Principe élémentaire Les deux types de machine à champs ...
14
1 La variation de vitesse de la machine à courant continu g LES PRINCIPES DE LA MACHINE A COURANT CONTINU g LES CONVERTISSEURS STATIQUES g L ’ARCHITECTURE DE COMMANDE DES ENSEMBLES CONVERTISSEUR/MACHINE Les principes de la machine à courant continu g Constitution g Principe g Technologie g Equations de fonctionnement g Caractéristiques électromécaniques g Principe des dispositifs d ’alimentation Soit un aimant permanent produisant un champ d ’excitation Be et une spire parcourue par un courant continu produisant un champ Bi. qu'observe-t-on ? Principe élémentaire N S N S Bi Be Réponse: N S Bi Be N S Un effort d'attraction Mais le mouvement reste limité à cette nouvelle position stable. Il faut malgré le mouvement produit, maintenir le décalage des 2 champs pour entretenir un effort d’attraction continu et ainsi produire une rotation. Conclusion: Comment ? -Le champ d’excitation Be doit tourner si le champ d’induit Bi tourne. -Le champ d’induit Bi doit rester fixe si le champ d’excitation Be est fixe. Les deux types de machine à champs couplés Bi Be N S N S -Le champ d’excitation Be doit tourner si le champ d’induit Bi tourne. N S N S Bi Be -Le champ d’induit Bi doit rester fixe si le champ d’excitation Be est fixe. Principe des machines à champ tournant par courants alternatifs. Principe des machines à champ fixe par courant continu et aiguillage de ce courant. Fonctionnement Création de couple moteur B Ω I I Forces de Laplace B I l F r r r ∧ = L’imposition d’un courant dans la spire crée un couple moteur Fonctionnement Production d’une f.e.m. Ω B Spire de surface S Champ magnétique uniforme d’induction B Vitesse de rotation constante Ω θ cos S B = Φ e t in dt in Ω Ω = = Φ − = s S B d s S B dt d e θ θ
Transcript of Principe élémentaire Les deux types de machine à champs ...

1
La variation de vitesse de la machine à courant continu
g LES PRINCIPES DE LA MACHINE A COURANT CONTINU
g LES CONVERTISSEURS STATIQUES
g L ’ARCHITECTURE DE COMMANDE DES ENSEMBLES CONVERTISSEUR/MACHINE
Les principes de la machine àcourant continu
g Constitution
g Principe
g Technologie
g Equations de fonctionnement
g Caractéristiques électromécaniques
g Principe des dispositifs d ’alimentation
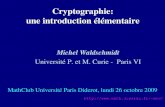
Soit un aimant permanent produisant un champ d ’excitation Be et une spire parcourue par un
courant continu produisant un champ Bi.
qu'observe-t-on ?
Principe élémentaire
NS
N
S
Bi
Be
Réponse:
N
S
BiBe
N
S
Un effort d'attraction
Mais le mouvement reste limité à cette nouvelle position stable.
Il faut malgré le mouvement produit, maintenir le décalage des 2 champs pour entretenir un effort d’attraction continu et ainsi produire une rotation.
Conclusion:
Comment ?
-Le champ d’excitation Be doit tourner si le champ d’induit Bi tourne.
-Le champ d’induit Bi doit rester fixe si le champ d’excitation Be est fixe.
Les deux types de machine à champs couplés
Bi
BeN
S
N S
-Le champ d’excitation Be doit tourner si le champ d’induit Bi tourne.
NS
N
S
Bi
Be
-Le champ d’induit Bi doit rester fixe si le champ d’excitation Be est fixe.
Principe des machines à champ tournant par courants alternatifs.
Principe des machines à champ fixe par courant continu et aiguillage de ce courant.
FonctionnementCréation de couple moteur
B
Ω
I
I
Forces de Laplace BIlFrrr
∧= L’imposition d’un courant dans la spire crée un couple moteur
FonctionnementProduction d’une f.e.m.
Ω
BSpire de surface S
Champ magnétique uniforme d’induction B
Vitesse de rotation constante Ω
θcos SB=Φ
e
tin dt
in ΩΩ==Φ
−= sSBdsSBdtde θθ

2
FonctionnementGéométrie réelle
Bθ
Nécessité d’un support en rotation pour la spire : le rotor
FonctionnementLe collecteur
U(t)
θ
θ1 θ2
la tension dans une spire est alternative
Solution: un redresseur mécanique
Lames métalliques assurant le contact
électrique avec les spires
Balais en graphite “collectant“ les tensions
des spires en rotation
U(t)
Principe d ’aiguillage du courant d ’induit
Be
θ
Couple
Bi
1
Faire tourner de +22,5°
− θ représente l’angle entre les axes magnétiques du champ Bi d’induit et Be de l’inducteur.
− On admet que le couple électromagnétique résultant de ces deux champs en présence varie avec le sinus de l’angle θ.
Principe d ’aiguillage du courant d ’induit
Be
θ
Couple
Bi1
Faire tourner de +22,5°
Faire tourner de -22,5°
− θ représente l’angle entre les axes magnétiques du champ Bi d’induit et Be de l’inducteur.
− On admet que le couple électromagnétique résultant de ces deux champs en présence varie avec le sinus de l’angle θ.
Principe d ’aiguillage du courant d ’induit
Be
θ
Couple
Bi
1
Faire tourner de +22,5°
Faire tourner de -22,5°
− θ représente l’angle entre les axes magnétiques du champ Bi d’induit et Be de l’inducteur.
− On admet que le couple électromagnétique résultant de ces deux champs en présence varie avec le sinus de l’angle θ.
Principe d ’aiguillage du courant d ’induit
Be
θ
Couple
Bi
1
Faire tourner de +22,5°
Faire tourner de -22,5°
− θ représente l’angle entre les axes magnétiques du champ Bi d’induit et Be de l’inducteur.
− On admet que le couple électromagnétique résultant de ces deux champs en présence varie avec le sinus de l’angle θ.

3
Principe d ’aiguillage du courant d ’induit
Be
θ
Couple
Bi
1
Faire tourner de +22,5°
Faire tourner de -22,5°
− θ représente l’angle entre les axes magnétiques du champ Bi d’induit et Be de l’inducteur.
− On admet que le couple électromagnétique résultant de ces deux champs en présence varie avec le sinus de l’angle θ.
Principe d ’aiguillage du courant d ’induit
Be
θ
Couple
Bi
1
Faire tourner de +22,5°
Faire tourner de -22,5°
− θ représente l’angle entre les axes magnétiques du champ Bi d’induit et Be de l’inducteur.
− On admet que le couple électromagnétique résultant de ces deux champs en présence varie avec le sinus de l’angle θ.
Principe d ’aiguillage du courant d ’induit
Be
θ
Couple
Bi
1
Faire tourner de +22,5°
Faire tourner de -22,5°
− θ représente l’angle entre les axes magnétiques du champ Bi d’induit et Be de l’inducteur.
− On admet que le couple électromagnétique résultant de ces deux champs en présence varie avec le sinus de l’angle θ.
Principe d ’aiguillage du courant d ’induit
Be
θ
Couple
Bi
1
Faire tourner de +22,5°
Faire tourner de -22,5°
− θ représente l’angle entre les axes magnétiques du champ Bi d’induit et Be de l’inducteur.
− On admet que le couple électromagnétique résultant de ces deux champs en présence varie avec le sinus de l’angle θ.
Principe d ’aiguillage du courant d ’induit
Be
θ
Couple
Bi1
Faire tourner de +22,5°
Faire tourner de -22,5°
− θ représente l’angle entre les axes magnétiques du champ Bi d’induit et Be de l’inducteur.
− On admet que le couple électromagnétique résultant de ces deux champs en présence varie avec le sinus de l’angle θ.
Principe d ’aiguillage du courant d ’induit
Be
θ
Couple
Bi
1
Faire tourner de +22,5°
Faire tourner de -22,5°
− θ représente l’angle entre les axes magnétiques du champ Bi d’induit et Be de l’inducteur.
− On admet que le couple électromagnétique résultant de ces deux champs en présence varie avec le sinus de l’angle θ.

4
Principe d ’aiguillage du courant d ’induit
Be
θ
Couple
Bi
1
Faire tourner de -22,5°
Pour aller plus loin…
Principe d ’aiguillage du courant d ’induit
Be
θ
Couple
Bi
1
Pour aller plus loin…
-Comment pourrait-on réduire l’ondulation du couple ?
-Quelle est l’influence de la position des balais sur le fonctionnement ?
Inducteur Deux types d ’excitation sont utilisées, soit :
- à aimants permanents. Les pertes joules sont supprimées mais l ’excitation magnétique est fixe. Dans les grosses machines, le coût des aimants pénalise cette solution.
- à enroulements et pièces polaires. Le réglage de l ’excitation rend possible le fonctionnement en survitesse. Pour les grosses machines, le montage de pôles auxiliairesaméliore la commutation du courant dans les conducteurs de l ’induit.
Vue en coupe
Boîte à bornes
VentilateurInduit bobiné Inducteur
Balais
Collecteur
Inducteur Deux types d ’excitation sont utilisées, soit :
- à aimants permanents. Les pertes joules sont supprimées mais l ’excitation magnétique est fixe. Dans les grosses machines, le coût des aimants pénalise cette solution.
- à enroulements et pièces polaires. Le réglage de l ’excitation rend possible le fonctionnement en survitesse. Pour les grosses machines, le montage de pôles auxiliairesaméliore la commutation du courant dans les conducteurs de l ’induit.
Induit bobiné
Les bobines de l ’induit sont logées dans des encoches fermées par des cales. Un frettage assure la tenue aux efforts centrifuges.
Les bobines sont brasées aux lames du collecteur et mises en série. On note l ’importance des têtes de bobines et du collecteur ( partie inactive )sur la longueur de la machine.
Le champ inducteur vu par l’induit au cours d’un tour est variable. Il faudra feuilleter le rotor afin de réduire les pertes fer de l’induit.
Il est donc constitué de tôles circulaires isolées et empilées sur l’arbre de façon à obtenir le cylindre d’induit. Ces tôles sont en acier au silicium et isolées par vernis.

5
BalaisLes balais assurent la liaison électrique ( contact
glissant ) entre la partie fixe et la partie tournante. Pour des machines de forte puissance, la mise en parallèle des balais est alors nécessaire.
Pour des raisons d’économie, ils doivent avoir une durée de vie aussi longue que possible et assurer un bon contact électrique. Différentes technologies existent : les balais au charbon dur, les graphitiques, les électro-graphitiques, et les métallo-graphitiques. On peut considérer que dans un contact glissant les pertes sont de nature mécanique à 35% et de nature électrique à 65%.
Collecteur
Le collecteur a pour fonction d’assurer la commutation du courant d’alimentation dans les conducteurs de l’induit.
Il est essentiellement constitué par une juxtaposition cylindrique de lames de cuivre séparées par des lames isolantes. Chaque lame est reliée électriquement au bobinage induit.
Le collecteur est le constituant critique des machines à courant continu car ses lames sont soumises aux efforts centrifuge et assemblées manuellement.
Son usure consécutive du frottement des balais nécessite un démontage et un ré-usinage périodiques.
De plus, il accroît de 20 à 30% la longueur totale de la machine.
Collecteur
collecteur
balais
Organisation matérielleVue en coupe
bobinage inducteurparcouru par le courant d’excitation
bobinage induit.parcouru par le courant d’induit.
stator(ferromagnétique)
rotor (ferromagnétique)
pôle
lignes dechamps
ligne neutre
corne polaire
Organisation matérielleVue éclatée générale
Roulements
Roulements
Flasque palier côté bout d’arbre
Turbine de ventilationCollecteur
Induit Stator
Balais etPorte-balais
Flasque palier côté collecteur
Porte de visite
Borne
Plaque à borne didactique
Anneau de manutention
Equations de fonctionnement
RR LR L Ei
U
R L E
EdtdiLRiU ++=
E=k…
Mi
Uie
CeΩ
Cr
J
Mi
Uie
CemΩ
Mi
Uie
Cem= k…
Cem= k i…
Cem= k i Φe
dtdJCrCem Ω=−
E=k Ω …
E=k ΩΦe

6
Equations de fonctionnementEn résumé:
i
Uie
CeΩ
Cr
J
RLE
Les équations qui caractérisent la machine à courant continu sont :
1°)
2°) E=k ΩΦe
3°) Cem= k i Φe
4°)
EdtdiLRiU ++=
dtdJCrCem Ω=−
Caractéristiques électro-mécaniquesDans un problème de motorisation, la charge entraînée impose au moteur de développer un couple
électromagnétique Cem et une vitesse Ω adaptés aux nécessités de fonctionnement.
Il est donc nécessaire pour un moteur donné, de définir l’ensemble des points de fonctionnement atteignables.
CemIkCem Φ=
Ω
Φ−=Ω k
RIU
KICem =
CemKR
KU 2−=Ω
Avec K= k Φnominal
Dans la pratique, on maximise le couple Cem par ampère en donnant au flux d’excitation sa valeur nominale, soit Φ= Φnominal.
Caractéristiques électro-mécaniquesCem
Ω
In
-In
Cem=K In
I1
-I1
Cem=KI1
I2
-I2
Cem=K I2
Caractéristiques électro-mécaniquesCem
Ω
In
-In
Cem=KInU2-U2
Ω−= RK
URKCem
2 2
U1-U1
Ω−= RK
URKCem
2 1
Caractéristiques électro-mécaniquesCem
Ω
In
-In
Cem=KInUn-Un
Un domaine fermé définit l’ensemble des couples ( Cem, Ω ) possibles pour une machine donnée.
Ω−= RK
nURKCem
2
Question :
Quelle est la nature du fonctionnement correspondant aux quatre points d’intersection des droites limites ?
Un
Principe des dispositifs d’alimentationCem
Ω
In
-In
Un-Un
CΩ>0
Fonctionnementen moteur avant
++U>0 Ω>0
UΩ
I>0 C>0
ICem
Quadrant 1
Les conventions de sens courant et de rotation sont en bleu.
Le dispositif d’alimentation fournit une puissance électrique.

7
Principe des dispositifs d’alimentationCem
Ω
In
-In
Un-Un
CΩ<0
Fonctionnement en génératrice arrière
++U<0 Ω<0
UΩ
I>0 C>0
ICem
Quadrant 2
Les conventions de sens courant et de rotation sont en bleu.
Le dispositif d’alimentation reçoit une puissance électrique.
Principe des dispositifs d’alimentationCem
Ω
In
-In
Un-Un
CΩ>0
Fonctionnementen moteur arrière
++
U<0 Ω<0
UΩ
I<0 C<0
ICem
Quadrant 3
Les conventions de sens courant et de rotation sont en bleu.
Le dispositif d’alimentation fournit une puissance électrique.
Principe des dispositifs d’alimentationCem
Ω
In
-In
Un-Un
CΩ<0
Fonctionnement en génératrice avant
++
U>0 Ω>0
UΩ
I<0 C<0
ICem
Quadrant 4
Les conventions de sens courant et de rotation sont en bleu.
Le dispositif d’alimentation reçoit une puissance électrique.
Quadrants de fonctionnementΓu
Ω
U<0I>0
Génératrice
4v
U>0I<0
Génératrice
2
v
U>0I>0
1v Moteur
U<0I<0
Moteur
3
v
Principe des dispositifs d’alimentationCem
Ω
In
-In
Un-Un
++
ΩI
CemU
Fonctionnement en moteur avant
Quadrant 1
M++
ΩI
CemU
Fonctionnement en génératrice arrière
Quadrant 2
G
++
ΩI
CemU
Fonctionnement en moteur arrière
Quadrant 3
M ++
ΩI
CemU
Fonctionnement en génératrice avant
Quadrant 4
G
Pour passer des quadrants Q1 Q4 ou Q2 Q3 le dispositif d’alimentation devra être réversible en courant.
Pour passer des quadrants Q1 Q2 ou Q3 Q4 le dispositif d’alimentation devra être réversible en tension.
Conclusion
Bilan énergétique du moteur
Pa = U I
Pe=
E I=
Γe Ω
Pu = Γu Ω
pe = Re Ie2 pj = R I2 pfer pméca
absorbée par l’induit
pertes Joulede l’induit
Puissance électromagnétique
dans le rotor(l’induit)
frottementset ventilation
Puissancemécanique utile
pertes Joulede l’inducteur
absorbée par le moteur
Pfer+méca = Γe Ω - Γu Ω = Γp Ω

8
Pertes fer et mécaniques
Pa = U I
Pe=
E I=
Γe Ω
Pu = Γu Ω
pe = Re Ie2 pj = R I2 pfer pméca
222mFmHfer BnKnBKp +=
Hystérésis courants de Foucault
frottements secs
frottements fluides
2 Ω+Ω= fsm kkp
2 Ω+Ω=+ BAp ferméca
ΩΓ= p
Ω+=Γ BAp
Les convertisseurs statiques
g SOURCE D’ALIMENTATION ALTERNATIVE
Non traité
Redresseur/onduleur à logique d’inversion
g SOURCE D’ALIMENTATION CONTINUE
Hacheur en pont complet
Source d’alimentation alternativeRedresseur/ Onduleur à logique d’inversion
R
1 32Réseau
Im
Um
R
E
MCC
Pour que la machine évolue dans les quatre quadrants, le dispositif de conversion alternatif/continu devra être:
-réversible en tension ( marche avant ou arrière ).
-réversible en courant ( fonctionnement moteur ou générateur ).
Question : Comment réaliser la conversion alternatif/continu ?
-Avec un pont de Graëtz à thyristor.
Source d’alimentation alternativeRedresseur/ Onduleur à logique d’inversion
R
Schéma de principe:
1 32Réseau
Im
Um
R
E
MCCI pont 1
Upont 1E,Ω
C, Im
Moteur
avant
Génératrice
arrière
Question : Comment réaliser la réversibilité en courant ?
-En ajoutant un deuxième pont de Graëtz en anti-parallèle.
La nature unidirectionnelle des thyristors du pont 1 impose:
Im = I pont1 avec Im > 0
Lorsque le convertisseur fonctionne en redresseur, Um = Upont 1 avec Um > 0
« Le réseau alimente la machine »
Lorsque le convertisseur fonctionne en onduleur, Um = Upont 1 avec Um < 0
« La machine alimente le réseau »
Source d’alimentation alternativeRedresseur/ Onduleur à logique d’inversion
R
Schéma de principe:
1 32
I pont 2
Upont 2Réseau
Im
Um
R
E
MCCI pont 1
Upont 1
E,Ω
C, Im
Moteur
avant
Génératrice
arrière
Génératrice
avant
Moteur
arrière
Source d’alimentation alternativeRedresseur/ Onduleur à logique d’inversion
1 32Réseau R
E
MCC
COMMANDEPONT 1
COMMANDEPONT 2 Mesure
courant
Référence
courant
Régulateur
de courant
Validation
pont1/pont2

9
Source d’alimentation alternativeRedresseur/ Onduleur à logique d’inversion
ET
ET
S
R
Q
τtemporisation4 à 5 msec
monostable valeurabsolue
valeur mini
détectionseuil mini
détectionchoix pont
Mesurecourantmoteur
Référencecourantmoteur
Validationpont1
S
R
QValidation
pont2 monostable
autorisation changement pont
Source d’alimentation alternativeRedresseur/ Onduleur à logique d’inversion
C, Im
E,Ω
Upont 1<0
Onduleur
Upont 2>0
Onduleur
Upont 1>0
Redresseur
Upont 2<0
Redresseur
R
E
MCC
1 32
I pont 1
Upont 1
I pont 2
Upont 2
RéseauIm
Um
Source d’alimentation continue
UalimU
I
fm1
fm2
fm3
fm4
Un fonctionnement dans les 4 quadrants du plan couple/vitesse nécessitent 4 interrupteurs. Ils autorisent l’alimentation du moteur sous une tension +Ualim/-Ualim.
L’association parallèle transistor-diode leur confère la réversibilité en courant nécessaire au fonctionnement dans les 4 quadrants.
Fonctionnement :
Configuration 1
Configuration 2
Configuration 3
Configuration 4
Les relevés…
Source d’alimentation continue
UalimU
I
fm1
fm2
fm3
fm4
Configuration 1
M
Cem
ΩM
T1, T4 fermés
T2, T3 ouverts
D1, D4 ouvertes
D2, D3 ouvertes
T1
T2 T4
T3D1
D4D2
D3
Source d’alimentation continue
UalimU
I
fm1
fm2
fm3
fm4
Configuration 2
G
Cem
ΩG
T1, T4 ouverts
T2, T3 ouverts
D1, D4 ouvertes
D2, D3 fermées
T1
T2 T4
T3D1
D4D2
D3
Source d’alimentation continue
UalimU
I
fm1
fm2
fm3
fm4
Configuration 3
M
Cem
Ω
M
T1, T4 ouverts
T2, T3 fermés
D1, D4 ouvertes
D2, D3 ouvertes
T1
T2 T4
T3D1
D4D2
D3

10
Source d’alimentation continue
UalimU
I
fm1
fm2
fm3
fm4
Configuration 4
G
Cem
Ω
G
T1, T4 ouverts
T2, T3 ouverts
D1, D4 fermées
D2, D3 ouvertes
T1
T2 T4
T3D1
D4D2
D3
UalimU
I
fm1
fm2
fm3
fm4
UalimU
I
fm1
fm2
fm3
fm4
UalimU
I
fm1
fm2
fm3
fm4
UalimU
I
fm1
fm2
fm3
fm4
MOTEUR AVANT GENERATRICE AVANT
Marche avant avec hacheur
Suite…
Marche arrière avec hacheur
UalimU
I
fm1
fm2
fm3
fm4
UalimU
I
fm1
fm2
fm3
fm4
UalimU
I
fm1
fm2
fm3
fm4
UalimU
I
fm1
fm2
fm3
fm4
MOTEUR ARRIERE GENERATRICE ARRIERE
Architecture de commande
CONVERTISSEURD'ALIMENTATION
DU MOTEURM
RESEAU
commande
Iinduit
Uinduit
charge
nmoteur
Couple résistant
Alimentation en tensionUn convertisseur transforme le réseau
triphasée en une source de tension continue réglable.
Un signal de commande détermine l’amplitude de cette tension continue.
Appliquée à l’induit de la MCC, cette tension détermine l’évolution du courant.
Le couple moteur engendré, détermine alors l’évolution de la vitesse de la ligne d’arbre.
Un convertisseur transforme le réseau triphasée en une source de tension continue réglable.
Un signal de commande détermine l’amplitude de cette tension continue.
Appliquée à l’induit de la MCC, cette tension détermine l’évolution du courant.
Le couple moteur engendré, détermine alors l’évolution de la vitesse de la ligne d’arbre.
Relevé du démarrage et de la mise en charge du moteur
Architecture de commande
0 500.0m
500.0
125.0m 250.0m 375.0m
0
250.0
Uinduit
nmoteur/10
Couple résistantIinduit
Surintensité
Survitesse
Question : Comment supprimer la surintensité transitoire ?
- En alimentant la machine en courant.
Un asservissement de courant impose la commande du convertisseur. Ainsi, l’alimentation progressive en tension de l’induit interdit les surintensités.
Architecture de commande
CONVERTISSEURD'ALIMENTATION
DU MOTEURM
RESEAU
commande
Iinduit
Uinduit
charge
nmoteur
Couple résistant
Système deréglage du
courant I et du couple
moteur
consigne courant
Alimentation en tension contrôlée en courant
Relevé du démarrage et de la mise en charge du moteur

11
Architecture de commande
0 500.0m125.0m 250.0m 375.0m
0
250.0
500.0
nmoteur/10
IinduitCouple résistant
Uinduit
Chute de vitesse
Courant limité
Question : Comment supprimer la chute de vitesse ?
- En contrôlant aussi la vitesse
Un asservissement de vitesse impose la consigne de courant d’induit nécessaire au suivi d’une consigne de vitesse.
Architecture de commande
CONVERTISSEURD'ALIMENTATION
DU MOTEURM
RESEAU
commande
Iinduit
Uinduit
charge
nmoteur
Couple résistant
Système deréglage du
courant I et du couple
moteur
consigne courant
Système deréglage dela vitesse
consigne vitesse
DT
Alimentation en tension contrôlée en vitesse et limitée en courant
Relevé du démarrage et de la mise en charge du moteur
Architecture de commande
0 500.0m125.0m 250.0m 375.0m
0
250.0
500.0
Uinduit
nmoteur/10
Couple résistantIinduit
Courant limité
Vitesse maintenueAsservissement de courant : plus de surintensité
Asservissement de vitesse : plus de chute de vitesse
Calcul de la f.e.m.
B
ΔxVBlerrr
∧=
txlBVBle
ΔΔ
== Sxl Δ=Δ
e =ΔφΔt (φ : flux coupé pour le passage d’une encoche à la suivante)
V
Calcul de la f.e.m.
B
Δθ
e =ΔφΔt
Ω =ΔθΔt
θφ
θφ
ΔΔ
Ω=ΩΔ
Δ=
/e
(e : fem dans un brin)
N brins au totalN
2πθ =Δbrins séparés d’un angle
πΦ
Ω= pepour 1 brin k
p paires de pôles (Φ flux sous un pôle)
pN 2/ Φ
=Δϕ
Calcul de la f.e.m.
B
Δθ
Ω =ΔθΔt
pour 1 brin k
bobinage simple : 2 voies d’enroulement
e1
e2
ek/2
ek
ek-1
e1+k/2
ΦΩ
== ∑=
2
2/
1NpeE
N
kk π
Φ= NnpE(avec n en tr/s) (sous un pôle)
πΦ
Ω= pe

12
Calcul de la f.e.m.
ΦΩ
== ∑=
2
2/
1N
apeE
aN
kk π
Φ= nNapE
(avec n en tr/s)
E
e1
e2
ek/4
ek/2
ek/2-1
e1+k/4
e3k/2
e3k/2-1
e1+k/2
ek
ek-1
e1+3k/2
Cas général: 2a voies d’enroulementpour 1 brin k
πΦ
Ω= pe
Calcul de la f.e.m.Expression complète
Φ= nNapE
p nombre de paires de pôlesa nombre de paires de voies d’enroulementN nombre de conducteurs actifs totaln vitesse de rotation en tr/sΦ flux total vu sous un pôle
avec:
La f.e.m. est proportionnelle à la vitesse de rotation
Couple électromagnétique
Ω=Γ
IEe
IE
Transfert puissance électromagnétique / mécanique
ΩΓ eTransfertD’énergie
forceélectromotrice
courantd’induit
vitesse derotation
coupleélectromagnétique
Ω
Φ=
InNap
INa
p 2
Φ=π
Le couple est proportionnel au courant d’induit
Lois électromagnétiqueLes deux équations fondamentales
ΩΦ= KEIKe Φ=Γ
Réaction magnétique d’induitCourant inducteur seul
I=0
lignes de champ
Réaction magnétique d’induitCourant induit seul
I
lignes de champ

13
Réaction magnétique d’induit
I
lignes de champ
Courant induit et inducteur
le bobinage induit déforme les lignes de champs
augmentationdu champ
diminutiondu champ
Réaction magnétique d’induitcourant inducteur seul
avec lescourants induit
et inducteur
θ
ligne neutre
déplacement dela ligne neutre
Effets de la RMI sur le fonctionnementDiminution de la f.e.m.
B
H∆H ∆H
∆B1
∆B2
H0
B000 ΦΩ== KEE v
A vide:
Φ = Φ0 − ΔΦΔΦΩ−ΦΩ= 0 KKE
ΔΦΩ−= 0 KEEEn charge:
ε−= 0EEε : chûte de tension due à la RMI
crée par courant inducteur seul
crée par courant induit seul
corne polairesaturée
Effets de la RMI sur le fonctionnement
augmentation du flux sousles cornes polaires d’entrée
fonctionnement moteur fonctionnement génératrice
I
FNord SudNord Sud F
Ω Ω
I
augmentation du flux sousles cornes polaires de sortie
Dans les 2 cas, augmentation de la tension entre certaines lames du collecteurdifficulté plus grande de la commutation
Effets de la RMI sur le fonctionnement
Problème identique en fonctionnement moteur
fonctionnement génératrice
Nord SudF
Ω
I
BRMI
BRMI s’oppose au changement du sens du courant dans la spire en commutation
Conducteurs en mouvements
VBle RMI =
déplacement dela ligne neutre
Réaction magnétique d’induitEffets sur le fonctionnement
• Diminution de la f.e.m• Augmentation tension entre lames collecteur• Difficulté de commutation• Possibilité d’instabilité mécanique

14
Compensation de la RMIEnroulements de compensation Encoches polaires
•Bobinés en série avec l’induit•Ils compensent le flux de RMI
•Fentes dans les pièces polaires•Contrarient le trajet des lignes de champ de la RMI