Physique - excerpts.numilog.comexcerpts.numilog.com/books/9782100762651.pdf · tige) est par...
22
Physique exercices incontournables
Transcript of Physique - excerpts.numilog.comexcerpts.numilog.com/books/9782100762651.pdf · tige) est par...
TP16-0423-Book1 19/04/2017 11:32 Page i
Physiqueexercices incontournables
TP16-0423-Book1 19/04/2017 11:32 Page ii
TP16-0423-Book1 19/04/2017 11:32 Page iii
MP MP* PT PT*JEAN-NOËLBEURY
Physiqueexercices incontournables
3e ÉDITION

TP16-0423-Book1 19/04/2017 11:32 Page iv
Avec la collaboration scientifique de SÉBASTIEN FAYOLLE
Conception et création de couverture : Atelier3+
© Dunod, 2012, 2014, 2017
11 rue Paul Bert, 92240 Malakoffwww.dunod.com
ISBN 978-2-10-076265-1
TP16-0423-Book1 19/04/2017 11:32 Page v
Table des matières
Partie 1Mecanique
1. Référentiels non galiléens 32. Mécanique du solide 17
Partie 2Electronique
3. ALI-Oscillateurs 294. Signaux périodiques 44
5. Électronique numérique 49
Partie 3Optique ondulatoire
6. Interférences 59
Partie 4Électromagnétisme
7. Électrostatique 938. Magnétostatique 120
9. Équationsde Maxwell– Énergieduchampélectromagnétique 13110. Propagation 143
Partie 5Thermodynamique
11. Systèmes ouverts en régime stationnaire 19112. Transferts thermiques 207
©D
unod
.Tou
tere
prod
ucti
onno
nau
tori
sée
estu
nd
élit
.
TP16-0423-Book1 19/04/2017 11:32 Page vi
Table des matières
13. Statique des fluides 23514. Fluide en écoulement 24115. Thermodynamique industrielle 252
Partie 6Physique quantique
16. Approche ondulatoire de la mécanique quantique 285
Partie 7Thermodynamique statistique
17. Facteur de Boltzmann 319
Index 327
Les énoncés dans lesquels apparaît un astérisqueannoncent des exercices plus difficiles.

TP16-0423-Book1 21/04/2017 12:6 Page 1
Partie 1
Mecanique
TP16-0423-Book1 21/04/2017 12:6 Page 2
1. Référentiels non galiléens 31.1 : Bille dans un tube (MP) 31.2 : Sismographe (MP) 61.3 : Circonférence en rotation et anneau (MP) 91.4 : Dynamique en référentiel tournant (MP) 12
2. Mécanique du solide 172.1 : Déplacement d’un solide sur un plan horizontal (MP) 172.2 : Détermination d’un coefficient de frottement (MP) 23

TP16-0423-Book1 21/04/2017 12:6 Page 3
1Référentielsnon galiléens
Exercice 1.1 : Bille dans un tube (MP)On considère un solide M de masse m susceptible de glisser sans frottement àl’intérieur d’un tube parallélépipédique d’extrémité O. Les grandeurs r0 = OM0et v0 caractérisent la position et la vitesse de M à l’instant initial t = 0 dans lerepère lié au tube. Le tube de longueur 2� est dans le plan horizontal et tourneautour de l’axe Oz vertical à la vitesse angulaire ω constante.
1. Déterminer l’équation différentielle en r du mouvement de M.2. Calculer le temps τ que mettra M pour sortir du tube avec � = 0,1 m ; r0 =0,01 m ; v0 = 0 m.s−1 et ω = 2 rad.s−1.3. Un ressort enfilé dans le tube est fixé à son extrémité en O et à son autreextrémité au solide M. La longueur à vide du ressort est 2r0. Discuter la naturedu mouvement de M suivant la valeur de ω.
Analyse du problèmeCet exercice traite du mouvement relatif d’un point matériel. Il faut bien définirle référentiel absolu (considéré comme galiléen) et le référentiel relatif (considérécomme non galiléen). Le bilan des forces se fait en travaillant d’abord dans le ré-férentiel galiléen. Il faut rajouter ensuite les forces d’inertie d’entraînement et deCoriolis pour appliquer le principe fondamental de la dynamique dans le référentielnon galiléen.
1.
�ur
�u
�uz
q
O x
y
M
q
©D
unod
.Tou
tere
prod
ucti
onno
nau
tori
sée
estu
nd
élit
.
3

TP16-0423-Book1 21/04/2017 12:6 Page 4
Partie 1 . Mécanique
Système : Bille de masse m.
Référentiels : �0 =(
O ; �i, �j, �k, t)
galiléen et � =(
O ; �ur, �uθ , �k, t)
non galiléen.Le vecteur rotation instantané de � par rapport à �0 vaut : �ω�/�0 = ω�k.
Le mouvement relatif dans � s’écrit :−→OM = r �ur ; �v (M)� = r �ur et
�a (M)� = r �ur.
Le vecteur unitaire �ur est fixe dans �. La dérivée par rapport au temps de r �ur dans� donne bien r �ur.
Bilan des forces :
• Le mouvement se fait sans frottement, la réaction du support est donc or-thogonale au petit déplacement de la bille par rapport au tube. La réactiondu support a donc une composante nulle sur �ur. La réaction du support estdonc
�R = R1�uθ + R2�k• Le poids de la masse m est :
�P = m�g• La force d’inertie d’entraînement est :
�fie (M) = mω2−→OM
• La force d’inertie de Coriolis :
�fic (M) = −2m �ω�/�0 ∧ �v (M)� = −2mωr �uθ
Principe fondamental de la dynamique (PFD) dans le référentiel nongaliléen :
m�a (M)� = �R + �P + �fie + �ficLa projection dans la base
(�ur, �uθ , �k
)donne :∣∣∣∣∣∣
mr = mω2r0 = R1 − 2mωr0 = R2 − mg
L’équation différentielle du mouvement s’obtient à partir de la premièreprojection du PFD :
r − ω2r = 0
4

TP16-0423-Book1 21/04/2017 12:6 Page 5
Chapitre 1 . Référentiels non galiléens
2. L’équation caractéristique s’écrit : x2 − ω2 = 0. On en déduit alors
x = ±ωLa solution de l’équation différentielle s’écrit donc :
r = A exp (ωt)+ B exp (−ωt)
La dérivée de r par rapport au temps est : r = Aω exp (ωt)−Bω exp (−ωt).À t = 0, r (0) = r0 et r (0) = v0.On a deux équations pour déterminer les constantes d’intégration A et B :∣∣∣∣ A + B = r0 (éq. 1)
Aω − Bω = v0 (éq. 2)
On fait les combinaisons linéaires suivantes : (1)ω + (2) et (1)ω − (2).
On a alors :
∣∣∣∣ 2Aω = r0ω + v02Bω = r0ω − v0
. D’où :
∣∣∣∣∣∣∣A = r0ω + v0
2ω
B = r0ω − v0
2ωLa bille quitte le tube pour r = �. Soit :
1
2
(r0 + v0
ω
)exp (ωt)+ 1
2
(r0 − v0
ω
)exp (−ωt) = �
On pose : X = exp (ωt) . En multipliant par exp(ωt), on est ramené à uneéquation du second degré :
1
2
(r0 + v0
ω
)X2 + 1
2
(r0 − v0
ω
)= �X
La résolution numérique donne : X = 19,95 et t = 1,5 s.
3. L’équation différentielle s’écrit :
mr = mω2r − k (r − 2r0)
Elle se met sous la forme :
r −(ω2 − k
m
)r = 2
kr0
m
• Si ω ≥√
k
m, le système diverge.
• Si ω <
√k
m, on a l’équation d’un oscillateur harmonique.
Ces deux résultats sont prévisibles physiquement. Si la constante de raideurest très petite, alors la force d’inertie d’entraînement l’emporte devant laforce exercée par le ressort. Comme �fie est centrifuge, on prévoit bien unsystème qui diverge.
©D
unod
.Tou
tere
prod
ucti
onno
nau
tori
sée
estu
nd
élit
.
5
TP16-0423-Book1 21/04/2017 12:6 Page 6
Partie 1 . Mécanique
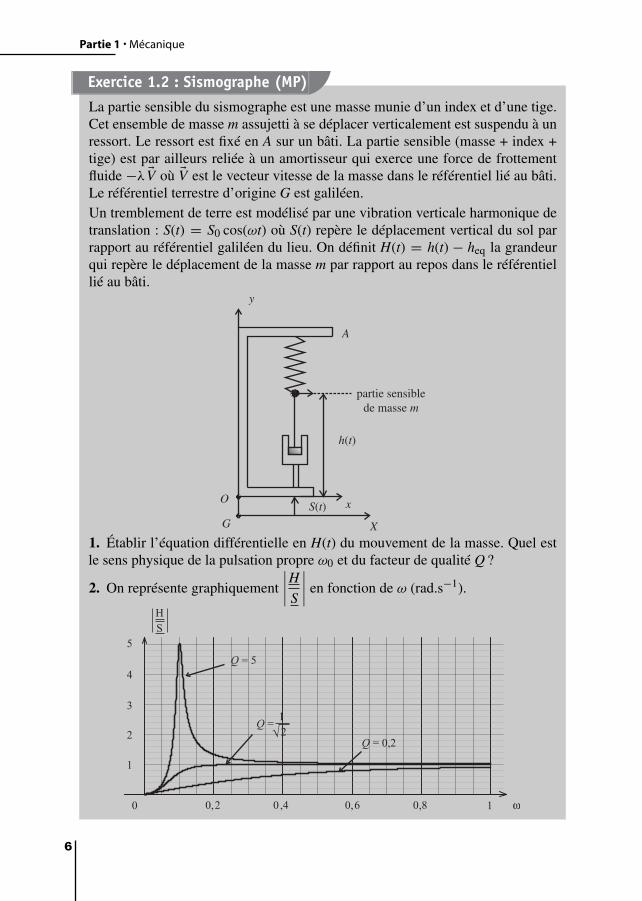
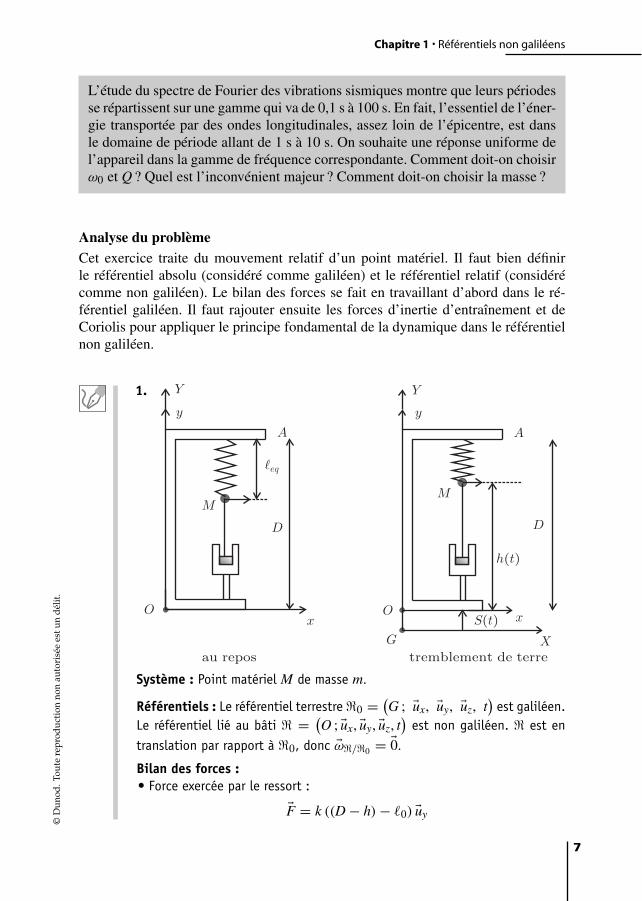
Exercice 1.2 : Sismographe (MP)La partie sensible du sismographe est une masse munie d’un index et d’une tige.Cet ensemble de masse m assujetti à se déplacer verticalement est suspendu à unressort. Le ressort est fixé en A sur un bâti. La partie sensible (masse + index +tige) est par ailleurs reliée à un amortisseur qui exerce une force de frottementfluide −λ �V où �V est le vecteur vitesse de la masse dans le référentiel lié au bâti.Le référentiel terrestre d’origine G est galiléen.Un tremblement de terre est modélisé par une vibration verticale harmonique detranslation : S(t) = S0 cos(ωt) où S(t) repère le déplacement vertical du sol parrapport au référentiel galiléen du lieu. On définit H(t) = h(t) − heq la grandeurqui repère le déplacement de la masse m par rapport au repos dans le référentiellié au bâti.
S(t)
h(t)
G
O
y
X
x
A
partie sensiblede masse m
1. Établir l’équation différentielle en H(t) du mouvement de la masse. Quel estle sens physique de la pulsation propre ω0 et du facteur de qualité Q ?
2. On représente graphiquement
∣∣∣∣HS∣∣∣∣ en fonction de ω (rad.s−1).
6
TP16-0423-Book1 21/04/2017 12:6 Page 7
Chapitre 1 . Référentiels non galiléens
L’étude du spectre de Fourier des vibrations sismiques montre que leurs périodesse répartissent sur une gamme qui va de 0,1 s à 100 s. En fait, l’essentiel de l’éner-gie transportée par des ondes longitudinales, assez loin de l’épicentre, est dansle domaine de période allant de 1 s à 10 s. On souhaite une réponse uniforme del’appareil dans la gamme de fréquence correspondante. Comment doit-on choisirω0 et Q ? Quel est l’inconvénient majeur ? Comment doit-on choisir la masse ?
Analyse du problèmeCet exercice traite du mouvement relatif d’un point matériel. Il faut bien définirle référentiel absolu (considéré comme galiléen) et le référentiel relatif (considérécomme non galiléen). Le bilan des forces se fait en travaillant d’abord dans le ré-férentiel galiléen. Il faut rajouter ensuite les forces d’inertie d’entraînement et deCoriolis pour appliquer le principe fondamental de la dynamique dans le référentielnon galiléen.
1.
O
y
Y
x
A
�eq
D
M
S(t)
h(t)
G
O
y
Y
X
x
A
D
M
reposau de terretremblement
Système : Point matériel M de masse m.
Référentiels : Le référentiel terrestre �0 = (G ; �ux, �uy, �uz, t
)est galiléen.
Le référentiel lié au bâti � = (O ; �ux, �uy, �uz, t
)est non galiléen. � est en
translation par rapport à �0, donc �ω�/�0 = �0.
Bilan des forces :• Force exercée par le ressort :
�F = k ((D − h)− �0) �uy
©D
unod
.Tou
tere
prod
ucti
onno
nau
tori
sée
estu
nd
élit
.
7

TP16-0423-Book1 21/04/2017 12:6 Page 8
Partie 1 . Mécanique
• Poids :
�P = m�g• Force d’inertie d’entraînement :
�fie (M) = −m�ae (M) = −m
(d2−→GO
dt2
)�0
Or−→GO = S(t)�uy = S0 cos(ωt)�uy, d’où :
�fie (M) = mω2S0 cos(ωt)�uy
• Force d’inertie de Coriolis :
�fic (M) = �0puisque �ω�/�0 = �0.
La longueur du ressort à l’équilibre n’est pas égale à la longueur du ressortà vide.
Sur le schéma, il faut prendre l’initiative de rajouter des grandeurs intermédiaires :longueur à l’équilibre, distance D pour déterminer les longueurs du ressort au repossans tremblement de terre et à un instant t quelconque avec un tremblement de terre.On peut déterminer cette force en deux étapes :� La force fait intervenir k(�− �0). Déterminer � avec le schéma.� Rajouter un vecteur unitaire (ici �uy) et déterminer le signe devant k. Ici, il faut
bien mettre un signe + car si le ressort est étiré, la force est dirigée vers le hautavec une projection positive sur �uy.
PFD dans le référentiel non galiléen :
m�a (M)� = �P + �T + �fie (M)+ �fic (M)En projection sur �uy, on obtient :
mh = −mg + k (D − h − �0)− λh − mS
À l’équilibre sans tremblement de terre :
0 = −mg + k(D − heq − �0
)On fait la différence et on pose : H = h − heq. On en déduit :
mH = −kH − λH + mω2S0 cos (ωt)
On pose : ω20 = k
metω0
Q= λ
m.
L’équation différentielle s’écrit sous forme canonique :
H + ω0
QH + ω2
0H = ω2S0 cos (ωt)
8

TP16-0423-Book1 21/04/2017 12:6 Page 9
Chapitre 1 . Référentiels non galiléens
Q est le facteur de qualité. ω0 est la pulsation propre de l’oscillateur.Pour un système très faiblement amorti (Q � 1), la pseudo-pulsation desoscillations est très proche de la pulsation propre.2. On note le second membre : e(t) = ω2S0 cos(ωt). La représentationcomplexe s’écrit :
e = ω2S0 exp (iωt)
En régime sinusoïdal forcé, on cherche H(t) sous la forme : H(t) =Hm cos(ωt + ψ). La représentation complexe s’écrit :
H(t) = Hm exp (i (ωt + ψ))
On en déduit alors :
−ω2H + ω0
QjωH + ω2
0H = ω2S0 exp (iωt)
Soit :
H = ω2S0 exp (iωt)
ω20 − ω2 + jω0ω
Q
Le graphe donné dans l’énoncé représente
∣∣∣∣HS∣∣∣∣ en fonction de ω. Pour avoir
une réponse uniforme de l’appareil, il faut avoir une courbe la plus platepossible.
On peut choisir Q ≥ 1√2
et se placer à une pulsation telle que ω�ω0. Les
périodes vont de 1 à 10 s, ce qui correspond à des pulsations entre 0,63 et6,3 rad.s−1. Il faut donc avoir ωmin �ω0, soit
ω0 0,63 rad.s−1
Dans ce cas, toutes les composantes spectrales sont amplifiées de la mêmefaçon avec un facteur d’amplification égal à 1.L’inconvénient majeur est que ce facteur d’amplification vaut 1. C’est doncdifficile d’enregistrer des vibrations de faibles amplitudes.
Comme ω20 = k
m, il faut donc une masse m élevée pour avoir ω0 faible.
Exercice 1.3 : Circonférence en rotation et anneau (MP)
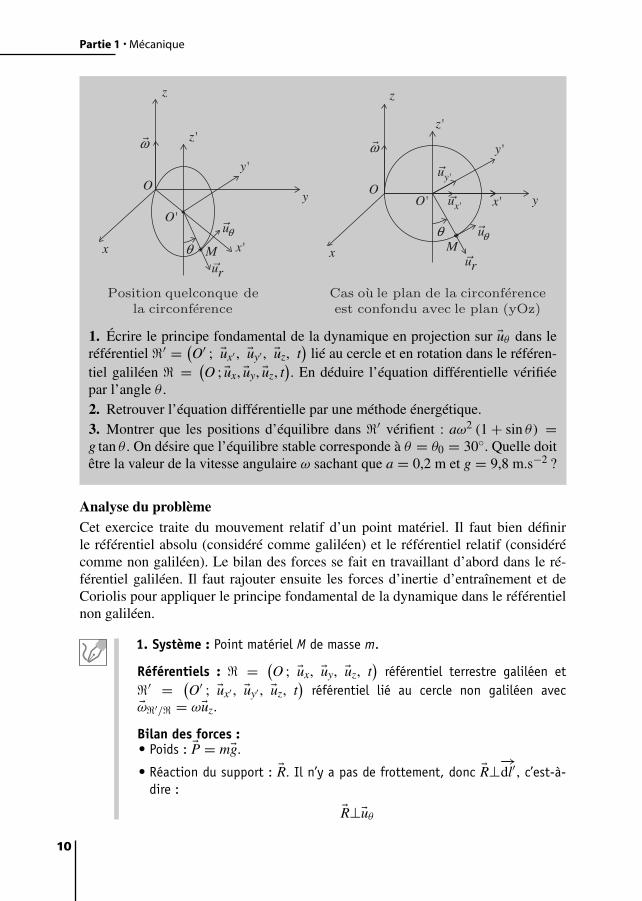
Une circonférence (C) de centre O′ et de rayon a, située dans un plan vertical,tourne autour d’une de ses tangentes verticales Oz, d’un mouvement de rotationuniforme défini par le vecteur rotation �ω. Un anneau M de masse m, assimilé à unpoint matériel, est mobile sans frottement sur cette circonférence. On désigne parθ l’angle que fait O′M avec la verticale descendante passant par O′. θ est comptépositivement dans le sens indiqué sur les schémas ci-dessous.
©D
unod
.Tou
tere
prod
ucti
onno
nau
tori
sée
estu
nd
élit
.
9
TP16-0423-Book1 21/04/2017 12:6 Page 10
Partie 1 . Mécanique
M x'
z'
y
y'
O
O'
x
ur
u
z z
z'
O
x
y
uM
O' ux'
uy'
x'
y'�
�
�ur�
�
�
�
w �w
qqq q
quelconque dela circonference
Position Cas ou le laplan de circonferenceest confondu avec le plan (yOz)
1. Écrire le principe fondamental de la dynamique en projection sur �uθ dans leréférentiel �′ = (
O′ ; �ux′ , �uy′ , �uz, t)
lié au cercle et en rotation dans le référen-tiel galiléen � = (
O ; �ux, �uy, �uz, t). En déduire l’équation différentielle vérifiée
par l’angle θ .2. Retrouver l’équation différentielle par une méthode énergétique.3. Montrer que les positions d’équilibre dans �′ vérifient : aω2 (1 + sin θ) =g tan θ . On désire que l’équilibre stable corresponde à θ = θ0 = 30◦. Quelle doitêtre la valeur de la vitesse angulaire ω sachant que a = 0,2 m et g = 9,8 m.s−2 ?
Analyse du problèmeCet exercice traite du mouvement relatif d’un point matériel. Il faut bien définirle référentiel absolu (considéré comme galiléen) et le référentiel relatif (considérécomme non galiléen). Le bilan des forces se fait en travaillant d’abord dans le ré-férentiel galiléen. Il faut rajouter ensuite les forces d’inertie d’entraînement et deCoriolis pour appliquer le principe fondamental de la dynamique dans le référentielnon galiléen.
1. Système : Point matériel M de masse m.
Référentiels : � = (O ; �ux, �uy, �uz, t
)référentiel terrestre galiléen et
�′ = (O′ ; �ux′ , �uy′ , �uz, t
)référentiel lié au cercle non galiléen avec
�ω�′/� = ω�uz.
Bilan des forces :• Poids : �P = m�g.
• Réaction du support : �R. Il n’y a pas de frottement, donc �R⊥−→dl′ , c’est-à-
dire :
�R⊥�uθ10

TP16-0423-Book1 21/04/2017 12:6 Page 11
Chapitre 1 . Référentiels non galiléens
• Force d’inertie d’entraînement : �Fie = mω2−→HM avec H projeté ortho-gonal de M sur l’axe Oz. On a
−→HM = HM �ux′ = (a + a sin θ) �ux′ =
a (1 + sin θ) �ux′ , d’où :
�Fie = mω2a (1 + sin θ) �ux′
• Force d’inertie de Coriolis : �Fic = −2mω�uz ∧ �vr. La vitesse relative de Mvaut : �vr = aθ�uθ . On en déduit que �Fic⊥�uz et �Fic⊥�uθ , donc �Fic//�uy′ . Ona alors :
�Fic = −2mωvr cos θ�uy′
Principe fondamental de la dynamique dans �′ :
m�a′ = �P + �R + �Fie + �Fic
Le mouvement relatif de M est circulaire. L’accélération relative est donc :
�ar = −aθ2�ur + aθ�uθLa projection du PFD sur �uθ donne :
m(aθ ) = −mg sin θ + mω2a (1 + sin θ) cos θ
2. L’énergie potentielle de la force centrifuge vaut :
Ep1 = −1
2mω2HM2 + cte = −1
2mω2x′2 + cte avec x′ = a (1 + sin θ).
On choisit Ep1 (θ = 0) = −1
2mω2a2 + cte = 0, d’où cte = 1
2mω2a2.
On a donc Ep1 = 1
2mω2a2
(1 − (1 + sin θ)2
), soit :
Ep1 = 1
2mω2a2
(−2 sin θ − sin2 θ
)L’énergie potentielle de pesanteur est :
Ep2 = mgz′ + cte′ = −mga cos θ + cte′
On choisit Ep2 (θ = 0) = 0. D’où :
Ep2 = mga (1 − cos θ)
Remarque : L’énoncé n’impose pas de référence pour les énergies potentielles.On peut laisser les constantes indéterminées puisqu’elles n’interviennent pas parla suite.
Il n’y a pas de frottement, donc la réaction du support �R est orthogonale au
petit déplacement : δW = �R⊥−→dl′ = 0 avec
−→dl′ = adθ�uθ . La réaction du
support ne travaille pas.
©D
unod
.Tou
tere
prod
ucti
onno
nau
tori
sée
estu
nd
élit
.
11

TP16-0423-Book1 21/04/2017 12:6 Page 12
Partie 1 . Mécanique
Il faut bien écrire le déplacement relatif−→dl′ et non le déplacement absolu
−→dl puis-
qu’on applique les théorèmes fondamentaux de la mécanique dans le référentielnon galiléen.
La puissance de la force de Coriolis est nulle : P = �Fic · �vr =− (2m �ω�′/� ∧ �vr
) · �vr = 0 puisque la force est orthogonale à la vitesserelative. La force de Coriolis ne travaille pas.Le poids et la force d’inertie d’entraînement sont des forces conservatives carelles dérivent d’une énergie potentielle.
Le système est donc conservatif. On a conservation de l’énergie mécaniquedans le référentiel �′ :
E′m = E′
c + Ep1 + Ep2 = cte
On a donc :
E′m = 1
2m(aθ)2 + 1
2mω2a2
(−2 sin θ − sin2 θ
)+ mga (1 − cos θ)
Soit :
dE′m
dt= 0 = ma2θ θ + 1
2mω2a2θ (−2 cos θ − 2 sin θ cos θ)+ mgaθ (sin θ)
Si on divise par θ , on obtient :
ma2θ + 1
2mω2a2 (−2 cos θ − 2 sin θ cos θ)+ mga (sin θ) = 0
On retrouve bien la même équation différentielle que dans la question 1.
3. Le point M est en équilibre relatif pour θ = 0, soit aω2 (1 + sin θ) =g tan θ . On a alors :
ω =√
g tan θ
a (1 + sin θ)= 4,35 rad.s−1
Exercice 1.4 : Dynamique en référentiel tournant (MP)
La tige OA se trouve dans le plan horizontal (x O y) et tourne autour de l’axevertical (�) à la vitesse angulaire constante ω. L’anneau est libéré sans vitesseinitiale par rapport à la tige à une distance r0 du point O. On repère la position del’anneau sur la tige par la distance r = OM. L’étude est menée dans le référentiellié à la tige. L’anneau glisse sans frottement sur la tige.
12

TP16-0423-Book1 21/04/2017 12:6 Page 13
Chapitre 1 . Référentiels non galiléens
x
y
z
OM
(Δ)
g
Aur
up
q = w t
w�
�
�ur�
a
(Δ)q = w tx
y
z
OM
A
w
up�
g�uT�
a pSchema avec2
= a pSchema avec2
<
1. Déterminer le temps que va mettre l’anneau pour quitter la tige. Déterminerla vitesse absolue lorsqu’il quitte la tige.
2. La tige O A fait maintenant un angle α <π
2constant avec l’axe (�).
Déterminer r(t). On posera ω′ = ω sin α.3. Déterminer la position d’équilibre req de l’anneau sur la tige. Montrer qu’il nepeut exister une position d’équilibre de l’anneau sur la tige que si ω > ω0.4. On se place dans le cas où ω > ω0, l’anneau étant dans sa position d’équilibre.On écarte légèrement l’anneau de cette position d’équilibre. L’équilibre est-ilstable ?
Analyse du problèmeCet exercice traite du mouvement relatif d’un point matériel. Il faut bien définirle référentiel absolu (considéré comme galiléen) et le référentiel relatif (considérécomme non galiléen). Le bilan des forces se fait en travaillant d’abord dans le ré-férentiel galiléen. Il faut rajouter ensuite les forces d’inertie d’entraînement et deCoriolis pour appliquer le principe fondamental de la dynamique dans le référentielnon galiléen.
1. Système : Point matériel M de masse m.
Référentiels : �G = (O ; �ux, �uy, �uz, t
)référentiel terrestre galiléen et
� = (O ; �ur, �uθ , �uz, t) référentiel non galiléen. Le vecteur rotation ins-tantané de � par rapport à �G est : �ω�/�G = ω�uz. Le mouvement relatifde M est rectiligne. La vitesse relative est �vr (M) = r�ur et l’accélérationrelative est �ar (M) = r�ur.
Bilan des forces :• Poids : �P = m�g = −mg�uz.©
Dun
od.T
oute
repr
oduc
tion
non
auto
risé
ees
tun
dél
it.
13

TP16-0423-Book1 21/04/2017 12:6 Page 14
Partie 1 . Mécanique
• Réaction du support : il n’y a pas de frottement, donc �R⊥−→dl . D’où :
�R = Rθ �uθ + Rz�uz
• Force d’inertie d’entraînement : �fie = mω2−→OM.• Force d’inertie de Coriolis :
�fic = −2m �ω�/�G ∧ �vr (M) = −2mω�uz ∧ r�ur = −2mωr�uθPrincipe fondamental de la dynamique dans � :
m�a (M) = �P + �R + �fie + �ficOn projette dans la base (�ur, �uθ , �uz) :∣∣∣∣∣∣
mr = mω2r0 = Rθ − 2mωr0 = Rz − mg
La projection sur �ur fournit directement l’équation différentielle :
r − ω2r = 0
L’équation caractéristique est : x2 − ω2 = 0, soit x = ±ω.La solution de l’équation différentielle s’écrit :
r = Ach (ωt)+ Bsh (ωt)
La dérivée par rapport au temps est : r = Aωsh (ωt)+ Bωch (ωt) .
Remarque : On pourrait utiliser la forme r = A′ exp (ωt)+ B′ exp (−ωt). La formeen ch et sh est plus simple ici compte tenu des conditions initiales.
À t = 0, r = r0 et r = 0. On a donc r0 = A et 0 = B. Finalement, on a :
r = r0ch (ωt)
L’anneau quitte la tige lorsque r = �, soit :
τ = 1
ωargch
(l
r0
)• La vitesse relative de M est : �vr (M) = r�ur = r0ωsh (ωt) �ur. Pour t = τ ,
on a �vr (M) = r0ωsh (ωτ) �ur. Comme ch2 (ωτ) − sh2 (ωτ) = 1, on endéduit que :
sh (ωτ) =√
ch2 (ωτ)− 1 =√(
l
r0
)2
− 1
D’où :
�vr (M) = ω
√l2 − r2
0�ur
14

TP16-0423-Book1 21/04/2017 12:6 Page 15
Chapitre 1 . Référentiels non galiléens
• La vitesse d’entraînement de M est : �ve (M) = rω�uθ . Pour t = τ , on a :
�ve (M) = lω�uθOn en déduit la vitesse absolue de M lorsqu’il quitte la tige :
�va (M) = ω
√l2 − r2
0�ur + lω�uθ2. z
O
M
ω
A
αg�
ur�
uT�
fie�
P�
H
(Δ)
Système : Point matériel M de masse m.
Référentiels : �G = (O ; �ux, �uy, �uz, t
)référentiel terrestre galiléen et � =
(O ; �ur, �uθ , �uz, t) référentiel non galiléen. Le vecteur rotation instantanéde � par rapport à �G est : �ω�/�G = ω�uz. Le mouvement relatif de M estrectiligne. La vitesse relative est �vr (M) = r�uT et l’accélération relative est�ar (M) = r�uT .
Bilan des forces :• Poids : �P = m�g = −mg�uz.• Réaction du support : il n’y a pas de frottement, donc �R⊥�uT .
• Force d’inertie d’entraînement : �fie = mω2−→HM. On a HM = r sinα. D’où :
�fie = mω2r sinα�ur
• Force d’inertie de Coriolis :
�fic = −2m �ω�/�G ∧ �vr (M) = −2mω�uz ∧ r�uT
Principe fondamental de la dynamique dans � :
m�a (M) = �P + �R + �fie + �ficLa projection sur �uT fournit directement l’équation différentielle :
mr =(
mω2r sinα)
sinα − mg cosα
Soit : r − ω2(sin2 α
)r = −g cosα. On pose ω′ = ω sinα. D’où :
r − ω′2r = −g cosα
©D
unod
.Tou
tere
prod
ucti
onno
nau
tori
sée
estu
nd
élit
.
15

TP16-0423-Book1 21/04/2017 12:6 Page 16
Partie 1 . Mécanique
• Solution générale de l’équation différentielle homogène : l’équation ca-ractéristique est x2 − ω′2 = 0, soit x = ±ω′. On en déduit que :rSG = Ach
(ω′t)+ Bsh
(ω′t)
.
• Solution particulière de l’équation avec second membre : rSP = g cosα
ω′2 .
• On en déduit la solution de l’équation différentielle : r (t) = Ach(ω′t)+
Bsh(ω′t)+ g cosα
ω′2 et r (t) = Aω′sh(ω′t)+ Bω′ch
(ω′t)
.
• À t = 0, r = r0 et r = 0. On a donc r0 = A + g cosα
ω′2 et 0 = B.
Finalement, on a :
r (t) =(
r0 − g cosα
ω′2)
ch(ω′t)+ g cosα
ω′2
Remarque : On retrouve bien le résultat de la question 1 avec α = π
2.
3. À l’équilibre relatif, on a r = 0. On en déduit d’après l’équationdifférentielle :
req = g
ω′2 cosα = g cosα
ω2 sin2 α
Il ne peut exister une position d’équilibre sur l’axe que si req ≤ l, soitω2 sin2 α
g cosα≥ 1
l, d’où ω2 ≥ g cosα
l sin2 α. Il faut donc que ω ≥ ω0 avec :
ω0 =√
g cosα
l sin2 α
4. On se place dans le cas où ω > ω0, l’anneau étant dans sa positiond’équilibre. Si on l’écarte légèrement de cette position d’équilibre :
• Si r > req, la force d’inertie d’entraînement augmente, l’anneau s’éloignede l’équilibre car les autres forces sont inchangées.
• Si r < req, la force d’inertie d’entraînement diminue, l’anneau s’éloigne del’équilibre car les autres forces sont inchangées.
On peut en conclure que la position d’équilibre est instable.
16