RAPPORT DE PROJET 2ème année de MASTER...
34
ELECTRONIQUE EMBARQUEE DU KART ELECTRIQUE RAPPORT DE PROJET 2ème année de MASTER Spécialité : Systèmes Embarqués Présenté par Thomas PIQUET Tuteurs : M. BOURNY M. CLAUDON INSSET 48 rue Raspail 02100 SAINT-QUENTIN Tél :03.23.62.89.59 Fax : 03.23.62.49.35 www.insset.u-picardie.fr [email protected] Systèmes Embarqués dans les Transports
Transcript of RAPPORT DE PROJET 2ème année de MASTER...

ELECTRONIQUE EMBARQUEE DU KART
ELECTRIQUE
RAPPORT DE PROJET
2ème année de MASTER
Spécialité : Systèmes Embarqués
Présenté par
Thomas PIQUET
Tuteurs : M. BOURNY
M. CLAUDON
INSSET 48 rue Raspail 02100 SAINT-QUENTIN Tél :03.23.62.89.59 Fax : 03.23.62.49.35 www.insset.u-picardie.fr [email protected]
Systèmes Embarqués dans les Transports

2
TTTTABLE DES MATIERESABLE DES MATIERESABLE DES MATIERESABLE DES MATIERES 1/2 1/2 1/2 1/2 TTTTABLE DES MATABLE DES MATABLE DES MATABLE DES MATIERESIERESIERESIERES ................................................................................................................................................................................................................................................................................................................................................................................................2222
I I I I ---- IIIINTRODUCTIONNTRODUCTIONNTRODUCTIONNTRODUCTION........................................................................................................................................................................................................................................................................................................................................................................................................................4444
IIIIIIII ----MOYEN MIS EN OEUVREMOYEN MIS EN OEUVREMOYEN MIS EN OEUVREMOYEN MIS EN OEUVRE............................................................................................................................................................................................................................................................................................................................................................4444
2.1 - Moyens humain...............................................................................................4 2.2 - Moyens matériels ............................................................................................4
IIIIIIIIIIII ----CAHIER DES CHARGESCAHIER DES CHARGESCAHIER DES CHARGESCAHIER DES CHARGES....................................................................................................................................................................................................................................................................................................................................................................5555
3.1 - Schéma de principe .........................................................................................6 3.2 - Organigramme.................................................................................................6 3.3 - Liste des composants.......................................................................................7 3.4 - Vitesse du kart.................................................................................................8 3.5 - Température du moteur ...................................................................................8 3.6 - Niveau de charge de la batterie .......................................................................9 3.7 - Affichage des données ..................................................................................10 3.8 - Communication HF.......................................................................................10 3.9 - Station PC......................................................................................................10
IIIIVVVV ----TECHNIQUE & FONCTIONNEMENTTECHNIQUE & FONCTIONNEMENTTECHNIQUE & FONCTIONNEMENTTECHNIQUE & FONCTIONNEMENT....................................................................................................................................................................................................................................................................11111111
4.1 – Communication CAN...................................................................................11 4.1.1 – Identifiants des cartes...................................................................11 4.1.2 – Trames émises sur le bus CAN.....................................................11 4.1.3 – Liaison physique des cartes..........................................................12
4.2 – Module superviseur et affichage ..................................................................13 4.2.1 – Fonctionnement ............................................................................13 4.2.2 – Organigramme du séquenceur de demande de données ..............13 4.2.3 – Organigramme de réception des données ....................................14 4.2.4 – Schéma de la carte........................................................................15
4.3 – Module batterie.............................................................................................16 4.3.1 – Fonctionnement ............................................................................16 4.3.2 – Organigramme .............................................................................17 4.3.3 – Schéma de la carte........................................................................18
4.4 – Module de communication HF.....................................................................19 4.4.1 – Fonctionnement ............................................................................19 4.4.2 – Organigramme .............................................................................19 4.4.3 – Trame HF .....................................................................................20 4.4.4 – Module Xbee.................................................................................20 4.4.5 – Schéma de la carte........................................................................21

3
TABLE DES MATIERESTABLE DES MATIERESTABLE DES MATIERESTABLE DES MATIERES 2/2 2/2 2/2 2/2 4.5 – Module température......................................................................................22 4.5.1 – Schéma de câblage du capteur .....................................................22 4.5.2 – Schéma de la carte........................................................................22 4.5.3 – Fonctionnement du capteur..........................................................23 4.5.4 – Ventilation moteur ........................................................................24
4.6 – Module vitesse..............................................................................................24 4.6.1 – Fonctionnement ............................................................................24 4.6.2 – Schéma de la carte........................................................................26
4.7 – Logiciel Kartstand ........................................................................................27 4.7.1 – Graphiques & statistiques ............................................................28 4.7.2 – Organigramme de fonctionnement...............................................30 4.7.3 – Voyants d’informations ................................................................31 4.7.4 – Notice d’utilisation .......................................................................32
VVVV ----CONCLUSIONCONCLUSIONCONCLUSIONCONCLUSION ................................................................................................................................................................................................................................................................................................................................................................................................................................33334444

4
I – INTRODUCTION
L’IUT de St Quentin dispose d’un kart électrique équipé de batteries au plomb, et souhaite lui intégrer un tableau de bord complet. Il s’agit ici de développer les différents modules constituant ce tableau de bord, à savoir :
- Un module de sonde de température moteur - Un module pour la vitesse du kart - Un module pour l’état des batteries - Un module de communication HF
Les différents modules seront en communication avec une carte superviseur équipée d’un écran OLED qui affichera toutes les informations. La communication entre les modules et la carte mère ce fera via un bus CAN.
II –MOYENS MIS EN OEUVRE
2.1 – Moyens humains :
L’équipe se compose de trois personnes. Un chef de projet M2, un M1 et un L3.
M2 PIQUET Thomas [email protected]
M1 SANKHARE Bilal [email protected]
L3 CONAN Jean-Pierre [email protected]
2.2 – Moyens matériels :
Les différents microcontrôleurs utilisés seront des DSPIC30F4011 de chez Microship qui seront programmés avec un ICD3. Le langage de programmation utilisé sera le C via l’environnement de développement MPLAB. L’ensemble des outils disponibles au labo de l’INSSET est à notre disposition (GBF, Oscilloscope,…).

5
III – CAHIER DES CHARGES
Le tableau de bord sera modulaire. Chaque module sera équipé d’un microcontrôleur DsPIC30F4011 qui dispose de toutes les fonctionnalités nécessaires à la réalisation de chaque module. L’alimentation de l’ensemble des modules ce fera en 12 V. Il est possible d’utiliser une batterie supplémentaire à faible encombrement dédié uniquement à l’alimentation de l’ensemble de l’instrumentation du kart. L’alimentation de l’électronique de commande ainsi que du bus CAN ce fera en 3.3V grâce à une régulation de tension sur chaque module. Une liaison série via un convertisseur série / USB sera présent sur chaque modules afin de pouvoir calibrer et vérifier le bon fonctionnement de celui-ci. La reprogrammation de chaque module sera possible grâce a un programmateur de type PICKIT. Le but est de pouvoir remplacer, supprimer ou ajouter un module facilement. Un ordinateur portable récupérera les données envoyées par le module de communication HF et les affichera dans un premier temps via l’HyperTerminal de Windows.

6
3.1 – Schéma de principe:
3.2 – Organigramme :
Carte acquisition
vitesse
Carte acquisition mesures batteries
Carte acquisition température
moteur
BUS CAN
Ecran OLED
Carte mère
Capteur température 1
Capteur température 2
Capteur vitesse
Tension batterie 1
Tension batterie 2
Tension batterie 3
Tension batterie 4
Ventilation moteurs
BUS CAN
Carte mère
Carte température Carte vitesse
Carte mesure batteries Carte HF
SPI
Carte communication
HF Module xbee-pro

7
3.3 – Liste des composants:
Référence Désignation Quantités prix unité prix
RS: 666-8292 DSPIC30F4011 5 6,67 € 33.35 € RS : 478-9656 Quartz 7.3728 Mhz 5 0.482 € 2.41 € RS : 406-580 FT232RL 1 5.00€ 5.0 € RS :533-9448 Régulateur 3.3 V LM1086CT-3.3 5 2,66 € 13.3 € RS : 461-9759 Contrôleur CAN SN65HVD230D 5 3.83 € 19.16 € RS : 670-2654 Embase mini USB type B 1 0.458 € 0.458 € RS : 479-1457 Bouton poussoir 5 0.224 € 1.12 € RS : 547-3239 Embase droite 2mm 18 contacts 5 0.83 € 4.15 €
F: 1498860 Ecran OLED 1 25,81 € 25.81 € RS: 684-3588 Capteur température IR MLX90614ESF 2 14,06 € 28.12 € RS :436-503 XBEE-PRO 2 36.02 € 72.04 €
RS : 467-0366 Bornier à vis ci 5.08mm, 3cts 1 1.21 € 1.214 € Prix total : 206.1€
RS : Fournisseur Radiospare F : Fournisseur Farnell

8
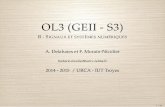
3.4 – Vitesse du kart:
La mesure de la vitesse doit s’effectuer grâce au capteur inductif présent sur le kart (le XS230SAPAL2) qui indique le nombre de tour de l’axe de la roue arrière. La distance maximum du champ de détection du capteur est de 2,2 cm. En fonction du diamètre de cet axe et d’éventuels pignons de transmission présent sur le kart. Celle-ci devra être convertie en Km/h puis envoyé sur le bus CAN.
Dans un premier temps, il est préférable d’utiliser le port série d’un PC pour afficher la vitesse et valider le bon fonctionnement du module.
Dés qu’une des 6 vis présente sur la roue passe devant la tête du capteur, Celui-ci produit une impulsion. C’est le temps entre chacune de c’est impulsions qui permet de déterminer la vitesse du karting.
Le principe de fonctionnement interne d’un capteur inductif est le suivant. Dans le capteur, un oscillateur crée en avant de sa face sensible un champ électromagnétique alternatif ayant une fréquence de 100 à 600 kHz selon le modèle. Lorsqu’un objet conducteur (une vis) entre dans le champ du capteur, il provoque un changement d’état de la sortie du capteur qui passe à la tension d’alimentation de celui-ci soit 12 V.
Le capteur possède 3 fils, un fil marron d’alimentation 12V, un fil bleu de masse et un fil de sortie noir.
Fig 1 : Schéma du capteur
3.5 – Température du moteur:
Capteur 1 Adaptation
Capteur inductif
Adaptation
Ventilation
Adaptation Capteur 2
Bus CAN UART
Puissance
Bus CAN
UART
Traitement
µc
Traitement
µc
Légende : BN : Marron BK : Noir BU : Bleu

9
La mesure de la température du moteur permettra de surveiller l’échauffement de celui-ci afin d’éviter de le détériorer en agissant par un système de refroidissement à base d’un ventilateur qui aspire l’air interne du moteur.
Selon deux seuils de température paramétrable dans le programme, le refroidissement se mettra en route ou se coupera afin d’éviter la surchauffe des moteurs et la surconsommation des batteries. Cette parti sera interne au module est indépendante des autres modules.
La mesure sera prise grâce à un capteur de température qui sera présent sur chaque moteur, et qui ressortira un signal numérique ou analogique.
Celui-ci devra être placé judicieusement de façon à réaliser la mesure la plus précise possible.
Si le capteur retenu envoi un signal analogique, un étage d’adaptation est nécessaire afin de pouvoir mesurer la tension à travers le convertisseur analogique / numérique du microcontrôleur.
Dans un premier temps, la température sera envoyé en degré sur le port série d’un PC, puis par la suite, sur le bus CAN.
Une veille technologique est nécessaire sur les différents capteurs existants afin de choisir le plus performant et le plus adapté pour notre application.
3.6 – Niveau de charge des batteries :
Le kart est alimenté par quatre batteries au plomb de 12 V. Il faut vérifier le niveau de charge de chacune indépendamment des autres.
La mesure de la tension de chaque batterie permettra de surveiller leurs niveaux de charge et d’anticiper le rechargement général.
Il faut cependant faire attention aux mesures réalisées pendant le roulement du kart qui pourrait faire écrouler l’alimentation.
Pour chaque mesure, un étage d’adaptation est nécessaire afin de pouvoir mesurer la tension à travers le convertisseur analogique / numérique du microcontrôleur.
Dans un premier temps, les différentes mesures des batteries seront envoyées sur le port série d’un PC, puis par la suite, sur le bus CAN.
Adaptation
Traitement µc
Tension batterie 1
Tension batterie 2
Tension batterie 3
Tension batterie 4
Adaptation
Adaptation
Adaptation
Bus CAN
UART

10
3.7 – Affichage des données:
Une carte mère équipée d’un écran OLED sera utilisée. Celle-ci devra gérer le réseau CAN et récupérer toutes les données en provenance des différents modules afin d’afficher les résultats des mesures. Ce module sera placé judicieusement au dessus du volant de façon à voir directement les informations affiché avec un minimum de confort pour le pilote.
3.8 – Communication HF:
La carte de communication HF permettra d’envoyer les données du kart directement à un ordinateur portable. Elle sera équipée d’un module XBEE-PRO d’une portée de 1.5 Km en champ libre qui sera relié à un DSPIC30F4011 via une liaison UART. 3.9 – Station PC:
L’ordinateur recevra les données des différents capteurs du kart pendant la course. Pour cela, une carte de communication sera réalisée avec un module XBEE-PRO, ainsi qu’un module FTDI afin de relier la carte avec le PC par une liaison USB. Dans un premier temps elles seront affichées directement par l’HyperTerminal de Windows.
Ecran OLED
Bus CAN
UART
Traitement
µc
Traitement
µc
Module xbee-pro
Bus CAN
UART
SPI
UART 2
USB
Carte réception communication HF
FTDI
USB / SERIE
Module XBEE-PRO UART

11
IV – TECHNIQUE & FONCTIONNEMENT 4.1 – Communication CAN : Le bus CAN est le protocole de communication utilisé pour la communication entres les différentes cartes. La vitesse de transmission de celui-ci est de 1Mbits/s. Chaque carte possèdes un identifiant pour l’émission et un pour la réception. Une trame d’émission de donnée est prioritaire par rapport à une trame de demande de donnée. L’identifiant le plus faible est le plus prioritaire. Les identifiant du bus CAN peuvent être de type standard avec 11 bits ou de type étendu avec 29 bits. Dans notre application, toutes les trames ont un identifiant de type standard.
4.1.1 – Identifiant des cartes :
Carte Emission (TX) Réception (RX)
Superviseur et affichage 0x000001E0 0x000001F0 Température N°1 0x000002E0 0x000002F0 Température N°2 0x000003E0 0x000003F0
Batterie 0x000004E0 0x000004F0 Vitesse 0x000005E0 0x000005F0
Communication HF 0x000006E0 0x000006F0
4.1.2 – Trames émises sur le bus CAN :
Identifiant Trame Donnée Action rattachée
Carte superviseur et affichage 0x000002F0 MOT1 Demande température moteur N°1 0x000003F0 MOT2 Demande température moteur N°2 0x000003F0 V1B Demande statu ventilation moteur 1 et 2 0x000004F0 BAT1 Demande tension batterie N°1 0x000004F0 BAT2 Demande tension batterie N°2 0x000004F0 BAT3 Demande tension batterie N°3 0x000004F0 BAT4 Demande tension batterie N°4 0x000005F0 VIT Demande vitesse 0x000006F0 HF Demande d’envois de trame HF ( Xbee)
Carte batterie
0x000004E0 B1**** Envois tension batterie N°1 0x000004E0 B2**** Envois tension batterie N°2

12
0x000004E0 B3**** Envois tension batterie N°3 0x000004E0 B4**** Envois tension batterie N°4
Carte vitesse
0x000005E0 V**** Envois vitesse
Carte température moteur N°1 0x000002E0 T**** Envois température moteur N°1 0x000002E0 S_VEN_0 Envois état ventilation moteurs OFF 0x000002E0 S_VEN_1 Envois état ventilation moteurs ON
Carte température moteur N°2
0x000003E0 T**** Envois température moteur N°2 0x000003E0 S_VEN_0 Envois état ventilation moteurs OFF 0x000003E0 S_VEN_1 Envois état ventilation moteurs ON
* : Octet de donnée
4.1.3 – Liaison physique des cartes :
Chaque carte possède, pour l’intégration dans des boitiers, deux connecteurs de six points au brochage identique sur lequel est branché un petit câble avec une prise DB9M qui sera vissé sur le boitier. (Schéma ci-dessous)
Pour la liaison entre les différents boitiers, les câbles seront réalisés directement sur le kart afin de prendre directement les bonnes longueurs. Sur chaque câble, ont retrouvera nos deux signaux pour le bus CAN ( CAN H et CAN L) ainsi que l’alimentation des cartes en 12V.
Il est à noter que un des câbles devra sortir deux fils en plus pour l’alimentation général de 12V. Ils seront reliés à notre batterie spécialement dédié à l’instrumentation.

13
4.2 – Module superviseur et affichage :
4.2.1 – Fonctionnement :
La carte superviseur gère l’ensemble du système. Toutes les demandes de données des différents modules sont faite par un séquenceur qui lui-même est géré par une interruption sur un timer. Chaque trame CAN de réponse qui contienne des données en provenance des autres modules est décodée puis enregistrée dans des buffers et enfin affiché sur l’écran OLED.
4.2.2 – Organigramme du séquenceur de demande de données :
DEBUT
Interruption Timer1
FIN
Non
Oui
Demande tension batterie 3
Demande température Moteur 2
Demande température Moteur 1
Demande vitesse
Demande tension batterie 1
Demande tension
batterie 2
Demande tension batterie 4
Demande vitesse
Demande état ventilation
Demande envois
Trame HF (Xbee)

14
4.2.3 – Organigramme de réception des données :
« X » correspond au numéro de la carte moteur ou au numéro de la batterie ou à l’état de la ventilation (1 pour actif et 0 pour inactif) .
DEBUT
Interruption Réception
CAN
FIN
Non
Oui
Enregistrement données température X
Si id = carte moteur X & 2 premier
octets = MX
Affichage sur écran OLED
Oui
Non
Si id = carte batterie & 2
premiers octets = BX Enregistrement données
batterie X
Affichage sur écran
OLED
Si id = carte vitesse &
premier octet = V Enregistrement données
vitesse
Affichage sur écran
OLED
Si 6 premiers octets =
SVENT_X
Enregistrement état ventilation moteurs
Non
Non
Non
Oui
Oui
Oui

15
4.2.4 – Schéma de la carte :

16
4.3 – Module batterie :
4.3.1 – Fonctionnement :
Sur ordre de la carte superviseur, la carte batterie va mesurer la tension aux bornes de la batterie concerné grâce au convertisseur analogique / numérique du dspic. Un étage d’adaptation permet de ramener la tension à un maximum de 3.3 V qui est la tension d’alimentation et de référence. Enfin elle va renvoyer la valeur de la tension de la batterie dans une trame CAN au superviseur. Afin de limiter les câbles sur le kart, les batteries sont mesurées en série. (Schéma ci-dessous)
Pour mesurer la tension de la batterie 1, on mesure une tension de 12 V, Pour mesurer la tension de la batterie 2, on mesure une tension de 24 V, puis on soustrait la tension de la batterie 1 mesuré précédemment. Pour mesurer la tension de la batterie 3, on mesure une tension de 36 V, puis on soustrait la tension de la batterie 1 et de la batterie 2 mesurées précédemment. Pour mesurer la tension de la batterie 4, nous mesurons une tension de 48 V, puis on soustrait la tension de la batterie 1, de la batterie 2 et de la batterie 3 mesurées précédemment. Il est à noter que l’étage d’adaptation à été réalisé pour des batteries avec une tension maximum de 15.5 V. En effet, lorsque les batteries vienne juste d’être chargé, il est possible que leurs tension soit supérieur à 12 V.
17
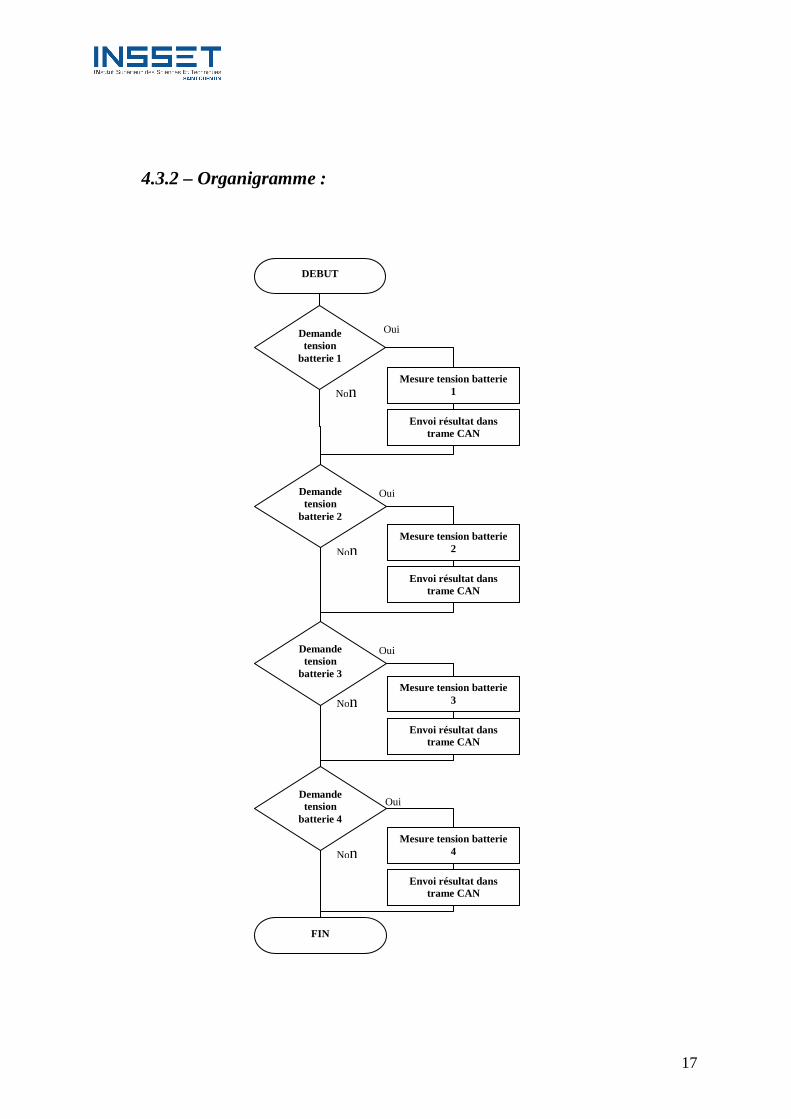
4.3.2 – Organigramme :
DEBUT
Demande tension
batterie 1
FIN
Non
Oui
Envoi résultat dans trame CAN
Mesure tension batterie 1
Demande tension
batterie 2
Envoi résultat dans trame CAN
Mesure tension batterie 2
Demande tension
batterie 3
Envoi résultat dans trame CAN
Mesure tension batterie 3
Demande tension
batterie 4
Envoi résultat dans trame CAN
Mesure tension batterie 4
Non
Non
Non
Oui
Oui
Oui

18
4.3.3 – Schéma de la carte :

19
4.4 – Module de communication HF :
4.4.1 – Fonctionnement :
Sur ordre de la carte superviseur, la carte communication HF va envoyer une trame zigbee au PC de contrôle avec les données des différents capteurs ainsi que le statut de la ventilation moteur. Ce module de communication HF enregistre toutes les données que les différents modules envois à la carte superviseur sur le bus CAN afin de créer directement la trame HF avec les données enregistrées lorsque le superviseur fait une demande d’envois HF.
4.4.2 – Organigramme :
DEBUT
Réception température
moteur 1
FIN
Non
Oui
Enregistrement donnée dans buffer
Réception température
moteur 2 Enregistrement donnée
dans buffer
Réception batterie
Enregistrement données dans buffer
Réception vitesse
Enregistrement donnée dans buffer
Oui
Oui
Oui
Non
Non
Réception état ventilation
Enregistrement donnée dans buffer
Non
Non
Oui
Demande envoi trame
HF Envoi trame HF zigbee
Non
Oui

20
4.4.3 – Trame HF :
La trame HF est composée de 31 octets. Dans l’ordre, ont trouve :
- 1 octet de début de trame à la valeur « H »,
- 4 Octets pour la tension de la batterie N°1,
- 4 Octets pour la tension de la batterie N°2,
- 4 Octets pour la tension de la batterie N°3,
- 4 Octets pour la tension de la batterie N°4,
- 4 Octets pour la température du moteur N°1,
- 4 Octets pour la température du moteur N°2,
- 4 Octets pour la vitesse,
- 1 octet pour l’état de la ventilation moteur,
- 1 octet de fin de trame à la valeur « F »,
4.4.4 – Module Xbee :
Le module XBee pro est un module de communication Hertzien autonome. Ils fonctionnent dans 16 canaux de la bande 2,4 GHz. La puissance émission est ajustable entre 10 mW et 60 mW. La portée théorique à l'intérieur est de 100 m et de 1,5 Km en extérieur. Il doit être alimenté en 3,3 V. La consommation en réception est 50 mA. Elle passe à 210 mA en émission 60 mW. De ce faite, afin d’économiser la batterie de l’électronique, entre deux trame émise, nous utilisons le mode veille du module qui passe la consommation à 10 µA. Le protocole utilisé est le 802.15.4 de la norme ZigBee. Nous utilisons la configuration du module par default qui utilise une puissance de sortie max de 60 mW et une vitesse de la liaison RS232 de 9600 bauds.
H B A T 1 B A T 2 B A T 3 B A T 4 M O T 1 M O T 2 V I T E V F

21
4.4.5 – Schéma de la carte :

22
4.5 – Module température :
MLX90614
Le capteur utilisé est un capteur de température infrarouge, il est piloté via un bus I2C. A la demande du superviseur, la carte température va lire la valeur du capteur infrarouge puis la renvoyer dans une trame CAN. Si la température relevée dépasse notre seuil critique, elle va déclencher la ventilation sans passer par le bus CAN. En revanche, elle va envoyer une trame sur le bus CAN afin d’indiquer que la ventilation est activé.
4.5.1 – Schéma de câblage du capteur :
4.5.2 – Schéma de la carte :

23
4.5.3 – Fonctionnement du capteur :
Le capteur possède une EEPROM pour stocker des donnés et une mémoire RAM ou la température de l’objet sera lue. La communication entre le capteur est la carte température ce fait en I2C.
La RAM est protégé en écriture, on ne peut y accéder qu’en mode lecture pour lire les donnés. Pour notre application, nous utiliserons uniquement les variables Ta, Tobj1, Tobj2 représentant successivement la température ambiante du milieu, la température de l’objet1 et de l’objet2. Le protocole utilisé pour communiquer avec le capteur est le SMBUS :
Ainsi pour lire la température de l’objet (moteur), il suffit d’envoyer l’adresse du capteur qui par défaut est 0x00 (7bits pour l’adresse plus une bit d’écriture ou de lecture w/r), ensuite d’envoyer l’adresse de commande (0x07) et enfin renvoyer l’adresse du capteur mais cette fois-ci en spécifiant avec le bit de poids faible que l’on désire lire 0x01 (7bits pour l’adresse plus un bit w/r)

24
4.5.4 – Ventilation moteur :
Les modules températures sont destinés à surveiller l’échauffement des moteurs et à contrôler en conséquence la ventilation de ceux-ci. Si un des deux modules mesure une température supérieure au seuil fixé, alors il déclenche automatiquement la ventilation. Cette partie de l’instrumentation du kart étant important et critique, les deux modules pour chaque moteur ne communique pas entres eux et peuvent déclencher tous les deux la ventilation des moteurs de façon séparé.
Pour le câblage, les broches 1 des quatre borniez sont relié ensembles, les broches 2 et 3 aussi. 4.6 – Module vitesse :
4.6.1 – Fonctionnement :
Sur l’axe de roulement arrière du kart, on trouve une roue avec six vis métalliques. Un capteur inductif détecte chaque passage d’une vis et le traduit par un état haut lorsque celle-ci se situe devant lui. Lorsque le kart est en mouvement, le capteur produit un signal de type TTL dont la fréquence varie en fonction de la vitesse du kart.
Schéma commande ventilation moteur 1 et 2
Alimentation ventilation
Ventilation

25
Pour relever la vitesse du kart, on mesure le temps entre le passage de deux vis devant le capteur. Pour cela, on utilise un timer qui lorsque l’on à un premier front montant va commencer à compter à partir de 0, puis lorsque l’on à un deuxième front montant, va arrêter de compter. On obtient alors le temps entre 2 vis. Une fois que nous avons le temps entre deux vis, il suffit de tenir compte du diamètre de la roue et des autres vis. Circonférence de la roue = pi * diamètre = pi * 25 = 78.5 Sachant que nous ne prenons pas le temps d’un tour complet de la roue mais 1/6 On divise donc la circonférence de la roue par six ce qui donne : 13.09 Ensuite on calcul la vitesse : Temps mesuré = PLL* valeur timer / quartz Temps mesuré = 16 * valeur timer / 7,3728 vitesse = (13.09/100) / Temps mesuré Une fois la vitesse en mètres par secondes obtenue, on la convertie en Km/h : vitesse = vitesse / 1000 vitesse = vitesse * 3600 Prenons par exemple un signal de 90 Hz qui nous donne un temps mesuré de 11 ms. Vitesse = (((13.09/100) / 0,011) /1000)* 3600 = 42,8 km/h
0 V
3.3 V
0
65535
t
t
Principe de mesure de vitesse
Timer
Signal de sortie du capteur
Principe de mesure de temps entre deux vis

26
Pour le câblage du capteur sur la carte, celui-ci possède 3 fils, un fil marron d’alimentation 12V, un fil bleu de masse et un fil de sortie noir.
Le fil marron d’alimentation 12V sera relié à la broche 3 du borniez J5, le fil noir de sortie sera relié à la broche 2 du borniez J5, et enfin le fil de masse bleu sera relié à la broche 1 du borniez J5.
4.6.2 – Schéma de la carte :
Légende : BN : Marron BK : Noir BU : Bleu
Schéma du capteur
Interface entre le capteur est le DSPIC

27
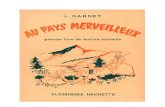
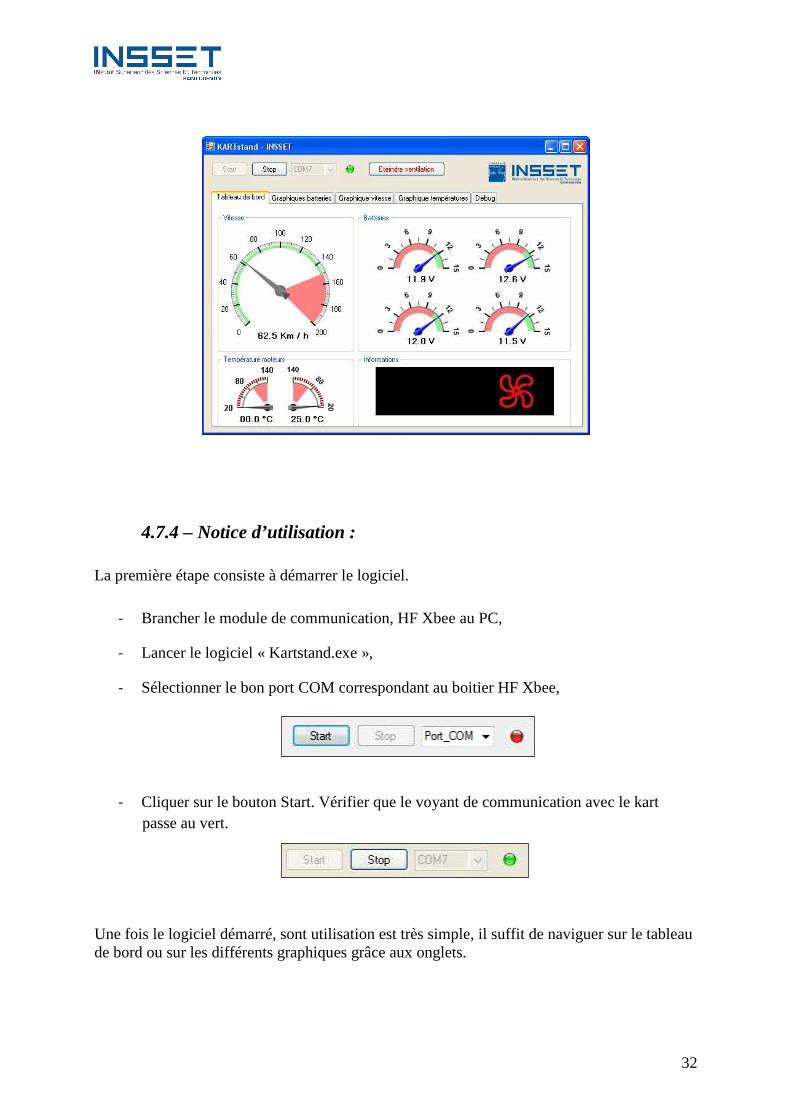
4.7 – Logiciel Kartstand : Kartstand est le logiciel de réception et de traitement des données en provenance du kart. Il permet de surveiller presque en temps réel avec un rafraichissement toutes les secondes des différentes valeurs des capteurs. Il à été réalisé avec l’environnement de développement Visual Studio en langage C#. Chaque trame émise par le module de communication HF du kart qui est reçu par le logiciel va être analysée afin de valider si il s’agit bien d’une trame en provenance du kart en vérifiant que celle-ci comporte 31 octets et que l’octet de début a bien pour valeur 0x48 qui correspond à un « H » et que l’octet de fin à bien une valeur de 0x46 qui correspond à un « F ». Si c’est le cas, alors la trame est considérée comme valide, puis décodée afin de récupérer les différentes données. Le logiciel nécessite le module de communication HF Xbee branché préalablement sur un port USB du PC.
L’affichage des données ce fait sur un tableau de bord virtuel. (Voir ci-dessous)
Module de communication Xbee
4
2
1
3

28
Celui est composé de quatre partis distincts. Une parti pour l’affichage de la vitesse (1), une partie pour l’affichage de la tension des quatre batteries (2), une parti pour l’affichage de la température des deux moteurs (3), et enfin une partie pour l’affichage des voyants d’information (4) qui nous signal si une des batteries est faible, si la température d’un ou des moteurs est trop élevé, et si la ventilation est en marche.
4.7.1 – Graphiques & statistiques :
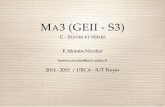
Afin de surveiller et voir l’évolution des données sur une ou plusieurs courses, le logiciel trace différents graphiques qui pourront être enregistrés. Ceux-ci démarrent dés le lancement du logiciel et l’établissement de la communication avec le kart (visible grâce au petit voyant vert en haut du logiciel.) Il est cependant possible de réinitialiser un graphique à tout moment grâce au bouton reset situé en bas a droite de chaque graphique. La base de temps est en minute, un point est placé par seconde environ selon la distance entre les deux modules HF Xbee. Lors du premier point, l’heure de début du tracé s’écrit dans le titre du graphique. A chaque nouveau point, l’échelle du graphique ce rafraichi automatiquement. Le premier graphique est la surveillance des batteries ou chaque courbe représente la tension d’une batterie. Il est possible d’afficher uniquement une ou plusieurs batteries.
Graphique de la tension des batteries

29
Le second graphique pour la vitesse du kart.
Enfin le dernier graphique pour la température des moteurs. Il est possible d’afficher uniquement la température du moteur souhaité.
Graphique de la vitesse du kart
Graphique de la température du moteur 2

30
4.7.2 – Organigramme de fonctionnement :
DEBUT
FIN
Réception trame 31
octets
Non
Oui
Découpage trame
Premier Octet = H
Non
Oui
Dernier Octet = F
Non
Oui
Enregistrement données dans buffer
Affichage tableau de bord
Affichage graphique correspondant
Clic bouton ventilation
Non
Oui
Arrêter ventilation Envoi Xbee : « VF »
Si ventilation activé
Non
Oui
Allumer ventilation Envoi Xbee : « VO »

31
4.7.3 – Voyant d’information :
Lorsqu’une ou plusieurs batteries descendent sous le seuil de 11V, alors le voyant de batterie faible s’affiche :
Lorsqu’au moins une des deux températures des moteurs dépasse le seuil de 90°C, alors le voyant température élevé s’affiche :
Lorsque la ventilation est activée automatiquement par une des cartes températures ou manuellement par l’interface, alors le voyant ventilation s’affiche. Il est à noter que dans ce cas, le bouton qui permet d’activer manuellement la ventilation permet maintenant de l’éteindre.
32
4.7.4 – Notice d’utilisation :
La première étape consiste à démarrer le logiciel.
- Brancher le module de communication, HF Xbee au PC,
- Lancer le logiciel « Kartstand.exe »,
- Sélectionner le bon port COM correspondant au boitier HF Xbee,
- Cliquer sur le bouton Start. Vérifier que le voyant de communication avec le kart passe au vert.
Une fois le logiciel démarré, sont utilisation est très simple, il suffit de naviguer sur le tableau de bord ou sur les différents graphiques grâce aux onglets.

33
Il est possible d’effectuer plusieurs action sur les graphiques comme par exemple agrandir l’échelle, enregistrer l’image,…
Pour cela il faut faire un clic droit sur le graphique afin d’afficher un menu.
L’intérêt est de pouvoir garder une traçabilité des différentes courses du kart afin d’enregistrer et de comparer les performances de celui-ci.

34
V – CONCLUSION La partie développement est terminée. L’ensemble du projet est opérationnels. Grâce à l’architecture modulaire de ce projet, il est facile d’ajouter si besoin des modules supplémentaires dans le futur. Il est aussi possible d’apporter des modifications à un module spécifique sans toucher aux autres. L’étape d’intégration est maintenant imminente.