
Rappels de mathématiques Table des matières
38
Rappels de mathématiques BA1 en chimie, mathématiques et physique. Table des matières 1 Fonctions 3 1.1 Généralités ............................. 3 1.2 Composition ............................. 5 1.3 Injectivité et surjectivité ...................... 5 1.4 Exercices .............................. 6 1.5 Dérivée ............................... 8 1.6 Approche intuitive ......................... 8 1.7 Sens physique de la dérivée .................... 9 1.8 Dérivée partielle .......................... 11 1.9 Règle de dérivation en chaîne ................... 12 1.10 Exercices .............................. 13 2 Trigonométrie 15 2.1 Systèmes de coordonnées du plan ................. 15 2.2 Mesure d’un angle ......................... 16 2.3 Fonctions trigonométriques .................... 17 2.4 Formules de base .......................... 18 2.5 Dérivées ............................... 20 2.6 Résolution de triangle ....................... 20 2.7 Applications ............................. 21 3 Les nombres complexes 23 3.1 Définitions .............................. 23 3.2 Plan de Gauss ............................ 23 3.3 Forme polaire ou trigonométrique ................. 24 3.4 Racine n e d’un complexe ...................... 25 3.5 Exercices .............................. 25 1
Transcript of Rappels de mathématiques Table des matières
Rappels de mathématiques
BA1 en chimie, mathématiques et physique.
Table des matières
1 Fonctions 31.1 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 Composition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.3 Injectivité et surjectivité . . . . . . . . . . . . . . . . . . . . . . 51.4 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.5 Dérivée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.6 Approche intuitive . . . . . . . . . . . . . . . . . . . . . . . . . 81.7 Sens physique de la dérivée . . . . . . . . . . . . . . . . . . . . 91.8 Dérivée partielle . . . . . . . . . . . . . . . . . . . . . . . . . . 111.9 Règle de dérivation en chaîne . . . . . . . . . . . . . . . . . . . 121.10 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2 Trigonométrie 152.1 Systèmes de coordonnées du plan . . . . . . . . . . . . . . . . . 152.2 Mesure d’un angle . . . . . . . . . . . . . . . . . . . . . . . . . 162.3 Fonctions trigonométriques . . . . . . . . . . . . . . . . . . . . 172.4 Formules de base . . . . . . . . . . . . . . . . . . . . . . . . . . 182.5 Dérivées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.6 Résolution de triangle . . . . . . . . . . . . . . . . . . . . . . . 202.7 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3 Les nombres complexes 233.1 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.2 Plan de Gauss . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3 Forme polaire ou trigonométrique . . . . . . . . . . . . . . . . . 243.4 Racine ne d’un complexe . . . . . . . . . . . . . . . . . . . . . . 253.5 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1

TABLE DES MATIÈRES 2
4 Analyse vectorielle 284.1 Introduction : scalaires et vecteurs . . . . . . . . . . . . . . . . 284.2 Addition de vecteurs . . . . . . . . . . . . . . . . . . . . . . . . 284.3 Composantes d’un vecteur et vecteurs de base . . . . . . . . . . 294.4 Produit scalaire . . . . . . . . . . . . . . . . . . . . . . . . . . . 304.5 Produit vectoriel . . . . . . . . . . . . . . . . . . . . . . . . . . 314.6 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5 Intégration 365.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.2 Rappels et exercices . . . . . . . . . . . . . . . . . . . . . . . . 38
Chapitre 1
Fonctions
1.1 Généralités
Une fonction est une relation associant à chaque élément x d’un ensemblede départ un et un seul élément d’un ensemble d’arrivée, que l’on appelle imagede x par f et que l’on note f(x). Si E est l’ensemble de départ et F l’ensembled’arrivée, on dit alors que f est une fonction de E dans F et on note cela :
f : E → F : x 7→ f(x)
E et F peuvent être par exemple l’ensemble des réels ou des complexes (Rou C). Par abus de langage, on parlera parfois de la fonction f(x) ou de lafonction y = f(x). Suivent une série de définitions :Image d’une fonction L’image d’une fonction f : E → F est la collection
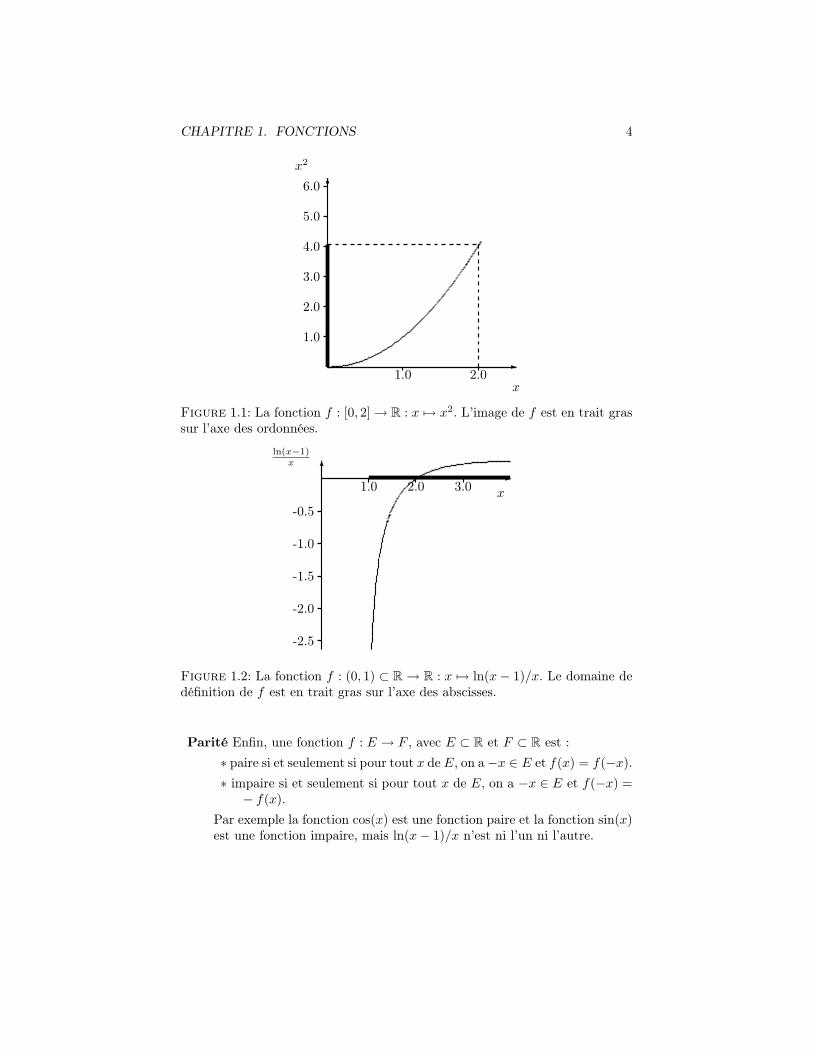
des f(x) pour x parcourant E ; c’est un sous-ensemble de F (f(E) ⊂ F ),on le note Imf .Par exemple, l’image de la fonction f : [0, 2] → R : x 7→ x2 est [0, 4] etc’est bien un sous-ensemble de la droite réelle.
Domaine de définition Le domaine de définition d’une fonction f est l’ensem-ble E. Il est parfois utile de préciser l’expression algébrique d’une fonc-tion (c’est-à-dire donner la formule) sans préciser le domaine, qu’il fautchercher ensuite.Par exemple, le domaine de définition E de la fonction f : E ⊂ R→ R :x 7→ ln(x− 1)/x est ]1,∞[.On peut représenter cette dernière fonction par son graphe.Le domaine de définition s’obtient alors en projetant le graphe sur l’axedes abscisses et l’image s’obtient en projetant le graphe sur l’axe desordonnées.
Antécédent Si x, élément de E, vérifie f(x) = y, on dit que x est un antécé-dent de y.Attention, un élément y de F peut très bien avoir plusieurs antécédentsou n’en avoir aucun.
3
CHAPITRE 1. FONCTIONS 4
-
6
1.0 2.0
1.0
2.0
3.0
4.0
5.0
6.0x2
x
Figure 1.1: La fonction f : [0, 2]→ R : x 7→ x2. L’image de f est en trait grassur l’axe des ordonnées.
-6
1.0 2.0 3.0
-0.5
-1.0
-1.5
-2.0
-2.5
ln(x−1)x
x
Figure 1.2: La fonction f : (0, 1) ⊂ R→ R : x 7→ ln(x− 1)/x. Le domaine dedéfinition de f est en trait gras sur l’axe des abscisses.
Parité Enfin, une fonction f : E → F , avec E ⊂ R et F ⊂ R est :∗ paire si et seulement si pour tout x de E, on a−x ∈ E et f(x) = f(−x).∗ impaire si et seulement si pour tout x de E, on a −x ∈ E et f(−x) =− f(x).
Par exemple la fonction cos(x) est une fonction paire et la fonction sin(x)est une fonction impaire, mais ln(x− 1)/x n’est ni l’un ni l’autre.
CHAPITRE 1. FONCTIONS 5
1.2 Composition
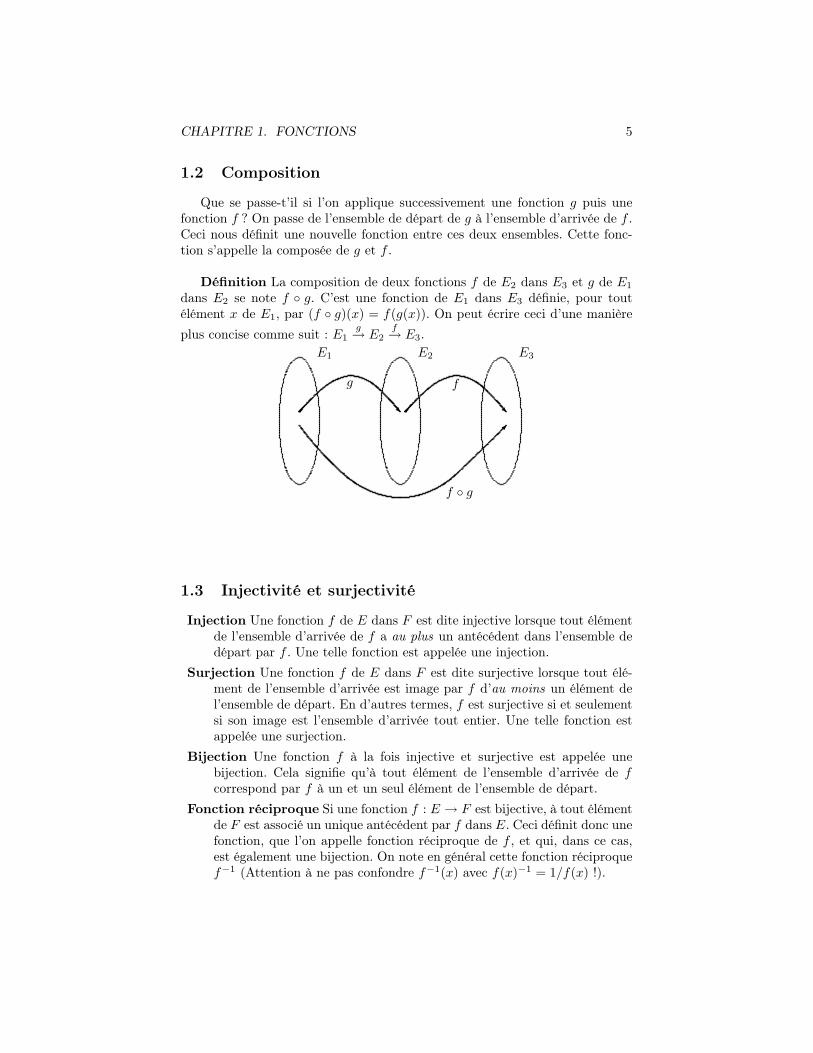
Que se passe-t’il si l’on applique successivement une fonction g puis unefonction f ? On passe de l’ensemble de départ de g à l’ensemble d’arrivée de f .Ceci nous définit une nouvelle fonction entre ces deux ensembles. Cette fonc-tion s’appelle la composée de g et f .
Définition La composition de deux fonctions f de E2 dans E3 et g de E1
dans E2 se note f ◦ g. C’est une fonction de E1 dans E3 définie, pour toutélément x de E1, par (f ◦ g)(x) = f(g(x)). On peut écrire ceci d’une manièreplus concise comme suit : E1
g→ E2f→ E3.
E1 E2 E3
R R
�
g f
f ◦ g
1.3 Injectivité et surjectivité
Injection Une fonction f de E dans F est dite injective lorsque tout élémentde l’ensemble d’arrivée de f a au plus un antécédent dans l’ensemble dedépart par f . Une telle fonction est appelée une injection.
Surjection Une fonction f de E dans F est dite surjective lorsque tout élé-ment de l’ensemble d’arrivée est image par f d’au moins un élément del’ensemble de départ. En d’autres termes, f est surjective si et seulementsi son image est l’ensemble d’arrivée tout entier. Une telle fonction estappelée une surjection.
Bijection Une fonction f à la fois injective et surjective est appelée unebijection. Cela signifie qu’à tout élément de l’ensemble d’arrivée de fcorrespond par f à un et un seul élément de l’ensemble de départ.
Fonction réciproque Si une fonction f : E → F est bijective, à tout élémentde F est associé un unique antécédent par f dans E. Ceci définit donc unefonction, que l’on appelle fonction réciproque de f , et qui, dans ce cas,est également une bijection. On note en général cette fonction réciproquef−1 (Attention à ne pas confondre f−1(x) avec f(x)−1 = 1/f(x) !).

CHAPITRE 1. FONCTIONS 6
Exemple La fonction f : [0,∞) → [0,∞) : x 7→ x2 admet la fonctionréciproque f−1 : [0,∞)→ [0,∞) : x 7→
√x.
Surjection Injection Bijection
-
:z
-
-
-
-
*
j
-
(Pas injectif !) (Pas surjectif !) (= injectif et surjectif)
1.4 Exercices
1. On donne les fonctions f(x) = 2x et g(x) = sin(x).a) Calculer f(π/2), g(π/2), (g ◦ f)(π/2) et (f ◦ g)(π/2)b) Quelles sont les expressions algébriques de f ◦ g et g ◦ f ?
2. Si f(x) = 1/(1− x), donner les expressions algébrique de f ◦ f et f ◦ f ◦ f .3. On donne la fonction
f(x) =
1/x si x < 0x2 si 0 ≤ x ≤ 2x+ 2 si 2 < x
a) Calculer f(−2), f(0), f(3/2), f(2) et f(3).b) Esquisser le graphe de f .c) Déterminer le domaine de définition et l’image de f .d) Déterminer la fonction réciproque de f si elle existe ; si elle n’existe
pas, expliquer pourquoi.4. Vrai ou faux ? : la fonction f : R→ R : x 7→ x2 + 3x+ 2 est
a) injectiveb) bijectivec) inversibled) surjective
5. Pour chacune des fonctions suivantes, déterminer le domaine de définition etla fonction réciproque si elle existe. Représenter la fonction et sa fonctionréciproque sur le même graphique.a) y = ex

CHAPITRE 1. FONCTIONS 7
b) y =√x
c) y =√
2x+13(x−1)
CHAPITRE 1. FONCTIONS 8
1.5 Dérivée
1.6 Approche intuitive
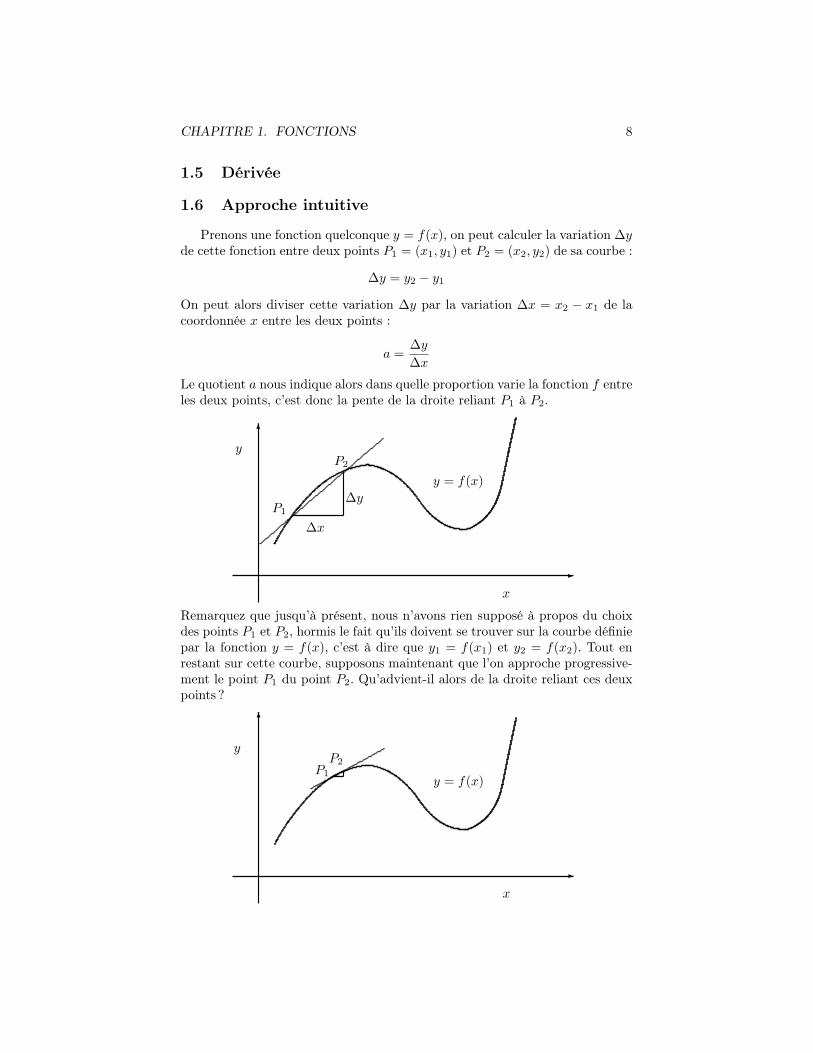
Prenons une fonction quelconque y = f(x), on peut calculer la variation ∆yde cette fonction entre deux points P1 = (x1, y1) et P2 = (x2, y2) de sa courbe :
∆y = y2 − y1
On peut alors diviser cette variation ∆y par la variation ∆x = x2 − x1 de lacoordonnée x entre les deux points :
a =∆y∆x
Le quotient a nous indique alors dans quelle proportion varie la fonction f entreles deux points, c’est donc la pente de la droite reliant P1 à P2.
6
-
y
x
∆y
∆x
P2
P1
y = f(x)
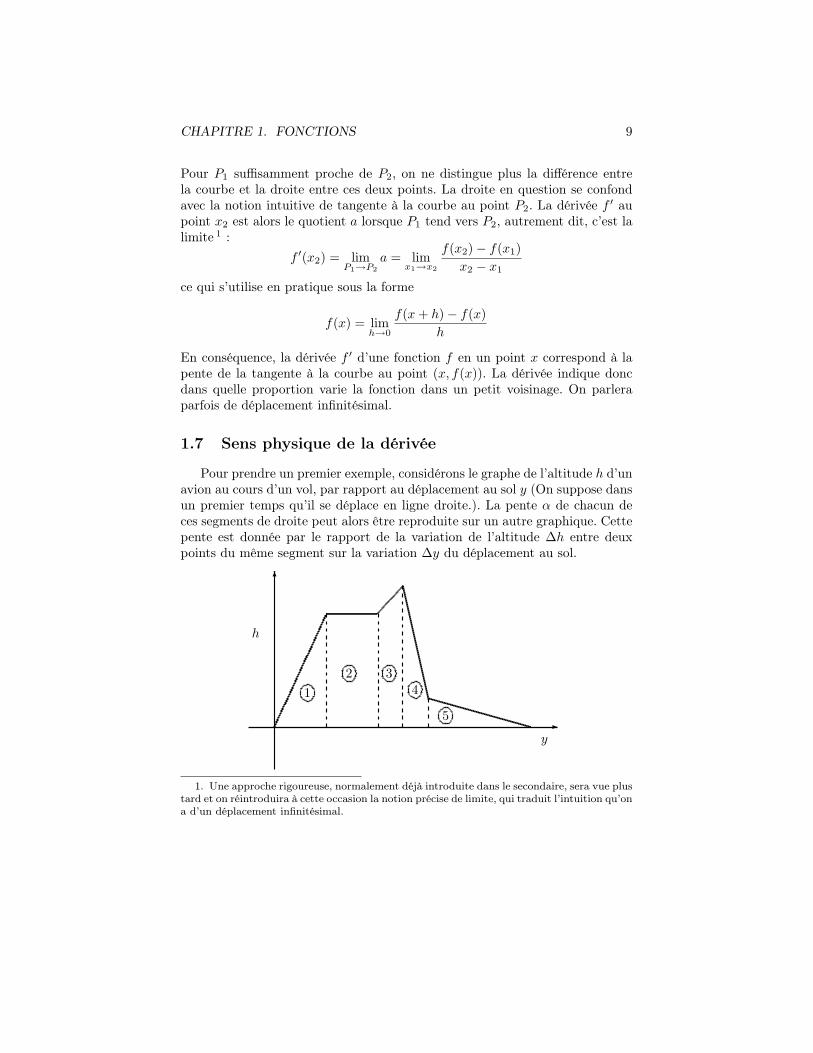
Remarquez que jusqu’à présent, nous n’avons rien supposé à propos du choixdes points P1 et P2, hormis le fait qu’ils doivent se trouver sur la courbe définiepar la fonction y = f(x), c’est à dire que y1 = f(x1) et y2 = f(x2). Tout enrestant sur cette courbe, supposons maintenant que l’on approche progressive-ment le point P1 du point P2. Qu’advient-il alors de la droite reliant ces deuxpoints ?
6
-
y
x
P2P1
y = f(x)
CHAPITRE 1. FONCTIONS 9
Pour P1 suffisamment proche de P2, on ne distingue plus la différence entrela courbe et la droite entre ces deux points. La droite en question se confondavec la notion intuitive de tangente à la courbe au point P2. La dérivée f ′ aupoint x2 est alors le quotient a lorsque P1 tend vers P2, autrement dit, c’est lalimite 1 :
f ′(x2) = limP1→P2
a = limx1→x2
f(x2)− f(x1)x2 − x1
ce qui s’utilise en pratique sous la forme
f(x) = limh→0
f(x+ h)− f(x)h
En conséquence, la dérivée f ′ d’une fonction f en un point x correspond à lapente de la tangente à la courbe au point (x, f(x)). La dérivée indique doncdans quelle proportion varie la fonction dans un petit voisinage. On parleraparfois de déplacement infinitésimal.
1.7 Sens physique de la dérivée
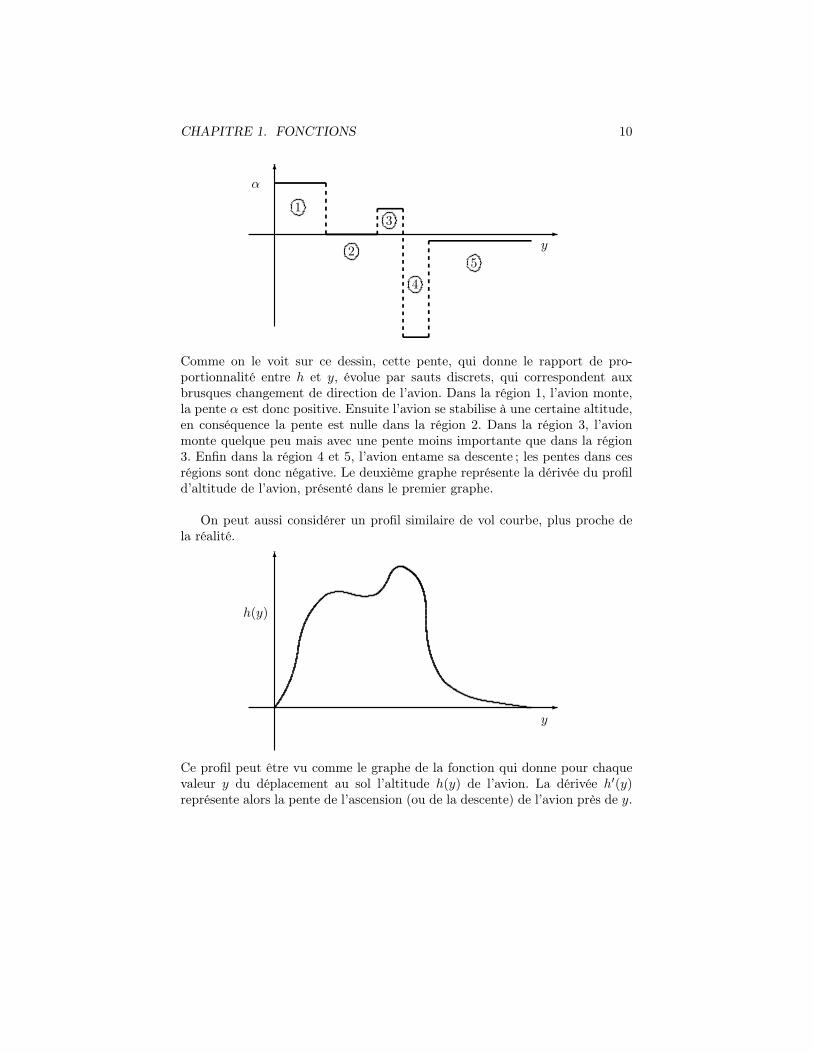
Pour prendre un premier exemple, considérons le graphe de l’altitude h d’unavion au cours d’un vol, par rapport au déplacement au sol y (On suppose dansun premier temps qu’il se déplace en ligne droite.). La pente α de chacun deces segments de droite peut alors être reproduite sur un autre graphique. Cettepente est donnée par le rapport de la variation de l’altitude ∆h entre deuxpoints du même segment sur la variation ∆y du déplacement au sol.
6
-y
h
12 3
4
5
1. Une approche rigoureuse, normalement déjà introduite dans le secondaire, sera vue plustard et on réintroduira à cette occasion la notion précise de limite, qui traduit l’intuition qu’ona d’un déplacement infinitésimal.
CHAPITRE 1. FONCTIONS 10
6
-y
α
1
2
3
4
5
Comme on le voit sur ce dessin, cette pente, qui donne le rapport de pro-portionnalité entre h et y, évolue par sauts discrets, qui correspondent auxbrusques changement de direction de l’avion. Dans la région 1, l’avion monte,la pente α est donc positive. Ensuite l’avion se stabilise à une certaine altitude,en conséquence la pente est nulle dans la région 2. Dans la région 3, l’avionmonte quelque peu mais avec une pente moins importante que dans la région3. Enfin dans la région 4 et 5, l’avion entame sa descente ; les pentes dans cesrégions sont donc négative. Le deuxième graphe représente la dérivée du profild’altitude de l’avion, présenté dans le premier graphe.
On peut aussi considérer un profil similaire de vol courbe, plus proche dela réalité.
6
-y
h(y)
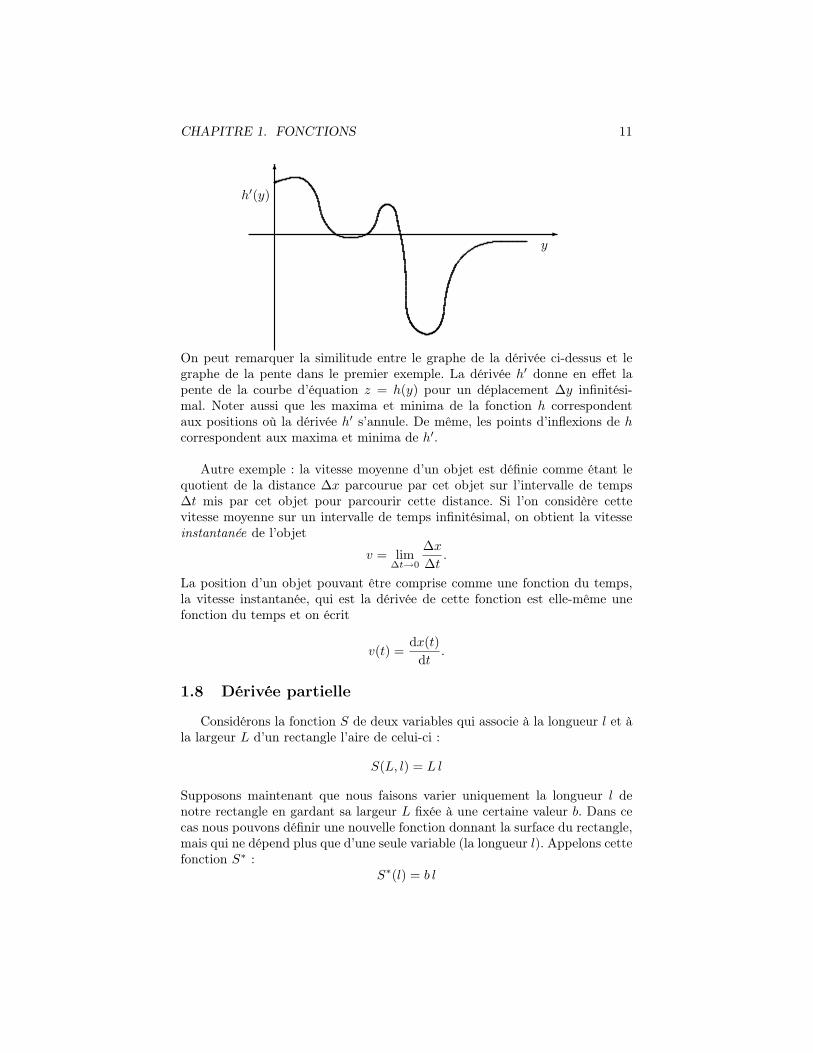
Ce profil peut être vu comme le graphe de la fonction qui donne pour chaquevaleur y du déplacement au sol l’altitude h(y) de l’avion. La dérivée h′(y)représente alors la pente de l’ascension (ou de la descente) de l’avion près de y.
CHAPITRE 1. FONCTIONS 11
6
-y
h′(y)
On peut remarquer la similitude entre le graphe de la dérivée ci-dessus et legraphe de la pente dans le premier exemple. La dérivée h′ donne en effet lapente de la courbe d’équation z = h(y) pour un déplacement ∆y infinitési-mal. Noter aussi que les maxima et minima de la fonction h correspondentaux positions où la dérivée h′ s’annule. De même, les points d’inflexions de hcorrespondent aux maxima et minima de h′.
Autre exemple : la vitesse moyenne d’un objet est définie comme étant lequotient de la distance ∆x parcourue par cet objet sur l’intervalle de temps∆t mis par cet objet pour parcourir cette distance. Si l’on considère cettevitesse moyenne sur un intervalle de temps infinitésimal, on obtient la vitesseinstantanée de l’objet
v = lim∆t→0
∆x∆t
.
La position d’un objet pouvant être comprise comme une fonction du temps,la vitesse instantanée, qui est la dérivée de cette fonction est elle-même unefonction du temps et on écrit
v(t) =dx(t)
dt.
1.8 Dérivée partielle
Considérons la fonction S de deux variables qui associe à la longueur l et àla largeur L d’un rectangle l’aire de celui-ci :
S(L, l) = L l
Supposons maintenant que nous faisons varier uniquement la longueur l denotre rectangle en gardant sa largeur L fixée à une certaine valeur b. Dans cecas nous pouvons définir une nouvelle fonction donnant la surface du rectangle,mais qui ne dépend plus que d’une seule variable (la longueur l). Appelons cettefonction S∗ :
S∗(l) = b l

CHAPITRE 1. FONCTIONS 12
Cette fonction est l’équation d’une droite de pente b. Si l’on dérive la fonctionS∗ par rapport à l, on obtient donc :
dS∗(l)dl
= b
Ce qui nous indique dans quelle proportion varie l’aire du rectangle lorsque l’onaugmente (ou diminue) la longueur l, alors que la largeur L est fixée.
Ce type de calcul peut être réalisé pour des fonctions de plusieurs (et pasuniquement deux) variables plus compliquées pour déduire comment varient cesfonctions lorsque toutes les variables sont fixées, sauf une que l’on fait varier.On appelle ce genre de dérivée une dérivée partielle et on la note comme suit :pour une fonction f de plusieurs variables x1, x2, . . . , xn, la dérivée partiellepar rapport à la je variable s’écrit
∂f(x1, x2, . . . , xn)∂xj
Dans la pratique, on ne dérive donc la fonction f que par rapport à la variablexj en considérant les autres comme des constantes. Par exemple, la dérivéepartielle de la fonction S ci-dessus par rapport à l donne
∂S(L, l)∂l
= L
et l’on peut faire le lien avec l’exemple ci-dessus :
dS∗(l)dl
=∂S(L, l)∂l
∣∣∣∣L=b
= b
où la barre verticale avec l’égalité L = b signifie que l’on évalue la dérivéepartielle en donnant à la variables L à la valeur b.
1.9 Règle de dérivation en chaîne
Soit deux fonctions f : E2 → E3 et g : E1 → E2 et considérons la composéef ◦ g : E1 → E3 de g et f . On peut exprimer la dérivée de cette composée enterme de la dérivée de f et de g par la règle de la dérivation en chaîne :
(f ◦ g)′(x) = [(f ′ ◦ g)(x)] g′(x)
ou encoredf(g(x))
dx=
df(u)du
∣∣∣∣u=g(x)
dg(x)dx
se qui peut se lire la dérivée d’une fonction composée est égale à la dérivée dela fonction externe évaluée en la valeur de la fonction interne fois la dérivéede la fonction interne évaluée en l’argument de la fonction composée.

CHAPITRE 1. FONCTIONS 13
Exemple La dérivée de la fonction h : x 7→ (x − x2)2 peut se calculercomme suit : on peut écrire h(x) comme la composée de la fonction f : x 7→ x2
et g : x 7→ x− x2. La dérivée de h est donc :
h′(x) = f ′(g(x)) g′(x) = f ′(x− x2) (1− 2x) = 2(x− x2) (1− 2x)
En développant le carré dans h(x) et en dérivant, on peut vérifier qu’on retrouvebien le même résultat.
1.10 Exercices
1. Calculer la dérivée des fonctions suivantes :a) y = x6 − 3x4 + 19x3 − 8x+ 4
b) y = (2− x)(1− 5x)
c) y = (2x+ 1)(3x+ 2) 3√
3x+ 2
d) y = x8
8(1−x2)4
2. Calculer les valeurs des dérivées première, deuxième et troisième des fonc-tions suivantes au point indiqué.
a) y = x3/2 x = 0b) y = x+ 1/x x = 1/2
3. Calculer la dérivée première par rapport à x de
a) y = t2 − 4t si t =√
2x2 + 1b) y = t− 3t2 si t =
√x2 − 6x+ 3
c) y =√
3t2 − 5t+ 4 si t = x2
4. Former les équations des tangentes à la courbe y = (x − 1)(x − 2)(x − 3)aux points d’intersection avec l’axe des abscisses.Rem. : l’équation de la droite tangente à une courbe y = f(x) en un pointa est y = f ′(a)(x− a) + f(a).
5. On considère un disque dont le rayon varie avec le temps. Sachant que lerayon augmente à la vitesse constante de 0.1cm/sec, quelle est la vitesseà laquelle augmente l’aire de la surface considérée, lorsquea) le rayon a 10 cmb) le rayon a 20 cm
6. Calculer la dérivée première des fonctions suivantes :a) y = sin(x2 + 1)
b) y = cot(x)/ sin(x)
c) y = (sin(x) + cos(x))/(sin(x)− cos(x))
d) y = arcsin(5x)

CHAPITRE 1. FONCTIONS 14
7. Le rayon d’une sphère augmente de 0.25 m/sec. Lorsque le rayon vaut 3 m,quelle est la vitesse de variationa) de la surface de la sphère ?b) du volume ?
8. Le volume d’un cône est donnée par la formule :
V (r, h) =πr2h
3
où r est le rayon du disque formant la base du cône, et h est la hauteurdu cône.Calculer la dérivée partielle de cette fonction par rapport à r. Interpréterle résultat : Que décrit cette dérivée partielle ?
9.Soit f une fonction dérivable.a) Si f est paire, montrer que sa dérivée f ′ est impaire. La réciproque
est-elle vraie ?b) Si f est impaire, montrer que sa dérivée f ′ est paire. La réciproque
est-elle vraie ?

Chapitre 2
Trigonométrie
Remarque préliminaire Connaître, c’est à la fois comprendre, reteniret savoir expliquer. Quand une matière est ardue, cela correspond en effet àtrois "passages". Les cours et les exercices aident à comprendre. Il faut ensuiteétudier, manipuler et se poser des questions seul ET en groupe afin de s’ap-proprier le savoir transmis. C’est à ce prix seul que l’on peut prétendre à laréussite d’un examen d’université.
Lorsque vous vous exprimez dans la vie courante, vous ne vérifiez pas chaquemot dans un dictionnaire. De même, il est exclu de se dire que l’on ira voir dansle formulaire si l’on a besoin des formules (de trigonométrie par exemple).
Définition (cf. Wikipedia) 1
La trigonométrie (du grec ancien τριγωνoσ / trígonos, « triangulaire », etµετρoν / métron, « mesure ») est une branche des mathématiques qui traite desrelations entre distances et angles dans les triangles et des fonctions trigonométriquestelles que sinus, cosinus et tangente.
Pour les besoins de la cause, nous suivrons cependant une approche dif-férente. Vous observerez toutefois que les triangles semblables et le théorèmede Pythagore jouent un rôle crucial à tous les niveaux.
2.1 Systèmes de coordonnées du plan
Le premier système de coordonnées qui vient à l’esprit est sans doute le sys-tème de coordonnées cartésiennes où un point est représenté par deux nombresréels : l’abscisse et l’ordonnée qui correspondent à la distance du point parrapport à deux axes orthogonaux de référence.
Dans beaucoup de problèmes physiques, il n’est cependant pas pratiqued’utiliser les coordonnées cartésiennes. En effet, dans une multitude de cas,le système étudié présente certaines symétries que l’on peut utiliser afin desimplifier la description mathématique des phénomènes qui s’y produisent. Sil’on veut par exemple étudier un problème à deux corps (ex : mouvement
1. Wikipedia a parfois tort mais Wikipedia a souvent raison. C’est un allié de choix.Utilisez-le mais restez critiques.
15

CHAPITRE 2. TRIGONOMÉTRIE 16
P
ordonnée
abscisseP
O
r
θ
Figure 2.1: Coordonnées cartésiennes (à gauche) et polaires (à droite) dupoint P . Les lignes fines sont celles sur lesquelles une des deux coordonnées estconstante.
d’une planète autour d’une étoile, ou d’un électron autour d’un noyau atom-ique) isotrope (aucune direction privilégiée), il est clair que le seul paramètregéométrique important est la distance entre les deux objets. Dans ces cas,on utilisera systématiquement les coordonnées polaires (ou leur généralisationtridimensionnelle : les coordonnées sphériques).
Il s’agit alors de fixer un point O -l’origine- ainsi qu’une demi droite issuede ce point et de les utiliser comme système de référence. Les coordonnéespolaires d’un point P sont données par le couple (r, θ) où r est la distance àl’origine et θ est l’angle polaire orienté (dans le sens anti horlogique, aussi ditsens trigonométrique) entre la demi droite de référence et le segment joignantle point P à l’origine (cf. Fig. 2.1).
La trigonométrie permet notamment de passer de l’un de ces systèmes decoordonnées à l’autre.
2.2 Mesure d’un angle
L’amplitude d’un angle se calcule ici en radians. Soient deux demi droitesde même origine O ainsi qu’un cercle de centre O et de rayon r arbitraire,soient aussi A et B les points d’intersection respectifs des demi droites et ducercle, l’amplitude en radians de l’angle AOB se calcule comme le rapport deslongueurs de l’arc de cercle AB et du rayon r. Elle est donc comprise entre 0et 2π puisque le périmètre d’un cercle complet de rayon r vaut 2πr.
Remarque : un angle de 2π correspondant à un tour complet, il est d’usagede considérer des angles α ∈ R, quelconques. Les valeurs négatives correspon-dent à des angles mesurés dans le sens horlogique, les valeurs positives à desangles mesurés dans le sens anti-horlogique (convention des coordonnées po-laires). On parle alors d’angle orienté. La détermination principale d’un angleorienté α est le nombre β ∈ [0, 2π] tel que α− β est un multiple de 2π.
CHAPITRE 2. TRIGONOMÉTRIE 17
1 rad
O A
B
Figure 2.2: Angle d’un radian. Les segments OA et OB sont de longueurségales entre elles et égales à la longueur de l’arc de cercle AB.
P (1, θ)
θ
sin θ
cos θ
tan θ =sin θcos θ
B
−1 − 12
1
−1
− 12
12
1
O A
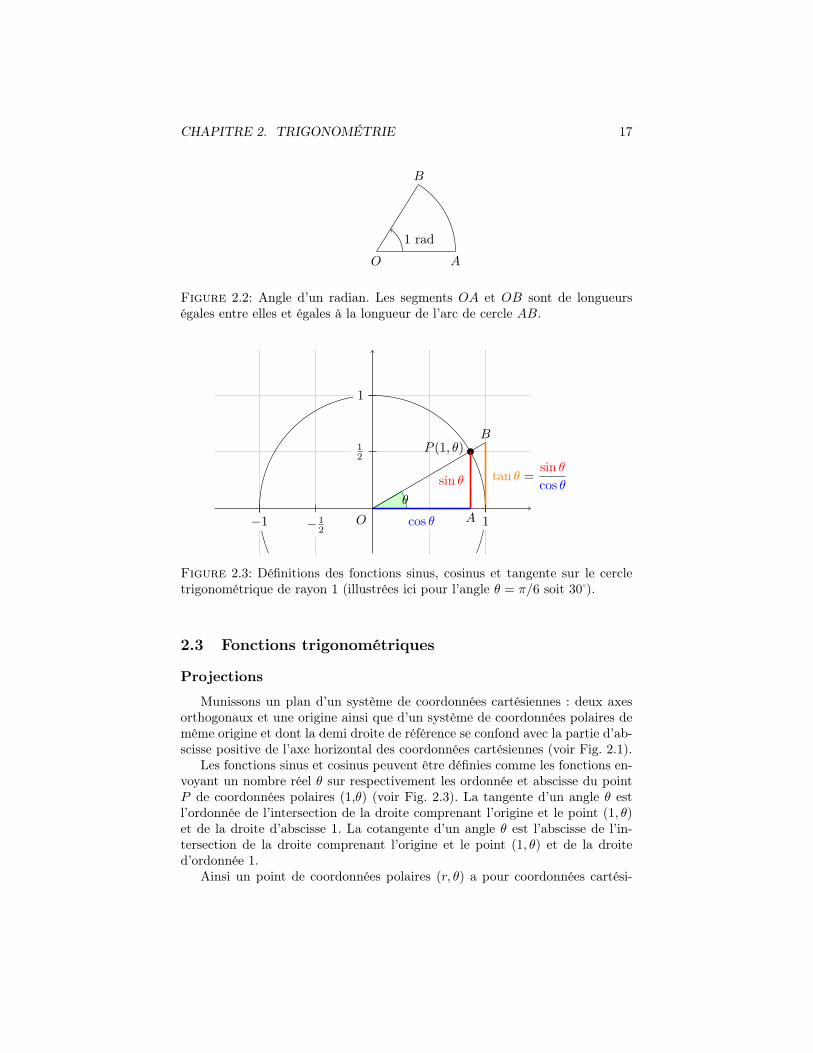
Figure 2.3: Définitions des fonctions sinus, cosinus et tangente sur le cercletrigonométrique de rayon 1 (illustrées ici pour l’angle θ = π/6 soit 30 ).
2.3 Fonctions trigonométriques
Projections
Munissons un plan d’un système de coordonnées cartésiennes : deux axesorthogonaux et une origine ainsi que d’un système de coordonnées polaires demême origine et dont la demi droite de référence se confond avec la partie d’ab-scisse positive de l’axe horizontal des coordonnées cartésiennes (voir Fig. 2.1).
Les fonctions sinus et cosinus peuvent être définies comme les fonctions en-voyant un nombre réel θ sur respectivement les ordonnée et abscisse du pointP de coordonnées polaires (1,θ) (voir Fig. 2.3). La tangente d’un angle θ estl’ordonnée de l’intersection de la droite comprenant l’origine et le point (1, θ)et de la droite d’abscisse 1. La cotangente d’un angle θ est l’abscisse de l’in-tersection de la droite comprenant l’origine et le point (1, θ) et de la droited’ordonnée 1.
Ainsi un point de coordonnées polaires (r, θ) a pour coordonnées cartési-

CHAPITRE 2. TRIGONOMÉTRIE 18
ennes (r cos θ, r sin θ).Les fonctions sin et cos sont donc à valeurs dans [−1, 1]. Les fonctions tg et
cotg sont à valeurs dans ]−∞,∞[. Remarquez aussi que la fonction tangente(resp. cotangente) n’est pas définie en π/2 + kπ, k ∈ Z (resp. kπ, k ∈ Z).
On a de plus que 2
∀θ ∈ R�{π
2+ kπ, k ∈ Z
}: tan θ =
sin θcos θ
. (2.1)
Valeurs remarquables
La table suivante est à connaître :
angle sin cos tg cotg0 0 1 0 @π6
12
√3
2
√3
3
√3
π4
√2
2
√2
2 1 1π3
√3
212
√3
√3
3π2 1 0 @ 0
ExerciceDémontrer la véracité de ladite table à partir des définitions.
Parité
Soit f une fonction d’un sous-ensemble I de R dans l’ensemble R des nom-bres réels. On suppose aussi que I est tel que ∀x ∈ I : −x ∈ I. La fonctionf est paire si et seulement si ∀x ∈ I : f(x) = f(−x). Elle est impaire si etseulement si ∀x ∈ I : f(−x) = −f(x).
Les fonctions sinus, tangente et cotangente sont impaires. La fonction cosi-nus est paire.
2.4 Formules de base
Formule fondamentale de la trigonométrie
Par application du théorème de Pythagore dans le triangle rectangle OAPde la Fig. 2.3 :
∀θ ∈ R : sin2 θ + cos2 θ = 1. (2.2)
ExercicesDémontrer :
tg2 θ + 1 =1
cos2 θet cotg2 θ + 1 =
1sin2 θ
. (2.3)
Démontrer le théorème de Pythagore.
2. Pourquoi ? indice : une histoire de triangles semblables. Quelle est la formule similaireimpliquant la cotangente ?

CHAPITRE 2. TRIGONOMÉTRIE 19
θ
π2 − θ
θπ − θ
Figure 2.4: Angle θ et son complémentaire (gauche) resp. supplémentaire(droite).
Angle complémentaire et angle supplémentaire
Deux angles sont complémentaires si la somme de leurs amplitudes enradian vaut π/2. Ils sont supplémentaires si cette somme fait π. On dit aussique le complémentaire de θ est π
2 − θ et que son supplémentaire est π− θ. VoirFig. 2.4.
ExerciceDémontrer les formules suivantes ∀θ ∈ R :
sin(π
2− θ) = cos θ; tan(
π
2− θ) = cot θ
cos(π
2− θ) = sin θ; cot(
π
2− θ) = tan θ
sin(π − θ) = sin θ; cot(π − θ) = − tan θcos(π − θ) = − cos θ; cot(π − θ) = − cot θ
et pendant que nous y sommes... voyons aussi :
sin(π + θ) = − sin θ; tan(π + θ) = tan θcos(π + θ) = − cos θ; cot(π + θ) = cot θ
Formules d’addition
Exercice 3
Démontrer les formules suivantes ∀α, β ∈ R :
sin(α± β) = sinα cosβ ± cosα sinβcos(α± β) = cosα cosβ ∓ sinα sinβ
En déduire les formules d’addition pour les tangentes et cotangentes.
Formules de Simpson
Exercices
3. Il s’agit d’un exercice sensiblement plus compliqué et donc aussi plus intéressant queles précédents

CHAPITRE 2. TRIGONOMÉTRIE 20
Démontrer ∀α, β ∈ R :
sinα cosβ =12(
sin(α− β) + sin(α+ β))
sinα sinβ =12(
cos(α− β)− cos(α+ β))
cosα cosβ =12(
cos(α− β) + cos(α+ β))
sinα± sinβ = 2 sin(α± β
2
)cos(α∓ β
2
)cosα+ cosβ = 2 cos
(α+ β
2
)cos(α− β
2
)cosα− cosβ = −2 sin
(α+ β
2
)sin(α− β
2
)Duplication et cos (2x)
ExerciceDémontrer ∀x ∈ R :
sin(2x) = 2 sinx cosx; cos(2x) = cos2 x− sin2 x;
cos2 x =1 + cos(2x)
2; sin2 x =
1− cos(2x)2
tan2 x =1− cos(2x)1 + cos(2x)
Formules en tan θ/2
ExerciceDémontrer que toute fonction trigonométrique de θ ∈ R peut s’écrire comme
une fonction rationnelle de tg θ2 . En quoi ces formules peuvent-elles aider àintégrer les fonctions trigonométriques ? 4
2.5 Dérivées
ExercicesDémontrer limh→0
sinhh = 1.
Démontrer que la dérivée de la fonction sinus est la fonction cosinus :sin′(x) = cos(x). Calculer de même les dérivées des fonctions cosinus, tangenteet cotangente.
2.6 Résolution de triangle
Exercice
4. Il s’agit d’une arme atomique. J’espère pour vous que vous ne devrez pas l’utilisersouvent ! Il y a presque toujours des méthodes plus rapides et plus élégantes

CHAPITRE 2. TRIGONOMÉTRIE 21
Dans un triangle ABC rectangle en A, démontrer les relations suivantes :
sin BCA =|AB||BC|
et cos BCA =|AC||BC|
. (2.4)
A priori un triangle est complètement connu si l’on a les amplitudes dechacun de ses angles et les longueurs de chacun de ses côtés. Toutefois, la con-naissance de trois de ces quantités permet parfois de déterminer les trois autresau moyen de la trigonométrie. C’est ce que l’on appelle résoudre un triangle.Remarquez cependant que la connaissance des trois angles permet seulement dedéterminer les rapports des longueurs des côtés. Dans cette situation, il resteratoujours un facteur d’échelle.
ExercicesDémontrer que si a, b et c sont les longueurs respectives des côtés d’un
triangle quelconque et α est l’amplitude de l’angle opposé au côté de longueura, alors : a2 = b2 + c2 − 2bc cosα.
Assurez-vous que vous pouvez résoudre des triangles. Dans quels cas l’am-plitude d’un angle et les longueurs de deux côtés ne déterminent-ils pas com-plètement le triangle ?
Soient a, b et c des réels. a) Quelles conditions y a-t-il pour que ces réelssoient les longueurs des côtés d’un triangle ? b) En supposant ces conditionssatisfaites, comment faire en pratique pour construire un tel triangle ?
Soient a, b et c les longueurs des côtés d’un triangle, et α, β et γ les ampli-tudes des angles respectivement opposés à ces côtés. Démontrer que
sinαa
=sinβb
=sin γc
=Q
2abc(2.5)
où Q =√
2b2c2 + 2c2a2 + 2a2b2 − a4 − b4 − c4.
2.7 Applications
Manipulation de formules
Démontrer les égalités suivantes :
sin2 θ − cos2 φ
sin2 θ sin2 φ= 1− cotg2 θcotg2 φ,
tan(π
4− θ)
+ tan(π
4+ θ)
=2
2 cos2 θ − 1,
cos 2a =cot a− tan acot a+ tan a
,
tan( π
12− a)
+ cot( π
12+ a)
=4 cos 2a
2 sin 2a+ 1.

CHAPITRE 2. TRIGONOMÉTRIE 22
Simplifier les expressions suivantes :
sin a+ sin(a+
2π3
)+ sin
(a+
4π3
),
cos2(a+ b) + cos2(a− b)− cos 2a cos 2b,2(sin6 θ + cos6 θ)− 3(sin4 θ + cos4 θ),cos a+ cos 3a+ cos 5asin a+ sin 3a+ sin 5a
.
Soient α, β et γ, les trois angles d’un triangle, démontrer qu’alors tanα +tanβ + tan γ = tanα tanβ tan γ.
L’âge du capitaine
Sachant que si l’on pose un objet sur une surface, la force de frottementexercée par l’un sur l’autre est proportionnelle à la force exercée perpendicu-lairement à la surface par l’objet (coefficient de proportionnalité appelé en faitcoefficient de frottement κ), résolvez le problème suivant.
Un tonneau rempli de 12 litres de vinasse se trouve posé sur une table àbord du Hollandais volant. Les pieds de la table font 90 cm de haut. Le pontdu navire se trouve à 10 m au-dessus de la surface de l’eau. La dite tableest exactement située à ln (πtan(π/2−0.02))/3 m à bâbord du mât principal quiculmine 80 m au-dessus du pont et qui, ne soyons pas tordus, se trouve trèsexactement au milieu de notre fameux trois mâts fin comme un oiseau. En ce 21décembre, le capitaine qui vient de fêter ses 112 ans vénusiens a mené son naviretrès exactement sur le tropique du capricorne et il est précisément midi solaire.Dans un élan de sadisme caractéristique du pirate qu’il est, il a déposé la cagede son perroquet juste à la gauche du mât principal avant de se rendre à la caleoù il retient prisonnier l’arrière arrière arrière... arrière petit-fils d’Archimède.Le roulis du bateau s’intensifie dangereusement depuis quelques minutes faisantosciller le bateau à la fréquence de 0.0625 Hz. Notre perroquet dont le nom debaptême est Pythagore se demande quelle est la longueur critique de l’ombredu mât à partir de laquelle le tonneau commencera à glisser. A cet instantdramatique, vous êtes priés de répondre à sa question existentielle.

Chapitre 3
Les nombres complexes
3.1 Définitions
Un nombre complexe s’écrit sous la forme z = a + bi, où a et b sont desnombres réels appelés (et notés) respectivement partie réelle (a = Re(z)) etpartie imaginaire (b = Im(z)) de z. L’ensemble des nombres de cette formes’appelle l’ensemble des nombres complexes ; cet ensemble porte une structurede corps et est noté C. Le nombre complexe i = 0+1i est un nombre imaginairequi a la particularité que i2 = −1.
Quand un complexe est noté a+ bi (avec a et b réels) on dit qu’il est sousforme cartésienne, par opposition à la forme polaire que nous verrons plus tard.Deux nombres complexes a+ bi et c+ di sous forme cartésienne sont égaux siet seulement si a = c et b = d, c’est-à-dire leurs parties réelles sont égales etleurs parties imaginaires sont égales.
3.2 Plan de Gauss
Un nombre complexe étant représenté par deux nombres, on peut le représen-ter dans un plan appelé « plan de Gauss ». La plupart des opérations sur lesnombres complexes ont leur interprétation géométrique dans ce plan.
Pour z = a+bi un nombre complexe, on note z = a−bi le complexe conjuguéde z. Dans le plan de Gauss, il s’agit du symétrique de z par rapport à la droiteréelle (généralement dessinée horizontalement).
On définit le module du complexe z par |z| =√zz =
√a2 + b2. Dans le plan
de Gauss, il s’agit de la distance entre 0 et z. En particulier, si z est réel (c-à-d.sa partie imaginaire est nulle), ce module est simplement la valeur absolue.Ceci explique pourquoi la notation |·| est la même pour la valeur absolue et lemodule.
Propriété. Pour tout z = a+ bi et z′ = a′ + b′i nombres complexes, on a1. zz = a2 + b2 ;2. ¯z = z ;
23

CHAPITRE 3. LES NOMBRES COMPLEXES 24
Figure 3.1: Illustration de nombres complexes dans le plan de Gauss
3. |z| = |z| ;4. |zz′| = |z| |z′| ;5. |z + z′| ≤ |z|+ |z′|.
3.3 Forme polaire ou trigonométrique
Dans le plan de Gauss, le module d’un complexe z représente la distanceentre 0 et z. On appelle argument de z (noté arg z) l’angle (déterminé à 2πprès) entre le demi-axe des réels positifs et la demi-droite qui part de 0 et passepar z. Le module, généralement noté ρ, et l’argument, souvent noté θ, d’uncomplexe permettent de déterminer univoquement ce complexe puisqu’on a laformule
z = a+ bi = ρ (cos(θ) + i sin(θ))
où ρ = |z| et θ = arg z. Une notation courante et très commode est d’écrire zsous la forme d’une exponentielle complexe, z = ρeiθ, où par définition
eiθ = cos(θ) + i sin(θ)
Remarque. Avec cette définition, la notation z = ρeiθ garde un sens si ρ estnégatif, mais alors |z| = |ρ| (lire : « le module de z est la valeur absolue de ρ »).
L’argument de z se détermine via les formules
a
|z|= cos(arg(z))
b
|z|= sin(arg(z))
ou encore par la formule
b
a= tan(arg(z)) en vérifiant le quadrant.
La vérification du quadrant vient de ce que la tangente ne détermine l’angle qu’àπ près, mais que le signe de a et b permettent de lever cette indétermination.
La forme polaire d’un complexe est pratique pour calculer des produits etdes puissances de nombres complexes :

CHAPITRE 3. LES NOMBRES COMPLEXES 25
Propriété. Si z = ρeiθ et z′ = ρ′eiθ′sont deux nombres complexes, et n un
entier, on a :1. z = ρe−iθ ;2. 1
ρeiθ= 1
ρe−iθ ;
3. (ρeiθ)(ρ′eiθ′) = ρρ′ei(θ+θ
′) ;4.(ρeiθ
)n = ρneinθ.
(Cette dernière formule prend parfois le nom de « De Moivre ».) On com-prend l’intérêt de la notation exponentielle, puisque les opérations décrites de-viennent de simples applications des règles sur les exposants. Il sera vu au coursque, mieux qu’une simple notation, l’exponentielle complexe est une générali-sation de l’exponentielle « usuelle » en base e = 2, 718 . . ..
3.4 Racine ne d’un complexe
Rappelons que lorsque r est un nombre réel, on note√r l’unique nombre
positif dont le carré vaut r. Évidemment, −√r est également un nombre dont
le carré est r, mais la définition du symbole √ est sans ambigüité.Dans le cadre des nombres complexes, par contre, il n’existe pas de notion
« agréable » de positivité. Dès lors, on ne parlera jamais de la racine d’unnombre complexe, mais des racines.
Soit un entier n ≥ 1 et z un complexe. On appelle racine ne de z tout nombrecomplexe w tel que wn = z. Pour les déterminer, nous avons la propriétésuivante :
Propriété. Si z est donné sous forme polaire ρeiθ (ρ ≥ 0), alors les racinesne de z sont les nombres w0, . . . , wn−1 définis par
wk = n√ρ ei
θ+2kπn où k = 0, . . . , n− 1
3.5 Exercices
Ex. 1. Donner une interprétation géométrique, dans le plan de Gauss,1. de l’addition d’un complexe avec le complexe a + bi [utiliser la forme
cartésienne],2. de la multiplication d’un complexe par le complexe eiθ [utiliser la forme
polaire]
Correction.1. C’est une translation, représentée par le vecteur (a, b).2. C’est une rotation d’angle θ.
Ex. 2. Mettre sous la forme cartésienne les nombres suivants

CHAPITRE 3. LES NOMBRES COMPLEXES 26
1. 1 + i+ 3 + 4i2. 3 + 7i+ (−3 + 4i)3. 4
3 + 2i5 −
(− 1
7 + 3i4
)4. (1 + i)(3 + 4i)5. (3 + 7i)(3− 7i)6.(
16 + i
3
) (35 − 2i
)
7. 3−2i2−3i
8. 15+7i
9. 1(√
7−i)2
10.√
3+i√3−i +
√3−i√3+i
11. (2+i)(5−2i)i
Correction.
1. 1 + i+ 3 + 4i = 4 + 5i
2. 3+7i+(−3+4i) = 0+11i = 11i
3. 43 + 2i
5 −(− 1
7 + 3i4
)= 31
21 −7i20
4. (1 + i)(3 + 4i) = −1 + 7i
5. (3 + 7i)(3− 7i) = 58
6.(
16 + i
3
) (35 − 2i
)= 23
30 −2i15
7. 3−2i2−3i = 12
13 + 5i13
8. 15+7i = 5
74 −7i74
9. 1(√
7−i)2 = 6+2√
7i64
10.√
3+i√3−i +
√3−i√3+i
= 1
11. (2+i)(5−2i)i = 1− 12i
Ex. 3. Effectuer les opérations suivantes après avoir mis tous les facteurs sousforme polaire
1. (−1 + i√
3)(√
3 + i) = 4e5πi6
2. (√
32 + 1
2 i)12 i = 1
2e2πi3
3. −2−√
3+i= e
iπ6
4. 6i−3−3i =
√2e−3iπ
4
5. 4+4√
3i√3+i
= 4eiπ6
6. (1 + i)8 = 16
7. (1− i)6 = 8i
8.(
12 − i
√3
2
)20
= e2iπ3
9. (1−i√
3)3
(−2+2i)4 = 18
10. (1+i)(√
3+i)3
(1−i√
3)3=√
2e−iπ4
Ex. 4. Calculer1. les racines carrées de i,2. les racines cubiques de 27i,3. les racines sixièmes de −1,4. les racines 4e de −8− 8i
√3,
5. les racines cubiques de 1.Représenter les racines cubiques de 1 dans le plan de Gauss.
Correction.1. ±
√2
2 (1 + i)
2. 3eπ6 +k 2π
3 avec k = 0, 1, 2
3. eπ6 +k π3 avec k = 0, 1, 2, 3, 4, 5
4. 2eπ3 +k π2 avec k = 0, 1, 2, 3

CHAPITRE 3. LES NOMBRES COMPLEXES 27
5.
Ex. 5. 1. Montrer que si (x+iy) est une racine carrée de (a+ib) où x, y, a, bsont des réels, alors x et y sont solutions du système
x2 − y2 = a,
2xy = b,
x2 + y2 =√a2 + b2
2. S’inspirer du point précédent pour déterminer les racines carrées de 4+3i.
Ex. 6. Dans C, résoudre les équations suivantes :
1. 2x2 − 2x+ 1 = 0
2. 2x2 − 3ix− 4 = 0
3. (1− i)x2 + 2x+ 4 = 0
4. x2 − (3 + 2i)x+ 5 + i = 0
5. z4 − 2iz2 + 1 = 0
6. ix2 − (2i+ 2)x+ 6− 3i = 0
7. x4 + x2(1− 2i)− 2i = 0
8. x5 + 32 +∑4k=1
(5k
)xk25−k = 1 +
√3i
Ex. 7. Par application de la formule de De Moivre, exprimer cos(2x) et cos(3x)en fonction des puissances de cos(x) et sin(x).
Ex. 8. Déterminer les réels a et b pour que (i− 1) soit solution de l’équation
z5 − az3 + b |z| = Re(
1z
)Ex. 9. Déterminer l’équation du cercle de centre c et de rayon r > 0 dans leplan de Gauss [utiliser les interprétations du module comme une distance et dela somme comme d’une translation]
Ex. 10. Représenter, dans le plan de Gauss, les ensembles suivants1. U = {z ∈ C t.q. Re(z) ≤ Im(z)}2. A = {z ∈ C t.q. |2 + 3i− z| < 2}3. B =
{z ∈ C t.q. 1 ≤ |z| ≤ 4 et π
2 ≤ arg z ≤ π}
4. C ={z ∈ C t.q. z2 ∈ B
}5. D =
{z ∈ C t.q. 1
z ∈ B}
Chapitre 4
Analyse vectorielle
4.1 Introduction : scalaires et vecteurs
Beaucoup de quantité peuvent être univoquement déterminées par leurgrandeur. Ces quantités sont appelées scalaires et sont représentées par unseul nombre réel. Il s’agit par exemple des longueurs, des températures, desmasses,. . .
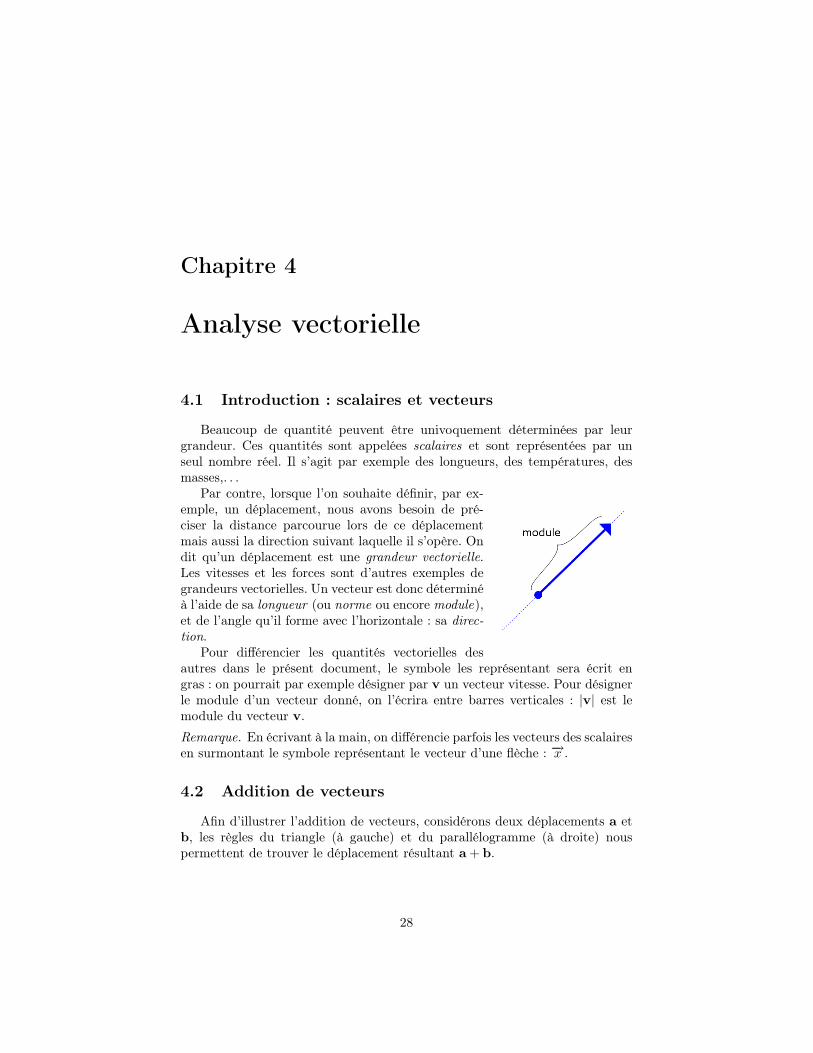
Par contre, lorsque l’on souhaite définir, par ex-emple, un déplacement, nous avons besoin de pré-ciser la distance parcourue lors de ce déplacementmais aussi la direction suivant laquelle il s’opère. Ondit qu’un déplacement est une grandeur vectorielle.Les vitesses et les forces sont d’autres exemples degrandeurs vectorielles. Un vecteur est donc déterminéà l’aide de sa longueur (ou norme ou encore module),et de l’angle qu’il forme avec l’horizontale : sa direc-tion.
Pour différencier les quantités vectorielles desautres dans le présent document, le symbole les représentant sera écrit engras : on pourrait par exemple désigner par v un vecteur vitesse. Pour désignerle module d’un vecteur donné, on l’écrira entre barres verticales : |v| est lemodule du vecteur v.
Remarque. En écrivant à la main, on différencie parfois les vecteurs des scalairesen surmontant le symbole représentant le vecteur d’une flèche : −→x .
4.2 Addition de vecteurs
Afin d’illustrer l’addition de vecteurs, considérons deux déplacements a etb, les règles du triangle (à gauche) et du parallélogramme (à droite) nouspermettent de trouver le déplacement résultant a + b.
28

CHAPITRE 4. ANALYSE VECTORIELLE 29
4.3 Composantes d’un vecteur et vecteurs de base
Soit un vecteur a dans le plan de coordonnées xy. La projection orthogonalede ce vecteur sur l’axe des x (axe des abcisses) donne la composante ax duvecteur a. De même, la composante ay est obtenue en projetant le vecteura sur l’axe des y (axe des ordonnées). Au lieu de définir un vecteur a parson module |a| et sa direction θ, on peut donc le définir par ses composantescartésiennes (ax, ay).
Le lien entre les composantes cartésiennes d’un vecteur, son module et sadirection est donné par {
ax = |a| cos θay = |a| sin θ
En particulier, on trouve |a| =√a2x + a2
y (c’est une illustration du théorèmede Pythagore).
-x
6y
���������3
v
vx
vy
-i
6j
Figure 4.1: Composantes d’un vecteur dans le plan
On peut également exprimer un vecteur en terme des vecteurs de base i,horizontal, et j, vertical, tous deux de longueur 1. Ils ont donc pour composantescartésiennes i = (1, 0) et j = (0, 1). Avec ces vecteurs de base, on peut alorsécrire
a = axi + ayj
où ax et ay sont les composantes cartésiennes du vecteur a.Pour un vecteur a dans l’espace de dimension 3, on peut l’écrire
a = axi + ayj + azk

CHAPITRE 4. ANALYSE VECTORIELLE 30
où ax, ay, az sont les composantes (cartésiennes) et i, j, k sont les vecteurs debase.
4.4 Produit scalaire
Le produit scalaire est une opération qui, avec deux vecteurs a et b, fabriqueun scalaire donné par :
a · b = |a| |b| cos(ϕ)
où ϕ est l’angle formé entre les vecteurs a et b. En particulier, le produitscalaire de deux vecteurs perpendiculaires est nul car cos(90 ) = 0.
Propriété. Le produit scalaire se distribue sur l’addition et est commutatif,c’est-à-dire que pour tous vecteurs a,b, c nous avons
(a + b) · c = a · c + b · c
eta · b = b · a
CHAPITRE 4. ANALYSE VECTORIELLE 31
Il est donc utile de connaître le produit scalaire des éléments de base entreeux :
· i j ki 1 0 0j 0 1 0k 0 0 1
On en déduit (le faire !) que le produit scalaire peut également s’exprimeren terme des composantes des vecteurs :
a · b = axbx + ayby + azbz
4.5 Produit vectoriel
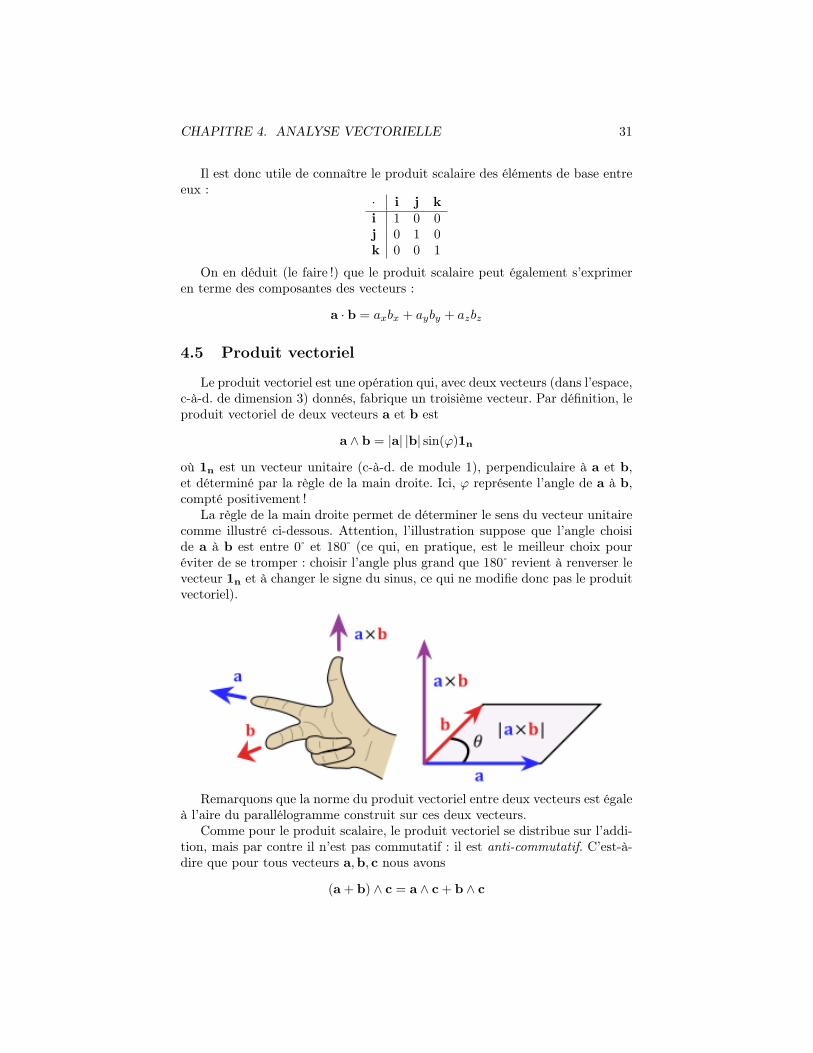
Le produit vectoriel est une opération qui, avec deux vecteurs (dans l’espace,c-à-d. de dimension 3) donnés, fabrique un troisième vecteur. Par définition, leproduit vectoriel de deux vecteurs a et b est
a ∧ b = |a| |b| sin(ϕ)1n
où 1n est un vecteur unitaire (c-à-d. de module 1), perpendiculaire à a et b,et déterminé par la règle de la main droite. Ici, ϕ représente l’angle de a à b,compté positivement !
La règle de la main droite permet de déterminer le sens du vecteur unitairecomme illustré ci-dessous. Attention, l’illustration suppose que l’angle choiside a à b est entre 0 et 180 (ce qui, en pratique, est le meilleur choix pouréviter de se tromper : choisir l’angle plus grand que 180 revient à renverser levecteur 1n et à changer le signe du sinus, ce qui ne modifie donc pas le produitvectoriel).
Remarquons que la norme du produit vectoriel entre deux vecteurs est égaleà l’aire du parallélogramme construit sur ces deux vecteurs.
Comme pour le produit scalaire, le produit vectoriel se distribue sur l’addi-tion, mais par contre il n’est pas commutatif : il est anti-commutatif. C’est-à-dire que pour tous vecteurs a,b, c nous avons
(a + b) ∧ c = a ∧ c + b ∧ c

CHAPITRE 4. ANALYSE VECTORIELLE 32
eta ∧ b = −b ∧ a
Écrivons la table de multiplication du produit vectoriel sur les vecteurs debase :
∧ i j ki 0 k −jj −k 0 ik j −i 0
Remarque 1. Cette table suppose que les coordonnées x, y, z de l’espace sontorientées en suivant la même règle de la main droite. Il faut donc veiller àorienter ses axes de coordonnées correctement (c-à-d. de sorte que i ∧ j = k).
Il est donc possible de calculer tout produit vectoriel de vecteurs donnés encomposantes. À titre mnémotechnique, la formule résultant de ce calcul peuts’exprimer en terme d’un déterminant, comme suit :
(axi + ayj + azk) ∧ (bxi + byj + bzk) =
∣∣∣∣∣∣i j kax ay azbx by bz
∣∣∣∣∣∣= (aybz − azby)i− (axbz − bxaz)j + (axby − bxay)k
4.6 Exercices
Somme et différence de vecteurs
Ex. 11. Soient deux vecteurs : a a six unités de long et fait un angle de +36avec l’axe abcisses positifs ; b a 7 unités de long et est dans la direction de l’axedes x négatifs. Trouver :
1. la somme de ces deux vecteurs (solution graphique et en composantes)2. la différence entre ces deux vecteurs (solution graphique et en composantes)
Ex. 12. On considère les forces et les objets suivants :
1. Dessiner la résultante des forces qui s’applique sur chacun des objets,2. Que vaut l’intensité et la direction de la force résultante dans chacun des
cas ?
Ex. 13. Quelle relation doit-il exister entre a et b pour que le module de leursomme, soit égal à

CHAPITRE 4. ANALYSE VECTORIELLE 33
1. |a|+ |b| ;2. |a| − |b| ;3. |b| − |a| ;
4.√|a|2 + |b|2 ?
Ex. 14. Un homme parcourt à pied 10m à 37 vers le Nord par rapport à l’Est,puis 20m à 60 vers l’Ouest par rapport au Nord. Quel est son déplacementrésultant ?
Ex. 15. Un canot automobile fait route plein Nord à 20km/h dans une régionoù il existe un courant de 5km/h dans la direction 70 Sud par rapport à l’Est.Trouver la vitesse résultante (grandeur et direction) du bateau.
Ex. 16. Étant donné les vecteurs déplacements a = (2i − 3j + 6k)m et b =(3i + 2j− 3k)m, déterminer :
1. la longueur de la somme de ces deux déplacements ;2. la longueur de la différence de ces deux déplacements ;3. le vecteur déplacement 2a− 3b
Ex. 17. On tire sur un objet avec deux forces F1 = (3i − 5j)N et F2 =(2i− 3j)N . Que vaut la résultante des forces (intensité et direction) ?
Composantes
Ex. 18. Trouver les composantes d’un vecteur qui a r unités de long, fait unangle θ avec l’axe des z (axe des cotes), et dont la projection sur le plan oxyfait un angle ϕ (angle orienté !) avec l’axe des x positifs.
Ex. 19. Trouver la distance entre les points (6, 8, 10) et (−4, 4, 10)
Produit scalaire
Ex. 20. Calculer le produit scalaire de 8i + 2j − 3k avec 3i − 6j + 4k. Quepouvez-vous en déduire concernant l’angle entre ces deux vecteurs ?
Ex. 21. Trouver l’angle entre les vecteurs (2, 1, 2) et (4, 0,−3).
Ex. 22. Démontrer à l’aide du produit scalaire que pour tout triangle desommets A, B et C,∣∣∣−−→AB∣∣∣2 =
∣∣∣−→AC∣∣∣2 +∣∣∣−−→BC∣∣∣2 − 2
∣∣∣−→AC∣∣∣2 ∣∣∣−−→BC∣∣∣2 cos θ
où θ est l’angle BCA.
Ex. 23. On considère trois points P = (−1, 3,−5), Q = (2, k,−1) et R =(m, 0,−8). Déterminez les valeurs des paramètres réels k et m telles que letriangle de sommets P , Q et R soit rectangle en P , et les côtés PQ et PRsoient de même longueur.

CHAPITRE 4. ANALYSE VECTORIELLE 34
Produit vectoriel
Ex. 24. Déterminer le produit vectoriel de 6i− 4j + 2k et i + 4j− 2k
Ex. 25. Déterminer le produit vectoriel de (2, 1, 2) et (4, 0,−3).
Ex. 26. Soit a et b deux vecteurs.1. Montrer que a · (a ∧ b) = 02. Comment arriver à ce résultat sans faire de calculs ?
Ex. 27. Trouver un vecteur de module 5 qui soit perpendiculaire à la fois auxvecteurs (6,−2, 4) et (4,−3,−1).
Ex. 28. Trouver l’aire du parallélogramme déterminé par les vecteurs 2i+3j−ket −i + j + 2k.
Ex. 29. Un parallélépipède a comme arêtes concourantes les vecteurs a =(1, 3, 1), b = (2, 0,−1) et c = (−2, 2,−1). Déterminez son volume, l’aire de labase déterminée par b et c, ainsi que sa hauteur par rapport à cette base.
Ex. 30. Déterminez α, β et γ pour que les vecteurs a = (1, 2, 3) et b = (α, β, γ)vérifient les relations a∧b = (1, 1,−1) et a ·b = 9. Le problème est-il possiblesi on impose plutôt a ∧ b = (1, 2,−2) par exemple ?
Géométrie
Ex. 31. Déterminer l’équation de la droite du plan passant par les pointsA = (1, 3) et B = (5,−2)
Ex. 32. Déterminer l’équation de la droite du plan passant par les pointsA = (1, 3) et parallèle à la droite d’équation y = 2x+ 1.
Ex. 33. Trouver :1. l’équation d’une droite qui passe par (7, 2).2. l’équation d’une droite perpendiculaire à la droite d’équation y+ 2x = 3.3. l’équation de la droite passant par (2, 3) et parallèle à la droite passant
par les points (7, 9) et (3,−2). Déterminez-en la pente ainsi que les inter-sections avec les axes.
Ex. 34. Trouvez l’équation de la droite perpendiculaire à la droite y = 3x− 1au point d’abscisse 5.
Ex. 35. Déterminer l’intersection des droites d ≡ y = 2x + 3 et d′ ≡ y =−3x+ 3.
Ex. 36. Déterminer l’intersection des d’équation y = 2x+ 3 et y = 2x+ 8
Ex. 37. Déterminer m en sachant que le point P = (2, 1, 5) est à une distance7 du milieu du segment joignant A = (1, 2, 3) à B = (−1, 6,m).
Ex. 38. Déterminer la distance entre les points A = (3,−1, 5) etB = (−1, 0, 6),ainsi que les coordonnées du milieu du segment les joignant.

CHAPITRE 4. ANALYSE VECTORIELLE 35
Exercice récapitulatif
Ex. 39. Soit P1 = (−1, 2, 3) et P2 = (2,−2, 8).
1. Donnez les composantes du vecteur−−−→P1P2, et sa longueur.
2. Donnez les coordonnées du point M , milieu du segment P1P2.
3. Donnez les coordonnées du point P3 défini par−−−→P1P3 =
−−−−→3P1P2

Chapitre 5
Intégrales, aire sous la courbe etprimitives
5.1 Introduction
Étant donnée une fonction f : [a, b]→ R, définie sur un intervalle [a, b] et àvaleurs dans R, on peut se demander comment calculer (et donc en particulierdéfinir avec rigueur) l’aire qui se trouve entre le graphe de cette courbe et l’axedes abcisses.
Une approche, qui sera détaillée et rendue rigoureuse au cours théoriquele moment venu, est de subdiviser l’intervalle [a, b] en de petites zones qu’onimagine infiniment petites. Sur chacune de ces zones, on construit alors unrectangle (dont l’aire est facile à calculer) et on fait la somme des aires deces rectangles pour obtenir une approximation de l’aire recherchée. L’aire sousla courbe s’obtient alors comme un processus limite, où l’épaisseur des zonesest de plus en plus petite. Cette méthode s’appelle la méthode des sommesde Darboux ou des sommes de Riemann, et conduit à définir ce qui s’appellel’intégrale de Riemann.
36
CHAPITRE 5. INTÉGRATION 37
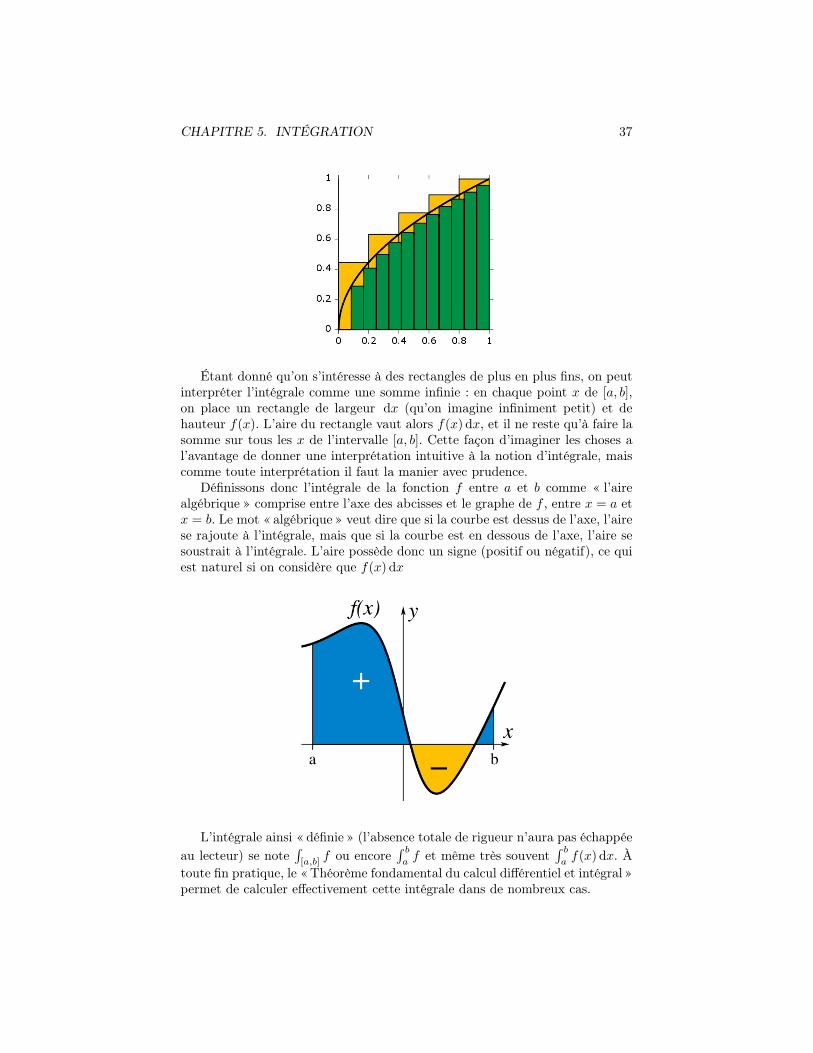
Étant donné qu’on s’intéresse à des rectangles de plus en plus fins, on peutinterpréter l’intégrale comme une somme infinie : en chaque point x de [a, b],on place un rectangle de largeur dx (qu’on imagine infiniment petit) et dehauteur f(x). L’aire du rectangle vaut alors f(x) dx, et il ne reste qu’à faire lasomme sur tous les x de l’intervalle [a, b]. Cette façon d’imaginer les choses al’avantage de donner une interprétation intuitive à la notion d’intégrale, maiscomme toute interprétation il faut la manier avec prudence.
Définissons donc l’intégrale de la fonction f entre a et b comme « l’airealgébrique » comprise entre l’axe des abcisses et le graphe de f , entre x = a etx = b. Le mot « algébrique » veut dire que si la courbe est dessus de l’axe, l’airese rajoute à l’intégrale, mais que si la courbe est en dessous de l’axe, l’aire sesoustrait à l’intégrale. L’aire possède donc un signe (positif ou négatif), ce quiest naturel si on considère que f(x) dx
L’intégrale ainsi « définie » (l’absence totale de rigueur n’aura pas échappéeau lecteur) se note
∫[a,b]
f ou encore∫ baf et même très souvent
∫ baf(x) dx. À
toute fin pratique, le « Théorème fondamental du calcul différentiel et intégral »permet de calculer effectivement cette intégrale dans de nombreux cas.

CHAPITRE 5. INTÉGRATION 38
Théorème 1 (Théorème fondamental du calcul différentiel et intégral). Soitf une fonction dont on recherche l’intégrale sur un intervalle [a, b]. Si F estune fonction définie et dérivable sur [a, b] telle que F ′ = f , alors∫ b
a
f(x) dx = F (b)− F (a)
Ce théorème, fondamental comme son nom l’indique, lie donc la notion« d’aire sous la courbe » avec la notion de dérivée.
Au vu de ce théorème, il est naturel de donner un nom aux fonctions Fdont la dérivée est une fonction f fixée : F est une primitive de f et on noteF =
∫f ou encore F (x) =
∫f(x) dx.
Dans les pages à venir sont développées des méthodes pour déterminer lesprimitives d’une fonction donnée.
5.2 Rappels et exercices


















