1 Master1 CCA « Conduite du changement » Les rôles dans une équipe.
Upload
mohamed-narumohCategory
view
27download
2description
1Machine synchrone
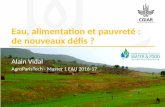
Notations complmentairesPour allger les notations a,b , c dsignent les variables statoriques.D dsigne les variables relatives lamortisseurs sur laxe dQ dsigne les variables relatives lamortisseur sur laxe qf dsigne les variables relatives linducteurMxy dsigne la mutuelle entre lenroulement x et y
On considre un repre d,q dont laxe d est align sur laxe polaire.
Vbs
bs
Vas
as
cs
Vcs
d
Vf
rVQ
q
VD
if
iD
iQ
La transformation Tdq0/abc associe ce changement de repre est appeletransformation de Park
2IntroductionLa variation de vitesse dune machine synchrone est obtenue par le rglage de lafrquence dalimentation. La frquence de commutation du convertisseurstatique assurant lalimentation de la machine est asservie la vitesse du rotor. Deplus, les impulsions des convertisseurs sont synchronises sur la position durotor de manire assurer un angle constant entre induction statorique etrotorique. Cette commande constitue lautopilotage. Cela assure la stabilit etdonne lensemble du systme convertisseur-machine, un fonctionnementproche de celui dune machine courant.
La machine synchrone peut tre alimente par un convertisseur de tension ou decourant. La source doit tre reversible pour un fonctionnement dans les quatrequadrants (moteur/ gnrateur dans les deux sens de rotation).Dans le cas dune alimentation en courant, la commutation peut tre naturelle ( lecourant doit alors tre en avance sur la tension. Pour faciliter ce mode defonctionnement, la machine doit tre surexcite). Elle peut tre aussi force. Parexemple, au dmarrage, les f.e.m. ne sont pas suffisantes pour permettrelextinction des thyristors.Lalimentation de la machine doit tre adapte aux caractristiques de celle-ci.Ainsi, il sera prfr une alimentation en crneaux de courant dans le cas dunemachine qui, lorsque deux de ses phases sont alimentes en srie par un courantconstant, possde une courbe Te(qm) de forme trapzodale (moteur synchrone aimants sans pices polaires). Cette alimentation minimise les ondulations decouple (la superposition des courbes Te(qm) lors des diffrentes squences defonctionnement donne une courbe de couple pratiquement constant).Le tableau suivant rappelle les diffrents types de machines concernes par cesapplications et leurs caractristiques essentielles. Pour clarifier lexpos, nousnous restreindrons aux actionneurs suivants :
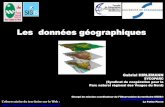
3Type Caractristiques Description
Machinesynchrone rotor bobin etentrefer lisse
Lds=Lqs A+
B+
C+ A-
B-
C-
S N
Machinesynchrone rotor bobin etples saillants
Lds>Lqseffet de saillance augmentation de Temax
A+
C+
B-
B +
B-
A - C -A +
C+
A-B+
C-
N
N
S S
Machinesynchrone aimants montsen surface durotorsans picepolaire
LdsLqsgrand entreferPour un angle polaire q=120(lectrique), lorsque deux desphases de la machine sontalimentes en srie par uncourant constant, Te(Qm) a uneforme trapzodale[LAJOIE-MAZENC 95].
NS
NS
N S
N
S q
Machinesynchrone aimants enterrsau rotor
Saillance inverse Lqs>LdsPossibilit de vitesses derotation leves N
N
SSN N
SS
Tableau 1. - Machines synchrones.
4Mise en quationPulsation statorique
w we m=
Expression des flux
YY
Y
Y
Y
Y
a
b
c
f
D
Q
a ab ac af aD aQ
ba b bc bf bD bQ
ca cb c cf cD cQ
fa fb fc f fD
Da Db Dc Df D
Qa Qb QC Q
a
b
c
f
D
Q
L M M M M M
M L M M M M
M M L M M M
M M M L M
M M M M L
M M M L
i
i
i
i
i
i
=
0
0
0 0
Cette quation peut scrire :
[ ] [ ]Yabc s abc sr fDQL i M i= +[ ] [ ]Y fDQ sr t abc fDQ fDQM i L i= +
Les paramtres inductifs du rotor sont indpendants de la position angulaire durotor puisque la face interne du stator est lisse.Lf, LD, Lq et Mfd sont donc constants.Tous les autres paramtres dpendent de qr. Lhypothse de rpartition spatialesinusodale des forces magntomotrices permet dcrire :
( )L l la s s r= +1 2 2cos q
L l lb s s r= + -
1 22
2
3cos q
p
L l lc s s r= + +
1 22
2
3cos q
p
5M M Mab s s r= + -
1 22
3cos q
p
M M Mbc s s r= + - -
1 22
3
2
3cos q
p p
M M Mca s s r= + - +
1 22
3
2
3cos q
p p
( )M Maf sf r= cos q
M Mbf sf r= -
cos q
p23
M Mcf sf r= +
cos qp23
( )M MaD sD r= cos qM MbD sD r= -
cos qp23
M McD sD r= +
cos qp23
( )M MaQ sQ r= sin q
M MbQ sQ r= -
sin qp23
M McQ sQ r= +
sin qp23
Simplification de la matrice dinductance par application de latransformation de ParkTranformation de Park :
T T R Ta dq abc abc
r r r
r r r= = =
- +
- - - - +
0 0
2
3
23
23
2
3
2
31
2
1
2
1
2
/ /
cos cos( ) cos( )
sin sin( ) sin(q ab
q qp
qp
q qp
qp
6Les vecteurs Yabc et iabc sont remplacs par leurs expressions en fonction des
vecteurs Ydq 0 et idq0Y Yabc a dqT=
-10 et i T iabc a dq=
-10
Compte tenu de ces changements de variable
[ ] [ ]Yabc s abc sr fDQL i M i= +[ ] [ ]Y fDQ sr t abc fDQ fDQM i L i= +
devient
[ ] [ ]Ydq a s a dq a sr fDQT L T i T M i0 1 0= +-[ ] [ ]YfDQ sr t a t abc fDQ fDQM T i L i= +
et aprs quelques pages de calculs trigonomtriques ....
YYYYYY
d
q
f
D
Q
d sf sD
q sQ
sf f fD
sD fD D
sQ Q
d
q
f
D
Q
L M M
L M
L
M L M
M M L
M L
i
i
i
i
i
i
00
0
0 032
32
0
0 0 0 032
0 0 0 0 032
0 0 0
32
0 0 0
032
0 0 0
=
aprs avoir dfiniLd (aussi note Lds) inductance cyclique synchrone longitudinale ,
L l M ld s s s= - +1 1 23
2Lq (aussi note Lqs) inductance cyclique synchrone transversale,
L l M lq s s s= - -1 1 232
7L0 (aussi note L0s) inductance cyclique synchrone homopolaire,L l Ms s0 1 12= +
On obtient alors la reprsentation suivante :
v
i
q
f
i
q
f
vq
d
Qi
vQ
v
id
d v
iD
D
= 0
= 0
Machine ples lisses
Les effets des amortisseurs ne sont plus pris en compte. Les inductancessynchrones sont gales puisque le rotor est lisse. Elles sont notes Ls.
Lquation matricielle devient :
YYY
d
q
f
s sf
s
sf f
d
q
f
L M
L
M L
i
i
i
=
032
0 032
0
8v
i
q
f
i
q
f
vq
d
v
id
d
Ls
Ls
Msf32
Lf
Machine aimants permanents
En crivant Yv rcos( )q le flux inducteur engendr par les aimants de la roue
polaire dans la phase statorique a ; il prend la valeur 32
Y Yv f= lorsquil est
transpos sur laxe d.Les quations des flux statoriques scrivent finalement
fdsdsds iL yy += et qsqsqs iL=y
v
i
S N
d
q
d
iq
d
vq LL
q d
Yv
3
2
9Equations lectriquesNous avons :
[ ]v R i ddtabc s abc abc
= + Y
[ ]v R i ddtfDQ fDQ fDQ fDQ= + Yavec
[ ]RR
R
Rs =
0 0
0 0
0 0et
[ ]RR
R
RfDQ
f
D
Q
=
0 0
0 0
0 0En transposant ces quations par la transformation de Park, on obtientau stator :
v Rid
dtd dd
m q= + -Y
Yw
v Rid
dtq qq
m d= + +Y
Yw
au rotor
v R id
dtf f ff
= +Y
v R id
dtD D DD= = +0
Y
v R id
dtQ Q QQ
= = +0Y
En dveloppant lexpression des flux en fonction des courants, on obtient :
[ ] [ ][ ] [ ] [ ] [ ][ ]V R i Ld
dti M im= + - w
avec
10
[ ]v
v
v
v
v
v
v
v
v
d
q
f
D
Q
d
q
f=
=
0
0
, [ ]i
i
i
i
i
i
d
q
f
D
Q
=
[ ]L
L M M
L M
M L M
M M L
M L
d sf sD
q sQ
sf f fD
sD fD D
sQ Q
=
032
32
0
0 0 032
32
0 0
32
0 0
032
0 0
[ ]
--
=
00000
00000
00000
023
230
23
000
sDsfd
sQq
MML
ML
M
Machine ples lisses
+
+
-+
=
f
q
d
ffsf
sfmssm
sfsms
f
q
d
i
i
i
sLRsM
MsLRL
sMLsLR
v
v
v
023
23
23
ww
w
11
Machine aimants permanents
( )v R L s i L id d d q m q= + - w( )v L i R L s iq d m d q q m f= + + +w w Y
Couple lectromagntique
A partir du calcul de la puissance instantane :p v i v i v i v i v id d q q f f D D Q Q= + + + +
En dveloppant, on peut regrouper les termes suivant :
pertes Joules :Ri Ri R i R i R id q f f D D Q Q2 2 2 2 2+ + + +
puissance dchange dnergie lectromagntique entre la machine et sessources
iddt
id
dti
d
dti
ddt
id
dtdd
q
q
f
f
DD
Q
QY Y Y Y Y+ + + +
puissance mcanique
[ ]wm q d d qi iY Y-On peut en dduire le couple
[ ]T p i ie p q d d q= -Y YEt en remplaant les flux par leurs expressions en fonction des courants :
( )T p L L i i M i i M i i M i ie p d q d q sf f q sD D q sQ Q d= - + + -
32
32
32
Cette expression met en vidence :
un couple de rluctance variable : ( )[ ]p L L i id q d q-
un couple principal : p M i isf f q32
un couple asynchrone (cage des amortisseurs) :
p M i i M i isD D q sQ Q d
32
32
-
12
Fonctionnement en rgime permanentA partir des quations de la machine synchrone :
v R id
dtds s dsds
e qs= + -Y
Yw et v R id
dtqs s qsqs
e ds= + +Y
w y
avec pour une machine aimants
Yds ds ds fL i= + y et Yqs qs qsL i=
En rgime permanent et dans le repre li au rotor, nous avons d
dtdsY = 0 et
d
dtqsY
= 0 . Ce qui conduit aux schmas quivalents suivants :
Machine ples lisses
Vf
X sIs
I s
Vs
d
yj
yf
j
Fonctionnement moteuren notant,Vf la force lectromotrice induite dansles enroulements statoriques
j
yd
Vf
X sIsVs
y f
jI
s
Fonctionnement gnratrice
Machine ples saillants
Vf
X dsIds
X qsIqs
Is
Ids Iqs
Vs
Vqs
dsV
d
yj
yf
axe d
axe q
Fonctionnement moteurEn notant : Xds = Ldswe et Xqs = Lqswed dsigne aussi langle entre Yf et YsYf valeur efficace du flux vide (cr parlinducteur)
axe d
axe q
jyd
VfX
dsI
ds
XqsI
qs
I s Ids
Iqs
dsV
Vqs
Vs
y f
Fonctionnement gnratriceEn notant : Xds = Ldsw e et Xqs = Lqsw e
Diagramme vectoriel dune machine synchrone en rgime permanent.
13
A partir de ces schmas quivalents et en ngligeant Rs, on peut tablir lescaractristiques de la machine synchrone en rgime permanent (exprimes pourles valeurs efficaces des flux et des courants).
Machine ples lisses
(en supposantla machinealimente pardes courantssinusodaux il ne faut garderque lefondamentaldes autresgrandeurs)
Expression du coupleT p Ie f s= 3 Y cosy
utilise pour le contrle encourant
( )T pLe f s s
= 31
Y Y sin d
avec Xs= Lsw e ractancesynchrone utilise pour le contrle entensionExpression de la puissanceabsorbeP V Is s= 3 cosjP V If s= 3 cosy
P V VXs f s
= 31
sind
Q V Is s= 3 sinj
Q V I X If s s s= +3 32siny
TeTe
0
Y-180 0 180
1
-1
avec T p Ie f s0 3= YTe
01
-1d-180 1800
0
90
Te
avec T pLe f s s0
31
= Y Y
Caractristiques des machines synchrones ples lisses.
14
Machine ples saillants
(en supposantla machinealimente pardes courantssinusodauxil ne faut garderque lefondamentaldes grandeurs)
Expression du couple
( )T p I
pL L I
e f s
ds qs s
= -
-
3
32
22
Y cos( )
sin( )
y
y
utilise pour le contrle encourant
( )T pL
p L L
L L
e f sds
ds qs
ds qss
= +
-
31
32
22
Y Y
Y
sin
sin( )
d
d
utilise pour le contrle entensionExpression de la puissanceabsorbeP V Is s= 3 cosj
( )P V I
X X I
f s
ds qs s
= -
-
3
32
22
cos
sin( )
y
y
P V VX
VX X
X X
s fds
sds qs
ds qs
= +
-
31
32
22
sin
sin
d
d
Q V Is s= 3 sinj
-1
0
1
T e
0T e
-180 1800Y
avec T p Ie f s0 3= Y
-2
0
2
TeTe 0
d0 90-180 +180
avec T pLe f s ds0
31
= Y Y
Le couple maximal est obtenupour un angle de dcalage
interne d infrieur p2
.
Caractristiques des machines synchrones ples saillants.
Rappelons quen rgime permanent
q w wr m et t= =En notant
( ) ( )Y Yfa sf f m v mM i t t= =cos cosw w la mesure algbrique du flux inducteurprojet sur la phase a
La tension induite vide sur la phase a est v ta v m m0 2= +
Y w w
pcos
Les valeurs sur les autres phases sont obtenues par des dphasages de 23p
Les composantes de Park sont : vd0 0= et v Vq s03
2 0= $ avec $Vs m v0 = w Y
15
Fonctionnement en rgime transitoireGrandeurs caractristiques de la machine
Notons :LD : est l'inductance propre de l'amortisseur d'axe direct.LQ : l'inductance propre de l'amortisseur d'axe quadrature.Mdf : l'inductance mutuelle entre inducteur et induit.MdD : l'inductance mutuelle entre amortisseur d'axe direct et induit.MdQ : l'inductance mutuelle entre amortisseur d'axe quadrature et induit.
GrandeursPhysiques
axe longituginal d axe transversal q
Ractancestransitoireset subtransitoires
X X .TTd
'd
d'
do'
X X .T .TT .Td
''d
d'
d' '
do'
do' '
X X .
T
Tq' '
qq''
qo''
Constantes detempstransitoireset subtransitoires vide (indice o)et en court-circuit
TLR
TR
L
32
M
L
do' f
f
d'
ff
df
d
-
12
.
TR
L
32
M M
M
TL
ML
R
DD
D
dD Df
df
do' '
DDf2
f
D
+
-
1.
.
TL
R
TR
L
32
M
L
qo' Q
Q
q'
q
-
12
.
Tableau 1 : Grandeurs Physiques
16
Mutuelle de l'axe d Mutuelle de l'axe q
M L .(L R .T )df d f f d'= -
23
.
M L .(L R .T )Df f D D do''= -
MMM
R .T LdDdf
DfD D D= -
23
. .( )
M L .(L R .T )qQ q Q Q q' '= -
23
.
Tableau 2 : Paramtres Physiques
Inductances oprationnelles
La dtermination des fonctions oprationnelles se fait partir des quationsgnrales de la machine dans le cadre des hypothses tablies pour les quationsde Park. A partir des quations tablies dans le domaine de Laplace, le flux Ydest exprim en fonction du courant Id et de la tension d'excitation Vf en liminant
ID et If, et le flux Yq en fonction du courant Iq en liminant IQ. Ceci permet demettre en vidence les fonctions oprationnelles :
FF
d d d f
q q q
= L (s).I + G(s).V
= L (s).I
avec : Ld (s) : inductance oprationnelle longitudinaleLq (s) : inductance oprationnelle transversaleG (s) : fonction d'excitation
Ces fonctions oprationnelles sont des fractions rationnelles du 1er et 2ndordre qu'il est possible d'exprimer en fonction des lments de la machinesynchrone, inductances et rsistances. Au vu des quations utilises, lesexpressions rigoureuses des fonctions sont extrmement compliques.
Il est possible d'approximer celles-ci, en utilisant les constantes de tempscaractristiques de la machine synchrone (Tab. 1) qui permettent de mettre lesfonctions sous la forme :
17
L (s) = L .(1 + T (1 + T
(1+ T (1 + T
G(s) =
32
M
r.
1 + T
(1 + T (1 + T
L (s) = L .(1 + T
(1+ T
d dd'
d''
do'
do''
df
f
D
do'
do''
q q
q''
qo''
. ). . )
. ). . )
.
. ). . )
. )
. )
s s
s s
s
s s
s
s
Dans le cas d'une machine synchrone sans amortisseurs ou d'une tuded'une machine complte sur une priode assez longue, la prsence desamortisseurs est nglige. De ce fait, les fractions oprationnelles Ld(s), G(s) etLq(s),reprsentes par les quations ci-dessus perdent un degr s au numrateuret dnominateur li l'annulation des constantes de temps subtransitoires.
Les expressions prcdentes deviennent :
L (s) = L .(1+ T(1+ T
G(s) =
32
M
r.
1(1+ T
L (s) = L
d dd'
do'
df
f do'
q q
. ). )
. )
s
s
s
Court circuit triphas videOn court-circuit simultanment les trois phases dun alternateur initialement vide.va = vb = vc = 0 et vf reste constanteProblme : connatre ia, ib et icOn obtient :
18
( )
( )
i t E
X X Xe
X Xe t
X Xe
X Xe t
a
d d d
t
T
d d
t
Te
d q
t
d q
te
d d
( )
' " 'cos
" "cos
" "cos
' "
=
- + -
+ -
+
+ +
+ -
+
- -
-
-
2
1 1 1 1 1
1
2
1 1
1
2
1 1
0
0
0
w q
q
w q
a
a
Cette relation fait apparatre trois termes : une composante pseudo-priodique amortie qui correspond lextinction du
flux initialement emprisonn dans les circuits du rotor. Td est principalementconditionne par les paramtres du circuit inducteur et Td par les paramtresdu circuit amortisseur daxe direct. A ce flux correspond un champ, quitournant la vitesse w e y induit un courant de pseudo pulsation w e steignantavec une loi faisant intervenir les mme constantes de temps.
une composante apriodique qui correspond lextinction du flux initialementemprisonn dans la phase a du stator avec la constante de temps 1/a avec
aw w
= +
R
X Xa e
d
e
q2 " ". Son amplitude dpend de la position de lenroulement par
rapport au circuit inducteur au moment du court-circuit. une composante amortie de frquence double lie lanisotropie des circuits
rotoriques dfilant devant le stator.
19
Dtermination des paramtres
Caractristique en circuit ouvert :Mode opratoire :Entraner le rotor la vitesse de synchronisme et faire crotre le courant inducteurIf de 0 Ifnom de manire monotone. Refaire la mme exprience en faisantdcrotre If de Ifnom 0 da manire monotone.
If
Ua
Caractristique en court-circuit :Mode opratoire :Le rotor est entran la vitesse de synchronisme. Le courant inducteur tant nul,les bobinages statoriques sont court-circuits. Le courant inducteur est augmentprogressivement de manire ce que le courant dinduit passe de 0 sa valeurnominale.
If
Ia
20
Dtermination de la ractance synchrone (diagramme de BenEschenburg)
Hypothse : machine non sature
Ua=0 Ef
Ra Xs
Nous avons : XE
Is nonsaturf
a( ) =
1
1 en supposant Ra
21
Lordre de succession des phases doit tre telle que la force magntomotrice etle rotor tourne dans le mme sens. Lenroulement inducteur, maintenu ouvert,nest pas excit.
0 0.5 1 1.5 25000
0
5000
isai
ti
0 0.5 1 1.5 2400
200
0
200
400
ufi
ti
Courant induit et tension inducteur
Lapplication des tensions statoriques cre un champ tournant la vitesse n1. Lerotor et donc les axes d et q glissent successivement sous le champ statorique.Durant une intervalle de temps, le champ statorique sera align avec le circuitmagntique rotorique. Lentrefer sera alors minimal et le courant statoriquepassera par un minimum. Quelques instant plus tard, le champ magntiquestatorique sera en quadrature avec le circuit magntique. Le courant passera alorspar un maximum. Ce battement se produit une frquence n1-n.
On montre :XX
II
d
q= max
min et Xd peut tre dtermin par les essais en circuit ouvert et en
court-circuit.
XU
Id= max
min3 et X
U
Iq= min
max3 en enregistrant les variations de la
tension dues aux chutes dans les inductances internes du variac.
Attention : Le glissement doit tre trs faible (
22
Dtermination des ractances transitoire Xd et subtransitoire Xd parlouverture des enroulements statoriques pralablement en court-circuit
fMoteur DC
A
V
V
A
A
nIacc
fMoteur DC
A
V
V
A
A
nIacc
Ua0
u'au''a
Ua0
t
ua
On dmontre :
=
=XU
IX
U
Ida
accd
a
acc
et ''
23
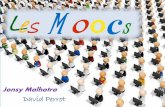
Essai de mise en court-circuit symtrique des enroulements statoriques
Les enroulements statoriques sont simultanment court-circuits. Les courantsstatoriques et le courant dexcitation sont enregistrs.
La machine non charge est entrane au synchronisme avant le court-circuit. Ellepossde une inertie suffisante pour conserver sa vitesse aprs le court-circuit.
On dmontre alors :
i I i i IU
X
U
Xe
U
X
U
Xes ss s s ss
d s
t T d
d d
t T d= + + = + - + --- D D' ' ' (
') (
' ' ')/ '
/
A partir de lenveloppe du courant de court-circuit, on obtient :
t
is
enveloppe
B
Ai''s
i's
Iss=U/Xs
I'd
I''d
Remarques : Xs=Xd et Xs = Xd
24
Notion de valeurs rduites
La machin synchrone est suppose caractrise par : sa tension nominale efficace entre phase et neutre Vn, son courant nominal efficace de ligne In, sa puissance apparente nominale Sn = VnIn,
sa vitesse angulaire w np
A un rgime permanent synchrone, un courant I, une tension V, une f.e.m. Esont associes les valeurs rduites :
iI
In= , v
VVn
= , eE
Vn=
En rgime quelconque , une impdance Z caractristique su stator, unepuissance active P ou ractive Q, un couple C sont associes les valeursrduites :
zZI
Vn
n
= , pP
Sn= , q
Q
Sn= , c
C
pSn
n
=w
Lquation du mouvement fait alors apparatre la constante dnergie cintique(exprime en s) :
Hp
J
Sn
n
=
1
2
2w
A chaque grandeur physique associe un enroulement (courant, tension, flux)est attribu une valeur de base permettant la conversion en valeur rduite.Pour les grandeurs associs aux enroulements d et q, la valeur de base est lavaleur nominale crte :
i p u ii
Idd
n
( . .) =2 ,
v p u iv
Vdd
n
( . .) =2 ,
YY
dd
n
p u iV
( . .) =2
Attention : la relation adopte nest pas homogne de sorte de ne pas modifierloprateur de drivation en passant en grandeurs rduites..