É COLE CENTRALE DE BUCAREST Module denseignement interdisciplinaire 2010 - 2011.
Click here to load reader
Upload
nguyentuongCategory
view
213download
1
Rev. Roum. Sci. Techn.– Électrotechn. et Énerg. Vol. 61, 2, pp. 126–130, Bucarest, 2016
Laboratoire de recherche en électrotechnique et en automatique, Université Farès Yahia, Pole urbain Ain d’hab-Medea, Algeria, e-mail: [email protected]
NOUVEL ALGORITHME D’OBSERVATION À MODE GLISSANT D’ORDRE SUPÉRIEUR APPLIQUÉ AU CONVERTISSEUR
MULTICELLULAIRE SÉRIE SKENDER MOHAMED REDHA, TLEMÇANI ABDELHALIM
Mots-clés: Convertisseur multicellulaire série, Observateur, Mode glissant, Super twisting, Hacheur.
L’estimation d’état des systèmes dynamiques non linéaires est une étape indispensable pour la synthèse des lois de commande, dans ce papier notre travail s’est focalisée sur l’observation d’état d’un convertisseur multicellulaire série, on utilisant le principe des observateurs à mode glissant d’ordre supérieur (super twisting), afin de contraindre les dynamiques de système à convergé vers une surface dite de glissement.
1. INTRODUCTION Il est parfois très nécessaire de mesurer quelques
grandeurs du système [1], pour des raisons que ce soit économique ou techniques, Cependant ces grandeurs peuvent être le noyau de l’information pour l’utilisation à la commande ou la surveillance.
Les systèmes de surveillance telle que les capteurs de tension et leurs chaînes de traitement sont d’une grande complexité à mettre en œuvre sur les systèmes haute puissance. En effet, pour avoir de l’information toute une chaîne doit être utilisée. Cette chaîne d’acquisition de données et de mesure ne pose pas seulement les problèmes de coût, mais aussi d’encombrement et de fiabilité.
Il est habituellement difficile d’observer les tensions flottantes des condensateurs, principalement en raison de l’issue d’isolation provoquée par les niveaux de tension et de puissance. Pour un hacheur multicellulaire monophasé de dimension p, il faut envisager p – 1 capteurs de tensions flottantes et un capteur de courant, et le problème se complique lorsque le convertisseur est un onduleur triphasé. Dans ce cas, le nombre de capteurs de tension flottante est de 3(p – 1) [2, 3].
La reconstruction de l’évolution de ces variables est alors nécessaire en absence des capteurs. Il faut penser à utiliser un capteur indirect représenté par les observateurs [4].Un observateur de tensions flottantes permet de s’affranchir des capteurs, et réduire ainsi le coût et l’encombrement de l’installation.
Un observateur, ou estimateur d’état, ou encore capteur logiciel est un algorithme basé sur la connaissance des modèles décrivant le comportement du système et utilisant des mesures acquises sur le procédé afin de reconstruire les mesures manquantes [5]. Avant toute synthèse d’obser-vateur, on doit se demander si sa conception est possible pour les convertisseurs multicellulaires avec certaines propriétés et conditions nécessaires.
Dans cet article, nous proposons un observateur par mode glissant d’ordre deux (super twisting) pour un convertisseur à quatre niveaux.
2. OBSERVATEURS Á MODE GLISSANTS
2.1. PRINCIPES DE FONCTIONNEMENT DE L’OBSERVATEUR
Les observateurs à mode glissant consiste à contraindre, à l’aide de fonctions discontinues, les dynamiques d’un système d’ordre n a converger vers une variété de dimension n – p dite surface de glissement [3, 6]. Les dynamiques concernées sont celles des erreurs d’observation
xxx ˆ~ −= , à partir de leurs valeurs initiales )0(~x , ces
erreurs convergentes vers les valeurs d’équilibre en deux phases [4, 7].
Dans une première phase, les trajectoires de ces erreurs sont forcées à aller vers la surface de glissement où l’erreur entre la sortie de l’observateur et la sortie du système réel
yyy ˆ~ −= est nulle. Cette étape est référée comme le mode atteint (ou reaching mode) et il est fortement dynamique.
La seconde phase appelée un mode de glissement (ou sliding mode) où la trajectoire des erreurs d’observation glisse sur la surface de glissement définie par 0~ =y avec une dynamique imposée afin d’annuler le reste de l’erreur.
2.2. OBSERVATEUR SUPER TWISTING
L’intérêt d’utilisation des observateurs à modes glissants et particulièrement ceux d’ordre deux (super twisting algorithm) est de restituer le plus fidèlement possible, les tensions aux bornes des capacités flottantes par la simple mesure du courant, l’autre intérêt sur la convergence en temps fini de l’erreur d’observation.
2.3. ÉTAPES DE DIMENSIONNEMENT DE L’OBSERVATEUR
La synthèse d’un observateur à mode glissant passe par différentes étapes connues et clairement identifiées par J.-J.E. Slotine, J.K. Hedrick et E.A. Misawa [8]. Ces dernières sont rappelées ci-dessous.
Considérons un système d’état non linéaire affine d’ordre n:
⎩⎨⎧
==
)(),(
xhyuxfx
, (1)
où x ∈Rn est le vecteur d’état et y ∈Rp est le vecteur de sortie mesuré du système et u est le vecteur de commande. L’observateur à mode glissant d’un tel système est défini avec la structure suivante :
s),ˆ(ˆ ΛΓ−= uxfx , (2)
où – x ∈Rn représente l’estimée du vecteur d’état x – u est le vecteur de commande – ),ˆ( uxf est l’estimée de la fonction ),( uxf à l’aide des , 1,...,ˆ j j nx = – Λ est une matrice pn× contenant les gains correctifs de l’observateur – Γs est le vecteur de dimension 1×p défini tel que

2 Observateurs à mode glissants d’un convertisseur multicellulaire
127
Tp21s )]~(sign),...,~(sign),~(sign[ yyy=Γ avec
ˆi i iy y y= − et i = 1,…, p. Soit yyy −= ˆ~ le vecteur relatif aux erreurs
d’observation de la sortie et xxx −= ˆ~ celui du vecteur d’état.
La surface de glissement est définie alors par 0ˆ~ =−== yyys .
Nous pouvons à présent déduire la dynamique des erreurs d’observation :
sˆ~ ΛΓ−Δ=−= fxxx , (3)
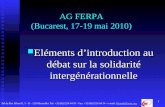
avec ),(),ˆ( uxfuxff −=Δ . Figure1 présente le schéma fonctionnel de l’observateur à
mode glissant. La surface de glissement, permettant la synthèse d’un
observateur à mode glissant, doit satisfaire la condition d’attractivité 0s s⋅ < et la condition d’invariance 0)( =xs et 0) =s(x .
La condition d’attractivité est assurée si la fonction de Lyapunov sssV T2/1)( = , vérifie 0)( <sV , quand 0≠s et la condition d’invariance est satisfaite à l’aide des termes correctifs Λ de l’équation (15).
Fig. 1 – Schéma fonctionnel de l’observateur à mode glissant.
3. APPLICATION À UN HACHEUR À TROIS CELLULES
3.1. STRUCTURE DE CONVERTISSEUR
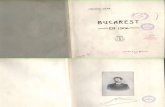
Cette section décrit la conception de l’observateur par mode glissant d’ordre deux, pour un convertisseur à quatre niveaux alimentant une charge RL fig.2.
Le modèle [9] d’état instantané d’un hacheur à trois cellules est exprimé comme suit :
⎪⎪⎩
⎪⎪⎨
⎧
==−−−−==
====
3
3221113033
32222
31111
)()δδ(),(
δ),(δ),(
xxhyEuxxbxbuxfx
xauxfxxauxfx
. (4)
T321
T321 ),,(),,( ccc VVVxxx = est le vecteur d’état tel que:
x∈R3, )(xhy = est le vecteur de mesure y ∈R et ),,( 321 uuu sont les commandes des interrupteurs;
1 2 1 2 1 3 21 , , ,0
Ra a b u u u uC L 2= = = δ = − δ = − .
Fig. 2 – Hacheur a trois cellules avec la charge RL.
Figure 3 montre le schéma bloc de la commande par mode glissant avec observateur des tensions flottantes par mode glissement d’ordre deux basé sur l’algorithme super twisting.
Fig. 3 – Schéma de commande avec observateur des tensions flottantes par mode glissant d’ordre deux.
3.2. CONDITIONS D’OBSERVABILITÉ
Hermann et Krener [10] ont discuté l’utilisation des dérivés de Lie pour développer les conditions locales. La matrice d’observabilité du système est donnée par :
)])(),(),(([d/d 3210 xhxhxhxQ = , (5)
où: )()(1 xhxh = et )(1 xhi+ est la iérne dérivées de Lie de la fonction le long de la trajectoire de s
),(d/)(d)(L)( 1f1 uxxfxhxhxh ii =+ . (6)
Le calcul des trois premiers termes de la matrice montre que la dernière rangée est une combinaison linéaire des lignes précédentes. Ceci implique que, pour un contrôle donné, le rang de la matrice d’observabilité est inférieur ou égal à 2(≠3) et le système est alors non observable.
En utilisant les changements des variables suivantes ),δδ()ε,ε( 3221121 xxx += [1] et pour chaque combinaison
de la commande des interrupteurs, le modèle d’état du système peut être réduit au modèle suivant
⎪⎩
⎪⎨⎧
+−−=+=
Eubbbaa
3111202
2222
2111
εεεε)δδ(ε .
(7)
aUne fois la stratégie de contrôle du convertisseur donné,
aε1 dépend à tout instant de ),( 21 xx , à l’exception de )0,0()δ,δ( 21 = . Cependant, après plusieurs séquences

Skender Mohamed Redha, Tlemçani Abdelhalim 3 128
des opérations du convertisseur, 1x et 2x sont observables indépendamment l’un de l’autre. En effet, ce phénomène est expliqué dans [11].
La convergence de 1ε , aussi garantie celle de
1 2et .x x1/C, b0= u3-u2 sont des coefficients
(0,0))δ,(δ 21 ≠ , 1ε est maintenant observable grâce au courant mesuré )ε( 2 chI= .
Delà, le rang de la nouvelle matrice d’observabilité:
⎟⎟⎠
⎞⎜⎜⎝
⎛−−
=01
010bb
Q est égale à 2.
L’observation par mode glissant du convertisseur est définie par l’équation suivante :
.
)~δ~δ(~ˆ~
),ˆ(ˆˆˆδ),ˆ(ˆ
ˆˆδ),ˆ(ˆ
332211130333
2322222
1311111
⎪⎪⎩
⎪⎪⎨
⎧
−−−−−=−=
−=−=
−=−=
ee
ee
ee
zEuxxbxbzuxfx
zxazuxfx
zxazuxfx(8)
ez1 , ez2 et ez3 sont les facteurs de correction basés sur l’algorithme super twisting (Fig. 3). Ils sont donnés par les formules :
⎪⎪⎩
⎪⎪⎨
⎧
Λ=
Λ=Λ=
)(sign
)(sign)(sign
2/133
22
11
ssz
szsz
e
e
e
,
(9)
où : – x∈R3 est le vecteur estimé de l’état x; – LbLRbCaa ˆ1/,ˆ/ˆ,1/ˆˆ 1021 ==== où : C,L,R ˆˆˆ – les valeurs estimées des circuits passifs; – ),ˆ( uxf est l’estimé du modèle ),( uxf en fonction de 3,2,1,ˆ =jjx ; – Λ est la matrice de gain (3×1) spécifiée grâce au critère qui sera donné par la suite; – sign(s) est un vecteur d’ordre 111 ×=×p puisque
ch3 Ix = est l’unique état mesuré; – s est la surface de glissement définit comme suit:
333~ˆ xxxs =−= .
La dynamique des erreurs d’observation x~ est alors définie comme suit:
1 1 1 3 1 1 3 1 3
2 2 2 3 2 2 3 2 31/2
3 3 3 3 31/2
0 3 1 1 1 2 2 3 3 3 3
sign( ) δ sign( )sign( ) δ sign( )
.sign( )
- (δ δ ) sign( )
x f x a x xx f x a x xx f x x
b x b x x u E x x
⎧ =Δ −Λ = −Λ⎪ =Δ −Λ = −Λ⎪⎨ =Δ −Λ =⎪⎪ =− + − −Λ⎩
(10)
L’objectif du gain Λ3 est d’assurer l’attractivité de la surface de glissement. Quant à Λ1 et Λ2 ils ont l’objectif d’imposer les dynamiques des erreurs d’observation sur la surface de glissement.
3.3. LES CONDITIONS DE GLISSEMENT
Soit la fonction de Lyapunov définie positive [12] : 23
2 ~2/12/12/1)( xsssxV T === . (11)
Sa dérivée par rapport au temps est :
))~(sign3(~~.~.)( 31/2
3333 xsfxxxsssV Λ−Δ=== . (12)
Selon la méthode directe de Lyapunov, la surface de glissement s est attractive si sa dérivée est semi définie négative 0)( <sV .
1/2 1/ 23 3 3( ) 0 ( 3 sign( )) 0 tqV s x f s x s< ⇒ Δ −Λ <
(13)
1/23 3 3
1/23 3 3
si 0( ) 0 .
si 0
s f xV s
s f x
⎧Λ > −Δ >⎪⇒ ⎨Λ < −Δ <⎪⎩
≺
Ce qui implique que 3~x∀ il suffit que max33 fΛ>Λ
pour que 0)( <sV On trouve la condition suffisante :
min1max21max11max301/2
3~~~ Ebxbxbxbs +++>Λ . (14)
Les gains de l’observateur prennent la forme :
⎪⎩
⎪⎨⎧
Λ−=Λ
Λ−=Λ
1232
1131
ˆτ/δ
ˆτ/δ
b
b. (15)
Les gains Λ1 et Λ2 sont fixés pour forcer la dynamique de l’erreur du mode de glissement. La dynamique théorique de la tension du condensateur flottant dépend du maximum du courant de charge et de la valeur du condensateur flottant :
CItVC /d/d maxch= . (16)
τ est un paramètre primordial qui doit être précisément ajusté, car il fixe la dynamique de l’observateur durant le mode de glissement.
En prenant en considération (15), la constante de temps τ doit être à:
31
τd / dCb V tΛ
= (17)
3.4. RÉSULTATS DE SIMULATION
Les paramètres du convertisseur sont : E = 1500V, C1 = C2=50μF, L = 0.5mH , R = 10Ω,
Iref = 80A. La valeur du gain d’observateur est directement calculée
d’après (14) Λ3=3,5.106A/s, et il est suffisant pour garantir l’attractivité de la surface de glissement : 0~
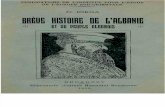
3 == xs . Figures 4 et 6 présentent les tensions observées et les
tensions mesurées aux bornes des condensateurs, les conditions initiales de l’observateur sont nulles. En dehors du régime transitoire les tensions estimées sont très proches aux tensions mesurées.
Nous allons présenter un zoom sur une partie de la Fig. 5 et Fig. 7, pour mieux voir les résultats obtenus.
Le résultat des gains d’observateur Λ1 et Λ2 sont égales d’après (15) à : Λ1,2=–2.106.δ V/s

4 Observateurs à mode glissants d’un convertisseur multicellulaire
129
4. CONCLUSION
Par la technique d’observateur à mode glissant d’ordre supérieur (super twisting) et d’après les résultats obtenus, entre les tensions observées et les tensions mesurées aux borne des condensateurs, et en dehors du régime transi-toire, les tensions estimées sont très proches aux tensions mesurées qui nous indique une bonne estimation d’état de convertisseurs multicellulaires série.
Reçu le 22 Octobre 2015
RÉFÉRENCES
1. K. Benmansour, A. Benalia, M. Djemai, J. Leon, Hybrid control of a multicellular converter, Nonlinear analysis: Hybrid systems, 1, 1, pp. 16–29, 2007.
2. G. Gateau, T.A. Meynard, H. Foch, Stacked Multicell Converter (SMC): Topology and Control, EPE (2001), Graz, Austria.
3. L. Delmas, G. Gateau, T.A. Meynard, H. Foch, Stacked Multicell Converter (SMC): Control and natural balancing, IEEE Power Electronics Specialists Conference (PESC’2002), Cairns-Australia, 2, pp. 689–694, 2002.
4. R. Bensaid, Oservateurs des tensions aux bornes des capacités flottantes pour les convertisseurs multicellulaires série, thèse de doctorat, Institut national Polytechnique de Toulouse,
5. J.P. Corriou, Commande des procédés, Technique & Docu-mentation, ISBN 2-74300145-3, Paris, 1996.
6. J. Aguillon-Garcia, J.M. Fernandez-Nava, P. Banuelos- Sanchez, Unbalanced Voltage Effects on a Single Phase Multilevel Inverter Due to Control Strategies, 26th International Tele-communications Energy Conference (INTELEC’04, pp. 140–145), Chicago, 2004.
7. G. Gateau, M. Fadel, R. Bensaid, T.A. Meynard, Multicells converters: Active control and bservation of Flying-Capacitor Voltages, IEEE Transactions on Industrial Electronics, 49, 5, pp. 998–1008, 2002.
8. J.-J.E. Slotine, J.K. Hedrick, E.A. Misawa, On Sliding Observers for Nonlinear Systems, Journal of Dynamic Systems, Measurements and Control, 109, pp. 245–252 (1987).
9. S. Hanafi, M.K. Fellah, M. Yaichi, M-F. Benkhoris, Nonlinear feedback decoupling control applied to stacked multicellular converter, Rev. Roum. Sci. Techn. – Électrotechn. et Énerg., 59, 1, pp. 97–106, Bucharest, 2014.
10. R. Herman, Nonlinearcontrolability and observability, IEEE Trans. Autom. Contr., AC-22, 5, pp.728–740, 1977.
11.G.Gateau, Contribution à la commande des convertisseurs statiques multicellulaires série, commande non linéaire et commande floue, Thèse de doctorat, Institut Nationale Polytechnique de Toulouse, 1997.
12. L. Parvulescu, D. Floricau, M. Covrig, Comparison between five-level flying capacitor structures, Rev. Roum. Sci. Techn. – Électrotechn. et Énerg., 57, 1, pp. 40–51, 2012.
Fig. 4 – Estimation de la tension flottante Vc1 par l’observateur
(super Twisting). Fig. 5 – Zoom sur estimation de la tension flottante Vc1.
Fig. 6 – Estimation de la tension flottante Vc2 par l’observateur
(super Twisting). Fig. 7 – Zoom sur estimation de la tension flottante Vc2.
Fig. 8 – Estimation de courant Ich par l’observateur (super twisting).

Observateurs à mode glissants d'un convertisseur multicellulaire 130
A NEW ALGORITHM OBSERVER OF HIGHER ORDER SLIDING MODE APPLIED
TO SERIES MULTICELLS CONVERTER Key words: Series multicells converter, Observer, Sliding mode, Super twisting, Chopper.
The state estimate of nonlinear dynamic systems is an essential step for the synthesis of control laws, In this paper ,our work has focused on the state observer of a series multicells converter, we use the principle of higher order sliding mode observers (super twisting) to force the system dynamic to converge on a so called sliding surface