
Projet de Biométrie - air.imag.frair.imag.fr/images/d/da/Cahier_des_Charges_signature.pdf ·...
16
Cahier des charges POLYTECH’GRENOBLE Projet de Biométrie 2010-2011 Acquisition et Reconnaissance de signatures
-
Upload
truongdang -
Category
Documents
-
view
215 -
download
0
Transcript of Projet de Biométrie - air.imag.frair.imag.fr/images/d/da/Cahier_des_Charges_signature.pdf ·...
Cahier des charges
POLYTECH’GRENOBLE
Projet de Biométrie
2010-2011
Acquisition et Reconnaissance
de signatures
Biométrie - Reconnaissance de signatures Page 2
Table des révisions
Version : Auteur : Date : Contenu : 0.1 Magalie GIMENES 21-02-2011 Création du document et
établissement du plan 0.2 Giang THAI QUYNH 21-02-2011 Présentation du projet 0.3 Christopher MANTOVAN 22-02-2011 Requis non fonctionnels 0.4 Magalie GIMENES 01-03-2011 Changement du plan, Ressources
matérielles
0.5 Giang THAI QUYNH 05-03-2011 Tableau des risques
0.6 Sophie CAMUS 10-03-2011 Description de l’IHM
1.0 Magalie GIMENES 12-03-2011 Mise en forme et corrections
1.1 Sara AMEZIANE 13-03-2011 Corrections
2.0 Toute l’équipe 14-03-2011 Validation du document
Biométrie - Reconnaissance de signatures Page 3
Table des matières
I. Présentation ___________________________________________________________ 4
A. Le projet __________________________________________________________________ 4
B. Les ressources physiques _____________________________________________________ 4
C. Les ressources matérielles ____________________________________________________ 5
II. Organisation du projet ___________________________________________________ 6
A. Dates et durées du projet _____________________________________________________ 6
B. Diagramme de Gantt prévisionnel ______________________________________________ 7
C. Diagramme de Gantt réel _____________________________________________________ 7
D. Cycle de vie du projet ________________________________________________________ 8
III. Tableau de risques ____________________________________________________ 10
IV. Description de l’IHM __________________________________________________ 11
V. Requis non fonctionnels de développement _________________________________ 15
A. Les performances de reconnaissance __________________________________________ 15
B. Les temps de calcul _________________________________________________________ 15
C. Contraintes physiques : l’acquisition des points __________________________________ 15
Biométrie - Reconnaissance de signatures Page 4
I. Présentation
a. Le projet Notre projet consiste à effectuer l’acquisition de signature numérique à partir d’un
DSTouch (écran de Nintendo DS) et de faire une étude de faisabilité sur la reconnaissance de celle-ci. Pour ce faire, nous étudierons plusieurs méthodes pour comparer différentes signatures et sauvegarder ces dernières dans plusieurs fichiers (selon l’identifiant donné) pour constituer une base de données pour notre système.
L’acquisition de la signature à partir du DSTouch se fait à l’aide du logiciel Arduino: seront ainsi sauvegardées les coordonnées de points qui serviront à la comparaison.
Pour la démonstration du projet, nous réaliserons une interface simple qui affichera la signature effectuée sur le DSTouch ainsi que le résultat de comparaison de celle-ci avec les signatures enregistrées dans le système.
b. Les ressources physiques Nous sommes tous issus de la classe RICM5 de l’école Polytech’Grenoble. Nous avons séparé le projet en cinq parties:
Montage du dispositif (électronique) Récupération directe des données de l’Arduino à notre programme Construction de l’algorithme de comparaison de signature Construction de l’IHM du programme Ecriture des documents
Nous avons réparti les membres de notre groupe comme suit :
AMEZIANE Sara :
Construction de l’algorithme de comparaison de signature : o mise en place de l’algorithme d’égalisation du nombre de points entre les
signatures o calcul du tableau de vecteurs à partir des points
CAMUS Sophie :
Chef de projet Responsable du wiki et des documents Construction de l’IHM du programme
CAZAUX Jérémy
Récupération directe des données de l’Arduino à notre programme
DARAS Gautier
Montage du dispositif (électronique) Récupération directe des données de l’Arduino à notre programme (aide)
GIMENES Magalie
Chef de projet Construction de l’algorithme de comparaison de signature :
o Algorithme de comparaison de vecteurs (aide) MAGNAT Nicolas
Construction de l’algorithme de comparaison de signature : o Algorithme de comparaison de vecteurs
Biométrie - Reconnaissance de signatures Page 5
MANTOVAN Christopher
Construction de l’algorithme de comparaison de signature : o mise en place des parsers d’écriture et lecture à partir des fichiers de points
THAI QUYNH Giang
Construction de l’algorithme de comparaison de signature : o mise en place des parsers d’écriture et lecture à partir des fichiers de vecteurs
c. Les ressources matérielles Pour établir la communication entre le DSTouch et nos machines, nous disposions de:
Deux Arduino (un Arduino Uno et un Arduino Duellanove)
Des fils électriques
Deux DSTouch
Deux nappes de connexion pour l’écran
Trois modules de communication entre les nappes et l’Arduino
Deux surfaces de montages pour connecter plusieurs fils entre eux
Deux câbles USB
Nous remercions Polytech’Grenoble, Mr Besacier et Mr Donsez pour nous avoir fourni le
matériel nécessaire à notre projet.
Biométrie - Reconnaissance de signatures Page 6
II. Organisation du projet
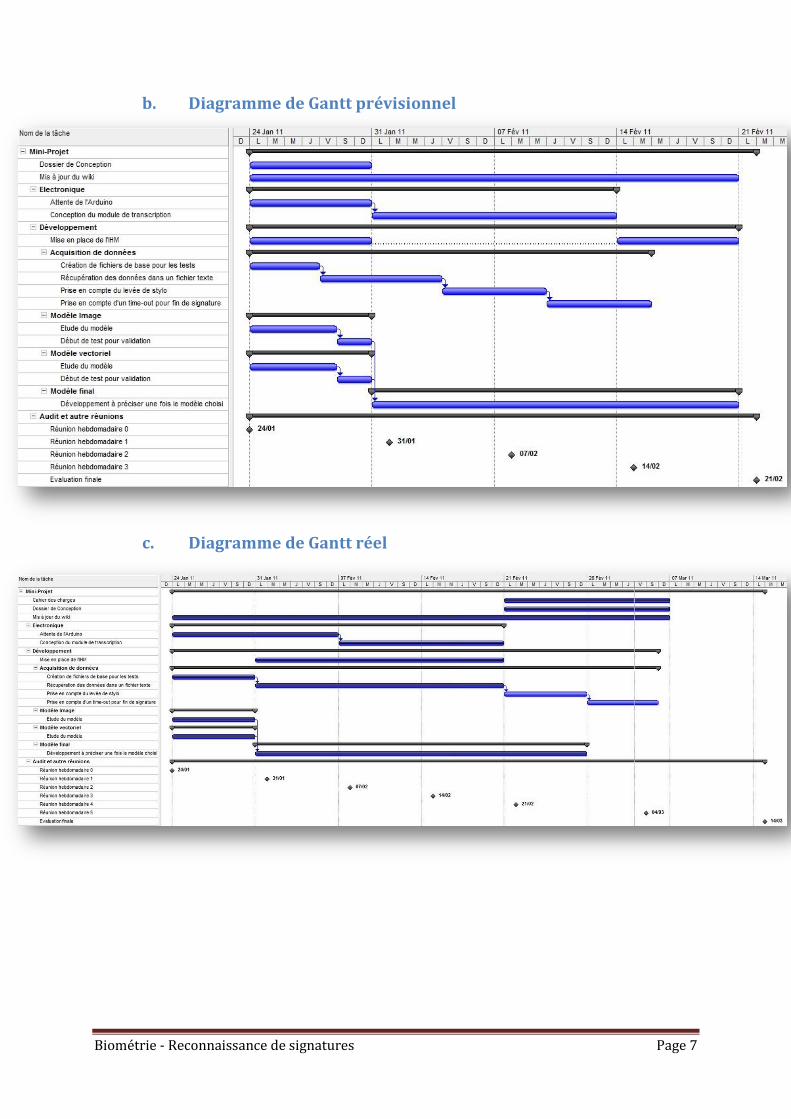
a. Dates et durées du projet Ce projet a débuté le 24 Janvier 2011 et doit être évalué le 14 Mars 2011. Comme vous
pouvez le voir sur le diagramme prévisionnel, nous avons cru qu’il fallait finir le projet pour le
21 Février 2011 ce qui nous a permis de prévoir les retards que nous avons eu à cause de
problèmes, pour la majorité, matériels. De plus, la dernière semaine avant l’évaluation est
réservée aux examens de seconde session ce qui explique pourquoi nous n’avons pas pu
travailler durant ce temps-là.
Nos ressources n’étaient disponibles pour le projet qu’à 10% du temps à cause de cours et
autre travaux sur lesquels nous devions travailler en plus de ce projet. Par conséquent, nous
disposions de 4h par personne et par semaine de travail sur ce projet. Nous disposions aussi
de deux heures par semaine en salle réservée pour se retrouver et faire le point sur l’état
d’avancement de notre projet. Nous avons donc convenu d’utiliser ces heures pour nous
réunir afin de discuter quelques minutes sur le projet (ce qui a déjà été fait et ce qu’il reste à
faire).
Biométrie - Reconnaissance de signatures Page 7
b. Diagramme de Gantt prévisionnel
c. Diagramme de Gantt réel
Biométrie - Reconnaissance de signatures Page 8
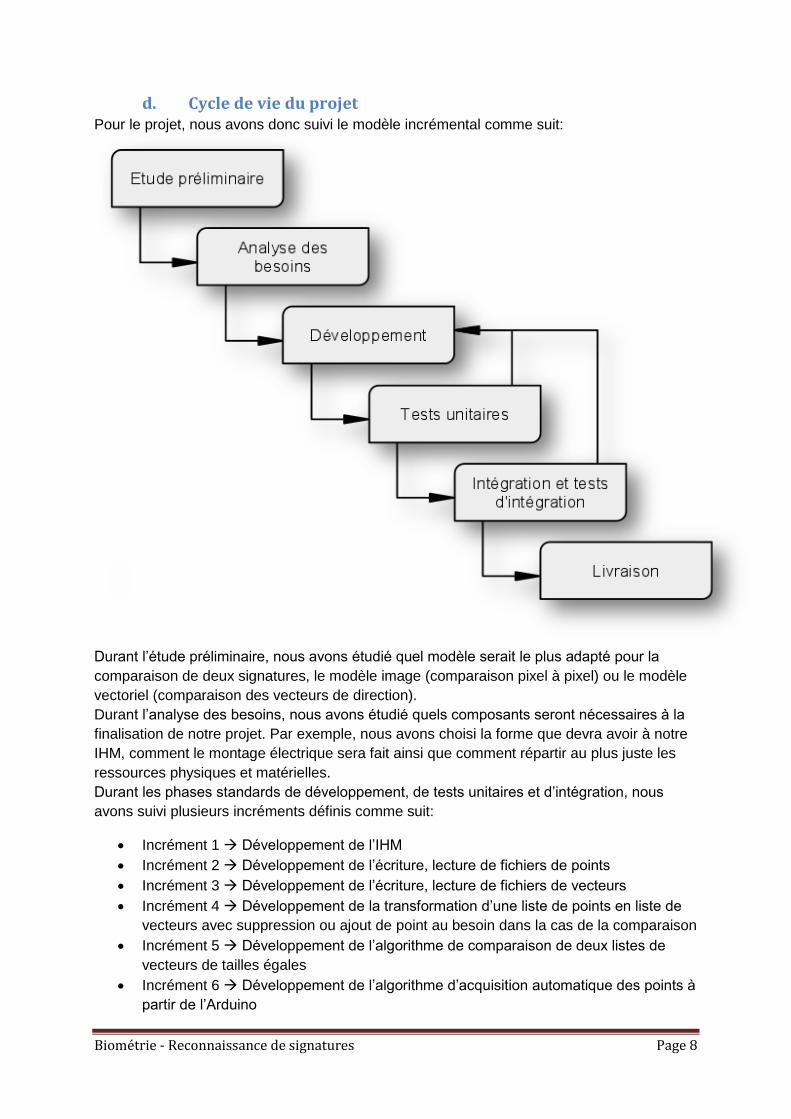
d. Cycle de vie du projet Pour le projet, nous avons donc suivi le modèle incrémental comme suit:
Durant l’étude préliminaire, nous avons étudié quel modèle serait le plus adapté pour la
comparaison de deux signatures, le modèle image (comparaison pixel à pixel) ou le modèle
vectoriel (comparaison des vecteurs de direction).
Durant l’analyse des besoins, nous avons étudié quels composants seront nécessaires à la
finalisation de notre projet. Par exemple, nous avons choisi la forme que devra avoir à notre
IHM, comment le montage électrique sera fait ainsi que comment répartir au plus juste les
ressources physiques et matérielles.
Durant les phases standards de développement, de tests unitaires et d’intégration, nous
avons suivi plusieurs incréments définis comme suit:
Incrément 1 Développement de l’IHM
Incrément 2 Développement de l’écriture, lecture de fichiers de points
Incrément 3 Développement de l’écriture, lecture de fichiers de vecteurs
Incrément 4 Développement de la transformation d’une liste de points en liste de
vecteurs avec suppression ou ajout de point au besoin dans la cas de la comparaison
Incrément 5 Développement de l’algorithme de comparaison de deux listes de
vecteurs de tailles égales
Incrément 6 Développement de l’algorithme d’acquisition automatique des points à
partir de l’Arduino
Biométrie - Reconnaissance de signatures Page 9
Durant la phase de livraison, nous allons préparer la présentation orale de notre produit ainsi
que finaliser les autres livrables (cahier des charges, wiki, dossier de conception).
Biométrie - Reconnaissance de signatures Page 10
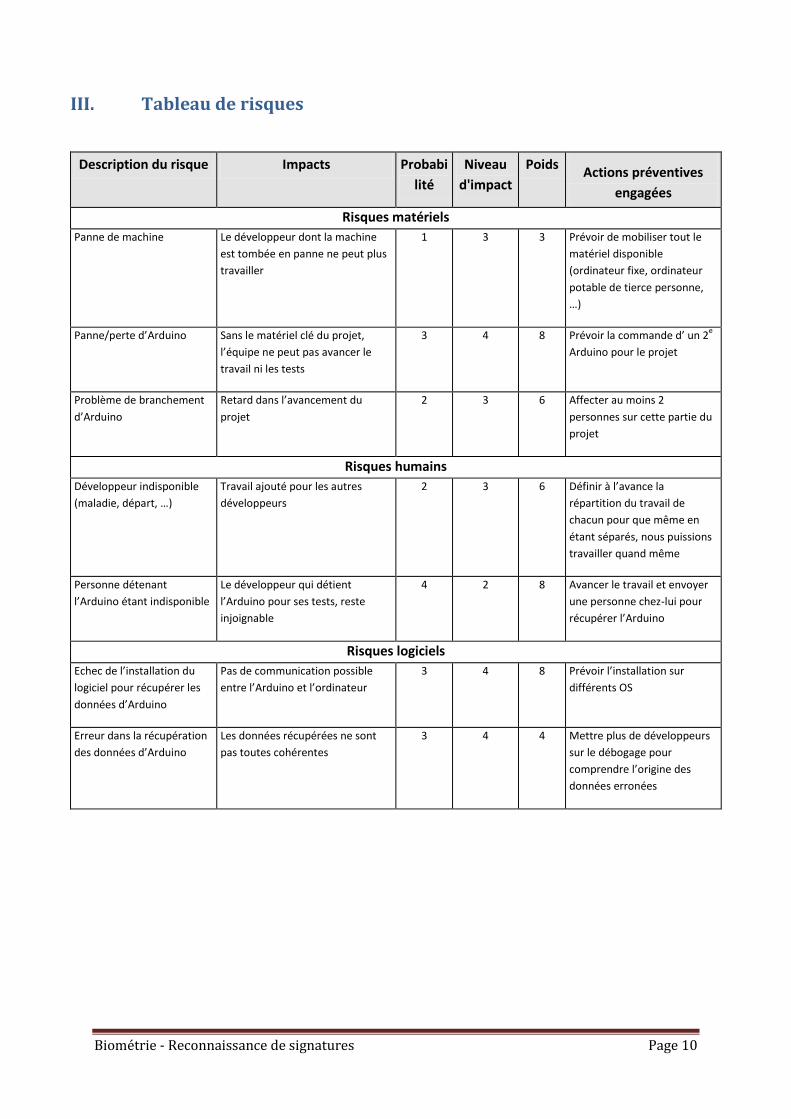
III. Tableau de risques
Description du risque Impacts Probabi
lité
Niveau
d'impact
Poids Actions préventives
engagées
Risques matériels
Panne de machine Le développeur dont la machine
est tombée en panne ne peut plus
travailler
1 3 3 Prévoir de mobiliser tout le
matériel disponible
(ordinateur fixe, ordinateur
potable de tierce personne,
…)
Panne/perte d’Arduino Sans le matériel clé du projet,
l’équipe ne peut pas avancer le
travail ni les tests
3 4 8 Prévoir la commande d’ un 2e
Arduino pour le projet
Problème de branchement
d’Arduino
Retard dans l’avancement du
projet
2 3 6 Affecter au moins 2
personnes sur cette partie du
projet
Risques humains
Développeur indisponible
(maladie, départ, …)
Travail ajouté pour les autres
développeurs
2 3 6 Définir à l’avance la
répartition du travail de
chacun pour que même en
étant séparés, nous puissions
travailler quand même
Personne détenant
l’Arduino étant indisponible
Le développeur qui détient
l’Arduino pour ses tests, reste
injoignable
4 2 8 Avancer le travail et envoyer
une personne chez-lui pour
récupérer l’Arduino
Risques logiciels
Echec de l’installation du
logiciel pour récupérer les
données d’Arduino
Pas de communication possible
entre l’Arduino et l’ordinateur
3 4 8 Prévoir l’installation sur
différents OS
Erreur dans la récupération
des données d’Arduino
Les données récupérées ne sont
pas toutes cohérentes
3 4 4 Mettre plus de développeurs
sur le débogage pour
comprendre l’origine des
données erronées
Biométrie - Reconnaissance de signatures Page 11
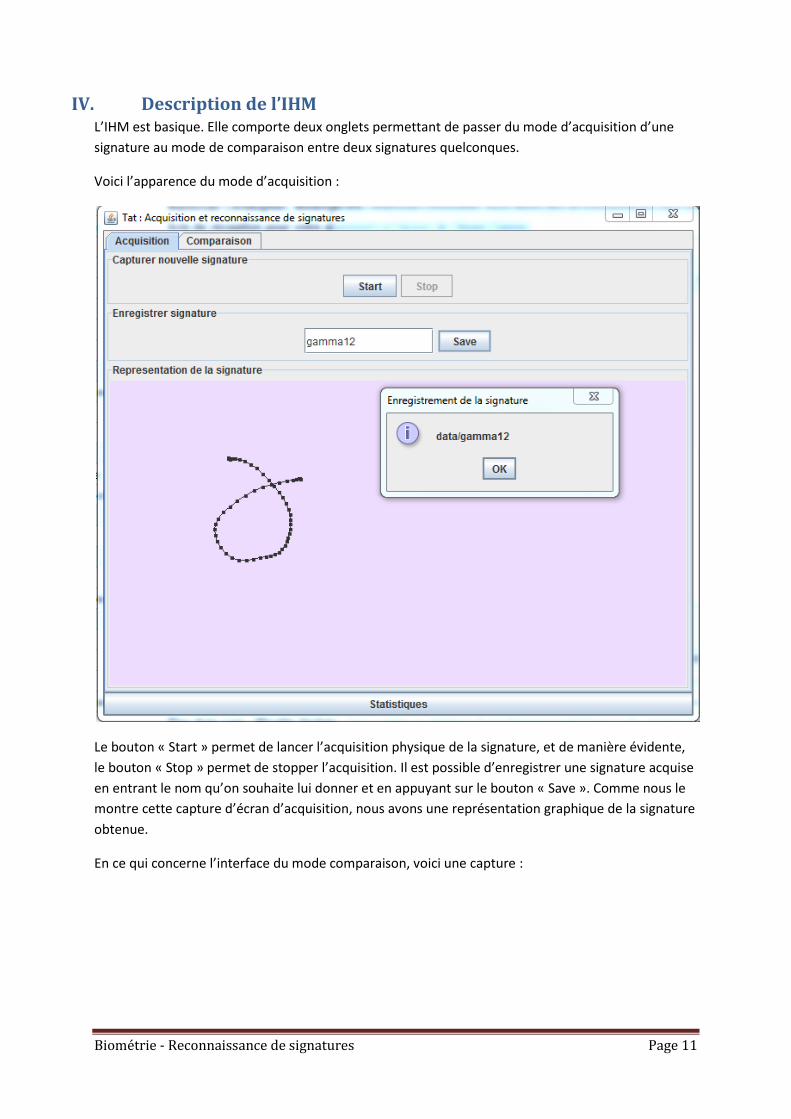
IV. Description de l’IHM L’IHM est basique. Elle comporte deux onglets permettant de passer du mode d’acquisition d’une
signature au mode de comparaison entre deux signatures quelconques.
Voici l’apparence du mode d’acquisition :
Le bouton « Start » permet de lancer l’acquisition physique de la signature, et de manière évidente,
le bouton « Stop » permet de stopper l’acquisition. Il est possible d’enregistrer une signature acquise
en entrant le nom qu’on souhaite lui donner et en appuyant sur le bouton « Save ». Comme nous le
montre cette capture d’écran d’acquisition, nous avons une représentation graphique de la signature
obtenue.
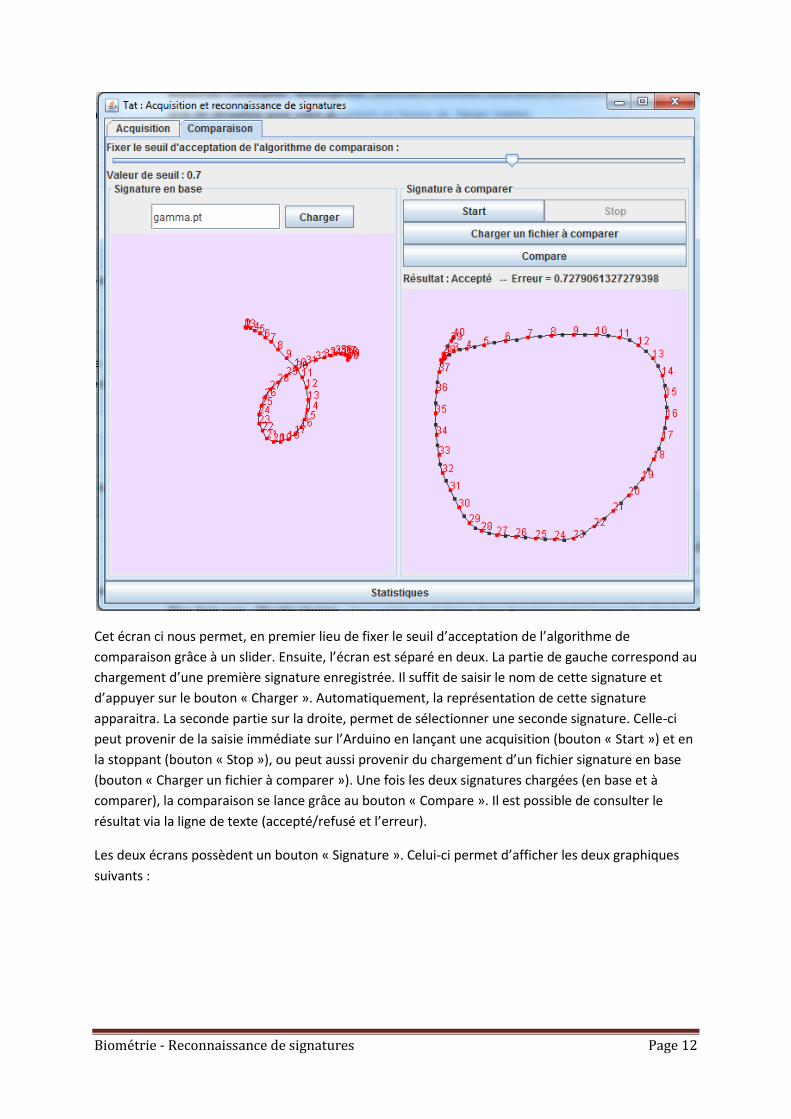
En ce qui concerne l’interface du mode comparaison, voici une capture :
Biométrie - Reconnaissance de signatures Page 12
Cet écran ci nous permet, en premier lieu de fixer le seuil d’acceptation de l’algorithme de
comparaison grâce à un slider. Ensuite, l’écran est séparé en deux. La partie de gauche correspond au
chargement d’une première signature enregistrée. Il suffit de saisir le nom de cette signature et
d’appuyer sur le bouton « Charger ». Automatiquement, la représentation de cette signature
apparaitra. La seconde partie sur la droite, permet de sélectionner une seconde signature. Celle-ci
peut provenir de la saisie immédiate sur l’Arduino en lançant une acquisition (bouton « Start ») et en
la stoppant (bouton « Stop »), ou peut aussi provenir du chargement d’un fichier signature en base
(bouton « Charger un fichier à comparer »). Une fois les deux signatures chargées (en base et à
comparer), la comparaison se lance grâce au bouton « Compare ». Il est possible de consulter le
résultat via la ligne de texte (accepté/refusé et l’erreur).
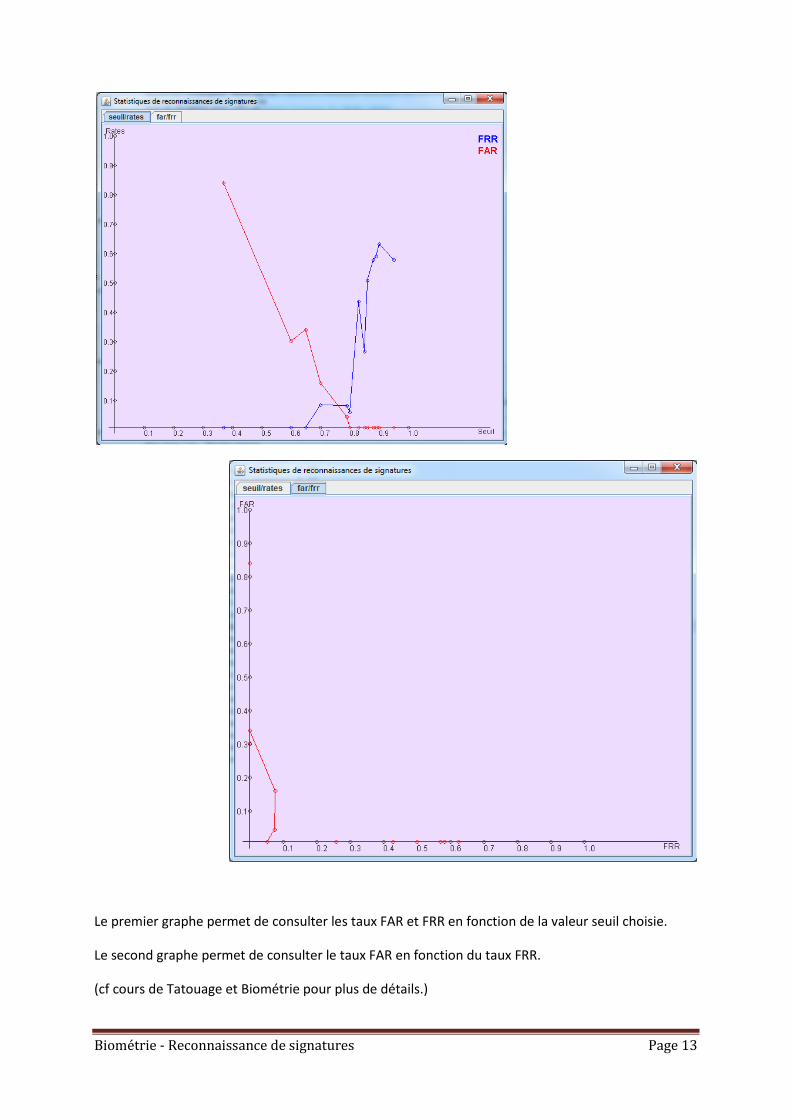
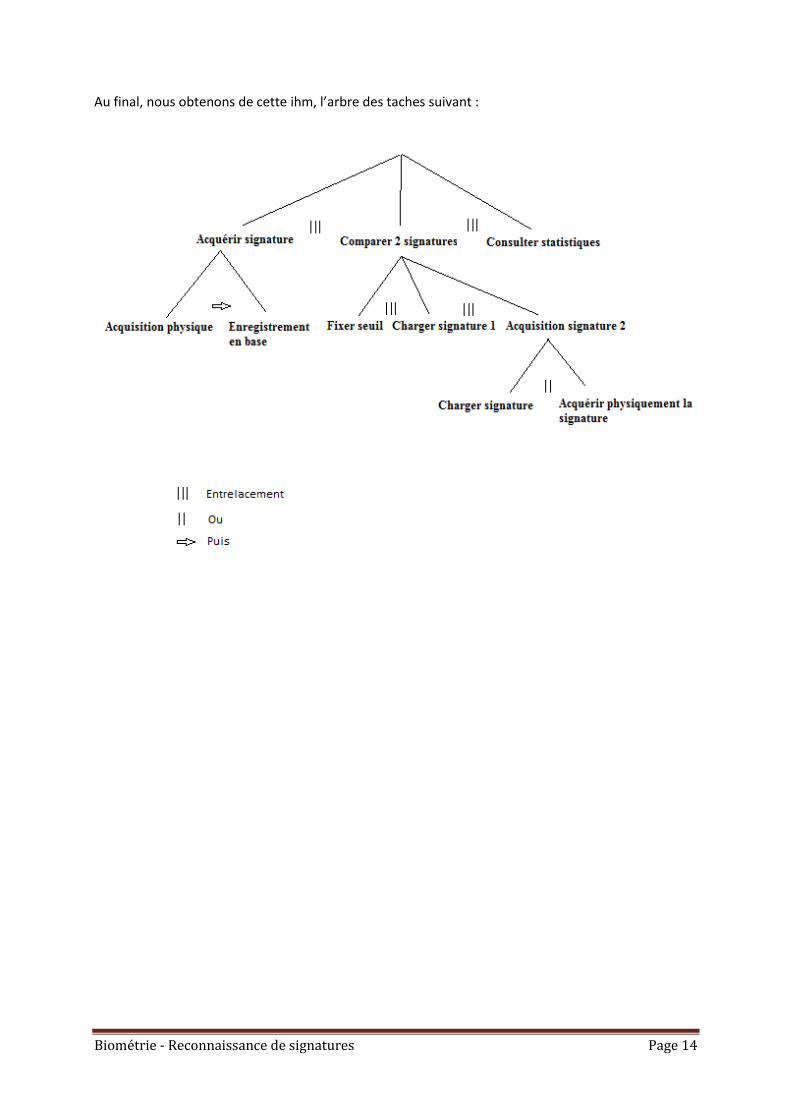
Les deux écrans possèdent un bouton « Signature ». Celui-ci permet d’afficher les deux graphiques
suivants :
Biométrie - Reconnaissance de signatures Page 13
Le premier graphe permet de consulter les taux FAR et FRR en fonction de la valeur seuil choisie.
Le second graphe permet de consulter le taux FAR en fonction du taux FRR.
(cf cours de Tatouage et Biométrie pour plus de détails.)
Biométrie - Reconnaissance de signatures Page 14
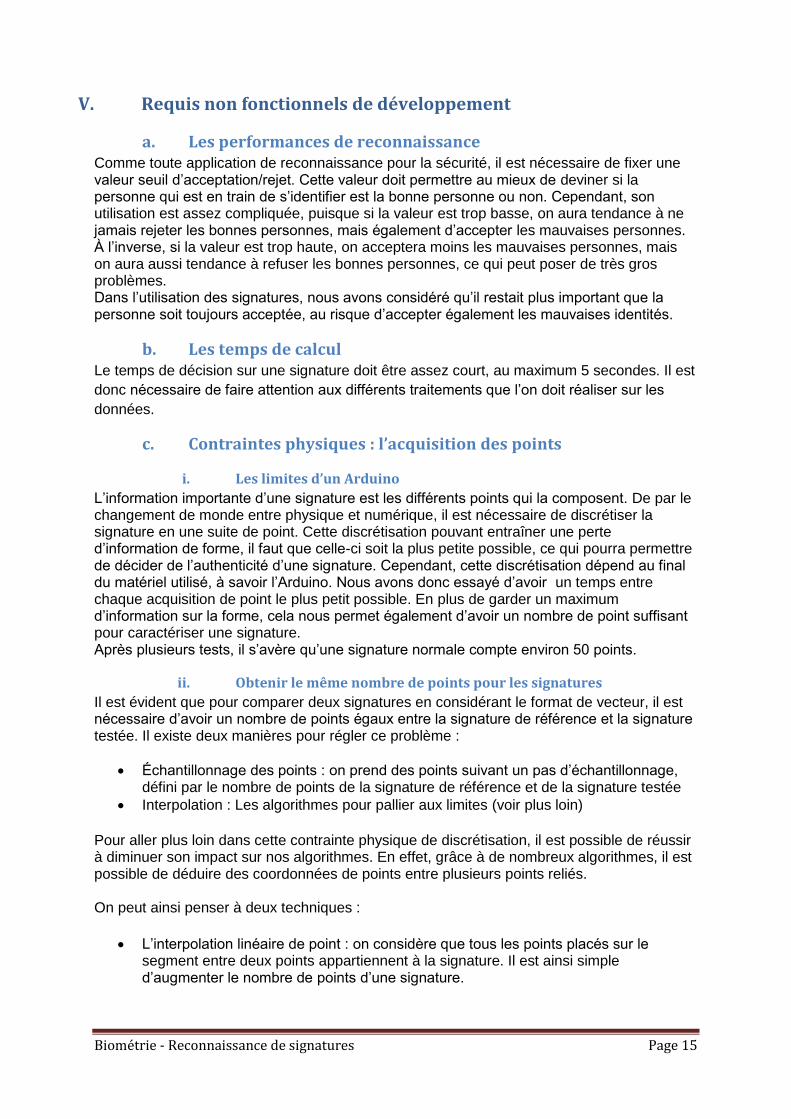
Au final, nous obtenons de cette ihm, l’arbre des taches suivant :
Biométrie - Reconnaissance de signatures Page 15
V. Requis non fonctionnels de développement
a. Les performances de reconnaissance Comme toute application de reconnaissance pour la sécurité, il est nécessaire de fixer une valeur seuil d’acceptation/rejet. Cette valeur doit permettre au mieux de deviner si la personne qui est en train de s’identifier est la bonne personne ou non. Cependant, son utilisation est assez compliquée, puisque si la valeur est trop basse, on aura tendance à ne jamais rejeter les bonnes personnes, mais également d’accepter les mauvaises personnes. À l’inverse, si la valeur est trop haute, on acceptera moins les mauvaises personnes, mais on aura aussi tendance à refuser les bonnes personnes, ce qui peut poser de très gros problèmes. Dans l’utilisation des signatures, nous avons considéré qu’il restait plus important que la personne soit toujours acceptée, au risque d’accepter également les mauvaises identités.
b. Les temps de calcul Le temps de décision sur une signature doit être assez court, au maximum 5 secondes. Il est
donc nécessaire de faire attention aux différents traitements que l’on doit réaliser sur les
données.
c. Contraintes physiques : l’acquisition des points
i. Les limites d’un Arduino
L’information importante d’une signature est les différents points qui la composent. De par le changement de monde entre physique et numérique, il est nécessaire de discrétiser la signature en une suite de point. Cette discrétisation pouvant entraîner une perte d’information de forme, il faut que celle-ci soit la plus petite possible, ce qui pourra permettre de décider de l’authenticité d’une signature. Cependant, cette discrétisation dépend au final du matériel utilisé, à savoir l’Arduino. Nous avons donc essayé d’avoir un temps entre chaque acquisition de point le plus petit possible. En plus de garder un maximum d’information sur la forme, cela nous permet également d’avoir un nombre de point suffisant pour caractériser une signature. Après plusieurs tests, il s’avère qu’une signature normale compte environ 50 points.
ii. Obtenir le même nombre de points pour les signatures
Il est évident que pour comparer deux signatures en considérant le format de vecteur, il est nécessaire d’avoir un nombre de points égaux entre la signature de référence et la signature testée. Il existe deux manières pour régler ce problème :
Échantillonnage des points : on prend des points suivant un pas d’échantillonnage, défini par le nombre de points de la signature de référence et de la signature testée
Interpolation : Les algorithmes pour pallier aux limites (voir plus loin)
Pour aller plus loin dans cette contrainte physique de discrétisation, il est possible de réussir à diminuer son impact sur nos algorithmes. En effet, grâce à de nombreux algorithmes, il est possible de déduire des coordonnées de points entre plusieurs points reliés. On peut ainsi penser à deux techniques :
L’interpolation linéaire de point : on considère que tous les points placés sur le segment entre deux points appartiennent à la signature. Il est ainsi simple d’augmenter le nombre de points d’une signature.
Biométrie - Reconnaissance de signatures Page 16
L’interpolation par des splines : l’avantage des splines est la considération non plus d’un segment mais d’une courbe, qui aura donc tendance à épouser bien mieux une signature, qui est justement une courbe et non une suite de segment
Dans la version actuelle, ces méthodes d’interpolation n’ont pas été appliquées.


















