La F.F.M. et les randonnées vertes moto et quad « Je roule nature » Avec le soutien du MJSVA.
description
L’Ecole Nationale Supérieur
D’Electricité et Mécanique
Casablanca
Quad-copter
Réaliser par : KOUSTA Ahmed
KHARRAB Brahim
ZERROUKI Anas
2013/2014

Quadcopter
2 Ecole Nationale Supérieur d’Electricité et Mécanique Casablanca 2013 /2014
Contenu Remerciements .............................................................................................................................................3
Introduction ...................................................................................................................................................4
I. Planification du projet : ............................................................................................................................4
II. Partie mécanique .....................................................................................................................................5
1. Conception mécanique du système .....................................................................................................5
2. Etude de mouvement ..........................................................................................................................6
Système électrique ..........................................................................................................................................7
III. Asservissement et correction du drone ...............................................................................................9
IV. Partie intelligente .............................................................................................................................. 10
1. Software ............................................................................................................................................ 10
2. Structure de système ........................................................................................................................ 10
3. Structure détaillée du programme : ................................................................................................. 11
4. Acquisition de données : ................................................................................................................... 11
V. Interface de commande ........................................................................................................................ 12
1. Commande avec manette ................................................................................................................. 12
2. Commande par ordinateur : ............................................................................................................. 13
Conclusion ................................................................................................................................................... 14

Quadcopter
3 Ecole Nationale Supérieur d’Electricité et Mécanique Casablanca 2013 /2014
Remerciements
Avant d’entamer notre rapport, nous adressons notre sincère
remerciement à tous les enseignants pour leur conseil et collaboration
durant toute la période du projet.
Nous remercions également tous ceux qui ont participé de près ou de
loin dans la réalisation de ce modeste travail.
Enfin, nous formulons notre haute considération et notre gratitude à
la direction de L’ENSEM.
Quadcopter
4 Ecole Nationale Supérieur d’Electricité et Mécanique Casablanca 2013 /2014
Introduction
La mécatronique allie l'utilisation simultanée et en étroite
symbiose des techniques du génie mécanique, de l'électronique,
de l'automatisme et de la micro-informatique pour envisager de
nouvelles façons de concevoir et de produire, créer de nouveaux
produits plus performants et de nouvelles machines.
C’est pour cela On a choisi comme projet un drone
Quadcopter qui traite les disciplines de la mécatronique.
L’importance de ce projet c’est savoir :
commander des moteur Bruchless.
Asservissement de position (correcteur PID).
Stabilisation du drone.
Traitement d’image.
Utiliser la communication sans fil.

Quadcopter
5 Ecole Nationale Supérieur d’Electricité et Mécanique Casablanca 2013 /2014
I. Planification du projet :
Notre projet s’organise selon les différentes phases suivantes :
II. Partie mécanique
1. Conception mécanique du système Voici les dessins techniques des différentes pièces dont notre système se compose :
Quadcopter
6 Ecole Nationale Supérieur d’Electricité et Mécanique Casablanca 2013 /2014
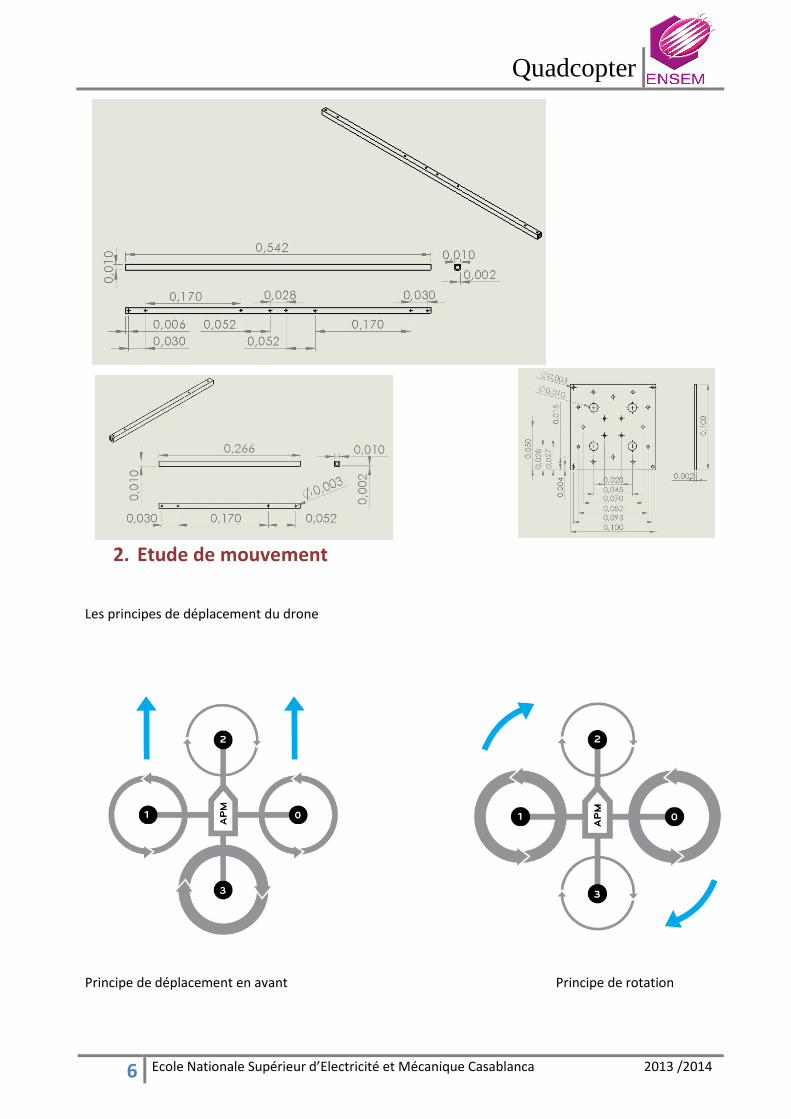
2. Etude de mouvement
Les principes de déplacement du drone
Principe de déplacement en avant Principe de rotation

Quadcopter
7 Ecole Nationale Supérieur d’Electricité et Mécanique Casablanca 2013 /2014
Système électrique 1. Moteur Brushless
Un moteur sans balais, ou « moteur brushless »,
ou machine synchrone autopilotée à aimants
permanents, est une machine électrique de la catégorie
des machines synchrones, dont le rotor est constitué
d'un ou de plusieurs aimants permanents et pourvu
d'origine d'un capteur de position rotorique
Les kv vous indiquent le nombre de tours/min par volt. A vide, un moteur de 5 800 kv sera
donc capable de tourner à 5 800 trs/min pour 1 volt, soit 42 920 tours avec les 7,4 volts d'un accu
LiPo. Donc plus le nombre de kv est grand, plus le moteur ira vite.
Le couple, lui, est donné par le nombre de tours (T). Plus T est grand, plus le couple sera
important. Malheureusement, la fabrication des moteurs brushless implique que la vitesse sera
également diminuée. Il n'y a donc pas de miracle, et les kv sont étroitement liés à T.
Donc, pour résumer, un fort kv sera lié à un petit nombre T, et le moteur sera fait pour la
vitesse de pointe. Un faible kv sera lié à un grand nombre T et le moteur sera fait pour arracher
le sol à l'accélération.
2. Gyromètre
Un gyromètre est un instrument qui mesure une vitesse angulaire. Il est utilisé
principalement dans les avions, les bateaux, les sous-marins pour déterminer
sa vitesse et sa position.

Quadcopter
8 Ecole Nationale Supérieur d’Electricité et Mécanique Casablanca 2013 /2014
3. Arduino
Arduino est un circuit imprimé en matériel libre (dont les
plans de la carte elle-même sont publiés en licence
libre mais dont certains composants sur la carte, comme
le microcontrôleur par exemple, ne sont pas en licence
libre) sur lequel se trouve un microcontrôleur qui peut
être programmé pour analyser et produire des signaux
électriques, de manière à effectuer des tâches très
diverses comme la domotique (le contrôle des appareils
domestiques - éclairage, chauffage…), le pilotage
d'un robot, etc.
4. Radio Télémétrie
Ce module permet de transmettre les données avec un canal
sans fil à savoir la radio avec une fréquence 915 Mhz
5. Batterie
On a utilisé une batterie de type Lipo 4000mAh
6. ESC Caractéristiques
• Gère des fréquences d'actualisation rapides • Les ESC fonctionnent à une fréquence d'actualisation de plus de 450 Hz • Le microprogramme de l'ESC est optimisé pour les quadri/multi coptères • Excellente fiabilité

Quadcopter
9 Ecole Nationale Supérieur d’Electricité et Mécanique Casablanca 2013 /2014
III. Asservissement et correction du drone
La stabilité est indispensable pour le vol du drone (on boucle ouverte), pour cela nous avons
besoin d’asservir le quadcopter en position
Pour bien assurée la stabilité en boucle fermée en utilise un correcteur PID parallèle pour
diminuer l’erreur à 0
Avec Erreur = Consigne – angle d’inclinaison
Simulation à l’aide de matlab\simulink
Angle d’inclinaison

Quadcopter
10 Ecole Nationale Supérieur d’Electricité et Mécanique Casablanca 2013 /2014
IV. Partie intelligente
1. Software Les logiciels utilisés pour le développement :
Visual C# (Interface de commande)
Matlab/Simulink (Stabilité)
Arduino (programmation)
2. Structure de système
On a utilisé la carte arduino pour le développement de notre algorithme qui permet d’acquisition du
capteur et la commande des quatre moteurs bruchless.

Quadcopter
11 Ecole Nationale Supérieur d’Electricité et Mécanique Casablanca 2013 /2014
3. Structure détaillée du programme :
L’algorithme du programme permet en générale :
L’asservissement de position à l’aide d’un correcteur PID
Communication permanant avec l’utilisation
Commande des moteurs
4. Acquisition de données :

Quadcopter
12 Ecole Nationale Supérieur d’Electricité et Mécanique Casablanca 2013 /2014
V. Interface de commande
1. Commande avec manette
Cette manette permet de commander le drone directement avec canal sans fil via la
radio télémétrie
Les inclinaisons de la manette permettent de contrôler
les directions du drone (Yaw, Pitch)
Ainsi que deux boutons poussoirs qui accélère et
décélère le drone (l’altitude)
Joystick de la manette met en rotation le drone (Roll)
Composants :
Wii nunchuck
Arduino Uno
Afficheur LCD 2x16
Radio télémétrie

Quadcopter
13 Ecole Nationale Supérieur d’Electricité et Mécanique Casablanca 2013 /2014
2. Commande par ordinateur :
Cette interface développée avec C# (Visual C Sharp Studio), met en place le contrôle de
votre drone en se connectant avec la radio télémétrie.
Page de configuration (Communication)
Commande par manette de jeu :

Quadcopter
14 Ecole Nationale Supérieur d’Electricité et Mécanique Casablanca 2013 /2014
Conclusion
Après avoir acquis le bagage technique nécessaire à l’ENSEM, les étudiants de la
filière électronique et télécommunication ont décidé de mettre en œuvre leurs
compétences par la réalisation de ce projet.
Les différentes étapes de réalisation de notre projet nous ont permis
l’acquisition d’autres compétences bénéfiques pouvant être essentiels et
importants dans notre vie professionnelle à savoir :
L’organisation du temps
L’assiduité et le sérieux dans le travail pour de bons résultats de production
Le développement de l’esprit du travail en groupe