RapportdePFE-Mémoiredestageeprints2.insa-strasbourg.fr/1186/1/Rapport_de_PFE.pdf · hésité à...
83
Université de Strasbourg Laboratoire des Sciences de l’Image, de l’Informatique et de la Télédétection Institut National des Sciences Appliquées Rapport de PFE - Mémoire de stage INSA | Département : mécanique - Spécialité : mécatronique Master | Sciences, Technologies, Santé - Imagerie, Robotique et Ingénierie du Vivant Ivan JANIN - Sujet - Stabilisation cardiaque active : Nouvelles stratégies de réalisation, impact sur la conception Professeurs encadrant : Pierre RENAUD François GEISKOPF Septembre 2012
Transcript of RapportdePFE-Mémoiredestageeprints2.insa-strasbourg.fr/1186/1/Rapport_de_PFE.pdf · hésité à...

Université deStrasbourg
Laboratoire desSciences de l’Image, del’Informatique et de la
Télédétection
Institut National desSciences Appliquées
Rapport de PFE - Mémoire de stageINSA | Département : mécanique - Spécialité : mécatroniqueMaster | Sciences, Technologies, Santé - Imagerie, Robotique et Ingénierie du Vivant
Ivan JANIN
- Sujet -Stabilisation cardiaque active :
Nouvelles stratégies de réalisation, impact sur la conception
Professeurs encadrant :
Pierre RENAUDFrançois GEISKOPF
Septembre 2012

Une condition essentielle de l’hypothèse scientifique ;c’est qu’elle soit aussi probable que possible.
Claude Bernard

Remerciements
Mes premiers remerciements s’adressent à mon tuteur, Pierre Renaud, pour m’avoir incité à parti-ciper à cette expérience enrichissante en plus de son soutien et de son encadrement. Il a effectivementtémoigné d’un esprit de synthèse et d’un œil critique bénéfiques dans ma progression organisationnellecomme dans la structure de mes présentations. Soucieux de l’avancé du travail, il n’a pourtant pashésité à m’accorder quelques jours supplémentaires dans la rédaction de mon rapport ou encore àm’autoriser un pont au mois de mai. Je retiendrai son ouverture scientifique et sa réactivité primor-diales dans certaines phases de stagnation ainsi que son approche nuancée d’indulgence, d’autonomie,d’assistance dans la résolution de problèmes et de jugement qui, malgré ma dispersion lors de mapremière approche, m’ont rapidement amené à prendre les devants et mieux gérer les problèmes, leplanning. . .
Je tiens également à remercier mon second tuteur, François Geiskopf, pour sa culture techniquepropice à de nombreux conseils avisés en termes d’usinage, d’assemblage et de divers autres procédés :mesure, matériaux. . . Son influence et ses contacts industriels nous auront permis d’accélérer la réa-lisation du prototype, de même que son intervention dans l’utilisation de la commande numérique.J’en profite pour me tourner vers les techniciens présents à l’atelier de l’INSA dont Vincent Galluzzo,Cédric Roth et plus particulièrement, Fabrice Buhl sans qui le prototype n’aurait probablement pasvu le jour. Sa patience dans la préparation de la FAO, son intervention dans les choix d’outils et saformation accélérée m’habilitant à manipuler la fraiseuse automatique ont été de précieux atouts dansla confection des pièces constitutives du prototype complet.
Ma gratitude touche à présent le laboratoire pour son ambiance chaleureuse et son contexte scienti-fique stimulant, rythmé notamment au travers de présentations, conférences et séminaires, d’échangesentre services et d’une cohabitation marquée par des spécialités distinctes. Si le sérieux de l’équipeétait affirmé dans son engagement au travail, les multiples sorties n’étaient pas incompatibles. Au seindu laboratoire, je remercie plus spécifiquement :
- Lennart pour son accompagnement dans mes premiers pas, son suivi dans un projet qui lui tenait àcœur et ses conseils personnels- Laure pour la pléthore de post-it qui animait mon quotidien- Marcus pour sa pugnacité et son entrain quotidien- Salih qui n’a jamais hésité à m’apporter son aide- De nombreux employés et stagiaires pour leur coopération tant professionnelle que ludique ainsi quetoutes les personnes que j’ai pu croiser durant mon stage, ayant favorisé mon intégration au sein dulaboratoire grâce à leur gentillesse et considération à mon égard.

Institut National des Sciences Appliquées de Strasbourg
Projet de Fin d’étudesAuteur : JANIN Ivan Promotion : Mécatronique 2012 - GaliléeTitre : Nouvelles stratégies de réalisation,impact sur la conception
Soutenance : 21 Septembre 2012
Structure d’accueil : LSIIT IRCAD, 1 Place de l’Hôpital 67000 StrasbourgNombre de volume : 1 Nombre de pages : 83Nombre de références bibliographiques : 41Résumé : Dans le dépistage des tumeurs par élastographie, nous proposons de réaliser une struc-ture compliante visant à guider et amplifier le déplacement d’une aiguille en translation. Étantdonné les faibles amplitudes de travail et les contraintes imposées en termes de précision, defréquences de fonctionnement et d’encombrement, nous avons recours à cette nouvelle topologiede mécanismes monolithiques que sont les mécanismes compliants. Pour pouvoir les utiliser àbon escient, il est indispensable d’associer à ce type d’architecture des modèles rigoureux ; d’oùle travail présenté qui consiste à identifier puis valider des outils de modélisation en rigidité au-tour d’une configuration en singularité, desquels doit se dégager une méthode générique. Danscette étude, nous parcourons les modèles analytiques d’une liaison charnière compliante, équi-valente à une liaison pivot dans une approche corps rigides que nous étendons ensuite à l’échelled’un mécanisme parallèle au travers de la "méthode matricielle" qui fait l’objet d’une analyseapprofondie. Cette méthode est approchée par des outils numériques avant de l’éprouver surun système physique. Un banc expérimental a été conçu à cet effet en prenant soin d’intégrerl’actionneur et le capteur d’effort dans son dimensionnement en plus d’étudier le processus demesure.Mots-clés : Robotique médicale, mécanismes compliants, matrice de raideur, évaluation desdéplacements, éléments finis, singularité, actionneur piézoélectriqueAbstract : In the context of tumors’ detection by means of elastography, we propose to achievea compliant structure, which guides and enhances the movement of a stirring needle. Low workranges besides accuracy, rate and dimensions-environment constraint use emergent monolithictechnology : the compliant mechanisms. In order to employ them efficiently, fine models arerequired. Hence the current study which involves indentification and authentification of stiff-ness modeling tools near the singularity. In this work, compliant hinges’ analytical models areidentified and more especially circular-hinge, equivalent to a revolute joint with a rigid bodyapproach, before expanding them up to parallel mechanisms through the "matrix method". Thismain tool is subject to further analysis among which finite elements and a prototype whichhas been designed and built in this purpose, taking into account the actuator and the strengthsensor’s behavior. Moreover, the measurement process has been included.Key words : Medical robotics, compliant mechanisms, spatial stiffness matrix, measure of dis-placements, finite elements, singularity, piezoelectric actuator

Sommaire
Remerciements 3
Récapitulatif 4
1 Introduction 71 Présentation du laboratoire et de l’équipe de travail . . . . . . . . . . . . . . . . . . . 72 Problématique du stage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Les liaisons compliantes 121 État de l’art . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122 La liaison de type "notch-circular" . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.1 Modélisation analytique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.1.1 Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.1.2 Compliance principale . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.1.3 Expression généralisée de la compliance . . . . . . . . . . . . . . . . . 172.1.4 Comparaison des modèles . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2 Synthèse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.3 Modélisation numérique en petits déplacements . . . . . . . . . . . . . . . . . . 20
2.3.1 Influence des conditions de simulations . . . . . . . . . . . . . . . . . 202.3.2 Appréciation des modèles analytiques par éléments finis . . . . . . . . 242.3.3 Évaluation des mouvements angulaires pour la matrice de rigidité . . 26
3 Les mécanismes parallèles 311 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312 Méthodes d’estimation de la raideur . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.1 Méthode matricielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.1.1 Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.1.2 Modélisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.2 Méthode du travail virtuel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373 Étude de la singularité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394 Application des méthodes à des modèles numériques . . . . . . . . . . . . . . . . . . . 40
4 Vérification sur un dispositif expérimental 431 Dimensionnement des paramètres géométriques . . . . . . . . . . . . . . . . . . . . . . 432 Dispositif de mesure en déplacements . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5
2.1 Présentation de la solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 462.2 Estimation de la mesure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3 Réalisation du banc de tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504 Exploitation des résultats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5 Conclusion 54
A Macro Excel - Calcul des coefficients 59
B Script Matlab - Calcul des déplacements 63
C Identification des matrices de rotation sur MAPLE 67
D Script Matlab - Evaluation de la mesure 68
E Mises en plan 76
CHAPITRE 1. INTRODUCTION
Chapitre 1
Introduction
1 Présentation du laboratoire et de l’équipe de travailDevant l’accélération de nos modes de vie, de communication et de production, le traitement de
l’information s’inscrit dans une logique organisationnelle et applicative. Une des formes d’informationla plus répandue concerne l’image et ses dérivées puisqu’elle joue un rôle important dans des domainesphares tels que l’informatique et la robotique à travers, par exemple, la réalité augmentée, l’autonomiedes robots par systèmes de vision, la modélisation géométrique, l’analyse d’images ou de séquencesd’images dans la détection ou la prévention. . . La recherche médicale s’avère d’ailleurs être un trèsgros demandeur en traitement d’images pour améliorer les diagnostics faits à partir des nombreusestechniques d’imagerie médicale. C’est dans ce contexte que s’inscrit le laboratoire qui m’a accueillidans la réalisation de mon projet de fin d’études.
Le Laboratoire des Sciences de l’Image, de l’Informatique et de la Télédétection(LSIIT) est une unité mixe de recherche, à savoir un regroupement d’organismes de recherche etd’établissements d’enseignement supérieur régi par le ministère de la recherche. Au sein de cette entitéquadriennale, dont la création remonte en 1994, l’Institut National des Sciences Appliquéesde Strasbourg (INSA), l’Université de Strasbourg (UdS) via l’Ecole Nationale Supérieure dePhysiques de Strasbourg (ENSPS) et la délégation régionale d’Alsace du Centre National deRecherche Scientifique (CNRS) travaillent conjointement autour de projets fédérés par l’imagerie. Lesdifférents travaux, tant appliqués que fondamentaux, s’articulent donc autour d’un large spectre del’informatique, de l’automatique, de la robotique, du traitement de l’image et de la télédétection,comme en témoignent les quatre programmes transversaux visant à mobiliser les compétences et re-grouper les projets de valorisation du laboratoire :
– Imagerie et robotique médicale et chirurgicale– Réalité virtuelle et augmentée, simulation et calcul intensif– Environnements mobiles embarqués– Imagerie physique multivariée
ainsi que les sept équipes de recherche :
– Informatique Géométrique et Graphique (IGG)
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
7/83
CHAPITRE 1. INTRODUCTION
– Modèles, Images et Vision (MIV)– Automatique, Vision et Robotique (AVR)– Réseaux– Image et Calcul Parallèle Scientifique (ICPS)– Bioinformatique théorique, Fouille de données et Optimisation stochastique (BFO)– Télédétection, Radiométrie et Imagerie Optique (TRIO)
Depuis sa création en 2001, le LSIIT prend part à différents projets dont la notoriété accrue pardes prix et une reconnaissance scientifique traduit une forte activité et une implication certaine dansla recherche. En outre, on soulignera son appartenance au pôle de compétitivité alsacien « Innovationsthérapeutiques », sa participation au projet « Laboratoires d’Excellence » (IRMIA, TRANSPLAN-TEX et CAMI), l’obtention du label Carnot, le succès de l’équipe AVR au concours OSEO. . . Autantde gratifications menées en partenariat avec le pôle Image Alsace (Iconoval), le Centre National de laRecherche Scientifique (CNRS), le Ministère de l’Education Nationale, de l’Enseignement Supérieuret de la Recherche (MENESR), le Réseau National de Recherche en Télécommunications (RNRT), leRéseau National Technologies pour la Santé (RNTS), l’Institut National de Recherche en Informatiqueet Automatique (INRIA), l’Institut National des Sciences de l’Univers (INSU), l’Institut National dela Santé et de la Recherche Médicale (INSERM), l’Université de Haute-Alsace (UHA), les hôpitauxuniversitaires de Strasbourg ou encore avec de nombreux partenaires industriels. Le succès du LSIITpasse également par la diversité du personnel, avoisinant les 200 personnes : professeurs, maîtres deconférences, postdocs et doctorants confondus, auxquels viennent s’ajouter les stagiaires.Fort d’une large communauté scientifique, le laboratoire dispose d’infrastructures conséquentes répar-ties en deux principales zones :
Le pôle d’Application et Promotion de l’Innovation (pôle API), un com-plexe moderne de 40 000 m2 financé par la Région Alsace, le Départe-ment du Bas-Rhin, la Communauté Urbaine de Strasbourg et la ville d’Ill-kirch. Situé sur le campus universitaire d’Illkirch, au sein du Parc d’inno-vation et à proximité des partenaires industriels, il accueille un ensemblede grandes écoles dont l’ENSPS qui cohabitent dans le secteur de la re-cherche.
Des locaux situés au sein de l’Institut de Recherche contre les Can-cers de l’Appareil Digestif (IRCAD), implanté sur le campus du Nou-vel Hôpital Civil de Strasbourg (NHC). Il s’agit d’un centre privé de re-cherche médicale fondé en 1994 par le professeur Jacques Marescaux dansune volonté de rapprocher les secteurs du médical et de la technique. Trèsrapidement reconnu dans le domaine de la laparoscopie 1, l’IRCAD a réa-lisé plusieurs opérations novatrices dont la première mondiale en 2001 quiconsistait en une ablation à distance, s’agissant d’opérer depuis New York
1. La laparoscopie, autrement appelée cœlioscopie est une technique d’endoscopie chirurgicale mini-invasive visant àréduire l’impact postopératoire dont les douleurs, séquelles, effets secondaires et le temps de rétablissement du patient.Utilisée pour diagnostiquer comme pour opérer, cette technique qui combine de petits outils à une assistance vidéo sedéroule à proximité de la cavité abdominale et s’emploi de plus en plus sur l’appareil digestif, en gynécologie et enurologie.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
8/83

CHAPITRE 1. INTRODUCTION
une patiente située à Strasbourg. C’est ainsi que chaque année, près de 4000 médecins viennent dumonde entier pour être formés aux nouvelles technologies chirurgicales. L’essor connu par ce centrese traduit d’ailleurs au travers de son implantation de par le monde : un centre à Taïwan depuis mai2006 et un autre au Brésil depuis juillet 2011, tandis que le centre de Strasbourg amorce, quant à lui,une phase d’extension.
L’unité à laquelle j’étais rattaché durant mon stage est l’équipe AVR, principalement orientéerobotique médicale. Elle tire ainsi parti de son rattachement à l’IRCAD en bénéficiant de locaux, ma-tériels et partenaires industriels mis à disposition en plus d’une proximité avec le monde médical quilui garantit une demande permanente, innovante et conforme aux pratiques chirurgicales, une expéri-mentation directe par des professionnels et de manière plus générale, une interaction privilégiée entredeux mondes enclin à une collaboration efficiente. Les principaux domaines d’activités, rattachés auprogramme de recherche multi-laboratoires Imagerie et Robotique Médicale et Chirurgicale (IRMC)de Strasbourg s’étendent donc de l’imagerie à la robotique et la réalité augmentée en passant par lamodélisation géométrique et bio-mécanique, la simulation et la planification du geste opératoire afind’assister le médecin en lui fournissant des outils adaptés à ses besoins.Cette équipe de recherche est dirigée par le Professeur Michel DE MATHELIN et recense pas moinsde 14 permanents, 15 doctorants ainsi que quelques stagiaires.
2 Problématique du stageDans de nombreuses applications technologiques telles que le micro-usinage, le micro-assemblage, la
télé-chirurgie, la biotechnologie, la microchirurgie et la nanotechnologie, incluant également des outilsspécifiques (notamment les MEMS 1), il est indispensable de satisfaire certaines exigences en termesprincipalement de précision, d’encombrement et d’entretien. Dépendant essentiellement de la topolo-gie de la structure mécanique, les précisions observées dans les mécanismes usuels se concentrent auniveau des articulations, ce qui explique le récent attrait pour les mécanismes compliants. Ces dernierspermettent effectivement de pallier divers problèmes en termes de frottements, jeux fonctionnels ouencore entretien et lubrification ; la mobilité d’un mécanisme compliant étant obtenue par exploitationde l’élasticité du matériau (utilisation de joints flexibles) et non le mouvement relatif de plusieurs élé-ments, comme c’est le cas dans les mécanismes standards à corps rigides. Ils présentent de nombreuxavantages dont les principaux :
– Diminution des coûts de fabrication– Compacité accessible– Réduction du phénomène d’hystérésis et du bruit lors de la mise en mouvement des articulations– Absence de jeu, friction et lubrification du fait d’une réalisation monolithique
En contrepartie, ils peuvent présenter des facteurs limitant dans le processus de conception. Eneffet, le développement d’un mécanisme compliant ne peut se faire indépendamment des propriétésmatériaux et topologiques en jeu : les caractéristiques intrinsèques du matériau telles que la résistanceà la fatigue et la limite élastique doivent être prises en considération dans la géométrie du système pour
1. Micro Electro Mechanical Systems
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
9/83

CHAPITRE 1. INTRODUCTION
s’assurer que les plages géométrique, cinématique et dynamique à exploiter sont accessibles de mêmeque l’architecture du système qui influera directement sur le processus de fabrication comme les tra-jectoires outils ou techniques employées visant à minimiser les défauts et déformations lors de l’usinage.
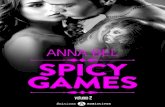
Un avant-projet réalisé au cours de mon PRT 1 avait permis de mettre ces difficultés en exergue.L’application consistait à entraîner une aiguille en vibration le long d’un axe vertical au moyen d’unestructure compliante présentée sur la figure 1.1. Le système d’aiguille active ainsi développé dérivaitdu robot parallèle "Delta" en configuration singulière, l’équivalent compliant de celui-ci réduisant lesrotules à des pivots étant donné le seul degré de liberté en translation désiré. Bien que motivés parsa valeur ajoutée dans le domaine de l’élastographie 2, c’était pour nous l’occasion de se familiariseravec les mécanismes compliants et de mettre en évidence les différents problèmes qui les caractérisentdont le plus important s’avère être celui de la modélisation du mécanisme. L’étude s’était néanmoinslimitée au seul déplacement porté par la direction de travail.
Figure 1.1 – Mise en contexte / Équivalent compliant d’un robot 3 R-R
La problématique du stage de Master s’inscrit donc en continuité de mes travaux de PRT, s’agis-sant de reprendre la solution proposée et de l’étudier en étendant la notion de déplacement utile àtous ceux de l’espace. On cherchera notamment à caractériser son comportement spatial à travers samatrice de rigidité qui constitue une information élémentaire sur le comportement statique, modal etdynamique. En effet, le comportement des mécanismes compliants peut être assimilé à celui d’une as-sociation de ressorts qui relient une action mécanique aux déplacements résultants. La loi cinématiqueentrée sortie couramment employée pour les mécanismes à corps rigides, à savoir les matrices jaco-biennes, ne traduisant pas ce couplage entre un effort et le déplacement produit, il convient davantaged’aborder de tels mécanismes par des matrices de rigidité, y compris pour leurs articulations élémen-taires auxquelles six degrés de libertés sont toujours associés en raison des déformations possibles danstoutes les directions de l’espace. On s’emploiera plus précisément à identifier puis, à valider des outilssusceptibles de décrire la rigidité locale de notre architecture dans les différentes directions de l’espaceet par extension, celle de n’importe quel mécanisme compliant parallèle. Si l’objectif de ce travail estd’évaluer des outils génériques de modélisation en rigidité, tels que la modélisation PRBM (cf. sec-
1. Projet de Recherche Technologique2. Il s’agit d’une technique d’imagerie récente dans la caractérisation tissulaire. Elle offre un intérêt fondamental
en diagnostic clinique étant donné qu’une altération des propriétés mécaniques tissulaires est observée en présence depathologies. La mesure s’effectue alors en appliquant une sollicitation extérieure dans les régions d’intérêt.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
10/83

CHAPITRE 1. INTRODUCTION
tion 3.1), on cherchera par-dessus tout à éprouver leur fonctionnement au voisinage de la singularité.En raison d’une facilité d’usinage, il peut effectivement être intéressant de fabriquer les mécanismescompliants dans le plan. Cette situation favorable à l’usinage correspond néanmoins à une singularitépour la plupart des mécanismes parallèles. C’est pourquoi l’appréciation de la rigidité des mécanismesparallèles au voisinage de la singularité peut s’avérer pertinente, d’autant plus qu’on pourra égalementêtre amenés à tirer parti de cette configuration dans la suppression d’actionneurs du fait du décou-plage actionneur-effecteur ou encore dans l’amplification des déplacements comme c’est le cas dans lestravaux de [1].A terme, le recours à ces outils devra assurer une caractérisation en manipulation ou en conception,étant en mesure d’envisager une optimisation des paramètres géométriques, une évaluation des effortsnécessaires pour engendrer un déplacement donné ou encore un dimensionnement précis des action-neurs [2] et ce, malgré des défauts géométriques résultant de l’usinage ou de l’assemblage de la chaîned’actionnement sur le système. Disposer de la matrice de raideur permettra donc d’évaluer le compor-tement du système sous l’action d’efforts extérieurs et, par suite, quantifier les déplacements engendréspar l’actionnement piézoélectrique envisagé dont la caractéristique première réside dans le couplageefforts/déplacements.
On s’attachera dans un premier temps à décrire le comportement des articulations flexibles étantdonné qu’il se répercute directement sur l’ensemble du mécanisme. On précisera d’ailleurs que le choixde l’articulation flexible sera effectué par analogie aux méthodes usuelles basées sur les déplacementsrelatifs des corps rigides. S’en suivra une analyse critique des modèles en déplacements de la liaison,par comparaison aux éléments finis dont on dispose pour examiner le comportement théorique d’unmodèle.Une fois la modélisation locale établie, on définira un protocole de mesure sur des outils numériquestels que Mechanica ou Patran qui seront repris, par la suite, sur des systèmes séries et parallèles. Onsera particulièrement vigilants quant à la précision et la répétabilité des résultats selon l’évolution dedifférents facteurs afin de garantir la fiabilité des mesures numériques.On abordera ensuite plusieurs méthodes sur des systèmes dits élémentaires avant de s’en approprierune en particulier, de manière à appréhender son fonctionnement en plus de déceler d’éventuelles in-cohérences avec les modèles par éléments finis.La finalité du stage s’organisera autour du système "Delta" qui comprend alors plusieurs étapes :l’optimisation des dimensions en réponse au cahier des charges fixé mais aussi aux besoins de l’expé-rimentation, l’évaluation théorique de la mesure (précision, dispersion), la modélisation CAO puis lafabrication du dispositif expérimental avant d’exploiter les résultats comme ouverture sur de nouvellesméthodes de conception.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
11/83
CHAPITRE 2. LES LIAISONS COMPLIANTES
Chapitre 2
Les liaisons compliantes
1 État de l’artDifférentes formes de liaisons compliantes ont été proposées pour disposer d’un bon compromis
entre :
– la précision en déplacement : elle nous renseigne sur le comportement cinématique de la liaisoncompliante par analogie avec son équivalent à corps rigides. Autrement dit, une liaison compliantepossède une grande précision lorsque son torseur cinématique respecte celui de la liaison àcorps rigides dont elle s’inspire (par exemple, une vitesse linéaire nulle du centre de la liaisonpour une approximation à une pivot). Par extension, les propriétés cinématiques doivent êtreconservées pour une sollicitation quelconque, ce qui se traduit par une rigidité élevée seloncertaines directions et à l’inverse, de faibles rigidités selon les axes de travail.
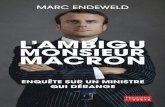
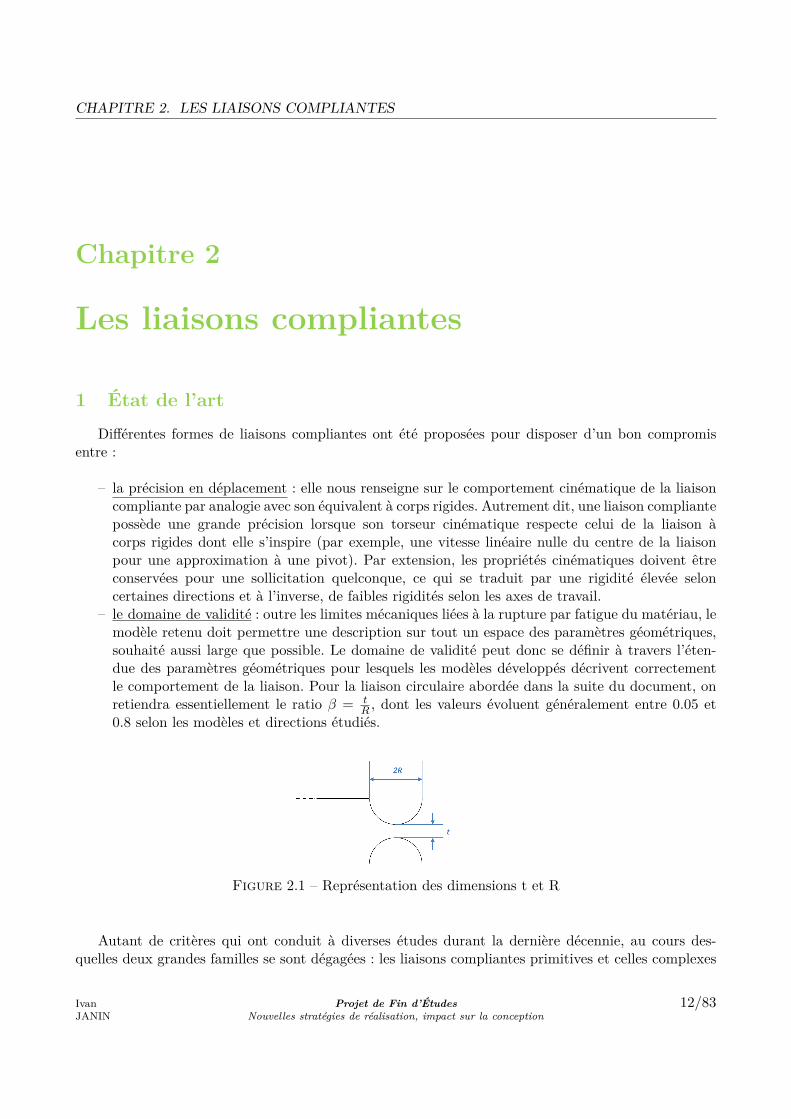
– le domaine de validité : outre les limites mécaniques liées à la rupture par fatigue du matériau, lemodèle retenu doit permettre une description sur tout un espace des paramètres géométriques,souhaité aussi large que possible. Le domaine de validité peut donc se définir à travers l’éten-due des paramètres géométriques pour lesquels les modèles développés décrivent correctementle comportement de la liaison. Pour la liaison circulaire abordée dans la suite du document, onretiendra essentiellement le ratio β = t
R , dont les valeurs évoluent généralement entre 0.05 et0.8 selon les modèles et directions étudiés.
Figure 2.1 – Représentation des dimensions t et R
Autant de critères qui ont conduit à diverses études durant la dernière décennie, au cours des-quelles deux grandes familles se sont dégagées : les liaisons compliantes primitives et celles complexes
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
12/83

CHAPITRE 2. LES LIAISONS COMPLIANTES
(habituellement, la combinaison de deux ou plusieurs liaisons primitives). Dans [3, 4], sont présentésdifférents éléments flexibles élémentaires, répartis en deux classes distinctes : les liaisons compliantesà répartition de matière localisée et les liaisons compliantes à répartition de matière distribuée.
Les liaisons à répartition de matière localisée possèdent des raideurs négligeables selon des axesprédéfinis. En contrepartie, elles souffrent de concentrations de contraintes élevées qui restreignentleur plage de travail à de petits déplacements uniquement.A l’inverse, les liaisons à répartition de matière distribuée permettent d’accéder à de grands dépla-cements mais s’avèrent plus difficiles à modéliser : si la théorie des poutres trouve une applicationdirecte dans ce deuxième type de liaison, elle permet difficilement de synthétiser des mécanismes ens’appuyant sur leurs équivalents à corps rigides.
Figure 2.2 – liaisons primitives, d’après [3]
On orientera donc la recherche sur les liaisons à mouvements localisés (Notch-type) et plus particu-lièrement sur les liaison pivots, c’est à dire celles présentant un mouvement prépondérant de rotation.En effet, les liaisons compliantes en question répondent au besoin de mobilité unique en rotation sou-haitée et favorisent même l’appropriation des méthodes employées sur les mécanismes à corps rigides,du fait d’une précision importante. Dans cette catégorie, il existe différentes géométries provenant destravaux initiaux de Paros & Weisbord [5] à ceux de Acer & Sabanovic [6]. On pourra se référer à laFigure 2.3 pour mieux positionner les travaux présentés dans le paragraphe suivant.
Figure 2.3 – Chronologie : études de la compliance pour les charnières flexibles
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
13/83

CHAPITRE 2. LES LIAISONS COMPLIANTES
En 1965, Paros & Weisbord introduisent la première liaison circulaire [5] ainsi que les équationsvisant à évaluer sa compliance (inverse de la raideur). Dès lors, différentes configurations sont ana-lysées par la méthode des éléments finis, comme le font Xu et King [7] sur des profils circulaires (cf.Figure 4.2a), elliptiques (cf. Figure 4.2b) et rectangulaires (cf. Figure 4.2c), révélant une rigiditéprincipale moindre pour le type rectangulaire que circulaire, au détriment néanmoins de la précisionqui s’avère meilleure pour la configuration circulaire (Figure 4.2a). La mise en place de modèles ana-lytiques pour les liaisons à profils elliptiques et liaisons parallélépipédiques (leaf-type) par Smith & al.[8, 9] ou encore pour les charnières à profils rectangulaires, paraboliques et hyperboliques par Lobontiu[10, 11] conduit à plusieurs comparaisons en termes de contrainte, flexibilité et sensibilité pour une sol-licitation donnée. D’après l’analyse établie par Lobontiu & al [12], les liaisons à profils hyperboliquesconservent au mieux la position du centre de rotation lorsqu’elles sont soumises à un moment purautour de l’axe de flexion principale et les liaisons à profils elliptiques, paraboliques et hyperboliquesprésentent des compliances décroissantes, largement supérieures à celles obtenues pour les liaisonsà profils circulaires dans le cas d’un ratio largeur/épaisseur élevé. En effet, si le rayon et la largeursont pris suffisamment petits, la liaison à profil circulaire devient plus compliante que toutes les autres.
(a) Profil circulaire :"Notch-circular flexure hinge"
(b) Profil elliptique :"Elliptical flexure hinge"
(c) Profil rectangulaire :"Corner-filleted flexure hinge"
Figure 2.4 – Différentes géométries de liaisons
Bien que de nouvelles configurations aient vu le jour [13], cumulant pour certaines les avantages descharnières circulaires (précision) et rectangulaires (amplitude), leur rigidité reste très peu modéliséedans les différentes directions. Aussi, les deux nouveaux profils hybrides RCCF 1 et RCE 2 proposéspar [13] (cf. Figure 2.5) ne seront pas retenus dans le travail futur, en faveur de la charnière à sectioncirculaire introduite par Paros & Weisbord qui demeure l’élément flexible le plus couramment employé.En effet, son centre de rotation se déplaçant faiblement, il offre une grande précision en rotation enplus d’une grande compliance autour de l’axe de flexion principale. L’existence de plusieurs modèleset études comparatives au sein d’une communauté scientifique motive également notre choix pour cetélément.
2 La liaison de type "notch-circular"
2.1 Modélisation analytique
1. Right Circular Corner Filleted hinge2. Right Circular Elliptical hinge
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
14/83

CHAPITRE 2. LES LIAISONS COMPLIANTES
Figure 2.5 – Aperçu de nouveaux profils, d’après [13]
2.1.1 PrésentationIdéalement, une liaison pivot flexible doit favoriser un unique axe de rotation. Dans cette pers-
pective, la liaison présentée ici consiste en une découpe de profil circulaire dans la largeur d’un blocmonolithique. On obtient alors un mouvement de flexion principale porté par l’axe z (cf. Figure 2.6)dont la rigidité est négligeable au vue de celles portées par les autres directions. En considérant le ratioβ = t
R suffisamment petit, il est possible d’assimiler la flexion de l’élément à la rotation d’une liaisonpivot, à laquelle viendrait s’ajouter une raideur. On cherchera donc à dimensionner cette grandeur quiinflue à la fois sur la forme et la précision de la liaison mais aussi sur la validité des modèles qui s’yrapportent.
Figure 2.6 – Schéma d’une liaison charnière à profil circulaire, d’après [14]
Pour rappel, si l’introduction d’éléments flexibles dans un mécanisme lui confère les principauxavantages mentionnés pour les systèmes compliants comme l’absence de jeu ou les petites dimensionsaccessibles, il en résulte certains inconvénients liés à leur modélisation. Il en va de la précision dumécanisme, étant donné l’influence de la rigidité sur l’attitude de l’organe terminal. Par conséquent,
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
15/83

CHAPITRE 2. LES LIAISONS COMPLIANTES
il est impératif d’approcher plus en détail le comportement de la liaison, à travers des modèles quel’on appréciera au regard des deux critères présentés en section 2.1. On pourra éventuellement consi-dérer un troisième critère, plus subjectif, concernant sa simplicité d’écriture en perspective de calculsaccélérés.
Dans un premier temps, on abordera la compliance principale (selon l’axe de flexion z) que l’oncherche à maximiser pour tendre vers une liaison pivot parfaite. Il s’agit effectivement de la sollicitationla plus significative puisqu’elle correspond au mouvement attendu de l’élément flexible considéré.
2.1.2 Compliance principaleDifférentes études ont été menées pour déterminer la rigidité des liaisons charnières à profil circu-
laire. Les méthodes employées reposent sur l’intégration des équations différentielles d’une poutre enflexion [5, 15, 16], le second théorème de Castigliano [16], la transformation conforme inverse [17], l’op-timisation par essaims particulaires (métaheuristique d’optimisation) [18] et les équations empiriquesétablies à partir de simulations par éléments finis [19, 20, 14]. On verra par la suite que la pertinenced’un modèle dépend de la géométrie, caractérisée par l’épaisseur et le rayon de l’amincissement, cer-taines de ces formulations prévalant sur d’autres selon la valeur du paramètre β.
Le premier modèle analytique provient du travail de J.Paros et L.Weisbord [5]. Il s’appuie surl’intégration de l’équation différentielle d’une poutre en flexion définie selon le théorème d’Euler-Bernoulli et débouche sur deux formulations : une complète et une simplifiée. La seconde expressionassure une simplicité de calcul, du fait de sa taille réduite, malgré un léger écart par rapport à lapremière (environ 1% pour une épaisseur relative β = t
R comprise entre 0,01 et 0,05 | 5% à 12% pourβ entre 0,1 et 0,3) [17]. Contre toute attente, Smith et al. [21] concluent sur la pertinence de l’équa-tion réduite de Paros & Weisbord, celle-ci présentant de meilleurs résultats que l’équation complèteau vue des résultats expérimentaux et par éléments finis. Il est important de préciser que les deuxformulations divergent, pour de larges valeurs de β, des résultats obtenus par éléments finis : l’écartprésenté par Tseytlin [17] atteignant jusqu’à 25% pour le ratio β = 0,6.
Les équations de Wu & Zhou présentées dans [15] reprennent les travaux de Paros & Weisbord [5].Les résultats sont donc identiques, au signe près.
Lobontiu et al. [12] quant à eux, déduisent du second théorème de Castigliano une nouvelle formede compliance. Les résultats analytiques pour des ratios β égaux à 0,05 | 0,1 et 0,2 ont été comparésaux résultats par éléments finis, on observe alors un pourcentage d’erreur d’environ 10%.
Une autre méthode consiste à approcher les mécanismes par des modèles numériques afin d’enextraire des expressions empiriques [19]. L’avantage principal réside dans la justesse des résultats,une analyse directe par éléments finis reflétant davantage les mesures réalisées sur prototypes. Néan-moins, la modélisation par éléments finis n’a de validité que pour la géométrie définie. C’est pourquoiTseytlin envisage une formulation dépendant des paramètres [17] en ayant notamment recours auxtransformations conformes inverses. Il définit alors une nouvelle modélisation, scindée en 3 domaines :"mince" (β ≤ 0, 07), "intermédiaire" (0, 07 ≤ β ≤ 0, 2) et "épais" (0, 2 ≤ β ≤ 0, 6), pour lesquels l’ana-lyse conjointe des écarts analytiques, expérimentaux et par éléments finis avoisine les 10% d’erreur.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
16/83

CHAPITRE 2. LES LIAISONS COMPLIANTES
Cette équation reste néanmoins valable sur un intervalle restreint à β compris entre 0,1 et 0,5 [17](ré-apprécié à 0,2-0,65 d’après [14]), ce qui explique l’apparition de modèles plus récentes, tels quecelui de Schotborgh [20] avec un domaine plus étendu : β appartenant à la plage 0,05-0,65.
2.1.3 Expression généralisée de la complianceLa section précédente traitait de la compliance pour le mouvement principal de rotation autour
de l’axe z. Cette notion est étendue ici à toutes les directions de l’espace, la relation entre le torseurcinématique X et le torseur d’actions F étant généralement décrite par une expression de la forme :
X = CF (2.1)
La matrice de compliance, notée C, comporte différents coefficients intervenant dans l’estimationrespective des déplacements linéaires et angulaires pour des sollicitations en forces et moments aux-quelles la liaison est susceptible d’être soumise. Dans le cas de l’état de l’art, la liaison "notch-circular"est généralement modélisée par huit coefficients. Conformément au repère représenté en figure 2.6, Cs’écrit alors :
∆x
∆y
∆z
αxαyαz
=
c1 0 0 0 0 00 c2 0 0 0 c30 0 c4 0 c5 00 0 0 c6 0 00 0 c5 0 c7 00 c3 0 0 0 c8
FxFyFzMx
My
Mz
(2.2)
En plus de la compliance principale c8, les travaux cités en partie 2.1.2 ont généralement introduitdes expressions pour les coefficients c1 et c2 afin d’évaluer les déplacements contenus dans le plan detravail de la liaison. Toutefois, les compliances précédentes se limitent aux déplacements de mêmenature que la sollicitation, à savoir un déplacement linéaire (resp. angulaire) pour un effort (resp.moment), d’où la nécessité du coefficient c3 pour couvrir l’ensemble des déplacements de l’espace 2D,quelle que soit la sollicitation du plan envisagée. En travaillant pour de petits déplacements, il estcourant d’écrire : c3 = c8R = c2
R . On constate alors l’équivalence entre un déplacement engendré parun moment et la force provenant d’une rotation dont les axes de référence sont interchangés.Les autres coefficients, c4 à c7 permettent d’exprimer les mouvements non contenus dans le plan. Ilsrestent peu étudiés depuis leur formulation par Paros & Weisbord, les applications fréquentes faisanttravailler la liaison dans le plan. De la même façon que c3 lie conjointement αz à fy et ∆y à Mz, c5est utilisé pour caractériser deux compliances égales : ∆z
Myet αy
fz.
2.1.4 Comparaison des modèlesLa richesse de la littérature mise en avant dans les parties précédentes pour ce type de liaison
témoigne de l’importance accordée au facteur β, ce dernier influant directement sur la précision des
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
17/83
CHAPITRE 2. LES LIAISONS COMPLIANTES
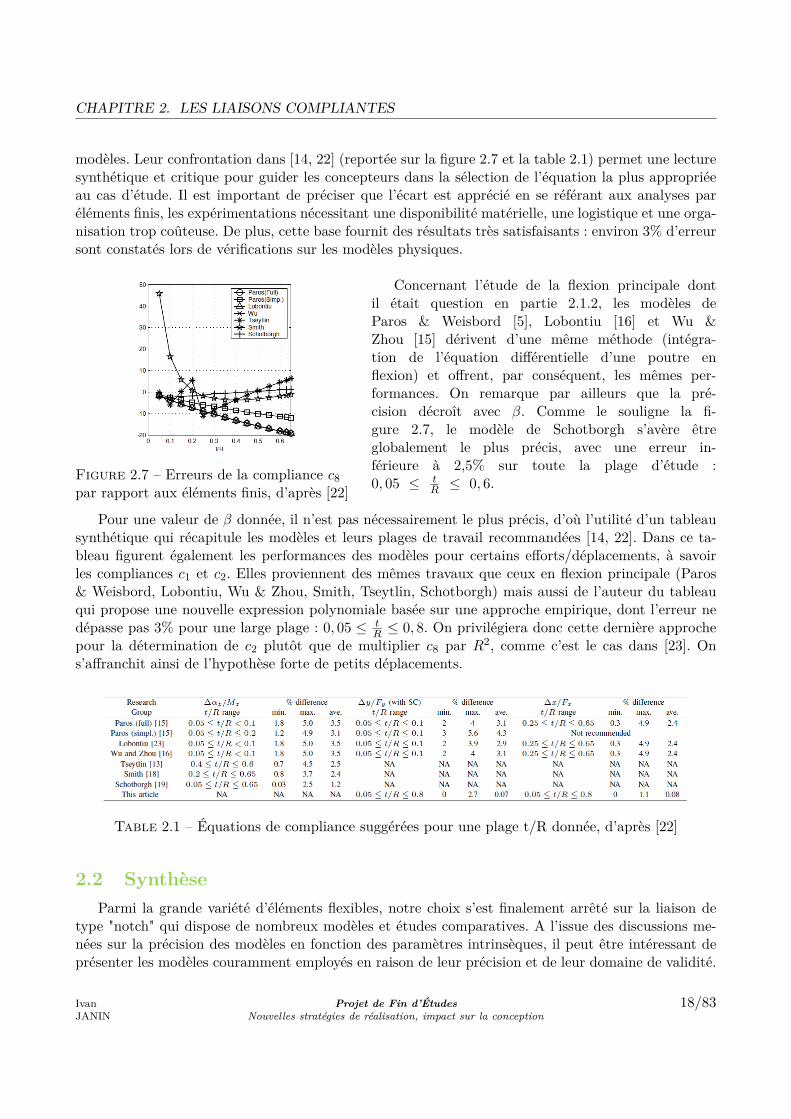
modèles. Leur confrontation dans [14, 22] (reportée sur la figure 2.7 et la table 2.1) permet une lecturesynthétique et critique pour guider les concepteurs dans la sélection de l’équation la plus appropriéeau cas d’étude. Il est important de préciser que l’écart est apprécié en se référant aux analyses paréléments finis, les expérimentations nécessitant une disponibilité matérielle, une logistique et une orga-nisation trop coûteuse. De plus, cette base fournit des résultats très satisfaisants : environ 3% d’erreursont constatés lors de vérifications sur les modèles physiques.
Figure 2.7 – Erreurs de la compliance c8par rapport aux éléments finis, d’après [22]
Concernant l’étude de la flexion principale dontil était question en partie 2.1.2, les modèles deParos & Weisbord [5], Lobontiu [16] et Wu &Zhou [15] dérivent d’une même méthode (intégra-tion de l’équation différentielle d’une poutre enflexion) et offrent, par conséquent, les mêmes per-formances. On remarque par ailleurs que la pré-cision décroît avec β. Comme le souligne la fi-gure 2.7, le modèle de Schotborgh s’avère êtreglobalement le plus précis, avec une erreur in-férieure à 2,5% sur toute la plage d’étude :0, 05 ≤ t
R ≤ 0, 6.
Pour une valeur de β donnée, il n’est pas nécessairement le plus précis, d’où l’utilité d’un tableausynthétique qui récapitule les modèles et leurs plages de travail recommandées [14, 22]. Dans ce ta-bleau figurent également les performances des modèles pour certains efforts/déplacements, à savoirles compliances c1 et c2. Elles proviennent des mêmes travaux que ceux en flexion principale (Paros& Weisbord, Lobontiu, Wu & Zhou, Smith, Tseytlin, Schotborgh) mais aussi de l’auteur du tableauqui propose une nouvelle expression polynomiale basée sur une approche empirique, dont l’erreur nedépasse pas 3% pour une large plage : 0, 05 ≤ t
R ≤ 0, 8. On privilégiera donc cette dernière approchepour la détermination de c2 plutôt que de multiplier c8 par R2, comme c’est le cas dans [23]. Ons’affranchit ainsi de l’hypothèse forte de petits déplacements.
Table 2.1 – Équations de compliance suggérées pour une plage t/R donnée, d’après [22]
2.2 SynthèseParmi la grande variété d’éléments flexibles, notre choix s’est finalement arrêté sur la liaison de
type "notch" qui dispose de nombreux modèles et études comparatives. A l’issue des discussions me-nées sur la précision des modèles en fonction des paramètres intrinsèques, il peut être intéressant deprésenter les modèles couramment employés en raison de leur précision et de leur domaine de validité.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
18/83

CHAPITRE 2. LES LIAISONS COMPLIANTES
Comme annoncé en partie précédente, on retiendra l’équation de Schotborgh dans l’expression de lacompliance principale. Concernant les coefficients c1 et c2, les équations polynomiales de Yong & al.permettront théoriquement de ne pas dépasser 0,08% d’erreur et ce, sur un plus grand domaine devalidité que les autres expressions. Quant aux autres coefficients, ils proviennent pour certains destravaux de Paros & Weisbord et dérivent, pour d’autres d’un passage d’une variation angulaire à unevariation linéaire par multiplication par le rayon R (pour rappel, valable uniquement en petits dépla-cements). Les expressions des coefficients c1, c2 et c3 proviennent de [14] tandis que les autres sontissus de [23] :
c1 = (Eb[n∑k=0
ck(t
R)k])−1 (2.3)
c2 = (Eb[n∑k=0
ck(t
R)k])−1 (2.4)
c3 = c8R (2.5)
c4 = 12πr2
Eb3.[(rt)
12 − 1
4] (2.6)
c5 = − 12rEb3
.[π(rt)
12 − 2 + π
2 ] (2.7)
c6 = 9πr12
4Gbt52
(2.8)
c7 = 12Eb3
.[π(rt)
12 − 2 + π
2 ] (2.9)
c8 = Ebt2
12 [−0, 0089 + 1, 3556√
t
2R − 0, 5227 t
2R ]−1
(2.10)
Avec :
- E : module de Young (élasticité longitudinale) [MPa]- G : module de cisaillement (élasticité transversale) [MPa]
Table 2.2 – Coefficients pour c1, c2, d’après [14]
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
19/83

CHAPITRE 2. LES LIAISONS COMPLIANTES
2.3 Modélisation numérique en petits déplacements
2.3.1 Influence des conditions de simulationsEn l’absence de prototypes sur lesquels effectuer les simulations, la précédente caractérisation de la
charnière circulaire par des modèles analytiques doit à présent être confrontée à des outils numériques,dont le module Mechanica de Pro-Engineer qui sera exploité comme référence. L’identification de cesrésultats relève donc d’une nécessité, d’une part dans un souci de validation des équations analytiquesmais également en projection des tests ultérieurs.En amont de cette calibration, il est important de s’assurer que la fiabilité des résultats ne dépend pasdes conditions de simulation, ce qui, le cas échéant, discréditerait les résultats fournis par Mechanica.En d’autres termes, il ne doit exister aucune corrélation entre le paramétrage de l’analyse statique etles déplacements quantifiés, d’où le recours à des tests préliminaires sur trois facteurs spécifiques aussibien conditionnés par le cas d’étude que par le paramétrage de la simulation : l’application de l’effort(entité sollicitée et répartition de l’effort), le maillage et le cas de charge (composante et intensité dutorseur d’action).Tout d’abord, les paramètres géométriques de la charnière doivent être fixés afin de conserver unemaquette numérique identique dans les étapes consécutives d’analyse des conditions de simulations etd’utilisation au sein des futurs mécanismes. Les deux principaux paramètres que sont t et R doiventnotamment satisfaire l’ensemble des domaines de validité connus pour pouvoir appliquer les modèlesanalytiques, c’est-à-dire 0, 05 ≤ β ≤ 0, 65 résultant de l’intersection des domaines synthétisés surle tableau 2.1 et qui conduit au choix arbitraire : R=10[mm], t=1[mm] et b=20[mm] (représentés surla figure 2.6).
- Application de l’effort : la performance d’un calcul par éléments finis est fonction de nombreuxcritères parmi lesquels figurent les conditions aux limites. En n’apportant aucune modification à lagéométrie de la liaison charnière, on observe par exemple une concentration de contraintes au niveaude ses extrémités qui se traduit par des déformations locales excessives si on exerce un effort de trac-tion réparti uniformément sur la surface extérieure (cf. Figure 2.8).
Figure 2.8 – Influence des conditions aux limites
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
20/83
CHAPITRE 2. LES LIAISONS COMPLIANTES
Pour corriger ce problème, il est fréquent de rajouter de la matière de part et d’autre de l’élémentflexible, de manière à déporter l’effort sur une section pleine et continue. En revanche, cette façon deprocéder induit une distribution des déformations, la déformée de la poutre contribuant aux déplace-ments du point d’intérêt en plus de devoir recalculer le torseur d’action pour qu’une fois déporté, ilgénère les mêmes efforts sur la surface initiale. Il n’est donc pas envisageable d’employer cette alter-native.On adoptera finalement l’application directe de l’effort en un point, moyennant une hypothèse forted’indéformabilité de la surface laissée libre (opposée à celle encastrée). La restriction de l’extrémitéà une région de surface rigide ne doit pas être confondue avec une perte de mobilité sachant qu’ellen’affecte pas les déplacements mais seulement les déformations. Cette démarche facilite la vérificationde la matrice de rigidité puisque le torseur appliqué dans le modèle analytique est directement expriméau point d’application théorique et ne suscite donc aucun calcul intermédiaire.
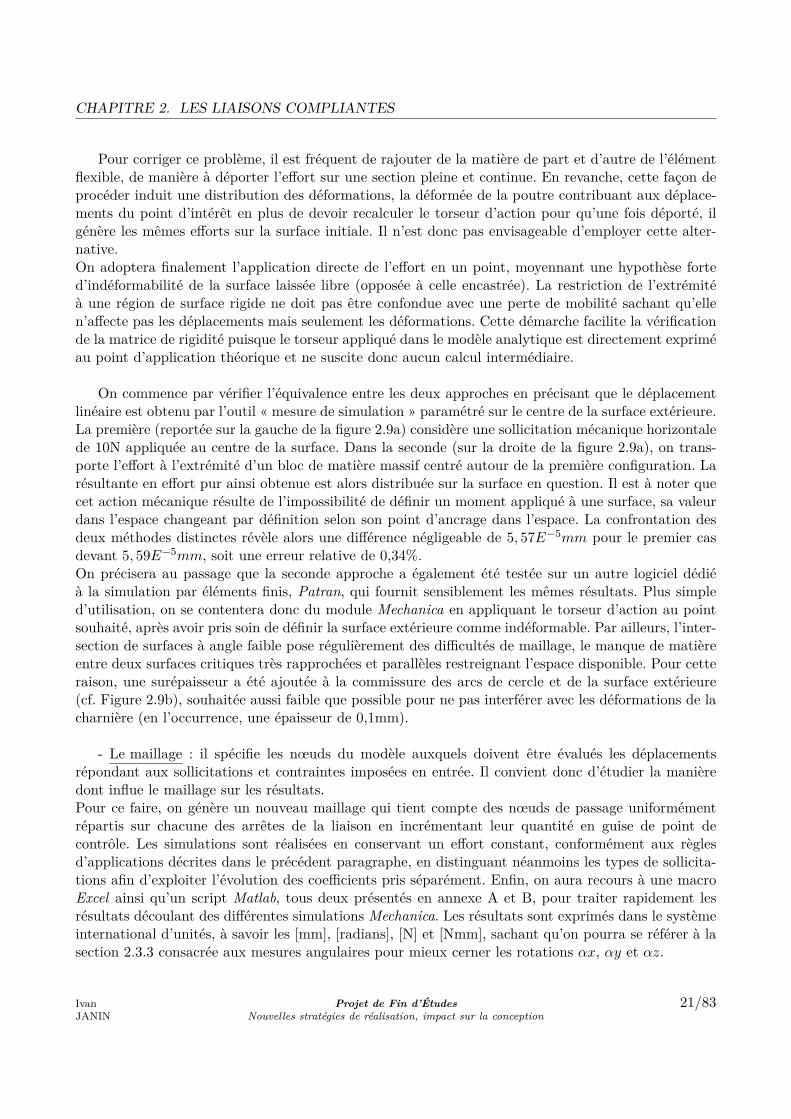
On commence par vérifier l’équivalence entre les deux approches en précisant que le déplacementlinéaire est obtenu par l’outil « mesure de simulation » paramétré sur le centre de la surface extérieure.La première (reportée sur la gauche de la figure 2.9a) considère une sollicitation mécanique horizontalede 10N appliquée au centre de la surface. Dans la seconde (sur la droite de la figure 2.9a), on trans-porte l’effort à l’extrémité d’un bloc de matière massif centré autour de la première configuration. Larésultante en effort pur ainsi obtenue est alors distribuée sur la surface en question. Il est à noter quecet action mécanique résulte de l’impossibilité de définir un moment appliqué à une surface, sa valeurdans l’espace changeant par définition selon son point d’ancrage dans l’espace. La confrontation desdeux méthodes distinctes révèle alors une différence négligeable de 5, 57E−5mm pour le premier casdevant 5, 59E−5mm, soit une erreur relative de 0,34%.On précisera au passage que la seconde approche a également été testée sur un autre logiciel dédiéà la simulation par éléments finis, Patran, qui fournit sensiblement les mêmes résultats. Plus simpled’utilisation, on se contentera donc du module Mechanica en appliquant le torseur d’action au pointsouhaité, après avoir pris soin de définir la surface extérieure comme indéformable. Par ailleurs, l’inter-section de surfaces à angle faible pose régulièrement des difficultés de maillage, le manque de matièreentre deux surfaces critiques très rapprochées et parallèles restreignant l’espace disponible. Pour cetteraison, une surépaisseur a été ajoutée à la commissure des arcs de cercle et de la surface extérieure(cf. Figure 2.9b), souhaitée aussi faible que possible pour ne pas interférer avec les déformations de lacharnière (en l’occurrence, une épaisseur de 0,1mm).
- Le maillage : il spécifie les nœuds du modèle auxquels doivent être évalués les déplacementsrépondant aux sollicitations et contraintes imposées en entrée. Il convient donc d’étudier la manièredont influe le maillage sur les résultats.Pour ce faire, on génère un nouveau maillage qui tient compte des nœuds de passage uniformémentrépartis sur chacune des arrêtes de la liaison en incrémentant leur quantité en guise de point decontrôle. Les simulations sont réalisées en conservant un effort constant, conformément aux règlesd’applications décrites dans le précédent paragraphe, en distinguant néanmoins les types de sollicita-tions afin d’exploiter l’évolution des coefficients pris séparément. Enfin, on aura recours à une macroExcel ainsi qu’un script Matlab, tous deux présentés en annexe A et B, pour traiter rapidement lesrésultats découlant des différentes simulations Mechanica. Les résultats sont exprimés dans le systèmeinternational d’unités, à savoir les [mm], [radians], [N] et [Nmm], sachant qu’on pourra se référer à lasection 2.3.3 consacrée aux mesures angulaires pour mieux cerner les rotations αx, αy et αz.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
21/83

CHAPITRE 2. LES LIAISONS COMPLIANTES
(a) Confrontation des deux méthodes
(b) Mise en exergue de la surépaisseur
Figure 2.9 – Définition de région d’application de l’effort
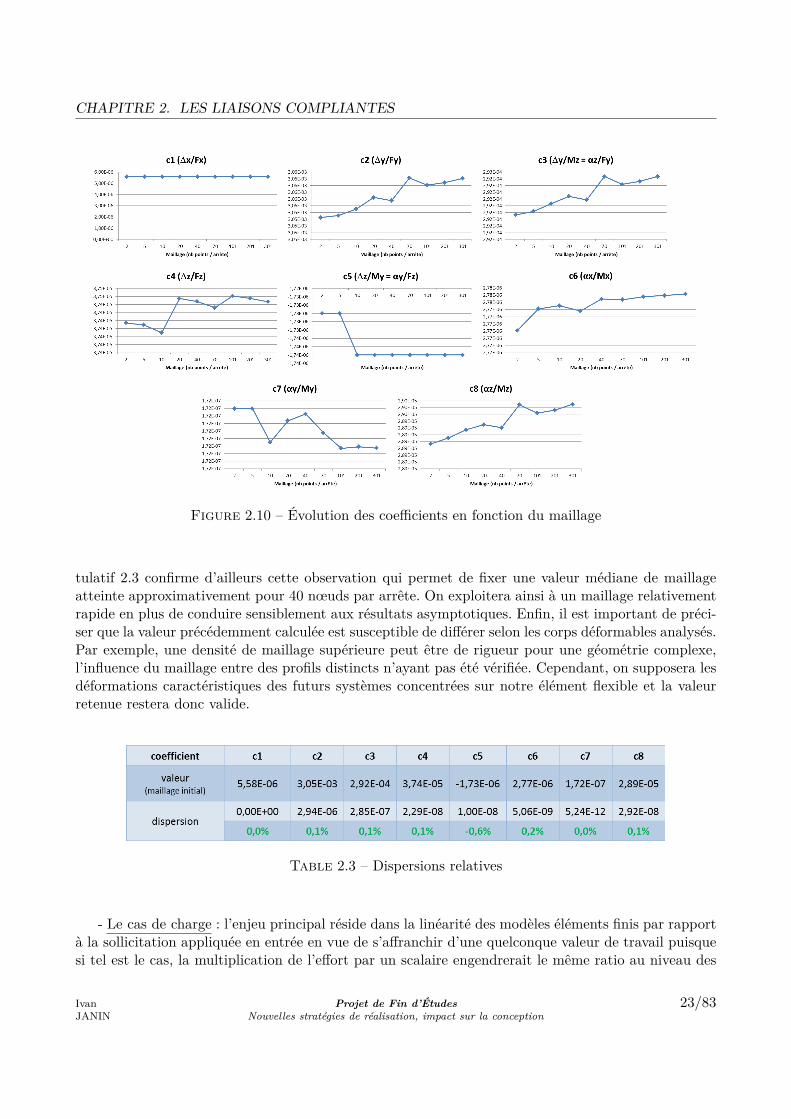
A première vue, les courbes représentatives de l’évolution des coefficients en fonction du maillage(cf. Figure 2.10) ne possèdent pas une croissance monotone ou nulle, mis-à-part l’allure du coefficientc1 qui reste rigoureusement identique du fait d’un cas simple de traction. Ces fluctuations proviennentprobablement des asymétries introduites dans la reconstruction optimale du maillage en accord avecles nœuds imposés et la géométrie. Naturellement, l’augmentation drastique du nombre de nœuds pararrête implique un maillage resserré qui tend alors à estomper les dissymétries, d’où la présence d’uneconvergence pour la plupart des coefficients au voisinage du maillage le plus fin (301 points/arrête).Toutefois une telle opération s’effectue au détriment du temps de calcul croissant alors que les dévia-tions ne sont pas alarmantes au vue des écarts portés sur la figure 2.10.
A plus grande échelle, il semblerait que le maillage initial soit suffisamment précis étant donné queles coefficients varient très légèrement entre les deux bornes du domaine d’étude. Le tableau récapi-
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
22/83
CHAPITRE 2. LES LIAISONS COMPLIANTES
Figure 2.10 – Évolution des coefficients en fonction du maillage
tulatif 2.3 confirme d’ailleurs cette observation qui permet de fixer une valeur médiane de maillageatteinte approximativement pour 40 nœuds par arrête. On exploitera ainsi à un maillage relativementrapide en plus de conduire sensiblement aux résultats asymptotiques. Enfin, il est important de préci-ser que la valeur précédemment calculée est susceptible de différer selon les corps déformables analysés.Par exemple, une densité de maillage supérieure peut être de rigueur pour une géométrie complexe,l’influence du maillage entre des profils distincts n’ayant pas été vérifiée. Cependant, on supposera lesdéformations caractéristiques des futurs systèmes concentrées sur notre élément flexible et la valeurretenue restera donc valide.
Table 2.3 – Dispersions relatives
- Le cas de charge : l’enjeu principal réside dans la linéarité des modèles éléments finis par rapportà la sollicitation appliquée en entrée en vue de s’affranchir d’une quelconque valeur de travail puisquesi tel est le cas, la multiplication de l’effort par un scalaire engendrerait le même ratio au niveau des
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
23/83

CHAPITRE 2. LES LIAISONS COMPLIANTES
déformations en sortie. La compliance s’écrivant comme fraction du déplacement sur l’effort, ce quicorrespond à l’expression d’une quantité de déplacement pour un effort unitaire, sa valeur resteraitalors inchangée quelle que soit l’intensité de l’effort paramétrée. Théoriquement, les algorithmes d’élé-ments finis implémentés en petits déplacements sont strictement linéaires sur un domaine non borné,la prise en compte de la limite élastique étant à la charge de l’utilisateur et non du calcul. On veillenéanmoins à s’en assurer en conduisant des tests similaires à ceux effectués sur le maillage : utilisationdes mêmes macros, distinction des sollicitations afin de calculer les coefficients indépendamment lesuns des autres et conservation des hypothèses vérifiées au préalable (maillage égal à 40 nœuds pararrête, effort toujours appliqué en un point). Cette fois-ci, on part d’un effort (resp. moment) unitaireque l’on interpole jusqu’à 106N (resp. Nmm) pour les coefficients rattachés à un déplacement linéaireet 104N (resp. Nmm) pour les déplacements angulaires.
Figure 2.11 – Fluctuation des coefficients sur une plage d’efforts
Toutes les conditions semblent réunies pour conclure quant à la linéarité du modèle malgré unelégère altération des résultats autour de 104N et plus. La non constance la plus sensible concerne lacoefficient c8 pour lequel on passe d’une moyenne établie autour de 2, 89E−5 à 2, 82E−5, soit uneerreur relative de 2,4% que le changement radical de configuration peut expliquer. Par conséquent, onconservera l’hypothèse de linéarité du modèle numérique en restant cependant vigilant aux sollicita-tions en jeu, ce qui permet de certifier une absence de sensibilité au bruit numérique, d’amplifier lamesure jusqu’à un certain seuil selon les besoins mais aussi de faciliter la lecture de déplacements liésà d’infimes compliances et enfin, de justifier les 10N d’effort sur lesquels nous nous concentrerons toutau long des prochaines simulations.
2.3.2 Appréciation des modèles analytiques par éléments finisD’après la section précédente, les conditions d’étude importent peu vis-à-vis de la pertinence des
résultats, l’encadrement de ces derniers demeurant relativement resserré quel que soit l’environnementde simulation défini. De ce fait, il est possible de procéder à l’identification des coefficients, ce quirevient à élaborer la forme matricielle par application du théorème de superposition : on appliqueindépendamment un effort ou un moment pur dont le déplacement mis au regard de la formule 2.1détermine la compliance propre à un type de sollicitation et de déformation.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
24/83

CHAPITRE 2. LES LIAISONS COMPLIANTES
L’obtention par les outils numériques de la matrice de compliance permettra de valider les modèlesanalytiques et, le cas échéant, d’étudier d’éventuelles sources de divergences avant de retenir le casparticulier appliqué sur le logiciel d’éléments finis. En effet, la matrice finale de compliance est calquéesur les résultats numériques afin que la construction du modèle analytique d’un système concordeavec les vérifications numériques employées. L’importance accordée à la modélisation des systèmesprédomine donc sur celle des modèles locaux de la liaison qui ne doivent pas entraver la recherched’un outil de modélisation à l’échelle du mécanisme. On retiendra néanmoins qu’il s’agit d’une phasede prospection et que, à terme, on reviendra sur une utilisation des modèles analytiques qui offrent demeilleures performances grâce à leur modularité et rapidité de calcul.S’appuyant sur la charnière précédente, le tableau 2.4 recense les mesures de référence pour la construc-tion de la matrice de compliance, comparées par la même occasion aux résultats analytiques. Parconséquent, les maquettes numériques à venir devront être articulées par des liaisons aux dimensionsinchangées.
Table 2.4 – Détermination des coefficients - Confrontation analytique/éléments finis
Le premier constat concerne l’égalité des coefficients complémentaires. Il répond à l’analyse effec-tuée en section 2.1.3, de même que la proche correspondance des coefficients c2, c3 et c8 au facteur Rprès. La confrontation des résultats numériques avec ceux escomptés analytiquement confirme par lamême occasion la finesse des équations relatives à c1, c2 et c8, même si les pourcentages obtenus dé-passent légèrement les différences maximales attendues. En revanche, les autres coefficients ne satisfontpas les estimations analytiques avec des écarts évoluant entre 11% et 49%. On s’interrogera sur uneéventuelle optimisation géométrique visant à approcher des conditions qui nous auraient échappées,le respect de la plage de fonctionnement de ces équations n’étant pas conditionné par des bornes, dumoins non spécifiées dans littérature. Pour ce faire, on met en place une démarche d’optimisation danslaquelle les paramètres géométriques convergent vers une configuration ou les modèles analytiquesaboutissent sensiblement aux mêmes résultats que par éléments finis. Les formes obtenues pour lesoptimisations relatives à chaque compliance sont visibles sur la figure 2.12
Avec des écarts ramenés cette fois-ci à 0,5% au maximum, on observe des configurations très di-verses pour lesquelles le modèle numérique diverge peu de l’équation décrivant son comportement. Lesratios β qui s’y rapportent changent de manière conséquente, ce qui souligne l’explication concernantle domaine de validité expliquée en amont. Pour autant, on s’étonnera de certaines apparences commela forme octroyée au coefficient c6 qui ne ressemble plus à une liaison charnière. A ce jour, les mo-
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
25/83

CHAPITRE 2. LES LIAISONS COMPLIANTES
Figure 2.12 – Optimisation des paramètres géométriques
dèles disponibles dans la littérature décrivant les compliances c4 à c7 semblent donc inappropriés. Onse contentera du taux d’erreur de 49% en maintenant les paramètres géométriques initiaux, à savoirR=10[mm], t=1[mm] et b=20[mm] ainsi que les mesures s’y rapportant dans la détermination de lamatrice de compliance. Lors du retour aux modèles analytiques, on restera cependant vigilant quantà l’emploi des équations définissant les coefficients c4, c5, c6 et c7.Note : des tests similaires ont été conduits sur une géométrie élémentaire, une poutre à section circu-laire. Il en résulte une parfaite cohérence entre les modèles analytiques et les simulations par élémentsfinis, de quoi orienter les inexactitudes sur les équations en question.
2.3.3 Évaluation des mouvements angulaires pour la matrice de ri-gidité
Le concept de mobilité est fondamental dans l’étude d’un mécanisme. Pour rappel, la mobilitéd’un mécanisme est le nombre de paramètres d’entrée que l’on doit contrôler indépendamment pourfaire atteindre au mécanisme une position particulière. Bien qu’approchées à des liaisons pivots, lesarticulations compliantes retenues dans notre système présentent initialement six degrés de libertésque l’on retrouve dans les dimensions de la matrice locale de compliance. La présente section abordela mesure angulaire, ce qui revient à ne considérer que les trois degrés de liberté en rotation de notrearticulation.Parmi les différents outils de mesure accessibles sur ProE/Mechanica, on retrouve des grandeurs géné-riques telles que les contraintes, déformations, déplacements. . . Ce module avait d’ailleurs permis demesurer les déplacements linéaires dans les simulations déjà présentées, à la différence des variationsangulaires qui ne peuvent être issues directement d’une résolution par éléments finis ; d’où le recoursà d’autres méthodes dont il est maintenant question.Pour pouvoir mesurer une rotation pure, deux points sont nécessaires. Par extension, lorsqu’on s’in-téresse au cas de trois rotations dans l’espace, on étend les références de mesure à trois points. Dèslors, on peut définir deux vecteurs ayant une origine commune et par suite, un repère de référence encalculant le troisième par produit vectoriel des deux premiers. La détermination du repère orienté suitle même processus en précisant que les coordonnées des trois points dérivent de l’addition de leurs co-ordonnées initiales avec leurs déplacements dans les directions respectives de l’espace. C’est pourquoi
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
26/83

CHAPITRE 2. LES LIAISONS COMPLIANTES
un système de référencement identique à tous les mécanismes ne peut s’appuyer sur les contours de lasurface rigide dont l’orientation nous préoccupe mais requiert un repère prédéfini avec des longueursfixes, ce que l’on retrouve dans la solution adoptée : deux barres rigides extrudées perpendiculairement(cf. Figure 2.12). A leurs extrémités, on implémente des mesures en déplacements projetés de façonà établir le nouveau repère, conformément à la procédure précisée au-dessus. Une telle réalisationamplifie les déplacements mesurés et est favorable donc au traitement de nombres mésoscopiques plu-tôt que de préserver inutilement une échelle microscopique dans le cas de faibles rotations que nousrencontrons.Tout au long des sections antérieures, les mesures angulaires se basaient sur cette structure. Les anglesavaient été quantifiés par projection ou par rotations successives qui conduisaient alors aux mêmesrésultats, le choix d’une méthode n’ayant aucune incidence sur la valeur calculée face à une uniquerotation. Se pose alors le problème d’estimer correctement les rotations, plusieurs méthodes étantpossibles. Par ailleurs, il convient de s’interroger sur la méthode appropriée dans le cas d’une sollici-tation combinée. En effet, l’application d’une sollicitation mixte se traite aisément du point de vue dela matrice de compliance analytique qui prévoit justement d’être multipliée par un torseur d’actionsextérieures (on rappelle la relation : X = CF). En revanche, on ne sait pas ce qui a le plus de sensdans la mesure d’un tel déplacement, ce qui induit la façon de traiter la mesure sur ProE.
Un opérateur courant de modélisation de l’orientation d’un repère par rapport à un autre est êtrela matrice de rotation, notée R qui, dans un espace euclidien représente les isométries directes. End’autres termes, cette matrice contient les projections de chacun des trois vecteurs de la base finalesur la base de référence. En notant X, Y et Z les vecteurs mesurés sur la modèle numérique ramenésà leur expression unitaire, et avec le repère de référence [[1,0,0],[0,1,0],[0,0,1]], on a :
R =
~X.[1, 0, 0] ~Y .[1, 0, 0] ~Z.[1, 0, 0]~X.[0, 1, 0] ~Y .[0, 1, 0] ~Z.[0, 1, 0]~X.[0, 0, 1] ~Y .[0, 0, 1] ~Z.[0, 0, 1]
(2.11)
La définition des angles et de leur système de coordonnées varie selon le besoin, d’où l’existencede plusieurs formalismes :
Les angles projetés désignent les scalaires établis directement par projection sur le repère de réfé-rence. On liste deux méthodes :
1. La mesure trigonométrique : chaque angle dérive de l’arc-tangente des deux autres com-posantes d’un vecteur normal au vecteur portant la rotation. Aussi : rx = atan(Y (3)/Y (2)),ry = −atan(X(3)/X(1)) et rz = atan(X(2)/X(1))
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
27/83

CHAPITRE 2. LES LIAISONS COMPLIANTES
Figure 2.13 – Calcul des angles par trigonométrie
2. La rotation autour d’un axe : les trois rotations définissent les composantes du vecteur di-recteur de l’axe dont la norme θ définit la quantité de rotation. Le calcul des scalaires αx, αy etαz sera assuré par une fonction générique Matlab, la fonction Rodrigues dont la précision a étévalidée par un script personnel : une matrice de rotation est créée à partir de trois composantesux, uy et uz d’un vecteur ~u via la formule suivante puis égalisée avec les résultats que retournentla fonction Rodrigues, une fois celle-ci appliquée à R :
R =
ux2 + (1− ux2)c uxuy(1− c)− uzs uxuz(1− c) + uysuxuy(1− c) + uzs uy
2 + (1− uy2)c uyuz(1− c)− uxsuxuz(1− c)− uys uyuz(1− c) + uxs uz
2 + (1− uz2)c]
(2.12)
Figure 2.14 – Représentation des 3 endomorphismes liés à la rotation axiale
On précisera qu’un critère présent dans la fonction Rodrigues a été réduit afin d’étendre sonfonctionnement à de très petites valeurs. En prenant soin de travailler avec des nombres de type
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
28/83

CHAPITRE 2. LES LIAISONS COMPLIANTES
double, la norme de la matrice de rotation n’est pas approximée à zéro. La restriction visant àéviter de mauvaises approximations n’est donc plus de rigueur.
- Les rotations successives qui peuvent être de deux natures : déplacements angulaires consécutifspar rapport au repère initial ou en suivant les repères construits progressivement. Les matrices derotation s’obtiennent alors par multiplication matricielle des rotations de base, sachant que l’ordrede multiplication est altéré selon qu’on travaille par rapport à un repère fixe (pré-multiplication) oumobile (post-multiplication). Pour diminuer la quantité de travail, les matrices de bases ont été saisiessur Maple ainsi que les multiplications respectives (cf. Annexe C). On ne présentera pas ici le calculfinal des angles pour chacune des transformations retenues mais ils figurent en annexe (cf. Annexe B).
Analyse : La combinaison du script Matlab et d’une Macro Excel similaire permet d’ordonner ra-pidement les rotations issues de simulations Mechanica.Une première série de tests consiste à solliciter notre articulation par l’ensemble des quinze pairesd’actions mécaniques fixées à 10N pour les forces et 10Nmm pour les moments. Parmi tous les résul-tats, toutes méthodes confondues, on relève un écart maximal de 1,5% entre un calcul en rotation etla multiplication des coefficients en jeu par les efforts appliqués. Il est intéressant de constater quetoutes les sollicitations comportant un moment autour de l’axe ~y possèdent de plus grandes erreurs,la majorité des résultats avoisinant pour le reste les 0%. On conclut donc qu’à faibles angles et pourdeux sollicitations combinées, la mesure est correctement estimée par n’importe quelle méthode. Onprésente par exemple le cas de la méthode ’Rodrigues’ sur la figure 2.15 :
Figure 2.15 – Incertitudes de mesures pour les 3 angles par la méthode ’Rodrigues’
En maintenant le nombre de sollicitations combinées à deux, on étudie à présent l’influence d’ac-tionnements symétriques et ce, pour de grandes amplitudes approchant la dizaine de degrés. D’unepart, ces plus grands déplacements entraînent de plus grandes erreurs. D’autre part, on remarque que
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
29/83
CHAPITRE 2. LES LIAISONS COMPLIANTES
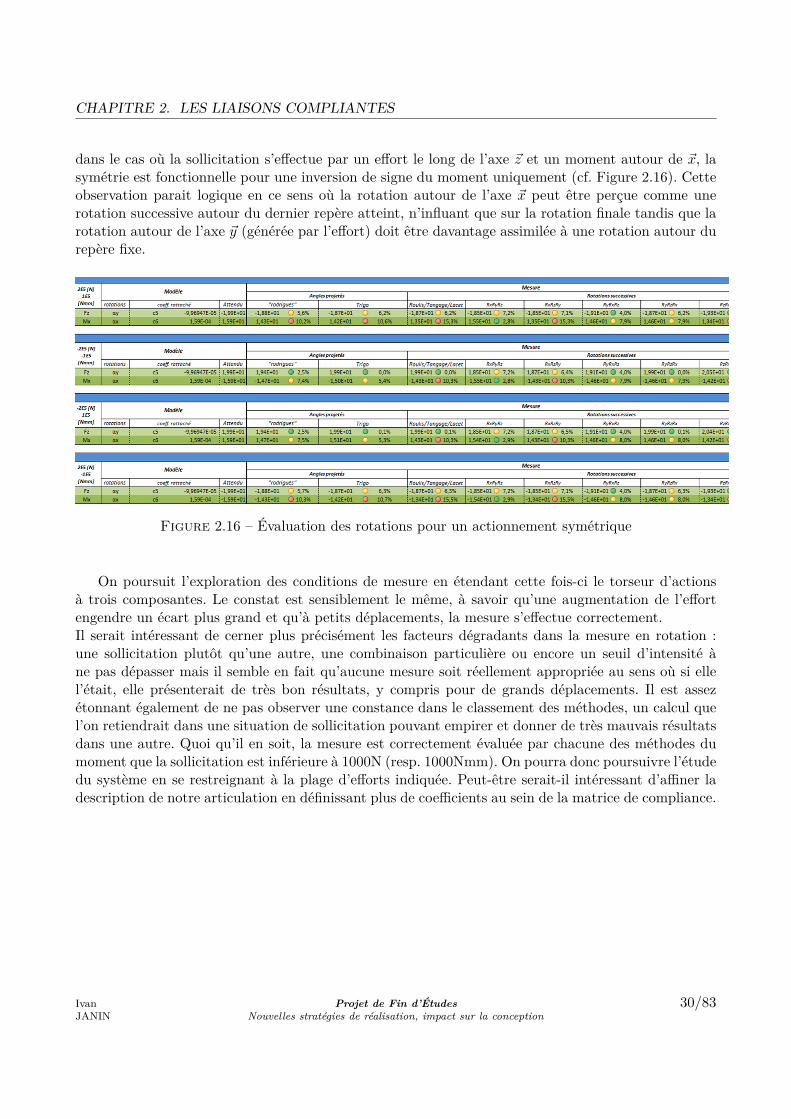
dans le cas où la sollicitation s’effectue par un effort le long de l’axe ~z et un moment autour de ~x, lasymétrie est fonctionnelle pour une inversion de signe du moment uniquement (cf. Figure 2.16). Cetteobservation parait logique en ce sens où la rotation autour de l’axe ~x peut être perçue comme unerotation successive autour du dernier repère atteint, n’influant que sur la rotation finale tandis que larotation autour de l’axe ~y (générée par l’effort) doit être davantage assimilée à une rotation autour durepère fixe.
Figure 2.16 – Évaluation des rotations pour un actionnement symétrique
On poursuit l’exploration des conditions de mesure en étendant cette fois-ci le torseur d’actionsà trois composantes. Le constat est sensiblement le même, à savoir qu’une augmentation de l’effortengendre un écart plus grand et qu’à petits déplacements, la mesure s’effectue correctement.Il serait intéressant de cerner plus précisément les facteurs dégradants dans la mesure en rotation :une sollicitation plutôt qu’une autre, une combinaison particulière ou encore un seuil d’intensité àne pas dépasser mais il semble en fait qu’aucune mesure soit réellement appropriée au sens où si ellel’était, elle présenterait de très bon résultats, y compris pour de grands déplacements. Il est assezétonnant également de ne pas observer une constance dans le classement des méthodes, un calcul quel’on retiendrait dans une situation de sollicitation pouvant empirer et donner de très mauvais résultatsdans une autre. Quoi qu’il en soit, la mesure est correctement évaluée par chacune des méthodes dumoment que la sollicitation est inférieure à 1000N (resp. 1000Nmm). On pourra donc poursuivre l’étudedu système en se restreignant à la plage d’efforts indiquée. Peut-être serait-il intéressant d’affiner ladescription de notre articulation en définissant plus de coefficients au sein de la matrice de compliance.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
30/83

CHAPITRE 3. LES MÉCANISMES PARALLÈLES
Chapitre 3
Les mécanismes parallèles
1 GénéralitésUn mécanisme parallèle se distingue d’un mécanisme série par la présence de chaînes cinématiques
fermées, l’organe terminal étant relié à la base par plusieurs chaines cinématiques indépendantes. Lesplus répandus sont connus sous des dénominations comme "plate-forme de Gough-Stewart" [24], "ro-bot Delta" [25], tombé dans le domaine public depuis 2007 ou encore "l’oeil agile" [26], proposé parC.Gosselin. Ils présentent plusieurs avantages dont l’augmentation de la raideur et de la précisionainsi que les charges et dynamiques accessibles. En contrepartie, leurs inconvénients majeurs sont : unespace de travail relativement réduit ainsi qu’une plus grande complexité de conception, modélisationet de commande en raison de leur comportement non linéaire. Enfin, l’interconnexion de plusieurschaînes cinématiques ne garantit pas nécessairement une augmentation de la raideur en proportionsattendues, celle-ci se trouvant souvent dégradée par la présence de déformations élastiques localiséesau niveau des articulations et distribuées au niveau des liens.En vue d’exploiter les avantages précédemment cités, tout en contournant un certain nombre d’in-convénients, il est indispensable d’analyser finement la raideur équivalente d’un mécanisme parallèlecompliant. Concernant sa modélisation, on recense deux principales approches [27] : l’approche baséecinématique et la méthode des éléments finis (FEM).
L’analyse de la raideur s’effectue généralement au travers de la première approche [4] qui consiste àtraduire le comportement d’éléments compliants à travers un mécanisme à corps rigides : l’évaluationdu déplacement se fait par les approches cinématiques usuelles utilisées pour les mécanismes à corpsrigides tandis que la relation liant l’effort au déplacement est approchée par des ressorts modélisantla raideur du membre compliant ; ce qui explique l’intitulé PRBM 1. Cette approche reste limitée auxdirections utiles de travail et ne peut donc pas convenir pour la caractérisation complète de la rigiditédans l’espace. Certaines erreurs persistent également dans l’idéalisation des éléments flexibles, leurmouvement ne reproduisant pas exactement celui de leur équivalent à corps rigides [28].
La méthode des éléments finis, quant à elle, est utilisée pour résoudre numériquement des équationsaux dérivées partielles. Elle est notamment utilisée dans la déformation des matériaux, exploitant leséquations de la mécanique des solides déformables sur un maillage numérique de la structure étudiée.
1. Pseudo-Rigid-Body Model
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
31/83

CHAPITRE 3. LES MÉCANISMES PARALLÈLES
Figure 3.1 – Synthèse de modélisations pour les mécanismes compliants
Figure 3.2 – Modélisation d’un élément flexible par la méthode PRBM, d’après [4]
On envisage alors d’identifier la matrice de rigidité dans une configuration donnée en procédant àplusieurs simulations pour des orientations et chargements différents. Toutefois, les temps de calculset la confection du modèle se révèlent être deux inconvénients considérables.
En conséquence, on préfère une approche analytique qui se concentre sur la propagation des rai-deurs articulaires au niveau opérationnel à travers l’analyse de l’architecture du mécanisme et plusparticulièrement la façon dont sont inter-connectées les différentes articulations (combinaison sérieou parallèle, longueur des liens, configuration d’étude...). La modélisation par éléments finis trouveranéanmoins une application ultérieure dans la vérification des performances du système.Après l’étude des mouvements statiques pour les manipulateurs série compliants par Svinin & al. [8],l’analyse en raideur pour les mécanismes parallèles par Arai & al. [9] et Oiwa & al. [10], Gosselin[11] introduit une méthode d’analyse des raideurs pour les mécanismes parallèles en considérant lesdéformations élastiques, au niveau des liaisons actives seulement. Depuis, plusieurs travaux tententd’élaborer des modèles analytiques, certains négligeant la déformations d’éléments comme les liens quisont souvent considérés rigides, d’autres ne s’intéressant qu’à une sollicitation extérieure, articulaire ouune combinaison des deux. Malgré les différentes hypothèses, les publications récentes convergent versun même objectif qui réside dans l’expression du déplacement observé en un point de la plateformepar rapport au torseur d’effort (intérieur et/ou extérieur) auquel le mécanisme est soumis.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
32/83

CHAPITRE 3. LES MÉCANISMES PARALLÈLES
2 Méthodes d’estimation de la raideur
2.1 Méthode matricielle
2.1.1 PrésentationLa mise en série (resp. parallèle) de ressorts étant largement explorée, elle pourrait constituer une
référence pour la modélisation de la raideur (resp. compliance) d’un mécanisme. Pour rappel, le calculdu ressort équivalent d’une association en parallèle s’écrit comme la somme des raideurs, traduitpar l’équation (Eq. 3.1) tandis qu’il s’agit de sommer les compliances pour obtenir la complianceéquivalente de ressorts mis bout à bout comme l’illustre l’équation (Eq. 3.2) :
K =∑i
Ki (3.1)
1K
= C =∑i
Ci (3.2)
Ces équations restent vraies lorsque les ressorts ont la même direction de déformation et que les dé-formations ne sont pas amplifiées ou mutuellement affectées. Les mécanismes compliants ne répondantpas aux précédents critères, on ne peut pas avoir directement recours à cette analogie pour calculerla raideur équivalente d’un mécanisme, d’où l’introduction de méthodes spécifiques visant à corrigerl’expression des raideurs et compliances. A terme, on doit être en mesure de caractériser le mécanismepar une raideur équivalente Keq, c’est-à-dire pouvoir écrire : F = Keq∆X avec ∆X désignant les petitsdéplacements et F le torseur d’actions au niveau de la plateforme.
Développée dans le domaine de l’architecture pour analyser des ponts ou autres structures entreillis [29, 30], l’analyse par la méthode de transport matriciel est particulièrement adaptée pour lesarchitectures cartésiennes aux liaisons charnières circulaires et permet de transporter une matrice decompliance d’un repère à un autre selon la relation :
C∗i = JCiJ
T (3.3)
Avec C∗i : matrice de compliance du ième élément exprimée dans un autre repère. En rappelant
que l’expression de la raideur est obtenue par inversion de de celle de la compliance, l’expression dela raideur équivalente s’écrit :
X = CF (3.4)⇒ F = C−1X = KX (3.5)⇒ K∗
i = J−TC−1i J−1 (3.6)
2.1.2 ModélisationDans une première partie, nous discutons de l’approche générique adoptée dans le cas de méca-
nismes série. Nous traitons ensuite les mécanismes parallèles. Il est important de préciser qu’une seuleet même méthode est utilisée dans les deux situations mais qu’une démarche progressive inspirée de[31] facilite l’intégration des notations. Seules les grandes étapes de calcul sont introduites de manière
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
33/83

CHAPITRE 3. LES MÉCANISMES PARALLÈLES
à identifier les termes de la formule réduite et juger de ses limites vis-à-vis d’une singularité ou del’hyperstatisme d’un mécanisme.
Figure 3.3 – Modèle série
1) Modélisation série :
Il s’agit ici de modéliser la raideur équivalented’un manipulateur série au niveau de son extrémité.Pour conserver la généricité de la méthode, chacundes m éléments (articulations et liens) est assimilé àun membre flexible avec une matrice 6x6 de com-pliance locale Cij , où ’i’ fait référence au numéro dela chaine série à laquelle l’élément j appartient. Ennotant eij la matrice 6x1 de déformation et fij letorseur d’actions 6x1 rattachés à l’élément ij, tousdeux exprimés dans un même repère de référence fixe,on a :
eij(6∗1) =
δxijδyijδzijδαxijδαyijδαzij
= Cij(6∗6) ∗ fij(6∗1) (3.7)
La formulation précédente peut être généralisée à l’échelle du mécanisme en regroupant l’ensembledes déformations sous une même matrice eij :
eij =
ei1ei2...eim
=
Ci1
Ci2. . .
Cim
fi1fi2...fim
= CijF ij (3.8)
A ce stade, la méthode se heurte à la connaissance des efforts localisés. En conséquence, il estnécessaire d’exprimer les efforts articulaires en fonction de l’effort Fi agissant sur l’organe terminal etrelier les déformations locales au déplacement de l’effecteur de manière à se ramener à une expressiondu type : ∆Xi = CeqFi. Pour ce faire, on exploite la définition du Jacobien J (6x6m) tel que :
eij = CijF ij = CijJTFi (3.9)
⇒ ∆Xi = Jeij = JCijJTFi = CeqFi (3.10)
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
34/83

CHAPITRE 3. LES MÉCANISMES PARALLÈLES
Comme suggéré dans [32], on peut également envisager travailler avec des sous-matrices Jij , reliantdirectement les déformations de l’élément ij à celles de l’effecteur. En observant que le déplacementde l’extrémité (∆Xi) résulte de la somme des déformations élastiques des éléments (eij) exprimées auniveau de l’effecteur, puis en procédant de même que précédemment (déplacement des efforts articu-laires au niveau de l’effecteur et expression des efforts articulaires en fonction de l’effort généralisé),la relation devient :
∆Xi =m∑j=1
∆Xij =m∑j=1
Jijeij =m∑j=1
JijCijFij =m∑j=1
JijCijJijTF = JCijJ
TFi (3.11)
Avec J = [Ji1 Ji2 ... Jim] | Cij = diag(Ci1, Ci2, ..., Cim)
On retrouve la propriété des robots série selon laquelle le jacobien J peut être découplé et segmentéen sous-matrices Jij rattachées aux articulations respectives. Cette formulation permet notammentd’aborder la compliance équivalente comme étant la somme des compliances transportées au niveaude l’effecteur. En plus de la similitude avec la mise en série de ressorts, on s’affranchit du JacobienJ à proprement parler en ne considérant que les transformations JijCijJijT , l’expression de Jij étantfournie dans de nombreux travaux [33, 23, 34, 35] :
Jij =(ijRT [ijPT⊗]ijRT
0 ijRT
)(3.12)
où ijRT désigne la matrice de rotation du repère local Rij au repère rattaché à l’effecteur RT .ijPT = [ijPTx, ijPTy, ijPTz]T correspond au vecteur translation permettant le passage de Rij à RTexprimé dans le repère local et ijPT⊗ son pré-produit vectoriel tel que :
ijPT⊗ =
0 −ijPTz ijPTyijPTz 0 −ijPTx−ijPTy ijPTx 0
(3.13)
Figure 3.4 – Modèle parallèle
2) Modélisation parallèle :
Un robot parallèle peut être défini comme un en-semble de n chaînes séries rattachées à une mêmeplateforme. En définissant Ksi = Csi
−1, la rai-deur équivalente à l’extrémité d’une chaîne série etJi les jacobiens permettant de passer des déplace-ments au bout d’une chaîne série à l’effecteur, ilvient :
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
35/83

CHAPITRE 3. LES MÉCANISMES PARALLÈLES
∆X︸︷︷︸effecteur
= J1X1 = J2X2 = ... = JnXn
⇒ Keq∆X = F =n∑i=1
Ji−TFi =
n∑i=1
Ji−TKsiJ
−1i︸ ︷︷ ︸
Keq //
∆X (3.14)
On peut constater que :
Keq // =n∑i=1
Ji−TKsiJ
−1i =
n∑i=1
Ji−T (
m∑j=1
JijCijJijT )−1J−1
i =n∑i=1
(m∑j=1
JiJijCijJijTJi
T )−1 (3.15)
⇒ Keq // =n∑i=1
(m∑j=1
JCijJT )−1 =
n∑i=1
C−1i =
n∑i=1
Ki (3.16)
Où Ci et Ki correspondent aux matrices de compliances (resp. raideur) équivalentes de la ième chaînesérie exprimées dans le repère final, celui de l’effecteur.
L’équation (3.16) peut être rapprochée de l’équation (3.1), comme prétendu dans [31]. Après avoiropéré au changement de repère par substitution de (3.12) dans l’équation de transport (3.3), on peutdonc calculer finalement la raideur du mécanisme avec les expressions propres aux ressorts (3.1) et(3.2). Pour cela, il convient donc d’établir les matrices de compliance (resp. raideur) pour chacunedes liaisons et éléments déformables en jeu. Par la suite, on procède au transport de celles-ci au pointd’intérêt choisi. Enfin, l’interconnexion des éléments par mise en parallèle (resp. série) des différentesmatrices conduit à une matrice de compliante globale au niveau du mécanisme qui permet de prédireson comportement pour une sollicitation donnée.
(a) liaison pris-matique
(b) liaison uni-verselle
(c) Mécanismeplan
(d) Micro-manipulateur
Diverses applications résultent de cette méthode, en raisonde sa simplicité de calcul et de la précision des résultats obte-nus. Dans [23] Koseki et al. explicitent le calcul conduisant àl’expression de J dans le cas du transport en translation d’untorseur de rigidité, par une approche logique en 3 temps : le dé-placement du torseur d’actions de l’effecteur à l’articulation parla formule de Varignon, l’introduction des compliances localiséespour les déplacements induits, le retour au niveau de l’effecteurpour quantifier le déplacement final. Ce travail confirme doncl’assimilation du Jacobien à une matrice de changement de re-père avant d’être étendu à la combinaison de la translation et dela rotation. Une démonstration similaire proposée dans [34] met,en plus, l’accent sur un élément essentiel : la prise en compte dela déformation des liens. Bien que non négligée dans
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
36/83

CHAPITRE 3. LES MÉCANISMES PARALLÈLES
(e) structure NINJAsimplifiée
(f) Micro-mécanismeparallèle à3dll
Figure 3.5 – Exemples d’applica-tions, d’après [33, 34, 23]
certains travaux, nombre de documents approximent la rai-deur des liens à une raideur infinie. Nagai & Liu proposentd’ailleurs de déplacer les compliances des liens au niveau ar-ticulaire pour faciliter l’expression du Jacobien dans le casoù on ne considère pas une somme de transports matri-ciels. On retrouve alors l’expression (3.3) avec J défini se-lon (3.12), à la différence près de la composante en transla-tion absente étant donné que le produit vectoriel de la ma-trice de rotation avec le déplacement est nul dans le casd’un système plan. On recense d’autres applications telles que[36, 35, 33] qui fournissent, pour certaines, des modèles en rai-deur prédéfinie pour des blocs élémentaires (U-joint, prismatic-joint).
L’efficacité de la méthode présentée est souvent estimée au moyen d’éléments finis. D’après les pu-blications traitant de cette approche, généralement appliquée à des mécanismes cartésiens comme lesmicro-manipulateurs (cf. Figure 3.5), la méthode est relativement précise puisque les erreurs évoluententre 5% et 10%. Les principales sources d’écarts citées sont :
– l’hypothèse éventuelle de rigidité infinie pour les liens entre les différentes liaisons– l’influence de l’épaisseur ’t’ de l’amincissement sur la précision des résultats– la connaissance précise de chacune des dimensions en jeu (pour une vérification expérimentale)– l’approximation à une structure de type treillis– l’hypothèse de relation linéaire entre les efforts et déplacements
Malgré ces écarts, au demeurant relativement faibles, il est important de noter le gain de tempsde calcul considérable observé pour cette méthode. De plus, la prédiction comportementale à traversdes expressions mathématiques peut être implémentée pour des phases d’optimisation ou servir dansl’évaluation de l’espace de travail, des jeux de paramètres géométriques.
2.2 Méthode du travail virtuelLe calcul de la raideur équivalente par le travail virtuel suit une démarche assez similaire à celle de
la méthode matricielle. Elle apporte cependant quelques particularités tel que le découplage des arti-culations dépendantes et indépendantes, les articulations dépendantes désignant les liaisons présentesdans l’expression du Jacobien, bien que passives sur le plan des sollicitations mécaniques. En effet, si laméthode matricielle approximait toutes les liaisons à des liaisons dépendantes, cette seconde approchedistingue deux Jacobiens, l’un permettant le passage de la plateforme aux articulations dépendantes (J)et l’autre aux articulations indépendantes (Jp), toutes deux passives. Dans le cas de la publication [37],on dénombre ainsi 3 liaisons dépendantes [1θ1, 2θ1, 3θ1] et 6 indépendantes [1θ2, 1θ3, 2θ2, 2θ3, 3θ2, 3θ3],reportés sur la figure 3.6 :
La méthode consiste alors à égaliser le travail (force ∗ déplacement) actif, c’est-à dire celui auniveau des parties actionnées par un torseur d’actions avec le travail passif qui correspond au travail
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
37/83
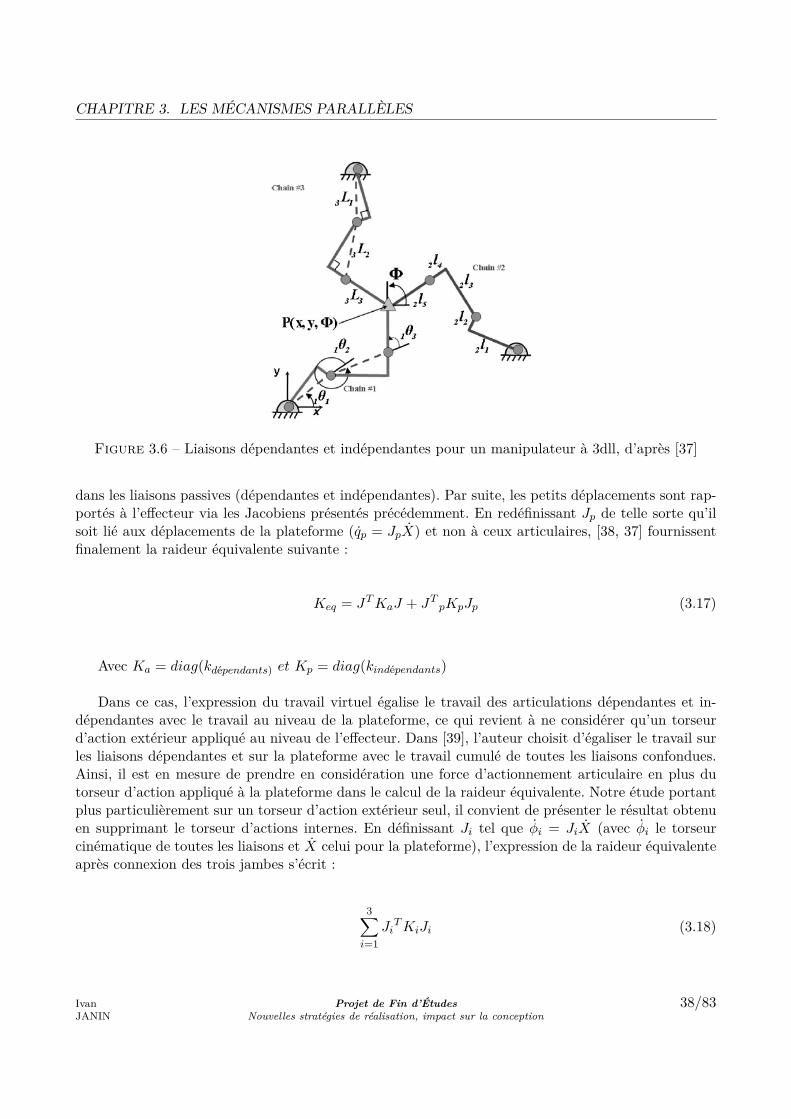
CHAPITRE 3. LES MÉCANISMES PARALLÈLES
Figure 3.6 – Liaisons dépendantes et indépendantes pour un manipulateur à 3dll, d’après [37]
dans les liaisons passives (dépendantes et indépendantes). Par suite, les petits déplacements sont rap-portés à l’effecteur via les Jacobiens présentés précédemment. En redéfinissant Jp de telle sorte qu’ilsoit lié aux déplacements de la plateforme (qp = JpX) et non à ceux articulaires, [38, 37] fournissentfinalement la raideur équivalente suivante :
Keq = JTKaJ + JT pKpJp (3.17)
Avec Ka = diag(kdépendants) et Kp = diag(kindépendants)
Dans ce cas, l’expression du travail virtuel égalise le travail des articulations dépendantes et in-dépendantes avec le travail au niveau de la plateforme, ce qui revient à ne considérer qu’un torseurd’action extérieur appliqué au niveau de l’effecteur. Dans [39], l’auteur choisit d’égaliser le travail surles liaisons dépendantes et sur la plateforme avec le travail cumulé de toutes les liaisons confondues.Ainsi, il est en mesure de prendre en considération une force d’actionnement articulaire en plus dutorseur d’action appliqué à la plateforme dans le calcul de la raideur équivalente. Notre étude portantplus particulièrement sur un torseur d’action extérieur seul, il convient de présenter le résultat obtenuen supprimant le torseur d’actions internes. En définissant Ji tel que φi = JiX (avec φi le torseurcinématique de toutes les liaisons et X celui pour la plateforme), l’expression de la raideur équivalenteaprès connexion des trois jambes s’écrit :
3∑i=1
JiTKiJi (3.18)
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
38/83
CHAPITRE 3. LES MÉCANISMES PARALLÈLES
Avec Ki = diag(ktoutes articulations)
Les travaux [38, 37, 39] confirment, d’une part la mise en parallèle de raideurs par leur somme et,d’autre part, l’équation (3.3) présentée dans la méthode matricielle en n’omettant pas de préciser quela méthode du travail virtuel nécessite d’avoir des liens rigides.
On en vient alors à conclure sur ces deux méthodes, à première vue similaires. Tout d’abord, ilest important de préciser qu’elles ne tiennent pas compte du changement de configuration lors de ladéformations des différents élements et que, par conséquent, il s’agit bien d’une raideur équivalente sta-tique. D’après les résultats présentés, on constate l’importance de la modélisation des liaisons flexibles.D’ailleurs, il est fréquent de considérer des matrices de raideurs 3x3 ou 6x6 pour les articulations selonles directions d’intérêt pour la rigidité équivalente, la méthode demeurant inchangée. Nous disposonsà présent de méthodes relativement faciles à prendre en main pour calculer la raideur équivalentede mécanismes compliants. Comme précisé en introduction, les cas de configurations singulières nousintéressent particulièrement. Dans une prochaine partie, on s’emploiera alors à définir la singularitédes mécanismes parallèles avant d’évaluer l’applicabilité des deux méthodes aux cas de configurationssingulières afin d’évaluer leurs limites et s’interroger sur un moyen de les contourner.
3 Étude de la singularité
En retenant la relation liant les coordonnées d’entrée et de sortie UX+V θ = 0, avec X les coordon-nées généralisées et θ les coordonnées articulaires, la lecture de [40, 41] stipule 3 modes de singularité :
– U singulière : il existera des vitesses opérationnelles non nulles pour lesquelles les vitesses arti-culaires sont nulles : présence de mouvements infinitésimaux en l’absence de commande
– V singulière : on observera des vitesses articulaires non nulles sans mouvement de la plateforme :on atteint la limite structurelle
– U et V singulières : revient à bouger l’organe terminal du robot avec des actionneurs bloqués etréciproquement
Pour revenir aux deux modélisations de la raideur équivalente, a priori identiques, elles ne secomportent pas de la même manière au voisinage de la singularité. En effet, l’expression de la rai-deur équivalente obtenue par la somme de transformations géométriques doit, théoriquement, resterexploitable même si le mécanisme est en singularité. A l’inverse, la méthode utilisant les Jacobiens ren-contrera un problème dans le calcul des Jacobiens inverses subissant une chute de rang à la singularité.Pour vérifier l’équivalence des deux modèles (méthode matricielle et méthode du travail virtuel), onpourra dans un premier temps chercher à évaluer leurs proximité à travers un modèle hors singularitéavant de revenir sur cette configuration particulière.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
39/83

CHAPITRE 3. LES MÉCANISMES PARALLÈLES
4 Application des méthodes à des modèles numériquesAprès avoir étudié les différentes méthodes et notamment celle du transport matriciel, nous en
venons à la phase de validation. Il s’agit d’appliquer la méthode à des systèmes séries dans un premiertemps, puis de l’étendre à des modèles parallèles avant de l’appliquer à notre système en configurationsingulière.Les premiers essais effectués sur une liaison seule avec déportation de l’effort par un bloc massif dematière (cf. Figure 3.7) révèlent une erreur maximale de 3,3% entre le modèle analytique et les ré-sultats par éléments finis. On réalise alors une succession de mesures sur des systèmes à complexitécroissante, y compris sur des mécanismes parallèles (cf. Figure 3.8 et Figure 3.9). L’ajout d’éléments ensérie puis la mise en parallèle soulignent le principal défaut de la méthode : les conditions aux limites.En effet, puisque la méthode considère un élément pris individuellement comme étant contraint d’uncôté et sollicité de l’autre, la succession d’éléments entraîne une accumulation d’erreurs. Par ailleurs,on diminue fortement l’erreur en posant l’hypothèse des poutres indéformables au niveau des barres.De plus, la méthode semble cinématiquement admissible puisque l’identification du torseur d’actionen jeu sur la moitié d’un système parallèle symétrique, contraint à se déplacer du champs mesuré lorsde l’application de l’effort sur la plateforme, concorde avec le torseur équivalent calculé au sein de laméthode matricielle.
Figure 3.7 – Application de la méthode matricielle sur une configuration élémentaire
Figure 3.8 – Vérification sur un système série
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
40/83
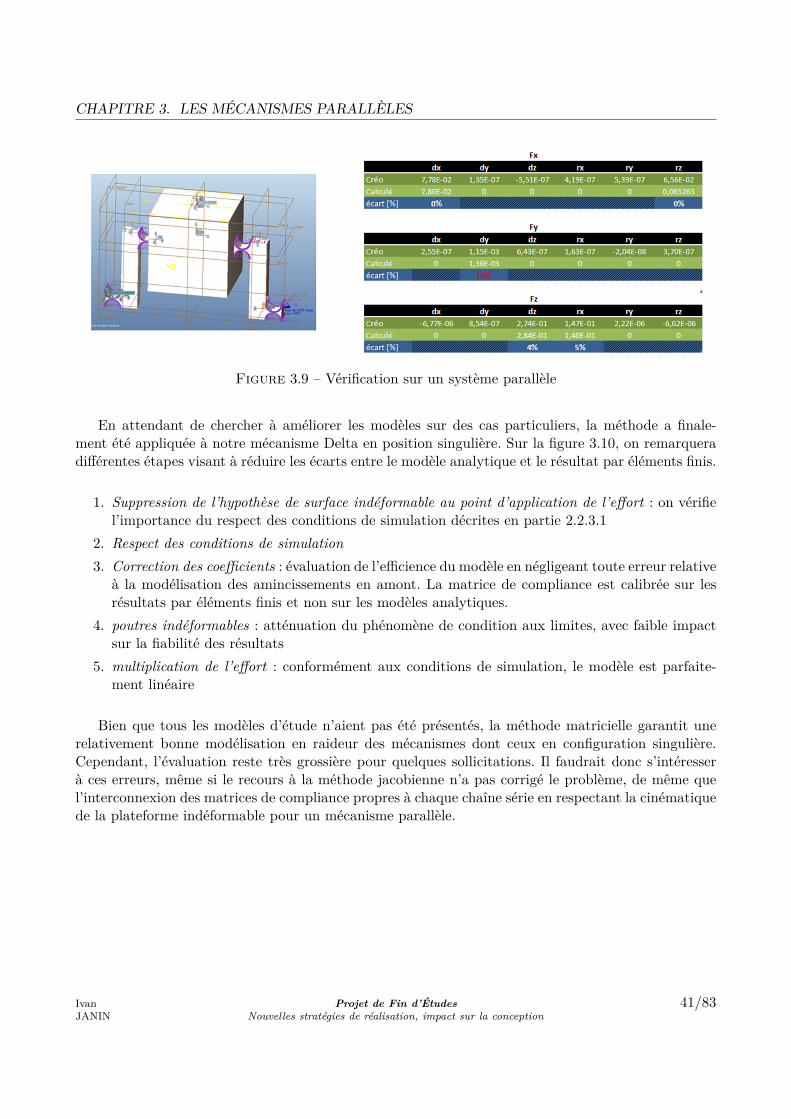
CHAPITRE 3. LES MÉCANISMES PARALLÈLES
Figure 3.9 – Vérification sur un système parallèle
En attendant de chercher à améliorer les modèles sur des cas particuliers, la méthode a finale-ment été appliquée à notre mécanisme Delta en position singulière. Sur la figure 3.10, on remarqueradifférentes étapes visant à réduire les écarts entre le modèle analytique et le résultat par éléments finis.
1. Suppression de l’hypothèse de surface indéformable au point d’application de l’effort : on vérifiel’importance du respect des conditions de simulation décrites en partie 2.2.3.1
2. Respect des conditions de simulation3. Correction des coefficients : évaluation de l’efficience du modèle en négligeant toute erreur relative
à la modélisation des amincissements en amont. La matrice de compliance est calibrée sur lesrésultats par éléments finis et non sur les modèles analytiques.
4. poutres indéformables : atténuation du phénomène de condition aux limites, avec faible impactsur la fiabilité des résultats
5. multiplication de l’effort : conformément aux conditions de simulation, le modèle est parfaite-ment linéaire
Bien que tous les modèles d’étude n’aient pas été présentés, la méthode matricielle garantit unerelativement bonne modélisation en raideur des mécanismes dont ceux en configuration singulière.Cependant, l’évaluation reste très grossière pour quelques sollicitations. Il faudrait donc s’intéresserà ces erreurs, même si le recours à la méthode jacobienne n’a pas corrigé le problème, de même quel’interconnexion des matrices de compliance propres à chaque chaîne série en respectant la cinématiquede la plateforme indéformable pour un mécanisme parallèle.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
41/83
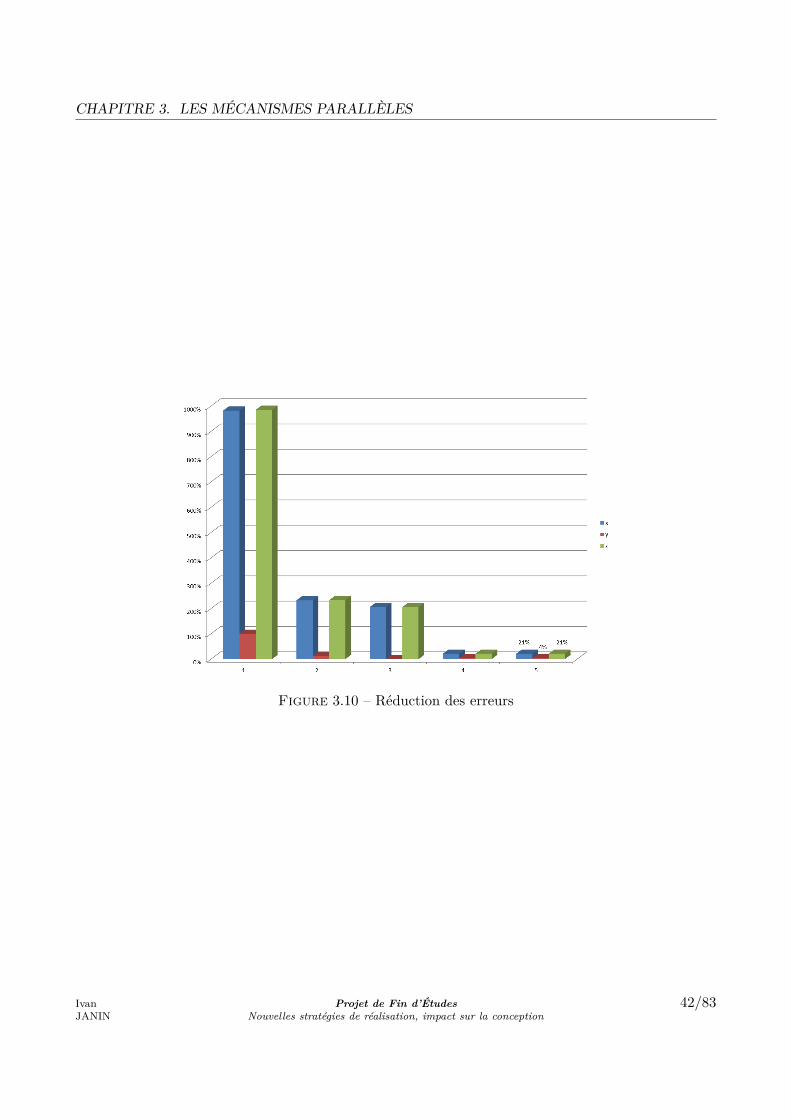
CHAPITRE 3. LES MÉCANISMES PARALLÈLES
Figure 3.10 – Réduction des erreurs
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
42/83
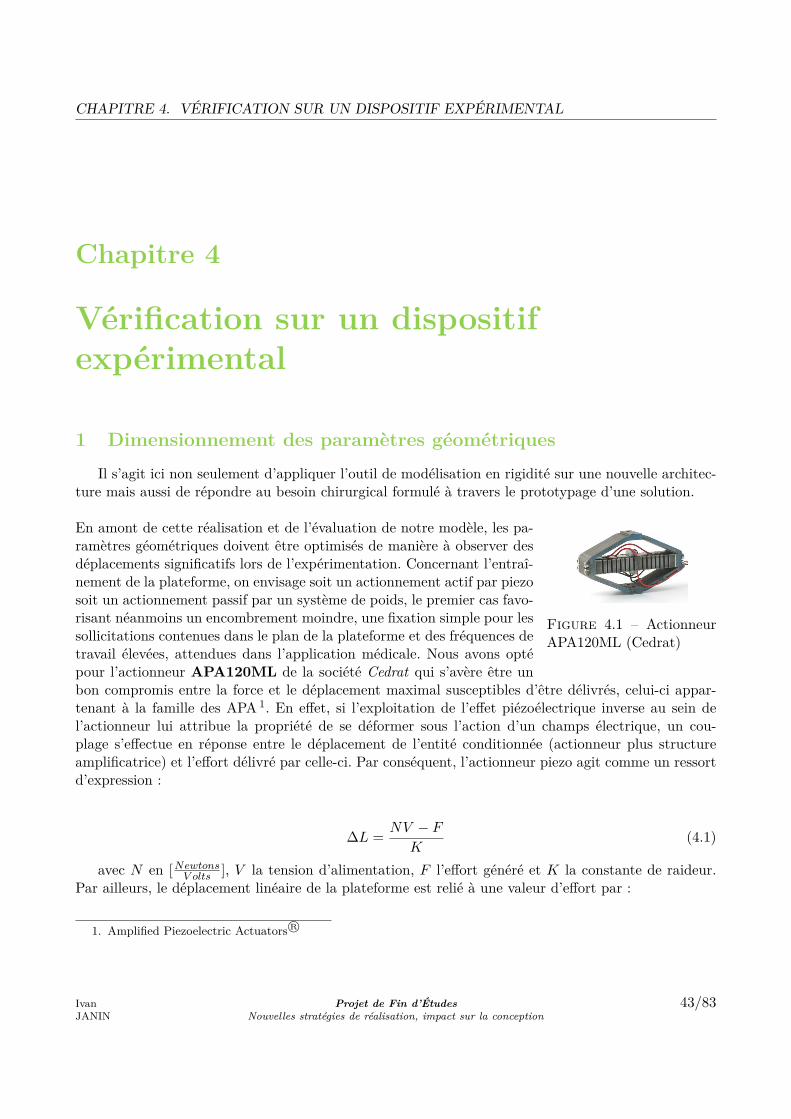
CHAPITRE 4. VÉRIFICATION SUR UN DISPOSITIF EXPÉRIMENTAL
Chapitre 4
Vérification sur un dispositifexpérimental
1 Dimensionnement des paramètres géométriquesIl s’agit ici non seulement d’appliquer l’outil de modélisation en rigidité sur une nouvelle architec-
ture mais aussi de répondre au besoin chirurgical formulé à travers le prototypage d’une solution.
Figure 4.1 – ActionneurAPA120ML (Cedrat)
En amont de cette réalisation et de l’évaluation de notre modèle, les pa-ramètres géométriques doivent être optimisés de manière à observer desdéplacements significatifs lors de l’expérimentation. Concernant l’entraî-nement de la plateforme, on envisage soit un actionnement actif par piezosoit un actionnement passif par un système de poids, le premier cas favo-risant néanmoins un encombrement moindre, une fixation simple pour lessollicitations contenues dans le plan de la plateforme et des fréquences detravail élevées, attendues dans l’application médicale. Nous avons optépour l’actionneur APA120ML de la société Cedrat qui s’avère être unbon compromis entre la force et le déplacement maximal susceptibles d’être délivrés, celui-ci appar-tenant à la famille des APA 1. En effet, si l’exploitation de l’effet piézoélectrique inverse au sein del’actionneur lui attribue la propriété de se déformer sous l’action d’un champs électrique, un cou-plage s’effectue en réponse entre le déplacement de l’entité conditionnée (actionneur plus structureamplificatrice) et l’effort délivré par celle-ci. Par conséquent, l’actionneur piezo agit comme un ressortd’expression :
∆L = NV − FK
(4.1)
avec N en [NewtonsV olts ], V la tension d’alimentation, F l’effort généré et K la constante de raideur.Par ailleurs, le déplacement linéaire de la plateforme est relié à une valeur d’effort par :
1. Amplified Piezoelectric Actuators R©
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
43/83

CHAPITRE 4. VÉRIFICATION SUR UN DISPOSITIF EXPÉRIMENTAL
∆L = CF (4.2)
L’effort finalement appliqué à la structure se traduit donc par un état d’équilibre qui égalise ledéplacement de la structure (4.2) et celui de l’actionneur (4.1). La valeur de l’effort appliqué danscette configuration vaut alors : F = NV
1+KC qui, injecté dans (4.1) permet de déterminer le déplacementà l’équilibre : X = NV C. En jouant sur la tension d’alimentation de l’actionneur et la compliancedu système, on est donc en mesure de régler le déplacement souhaité, comme illustré sur la figure4.2 : on voit clairement que pour augmenter le déplacement final, il convient d’augmenter la tensiond’alimentation et la valeur de compliance C. Par conséquent, on travaillera à tension maximale, ce quiimplique : NV = F0 = 1400 [N ]
(a) C = 6,328µm/N , V = 50V (b) C = 6,328 µm/N , V = 150V
(c) C = 1,808µm/N , V = 50V (d) C = 1,808µm/N , V = 150V
Figure 4.2 – Différents états d’équilibre
Initialement, la direction de travail devait présenter une compliance prépondérante pour qu’àefforts égaux, les autres déplacements soient considérés comme parasites voire négligeables du faitde leur petite amplitude devant celle de translation verticale. Toutefois, l’utilisation d’un capteurd’effort ELPM-T1 disponible au laboratoire limite l’effort mesuré à 50N, soit un déplacement minimalde l’actionneur de 125µm. Afin d’explorer toutes les directions de l’espace lors de la manipulationpour cette phase de validation modèle/réel, on respecte cette contrainte additionnelle en cherchant àoptimiser l’expression (4.3) pour chacune des directions cartésiennes i de l’espace :
Xi = CiF01 +KCi
(4.3)
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
44/83

CHAPITRE 4. VÉRIFICATION SUR UN DISPOSITIF EXPÉRIMENTAL
Figure 4.3 – Paramètres géométriques à déterminer
Pour ce faire, on a recours à la fonction fmincon dont les paramètres d’entrée sont ceux reportéssur la figure 4.3. Dans un souci d’encombrement et au vue des premiers résultats obtenus, la plate-forme qui accueillera la chaîne d’actionnement et de mesure a été paramétrée avec Lp = 30mm. Parailleurs, on conduit la boucle d’optimisation à plusieurs reprises pour contourner les minimas locauxen fixant aléatoirement, pour chaque itération, les variables sur leur plage d’évolution respectives :t=[0.5-5], R=[1-10], b=[10-20], L=[10-50]. L’algorithme doit déboucher sur un couple de paramètresgéométriques pour lequel le déplacement conduisant à l’équilibre est maximum dans les trois direc-tions, bien qu’on favorise légèrement le déplacement vertical en visant 128µm dans les deux courseshorizontales et 130µm pour la dernière, verticale. D’autres critères d’optimisation viennent s’ajouteraux trois déplacements précédents, à savoir : l’augmentation des dimensions b et a = 2R + t afin defaciliter l’usinage ainsi que la réduction du ratio β se situant généralement bien au-dessus des domainesde validité connus pour les modèles analytiques. On obtient :
t = 0.5[mm] | R = 10[mm] | b = 11[mm] | L = 60[mm]
Il est important de souligner que le ratio β en question (0, 05) se trouve sur la borne inférieuredu domaine de validité des modèles analytiques et que, par conséquent, il faudra être vigilant dansl’appréciation des résultats analytiques. On prend soin de réévaluer la matrice de compliance relativeà cette nouvelle configuration qui induit des déplacements théoriques de l’espace 3D suivants :
dx = 128.29[µm] | dy = 129.5[µm] | dz = 128.29[µm]
On remarque que les déplacements évoluent bien autour de 129[µm], inférant une évaluation précisede la pose pour réduire les erreurs dans l’estimation du modèle analytique. Par ailleurs, cette valeurs’avère satisfaisante au regard de la course maximale de l’actionneur APA120ML : 129.6296[µm]. Onpoursuit à présent le raisonnement en comparant les déplacements obtenus avec ceux fournis par uncalcul d’éléments finis sur Creo.Il est difficile de modéliser l’actionneur sur un modèle élément finis, du fait de la force décroissante. Onpourrait alors appliquer une force initiale de 1400N en plus d’une idéalisation ressort mais celle-ci n’estpas disponible en mode "grands déplacements". On choisit donc d’appliquer l’effort d’équilibre déter-miné par le modèle analytique avant de le corriger par une réévaluation de la compliance (∆Xobtenu
Feqth).
La figure 4.4 vérifie le couple de paramètres retenu dans le respect de l’effort maximal fixé à 50N etde la contrainte maximale (479.875 MPa) puisqu’aucun modèle en contraintes n’a été mis en place,faute de formulation analytique au niveau articulaire.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
45/83

CHAPITRE 4. VÉRIFICATION SUR UN DISPOSITIF EXPÉRIMENTAL
Figure 4.4 – Validation des paramètres géométriques (état d’équilibre)
2 Dispositif de mesure en déplacements
2.1 Présentation de la solution
Figure 4.5 – Machine tridimensionnelleBHN 305 de la marque "Mitutoyo"
L’ordre de grandeur de déplacement proposé par l’ac-tionneur et la volonté de concentrer davantage la me-sure sur un déplacement qu’une dimension ont finalementconduit à adopter une instrumentation couramment em-ployée dans le domaine de la métrologie : la machine à me-surer tridimensionnelle. Ce type de solution permet d’ob-tenir avec une grande précision les coordonnées de pointspalpés sur une pièce mécanique. Il reste à définir un empla-cement spécifique, ce pourquoi l’architecture a été pourvued’ailettes (cf. Figure 4.6) afin d’accueillir le palpeur de laMMT. Elles sont au nombre de trois, conférant ainsi unecertaine redondance à la mesure : premièrement pour lessollicitations horizontales qui réduisent le nombre d’alé-sage fonctionnels, la chaîne d’actionnement surplombantet obstruant par la même occasion le passage du palpeur ;deuxièmement, pour renforcer la robustesse de la mesure qui peut être sujette à des perturbationsextérieures, des défauts locaux d’usinage. . . Distantes de 70mm environ de l’effecteur situé au centrede la plateforme, elles appartiennent à l’espace de travail de la MMT caractérisée par des courses dansle plan horizontal de plus de 300mm. La plateforme est également accessible en déplacement verticalpar le bras manipulateur qui peut se déplacer jusqu’à 290mm, le système ne mesurant que 160mm dehauteur.
En résumé, la mesure des déplacements de l’effecteur se fera après convergence du système vers sanouvelle configuration d’équilibre. Automatisée, rapide et précise, cette installation nous exempt decalcul intermédiaire, assurant elle-même le traitement des données en estimant la position de primi-tives géométriques à partir des points de mesure.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
46/83
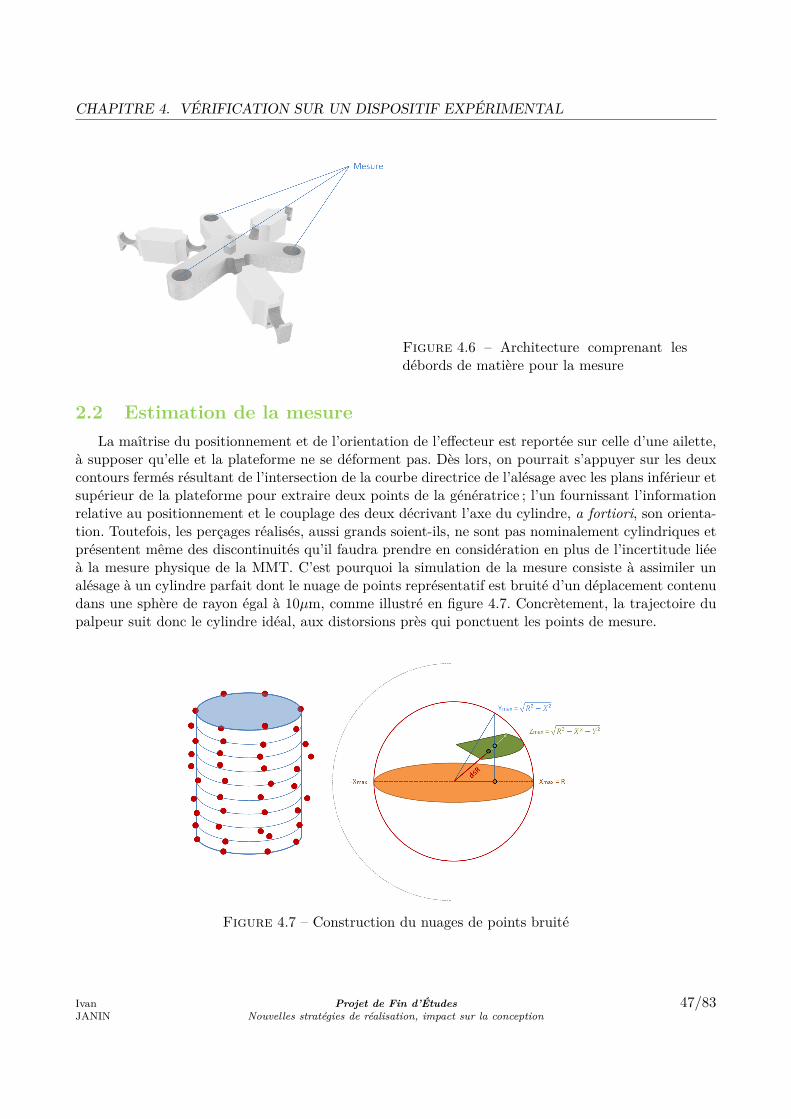
CHAPITRE 4. VÉRIFICATION SUR UN DISPOSITIF EXPÉRIMENTAL
Figure 4.6 – Architecture comprenant lesdébords de matière pour la mesure
2.2 Estimation de la mesureLa maîtrise du positionnement et de l’orientation de l’effecteur est reportée sur celle d’une ailette,
à supposer qu’elle et la plateforme ne se déforment pas. Dès lors, on pourrait s’appuyer sur les deuxcontours fermés résultant de l’intersection de la courbe directrice de l’alésage avec les plans inférieur etsupérieur de la plateforme pour extraire deux points de la génératrice ; l’un fournissant l’informationrelative au positionnement et le couplage des deux décrivant l’axe du cylindre, a fortiori, son orienta-tion. Toutefois, les perçages réalisés, aussi grands soient-ils, ne sont pas nominalement cylindriques etprésentent même des discontinuités qu’il faudra prendre en considération en plus de l’incertitude liéeà la mesure physique de la MMT. C’est pourquoi la simulation de la mesure consiste à assimiler unalésage à un cylindre parfait dont le nuage de points représentatif est bruité d’un déplacement contenudans une sphère de rayon égal à 10µm, comme illustré en figure 4.7. Concrètement, la trajectoire dupalpeur suit donc le cylindre idéal, aux distorsions près qui ponctuent les points de mesure.
Figure 4.7 – Construction du nuages de points bruité
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
47/83
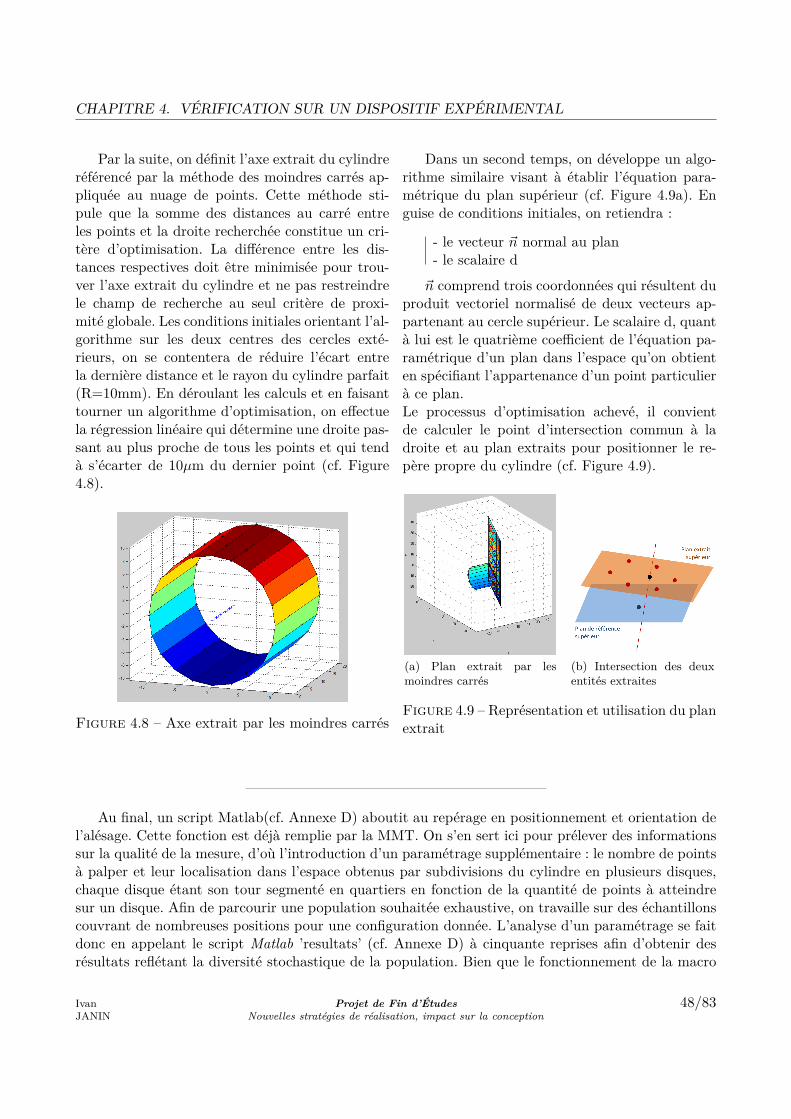
CHAPITRE 4. VÉRIFICATION SUR UN DISPOSITIF EXPÉRIMENTAL
Par la suite, on définit l’axe extrait du cylindreréférencé par la méthode des moindres carrés ap-pliquée au nuage de points. Cette méthode sti-pule que la somme des distances au carré entreles points et la droite recherchée constitue un cri-tère d’optimisation. La différence entre les dis-tances respectives doit être minimisée pour trou-ver l’axe extrait du cylindre et ne pas restreindrele champ de recherche au seul critère de proxi-mité globale. Les conditions initiales orientant l’al-gorithme sur les deux centres des cercles exté-rieurs, on se contentera de réduire l’écart entrela dernière distance et le rayon du cylindre parfait(R=10mm). En déroulant les calculs et en faisanttourner un algorithme d’optimisation, on effectuela régression linéaire qui détermine une droite pas-sant au plus proche de tous les points et qui tendà s’écarter de 10µm du dernier point (cf. Figure4.8).
Figure 4.8 – Axe extrait par les moindres carrés
Dans un second temps, on développe un algo-rithme similaire visant à établir l’équation para-métrique du plan supérieur (cf. Figure 4.9a). Enguise de conditions initiales, on retiendra :
- le vecteur ~n normal au plan- le scalaire d
~n comprend trois coordonnées qui résultent duproduit vectoriel normalisé de deux vecteurs ap-partenant au cercle supérieur. Le scalaire d, quantà lui est le quatrième coefficient de l’équation pa-ramétrique d’un plan dans l’espace qu’on obtienten spécifiant l’appartenance d’un point particulierà ce plan.Le processus d’optimisation achevé, il convientde calculer le point d’intersection commun à ladroite et au plan extraits pour positionner le re-père propre du cylindre (cf. Figure 4.9).
(a) Plan extrait par lesmoindres carrés
(b) Intersection des deuxentités extraites
Figure 4.9 – Représentation et utilisation du planextrait
Au final, un script Matlab(cf. Annexe D) aboutit au repérage en positionnement et orientation del’alésage. Cette fonction est déjà remplie par la MMT. On s’en sert ici pour prélever des informationssur la qualité de la mesure, d’où l’introduction d’un paramétrage supplémentaire : le nombre de pointsà palper et leur localisation dans l’espace obtenus par subdivisions du cylindre en plusieurs disques,chaque disque étant son tour segmenté en quartiers en fonction de la quantité de points à atteindresur un disque. Afin de parcourir une population souhaitée exhaustive, on travaille sur des échantillonscouvrant de nombreuses positions pour une configuration donnée. L’analyse d’un paramétrage se faitdonc en appelant le script Matlab ’resultats’ (cf. Annexe D) à cinquante reprises afin d’obtenir desrésultats reflétant la diversité stochastique de la population. Bien que le fonctionnement de la macro
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
48/83
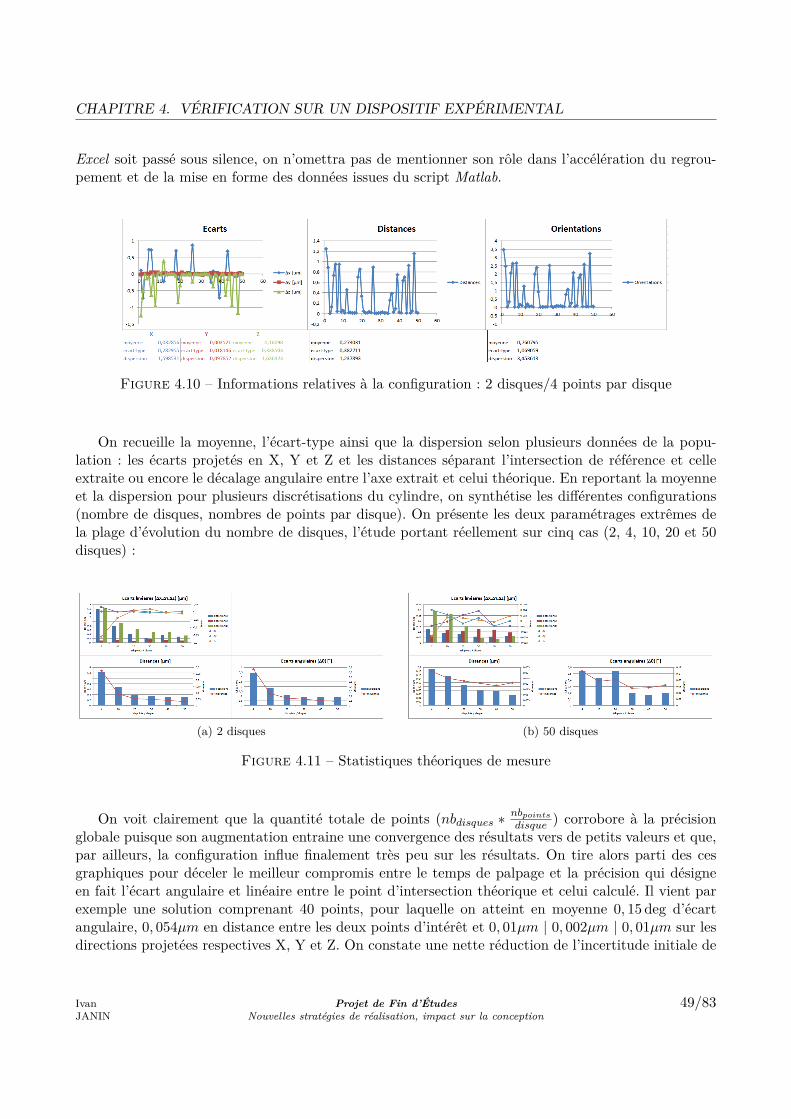
CHAPITRE 4. VÉRIFICATION SUR UN DISPOSITIF EXPÉRIMENTAL
Excel soit passé sous silence, on n’omettra pas de mentionner son rôle dans l’accélération du regrou-pement et de la mise en forme des données issues du script Matlab.
Figure 4.10 – Informations relatives à la configuration : 2 disques/4 points par disque
On recueille la moyenne, l’écart-type ainsi que la dispersion selon plusieurs données de la popu-lation : les écarts projetés en X, Y et Z et les distances séparant l’intersection de référence et celleextraite ou encore le décalage angulaire entre l’axe extrait et celui théorique. En reportant la moyenneet la dispersion pour plusieurs discrétisations du cylindre, on synthétise les différentes configurations(nombre de disques, nombres de points par disque). On présente les deux paramétrages extrêmes dela plage d’évolution du nombre de disques, l’étude portant réellement sur cinq cas (2, 4, 10, 20 et 50disques) :
(a) 2 disques (b) 50 disques
Figure 4.11 – Statistiques théoriques de mesure
On voit clairement que la quantité totale de points (nbdisques ∗ nbpoints
disque ) corrobore à la précisionglobale puisque son augmentation entraine une convergence des résultats vers de petits valeurs et que,par ailleurs, la configuration influe finalement très peu sur les résultats. On tire alors parti des cesgraphiques pour déceler le meilleur compromis entre le temps de palpage et la précision qui désigneen fait l’écart angulaire et linéaire entre le point d’intersection théorique et celui calculé. Il vient parexemple une solution comprenant 40 points, pour laquelle on atteint en moyenne 0, 15 deg d’écartangulaire, 0, 054µm en distance entre les deux points d’intérêt et 0, 01µm | 0, 002µm | 0, 01µm sur lesdirections projetées respectives X, Y et Z. On constate une nette réduction de l’incertitude initiale de
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
49/83

CHAPITRE 4. VÉRIFICATION SUR UN DISPOSITIF EXPÉRIMENTAL
10µm.La description faite dans ce chapitre se réfère à une unique ailette. Il va de soi qu’elle sera répétée àl’identique sur les trois alésages, la concourance théorique des trois étant approchée en section 4.
3 Réalisation du banc de testsLe système et son environnement de mesure validés, nous en venons à réaliser une CAO du dis-
positif expérimental qui comprend notamment le système principal, l’actionneur, le capteur d’effortet un bâti de fixation. Les différents éléments constitutifs reportés sur la figure 4.12 sont abordéssuccessivement afin d’expliquer les choix principaux de conception.
Figure 4.12 – Principales étapes d’assemblage
BâtiLes extrémités de l’actionneur se rapprochant pendant la convergence du système vers son état
d’équilibre, il est nécessaire de prévoir une fixation pour éviter la rupture du contact marbre/action-neur. Cette dernière doit présenter comme principales caractéristiques : un déplacement minimal souseffort, une épaisseur moindre dans un souci d’économie de matière et une surface assurant le recouvre-ment de l’espace occupé par le système. A cet effet, un assemblage de poutres Norcan est employé. Laformation triangulaire retenue concorde avec la répartition des trois jambes du mécanisme compliantsur 120◦.Concernant le raccordement de l’actionneur sur le bâti, une première possibilité consistait à utiliserune tête de vis en butée (cf. Figure 4.13a). Toutefois, le profil simple envisagé comportait une rainurecentrale trop large, rendant alors la vis flottante. L’utilisation d’écrous Norcan à filetage M3 (cf. Fi-gure 4.13b) pourrait pallier la prise manquante, le problème résidant cette fois-ci dans la restriction
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
50/83

CHAPITRE 4. VÉRIFICATION SUR UN DISPOSITIF EXPÉRIMENTAL
spatiale imposée par l’actionneur entre les deux trous de fixation : les écrous proposés mesurent 14mmde large, ce qui induit un espacement minimal des axes de vissage de 14mm, supérieur aux 10mm im-posés. Dans l’alternative finalement retenue (cf. Figure 4.13c), on utilise une poutre à profil doubledont la surface centrale peut être percée en vue d’accueillir le corps des vis et ainsi se ramener à lapremière solution : appui de la tête de vis sur une surface et serrage par écrou sur l’autre extrémité.On s’affranchit ainsi de l’usinage d’une pièce intermédiaire dans le cas du profil simple.
(a) Tête de vis (b) collision de matière (c) Solution retenue
Figure 4.13 – Fixation de l’actionneur sur le bâti
La seconde partie du bâti se situe au niveau des trois poutres verticales, utilisées pour fixer lesystème au-dessus de sa chaîne d’actionnement et de mesure dans le cas de la sollicitation verticale ousimplement au contact de la base fixe pour les autres sollicitations. Un degré de liberté a été maintenuen prévision du jeu de montage vertical, ce qui explique le vissage latéral du système sur les montantsverticaux en guise de glissière plutôt qu’un simple appui-plan en le déposant au-dessus. Ce système decoulissement offre une précision moindre comparée à une vis de réglage mais prime sur sa simplicitéde mise en œuvre et d’utilisation.
Chaîne complète d’actionnement et de mesureParmi les deux organes centraux nécessaires soit à l’actionnement soit à la mesure, on retrouve
le capteur d’effort qui s’intercale entre l’actionneur et une rotule compliante clôturant la chaîne (cf.Figure 4.14). Du côté de l’actionneur, la connexion s’effectue par une pièce intermédiaire vissée aussibien sur l’embout fileté du capteur que sur des tiges filetées rattachées à l’actionneur. Les tiges sontalors vissées à fond de filet et serrées par des écrous à l’intérieur de la structure amplificatrice, l’accèspar la face supérieure étant obstrué par la pièce en question.A l’opposé, on retrouve donc une rotule compliante qui vise à autoriser le rotulage de la plateformeattendu principalement en réponse à des sollicitations horizontales. On veillera à juste titre à ne défor-mer que légèrement cet élément lors de la fixation du "Delta" sur le sous-système d’entraînement et demesure de l’effort puisqu’elle doit octroyer une faible liberté de placement nécessaire à la liaison de tousles éléments mais ne doit pas compromettre leur alignement. Pour ce faire, on pourrait éventuellementavoir recours à une coquille mais devant le manque de temps, on restera simplement minutieux dansle protocole de montage. Elle a été dimensionnée en conséquent du comportement décrit, comme entémoigne un déplacement en traction de 1µm suite à un effort de 50N tandis que le rotulage projetéatteint environ 93µm pour seulement 10N appliqués horizontalement (cf. Figure 4.15). Le centrage
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
51/83

CHAPITRE 4. VÉRIFICATION SUR UN DISPOSITIF EXPÉRIMENTAL
court, quant à lui, garantit une référence de mise en position construite sur la surface extraite de laplateforme et non sur le cylindre extrait de l’alésage. Par ailleurs, quatre trous oblongs ont été percéssur le chapeau de cette pièce en vue d’autoriser une manœuvre en rotation requise du fait de la fixationdes précédents éléments par vissage lors du montage.
Figure 4.14 – Montage du capteur d’effort sur l’actionneur
Figure 4.15 – Déformation caractéristique d’une rotule compliante
SystèmeLe système a déjà été présenté au cours de l’optimisation de ses paramètres géométriques. On
retrouve notamment les ailettes de mesure et les poutres intermédiaires reliant deux liaisons pivotcompliantes sur chacune des trois jambes du mécanisme. Ces dernières présentent des sections pluslarges (30x30mm) que les articulations afin d’asseoir l’hypothèse de poutre indéformable. Les évi-dements de matières, quant à eux sont réalisés à titre de simplification de l’usinage sachant qu’ilsn’influent pas sur les résultats. De plus, le centre de la plateforme est évidé pour accueillir la rotuledont il était question en partie précédente. Enfin, une couronne assure le maintien du delta aux poutresverticales tout en consolidant la structure et en facilitant l’usinage par une forme continue.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
52/83
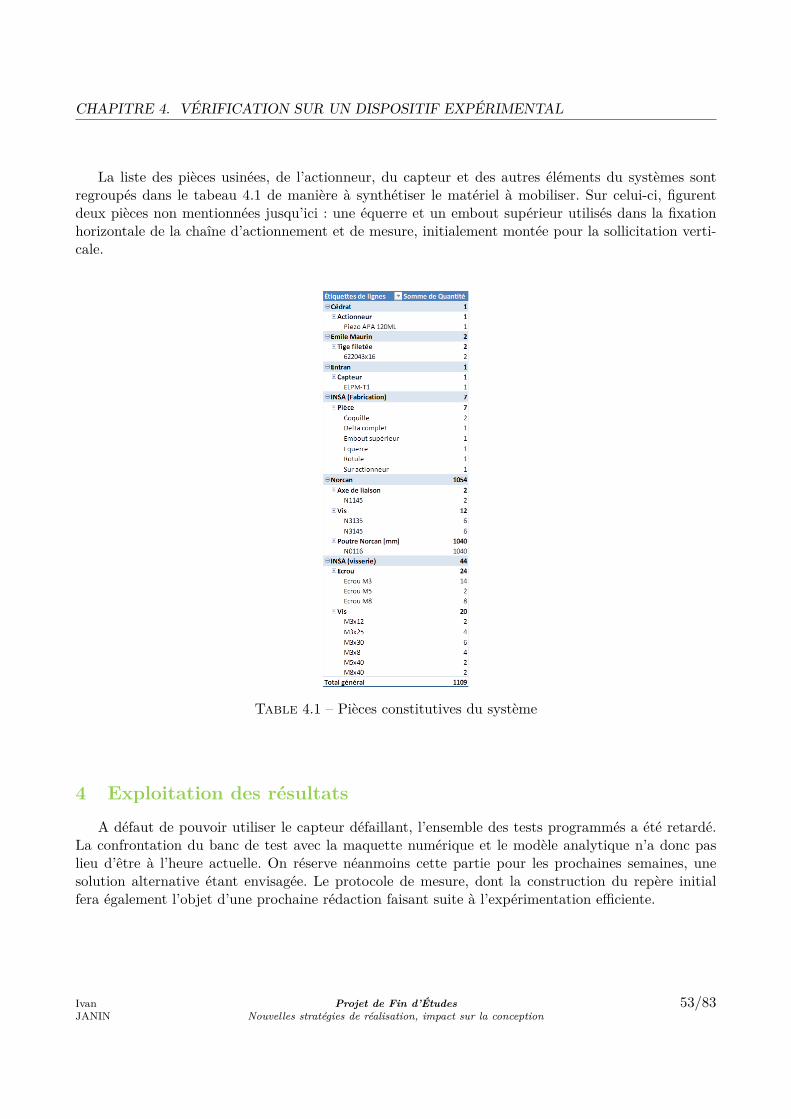
CHAPITRE 4. VÉRIFICATION SUR UN DISPOSITIF EXPÉRIMENTAL
La liste des pièces usinées, de l’actionneur, du capteur et des autres éléments du systèmes sontregroupés dans le tabeau 4.1 de manière à synthétiser le matériel à mobiliser. Sur celui-ci, figurentdeux pièces non mentionnées jusqu’ici : une équerre et un embout supérieur utilisés dans la fixationhorizontale de la chaîne d’actionnement et de mesure, initialement montée pour la sollicitation verti-cale.
Table 4.1 – Pièces constitutives du système
4 Exploitation des résultatsA défaut de pouvoir utiliser le capteur défaillant, l’ensemble des tests programmés a été retardé.
La confrontation du banc de test avec la maquette numérique et le modèle analytique n’a donc paslieu d’être à l’heure actuelle. On réserve néanmoins cette partie pour les prochaines semaines, unesolution alternative étant envisagée. Le protocole de mesure, dont la construction du repère initialfera également l’objet d’une prochaine rédaction faisant suite à l’expérimentation efficiente.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
53/83

CHAPITRE 5. CONCLUSION
Chapitre 5
Conclusion
Forts de caractéristiques avantageuses, les mécanismes compliants sont largement utilisés dans desapplications médicales et nanotechnologiques. Pour autant, leur conception demeure difficile du faitdes méthodes actuellement employées qui nécessitent une mise en œuvre conséquente et incertaine auvoisinage de la singularité que nous voulions exploiter. C’est pourquoi l’objectif du stage réside dansl’identification puis, la modélisation de la raideur des mécanismes compliants au voisinage de cetteconfiguration. Une première étape consistait donc à décrire le comportement des articulations, d’oùl’intervention de la matrice globale de compliance. L’état de l’art a révélé un nombre important demodèles analytiques portant plus particulièrement sur les liaisons à répartition de matière localiséeavec une compliance principale en vue du prototype à réaliser. Après s’être assuré que les conditionsde simulation n’intervenaient pas dans le calcul par éléments finis, les principaux coefficients de lamatrice globale de compliance ont été approuvés, mettant en avant l’incertitude d’autres modèlesdans les directions parasites de la liaison circulaire.La re-calibration de la matrice de compliance articulaire autour des éléments finis, retenus commeréférence, a permis par la suite de s’interroger sur la signification des mobilités obtenues suite à sonutilisation. D’après les résultats observés, le théorème de superposition auquel la méthode a recourssemble adapté pour de petits déplacements, contrairement au cas de plus grands déplacements. Eneffet, nous avons pu constater que cette façon de procéder consiste en une sommation des déformationsrattachées chacune à la configuration initiale, ce qui ne peut être traduit par aucune modélisationen rotation connue, qu’il s’agisse de rotations successives ou projetées. On retiendra néanmoins quecertaines méthodes qu’il reste à déterminer se prêtent mieux à certaines configurations.Il convenait alors d’étendre la modélisation à l’échelle des mécanismes parallèles, d’où la découverte dela méthode matricielle. Celle-ci s’avère simple d’application, s’agissant d’une description géométriquequi nécessite la seule connaissance des matrices de compliances, des éléments constitutifs du systèmeet de leur positionnement relatif. Par conséquent, elle peut être employée au voisinage de la singularitémême si son fonctionnement n’a été validé que par l’expérience. En revanche, un travail est encorenécessaire dans la correction d’importantes erreurs sur quelques cas particuliers.A terme, on exploitera un prototype usiné et dimensionné spécifiquement pour l’expérimentation afind’aborder cette même méthode sur un mécanisme physique et tenter d’appréhender les divergences etécarts en question.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
54/83

Bibliographie
[1] L. Rubbert, S. Caro, P. Renaud et J. Gangloff : A planar rrp compliant mechanism basedon the singularity analysis of a 3-us parallel mechanism. (En cours de validation), 2012.
[2] G. Alici et B. Shirinzadeh : Kinematics and stiffness analyses of a flexure-jointed planarmicromanipulation system for a decoupled compliant motion. In IEEE International Conferenceon Intelligent Robots and Systems, pages 3282–3287, octobre 2003.
[3] Y. Jingjun, P. Xu, S. Minglei, Z. Shanshan, B. Sushing et Z. Guanghua : A new large-stroke compliant joint & micro-nano positioner design based on compliant building blocks. InASME/IFToMM International Conference on Reconfigurable Mechanisms and Robots, pages 409–416, juin 2009.
[4] L.L Howell : Compliant mechanisms. Wiley, 2001.[5] J Paros et L. Weisbord : How to design flexure hinges. Machine Design, 37:151–157, 1965.[6] M. Acer et S. Sabanovic : Comparison of circular flexure hinge compliance modeling methods.
In International Conference on Mechatronics, pages 272–276, April 13-15 2011.[7] W. Xu et T.G. King : Flexure hinges for piezoactuator displacement amplifiers : flexibility,
accuracy, and stress considerations. Precision Engineering, 19:4–10, 1996.[8] T. Smith, V.G. Badami, J.S. Dale et Y. Xu : Elliptical flexure hinges. Rev. Sci. Instrum.,
68:1474–1483, mars 1997.[9] S.T. Smith : Flexures : elements of elastic mechanisms. Gordon and Breach Science, 2000.[10] N. Lobontiu, J.S.N. Paine, E. Garcia et M. Goldfarb : Corner-filleted flexure hinges. ASME
Journal of Mechanical Design, 123:346–352, sept. 2001.[11] N. Lobontiu, S.N Jeffrey, E. O’Malley et M. Samuelson : Parabolic and hyperbolic flexure
hinges : flexibility, motion precision and stress characterization based on compliance closed-formequations. Precision Engineering, 26:183–192, 2002.
[12] N. Lobontiu, J.S.N. Paine, E. Garcia et M. Goldfarb : Design of symmetric conic-sectionflexure hinges based on closed-form compliance equations. Mechanism and Machine Theory,37:477–498, 2002.
[13] C. Gui-Min, J. Jian-Yuan et L. Zhi-Wu : On hybrid flexure hinges. In IEEE InternationalConference on Networking, Sensing and Control, pages 700–704, mars 2005.
[14] Y.K. Yong, T.F. Lu et D.C. Handley : Review of circular flexure hinge design equations andderivation of empirical formulations. Precision Engineering, 32:63–70, 2009.
[15] Y. Wu et Z. Zhou : Design calculations for flexure hinges. Rev. Sci. Instrum., 73(9):3101–3106,2002.
55
BIBLIOGRAPHIE
[16] N. Lobontiu : Compliant mechanisms : design of flexure hinges. CRC Press, novembre 2002.[17] Y. Tseytlin : Notch flexure hinges : an effective theory. Rev. Sci. Instrum., 73(9):3363–3368,
2002.[18] C. Guimin, J. Jianyuan, H. Qi et W. Yingkun : Performance optimization of elliptical flexure
hinge using a modified particle swarm algorithm. In IEEE International Conference on IndustrialTechnology, pages 1180–1185, dec. 2005.
[19] S. Smith, D.G. Chetwynd et D.K. Bowen : Design and assessment of monolithic high precisiontranslation mechanisms. Journal of Physics E : Scientific Instruments, 20(8):977–983, 1987.
[20] W.O. Schotborgh, F.G.M. Kokkeler, H. Trager et van Houten F.J.A.M. : Dimensionlessdesign graphs for flexure elements and a comparison between three flexure elements. PrecisionEngineering, 29:41–47, 2005.
[21] S. Smith, V. Badami, J. Dale et Y. Xu : Elliptical flexure hinges. Rev. Sci. Instrum., 68(3):1474–1483, 1997.
[22] Y.K. Yong et T.F. Lu : Comparison of circular flexure hinge design equations and the derivationof empirical stiffness formulations. IEEE/ASME International Conference on Advanced IntelligentMechatronics, pages 510–515, 2009.
[23] Y. Koseki, T. Tanikawa, T. Arai et N. Koyachi : Kinematic analysis of translational 3-dofmicro parallel mechanism using matrix method. In International Conference on Intelligent Robotsand Systems, 2000.
[24] D. Stewart : A platform with six degrees of freedom. Proceedings of the Institution of MechanicalEngineers, 180:371–386, 1965.
[25] R. Clavel : Delta, a fast robot with parallel geometry. 18th International Symposium onIndustrial Robots, pages 91–100, 1988.
[26] C.M. Gosselin et J.-F. Hamel : The agile eye : a high-performance three-degree-of-freedomcamera-orienting devices. IEEE International Conference on Robotics and Automation, 1:781–786, 1994.
[27] M.Y. Wang : An analysis of the compliant mechanism models. In ASME/IFToMM InternationalConference on Reconfigurable Mechanisms and Robots, pages 377–385, juin 2009.
[28] L.L. Howell et A. Midha : A loop-closure theory for the analysis and synthesis of compliantmechanisms. ASME Journal of Mechanical Design, 118:121–125, 1996.
[29] E.C. Pestel et Leckie F.A. : Matrix Methods in Elasto Mechanics. McGraw-Hill Book Co. Inc.,1963.
[30] H.C. Martin : Introduction to Matrix Methods of Structural Analysis. McGraw-Hill Book Co.Inc., 1966.
[31] W.-K. Yoon, T. Suehiro, Y. Tsumaki et M. Uchiyama : A method for analyzing parallelmechanism stiffness including elastic deformations in the structure. In IEEE/RSJ InternationalConference on Intelligent Robots and Systems, pages 2875–2880, 2002.
[32] H.-H. Pham et I.-M. Chen : Stiffness modeling of flexure parallel mechanism. Precision Engi-neering, 29(4):467–478, 2005.
[33] Q. Xu et Y. Li : Stiffness modeling for an orthogonal 3-puu compliant parallel micromanipulator.In Mechatronics and Automation, Proceedings of the 2006 IEEE International Conference on,pages 124–129, juin 2006.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
56/83
BIBLIOGRAPHIE
[34] K. Nagai et Z. Liu : A systematic approach to stiffness analysis of parallel mechanisms and itscomparison with fem. SICE Annual Conference, 2007.
[35] Q. Liang, D. Zhang, Z. Chi, Q. Song, Y. Ge et Y. Ge : Six-dof micro-manipulator based oncompliant parallel mechanism with integrated force sensor. Elsevier Ltd., 27:124–134, 2010.
[36] J. Huang et Y. Li : Design and analysis of a completely decoupled compliant parallel xy micro-motion stage. IEEE International Conference on Robotics and Biomimetics, pages 1008–1013,2010.
[37] B.-J. Yi, G.B. Chung, H.Y. Na, W.K. Kim et H. Suh : Design and experiment of a 3-dofparallel micromechanism utilizing flexure hinges. IEEE International Conference on Roboticsand Automation, 19(4):604–612, 2003.
[38] G. Cui et Y. Li : Study on stiffness modeling and performance of spatial rotation 4-sps-s pa-rallel robot mechanism. Third International Symposium on Intelligent Information TechnologyApplication, pages 541–544, 2009.
[39] Y. Yue, F. Gao, X. Zhao et Q.J. Ge : Relationship among input-force, payload, stiffnessand displacement of a 3-dof perpendicular parallel micro-manipulator. Mechanism and MachineTheory, 45(5):756–771, 2010.
[40] J.P. Merlet : Parallel manipulators, part 11 : Theory, singular configurations and grassrnanngeometry. Tech. Rep., 79, 1988.
[41] C. Gosselin : Singularity analysis of closed-loop kinematic chains. IEEE International Confe-rence on Robotics and Automation, 6(3):281–290, 1990.
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
57/83

BIBLIOGRAPHIE
Annexes
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
58/83
Annexe A
La macro Excel suivante permet de remplir des tableaux de mesure (cf. Figure A.1), préétablisou rajoutés au fur et à mesure selon l’option choisie à son exécution. Pour ce faire, elle parcourtl’ensemble des fichiers de simulation présents dans un dossier préalablement sélectionné qu’elle traitepar un algorithme Matlab (cf. Annexe B) avant de les réordonner pour chaque configuration. Cettemacro est donc utilisée à la fois dans le calcul des coefficients pour différents maillages mais aussi pourdifférentes sollicitations.
Figure A.1 – Synthèse des déplacements pour le calcul des coefficients
Sub Evaluation_coefficients ()
’ Declaration des variables - choix du dossier et de l’ option de remplissageDim fsoSet fso = CreateObject (" Scripting . FileSystemObject ")nb_fichier = 0Dim NomOnglet As StringSet dossier = CreateObject (" Shell . Application "). BrowseForFolder (& H0&, " choisir un repertoire "
, &H200&, ThisWorkbook .Path)Chemin_donnees = dossier . ParentFolder . ParseName ( dossier . Title ).Path + "\ "fichier = Dir( Chemin_donnees & "*. csv")NomOnglet = ActiveWorkbook . ActiveSheet .Namesollicitation = Left(fichier , InStr (fichier , "-") - 1)Mode = MsgBox (" Partir d un seul template et rajouter bloc au fur et a mesure ?", vbYesNo +
vbQuestion , "Mode de saisie ")
’ Traitement de tous les fichiers : calculs des deplacements et anglesDo While Len( fichier ) > 0
’ Preparation de la zone de copiesollicitation_temp = Left(fichier , InStr (fichier , "-") - 1)If ( sollicitation_temp <> sollicitation ) Then
sollicitation = sollicitation_temp
59
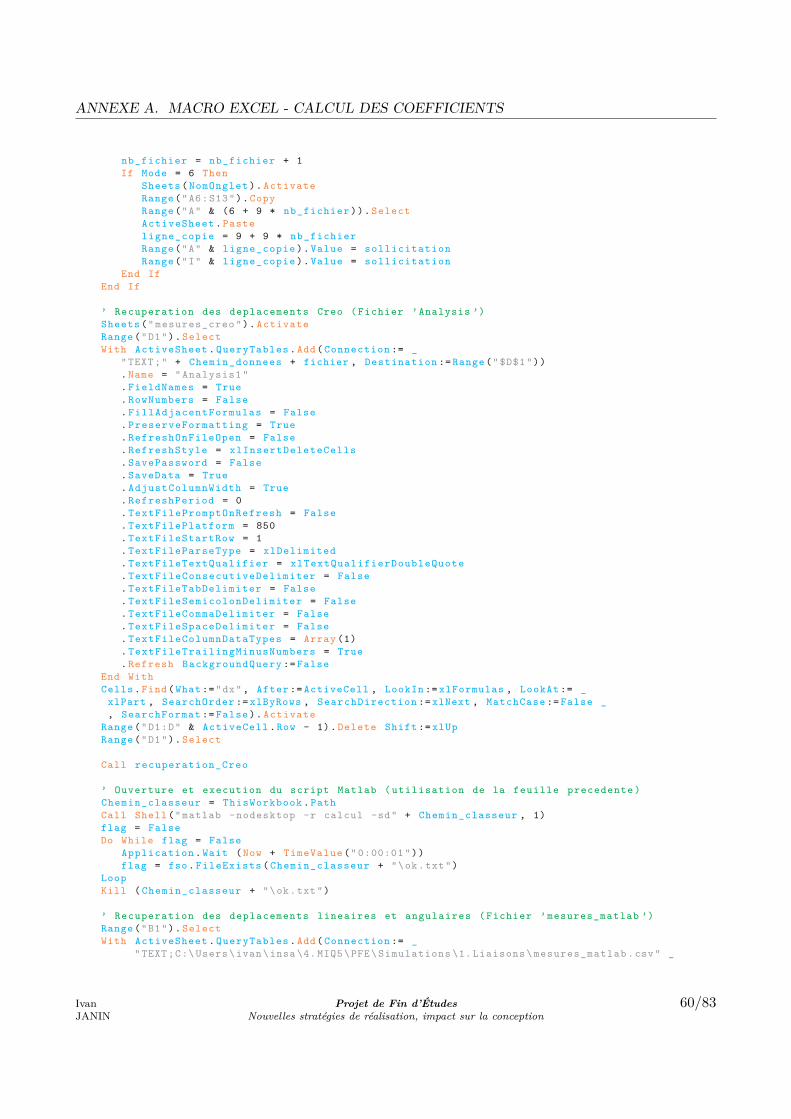
ANNEXE A. MACRO EXCEL - CALCUL DES COEFFICIENTS
nb_fichier = nb_fichier + 1If Mode = 6 Then
Sheets ( NomOnglet ). ActivateRange ("A6:S13").CopyRange ("A" & (6 + 9 * nb_fichier )). SelectActiveSheet . Pasteligne_copie = 9 + 9 * nb_fichierRange ("A" & ligne_copie ). Value = sollicitationRange ("I" & ligne_copie ). Value = sollicitation
End IfEnd If
’ Recuperation des deplacements Creo ( Fichier ’Analysis ’)Sheets (" mesures_creo "). ActivateRange ("D1"). SelectWith ActiveSheet . QueryTables .Add( Connection := _
"TEXT;" + Chemin_donnees + fichier , Destination := Range ("$D$1")).Name = " Analysis1 ". FieldNames = True. RowNumbers = False. FillAdjacentFormulas = False. PreserveFormatting = True. RefreshOnFileOpen = False. RefreshStyle = xlInsertDeleteCells. SavePassword = False. SaveData = True. AdjustColumnWidth = True. RefreshPeriod = 0. TextFilePromptOnRefresh = False. TextFilePlatform = 850. TextFileStartRow = 1. TextFileParseType = xlDelimited. TextFileTextQualifier = xlTextQualifierDoubleQuote. TextFileConsecutiveDelimiter = False. TextFileTabDelimiter = False. TextFileSemicolonDelimiter = False. TextFileCommaDelimiter = False. TextFileSpaceDelimiter = False. TextFileColumnDataTypes = Array (1). TextFileTrailingMinusNumbers = True. Refresh BackgroundQuery := False
End WithCells .Find(What :="dx", After := ActiveCell , LookIn := xlFormulas , LookAt := _
xlPart , SearchOrder := xlByRows , SearchDirection := xlNext , MatchCase := False _, SearchFormat := False ). Activate
Range ("D1:D" & ActiveCell .Row - 1). Delete Shift := xlUpRange ("D1"). Select
Call recuperation_Creo
’ Ouverture et execution du script Matlab ( utilisation de la feuille precedente )Chemin_classeur = ThisWorkbook .PathCall Shell (" matlab -nodesktop -r calcul -sd" + Chemin_classeur , 1)flag = FalseDo While flag = False
Application .Wait (Now + TimeValue (" 0:00:01 "))flag = fso. FileExists ( Chemin_classeur + "\ok.txt")
LoopKill ( Chemin_classeur + "\ok.txt")
’ Recuperation des deplacements lineaires et angulaires ( Fichier ’mesures_matlab ’)Range ("B1"). SelectWith ActiveSheet . QueryTables .Add( Connection := _
"TEXT;C:\ Users \ivan\insa \4. MIQ5\PFE\ Simulations \1. Liaisons \ mesures_matlab .csv" _
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
60/83

ANNEXE A. MACRO EXCEL - CALCUL DES COEFFICIENTS
, Destination := Range ("$B$1")).Name = " mesures_matlab ". FieldNames = True. RowNumbers = False. FillAdjacentFormulas = False. PreserveFormatting = True. RefreshOnFileOpen = False. RefreshStyle = xlInsertDeleteCells. SavePassword = False. SaveData = True. AdjustColumnWidth = True. RefreshPeriod = 0. TextFilePromptOnRefresh = False. TextFilePlatform = 850. TextFileStartRow = 1. TextFileParseType = xlDelimited. TextFileTextQualifier = xlTextQualifierDoubleQuote. TextFileConsecutiveDelimiter = False. TextFileTabDelimiter = False. TextFileSemicolonDelimiter = False. TextFileCommaDelimiter = False. TextFileSpaceDelimiter = False. TextFileColumnDataTypes = Array (1). TextFileTrailingMinusNumbers = True. Refresh BackgroundQuery := False
End With
For i = 1 To Range ("B1"). CurrentRegion .Rows. CountCells (i, "B"). Value = Replace ( Cells (i, "B").Value , "e", "E")
Next iRange ("B1:C1"). MergeRange ("B2:C2"). MergeRange ("B3:C3"). Merge
’ Ecriture dans les cellules prevues à cet effetanalyse = Mid(fichier , InStr (fichier , "-") + 1, 1)ligne_copie = 81 + 9 * nb_fichierSheets ( NomOnglet ). Activate
Select Case analyseCase 1:Sheets (" mesures_creo "). Range ("B1").CopySheets ( NomOnglet ). Range ("D" & ligne_copie ). PasteSpecial Paste := xlPasteValues , Operation :=
xlNone , SkipBlanks _:= False , Transpose := False
Case 2:Sheets (" mesures_creo "). Range ("B2").CopySheets ( NomOnglet ). Range ("D" & ligne_copie + 1). PasteSpecial Paste := xlPasteValues ,
Operation := xlNone , SkipBlanks _:= False , Transpose := False
Sheets (" mesures_creo "). Range ("B6").CopySheets ( NomOnglet ). Range ("D" & ligne_copie + 2). PasteSpecial Paste := xlPasteValues ,
Operation := xlNone , SkipBlanks _:= False , Transpose := False
Sheets (" mesures_creo "). Range ("B9").CopySheets ( NomOnglet ). Range ("E" & ligne_copie + 2). PasteSpecial Paste := xlPasteValues ,
Operation := xlNone , SkipBlanks _:= False , Transpose := False
Case 3:Sheets (" mesures_creo "). Range ("B3").CopySheets ( NomOnglet ). Range ("D" & ligne_copie + 3). PasteSpecial Paste := xlPasteValues ,
Operation := xlNone , SkipBlanks _:= False , Transpose := False
Sheets (" mesures_creo "). Range ("B5").Copy
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
61/83
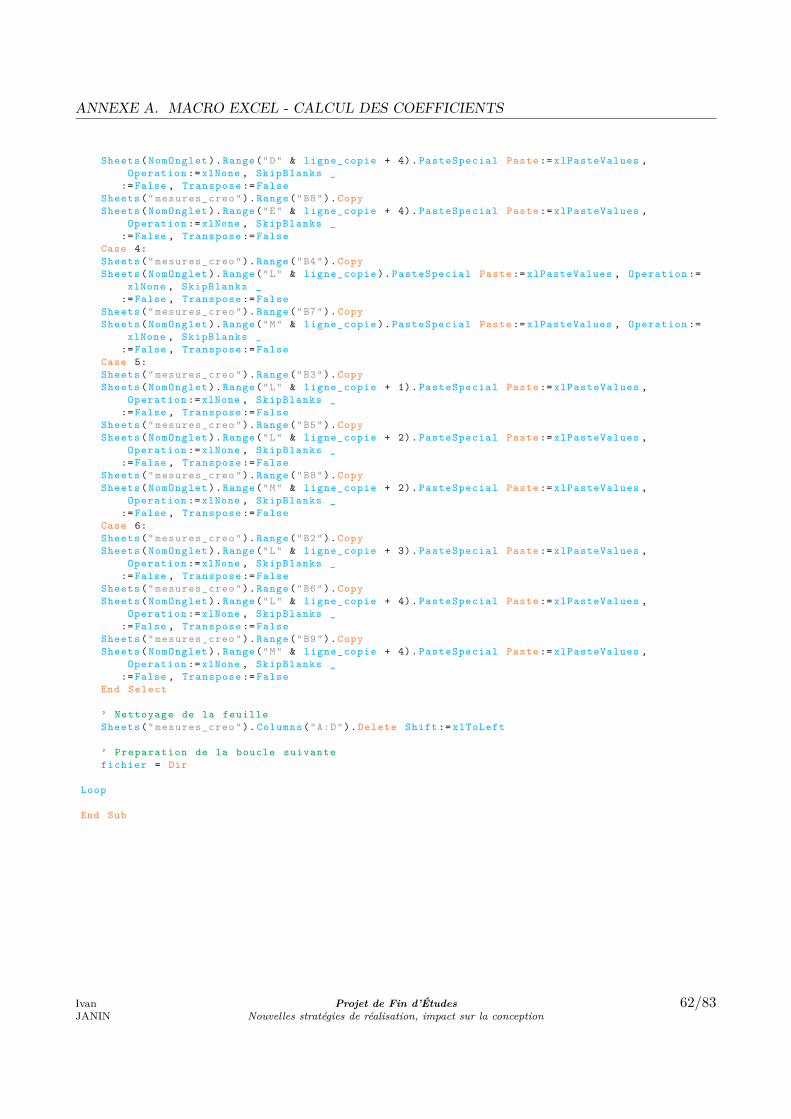
ANNEXE A. MACRO EXCEL - CALCUL DES COEFFICIENTS
Sheets ( NomOnglet ). Range ("D" & ligne_copie + 4). PasteSpecial Paste := xlPasteValues ,Operation := xlNone , SkipBlanks _
:= False , Transpose := FalseSheets (" mesures_creo "). Range ("B8").CopySheets ( NomOnglet ). Range ("E" & ligne_copie + 4). PasteSpecial Paste := xlPasteValues ,
Operation := xlNone , SkipBlanks _:= False , Transpose := False
Case 4:Sheets (" mesures_creo "). Range ("B4").CopySheets ( NomOnglet ). Range ("L" & ligne_copie ). PasteSpecial Paste := xlPasteValues , Operation :=
xlNone , SkipBlanks _:= False , Transpose := False
Sheets (" mesures_creo "). Range ("B7").CopySheets ( NomOnglet ). Range ("M" & ligne_copie ). PasteSpecial Paste := xlPasteValues , Operation :=
xlNone , SkipBlanks _:= False , Transpose := False
Case 5:Sheets (" mesures_creo "). Range ("B3").CopySheets ( NomOnglet ). Range ("L" & ligne_copie + 1). PasteSpecial Paste := xlPasteValues ,
Operation := xlNone , SkipBlanks _:= False , Transpose := False
Sheets (" mesures_creo "). Range ("B5").CopySheets ( NomOnglet ). Range ("L" & ligne_copie + 2). PasteSpecial Paste := xlPasteValues ,
Operation := xlNone , SkipBlanks _:= False , Transpose := False
Sheets (" mesures_creo "). Range ("B8").CopySheets ( NomOnglet ). Range ("M" & ligne_copie + 2). PasteSpecial Paste := xlPasteValues ,
Operation := xlNone , SkipBlanks _:= False , Transpose := False
Case 6:Sheets (" mesures_creo "). Range ("B2").CopySheets ( NomOnglet ). Range ("L" & ligne_copie + 3). PasteSpecial Paste := xlPasteValues ,
Operation := xlNone , SkipBlanks _:= False , Transpose := False
Sheets (" mesures_creo "). Range ("B6").CopySheets ( NomOnglet ). Range ("L" & ligne_copie + 4). PasteSpecial Paste := xlPasteValues ,
Operation := xlNone , SkipBlanks _:= False , Transpose := False
Sheets (" mesures_creo "). Range ("B9").CopySheets ( NomOnglet ). Range ("M" & ligne_copie + 4). PasteSpecial Paste := xlPasteValues ,
Operation := xlNone , SkipBlanks _:= False , Transpose := False
End Select
’ Nettoyage de la feuilleSheets (" mesures_creo "). Columns ("A:D"). Delete Shift := xlToLeft
’ Preparation de la boucle suivantefichier = Dir
Loop
End Sub
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
62/83

Annexe B
Le script Matlab dont il est question permet d’extraire les rotations et déplacements linaires àpartir d’un fichier renseignant les déplacements aux trois points du repère fixé (cf. section 2.3.3). Lesneuf points de mesure ainsi intégrés contribuent effectivement à la création du nouveau repère suite àla déformation du système. Le script permet alors, au choix, d’afficher ou de retourner l’ensemble desdéplacements linéaires et l’intégralité ou une partie des déplacements angulaires selon les méthodesspécifiques à la rotation employées.
% ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗% ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗ Calcu l des de format ions sur Creo ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗% ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗
clear a l l ;format long
% opt ion :% 1 = pour macro ( c a l c u l dans l e cas d ’ une r o t a t i on pure )% 2 = pour macro ( toute s l e s formes de r o t a t i on )% 3 = a f f i c h a g e des r e s u l t a t sopt ion = 1 ;mesures = load ( ’ mesures_creo . csv ’ ) ;
% Recuperat ion des deplacements mesures sur Creo% Point ’ centre ’dx=mesures (1 ) ;dy=mesures (2 ) ;dz=mesures (3 ) ;% Point ’X’dx_X=mesures (4 ) ;dy_X=mesures (5 ) ;dz_X=mesures (6 ) ;% Point ’Z ’dx_Z=mesures (7 ) ;dy_Z=mesures (8 ) ;dz_Z=mesures (9 ) ;
63
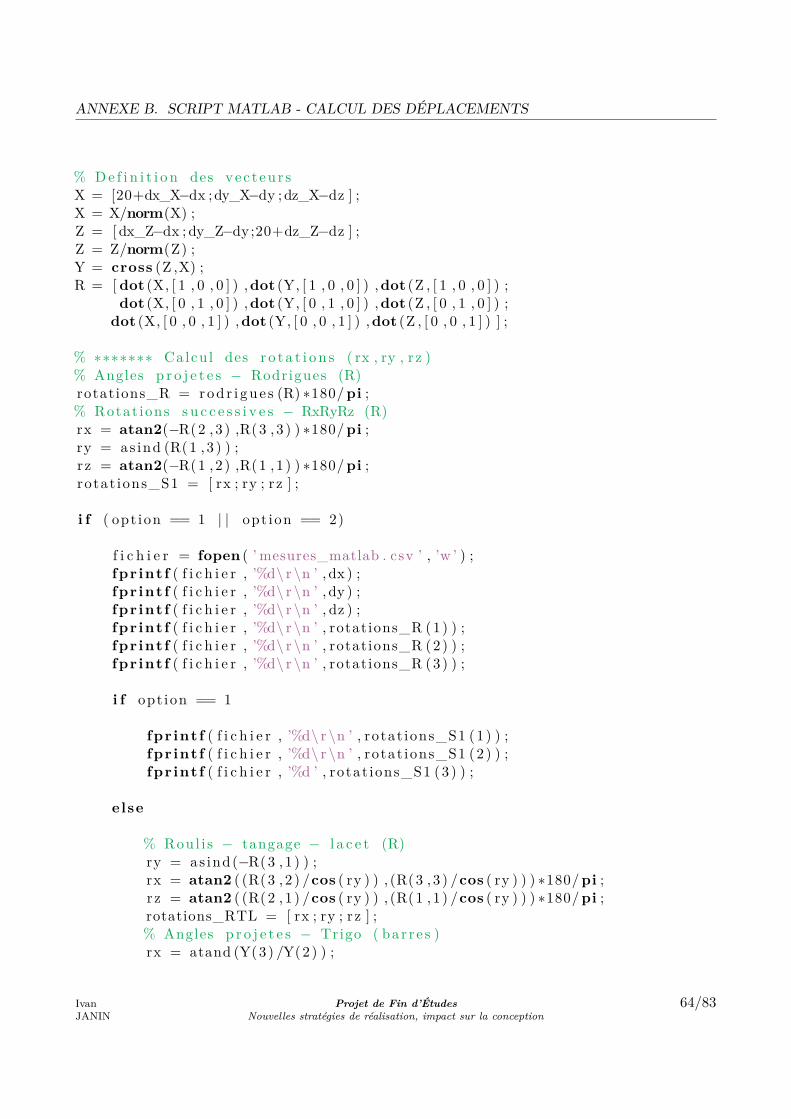
ANNEXE B. SCRIPT MATLAB - CALCUL DES DÉPLACEMENTS
% De f i n i t i o n des vec t eu r sX = [20+dx_X−dx ;dy_X−dy ;dz_X−dz ] ;X = X/norm(X) ;Z = [ dx_Z−dx ; dy_Z−dy;20+dz_Z−dz ] ;Z = Z/norm(Z) ;Y = cross (Z ,X) ;R = [ dot (X, [ 1 , 0 , 0 ] ) ,dot (Y, [ 1 , 0 , 0 ] ) ,dot (Z , [ 1 , 0 , 0 ] ) ;
dot (X, [ 0 , 1 , 0 ] ) ,dot (Y, [ 0 , 1 , 0 ] ) ,dot (Z , [ 0 , 1 , 0 ] ) ;dot (X, [ 0 , 0 , 1 ] ) ,dot (Y, [ 0 , 0 , 1 ] ) ,dot (Z , [ 0 , 0 , 1 ] ) ] ;
% ∗∗∗∗∗∗∗ Calcu l des r o t a t i o n s ( rx , ry , rz )% Angles p r o j e t e s − Rodrigues (R)rotations_R = rodr i gue s (R) ∗180/pi ;% Rotat ions s u c c e s s i v e s − RxRyRz (R)rx = atan2(−R(2 ,3 ) ,R(3 , 3 ) ) ∗180/pi ;ry = as ind (R(1 , 3 ) ) ;rz = atan2(−R(1 ,2 ) ,R(1 , 1 ) ) ∗180/pi ;rotat ions_S1 = [ rx ; ry ; rz ] ;
i f ( opt ion == 1 | | opt ion == 2)
f i c h i e r = fopen ( ’ mesures_matlab . csv ’ , ’w ’ ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , dx ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , dy ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , dz ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotations_R (1) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotations_R (2) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotations_R (3) ) ;
i f opt ion == 1
fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S1 (1) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S1 (2) ) ;fpr intf ( f i c h i e r , ’%d ’ , rotat ions_S1 (3) ) ;
else
% Roul i s − tangage − l a c e t (R)ry = as ind(−R(3 ,1 ) ) ;rx = atan2 ( (R(3 , 2 ) /cos ( ry ) ) , (R(3 , 3 ) /cos ( ry ) ) ) ∗180/pi ;r z = atan2 ( (R(2 , 1 ) /cos ( ry ) ) , (R(1 , 1 ) /cos ( ry ) ) ) ∗180/pi ;rotations_RTL = [ rx ; ry ; rz ] ;% Angles p r o j e t e s − Trigo ( bar r e s )rx = atand (Y(3) /Y(2) ) ;
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
64/83
ANNEXE B. SCRIPT MATLAB - CALCUL DES DÉPLACEMENTS
ry = −atand (X(3) /X(1) ) ;rz = atand (X(2) /X(1) ) ;rotations_T = [ rx ; ry ; rz ] ;% Rotat ions s u c c e s s i v e s − RxRzRy (R)rx = atan2 (R(3 , 2 ) ,R(2 , 2 ) ) ∗180/pi ;ry = atan2 (R(1 , 3 ) ,R(1 , 1 ) ) ∗180/pi ;r z = as ind(−R(1 ,2 ) ) ;rotat ions_S2 = [ rx ; ry ; rz ] ;% Rotat ions s u c c e s s i v e s − RyRxRz (R)rx = as ind(−R(2 ,3 ) ) ;ry = atan2 (R(1 , 3 ) ,R(3 , 3 ) ) ∗180/pi ;r z = atan2 (R(2 , 1 ) ,R(2 , 2 ) ) ∗180/pi ;rotat ions_S3 = [ rx ; ry ; rz ] ;% Rotat ions s u c c e s s i v e s − RyRzRx (R)rx = atan2(−R(2 ,3 ) ,R(2 , 2 ) ) ∗180/pi ;ry = atan2(−R(3 ,1 ) ,R(1 , 1 ) ) ∗180/pi ;r z = as ind (R(2 , 1 ) ) ;rotat ions_S4 = [ rx ; ry ; rz ] ;% Rotat ions s u c c e s s i v e s − RzRxRy (R)rx = as ind (R(3 , 2 ) ) ;ry = atan2(−R(3 ,1 ) ,R(3 , 3 ) ) ∗180/pi ;r z = atan2(−R(1 ,2 ) ,R(2 , 2 ) ) ∗180/pi ;rotat ions_S5 = [ rx ; ry ; rz ] ;% Rotat ions s u c c e s s i v e s − RzRyRx (R) = ang l e s d ’ Eulerrx = atan2 (R(3 , 2 ) ,R(3 , 3 ) ) ∗180/pi ;ry = as ind(−R(3 ,1 ) ) ;rz = atan2 (R(2 , 1 ) ,R(1 , 1 ) ) ∗180/pi ;rotat ions_S6 = [ rx ; ry ; rz ] ;
fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotations_RTL (1) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotations_RTL (2) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotations_RTL (3) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotations_T (1) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotations_T (2) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotations_T (3) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S1 (1) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S1 (2) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S1 (3) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S2 (1) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S2 (2) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S2 (3) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S3 (1) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S3 (2) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S3 (3) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S4 (1) ) ;
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
65/83

ANNEXE B. SCRIPT MATLAB - CALCUL DES DÉPLACEMENTS
fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S4 (2) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S4 (3) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S5 (1) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S5 (2) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S5 (3) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S6 (1) ) ;fpr intf ( f i c h i e r , ’%d\ r \n ’ , rotat ions_S6 (2) ) ;fpr intf ( f i c h i e r , ’%d ’ , rotat ions_S6 (3) ) ;
end
fc lose ( f i c h i e r ) ;f lag = fopen ( ’ ok . txt ’ , ’w ’ ) ;fc lose ( f lag ) ;e x i t
else
disp ( s t r c a t ( ’ dx , ’ , s t r c a t (num2str( dx ) , ’ , [mm] ’ ) ) ) ;disp ( s t r c a t ( ’ dy , ’ , s t r c a t (num2str( dy ) , ’ , [mm] ’ ) ) ) ;disp ( s t r c a t ( ’ dz , ’ , s t r c a t (num2str( dz ) , ’ , [mm] ’ ) ) ) ;disp ( s t r c a t ( ’ rx , ’ , s t r c a t (num2str( rotations_R (1) ) , ’ , [ deg ] ’ ) ) ) ;disp ( s t r c a t ( ’ ry , ’ , s t r c a t (num2str( rotations_R (2) ) , ’ , [ deg ] ’ ) ) ) ;disp ( s t r c a t ( ’ rz , ’ , s t r c a t (num2str( rotations_R (3) ) , ’ , [ deg ] ’ ) ) ) ;
end
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
66/83

Annexe C
Figure C.1 – Expression des matrices de rotation sur Maple
67

ANNEXE D. SCRIPT MATLAB - EVALUATION DE LA MESURE
Annexe D
cylindre.m
% ∗∗∗∗∗∗∗∗∗∗∗ Calcu l des coordonnees ∗∗∗∗∗∗∗∗∗∗∗∗% Calcul c on f i gu r a t i on v e r t i c a l etheta = 2∗pi ∗ ( 0 : nb_elements−1)/nb_elements ;x = repmat ( [ rayon∗cos ( theta ) ] , 1 , nb_disques ) ;z = repmat ( [ rayon∗ sin(− theta ) ] , 1 , nb_disques ) ;y = reshape ( ones ( nb_elements , 1 ) ∗ ( 0 :L/( nb_disques−1) : L) ,1 , nb_disques∗
nb_elements ) ;po in t s = [ x ; y ; z ] ;
% Decalage angu l a i r e − o r i e n t a t i o nR1 = [ cos ( angle_z ) ,−sin ( angle_z ) , 0 ;
sin ( angle_z ) , cos ( angle_z ) , 0 ;0 , 0 , 1 ] ;
R2 = [ 1 , 0 , 0 ;0 , cos ( angle_x ) , sin ( angle_x ) ;
0,− sin ( angle_x ) , cos ( angle_x ) ] ;
R = R2∗R1 ;cent re_super i eur = R∗ [ 0 ,L , 0 ] ’ ;po in t s = R∗ po in t s ;
% ∗∗∗∗∗∗∗∗∗∗∗ Af f i chage graphique ∗∗∗∗∗∗∗∗∗∗∗∗% De f i n i t i o n des vec t eu r s d ’ a f f i c h a g er e f e r e n c e = nb_elements ∗( nb_disques−1)+1;x = [ po in t s ( 1 , 1 : nb_elements ) , po in t s ( 1 , 1 ) ; po in t s (1 , r e f e r e n c e : end) , po in t s
(1 , r e f e r e n c e ) ] ;y = [ po in t s ( 2 , 1 : nb_elements ) , po in t s ( 2 , 1 ) ; po in t s (2 , r e f e r e n c e : end) , po in t s
(2 , r e f e r e n c e ) ] ;z = [ po in t s ( 3 , 1 : nb_elements ) , po in t s ( 3 , 1 ) ; po in t s (3 , r e f e r e n c e : end) , po in t s
(3 , r e f e r e n c e ) ] ;% Dess in ( c y l i nd r e i d e a l )f igure (1 ) ;
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
68/83

ANNEXE D. SCRIPT MATLAB - EVALUATION DE LA MESURE
axis squareaxis equalhold a l l ;xlabel ( ’ x ’ ) ;ylabel ( ’ y ’ ) ;zlabel ( ’ z ’ ) ;grid on ;saveas ( surf (x , y , z ) , ’ c y l i nd r e_r e f e r en c e ’ , ’ f i g ’ ) ;close a l l ;
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
69/83

ANNEXE D. SCRIPT MATLAB - EVALUATION DE LA MESURE
droite.m
function mco = dro i t e ( parametres_droite )
global xglobal yglobal z% De f i n i t i o n des parametres de l a d r o i t eP0 = parametres_droite ( 1 : 3 ) ;U = parametres_droite ( 4 : 6 ) ;% Calcu l de l a somme des d i s t an c e s au ca r r ep rodu i t_vec t o r i e l = [U(3) ∗(y−P0(2) )−U(2) ∗( z−P0(3) ) ;
U(1 ) ∗( z−P0(3) )−U(3) ∗(x−P0(1) ) ;U(2 ) ∗(x−P0(1) )−U(1) ∗(y−P0(2) ) ] ;
mco = trace ( p r odu i t_vec t o r i e l ∗ produ i t_vec to r i e l ’ ) /(norm(U) ^2) ;mco = mco+abs (norm( p r odu i t_vec t o r i e l ( : , end) ) /(norm(U) ^2)−10) ;
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
70/83

ANNEXE D. SCRIPT MATLAB - EVALUATION DE LA MESURE
plan.m
function mco = plan ( parametres_plan )
% De f i n i t i o n des po in t s de passageglobal xglobal yglobal zglobal nb_elements% De f i n i t i o n des parametres du plann = parametres_plan ( 1 : 3 ) ;d = parametres_plan (4 ) ;% Calcu l de l a somme des d i s t an c e s au ca r r ed i s t anc e = [ ( n ’∗ ones (1 , nb_elements ) ) . ∗ [ x ; y ; z ] ; d∗ ones (1 , nb_elements ) ] ;mco = sum(abs (sum( d i s t anc e ) ) ) /(norm(n) ^2) ;
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
71/83
ANNEXE D. SCRIPT MATLAB - EVALUATION DE LA MESURE
resultats.m
clear a l lclose a l l
global xglobal yglobal zglobal nb_elementsopt ions = opt imset ( ’MaxFunEvals ’ ,1000) ;
% ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗ Var iab l e s ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗% Parametres du cy l i nd r erayon = 10 ;L = 20 . 5 ;% Parametres de l a mesures e r i e_d i sque s = [ 2 , 4 , 1 0 , 2 0 , 5 0 ] ;s e r i e_e l ements = [ 4 , 1 0 , 2 0 , 3 0 , 4 0 , 5 0 ] ;angle_z = 0 ;angle_x = 0 ;Rb = 0 . 0 1 ;% parametres a lgor i thmenb_boucles = 50 ;a f f i c h a g e = 0 ;% Autresdelete ( ’ ∗ . tx t ’ ) ;delete ( ’ ∗ . f i g ’ ) ;
for j = 1 : length ( s e r i e_d i sque s )for k = 1 : length ( s e r i e_e l ements )
nb_disques = se r i e_d i sque s ( j ) ;nb_elements = ser i e_e l ements ( k ) ;f i c h i e r = fopen ( s t r c a t (num2str(10∗ j+k−1) , ’ . ’ ,num2str( nb_disques ) ,
’− ’ ,num2str( nb_elements ) , ’ . tx t ’ ) , ’w ’ ) ;bouc le = 1 ;d i f f e r e n c e s = zeros (3 , nb_boucles ) ;o r i e n t a t i o n s = zeros (1 , nb_boucles ) ;
% ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗ Debut a lgor i thme ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗% De f i n i t i o n du cy l i nd r e de r e f e r e n c e : c r e a t i on des po in t sc y l i nd r e
while bouc le <= nb_boucles
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
72/83
ANNEXE D. SCRIPT MATLAB - EVALUATION DE LA MESURE
% Ajout d ’ un bru i t sur l e s po in t s − a f f i c h a g e des po in t sb ru i t = zeros (3 , nb_disques∗nb_elements ) ;for i =1: nb_disques∗nb_elements
bx = 2∗Rb∗rand (1 )−Rb;ymax = sqrt (Rb^2−bx^2) ;by = 2∗ymax∗rand (1 )−ymax ;zmax = sqrt (Rb^2−bx^2−by^2) ;bz = 2∗zmax∗rand (1 )−zmax ;b ru i t ( : , i ) = [ bx ; by ; bz ] ;
endbru i t = po in t s+bru i t ;
% ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗ Cara c t e r i s a t i on ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗% Axe e x t r a i t du cy l i nd r e palpe ( d r o i t e =[P0 ,U] | vec teur 1x6 )x = bru i t ( 1 , : ) ;y = bru i t ( 2 , : ) ;z = bru i t ( 3 , : ) ;centre_bas = ( bru i t ( : , round( nb_elements/2+1) )+bru i t ( : , 1 ) ) /2 ;centre_haut = ( bru i t ( : , r e f e r e n c e+round( nb_elements /2) )+bru i t
( : , r e f e r e n c e ) ) /2 ;depart = [ centre_bas ’ , ( 10^3∗ ( centre_haut−centre_bas ) /norm(
centre_haut−centre_bas ) ) ’ ] ;[ d ro i t e , ~ , f l a g 1 ] = fminsearch (@( parametres_droite ) d r o i t e (
parametres_droite ) , depart , opt ions ) ;P0 = d ro i t e ( 1 : 3 ) ;U = dro i t e ( 4 : 6 ) /norm( d r o i t e ( 4 : 6 ) ) ;% Plan supe r i eu r e x t r a i t ( plan=[a , b , c , d ] | vec teur 1x4 )x = bru i t (1 , r e f e r e n c e : end) ;y = bru i t (2 , r e f e r e n c e : end) ;z = bru i t (3 , r e f e r e n c e : end) ;depart = cross ( b ru i t ( : , end)−bru i t ( : , r e f e r e n c e ) , b ru i t ( : ,
r e f e r e n c e+round( nb_elements /2) )−bru i t ( : , r e f e r e n c e ) ) ’ ;depart = 10^3∗ depart /norm( depart ) ;depart = [ depart ,−depart ∗ bru i t ( : , end) ] ;[ plan ,~ , f l a g 2 ] = fminsearch (@( parametres_plan ) plan (
parametres_plan ) , depart , opt i ons ) ;
% ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗ Evaluat ion ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗% Coordonnees du po int d ’ i n t e r s e c t i o ni f ( f l a g 1==1 && f l a g 2==1)
k_ in t e r s e c t i on = ( plan ( 1 : 3 ) ∗P0’−plan (4 ) ) /( plan ( 1 : 3 ) ∗U’ ) ;d i f f e r e n c e s ( : , bouc le ) = centre_super i eur −(P0’+U’∗
k_in t e r s e c t i on ) ;U = sign (dot ( centre_super i eur ,U’ ) ) ∗U;o r i e n t a t i o n s ( bouc le ) = acosd (dot (U’ , c ent re_super i eur /norm
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
73/83
ANNEXE D. SCRIPT MATLAB - EVALUATION DE LA MESURE
( cent re_super i eur ) ) ) ;% ∗∗∗∗∗∗∗∗∗∗∗ Af f i chage (1 e re bouc le ) ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗i f ( a f f i c h a g e==1 && boucle==1)% Cyl indre de r e f e r e n c ehgload ( ’ c y l i nd r e_r e f e r en c e ’ ) ;% Point b ru i t e ss c a t t e r 3 ( b ru i t ( 1 , : ) , b ru i t ( 2 , : ) , b ru i t ( 3 , : ) , ’+ ’ , ’ b lack ’ ) ;% Droi te e x t r a i r ei =0 :1 : 10 ;po in t s_dro i t e = P0 ’∗ ones (1 , s ize ( i , 2 ) )+U’∗ i ;s c a t t e r 3 ( po in t s_dro i t e ( 1 , : ) , po in t s_dro i t e ( 2 , : ) ,
po in t s_dro i t e ( 3 , : ) , ’+ ’ , ’ b lue ’ ) ;% Plan e x t r a i t[X,Y]=meshgrid (x , y ) ;Z = −(plan (1 ) ∗X+plan (2 ) ∗Y+plan (4 ) ) / plan (3 ) ;surf (X,Y,Z) ;% Enregistrementsaveas ( gcf , s t r c a t (num2str(10∗ j+k−1) , ’−Figure ’ ) , ’ f i g ’ ) ;
endelse
bouc le = boucle −1;end
clear d r o i t e ;clear plan ;close a l l ;bouc le = bouc le+1;
end
% ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗ Ecr i tu r e donnees dans f i c h i e r ∗∗∗∗∗∗∗∗∗∗∗∗∗for i =1: nb_boucles
fpr intf ( f i c h i e r , ’%f | ’ , d i f f e r e n c e s (1 , i ) ) ;end
fprintf ( f i c h i e r , ’ \ r \n ’ ) ;for i =1: nb_boucles
fpr intf ( f i c h i e r , ’%f | ’ , d i f f e r e n c e s (2 , i ) ) ;end
fprintf ( f i c h i e r , ’ \ r \n ’ ) ;for i =1: nb_boucles
fpr intf ( f i c h i e r , ’%f | ’ , d i f f e r e n c e s (3 , i ) ) ;end
fprintf ( f i c h i e r , ’ \ r \n ’ ) ;for i =1: nb_boucles
fpr intf ( f i c h i e r , ’%f | ’ , o r i e n t a t i o n s ( i ) ) ;
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
74/83

ANNEXE D. SCRIPT MATLAB - EVALUATION DE LA MESURE
end
fc lose ( f i c h i e r ) ;
endend
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
75/83
ANNEXE E. MISES EN PLAN
Annexe E
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
76/83
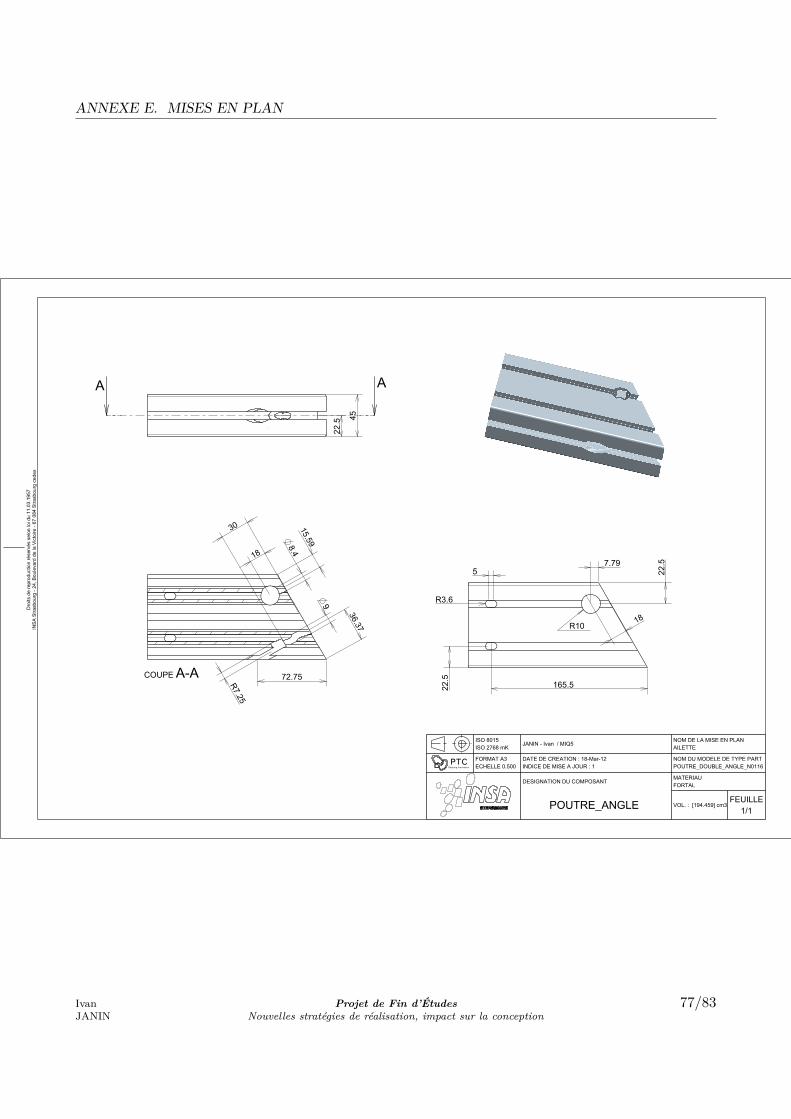
Dro
its d
e re
prod
uctio
n ré
serv
és s
elon
loi d
u 11
.03.
1957
INS
A S
trasb
ourg
- 24
, Bou
leva
rd d
e la
Vic
toire
- 67
084
Stra
sbou
rg c
edex
PTCShaping Innovation
AA
ISO 8015ISO 2768 mK
JANIN - Ivan / MIQ5NOM DE LA MISE EN PLANAILETTE
FORMAT A3ECHELLE 0.500
DATE DE CREATION : 18-Mar-12INDICE DE MISE A JOUR : 1
NOM DU MODELE DE TYPE PARTPOUTRE_DOUBLE_ANGLE_N0116
DESIGNATION DU COMPOSANTMATERIAUFORTAL
POUTRE_ANGLE VOL. : [194.459] cm3FEUILLE
1/1
7.79
A-ACOUPE
5
R3.6
22.5
R10 18
22.5
9
R7.25
72.75
30
36.37
18
22.5
165.5
45
15.598.4
ANNEXE E. MISES EN PLAN
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
77/83

Dro
its d
e re
prod
uctio
n ré
serv
és s
elon
loi d
u 11
.03.
1957
INS
A S
trasb
ourg
- 24
, Bou
leva
rd d
e la
Vic
toire
- 67
084
Stra
sbou
rg c
edex
PTCShaping Innovation
C
C
ISO 8015ISO 2768 mK
JANIN Ivan / MIQ5NOM DE LA MISE EN PLANPOUTRE_CENTRALE
FORMAT A3ECHELLE 0.500
DATE DE CREATION : 18-Mar-12INDICE DE MISE A JOUR : 1
NOM DU MODELE DE TYPE PARTPOUTRE_DOUBLE_N0116
DESIGNATION DU COMPOSANTMATERIAUFORTAL
POUTRE_CENTRALE VOL. : [369.969] cm3FEUILLE
1/1
C-CCOUPE
22.5
4.2R4
21.9
26.1
32.9
37.1
22.5
ANNEXE E. MISES EN PLAN
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
78/83

Dro
its d
e re
prod
uctio
n ré
serv
és s
elon
loi d
u 11
.03.
1957
INS
A S
trasb
ourg
- 24
, Bou
leva
rd d
e la
Vic
toire
- 67
084
Stra
sbou
rg c
edex
PTCShaping Innovation
A
A
ISO 8015ISO 2768 mK
JANIN - Ivan / MIQ5NOM DE LA MISE EN PLANBATI
ECHELLE 0.300FORMAT A3
DATE DE CREATION : 27-Juin-12INDICE DE MISE A JOUR : 1
NOM DU MODELE DE TYPE ASSEMBATI
DESIGNATION DE L'ASSEMBLAGE
ASSEMBLAGE BÂTI VOL. : 795.7 cm3FEUILLE
1/1
Rep. Qté. NOM fichier- DESIGNATION composant
1 2 AXE_LIAISON_N1145-
2 2 ECROU_NORCAN-
3 2 POUTRE_DOUBLE_ANGLE_N0116-
4 1 POUTRE_DOUBLE_N0116-
5 2 VIS_CHC_M8X40- VIS CHC, M 8-40, NF E 27-161
1
2
3
4
5
A-ACOUPE
300
8 3.2
7710
19.6
5
5
R3.6R
10
190
26.5
24.48
36.3
7
38
45
90
ANNEXE E. MISES EN PLAN
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
79/83
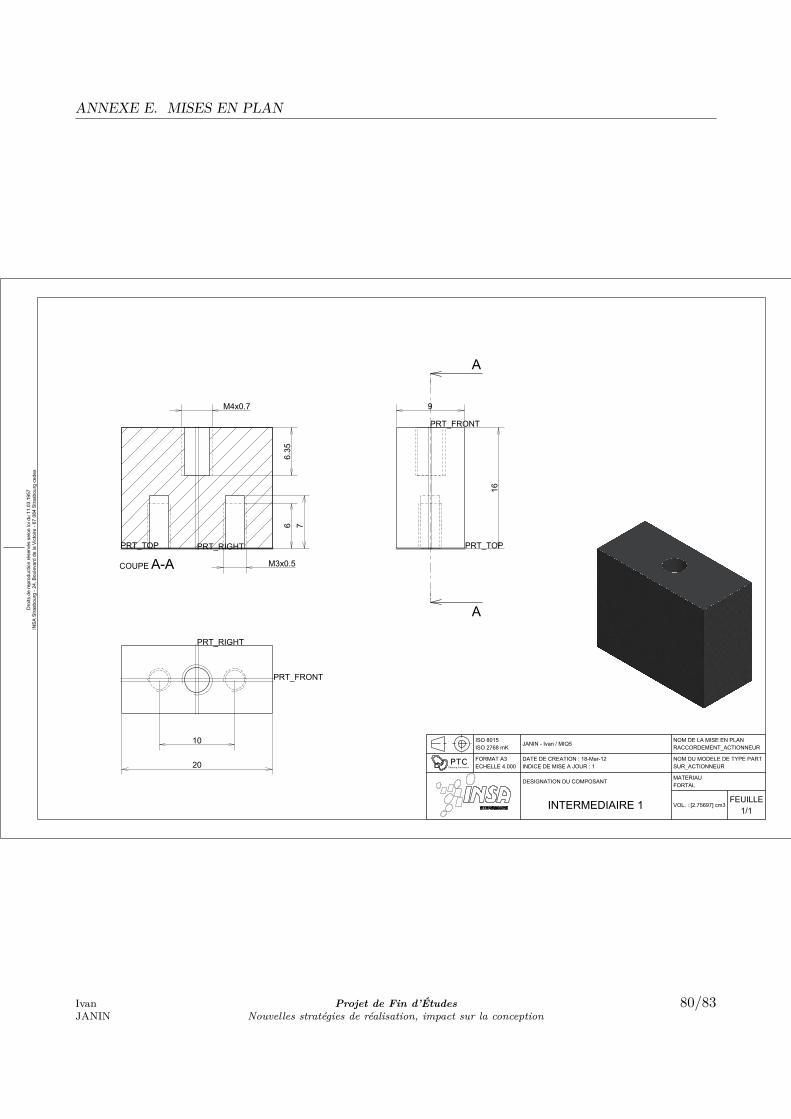
Dro
its d
e re
prod
uctio
n ré
serv
és s
elon
loi d
u 11
.03.
1957
INS
A S
trasb
ourg
- 24
, Bou
leva
rd d
e la
Vic
toire
- 67
084
Stra
sbou
rg c
edex
PTCShaping Innovation
A
A
ISO 8015ISO 2768 mK
JANIN - Ivan / MIQ5NOM DE LA MISE EN PLANRACCORDEMENT_ACTIONNEUR
FORMAT A3ECHELLE 4.000
DATE DE CREATION : 18-Mar-12INDICE DE MISE A JOUR : 1
NOM DU MODELE DE TYPE PARTSUR_ACTIONNEUR
DESIGNATION DU COMPOSANTMATERIAUFORTAL
INTERMEDIAIRE 1 VOL. : [2.75697] cm3FEUILLE
1/1
PRT_TOP
PRT_FRONT
PRT_RIGHTPRT_TOP
PRT_RIGHT
PRT_FRONT
A-ACOUPE
16
9M4x0.7
6.35
M3x0.5
6 7
10
20
ANNEXE E. MISES EN PLAN
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
80/83
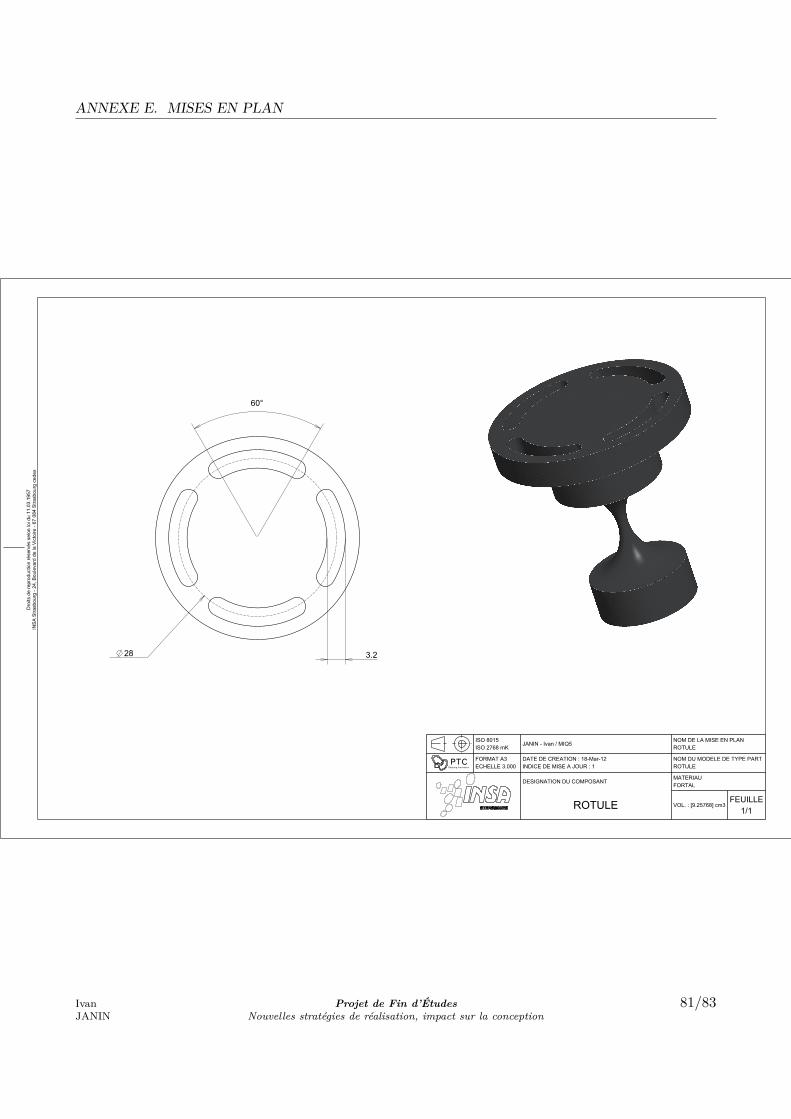
Dro
its d
e re
prod
uctio
n ré
serv
és s
elon
loi d
u 11
.03.
1957
INS
A S
trasb
ourg
- 24
, Bou
leva
rd d
e la
Vic
toire
- 67
084
Stra
sbou
rg c
edex
PTCShaping Innovation
ISO 8015ISO 2768 mK
JANIN - Ivan / MIQ5NOM DE LA MISE EN PLANROTULE
FORMAT A3ECHELLE 3.000
DATE DE CREATION : 18-Mar-12INDICE DE MISE A JOUR : 1
NOM DU MODELE DE TYPE PARTROTULE
DESIGNATION DU COMPOSANTMATERIAUFORTAL
ROTULE VOL. : [9.25768] cm3FEUILLE
1/1
28 3.2
60°
ANNEXE E. MISES EN PLAN
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
81/83
Dro
its d
e re
prod
uctio
n ré
serv
és s
elon
loi d
u 11
.03.
1957
INS
A S
trasb
ourg
- 24
, Bou
leva
rd d
e la
Vic
toire
- 67
084
Stra
sbou
rg c
edex
PTCShaping Innovation
A
A
ISO 8015ISO 2768 mK
JANIN - Ivan / MIQ5NOM DE LA MISE EN PLANRACCORDEMENT_DELTA
FORMAT A3ECHELLE 2.000
DATE DE CREATION : 18-Mar-12INDICE DE MISE A JOUR : 1
NOM DU MODELE DE TYPE PARTEMBOUT_SUPERIEUR
DESIGNATION DU COMPOSANTMATERIAUFORTAL
INTERMEDIAIRE 2 VOL. : [40.6247] cm3FEUILLE
1/1
ECHELLE 1.500
A-ACOUPE
42
37
8
20
M3x0.5
9
36
(M3x0.5) x 4
16
5
18.5
14
ANNEXE E. MISES EN PLAN
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
82/83

Dro
its d
e re
prod
uctio
n ré
serv
és s
elon
loi d
u 11
.03.
1957
INS
A S
trasb
ourg
- 24
, Bou
leva
rd d
e la
Vic
toire
- 67
084
Stra
sbou
rg c
edex
PTCShaping Innovation
ISO 8015ISO 2768 mK
NOM - PRENOM / SPECIALITE: - ) / - - -
NOM DE LA MISE EN PLANEQUERRE
FORMAT A3ECHELLE 2.000
DATE DE CREATION : 18-Mar-10INDICE DE MISE A JOUR : 1
NOM DU MODELE DE TYPE PARTEQUERRE
DESIGNATION DU COMPOSANTMATERIAUUNASSIGNED
COMPOSANT PRO/EVOL. : 8.7 cm3 MASSE : 0.1 kg
FEUILLE1/1
18
4R2.9
1410
25
2
50
101.8
R1.6
5.857.65
8.2
23
21
25
ANNEXE E. MISES EN PLAN
IvanJANIN
Projet de Fin d’ÉtudesNouvelles stratégies de réalisation, impact sur la conception
83/83