Par Denis BERDJAG Encadrement Pr. Vincent COCQUEMPOT Dr. Cyrille CHRISTOPHE
92
Méthodes algébriques pour la décomposition de modèles comportementaux : Application à la détection et à la localisation de défaillances Par Denis BERDJAG Encadrement Pr. Vincent COCQUEMPOT Dr. Cyrille CHRISTOPHE équipe SFSD–LAGIS Soutenance de thèse
-
Upload
colleen-burks -
Category
Documents
-
view
29 -
download
0
description
Soutenance de thèse. Méthodes algébriques pour la décomposition de modèles comportementaux : Application à la détection et à la localisation de défaillances. Par Denis BERDJAG Encadrement Pr. Vincent COCQUEMPOT Dr. Cyrille CHRISTOPHE. équipe SFSD–LAGIS. Contexte de la thèse. Constat : - PowerPoint PPT Presentation
Transcript of Par Denis BERDJAG Encadrement Pr. Vincent COCQUEMPOT Dr. Cyrille CHRISTOPHE
Méthodes algébriques pour la décomposition de modèles comportementaux :
Application à la détection et à la localisation de défaillances
Par Denis BERDJAGEncadrement
Pr. Vincent COCQUEMPOTDr. Cyrille CHRISTOPHE
équipe SFSD–LAGIS
Soutenance de thèse
Contexte de la thèse
Constat : – Techniques de surveillance à base de modèles:
• 2 communautés (SEC, SED).• Modèles et outils différents
– Des outils mathématiques (algébriques) permettent une abstraction élevée
• Algèbre des paires : Hartmanis & Stearns (1966)• Algèbre des fonctions : Zhirabok & Shumsky (1987 )
2
3
Contexte de la thèse
Objectif :– Comprendre et rendre accessibles les outils
algébriques– Approfondir l’utilisation de ces outils.– Grâce au niveau élevé d’abstraction :
• Étendre des concepts des SEC vers les SED.• Proposer une méthodologie de surveillance
indépendante du type de modèle.
4
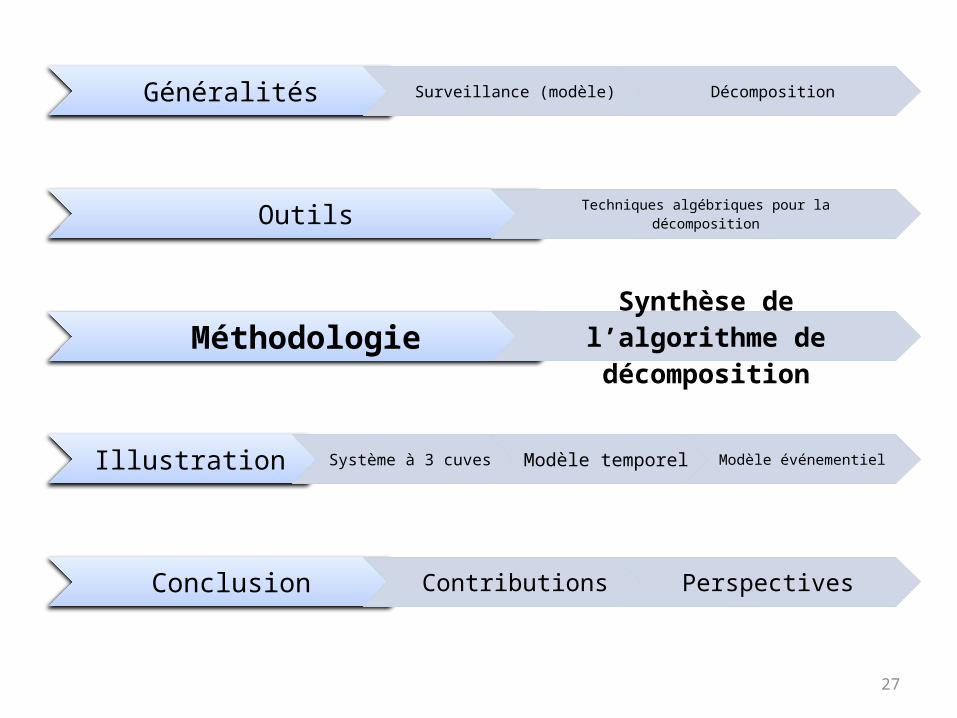
GénéralitésSurveillance
(modèle) Décomposition
Outils Techniques algébriques pour la décomposition
Méthodologie Synthèse de l’algorithme de décomposition
Illustration Système à 3 cuves
Conclusion Contributions & perspectives
5
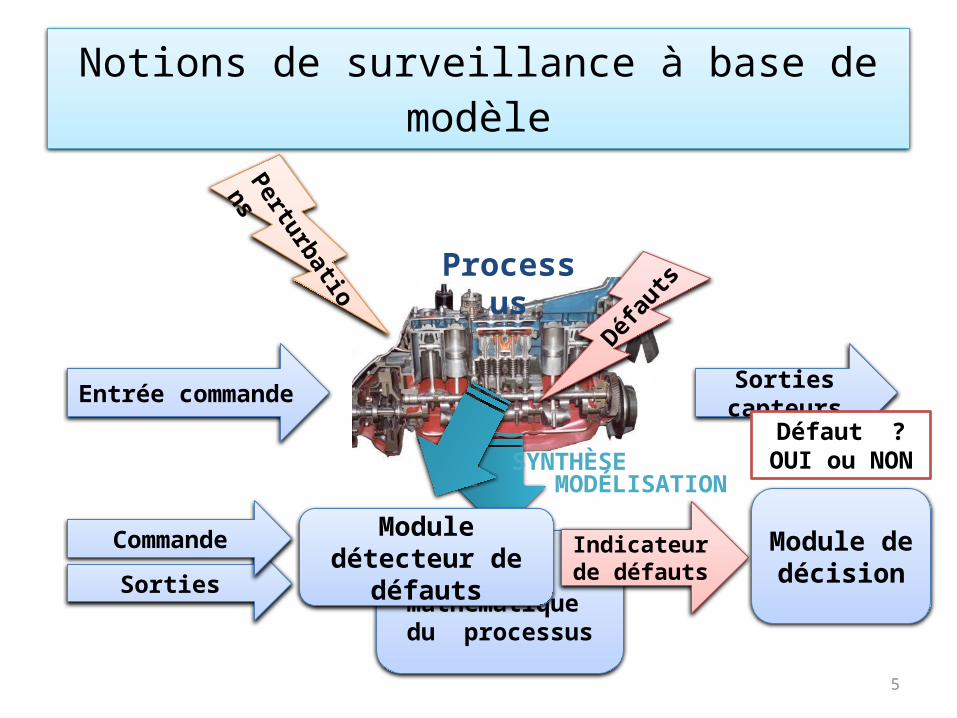
Notions de surveillance à base de modèle
Entrée commande Sorties capteurs
Processus
PerturbationsDéfa
uts
Modèle mathématique du processus
Indicateur de défautsSorties
Module détecteur de défauts
Module de décision
Défaut ?OUI ou NON
Commande
MODÉLISATIONSYNTHÈSE
6
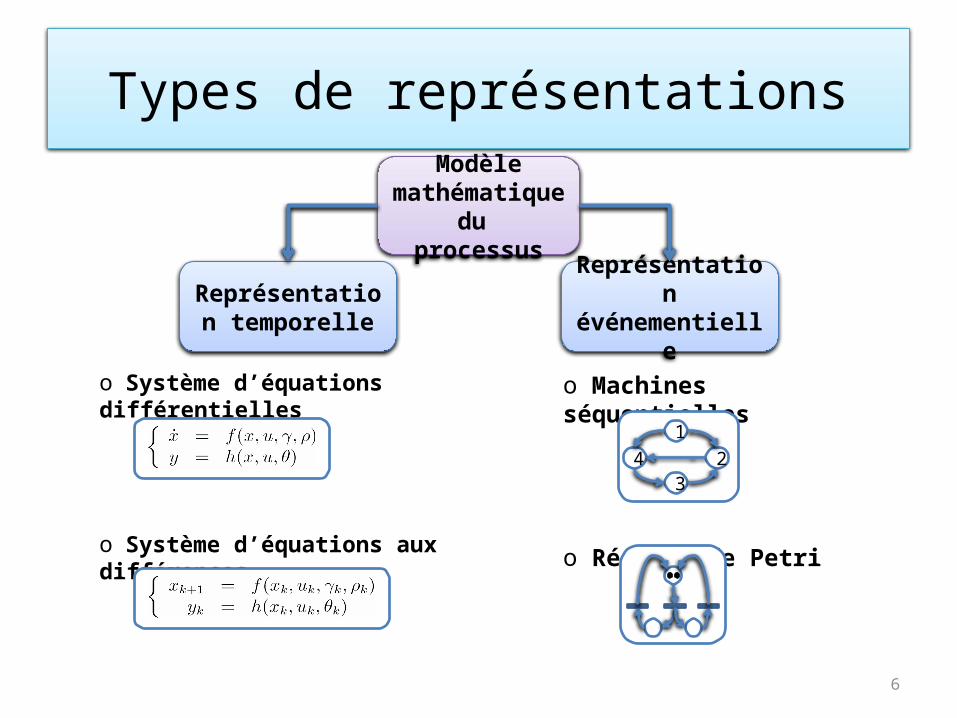
Types de représentationsModèle
mathématique du processus
Représentation temporelle
Représentation événementielle
o Système d’équations différentielles
o Système d’équations aux différences
o Machines séquentielles
o Réseaux de Petri
124
3
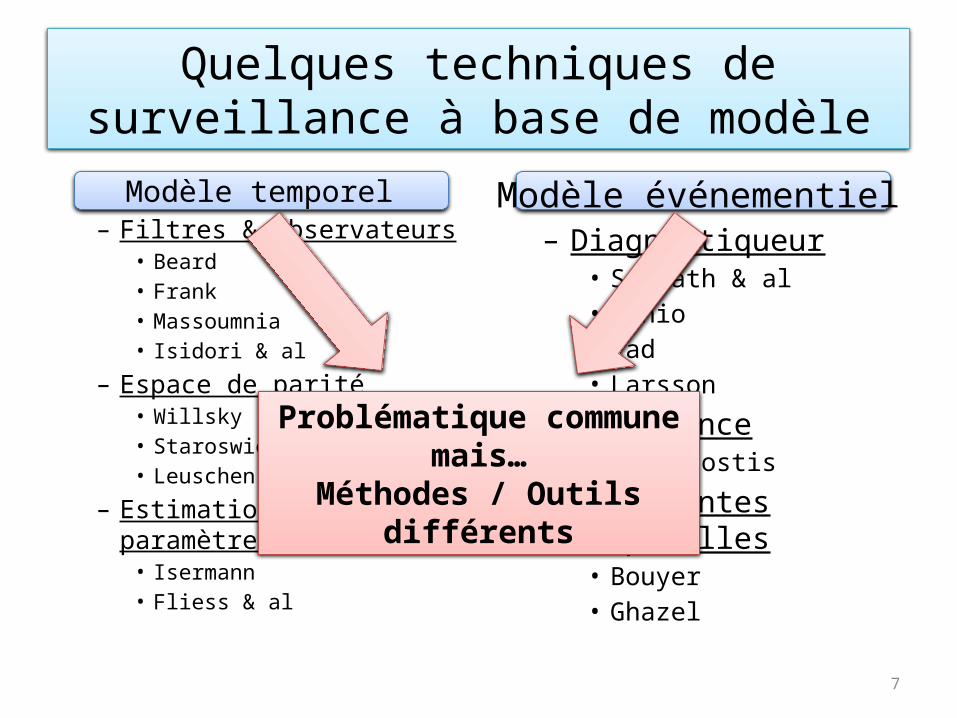
Quelques techniques de surveillance à base de modèle
Modèle temporel– Filtres & observateurs
• Beard• Frank• Massoumnia• Isidori & al
– Espace de parité• Willsky• Staroswiecki• Leuschen
– Estimation de paramètres• Isermann• Fliess & al
Modèle événementiel– Diagnostiqueur
• Sampath & al• Ushio• Zad• Larsson
– Redondance• Hadjicostis
– Contraintes temporelles• Bouyer• Ghazel
7
Problématique communemais…
Méthodes / Outils différents
8
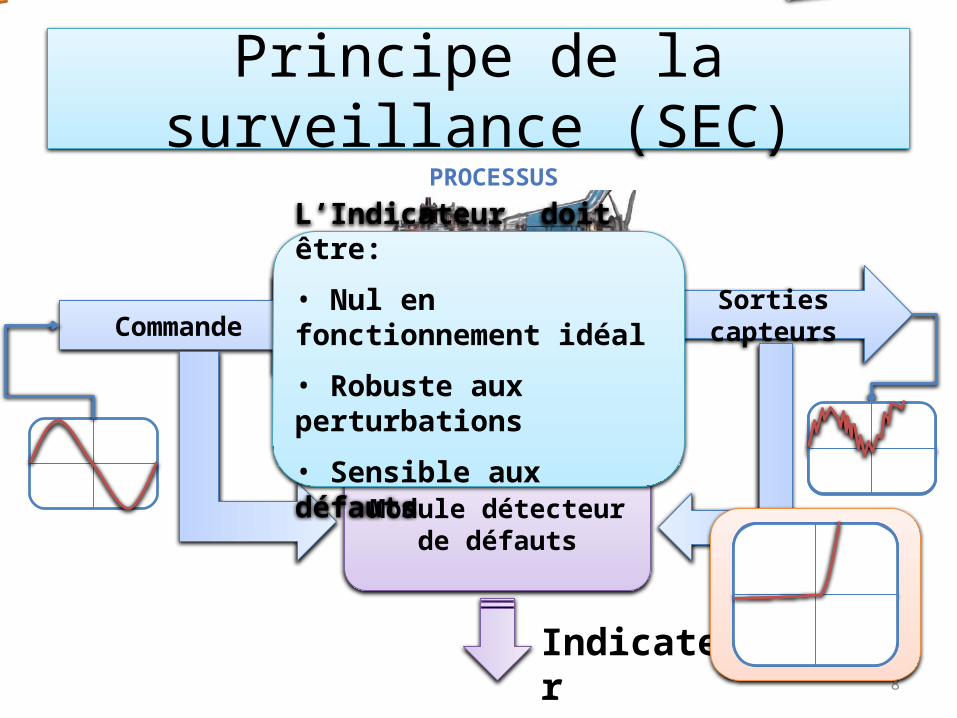
Principe de la surveillance (SEC)
Commande Sorties capteurs
Module détecteur de défauts
Indicateur
PROCESSUS
Perturbations
Défaut
L’Indicateur doit être:
• Nul en fonctionnement idéal
• Robuste aux perturbations
• Sensible aux défauts
9
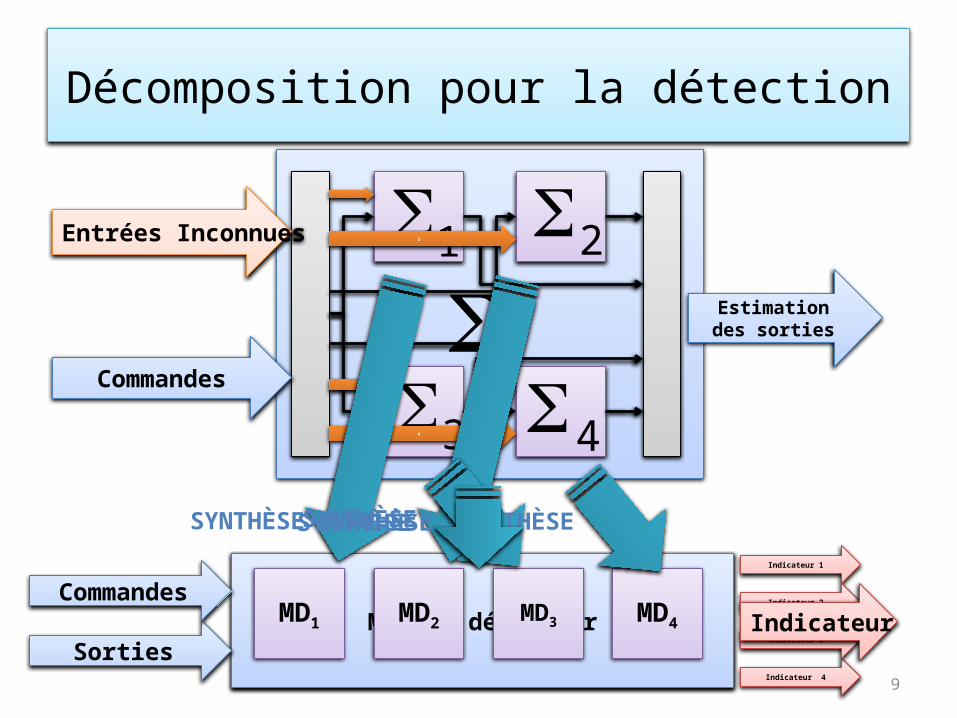
Décomposition pour la détection
Module détecteurMD2 MD3 MD4MD1
Commandes
Indicateur 4
Entrées Inconnues
Estimation des sorties
Indicateur 3
Indicateur 1
Indicateur 2
11
22
33
44
SYNTHÈSE SYNTHÈSE
Sorties
Commandes
SYNTHÈSE SYNTHÈSE
Indicateur
SYNTHÈSE
10
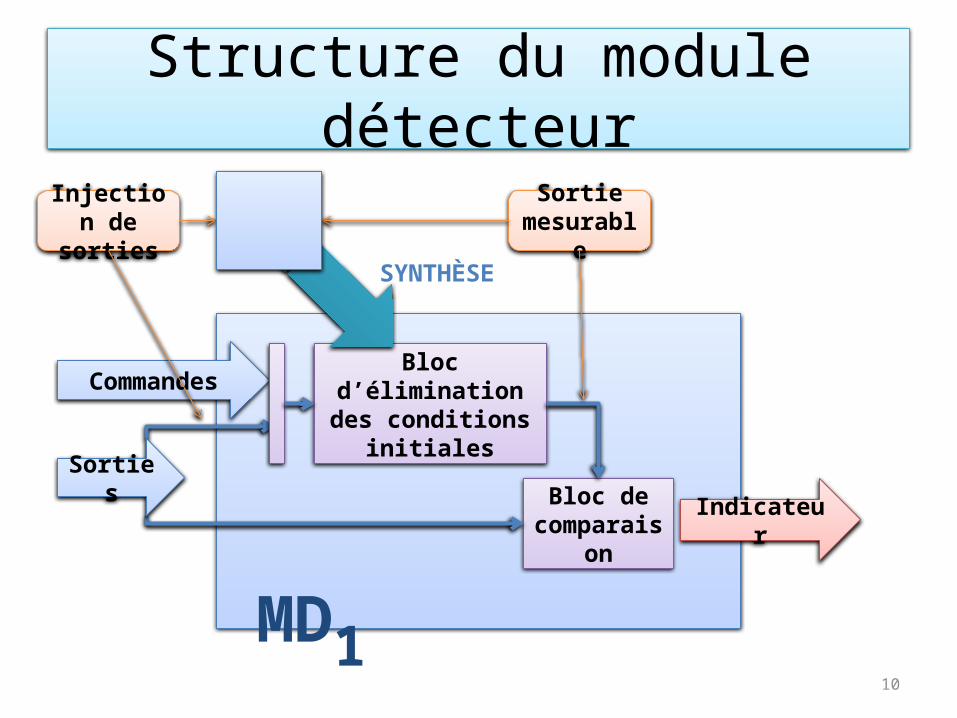
Structure du module détecteur
Bloc d’élimination des conditions
initiales
Bloc decomparaison
Sorties
MD1
Indicateur
Commandes
SYNTHÈSE
Injection de sorties
Sortiemesurable
11
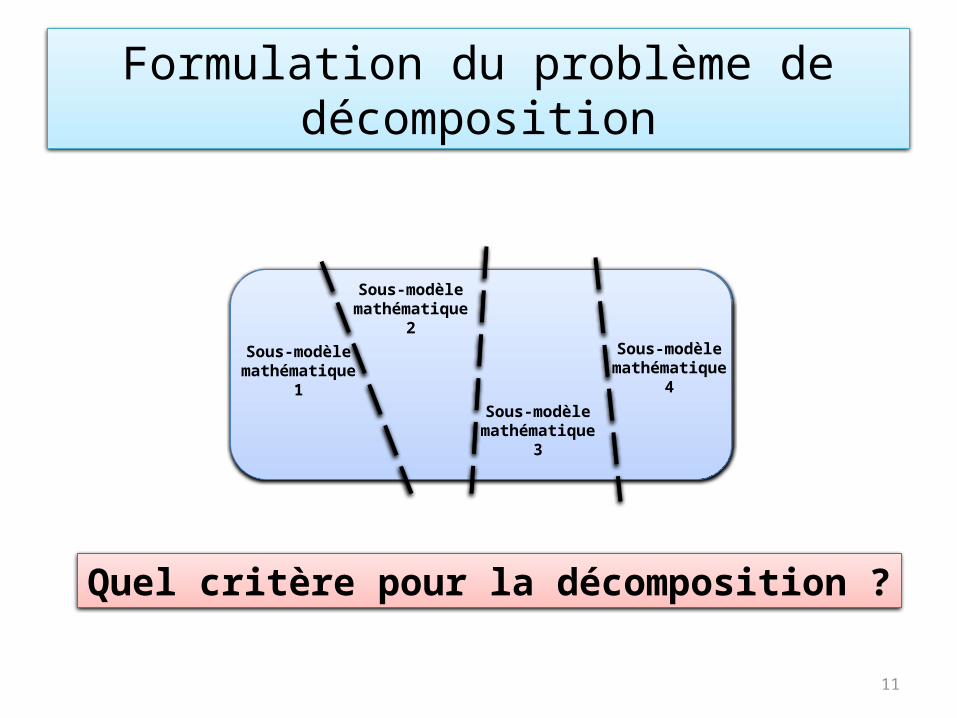
Modèle mathématiqueSous-modèle
mathématique1
Sous-modèlemathématique
2
Sous-modèlemathématique
3
Sous-modèlemathématique
4
Formulation du problème de décomposition
Quel critère pour la décomposition ?
12
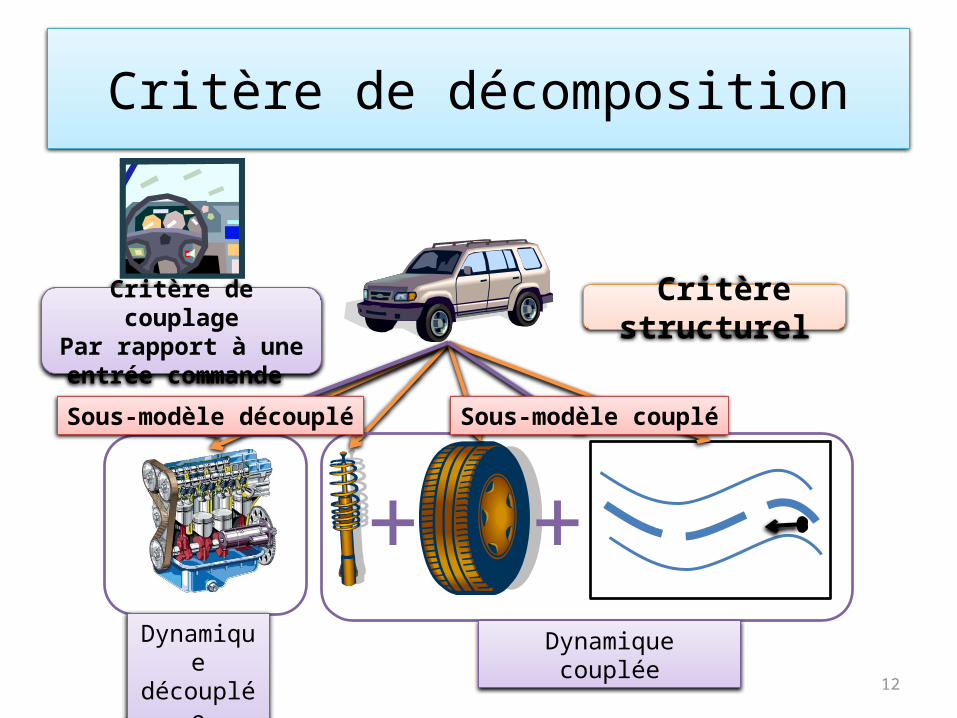
Critère de décomposition
Critère structurelCritère de couplagePar rapport à une entrée
commande
++Dynamique coupléeDynamique
découplée
Sous-modèle découplé Sous-modèle couplé
13
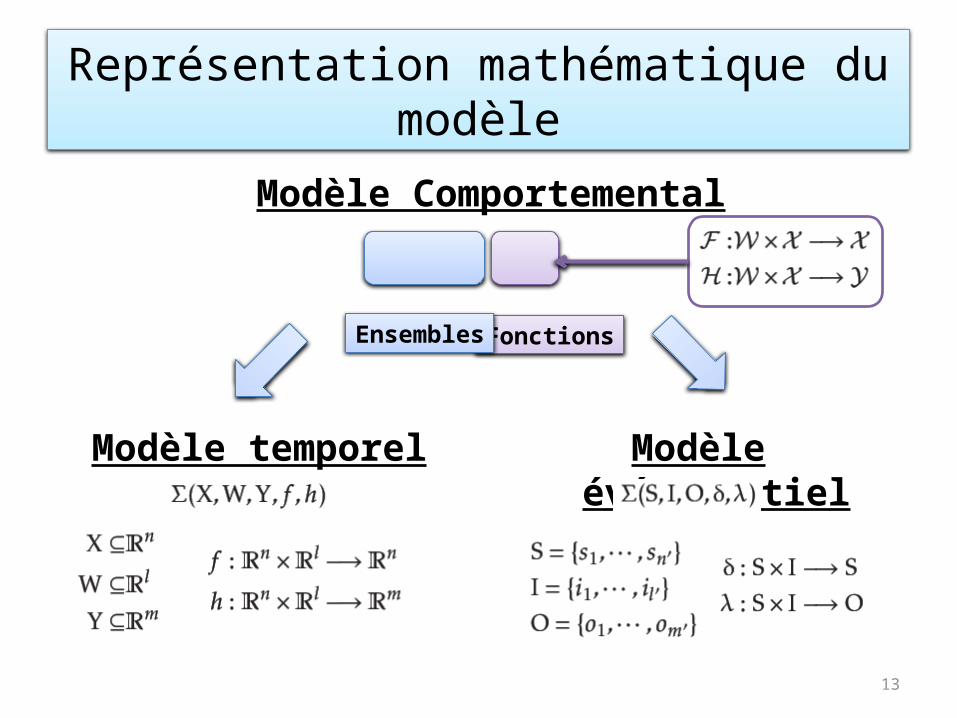
FonctionsEnsembles
Représentation mathématique du modèle
Modèle temporel Modèle événementiel
Modèle Comportemental
14
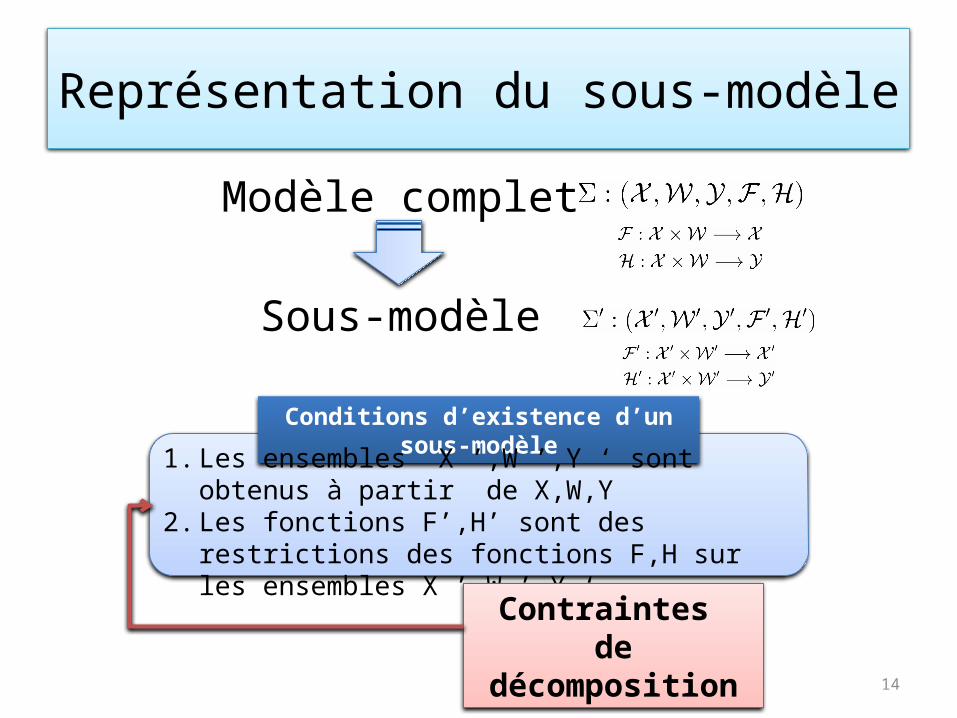
Représentation du sous-modèle
Conditions d’existence d’un sous-modèle
1. Les ensembles X ’,W ’,Y ‘ sont obtenus à partir de X,W,Y
2. Les fonctions F’,H’ sont des restrictions des fonctions F,H sur les ensembles X ’,W ’,Y ‘ .
Contraintes de décomposition
Modèle complet
Sous-modèle
15
Généralités Surveillance (modèle) Décomposition
Outils Techniques algébriques pour la décomposition
Méthodologie Synthèse de l’algorithme de décomposition
Illustration Système à 3 cuves Modèle temporel Modèle événementiel
Conclusion Contributions Perspectives
16
Décomposition avec critère de découplage
• Décomposition connue en SEC et en SED– Formalisée avec des outils spécifiques au modèle
considéré• Généraliser la décomposition quel que soit le
modèle comportemental ?
Définir des outils mathématiques pour homogénéiser la démarche
de décomposition
17
Rappel : structures algébriques
Algèbre• Un ensemble
d’éléments• Des lois (opérations)
sur ces éléments– Deux lois internes– Une loi externe
Treillis• Un ensemble d’éléments• Une relation d’ordreOu• Un ensemble d’éléments• Deux lois internes
Traitement Hiérarchie
18
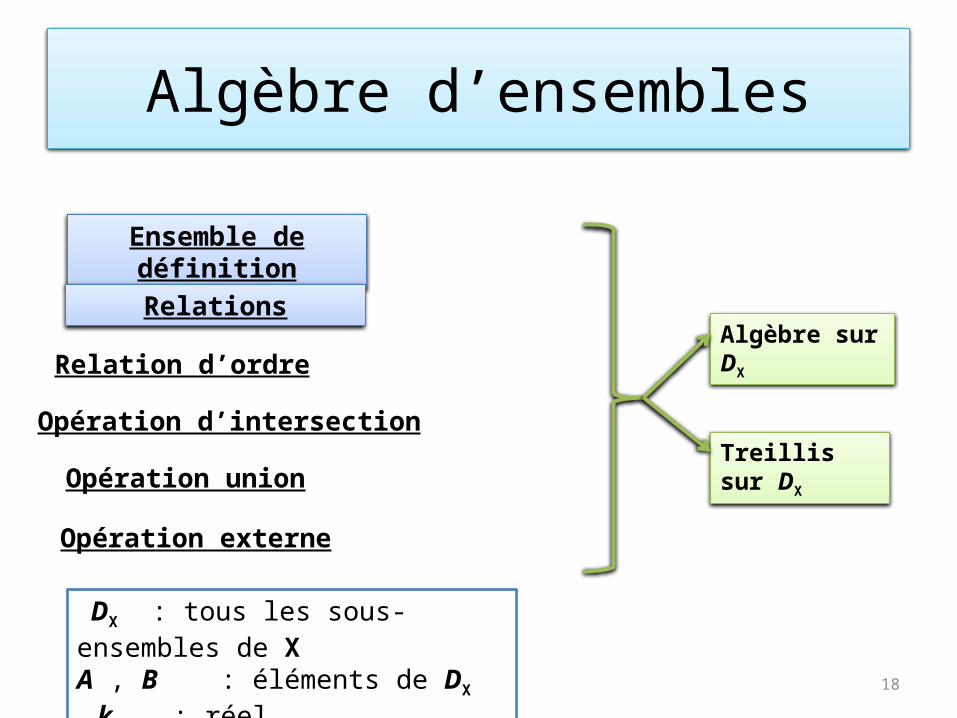
Algèbre d’ensembles
Algèbre sur DX
Treillis sur DX
Relation d’ordre
Opération d’intersection
Opération union
DX : tous les sous-ensembles de XA , B : éléments de DX
k : réel
Ensemble de définition
Relations
Opération externe
19
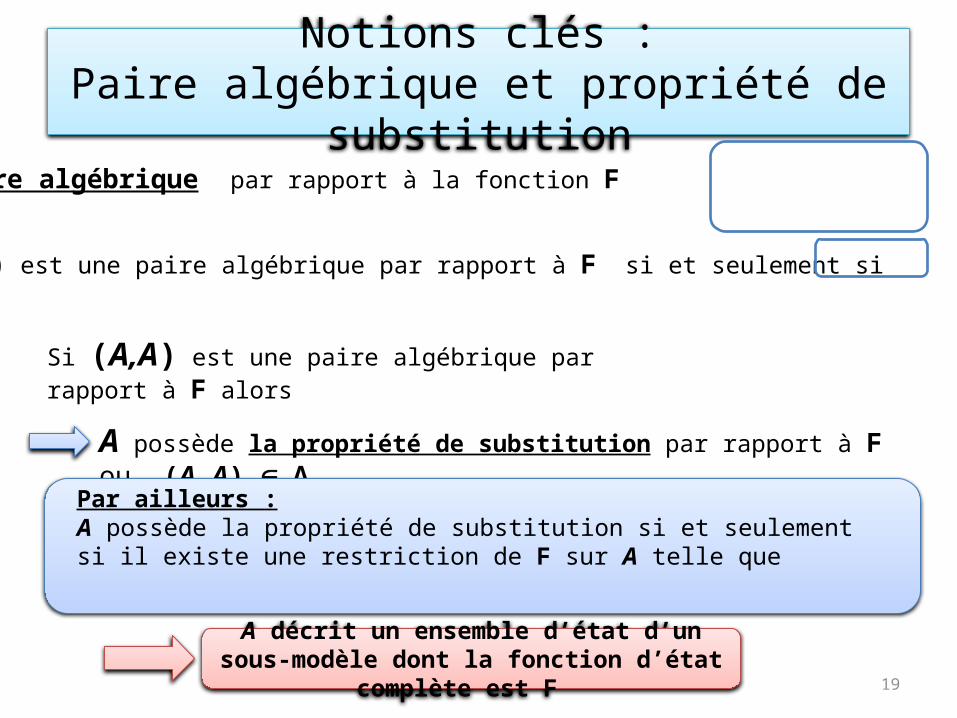
Notions clés :Paire algébrique et propriété de substitution
(A,B) est une paire algébrique par rapport à F si et seulement si
Si (A,A) est une paire algébrique par rapport à F alors
A possède la propriété de substitution par rapport à F ou (A,A) ∈ ΔF
Paire algébrique par rapport à la fonction F
Par ailleurs : A possède la propriété de substitution si et seulement si il existe une restriction de F sur A telle que
A décrit un ensemble d’état d’un sous-modèle dont la fonction d’état complète est F
20
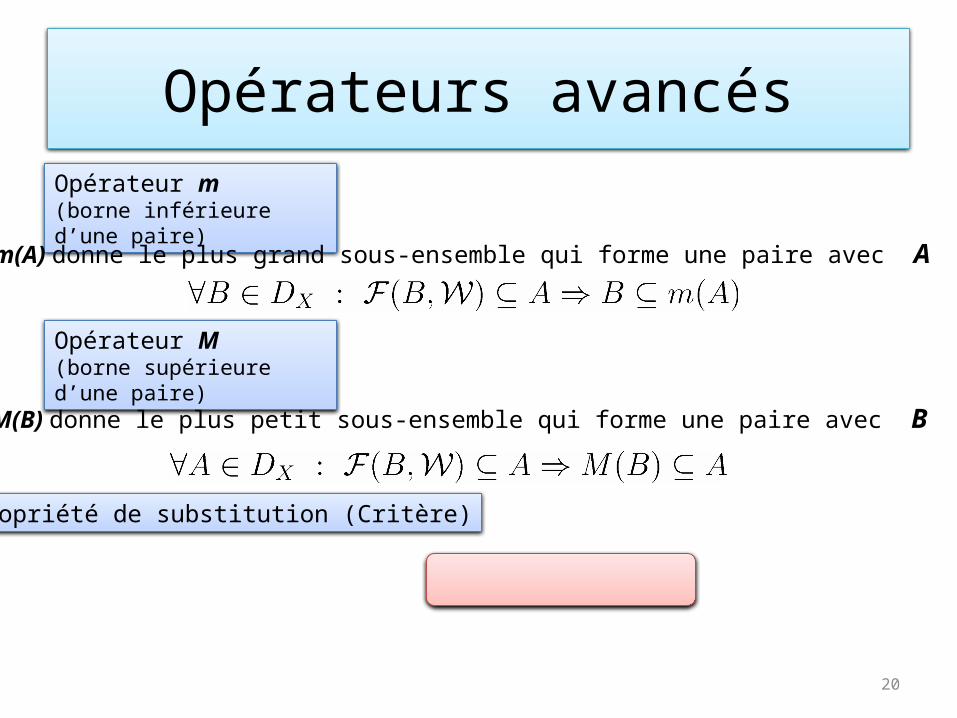
Opérateurs avancésOpérateur m (borne inférieure d’une paire)
Opérateur M(borne supérieure d’une paire)
m(A) donne le plus grand sous-ensemble qui forme une paire avec A
M(B) donne le plus petit sous-ensemble qui forme une paire avec B
Propriété de substitution (Critère)
21
Du modèle au sous-modèle
• Le sous-modèle est caractérisé par un sous-ensemble d’état obtenu par une décomposition.
• La décomposition d’un modèle requiert la manipulation d’ensembles d’éléments.
Solution
oDéfinir des « délimiteurs » pour caractériser les différents ensembles.
oManipuler des ensembles d’éléments revient à manipuler les délimiteurs.
Hartmanis, Stearns, Shumsky, Zhirabok
22
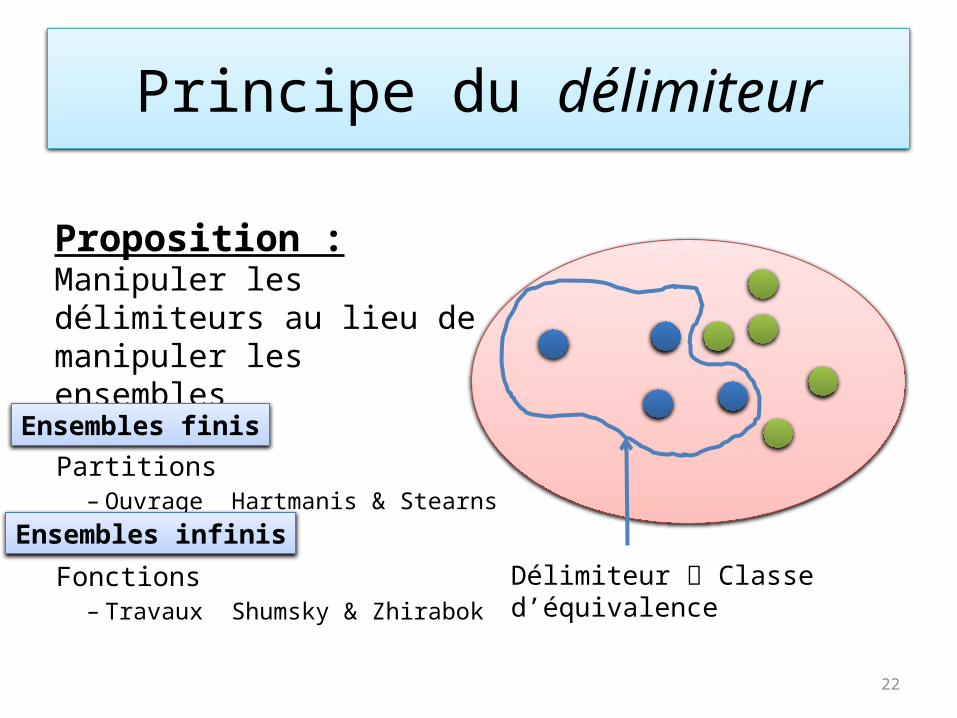
Principe du délimiteur
Partitions– Ouvrage Hartmanis & Stearns
Fonctions– Travaux Shumsky & Zhirabok
Délimiteur Classe d’équivalence
Proposition :Manipuler les délimiteurs au lieu de manipuler les ensembles
Ensembles finis
Ensembles infinis
23
1
2
3
4
5
6
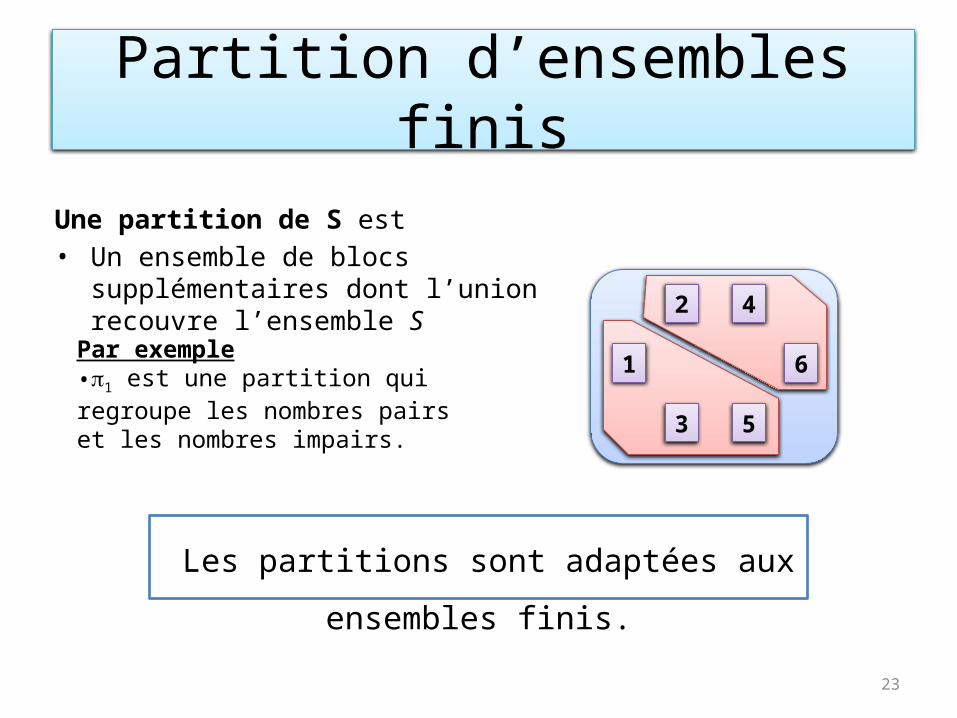
Partition d’ensembles finis
Une partition de S est• Un ensemble de blocs supplémentaires
dont l’union recouvre l’ensemble S
Par exemple•p1 est une partition qui regroupe les nombres pairs et les nombres impairs.
Les partitions sont adaptées aux ensembles finis.
24
Partition d’ensembles infinis
• Toute fonction f(x) crée un partitionnement de son ensemble de définition X
• Un bloc regroupe tous les éléments qui ont la même image avec la fonction f(x).
Par exemple :Le noyau de toute fonction définit le bloc d’une partition de X.
25
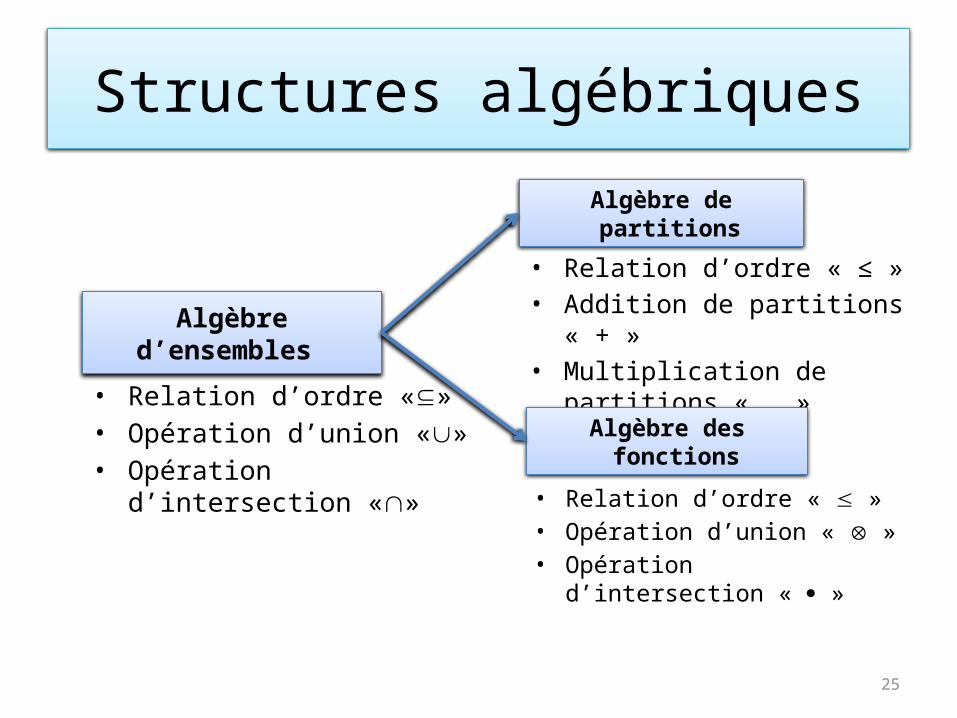
Structures algébriques
Algèbre d’ensembles
• Relation d’ordre «⊆»• Opération d’union «∪»• Opération d’intersection «∩»
Algèbre de partitions
• Relation d’ordre « ≤ »• Addition de partitions « + »• Multiplication de partitions « . »
Algèbre des fonctions
• Relation d’ordre « »• Opération d’union « »• Opération d’intersection « »
26
Notion clé :Propriété d’invariance
Soit une fonction
Si A possède la propriété de substitution par rapport à F alors
la fonction est dite invariante par rapport à F Fonctions
• Invariance
Ensembles
• Propriété de substitution
La fonction est une fonction de décomposition
27
Généralités Surveillance (modèle) Décomposition
Outils Techniques algébriques pour la décomposition
Méthodologie Synthèse de l’algorithme de décomposition
Illustration Système à 3 cuves Modèle temporel Modèle événementiel
Conclusion Contributions Perspectives
28
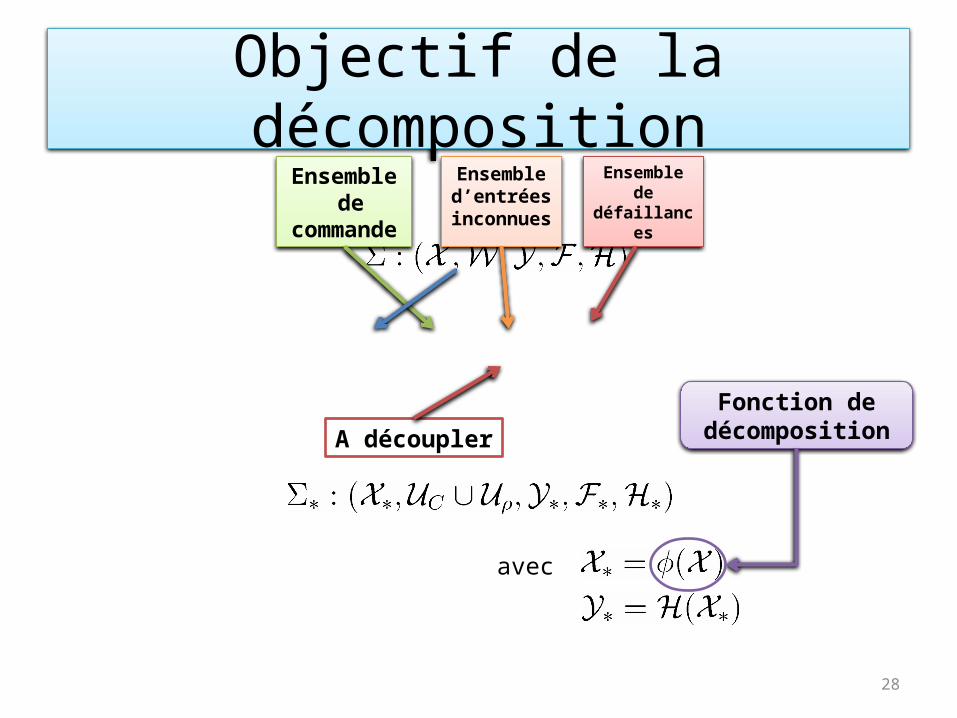
Objectif de la décompositionEnsemble
de commande
Ensemble d’entrées inconnues
Ensemble de
défaillances
A découpler
avec
Fonction de décomposition
29
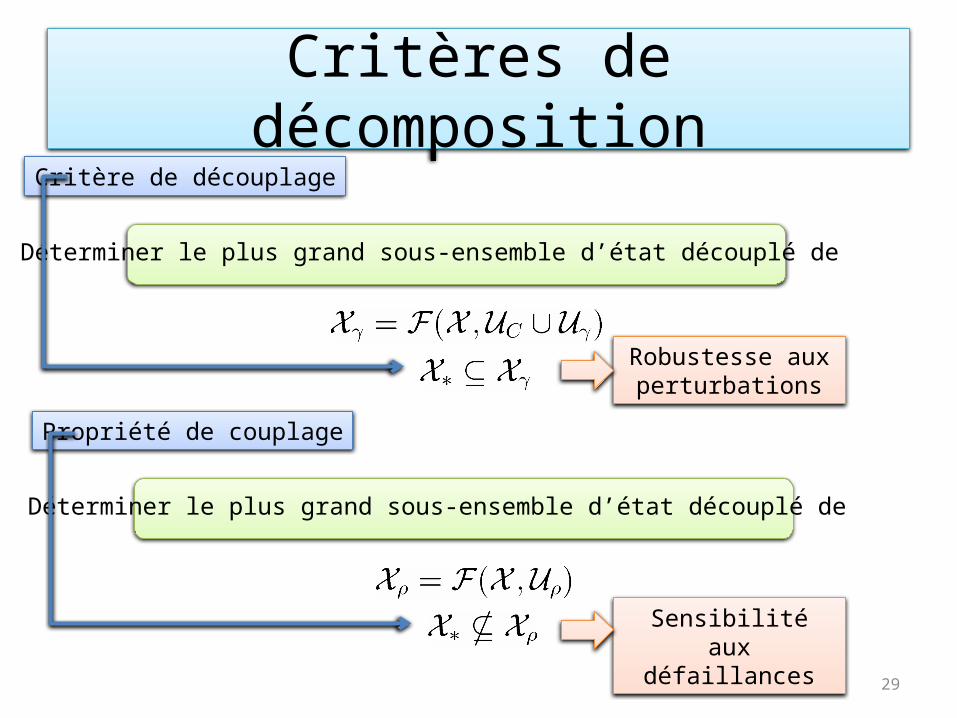
Critères de décompositionCritère de découplage
Déterminer le plus grand sous-ensemble d’état découplé de
Propriété de couplage
Déterminer le plus grand sous-ensemble d’état découplé de
Robustesse aux perturbations
Sensibilité aux défaillances
30
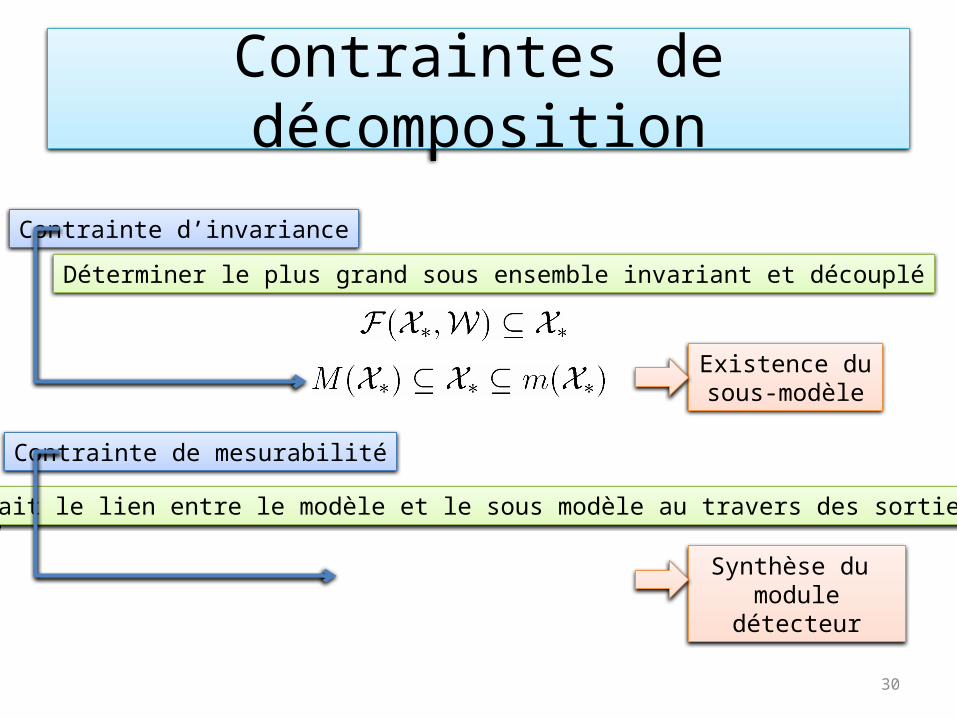
Contraintes de décomposition
Contrainte d’invariance
Contrainte de mesurabilité
Déterminer le plus grand sous ensemble invariant et découplé
Fait le lien entre le modèle et le sous modèle au travers des sorties
Existence du sous-modèle
Synthèse du module détecteur
31
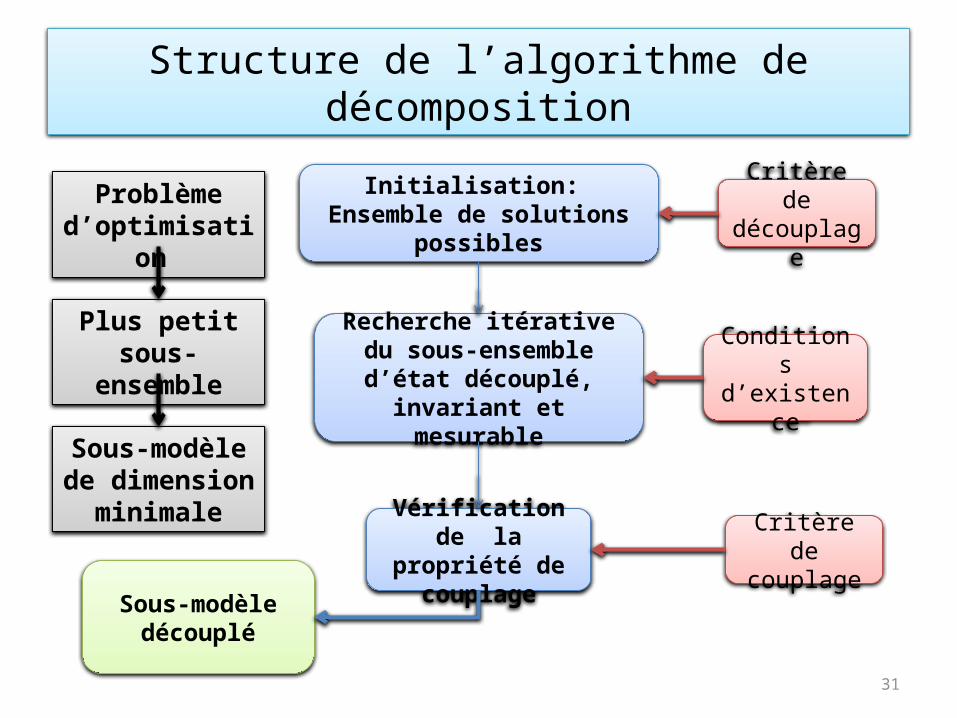
Structure de l’algorithme de décomposition
Initialisation: Ensemble de solutions possibles
Recherche itérative du sous-ensemble d’état découplé,
invariant et mesurable
Vérification de la propriété de
couplage
Critère de découplage
Conditions d’existence
Critère de couplage
Sous-modèle découplé
Problème d’optimisation
Plus petit sous-ensemble
Sous-modèle de dimension minimale
32
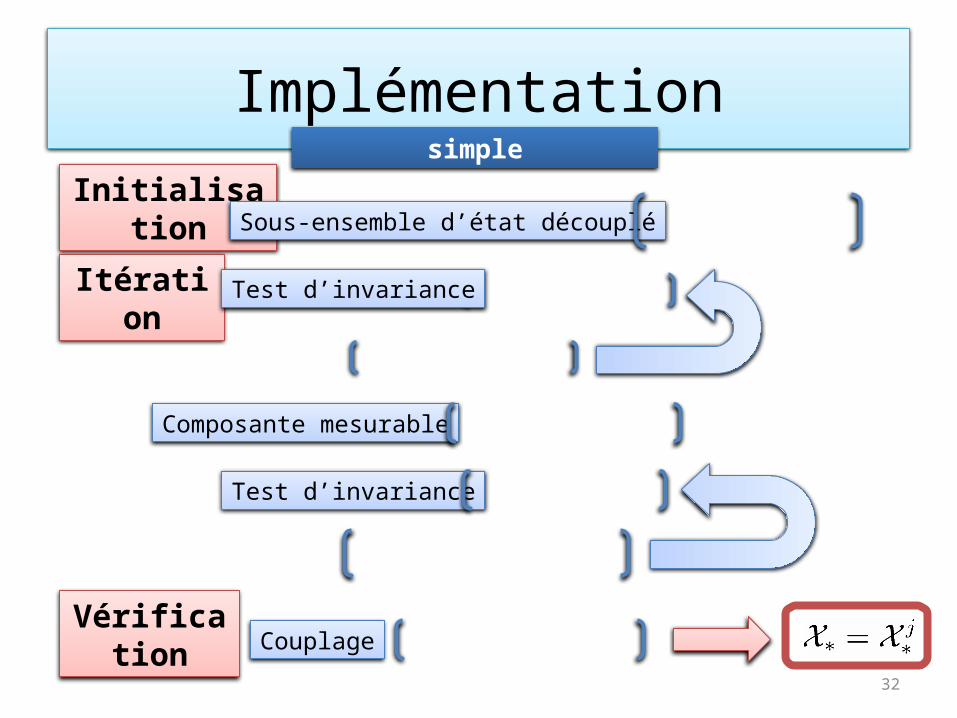
Implémentationsimple
Initialisation
Itération
Vérification
Sous-ensemble d’état découplé
Test d’invariance
Composante mesurable
Test d’invariance
Couplage
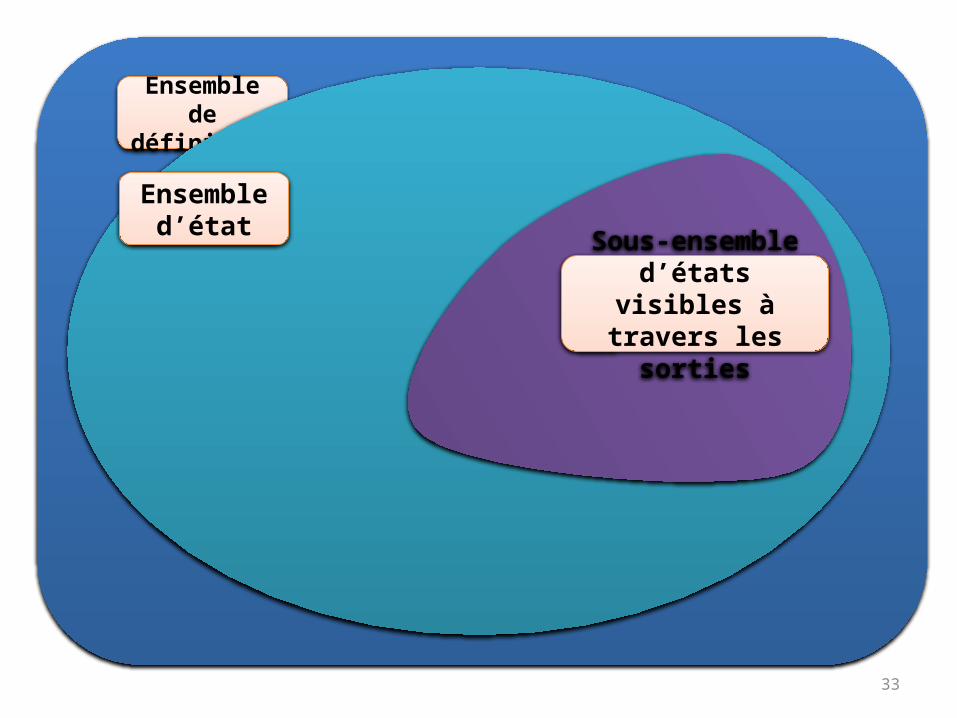
Ensemble de définition
Ensemble d’état
Sous-ensemble d’états visibles à
travers les sorties
33
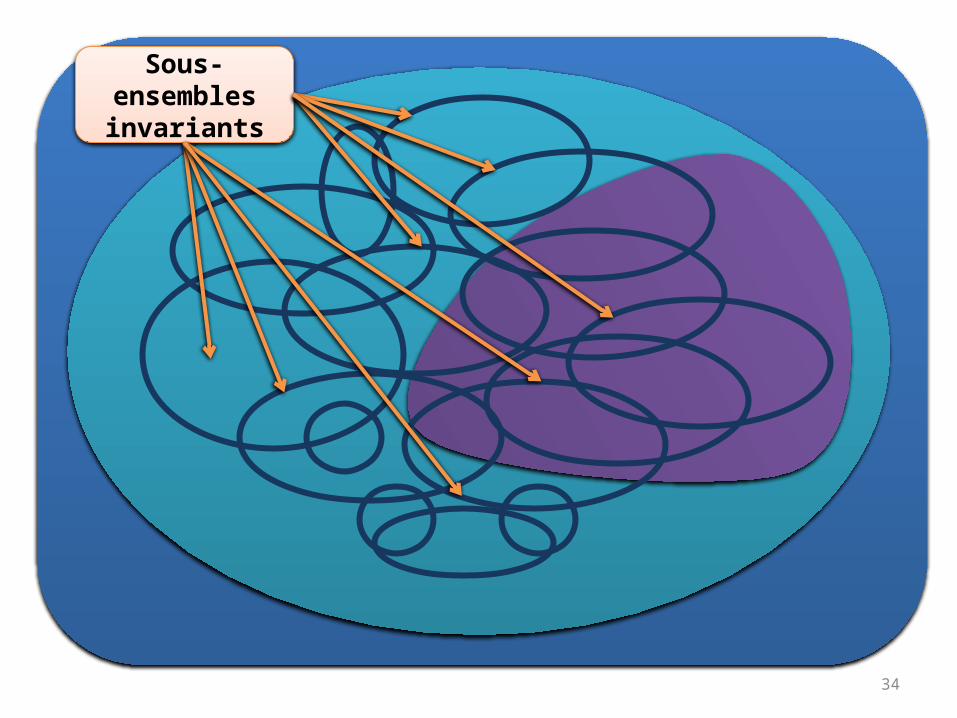
Sous-ensembles invariants
34
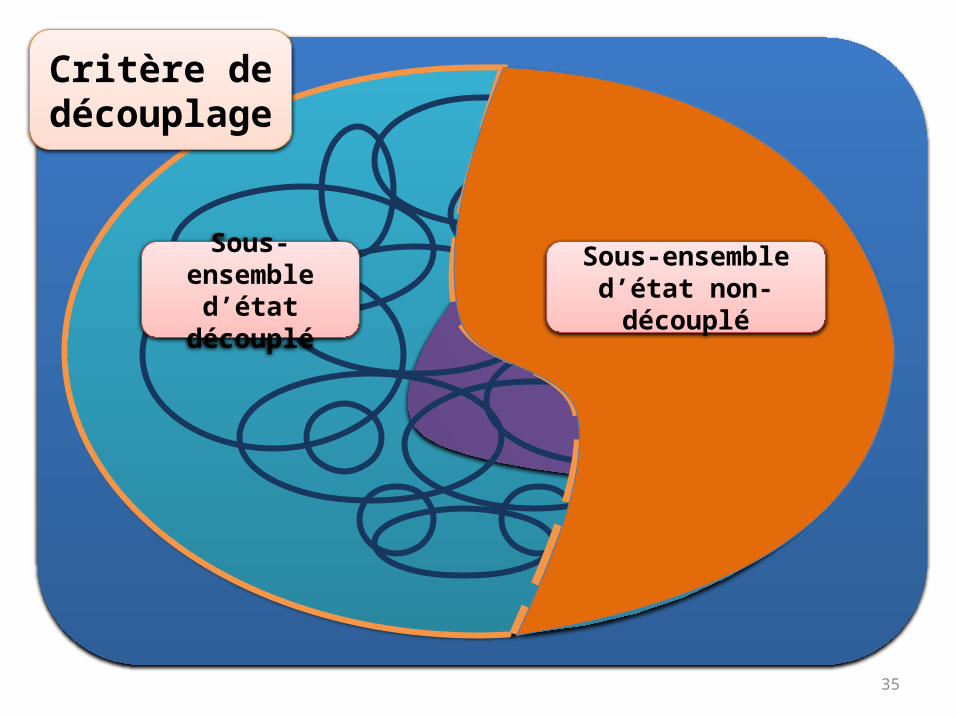
Sous-ensemble d’état découplé
Sous-ensemble d’état non-découplé
Critère de découplage
35
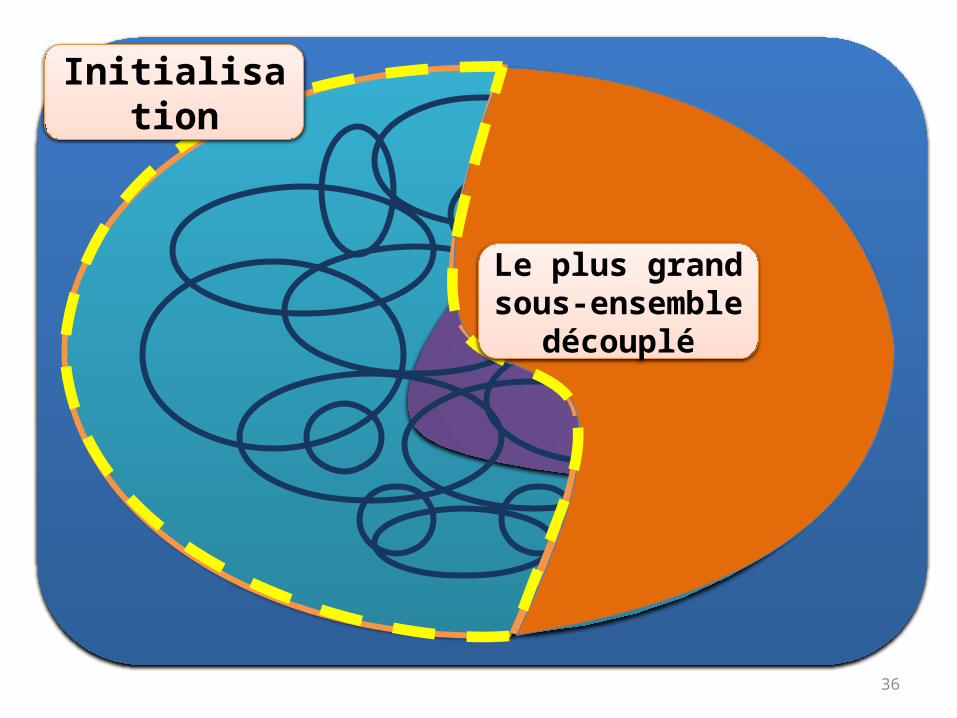
Le plus grand sous-ensemble
découplé
Initialisation
36
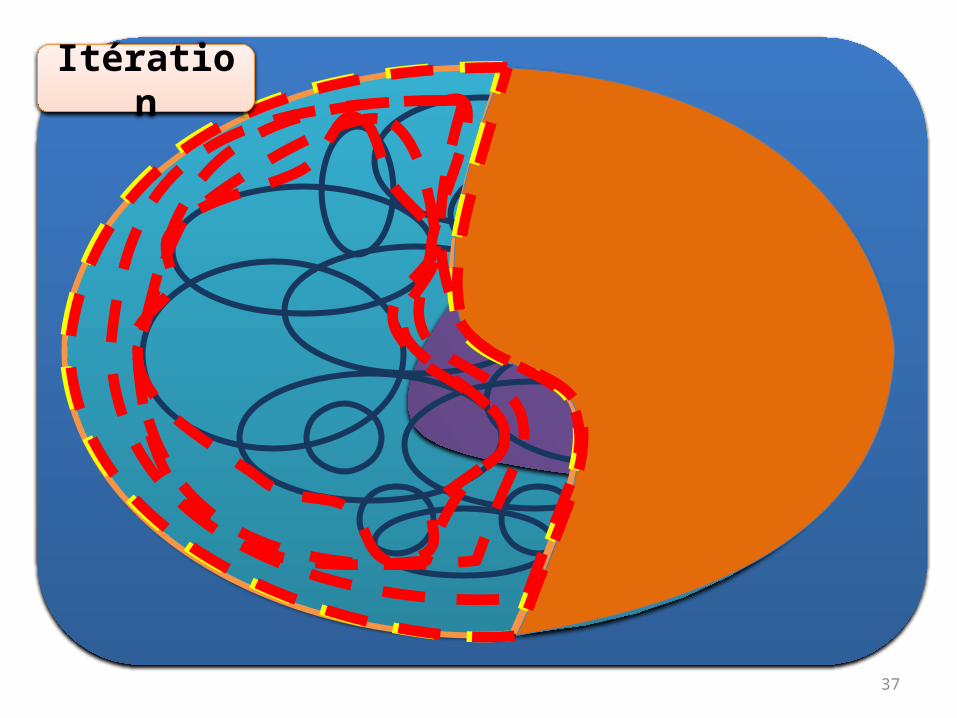
Itération
37
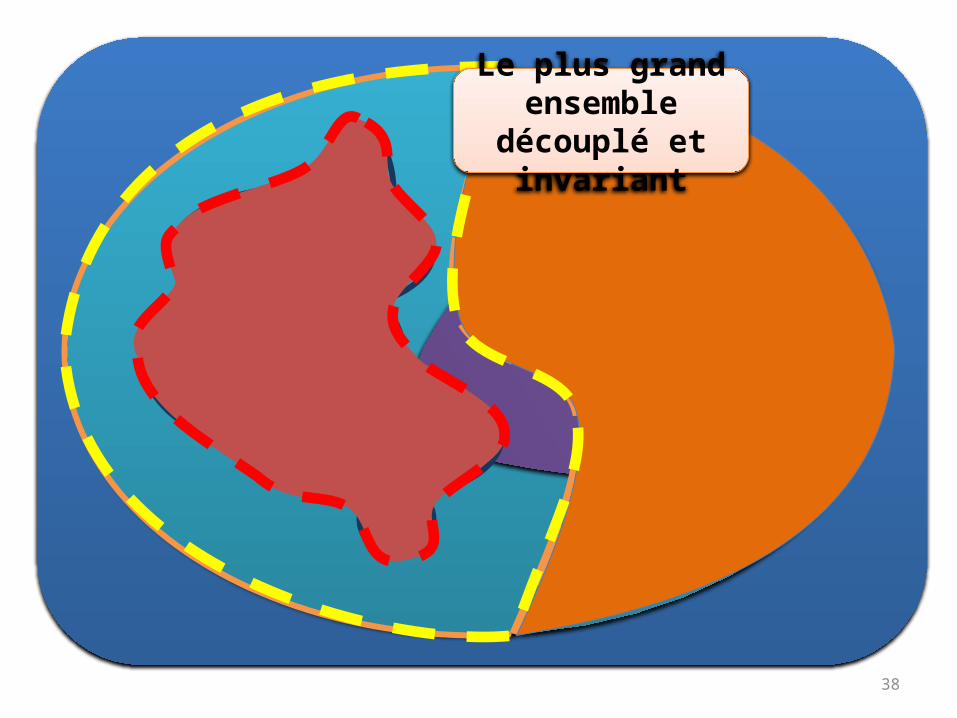
Le plus grand ensemble découplé
et invariant
38
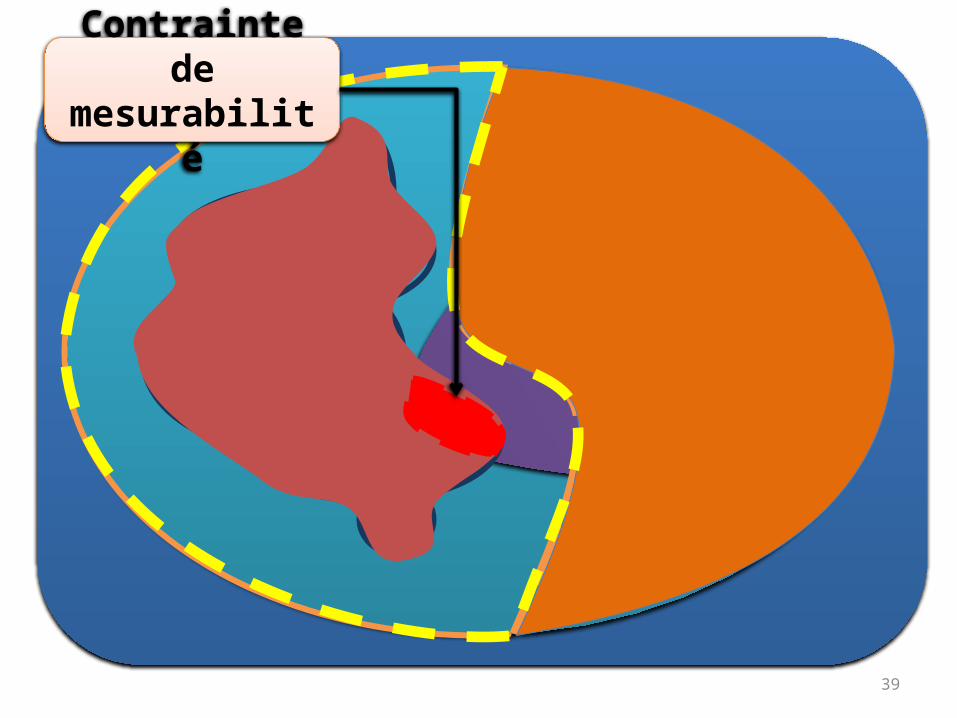
Contrainte de mesurabilité
39
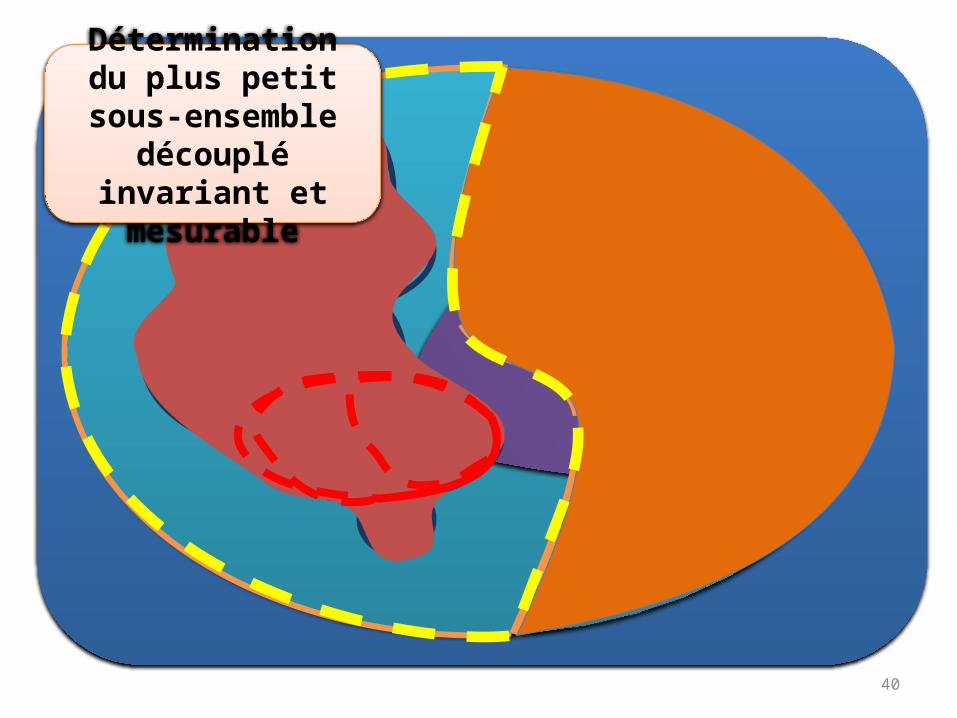
Détermination du plus petit sous-ensemble découplé invariant et
mesurable
40
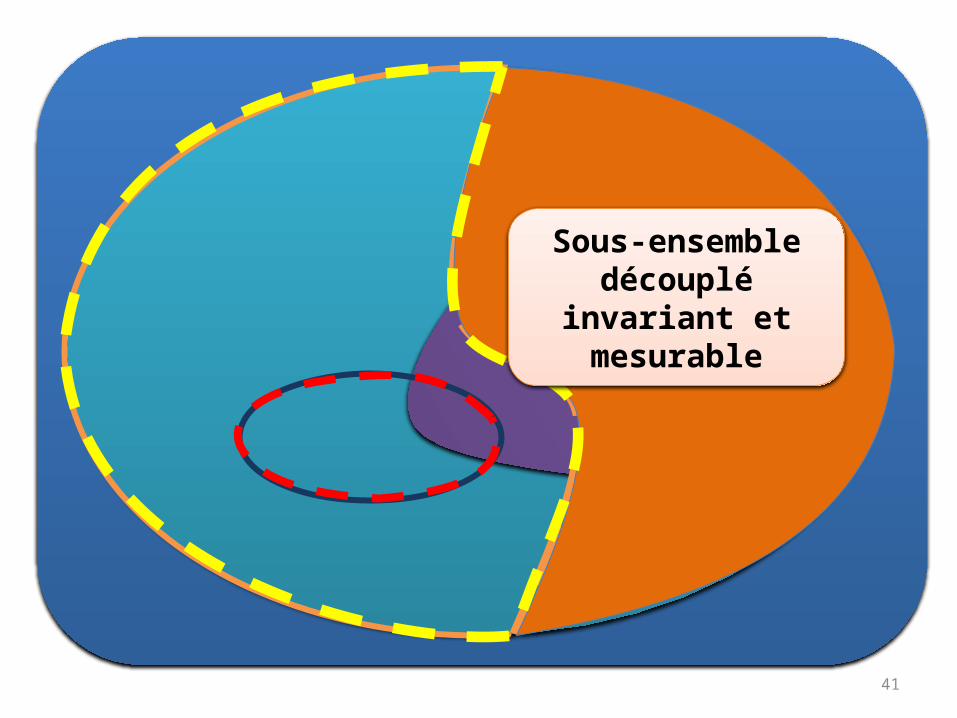
Sous-ensemble découplé invariant et
mesurable
41
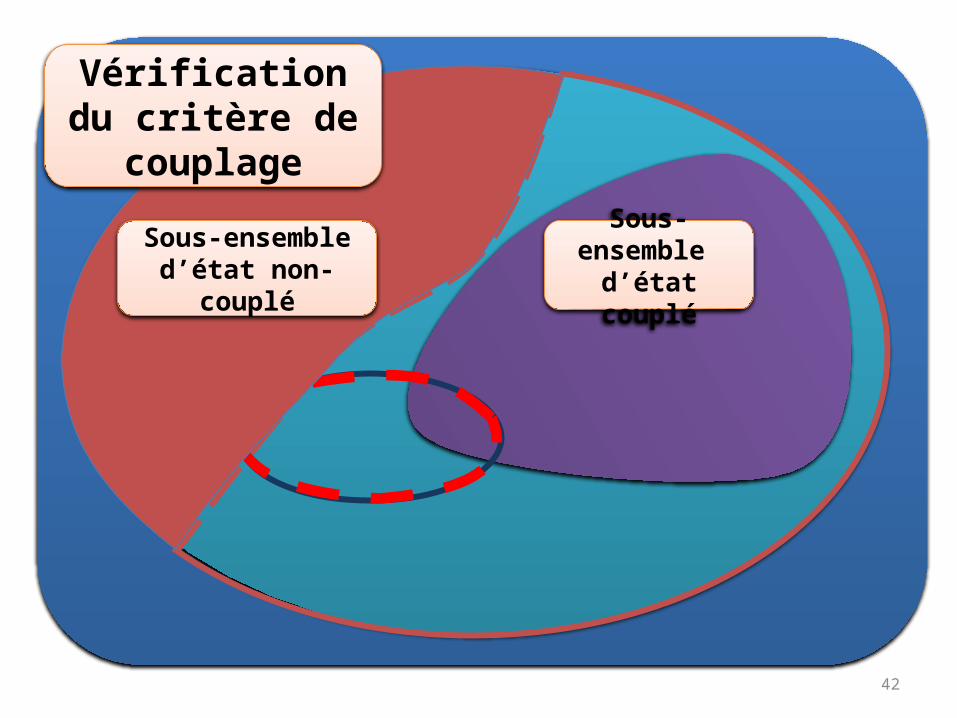
Vérification du critère de couplage
Sous-ensemble d’état non-couplé
Sous-ensemble d’état couplé
42
43
Problèmes rencontrés et traités
• La contrainte d’invariance– Que faire s’il n’existe pas de sous-ensemble découplé
invariant ?
• Problème d’initialisation– Comment trouver le sous-ensemble découplé maximal ?
• Aspect calculatoires– Comment déterminer les opérateurs m et M dans les cas
calculatoires complexes?
44
Injection de sorties
• ProblèmeRelâcher la contrainte d’invariance et proposer un critère général
d’invariance étendue
• Solution– Injection de sorties pour pallier à l’information perdue par
décomposition– Seules les sorties insensibles aux perturbations sont injectées– Extension de la technique connue dans le cadre des SEC au cas des SED
• Contribution D. BERDJAG, V. COCQUEMPOT ET C. CHRISTOPHE : An algebraic approach to behavioral model décomposition. Soumis à l’IFAC World Congress 2008. Seoul, South Korea. Juin 2008.
45
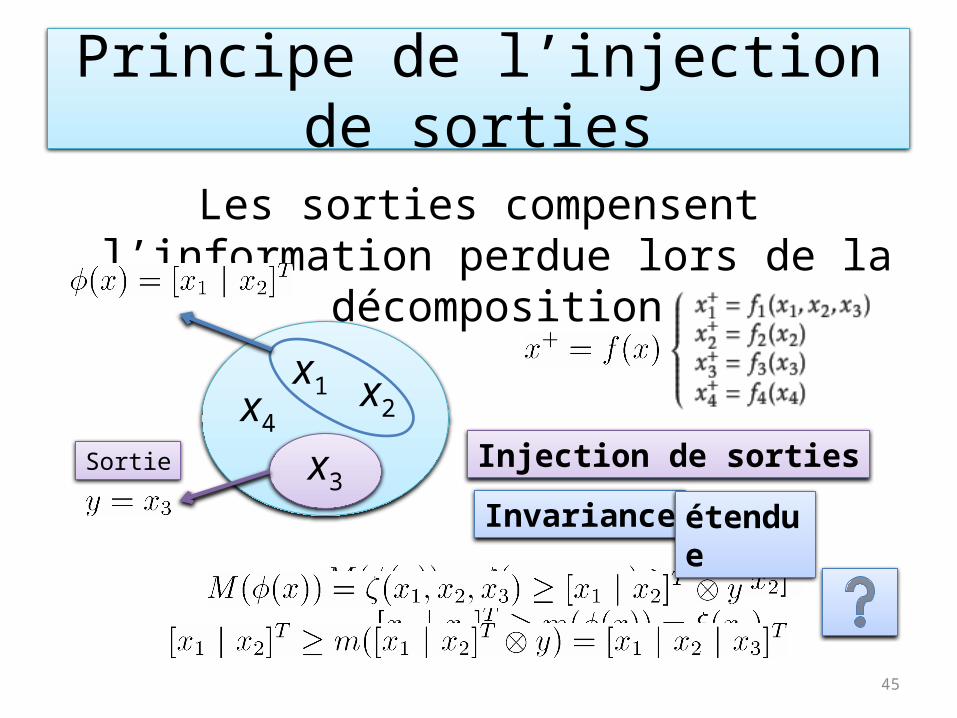
Principe de l’injection de sorties
Les sorties compensent l’information perdue lors de la décomposition
x1 x2x4
x3Injection de sorties
Invariance étendue
Sortie
46
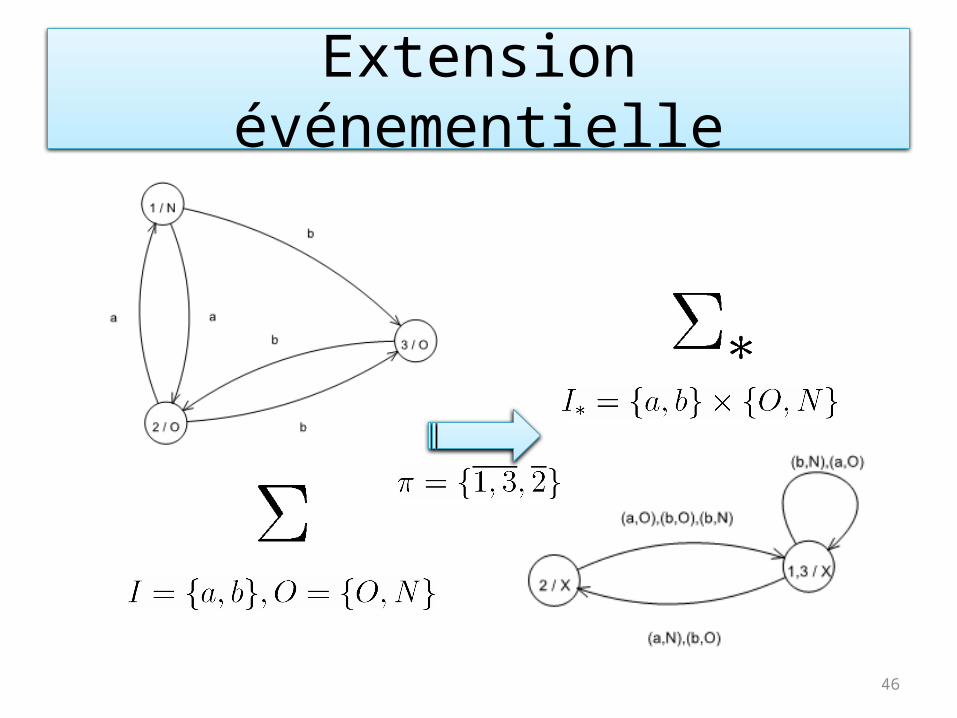
Extension événementielle
47
Initialisation optimale
• ProblèmeObtenir le sous-ensemble découplé maximal
• Solution– Utilisation de techniques d’élimination de variables pour
réduire l’influence de sur l’ensemble d’état– Application dans le cas d’une injection linéaire des entrées
inconnues (modèles temporels)
• Contribution
48
Aspects calculatoires
• ProblèmeProposer une méthode alternative de calcul des opérateurs
• Solution– Une méthode de calcul basée sur l’utilisation de fonctions
équivalentes a été développée
• Publications
49
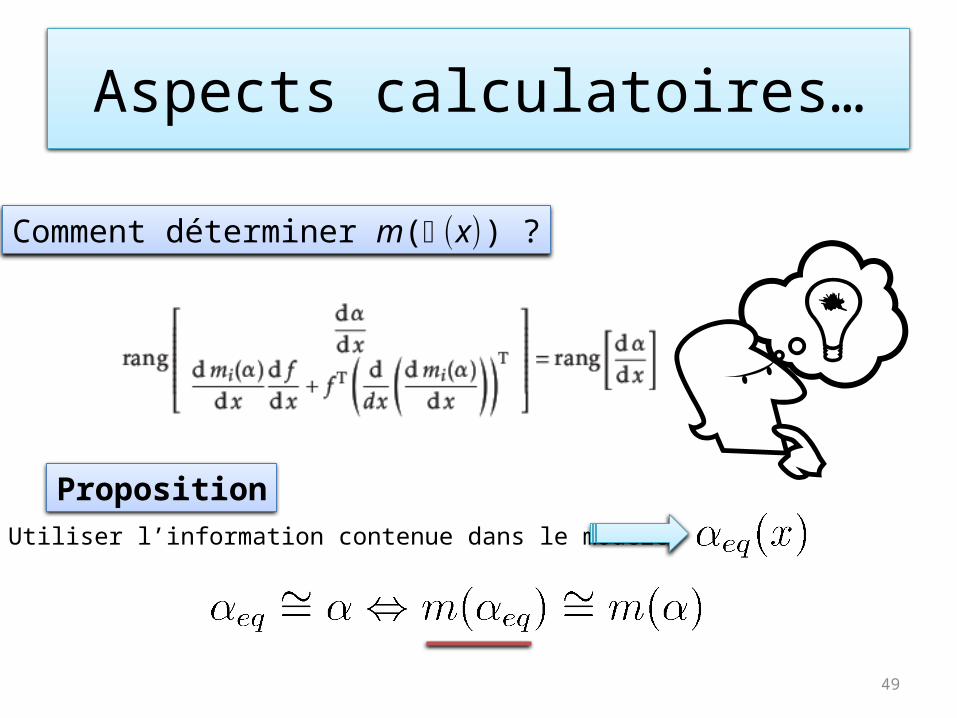
Aspects calculatoires…
Comment déterminer m( (a x)) ?
PropositionUtiliser l’information contenue dans le modèle
50
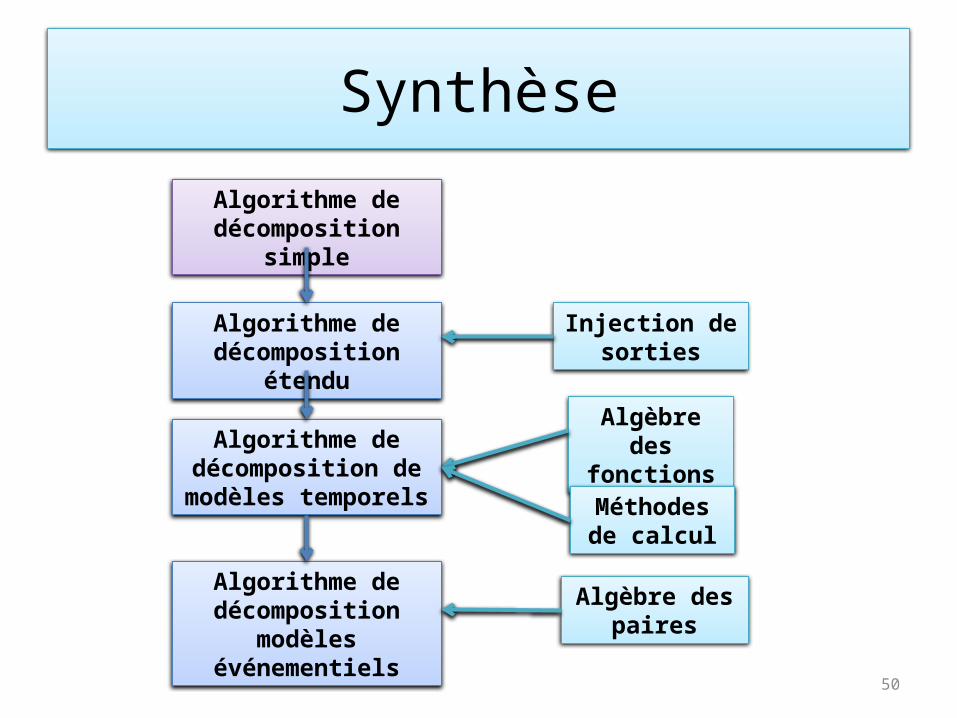
Synthèse
Algorithme de décomposition simple
Injection de sorties
Algorithme de décomposition étendu
Algèbre des paires
Algèbre des fonctionsAlgorithme de
décomposition de modèles temporels
Algorithme de décomposition modèles
événementiels
Méthodes de calcul
51
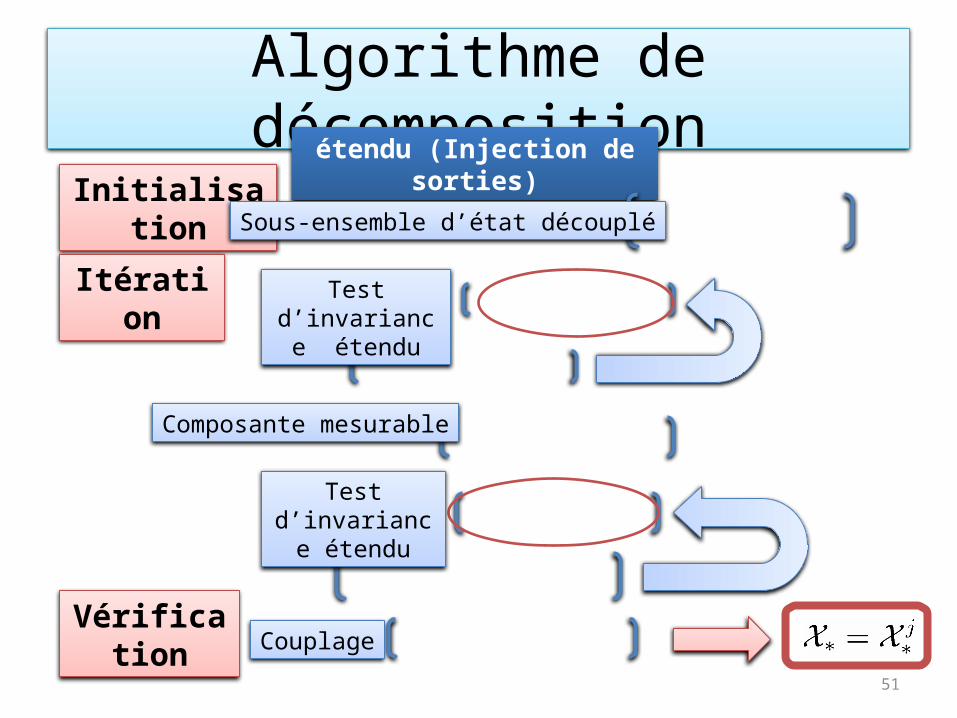
Algorithme de décompositionétendu (Injection de sorties)
Initialisation
Itération
Vérification
Sous-ensemble d’état découplé
Test d’invariance étendu
Composante mesurable
Test d’invariance étendu
Couplage
52
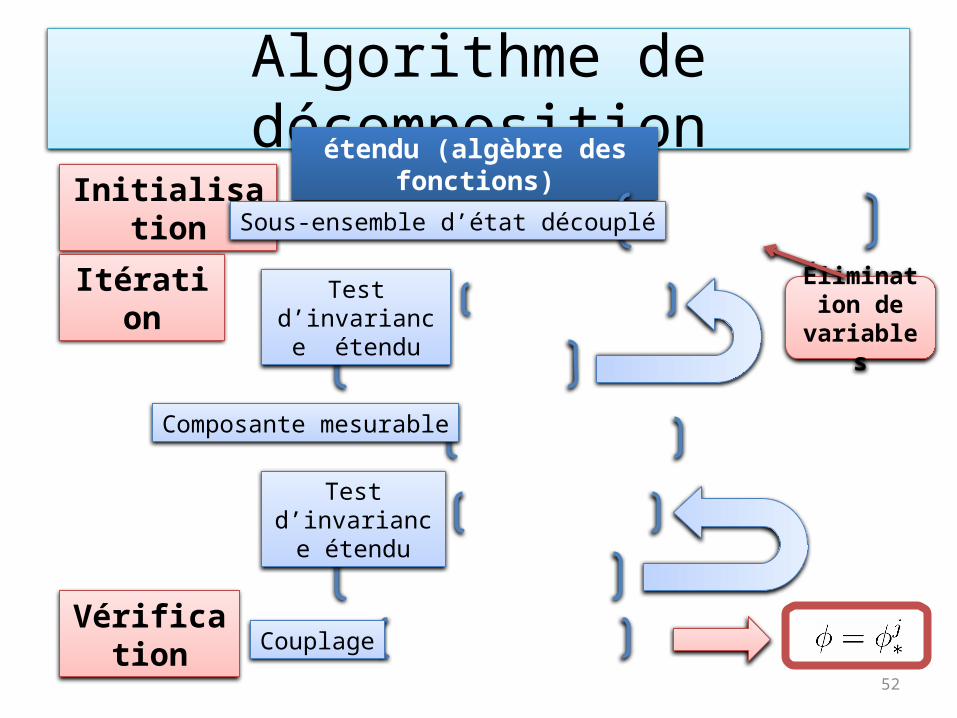
Algorithme de décompositionétendu (algèbre des fonctions)
Élimination de variables
Initialisation
Itération
Vérification
Sous-ensemble d’état découplé
Test d’invariance étendu
Composante mesurable
Test d’invariance étendu
Couplage
53
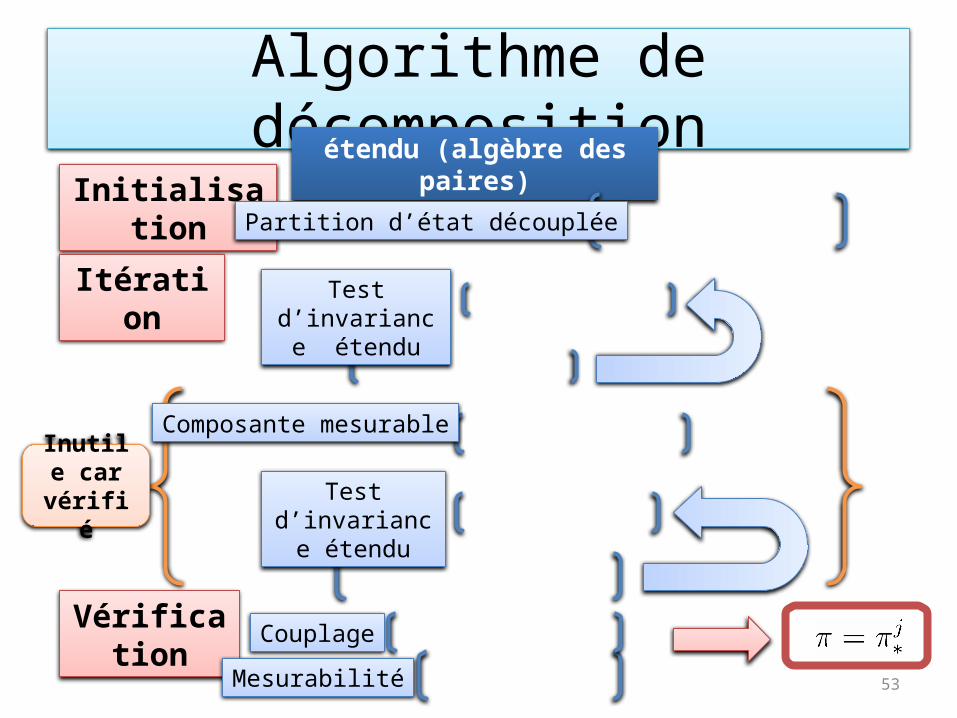
Algorithme de décompositionétendu (algèbre des paires)
Inutile car vérifié
Initialisation
Itération
Vérification
Partition d’état découplée
Test d’invariance étendu
Composante mesurable
Test d’invariance étendu
Couplage
Mesurabilité
54
Généralités Surveillance (modèle) Décomposition
Outils Techniques algébriques pour la décomposition
Méthodologie Synthèse de l’algorithme de décomposition
Illustration Système à 3 cuves
Conclusion Contributions Perspectives
55
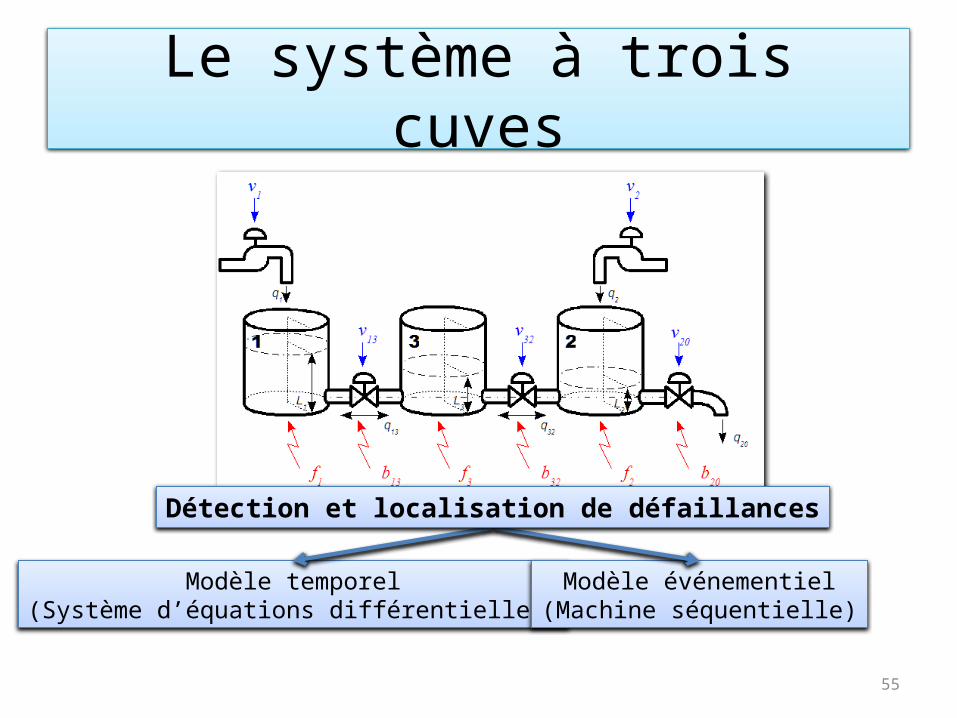
Le système à trois cuves
Modèle temporel(Système d’équations différentielles)
Modèle événementiel(Machine séquentielle)
Détection et localisation de défaillances
56
Généralités Surveillance (modèle) Décomposition
Outils Techniques algébriques pour la décomposition
Méthodologie Synthèse de l’algorithme de décomposition
Illustration Système à 3 cuves Modèle temporel
Modèle événementiel
Conclusion Contributions Perspectives
57
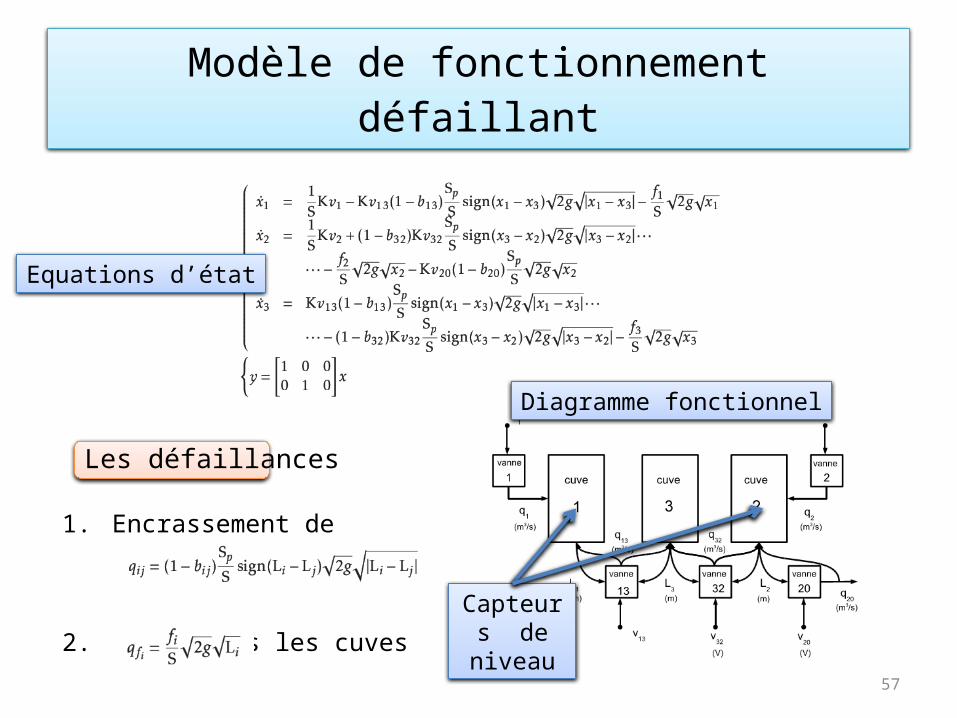
Modèle de fonctionnement défaillant
1. Encrassement de conduite
2. Fuite dans les cuves
Les défaillances
Diagramme fonctionnel
Equations d’état
Capteurs de niveau
58
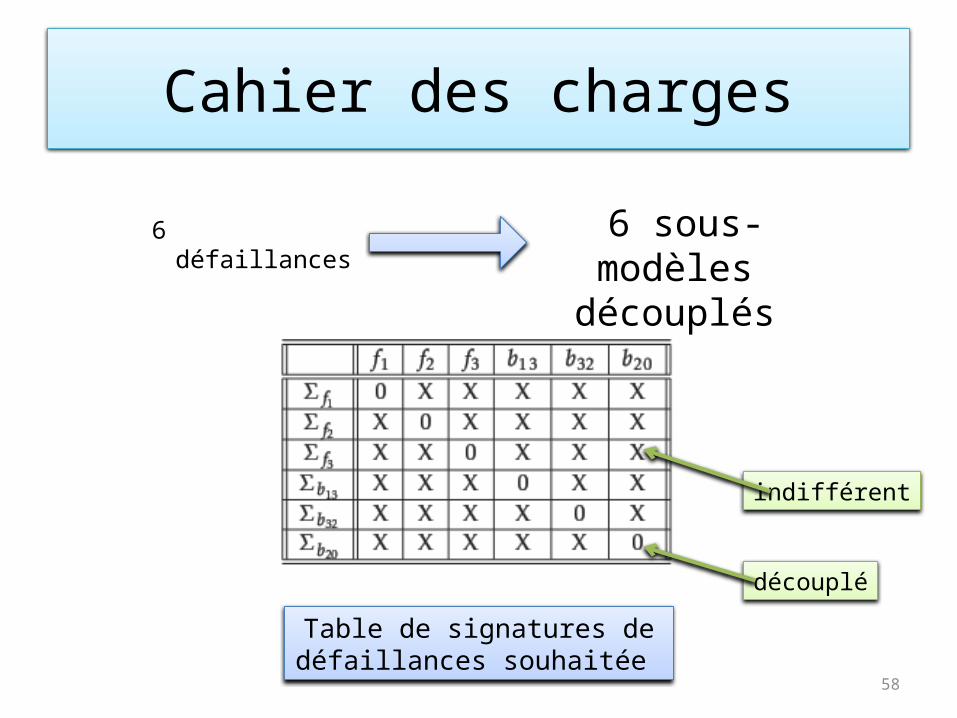
Cahier des charges
Table de signatures de défaillances souhaitée
indifférent
découplé
6 défaillances 6 sous-modèles découplés
59
Exemple de décomposition
• Déterminer le sous-modèle b13 :
– Découplé de la défaillance b13
– Couplé par rapport aux défaillances f1,f2,f3, b32,b20
• Synthétiser un générateur de résidu à partir de b13
– Un observateur pour éliminer les conditions initiales.
Denis BERDJAG
Justifier le choix des modes glissants
60
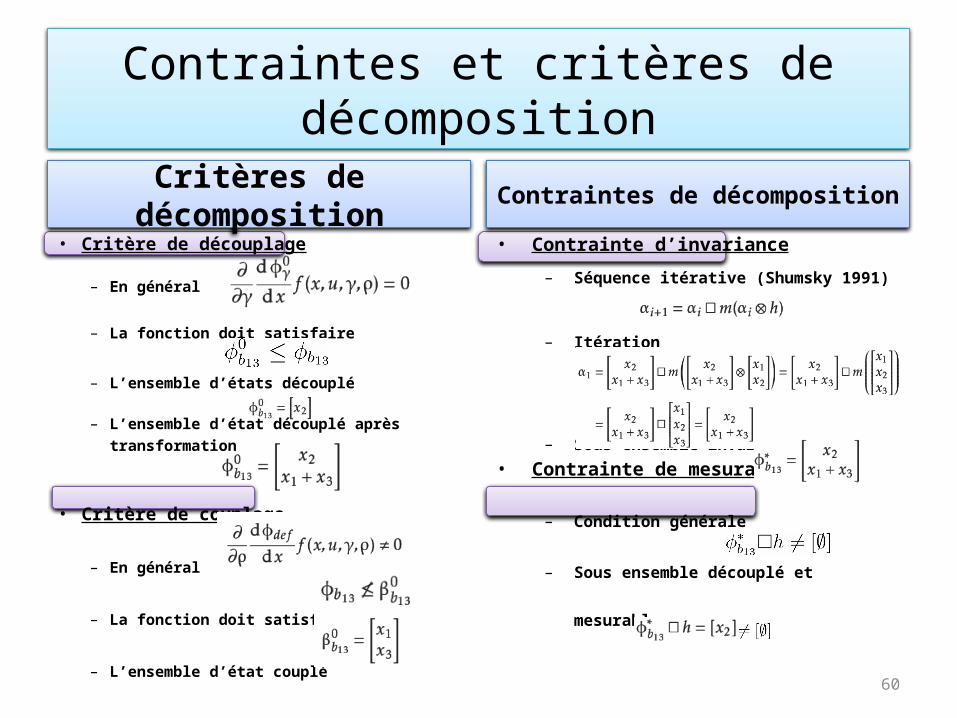
Contraintes et critères de décomposition
Critères de décomposition• Critère de découplage
– En général
– La fonction doit satisfaire
– L’ensemble d’états découplé
– L’ensemble d’état découplé après transformation
• Critère de couplage
– En général
– La fonction doit satisfaire
– L’ensemble d’état couplé
Contraintes de décomposition• Contrainte d’invariance
– Séquence itérative (Shumsky 1991)
– Itération
– Sous-ensemble invariant
• Contrainte de mesurabilité
– Condition générale
– Sous ensemble découplé et mesurable
61
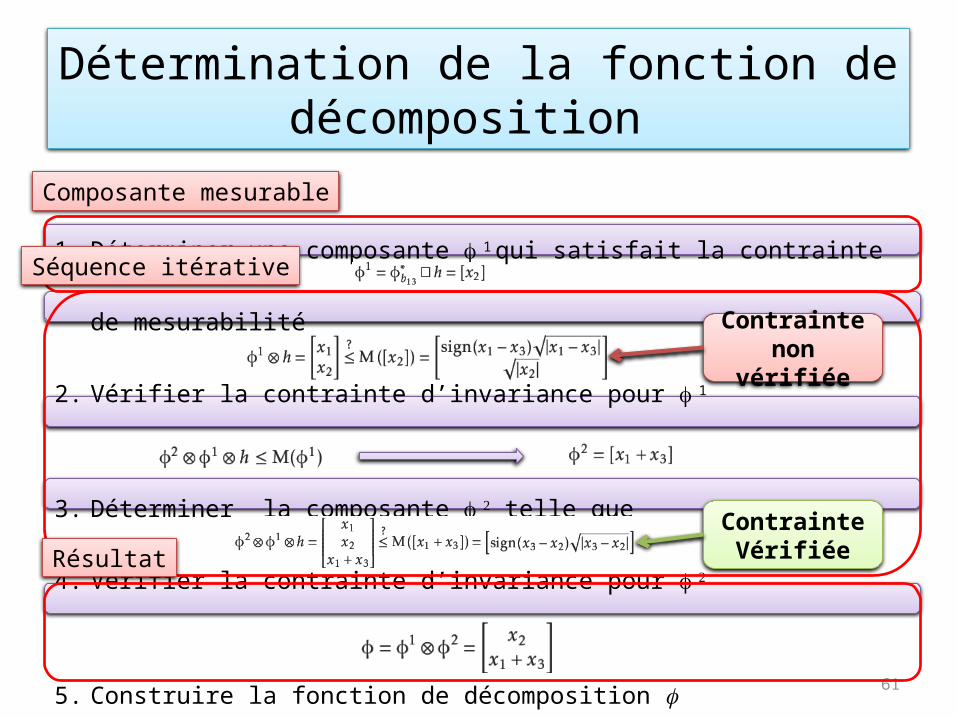
Détermination de la fonction de décomposition
1. Déterminer une composante f 1 qui satisfait la contrainte de mesurabilité
2. Vérifier la contrainte d’invariance pour f 1
3. Déterminer la composante f 2 telle que
4. Vérifier la contrainte d’invariance pour f 2
5. Construire la fonction de décomposition f
Contrainte non vérifiée
Contrainte Vérifiée
Composante mesurable
Séquence itérative
Résultat
Denis BERDJAG
Détailler en se référant au rapport
62
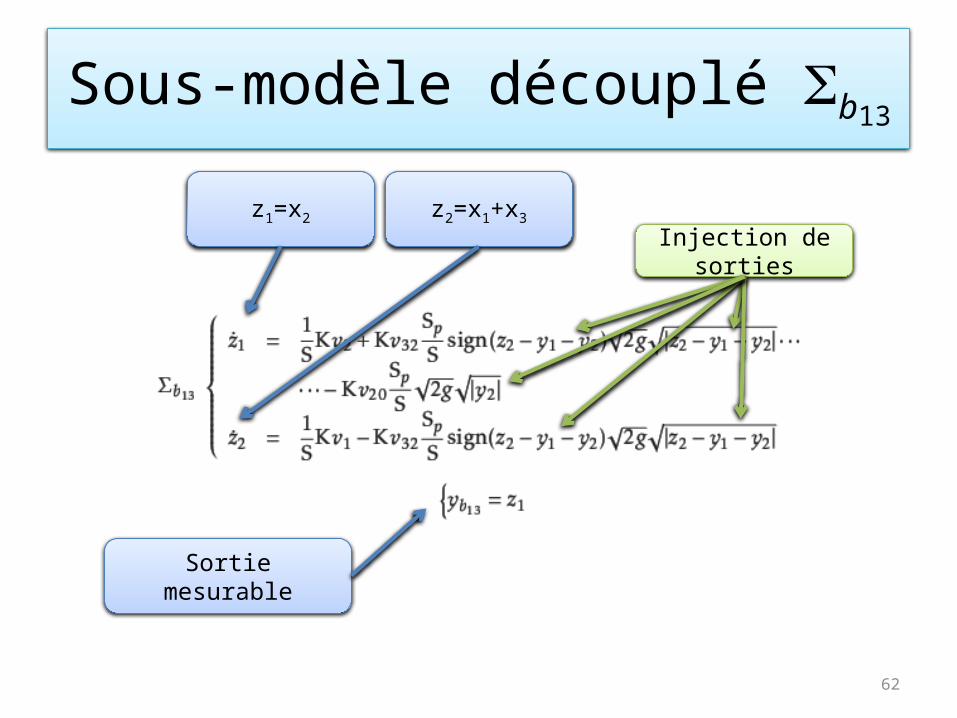
Sous-modèle découplé b13
z1=x2 z2=x1+x3
Injection de sorties
Sortie mesurable
63
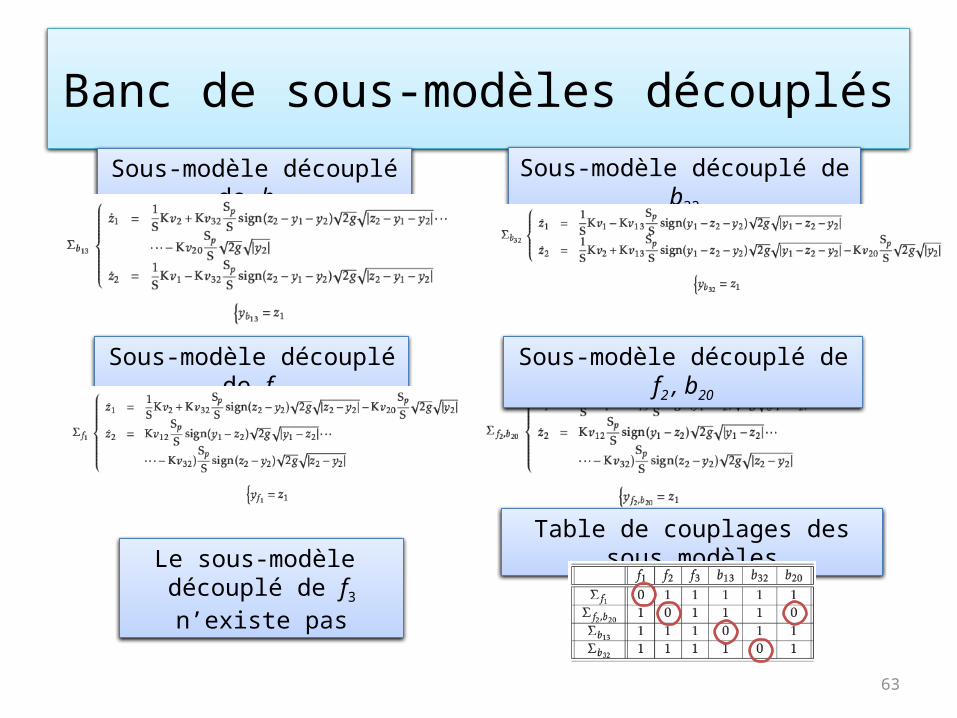
Banc de sous-modèles découplésSous-modèle découplé de b32Sous-modèle découplé de b13
Sous-modèle découplé de f2 , b20Sous-modèle découplé de f1
Table de couplages des sous modèlesLe sous-modèle découplé
de f3 n’existe pas
64
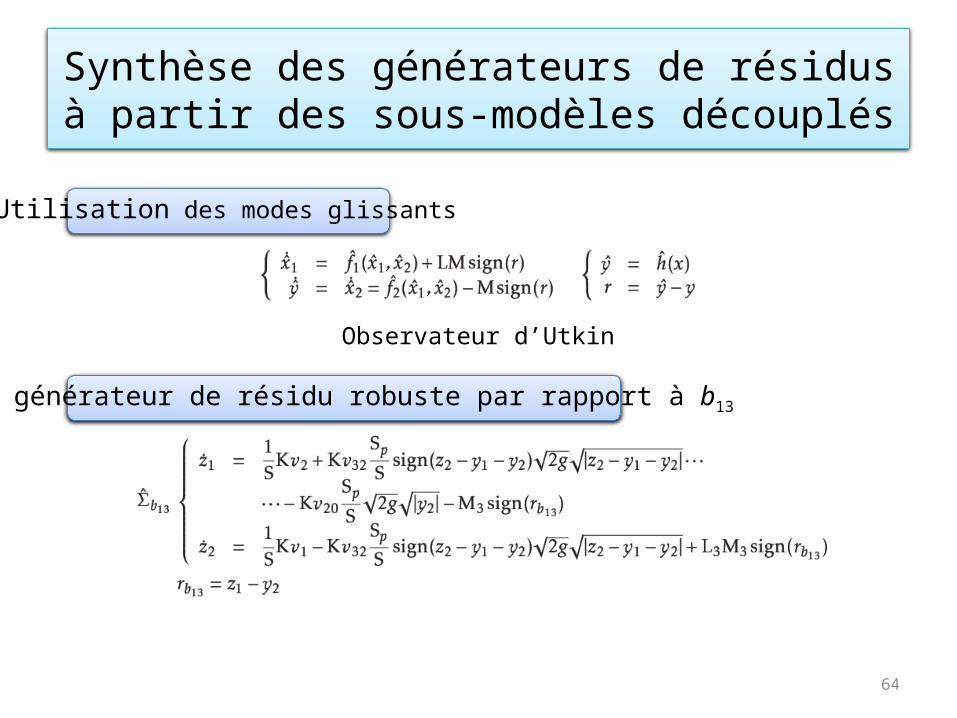
Synthèse des générateurs de résidus à partir des sous-modèles découplés
Observateur d’Utkin
Le générateur de résidu robuste par rapport à b13
Utilisation des modes glissants
65
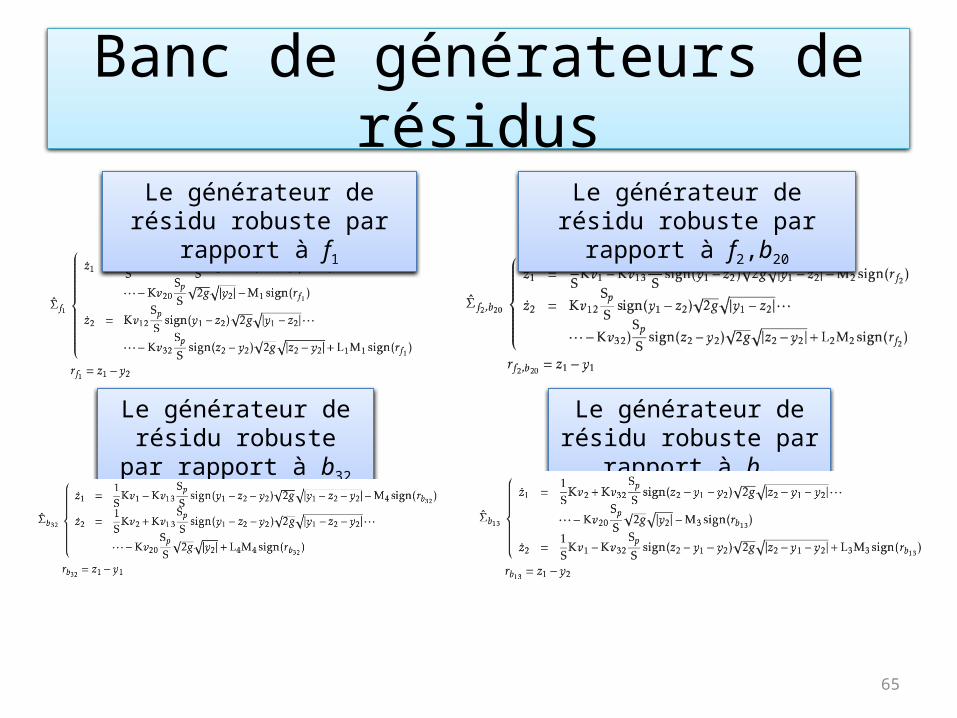
Banc de générateurs de résidus
Le générateur de résidu robuste par rapport à b32
Le générateur de résidu robuste par rapport à f1
Le générateur de résidu robuste par rapport à f2,b20
Le générateur de résidu robuste par rapport à b13
66
Constantes du Mode glissant
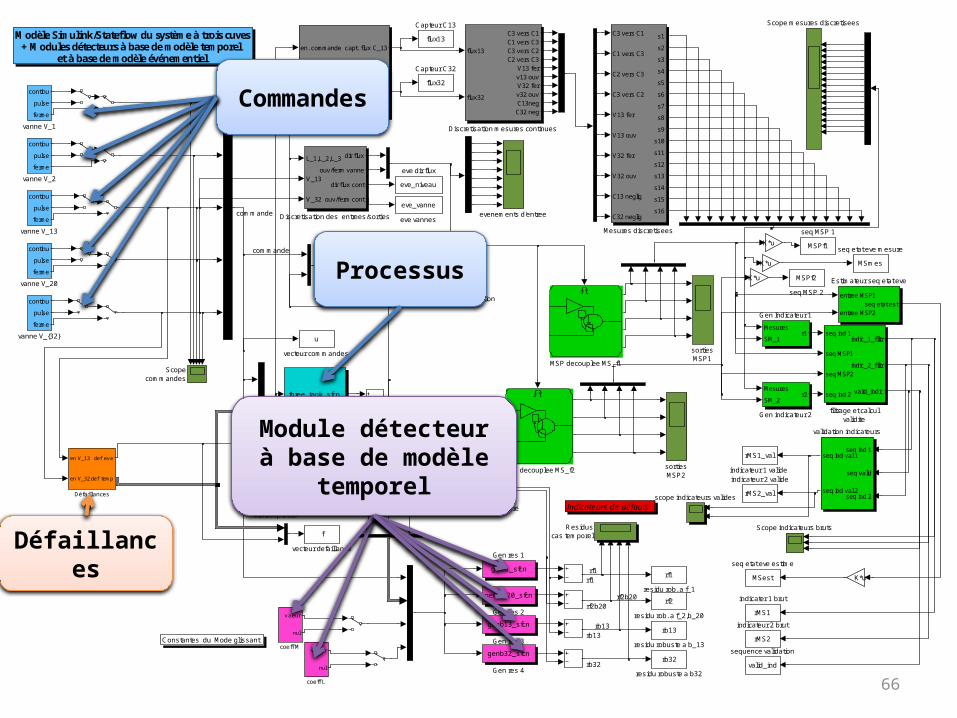
Légende sorties :jaune cuve 1mauve cuve 2bleu cuve 3
Modèle Simulink/Stateflow du système à trois cuves+ Modules détecteurs à base de modèle temporel
et à base de modèle événementiel
Indicateurs de défauts
f
vecteur defaillance
u
vecteur commandes
Y
vecteur Sorties
continu
pulse
ferme
vanne V_{32}
continu
pulse
ferme
vanne V_20
continu
pulse
ferme
vanne V_2
continu
pulse
ferme
vanne V_13
continu
pulse
ferme
vanne V_1
seq ind 1
seq valid
seq ind 2
seq ind val 1
seq ind val 2
validation indicateurs
sortiesMSP2
sortiesMSP1
valid_ind
sequence validation
MSmes
seq etat eve mesure
MSest
seq etat eve estime
MSPf2
seq MSP 2
MSPf1
seq MSP 1
scope indicateurs valides
rb13
residu robuste a b_13
rb32
residu robuste a b32
rf2
residu rob. a f_2,b_20
rf1
residu rob. a f_1
rMS2_val
indicateur 2 valide
rMS2
indicateur 2 brut
rMS1_val
indicateur 1 valide
rMS1
indicater 1 brut
bruit blanc
generateurbruit capteurs
seq ind 1
seq MSP1
seq MSP2
seq ind 2
indic_1_filtr
indic_2_filtr
valid_indic
filtrage et calculvalidite
evenements d'entreeeve_vanne
eve vannes
eve_niveau
eve dir flux
erreur estimation
v aleur
nul
coeff Mv aleur
nul
coeff L
0.2
amplitude bruit
t
Temps
Scope mesures discretisees
Scope indicateurs bruts
Scope bruit
Scopecommandes
Residuscas temporel
three_tank_sfcn
Process Reel
Niveaux cuves
Niveaux
C3 vers C1
C1 vers C3
C2 vers C3
C3 vers C2
V13 fer
V13 ouv
V32 fer
V32 ouv
C13 neglig
C32 neglig
s1
s2
s3
s4
s5
s6
s7
s8
s9
s10
s11
s12
s13
s14
s15
s16
Mesures discretisees
MSP decouplee MS_f2
MSP decouplee MS_f1
0 Le niveau C3 n'est pas mesuré
Initialisation
genb32_sfcn
Gen res 4
genb13_sfcn
Gen res 3
genf2b20_sfcn
Gen res 2
genf1_sfcn
Gen res 1
Mesures
SM_2r2
Gen indicateur 2
Mesures
SM_1r1
Gen Indicateur 1
K*u
K*u
K*u
K*u
entree MSP1
entree MSP2seq etat est
Estimateur seq etat eve
gen1_sfcn
Estimateur Mode FN
en V_13
en V_32
def ev e
def temp
Défaillances
f lux13
flux32
C3 vers C1C1 vers C3C3 vers C2C2 vers C3
V13 ferv13 ouvV32 ferv32 ouvC13negC32 neg
Discretisation mesures continues
L_1,L_2,L_3
V_13
V_32
dir f lux
ouv/ferm vanne
dir f lux cont
ouv/ferm cont
Discretisation des entrees/sorties
Clock
en. commande
en. mesures
capt. f lux C_13
capt. f lux C_32
Capteurs flux
flux32
Capteur C32
flux13
Capteur C13
Add5
commande
commande
c3c3 c2c2
rf1rf1
rf2b20rf2b20
rb13rb13
rb32
c1c1
y
Commandes
Défaillances
Module détecteur à base de modèle temporel
Processus
67
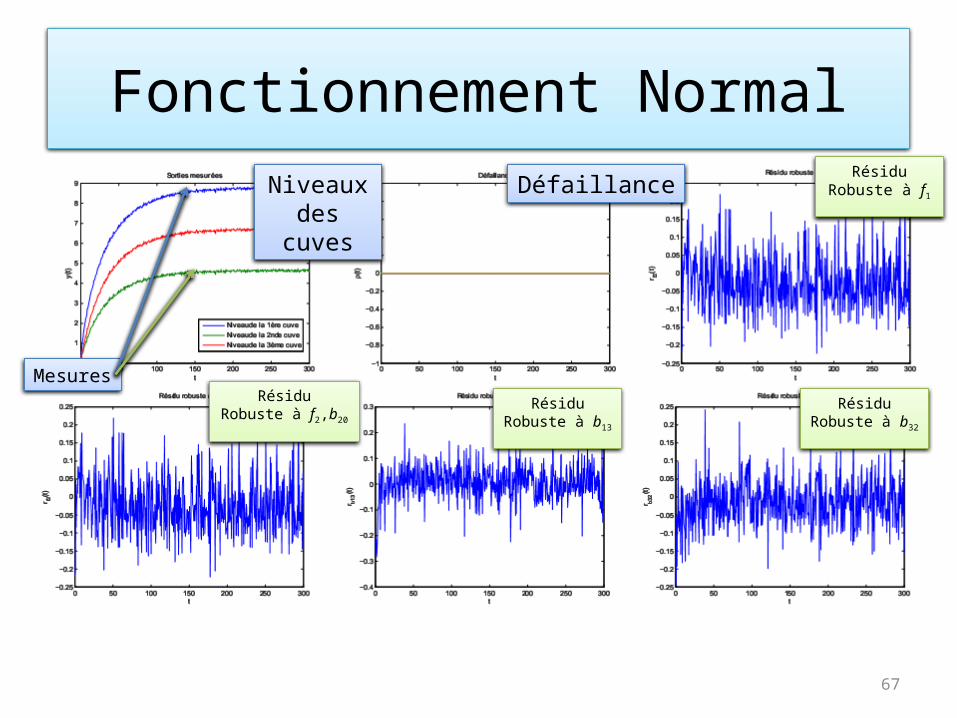
Fonctionnement NormalNiveaux
des cuvesDéfaillance Résidu
Robuste à f1
RésiduRobuste à f2,b20
RésiduRobuste à b13
RésiduRobuste à b32
Mesures
68
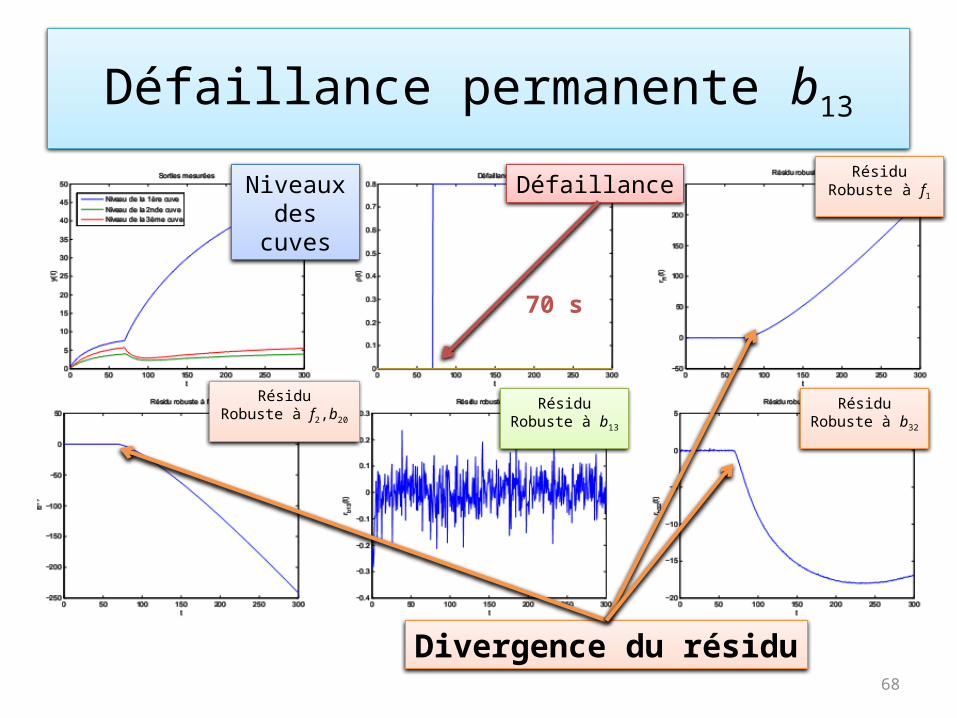
Défaillance permanente b13
Défaillance RésiduRobuste à f1
RésiduRobuste à f2,b20
RésiduRobuste à b13
RésiduRobuste à b32
Divergence du résidu
70 s
Niveaux des cuves
Denis BERDJAG
les résidus ne detectent pas. ils reflètent le défautpermettent de faire une détection après.
69
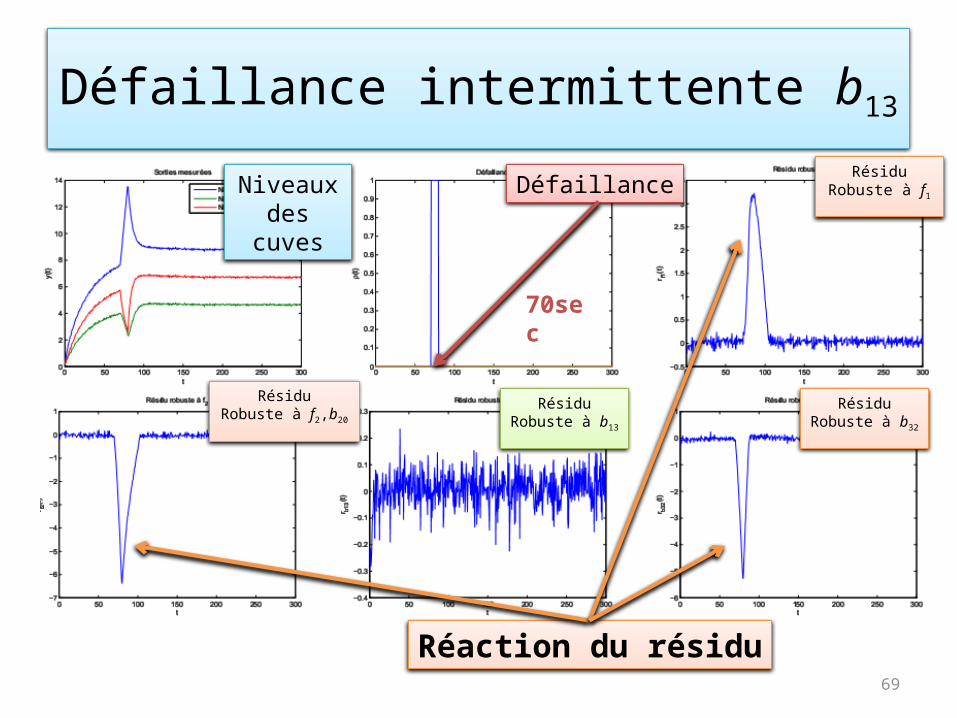
Défaillance intermittente b13
Défaillance RésiduRobuste à f1
RésiduRobuste à f2,b20
RésiduRobuste à b13
RésiduRobuste à b32
70sec
Réaction du résidu
Niveaux des cuves
70
Généralités Surveillance (modèle) Décomposition
Outils Techniques algébriques pour la décomposition
Méthodologie Synthèse de l’algorithme de décomposition
Illustration Système à 3 cuves Modèle temporelModèle
événementiel
Conclusion Contributions Perspectives
71
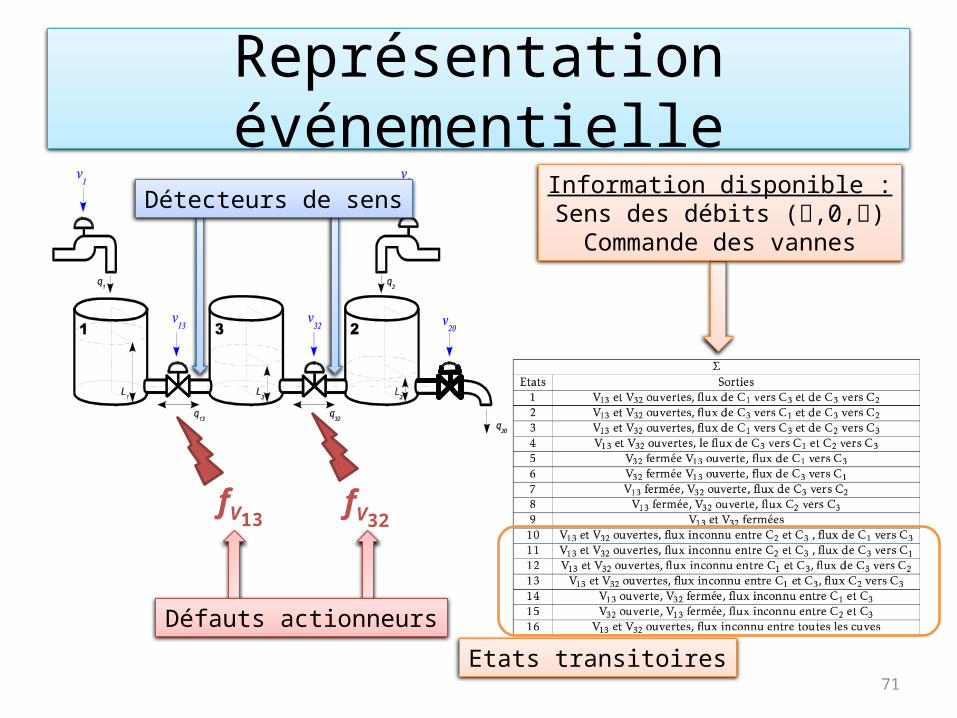
Représentation événementielle
Détecteurs de sens
fV13fV32
Défauts actionneurs
Information disponible :Sens des débits (,0,)Commande des vannes
Etats transitoires
72
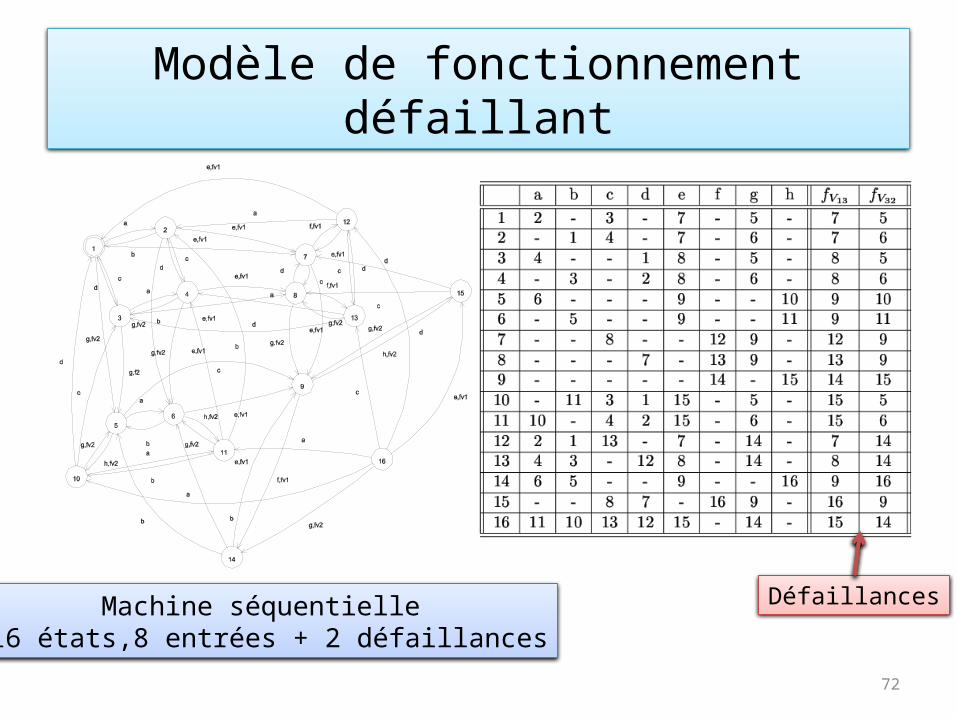
Modèle de fonctionnement défaillant
Machine séquentielle 16 états,8 entrées + 2 défaillances
Défaillances
73
Cahier des charges
Deux machines séquentielles partielles découplées
Découplée de l’influence de fV13
Couplée à l’influence de fV32
Découplée de l’influence de fV32
Couplée à l’influence de fV13
74
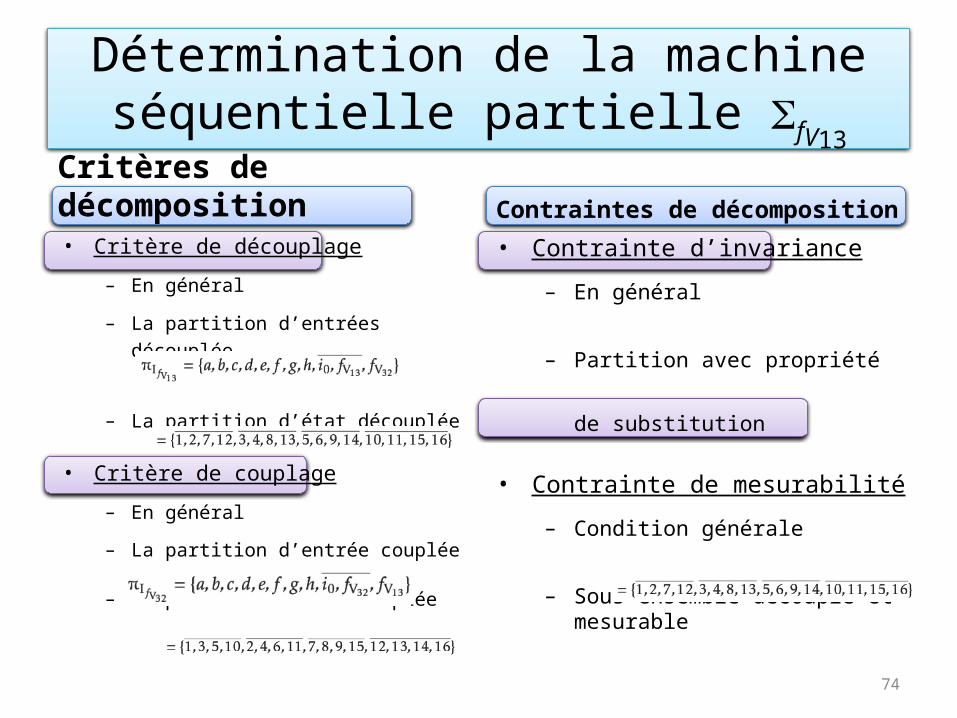
Détermination de la machine séquentielle partielle fV13
Critères de décomposition• Critère de découplage
– En général
– La partition d’entrées découplée
– La partition d’état découplée
• Critère de couplage
– En général
– La partition d’entrée couplée
– La partition d’état couplée
Contraintes de décomposition• Contrainte d’invariance
– En général
– Partition avec propriété de substitution
• Contrainte de mesurabilité
– Condition générale
– Sous ensemble découplé et mesurable
75
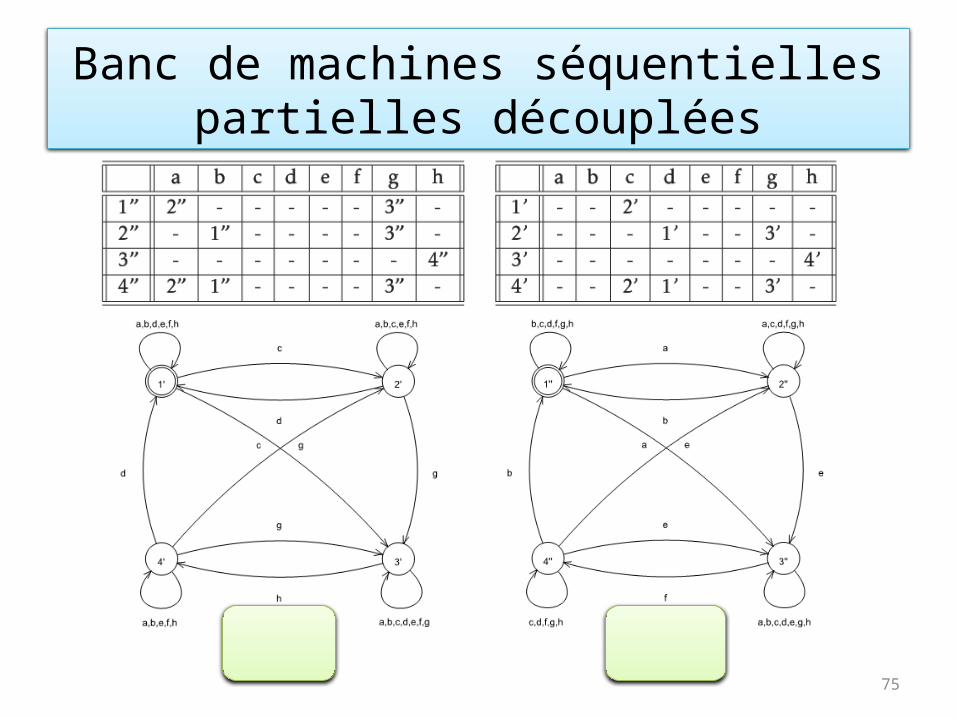
Banc de machines séquentielles partielles découplées
76
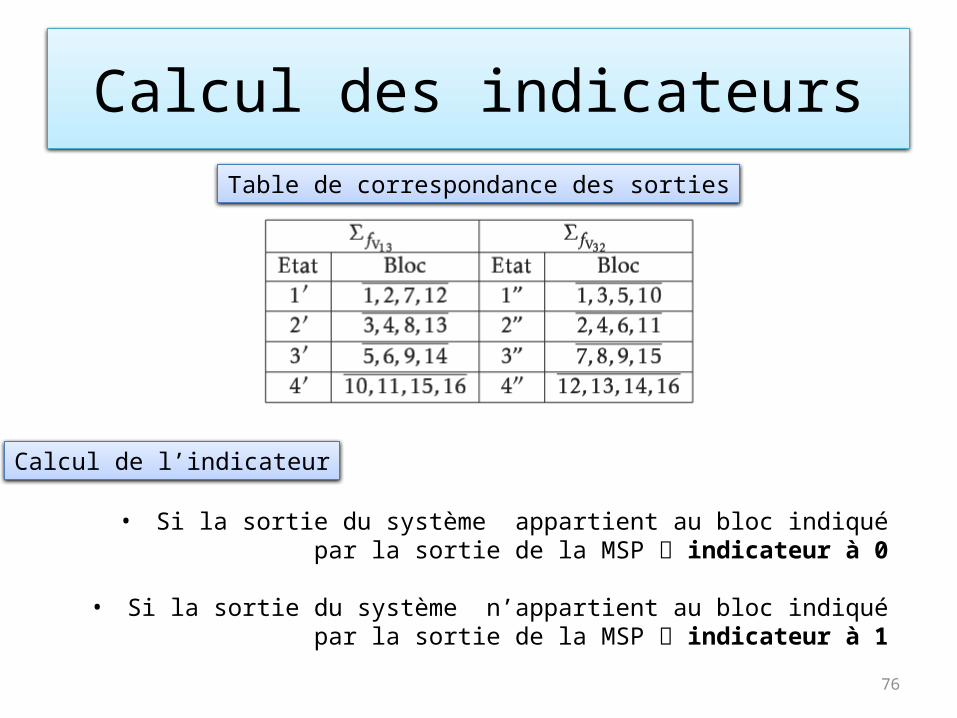
Calcul des indicateursTable de correspondance des sorties
Calcul de l’indicateur
• Si la sortie du système appartient au bloc indiqué par la sortie de la MSP indicateur à 0
• Si la sortie du système n’appartient au bloc indiqué par la sortie de la MSP indicateur à 1
77
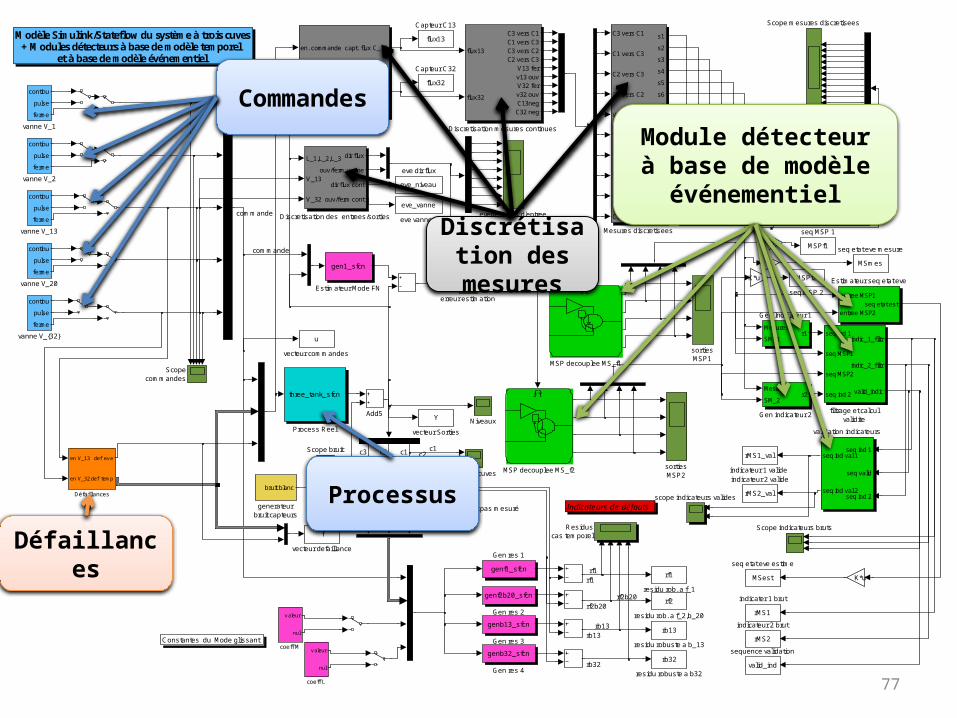
Constantes du Mode glissant
Légende sorties :jaune cuve 1mauve cuve 2bleu cuve 3
Modèle Simulink/Stateflow du système à trois cuves+ Modules détecteurs à base de modèle temporel
et à base de modèle événementiel
Indicateurs de défauts
f
vecteur defaillance
u
vecteur commandes
Y
vecteur Sorties
continu
pulse
ferme
vanne V_{32}
continu
pulse
ferme
vanne V_20
continu
pulse
ferme
vanne V_2
continu
pulse
ferme
vanne V_13
continu
pulse
ferme
vanne V_1
seq ind 1
seq valid
seq ind 2
seq ind val 1
seq ind val 2
validation indicateurs
sortiesMSP2
sortiesMSP1
valid_ind
sequence validation
MSmes
seq etat eve mesure
MSest
seq etat eve estime
MSPf2
seq MSP 2
MSPf1
seq MSP 1
scope indicateurs valides
rb13
residu robuste a b_13
rb32
residu robuste a b32
rf2
residu rob. a f_2,b_20
rf1
residu rob. a f_1
rMS2_val
indicateur 2 valide
rMS2
indicateur 2 brut
rMS1_val
indicateur 1 valide
rMS1
indicater 1 brut
bruit blanc
generateurbruit capteurs
seq ind 1
seq MSP1
seq MSP2
seq ind 2
indic_1_filtr
indic_2_filtr
valid_indic
filtrage et calculvalidite
evenements d'entreeeve_vanne
eve vannes
eve_niveau
eve dir flux
erreur estimation
v aleur
nul
coeff Mv aleur
nul
coeff L
0.2
amplitude bruit
t
Temps
Scope mesures discretisees
Scope indicateurs bruts
Scope bruit
Scopecommandes
Residuscas temporel
three_tank_sfcn
Process Reel
Niveaux cuves
Niveaux
C3 vers C1
C1 vers C3
C2 vers C3
C3 vers C2
V13 fer
V13 ouv
V32 fer
V32 ouv
C13 neglig
C32 neglig
s1
s2
s3
s4
s5
s6
s7
s8
s9
s10
s11
s12
s13
s14
s15
s16
Mesures discretisees
MSP decouplee MS_f2
MSP decouplee MS_f1
0 Le niveau C3 n'est pas mesuré
Initialisation
genb32_sfcn
Gen res 4
genb13_sfcn
Gen res 3
genf2b20_sfcn
Gen res 2
genf1_sfcn
Gen res 1
Mesures
SM_2r2
Gen indicateur 2
Mesures
SM_1r1
Gen Indicateur 1
K*u
K*u
K*u
K*u
entree MSP1
entree MSP2seq etat est
Estimateur seq etat eve
gen1_sfcn
Estimateur Mode FN
en V_13
en V_32
def ev e
def temp
Défaillances
f lux13
flux32
C3 vers C1C1 vers C3C3 vers C2C2 vers C3
V13 ferv13 ouvV32 ferv32 ouvC13negC32 neg
Discretisation mesures continues
L_1,L_2,L_3
V_13
V_32
dir f lux
ouv/ferm vanne
dir f lux cont
ouv/ferm cont
Discretisation des entrees/sorties
Clock
en. commande
en. mesures
capt. f lux C_13
capt. f lux C_32
Capteurs flux
flux32
Capteur C32
flux13
Capteur C13
Add5
commande
commande
c3c3 c2c2
rf1rf1
rf2b20rf2b20
rb13rb13
rb32
c1c1
y
Commandes
Défaillances
Module détecteur à base de modèle événementiel
Processus
Discrétisation des mesures
78
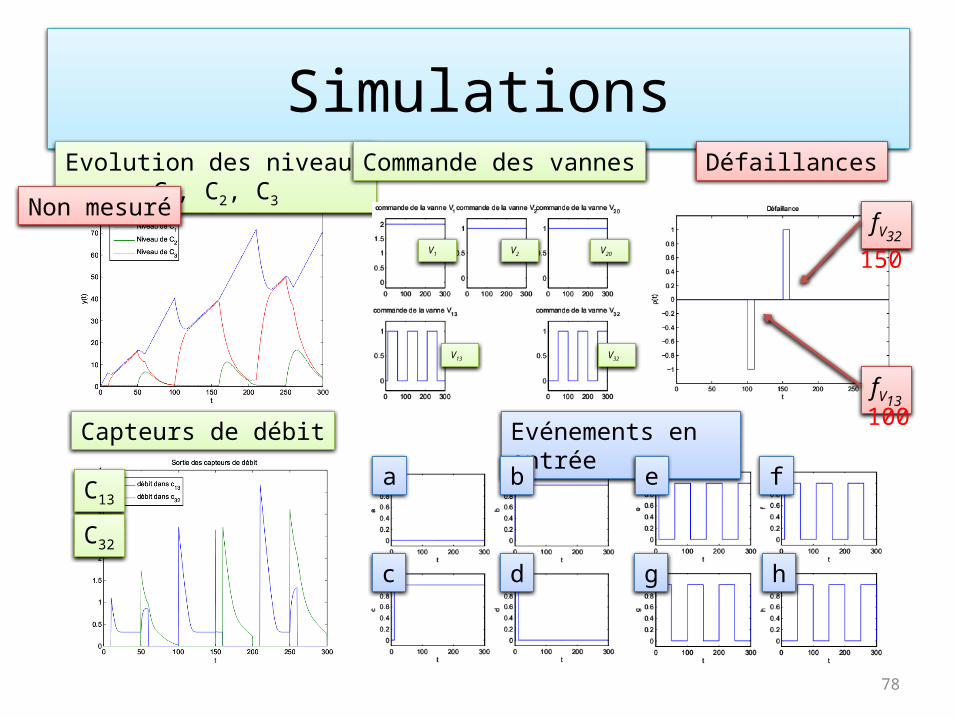
SimulationsEvolution des niveaux
C1, C2, C3
Commande des vannes Défaillances
Capteurs de débit Evénements en entrée
a
c
b
d
e
g
f
h
fV13
fV32
150
100
V20V2V1
V32V13
C13
C32
Non mesuré
79
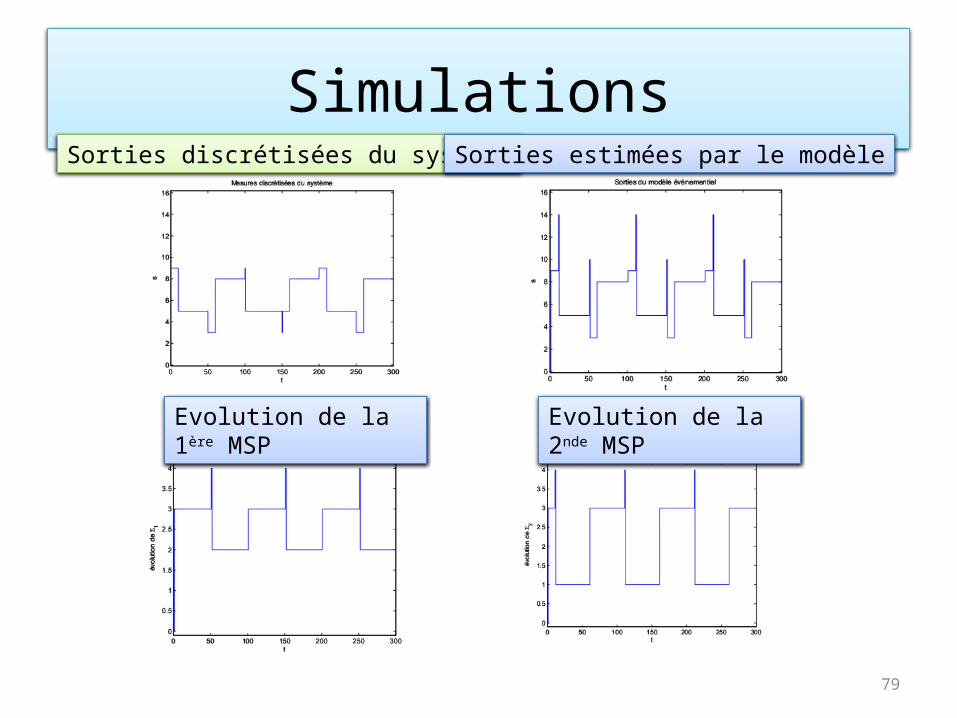
SimulationsSorties discrétisées du système Sorties estimées par le modèle
Evolution de la 1ère MSP Evolution de la 2nde MSP
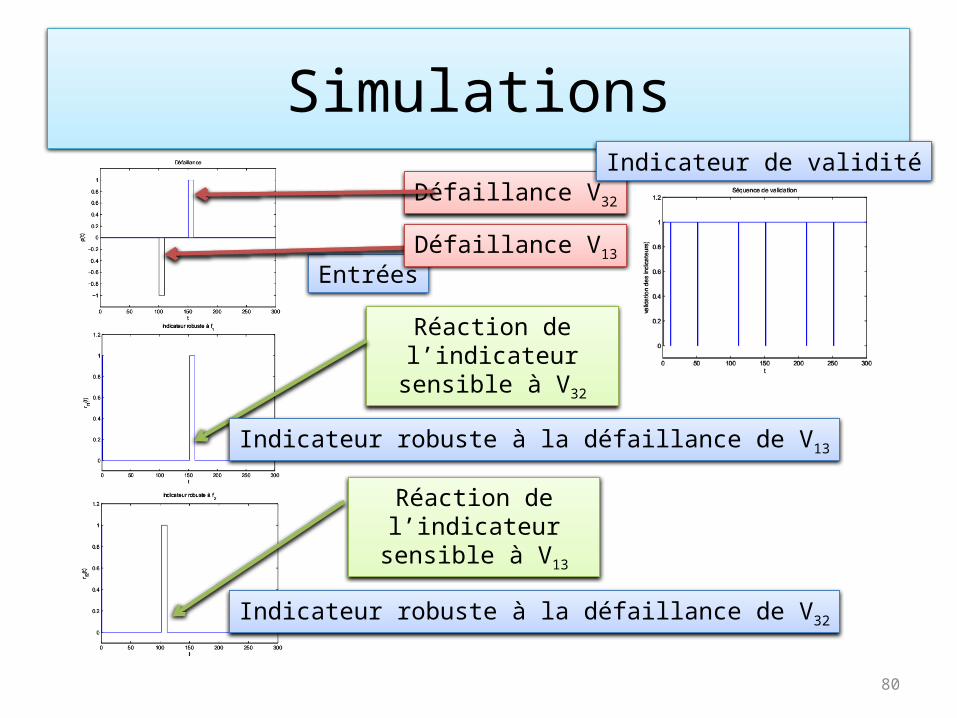
80
SimulationsDéfaillance V32
Réaction de l’indicateursensible à V32
Réaction de l’indicateur sensible à V13
Entrées
Indicateur robuste à la défaillance de V13
Indicateur robuste à la défaillance de V32
Indicateur de validité
Défaillance V13
81
Généralités Surveillance (modèle) Décomposition
Outils Techniques algébriques pour la décomposition
Méthodologie Synthèse de l’algorithme de décomposition
Illustration Système à 3 cuves Modèle temporel Modèle événementiel
Conclusion Contributions Perspectives
82
Contributions : aspect pédagogique
• L’outil algèbre des fonctions– Présentation de l’outil et situation par rapport aux travaux
de la communauté FDI.– Détail de l’utilisation des outils mathématiques.– Implémentation en langage symbolique.
• L’outil algèbre des paires– Extension de la problématique FDI– Implémentation en langage symbolique.
83
Contributions : aspect mathématique
• Détail de la procédure de calcul des opérateurs de l’algèbre des fonctions– Équations d’état linéaires, non-linéaire, événementielles.
• Proposition de solutions aux problèmes calculatoires – Résultat obtenu en utilisant des fonction équivalentes
• Amélioration de la décomposition– Utilisation des techniques d’élimination de variables pour
calculer le sous-ensemble découplé optimal (injection linéaire des défaillances)
84
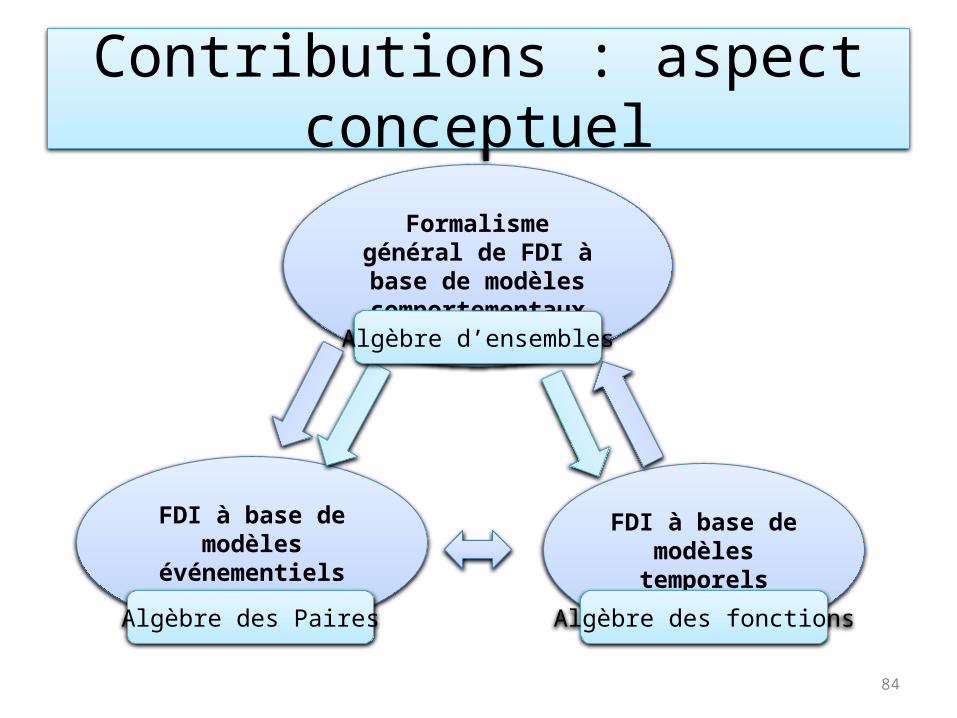
Contributions : aspect conceptuel
FDI à base de modèles temporels
FDI à base de modèles événementiels
Formalisme général de FDI à base de modèles
comportementaux
Algèbre des fonctionsAlgèbre des Paires
Algèbre d’ensembles
85
Généralités Surveillance (modèle) Décomposition
Outils Techniques algébriques pour la décomposition
Méthodologie Synthèse de l’algorithme de décomposition
Illustration Système à 3 cuves Modèle temporel Modèle événementiel
Conclusion Contributions Perspectives
86
Perspectives• Implémenter des techniques d’élimination de variables non linéaires
pour l’initialisation de l’algorithme de décomposition.– Bases de Groebner
• Appliquer la méthodologie de décomposition sur des modèles hybrides
• Autres utilisations de la méthodologie ou des outils– Décomposition canonique (Kalman)– Flux de données corrélées (théorie de l’information)
• Approfondir la méthode de détection et de localisation de défaillances en utilisant des modèles événementiels– Description du modèle sous forme de paires algébriques– Définition d’indicateurs de défaillances directionnels

87
Merci pour votre attention
88
Perspectives : Techniques d’élimination de variables non-linéaires
• Utilisation des bases de Groebner pour l’élimination de la variable à découpler (injection polynomiale)
• Division polynomiale pour reconstruire la transformation
• Les expressions qui constituent la transformation augmentent la partie découplée
89
Perspectives : Décomposition de modèles hybrides
1. Considérer les dynamiques événementielles et temporelles comme indépendantes (commutation)
– Décompositions indépendantes du modèle temporel et du modèle événementiel
2. Considérer le cas général et les couplages temporels-événementiels
– Décrire le modèle hybride sous forme de quintuplet– Exprimer les contraintes inégalité de manière algébrique– Définir des méta-ensembles constitués d’éléments finis et infinis.
Modèle complet hybride
Sous-modèle hybride
90
Perspectives : Autres utilisations des outils et de la méthodologie
Décomposition canonique (Kalman)– Exprimer l’observabilité et la commandabilité de
manière algébrique ( opérateurs m, M)– Formuler un algorithme de décomposition (critère
de couplage)Flux de données corrélées– Les opérateurs m, M quantifient l’information dans
un flux de données– Déterminer la propagation d’une donnée dans le
flux
91
Perspectives : Méthode de FDI à base de modèles événementiels
• Déterminer le treillis qui décrit la structure du modèle événementiel
• Exprimer les critères de couplage et le découplage par rapport à ce treillis
• Comparer la sortie du système avec les partitions qui forment les nœuds du treillis
• Obtenir des indicateurs de défaillances directionnels
92
Merci pour votre attention
Tous au potsalle 2A25








![[Aressad] charte-encadrement-livret-accueil](https://static.fdocuments.fr/doc/165x107/549210e5b4795963488b52ef/aressad-charte-encadrement-livret-accueil.jpg)