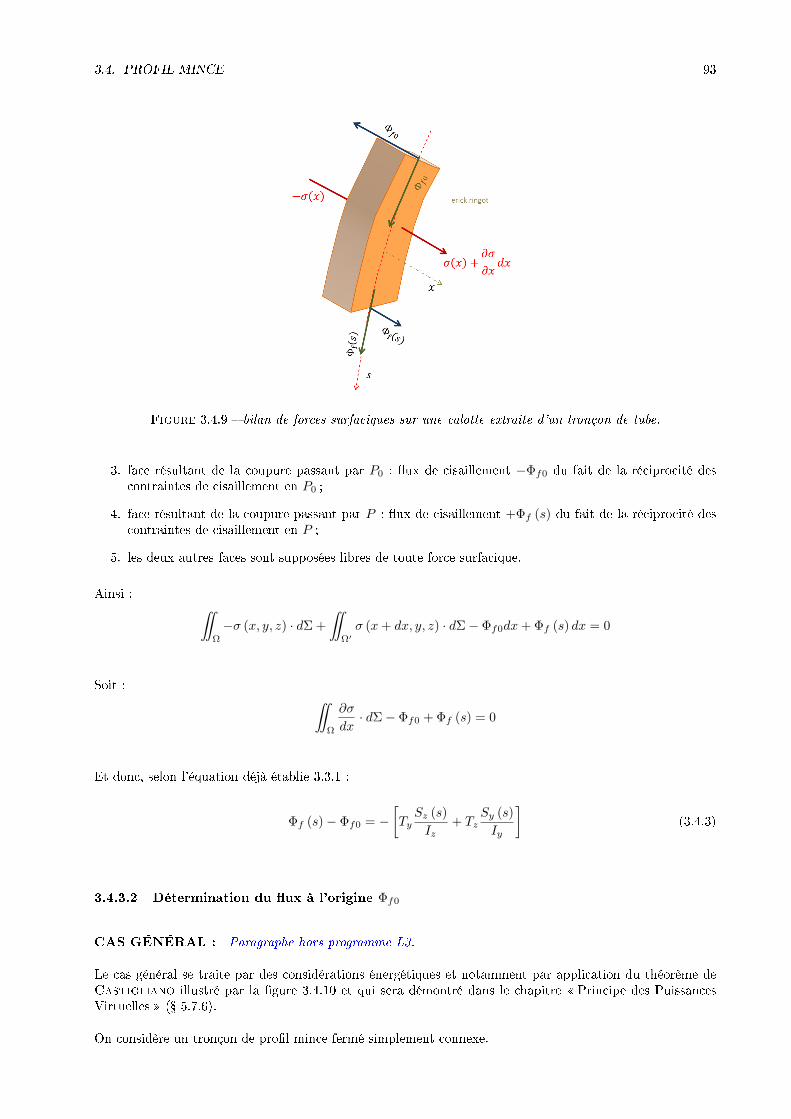
3.4. PROFIL MINCE 93
Figure 3.4.9 bilan de forces surfaciques sur une calotte extraite d'un tronçon de tube.
3. face résultant de la coupure passant par P0 : ux de cisaillement −Φf0 du fait de la réciprocité descontraintes de cisaillement en P0 ;
4. face résultant de la coupure passant par P : ux de cisaillement +Φf (s) du fait de la réciprocité descontraintes de cisaillement en P ;
5. les deux autres faces sont supposées libres de toute force surfacique.
Ainsi : ¨Ω
−σ (x, y, z) · dΣ +
¨Ω′σ (x+ dx, y, z) · dΣ− Φf0dx+ Φf (s) dx = 0
Soit : ¨Ω
∂σ
dx· dΣ− Φf0 + Φf (s) = 0
Et donc, selon l'équation déjà établie 3.3.1 :
Φf (s)− Φf0 = −[TySz (s)
Iz+ Tz
Sy (s)
Iy
](3.4.3)
3.4.3.2 Détermination du ux à l'origine Φf0
CAS GÉNÉRAL : Paragraphe hors programme L3.
Le cas général se traite par des considérations énergétiques et notamment par application du théorème deCastigliano illustré par la gure 3.4.10 et qui sera démontré dans le chapitre Principe des PuissancesVirtuelles ( 5.7.6).
On considère un tronçon de prol mince fermé simplement connexe.

94 CHAPITRE 3. CISAILLEMENT DE FLEXION
Figure 3.4.10 Illustration du théorème de Castigliano. (S) est un solide élastique ; la dérivée partiellede l'énergie élastique We =
´(S)
12σ : εdV due à l'ensemble des forces agissant sur lui par rapport à la force
F est égale au déplacement u du point d'application de cette force dans sa direction : u = ∂We
∂F .
Figure 3.4.11 Un prol fermé est le siège d'un ux de cisaillement de exion (à gauche). Si une coupureest pratiquée en P0 (origine de l'abscisse curviligne s), les lèvres de cette coupure subissent un glissementrelatif δu (à droite). L'action du ux à l'origine Φf0 est justement de neutraliser ce glissement : δu = 0.
L'énergie élastique linéique de cisaillement de exion du tronçon de poutre de la gure 3.4.11 est égale à :
w1 =
¨
Σ
1
2τf × γf · dΣ =
¨
Σ
1
2
1
Gτ2f dΣ =
1
G
˛
L
1
2
(Φf (s)
e (s)
)2
·dΣ︷ ︸︸ ︷
e (s) ds =1
G
˛
L
1
2Φ2f (s) · ds
e (s)
Le glissement des lèvres est égal à :
δu =∂w1
∂Φfo
Et ce glissement est nul lorsque Φf0 a sa valeur réelle. Par conséquent :
∂w1
∂Φfo= 0⇒
˛
L
∂Φf∂Φf0
× Φf (s)× ds
e (s)= 0
Or, équation 3.4.3 :
Φf (s) = Φf0 −[TySz (s)
Iz+ Tz
Sy (s)
Iy
]Donc :
∂Φf∂Φf0
= 1

3.4. PROFIL MINCE 95
Par conséquent 5 : ˛
L
Φf (s)× ds
e (s)=
˛
L
τf (s) · ds =
˛
L
−→τf (s) ·−→ds = 0 (3.4.4)
Soit : ˛
L
[Φf0 −
[TySz (s)
Iz+ Tz
Sy (s)
Iy
]]× ds
e (s)= 0
En n de compte :
Φf0 =1¸L
dse(s)
×
TyIz
˛
L
Sz (s)
e (s)ds+
TzIy
˛
L
Sy (s)
e (s)ds
On pose :
Φf0 = TyKz
Iz+ Tz
Ky
Iy
Avec : Kz =
¸LSz(s)e(s)
ds¸L
dse(s)
Ky =
¸LSy(s)
e(s)ds¸
Ldse(s)
Dans le cas d'un prol fermé d'épaisseur constante, il vient :Kz =
¸L Sz(s)ds
L
Ky =¸L Sy(s)ds
L
où L désigne le périmètre du contour moyen (L).
Finalement, on retiendra que :
Φf (s) = −[Ty
[Sz (s)−Kz]
Iz+ Tz
[Sy (s)−Ky]
Iy
](3.4.5)
CAS PARTICULIER S'APPUYANT SUR LA SYMÉTRIE : Dans le cas particulier où un prolsymétrique est symétriquement chargé, les ux de cisaillement sont également symétriques. Cette symétrieimpose que le ux de cisaillement de exion soit nul dans le plan de symétrie. On adopte donc, pour origineP0 des abscisses curvilignes, un point du contour moyen qui soit situé dans le plan de symétrie (on a deuxchoix).
De ce fait Φf0 = 0 et donc le problème de la détermination de la distribution des ux de cisaillement deexion peut se traiter de deux façons :
1. on coupe le prol en P0 et on le traite comme un prol de même géométrie mais ouvert ;
2. on ne considère que le demi-prol soumis au demi-eort tranchant.
3.4.4 Circulation du vecteur cisaillement
Paragraphe hors programme L3.
5. Cette relation montre que la circulation du vecteur contrainte le long du contour fermé est nulle :¸L τf (s) · ds = 0.
Nous reviendrons sur la circulation de la contrainte de cisaillement au paragraphe 3.4.4.
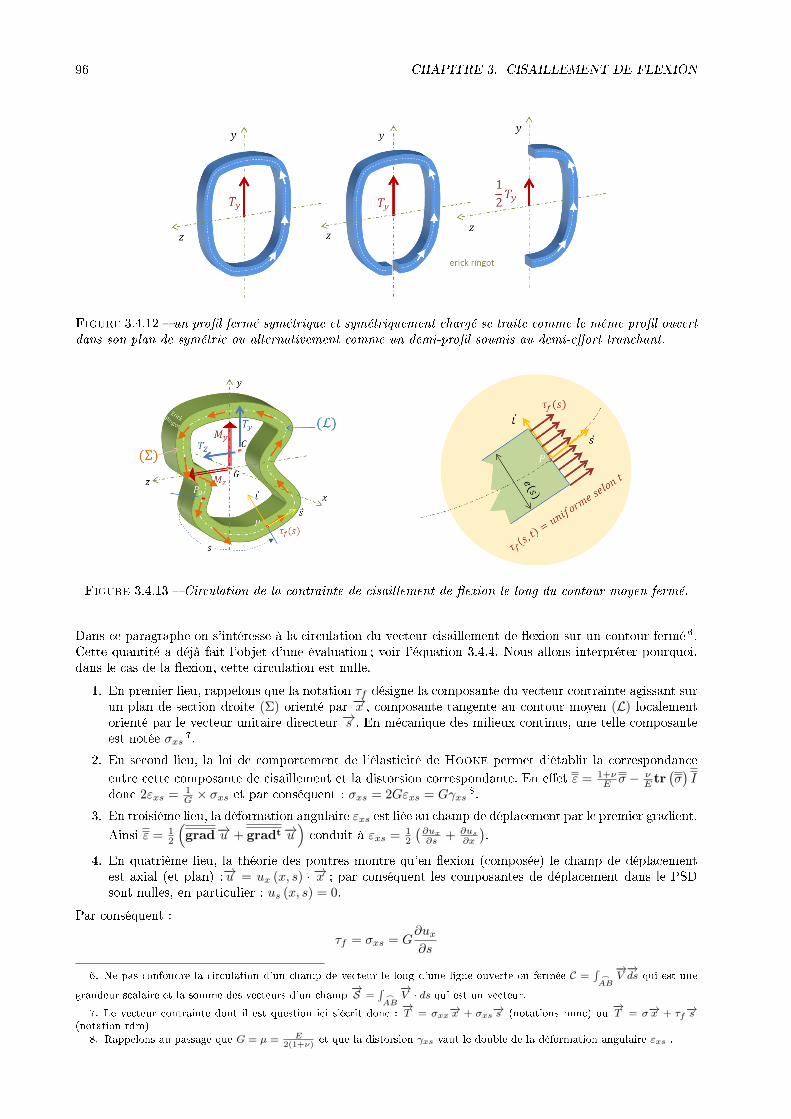
96 CHAPITRE 3. CISAILLEMENT DE FLEXION
Figure 3.4.12 un prol fermé symétrique et symétriquement chargé se traite comme le même prol ouvertdans son plan de symétrie ou alternativement comme un demi-prol soumis au demi-eort tranchant.
Figure 3.4.13 Circulation de la contrainte de cisaillement de exion le long du contour moyen fermé.
Dans ce paragraphe on s'intéresse à la circulation du vecteur cisaillement de exion sur un contour fermé 6.Cette quantité a déjà fait l'objet d'une évaluation ; voir l'équation 3.4.4. Nous allons interpréter pourquoi,dans le cas de la exion, cette circulation est nulle.
1. En premier lieu, rappelons que la notation τf désigne la composante du vecteur contrainte agissant surun plan de section droite (Σ) orienté par −→x , composante tangente au contour moyen (L) localementorienté par le vecteur unitaire directeur −→s . En mécanique des milieux continus, une telle composanteest notée σxs 7.
2. En second lieu, la loi de comportement de l'élasticité de Hooke permet d'établir la correspondanceentre cette composante de cisaillement et la distorsion correspondante. En eet ε = 1+ν
E σ − νE tr
(σ)I
donc 2εxs = 1G × σxs et par conséquent : σxs = 2Gεxs = Gγxs
8.
3. En troisième lieu, la déformation angulaire εxs est liée au champ de déplacement par le premier gradient.
Ainsi ε = 12
(grad−→u + gradt−→u
)conduit à εxs = 1
2
(∂ux∂s + ∂us
∂x
).
4. En quatrième lieu, la théorie des poutres montre qu'en exion (composée) le champ de déplacementest axial (et plan) :−→u = ux (x, s) · −→x ; par conséquent les composantes de déplacement dans le PSDsont nulles, en particulier : us (x, s) = 0.
Par conséquent :
τf = σxs = G∂ux∂s
6. Ne pas confondre la circulation d'un champ de vecteur le long d'une ligne ouverte ou fermée C =´_AB
−→V−→ds qui est une
grandeur scalaire et la somme des vecteurs d'un champ−→S =
´_AB
−→V · ds qui est un vecteur.
7. Le vecteur contrainte dont il est question ici s'écrit donc :−→T = σxx
−→x + σxs−→s (notations mmc) ou
−→T = σ−→x + τf
−→s(notation rdm)
8. Rappelons au passage que G = µ = E2(1+ν)
et que la distorsion γxs vaut le double de la déformation angulaire εxs .
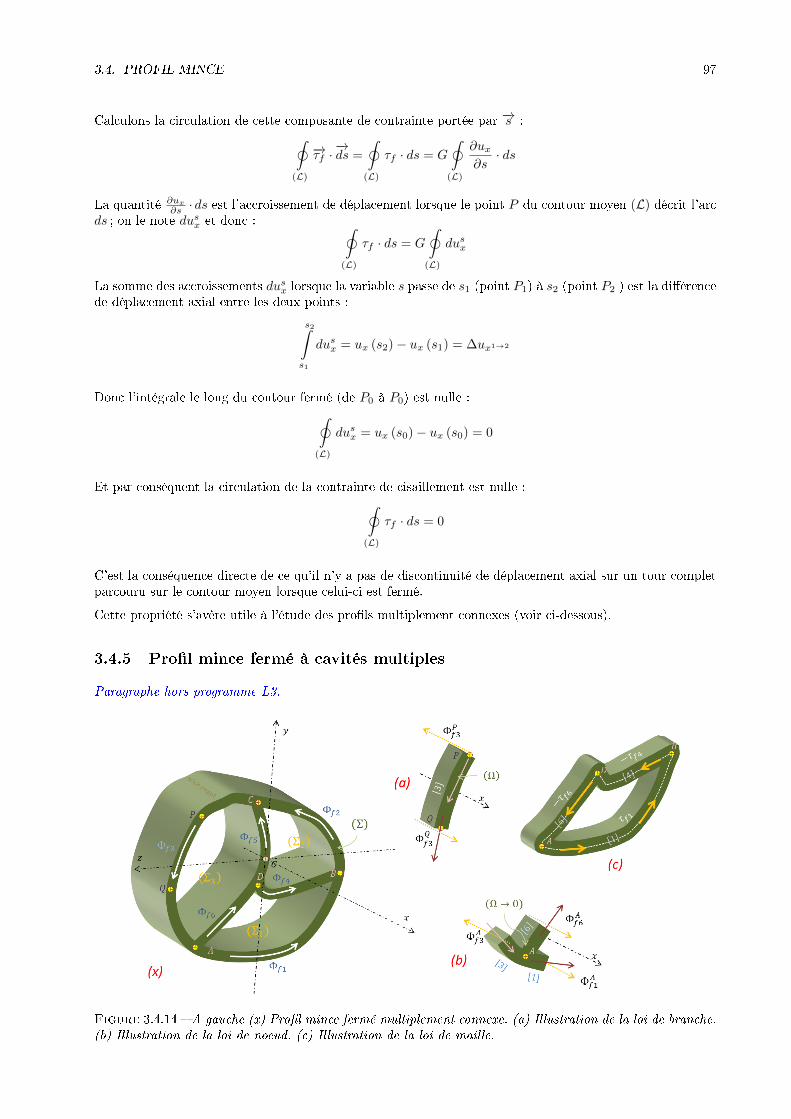
3.4. PROFIL MINCE 97
Calculons la circulation de cette composante de contrainte portée par −→s :˛
(L)
−→τf ·−→ds =
˛
(L)
τf · ds = G
˛
(L)
∂ux∂s· ds
La quantité ∂ux∂s · ds est l'accroissement de déplacement lorsque le point P du contour moyen (L) décrit l'arc
ds ; on le note dusx et donc : ˛
(L)
τf · ds = G
˛
(L)
dusx
La somme des accroissements dusx lorsque la variable s passe de s1 (point P1) à s2 (point P2 ) est la diérencede déplacement axial entre les deux points :
s2ˆ
s1
dusx = ux (s2)− ux (s1) = ∆ux1→2
Donc l'intégrale le long du contour fermé (de P0 à P0) est nulle :˛
(L)
dusx = ux (s0)− ux (s0) = 0
Et par conséquent la circulation de la contrainte de cisaillement est nulle :˛
(L)
τf · ds = 0
C'est la conséquence directe de ce qu'il n'y a pas de discontinuité de déplacement axial sur un tour completparcouru sur le contour moyen lorsque celui-ci est fermé.
Cette propriété s'avère utile à l'étude des prols multiplement connexes (voir ci-dessous).
3.4.5 Prol mince fermé à cavités multiples
Paragraphe hors programme L3.
Figure 3.4.14 A gauche (x) Prol mince fermé multiplement connexe. (a) Illustration de la loi de branche.(b) Illustration de la loi de noeud. (c) Illustration de la loi de maille.

98 CHAPITRE 3. CISAILLEMENT DE FLEXION
On considère une section droite constituée par un prol mince fermé multiplement connexe soumis à uneort tranchant. Le nombre de connexité du prol est celui du nombre de cavités ou cellules délimitées parle contour moyen. La gure 3.4.14 illustre un exemple qui sert à étayer les développements qui suivent.
Le paramétrage (conseillé) et la méthodologie pour l'étude d'un tel prol, visant à déterminer les ux decisaillement de exion, se présentent comme suit.
1. On désigne par (Σ) le PSD et (Σi) chacune des cellules. Le contour moyen d'une cellule est noté (Li) ; Exemple : 3 cellules (Σ1) , (Σ2) , (Σ3).
2. Les cellules sont séparées entre elles par des parois formées par des branches du contour moyen ; Exemple : branche (4) entre (Σ1) et (Σ2) .
3. Un branche peut aussi séparer une cellule de l'extérieur du PSD ; Exemple : branche (1) entre (Σ1) et l'extérieur.
4. Chaque branche est numérotée en commençant, par exemple, par les branches périphériques et enparcourant le PSD dans le sens direct ; Exemple : branches (1) à (6).
5. Chaque branche possède une origine et une extrémité et donc un sens de parcours. Le point originesert également d'origine pour l'abscisse curviligne s locale à la branche ; Exemple : branche (1) orientée de A vers B et (4) de D vers B.
6. Loi de branche : entre deux points quelconques de la même branche la formule de Bredt s'appliquecomme cela a été vu pour les prols simplement connexes. On désigne par (Ω) la portion du PSDdélimité par les deux points ; Exemple : entre C et Q de la branche [3] :
ΦQf3 − ΦPf3 = −[Ty
Sz (Ω)
Iz+ Tz
Sy (Ω)
Iy
]7. Loi de noeud : les noeuds sont les points de jonction des branches. Au moins trois branches y
convergent. En isolant un noeud par des coupures virtuelles et en écrivant son équilibre, on établitautant de relations entre les ux d'extrémité des branches qu'il y a de noeuds ; Exemple : noeud A à la jonction des branches[1], [3] et [6] et en négligeant le moment statique de la portion
(Ω) de PSD formée par les embryons de branches autour de A :
ΦAf1 + ΦAf6 − ΦAf3 ≈ 0
8. Loi de maille : Une maille (Li) est constituée par une portion du contour moyen (L) contourant unecellule. La loi de maille consiste à écrire que la circulation du vecteur contrainte le long d'une mailleest nulle. Ainsi pour chaque maille :
¸(Li) τf (s) · ds =
¸(Li)
Φf (s)e(s) ds = 0 ;
Exemple : maille (L1) entourant la cellule (Σ1) en tenant compte du sens de circulation initialement choisi
pour la dénition des ux de cisaillement :
˛
(L1)
Φf (s)
e (s)ds =
ˆ
[1]
Φf1 (s)
e (s)ds−
ˆ
[4]
Φf4 (s)
e (s)ds−
ˆ
[6]
Φf6 (s)
e (s)ds = 0
Au bilan Si un prol multiplement connexe comporte M mailles formées par B branches interconnectéesen N noeuds, on cherchera à déterminer les ux de cisaillement aux extrémités des branches ; cela introduitdonc 2B inconnues. Pour la résolution on dispose de 9 : B équations de branche ; N équations de noeuds ; M équations de maille.
3.5 Sections réduites
En théorie des poutres on a introduit, par anticipation, la notion de section réduite . Cette notion permetà la fois d'exprimer la loi de comportement qui relie l'eort tranchant Ti dans la direction i (y ou z) au
9. En topologie des réseaux il est montré que B + 1 = N +M ; ainsi 2B = B +N +M − 1 et donc 2B < B +N +M il y adonc davantage d'équations que d'inconnues.

3.5. SECTIONS RÉDUITES 99
glissement γGi du PSD : Ti = GA′iγGi et aussi d'exprimer la densité d'énergie élastique de cisaillement de
exion (énergie par unité de longueur poutre) :
wTi =1
2
T 2i
GA′i=
1
2GA′iγ
G 2i =
1
2Tiγ
Gi avec i = y ou z
L'objet du présent paragraphe est d'établir l'expression de cette section réduite. Nous le ferons dans le cas desprols minces uniquement. La méthode consiste à comparer deux expressions de l'énergie élastique (totale)par unité de longueur de poutre que nous noterons w1 :
1. la première obtenue en s'appuyant sur la théorie de la mécanique des milieux continus (voir le coursde mmc) ;
2. la seconde par la théorie des poutres.
NOTATION SIMPLIFIÉE : Le glissement γGi est noté γi par la suite (implicitement au niveau du CDG).
3.5.1 Expression de w1 par la mmc
La poutre est considérée en tant que solide déformable dans lequel règne un tenseur des contraintes σ etun tenseur des déformations ε. La densité volumique d'énergie w3 est tout simplement égale au produitcontracté des deux tenseurs au facteur 1/2 près :
w3 =1
2σ : ε
Selon l'hypothèse de Saint-Venant, le tenseur des contraintes est incomplet et de la forme :
σ =
σ = σxx τy = σxy τz = σxzτy = σxy 0 0τz = σxz 0 0
xyz
ou σ =
σ = σxx τf = σxs 0τf = σxs 0 0
0 0 0
xst
La première forme du tenseur des contraintes étant écrite dans le système d'axes principaux de la poutreet la seconde en gardant x comme première coordonnée et en adoptant les coordonnées curvilignes (s, t)dans le plan de section droite. Dans cette seconde conguration on a vu que la composante de cisaillementperpendiculaire au prol moyen τxt était nulle par hypothèse.
On a noté τf la contrainte de cisaillement de exion parallèle au contour (normalement σxs = τs) pour bieninsister sur l'absence de torsion dans ce chapitre.
Le tenseur des déformations est, quant à lui, de la forme 10 :
ε =
ε = εxx εxs = 12γf 0
εxs = 12γf εss =? 0
0 0 εtt =?
xst
L'énergie volumique est donc égale à :
w3 =1
2[σε+ τfγf ]
Avec la loi de comportement élastique linéaire réduite à :σ = Eετf = µγf = Gγf
Pour obtenir la densité d'énergie linéique w1 il sut d'intégrer la densité d'énergie volumique sur le plan desection droite :
w1 =
¨Σ
w3 · dΣ
10. Les composantes εss et εtt ne sont pas renseignées ici. L'hypothèse de Bernoulli voudrait qu'elles soient nulles mais cettemême hypothèse ne permet pas d'établir correctement les contraintes de cisaillement (voir le chapitre théorie des poutres ).

100 CHAPITRE 3. CISAILLEMENT DE FLEXION
Par conséquent :
w1 =
¨Σ
1
2
[σ2
E+τ2f
G
]· dΣ =
1
2×[
1
E
¨Σ
σ2 · dΣ +1
G
¨Σ
τ2f · dΣ
](3.5.1)
A noter que σ dépend uniquement des sollicitations normales N, My, Mz et que τf ne dépend que des eortstranchants Ty, Tz 11.
3.5.2 Expression de w1 par la théorie des poutres (rappel)
Dans le chapitre théorie des poutres , la densité linéique d'énergie élastique (hors torsion) a été établiecomme suit 12 :
w1 =1
2
[N2
EA+M2y
EIy+M2z
EIz+
T 2y
GA′y+
T 2z
GA′z
]
Dérivons w1 par rapport à l'une quelconque des sollicitations : le résultat de cette opération est la déformationassociée à la sollicitation choisie. En particulier :
∂w1
∂Ty=
TyGA′y
= γy∂w1
∂Tz= Tz
GA′z= γz
Remplaçons maintenant w1 par l'expression 3.5.1. Remarquons que ∂σ∂Ty
= ∂σ∂Tz
= 0 , il vient donc :∂w1
∂Ty=
TyGA′y
= 1G
˜Στf · ∂τf (s)
∂Ty· dΣ
∂w1
∂Tz= Tz
GA′z= 1
G
˜Στf · ∂τf (s)
∂Tz· dΣ
(3.5.2)
A partir de ces égalités et moyennant le calcul des intégrales, nous allons pouvoir déterminer les sectionsréduites.
3.5.3 Prol mince fermé / ouvert
Figure 3.5.1 élément d'aire dΣ de la section droite d'un prol mince.
Dans un prol mince un élément d'aire est égal à l'épaisseur multipliée par un élément de longueur du prolmoyen : dΣ = e (s) · ds ; dans les expressions 3.5.2 les intégrales de surface se muent donc en intégralescurvilignes.
Ainsi : TyGA′y
= 1G
´L τf ·
∂τf (s)∂Ty
· e (s) · ds = 1G
´L Φf · ∂Φf (s)
∂Ty· dse(s)
TzGA′z
= 1G
´L τf ·
∂τf (s)∂Tz
· e (s) · ds = 1G
´L Φf · ∂Φf (s)
∂Tz· dse(s)
11. Le moment de torsion Mx sera pris en compte dans le chapitre suivant.12. Il s'agit de l'expression en terme de sollicitations. Deux expressions alternatives existent : en déformation et mixte.

3.6. TORSEUR DES CONTRAINTES DE CISAILLEMENT DE FLEXION 101
3.5.3.1 Section mince fermée
Dans un prol mince fermé, on a montré que (3.4.5) : Φf (s) = −[Ty
[Sz(s)−Kz ]Iz
+ Tz[Sy(s)−Ky ]
Iy
]Donc :
TyGA′y
=1
G
˛L
Φf ·∂Φf (s)
∂Ty· dse (s)
=1
G
˛L−[Ty
[Sz (s)−Kz]
Iz+ Tz
[Sy (s)−Ky]
Iy
]×[− [Sz (s)−Kz]
Iz
]· dse (s)
Ou encore :
TyGA′y
=1
G×[Ty
1
I2z
˛L
[Sz (s)−Kz]2 ds
e (s)+ Tz
1
IyIz
˛L
[Sz (s)−Kz] [Sy (s)−Ky]ds
e (s)
]Or on montre facilement que 13 :
˛LSy (s)
ds
e (s)= 0
˛LSz (s)
ds
e (s)= 0
˛LSy (s)Sz (s)
ds
e (s)= 0
Il reste donc :TyGA′y
=1
G× Ty
1
I2z
˛L
[Sz (s)−Kz]2 ds
e (s)
Identiant les deux membres de cette égalité, nous trouvons que :
A′y =I2z¸
L[Sz(s)−Kz ]2
e(s) ds
Et on montrerait de même que :
A′z =I2y¸
L[Sy(s)−Ky ]2
e(s) ds
3.5.3.2 Section mince ouverte
Dans ce cas l'origine des abscisses curvilignes est choisie pour coïncider avec l'une des extrémités P0 du prolmoyen de sorte que Ky = Kz = 0 et donc :
A′z =I2y´
LS2y(s)
e(s) dset A′y =
I2z´
LS2z(s)e(s) ds
(3.5.3)
3.6 Torseur des contraintes de cisaillement de exion
Dans ce paragraphe, nous cherchons à déterminer quel est le torseur équivalent à la distribution des contraintesde cisaillement de exion. Nous restreindrons l'étude au cas des prols minces ouverts.
Paramétrage : On considère donc une section mince ouverte (Σ) dont le prol moyen (L) court du pointP0 au point P1. Chaque point P du prol moyen est repéré par son abscisse curviligne s mais aussi par sescoordonnées cartésiennes y et z. On désigne ainsi P par un triplet de coordonnées dépendantes (s, y, z). Ilen va ainsi de l'origine P0 (s0, y0, z0) et l'extrémité P1 (s1, y1, z1) .
Au point P l'épaisseur du prol (mesurée dans la direction de−→t ) vaut e (s) et la contrainte de cisaillement
de exion vaut τf (s) de sorte que le ux de cisaillement, porté par −→s , est égal à Φf (s) = e (s) · τf (s) =
−[TyIzSz (s) + Tz
IySy (s)
](selon 3.4.1).
Le vecteur tangent au prol moyen peut être projeté sur les vecteurs de base du repère principal d'inertie :−→s = cos θ−→y + sin θ−→z .13. Il sut de procéder par intégration par partie ; il est nécessaire que Gyz soit le système principal d'inertie quadratique
du plan de section droite (ce qui est le cas).

102 CHAPITRE 3. CISAILLEMENT DE FLEXION
Figure 3.6.1 paramétrage d'un prol mince ouvert en vue du calcul du torseur équivalent au ux decisaillement de exion.
3.6.1 résultante des contraintes τf (s)
La résultante du torseur des forces équivalent à la distribution des ux de cisaillement de exion est égal àla somme vectorielle des dits ux étendue au plan de section droite (c'est-à-dire du prol moyen) :
−→R =
ˆ(L)
−→Φf (s) · ds =
¨(Σ)
−→τf (s) · dΣ
expression dans laquelle on a posé :−→Φf = Φf · −→s .
La composante de−→R portée par −→y est, par exemple : Ry =
´(L)
Φf (s) · −→s · −→y · ds =´
(L)Φf (s) · cos θ · ds
On remarquera qu'un élément vectoriel diérentiel de prol moyen s'écrit−→ds = ds · −→s = dy · −→y + dz · −→z de
sorte que dy = ds · cos θ et que dz = ds · sin θAinsi : Ry =
´(L)
Φf (s) · dy et donc, compte tenu de 3.4.1, Ry = −TyIz´
(L)Sz (s) · dy − Tz
Iy
´(L)
Sy (s) · dy1. Pour calculer la première intégrale : (a) on se rappelle l'expression du moment statique Sz (s) =
´ yy0y·dΣ
, (b) en diérenciant : dSz = y ·dΣ , (c) on intègre ensuite par partie :´ y1
y0Szdy = [y · Sz]y1
y0−´ y1
y0ydSz =
y1 × 0− y0 × 0−´ y1
y0y2 · dΣ = −Iz
2. Pour calculer la seconde intégrale, on procède de façon analogue : (a) Sy (s) =´ yy0z·dΣ , (b) dSy = e·dΣ,
(c)´ y1
y0Sydy = [y · Sy]
y1
y0−´ y1
y0ydSy = y1× 0− y0× 0−
´ y1
y0yz · dΣ = 0 car Gyz est système principal
d'inertie.Par conséquent : Ry = Ty ; on montrerait de même que Rz = Tz ; cette démonstration prouve que la
résultante des contraintes de cisaillement de exion est bien égale à l'eort tranchant−→T .
3.6.2 moment en Q des contraintes τf (s)
Soit un point Q quelconque du plan de section droite, le moment en Q de l'ensemble des ux de cisaillementest égal à :
−−→MQ =
ˆ(L)
−−→QP ∧
−→Φf (s) · ds
REMARQUE : Sauf cas particuliers de symétrie, ce moment n'est pas nul ! Attention ! ! ilne doit pas être confondu avec un éventuel moment de torsion 14.
Les vecteurs−−→QP et
−→Φf appartiennent au plan yz ; c'est donc que le moment
−−→MQ est porté par l'axe −→x :
MQ−→x =
ˆL
Φf (s) ·−−→QP ∧
−→ds
14. La torsion est abordée au chapitre suivant.

3.6. TORSEUR DES CONTRAINTES DE CISAILLEMENT DE FLEXION 103
La quantité[−−→QP ∧
−→ds]−→x est égale au double de l'aire balayée par le rayon QP lorsque P parcourt le
vecteur−→ds. Cette quantité est algébrique : positive lorsque P tourne dans le sens direct autour de Q elle
devient négative dans le cas contraire.
Figure 3.6.2 élément d'aire sectorielle par rapport à un pôle (ici le pôle Q).
Cette quantité surfacique (illustrée ci-dessus) est appelée élément d'aire sectorielle de pôle Q de la ligne(L) ; elle est notée dωQ :
dωQ−→x =
−−→QP ∧
−→ds (3.6.1)
On peut donc exprimer le moment produit par le ux de cisaillement de exion par la relation :
MQ =
ˆL
Φf (s) · dωQ
Remplaçons le ux de cisaillement par son expression (3.4.1), alors :
MQ = −TyIz
ˆLSz (s) · dωQ −
TzIy
ˆLSy (s) · dωQ
Intégrons la première intégrale curviligne par partie :´L Sz (s) · dωQ = [Sz (s) · ωQ (s)]
s10 −
´L ωQ (s) · dSz
Avec dSz = y · dΣ par dénition ; c'est donc que :´L Sz (s) · dωQ = −
´L ωQ (s) · ydΣ le crochet étant nul
quant à lui car le moment statique Sz (s) est nul aux deux extrémités du prol.
On montrerait de la même manière que´L Sy (s) · dωQ = −
´L ωQ (s) · zdΣ . Par conséquent :
MQ = −TyIz
ˆLωQ (s) · ydΣ− Tz
Iy
ˆLωQ (s) · zdΣ
Les termes´L ωQ (s) · ydΣ et
´L ωQ (s) · zdΣ sont appelés, respectivement, moments sectoriels de pôle Q de
1er ordre par rapport aux axes, respectivement, Gz et Gy 15.
3.6.3 Centre de exion
3.6.3.1 Dénition
On appelle centre de exion le point C du plan de section droite où le moment produit par les contraintesde cisaillement de exion est nul.
Remarque 68. En règle générale, le centre de exion n'est pas confondu avec le centre de gravitédu plan de section droite.
15. Bien noter que les côtes y et z sont comptées par rapport au CdG G indépendamment du choix fait pour le pôle Q .

104 CHAPITRE 3. CISAILLEMENT DE FLEXION
Si le moment des ux de cisaillement de exion MC est nul quelque soit l'intensité des eorts tranchants Tyet Tz , c'est que les moments sectoriels Tz de pôle C sont nuls ; d'où la propriété suivante :
Proposition 69. Le centre de exion est le point du plan de section droite de moments sectoriels nuls ; lecentre de exion est donc une caractéristique intrinsèque du plan de section droite :ˆ
LωC (s) · ydΣ = 0 et
ˆLωC (s) · zdΣ = 0
3.6.3.2 Conséquence
Soit τf la distribution des contraintes de cisaillement de exion et soit τt la distribution des contraintesde cisaillement de torsion. Alors la distribution des contraintes de cisaillement tous types confondus estτ = τf+ τt
1. La distribution τf est équivalente au torseur
−→T = Ty
−→y + Tz−→z
−→0
C
2. La distribution τt est équivalente au torseur
−→0−→Mx
en tout point
3. La superposition τ = τf+ τt est équivalente au torseur
−→T−→Mx
C
conséquence : Le moment de torsion est toujours évalué au centre de exion.
3.6.3.3 Détermination de la position du centre de exion C (cas général)
Par dénition : Tz−−→MC =
ˆ(L)
−−→CP ∧
−→Φf (s) · ds =
−→0
Supposons le moment des ux de cisaillement−−→MG connu en G ; alors
−−→MG =
−−→MC +
−−→GC ∧
−→T =
−−→GC ∧
−→T =
[yC · Tz − zC · Ty]−→x
Par conséquent [yC · Tz − zC · Ty] = −TyIz´L ωG (s) · ydΣ− Tz
Iy
´L ωG (s) · zdΣ
Identions les termes deux à deux :
yC = − 1
Iz
ˆLωG (s) · ydΣ zC = +
1
Iy
ˆLωG (s) · zdΣ
EN PRATIQUE :1. Si le prol possède deux axes de symétrie alors le centre de exion est confondu avec le centre de
gravité lui-même confondu avec le centre de symétrie ;
2. Si le prol possède un axe de symétrie alors le centre de exion est situé sur cet axe. Le centre degravité est également sur cet axe mais généralement à une autre place ;
3. D'un point de vue qualitatif, lorsque le prol ouvert présente une certaine convexité, alors le centre degravité est situé dans la convexité alors que le centre de exion est placé à l'extérieur de la convexité ;
4. Si l'on peut déterminer le point de concours des ux de cisaillement, alors ce point de concours est lecentre de exion ;
5. En alternative au paragraphe 3.6.3.3 dans la recherche du centre de exion, on peut également procédercomme suit : (a) calculer le moment produit par le ux de cisaillement en un point Q (yQ, zQ) là où
le calcul semble le plus simple à conduire (b) exprimer la relation−−→MQ =
−−→QC ∧
−→T ⇒
[yC − yQzC − zQ
]∧[
TyTz
]= MQ ⇒ (yC − yQ)Tz − (zC − zQ)Ty = MQ . Comme MQ est une fonction linéaire de Ty et
de Tz , cette dernière égalité permet de déduire yC et zC . Cette méthode évite le calcul explicite desmoments sectoriels.
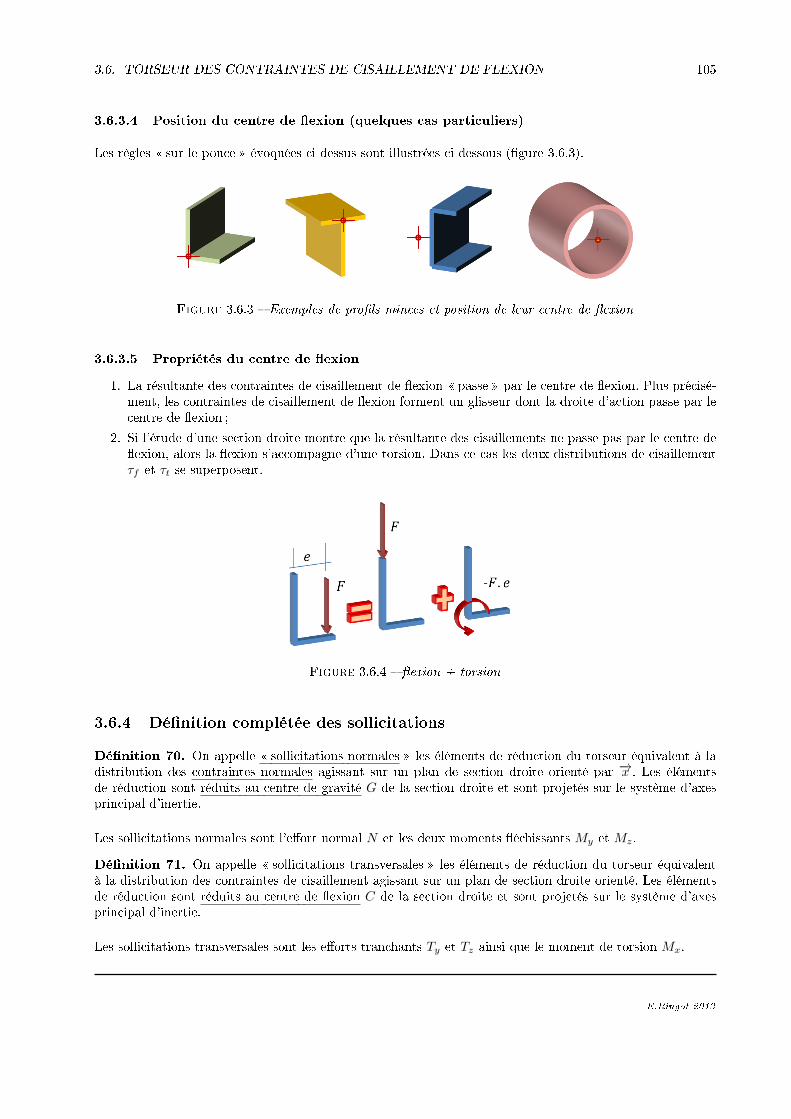
3.6. TORSEUR DES CONTRAINTES DE CISAILLEMENT DE FLEXION 105
3.6.3.4 Position du centre de exion (quelques cas particuliers)
Les règles sur le pouce évoquées ci-dessus sont illustrées ci-dessous (gure 3.6.3).
Figure 3.6.3 Exemples de prols minces et position de leur centre de exion
3.6.3.5 Propriétés du centre de exion
1. La résultante des contraintes de cisaillement de exion passe par le centre de exion. Plus précisé-ment, les contraintes de cisaillement de exion forment un glisseur dont la droite d'action passe par lecentre de exion ;
2. Si l'étude d'une section droite montre que la résultante des cisaillements ne passe pas par le centre deexion, alors la exion s'accompagne d'une torsion. Dans ce cas les deux distributions de cisaillementτf et τt se superposent.
Figure 3.6.4 exion + torsion
3.6.4 Dénition complétée des sollicitations
Dénition 70. On appelle sollicitations normales les éléments de réduction du torseur équivalent à ladistribution des contraintes normales agissant sur un plan de section droite orienté par −→x . Les élémentsde réduction sont réduits au centre de gravité G de la section droite et sont projetés sur le système d'axesprincipal d'inertie.
Les sollicitations normales sont l'eort normal N et les deux moments échissants My et Mz.
Dénition 71. On appelle sollicitations transversales les éléments de réduction du torseur équivalentà la distribution des contraintes de cisaillement agissant sur un plan de section droite orienté. Les élémentsde réduction sont réduits au centre de exion C de la section droite et sont projetés sur le système d'axesprincipal d'inertie.
Les sollicitations transversales sont les eorts tranchants Ty et Tz ainsi que le moment de torsion Mx.
E.Ringot 2013
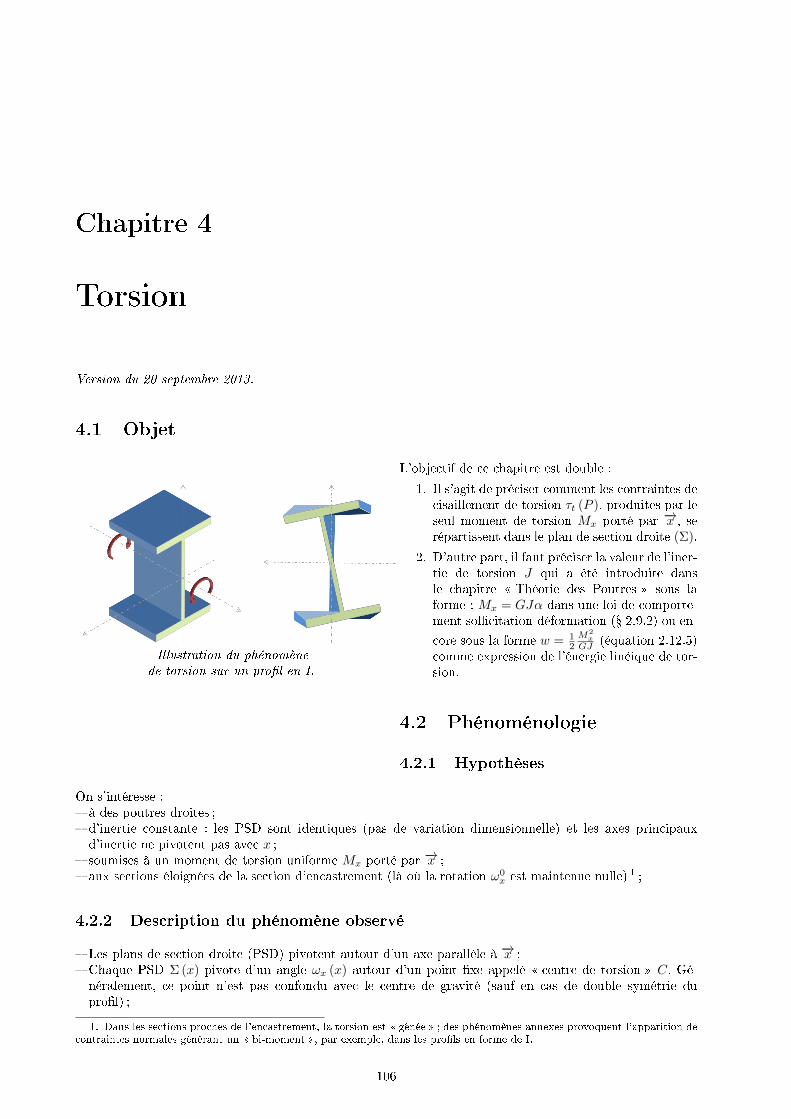
Chapitre 4
Torsion
Version du 20 septembre 2013.
4.1 Objet
Illustration du phénomènede torsion sur un prol en I.
L'objectif de ce chapitre est double :
1. Il s'agit de préciser comment les contraintes decisaillement de torsion τt (P ), produites par leseul moment de torsion Mx porté par −→x , serépartissent dans le plan de section droite (Σ).
2. D'autre part, il faut préciser la valeur de l'iner-tie de torsion J qui a été introduite dansle chapitre Théorie des Poutres sous laforme : Mx = GJα dans une loi de comporte-ment sollicitation-déformation ( 2.9.2) ou en-
core sous la forme w = 12M2x
GJ (équation 2.12.5)comme expression de l'énergie linéique de tor-sion.
4.2 Phénoménologie
4.2.1 Hypothèses
On s'intéresse : à des poutres droites ; d'inertie constante : les PSD sont identiques (pas de variation dimensionnelle) et les axes principauxd'inertie ne pivotent pas avec x ;
soumises à un moment de torsion uniforme Mx porté par −→x ; aux sections éloignées de la section d'encastrement (là où la rotation ω0
x est maintenue nulle) 1 ;
4.2.2 Description du phénomène observé
Les plans de section droite (PSD) pivotent autour d'un axe parallèle à −→x ; Chaque PSD Σ (x) pivote d'un angle ωx (x) autour d'un point xe appelé centre de torsion C. Gé-néralement, ce point n'est pas confondu avec le centre de gravité (sauf en cas de double symétrie duprol) ;
1. Dans les sections proches de l'encastrement, la torsion est gênée ; des phénomènes annexes provoquent l'apparition decontraintes normales générant un bi-moment , par exemple, dans les prols en forme de I.
106
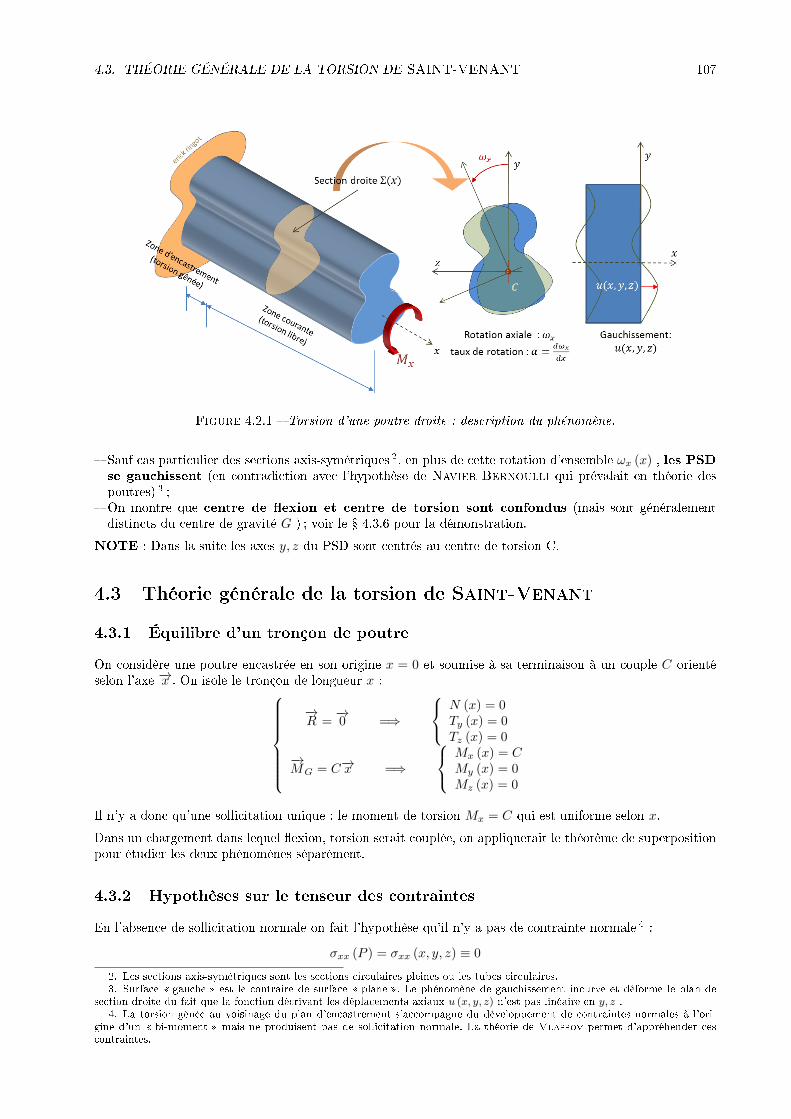
4.3. THÉORIE GÉNÉRALE DE LA TORSION DE SAINT-VENANT 107
Figure 4.2.1 Torsion d'une poutre droite : description du phénomène.
Sauf cas particulier des sections axis-symétriques 2, en plus de cette rotation d'ensemble ωx (x) , les PSDse gauchissent (en contradiction avec l'hypothèse de Navier-Bernoulli qui prévalait en théorie despoutres) 3 ;
On montre que centre de exion et centre de torsion sont confondus (mais sont généralementdistincts du centre de gravité G ) ; voir le 4.3.6 pour la démonstration.
NOTE : Dans la suite les axes y, z du PSD sont centrés au centre de torsion C.
4.3 Théorie générale de la torsion de Saint-Venant
4.3.1 Équilibre d'un tronçon de poutre
On considère une poutre encastrée en son origine x = 0 et soumise à sa terminaison à un couple C orientéselon l'axe −→x . On isole le tronçon de longueur x :
−→R =
−→0 =⇒
N (x) = 0Ty (x) = 0Tz (x) = 0
−→MG = C−→x =⇒
Mx (x) = CMy (x) = 0Mz (x) = 0
Il n'y a donc qu'une sollicitation unique : le moment de torsion Mx = C qui est uniforme selon x.
Dans un chargement dans lequel exion, torsion serait couplée, on appliquerait le théorème de superpositionpour étudier les deux phénomènes séparément.
4.3.2 Hypothèses sur le tenseur des contraintes
En l'absence de sollicitation normale on fait l'hypothèse qu'il n'y a pas de contrainte normale 4 :
σxx (P ) = σxx (x, y, z) ≡ 0
2. Les sections axis-symétriques sont les sections circulaires pleines ou les tubes circulaires.3. Surface gauche est le contraire de surface plane . Le phénomène de gauchissement incurve et déforme le plan de
section droite du fait que la fonction décrivant les déplacements axiaux u (x, y, z) n'est pas linéaire en y, z .4. La torsion gênée au voisinage du plan d'encastrement s'accompagne du développement de contraintes normales à l'ori-
gine d'un bi-moment mais ne produisent pas de sollicitation normale. La théorie de Vlassov permet d'appréhender cescontraintes.

108 CHAPITRE 4. TORSION
Dans l'hypothèse de l'étude d'une poutre on considèrera également l'absence de contraintes normales trans-versales :
σyy (P ) = σzz (P ) = 0
Toujours dans le cadre de cette hypothèse, seules les contraintes de cisaillement agissant dans les plans desection droite Σ (x) sont prises en compte 5 ; par conséquent :
σyz (P ) ≡ 0 et σxy (P ) 6= 0 ; σxz (P ) 6= 0
Le tenseur des contraintes de torsion selon ces hypothèses a la forme 6 :
σ =
0 σxy σxzσxy 0 0σxz 0 0
xyz
Résoudre un problème de torsion, c'est trouver l'expression des contraintes σxy et σxz en fonction du momentde torsion d'une part et des coordonnées y et z d'autre part.
A noter que, dans la conguration de chargement considérée, le moment de torsion Mx ne dépendant pas dex, le tenseur σ ne dépend pas de x non-plus.
4.3.3 Équilibre local
En mécanique des milieux continus, l'équilibre local de chaque particule du solide est régi par l'équation−−→div σ =
−→0 en l'absence de force de volume. En coordonnées cartésiennes :
∂σxx∂x +
∂σxy∂y + ∂σxz
∂z = 0∂σxy∂x +
∂σyy∂y +
∂σyz∂z = 0
∂σxz∂x + ∂σxz
∂y + ∂σzz∂z = 0
=⇒
∂σxy∂y + ∂σxz
∂z = 0
σxy (P ) = σxy (y, z)σxz (P ) = σxz (y, z)
(4.3.1)
ce qui conrme que les contraintes ne dépendent pas de la position x du PSD Σ (x).
4.3.4 Élasticité : Loi de Hooke
La loi de l'élasticité s'écrit : ε = 1+νE σ− ν
E tr(σ)I ; en l'absence de contraintes normales selon les axes x, y, z
la trace du tenseur des contrainte l'est également. Il reste donc : εxy = 1+νE σxy
εxz = 1+νE σxz
εyz = 0
INTERPRÉTATION :
Considérons, pour les besoins de l'illustration, une poutre de section rectangulaire. Sous l'action du momentde torsion, naissent des distorsions γxy et γxz (sur les faces latérales de la poutre) qui représentent respec-
tivement les variations des angles droits bâtis sur −→x ,−→y et −→x ,−→z . Ces distorsions sont égales au double desdéformations angulaires de mêmes indices et sont proportionnelles aux contraintes de cisaillement corres-pondantes :
σxy (y, z) = G · γxy (y, z)σxz (y, z) = G · γxz (y, z)G = µ = E
2(1+ν) module de cisaillement deCoulomb
5. Ainsi, naturellement, que les contraintes de cisaillement réciproques !6. Cette forme de σ résulte directement de l'hypothèse de Saint-Venant.

4.3. THÉORIE GÉNÉRALE DE LA TORSION DE SAINT-VENANT 109
Figure 4.3.1 Torsion d'une poutre droite : distorsions.
4.3.5 Centre de torsion & champ de déplacement
Rappel de mmc : ε = 12
[grad−→u + grad T−→u
]En coordonnées cartésiennes : εij = 1
2
[∂ui∂xj
+∂uj∂xi
]En particulier 7 , pour les déformations axiales :
εxx = ∂u∂x = 0 =⇒ u = u (y, z)
εyy = ∂v∂y = 0 =⇒ v = v (x, z)
εzz = ∂w∂z = 0 =⇒ w = w (x, y)
... et donc, pour la distorsion γxy :
γxy (y, z) = 2εxy (y, z) =∂u
∂y(y, z) +
∂v
∂x(x, z)
en séparant les fonctions de y, z d'un coté et de x, z de l'autre :[γxy −
∂u
∂y
](y, z) =
∂v
∂x(x, z)
C'est donc que ces fonctions ne dépendent ni de y ni de x 8 , on pose donc :
γxy −∂u
∂y=∂v
∂x= f (z) =⇒ v (x, z) = f (z) · x+ g (z) (4.3.2)
En traitant de la même façon de la distorsion γxz on arrive à la relation :
w (x, y) = h (y) · x+ k (y) (4.3.3)
Enn, pour ce qui concerne la dernière distorsion γyz = 0 , elle montre que les angles droits y, z tracés surun PSD ne varient pas.
D'un point de vue mathématique :
γyz =∂v
∂z+∂w
∂y= 0 =⇒ ∂
∂z[f (z)x+ g (z)] +
∂
∂y[h (y)x+ k (y)] = 0
Soit, en adoptant une autre notation 9 et en factorisant :
x · [f ′ (z) + h′ (y)] + [g′ (z) + k′ (y)] = 0 ∀x, y, z
7. Rappelons que si ∂f∂α
= 0 ∀α c'est que f est indépendante de α.8. En eet, supposons vériée l'égalité f (x, y) = g (x, z) et dérivons par rapport à y : alors ∂f
∂y= 0 ce qui prouve que f
ne dépend pas de y . En dérivant la même équation par rapport à z, on montre que g ne dépend pas de z. Par conséquentf (x) = g (x).
9. Quand une fonction f ne dépend que d'une seule variable α alors sa dérivée est notée dfdα
= f ′.
110 CHAPITRE 4. TORSION
C'est donc que −f ′ (z) = +h′ (y) = α (constante) et −g′ (z) = +k′ (y) = β (constante) .
Intégrons ces quatre fonctions : f (z) = −αz + C1
h (y) = +αy + C2
k (y) = +βy + C3
g (z) = −βz + C4
Substituons ces dernières fonctions dans les expressions 4.3.2 et 4.3.3, alors le champ de déplacement adoptela forme : u = u (y, z)
v = v (x, z) = −αxz + C1x− βz + C4
w = w (x, y) = αxy + C2x+ βy + C3
Ce qui peut être mis en forme matriciellement (ou vectoriellement) : uvw
=
0C4
C3
︸ ︷︷ ︸
TRANSLATION
+
β−C2
C1
∧ xyz
︸ ︷︷ ︸
ROTATION︸ ︷︷ ︸DEPLACEMENT DE SOLIDE
+
u (y, z) + C2z + C1y−αxz+αxy
︸ ︷︷ ︸
CHAMP AL′ORIGINEDESDEFORMATIONS
Soit encore : −→U =
−→T +
−→Ω ∧−−→OP +
−→D
A son tour, le vecteur−→D se décompose en :
−→D =
ug (y, z)00
︸ ︷︷ ︸
FONCTION DEGAUCHISSEMENT
+
αx00
∧ 0yz
︸ ︷︷ ︸−→ω (x) ∧
−−→CP
ROTATION D′ENSEMBLEDE LASECTION AUTOURDU CENTRE C
Le rôle de l'encastrement est justement de neutraliser le mouvement de solide indéformable de sorte que lechamp de déplacement d'une poutre en torsion se décompose en :
1. gauchissement : les PSD ne restent pas plans ;
2. rotation autour de l'axe joignant les centres de torsion C 10.
La rotation ω (x) est portée par l'axe −→x et son amplitude est proportionnelle à l'abscisse x. La quantitéα = dω/dx est ni plus ni moins que le taux de torsion déjà introduit en tant que déformation en théoriedes poutres.
Rappelons que la rotation d'ensemble d'un PSD s'eectue autour de l'axe x passant par un point C immobile(au gauchissement près) et appelé centre de torsion . La dénition du centre de torsion est donc de naturecinématique.
Le centre de torsion est diérent du centre de gravité. Dans le paragraphe qui suit, on démontre qu'il estconfondu avec le centre de exion introduit dans le chapitre cisaillement de exion au 3.6.3.
4.3.6 Sur le centre de torsion
Nous avons deux dénitions distinctes pour le centre de exion et le centre de torsion :
1. Centre de exion : Point caractéristique C1 du plan de section droite (Σ) par lequel la droite supportdu glisseur formé par les contraintes de cisaillement de exion passe. Ainsi, le moment produit par lescontraintes de cisaillement de exion est nul au centre de exion. Cette dénition possède un caractèrestatique.
10. Le centre de torsion d'un PSD est le point autour duquel le PSD tourne

4.3. THÉORIE GÉNÉRALE DE LA TORSION DE SAINT-VENANT 111
2. Centre de torsion : Point caractéristique C2 du plan de section droite (Σ) autour duquel tourne leditPSD lorsqu'il est soumis à la torsion. Cette dénition possède un caractère cinématique.
Figure 4.3.2 Centre de exion (à gauche) et centre de torsion (à droite) d'un plan de section droite.
Comme énoncé au paragraphe 4.2.2, le centre de torsion est confondu avec le centre de exion. La démons-tration peut en être faite par l'application du théorème de réciprocité de Maxwell-Betti qui est présentédans le chapitre principe des puissances virtuelles au 5.7.5.
1. Considérons un plan de section droite (Σ) de la poutre (S) soumise à un eort tranchant−→T = Ty
−→y +
Tz−→z et le moment échissant
−→M = My
−→y +Mz−→z à l'exclusion de toute torsion et de tout eort normal.
Cela constitue l'état 1 de la poutre que nous désignerons par (S1) ;
(a) Le torseur des contraintes de cisaillement de exion τf est un glisseur−→T passant par le centre de
exion C1 :
T1 =
−→T−→0
C1
=
−→T
−−→GC1 ∧
−→T
G
(b) Le champ de déplacement −→u1 est caractérisé par un torseur cinématique :
C1 =
−→Ω1 = ωy
−→y + ωz−→z
−→uG1 = uG1
−→x
G
2. Considérons, d'autre part, le même PSD (Σ) mais, cette fois, soumis au seul moment de torsion−→Mx =
Mx−→x à l'exclusion de toute exion, ce qui constitue l'état 2 désigné par (S2) ;
(a) Le torseur des contraintes de cisaillement de torsion τt est un couple−→Mx :
T2 =
−→0−→Mx
∀P
=
−→0−→Mx
G
(b) Le champ de déplacement −→u2 résulte de la rotation autour du centre de torsion C2 et estcaractérisé, au gauchissement −→u (y,z) près, par un torseur cinématique :
C2 =
−→Ω2 = ωx
−→x−→0
C2
=
−→Ω2 = ωx
−→x−→Ω2 ∧
−−→C2G+−→u G
G
Appliquons le théorème de Maxwell-Betti et, pour cela, calculons le travail W12 des forces T1 dansle champ de déplacement −→u2 puis le travail W21 des forces T2 dans le champ de déplacement −→u1 11 :11. Le travail dont il est question ici est tout virtuel. Il s'agit en fait de la puissance virtuelle d'un torseur de force
T =
−→R−−→MG
G
dans un champ de vitesse virtuel caractérisé par un torseur cinématique C =
−→Ω−→uG
G
. Cette puissance
est égale au comoment des deux torseurs (réduits nécessairement au même point de réduction) : W =−→R · −→uG +
−−→MG ·
−→Ω (voir
le 1.7.3).

112 CHAPITRE 4. TORSION
1. W12 = T1G ⊗ C2G soit :
W12 =
−→T
−−→GC1 ∧
−→T
G
⊗
−→Ω2 = ωx
−→x−→Ω2 ∧
−−→C2G
G
W12 =−→T(−→
Ω2 ∧−−→C2G
)+−→Ω2
(−−→GC1 ∧
−→T)
2. W21 = T2G ⊗ C1G soit :
W21 =
−→0
−→Mx = Mx
−→x
G
⊗
−→Ω1 = ωy
−→y + ωz−→z
−→uG1 = uG1
−→x
G
W21 = Mx−→x (ωy
−→y + ωz−→z ) = 0
Comme W12 = W21 et que W21 = 0, on voit que :
−→T(−→
Ω2 ∧−−→C2G
)+−→Ω2
(−−→GC1 ∧
−→T)
= 0
Compte tenu des propriétés du produit mixte :
−→T(−→
Ω2 ∧−−→C2G
)+−→T(−→
Ω2 ∧−−→GC1
)= 0 ∀
−→T
Donc : −→Ω2 ∧
−−→GC1 =
−→Ω2 ∧
−−→GC2 ∀
−→Ω2
Donc : −−→GC1 =
−−→GC2
⇒ Centre de exion et centre de torsion sont donc bien confondus.
4.3.7 Fonction de torsion de Prandtl
La fonction de Prandtl 12 est à la torsion ce que la fonction d'Airy 13 est à l'élasticité plane 14. Il s'agitd'une fonction unique dont le champ de contrainte dérive et qui satisfait des conditions locales (équationdiérentielle) et aux limites du solide. Le problème de torsion (ou d'élasticité plane) est alors avantageusement réduit à la détermination de cette seule fonction ce qui peut être fait, soit analytiquement dans les cassimples, soit numériquement de façon générale, soit de manière approchée quand une solution approximativeconvient.
4.3.7.1 Dénition
La première équation d'équilibre local est ∂σxy∂y + ∂σxz
∂z = 0 (voir équation 4.3.1) que l'on ré-écrit :
∂σxy∂y
= −∂σxz∂z
Introduisons une fonction, dite fonction de Prandtl, telle que :
σxy =∂φ
∂zet σxz = −∂φ
∂y(4.3.4)
Alors l'équation précédente est automatiquement satisfaite 15
On dit que les contraintes de cisaillement de torsion dérivent de la fonction de Prandtl.
12. Ludwig Prandtl (1875-1953) physicien Allemand rendu célèbre par ses travaux en dynamique des uides et en calculdes structure, notamment dans les domaines de la stabilité et de la torsion.13. George Biddell Airy (1801-1892) mathématicien et physicien Anglais auteur de la fonction du même nom et également
connu pour ses travaux en astronomie. Un cratère de la Lune porte son nom.14. Voir le cours de mmc de L3
15. En vertu du théorème de Cauchy ∂2φ∂y∂z
= ∂2φ∂z∂y
.

4.3. THÉORIE GÉNÉRALE DE LA TORSION DE SAINT-VENANT 113
4.3.7.2 Équation de la torsion
Calculons les distorsions :
(a) γxy =1
Gσxy =
1
G
∂φ
∂z=∂ug∂y− αz
(b) γxz =1
Gσxz = − 1
G
∂φ
∂y=∂ug∂z
+ αy
Ces équations constituent les relations existant entre fonction de torsion et fonction de gauchissement.
Dérivons la 1ère expression par rapport à z, puis la seconde par rapport à y et, enn, calculons la diérence.Il vient :
∂ (a)
∂z− ∂ (b)
∂y⇒ 1
G
[∂2φ
∂z2+∂2φ
∂y2
]= −2α
Soit :∆φ = −2Gα (4.3.5)
⇒ Le Laplacien de la fonction de Prandtl est constant ; il est égal, au signe près, au doubledu produit du module de cisaillement par le taux de rotation. Cette équation est connue comme l'équation de la torsion .
Dérivons la 1ère expression par rapport à y, puis la seconde par rapport à z et, enn, calculons la somme.Il vient :
∂ (a)
∂y+∂ (b)
∂z⇒ 1
G
[∂2φ
∂z∂y− ∂2φ
∂y∂z
]=
[∂2ug∂y2
+∂2ug∂z2
]Soit :
∆ug = 0
⇒ La fonction de gauchissement est harmonique.
4.3.7.3 Condition à la périphérie du PSD
On suppose le barreau exempt de forces de volume et de forces de surface.
La surface latérale de la poutre (∂Σ) et donc de la section droite Σ est orientée par le vecteur unitaireextérieur −→n = ny
−→y + nz−→z .
Le vecteur contrainte agissant sur une facette latérale est nul :−→Φn (P ∈ ∂Σ,−→n ) =
−→0
Par conséquent : 0 σxy σxzσxy 0 0σxz 0 0
· 0nynz
=
000
⇒ σxyny + σxznz = 0
Or σxy = ∂φ∂z et σxz = −∂φ∂y ainsi ∂φ∂y × −nz + ∂φ
∂z × ny = 0 on reconnait le produit scalaire (dans le plan
yz)
[∂φ∂y∂φ∂z
]·[−nzny
]= 0 . Or le vecteur −nz−→y + nz
−→z est le vecteur−→t perpendiculaire à −→n et donc
tangent au contour ∂Σ. Le produit scalaire est donc égal à−−−→gradφ · −→t qui n'est autre que la dérivée de la
fonction de Prandtl parallèlement au contour ; cette dérivée directionnelle ∂φ∂s est nulle⇒ La fonction de
Prandtl est constante sur le périmètre du PSD. Comme la fonction de Prandtl se dénie à uneconstante près. On adopte une valeur périphérique nulle :
φ (P ) = 0 si P ∈ ∂Σ (4.3.6)
Si la section présente des évidements Σi la fonction de Prandtl est constante sur le contour ∂Σi de chaquecavité .

114 CHAPITRE 4. TORSION
Figure 4.3.3 Torsion d'une section droite (Σ) : la fonction de Prandtl est nulle sur le contour extérieur(∂Σ) et égale une constante le long de chacun des contours intérieurs (∂Σi) délimitant les cavités (Σi).
4.3.8 Torseur des contraintes de cisaillement de torsion
Le PSD Σ est orienté par le vecteur −→x . En chaque point P du PSD le vecteur contrainte−→T est donc égal à :
−→T x (P ∈ Σ,−→x ) =
0 σxy σxzσxy 0 0σxz 0 0
· 1
00
=
0σxyσxz
=
0∂φ∂z
−∂φ∂y
La résultante est nulle :
Ry =
¨
Σ
∂φ
∂zdΣ = 0 et Rz =
¨
Σ
−∂φ∂ydΣ = 0
Le moment−→Mx =
´Σ
−−→CP ∧
−→T x (P,−→x ) · dΣ est porté par −→x et est égal au moment de torsion d'intensité :
Mx = −¨
Σ
(y∂φ
∂y+ z
∂φ
∂z
)dΣ
Intégrons chaque terme par partie : 1er terme :
´Σy ∂φ∂y dΣ =
´Σ
[∂∂y (yφ)− φ
]dΣ
2eme terme :´
Σz ∂φ∂y dΣ =
´Σ
[∂∂z (zφ)− φ
]dΣ
Sommons en remarquant que ∂∂y (yφ) + ∂
∂z (zφ) est le rotationnel (selon −→x ) du vecteur φ (−z−→y + y−→z ) 16 :
Mx = −¨
Σ
−→rot [φ (−z−→y + y−→z )] ·
−→dΣ + 2
¨
Σ
φdΣ
Par application du théorème d'Ostrogradski 17 :
Mx = −˛
∂Σ
φ (−z−→y + y−→z ) ·−→ds+ 2
¨
Σ
φdΣ
Or la fonction φ est nulle sur le contour ∂Σ de sorte que l'intégrale curviligne ci-dessus est nulle. Ainsi, enn de compte :
Mx = 2
¨
Σ
φdΣ
16. Rappelons que :−→rot−→h =
−→∇ ∧−→h , avec :
−→∇ = ∂
∂x−→x + ∂
∂y−→y + ∂
∂z−→z . Dans le cas présent,
−→h = hy (y, z)−→y + hz (y, z)−→z .
Par conséquent−→rot−→h =
(∂hz∂y− ∂hy
∂z
)−→x17. La circulation d'un vecteur −→u sur un contour fermé ∂Σ est égal au ux du rotationnel de ce vecteur au travers de la
surface Σ délimitée par le contour :˜
Σ
−→rot−→u ·
−→dΣ =
´∂Σ−→u ·−→ds. On suppose ici que la surface Σ n'est délimitée que par un seul
contour (extérieur) ∂Σ.

4.3. THÉORIE GÉNÉRALE DE LA TORSION DE SAINT-VENANT 115
Si la section comporte N cavités Ci délimitées par les contours ∂Σi de surface Bi au bord desquelles lafonction de torsion adopte la constante φi, alors l'expression du moment de torsion devient 18 :
Mx = 2(˜
ΣφdΣ +
∑Ni=1Bi · φi
)4.3.9 Rigidité à la torsion
D'une part :
∆φ = −2Gα = −2Mx
J
D'autre part (section sans cavité) :
Mx = 2
¨
Σ
φdΣ
Donc :
J = −4
˜ΣφdΣ
∆φ
Et plus généralement, en cas de pluralité de cavités :
J = −4
˜ΣφdΣ +
∑Ni=1Bi · φi
∆φ(4.3.7)
Ces dernières relations permettent d'établir la valeur de la rigidité de torsion à l'aide seule de la fonction detorsion.
4.3.10 Résumé de la théorie de torsion de Saint-Venant
Soit une section Σ délimitée par son contour extérieur ∂Σ et éventuellement N contours intérieurs Ci etsoumise à l'action unique d'un moment de torsion Mx.
On cherche la fonction de Prandtl φ (y, z) vériant les conditions suivantes :
1. L'équation de la torsion : ∆φ = −2Gα ;
2. Conditions aux limites : φ = 0 le long de ∂Σ extérieur et φ = φi le long des ∂Σi intérieurs ;
3. Les contraintes de cisaillement dérivent de la fonction de torsion par σxy = ∂φ∂z et σxz = −∂φ∂y ;
4. Mx = 2(˜
ΣφdΣ +
∑Ni=1Bi · φi
)qui se simplie en Mx = 2
˜ΣφdΣ en l'absence de cavité ;
5. L'inertie de torsion vaut : J = −4˜
ΣφdΣ+
∑Ni=1 Bi·φi
∆φ soit J = −4˜
ΣφdΣ
∆φ en l'absence de cavité ;
6. La fonction de gauchissement du PSD est liée à la fonction de torsion par ∂ug∂y = 1
G∂φ∂z + αz et ∂ug
∂z =
− 1G∂φ∂y − αy . Ces relations peuvent aussi être écrites en termes de contraintes sous la forme σxy =
Gα[∂∂y
(ugα − yz
)]et σxz = Gα
[∂∂z
(ugα + yz
)]. On introduit donc une fonction ψ =
ugα , biharmonique
et dont les contraintes de cisaillement dérivent par σxy = Gα[∂ψ∂y − z
]et σxz = Gα
[∂ψ∂z + y
].
4.3.11 Applications
4.3.11.1 Torsion de la section circulaire pleine
La section circulaire, en plus de pouvoir être traitée directement par des considérations d'axis-symétrie desa géométrie (ce qui est généralement fait dans les niveaux de licence L1 ou L2), se prête à une intégrationanalytique exacte de l'équation de torsion.
18. Le terme 2Biφi vient de l'intégrale´∂Σi
φi(z−→y − y−→z
)·−→ds = φi
´∂Σi
(ydz − zdy) = φi´∂Σi
dωG où dωG est un élémentsectoriel du contour ∂Σi de pôle G. De plus l'intégrale de l'aire sectorielle sur le contour fermé est égale au double de l'airedélimitée par ce contour (indépendamment du pôle) ; d'où le résultat.

116 CHAPITRE 4. TORSION
Figure 4.3.4 Torsion d'une section circulaire pleine : les contraintes de cisaillement sont orthoradiales etleur intensité est proportionnelle au rayon polaire.
Le contour ∂Σ de la section circulaire Σ de rayon R est décrit par l'équation cartésienne :
y2 + z2 = R2
Choisissons comme fonction de Prandtl candidate une fonction de la forme :
φ (y, z) = k(y2 + z2 −R2
)1. Il est évident que la condition aux limites φ = 0 sur le contour ∂Σ est satisfaite par construction ;
2. D'autre part le Laplacien de la fonction vaut ∆φ = 4k = −2Gα de sorte que l'équation de torsion estvériée en prenant k = − 1
2Gα.
La fonction de Prandtl du prol circulaire plein est donc :
φ (y, z) = −1
2Gα
(y2 + z2 −R2
)Calculons l'inertie de torsion :
J = −4
˜ΣφdΣ
∆φ= −4
´ R0− 1
2Gα(r2 −R2
)× 2πrdr
−2Gα=πR4
2
Puis les contraintes de cisaillement :
σxy =∂φ
∂z= −Gαz et σxz =
∂φ
∂y= +Gαy
Le vecteur contrainte de cisaillement est donc :
−→τ t (y, z) = Gα (−z−→y + y−→z )
Il est perpendiculaire au vecteur polaire−−→OP et son module Gαr est proportionnel à r .
Le gauchissement du plan de section droite est donné par les relations ∂ug∂y = 1
G∂φ∂z + αz = 0 et ∂ug
∂z =
− 1G∂φ∂y − αy = 0 ; la fonction de gauchissement dans le cas particulier présent est nulle. Les sections
circulaires ne gauchissent pas.
4.3.11.2 Torsion de la section annulaire
En prolongement de l'étude précédente, on envisage la situation ou le prol circulaire de rayon Re présenteun évidement circulaire centré de rayon Ri.

4.3. THÉORIE GÉNÉRALE DE LA TORSION DE SAINT-VENANT 117
Figure 4.3.5 Torsion d'une section annulaire.
La fonction de Prandtl du prol annulaire est la même que précédemment :
φ (y, z) = −1
2Gα
(y2 + z2 −R2
e
)Cette fonction est bien nulle sur le contour extérieur φ (r = Re) = 0 et constante sur le contour intérieurφ (r = Ri) = − 1
2Gα(R2i −R2
e
).
L'inertie de torsion vaut :
J = −4
˜ΣφdΣ
∆φ= −4
´ ReRi− 1
2Gα(r2 −R2
e
)× 2πrdr
−2Gα=π
2
(R4e −R4
i
)Comme pour le prol plein, les contraintes de cisaillement sont : τt = Gαz.
Si la diérence de rayon e = Re − Ri est petite devant le rayon extérieur R = Re alors on peut fairel'approximation :
R4e −R4
i = (Re −Ri)(R3e +R2
eRi +ReR2i +Ri3
)≈ 4R3e
L'inertie devient :J = 2πR3e (4.3.8)
4.3.11.3 Torsion de la section rectangulaire pleine
Paragraphe hors programme L3.
Selon torsion of a rectangular prismatic bar : solution using a power t model de Louis Angelo M.Danaoet Ryan M. Cabrera (Philippine Engineering Journal 2007 ; vol 28, n°1, pp 77-98).
Dans ce paragraphe, on considère une section droite de forme rectangulaire, pleine, de hauteur h parallèlementà y et de base b parallèlement à z . Cette section est soumise à l'action unique d'un moment de torsion Mx.Le centre de torsion est manifestement confondu avec le centre géométrique de la section rectangulaire.
L'antisymétrie du problème se traduit par :
(a) σxy (−y, z) = +σxy (y, z) parite de la fct σxy en y(b) σxy (y,−z) = −σxy (y, z) imparite de la fct σxy en z(c) σxz (−y, z) = −σxz (y, z) imparite de la fct σxz en y(d) σxz (y,−z) = +σxz (y, z) parite de la fct σxz en z
Par conséquent :(a) ∂ψ
∂y paire en y ⇒ ψimpaire en y
(b) ∂ψ∂y impaire en z
(c) ∂ψ∂z impaire en y
(d) ∂ψ∂z paire en z ⇒ ψ impaire en z

118 CHAPITRE 4. TORSION
Figure 4.3.6 Torsion d'une section rectangulaire pleine : symétrie/antisymétrie des contraintes de cisaille-ment.
La fonction ψ vérie l'équation ∆ψ = 0 ainsi que les conditions aux limites :
Le long des bords latéraux, la contrainte de cisaillement σxz est nulle :
∂ψ
∂z
(y,± b
2
)= −y (4.3.9)
Le long des bords supérieur et inférieur c'est la contrainte σxy qui est nulle :
∂ψ
∂y
(±h
2, z
)= +z (4.3.10)
Choisissons la fonction ψ sous la forme du produit de fonctions découplées : ψ (y, z) = f (y) · g (z). A noterque la double imparité de ψ par rapport à y et z entraine l'imparité de g ainsi que celle de f .
Calculons le Laplacien :
∆ψ =∂2ψ
∂y2+∂2ψ
∂z2= f
′′(y) · g (z) + f (y) · g
′′(z) = 0
Séparons les fonctions (et ainsi les variables). Les deux fonctions étant égales, elles sont donc aussi constantes :
f′′
(y)
f (y)= −g
′′(z)
g (z)= −ω2
On obtient ainsi deux équations linéaires à coecients constants dont les solutions sont impaires :
(a) g′′ − ω2g = 0
(b) f′′
+ ω2f = 0(4.3.11)
et qui sont respectivement une fonction sinus et une fonction sinus hyperbolique de même pulsation ωk =(1+2k)π
h .
Tous calculs faits on trouve :
ψ (y, z) = yz − 8h2
π3
∑k=∞k=0
(−1)k
(1+2k)3sinhωkz
coshωkb
2
sinωky
σxy (y, z) = − 8Gαhπ2
∑k=∞k=0
(−1)k
(1+2k)2sinhωkz
coshωkb
2
cosωky
σxz (y, z) = 2Gαy − 8Gαhπ2
∑k=∞k=0
(−1)k
(1+2k)2coshωkz
coshωkb
2
sinωky
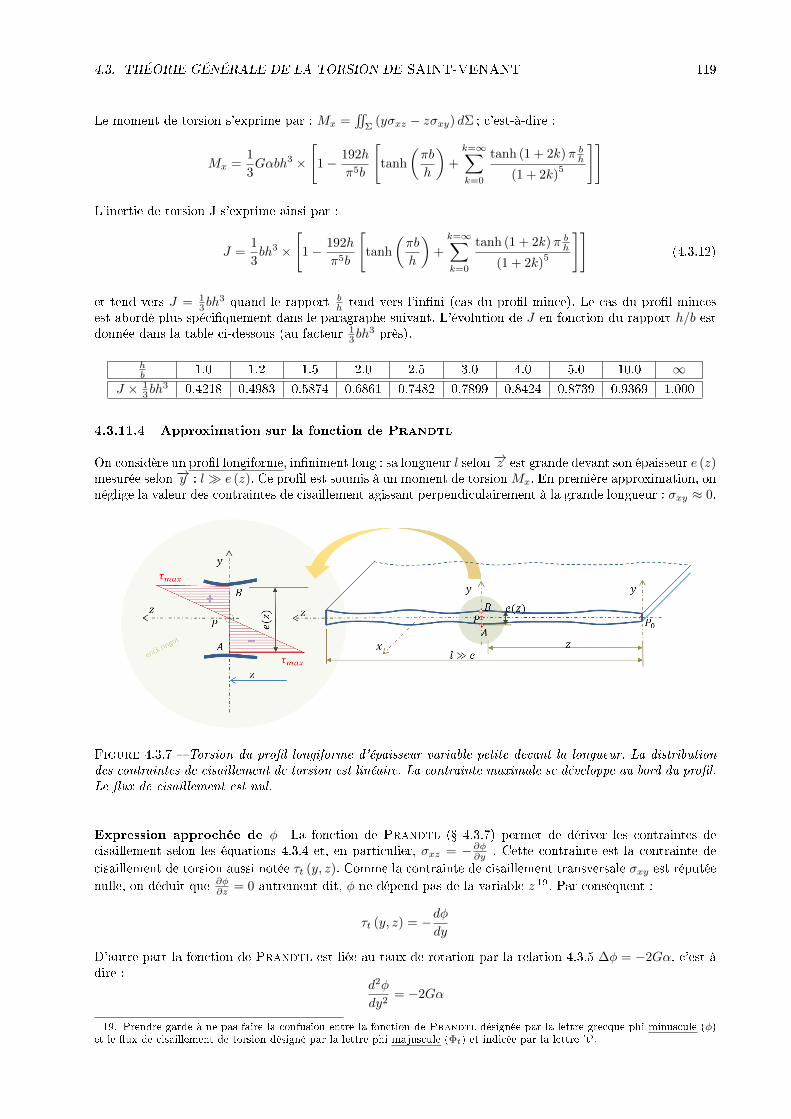
4.3. THÉORIE GÉNÉRALE DE LA TORSION DE SAINT-VENANT 119
Le moment de torsion s'exprime par : Mx =˜
Σ(yσxz − zσxy) dΣ ; c'est-à-dire :
Mx =1
3Gαbh3 ×
[1− 192h
π5b
[tanh
(πb
h
)+
k=∞∑k=0
tanh (1 + 2k)π bh(1 + 2k)
5
]]
L'inertie de torsion J s'exprime ainsi par :
J =1
3bh3 ×
[1− 192h
π5b
[tanh
(πb
h
)+
k=∞∑k=0
tanh (1 + 2k)π bh(1 + 2k)
5
]](4.3.12)
et tend vers J = 13bh
3 quand le rapport bh tend vers l'inni (cas du prol mince). Le cas du prol minces
est abordé plus spéciquement dans le paragraphe suivant. L'évolution de J en fonction du rapport h/b estdonnée dans la table ci-dessous (au facteur 1
3bh3 près).
hb 1.0 1.2 1.5 2.0 2.5 3.0 4.0 5.0 10.0 ∞
J × 13bh
3 0.4218 0.4983 0.5874 0.6861 0.7482 0.7899 0.8424 0.8739 0.9369 1.000
4.3.11.4 Approximation sur la fonction de Prandtl
On considère un prol longiforme, inniment long : sa longueur l selon −→z est grande devant son épaisseur e (z)mesurée selon −→y : l e (z). Ce prol est soumis à un moment de torsionMx. En première approximation, onnéglige la valeur des contraintes de cisaillement agissant perpendiculairement à la grande longueur : σxy ≈ 0.
Figure 4.3.7 Torsion du prol longiforme d'épaisseur variable petite devant la longueur. La distributiondes contraintes de cisaillement de torsion est linéaire. La contrainte maximale se développe au bord du prol.Le ux de cisaillement est nul.
Expression approchée de φ La fonction de Prandtl ( 4.3.7) permet de dériver les contraintes decisaillement selon les équations 4.3.4 et, en particulier, σxz = −∂φ∂y . Cette contrainte est la contrainte decisaillement de torsion aussi notée τt (y, z). Comme la contrainte de cisaillement transversale σxy est réputéenulle, on déduit que ∂φ
∂z = 0 autrement dit, φ ne dépend pas de la variable z 19. Par conséquent :
τt (y, z) = −dφdy
D'autre part la fonction de Prandtl est liée au taux de rotation par la relation 4.3.5 ∆φ = −2Gα. c'est àdire :
d2φ
dy2= −2Gα
19. Prendre garde à ne pas faire la confusion entre la fonction de Prandtl désignée par la lettre grecque phi minuscule (φ)et le ux de cisaillement de torsion désigné par la lettre phi majuscule (Φt) et indicée par la lettre 't'.

120 CHAPITRE 4. TORSION
En intégrant une fois :dφ
dy= −2Gαy +A1
Et une seconde fois :
φ (y) = −Gαy2 +A1y +A2
Or la fonction φ s'annule sur le bord du prol c'est-à-dire pour y = ± e2 (condition 4.3.6). Par conséquent 20 :
φ (y) = Gα
[(e2
)2
− y2
](4.3.13)
Expression de la contrainte τf On déduit donc la contrainte de cisaillement de torsion par :
τt (y, z) = −dφdy
= +2Gαy
La contrainte de cisaillement de torsion est linéaire et impaire. La contrainte maximale τmax se développeau bord du prol (là où y est la plus grande en ± 1
2e (z)) ; on déduit que :
τmax (z) = Gαe (z) (4.3.14)
Ce qui permet d'exprimer la contrainte de cisaillement sous la forme :
τt (y, z) = τmax (z)× 2y
e (z)
Rigidité à la torsion J Reprenons l'expression 4.3.7 selon laquelle :
J = −4
˜ΣφdΣ
∆φ
et remplaçons la fonction φ par sa valeur approchée (équation 4.3.13)
φ (y) = Gα
[(e2
)2
− y2
]Alors 21 :
∆φ = −2Gα
et :¨
Σ
φ · dΣ = Gα
ˆ
L
+e/2ˆ
−e/2
[(e2
)2
− y2
]dy · ds =
1
6Gα
ˆ
L
e3 (s) · ds
par conséquent :
J = −4×16Gα
´L e
3 (s) · ds−2×Gα
=1
3
ˆ
L
e3 (s) · ds (4.3.15)
Et dans le cas où l'épaisseur ne varie pas :
J =1
3le3
20. En toute rigueur l'épaisseur e dépend de z.
21. On a fait l'approximation ∆φ ≈ ∂2φ∂y2 ce qui revient à supposer que e (z) ne varie pas brusquement.
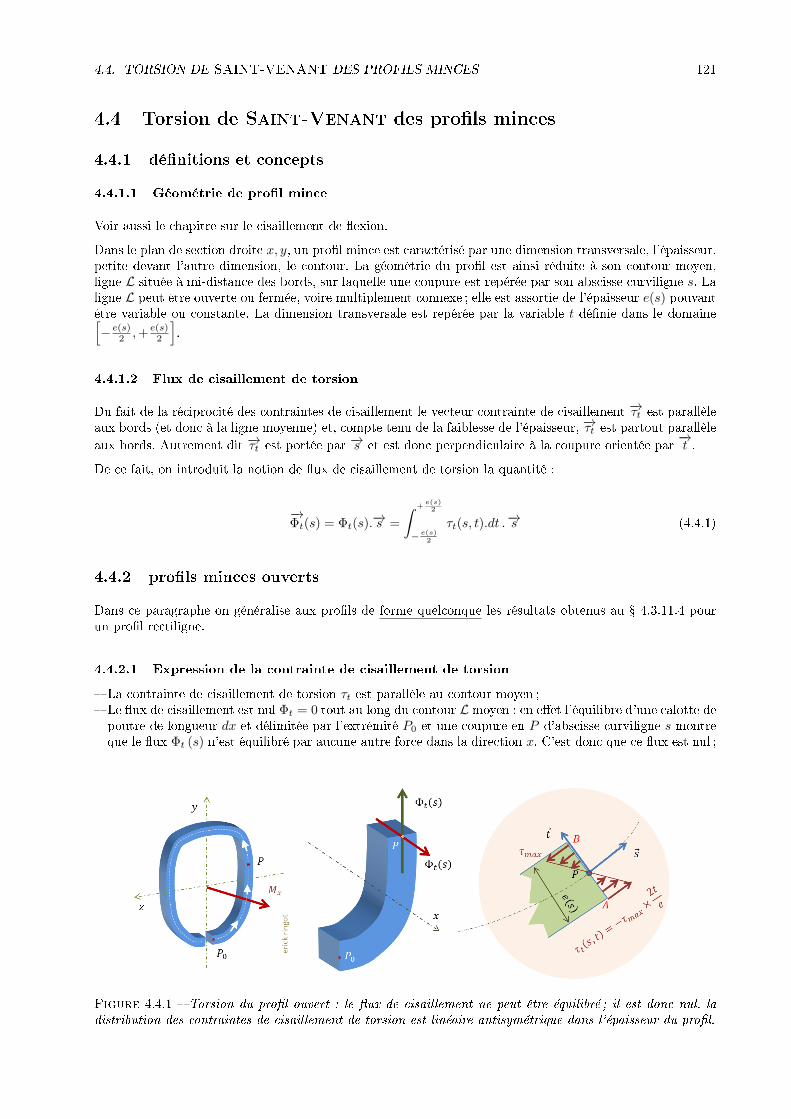
4.4. TORSION DE SAINT-VENANT DES PROFILS MINCES 121
4.4 Torsion de Saint-Venant des prols minces
4.4.1 dénitions et concepts
4.4.1.1 Géométrie de prol mince
Voir aussi le chapitre sur le cisaillement de exion.
Dans le plan de section droite x, y, un prol mince est caractérisé par une dimension transversale, l'épaisseur,petite devant l'autre dimension, le contour. La géométrie du prol est ainsi réduite à son contour moyen,ligne L située à mi-distance des bords, sur laquelle une coupure est repérée par son abscisse curviligne s. Laligne L peut être ouverte ou fermée, voire multiplement connexe ; elle est assortie de l'épaisseur e(s) pouvantêtre variable ou constante. La dimension transversale est repérée par la variable t dénie dans le domaine[− e(s)2 ,+ e(s)
2
].
4.4.1.2 Flux de cisaillement de torsion
Du fait de la réciprocité des contraintes de cisaillement le vecteur contrainte de cisaillement −→τt est parallèleaux bords (et donc à la ligne moyenne) et, compte tenu de la faiblesse de l'épaisseur, −→τt est partout parallèleaux bords. Autrement dit −→τt est portée par −→s et est donc perpendiculaire à la coupure orientée par
−→t .
De ce fait, on introduit la notion de ux de cisaillement de torsion la quantité :
−→Φt(s) = Φt(s).
−→s =
ˆ +e(s)
2
− e(s)2
τt(s, t).dt .−→s (4.4.1)
4.4.2 prols minces ouverts
Dans ce paragraphe on généralise aux prols de forme quelconque les résultats obtenus au 4.3.11.4 pourun prol rectiligne.
4.4.2.1 Expression de la contrainte de cisaillement de torsion
La contrainte de cisaillement de torsion τt est parallèle au contour moyen ; Le ux de cisaillement est nul Φt = 0 tout au long du contour L moyen : en eet l'équilibre d'une calotte depoutre de longueur dx et délimitée par l'extrémité P0 et une coupure en P d'abscisse curviligne s montreque le ux Φt (s) n'est équilibré par aucune autre force dans la direction x. C'est donc que ce ux est nul ;
Figure 4.4.1 Torsion du prol ouvert : le ux de cisaillement ne peut être équilibré ; il est donc nul. ladistribution des contraintes de cisaillement de torsion est linéaire antisymétrique dans l'épaisseur du prol.

122 CHAPITRE 4. TORSION
La répartition des contraintes de cisaillement est linéaire et anti-symétrique dans l'épaisseur du prol.Cette distribution est compatible en tout point avec un ux de cisaillement nul. Ainsi, si l'on appelle tl'abscisse perpendiculaire au prol, on peut exprimer la distribution τt(s, t) par :
τt(s, t) = −τmax(s).2t
e(s)(4.4.2)
S'inspirant des résultats établis pour le prol rectiligne mince (équation 4.3.14), nous conviendrons que lavaleur de la contrainte de cisaillement maximale, au bord du prol, est égale à :
τmax (s) = Gαe (s) =Mx
JO· e (s) (4.4.3)
oùMx désigne le moment de torsion (porté par −→x ), JO l'inertie de torsion 22 telle qu'introduite par la théoriedes poutres, e (s) l'épaisseur locale. Et, ce, quelque soit la forme du prol mince ouvert.
=⇒ Dans un prol ouvert, la contrainte de cisaillement est ainsi maximale là où l'épaisseur est la plus forte !
4.4.2.2 Expression de l'inertie de torsion
En théorie des poutres, on introduit l'inertie de torsion J comme caractéristique globale de la section droitede la poutre. Cela permet d'exprimer la relation taux de rotation, moment de torsion par Mt = G.J.αpuis d'exprimer l'énergie élastique linéique (par unité de longueur de poutre), ainsi 23 :
we =1
2Mxα =
1
2
M2x
GJ=
1
2GJα2 (4.4.4)
Pour un prol ouvert, on notera donc :
we =1
2
M2x
GJO(4.4.5)
Une autre façon d'exprimer cette énergie élastique consiste, se référant à une approche par la mécaniquedes milieux continus, à intégrer l'énergie volumique créée par les contraintes de cisaillement de torsion surle plan de section droite (Σ) :
we =
¨
Σ
1
2
τ2t
GdΣ (4.4.6)
Il faut alors considérer deux abscisses : l'abscisse curviligne s décrivant le contour ouvert et la coordonnéetransverse t décrivant l'épaisseur localement.
we =1
2G
ˆL
[ˆ + e2
− e2
(τmax(s).
2t
e(s)
)2
dt
]ds (4.4.7)
En remplaçant τmax par son expression (4.4.3) :
we =1
2G
ˆL
[ˆ + e2
− e2
([Mx
JOe (s)
].
2t
e(s)
)2
dt
]ds (4.4.8)
En développant :
we =1
2G× M2
x
J2O
ˆL
1
3.e3(s).ds (4.4.9)
A identier à :
22. L'indice O indique qu'il s'agit de l'inertie de torsion d'un prol Ouvert.23. Cette relation est valable également pour les prols fermés.
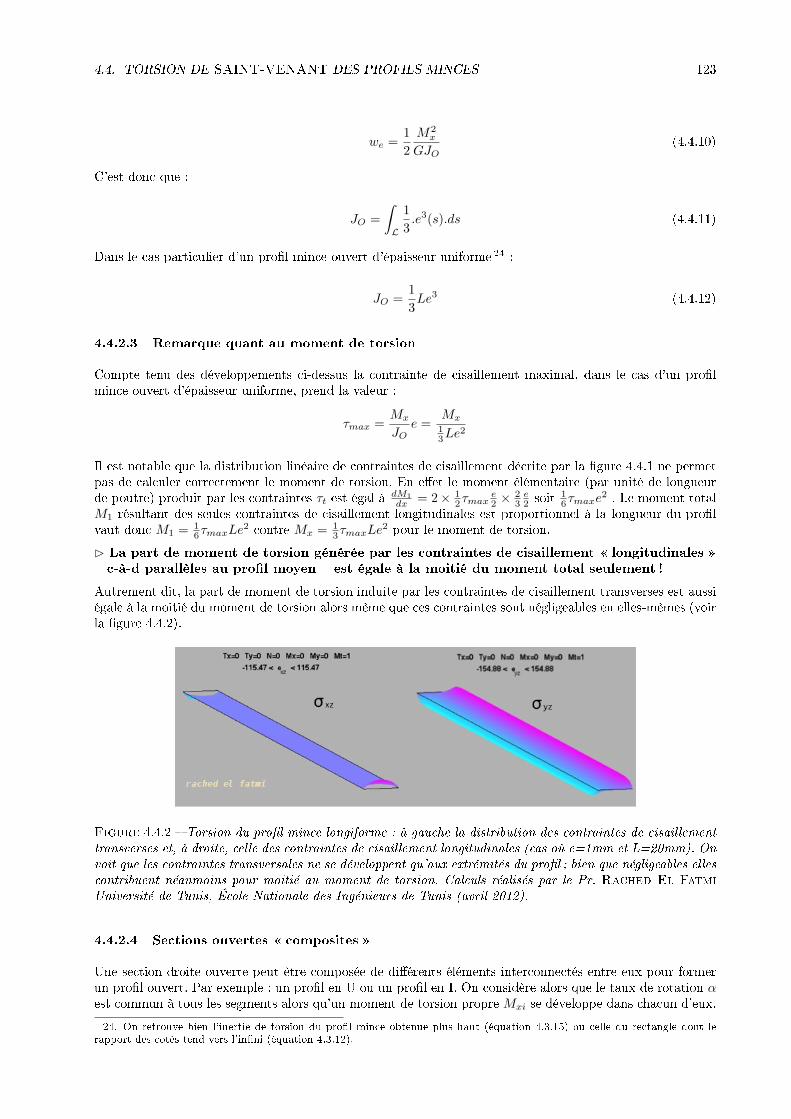
4.4. TORSION DE SAINT-VENANT DES PROFILS MINCES 123
we =1
2
M2x
GJO(4.4.10)
C'est donc que :
JO =
ˆL
1
3.e3(s).ds (4.4.11)
Dans le cas particulier d'un prol mince ouvert d'épaisseur uniforme 24 :
JO =1
3Le3 (4.4.12)
4.4.2.3 Remarque quant au moment de torsion
Compte tenu des développements ci-dessus la contrainte de cisaillement maximal, dans le cas d'un prolmince ouvert d'épaisseur uniforme, prend la valeur :
τmax =Mx
JOe =
Mx13Le
2
Il est notable que la distribution linéaire de contraintes de cisaillement décrite par la gure 4.4.1 ne permetpas de calculer correctement le moment de torsion. En eet le moment élémentaire (par unité de longueurde poutre) produit par les contraintes τt est égal à
dM1
dx = 2× 12τmax
e2 ×
23e2 soit 1
6τmaxe2 . Le moment total
M1 résultant des seules contraintes de cisaillement longitudinales est proportionnel à la longueur du prolvaut donc M1 = 1
6τmaxLe2 contre Mx = 1
3τmaxLe2 pour le moment de torsion.
B La part de moment de torsion générée par les contraintes de cisaillement longitudinales c-à-d parallèles au prol moyen est égale à la moitié du moment total seulement !
Autrement dit, la part de moment de torsion induite par les contraintes de cisaillement transverses est aussiégale à la moitié du moment de torsion alors même que ces contraintes sont négligeables en elles-mêmes (voirla gure 4.4.2).
Figure 4.4.2 Torsion du prol mince longiforme : à gauche la distribution des contraintes de cisaillementtransverses et, à droite, celle des contraintes de cisaillement longitudinales (cas où e=1mm et L=20mm). Onvoit que les contraintes transversales ne se développent qu'aux extrémités du prol ; bien que négligeables ellescontribuent néanmoins pour moitié au moment de torsion. Calculs réalisés par le Pr. Rached El Fatmi
Université de Tunis, École Nationale des Ingénieurs de Tunis (avril 2012).
4.4.2.4 Sections ouvertes composites
Une section droite ouverte peut être composée de diérents éléments interconnectés entre eux pour formerun prol ouvert. Par exemple : un prol en U ou un prol en I. On considère alors que le taux de rotation αest commun à tous les segments alors qu'un moment de torsion propre Mxi se développe dans chacun d'eux.
24. On retrouve bien l'inertie de torsion du prol mince obtenue plus haut (équation 4.3.15) ou celle du rectangle dont lerapport des cotés tend vers l'inni (équation 4.3.12).
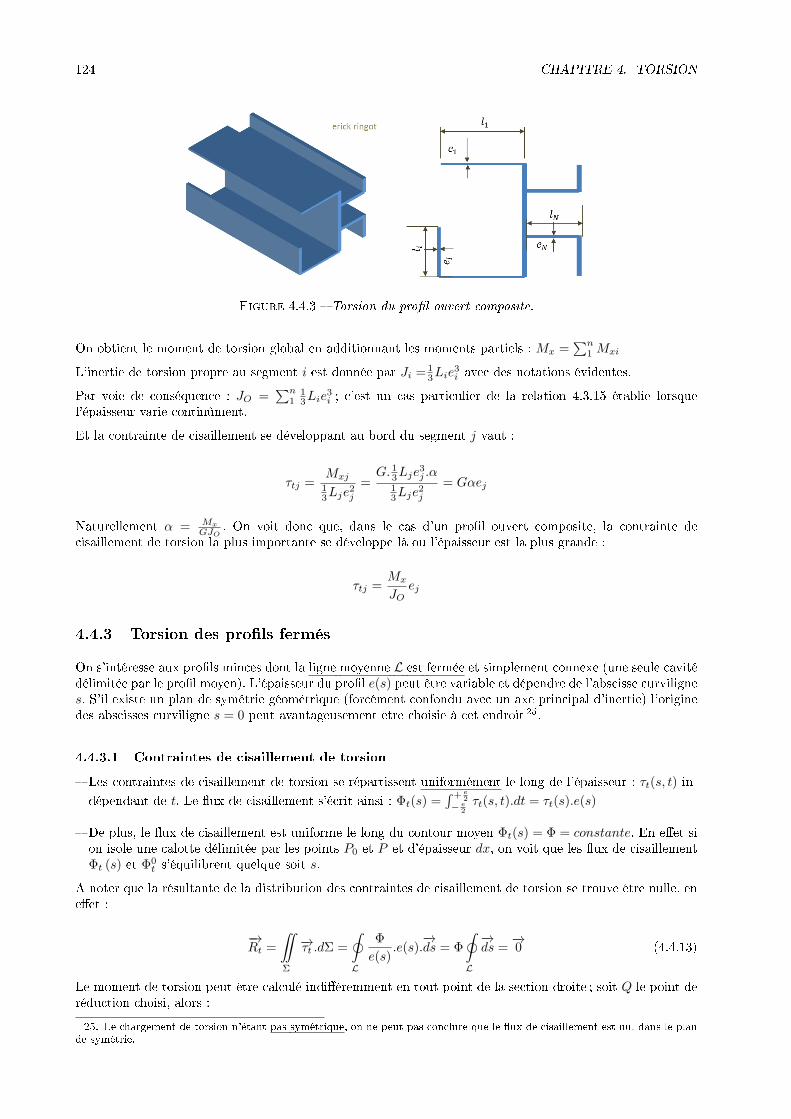
124 CHAPITRE 4. TORSION
Figure 4.4.3 Torsion du prol ouvert composite.
On obtient le moment de torsion global en additionnant les moments partiels : Mx =∑n
1 Mxi
L'inertie de torsion propre au segment i est donnée par Ji = 13Lie
3i avec des notations évidentes.
Par voie de conséquence : JO =∑n
113Lie
3i ; c'est un cas particulier de la relation 4.3.15 établie lorsque
l'épaisseur varie continûment.
Et la contrainte de cisaillement se développant au bord du segment j vaut :
τtj =Mxj
13Lje
2j
=G. 13Lje
3j .α
13Lje
2j
= Gαej
Naturellement α = Mx
GJO. On voit donc que, dans le cas d'un prol ouvert composite, la contrainte de
cisaillement de torsion la plus importante se développe là ou l'épaisseur est la plus grande :
τtj =Mx
JOej
4.4.3 Torsion des prols fermés
On s'intéresse aux prols minces dont la ligne moyenne L est fermée et simplement connexe (une seule cavitédélimitée par le prol moyen). L'épaisseur du prol e(s) peut être variable et dépendre de l'abscisse curvilignes. S'il existe un plan de symétrie géométrique (forcément confondu avec un axe principal d'inertie) l'originedes abscisses curviligne s = 0 peut avantageusement être choisie à cet endroit 25.
4.4.3.1 Contraintes de cisaillement de torsion
Les contraintes de cisaillement de torsion se répartissent uniformément le long de l'épaisseur : τt(s, t) in-
dépendant de t. Le ux de cisaillement s'écrit ainsi : Φt(s) =´ + e
2
− e2τt(s, t).dt = τt(s).e(s)
De plus, le ux de cisaillement est uniforme le long du contour moyen Φt(s) = Φ = constante. En eet sion isole une calotte délimitée par les points P0 et P et d'épaisseur dx, on voit que les ux de cisaillementΦt (s) et Φ0
t s'équilibrent quelque soit s.
A noter que la résultante de la distribution des contraintes de cisaillement de torsion se trouve être nulle, eneet :
−→Rt =
¨
Σ
−→τt .dΣ =
˛
L
Φ
e(s).e(s).
−→ds = Φ
˛
L
−→ds =
−→0 (4.4.13)
Le moment de torsion peut être calculé indiéremment en tout point de la section droite ; soit Q le point deréduction choisi, alors :
25. Le chargement de torsion n'étant pas symétrique, on ne peut pas conclure que le ux de cisaillement est nul dans le plande symétrie.

4.4. TORSION DE SAINT-VENANT DES PROFILS MINCES 125
Figure 4.4.4 Torsion du prol fermé : le ux de cisaillement est uniforme et non nul. La distribution descontraintes de cisaillement de torsion est uniforme dans l'épaisseur du prol.
−→Mx = Mx
−→x =
¨
Σ
−−→QP ∧ −→τt .dΣ (4.4.14)
D'où on tire :
Mx = Φ.−→x˛
L
−−→QP ∧
−→ds (4.4.15)
On a ainsi introduit un élément d'aire sectorielle de pôle Q : dωQ = −→x ·(−−→QP ∧
−→ds)
dont l'intégrale le long du contour fermé est égale, en valeur, à deux fois l'aire de la surface délimitée 26 parledit contour :
˛
L
dωQ = 2B ∀Q ∈ (Σ) (4.4.16)
Par conséquent, on déduit la première formule de Leduc 27 :
Φ =Mx
2B(4.4.17)
Comme Φ = τf (s) · e (s) on constate que, dans un prol fermé, la contrainte de cisillement de exion estmaximale là où l'épaisseur est la plus faible.
4.4.3.2 Inertie de torsion d'un prol mince et fermé
Comme précédemment, l'énergie élastique est exprimée par deux voies :
Celle de la théorie des poutres par l'équation 4.4.4 ou encore par celle de la mmc grâce à l'équation 4.4.6.
Par rapport au paragraphe précédent, seule l'expression de la contrainte de cisaillement de torsion est chan-gée. Ainsi :
we =
¨
Σ
1
2
τ2t
GdΣ =
1
2G
˛
L
[Φ
e(s)
]2
e(s).ds (4.4.18)
26. Ne pas confondre l'aire de la section droite (occupée par la matière) notée A et l'aire délimitée par le contour moyen(cavité) notée B en écriture cursive calligraphiée.27. René Leduc (1898-1959), ingénieur Français en aéronautique, auteur de la thèse Contribution à l'Étude des Poutres
Prismatiques soutenue en 1929.

126 CHAPITRE 4. TORSION
En simpliant :
we =1
2G.M2t
4.B2
˛
L
ds
e(s)(4.4.19)
Et l'inertie de torsion d'un prol fermé JF s'exprime donc par la seconde formule de Leduc :
JF =4B2¸L
dse(s)
(4.4.20)
Et dans le cas particulier où le prol présente une épaisseur e uniforme :
JF =4B2e
L(4.4.21)
Par exemple l'inertie du tube circulaire de rayon R et d'épaisseur e vaut :
J =4×
(πR2
)2e
2πR= 2πR3e
Cette expression a été établie lors de l'étude du prol annulaire (équation 4.3.8).
4.4.3.3 Circulation du vecteur cisaillement
Paragraphe hors programme L3.
Figure 4.4.5 Circulation de la contrainte de cisaillement de torsion le long du contour moyen fermé.
Calcul direct On reprend le type de démonstration utilisé pour le cisaillement de exion.
Dans ce paragraphe on s'intéresse à la circulation du vecteur cisaillement de torsion sur un contour fermé.Une partie du raisonnement est inspirée du paragraphe 3.4.4 abordé dans le chapitre sur le cisaillement deexion.
1. En premier lieu, rappelons que la notation τt désigne la composante du vecteur contrainte agissant surun plan de section droite (Σ) orienté par −→x , composante tangente au contour moyen (L) localementorienté par le vecteur unitaire directeur −→s . En mécanique des milieux continus, une telle composanteest notée σxs 28.
2. En second lieu, la loi de comportement de l'élasticité de Hooke permet d'établir la correspondanceentre cette composante de cisaillement et la distorsion correspondante. En eet ε = 1+ν
E σ − νE tr
(σ)I
donc εxs = 12G × σxs et par conséquent : σxs = 2Gεxs.
28. Le vecteur contrainte dont il est question ici s'écrit donc :−→T = σxs
−→s (notations mmc) ou−→T = τt
−→s (notation rdm) ; iln'y a, en eet, pas de contrainte normale en torsion pure.

4.4. TORSION DE SAINT-VENANT DES PROFILS MINCES 127
3. En troisième lieu, la déformation angulaire εxs est liée au champ de déplacement par le premier gradient.
Ainsi ε = 12
(grad−→u + gradt−→u
)conduit à εxs = 1
2
(∂ux∂s + ∂us
∂x
).
4. En quatrième lieu, la théorie de la torsion le champ de déplacement comporte une composante axialede gauchissement ug = ux (s, t) et une composante de déplacement dans le plan de section droite
résultant de la rotation axiale autour du centre de torsion C, ainsi :−→u = ux (s, t)−→x +−→Ωx (x)∧
−−→CP . La
composante de déplacement us au point P est la projection du vecteur déplacement dans la direction
s soit : us = −→s ·(−→
Ωx (x) ∧−−→CP)
= Ωx (x)−→x ·(−−→CP ∧ −→s
)Par conséquent :
τt = σxs = G
[∂ux∂s
+dΩxdx−→x ·
(−−→CP ∧ −→s
)]= G
[∂ux∂s
+ α−→x ·(−−→CP ∧ −→s
)]Calculons la circulation de cette composante de contrainte ‖ −→s :
˛
(L)
−→τt ·−→ds =
˛
(L)
τt · ds = G
˛
(L)
∂ux∂s· ds+ α
˛
(L)
−→x ·(−−→CP ∧
−→ds)
︸ ︷︷ ︸element d′aire sectorielle
de poleC = dωC
Par conséquent :
˛
(L)
τt · ds = G
˛(L)
dusx + α
˛
(L)
dωC
La première intégrale est la diérence de déplacement axial ∆ux lorsque le point P eectue un parcourscomplet du contour (L) ; elle est donc nulle ;
La seconde intégrale est égale au double de l'aire B de la surface délimitée par (L).
Par conséquent : ˛
(L)
τt · ds = 2GBα
Démonstration par les formules de Leduc Nous aurions aussi pu démontrer cette relation en nousappuyant sur les deux formules de Leduc. En eet, d'une part :
JF =Mx
Gα=
4B2¸(L)
dse(s)
⇒Mx = Gα× 4B2Φ¸(L)
Φdse(s)
= Gα× 4B2Φ¸(L)
τt (s) ds
De l'autre :
Mx = 2BΦ
Donc
2BΦ = Gα× 4B2Φ¸(L)
τt (s) ds
Par conséquent : ˛
(L)
τt · ds = 2GBα
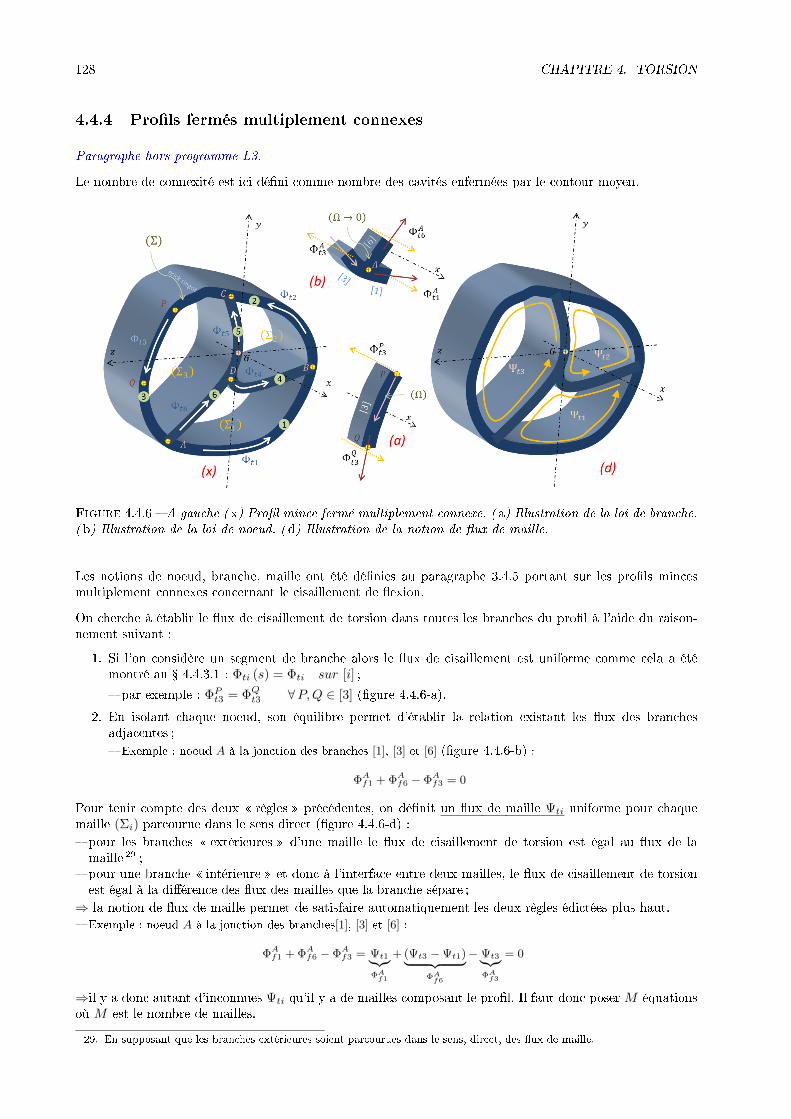
128 CHAPITRE 4. TORSION
4.4.4 Prols fermés multiplement connexes
Paragraphe hors programme L3.
Le nombre de connexité est ici déni comme nombre des cavités enfermées par le contour moyen.
Figure 4.4.6 A gauche ( x) Prol mince fermé multiplement connexe. ( a) Illustration de la loi de branche.(b) Illustration de la loi de noeud. (d) Illustration de la notion de ux de maille.
Les notions de noeud, branche, maille ont été dénies au paragraphe 3.4.5 portant sur les prols mincesmultiplement connexes concernant le cisaillement de exion.
On cherche à établir le ux de cisaillement de torsion dans toutes les branches du prol à l'aide du raison-nement suivant :
1. Si l'on considère un segment de branche alors le ux de cisaillement est uniforme comme cela a étémontré au 4.4.3.1 : Φti (s) = Φti sur [i] ;
par exemple : ΦPt3 = ΦQt3 ∀P,Q ∈ [3] (gure 4.4.6-a).
2. En isolant chaque noeud, son équilibre permet d'établir la relation existant les ux des branchesadjacentes ; Exemple : noeud A à la jonction des branches [1], [3] et [6] (gure 4.4.6-b) :
ΦAf1 + ΦAf6 − ΦAf3 = 0
Pour tenir compte des deux règles précédentes, on dénit un ux de maille Ψti uniforme pour chaquemaille (Σi) parcourue dans le sens direct (gure 4.4.6-d) : pour les branches extérieures d'une maille le ux de cisaillement de torsion est égal au ux de lamaille 29 ;
pour une branche intérieure et donc à l'interface entre deux mailles, le ux de cisaillement de torsionest égal à la diérence des ux des mailles que la branche sépare ;⇒ la notion de ux de maille permet de satisfaire automatiquement les deux règles édictées plus haut. Exemple : noeud A à la jonction des branches[1], [3] et [6] :
ΦAf1 + ΦAf6 − ΦAf3 = Ψt1︸︷︷︸ΦAf1
+ (Ψt3 − Ψt1)︸ ︷︷ ︸ΦAf6
− Ψt3︸︷︷︸ΦAf3
= 0
⇒il y a donc autant d'inconnues Ψti qu'il y a de mailles composant le prol. Il faut donc poser M équationsoù M est le nombre de mailles.
29. En supposant que les branches extérieures soient parcourues dans le sens, direct, des ux de maille.

4.5. TORSEUR ÉQUIVALENT À LA DISTRIBUTION DES CONTRAINTES DE CISAILLEMENTDE TORSION129
1. Le moment de torsion est donné par :
Mx = −→x ·
sur le contourmultiplement connexe︷ ︸︸ ︷˛
(L)
−−→QP ∧ Φt (s) ·
−→ds =
∑i
Ψti
˛(Li)
−→x ·(−−→QP ∧
−→ds)
︸ ︷︷ ︸dωQ
⇒ Mx = 2∑i
Ψti · Bi = GJα (4.4.22)
où Bi désigne l'aire de la maille numéro i.
2. D'autre part la circulation de la contrainte de cisaillement de torsion sur un contour fermé a été calculéeprécédemment ( 4.4.3.3) :
˛
(Li)
τti (s) · ds =
˛
(Li)
Φti ·ds
e (s)= 2GBiα i = 1 · · ·M
⇒ Ψti
˛
(Li)
ds
e (s)−∑j
Ψtj
ˆ
(Lij)
ds
e (s)= 2GBiα i = 1 · · ·M (4.4.23)
où (Lij) désigne la branche séparant les mailles i et j .
Par conséquent les M équations 4.4.23 constituent un système d'équations linéaire dont les inconnues sontles ux de maille ; la résolution permet d'exprimer lesdits ux en fonction du taux de rotation de torsion α.
La substitution des valeurs de ux ainsi obtenues dans l'équation 4.4.22 permet ensuite de calculer le tauxde rotation α étant entendu que le moment de torsion Mx est connu. L'inertie de torsion J s'en déduit alorsimmédiatement.
4.5 Torseur équivalent à la distribution des contraintes de cisaille-ment de torsion
Pour mémoire : Résultante :
−→Rt =
˜(Σ)−→τt (P ) · dΣ =
−→0 ; la résultante des contraintes de cisaillement est nulle.
Moment : Mx · −→x =˜
(Σ)
−−→QP ∧−→τt (P ) · dΣ uniforme ∀Q ∈ (Σ) ; le moment de torsion est indépendant du
point de calcul des éléments de réduction.
Remarque 72. Dans cette dernière relation, les éventuelles contraintes de cisaillement de exion τf (P ) nesont pas prises en compte auquel cas le point Q peut être choisi arbitrairement.
Dans le cas où la distribution des contraintes de cisaillement est globale : τ = τt + τf il est
essentiel de calculer le moment de torsion au centre de exion C 30 : Mx ·−→x =˜
(Σ)
−−→CP ∧−→τ (P )·dΣ.
Dans ce cas, la résultante des cisaillements est égale à l'eort tranchant :−→T = Ty
−→y + Tz−→z =˜
(Σ)−→τ (P ) · dΣ (voir le chapitre sur le cisaillement de exion).
E.Ringot 2013
30. Voir le chapitre sur le cisaillement de exion pour la détermination du centre de exion.
Chapitre 5
Principe des puissances virtuelles PPV∗
et autres théorèmes dérivés
Mise à jour du 27 février 2013
5.1 Objet
le PPV∗, véritable couteauSuisse du mécanicien.
Le principe des puissances virtuelles désigné parle signe PPV∗ dans la suite de ce cours est unoutil pratique au service du mécanicien. Il se sub-stitue avec ecacité à d'autres outils plus intuitifsmais (parfois, souvent) moins performants tels queles principes Newtoniens et autres formulations en forces .
La logique qui sous-tend ce principe est simple : onimpose un mouvement virtuel 1 choisi au systèmemécanique étudié et le bilan des puissances virtuellesqui en résulte permet le calcul de grandeurs vraiesdans ledit système.
La magie de ce principe réside dans le fait quechaque champ de vitesse virtuelle fonctionne comme une sonde permettant de cibler le résultat souhaité.
L'énoncé de ce principe est dû à Lagrange 2.
Les avantages du PPV∗ sont multiples :1. Le PPV∗ a une formulation scalaire, à l'opposé des principes de statique ou de dynamique qui ont une
formulation vectorielle ;
2. Le PPV∗ intègre les conditions aux limites des ensembles matériels étudiés : c'est une formulationintégrale et non pas diérentielle ;
3. Le PPV∗ donne une représentation uniée des outils de la mécanique dont dispose l'ingénieur civil ; ilse substitue à toute une mosaïc de théorèmes épars : Ménabréa, Castigliano, De Fonviolan, ...
4. Le PPV∗ couvre un large spectre d'applications : mécanique des milieux continus 3, plaques et coques,résistance des matériaux, dynamique, plasticité, stabilité, etc...
La maitrise de cet outil même si elle mérite un investissement personnel et un certain eort d'abstraction constitue un bon investissement intellectuel.
1. Si le mouvement virtuel est caractérisé par un champ de vitesse instantané et virtuel, on parle de principe despuissances virtuelles ; c'est le choix qui est fait dans ce support de cours. Si, alternativement et de façon équivalente,le mouvement virtuel est caractérisé par un champ de petits déplacements virtuels, on parle de principe des travauxvirtuels ou encore de théorème des travaux virtuels . Il s'agit simplement d'une subtilité de vocabulaire.
2. Joseph Louis, comte de Lagrange ou, en italien, Giuseppe Lodovico de Lagrangia, (1736-1813), mathématicien,mécanicien et astronome franco-italien.
3. Voir le polycopié de mmc sur le site sciencespourlingenieur.
130
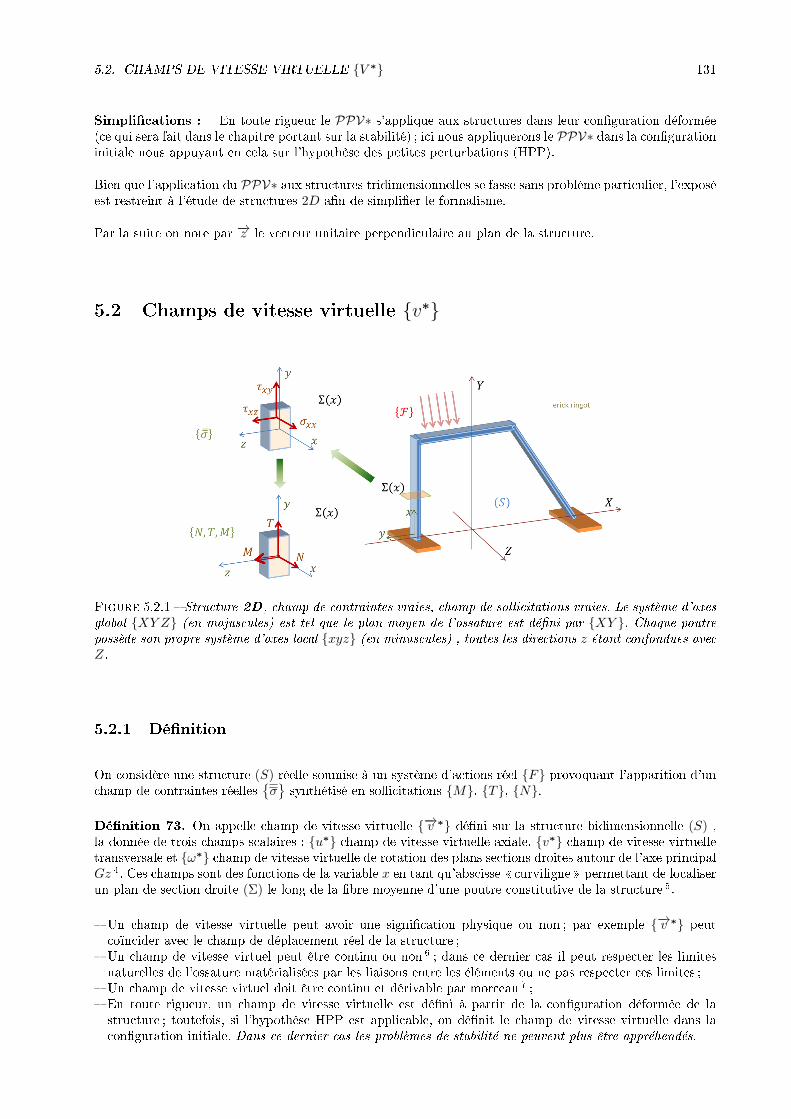
5.2. CHAMPS DE VITESSE VIRTUELLE V ∗ 131
Simplications : En toute rigueur le PPV∗ s'applique aux structures dans leur conguration déformée(ce qui sera fait dans le chapitre portant sur la stabilité) ; ici nous appliquerons le PPV∗ dans la congurationinitiale nous appuyant en cela sur l'hypothèse des petites perturbations (HPP).
Bien que l'application du PPV∗ aux structures tridimensionnelles se fasse sans problème particulier, l'exposéest restreint à l'étude de structures 2D an de simplier le formalisme.
Par la suite on note par −→z le vecteur unitaire perpendiculaire au plan de la structure.
5.2 Champs de vitesse virtuelle v∗
Figure 5.2.1 Structure 2D, champ de contraintes vraies, champ de sollicitations vraies. Le système d'axesglobal XY Z (en majuscules) est tel que le plan moyen de l'ossature est déni par XY . Chaque poutrepossède son propre système d'axes local xyz (en minuscules) , toutes les directions z étant confondues avecZ.
5.2.1 Dénition
On considère une structure (S) réelle soumise à un système d'actions réel F provoquant l'apparition d'unchamp de contraintes réelles
σsynthétisé en sollicitations M, T, N.
Dénition 73. On appelle champ de vitesse virtuelle −→v ∗ déni sur la structure bidimensionnelle (S) ,la donnée de trois champs scalaires : u∗ champ de vitesse virtuelle axiale, v∗ champ de vitesse virtuelletransversale et ω∗ champ de vitesse virtuelle de rotation des plans sections droites autour de l'axe principalGz 4. Ces champs sont des fonctions de la variable x en tant qu'abscisse curviligne permettant de localiserun plan de section droite (Σ) le long de la bre moyenne d'une poutre constitutive de la structure 5.
Un champ de vitesse virtuelle peut avoir une signication physique ou non ; par exemple −→v ∗ peutcoïncider avec le champ de déplacement réel de la structure ;
Un champ de vitesse virtuel peut être continu ou non 6 ; dans ce dernier cas il peut respecter les limitesnaturelles de l'ossature matérialisées par les liaisons entre les éléments ou ne pas respecter ces limites ;
Un champ de vitesse virtuel doit être continu et dérivable par morceau 7 ; En toute rigueur, un champ de vitesse virtuelle est déni à partir de la conguration déformée de lastructure ; toutefois, si l'hypothèse HPP est applicable, on dénit le champ de vitesse virtuelle dans laconguration initiale. Dans ce dernier cas les problèmes de stabilité ne peuvent plus être appréhendés.
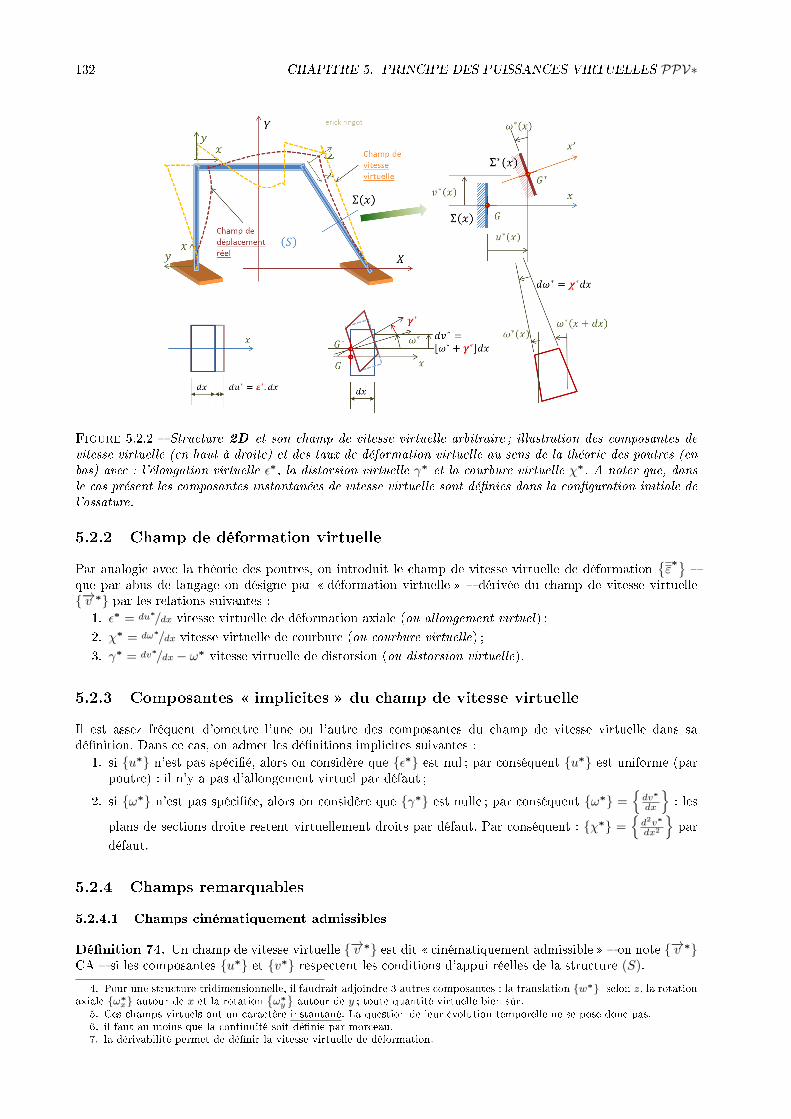
132 CHAPITRE 5. PRINCIPE DES PUISSANCES VIRTUELLES PPV∗
Figure 5.2.2 Structure 2D et son champ de vitesse virtuelle arbitraire ; illustration des composantes devitesse virtuelle (en haut à droite) et des taux de déformation virtuelle au sens de la théorie des poutres (enbas) avec : l'élongation virtuelle ε∗, la distorsion virtuelle γ∗ et la courbure virtuelle χ∗. A noter que, dansle cas présent les composantes instantanées de vitesse virtuelle sont dénies dans la conguration initiale del'ossature.
5.2.2 Champ de déformation virtuelle
Par analogie avec la théorie des poutres, on introduit le champ de vitesse virtuelle de déformationε∗
que par abus de langage on désigne par déformation virtuelle dérivée du champ de vitesse virtuelle−→v ∗ par les relations suivantes :
1. ε∗ = du∗/dx vitesse virtuelle de déformation axiale (ou allongement virtuel) ;
2. χ∗ = dω∗/dx vitesse virtuelle de courbure (ou courbure virtuelle) ;
3. γ∗ = dv∗/dx− ω∗ vitesse virtuelle de distorsion (ou distorsion virtuelle).
5.2.3 Composantes implicites du champ de vitesse virtuelle
Il est assez fréquent d'omettre l'une ou l'autre des composantes du champ de vitesse virtuelle dans sadénition. Dans ce cas, on admet les dénitions implicites suivantes :
1. si u∗ n'est pas spécié, alors on considère que ε∗ est nul ; par conséquent u∗ est uniforme (parpoutre) : il n'y a pas d'allongement virtuel par défaut ;
2. si ω∗ n'est pas spéciée, alors on considère que γ∗ est nulle ; par conséquent ω∗ =dv∗
dx
: les
plans de sections droite restent virtuellement droits par défaut. Par conséquent : χ∗ =d2v∗
dx2
par
défaut.
5.2.4 Champs remarquables
5.2.4.1 Champs cinématiquement admissibles
Dénition 74. Un champ de vitesse virtuelle −→v ∗ est dit cinématiquement admissible on note −→v ∗CA si les composantes u∗ et v∗ respectent les conditions d'appui réelles de la structure (S).
4. Pour une structure tridimensionnelle, il faudrait adjoindre 3 autres composantes : la translation w∗ selon z, la rotationaxiale ω∗
x autour de x et la rotationω∗y
autour de y ; toute quantité virtuelle bien sûr.
5. Ces champs virtuels ont un caractère instantané. La question de leur évolution temporelle ne se pose donc pas.6. il faut au moins que la continuité soit dénie par morceau.7. la dérivabilité permet de dénir la vitesse virtuelle de déformation.
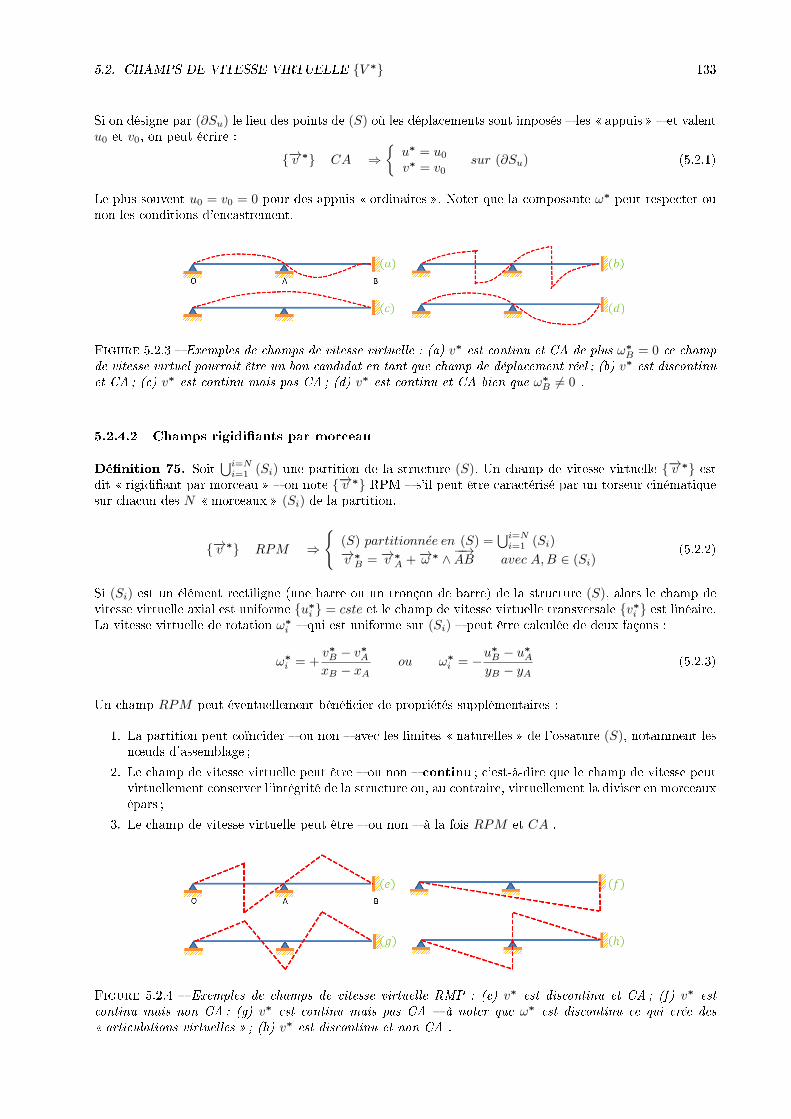
5.2. CHAMPS DE VITESSE VIRTUELLE V ∗ 133
Si on désigne par (∂Su) le lieu des points de (S) où les déplacements sont imposés les appuis et valentu0 et v0, on peut écrire :
−→v ∗ CA ⇒u∗ = u0
v∗ = v0sur (∂Su) (5.2.1)
Le plus souvent u0 = v0 = 0 pour des appuis ordinaires . Noter que la composante ω∗ peut respecter ounon les conditions d'encastrement.
Figure 5.2.3 Exemples de champs de vitesse virtuelle : (a) v∗ est continu et CA de plus ω∗B = 0 ce champ
de vitesse virtuel pourrait être un bon candidat en tant que champ de déplacement réel ; (b) v∗ est discontinuet CA ; (c) v∗ est continu mais pas CA ; (d) v∗ est continu et CA bien que ω∗
B 6= 0 .
5.2.4.2 Champs rigidiants par morceau
Dénition 75. Soit⋃i=Ni=1 (Si) une partition de la structure (S). Un champ de vitesse virtuelle −→v ∗ est
dit rigidiant par morceau on note −→v ∗ RPM s'il peut être caractérisé par un torseur cinématiquesur chacun des N morceaux (Si) de la partition.
−→v ∗ RPM ⇒
(S) partitionnee en (S) =
⋃i=Ni=1 (Si)
−→v ∗B = −→v ∗
A +−→ω ∗ ∧−−→AB avec A,B ∈ (Si)
(5.2.2)
Si (Si) est un élément rectiligne (une barre ou un tronçon de barre) de la structure (S), alors le champ devitesse virtuelle axial est uniforme u∗i = cste et le champ de vitesse virtuelle transversale v∗i est linéaire.La vitesse virtuelle de rotation ω∗
i qui est uniforme sur (Si) peut être calculée de deux façons :
ω∗i = +
v∗B − v∗AxB − xA
ou ω∗i = −u
∗B − u∗AyB − yA
(5.2.3)
Un champ RPM peut éventuellement bénécier de propriétés supplémentaires :
1. La partition peut coïncider ou non avec les limites naturelles de l'ossature (S), notamment lesn÷uds d'assemblage ;
2. Le champ de vitesse virtuelle peut être ou non continu ; c'est-à-dire que le champ de vitesse peutvirtuellement conserver l'intégrité de la structure ou, au contraire, virtuellement la diviser en morceauxépars ;
3. Le champ de vitesse virtuelle peut être ou non à la fois RPM et CA .
Figure 5.2.4 Exemples de champs de vitesse virtuelle RMP : (e) v∗ est discontinu et CA ; (f) v∗ estcontinu mais non CA ; (g) v∗ est continu mais pas CA à noter que ω∗ est discontinu ce qui crée des articulations virtuelles ; (h) v∗ est discontinu et non CA .

134 CHAPITRE 5. PRINCIPE DES PUISSANCES VIRTUELLES PPV∗
5.3 Puissances virtuelles
5.3.1 Puissance virtuelle des forces externes P∗e
Dénition 76. La structure (S) étant délimitée par un contour fermé (∂S), on appelle forces externes l'ensemble des actions agissant sur (S) au travers de (∂S).
Les forces externes peuvent être :
des forces concentrées−→Fi agissant aux points Pi ;
des couples Cj agissant aux points Pj ; des forces linéiquement réparties −→q (x) ; le cas échéant des couples répartis c (x) ;
les réactions d'appui−→Rk et les moments d'encastrement éventuels Ck.
Les forces externes ne sont pas : un champ de température ; le champ de sollicitation ; les actions internes de liaison.
Dénition 77. On appelle puissance virtuelle des forces externes on note P∗e la puissance des forcesexternes calculées dans le champ de vitesse virtuelle.
P∗e =
∑Ni=1
−→Fi−→v ∗i forces concentrees
+∑Mj=1 Cjω
∗j couples concentres
+´
(S)−→q (x)−→v ∗ (x) dx force repartie
+´
(S)c (x)ω∗ (x) dx couple reparti
+∑Rk=1
[−→Rk−→v ∗k + Ckω
∗k
]reactions d′appui
(5.3.1)
Figure 5.3.1 Puissance virtuelle d'une force concentrée ou d'un couple concentré .
5.3.2 Puissance virtuelle d'accélération P∗a 8
En régime dynamique, l'ossature subit les eets de l'accélération Galiléenne. Soit R0 un référentiel Galiléenet 0, xo, yo, zo un repère attaché à ce référentiel. En génie civil, on considère qu'un repère attaché à laTerre est une approximation d'un repère Galiléen. Soit P un point quelconque de la structure (S), alorsl'accélération galiléenne de P est donnée par l'expression :
−→Γ (P ) =
[d2−−→OPdt2
]=−−→OP (5.3.2)
La structure (S) est soumise à des forces d'inertie proportionnelles aux masses en mouvement et aux ac-célérations galiléennes vraies. Le mouvement de rotation réel ω (x, t) des plans de section droite provoquel'apparition d'une distribution de couples d'inertie.
Parmi les eorts dynamiques, on distingue ainsi :
1. Les forces d'inertie−→Fi des masses Mi concentrées aux points Pi de la structure, animées par l'accélé-
ration vraie−→Γi. −→
Fi = Mi ·−→Γi
8. Ce terme n'apparaît qu'en présence d'un champ d'accélération. C'est une situation rencontrée en dynamique des structureslors de leur calcul parasismique (voir les cours de M1 et de M2 de génie civil).

5.3. PUISSANCES VIRTUELLES 135
2. Les forces d'inerties linéïques−→fd (x) par unité de longueur de poutre résultant de la masse linéïque
m (x) :−→fd (x) = m (x) ·
−→Γ (x)
3. Les couples d'inertie Cj résultant de la rotation autour de −→z de masses concentrées en Pj ayant uneinertie de rotation Ij :
Cj = Ij · Ωj
4. Les couples linéïques d'inertie cd (x) résultant de la rotation des plans de section droite des poutresdont l'inertie linéïque est égale à I(x)m (x) I désigne l'inertie quadratique principale autour de l'axeGz tels que :
cd (x) = m (x) I (x) · ω (x)
Dénition 78. On appelle puissance virtuelle d'accélération ou puissance virtuelle des forces d'inertie et on note P∗a la puissance virtuelle des eorts d'inertie calculée dans le champ de vitesse virtuelle.
P∗a =
∑Ni=1Mi
−→Γi−→v ∗i masses concentrees
+∑Mj=1 IjΩjω
∗j inerties de rotation concentrees
+´
(S)m (x)
−→Γ (x)−→v ∗ (x) dx masse repartie
+´
(S)I (x)m (x) ω (x)ω∗ (x) dx inertie de rotation repartie
(5.3.3)
Figure 5.3.2 Puissance virtuelle d'accélération : cas d'une masse concentrée et d'un solide d'inertie.
Il convient de bien distinguer ici les mouvements réels de l'ossature (S) provoquant les eorts inertiels d'unepart, des mouvements virtuels sans réalité physique mais provoquant des puissances virtuelles d'autre part.
En pratique, pour les ossature ordinaires , la puissance virtuelle d'accélération due à l'inertie de rotationest négligée, de sorte que P∗aest réduite à l'expression :
P∗a 'N∑i=1
Mi−→Γi−→v ∗i︸ ︷︷ ︸
masses concentrees
+
ˆ(S)
m (x)−→Γ (x)−→v ∗ (x) dx︸ ︷︷ ︸
masses reparties
5.3.3 Puissance virtuelle des forces internes
Dénition 79. On appelle forces internes à la structure (S), le champ des sollicitations vraies N,T, M, résultant du champ de contrainte vrai
σdu fait des actions extérieures F. En toute rigueur,
le champ de contrainte à considérer devrait être établi dans la conguration déformée de (S) il s'agitalors du tenseur des contraintes de Kirshoff ; on se satisfait du tenseur des contraintes de déni dans laconguration initiale si l'hypothèse des petites perturbations (HPP) est applicable.
La puissance virtuelle des forces internes s'exprime pour deux raisons :
1. les variations continues du champ de vitesse virtuelle −→v ∗ qui provoquent des taux de déformationvirtuelle
ε∗
;
2. les variations brusques (discontinuités) du champ de vitesse virtuelle −→v ∗ à l'interface entre lesdiérents morceaux (Si) de la partition de la structure (S).

136 CHAPITRE 5. PRINCIPE DES PUISSANCES VIRTUELLES PPV∗
5.3.3.1 Puissance virtuelle interne de cohésion
Soit dv un petit élément de volume prélevé dans la structure (S), soumise au vrai champ de contrainteσ
à cause des actions extérieures F. Soit −→v ∗ un champ de vitesse virtuelle déni sur (S) provoquant lechamp de déformation virtuelle
ε∗
; alors la puissance virtuelle développées par les forces de surface c'est-à-dire les vecteurs contrainte à la périphérie du petit volume dv est égale à dP v = σ : ε
∗dv.
Dénition 80. On appelle densité volumique de puissance virtuelle interne de cohésion la quantitép∗ic,v = −σ : ε
∗. Bien noter la présence du signe '-' dans cette dénition.
Intégrons la densité volumique de puissance p∗ic,v sur un plan de section droite Σ (x) prise sur un élémentconstitutif de la structure (S) ; nous obtenons la densité linéïque de puissance virtuelle p∗ic :
p∗ic =
¨
Σ(x)
−σ : ε∗dΣ (5.3.4)
En s'inspirant du calcul analogue (densité de puissance élastique) opéré dans le chapitre Théorie desPoutres , on montrerait que :
p∗ic=-[N (x) · ε∗ (x) + T (x) · γ∗ (x) +M (x) · χ∗ (x)] (5.3.5)
en introduisant les sollicitations N , T et M .
Figure 5.3.3 Illustration de la contribution de chaque sollicitation à la densité linéaire de puissance internede cohésion.
Dénition 81. On appelle puissance virtuelle interne de cohésion et on la note P∗ic la somme desdensités de puissance virtuelle interne de cohésion étendue à toute la structure : P∗ic =
´(S)
p∗ic · dx : 9
P∗ic =
ˆ
(S)
− [N (x) · ε∗ (x) + T (x) · γ∗ (x) +M (x) · χ∗ (x)] dx (5.3.6)
5.3.3.2 Puissance virtuelle interne de liaison
On voit que dans l'expression précédente, on ne tient compte que des variations continues, progressives, desvitesses virtuelles. On envisage maintenant que celles-ci puissent accuser des variations brusques, disconti-nues. On se doit donc de rendre compte de ces discontinuité par l'introduction d'un terme supplémentairede puissance virtuelle interne appelé puissance virtuelle interne de liaison.
A l'interface entre deux morceaux (Si) et (Sj) de la partition de la structure (S) ou encore à l'interfacede (S) avec le sol des discontinuités ∆u∗i , ∆v∗i ou ∆ω∗
i peuvent survenir dans la dénition des composantesde vitesse virtuelle.
9. On rappelle que dx représente un élément diérentiel de longueur de poutre.
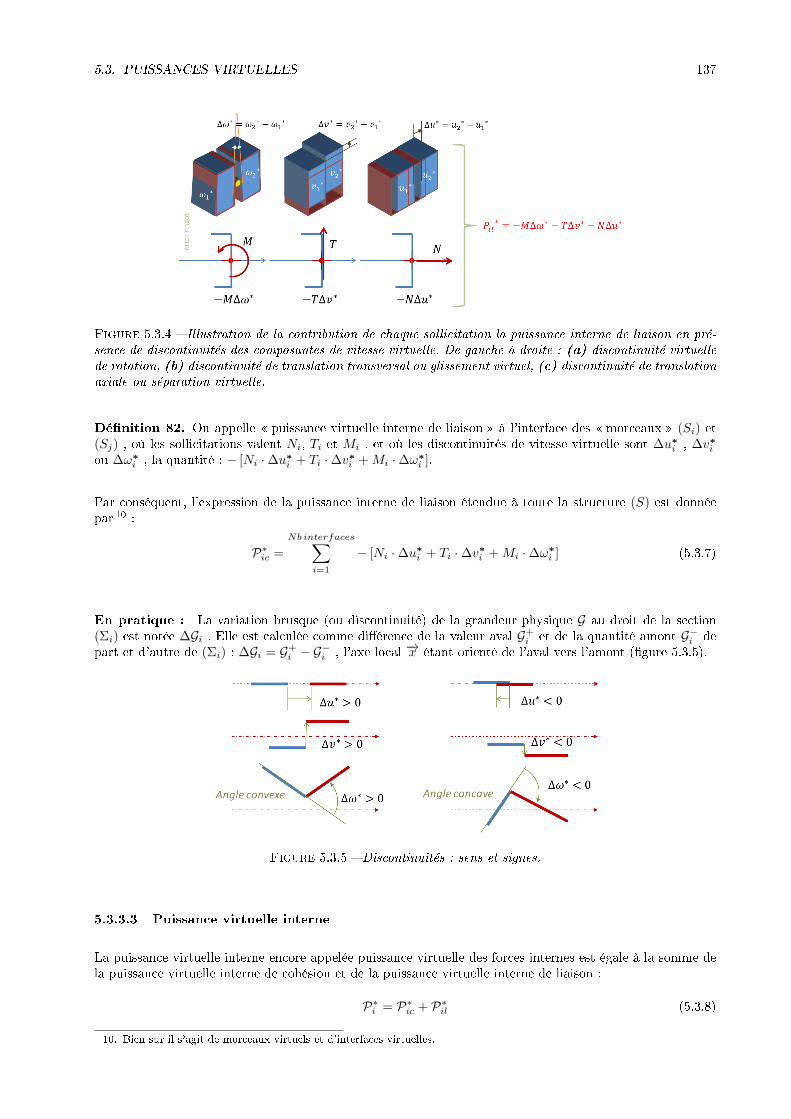
5.3. PUISSANCES VIRTUELLES 137
Figure 5.3.4 Illustration de la contribution de chaque sollicitation la puissance interne de liaison en pré-sence de discontinuités des composantes de vitesse virtuelle. De gauche à droite : (a) discontinuité virtuellede rotation, (b) discontinuité de translation transversal ou glissement virtuel, (c) discontinuité de translationaxiale ou séparation virtuelle.
Dénition 82. On appelle puissance virtuelle interne de liaison à l'interface des morceaux (Si) et(Sj) , où les sollicitations valent Ni, Ti et Mi , et où les discontinuités de vitesse virtuelle sont ∆u∗i , ∆v∗iou ∆ω∗
i , la quantité : − [Ni ·∆u∗i + Ti ·∆v∗i +Mi ·∆ω∗i ].
Par conséquent, l'expression de la puissance interne de liaison étendue à toute la structure (S) est donnéepar 10 :
P∗ic =
Nb interfaces∑i=1
− [Ni ·∆u∗i + Ti ·∆v∗i +Mi ·∆ω∗i ] (5.3.7)
En pratique : La variation brusque (ou discontinuité) de la grandeur physique G au droit de la section(Σi) est notée ∆Gi . Elle est calculée comme diérence de la valeur aval G+
i et de la quantité amont G−i depart et d'autre de (Σi) : ∆Gi = G+
i − G−i , l'axe local −→x étant orienté de l'aval vers l'amont (gure 5.3.5).
Figure 5.3.5 Discontinuités : sens et signes.
5.3.3.3 Puissance virtuelle interne
La puissance virtuelle interne encore appelée puissance virtuelle des forces internes est égale à la somme dela puissance virtuelle interne de cohésion et de la puissance virtuelle interne de liaison :
P∗i = P∗ic + P∗il (5.3.8)
10. Bien sûr il s'agit de morceaux virtuels et d'interfaces virtuelles.

138 CHAPITRE 5. PRINCIPE DES PUISSANCES VIRTUELLES PPV∗
5.4 Énoncé du PPV∗
On peut admettre le PPV∗ soit comme principe de la mécanique classique, soit comme un théorème dérivédu principe fondamental de la dynamique de Newton.
5.4.1 Enoncé du principe (des puissances virtuelles)
Conjecture 83. Soit une structure (S) soumise à des actions extérieures F produisant un champ decontrainte vrai
σ, sur laquelle on dénit un champ de vitesse virtuelle −→v ∗. Alors, la puissance virtuelle
d'accélération P∗a est égale à la somme de la puissance virtuelle des forces externes P∗e et de la puissancevirtuelle des forces internes P∗i .
P∗a = P∗e + P∗i (5.4.1)
5.4.2 Démonstration du théorème (des puissances virtuelles)
Il peut paraître arbitraire d'énoncer un nouveau principe surtout si celui-ci ne peut être facilement confrontéà l'expérience du fait de la virtualité des quantités manipulées.
On montre, dans ce paragraphe, la validité de la relation 5.4.1 en développant une démonstration basée surle principe fondamental de la dynamique (le principe devient ainsi un théorème).
Pour cela adoptons le point de vue général de la mécanique des milieux continus. La dynamique d'un solidedéformable (S) de masse volumique ρ (P ) soumis à une force volumique
−→fv (P ) ces forces volumiques
résultent généralement du champ de pesanteur :−→fv = ρ−→g dans un champ d'accélération
−→Γ (P ) est régie
par l'équation bien connue 11 : −−→div σ +
−→fv = ρ
−→Γ (5.4.2)
Si l'on considère le champ de vitesse −→v ∗ déni sur le solide ou ensemble de solides (S) que l'on étudie, onpeut prémultiplier scalairement l'équation 5.4.2 par −→v ∗ :
−→v ∗−−→div σ +−→v ∗−→fv = ρ−→v ∗−→Γ
Egalité qu'il est loisible d'intégrer sur le volume constitué par (S) :˚
(S)
−→v ∗−−→div σdv +
˚
(S)
−→v ∗−→fvdv =
˚
(S)
ρ−→v ∗−→Γ dv (5.4.3)
On reconnaît immédiatement :
P∗e(−→fv
)=
˚
(S)
−→v ∗−→fvdv la puissance virtuelle des forces de volume
P∗a =
˚
(S)
ρ−→v ∗−→Γ dv la puissance virtuelle d′acceleration
Particularisons le système de projection pour ré-écrire le premier terme de l'équation 5.4.3 en coordonnéescartésiennes et en employant la notation d'Einstein pour les sommations implicites 12 13 :
˚
(S)
−→v ∗−−→div σdv =
˚
(S)
σij,iv∗j dv
11. Voir le polycopié de mmc sur ce site.12. La notation f,k est également due à Einstein : il s'agit de la dérivée partielle de la fonction f par rapport à la variable
xk : f,k = ∂f/∂xk.13. Rappelons que, selon la convention d'Einstein, lorsqu'un indice est répété dans un produit, il faut sommer ce produit
sur le domaine des valeur de l'indice. Par exemple aibi est équivalent à a1b1 + a2b2 + a3b3 si i peut valoir 1,2 ou 3. Si deuxindices sont répétés il y a alors une double sommation comme c'est le cas ici.

5.4. ÉNONCÉ DU PPV∗ 139
Comme (a · b),i = a,i · b+ a · b,i , on peut ré-écrire la relation précédente sous la forme :˚
(S)
−→v ∗−−→div σdv =
˚
(S)
[σijv
∗j
],i︸ ︷︷ ︸
div [σ−→v ∗]
dv −˚
(S)
σijv∗j,i︸ ︷︷ ︸
σ:ε∗
dv
En eet : On reconnaît la divergence du vecteur σ−→v ∗ 14 dans l'intégrale du premier terme du second membre. Par symétrie du tenseur σ , on peut écrire que σijv∗j,i = σjiv
∗j,i comme les indices de sommation sont muets
on peut en inverser l'ordre et donc σijvj,i = σijvi,j . en sommant les deux formes possible de σijvj,i et endivisant par deux on obtient : σijv∗j,i = 1
2
[σijv
∗j,i + σijv
∗i,j
], soit σijv∗j,i = σij × 1
2
[v∗j,i + v∗i,j
]. Et donc :
σijv∗j,i = σij × ε∗ij = σ : ε
∗ 15.Ainsi : ˚
(S)
−→v ∗−−→div σdv =
˚
(S)
div[σ−→v ∗] dv −˚
(S)
σ : ε∗dv (5.4.4)
Le dernier terme du second membre de cette équation n'est autre que la puissance virtuelle des forcesinternes :
P∗ic =
˚
(S)
−σ : ε∗dv
Transformons la première intégrale triple du second membre en intégrale de surface grâce au théorème de ladivergence (Stockes) 16 :
˚
(S)
div[σ−→v ∗] dv =
¨
(∂S)
(σ−→v ∗)−→dS =
¨
(∂S)
(σ−→v ∗) dS · −→n
Compte tenu de la symétrie du tenseur des contraintes, on peut permuter l'ordre d'associativité dans le produit précédent de sorte que
(σ−→v ∗)−→n =
(σ−→n
)−→v ∗ . Le produit σ−→n est égal au vecteur contrainte−→Φ agissant sur la facette orientée par −→n extérieure à (S). Ces vecteurs
−→Φ constituent les forces surfaciques
provenant des actions−→fs directement appliquées au système (S) à travers sa surface (∂S).
Par conséquent le terme˝
(S)div
[σ−→v ∗] dv est égal à ˜
(∂S)
−→fs · −→v ∗dS qui représente la puissance virtuelle
des forces extérieures de surface :
P∗e(−→fs
)=
¨
(∂S)
−→fs · −→v ∗dS (5.4.5)
Naturellement, si le champ de vitesse virtuelle −→v ∗ présente des discontinuités dans sa dénition, l'intégrationdoit être réalisée morceau par morceau ; de ce fait des termes supplémentaires sont induits aux interfaces deces morceaux.
Ainsi, à l'interface (∂S1↔2) entre les morceaux (S1) et (S2) , apparaît le terme :¨
(∂S1↔2)
(σ1−→n 1
)−→v 1dS +
¨
(∂S2↔1)
(σ2−→n 2
)−→v 2dS
A l'interface, les vecteurs directeurs sont opposés : −→n 1 = −−→n 2, ainsi la puissance virtuelle qui se développesur cette interface s'exprime par 17 :
14. En coordonnées cartésiennes la divergence d'un vecteur −→u est égale à la somme des dérivées partielles du vecteur :div−→u = ui,i .
15. On rappelle que le tenseur des déformations est égal à ε = 12
[grad−→u + gradt−→u
]dans l'hypothèse des petites pertur-
bations.16. Voir l'appendice de mathématique dans le polycopié de mmc. Rappelons simplement la relation :
˝(S) div−→u · dv =˜
(∂S)−→u ·−→dS qui exprime que le ux d'un vecteur −→u à travers l'enveloppe (∂S) d'un volume (S) est égal à l'intégrale de la
divergence dudit vecteur dans ce volume. Le vecteur−→dS est un élément d'aire de l'enveloppe (∂S) orienté par la normale unitaire
extérieure −→n :−→dS = dS · −→n .
17. On note ∆ [f ] la quantité f2 − f1 dans la transition orientée 1→ 2.

140 CHAPITRE 5. PRINCIPE DES PUISSANCES VIRTUELLES PPV∗
¨
(∂S1↔2)
−∆[(σ−→n
)−→v ] dSSi l'on somme tous ces termes sur l'ensemble des discontinuités (ou interfaces) on introduit tout naturellementle terme de puissance virtuelle des forces de liaison :
P∗il =
Nb interfaces∑i=1
¨
(∂Si↔j)
−∆[(σ−→n
)−→v ] dSPar conséquent l'équation 5.4.4 se résume en :
P∗il + P∗ic︸ ︷︷ ︸P∗i
+P∗e(−→fv
)+ P∗e
(−→fs
)︸ ︷︷ ︸
P∗e
= P∗a (5.4.6)
Par conséquent, si l'on admet le principe fondamental de la dynamique exprimé par l'équation 5.4.2, ondémontre le théorème des puissances virtuelles exprimé en 5.4.1. On notera que la démonstration ne s'appuiesur aucune loi de comportement particulière. En toute rigueur, la démonstration est valable si le domained'intégration (S) est le volume occupé par la structure ou le solide déformable dans sa congurationdéformée instantanée, c'est-à-dire la conguration dans laquelle l'équilibre dynamique est établi. En pratique,lorsque l'hypothèse des petites perturbations le permet, on accepte de mener les calculs dans la congurationinitiale.
5.4.3 Réciproquement
Si on admet, cette fois, le principe des puissances virtuelles, il est aisé de démontrer le théorème fondamentalde la dynamique.
Considérons en eet un corps ponctuel P de masse concentrée M soumis à l'action d'une force concentrée−→F et subissant une accélération galiléenne
−→Γ . Dénissons un vecteur vitesse −→v ∗ quelconque en P . On peut
alors calculer les diérents termes de puissances virtuelles :
1. Puissance des forces intérieures : P∗i = 0 puisqu'il n'y a pas d' intérieur à un solide ponctuel ;
2. Puissance de la force extérieure : P∗e =−→F · −→v ∗
3. Puissance de la force d'inertie : P∗a = M−→Γ−→v ∗
Comme P∗a = P∗i + P∗e il vient :−→F · −→v ∗ = M
−→Γ−→v ∗ = 0, soit −→v ∗
(−→F −M
−→Γ)
= 0 ∀−→v ∗. Par conséquent :−→F = M
−→Γ .
Figure 5.4.1 Illustration de la démonstration du théorème fondamental de la dynamique à partir du principedes puissances virtuelles.
Il devient ainsi évident que le PPV∗ ne constitue pas un principe supplémentaire de la mécaniqueclassique mais un principe qui se substitue au principe fondamental de la dynamique. Bien que les deuxprincipes soient équivalents puisque qu'ils se déduisent réciproquement l'un de l'autre, le PPV∗ se montreplus ecace dans bon nombre d'applications, notamment en mécanique des structures. Cela en fait un outilde choix pour la suite de ce cours.
5.5. APPLICATION AU CALCUL DES STRUCTURES ISOSTATIQUES 141
5.5 Application au calcul des structures isostatiques
5.5.1 Rappel sur les structures isostatiques
Dénition 84. (structure isostatique) Une structure est dite isostatique si les seules équations de la statiquesusent à déterminer les actions de liaison et le champ de sollicitation.
Corollaire 85. Dans une structure isostatique :
Les sollicitations ne dépendent pas de la distribution des inerties ; Les sollicitations ne dépendent pas de la loi de comportement des matériaux ; Un champ de température appliqué à une structure isostatique provoque des déformations thermiques libresεth et χth sans qu'aucune contrainte ne se développe 18.
Pour déterminer si une structure est isostatique ou pas, une méthode consiste à dénombrer les inconnuesde liaisons ni et les équations de la statique disponibles ne. Le degré d'hyperstaticité est introduit commedécit d'équations d'équilibre :
h = ne − ni Si h < 0 le système mécanique étudié est un mécanisme à |h| degrés de liberté ; Si h = 0 le système est probablement isostatique 19 ; Si h > 0 le système est hyperstatique d'ordre h.
5.5.2 Méthodologie générale pour la détermination d'une sollicitation
Proposition 86. Soit (Siso) une structure isostique soumise à des actions F et soit à Gi la sollicitationà déterminer dans le plan de section droite (Σi). On imagine le mécanisme virtuel (S∗) obtenu en libérantl'eet Gi et lui seul (pour cela on est amené à introduire une articulation virtuelle ou une coupure virtuelledans la structure initiale). Le mécanisme (S∗) est un mécanisme à un degré de liberté dont on déterminele champ de vitesse −→v ∗ considéré par la suite en tant que champ de vitesse virtuelle RPM. On appliquealors le PPV∗ à la structure (Siso) dans le champ de vitesse virtuelle −→v ∗ ; on obtient une équation scalairepermettant de déduire immédiatement la grandeur cherchée Gi.Remarque 87. Il faut choisir un champ de vitesse virtuelle rigidiant par morceau de sorte que les taux virtuelsde déformation soient nuls. Par conséquent les sollicitations ne développent aucune puissance virtuelle internede cohésion. Seule la puissance virtuelle interne de liaison intervient là où une discontinuité de vitesse virtuelleapparaît, c'est-à-dire là où le calculateur l'a lui-même décidé. C'est cette latitude qui permet justement de cibler le résultat attendu.
5.5.3 Exemple 1 - détermination d'un moment échissant
METHODE On vérie facilement que la structure proposée est isostatique ; On recherche le moment échissant en C : MC ; on introduit donc une articulation virtuelle en C ; On obtient un mécanisme à 1 DLL composé de 3 poutres considérées comme rigides de sorte que lechamp de vitesse soit celui d'un mécanisme constitué par l'assemblage de solides indéformables et doncRPM ;
On choisit arbitrairement l'amplitude de vitesse virtuelle du n÷ud B : v∗B = 1 ; On déduit les vitesses virtuelles de rotations des 3 poutres : ω∗
1 = −1L , ω∗
2 = 0, ω∗3 = −2
3L ; On calcule la puissance virtuelles des forces externes : P∗e =
´(3)q−→x ×
[1− 2x
3L
]−→x dx = 34qL
20 ; On calcule la puissance virtuelle des forces internes. Celle-ci se réduit à la puissance virtuelle de liaisonen C puisque le champ est continu, CA, RPM : P∗il = −MC∆ω∗
C = −MC × [ω∗3 − ω∗
2 ] = 23LMC ;
La somme des puissances interne et externe est nulle en vertu du PPV∗ : 34qL + 2
3MC
L = 0 , parconséquent : MC = − 9
8qL2.
18. Rappelons la loi de Hooke-Duhamel : ε = 1+νEσ − ν
Etr(σ)
+ λ∆T19. Pour être rigoureux, il conviendrait de vérier que la matrice de rigidité du système mécanique étudié n'est pas singulière.
Dans la plupart des cas il sura de contrôler qu'une insusance de liaisons dans une région de la structure n'est pas compenséenumériquement par un surcroît de liaisons dans une autre région.20. La puissance virtuelle des forces extérieures agissant sur un solide indéformable est égale au comoment du torseur de force
et du torseur cinématique. Ici la résultante vaut 32qL et la vitesse du point d'application du glisseur est 1
2(vitesse du point
milieu du poteau).
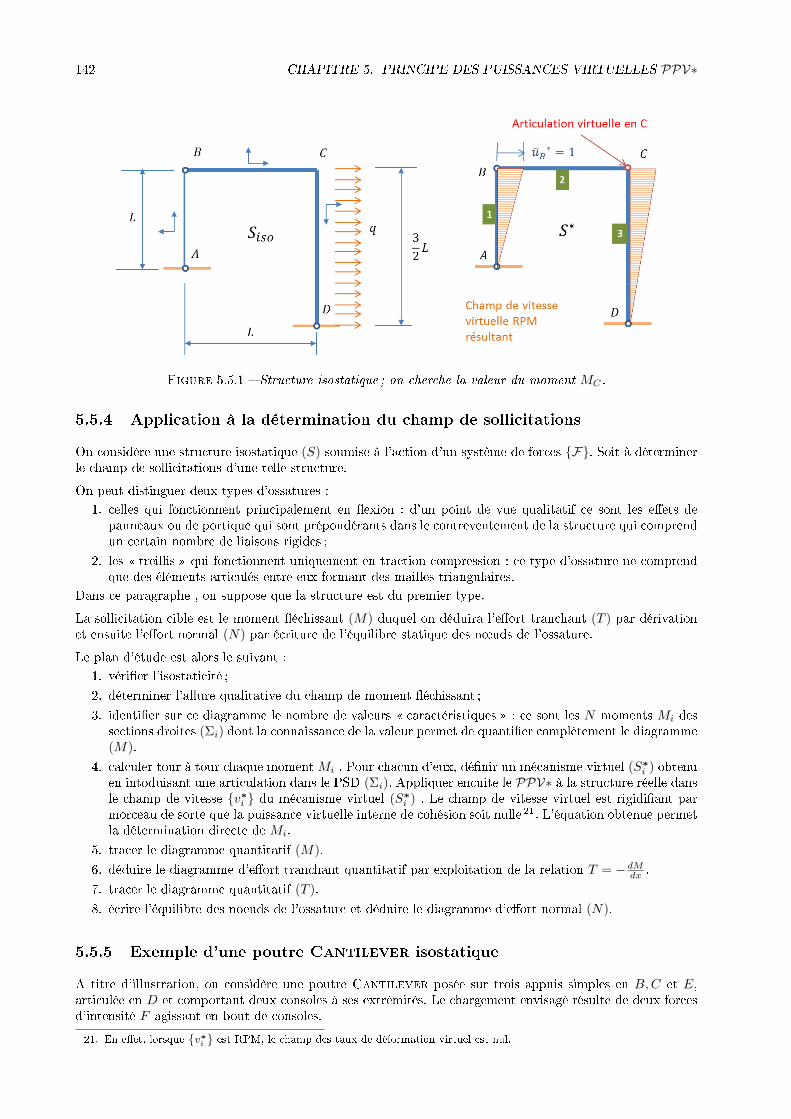
142 CHAPITRE 5. PRINCIPE DES PUISSANCES VIRTUELLES PPV∗
Figure 5.5.1 Structure isostatique ; on cherche la valeur du moment MC .
5.5.4 Application à la détermination du champ de sollicitations
On considère une structure isostatique (S) soumise à l'action d'un système de forces F. Soit à déterminerle champ de sollicitations d'une telle structure.
On peut distinguer deux types d'ossatures :
1. celles qui fonctionnent principalement en exion : d'un point de vue qualitatif ce sont les eets depanneaux ou de portique qui sont prépondérants dans le contreventement de la structure qui comprendun certain nombre de liaisons rigides ;
2. les treillis qui fonctionnent uniquement en traction-compression : ce type d'ossature ne comprendque des éléments articulés entre eux formant des mailles triangulaires.
Dans ce paragraphe , on suppose que la structure est du premier type.
La sollicitation cible est le moment échissant (M) duquel on déduira l'eort tranchant (T ) par dérivationet ensuite l'eort normal (N) par écriture de l'équilibre statique des n÷uds de l'ossature.
Le plan d'étude est alors le suivant :
1. vérier l'isostaticité ;
2. déterminer l'allure qualitative du champ de moment échissant ;
3. identier sur ce diagramme le nombre de valeurs caractéristiques : ce sont les N moments Mi dessections droites (Σi) dont la connaissance de la valeur permet de quantier complètement le diagramme(M).
4. calculer tour à tour chaque moment Mi . Pour chacun d'eux, dénir un mécanisme virtuel (S∗i ) obtenu
en intoduisant une articulation dans le PSD (Σi). Appliquer encuite le PPV∗ à la structure réelle dansle champ de vitesse v∗i du mécanisme virtuel (S∗
i ) . Le champ de vitesse virtuel est rigidiant parmorceau de sorte que la puissance virtuelle interne de cohésion soit nulle 21. L'équation obtenue permetla détermination directe de Mi.
5. tracer le diagramme quantitatif (M).
6. déduire le diagramme d'eort tranchant quantitatif par exploitation de la relation T = −dMdx .7. tracer le diagramme quantitatif (T ).
8. écrire l'équilibre des noeuds de l'ossature et déduire le diagramme d'eort normal (N).
5.5.5 Exemple d'une poutre Cantilever isostatique
A titre d'illustration, on considère une poutre Cantilever posée sur trois appuis simples en B,C et E,articulée en D et comportant deux consoles à ses extrémités. Le chargement envisagé résulte de deux forcesd'intensité F agissant en bout de consoles.
21. En eet, lorsquev∗iest RPM, le champ des taux de déformation virtuel est nul.
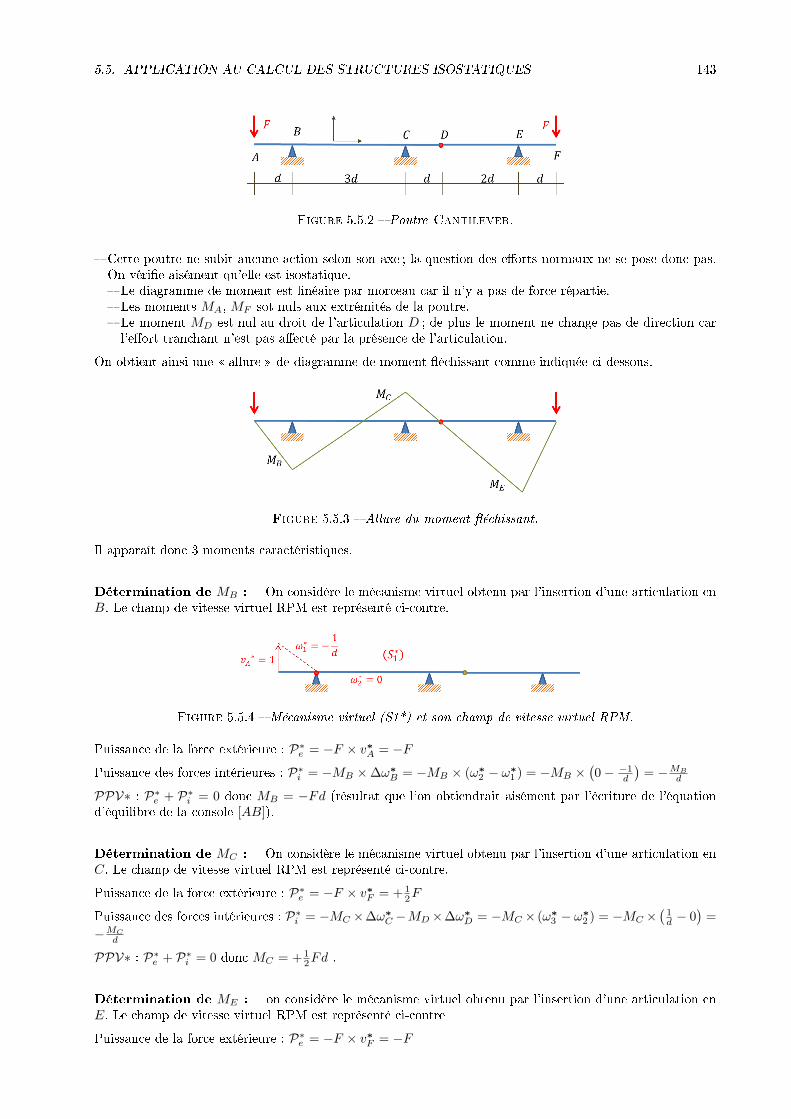
5.5. APPLICATION AU CALCUL DES STRUCTURES ISOSTATIQUES 143
Figure 5.5.2 Poutre Cantilever.
Cette poutre ne subit aucune action selon son axe ; la question des eorts normaux ne se pose donc pas.On vérie aisément qu'elle est isostatique. Le diagramme de moment est linéaire par morceau car il n'y a pas de force répartie. Les moments MA, MF sot nuls aux extrémités de la poutre. Le moment MD est nul au droit de l'articulation D ; de plus le moment ne change pas de direction carl'eort tranchant n'est pas aecté par la présence de l'articulation.
On obtient ainsi une allure de diagramme de moment échissant comme indiquée ci-dessous.
Figure 5.5.3 Allure du moment échissant.
Il apparaît donc 3 moments caractéristiques.
Détermination de MB : On considère le mécanisme virtuel obtenu par l'insertion d'une articulation enB. Le champ de vitesse virtuel RPM est représenté ci-contre.
Figure 5.5.4 Mécanisme virtuel (S1*) et son champ de vitesse virtuel RPM.
Puissance de la force extérieure : P∗e = −F × v∗A = −F
Puissance des forces intérieures : P∗i = −MB ×∆ω∗B = −MB × (ω∗
2 − ω∗1 ) = −MB ×
(0− −1
d
)= −MB
d
PPV∗ : P∗e + P∗i = 0 donc MB = −Fd (résultat que l'on obtiendrait aisément par l'écriture de l'équationd'équilibre de la console [AB]).
Détermination de MC : On considère le mécanisme virtuel obtenu par l'insertion d'une articulation enC. Le champ de vitesse virtuel RPM est représenté ci-contre.
Puissance de la force extérieure : P∗e = −F × v∗F = + 12F
Puissance des forces intérieures : P∗i = −MC ×∆ω∗C −MD×∆ω∗
D = −MC × (ω∗3 − ω∗
2 ) = −MC ×(
1d − 0
)=
−MC
d
PPV∗ : P∗e + P∗i = 0 donc MC = + 12Fd .
Détermination de ME : on considère le mécanisme virtuel obtenu par l'insertion d'une articulation enE. Le champ de vitesse virtuel RPM est représenté ci-contre
Puissance de la force extérieure : P∗e = −F × v∗F = −F
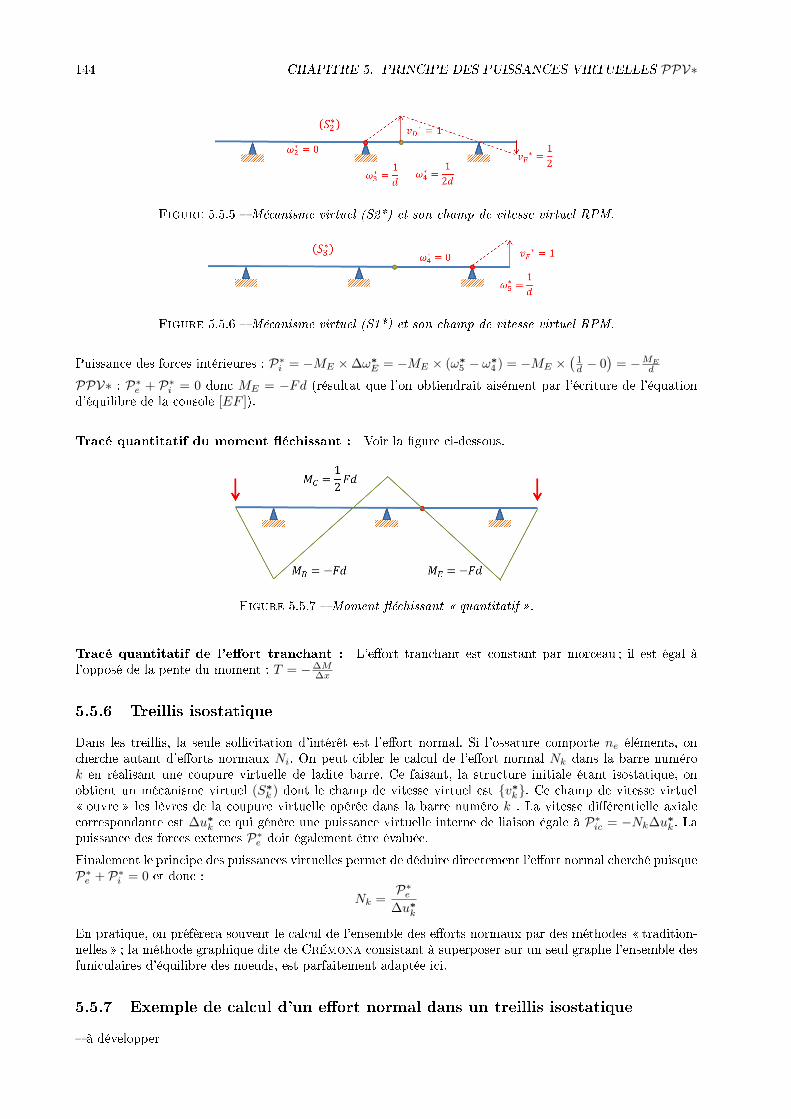
144 CHAPITRE 5. PRINCIPE DES PUISSANCES VIRTUELLES PPV∗
Figure 5.5.5 Mécanisme virtuel (S2*) et son champ de vitesse virtuel RPM.
Figure 5.5.6 Mécanisme virtuel (S1*) et son champ de vitesse virtuel RPM.
Puissance des forces intérieures : P∗i = −ME ×∆ω∗E = −ME × (ω∗
5 − ω∗4 ) = −ME ×
(1d − 0
)= −ME
d
PPV∗ : P∗e + P∗i = 0 donc ME = −Fd (résultat que l'on obtiendrait aisément par l'écriture de l'équationd'équilibre de la console [EF ]).
Tracé quantitatif du moment échissant : Voir la gure ci-dessous.
Figure 5.5.7 Moment échissant quantitatif .
Tracé quantitatif de l'eort tranchant : L'eort tranchant est constant par morceau ; il est égal àl'opposé de la pente du moment : T = −∆M
∆x
5.5.6 Treillis isostatique
Dans les treillis, la seule sollicitation d'intérêt est l'eort normal. Si l'ossature comporte ne éléments, oncherche autant d'eorts normaux Ni. On peut cibler le calcul de l'eort normal Nk dans la barre numérok en réalisant une coupure virtuelle de ladite barre. Ce faisant, la structure initiale étant isostatique, onobtient un mécanisme virtuel (S∗
k ) dont le champ de vitesse virtuel est v∗k. Ce champ de vitesse virtuel ouvre les lèvres de la coupure virtuelle opérée dans la barre numéro k . La vitesse diérentielle axialecorrespondante est ∆u∗k ce qui génère une puissance virtuelle interne de liaison égale à P∗ic = −Nk∆u∗k . Lapuissance des forces externes P∗e doit également être évaluée.
Finalement le principe des puissances virtuelles permet de déduire directement l'eort normal cherché puisqueP∗e + P∗i = 0 et donc :
Nk =P∗e
∆u∗k
En pratique, on préfèrera souvent le calcul de l'ensemble des eorts normaux par des méthodes tradition-nelles ; la méthode graphique dite de Crémona consistant à superposer sur un seul graphe l'ensemble desfuniculaires d'équilibre des noeuds, est parfaitement adaptée ici.
5.5.7 Exemple de calcul d'un eort normal dans un treillis isostatique
à développer
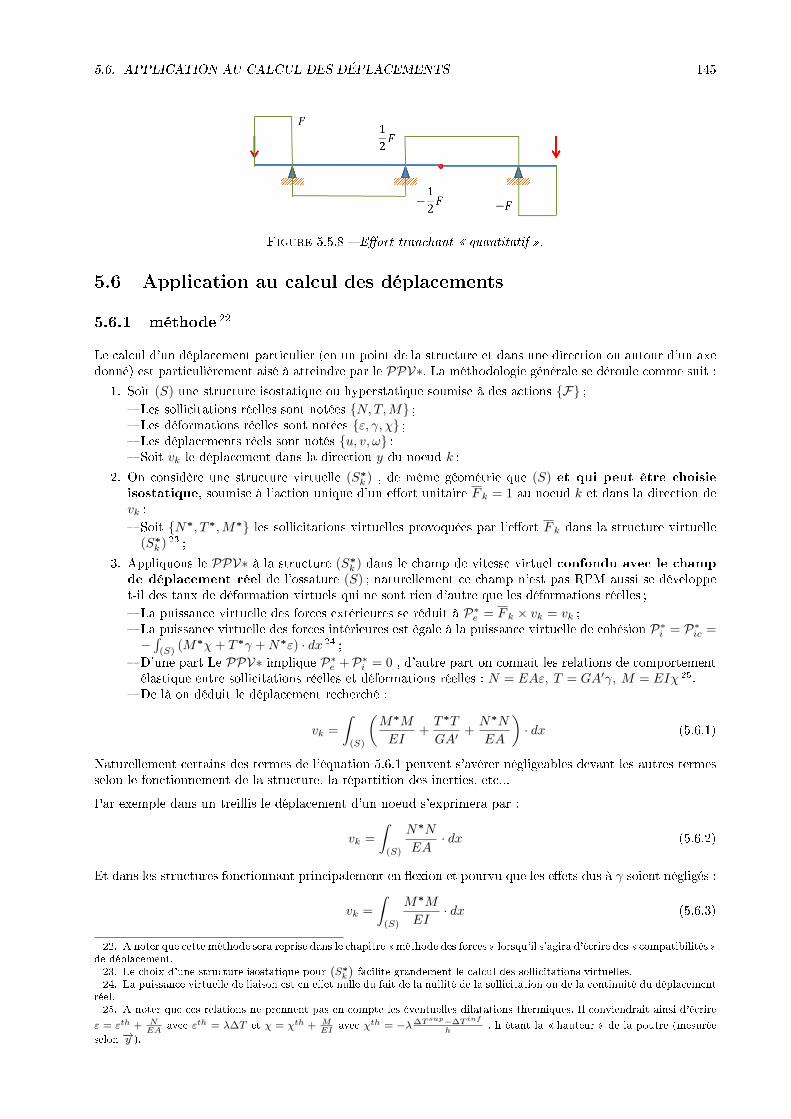
5.6. APPLICATION AU CALCUL DES DÉPLACEMENTS 145
Figure 5.5.8 Eort tranchant quantitatif .
5.6 Application au calcul des déplacements
5.6.1 méthode 22
Le calcul d'un déplacement particulier (en un point de la structure et dans une direction ou autour d'un axedonné) est particulièrement aisé à atteindre par le PPV∗. La méthodologie générale se déroule comme suit :
1. Soit (S) une structure isostatique ou hyperstatique soumise à des actions F ; Les sollicitations réelles sont notées N,T,M ; Les déformations réelles sont notées ε, γ, χ ; Les déplacements réels sont notés u, v, ω ; Soit vk le déplacement dans la direction y du noeud k ;
2. On considère une structure virtuelle (S∗k ) , de même géométrie que (S) et qui peut être choisie
isostatique, soumise à l'action unique d'un eort unitaire F k = 1 au noeud k et dans la direction devk ; Soit N∗, T ∗,M∗ les sollicitations virtuelles provoquées par l'eort F k dans la structure virtuelle
(S∗k ) 23 ;
3. Appliquons le PPV∗ à la structure (S∗k ) dans le champ de vitesse virtuel confondu avec le champ
de déplacement réel de l'ossature (S) ; naturellement ce champ n'est pas RPM aussi se développet-il des taux de déformation virtuels qui ne sont rien d'autre que les déformations réelles ; La puissance virtuelle des forces extérieures se réduit à P∗e = F k × vk = vk ; La puissance virtuelle des forces intérieures est égale à la puissance virtuelle de cohésion P∗i = P∗ic =−´
(S)(M∗χ+ T ∗γ +N∗ε) · dx 24 ;
D'une part Le PPV∗ implique P∗e +P∗i = 0 , d'autre part on connaît les relations de comportementélastique entre sollicitations réelles et déformations réelles : N = EAε, T = GA′γ, M = EIχ 25.
De là on déduit le déplacement recherché :
vk =
ˆ(S)
(M∗M
EI+T ∗T
GA′+N∗N
EA
)· dx (5.6.1)
Naturellement certains des termes de l'équation 5.6.1 peuvent s'avérer négligeables devant les autres termesselon le fonctionnement de la structure, la répartition des inerties, etc...
Par exemple dans un treillis le déplacement d'un noeud s'exprimera par :
vk =
ˆ(S)
N∗N
EA· dx (5.6.2)
Et dans les structures fonctionnant principalement en exion et pourvu que les eets dus à γ soient négligés :
vk =
ˆ(S)
M∗M
EI· dx (5.6.3)
22. A noter que cette méthode sera reprise dans le chapitre méthode des forces lorsqu'il s'agira d'écrire des compatibilités de déplacement.23. Le choix d'une structure isostatique pour
(S∗k
)facilite grandement le calcul des sollicitations virtuelles.
24. La puissance virtuelle de liaison est en eet nulle du fait de la nullité de la sollicitation ou de la continuité du déplacementréel.25. A noter que ces relations ne prennent pas en compte les éventuelles dilatations thermiques. Il conviendrait ainsi d'écrire
ε = εth + NEA
avec εth = λ∆T et χ = χth + MEI
avec χth = −λ∆Tsup−∆T inf
h, h étant la hauteur de la poutre (mesurée
selon −→y ).

146 CHAPITRE 5. PRINCIPE DES PUISSANCES VIRTUELLES PPV∗
5.6.2 Exemple de calcul de déplacement
à développer
5.7 Théorèmes dits de l'énergie
5.7.1 Théorème de l'énergie cinétique
Théorème 88. Dans un système Galiléen, la dérivée temporelle de l'énergie cinétique d'un système (S) estégale à la somme de la puissance des forces extérieures et de la puissance des forces intérieures 26.
Démonstration : Considérons une structure (S) en mouvement dynamique sous l'action de forces exté-rieures F. Appliquons le PPV∗ en adoptant comme champ de vitesse virtuel le vrai champ de vitesseinstantané par rapport à un repère Galiléen. Dans ce cas les puissances virtuelles deviennent des puissancesréelles et :
Pa = Pi + Pe
La puissance d'accélération réelle est telle que :
Pa =
ˆ(S)
m (x)−→γ (x)−→v (x) dx
avec −→γ =−→dvdt , donc :
Pa =d
dt
ˆ(S)
1
2mv2dx =
dK
dt
En désignant par K =´
(S)12mv
2dx l'énergie cinétique du système. Si bien que :
dK
dt= Pe + Pi (5.7.1)
Si Ui est la vitesse de déplacement du point d'application de la force Fi dans la direction de cette dernière,alors :
Pe =
N∑i=1
FiUi
et
Pi = −ˆ
(S)
(Mχ+ T γ +Nε) dx
5.7.2 Conservation du travail
Considérons le chargement quasi-statique de la structure (S) de sorte qu'aucun eet dynamique n'apparaisse ;il sut pour cela que le chargement soit appliqué très progressivement. Alors l'énergie cinétique est nulleK = 0. L'équation 5.7.1 se réduit à :
Pe = −Pi =
ˆ(Mχ+ T γ +Nε) dx
Compte tenu des lois de comportement élastiques linéaires N = EAε, T = GA′γ, M = EIχ , on voit que,à chaque instant t du chargement :
26. Il s'agit ici des puissances vraies .

5.7. THÉORÈMES DITS DE L'ÉNERGIE 147
Pe =
ˆ
(S)
(MM
EI+
T T
GA′+NN
EA
)dx =
d
dt
1
2
ˆ
(S)
(M2
EI+
T 2
GA′+N2
EA
)dx
Intégrons ces quantités depuis le début du chargement (instant t0 = 0) jusqu'à l'instant nal t et introduisonsla notation Te =
´ tt0=0
Pe · dt pour désigner le travail des forces extérieures :
Te =1
2
ˆ
(S)
(M2
EI+
T 2
GA′+N2
EA
)dx
︸ ︷︷ ︸ENERGIE ELASTIQUEWe
On voit que le travail des forces extérieures est totalement converti en énergie élastique :
Te = We
5.7.3 Expression du travail des forces extérieures
Appliquons le PPV∗ à la structure (S) en prenant, comme champ de vitesse virtuel, le champ de déplacementvrai de la structure (S) 27 :
P∗e =
N∑i=1
Fi · Ui
P∗i = −ˆ
(S)
(Mχ+ Tγ +Nε) dx = −ˆ
(S)
(M2
EI+
T 2
GA′+N2
EA
)dx = −2We
Comme P∗e + P∗i = 0 en statique, il vient :
P∗e =
N∑i=1
Fi · Ui = 2We
Par conséquent, puisque Te = We :
P∗e = 2Te
Et donc :
Te =1
2
N∑i=1
Fi · Ui (5.7.2)
Théorème 89. Dans une structure élastique et sous réserve de l'hypothèse des petites perturbations, le travaildes forces extérieures est égal, au facteur 1
2 près, à la somme des produits des forces par les déplacementscolinéaires correspondants.
Cette relation est naturellement étendue au cas des forces réparties et des couples de sorte que, de façongénérale :
Te =1
2
∑i
FiUi +∑j
CjΩj +
ˆ
(S)
−→q −→u dx
27. Ce qui est diérent de ce qui a été fait au 5.7.1 où l'on prenait le champ de vitesse vrai (et non pas de déplacement) en
guise de champ de vitesse virtuel.

148 CHAPITRE 5. PRINCIPE DES PUISSANCES VIRTUELLES PPV∗
Remarque 90. Il convient de bien distinguer le travail d'une force de son potentiel. Le travail d'une force est
formellement : T (F ) =´ tτ=0
−→F (τ) ·
−→U (τ) · dτ =
´ U0
−→F ·−→dU . Lorsque la force est conservative et donc ne
change pas de direction, le travail s'écrit T (F ) =´ U
0F · dU pourvu que dU soit colinéaire à F . Si, de plus,
il existe une relation de proportionalité entre F et U alors T (F ) = 12FU
28. Quant au potentiel de la force
conservative F , elle est dénie tout simplement par V (F ) = −−→F ·−→U soit V (F ) = −FU si U est colinéaire
et de même sens que F . La notion de potentiel est utile dans l'expression des équations de Lagrange endynamique des structures ou dans la recherche des conditions d'équilibre et de stabilité d'un équilibre 29.
5.7.4 Coecients d'inuence
5.7.4.1 dénition
Considérons une ossature (S) soumise à l'action de N forces extérieures Fi appliquées aux points Ai. NotonsUi le déplacement du noeud Ai dans la direction de la force Fi. Du fait du comportement élastique et linéairede la structure, le déplacement Ui s'exprime comme combinaison linéaire des eorts Fj :
Ui =
N∑j=1
Cij · Fj (5.7.3)
Le coecient Cij s'appelle coecient d'inuence de la force Fj sur le déplacement Ui :
C i︸ ︷︷ ︸indice
deplacement
j︸ ︷︷ ︸indiceforce
5.7.4.2 interprétation
Supposons toutes les forces nulles à l'exception de Fjà laquelle on confère une valeur unitaire : F j = 1, onvoit que le déplacement produit au point Ai devient Ui = Cij . Par conséquent, le coecient d'inuence Cijest le déplacement produit au point Ai sous l'action de la seule force unitaire F j = 1.
5.7.4.3 calcul des coecients d'inuence
La structure (S) étant chargée par les forces Fi, se développe un champ de moment échissant M quipeut s'écrire comme combinaison linéaire des moments échissants Mj produits par chacune des forcesFj : M =
∑Nj=1 Fj · Mj.
Soit (Si) la même structure mais uniquement soumise à l'action de la force unitaire F i = 1.
Appliquons le PPV∗ à (Si) dans le champ de déplacement réel de (S) . Alors :
P∗e = F i · Ui = Ui
P∗i = −ˆ
(S)
Mi (x) · χ (x) · dx = −ˆ
(S)
Mi (x) ·∑Nj=1 Fj ·Mj (x)
EI (x)· dx
Comme Pe + Pi = 0 en statique, il vient :
Ui =
N∑j=1
Fj ·ˆ
(S)
Mi (x) ·Mj (x)
EI (x)· dx
28. Le facteur 12que l'on trouve dans l'expression du travail est la signature de l'élasticité linéaire.
29. Voir le cours de mmc au chapitre méthode de Ritz par exemple.

5.7. THÉORÈMES DITS DE L'ÉNERGIE 149
Expression à identier à :
Ui =
N∑j=1
Cij · Fj
Par conséquent :
Cij =
ˆ
(S)
Mi (x) ·Mj (x)
EI (x)· dx (5.7.4)
De façon plus générale il conviendrait d'écrire :
Cij =
ˆ
(S)
[Mi (x) ·Mj (x)
EI (x)+Ti (x) · Tj (x)
GA′ (x)+Ni (x) ·Nj (x)
EA (x)
]· dx
Ou, dans le cas d'un treillis, simplement :
Cij =
ˆ
(S)
Ni (x) ·Nj (x)
EA (x)· dx
5.7.4.4 réciprocité
Par permutation des indices i et j dans l'expresssion 5.7.4, il est évident que :
Cij = Cji
Cette relation de réciprocité exprime que le déplacement du point Ai sous l'action de la force F j = 1appliquée en Aj est égal au déplacement du point Aj sous l'action de la force F i = 1 appliquée en Ai.
5.7.5 Théorème de réciprocité de Maxwell30-Betti
31
Il s'agit de la généralisation du théorème de réciprocité abordé pour les coecients d'inuence.
On considère une ossature (S) dans deux états de chargement :1. Etat (S1) sous l'action des forces extérieures F1 :
Sollicitations N1, T1,M1 ; Déformations ε1, γ1, χ1.
2. Etat (S2) sous l'action des forces extérieures F2 : Sollicitations N2, T2,M2 ; Déformations ε2, γ2, χ2.
On applique le PPV∗ à (S1) dans le champ de déplacement de (S2) et réciproquement :
N∑i=1
F1,i · U2,i −ˆ
(S)
M1 (x)χ2 (x) dx = 0 ⇒N∑i=1
F1,i · U2,i =
ˆ
(S)
M1 (x)M2 (x)
EI (x)dx
etN∑i=1
F2,i · U1,i −ˆ
(S)
M2 (x)χ1 (x) dx = 0 ⇒N∑i=1
F2,i · U1,i =
ˆ
(S)
M2 (x)M1 (x)
EI (x)dx
Par diérence :N∑i=1
F1,i · U2,i =
N∑i=1
F2,i · U1,i
Ce qui s'énonce comme suit.
30. James Clerk Maxwell (1831-1879) physicien et mathématicien écossais.31. Enrico Betti (1823-1892) mathématicien italien.

150 CHAPITRE 5. PRINCIPE DES PUISSANCES VIRTUELLES PPV∗
Théorème 91. (de Maxwell-Betti) Le travail 32 du système de forces F1 dans le champ de dépla-cement U2 de la structure (S) provoqué par le système de forces F2 est égal au travail du système deforces F2 dans le champ de déplacement U1 de la structure (S) provoqué par le système de forces F1 .
*** A ILLUSTRER ET DEVELOPPER ***
5.7.6 Théorème de Castigliano 33
5.7.6.1 Enoncé et démonstration
Comme précédemment, considérons une ossature (S) soumise à l'action de N forces extérieures Fi appli-quées aux points Ai. Notons Ui le déplacement du noeud Ai dans la direction de la force Fi. Du fait ducomportement élastique et linéaire de la structure, le déplacement Ui s'exprime comme combinaison linéairedes eorts Fj :
Ui =
N∑j=1
Cij · Fj
D'autre part le travail des forces extérieures, ou ce qui revient au même, l'énergie élastique, est égal à :
Te (F1, F2, . . . FN ) = We (F1, F2, . . . FN ) =1
2
N∑i=1
Fi · Ui
Par conséquent :
We (F1, F2, . . . FN ) =1
2
N∑i,j=1
Cij · Fi · Fj =1
2[F ]
T · [C] · [F ] (5.7.5)
Dans cette forme bilinéaire symétrique, les termes en Ckk ·F 2k pour k = 1 . . . N apparaissent une fois chacun
et les termes en Cnk · Fn · Fk avec n 6= k apparaissent deux fois du fait de la symétrie de la matrice [C] descoecients d'inuence.
Dérivons l'équation 5.7.5 par rapport à Fk :
∂We
∂Fk=
1
2
2× CkkFk︸ ︷︷ ︸derivee de CkkF 2
k
+ 2∑i6=k
CkiFi︸ ︷︷ ︸derivee de 2CkiFiFk
=
N∑i=1
CkiFi
On reconnaît le déplacement Uk du point d'application de la force Fk dans la direction de cette dernière.
En conclusion :
Uk =∂We
∂Fk(5.7.6)
Ce qui s'énonce comme suit :
Théorème 92. (de Castigliano) - Dans une structure soumise à un ensemble d'eorts Fi, le déplacementUk de la force Fk dans la direction de celle-ci est égal à la valeur de la dérivée de l'energie élastique (ou dutravail des forces extérieures) par rapport à la force Fk, prise pour les valeurs nominales des forces Fi 34.
32. Il s'agit d'un travail tout virtuel.33. Carlo Alberto Castigliano, mathématicien et ingénieur italien (1847-1884).34. Dans le calcul du déplacement Uk on considère tout d'abord les quantités Fi en tant que variables indépendantes ; cela
permet le calcul de la dérivée partielle ∂We/∂Fk . Une fois cette fonction dérivée calculée on prend sa valeur lorsque les forcesFi prennent leur valeur nominale F 0
i (nale, de service). En toute rigueur, on devrait ainsi écrire :
Uk =∂We
∂Fk
∣∣∣∣Fi=F
0i

5.8. LIGNES D'INFLUENCE 151
Naturellement ce théorème s'étend également au calcul de la rotation Ωk du plan de section droite (Σk)soumis à l'action d'un couple extérieur Ck :
Ωk =∂We
∂Ck
5.7.6.2 Application
Supposons une structure (S) soumise à l'action de N eorts Fi. Notons par Ui le déplacement des pointsd'application de ces forces colinéairement aux forces Fi 35.
Considérons une sollicitation prépondérante, par exemple le moment échissant (M) 36. Du fait de la linéaritéde comportement de la structure, le moment (M) s'exprime comme combinaison linéaire des momentséchissants induits par chaque force prise séparément :
(M) =
N∑i=1
Fi ·(M i
)expression dans laquelle
(M i
)désigne le moment échissant produit uniquement par la force Fi lorsque son
intensité est unitaire : F i = 1.
L'énergie élastique de l'ossature (réduite à l'eet de exion) est ainsi :
We =1
2
ˆ
(S)
(M)2
(EI)dx =
1
2
ˆ
(S)
[∑Fi ·
(M i
)]2(EI)
dx
Le déplacement Uk colinéaire à Fk est obtenu par application du théorème de Castigliano 37 :
Uk =∂We
∂Fk=
N∑i=1
Fi ׈
(S)
(Mk
) (M i
)(EI)
dx
Cette relation se généralise au cas où les autres sollicitations importent :
Uk =∂We
∂Fk=
N∑i=1
Fi ×
ˆ(S)
(Nk
) (N i
)(EA)
dx+
ˆ
(S)
(T k) (T i)
(GA′)dx+
ˆ
(S)
(Mk
) (M i
)(EI)
dx
Elle se généralise également pour le calcul de rotations.
A noter que nous avons déjà appris à calculer un déplacement par application directe du PPV∗ (cf 5.6).Les équations conduisent aux mêmes résultats naturellement.
5.8 Lignes d'inuence
*** A DEVELOPPER ***
E.Ringot 2012
35. Attention ! il est fort probable que les points d'application des forces possèdent également une composante de déplacementtransversale auxdites forces.36. Notation : une fonction f (x) est parfois notée (f) pour alléger l'écriture, voire f tout simplement s'il n'y a pas d'ambigüité
possible.37. On remarquera que ∂Fi
∂Fk= δik (symbole de Kröenecker)

Chapitre 6
Méthode des forces
Mise à jour du 29 mars 2012
6.1 Objet
L'objectif de la méthode des forces est de déterminer les sollicitations dans les structures hyperstatiques.
La technique présentée dans ce chapitre est fondée sur l'application du PPV∗ et permet de prendre encompte : les déplacements imposés ; les appuis élastiques ; les actions de précontrainte ; l'eet d'un champ de température.Une fois les sollicitations déterminées, les déplacements peuvent être calculés en suivant la méthode présentéeau paragraphe 5.6.
6.2 Hypothèses
1. On se restreindra au cas des structures planes chargées dans leur plan ; la technique est aisémentgénéralisable aux structures spatiales ;
2. Hypothèse des petites prturbations (HPP) ; les phénomènes d'instabilité ne sont pas abordés dans cechapitre ;
3. Elasticité linéaire isotrope.
6.3 Hyperstaticité
6.3.1 Dénition
Dénition 93. On appelle structure hyperstatique une structure dont les sollicitations ne peuvent pasêtre déduites des seules équations de la statique.
Remarque 94. les équations de la statique sont elles-mêmes obtenues :
soit par application du principe de l'équilibre statique de Newton torseur des forces = torseur nulappliqué à la structure ou à ses sous-ensemble ;
soit par application du PPV∗ à la structure en adoptant des champs de vitesse virtuels rigidiants parmorceaux.
152
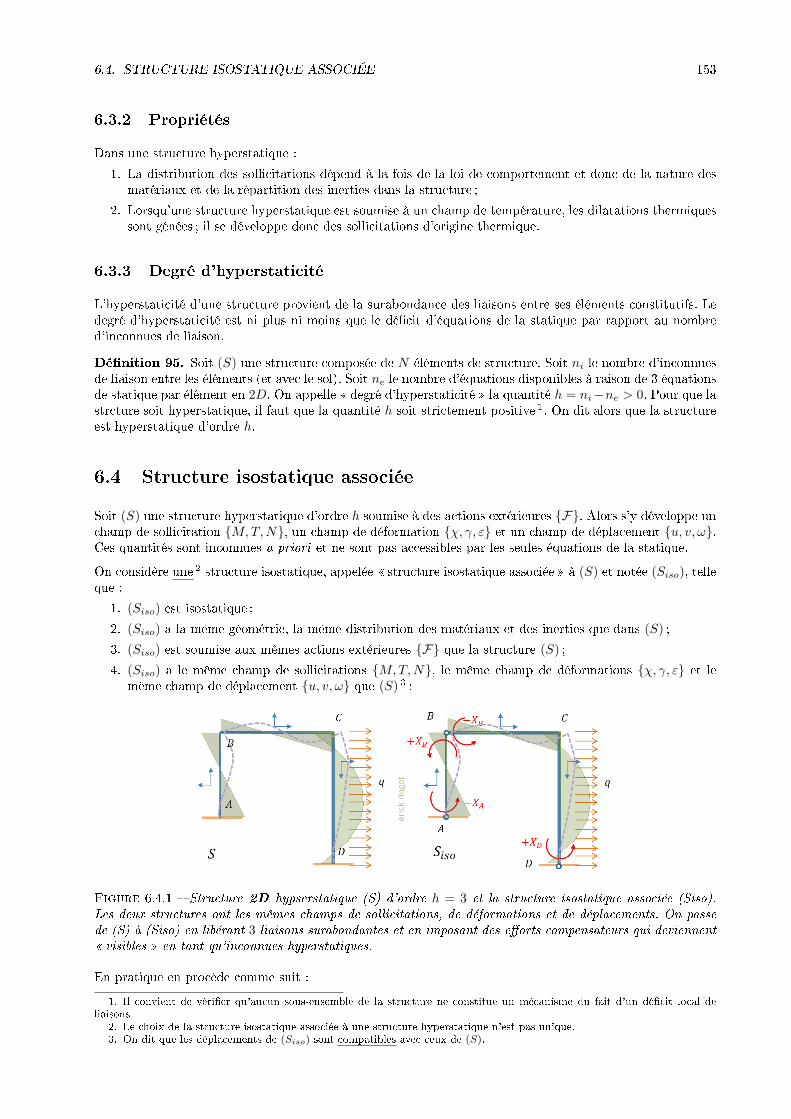
6.4. STRUCTURE ISOSTATIQUE ASSOCIÉE 153
6.3.2 Propriétés
Dans une structure hyperstatique :
1. La distribution des sollicitations dépend à la fois de la loi de comportement et donc de la nature desmatériaux et de la répartition des inerties dans la structure ;
2. Lorsqu'une structure hyperstatique est soumise à un champ de température, les dilatations thermiquessont génées ; il se développe donc des sollicitations d'origine thermique.
6.3.3 Degré d'hyperstaticité
L'hyperstaticité d'une structure provient de la surabondance des liaisons entre ses éléments constitutifs. Ledegré d'hyperstaticité est ni plus ni moins que le décit d'équations de la statique par rapport au nombred'inconnues de liaison.
Dénition 95. Soit (S) une structure composée de N éléments de structure. Soit ni le nombre d'inconnuesde liaison entre les éléments (et avec le sol). Soit ne le nombre d'équations disponibles à raison de 3 équationsde statique par élément en 2D. On appelle degré d'hyperstaticité la quantité h = ni−ne > 0. Pour que lastrcture soit hyperstatique, il faut que la quantité h soit strictement positive 1. On dit alors que la structureest hyperstatique d'ordre h.
6.4 Structure isostatique associée
Soit (S) une structure hyperstatique d'ordre h soumise à des actions extérieures F. Alors s'y développe unchamp de sollicitation M,T,N, un champ de déformation χ, γ, ε et un champ de déplacement u, v, ω.Ces quantités sont inconnues a priori et ne sont pas accessibles par les seules équations de la statique.
On considère une 2 structure isostatique, appelée structure isostatique associée à (S) et notée (Siso), telleque :
1. (Siso) est isostatique ;
2. (Siso) a la même géométrie, la même distribution des matériaux et des inerties que dans (S) ;
3. (Siso) est soumise aux mêmes actions extérieures F que la structure (S) ;
4. (Siso) a le même champ de sollicitations M,T,N, le même champ de déformations χ, γ, ε et lemême champ de déplacement u, v, ω que (S) 3 ;
Figure 6.4.1 Structure 2D hypserstatique (S) d'ordre h = 3 et la structure isostatique associée (Siso).Les deux structures ont les mêmes champs de sollicitations, de déformations et de déplacements. On passede (S) à (Siso) en libérant 3 liaisons surabondantes et en imposant des eorts compensateurs qui deviennent visibles en tant qu'inconnues hyperstatiques.
En pratique en procède comme suit :
1. Il convient de vérier qu'aucun sous-ensemble de la structure ne constitue un mécanisme du fait d'un décit local deliaisons
2. Le choix de la structure isostatique associée à une structure hyperstatique n'est pas unique.3. On dit que les déplacements de (Siso) sont compatibles avec ceux de (S).
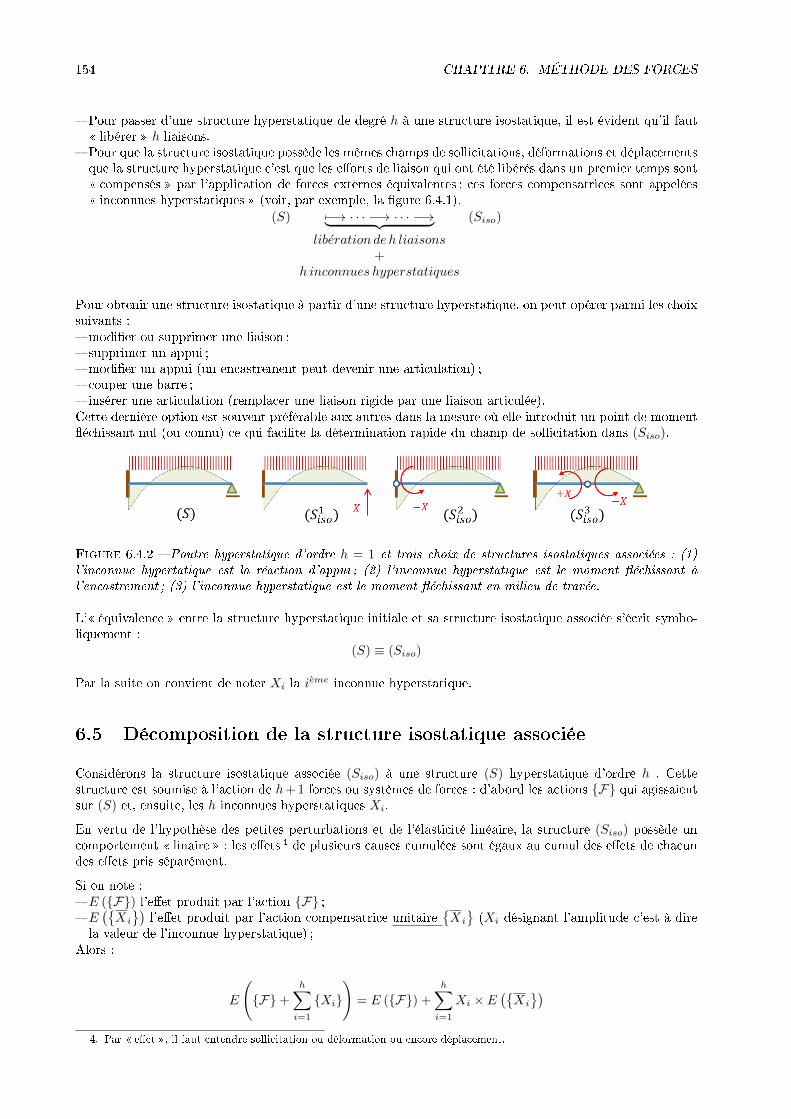
154 CHAPITRE 6. MÉTHODE DES FORCES
Pour passer d'une structure hyperstatique de degré h à une structure isostatique, il est évident qu'il faut libérer h liaisons.
Pour que la structure isostatique possède les mêmes champs de sollicitations, déformations et déplacementsque la structure hyperstatique c'est que les eorts de liaison qui ont été libérés dans un premier temps sont compensés par l'application de forces externes équivalentes ; ces forces compensatrices sont appelées inconnues hyperstatiques (voir, par exemple, la gure 6.4.1).
(S) 7−→ · · · −→ · · · −→︸ ︷︷ ︸liberation de h liaisons
+h inconnues hyperstatiques
(Siso)
Pour obtenir une structure isostatique à partir d'une structure hyperstatique, on peut opérer parmi les choixsuivants : modier ou supprimer une liaison ; supprimer un appui ; modier un appui (un encastrement peut devenir une articulation) ; couper une barre ; insérer une articulation (remplacer une liaison rigide par une liaison articulée).Cette dernière option est souvent préférable aux autres dans la mesure où elle introduit un point de momentéchissant nul (ou connu) ce qui facilite la détermination rapide du champ de sollicitation dans (Siso).
Figure 6.4.2 Poutre hyperstatique d'ordre h = 1 et trois choix de structures isostatiques associées : (1)l'inconnue hypertatique est la réaction d'appui ; (2) l'inconnue hyperstatique est le moment échissant àl'encastrement ; (3) l'inconnue hyperstatique est le moment échissant en milieu de travée.
L' équivalence entre la structure hyperstatique initiale et sa structure isostatique associée s'écrit symbo-liquement :
(S) ≡ (Siso)
Par la suite on convient de noter Xi la ieme inconnue hyperstatique.
6.5 Décomposition de la structure isostatique associée
Considérons la structure isostatique associée (Siso) à une structure (S) hyperstatique d'ordre h . Cettestructure est soumise à l'action de h+ 1 forces ou systèmes de forces : d'abord les actions F qui agissaientsur (S) et, ensuite, les h inconnues hyperstatiques Xi.
En vertu de l'hypothèse des petites perturbations et de l'élasticité linéaire, la structure (Siso) possède uncomportement linaire : les eets 4 de plusieurs causes cumulées sont égaux au cumul des eets de chacundes eets pris séparément.
Si on note : E (F) l'eet produit par l'action F ; E
(Xi
)l'eet produit par l'action compensatrice unitaire
Xi
(Xi désignant l'amplitude c'est à dire
la valeur de l'inconnue hyperstatique) ;Alors :
E
(F+
h∑i=1
Xi
)= E (F) +
h∑i=1
Xi × E(Xi
)4. Par eet , il faut entendre sollicitation ou déformation ou encore déplacement.
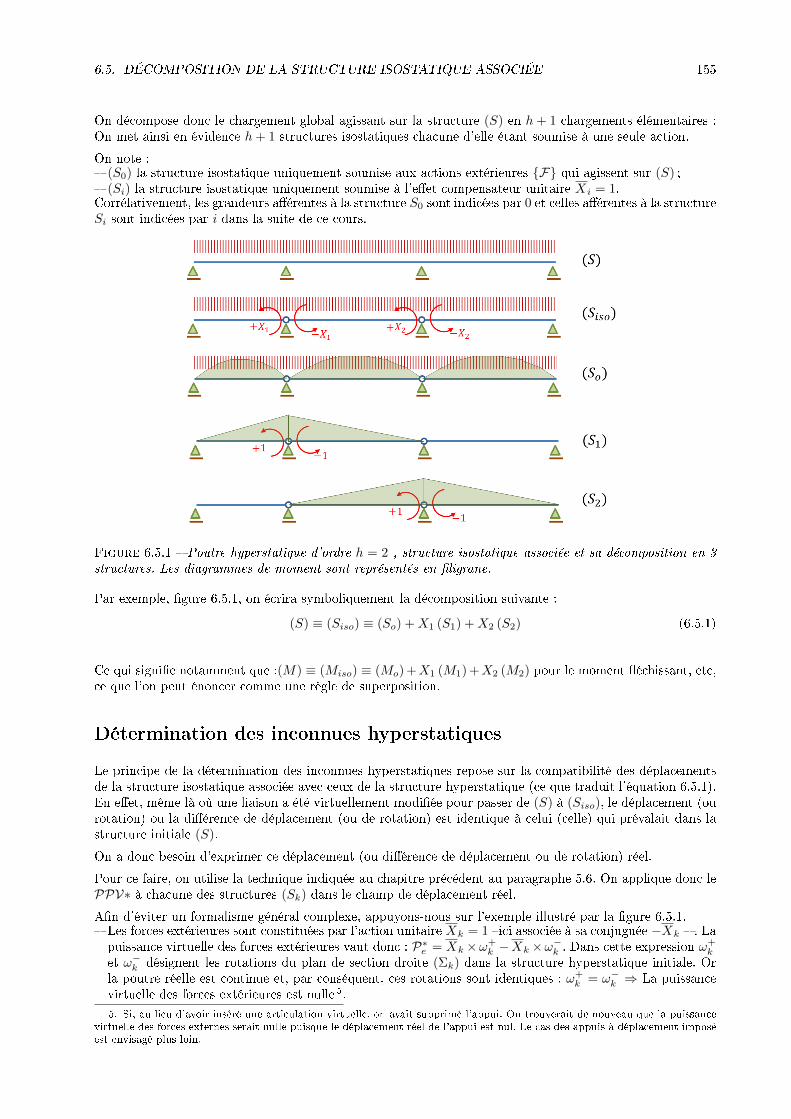
6.5. DÉCOMPOSITION DE LA STRUCTURE ISOSTATIQUE ASSOCIÉE 155
On décompose donc le chargement global agissant sur la structure (S) en h+ 1 chargements élémentaires :On met ainsi en évidence h+ 1 structures isostatiques chacune d'elle étant soumise à une seule action.
On note : (S0) la structure isostatique uniquement soumise aux actions extérieures F qui agissent sur (S) ; (Si) la structure isostatique uniquement soumise à l'eet compensateur unitaire Xi = 1.Corrélativement, les grandeurs aérentes à la structure S0 sont indicées par 0 et celles aérentes à la structureSi sont indicées par i dans la suite de ce cours.
Figure 6.5.1 Poutre hyperstatique d'ordre h = 2 , structure isostatique associée et sa décomposition en 3structures. Les diagrammes de moment sont représentés en ligrane.
Par exemple, gure 6.5.1, on écrira symboliquement la décomposition suivante :
(S) ≡ (Siso) ≡ (So) +X1 (S1) +X2 (S2) (6.5.1)
Ce qui signie notamment que :(M) ≡ (Miso) ≡ (Mo) +X1 (M1) +X2 (M2) pour le moment échissant, etc,ce que l'on peut énoncer comme une règle de superposition.
Détermination des inconnues hyperstatiques
Le principe de la détermination des inconnues hyperstatiques repose sur la compatibilité des déplacementsde la structure isostatique associée avec ceux de la structure hyperstatique (ce que traduit l'équation 6.5.1).En eet, même là où une liaison a été virtuellement modiée pour passer de (S) à (Siso), le déplacement (ourotation) ou la diérence de déplacement (ou de rotation) est identique à celui (celle) qui prévalait dans lastructure initiale (S).
On a donc besoin d'exprimer ce déplacement (ou diérence de déplacement ou de rotation) réel.
Pour ce faire, on utilise la technique indiquée au chapitre précédent au paragraphe 5.6. On applique donc lePPV∗ à chacune des structures (Sk) dans le champ de déplacement réel.
An d'éviter un formalisme général complexe, appuyons-nous sur l'exemple illustré par la gure 6.5.1. Les forces extérieures sont constituées par l'action unitaire Xk = 1 ici associée à sa conjuguée −Xk . Lapuissance virtuelle des forces extérieures vaut donc : P∗e = Xk×ω+
k −Xk×ω−k . Dans cette expression ω+k
et ω−k désignent les rotations du plan de section droite (Σk) dans la structure hyperstatique initiale. Orla poutre réelle est continue et, par conséquent, ces rotations sont identiques : ω+
k = ω−k ⇒ La puissancevirtuelle des forces extérieures est nulle 5.
5. Si, au lieu d'avoir inséré une articulation virtuelle, on avait supprimé l'appui. On trouverait de nouveau que la puissancevirtuelle des forces externes serait nulle puisque le déplacement réel de l'appui est nul. Le cas des appuis à déplacement imposéest envisagé plus loin.

156 CHAPITRE 6. MÉTHODE DES FORCES
Les forces intérieures sont constituées par le champ de sollicitations Mk, Tk, Nk. Les déformations vir-tuelles sont ici constituées par les déformations vraies de la structure hyperstatique χ, γ, ε. La puissancevirtuelle des forces intérieures est donc égale à P∗i = −
´(S)
[Mk (x)χ (x) + Tk (x) γ (x) +Nk (x) ε (x)] dx.De nouveau, par souci de simplication, supposons que la sollicitation prépondérante soit le momentéchissant alors : P∗i = −
´(S)
Mk (x)χ (x) dx. Le PPV∗ s'énonce comme suit : P∗i + P∗e = 0 en statique. Par conséquent :
ˆ
(S)
Mk (x) · χ (x) dx = 0 (6.5.2)
Or, par équivalence de la structure isostatique associée : χ (x) = χiso (x) ;
De plus, par superposition, χ (x) = χiso (x) = χ0 (x) +∑hi=1 χk (x)
χ0 (x) est le champ de courbure provoqué par les actions externes sur la structure isostatique. Dans le cas oùles actions sont des eorts, cette courbure dérive du moment échissant M0 (x) 6 par la relation χ0 = M0
EI ;
χi (x) est le champ de courbure provoqué par la force compensatrice unitaire Xi = 1 (et sa conjuguéeéventuelle) : χi = Mi
EI
L'équation 6.5.2 peut ainsi être écrite sous la forme :
ˆ
(S)
Mk (x) · 1
EI (x)
[M0 (x) +
h∑i=1
Xi ·Mi (x)
]dx = 0
Soit, par distribution de la somme intégrale :
h∑i=1
Xi ·ˆ
(S)
Mk (x)Mi (x)
EI (x)dx = −
ˆ
(S)
Mk (x)M0 (x)
EI (x)dx k = 1 · · ·h
Comme cette opération est réitérée pour toutes les structures (Sk), on dispose nalement de h équationslinéaires à h inconnues :
a11X1 +a12X2 + · · · a1hXh = −b10
a21X1 +a22X2 + · · · a2hXh = −b20
· · · · · · · · · · · · · · ·ah1X1 ah2X2 + · · · ahhXh = −bh0
Ce système linéaire peut être écrit sous forme condensée : [A] [X] = [B]
Avec :
aij =
ˆ
(S)
Mi (x)Mj (x)
EI (x)dx
bi0 =
ˆ
(S)
Mi (x)M0 (x)
EI (x)dx
La matrice [A] carrée de rang h jouit des propriétés suivantes :
1. symétrie : aij = aji ou [A]t
= [A] ;
2. dénie : [A]−1 existe ;
3. positive : [X]t[A] [X] ≥ 0 ∀ [X]
Les coecients aij et bi0 s'écrivent donc en tant qu'intégrales de Mohr dont les modalités pratiques decalcul ont été abordées au chapitre précédent.
6. Attention la courbure isostatique peut aussi être provoquée par un gradient de température en l'absence même de solli-citation.
6.6. ALGORITHME D'ÉTUDE D'UNE STRUCTURE PAR LA MÉTHODE DES FORCES 157
6.6 Algorithme d'étude d'une structure par la méthode des forces
1. Attacher un système d'axes local à chaque élément de la structure ;
2. Etablir le degré d'hyperstaticité h : si h < 0 il s'agit d'un mécanisme qui ne relève pas du calcul des structures ; si h = 0 il s'agit d'une structure isostatique et les sollicitations sont établies à l'aide des seuleséquations de la statique ;
si h > 0 il s'agit d'une structure hyperstatique et on poursuit l'algorithme comme suit.
3. Choisir une structure isostatique associée (Siso) et dénir les h inconnues hyperstatiques Xi ;
4. Décomposer le chargement de (Siso) en h+1 cas élémentaires et calculer les sollicitations utilesM,T,Ndans chacune d'elles ;
5. Appliquer le PPV∗ à chacune des h structures virtuelles (Sk) k = 1 · · ·h pour obtenir un système deh équations linéaires à h inconnues ;
6. Déterminer les inconnuesXi en calculant les h+h(h+1)2 intégrales deMohr du système et en l'inversant ;
7. Construire les diagrammes de sollicitations réelles sur le modèle M = M0 + Σhi=1Xi ·Mi.
6.7 Cas spéciaux
6.7.1 Dénivellation d'appui
à développer
6.7.2 Appui élastique
à développer
6.7.3 Chargement thermique
à développer
6.7.4 Précontrainte externe
à développer
E.Ringot 2012
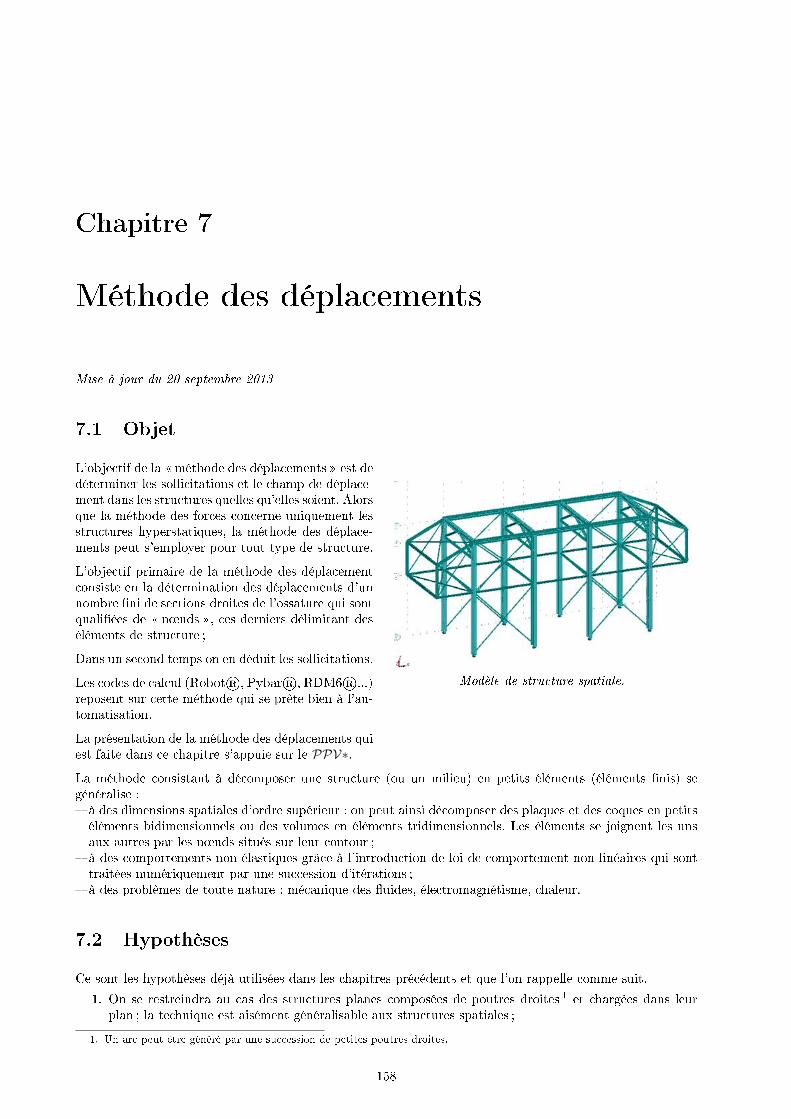
Chapitre 7
Méthode des déplacements
Mise à jour du 20 septembre 2013
7.1 Objet
Modèle de structure spatiale.
L'objectif de la méthode des déplacements est dedéterminer les sollicitations et le champ de déplace-ment dans les structures quelles qu'elles soient. Alorsque la méthode des forces concerne uniquement lesstructures hyperstatiques, la méthode des déplace-ments peut s'employer pour tout type de structure.
L'objectif primaire de la méthode des déplacementconsiste en la détermination des déplacements d'unnombre ni de sections droites de l'ossature qui sontqualiées de n÷uds , ces derniers délimitant deséléments de structure ;
Dans un second temps on en déduit les sollicitations.
Les codes de calcul (Robot®, Pybar®, RDM6®...)reposent sur cette méthode qui se prête bien à l'au-tomatisation.
La présentation de la méthode des déplacements quiest faite dans ce chapitre s'appuie sur le PPV∗.
La méthode consistant à décomposer une structure (ou un milieu) en petits éléments (éléments nis) segénéralise : à des dimensions spatiales d'ordre supérieur : on peut ainsi décomposer des plaques et des coques en petitséléments bidimensionnels ou des volumes en éléments tridimensionnels. Les éléments se joignent les unsaux autres par les n÷uds situés sur leur contour ;
à des comportements non-élastiques grâce à l'introduction de loi de comportement non-linéaires qui sonttraitées numériquement par une succession d'itérations ;
à des problèmes de toute nature : mécanique des uides, électromagnétisme, chaleur.
7.2 Hypothèses
Ce sont les hypothèses déjà utilisées dans les chapitres précédents et que l'on rappelle comme suit.
1. On se restreindra au cas des structures planes composées de poutres droites 1 et chargées dans leurplan ; la technique est aisément généralisable aux structures spatiales ;
1. Un arc peut être généré par une succession de petites poutres droites.
158
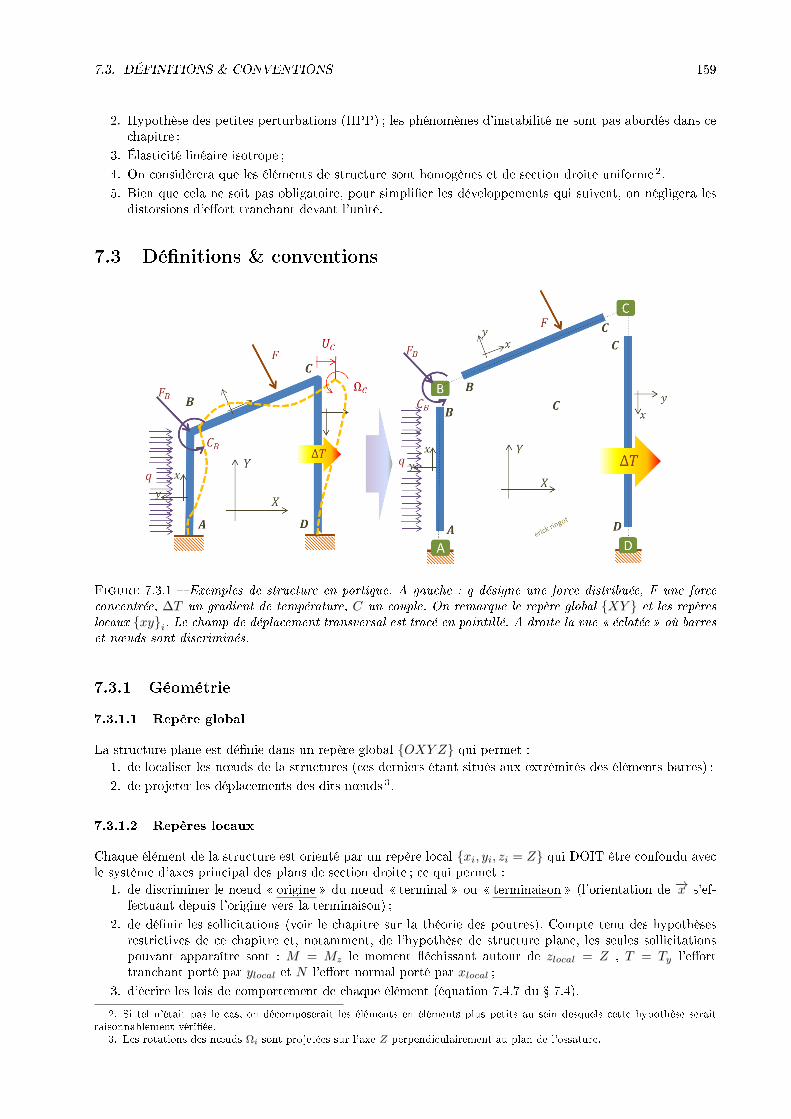
7.3. DÉFINITIONS & CONVENTIONS 159
2. Hypothèse des petites perturbations (HPP) ; les phénomènes d'instabilité ne sont pas abordés dans cechapitre ;
3. Élasticité linéaire isotrope ;
4. On considèrera que les éléments de structure sont homogènes et de section droite uniforme 2.
5. Bien que cela ne soit pas obligatoire, pour simplier les développements qui suivent, on négligera lesdistorsions d'eort tranchant devant l'unité.
7.3 Dénitions & conventions
Figure 7.3.1 Exemples de structure en portique. A gauche : q désigne une force distribuée, F une forceconcentrée, ∆T un gradient de température, C un couple. On remarque le repère global XY et les repèreslocaux xyi. Le champ de déplacement transversal est tracé en pointillé. A droite la vue éclatée où barreset n÷uds sont discriminés.
7.3.1 Géométrie
7.3.1.1 Repère global
La structure plane est dénie dans un repère global OXY Z qui permet :1. de localiser les n÷uds de la structures (ces derniers étant situés aux extrémités des éléments barres) ;
2. de projeter les déplacements des-dits n÷uds 3.
7.3.1.2 Repères locaux
Chaque élément de la structure est orienté par un repère local xi, yi, zi = Z qui DOIT être confondu avecle système d'axes principal des plans de section droite ; ce qui permet :
1. de discriminer le n÷ud origine du n÷ud terminal ou terminaison (l'orientation de −→x s'ef-fectuant depuis l'origine vers la terminaison) ;
2. de dénir les sollicitations (voir le chapitre sur la théorie des poutres). Compte tenu des hypothèsesrestrictives de ce chapitre et, notamment, de l'hypothèse de structure plane, les seules sollicitationspouvant apparaître sont : M = Mz le moment échissant autour de zlocal = Z , T = Ty l'eorttranchant porté par ylocal et N l'eort normal porté par xlocal ;
3. d'écrire les lois de comportement de chaque élément (équation 7.4.7 du 7.4).
2. Si tel n'était pas le cas, on décomposerait les éléments en éléments plus petits au sein desquels cette hypothèse seraitraisonnablement vériée.
3. Les rotations des n÷uds Ωi sont projetées sur l'axe Z perpendiculairement au plan de l'ossature.
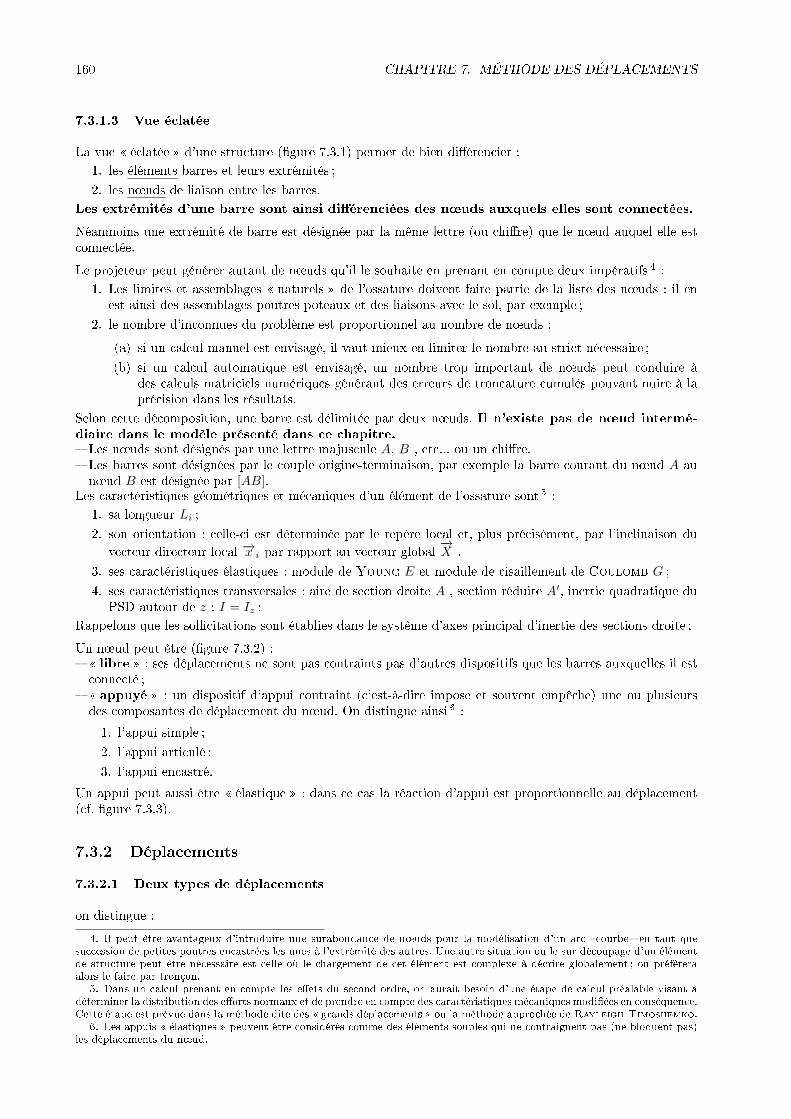
160 CHAPITRE 7. MÉTHODE DES DÉPLACEMENTS
7.3.1.3 Vue éclatée
La vue éclatée d'une structure (gure 7.3.1) permet de bien diérencier :
1. les éléments barres et leurs extrémités ;
2. les n÷uds de liaison entre les barres.
Les extrémités d'une barre sont ainsi diérenciées des n÷uds auxquels elles sont connectées.
Néanmoins une extrémité de barre est désignée par la même lettre (ou chire) que le n÷ud auquel elle estconnectée.
Le projeteur peut générer autant de n÷uds qu'il le souhaite en prenant en compte deux impératifs 4 :
1. Les limites et assemblages naturels de l'ossature doivent faire partie de la liste des n÷uds : il enest ainsi des assemblages poutres-poteaux et des liaisons avec le sol, par exemple ;
2. le nombre d'inconnues du problème est proportionnel au nombre de n÷uds :
(a) si un calcul manuel est envisagé, il vaut mieux en limiter le nombre au strict nécessaire ;
(b) si un calcul automatique est envisagé, un nombre trop important de n÷uds peut conduire àdes calculs matriciels numériques générant des erreurs de troncature cumulés pouvant nuire à laprécision dans les résultats.
Selon cette décomposition, une barre est délimitée par deux n÷uds. Il n'existe pas de n÷ud intermé-diaire dans le modèle présenté dans ce chapitre. Les n÷uds sont désignés par une lettre majuscule A, B , etc... ou un chire. Les barres sont désignées par le couple origine-terminaison, par exemple la barre courant du n÷ud A aun÷ud B est désignée par [AB].
Les caractéristiques géométriques et mécaniques d'un élément de l'ossature sont 5 :
1. sa longueur Li ;
2. son orientation : celle-ci est déterminée par le repère local et, plus précisément, par l'inclinaison duvecteur directeur local −→x i par rapport au vecteur global
−→X .
3. ses caractéristiques élastiques : module de Young E et module de cisaillement de Coulomb G ;
4. ses caractéristiques transversales : aire de section droite A , section réduite A′, inertie quadratique duPSD autour de z : I = Iz ;
Rappelons que les sollicitations sont établies dans le système d'axes principal d'inertie des sections droite ;
Un n÷ud peut être (gure 7.3.2) : libre : ses déplacements ne sont pas contraints pas d'autres dispositifs que les barres auxquelles il estconnecté ;
appuyé : un dispositif d'appui contraint (c'est-à-dire impose et souvent empêche) une ou plusieursdes composantes de déplacement du n÷ud. On distingue ainsi 6 :
1. l'appui simple ;
2. l'appui articulé ;
3. l'appui encastré.
Un appui peut aussi être élastique : dans ce cas la réaction d'appui est proportionnelle au déplacement(cf. gure 7.3.3).
7.3.2 Déplacements
7.3.2.1 Deux types de déplacements
on distingue :
4. Il peut être avantageux d'introduire une surabondance de n÷uds pour la modélisation d'un arc courbe en tant quesuccession de petites poutres encastrées les unes à l'extrémité des autres. Une autre situation ou le sur-découpage d'un élémentde structure peut être nécessaire est celle où le chargement de cet élément est complexe à décrire globalement ; on préfèreraalors le faire par tronçon.
5. Dans un calcul prenant en compte les eets du second ordre, on aurait besoin d'une étape de calcul préalable visant àdéterminer la distribution des eorts normaux et de prendre en compte des caractéristiques mécaniques modiées en conséquence.Cette étape est prévue dans la méthode dite des grands déplacements ou la méthode approchée de Rayleigh-Timoshemko.
6. Les appuis élastiques peuvent être considérés comme des éléments souples qui ne contraignent pas (ne bloquent pas)les déplacements du n÷ud.

7.3. DÉFINITIONS & CONVENTIONS 161
Figure 7.3.2 Diérents types d'appui. (A) appui simple horizontal : VA = 0. (B) appui simple incliné :V ′A = 0 ⇒ VA cosα − UA sinα = 0. (C) appui simple avec une inclinaison négative - à noter que les deuxbarres sont rigidement liées quant à elles. (D) appui articulé. (E) appui encastré ou encastrement.
Figure 7.3.3 Appuis élastiques. A gauche : ressort de torsion, le moment de liaison est proportionnelà la rotation. A droite : ressort compression-extension, l'eort transmis dans la direction du ressort estproportionnel à son élongation.
1. Les déplacements des extrémités des barres. Ils sont notés par des lettres minuscules ; Ils sont projetés dans le repère local à la poutre : u déplacement axial porté par −→x local, vdéplacement transversal porté par −→y local, ω rotation portée par −→z ;
Ils sont indicés par le numéro (ou la lettre) désignant le n÷ud attaché à l'extrémité. Cette notationest donc contextuelle et doit être assortie de l'information de la barre concernée. Par exemple lanotation ωi peut désigner la rotation de l'extrémité i de la barre [ij] comme celle de la barre [ki]bien que ces deux rotations puissent être diérentes.
2. les déplacements des n÷uds. Ils sont notés par des lettres majuscules ; Ils sont projetés dans le repère global : U déplacement selon
−→X (généralement mais pas obliga-
toirement horizontal), V déplacement selon−→Y (généralement mais pas obligatoirement vertical), Ω
rotation autour de−→Z ;
Ils sont indicés par le numéro ou la lettre désignant le n÷ud : UA, VA, ΩA désignent donc lesdéplacements du n÷ud A.
7.3.2.2 Dépendance entre les translations
Pour établir la relation entre les composantes de déplacement de translation d'une extrémité de barre et dun÷ud attenant, il sut d'adopter une approche vectorielle : Le vecteur déplacement de l'extrémité s'exprime dans le repère local à la barre :
−→D i = ui
−→x + vi−→y
Le vecteur déplacement du n÷ud s'exprime dans le repère global :−→D i = Ui
−→X + Vi
−→Y
Du fait de la connexion extrémité-n÷ud, ces deux translations n'en forment qu'une : ui−→x +vi
−→y = Ui−→X+Vi
−→Y
La barre considérée accusant un angle d'inclinaison θ avec la direction−→X , on peut exprimer les vecteurs de
la base −→x ,−→y en fonction de ceux de la base−→X,−→Y: −→x =
−→X cos θ +
−→Y sin θ
−→y = −−→X sin θ +
−→Y cos θ
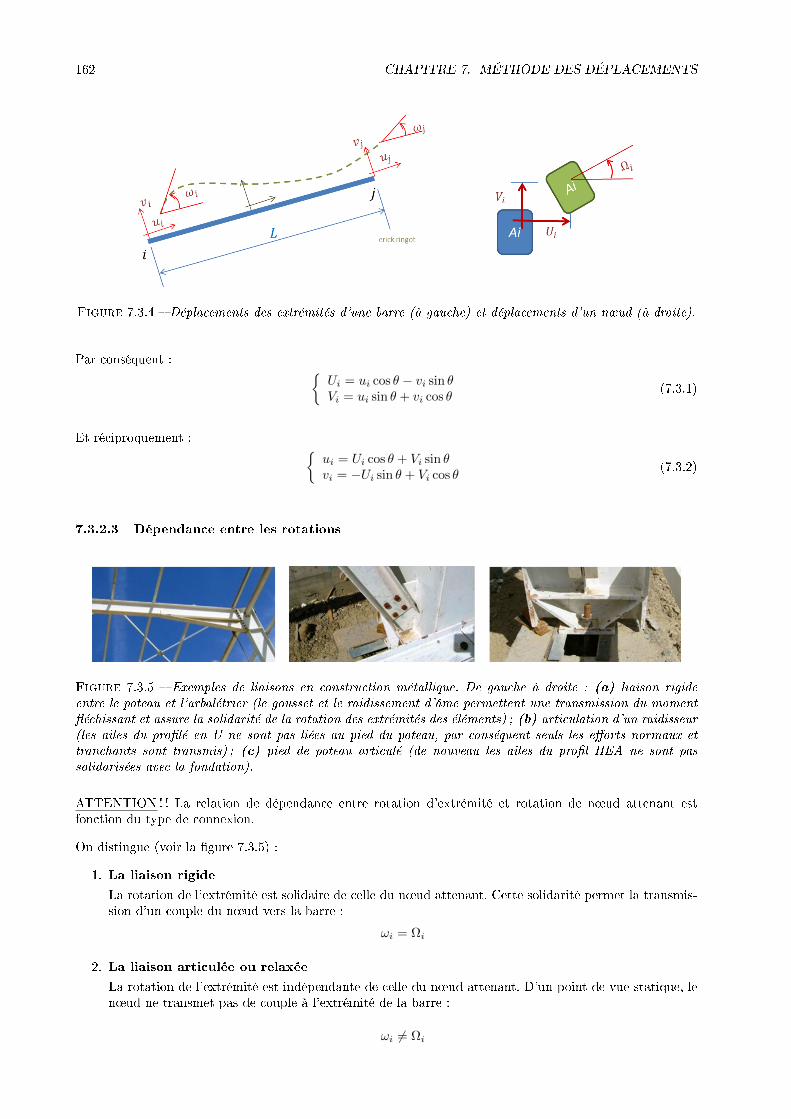
162 CHAPITRE 7. MÉTHODE DES DÉPLACEMENTS
Figure 7.3.4 Déplacements des extrémités d'une barre (à gauche) et déplacements d'un n÷ud (à droite).
Par conséquent : Ui = ui cos θ − vi sin θVi = ui sin θ + vi cos θ
(7.3.1)
Et réciproquement : ui = Ui cos θ + Vi sin θvi = −Ui sin θ + Vi cos θ
(7.3.2)
7.3.2.3 Dépendance entre les rotations
Figure 7.3.5 Exemples de liaisons en construction métallique. De gauche à droite : (a) liaison rigideentre le poteau et l'arbalétrier (le gousset et le raidissement d'âme permettent une transmission du momentéchissant et assure la solidarité de la rotation des extrémités des éléments) ; (b) articulation d'un raidisseur(les ailes du prolé en U ne sont pas liées au pied du poteau, par conséquent seuls les eorts normaux ettranchants sont transmis) ; (c) pied de poteau articulé (de nouveau les ailes du prol HEA ne sont passolidarisées avec la fondation).
ATTENTION ! ! La relation de dépendance entre rotation d'extrémité et rotation de n÷ud attenant estfonction du type de connexion.
On distingue (voir la gure 7.3.5) :
1. La liaison rigide
La rotation de l'extrémité est solidaire de celle du n÷ud attenant. Cette solidarité permet la transmis-sion d'un couple du n÷ud vers la barre :
ωi = Ωi
2. La liaison articulée ou relaxée
La rotation de l'extrémité est indépendante de celle du n÷ud attenant. D'un point de vue statique, len÷ud ne transmet pas de couple à l'extrémité de la barre :
ωi 6= Ωi
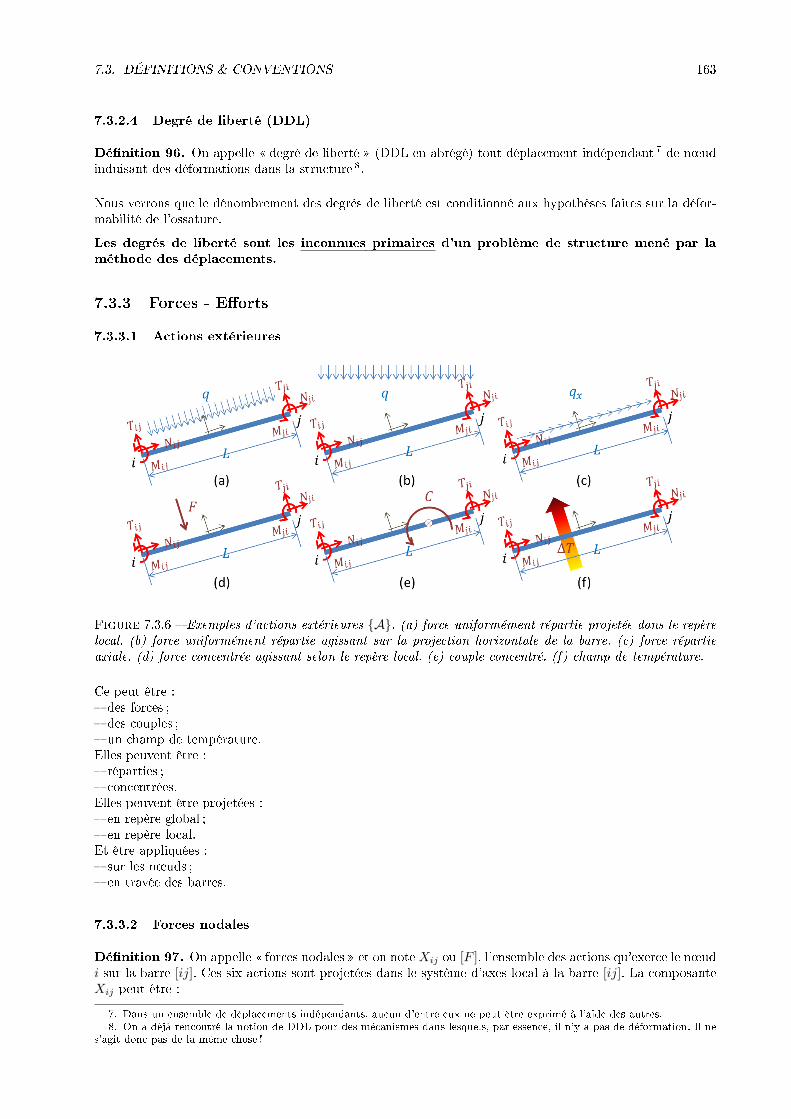
7.3. DÉFINITIONS & CONVENTIONS 163
7.3.2.4 Degré de liberté (DDL)
Dénition 96. On appelle degré de liberté (DDL en abrégé) tout déplacement indépendant 7 de n÷udinduisant des déformations dans la structure 8.
Nous verrons que le dénombrement des degrés de liberté est conditionné aux hypothèses faites sur la défor-mabilité de l'ossature.
Les degrés de liberté sont les inconnues primaires d'un problème de structure mené par laméthode des déplacements.
7.3.3 Forces - Eorts
7.3.3.1 Actions extérieures
Figure 7.3.6 Exemples d'actions extérieures A. (a) force uniformément répartie projetée dans le repèrelocal. (b) force uniformément répartie agissant sur la projection horizontale de la barre. (c) force répartieaxiale. (d) force concentrée agissant selon le repère local. (e) couple concentré. (f) champ de température.
Ce peut être : des forces ; des couples ; un champ de température.Elles peuvent être : réparties ; concentrées.Elles peuvent être projetées : en repère global ; en repère local.Et être appliquées : sur les n÷uds ; en travée des barres.
7.3.3.2 Forces nodales
Dénition 97. On appelle forces nodales et on note Xij ou [F ], l'ensemble des actions qu'exerce le n÷udi sur la barre [ij]. Ces six actions sont projetées dans le système d'axes local à la barre [ij]. La composanteXij peut être :
7. Dans un ensemble de déplacements indépendants, aucun d'entre eux ne peut être exprimé à l'aide des autres.8. On a déjà rencontré la notion de DDL pour des mécanismes dans lesquels, par essence, il n'y a pas de déformation. Il ne
s'agit donc pas de la même chose !
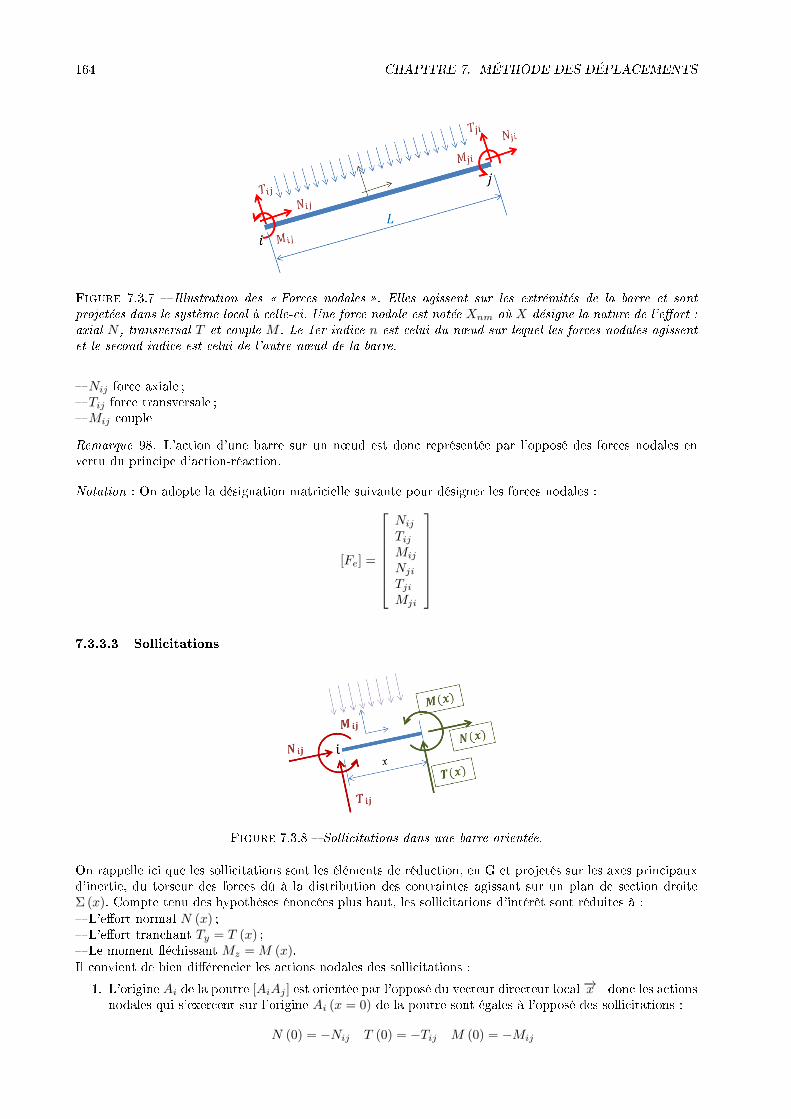
164 CHAPITRE 7. MÉTHODE DES DÉPLACEMENTS
Figure 7.3.7 Illustration des Forces nodales . Elles agissent sur les extrémités de la barre et sontprojetées dans le système local à celle-ci. Une force nodale est notée Xnm où X désigne la nature de l'eort :axial N , transversal T et couple M . Le 1er indice n est celui du n÷ud sur lequel les forces nodales agissentet le second indice est celui de l'autre n÷ud de la barre.
Nij force axiale ; Tij force transversale ; Mij couple
Remarque 98. L'action d'une barre sur un n÷ud est donc représentée par l'opposé des forces nodales envertu du principe d'action-réaction.
Notation : On adopte la désignation matricielle suivante pour désigner les forces nodales :
[Fe] =
NijTijMij
NjiTjiMji
7.3.3.3 Sollicitations
Figure 7.3.8 Sollicitations dans une barre orientée.
On rappelle ici que les sollicitations sont les éléments de réduction, en G et projetés sur les axes principauxd'inertie, du torseur des forces dû à la distribution des contraintes agissant sur un plan de section droiteΣ (x). Compte tenu des hypothèses énoncées plus haut, les sollicitations d'intérêt sont réduites à : L'eort normal N (x) ; L'eort tranchant Ty = T (x) ; Le moment échissant Mz = M (x).Il convient de bien diérencier les actions nodales des sollicitations :
1. L'origine Ai de la poutre [AiAj ] est orientée par l'opposé du vecteur directeur local−→x - donc les actions
nodales qui s'exercent sur l'origine Ai (x = 0) de la poutre sont égales à l'opposé des sollicitations :
N (0) = −Nij T (0) = −Tij M (0) = −Mij
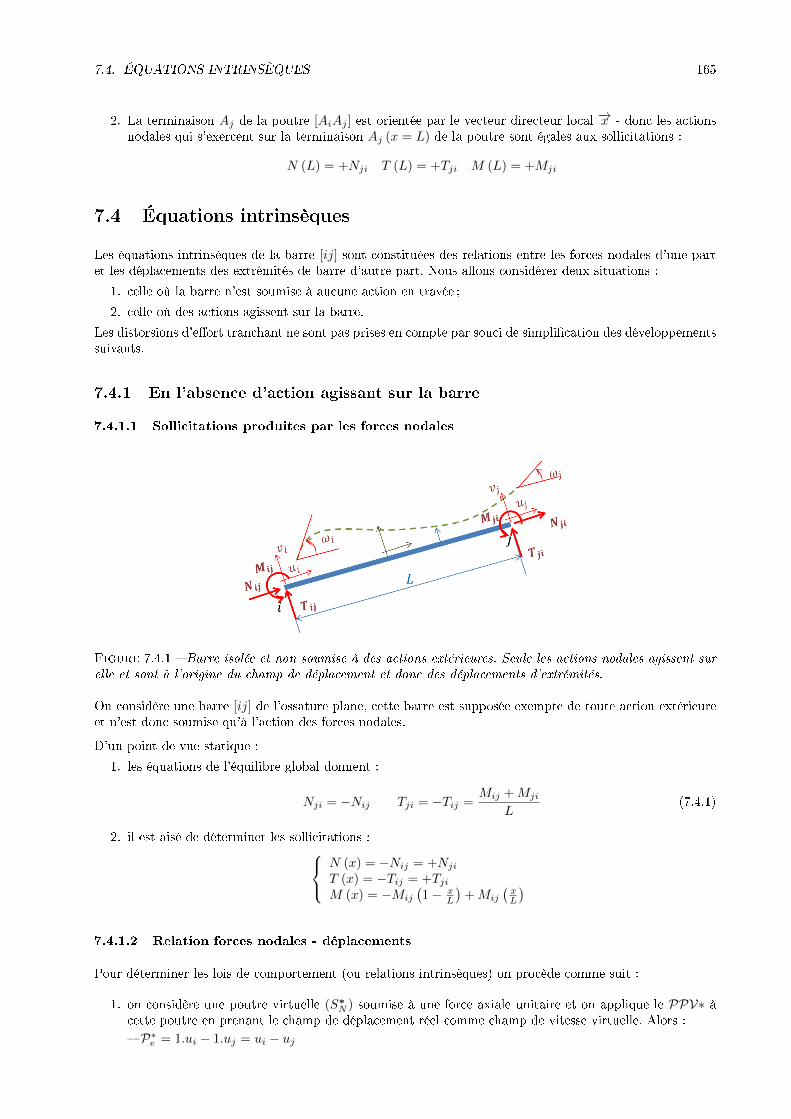
7.4. ÉQUATIONS INTRINSÈQUES 165
2. La terminaison Aj de la poutre [AiAj ] est orientée par le vecteur directeur local−→x - donc les actions
nodales qui s'exercent sur la terminaison Aj (x = L) de la poutre sont égales aux sollicitations :
N (L) = +Nji T (L) = +Tji M (L) = +Mji
7.4 Équations intrinsèques
Les équations intrinsèques de la barre [ij] sont constituées des relations entre les forces nodales d'une partet les déplacements des extrémités de barre d'autre part. Nous allons considérer deux situations :
1. celle où la barre n'est soumise à aucune action en travée ;
2. celle où des actions agissent sur la barre.
Les distorsions d'eort tranchant ne sont pas prises en compte par souci de simplication des développementssuivants.
7.4.1 En l'absence d'action agissant sur la barre
7.4.1.1 Sollicitations produites par les forces nodales
Figure 7.4.1 Barre isolée et non soumise à des actions extérieures. Seule les actions nodales agissent surelle et sont à l'origine du champ de déplacement et donc des déplacements d'extrémités.
On considère une barre [ij] de l'ossature plane, cette barre est supposée exempte de toute action extérieureet n'est donc soumise qu'à l'action des forces nodales.
D'un point de vue statique :
1. les équations de l'équilibre global donnent :
Nji = −Nij Tji = −Tij =Mij +Mji
L(7.4.1)
2. il est aisé de déterminer les sollicitations : N (x) = −Nij = +NjiT (x) = −Tij = +TjiM (x) = −Mij
(1− x
L
)+Mij
(xL
)7.4.1.2 Relation forces nodales - déplacements
Pour déterminer les lois de comportement (ou relations intrinsèques) on procède comme suit :
1. on considère une poutre virtuelle (S∗N ) soumise à une force axiale unitaire et on applique le PPV∗ à
cette poutre en prenant le champ de déplacement réel comme champ de vitesse virtuelle. Alors : P∗e = 1.ui − 1.uj = ui − uj
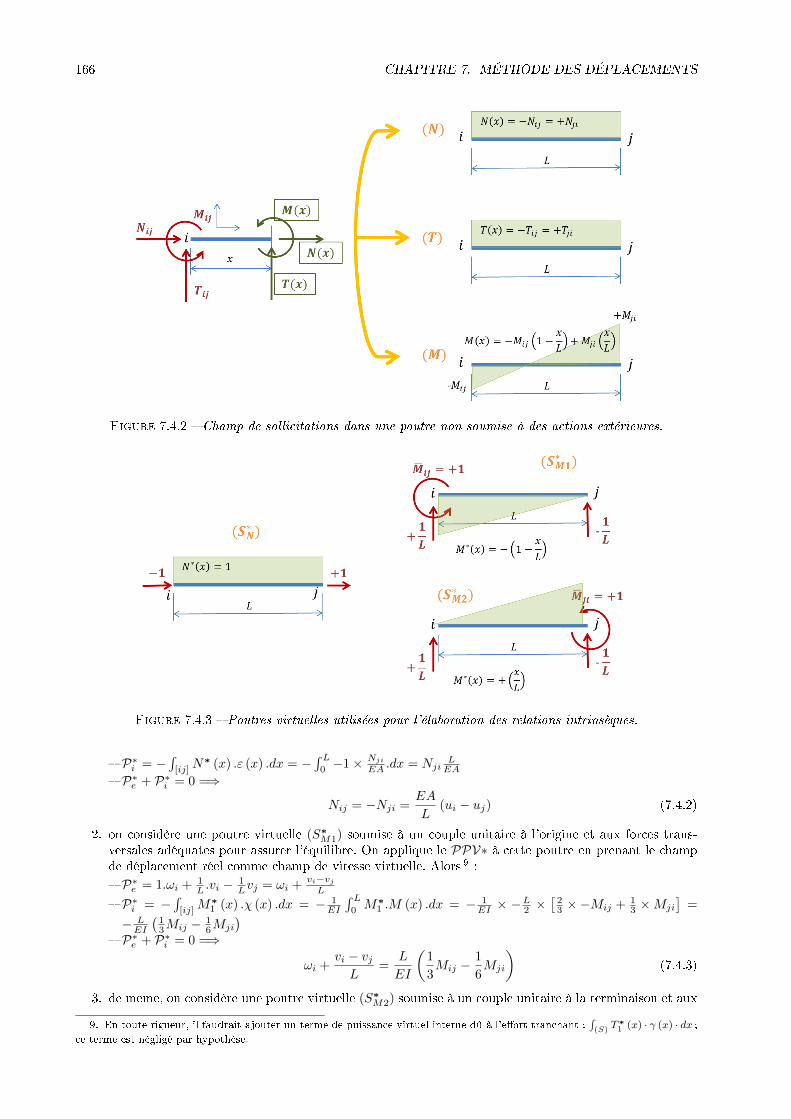
166 CHAPITRE 7. MÉTHODE DES DÉPLACEMENTS
Figure 7.4.2 Champ de sollicitations dans une poutre non soumise à des actions extérieures.
Figure 7.4.3 Poutres virtuelles utilisées pour l'élaboration des relations intrinsèques.
P∗i = −´
[ij]N∗ (x) .ε (x) .dx = −
´ L0−1× Nji
EA .dx = NjiLEA
P∗e + P∗i = 0 =⇒
Nij = −Nji =EA
L(ui − uj) (7.4.2)
2. on considère une poutre virtuelle (S∗M1) soumise à un couple unitaire à l'origine et aux forces trans-
versales adéquates pour assurer l'équilibre. On applique le PPV∗ à cette poutre en prenant le champde déplacement réel comme champ de vitesse virtuelle. Alors 9 : P∗e = 1.ωi + 1
L .vi −1Lvj = ωi +
vi−vjL
P∗i = −´
[ij]M∗
1 (x) .χ (x) .dx = − 1EI
´ L0M∗
1 .M (x) .dx = − 1EI × −
L2 ×
[23 ×−Mij + 1
3 ×Mji
]=
− LEI
(13Mij − 1
6Mji
) P∗e + P∗i = 0 =⇒
ωi +vi − vjL
=L
EI
(1
3Mij −
1
6Mji
)(7.4.3)
3. de même, on considère une poutre virtuelle (S∗M2) soumise à un couple unitaire à la terminaison et aux
9. En toute rigueur, il faudrait ajouter un terme de puissance virtuel interne dû à l'eort tranchant :´(S) T
∗1 (x) · γ (x) · dx ;
ce terme est négligé par hypothèse.

7.4. ÉQUATIONS INTRINSÈQUES 167
forces transversales adéquates pour assurer l'équilibre. On applique le PPV∗ à cette poutre en prenantle champ de déplacement réel comme champ de vitesse virtuelle. Alors : P∗e = 1.ωj + 1
L .vi −1Lvj = ωi +
vi−vjL
P∗i = −´
[ij]M∗
2 (x) .χ (x) .dx = − 1EI
´ L0M∗
2 .M (x) .dx = − 1EI ×
L2 ×
[13 ×−Mij + 2
3 ×Mji
]=
− LEI
(− 1
6Mij + 13Mji
) P∗e + P∗i = 0 =⇒
ωj +vi − vjL
=L
EI
(−1
6Mij +
1
3Mji
)(7.4.4)
4. on ré-écrit les équations 7.4.3 et 7.4.4 sous la forme :
2Mij −Mji = 6EIL ωi + 6EI
L2 (vi − vj)−Mij + 2Mji = 6EI
L ωj + 6EIL2 (vi − vj)
D'où on déduit :Mij = 4EI
L ωi + 2EIL ωj + 6EI
L2 (vi − vj)Mji = 2EI
L ωi + 4EIL ωj + 6EI
L2 (vi − vj)(7.4.5)
5. les équations concernant les eorts transversaux se déduisent des précédentes (7.4.5) et des équationsd'équilibre 7.4.1 :
Tij = 6EIL2 ωi + 6EI
L2 ωj + 12EIL3 (vi − vj)
Tji = − 6EIL2 ωi − 6EI
L2 ωj − 12EIL2 (vi − vj)
(7.4.6)
7.4.1.3 Matrice de rigidité élémentaire
Bilan :
On dispose de 6 équations linéaires entre les 6 déplacements d'extrémités de barre et les 6 actions nodales.
On introduit donc : Le vecteur des déplacements :
[De] =
uiviωiujvjωj
Le vecteur des forces nodales :
[Fe] =
NijTijMij
NjiTjiMji
Les équations de comportement peuvent ainsi être mises sous forme matricielle :
NijTijMij
NjiTjiMji
=
EAL 0 0 −EAL 0 00 12EI
L26EIL3 0 − 12EI
L26EIL3
0 6EIL2
4EIL 0 − 6EI
L22EIL
−EAL 0 0 EAL 0 0
0 − 12EIL2 − 6EI
L3 0 12EIL2 − 6EI
L3
0 6EIL2
2EIL 0 − 6EI
L24EIL
·uiviωiujvjωj
(7.4.7)
Soit, sous forme condensée :[Fe] = [Ke] · [De]
La matrice [Ke] est la matrice de rigidité élémentaire en petits déplacements et jouit des propriétés de : symétrie : [Ke] = [Ke]
T ; positivité : la forme bilinéaireWe = 1
2 [De]T ·[Ke]·[De] est positive ou nulle quelque soit [De] et correspond
à l'énergie élastique emmagasinée dans la barre (voir le 7.4.3).
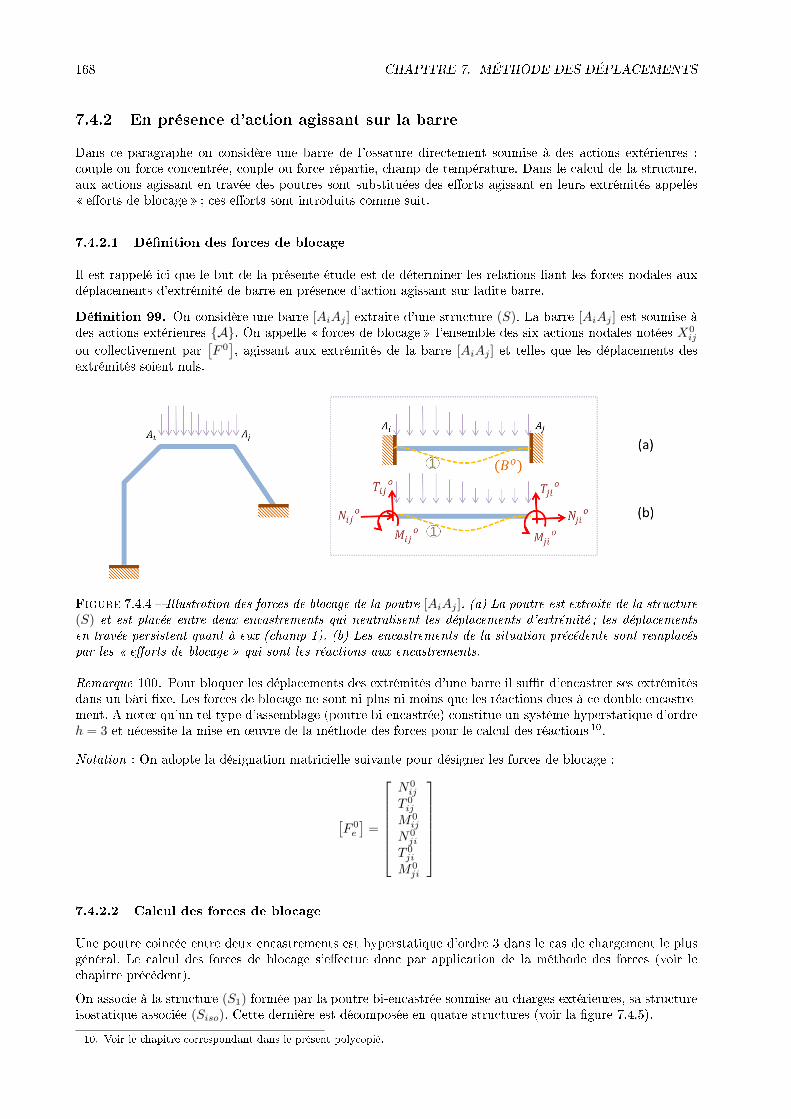
168 CHAPITRE 7. MÉTHODE DES DÉPLACEMENTS
7.4.2 En présence d'action agissant sur la barre
Dans ce paragraphe on considère une barre de l'ossature directement soumise à des actions extérieures :couple ou force concentrée, couple ou force répartie, champ de température. Dans le calcul de la structure,aux actions agissant en travée des poutres sont substituées des eorts agissant en leurs extrémités appelés eorts de blocage ; ces eorts sont introduits comme suit.
7.4.2.1 Dénition des forces de blocage
Il est rappelé ici que le but de la présente étude est de déterminer les relations liant les forces nodales auxdéplacements d'extrémité de barre en présence d'action agissant sur ladite barre.
Dénition 99. On considère une barre [AiAj ] extraite d'une structure (S). La barre [AiAj ] est soumise àdes actions extérieures A. On appelle forces de blocage l'ensemble des six actions nodales notées X0
ij
ou collectivement par[F 0], agissant aux extrémités de la barre [AiAj ] et telles que les déplacements des
extrémités soient nuls.
Figure 7.4.4 Illustration des forces de blocage de la poutre [AiAj ]. (a) La poutre est extraite de la structure(S) et est placée entre deux encastrements qui neutralisent les déplacements d'extrémité ; les déplacementsen travée persistent quant à eux (champ 1). (b) Les encastrements de la situation précédente sont remplacéspar les eorts de blocage qui sont les réactions aux encastrements.
Remarque 100. Pour bloquer les déplacements des extrémités d'une barre il sut d'encastrer ses extrémitésdans un bâti xe. Les forces de blocage ne sont ni plus ni moins que les réactions dues à ce double encastre-ment. A noter qu'un tel type d'assemblage (poutre bi-encastrée) constitue un système hyperstatique d'ordreh = 3 et nécessite la mise en ÷uvre de la méthode des forces pour le calcul des réactions 10.
Notation : On adopte la désignation matricielle suivante pour désigner les forces de blocage :
[F 0e
]=
N0ij
T 0ij
M0ij
N0ji
T 0ji
M0ji
7.4.2.2 Calcul des forces de blocage
Une poutre coincée entre deux encastrements est hyperstatique d'ordre 3 dans le cas de chargement le plusgénéral. Le calcul des forces de blocage s'eectue donc par application de la méthode des forces (voir lechapitre précédent).
On associe à la structure (S1) formée par la poutre bi-encastrée soumise au charges extérieures, sa structureisostatique associée (Siso). Cette dernière est décomposée en quatre structures (voir la gure 7.4.5).
10. Voir le chapitre correspondant dans le présent polycopié.
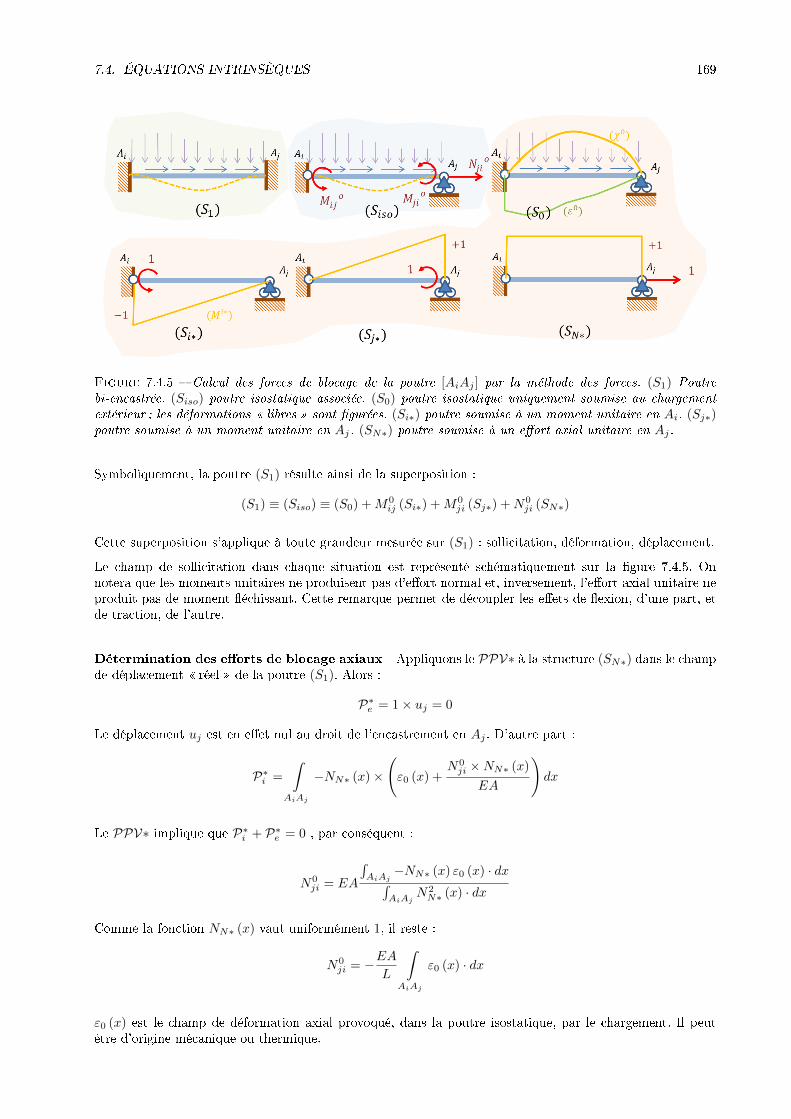
7.4. ÉQUATIONS INTRINSÈQUES 169
Figure 7.4.5 Calcul des forces de blocage de la poutre [AiAj ] par la méthode des forces. (S1) Poutrebi-encastrée. (Siso) poutre isostatique associée. (S0) poutre isostatique uniquement soumise au chargementextérieur ; les déformations libres sont gurées. (Si∗) poutre soumise à un moment unitaire en Ai. (Sj∗)poutre soumise à un moment unitaire en Aj. (SN∗) poutre soumise à un eort axial unitaire en Aj.
Symboliquement, la poutre (S1) résulte ainsi de la superposition :
(S1) ≡ (Siso) ≡ (S0) +M0ij (Si∗) +M0
ji (Sj∗) +N0ji (SN∗)
Cette superposition s'applique à toute grandeur mesurée sur (S1) : sollicitation, déformation, déplacement.
Le champ de sollicitation dans chaque situation est représenté schématiquement sur la gure 7.4.5. Onnotera que les moments unitaires ne produisent pas d'eort normal et, inversement, l'eort axial unitaire neproduit pas de moment échissant. Cette remarque permet de découpler les eets de exion, d'une part, etde traction, de l'autre.
Détermination des eorts de blocage axiaux Appliquons le PPV∗ à la structure (SN∗) dans le champde déplacement réel de la poutre (S1). Alors :
P∗e = 1× uj = 0
Le déplacement uj est en eet nul au droit de l'encastrement en Aj . D'autre part :
P∗i =
ˆ
AiAj
−NN∗ (x)×
(ε0 (x) +
N0ji ×NN∗ (x)
EA
)dx
Le PPV∗ implique que P∗i + P∗e = 0 , par conséquent :
N0ji = EA
´AiAj
−NN∗ (x) ε0 (x) · dx´AiAj
N2N∗ (x) · dx
Comme la fonction NN∗ (x) vaut uniformément 1, il reste :
N0ji = −EA
L
ˆ
AiAj
ε0 (x) · dx
ε0 (x) est le champ de déformation axial provoqué, dans la poutre isostatique, par le chargement. Il peutêtre d'origine mécanique ou thermique.

170 CHAPITRE 7. MÉTHODE DES DÉPLACEMENTS
La détermination de la force de blocage axiale N0ij s'eectue ensuite par simple équilibre statique :
N0ij +N0
ji +
effort axial reparti︷ ︸︸ ︷ˆAiAj
qx (x) dx +
efforts axiaux concentres︷ ︸︸ ︷ΣkF
kx = 0
avec des notations usuelles évidentes.
Détermination des moments de blocage Appliquons le PPV∗ à la structure (Si∗) dans le champ dedéplacement réel de la poutre bi-encastrée (S1). Alors :
P∗e = 1× ωi = 0
La rotation ωi est en eet nulle au droit de l'encastrement. D'autre part :
P∗i =
ˆ
AiAj
−Mi∗ (x)×
(χ0 (x) +
M0ij ×Mi∗ (x) +M0
ji ×Mj∗ (x)
EI
)dx
Le PPV∗ implique que P∗i + P∗e = 0 , par conséquent on déduit une première équation :
M0ij
ˆ
AiAj
M2i∗ (x) · dx+M0
ji
ˆ
AiAj
Mi∗ (x)Mj∗ (x) · dx = −EIˆ
AiAj
Mi∗ (x)χ0 (x) · dx
L'application du PPV∗ à la structure (Sj∗) conduirait à cette seconde équation :
M0ij
ˆ
AiAj
Mi∗ (x)Mj∗ (x) · dx+M0ji
ˆ
AiAj
M2j∗ (x) · dx = −EI
ˆ
AiAj
Mj∗ (x)χ0 (x) · dx
Dans les équations précédentes, χ0 (x) est le champ de courbure provoqué, dans la poutre isostatique, par lechargement. De nouveau, celui-ci peut être d'origine thermomécanique.
Les fonctions Mi∗ (x) = −(1− x
L
)et Mj∗ (x) = x
L sont linéaires ce qui permet aisément de calculer lesintégrales de Mohr qui en dépendent. Ainsi :
ˆ
AiAj
M2i∗ (x) · dx =
ˆ
AiAj
M2j∗ (x) · dx =
L
3et
ˆ
AiAj
Mi∗ (x)Mj∗ (x) · dx = −L6
Le système d'équations devient donc :2M0
ij −M0ji = −6EIL
´AiAj
Mi∗ (x)χ0 (x) · dx−M0
ij + 2M0ji = −6EIL
´AiAj
Mj∗ (x)χ0 (x) · dx
Soit : M0ij = −2EIL
[2´AiAj
Mi∗ (x)χ0 (x) · dx+´AiAj
Mj∗ (x)χ0 (x) · dx]
M0ji = −2EIL
[´AiAj
Mi∗ (x)χ0 (x) · dx+ 2´AiAj
Mj∗ (x)χ0 (x) · dx]
7.4.2.3 Exemples de forces de blocage
Quelques exemples courants sont évoqués ci-après (gure 7.4.6 - voir aussi 7.3.6).
Exemple 101. (a) poutre soumise à une force répartie transversale q uniforme.

7.4. ÉQUATIONS INTRINSÈQUES 171
Figure 7.4.6 Exemples d'actions transversales agissant en travée de poutre. (a) force transversale unifor-mément répartie. (b) force transversale concentrée centrée. (c) champ de température. En pointillé est gurél'allure du champ de déplacement transversal (nul dans le cas du chargement thermique).
Le moment est parabolique symétrique et présente un maximum au milieu de la poutre avec une valeur qL2
8 .La courbure χ0 est d'origine mécanique. Les intégrales de Mohr valent :ˆ
AiAj
Mi∗ (x)χ0 (x) · dx =2
3× L× qL2
8EI×−1
2= − qL3
24EIet
ˆ
AiAj
Mj∗ (x)χ0 (x) · dx = +qL3
24EI
Par conséquent :
M0ij =
1
12qL2 et M0
ji = − 1
12qL2
Exemple 102. (b) poutre soumise à une force concentrée transversale F centrée.
Le moment est bilinéaire symétrique et présente un maximum au milieu de la poutre avec une valeur FL4 .
La courbure χ0 est d'origine mécanique. Les intégrales de Mohr valent :ˆ
AiAj
Mi∗ (x)χ0 (x) · dx =1
2× L× FL
4EI×−1
2= − FL2
16EIet
ˆ
AiAj
Mj∗ (x)χ0 (x) · dx = +FL2
16EI
Par conséquent :
M0ij =
1
8FL et M0
ji = −1
8FL
Exemple 103. (c) poutre soumise à un gradient uniforme de température. Supposons que la températureTe à l'extrados (face supérieure) soit plus forte que la température Ti d'intrados (face inférieure). Soit h lahauteur de la section droite de poutre. Soit λ le coecient de dilatation thermique supposé indépendant dela température dans la plage de température considérée. Alors la bre supérieure dans la poutre isostatique(S0) subit un allongement εthe = λTe alors que la bre inférieure subit un allongement εthi = λTi. En régimethermique établi, le champ de température est linéaire dans la hauteur de la poutre ainsi que le champ desdilatations thermiques. De ce fait la courbure thermique libre subie par la poutre isostatique est égale à
χth = − εthe −ε
thi
h = −λ∆Th en posant ∆T = Te − Ti.
La courbure χth est d'origine mécanique ; elle est uniforme. Les intégrales de Mohr valent :ˆ
AiAj
Mi∗ (x)χth (x) · dx = −1
2L×−λ∆T
h= +
1
2λ∆T
L
het
ˆ
AiAj
Mj∗ (x)χ0 (x) · dx = −1
2λ∆T
L
h
Par conséquent :
M0ij = −EI λ∆T
het M0
ji = +EIλ∆T
h
7.4.2.4 Prise en compte des forces de blocage
Considérons la poutre [AiAj ], notée (B), extraite de la structure (S) ; celle-ci est soumise à la fois aux forcesnodales Xij et aux actions en travée A.
Décomposons l'ensemble de ces forces et actions en deux chargements :
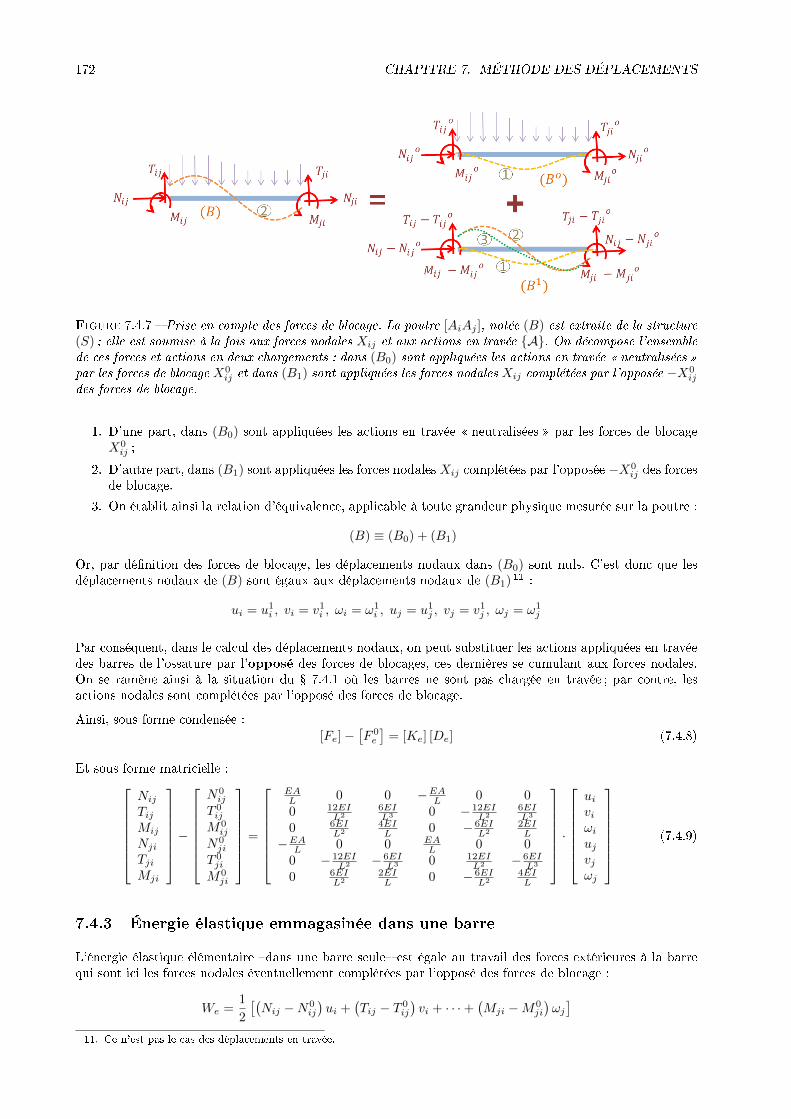
172 CHAPITRE 7. MÉTHODE DES DÉPLACEMENTS
Figure 7.4.7 Prise en compte des forces de blocage. La poutre [AiAj ], notée (B) est extraite de la structure(S) ; elle est soumise à la fois aux forces nodales Xij et aux actions en travée A. On décompose l'ensemblede ces forces et actions en deux chargements : dans (B0) sont appliquées les actions en travée neutralisées par les forces de blocage X0
ij et dans (B1) sont appliquées les forces nodales Xij complétées par l'opposée −X0ij
des forces de blocage.
1. D'une part, dans (B0) sont appliquées les actions en travée neutralisées par les forces de blocageX0ij ;
2. D'autre part, dans (B1) sont appliquées les forces nodales Xij complétées par l'opposée −X0ij des forces
de blocage.
3. On établit ainsi la relation d'équivalence, applicable à toute grandeur physique mesurée sur la poutre :
(B) ≡ (B0) + (B1)
Or, par dénition des forces de blocage, les déplacements nodaux dans (B0) sont nuls. C'est donc que lesdéplacements nodaux de (B) sont égaux aux déplacements nodaux de (B1) 11 :
ui = u1i , vi = v1
i , ωi = ω1i , uj = u1
j , vj = v1j , ωj = ω1
j
Par conséquent, dans le calcul des déplacements nodaux, on peut substituer les actions appliquées en travéedes barres de l'ossature par l'opposé des forces de blocages, ces dernières se cumulant aux forces nodales.On se ramène ainsi à la situation du 7.4.1 où les barres ne sont pas chargée en travée ; par contre, lesactions nodales sont complétées par l'opposé des forces de blocage.
Ainsi, sous forme condensée :[Fe]−
[F 0e
]= [Ke] [De] (7.4.8)
Et sous forme matricielle :NijTijMij
NjiTjiMji
−
N0ij
T 0ij
M0ij
N0ji
T 0ji
M0ji
=
EAL 0 0 −EAL 0 00 12EI
L26EIL3 0 − 12EI
L26EIL3
0 6EIL2
4EIL 0 − 6EI
L22EIL
−EAL 0 0 EAL 0 0
0 − 12EIL2 − 6EI
L3 0 12EIL2 − 6EI
L3
0 6EIL2
2EIL 0 − 6EI
L24EIL
·uiviωiujvjωj
(7.4.9)
7.4.3 Énergie élastique emmagasinée dans une barre
L'énergie élastique élémentaire dans une barre seule est égale au travail des forces extérieures à la barrequi sont ici les forces nodales éventuellement complétées par l'opposé des forces de blocage :
We =1
2
[(Nij −N0
ij
)ui +
(Tij − T 0
ij
)vi + · · ·+
(Mji −M0
ji
)ωj]
11. Ce n'est pas le cas des déplacements en travée.

7.5. CONDENSATION STATIQUE 173
Ce qui peut être écrit de façon plus synthétique par :
We =1
2
([Fe]−
[F 0e
])T · [De] ou We =1
2[De]
T ·([Fe]−
[F 0e
])Or, d'après l'équation 7.4.8 :
[Fe]−[F 0e
]= [Ke] [De]
Par conséquent :
We =1
2[De]
T · [Ke] · [De]
1. L'énergie élastique est la demi-forme bilinéaire construite sur la matrice de rigidité élémentaire. Commel'énergie élastique est une quantité positive il en est de même de cette forme bilinéaire et on dit que lamatrice de rigidité elle même est positive ;
2. D'après le théorème de réciprocité de Maxwell-Betti la matrice de rigidité est symétrique ; il faut,pour cela, que l'ordre de classement des déplacements dans le vecteur [De] soit le même que l'ordre desforces nodales associées dans le vecteur [Fe] ;
3. Enn, la matrice [Ke] n'est pas régulière du fait que les lois de comportement deplacements − actions nodalessont dénies à un mouvement de solide indéformable près. La donnée des forces nodales ne permetdonc pas de trouver univoquement les déplacements des extrémités de la barre. [Ke] n'est donc pasinversible et [Ke]
−1 n'existe pas 12.
On démontre ainsi les propriétés énoncée au 7.4.1.3.
7.5 Condensation statique
Le premier but de la méthode des déplacements étant de déterminer les degrés de liberté, il convient de lessubstituer aux déplacements des extrémités des barres.
Pour les translations On utilise les relations de l'équation 7.3.2 pour éliminer les translations expri-mées dans le repère local au prot des translations exprimées dans le repère global :
ui = Ui cos θ + Vi sin θvi = −Ui sin θ + Vi cos θ
Pour les rotations Il y a lieu de tenir compte de la nature de la liaison avec le n÷ud attenant :
1. Si la liaison est rigide, alors on remplace purement et simplement la rotation de l'extrémité de la barrepar celle du n÷ud et donc ωi = Ωi ;
2. Si la liaison est relaxée, alors la rotation ωi n'est pas un degré de liberté et il convient de la condenserde la façon suivante 13.
Supposons, pour xer les idées, que la liaison en Ai est relaxée alors que la liaison en Aj est rigide. Dans cecas, on peut poser ωj = Ωj et il faut entreprendre la condensation de la rotation ωi. Comme la liaison en Aiest relaxée, c'est que le n÷ud Ai ne transmet pas de couple à l'extrémité de la barre et, donc, Mij = 0.
La 3ème ligne de l'équation 7.4.9 montre que :
Mij −M0ij =
4EI
Lωi +
2EI
Lωj +
6EI
L2(vi − vj) avec Mij = 0
On en déduit donc que :
ωi = −(
L
4EIM0ij +
1
2Ωj +
3
2[− (Ui − Uj) sin θ + (Vi − Vj) cos θ]
)12. Nous verrons que l'assemblage des matrices de rigidité élémentaires joint à la prise en compte des conditions d'appui
de la structure conduit à l'élaboration d'une matrice de rigidité globale qui, elle, est dénie.13. Attention ! condenser une rotation ne signie nullement que ladite rotation est nulle.
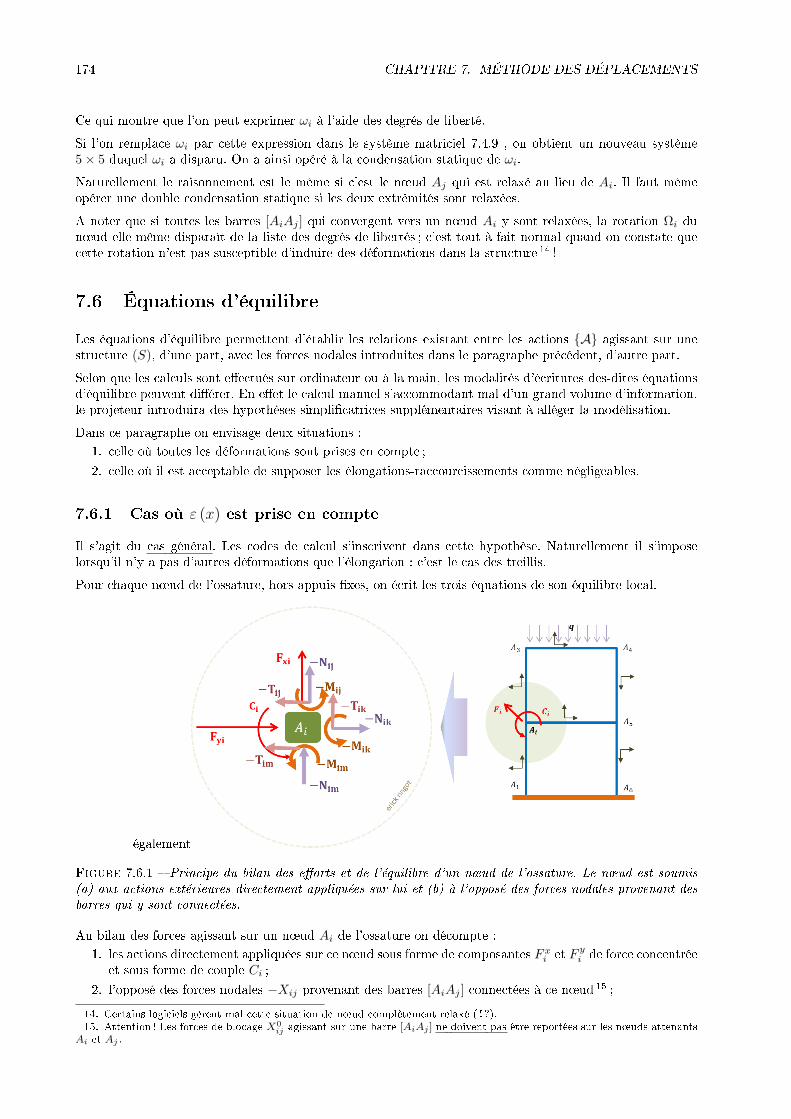
174 CHAPITRE 7. MÉTHODE DES DÉPLACEMENTS
Ce qui montre que l'on peut exprimer ωi à l'aide des degrés de liberté.
Si l'on remplace ωi par cette expression dans le système matriciel 7.4.9 , on obtient un nouveau système5× 5 duquel ωi a disparu. On a ainsi opéré à la condensation statique de ωi.
Naturellement le raisonnement est le même si c'est le n÷ud Aj qui est relaxé au lieu de Ai. Il faut mêmeopérer une double condensation statique si les deux extrémités sont relaxées.
A noter que si toutes les barres [AiAj ] qui convergent vers un n÷ud Ai y sont relaxées, la rotation Ωi dun÷ud elle-même disparaît de la liste des degrés de libertés ; c'est tout à fait normal quand on constate quecette rotation n'est pas susceptible d'induire des déformations dans la structure 14 !
7.6 Équations d'équilibre
Les équations d'équilibre permettent d'établir les relations existant entre les actions A agissant sur unestructure (S), d'une part, avec les forces nodales introduites dans le paragraphe précédent, d'autre part.
Selon que les calculs sont eectués sur ordinateur ou à la main, les modalités d'écritures des-dites équationsd'équilibre peuvent diérer. En eet le calcul manuel s'accommodant mal d'un grand volume d'information,le projeteur introduira des hypothèses simplicatrices supplémentaires visant à alléger la modélisation.
Dans ce paragraphe on envisage deux situations :
1. celle où toutes les déformations sont prises en compte ;
2. celle où il est acceptable de supposer les élongations-raccourcissements comme négligeables.
7.6.1 Cas où ε (x) est prise en compte
Il s'agit du cas général. Les codes de calcul s'inscrivent dans cette hypothèse. Naturellement il s'imposelorsqu'il n'y a pas d'autres déformations que l'élongation : c'est le cas des treillis.
Pour chaque n÷ud de l'ossature, hors appuis xes, on écrit les trois équations de son équilibre local.
également
Figure 7.6.1 Principe du bilan des eorts et de l'équilibre d'un n÷ud de l'ossature. Le n÷ud est soumis(a) aux actions extérieures directement appliquées sur lui et (b) à l'opposé des forces nodales provenant desbarres qui y sont connectées.
Au bilan des forces agissant sur un n÷ud Ai de l'ossature on décompte :
1. les actions directement appliquées sur ce n÷ud sous forme de composantes F xi et F yi de force concentréeet sous forme de couple Ci ;
2. l'opposé des forces nodales −Xij provenant des barres [AiAj ] connectées à ce n÷ud 15 ;
14. Certains logiciels gèrent mal cette situation de n÷ud complètement relaxé ( ! ?).15. Attention ! Les forces de blocage X0
ij agissant sur une barre [AiAj ] ne doivent pas être reportées sur les n÷uds attenantsAi et Aj .

7.7. ASSEMBLAGE MATRICIEL 175
Soit ni le nombre de barres connectées au n÷ud Ai, soit θij l'inclinaison de la barre [AiAj ] orientée par−→x ij
par rapport à l'axe global X, alors les trois équations d'équilibre de ce n÷ud sont les suivantes :−Σnij=1 (Nij cos θij − Tij sin θij) + F xi = 0
−Σnij=1 (Nij sin θij + Tij cos θij) + F yi = 0
−Σnij=1Mij + Ci = 0
7.6.2 Cas où ε (x) n'est pas prise en compte
Il s'agit du cas particulier où les déformations axiales de la bre moyenne des poutres constitutives del'ossature ont un eet négligeable devant celui des autres déformations. Il faut que les eets dus à la exionsoient prépondérants. Nous allons voir que cette hypothèse permet de réduire considérablement le nombrede degrés de liberté nécessaire à l'étude d'une structure ce qui est favorable à la conduite d'un calcul manuel.
Dire que la déformation axiale εij dans la barre [AiAj ] est négligeable revient à écrire que :
εij =uj − uiL
= 0
Par conséquent les déplacements axiaux des extrémités Ai et Aj dans la direction −→x ij de la barre [AiAj ]sont identiques :
ui ≡ uj
Or la première (et la quatrième) ligne du système matriciel de l'équation 7.4.9 s'écrit :
Nij −N0ij =
EA
L(ui − uj) = −EAεij
Et, bien sûr, les forces nodales ne sont pas nulles ! c'est donc qu'il faille considérer que la rigidité de la barreà la traction, caractérisée par le produit EA est très grande :
EA −→∞
De cette façon :EA︸︷︷︸∞
× εij︸︷︷︸0
= Nji −N0ji = −
(Nij −N0
ij
)︸ ︷︷ ︸indetermine
En conclusion, pour chaque barre pour laquelle l'hypothèse d'inextensibilité est prononcée, on gagne uneinformation à caractère cinématique puisque ui = uj mais on perd une information à caractère statiquepuisque les eorts axiaux Nij et Nji deviennent indéterminés.
Par conséquent, il n'est pas utile d'écrire le bilan des forces et les équations en force des n÷uds.
Il est par contre nécessaire d'écrire les équations en moment :
−Σnij=1Mij + Ci = 0
Nous verrons par la suite que d'autres équations de statique, globales, seront nécessaires à la résolution duproblème.
7.7 Assemblage matriciel
A cette étape de l'étude de structure le projeteur dispose :
1. des équations intrinsèques reliant les eorts nodaux aux degrés de liberté, compte tenu des eorts deblocage motivés par les actions extérieures directement appliquées en travée des barres ;
2. des équations d'équilibre des barres reliant les eorts nodaux aux actions directement appliquées surles n÷uds.
176 CHAPITRE 7. MÉTHODE DES DÉPLACEMENTS
L'étape d'assemblage matriciel consiste à combiner les deux jeux d'équations an d' éliminer 16 les forcesnodales et d'obtenir des relations entre les seuls actions extérieures, d'une part, et les seuls degrés de liberté,d'autre part. Naturellement, dans le cadre de l'élasticité jointe à l'hypothèse HPP, toutes les relations sontlinéaires. Il en sera de même des équations résultantes.
Comme au paragraphe précédent ( 7.6), nous allons distinguer deux situations :
1. celle où toutes les déformations sont prises en compte ;
2. celle où il est acceptable de supposer les élongations-raccourcissements comme négligeables.
7.7.1 Cas où ε (x) est prise en compte
7.7.1.1 Dénombrement des DDL
Supposons que la structure possède B barres connectées à NL n÷uds libres de se déplacer et que parmi euxNR n÷uds ont une rotation signicative, c'est-à-dire induisant des déformations dans l'ossature. Alors il ya : NT degrés de liberté de translation ; NR degrés de liberté en rotation ; soit un total de N = NT +NR degrés de liberté et, par voie de conséquence, autant d'inconnues.Supposons établies les équations intrinsèques des B barres de sorte que toutes les forces nodales soientexprimées en terme de degrés de liberté. A priori, une barre possède 6 équations intrinsèques à moins qu'ellen'ait une extrémité relaxée auquel cas ce nombre est diminué d'une unité.
7.7.1.2 Équations d'équilibre
Du point de vue équations de statique, on dénombre : NT équations de statique en force (selon X et Y pour chaque n÷ud libre) ; NR équations en moment, les n÷uds totalement relaxés n'étant associés à aucune équation puisque tousles moments nodaux aérents se trouvent être nuls ;
Il y a donc un total de N = NT +NR équations de statique.Au bilan, le projeteur dispose d'un système linéaire de N équations à N inconnues qu'il peut mettre sous laforme matricielle :
[K] [D] =[F 0]
Cette forme matricielle est à rapprocher de l'équation 7.4.8 qui concernait une barre seule. Le vecteur desforces nodales a, bien entendu, disparu. La matrice N ×N [K] constitue la matrice de rigidité globale de lastructure. Elle est construite par assemblage des matrices de rigidité élémentaires.
A chaque ligne de la matrice correspond un degré de liberté. En eet l'équilibre statique d'un n÷ud de lastructure est régi par trois équations : une en rotation (si le n÷ud n'est pas totalement relaxé) et deux entranslation. Ainsi pour le n÷ud Ai, le système matriciel comportera :
1. l'équation en moment (selon Z) associée à la rotation Ωi si Ωi est un DDL ;
2. l'équation en force selon X associée à la translation Ui si Ui est un DDL ;
3. l'équation en force selon Y associée à la translation Vi si Vi est un DDL.
7.7.2 Cas où ε (x) est négligée
7.7.2.1 Réduction du nombre de DDL
Supposons que la structure possède B barres connectées à NL n÷uds libres de se déplacer et que parmi euxNR n÷uds ont une rotation signicative, c'est-à-dire induisant des déformations dans l'ossature. Alors il ya : A priori NT mobilités de translation. Mais il faut tenir compte de l'hypothèse εij = 0 dans chacune desB barres ce qui se traduit par B relations de dépendance ui = uj entre les mobilités des translation.Finalement, il reste NT −B degrés de liberté de translation.
16. Il serait plus juste de dire que l'on condense les forces nodales.

7.7. ASSEMBLAGE MATRICIEL 177
NR degrés de liberté en rotation ; soit un total de N = (NT −B) +NR degrés de liberté et, par voie de conséquence, autant d'inconnues.Supposons établies les équations intrinsèques des B barres de sorte que toutes les forces nodales soient expri-mées en terme de degrés de liberté. A priori, une barre ne possède plus que quatre équations intrinsèques. Eneet les relations intrinsèques concernant les forces nodales axiales sont indéterminées et donc inexploitables.Il sera donc inutile d'écrire les équations d'équilibre des n÷uds en termes de forces. De ce fait les relationsintrinsèques concernant les eorts nodaux transversaux deviennent également inutiles dans l'immédiat. Nousn'avons plus que deux équations intrinsèques utiles pour chaque barre :
Mij −M0ij = 4EI
L ωi + 2EIL ωj + 6EI
L2 (vi − vj)Mji −M0
ji = 2EIL ωi + 4EI
L ωj + 6EIL2 (vi − vj)
Du point de vue des équations de statique, on dénombre : L équations en moment. Les n÷uds totalement relaxés ne sont associés à aucune équation ; ⇒ Il faut donc établir NT − B équations complémentaires de statique, autant d'équations que de degrésde liberté en translation.
7.7.2.2 Équations d'équilibre complémentaires
Dans le paragraphe précédent, 7.7.1, on a vu que la matrice de rigidité comportait autant d'équationsqu'il y avait de DDL et que, de plus, chaque ligne, correspondant à l'une de ces équations de statique, étaitassociée à un DDL particulier : Aux DDL de rotation Ωi correspondent les équations de statique des n÷uds Ai en moment : Σj−Mij+Ci =
0 Aux DDL de translation Ui et Vi correspondaient, respectivement, les équations de statique des n÷uds Aien force selon les directions, respectivement, X et Y .
Or dans le cas où les déformations axiales sont négligées on ne peut pas exprimer les actions nodales axialesen fonction des DDL de façon pertinente. Les équations en force ne sont donc d'aucun secours et il fauttrouver d'autres équations de statique à associer aux DDL de translation.
Nous procédons comme suit et le PPV∗ va s'avérer très utile en la circonstance :
1. A la structure réelle (S) on associe le mécanisme (S∗) obtenu en remplaçant tous les n÷uds par desarticulations complètement relaxées ;
le champ de vitesse virtuel −→u ∗ du mécanisme est continu ; ce mécanisme suppose que chaque barre est virtuellement indéformable : ε∗ = 0, χ∗ = 0, γ∗ = 0 ; le champ de vitesse virtuel −→u ∗ de ce mécanisme est cinématiquement admissible ; on impose aux n÷uds de l'ossature une vitesse virtuelle de rotation nulle : ω∗
i = 0 (pas de mécanismede n÷ud).
2. La totalité des actions A qui agissaient sur la structure réelle (S) est également appliquée sur lemécanisme (S∗) ;
3. L'équilibre statique du mécanisme est obtenu en appliquant les forces nodales aux extrémités de toutesles barres (et leur opposé sur les n÷uds) ;
4. On singularise le champ de vitesse virtuel de sorte que seul un n÷ud, nonobstant la continuité de−→u ∗, possède une composante de vitesse virtuelle unitaire. Si on prend, par exemple, Ui
∗= 1, toutes
les autres vitesses virtuelles de translation sont neutralisées. Autrement dit on force le degré de libertéUi et on bloque tous les autres : on obtient le champ singulier u∗i ;
5. On écrit le PPV∗ appliqué au mécanisme (S∗) dans son propre champ de vitesse virtuel u∗i ⇒ onobtient une équation de statique reliant les moments nodaux aux actions extérieures ;
6. On ré-itère les points (4) et (5) précédents pour tous les DDL de translation⇒ on obtient donc 2M−Béquations complémentaires ;
7. On organise toutes les équations obtenues, y compris les équations en rotation, dans un système ma-triciel en classant les équations dans l'ordre des DDL associés ⇒ on en déduit la matrice de rigidité[K].
Voir le paragraphe 7.9 pour les illustrations de la méthode.
178 CHAPITRE 7. MÉTHODE DES DÉPLACEMENTS
7.8 Algorithme d'étude
La méthode des déplacements est complètement automatisable et constitue le c÷ur de nombre de logiciels decalcul de structures. L'algorithme d'étude proposé dans ce paragraphe concerne les structures fonctionnanten exion (des portiques) et l'hypothèse d'indéformabilité axiale est faite.
1. Analyse de la géométrie de la structure :
(a) choix d'un repère global OXY pour la dénition des DDL ;
(b) identication des n÷uds ;
i. désignation (lettre ou numéro) ;
ii. position dans le plan ;
iii. type d'appui le cas échéant ;
iv. identication de la mobilité de rotation Ω : si deux barres, au moins, sont rigidement liées, la rotation est un DDL ; sinon la rotation de ce n÷ud n'est pas une mobilité pertinente et ne doit pas être décomptéeen tant que DDL. C'est la situation du n÷ud totalement relaxé ;
v. identication et désignation des mobilités de translation U et V dans le repère global OXY avec prise en compte des restrictions imposées par les conditions d'appui le cas échéant ;
vi. eorts concentrés éventuels FX , FY et C ;
(c) identication des barres ou éléments ;
i. n÷ud origine, n÷ud extrémité et dénition du repère local xy ;ii. caractéristiques (la raideur axiale est réputée innie : EA→∞) :
A. longueur L ;
B. module d'élasticité du matériau E ;
C. inertie quadratique autour de Gz : I ;
iii. actions en travée. Selon le cas : champ de température, charge répartie, charges concentrées,etc... dans le repère local ou global ;
2. Réduction/dénombrement et identication des DDL :
(a) Toutes les rotations NR retenues à l'étape 1(b)iv sont à considérer en tant que DDL. L'hypothèseε = 0 ne change pas le nombre d'inconnues en rotation ;
(b) Du nombre NT de mobilités en translation retenues à l'étape 1(b)v, déduire autant d'inconnuesqu'il y a de barres B inextensibles ;
(c) Choisir les NT −B degrés de liberté de translation parmi les mobilités indépendantes ;
(d) Exprimer les B relations εij = 0 ⇔ ui = uj en termes de degrés de liberté de translation ;
3. Écriture des équations intrinsèques pour chacune des B barres :
(a) Isoler et représenter la barre et les eorts qui s'exercent sur elle :
i. moments nodaux ;
ii. actions transversales ;
(b) reporter la longueur et l'inertie de exion EI ;
(c) Calculer les forces de blocage le cas échéant ;
(d) Exprimer les 2 équations intrinsèques en moment dans le repère local :
Mij −M0ij = 4EI
L ωi + 2EIL ωj + 6EI
L2 (vi − vj)Mji −M0
ji = 2EIL ωi + 4EI
L ωj + 6EIL2 (vi − vj)
(e) Tenir compte des relaxations le cas échéant :

7.8. ALGORITHME D'ÉTUDE 179
i. si l'origine Ai est relaxée alorsMij = 0 et condenser ωi. Il reste une seule équation intrinsèque :
Mji −M0ji +
1
2M0ij =
3EI
Lωj +
3EI
L2(vi − vj)
ii. si la terminaison Aj est relaxée alors Mji = 0 et condenser ωj . Il reste une seule équationintrinsèque :
Mji −M0ij +
1
2M0ji =
3EI
Lωi +
3EI
L2(vi − vj)
iii. si les deux extrémités sont relaxées alorsMij = Mji = 0 et il n'y a plus d'équation intrinsèque.
(f) Exprimer les équations intrinsèques en termes de DDL
4. Écrire les NR équations d'équilibre en moment des NR n÷uds comportant un DDL de rotation. Re-porter en second membre le couple agissant directement sur le n÷ud le cas échéant :
Σnij=1Mij = Ci
5. Écrire les NT − B équations d'équilibre complémentaires, chacune étant associée à un DDL de trans-lation. Pour chaque DDL de translation :
(a) caractériser le champ de vitesse virtuel rigidiant par morceau, continu et cinématiquement ad-missible, du mécanisme déduit de la structure réelle par insertion d'articulations virtuelles etmobilisant un et un seul degré de liberté de translation pris unitaire ;
(b) appliquer le PPV∗ au mécanisme obtenu dans son propre champ de vitesse virtuel ;
(c) reporter au second membre la puissance virtuelle des forces externes ;
6. Procéder à l'assemblage matriciel en écrivant les équations obtenues aux étapes précédentes 4 et 5 enremplaçant les moments nodaux par leur expression en termes de DDL :
(a) les classer dans le même ordre que les DDL ;
(b) former la matrice de rigidité [K] et le vecteur second membre [F 0];
(c) vérier que la matrice de rigidité obtenue est symétrique ; aucune contribution aux termes de ladiagonale ne peut être négative : [
F 0]
= [K] · [D]
7. Inverser le système matriciel obtenu à l'étape précédente et déduire les DDL :
[D] = [K]−1 ·
[F 0]
8. Calculer les moments nodaux à l'aide des équations intrinsèques établies à l'étape 3 ;
9. Tracer le diagramme de moment échissant (M) ;
10. Déduire le diagramme d'eort tranchant (T ) par l'équilibre local :
T = −dMdx
11. Déduire les eorts normaux en écrivant l'équilibre en force des n÷uds :
(a) Le cas échéant ces équations permettent de déterminer également les réactions aux appuis ;
(b) Tracer le diagramme (N) ;
12. Les déplacements et les sollicitations étant connus dans la structure, procéder aux calculs règlementairesselon les Eurocodes.
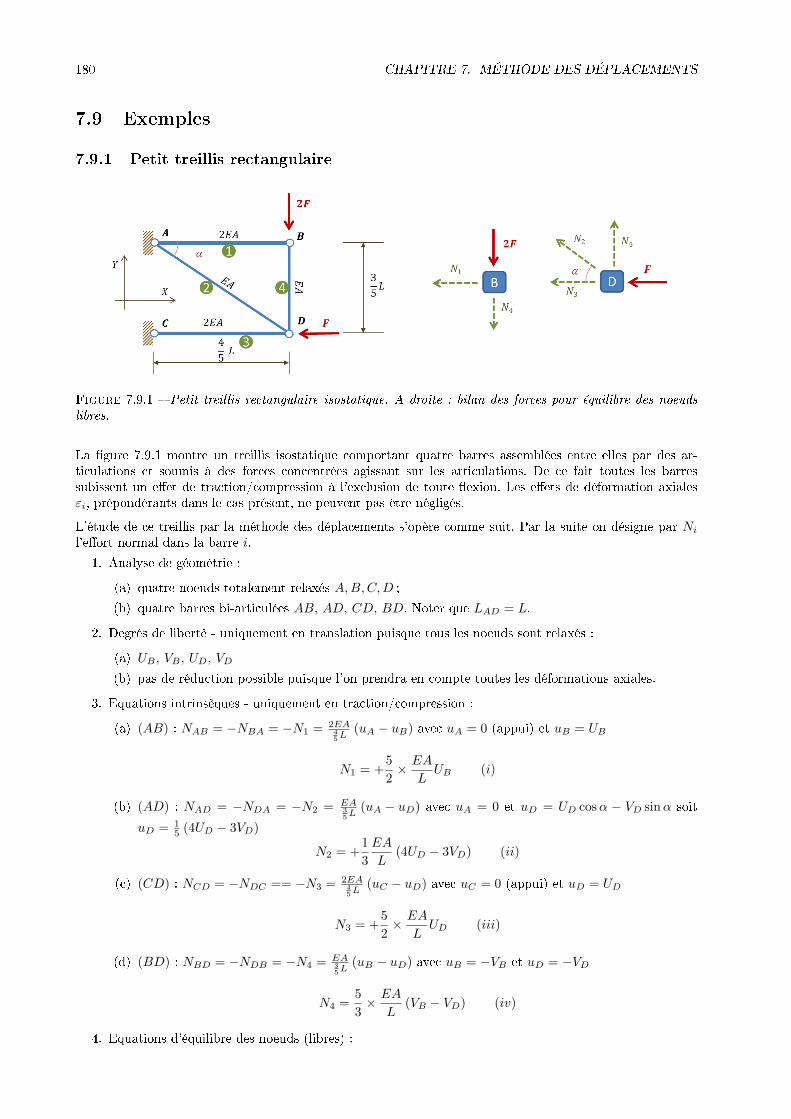
180 CHAPITRE 7. MÉTHODE DES DÉPLACEMENTS
7.9 Exemples
7.9.1 Petit treillis rectangulaire
Figure 7.9.1 Petit treillis rectangulaire isostatique. A droite : bilan des forces pour équilibre des noeudslibres.
La gure 7.9.1 montre un treillis isostatique comportant quatre barres assemblées entre elles par des ar-ticulations et soumis à des forces concentrées agissant sur les articulations. De ce fait toutes les barressubissent un eet de traction/compression à l'exclusion de toute exion. Les eets de déformation axialesεi, prépondérants dans le cas présent, ne peuvent pas être négligés.
L'étude de ce treillis par la méthode des déplacements s'opère comme suit. Par la suite on désigne par Nil'eort normal dans la barre i.
1. Analyse de géométrie :
(a) quatre noeuds totalement relaxés A,B,C,D ;
(b) quatre barres bi-articulées AB, AD, CD, BD. Noter que LAD = L.
2. Degrés de liberté - uniquement en translation puisque tous les noeuds sont relaxés :
(a) UB , VB , UD, VD(b) pas de réduction possible puisque l'on prendra en compte toutes les déformations axiales.
3. Equations intrinsèques - uniquement en traction/compression :
(a) (AB) : NAB = −NBA = −N1 = 2EA45L
(uA − uB) avec uA = 0 (appui) et uB = UB
N1 = +5
2× EA
LUB (i)
(b) (AD) : NAD = −NDA = −N2 = EA35L
(uA − uD) avec uA = 0 et uD = UD cosα − VD sinα soit
uD = 15 (4UD − 3VD)
N2 = +1
3
EA
L(4UD − 3VD) (ii)
(c) (CD) : NCD = −NDC == −N3 = 2EA45L
(uC − uD) avec uC = 0 (appui) et uD = UD
N3 = +5
2× EA
LUD (iii)
(d) (BD) : NBD = −NDB = −N4 = EA35L
(uB − uD) avec uB = −VB et uD = −VD
N4 =5
3× EA
L(VB − VD) (iv)
4. Equations d'équilibre des noeuds (libres) :
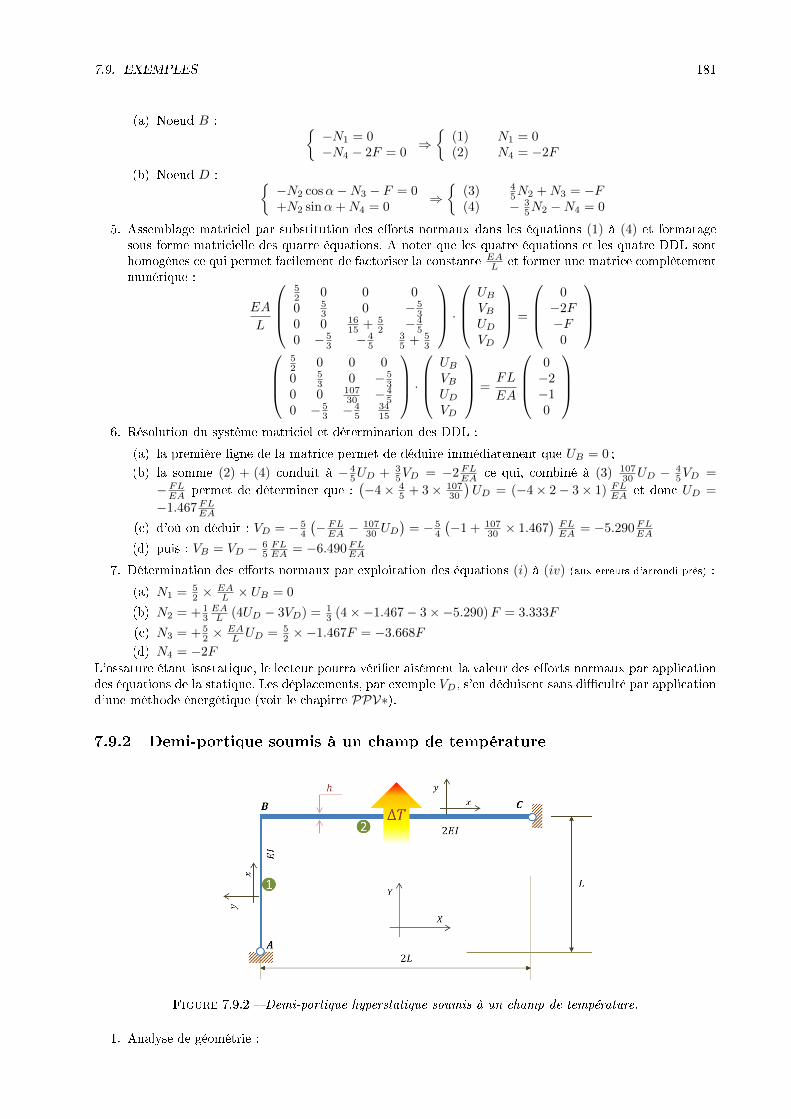
7.9. EXEMPLES 181
(a) Noeud B : −N1 = 0−N4 − 2F = 0
⇒
(1) N1 = 0(2) N4 = −2F
(b) Noeud D : −N2 cosα−N3 − F = 0+N2 sinα+N4 = 0
⇒
(3) 45N2 +N3 = −F
(4) − 35N2 −N4 = 0
5. Assemblage matriciel par substitution des eorts normaux dans les équations (1) à (4) et formatagesous forme matricielle des quatre équations. A noter que les quatre équations et les quatre DDL sonthomogènes ce qui permet facilement de factoriser la constante EA
L et former une matrice complètementnumérique :
EA
L
52 0 0 00 5
3 0 − 53
0 0 1615 + 5
2 − 45
0 − 53 − 4
535 + 5
3
·
UBVBUDVD
=
0−2F−F0
52 0 0 00 5
3 0 − 53
0 0 10730 − 4
50 − 5
3 − 45
3415
·
UBVBUDVD
=FL
EA
0−2−10
6. Résolution du système matriciel et détermination des DDL :
(a) la première ligne de la matrice permet de déduire immédiatement que UB = 0 ;
(b) la somme (2) + (4) conduit à − 45UD + 3
5VD = −2FLEA ce qui, combiné à (3) 10730 UD −
45VD =
−FLEA permet de déterminer que :
(−4× 4
5 + 3× 10730
)UD = (−4× 2− 3× 1) FLEA et donc UD =
−1.467FLEA(c) d'où on déduit : VD = − 5
4
(−FLEA −
10730 UD
)= − 5
4
(−1 + 107
30 × 1.467)FLEA = −5.290FLEA
(d) puis : VB = VD − 65FLEA = −6.490FLEA
7. Détermination des eorts normaux par exploitation des équations (i) à (iv) (aux erreurs d'arrondi près) :
(a) N1 = 52 ×
EAL × UB = 0
(b) N2 = + 13EAL (4UD − 3VD) = 1
3 (4×−1.467− 3×−5.290)F = 3.333F
(c) N3 = + 52 ×
EAL UD = 5
2 ×−1.467F = −3.668F
(d) N4 = −2F
L'ossature étant isostatique, le lecteur pourra vérier aisément la valeur des eorts normaux par applicationdes équations de la statique. Les déplacements, par exemple VD, s'en déduisent sans diculté par applicationd'une méthode énergétique (voir le chapitre PPV∗).
7.9.2 Demi-portique soumis à un champ de température
Figure 7.9.2 Demi-portique hyperstatique soumis à un champ de température.
1. Analyse de géométrie :
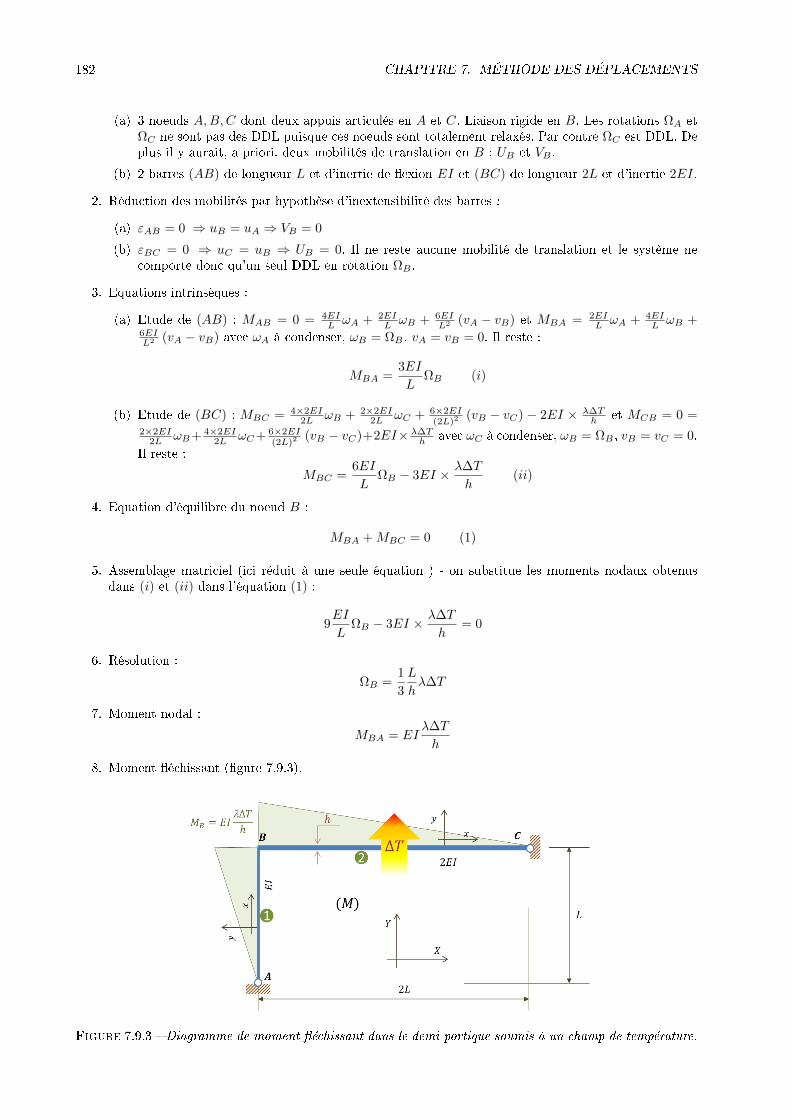
182 CHAPITRE 7. MÉTHODE DES DÉPLACEMENTS
(a) 3 noeuds A,B,C dont deux appuis articulés en A et C. Liaison rigide en B. Les rotations ΩA etΩC ne sont pas des DDL puisque ces noeuds sont totalement relaxés. Par contre ΩC est DDL. Deplus il y aurait, a priori, deux mobilités de translation en B : UB et VB .
(b) 2 barres (AB) de longueur L et d'inertie de exion EI et (BC) de longueur 2L et d'inertie 2EI.
2. Réduction des mobilités par hypothèse d'inextensibilité des barres :
(a) εAB = 0 ⇒ uB = uA ⇒ VB = 0
(b) εBC = 0 ⇒ uC = uB ⇒ UB = 0. Il ne reste aucune mobilité de translation et le système necomporte donc qu'un seul DDL en rotation ΩB .
3. Equations intrinsèques :
(a) Etude de (AB) : MAB = 0 = 4EIL ωA + 2EI
L ωB + 6EIL2 (vA − vB) et MBA = 2EI
L ωA + 4EIL ωB +
6EIL2 (vA − vB) avec ωA à condenser, ωB = ΩB , vA = vB = 0. Il reste :
MBA =3EI
LΩB (i)
(b) Etude de (BC) : MBC = 4×2EI2L ωB + 2×2EI
2L ωC + 6×2EI(2L)2 (vB − vC) − 2EI × λ∆T
h et MCB = 0 =2×2EI
2L ωB+ 4×2EI2L ωC+ 6×2EI
(2L)2 (vB − vC)+2EI× λ∆Th avec ωC à condenser, ωB = ΩB , vB = vC = 0.
Il reste :
MBC =6EI
LΩB − 3EI × λ∆T
h(ii)
4. Equation d'équilibre du noeud B :
MBA +MBC = 0 (1)
5. Assemblage matriciel (ici réduit à une seule équation ) - on substitue les moments nodaux obtenusdans (i) et (ii) dans l'équation (1) :
9EI
LΩB − 3EI × λ∆T
h= 0
6. Résolution :
ΩB =1
3
L
hλ∆T
7. Moment nodal :
MBA = EIλ∆T
h
8. Moment échissant (gure 7.9.3).
Figure 7.9.3 Diagramme de moment échissant dans le demi-portique soumis à un champ de température.
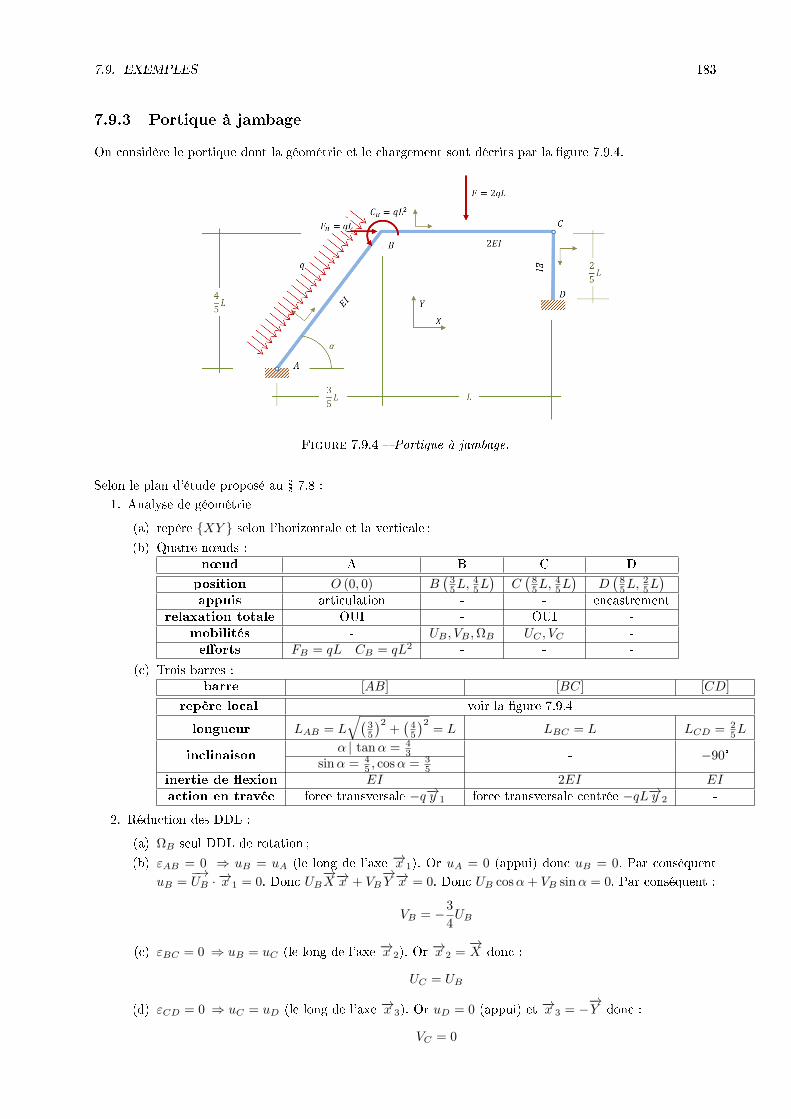
7.9. EXEMPLES 183
7.9.3 Portique à jambage
On considère le portique dont la géométrie et le chargement sont décrits par la gure 7.9.4.
Figure 7.9.4 Portique à jambage.
Selon le plan d'étude proposé au 7.8 :
1. Analyse de géométrie
(a) repère XY selon l'horizontale et la verticale ;
(b) Quatre n÷uds :n÷ud A B C D
position O (0, 0) B(
35L,
45L)
C(
85L,
45L)
D(
85L,
25L)
appuis articulation - - encastrementrelaxation totale OUI - OUI -
mobilités - UB , VB ,ΩB UC , VC -eorts FB = qL CB = qL2 - - -
(c) Trois barres :barre [AB] [BC] [CD]
repère local voir la gure 7.9.4
longueur LAB = L
√(35
)2+(
45
)2= L LBC = L LCD = 2
5L
inclinaisonα | tanα = 4
3 - −90°sinα = 4
5 , cosα = 35
inertie de exion EI 2EI EIaction en travée force transversale −q−→y 1 force transversale centrée −qL−→y 2 -
2. Réduction des DDL :
(a) ΩB seul DDL de rotation ;
(b) εAB = 0 ⇒ uB = uA (le long de l'axe −→x 1). Or uA = 0 (appui) donc uB = 0. Par conséquent
uB =−→UB · −→x 1 = 0. Donc UB
−→X−→x + VB
−→Y −→x = 0. Donc UB cosα+ VB sinα = 0. Par conséquent :
VB = −3
4UB
(c) εBC = 0 ⇒ uB = uC (le long de l'axe −→x 2). Or−→x 2 =
−→X donc :
UC = UB
(d) εCD = 0 ⇒ uC = uD (le long de l'axe −→x 3). Or uD = 0 (appui) et −→x 3 = −−→Y donc :
VC = 0
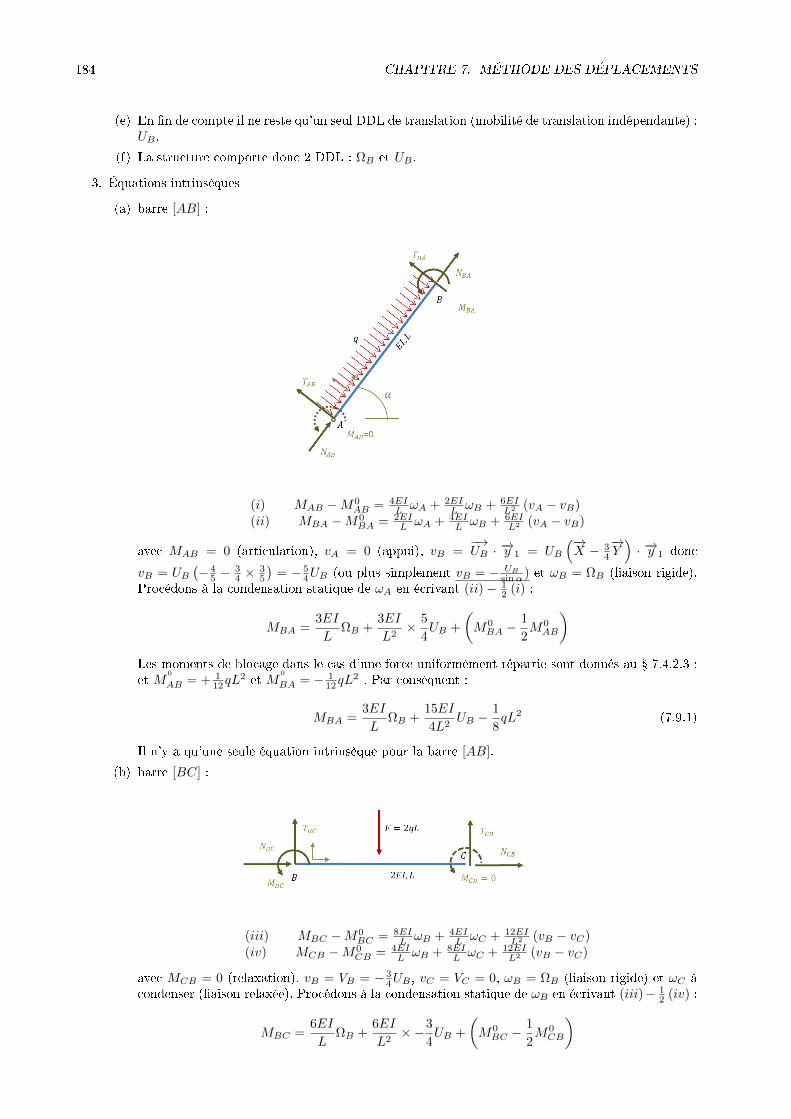
184 CHAPITRE 7. MÉTHODE DES DÉPLACEMENTS
(e) En n de compte il ne reste qu'un seul DDL de translation (mobilité de translation indépendante) :UB .
(f) La structure comporte donc 2 DDL : ΩB et UB .
3. Équations intrinsèques
(a) barre [AB] :
(i) MAB −M0AB = 4EI
L ωA + 2EIL ωB + 6EI
L2 (vA − vB)(ii) MBA −M0
BA = 2EIL ωA + 4EI
L ωB + 6EIL2 (vA − vB)
avec MAB = 0 (articulation), vA = 0 (appui), vB =−→UB · −→y 1 = UB
(−→X − 3
4
−→Y)· −→y 1 donc
vB = UB(− 4
5 −34 ×
35
)= − 5
4UB (ou plus simplement vB = − UBsinα ) et ωB = ΩB (liaison rigide).
Procédons à la condensation statique de ωA en écrivant (ii)− 12 (i) :
MBA =3EI
LΩB +
3EI
L2× 5
4UB +
(M0BA −
1
2M0AB
)Les moments de blocage dans le cas d'une force uniformément répartie sont donnés au 7.4.2.3 :et M
0
AB = + 112qL
2 et M0
BA = − 112qL
2 . Par conséquent :
MBA =3EI
LΩB +
15EI
4L2UB −
1
8qL2 (7.9.1)
Il n'y a qu'une seule équation intrinsèque pour la barre [AB].
(b) barre [BC] :
(iii) MBC −M0BC = 8EI
L ωB + 4EIL ωC + 12EI
L2 (vB − vC)(iv) MCB −M0
CB = 4EIL ωB + 8EI
L ωC + 12EIL2 (vB − vC)
avec MCB = 0 (relaxation), vB = VB = − 34UB , vC = VC = 0, ωB = ΩB (liaison rigide) et ωC à
condenser (liaison relaxée). Procédons à la condensation statique de ωB en écrivant (iii)− 12 (iv) :
MBC =6EI
LΩB +
6EI
L2×−3
4UB +
(M0BC −
1
2M0CB
)
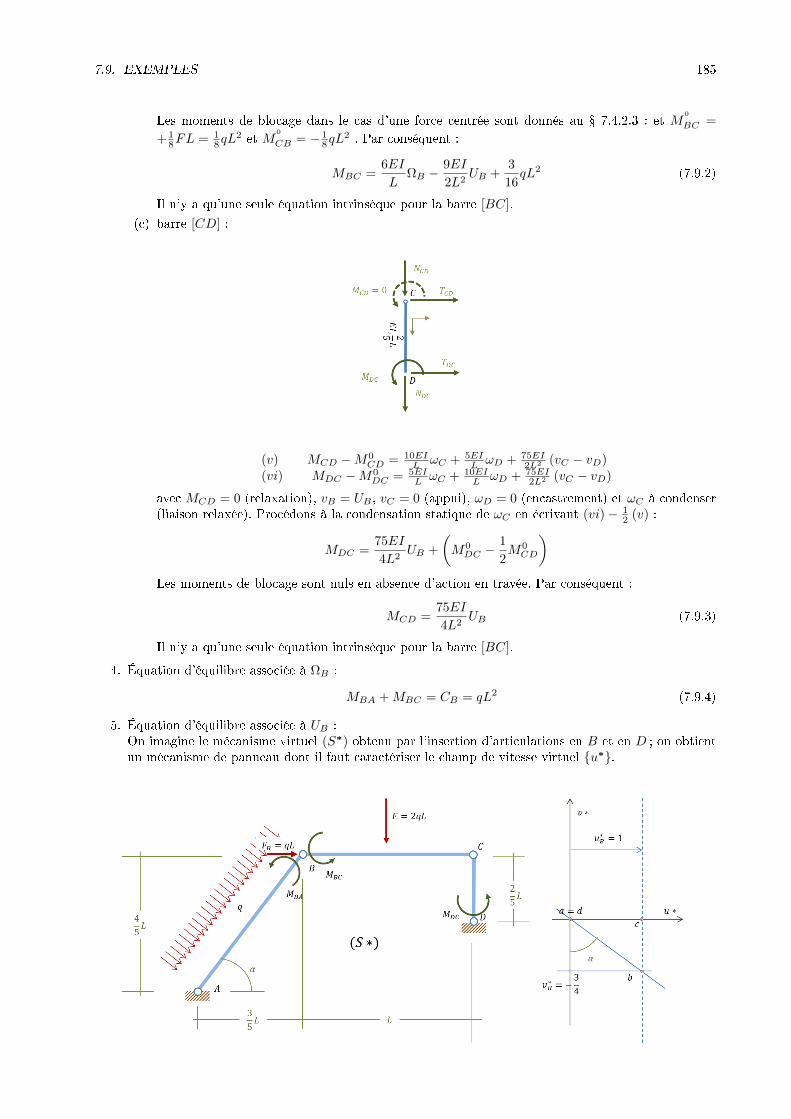
7.9. EXEMPLES 185
Les moments de blocage dans le cas d'une force centrée sont donnés au 7.4.2.3 : et M0
BC =
+ 18FL = 1
8qL2 et M
0
CB = − 18qL
2 . Par conséquent :
MBC =6EI
LΩB −
9EI
2L2UB +
3
16qL2 (7.9.2)
Il n'y a qu'une seule équation intrinsèque pour la barre [BC].
(c) barre [CD] :
(v) MCD −M0CD = 10EI
L ωC + 5EIL ωD + 75EI
2L2 (vC − vD)(vi) MDC −M0
DC = 5EIL ωC + 10EI
L ωD + 75EI2L2 (vC − vD)
avec MCD = 0 (relaxation), vB = UB , vC = 0 (appui), ωD = 0 (encastrement) et ωC à condenser(liaison relaxée). Procédons à la condensation statique de ωC en écrivant (vi)− 1
2 (v) :
MDC =75EI
4L2UB +
(M0DC −
1
2M0CD
)Les moments de blocage sont nuls en absence d'action en travée. Par conséquent :
MCD =75EI
4L2UB (7.9.3)
Il n'y a qu'une seule équation intrinsèque pour la barre [BC].
4. Équation d'équilibre associée à ΩB :
MBA +MBC = CB = qL2 (7.9.4)
5. Équation d'équilibre associée à UB :On imagine le mécanisme virtuel (S∗) obtenu par l'insertion d'articulations en B et en D ; on obtientun mécanisme de panneau dont il faut caractériser le champ de vitesse virtuel u∗.

186 CHAPITRE 7. MÉTHODE DES DÉPLACEMENTS
*** A SUIVRE ***
E.Ringot 2013



![[RDM] Edition Zéro](https://static.fdocuments.fr/doc/165x107/568c4cbd1a28ab4916a14f73/rdm-edition-zero.jpg)