Sur quelques modes électriques d'entretien du pendule. pendule ...
Upload
mousse2010Category
view
148download
8
Pendule de Foucault
1
PENDULE DE FOUCAULT
Gilbert VINCENT
Février 2004
http://perso.wanadoo.fr/physique.belledonne/

Pendule de Foucault
2
Plan du pendule fixe par rapport à une étoile
La terre tourne
Plan du pendule fixe par rapport à une étoile
La terre tourne
Dans le repère terrestre,le plan du pendule:
• effectue un tour en 1 journée
• est fixe (plan de l’équateur)
Au pôle
A l’équateur
Plan du pendule fixe par rapport à une étoile
La terre tourne
Plan du pendule fixe par rapport à une étoile
La terre tourne
Dans le repère terrestre,le plan du pendule:
• effectue un tour en 1 journée
• est fixe (plan de l’équateur)
Au pôle
A l’équateur

Pendule de Foucault
3
PENDULE DE FOUCAULT "Je vous invite à venir voir tourner la Terre". Non la proposition de Foucault n’était pas d’observer le mouvement des étoiles, mais de s’enfermer dans une pièce et de regarder osciller un pendule. Ceci mérite bien une petite étude que nous allons mener selon l'itinéraire ci-dessous : Le pendule aux pôles et à l'équateur Présentation du problème général Forces appliquées Accélération: repère Galiléen Terre-Etoiles Application du principe fondamental de la dynamique (PXY) Position d'équilibre et simplifications Introduction de la variable complexe Résolution avec conditions initiales Equation du mouvement et conclusion Mouvement dans un repère tournant Autre résolution: coordonnées locales polaires (P, r, α) Le pendule et les pseudo-forces LE PENDULE SIMPLIFIE
LE PENDULE AU POLE NORD (OU SUD) ET A L’EQUATEUR
Aux pôles Un pendule qui serait écarté de sa position d’équilibre, et lâché sans vitesse initiale, au pôle
ne reste pas dans un plan fixe par rapport à l’observateur assis à côté. Il semble faire un tour en 1 journée.
Voici la raison : un pendule lancé au pôle garde une direction constante … PAR RAPPORT AUX ETOILES.
Il n’y a aucune force susceptible de faire tourner son plan d’oscillation avec la terre. Il ne faut pas inventer une force d’ "entraînement" communiquée par l’air ou par tout autre moyen! Si le pendule est mis sous vide, son comportement est inchangé.
Ce plan étant fixe par rapport aux étoiles, c’est la terre qui tourne sous le pendule, en un peu moins de 24h.
NB. Le temps de révolution est de 23h 56min 04,1sec, jour sidéral, période nécessaire pour
retrouver une étoile à la même position. Ce temps est facile à vérifier en observant le lever ou le coucher, ou encore le passage d’une étoile brillante plusieurs jours de suite.

Pendule de Foucault
4
Vers Etoile
λ
O
N
P
APoint de fixation du pendule
S
Ω M L
Equateur
Mér
idie
n
Parallèle Ir
Kuur
Eur
JurH
ϕ
Vers Etoile
λ
O
N
P
APoint de fixation du pendule
S
Ω M L
Equateur
Mér
idie
n
Parallèle Ir
Kuur
Eur
JurH
ϕ

Pendule de Foucault
5
A l'équateur A l’équateur, le plan d’oscillation est fixe, quelle que soit la direction dans laquelle on
l’écarte avant de le lâcher. Ceci se comprend encore très bien si le pendule est lancé dans le plan de l’équateur : le plan de l’équateur est fixe par rapport aux étoiles, celui du pendule aussi, il n’y a donc pas de rotation du plan du pendule dans le repère local.
Si à l’équateur le pendule est lancé suivant une direction Nord Sud, c’est un peu plus compliqué, mais le physicien dirait que vu la symétrie du problème, il n’a aucun argument pour fixer le sens de rotation dans un sens ou dans l'autre, donc le plan ne tourne pas.
Si la direction du lâcher est quelconque, la discussion se complique, et comme nous ne sommes généralement ni au pôle ni à l’équateur, il est temps de formaliser le problème.
PRESENTATION DU PROBLEME GENERAL La figure pose le problème dans toute sa généralité. Le pendule, supposé ponctuel, repéré
par le point M, est suspendu au point A par un fil de longueur L. La terre est supposée à symétrie sphérique, seule dans l’espace en compagnie d’étoiles
lointaines. Le point P et les axes X ( Ir
), Y ( Jur
), Z ( Kuur
) sont le repère local que l’on pourrait matérialiser dans un amphithéâtre.
La question que l’on se pose est : quelle est la trajectoire du pendule dans le repère local ?
FORCES APPLIQUEES Il n’y a que DEUX forces appliquées à la masse m du pendule :
• l’attraction de la terre • la tension du fil
Le problème du pendule est un trop grand classique pour le reprendre ici et nous allons
simplement utiliser certaines de ses conclusions. Pour des petits mouvements (X ou Y très petits devant L), la résultante de ces 2 forces est
une force proportionnelle à l'écart θ du pendule : F mgθ= − ou ( / )F mg PM L= − Toujours du fait des faibles amplitudes envisagées, la variable Z (altitude) ne sera pas
considérée, et le vecteur PMuuuur
sera repéré par : PM X I Y J= +uuuur r ur
La force résultante (Terre+fil) est alors très bien approchée par l'expression:
( )mgF X I Y JL
= − +ur r ur
ou 20 ( )F m X I Y Jω= − +
ur r ur avec 2
0gL
ω =
Cette force est nulle si M est en P, et proportionnelle à l'écart du pendule par rapport à la droite OA.
NB: ces approximations poseront un petit problème plus loin (cf. application PFD)

Pendule de Foucault
6
Plan du pendule OAM (ou PAM). Résultats classiques θ petit
Vers centre O de la terre
M
A
P
θ
Kuur
Force résultante
La pesanteur ramène le pendule suivant AP (ou AO)
L
Position dans PXYZ
PM X I Y J≅ +uuuur r ur
20
20
( )RF m X I Y JgL
ω
ω
≅ − +
=
uur r ur
Mouvement suivant Z négligeable
Plan du pendule OAM (ou PAM). Résultats classiques θ petit
Vers centre O de la terre
M
A
P
θ
Kuur
Force résultante
La pesanteur ramène le pendule suivant AP (ou AO)
L
Position dans PXYZ
PM X I Y J≅ +uuuur r ur
20
20
( )RF m X I Y JgL
ω
ω
≅ − +
=
uur r ur
Mouvement suivant Z négligeable

Pendule de Foucault
7
ACCELERATION: REPERE INERTIEL TERRE-ETOILES Le repère « amphithéâtre » est insuffisant pour traiter ce problème, car même si son
extension spatiale n’est pas très importante, le temps sur lequel il se déroule exige un repère plus "large". Dans un repère de type local (amphithéâtre), l’application du principe fondamental conduirait au mouvement classiquement établi d’oscillations harmoniques dans un plan fixe, ce qui est contraire à l’observation.
Calculons donc l’accélération dans un repère constitué par le centre de la terre O et des axes
lié aux étoiles : ce repère prend donc bien en compte la rotation que nous caractérisons par le vecteur Ω
ur : suivant l’axe de rotation de la terre, orienté du Sud vers le Nord (voire le tire-
bouchon) dont le module est égal à 2 /86164π rad/s et qui est constant en module, sens et direction.
Position La position du pendule est repérée par :
( )OM RK X I Y J= + +uuuur uur r ur
Rappel : Z est considéré comme négligeable. Pour calculer l'accélération, nous pouvons employer le théorème de composition des
accélérations (voir annexe), mais il est tout à fait possible d’opérer par différentiation, ce que nous allons faire. Nous aurons besoin pour cela des différentielles de vecteurs unitaires, que nous allons établir tout de suite en nous aidant des figures ou mieux d’un globe terrestre.
d I E dλ= − r ur
vecteur dans le plan de rotation (plan du parallèle) sind J I dϕ λ= −
ur r doit faire zéro si 0ϕ = (translation pure)
cosd K I dϕ λ= + uur r
doit faire zéro si 2ϕ π= ( Kuur
tourne sur lui-même) d E I dλ= ur r
vecteur dans le plan de rotation (plan du parallèle) NB: le vecteur E
ur ne fait pas partie de la panoplie ordinaire des trois vecteurs de base des
repères sphériques, mais il est extrêmement utile. Il n’y a plus qu’à calculer la vitesse puis l’accélération.
Vitesse Fort de ces relations, calculons la variation différentielle de la position: dOM Rd K Xd I Yd J IdX JdY= + + + +uuuur uur r ur r ur
Soit, en remplaçant les différentielles des vecteurs par leurs expressions:
[ cos sin ]dOM R I X E Y I d IdX JdYϕ ϕ λ= − − + +uuuur ur ur r r ur
Pour obtenir la vitesse, il faut diviser par dt et, compte tenu de /d dtλ = Ω :
[( cos sin ) ]MdX dYV R Y I X E I Jdt dt
ϕ ϕ= − − Ω + +uur r ur r ur
Ceci est l'expression de la vitesse du pendule dans le repère Galiléen. Dans le repère local, ce serait simplement ( ) ( )dX dt I dY dt J+
r ur.
Expression à vérifier en essayant de visualiser chacun des termes : annuler X et Y, faire 0ϕ = et / 2ϕ π= …

Pendule de Foucault
8
Ir
Jur
Vers Nord
Vers Est
P
Kuur
X
Y
Eur
Jur
Vers Nord
Parallèle à l’équateur
P
Kuur
Z
Y
Ωur
Suivant OP(vers le haut)
Coordonnées locales X,Y,Z
Cteϕ = (Latitude)
Plan tangent à la sphère
PS: la direction Z est notée "suivant OP"; il n’est pas écrit "suivant la verticale". Si la verticale est bien définie comme la direction du fil à plomb, OP et la verticale ne sont pas confondus, nous verrons plus loin pourquoi.
Ir
Ir
Jur
Vers Nord
Vers Est
P
KuurKuur
X
Y
Eur
Jur
Vers Nord
Parallèle à l’équateur
P
Kuur
Z
Y
Ωur
Suivant OP(vers le haut)
Coordonnées locales X,Y,Z
Cteϕ = (Latitude)Cteϕ = (Latitude)
Plan tangent à la sphère
PS: la direction Z est notée "suivant OP"; il n’est pas écrit "suivant la verticale". Si la verticale est bien définie comme la direction du fil à plomb, OP et la verticale ne sont pas confondus, nous verrons plus loin pourquoi.
PS: la direction Z est notée "suivant OP"; il n’est pas écrit "suivant la verticale". Si la verticale est bien définie comme la direction du fil à plomb, OP et la verticale ne sont pas confondus, nous verrons plus loin pourquoi.
IrIr
Plan du parallèle (ou plan équatorial)Attention, ce n’est pas un dessin dans l’espace, mais dans un plan
EurI
r
Vers Est
Parallèle
P
X
Vers étoile λddtλ
= Ω
λ n’est pas la longitude, mais un angle qui repère la rotation du plan méridien par rapport aux étoiles
Parallèl
e
Ir
Vers Est
P X
Ωur
Eur
est normal au plan du parallèle(et à celui de l’équateur)
ΩurPlan du parallèle (ou plan équatorial)
Attention, ce n’est pas un dessin dans l’espace, mais dans un plan
EurI
r
Vers Est
Parallèle
P
X
Vers étoile λddtλ
= Ω
λ n’est pas la longitude, mais un angle qui repère la rotation du plan méridien par rapport aux étoiles
Parallèl
e
Ir
Vers Est
P X
Ωur
Eur
est normal au plan du parallèle(et à celui de l’équateur)
Ωur

Pendule de Foucault
9
Accélération Il n’y a plus qu’à recommencer exactement la même gymnastique, et calculer MdV
uurpuis
/MdV dtuur
. Dans MdVuur
, garder ( / )d dX dt (variation de la vitesse suivant X dans le repère local) qui deviendra 2 2( / ) / /d dX dt dt d X dt= . Si vous avez un peu de mal, définissez /XV dX dt= et
/YV dY dt= . Ceci conduit finalement à l’accélération : 2
22
2
2
2 2
[ 2 sin ]
[ 2 sin cos ]
Md X dY X Idt dtd Y Jdt
dX Y R Edt
ϕ
ϕ ϕ
Γ = − Ω − Ω
+
+ − Ω + Ω − Ω
uuur ur
ur
ur
Là encore il est possible de visualiser les composantes. Mais du fait du rassemblement (mathématique) de termes, certaines composantes sont difficiles à "voir" : ce sont notamment les termes Coriolis, qui se distinguent par un facteur 2 et qui sont ici des couplages translation-rotation. NB : il est beaucoup plus facile de visualiser les termes dans MdV
uurque dans MΓ
uuur.
APPLICATION DU PRINCIPE FONDAMENTAL L’application de
MF m= − Γur ur
avec, comme nous l’avons vu pour la force résultante : 20 ( )F m X I Y Jω= − +
ur r ur nous fournit l’équation différentielle vectorielle:
20 ( ) 0M X I Y JωΓ + + =
uuur r ur L'expression de MΓ
uuurn'est pas réécrite ici.
Nous cherchons X et Y. Pour obtenir deux équations scalaires, il faut projeter sur 2 axes. Le plus commode est de projeter sur les axes X et Y, c’est à dire de multiplier scalairement par les vecteurs I
rpuis J
ur. Attention .J E
ur ur n'est pas nul (= sinϕ− ).
22 202 2 sin ( ) 0d X dY X
dt dtϕ ω− Ω + − Ω =
22 2 202 2 sin [ ( sin ) ] sin cosd Y dX Y R
dt dtϕ ω ϕ ϕ ϕ + Ω + − Ω = −Ω
NB: Là se situe le petit problème évoqué au début: l'accélération est valable à 3 dimensions et nous pouvons donc établir une 3ème équation en multipliant par exemple Γ
ur par K
uur
( . cosK E ϕ=uur ur
). Du fait des approximations opérées, cette équation n'a pas de sens.
POSITION D’EQUILIBRE ET SIMPLIFICATIONS
Plaçons nous tout à la position d’équilibre du pendule : X Cte= et Y Cte= . Dans le repère local PXY la vitesse est nulle, ainsi que l’accélération. Les 2 équations conduisent à :
. 0eqX = 2
. 2 20
sin cos( sin )eqY Rϕ ϕ
ω ϕΩ
= −− Ω

Pendule de Foucault
10
P X
Y
Yeq
2
. 2 20
sin cos( sin )eqY R ϕ ϕ
ω ϕΩ
= −− Ω
Position d’équilibre du pendule
Changement d’axe à effectuer pour éliminer le terme constant des équations
2
.1 sin 22eq
RY Lg
ϕΩ≅ −
Pour le pendule classique, Yeq/L est au maximum égal à 0,0017P et P’ sont pratiquement confondus
EQUILIBRE
P’
P X
Y
Yeq
2
. 2 20
sin cos( sin )eqY R ϕ ϕ
ω ϕΩ
= −− Ω
Position d’équilibre du pendule
Changement d’axe à effectuer pour éliminer le terme constant des équations
2
.1 sin 22eq
RY Lg
ϕΩ≅ −
Pour le pendule classique, Yeq/L est au maximum égal à 0,0017P et P’ sont pratiquement confondus
EQUILIBRE
P’

Pendule de Foucault
11
.eqX ne nous surprend pas, mais pourquoi .eqY n’est-il pas nul ? Il suffit de regarder la figure de la présentation du problème pour se rendre compte que du fait de la rotation de la terre, le pendule doit s’écarter le la direction AO. Pour parler "Galilée", le pendule décrivant un cercle, il faut une force pour assurer cette rotation, et c’est ce petit écart
.eqY qui permet à la pesanteur d'assurer cette force. Si cela ne vous convainc pas, pensez à la pseudo force centrifuge … A ce stade, deux réflexions. 1) On peut effectuer un changement de variable très simple .' eqY Y Y= − . C’est une simple translation des axes qui ne change pas les dérivées. Le terme constant de la deuxième équation différentielle disparaît. En réfléchissant on s’aperçoit d’ailleurs que le pendule va "automatiquement" faire ce changement de variable, puisqu'au repos, il va se positionner en .eqY Y= , suivant la verticale du lieu qui n'est donc pas suivant PA (ou OP). 2) Pour notre système, Ω est tout à fait négligeable devant 0ω : les périodes correspondantes sont la journée et quelques secondes: 2 8( / ) 10 àω − −10Ω = 10 Donc nous avons sensiblement :
2
. 20
sin coseqY R ϕ ϕωΩ
= − soit 2
.1 sin(2 )2eq
RY Lg
ϕΩ= −
La valeur de eqY est maximum sous 45 degrés de latitude, et pour L=10m, ordre de grandeur des grands pendules de démonstration, 17eqY mm= . Cette correction est donc faible, et on pourrait la négliger, et donc supprimer le terme constant sans autre forme de procès. Nous allons cependant effectuer le changement de variable .' eqY Y Y= − en gardant en mémoire que cette correction est faible et que pratiquement, les déplacements observés vérifient Y', donc la valeur que nous allons calculer, et non pas Y. Les deux équations s'écrivent finalement, en négligeant 2Ω devant 2
0ω : 2 '
2
2 '
20
20
'2
2 sin 0
2 sin 0
d X dY Xdt dt
d Y dX Ydt dt
ϕ ω
ϕ ω
− Ω + =
+ Ω + =
En supprimant la rotation de la terre ( 0Ω = ), les équations deviennent de très classiques équations harmoniques indépendantes. Cette rotation couple donc X et Y, de manière assez symétrique, par un terme de dérivée première.
INTRODUCTION DE LA VARIABLE COMPLEXE ZC En posant
'CZ X iY= + et sinS ϕΩ = Ω
Les 2 équations se résument à une seule:

Pendule de Foucault
12
Ir
Jur
Vers le Nord
Vers l’EstP’
X
Y’
2Xinit
(Ωsinϕ).t
Trajectoire du penduledans P’XY’1/ Oscillations harmoniques de pulsation ω02/ Rotation du plan d’oscillationSi ϕ>0, sens horaireSi ϕ<0, sens trigonométrique
CONCLUSION

Pendule de Foucault
13
2202 2 0C C
S Cd Z dZi Zdt dt
ω+ Ω + =
Un deuxième changement de variable
0 exp[ ]C C SZ Z i t= Ω ou 0 exp[ ]C C SZ Z i t= − Ω ( sinS ϕΩ = Ω ) reporté dans l'équation en ZC conduit à:
22 200 02 [ ] 0C
S Cd Z Z
dtω+ + Ω =
qui compte tenu des valeurs respectives de 0ω et ( sin )S ϕΩ = Ω se simplifie sous la forme: 2
200 02 0C
Cd Z Z
dtω+ =
Nous ne pouvions pas rêver beaucoup plus simple! C'est l'équation d'une évolution harmonique de pulsation 0ω . Sans aller plus loin dans les calculs, nous pouvons donc décrire le mouvement:
• c'est une oscillation harmonique de pulsation 0ω , traduite par l'équation 2 2 2
0 0 0 0C Cd Z dt Zω+ = • le plan de l'oscillation tourne avec une vitesse - SΩ : c'est le sens de l'équation
0 exp[ ]C C SZ Z i t= − Ω
RESOLUTION AVEC LES CONDITIONS INITIALES
La solution de l'équation en 0CZ s'écrit:
0 0 0exp( ) exp( )CZ A i t B i tω ω= + − Soit en en revenant à CZ :
0 0exp( )[ exp( ) exp( )]C sZ i t A i t B i tω ω= − Ω + − Fixons nous des conditions initiales. Par exemple:
' '.0, , 0, / 0, / 0initt X X Y dX dt dY dt= = = = =
Appliquons ces conditions à la variable complexe CZ et à sa dérivée: 0 0exp[ ( ) )] exp[ ( ) ]C s sZ A i t B i tω ω= − Ω + − + Ω
0 0 0 0/ ( ) exp[ ( ) )] ( ) exp[ ( ) ]C s s s sdZ dt i A i t i B i tω ω ω ω= − Ω − Ω − + Ω − + Ω Les deux inconnues A et B doivent vérifier:
. ( 0)init C tX Z A B== = + 0 0 00 ( / ) ( ) ( )C t s sdZ dt i A i Bω ω== = − Ω − + Ω
d'où: .
0
.
0
(1 )2
(1 )2
init S
init S
XA
XB
ω
ω
Ω= +
Ω= −

Pendule de Foucault
14
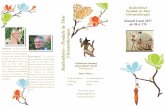
TRAJECTOIRE LOCALE DU PENDULE
1/ Hémisphère Nord. 2/ Le rapport Ω/ω0 est très exagéré (10-1)
par rapport à celui du pendule de Foucault (10-4)
Conditions initiales:• X=Xinit• vitesse nulle
-1,0
-0,5
0,0
0,5
1,0
-1,0 -0,5 0,0 0,5 1,0
Y’/Xinit.
X/Xinit.
P’
-1,0
-0,5
0,0
0,5
1,0
-1,0 -0,5 0,0 0,5 1,0
Y’/Xinit.
X/Xinit.
P’ EstOuest
Nord

Pendule de Foucault
15
La fonction CZ s'écrit donc: ' . .
0 00 0
(1 )exp[ ( ) )] (1 ) exp[ ( ) ]2 2init S init S
C s sX XZ X iY i t i tω ω
ω ωΩ Ω
= + = + − Ω + − − + Ω
En identifiant les termes réels et imaginaires: .
0 00 0
' .0 0
0 0
(1 )cos[( ) ] (1 )cos[( ) ]2
(1 )sin[( ) ] (1 )sin[( ) ]2
init S Ss s
init S Ss s
XX t t
XY t t
ω ωω ω
ω ωω ω
Ω Ω= + − Ω + − + Ω
Ω Ω
= + − Ω − − + Ω
Soit encore, en utilisant les lois d'additions de la trigonométrie:
. 0 00
'. 0 0
0
[cos( )cos( ) sin( )sin( )]
[ cos( )sin( ) sin( ) cos( )] .sin
Sinit s s
Sinit S s S
X X t t t t
Y X t t t t
ω ωω
ω ω ϕω
Ω= Ω + Ω
Ω= − Ω + Ω Ω = Ω
Voir la figure "trajectoire locale du pendule" pour illustration. Pour avoir une idée approchée (mais attention, ceci déforme les trajectoires) en négligeant
0/s ωΩ , les expressions deviennent très simples:
. 0
'. 0
'
cos( ) cos( )
cos( )sin( )
( ) .sin
init s
init S
S S
X X t t
Y X t t
Y tg tX
ω
ω
ϕ
= Ω
= − Ω
= − Ω Ω = Ω
Cette dernière relation a une signification très claire. Pour résumer: Le pendule effectue un mouvement harmonique de pulsation 0ω telle que 2
0 /g Lω = Le plan du pendule effectue un mouvement de rotation dans le sens trigonométrique dans
l'hémisphère Sud et dans le sens horaire dans l'hémisphère Nord (l'équateur est l'équivalent d'un miroir).
La vitesse angulaire SΩ de cette rotation est égale à sinϕΩ , liée à la latitude ϕ et à la vitesse de rotation de la terre Ω . Elle est nulle à l'équateur et égale à Ω aux pôles. La période en un lieu donné est T=1 jour/sinϕ
C'est le génie du pendule de Foucault: enfermé dans une cave, on peut affirmer que la terre
tourne, et même déterminer la latitude si la période de rotation de la terre est supposée connue. Attention, ces conclusions sont sensiblement différentes lorsque Ω n'est pas négligeable
devant ω0. C'est notamment le cas lors d'expériences en laboratoire ou Ω est simulé avec une table tournante.
Il existe une explication simplifiée pour expliquer la période de rotation du plan du pendule sous une latitude quelconque. Basée sur la différence des vitesses de la terre au point extrême atteint par le pendule, elle marche lorsque le plan d’oscillation est Nord-Sud, mais reste muette pour une orientation Est-Ouest: elle est présentée en fin de document.
A titre d’exercice, une approche avec des coordonnées locales polaires est maintenant proposée.

Pendule de Foucault
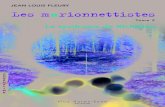
16
y
xXinit.
(Ω.sinϕ/ω)Xinit.
Mouvement dans l’espace ZC’Le système d’axes P’xy tourne à la vitesse –ΩS
par rapport au système local P’XY
Ellipse extrêmement aplatie, rapport des axes ~10-4
A ne pas confondre avec la trajectoire réelle du pendule (cf. figure précédente)
P’
X
St−Ω
Trajectoire du pendule
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
-1.0 -0.5 0.0 0.5 1.0
Trajectoire dans le plan P’XY d’un pendule lancé avec vitesse initiale
négative suivant Y.

Pendule de Foucault
17
MOUVEMENT DANS UN REPERE TOURNANT
Nous venons de voir que dans notre repère P’XY, fixe par rapport au sol, le mouvement du
pendule a une allure en "étoile".
Il est beaucoup plus simple dans un repère tournant à la vitesse S−Ω . C’est en fait le repère de la variable complexe 0CZ , dans lequel le mouvement a été trouvé égal à :
0 0 0exp( ) exp( )CZ A i t B i tω ω= + − En reprenant les conditions initiales précédentes (lâcher sans vitesse initiale le long de l’axe
X), nous avons montré que les constantes A et B respectent :
.
0
.
0
(1 )2
(1 )2
init S
init S
XA
XB
ω
ω
Ω= +
Ω= −
Appelons x et y les variables du repère 0CZ . Nous avons en développant les exponentielles imaginaires :
. .0 0 0 0 0
0 0
(1 )[cos sin ] (1 )[cos sin ]2 2init S init S
CX XZ x iy t i t t i tω ω ω ω
ω ωΩ Ω
= + = + + + − −
D’où, en identifiant les termes réels et imaginaires :
. 0
. 00
cos
sin
init
Sinit
x X t
y X t
ω
ωω
=Ω
=
Ceci est l’équation d’une ellipse, très aplatie puisque 0S ωΩ est faible, parcourue en un temps
02T π ω= , période du pendule
NB : La littérature traite très généralement le cas du lâcher sans vitesse initiale. La trajectoire
observée doit donc être celle de la figure "Trajectoire locale du pendule" : à chaque demi-période, le pendule s’immobilise. Or on trouve souvent dans cette littérature des courbes aussi esthétiques que fantaisistes, qui correspondent en fait à des lâchers avec une vitesse tranversale.
Dans le repère 0CZ que nous venons d’étudier, lorsque le pendule arrive à une extrémité (x=Xinit par exemple), il est très facile de montrer que le pendule a une vitesse dy/dt =XinitΩS, qui est égale et opposée à la vitesse d’entrainement du système d’axes Xinit(-ΩS) : le pendule est bien immobile.

Pendule de Foucault
18
Coordonnées locales polaires
Ir
Jur
Vers Nord
Vers Est
P
Kuur
X
Y
Plan tangent à la sphère
Murw
ur
θ
r
Coordonnées locales polaires
Ir
Jur
Vers Nord
Vers Est
P
KuurKuur
X
Y
Plan tangent à la sphère
Murw
ur
θ
r

Pendule de Foucault
19
PENDULE DE FOUCAULT: COORDONNEES POLAIRES
Accélération D'après la relation de composition des accélérations (Annexe 1)
2 [ ]M P R RdV PM PMdtΩ
Γ = Γ + Ω ∧ + Ω ∧ Ω ∧ + ∧ + Γur
uuur uur ur uur ur ur uuuur uuuur uur
RVuur
et RΓuur
sont la vitesse et l'accélération dans le repère dit relatif PXY
En supprimant le terme en [ ]PMΩ ∧ Ω ∧ur ur uuuur
, négligeable (voir paragraphes précédents), et le terme d dtΩ
ur qui est nul:
2M P R RVΓ ≅ Γ + Ω ∧ + Γuuur uur ur uur uur
Dans la suite, comme précédemment, nous négligerons aussi la composante Z (altitude).
Force résultante Comme nous l’avons vu, la force résultante s'écrit:
20F m PMω≅ −
ur uuuur
Application du PFD L’équation du PFD MF mΓ=
ur uuur
s’écrit finalement: 20 2 0R P RPM VωΓ + + Γ + Ω ∧ =
uur uuuur uur ur uur r
Avec:
2( cos )P R EϕΓ = − Ωuur ur
car le point P décrit un cercle (un parallèle) de rayon cosR ϕ , et les relations classiques des coordonnées polaires: PM ru=uuuur r
Rdr dV u r wdt dt
θ= +
uur r ur
2 22
2 2[ ( ) ] [2 ]Rd r d dr d dΓ r u r r wdt dt dt dt dt
θ θ θ= − + +
uur r ur
Ecrivons tout de suite deux équations scalaires en projetant l'équation du PFD sur u
ret wur
. (Se rappeler qu'un produit vectoriel impliquant u
r est obligatoirement perpendiculaire à u
r !)
22 2 2
02 ( ) ( cos ) . 2 ( ). 0d r d dr r R E u r w udt dt dt
θ θω ϕ− + − Ω + Ω ∧ =ur r ur ur r
2
22[2 ] ( cos ) . 2 ( ). 0dr d d drr R E w u w
dt dt dt dtθ θ ϕ+ − Ω + Ω ∧ =
ur ur ur r ur
Avec: . (cos sin ).(cos sin ) sin sinE u K J I Jϕ ϕ θ θ ϕ θ= − + = −
ur r uur ur r ur
. (cos sin ).( sin cos ) sin cosE w K J I Jϕ ϕ θ θ ϕ θ= − − + = −ur ur uur ur r ur
( w ).u w u ) K ) .sinϕΩ ∧ = Ω.( ∧ = Ω.(− = −Ωur ur r ur uuurr ur uur
( u ).w u w ) K ) .sinϕΩ ∧ = Ω.( ∧ = Ω.( = Ωur r ur ur uuurur ur uur

Pendule de Foucault
20
Jean-Bernard-Léon Foucault : Paris,
1819 - Paris, 1868

Pendule de Foucault
21
Les deux équations scalaires deviennent donc:
22 2 2
02[ ( ) ] sin cos sin 2 sin 0d r d dr r R rdt dt dt
θ θω ϕ ϕ θ ϕ− + + Ω − Ω = 2
22[2 ] sin cos cos 2 sin 0dr d d drr R
dt dt dt dtθ θ ϕ ϕ θ ϕ+ + Ω + Ω =
Au repos (r et θ constants), nous obtenons:
• de la deuxième équation cos 0θ = donc 2θ π= ± • de la première équation:
2 2. 0sin coseqr R ϕ ϕ ω= Ω
qui est l'équivalent du .eqY de l'approche XY, en prenant 2θ π= −
Nous négligerons le terme 2 sin cos sinR ϕ ϕ θΩ dans la suite (voir discussion .eqY ).
En posant ddtθϖ = :
2202 [2 sin ] 0d r r r
dtω ϖ ϕ ϖ+ − Ω + =
2 2 sin 0d dr drr
dt dt dtϖ ϖ ϕ+ + Ω =
La deuxième équation conduit à: 2 [ sin ] 0rd drϖ ϖ ϕ+ + Ω = => 2 0
sindr dr
ϖϖ ϕ
+ =+ Ω
=> 2[ sin ]r Cte Cϖ ϕ+ Ω = =
Qui est une relation ressemblant à la loi des aires de Képler. En reportant ce résultat dans la première équation, nous obtenons :
2202 2 2[ sin ][ sin ] 0d r C Cr r
dt r rω ϕ ϕ+ − − Ω + Ω =
2
2 202
C[ ( sin ) ] 0d r rdt r
ω ϕ2
3+ + Ω − = dans laquelle 2 20 ( sin )ω ϕ+ Ω se résume à 2
0ω . Finalement:
2202
C 0d r rdt r
ω2
3+ − =
2 sinCr
ϖ ϕ= − Ω
Il ne reste plus qu’à résoudre et à mettre en musique les conditions initiales …! Fixons nous tout d’abord deux conditions initiales pour y voir un peu plus clair : pendule écarté, immobile dans le repère local.
0r r= 0 0ϖ =

Pendule de Foucault
22
FORCE DE RAPPEL ET PSEUDO-FORCES
20 2R P Rm m PM m m VωΓ ≅ − − Γ − Ω ∧
uur uuuur uur ur uur
Ir
Jur
Vers EstPX
Y
2Xinit
Force rappel =>oscillations harmoniques de pulsation ω 0
Centrifuge =>écart équilibre / OA
Coriolis =>Rotation du plan
L’interprétation de la rotation du plan à partir de Coriolis n’est pas aussi simple qu’il n’y paraîtcar VR change de sens à chaque ½ période!Il faut bien observer la trajectoire pour comprendre
-1,0
-0,5
0,0
0,5
1,0
-1,0 -0,5 0,0 0,5 1,0
Aux extrema, la vitesse est nulle, • il n’y a pas de pseudo-force de Coriolis, • le mobile se dirige vers la position d’équilibre P’sous l’effet de la force de rappel (poids)
Lorsque la vitesse augmente,la pseudo-force de Coriolis agit et incurve la trajectoire
Y’/Xinit.
X/Xinit.
P’
Conditions initiales• X=Xinit• dX/dt=0• dY/dt=0
Le pendule a une vitesse nulle

Pendule de Foucault
23
422 2002
r ( sin ) 0d r rdt r
ω ϕ3+ − Ω =
202[ 1] sinr
rϖ ϕ= − Ω La vitesse de rotation d dtϖ θ= s’annule chaque fois que 0r r= . Il est aussi possible d’éliminer le temps pour obtenir l’équation différentielle en r et θ , en
remarquant que d’après l’équation 2 sinCr
ϖ ϕ= − Ω :
2 sinddt
C rθ
ϕ=
− Ω Ce qui conduit finalement à :
22 2 2
02 3
C C 2 C[ sin ] [ ] [ sin ] 0d r dr C rd r d r r r
ϕ ϕ ωθ θ
2
2 2 3− Ω − − Ω + − =
A ce stade il faut se tourner vers une solution numérique …
LE PENDULE ET LES PSEUDO FORCES Repartons de l'application du principe fondamental dans un repère Galiléen (cf. ci dessus), en utilisant uniquement les deux forces en présence: tension du fil et pesanteur.
220 R P R-m PM=mΓ mΓ m Vω + + Ω ∧uuuur uur uur ur uur
Cette équation se réécrit:
22R 0 P RmΓ =-m PM mΓ m Vω − − Ω ∧
uur uuuur uur ur uur
Dans cette équation de type m ForcesΓ = Σ
ur uuuuuuuur (voir figure)
RΓuur
est l'accélération dans notre repère local, qui conditionne le mouvement que nous observons. En ce qui concerne les forces :
20- m PMωuuuur
est la force classique de rappel du pendule
PmΓ−uur
est la pseudo-force centrifuge qui écarte le pendule de l'axe de la terre 2 Rm V− Ω ∧ur uur
est la pseudo-force de Coriolis qui fait tourner le plan d'oscillation A propos de le pseudo force de Coriolis 2 Rm V− Ω ∧
ur uur
• elle est maximum au pôle car Ωur
et RVuur
sont toujours perpendiculaires. • en s'éloignant du pôle son efficacité diminue • à l'équateur, la force a pour direction K
uur (et ici, comme aux pôles, la verticale et K
uur sont
confondus) et elle ne donne aucune contribution à une rotation.

Pendule de Foucault
24
Foucault Léon Foucault Paris 1819-1868

Pendule de Foucault
25
ANNEXE:
CALCUL DE L'ACCELERATION PAR LES THEOREMES GENERAUX
Rappel de la relation de composition des accélérations. Voir : http://perso.wanadoo.fr/physique.belledonne/ Mécanique /changement de repère. Elle fournit l'accélération MΓ
uuurdans un repère A lorsque:
• la position PMuuuur
, la vitesse RVuur
et l'accélération RΓuur
sont connus dans un repère R, • et que l'on dispose des deux caractéristiques du mouvement du repère R par rapport
au repère A : l'accélération PΓuur
de l'origine du repère R, et vecteur rotation Ωur
.
2 [ ]M P R RdV PM PMdtΩ
Γ = Γ + Ω ∧ + Ω ∧ Ω ∧ + ∧ + Γur
uuur uur ur uur ur ur uuuur uuuur uur
Relation dont la démonstration utilise largement la recette qui permet d'obtenir la dérivée
d'un vecteur unitaire ur
: du dt u= Ω ∧r ur r
Application au pendule de Foucault. La terre et des étoiles constituent le repère A et PXYZ le repère R. Le vecteur Ω
ur, est le vecteur rotation de la terre sur elle-même.
En négligeant la variable Z, nous obtenons.
2 2
2 22 ( ) [ ( )] ( )M PdX dY d d X d YI J X I Y J X I Y J I Jdt dt dt dt dt
ΩΓ = Γ + Ω ∧ + + Ω ∧ Ω ∧ + + ∧ + + +
uruuur uur ur r ur ur ur r ur r ur r ur
La vitesse de rotation étant constante, le terme /d dtΩur
disparaît. L'accélération du point P est très facile à exprimer puisque le point P décrit un cercle de rayon cosR ϕ :
2( cos )P R EϕΓ = − Ωuur ur
Le travail n'est pas terminé pour autant! Il faut effectuer les produits vectoriels. Ce qui donne:
I EΩ ∧ = −Ωur r ur
sinJ IϕΩ ∧ = −Ω
ur ur r
E IΩ ∧ = −Ωur ur r
Il ne faut plus qu'un peu de patience pour reporter tout cela dans MΓ
uuur.

Pendule de Foucault
26
Cette page est destinée à faciliter l’affichage 2 pages à l’écran :
figures à gauche et texte à droite
PENDULE DE FOUCAULT
Approche simplifiée
- par la vitesse différentielle
- par la force de Coriolis (qualitative)
Gilbert VINCENT
Université Joseph Fourier, Grenoble
Janvier 2007
http://perso.wanadoo.fr/physique.belledonne/

Pendule de Foucault
27
PENDULE DE FOUCAULT
Approche simplifiée
- par la vitesse différentielle
- par la force de Coriolis (qualitative)
Gilbert VINCENT
Université Joseph Fourier, Grenoble
Janvier 2007
http://perso.wanadoo.fr/physique.belledonne/

Pendule de Foucault
28
ϕ
Nord
r
Y
aO
B
AEquateur
H
L’angle OBHest égal à ϕ
Lorsque la Terre tourne, la vitesse du point A est supérieure à celledu point B
X (Est)
Y (Nord)
A
O
B
a
Trajectoiredu pendule
a
Dans le plan horizontal
X
Y
2 rJπ
A
O
B
2 ( sin )r aJ
π ϕ+
2 ( sin )r aJ
π ϕ−
a
a
Vitesses (m/s)

Pendule de Foucault
29
Démonstration simplifiée de la période de rotation Première démonstration, vitesse différentielle : Nous n’utiliserons pas ici les vitesses angulaires de rotation, mais les périodes. La terre tourne sur elle-même en un temps J Lâchons le pendule, sans vitesse initiale, depuis un point A situé au sud du point O d’équilibre, à une distance a. Il oscille avec une période T, et une amplitude 2a. La vitesse vers l’Est, liée à la rotation de la terre est, en désignant par r le rayon parcouru par le point O : 2 ( sin )r a
Jπ ϕ+ au point A
2 ( sin )r aJ
π ϕ− au point B
Au bout d’une demi-période, le pendule arrive au point septentrional (au Nord) de sa trajectoire. Comme il a conservé sa vitesse du point A, il aura parcouru vers l’Est une distance de : 2 ( sin )
2r a T
Jπ ϕ+
Le repère OXY, se sera lui déplacé vers l’Est de : 2
2r T
Jπ .
Après une demi-période, le pendule sera donc en avance d’une distance égale à la différence, soit: 2 sin
2a TJ
π ϕ
Ceci explique la déviation du plan de rotation. Pour aller un peu plus loin, on peut établir le temps qu’il faut au point B pour effectuer un tour complet, en supposant que la vitesse de rotation est constante. Le périmètre du cercle décrit par les extrémités des oscillations mesure : 2 aπ A raison, pour chaque demi-période, d’une distance 2 sin
2a TJ
π ϕ il faudra :
22 sin ( ) sin ( )
2 2
a Ja T TJ
ππ ϕ ϕ
= demi-périodes pour faire un tour complet, soit un temps
total de

Pendule de Foucault
30
-1,0
-0,5
0,0
0,5
1,0
-1,0 -0,5 0,0 0,5 1,0
Aux extrema, la vitesse est nulle, • il n’y a pas de pseudo-force de Coriolis, • le mobile se dirige vers la position d’équilibre Osous l’effet de la force de rappel (poids)
Lorsque la vitesse augmente,la pseudo-force de Coriolis agit et incurve la trajectoire
Y/Xinit.
X/Xinit.
O
Conditions initialesX=XinitdX/dt=0dY/dt=0

Pendule de Foucault
31
( )2 sinsin ( )
2
J T JT ϕϕ
=
La période de rotation du plan d’oscillation est donc : sin
Jϕ
Le problème est que cette approche n’explique pas le comportement du pendule pour des oscillations Est Ouest. Cette démonstration est donc fausse, même si le résultat est exact !
Deuxième démonstration : pseudo-force de Coriolis. Il est possible d’employer le repère local OXY pour exprimer la relation fondamentale de la dynamique, à condition d’ajouter aux forces réelles des pseudo-forces, pour tenir compte du mouvement de ce repère par rapport à un repère considéré comme Galiléen. Pour notre problème ce repère dit inertiel sera le centre de la Terre et des axes liés aux étoiles. Si la terre ne tournait pas, notre pendule oscillerait dans un plan fixe. Ce qui provoque la rotation du plan, c’est la pseudo-force de Coriolis qui s’exprime par (si le produit vectoriel vous est inconnu, allez directement à "plus simplement" ):
. 2CorF m V∧= − Ωuuuur ur ur
Où m est la masse du pendule, Ωur
le vecteur rotation de la terre (= (2 )J nπr
) si nr
est un vecteur unitaire porté par l’axe de la terre, dirigé du Sud vers le Nord, et V
urla vitesse du
pendule dans OXY. Plus simplement, le pendule est soumis à une force toujours perpendiculaire à sa vitesse, et toujours dirigé vers la droite (dans l’hémisphère Nord) dont le module est égal à :
.22 sinCorF m VJπ ϕ=
Cette force est nulle à l’équateur, puis s’inverse dans l’hémisphère Sud où la force est dirigée vers la gauche du mouvement. Ceci explique qualitativement que le pendule, toujours dévié vers la droite de son mouvement ait un plan d’oscillation qui tourne (voir figure).

Pendule de Foucault
32
X
Y
A
O
B
a
Trajectoiredu pendule
Force de Coriolis
a

Pendule de Foucault
33
Quantitativement. Attention, attention Prenons un pendule qui oscille au départ dans un plan Nord Sud, sur une Terre immobile. S’il part du Sud, on peut décrire son mouvement par :
0cos( )Y a tω= − ( 0 2 Tω π= ) et sa vitesse s’exprime par : 0 0sin( )dY a tdt
ω ω=
Maintenant la terre tourne. Lors de la première demi-période, le mouvement reste sensiblement sinusoïdal le long de Y. Il en est de même de la vitesse, et donc durant tout ce temps le pendule est soumis à une force de Coriolis perpendiculaire, dirigée suivant X, égale à :
. 0 02 sin ( ) [2 sin ][ sin( )]CorF m dY dt m a tϕ ϕ ω ω= Ω = Ω Il est donc tentant de calculer le mouvement du pendule suivant X en appliquant .CorF m= Γ , soit :
2
0 02 [2 sin ]sin( )d X a tdt
ϕ ω ω= Ω
Avec la condition initiale 0dX dt = , la vitesse de X est donc donnée par :
0[2 sin ][1 cos( )]dX a tdt
ϕ ω= Ω − (dériver pour vérifier).
Et X, nul au temps t=0, répond finalement à :
0 00
[2 sin ][ sin( )]X a t tϕ ω ωωΩ
= −
Au bout d’une demi période ( 0tω π= ), X est égal à :
0
2 sinX aπ π ϕωΩ
= ou encore :
2 sinTX aJπ π ϕ=
On trouve exactement le double de la bonne valeur (cf. approche par vitesses différentielles), ce qui prouve bien que cette simplification n’est pas valable). La période trouvée serait trop courte d’un facteur 2. Le coin du spécialiste: En fait, dans la direction X, l’équation fondamentale de la dynamique s’écrit, en tenant compte des forces réelles (voir étude complète) et de la force de Coriolis :
2202 2 sind X dYm m X m
dt dtω ϕ= − + Ω
d’où en prenant la vitesse 0 0sin( )dY a tdt
ω ω= que nous avons calculée ci-dessus :
220 0 02 [2 sin ]sin( )d X X a t
dtω ϕ ω ω+ = Ω
Ceci correspond à une résonnance non amortie ! Cette approche est effectivement trop simplifiée !! Conclusion , attention à bien traiter les équatios couplées