PRT Rapport Final 4GE1 2012 BINOME 21
28
Rapport Pr Réalisé par Binôme 21 ZILL Yvan PHAM HO B t Final du Projet de Réalisation Technologique rojet de Réalisation Technologique Tuteurs: Ma Did Bao An ZILL Yvan PHAM HO Bao An 1 ady GUILLEMOT dier NOTERMAN
-
Upload
ultimatest-nova -
Category
Documents
-
view
54 -
download
7
Transcript of PRT Rapport Final 4GE1 2012 BINOME 21
Rapport Final
Projet de
Réalisé par Binôme 21
ZILL Yvan PHAM HO Bao An
Rapport Final du Projet de Réalisation Technologique
rojet de Réalisation
Technologique
Tuteurs: Mady GUILLEMOT
Didier NOTERMAN
PHAM HO Bao An
ZILL Yvan
PHAM HO Bao An
1
Tuteurs: Mady GUILLEMOT
Didier NOTERMAN
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
2
Sommaire
I. Présentation générale du projet ..................................................................................................... 4
I. Sujet du projet ............................................................................................................................. 4
II. Présentation d’une partie opérative virtuelle ............................................................................. 4
II. Cahier des charges........................................................................................................................... 5
1. Le cahier des charges .................................................................................................................. 5
2. Identification des éléments du projet: ........................................................................................ 6
3. Analyse fonctionnelle .................................................................................................................. 7
III. Réalisation de la PO virtuelle 3D : ............................................................................................... 8
1. Présentation du logiciel VU : ....................................................................................................... 8
2. Choix des modèles : ..................................................................................................................... 8
3. Création de la perçeuse : ............................................................................................................. 9
a. Recherche d’un modèle :......................................................................................................... 9
b. Importation depuis Solidwork : ............................................................................................... 9
c. Assemblage et programmation des scripts : ......................................................................... 11
4. Création de l’ensemble de la Partie Opérative Virtuelle ........................................................... 11
a. Vérins ..................................................................................................................................... 11
b. Convoyeurs : .......................................................................................................................... 14
c. Capteur de présence : ........................................................................................................... 15
d. Colonne de voyants : ............................................................................................................. 16
e. Caméras: ................................................................................................................................ 18
IV. Réalisation de la partie commande (Pupitre de commande) ................................................... 19
1. Présentation du logiciel Vijéo Designer ..................................................................................... 19
2. Choix des modèles ..................................................................................................................... 19
3. Création du pupitre de commande ........................................................................................... 19
a. Création d’un projet .............................................................................................................. 19
b. Lien avec l’automate ............................................................................................................. 20
c. Création des éléments du pupitre ......................................................................................... 21
d. Gestion de l’arrêt d’urgence.................................................................................................. 23
e. Présentation du pupitre de commande finalisé .................................................................... 24
V. Essais : ........................................................................................................................................... 25
1. Essais unitaires : ........................................................................................................................ 25
2. Essais fonctionnels :................................................................................................................... 25
VI. Conclusion : ............................................................................................................................... 26

Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
3
VII. Annexes : ................................................................................................................................... 27
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
4
INTRODUCTION
Etudiants en quatrième année du département Génie Electrique de l‘INSA de Lyon,
nous devons réaliser un projet de réalisaFon technologique (PRT) qui s’inscrit dans le cadre
de l’enseignement de l’automaFque des systèmes à évènements discrets.
Ce projet nous permet de développer notre capacité à travailler en équipe,
d’apprendre à gérer un projet de la phase analyse fonctionnelle jusqu’à la remise du produit
au client. Enfin, nous pouvons profiter de cette occasion pour enrichir nos connaissances
techniques et aussi de mettre à profit nos compétences au bon déroulement de ce projet.
Concernant le sujet du PRT, il s’agit de concevoir une maquette virtuelle en 3D aussi
appelée “Virtual Commissioning”.
I. Présentation générale du projet
I. Sujet du projet
L’objecFf est de créer une parFe opéraFve (PO) virtuelle correspondant à un poste de
perçage automaFsé et qui sera commandée par un automate programmable de type M340.
Une partie opérative virtuelle en 2D est déjà existante, elle a été développée à l’aide du
logiciel VijéoDesigner de Schneider-Electric. La parFe opéraFve créee au Ftre du PRT dispose
d’un affichage en 3D qui va permeLre d’obtenir une représentaFon s’approchant de la réalité
beaucoup plus fidèlement que son prédécesseur et va donc le remplacer.
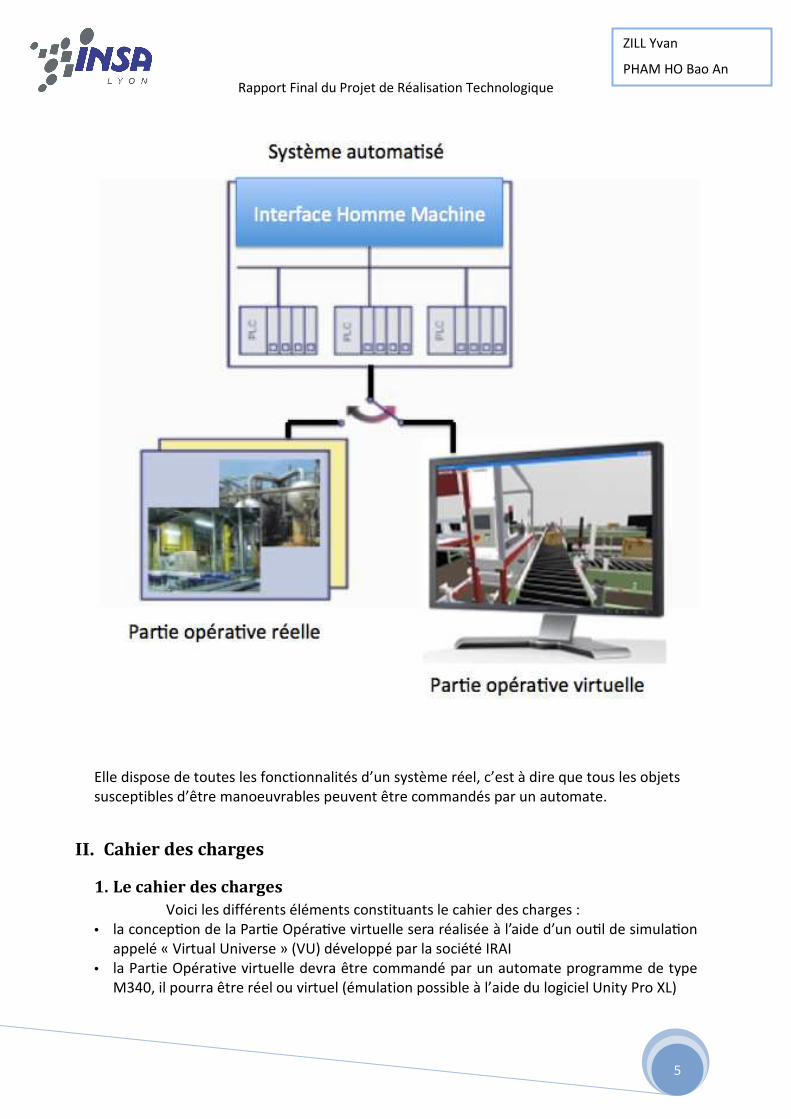
II. Présentation d’une partie opérative virtuelle
Une partie opérative virtuelle est une représentation d’un système de production. Elle
peut être developpée par des logiciels aussi appelés outils de simulation.
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
5
Elle dispose de toutes les fonctionnalités d’un système réel, c’est à dire que tous les objets
susceptibles d’être manoeuvrables peuvent être commandés par un automate.
II. Cahier des charges
1. Le cahier des charges
Voici les différents éléments constituants le cahier des charges :
• la concepFon de la ParFe OpéraFve virtuelle sera réalisée à l’aide d’un ouFl de simulaFon
appelé « Virtual Universe » (VU) développé par la société IRAI
• la Partie Opérative virtuelle devra être commandé par un automate programme de type
M340, il pourra être réel ou virtuel (émulation possible à l’aide du logiciel Unity Pro XL)

Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
6
• la conception de la partie commande (ou Interface Homme Machine) sera réalisée à l’aide
du logiciel Vijéo Designer de Schneider-Electric.
Ce dernier point n’avait pas été défini lors de l’attribution du sujet de PRT et a été conclu
après plusieurs mises au point avec le client. En effet, la conception de l’IHM est
réalisable à l’aide du logiciel VU mais il a été convenu avec le client de la réaliser avec le
logiciel Vijéo Designer. Ce choix a été motivé par le fait que dans le monde de l’industrie il
est courant d’avoir une séparation réelle entre les trois éléments constituant une chaîne
automatisée c’est à dire : IHM, Automate et Partie Opérative.
2. Identification des éléments du projet: On a vu précédemment que trois éléments principaux contribuent au bon fonctionnement
de la chaîne automatisée. Bien que nous devions concevoir uniquement la partie opérative
et l’IHM, l’automate occupe quant à lui un rôle central. Le programme de l’automate étant
déjà réalisé, c’est sur lui que nous nous sommes appuyés pour réaliser notre projet. Nous
avons aussi utilisé, comme référénce, l’ancienne partie opérative et son pupitre de
commande dévéloppés sur Vijéo Designer (en 2 dimensions).
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
7
Grâce aux différents listings issus du programme automate ainsi qu’aux schémas de la partie
opérative 2D et son pupitre nous avons pu établir des listes exhaustives des éléments à
créer.
Ces listes nous ont permis:
• d’avoir un suivi sur les phases de conception : partie opérative et IHM
• de garantir la bonne prise en compte de l’ensemble des éléments concernés par la
conception et donc d’éviter un éventuel oubli
En plus des éléments cités ci-dessus, nous avons intégré la démarche Lean à notre projet.
C’est à dire que nous avons tenu compte de la signalisation d’état ou encore appelée
« Pilotage par le visuel » en ajoutant celle-ci à la fois sur le pupitre de commande (3 voyants)
et sur la partie opérative elle même sous forme de colonne lumineuse.
Cette démarche permet d’être informé à tout instant de l’état actuel de la production par un
simple coup d’œil sur l’installation.
Afin de réaliser la signalisation d’état nous avons du apporter des modifications mineurs au
programme d’automate.
Nous avons donc crée des variables %Mi ainsi que des sections d’action afin de pouvoir
communiquer les différentes signalisations d’état à l’IHM et à la partie opérative
3. Analyse fonctionnelle:
L’analyse fonctionnelle a été réalisée dans le cadre de l’élaboration du plan directeur de
projet que nous avons dû établir avant de démarrer le PRT.Le plan directeur de projet est
une exigence du module d’enseignement HU3 et fait donc l’objet d’une évaluation.Ce travail
de longue haleine nous a permis d’une part de porter notre analyse sur le produit que nous
devions mettre en oeuvre et d’autre part de mettre en place les outils nécessaires à la bonne
conduite de notre projet.Le plan auquel nous faisons référence est livré avec le rapport ci-
présent.
Référence du document : PLAN_DIRECTEUR_4GE1_2012_BINOME_21.pdf
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
8
III. Réalisation de la PO virtuelle 3D :
1. Présentation du logiciel VU :
C’est un simulateur 3D temps réel créé par la société française IRAI. Il fonctionne sous
Windows XP, Vista ou Windows7. Virtual Universe offre à ses utilisateurs la possibilité de
développer leurs propres maquettes numériques 3D. Les modèles ainsi crées peuvent être
pilotés par une connexion directe avec des logiciels d’automatisme (Schneider, Siemens,
Rockwell, Automgen,...), des automates programmables, de driver OPC, de cartes Advantech
ou de l’éditeur exécuteur intégré de script ou d’organigrammes qui permet de décrire
aisément les comportements. Des modèles peuvent être créés en important des fichiers 3D
à partir de différents logiciels de CAO (ProEngineer, 3DS…) en format VRML 1.0. Une
fonction d’importation directe des pièces et des assemblages à partir de Solidworks est
intégrée. Virtual Universe contient également une passerelle qui permet la communication
avec Matlab/Simulink. Il contient des bibliothèques d’objets standards permettant
également de créer de nouveaux objets réutilisables.
Il existe une licence professeurs et étudiants de VU téléchargeable gratuitement en version
d’essai de 40 jours depuis le site web de la société IRAI. Quant à la licence complète, elle est
d’un coût modeste (~300 euros).
Nous avons pu bénéficier d’un code d’activation lié à la licence de l’INSA après avoir
sollicité la personne en charge du logiciel de la société IRAI.
2. Choix des modèles :
La marge de manœuvre concernant les choix de concepFon se limite à la ParFe OpéraFve en
elle même. C’est à dire au choix des différents modèles 3D à créer ou à récupérer dans des
bibliothèques afin de consFtuer notre chaine complète de perçage automaFsé virtuelle.
La plupart des éléments nécessaires à la consFtuFon de la chaine de perçage sont
disponibles dans la bibliothèque fournie avec le logiciel Virtual Universe.
L’élément crucial de la chaine est la perceuse et nous devions, pour mener à bien ce projet,
trouver un modèle 3D de perceuse qui répondait au mieux aux trois critères suivants :
• représentaFon se rapprochant le plus possible de la réalité.
• les éléments requis pour simuler les différents mouvements (rotaFon, translaFon)
devaient tous être manoeuvrables.
• le fichier de concepFon devait être compaFble avec le logiciel Virtual Universe (ou
convertible vers un fichier compatible).
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
9
• Le choix sur lequel nous nous étions portés lors de notre étude ne convenait
finalement pas car lors des premiers essais sur VU, nous n’avons pas réussi à obtenir
des résultats satisfaisants.
Nous avons donc finalement opté pour un autre modèle.
3. Création de la perçeuse :
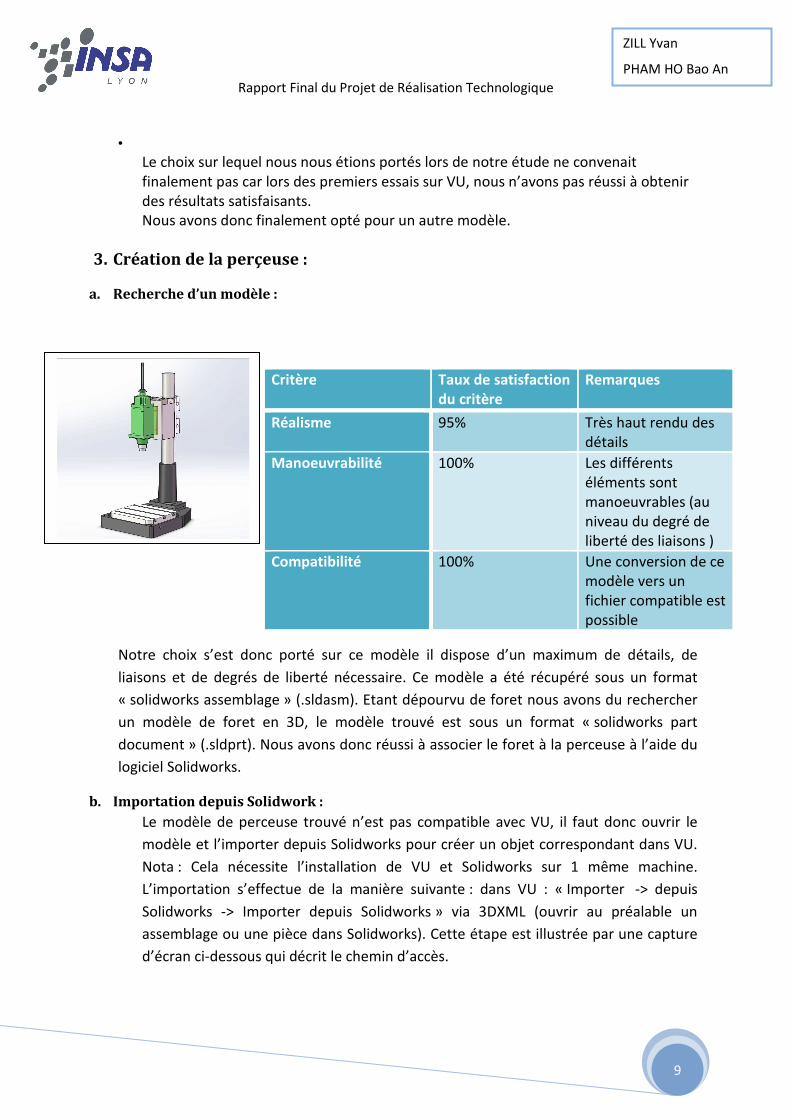
a. Recherche d’un modèle :
Notre choix s’est donc porté sur ce modèle il dispose d’un maximum de détails, de
liaisons et de degrés de liberté nécessaire. Ce modèle a été récupéré sous un format
« solidworks assemblage » (.sldasm). Etant dépourvu de foret nous avons du rechercher
un modèle de foret en 3D, le modèle trouvé est sous un format « solidworks part
document » (.sldprt). Nous avons donc réussi à associer le foret à la perceuse à l’aide du
logiciel Solidworks.
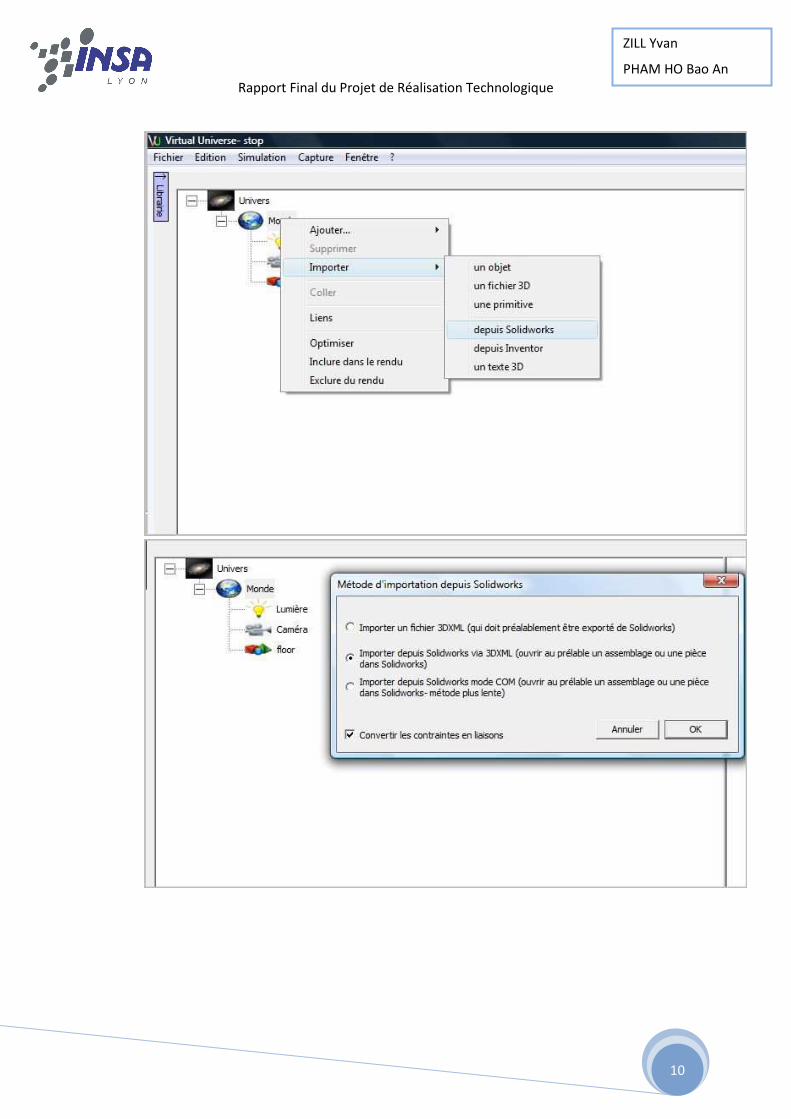
b. Importation depuis Solidwork :
Le modèle de perceuse trouvé n’est pas compatible avec VU, il faut donc ouvrir le
modèle et l’importer depuis Solidworks pour créer un objet correspondant dans VU.
Nota : Cela nécessite l’installation de VU et Solidworks sur 1 même machine.
L’importation s’effectue de la manière suivante : dans VU : « Importer -> depuis
Solidworks -> Importer depuis Solidworks » via 3DXML (ouvrir au préalable un
assemblage ou une pièce dans Solidworks). Cette étape est illustrée par une capture
d’écran ci-dessous qui décrit le chemin d’accès.
Critère Taux de satisfaction
du critère
Remarques
Réalisme 95% Très haut rendu des
détails
Manoeuvrabilité 100% Les différents
éléments sont
manoeuvrables (au
niveau du degré de
liberté des liaisons )
Compatibilité 100% Une conversion de ce
modèle vers un
fichier compatible est
possible
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
10

Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
11
c. Assemblage et programmation des scripts :
Une fois que la perceuse a été assemblée et importée, nous lui avons ajouté des
comportements et scripts associés.
Rôles des comportements créés pour la perçeuse :
Updown : déplacement Tout ou Rien selon axe vertical
Rotation : rotation Tout ou Rien selon axe vertical
Descendre, Rotate : lecture générique qui lit une valeur liée à l’adresse de la variable
Unity Pro.
Perceuse_Bas, Perceuse_Haut : écriture générique qui écrit une valeur liée à
l’adresse de la variable Unity Pro.
Script : définir la « postion des capteurs » correspondante à des fins de course de la
perçeuse.
4. Création de l’ensemble de la Partie Opérative Virtuelle
a. Vérins
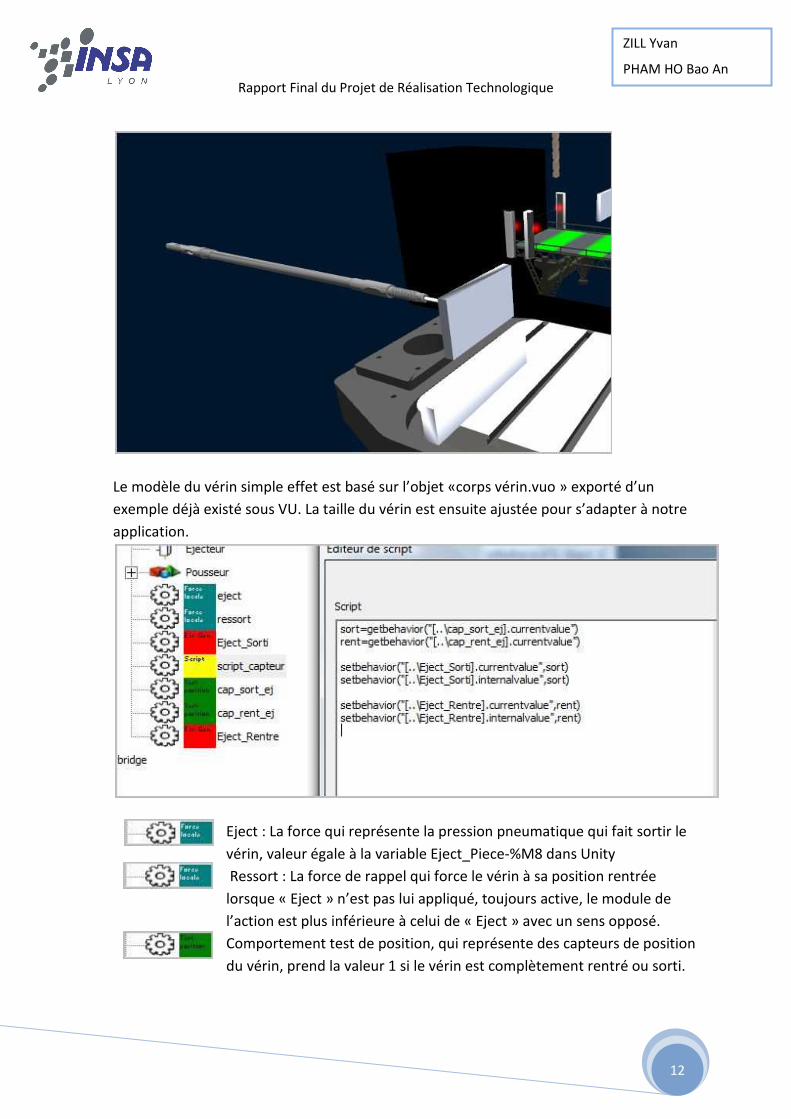
� Vérin simple effet (1 vérin : Ejecteur)
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
12
Le modèle du vérin simple effet est basé sur l’objet «corps vérin.vuo » exporté d’un
exemple déjà existé sous VU. La taille du vérin est ensuite ajustée pour s’adapter à notre
application.
Eject : La force qui représente la pression pneumatique qui fait sortir le
vérin, valeur égale à la variable Eject_Piece-%M8 dans Unity
Ressort : La force de rappel qui force le vérin à sa position rentrée
lorsque « Eject » n’est pas lui appliqué, toujours active, le module de
l’action est plus inférieure à celui de « Eject » avec un sens opposé.
Comportement test de position, qui représente des capteurs de position
du vérin, prend la valeur 1 si le vérin est complètement rentré ou sorti.
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
13
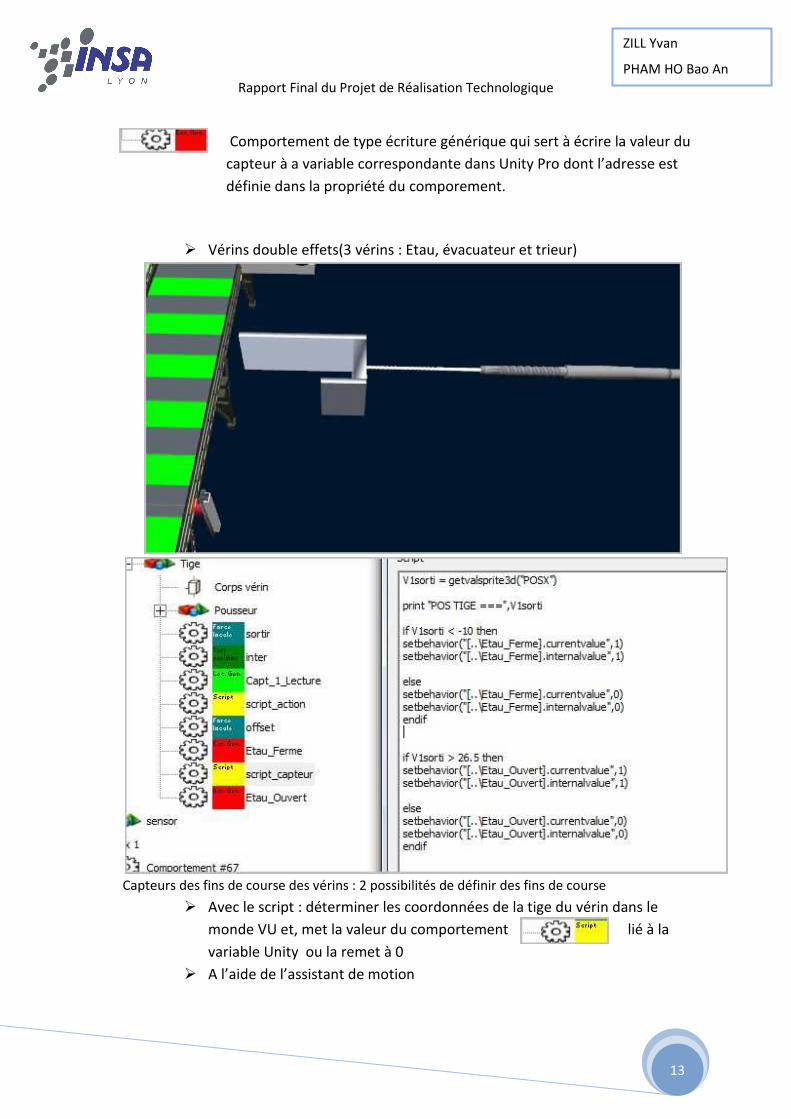
Comportement de type écriture générique qui sert à écrire la valeur du
capteur à a variable correspondante dans Unity Pro dont l’adresse est
définie dans la propriété du comporement.
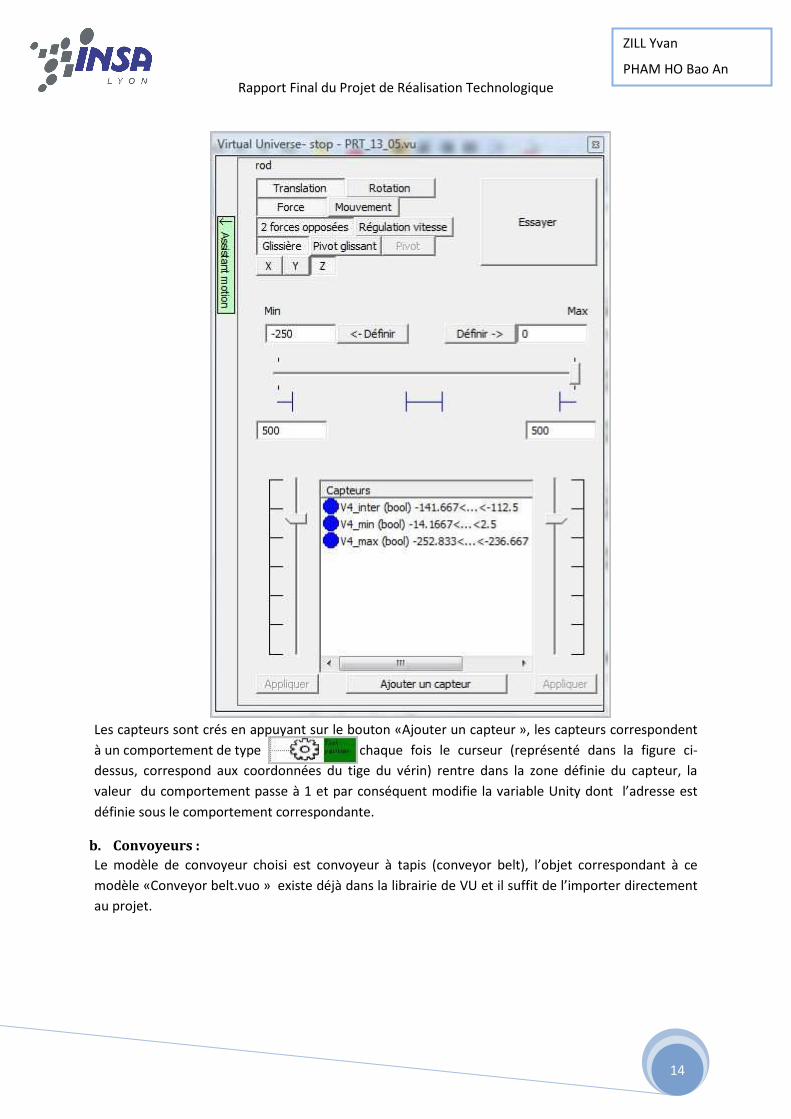
� Vérins double effets(3 vérins : Etau, évacuateur et trieur)
Capteurs des fins de course des vérins : 2 possibilités de définir des fins de course
� Avec le script : déterminer les coordonnées de la tige du vérin dans le
monde VU et, met la valeur du comportement lié à la
variable Unity ou la remet à 0
� A l’aide de l’assistant de motion
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
14
Les capteurs sont crés en appuyant sur le bouton «Ajouter un capteur », les capteurs correspondent
à un comportement de type chaque fois le curseur (représenté dans la figure ci-
dessus, correspond aux coordonnées du tige du vérin) rentre dans la zone définie du capteur, la
valeur du comportement passe à 1 et par conséquent modifie la variable Unity dont l’adresse est
définie sous le comportement correspondante.
b. Convoyeurs :
Le modèle de convoyeur choisi est convoyeur à tapis (conveyor belt), l’objet correspondant à ce
modèle «Conveyor belt.vuo » existe déjà dans la librairie de VU et il suffit de l’importer directement
au projet.
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
15
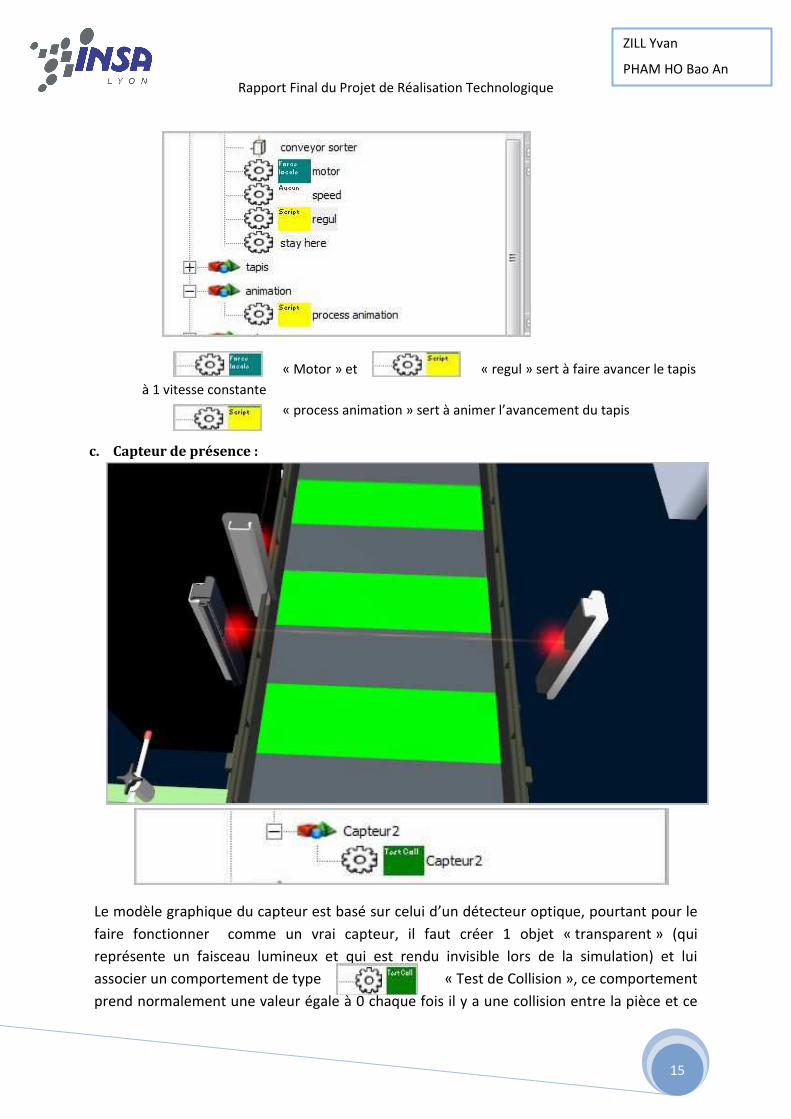
« Motor » et « regul » sert à faire avancer le tapis
à 1 vitesse constante
« process animation » sert à animer l’avancement du tapis
c. Capteur de présence :
Le modèle graphique du capteur est basé sur celui d’un détecteur optique, pourtant pour le
faire fonctionner comme un vrai capteur, il faut créer 1 objet « transparent » (qui
représente un faisceau lumineux et qui est rendu invisible lors de la simulation) et lui
associer un comportement de type « Test de Collision », ce comportement
prend normalement une valeur égale à 0 chaque fois il y a une collision entre la pièce et ce
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
16
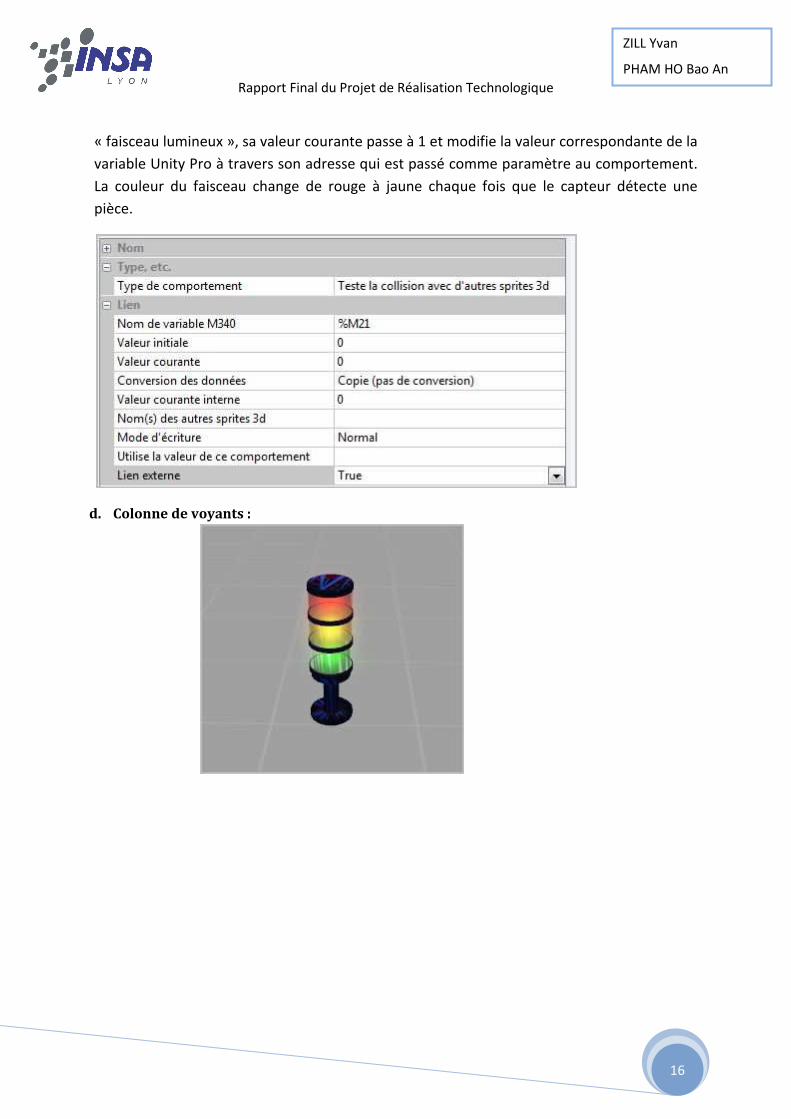
« faisceau lumineux », sa valeur courante passe à 1 et modifie la valeur correspondante de la
variable Unity Pro à travers son adresse qui est passé comme paramètre au comportement.
La couleur du faisceau change de rouge à jaune chaque fois que le capteur détecte une
pièce.
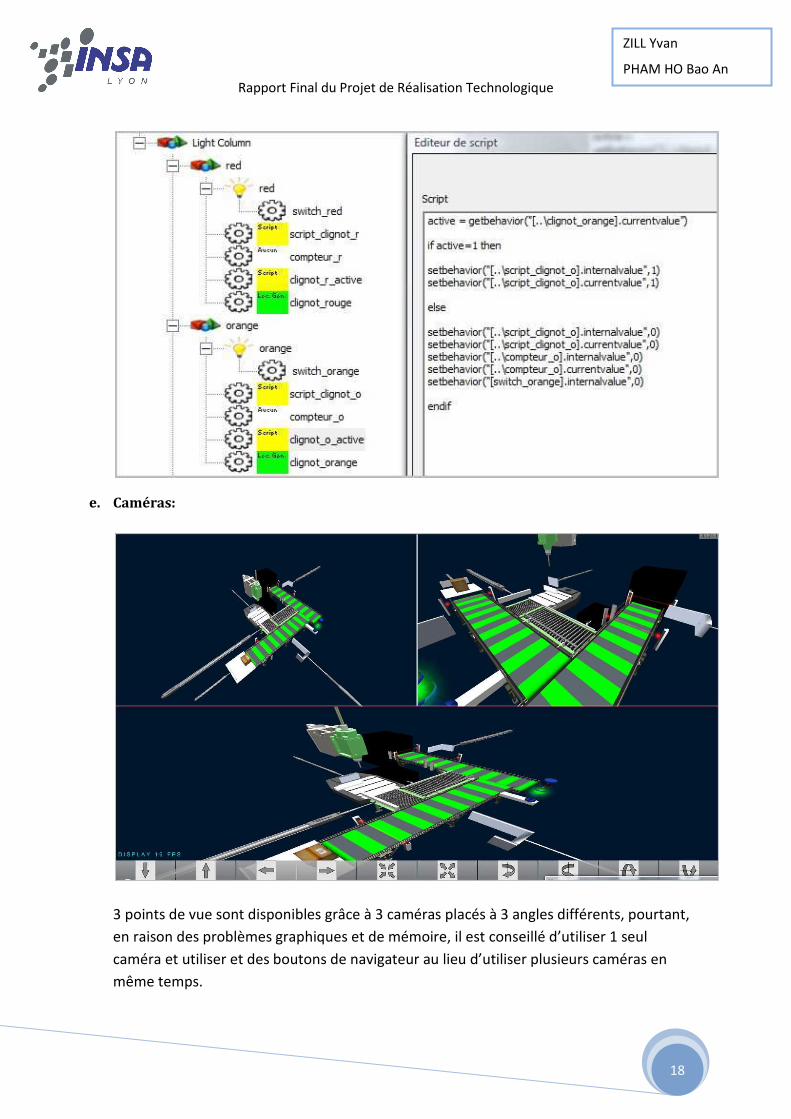
d. Colonne de voyants :
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
17
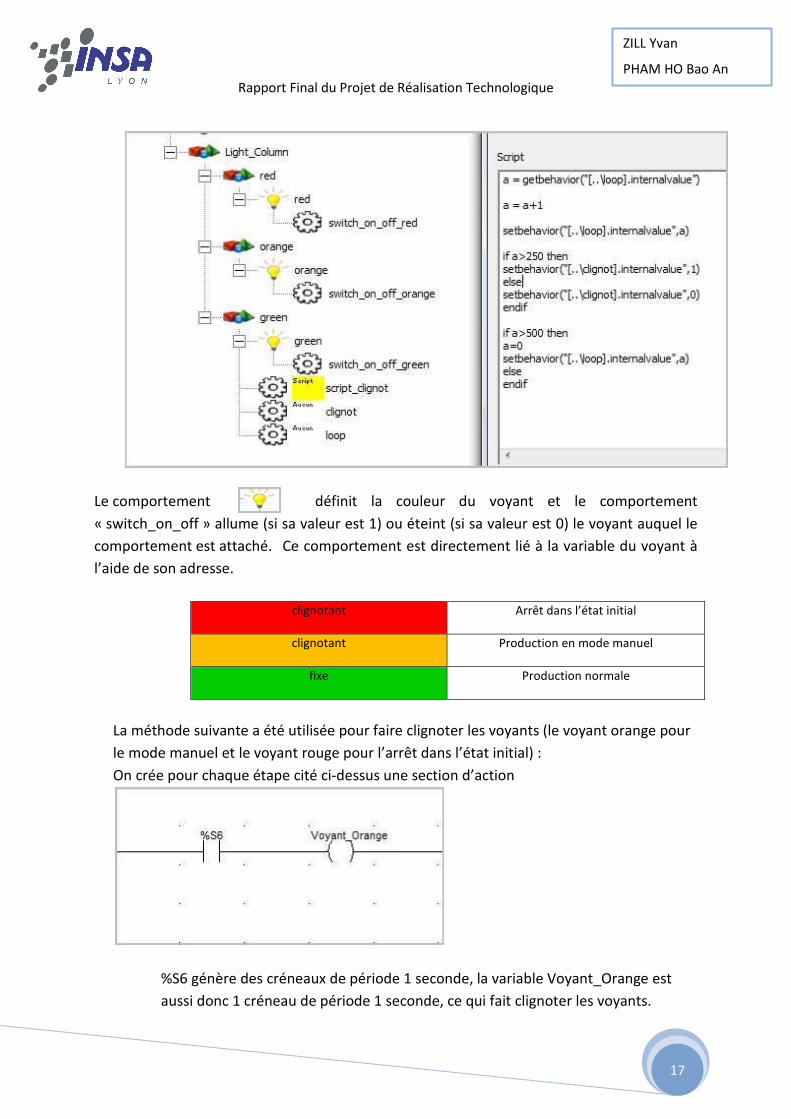
Le comportement définit la couleur du voyant et le comportement
« switch_on_off » allume (si sa valeur est 1) ou éteint (si sa valeur est 0) le voyant auquel le
comportement est attaché. Ce comportement est directement lié à la variable du voyant à
l’aide de son adresse.
clignotant Arrêt dans l’état initial
clignotant Production en mode manuel
fixe Production normale
La méthode suivante a été utilisée pour faire clignoter les voyants (le voyant orange pour
le mode manuel et le voyant rouge pour l’arrêt dans l’état initial) :
On crée pour chaque étape cité ci-dessus une section d’action
%S6 génère des créneaux de période 1 seconde, la variable Voyant_Orange est
aussi donc 1 créneau de période 1 seconde, ce qui fait clignoter les voyants.
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
18
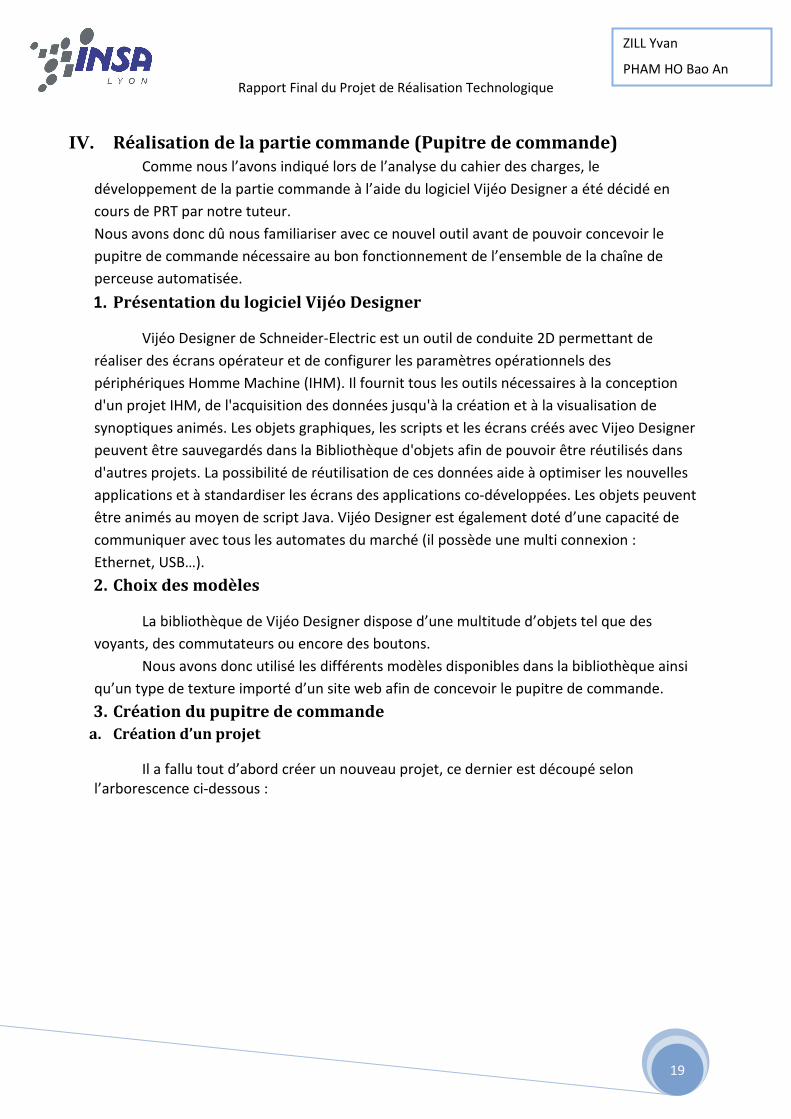
e. Caméras:
3 points de vue sont disponibles grâce à 3 caméras placés à 3 angles différents, pourtant,
en raison des problèmes graphiques et de mémoire, il est conseillé d’utiliser 1 seul
caméra et utiliser et des boutons de navigateur au lieu d’utiliser plusieurs caméras en
même temps.
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
19
IV. Réalisation de la partie commande (Pupitre de commande)
Comme nous l’avons indiqué lors de l’analyse du cahier des charges, le
développement de la partie commande à l’aide du logiciel Vijéo Designer a été décidé en
cours de PRT par notre tuteur.
Nous avons donc dû nous familiariser avec ce nouvel outil avant de pouvoir concevoir le
pupitre de commande nécessaire au bon fonctionnement de l’ensemble de la chaîne de
perceuse automatisée.
1. Présentation du logiciel Vijéo Designer
Vijéo Designer de Schneider-Electric est un outil de conduite 2D permettant de
réaliser des écrans opérateur et de configurer les paramètres opérationnels des
périphériques Homme Machine (IHM). Il fournit tous les outils nécessaires à la conception
d'un projet IHM, de l'acquisition des données jusqu'à la création et à la visualisation de
synoptiques animés. Les objets graphiques, les scripts et les écrans créés avec Vijeo Designer
peuvent être sauvegardés dans la Bibliothèque d'objets afin de pouvoir être réutilisés dans
d'autres projets. La possibilité de réutilisation de ces données aide à optimiser les nouvelles
applications et à standardiser les écrans des applications co-développées. Les objets peuvent
être animés au moyen de script Java. Vijéo Designer est également doté d’une capacité de
communiquer avec tous les automates du marché (il possède une multi connexion :
Ethernet, USB…). 2. Choix des modèles
La bibliothèque de Vijéo Designer dispose d’une multitude d’objets tel que des
voyants, des commutateurs ou encore des boutons.
Nous avons donc utilisé les différents modèles disponibles dans la bibliothèque ainsi
qu’un type de texture importé d’un site web afin de concevoir le pupitre de commande.
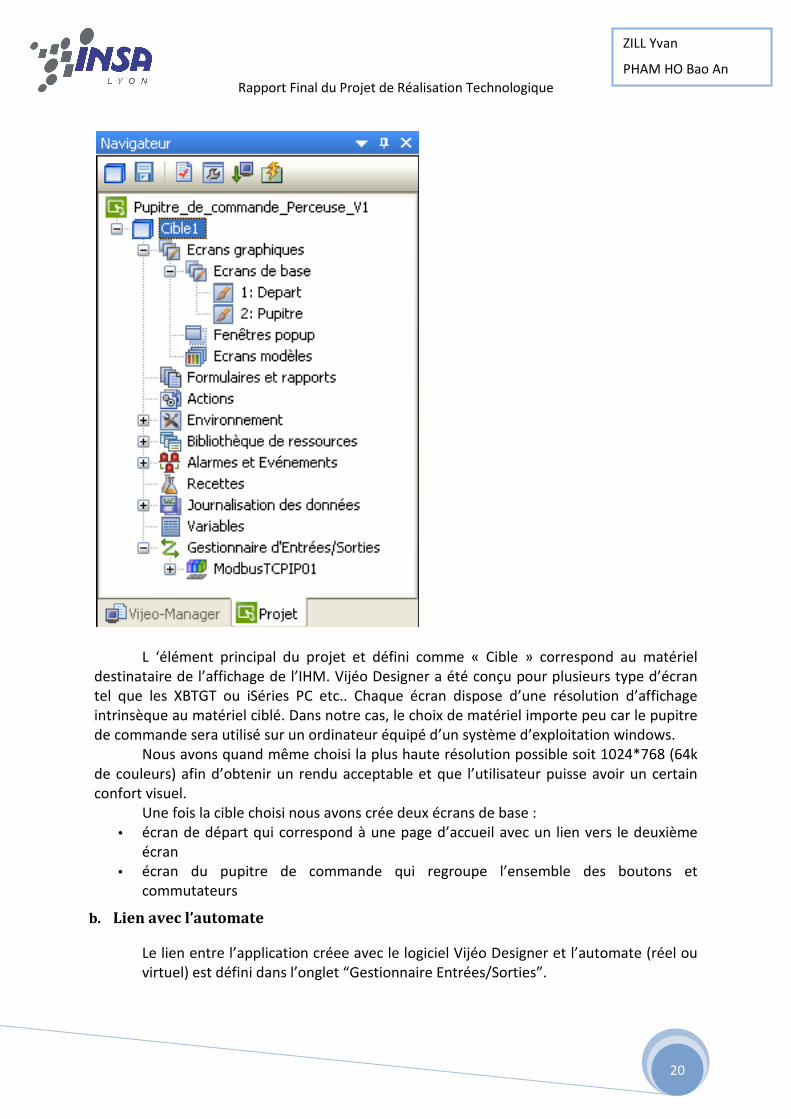
3. Création du pupitre de commande
a. Création d’un projet
Il a fallu tout d’abord créer un nouveau projet, ce dernier est découpé selon
l’arborescence ci-dessous :
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
20
L ‘élément principal du projet et défini comme « Cible » correspond au matériel
destinataire de l’affichage de l’IHM. Vijéo Designer a été conçu pour plusieurs type d’écran
tel que les XBTGT ou iSéries PC etc.. Chaque écran dispose d’une résolution d’affichage
intrinsèque au matériel ciblé. Dans notre cas, le choix de matériel importe peu car le pupitre
de commande sera utilisé sur un ordinateur équipé d’un système d’exploitation windows.
Nous avons quand même choisi la plus haute résolution possible soit 1024*768 (64k
de couleurs) afin d’obtenir un rendu acceptable et que l’utilisateur puisse avoir un certain
confort visuel.
Une fois la cible choisi nous avons crée deux écrans de base : • écran de départ qui correspond à une page d’accueil avec un lien vers le deuxième
écran • écran du pupitre de commande qui regroupe l’ensemble des boutons et
commutateurs
b. Lien avec l’automate
Le lien entre l’application créee avec le logiciel Vijéo Designer et l’automate (réel ou
virtuel) est défini dans l’onglet “Gestionnaire Entrées/Sorties”.
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
21
C’est dans cette onglet qu’est configurée l’adresse de l’automate. Dans notre cas, ayant
utilisé un automate virtuel généré par le logiciel Unity Pro XL, nous avons défini la
configuration de la manière suivante :
Gestionnaire Entrées/Sorties : ModbusTCPIP01 => EquipementModbus01.
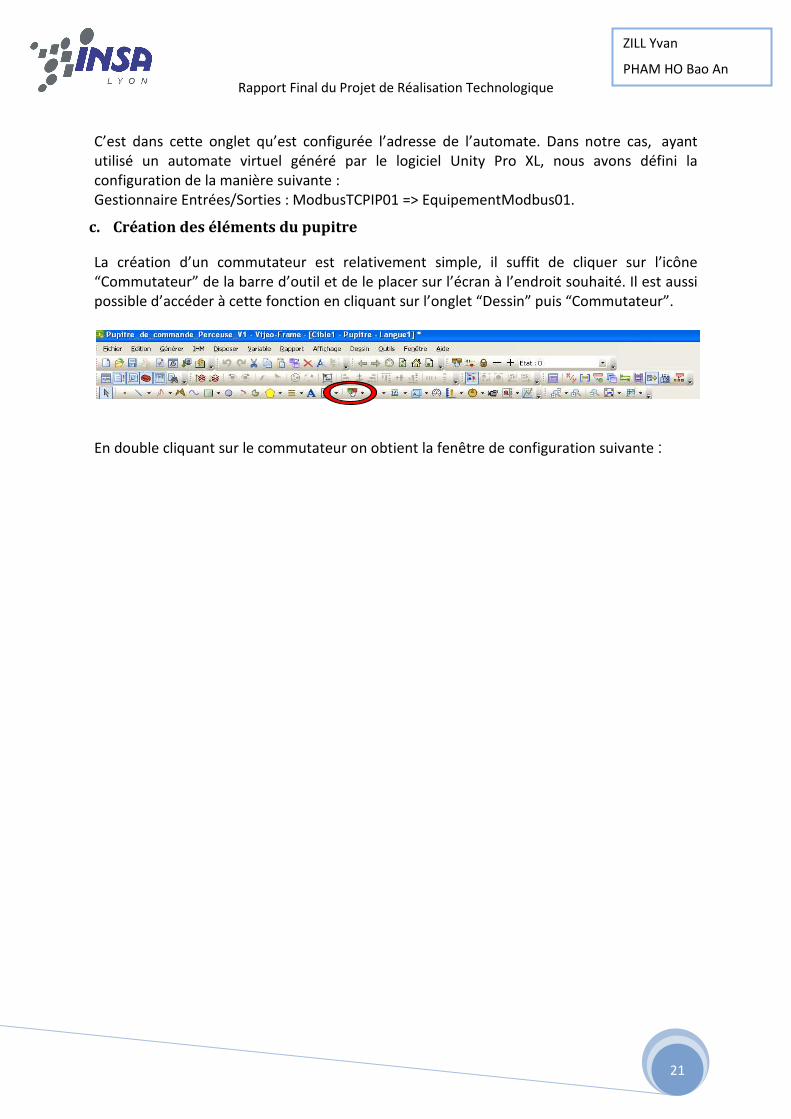
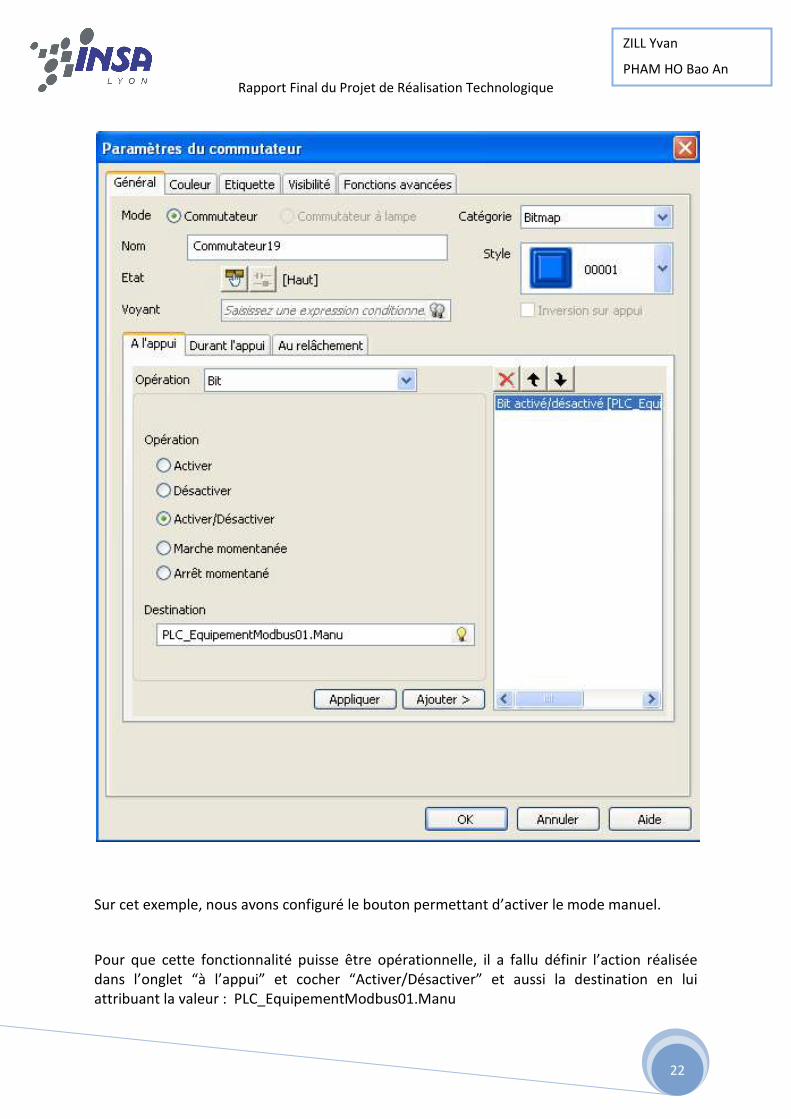
c. Création des éléments du pupitre
La création d’un commutateur est relativement simple, il suffit de cliquer sur l’icône
“Commutateur” de la barre d’outil et de le placer sur l’écran à l’endroit souhaité. Il est aussi
possible d’accéder à cette fonction en cliquant sur l’onglet “Dessin” puis “Commutateur”.
En double cliquant sur le commutateur on obtient la fenêtre de configuration suivante :
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
22
Sur cet exemple, nous avons configuré le bouton permettant d’activer le mode manuel.
Pour que cette fonctionnalité puisse être opérationnelle, il a fallu définir l’action réalisée
dans l’onglet “à l’appui” et cocher “Activer/Désactiver” et aussi la destination en lui
attribuant la valeur : PLC_EquipementModbus01.Manu
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
23
La syntaxe d’adresse est la suivante : PLC_EquipementModbus01.Mnémonique
En effet, il suffit de remplacer “Mnémonique” par le nom associé aux variables définies dans
Unity Pro XL.
Pour cela il faut, au préalable, créer les variables préalablement dans Vijéo Designer, il suffit
juste d’indiquer le type (BOOL,INT etc..) et l’adresse sous forme %Mi (i correspond au
numéro attribué dans Unity Pro XL).
Ce type d’adressage démontre la simplicité de l’utilisation de Vijéo Designer qui rappelle
bien ici qu’il a été conçu par Schneider-Electric dans le but d’être utilisé avec leur plateforme
de programmation d’automate.
Nous avons essayé de donner un meilleur rendu au pupitre en intégrant un objet de type
texture importé d’un site web regroupant plusieurs type de textures. (adresse du site web
de texture en haute définition : http://mameara.com/archives/1679)
Pour ce faire il suffit de cliquer sur l’icône “Image” ou l’onglet “Dessin” puis “Image, et de
définir la zone d’integration de la texture.
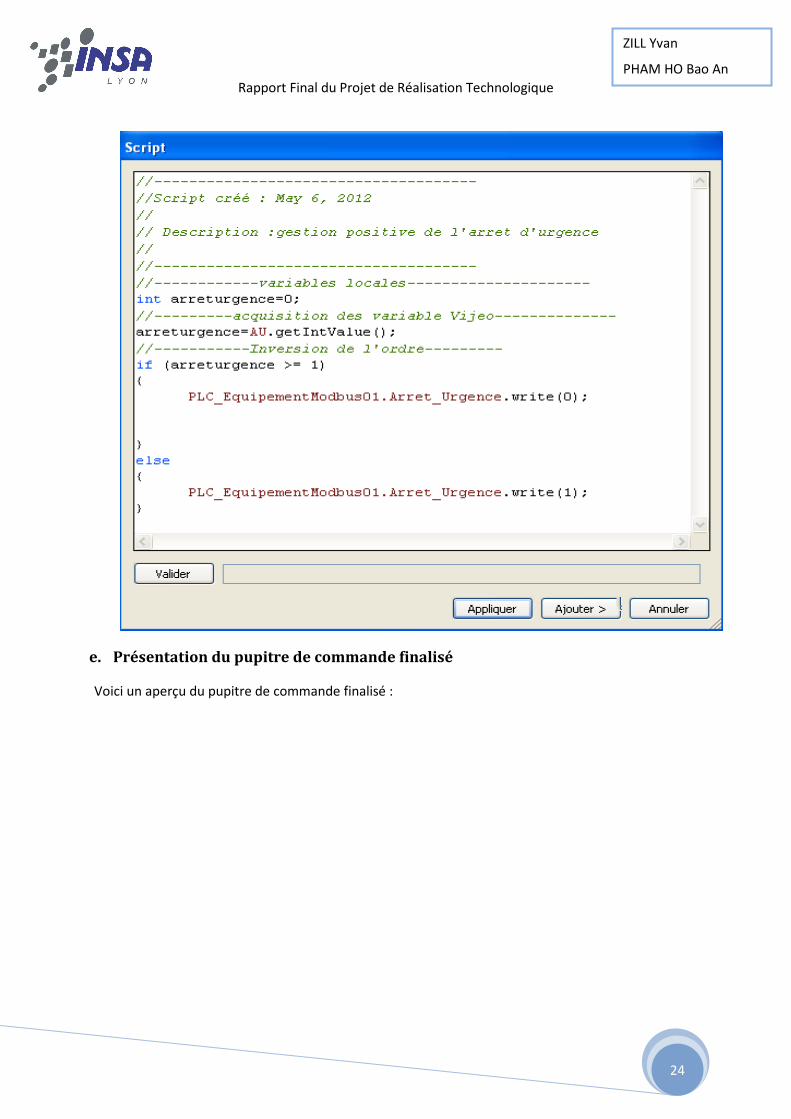
d. Gestion de l’arrêt d’urgence
L’arrêt d’urgence étant câblé en “normalement fermé” c’est à dire que l’état du bit est à 1
quand il n’y a pas de demande d’arrêt d’urgence, et que l’appui sur les boutons de Vijeo ne
permet pas de passage à 0 d’une entrée il a donc fallu programmer un script pour gérer
cette subtilité.
Le script ci-dessous permet donc d’obtenir un bit à 0 lors de l’appui sur le bouton d’arrêt
d’urgence :
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
24
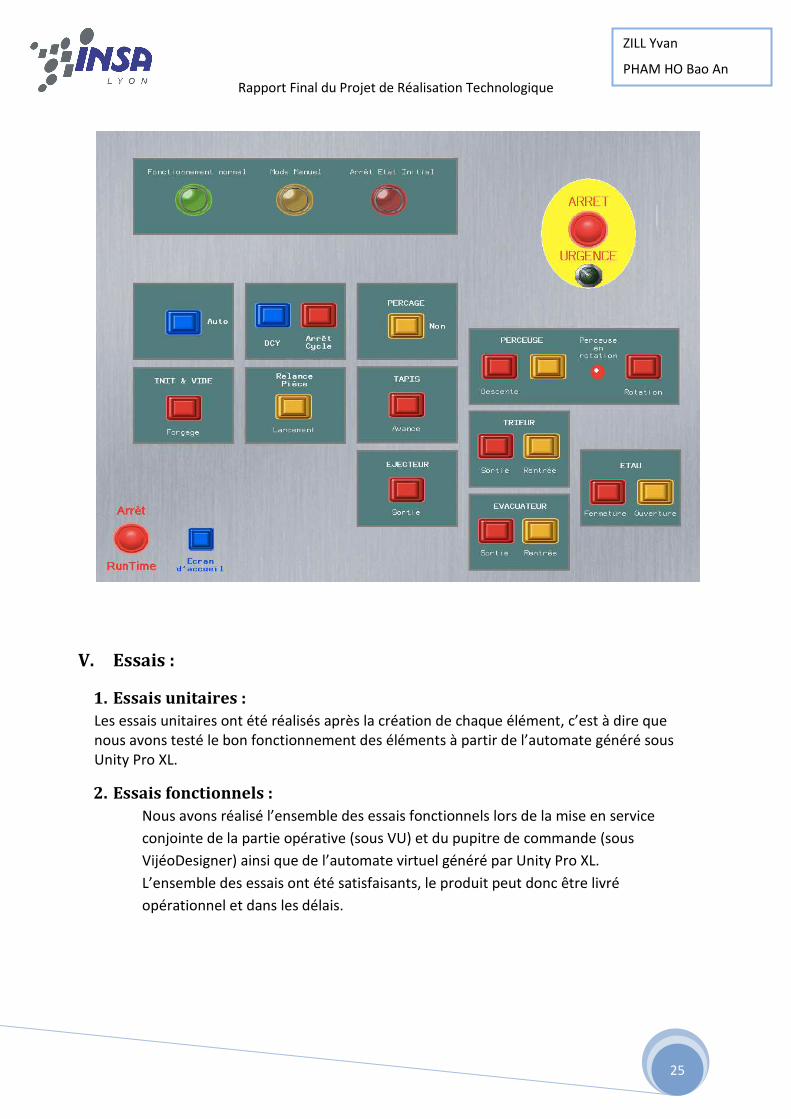
e. Présentation du pupitre de commande finalisé
Voici un aperçu du pupitre de commande finalisé :
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
25
V. Essais :
1. Essais unitaires :
Les essais unitaires ont été réalisés après la création de chaque élément, c’est à dire que
nous avons testé le bon fonctionnement des éléments à partir de l’automate généré sous
Unity Pro XL.
2. Essais fonctionnels :
Nous avons réalisé l’ensemble des essais fonctionnels lors de la mise en service
conjointe de la partie opérative (sous VU) et du pupitre de commande (sous
VijéoDesigner) ainsi que de l’automate virtuel généré par Unity Pro XL.
L’ensemble des essais ont été satisfaisants, le produit peut donc être livré
opérationnel et dans les délais.

Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
26
VI. Conclusion :
Tout d’abord, la constitution du plan directeur de projet en amont de la phase réalisation
nous a permis de prendre du recul par rapport au travail que nous devions réaliser au
titre du PRT et de nous familiariser avec la démarche gestion de projet : analyse
fonctionnelle, planification, pilotage etc...
Le projet nous a permis de développer des compétences techniques : programmation,
analyse et interprétation d’un système automatisé. Nous avons dû nous familiariser avec
différents types de logiciel avant de pouvoir concevoir la partie opérative et l’IHM.
Nous avons aussi pu développer des capacités relationnelles grâce aux différentes prises
de contact que nous avons dû établir avec le client ainsi que le fournisseur du logiciel VU
et enfin avec la personne référente dans l’utilisation du logiciel. Il est aussi important de
noter que nous n’avons pas eu besoin de recourir au budget attribué à la réalisation du
PRT. Le coût du projet se résumerait donc uniquement aux heures réalisées par notre
binôme, heures qui ne seront bien sûr pas facturées au client.
Enfin, nous espérons avoir pu répondre à l’ensemble des exigences du cahier des charges
et espérons que notre client soit pleinement satisfait de notre produit.
Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
27
VII. Annexes : Voir le fichier listing.xls Excel joint.

Rapport Final du Projet de Réalisation Technologique
ZILL Yvan
PHAM HO Bao An
28




![FICHIER FOURNI PRT À IMPRIMER PRO - … · GUILHERAND-GRANGES [07] T 04 75 44 54 96 ve rvic once devis - prepresse • dat 016 FICHIER FOURNI PRT À IMPRIMER PRO](https://static.fdocuments.fr/doc/165x107/5b967a3309d3f27e758ba674/fichier-fourni-prt-a-imprimer-pro-guilherand-granges-07-t-04-75-44-54-96.jpg)
![Protection et Récupération des Tortues (PRT) · JMD [Tapez le nom de la société] [Sélectionnez la date] Jean-Marc Ducotterd Président de l’Association PRT Protection et Récupération](https://static.fdocuments.fr/doc/165x107/602c1e26b63bef3bca394c14/protection-et-rcupration-des-tortues-prt-jmd-tapez-le-nom-de-la-socit.jpg)