OS 4 Chapitre3 Laquantitédemouvement#et#les#...
13
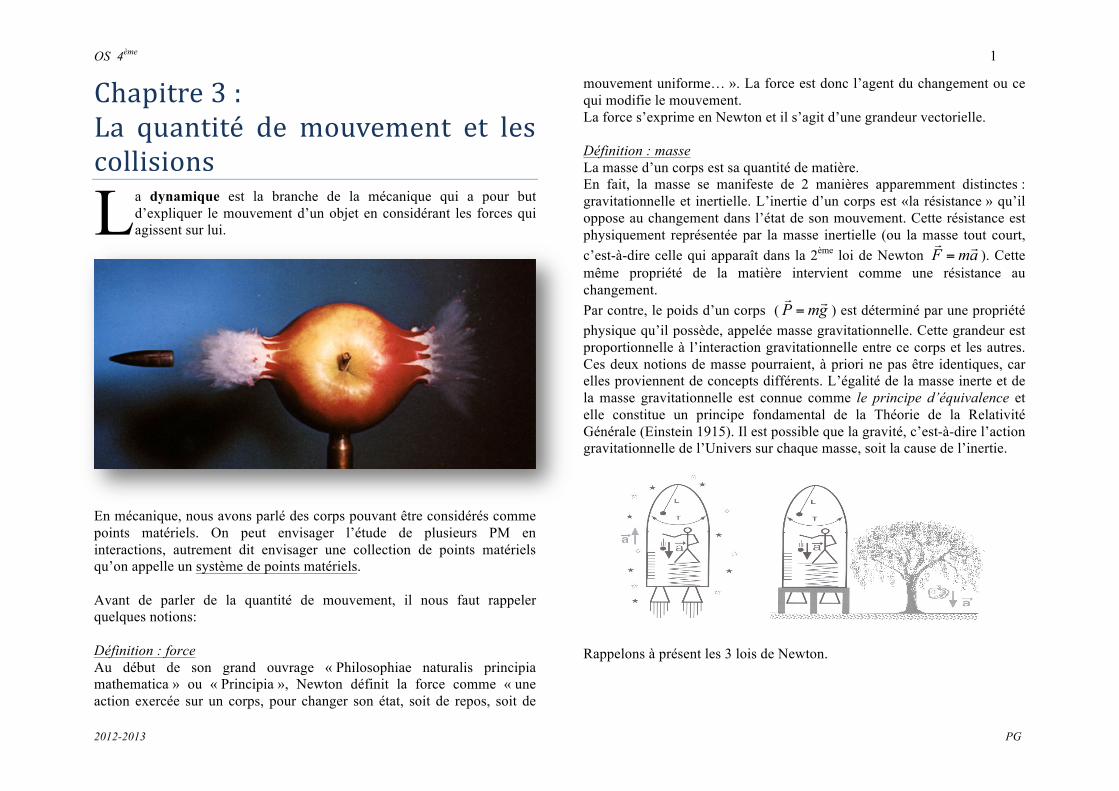
OS 4 ème 1 2012-2013 PG Chapitre 3 : La quantité de mouvement et les collisions a dynamique est la branche de la mécanique qui a pour but d’expliquer le mouvement d’un objet en considérant les forces qui agissent sur lui. En mécanique, nous avons parlé des corps pouvant être considérés comme points matériels. On peut envisager l’étude de plusieurs PM en interactions, autrement dit envisager une collection de points matériels qu’on appelle un système de points matériels. Avant de parler de la quantité de mouvement, il nous faut rappeler quelques notions: Définition : force Au début de son grand ouvrage « Philosophiae naturalis principia mathematica » ou « Principia », Newton définit la force comme « une action exercée sur un corps, pour changer son état, soit de repos, soit de mouvement uniforme… ». La force est donc l’agent du changement ou ce qui modifie le mouvement. La force s’exprime en Newton et il s’agit d’une grandeur vectorielle. Définition : masse La masse d’un corps est sa quantité de matière. En fait, la masse se manifeste de 2 manières apparemment distinctes : gravitationnelle et inertielle. L’inertie d’un corps est «la résistance » qu’il oppose au changement dans l’état de son mouvement. Cette résistance est physiquement représentée par la masse inertielle (ou la masse tout court, c’est-à-dire celle qui apparaît dans la 2 ème loi de Newton F = m a ). Cette même propriété de la matière intervient comme une résistance au changement. Par contre, le poids d’un corps ( P = m g ) est déterminé par une propriété physique qu’il possède, appelée masse gravitationnelle. Cette grandeur est proportionnelle à l’interaction gravitationnelle entre ce corps et les autres. Ces deux notions de masse pourraient, à priori ne pas être identiques, car elles proviennent de concepts différents. L’égalité de la masse inerte et de la masse gravitationnelle est connue comme le principe d’équivalence et elle constitue un principe fondamental de la Théorie de la Relativité Générale (Einstein 1915). Il est possible que la gravité, c’est-à-dire l’action gravitationnelle de l’Univers sur chaque masse, soit la cause de l’inertie. Rappelons à présent les 3 lois de Newton. L
Transcript of OS 4 Chapitre3 Laquantitédemouvement#et#les#...
OS 4ème 1
2012-2013 PG
Chapitre 3 : La quantité de mouvement et les collisions
a dynamique est la branche de la mécanique qui a pour but d’expliquer le mouvement d’un objet en considérant les forces qui agissent sur lui.
En mécanique, nous avons parlé des corps pouvant être considérés comme points matériels. On peut envisager l’étude de plusieurs PM en interactions, autrement dit envisager une collection de points matériels qu’on appelle un système de points matériels. Avant de parler de la quantité de mouvement, il nous faut rappeler quelques notions: Définition : force Au début de son grand ouvrage « Philosophiae naturalis principia mathematica » ou « Principia », Newton définit la force comme « une action exercée sur un corps, pour changer son état, soit de repos, soit de
mouvement uniforme… ». La force est donc l’agent du changement ou ce qui modifie le mouvement. La force s’exprime en Newton et il s’agit d’une grandeur vectorielle. Définition : masse La masse d’un corps est sa quantité de matière. En fait, la masse se manifeste de 2 manières apparemment distinctes : gravitationnelle et inertielle. L’inertie d’un corps est «la résistance » qu’il oppose au changement dans l’état de son mouvement. Cette résistance est physiquement représentée par la masse inertielle (ou la masse tout court, c’est-à-dire celle qui apparaît dans la 2ème loi de Newton
F =ma ). Cette
même propriété de la matière intervient comme une résistance au changement. Par contre, le poids d’un corps (
P =mg ) est déterminé par une propriété
physique qu’il possède, appelée masse gravitationnelle. Cette grandeur est proportionnelle à l’interaction gravitationnelle entre ce corps et les autres. Ces deux notions de masse pourraient, à priori ne pas être identiques, car elles proviennent de concepts différents. L’égalité de la masse inerte et de la masse gravitationnelle est connue comme le principe d’équivalence et elle constitue un principe fondamental de la Théorie de la Relativité Générale (Einstein 1915). Il est possible que la gravité, c’est-à-dire l’action gravitationnelle de l’Univers sur chaque masse, soit la cause de l’inertie.
Rappelons à présent les 3 lois de Newton.
L
OS 4ème 2
2012-2013 PG
Enoncé de la 1ère loi ou loi d’inertie : « Tout corps reste immobile ou conserve un mouvement rectiligne et uniforme aussi longtemps qu’aucune force extérieure ne vient modifier son état». Cette loi, énoncée préalablement par Galilée s’oppose à la conception aristotélicienne qui affirmait que tout mouvement d’un objet nécessite l’action d’une force. Un PM qui n’est soumis à aucune influence extérieure (force) ou à une résultante nulle ne subit aucune variation de vitesse. Si 0
=∑F =⇒ v constante (1)
Définition : référentiel d’inertie On appelle référentiel d’inertie (ou galiléen) un référentiel pour lequel la loi d’inertie est vérifiée. Théorème : Tout référentiel en translation rectiligne uniforme par rapport à un référentiel d’inertie est également un référentiel d’inertie. Développement :
La réciproque est également vraie : tous les référentiels d’inertie sont en translation rectiligne les uns par rapport aux autres. Théorème : La force agissant sur un PM est la même dans tous les référentiels d’inertie Développement : Il existe des référentiels non inertiels. En voici une illustration. Exemple : voiture dans un virage. Il arrive souvent qu’un conducteur se trouve agacé par le mouvement de va et vient de certains objets dans sa voiture lors d’accélération, de décélération en ligne droite ou surtout dans les virages. Le conducteur remarque que les objets se déplacent à gauche lorsqu’il tourne à droite et réciproquement. Quelles sont les forces qui agissent sur l’objet ? Il y a manifestement son poids et la force de soutien du plancher, ces forces se compensant exactement (le sol étant plat). La somme des forces est donc nulle. Le conducteur doit bien admettre que la physique de Sir Isaac Newton est violée puisque les objets sont accélérés alors que 0
=∑F .
Un observateur placé au bord de la route voit les choses différemment (heureusement !). Pour lui, les objets en question ne subissent aucune force et doivent donc garder une vitesse constante : leur trajectoire est une droite. Il voit par contre la voiture tourner : son accélération est centripète (dirigée vers le centre du cercle) et la force responsable de cette accélération est la force de frottement entre les pneus et la route. Pour cet observateur, une face de la voiture se déplace vers les objets plutôt que le contraire.
OS 4ème 3
2012-2013 PG
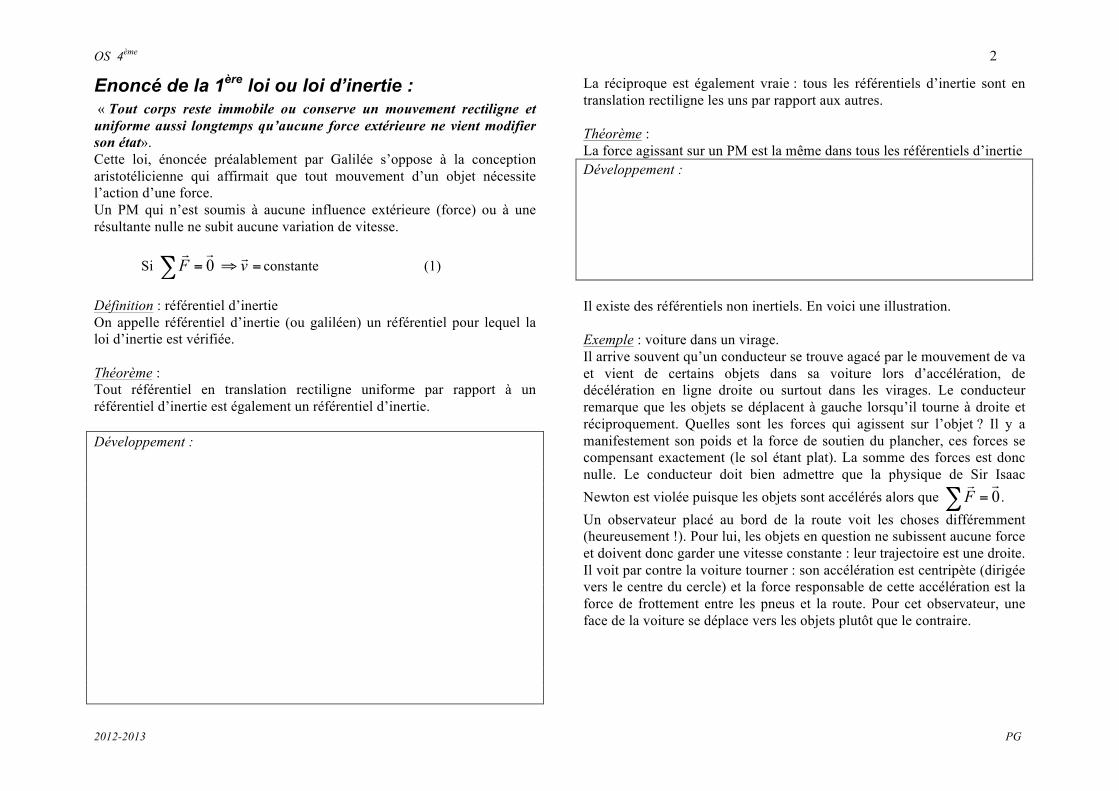
Référentiel lié à la voiture (référentiel accéléré)
Trajectoire « accélérée » de l’objet Référentiel lié au sol (référentiel inertiel)
Trajectoire rectiligne de l’objet (MRU) On est donc obligé d’admettre que la physique n’est pas la même dans tous les référentiels. Si l’on revient à l’exemple initial, on remarque par contre que la force observée dans les différents référentiels n’est plus la même : l’observateur placé dans le référentiel non-inertiel (la voiture) postule l’existence de forces responsables de l’accélération de l’objet relativement à ce référentiel. On parle alors de forces d’inertie ou pseudo-forces notées . Cette action ne correspond pas une réaction comme l’exige la 3ème loi de Newton (c.f page suivante). Ex : Coriolis Exemple :Soit un pendule suspendu au toit d’un camion qui est en accélération constante a par rapport à un référentiel d’inertie de la route. Pour un observateur inertiel, la masse du pendule a une accélération a et la deuxième loi de Newton s’écrit donc:
Pour un observateur lié au référentiel non inertiel du camion, celui-ci voit la masse du pendule en équilibre statique et explique l’inclinaison par une force d’inertie ou pseudo-force inF
et la deuxième loi de Newton s’écrit
donc:
Enoncé de la 2ème loi de Newton ou loi fondamentale de la dynamique « Le changement dans le mouvement (la quantité de mouvement) est toujours proportionnel à la force motrice qui s’exerce et il s’effectue dans la direction de la ligne (droite) d’action de cette force ». La 2ème loi affirme qu’une force F
extérieure produit une variation ∆ p de
la quantité de mouvement p ( p mv=r r
) proportionnelle à F
.
vmdtd
dtvdmamF
===∑ = p
dtd
(2)
Newton découvre alors l’expression de la force de la gravitation FG (c.f page suivante) pour une planète en rotation autour du soleil en utilisant la 3ème loi de Kepler : 3ème loi de Kepler (1618) : Le carré de la période de l’orbite est proportionnel au cube du rayon de l’orbite (dans le cas d’une ellipse, nous considérons en lieu et place du rayon le demi-grand axe a de l’orbite) :
T2 ≈ a3 a3/T2 = constante = G(M+m)/4π2 (3)
OS 4ème 4
2012-2013 PG
où a = demi-grand axe de l’orbite T = période de révolution de la planète M = masse du corps situé au foyer de l’ellipse m = masse de la planète
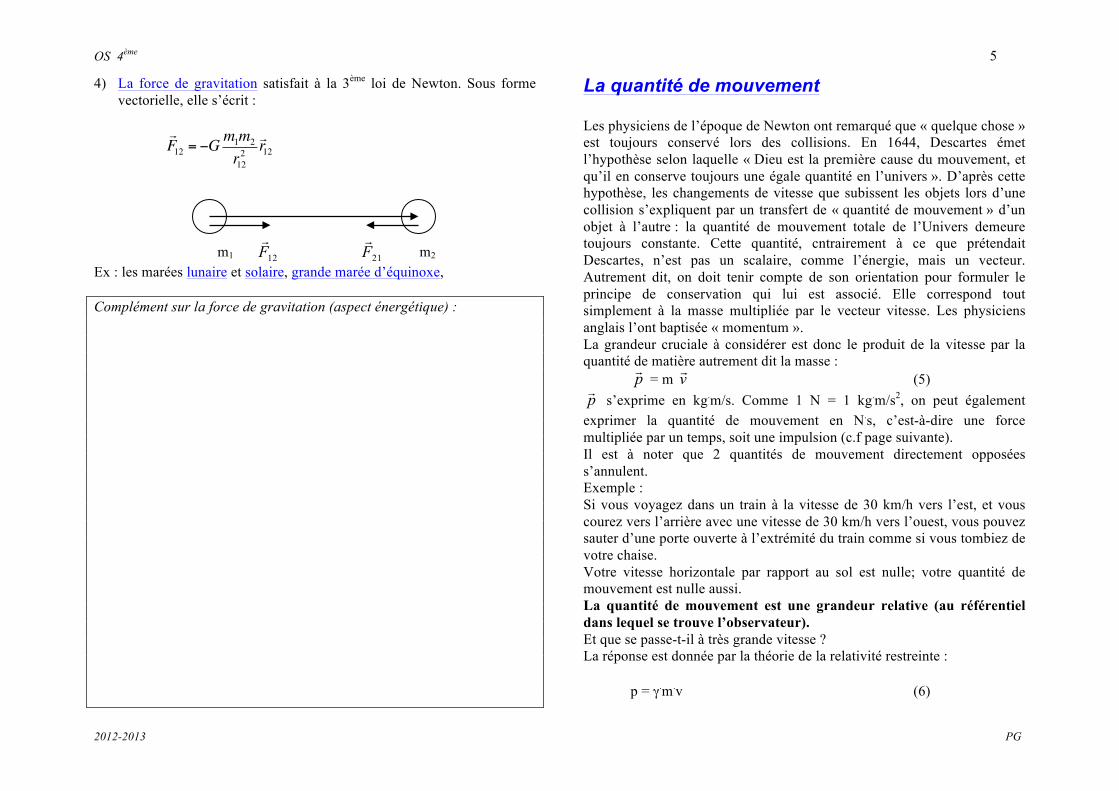
Développement : Cette interaction est-elle instantanée ? Existe-il un médiateur de l’interaction, une particule capable de transmettre cette interaction (le graviton)? La physique moderne n’a pas encore une réponse définitive sur le sujet. Les deux premières lois de Kepler s’énoncent comme suit : 1ère loi de Kepler (1604) : Chaque planète se déplace autour du soleil suivant une trajectoire appelée ellipse avec le soleil à l’un de ses foyers. Construction géométrique d’une ellipse : 2 clous placés au foyer, avec une ficelle et un crayon. L’ellipse est le lieu géométrique des points dont la somme des distances à 2 points fixes (les foyers) est une constante. C’est en fait un cercle aplati. 2ème loi de Kepler (1604): les planètes ne tournent pas autour du soleil à une vitesse uniforme, mais se déplacent plus rapidement lorsqu’elles sont plus proches du soleil. En fait, c’est la loi des aires. La vitesse orbitale de chaque planète est telle que le rayon balaye des surfaces égales dans des temps égaux.
Enoncé de la 3ème loi de Newton « A chaque action correspond toujours une réaction égale et opposée. Les actions mutuelles de 2 corps, l’un sur l’autre, sont toujours égales en intensité et de sens opposés » Soit un corps 1 exerçant une force
F21 sur un corps 2 et soit
F12 la force
exercée par le corps 2 sur le corps 1. Alors : 12F
= - 21F
(4) Exemples : 1) vous exercez une force F sur un mur, par réaction le mur exerce une
force –F sur vous. Comment le mur peut-il réagir ? Le mur « sait » qu’une force s’exerce sur lui car, sous l’effet de cette force, il se déforme imperceptiblement (le mur est en fait un ressort de constante k très élevée). C’est suite à cette déformation que le mur exerce une force opposée à celle qu’on exerce sur lui.
2) Sur une patinoire, vous êtes immobile. Vous poussez alors un camarade qui va partir dans un sens. Par réaction, il exerce sur vous une force opposée qui vous propulse dans le sens opposé.
3) Prenez un ballon et gonflez-le. Puis, lâchez-le. L’air va sortir par le trou : il est donc soumis à une force et par réaction le ballon subit une force opposée, qu’on appelle force de propulsion: c’est le principe des moteurs à réaction.
OS 4ème 5
2012-2013 PG
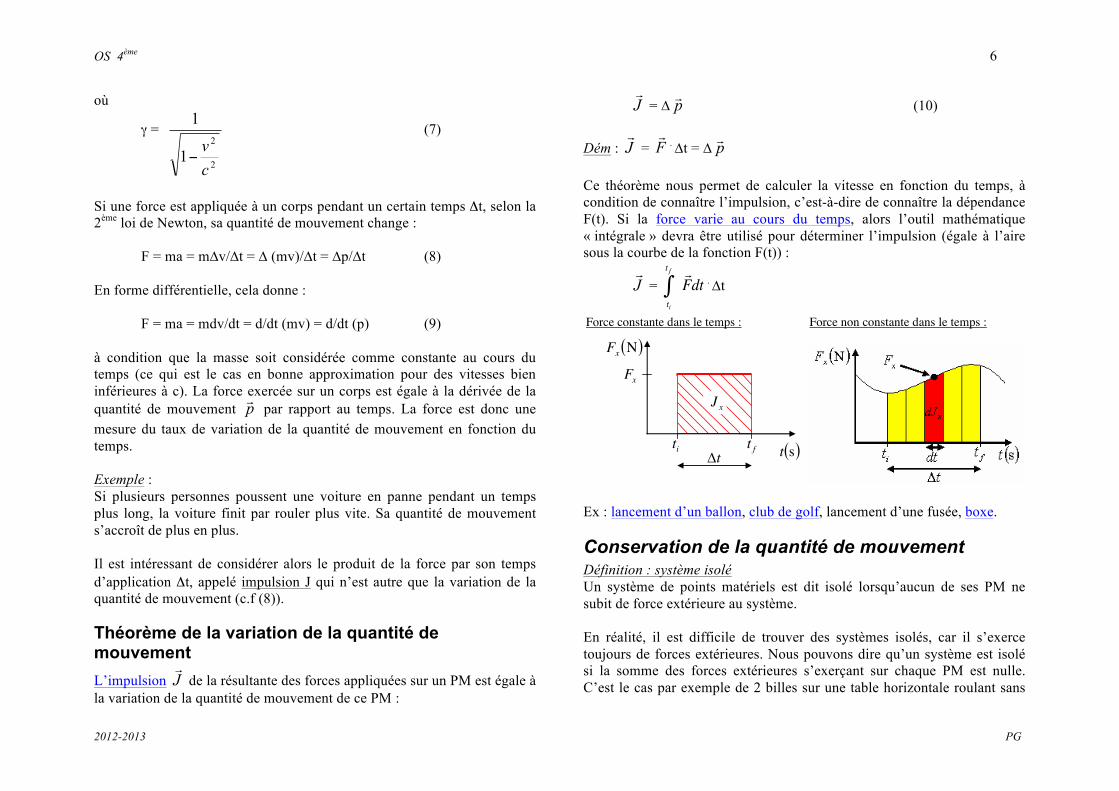
4) La force de gravitation satisfait à la 3ème loi de Newton. Sous forme vectorielle, elle s’écrit :
F12 = −G
m1m2
r122
r12
m1 12F
21F
m2
Ex : les marées lunaire et solaire, grande marée d’équinoxe,
Complément sur la force de gravitation (aspect énergétique) :
La quantité de mouvement Les physiciens de l’époque de Newton ont remarqué que « quelque chose » est toujours conservé lors des collisions. En 1644, Descartes émet l’hypothèse selon laquelle « Dieu est la première cause du mouvement, et qu’il en conserve toujours une égale quantité en l’univers ». D’après cette hypothèse, les changements de vitesse que subissent les objets lors d’une collision s’expliquent par un transfert de « quantité de mouvement » d’un objet à l’autre : la quantité de mouvement totale de l’Univers demeure toujours constante. Cette quantité, cntrairement à ce que prétendait Descartes, n’est pas un scalaire, comme l’énergie, mais un vecteur. Autrement dit, on doit tenir compte de son orientation pour formuler le principe de conservation qui lui est associé. Elle correspond tout simplement à la masse multipliée par le vecteur vitesse. Les physiciens anglais l’ont baptisée « momentum ». La grandeur cruciale à considérer est donc le produit de la vitesse par la quantité de matière autrement dit la masse : p = m v (5) p s’exprime en kg.m/s. Comme 1 N = 1 kg.m/s2, on peut également
exprimer la quantité de mouvement en N.s, c’est-à-dire une force multipliée par un temps, soit une impulsion (c.f page suivante). Il est à noter que 2 quantités de mouvement directement opposées s’annulent. Exemple : Si vous voyagez dans un train à la vitesse de 30 km/h vers l’est, et vous courez vers l’arrière avec une vitesse de 30 km/h vers l’ouest, vous pouvez sauter d’une porte ouverte à l’extrémité du train comme si vous tombiez de votre chaise. Votre vitesse horizontale par rapport au sol est nulle; votre quantité de mouvement est nulle aussi. La quantité de mouvement est une grandeur relative (au référentiel dans lequel se trouve l’observateur). Et que se passe-t-il à très grande vitesse ? La réponse est donnée par la théorie de la relativité restreinte : p = γ.m.v (6)
OS 4ème 6
2012-2013 PG
où
γ =
2
2
1
1
cv
−
(7)
Si une force est appliquée à un corps pendant un certain temps Δt, selon la 2ème loi de Newton, sa quantité de mouvement change : F = ma = m∆v/∆t = ∆ (mv)/∆t = ∆p/∆t (8) En forme différentielle, cela donne :
F = ma = mdv/dt = d/dt (mv) = d/dt (p) (9)
à condition que la masse soit considérée comme constante au cours du temps (ce qui est le cas en bonne approximation pour des vitesses bien inférieures à c). La force exercée sur un corps est égale à la dérivée de la quantité de mouvement p par rapport au temps. La force est donc une mesure du taux de variation de la quantité de mouvement en fonction du temps. Exemple : Si plusieurs personnes poussent une voiture en panne pendant un temps plus long, la voiture finit par rouler plus vite. Sa quantité de mouvement s’accroît de plus en plus. Il est intéressant de considérer alors le produit de la force par son temps d’application Δt, appelé impulsion J qui n’est autre que la variation de la quantité de mouvement (c.f (8)).
Théorème de la variation de la quantité de mouvement L’impulsion J
de la résultante des forces appliquées sur un PM est égale à
la variation de la quantité de mouvement de ce PM :
J
= ∆ p (10)
Dém : J
= F
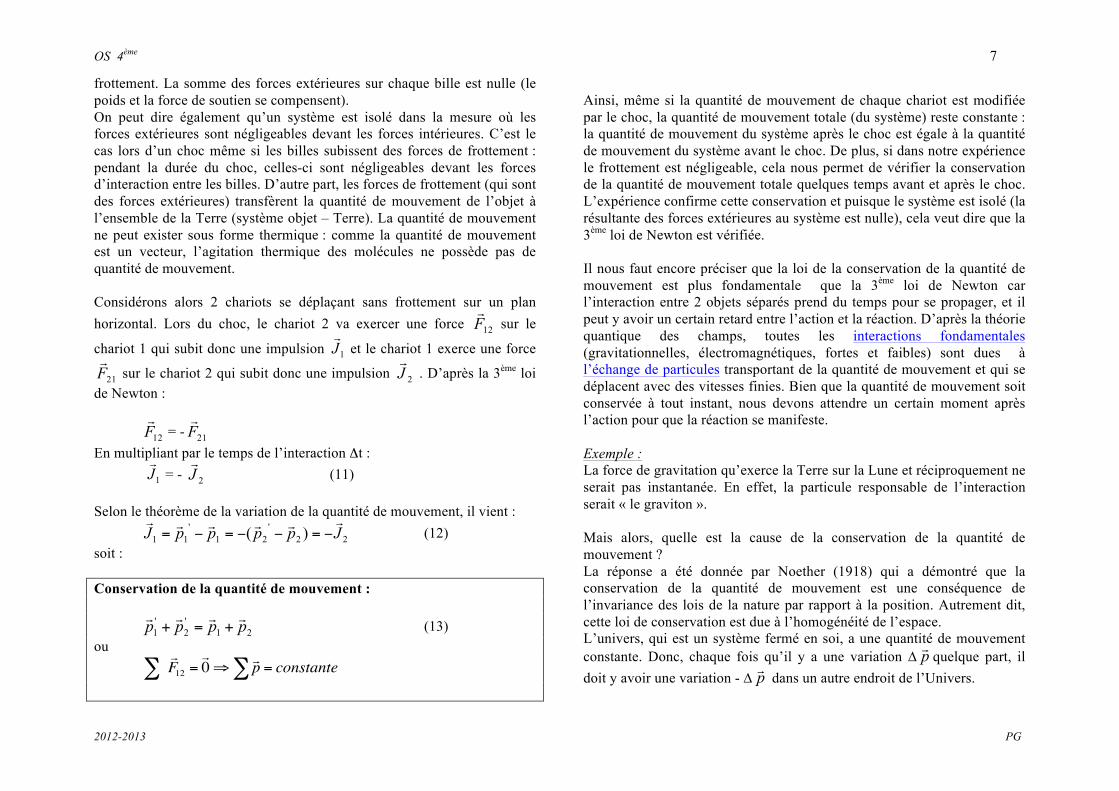
. ∆t = ∆ p Ce théorème nous permet de calculer la vitesse en fonction du temps, à condition de connaître l’impulsion, c’est-à-dire de connaître la dépendance F(t). Si la force varie au cours du temps, alors l’outil mathématique « intégrale » devra être utilisé pour déterminer l’impulsion (égale à l’aire sous la courbe de la fonction F(t)) :
J
= ti
t f
∫Fdt . ∆t
Ex : lancement d’un ballon, club de golf, lancement d’une fusée, boxe.
Conservation de la quantité de mouvement Définition : système isolé Un système de points matériels est dit isolé lorsqu’aucun de ses PM ne subit de force extérieure au système. En réalité, il est difficile de trouver des systèmes isolés, car il s’exerce toujours de forces extérieures. Nous pouvons dire qu’un système est isolé si la somme des forces extérieures s’exerçant sur chaque PM est nulle. C’est le cas par exemple de 2 billes sur une table horizontale roulant sans Référence : Marc Séguin, Physique XXI Volume A Page 2Note de cours rédigée par : Simon Vézina
Situation A : On pousse une boîte. Une boîte 2 kg ayant une vitesse initiale de 2 m/s selonl’axe x est poussée à l’aide d’une force de 5 N selon l’axe des x pendant 3 secondes. Ondésire déterminer la quantité de mouvement de la boîte après 3 secondes de poussée.
Quantité de mouvement initiale :
ii vmp ** � � �� �ipi** 22 � Ns4 ipi
**
Impulsion donnée à la boîte :tFJ '
**� � �� �35iJ
** � Ns15 iJ
**
La quantité de mouvement après 3 secondes :
extif Jpp*** � � � � � �iip f
*** 154 � � Ns19 ip f
**
L’impulsion d’une force non constante
Pour évaluer l’impulsion J*d’une force F
*, nous avons besoin d’évaluer l’aire sous la
courbe d’un graphique de force en fonction du temps t . Ce calcul peut s’effectuer grâce àl’intégrale d’une fonction � �tFx :
Force constante dans le temps : Force non constante dans le temps :
� �stit ftt'
xJxF
� �NxF
Équation : tFJ xx ' Équation : ³
f
i
t
ttxx dtFJ
Sous forme vectorielle, l’impulsion prend la forme suivante :
³
f
i
t
tt
dtFJ**
OS 4ème 7
2012-2013 PG
frottement. La somme des forces extérieures sur chaque bille est nulle (le poids et la force de soutien se compensent). On peut dire également qu’un système est isolé dans la mesure où les forces extérieures sont négligeables devant les forces intérieures. C’est le cas lors d’un choc même si les billes subissent des forces de frottement : pendant la durée du choc, celles-ci sont négligeables devant les forces d’interaction entre les billes. D’autre part, les forces de frottement (qui sont des forces extérieures) transfèrent la quantité de mouvement de l’objet à l’ensemble de la Terre (système objet – Terre). La quantité de mouvement ne peut exister sous forme thermique : comme la quantité de mouvement est un vecteur, l’agitation thermique des molécules ne possède pas de quantité de mouvement. Considérons alors 2 chariots se déplaçant sans frottement sur un plan horizontal. Lors du choc, le chariot 2 va exercer une force 12F
sur le
chariot 1 qui subit donc une impulsion 1J
et le chariot 1 exerce une force
21F
sur le chariot 2 qui subit donc une impulsion 2J
. D’après la 3ème loi de Newton : 12F
= - 21F
En multipliant par le temps de l’interaction Δt :
1J
= - 2J
(11) Selon le théorème de la variation de la quantité de mouvement, il vient : 22
'21
'11 )( JppppJ
−=−−=−= (12)
soit : Conservation de la quantité de mouvement :
21'2
'1 pppp
+=+ (13) ou ∑
F12 =
0⇒ p∑ = constante
Ainsi, même si la quantité de mouvement de chaque chariot est modifiée par le choc, la quantité de mouvement totale (du système) reste constante : la quantité de mouvement du système après le choc est égale à la quantité de mouvement du système avant le choc. De plus, si dans notre expérience le frottement est négligeable, cela nous permet de vérifier la conservation de la quantité de mouvement totale quelques temps avant et après le choc. L’expérience confirme cette conservation et puisque le système est isolé (la résultante des forces extérieures au système est nulle), cela veut dire que la 3ème loi de Newton est vérifiée. Il nous faut encore préciser que la loi de la conservation de la quantité de mouvement est plus fondamentale que la 3ème loi de Newton car l’interaction entre 2 objets séparés prend du temps pour se propager, et il peut y avoir un certain retard entre l’action et la réaction. D’après la théorie quantique des champs, toutes les interactions fondamentales (gravitationnelles, électromagnétiques, fortes et faibles) sont dues à l’échange de particules transportant de la quantité de mouvement et qui se déplacent avec des vitesses finies. Bien que la quantité de mouvement soit conservée à tout instant, nous devons attendre un certain moment après l’action pour que la réaction se manifeste. Exemple : La force de gravitation qu’exerce la Terre sur la Lune et réciproquement ne serait pas instantanée. En effet, la particule responsable de l’interaction serait « le graviton ». Mais alors, quelle est la cause de la conservation de la quantité de mouvement ? La réponse a été donnée par Noether (1918) qui a démontré que la conservation de la quantité de mouvement est une conséquence de l’invariance des lois de la nature par rapport à la position. Autrement dit, cette loi de conservation est due à l’homogénéité de l’espace. L’univers, qui est un système fermé en soi, a une quantité de mouvement constante. Donc, chaque fois qu’il y a une variation ∆ p quelque part, il doit y avoir une variation - ∆ p dans un autre endroit de l’Univers.
OS 4ème 8
2012-2013 PG
Collisions
Le terme collision désigne en général une interaction brève entre 2 corps pendant laquelle les forces internes (les forces que les corps exercent l’un sur l’autre) sont beaucoup plus intenses que les forces externes résultantes que l’environnement exerce sur les objets. La durée de l’interaction est suffisamment courte pour nous permettre de limiter notre étude à l’instant précédant immédiatement et à l’instant suivant immédiatement l’événement. Toutefois, la durée d’une collision peut durer 10-23 s pour des particules élémentaires alors qu’une collision entre 2 galaxies dure des millions d’années. Les collisions faisant intervenir des objets courants tels que des balles et des automobiles durent de 10-3s à 1s environ. Les collisions peuvent être élastiques, inélastiques ou parfaitement inélastiques : la quantité de mouvement se conserve dans les 3 cas. Exemple : 2 joueurs de hockey de 120 kg chacun foncent l’un vers l’autre sur une patinoire, chacun se déplaçant à 10 m/s. Ils entrent en collision et restent empêtrés l’un dans l’autre. En raison de la symétrie des masses et des vitesses initiales, les 2 joueurs restent immobiles. La durée de la collision (le temps entre le premier contact entre les joueurs et l’arrêt final) est de 0,2 s. On désire évaluer le module de la force moyenne qu’un joueur exerce sur l’autre pendant la collision.
Nous constatons dans l’exemple précédent que l’énergie cinétique a été perdue lors de la collision, car la vitesse finale des 2 joueurs est nulle. Cette énergie a été emportée sous la forme d’une onde sonore générée lors de la collision, tandis qu’une autre a été transformée en énergie thermique.
Collisions élastiques Soient 2 PM de masses m1 et m2 formant un système isolé et rentrant en collision. Définition : choc élastique Un choc est dit élastique lorsque l’énergie cinétique du système est conservée. On peut modéliser un choc élastique comme une collision entre 2 ressorts : ceux-ci se contractent puis restituent totalement l’énergie qu’ils avaient emmagasinée. Supposons maintenant que les masses m1 et m2 ainsi que les vitesses initiales 1v
et 2v
soient connues. Est-il possible de déterminer univoquement les vitesses finales ? Pour y répondre, il faut faire un bilan des équations à disposition et des inconnues du système. Si l’on travaille à 3 dimensions, le cas général, nous avons 2 fois 3 inconnues ( zyxzyx vvvvvv 222111 ,,,,, ʹ′ʹ′ʹ′ʹ′ʹ′ʹ′ ), soit 6 inconnues, qui sont les composantes des vecteurs des vitesses finales et les équations à disposition sont : 21
'2
'1 pppp
+=+ (14) (conservation de la quantité de mouvement)
222
211
222
2'11 2
121
21
21 vmvmvmvm +=ʹ′+ (15)
(conservation de l’énergie cinétique) On obtient 3 équations par la conservation de la quantité de mouvement (3 composantes) et 1 équation donnée par la conservation de l’énergie cinétique. Comme on a plus d’inconnues que d’équations, les vitesses finales ne sont pas univoquement déterminées. Un même raisonnement à 2
Référence : Marc Séguin, Physique XXI Volume A Page 6 Note de cours rédigée par : Simon Vézina
Force interne et force externe Une force interne est une force appliquée sur un objet d’un système qui est jumelée à une autre force appliquée sur un autre objet pour former une paire action-réaction. Des forces internes ne propulsent pas le système, car la somme des forces internes d’un système est toujours égale à zéro par la 3ième loi de Newton ( BAAB FF
vv!= ).
Une force externe est une force appliquée sur un objet d’un système dont la source de la force ne fait pas partie du système. Il n’y a donc pas d’association de paire action-réaction avec ces forces. Ce sont les forces externes qui sont responsable de la propulsion du système par la 2ième loi de Newton ( amF
vvsysext =∑ ).
Exemple : Le système de bloc A et B frotte contre le sol et est tiré par une corde.
A
B
cfv
gmv
B
nv
ABfv
BAfv
Tv
gmv
B
ABnv
BAnv
Forces internes de somme nulle :
0BAABBAAB =+++ nnffvvvv
Forces externes de somme nulle :
0BA =++ ngmgmvvv
Forces externes résiduelles :
( )ammTf BAc
vvv+=+
(supposant que les blocs A et B restent collés)
La conservation de la quantité de mouvement Lorsqu’un système de masses est parfaitement isolé de toutes formes de force externe ou que la somme des force externes est égale à zéro en tout temps, il y a conservation de la quantité de mouvement p
vdans
le temps pour l’ensemble du système :
0ext =∑Fv
" constante=∑ pv
⇒ ∑∑ = if ppvv
Une casse au billard est un bon exemple de conservation de la quantité de mouvement, car il n’y a que des forces
normales de contact en jeu (force internes) si l’on néglige le frottement de contact durant la collision (force externe).
où ∑ ipv
: Somme de la quantité de mouvement avant la collision ( m/skg # )
∑ fpv
: Somme de la quantité de mouvement après la collision ( m/skg # )

OS 4ème 9
2012-2013 PG
dimensions nous conduirait à un système à 3 équations à 4 inconnues, d’où une indétermination sur les vitesses finales. Cette indétermination tient au fait que les objets en collision sont approximés comme PM et qu’il faudrait tenir compte en fait de la localisation de l’impact sur les objets. Seul un choc élastique à une dimension (les PM se déplacent avant et après la collision sur la même droite) nous permet de déterminer les vitesses finales. Définition : collision centrale Une collision entre 2 corps est dite centrale si les corps se déplacent, avant et après la collision, sur une même droite. Si on connaît les masses et les vitesses initiales, alors on peut connaître, dans un choc central et élastique, les vitesses finales (2 équations à 2 inconnues). Définition : vitesse relative La vitesse relative d’un objet 2 relativement à un objet 1 est la vitesse de l’objet 2 dans le référentiel lié à l’objet 1. Dans un référentiel lié au sol, un objet 1 a une vitesse 1v
et un objet 2 a
une vitesse 2v
. La vitesse de 2 relativement à 1 est : 12 vvvr
−= (16)
1v
2v
rv
Théorème : Lors d’un choc élastique, la norme de la vitesse relative est conservée 121
'2 vvvv
−=ʹ′− (17)
Développement : Corollaire 1 Lors d’un choc central et élastique, la vitesse relative change de signe. ( ) ( )12
'1
'2 vvvv
−−=− (18) Ce corollaire facilite l’étude d’un choc central. Pour le calcul des vitesses finales, il est commode d’utiliser la conservation de la quantité de mouvement et le changement de signe de la vitesse relative, 2 équations linéaires (degré 1) par rapport aux vitesses. Cela évite de passer par l’énergie cinétique qui est une forme quadratique (degré 2) de la vitesse. Corollaire 2 Lors d’un choc élastique avec 2 objets de même masse, le produit scalaire des vitesses reste conservé. 12
'1
'2 vvvv
•=• (19)
OS 4ème 10
2012-2013 PG
Développement : Il existe un cas particulier intéressant à discuter : celui où le produit scalaire des vitesses initiales est nul. Cela est réalisé lorsque :
a) Les vitesses initiales sont perpendiculaires b) Une des vitesses initiales est nulle
Il s’en suit que les vitesses finales sont soit perpendiculaires, soit une des vitesses finales est nulle. Dans le cas du choc frontal où l’une des 2 masses est au repos, il y a échange des vitesses: l’objet 1 qui arrive, s’arrête et l’objet 2 initialement au repos, part avec la vitesse initiale de l’objet 2. Remarque : Soit un objet de masse m1 entrant en collision avec un objet de masse m2 au repos, avec m2>>m1. Dans ce cas, l’énergie cinétique du premier objet de masse m1 est pratiquement conservée. Exemple : Soit un objet de masse m et de vitesse 1v
entrant en collision avec un objet
au repos de masse 2m. Calculer les vitesses finales en supposant le choc central et élastique.
Collisions inélastiques Une collision inélastique s’accompagne d’une perte cinétique sous forme de chaleur ou de déformation permanente. Dans ce cas, l’énergie cinétique totale des objets varie. Une partie de l’énergie cinétique peut servir à faire passer le système (par exemple, un atome) à un niveau d’énergie plus élevé, ou bien être convertie en énergie thermique de vibration des atomes
et des molécules ou en énergie lumineuse, sonore, etc…(L’énergie totale, qui comprend toutes les formes d’énergie, est toujours conservée). Par exemple, la collision entre 2 boules en bois est accompagnée d’un bruit : une partie de l’énergie est transformée en énergie sonore, et la collision et donc inélastique.
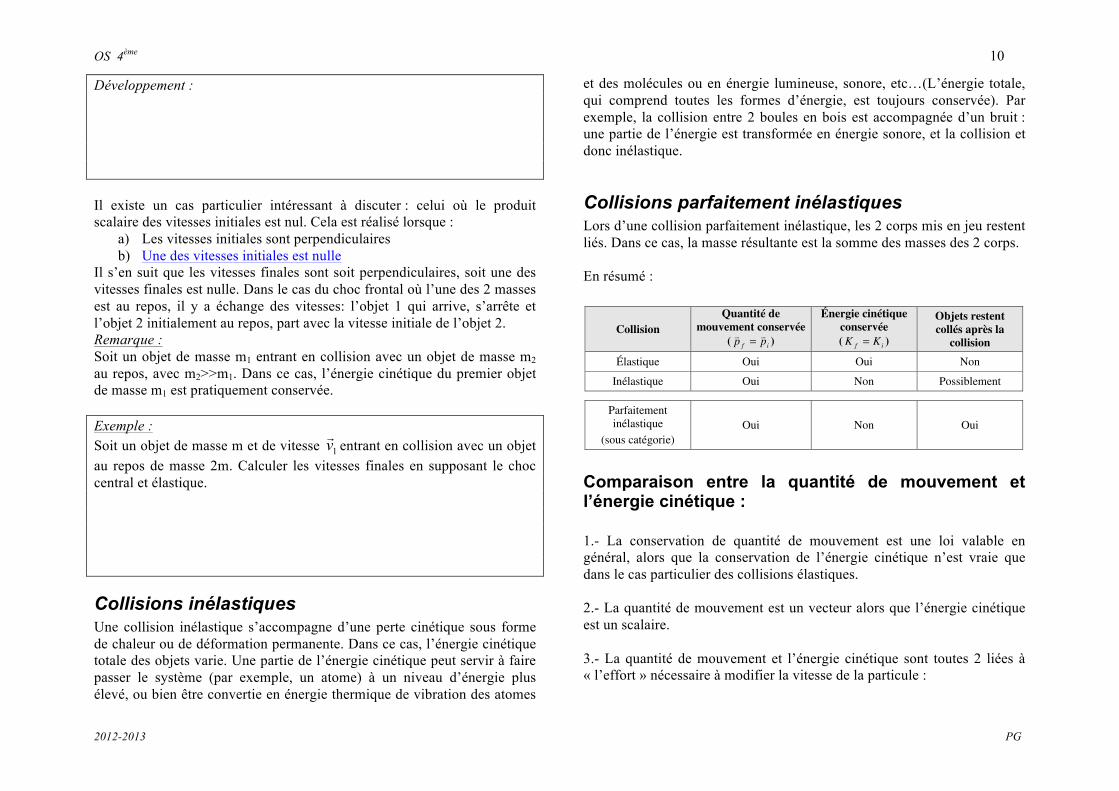
Collisions parfaitement inélastiques Lors d’une collision parfaitement inélastique, les 2 corps mis en jeu restent liés. Dans ce cas, la masse résultante est la somme des masses des 2 corps. En résumé :
Comparaison entre la quantité de mouvement et l’énergie cinétique : 1.- La conservation de quantité de mouvement est une loi valable en général, alors que la conservation de l’énergie cinétique n’est vraie que dans le cas particulier des collisions élastiques. 2.- La quantité de mouvement est un vecteur alors que l’énergie cinétique est un scalaire. 3.- La quantité de mouvement et l’énergie cinétique sont toutes 2 liées à « l’effort » nécessaire à modifier la vitesse de la particule :
Référence : Marc Séguin, Physique XXI Volume A Page 7 Note de cours rédigée par : Simon Vézina
Preuve :
Considérons un système à deux corps A et B. Appliquons la 2ième loi de Newton dans la condition où la somme des forces externes est égale à zéro afin de démonter la conservation de la quantité de mouvement dans une telle situation :
t
pF
dd A
A
vv=∑ et
t
pF
dd B
B
vv=∑ (2ième loi de Newton sur A et B)
⇒ t
p
t
pFF
dd
dd BA
BA
vvvv+=+∑∑ (Créer le système en add. nos deux éq.)
⇒ ( ) ( )t
p
t
pFFFF
dd
dd BA
ABextBBAextA
vvvvvv+=+++ (Remplacer intext FFF
vvv+=∑ )
⇒ t
p
t
pFF
dd
dd BA
ABBA
vvvv+=+ (Supposer 0extA =F
v et 0extB =F
v)
⇒ t
p
t
p
dd
dd
0 BAvv
+= (3ième loi Newton : BAAB FFvv
!= )
⇒ 0dd BA =+ ppvv
(Indépendante du temps, simplifier dt)
⇒ 0BA ="+" ppvv
(Différentielle relaxée, "#d )
⇒ ( ) ( ) 0AABB =!+! ifif ppppvvvv
( if pppvvv
!=" )
⇒ iiff pppp BAABvvvv
+=+ (Séparer terme initial et final)
⇒ ∑∑ =B,AB,A
if ppvv
■ (Remplacer par une sommation)
Collision élastiques, inélastiques et parfaitement inélastiques Puisque la conservation de la quantité de mouvement est toujours applicable dans tous les problèmes de collision, nous pouvons distinguer deux grandes familles de collision :
Collision Quantité de
mouvement conservée ( if pp
vv= )
Énergie cinétique conservée ( if KK = )
Objets restent collés après la
collision
Élastique Oui Oui Non
Inélastique Oui Non Possiblement
Parfaitement inélastique
(sous catégorie) Oui Non Oui
N.B. Lors d’une collision inélastique, l’énergie cinétique initiale n’est pas perdue mais
prend une forme autre qu’en mouvement (ex : chaleur, déformation permanente d’un objet, bruit, émission de lumière).
OS 4ème 11
2012-2013 PG
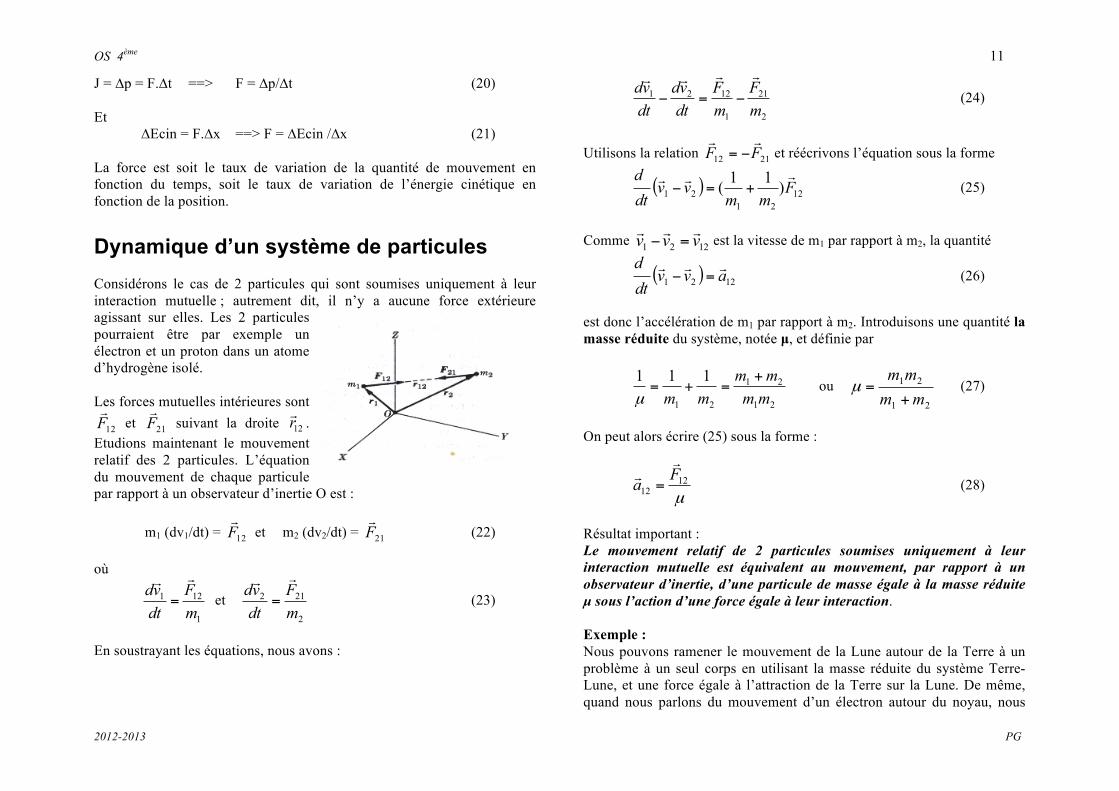
J = ∆p = F.∆t ==> F = ∆p/∆t (20) Et ∆Ecin = F.∆x ==> F = ∆Ecin /∆x (21) La force est soit le taux de variation de la quantité de mouvement en fonction du temps, soit le taux de variation de l’énergie cinétique en fonction de la position. Dynamique d’un système de particules Considérons le cas de 2 particules qui sont soumises uniquement à leur interaction mutuelle ; autrement dit, il n’y a aucune force extérieure agissant sur elles. Les 2 particules pourraient être par exemple un électron et un proton dans un atome d’hydrogène isolé. Les forces mutuelles intérieures sont
12F
et 21F
suivant la droite 12r
. Etudions maintenant le mouvement relatif des 2 particules. L’équation du mouvement de chaque particule par rapport à un observateur d’inertie O est :
m1 (dv1/dt) = 12F
et m2 (dv2/dt) = 21F
(22) où
1
121
mF
dtvd
= et
2
212
mF
dtvd
= (23)
En soustrayant les équations, nous avons :
2
21
1
1221
mF
mF
dtvd
dtvd
−=− (24)
Utilisons la relation 2112 FF
−= et réécrivons l’équation sous la forme
( ) 1221
21 )11( Fmm
vvdtd
+=− (25)
Comme 1221 vvv
=− est la vitesse de m1 par rapport à m2, la quantité
( ) 1221 avvdtd
=− (26)
est donc l’accélération de m1 par rapport à m2. Introduisons une quantité la masse réduite du système, notée µ, et définie par
21
21
21
111mmmm
mm+
=+=µ
ou 21
21
mmmm+
=µ (27)
On peut alors écrire (25) sous la forme :
µ12
12Fa
= (28)
Résultat important : Le mouvement relatif de 2 particules soumises uniquement à leur interaction mutuelle est équivalent au mouvement, par rapport à un observateur d’inertie, d’une particule de masse égale à la masse réduite µ sous l’action d’une force égale à leur interaction. Exemple : Nous pouvons ramener le mouvement de la Lune autour de la Terre à un problème à un seul corps en utilisant la masse réduite du système Terre-Lune, et une force égale à l’attraction de la Terre sur la Lune. De même, quand nous parlons du mouvement d’un électron autour du noyau, nous
OS 4ème 12
2012-2013 PG
pouvons supposer le système réduit à une particule de masse égale à la masse réduite de l’ensemble électron – noyau et se déplaçant sous l’action de la force entre l’électron et le noyau. Donc, en décrivant le mouvement de 2 particules sous l’influence de leur interaction mutuelle, nous pouvons décomposer le mouvement du système en mouvement du centre de gravité, dont la vitesse est constante, et en mouvement relatif des 2 particules, donné par l’équation (28) qui se rapporte à un référentiel lié au centre de gravité. Remarquons que si l’une des particules, disons m1, a une masse beaucoup plus petite que l’autre, la masse réduite est à peu près égale à la masse de la particule la plus légère. Par exemple, quand nous étudions le mouvement d’un satellite artificiel autour de la Terre, nous pouvons utiliser, avec une bonne approximation, la masse du satellite et non la masse réduite du système Terre-satellite. Par ailleurs, si les 2 particules ont la même masse, nous avons alors µ = ½ m1.
Série d’exercices 1.- 2 hommes se tiennent debout sur la glace. Le plus grand des deux est un géant et pèse 300 kg tandis que le plus petit pèse seulement 100 kg. Le plus petit tend le bras vers le plus grand et le pousse de toutes ses forces, soit une force totale de 100 N. Quel sera le résultat de ce geste ? Lequel des deux va glisser sur la glace, et avec quelle accélération ? 2.- Un bloc de 2 kg se déplace initialement à 4 m/s sur une surface horizontale rugueuse : il possède 16 J d’énergie cinétique et 8 kg . m/s de quantité de mouvement. En raison du frottement, il ralentit et s’arrête. Où sont passées : a) son énergie cinétique b) sa quantité de mouvement ? 3.- Au moment où elle entre en contact avec une raquette, une balle de tennis de 58 g se déplace horizontalement vers la gauche à 15 m/s. Lorsqu’elle cesse d’être en contact avec la raquette, 0,05 s plus tard, elle possède une vitesse de 25 m/s orientée vers la droite, à 20° au dessus de l’horizontale. Déterminez : a) l’impulsion (module et oritentation) que subit la balle b) la force résultante moyenne (module et orientation) qui agit sur la balle pendant son interaction avec la raquette.
4.- Certaines sondes spatiales possèdent des moteurs ioniques qui fonctionnent en ionisant des atomes de xénon (ceux utilisés également dans les phares des voitures), en les accélérant à l’aide d’un champ électrique et en les expulsant à grande vitesse. Ces moteurs produisent des forces relativement faibles, mais sont si économes en carburant qu’ils peuvent fonctionner pendant des dizaines de jours, ce qui permet d’atteindre des vitesses finales jusqu’à 10 fois plus élevées que celles qui résultent de moteurs chimiques à combustion. Un moteur ionique expulse 1020 atomes de xénon par seconde à 25 km/s. Sachant que la masse d’un atome de xénon est de 2,19 .10-25 kg et que le réservoir de la sonde contient 50 kg de xénon, calculez : a) la force de poussée générée par le moteur (en supposant que la vitesse de la sonde est négligeable comparativement à la vitesse d’expulsion des ions), et b) le temps requis pour épuiser les réserves de carburant 5.- Une boule de billard qui se déplace à 1,5 m/s vers la droite subit une collision élastique frontale avec une boule immobile de masse identique. On désire déterminer les vitesses des boules immédiatement après la collision. 6.- Un wagon descend sans frottement le long d’un plan incliné d’angle α par rapport à l’horizontale. Dans ce mobile se trouve un bac d’eau et un pendule de longueur L. a.- Calculer l’angle par rapport au plafond que fait le pendule dans sa position d’équilibre. b.- Déterminer l’inclinaison du plan d’eau par rapport au plancher du mobile et la période du pendule. 7.- Un pendule suspendu au toit d’un camion fait un angle de 8° avec la verticale. Quel est le module de l’accélération du camion ? 8.- Une automobile prend un virage plat de rayon 40 m à une vitesse de module constant. Le niveau de l’eau dans un verre vertical de diamètre 3 cm s’élève de 0,5 cm d’un côté par rapport à l’horizontale. Quel est le module de la vitesse de l’automobile ?
OS 4ème 13
2012-2013 PG
9.- Une balle de 150 g est lancée à 30 m/s. Elle frappe un bâton qui lui donne une vitesse de module 40 m/s dans le sens opposé. Si la durée de contact est égale à 10-2 s, quelle est la force moyenne agissant sur la balle ? 10.- Une limousine Cadillac de masse 2000 kg roulant vers l’est à 10 m/s entre en collision avec une Honda de masse 1000 kg roulant vers l’ouest à 26 m/s. La collision est parfaitement inélastique. a) Trouver la vitesse v commune des véhicules immédiatement après la collision b) Quelle est la fraction d’énergie cinétique perdue pendant la collision ? 11.- Une carabine Winchester Super X de masse 3,24 kg, initialement au repos, tire une balle de 11,7 g dont la vitesse a un module de 800 m/s. a) Quelle est la vitesse de recul de la carabine ? b) Quel est le rapport des énergies cinétiques de la balle et de la carabine ? 12.- Un proton se déplaçant à la vitesse 1v
= 5 km/s subit une collision élastique
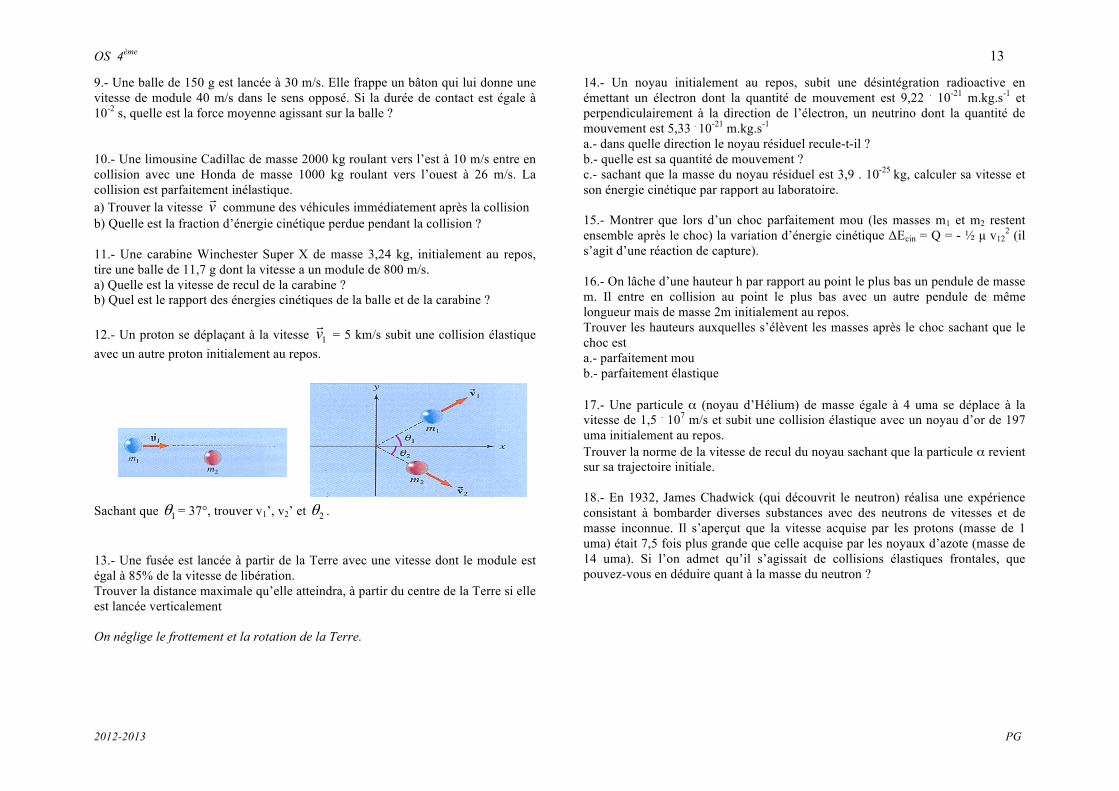
avec un autre proton initialement au repos. Sachant que 1θ = 37°, trouver v1’, v2’ et 2θ . 13.- Une fusée est lancée à partir de la Terre avec une vitesse dont le module est égal à 85% de la vitesse de libération. Trouver la distance maximale qu’elle atteindra, à partir du centre de la Terre si elle est lancée verticalement On néglige le frottement et la rotation de la Terre.
14.- Un noyau initialement au repos, subit une désintégration radioactive en émettant un électron dont la quantité de mouvement est 9,22 . 10-21 m.kg.s-1 et perpendiculairement à la direction de l’électron, un neutrino dont la quantité de mouvement est 5,33 . 10-21 m.kg.s-1
a.- dans quelle direction le noyau résiduel recule-t-il ? b.- quelle est sa quantité de mouvement ? c.- sachant que la masse du noyau résiduel est 3,9 . 10-25 kg, calculer sa vitesse et son énergie cinétique par rapport au laboratoire. 15.- Montrer que lors d’un choc parfaitement mou (les masses m1 et m2 restent ensemble après le choc) la variation d’énergie cinétique ΔEcin = Q = - ½ µ v12
2 (il s’agit d’une réaction de capture). 16.- On lâche d’une hauteur h par rapport au point le plus bas un pendule de masse m. Il entre en collision au point le plus bas avec un autre pendule de même longueur mais de masse 2m initialement au repos. Trouver les hauteurs auxquelles s’élèvent les masses après le choc sachant que le choc est a.- parfaitement mou b.- parfaitement élastique 17.- Une particule α (noyau d’Hélium) de masse égale à 4 uma se déplace à la vitesse de 1,5 . 107 m/s et subit une collision élastique avec un noyau d’or de 197 uma initialement au repos. Trouver la norme de la vitesse de recul du noyau sachant que la particule α revient sur sa trajectoire initiale. 18.- En 1932, James Chadwick (qui découvrit le neutron) réalisa une expérience consistant à bombarder diverses substances avec des neutrons de vitesses et de masse inconnue. Il s’aperçut que la vitesse acquise par les protons (masse de 1 uma) était 7,5 fois plus grande que celle acquise par les noyaux d’azote (masse de 14 uma). Si l’on admet qu’il s’agissait de collisions élastiques frontales, que pouvez-vous en déduire quant à la masse du neutron ?