Physique statistique et simulations num eriques ... · 6 Formalisme de la sommation d’Ewald pour...
117
Physique statistique et simulations num´ eriques : introduction aux m´ ethodes de mod´ elisation num´ erique de la mati` ere condens´ ee (gaz, liquides, solides, mol´ ecules biologiques) Marie-Pierre Gaigeot Professeur des Universit´ es au laboratoire LAMBE LAMBE Laboratoire Analyse et Mod´ elisation pour la Biologie et l’Environnement, UMR-CNRS 8587, Universit´ e d’Evry val d’Essonne, Bˆ at. Maupertuis, F-91025 Evry - France [email protected] Master M2 - PCAV - UE 32 Ann´ ee Universitaire 2007-2008
Transcript of Physique statistique et simulations num eriques ... · 6 Formalisme de la sommation d’Ewald pour...

Physique statistique et simulations numeriques :
introduction aux methodes de modelisation
numerique de la matiere condensee
(gaz, liquides, solides, molecules biologiques)
Marie-Pierre Gaigeot
Professeur des Universites au laboratoire LAMBE
LAMBE Laboratoire Analyse et Modelisation pour la Biologie et
l’Environnement, UMR-CNRS 8587, Universite d’Evry val d’Essonne,
Bat. Maupertuis, F-91025 Evry - France
Master M2 - PCAV - UE 32
Annee Universitaire 2007-2008

Table des matieres
1 Definitions des ensembles thermodynamiques et de la fonction de par-
tition associee 5
1.1 Les ensembles de la mecanique statistique . . . . . . . . . . . . . . . . 5
1.2 Valeur moyenne et fluctuation . . . . . . . . . . . . . . . . . . . . . . . 6
1.3 Equations du mouvement : formalismes de Newton, de Lagrange, et de
Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4 Ensemble microcanonique NVE . . . . . . . . . . . . . . . . . . . . . . 10
1.5 Ensemble canonique NVT . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.6 Ensemble grand canonique µVT . . . . . . . . . . . . . . . . . . . . . . 14
1.7 Modele d’Ising 1D : resolution analytique . . . . . . . . . . . . . . . . . 16
2 Simulations numeriques 22
2.1 Potentiels d’interaction . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.1.1 Champ de forces intra-moleculaire . . . . . . . . . . . . . . . . . 30
2.1.2 Au-dela des expressions harmoniques des interactions intra-molecu-
laires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.1.3 Introduction de termes a 3 corps dans les potentiels . . . . . . 34
2.1.4 Champ de forces inter-moleculaire . . . . . . . . . . . . . . . . . 35
2.1.5 Introduction des effets de polarisation electrostatique : terme a
N-corps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.1.6 Potentiels pour les fluides de gaz rare . . . . . . . . . . . . . . . 44
1

2.1.7 Potentiels pour les clusters de fullerene C60 . . . . . . . . . . . . 45
2.1.8 Potentiels pour les clusters d’oxygene O2 . . . . . . . . . . . . . 46
2.1.9 Potentiels pour l’eau liquide et pour les agregats d’eau . . . . . 47
2.1.10 Potentiels CHARMM et AMBER pour les biomolecules . . . . . 49
2.2 Deux classes de simulations numeriques : T nulle, T finie . . . . . . . . 51
2.2.1 T = 0K . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
2.2.2 T finie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
2.3 Simulations de dynamique moleculaire . . . . . . . . . . . . . . . . . . 63
2.3.1 Exploration de l’espace des phases . . . . . . . . . . . . . . . . . 63
2.3.2 Equations du mouvement . . . . . . . . . . . . . . . . . . . . . 64
2.3.3 Conservation de l’energie totale . . . . . . . . . . . . . . . . . . 65
2.3.4 Algorithmes de resolution des equations du mouvement . . . . . 66
2.3.5 Conditions periodiques aux bords : simulation de milieux continus 70
2.3.6 Liste de Verlet . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3 Fluctuations, moyennes et principe d’ergodicite 75
4 Temperature en dynamique moleculaire 79
4.1 Temperature thermodynamique et temperature instantanee . . . . . . . 79
4.2 Distribution gaussienne de Maxwell-Boltzmann . . . . . . . . . . . . . 80
5 Illustration des fluctuations, et conservation de l’energie totale E 83
2

6 Formalisme de la sommation d’Ewald pour les simulations en condi-
tions periodiques 85
7 Dynamique moleculaire dans l’ensemble thermodynamique canoni-
que 85
7.1 Thermostat d’Andersen . . . . . . . . . . . . . . . . . . . . . . . . . 85
7.2 Thermostat de Nose-Hoover . . . . . . . . . . . . . . . . . . . . . . 86
8 Equilibration et echantillonnage en simulations de dynamique mole-
culaire 88
9 Configurations initiales des simulations numeriques de dynamique
moleculaire 91
10 Proprietes issues des simulations de dynamique moleculaire 96
10.1 RMSD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
10.2 Rayon de gyration de molecules . . . . . . . . . . . . . . . . . . . . . . 96
10.3 Energie libre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
10.4 Fonction de distribution radiale (RDF ou g(r)) . . . . . . . . . . . . . . 97
10.5 Fonctions de correlation . . . . . . . . . . . . . . . . . . . . . . . . . . 103
10.6 Coefficient de diffusion . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
10.7 Spectre vibrationnel . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
10.8 Spectre infrarouge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
11 Mise en place d’un code de dynamique moleculaire pour des systemes
simples 115
3

12 Principes de la dynamique moleculaire ab initio 116
12.1 Dynamique de type Born-Oppenheimer . . . . . . . . . . . . . . . . . . 116
12.2 Dynamique de type Car-Parrinello . . . . . . . . . . . . . . . . . . . . . 116
Ouvrages de reference
- Computer Simulation of Liquids - M.P. Allen & D.J. Tildesley, Oxford Science Pu-
blications
- Understanding Molecular Simulation - D. Frenkel & B. Smit, Academic Press
- Molecular Modelling, Principles and applications - A.R. Leach, Prentice Hall
4

1 Definitions des ensembles thermodynamiques et
de la fonction de partition associee
1.1 Les ensembles de la mecanique statistique
La physique statistique (ou mecanique statistique) et la modelisation numerique per-
mettent de definir des grandeurs thermodynamiques macroscopiques (comme la pres-
sion, l’energie libre, l’enthalpie, etc) a partir de la modelisation de systemes a l’echelle
microscopique.
En physique statistique, c’est la connaissance de la fonction de partition d’un systeme
qui permet d’acceder a l’ensemble des grandeurs thermodynamiques. L’apport des si-
mulations numeriques est de permettre le calcul des moyennes d’ensemble sans avoir a
calculer la fonction de partition explicitement.
Il existe plusieurs ensembles thermodynamiques en mecanique statistique : l’ensemble
microcanonique, l’ensemble canonique, l’ensemble grand canonique, et l’ensemble isobare-
isotherme. On suppose que la limite thermodynamique des differents ensembles conduit
aux memes grandeurs thermodynamiques.
En simulation numerique, nous utilisons des systemes modeles de taille finie. Il peut
alors y avoir des differences sur les valeurs des grandeurs thermodynamiques calculees
dans les differents ensembles. Il convient de s’en souvenir, et d’analyser les differences
le cas echeant.
Trois ensembles sont principalement definis ici : l’ensemble microcanonique, l’ensemble
canonique et l’ensemble grand-canonique. Comme nous le reverrons ci-dessous, les en-
sembles de la physique statistique sont caracterises par des grandeurs constantes (par
ex. N, V, E dans l’ensemble microcanonique), le reste des grandeurs n’etant connues que
par une valeur moyenne d’ensemble (c’est-a-dire obtenue dans l’ensemble statistique
5

thermodynamique de reference) : par exemple on peut calculer les valeurs moyennes
de P ou F dans l’ensemble microcanonique. On dit donc que les variables conjuguees
des grandeurs constantes fluctuent.
1.2 Valeur moyenne et fluctuation
On definit les fluctuations. Si l’on s’interesse a la variable A de valeur moyenne 〈A〉,
alors les fluctuations de A sont definies par σ(A) qui est le RMSD (Root Mean Square
Deviation) tel que :
σ2(A) = 〈δA〉 =⟨
A2⟩
−⟨
A⟩2
(1)
avec
δA = A−〈A〉 (2)
1.3 Equations du mouvement : formalismes de Newton, de
Lagrange, et de Hamilton
• Equations de Newton
La mecanique Newtonienne est regie par les equations du mouvement :
∑
~Fext = m~a (3)
que l’on ecrit pour chaque particule i qui compose le systeme d’interet :
∑
~Fext,i = mi−→ai = mi
d2~ri
dt2=
d~pi
dt(4)
i variant de 1 a N . On doit donc connaıtre l’ensemble des forces qui s’appliquent sur
la particule i, en faire la somme∑ ~Fext,i, et cela est egal au produit de la masse de la
particule par son acceleration (ou a la derivee par rapport au temps de la quantite de
mouvement ~pi). Rappelons que ~F = −∇V : la force est egale au gradient du potentiel
6

d’interaction (au signe pres). Si l’on connaıt le potentiel d’interaction, on connaıt la
force.
Rappel : ∇ = ∂∂x
~i + ∂∂x
~j + ∂∂x
~k en coordonnees cartesiennes.
Pour les systemes moleculaires qui nous interessent, le potentiel d’interaction est
V (~r1, ~r2, . . . , ~rN) : il depend des 3N coordonnees cartesiennes des particules. Ce po-
tentiel est a N − corps et traduit le fait que les interactions entre les particules sont
couplees (i interagit avec j, qui lui-meme interagit avec k, qui interagit avec l, qui...,
etc). On a donc un systeme compose de N equations differentielles couplees du second
degre en ~r a resoudre pour obtenir la trajectoire de chaque particule i du systeme. On
a besoin de N conditions initiales pour les resoudre (les N positions initiales ~ri).
• Equations de Lagrange
On definit le Lagrangien L(q, dqdt
, t) = K(dqdt
)− V (q) comme la difference entre l’energie
cinetique K(dqdt
) et l’energie potentielle V (q). Ici : q = q1, q2, . . . , qn et q = dqdt
=
dq1
dt, dq2
dt. . . , dqn
dt
= q1, q2, . . . , qn sont les vecteurs de dimension n qui definissent
l’ensemble des variables generalisees et leurs derivees, pour le systeme d’interet. Le
systeme est decrit par n degres de liberte.
Les variables generalisees qi ne sont pas forcement les vecteurs positions (elles peuvent
l’etre mais ce n’est pas obligatoire). Ce sont en general des variables quelconques qui
permettent de simplifier le probleme mecanique et mathematique. Les derivees qi sont
appelees les vitesses generalisees.
La mecanique Lagrangienne verifie les equations suivantes :
d
dt
(
∂L
∂qi
)
−∂L
∂qi= 0
pour chaque variable generalisee qi.
Il y a donc n equations couplees a resoudre. Ce sont des equations du second degre en
qi, et on a besoin de 2n conditions initiales pour les resoudre : n conditions initiales
7

pour les qi et n conditions initiales pour les qi.
• Equations de Hamilton
Avec les equations de Hamilton, on cherche a ce que le mouvement du systeme soit
decrit par des equations differentielles du premier ordre. On introduit les variables
generalisees qi comme precedemment et les impulsions generalisees pi qui sont definies
par pi = ∂L∂qi
. Les equations de Hamilton sont alors :
qi =∂H
∂pi
−pi =∂H
∂qi
pour chaque valeur de i, et H = K(q)+V (q) est la somme de l’energie cinetique K( dqdt
)
et de l’energie potentielle V (q). Ici : q = q1, q2, . . . , qn et q = dqdt
=
dq1
dt, dq2
dt. . . , dqn
dt
=
q1, q2, . . . , qn sont les vecteurs qui definissent l’ensemble des variables generalisees et
leurs derivees, pour le systeme d’interet.
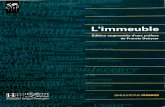
• Un exemple : le ressort a une dimension
Fig. 1 – Ressort a une dimension suivant l’axe des ~i.
Soit le ressort 1D illustre sur la figure 1. Nous allons montrer que les trois formulations
de la mecanique classique conduisent a la meme equation du mouvement, et donc a la
meme solution.
8

– Formulation de Newton
L’equation de Newton sur l’axe ~i est :
∑
Fext,x = max
−k(x − x0) = md2x
dt2= mx
Soit l’equation du mouvement a resoudre :
x +k
m(x − x0) = 0
– Formulation de Lagrange
On choisit la variable generalisee q = x et la vitesse generalisee associee q = x. Avec
ce choix, le Lagrangien du systeme est :
L = T − V =1
2mx2 −
1
2k(x − x0)
2
L’equation de Lagrange pour ce couple de variables generalisees est :
d
dt
∂L
∂x−
∂L
∂x= 0
Soit :
d
dt(mx) + k(x − x0) = 0
mx + k(x − x0) = 0
Soit a resoudre :
x +k
m(x − x0) = 0
– Formulation de Hamilton
On choisit la variable generalisee q = x. Le moment generalise associe est p = ∂L∂x
avec L = T − V = 12mx2 − 1
2k(x − x0)
2. Des lors : p = ∂L∂x
= mx
Le Hamiltonien du systeme est H = T + V = 12mx2 + 1
2k(x − x0)
2
9

Les equations de Hamilton pour le couple de variables generalisees sont :
x =∂H
∂px
−px =∂H
∂x
Soit :
x =∂H
∂px=
∂H
∂(mx)=
1
m
∂H
∂x= x
−px =∂H
∂x⇐⇒ −mx = k(x − x0)
La premiere equation en x est evidemment triviale, et la seconde nous donne l’equation
du mouvement du ressort :
x +k
m(x − x0) = 0
On a bien trouve trois fois (Newton, Lagrange et Hamilton) la meme equation du
mouvement x + km
(x − x0) = 0.
1.4 Ensemble microcanonique NVE
L’ensemble microcanonique est l’ensemble NVE dans lequel le nombre N de particules
du systeme est constant, ainsi que le volume V et l’energie totale E. Notons que cet
ensemble n’est pas l’ensemble naturel des experiences. On travaille en effet plutot a
pression P constante, ou temperature T constante, ou potentiel chimique µ constant.
Par definiton de la mecanique statistique, les variables conjuguees aux grandeurs cons-
tantes de l’ensemble fluctuent. Pour l’ensemble microcanonique, il s’agit de la pression
(variable conjuguee de V), de la temperature (variable conjuguee de E) et du potentiel
chimique (variable conjuguee de N).
Si l’on definit H le hamiltonien du systeme ou H = Ecin + V est la somme de l’energie
cinetique et de l’energie potentielle du systeme, la fonction de partition dans l’ensemble
10

microcanonique est :
Q(N, V, E) =∑
α
δ(Hα − E) (5)
ou la somme est ecrite sur tous les etats α possibles du systeme. On ecrit ainsi que
seuls les etats α qui ont un Hamiltonien Hα egal a l’energie E sont des etats permis
du systeme.
La grandeur thermodynamique naturelle de l’ensemble microcanonique est l’entropie
S qui est definie comme :
S = k ln Q(N, V, E) = k ln∑
α
δ(Hα − E) (6)
ou k est la constante de Boltzmann.
Les equations de Newton de la mecanique classique conservent l’energie totale : la
mecanique Newtonienne est donc la methode naturelle pour generer les etats α de l’en-
semble microcanonique. Ceci est realise par des simulations de dynamique moleculaire.
Les grandeurs thermodynamiques que l’on derive dans l’ensemble microcanonique sont :
• La temperature :
1
T=
∂S
∂E= k
∂ ln Q(N, V, E)
∂E(7)
soit
1
kT= β =
∂ lnQ(N, V, E)
∂E(8)
ou l’on a definit β = 1/kT l’inverse de la temperature.
• La chaleur specifique a volume constant :
Cv = T∂S
∂T= kT
∂ ln Q(N, V, E)
∂T=
1
β
∂ ln Q(N, V, E)
∂T(9)
11

1.5 Ensemble canonique NVT
Dans l’ensemble canonique NVT, le systeme est caracterise par un nombre N de parti-
cules constant, un volume V constant et une temperature T constante. Si l’on definit
H le hamiltonien du systeme ou H = Ecin + V est la somme de l’energie cinetique et
de l’energie potentielle du systeme, la fonction de partition canonique s’ecrit :
Q(N, V, T ) =∑
α
e−βH(α) (10)
ou la somme est ecrite sur tous les etats α possibles du systeme. β = 1/kT est l’inverse
de la temperature du systeme (k est la constante de Boltzmann). Dans cet ensemble,
toutes les valeurs de l’energie E sont possibles, et l’on a des fluctuations d’energie.
La grandeur thermodynamique naturelle de l’ensemble canonique est l’energie libre F
definie comme :
F (N, V, T ) = −kT ln Q(N, V, T ) (11)
ou
βF (N, V, T ) = − ln Q(N, V, T ) = − ln∑
α
e−βH(α) (12)
On definit egalement la probabilite que le systeme soit dans la configuration α par :
P (N, V, T ; α) =e−βH(α)
Q(N, V, T )(13)
Les equations de Newton de la mecanique classique qui conservent l’energie totale ne
sont pas les equations appropriees pour generer les etats α de l’ensemble canonique ou
E fluctue. Nous verrons plus loin quelles methodes peuvent etre employees pour generer
les etats de l’ensemble canonique. Les simulations Monte-Carlo sont la methode natu-
relle pour generer les etats de l’ensemble canonique, mais on peut egalement modifier
les equations de Newton de la mecanique classique pour atteindre le meme objectif
avec des simulations de dynamique moleculaire classique.
Les grandeurs thermodynamiques que l’on derive dans l’ensemble canonique sont :
12

• L’energie interne :
U(N, V, T ) =∂(βF (N, V, T ))
∂β= −
∂ ln Q(N, V, T )
∂β(14)
soit
U(N, V, T ) = −1
Q(N, V, T )
∂Q(N, V, T )
∂β(15)
U(N, V, T ) = −1
Q(N, V, T )
∑
α
−H(α)e−βH(α)
=∑
α
H(α)P (N, V, T ; α)
= 〈H(α)〉
L’energie interne est donc la valeur moyenne du Hamiltonien du systeme, moyenne sur
l’ensemble des etats α possibles.
• La chaleur specifique a volume constant :
Cv(N, V, T ) = T∂F
∂T= −kβ2 ∂U(N, V, T )
∂β(16)
soit
Cv(N, V, T ) = −kβ2 ∂
∂β
∑
α
H(α)P (N, V, T ; α)
= −kβ2 ∂
∂β
∑
α
H(α)e−βH(α)
Q(N, V, T )
= −kβ2∑
α
[
H(α)
Q(N, V, T )
∂e−βH(α)
∂β+ H(α)e−βH(α) ∂
∂β
1
Q(N, V, T )
]
= −kβ2∑
α
[
−H2(α)e−βH(α)
Q(N, V, T )−H(α)e−βH(α) 1
Q2(N, V, T )
∂Q(N, V, T )
∂β
]
= −kβ2∑
α
[
−H2(α)e−βH(α)
Q(N, V, T )+ H(α)e−βH(α) 1
Q2(N, V, T )
∑
α
H(α)e−βH(α) ]
= kβ2∑
α
H2(α)P (N, V, T ; α)− kβ2∑
α
H(α)P (N, V, T ; α)∑
α
H(α)P (N, V, T ; α)
13

Soit :
Cv(N, V, T ) = kβ2(⟨
H2(α)⟩
− 〈H(α)〉2)
= kβ2⟨
δH⟩
(17)
La chaleur specifique est donc obtenue via l’ecart type des fluctuations du Hamiltonien
du systeme.
1.6 Ensemble grand canonique µVT
L’ensemble grand-canonique est l’ensemble dans lequel le potentiel chimique µ, le vo-
lume V et la temperature T sont constants. La fonction de partition de cet ensemble
est :
(µ, V, T ) =
∞∑
N=0
∑
αN
e−β[HN (αN )−µN ] (18)
ou N est le nombre de particules du systeme, HN est le Hamiltonien du systeme
contenant N particules, et la sommation∑
αNparcourt l’ensemble des configurations
αN du systeme. On peut ecrire(µ, V, T ) comme
(µ, V, T ) =
∞∑
N=0
eβµN∑
αN
e−βHN (αN ) =∞∑
N=0
eβµNQ(N, V, T ) (19)
ou Q(N, V, T ) est la fonction de partition de l’ensemble canonique.
On definit le grand potentiel comme :
βΩ(µ, V, T ) = − ln(µ, V, T ) (20)
C’est une definition analogue a celle de l’energie libre dans l’ensemble canonique.
La grandeur thermodynamique naturelle de l’ensemble grand canonique est PV/kT tel
que :
PV
kT= ln
(µ, V, T ) = ln
∞∑
N=0
eβµNQ(N, V, T ) (21)
On definit la probabilite que le systeme soit dans la configuration αN avec N particules :
P (µ, V, T ; αN) =e−β[HN (αN )−µN ]
(µ, V, T )
(22)
14

Pour explorer les etats de l’ensemble grand canonique, il faut des schemas qui per-
mettent notamment de faire varier le nombre de particules dans le milieu, en ajoutant
ou en enlevant des particules. Les simulations Monte-Carlo sont les plus appropriees
pour atteindre cet objectif. Il faut egalement savoir calculer le potentiel chimique µ, ce
qui n’est pas trivial.
Les grandeurs thermodynamiques que l’on derive dans l’ensemble grand-canonique
sont :
• Le nombre moyen de particules :
〈N(µ, V, T )〉 = −∂[βΩ(µ, V, T )]
∂(βµ)
=∂[ln
(µ, V, T )]
∂(βµ)
=1
(µ, V, T )
∂
(µ, V, T )
∂(βµ)
=1
(µ, V, T )
∞∑
N=0
∑
αN
Ne−β[HN (αN )−µN ] =∞∑
N=0
∑
αN
NP (µ, V, T ; αN)
• La susceptibilite :
χ(µ, V, T ) =β
〈N(µ, V, T )〉
∂〈N(µ, V, T )〉
∂(βµ)
=β
〈N(µ, V, T )〉
∞∑
N=0
∑
αN
N2P (µ, V, T ; αN) −
(
∞∑
N=0
∑
αN
NP (µ, V, T ; αN)
)2
15

1.7 Modele d’Ising 1D : resolution analytique
On considere un reseau de N spins si qui peuvent prendre les deux valeurs finies +1
ou −1 : on parle de spin haut(+1) et de spin bas(−1). A une dimension 1D, les spins sont
repartis sur une ligne et sont equidistants de d les uns des autres. Le Hamiltonien du
systeme est :
H = −J∑
i,j
SiSj − Hext
∑
i
Si (23)
dans lequel les spins interagissent seulement avec leurs plus proches voisins (la somme
∑
i,j SiSj est restreinte sur les paires i − j des plus proches voisins). Un critere sera
applique pour definir les plus proches voisins. Par convention, J > 0 correspond a une
interaction ferromagnetique et J < 0 a une interaction antiferromagnetique. Hext est le
champ magnetique externe applique au reseau. La convention est de repliquer le reseau
dans l’espace, comme illustre sur la figure 2, et tel que le premier spin S0 soit egal au
Fig. 2 – Reseau d’Ising 1D et illustration de la periodicite.
dernier spin SN−1 sur la ligne.
Compte tenu de l’interaction entre plus proches voisins, on peut ecrire :
H = −JN−1∑
i=0
SiSi+1 − Hext
N−1∑
i=0
Si (24)
La meme expression du Hamiltonien est utilisee a 1D, 2D, et 3D, les seules differences
etant dans la facon de considerer les voisins. La figure 3 illustre ce point a 2D.
On definit l’aimantation du reseau M =∑
i Si (somme des spins en chaque point du
reseau) et l’aimantation moyenne par spin m = M/N ou N est le nombre de sites du
reseau.
16

Fig. 3 – Reseau d’Ising 2D (a gauche), et illustration de deux choix possibles (parmi d’autres) de
denombrement de plus proches voisins d’un atome (represente en rouge) (a droite). 1er cas : 4 atomes
voisins (en noir), 2eme cas : 8 atomes voisins (en noir).
Pour connaıtre les proprietes thermodynamiques du reseau de spins 1D, on doit tout
d’abord calculer la fonction de partition du systeme (ici dans l’ensemble canonique)
compose de N spins, les fonctions thermodynamiques etant calculees ensuite. La fonc-
tion de partition est :
Q(N, V, T ) =∑
α
e−βH(α)
=∑
α
eβJP
i,j SiSjeβHext
P
i Si
=∑
α
eβJP
i SiSi+1eβHext
P
i Si
Les etats α canoniques sont les etats qui correspondent aux valeurs permises des spins
du reseau, soit +1 ou −1. Donc :
Q(N, V, T ) =∑
S0=+1,−1
∑
S1=+1,−1
∑
SN−1=+1,−1
eβJ [S0S1+S1S2+....+SN−1S0]eβHext[S0+S2+...+SN−1]
(25)
17

Q(N, V, T ) =∑
S0=+1,−1
∑
S1=+1,−1
∑
SN−1=+1,−1
eβJS0S1eβHext[S0+S1]/2eβJS1S2eβHext[S1+S2]/2 . . .
. . . eβJSN−1S0eβHext[SN−1+S0]/2
On pose : T (Si, Si+1) = eβJSiSi+1eβHext[Si+Si+1]/2 et la fonction de partition prend alors
l’expression :
Q(N, V, T ) =∑
S0=+1,−1
∑
S1=+1,−1
∑
SN−1=+1,−1
T (S0, S1)T (S1, S2) . . .T (SN−1, S0)
Si l’on prend l’exemple de 3 spins, S0, S1 et S2 tels que S0 = S2 par convention des
repliques, on a :
Q(N = 3, V, T ) =∑
S0=+1,−1
∑
S1=+1,−1
T (S0, S1)T (S1, S0)
On va adopter les notations : T (Si = +1, Si+1 = +1) = T++, T (Si = −1, Si+1 =
−1) = T−−, T (Si = +1, Si+1 = −1) = T+−, T (Si = −1, Si+1 = +1) = T−+
Donc, en considerant toutes les combinaisons de spins possibles, la fonction de partition
est :
Q(N = 3, V, T ) = T++T++ + T−−T−− + T+−T−+ + T−+T+−
Si l’on ecrit la matrice suivante :
T++ T+−
T−+ T−−
On a alors :
T++ T+−
T−+ T−−
T++ T+−
T−+ T−−
=
T++T++ + T+−T−+ T++T+− + T+−T−−
T−+T++ + T−−T−+ T−+T+− + T−−T−−
Soit :
Q(N = 3, V, T ) = Tr = Tr 2 (26)
18

La fonction de partition du reseau de 3 spins est egale a la trace du produit matriciel
2.
On generalise l’expression a N spins :
Q(N, V, T ) = Tr N (27)
avec toujours la meme matrice d’interactions entre 2 spins voisins.
La matrice est reelle symetrique, donc diagonalisable et ayant des valeurs propres
reelles. La trace d’une matrice est independante de la base dans laquelle la matrice est
calculee. Il suffit donc de diagonaliser la matrice pour obtenir ses valeurs propres et sa
trace facilement. On a ainsi :
=
T++ T+−
T−+ T−−
=
λ1 0
0 λ2
et
2 =
λ21 0
0 λ22
soit
Q(N = 3, V, T ) = Tr 2 = λ21 + λ2
2 (28)
En generalisant a N quelconque, on a :
Q(N, V, T ) = Tr N = λN1 + λN
2 (29)
ou les λi sont les valeurs propres reelles de la matrice .
Pour la diagonalisation de la matrice : il faut resoudre | − λ | = 0 ou est la
matrice identite composee de 1 sur la diagonale et 0 hors diagonale.
| − λ | =
∣
∣
∣
∣
∣
∣
eβ(J+Hext) − λ e−βJ
e−βJ eβ(J−Hext) − λ
∣
∣
∣
∣
∣
∣
= 0
qui donne les deux solutions suivantes :
λ = eβJchβHext ±√
e2βJch2βHext − 2sh2βJ (30)
19

que l’on note
λ+ = eβJchβHext +√
e2βJch2βHext − 2sh2βJ
et λ− = eβJchβHext −√
e2βJch2βHext − 2sh2βJ
Dans ces conditions :
Q(N, V, T ) = Tr N = λN+ + λN
− = λN+ (1 + (
λ−
λ+)N)
avec∣
∣
∣
λ−
λ+| < 1
Dans la limite ou N 1, on a alors :
Q(N, V, T ) =λN+ (1 + (
λ−
λ+
)N) = λN+ (31)
Soit :
Q(N, V, T ) =[ eβJchβHext +√
e2βJch2βHext − 2sh2βJ]N (32)
que l’on peut reecrire a l’aide des definitions de sh, ch et ch2a − sh2a = 1 par :
Q(N, V, T ) = eβNJ[
chβHext +√
sh2βHext + e−4βJ ]N (33)
On connaıt la fonction de partition du reseau 1D de spins d’Ising, on peut donc deduire
les grandeurs thermodynamiques du milieu.
Ainsi l’energie libre est :
F = −kT ln Q(N, V, T ) = −NkT ln[ eβJchβHext +√
e2βJch2βHext − 2sh2βJ ] (34)
Si Hext = 0 : F = −NkT ln(2chβJ)
L’aimantation du systeme est :
M = −∂F
∂Hext= kT
∂ ln Q(N, V, T )
∂Hext= kT
1
Q(N, V, T )
∂Q(N, V, T )
∂Hext(35)
Soit apres plusieurs lignes de calculs :
M = NeβJshβHext
√
e2βJsh2βHext + e−2βJ(36)
20

L’energie interne du systeme est :
U = −∂ ln Q(N, V, T )
∂β= −
1
Q(N, V, T )
∂Q(N, V, T )
∂β(37)
Soit apres plusieurs lignes de calculs :
U = −NJsh2βJ + eβJ(JchβHext + HextshβHext)(e
βJchβHext +√
e2βJsh2βHext + e−2βJ)
(eβJchβHext +√
e2βJsh2βHext + e−2βJ)(e2βJsh2βHext + e−2βJ)
qui donne une expression plus sympathique pour Hext = 0 :
U = −NJeβJ(2eβJ − e−βJ)
L’ensemble de ces calculs montre que meme pour un systeme tres simple, l’obtention de
la fonction de partition est difficile a obtenir analytiquement, et les derivees suivantes
pour l’obtention des grandeurs thermodynamiques est encore plus difficile.
On peut encore obtenir l’expression analytique de M pour un reseau d’Ising 2D place
en champ externe nul Hext = 0, comme l’a demontre Onsager en 1944. Au-dela, rien
ne peut etre fait analytiquement, et l’on doit avoir recours aux simulations numeriques
pour resoudre le probleme. Pour les reseaux d’Ising, on emploie la methode de Monte-
Carlo, car seules les proprietes statiques du milieu sont pertinentes. Il existe un grand
nombre de publications de simulations Monte-Carlo pour obtenir les proprietes ther-
modynamiques et magnetiques des reseaux d’Ising.
21

2 Simulations numeriques
Pour obtenir les proprietes statistiques d’un systeme donne, il s’agit de savoir calculer
la fonction de partition (dans l’ensemble thermodynamique choisi) et de deriver les
grandeurs voulues, comme realise precedemment. On a vu avec le modele d’Ising 1D le
plus simple combien cela est complexe et difficile a realiser analytiquement.
C’est ici qu’interviennent les simulations numeriques.
Dans le domaine de la modelisation des proprietes des molecules, des liquides ato-
miques et moleculaires, des milieux de la matiere condensee (gaz, liquides, solides,
homogenes et heterogenes), des biomolecules isolees ou en liquide, des membranes, les
simulations numeriques sont principalement de deux types : simulations Monte-Carlo et
simulations de dynamique moleculaire. Les simulations Monte-Carlo permettent prin-
cipalement de determiner des proprietes thermodynamiques et statiques, alors que les
simulations de dynamique moleculaire permettent d’acceder aux proprietes thermody-
namiques, statiques mais egalement aux proprietes dynamiques. Le choix de la methode
est donc principalement lie aux proprietes que l’on souhaite calculer (statique versus
dynamique). Les deux methodes donnent des resultats equivalents sur les proprietes
thermodynamiques (diagramme de phase par exemple), mais la dynamique moleculaire
apporte en plus la connaissance des proprietes dynamiques du liquide.
Dans la suite de ce cours, nous allons decrire precisement les principes des simulations
de dynamique moleculaire. Les simulations Monte-Carlo ne sont pas presentees, par
manque de temps. Une autre raison est que les simulations de dynamique moleculaire
sont la methode principale employee pour la modelisation des proprietes des bio-
molecules. Ceci fait l’objet de l’UE34 couplee a cette UE32.
Rappelons ici qu’en dehors de la modelisation des proprietes de la matiere condensee, la
resolution des equations differentielles couplees qui regissent les equations des systemes
22

est obtenue par la methode des elements finis. C’est le cas en particulier des modelisations
realisees dans le domaine de l’aeronautique (avions, voitures) et de la climatologie. Nous
ne presentons pas ces methodes ici.
Avant d’aller plus loin, la grandeur de base dans les simulations numeriques de Monte-
Carlo et de dynamique moleculaire est le potentiel d’interactions (ou champ de forces)
qui regit les interactions entre les particules du milieu et donc les mouvements. Nous
allons donc decrire precisement les champs de forces.
2.1 Potentiels d’interaction
Rappelons immediatement que la facon correcte de traiter les interactions entre atomes
et molecules est de resoudre l’equation de Schrodinger de la mecanique quantique ecrite
ci-dessous dans l’approximation de Born-Oppenheimer :
HΨ(~r1, ~r2, . . . ., ~rN) = E(~R1, ~R2, . . . , ~RM)Ψ(~r1, ~r2, . . . ., ~rN) (38)
ou H est l’operateur Hamiltonien quantique du systeme considere, Ψ(~r1, ~r2, . . . ., ~rN) est
la fonction d’onde du systeme qui depend de la position des N electrons du systeme,
et E est l’energie du systeme qui depend de facon parametrique de la position des
noyaux, soit E(~R1, ~R2, . . . ., ~RM). Les atomes et molecules interagissent via leurs nuages
electroniques. Resoudre l’equation de Schrodinger est couteux en temps de calculs, et
ne peut encore a l’heure actuelle n’etre realisee que pour des systemes composes de
quelques centaines d’atomes au maximum. Ceci restreint le champ d’investigation.
Pour aller au-dela, on se place dans le cadre de la mecanique classique dans laquelle les
electrons ne sont pas pris en compte et les atomes sont des particules ponctuelles. Les
nuages electroniques ne sont plus directement presents dans la representation, et l’on
doit modeliser les vraies interactions quantiques entre les nuages electroniques par des
modeles classiques d’interactions. Le developpement de potentiels d’interaction (ou de
23

champs de forces) est un domaine de recherche a part entiere, qui est tres complexe.
Dans la suite, je presente les lignes directrices bien etablies.
Le potentiel d’interaction est une fonction des positions des atomes (ou noyaux) du
systeme moleculaire, soit l’expression generale V ( ~R1, ~R2, . . . , ~RM) dans laquelle ~Ri
est la position cartesienne du noyau i. On note indifferemment V ( ~R1, ~R2, . . . , ~RM) et
V (~r1, ~r2, . . . , ~rM). Comme on le voit sur la figure 4, la surface d’energie potentielle (ici
representee a 3D) est complexe : elle est composee de minima, d’extrema, de bassins
d’attraction de largeur et de profondeur variees. C’est un domaine “rugueux”.
Fig. 4 – Illustration de la complexite d’une surface de potentiel.
Le potentiel d’interaction est decompose en deux parties : le potentiel intra-mole-
culaire et le potentiel inter-moleculaire. A la place de potentiel d’interaction,
on emploie aussi le terme champ de forces. Dans notre texte, nous emploierons
indifferemment les deux expressions. Globalement, les interactions intra-moleculaires
24

maintiennent les liaisons chimiques naturelles des molecules et permettent aux molecules
de se deformer, et les interactions intermoleculaires assurent l’organisation generale de
la matiere, par exemple les associations ou non entre molecules, la solvatation des
molecules.
La partie intra-moleculaire n’a de sens que pour des molecules. Cette partie prend en
effet en charge les interactions entre atomes a l’interieur de la molecule. Par exemple,
pour la molecule d’eau dessinee sur la figure 5, le champ de forces intra-moleculaire
Fig. 5 – Molecule d’eau composee d’un atome d’oxygene (rouge) et de deux atomes d’hydrogene
(gris).
modelise les interactions entre l’oxygene et chacun des hydrogenes a l’interieur de la
molecule.
La partie inter-moleculaire prend en charge les interactions entre atomes qui appar-
tiennent a des molecules differentes. Par exemple, les interactions entre atomes d’oxy-
genes de 2 molecules d’eau differentes, entre l’oxygene d’une molecule d’eau et les
hydrogenes de l’autre molecule d’eau dans le cas du dimere d’eau illustre sur la fi-
gure 6. Bien evidemment, si on modelise un milieu compose d’atomes uniquement (qui
ne forment pas de molecules), on a seulement des interactions inter-moleculaires.
Pour les molecules comprenant plus de 4 atomes, comme les molecules biologiques,
on a coutume de realiser une separation intra/inter-moleculaire legerement differente.
On parle d’interaction intra-moleculaire si les atomes qui interagissent sont au maxi-
25

Fig. 6 – Illustration d’un dimere compose de deux molecules d’eau.
mum separes par 3 liaisons chimiques consecutives. Si les atomes sont distants de plus
de 3 liaisons chimiques, on parle alors d’interactions inter-moleculaires, meme si les
atomes appartiennent a la meme molecule ! On emploie la nomenclature suivante :
1-2, 1-3 et 1-4 representent les interactions intra-moleculaires et >1-4 represente les
interactions inter-moleculaires. La notation 1-2 signifie que l’on calcule les interactions
intra-moleculaires entre 2 atomes consecutifs separes par une liaison chimique (interac-
tion de stretching), 1-3 signifie que l’on calcule les interactions intra-moleculaires entre
3 atomes relies par 2 liaisons chimiques (interaction de bending), et 1-4 signifie que l’on
calcule les interactions intra-moleculaires entre 4 atomes relies par 2 liaisons chimiques
consecutives (interaction de torsion). Ceci est illustre sur la figure 7.
26

tau
1
2,3
4
2
3
1
phi3
phi2
4
1
4
3
1’’
thetas1
s4
s2 s3
2
21
r 12 s2
s1
s2s3
1
2 phi 3
r12 r13
StretchBending
s1
Torsion propre
Torsion impropre
1
2
3
phi3
phi2
phi14
Fig. 7 – Illustration des coordonnees de stretch, bend, torsion, associees a la nomenclature 1-2,
1-3, 1-4 des interactions intra/inter-moleculaires employee pour traiter les interactions au sein des
molecules biologiques.
27

Par definition, un champ de forces est un objet mathematique a N − corps c’est-a-
dire qui modelise les interactions entre les N atomes du systeme. On a par definition
V (~r1, ~r2, . . . ., ~rN) ou ~ri represente la position de l’atome i dans l’espace. Cela signifie que
l’interaction de l’atome i avec l’atome j depend egalement de l’interaction de l’atome
j avec l’ensemble des autres atomes du systeme.
On simplifie et decompose l’expression generale V (~r1, ~r2, . . . ., ~rN) a N-corps par une
somme de termes a 1-corps, 2-corps, 3-corps, 4-corps, etc de la maniere suivante :
V (~r1, ~r2, . . . ., ~rN) =N∑
i=1
V (~ri) +N∑
i,j=1
V (~ri, ~rj) +N∑
i,j,k=1
V (~ri, ~rj, ~rk) + . . . . (39)
Cette decomposition est tronquee a l’ordre voulu. En general, on tronque a l’ordre
2, c’est-a-dire aux termes a 2-corps, ou a l’ordre 3 aux termes a 3-corps. On va tres
rarement au-dela, car la mise en place des expressions des potentiels au-dela de 3-corps
est tres compliquee. Le terme a 1-corps V (~ri) represente l’interaction de la particule i
avec un champ exterieur (electrique ~E ou magnetique ~B). Dans la majorite des calculs
que nous realisons, il n’y a pas de champ exterieur applique. Dans ces conditions,
l’expression generale du potentiel d’interaction est :
V (~r1, ~r2, . . . ., ~rN) =
N∑
i,j=1
V (~ri, ~rj) +
N∑
i,j,k=1
V (~ri, ~rj, ~rk) + . . . . (40)
Nous decrivons dans la suite les expressions usuellement employees pour les differents
termes du champ de forces.
La figure 8 schematise les interactions intra-moleculaires et inter-moleculaires que nous
allons maintenant detailler.
28

Fig. 8 – Illustration des interactions intra-moleculaires et inter-moleculaires. Les interactions intra-
moleculaires sont les 3 en haut de la figure : stretching, bending et torsion. Les interactions inter-
moleculaires sont les 2 en bas de la figure : electrostatique et van der Waals. Extrait du livre de
A. Leach.
Pour la suite, on definit :
∇i = ∂∂xi
~i + ∂∂yi
~j + ∂∂zi
~k ∇j = ∂∂xj
~i + ∂∂yj
~j + ∂∂zj
~k
rij =[
x2ij + y2
ij + z2ij
]1/2
~rij = ~rj − ~ri soit xij = xj − xi, yij = yj − yi, zij = zj − zi
29

2.1.1 Champ de forces intra-moleculaire
En general, le champ de forces intra-moleculaire est decompose comme une somme d’in-
teractions entre des ressorts harmoniques. Ces ressorts representent les mouvements
d’elongation et de contraction des liaisons covalentes (entre 2 atomes consecutifs),
les mouvements d’ouverture et de fermeture des angles covalents (entre 3 atomes
consecutifs), les mouvements de torsion autour d’une liaison covalente (et faisant in-
tervenir 4 atomes consecutifs). Se referer a la figure 8.
Les expressions analytiques employees sont maintenant presentees.
• Elongation et contraction des liaisons covalentes (stretching)
V (i, j) =1
2kij
[
(
xij − x0ij
)2+(
yij − y0ij
)2+(
zij − z0ij
)2]
(41)
ou kij est la constante de raideur du ressort, xij, yij et zij sont les composantes du
vecteur position relative entre les 2 atomes i et j de la liaison covalente, x0ij, y0
ij et z0ij
les composantes du vecteur de reference autour duquel les deux atomes vibrent.
Les forces associees sont :
~Fi = −∇iV (i, j) = kij
(
xij − x0ij
)
~i + kij
(
xij − x0ij
)
~j + kij
(
xij − x0ij
)
~k = −~Fj (42)
• Ouverture et fermeture des angles de valence (bending)
V (i, j, k) =1
2kijk
(
θijk − θ0ijk
)2(43)
30

ou kijk est la constante de raideur du ressort, θijk est l’angle de valence entre les 3
atomes i, j et k, et θ0ijk est l’angle de valence de reference autour duquel les trois
atomes vibrent.
• Torsion autour des liaisons covalentes
Plusieurs formes peuvent etre mises en place, et les plus employees dans la litterature
sont les deux suivantes :
V (i, j, k, l) =
M∑
n=0
Vn
2[1 + cos(nω − γ)] (44)
ou ω est l’angle de torsion, n est un entier que l’on choisit, γ est une phase que l’on
choiosit, et Vn est l’amplitude maximale.
Une autre expression est :
V (i, j, k, l) =M∑
n=0
Cn cos(ω)n (45)
ou Cn est l’amplitude.
On illustre sur les figures 9-10 des courbes de variation de l’energie potentielle de
torsion, pour les differentes expressions presenteees ci-dessus et differentes valeurs des
parametres.
31

Fig. 9 – Energie potentielle de torsion, extrait du livre de A. Leach.
Fig. 10 – Energie potentielle de torsion, extrait du livre de A. Leach.
32

2.1.2 Au-dela des expressions harmoniques des interactions intra-molecu-
laires
• Potentiel de Morse
Plutot que d’employer des expressions harmoniques du type V = 12k(σ − σ0)
2 on peut
introduire un potentiel de Morse qui prend en compte des effets anharmoniques du
potentiel. L’expression generale est :
VMorse = De
1 − e−a(σ−σ0)2
(46)
Une comparaison entre les deux potentiels est illustree sur la figure 11.
Fig. 11 – Illustration des courbures differentes d’un potentiel harmonique et d’un potentiel anhar-
monique de type Morse, extrait du livre de A. Leach.
• Termes de couplages entre coordonnees internes
On peut egalement aller au-dela des expressions 41 et 43 precedentes, en prenant en
compte les couplages entre coordonnees internes : couplage stretch/stretch, stretch/bending,
stretch/torsion, etc ...
33

On a alors des expressions du type :
V (i, j, k, l) =kijkl
2
[(
xij − x0ij
)
(xkl − x0kl) +
(
yij − y0ij
)
(ykl − y0kl) +
(
zij − z0ij
) (
zkl − z0kl
)]
(47)
pour le couplage entre le stretch i − j et le stretch k − l, et
V (i, j, k, l) =kijkl
2
[(
lij − l0ij)
+(
lkl − l0kl
) (
θ − θ0)]
(48)
pour le couplage entre les 2 stretches i − j et k − l et le bending θ qui les associe.
Les champs de forces qui introduisent des termes de couplage entre coordonnees internes
ne sont utilises que dans des modelisations tres specifiques, notamment pour modeliser
des spectres vibrationnels de molecules.
2.1.3 Introduction de termes a 3 corps dans les potentiels
On peut introduire des interactions a 3-corps sous la forme de Axilrod-Teller :
V (i, j, k) = E0
[
1 + 3 cos γi cos γj cos γk
(rijrikrjk)3
]
(49)
ou rij, rik et rjk sont les trois distances entre les 3 atomes i, j, k, et γi, γj, γk les trois
angles entre les atomes.
34

2.1.4 Champ de forces inter-moleculaire
Les interactions inter-moleculaires sont classiquement modelisees par les interactions
coulombiennes et les interactions de van der Waals. Se referer a la figure 8.
Toute molecule possede une densite electronique en mecanique quantique, que l’on
modelise classiquement par une distribution electrique multipolaire composee en general
de charges ponctuelles localisees sur chaque atome, de dipoles ponctuels loca-
lises sur chaque atome et de quadrupoles ponctuels localises sur chaque atome. On
peut pousser le developpement multipolaire au-dela des quadrupoles si on le souhaite.
Dans la pratique, on arrete souvent le developpement multipolaire a l’ordre le plus
bas, c’est-a-dire aux charges ponctuelles localisees sur les atomes. Plusieurs raisons a
cela, dont une principale : comme nous le verrons ci-dessous, les interactions et forces
electrostatiques entre charges ponctuelles sont faciles a calculer et peu couteuses en
temps de calculs, ce qui est un tres net avantage pour les simulations numeriques.
Il est evident que la somme des charges ponctuelles reparties sur les atomes est egale a
la charge totale de la molecule consideree, que la somme des dipoles ponctuels repartis
sur les atomes est egale au dipole permanent de la molecule consideree, etc. Ainsi, pour
la molecule d’eau representee sur la figure 12 : la distribution electronique quantique de
la molecule d’eau est classiquement approximee par trois charges ponctuelles localisees
sur les trois atomes de la molecule, avec qO = -0.834 e et qH = 0.417 e, telles que leur
somme vaille bien zero (qO + 2qH).
Les champs de forces electrostatiques qui prennent en compte des multipoles au-dela
des charges ponctuels atomiques sont qualifies de champs de forces evolues. Ce sont
principalement les champs de forces de Anthony Stone en Angleterre et de Pierre Clave-
rie et Nohad Gresh en France. On notera que pour ces champs de forces, les multipoles
sont a la fois localises sur les noyaux atomiques (sur les atomes) mais egalement sur
les barycentres des liaisons chimiques covalentes. Ces champs de forces sont tres precis
35

Fig. 12 – Champ de forces coulombien TIP3 pour l’eau schematise ici : trois charges ponctuelles
localisees sur les trois atomes de la molecule telles que qO = -0.834 e et qH = 0.417 e. La charge totale
est bien egale a zero : molecule neutre.
mais egalement tres couteux en temps de calculs pour des simulations de dynamique
moleculaire.
Les interactions de van der Waals, dites de dispersion a longue distance et de repulsion
a courte distance modelisent les interactions d’origine purement quantiques d’associa-
tions entre dipoles induits a longue distance et de repulsion de Pauli a courte distance
(qui specifie que deux electrons de meme spin ne peuvent occuper la meme orbitale
atomique quantique).
• Expressions generales des termes electrostatiques
On presente ci-dessous une facon compacte d’exprimer les termes electrostatiques. On
se reporte a la figure 13.
On considere un ensemble d’atomes numerotes i avec i = 1 − N , chacun portant une
charge ponctuelle qi, un dipole ponctuel ~pi =
pix
piy
piz
(dipole ponctuel permanent ou
induit, comme nous le verrons dans la suite), un quadrupole Qi qui est un tenseur de
36

Fig. 13 – Schema de principe : un ensemble de multipoles localises aux points ~ri de l’espace et le
point ~r de l’espace sur lequel les calculs seront realises. Note : le point ~r peut etre un point quelconque
de l’espace ou un point ~rq correspondant a la position d’un multipole.
dimension 3*3 tel que Qi =
Qixx Qixy Qixz
Qiyx Qiyy Qiyz
Qizx Qizy Qizz
.
Chaque atome est localise en ~ri de l’espace. Le vecteur ~ri est de composantes xi, yi, zi.
Le potentiel electrostatique V (~r) qui est cree par cet ensemble de multipoles en
n’importe quel point ~r de l’espace est :
V (~r) =N∑
i=1
(
qi − ~pi.∇~r + Qi : ∇~r∇~r
) 1
|~ri − ~r|(50)
ou
|~ri − ~r| est la distance qui separe l’atome i localise en ~ri du point ~r de l’espace
∇~r = ∂∂x
~i + ∂∂y
~j + ∂∂z
~k est le vecteur gradient exprime selon les coordonnees x, y, z du
vecteur ~r de l’espace
~pi.∇~r est le produit scalaire entre le vecteur ~pi et le vecteur ∇~r
Qi : ∇~r∇~r =∑
α,β=x,y,z Qiαβ∂
∂xα
∂∂xβ
avec xα = x ou xα = y ou xα = z et xβ = x ou
xβ = y ou xβ = z
soit
37

Qi : ∇~r∇~r = Qixx∂2
∂x2 +Qixy∂∂x
∂∂y
+Qixz∂∂x
∂∂z
+Qiyx∂∂y
∂∂x
+Qiyy∂2
∂y2 +Qiyz∂∂y
∂∂z
+Qizx∂∂z
∂∂x
+
Qizy∂∂z
∂∂y
+ Qizz∂2
∂z2
Le champ electrostatique ~E(~r) qui est cree par cet ensemble de multipoles en
n’importe quel point ~r de l’espace est :
~E(~r) = −∇~rV (~r) (51)
La force electrostatique ~F (~r) qui est cree par cet ensemble de multipoles en n’im-
porte quel point ~r de l’espace est :
~F (~r) = −∇~rU(~r1, ~r2, · · · , ~rN) (52)
ou L’energie electrostatique U(~r1, ~r2, · · · , ~rN) de l’ensemble de N multipoles est :
U(~r1, ~r2, · · · , ~rN) =1
2
N∑
i=1
N∑
j=1
(
qi − ~pi.∇~rj+ Qi : ∇~rj
∇~rj
) (
qj − ~pj.∇~ri+ Qj : ∇~ri
∇~ri
) 1
|~ri − ~rj|
(53)
En utilisant la propriete ∇~rj
1|~ri−~rj |
= −∇~ri
1|~ri−~rj |
, on obtient :
U(~r1, ~r2, · · · , ~rN) =1
2
N∑
i=1
N∑
j=1
(
qi + ~pi.∇~ri+ Qi : ∇~rj
∇~rj
) (
qj − ~pj.∇~ri+ Qj : ∇~ri
∇~ri
) 1
|~ri − ~rj|
(54)
On ecrit maintenant certaines de ces expressions dans des cas simples : un ensemble de
N charges ponctuelles seulement, puis un ensemble constitue de N charges ponctuelles
et de N dipoles ponctuels. Ce sont les cas que l’on rencontrera le plus souvent dans
nos modelisations moleculaires.
38

• Interactions coulombiennes entre charges ponctuelles
Tout atome du milieu portant une charge qi interagit avec un autre atome portant la
charge qj via l’energie potentielle d’interaction coulombienne :
UC(i, j) =1
4πε0
qiqj
rij
(55)
En coordonnees cartesiennes, la force ~Fi qui s’applique sur l’atome i est donc :
~Fi = −∇iUC(i, j)
et ~Fj celle qui s’applique sur l’atome j est :
~Fj = −∇jUC(i, j)
On a :
~Fi = −qiqj
4πε0
1
r3ij
[
(xj − xi)~i + (yj − yi)~j + (zj − zi)~k]
(56)
et
~Fj = −∇jV (qi, qj) =qiqj
4πε0
1
r3ij
[
(xj − xi)~i + (yj − yi)~j + (zj − zi)~k]
= −~Fi (57)
• Interactions coulombiennes entre charges et dipoles ponctuels
Le systeme constitue de N charges ponctuelles et de N dipoles ponctuels possede
l’energie electrostatique :
U(~r1, ~r2, · · · , ~rN) =1
2
N∑
i=1
N∑
j=1,j 6=i
(qi + ~pi.∇~ri) (qj − ~pj.∇~ri
)1
|~ri − ~rj|(58)
Soit apres quelques lignes de calculs (Attention a bien appliquer les derivations dans
le bon ordre !) :
U(~r1, ~r2, · · · , ~rN) =1
2
∑
i,j,i6=j
[
qiqj
rij
+1
r3ij
(−qi ~pj + qj ~pi) . ~rij + ~pi .T ij. ~pj
]
(59)
39

avec
~rij = ~rj − ~ri
|~rj − ~ri| = |~rij|
T ij =1
r3ij
(
1 − 3Aij
r2ij
)
Aij =
(xj − xi)2 (xj − xi)(yj − yi) (xj − xi)(zj − zi)
(yj − yi)(xj − xi) (yj − yi)2 (yj − yi)(zj − zi)
(zj − zi)(xj − xi) (zj − zi)(yj − yi) (zj − zi)2
et 1 est la matrice unite (valeurs 1 sur la diagonale, 0 hors de la diagonale).
La force ~Fi qui s’applique sur l’atome i est donc :
~Fi = −∇~riU(~r1, ~r2, · · · , ~rN)
et ~Fj celle qui s’applique sur l’atome j est :
~Fj = −∇~rjU(~r1, ~r2, · · · , ~rN) = −~Fi
2.1.5 Introduction des effets de polarisation electrostatique : terme a N-
corps
En mecanique quantique, le nuage electronique de chaque molecule (qui est represente
par la densite electronique ρ(~r)) est polarisable, c’est-a-dire que la molecule peut
acquerir un dipole de polarisation meme si initialement elle n’est pas dipolaire. De
meme, un ion est polarisable.
La polarisation est le reflet du deplacement de densite electronique autour de chaque
noyau sous l’effet de l’application d’un champ electrique externe ~E. Ce champ electrique
externe peut provenir de l’application d’un champ exterieur ou du champ cree par des
molecules polaires presentes dans le milieu.
40

Dans les simulations a l’echelle atomique, on modelise la polarisation moleculaire
par des dipoles induits (c’est-a-dire non permanents) localises sur chaque atome. Par
convention, le dipole induit ~pi = αi~Ei est associe a l’atome i du milieu ou αi est la pola-
risabilite de l’atome i et ~Ei le champ electrique applique sur l’atome i. La polarisation
electrostatique ~P est obtenue comme la somme des dipoles induits normalises par le
volume V de la molecule (ou plus generalement le volume de la boıte de simulation) :
~P =1
V
N∑
i=1
~pi (60)
La connaissance de chaque dipole induit ~pi provient de la resolution de l’equation self-
consistante :
~pi = αi
[
~Ei −N∑
q 6=i,q=1
Tiq~pq
]
(61)
dans laquelle Tiq est un tenseur geometrique de dimension 3*3 et d’expression generale :
Tiq =1
r3iq
1 −3
r5iq
x2iq xiqyiq xiqziq
yiqxiq y2iq yiqziq
ziqxiq ziqyiq z2iq
(62)
ou 1 est la matrice 3*3 identite, riq est la distance qui separe les atomes i et q, et xiq,
yiq, ziq sont les composantes du vecteur ~riq.
L’equation 61 est self-consistante puisque la valeur du dipole induit ~pi sur l’atome i
depend de la valeur des dipoles induits ~pq localises sur tous les autres atomes q du
milieu. Cela “tourne en rond”, et l’on parle alors de self-consistance.
La polarisation et les dipoles induits atomiques sont des objets a N − corps puisque la
valeur du dipole induit ~pi depend des N − 1 autres dipoles induits ~pq (q 6= i).
Tout ceci sera demontre dans l’UE 34.
Note : ce modele est appele modele de Thole, du nom de son auteur. Il existe un autre
modele appele modele de Drude, egalement base sur des dipoles induits atomiques, mais
modelises differemment. Une autre facon de mettre en place la polarisation moleculaire
41

classiquement est de modeliser des charges atomiques fluctuantes, qui fluctuent en
fonction de la geometrie de la molecule : cela permet de mettre en place un dipole
moleculaire induit directement sans passer par des dipoles atomiques induits. Ce modele
est developpe par quelques auteurs de la litterature (B. Berne aux USA et F. Calvo en
France notamment). Cela sera egalement presente dans le cadre de l’UE 34.
42

• Interactions de van der Waals
Les interactions de van der Waals sont en general modelisees par la forme de Lennard-
Jones :
VLJ(i, j) = 4ε
[
(
σij
rij
)12
−
(
σij
rij
)6]
(63)
que l’on nomme egalement forme 12-6. L’exposant 12 correspond a l’interaction de
repulsion a courte distance, et la partie 6 a l’interaction de dispersion a longue distance.
Les forces de van der Waals qui s’appliquent sur chaque atome sont :
~Fi = −∇iVLJ(i, j)
et
~Fj = −∇jVLJ(i, j)
Soit :
~Fi =48ε
rij
[
2
(
σij
rij
)12
−
(
σij
rij
)6]
[
(xj − xi)~i + (yj − yi)~j + (zj − zi)~k]
(64)
et
~Fj = −~Fi = −48ε
rij
[
2
(
σij
rij
)12
−
(
σij
rij
)6]
[
(xj − xi)~i + (yj − yi)~j + (zj − zi)~k]
(65)
Une autre expression du potentiel de van der Waals peut etre :
V (i, j) =ε
1 − 6/h
[
eh(1−r/rm) −
(
r
rm
)6]
dans laquelle le mur repulsif a courte distance est moins fort que pour le potentiel
Lennard-Jones precedent. L’expression des forces est plus compliquee qu’avec le poten-
tiel Lennard-Jones, c’est une des raisons pour lesquelles ce potentiel d’interaction est
moins employe.
43

On peut compliquer encore l’expression generale avec :
V (i, j) = Ae−αr/rm +
[
C6
r6+
C8
r8+
C10
r10
]
F (r/rm)
ou F (r/rm) est une fonction d’amortissemnt du type :
F (r/rm) = e−(D rmr
−1)2
si r/rm 6 D
= 1 si r/rm > D
A nouveau, l’expression generale du potentiel et des forces est compliquee, ce qui n’est
pas avantageux dans les simulations numeriques.
Nous detaillons maintenant certains des potentiels d’interaction mis en place dans la
litterature. Plusieurs lecons seront a retenir : la complexite ou non des expressions
de l’energie potentielle et donc des forces, un potentiel d’interaction est generalement
developpe pour un systeme moleculaire specifique, et surtout un potentiel d’interaction
est justifie pour un type de domaine donne. Ainsi, des potentiels developpes pour la
phase liquide sont rarement applicables pour traiter des proprietes de la phase solide
ou d’agregats, et inversement. Quelques potentiels sont universels, mais ils sont rares.
2.1.6 Potentiels pour les fluides de gaz rare
Les interactions entre atomes de gaz rare (Argon, Xenon, Krypton) sont modelisees par
les seules interactions de van der Waals. En effet, ces atomes sont neutres, non polaires,
les interactions electrostatiques sont donc nulles. On peut ajouter des interactions de
polarisation, car ces atomes sont polarisables. Ceci est toutefois rarement inclus dans
les modeles.
Les champs de forces des gaz rares sont generalement de type Lennard-Jones
VLJ(i, j) = 4ε
[
(
σij
rij
)12
−
(
σij
rij
)6]
(66)
44

avec par exemple εAr−Ar = 119.6 K et σAr−Ar=3.4 A. Voir le livre de Allen et Tildesley
pour un tableau des valeurs tabulees pour les differents atomes de gaz rare.
Le potentiel Lennard-Jones est reconnu comme permettant de bien modeliser les pro-
prietes des agregats de gaz rare, les proprietes des fluides de gaz rare (gaz et liquide),
mais il existe des defauts pour la modelisation des solides de gaz rare.
Barker, Fisher et Watts (Mol.Phys.,vol 21,page 657,1971) ont employe une forme bien
plus complexe pour traiter les interactions Argon-Argon. C’est :
VBFW (i, j) =∑
k,l
V (k, l) +∑
k,l;,m
V (k, l, m) (67)
ou V (k, l) est un potentiel d’interaction a 2-corps entre 2 atomes de gaz rare et
V (k, l, m) est un potentiel d’interaction a 3-corps entre 3 atomes de gaz rare. Ils ont
choisi les expressions suivantes :
V (k, l) = ε
[
5∑
i=1
Ai(r − 1)ieα(1−r) −2∑
i=1
C2i+6
δ + r2i+6
]
(68)
ou r = rkl/Rm avec Rm la separation interatomique au minimum du potentiel, les
constantes Ai et C2i+6 sont obtenues par ajustements sur des grandeurs experimentales
connues, et
V (k, l, m) = E0
[
1 + 3 cos γi cos γj cos γk
(rijrikrjk)3
]
(69)
est le potentiel a 3-corps d’Axilrod-Teller deja presente.
Ce potentiel permet de decrire tres precisement les proprietes des gaz, liquides, et
solides de gaz rare d’Argon.
2.1.7 Potentiels pour les clusters de fullerene C60
Un fullerene est un agregat compose de 60 atomes de carbone, C60. Un potentiel assez
utilise dans la litterature est celui de Lu et collaborateurs (Phys.Rev.Lett., vol 68, page
45

1551, 1992) ou de Schelkacheva et Tareyeva (Phys.Rev.B.,vol 61, page 3143, 2000), dans
lequel on place 60 charges δq sur les milieux des liaisons covalentes simples C − C et
30 charges −2δq sur les milieux des liaisons covalentes doubles C = C. La molecule de
fullerene est ainsi bien neutre. On aura donc les interactions charge-charge a calculer.
Le potentiel a 2-corps d’interaction de van der Waals entre 2 atomes de carbone a la
forme suivante :
V (s) = −α
[
1
s(s − 1)3+
1
s(s + 1)3−
2
s4
]
+ β
[
1
s(s − 1)9+
1
s(s + 1)9−
2
s10
]
(70)
ou s = r/D avec D le diametre de l’agregat C60.
D’autres expressions existent dans la litterature.
2.1.8 Potentiels pour les clusters d’oxygene O2
Cette fois, nous avons a traiter a la fois les interactions intra-moleculaires oxygene-
oxygene a l’interieur de chaque molecule O2 et les interactions inter-moleculaires oxygene-
oxygene entre 2 molecules O2 differentes. On peut simplifier le probleme en gelant
la molecule O2 a sa configuration d’equilibre obtenue dans des calculs tres precis de
mecanique quantique par exemple. Il faut noter que la molecule O2 est magnetique, on
doit donc introduire ce type d’interaction dans le potentiel classique.
Un potentiel utilise dans la litterature est celui de Etters, Kobashi et Belak, note EKB,
qui est tel que :
VEKB = Vrd(~ri, ~rj, ~ni, ~nj) + Velec(~ri, ~rj, ~ni, ~nj) + Vmagn(~ri, ~rj, ~ni, ~nj, ~si, ~sj) (71)
ou Vrd est le potentiel d’interaction de repulsion-dispersion a 2-corps, Velec est le poten-
tiel electrostatique a 2-corps ou les atomes d’oxygene portent une charge ponctuelle, et
Vmagn est le potentiel magnetique (~si est le spin de l’atome d’oxygene). Dans ce potentiel
d’interaction, la geometrie de la molecule O2 est figee, il n’y a donc pas d’interactions
intra-moleculaires.
46

On a :
Vrd(i, j) =
4∑
k=1
(
Ae−αrk − f(rk)
[
C6
r6k
+C8
r8k
+C10
r1k0
])
(72)
avec
f(r) = e−(rcut/r−1)2 si r ≤ rcut
= 1 si r > rcut
et
Vmagn(i, j) = 2J(rij)~si.~sj + D [ (~si.~ni) + (~si.~ni)] (73)
J(r) = J1e−a1(r−r0) si r ≤ rmin
J(r) = J2e−a2(r−r0)+a3(r−r0)2 si rmin ≤ r < rmax
J(r) = J3e−a4(r−r0) si r > rmax
Ce potentiel relativement complique donne d’excellents resultats pour la structure et
la thermodynamique des agregats d’oxygene O2.
2.1.9 Potentiels pour l’eau liquide et pour les agregats d’eau
La figure 14 resume schematiquement les principaux champs de forces mis au point et
utilises dans la litterature pour modeliser les interactions entre molecules d’eau, soit
pour modeliser l’eau liquide (ou le fluide supercritique) soit pour modeliser des agregats
d’eau. Ces potentiels sont de trois types :
1) La molecule d’eau a une geometrie figee (celle calculee en mecanique quantique) et les
interactions sont de type inter-moleculaires, avec interactions entre les charges portees
par les atomes et interactions de van der Waals sous forme Lennard-Jones 12-6. On note
au passage que les charges portes par les atomes d’hydrogene sont toujours localisees
sur ces atomes, alors que la charge portee par l’atome d’oxygene est soit localisee sur cet
atome soit deplacee legerement par rapport a la position de cet atome. Il existe tres peu
47

Fig. 14 – Resume schematique des principaux champs de forces mis au point et utilises dans la
litterature pour modeliser les interactions entre molecules d’eau. Extrait de la revue de Florent Calvo.
Les charges electrostatiques sur les atomes sont notifiees, la notation LJ signifie que des parametres
Lennard-Jones sont associes aux atomes, et D ou Q signifie que des dipoles et quadrupoles atomiques
permanents ont ete inclus dans le modele (cela ne s’applique qu’aux potentiels RWL).
de modeles dans la litterature incluant des multipoles d’ordre superieur aux charges. Ce
sont des modeles tres couteux en temps de calculs et donc tres peu utilises. Par ailleurs,
la demonstration de l’utilite d’inclure des dipoles atomiques permanents et quadrupoles
atomiques permanents n’a pas ete demontree. Ces potentiels sont principalement ceux
developpes par Rowlinson (nomenclature RWL). Par ailleurs, seules les interactions
Lennard-Jones oxygene-oxygene sont calculees, quel que soit le modele.
2) On peut supplementer cela avec les interactions de polarisation. 3) En plus de cela,
les interactions intra-moleculaires de stretch O-H et de bending H-O-H sont modelisees.
Les potentiels SPC, SPC/E et TIP sont particulierement pertinents pour modeliser
les proprietes de l’eau liquide, ils sont extremement employes et populaires dans la
48

litterature. Le potentiel TIP4P permet egalement d’obtenir d’excellents resultats de
structure et de diagramme de phase pour les agregats d’eau. A nouveau, ces potentiels
sont incapables de reproduire correctement les proprietes vibrationnelles des agregats
d’eau mais egalement de l’eau liquide (que ce soit pour les modes de vibration intra-
moleculaires ou inter-moleculaires). Pour l’eau liquide par exemple, il faut noter qu’un
modele d’eau qui est capable de reproduire correctement des proprietes structurales et
thermodynamiques sera en general incapable de modeliser correctement les proprietes
de viscosite ou de constante dielectrique, et inversement. Il faut donc faire attention a
choisir son modele d’eau en fonction des proprietes que l’on souhaite modeliser.
Le modele TIP3 est usuellement employe pour modeliser l’eau de solvatation autour
des molecules biologiques. Le modele SPC est egalement employe dans la litterature a
cet effet. Les modeles TIP4 et SPC sont tres bons en general pour decrire les proprietes
de solvatation d’ions atomiques immerges dans l’eau liquide.
2.1.10 Potentiels CHARMM et AMBER pour les biomolecules
L’expression generale de ces potentiels a 2-corps est la suivante :
V (i, j) =∑
stretch i−j
1
2kij
(
rij − r0ij
)
+∑
bend i−j−k
1
2kijk
(
θijk − θ0ijk
)2
+∑
torsion i−j−k−l
M∑
n=0
Vn
2[1 + cos(nω − γ)]
+∑
i−j
1
4πε0
qiqj
rij
+∑
i−j
4εij
[
(
σij
rij
)12
−
(
σij
rij
)6]
composes de termes intra-moleculaires 1-2, 1-3 et 1-4, et de termes intermoleculaires
electrostatiques et de van der Waals.
49

Les nouvelles versions datant de 2003 incluent les effets de polarisation electrostatique.
On parle alors de champs de forces de seconde generation a N-corps.
Ces potentiels donnent de tres bons resultats sur les proprietes de structure et de dy-
namique des molecules biologiques en phase liquide, car les parametres sont developpes
pour la phase liquide (c’est-a-dire molecule biologique immergee dans l’eau liquide). Ils
sont generalement tres nettement moins satisfaisants pour traiter les proprietes de la
phase gazeuse, c’est-a-dire molecule biologique isolee. Ces potentiels sont inadequats
pour traiter les proprietes des vibrations intramoleculaires des molecules biologiques,
car les parametres et les formes a 2-corps employees ne sont pas suffisants pour avoir
une bonne representation vibrationnelle. Nous verrons un exemple plus loin. A noter
egalement, des jeux de parametres totalement differents ont ete developpes pour les
proteines d’un cote et pour les acides nucleiques de l’autre.
Tout ceci sera revu en details au cours de l’UE 34.
50

2.2 Deux classes de simulations numeriques : T nulle, T finie
On remet sur la figure 15 l’illustration d’une surface d’energie potentielle (dessinee
a 3D) pour montrer encore une fois sa complexite. Si l’on coupe la surface d’energie
Fig. 15 – Illustration de la complexite d’une surface de potentiel.
potentielle selon une certaine coordonnee q, on obtient typiquement l’image de la fi-
gure 16. Sur ce graphe, on voit apparaıtre trois bassins d’attraction notes A, B et C,
de profondeur et de largeur differentes. Sur la figure 17 on note les “points” principaux
de cette surface d’energie potentielle. On observe trois minima associes a chaque bassin
d’attraction (minima m1, m2 et m3), et deux points selles qui permettent respective-
ment de passer entre les bassins d’attraction A et B (point selle s1) et B et C (point
selle s2). Toute coupe de la surface d’energie potentielle suivant n’importe quelle direc-
tion q fera apparaıtre des bassins d’attraction auxquels on associe des minima et des
points selles.
Dans la suite, on presente deux types de modelisation numerique : l’une a temperature
51

Fig. 16 – Coupe 2D selon une coordonnee q d’une surface d’energie potentielle.
nulle, et l’autre a temperature finie. Chacune de ces modelisations se rapporte a une
exploration differente des zones de la surface d’energie potentielle V ( ~R1, ~R2, . . . , ~RM)
a 3M − 6 degres de liberte.
2.2.1 T = 0K
Une simulation numerique a temperature nulle correspond a la determination des mi-
nima et points selles (souvent appeles etats de transition) de la surface d’energie po-
tentielle. Cela correspond a trouver les points notes minima m1, m2 et m3 et points
selles s1 et s2 sur la figure 17.
Trouver ces etats particuliers n’a de sens que pour des molecules en phase gazeuse
ou des clusters de molecules formant des assemblages moleculaires specifiques. Voir les
illustrations ci-dessous sur la figure 18 pour un dipeptide d’alanine (3 minima d’energie
potentielle sur la surface d’energie potentielle), et sur les figures 19-20 pour des isomeres
52

Fig. 17 – Coupe 2D selon une coordonnee q d’une surface d’energie potentielle. On reporte les
minima et points selles de la surface.
conformationnels de la base uracile de l’ARN formant des liaisons hydrogene avec un
nombre croissant de molecules d’eau environnantes.
53

Fig. 18 – Differents isomeres conformationnels de l’alanine dipeptide qui sont associes a des minima
d’energie potentielle sur la surface d’energie potentielle de l’alanine dipeptide (surface composee de 60
degres de liberte ; 22 atomes constituent la molecule). Ces configurations sont notees C7eq (a gauche),
C7ax (au centre) et C5 (a droite). Issu du travail personnel de M.P. Gaigeot et al..
54

Fig. 19 – Quatre isomeres conformationnels de plus basse energie de l’Uracile entouree d’une
molecule d’eau qui sont associes a des minima d’energie potentielle sur la surface d’energie potentielle
du systeme (surface composee de 39 degres de liberte ; 15 atomes constituent le complexe/agregat).
Issu du travail personnel de M.P. Gaigeot et al., article J.Phys.Chem.B.,105 :5007, 2001. Les energies
relatives sont dans l’unite kcal/mol.
55

Fig. 20 – Quatre isomeres conformationnels de plus basse energie de l’Uracile entouree de trois
molecules d’eau qui sont associes a des minima d’energie potentielle sur la surface d’energie potentielle
du systeme (surface composee de 57 degres de liberte ; 21 atomes constituent le complexe/agregat).
Issu du travail personnel de M.P. Gaigeot et al., article J.Phys.Chem.B.,105 :5007, 2001. Les energies
relatives sont dans l’unite kcal/mol.
56

Il existe des algorithmes numeriques specifiques pour trouver les minima/extrema d’une
surface d’energie potentielle. Une illustration de la methode est schematisee sur la
figure 21. N’oublions pas qu’un systeme compose de N particules possede 3N − 6
Fig. 21 – Illustration schematique de la caracterisation des minima de la surface d’energie potentielle.
degres de liberte et possede donc une surface d’energie potentielle de dimension 3N−6.
Trouver les points particuliers tels que points minima ou points selles sur une surface
complexe de dimension 3N − 6 est un challenge remarquable.
Les algorithmes communement employes pour caracteriser les minima/points selles
sont l’algorithme de Steepest-Descent et l’algorithme de Gradient Conjugue. Ceci est
presente dans l’UE34. Voir egalement le livre “Numerical Recipes” pour plus de details.
Trouver les minima de la surface d’energie potentielle signifie que l’on trouve les struc-
tures moleculaires de plus basses energies sur la surface d’energie potentielle : on parle
alors d’optimisation de geometrie. On caracterise ainsi des isomeres conforma-
tionnels. Realiser des optimisations de geometrie est communement notifie comme
57

modelisation a temperature nulle 0K. En effet, a chaque minimum d’energie poten-
tielle correspond une certaine geometrie des molecules, et par definition d’un minimum
la conformation associee ne possede pas d’energie cinetique, elle ne possede que de
l’energie potentielle.
On parle de minima locaux sur la surface d’energie potentielle et de minimum absolu.
Ceci est illustre sur la figure 22, ou l’on a represente trois bassins d’attraction sur
Fig. 22 – Illustration des notions de minima locaux et minimum absolu d’une surface d’energie
potentielle.
la surface d’energie potentielle (coupe selon la direction quelconque q). Le minimum
d’energie associe au bassin d’attraction A est celui qui possede l’energie potentielle V
la plus basse parmi les trois minima. On l’appelle le minimum absolu. Les deux autres
58

minima d’energie associes aux bassins B et C ont des energies potentielles plus hautes.
On parle alors de minima locaux.
Pour caracteriser completement un etat minimum de la surface il faut verifier que
toutes ses frequences de vibration sont positives. Un etat de transition ou point selle
sur la surface d’energie potentielle a toutes ses frequences positives sauf une qui est
imaginaire. Cette frequence est associee au chemin sur la surface d’energie potentielle
qui permet de passer d’un minimum de la surface d’energie potentielle a un autre
minimum, via un etat de transition.
Le calcul des frequences est effectue par diagonalisation d’une matrice Hessienne. En
coordonnees cartesiennes, cette matrice est composee des derivees secondes de l’energie
potentielle par rapport aux coordonnees cartesiennes des atomes : ∂2V (~r1,~r2,...,~rN )∂~ri∂~rj
. C’est
une matrice de dimension 3Nx3N .
La diagonalisation de la matrice de Hessien fournit les 3N − 6 modes normaux de
vibration du systeme constitue de N atomes. Voir l’illustration des mouvements associes
aux modes normaux de vibration de la molecule de formaldehyde en phase gazeuse sur
la figure 23.
59

Fig. 23 – Illustration des modes normaux pour la molecule de formaldehyde en phase gazeuse.
Extrait du travail personnel de M.P. Gaigeot et al., J.Chem.Phys.125 :144106, 2006.
60

2.2.2 T finie
Les simulations numeriques a l’echelle microscopique qui prennent en compte la notion
de temperature finie du milieu sont principalement de deux types : simulations Monte-
Carlo et simulations de dynamique moleculaire.
Seule la methode de dynamique moleculaire est presentee dans la suite. Notons juste ici
que quelques elements de modelisation sont communs aux deux methodes, comme les
champs de forces employes, les conditions periodiques, les sommes d’Ewald pour traiter
les interactions electrostatiques. Les algorithmes sont intrinsequement differents. Les
proprietes etudiees avec chacune de ces methodes peuvent egalement etre differentes,
en particulier seules les simulations de dynamique moleculaire permettent d’acceder
aux proprietes dynamiques.
On illustre schematiquement sur la figure 24 l’exploration a temperature finie de la sur-
face d’energie potentielle telle qu’elle est realisee au cours des dynamiques moleculaires
dans l’ensemble microcanonique NV E. A energie totale E fixee, on peut ne explorer
que les zones hachurees sur la figure de la surface d’energie potentielle. Ce sont les zones
energetiquement accessibles. Rappelons que E = K + V , l’energie totale se repartit en
energie cinetique et en energie potentielle. Ainsi, on peut avoir suffisamment d’energie
pour explorer l’ensemble des bassins d’attraction ou pas suffisamment et dans ce cas
on ne peut explorer que quelques bassins de la surface d’energie potentielle.
Tout ceci est a opposer a la figure 22 dans laquelle on illustrait la notion de determination
des points d’energie minimale sur la surface de potentielle lorsque l’on realise des op-
timisations de geometrie a temperature nulle. En dynamique moleculaire on explore
des bassins d’attraction sur la surface d’energie potentielle alors qu’en optimisation de
geometrie on ne caracterise que les points d’energie minimum de la surface d’energie
potentielle.
61

Fig. 24 – Illustration schematique de l’exploration a temperature finie de la surface d’energie poten-
tielle telle qu’elle est realisee au cours des dynamiques moleculaires dans l’ensemble microcanonique
NV E.
62

2.3 Simulations de dynamique moleculaire
2.3.1 Exploration de l’espace des phases
La presentation precedente ne tient pas compte des vitesses des atomes. En simulations
de dynamique moleculaire, on explore en fait l’espace des conformations moleculaires
comme precedemment illustre, mais egalement l’espace des vitesses des atomes. On
explore en realite l’espace des phases note Γ = (~r1, ~r2, · · · , ~rN) , (~v1, ~v2, · · · , ~vN) ou
encore Γ = (~r) , (~v) ou ~r = ~r1, ~r2, · · · , ~rN et ~v = ~v1, ~v2, · · · , ~vN sont les vecteurs
globaux qui contiennent respectivement l’ensemble des vecteurs positions des N atomes
et l’ensemble des vecteurs vitesses des N atomes.
La qualite d’une simulation de dynamique moleculaire sera reliee a “l’exhaustivite” de
l’exploration de l’espace des phases qui aura reellement ete obtenu.
Par definition, on devrait explorer l’ensemble de l’espace des phases accessible au
systeme au cours d’une simulation de dynamique moleculaire (accessible veut dire ici
accessible compte tenu des conditions thermodynamiques de la simulation). L’explo-
ration de l’ensemble de l’espace des phases du systeme nous permettrait de calculer
exactement la fonction de partition du systeme, simplement en sommant les valeurs
de e−E/kT dans l’ensemble thermodynamique canonique. Ceci nous assurerait de pou-
voir calculer toutes les grandeurs thermodynamiques, statiques et dynamiques de facon
exacte.
Dans la pratique, cela necessiterait des simulations excessivement longues en temps de
calculs et/ou une statistique tres importante sur le nombre de simulations a realiser.
Par ailleurs, certaines zones de l’espace des phases sont difficilement explorees (meme
si thermodynamiquement accessibles). C’est le cas par exemple des zones associees
aux etats de transition entre bassins d’attraction. Meme une simulation extremement
longue ne permet pas d’explorer ces zones de facon statistiquement suffisante.
63

Dans la pratique, on explorera une partie seulement de l’espace des phases accessible,
et l’on en deduira les proprietes thermodynamiques, statiques et dynamiques, de facon
approchee. Ceci signifie que l’on sait pertinemment que l’on commet une erreur sur
les valeurs calculees a l’issue des simulations de dynamique moleculaire. A charge pour
nous de quantifier cette erreur.
Dans la pratique, on verifie toujours a posteriori la qualite de l’exploration de l’espace
des phases au cours des simulations : on verifie que l’on a effectivement suffisamment et
convenablement explore l’espace des positions et des vitesses. On represente pour cela
une projection dans le plan (~r) , (~v) de l’ensemble des positions et vitesses des atomes du
systeme. On a une figure a deux dimensions dont l’axe horizontal represente l’ensemble
des coordonnees des vecteurs ~ri et l’axe vertical represente l’ensemble des coordonnees
des vecteurs ~vi des atomes i = 1−N du systeme simule. On regarde la forme generale
de la figure obtenue. Une dynamique moleculaire dans laquelle l’espace des phases a
ete explore convenablement se traduit par un noircissement homogene et uniforme.
Tout biais dans la statistique, c’est-a-dire une non exploration d’une certaine partie de
l’espace des phases se traduit par l’apparition de zones blanches (zones dans lesquelles
on n’est pas passe au cours de la dynamique). On observera alors un noircissement non
homogene de la figure.
2.3.2 Equations du mouvement
Les simulations de dynamique moleculaire consistent a resoudre les equations de New-
ton du mouvement :∑
~Fext = m~a
pour chaque atome qui compose le systeme d’interet, soit a resoudre :
∑
(~Fext)i = mi−→ai = mi
d2~ri
dt2=
d~pi
dt(74)
64

pour chaque atome i, i variant de 1 a N . On doit donc connaıtre l’ensemble des forces
qui s’appliquent sur l’atome i, en faire la somme∑
(~Fext)i, et cela est egal au produit
de la masse de l’atome par son acceleration (ou a la derivee par rapport au temps
de la quantite de mouvement ~pi de l’atome). Rappelons que ~F = −∇V : la force est
egale au gradient du potentiel d’interaction (au signe pres). Si l’on connaıt le potentiel
d’interaction, on connaıt la force.
Rappel : ∇ = ∂∂x
~i + ∂∂x
~j + ∂∂x
~k en coordonnees cartesiennes.
On a donc un systeme compose de N equations couplees (puisque N atomes constituent
le systeme) a resoudre.
2.3.3 Conservation de l’energie totale
L’energie totale du systeme est E = K + V ou K est l’energie cinetique du systeme
et V son energie potentielle. On sait que K =∑N
i=112mi~v
2i =
∑Ni=1
~p2i
2mi. K ne depend
que des vitesses des particules. Nous verrons dans la suite que l’on sait mettre en place
des expressions anamytiques de l’energie potentielle V . Notons simplement ici que V
ne depend que des positions des atomes qui constituent le milieu, soit la notation
V (~r1, ~r2, . . . ., ~rN) dans la suite.
Prouvons que E est une quantite constante du mouvement dans une dynamique New-
tonnienne, soit dEdt
= 0
On a :
dE
dt=
d
dt
[
N∑
i=1
~p2i
2mi
+ V (~r1, ~r2, . . . ., ~rN)
]
=N∑
i=1
~pid−→p i/dt
mi
+dV (~r1, ~r2, . . . ., ~rN)
dt
On sait que d~pi
dt= ~Fi , ~Fi = −∇V , et ~pi = mi~vi = mi
d~ri
dt, d’ou :
dE
dt=
N∑
i=1
d~ri
dt~Fi +
N∑
i=1
∂V (~r1, ~r2, . . . ., ~rN)
∂~ri
∂~ri
∂t
65

par application des compositions de derivees pour dV (~r1, ~r2, . . . ., ~rN)/dt
On a finalement :
dE
dt= −
N∑
i=1
d~ri
dt
∂V (~r1, ~r2, . . . ., ~rN)
∂~ri+
N∑
i=1
∂V (~r1, ~r2, . . . ., ~rN)
∂~ri
∂~ri
∂t
dE
dt= −
N∑
i=1
d~ri
dt
∂V (~r1, ~r2, . . . ., ~rN)
∂~ri+
N∑
i=1
∂V (~r1, ~r2, . . . ., ~rN)
∂~ri
d~ri
dt= 0
Dans une dynamique Newtonienne, l’energie totale E est donc une constante du mou-
vement (qui ne depend pas du temps). Ceci doit etre verifie dans nos simulations.
A l’equilibre, on a egalement∑N
i=1 ~pi = ~P = ~0 puisque par definition∑N
i=1 ~pi =∑N
i=1~Fi
et∑N
i=1~Fi = ~0 pour un systeme a l’equilibre.
2.3.4 Algorithmes de resolution des equations du mouvement
On resoud le systeme d’equations couplees numeriquement. Pour cela, on discretise en
temps, et on emploie des algorithmes numeriques de resolution. L’algorithme le plus
employe est celui de Verlet, du nom de son auteur Loup Verlet, chercheur francais
de l’Universite d’Orsay. La publication de cet algorithme date de 1964. Il existe deux
algorithmes de Verlet, l’un appele Position Verlet et l’autre appele Velocity Verlet.
Pour la suite, nous supposons que notre systeme d’interet est compose de N parti-
cules, chaque particule i est reperee dans l’espace par sa position ~ri en coordonnees
cartesiennes, et on note ~r = ~r1, ~r2, . . . . . . , ~rN le vecteur de l’espace qui contient
l’ensemble des positions des atomes. De meme, ~v = ~v1, ~v2, . . . . . . , ~vN est le vecteur
de l’espace qui contient l’ensemble des vitesses des atomes. On note ~Fi la force totale
qui s’exerce sur l’atome i (anciennement notee ( ~Fext)i ).
66

• Algorithme Position Verlet
On part des deux developpements de Taylor suivants, ecrits pour chaque atome i du
systeme (developpements avec +δt et −δt, que l’on nomme forward et backward en
anglais) :
~ri(t + δt) = ~ri(t) + ~vi(t)δt +~Fi(t)
2miδt2 +
d3~ri
dt3δt3 + O(δt4)
~ri(t − δt) = ~ri(t) − ~vi(t)δt +~Fi(t)
2miδt2 −
d3~ri
dt3δt3 + O(δt4)
On somme les deux expressions :
~ri(t + δt) + ~ri(t − δt) = 2~ri(t) +~Fi(t)
miδt2 + O(δt4) (75)
soit
~ri(t + δt) = 2~ri(t) − ~ri(t − δt) +~Fi(t)
miδt2 + O(δt4) (76)
La nouvelle position ~ri(t + δt) de l’atome i a l’instant t + δt est connue a partir des
positions anciennes de l’atome aux deux instants precedents t et t−δt , ainsi qu’a partir
de la force totale ~Fi(t) qui s’applique sur l’atome i a l’instant precedent t. L’erreur
commise sur la nouvelle position est a l’ordre 4, O(δt4).
Pour calculer la vitesse de l’atome i a l’instant t, on ecrit un nouveau developpemnt
de Taylor a l’ordre 2 :
~vi(t) =~ri(t + δt) − ~ri(t − δt)
2δt+ O(δt2) (77)
Les expressions 76 et 77 constituent l’algorithme de verlet appele Position Verlet.
On connaıt ainsi la position ~ri de chaque atome i a l’instant t + δt de la dynamique, et
sa vitesse ~vi a l’instant precedent t de la dynamique, c’est-a-dire position et vitesse a
deux instants decales.
67

Pour initier l’algorithme, on doit donner la position ~ri(0) de chaque atome i aux instants
initiaux t = 0 et t = −δt de la simulation, on calcule la force totale ~Fi(0) qui s’exerce
sur chaque atome i a l’instant initial t = 0, et le tour est joue. L’algorithme permet
d’integrer ensuite les mouvements ~ri(t + δt) aux instants ulterieurs.
• Algorithme Velocity Verlet
On commence par ecrire un developpement de Taylor pour obtenir l’expression de la
position ~ride chaque atome a l’instant t + δt (comme ci-dessus) :
~ri(t + δt) = ~ri(t) + ~vi(t)δt +~Fi(t)
2miδt2 + O(δt3) (78)
Pour obtenir les vitesses au meme instant t + δt, il nous faut tout d’abord les forces
~Fi(t + δt) qui s’exercent sur chaque atome, soit ~Fi(t + δt) = −∇Vi[~r1(t + δt), ~r2(t +
δt), . . . ., ~rN(t+δt)]. Dans cette expression, on voit que l’on a besoin de calculer l’energie
potentielle (puis la derivee) du systeme pour les nouvelles positions atomiques ~ri(t+δt).
Si l’on reprend le developpement de Taylor de ~ri en temps arriere (backward en anglais),
en prenant l’instant t + δt comme instant de reference dans le developpement, (on
emploie notamment−δt au lieu de +δt), on a alors :
~ri(t) = ~ri(t + δt) − ~vi(t + δt)δt +~Fi(t + δt)
2miδt2 + O(δt3) (79)
Si l’on additionne les deux developpements de Taylor, on obtient alors :
~ri(t+δt)+~ri(t) = ~ri(t)+~ri(t+δt)+~vi(t)δt−~vi(t+δt)δt+~Fi(t)
2miδt2+
~Fi(t + δt)
2miδt2+O(δt3)
soit
~vi(t + δt) = ~vi(t) +~Fi(t) + ~Fi(t + δt)
2miδt + O(δt3) (80)
Les equations 79 et 80 constituent l’algorithme Velocity Verlet dans lequel les positions
~ri et vitesses ~vi de chaque atome i du systeme sont connues exactement au meme instant
68

de la dynamique t + δt . Note : les 2 algorithmes de Verlet produisent exactement la
meme trajectoire.
Pour initier l’algorithme, on doit donner la position ~ri(0), la vitesse ~vi(0) et la force
~Fi(0) pour chaque atome i du systeme a l’instant initial t = 0 de la simulation, et
le tour est joue. L’algorithme permet d’integrer ensuite les mouvements ~ri(t + δt) et
vitesses ~vi(t + δt) aux instants ulterieurs. Cet algorithme est conceptuellement plus
simple, mais il est aussi legerement plus couteux que Position Velocity, puisque les
forces doivent etre calculees a t + δt et gardees en memoire a l’instant precedent t.
• Algorithme de Leap-Frog (saute-mouton)
Dans cet algorithme, les vitesses et positions des atomes sont calculees a des instants
alternes, et les vitesses font explicitement partie de l’algorithme qui calcule les nouvelles
positions.
On a :
~vi(t +δt
2) =
~ri(t + δt) − ~ri(t)
δt+ O(δt2)
et
~vi(t −δt
2) =
~ri(t) − ~ri(t − δt)
δt+ O(δt2)
ce qui donne :
~ri(t + δt) = ~ri(t) + ~vi(t +δt
2)δt
et
~ri(t − δt) = ~ri(t) − ~vi(t −δt
2)δt
En utilisant la relation deja vue plus haut :
~ri(t + δt) = 2~ri(t) − ~ri(t − δt) +~Fi(t)
miδt2 + O(δt4)
69

dans laquelle on remplace les expressions pour ~ri(t + δt) et ~ri(t − δt) ci-dessus, on
obtient alors :
~vi(t +δt
2) = ~vi(t −
δt
2) +
~Fi(t)
miδt + O(δt3) (81)
On calcule ainsi la vitesse de chaque atome i a l’instant demi-entier t+ δt/2 a partir de
la force totale ~Fi(t) qui s’applique sur l’atome a l’instant t et de la vitesse a l’instant
demi-entier precedent t − δt/2 . La nouvelle position de l’atome est obtenue par la
relation
~ri(t + δt) = ~ri(t) + ~vi(t +δt
2)δt (82)
dans laquelle la vitesse a l’instant demi-entier t + δt/2 est directement inseree.
Pour initier l’algorithme, on doit donner la position ~ri(0) de chaque atome i a l’instant
initial t = 0 de la simulation, la vitesse ~vi(−δt2) de chaque atome a l’instant demi-entier
precedent −δt/2, on calcule la force totale ~Fi(0) qui s’exerce sur chaque atome i a
l’instant initial t = 0, et le tour est joue. L’algorithme permet d’integrer les mouvements
~ri(t + δt) aux instants ulterieurs.
D’autres algorithmes ecrits a des ordres superieurs existent. Ils peuvent etre plus precis,
mais seront toujours plus couteux en temps de calcul, car il faut garder en memoire
beaucoup plus de donnees. Ils ne sont pas forcement meilleurs pour permettre de
conserver les grandeurs qui doivent etre constantes le long des trajectoires, comme
l’energie totale E. Les algorithmes ci-dessus sont en general les meilleurs compromis
precision/rapidite/conservations des grandeurs, et sont ceux que l’on rencontre le plus
frequemment dans les codes de dynamique moleculaire de la litterature. C’est pourquoi
nous ne presentons pas les autres algorithmes ici.
2.3.5 Conditions periodiques aux bords : simulation de milieux continus
Pour modeliser la matiere condensee continue (liquides et solides) avec des tailles fi-
nies et raisonnables (pour les temps de calculs) de systemes, on applique les conditions
70

Fig. 25 – Illustration des conditions aux bords periodiques en simulations numeriques de la matiere
condensee, ici en 2D. Image extraite du livre de A. Gerschel.
aux bords periodiques (PBC en anglais, pour Periodic Boundary Conditions). Un fluide
quelconque est ainsi represente par N atomes places dans une boıte centrale cubique (ou
toute autre forme), qui est repliquee dans toutes les directions de l’espace. Cela consti-
tue 9 boıtes repliquees dans le plan 2D (voir dessin figure 25), et 27 boıtes repliquees
dans l’espace 3D. Il existe dans la simulation une boıte centrale (aussi appelee boıte
principale) de simulation, toutes les autres sont ses repliques. Toute particule qui au
cours de son mouvement sort (respectivement, entre) par un cote de la boıte principale
de simulation a son image qui est localisee dans la boıte la plus proche entrer (res-
pectivement, sortir) dans (respectivement, de) la boıte principale de simulation. Ainsi,
la boıte de simulation contient toujours N particules fixes. Ceci vaut donc pour les
simulations dans les ensembles microcanoniques et canoniques.
A chaque instant de la dynamique, on doit savoir quels sont les atomes qui appar-
71

tiennent effectivement a la boıte principale de simulation. Pour cela, on applique le
schema suivant. Supposons que les coordonnees des particules evoluent entre 0 et L (L
largeur de la boıte) pour chacune des 3 directions de l’espace. Si une particule sort de
la boıte dans la direction ~i de l’espace, cela signifie que sa coordonnee x est telle que
x > L ou x < 0. Pour qu’elle soit a nouveau localisee dans la boıte principale, il faut
translater x de−L dans le 1er cas et de+L dans le 2nd cas. Cela revient a faire entrer
les images de la particule, initialement respectivement situee a gauche (dans le 1er cas)
et a droite (dans le 2nd cas), dans la boıte principale suivant la direction x de l’espace.
L’algorithme employe pour realiser cela dans les 3 directions de l’espace est le suivant :
x = (|x| − L)*sign(1, x)
y = (|y| − L)*sign(1, y)
z = (|z| − L)*sign(1, z)
ou la fonction sign renvoie un signe +1 si x > 0 (meme chose pour y et z), et −1 si
x < 0. Dans l’expression, on a les valeurs absolues de x, y et z qui interviennent.
Si les coordonnees sont comprises entre −L/2 et +L/2 dans chaque direction de l’es-
pace, on ecrit les memes expressions.
Avec la representation periodique, il faut egalement faire attention a prendre en compte
correctement quelles particules interagissent effectivement entre elles. En effet, comme
illustre sur la figure 26, ce sont les images periodiques les plus proches qui interagissent
entre elles, et non pas les particules situees dans la meme boıte centrale de simulation.
En general, les potentiels d’interaction dependent de la distance relative rij entre deux
particules i et j. La distance relative qui correspond a rij minimum (image periodique
la plus proche) est obtenue par :
xij = (|xij| − L)*sign(1, xij)
72

Fig. 26 – Illustration des conditions aux bords periodiques en simulations numeriques de la matiere
condensee et de la facon de prendre en compte les plus proches voisins pour le calcul des interactions.
Image extraite du livre de A. Gerschel.
yij = (|yij| − L)*sign(1, yij)
zij = (|zij| − L)*sign(1, zij)
2.3.6 Liste de Verlet
La liste des voisins de Verlet est employee pour les systemes moleculaires de grande
taille afin de diminuer les temps de calculs sur l’evaluation des interactions inter-
moleculaires et des forces. L’idee de base est de mettre en place une liste d’atomes
voisins pour chaque atome qui constitue le systeme et de ne calculer les interactions
intermoleculaires et les forces que pour ces atomes voisins. L’image correspondante est
representee sur la figure 27. L’idee sous-jacente est qu’il n’est pas besoin de calculer les
interactions et forces entre particules trop eloignees en distance, on ne calculerait que
73

des valeurs proches de zero.
Fig. 27 – Illustration pour les definitions des rayons utilises pour la liste de Verlet.
On choisit deux rayons rc et rl schematises sur la figure 27, qui definissent 2 spheres
qui entourent l’atome i central. La sphere de rayon rc est la sphere principale d’inter-
action autour de l’atome i, et la sphere de rayon rl correspond a l’enveloppe maximale
autorisee : seules les interactions et forces entre l’atome i et les atomes qui sont inclus
dans la sphere maximale de rayon rl sont calculees. Evidemment, les atomes bougent
au cours du temps, tel que des atomes initialement contenus dans la sphere de rayon
rl en sortiront, et des atomes initialement non presents dans cette sphere y rentreront
au cours de leur mouvement. Il faut donc remettre a jour cette liste de voisins par
intervalles reguliers afin de prendre en compte ces mouvements.
L’algorithme de base est donc le suivant. Tous les ∆t pas de temps, pour chaque atome
i du systeme on identifie quels sont les atomes voisins contenus dans la sphere de rayon
maximal rl centre sur l’atome i. Pour les ∆t pas de temps suivants de la dynamique
moleculaire, on ne calculera les interactions et forces que entre ces atomes idenfies. En
general, ∆t =20-30 pas de dynamique moleculaire.
74

3 Fluctuations, moyennes et principe d’ergodicite
Toutes les quantites, a l’exception de l’energie totale E, fluctuent au cours du temps en
dynamique moleculaire. On a ainsi : A(t) = A(~r(t), ~v(t)) avec ~r(t) = ~r1(t),−→r2 (t), . . . , ~rN(t)
et ~v(t) = ~v1(t),−→v2(t), . . . , ~vN(t).
Pour les systemes a l’equilibre thermodynamique qui nous interessent, le systeme est
stationnaire, ce qui signifie que le systeme fluctue au cours du temps mais qu’il n’y a pas
de reel changement fondamental de ce systeme. Dans ces conditions, la moyenne d’une
grandeur calculee sur une duree finie τ de simulation de dynamique moleculaire A =
〈A〉time = 1τ
∫ τ
0A (Γ(t)) dt approche la valeur thermodynamique d’ensemble 〈A〉enssi le
temps τ est suffisamment long, soit : 〈A〉ens = limτ→∞ 〈A〉time
Le principe d’ergodicite dit qu’une moyenne d’ensemble est egale a une moyenne tem-
porelle.
Definissons tout cela.
Comme deja dit, les simulations numeriques nous permettent de calculer des gran-
deurs moyennes extraites de la simulation, valeurs qui seront representatives de
l’echantillonnage qui a ete realise.
En dynamique moleculaire, on suit l’evolution du systeme au cours du temps. Il est
donc logique de calculer toute moyenne d’une grandeur A comme :
A = 〈A〉time = limτ→∞
1
τ
∫ τ
0
A (Γ(t)) dt (83)
ou A(Γ(t)) est la valeur de A au point Γ de l’espace des phases, point explore a l’instant
t de la dynamique. τ est le temps total de la simulation de dynamique moleculaire. Ce
temps doit etre le plus long possible (d’ou τ → ∞) pour que la moyenne ait un sens
statistique. Comme le temps τ est fini dans nos simulations (τdyn), on peut ecrire
75

l’equation precedente a l’aide d’une somme discrete :
A = 〈A〉time =1
τdyn
τ=τdyn∑
τ=1
A (Γ(t)) (84)
et tel que l’indice τ de sommation ne soit rien d’autre que l’index qui courre sur la
trajectoire de dynamique.
En simulation Monte-Carlo, le temps n’est pas present, mais l’indice de sommation
τdyn peut etre remplace par l’indice qui repere la conformation generee τconf . Donc, on
peut ecrire une moyenne comme :
A = 〈A〉conf =1
τconf
τ=τconf∑
τ=1
A (Ω) (85)
ou A(Ω) est la valeur de A pour la conformation Ω generee dans l’espace des confor-
mations accessibles.
La mecanique Newtonienne peut etre reecrite via le formalisme de Liouville, avec
l’operateur de Liouville L defini par :
iL =
(
∑
i
d~ri
dt∇~ri
+∑
i
d~pi
dt∇~pi
)
(86)
les sommes courrent sur le nombre d’atomes du systeme (i = 1 − N). Les points de
l’espace des phases Γ sont repartis selon une loi de densite de probabilite ρens(Γ). Cette
fonction est determinee par le choix de l’ensemble thermodynamique dans lequel les
simulations seront realisees : ρNVE(Γ) dans l’ensemble microcanonique, ρNVT(Γ) dans
l’ensemble canonique, etc.
Cette densite de probabilite est regie par le theoreme de Liouville :
∂ρens(Γ, t)
∂t= −iLρens(Γ, t) (87)
ou l’on note explicitement le temps t dans ρens(Γ, t) pour rappeler que le point Γ de
l’espace des phases est obtenu a l’instant t de la dynamique moleculaire.
76

La solution formelle de l’equation de Liouville est :
ρens(Γ, t) = e−iLtρens(Γ, 0) (88)
ou e−iLt = 1 − iLt − 12L2t2 + . . . ., et ρens(Γ, 0) est la densite de probabilite a l’instant
initial de la dynamique.
Dans ces conditons,
dA(Γ(t))
dt= iLA(Γ(t)) (89)
et
A(Γ(t)) = eiLtA(Γ(0)) (90)
La moyenne de A dans l’ensemble thermodynamique de simulation est alors :
Aens = 〈A〉ens =〈A|ρens〉 =∑
Γ
A(Γ)ρens(Γ) (91)
qui signifie que la moyenne de A depend de l’evolution de ρens(Γ) dans l’ensemble
thermodynamique voulu.
Le principe d’ergodicite nous dit que :
Aens =∑
Γ
A(Γ)ρens(Γ) =< A >time=1
τdyn
τ=τdyn∑
τ=1
A (Γ(t)) (92)
La moyenne d’ensemble est egale a la moyenne sur la duree de la trajectoire de dyna-
mique moleculaire, et que
Aens =∑
Γ
A(Γ)ρens(Γ) = 〈A〉conf =1
τconf
τ=τconf∑
τ=1
A (Ω) (93)
La moyenne d’ensemble est egale a la moyenne sur l’exploration des conformations par
simulation Monte-Carlo.
On note au passage immediatement que Aens = 〈A〉time = 〈A〉conf : les simulations
Monte-Carlo et de dynamique moleculaire doivent fournir les memes valeurs moyennes.
77

Attention :
Les egalites 92 et 93 supposent que l’exploration de l’espace des phases (equation 92)
ou de l’espace des conformations (equation 93) est realise parfaitement et extensive-
ment, ce qui signifie que tout l’espace des phases (respectivement, tout l’espace des
conformations) a ete explore ! Dans la pratique, on doit s’en assurer !
78

4 Temperature en dynamique moleculaire
4.1 Temperature thermodynamique et temperature instan-
tanee
Dans l’ensemble canonique, la temperature d’un systeme compose de N particules est
definie a partir de la moyenne de l’energie cinetique via :
<N∑
i=1
1
2mi~v
2i >NVT=
3
2NkT (94)
Cette expression n’est rien d’autre que le theoreme d’equipartition d’energie : chaque
degre de liberte atomique possede une energie cinetique de kT/2 ou k est la constante
de Boltzmann (soit 1/2mi~v2i = 1/2kT ).
L’hypothese sous-jacente est que les composantes cartesiennes des vitesses atomiques
sont distribuees selon la distribution gaussienne de Maxwell-Boltzmann :
P (vx,i) =
√
mi
2πkTe−
miv2x,i
2kT (95)
La distribution est ecrite ci-dessus pour la composant x de la vitesse de l’atome i, la
meme expression peut etre ecrite pour les 2 autres composantes cartesiennes P (vy,i) et
P (vz,i).
On introduit la notion de temperature instantanee T (~v) :
T (~v) =1
3kN
N∑
i=1
mi~v2i (96)
La temperature instantanee T (~v) fluctue donc au cours du temps puisque les vitesses
atomiques changent au cours du temps, et l’on definit alors la temperature du systeme
dans l’ensemble microcanonique via la moyenne :
TN =1
M
M∑
l=1
T (~vl) (97)
79

La temperature microcanonique depend donc du nombre N de particules qui consti-
tuent le systeme moleculaire et de la duree de la simulation M . Pour N et M grands,
la temperature TN converge vers la temperature thermodynamique correcte. Il faut
retenir deux choses : on ne peut definir la notion de temperature que pour un systeme
moleculaire grand et des simulations de dynamique moleculaire longues : ce sont les
conditions qui assurent que la temperature moyenne issue de la simulation converge
vers la temperature thermodynamique.
4.2 Distribution gaussienne de Maxwell-Boltzmann
Nous allons voir que les vitesses des atomes verifient effectivement une distribution
gaussienne de Maxwell-Boltzmann dans les simulations de dynamique moleculaire dans
l’ensemble micro-canonique. Nous illustrons cela sur un fluide de gaz rare d’argon. La
simulation de dynamique moleculaire est realisee pour 125 atomes d’argon.
Sur la figure 28 on observe bien une distribution gaussienne (de Maxwell-Boltzmann) de
la composante x des vitesses de l’ensemble des atomes d’argon en bleu, la distribution
identique obtenue pour 10 atomes seulement de la boıte de simulation. On remarque
que chaque atome pris individuellement ne verifie pas la distribution gaussienne de
l’ensemble. La distribution des vitesses selon une loi gaussienne de Maxwell-Boltzmann
possede un sens statistique.
Sur la figure 29, on observe que la distribution de Maxwell-Boltzmann des vitesses
est obtenue sur des temps courts de simulation. Pour une simulation de 100 femto-
secondes, la distribution est deja observable meme si elle est accompagnee de bruit.
A partir de 1 pico-seconde de dynamique, la distribution de Maxwell-Boltzmann est
stable et n’evolue plus.
Ces courbes illustrent le fait que dans une simulation micro-canonique NVE, les vi-
tesses des particules verifient spontanement une distribution de Maxwell-Boltzmann,
80

0 1 2 3 4 5 6norme de la vitesse
0
100
200
300
400
histo
gram
me
1 atome4 atomes10 atomes125 atomes
Distribution de la norme des vitesses des atomes100 ps dynamique
Fig. 28 – Distribution des vitesses des atomes d’un fluide d’argon obtenue dans des simulations de
dynamique moleculaire. Etude statistiqiue en fonction du nombre d’atomes pris en compte.
et que cette distribution est obtenue tres rapidement. La redistribution d’energie dans
les differents degres de liberte pour atteindre un etat d’equilibre thermodynamique,
notamment caracterise par une distribution de Maxwell-Boltzmann des vitesses, est
realisee sur des echelles de temps de quelques dizaines-centaines de femto-secondes.
81

0 1 2 3 4 5 6norme de la vitesse
0
2
4
6
8
histo
gram
me
temps 0.1 ps1.0 ps10 ps100 ps
Distribution de la norme de la vitesse des atomesInfluence temps de DYN, Tous atomes pris en compte
Fig. 29 – Distribution des vitesses des atomes d’un fluide d’argon obtenue dans des simulations de
dynamique moleculaire. Etude statistiqiue en fonction du temps de simulation de la dynamique.
82

5 Illustration des fluctuations, et conservation de
l’energie totale E
Sur la figure 30, on illustre l’evolution au cours du temps des grandeurs d’energie
totale E, d’energie potentielle Epot et d’energie cinetique Ecin pour une simulation de
dynamique moleculaire d’un fluide d’argon (125 atomes d’argon dans la simulation).
La duree totale de simulation est de 200 pico-secondes. On observe la conservation
de l’energie totale, et les fluctuations associees de l’energie potentielle et de l’energie
cinetique.
Les 10 premieres pico-secondes correspondent a la periode d’equilibration du systeme.
On voit ainsi les variations des grandeurs au fur et a mesure des periodes d’application
de scaling des vitesses. Une fois cette periode passee, les grandeurs evoluent correcte-
ment. En particulier, les fluctuations faibles de l’energie cinetique montrent bien que
la valeur de la temperature fluctue peu.
83

0 1 2 3 4 5 6 7 8 9 10t (ps)
-6-5-4-3-2-10
etot
100 150 200t (ps)
-6
-5
-4
etot
0 1 2 3 4 5 6 7 8 9 10t (ps)
-7-6-5-4-3
epot
100 150 200t (ps)
-7-6-5-4-3
epot
0 1 2 3 4 5 6 7 8 9 10t (ps)
11.5
22.5
3
ecin
100 150 200t (ps)
11.5
22.5
3
ecin
Fig. 30 – Illustrations des deux regimes d’equilibration et de dynamique au cours du temps. Illus-
tration egalement des fluctuations de l’energie cinetique et de l’energie potentielle au cours du temps
et de la conservation de l’energie totale au cours du temps. Simulation d’un fluide d’argon compose
de 125 atomes.
84

6 Formalisme de la sommation d’Ewald pour les
simulations en conditions periodiques
Ce formalisme s’applique au calcul des interactions et des forces coulombiennes, et est
employe a la fois pour les simulations de dynamique moleculaire et de Monte-Carlo.
Par definition, les interactions coulombiennes entre particules qui appartiennent a des
boıtes repliquees dans l’espace divergent. Pour eviter cela, on emploie le formalisme
d’Ewald developpe par Ewald.
Ceci sera detaille dans l’UE 34.
7 Dynamique moleculaire dans l’ensemble thermo-
dynamique canonique
Par definition, les simulations de dynamique moleculaire sont realisees dans l’ensemble
micro-canonique, ou l’energie totale est constante, a moins de modifier le Hamiltonien
du systeme pour simuler d’autres ensembles thermodynamiques. Pour realiser des si-
mulations de dynamique moleculaire dans l’ensemble canonique, il faut mettre en place
un controle de la temperature du milieu via un thermostat. Il existe plusieurs facons
de realiser cela.
7.1 Thermostat d’Andersen
Le systeme moleculaire est couple a un thermostat par des forces stochastiques ins-
tantanees qui modifient aleatoirement les vitesses des particules. Entre les collisions
stochastiques le systeme evolue selon la dynamique Newtonienne habituelle. Les colli-
sions stochastiques doivent rester decorrelees, ce qui conduit a choisir une distribution
85

de collision de la forme d’une distribution de Poisson P (ν, t) = e−νt ou ν est le pa-
rametre de frequence de collision. P (ν, t) est la probabilite que la prochaine collision
d’une particule avec le bain (ou thermostat) soit obtenue dans l’intervalle de temps dt.
L’algorithme d’Andersen se decompose de la maniere suivante :
1- Le systeme simule suit la dynamique Newtonienne habituelle sur une duree ∆t (et
le parametre ν = 1/∆t).
2- Au bout du temps ∆t , on choisit au hasard un nombre de particules qui subiront des
collisions stochastiques. Nous rappelons que la probabilite qu’une particule soit choisie
dans l’intervalle de temps ∆t est ν∆t .
3- Pour chaque particule tiree au hasard, sa vitesse est modifiee et est tiree au ha-
sard dans une distribution de Maxwell-Boltzmann centree sur la temperature T du
thermostat. Les vitesses des autres particules ne sont pas modifiees.
Il est important de noter ici que pour faire en sorte que le systeme possede exactement
la temperature T , on modifie les vitesses des particules : on modifie donc la dynamique
Newtonienne reelle du systeme. Dans ce cas, toute fonction de correlation temporelle
de grandeurs dynamiques seront dependantes du couplage impose avec le thermostat,
et ne seront pas exploitables facilement. Nous reviendrons la-dessus plus loin.
7.2 Thermostat de Nose-Hoover
On introduit un Hamiltonien modifie de la mecanique classique dans lequel on decrit
N particules couplees a des coordonnees supplementaires qui jouent le role d’un ther-
mostat qui prelevera ou remettra de l’energie cinetique/temperature au sein des degres
de liberte mecaniques. La dynamique engendree n’est plus Newtonienne. La methode
de Nose-Hoover est la bonne methode pour generer les etats de l’ensemble canonique.
86

On ecrit le Hamiltonien H d’un ensemble de N particules comme :
H =
N∑
i=1
~p2i
2mi+ V (~r1, ~r2, . . . , ~rN) +
ζ2Q
2+ g
s
β(98)
dans lequel on reconnaıt le Hamiltonien de la mecanique Newtonienne supplemente par
deux termes qui representent deux variables fictives ζ et s de la dynamique.
Les equations du mouvement correspondantes sont :
d~ri
dt=
~pi
mi
d~pi
dt= −
∂V (~r1, ~r2, . . . , ~rN)
∂~ri− ζ~pi
dζ
dt=
1
Q
[
N∑
i=1
~p2i
mi−
g
β
]
1
s
ds
dt=
d ln s
dt= ζ
Des algorithmes ont ete mis en place pour resoudre ces equations du mouvement. Nous
ne les presentons pas ici.
87

8 Equilibration et echantillonnage en simulations
de dynamique moleculaire
Compte tenu de la prise en compte des positions et des vitesses dans les simulations de
dynamique moleculaire, l’exploration statistique qui est realisee est l’echantillonnage
de l’espace des phases, c’est-a-dire de l’ensemble des positions et vitesses du systeme.
On note en general l’espace des phases par Γ = ~r, ~v ou ~r = (~r1, ~r2, . . . ., ~rN) et
~v = (~v1, ~v2, . . . ., ~vN) sont les vecteurs contenant l’ensemble des positions des atomes
(~r) et des vitesses (~v).
Les simulations de dynamique moleculaire sont decomposees en deux parties : une
premiere partie appelee equilibration avec contrainte de temperature, et une seconde
partie qui correspond a la dynamique moleculaire sans contrainte sur laquelle les
moyennes sont effectivement calculees.
Comme nous l’avons vu precedemment, toutes les quantites issues des simulations de
dynamique moleculaire fluctuent, sauf l’energie totale qui est conservee au cours du
temps. Toutefois, les systemes simules doivent etre a l’equilibre thermodynamique,
c’est-a-dire dans des conditions telles que la temperature du systeme soit en equilibre
(cad egale) avec la temperature du milieu exterieur dans lequel le systeme est plonge.
Typiquement, la temperature du systeme est egale a la temperature du recipient qui le
contient (equilibre thermique avec les parois du recipient).
Il faut donc que la temperature moyenne de notre systeme issue des simulations de
dynamique moleculaire fluctue peu. Nous savons comment proceder pour atteindre cet
objectif : c’est le but de la periode appelee equilibration dans les simulations de
dynamique moleculaire.
Pendant cette periode, on equilibre la temperature du systeme simule en appliquant des
contraintes sur les vitesses. Ainsi, on souhaite que le systeme simule ait une temperature
88

moyenne T0 (par ex : 300K, 50K, 1000K,...) avec des fluctuations faibles autour de cette
valeur. A chaque pas de la dynamique, on calcule la temperature instantanee T (~v). Si
T (~v) > T0 on applique un facteur de scaling sur les vitesses des atomes afin de recentrer
la valeur de la temperature instantanee sur la valeur T0 voulue.
Le facteur d’echelle a appliquer (on applique le meme quel que soit la particule du
systeme) est α =√
T0/T (~v), ce qui signifie que toutes les vitesses des atomes doivent
etre multipliees par cette valeur, soit ~vnewi = α−→v old
i = T0/T (~v)−→v oldi
Si l’on applique ce schema a chaque pas d’integration des equations du mouvement, on
modifie la distribution de Maxwell-Boltzmann des vitesses a chaque pas de la dyna-
mique et l’on perturbe le systeme de facon significative. Comme vu precedemment, tout
systeme evolue spontanement pour donner une distribution de Maxwell-Boltzmann. Si
on laisse le systeme relaxer sans contraintes appliquees sur les vitesses pendant une
duree ∆t, le systeme evoluera naturellement vers un equilibre statistique et une dis-
tribution gaussienne de Maxwell-Boltzmann centree sur une temperature T1. En fait,
l’equilibration est le processus naturel pendant lequel il y a redistribution de l’energie
parmi les differents degres de liberte du systeme.
Si l’on applique par periodes successives ∆t le schema suivant : a) calcul de la temperature
instantanee T (~v) et comparaison a T0, b) si T0 − δT < T (~v) < T0 + δT (avec δT =
ecart a la valeur desiree, valeur fixee a l’avance) : le systeme possede une distribution
de Boltzmann des vitesses centree correctement sur la valeur centrale T0, on laisse le
systeme continuer sa trajectoire. Si T (~v) > T0 + δT ou T (~v) < T0 − δT : le systeme
ne possede pas une distribution de Boltzmann des vitesses centree correctement sur la
valeur centrale T0, et l’on doit appliquer une contrainte de rescaling sur les vitesses telle
que ~vnewi = α−→v old
i = T0/T (~v)−→v oldi . On reprend la dynamique moleculaire en conser-
vant les positions des atomes mais en ayant modifie les vitesses de la facon precedente.
On applique les points a) et b) sur une duree de dynamique τequil que l’on choisit afin
89

d’atteindre une distribution de Boltzmann des vitesses stable et centree correctement
sur la valeur T0 . C’est la periode d’equilibration avec contraintes sur les vitesses.
Une fois la distribution de Boltzmann des vitesses stable obtenue, on laisse le systeme
evoluer sans contraintes de vitesses. La distribution de Boltzmann est maintenue. Cette
periode s’appelle la periode de dynamique moleculaire sans contraintes de vitesses. Elle
s’effectue sur la duree τdyn voulue. La temperature moyenne issue de la simulation sera
bien centree sur T0 et aura des fluctuations faibles. Cela a ete illustre sur la figure 30.
Toutes les grandeurs issues de la simulation de dynamique moleculaire sont calculees
pendant la seconde periode de dynamique. On ne garde pas les valeurs generees pendant
la premiere partie.
90

9 Configurations initiales des simulations numeriques
de dynamique moleculaire
Les conditions initiales se referent aux positions initiales des atomes a l’instant t = 0
des simulations dans le cas des simulations Monte-Carlo et dynamique moleculaire, et
aux vitesses initiales des atomes a t = 0 dans le cas des simulations de dynamique
moleculaire. Les recettes suivantes sont appliquees en simulations Monte-Carlo et en
simulations de dynamique moleculaire. Il n’y a pas de differences.
• Simulation d’un solide : on positionne les atomes sur les sites connus des reseaux
cristallins. Par exemple sur les sites d’un reseau cubique simple si le solide simule
correspond a cette symetrie de reseau, ou d’un reseau cubique faces centrees si le solide
simule correspond a cette symetrie de reseau. Illustration sur la figure 31.
Fig. 31 – Schema d’un reseau cubique faces centrees.
• Simulation d’un fluide ou liquide : deux cas de figure se presentent.
a) On commence la simulation de scratch. On placera les atomes du systeme sur les
sites connus du reseau cristallin le plus simple possible, le reseau cubique simple ou
cubique faces centrees (voir figure 31), sans vitesse initiale. On tire ensuite au hasard
les vitesses des atomes dans une distribution de Maxwell-Boltzmann afin de generer
une temperature initiale du systeme centree sur une valeur voulue. On chauffera pro-
gressivement le systeme pour atteindre la temperature du fluide voulu. En chauffant,
91

les atomes acquierent de l’energie cinetique, peuvent se deplacer et interagir entre eux,
et distordre le reseau cristallin initial pour finalement former un liquide non structure.
Sur la figure 32, on illustre l’evolution des mouvements des atomes d’argon dans une
simulation de dynamique moleculaire de fusion de l’argon. On part de l’argon solide
a tres basse temperature, et l’on augmente progressivement la temperature dans le
systeme afin d’atteindre un liquide d’argon. On represente ici la projection des posi-
tions ~r des atomes dans un plan donne, pour les 4 temperatures choisies. On voit (en
haut a gauche) que le systeme est initialement dans un etat solide puisque les atomes
d’argon ne s’eloignent pas de leur position definie dans le solide. Au fur et a mesure
de l’augmentation de temperature, les atomes acquierent de l’energie cinetique et donc
des mouvements de vibration autour de leur position initiale dans le solide (les taches
associees a chaque atome grossissent progressivement) puis des mouvements de transla-
tion de plus grande amplitude jusqu’a s’eloigner de leur position initiale dans le solide.
Lorsque le liquide est obtenu (en bas a droite), la notion de site associe a chaque atome
n’existe plus et les atomes peuvent venir occuper des positions laissees vacantes par
d’autres atomes. Il n’y a plus de structure ordonnee : c’est un liquide.
b) La simulation peut etre demarree a partir d’une simulation anterieure du meme
fluide realisee a la temperature Told. On reprend ainsi les conditions de positions et
vitesses de cette autre simulation. En generale, les positions sont conservees, et on
applique un coefficient de scaling sur les vitesses pour avoir une distribution centree
autour d’une nouvelle valeur Tnew de temperature.
• Simulation d’une molecule biologique : on part en general d’une conformation
qui a ete obtenue dans des experiences de cristallographie (en phase solide) ou de RMN
(en phase liquide). Il existe une banque de donnees appelee PDB dans laquelle on peut
chercher cela.
92

0 1 2 3 4 50
1
2
3
4
5T=0.001
0 1 2 3 4 50
1
2
3
4
5T=0.01
0 1 2 3 4 50
1
2
3
4
5T=0.1
0 1 2 3 4 50
1
2
3
4
5T=1.0
Fig. 32 – Illustrations de l’evolution des mouvements des atomes d’argon dans une simulation de
dynamique moleculaire en fonction de l’augmentation de la temperature. En allant du haut a gauche
vers le bas a droite, c’est-a-dire en augmentant progressivement la temperature du milieu, on voit
l’augmentation de l’amplitude des mouvements. On passe d’un solide a un liquide. Simulation d’un
fluide d’argon compose de 125 atomes.
93

• Simulation d’un solute immerge dans l’eau liquide
La question est maintenant de savoir comment on prepare une simulation dans laquelle
une molecule de solute (par exemple une molecule biologique) est immergee dans un
solvant (par exemple l’eau liquide).
Le processus est simple et bien etabli. On possede separement la conformation de la
molecule de solute et d’une boıte homogene de solvant, ici d’eau liquide. La boıte
d’eau liquide est non equilibree, c’est-a-dire que les molecules d’eau sont placees sur
les sommets d’un reseau cubique simple solide. Les configurations sont illustrees sur
la figure 33 dans le cas d’un dipeptide d’alanine comme solute et d’une boıte d’eau
composee de 500 molecules.
Fig. 33 – Solute dipeptide d’alanine et boıte de 500 molecules d’eau.
On cree ensuite une cavite de la forme et de la dimension de la molecule de solute au
centre de la boıte d’eau afin d’inserer le solute au centre du solvant. Cela signifie que
l’on enleve des molecules d’eau qui sont presentes au centre de la boıte de simulation,
afin de remplacer l’espace ainsi libere par la molecule de solute.
On laisse ensuite le solvant se relaxer autour du solute. Pour cela, on realise une
dynamique moleculaire dans laquelle la molecule de solute est traitee rigide (pas de
94

deformations intra-moleculaires) et ne peut subir ni translation ni rotation, alors que
les molecules de solvant sont libres de subir toutes deformations intra-moleculaires et
translations et rotations. Le solvant s’adapte donc non seulement a la presence de
l’ensemble des molecules de solvant mais egalement a la presence du solute en son sein.
Le solute est ensuite libre de se relaxer et de bouger dans une dynamique moleculaire
suivante. On obtient alors une configuration comme presentee sur la figure 9. Cette
configuration est alors consideree comme la configuration de depart d’une dynamique
moleculaire du systeme compose d’un solute et d’un solvant aqueux.
95

10 Proprietes issues des simulations de dynamique
moleculaire
10.1 RMSD
RMSD est l’acronyme de Root Mean Square Deviation. Le critere RMSD est employe
pour mesurer la ’difference’ entre la structure d’une molecule obtenue a l’instant t de la
dynamique et celle de reference de la meme molecule. La reference peut etre la structure
de l’instant initial t = 0 de la dynamique, et l’on mesure ainsi les variations de structure
au cours du temps, ou bien la reference peut etre une structure issue d’experiences de
cristallographie ou de RMN et l’on mesure alors les variations de structure au cours de
la dynamique par rapport a cette mesure experimentale.
On definit :
RMSD =
√
∑Ni=1 d2
i
N(99)
ou N est le nombre d’atomes de la molecule et
d2i =
(
xi − xrefi
)2
+(
yi − yrefi
)2
+(
zi − zrefi
)2
avec (xi, yi, zi) les coordonnees de
l’atome i dans la structure generee dans la dynamique a l’instant t, et (xrefi , yref
i , zrefi )
les coordonnees de l’atome i dans la structure de reference.
La somme∑N
i=1 s’entend sur tous les atomes de la molecule, ou bien sur une partie
seulement des atomes de la molecule. Ainsi, pour les proteines, on distingue en general
le squelette de la molecule du reste de la molecule : le RMSD est en general calcule
seulement sur les atomes du squelette.
10.2 Rayon de gyration de molecules
Il est interessant de caracteriser les structures de polymeres (polymeres ou chaınes de
carbones, proteines, acides nucleiques, ...) en termes de molecules allongees ou repliees.
96

Le critere du rayon de gyration permet de quantifier cela. Plusieurs definitions peuvent
etre employees. Par exemple, on peut calculer la distance entre les extremites du po-
lymere et regarder l’evolution de cette distance en fonction du temps. On peut aussi
calculer la distance entre le centre de masse du polymere et ses extremites, et suivre son
evolution au cours du temps. On peut encore calculer le rayon de gyration en moyen-
nant les distances de chaque atome au centre de masse, chaque distance etant ponderee
par la masse de l’atome. Ainsi un atome lourd contribue de facon plus importante a la
valeur du rayon de gyration qu’un atome leger. Comme pour le critere RMSD, on peut
ne prendre en compte que les atomes de la chaıne principale de la molecule (le squelette
des proteines par exemple) pour le calcul du rayon de gyration. On suit l’evolution de
ce critere en fonction du temps.
10.3 Energie libre
Cela est fait en details dans l’UE 34. Nous ne presentons rien ici.
10.4 Fonction de distribution radiale (RDF ou g(r))
Une fonction de distribution radiale est un histogramme normalise (nous verrons le
facteur de normalisation qui est employe) qui decompte le nombre de particules qui
sont presentes a l’interieur de couches. Voir l’illustration de la figure 34. La fonction
de distribution radiale mesure la correlation statistique qui existe entre les positions
des particules. C’est une mesure moyenne qui reflete l’ensemble de la dynamique et
l’ensemble des particules.
Une fonction de distribution radiale est composee de pics qui representent les couches de
particules voisines. Le premier pic est associe a la premiere couche de particules voisines,
le second pic a la seconde couche de particules voisines (a plus longue distance), etc ...
97

Fig. 34 – Illustration des couches et du decompte des particules a l’interieur des couches pour mettre
en place la fonction de distribution radiale.
Plus la couche (ou le pic) est localisee a longue distance, moins il existe de correlations
de position entre les particules qui appartiennent a ces couches. Au contraire, plus
la couche (ou le pic) est localisee a courte distance, plus il existe de correlations de
position entre les particules qui appartiennent a ces couches.
Principe du calcul d’une fonction de distribution radiale :
– choisir une particule i de reference localisee en ~ri
– dessiner une sphere de rayon r et d’epaisseur ∆r autour de ~ri (voir illustration de la
figure 34). ∆r est choisi suffisamment petit.
– une particule j appartient a cette sphere si la distance rij = |~ri − ~rj| est telle que
r − ∆r ≤ rij < r. On definit ainsi des couronnes concentriques d’epaisseur ∆r.
– Si la particule j appartient bien a cette couronne spherique, on incremente un comp-
98

teur d’histogramme note ni(r, ∆r)
– on realise ce decompte d’histogramme pour toutes les particules du milieu.
– on divise ni(r, ∆r) par le volume de la couronne spherique 4πr2∆r, et on moyenne
sur l’ensemble des particules 1N
∑Ni=1
ni(r,∆r)4πr2∆r
– la fonction de distribution radiale est finalement obtenue en normalisant par la den-
site du milieu ρ = NV
ou V est le volume du milieu : g(r) = 1ρ
1N
∑Ni=1
ni(r,∆r)4πr2∆r
, soit
g(r) =V
N2
N∑
i=1
ni(r, ∆r)
4πr2∆r(100)
– on fait attention que ce calcul est realise a chaque pas de la simulation de dynamique
moleculaire. On doit donc moyenner le resultat sur l’ensemble des pas de dynamique,
ici note τ , soit
g(r) =1
τ
V
N2
N∑
i=1
ni(r, ∆r)
4πr2∆r(101)
On definit ensuite le nombre de coordination nc qui represente le nombre de parti-
cules qui sont localisees au maximum a la distance Rc d’une particule de reference (cad
localisees a l’interieur de la sphere de rayon Rc centree sur une particule de reference) :
nc(r) =N
V
∫ Rc
0
4πr2g(r)dr (102)
nc donne le nombre de particules plus proches voisines de la particule de reference.
Les figures 35 illustrent des fonctions de distribution radiale typiques d’un solide et
d’un liquide homogene. Un solide est caracterise par des pics parfaitement localises
dans l’espace, tres faible largeur (pratiquement des diracs) et d’amplitude forte. Le
liquide homogene apparaıt comme un solide deforme avec des pics plus larges et moins
intenses, des pics moins bien definis que pour le solide. La fonction de distribution
radiale doit tendre vers l’asymptote 1 a longue distance, asypmtote caracteristique du
99

Fig. 35 – Illustration des fonctions de distribution radiale typiques d’un solide, liquide homogene
et gaz.
gaz. Un gaz est caracterise par un g(r) qui vaut zero ou 1, c’est une marche d’escalier.
La fonction de distribution radiale peut etre utilisee pour definir des solides ou liquides,
comme decrit ci-desus, mais egalement pour definir les liaisons hydrogenes formees
entre les atomes d’une molecule de solute immergee dans un solvant (par exemple l’eau
liquide). On determine ainsi quels atomes du solute sont offerts a la solvatation et donc
100

potentiellement a la formation de liaisons hydrogene avec les atomes du solvant, et
quels atomes sont enterres et donc non accessibles au solvant. Ceci est illustre dans le
cas de la molecule N-methyl-acetamide (NMA, figure 36) immergee dans l’eau liquide
(calculs de dynamique moleculaire ab initio - M.P. Gaigeot et Coll.) sur la figure 37.
Fig. 36 – Representation de la molecule NMA N-methyl-acetamide (a gauche) et de la molecule
immergee dans une boıte d’eau liquide (a droite).
Sur les figures 37, les premiers pics des distributions radiales sont localises aux distances
de l’ordre de 1.8-2.0 A, ce qui correspond a des valeurs de liaisons hydrogenes. A part
pour les distributions solvant-solvant, les seconds pics sont difficilement discernables,
ce qui montre que seule une couche de solvant est parfaitement organisee autour de la
molecule solute NMA. Les autres couches de solvant ne sont pas bien structurees, ce
qui se traduit par des seconds pics de distribution radiale qui ne sont pas bien definis.
101

1 2 3 4 5 6r (Ang.)
0
0.5
1
1.5
2Trans-NMACis-NMA
1 2 3 4 5 6r (Ang.)
0
0.5
1
1.5
2Trans-NMACis-NMA
3 4 5 6 7 8r (Ang.)
0
1
2
3
4Trans-NMACis-NMA
1 2 3 4 5 6 7r (Ang.)
0
1
2
3
4
5
6Trans-NMACis-NMA
Fig. 37 – Fonctions de distribution radiales solute-solvant et solvant-solvant pour la simulation de
dynamique moleculaire de NMA N-methyl-acetamide immergee dans l’eau liquide (calculs de dyna-
mique moleculaire ab initio - M.P. Gaigeot et Coll.) Conventions : H est l’atome d’hydrogene du groupe
N − H de NMA, O est l’atome d’oxygene du groupe C = O de NMA, C est l’atome de carbone du
groupe C = O de NMA, Ow et Hw sont les atomes d’oxygene et d’hydrogene des molecules d’eau de
solvant. RDF : H-Ow (haut a gauche), O-Hw (haut a droite), C-Ow (bas a gauche), Ow-Ow, Ow-Hw,
Hw-Hw (bas a droite). Sur la figure, on a represente les resultats obtenus ppour Trans-NMA (lignes
pleines) et Cis-NMA (lignes pointillees). Les distances sont en Angstrom.
102

10.5 Fonctions de correlation
Beaucoup de grandeurs physiques seront calculees a partir de fonctions de correlation
temporelle. Cela provient de la Theorie de la Reponse Lineaire, que nous ne presentons
pas ici.
Principe du calcul d’une fonction de correlation temporelle d’une grandeur
quelconque A(t) :
On veut calculer C(t) =< A(t).A(0) > la correlation de la valeur de la grandeur A(t)
a l’instant t avec la valeur de la grandeur A(0) a l’instant initial de la simulation
t = 0. Les < · · · > signifient une moyenne statistique d’ensemble. Cette statistique
s’entend par un nombre important de simulations de dynamique moleculaire realisees
sur le systeme etudie, sur lesquelles on moyenne le calcul de A(t).A(0). Le calcul de
A(t).A(0) a chaque instant t de la simulation est evident a realiser dynamique par
dynamique, il suffit de multiplier les deux grandeurs entre elles instant t par instant t,
il faut ensuite moyenner le resultat a chaque instant t sur l’ensemble des dynamiques
realisees.
C’est la que le “bas blesse”. En effet, les simulations de dynamique moleculaire peuvent
etre relativement cheres en temps de calculs. Aussi, on realise tres rarement plusieurs si-
mulations differentes (qui different par les conditions initiales de positions et de vitesses
des atomes du systeme). On realise donc tres rarement une statistique qui permette de
calculer effectivement une moyenne d’ensemble du type < · · · >.
Pour palier cela, on utilise l’astuce suivante. En general, suivant le principe d’ergodicite,
on realise une seule simulation de dynamique moleculaire suffisamment longue. Chaque
instant t de la dynamique peut etre vu comme un instant t = 0 potentiel, celui d’une
autre simulation, puisque les coordonnees et vitesses des atomes sont differents de ceux
aux instants precedents de la simulation. On va donc dire que chaque instant t de
103

la simulation peut servir de temps t = 0 pour le calcul des fonctions de correlation.
On definit ainsi M origines de temps tj = 0 issues de la simulation de dynamique
moleculaire.
On calcule alors la fonction de correlation C(t) comme suit :
C(t) =1
M
M∑
j=1
A(tj)A(tj + t) (103)
suivant l’image representee sur la figure 38. Il faut bien faire attention a prendre en
compte correctement les instants posterieurs a chaque nouvel instant tj = 0 en trans-
latant de l’intervalle t voulu. La moyenne d’ensemble est representee par la moyenne
sur les M instants origines tj = 0.
Fig. 38 – Illustration de l’astuce des temps t = 0 pour le calcul des fonctions de correlation.
La figure 39 illustre une fonction de correlation typique, ici des vitesses ~v. On voit par
exemple que la fonction de correlation tend rapidement vers zero, en environ 0.2 pico-
secondes. Cela signifie que le vecteur vitesse ~v(t) perd la memoire du vecteur vitesse
initial ~v(0) en environ 0.2 pico-secondes. En d’autres termes, quel que soit l’instant t
de la simulation, le vecteur vitesse ~v(t) perd completement la memoire des vecteurs
vitesse anterieurs de 0.2 pico-secondes.
104

Fig. 39 – Illustration d’une fonction de correlation typique (ici des vitesses ~v).
105

10.6 Coefficient de diffusion
Les simulations de dynamique moleculaire ont l’avantage d’inclure explicitement la no-
tion temporelle. On peut donc s’en servir pour determiner des mouvements de molecules
et en particulier des coefficients de diffusion.
Deux formules peuvent etre employees pour calculer le coefficient de diffusion d’une
particule (atome, molecule) : la formule d’Einstein ou la formule basee sur la fonction
de correlation des vitesses.
La formule d’Einstein est :
D(t) =1
6t|~ri(t) − ~ri(0)|2 (104)
La formule basee sur la fonction de correlation des vitesses est :
D(t) =1
3
∫ ∞
0
< ~vi(t).~vi(0) > (105)
Fig. 40 – Illustration de courbes de diffusion D(t) pour un liquide a deux temperatures differentes.
106

L’indice i dans ces formules represente la particule i que l’on caracterise. Ces deux
formules sont representatives d’un espace a 3 dimensions.
Ces formules nous donne l’evolution d’un coefficient D en fonction du temps comme
illustre sur la figure 40. Ce coefficient est le carre du deplacement moyen suivant la
formule d’Einstein. Le coefficient de diffusion D est obtenu comme la pente de la
courbe.
Si l’on est dans un liquide dans lequel plusieurs particules de type i sont presentes,
on calcule le coefficient de diffusion moyen representatif de l’ensemble des particules
du meme type i. Dans ces conditions, on moyenne les expressions precedentes sur le
nombre de particules du meme type, Ni ici, soit :
D(t) =1
Ni
Ni∑
i=1
1
6t|~ri(t) − ~ri(0)|2 (106)
D(t) =1
3
1
Ni
Ni∑
i=1
∫ ∞
0
< ~vi(t).~vi(0) > (107)
107

10.7 Spectre vibrationnel
Le spectre vibrationnel d’un systeme donne (que ce soit une molecule, l’ensemble des
molecules d’un liquide, un liquide atomique ou moleculaire, un solide atomique ou
moleculaire) est calcule par la transformee de Fourier de la fonction de correlation
des vitesses des atomes du systeme. On l’appelle VDOS pour Vibrational Density Of
States :
V DOS(ω) =∑
i=1,N
∫ ∞
−∞
〈vi(t)·vi(0)〉 exp(iωt) dt (108)
ou la somme courre sur l’ensemble des N atomes qui constituent le systeme dont on
caracterise le spectre vibrationnel.
Cette formule nous fournit le spectre vibrationnel total du systeme considere (3N − 6
modes de vibration pour les N atomes du systeme). Il faut bien faire attention a ce
que certaines des vibrations seront actives en spectroscopie vibrationnelle infrarouge,
certaines seront actives en spectroscopie vibrationnelle Raman, certaines ne seront
actives ni en spectroscopie infrarouge ni en spectroscopie Raman. En aucun cas, le
spectre VDOS ne peut donc etre directement compare aux spectres experimentaux
infrarouge ou Raman. Le spectre VDOS donne l’ensemble des 3N−6 modes de vibration
du systeme considere, sans indication d’activite infrarouge ou Raman.
Le spectre vibartionnel VDOS peut etre decompose en composantes atomiques indi-
viduelles en restreignant la sommation de la formule 108 a des indices d’atomes pre-
definis. On extrait ainsi la contribution d’un atome ou d’un groupe d’atomes particulier
des pics vibrationnels. Cette decomposition est utilisee pour interpreter le spectre vi-
brationnel VDOS afin d’attribuer chaque pic vibrationnel a des mouvements atomiques
specifiques.
Ceci est illustre sur la figure 41 dans le cas de la simulation de dynamique moleculaire
ab initio de la molecule N-methyl-acetamide NMA immergee dans l’eau liquide (voir
108

figure 36 pour l’image du systeme simule) (resultats extraits des travaux de M.P. Gai-
geot et Coll.). Illustration sur le domaine de frequences 1000-2000 cm−1. On presente
ici le spectre VDOS de la molecule de solute N-methyl-acetamide.
109

1000
1200
1400
1600
1800
1000
1200
1400
1600
1800
NM
A
CONH
NM
A
CH
3/C
=O si
de
CH
3/N
-H si
de
C/C
=O si
de
C/N
-H si
de
Fig. 41 – VDOS de N-methyl-acetamide NMA immergee dans l’eau liquide a 300 K. Resultats
extraits des travaux de M.P. Gaigeot et Coll.
110

10.8 Spectre infrarouge
Le spectre vibrationnel infrarouge est obtenu via la transformee de Fourier de la fonc-
tion de correlation du moment dipolaire du systeme considere ~M (note ici M) :
I (ω) =2πβω2
3cV
∫ ∞
−∞
dt 〈M(t)·M(0)〉 exp(iωt) (109)
ou β = 1/kT , c est la vitesse de la lumiere, V est le volume du systeme.
Une illustration est presentee sur la figure 42 dans le cas de la simulation de dyna-
mique moleculaire ab initio de la molecule N-methyl-acetamide NMA, soit en phase
gazeuse soit immergee dans l’eau liquide (voir figure 36 pour l’image du systeme simule)
(resultats extraits des travaux de M.P. Gaigeot et Coll.). Illustration sur le domaine
de frequences 1000-2000 cm−1. On presente sur la figure 42 le spectre infrarouge de la
molecule de solute N-methyl-acetamide.
On voit bien sur la figure 42 les modifications de spectre infrarouge de la molecule
NMA, selon sa conformation Trans ou Cis, et selon qu’elle est en phase gazeuse ou en
phase liquide. Les positions des bandes vibrationnelles actives en infrarouge, leur forme
ainsi que leur intensite varient en effet considerablement selon ces conditions.
On illustre sur la figure 43 l’attribution des bandes vibrationnelles actives infrarouges
de la molecule NMA a partir de la connaissance du spectre infrarouge, du spectre VDOS
et des decompositions du spectre VDOS comme presente dans la section precedente.
La comparaison du spectre infrarouge issu du calcul a celui mesure experimentalement
est presente sur la figure 44 pour NMA immergee dans l’eau liquide. Le tres bon
accord obtenu ici provient essentiellement de la qualite des simulations de dynamique
moleculaire ab initio qui ont ete employees dans le travail. Aucun champs de forces
classiques n’est a l’heure actuelle capable de fournir un tel accord avec l’experience.
111

1000
1500
0
2000
4000
1000
1500
0
600
1200
1000
1500
0
2000
4000
1000
1500
0
600
1200
Fig. 42 – Spectres infrarouges de Trans-NMA (en haut a gauche) et Cis-NMA (en bas a gauche) en
phase gazeuse, de Trans-NMA (en haut a droite) et Cis-NMA (en bas a droiote) immergees dans l’eau
liquide. Spectres presentes sur le domaine de frequences 1000-2000 cm−1, les intensites sont egalement
en unite cm−1. Resultats extraits des travaux de M.P. Gaigeot et Coll.112

Fig. 43 – Illustration de l’attribution des bandes vibrationnelles actives infrarouges de la molecule
NMA : phase gazeuse (en haut) et phase aqueuse (en bas). Resultats extraits des travaux de M.P. Gai-
geot et Coll.
113

Fig. 44 – Comparaison du calcul du spectre infrarouge issu du calcul et celui mesure
experimentalement est presente sur la figure 44 pour NMA immergee dans l’eau liquide. L’experience
est en traits pleins et la simulation en traits pointilles. Resultats extraits des travaux de M.P. Gaigeot
et Coll.
114

11 Mise en place d’un code de dynamique moleculaire
pour des systemes simples
115

12 Principes de la dynamique moleculaire ab initio
12.1 Dynamique de type Born-Oppenheimer
12.2 Dynamique de type Car-Parrinello
116