
PROJET SARI - PREDIT 3sari.ifsttar.fr/livrables/vizir/VIZIR_2.1.1.pdf · VIZIR MATÉRIEL PROTOTYPE...
26
PROJET SARI - PREDIT 3 Surveillance Automatisée de la Route pour l’Information des conducteurs et des gestionnaires VIZIR MATÉRIEL PROTOTYPE POUR L’ACQUISITION DE SÉQUENCES D’IMAGES PAR STÉRÉOVISION Livrable N°2.1.1 Décembre 2006 Prédit SARI, thème VIZIR – 1ère tranche Projet financé par la DRAST CETE de l’Est, LRPC Strasbourg ERA 27 LCPC Responsable : Charbonnier P. Acteurs : Muzet V, Windenberger L., Nicolle P.
-
Upload
trannguyet -
Category
Documents
-
view
216 -
download
0
Transcript of PROJET SARI - PREDIT 3sari.ifsttar.fr/livrables/vizir/VIZIR_2.1.1.pdf · VIZIR MATÉRIEL PROTOTYPE...
PROJET SARI - PREDIT 3Surveillance Automatisée de la Route pour l’Information des
conducteurs et des gestionnaires
VIZIR
MATÉRIEL PROTOTYPE POUR L’ACQUISITION DE SÉQUENCES D’IMAGES PAR STÉRÉOVISION
Livrable N°2.1.1
Décembre 2006
Prédit SARI, thème VIZIR – 1ère tranche
Projet financé par la DRAST
CETE de l’Est,
LRPC Strasbourg
ERA 27 LCPC
Responsable : Charbonnier P.
Acteurs : Muzet V, Windenberger L., Nicolle P.

Livrable 2.1.1 Projet VIZIR version 1.0
Sommaire1 -Introduction........................................................................................................................... 32 -Le prototype de stéréovision.................................................................................................. 4
2.1 -Le véhicule................................................................................................................................. 42.1.1 -Installation électrique............................................................................................................................. 42.1.2 -PC...........................................................................................................................................................5
2.2 -Caméras et supports de caméra............................................................................................... 5
2.3 -Déclenchement de l’acquisition................................................................................................ 6
3 -Les logiciels développés........................................................................................................73.1 -L’acquisition.............................................................................................................................. 7
3.2 -Le calibrage et la rectification................................................................................................. 7
3.3 -Le dépouillement....................................................................................................................... 8
3.4 -Validation................................................................................................................................... 9
4 -Conclusions ........................................................................................................................ 10ANNEXE 1 - Références......................................................................................................... 11ANNEXE 2 - Spécifications et Schémas électriques.............................................................. 12ANNEXE 3 - Spécifications des caméras Marlin F145C...................................................... 15ANNEXE 4 - Alignement en géométrie épipolaire rectifiée.................................................. 17ANNEXE 5 - Utilisation de la stéréovision dans le véhicule Kangoo .................................. 20ANNEXE 6 - Notice du logiciel de traitement « stéréo »....................................................... 23
2/26

Livrable 2.1.1 Projet VIZIR version 1.0
1 - INTRODUCTIONLes scènes routières sont des séquences d'images de la route et de son environnement proche, acquises à partir d'un véhicule en circulation sur un itinéraire. En effet, la connaissance de cet espace est un élément essentiel à la gestion du réseau routier et à l'amélioration des conditions de sécurité des usagers. De plus, la sécurité des agents au cours de relevés sur le terrain est difficile à assurer dans les conditions actuelles de trafic. La simple exploitation visuelle des images numériques fait aujourd’hui place à des demandes plus quantitatives, auxquelles les techniques d'analyse d'images sont susceptibles d'apporter une solution. Les besoins recensés concernent principalement la détection, la reconnaissance et le positionnement d'objets d'intérêt, ainsi que la mesure dimensionnelle. Aussi, la demande en matière de scènes routières va-t-elle croissante. L'enjeu pour le Réseau Scientifique et Technique (RST) du ministère de l’équipement est à la fois de pouvoir produire de telles banques d'images et de disposer d'outils d'exploitation. La première génération d'appareils embarqués de prises de vues était fondée sur des caméras vidéo analogiques. L'obsolescence de ces appareils a justifié la mise au point d’un matériel LPC spécifique pour la prise de vues, dénommé IRCAN (pour une présentation : www.lcpc.fr/fr/produits/materiels_mlpc/doc/ircan.pdf).
Les possibilités de mesure des systèmes actuels, mono-caméras, sont limitées à un plan de référence assimilé à la chaussée. Aussi, une seconde génération de matériel est-elle étudiée par l’ERA 27 de Strasbourg en collaboration avec la section métrologie et instrumentation du LCPC (LCPC/SMI), la division Exploitation Sécurité (LCPC/ESE) et le soutien du Centre d’Études et de Conception de Prototype (CECP) d'Angers et du Laboratoire sur les Interactions Véhicule - Infrastructure - Conducteur (LIVIC). Il s’agit de transférer au domaine de l’analyse de scènes routières les techniques de stéréovision, bien connues dans le milieu académique de la vision par ordinateur. L’intérêt est de rendre possible des mesures tri-dimensionnelles, ce qui ouvre de nombreuses possibilités nouvelles. Le présent document décrit les outils matériels et logiciels d’acquisition et d’analyse d’image par stéréovision mis au point dans le cadre de cette étude et mis à disposition du consortium VIZIR du projet PREDIT SARI.
3/26

Livrable 2.1.1 Projet VIZIR version 1.0
2 - LE PROTOTYPE DE STÉRÉOVISION
2.1 - Le véhiculeLe véhicule expérimental du Laboratoire Régional de Strasbourg est un Renault Kangoo qui a été instrumenté par le CECP d’Angers [MUZ04] et [MUZ06].
Il comporte une installation électrique, un PC et une barre de fixation pour des supports de caméras. Cette dernière permet de régler facilement la position et l’orientation des caméras. L’écartement entre les deux caméras est modulable entre 50 cm et 1,5 m et peut être figé par des cales de butées.
Figure 1 : Photographies du prototype de stéréovision.
2.1.1 - Installation électriqueL’installation électrique est principalement composée des éléments suivants • une batterie supplémentaire • une armoire électrique alimentée par batterie comportant un interrupteur de mise en route, un
disjoncteur et des fusibles, un convertisseur 12V/220V, et un système de gestion des deux batteries• un voltmètre permettant le contrôle de la charge des batteries (cf. Figure 2 et Figure 3).
Le schéma électrique de l’armoire est donné en annexe 2.
Transformateur 12V=>220V
Gestion des 2 batteries
Figure 2 : Armoire électrique : vue externe (gauche), vue interne (droite)
4/26

Livrable 2.1.1 Projet VIZIR version 1.0
Mesure de tension des 2 batteries Topomètre
Figure 3: gauche : batterie auxiliaire, droite : topomètre et voltmètre permettant le contrôle de la charge des deux batteries.
2.1.2 - PCLe véhicule est équipé d’un ordinateur durci : PC Rack 19″ Pentium IV 3GHz équipé de deux disques durs SCSI rapides. Cet ordinateur est monté sur une plate forme équipée de cylindres blocs afin de limiter les vibrations (Figure 4). Le clavier et l’écran sont situés au niveau du siège passager.
Figure 4 : gauche : Photographie du PC Rack installé sur des cylindres blocs, droite : Photographie du tableau de bord. Le boîtier de commande d’ouverture du diaphragme des deux caméras est sur le siège
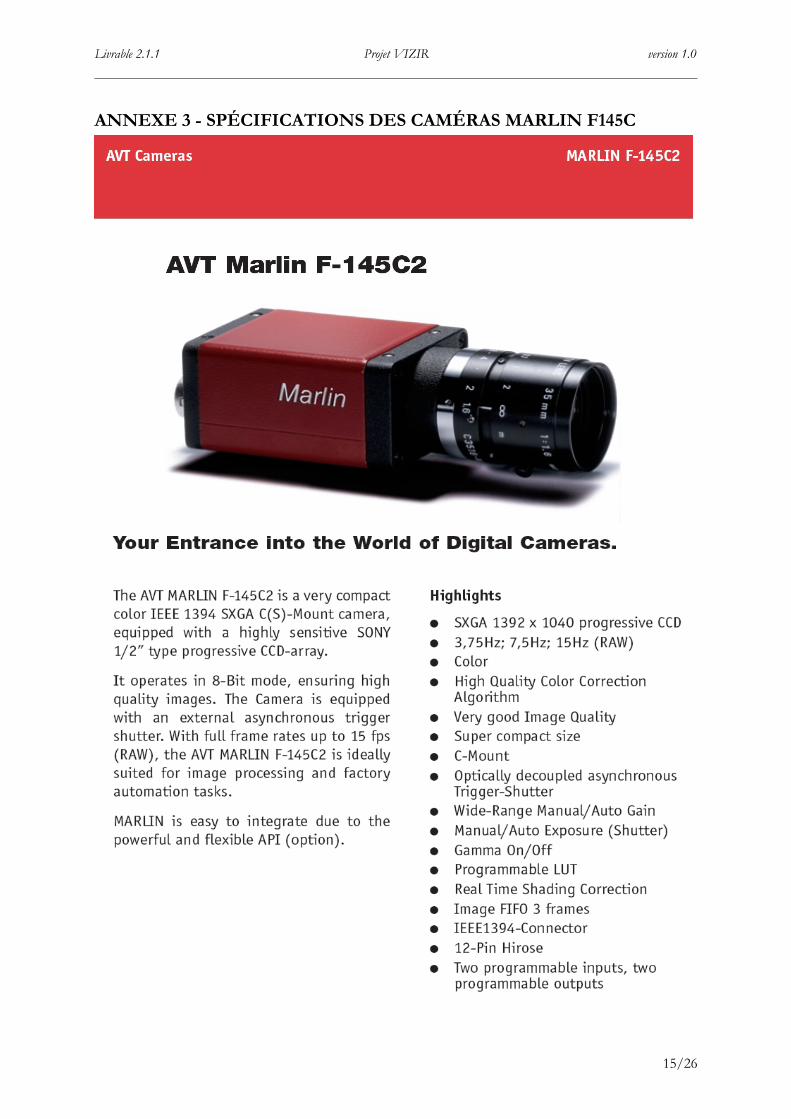
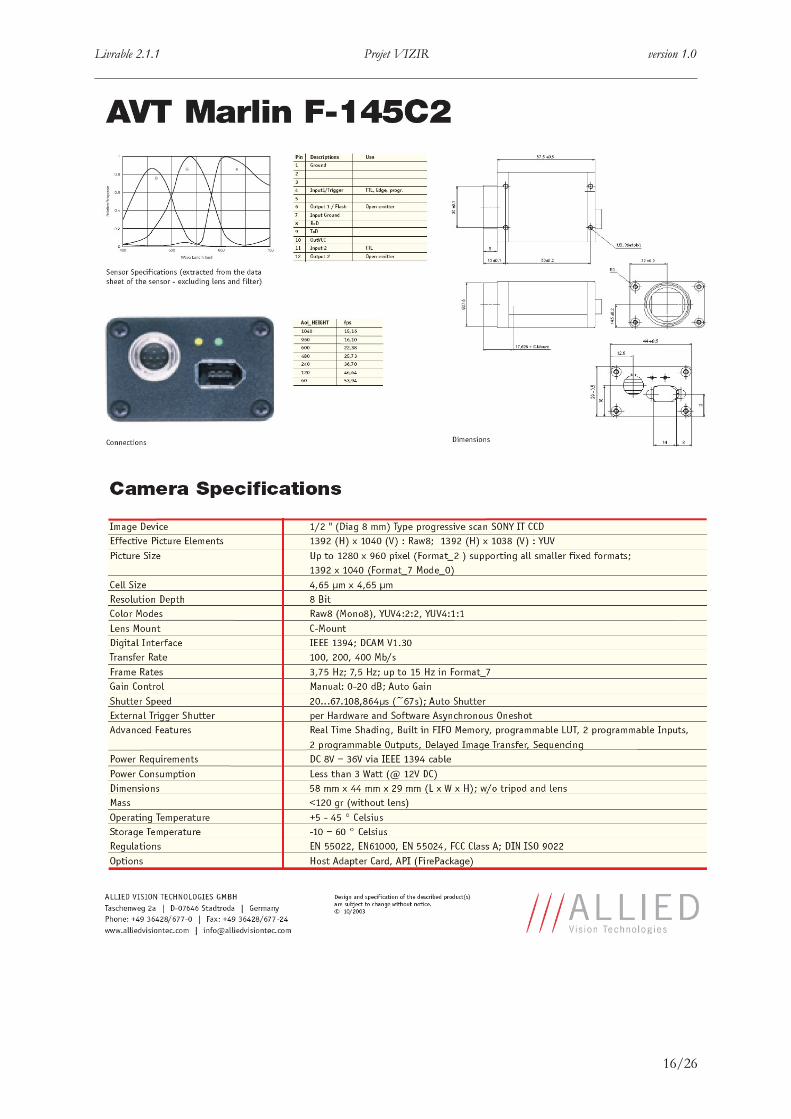
2.2 - Caméras et supports de caméraLes deux caméras du LRS sont celles utilisées pour l’IRCAN2. Ce sont des caméras numériques CCD AVT Marlin F145C IEEE1394. Le PC est équipé d’une carte interface 1394 permettant la gestion de 1 à 4 caméras. Une fiche technique des caméras est en annexe 3.
Ces caméras sont équipées d’objectifs motorisés Schneider SKR IR CINEGON de focale 4.8mm et d’ouverture 1.8. L’ouverture du diaphragme des objectifs est commandée manuellement au moyen d’un boîtier réalisé par le CECP d’Angers et représenté Figure 4.
Nous disposons également de deux autres paires d’objectifs :- objectifs motorisés Pentax de focale 6mm ouvrant à 1.2 (réf H612ER) - objectifs manuels de focale 8mm ouvrant à 1.4.
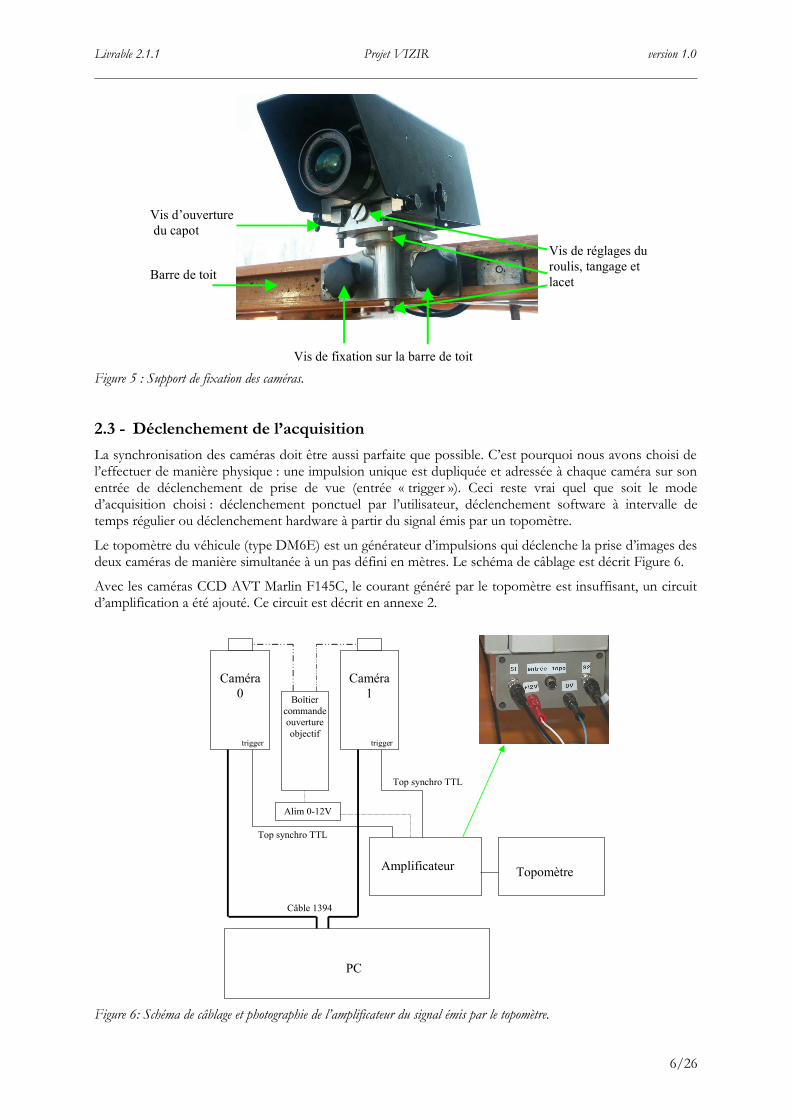
Ces caméras sont fixées sur des supports permettant le réglage du positionnement relatif des caméras (cf. Figure 5 et annexe 4.
5/26
Livrable 2.1.1 Projet VIZIR version 1.0
Barre de toit
Vis d’ouverture du capot
Vis de réglages du roulis, tangage et lacet
Vis de fixation sur la barre de toit
Figure 5 : Support de fixation des caméras.
2.3 - Déclenchement de l’acquisitionLa synchronisation des caméras doit être aussi parfaite que possible. C’est pourquoi nous avons choisi de l’effectuer de manière physique : une impulsion unique est dupliquée et adressée à chaque caméra sur son entrée de déclenchement de prise de vue (entrée « trigger »). Ceci reste vrai quel que soit le mode d’acquisition choisi : déclenchement ponctuel par l’utilisateur, déclenchement software à intervalle de temps régulier ou déclenchement hardware à partir du signal émis par un topomètre.
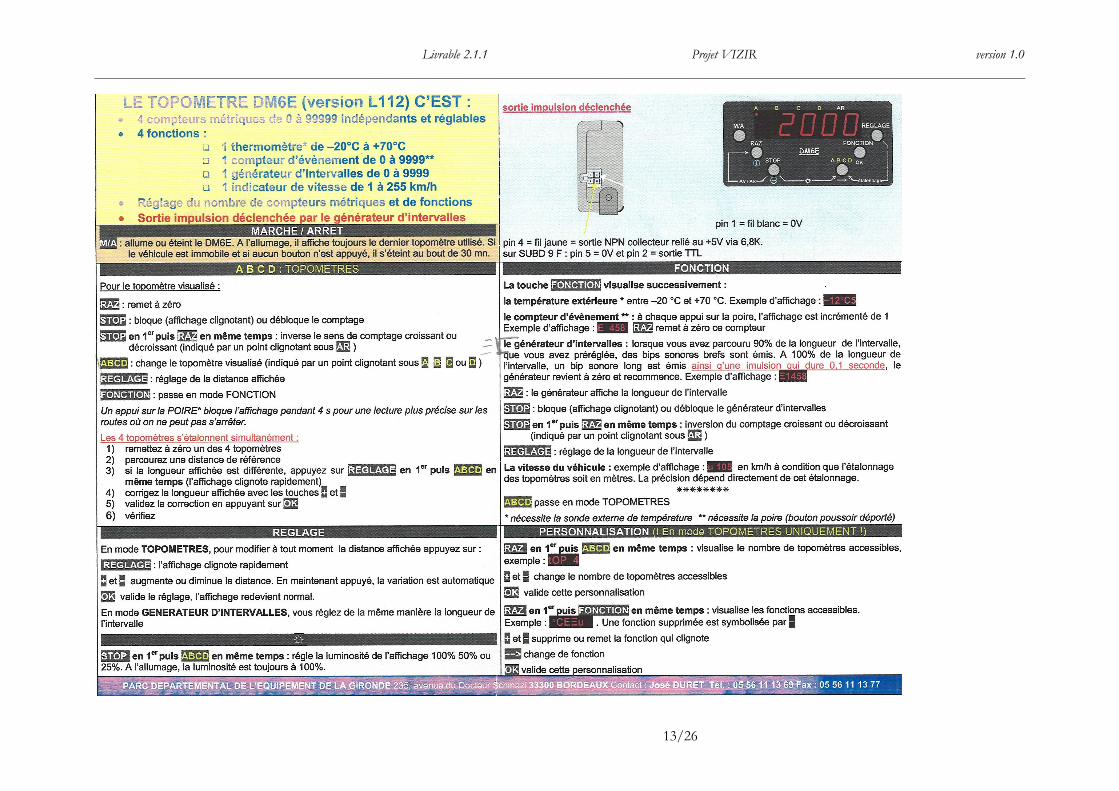
Le topomètre du véhicule (type DM6E) est un générateur d’impulsions qui déclenche la prise d’images des deux caméras de manière simultanée à un pas défini en mètres. Le schéma de câblage est décrit Figure 6.
Avec les caméras CCD AVT Marlin F145C, le courant généré par le topomètre est insuffisant, un circuit d’amplification a été ajouté. Ce circuit est décrit en annexe 2.
PC
Topomètre Amplificateur
Caméra 0
trigger
Caméra 1
trigger
Boîtier commande ouverture objectif
Alim 0-12V
Câble 1394
Top synchro TTL
Top synchro TTL
Figure 6: Schéma de câblage et photographie de l’amplificateur du signal émis par le topomètre.
6/26
Livrable 2.1.1 Projet VIZIR version 1.0
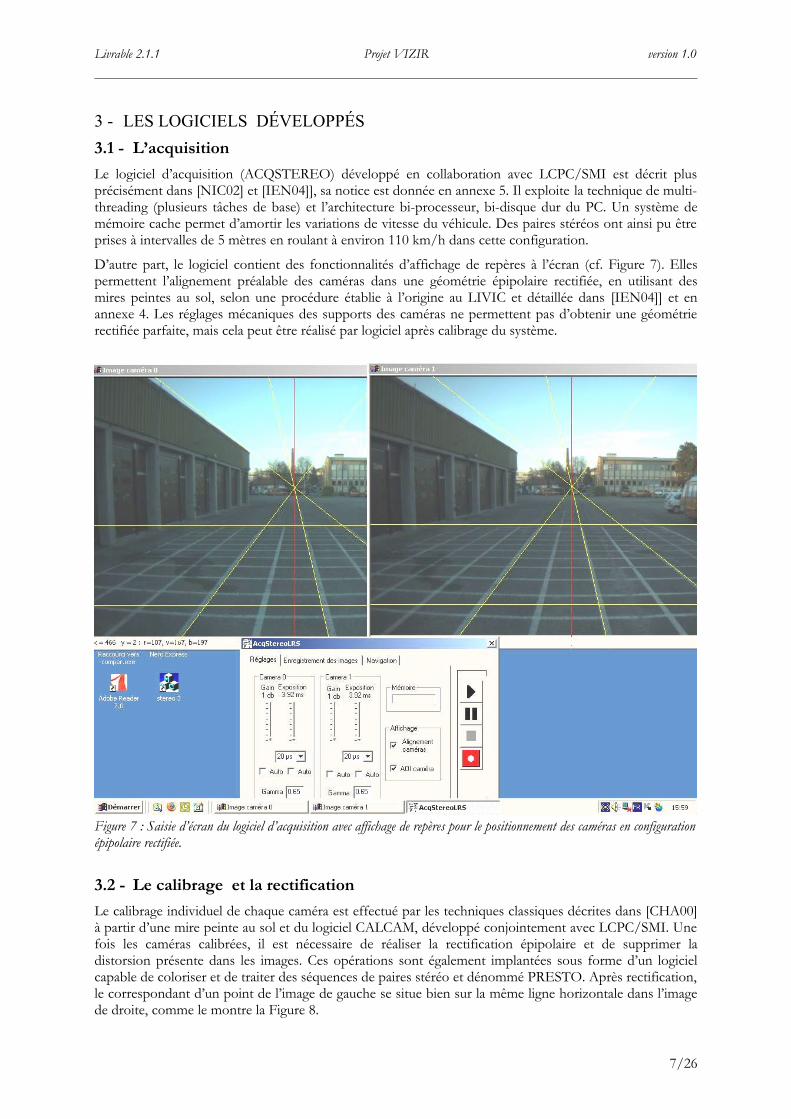
3 - LES LOGICIELS DÉVELOPPÉS3.1 - L’acquisitionLe logiciel d’acquisition (ACQSTEREO) développé en collaboration avec LCPC/SMI est décrit plus précisément dans [NIC02] et [IEN04]], sa notice est donnée en annexe 5. Il exploite la technique de multi-threading (plusieurs tâches de base) et l’architecture bi-processeur, bi-disque dur du PC. Un système de mémoire cache permet d’amortir les variations de vitesse du véhicule. Des paires stéréos ont ainsi pu être prises à intervalles de 5 mètres en roulant à environ 110 km/h dans cette configuration.
D’autre part, le logiciel contient des fonctionnalités d’affichage de repères à l’écran (cf. Figure 7). Elles permettent l’alignement préalable des caméras dans une géométrie épipolaire rectifiée, en utilisant des mires peintes au sol, selon une procédure établie à l’origine au LIVIC et détaillée dans [IEN04]] et en annexe 4. Les réglages mécaniques des supports des caméras ne permettent pas d’obtenir une géométrie rectifiée parfaite, mais cela peut être réalisé par logiciel après calibrage du système.
Figure 7 : Saisie d’écran du logiciel d’acquisition avec affichage de repères pour le positionnement des caméras en configuration épipolaire rectifiée.
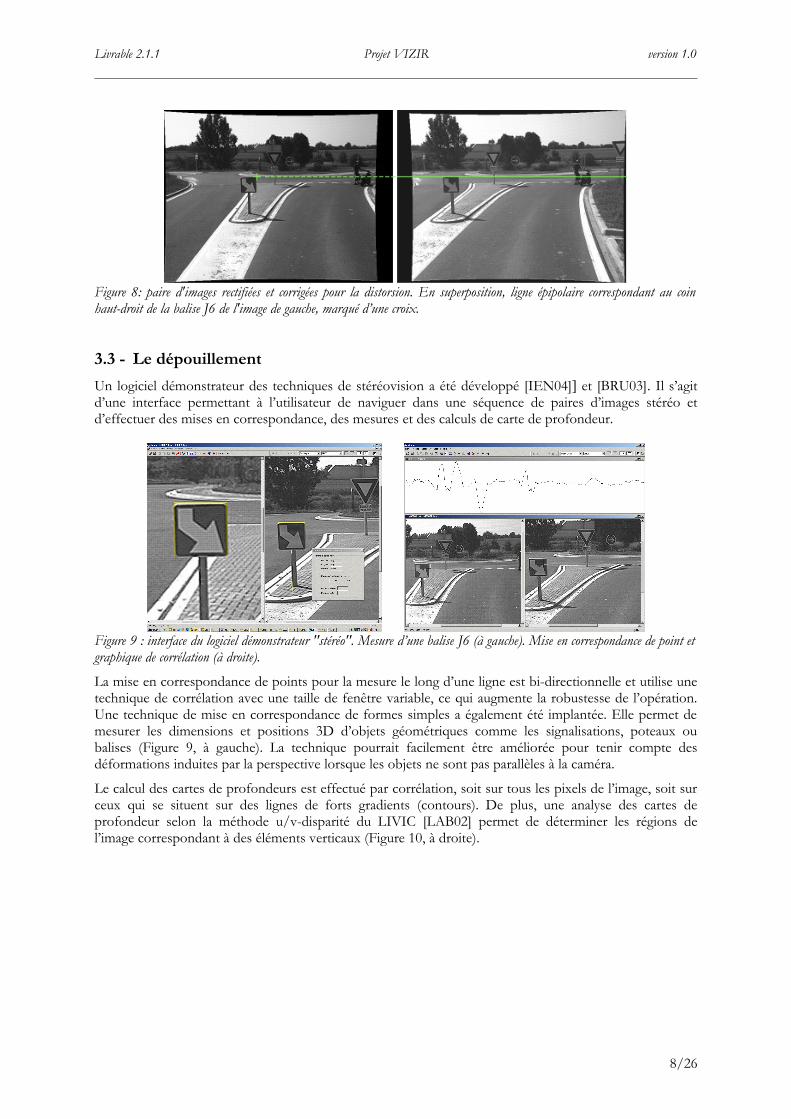
3.2 - Le calibrage et la rectificationLe calibrage individuel de chaque caméra est effectué par les techniques classiques décrites dans [CHA00] à partir d’une mire peinte au sol et du logiciel CALCAM, développé conjointement avec LCPC/SMI. Une fois les caméras calibrées, il est nécessaire de réaliser la rectification épipolaire et de supprimer la distorsion présente dans les images. Ces opérations sont également implantées sous forme d’un logiciel capable de coloriser et de traiter des séquences de paires stéréo et dénommé PRESTO. Après rectification, le correspondant d’un point de l’image de gauche se situe bien sur la même ligne horizontale dans l’image de droite, comme le montre la Figure 8.
7/26
Livrable 2.1.1 Projet VIZIR version 1.0
Figure 8: paire d'images rectifiées et corrigées pour la distorsion. En superposition, ligne épipolaire correspondant au coin haut-droit de la balise J6 de l'image de gauche, marqué d’une croix.
3.3 - Le dépouillementUn logiciel démonstrateur des techniques de stéréovision a été développé [IEN04]] et [BRU03]. Il s’agit d’une interface permettant à l’utilisateur de naviguer dans une séquence de paires d’images stéréo et d’effectuer des mises en correspondance, des mesures et des calculs de carte de profondeur.
Figure 9 : interface du logiciel démonstrateur "stéréo". Mesure d’une balise J6 (à gauche). Mise en correspondance de point et graphique de corrélation (à droite).
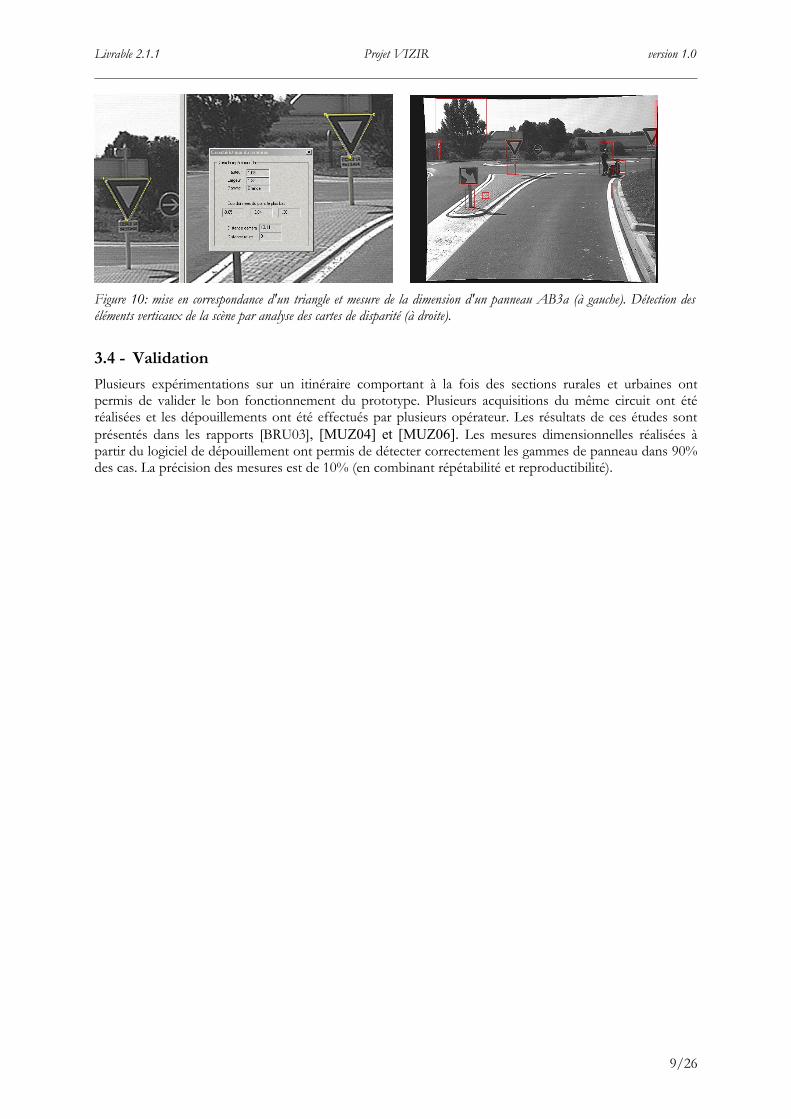
La mise en correspondance de points pour la mesure le long d’une ligne est bi-directionnelle et utilise une technique de corrélation avec une taille de fenêtre variable, ce qui augmente la robustesse de l’opération. Une technique de mise en correspondance de formes simples a également été implantée. Elle permet de mesurer les dimensions et positions 3D d’objets géométriques comme les signalisations, poteaux ou balises (Figure 9, à gauche). La technique pourrait facilement être améliorée pour tenir compte des déformations induites par la perspective lorsque les objets ne sont pas parallèles à la caméra.
Le calcul des cartes de profondeurs est effectué par corrélation, soit sur tous les pixels de l’image, soit sur ceux qui se situent sur des lignes de forts gradients (contours). De plus, une analyse des cartes de profondeur selon la méthode u/v-disparité du LIVIC [LAB02] permet de déterminer les régions de l’image correspondant à des éléments verticaux (Figure 10, à droite).
8/26
Livrable 2.1.1 Projet VIZIR version 1.0
Figure 10: mise en correspondance d'un triangle et mesure de la dimension d'un panneau AB3a (à gauche). Détection des éléments verticaux de la scène par analyse des cartes de disparité (à droite).
3.4 - ValidationPlusieurs expérimentations sur un itinéraire comportant à la fois des sections rurales et urbaines ont permis de valider le bon fonctionnement du prototype. Plusieurs acquisitions du même circuit ont été réalisées et les dépouillements ont été effectués par plusieurs opérateur. Les résultats de ces études sont présentés dans les rapports [BRU03], [MUZ04] et [MUZ06]. Les mesures dimensionnelles réalisées à partir du logiciel de dépouillement ont permis de détecter correctement les gammes de panneau dans 90% des cas. La précision des mesures est de 10% (en combinant répétabilité et reproductibilité).
9/26
Livrable 2.1.1 Projet VIZIR version 1.0
4 - CONCLUSIONS Dans ce document, nous avons décrit un système d’acquisition et de traitement d’images de stéréovision, formé d’un matériel embarqué de prises de vues simultanées et d’une boîte à outils de logiciels. Le système expérimental d’acquisition est opérationnel à une cadence suffisante (une paire d’images 1280x1024 pixels tous les 5 mètres à 110 km/h) pour effectuer les prises de vues à une vitesse normale du véhicule, donc sans immobilisation de l’itinéraire étudié. Les questions de la synchronisation des caméras, du calibrage du capteur stéréo, de la rectification épipolaire des images et de la mise en correspondance de points sont maîtrisées et un logiciel démonstrateur pour la visualisation et la mesure à partir d’images a été développé. Sur cette base, une opération de développement pilotée par l’ERA 27 a été lancée par le LCPC afin de produire à moyen terme une version d’IRCAN et de son logiciel d’exploitation associé IREVE, adaptée à la stéréovision.
Le système a été testé dans un premier temps sur des itinéraires proches du LRPC de Strasbourg. Dans le cadre des activités du consortium VIZIR, ces images sont utilisées pour la mise au point d’une méthode d’estimation du profil longitudinal local de la chaussée par LCPC/DESE. D’autre part, une campagne d’acquisition a été effectuée dans le département de l’Essonne (91) en novembre 2006. Les séquences stéréo correspondantes ont été livrées aux partenaires du projet (DESE, Centre d’Automatique et de Robotique de l’école des Mines de Paris).
Dans un futur proche, nous étudierons l’extension du système d’acquisition au cas de trois caméras ou plus. Outre la stéréovision trinoculaire ou l’imagerie panoramique, d’autres applications seront alors envisageables. Le prototype pourrait ainsi servir à tester la mise en œuvre d’algorithmes de localisation précise du véhicule dans sa voie, comme ceux développés dans [IEN04].
10/26
Livrable 2.1.1 Projet VIZIR version 1.0
ANNEXE 1 - RÉFÉRENCES
[BRU03] Brusson T, 2003, « Mise en correspondance et mesure par stéréovision pour l’imagerie routière », rapport LCPC, Opération 11A025.
[CHA00] Charbonnier P., Nicolle P., 2000, « Vision 3D : compte rendu des travaux 1999 », rapport LCPC, FAER 182439.
[CUG02] Cugnière J., Charbonnier P., 2002, « Mesures par stéréovision », rapport LCPC, Opération 11A025.
[IEN04] Ieng S.S., 2004, « Méthodes robustes pour la détection et suivi des marquages », thèse de Doctorat de l’université Paris VI.
[LAB02] Labayrade R., Aubert D., Tarel J.P., « Real time obstacle detection on non flat road geometry through ‘V-Disparity’ representation », IEEE Intelligent Vehicle Symposium, 2002.
[MUZ04] Muzet V., Charbonnier P., Guillard Y., 2004, « Évaluation d’un dispositif de stéréovision pour l’analyse de scènes routière », Rapport LCPC, Opération 11A025.
[MUZ06] Muzet V., Charbonnier P., Guillard Y., 2006, « Évaluation de la précision d’un dispositif de stéréovision pour l’analyse de scènes routière », Rapport LCPC, Opération 11K063.
[NIC00] Nicolle P., Charbonnier P., 2000, « Notice d’utilisation du programme Calcam », rapport LCPC, Opération 11A025.
[NIC02] Nicolle P., « Acquisition synchronisée d'images », mémoire d’examen professionnel de technicien principal – OPA, septembre 2002.
[NIC06] Nicolle P., 2006, « Acquisition synchronisée d’image – Mesure de déphasage », Compte rendu d’essais.
11/26
Livrable 2.1.1 Projet VIZIR version 1.0
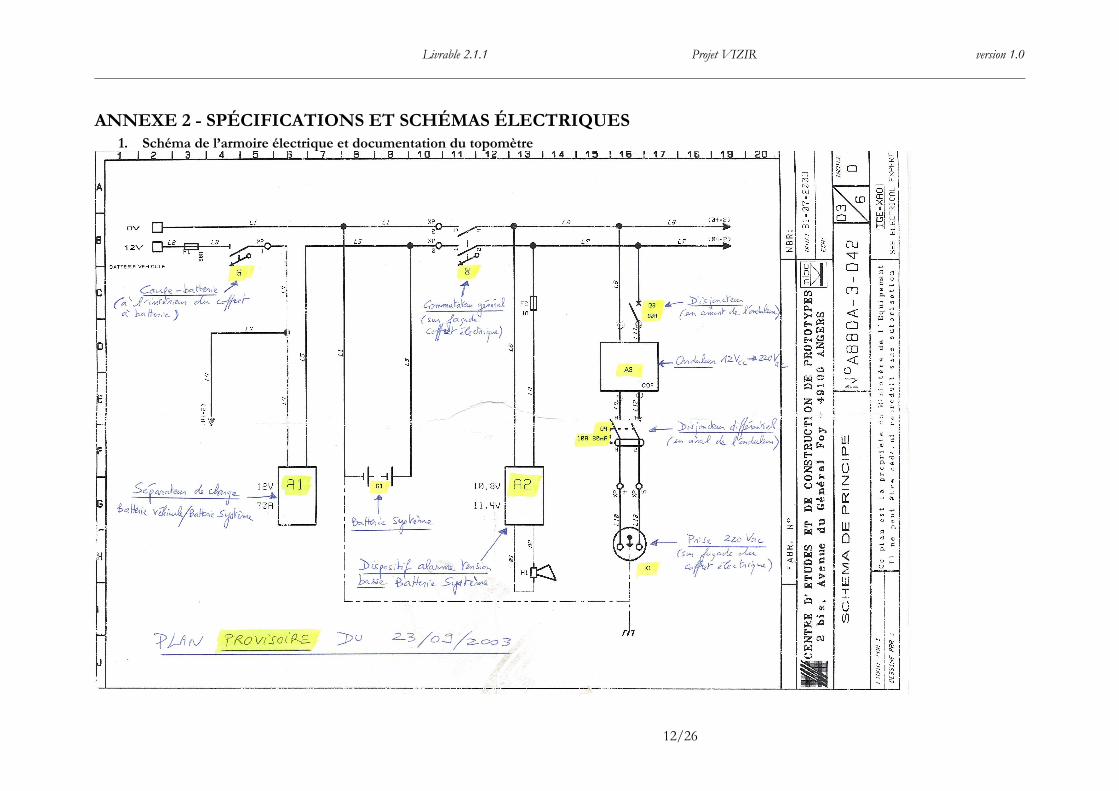
ANNEXE 2 - SPÉCIFICATIONS ET SCHÉMAS ÉLECTRIQUES1. Schéma de l’armoire électrique et documentation du topomètre
12/26
Livrable 2.1.1 Projet VIZIR version 1.0
13/26
Livrable 2.1.1 Projet VIZIR version 1.0
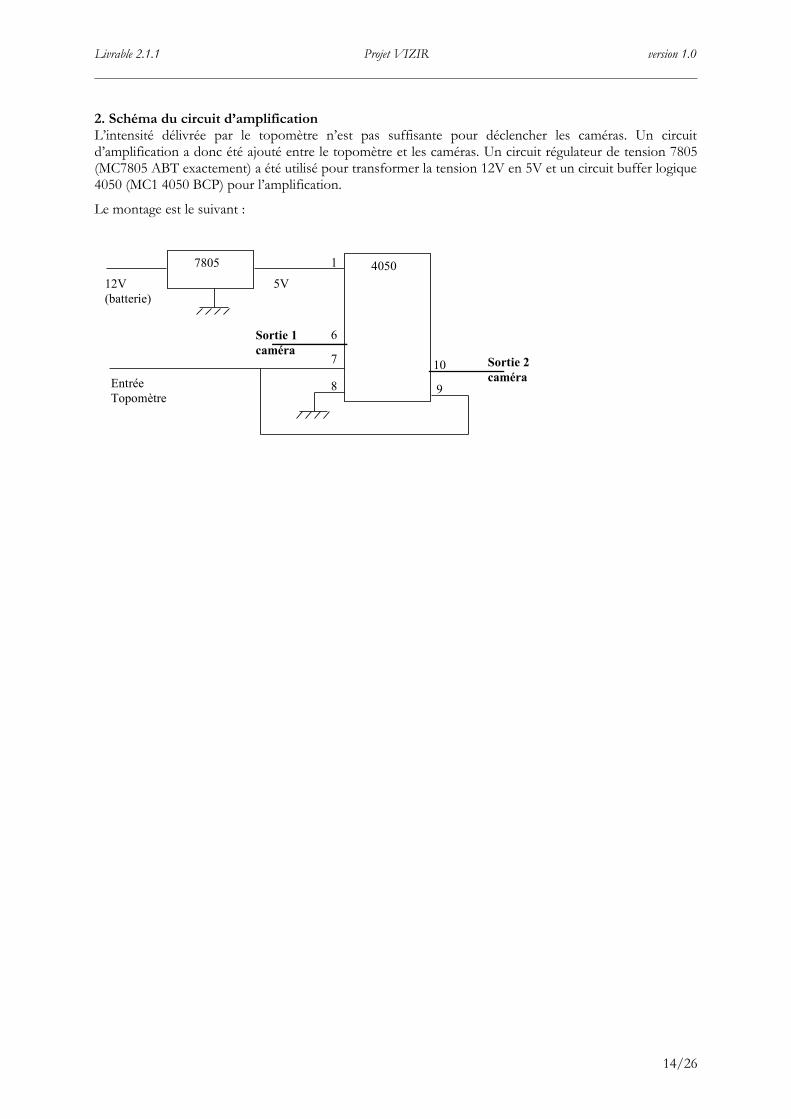
2. Schéma du circuit d’amplificationL’intensité délivrée par le topomètre n’est pas suffisante pour déclencher les caméras. Un circuit d’amplification a donc été ajouté entre le topomètre et les caméras. Un circuit régulateur de tension 7805 (MC7805 ABT exactement) a été utilisé pour transformer la tension 12V en 5V et un circuit buffer logique 4050 (MC1 4050 BCP) pour l’amplification.
Le montage est le suivant :
7805
12V (batterie)
5V 4050 1
9
10 7
8 Entrée Topomètre
Sortie 2 caméra
6 Sortie 1 caméra
14/26
Livrable 2.1.1 Projet VIZIR version 1.0
ANNEXE 3 - SPÉCIFICATIONS DES CAMÉRAS MARLIN F145C
15/26
Livrable 2.1.1 Projet VIZIR version 1.0
16/26
Livrable 2.1.1 Projet VIZIR version 1.0
ANNEXE 4 - ALIGNEMENT EN GÉOMÉTRIE ÉPIPOLAIRE RECTIFIÉE
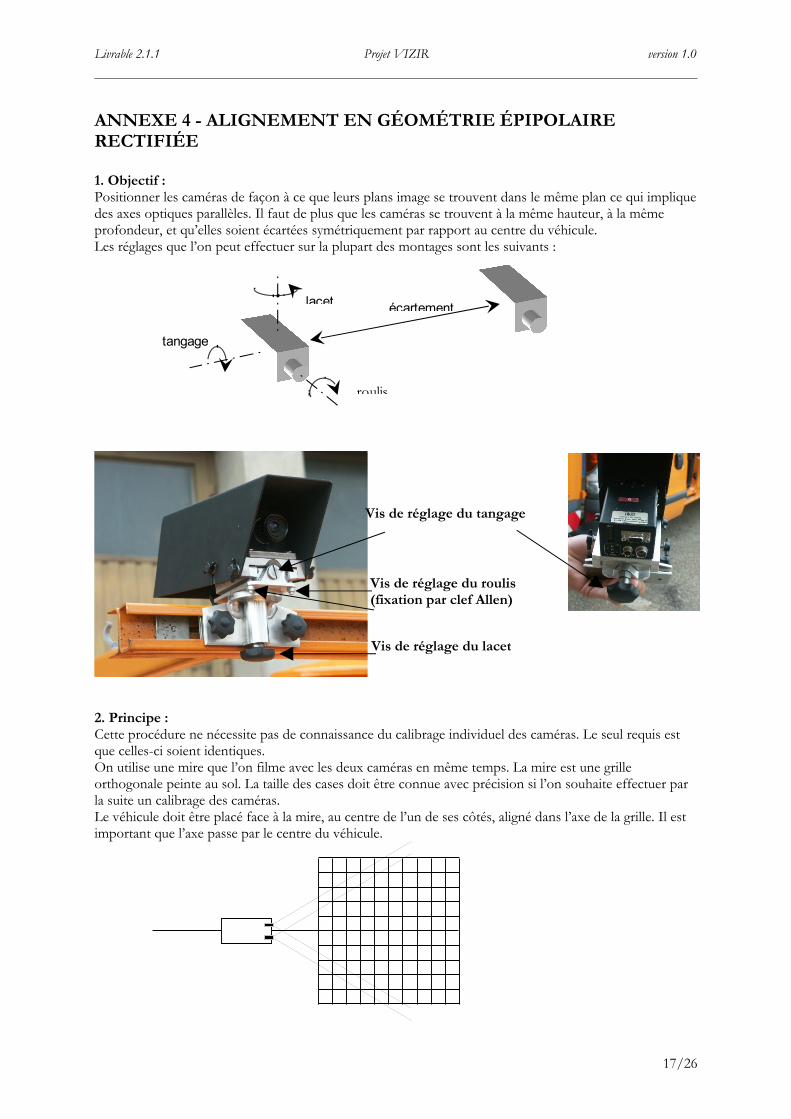
1. Objectif :Positionner les caméras de façon à ce que leurs plans image se trouvent dans le même plan ce qui implique des axes optiques parallèles. Il faut de plus que les caméras se trouvent à la même hauteur, à la même profondeur, et qu’elles soient écartées symétriquement par rapport au centre du véhicule.Les réglages que l’on peut effectuer sur la plupart des montages sont les suivants :
2. Principe :Cette procédure ne nécessite pas de connaissance du calibrage individuel des caméras. Le seul requis est que celles-ci soient identiques.On utilise une mire que l’on filme avec les deux caméras en même temps. La mire est une grille orthogonale peinte au sol. La taille des cases doit être connue avec précision si l’on souhaite effectuer par la suite un calibrage des caméras.Le véhicule doit être placé face à la mire, au centre de l’un de ses côtés, aligné dans l’axe de la grille. Il est important que l’axe passe par le centre du véhicule.
17/26
lacet
tangage
roulis
écartement
Vis de réglage du lacet
Vis de réglage du roulis (fixation par clef Allen)
Vis de réglage du tangage
Livrable 2.1.1 Projet VIZIR version 1.0
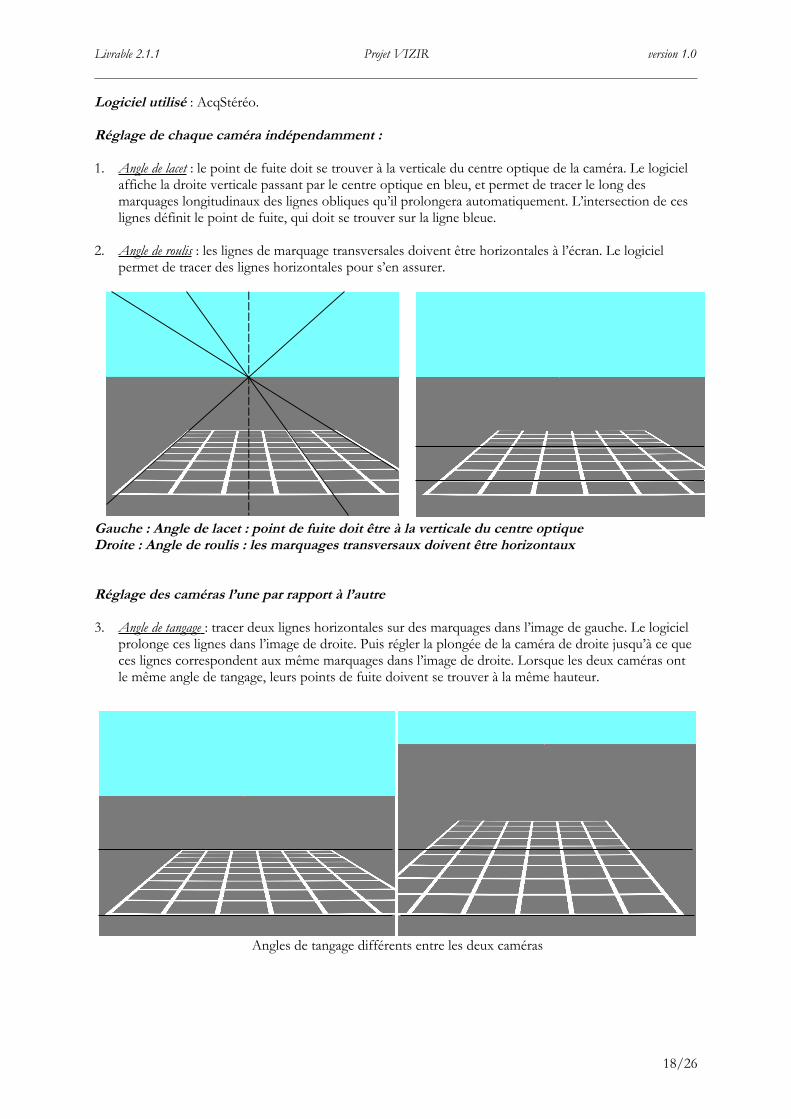
Logiciel utilisé : AcqStéréo.
Réglage de chaque caméra indépendamment :
1. Angle de lacet : le point de fuite doit se trouver à la verticale du centre optique de la caméra. Le logiciel affiche la droite verticale passant par le centre optique en bleu, et permet de tracer le long des marquages longitudinaux des lignes obliques qu’il prolongera automatiquement. L’intersection de ces lignes définit le point de fuite, qui doit se trouver sur la ligne bleue.
2. Angle de roulis : les lignes de marquage transversales doivent être horizontales à l’écran. Le logiciel permet de tracer des lignes horizontales pour s’en assurer.
Gauche : Angle de lacet : point de fuite doit être à la verticale du centre optiqueDroite : Angle de roulis : les marquages transversaux doivent être horizontaux
Réglage des caméras l’une par rapport à l’autre
3. Angle de tangage : tracer deux lignes horizontales sur des marquages dans l’image de gauche. Le logiciel prolonge ces lignes dans l’image de droite. Puis régler la plongée de la caméra de droite jusqu’à ce que ces lignes correspondent aux même marquages dans l’image de droite. Lorsque les deux caméras ont le même angle de tangage, leurs points de fuite doivent se trouver à la même hauteur.
18/26
Angles de tangage différents entre les deux caméras
Livrable 2.1.1 Projet VIZIR version 1.0
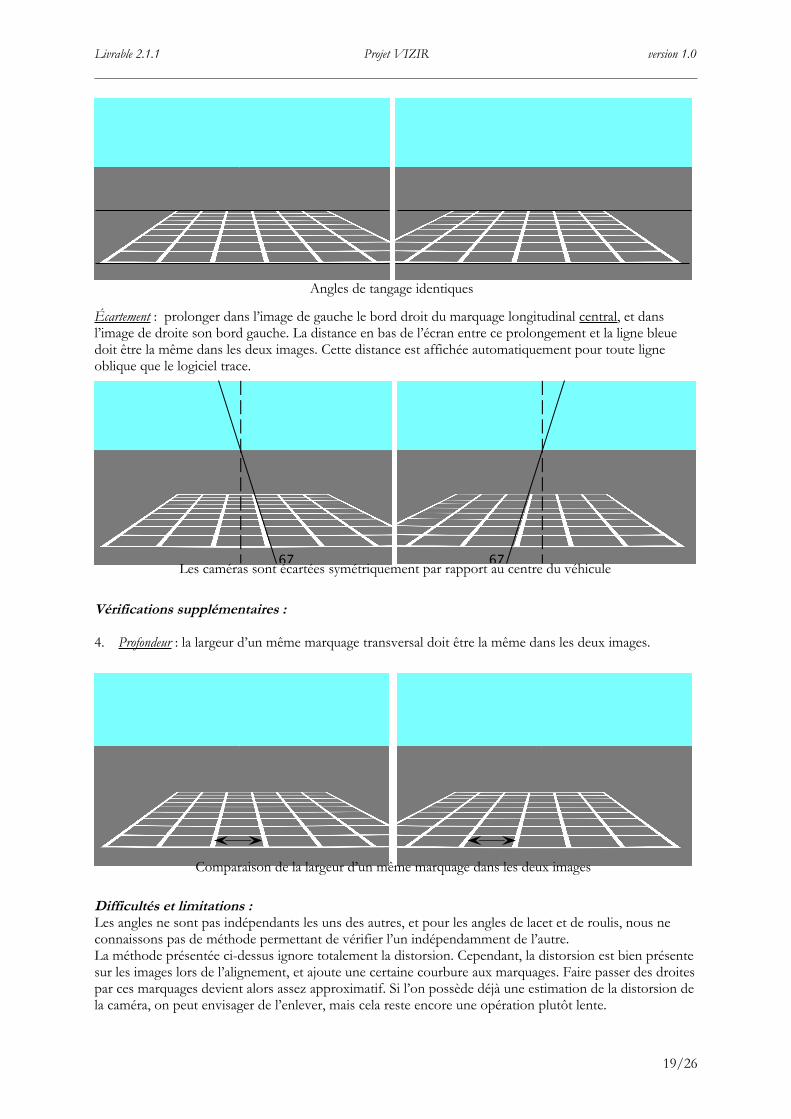
Écartement : prolonger dans l’image de gauche le bord droit du marquage longitudinal central, et dans l’image de droite son bord gauche. La distance en bas de l’écran entre ce prolongement et la ligne bleue doit être la même dans les deux images. Cette distance est affichée automatiquement pour toute ligne oblique que le logiciel trace.
Vérifications supplémentaires :
4. Profondeur : la largeur d’un même marquage transversal doit être la même dans les deux images.
Difficultés et limitations :Les angles ne sont pas indépendants les uns des autres, et pour les angles de lacet et de roulis, nous ne connaissons pas de méthode permettant de vérifier l’un indépendamment de l’autre.La méthode présentée ci-dessus ignore totalement la distorsion. Cependant, la distorsion est bien présente sur les images lors de l’alignement, et ajoute une certaine courbure aux marquages. Faire passer des droites par ces marquages devient alors assez approximatif. Si l’on possède déjà une estimation de la distorsion de la caméra, on peut envisager de l’enlever, mais cela reste encore une opération plutôt lente.
19/26
Angles de tangage identiques
67 67Les caméras sont écartées symétriquement par rapport au centre du véhicule
Comparaison de la largeur d’un même marquage dans les deux images
Livrable 2.1.1 Projet VIZIR version 1.0
ANNEXE 5 - UTILISATION DE LA STÉRÉOVISION DANS LE VÉHICULE KANGOO
Notice au 24 octobre 2006
1. Alimentation électrique :- S ‘assurer que la batterie supplémentaire placée à l’arrière du véhicule dans le caisson bleu est
activée (Manette rouge à l’intérieur du caisson enfoncée)
- Démarrer la voiture
- Allumer le boîtier électrique
Un voltmètre est placé à l’avant du véhicule et permet de vérifier le niveau de charge des batteries (véhicule et auxiliaire). Vérifier la charge des batteries la veille (pour avoir le temps de les charger si nécessaire).
Remarques importantes :Toujours éteindre le boîtier électrique lorsque le moteur est éteint afin de ne pas décharger les batteries.Lors d’une utilisation prolongée du véhicule ne nécessitant pas de 220V, il est préférable de mettre le boîtier électrique sur 0 et de déconnecter la batterie auxiliaire.
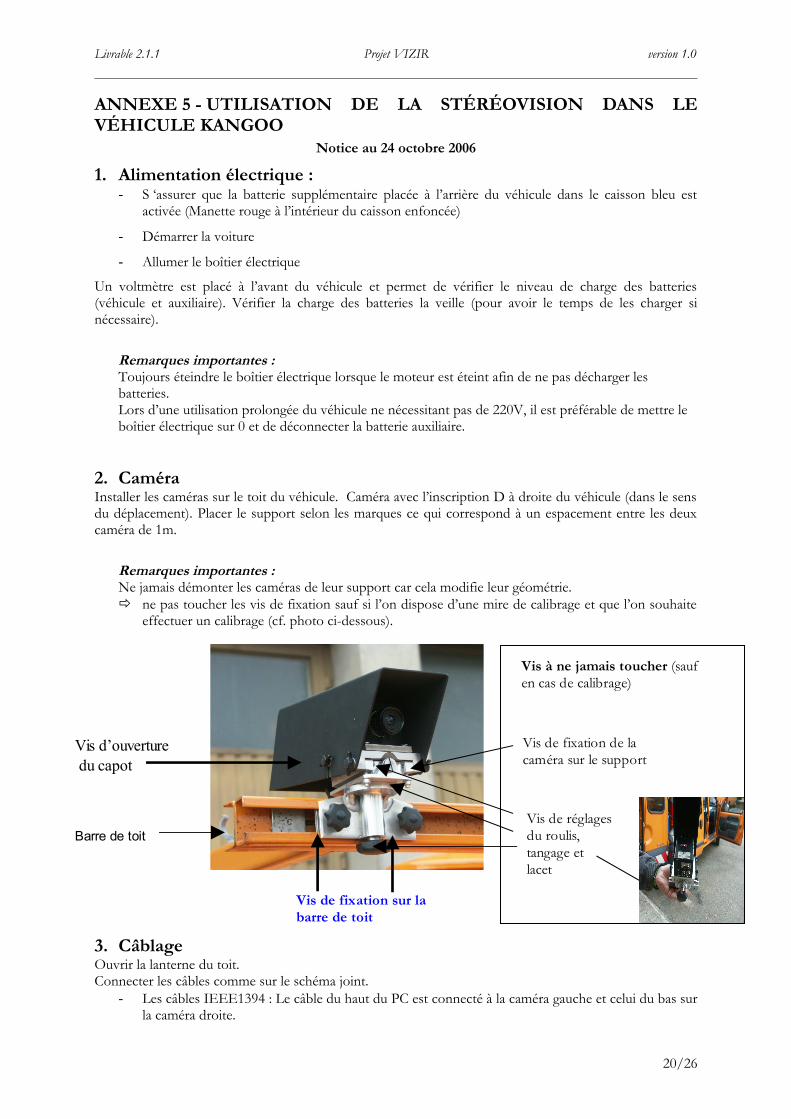
2. CaméraInstaller les caméras sur le toit du véhicule. Caméra avec l’inscription D à droite du véhicule (dans le sens du déplacement). Placer le support selon les marques ce qui correspond à un espacement entre les deux caméra de 1m.
Remarques importantes :Ne jamais démonter les caméras de leur support car cela modifie leur géométrie. ne pas toucher les vis de fixation sauf si l’on dispose d’une mire de calibrage et que l’on souhaite
effectuer un calibrage (cf. photo ci-dessous).
3. CâblageOuvrir la lanterne du toit.Connecter les câbles comme sur le schéma joint.
- Les câbles IEEE1394 : Le câble du haut du PC est connecté à la caméra gauche et celui du bas sur la caméra droite.
20/26
Barre de toit
Vis de fixation sur la barre de toit
Vis d’ouverture du capot
Vis à ne jamais toucher (sauf en cas de calibrage)
Vis de fixation de la caméra sur le support
Vis de réglagesdu roulis, tangage et lacet
Livrable 2.1.1 Projet VIZIR version 1.0
- Le boîtier de commande des objectifs doit être alimenté en 0-12V par l’intermédiaire du boîtier amplificateur placé sous l’armoire électrique.
- Connecter les deux objectifs à leur boîtier de commande.- Pour la synchronisation des caméras, connecter les deux caméras aux sorties 1 et 2 de
l’amplificateur (cables BNC). Connecter le topomètre (BNC ) à l’amplificateur. - Fermer la lanterne en l’orientant pour permettre le passage des câbles.
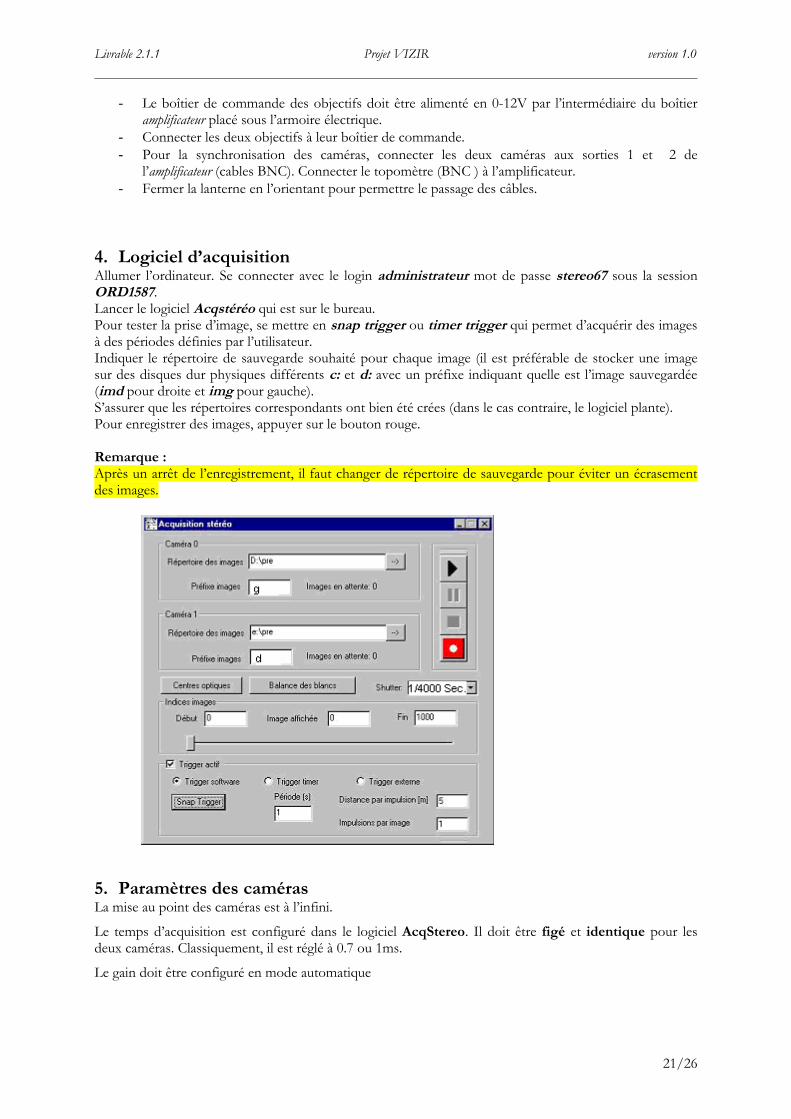
4. Logiciel d’acquisitionAllumer l’ordinateur. Se connecter avec le login administrateur mot de passe stereo67 sous la session ORD1587. Lancer le logiciel Acqstéréo qui est sur le bureau.Pour tester la prise d’image, se mettre en snap trigger ou timer trigger qui permet d’acquérir des images à des périodes définies par l’utilisateur.Indiquer le répertoire de sauvegarde souhaité pour chaque image (il est préférable de stocker une image sur des disques dur physiques différents c: et d: avec un préfixe indiquant quelle est l’image sauvegardée (imd pour droite et img pour gauche).S’assurer que les répertoires correspondants ont bien été crées (dans le cas contraire, le logiciel plante).Pour enregistrer des images, appuyer sur le bouton rouge.
Remarque :Après un arrêt de l’enregistrement, il faut changer de répertoire de sauvegarde pour éviter un écrasement des images.
5. Paramètres des camérasLa mise au point des caméras est à l’infini.
Le temps d’acquisition est configuré dans le logiciel AcqStereo. Il doit être figé et identique pour les deux caméras. Classiquement, il est réglé à 0.7 ou 1ms.
Le gain doit être configuré en mode automatique
21/26
Livrable 2.1.1 Projet VIZIR version 1.0
6. Balance des blancs (avant chaque prise de vue)La balance des blancs doit être faite pour chaque caméra grâce au logiciel FIREVIEW.
Seule une petite portion de l’image (320*200 ?) est prise en compte et correspond à une portion de route qui sera considérée comme grise. Fireview est configuré en mode « balance des blancs automatique ». Les réglages colorimétriques seront appliqués à toutes les images et éventuellement adaptés à un changement de luminosité.
7. Mise en route du topomètre en mode générateur d’impulsionsAllumer le topomètre, Sélectionner le mode « générateur d’intervalles » en appuyant trois fois sur la touche FONCTION. 0 s’affiche et le zéro clignote.Programmer une longueur d’intervalle de 5m : REGLAGE puis ++++ pour afficher 5 puis OK.Appuyer sur STOP pour enclencher le générateur d’intervalle. Seul le point situé à gauche du chiffre clignote.
8. Calibrage (avec une mire)Le calibrage est effectué si l’on dispose d’une mire de calibrage. Généralement une grille de marquage au sol est utilisée (cf. Figure 7). Dans le cas contraire, il faut positionner les caméras exactement comme lors du dernier calibrage. Le véhicule doit être placé au même endroit pour chaque étalonnage. Les caméras sont positionnées en géométrie épipolaire rectifiée en suivant la procédure décrite en annexe 4. Lorsque les deux caméras sont correctement alignées sur le support, elles sont calibrées individuellement à partir de la grille connue peinte sur le sol. Pour ce faire, il suffit d’enregistrer une image pour chaque caméra.
9. Prise de vuesLes scènes routières sont enregistrées sur une durée déterminée par la capacité mémoire du disque dur. Le système actuel semble limité à une prise de vue à environ 110 km/h. Cette vitesse est conditionnée par le couple alimentation du système et la vitesse d’écriture sur le disque. Le nombre d’images en mémoire vive est affiché. Il est de 1 en fonctionnement normal ce qui correspond à une sauvegarde immédiate de l’image. S’il augmente, il faut ralentir pour que les images du buffer soient enregistrées en mémoire vive. Dans sa configuration actuelle, le véhicule de stéréovision permet l’acquisition de couples d’images à un pas de 5m avec une vitesse pouvant aller jusqu’à 110km/h.
Remarques : Optimisation du PC pour l’acquisition.- Faire un maximum de place sur l’ordinateur puis défragmenter les disques.- Supprimer tous les programmes tournant sur le PC en tâche de fond (antivirus…).- Dans le logiciel AcqStéréo, enregistrer l’image de droite sur un disque et l’image de gauche sur un
autre disque. - La taille d’une image est de 1.28Mo. Pour une section de 100km, il faut donc disposer de 25.6Go
sur chaque disque dur.
22/26
Livrable 2.1.1 Projet VIZIR version 1.0
ANNEXE 6 - NOTICE DU LOGICIEL DE TRAITEMENT « STÉRÉO »
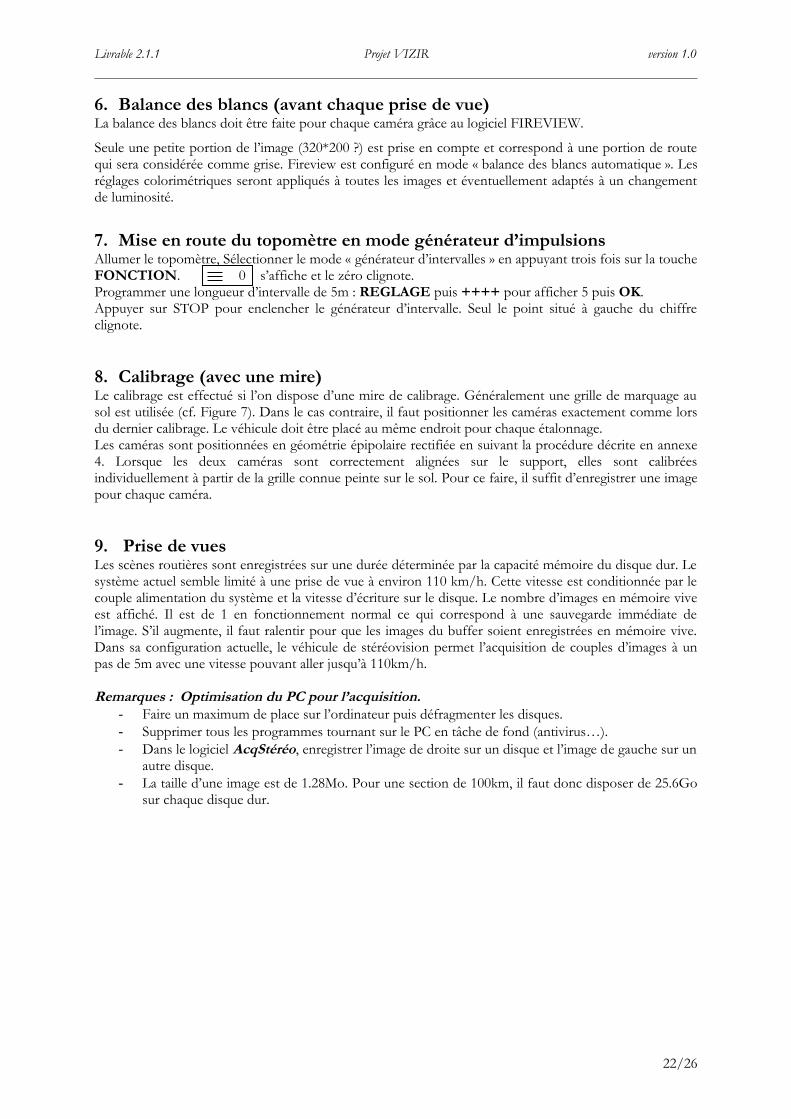
Pré requis : copier les fichiers gSequence.me0 et dSequence.me0 se trouvant dans les répertoires des images brutes, respectivement de gauche et de droite dans le répertoire des images rectifiées(donc le répertoire de destination indiqué précédemment à COMPER ou PRESTO pour les images rectifiées)
1}Ouvrir une paire stéréo : cliquez sur « fichier/ouvrir »
2}Indiquez dans l’espace « image de la camera gauche » le répertoire ou se trouvent les images gauche et droites modifiées à l’aide de REG.
3}Sélectionnez la séquence gauche « gSequence.me0 »,
4}Cliquez sur ouvrir et tous les champs se remplissent,
Si ce n’est pas le cas, sélectionner manuellement les fichiers de calibration (ils sont dans le même répertoire que les images).
5}Cliquez sur « OK ».
6}Les images peuvent défiler à l’aide des flèches directionnelles.
23/26
Livrable 2.1.1 Projet VIZIR version 1.0
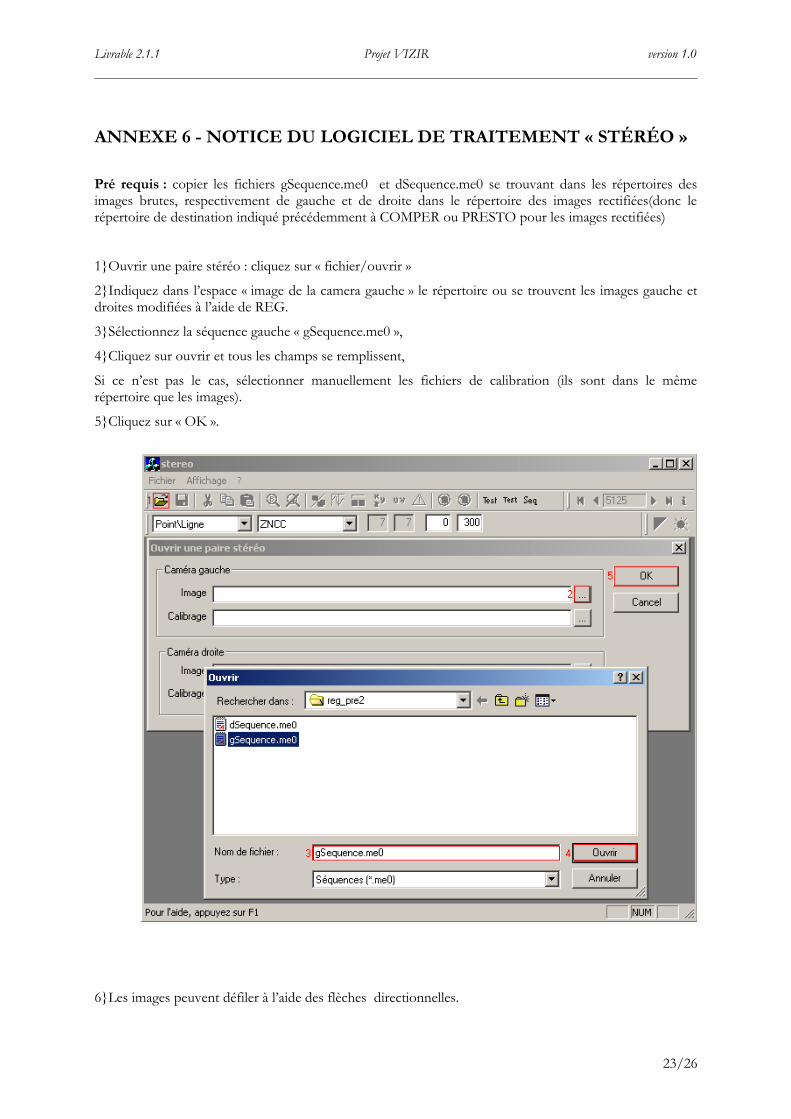
Le curseur vert (non visible sur cette image) permet de faire défiler toutes les images.
7}Définir la forme à mesurer dans l’espace « rectangle»etc.. en cliquant dessus pour faire apparaître le volet déroulant
8}Sélectionner sur l’image de droite ce que l’on veut mesurer
Afin de bien ajuster la forme, ne pas hésiter à zoomer. Pour ce faire, il faut se placer au niveau du panneau avec le pointeur de la souris et utiliser la roulette pour zoomer
Il est possible de vérifier la mise en correspondance : à l’aide du graph. de corrélation (méthode indiquée en fin de notice, sur la dernière capture d’écrans)
9}Presser le bouton /!\ (9a) ou « xyz »(9b) pour avoir les infos relatives à la mesure, selon le cas ou l’on mesure un panneau ou une distance.
24/26
Livrable 2.1.1 Projet VIZIR version 1.0
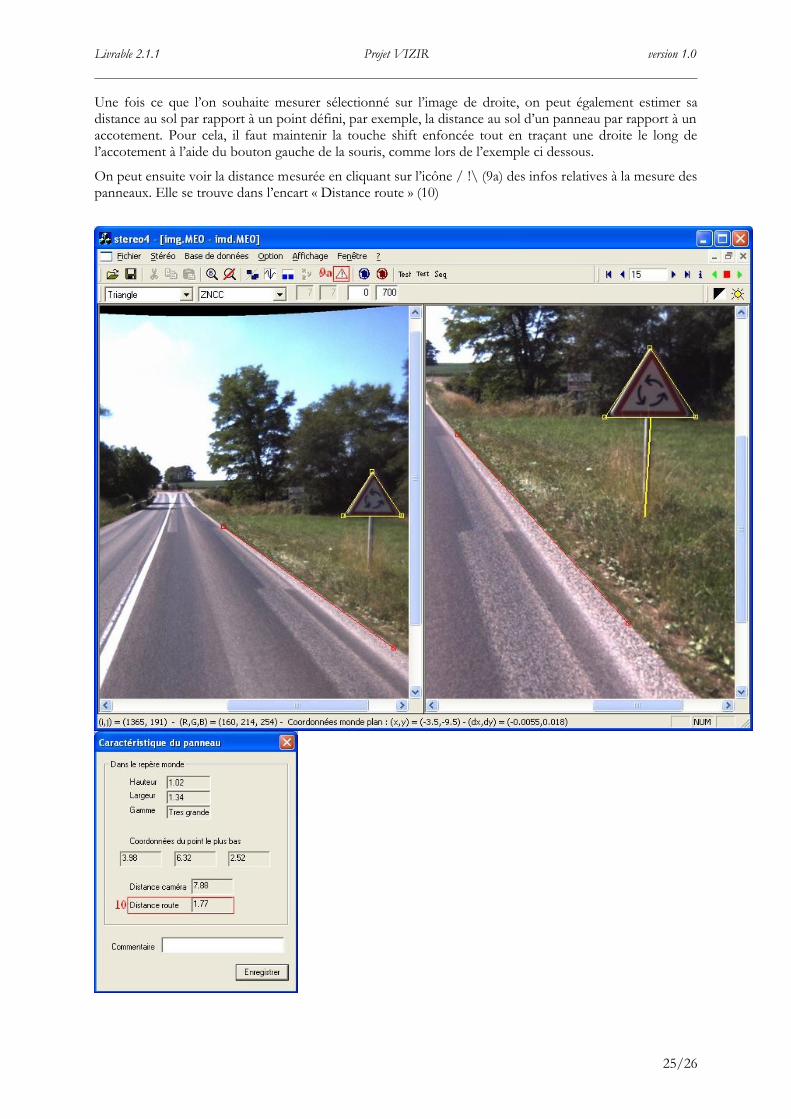
Une fois ce que l’on souhaite mesurer sélectionné sur l’image de droite, on peut également estimer sa distance au sol par rapport à un point défini, par exemple, la distance au sol d’un panneau par rapport à un accotement. Pour cela, il faut maintenir la touche shift enfoncée tout en traçant une droite le long de l’accotement à l’aide du bouton gauche de la souris, comme lors de l’exemple ci dessous.
On peut ensuite voir la distance mesurée en cliquant sur l’icône / !\ (9a) des infos relatives à la mesure des panneaux. Elle se trouve dans l’encart « Distance route » (10)
25/26
Livrable 2.1.1 Projet VIZIR version 1.0
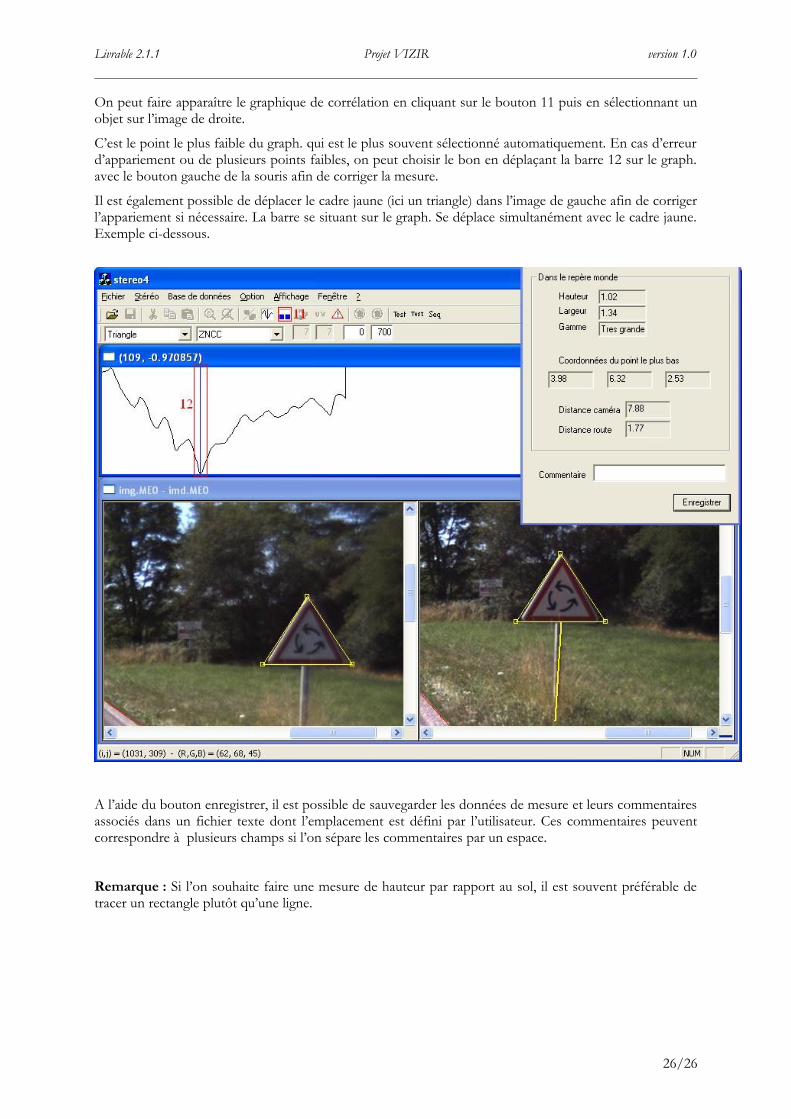
On peut faire apparaître le graphique de corrélation en cliquant sur le bouton 11 puis en sélectionnant un objet sur l’image de droite.
C’est le point le plus faible du graph. qui est le plus souvent sélectionné automatiquement. En cas d’erreur d’appariement ou de plusieurs points faibles, on peut choisir le bon en déplaçant la barre 12 sur le graph. avec le bouton gauche de la souris afin de corriger la mesure.
Il est également possible de déplacer le cadre jaune (ici un triangle) dans l’image de gauche afin de corriger l’appariement si nécessaire. La barre se situant sur le graph. Se déplace simultanément avec le cadre jaune. Exemple ci-dessous.
A l’aide du bouton enregistrer, il est possible de sauvegarder les données de mesure et leurs commentaires associés dans un fichier texte dont l’emplacement est défini par l’utilisateur. Ces commentaires peuvent correspondre à plusieurs champs si l’on sépare les commentaires par un espace.
Remarque : Si l’on souhaite faire une mesure de hauteur par rapport au sol, il est souvent préférable de tracer un rectangle plutôt qu’une ligne.
26/26









![PROJET SARI - PREDIT 3sari.ifsttar.fr/livrables/vizir/VIZIR_3.1.2.pdf · Cette méthode d'évaluation de la visibilité géométrique des routes [BIG08] a été développée dans](https://static.fdocuments.fr/doc/165x107/605d39f1b877ff45ef7de393/projet-sari-predit-3sari-cette-mthode-dvaluation-de-la-visibilit-gomtrique.jpg)






