ouvrages d’art par - Bienvenue sur Catalogue des...
75
Projet de fin d’études : Gestion préventive des ouvrages d’art par instrumentation Présenté par : Matthieu BRAUN INSA de Strasbourg – Spécialité GENIE CIVIL Tuteur à l’INSA : Hossein NOWAMOOZ Tuteur au laboratoire : Davy PRZYBYLA Juin 2010
Transcript of ouvrages d’art par - Bienvenue sur Catalogue des...

Projet de fin d’études :
Gestion préventive des
ouvrages d’art par
instrumentation
Présenté par : Matthieu BRAUN
INSA de Strasbourg – Spécialité GENIE CIVIL
Tuteur à l’INSA : Hossein NOWAMOOZ
Tuteur au laboratoire : Davy PRZYBYLA
Juin 2010
Page 2
Remerciements
Ce mémoire a été réalisé au sein du Laboratoire Régional des Ponts et Chaussées de
Strasbourg sous la direction de Monsieur Davy Przybyla, adjoint au chef de groupe Ouvrages
d’art. Je tiens à lui adresser toute ma reconnaissance pour m’avoir proposé ces travaux, mais
surtout pour m’avoir encadré tout au long de mon projet de fin d’études. Ses connaissances
et ses attentes sur mes travaux ont permis d’encadrer mon travail.
Je tiens également à remercier Monsieur Hervé Eichwald, responsable d’activité Ouvrages d’art, pour
sa participation à mes projets, sa position d’interlocuteur privilégié entre le conseil Général 67 et GE
Energy pour le financement du monitoring embarqué ainsi que son implication dans le suivi des murs
de soutènement.
Je tiens à adresser ma gratitude à Monsieur Fabien Renaudin, adjoint au chef de division, pour ses
commentaires et son expérience sur la problématique des murs de soutènement ; ainsi que
Monsieur Matthieu Kirstetter, inspecteur Ouvrages d’art, sans qui l’instrumentation à Urbès n’aurait
pu avoir lieu.
Ma reconnaissance va également à Monsieur Hossein Nowamooz, mon tuteur à l’INSA de Strasbourg,
de m’avoir suivi durant les cinq mois et d’avoir été à mon écoute quand je le souhaitais.
Je tiens pour finir à saluer l’ensemble du personnel du CETE de l’Est et plus précisément aux
membres du groupe Ouvrages d’art du Laboratoire de Strasbourg pour leur accueille et leur partage
du métier lors de visites, essais et contrôle sur chantier.
Page 3
SOMMAIRE
Remerciements .......................................................................................................................... 2
Lexique ....................................................................................................................................... 7
Introduction ................................................................................................................................ 8
Chapitre 1. Le vieillissement des ouvrages : phénomène inévitable ................................... 10
1. Origines des désordres : ................................................................................................ 10
2. Types de désordres recensés : ...................................................................................... 12
3. Désordres à surveiller sur les ouvrages : ....................................................................... 16
Chapitre 2. L’évaluation des ouvrages d’art ......................................................................... 17
1. L’auscultation au service de la pérennité des ouvrages ............................................... 17
2. L’évaluation des ouvrages ; recensement des désordres ............................................. 18
3. Réalisation des mesures : appareillage et procédé ...................................................... 23
4. Etudes approfondies pour évaluer les ouvrages ........................................................... 25
Chapitre 3. Mise en place d’un monitoring sur les ponts : PEGASE ..................................... 27
1. Convoi exceptionnel et ouvrage d’art ........................................................................... 27
2. Problématique et hypothèse de départ ........................................................................ 29
3. Ouvrage d’art instrumenté : Pont sur la Scheer, RD 1083, Hipsheim ........................... 29
4. Description de PEGASE : ................................................................................................ 30
5. Cahier des charges de la plateforme ............................................................................. 31
6. Montage financier et Coûts du monitoring .................................................................. 40
7. Analyse des premiers résultats ..................................................................................... 41
8. Conclusion – Ouverture : ............................................................................................... 46
Page 4
Chapitre 4. Mise en place d’un monitoring sur les murs de soutènement .......................... 47
1. Problématique ............................................................................................................... 47
2. Principe de suivi ............................................................................................................ 47
3. Description du matériel utilisé ...................................................................................... 49
4. Limites du suivi avec le tachéomètre et chiffres significatifs ........................................ 50
5. Réalisation de mesure et traitement des données : cas général .................................. 55
6. Analyse des résultats ..................................................................................................... 60
Chapitre 5. Surveillance des murs en Pneusol à Urbès ........................................................ 62
1. Description des ouvrages .............................................................................................. 62
2. Principe de fonctionnement du Pneusol : ..................................................................... 62
3. Méthode de suivi spécifique ......................................................................................... 63
4. Analyse numérique et interprétation ........................................................................... 68
5. Conclusion : ................................................................................................................... 72
Conclusion générale et perspectives ....................................................................................... 73
Bibliographie : .......................................................................................................................... 75
Page 5
Table des figures
Fig. 1.01 Tableau récapitulatif des fissures les plus courantes dans le béton ......................... 13
Fig. 2.01 Illustration du graphe croisé (ISE, IE) de la méthode départementale ..................... 20
Fig. 2.02 Effondrement du pont autoroutier en acier à Minneapolis en 2007 ....................... 23
Fig. 3.01 Convoi exceptionnel, de catégorie 3, susceptible de circuler sur l’itinéraire Belfort-
Strasbourg (composition : 1 tracteur, 1 remorque, 2 pousseurs) ........................................... 28
Fig. 3.02 Situation géographique de l’ouvrage surveillé .......................................................... 29
Fig. 3.03 Photos du pont de la RD 1083 sur la Scheer à Hipsheim .......................................... 30
Fig. 3.04 Photos du capteur à tube plongeur et la cornière, de butée, en aluminium ........... 31
Fig. 3.05 Pont sur la Scheer, RD1083 à proximité de Hipsheim ............................................... 35
Fig. 3.06 Schéma de fixation des capteurs de fissure et butée ............................................... 37
Fig. 3.07 Positionnement des capteurs sur l’intrados, au niveau du dernier élargissement .. 39
Fig. 3.08 Élévation amont de l’ouvrage ................................................................................... 40
Fig. 3.09 Courbe caractéristique charge flèche d’une structure en béton ............................. 43
Fig. 3. 10 Résultats du passage d’un convoi antérieur (similaires à ceux qui seront obtenus
par la plateforme PEGASE) ....................................................................................................... 44
Fig. 4.01 phénomènes de Basculement et Déversement ........................................................ 47
Fig. 4.02 Représentation de la zone d’influence selon IQOA................................................... 48
Fig. 4.03 Prisme de visée pour points ou références ............................................................... 49
Fig. 4.04 tachéomètre Leica TDA 5005 du LRS ......................................................................... 49
Fig. 4.06 Changement de repère pour l’analyse ...................................................................... 57
Fig. 5.01 un des cinq murs de soutènement en Pneusol ......................................................... 62
Fig. 5.02 mode de construction d’un mur en Pneusol ............................................................. 63
Fig. 5.03 Mesure sur un extensomètre et état en2005 : tige métallique en décomposition
avancée et brisée ..................................................................................................................... 64
Fig. 5.04 Implantation des ouvrages dans le site naturel : absence d'éléments fixes et
indépendants ............................................................................................................................ 64
Fig. 5.05 Paroi rocheuse à l’amont de la route : zone d’installation des références .............. 66
Fig. 5.06 regard en béton à l’aval du mur : zone d’installation des références ...................... 66
Fig. 5.07 Installation du tachéomètre : mode 1 ....................................................................... 67
Fig. 5.08 Installation du tachéomètre : mode 2 ....................................................................... 67
Fig. 5.09 Schématisation de la transformation ........................................................................ 70
Page 6
Table des tableaux
Tab. 2.01 Classification des ouvrages selon la méthode IQOA ................................................ 19
Tab. 2.02 Classification allemande des ponts selon la norme DIN 1076 ................................. 21
Tab. 2.03 Résumé des principaux instruments de mesures utilisés sur les ouvrages d’art .... 25
Tab. 3.01 Charges maximales règlementaires du Code de la Route ....................................... 27
Tab. 3.02 Catégories des convois exceptionnels ..................................................................... 28
Tab. 3.03 Données significatives pour un capteur ................................................................... 32
Tab. 3.04 Données significatives pour cinq capteurs .............................................................. 33
Tab. 3.05 Données significatives pour le thermocouple ......................................................... 33
Tab. 3.06 Synthèse comparative des différents systèmes d’attaches ..................................... 37
Tab. 3.07 Récapitulatif du montage financier pour la plate-forme de monitoring ................. 40
Tab. 3.08 Valeurs recommandées de Wmax et règles de combinaison pertinentes .............. 41
Tab. 4.01 Déplacement du tachéomètre ................................................................................. 51
Tab. 4.02 Déplacements fictifs des références : exemple référence 1.................................... 51
Tab. 4.03 Déplacement du tachéomètre ................................................................................. 52
Tab. 4.04 Déplacements fictifs des références dans le champ: exemple référence 1 ............ 52
Tab. 4.05 Déplacement du tachéomètre ................................................................................. 52
Tab. 4.06 Déplacements fictifs des références hors du champ: exemple référence 1 ........... 52
Tab. 4.07 Déplacements fictifs des références : exemple référence 3.................................... 53
Tab. 4.08 Mesure et correction d’un point en extérieur ......................................................... 54
Tab. 5.01 Déplacement des références lors de la réinstallation ............................................. 68
Tab. 5.02 Déplacement des références / Correction à appliquer ........................................... 68
Tab. 5.03 Déplacement des profils, après la correction et avant la transformation, entre
l’initialisation et la première mesure ....................................................................................... 69
Tab. 5.04 Déplacement des profils, après la correction et après la transformation, entre
l’initialisation et la première mesure ....................................................................................... 71
Page 7
Lexique
LRPC : Laboratoire Régional des Ponts et Chaussées
LCPC : Laboratoire Centrale des Ponts et Chaussées
CETE de L’Est : Centre d’Etudes Techniques et de L’Equipement (Metz, Nancy, Strasbourg)
Sétra : Service d’étude sur les transports, les routes et leurs aménagements
IQOA : Image Qualité des Ouvrages d’Art
ITSEOA : Instruction technique pour la Surveillance et l’Entretien des Ouvrages d’Art
BRIME : Bridge Management in Europe
ADSTD : Association des Directeurs de Services Techniques Départementaux
DOT : Department of Transportation
FHWA : Federal Highway Administration
NBIS : National Bridge inventory standards
LF: Load factor
LRFR: Load Resistance Factor Rating
PEGASE : Plateforme Experte Générique pour L’Application Sans-fil Embarquée
DDE 68 : Direction Départementale de l’Equipement du Haut-Rhin
DIREST : Direction Interrégionale de l’Est
Page 8
Introduction
Le laboratoire régional des ponts et chaussées de Strasbourg, entité du Centre d’Etude
Technique de l’Equipement de l’Est, s’organise autour de plusieurs groupes de travail :
chaussées, géotechnique, ouvrages d’art, bâtiment, étude physique et acoustique. Le
département qui m’a accueilli lors de mon projet de fin d’études est le groupe ouvrages
d’art. Ce dernier s’organise autour de trois grandes missions bien distinctes : l’exécution
regroupant les contrôles externes, les essais et la surveillance des ouvrages ; la recherche
ainsi que la méthodologie.
En France, et comme dans beaucoup de pays, le niveau d’équipement en infrastructures est
élevé et cela depuis de nombreuses années. Si ces ouvrages ne présentent pas tous un
intérêt architectural, ils occupent néanmoins une place de choix sur le territoire, car ils sont
des vecteurs économiques, de transports, de sécurité. Leur construction a nécessité du
temps et de forts investissements. Leurs disparitions troubleraient, aujourd’hui, la vie des
utilisateurs. Ainsi, depuis plusieurs années, la gestion du patrimoine suggère que l’on
surveille, ausculte et évalue, de manière régulière, l’ensemble du parc d’ouvrage d’art
(ponts, murs de soutènement…). La première étape consiste à assurer la sécurité des
utilisateurs. Dans un second temps, la gestion du patrimoine doit permettre de respecter
voire d’allonger la durée de vie des ouvrages. De grandes avancées sur la fatigue des
matériaux ont permis de développer des matériaux plus résistants aux attaques extérieures.
Il n’en reste pas moins que chaque ouvrage possède son environnement propre, plus ou
moins agressif. De plus, les phénomènes de fatigue des structures sont encore mal maitrisés.
A cela, s’ajoutent les ouvrages anciens qui n’ont pas pu bénéficier des avancées de la science
et de la technique et qu’il faut tout de même préserver au mieux.
Dans cette optique, le présent mémoire sera articulé autour de cinq chapitres. Les deux
premiers, théoriques, présentent l’état de l’art concernant la gestion des ouvrages. Tout
d’abord, le vieillissement et la dégradation des ouvrages seront abordés en essayant de
recouper causes et conséquences. Par la suite, nous nous intéresserons plus en détail aux
outils, à disposition, pour évaluer et gérer le parc d’ouvrages. Les trois derniers chapitres
traiteront de la surveillance de la fissuration d’un pont et de la déformation des murs de
soutènement. L’instrumentation du pont, par un monitoring à distance est motivée par la
problématique des convois exceptionnels et celle de la fatigue des structures. La demande
grandissante de la part des conseils généraux et de la DIREST de surveiller des murs de
soutènement poussent également à revoir l’utilisation du tachéomètre pour ces suivis.

Page 9
L’instauration du Grenelle Environnement, depuis 2009, au sein de la politique française
prescrit au laboratoire et notamment au groupe ouvrage d’art de favoriser la recherche et la
méthodologie au profit des missions d’exécution. Cette nouvelle répartition est prise en
compte depuis début 2010, sans pouvoir pour autant supprimer définitivement certains
contrôles et surveillances d’ouvrage, comme pour nos deux ouvrages suivis. Cependant,
certains choix, notamment dans la conception de la plateforme d’instrumentation du pont,
devront permettre d’inscrire cette action dans la démarche du Grenelle Environnement.
Chapitre 1 Le vieillissement des ouvrages : phénomène inévitable
Page 10
Chapitre 1. Le vieillissement des
ouvrages : phénomène inévitable
1. Origines des désordres :
Les ouvrages de tous types (ponts, murs de soutènement, barrage, bâtiments…) vieillissent
et laissent apparaître des désordres au niveau des matériaux et de la structure. Ces
désordres provoquent la fragilité et accélèrent donc la fin de vie de l’ouvrage. La
connaissance de l’origine de ces désordres doit permettre de mieux concevoir, prévenir, et
réparer les ouvrages concernés.
1.1. Actions appliquées aux ouvrages :
Actions permanentes :
La conception, bien que respectant les normes et coefficients de sécurité, peut être à
l’origine d’erreurs ou d’imprécisions parfois inacceptables. Une première erreur concerne la
masse volumique du béton fixée conventionnellement à 2.5 t/m3. Cependant, cette valeur
peut être significativement plus élevée si l’on emploie des matériaux « lourds ». D’autres
imprécisions, entachant également le poids propre de la structure, sont des erreurs de
métrés et la sous-estimation du poids des équipements.
Au cours de la vie d’un ouvrage, son poids propre peut varier. Les équipements peuvent être
remplacés ou complétés. Dans le cas d’un pont routier, la couche de roulement de la
chaussée peut être rechargée. Ce problème de modification du poids propre, dû à l’entretien
et à l’usure, est surtout observable sur les anciens ouvrages. En effet, les normes et codes de
calculs actuels prennent en compte ces modifications par l’intermédiaire d’une fourchette
de valeurs.
Actions liées au comportement rhéologique du matériau :
Le comportement à long terme des matériaux, sous chargement, n’est connu que depuis
peu. Les règles de calcul ne prenaient pas en compte le fluage du béton, la relaxation des
aciers… Suite à des campagnes d’études, ces comportements sont maintenant connus et pris
en compte à travers les coefficients de sécurité. Cependant, la maîtrise et l’estimation de ces
comportements ne sont pas simples.
Chapitre 1 Le vieillissement des ouvrages : phénomène inévitable
Page 11
Effet du trafic (routier et ferroviaire) :
Utilisés comme liaisons, les ponts servent, depuis toujours, de support au trafic routier et/ou
ferroviaire. Cependant, le mode de transport ainsi que ses caractéristiques n’ont cessé de se
modifier. Les nouveaux règlements ont permis d’adapter les codes de calculs. Des guides,
comme le guide méthodologique « Eurocode 2 – Application aux ponts-routes en béton »du
Sétra, ont été rédigés pour faciliter le recalcul des ponts. Cependant, il ne reste pas moins le
problème des anciens ouvrages, dont les notes de calculs n’existent plus. Il est donc parfois
difficile de savoir si l’ouvrage est dimensionné pour supporter le trafic auquel il est soumis.
De plus, la vitesse des véhicules augmente. La vitesse et les poids des véhicules engendrent
des vibrations dans l’ensemble de la structure pour lesquelles les ouvrages n’ont pas été
dimensionnés. Les forces de freinage peuvent également provoquer le cheminement des
appareils d’appuis.
Tous les ouvrages n’ont donc pas la même capacité portante et ne peuvent donc pas
accepter, sans risque, le même trafic.
Effet des actions naturelles :
Les ouvrages font partie intégrante de l’aménagement du territoire. Ils sont donc soumis aux
aléas climatiques et environnementaux qui les entourent.
Le premier phénomène agissant sur les ouvrages est la température. Elle agit dans un
premier temps sur les matériaux. Par exemple, lors du gel, le béton aura tendance à se
fissurer sous l’action de variation de volume anisotrope ou de contraintes interstitielles trop
élevées.
La température a un double effet sur la structure. Le premier est la dilatation / rétractation
en période chaude et en période froide. Pour éviter de développer des efforts dans la
structure, des appareils d’appuis mobiles sont utilisés. Le second phénomène est le gradient
thermique. Il est induit pas la différence de température entre les faces exposées au soleil et
les faces à l’ombre. La sensibilité de l’ouvrage à la température sera influencée par son
épaisseur, sa couleur de revêtement… Pris en compte que depuis 1970 dans les codes de
calculs, l’effet de la température peut être important, notamment pour les structures
hyperstatiques. Les travées étant liaisonnées, les zones d’appuis sont soumises à la
concentration des contraintes et des déformations des travées situées de par et d’autres. Il
en découle une augmentation des efforts et notamment des efforts tranchants.
L’eau est également une source de désordres pour les ouvrages. Les structures métalliques
sont sensibles à la corrosion. Pour les structures en béton, c’est l’infiltration de l’eau dans le
matériau qui est néfaste (phénomène de gel/dégel, corrosion des armatures, transport des
chlorures provenant des sels de déverglaçage).
Chapitre 1 Le vieillissement des ouvrages : phénomène inévitable
Page 12
D’autres phénomènes climatiques peuvent avoir une influence sur la durée de vie d’un
ouvrage comme le vent, qui sera responsable de la fatigue d’éléments (câble de haubanage)
ou de déplacements non désirés.
Actions à caractère accidentel :
L’ouvrage, au service de l’homme, placé dans un milieu naturel, peut être soumis à des
actions ponctuelles et relativement rares. Les crues, les séismes, les chocs dus à un navire où
un véhicule sont pris en compte par les codes de calculs. Cependant, de nos jours, les
coefficients de sécurité sont déterminés de manière probabiliste, ce qui signifie que le risque
absolu et la répétition fréquente ne sont pas considérés. L’ouvrage, quel qu’il soit, subira
donc des agressions extérieures et sa durée de vie en sera influencée.
1.2. Dégradation des matériaux :
Les matériaux constitutifs des ouvrages peuvent également subir des désordres internes qui
auront des conséquences sur la stabilité et la longévité de la structure. Certains de ces
désordres sont des conséquences directes des phénomènes extérieurs auxquels la structure
est soumise. C’est notamment le cas de la corrosion des armatures et de l’acier, de
l’éclatement du béton lors du gel…
En revanche, d’autres phénomènes comme l’alcali-réaction ne sont imputables qu’au
matériau lui-même. En effet, l’interaction entre les granulats siliceux et les alcalins de la pâte
de ciment provoque un gonflement du béton en présence d’eau.
2. Types de désordres recensés :
La pérennité d’un ouvrage est fortement influencée par son environnement et les actions
auxquelles il est soumis. Les désordres engendrés et responsables de sa fragilité se
matérialisent sous différentes formes. Certains sont apparents alors que d’autres ont lieu à
l’intérieur même du matériau. L’expert, auscultant un ouvrage « malade », recensera tout
d’abord les désordres puis cherchera les causes de ces pathologies afin de mettre en place le
plan de réparation adéquat.
2.1. Fissure, Éclatement :
La fissuration est sûrement le désordre le plus facilement observable et le plus
caractéristique. L’amplitude, la fréquence et la propagation de la fissure permettent de
connaître si elle est due à un comportement normal ou non. Le plus souvent, la fissuration
Chapitre 1 Le vieillissement des ouvrages : phénomène inévitable
Page 13
traduira un état de contrainte anormal, de traction, de cisaillement (…), dépassant la limite
de rupture du matériau.
Pour le béton armé, la fissuration est un phénomène normal. Il faut néanmoins la contrôler
et veiller à ce qu’elle n’atteigne pas des proportions dangereuses pour la stabilité de la
structure.
Étant toutes issues d’un dépassement de la contrainte admissible du matériau, à un moment
donné de la vie de l’ouvrage, les experts s’efforcent de classer les fissures suivant leurs
origines : cela afin de prévenir au mieux leurs évolutions et les réparations possibles.
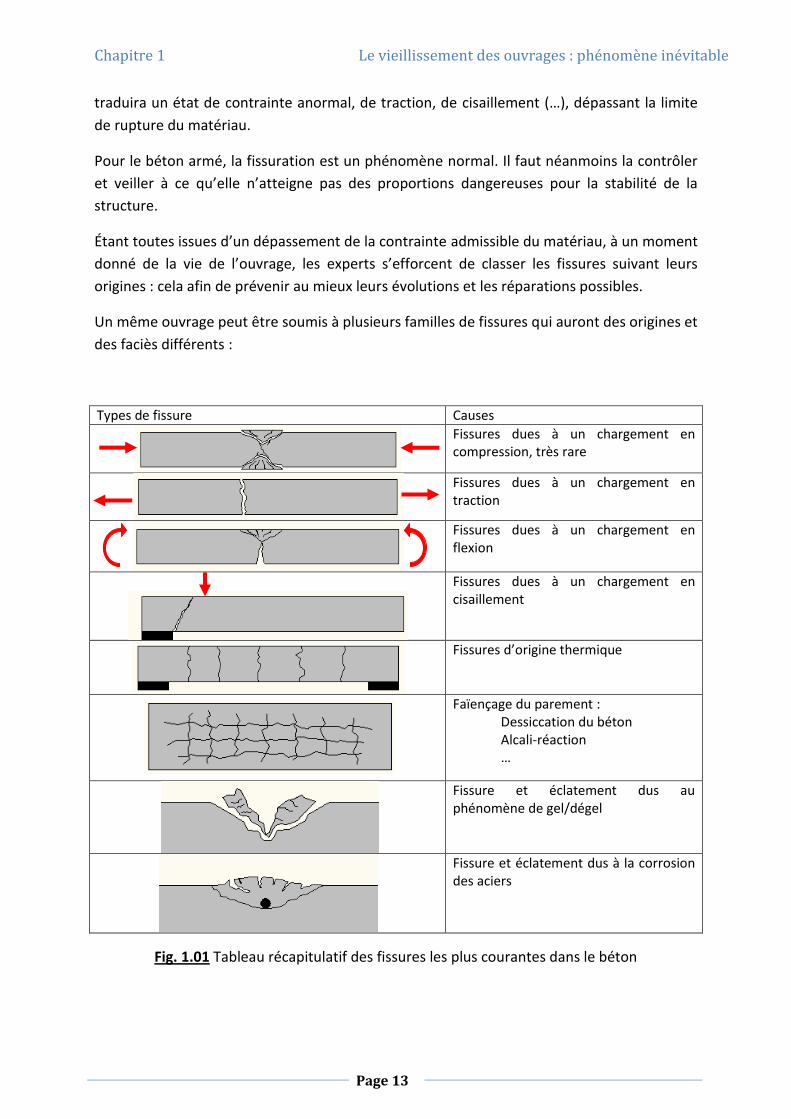
Un même ouvrage peut être soumis à plusieurs familles de fissures qui auront des origines et
des faciès différents :
Types de fissure Causes
Fissures dues à un chargement en compression, très rare
Fissures dues à un chargement en traction
Fissures dues à un chargement en flexion
Fissures dues à un chargement en cisaillement
Fissures d’origine thermique
Faïençage du parement : Dessiccation du béton Alcali-réaction …
Fissure et éclatement dus au phénomène de gel/dégel
Fissure et éclatement dus à la corrosion des aciers
Fig. 1.01 Tableau récapitulatif des fissures les plus courantes dans le béton
Chapitre 1 Le vieillissement des ouvrages : phénomène inévitable
Page 14
La notification de toute nouvelle fissure doit se faire assez tôt. En effet, le problème de
fissuration, notamment dans le béton, n’est pas leur existence, mais leur évolution. À terme,
une fissure, qui ne cesse de s’ouvrir, provoquera l’éclatement, la chute voir l’effondrement
d’un bloc ou de l’ensemble de la structure.
Connaitre la date d’apparition de la fissure est important, car cela permet de prévoir la
réparation ou la limitation de son expansion. Cependant, pour savoir la dangerosité de celle-
ci et de ce fait l’état de fragilité de l’ouvrage, il est nécessaire de connaître les
caractéristiques de la fissure :
L’âge :
Bien que difficile à cerner de manière précise, quand celle-ci n’est pas provoquée par une
cause accidentelle ou signalée, cette donnée ne manque pas d’intérêt. Le traitement des
fissures par injection est fortement influencé par ce caractère. En effet, on admet qu’une
fissure « jeune », inférieure à 2 ans, ne présente pas de problème d’injection alors qu’une
fissure plus ancienne présentera des cristaux de calcite, de la végétation ou de la poussière,
qui empêcheront l’injection de manière optimale.
Le tracé :
Il est défini par son orientation et sa longueur mesurable sur la structure. L’orientation est
souvent révélatrice de son origine. Cependant, la fissure est rarement rectiligne et donc
confondue avec son orientation. Lorsqu’elle est continue sur l’axe d’orientation, elle est dite
franche, dans le cas contraire discontinue. La longueur correspond au développé de la partie
visible.
L’ouverture :
Facilement évaluable à l’œil nu, on utilise dans la pratique un réglet, un fissuromètre, un
compte-fils, une jauge d’épaisseur. De manière générale, la précision au dixième de
millimètre est suffisante. On admet également que l’ouverture d’une fissure correspond à
l’ouverture maximale sur le tracé.
La profondeur :
Une fissure est dite traversante lorsqu’elle est visible sur au moins deux faces de la
structure. Elle est dite aveugle quand elle est supposée traversante, mais débouche sur une
face non accessible de la structure. C’est notamment le cas sur les murs de soutènement.
Une fissure aveugle est souvent d’ouverture importante et peut donc laisser passer les
agents agressifs (eau, air).
Une fissure est dite de surface quand son ouverture de surface est maximale en surface et
devient nulle à l’intérieur du matériau. En revanche dans un élément épais, une fissure de
surface peut avoir une profondeur importante.

Chapitre 1 Le vieillissement des ouvrages : phénomène inévitable
Page 15
L’activité :
Ce caractère quantifie l’évolution dimensionnelle de l’ouverture et de la profondeur de la
fissure dans le temps. Une fissure peut être qualifiée de morte, si son ouverture et sa
profondeur restent constantes quelles que soient la variation de température, charges.
En revanche, les fissures qui sont soumises aux facteurs extérieurs tels que température,
hygrométrie, charges, vibrations sont qualifiées d’actives.
2.2. Défauts dans le parement :
L’exposition à certains phénomènes climatiques comme le vent, un écoulement
(ruissellement, suintement) peut provoquer la détérioration des parements de l’ouvrage.
Pour un ouvrage en béton, cela se traduit par la disparition de la pâte de ciment. Des « nids
de cailloux » apparaissent, laissant les granulats vulnérables aux agressions extérieures. Un
phénomène similaire est observable sur les structures en maçonnerie. Les joints de ciments
ainsi que les roches peuvent s’éroder. La disparition totale du liant peut engendrer des
conséquences telles que l’effondrement.
De tels défauts dans les parements n’ont donc pas d’influence directe sur le comportement
structurel de l’ouvrage. Comme pour les fissures, c’est l’évolution de ces phénomènes qui
est dangereuse, pouvant aller jusqu’à l’effondrement entier du parement ou de la structure.
2.3. Déplacement, Déformation :
Toute construction est susceptible de bouger au cours de sa vie. Cela peut être dû à un
mauvais dimensionnement des fondations, au mouvement des terres, à un sur-chargement
ou encore le fluage du matériau. L’ensemble de ces phénomènes est à surveiller, car ils
entraînent une répartition des efforts et contraintes non souhaitée pouvant aller de la
simple fissuration au basculement ou à l'effondrement de la structure.
Remarque : le fluage, déformation à long terme, ne peut pas être empêche, il doit donc être
pris en compte lors du dimensionnent et la surveillance.
2.4. Acier et câble de précontrainte
En plus de son vieillissement à l’intérieur du béton, l’acier peut être une cause de désordres.
En effet, l’auscultation d’ouvrages en béton a révélé des maladresses d‘exécution sur
certains d’entre eux : enrobage insuffisant, conformité entre le ferraillage et la position des
appareils d’appuis… En ce qui concerne les ouvrages en béton précontraint, la présence de
fissuration inhabituelle au niveau des ancrages de précontrainte a obligé les bureaux
d’études à revoir leur méthode de dimensionnement. On observe également des problèmes
dus à la relaxation des câbles de précontrainte, voire à leur rupture, amplifiant la fissuration.
Chapitre 1 Le vieillissement des ouvrages : phénomène inévitable
Page 16
3. Désordres à surveiller sur les ouvrages :
3.1. Zone à surveiller sur un ouvrage d’art type pont :
Sur le tablier :
- Chaussée sur l’ouvrage et ses accès : présence de flaches, bourrelets, faïençage, profil en
long
- Caniveaux – bordures : propreté, état, continuité du fil d’eau aux extrémités du tablier
- Joint de chaussée : état du revêtement au droit du joint, propreté, bruits anormaux sous
passage, éléments manquants, fermeture/ouverture anormale
- Garde-corps et dispositifs de retenue : verticalité et alignement tant en plan qu’en profil en
long, manque d’élément, état de la protection anticorrosion, état des scellements des
montants
- Trottoirs : état du revêtement de trottoir, présence de végétation
Sous le tablier :
- L’état des perrés
- Évacuation des eaux de pluies, gargouilles, drains, barbacanes,
- sommiers des piles et des culées et les appareils d’appui : propreté, état du mur garde-grève,
désagrégation du sommier, déformations importantes des appareils d’appui en élastomère,
présence de végétations parasites
- Continuité de l’étanchéité au droit des joints de chaussée
- Appuis : traces de chocs, état des dispositifs de protection, état des berges et présence
éventuelle d’affouillement, désordres du parement, défaut d’aplomb.
- Intrados du tablier : traces de chocs, stalactites, taches d’efflorescence, fissures,
disjointoiement et enlèvement de pierres ou briques, désagrégations ou éclats du béton et
apparition d’armatures, corrodées ou non, défaut de la protection anticorrosion dans le cas
de tabliers métalliques.
3.2. Zone à surveiller sur un ouvrage d’art type mur de soutènement :
- Chaussée et trottoirs : fissures dans le revêtement, déversement ou déplacement des
bordures
- Dispositifs de retenues : mêmes constatations pour les ponts
- Parois : déformations d’ensemble (ventres, déversements), désordres du parement
(écaillage, fissures, dégradations de joints…)
Chapitre 2 L’évaluation des ouvrages d’art
Page 17
Chapitre 2. L’évaluation des ouvrages
d’art
1. L’auscultation au service de la pérennité des
ouvrages
Lorsque l’on parle de gestion des ouvrages d’art ou plus généralement du patrimoine, les
termes évaluation et auscultation reviennent souvent. L’évaluation d’un ouvrage consiste à
caractériser son état général, ses différents éléments, les matériaux constitutifs de manière
qualitative et/ou quantitative. Cette évaluation sert de bilan de santé pour son gestionnaire.
L’auscultation définit l’ensemble des examens et mesures spécifiques faisant le plus souvent
appel à des techniques élaborées, destinées à approfondir la connaissance réelle d’un
ouvrage. L’auscultation d’un ouvrage va donc permettre de l’évaluer.
Le but premier de toutes les démarches d’auscultation, inspections, évaluations est de
prévoir et détecter les risques d’affaiblissement des matériaux et de la structure avant que la
stabilité de l’ouvrage ne soit mise en cause. La réparation des désordres peut avoir un coût
non négligeable sur la durée de vie de l’ouvrage. Leur détection en amont permet de réduire
ces coûts en nécessitant des réparations moins contraignantes, elle permet également de
mieux planifier la maintenance sur l’ensemble du patrimoine. L’expérience montre qu’il est
préférable d’un point de vue financier, pour le maître d’ouvrage, et structurel, pour
l’ouvrage, de favoriser une maintenance préventive plutôt que curative. En France, le
nombre de ponts (ouvertures supérieures à 2 m), propriété de l’Etat, est de 12 000. Ils
représentent une surface de 5.5 millions de m². Le budget de surveillance et de l’entretien
est de 46.2 M€ par an, soit environ 8.4 €/m². Ces inspections sont effectuées par les LRPC,
dont l’effectif consacré est de 50 inspecteurs environ, soit un inspecteur pour 145 000 m².
De ce fait, un grand nombre d’inspections est sous-traité à des bureaux d’études privés, afin
que la surveillance du parc d’ouvrages puisse être effectuée en totalité.
Afin de connaître l’évolution de l’ouvrage et l’apparition des désordres, il est nécessaire de
connaître son état à la réception de l’ouvrage. Pour cela, il est fortement conseillé
d’effectuer une évaluation « point zéro ». Comme toutes les évaluations que va subir
l’ouvrage au cours de sa vie, le « point zéro » répertoriera son état surfacique à travers un
procès verbal. Ce dernier servira de point de référence pour les auscultations et la
surveillance de l’ouvrage.
Chapitre 2 L’évaluation des ouvrages d’art
Page 18
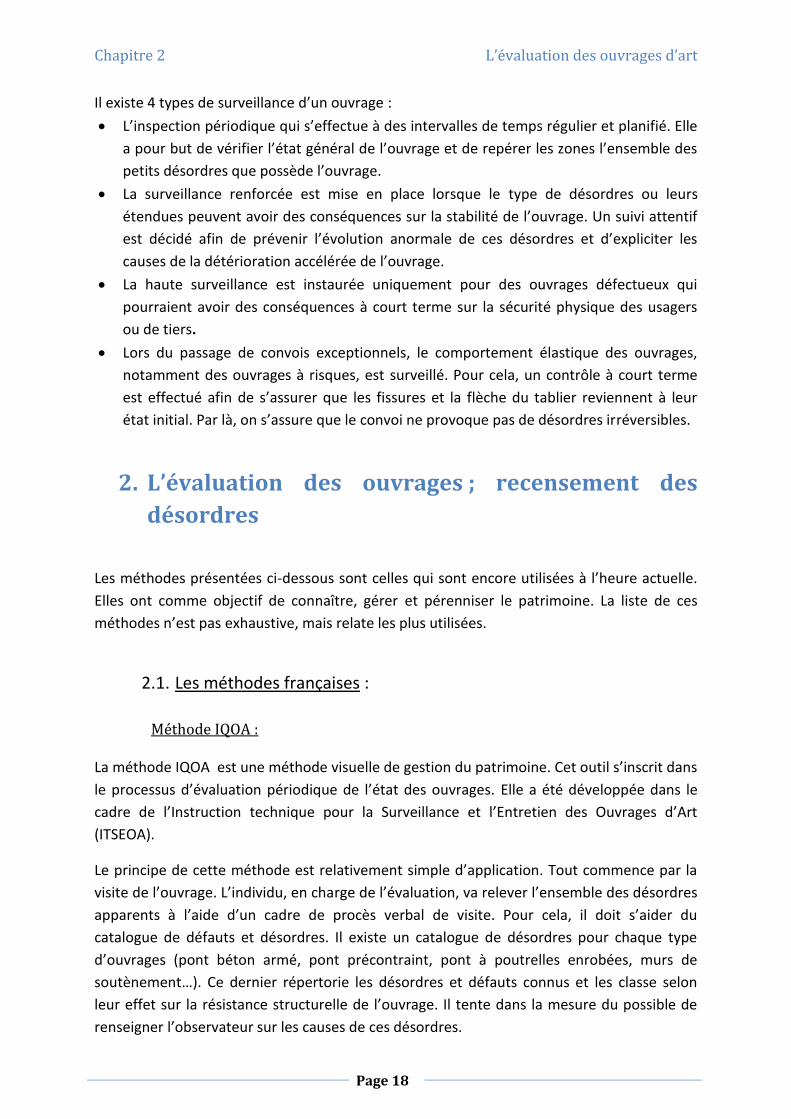
Il existe 4 types de surveillance d’un ouvrage :
L’inspection périodique qui s’effectue à des intervalles de temps régulier et planifié. Elle
a pour but de vérifier l’état général de l’ouvrage et de repérer les zones l’ensemble des
petits désordres que possède l’ouvrage.
La surveillance renforcée est mise en place lorsque le type de désordres ou leurs
étendues peuvent avoir des conséquences sur la stabilité de l’ouvrage. Un suivi attentif
est décidé afin de prévenir l’évolution anormale de ces désordres et d’expliciter les
causes de la détérioration accélérée de l’ouvrage.
La haute surveillance est instaurée uniquement pour des ouvrages défectueux qui
pourraient avoir des conséquences à court terme sur la sécurité physique des usagers
ou de tiers.
Lors du passage de convois exceptionnels, le comportement élastique des ouvrages,
notamment des ouvrages à risques, est surveillé. Pour cela, un contrôle à court terme
est effectué afin de s’assurer que les fissures et la flèche du tablier reviennent à leur
état initial. Par là, on s’assure que le convoi ne provoque pas de désordres irréversibles.
2. L’évaluation des ouvrages ; recensement des
désordres
Les méthodes présentées ci-dessous sont celles qui sont encore utilisées à l’heure actuelle.
Elles ont comme objectif de connaître, gérer et pérenniser le patrimoine. La liste de ces
méthodes n’est pas exhaustive, mais relate les plus utilisées.
2.1. Les méthodes françaises :
Méthode IQOA :
La méthode IQOA est une méthode visuelle de gestion du patrimoine. Cet outil s’inscrit dans
le processus d’évaluation périodique de l’état des ouvrages. Elle a été développée dans le
cadre de l’Instruction technique pour la Surveillance et l’Entretien des Ouvrages d’Art
(ITSEOA).
Le principe de cette méthode est relativement simple d’application. Tout commence par la
visite de l’ouvrage. L’individu, en charge de l’évaluation, va relever l’ensemble des désordres
apparents à l’aide d’un cadre de procès verbal de visite. Pour cela, il doit s’aider du
catalogue de défauts et désordres. Il existe un catalogue de désordres pour chaque type
d’ouvrages (pont béton armé, pont précontraint, pont à poutrelles enrobées, murs de
soutènement…). Ce dernier répertorie les désordres et défauts connus et les classe selon
leur effet sur la résistance structurelle de l’ouvrage. Il tente dans la mesure du possible de
renseigner l’observateur sur les causes de ces désordres.
Chapitre 2 L’évaluation des ouvrages d’art
Page 19
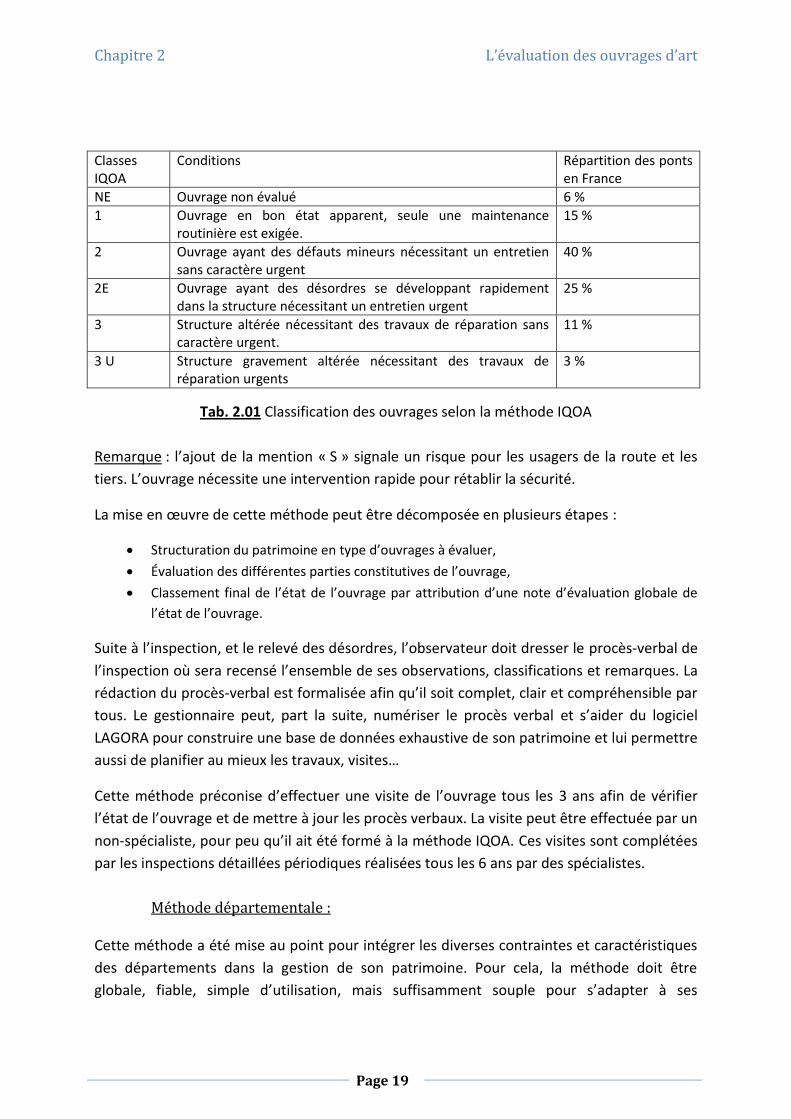
Classes IQOA
Conditions Répartition des ponts en France
NE Ouvrage non évalué 6 %
1 Ouvrage en bon état apparent, seule une maintenance routinière est exigée.
15 %
2 Ouvrage ayant des défauts mineurs nécessitant un entretien sans caractère urgent
40 %
2E Ouvrage ayant des désordres se développant rapidement dans la structure nécessitant un entretien urgent
25 %
3 Structure altérée nécessitant des travaux de réparation sans caractère urgent.
11 %
3 U Structure gravement altérée nécessitant des travaux de réparation urgents
3 %
Tab. 2.01 Classification des ouvrages selon la méthode IQOA
Remarque : l’ajout de la mention « S » signale un risque pour les usagers de la route et les
tiers. L’ouvrage nécessite une intervention rapide pour rétablir la sécurité.
La mise en œuvre de cette méthode peut être décomposée en plusieurs étapes :
Structuration du patrimoine en type d’ouvrages à évaluer,
Évaluation des différentes parties constitutives de l’ouvrage,
Classement final de l’état de l’ouvrage par attribution d’une note d’évaluation globale de
l’état de l’ouvrage.
Suite à l’inspection, et le relevé des désordres, l’observateur doit dresser le procès-verbal de
l’inspection où sera recensé l’ensemble de ses observations, classifications et remarques. La
rédaction du procès-verbal est formalisée afin qu’il soit complet, clair et compréhensible par
tous. Le gestionnaire peut, part la suite, numériser le procès verbal et s’aider du logiciel
LAGORA pour construire une base de données exhaustive de son patrimoine et lui permettre
aussi de planifier au mieux les travaux, visites…
Cette méthode préconise d’effectuer une visite de l’ouvrage tous les 3 ans afin de vérifier
l’état de l’ouvrage et de mettre à jour les procès verbaux. La visite peut être effectuée par un
non-spécialiste, pour peu qu’il ait été formé à la méthode IQOA. Ces visites sont complétées
par les inspections détaillées périodiques réalisées tous les 6 ans par des spécialistes.
Méthode départementale :
Cette méthode a été mise au point pour intégrer les diverses contraintes et caractéristiques
des départements dans la gestion de son patrimoine. Pour cela, la méthode doit être
globale, fiable, simple d’utilisation, mais suffisamment souple pour s’adapter à ses
Chapitre 2 L’évaluation des ouvrages d’art
Page 20
spécificités. La méthode départementale à la particularité d’être un outil macro-économique
permettant de suivre ou développer une politique budgétaire.
À la différence de la méthode IQOA, celle-ci, en plus de couvrir la surveillance et l’évaluation
de l’état des ouvrages, est prend en compte l’aspect socio-économique pour la
programmation des opérations de maintenance.
Comme pour la méthode IQOA, tout commence par la surveillance périodique du patrimoine
et le relevé des désordres. Cette étape peut être réalisée par du personnel peu qualifié
formé à la méthode, mais la classification de l’état de l’ouvrage doit être confiée à un
spécialiste des ouvrages d’art. Le recensement des désordres sur l’ensemble du parc
d’ouvrage doit conduire à la réalisation d’un programme d’entretien. Pour cela, la méthode
prend en compte deux indices bien distincts :
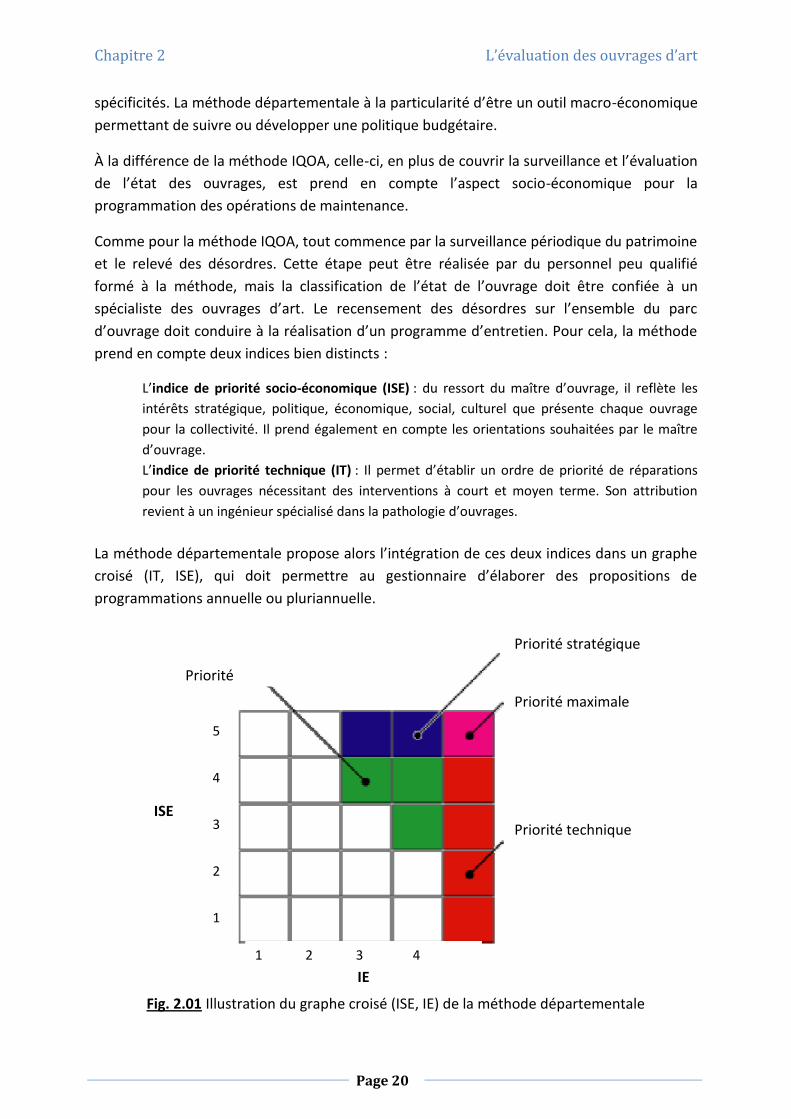
L’indice de priorité socio-économique (ISE) : du ressort du maître d’ouvrage, il reflète les
intérêts stratégique, politique, économique, social, culturel que présente chaque ouvrage
pour la collectivité. Il prend également en compte les orientations souhaitées par le maître
d’ouvrage.
L’indice de priorité technique (IT) : Il permet d’établir un ordre de priorité de réparations
pour les ouvrages nécessitant des interventions à court et moyen terme. Son attribution
revient à un ingénieur spécialisé dans la pathologie d’ouvrages.
La méthode départementale propose alors l’intégration de ces deux indices dans un graphe
croisé (IT, ISE), qui doit permettre au gestionnaire d’élaborer des propositions de
programmations annuelle ou pluriannuelle.
Fig. 2.01 Illustration du graphe croisé (ISE, IE) de la méthode départementale
ISE
IE
5
4
3
2
1
1 2 3 4
5
Priorité
moyenne
Priorité stratégique
Priorité maximale
Priorité technique
Chapitre 2 L’évaluation des ouvrages d’art
Page 21
2.2. Les méthodes européennes :
Dans le cadre d’une démarche commune de connaissance des ponts et de leur cycle de vie,
une concertation plurinationale a été lancée en Europe sous le nom de BRIME. Les thèmes
abordés concernent l’évaluation et le classement des désordres, l’évaluation de la capacité
portante et structurelle d’un pont endommagé, de leur optimisation… Le projet BRIME avait
pour but de faire un bilan des systèmes de gestion des ponts en Europe.
Les laboratoires qui y ont participé sont au nombre de six :
- Bundesanstalt für Straßenwesen (BASt), Allemagne
- Centro de Estudios y Experimentación de Obras Publicas (CEDEX), Espagne
- Laboratoire Central des Ponts et Chaussées (LCPC), France
- Norwegian Public Roads Administration (NPRA), Norvège
- Slovenian National Building and Civil Engineering Institute (ZAG), Slovénie
- Transport Research Laboratory (TRL), Royaume-Uni
Le projet BRIME n’avait pas la prétention d’élaborer une méthode commune d’évaluation
des ponts, mais seulement de recenser les méthodes et les connaissances des différents
pays. Cette partie sera donc consacrée à la présentation de méthode d’évaluation des pays
participants au projet BRIME de manière synthétique.
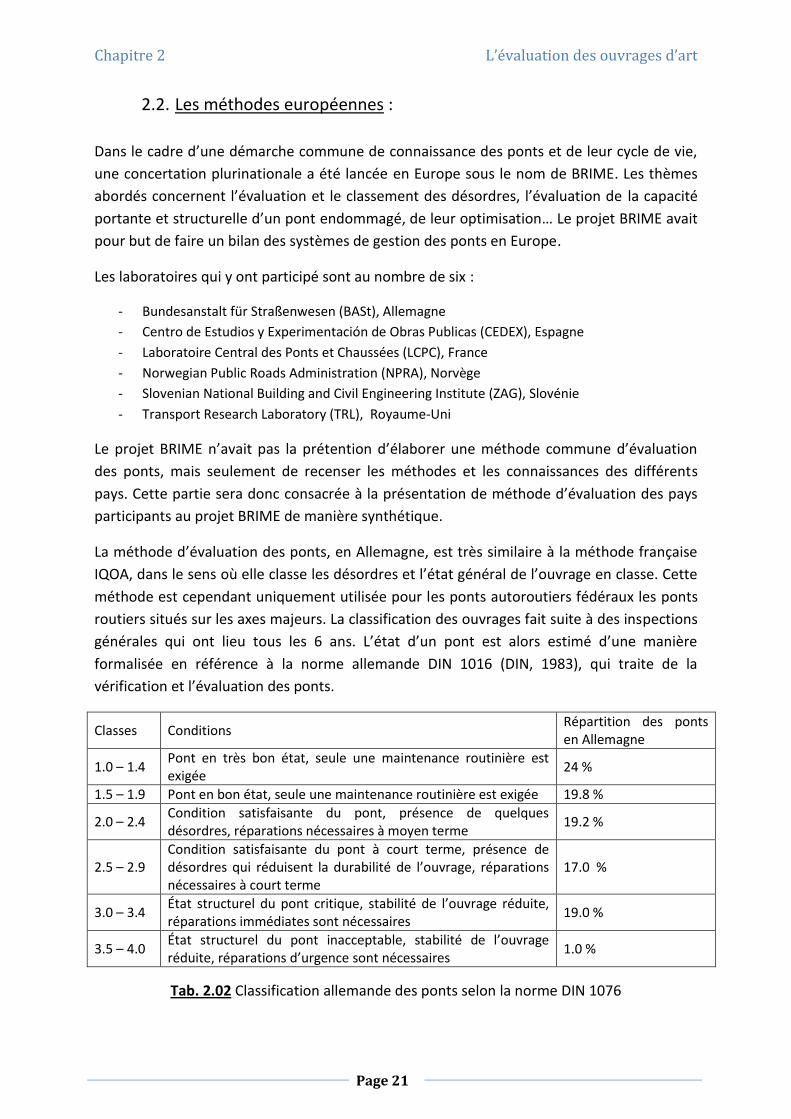
La méthode d’évaluation des ponts, en Allemagne, est très similaire à la méthode française
IQOA, dans le sens où elle classe les désordres et l’état général de l’ouvrage en classe. Cette
méthode est cependant uniquement utilisée pour les ponts autoroutiers fédéraux les ponts
routiers situés sur les axes majeurs. La classification des ouvrages fait suite à des inspections
générales qui ont lieu tous les 6 ans. L’état d’un pont est alors estimé d’une manière
formalisée en référence à la norme allemande DIN 1016 (DIN, 1983), qui traite de la
vérification et l’évaluation des ponts.
Classes Conditions Répartition des ponts en Allemagne
1.0 – 1.4 Pont en très bon état, seule une maintenance routinière est exigée
24 %
1.5 – 1.9 Pont en bon état, seule une maintenance routinière est exigée 19.8 %
2.0 – 2.4 Condition satisfaisante du pont, présence de quelques désordres, réparations nécessaires à moyen terme
19.2 %
2.5 – 2.9 Condition satisfaisante du pont à court terme, présence de désordres qui réduisent la durabilité de l’ouvrage, réparations nécessaires à court terme
17.0 %
3.0 – 3.4 État structurel du pont critique, stabilité de l’ouvrage réduite, réparations immédiates sont nécessaires
19.0 %
3.5 – 4.0 État structurel du pont inacceptable, stabilité de l’ouvrage réduite, réparations d’urgence sont nécessaires
1.0 %
Tab. 2.02 Classification allemande des ponts selon la norme DIN 1076
Chapitre 2 L’évaluation des ouvrages d’art
Page 22
Au Royaume-Uni, la gestion du patrimoine est faite de manière un peu différente. Le
patrimoine est tout d’abord classé. Il s’en suit une étude complète pour avoir le prix des
travaux, et réalise une analyse coût/bénéfice pour mettre en avant les actions de travaux et
de maintenance les plus avantageuses d’un point de vue technique et économique.
2.3. Les méthodes américaines :
En 2009, le LCPC, le Sétra ainsi que l’ADSTD ont effectué un voyage d’études aux États-Unis
d’Amérique afin de comparer leurs méthodes de gestion et la maintenance des Ponts avec
celles utilisées en France. Les services responsables de la gestion des ponts sont doubles : les
DOT de chaque État ainsi que la FHWA. L’évaluation des ponts est basée sur les règles
fédérales NBIS. Le NBIS définit quatre types d’inspections : l’inspection de routine (type
IQOA), l’inspection approfondie, l’inspection pour les ponts comportant des éléments
critiques vis-à-vis de la rupture et l’inspection subaquatique. Les intervalles entre deux
inspections varient de 2 ans pour l’inspection de routine à 5 ans maximum pour l’inspection
subaquatique. Un rapport fait suite à chaque inspection et doit être communiqué au DOT. En
effet, que le pont soit privé ou public, chaque DOT doit s’assurer du bon état de tous les
ouvrages présents sur son territoire. Dans certains cas, comme en France, des calculs
structurels spécifiques sont menés pour évaluer les ouvrages. La méthode de calcul aux
contraintes admissibles, méthode de dimensionnement, n’est plus utilisée dans ce cas. Les
deux méthodes actuelles pour évaluer les ouvrages aux USA sont : LF et LRFR (. Ces
méthodes s’inscrivent dans la même logique que celles utilisées en France, et prennent en
compte un recalibrage des coefficients de sécurité des charges et des résistances à partir de
statistiques. Le’’ système de gestion américain repose sur le logiciel PONTIS. Disposant d’une
base de données du NBI et complété par les différentes inspections, il permet la gestion de
l’ensemble du patrimoine. En plus d’évaluer et classer les ouvrages selon leurs défaillances, il
permet également la planification leur entretien, voir leur amélioration, en proposant de
simulations prenant en compte de l’aspect coût/bénéfice.
Le voyage d’étude aux Etats-Unis, concernant la gestion et la maintenance des Ponts, a donc
révélé que l’approche américaine est comparable à l’approche française ; que ce soit dans
l’auscultation ou l’évaluation. Les États-Unis sont cependant en avance sur la gestion et la
planification avec leur système de gestion type PONTIS. La France s’oriente néanmoins vers
une gestion informatisée avec son logiciel LAGORA, allant dans le sens de la gestion
américaine. Toutefois, on peut légitimement se demander si la gestion américaine doit être
servir de modèle : les exemples d’effondrements des ponts et le montant des travaux de
réparation que vont engager les États-Unis (environ 4 milliards de dollars) indiquent que le
système n’est pas parfait.
Chapitre 2 L’évaluation des ouvrages d’art
Page 23
Fig. 2.02 Effondrement du pont autoroutier en acier à Minneapolis en 2007
3. Réalisation des mesures : appareillage et procédé
D’une manière générale, l’ensemble des désordres, qui sont susceptibles de survenir, est
mesurable par des appareils. Cette partie sera consacrée à la présentation des appareils, les
plus couramment utilisés, et qui seront susceptibles d’être utilisé dans le cadre d’un
monitoring d’ouvrage d’art.
3.1. La fissuration :
Le Fissuromètre :
Pour connaître l’ouverture d’une fissure à un moment donné, l’inspecteur peut utiliser un
fissuromètre. Sous la forme d’une règle transparente, il mesure le plus souvent l’ouverture
au dixième de millimètre. C’est appareil est notamment utilisé pour les évaluations
d’ouvrages telles que l’IQOA.
L’extensomètre LVDT :
Il est souvent intéressant de suivre l’évolution d’une fissure sur un intervalle de temps plus
ou moins long. Dans ce cas, l’utilisation d’un fissuromètre n’est plus valide, car le suivi
nécessite une mesure au même endroit et avec la même précision. L’utilisation de capteurs,
fixés à l’ouvrage le temps des mesures, est donc requise. L’extensomètre LVDT (Linear
Variable Differential Transformer) est un capteur électrique (voir maintenant électroniques)
que l’on encastre de part et d’autre de la fissure et qui indique de manière quantitative

Chapitre 2 L’évaluation des ouvrages d’art
Page 24
l’ouverture ou la fermeture de la fissure. L’intervalle de temps entre chaque mesure peut,
pour la plus part de ces capteurs, être choisi par l’utilisateur. Ce type de capteur peut
également servir en zone non-fissurée et servir, dans cette configuration, à mesurer la
déformation du matériau.
3.2. Déplacements, déformations :
Fil INVAR :
Le fil INVAR détient son nom de son insensibilité à la température. Il est utilisé notamment
pour mesurer la flèche d’un ouvrage, à court terme, comme pour le franchissement d’un
pont par un convoi exceptionnel. Le principe est simple. Une extrémité du fil INVAR est fixée
au tablier de l’ouvrage. L’autre extrémité sera fixée au sol (ou corps jugé non déplaçable,
non déformable) par l’intermédiaire d’un ressort. Sur le fil INVAR tendu, un bras mécanique
est fixé et permet de dessiner sur un sismographe. Tout faible mouvement du tablier
transmet un effort au ressort qui se comprime ou s’étire. Par un système d’amplification du
mouvement, le bras mécanique tracera l’évolution du mouvement du tablier.
Tachéomètre :
L’utilisation du tachéomètre peut servir au suivi de plusieurs grandeurs, comme le profil du
tablier, d’un mur… Jusqu’à présent, le logiciel qui est associé au tachéomètre oblige le
recalcul à la main des positions des points levés. Les techniciens ne l’utilisent donc que sur
des levés journaliers, comme pour le suivi de la déformation du tablier lors du
franchissement d’un convoi exceptionnel. A l’avenir, et l’achat d’un nouveau logiciel devrait
rendre possible l’utilisation du tachéomètre sur le suivi à long terme des murs de
soutènement.
Accéléromètre :
Fixé à la structure du tablier, ce capteur permet de mesurer son accélération dynamique.
Concrètement, il permet de mesurer l’oscillation du tablier sous chargement. Pour un
ouvrage donné, ce mouvement est influencé par la charge en mouvement ainsi que par la
vitesse de franchissement. Des mesures complémentaires de ces deux paramètres peuvent
être intéressantes si l’on cherche à expliciter les relations oscillation – vitesse de circulation
et oscillation – charge, pour un ouvrage.
Inclinomètre :
Il permet la mesure d’angle. Dans la gestion des ouvrages d’art, il est notamment utilisé pour
mesurer l’inclinaison des piles ou culées, signe d’un basculement. Il est utilisé en mesure
complémentaire de la déformation (flèche, oscillation). L’utilisation de l’inclinomètre reste
cependant rare comparer aux mesures de flèche et d’oscillation.
Chapitre 2 L’évaluation des ouvrages d’art
Page 25
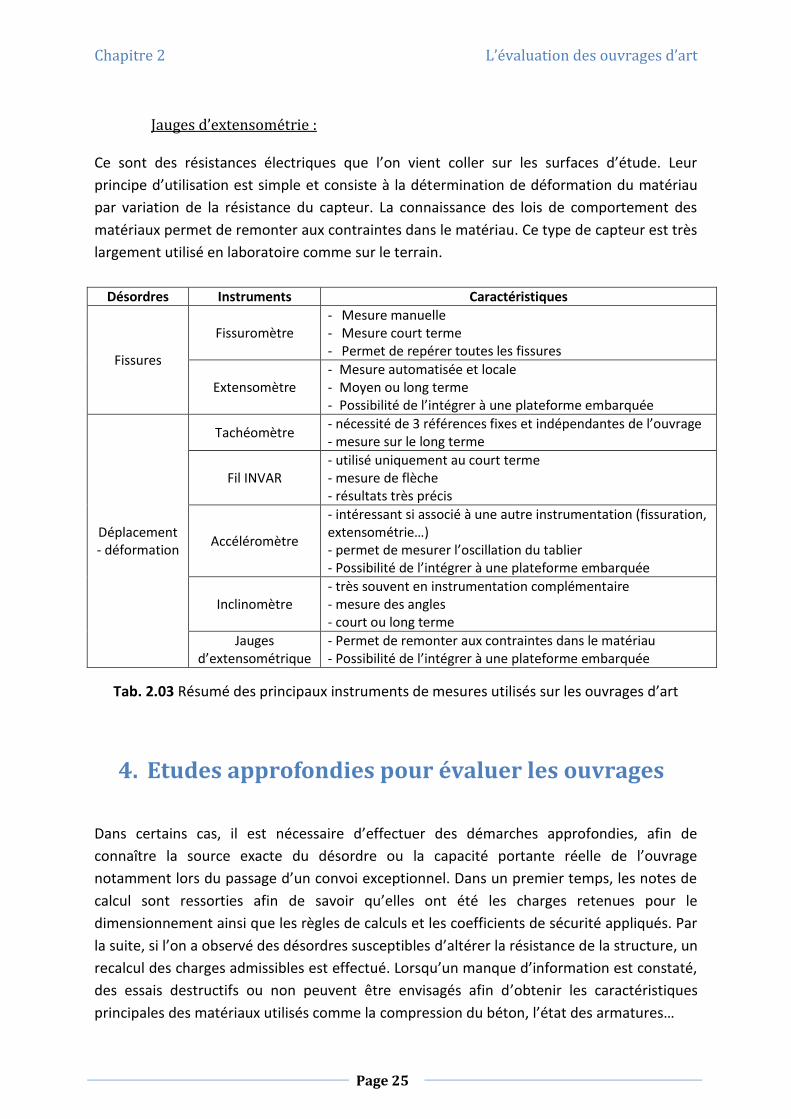
Jauges d’extensométrie :
Ce sont des résistances électriques que l’on vient coller sur les surfaces d’étude. Leur
principe d’utilisation est simple et consiste à la détermination de déformation du matériau
par variation de la résistance du capteur. La connaissance des lois de comportement des
matériaux permet de remonter aux contraintes dans le matériau. Ce type de capteur est très
largement utilisé en laboratoire comme sur le terrain.
Désordres Instruments Caractéristiques
Fissures
Fissuromètre - Mesure manuelle - Mesure court terme - Permet de repérer toutes les fissures
Extensomètre - Mesure automatisée et locale - Moyen ou long terme - Possibilité de l’intégrer à une plateforme embarquée
Déplacement - déformation
Tachéomètre - nécessité de 3 références fixes et indépendantes de l’ouvrage - mesure sur le long terme
Fil INVAR - utilisé uniquement au court terme - mesure de flèche - résultats très précis
Accéléromètre
- intéressant si associé à une autre instrumentation (fissuration, extensométrie…) - permet de mesurer l’oscillation du tablier - Possibilité de l’intégrer à une plateforme embarquée
Inclinomètre - très souvent en instrumentation complémentaire - mesure des angles - court ou long terme
Jauges d’extensométrique
- Permet de remonter aux contraintes dans le matériau - Possibilité de l’intégrer à une plateforme embarquée
Tab. 2.03 Résumé des principaux instruments de mesures utilisés sur les ouvrages d’art
4. Etudes approfondies pour évaluer les ouvrages
Dans certains cas, il est nécessaire d’effectuer des démarches approfondies, afin de
connaître la source exacte du désordre ou la capacité portante réelle de l’ouvrage
notamment lors du passage d’un convoi exceptionnel. Dans un premier temps, les notes de
calcul sont ressorties afin de savoir qu’elles ont été les charges retenues pour le
dimensionnement ainsi que les règles de calculs et les coefficients de sécurité appliqués. Par
la suite, si l’on a observé des désordres susceptibles d’altérer la résistance de la structure, un
recalcul des charges admissibles est effectué. Lorsqu’un manque d’information est constaté,
des essais destructifs ou non peuvent être envisagés afin d’obtenir les caractéristiques
principales des matériaux utilisés comme la compression du béton, l’état des armatures…
Chapitre 2 L’évaluation des ouvrages d’art
Page 26
4.1. Chargement maximum admissible
Lorsqu’on envisage le passage d’un convoi exceptionnel sur l’ouvrage, on doit s’assurer qu’il
ne provoquera ni désordre ni la ruine complète de l’ouvrage. Pour cela, on procède à un
essai de chargement. Ce dernier s’effectue progressivement en suivant quelques
caractéristiques types afin de vérifier que le pont restera dans le domaine élastique. Les
caractéristiques suivies sont en général l’ouverture et la fermeture des fissures ainsi que la
flèche et l’absence de flèche résiduelle postchargèrent. Ces mesures sont alors effectuées en
amont du passage du convoi, mais également lors de ce dernier. L’intérêt premier étant la
vérification du comportement élastique de l’ouvrage sous un chargement à court terme, ces
mesures s’effectuent relativement facilement.
4.2. Mouvement des murs de soutènement
La problématique lors d’un suivi de mur de soutènement est autre. On cherche à mesurer
son déplacement et sa déformation à long terme afin d’éviter son basculement ou toute
autre ruine. À l’heure actuelle, la méthode utilisée consiste en des relevés topographiques
réguliers. La difficulté de cette méthode réside en la mesure des mêmes points à partir d’une
station fixe. Pour cela, les points de levé doivent être correctement repérés (précision, aucun
mouvement possible). D’autre part, la station où est installé le tachéomètre doit elle aussi
être immobile en plan et en dénivellation, mais surtout l’instrument doit pouvoir être
replacé dans les mêmes conditions à chaque mesure.
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 27
Chapitre 3. Mise en place d’un
monitoring sur les ponts : PEGASE
Les études approfondies du chapitre précédent parlent des convois exceptionnels. Pour le
LRPC, cette problématique concerne essentiellement l’itinéraire Belfort – Strasbourg qui est
soumis à un trafic de convois exceptionnels relativement fréquent. Il est en charge de la
vérification de contrôler le non-endommagement de certains ouvrages lors de ces passages.
Les missions du laboratoire changeant, il est envisagé de traiter cette problématique d’un
nouveau point de vue en développant un monitoring permanent et autonome sur l’un des
ouvrages présents sur l’itinéraire.
1. Convoi exceptionnel et ouvrage d’art
Un transport ou convoi est exceptionnel lorsqu’il est effectué de manière non conforme aux
prescriptions de Code de la Route. Il concerne le transport d’objets ou de masses indivisibles
dont les dimensions ou la masse excèdent les limites règlementaires fixées par le Code de la
Route.
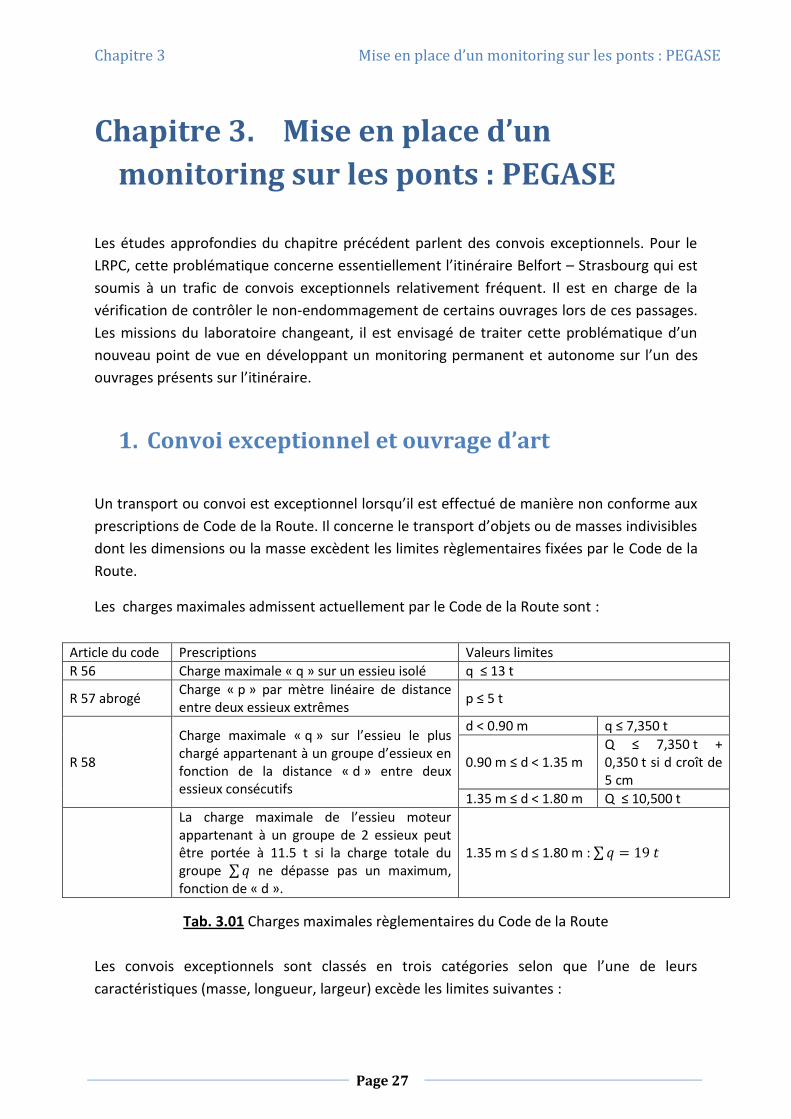
Les charges maximales admissent actuellement par le Code de la Route sont :
Tab. 3.01 Charges maximales règlementaires du Code de la Route
Les convois exceptionnels sont classés en trois catégories selon que l’une de leurs
caractéristiques (masse, longueur, largeur) excède les limites suivantes :
Article du code Prescriptions Valeurs limites
R 56 Charge maximale « q » sur un essieu isolé q ≤ 13 t
R 57 abrogé Charge « p » par mètre linéaire de distance entre deux essieux extrêmes
p ≤ 5 t
R 58
Charge maximale « q » sur l’essieu le plus chargé appartenant à un groupe d’essieux en fonction de la distance « d » entre deux essieux consécutifs
d < 0.90 m q ≤ 7,350 t
0.90 m ≤ d < 1.35 m Q ≤ 7,350 t + 0,350 t si d croît de 5 cm
1.35 m ≤ d < 1.80 m Q ≤ 10,500 t
La charge maximale de l’essieu moteur appartenant à un groupe de 2 essieux peut être portée à 11.5 t si la charge totale du groupe 𝑞 ne dépasse pas un maximum, fonction de « d ».
1.35 m ≤ d ≤ 1.80 m : 𝑞 = 19 𝑡
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 28
Catégories Longueur Largeur Masse totale
1 L ≤ 20 m l ≤ 3 m M ≤ 48 t
2 20 m < L ≤ 25 m 3 m < l < 4 m 48 t < M < 72 t
3 L > 25 m l > 4 m M > 72 t
Tab. 3.02 Catégories des convois exceptionnels
On remarque que la hauteur du convoi n’est pas une caractéristique limite. La compatibilité
de l’itinéraire avec la hauteur du convoi est de la responsabilité du transporteur.
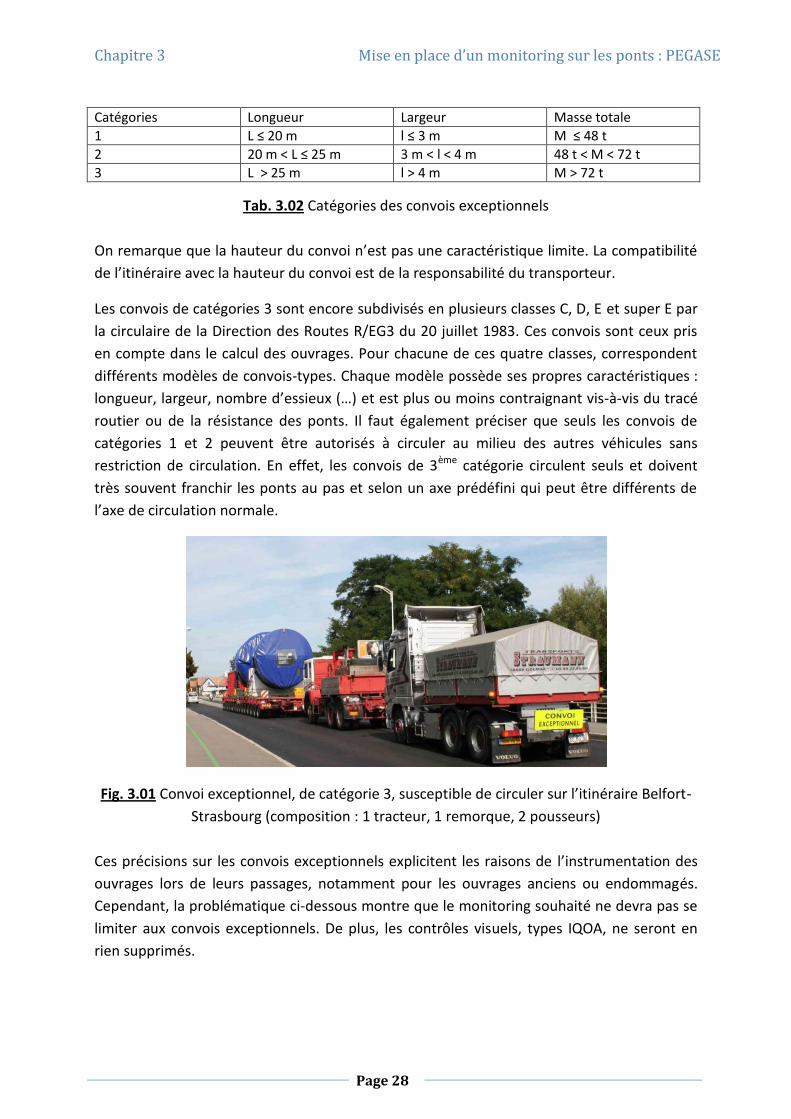
Les convois de catégories 3 sont encore subdivisés en plusieurs classes C, D, E et super E par
la circulaire de la Direction des Routes R/EG3 du 20 juillet 1983. Ces convois sont ceux pris
en compte dans le calcul des ouvrages. Pour chacune de ces quatre classes, correspondent
différents modèles de convois-types. Chaque modèle possède ses propres caractéristiques :
longueur, largeur, nombre d’essieux (…) et est plus ou moins contraignant vis-à-vis du tracé
routier ou de la résistance des ponts. Il faut également préciser que seuls les convois de
catégories 1 et 2 peuvent être autorisés à circuler au milieu des autres véhicules sans
restriction de circulation. En effet, les convois de 3ème catégorie circulent seuls et doivent
très souvent franchir les ponts au pas et selon un axe prédéfini qui peut être différents de
l’axe de circulation normale.
Fig. 3.01 Convoi exceptionnel, de catégorie 3, susceptible de circuler sur l’itinéraire Belfort-
Strasbourg (composition : 1 tracteur, 1 remorque, 2 pousseurs)
Ces précisions sur les convois exceptionnels explicitent les raisons de l’instrumentation des
ouvrages lors de leurs passages, notamment pour les ouvrages anciens ou endommagés.
Cependant, la problématique ci-dessous montre que le monitoring souhaité ne devra pas se
limiter aux convois exceptionnels. De plus, les contrôles visuels, types IQOA, ne seront en
rien supprimés.

Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 29
2. Problématique et hypothèse de départ
PEGASE Signifie Plateforme Experte Générique pour Application Sans-fil Embarquée et a été
développée par le LCPC et la société A3IP. Combinée à des capteurs et un modem GPRS/3G,
la plateforme permet au gestionnaire de suivre l’évolution des caractéristiques étudiées
depuis un ordinateur, à distance. Pour le laboratoire de recherche de Strasbourg, cette
plateforme permettra surtout de suivre des caractéristiques précises sur un ouvrage,
habituellement surveillées à court terme : le battement des fissures. Elle doit permettre de
comprendre l’effet du trafic routier normal sur l’ouvrage, détecter si des véhicules ne sont
pas plus destructeurs que les convois exceptionnels et observer l’existence ou non d’un
phénomène de fatigue générale de la structure.
Cette étude expérimentale a pour but de valider et développer l’instrumentation, à long
terme, des ouvrages d’art afin d’améliorer leur préservation. Pour cela, l’étude initiale va
porter sur le pont de la RD 1083 sur la Scheer à Hipsheim.
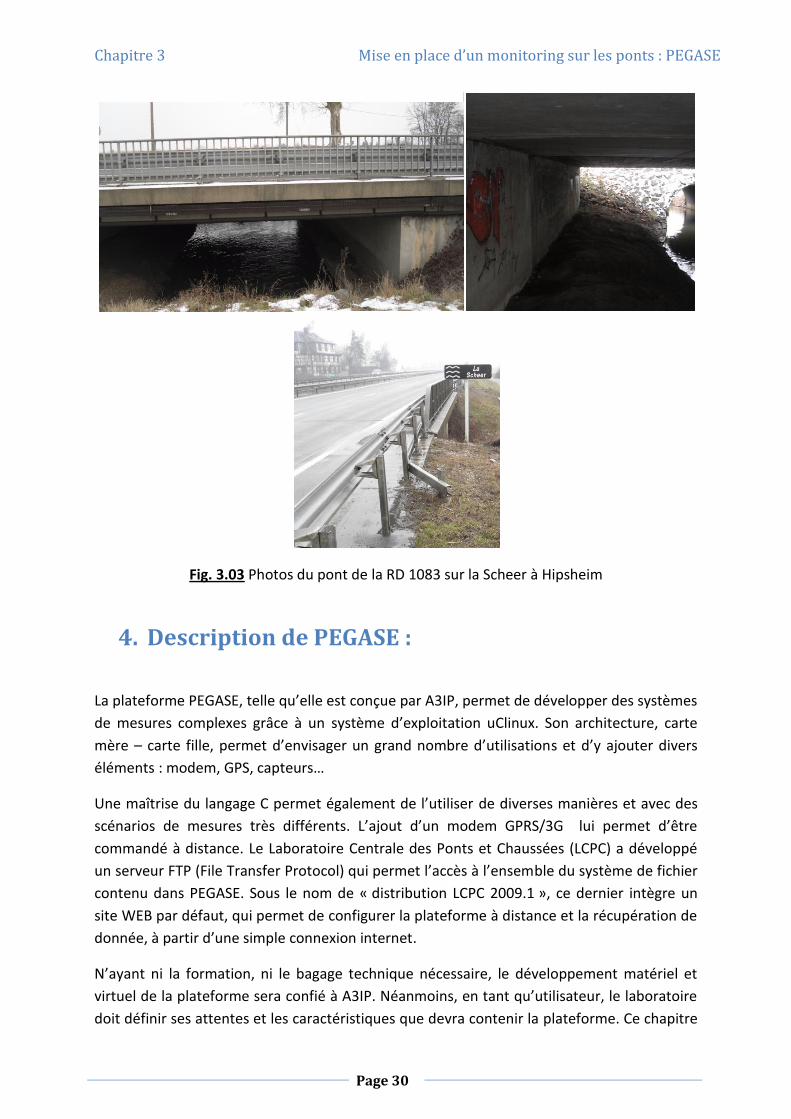
3. Ouvrage d’art instrumenté : Pont sur la Scheer,
RD 1083, Hipsheim
Cet ouvrage est situé à une dizaine de kilomètres au sud de Strasbourg, sur la RD1083. Long
de 12 m, son unique travée est constituée de poutrelles enrobées.
Construit dans les années 1950, il a été élargi deux
fois. Le premier élargissement, en 1968, est
indépendant de l’ouvrage d’origine alors que
l’élargissement de 1976 est relié mécaniquement à
celui de 1968. Il mesure aujourd’hui 21.55 m de
large. Ces deux élargissements ont été réalisés sur
la partie amont de l’ouvrage, dans le sens
Strasbourg-Colmar. L’ouvrage initial est très mal
connu, il manque l’ensemble des notes de calcul et
des plans. Ainsi, les convois exceptionnels passent
donc tous sur les deux élargissements, quelque soit
le sens de du convoi. L’étude systématique de cet
ouvrage, lors des passages de convois, provient de
son mauvais état général ainsi que du manque
d’information.
Fig. 3.02 Situation géographique de l’ouvrage surveillé
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 30
Fig. 3.03 Photos du pont de la RD 1083 sur la Scheer à Hipsheim
4. Description de PEGASE :
La plateforme PEGASE, telle qu’elle est conçue par A3IP, permet de développer des systèmes
de mesures complexes grâce à un système d’exploitation uClinux. Son architecture, carte
mère – carte fille, permet d’envisager un grand nombre d’utilisations et d’y ajouter divers
éléments : modem, GPS, capteurs…
Une maîtrise du langage C permet également de l’utiliser de diverses manières et avec des
scénarios de mesures très différents. L’ajout d’un modem GPRS/3G lui permet d’être
commandé à distance. Le Laboratoire Centrale des Ponts et Chaussées (LCPC) a développé
un serveur FTP (File Transfer Protocol) qui permet l’accès à l’ensemble du système de fichier
contenu dans PEGASE. Sous le nom de « distribution LCPC 2009.1 », ce dernier intègre un
site WEB par défaut, qui permet de configurer la plateforme à distance et la récupération de
donnée, à partir d’une simple connexion internet.
N’ayant ni la formation, ni le bagage technique nécessaire, le développement matériel et
virtuel de la plateforme sera confié à A3IP. Néanmoins, en tant qu’utilisateur, le laboratoire
doit définir ses attentes et les caractéristiques que devra contenir la plateforme. Ce chapitre
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 31
s’intéressera donc à tous les éléments constitutifs de la plateforme. Pour certains d’entre
eux, une réflexion et une discussion avec la société A3IP ont été nécessaires pour s’assurer
que les fonctionnalités soient les plus proches de celles attendues et que la faisabilité
technique soit validée.
Cf. Annexe 7 – Interphase de commande de la plateforme PEGASE
5. Cahier des charges de la plateforme
5.1. Description des capteurs utilisés
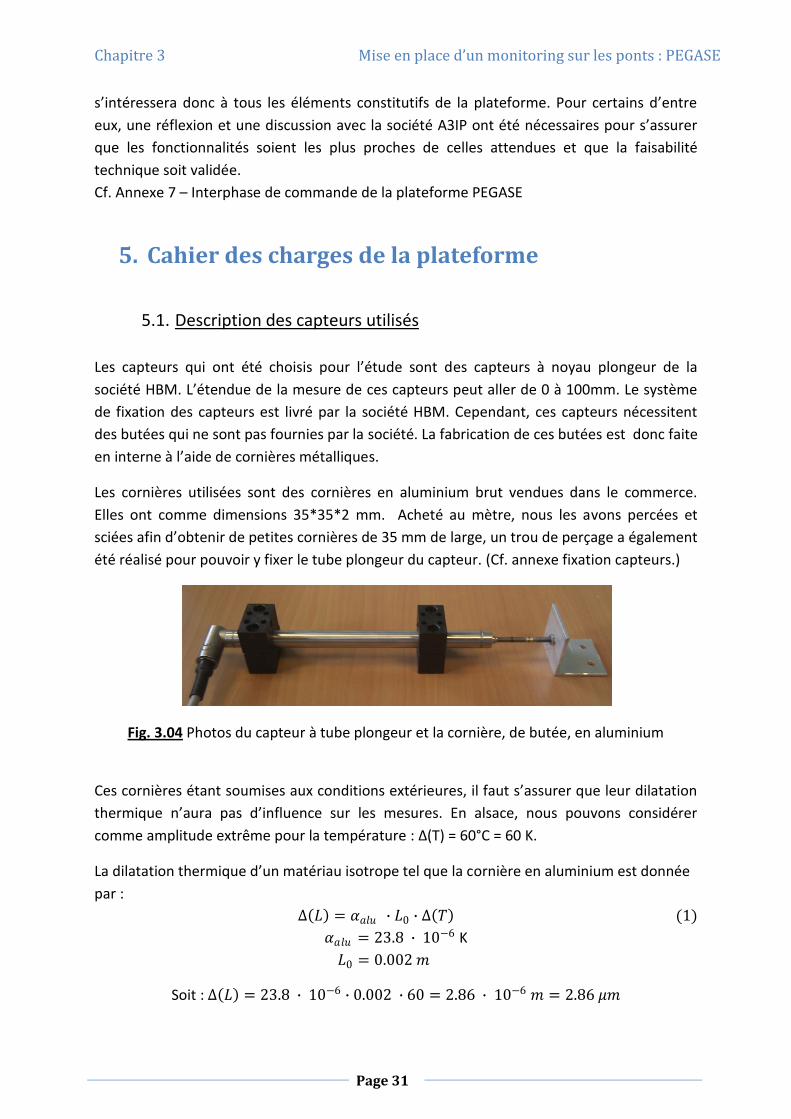
Les capteurs qui ont été choisis pour l’étude sont des capteurs à noyau plongeur de la
société HBM. L’étendue de la mesure de ces capteurs peut aller de 0 à 100mm. Le système
de fixation des capteurs est livré par la société HBM. Cependant, ces capteurs nécessitent
des butées qui ne sont pas fournies par la société. La fabrication de ces butées est donc faite
en interne à l’aide de cornières métalliques.
Les cornières utilisées sont des cornières en aluminium brut vendues dans le commerce.
Elles ont comme dimensions 35*35*2 mm. Acheté au mètre, nous les avons percées et
sciées afin d’obtenir de petites cornières de 35 mm de large, un trou de perçage a également
été réalisé pour pouvoir y fixer le tube plongeur du capteur. (Cf. annexe fixation capteurs.)
Fig. 3.04 Photos du capteur à tube plongeur et la cornière, de butée, en aluminium
Ces cornières étant soumises aux conditions extérieures, il faut s’assurer que leur dilatation
thermique n’aura pas d’influence sur les mesures. En alsace, nous pouvons considérer
comme amplitude extrême pour la température : Δ(T) = 60°C = 60 K.
La dilatation thermique d’un matériau isotrope tel que la cornière en aluminium est donnée
par :
∆ 𝐿 = 𝛼𝑎𝑙𝑢 ∙ 𝐿0 ∙ ∆ 𝑇 (1)
𝛼𝑎𝑙𝑢 = 23.8 ∙ 10−6 K
𝐿0 = 0.002 𝑚
Soit : ∆ 𝐿 = 23.8 ∙ 10−6 ∙ 0.002 ∙ 60 = 2.86 ∙ 10−6 𝑚 = 2.86 𝜇𝑚
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 32
La dilatation thermique de la cornière en aluminium n’influencera donc pas les mesures
d’ouverture des fissures.
5.2. Fréquence d’échantillonnage
Le système de monitoring qui est développé doit permettre de connaître l’influence du trafic
normal ainsi que des convois exceptionnels. Ce dernier s’effectue à vitesse très lente,
comparé à la vitesse normale des autres véhicules qui est de 110 km/h. Le convoi
exceptionnel ne représente donc pas notre condition de référence.
L’ouvrage mesure 12 m de long et les véhicules circulent à 110 km/h. Un véhicule mettra
donc 0.39 s pour traverser le pont.
AN : 𝑡 =𝑑
𝑣=
12 𝑚 ∙3600 𝑠
110 ∙ 103𝑚= 0.39 𝑠 (2)
Cependant, connaître l’influence du trafic normal consiste à connaître l’influence de chaque
véhicule à différents moments de sa traversée de l’ouvrage. Il serait donc intéressant de
pouvoir obtenir 4 ou 5 mesures au cours de la traversée de chaque véhicule. D’autre part, le
schéma initial d’expérimentation consiste à effectuer des séries de mesure sur un mois
complet. Ce mois servira de référence et de telles mesures pourront être répétées tous les 6
mois ou tous les ans. L’ensemble de ces conditions a pour conséquence de générer un
nombre impressionnant de données à stocker, transmettre et traiter. La société A3IP nous a
alors signalé que PEGASE était capable d’effectuer des mesures en continu sur un mois avec
une fréquence d’acquisition allant jusqu’à 20 Hz. La fréquence d’acquisition souhaitée, soit
jusqu’à 4 ou 5 mesures par traversée, est donc retenue.
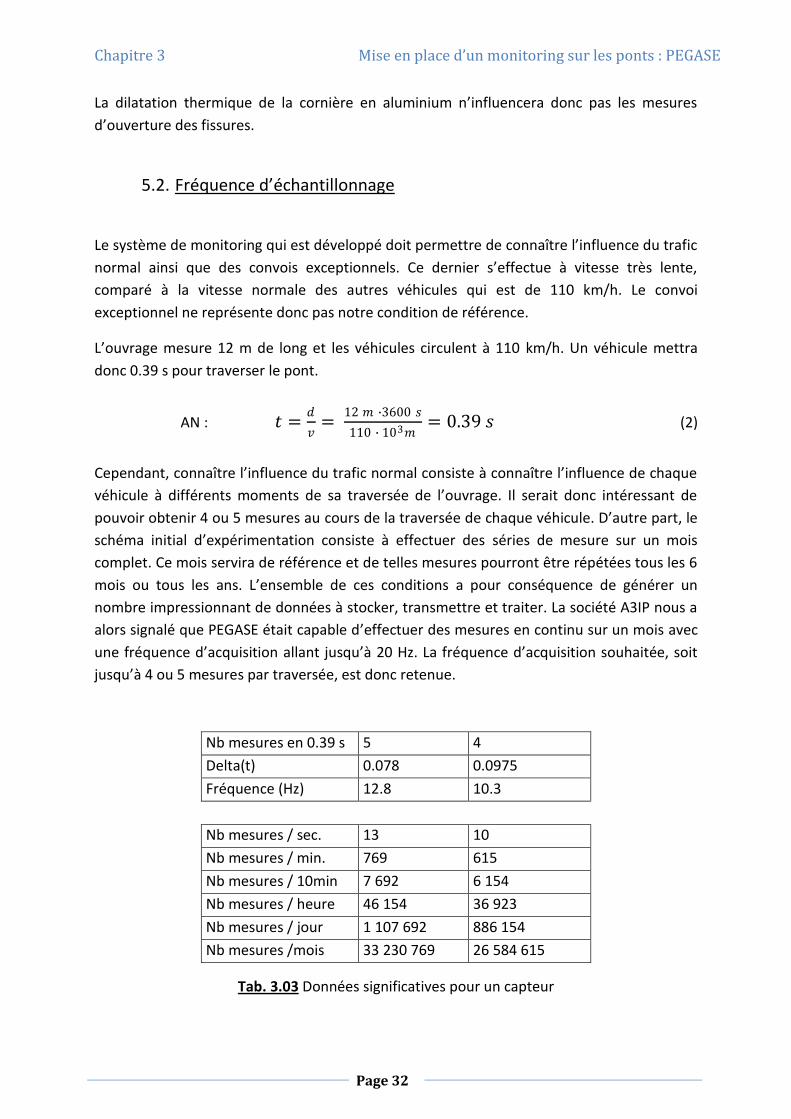
Nb mesures en 0.39 s 5 4
Delta(t) 0.078 0.0975
Fréquence (Hz) 12.8 10.3
Nb mesures / sec. 13 10
Nb mesures / min. 769 615
Nb mesures / 10min 7 692 6 154
Nb mesures / heure 46 154 36 923
Nb mesures / jour 1 107 692 886 154
Nb mesures /mois 33 230 769 26 584 615
Tab. 3.03 Données significatives pour un capteur
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 33
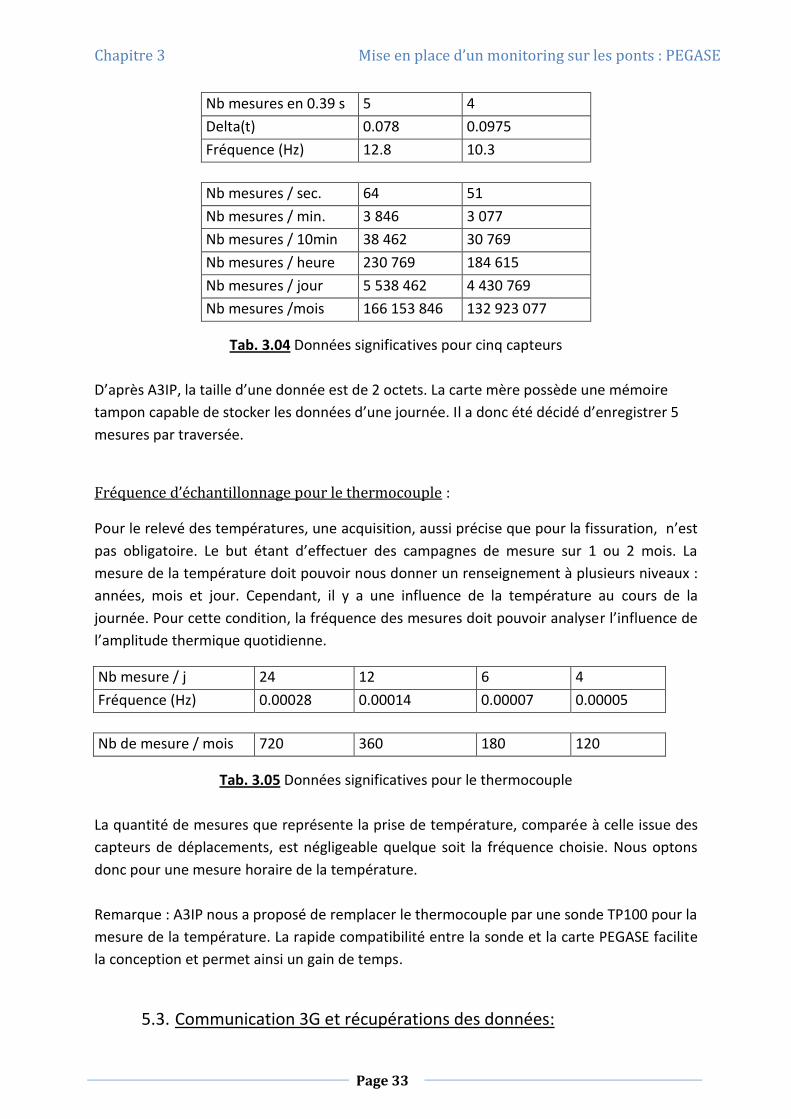
Nb mesures en 0.39 s 5 4
Delta(t) 0.078 0.0975
Fréquence (Hz) 12.8 10.3
Nb mesures / sec. 64 51
Nb mesures / min. 3 846 3 077
Nb mesures / 10min 38 462 30 769
Nb mesures / heure 230 769 184 615
Nb mesures / jour 5 538 462 4 430 769
Nb mesures /mois 166 153 846 132 923 077
Tab. 3.04 Données significatives pour cinq capteurs
D’après A3IP, la taille d’une donnée est de 2 octets. La carte mère possède une mémoire
tampon capable de stocker les données d’une journée. Il a donc été décidé d’enregistrer 5
mesures par traversée.
Fréquence d’échantillonnage pour le thermocouple :
Pour le relevé des températures, une acquisition, aussi précise que pour la fissuration, n’est
pas obligatoire. Le but étant d’effectuer des campagnes de mesure sur 1 ou 2 mois. La
mesure de la température doit pouvoir nous donner un renseignement à plusieurs niveaux :
années, mois et jour. Cependant, il y a une influence de la température au cours de la
journée. Pour cette condition, la fréquence des mesures doit pouvoir analyser l’influence de
l’amplitude thermique quotidienne.
Nb mesure / j 24 12 6 4
Fréquence (Hz) 0.00028 0.00014 0.00007 0.00005
Nb de mesure / mois 720 360 180 120
Tab. 3.05 Données significatives pour le thermocouple
La quantité de mesures que représente la prise de température, comparée à celle issue des
capteurs de déplacements, est négligeable quelque soit la fréquence choisie. Nous optons
donc pour une mesure horaire de la température.
Remarque : A3IP nous a proposé de remplacer le thermocouple par une sonde TP100 pour la
mesure de la température. La rapide compatibilité entre la sonde et la carte PEGASE facilite
la conception et permet ainsi un gain de temps.
5.3. Communication 3G et récupérations des données:
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 34
Pour le fonctionnement à distance, il est nécessaire de disposer d’une licence pour
emprunter le réseau 3G. La première année et notamment les premiers mois servent de test
à ce nouveau système de monitoring. Nous avons opté pour une connexion illimitée en
quantité d’information transmise afin de pouvoir effectuer des tests et modification sans
restriction. Après avoir étudié les offres du commerce, le conseil général 67 a pris la
responsabilité de s’occuper directement de la commande la carte SIM 3G et du forfait, tout
en respectant nos attentes.
La récupération des données se fait ensuite via un serveur informatique, sur internet
directement depuis le laboratoire. La connexion est sécurisée et stockera les données brutes
des mesures en vue d’une analyse ultérieure.
5.4. Choix du type d’alimentation pour le monitoring :
Les différents éléments constitutifs de la plateforme nécessitent une alimentation différente
(24 Volts pour PEGASE, 2.5 Volts pour les capteurs, 220 Volts pour le modem 3G). Pour des
raisons de simplicité d’alimentation, celle-ci sera générale et des transformateurs
modifieront le courant. Il n’en reste pas moins que l’alimentation peut provenir de 3 sources
distinctes :
a) L’utilisation de batterie conviendrait le mieux à la plateforme PEGASE. Cependant dans
le but d’une instrumentation autonome sur le long terme, l’alimentation avec un
courant continu semblerait être plus adaptée à la problématique.
b) La proximité d’un courant continu, 220 V alternatif, permet, par l’intermédiaire d’un
transformateur, d’obtenir des courants continus DC pour le modem ainsi que pour
PEGASE. La plateforme serait alors totalement autonome. Un coût de fonctionnement
est cependant à prévoir du fait de la consommation d’électricité sur le réseau à
proximité. De plus, le franchissement d’une voie d’insertion de la RD1083 nécessite
l’intervention du gestionnaire du réseau et donc des coûts et délais supplémentaires.
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 35
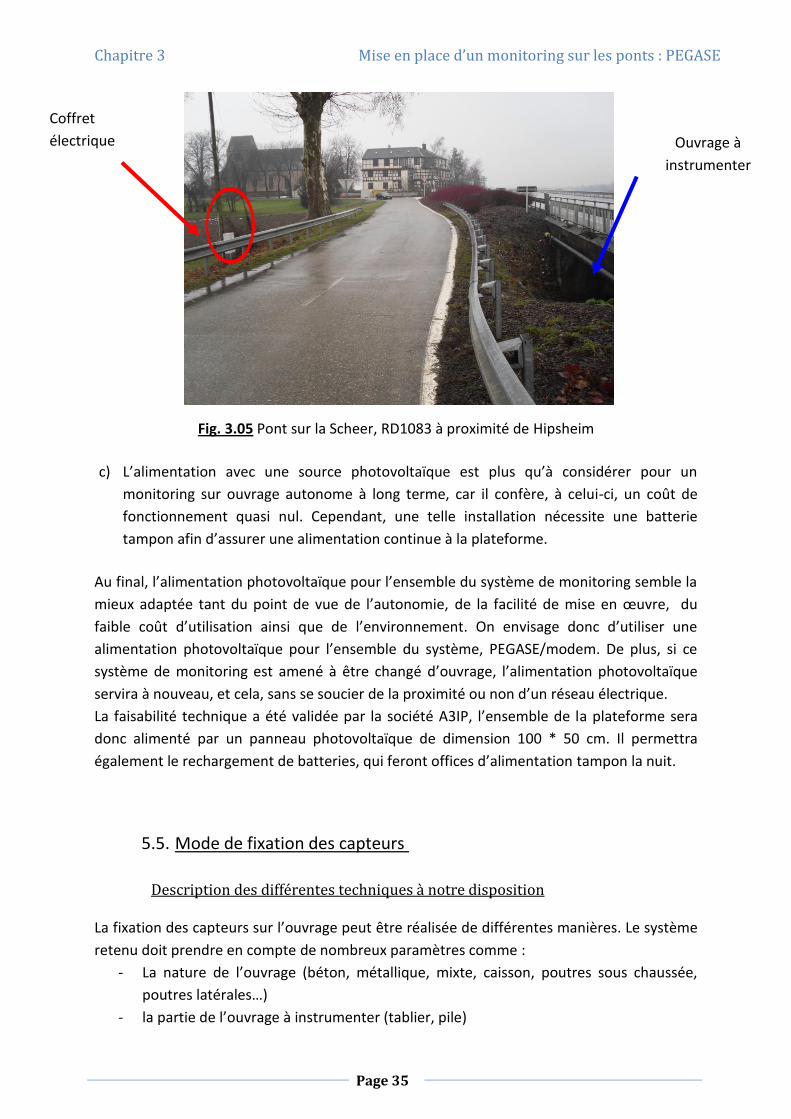
Fig. 3.05 Pont sur la Scheer, RD1083 à proximité de Hipsheim
c) L’alimentation avec une source photovoltaïque est plus qu’à considérer pour un
monitoring sur ouvrage autonome à long terme, car il confère, à celui-ci, un coût de
fonctionnement quasi nul. Cependant, une telle installation nécessite une batterie
tampon afin d’assurer une alimentation continue à la plateforme.
Au final, l’alimentation photovoltaïque pour l’ensemble du système de monitoring semble la
mieux adaptée tant du point de vue de l’autonomie, de la facilité de mise en œuvre, du
faible coût d’utilisation ainsi que de l’environnement. On envisage donc d’utiliser une
alimentation photovoltaïque pour l’ensemble du système, PEGASE/modem. De plus, si ce
système de monitoring est amené à être changé d’ouvrage, l’alimentation photovoltaïque
servira à nouveau, et cela, sans se soucier de la proximité ou non d’un réseau électrique.
La faisabilité technique a été validée par la société A3IP, l’ensemble de la plateforme sera
donc alimenté par un panneau photovoltaïque de dimension 100 * 50 cm. Il permettra
également le rechargement de batteries, qui feront offices d’alimentation tampon la nuit.
5.5. Mode de fixation des capteurs
Description des différentes techniques à notre disposition
La fixation des capteurs sur l’ouvrage peut être réalisée de différentes manières. Le système
retenu doit prendre en compte de nombreux paramètres comme :
- La nature de l’ouvrage (béton, métallique, mixte, caisson, poutres sous chaussée,
poutres latérales…)
- la partie de l’ouvrage à instrumenter (tablier, pile)
Ouvrage à
instrumenter
Coffret
électrique
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 36
- le type de capteurs, de leur sensibilité à l’environnement extérieur (chaleur,
humidité)
- le caractère déplaçable du système
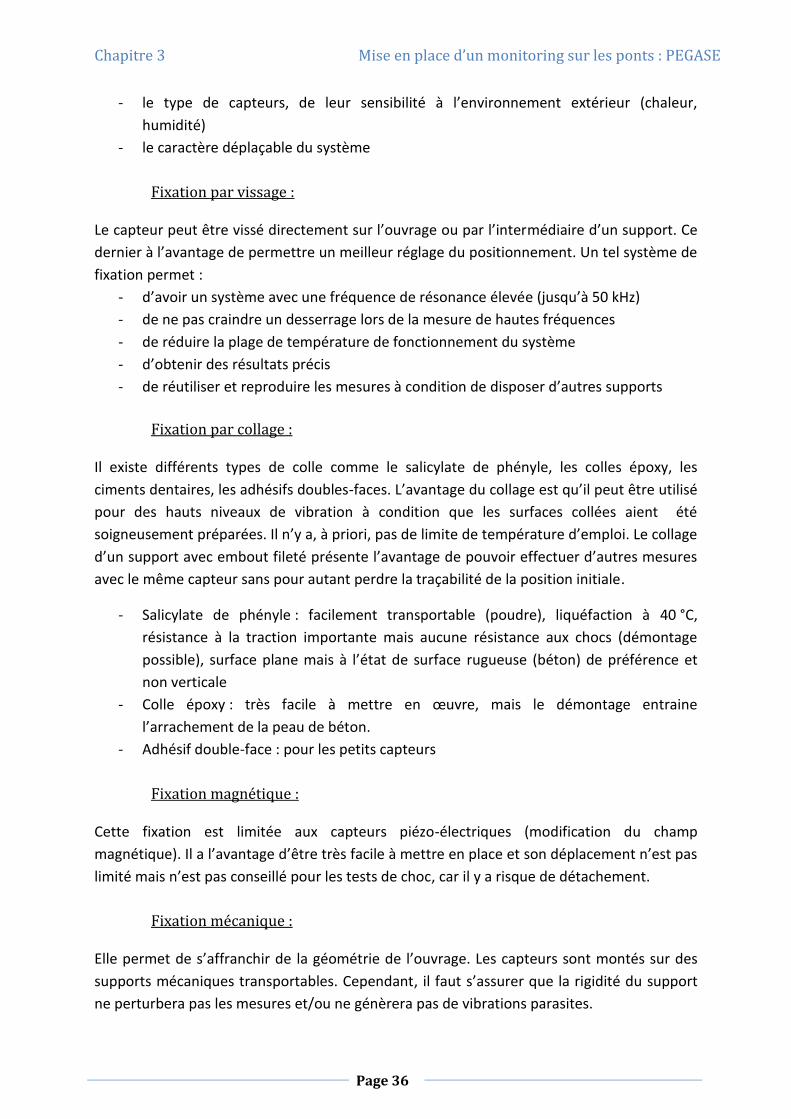
Fixation par vissage :
Le capteur peut être vissé directement sur l’ouvrage ou par l’intermédiaire d’un support. Ce
dernier à l’avantage de permettre un meilleur réglage du positionnement. Un tel système de
fixation permet :
- d’avoir un système avec une fréquence de résonance élevée (jusqu’à 50 kHz)
- de ne pas craindre un desserrage lors de la mesure de hautes fréquences
- de réduire la plage de température de fonctionnement du système
- d’obtenir des résultats précis
- de réutiliser et reproduire les mesures à condition de disposer d’autres supports
Fixation par collage :
Il existe différents types de colle comme le salicylate de phényle, les colles époxy, les
ciments dentaires, les adhésifs doubles-faces. L’avantage du collage est qu’il peut être utilisé
pour des hauts niveaux de vibration à condition que les surfaces collées aient été
soigneusement préparées. Il n’y a, à priori, pas de limite de température d’emploi. Le collage
d’un support avec embout fileté présente l’avantage de pouvoir effectuer d’autres mesures
avec le même capteur sans pour autant perdre la traçabilité de la position initiale.
- Salicylate de phényle : facilement transportable (poudre), liquéfaction à 40 °C,
résistance à la traction importante mais aucune résistance aux chocs (démontage
possible), surface plane mais à l’état de surface rugueuse (béton) de préférence et
non verticale
- Colle époxy : très facile à mettre en œuvre, mais le démontage entraine
l’arrachement de la peau de béton.
- Adhésif double-face : pour les petits capteurs
Fixation magnétique :
Cette fixation est limitée aux capteurs piézo-électriques (modification du champ
magnétique). Il a l’avantage d’être très facile à mettre en place et son déplacement n’est pas
limité mais n’est pas conseillé pour les tests de choc, car il y a risque de détachement.
Fixation mécanique :
Elle permet de s’affranchir de la géométrie de l’ouvrage. Les capteurs sont montés sur des
supports mécaniques transportables. Cependant, il faut s’assurer que la rigidité du support
ne perturbera pas les mesures et/ou ne génèrera pas de vibrations parasites.
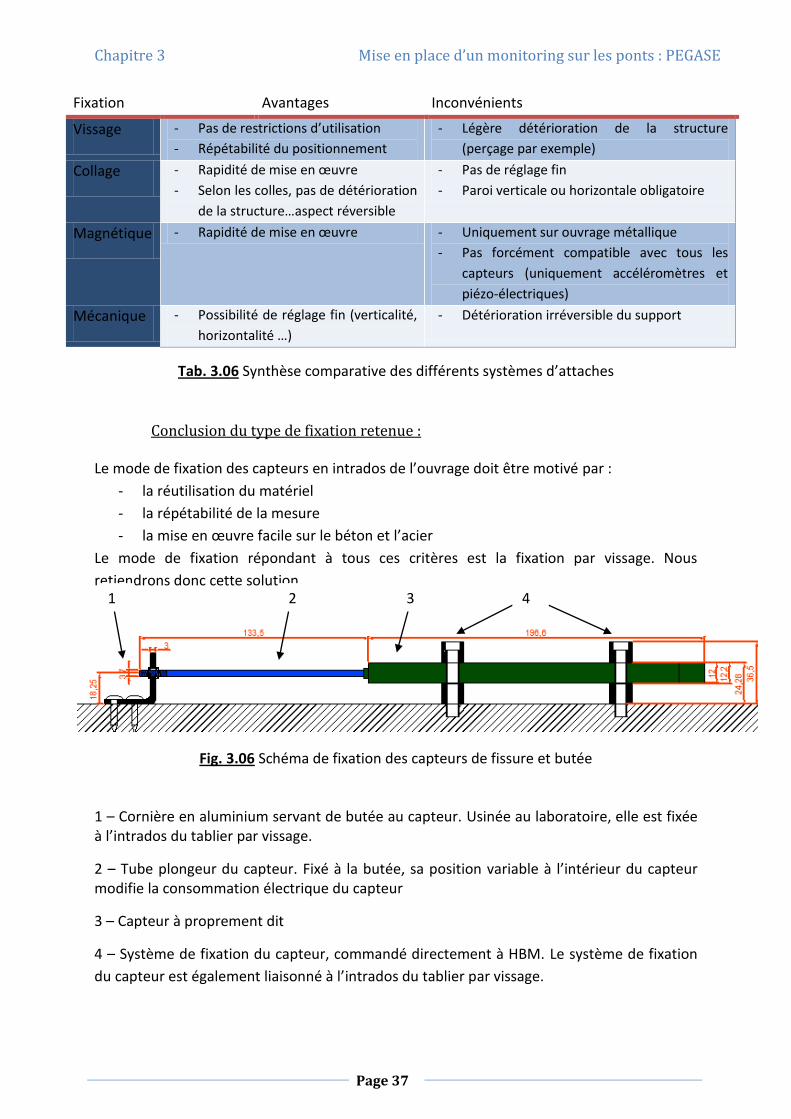
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 37
Fixation Avantages Inconvénients
Vissage - Pas de restrictions d’utilisation
- Répétabilité du positionnement
- Légère détérioration de la structure
(perçage par exemple)
Collage - Rapidité de mise en œuvre
- Selon les colles, pas de détérioration
de la structure…aspect réversible
- Pas de réglage fin
- Paroi verticale ou horizontale obligatoire
Magnétique - Rapidité de mise en œuvre - Uniquement sur ouvrage métallique
- Pas forcément compatible avec tous les
capteurs (uniquement accéléromètres et
piézo-électriques)
Mécanique - Possibilité de réglage fin (verticalité,
horizontalité …)
- Détérioration irréversible du support
Tab. 3.06 Synthèse comparative des différents systèmes d’attaches
Conclusion du type de fixation retenue :
Le mode de fixation des capteurs en intrados de l’ouvrage doit être motivé par :
- la réutilisation du matériel
- la répétabilité de la mesure
- la mise en œuvre facile sur le béton et l’acier
Le mode de fixation répondant à tous ces critères est la fixation par vissage. Nous
retiendrons donc cette solution.
Fig. 3.06 Schéma de fixation des capteurs de fissure et butée
1 – Cornière en aluminium servant de butée au capteur. Usinée au laboratoire, elle est fixée à l’intrados du tablier par vissage.
2 – Tube plongeur du capteur. Fixé à la butée, sa position variable à l’intérieur du capteur modifie la consommation électrique du capteur
3 – Capteur à proprement dit
4 – Système de fixation du capteur, commandé directement à HBM. Le système de fixation
du capteur est également liaisonné à l’intrados du tablier par vissage.
1 2 3 4
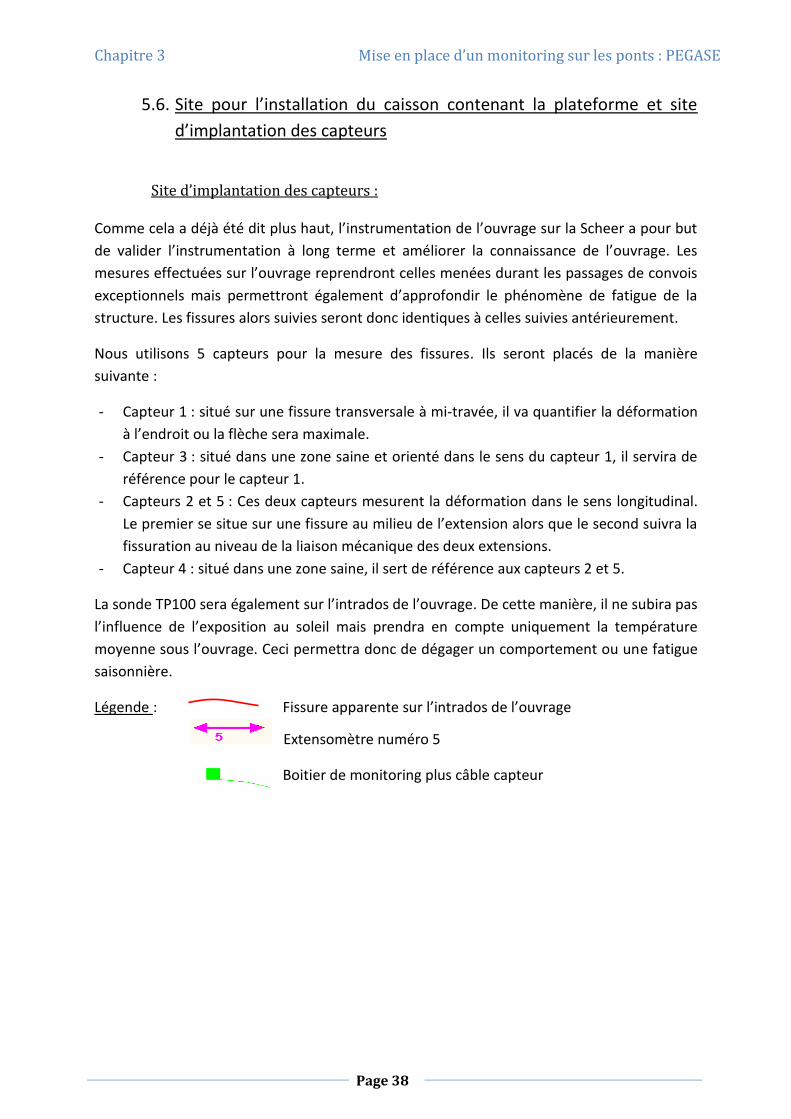
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 38
5.6. Site pour l’installation du caisson contenant la plateforme et site
d’implantation des capteurs
Site d’implantation des capteurs :
Comme cela a déjà été dit plus haut, l’instrumentation de l’ouvrage sur la Scheer a pour but
de valider l’instrumentation à long terme et améliorer la connaissance de l’ouvrage. Les
mesures effectuées sur l’ouvrage reprendront celles menées durant les passages de convois
exceptionnels mais permettront également d’approfondir le phénomène de fatigue de la
structure. Les fissures alors suivies seront donc identiques à celles suivies antérieurement.
Nous utilisons 5 capteurs pour la mesure des fissures. Ils seront placés de la manière
suivante :
- Capteur 1 : situé sur une fissure transversale à mi-travée, il va quantifier la déformation
à l’endroit ou la flèche sera maximale.
- Capteur 3 : situé dans une zone saine et orienté dans le sens du capteur 1, il servira de
référence pour le capteur 1.
- Capteurs 2 et 5 : Ces deux capteurs mesurent la déformation dans le sens longitudinal.
Le premier se situe sur une fissure au milieu de l’extension alors que le second suivra la
fissuration au niveau de la liaison mécanique des deux extensions.
- Capteur 4 : situé dans une zone saine, il sert de référence aux capteurs 2 et 5.
La sonde TP100 sera également sur l’intrados de l’ouvrage. De cette manière, il ne subira pas
l’influence de l’exposition au soleil mais prendra en compte uniquement la température
moyenne sous l’ouvrage. Ceci permettra donc de dégager un comportement ou une fatigue
saisonnière.
Légende : Fissure apparente sur l’intrados de l’ouvrage
Extensomètre numéro 5
Boitier de monitoring plus câble capteur

Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 39
Fig. 3.07 Positionnement des capteurs sur l’intrados, au niveau du dernier élargissement
Site d’implantation du caisson :
Une zone non immergée longe la totalité de la culée Nord. Large d’environ 1.3 m, elle
permet une circulation sous l’ouvrage et rend donc le matériel vulnérable vandalisme. Il a
donc été décidé de fixer l’ensemble du boitier contenant la plateforme PEGASE ainsi que le
modem 3G à l’intérieur d’un caisson qui sera vissé sur l’intrados de l’ouvrage. Placé au-
dessus du cours d’eau, il ne sera donc pas accessible depuis la zone non immergée. Son
installation au plus proche des capteurs réduit également la longueur des câbles
d’alimentation de ces derniers.
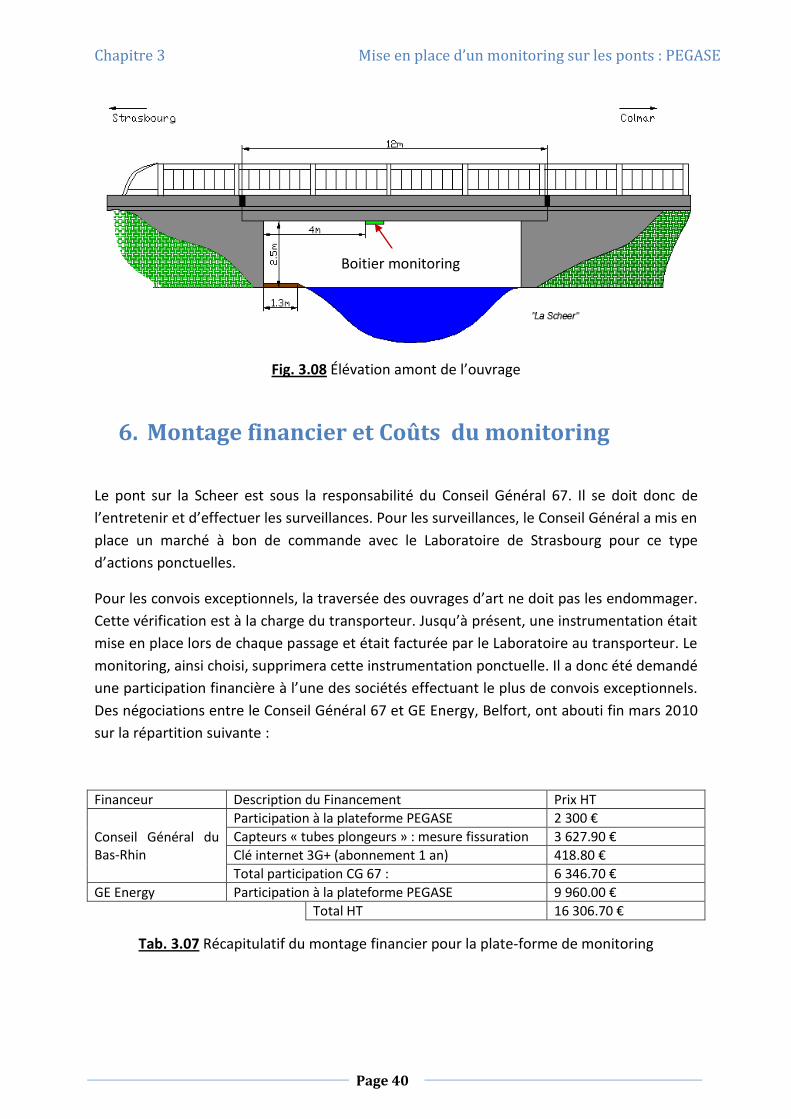
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 40
Fig. 3.08 Élévation amont de l’ouvrage
6. Montage financier et Coûts du monitoring
Le pont sur la Scheer est sous la responsabilité du Conseil Général 67. Il se doit donc de
l’entretenir et d’effectuer les surveillances. Pour les surveillances, le Conseil Général a mis en
place un marché à bon de commande avec le Laboratoire de Strasbourg pour ce type
d’actions ponctuelles.
Pour les convois exceptionnels, la traversée des ouvrages d’art ne doit pas les endommager.
Cette vérification est à la charge du transporteur. Jusqu’à présent, une instrumentation était
mise en place lors de chaque passage et était facturée par le Laboratoire au transporteur. Le
monitoring, ainsi choisi, supprimera cette instrumentation ponctuelle. Il a donc été demandé
une participation financière à l’une des sociétés effectuant le plus de convois exceptionnels.
Des négociations entre le Conseil Général 67 et GE Energy, Belfort, ont abouti fin mars 2010
sur la répartition suivante :
Financeur Description du Financement Prix HT
Conseil Général du Bas-Rhin
Participation à la plateforme PEGASE 2 300 €
Capteurs « tubes plongeurs » : mesure fissuration 3 627.90 €
Clé internet 3G+ (abonnement 1 an) 418.80 €
Total participation CG 67 : 6 346.70 €
GE Energy Participation à la plateforme PEGASE 9 960.00 €
Total HT 16 306.70 €
Tab. 3.07 Récapitulatif du montage financier pour la plate-forme de monitoring
Boitier monitoring
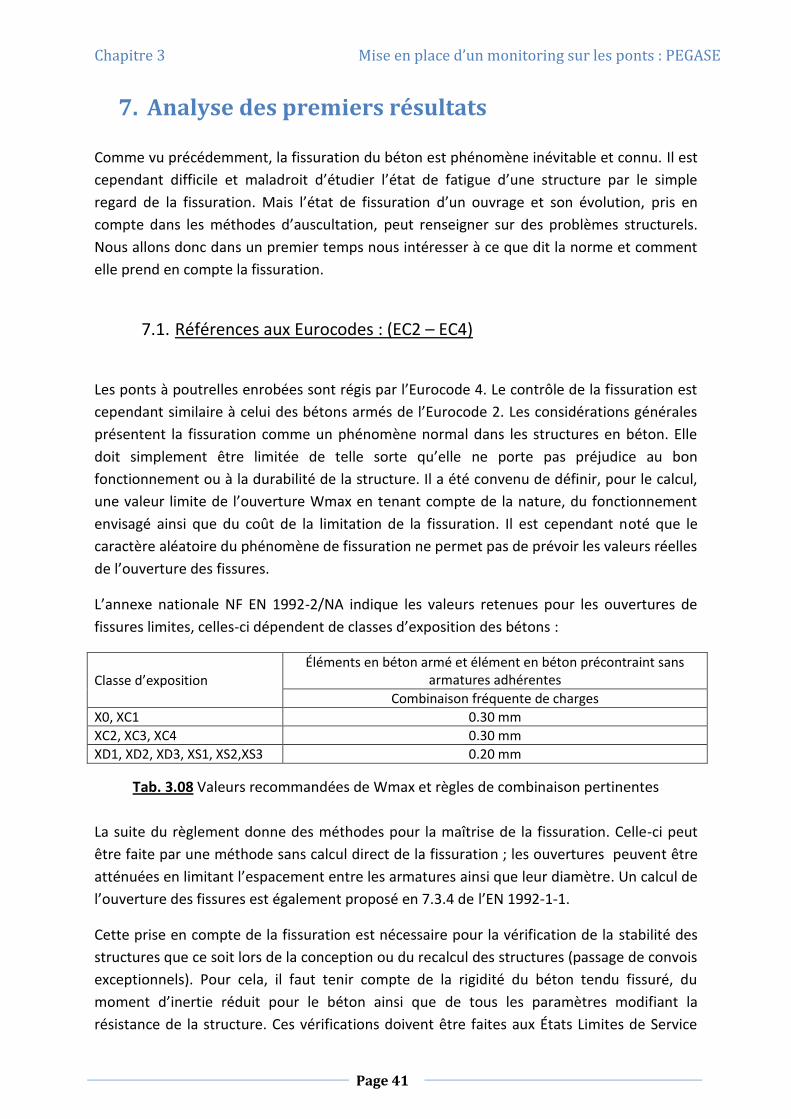
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 41
7. Analyse des premiers résultats
Comme vu précédemment, la fissuration du béton est phénomène inévitable et connu. Il est
cependant difficile et maladroit d’étudier l’état de fatigue d’une structure par le simple
regard de la fissuration. Mais l’état de fissuration d’un ouvrage et son évolution, pris en
compte dans les méthodes d’auscultation, peut renseigner sur des problèmes structurels.
Nous allons donc dans un premier temps nous intéresser à ce que dit la norme et comment
elle prend en compte la fissuration.
7.1. Références aux Eurocodes : (EC2 – EC4)
Les ponts à poutrelles enrobées sont régis par l’Eurocode 4. Le contrôle de la fissuration est
cependant similaire à celui des bétons armés de l’Eurocode 2. Les considérations générales
présentent la fissuration comme un phénomène normal dans les structures en béton. Elle
doit simplement être limitée de telle sorte qu’elle ne porte pas préjudice au bon
fonctionnement ou à la durabilité de la structure. Il a été convenu de définir, pour le calcul,
une valeur limite de l’ouverture Wmax en tenant compte de la nature, du fonctionnement
envisagé ainsi que du coût de la limitation de la fissuration. Il est cependant noté que le
caractère aléatoire du phénomène de fissuration ne permet pas de prévoir les valeurs réelles
de l’ouverture des fissures.
L’annexe nationale NF EN 1992-2/NA indique les valeurs retenues pour les ouvertures de
fissures limites, celles-ci dépendent de classes d’exposition des bétons :
Classe d’exposition Éléments en béton armé et élément en béton précontraint sans
armatures adhérentes
Combinaison fréquente de charges
X0, XC1 0.30 mm
XC2, XC3, XC4 0.30 mm
XD1, XD2, XD3, XS1, XS2,XS3 0.20 mm
Tab. 3.08 Valeurs recommandées de Wmax et règles de combinaison pertinentes
La suite du règlement donne des méthodes pour la maîtrise de la fissuration. Celle-ci peut
être faite par une méthode sans calcul direct de la fissuration ; les ouvertures peuvent être
atténuées en limitant l’espacement entre les armatures ainsi que leur diamètre. Un calcul de
l’ouverture des fissures est également proposé en 7.3.4 de l’EN 1992-1-1.
Cette prise en compte de la fissuration est nécessaire pour la vérification de la stabilité des
structures que ce soit lors de la conception ou du recalcul des structures (passage de convois
exceptionnels). Pour cela, il faut tenir compte de la rigidité du béton tendu fissuré, du
moment d’inertie réduit pour le béton ainsi que de tous les paramètres modifiant la
résistance de la structure. Ces vérifications doivent être faites aux États Limites de Service
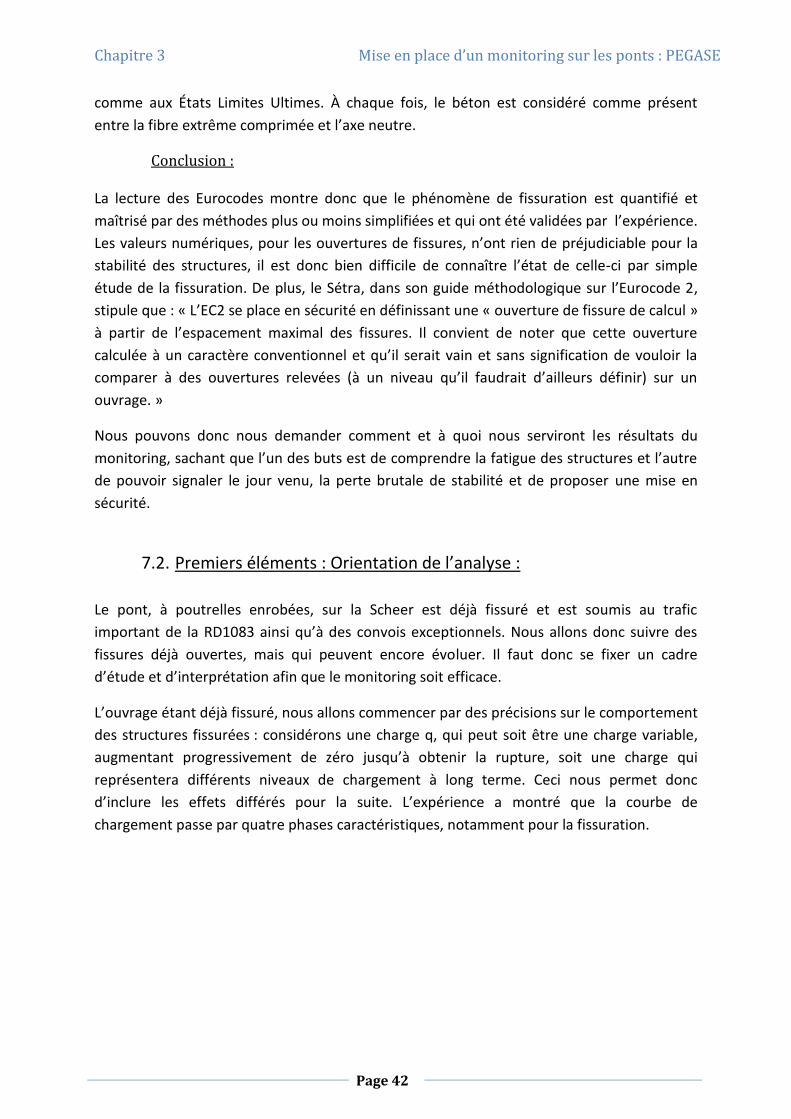
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 42
comme aux États Limites Ultimes. À chaque fois, le béton est considéré comme présent
entre la fibre extrême comprimée et l’axe neutre.
Conclusion :
La lecture des Eurocodes montre donc que le phénomène de fissuration est quantifié et
maîtrisé par des méthodes plus ou moins simplifiées et qui ont été validées par l’expérience.
Les valeurs numériques, pour les ouvertures de fissures, n’ont rien de préjudiciable pour la
stabilité des structures, il est donc bien difficile de connaître l’état de celle-ci par simple
étude de la fissuration. De plus, le Sétra, dans son guide méthodologique sur l’Eurocode 2,
stipule que : « L’EC2 se place en sécurité en définissant une « ouverture de fissure de calcul »
à partir de l’espacement maximal des fissures. Il convient de noter que cette ouverture
calculée à un caractère conventionnel et qu’il serait vain et sans signification de vouloir la
comparer à des ouvertures relevées (à un niveau qu’il faudrait d’ailleurs définir) sur un
ouvrage. »
Nous pouvons donc nous demander comment et à quoi nous serviront les résultats du
monitoring, sachant que l’un des buts est de comprendre la fatigue des structures et l’autre
de pouvoir signaler le jour venu, la perte brutale de stabilité et de proposer une mise en
sécurité.
7.2. Premiers éléments : Orientation de l’analyse :
Le pont, à poutrelles enrobées, sur la Scheer est déjà fissuré et est soumis au trafic
important de la RD1083 ainsi qu’à des convois exceptionnels. Nous allons donc suivre des
fissures déjà ouvertes, mais qui peuvent encore évoluer. Il faut donc se fixer un cadre
d’étude et d’interprétation afin que le monitoring soit efficace.
L’ouvrage étant déjà fissuré, nous allons commencer par des précisions sur le comportement
des structures fissurées : considérons une charge q, qui peut soit être une charge variable,
augmentant progressivement de zéro jusqu’à obtenir la rupture, soit une charge qui
représentera différents niveaux de chargement à long terme. Ceci nous permet donc
d’inclure les effets différés pour la suite. L’expérience a montré que la courbe de
chargement passe par quatre phases caractéristiques, notamment pour la fissuration.
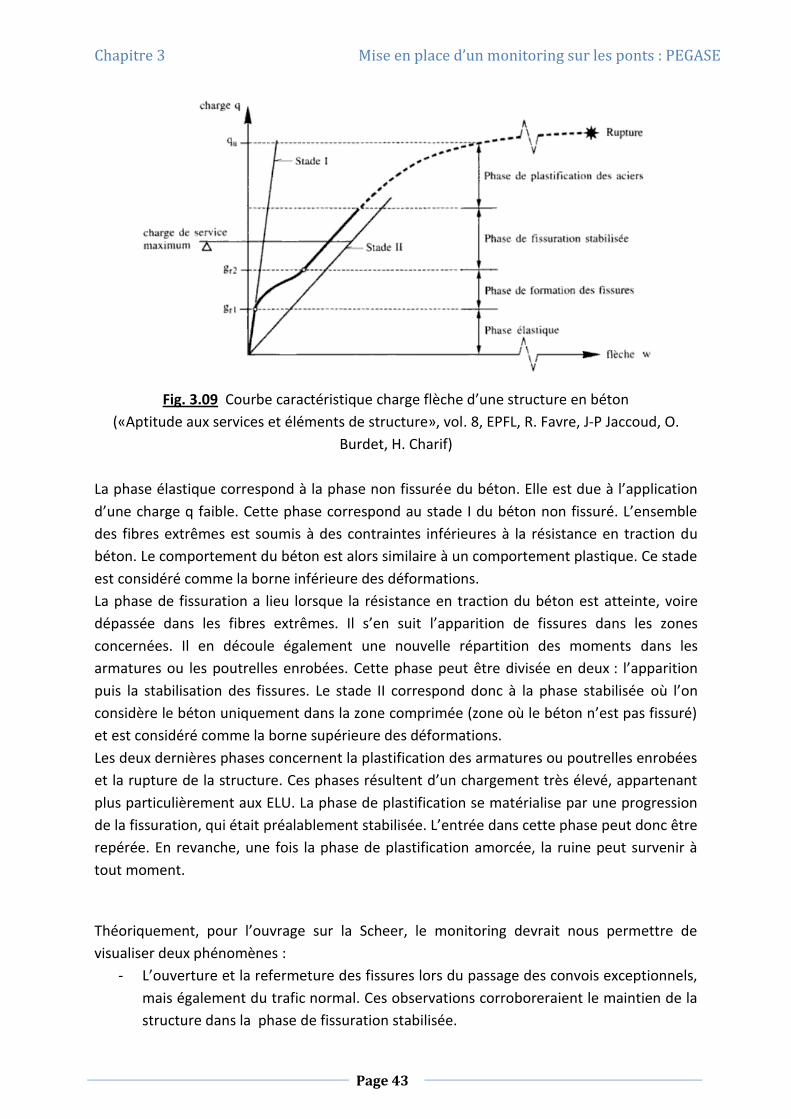
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 43
Fig. 3.09 Courbe caractéristique charge flèche d’une structure en béton
(«Aptitude aux services et éléments de structure», vol. 8, EPFL, R. Favre, J-P Jaccoud, O.
Burdet, H. Charif)
La phase élastique correspond à la phase non fissurée du béton. Elle est due à l’application
d’une charge q faible. Cette phase correspond au stade I du béton non fissuré. L’ensemble
des fibres extrêmes est soumis à des contraintes inférieures à la résistance en traction du
béton. Le comportement du béton est alors similaire à un comportement plastique. Ce stade
est considéré comme la borne inférieure des déformations.
La phase de fissuration a lieu lorsque la résistance en traction du béton est atteinte, voire
dépassée dans les fibres extrêmes. Il s’en suit l’apparition de fissures dans les zones
concernées. Il en découle également une nouvelle répartition des moments dans les
armatures ou les poutrelles enrobées. Cette phase peut être divisée en deux : l’apparition
puis la stabilisation des fissures. Le stade II correspond donc à la phase stabilisée où l’on
considère le béton uniquement dans la zone comprimée (zone où le béton n’est pas fissuré)
et est considéré comme la borne supérieure des déformations.
Les deux dernières phases concernent la plastification des armatures ou poutrelles enrobées
et la rupture de la structure. Ces phases résultent d’un chargement très élevé, appartenant
plus particulièrement aux ELU. La phase de plastification se matérialise par une progression
de la fissuration, qui était préalablement stabilisée. L’entrée dans cette phase peut donc être
repérée. En revanche, une fois la phase de plastification amorcée, la ruine peut survenir à
tout moment.
Théoriquement, pour l’ouvrage sur la Scheer, le monitoring devrait nous permettre de
visualiser deux phénomènes :
- L’ouverture et la refermeture des fissures lors du passage des convois exceptionnels,
mais également du trafic normal. Ces observations corroboreraient le maintien de la
structure dans la phase de fissuration stabilisée.
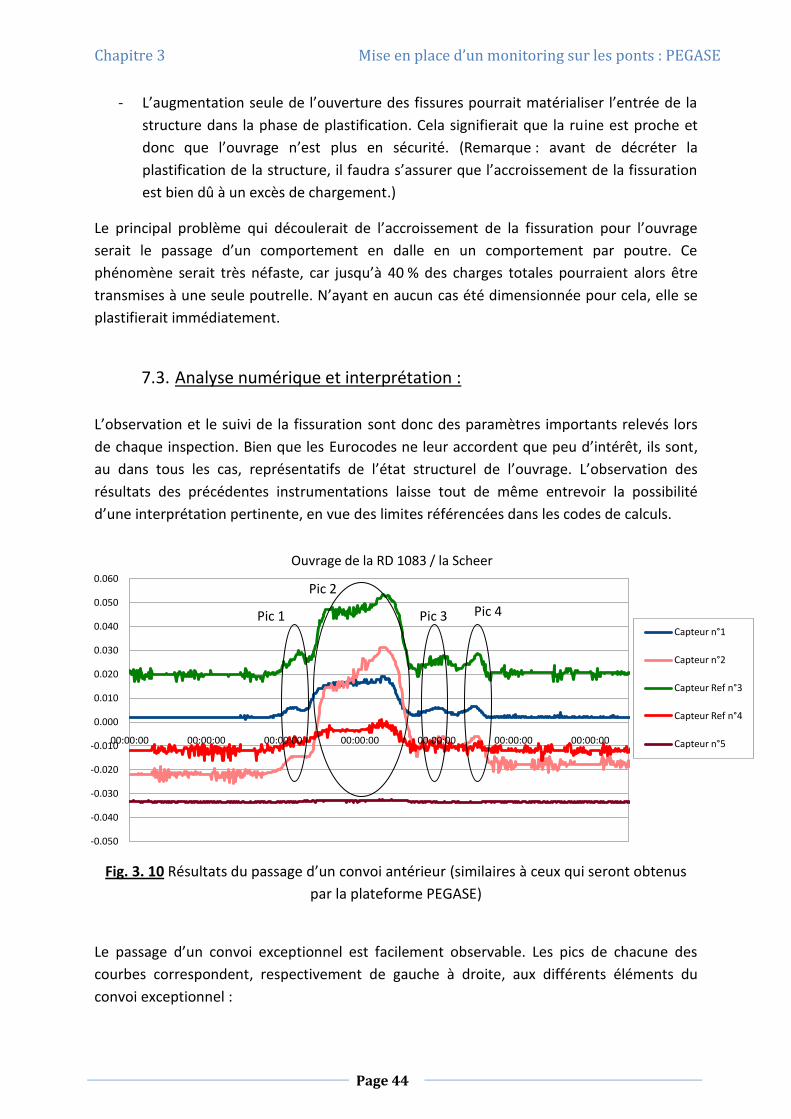
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 44
- L’augmentation seule de l’ouverture des fissures pourrait matérialiser l’entrée de la
structure dans la phase de plastification. Cela signifierait que la ruine est proche et
donc que l’ouvrage n’est plus en sécurité. (Remarque : avant de décréter la
plastification de la structure, il faudra s’assurer que l’accroissement de la fissuration
est bien dû à un excès de chargement.)
Le principal problème qui découlerait de l’accroissement de la fissuration pour l’ouvrage
serait le passage d’un comportement en dalle en un comportement par poutre. Ce
phénomène serait très néfaste, car jusqu’à 40 % des charges totales pourraient alors être
transmises à une seule poutrelle. N’ayant en aucun cas été dimensionnée pour cela, elle se
plastifierait immédiatement.
7.3. Analyse numérique et interprétation :
L’observation et le suivi de la fissuration sont donc des paramètres importants relevés lors
de chaque inspection. Bien que les Eurocodes ne leur accordent que peu d’intérêt, ils sont,
au dans tous les cas, représentatifs de l’état structurel de l’ouvrage. L’observation des
résultats des précédentes instrumentations laisse tout de même entrevoir la possibilité
d’une interprétation pertinente, en vue des limites référencées dans les codes de calculs.
Fig. 3. 10 Résultats du passage d’un convoi antérieur (similaires à ceux qui seront obtenus
par la plateforme PEGASE)
Le passage d’un convoi exceptionnel est facilement observable. Les pics de chacune des
courbes correspondent, respectivement de gauche à droite, aux différents éléments du
convoi exceptionnel :
00:00:00 00:00:00 00:00:00 00:00:00 00:00:00 00:00:00 00:00:00
-0.050
-0.040
-0.030
-0.020
-0.010
0.000
0.010
0.020
0.030
0.040
0.050
0.060
Ouvrage de la RD 1083 / la Scheer
Capteur n°1
Capteur n°2
Capteur Ref n°3
Capteur Ref n°4
Capteur n°5
Pic 1
Pic 2
Pic 3 Pic 4
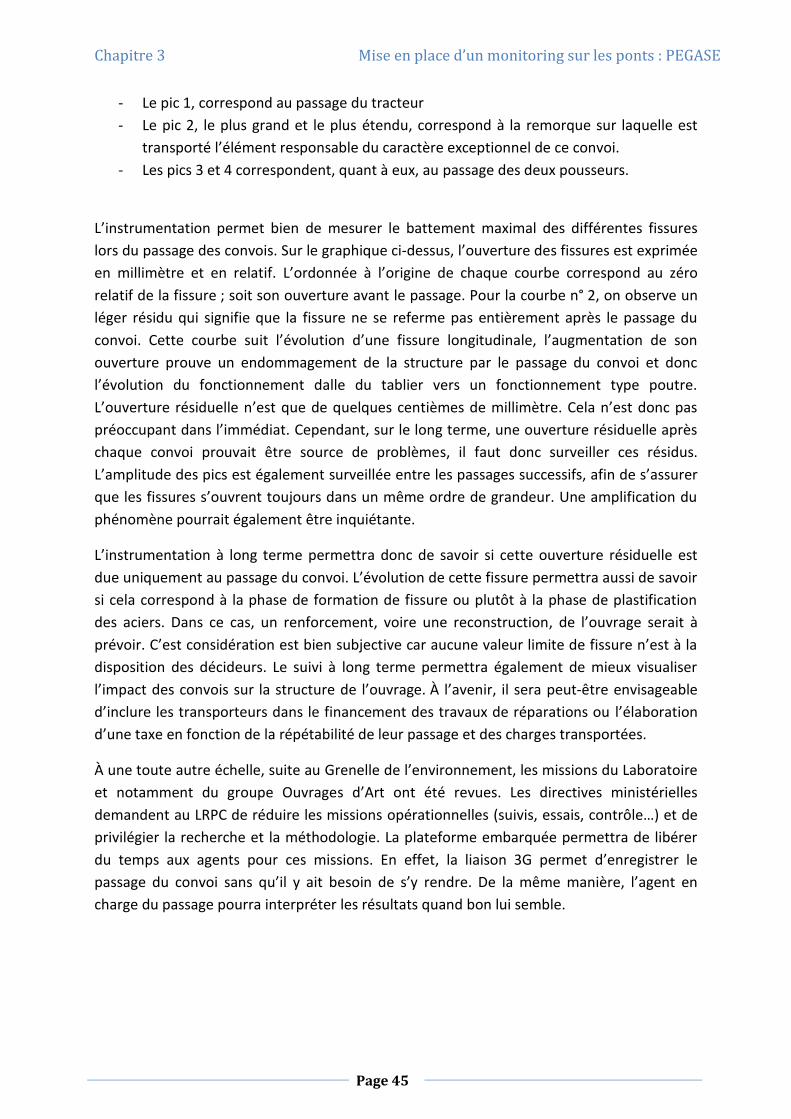
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 45
- Le pic 1, correspond au passage du tracteur
- Le pic 2, le plus grand et le plus étendu, correspond à la remorque sur laquelle est
transporté l’élément responsable du caractère exceptionnel de ce convoi.
- Les pics 3 et 4 correspondent, quant à eux, au passage des deux pousseurs.
L’instrumentation permet bien de mesurer le battement maximal des différentes fissures
lors du passage des convois. Sur le graphique ci-dessus, l’ouverture des fissures est exprimée
en millimètre et en relatif. L’ordonnée à l’origine de chaque courbe correspond au zéro
relatif de la fissure ; soit son ouverture avant le passage. Pour la courbe n° 2, on observe un
léger résidu qui signifie que la fissure ne se referme pas entièrement après le passage du
convoi. Cette courbe suit l’évolution d’une fissure longitudinale, l’augmentation de son
ouverture prouve un endommagement de la structure par le passage du convoi et donc
l’évolution du fonctionnement dalle du tablier vers un fonctionnement type poutre.
L’ouverture résiduelle n’est que de quelques centièmes de millimètre. Cela n’est donc pas
préoccupant dans l’immédiat. Cependant, sur le long terme, une ouverture résiduelle après
chaque convoi prouvait être source de problèmes, il faut donc surveiller ces résidus.
L’amplitude des pics est également surveillée entre les passages successifs, afin de s’assurer
que les fissures s’ouvrent toujours dans un même ordre de grandeur. Une amplification du
phénomène pourrait également être inquiétante.
L’instrumentation à long terme permettra donc de savoir si cette ouverture résiduelle est
due uniquement au passage du convoi. L’évolution de cette fissure permettra aussi de savoir
si cela correspond à la phase de formation de fissure ou plutôt à la phase de plastification
des aciers. Dans ce cas, un renforcement, voire une reconstruction, de l’ouvrage serait à
prévoir. C’est considération est bien subjective car aucune valeur limite de fissure n’est à la
disposition des décideurs. Le suivi à long terme permettra également de mieux visualiser
l’impact des convois sur la structure de l’ouvrage. À l’avenir, il sera peut-être envisageable
d’inclure les transporteurs dans le financement des travaux de réparations ou l’élaboration
d’une taxe en fonction de la répétabilité de leur passage et des charges transportées.
À une toute autre échelle, suite au Grenelle de l’environnement, les missions du Laboratoire
et notamment du groupe Ouvrages d’Art ont été revues. Les directives ministérielles
demandent au LRPC de réduire les missions opérationnelles (suivis, essais, contrôle…) et de
privilégier la recherche et la méthodologie. La plateforme embarquée permettra de libérer
du temps aux agents pour ces missions. En effet, la liaison 3G permet d’enregistrer le
passage du convoi sans qu’il y ait besoin de s’y rendre. De la même manière, l’agent en
charge du passage pourra interpréter les résultats quand bon lui semble.
Chapitre 3 Mise en place d’un monitoring sur les ponts : PEGASE
Page 46
8. Conclusion – Ouverture :
L’instrumentation embarquée avec communication 3G est actuellement au stade
expérimental. C’est notamment pour cela qu’elle ne possède que des capteurs d’ouverture
de fissure et un thermocouple. Si son utilisation, son autonomie ainsi que le post-traitement
des résultats sont satisfaisants, il est envisageable d’installer d’autres plateformes similaires
sur d’autres ouvrages. En effet, lors de la présentation du projet aux principaux
collaborateurs du laboratoire, le conseil général ainsi que la SNCF ont manifesté leur intérêt
pour des systèmes embarqués de ce type. L’autonomie et la communication à distance de ce
type de plateforme d’instrumentation seraient en effet intéressantes à installer sur des
ouvrages difficiles d’accès : ouvrages surplombants des voies SNCF ou ouvrages avec des
tabliers très hauts.
À l’avenir, il est également envisageable de compléter la plateforme d’instrumentation avec
d’autres types de capteurs comme des jauges d’extensométrie. Cette configuration
permettrait alors d’obtenir des informations sur les contraintes dans la structure lors du
passage et de les comparer aux déformations et à l’ouverture des fissures. La satisfaction
avenir de cette plateforme peut laisser entrevoir une amélioration des connaissances sur la
fatigue des structures et ainsi une meilleure gestion des ouvrages.
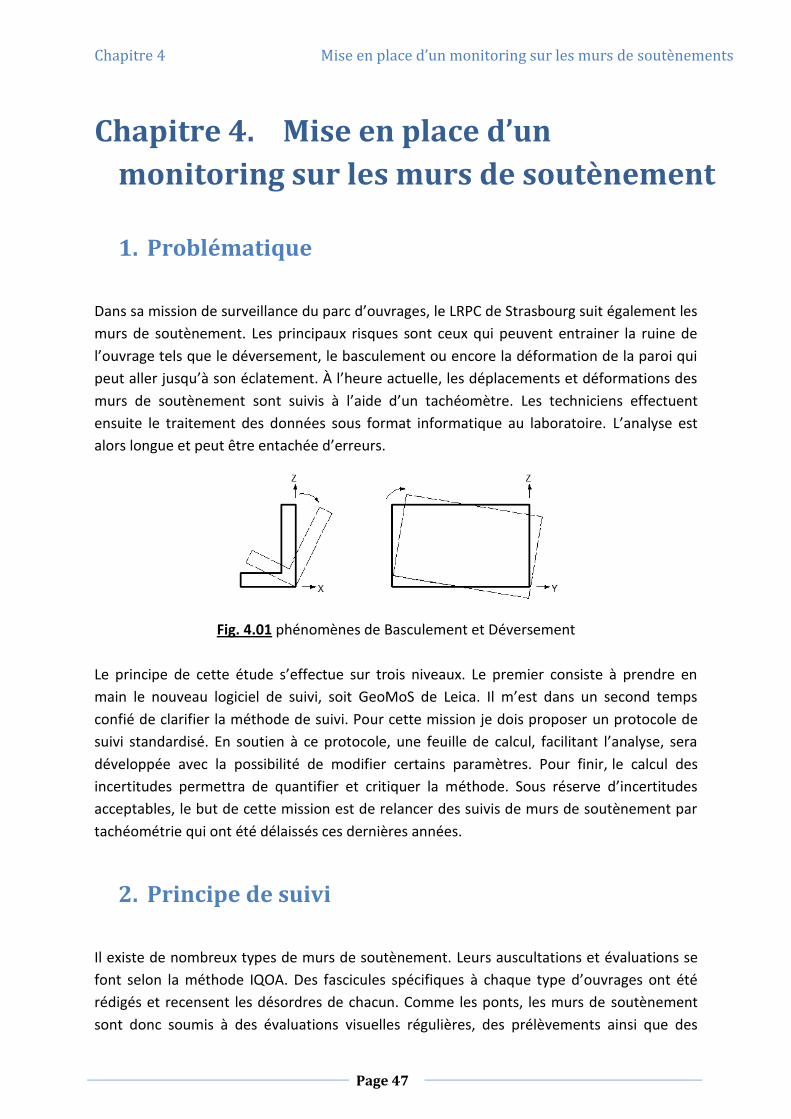
Chapitre 4 Mise en place d’un monitoring sur les murs de soutènements
Page 47
Chapitre 4. Mise en place d’un
monitoring sur les murs de soutènement
1. Problématique
Dans sa mission de surveillance du parc d’ouvrages, le LRPC de Strasbourg suit également les
murs de soutènement. Les principaux risques sont ceux qui peuvent entrainer la ruine de
l’ouvrage tels que le déversement, le basculement ou encore la déformation de la paroi qui
peut aller jusqu’à son éclatement. À l’heure actuelle, les déplacements et déformations des
murs de soutènement sont suivis à l’aide d’un tachéomètre. Les techniciens effectuent
ensuite le traitement des données sous format informatique au laboratoire. L’analyse est
alors longue et peut être entachée d’erreurs.
Fig. 4.01 phénomènes de Basculement et Déversement
Le principe de cette étude s’effectue sur trois niveaux. Le premier consiste à prendre en
main le nouveau logiciel de suivi, soit GeoMoS de Leica. Il m’est dans un second temps
confié de clarifier la méthode de suivi. Pour cette mission je dois proposer un protocole de
suivi standardisé. En soutien à ce protocole, une feuille de calcul, facilitant l’analyse, sera
développée avec la possibilité de modifier certains paramètres. Pour finir, le calcul des
incertitudes permettra de quantifier et critiquer la méthode. Sous réserve d’incertitudes
acceptables, le but de cette mission est de relancer des suivis de murs de soutènement par
tachéométrie qui ont été délaissés ces dernières années.
2. Principe de suivi
Il existe de nombreux types de murs de soutènement. Leurs auscultations et évaluations se
font selon la méthode IQOA. Des fascicules spécifiques à chaque type d’ouvrages ont été
rédigés et recensent les désordres de chacun. Comme les ponts, les murs de soutènement
sont donc soumis à des évaluations visuelles régulières, des prélèvements ainsi que des
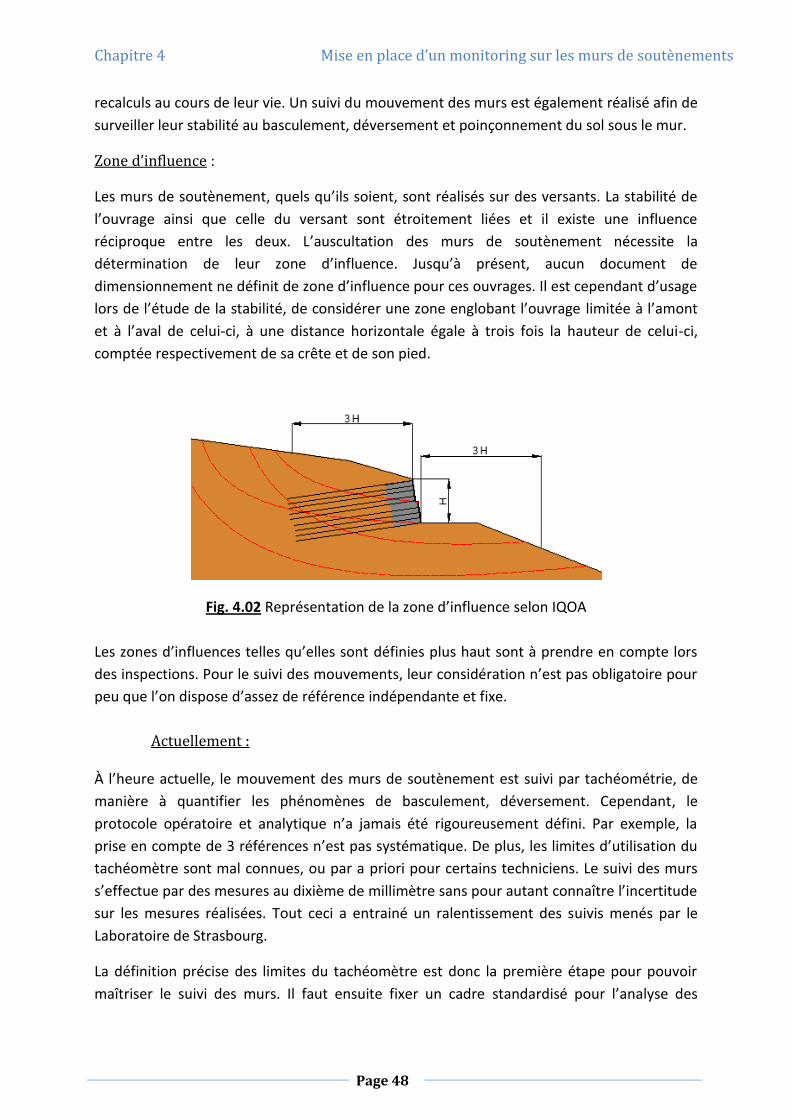
Chapitre 4 Mise en place d’un monitoring sur les murs de soutènements
Page 48
recalculs au cours de leur vie. Un suivi du mouvement des murs est également réalisé afin de
surveiller leur stabilité au basculement, déversement et poinçonnement du sol sous le mur.
Zone d’influence :
Les murs de soutènement, quels qu’ils soient, sont réalisés sur des versants. La stabilité de
l’ouvrage ainsi que celle du versant sont étroitement liées et il existe une influence
réciproque entre les deux. L’auscultation des murs de soutènement nécessite la
détermination de leur zone d’influence. Jusqu’à présent, aucun document de
dimensionnement ne définit de zone d’influence pour ces ouvrages. Il est cependant d’usage
lors de l’étude de la stabilité, de considérer une zone englobant l’ouvrage limitée à l’amont
et à l’aval de celui-ci, à une distance horizontale égale à trois fois la hauteur de celui-ci,
comptée respectivement de sa crête et de son pied.
Fig. 4.02 Représentation de la zone d’influence selon IQOA
Les zones d’influences telles qu’elles sont définies plus haut sont à prendre en compte lors
des inspections. Pour le suivi des mouvements, leur considération n’est pas obligatoire pour
peu que l’on dispose d’assez de référence indépendante et fixe.
Actuellement :
À l’heure actuelle, le mouvement des murs de soutènement est suivi par tachéométrie, de
manière à quantifier les phénomènes de basculement, déversement. Cependant, le
protocole opératoire et analytique n’a jamais été rigoureusement défini. Par exemple, la
prise en compte de 3 références n’est pas systématique. De plus, les limites d’utilisation du
tachéomètre sont mal connues, ou par a priori pour certains techniciens. Le suivi des murs
s’effectue par des mesures au dixième de millimètre sans pour autant connaître l’incertitude
sur les mesures réalisées. Tout ceci a entrainé un ralentissement des suivis menés par le
Laboratoire de Strasbourg.
La définition précise des limites du tachéomètre est donc la première étape pour pouvoir
maîtriser le suivi des murs. Il faut ensuite fixer un cadre standardisé pour l’analyse des
Chapitre 4 Mise en place d’un monitoring sur les murs de soutènements
Page 49
résultats. Pour finir, l’association des résultats avec leurs incertitudes est nécessaire pour
pouvoir justifier d’une analyse pertinente.
3. Description du matériel utilisé
3.1. Matérialisation des points de mesure
Les points mesurés ainsi que les références sont matérialisés par
des prismes Leica de diamètre 24 mm, type « réflecteur coin
cube ». Ils sont fixés sur l’ouvrage par vissage dans des chevilles
préalablement scellées. Selon l’accès du site au public, et grâce
aux chevilles scellées, les prismes peuvent être facilement
enlevés et remis en place afin d’éviter les vols.
3.2. Le tachéomètre
Un tachéomètre est un théodolite motorisé. Il permet de mesurer
des angles horizontaux, verticaux ainsi que la distance entre
l’instrument et le prisme. Ces mesures sont réalisées par lecture
optique, basée sur le principe de réflexion infrarouge. Le modèle
utilisé au laboratoire régional de Strasbourg est un Leica TDA 5005.
Cet appareil est doté d’un système de mesure de localisation
automatique de prisme appelé ATR (Automatic Target Recognition), qui lui permet de
retrouver par lui-même le centre des prismes. Ce système a pour intérêt de rendre la
mesure plus précise et surtout plus facile pour l’opérateur, qui n’a plus besoin d’effectuer
des pointés précis. Le pilotage de l’instrument s’effectue par communication radio depuis le
logiciel GeoMoS, installé sur un PC portable.
3.3. Description du logiciel GeoMoS : Télécommande & traitement
Ce logiciel a été acheté par le laboratoire régional de Strasbourg en 2007, mais n’a jamais
été utilisé sur le terrain. Commercialisé par Leica Geosystem, il a été développé pour
l’auscultation et la surveillance d’ouvrage. Le logiciel possède deux interfaces : Monitor et
Analyser.
Fig. 4.04 tachéomètre
Leica TDA 5005 du LRS
Fig. 4.03 Prisme de visée
pour points ou références
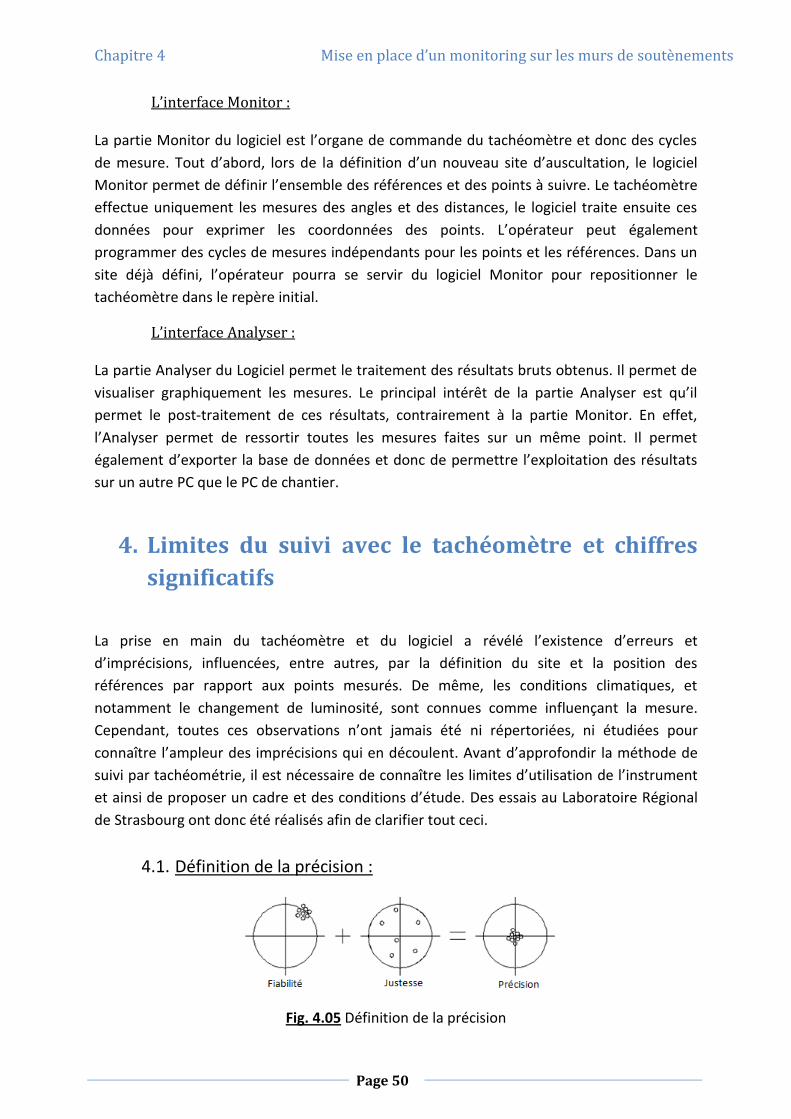
Chapitre 4 Mise en place d’un monitoring sur les murs de soutènements
Page 50
L’interface Monitor :
La partie Monitor du logiciel est l’organe de commande du tachéomètre et donc des cycles
de mesure. Tout d’abord, lors de la définition d’un nouveau site d’auscultation, le logiciel
Monitor permet de définir l’ensemble des références et des points à suivre. Le tachéomètre
effectue uniquement les mesures des angles et des distances, le logiciel traite ensuite ces
données pour exprimer les coordonnées des points. L’opérateur peut également
programmer des cycles de mesures indépendants pour les points et les références. Dans un
site déjà défini, l’opérateur pourra se servir du logiciel Monitor pour repositionner le
tachéomètre dans le repère initial.
L’interface Analyser :
La partie Analyser du Logiciel permet le traitement des résultats bruts obtenus. Il permet de
visualiser graphiquement les mesures. Le principal intérêt de la partie Analyser est qu’il
permet le post-traitement de ces résultats, contrairement à la partie Monitor. En effet,
l’Analyser permet de ressortir toutes les mesures faites sur un même point. Il permet
également d’exporter la base de données et donc de permettre l’exploitation des résultats
sur un autre PC que le PC de chantier.
4. Limites du suivi avec le tachéomètre et chiffres
significatifs
La prise en main du tachéomètre et du logiciel a révélé l’existence d’erreurs et
d’imprécisions, influencées, entre autres, par la définition du site et la position des
références par rapport aux points mesurés. De même, les conditions climatiques, et
notamment le changement de luminosité, sont connues comme influençant la mesure.
Cependant, toutes ces observations n’ont jamais été ni répertoriées, ni étudiées pour
connaître l’ampleur des imprécisions qui en découlent. Avant d’approfondir la méthode de
suivi par tachéométrie, il est nécessaire de connaître les limites d’utilisation de l’instrument
et ainsi de proposer un cadre et des conditions d’étude. Des essais au Laboratoire Régional
de Strasbourg ont donc été réalisés afin de clarifier tout ceci.
4.1. Définition de la précision :
Fig. 4.05 Définition de la précision

Chapitre 4 Mise en place d’un monitoring sur les murs de soutènements
Page 51
Les mesures sur le terrain ont montré que les mesures successives d’un même point ne
varient pas de plus de 0.1 mm. En revanche, lorsque certaines conditions changent ou que
l’on déplace le tachéomètre, la mesure des points donne des résultats plus ou moins
dispersés : ceci traduit un problème de justesse dans la mesure pouvant aller jusqu’au
centimètre. L’utilisation actuelle du tachéomètre s’effectue donc avec une imprécision,
encore inconnue.
4.2. Influence du déplacement du tachéomètre :
Lors de la définition du site de mesure, le tachéomètre définit sa position initiale comme
l’origine de son repère. On enregistre ensuite les coordonnées des trois références. Celles-ci
resteront inchangées pour toutes les mesures antérieures. Lors de notre campagne d’essais
au laboratoire, nous avons cependant observé que le tachéomètre modifie légèrement les
coordonnées des références lorsqu’on lui demande de se resituer dans un site déjà défini.
Ces modifications, aussi faibles soient-elles, vont modifier les mesures de nos points et donc
fausser l’analyse. En revanche, on remarque que le replacement dans une position proche
de sa position initiale permet de réduire le déplacement fictif des références mais en aucun
cas de l’annuler.
Point X (m) Y (m) Z (m) Delta X (mm)
Delta Y (mm)
Delta Z (mm)
Cycle 1 tachéo 0 0 0 0 0 0
Cycle 3 tachéo -0.2893 -1.0494 -0.0044 -289.3 -1049.4 -4.4
Cycle 4 tachéo 0.0402 0.036 0.0099 40.2 36 9.9
Tab. 4.01 Déplacement du tachéomètre
Point X (m) Y (m) Z (m) Delta X (mm)
Delta Y (mm)
Delta Z (mm)
ref 1 3.1348 2.5418 0.2737 0 0 0
ref 1 3.1376 2.545 0.2739 2.8 3.2 0.2
ref 1 3.1347 2.5416 0.2737 -0.1 -0.2 0
Tab. 4.02 Déplacements fictifs des références : exemple référence 1
Ces premières erreurs, dues au replacement du tachéomètre dans le site, perturbent
l’analyse des résultats. Il faut dès lors envisager une correction permettant de passer outre
les mises au point du tachéomètre, lors de sa réimplantation.
4.3. Influence de la position des références :
Le second élément qui semble influencer la précision des mesures est la position des
références par rapport aux points à mesurer. Nous avons, dans un premier temps, défini un
Chapitre 4 Mise en place d’un monitoring sur les murs de soutènements
Page 52
site où les références étaient placées autour des points à suivre. Le tachéomètre n’avait
donc pas besoin d’effectuer de grande rotation entre la mesure des références et la mesure
de points. Par la suite, nous avons réitéré l’essai en plaçant deux références hors du champ
de mesure des points.
Essai 1 : références dans le champ des points mesurés
Point X (m) Y (m) Z (m) Delta X (mm) Delta Y (mm) Delta Z (mm) Cycle 1 tachéo -0.5364 0.6106 -0.0524 0.00 0.00 0.00 Cycle 2 tachéo -0.5364 0.6106 -0.0524 536.40 -610.00 52.40
Tab. 4.03 Déplacement du tachéomètre
Remarque : les deltas correspondant aux points « tachéo » indiquent le déplacement du
tachéomètre par rapport à sa position initiale. En revanche, pour l’ensemble des autres
points, les deltas indiquent les erreurs de mesures.
Tab. 4.04 Déplacements fictifs des références dans le champ: exemple référence 1
Essai 2 : références hors champ des points mesurés
Point X (m) Y (m) Z (m) Delta X (mm) Delta Y (mm) Delta Z (mm)
Cycle 1 tachéo 0 0 0 0 0 0
Cycle 3 tachéo -0.2893 -1.0494 -0.0044 -289.3 -1049.4 -4.4
Tab. 4.05 Déplacement du tachéomètre
Point X (m) Y (m) Z (m) Delta X (mm) Delta Y (mm) Delta Z (mm)
ref 1 3.1348 2.5418 0.2737 0 0 0
ref 1 3.1376 2.545 0.2739 2.8 3.2 0.2
Tab. 4.06 Déplacements fictifs des références hors du champ: exemple référence 1
Ces deux essais montrent que le recalcul de la position du tachéomètre a une influence
différente selon le positionnement des références. Les erreurs imputées aux références sont
d’autant plus grandes que ces dernières n’appartiennent pas au champ de mesure des
points. Nous pouvons donc conclure qu’il est préférable de se fixer des références dans le
champ de mesure. Ainsi, le tachéomètre effectuera de faibles rotations sur son axe et de ce
faite les erreurs seront réduites. Malgré cette prescription pour la définition du site, il ne
reste pas moins des erreurs qu’il va falloir corriger pour l’interprétation.
Point X (m) Y (m) Z (m) Delta X (mm) Delta Y (mm) Delta Z (mm) Ref 1 -4.0579 -6.2959 -1.5286 0 0 0 Ref 1 -4.0574 -6.2950 -1.5292 -0.5 -0.9 0.6

Chapitre 4 Mise en place d’un monitoring sur les murs de soutènements
Page 53
4.4. Influence des conditions d’ensoleillement :
Un paramètre très influençant que nous voulions pouvoir quantifier et corriger est la
variation des conditions lumineuses. Nous avons donc procédé à un dernier essai en
extérieur. Nous avons effectué la mesure d’un site (3 références et 2 points de mesure) sur
deux jours dans des conditions d’éclairement différents. Le tachéomètre est resté en
position durant toute la durée de l’essai.
Temps X (m) Y (m) Z (m) Delta X (mm)
Delta Y (mm)
Delta Z (mm)
ref 3 22/03/10 14:47 2.3734 21.0919 -0.4296 0 0 0 ref 3 23/03/10 08:57 2.384 21.0907 -0.4304 10.6 -1.2 -0.8
ref 3 23/03/10 14:33 2.3723 21.0919 -0.4297 -1.1 0 -0.1
Tab. 4.07 Déplacements fictifs des références : exemple référence 3
Les conditions de luminosité lors de la mesure sont donc très influentes. Il en va de même
pour la température. Cette dernière peut cependant être compensée par le logiciel GeoMoS.
Une atténuation de l’influence des conditions lumineuses doit donc être à entreprendre si
l’on souhaite utiliser le tachéomètre dans le suivi de murs de soutènement.
4.5. Possibilité d’un système correctif :
L’ensemble des paramètres influençant la précision des mesures est dû aux conditions
d’utilisation du tachéomètre. Ils proviennent de la réinstallation du tachéomètre sur un site
en extérieur. L’interprétation des résultats bruts n’est donc pas envisageable car ils sont
entachés d’erreurs relativement importantes, qui faussent l’analyse du comportement réel
de l’ouvrage. Il faut donc corriger ces résultats avant de pouvoir les analyser.
Les essais réalisés au laboratoire laissent apparaître que le tachéomètre déplace, de manière
fictive, l’ensemble des références dans le même sens. Par là, il faut comprendre que si le
tachéomètre à tendance à éloigner la référence 1, il en fera de même pour les autres
références, et cela, pour les axes X, Y ou Z. Nous avons donc calculé les déplacements
moyens des trois références et considéré le résultat comme la correction à appliquer aux
points mesurés.
𝐶𝑜𝑟𝑟𝑒𝑐𝑡 𝑋 = 𝑚𝑜𝑦𝑒𝑛𝑛𝑒 𝛥 Xref 1 + 𝛥 Xref 2 + 𝛥 Xref 3 (3)
𝐶𝑜𝑟𝑟𝑒𝑐𝑡 𝑌 = 𝑚𝑜𝑦𝑒𝑛𝑛𝑒 𝛥 Yref 1 + 𝛥 Yref 2 + 𝛥 Yref 3 (4)
𝐶𝑜𝑟𝑟𝑒𝑐𝑡 𝑍 = 𝑚𝑜𝑦𝑒𝑛𝑛𝑒 𝛥 Zref 1 + 𝛥 Zref 2 + 𝛥 Zref 3 (5)
Avec : 𝛥 𝐴 = 𝐴𝑡𝑖 − 𝐴𝑡0 𝐴𝑡𝑖 ∶ mesure du jour 𝐴𝑡0 ∶ mesure initiale (6)
Cette correction est ensuite simplement soustraite aux coordonnées des points mesurés. La
correction des résultats bruts obtenus pendant les essais semble vérifier la pertinence de
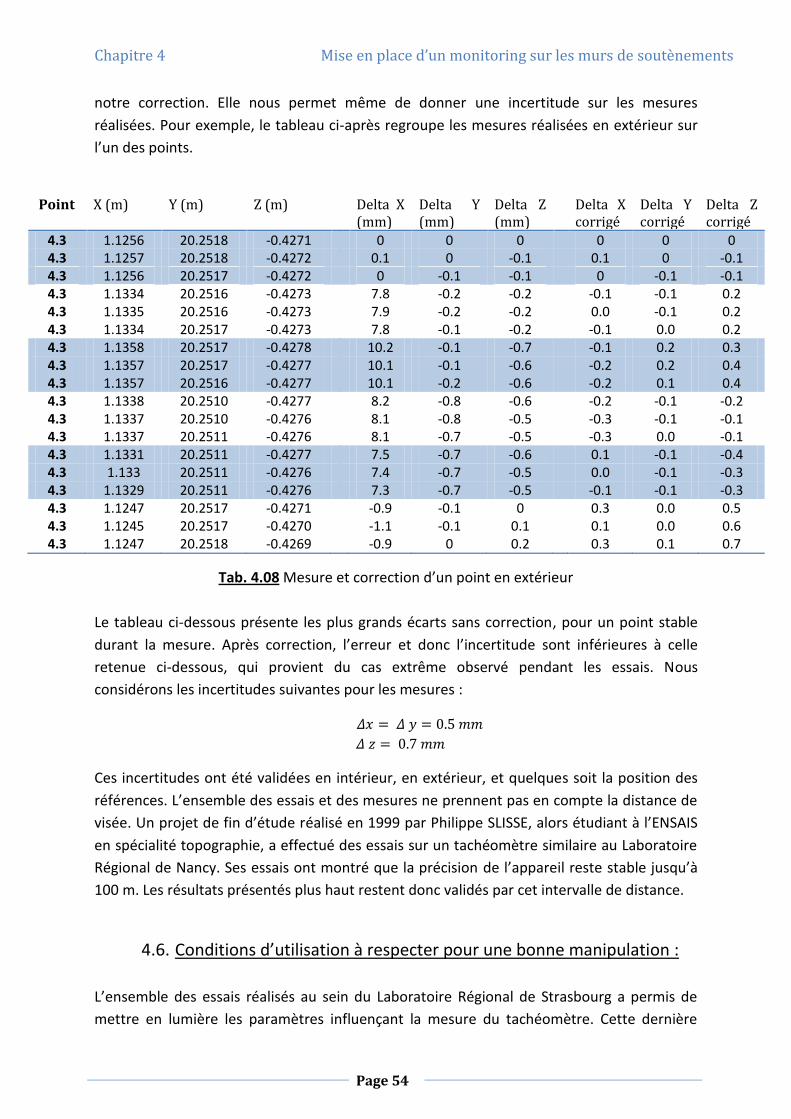
Chapitre 4 Mise en place d’un monitoring sur les murs de soutènements
Page 54
notre correction. Elle nous permet même de donner une incertitude sur les mesures
réalisées. Pour exemple, le tableau ci-après regroupe les mesures réalisées en extérieur sur
l’un des points.
Point X (m) Y (m) Z (m) Delta X (mm)
Delta Y (mm)
Delta Z (mm)
Delta X corrigé
Delta Y corrigé
Delta Z corrigé
4.3 1.1256 20.2518 -0.4271 0 0 0 0 0 0 4.3 1.1257 20.2518 -0.4272 0.1 0 -0.1 0.1 0 -0.1 4.3 1.1256 20.2517 -0.4272 0 -0.1 -0.1 0 -0.1 -0.1 4.3 1.1334 20.2516 -0.4273 7.8 -0.2 -0.2 -0.1 -0.1 0.2 4.3 1.1335 20.2516 -0.4273 7.9 -0.2 -0.2 0.0 -0.1 0.2 4.3 1.1334 20.2517 -0.4273 7.8 -0.1 -0.2 -0.1 0.0 0.2 4.3 1.1358 20.2517 -0.4278 10.2 -0.1 -0.7 -0.1 0.2 0.3 4.3 1.1357 20.2517 -0.4277 10.1 -0.1 -0.6 -0.2 0.2 0.4 4.3 1.1357 20.2516 -0.4277 10.1 -0.2 -0.6 -0.2 0.1 0.4 4.3 1.1338 20.2510 -0.4277 8.2 -0.8 -0.6 -0.2 -0.1 -0.2 4.3 1.1337 20.2510 -0.4276 8.1 -0.8 -0.5 -0.3 -0.1 -0.1 4.3 1.1337 20.2511 -0.4276 8.1 -0.7 -0.5 -0.3 0.0 -0.1 4.3 1.1331 20.2511 -0.4277 7.5 -0.7 -0.6 0.1 -0.1 -0.4 4.3 1.133 20.2511 -0.4276 7.4 -0.7 -0.5 0.0 -0.1 -0.3 4.3 1.1329 20.2511 -0.4276 7.3 -0.7 -0.5 -0.1 -0.1 -0.3 4.3 1.1247 20.2517 -0.4271 -0.9 -0.1 0 0.3 0.0 0.5 4.3 1.1245 20.2517 -0.4270 -1.1 -0.1 0.1 0.1 0.0 0.6 4.3 1.1247 20.2518 -0.4269 -0.9 0 0.2 0.3 0.1 0.7
Tab. 4.08 Mesure et correction d’un point en extérieur
Le tableau ci-dessous présente les plus grands écarts sans correction, pour un point stable
durant la mesure. Après correction, l’erreur et donc l’incertitude sont inférieures à celle
retenue ci-dessous, qui provient du cas extrême observé pendant les essais. Nous
considérons les incertitudes suivantes pour les mesures :
𝛥𝑥 = 𝛥 𝑦 = 0.5 𝑚𝑚
𝛥 𝑧 = 0.7 𝑚𝑚
Ces incertitudes ont été validées en intérieur, en extérieur, et quelques soit la position des
références. L’ensemble des essais et des mesures ne prennent pas en compte la distance de
visée. Un projet de fin d’étude réalisé en 1999 par Philippe SLISSE, alors étudiant à l’ENSAIS
en spécialité topographie, a effectué des essais sur un tachéomètre similaire au Laboratoire
Régional de Nancy. Ses essais ont montré que la précision de l’appareil reste stable jusqu’à
100 m. Les résultats présentés plus haut restent donc validés par cet intervalle de distance.
4.6. Conditions d’utilisation à respecter pour une bonne manipulation :
L’ensemble des essais réalisés au sein du Laboratoire Régional de Strasbourg a permis de
mettre en lumière les paramètres influençant la mesure du tachéomètre. Cette dernière
Chapitre 4 Mise en place d’un monitoring sur les murs de soutènements
Page 55
peut être corrigée mais il faut tout de même tenir compte de certaines conditions
d’utilisation afin de s’assurer des bons résultats.
- Tout d’abord, il est indispensable de disposer de trois références sur le site à
surveiller. Elles servent à replacer de manière précise le tachéomètre dans son
repère initial mais permettent également d’obtenir une correction pour les mesures.
- Bien que moins contraignant, avec le système de correction, il est préférable de
disposer les références dans le champ de mesure, afin de limiter de grandes rotations
du tachéomètre, qui auront tendance à accentuer les erreurs.
- La première installation du tachéomètre doit être réfléchie de façon à pouvoir le
réinstaller par la suite dans une position quasi similaire.
- Afin de pouvoir appliquer le système correctif, il est indispensable d’effectuer un
cycle d’enregistrement des références et ceci lors de chaque réinstallation du
tachéomètre. Il ne faut bien entendu pas oublier d’enregistrer les coordonnées
initiales des références qui servent de base à la correction.
- Il est indispensable que les conditions lumineuses ne varient pas lors d’un cycle
d’enregistrement. Dans le cas où ces conditions ont changé entre deux cycles, il est
nécessaire d’enregistrer les nouvelles coordonnées des références.
Remarque : Une grande partie de ces conditions est annulée par le système correctif. Il est
néanmoins préférable de limiter les erreurs de mesure et donc d’appliquer de faible
correction.
5. Réalisation de mesure et traitement des données :
cas général
5.1. Besoin d’une méthode standardisée:
La méthode présentée ci-dessous a été développée en prenant en compte les indications, les
limites et les attentes des laboratoires de Strasbourg et de Nancy. Les principaux besoins
sont :
- L’obtention de résultats précis et leur encadrement par des incertitudes
- Une méthode reproductible sur une grande partie des ouvrages
- Une analyse relativement aisée pour les techniciens en charge des comptes-rendus de
surveillance
5.2. Instrumentation du mur – Définition du site de mesure :
Chapitre 4 Mise en place d’un monitoring sur les murs de soutènements
Page 56
La première instrumentation est déterminante pour l’ensemble du suivi du mur. Lors de
celle-ci sont fixés les profils de mesure ainsi que les références. Il est nécessaire de disposer
de trois références au minimum, indépendantes de l’ouvrage à suivre. Elles doivent être
situées dans le champ de visée des profils. L’installation du tachéomètre doit également être
faite de manière judicieuse.
Nous entendons par profil un groupe de prismes placés sur un même axe vertical, du pied
jusqu’au sommet. Le nombre de profils, leur espacement ainsi que le nombre de points
composant les profils devront être choisis selon la taille de l’ouvrage et le type de désordres.
Ces profils vont permettre de visualiser les mouvements du mur dans l’espace. Pour l’étude
du basculement ou déversement, les profils pourront être plus espacés et comportés moins
de points que pour le suivi d’un bombement.
Une installation judicieuse pour le tachéomètre prend en compte plusieurs critères. Le
premier concerne la réinstallation du tachéomètre. Il doit être replacé dans une position
proche de celle d’origine afin de réduire les erreurs avant correction. Il est donc nécessaire
de marquer physiquement sa position sur le site (ex. : piquet). Le second critère prend en
compte le champ de vision du tachéomètre. Il faut, dans le meilleur des cas, que l’ensemble
des visées soit fait avec le moins de mouvement possible du tachéomètre. Pour cela, les
références ainsi que les points de mesures doivent être situés dans le même champ de
vision. On s’aperçoit qu’il est difficile de définir précisément ce qu’est une installation
rigoureuse, car les critères et possibilités dépendent de l’environnement de chaque ouvrage.
Le mur instrumenté et présenté plus loin permettra de justifier et d’illustrer une installation
judicieuse en fonction du site.
Il faut aussi préciser que la première installation sert de définition du site pour le logiciel. Le
tachéomètre possède, dans cette configuration, les coordonnées (0, 0, 0). Celles-ci seront
forcément modifiées lors de chaque réinstallation. Les trois références servent à replacer le
tachéomètre dans le site initial et de lui donner ses nouvelles coordonnées. Pour raccorder
le tachéomètre, on pointe successivement les trois références et le logiciel GeoMoS calcule
automatiquement les nouvelles coordonnées du tachéomètre. Suite à cela, l’instrument
retrouve par lui-même les points des profils, préalablement définis lors de l’installation.
5.3. Correction des mesures du tachéomètre :
Lors de la venue sur le site, la réinstallation du tachéomètre dans une position proche de sa
position initiale améliore la justesse des mesures. Cependant lorsque l’on replace le
tachéomètre dans le site, l’expérience a montré que le tachéomètre modifie les
coordonnées des références, normalement fixes. Dans un premier temps, il est donc
nécessaire d’effectuer un cycle de mesure sur les références. Ceci permettra de quantifier
l’erreur faite par le tachéomètre lors de sa réimplantation. L’erreur, faite sur les références,
se répercutera ensuite sur l’ensemble des points à mesurer. La quantification de l’erreur sur

Chapitre 4 Mise en place d’un monitoring sur les murs de soutènements
Page 57
les références (dans les trois dimensions) nous permettra ainsi de corriger la mesure des
profils (comme vue précédemment).
La correction retenue et validée par l’expérience nous donne :
𝐶𝑜𝑟𝑟𝑒𝑐𝑡 𝑋 = 𝑚𝑜𝑦𝑒𝑛𝑛𝑒 𝛥 Xref 1 + 𝛥 Xref 2 + 𝛥 Xref 3
𝐶𝑜𝑟𝑟𝑒𝑐𝑡 𝑌 = 𝑚𝑜𝑦𝑒𝑛𝑛𝑒 𝛥 Yref 1 + 𝛥 Yref 2 + 𝛥 Yref 3
𝐶𝑜𝑟𝑟𝑒𝑐𝑡 𝑍 = 𝑚𝑜𝑦𝑒𝑛𝑛𝑒 𝛥 Zref 1 + 𝛥 Zref 2 + 𝛥 Zref 3
𝛥 𝐴 = 𝐴𝑡𝑖 − 𝐴𝑡0
Cette correction sera ensuite appliquée aux points mesurés par simple soustraction.
5.4. Analyse des résultats des mesures et préconisations :
Une fois les mesures et la correction réalisées, nous disposons des coordonnées des
différents profils dans le repère du tachéomètre. Cependant, l’étude du mouvement d’un
mur doit servir à quantifier le basculement, le déversement et le tassement de celui-ci. Ces
deux premiers phénomènes se produisent respectivement dans le plan orthogonal et dans
celui du mur. Afin de quantifier et d’analyser de manière pertinente ces mouvements, il est
nécessaire d’exprimer les coordonnées selon un repère correspondant à ces mouvements,
c’est-à-dire un repère orthonormé au mur. Un changement de repère s’impose donc. Pour
cela, deux transformations successives seront effectuées :
- rotation des axes du repère orthonormé : repère (X’,Y’,Z’)
- translation au niveau du pied du mur : repère (X’’,Y’’,Z’’)
Fig. 4.06 Changement de repère pour l’analyse
Repère (X,Y,Z) d’origine / Repère (X’’,Y’’,Z’’) final

Chapitre 4 Mise en place d’un monitoring sur les murs de soutènements
Page 58
Dans le cas où le mur ne serait pas plan (mur anguleux), l’étude complète de l’ouvrage
s’effectuera par l’étude successive de chaque tronçon rectiligne. Cette décomposition
n’interviendra pas pour les murs possédant uniquement des défauts de linéarité (ex. : mur
en maçonnerie, profil oscillant…).
Le changement de repère, en vue d’une analyse, s’opèrera en trois grandes étapes. Les deux
premières consistent au changement de repère effectué par rotation et translation. La
dernière concerne le calcul d’incertitude lié à ces transformations, afin de valider la
pertinence des résultats obtenus.
Angle de rotation et translation :
Sur le mur à suivre, plusieurs profils verticaux ont été installés sur l’ouvrage pour suivre ses
mouvements. Dans la majorité des cas, le pied du mur est susceptible d’être la partie la
moins sensible au mouvement. Le repère orthonormé secondaire aura donc pour origine un
des points de mesure au niveau du pied du mur. De préférence, on choisira une extrémité.
L’axe X’ sera choisi comme l’axe passant par les deux points extrêmes des profils, au niveau
du pied. Bien qu’un mur ne soit dans l’absolu jamais totalement rectiligne, ce choix arbitraire
est justifié par le calcul d’incertitude présent ci-après. En effet, pour effectuer le changement
de repère, il nous faut déterminer l’angle 𝜃 entre l’axe X’ du mur et l’axe X du repère initial.
Pour cela, nous choisissons de faire passer le futur axe x’ par seulement deux pieds de
profils.
Nous effectuons dans un premier temps une translation du repère du tachéomètre pour le
ramener au niveau de l’un des pieds des deux profils choisis. Ce repère sera appelé repère
secondaire (X’,Y’,Z’) ou repère intermédiaire. Les coordonnées dans le repère secondaire :
𝑥′ = 𝑥 − 𝑥0 (7.1)
𝑦′ = 𝑦 − 𝑦0 (7.2)
𝑧′ = 𝑧 − 𝑧0 (7.3)
Le point dont les coordonnées sont (𝑥0, 𝑦0, 𝑧0) est le pied du mur choisi comme origine du
repère final. Suite à la translation, il ne reste plus qu’à effectuer la rotation du repère :
𝑥′′ = 𝑥′ ∙ cos 𝜃 + 𝑦′ ∙ sin 𝜃 ( 8.1)
= 𝑥 − 𝑥0 ∙ cos 𝜃 + 𝑦 − 𝑦0 ∙ 𝑠𝑖𝑛𝜃
𝑦′′ = − 𝑥′ ∙ sin 𝜃 + 𝑦′ ∙ cos 𝜃 (8.2)
= − 𝑥 − 𝑥0 ∙ sin 𝜃 + 𝑦 − 𝑦0 ∙ cos 𝜃
𝑧′′ = 𝑧′ − 𝑧0 = 𝑧 − 𝑧0 (8.3)

Chapitre 4 Mise en place d’un monitoring sur les murs de soutènements
Page 59
Calcul d’incertitude :
Le mouvement des murs peut être le signe d’une pathologie de l’ouvrage, il est donc
nécessaire de repérer ce phénomène relativement tôt. Cependant, dans la plus part des cas,
les mouvements observés ne sont pas importants, de l’ordre du millimètre voir du
centimètre. Les mesures effectuées sont faites au dixième de millimètre (affichage du
tachéomètre). Chaque mesure induit une erreur, tout résultat doit donc être accompagné
d’un calcul d’incertitude. Les essais au laboratoire ont permis de nous donner les
incertitudes sur les mesures. Le changement de repère modifie donc ces incertitudes, qu’il
va falloir recalculer.
D’or et déjà, nous pouvons envisager que le changement de repère entrainera une
aggravation des incertitudes et donc une perte de précision. Cette transformation
permettant de mieux visualiser le mouvement réel du mur. Si la perte de précision est
gênante, une comparaison avec les résultats bruts est toujours possible.
La formule générale pour le calcul d’incertitude est la suivante :
∆f x, y =𝜗𝑓 𝑥, 𝑦
𝜗𝑥∙ ∆𝑥 +
𝜗𝑓 𝑥, 𝑦
𝜗𝑦∙ ∆𝑦 (9)
D’après (2.1), on obtient donc comme incertitude sur X’’ :
∆𝑥′′ = 𝜗𝑥′′ 𝑥′, 𝑦′
𝜗𝑥′∙ ∆𝑥′ +
𝜗𝑥′′ 𝑥′ , 𝑦′
𝜗𝑦′∙ ∆𝑦′ (10.1)
D’où :
∆𝑥′′ = cos 𝜃 ∙ 2 ∙ ∆𝑥 + sin𝜃 ∙ 2 ∙ ∆𝑦 (10.2)
D’après (2.2), on obtient donc comme incertitude sur Y’’ :
∆𝑦′′ = 𝜕𝑦′′ (𝑥′ , 𝑦′)
𝜕 𝑥′∙ ∆𝑥′ +
𝜕𝑦′′ (𝑥′ , 𝑦′)
𝜕 𝑦′∙ ∆𝑦′ (11.1)
D’où :
∆𝑦′′ = sin 𝜃 ∙ 2 ∙ ∆𝑥 + cos 𝜃 ∙ 2 ∙ ∆𝑦 (11.2)
L’axe vertical ne subissant aucune transformation hormis la translation, donc d’après (2.3) :
∆𝑧′′ = 2 ∙ 𝛥 𝑧 (12)
Ces calculs d’incertitude laissent tout d’abord apparaître que les incertitudes sur x’’ et y’’
sont identiques. L’étude du basculement et du déversement peut être faite avec la même
précision. De plus, on s’aperçoit que la précision sur un ouvrage restera identique tout au
long de son étude. Cette observation est intéressante car ceci facilitera la comparaison des
Chapitre 4 Mise en place d’un monitoring sur les murs de soutènements
Page 60
résultats entre deux relevés et par la même occasion facilitera l’interprétation. Lors de la
première installation sur le site, le calcul de l’incertitude devra être effectué et validé. Dans
le cas échéant, il est conseillé de redéfinir un site dans le logiciel GeoMoS et de déplacer le
tachéomètre.
5.5. Discussion sur la pertinence de la transformation :
L’angle choisi pour le changement de repère n’est pas un paramètre influençant les
incertitudes. Il dépend uniquement de l’orientation du repère initial du tachéomètre et celui
du mur. Fixés dès l’installation, tous les points de tous les profils subiront la même
transformation au cours des différentes mesures. L’angle apparaît donc bien comme une
constante. Une discussion peut cependant avoir lieu sur la pertinence de cette
transformation. En effet, l’axe x’’ est un axe arbitraire passant par deux pieds de profils et
choisis par l’opérateur. La position de ces deux pieds est entachée d’une erreur. De plus,
l’axe x’’ ne correspond pas exactement au plan du mur. C’est un axe, considéré comme axe
de référence, où les profils y sont répartis autour (la linéarité absolue d’un mur est
irréalisable). Cette méthode ne permet donc pas de connaître le basculement et
déversement absolu de l’ouvrage mais permet d’exprimer ces phénomènes par rapport à un
axe proche de l’axe du mur, et de donner une incertitude aux résultats annoncés. Les choix
des profils et de cet axe de référence seront donc déterminants pour la pertinence de la
méthode et des résultats obtenus.
5.6. Théorie / pratique :
La méthode présentée ci-dessus est faite pour répondre aux besoins qui ont été explicités
par les services concernés. Cependant, il est parfois difficile de rassembler l’ensemble des
paramètres. En effet, on verra dans le chapitre qui suit que certains ouvrages se situent en
pleine nature. Il est donc très difficile, voire impossible, d’obtenir des références fixes et
indépendantes de l’ouvrage. Le suivi par tachéométrie devra donc s’effectuer dans d’autres
conditions qui risquent d’influencer la méthode d’analyse et l’incertitude sur les résultats.
6. Analyse des résultats
En théorie, un ouvrage de soutènement est dimensionné pour qu’il soit stable dans le temps.
La seule observation d’un mouvement laisse déjà apparaître l’existence d’un défaut. Ce
dernier peut être dû à une erreur de conception ou de réalisation. Le progrès dans ces
domaines ne supprime pas définitivement les écarts entre la théorie et le terrain. En effet, le
mouvement d’un ouvrage de soutènement n’est pas rare. Cependant, tout mouvement n’est
pas forcement problématique pour la stabilité de l’ouvrage. Il nécessite néanmoins d’être
Chapitre 4 Mise en place d’un monitoring sur les murs de soutènements
Page 61
quantifié et suivi dans le temps. L’observation et le suivi d’un mur doivent permettre de
détecter le caractère évolutif du mouvement. La dimension temporelle de la surveillance est
donc importante. Les guides d’inspection IQOA concernant les murs de soutènement
donnent pour la majorité des ouvrages une limite chiffrée pour le déversement vers l’aval :
W < H/100 : 2E (désordres se développant rapidement et nécessitant un entretien urgent)
W > H/100 : 3U (structure gravement altérée nécessitant des travaux de réparations urgents)
En cas de déversement aval, la comparaison à ces valeurs servira de point de départ à
l’analyse. Cependant, il faut savoir que ces valeurs ont été fixées arbitrairement en se basant
sur l’expérience. Un ouvrage subissant un tel déversement n’encourt pas forcément une
ruine proche. Cependant, comme pour le suivi des ponts, le manque de connaissance sur la
ruine nous oblige à préférer les principes de précautions et peut-être l’excès de sécurité.
La détection de problème de stabilité entraîne très souvent une campagne de réparation ou
de consolidation. Suite à cela, un suivi est à nouveau mené afin de vérifier l’arrêt de la
propagation du désordre. Dans le cas contraire, cela signifierait que les réparations ne
concernaient pas le phénomène responsable du désordre et donc que l’instabilité de
l’ouvrage persiste.
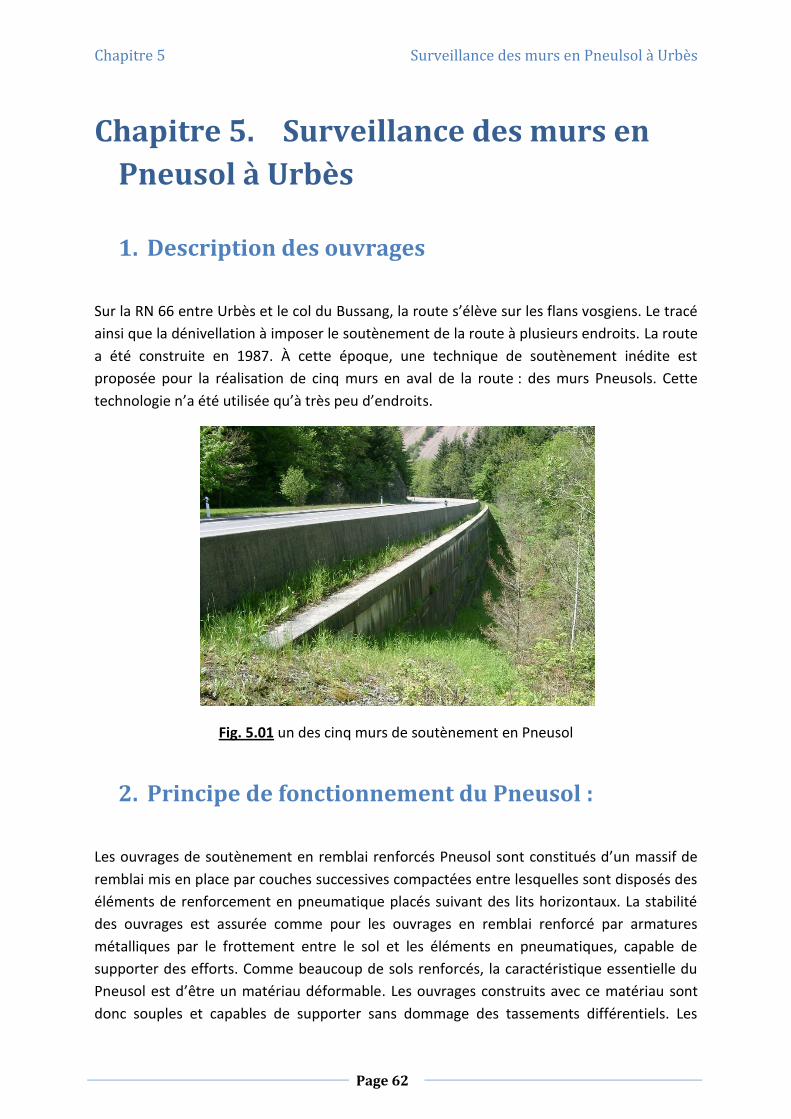
Chapitre 5 Surveillance des murs en Pneulsol à Urbès
Page 62
Chapitre 5. Surveillance des murs en
Pneusol à Urbès
1. Description des ouvrages
Sur la RN 66 entre Urbès et le col du Bussang, la route s’élève sur les flans vosgiens. Le tracé
ainsi que la dénivellation à imposer le soutènement de la route à plusieurs endroits. La route
a été construite en 1987. À cette époque, une technique de soutènement inédite est
proposée pour la réalisation de cinq murs en aval de la route : des murs Pneusols. Cette
technologie n’a été utilisée qu’à très peu d’endroits.
Fig. 5.01 un des cinq murs de soutènement en Pneusol
2. Principe de fonctionnement du Pneusol :
Les ouvrages de soutènement en remblai renforcés Pneusol sont constitués d’un massif de
remblai mis en place par couches successives compactées entre lesquelles sont disposés des
éléments de renforcement en pneumatique placés suivant des lits horizontaux. La stabilité
des ouvrages est assurée comme pour les ouvrages en remblai renforcé par armatures
métalliques par le frottement entre le sol et les éléments en pneumatiques, capable de
supporter des efforts. Comme beaucoup de sols renforcés, la caractéristique essentielle du
Pneusol est d’être un matériau déformable. Les ouvrages construits avec ce matériau sont
donc souples et capables de supporter sans dommage des tassements différentiels. Les
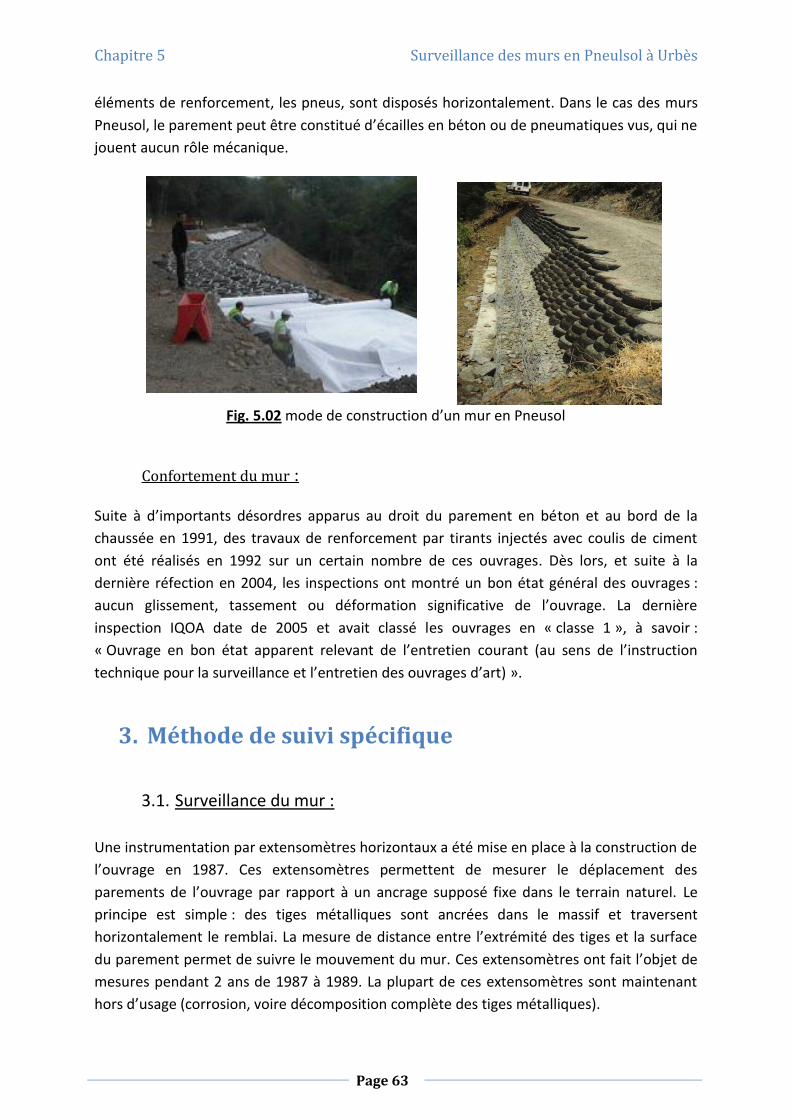
Chapitre 5 Surveillance des murs en Pneulsol à Urbès
Page 63
éléments de renforcement, les pneus, sont disposés horizontalement. Dans le cas des murs
Pneusol, le parement peut être constitué d’écailles en béton ou de pneumatiques vus, qui ne
jouent aucun rôle mécanique.
Fig. 5.02 mode de construction d’un mur en Pneusol
Confortement du mur :
Suite à d’importants désordres apparus au droit du parement en béton et au bord de la
chaussée en 1991, des travaux de renforcement par tirants injectés avec coulis de ciment
ont été réalisés en 1992 sur un certain nombre de ces ouvrages. Dès lors, et suite à la
dernière réfection en 2004, les inspections ont montré un bon état général des ouvrages :
aucun glissement, tassement ou déformation significative de l’ouvrage. La dernière
inspection IQOA date de 2005 et avait classé les ouvrages en « classe 1 », à savoir :
« Ouvrage en bon état apparent relevant de l’entretien courant (au sens de l’instruction
technique pour la surveillance et l’entretien des ouvrages d’art) ».
3. Méthode de suivi spécifique
3.1. Surveillance du mur :
Une instrumentation par extensomètres horizontaux a été mise en place à la construction de
l’ouvrage en 1987. Ces extensomètres permettent de mesurer le déplacement des
parements de l’ouvrage par rapport à un ancrage supposé fixe dans le terrain naturel. Le
principe est simple : des tiges métalliques sont ancrées dans le massif et traversent
horizontalement le remblai. La mesure de distance entre l’extrémité des tiges et la surface
du parement permet de suivre le mouvement du mur. Ces extensomètres ont fait l’objet de
mesures pendant 2 ans de 1987 à 1989. La plupart de ces extensomètres sont maintenant
hors d’usage (corrosion, voire décomposition complète des tiges métalliques).
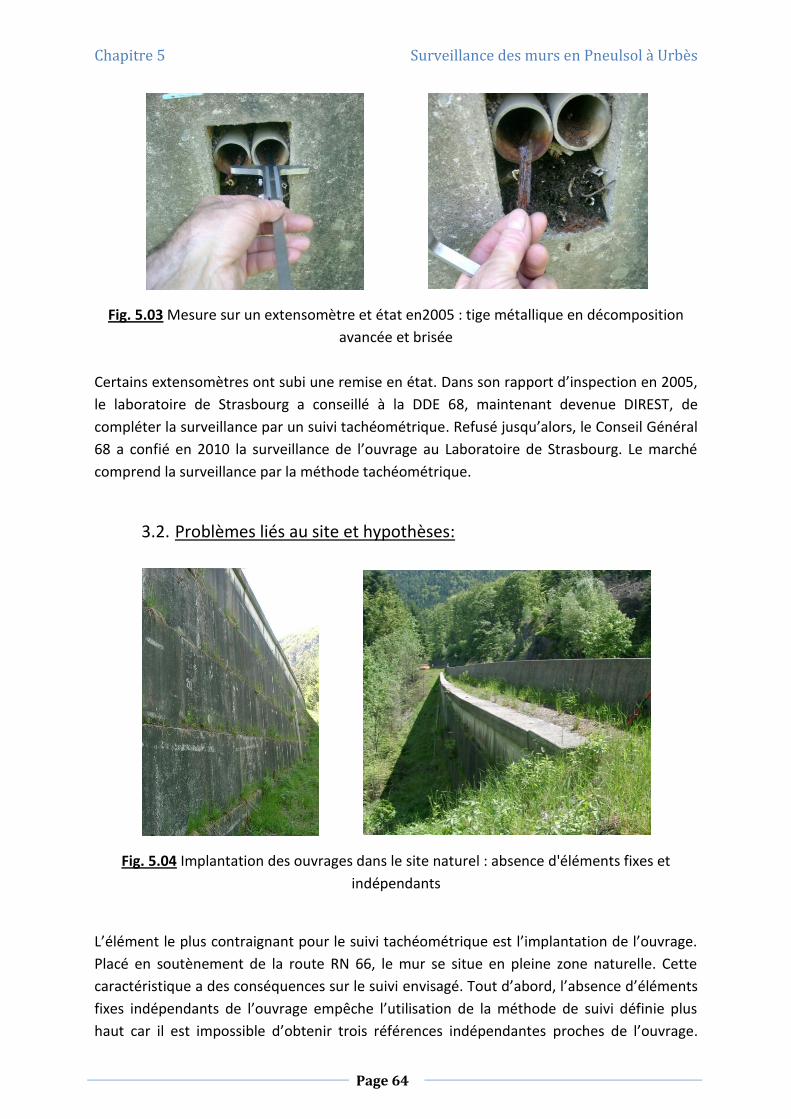
Chapitre 5 Surveillance des murs en Pneulsol à Urbès
Page 64
Fig. 5.03 Mesure sur un extensomètre et état en2005 : tige métallique en décomposition
avancée et brisée
Certains extensomètres ont subi une remise en état. Dans son rapport d’inspection en 2005,
le laboratoire de Strasbourg a conseillé à la DDE 68, maintenant devenue DIREST, de
compléter la surveillance par un suivi tachéométrique. Refusé jusqu’alors, le Conseil Général
68 a confié en 2010 la surveillance de l’ouvrage au Laboratoire de Strasbourg. Le marché
comprend la surveillance par la méthode tachéométrique.
3.2. Problèmes liés au site et hypothèses:
Fig. 5.04 Implantation des ouvrages dans le site naturel : absence d'éléments fixes et
indépendants
L’élément le plus contraignant pour le suivi tachéométrique est l’implantation de l’ouvrage.
Placé en soutènement de la route RN 66, le mur se situe en pleine zone naturelle. Cette
caractéristique a des conséquences sur le suivi envisagé. Tout d’abord, l’absence d’éléments
fixes indépendants de l’ouvrage empêche l’utilisation de la méthode de suivi définie plus
haut car il est impossible d’obtenir trois références indépendantes proches de l’ouvrage.
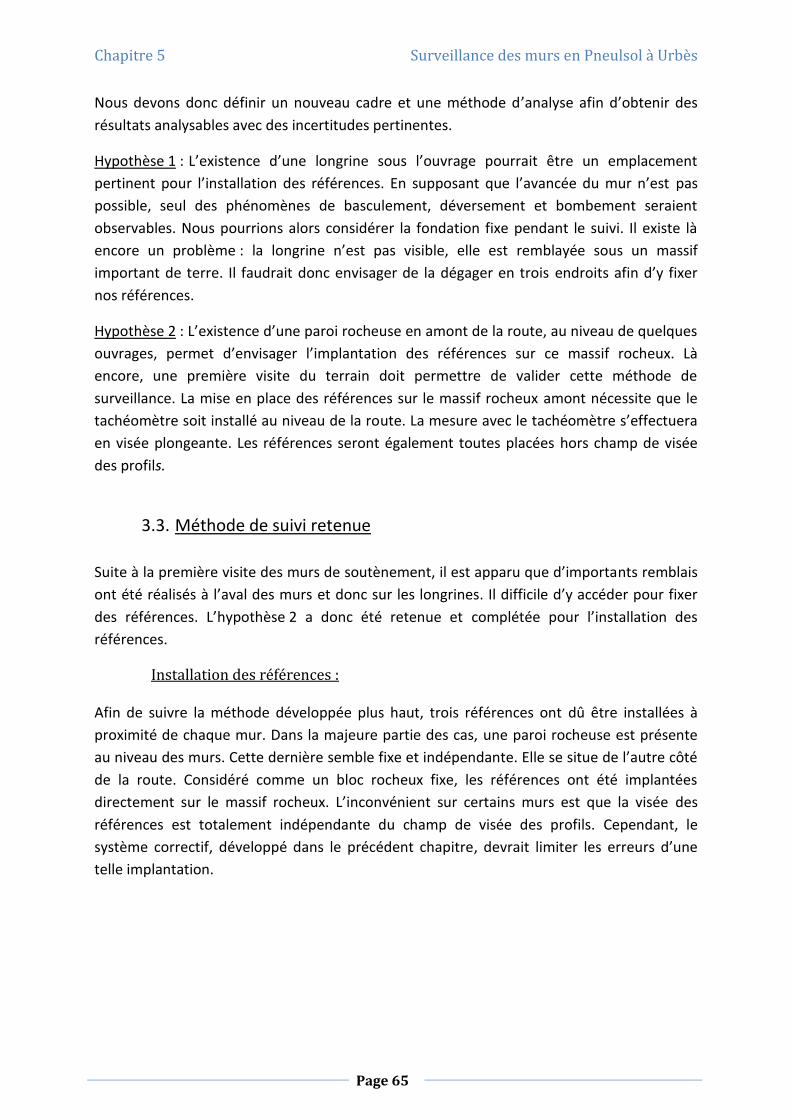
Chapitre 5 Surveillance des murs en Pneulsol à Urbès
Page 65
Nous devons donc définir un nouveau cadre et une méthode d’analyse afin d’obtenir des
résultats analysables avec des incertitudes pertinentes.
Hypothèse 1 : L’existence d’une longrine sous l’ouvrage pourrait être un emplacement
pertinent pour l’installation des références. En supposant que l’avancée du mur n’est pas
possible, seul des phénomènes de basculement, déversement et bombement seraient
observables. Nous pourrions alors considérer la fondation fixe pendant le suivi. Il existe là
encore un problème : la longrine n’est pas visible, elle est remblayée sous un massif
important de terre. Il faudrait donc envisager de la dégager en trois endroits afin d’y fixer
nos références.
Hypothèse 2 : L’existence d’une paroi rocheuse en amont de la route, au niveau de quelques
ouvrages, permet d’envisager l’implantation des références sur ce massif rocheux. Là
encore, une première visite du terrain doit permettre de valider cette méthode de
surveillance. La mise en place des références sur le massif rocheux amont nécessite que le
tachéomètre soit installé au niveau de la route. La mesure avec le tachéomètre s’effectuera
en visée plongeante. Les références seront également toutes placées hors champ de visée
des profils.
3.3. Méthode de suivi retenue
Suite à la première visite des murs de soutènement, il est apparu que d’importants remblais
ont été réalisés à l’aval des murs et donc sur les longrines. Il difficile d’y accéder pour fixer
des références. L’hypothèse 2 a donc été retenue et complétée pour l’installation des
références.
Installation des références :
Afin de suivre la méthode développée plus haut, trois références ont dû être installées à
proximité de chaque mur. Dans la majeure partie des cas, une paroi rocheuse est présente
au niveau des murs. Cette dernière semble fixe et indépendante. Elle se situe de l’autre côté
de la route. Considéré comme un bloc rocheux fixe, les références ont été implantées
directement sur le massif rocheux. L’inconvénient sur certains murs est que la visée des
références est totalement indépendante du champ de visée des profils. Cependant, le
système correctif, développé dans le précédent chapitre, devrait limiter les erreurs d’une
telle implantation.
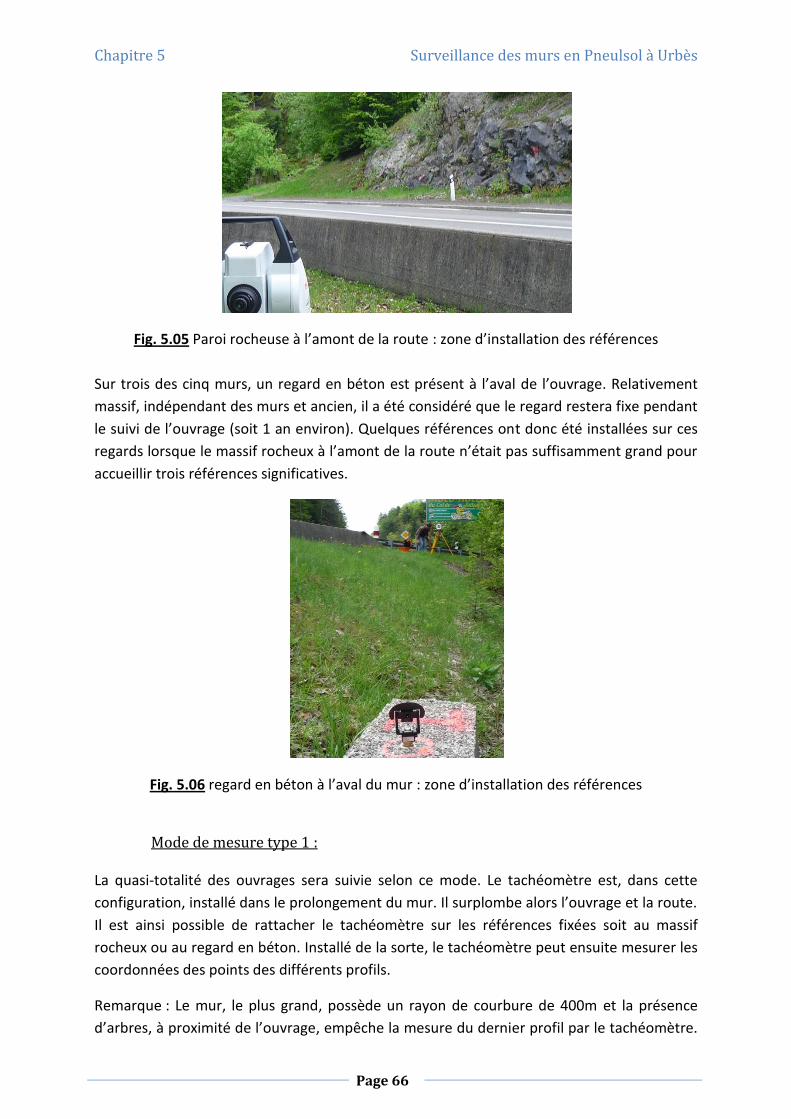
Chapitre 5 Surveillance des murs en Pneulsol à Urbès
Page 66
Fig. 5.05 Paroi rocheuse à l’amont de la route : zone d’installation des références
Sur trois des cinq murs, un regard en béton est présent à l’aval de l’ouvrage. Relativement
massif, indépendant des murs et ancien, il a été considéré que le regard restera fixe pendant
le suivi de l’ouvrage (soit 1 an environ). Quelques références ont donc été installées sur ces
regards lorsque le massif rocheux à l’amont de la route n’était pas suffisamment grand pour
accueillir trois références significatives.
Fig. 5.06 regard en béton à l’aval du mur : zone d’installation des références
Mode de mesure type 1 :
La quasi-totalité des ouvrages sera suivie selon ce mode. Le tachéomètre est, dans cette
configuration, installé dans le prolongement du mur. Il surplombe alors l’ouvrage et la route.
Il est ainsi possible de rattacher le tachéomètre sur les références fixées soit au massif
rocheux ou au regard en béton. Installé de la sorte, le tachéomètre peut ensuite mesurer les
coordonnées des points des différents profils.
Remarque : Le mur, le plus grand, possède un rayon de courbure de 400m et la présence
d’arbres, à proximité de l’ouvrage, empêche la mesure du dernier profil par le tachéomètre.
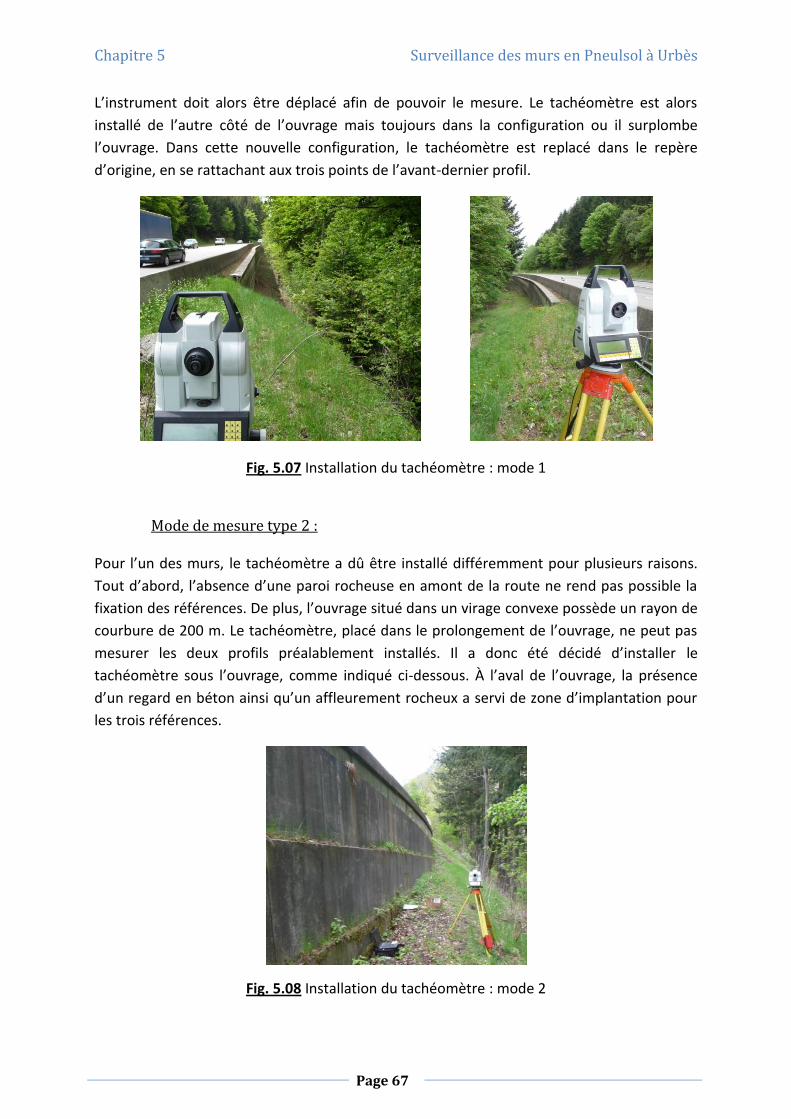
Chapitre 5 Surveillance des murs en Pneulsol à Urbès
Page 67
L’instrument doit alors être déplacé afin de pouvoir le mesure. Le tachéomètre est alors
installé de l’autre côté de l’ouvrage mais toujours dans la configuration ou il surplombe
l’ouvrage. Dans cette nouvelle configuration, le tachéomètre est replacé dans le repère
d’origine, en se rattachant aux trois points de l’avant-dernier profil.
Fig. 5.07 Installation du tachéomètre : mode 1
Mode de mesure type 2 :
Pour l’un des murs, le tachéomètre a dû être installé différemment pour plusieurs raisons.
Tout d’abord, l’absence d’une paroi rocheuse en amont de la route ne rend pas possible la
fixation des références. De plus, l’ouvrage situé dans un virage convexe possède un rayon de
courbure de 200 m. Le tachéomètre, placé dans le prolongement de l’ouvrage, ne peut pas
mesurer les deux profils préalablement installés. Il a donc été décidé d’installer le
tachéomètre sous l’ouvrage, comme indiqué ci-dessous. À l’aval de l’ouvrage, la présence
d’un regard en béton ainsi qu’un affleurement rocheux a servi de zone d’implantation pour
les trois références.
Fig. 5.08 Installation du tachéomètre : mode 2
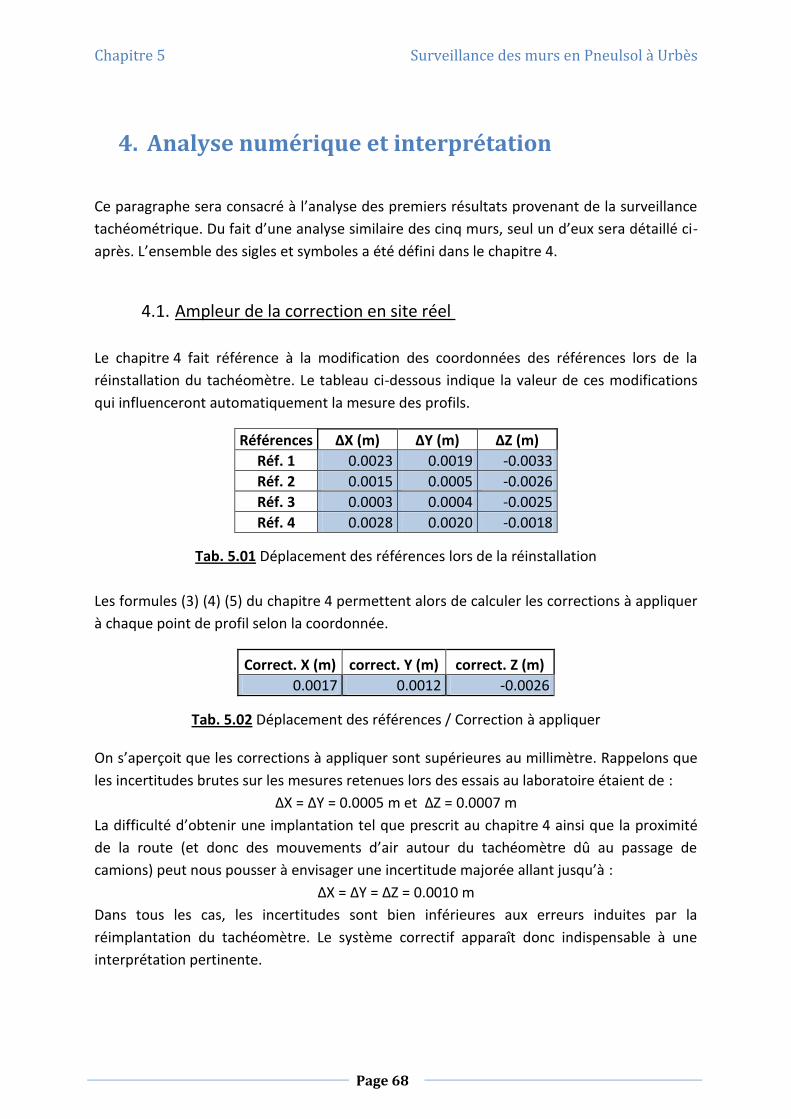
Chapitre 5 Surveillance des murs en Pneulsol à Urbès
Page 68
4. Analyse numérique et interprétation
Ce paragraphe sera consacré à l’analyse des premiers résultats provenant de la surveillance
tachéométrique. Du fait d’une analyse similaire des cinq murs, seul un d’eux sera détaillé ci-
après. L’ensemble des sigles et symboles a été défini dans le chapitre 4.
4.1. Ampleur de la correction en site réel
Le chapitre 4 fait référence à la modification des coordonnées des références lors de la
réinstallation du tachéomètre. Le tableau ci-dessous indique la valeur de ces modifications
qui influenceront automatiquement la mesure des profils.
Références ΔX (m) ΔY (m) ΔZ (m)
Réf. 1 0.0023 0.0019 -0.0033
Réf. 2 0.0015 0.0005 -0.0026
Réf. 3 0.0003 0.0004 -0.0025
Réf. 4 0.0028 0.0020 -0.0018
Tab. 5.01 Déplacement des références lors de la réinstallation
Les formules (3) (4) (5) du chapitre 4 permettent alors de calculer les corrections à appliquer
à chaque point de profil selon la coordonnée.
Correct. X (m) correct. Y (m) correct. Z (m)
0.0017 0.0012 -0.0026
Tab. 5.02 Déplacement des références / Correction à appliquer
On s’aperçoit que les corrections à appliquer sont supérieures au millimètre. Rappelons que
les incertitudes brutes sur les mesures retenues lors des essais au laboratoire étaient de :
ΔX = ΔY = 0.0005 m et ΔZ = 0.0007 m
La difficulté d’obtenir une implantation tel que prescrit au chapitre 4 ainsi que la proximité
de la route (et donc des mouvements d’air autour du tachéomètre dû au passage de
camions) peut nous pousser à envisager une incertitude majorée allant jusqu’à :
ΔX = ΔY = ΔZ = 0.0010 m
Dans tous les cas, les incertitudes sont bien inférieures aux erreurs induites par la
réimplantation du tachéomètre. Le système correctif apparaît donc indispensable à une
interprétation pertinente.
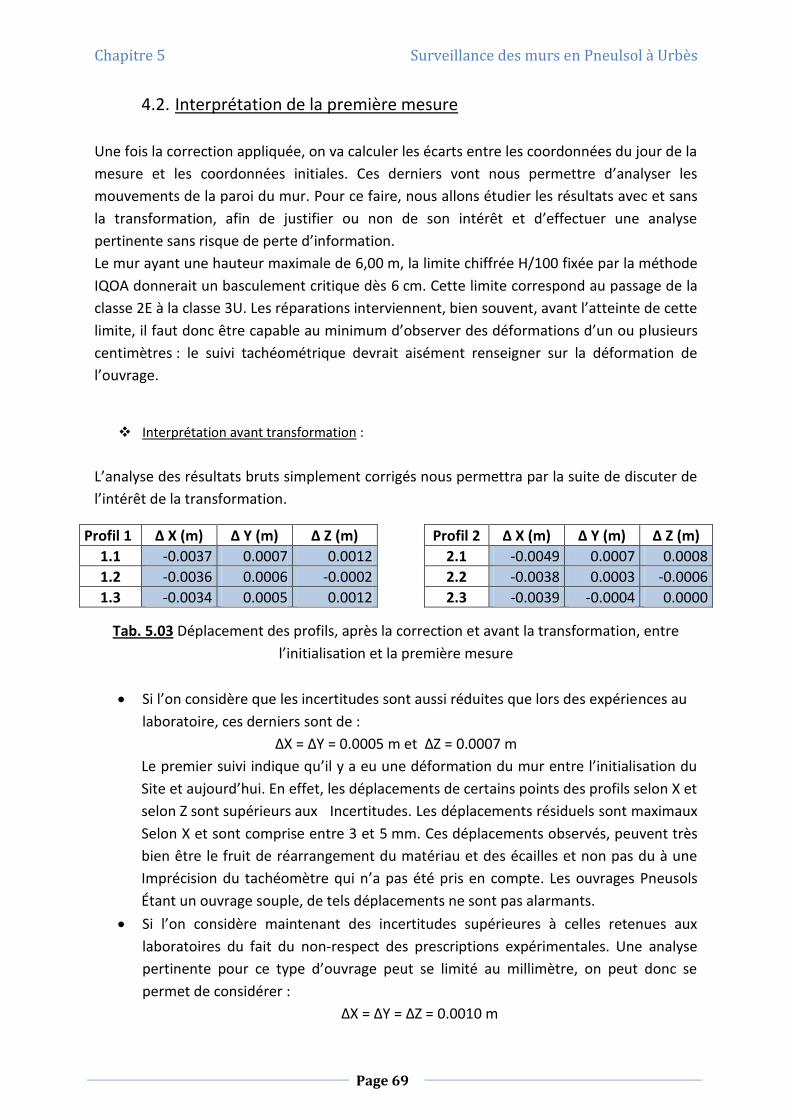
Chapitre 5 Surveillance des murs en Pneulsol à Urbès
Page 69
4.2. Interprétation de la première mesure
Une fois la correction appliquée, on va calculer les écarts entre les coordonnées du jour de la
mesure et les coordonnées initiales. Ces derniers vont nous permettre d’analyser les
mouvements de la paroi du mur. Pour ce faire, nous allons étudier les résultats avec et sans
la transformation, afin de justifier ou non de son intérêt et d’effectuer une analyse
pertinente sans risque de perte d’information.
Le mur ayant une hauteur maximale de 6,00 m, la limite chiffrée H/100 fixée par la méthode
IQOA donnerait un basculement critique dès 6 cm. Cette limite correspond au passage de la
classe 2E à la classe 3U. Les réparations interviennent, bien souvent, avant l’atteinte de cette
limite, il faut donc être capable au minimum d’observer des déformations d’un ou plusieurs
centimètres : le suivi tachéométrique devrait aisément renseigner sur la déformation de
l’ouvrage.
Interprétation avant transformation :
L’analyse des résultats bruts simplement corrigés nous permettra par la suite de discuter de
l’intérêt de la transformation.
Profil 1 Δ X (m) Δ Y (m) Δ Z (m)
Profil 2 Δ X (m) Δ Y (m) Δ Z (m)
1.1 -0.0037 0.0007 0.0012
2.1 -0.0049 0.0007 0.0008
1.2 -0.0036 0.0006 -0.0002
2.2 -0.0038 0.0003 -0.0006
1.3 -0.0034 0.0005 0.0012
2.3 -0.0039 -0.0004 0.0000
Tab. 5.03 Déplacement des profils, après la correction et avant la transformation, entre
l’initialisation et la première mesure
Si l’on considère que les incertitudes sont aussi réduites que lors des expériences au
laboratoire, ces derniers sont de :
ΔX = ΔY = 0.0005 m et ΔZ = 0.0007 m
Le premier suivi indique qu’il y a eu une déformation du mur entre l’initialisation du
Site et aujourd’hui. En effet, les déplacements de certains points des profils selon X et
selon Z sont supérieurs aux Incertitudes. Les déplacements résiduels sont maximaux
Selon X et sont comprise entre 3 et 5 mm. Ces déplacements observés, peuvent très
bien être le fruit de réarrangement du matériau et des écailles et non pas du à une
Imprécision du tachéomètre qui n’a pas été pris en compte. Les ouvrages Pneusols
Étant un ouvrage souple, de tels déplacements ne sont pas alarmants.
Si l’on considère maintenant des incertitudes supérieures à celles retenues aux
laboratoires du fait du non-respect des prescriptions expérimentales. Une analyse
pertinente pour ce type d’ouvrage peut se limité au millimètre, on peut donc se
permet de considérer :
ΔX = ΔY = ΔZ = 0.0010 m

Chapitre 5 Surveillance des murs en Pneulsol à Urbès
Page 70
La prise en compte de ces nouvelles incertitudes n’a pas d’influence sur
l’interprétation des résultats, car il est ressort des mouvements de profils réduits
mais quasi similaires à ceux observés avec les premières incertitudes. On passe d’un
déplacement sur X compris entre 3 et 5 mm à un déplacement compris entre 2 et
4 mm. La différence apparait comme négligeable par rapport à la limite critique
d’IQOA qui est ici de 6 cm.
Transformation :
Fig. 5.09 Schématisation de la transformation
La figure ci-dessus représente la transformation opérée pour obtenir le repère centré sur le
point 1.1 du profil 1 avec son axe X’’ dans le plan du mur. La rotation induite est de 87 °.
Comme expliquée dans le chapitre ci-dessus, cette transformation a pour but d’expliciter
facilement dans quelle direction principale du mur les déplacements ont lieu.
Dans notre cas, l’interprétation avant transformation permet de valider l’existence du
déplacement des points mais en aucun cas de caractériser leurs mouvements par rapport au
plan du mur.
Le repère (1.1 ; X’’, Y’’, Z’’) est un repère orthonormé dont son axe Y’’ est orienté vers
l’amont (vers la route).
- Sur l’axe X’’, et conformément à la convention fixée au chapitre 4, les deltas positifs
représenteront des déplacements dans le sens Profil 1 – Profil 2.
- Sur l’axe Y’’, les deltas négatifs correspondront à un déplacement des points vers
l’aval. Ils seront signe d’un bombement ou d’un basculement.
- Sur Z’’, les deltas négatifs correspondront à un tassement des points.
Attention : ceci dépend de l’implantation initiale du tachéomètre par rapport au mur. La
convention de signe est donc propre à chaque ouvrage.
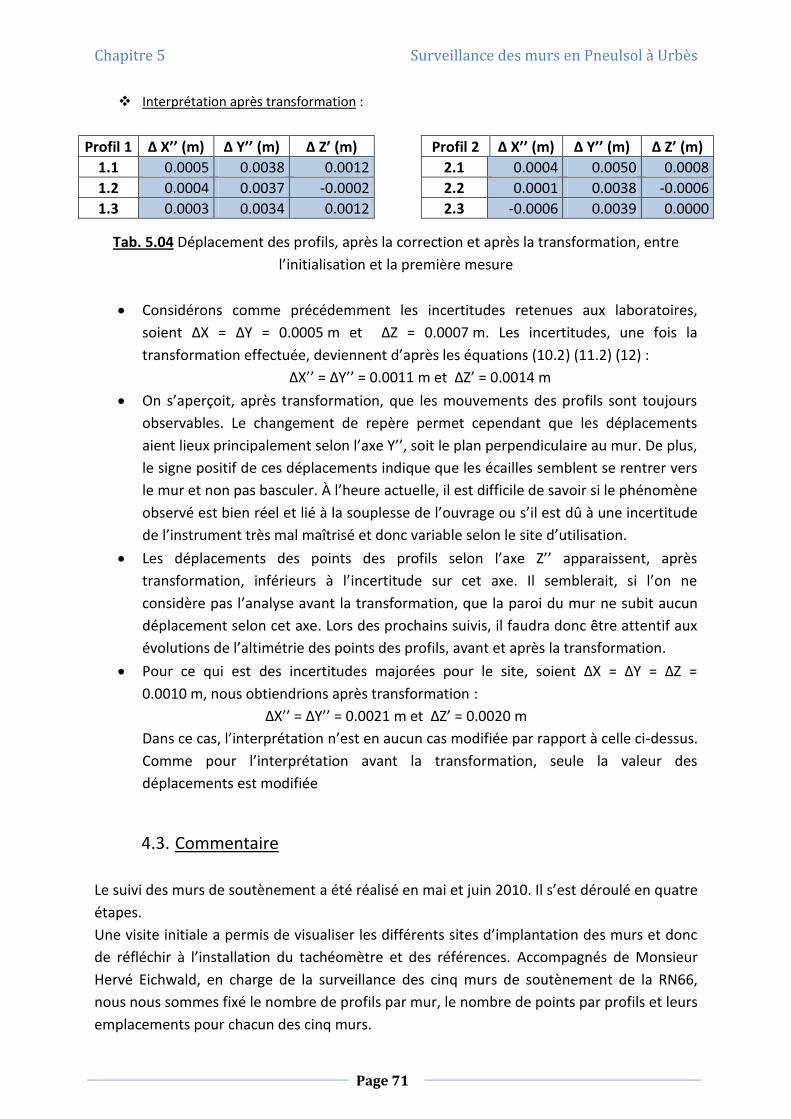
Chapitre 5 Surveillance des murs en Pneulsol à Urbès
Page 71
Interprétation après transformation :
Profil 1 Δ X’’ (m) Δ Y’’ (m) Δ Z’ (m)
Profil 2 Δ X’’ (m) Δ Y’’ (m) Δ Z’ (m)
1.1 0.0005 0.0038 0.0012
2.1 0.0004 0.0050 0.0008
1.2 0.0004 0.0037 -0.0002
2.2 0.0001 0.0038 -0.0006
1.3 0.0003 0.0034 0.0012
2.3 -0.0006 0.0039 0.0000
Tab. 5.04 Déplacement des profils, après la correction et après la transformation, entre
l’initialisation et la première mesure
Considérons comme précédemment les incertitudes retenues aux laboratoires,
soient ΔX = ΔY = 0.0005 m et ΔZ = 0.0007 m. Les incertitudes, une fois la
transformation effectuée, deviennent d’après les équations (10.2) (11.2) (12) :
ΔX’’ = ΔY’’ = 0.0011 m et ΔZ’ = 0.0014 m
On s’aperçoit, après transformation, que les mouvements des profils sont toujours
observables. Le changement de repère permet cependant que les déplacements
aient lieux principalement selon l’axe Y’’, soit le plan perpendiculaire au mur. De plus,
le signe positif de ces déplacements indique que les écailles semblent se rentrer vers
le mur et non pas basculer. À l’heure actuelle, il est difficile de savoir si le phénomène
observé est bien réel et lié à la souplesse de l’ouvrage ou s’il est dû à une incertitude
de l’instrument très mal maîtrisé et donc variable selon le site d’utilisation.
Les déplacements des points des profils selon l’axe Z’’ apparaissent, après
transformation, inférieurs à l’incertitude sur cet axe. Il semblerait, si l’on ne
considère pas l’analyse avant la transformation, que la paroi du mur ne subit aucun
déplacement selon cet axe. Lors des prochains suivis, il faudra donc être attentif aux
évolutions de l’altimétrie des points des profils, avant et après la transformation.
Pour ce qui est des incertitudes majorées pour le site, soient ΔX = ΔY = ΔZ =
0.0010 m, nous obtiendrions après transformation :
ΔX’’ = ΔY’’ = 0.0021 m et ΔZ’ = 0.0020 m
Dans ce cas, l’interprétation n’est en aucun cas modifiée par rapport à celle ci-dessus.
Comme pour l’interprétation avant la transformation, seule la valeur des
déplacements est modifiée
4.3. Commentaire
Le suivi des murs de soutènement a été réalisé en mai et juin 2010. Il s’est déroulé en quatre
étapes.
Une visite initiale a permis de visualiser les différents sites d’implantation des murs et donc
de réfléchir à l’installation du tachéomètre et des références. Accompagnés de Monsieur
Hervé Eichwald, en charge de la surveillance des cinq murs de soutènement de la RN66,
nous nous sommes fixé le nombre de profils par mur, le nombre de points par profils et leurs
emplacements pour chacun des cinq murs.
Chapitre 5 Surveillance des murs en Pneulsol à Urbès
Page 72
Lors de la seconde venue sur site, il a fallu sceller la totalité des références et des points des
profils. La colle de scellement nécessitant un temps de prise, l’initialisation n’a pu avoir lieu
qu’au cours d’une troisième journée afin d’éliminer les erreurs dues à un mouvement des
bases de mesure non encore scellées. La dernière étape a enfin permis d’effectuer une
première mesure.
L’espacement de ces quatre étapes aurait pu être raccourci si certains évènements
extérieurs avaient été différents :
- Tout d’abord, l’utilisation du tachéomètre en extérieur nécessite une journée non
pluvieuse.
- Les prismes de visée du tachéomètre devant être installés lors de chaque venue sur
site nécessitent la présence de deux ou trois opérateurs pour que les mesures
puissent être effectuées en une journée.
- Le personnel du laboratoire doit, pour leur part, également respecter le calendrier
prévu des inspections détaillées.
- De plus, Urbès se situant à plus de 150Km de Strasbourg, il fallait s’assurer que la
météo nous permettrait d’effectuer une mesure sur les cinq ouvrages au cours d’une
seule journée.
5. Conclusion :
La surveillance tachéométrique, menée jusqu’à présent, sur les cinq murs de soutènement
ne permet pas de statuer sur l’état de stabilité de ces murs. Des désordres tels que des
bombements ou des voilements sur certaines parois laissent entrevoir des instabilités
structurelles sur certains de ces ouvrages. Cependant, l’ordre de grandeur des déplacements
observés et leurs orientations correspondent plutôt un mouvement dû à la souplesse des
matériaux constitutifs. Ces deux observations contradictoires encouragent donc un suivi sur
le long terme, qui eux seuls permettront de déterminer si les déformations vont en évoluant.
La gestion préventive étant basée sur la minimisation des risques, si l’observation d’une
déformation de plus d’un centimètre a lieu sur quelques mois, le gestionnaire devra être
rapidement informé et réfléchir sérieusement à une rapide mise en sécurité.
Pour finir, les résultats obtenus et présentés plus haut ainsi que le cadre d’étude, lié à la
souplesse des ouvrages, laissent à penser que la méthode développée au chapitre 4 est
suffisamment précise pour pouvoir déceler des déformations inquiétantes au niveau des
profils suivis et par conséquent sur toute l’étendue de ces ouvrages.
Page 73
Conclusion générale et perspectives
Au cours des cinq mois passés au sein du LRPC, j’ai pu découvrir de nouveaux enjeux
concernant les infrastructures et plus particulièrement les ouvrages d’art. Suite à sa
construction, les propriétaires et gestionnaires des ouvrages doivent s’assurer du bon
maintien structurel de l’ouvrage. En France, et dans bien d’autres pays, elle passe par une
gestion en amont des désordres. Elle est donc bien souvent caractérisée de gestion
préventive. Mon projet de fin d’études s’articulait autour de deux types d’instrumentation :
le renouvellement et l’optimisation de l’instrumentation d’un pont et l’initialisation de la
surveillance tachéométrique sur des murs en Pneusol à Urbès.
La réflexion concernant la nouvelle instrumentation du pont sur la Scheer a permis d’obtenir
un produit correspondant aux attentes du laboratoire. Tout d’abord, l’étude sur le long
terme semblait primordiale pour recenser l’ensemble des phénomènes responsables de
l’évolution des fissures. L’analyse prévisionnelle s’est faite en se basant sur les textes
normatifs ainsi que sur les résultats des instrumentations ponctuelles antérieures. Le simple
suivi du battement des fissures en continu permettra de connaître l’impact dû au trafic
normal, à l’intensité des convois non exceptionnels mais intense et donc de déceler les
charges d’exploitation responsables de la fatigue structurelle de l’ouvrage.
L’espoir d’améliorer la gestion du patrimoine grâce à une telle instrumentation est très fort,
car elle permettra des actions de maintenance préventive. Son autonomie, du point de vue
énergique et de la communication, est également une satisfaction car elle permet d’inclure
dans un seul et même projet : de la recherche, de la surveillance et également un test
d’alimentation de capteurs par énergie verte.
Les délais de conception des différents éléments de la plateforme ayant été sous-estimés,
l’installation sur l’ouvrage se fera à la fin du mois de juin. Ma satisfaction personnelle est
donc un peu réduite car il m’aurait tenu à cœur de participer à l’initialisation des mesures
sur mon projet.
Concernant les désordres et mouvements des murs de soutènement, leur existence est bien
problématique et nécessite une surveillance. La grande diversité des sites d’implantation et
des zones de désordres de ces ouvrages ne font que favoriser l’utilisation de la
tachéométrie, qui présente une souplesse dans sa mise en place. Les précédentes
utilisations faites de l’appareil ont montré qu’il est mal maîtrisé par les opérateurs du
laboratoire. La première étape a donc concerné la quantification des erreurs de l’appareil.
Les essais au laboratoire ont permis de dégager les principaux paramètres influençant la
mesure (emplacement des références, réimplantation du tachéomètre, luminosité
changeante). Ils ont également permis de dégager un système de correction permettant de
minimiser les erreurs et de proposer un encadrement des résultats par des incertitudes.
Malgré tout cela, des erreurs persistent toujours. L’appareil permet néanmoins de suivre des
Page 74
déformations évolutives avec une précision assurée au demi-centimètre et voir même au
millimètre en cas de bon respect des conditions d’utilisation (position des références, des
profils, réimplantation, distance inférieure à 100 m). La surveillance tachéométrique est
donc plutôt adaptée pour des déformations supérieures à quelques millimètres. Pour le suivi
de déformations inférieures, il faut donc préférer des instrumentations alternatives comme
avec des inclinomètres (plus précis mais moins pratique à mettre en place). Cependant, il
faut rappeler que la simple observation d’un mouvement du mur est déjà le signe
d’instabilité, qu’il est préférable de réparer au plus tôt. Dans le cadre de la surveillance des
murs à Urbès, cet appareil semble donc suffisamment adapté car le matériau Pneusol est
susceptible d’être déformable.
La difficulté à obtenir des références indépendantes sur certains ouvrages à surveiller laisser
à penser qu’il serait peu être judicieux, à l’avenir, de s’assurer qu’une telle surveillance
puisse avoir lieu. La réalisation de plots indépendants, dès la construction, est peut-être
alors à prévoir et à intégrer au coût total de l’opération.
Au final, on s’aperçoit que l’ensemble du travail mené sur la démarche de gestion préventive
des ouvrages d’art est multidisciplinaire et multidirective. Elle fait aussi bien intervenir les
gestionnaires qui souhaitent pérenniser leurs biens, les chercheurs qui tentent d’améliorer la
connaissance des phénomènes et les inspecteurs et opérateurs qui repèrent et quantifient
les désordres. Toutes ces démarches vont donc dans le même sens : déceler au plus tôt les
désordres et leurs causes afin de favoriser la petite maintenance aux grosses réparations
mais également et surtout de minimiser les risques pour la structure et les utilisateurs.
Page 75
Bibliographie :
- J-A Calgaro & R Lacroix, « Maintenance et réparation des ponts », Presses de l’école nationale des Ponts et chaussées, 1997
- Ministère du Transport, Fascicule 2, « instruction technique pour la surveillance et l’entretien des ouvrages d’art », 19 octobre 1979
- LCPC, guide technique, « Investigations et évaluations dynamiques des ponts », 2009
- LCPC, guide technique, « La télésurveillance des ouvrages d’art sous haute surveillance », 2005
- www.piles.setra.equipement.gouv.fr/IMG/pdf/plaquette_V2_05_09_08_cle6c3562-1.pdf
- Sétra, Présentation, « la méthode de gestion des ouvrages d’art départementaux, Gilles Lacoste, Juin 2006
- « les transports exceptionnels et les ouvrages d’art », Daniel POINEAU, directeur technique à la Division des Grands Ouvrages du Centre des Techniques d’Ouvrage d’Art di SETRA
- www.convoi-exceptionnel.de:?page=autorisation
- Guide technique, « Ouvrages de soutènement – Recommandations pour l’inspection détaillée, le suivi et le diagnostic des poutres et voiles ancrés par tirants précontraints », LCPC
- Rapport d’inspection du canal Bief N= 20, Sarralbe, Laboratoire Régional de Strasbourg
- Eurocode 2
- Eurocode 4
- Sétra, Guide méthodologique, « Eurocode 2, Application aux ponts-routes en béton », juillet 2008
- PFE ENSAIS, spécialité topographie, « Mesure de déplacement en ouvrage d’art – Utilisation de la tachéométrie », Philippe Slisse, Juin 1999
- « Rapport d’inspection détaillée et d’investigations », mur de soutènement MN 066 040 au PK 1.295 à Urbès, juin 2005, Hervé Eichwald