notes de cours capteurs et actionneurs.pdf
264
Session Automne 2012 Notes de cours de GPA668 Capteurs et actionneurs Par Guy Gauthier professeur en GPA D´ epartement de G´ enie de la production automatis´ ee
-
Upload
jalel-khediri -
Category
Documents
-
view
370 -
download
57
Transcript of notes de cours capteurs et actionneurs.pdf
Session Automne 2012
Notes de cours deGPA668 Capteurs etactionneurs
Par Guy Gauthierprofesseur en GPA
Departement de Genie de la production automatisee

Table des matieres
1 Caracteristiques d’un capteur 11.1 Le systeme de mesure . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Definition generale . . . . . . . . . . . . . . . . . . . . 11.1.2 L’element de mesure . . . . . . . . . . . . . . . . . . . 21.1.3 Modes de mesure . . . . . . . . . . . . . . . . . . . . . 41.1.4 Terminologie . . . . . . . . . . . . . . . . . . . . . . . 6
1.2 Capteurs actifs vs capteurs passifs . . . . . . . . . . . . . . . . 61.2.1 Capteurs actifs . . . . . . . . . . . . . . . . . . . . . . 61.2.2 Les capteurs passifs . . . . . . . . . . . . . . . . . . . . 101.2.3 Montages utilises avec les capteurs passifs dont l’impedance
est resistive . . . . . . . . . . . . . . . . . . . . . . . . 161.3 Les caracteristiques metrologiques . . . . . . . . . . . . . . . . 18
1.3.1 Les domaines de fonctionnement . . . . . . . . . . . . . 181.3.2 La sensibilite . . . . . . . . . . . . . . . . . . . . . . . 211.3.3 La finesse . . . . . . . . . . . . . . . . . . . . . . . . . 221.3.4 La linearite . . . . . . . . . . . . . . . . . . . . . . . . 231.3.5 La rapidite . . . . . . . . . . . . . . . . . . . . . . . . 261.3.6 L’hysteresis . . . . . . . . . . . . . . . . . . . . . . . . 271.3.7 La repetabilite et la reproductibilite . . . . . . . . . . . 281.3.8 La resolution . . . . . . . . . . . . . . . . . . . . . . . 331.3.9 La precision . . . . . . . . . . . . . . . . . . . . . . . . 33
1.4 Les erreurs de mesure dans les capteurs . . . . . . . . . . . . . 361.4.1 L’erreur sur le zero . . . . . . . . . . . . . . . . . . . . 361.4.2 L’erreur liee a l’etalonnage . . . . . . . . . . . . . . . . 371.4.3 Les erreurs dues aux grandeurs d’influence . . . . . . . 371.4.4 Les erreurs dues aux conditions d’alimentation et de
traitement de signal . . . . . . . . . . . . . . . . . . . . 38
i

ii TABLE DES MATIERES
1.4.5 Les erreurs dues au mode d’utilisation . . . . . . . . . 391.5 Les incertitudes de mesure dans les capteurs . . . . . . . . . . 39
1.5.1 Les erreurs liees aux indeterminations intrinseques d’uncapteur . . . . . . . . . . . . . . . . . . . . . . . . . . 40
1.5.2 Les erreurs dues a des signaux parasites de caracterealeatoire . . . . . . . . . . . . . . . . . . . . . . . . . . 40
1.5.3 Les erreurs de mesure dues aux grandeurs d’influencenon-controlees . . . . . . . . . . . . . . . . . . . . . . . 40
1.6 Le calcul d’erreur dans les chaınes de mesure . . . . . . . . . . 411.6.1 Erreur sur le resultat d’une somme . . . . . . . . . . . 421.6.2 Erreur sur le resultat d’une difference . . . . . . . . . . 431.6.3 Erreur sur le resultat d’une multiplication . . . . . . . 431.6.4 Erreur sur le resultat d’une division . . . . . . . . . . . 441.6.5 Exemple d’application de la serie de Taylor . . . . . . . 451.6.6 Erreur sur un capteur actif (ou un capteur transmetteur) 471.6.7 Erreur sur un capteur passif . . . . . . . . . . . . . . . 471.6.8 Erreur sur un module de conditionnement elec-tronique 48
2 La detection de position/proximite 492.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 492.2 Interrupteur de fin de course . . . . . . . . . . . . . . . . . . . 502.3 Detecteur de proximite inductif . . . . . . . . . . . . . . . . . 552.4 Detecteur de proximite capacitif . . . . . . . . . . . . . . . . . 632.5 Detecteur de proximite photoelectrique . . . . . . . . . . . . . 67
2.5.1 La methode de la barriere . . . . . . . . . . . . . . . . 702.5.2 Methode retro-reflective . . . . . . . . . . . . . . . . . 722.5.3 Methode diffuse . . . . . . . . . . . . . . . . . . . . . . 732.5.4 La methode convergente . . . . . . . . . . . . . . . . . 742.5.5 La methode du champ-fixe . . . . . . . . . . . . . . . . 752.5.6 La methode speculaire . . . . . . . . . . . . . . . . . . 752.5.7 Marge de fonctionnement, contraste et patrons . . . . . 762.5.8 Detecteur ultrasonique . . . . . . . . . . . . . . . . . . 84
3 La mesure de deplacement 893.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 893.2 Potentiometre . . . . . . . . . . . . . . . . . . . . . . . . . . . 903.3 LVDT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 943.4 Synchromachines . . . . . . . . . . . . . . . . . . . . . . . . . 100

TABLE DES MATIERES iii
3.4.1 Le resolver . . . . . . . . . . . . . . . . . . . . . . . . . 1003.4.2 La synchomachine . . . . . . . . . . . . . . . . . . . . 1013.4.3 L’Inductosyn . . . . . . . . . . . . . . . . . . . . . . . 1023.4.4 Bilan et resume . . . . . . . . . . . . . . . . . . . . . . 104
3.5 Les codeurs de deplacement (encodeurs) . . . . . . . . . . . . 1043.5.1 Encodeur absolu . . . . . . . . . . . . . . . . . . . . . 1043.5.2 Encodeur incremental (ou relatif) . . . . . . . . . . . . 107
3.6 Capteur de deplacement au LASER . . . . . . . . . . . . . . . 108
4 La mesure de vitesse 1114.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1114.2 Generatrices a courant alternatif . . . . . . . . . . . . . . . . . 1124.3 Generatrices a courant continu . . . . . . . . . . . . . . . . . . 1134.4 Tachymetres lineaires a fil . . . . . . . . . . . . . . . . . . . . 1144.5 Tachymetres a impulsions . . . . . . . . . . . . . . . . . . . . 1154.6 Tachymetres lineaires a ondes . . . . . . . . . . . . . . . . . . 117
5 La mesure d’acceleration 1195.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1195.2 Accelerometres piezoelectriques . . . . . . . . . . . . . . . . . 1215.3 Accelerometres piezoresistifs . . . . . . . . . . . . . . . . . . . 1245.4 Accelerometres asservis . . . . . . . . . . . . . . . . . . . . . . 125
6 La mesure de force 1276.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1276.2 Les corps d’epreuves . . . . . . . . . . . . . . . . . . . . . . . 128
6.2.1 Poutre encastree . . . . . . . . . . . . . . . . . . . . . 1286.2.2 Tige rectangulaire en traction . . . . . . . . . . . . . . 1296.2.3 Tube cylindrique en traction . . . . . . . . . . . . . . . 1316.2.4 Etrier en flexion . . . . . . . . . . . . . . . . . . . . . . 1326.2.5 Poutre en magnetostriction . . . . . . . . . . . . . . . 133
6.3 Les elements de transduction . . . . . . . . . . . . . . . . . . . 1346.3.1 Mesure de la deformation d’un ressort . . . . . . . . . 1346.3.2 Jauge extensiometrique . . . . . . . . . . . . . . . . . . 1346.3.3 Pont de Wheatstone . . . . . . . . . . . . . . . . . . . 1376.3.4 Jauge a deux fils . . . . . . . . . . . . . . . . . . . . . 1406.3.5 Jauge a trois fils . . . . . . . . . . . . . . . . . . . . . 141
6.4 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142

iv TABLE DES MATIERES
7 La mesure de couple 1457.1 Mesure du couple par jauge . . . . . . . . . . . . . . . . . . . 1457.2 Mesure du couple par torsion . . . . . . . . . . . . . . . . . . 1477.3 Mesure du couple par reaction . . . . . . . . . . . . . . . . . . 1487.4 Mesure du couple par le courant . . . . . . . . . . . . . . . . . 149
8 La mesure de pression 1518.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
8.1.1 Notions de base . . . . . . . . . . . . . . . . . . . . . . 1518.1.2 Principe de Pascal . . . . . . . . . . . . . . . . . . . . 1538.1.3 Unites de mesure . . . . . . . . . . . . . . . . . . . . . 154
8.2 Manometres a section uniforme . . . . . . . . . . . . . . . . . 1568.3 Manometres a reservoir . . . . . . . . . . . . . . . . . . . . . . 1588.4 Tube de Bourdon . . . . . . . . . . . . . . . . . . . . . . . . . 1598.5 Manometre a soufflet (Bellows) . . . . . . . . . . . . . . . . . 1608.6 Capsule aneroıde . . . . . . . . . . . . . . . . . . . . . . . . . 1618.7 Manometre a membrane . . . . . . . . . . . . . . . . . . . . . 1638.8 Montage des manometres au procede . . . . . . . . . . . . . . 164
8.8.1 Montage pour un gaz non-corrosif . . . . . . . . . . . . 1658.8.2 Montage pour un gaz condensable . . . . . . . . . . . . 1668.8.3 Montage pour les liquides non-corrosifs . . . . . . . . . 1688.8.4 Montage pour un produit (gaz ou liquide) corrosif . . . 169
9 La mesure de niveau 1759.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1759.2 Flotteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
9.2.1 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1769.3 Plongeur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
9.3.1 Mesure d’une interface deux liquides . . . . . . . . . . 1789.3.2 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
9.4 Palpeur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1819.4.1 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
9.5 Le capteur de pression . . . . . . . . . . . . . . . . . . . . . . 1849.5.1 Mesure en reservoir non-etanche . . . . . . . . . . . . . 1859.5.2 Mesure en reservoir etanche . . . . . . . . . . . . . . . 1859.5.3 Mesure de niveau avec correction de densite . . . . . . 1879.5.4 Mesure du niveau d’une interface . . . . . . . . . . . . 1889.5.5 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190

TABLE DES MATIERES v
9.6 La sonde conductrice . . . . . . . . . . . . . . . . . . . . . . . 1919.6.1 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
9.7 Les sondes capacitives . . . . . . . . . . . . . . . . . . . . . . 1929.8 Les sondes optiques . . . . . . . . . . . . . . . . . . . . . . . . 193
9.8.1 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1949.9 Les capteurs de niveau ultrasonique . . . . . . . . . . . . . . . 195
9.9.1 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1979.10 Les capteurs de niveau a hyperfrequences . . . . . . . . . . . . 198
9.10.1 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1999.11 Les capteurs de niveau par gammametrie . . . . . . . . . . . . 199
9.11.1 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2019.12 Mesure de niveau par pesee . . . . . . . . . . . . . . . . . . . 201
9.12.1 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2029.13 Lame vibrante et palpeur rotationnel . . . . . . . . . . . . . . 202
9.13.1 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
10 Mesure de debit 20510.1 Un survol de la mecanique des fluides . . . . . . . . . . . . . . 205
10.1.1 La loi de Bernoulli . . . . . . . . . . . . . . . . . . . . 20510.1.2 Les pertes de charge . . . . . . . . . . . . . . . . . . . 20710.1.3 Les regimes d’ecoulement des fluides . . . . . . . . . . 209
10.2 Les detecteurs de circulation . . . . . . . . . . . . . . . . . . . 21510.3 Les rotametres . . . . . . . . . . . . . . . . . . . . . . . . . . 21610.4 Les organes deprimogenes . . . . . . . . . . . . . . . . . . . . 217
10.4.1 Les plaques orifices . . . . . . . . . . . . . . . . . . . . 22010.4.2 Les venturis . . . . . . . . . . . . . . . . . . . . . . . . 22210.4.3 Les tuyeres . . . . . . . . . . . . . . . . . . . . . . . . 223
10.5 Les tubes de Pitot . . . . . . . . . . . . . . . . . . . . . . . . 22310.6 Les debitmetres electromagnetiques . . . . . . . . . . . . . . . 22510.7 Les debitmetres a ultrasons . . . . . . . . . . . . . . . . . . . 226
10.7.1 A temps de parcours . . . . . . . . . . . . . . . . . . . 22610.7.2 A effet Doppler . . . . . . . . . . . . . . . . . . . . . . 228
10.8 Les debitmetres a vortex . . . . . . . . . . . . . . . . . . . . . 22910.8.1 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230
10.9 Debitmetre-masse a effet Coriolis . . . . . . . . . . . . . . . . 23010.9.1 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231
10.10Debitmetre massique thermique . . . . . . . . . . . . . . . . . 23110.11Les compteurs volumetriques . . . . . . . . . . . . . . . . . . . 233

vi TABLE DES MATIERES
10.11.1 Compteurs a piston rotatif . . . . . . . . . . . . . . . . 23310.11.2 Compteurs a disque oscillant . . . . . . . . . . . . . . . 23510.11.3 Compteurs a double roues ovales . . . . . . . . . . . . 23610.11.4 Compteurs a double roues en huit . . . . . . . . . . . . 23710.11.5 Compteurs a palettes . . . . . . . . . . . . . . . . . . . 23710.11.6 Bilan pour les compteurs volumetriques . . . . . . . . . 238
10.12Debitmetres a turbine . . . . . . . . . . . . . . . . . . . . . . 23810.13Debitmetres a ecoulement libre . . . . . . . . . . . . . . . . . 239
10.13.1 Les deversoirs . . . . . . . . . . . . . . . . . . . . . . . 23910.13.2 Les canaux jaugeurs . . . . . . . . . . . . . . . . . . . 24410.13.3 Canal jaugeur de Palmer-Bowlus . . . . . . . . . . . . 245

Table des figures
1.1 Schema bloc d’un systeme de mesure analogique . . . . . . . . 11.2 Schema bloc d’un systeme de mesure numerique . . . . . . . . 21.3 Schema bloc d’un systeme de mesure numerique . . . . . . . . 31.4 Mesure par deviation . . . . . . . . . . . . . . . . . . . . . . . 41.5 Mesure par comparaison . . . . . . . . . . . . . . . . . . . . . 41.6 Mesure par compensation . . . . . . . . . . . . . . . . . . . . 51.7 Effet Seebeck - thermocouple . . . . . . . . . . . . . . . . . . 71.8 Effet pyroelectrique - pyrometre . . . . . . . . . . . . . . . . . 71.9 Effet piezoelectrique - accelerometre . . . . . . . . . . . . . . . 81.10 Effet photoelectrique - capteur de lumiere . . . . . . . . . . . 81.11 Capteur a effet Hall - capteur de distance . . . . . . . . . . . . 91.12 Capteur a effet inductif - capteur de vitesse . . . . . . . . . . 101.13 Condensateur a plaques rectangulaires paralleles . . . . . . . . 121.14 Condensateur cylindrique . . . . . . . . . . . . . . . . . . . . . 121.15 Inductance faite avec un fil conducteur bobine . . . . . . . . . 141.16 Calcul d’inductance — Exemple 1 . . . . . . . . . . . . . . . . 151.17 Calcul d’inductance — Exemple 2 . . . . . . . . . . . . . . . . 161.18 Montage potentiometrique . . . . . . . . . . . . . . . . . . . . 171.19 Montage en pont de Wheatstone . . . . . . . . . . . . . . . . . 171.20 Montage dans un amplificateur . . . . . . . . . . . . . . . . . 191.21 Les trois domaines de fonctionnement d’un capteur . . . . . . 191.22 Caracteristique lineaire . . . . . . . . . . . . . . . . . . . . . . 211.23 Reponse d’un systeme de premier ordre (τ = 10sec.) . . . . . . 261.24 Reponse d’un systeme de deuxieme ordre . . . . . . . . . . . . 281.25 Courbe d’hysteresis (Source : www.physique-appliquee.net) . . 291.26 Courbe gaussienne (Moyenne x = 0) . . . . . . . . . . . . . . . 311.27 Zone de probabilite 1/(2N) (Moyenne = x ; l’axe vertical est
la densite de probabilite) . . . . . . . . . . . . . . . . . . . . . 32
vii

viii TABLE DES FIGURES
1.28 La fidelite d’un capteur . . . . . . . . . . . . . . . . . . . . . . 351.29 La justesse d’un capteur . . . . . . . . . . . . . . . . . . . . . 361.30 Erreur sur le zero . . . . . . . . . . . . . . . . . . . . . . . . . 371.31 Erreur liee a l’etalonnage . . . . . . . . . . . . . . . . . . . . . 37
2.1 Interrupteur de fin de course 1 . . . . . . . . . . . . . . . . . . 512.2 Organes de commande 2 . . . . . . . . . . . . . . . . . . . . . 522.3 Types de contact d’un interrupteur de fin de course . . . . . . 532.4 Limites mecaniques et points de commutation des organes de
commande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 542.5 Points de commutation des relais . . . . . . . . . . . . . . . . 542.6 Detecteur de proximite inductif 3 . . . . . . . . . . . . . . . . 552.7 Schema de principe du detecteur de proximite inductif 4 . . . . 552.8 Fonctionnement d’un capteur de proximite inductif . . . . . . 562.9 Portee nominale d’un capteur . . . . . . . . . . . . . . . . . . 572.10 Effet des tolerances de fabrication . . . . . . . . . . . . . . . . 572.11 Effet cumule des tolerances de fabrication et de la temperature 582.12 Les diverses approches de la cible par rapport au detecteur 5 . 602.13 Detecteur de proximite inductive blinde 6 . . . . . . . . . . . . 602.14 Detecteur de proximite inductive non-blinde 7 . . . . . . . . . 612.15 Regles de montage d’un capteur de proximite inductif 8 . . . . 622.16 Regles de montage de plusieurs capteurs de proximite inductifs
blindes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 622.17 Regles de montage de plusieurs capteurs de proximite inductifs
non-blindes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 632.18 Detecteurs de proximite capacitifs 9 . . . . . . . . . . . . . . . 632.19 Schema de principe d’un detecteur de proximite capacitif 10 . . 642.20 Portee du detecteur en fonction de la constante dielectrique 11 662.21 Champ de compensation . . . . . . . . . . . . . . . . . . . . . 672.22 Detecteur de proximite photoelectrique 12 . . . . . . . . . . . . 682.23 Circuit de l’emetteur du faisceau lumineux . . . . . . . . . . . 682.24 Circuit du recepteur detectant le faisceau lumineux . . . . . . 692.25 Spectre electromagnetique . . . . . . . . . . . . . . . . . . . . 692.26 Reponse spectrale d’un phototransistor et spectres d’emission
des DEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 702.27 Methode de la barriere . . . . . . . . . . . . . . . . . . . . . . 702.28 Le faisceau efficace et les obturateurs . . . . . . . . . . . . . . 712.29 Le faisceau efficace ajuste par des collimateurs . . . . . . . . . 71

TABLE DES FIGURES ix
2.30 Methode retro-reflective . . . . . . . . . . . . . . . . . . . . . 722.31 Detection avec lumiere polarisee . . . . . . . . . . . . . . . . . 732.32 Methode diffuse . . . . . . . . . . . . . . . . . . . . . . . . . . 742.33 Methode convergente . . . . . . . . . . . . . . . . . . . . . . . 742.34 Methode du champ-fixe . . . . . . . . . . . . . . . . . . . . . . 752.35 Methode speculaire . . . . . . . . . . . . . . . . . . . . . . . . 762.36 Marge de fonctionnement methode de la barriere (exemple) . . 782.37 Marge de fonctionnement methode retro-reflective (exemple) . 782.38 Marge de fonctionnement methode diffuse (exemple) . . . . . . 792.39 Patron de detection — methode de la barriere (exemple) . . . 802.40 Patron de detection — methode retro-reflective (exemple) . . 812.41 Patron de detection — methode diffuse (exemple) . . . . . . . 822.42 Detecteur ultrasonique 13 . . . . . . . . . . . . . . . . . . . . . 842.43 Schema de principe d’un detecteur ultrasonique 14 . . . . . . . 852.44 Detecteur ultrasonique, patron d’emission 15 . . . . . . . . . . 862.45 Detecteur ultrasonique, orientation d’une cible plane 16 . . . . 872.46 Patrons de detection d’un detecteur ultrasonique, pour divers
types de cibles 17 . . . . . . . . . . . . . . . . . . . . . . . . . 872.47 Regles de montage de detecteurs ultrasoniques 18 . . . . . . . . 882.48 Exemple d’interface permettant l’ajustement de la zone de
detection 19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
3.1 Mesure de deplacement par potentiometre 20 . . . . . . . . . . 903.2 Schema de principe d’un capteur de deplacement a poten-
tiometre 21 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 903.3 Mesure de deplacement par potentiometre lineaire 22 . . . . . . 913.4 Circuit interne d’un capteur de deplacement a potentiometre . 913.5 Relation position/tension de sortie pour diverses valeurs du
rapport RL/RPot . . . . . . . . . . . . . . . . . . . . . . . . . 923.6 Variante en pont du circuit interne du capteur de deplacement
a potentiometre . . . . . . . . . . . . . . . . . . . . . . . . . . 933.7 Causes de la resolution finie d’un potentiometre a fil . . . . . . 933.8 Resolution d’un potentiometre . . . . . . . . . . . . . . . . . . 943.9 Capteurs de deplacement a LVDT 23 . . . . . . . . . . . . . . . 953.10 Principe du couplage entre 2 bobines (transformateur) . . . . 953.11 Couplage reduit avec tige metallique deplacee . . . . . . . . . 963.12 Principe de fonctionnement du LVDT . . . . . . . . . . . . . . 963.13 Circuit equivalent d’un LVDT . . . . . . . . . . . . . . . . . . 97

x TABLE DES FIGURES
3.14 Circuit equivalent d’un LVDT . . . . . . . . . . . . . . . . . . 993.15 Sortie et phase du signal de sortie du LVDT . . . . . . . . . . 993.16 Schema simplifie d’un resolver . . . . . . . . . . . . . . . . . . 1013.17 Bobinages primaire et secondaires dans un resolver . . . . . . 1013.18 Bobinages primaire et secondaires dans une synchromachine
resolver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1023.19 Photo d’un Inductosyn 24 . . . . . . . . . . . . . . . . . . . . . 1033.20 Schema de principe de l’Inductosyn 25 . . . . . . . . . . . . . . 1033.21 Codeur de deplacement 26 . . . . . . . . . . . . . . . . . . . . 1043.22 Principe de l’encodeur absolu . . . . . . . . . . . . . . . . . . 1053.23 Encodeur absolu fait maison 27 . . . . . . . . . . . . . . . . . . 1053.24 Differents codages de position en binaire . . . . . . . . . . . . 1063.25 Principe de l’encodeur incremental . . . . . . . . . . . . . . . 1073.26 Capteur de deplacement au laser 28 . . . . . . . . . . . . . . . 1083.27 Capteur de deplacement au laser avec objet a la distance de
reference 29 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1093.28 Capteur de deplacement au laser avec objet a une distance
inferieure a la distance de reference 30 . . . . . . . . . . . . . . 1103.29 Capteur de deplacement au laser avec objet a une distance
superieure a la distance de reference 31 . . . . . . . . . . . . . 110
4.1 Generatrice tachymetrique a CA . . . . . . . . . . . . . . . . . 1124.2 Generatrice tachymetrique a CC . . . . . . . . . . . . . . . . . 1134.3 Principe de fonctionnement du commutateur . . . . . . . . . . 1144.4 FEM d’une generatrice a CC a 2 paires de poles . . . . . . . . 1144.5 Tachymetre lineaire a fil . . . . . . . . . . . . . . . . . . . . . 1154.6 Tachymetre a impulsions avec capteur de proximite inductif . 1154.7 Tachymetre a impulsions avec capteur de proximite optique . . 1164.8 Tachymetre lineaire a onde — Version radar de police 32 . . . . 117
5.1 Accelerometres piezoelectriques . . . . . . . . . . . . . . . . . 1205.2 Schema de principe de l’accelerometre piezoelectrique . . . . . 1215.3 Cristal piezoelectrique soumis a une force . . . . . . . . . . . . 1225.4 Amplificateur de charge . . . . . . . . . . . . . . . . . . . . . 1225.5 Diagramme de Bode typique d’un accelerometre piezoelectrique1235.6 Bande passante utilisable . . . . . . . . . . . . . . . . . . . . . 1245.7 Schema de principe d’un accelerometre piezoresistif . . . . . . 1255.8 Accelerometre asservis . . . . . . . . . . . . . . . . . . . . . . 125

TABLE DES FIGURES xi
5.9 Schema bloc de l’accelerometre asservi . . . . . . . . . . . . . 126
6.1 Poutre encastree . . . . . . . . . . . . . . . . . . . . . . . . . 1286.2 La fleche d’une poutre encastree . . . . . . . . . . . . . . . . . 1286.3 Section de la poutre rectangulaire (de la Figure 6.1) a vide vs
la meme poutre en charge (la force est vers le bas) . . . . . . . 1306.4 Tige rectangulaire en traction . . . . . . . . . . . . . . . . . . 1306.5 Tube cylindrique en traction . . . . . . . . . . . . . . . . . . . 1316.6 Etrier en flexion . . . . . . . . . . . . . . . . . . . . . . . . . . 1326.7 Jauges extensiometriques . . . . . . . . . . . . . . . . . . . . . 1346.8 Pont de Wheatstone . . . . . . . . . . . . . . . . . . . . . . . 1376.9 Relation Vr vs ε pour une jauge de 350 Ohms ayant un facteur
de jauge de G = 2.4 . . . . . . . . . . . . . . . . . . . . . . . . 1396.10 Pont de Wheatstone avec jauge a deux fils . . . . . . . . . . . 1406.11 Pont de Wheatstone avec jauge a trois fils . . . . . . . . . . . 141
7.1 Piece mecanique pour la mesure de couple par jauge . . . . . . 1467.2 Detail de la piece mecanique transmettant l’effort . . . . . . . 1467.3 Capteur de couple par jauge de Futek 33 . . . . . . . . . . . . 1477.4 Mesure du couple par torsion . . . . . . . . . . . . . . . . . . 1487.5 Mesure du couple par reaction . . . . . . . . . . . . . . . . . . 1497.6 Diagramme des corps libres du moteur electrique . . . . . . . 150
8.1 La pression statique . . . . . . . . . . . . . . . . . . . . . . . . 1528.2 La pression totale et dynamique . . . . . . . . . . . . . . . . . 1528.3 Le principe de Pascal . . . . . . . . . . . . . . . . . . . . . . . 1538.4 Verins hydraulique 34 . . . . . . . . . . . . . . . . . . . . . . . 1548.5 Manometre a section uniforme . . . . . . . . . . . . . . . . . . 1578.6 Manometre a reservoir . . . . . . . . . . . . . . . . . . . . . . 1588.7 Tube de Bourdon . . . . . . . . . . . . . . . . . . . . . . . . . 1598.8 Schema de principe du tube de Bourdon . . . . . . . . . . . . 1608.9 Serpentin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1618.10 Tube de Bourdon en spirale . . . . . . . . . . . . . . . . . . . 1618.11 Schema d’un manometre a soufflet . . . . . . . . . . . . . . . . 1628.12 Manometre a capsules aneroıdes 35 . . . . . . . . . . . . . . . . 1638.13 Manometre a membrane 36 . . . . . . . . . . . . . . . . . . . . 1648.14 Montage sur une conduite . . . . . . . . . . . . . . . . . . . . 1658.15 Robinets d’isolation/calibration . . . . . . . . . . . . . . . . . 166
xii TABLE DES FIGURES
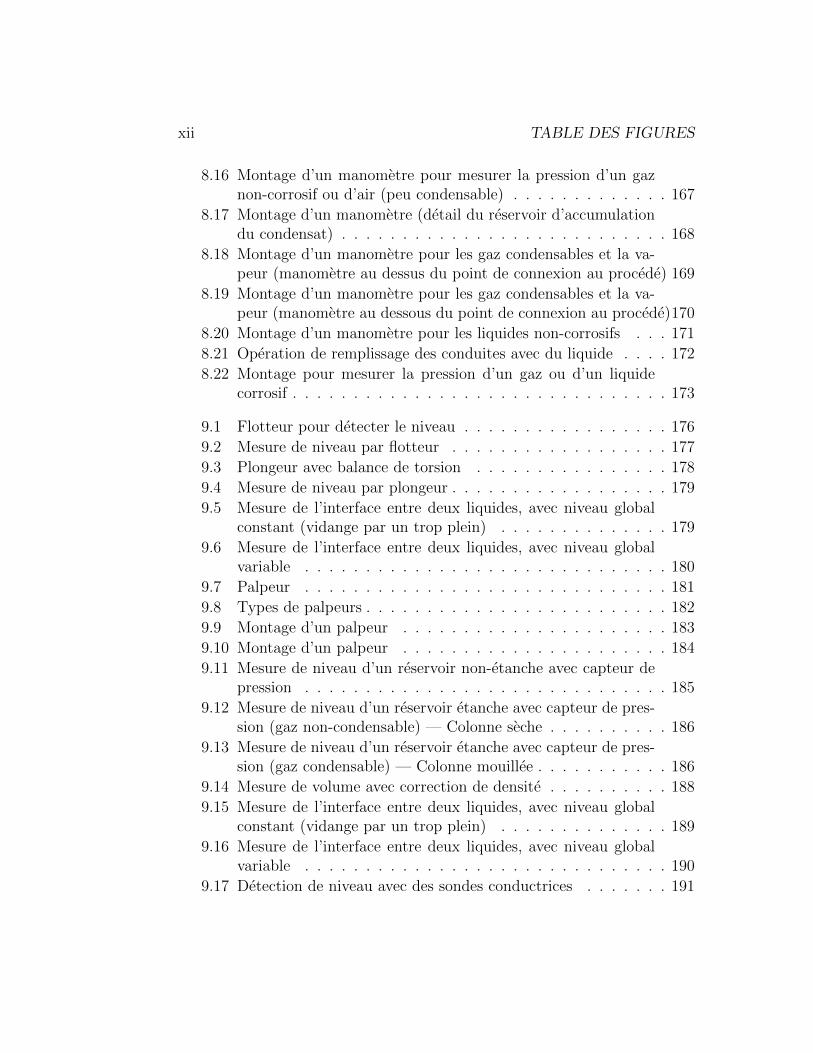
8.16 Montage d’un manometre pour mesurer la pression d’un gaznon-corrosif ou d’air (peu condensable) . . . . . . . . . . . . . 167
8.17 Montage d’un manometre (detail du reservoir d’accumulationdu condensat) . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
8.18 Montage d’un manometre pour les gaz condensables et la va-peur (manometre au dessus du point de connexion au procede) 169
8.19 Montage d’un manometre pour les gaz condensables et la va-peur (manometre au dessous du point de connexion au procede)170
8.20 Montage d’un manometre pour les liquides non-corrosifs . . . 171
8.21 Operation de remplissage des conduites avec du liquide . . . . 172
8.22 Montage pour mesurer la pression d’un gaz ou d’un liquidecorrosif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
9.1 Flotteur pour detecter le niveau . . . . . . . . . . . . . . . . . 176
9.2 Mesure de niveau par flotteur . . . . . . . . . . . . . . . . . . 177
9.3 Plongeur avec balance de torsion . . . . . . . . . . . . . . . . 178
9.4 Mesure de niveau par plongeur . . . . . . . . . . . . . . . . . . 179
9.5 Mesure de l’interface entre deux liquides, avec niveau globalconstant (vidange par un trop plein) . . . . . . . . . . . . . . 179
9.6 Mesure de l’interface entre deux liquides, avec niveau globalvariable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
9.7 Palpeur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
9.8 Types de palpeurs . . . . . . . . . . . . . . . . . . . . . . . . . 182
9.9 Montage d’un palpeur . . . . . . . . . . . . . . . . . . . . . . 183
9.10 Montage d’un palpeur . . . . . . . . . . . . . . . . . . . . . . 184
9.11 Mesure de niveau d’un reservoir non-etanche avec capteur depression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
9.12 Mesure de niveau d’un reservoir etanche avec capteur de pres-sion (gaz non-condensable) — Colonne seche . . . . . . . . . . 186
9.13 Mesure de niveau d’un reservoir etanche avec capteur de pres-sion (gaz condensable) — Colonne mouillee . . . . . . . . . . . 186
9.14 Mesure de volume avec correction de densite . . . . . . . . . . 188
9.15 Mesure de l’interface entre deux liquides, avec niveau globalconstant (vidange par un trop plein) . . . . . . . . . . . . . . 189
9.16 Mesure de l’interface entre deux liquides, avec niveau globalvariable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
9.17 Detection de niveau avec des sondes conductrices . . . . . . . 191

TABLE DES FIGURES xiii
9.18 Mesure de niveau d’un liquide isolant avec une sonde capaci-tive cylindrique . . . . . . . . . . . . . . . . . . . . . . . . . . 192
9.19 Mesure de niveau d’un liquide conducteur avec une sonde ca-pacitive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
9.20 Reflexion totale vs refraction d’un rayon lumineux . . . . . . . 1949.21 Principe de fonctionnement du detecteur de niveau . . . . . . 1959.22 Capteurs de niveau ultrasonique . . . . . . . . . . . . . . . . . 1969.23 Principe de fonctionnement d’un capteur de niveau ultrasonique1969.24 Montages d’un capteur de niveau ultrasonique . . . . . . . . . 1979.25 Principe de mesure avec un capteur de niveau hyperfrequence 1989.26 Source radioactive . . . . . . . . . . . . . . . . . . . . . . . . . 2009.27 Conteneur et collimateur pour la source de radiation . . . . . 2009.28 Scintillateur pour detecter les radiations . . . . . . . . . . . . 2009.29 Principe de mesure par gammametrie. . . . . . . . . . . . . . 2019.30 Detecteurs de niveau a lames vibrantes . . . . . . . . . . . . . 2039.31 Palpeur rotationnel . . . . . . . . . . . . . . . . . . . . . . . . 203
10.1 Debimetre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20510.2 Reservoir se vidant par gravite . . . . . . . . . . . . . . . . . . 20610.3 Exemple de table de pertes de charges . . . . . . . . . . . . . 20810.4 Exemple de table de longueurs equivalentes de raccords 37 . . . 20910.5 Suite de table de longueurs equivalentes de raccords 38 . . . . . 20910.6 Relation debit-pression (hauteur manometrique) . . . . . . . . 21210.7 Circuit fluidique de l’exemple . . . . . . . . . . . . . . . . . . 21210.8 Evolution de la pression dans le circuit fluidique de l’exemple . 21410.9 Detecteurs de circulation 39 . . . . . . . . . . . . . . . . . . . . 21510.10Rotametre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21610.11Principe de fonctionnement du rotametre . . . . . . . . . . . . 21710.12Mesure de vitesse d’ecoulement par organe deprimogene . . . . 21810.13Plaques orifices . . . . . . . . . . . . . . . . . . . . . . . . . . 22010.14Les differentes facons de mesurer la chute de pression . . . . . 22110.15Debitmetre a venturi . . . . . . . . . . . . . . . . . . . . . . . 22210.16Debimetre a tuyere . . . . . . . . . . . . . . . . . . . . . . . . 22310.17Tube de Pitot utilise en aeronautique . . . . . . . . . . . . . . 22310.18Principe de fonctionnement du tube de Pitot . . . . . . . . . . 22410.19Principe de fonctionnement d’un debitmetre electromagnetique 22510.20Principe du debitmetre ultrasonique a temps de parcours . . . 22710.21Principe du debitmetre ultrasonique a effet Doppler . . . . . . 228

xiv TABLE DES FIGURES
10.22Debitmetre a vortex . . . . . . . . . . . . . . . . . . . . . . . 22910.23Debitmetre massique thermique 40 . . . . . . . . . . . . . . . . 23210.24Principe du debitmetre massique thermique . . . . . . . . . . 23210.25Compteurs volumetriques . . . . . . . . . . . . . . . . . . . . 23310.26Compteur volumetrique a piston rotatif 41 . . . . . . . . . . . . 23410.27Cycle d’un compteur a disque oscillant . . . . . . . . . . . . . 23610.28Compteur a double roues ovales . . . . . . . . . . . . . . . . . 23610.29Cycle d’un compteur a double roues ovales . . . . . . . . . . . 23710.30Cycle d’un compteur a double roues en huit . . . . . . . . . . 23710.31Cycle d’un compteur a palettes . . . . . . . . . . . . . . . . . 23810.32Debitmetres a turbine . . . . . . . . . . . . . . . . . . . . . . 23910.33Deversoir rectangulaire avec deux contractions laterales . . . . 24010.34Barrage total . . . . . . . . . . . . . . . . . . . . . . . . . . . 24010.35Barrage total et equipement pour acheminer de l’air sous la
chute d’eau . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24110.36Barrage a contractions . . . . . . . . . . . . . . . . . . . . . . 24210.37Deversoir trapezoıdal . . . . . . . . . . . . . . . . . . . . . . . 24310.38Barrage a deversoir triangulaire . . . . . . . . . . . . . . . . . 24310.39Barrage a deversoir triangulaire . . . . . . . . . . . . . . . . . 24410.40Canal jaugeur de Parshall . . . . . . . . . . . . . . . . . . . . 24510.41Canal jaugeur de Palmer-Bowlus . . . . . . . . . . . . . . . . 246
Liste des tableaux
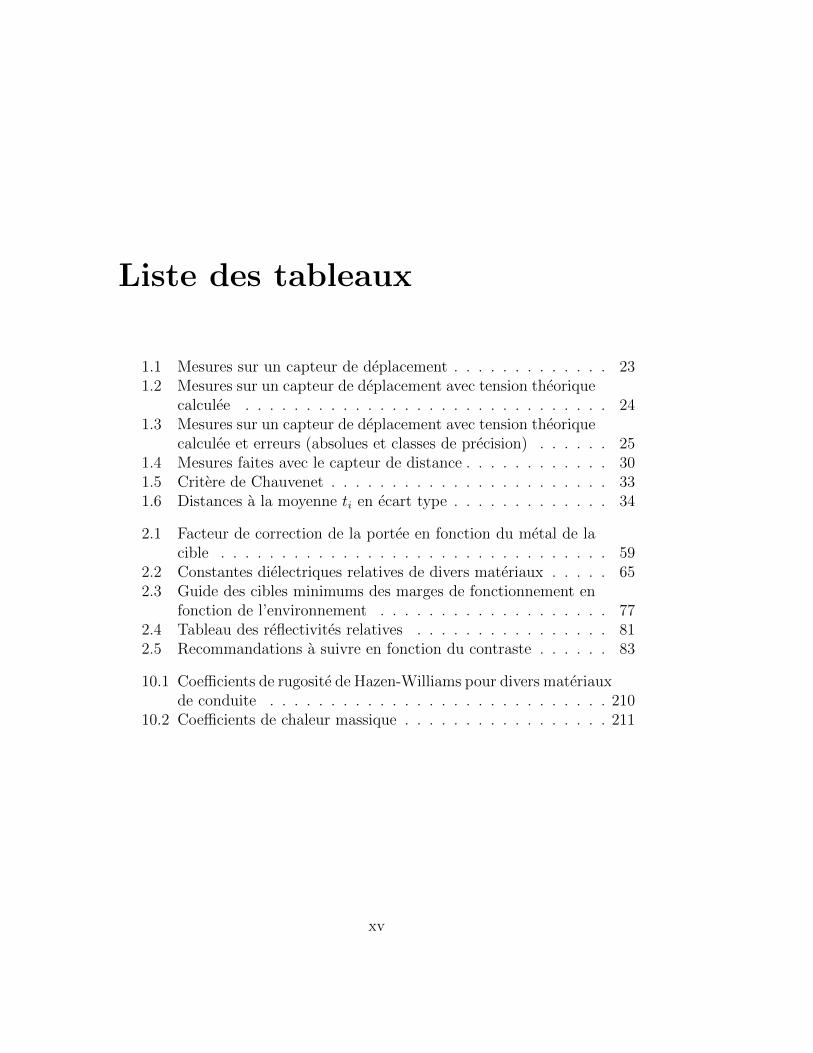
1.1 Mesures sur un capteur de deplacement . . . . . . . . . . . . . 231.2 Mesures sur un capteur de deplacement avec tension theorique
calculee . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.3 Mesures sur un capteur de deplacement avec tension theorique
calculee et erreurs (absolues et classes de precision) . . . . . . 251.4 Mesures faites avec le capteur de distance . . . . . . . . . . . . 301.5 Critere de Chauvenet . . . . . . . . . . . . . . . . . . . . . . . 331.6 Distances a la moyenne ti en ecart type . . . . . . . . . . . . . 34
2.1 Facteur de correction de la portee en fonction du metal de lacible . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2.2 Constantes dielectriques relatives de divers materiaux . . . . . 652.3 Guide des cibles minimums des marges de fonctionnement en
fonction de l’environnement . . . . . . . . . . . . . . . . . . . 772.4 Tableau des reflectivites relatives . . . . . . . . . . . . . . . . 812.5 Recommandations a suivre en fonction du contraste . . . . . . 83
10.1 Coefficients de rugosite de Hazen-Williams pour divers materiauxde conduite . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
10.2 Coefficients de chaleur massique . . . . . . . . . . . . . . . . . 211
xv
xvi LISTE DES TABLEAUX
Chapitre 1
Caracteristiques d’un capteur
Le cours de GPA-668 se divise en deux parties, la partie capteurs et la par-tie actionneurs. La partie capteurs est introduite avec ce chapitre definissantles caracteristiques d’un systeme de mesure.
1.1 Le systeme de mesure
1.1.1 Definition generale
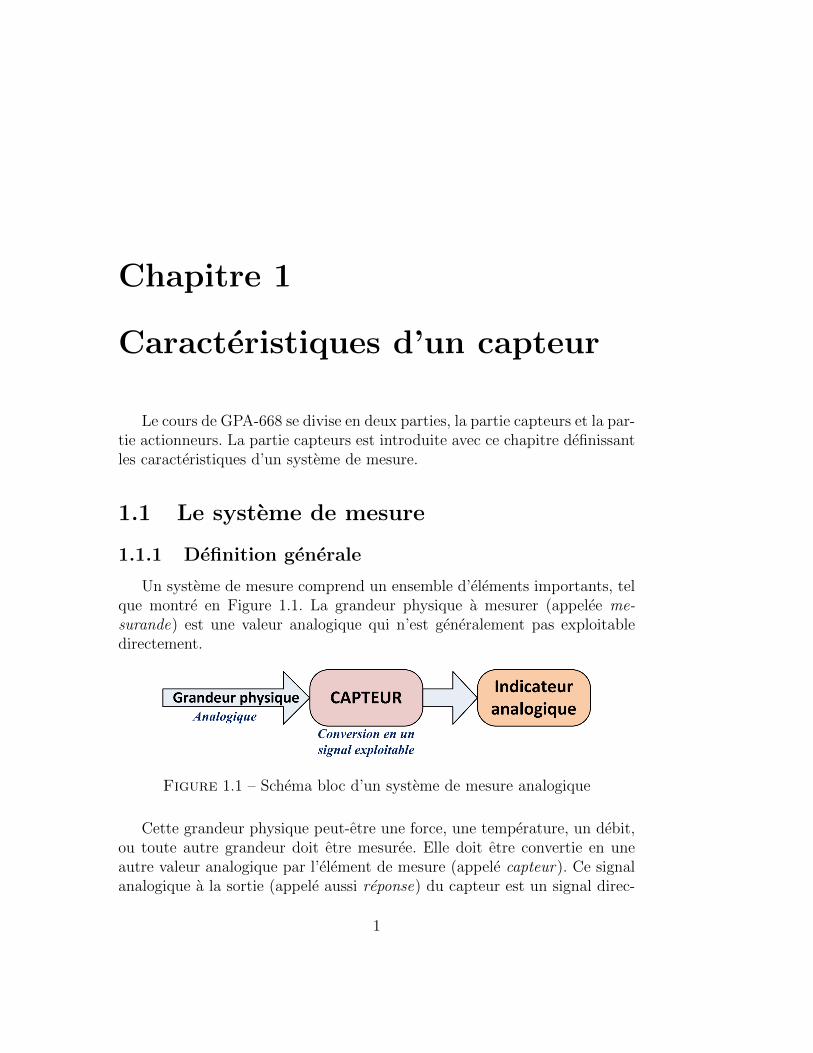
Un systeme de mesure comprend un ensemble d’elements importants, telque montre en Figure 1.1. La grandeur physique a mesurer (appelee me-surande) est une valeur analogique qui n’est generalement pas exploitabledirectement.
Figure 1.1 – Schema bloc d’un systeme de mesure analogique
Cette grandeur physique peut-etre une force, une temperature, un debit,ou toute autre grandeur doit etre mesuree. Elle doit etre convertie en uneautre valeur analogique par l’element de mesure (appele capteur). Ce signalanalogique a la sortie (appele aussi reponse) du capteur est un signal direc-
1
2 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
tement exploitable pour les indicateurs analogiques (affichage a aiguille). EnFigure 1.1, le signal de sortie peut etre de nature electrique.
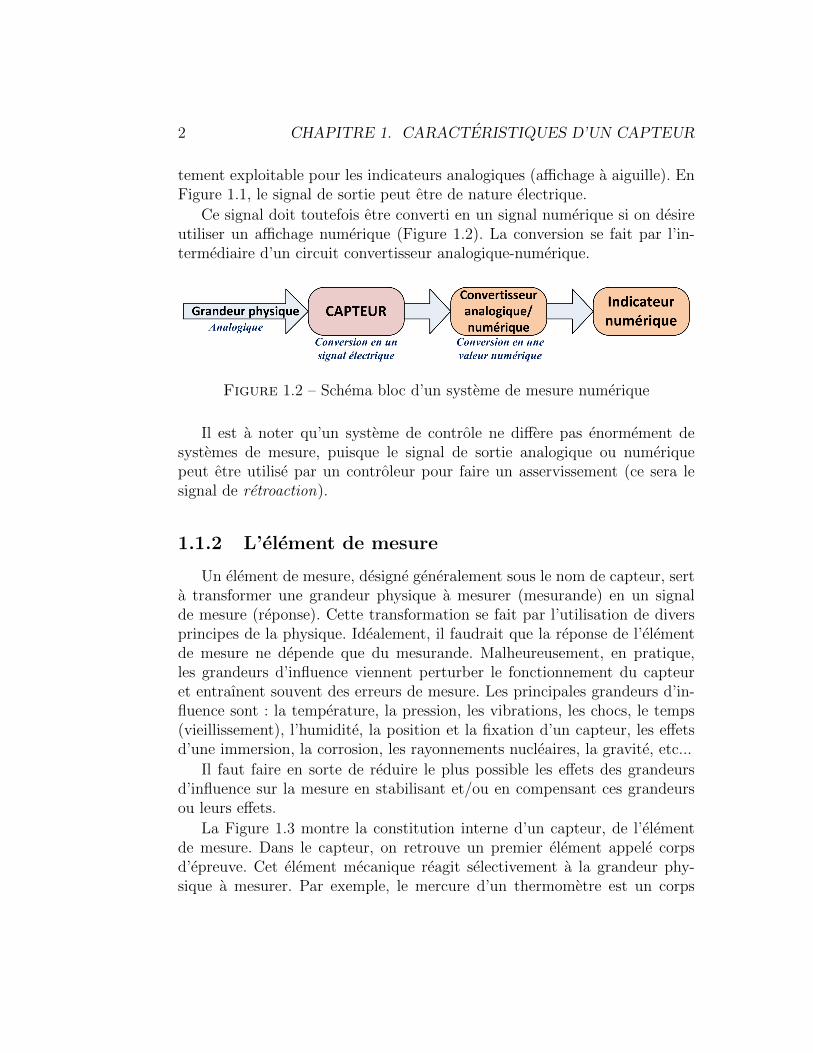
Ce signal doit toutefois etre converti en un signal numerique si on desireutiliser un affichage numerique (Figure 1.2). La conversion se fait par l’in-termediaire d’un circuit convertisseur analogique-numerique.
Figure 1.2 – Schema bloc d’un systeme de mesure numerique
Il est a noter qu’un systeme de controle ne differe pas enormement desystemes de mesure, puisque le signal de sortie analogique ou numeriquepeut etre utilise par un controleur pour faire un asservissement (ce sera lesignal de retroaction).
1.1.2 L’element de mesure
Un element de mesure, designe generalement sous le nom de capteur, serta transformer une grandeur physique a mesurer (mesurande) en un signalde mesure (reponse). Cette transformation se fait par l’utilisation de diversprincipes de la physique. Idealement, il faudrait que la reponse de l’elementde mesure ne depende que du mesurande. Malheureusement, en pratique,les grandeurs d’influence viennent perturber le fonctionnement du capteuret entraınent souvent des erreurs de mesure. Les principales grandeurs d’in-fluence sont : la temperature, la pression, les vibrations, les chocs, le temps(vieillissement), l’humidite, la position et la fixation d’un capteur, les effetsd’une immersion, la corrosion, les rayonnements nucleaires, la gravite, etc...
Il faut faire en sorte de reduire le plus possible les effets des grandeursd’influence sur la mesure en stabilisant et/ou en compensant ces grandeursou leurs effets.
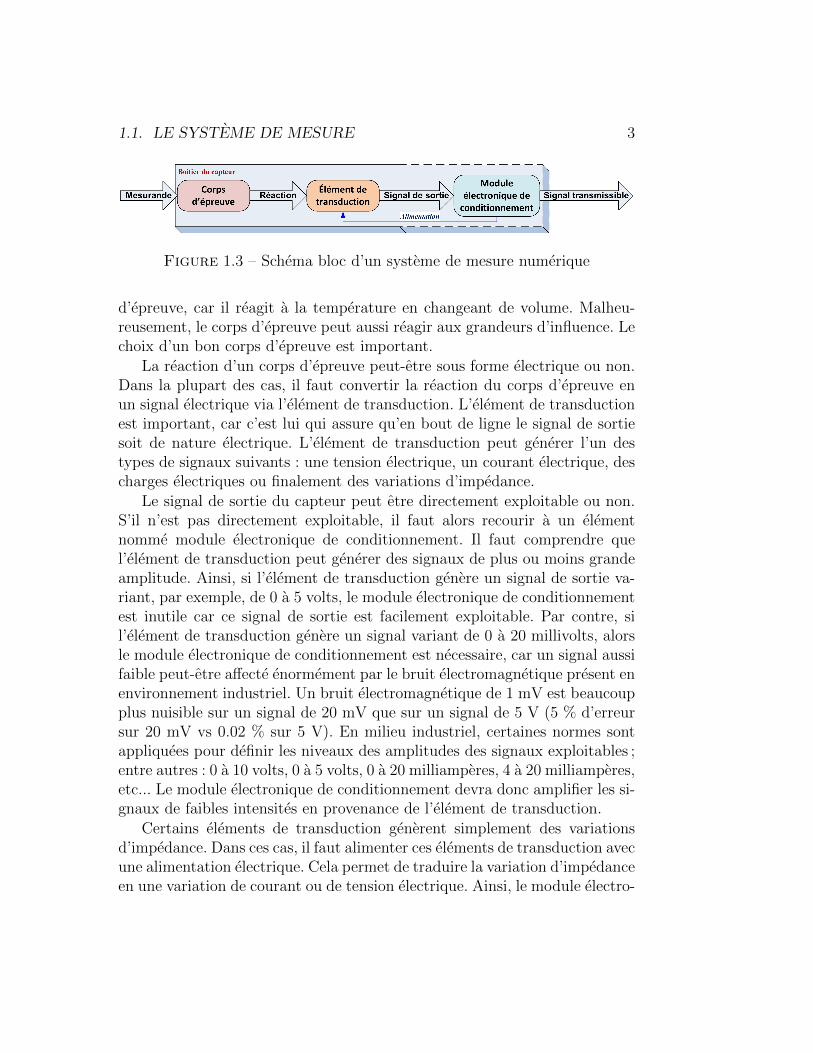
La Figure 1.3 montre la constitution interne d’un capteur, de l’elementde mesure. Dans le capteur, on retrouve un premier element appele corpsd’epreuve. Cet element mecanique reagit selectivement a la grandeur phy-sique a mesurer. Par exemple, le mercure d’un thermometre est un corps
1.1. LE SYSTEME DE MESURE 3
Figure 1.3 – Schema bloc d’un systeme de mesure numerique
d’epreuve, car il reagit a la temperature en changeant de volume. Malheu-reusement, le corps d’epreuve peut aussi reagir aux grandeurs d’influence. Lechoix d’un bon corps d’epreuve est important.
La reaction d’un corps d’epreuve peut-etre sous forme electrique ou non.Dans la plupart des cas, il faut convertir la reaction du corps d’epreuve enun signal electrique via l’element de transduction. L’element de transductionest important, car c’est lui qui assure qu’en bout de ligne le signal de sortiesoit de nature electrique. L’element de transduction peut generer l’un destypes de signaux suivants : une tension electrique, un courant electrique, descharges electriques ou finalement des variations d’impedance.
Le signal de sortie du capteur peut etre directement exploitable ou non.S’il n’est pas directement exploitable, il faut alors recourir a un elementnomme module electronique de conditionnement. Il faut comprendre quel’element de transduction peut generer des signaux de plus ou moins grandeamplitude. Ainsi, si l’element de transduction genere un signal de sortie va-riant, par exemple, de 0 a 5 volts, le module electronique de conditionnementest inutile car ce signal de sortie est facilement exploitable. Par contre, sil’element de transduction genere un signal variant de 0 a 20 millivolts, alorsle module electronique de conditionnement est necessaire, car un signal aussifaible peut-etre affecte enormement par le bruit electromagnetique present enenvironnement industriel. Un bruit electromagnetique de 1 mV est beaucoupplus nuisible sur un signal de 20 mV que sur un signal de 5 V (5 % d’erreursur 20 mV vs 0.02 % sur 5 V). En milieu industriel, certaines normes sontappliquees pour definir les niveaux des amplitudes des signaux exploitables ;entre autres : 0 a 10 volts, 0 a 5 volts, 0 a 20 milliamperes, 4 a 20 milliamperes,etc... Le module electronique de conditionnement devra donc amplifier les si-gnaux de faibles intensites en provenance de l’element de transduction.
Certains elements de transduction generent simplement des variationsd’impedance. Dans ces cas, il faut alimenter ces elements de transduction avecune alimentation electrique. Cela permet de traduire la variation d’impedanceen une variation de courant ou de tension electrique. Ainsi, le module electro-
4 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
nique de conditionnement fournira l’alimentation electrique a l’element detransduction et amplifiera le signal electrique en provenance de ce dernier.
1.1.3 Modes de mesure
Les capteurs sont capables de determiner l’amplitude du mesurande enutilisant l’un des trois modes suivants :• Mesure par deviation ;• Mesure par comparaison ;• Mesure par compensation.
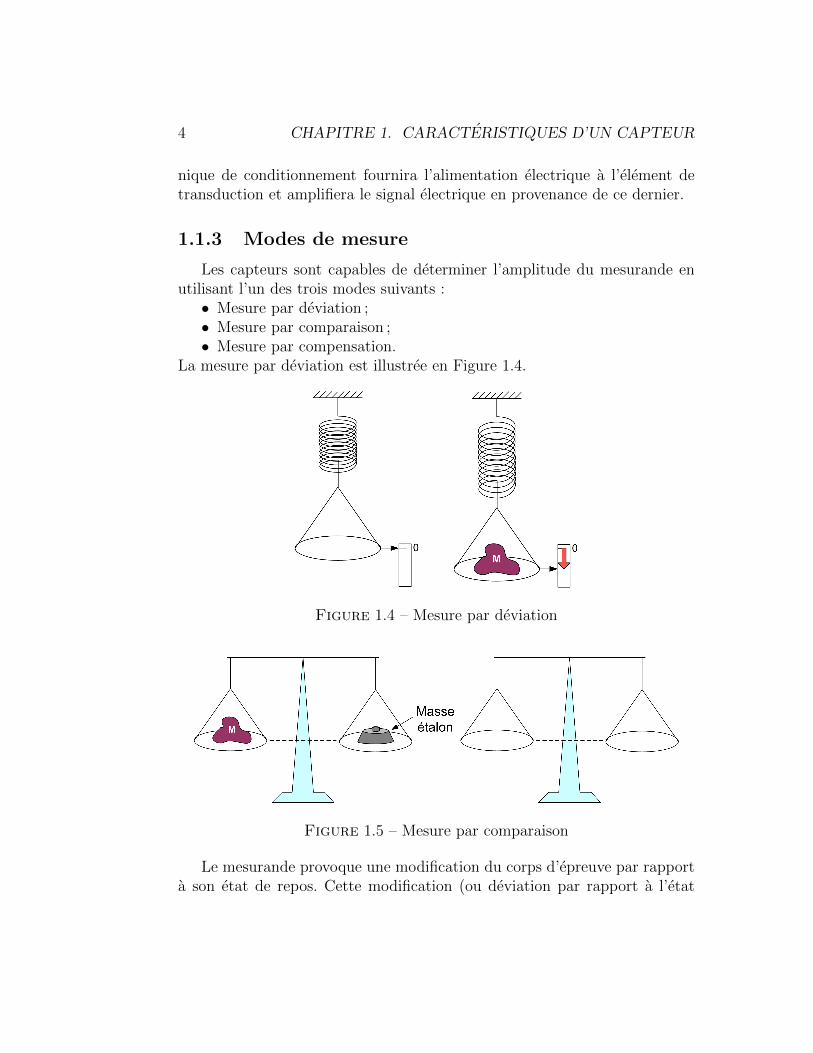
La mesure par deviation est illustree en Figure 1.4.
Figure 1.4 – Mesure par deviation
Figure 1.5 – Mesure par comparaison
Le mesurande provoque une modification du corps d’epreuve par rapporta son etat de repos. Cette modification (ou deviation par rapport a l’etat
1.1. LE SYSTEME DE MESURE 5
de repos) est mesuree par l’element de transduction. Cette mesure se fait enboucle ouverte et la mesure de la grandeur physique est obtenue directementde la deviation du corps d’epreuve par rapport a son etat de repos.
La Figure 1.5 presente un schema presentant la methode de mesure parcomparaison. Cette facon de mesurer s’effectue en boucle fermee. C’etaitla facon utilisee pour mesurer la masse d’un objet, en le comparant avecune balance des masses etalonnees. Lorsque la balance est en equilibre, celaimplique que la masse de l’objet est egale a la masse des etalons places surl’autre cote de la balance.
Une methode similaire est utilisee en electronique dans un convertisseuranalogique numerique a approximations successives.
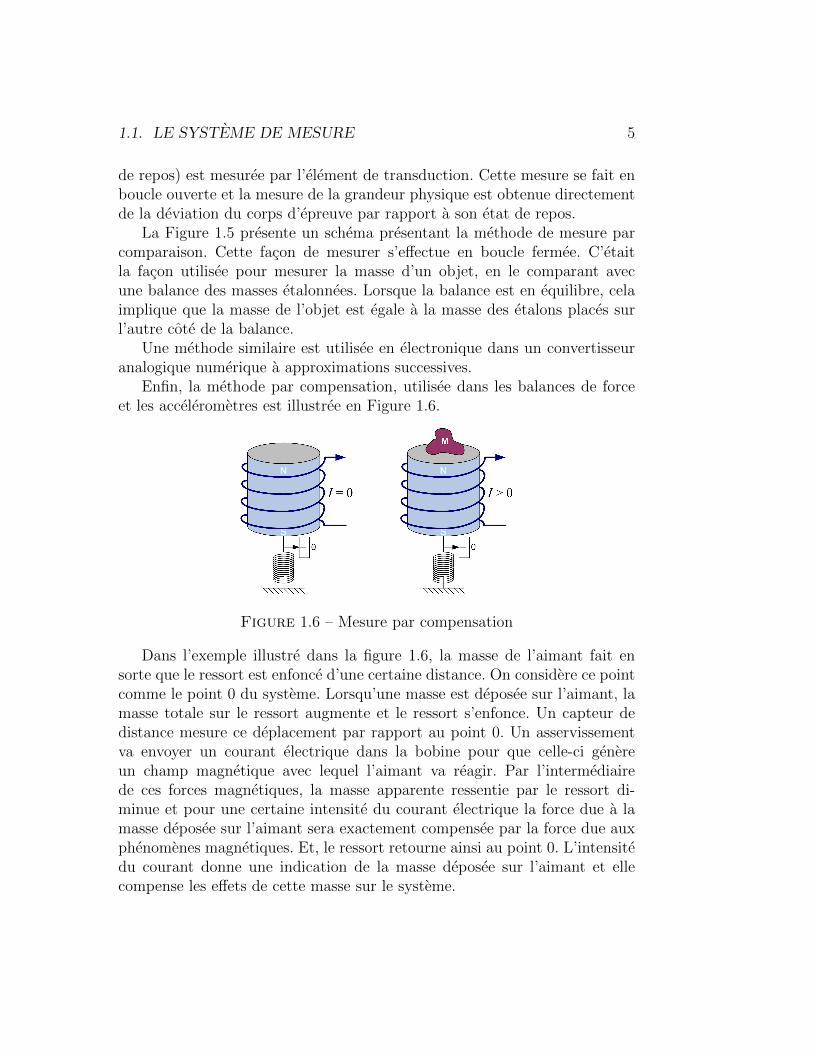
Enfin, la methode par compensation, utilisee dans les balances de forceet les accelerometres est illustree en Figure 1.6.
Figure 1.6 – Mesure par compensation
Dans l’exemple illustre dans la figure 1.6, la masse de l’aimant fait ensorte que le ressort est enfonce d’une certaine distance. On considere ce pointcomme le point 0 du systeme. Lorsqu’une masse est deposee sur l’aimant, lamasse totale sur le ressort augmente et le ressort s’enfonce. Un capteur dedistance mesure ce deplacement par rapport au point 0. Un asservissementva envoyer un courant electrique dans la bobine pour que celle-ci genereun champ magnetique avec lequel l’aimant va reagir. Par l’intermediairede ces forces magnetiques, la masse apparente ressentie par le ressort di-minue et pour une certaine intensite du courant electrique la force due a lamasse deposee sur l’aimant sera exactement compensee par la force due auxphenomenes magnetiques. Et, le ressort retourne ainsi au point 0. L’intensitedu courant donne une indication de la masse deposee sur l’aimant et ellecompense les effets de cette masse sur le systeme.
6 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
1.1.4 Terminologie
Cette section presente la terminologie utilisee pour identifier les capteurs.Cette terminologie depend des grandeurs de sorties que les capteurs generent.
Le mot capteur designe un capteur de facon generique, mais aussi unelement de mesure ayant une sortie analogique electrique de niveau bas.
Un capteur-transmetteur est un element de mesure ayant une sortieanalogique electrique de niveau haut (signaux electriques standards).
Un codeur est element de mesure ayant une sortie numerique envoyantles signaux en paralleles (encodeur absolu).
Un compteur est element de mesure ayant une sortie numerique en-voyant les signaux en serie (encodeur incremental).
Un detecteur est element de mesure ayant une sortie logique, i.e., evo-luant selon deux etats possibles, selon la valeur du mesurande par rapport aun seuil (sortie tout-ou-rien).
1.2 Capteurs actifs vs capteurs passifs
1.2.1 Capteurs actifs
Les capteurs actifs sont des capteurs qui fonctionnent en generateur. Lecorps d’epreuve ou l’element de transduction utilise un principe physique quiassure la conversion en energie electrique l’energie propre au mesurande.
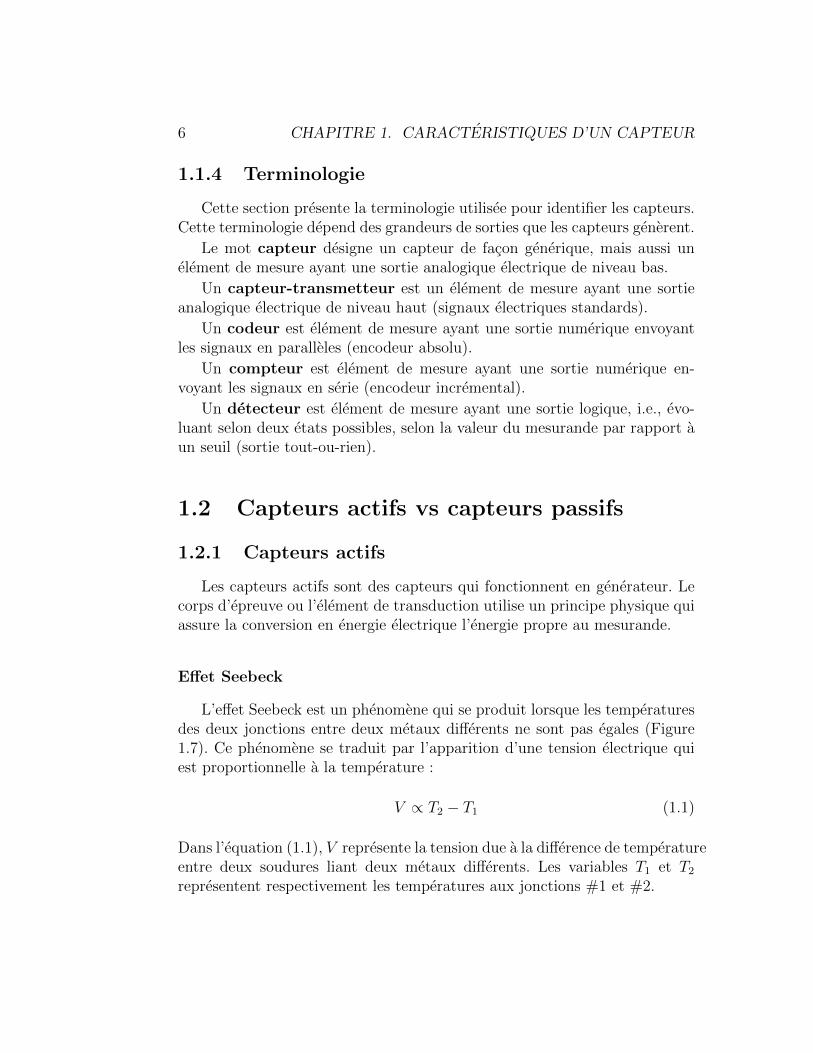
Effet Seebeck
L’effet Seebeck est un phenomene qui se produit lorsque les temperaturesdes deux jonctions entre deux metaux differents ne sont pas egales (Figure1.7). Ce phenomene se traduit par l’apparition d’une tension electrique quiest proportionnelle a la temperature :
V ∝ T2 − T1 (1.1)
Dans l’equation (1.1), V represente la tension due a la difference de temperatureentre deux soudures liant deux metaux differents. Les variables T1 et T2
representent respectivement les temperatures aux jonctions #1 et #2.
1.2. CAPTEURS ACTIFS VS CAPTEURS PASSIFS 7
Figure 1.7 – Effet Seebeck - thermocouple
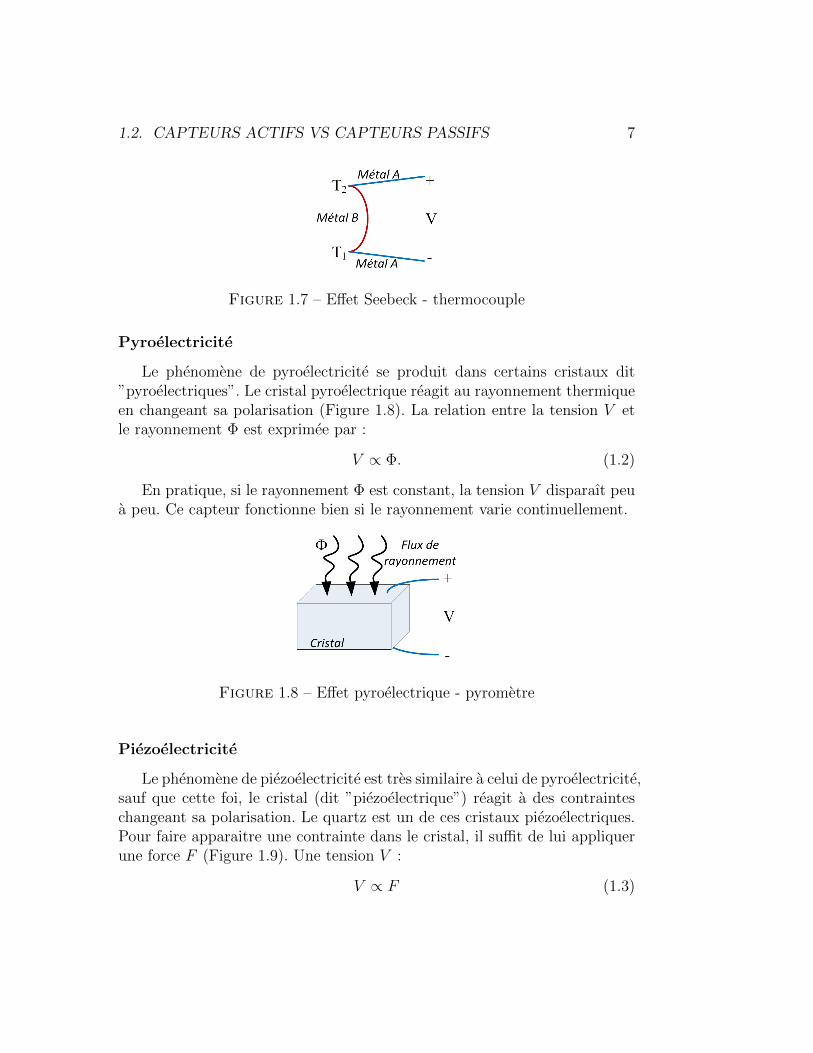
Pyroelectricite
Le phenomene de pyroelectricite se produit dans certains cristaux dit”pyroelectriques”. Le cristal pyroelectrique reagit au rayonnement thermiqueen changeant sa polarisation (Figure 1.8). La relation entre la tension V etle rayonnement Φ est exprimee par :
V ∝ Φ. (1.2)
En pratique, si le rayonnement Φ est constant, la tension V disparaıt peua peu. Ce capteur fonctionne bien si le rayonnement varie continuellement.
Figure 1.8 – Effet pyroelectrique - pyrometre
Piezoelectricite
Le phenomene de piezoelectricite est tres similaire a celui de pyroelectricite,sauf que cette foi, le cristal (dit ”piezoelectrique”) reagit a des contrainteschangeant sa polarisation. Le quartz est un de ces cristaux piezoelectriques.Pour faire apparaitre une contrainte dans le cristal, il suffit de lui appliquerune force F (Figure 1.9). Une tension V :
V ∝ F (1.3)
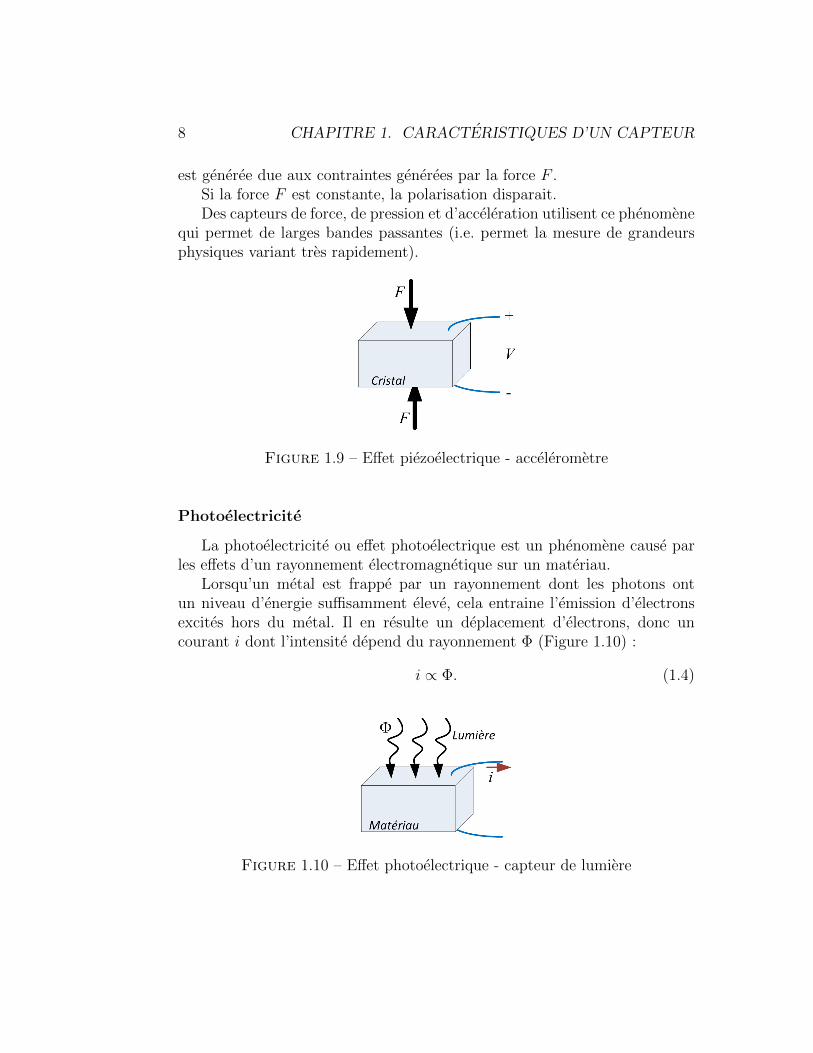
8 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
est generee due aux contraintes generees par la force F .Si la force F est constante, la polarisation disparait.Des capteurs de force, de pression et d’acceleration utilisent ce phenomene
qui permet de larges bandes passantes (i.e. permet la mesure de grandeursphysiques variant tres rapidement).
Figure 1.9 – Effet piezoelectrique - accelerometre
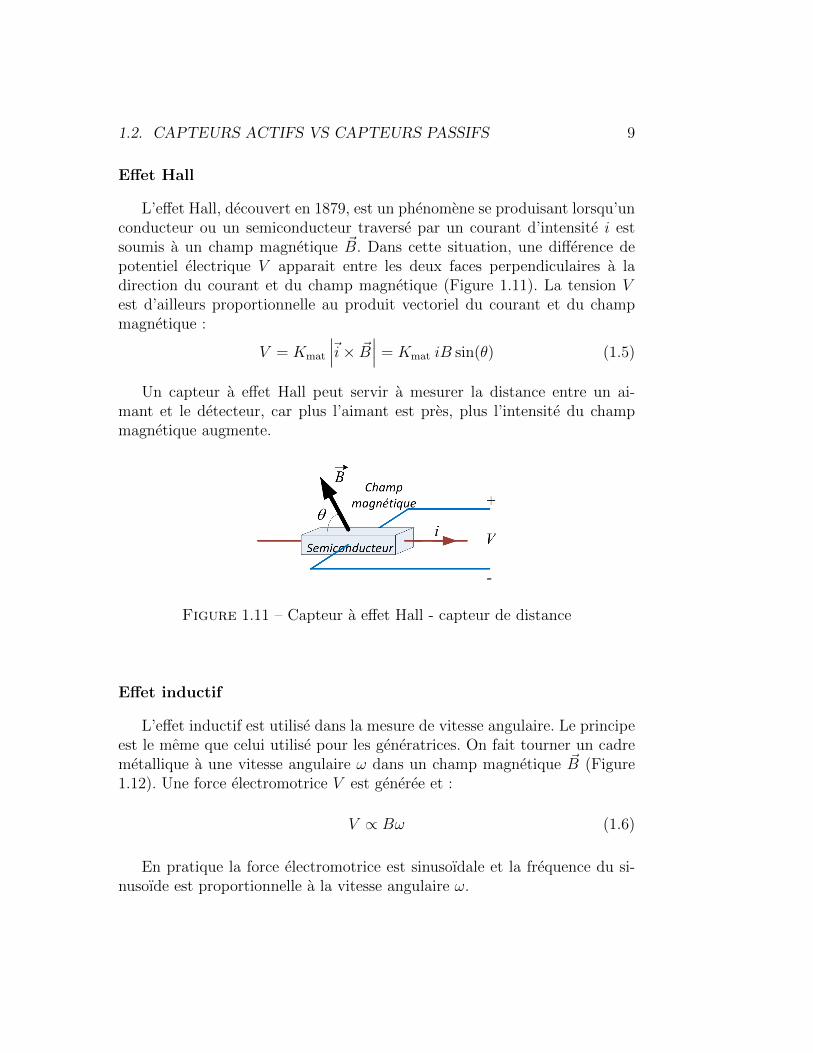
Photoelectricite
La photoelectricite ou effet photoelectrique est un phenomene cause parles effets d’un rayonnement electromagnetique sur un materiau.
Lorsqu’un metal est frappe par un rayonnement dont les photons ontun niveau d’energie suffisamment eleve, cela entraine l’emission d’electronsexcites hors du metal. Il en resulte un deplacement d’electrons, donc uncourant i dont l’intensite depend du rayonnement Φ (Figure 1.10) :
i ∝ Φ. (1.4)
Figure 1.10 – Effet photoelectrique - capteur de lumiere
1.2. CAPTEURS ACTIFS VS CAPTEURS PASSIFS 9
Effet Hall
L’effet Hall, decouvert en 1879, est un phenomene se produisant lorsqu’unconducteur ou un semiconducteur traverse par un courant d’intensite i estsoumis a un champ magnetique ~B. Dans cette situation, une difference depotentiel electrique V apparait entre les deux faces perpendiculaires a ladirection du courant et du champ magnetique (Figure 1.11). La tension Vest d’ailleurs proportionnelle au produit vectoriel du courant et du champmagnetique :
V = Kmat
∣∣∣~i× ~B∣∣∣ = Kmat iB sin(θ) (1.5)
Un capteur a effet Hall peut servir a mesurer la distance entre un ai-mant et le detecteur, car plus l’aimant est pres, plus l’intensite du champmagnetique augmente.
Figure 1.11 – Capteur a effet Hall - capteur de distance
Effet inductif
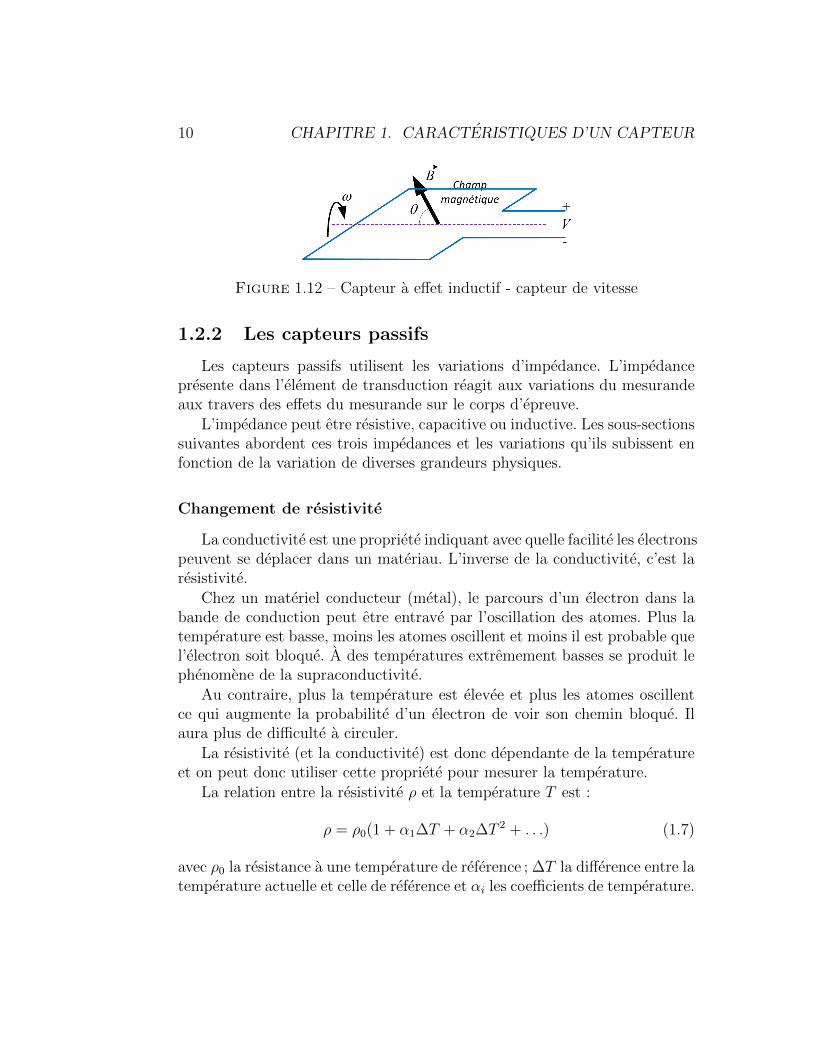
L’effet inductif est utilise dans la mesure de vitesse angulaire. Le principeest le meme que celui utilise pour les generatrices. On fait tourner un cadremetallique a une vitesse angulaire ω dans un champ magnetique ~B (Figure1.12). Une force electromotrice V est generee et :
V ∝ Bω (1.6)
En pratique la force electromotrice est sinusoıdale et la frequence du si-nusoıde est proportionnelle a la vitesse angulaire ω.
10 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
Figure 1.12 – Capteur a effet inductif - capteur de vitesse
1.2.2 Les capteurs passifs
Les capteurs passifs utilisent les variations d’impedance. L’impedancepresente dans l’element de transduction reagit aux variations du mesurandeaux travers des effets du mesurande sur le corps d’epreuve.
L’impedance peut etre resistive, capacitive ou inductive. Les sous-sectionssuivantes abordent ces trois impedances et les variations qu’ils subissent enfonction de la variation de diverses grandeurs physiques.
Changement de resistivite
La conductivite est une propriete indiquant avec quelle facilite les electronspeuvent se deplacer dans un materiau. L’inverse de la conductivite, c’est laresistivite.
Chez un materiel conducteur (metal), le parcours d’un electron dans labande de conduction peut etre entrave par l’oscillation des atomes. Plus latemperature est basse, moins les atomes oscillent et moins il est probable quel’electron soit bloque. A des temperatures extremement basses se produit lephenomene de la supraconductivite.
Au contraire, plus la temperature est elevee et plus les atomes oscillentce qui augmente la probabilite d’un electron de voir son chemin bloque. Ilaura plus de difficulte a circuler.
La resistivite (et la conductivite) est donc dependante de la temperatureet on peut donc utiliser cette propriete pour mesurer la temperature.
La relation entre la resistivite ρ et la temperature T est :
ρ = ρ0(1 + α1∆T + α2∆T 2 + . . .) (1.7)
avec ρ0 la resistance a une temperature de reference ; ∆T la difference entre latemperature actuelle et celle de reference et αi les coefficients de temperature.
1.2. CAPTEURS ACTIFS VS CAPTEURS PASSIFS 11
Chez le semi-conducteur, la resistance evolue selon une fonction logarith-mique avec la temperature et elle depend du dopage du semi-conducteur. Lechangement de temperature modifie le nombre d’electrons libres et de trous,changeant ainsi la resistivite du semi-conducteur.
La resistance d’un conducteur ou d’un semi-conducteur, depend aussi dela geometrie. Ainsi, pour un fil cylindrique de longueur l et de section A, laresistance est :
R = ρl
A(1.8)
Si cette geometrie est modifiee, cela entrainera des changements aux va-leurs des variables l et A, ce qui fera varier la valeur de la resistance R. Celaest utilise dans les jauges de contraintes qui sont des resistances utilisees pourmesurer la deformation de poutres soumises a des forces.
La resistivite de certains semi-conducteurs est aussi dependante du fluxlumineux. Le rayonnement lumineux fait passer des electrons de la bandede valence a la bande de conduction. Donc, comme le nombre d’electrons dela bande de conduction (et de trous dans a bande de valence) a change, laresistance du semi-conducteur est modifiee.
Enfin, la resistivite ρ de certains materiaux, dont le chlorure de lithiumdepend du niveau d’humidite. On peut donc deduire niveau d’humidite enmesurant la variation de la resistance.
Changement de capacitance
La capacitance C est definie comme le rapport entre la quantite Q decharges electriques stockees sur deux plaques metalliques et le champ electri-que V entre ces plaques provoque par ces charges electriques :
C =Q
V(1.9)
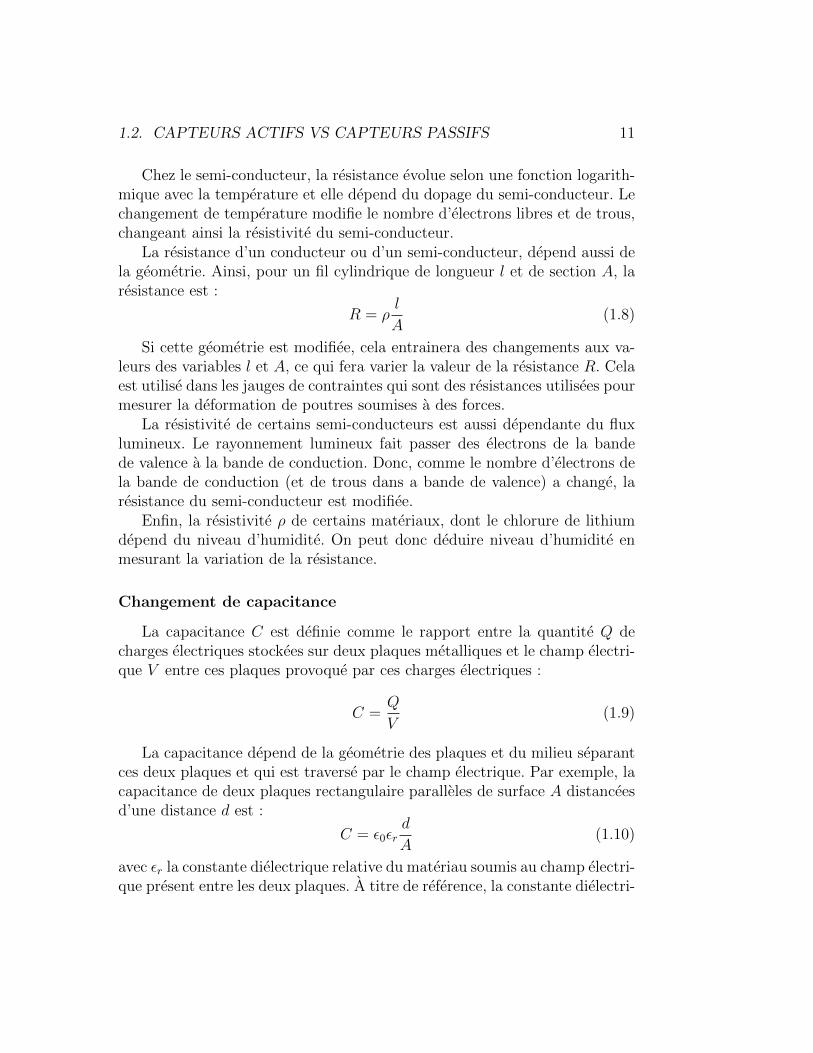
La capacitance depend de la geometrie des plaques et du milieu separantces deux plaques et qui est traverse par le champ electrique. Par exemple, lacapacitance de deux plaques rectangulaire paralleles de surface A distanceesd’une distance d est :
C = ε0εrd
A(1.10)
avec εr la constante dielectrique relative du materiau soumis au champ electri-que present entre les deux plaques. A titre de reference, la constante dielectri-
12 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
Figure 1.13 – Condensateur a plaques rectangulaires paralleles
que du vide (dite aussi permittivite du vide) est ε0 = 8.854 × 10−12 Fa-rads/metre et la constante dielectrique relative de l’air est εr = 1.000264.
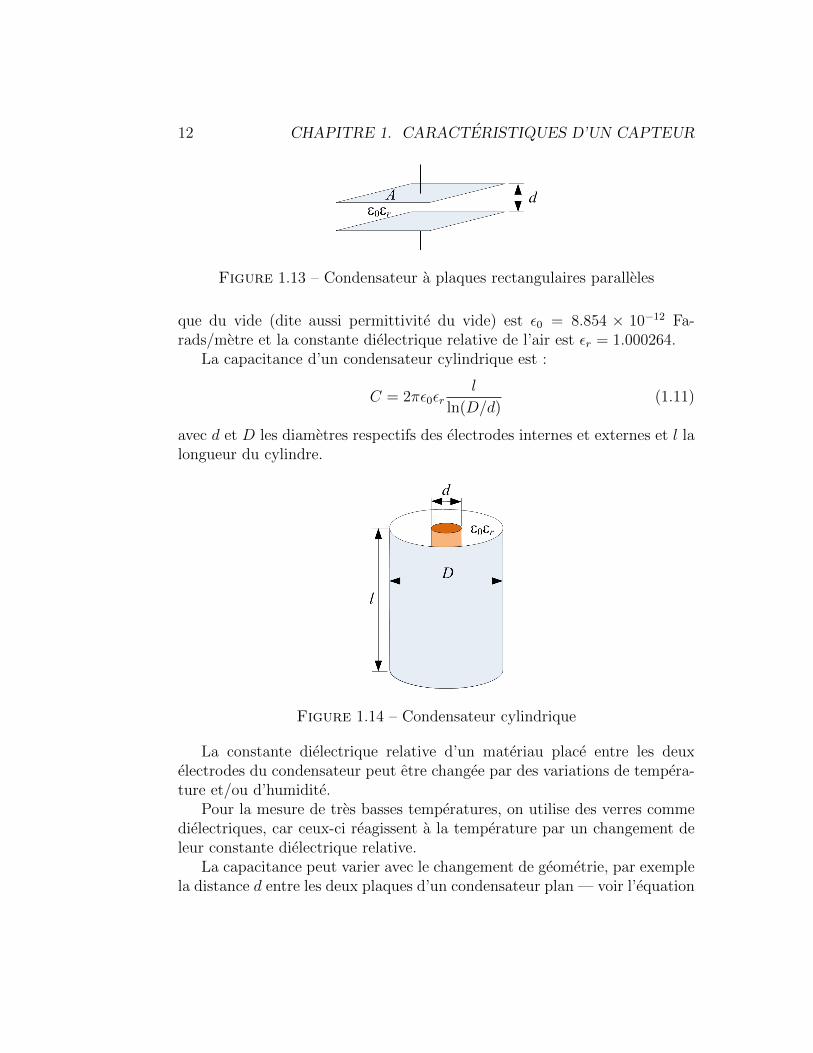
La capacitance d’un condensateur cylindrique est :
C = 2πε0εrl
ln(D/d)(1.11)
avec d et D les diametres respectifs des electrodes internes et externes et l lalongueur du cylindre.
Figure 1.14 – Condensateur cylindrique
La constante dielectrique relative d’un materiau place entre les deuxelectrodes du condensateur peut etre changee par des variations de tempera-ture et/ou d’humidite.
Pour la mesure de tres basses temperatures, on utilise des verres commedielectriques, car ceux-ci reagissent a la temperature par un changement deleur constante dielectrique relative.
La capacitance peut varier avec le changement de geometrie, par exemplela distance d entre les deux plaques d’un condensateur plan — voir l’equation
1.2. CAPTEURS ACTIFS VS CAPTEURS PASSIFS 13
(1.10). Ce principe peut etre utilise dans un capteur de pression a membrane,celle-ci etant l’une des deux plaques du condensateur. La deformation de lamembrane change la capacitance.
Changement d’inductance
L’inductance L est une mesure du rapport entre le flux Φ du champmagnetique genere par un fil conducteur traverse par un courant d’intensiteI :
L =Φ
I(1.12)
En vertu de la loi de Faraday, la tension e(t) est :
e(t) =dΦ(t)
dt(1.13)
ce qui mene a la relation entre la tension et le coutant dans une inductance :
e(t) = −Ldi(t)dt
(1.14)
Il faut donc que le courant i(t) varie dans le temps pour que l’on puissemesurer l’inductance.
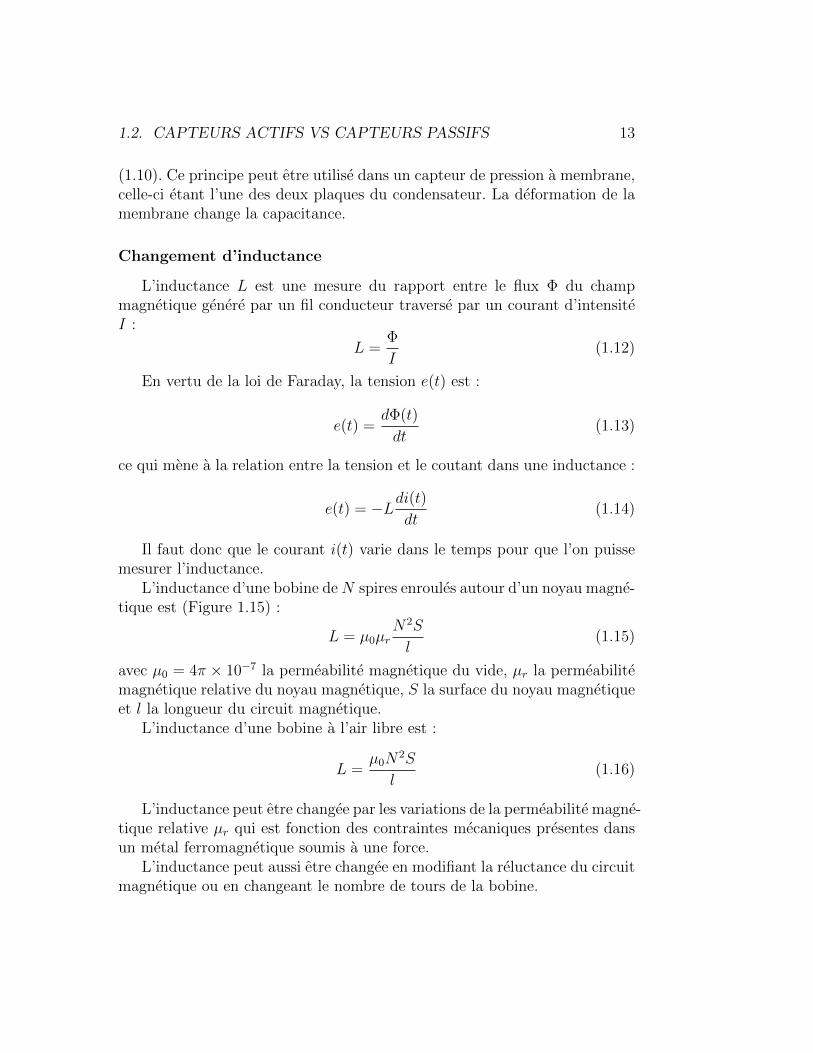
L’inductance d’une bobine deN spires enroules autour d’un noyau magne-tique est (Figure 1.15) :
L = µ0µrN2S
l(1.15)
avec µ0 = 4π × 10−7 la permeabilite magnetique du vide, µr la permeabilitemagnetique relative du noyau magnetique, S la surface du noyau magnetiqueet l la longueur du circuit magnetique.
L’inductance d’une bobine a l’air libre est :
L =µ0N
2S
l(1.16)
L’inductance peut etre changee par les variations de la permeabilite magne-tique relative µr qui est fonction des contraintes mecaniques presentes dansun metal ferromagnetique soumis a une force.
L’inductance peut aussi etre changee en modifiant la reluctance du circuitmagnetique ou en changeant le nombre de tours de la bobine.
14 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
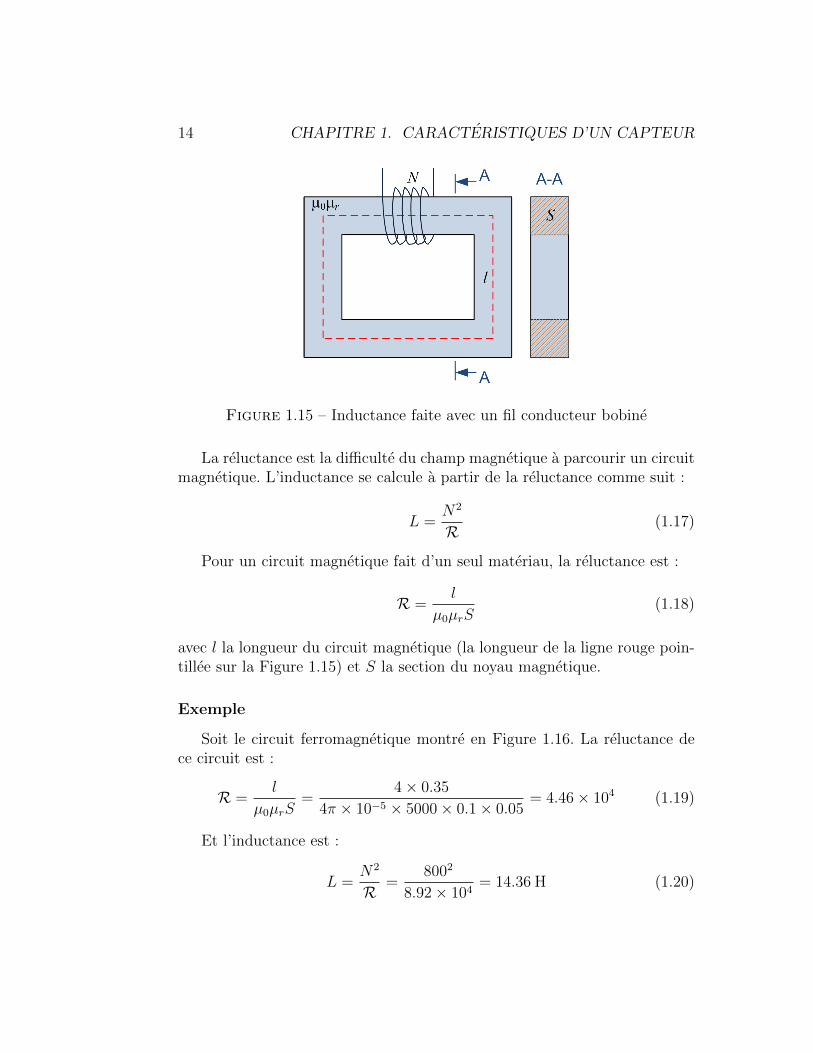
Figure 1.15 – Inductance faite avec un fil conducteur bobine
La reluctance est la difficulte du champ magnetique a parcourir un circuitmagnetique. L’inductance se calcule a partir de la reluctance comme suit :
L =N2
R(1.17)
Pour un circuit magnetique fait d’un seul materiau, la reluctance est :
R =l
µ0µrS(1.18)
avec l la longueur du circuit magnetique (la longueur de la ligne rouge poin-tillee sur la Figure 1.15) et S la section du noyau magnetique.
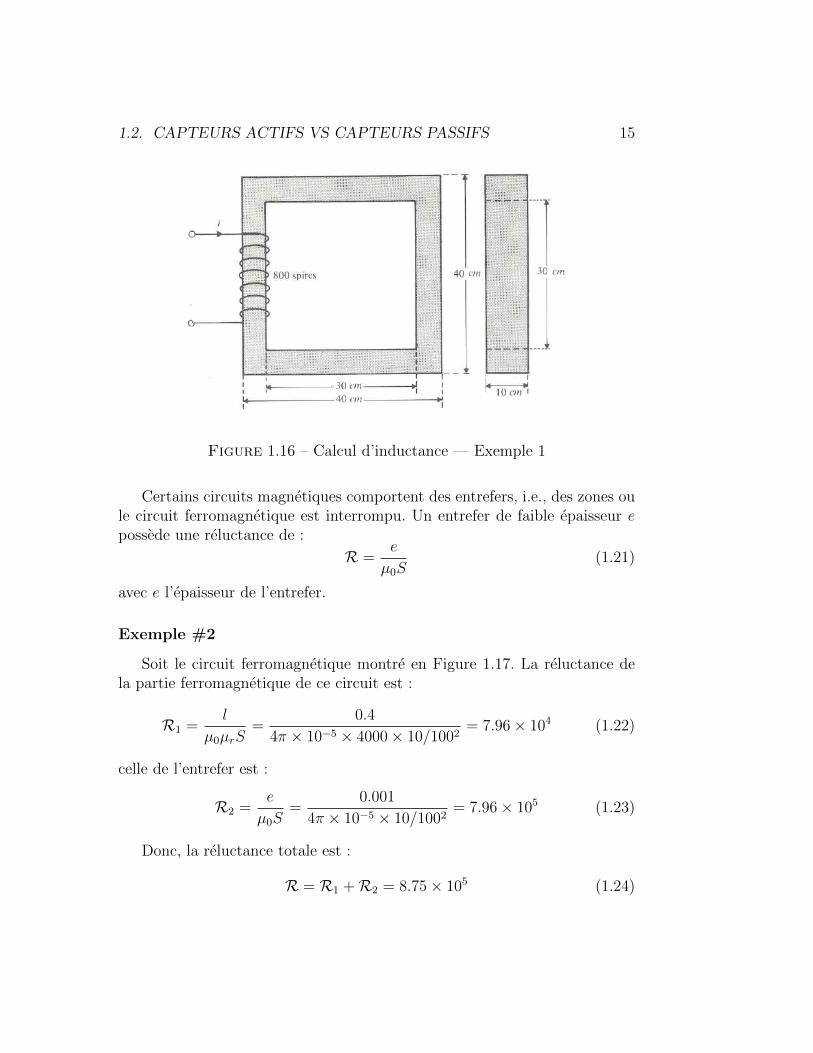
Exemple
Soit le circuit ferromagnetique montre en Figure 1.16. La reluctance dece circuit est :
R =l
µ0µrS=
4× 0.35
4π × 10−5 × 5000× 0.1× 0.05= 4.46× 104 (1.19)
Et l’inductance est :
L =N2
R=
8002
8.92× 104= 14.36 H (1.20)
1.2. CAPTEURS ACTIFS VS CAPTEURS PASSIFS 15
Figure 1.16 – Calcul d’inductance — Exemple 1
Certains circuits magnetiques comportent des entrefers, i.e., des zones oule circuit ferromagnetique est interrompu. Un entrefer de faible epaisseur epossede une reluctance de :
R =e
µ0S(1.21)
avec e l’epaisseur de l’entrefer.
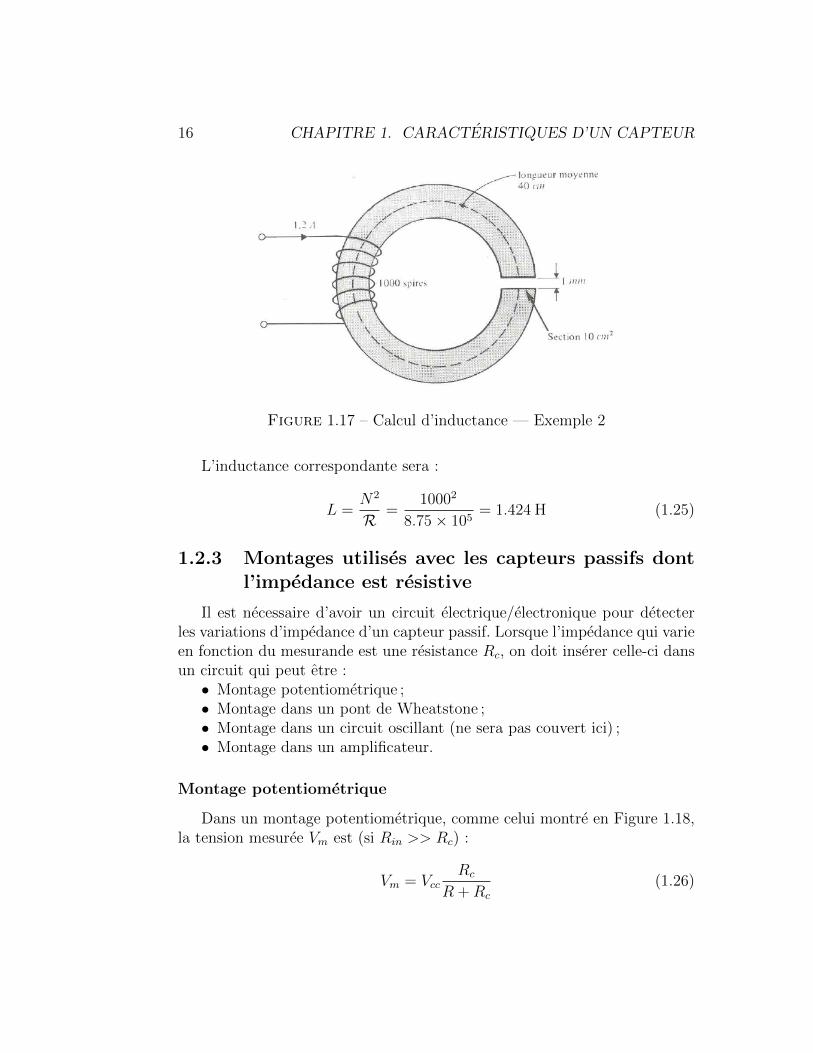
Exemple #2
Soit le circuit ferromagnetique montre en Figure 1.17. La reluctance dela partie ferromagnetique de ce circuit est :
R1 =l
µ0µrS=
0.4
4π × 10−5 × 4000× 10/1002= 7.96× 104 (1.22)
celle de l’entrefer est :
R2 =e
µ0S=
0.001
4π × 10−5 × 10/1002= 7.96× 105 (1.23)
Donc, la reluctance totale est :
R = R1 +R2 = 8.75× 105 (1.24)
16 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
Figure 1.17 – Calcul d’inductance — Exemple 2
L’inductance correspondante sera :
L =N2
R=
10002
8.75× 105= 1.424 H (1.25)
1.2.3 Montages utilises avec les capteurs passifs dontl’impedance est resistive
Il est necessaire d’avoir un circuit electrique/electronique pour detecterles variations d’impedance d’un capteur passif. Lorsque l’impedance qui varieen fonction du mesurande est une resistance Rc, on doit inserer celle-ci dansun circuit qui peut etre :• Montage potentiometrique ;• Montage dans un pont de Wheatstone ;• Montage dans un circuit oscillant (ne sera pas couvert ici) ;• Montage dans un amplificateur.
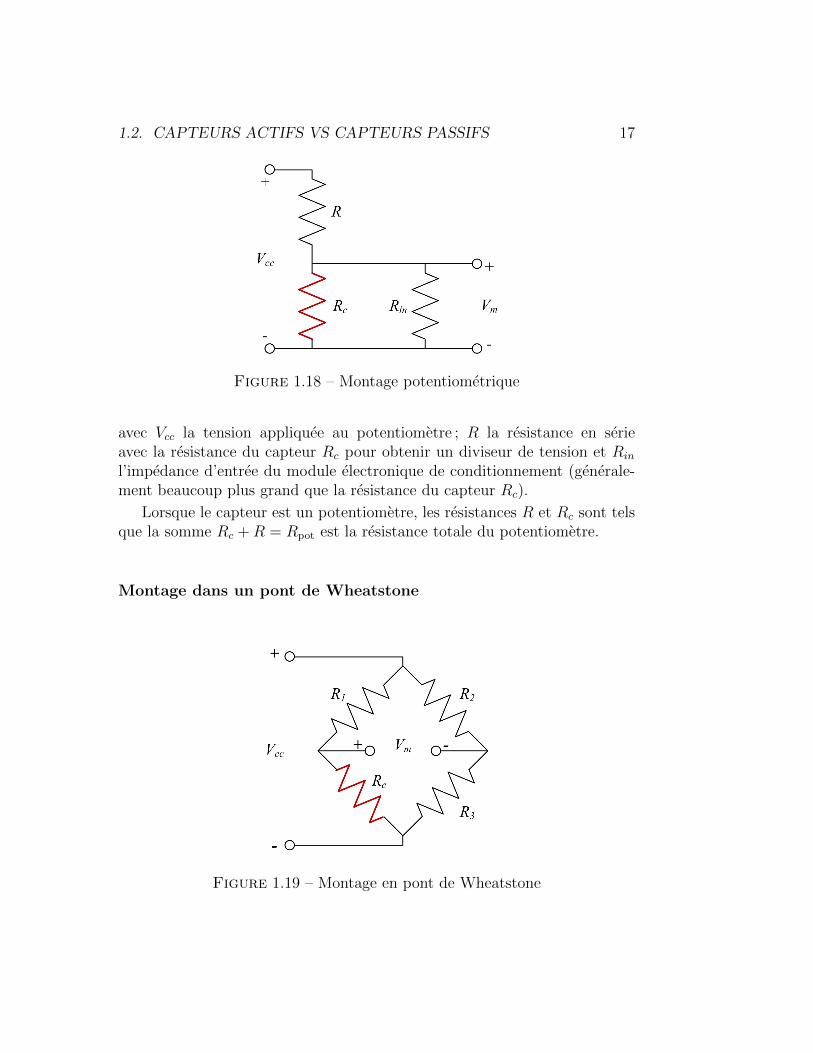
Montage potentiometrique
Dans un montage potentiometrique, comme celui montre en Figure 1.18,la tension mesuree Vm est (si Rin >> Rc) :
Vm = VccRc
R +Rc
(1.26)
1.2. CAPTEURS ACTIFS VS CAPTEURS PASSIFS 17
Figure 1.18 – Montage potentiometrique
avec Vcc la tension appliquee au potentiometre ; R la resistance en serieavec la resistance du capteur Rc pour obtenir un diviseur de tension et Rin
l’impedance d’entree du module electronique de conditionnement (generale-ment beaucoup plus grand que la resistance du capteur Rc).
Lorsque le capteur est un potentiometre, les resistances R et Rc sont telsque la somme Rc +R = Rpot est la resistance totale du potentiometre.
Montage dans un pont de Wheatstone
Figure 1.19 – Montage en pont de Wheatstone

18 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
Dans un montage en pont (Figure 1.19), la tension mesuree Vm est :
Vm = Vcc
(Rc
R1 +Rc
− R3
R2 +R3
)(1.27)
et elle depend de la tension d’alimentation du pont Vcc ; des resistances R1,R2 et R3 et de la resistance Rc de l’element de transduction du capteur. Siles trois resistances R1, R2 et R3 sont posees egales a R, on peut ecrire :
Vm = Vcc
(Rc
R +Rc
− R
R +R
)= Vcc
(Rc
R +Rc
− 1
2
)= Vcc
(Rc −R
2(R +Rc)
) (1.28)
De plus, si la resistance du capteur possede une relation du type Rc = R (1+x), avec le mesurande x, alors :
Vm = Vcc
(x
2(2 + x)
)(1.29)
qui est une fonction non-lineaire de x.Ces equations peuvent etre generalisees pour des impedances quelconques
(capacitances et inductances).
Montage dans un amplificateur
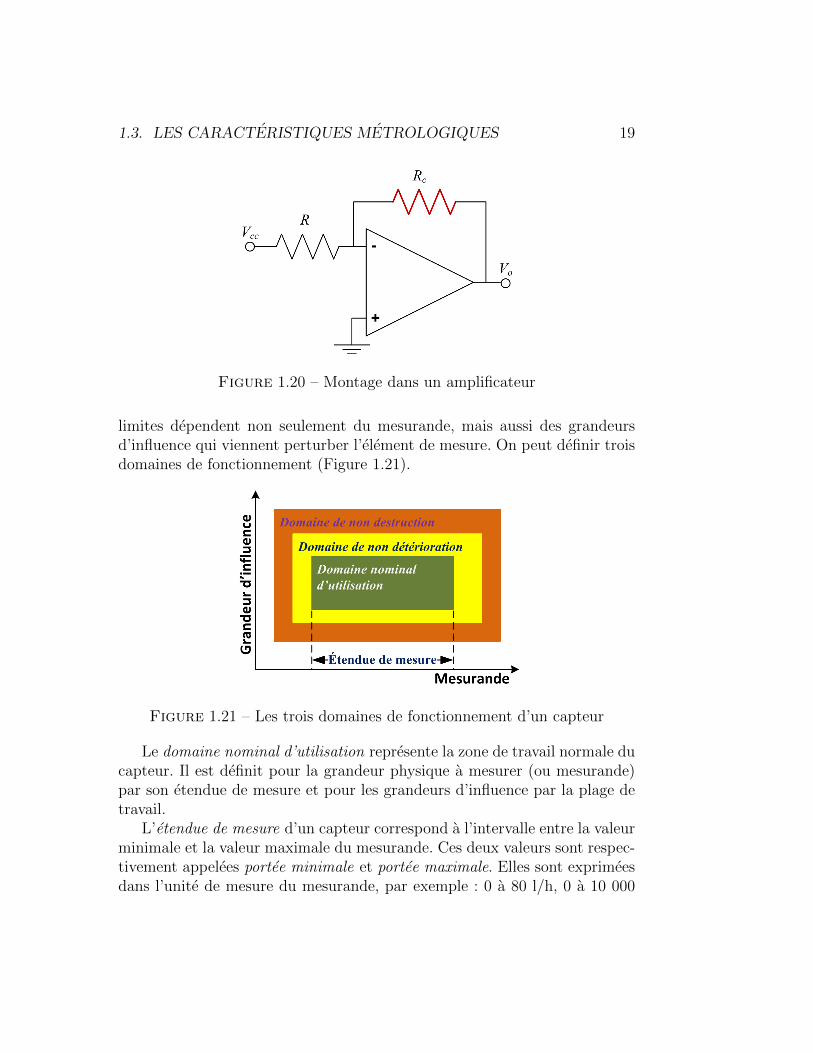
Dans le montage dans un amplificateur, montre en Figure 1.20 (amplifi-cateur inverseur), la tension en sortie de l’amplificateur Vo est :
V0 = −VccRc
R(1.30)
et depend ainsi de la tension d’entree Vcc ; de la resistance R et de la resistanceRc de l’element de transduction du capteur.
1.3 Les caracteristiques metrologiques
1.3.1 Les domaines de fonctionnement
Chaque capteur (ou element de mesure) presente certaines caracteristiquesmetrologiques qui definissent ses limites d’utilisation et de precision. Ces
1.3. LES CARACTERISTIQUES METROLOGIQUES 19
Figure 1.20 – Montage dans un amplificateur
limites dependent non seulement du mesurande, mais aussi des grandeursd’influence qui viennent perturber l’element de mesure. On peut definir troisdomaines de fonctionnement (Figure 1.21).
Figure 1.21 – Les trois domaines de fonctionnement d’un capteur
Le domaine nominal d’utilisation represente la zone de travail normale ducapteur. Il est definit pour la grandeur physique a mesurer (ou mesurande)par son etendue de mesure et pour les grandeurs d’influence par la plage detravail.
L’etendue de mesure d’un capteur correspond a l’intervalle entre la valeurminimale et la valeur maximale du mesurande. Ces deux valeurs sont respec-tivement appelees portee minimale et portee maximale. Elles sont exprimeesdans l’unite de mesure du mesurande, par exemple : 0 a 80 l/h, 0 a 10 000
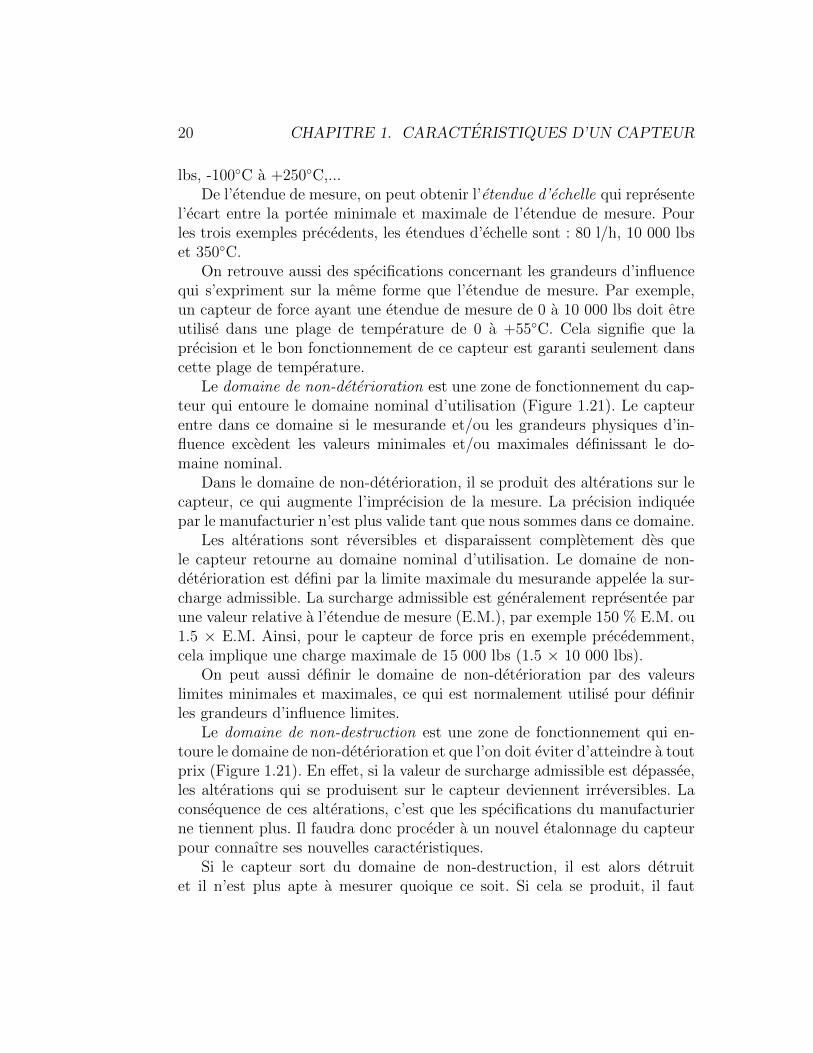
20 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
lbs, -100C a +250C,...De l’etendue de mesure, on peut obtenir l’etendue d’echelle qui represente
l’ecart entre la portee minimale et maximale de l’etendue de mesure. Pourles trois exemples precedents, les etendues d’echelle sont : 80 l/h, 10 000 lbset 350C.
On retrouve aussi des specifications concernant les grandeurs d’influencequi s’expriment sur la meme forme que l’etendue de mesure. Par exemple,un capteur de force ayant une etendue de mesure de 0 a 10 000 lbs doit etreutilise dans une plage de temperature de 0 a +55C. Cela signifie que laprecision et le bon fonctionnement de ce capteur est garanti seulement danscette plage de temperature.
Le domaine de non-deterioration est une zone de fonctionnement du cap-teur qui entoure le domaine nominal d’utilisation (Figure 1.21). Le capteurentre dans ce domaine si le mesurande et/ou les grandeurs physiques d’in-fluence excedent les valeurs minimales et/ou maximales definissant le do-maine nominal.
Dans le domaine de non-deterioration, il se produit des alterations sur lecapteur, ce qui augmente l’imprecision de la mesure. La precision indiqueepar le manufacturier n’est plus valide tant que nous sommes dans ce domaine.
Les alterations sont reversibles et disparaissent completement des quele capteur retourne au domaine nominal d’utilisation. Le domaine de non-deterioration est defini par la limite maximale du mesurande appelee la sur-charge admissible. La surcharge admissible est generalement representee parune valeur relative a l’etendue de mesure (E.M.), par exemple 150 % E.M. ou1.5 × E.M. Ainsi, pour le capteur de force pris en exemple precedemment,cela implique une charge maximale de 15 000 lbs (1.5 × 10 000 lbs).
On peut aussi definir le domaine de non-deterioration par des valeurslimites minimales et maximales, ce qui est normalement utilise pour definirles grandeurs d’influence limites.
Le domaine de non-destruction est une zone de fonctionnement qui en-toure le domaine de non-deterioration et que l’on doit eviter d’atteindre a toutprix (Figure 1.21). En effet, si la valeur de surcharge admissible est depassee,les alterations qui se produisent sur le capteur deviennent irreversibles. Laconsequence de ces alterations, c’est que les specifications du manufacturierne tiennent plus. Il faudra donc proceder a un nouvel etalonnage du capteurpour connaıtre ses nouvelles caracteristiques.
Si le capteur sort du domaine de non-destruction, il est alors detruitet il n’est plus apte a mesurer quoique ce soit. Si cela se produit, il faut
1.3. LES CARACTERISTIQUES METROLOGIQUES 21
serieusement etudier les raisons qui ont entrainees la destruction du capteur.
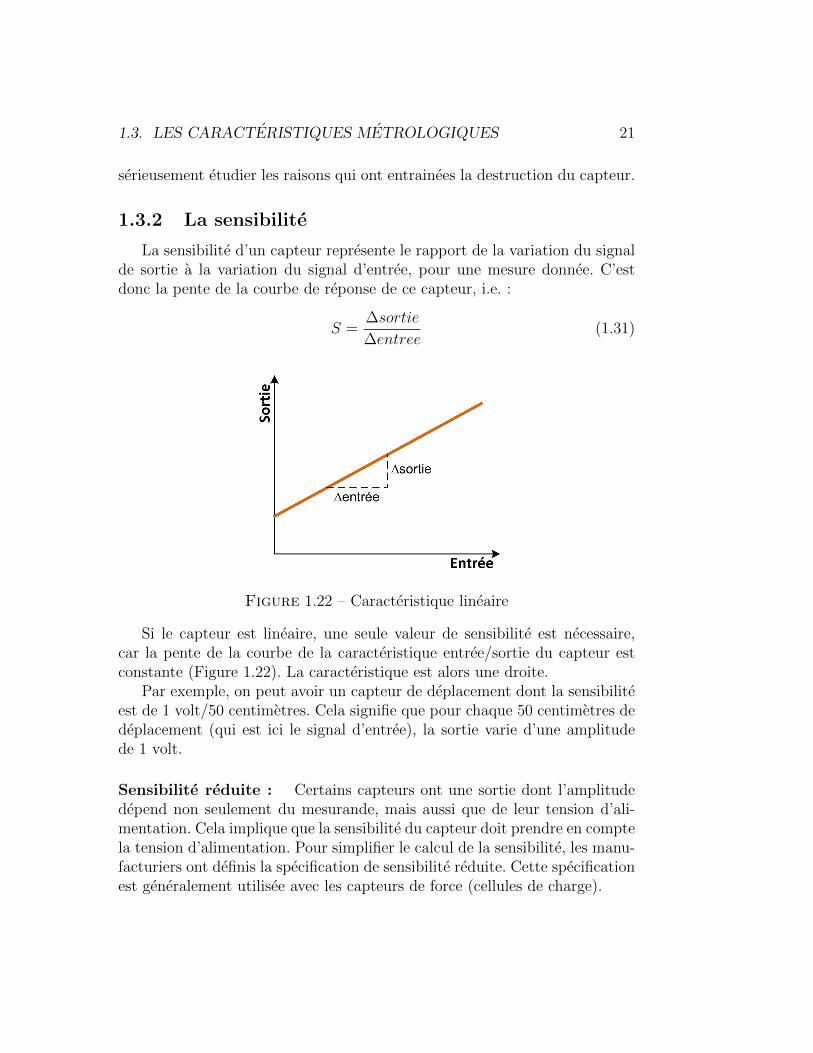
1.3.2 La sensibilite
La sensibilite d’un capteur represente le rapport de la variation du signalde sortie a la variation du signal d’entree, pour une mesure donnee. C’estdonc la pente de la courbe de reponse de ce capteur, i.e. :
S =∆sortie
∆entree(1.31)
Figure 1.22 – Caracteristique lineaire
Si le capteur est lineaire, une seule valeur de sensibilite est necessaire,car la pente de la courbe de la caracteristique entree/sortie du capteur estconstante (Figure 1.22). La caracteristique est alors une droite.
Par exemple, on peut avoir un capteur de deplacement dont la sensibiliteest de 1 volt/50 centimetres. Cela signifie que pour chaque 50 centimetres dedeplacement (qui est ici le signal d’entree), la sortie varie d’une amplitudede 1 volt.
Sensibilite reduite : Certains capteurs ont une sortie dont l’amplitudedepend non seulement du mesurande, mais aussi que de leur tension d’ali-mentation. Cela implique que la sensibilite du capteur doit prendre en comptela tension d’alimentation. Pour simplifier le calcul de la sensibilite, les manu-facturiers ont definis la specification de sensibilite reduite. Cette specificationest generalement utilisee avec les capteurs de force (cellules de charge).
22 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
La sensibilite reduite s’exprime comme etant le rapport de la plage devariation totale de la sortie a la tension d’alimentation (appelee aussi tensiond’excitation). Ainsi, un capteur, ayant une sensibilite reduite de 2 mV/Vet alimente avec une tension d’excitation d’un volt, voit sa sortie evoluersur une plage de 2 mV pendant que l’entree evolue d’un bout a l’autre del’etendue de mesure. Le meme capteur alimente avec une tension d’excitationde 12 volts, verra sa sortie evoluer de 24 mV (soit 12 V × 2 mV/V) dans lesmemes conditions.
A partir de la sensibilite reduite, de la tension d’alimentation et de l’eten-due de mesure, il est possible de calculer la sensibilite du capteur. Dansl’exemple donne au paragraphe precedent, avec une cellule de charge ayantune etendue de mesure de 0 a 5 000 lbs et une tension d’excitation d’un volt,la sensibilite de ce capteur est S = 2 mV/5 000 lbs. Avec le meme capteur,mais sous une tension d’excitation de 12 Volts, la sensibilite serait S = 24mV/5 000 lbs, soit 12 fois plus grande qu’a un volt.
Cela permet ainsi de simplifier la tache aux manufacturiers qui ne saventpas a priori a quelle tension d’alimentation sera utilise leur capteur.
1.3.3 La finesse
Un capteur a tendance a influencer la grandeur physique qu’il doit mesu-rer. Moins un capteur influence son environnement, meilleure est sa finesse.
La finesse et la sensibilite sont deux antagonistes et il est necessaire defaire un compromis.
Par exemple, on peut utiliser une resistance pour mesurer une temperature.Toutefois, pour mesurer la valeur de la resistance, il faut qu’un courantelectrique y circule. Or, lorsqu’un courant circule dans une resistance, elleest sujette a l’effet Joule, donc la resistance chauffe. Si elle chauffe beaucoup,elle peut influencer la temperature qu’elle doit mesurer.
Supposons qu’une resistance de 1 kΩ varie de 1 Ω avec une certaine va-riation de temperature ∆T . Si cette resistance est soumise a une tension de100 volts, la variation de courant resultant de la variation de temperaturesera d’environ 0.1 mA. Cette resistance dissipera alors 10 Watts. Avec unetension d’un volt appliquee a cette meme resistance, la variation de courantne sera que d’environ 1 µA et la resistance ne dissipera qu’un mW.
En conclusion, pour une sensibilite de 0.1 mA/∆T la resistance dissipe10 W, affectant ainsi l’environnement autour de la resistance alors que pourune sensibilite 100 fois plus faible (de 1 µA/∆T ) l’effet sur l’environnement
1.3. LES CARACTERISTIQUES METROLOGIQUES 23
est beaucoup plus faible, puisque la resistance dissipe 10000 fois moins depuissance.
On constate dans cet exemple que la resistance soumise a la tension d’unvolt aura plus de finesse que celle soumise a la tension de 100 V. Toutefois,sa sensibilite sera plus faible.
1.3.4 La linearite
La linearite est une caracteristique qui definit la constance de la sensibilitesur toute la plage de mesure.
Le polynome de l’equation decrivant la relation entre le signal d’entreex et le signal de sortie y doit etre de premier degre (y = mx + b) pourque le capteur soit considere comme lineaire. Si le capteur n’est pas lineaire,la relation entree/sortie peut etre approximee par une equation du premierdegre, mais il faut accepter l’imprecision causee par cette approximation.
L’ecart de linearite est exprime par un pourcentage de l’etendue de me-sure. Par exemple, si un capteur de force ayant une etendue de mesure de 0 a5 000 livres a un ecart de linearite de ±0.5 % E.M., cela implique une erreur(due a la non-linearite) de ±25 livres dans le pire des cas.
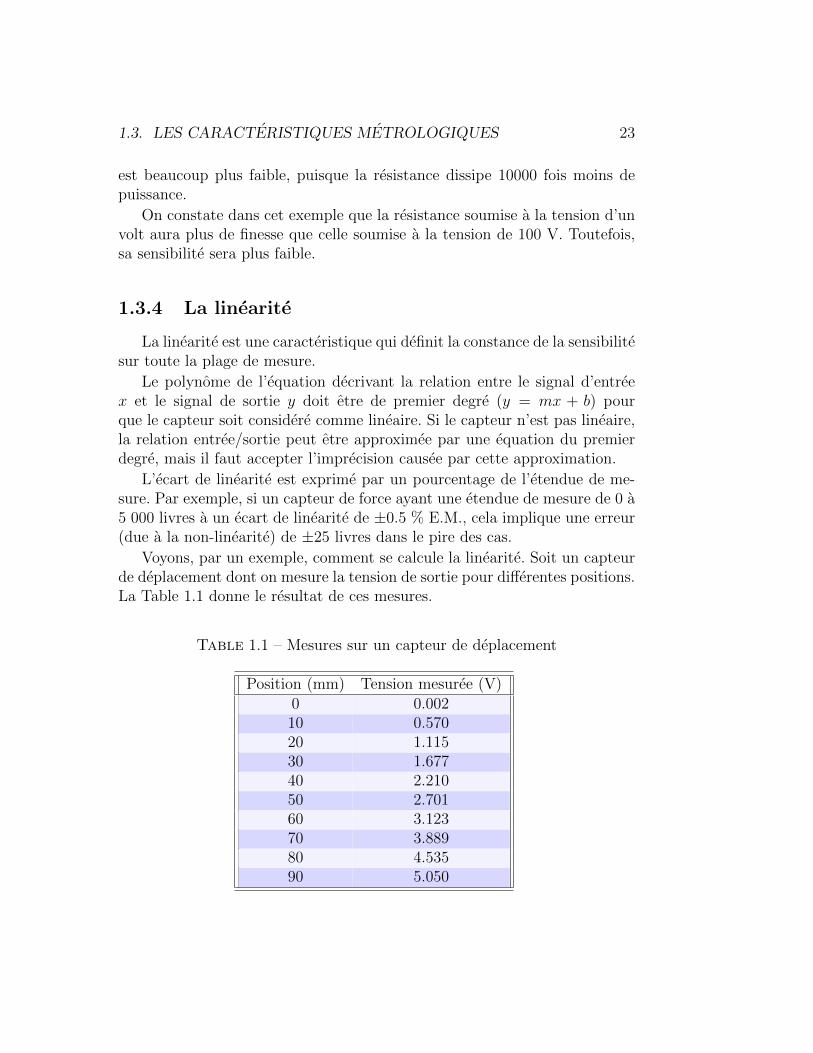
Voyons, par un exemple, comment se calcule la linearite. Soit un capteurde deplacement dont on mesure la tension de sortie pour differentes positions.La Table 1.1 donne le resultat de ces mesures.
Table 1.1 – Mesures sur un capteur de deplacement
Position (mm) Tension mesuree (V)0 0.00210 0.57020 1.11530 1.67740 2.21050 2.70160 3.12370 3.88980 4.53590 5.050

24 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
Table 1.2 – Mesures sur un capteur de deplacement avec tension theoriquecalculee
Position Tension Tension(mm) mesuree (V) theorique (V)
0 0.002 -0.01910 0.570 0.53820 1.115 1.09530 1.677 1.65340 2.210 2.21050 2.701 2.76760 3.123 3.32470 3.889 3.88180 4.535 4.43990 5.050 4.996
Selon le manufacturier, le capteur de deplacement possede une etenduede mesure de 0 a 90 millimetres et genere une sortie variant de 0 a 5 volts.
Pour calculer la linearite, il faut evaluer dans un premier temps, la penteet l’ordonnee a l’origine de la droite approximant le mieux les mesures faites.Pour la methode de la regression lineaire, les equations a appliquer sont pourtrouver la pente :
m =
∑ni=1 xiyi − n−1
∑ni=1 xi
∑ni=1 yi∑n
i=1 x2i − n−1 (
∑ni=1 xi)
2 (1.32)
puis l’ordonnee a l’origine :
b =
∑ni=1 yin
−m∑n
i=1 xin
(1.33)
Dans ces deux equations, les xi ∈ R representent les valeurs en entree(mesurande) et les yi ∈ R sont les valeurs en sortie du capteur. Le nombrede points considere dans ce calcul est n ∈ N. En appliquant ces equationssur les valeurs de la Table 1.1, on trouve que la pente de la caracteristiquedu capteur est 0.0577 V/mm et son ordonnee a l’origine est de -0.019 volts.A partir de ces valeurs la caracteristique theorique est :
y = 0.0577 V/mm× x− 0.019 V
1.3. LES CARACTERISTIQUES METROLOGIQUES 25
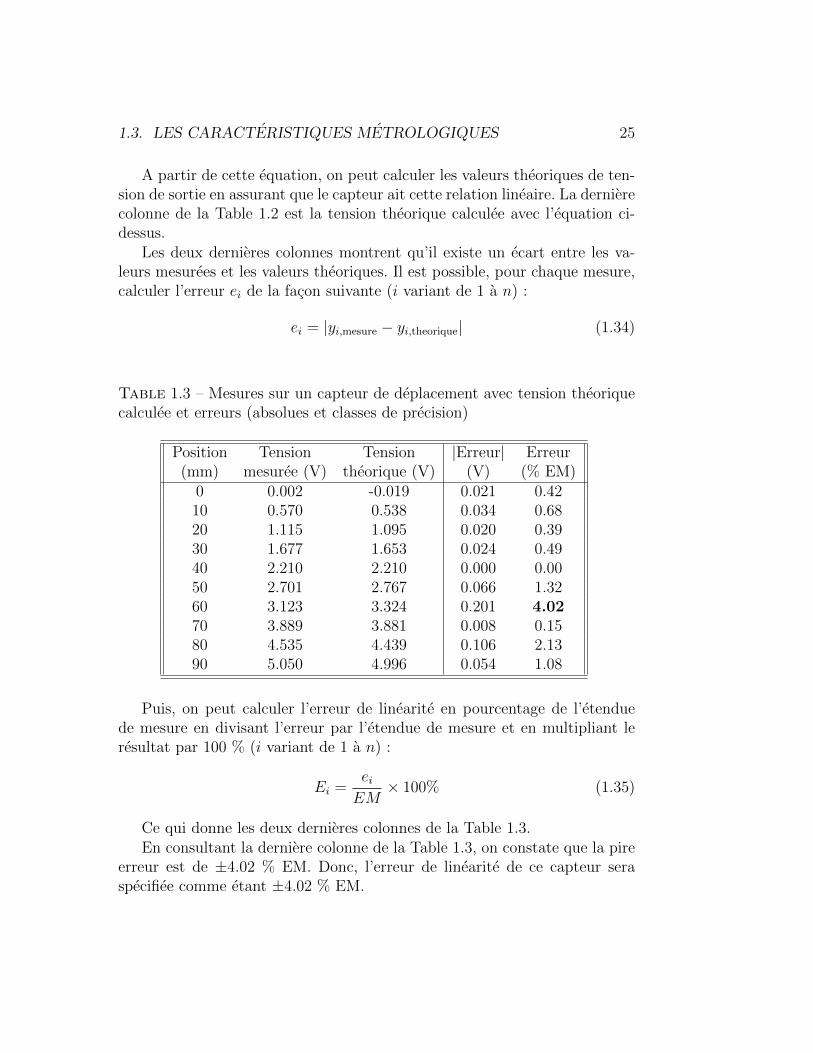
A partir de cette equation, on peut calculer les valeurs theoriques de ten-sion de sortie en assurant que le capteur ait cette relation lineaire. La dernierecolonne de la Table 1.2 est la tension theorique calculee avec l’equation ci-dessus.
Les deux dernieres colonnes montrent qu’il existe un ecart entre les va-leurs mesurees et les valeurs theoriques. Il est possible, pour chaque mesure,calculer l’erreur ei de la facon suivante (i variant de 1 a n) :
ei = |yi,mesure − yi,theorique| (1.34)
Table 1.3 – Mesures sur un capteur de deplacement avec tension theoriquecalculee et erreurs (absolues et classes de precision)
Position Tension Tension |Erreur| Erreur(mm) mesuree (V) theorique (V) (V) (% EM)
0 0.002 -0.019 0.021 0.4210 0.570 0.538 0.034 0.6820 1.115 1.095 0.020 0.3930 1.677 1.653 0.024 0.4940 2.210 2.210 0.000 0.0050 2.701 2.767 0.066 1.3260 3.123 3.324 0.201 4.0270 3.889 3.881 0.008 0.1580 4.535 4.439 0.106 2.1390 5.050 4.996 0.054 1.08
Puis, on peut calculer l’erreur de linearite en pourcentage de l’etenduede mesure en divisant l’erreur par l’etendue de mesure et en multipliant leresultat par 100 % (i variant de 1 a n) :
Ei =eiEM
× 100% (1.35)
Ce qui donne les deux dernieres colonnes de la Table 1.3.En consultant la derniere colonne de la Table 1.3, on constate que la pire
erreur est de ±4.02 % EM. Donc, l’erreur de linearite de ce capteur seraspecifiee comme etant ±4.02 % EM.

26 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
1.3.5 La rapidite
La rapidite indique l’aptitude d’un capteur a suivre dans le temps lesvariations de la grandeur physique a mesurer. En effet, il faut toujours uncertain temps pour qu’un changement a du signal a l’entree soit percu a lasortie (souvenez-vous de vos notions de systemes asservis — GPA535). Onl’exprime de l’une des trois facons suivantes :
• Le temps de reponse (ou constante de temps) ;• La bande passante du capteur ;• La frequence de coupure (ou frequence propre).
Le temps de reponse represente le temps qu’il faut au capteur pour quesa sortie soit a moins d’un certain ecart en pourcentage de la valeur finale,lorsque le mesurande (l’entree) est soumis a une variation brusque de typeechelon. Comme le temps de reponse depend du pourcentage d’ecart, il estobligatoire de specifier le pourcentage d’ecart (generalement 5 %) considerepour evaluer le temps de reponse de l’element de mesure. Plus le capteur estrapide, plus le temps de reponse est court.
Figure 1.23 – Reponse d’un systeme de premier ordre (τ = 10sec.)
Si le capteur est un systeme de premier ordre (Figure 1.23), la reponsea un echelon possede un temps de reponse qui depend de la constante detemps τ du systeme. La constante de temps correspond au temps de reponsea 37 %. Le temps de reponse a 5 % d’un capteur de premier ordre est egal aenviron 3τ (Rappel de GPA535 : le temps de reponse a 2 % est de 4τ).
1.3. LES CARACTERISTIQUES METROLOGIQUES 27
La bande passante d’un capteur du premier ordre sera la plage de frequenceentre 0 Hertz et la frequence de coupure fc qui est egale a 1/(2πτ). Pour qu’uncapteur du premier ordre soit rapide, il faut donc que la constante de tempssoit courte, que sa frequence de coupure soit elevee et que la bande passantesoit etendue. Ce constat est evident, puisque tous ces parametres sont liesentre eux.
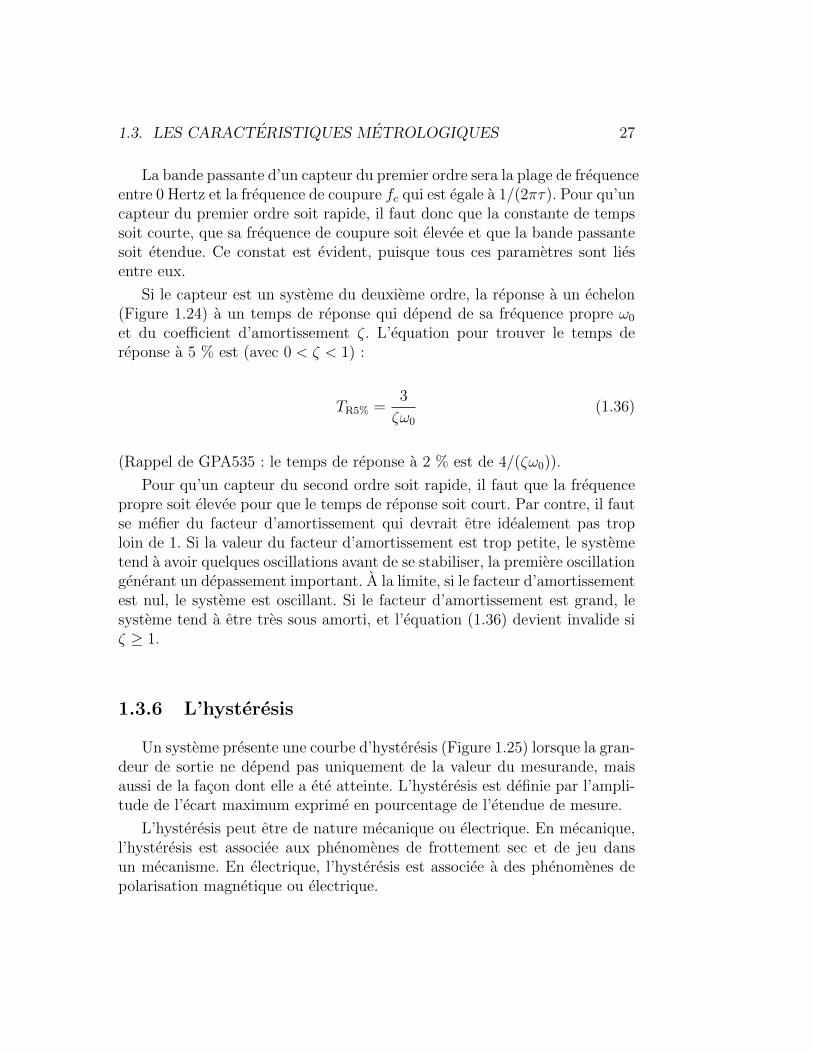
Si le capteur est un systeme du deuxieme ordre, la reponse a un echelon(Figure 1.24) a un temps de reponse qui depend de sa frequence propre ω0
et du coefficient d’amortissement ζ. L’equation pour trouver le temps dereponse a 5 % est (avec 0 < ζ < 1) :
TR5% =3
ζω0
(1.36)
(Rappel de GPA535 : le temps de reponse a 2 % est de 4/(ζω0)).
Pour qu’un capteur du second ordre soit rapide, il faut que la frequencepropre soit elevee pour que le temps de reponse soit court. Par contre, il fautse mefier du facteur d’amortissement qui devrait etre idealement pas troploin de 1. Si la valeur du facteur d’amortissement est trop petite, le systemetend a avoir quelques oscillations avant de se stabiliser, la premiere oscillationgenerant un depassement important. A la limite, si le facteur d’amortissementest nul, le systeme est oscillant. Si le facteur d’amortissement est grand, lesysteme tend a etre tres sous amorti, et l’equation (1.36) devient invalide siζ ≥ 1.
1.3.6 L’hysteresis
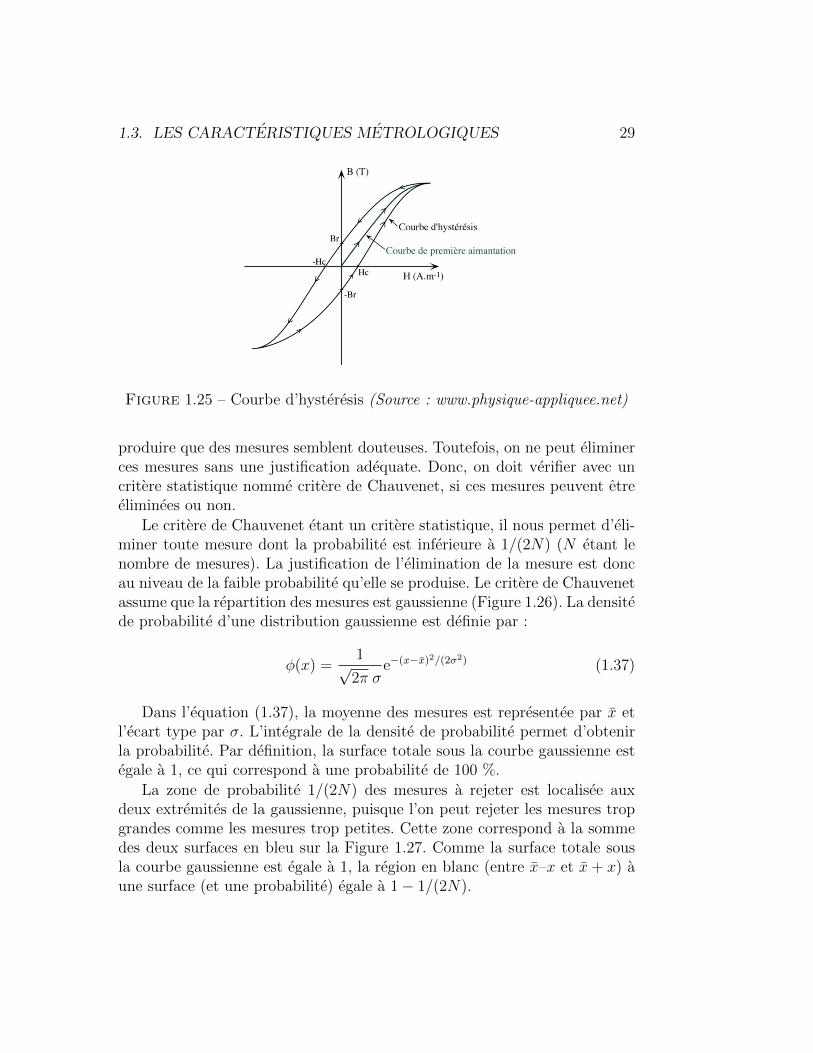
Un systeme presente une courbe d’hysteresis (Figure 1.25) lorsque la gran-deur de sortie ne depend pas uniquement de la valeur du mesurande, maisaussi de la facon dont elle a ete atteinte. L’hysteresis est definie par l’ampli-tude de l’ecart maximum exprime en pourcentage de l’etendue de mesure.
L’hysteresis peut etre de nature mecanique ou electrique. En mecanique,l’hysteresis est associee aux phenomenes de frottement sec et de jeu dansun mecanisme. En electrique, l’hysteresis est associee a des phenomenes depolarisation magnetique ou electrique.
28 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
Figure 1.24 – Reponse d’un systeme de deuxieme ordre
1.3.7 La repetabilite et la reproductibilite
La repetabilite est la marge de fluctuation de la sortie a court terme,lorsque le meme mesurande est applique a plusieurs reprises et dans le memesens. Cette marge est attribuable a plusieurs causes (entre autre l’operateur)et s’exprime en pourcentage de l’etendue de mesure.
La reproductibilite est la marge de fluctuation de la sortie a long terme,lorsque le meme mesurande est applique a plusieurs reprises et dans le memesens. Cette marge est attribuable a plusieurs causes (dont le vieillissement)et s’exprime en pourcentage de l’etendue de mesure.
En robotique, ces deux termes correspondent a la precision d’un robot.La repetabilite est une mesure de la precision d’un robot qui arrive a un pointdonnee suite a une trajectoire executee de facon cyclique. La reproductibiliteest une mesure de la precision d’un robot qui arrive a un point donnee viadiverses trajectoires.
Voyons avec un exemple comment on calcule la repetabilite (cela s’ap-plique aussi a la reproductibilite).
Soit un capteur de distance ayant une etendue de mesure de 0 a 40 cm.Une distance de reference (par exemple : 20 cm) est mesuree a 15 reprises parce capteur et les distances evaluees par le capteur sont indiquees a la Table1.4.
Pour pouvoir obtenir la repetabilite, il faut evaluer si toutes les donneessont valides. Comme lors d’experimentations faites en laboratoire, il peut se
1.3. LES CARACTERISTIQUES METROLOGIQUES 29
Figure 1.25 – Courbe d’hysteresis (Source : www.physique-appliquee.net)
produire que des mesures semblent douteuses. Toutefois, on ne peut eliminerces mesures sans une justification adequate. Donc, on doit verifier avec uncritere statistique nomme critere de Chauvenet, si ces mesures peuvent etreeliminees ou non.
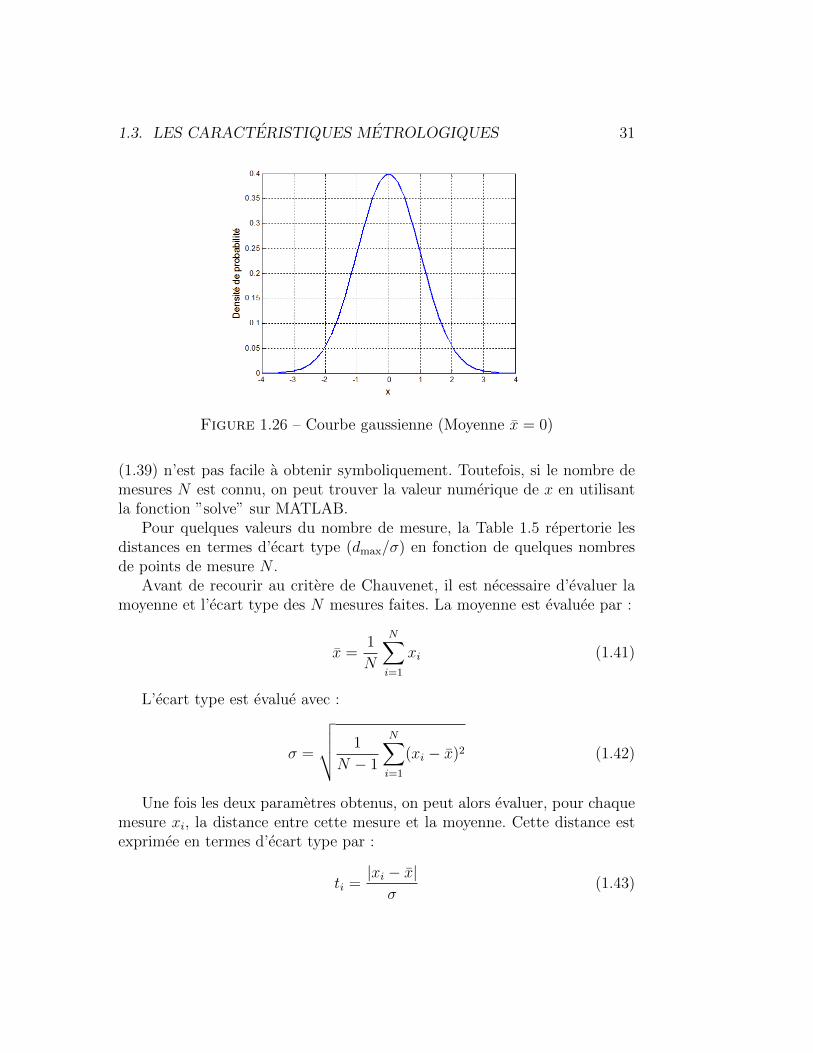
Le critere de Chauvenet etant un critere statistique, il nous permet d’eli-miner toute mesure dont la probabilite est inferieure a 1/(2N) (N etant lenombre de mesures). La justification de l’elimination de la mesure est doncau niveau de la faible probabilite qu’elle se produise. Le critere de Chauvenetassume que la repartition des mesures est gaussienne (Figure 1.26). La densitede probabilite d’une distribution gaussienne est definie par :
φ(x) =1√
2π σe−(x−x)2/(2σ2) (1.37)
Dans l’equation (1.37), la moyenne des mesures est representee par x etl’ecart type par σ. L’integrale de la densite de probabilite permet d’obtenirla probabilite. Par definition, la surface totale sous la courbe gaussienne estegale a 1, ce qui correspond a une probabilite de 100 %.
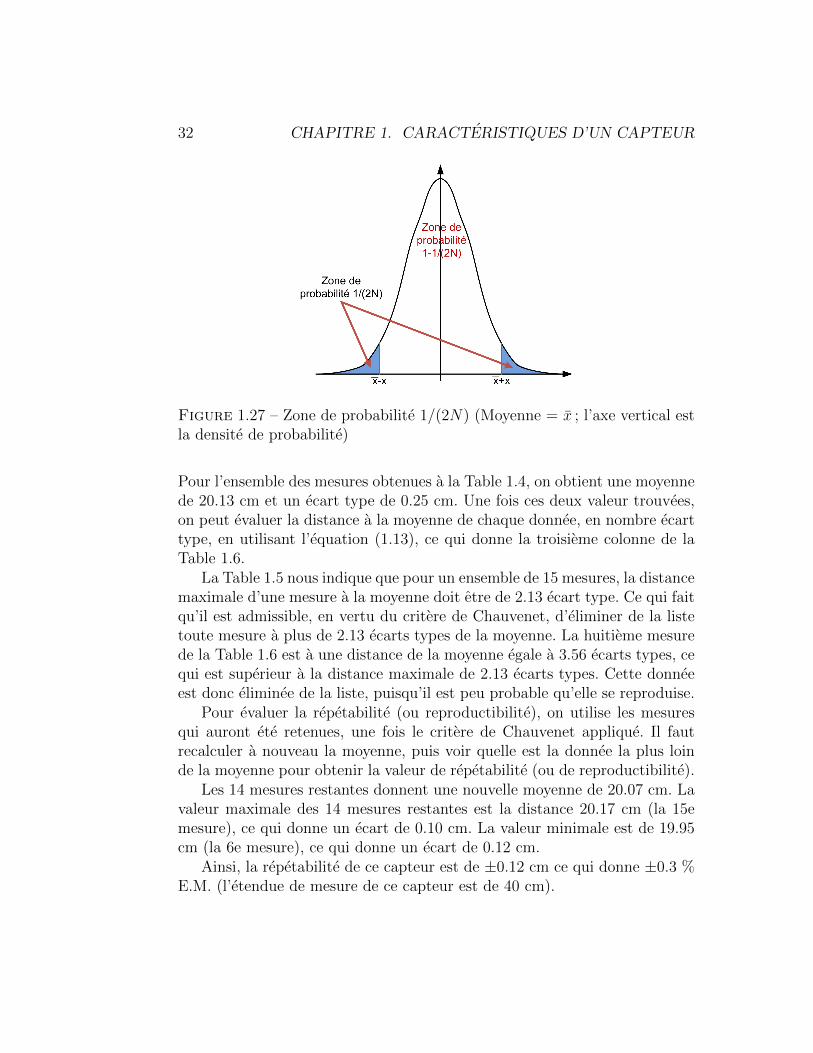
La zone de probabilite 1/(2N) des mesures a rejeter est localisee auxdeux extremites de la gaussienne, puisque l’on peut rejeter les mesures tropgrandes comme les mesures trop petites. Cette zone correspond a la sommedes deux surfaces en bleu sur la Figure 1.27. Comme la surface totale sousla courbe gaussienne est egale a 1, la region en blanc (entre x–x et x+ x) aune surface (et une probabilite) egale a 1− 1/(2N).

30 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
Table 1.4 – Mesures faites avec le capteur de distance
Numero Distancede test mesuree (cm)
1 20.002 20.103 20.054 20.155 20.136 19.957 19.998 21.029 20.1210 20.0911 20.1012 20.1013 20.0514 19.9815 20.17
La valeur de x–x (et symetriquement x + x) qui borne la region ayantune probabilite egale a 1− 1/(2N) est celle qui fera en sorte que :∫ x−x
x−xφ(t) dt = 1− 1
2N=
2N − 1
2N(1.38)
La valeur de x sera donc la solution de :
0.3990√
2π × erf
(|x− x|√
2 σ
)=
2N − 1
2N(1.39)
avec la fonction mathematique erf identifiant la fonction d’erreur :
erf(z) =2√π
∫ z
0
e−t2
dt (1.40)
La valeur de x qui sera solution de l’equation (1.39) sera la valeur surla frontiere entre l’elimination et la non elimination. La distance entre cettevaleur et la moyenne est identifiee par dmax = |x−x|. La solution de l’equation
1.3. LES CARACTERISTIQUES METROLOGIQUES 31
Figure 1.26 – Courbe gaussienne (Moyenne x = 0)
(1.39) n’est pas facile a obtenir symboliquement. Toutefois, si le nombre demesures N est connu, on peut trouver la valeur numerique de x en utilisantla fonction ”solve” sur MATLAB.
Pour quelques valeurs du nombre de mesure, la Table 1.5 repertorie lesdistances en termes d’ecart type (dmax/σ) en fonction de quelques nombresde points de mesure N .
Avant de recourir au critere de Chauvenet, il est necessaire d’evaluer lamoyenne et l’ecart type des N mesures faites. La moyenne est evaluee par :
x =1
N
N∑i=1
xi (1.41)
L’ecart type est evalue avec :
σ =
√√√√ 1
N − 1
N∑i=1
(xi − x)2 (1.42)
Une fois les deux parametres obtenus, on peut alors evaluer, pour chaquemesure xi, la distance entre cette mesure et la moyenne. Cette distance estexprimee en termes d’ecart type par :
ti =|xi − x|
σ(1.43)
32 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
Figure 1.27 – Zone de probabilite 1/(2N) (Moyenne = x ; l’axe vertical estla densite de probabilite)
Pour l’ensemble des mesures obtenues a la Table 1.4, on obtient une moyennede 20.13 cm et un ecart type de 0.25 cm. Une fois ces deux valeur trouvees,on peut evaluer la distance a la moyenne de chaque donnee, en nombre ecarttype, en utilisant l’equation (1.13), ce qui donne la troisieme colonne de laTable 1.6.
La Table 1.5 nous indique que pour un ensemble de 15 mesures, la distancemaximale d’une mesure a la moyenne doit etre de 2.13 ecart type. Ce qui faitqu’il est admissible, en vertu du critere de Chauvenet, d’eliminer de la listetoute mesure a plus de 2.13 ecarts types de la moyenne. La huitieme mesurede la Table 1.6 est a une distance de la moyenne egale a 3.56 ecarts types, cequi est superieur a la distance maximale de 2.13 ecarts types. Cette donneeest donc eliminee de la liste, puisqu’il est peu probable qu’elle se reproduise.
Pour evaluer la repetabilite (ou reproductibilite), on utilise les mesuresqui auront ete retenues, une fois le critere de Chauvenet applique. Il fautrecalculer a nouveau la moyenne, puis voir quelle est la donnee la plus loinde la moyenne pour obtenir la valeur de repetabilite (ou de reproductibilite).
Les 14 mesures restantes donnent une nouvelle moyenne de 20.07 cm. Lavaleur maximale des 14 mesures restantes est la distance 20.17 cm (la 15emesure), ce qui donne un ecart de 0.10 cm. La valeur minimale est de 19.95cm (la 6e mesure), ce qui donne un ecart de 0.12 cm.
Ainsi, la repetabilite de ce capteur est de ±0.12 cm ce qui donne ±0.3 %E.M. (l’etendue de mesure de ce capteur est de 40 cm).

1.3. LES CARACTERISTIQUES METROLOGIQUES 33
Table 1.5 – Critere de ChauvenetNombre Ratio
de mesures dmax/σ2 1.153 1.384 1.545 1.656 1.737 1.8010 1.9615 2.1325 2.3350 2.57100 2.81300 3.14500 3.291000 3.48
Il est important de noter que le critere de Chauvenet n’est appliquequ’une seule fois sur les mesures faites.
1.3.8 La resolution
La resolution correspond a la granularite de la mesure, i.e., a la pluspetite variation discernable par le capteur. La resolution peut ne pas etreconstante sur toute l’etendue de la mesure. La resolution s’applique aussiaux convertisseurs analogiques/numeriques (A/N).
Le seuil est la resolution a l’origine, au voisinage de la valeur 0 du mesu-rande.
1.3.9 La precision
La precision est un des parametres les plus importants d’un systeme demesure. Elle permet d’evaluer la qualite de mesure en donnant l’idee del’ampleur de l’erreur affectant la mesure. La precision fait appel a la notionde fidelite et de justesse, puisqu’un capteur precis est juste et fidele.

34 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
Table 1.6 – Distances a la moyenne ti en ecart type
Numero Distance Distance tide test mesuree (cm)
1 20.00 0.522 20.10 0.123 20.05 0.284 20.15 0.085 20.13 0.006 19.95 0.727 19.99 0.568 21.02 3.569 20.12 0.0410 20.09 0.1611 20.10 0.1212 20.10 0.1213 20.05 0.2814 19.98 0.6015 20.17 0.16
La fidelite d’un capteur (Figure 1.28) correspond a l’ecart type d’un en-semble de mesures faites pour un mesurande donne. Plus l’ecart type esteleve, moins le capteur est fidele. La fidelite represente donc les incertitudesde mesures d’un capteur. Elle depend des erreurs aleatoires (exemple : bruitelectromagnetique) qui seront enumerees a la Section 1.5).
La justesse d’un capteur (Figure 1.29) correspond a la difference entre lavaleur moyenne d’un ensemble de mesures faites pour un mesurande donneet celui-ci. La justesse represente les erreurs systematiques du systeme demesure qui seront presentees en Section 1.4). Ces erreurs peuvent etre reduitespar la calibration du capteur.
La precision est specifiee par l’erreur de precision qui delimite un intervalleautour de la valeur mesuree, a l’interieur duquel on est assure de trouver lavaleur vraie du mesurande. Cette erreur de precision peut etre representeede trois facons :
• Par l’erreur absolue ea qui exprime l’erreur de precision dans l’unite demesure du mesurande ;• Par l’erreur relative er qui exprime l’erreur de precision en pourcentage
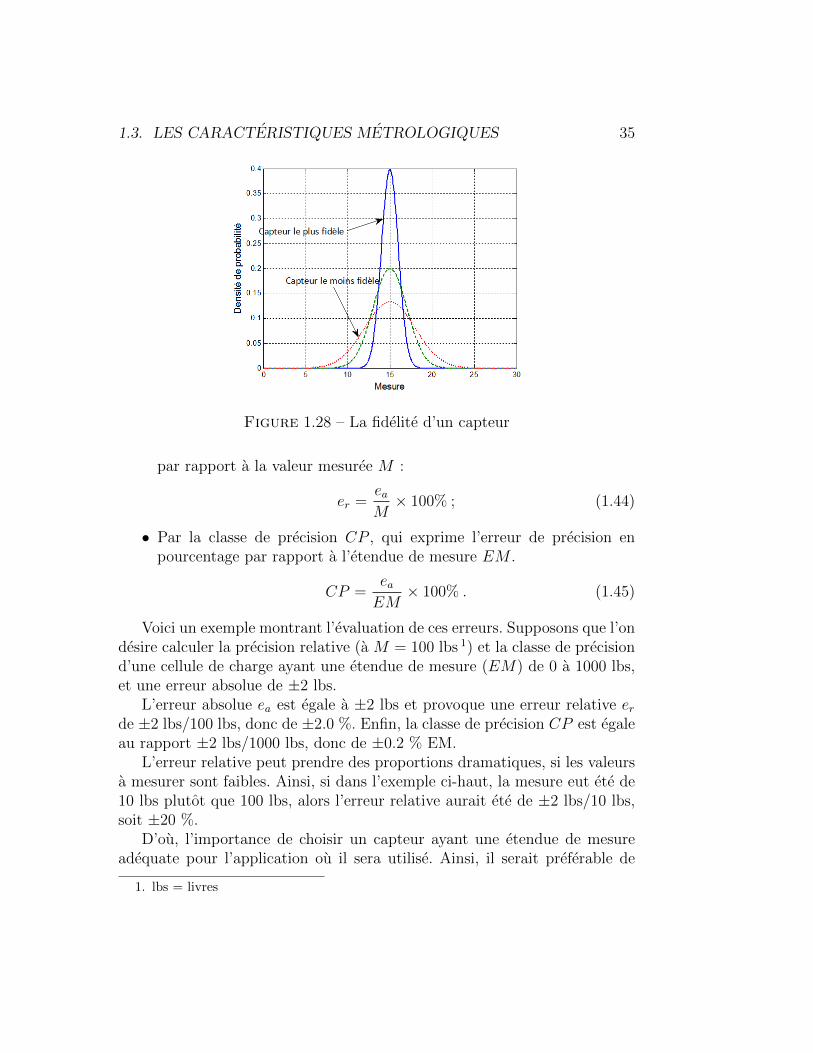
1.3. LES CARACTERISTIQUES METROLOGIQUES 35
Figure 1.28 – La fidelite d’un capteur
par rapport a la valeur mesuree M :
er =eaM× 100% ; (1.44)
• Par la classe de precision CP , qui exprime l’erreur de precision enpourcentage par rapport a l’etendue de mesure EM .
CP =eaEM
× 100% . (1.45)
Voici un exemple montrant l’evaluation de ces erreurs. Supposons que l’ondesire calculer la precision relative (a M = 100 lbs 1) et la classe de precisiond’une cellule de charge ayant une etendue de mesure (EM) de 0 a 1000 lbs,et une erreur absolue de ±2 lbs.
L’erreur absolue ea est egale a ±2 lbs et provoque une erreur relative erde ±2 lbs/100 lbs, donc de ±2.0 %. Enfin, la classe de precision CP est egaleau rapport ±2 lbs/1000 lbs, donc de ±0.2 % EM.
L’erreur relative peut prendre des proportions dramatiques, si les valeursa mesurer sont faibles. Ainsi, si dans l’exemple ci-haut, la mesure eut ete de10 lbs plutot que 100 lbs, alors l’erreur relative aurait ete de ±2 lbs/10 lbs,soit ±20 %.
D’ou, l’importance de choisir un capteur ayant une etendue de mesureadequate pour l’application ou il sera utilise. Ainsi, il serait preferable de
1. lbs = livres
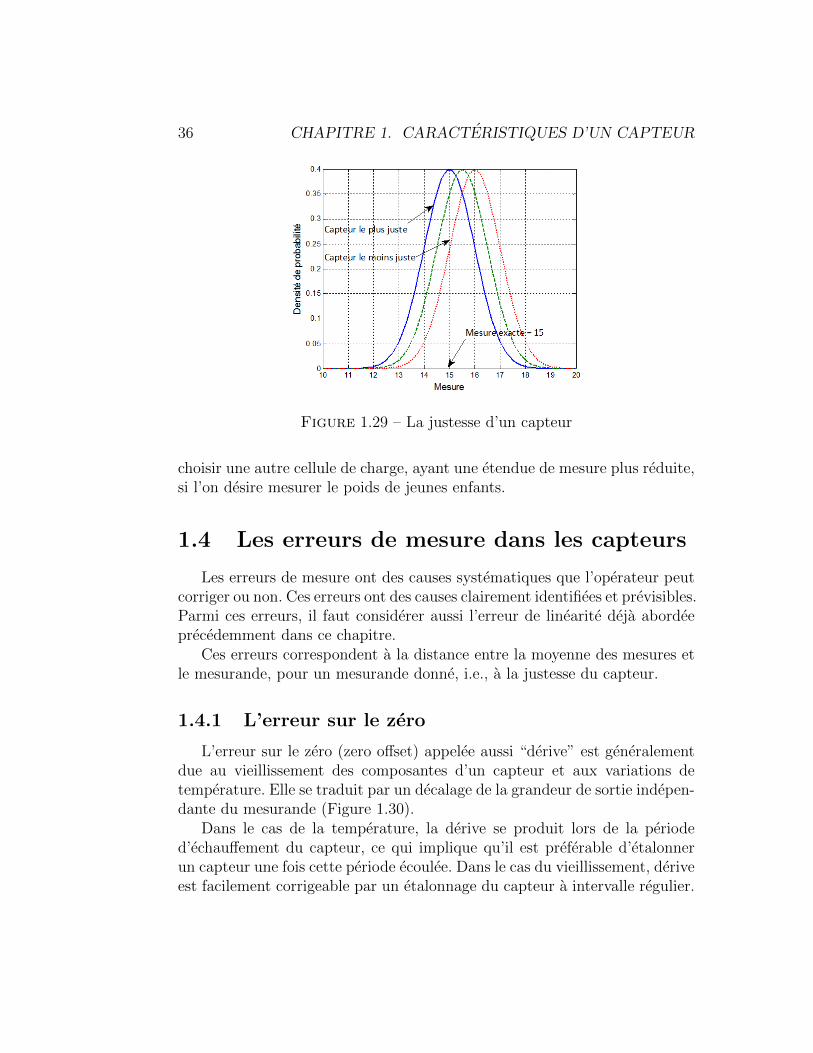
36 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
Figure 1.29 – La justesse d’un capteur
choisir une autre cellule de charge, ayant une etendue de mesure plus reduite,si l’on desire mesurer le poids de jeunes enfants.
1.4 Les erreurs de mesure dans les capteurs
Les erreurs de mesure ont des causes systematiques que l’operateur peutcorriger ou non. Ces erreurs ont des causes clairement identifiees et previsibles.Parmi ces erreurs, il faut considerer aussi l’erreur de linearite deja abordeeprecedemment dans ce chapitre.
Ces erreurs correspondent a la distance entre la moyenne des mesures etle mesurande, pour un mesurande donne, i.e., a la justesse du capteur.
1.4.1 L’erreur sur le zero
L’erreur sur le zero (zero offset) appelee aussi “derive” est generalementdue au vieillissement des composantes d’un capteur et aux variations detemperature. Elle se traduit par un decalage de la grandeur de sortie indepen-dante du mesurande (Figure 1.30).
Dans le cas de la temperature, la derive se produit lors de la perioded’echauffement du capteur, ce qui implique qu’il est preferable d’etalonnerun capteur une fois cette periode ecoulee. Dans le cas du vieillissement, deriveest facilement corrigeable par un etalonnage du capteur a intervalle regulier.
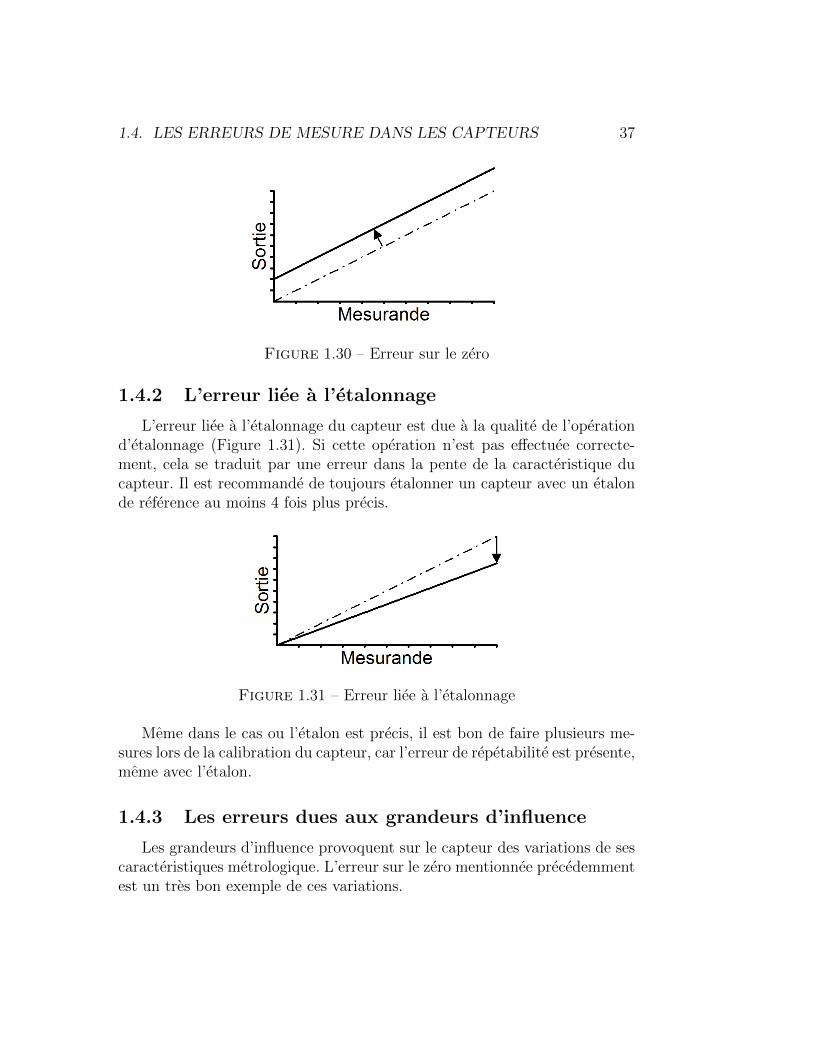
1.4. LES ERREURS DE MESURE DANS LES CAPTEURS 37
Figure 1.30 – Erreur sur le zero
1.4.2 L’erreur liee a l’etalonnage
L’erreur liee a l’etalonnage du capteur est due a la qualite de l’operationd’etalonnage (Figure 1.31). Si cette operation n’est pas effectuee correcte-ment, cela se traduit par une erreur dans la pente de la caracteristique ducapteur. Il est recommande de toujours etalonner un capteur avec un etalonde reference au moins 4 fois plus precis.
Figure 1.31 – Erreur liee a l’etalonnage
Meme dans le cas ou l’etalon est precis, il est bon de faire plusieurs me-sures lors de la calibration du capteur, car l’erreur de repetabilite est presente,meme avec l’etalon.
1.4.3 Les erreurs dues aux grandeurs d’influence
Les grandeurs d’influence provoquent sur le capteur des variations de sescaracteristiques metrologique. L’erreur sur le zero mentionnee precedemmentest un tres bon exemple de ces variations.
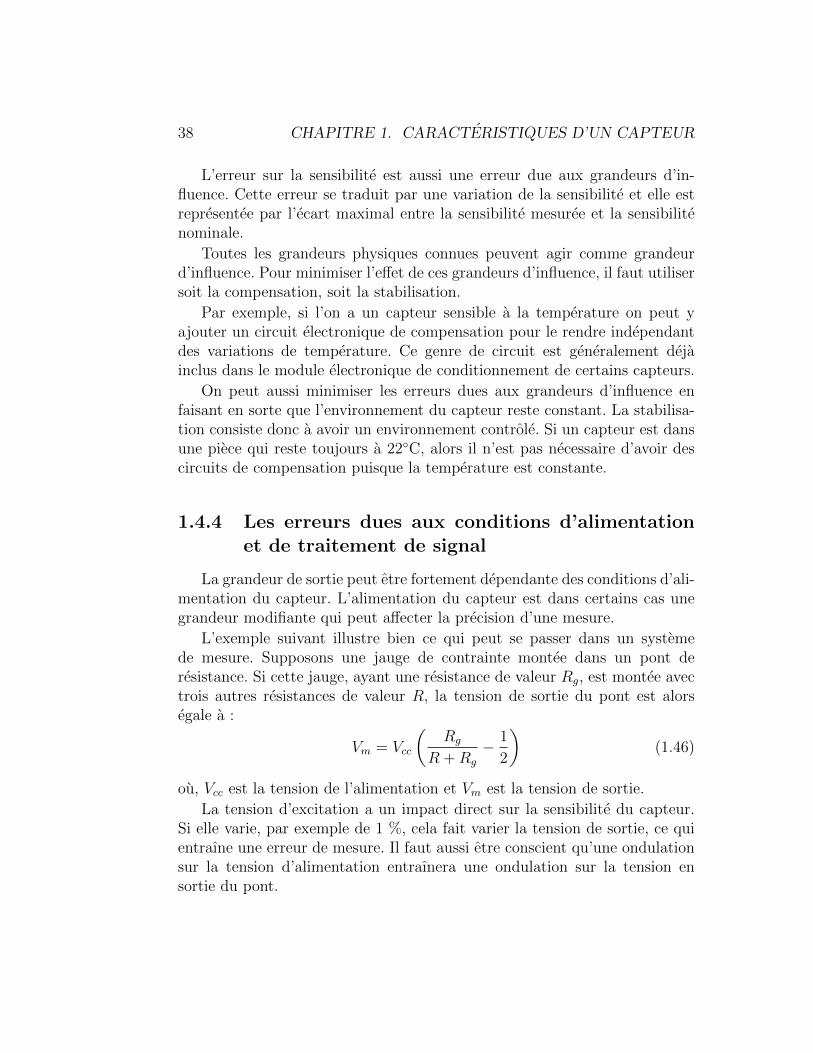
38 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
L’erreur sur la sensibilite est aussi une erreur due aux grandeurs d’in-fluence. Cette erreur se traduit par une variation de la sensibilite et elle estrepresentee par l’ecart maximal entre la sensibilite mesuree et la sensibilitenominale.
Toutes les grandeurs physiques connues peuvent agir comme grandeurd’influence. Pour minimiser l’effet de ces grandeurs d’influence, il faut utilisersoit la compensation, soit la stabilisation.
Par exemple, si l’on a un capteur sensible a la temperature on peut yajouter un circuit electronique de compensation pour le rendre independantdes variations de temperature. Ce genre de circuit est generalement dejainclus dans le module electronique de conditionnement de certains capteurs.
On peut aussi minimiser les erreurs dues aux grandeurs d’influence enfaisant en sorte que l’environnement du capteur reste constant. La stabilisa-tion consiste donc a avoir un environnement controle. Si un capteur est dansune piece qui reste toujours a 22C, alors il n’est pas necessaire d’avoir descircuits de compensation puisque la temperature est constante.
1.4.4 Les erreurs dues aux conditions d’alimentationet de traitement de signal
La grandeur de sortie peut etre fortement dependante des conditions d’ali-mentation du capteur. L’alimentation du capteur est dans certains cas unegrandeur modifiante qui peut affecter la precision d’une mesure.
L’exemple suivant illustre bien ce qui peut se passer dans un systemede mesure. Supposons une jauge de contrainte montee dans un pont deresistance. Si cette jauge, ayant une resistance de valeur Rg, est montee avectrois autres resistances de valeur R, la tension de sortie du pont est alorsegale a :
Vm = Vcc
(Rg
R +Rg
− 1
2
)(1.46)
ou, Vcc est la tension de l’alimentation et Vm est la tension de sortie.
La tension d’excitation a un impact direct sur la sensibilite du capteur.Si elle varie, par exemple de 1 %, cela fait varier la tension de sortie, ce quientraıne une erreur de mesure. Il faut aussi etre conscient qu’une ondulationsur la tension d’alimentation entraınera une ondulation sur la tension ensortie du pont.
1.5. LES INCERTITUDES DE MESURE DANS LES CAPTEURS 39
Le traitement de signal peut aussi contribuer a generer des erreurs, cequi peut se produire si le gain d’un amplificateur de sortie n’est pas constant(parce que non-lineaire).
1.4.5 Les erreurs dues au mode d’utilisation
Certaines erreurs sont simplement dues a une utilisation incorrecte d’uncapteur. Par exemple, on si utilise un capteur pas assez rapide dans un casou le mesurande evolue de facon rapide.
Un autre exemple, c’est lorsque l’on utilise un capteur utilisant un prin-cipe piezoelectrique pour faire une mesure statique, puisque ce principe exigeune variation du mesurande pour etre apte a le mesurer (ex : accelerometrepiezoelectrique).
Il est tres important de suivre les directives du fabricant pour le montageet l’installation d’un capteur pour s’assurer que ce dernier mesure correcte-ment.
1.5 Les incertitudes de mesure dans les cap-
teurs
Les erreurs d’incertitude sont des erreurs de nature non-deterministesdues a des causes accidentelles que l’operateur ne peut corriger. Elles sontappelees parfois erreurs aleatoires et elles ont les proprietes suivantes :
• Pour une erreur d’une amplitude de valeur absolue donnee, la probabi-lite que l’erreur soit positive est egale a celle que l’erreur soit negative ;• La probabilite que l’erreur due a une incertitude se produise est inver-
sement proportionnelle a son amplitude ;• Pour un nombre eleve de mesure d’une grandeur physique donnee, la
moyenne des erreurs approche de 0 ;• Pour une methode de mesure donnee, les erreurs dues aux incertitudes
de mesures ne doivent pas exceder une valeur donnee. Toute mesureayant une erreur excedant cette valeur doit etre repetee, et si necessaireanalysee separement.
Ces erreurs correspondent a l’ecart type des mesures, pour un mesurandedonne, i.e., a la fidelite du capteur.
40 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
1.5.1 Les erreurs liees aux indeterminations intrinsequesd’un capteur
Certaines erreurs aleatoires sont liees a la non-connaissance de caracteris-tiques de capteurs. Ainsi, pour certains capteurs, on ne connaıt pas de faconprecise des parametres comme la resolution, reversibilite, hysteresis,... Parexemple, lorsque l’on achete un potentiometre, on ne se pose pas de questionssur la resolution de ce capteur. Pourtant, cette resolution peut generer uneerreur de mesure de nature aleatoire, car le passage du curseur d’une bobinede fil a l’autre fait augmenter (ou diminuer) la resistance d’une valeur ∆Rqui n’est pas necessairement constante d’un bout a l’autre du potentiometre.
Le meme genre d’indetermination se pose chez les capteurs utilisant desprincipes bases sur les champs magnetiques et qui sont susceptibles a etre lesiege de phenomenes d’hysteresis.
1.5.2 Les erreurs dues a des signaux parasites de ca-ractere aleatoire
Le bruit electrique, si nuisible a la qualite des mesures, est la sourceprincipale des signaux parasites. Ces signaux sont dus generalement a desphenomenes d’induction, ce qui fait que l’on recommande de blinder lesconducteurs transportant les signaux de mesure.
En effet, lorsqu’un capteur envoie un signal de mesure a un automate (outout autre appareil), un conducteur transporte le signal de mesure, tandisqu’un autre assure que les deux elements aient la meme masse. Les deuxconducteurs forment donc une boucle qui est en mesure de pouvoir detecterdes ondes electromagnetiques, comme une antenne. Une tension parasite ap-paraıt, affectant la qualite du signal transmit.
1.5.3 Les erreurs de mesure dues aux grandeurs d’in-fluence non-controlees
Les grandeurs d’influence non-controlees sont souvent sources d’erreur,car le corps d’epreuve d’un capteur est generalement sensible a plus d’unegrandeur physique. Par exemple, plusieurs capteurs sont sensibles a la tempe-rature. Ainsi, une jauge de contrainte, dont le but premier est de mesurer unedeformation, peut donner un signal qui varie en fonction de la deformation
1.6. LE CALCUL D’ERREUR DANS LES CHAINES DE MESURE 41
(bien sur !), mais aussi avec la temperature. Ainsi, un changement du signalde sortie peut provenir aussi bien d’une deformation que d’une temperature,et il n’y a aucun moyen pour trouver laquelle des deux grandeurs physiquesa change.
Il faut donc prevoir l’utilisation de circuits de compensation pour reduirecette erreur. Le circuit de compensation genere un signal qui a pour butd’annuler l’effet produit par la grandeur d’influence non controlee.
La stabilisation de la grandeur d’influence peut aussi reduire les erreursde mesures. Par exemple, si le capteur est dans un environnement ou latemperature est maintenue constante, il n’y aura aucune erreur due au chan-gement de temperature puisque celle-ci est constante. Donc en stabilisant lagrandeur d’influence, on en reduit grandement les effets.
Ces deux solutions peuvent ne pas etre faisables, ce qui fait en sorte qu’ilfaut vivre avec cette source d’erreur aleatoire. Il peut etre bon de calculerl’erreur induite par la grandeur physique non-controlee pour evaluer l’erreurpouvant entacher la qualite de la mesure.
1.6 Le calcul d’erreur dans les chaınes de me-
sure
Cette section presente quelques notions de calcul d’erreur et montre leseffets de l’erreur dans une chaıne de mesure.
Commencons par introduire l’equation (ou la serie) de Taylor. Soit la va-leur de la mesureM qui est dependante de plusieurs parametres (x1, x2, ..., xn).La fonction representant M en fonction de ces parametres peut etre ecritecomme suit :
M = f(x1, . . . , xn) (1.47)
Si chacun des parametres xi sont entaches d’une erreur ∆xi, la valeur dela mesure sera aussi entachee d’une erreur ∆M . La fonction representee parl’equation ci-haut peut se reecrire comme suit :
M + ∆M = f(x1 + ∆x1, . . . , xn + ∆xn) (1.48)
Or cette equation peut etre reecrite en utilisant la serie de Taylor, ap-

42 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
pliquee sur le membre de droite, et elle devient :
M + ∆M = f(x1, . . . , xn) +
∆x1
∣∣∣∣ ∂f∂x1
∣∣∣∣+ . . .+ ∆xn∂f
∂xn
+
1
2!
∆x2
1
∣∣∣∣∂2f
∂x21
∣∣∣∣+ . . .+ ∆x1∆xn∂2f
∂x1∂xn+ . . .+
∆xn∆x1∂2f
∂xn∂x1
+ . . .+ ∆x2n
∂2f
∂x2n
+O3
(1.49)
ou O3 represente les termes d’ordre superieur a 2.Donc, le terme d’erreur de mesure ∆M est egal a :
∆M = ∆x1
∣∣∣∣ ∂f∂x1
∣∣∣∣+ . . .+ ∆xn∂f
∂xn+
1
2!
∆x2
1
∣∣∣∣∂2f
∂x21
∣∣∣∣+ . . .+
∆x1∆xn∂2f
∂x1∂xn+ . . .+ ∆xn∆x1
∂2f
∂xn∂x1
+ . . .+
∆x2n
∂2f
∂x2n
+O3
(1.50)
La serie de Taylor est une serie infinie, mais on peut generalement retenirles termes contenant les derivees d’ordre 1 et les derivees d’ordre 2. On negligeainsi les termes d’ordre superieur.
1.6.1 Erreur sur le resultat d’une somme
Soit la somme C = A+B. Si le parametre A possede une erreur absolue∆A et le parametre B une erreur absolue ∆B, quelle est l’erreur ∆C sur lasomme ?
La serie de Taylor nous mene a calculer l’erreur absolue comme suit :
∆C = ∆A
∣∣∣∣∂C∂A∣∣∣∣+ ∆B
∣∣∣∣∂C∂B∣∣∣∣
= ∆A+ ∆B
(1.51)
Donc, la somme de deux parametres A et B ayant chacun une erreur ∆Aet ∆B donne un resultat C dont l’erreur ∆C est la somme des deux erreurs∆A et ∆B.
Par exemple, si les parametres A ±∆A et B ±∆B sont respectivementegaux a 10 ± 0.1 et 15 ± 0.7, alors la valeur nominale de C est egale a 25

1.6. LE CALCUL D’ERREUR DANS LES CHAINES DE MESURE 43
et l’equation (1.51) donne l’erreur sur le resultat de C egal a ± 0.8. Si leserreurs relatives sont evaluees, les erreurs relatives sur A et B qui etaientrespectivement de ± 1 % et de ± 4.67 % donnent une erreur relative sur Cde ± 3.2 %.
1.6.2 Erreur sur le resultat d’une difference
Soit la difference C = A−B. Si le parametre A possede une erreur absolue∆A et le parametre B une erreur absolue ∆B, quelle est l’erreur ∆C sur ladifference ?
La serie de Taylor nous mene a calculer l’erreur absolue de la facon sui-vante :
∆C = ∆A
∣∣∣∣∂C∂A∣∣∣∣+ ∆B
∣∣∣∣∂C∂B∣∣∣∣
= ∆A+ ∆B
(1.52)
La difference de deux parametres A et B ayant chacun une erreur ∆Aet ∆B donne un resultat C dont l’erreur ∆C est la somme des deux erreurs∆A et ∆B.
Par exemple, si les parametres A ±∆A et B ±∆B sont respectivementegaux a 10 ± 0.1 et 15 ± 0.7, alors C est egal a -5 et l’equation (1.52) donneune erreur sur le resultat de C egale a ± 0.8. Si les erreurs relatives sontevaluees, les erreurs relatives sur A et B qui etaient de ± 1 % et de ± 4.67% donnent une erreur relative sur C de ± 16 %. L’erreur relative a donctendance a s’accroıtre lorsque l’on utilise l’operateur de soustraction, ce quifait que l’on a tendance a eviter cet operateur.
1.6.3 Erreur sur le resultat d’une multiplication
Soit le produit C = A×B. Si le parametre A possede une erreur absolue∆A et le parametre B une erreur absolue ∆B, quelle est l’erreur ∆C sur leproduit ?
La serie de Taylor nous mene a calculer l’erreur absolue du produit commesuit :
∆C = ∆A
∣∣∣∣∂C∂A∣∣∣∣+ ∆B
∣∣∣∣∂C∂B∣∣∣∣
= ∆A|B|+ ∆B|A|(1.53)

44 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
Donc, le produit de deux parametres A et B ayant chacun une erreur∆A et ∆B donne un resultat C dont l’erreur ∆C est calculee comme suit :∆C = ∆A|B|+ ∆B|A|.
Par exemple, si les parametres A ±∆A et C ±∆B sont respectivementegaux a 10 ± 0.1 et 15 ± 0.7, alors C est egal a 150 et l’equation (1.53)donne l’erreur sur le resultat de C egale a ± 8.57. Si les erreurs relatives sontevaluees, les erreurs relatives sur A et B qui etaient de ± 1 % et de ± 4.67% donnent une erreur relative sur C de ± 5.71 %.
1.6.4 Erreur sur le resultat d’une division
Soit le quotient C = A/B. Si le parametre A possede une erreur absolue∆A et le parametre B une erreur absolue ∆B, quelle est l’erreur ∆C sur lequotient ?
La serie de Taylor nous mene a calculer l’erreur absolue comme suit :
∆C = ∆A
∣∣∣∣∂C∂A∣∣∣∣+ ∆B
∣∣∣∣∂C∂B∣∣∣∣+
∆A2
2
∣∣∣∣∂2C
∂A2
∣∣∣∣+∆A∆B
2
∣∣∣∣ ∂2C
∂A∂B
∣∣∣∣+
∆B∆A
2
∣∣∣∣ ∂2C
∂B∂A
∣∣∣∣+∆B2
2
∣∣∣∣∂2C
∂B2
∣∣∣∣= ∆A
∣∣∣∣ 1
B
∣∣∣∣+ ∆B
∣∣∣∣−AB2
∣∣∣∣+∆A2
2|0|+ ∆A∆B
∣∣∣∣−1
B2
∣∣∣∣+∆B2
2
∣∣∣∣ 2
B3
∣∣∣∣(1.54)
Le quotient de deux parametres deux parametres A et B ayant chacunune erreur ∆A et ∆B donne un resultat C dont l’erreur ∆C est l’equationsuivante :
∆C = ∆A
∣∣∣∣ 1
B
∣∣∣∣+ ∆B
∣∣∣∣ AB2
∣∣∣∣+ ∆A∆B
∣∣∣∣ 1
B2
∣∣∣∣+∆B2
2
∣∣∣∣ 2
B3
∣∣∣∣ (1.55)
Par exemple, si les parametres A ±∆A et C ±∆B sont respectivementegaux a 10 ± 0.1 et 15 ± 0.7, alors C est egal a 0.66667 et l’equation (1.55)donne l’erreur sur le resultat de C egal a ± 0.0395. Si les erreurs relativessont evaluees, les erreurs relatives sur A et B qui etaient de ± 1 % et de± 4.67 % donnent une erreur relative sur C de ± 5.92 %. Comme pour lasoustraction, l’erreur relative a tendance a s’accroıtre aussi pour un quotient,ce qui fait que l’on a tendance a eviter d’utiliser cet operateur.

1.6. LE CALCUL D’ERREUR DANS LES CHAINES DE MESURE 45
1.6.5 Exemple d’application de la serie de Taylor
Soit un capteur de force constitue d’un ressort et d’un capteur de position.Ce capteur sera utilise pour mesurer la masse de divers objets. La physiquemecanique nous indique qu’un ressort soumis a une force F (en Newton) seradeforme d’une distance x (en metres), et la relation entre ces deux parametresest definie par :
F = K x (1.56)
ou K est la constante du ressort (en Newton par metre).
La loi de Newton permet de calculer la masse M (en kilogramme) d’unobjet en fonction de la force F et de l’acceleration gravitationnelle g (enmetres par seconde au carre) :
F = M g (1.57)
Avec la mesure de la deformation x du ressort, il est possible de calculerdirectement la masse en combinant les equations (1.56) et (1.57), ce qui menea :
M =K x
g(1.58)
Dans le cas ou le ressort, ayant une constante K de 1 000 N/m, estdeforme de 10 cm dans un champ de gravite, ayant une acceleration de lapesanteur de 9.81 m/s2 alors la masse calculee sera d’environ 10.194 kg.
Assumons maintenant que la constante du ressort n’est connue qu’a ±5 N/m pres, que le capteur de deplacement peut faire une erreur absoluede l’ordre de ± 2 mm, et que la gravite peut varier de ± 0.1 m/s2 (carl’acceleration de la pesanteur varie avec la localisation geographique et l’al-titude). Il faut alors evaluer quelle sera l’erreur faite sur la masse.
Il suffit d’appliquer la serie de Taylor pour trouver l’erreur de mesure surla masse, nomme ∆M :
∆M = Q1 +1
2!(Q2 +Q3 +Q4) (1.59)
Avec Q1 definit comme suit :
Q1 = ∆K
∣∣∣∣∂M∂K∣∣∣∣+ ∆x
∣∣∣∣∂M∂x∣∣∣∣+ ∆g
∣∣∣∣∂M∂g∣∣∣∣ (1.60)

46 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
puis Q2 :
Q2 = ∆K
(∆K
∣∣∣∣∂2M
∂K2
∣∣∣∣+ ∆x
∣∣∣∣ ∂2M
∂K∂x
∣∣∣∣+ ∆g
∣∣∣∣ ∂2M
∂K∂g
∣∣∣∣) (1.61)
puis Q3 :
Q3 = ∆x
(∆K
∣∣∣∣ ∂2M
∂x∂K
∣∣∣∣+ ∆x
∣∣∣∣∂2M
∂x2
∣∣∣∣+ ∆g
∣∣∣∣ ∂2M
∂x∂g
∣∣∣∣) (1.62)
et enfin Q4 :
Q4 = ∆g
(∆K
∣∣∣∣ ∂2M
∂g∂K
∣∣∣∣+ ∆x
∣∣∣∣ ∂2M
∂g∂x
∣∣∣∣+ ∆g
∣∣∣∣∂2M
∂g2
∣∣∣∣) (1.63)
En executant les derivees partielles, on obtient :
Q1 = ∆K
∣∣∣∣xg∣∣∣∣+ ∆x
∣∣∣∣Kg∣∣∣∣+ ∆g
∣∣∣∣−Kxg2
∣∣∣∣ (1.64)
Q2 = ∆K
(∆K|0|+ ∆x
∣∣∣∣1g∣∣∣∣+ ∆g
∣∣∣∣−xg2
∣∣∣∣)= ∆K
(∆x
∣∣∣∣1g∣∣∣∣+ ∆g
∣∣∣∣−xg2
∣∣∣∣) (1.65)
Q3 = ∆x
(∆K
∣∣∣∣1g∣∣∣∣+ ∆x|0|+ ∆g
∣∣∣∣−Kg2
∣∣∣∣)= ∆x
(∆K
∣∣∣∣1g∣∣∣∣+ ∆g
∣∣∣∣−Kg2
∣∣∣∣) (1.66)
et
Q4 = ∆g
(∆K
∣∣∣∣−xg2
∣∣∣∣+ ∆x
∣∣∣∣−Kg2
∣∣∣∣+ ∆g
∣∣∣∣2Kxg3
∣∣∣∣) (1.67)
En combinant toutes ces equations et en assumant que toutes les variablesen jeu sont positives :
∆M =∆Kx
g+K∆x
g+
∆K∆x
g+Kx∆g
g2+
∆Kx∆g
g2
+K∆x∆g
g2+Kx∆g2
g3
(1.68)
Avec l’equation (1.68), on obtient la valeur numerique de l’erreur de me-sure qui est de ±0.363 kg, ce qui donne ±3.6 % d’erreur relative.

1.6. LE CALCUL D’ERREUR DANS LES CHAINES DE MESURE 47
1.6.6 Erreur sur un capteur actif (ou un capteur trans-metteur)
Soit un capteur actif (ou un capteur transmetteur). Ce capteur mesureune grandeur physique nommee x et envoie en sortie un signal nomme y.La transformation entre x et y est representee par la fonction de transfertsuivante :
y = mx+ b (1.69)
Le parametre m represente la sensibilite du capteur et le parametre brepresente le signal de sortie correspondant a une grandeur physique nulle(x = 0). L’erreur de ce capteur peut etre calculee par la serie de Taylorsuivante :
∆y = ∆m|x|+ ∆x|m|+ ∆m∆x (1.70)
∆m represente l’erreur de sensibilite calcule a partir de la classe deprecision du capteur :
∆m =CP (%)
100 %×m (1.71)
∆x represente l’erreur sur la grandeur physique a mesurer qui est nulle.Puisque ∆x = 0, alors l’erreur absolue du capteur se reduit simplement a :
∆y = ∆m|x| (1.72)
et elle est evaluee avec la valeur de x qui donne le ∆y maximal.
1.6.7 Erreur sur un capteur passif
Dans le cas d’un capteur passif, une source d’alimentation exterieure Vccest requise. Le capteur mesure une grandeur physique nommee x et envoieen sortie un signal nomme y. La transformation entre x et y est representeepar la fonction de transfert suivante :
y =SRVccEMx
x+ b (1.73)
La sensibilite reduite du capteur est representee par SR, l’etendue demesure du capteur par EMx et la tension d’alimentation du capteur par Vcc.Le parametre b represente le signal de sortie correspondant a une grandeurphysique nulle (x = 0). L’erreur de ce capteur peut etre calculee par la serie

48 CHAPITRE 1. CARACTERISTIQUES D’UN CAPTEUR
de Taylor suivante (considerant l’erreur sur la grandeur physique a mesurer∆x = 0) :
∆y = ∆SR
∣∣∣∣ VccEMx
x
∣∣∣∣+ ∆Vcc
∣∣∣∣ SREMx
x
∣∣∣∣+ ∆SR∆Vcc
∣∣∣∣ 1
EMx
x
∣∣∣∣ (1.74)
∆SR represente l’erreur de sensibilite reduite calcule a partir de la classe deprecision du capteur :
∆SR =CP (%)
100 %× SR (1.75)
∆Vcc represente l’erreur sur la tension d’alimentation (generalement l’am-plitude de l’ondulation). L’erreur en (1.74) est evaluee avec la valeur de xqui donne la valeur maximale pour ∆y.
1.6.8 Erreur sur un module de conditionnement elec-tronique
Cette erreur est calculee exactement comme dans le cas d’un capteuractif, mais puisque le signal d’entree x est le signal provenant d’un elementde la chaine de mesure, l’erreur ∆x est non-nulle. La fonction de transfertsuivante du module de conditionnement electronique est :
y = mx+ b (1.76)
Le parametre m represente la sensibilite du module de conditionnementelectronique et le parametre b represente le signal de sortie correspondant aune grandeur physique nulle (x = 0). L’erreur de ce module de conditionne-ment electronique est :
∆y = ∆m|x|+ ∆x|m|+ ∆m∆x (1.77)
∆m represente l’erreur de sensibilite calcule a partir de la classe deprecision du module electronique de conditionnement :
∆m =CP (%)
100 %×m (1.78)
L’erreur absolue representee par (1.77) est evaluee avec la valeur de x quidonne le ∆y maximal.
Chapitre 2
La detection deposition/proximite
2.1 Introduction
Un detecteur de position est un element de mesure ayant un contactavec l’objet dont on doit verifier s’il occupe une position donnee. Une seuletechnologie est utilisee, ce sont les interrupteurs de fin de course.
Un detecteur de proximite est un element de mesure detectant si un ob-jet est present a proximite sans avoir de contact avec l’objet. La detections’opere par des effets physiques que l’objet peut produire sur le detecteur,sans contact. Il existe 4 technologies :
• Detecteur de proximite inductif : l’objet est detecte par ses effets surun champ magnetique emis par le detecteur.• Detecteur de proximite capacitif : l’objet est detecte par ses effets sur
un champ electrique emis par le detecteur.• Detecteur de proximite photoelectrique : l’objet est detecte par ses
effets sur un faisceau de rayonnement optique.• Detecteur de proximite ultrasonique : l’objet est detecte par ses effets
sur une onde ultrasonique emise par le detecteur.
Ces quatre technologies doivent etre envisagees dans l’ordre dans lequelelles ont ete enumerees. Ainsi, il faut en premier lieu envisager l’utilisationd’un detecteur de proximite inductif. Si l’objet a detecter est non-metalliqueou trop loin, il faut utiliser une autre technologie. En second lieu, il faut envi-sager l’utilisation d’un detecteur capacitif. Si l’objet est trop loin, ou n’a pas
49
50 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
assez d’effet sur un champ electrique, il faut passer a la technologie suivante.Celle-ci sera la technologie optique pour la detection. Si l’environnement oul’objet fait en sorte que cette technologie ne fonctionne pas, il reste le der-nier et ultime choix, la detection de proximite ultrasonique. Et, si memecette technologie ne fonctionne pas, il faut se demander s’il est absolumentnecessaire de faire la detection sans contact.
L’utilisation d’un detecteur de proximite s’avere une bien meilleure solu-tion dans les cas ou la vitesse de l’objet a detecter est rapide. L’usage d’uninterrupteur de fin de course dans ces conditions est difficile, car l’impactde l’objet risque d’endommager l’interrupteur de fin de course (et l’objetlui-meme).
Dans les cas ou l’objet a detecter est petit et/ou fragile, le detecteur deproximite s’avere la seule solution exploitable. La commutation d’un inter-rupteur de fin de course exige de la part de l’objet une force minimale qu’unobjet de petite masse ne peut atteindre. De plus, le contact entre l’inter-rupteur de fin de course et un objet fragile risque de rayer la surface de cedernier.
Les detecteurs de proximite possedent des portees qui varient de l’ordre de25 micrometres a un bout de l’echelle jusqu’a 200 metres pour l’autre bout.Les signaux generes sont des signaux logiques tout-ou-rien. Ces detecteursn’ont aucune piece mecanique mobile contrairement aux interrupteurs de finde course. Ils sont utilises dans une foule d’applications industrielles : controlede presence ou d’absence de pieces, controle de fin de course, detection depassage de pieces, positionnement de pieces, comptage de pieces, barrages deprotection, etc...
2.2 Interrupteur de fin de course
Un detecteur de position (Figure 2.1) est un capteur mieux connu sous lenom d’interrupteur de fin de course. Puisque c’est un detecteur, par definitionil fournit en sortie un signal logique evoluant entre deux etats (tout ou rien).L’interrupteur de fin de course exige un contact avec l’objet a detecter. Cecontact a lieu au niveau de l’organe de commande. Divers types d’organes decommande sont disponibles sur le marche (Figure 2.2), pour s’adapter auxdivers objets que le detecteur doit pouvoir detecter. Ce choix est important,
1. Source de l’image de la Figure 2.1 en page 51 : www.inotek.com
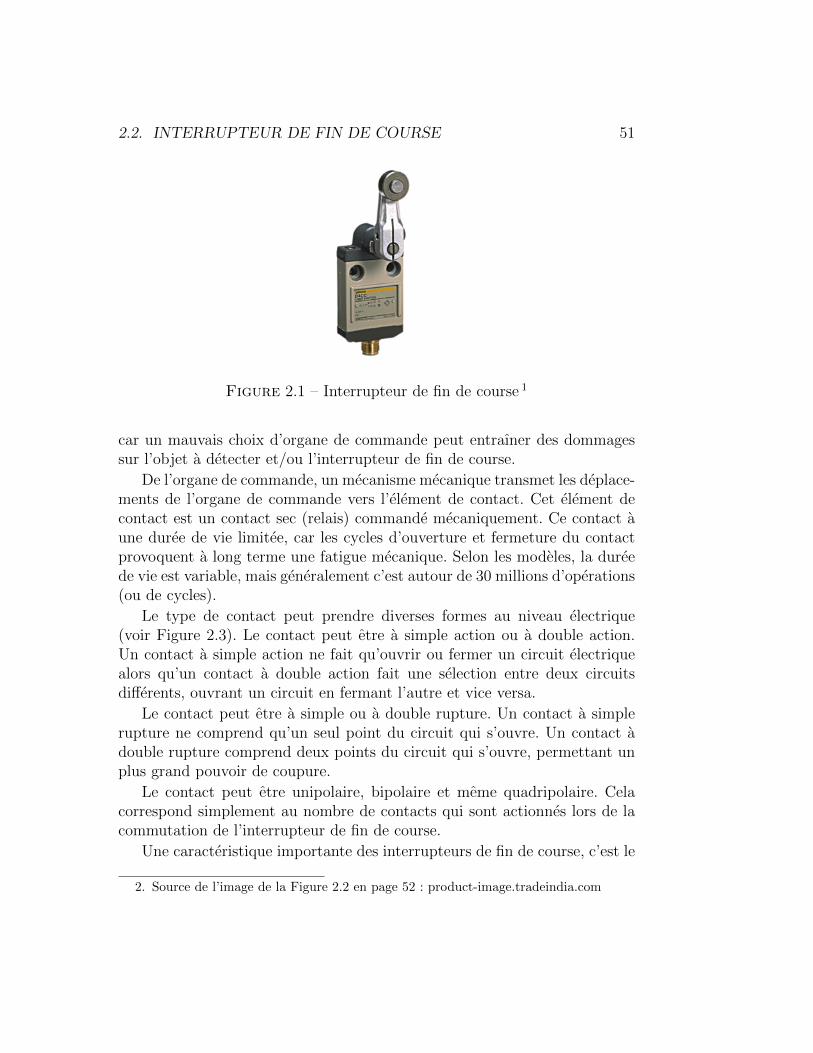
2.2. INTERRUPTEUR DE FIN DE COURSE 51
Figure 2.1 – Interrupteur de fin de course 1
car un mauvais choix d’organe de commande peut entraıner des dommagessur l’objet a detecter et/ou l’interrupteur de fin de course.
De l’organe de commande, un mecanisme mecanique transmet les deplace-ments de l’organe de commande vers l’element de contact. Cet element decontact est un contact sec (relais) commande mecaniquement. Ce contact aune duree de vie limitee, car les cycles d’ouverture et fermeture du contactprovoquent a long terme une fatigue mecanique. Selon les modeles, la dureede vie est variable, mais generalement c’est autour de 30 millions d’operations(ou de cycles).
Le type de contact peut prendre diverses formes au niveau electrique(voir Figure 2.3). Le contact peut etre a simple action ou a double action.Un contact a simple action ne fait qu’ouvrir ou fermer un circuit electriquealors qu’un contact a double action fait une selection entre deux circuitsdifferents, ouvrant un circuit en fermant l’autre et vice versa.
Le contact peut etre a simple ou a double rupture. Un contact a simplerupture ne comprend qu’un seul point du circuit qui s’ouvre. Un contact adouble rupture comprend deux points du circuit qui s’ouvre, permettant unplus grand pouvoir de coupure.
Le contact peut etre unipolaire, bipolaire et meme quadripolaire. Celacorrespond simplement au nombre de contacts qui sont actionnes lors de lacommutation de l’interrupteur de fin de course.
Une caracteristique importante des interrupteurs de fin de course, c’est le
2. Source de l’image de la Figure 2.2 en page 52 : product-image.tradeindia.com
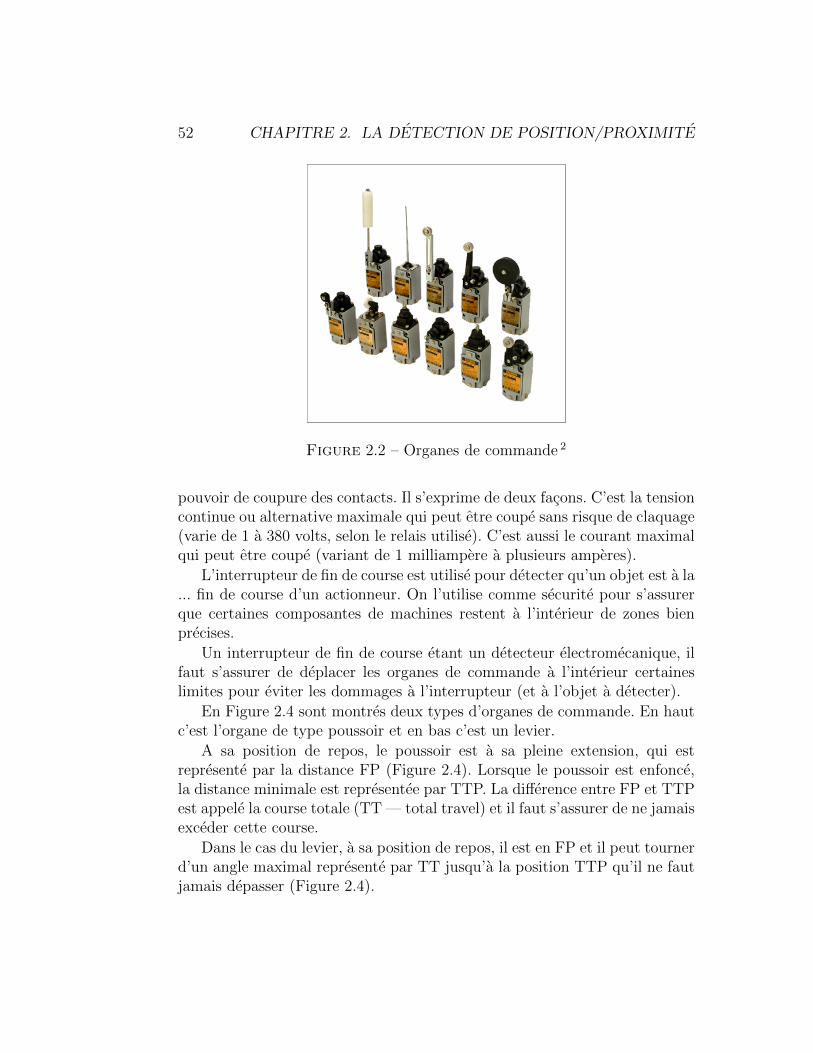
52 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Figure 2.2 – Organes de commande 2
pouvoir de coupure des contacts. Il s’exprime de deux facons. C’est la tensioncontinue ou alternative maximale qui peut etre coupe sans risque de claquage(varie de 1 a 380 volts, selon le relais utilise). C’est aussi le courant maximalqui peut etre coupe (variant de 1 milliampere a plusieurs amperes).
L’interrupteur de fin de course est utilise pour detecter qu’un objet est a la... fin de course d’un actionneur. On l’utilise comme securite pour s’assurerque certaines composantes de machines restent a l’interieur de zones bienprecises.
Un interrupteur de fin de course etant un detecteur electromecanique, ilfaut s’assurer de deplacer les organes de commande a l’interieur certaineslimites pour eviter les dommages a l’interrupteur (et a l’objet a detecter).
En Figure 2.4 sont montres deux types d’organes de commande. En hautc’est l’organe de type poussoir et en bas c’est un levier.
A sa position de repos, le poussoir est a sa pleine extension, qui estrepresente par la distance FP (Figure 2.4). Lorsque le poussoir est enfonce,la distance minimale est representee par TTP. La difference entre FP et TTPest appele la course totale (TT — total travel) et il faut s’assurer de ne jamaisexceder cette course.
Dans le cas du levier, a sa position de repos, il est en FP et il peut tournerd’un angle maximal represente par TT jusqu’a la position TTP qu’il ne fautjamais depasser (Figure 2.4).
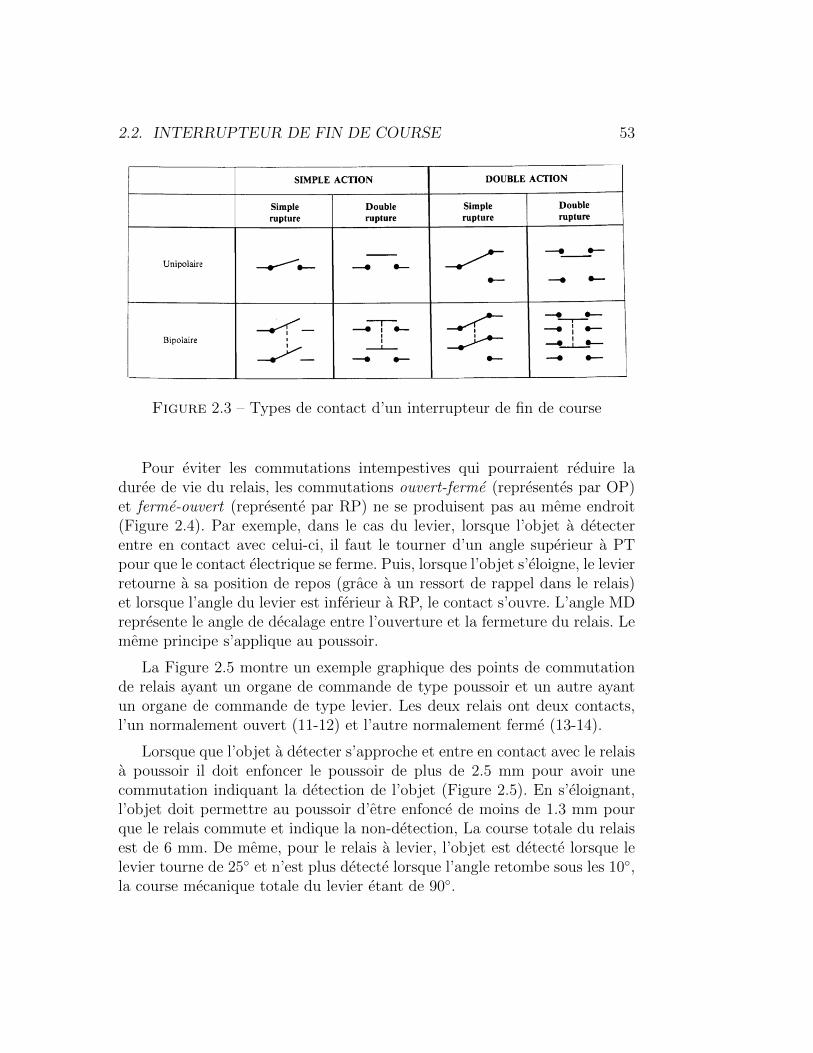
2.2. INTERRUPTEUR DE FIN DE COURSE 53
Figure 2.3 – Types de contact d’un interrupteur de fin de course
Pour eviter les commutations intempestives qui pourraient reduire laduree de vie du relais, les commutations ouvert-ferme (representes par OP)et ferme-ouvert (represente par RP) ne se produisent pas au meme endroit(Figure 2.4). Par exemple, dans le cas du levier, lorsque l’objet a detecterentre en contact avec celui-ci, il faut le tourner d’un angle superieur a PTpour que le contact electrique se ferme. Puis, lorsque l’objet s’eloigne, le levierretourne a sa position de repos (grace a un ressort de rappel dans le relais)et lorsque l’angle du levier est inferieur a RP, le contact s’ouvre. L’angle MDrepresente le angle de decalage entre l’ouverture et la fermeture du relais. Lememe principe s’applique au poussoir.
La Figure 2.5 montre un exemple graphique des points de commutationde relais ayant un organe de commande de type poussoir et un autre ayantun organe de commande de type levier. Les deux relais ont deux contacts,l’un normalement ouvert (11-12) et l’autre normalement ferme (13-14).
Lorsque que l’objet a detecter s’approche et entre en contact avec le relaisa poussoir il doit enfoncer le poussoir de plus de 2.5 mm pour avoir unecommutation indiquant la detection de l’objet (Figure 2.5). En s’eloignant,l’objet doit permettre au poussoir d’etre enfonce de moins de 1.3 mm pourque le relais commute et indique la non-detection, La course totale du relaisest de 6 mm. De meme, pour le relais a levier, l’objet est detecte lorsque lelevier tourne de 25 et n’est plus detecte lorsque l’angle retombe sous les 10,la course mecanique totale du levier etant de 90.
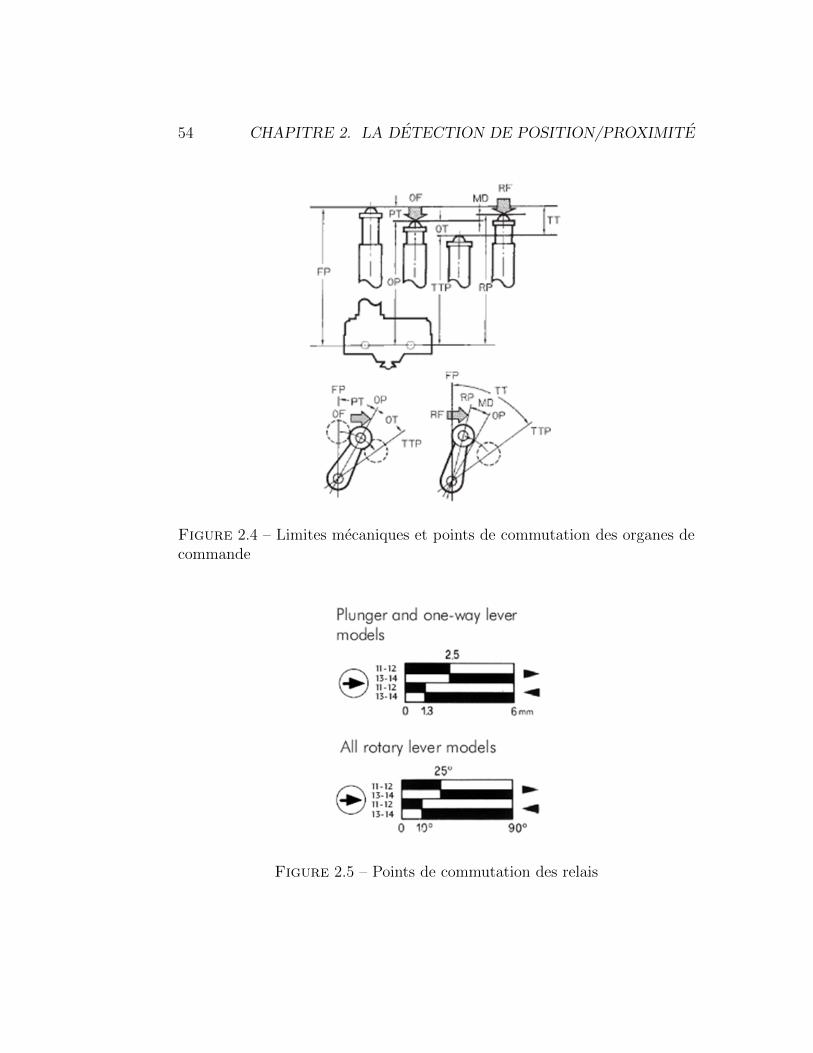
54 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Figure 2.4 – Limites mecaniques et points de commutation des organes decommande
Figure 2.5 – Points de commutation des relais
2.3. DETECTEUR DE PROXIMITE INDUCTIF 55
2.3 Detecteur de proximite inductif
Figure 2.6 – Detecteur de proximite inductif 3
Un detecteur de proximite inductif (Figure 2.6) detecte tout objet qui aun effet sur un champ magnetique. Donc, le detecteur de proximite inductifdetectera uniquement des objets metalliques. Tout objet non-metallique nesera pas detecte.
Ce detecteur comporte un circuit oscillateur qui envoie une tension alter-native dans une bobine localisee au bout du capteur (Figure 2.7). Un champmagnetique alternatif est emis au bout du capteur. Si un objet metallique sepresente dans ce champ magnetique, il y aura apparition d’un courant induit,dit courant de Foucault (les anglophones le designent sous le nom de courantd’Eddy). Le courant de Foucault qui apparaıt dans l’objet metallique prelevede l’energie au circuit oscillateur. L’amplitude et la frequence de l’oscillateurchange lorsqu’un objet est present. Plus l’objet est pres, plus l’amplitudediminue (Figure 2.8).
Figure 2.7 – Schema de principe du detecteur de proximite inductif 4
A partir de la reponse de l’oscillateur, une tension de sortie est obtenue vial’electronique de detection (Figure 2.8). Tout comme pour les interrupteurs
3. Source de l’image de la Figure 2.6 : www.festo.com4. Dessin de la Figure 2.7 inspire d’un schema trouve chez : Turk Inc.
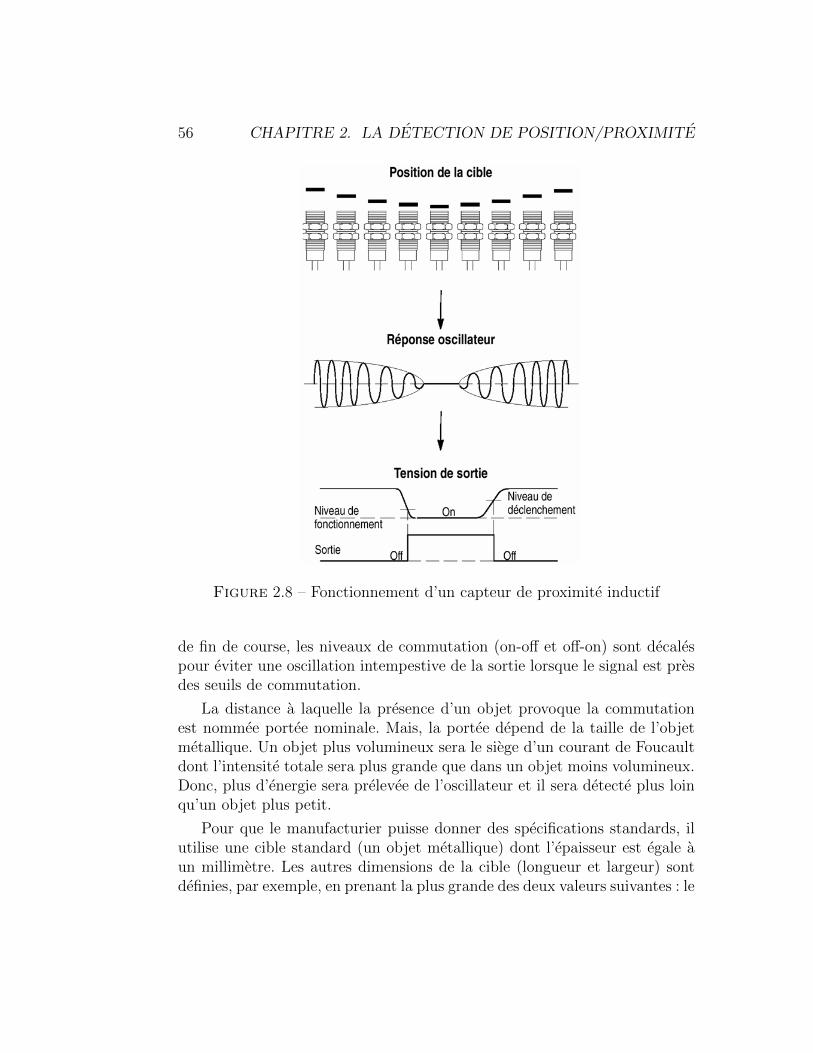
56 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Figure 2.8 – Fonctionnement d’un capteur de proximite inductif
de fin de course, les niveaux de commutation (on-off et off-on) sont decalespour eviter une oscillation intempestive de la sortie lorsque le signal est presdes seuils de commutation.
La distance a laquelle la presence d’un objet provoque la commutationest nommee portee nominale. Mais, la portee depend de la taille de l’objetmetallique. Un objet plus volumineux sera le siege d’un courant de Foucaultdont l’intensite totale sera plus grande que dans un objet moins volumineux.Donc, plus d’energie sera prelevee de l’oscillateur et il sera detecte plus loinqu’un objet plus petit.
Pour que le manufacturier puisse donner des specifications standards, ilutilise une cible standard (un objet metallique) dont l’epaisseur est egale aun millimetre. Les autres dimensions de la cible (longueur et largeur) sontdefinies, par exemple, en prenant la plus grande des deux valeurs suivantes : le
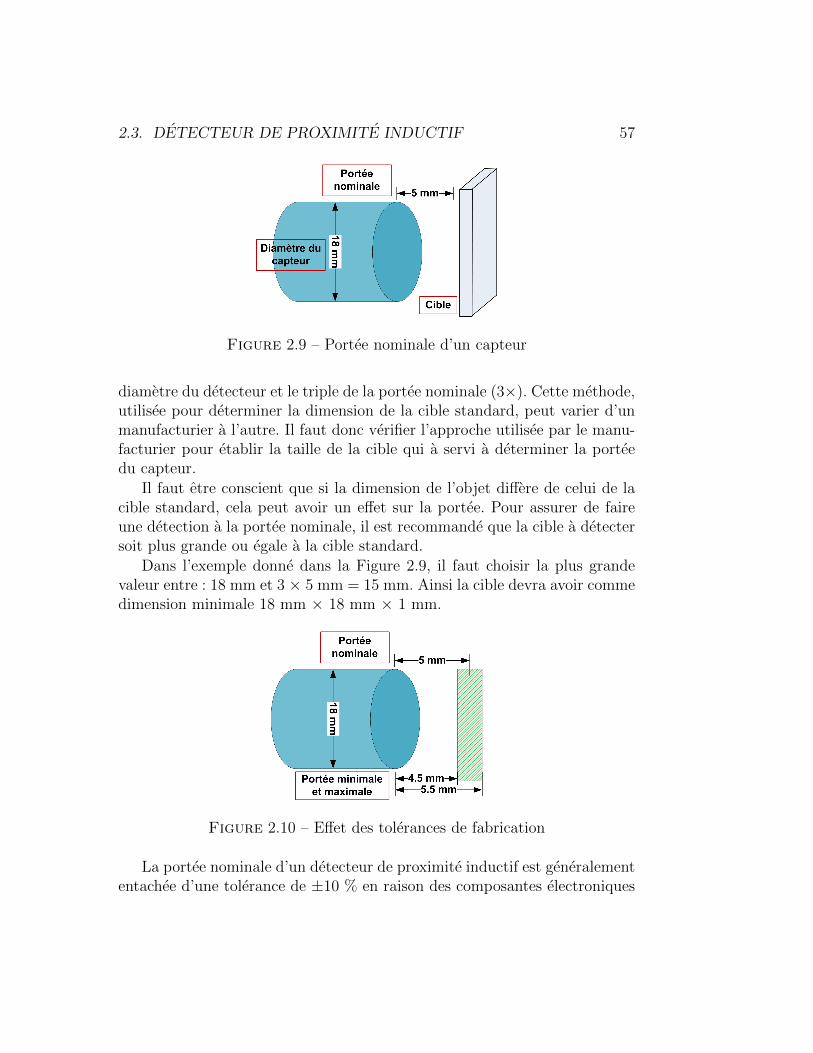
2.3. DETECTEUR DE PROXIMITE INDUCTIF 57
Figure 2.9 – Portee nominale d’un capteur
diametre du detecteur et le triple de la portee nominale (3×). Cette methode,utilisee pour determiner la dimension de la cible standard, peut varier d’unmanufacturier a l’autre. Il faut donc verifier l’approche utilisee par le manu-facturier pour etablir la taille de la cible qui a servi a determiner la porteedu capteur.
Il faut etre conscient que si la dimension de l’objet differe de celui de lacible standard, cela peut avoir un effet sur la portee. Pour assurer de faireune detection a la portee nominale, il est recommande que la cible a detectersoit plus grande ou egale a la cible standard.
Dans l’exemple donne dans la Figure 2.9, il faut choisir la plus grandevaleur entre : 18 mm et 3 × 5 mm = 15 mm. Ainsi la cible devra avoir commedimension minimale 18 mm × 18 mm × 1 mm.
Figure 2.10 – Effet des tolerances de fabrication
La portee nominale d’un detecteur de proximite inductif est generalemententachee d’une tolerance de ±10 % en raison des composantes electroniques
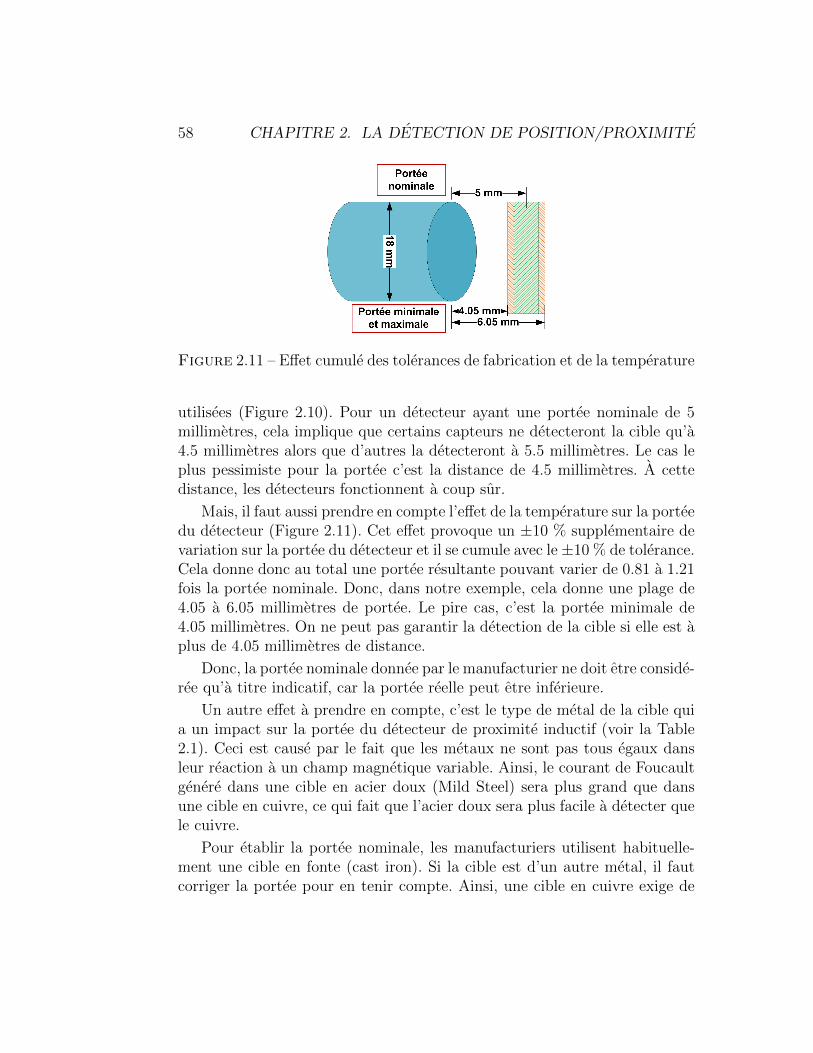
58 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Figure 2.11 – Effet cumule des tolerances de fabrication et de la temperature
utilisees (Figure 2.10). Pour un detecteur ayant une portee nominale de 5millimetres, cela implique que certains capteurs ne detecteront la cible qu’a4.5 millimetres alors que d’autres la detecteront a 5.5 millimetres. Le cas leplus pessimiste pour la portee c’est la distance de 4.5 millimetres. A cettedistance, les detecteurs fonctionnent a coup sur.
Mais, il faut aussi prendre en compte l’effet de la temperature sur la porteedu detecteur (Figure 2.11). Cet effet provoque un ±10 % supplementaire devariation sur la portee du detecteur et il se cumule avec le±10 % de tolerance.Cela donne donc au total une portee resultante pouvant varier de 0.81 a 1.21fois la portee nominale. Donc, dans notre exemple, cela donne une plage de4.05 a 6.05 millimetres de portee. Le pire cas, c’est la portee minimale de4.05 millimetres. On ne peut pas garantir la detection de la cible si elle est aplus de 4.05 millimetres de distance.
Donc, la portee nominale donnee par le manufacturier ne doit etre conside-ree qu’a titre indicatif, car la portee reelle peut etre inferieure.
Un autre effet a prendre en compte, c’est le type de metal de la cible quia un impact sur la portee du detecteur de proximite inductif (voir la Table2.1). Ceci est cause par le fait que les metaux ne sont pas tous egaux dansleur reaction a un champ magnetique variable. Ainsi, le courant de Foucaultgenere dans une cible en acier doux (Mild Steel) sera plus grand que dansune cible en cuivre, ce qui fait que l’acier doux sera plus facile a detecter quele cuivre.
Pour etablir la portee nominale, les manufacturiers utilisent habituelle-ment une cible en fonte (cast iron). Si la cible est d’un autre metal, il fautcorriger la portee pour en tenir compte. Ainsi, une cible en cuivre exige de
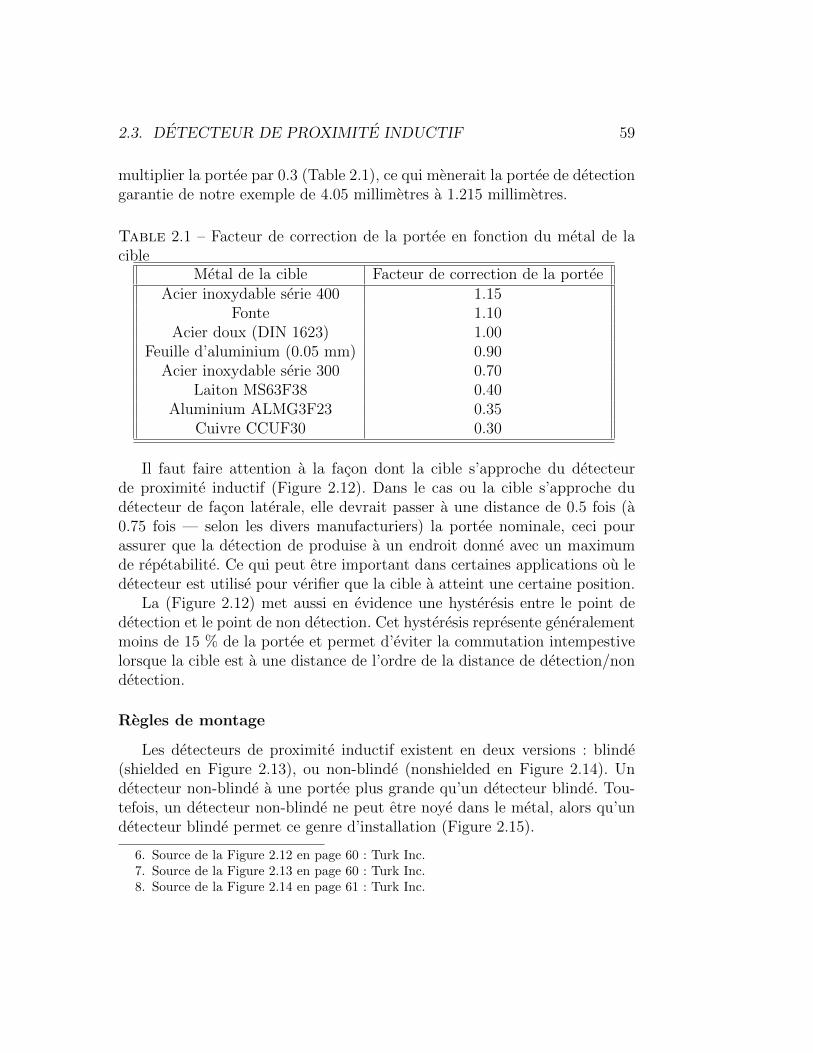
2.3. DETECTEUR DE PROXIMITE INDUCTIF 59
multiplier la portee par 0.3 (Table 2.1), ce qui menerait la portee de detectiongarantie de notre exemple de 4.05 millimetres a 1.215 millimetres.
Table 2.1 – Facteur de correction de la portee en fonction du metal de lacible
Metal de la cible Facteur de correction de la porteeAcier inoxydable serie 400 1.15
Fonte 1.10Acier doux (DIN 1623) 1.00
Feuille d’aluminium (0.05 mm) 0.90Acier inoxydable serie 300 0.70
Laiton MS63F38 0.40Aluminium ALMG3F23 0.35
Cuivre CCUF30 0.30
Il faut faire attention a la facon dont la cible s’approche du detecteurde proximite inductif (Figure 2.12). Dans le cas ou la cible s’approche dudetecteur de facon laterale, elle devrait passer a une distance de 0.5 fois (a0.75 fois — selon les divers manufacturiers) la portee nominale, ceci pourassurer que la detection de produise a un endroit donne avec un maximumde repetabilite. Ce qui peut etre important dans certaines applications ou ledetecteur est utilise pour verifier que la cible a atteint une certaine position.
La (Figure 2.12) met aussi en evidence une hysteresis entre le point dedetection et le point de non detection. Cet hysteresis represente generalementmoins de 15 % de la portee et permet d’eviter la commutation intempestivelorsque la cible est a une distance de l’ordre de la distance de detection/nondetection.
Regles de montage
Les detecteurs de proximite inductif existent en deux versions : blinde(shielded en Figure 2.13), ou non-blinde (nonshielded en Figure 2.14). Undetecteur non-blinde a une portee plus grande qu’un detecteur blinde. Tou-tefois, un detecteur non-blinde ne peut etre noye dans le metal, alors qu’undetecteur blinde permet ce genre d’installation (Figure 2.15).
6. Source de la Figure 2.12 en page 60 : Turk Inc.7. Source de la Figure 2.13 en page 60 : Turk Inc.8. Source de la Figure 2.14 en page 61 : Turk Inc.
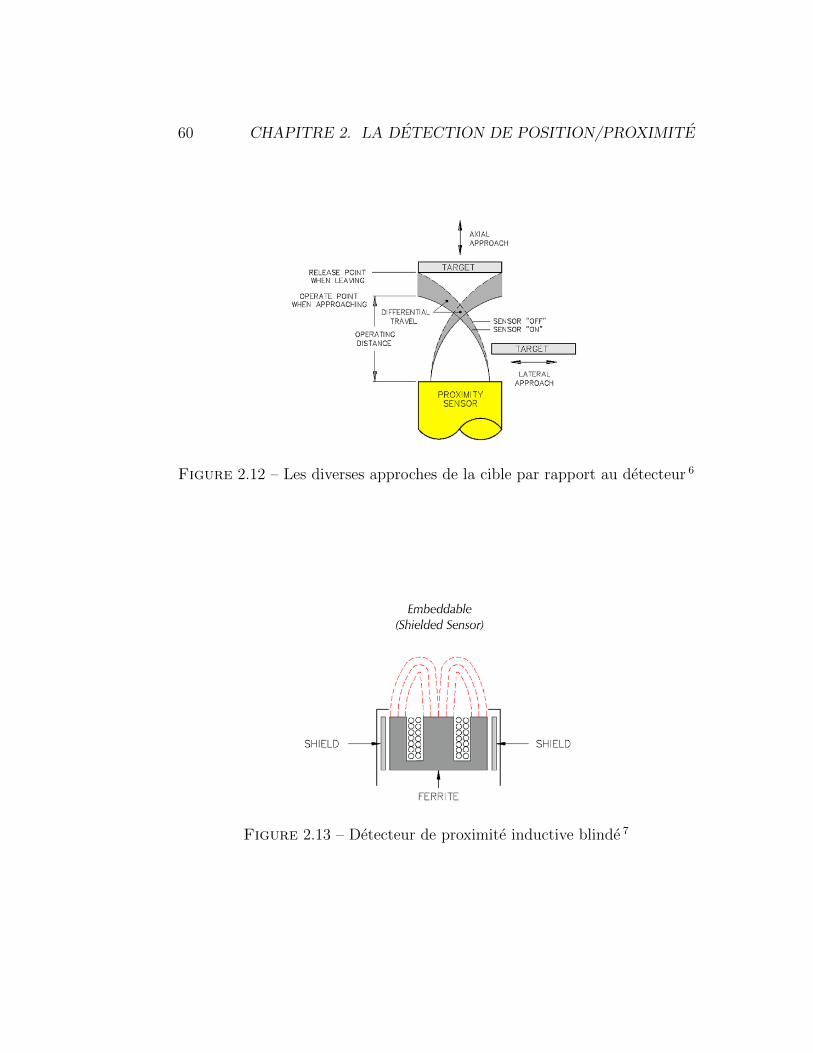
60 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Figure 2.12 – Les diverses approches de la cible par rapport au detecteur 6
Figure 2.13 – Detecteur de proximite inductive blinde 7
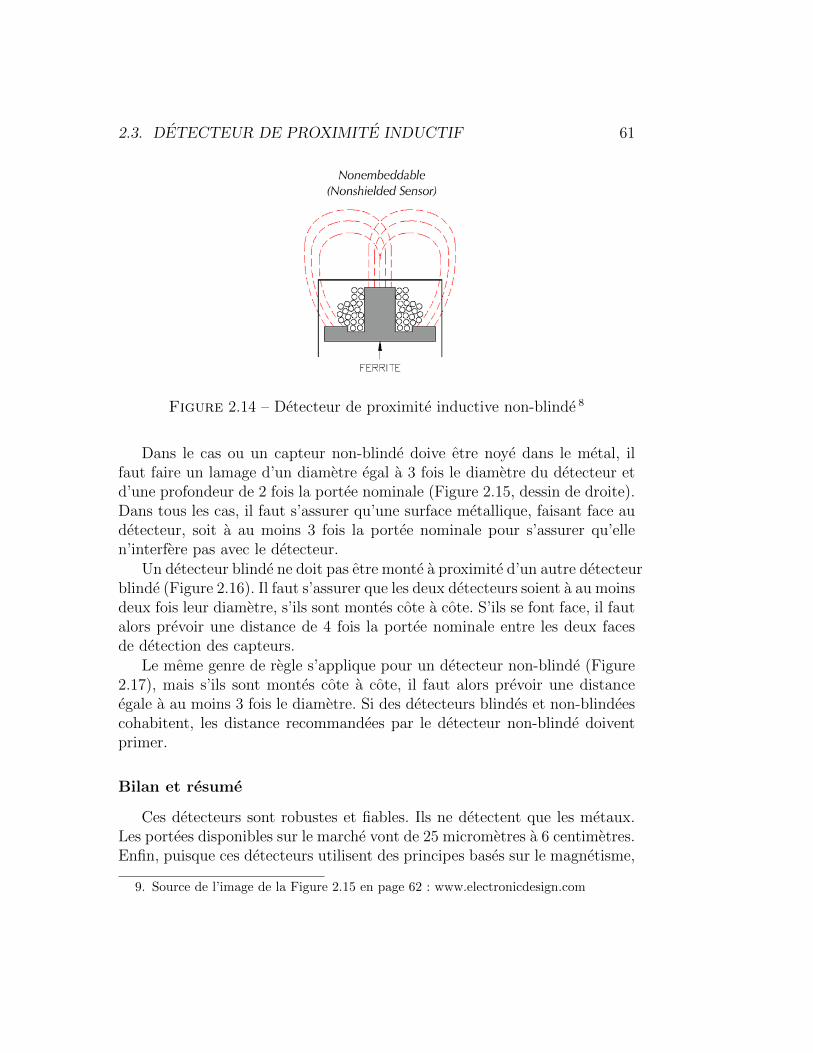
2.3. DETECTEUR DE PROXIMITE INDUCTIF 61
Figure 2.14 – Detecteur de proximite inductive non-blinde 8
Dans le cas ou un capteur non-blinde doive etre noye dans le metal, ilfaut faire un lamage d’un diametre egal a 3 fois le diametre du detecteur etd’une profondeur de 2 fois la portee nominale (Figure 2.15, dessin de droite).Dans tous les cas, il faut s’assurer qu’une surface metallique, faisant face audetecteur, soit a au moins 3 fois la portee nominale pour s’assurer qu’ellen’interfere pas avec le detecteur.
Un detecteur blinde ne doit pas etre monte a proximite d’un autre detecteurblinde (Figure 2.16). Il faut s’assurer que les deux detecteurs soient a au moinsdeux fois leur diametre, s’ils sont montes cote a cote. S’ils se font face, il fautalors prevoir une distance de 4 fois la portee nominale entre les deux facesde detection des capteurs.
Le meme genre de regle s’applique pour un detecteur non-blinde (Figure2.17), mais s’ils sont montes cote a cote, il faut alors prevoir une distanceegale a au moins 3 fois le diametre. Si des detecteurs blindes et non-blindeescohabitent, les distance recommandees par le detecteur non-blinde doiventprimer.
Bilan et resume
Ces detecteurs sont robustes et fiables. Ils ne detectent que les metaux.Les portees disponibles sur le marche vont de 25 micrometres a 6 centimetres.Enfin, puisque ces detecteurs utilisent des principes bases sur le magnetisme,
9. Source de l’image de la Figure 2.15 en page 62 : www.electronicdesign.com
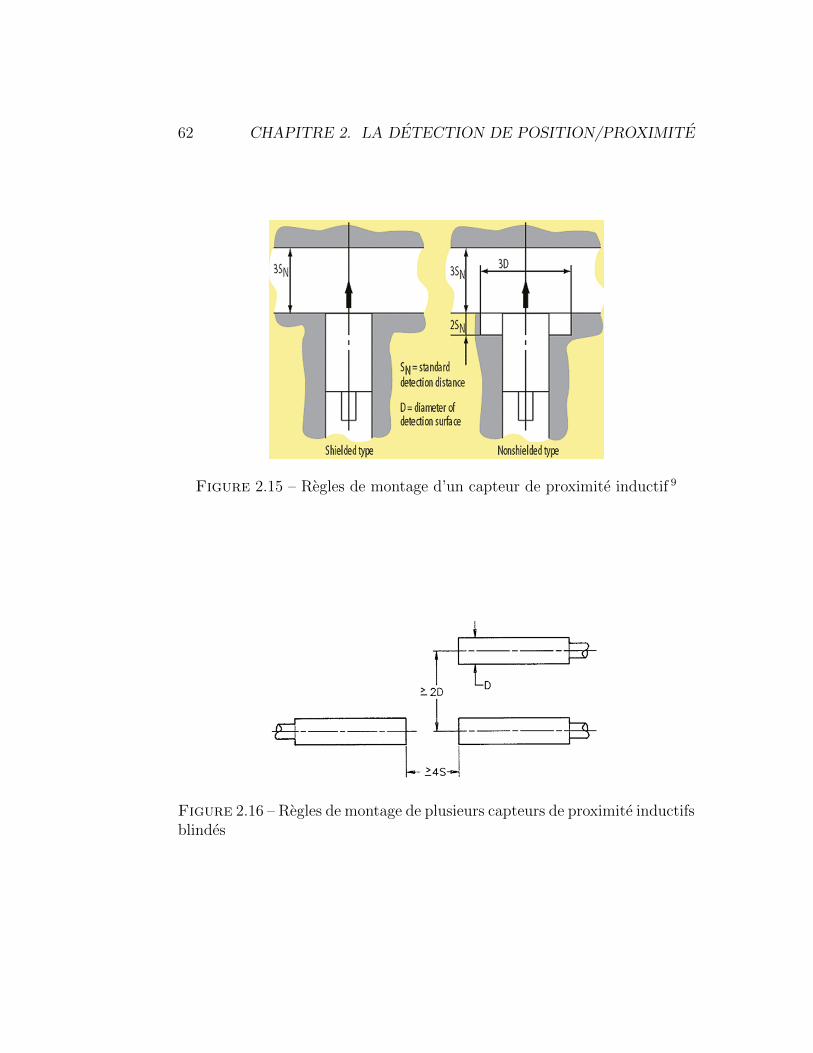
62 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Figure 2.15 – Regles de montage d’un capteur de proximite inductif 9
Figure 2.16 – Regles de montage de plusieurs capteurs de proximite inductifsblindes
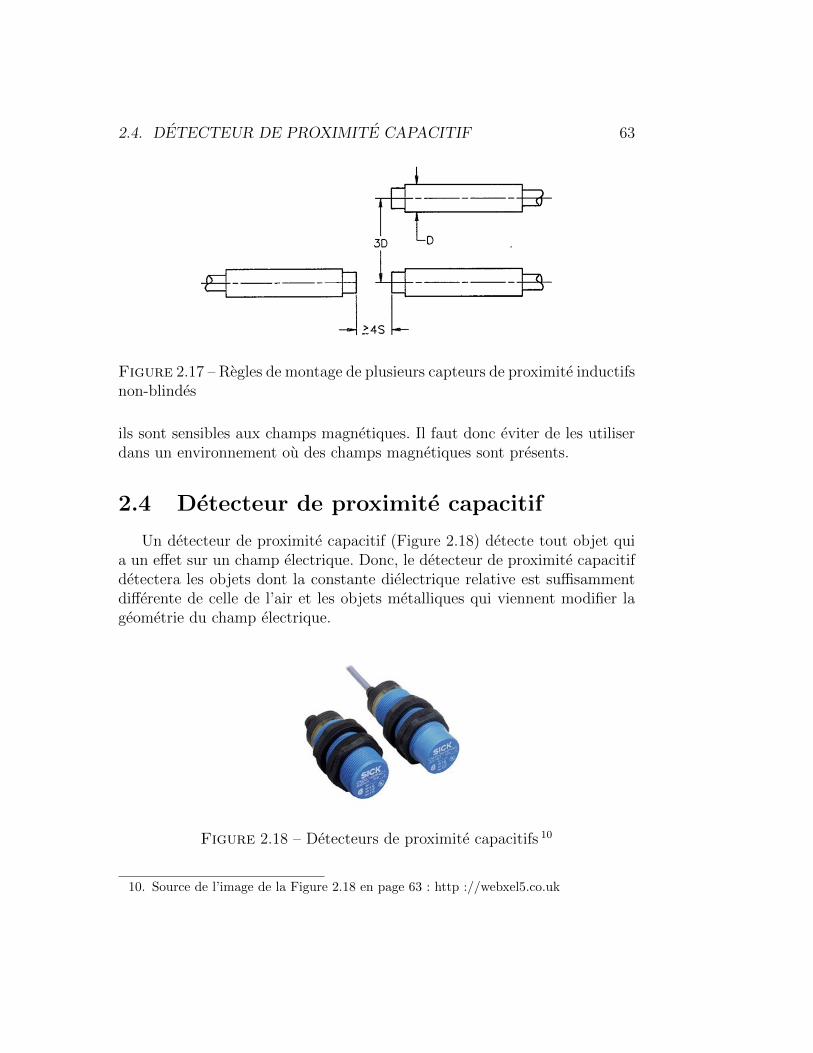
2.4. DETECTEUR DE PROXIMITE CAPACITIF 63
Figure 2.17 – Regles de montage de plusieurs capteurs de proximite inductifsnon-blindes
ils sont sensibles aux champs magnetiques. Il faut donc eviter de les utiliserdans un environnement ou des champs magnetiques sont presents.
2.4 Detecteur de proximite capacitif
Un detecteur de proximite capacitif (Figure 2.18) detecte tout objet quia un effet sur un champ electrique. Donc, le detecteur de proximite capacitifdetectera les objets dont la constante dielectrique relative est suffisammentdifferente de celle de l’air et les objets metalliques qui viennent modifier lageometrie du champ electrique.
Figure 2.18 – Detecteurs de proximite capacitifs 10
10. Source de l’image de la Figure 2.18 en page 63 : http ://webxel5.co.uk
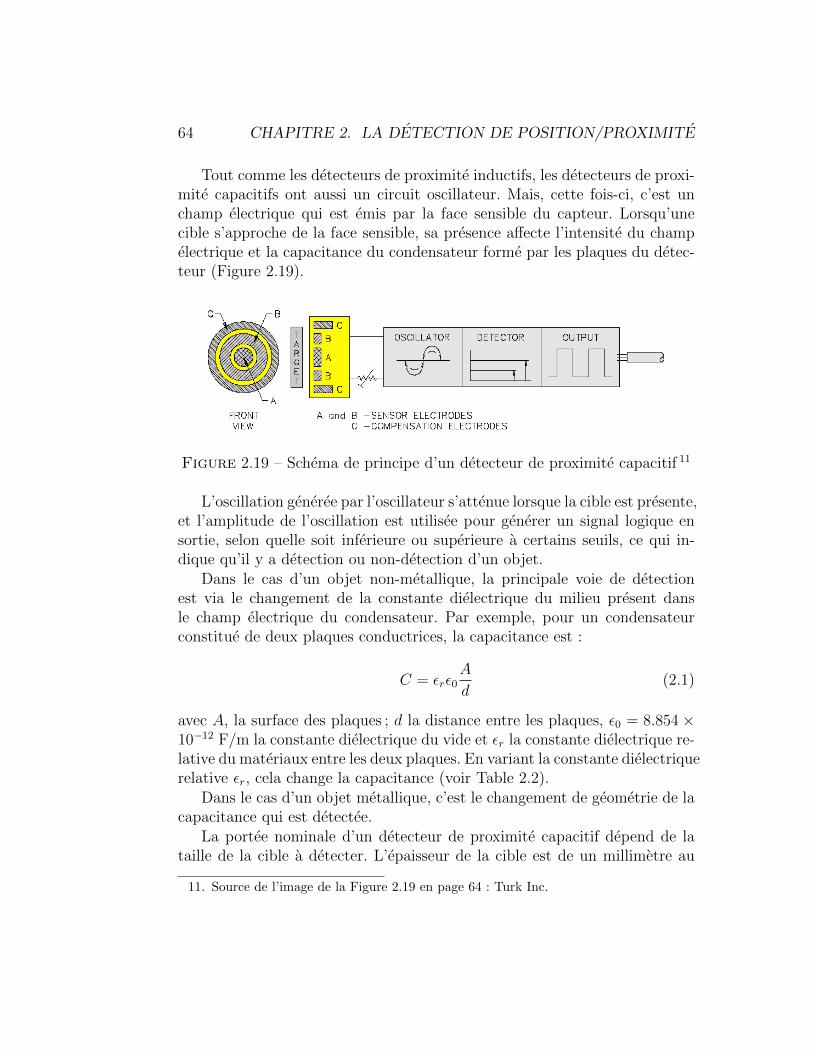
64 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Tout comme les detecteurs de proximite inductifs, les detecteurs de proxi-mite capacitifs ont aussi un circuit oscillateur. Mais, cette fois-ci, c’est unchamp electrique qui est emis par la face sensible du capteur. Lorsqu’unecible s’approche de la face sensible, sa presence affecte l’intensite du champelectrique et la capacitance du condensateur forme par les plaques du detec-teur (Figure 2.19).
Figure 2.19 – Schema de principe d’un detecteur de proximite capacitif 11
L’oscillation generee par l’oscillateur s’attenue lorsque la cible est presente,et l’amplitude de l’oscillation est utilisee pour generer un signal logique ensortie, selon quelle soit inferieure ou superieure a certains seuils, ce qui in-dique qu’il y a detection ou non-detection d’un objet.
Dans le cas d’un objet non-metallique, la principale voie de detectionest via le changement de la constante dielectrique du milieu present dansle champ electrique du condensateur. Par exemple, pour un condensateurconstitue de deux plaques conductrices, la capacitance est :
C = εrε0A
d(2.1)
avec A, la surface des plaques ; d la distance entre les plaques, ε0 = 8.854×10−12 F/m la constante dielectrique du vide et εr la constante dielectrique re-lative du materiaux entre les deux plaques. En variant la constante dielectriquerelative εr, cela change la capacitance (voir Table 2.2).
Dans le cas d’un objet metallique, c’est le changement de geometrie de lacapacitance qui est detectee.
La portee nominale d’un detecteur de proximite capacitif depend de lataille de la cible a detecter. L’epaisseur de la cible est de un millimetre au
11. Source de l’image de la Figure 2.19 en page 64 : Turk Inc.

2.4. DETECTEUR DE PROXIMITE CAPACITIF 65
Table 2.2 – Constantes dielectriques relatives de divers materiaux
Materiau Constante dielectrique relativeAir 1.000264
Acetone 19.5Farine De 2.5 a 3.0Verre De 3.7 a 10.0
Marbre 8.5Glycerine 47
Polypropylene De 2.0 a 2.2Sel 6Eau 80
Bois sec De 2 a 6Bois humide De 10 a 30
minimum. La largeur et longueur de la cible doit etre trois fois la porteenominale du capteur. Par exemple, un detecteur de proximite capacitif ayantune portee nominale de 20 millimetres exige une cible d’au moins 60 mm ×60 mm × 1 mm.
La portee est entachee d’une tolerance de fabrication de ±10 %. Donc,un detecteur ayant une portee nominale de 20 millimetres aura une porteevariant de 18 a 22 millimetres. La detection de la cible est assuree si sadistance au detecteur est de 18 millimetres ou moins. La portee est aussientachee par les variations de temperature qui vient ajouter un ±20 %. Cequi mene a une fourchette de portee de 0.72 a 1.32 fois la portee nominale.Ce qui pour le detecteur pris en exemple, mene a une valeur minimale de14.4 millimetres. A cette distance, la detection est assuree.
L’importance de l’effet de la cible sur le champ electrique depend de saconstante dielectrique (si la cible est non-metallique). La portee nominale estetablie pour une cible ayant une constante dielectrique de l’ordre de 80. Si laconstante dielectrique est differente, alors il faut corriger la portee comme lemontre la Figure 2.20. Ainsi, si la constante dielectrique de la cible etait de 10,la portee serait 60 % de la portee nominale et ainsi, si on reprend l’exemple dudetecteur avec une portee nominale de 20 millimetres, on trouve finalementune portee de 8.64 millimetres pour cette cible.
Il n’est pas evident d’etablir la constante dielectrique d’un objet a detecter.
13. Source de l’image de la Figure 2.20 en page 66 : Turk Inc.
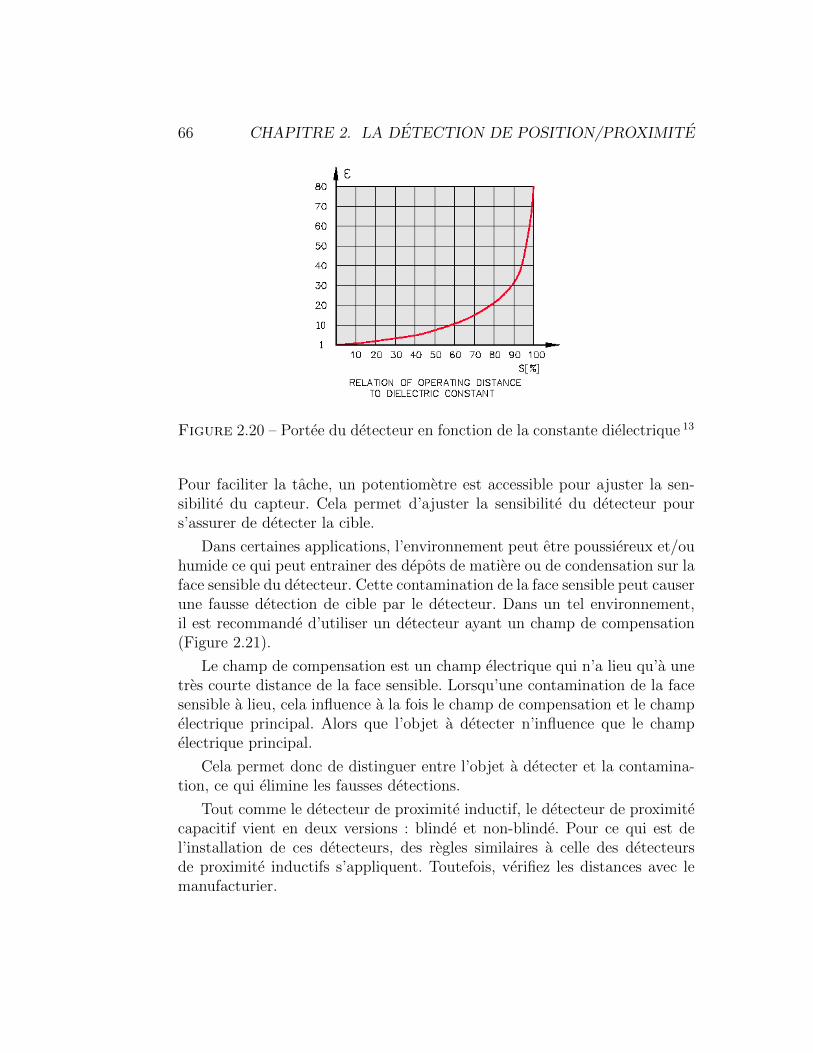
66 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Figure 2.20 – Portee du detecteur en fonction de la constante dielectrique 13
Pour faciliter la tache, un potentiometre est accessible pour ajuster la sen-sibilite du capteur. Cela permet d’ajuster la sensibilite du detecteur pours’assurer de detecter la cible.
Dans certaines applications, l’environnement peut etre poussiereux et/ouhumide ce qui peut entrainer des depots de matiere ou de condensation sur laface sensible du detecteur. Cette contamination de la face sensible peut causerune fausse detection de cible par le detecteur. Dans un tel environnement,il est recommande d’utiliser un detecteur ayant un champ de compensation(Figure 2.21).
Le champ de compensation est un champ electrique qui n’a lieu qu’a unetres courte distance de la face sensible. Lorsqu’une contamination de la facesensible a lieu, cela influence a la fois le champ de compensation et le champelectrique principal. Alors que l’objet a detecter n’influence que le champelectrique principal.
Cela permet donc de distinguer entre l’objet a detecter et la contamina-tion, ce qui elimine les fausses detections.
Tout comme le detecteur de proximite inductif, le detecteur de proximitecapacitif vient en deux versions : blinde et non-blinde. Pour ce qui est del’installation de ces detecteurs, des regles similaires a celle des detecteursde proximite inductifs s’appliquent. Toutefois, verifiez les distances avec lemanufacturier.
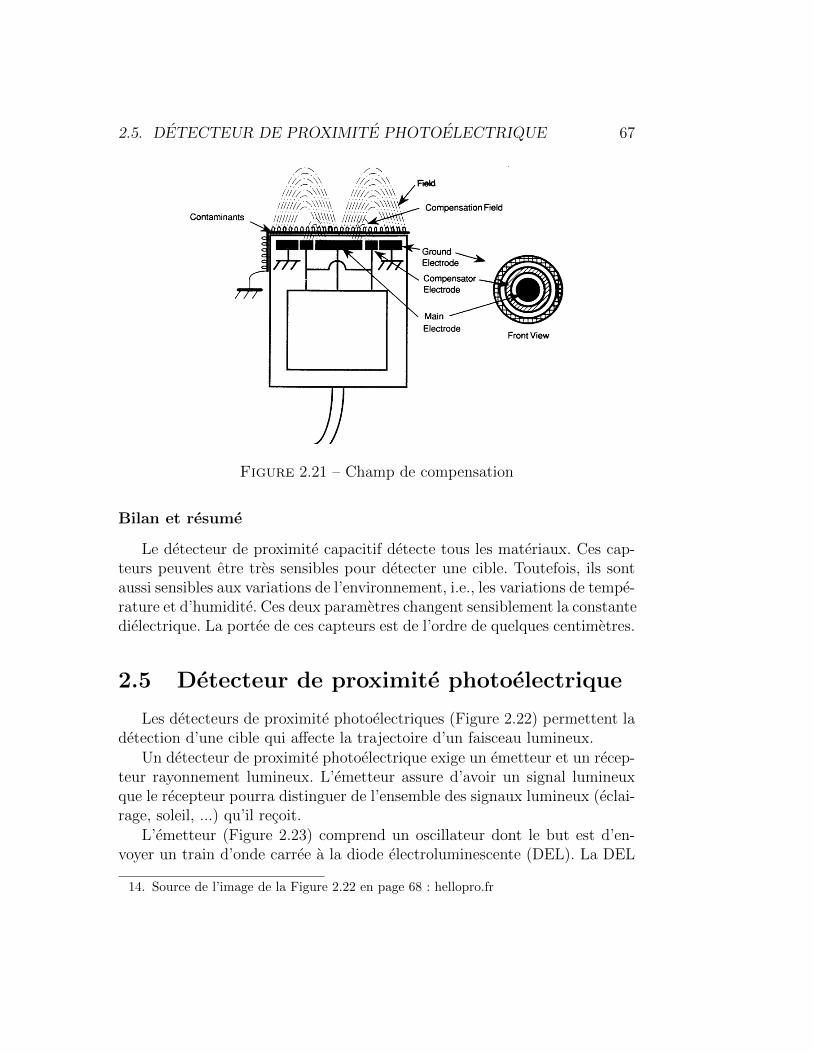
2.5. DETECTEUR DE PROXIMITE PHOTOELECTRIQUE 67
Figure 2.21 – Champ de compensation
Bilan et resume
Le detecteur de proximite capacitif detecte tous les materiaux. Ces cap-teurs peuvent etre tres sensibles pour detecter une cible. Toutefois, ils sontaussi sensibles aux variations de l’environnement, i.e., les variations de tempe-rature et d’humidite. Ces deux parametres changent sensiblement la constantedielectrique. La portee de ces capteurs est de l’ordre de quelques centimetres.
2.5 Detecteur de proximite photoelectrique
Les detecteurs de proximite photoelectriques (Figure 2.22) permettent ladetection d’une cible qui affecte la trajectoire d’un faisceau lumineux.
Un detecteur de proximite photoelectrique exige un emetteur et un recep-teur rayonnement lumineux. L’emetteur assure d’avoir un signal lumineuxque le recepteur pourra distinguer de l’ensemble des signaux lumineux (eclai-rage, soleil, ...) qu’il recoit.
L’emetteur (Figure 2.23) comprend un oscillateur dont le but est d’en-voyer un train d’onde carree a la diode electroluminescente (DEL). La DEL
14. Source de l’image de la Figure 2.22 en page 68 : hellopro.fr
68 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Figure 2.22 – Detecteur de proximite photoelectrique 14
emet un signal lumineux oscillant dont la frequence est de quelques kilohertz.C’est grace a cette frequence particuliere que le recepteur (Figure 2.24) seraen mesure de distinguer ce signal lumineux dans l’ensemble du rayonnementlumineux recu par le recepteur.
Figure 2.23 – Circuit de l’emetteur du faisceau lumineux
Le phototransistor du recepteur capte la lumiere et elle est amplifieepour pouvoir detecter plus facilement le signal lumineux en provenance del’emetteur. Le demodulateur extrait le signal du l’emetteur, si celui-ci estdetecte. Il peut ne pas etre detecte, soit parce qu’un obstacle bloque le pas-sage du signal lumineux, soit parce que le signal lumineux est noye dansl’ensemble des signaux lumineux recus par le recepteur.
Les diodes electroluminescentes (DEL) utilisees dans l’emetteur emettentdans la bande de 600 a 700 nanometres pour les DEL rouges et dans la bandede 850 a 950 nanometres pour les DEL infrarouges (Figure 2.25).
La Figure 2.26 montre la reponse spectrale d’un phototransistor compareeaux spectres d’emission des DEL rouges et infrarouges et le spectre d’emissiondu soleil.
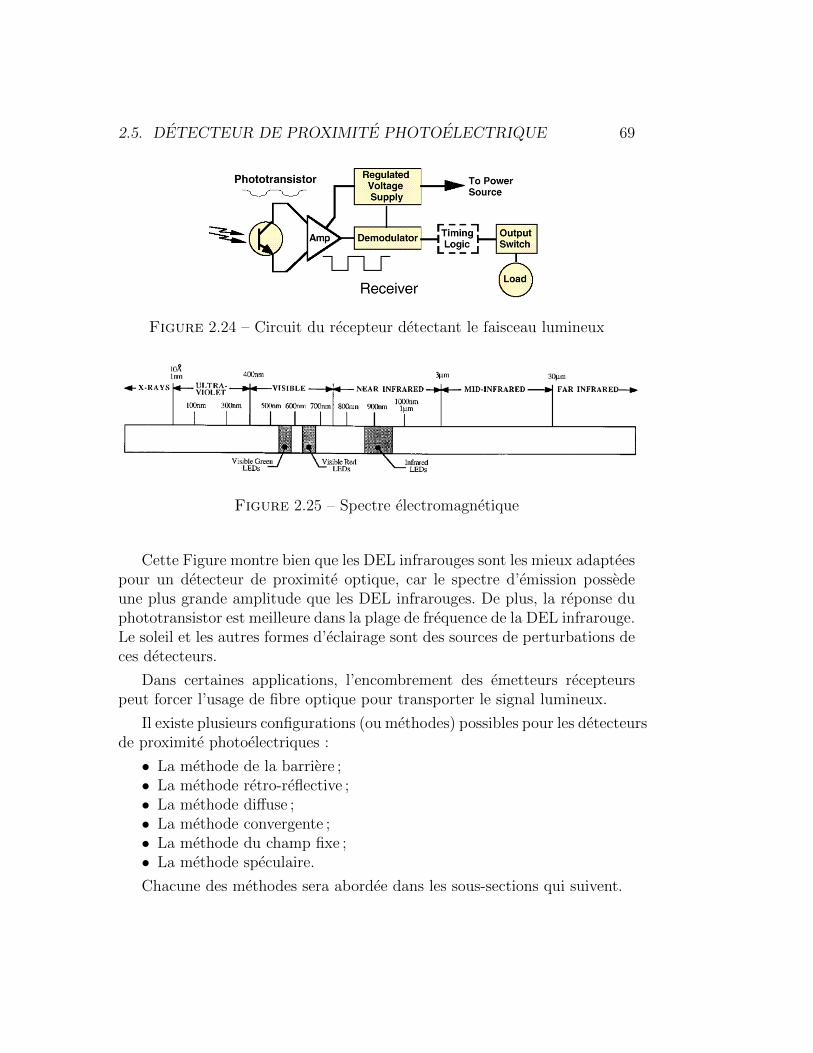
2.5. DETECTEUR DE PROXIMITE PHOTOELECTRIQUE 69
Figure 2.24 – Circuit du recepteur detectant le faisceau lumineux
Figure 2.25 – Spectre electromagnetique
Cette Figure montre bien que les DEL infrarouges sont les mieux adapteespour un detecteur de proximite optique, car le spectre d’emission possedeune plus grande amplitude que les DEL infrarouges. De plus, la reponse duphototransistor est meilleure dans la plage de frequence de la DEL infrarouge.Le soleil et les autres formes d’eclairage sont des sources de perturbations deces detecteurs.
Dans certaines applications, l’encombrement des emetteurs recepteurspeut forcer l’usage de fibre optique pour transporter le signal lumineux.
Il existe plusieurs configurations (ou methodes) possibles pour les detecteursde proximite photoelectriques :
• La methode de la barriere ;• La methode retro-reflective ;• La methode diffuse ;• La methode convergente ;• La methode du champ fixe ;• La methode speculaire.
Chacune des methodes sera abordee dans les sous-sections qui suivent.
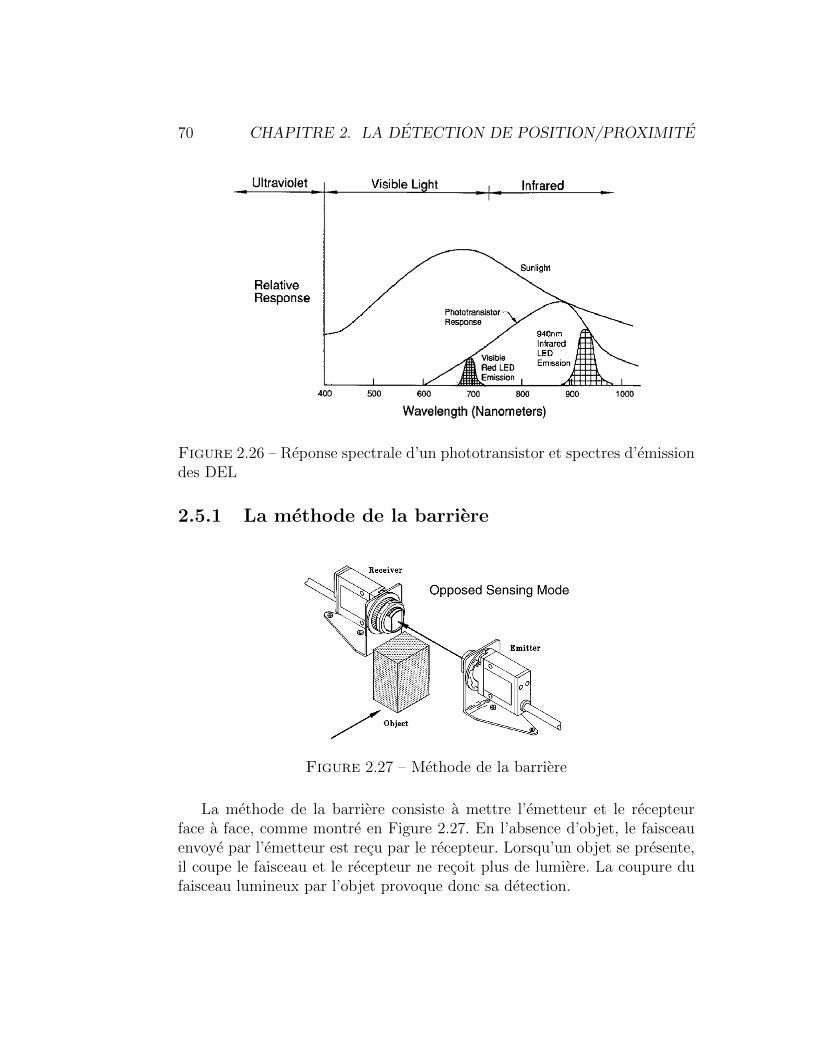
70 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Figure 2.26 – Reponse spectrale d’un phototransistor et spectres d’emissiondes DEL
2.5.1 La methode de la barriere
Figure 2.27 – Methode de la barriere
La methode de la barriere consiste a mettre l’emetteur et le recepteurface a face, comme montre en Figure 2.27. En l’absence d’objet, le faisceauenvoye par l’emetteur est recu par le recepteur. Lorsqu’un objet se presente,il coupe le faisceau et le recepteur ne recoit plus de lumiere. La coupure dufaisceau lumineux par l’objet provoque donc sa detection.
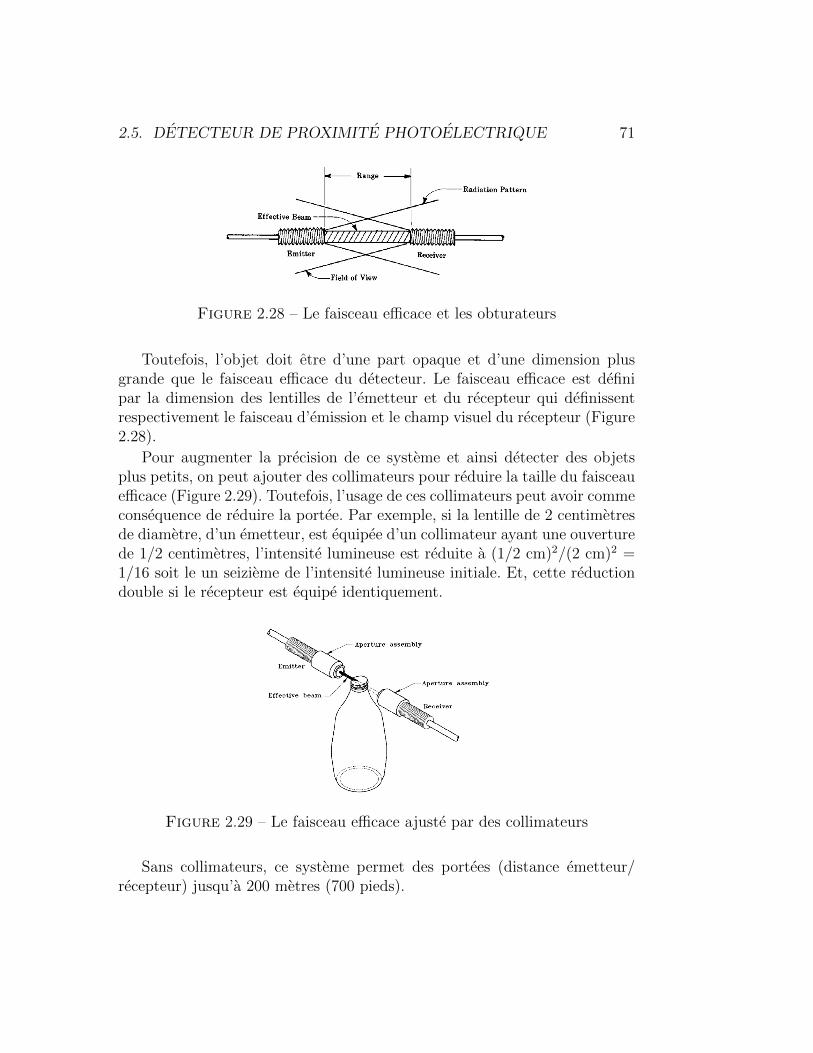
2.5. DETECTEUR DE PROXIMITE PHOTOELECTRIQUE 71
Figure 2.28 – Le faisceau efficace et les obturateurs
Toutefois, l’objet doit etre d’une part opaque et d’une dimension plusgrande que le faisceau efficace du detecteur. Le faisceau efficace est definipar la dimension des lentilles de l’emetteur et du recepteur qui definissentrespectivement le faisceau d’emission et le champ visuel du recepteur (Figure2.28).
Pour augmenter la precision de ce systeme et ainsi detecter des objetsplus petits, on peut ajouter des collimateurs pour reduire la taille du faisceauefficace (Figure 2.29). Toutefois, l’usage de ces collimateurs peut avoir commeconsequence de reduire la portee. Par exemple, si la lentille de 2 centimetresde diametre, d’un emetteur, est equipee d’un collimateur ayant une ouverturede 1/2 centimetres, l’intensite lumineuse est reduite a (1/2 cm)2/(2 cm)2 =1/16 soit le un seizieme de l’intensite lumineuse initiale. Et, cette reductiondouble si le recepteur est equipe identiquement.
Figure 2.29 – Le faisceau efficace ajuste par des collimateurs
Sans collimateurs, ce systeme permet des portees (distance emetteur/recepteur) jusqu’a 200 metres (700 pieds).
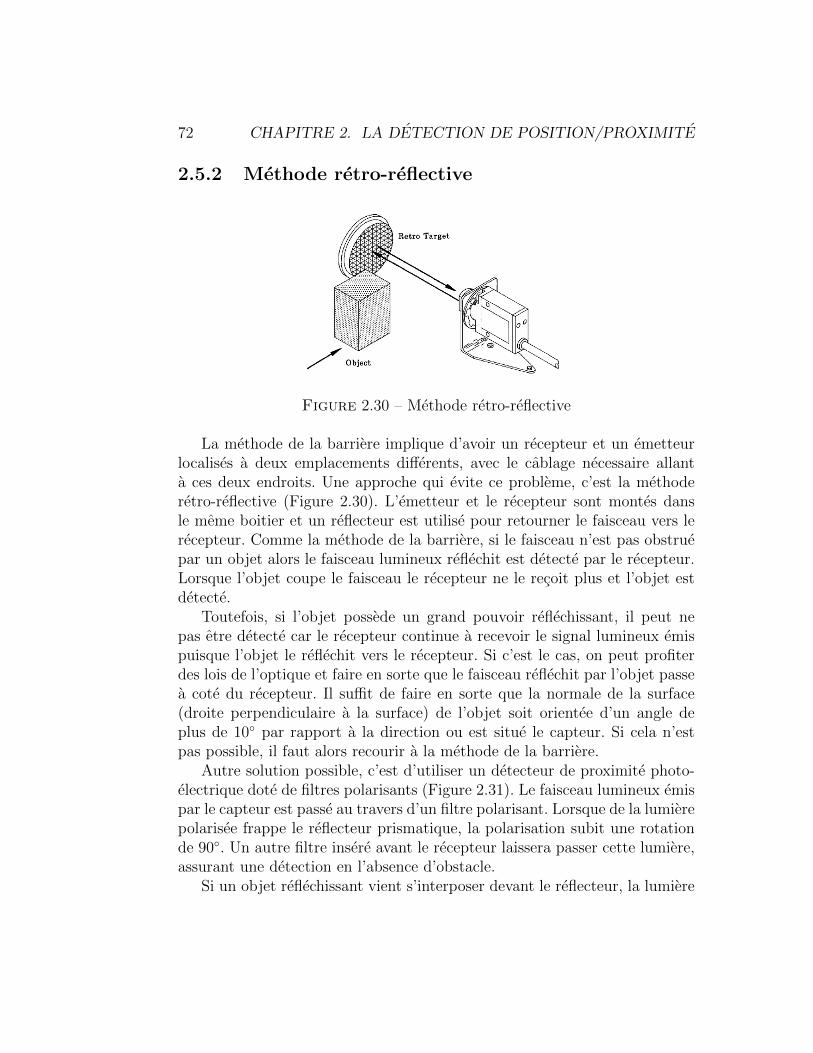
72 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
2.5.2 Methode retro-reflective
Figure 2.30 – Methode retro-reflective
La methode de la barriere implique d’avoir un recepteur et un emetteurlocalises a deux emplacements differents, avec le cablage necessaire allanta ces deux endroits. Une approche qui evite ce probleme, c’est la methoderetro-reflective (Figure 2.30). L’emetteur et le recepteur sont montes dansle meme boitier et un reflecteur est utilise pour retourner le faisceau vers lerecepteur. Comme la methode de la barriere, si le faisceau n’est pas obstruepar un objet alors le faisceau lumineux reflechit est detecte par le recepteur.Lorsque l’objet coupe le faisceau le recepteur ne le recoit plus et l’objet estdetecte.
Toutefois, si l’objet possede un grand pouvoir reflechissant, il peut nepas etre detecte car le recepteur continue a recevoir le signal lumineux emispuisque l’objet le reflechit vers le recepteur. Si c’est le cas, on peut profiterdes lois de l’optique et faire en sorte que le faisceau reflechit par l’objet passea cote du recepteur. Il suffit de faire en sorte que la normale de la surface(droite perpendiculaire a la surface) de l’objet soit orientee d’un angle deplus de 10 par rapport a la direction ou est situe le capteur. Si cela n’estpas possible, il faut alors recourir a la methode de la barriere.
Autre solution possible, c’est d’utiliser un detecteur de proximite photo-electrique dote de filtres polarisants (Figure 2.31). Le faisceau lumineux emispar le capteur est passe au travers d’un filtre polarisant. Lorsque de la lumierepolarisee frappe le reflecteur prismatique, la polarisation subit une rotationde 90. Un autre filtre insere avant le recepteur laissera passer cette lumiere,assurant une detection en l’absence d’obstacle.
Si un objet reflechissant vient s’interposer devant le reflecteur, la lumiere
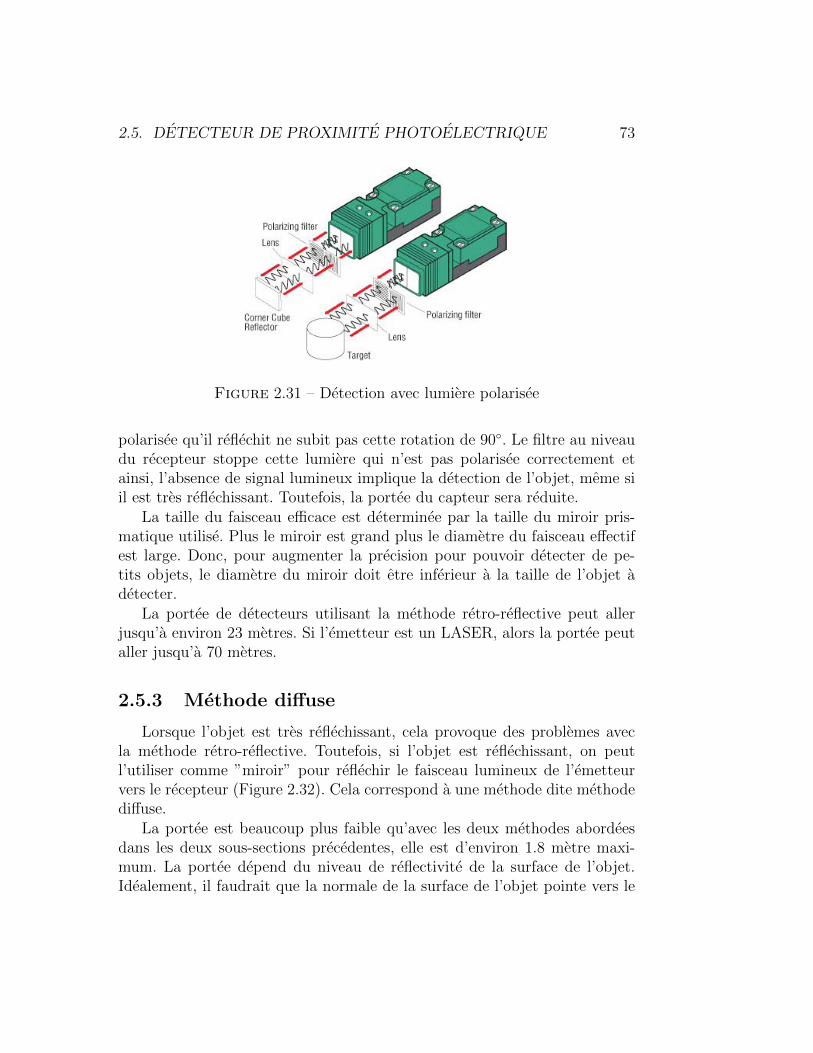
2.5. DETECTEUR DE PROXIMITE PHOTOELECTRIQUE 73
Figure 2.31 – Detection avec lumiere polarisee
polarisee qu’il reflechit ne subit pas cette rotation de 90. Le filtre au niveaudu recepteur stoppe cette lumiere qui n’est pas polarisee correctement etainsi, l’absence de signal lumineux implique la detection de l’objet, meme siil est tres reflechissant. Toutefois, la portee du capteur sera reduite.
La taille du faisceau efficace est determinee par la taille du miroir pris-matique utilise. Plus le miroir est grand plus le diametre du faisceau effectifest large. Donc, pour augmenter la precision pour pouvoir detecter de pe-tits objets, le diametre du miroir doit etre inferieur a la taille de l’objet adetecter.
La portee de detecteurs utilisant la methode retro-reflective peut allerjusqu’a environ 23 metres. Si l’emetteur est un LASER, alors la portee peutaller jusqu’a 70 metres.
2.5.3 Methode diffuse
Lorsque l’objet est tres reflechissant, cela provoque des problemes avecla methode retro-reflective. Toutefois, si l’objet est reflechissant, on peutl’utiliser comme ”miroir” pour reflechir le faisceau lumineux de l’emetteurvers le recepteur (Figure 2.32). Cela correspond a une methode dite methodediffuse.
La portee est beaucoup plus faible qu’avec les deux methodes abordeesdans les deux sous-sections precedentes, elle est d’environ 1.8 metre maxi-mum. La portee depend du niveau de reflectivite de la surface de l’objet.Idealement, il faudrait que la normale de la surface de l’objet pointe vers le
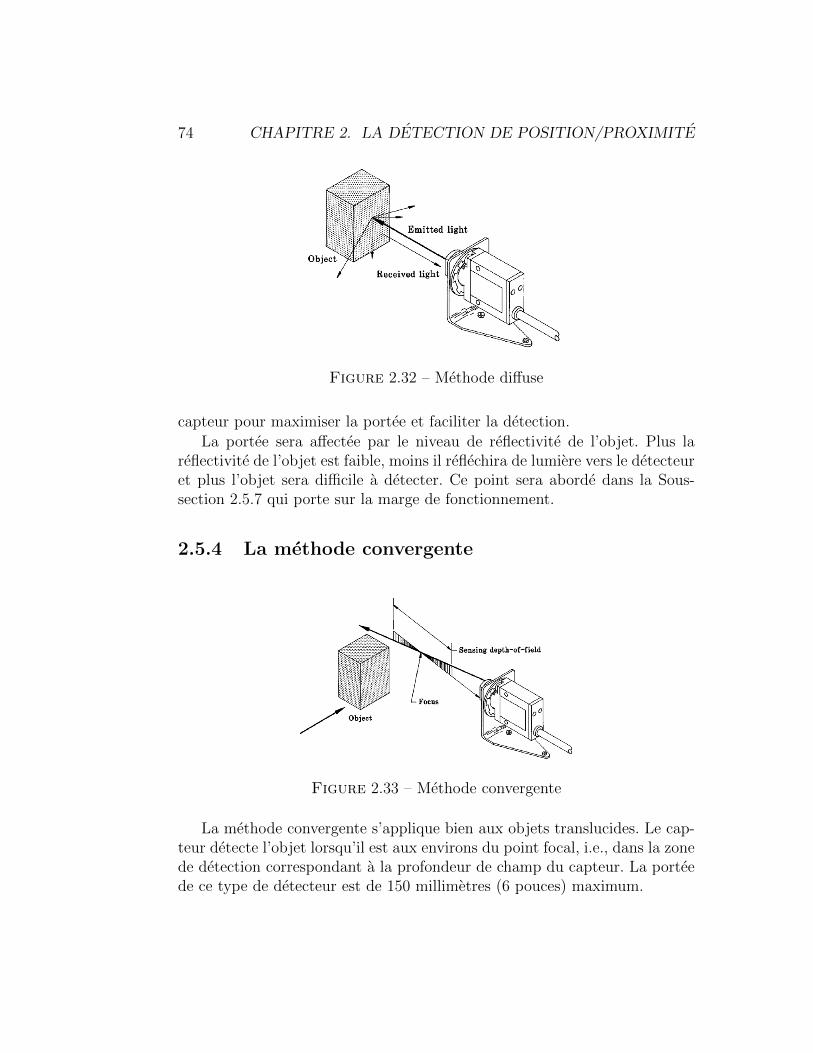
74 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Figure 2.32 – Methode diffuse
capteur pour maximiser la portee et faciliter la detection.
La portee sera affectee par le niveau de reflectivite de l’objet. Plus lareflectivite de l’objet est faible, moins il reflechira de lumiere vers le detecteuret plus l’objet sera difficile a detecter. Ce point sera aborde dans la Sous-section 2.5.7 qui porte sur la marge de fonctionnement.
2.5.4 La methode convergente
Figure 2.33 – Methode convergente
La methode convergente s’applique bien aux objets translucides. Le cap-teur detecte l’objet lorsqu’il est aux environs du point focal, i.e., dans la zonede detection correspondant a la profondeur de champ du capteur. La porteede ce type de detecteur est de 150 millimetres (6 pouces) maximum.
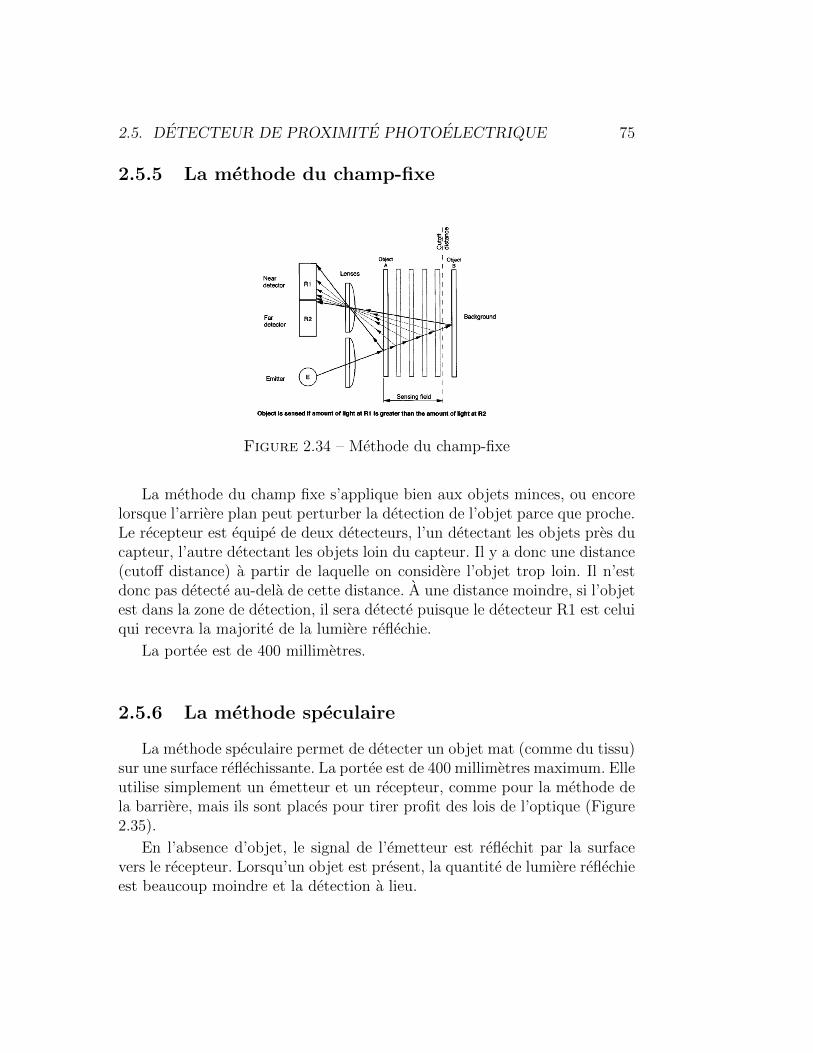
2.5. DETECTEUR DE PROXIMITE PHOTOELECTRIQUE 75
2.5.5 La methode du champ-fixe
Figure 2.34 – Methode du champ-fixe
La methode du champ fixe s’applique bien aux objets minces, ou encorelorsque l’arriere plan peut perturber la detection de l’objet parce que proche.Le recepteur est equipe de deux detecteurs, l’un detectant les objets pres ducapteur, l’autre detectant les objets loin du capteur. Il y a donc une distance(cutoff distance) a partir de laquelle on considere l’objet trop loin. Il n’estdonc pas detecte au-dela de cette distance. A une distance moindre, si l’objetest dans la zone de detection, il sera detecte puisque le detecteur R1 est celuiqui recevra la majorite de la lumiere reflechie.
La portee est de 400 millimetres.
2.5.6 La methode speculaire
La methode speculaire permet de detecter un objet mat (comme du tissu)sur une surface reflechissante. La portee est de 400 millimetres maximum. Elleutilise simplement un emetteur et un recepteur, comme pour la methode dela barriere, mais ils sont places pour tirer profit des lois de l’optique (Figure2.35).
En l’absence d’objet, le signal de l’emetteur est reflechit par la surfacevers le recepteur. Lorsqu’un objet est present, la quantite de lumiere reflechieest beaucoup moindre et la detection a lieu.
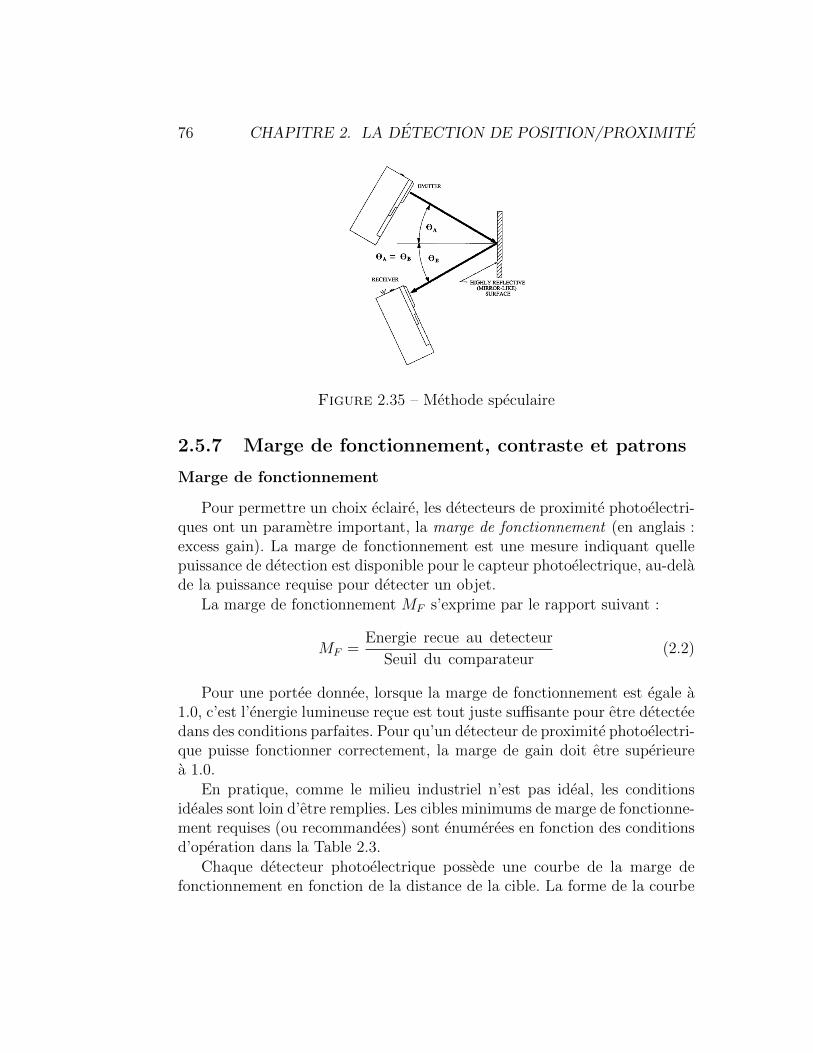
76 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Figure 2.35 – Methode speculaire
2.5.7 Marge de fonctionnement, contraste et patrons
Marge de fonctionnement
Pour permettre un choix eclaire, les detecteurs de proximite photoelectri-ques ont un parametre important, la marge de fonctionnement (en anglais :excess gain). La marge de fonctionnement est une mesure indiquant quellepuissance de detection est disponible pour le capteur photoelectrique, au-delade la puissance requise pour detecter un objet.
La marge de fonctionnement MF s’exprime par le rapport suivant :
MF =Energie recue au detecteur
Seuil du comparateur(2.2)
Pour une portee donnee, lorsque la marge de fonctionnement est egale a1.0, c’est l’energie lumineuse recue est tout juste suffisante pour etre detecteedans des conditions parfaites. Pour qu’un detecteur de proximite photoelectri-que puisse fonctionner correctement, la marge de gain doit etre superieurea 1.0.
En pratique, comme le milieu industriel n’est pas ideal, les conditionsideales sont loin d’etre remplies. Les cibles minimums de marge de fonctionne-ment requises (ou recommandees) sont enumerees en fonction des conditionsd’operation dans la Table 2.3.
Chaque detecteur photoelectrique possede une courbe de la marge defonctionnement en fonction de la distance de la cible. La forme de la courbe
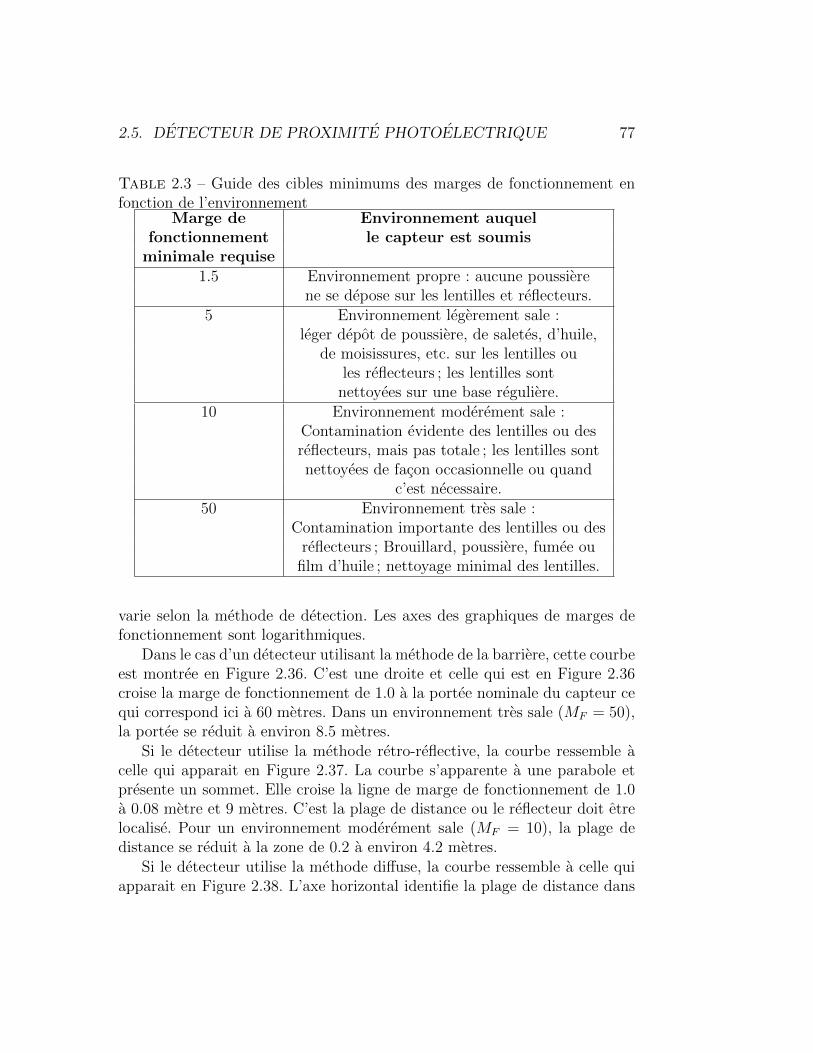
2.5. DETECTEUR DE PROXIMITE PHOTOELECTRIQUE 77
Table 2.3 – Guide des cibles minimums des marges de fonctionnement enfonction de l’environnement
Marge de Environnement auquelfonctionnement le capteur est soumis
minimale requise1.5 Environnement propre : aucune poussiere
ne se depose sur les lentilles et reflecteurs.5 Environnement legerement sale :
leger depot de poussiere, de saletes, d’huile,de moisissures, etc. sur les lentilles ou
les reflecteurs ; les lentilles sontnettoyees sur une base reguliere.
10 Environnement moderement sale :Contamination evidente des lentilles ou desreflecteurs, mais pas totale ; les lentilles sontnettoyees de facon occasionnelle ou quand
c’est necessaire.50 Environnement tres sale :
Contamination importante des lentilles ou desreflecteurs ; Brouillard, poussiere, fumee ou
film d’huile ; nettoyage minimal des lentilles.
varie selon la methode de detection. Les axes des graphiques de marges defonctionnement sont logarithmiques.
Dans le cas d’un detecteur utilisant la methode de la barriere, cette courbeest montree en Figure 2.36. C’est une droite et celle qui est en Figure 2.36croise la marge de fonctionnement de 1.0 a la portee nominale du capteur cequi correspond ici a 60 metres. Dans un environnement tres sale (MF = 50),la portee se reduit a environ 8.5 metres.
Si le detecteur utilise la methode retro-reflective, la courbe ressemble acelle qui apparait en Figure 2.37. La courbe s’apparente a une parabole etpresente un sommet. Elle croise la ligne de marge de fonctionnement de 1.0a 0.08 metre et 9 metres. C’est la plage de distance ou le reflecteur doit etrelocalise. Pour un environnement moderement sale (MF = 10), la plage dedistance se reduit a la zone de 0.2 a environ 4.2 metres.
Si le detecteur utilise la methode diffuse, la courbe ressemble a celle quiapparait en Figure 2.38. L’axe horizontal identifie la plage de distance dans
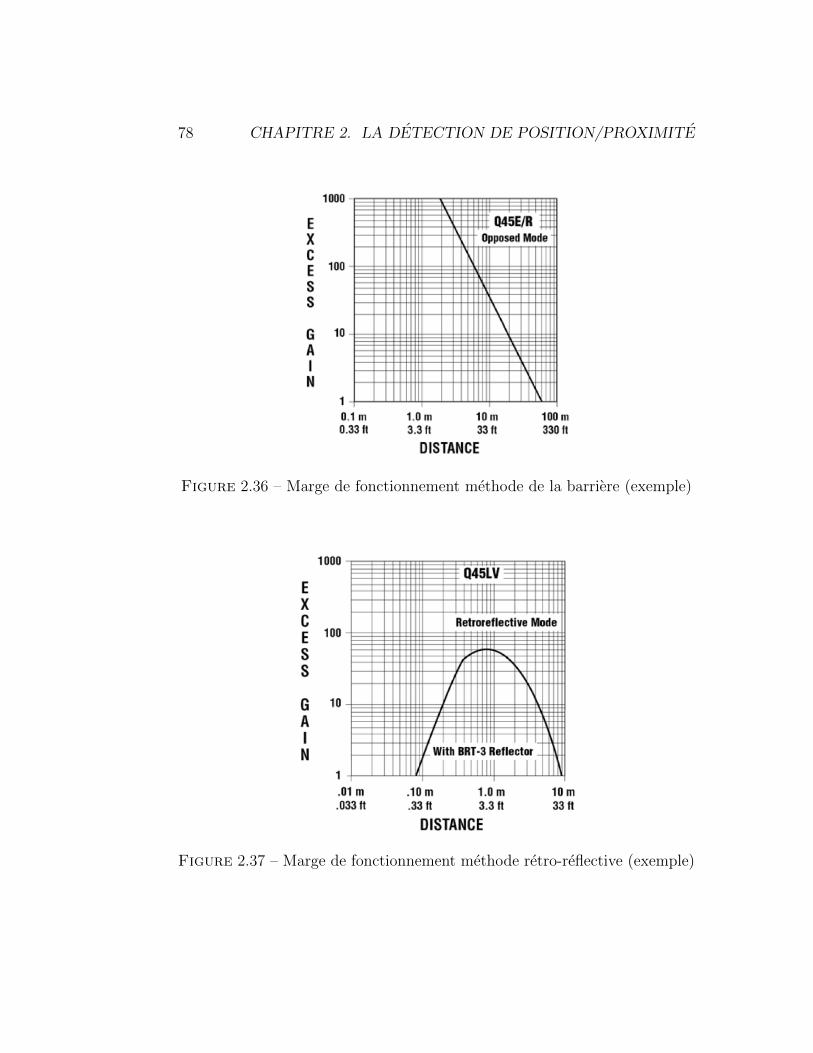
78 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Figure 2.36 – Marge de fonctionnement methode de la barriere (exemple)
Figure 2.37 – Marge de fonctionnement methode retro-reflective (exemple)
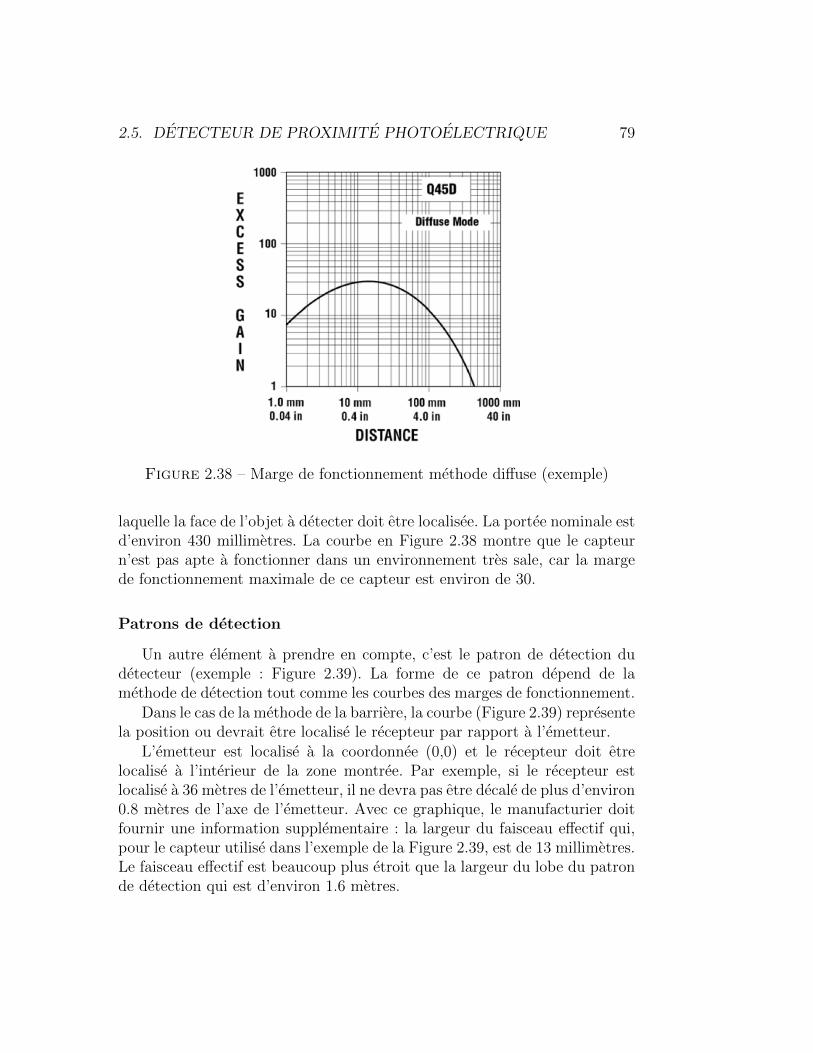
2.5. DETECTEUR DE PROXIMITE PHOTOELECTRIQUE 79
Figure 2.38 – Marge de fonctionnement methode diffuse (exemple)
laquelle la face de l’objet a detecter doit etre localisee. La portee nominale estd’environ 430 millimetres. La courbe en Figure 2.38 montre que le capteurn’est pas apte a fonctionner dans un environnement tres sale, car la margede fonctionnement maximale de ce capteur est environ de 30.
Patrons de detection
Un autre element a prendre en compte, c’est le patron de detection dudetecteur (exemple : Figure 2.39). La forme de ce patron depend de lamethode de detection tout comme les courbes des marges de fonctionnement.
Dans le cas de la methode de la barriere, la courbe (Figure 2.39) representela position ou devrait etre localise le recepteur par rapport a l’emetteur.
L’emetteur est localise a la coordonnee (0,0) et le recepteur doit etrelocalise a l’interieur de la zone montree. Par exemple, si le recepteur estlocalise a 36 metres de l’emetteur, il ne devra pas etre decale de plus d’environ0.8 metres de l’axe de l’emetteur. Avec ce graphique, le manufacturier doitfournir une information supplementaire : la largeur du faisceau effectif qui,pour le capteur utilise dans l’exemple de la Figure 2.39, est de 13 millimetres.Le faisceau effectif est beaucoup plus etroit que la largeur du lobe du patronde detection qui est d’environ 1.6 metres.
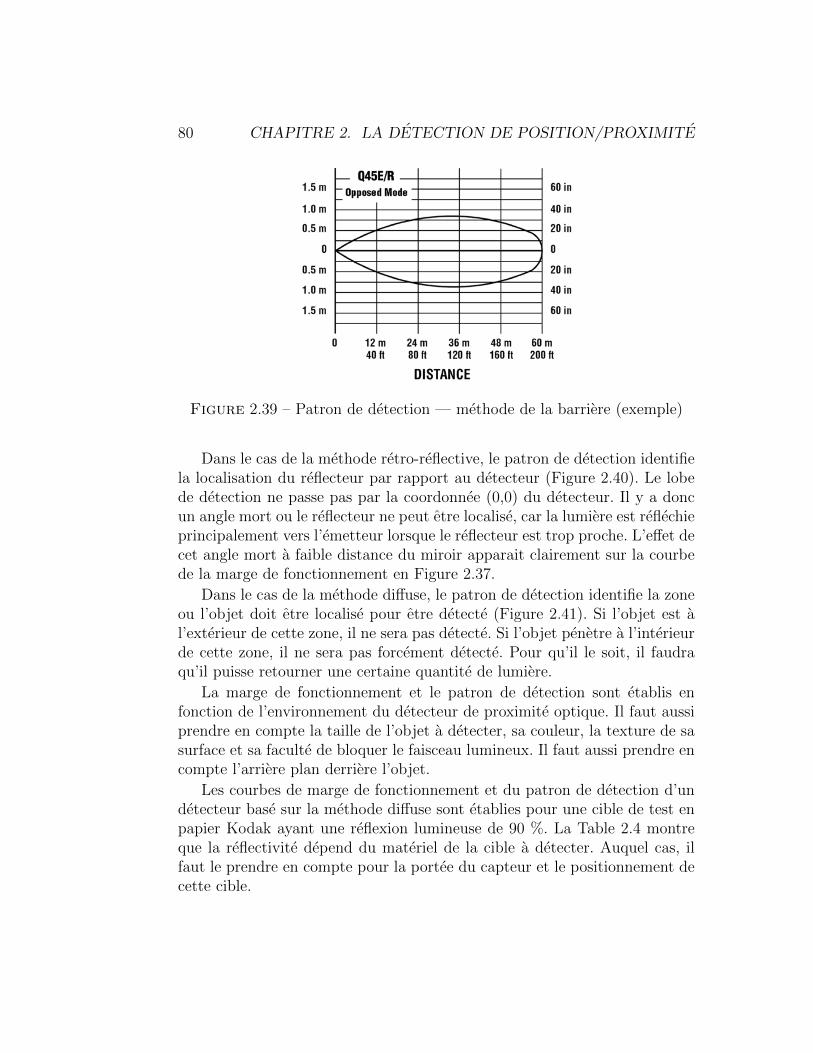
80 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Figure 2.39 – Patron de detection — methode de la barriere (exemple)
Dans le cas de la methode retro-reflective, le patron de detection identifiela localisation du reflecteur par rapport au detecteur (Figure 2.40). Le lobede detection ne passe pas par la coordonnee (0,0) du detecteur. Il y a doncun angle mort ou le reflecteur ne peut etre localise, car la lumiere est reflechieprincipalement vers l’emetteur lorsque le reflecteur est trop proche. L’effet decet angle mort a faible distance du miroir apparait clairement sur la courbede la marge de fonctionnement en Figure 2.37.
Dans le cas de la methode diffuse, le patron de detection identifie la zoneou l’objet doit etre localise pour etre detecte (Figure 2.41). Si l’objet est al’exterieur de cette zone, il ne sera pas detecte. Si l’objet penetre a l’interieurde cette zone, il ne sera pas forcement detecte. Pour qu’il le soit, il faudraqu’il puisse retourner une certaine quantite de lumiere.
La marge de fonctionnement et le patron de detection sont etablis enfonction de l’environnement du detecteur de proximite optique. Il faut aussiprendre en compte la taille de l’objet a detecter, sa couleur, la texture de sasurface et sa faculte de bloquer le faisceau lumineux. Il faut aussi prendre encompte l’arriere plan derriere l’objet.
Les courbes de marge de fonctionnement et du patron de detection d’undetecteur base sur la methode diffuse sont etablies pour une cible de test enpapier Kodak ayant une reflexion lumineuse de 90 %. La Table 2.4 montreque la reflectivite depend du materiel de la cible a detecter. Auquel cas, ilfaut le prendre en compte pour la portee du capteur et le positionnement decette cible.
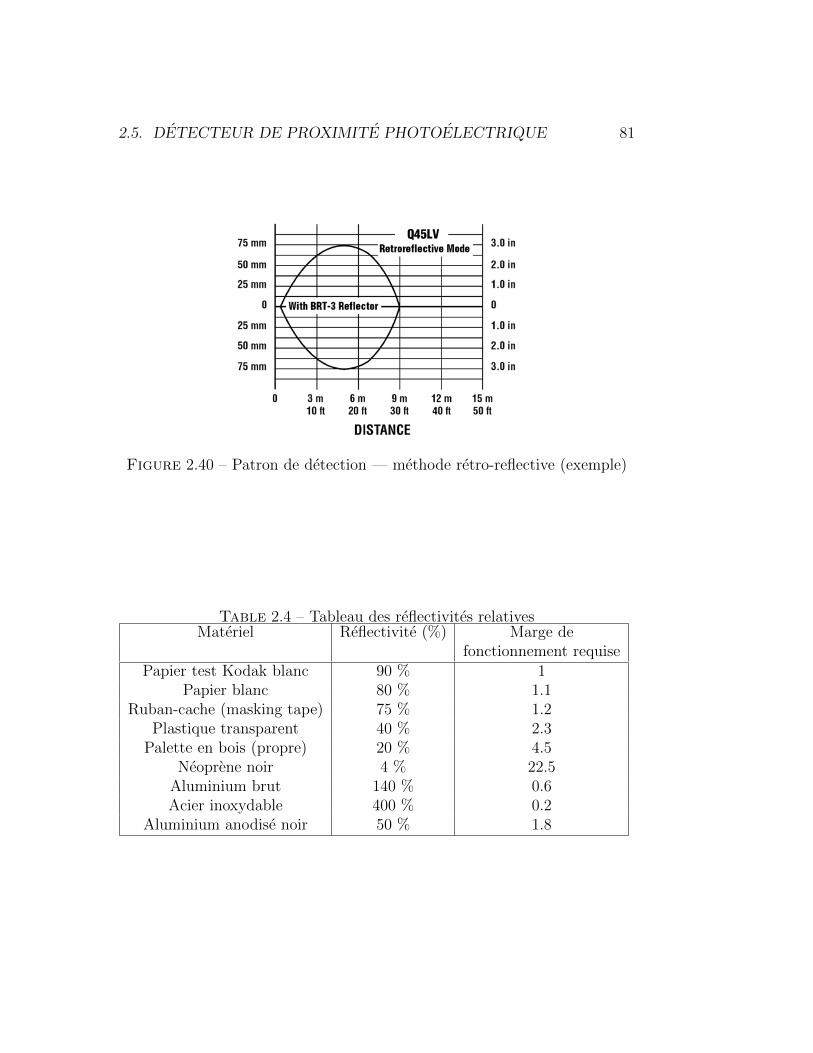
2.5. DETECTEUR DE PROXIMITE PHOTOELECTRIQUE 81
Figure 2.40 – Patron de detection — methode retro-reflective (exemple)
Table 2.4 – Tableau des reflectivites relativesMateriel Reflectivite (%) Marge de
fonctionnement requisePapier test Kodak blanc 90 % 1
Papier blanc 80 % 1.1Ruban-cache (masking tape) 75 % 1.2
Plastique transparent 40 % 2.3Palette en bois (propre) 20 % 4.5
Neoprene noir 4 % 22.5Aluminium brut 140 % 0.6Acier inoxydable 400 % 0.2
Aluminium anodise noir 50 % 1.8
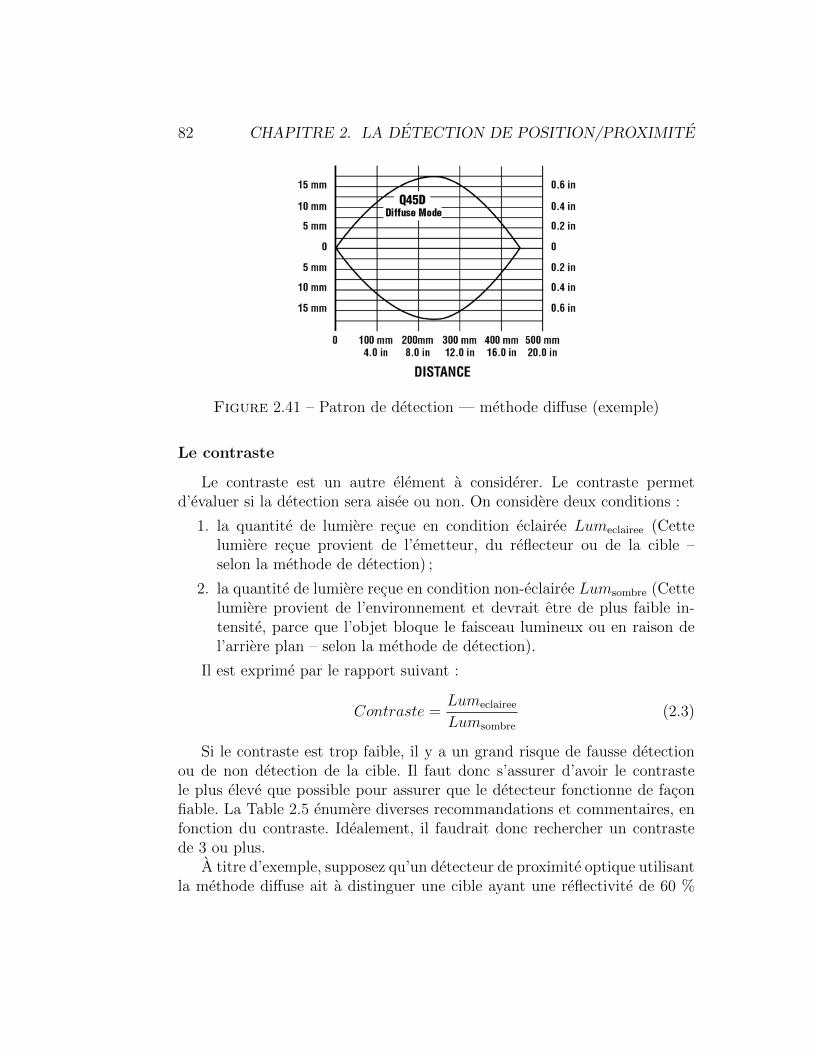
82 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Figure 2.41 – Patron de detection — methode diffuse (exemple)
Le contraste
Le contraste est un autre element a considerer. Le contraste permetd’evaluer si la detection sera aisee ou non. On considere deux conditions :
1. la quantite de lumiere recue en condition eclairee Lumeclairee (Cettelumiere recue provient de l’emetteur, du reflecteur ou de la cible –selon la methode de detection) ;
2. la quantite de lumiere recue en condition non-eclairee Lumsombre (Cettelumiere provient de l’environnement et devrait etre de plus faible in-tensite, parce que l’objet bloque le faisceau lumineux ou en raison del’arriere plan – selon la methode de detection).
Il est exprime par le rapport suivant :
Contraste =Lumeclairee
Lumsombre
(2.3)
Si le contraste est trop faible, il y a un grand risque de fausse detectionou de non detection de la cible. Il faut donc s’assurer d’avoir le contrastele plus eleve que possible pour assurer que le detecteur fonctionne de faconfiable. La Table 2.5 enumere diverses recommandations et commentaires, enfonction du contraste. Idealement, il faudrait donc rechercher un contrastede 3 ou plus.
A titre d’exemple, supposez qu’un detecteur de proximite optique utilisantla methode diffuse ait a distinguer une cible ayant une reflectivite de 60 %
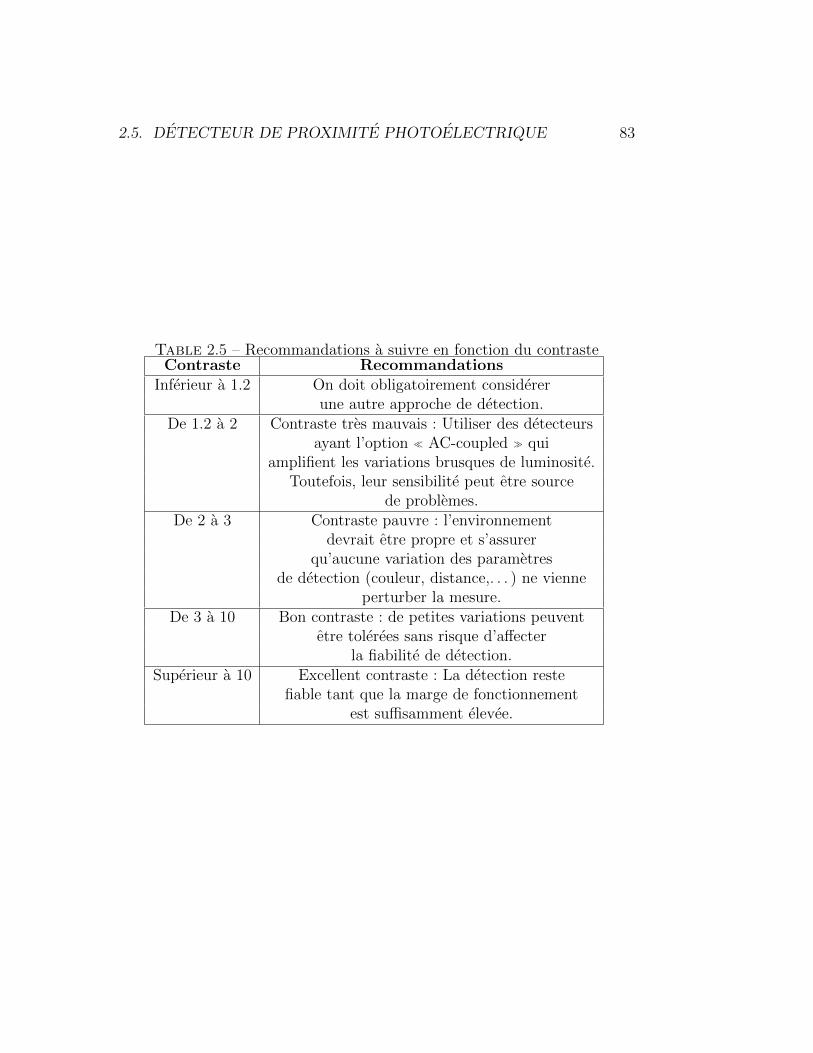
2.5. DETECTEUR DE PROXIMITE PHOTOELECTRIQUE 83
Table 2.5 – Recommandations a suivre en fonction du contrasteContraste Recommandations
Inferieur a 1.2 On doit obligatoirement considererune autre approche de detection.
De 1.2 a 2 Contraste tres mauvais : Utiliser des detecteursayant l’option AC-coupled qui
amplifient les variations brusques de luminosite.Toutefois, leur sensibilite peut etre source
de problemes.De 2 a 3 Contraste pauvre : l’environnement
devrait etre propre et s’assurerqu’aucune variation des parametres
de detection (couleur, distance,. . . ) ne vienneperturber la mesure.
De 3 a 10 Bon contraste : de petites variations peuventetre tolerees sans risque d’affecter
la fiabilite de detection.Superieur a 10 Excellent contraste : La detection reste
fiable tant que la marge de fonctionnementest suffisamment elevee.
84 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
d’un arriere plan ayant une reflectivite de 25 % (qui est malencontreusementdans le champ de detection du capteur). Cela donne un contraste egal a 60/25,soit 2.4. Ce contraste n’est pas tres eleve, mais le detecteur pourrait quandmeme fonctionner, en autant que la cible passe toujours a la meme distance,conserve son orientation et que sa couleur ne change pas. Et, en autantque l’environnement soit tres propre (avec une maintenance minutieuse dudetecteur).
Parmi les solutions possibles, on pourrait deplacer le lieu de detectionde la cible plus loin du mur (qui sera alors hors du champ de detection) oupeinturer le mur avec une couleur mate ayant une reflectivite plus faible.
Dans le cas ou le contraste est faible, on peut utiliser la variation deluminosite plutot que la luminosite elle meme pour indiquer la detection d’unobjet. Cette option identifiee ”AC-coupled” rend le capteur plus sensible,mais cela peut causer des problemes s’il y a trop de variations de luminositea l’endroit ou est le detecteur de proximite photoelectrique.
2.5.8 Detecteur ultrasonique
Les detecteurs de proximite ultrasoniques (Figure 2.42) permettent ladetection d’un objet, independamment de la matiere qui le compose, sa cou-leur, et sa transparence. Ce detecteur est relativement robuste et fiable dansun environnement industriel.
Figure 2.42 – Detecteur ultrasonique 15
Le principe de fonctionnement est semblable aux detecteurs de proximitephotoelectrique. Un signal ultrasonique est emit par un emetteur et detectepar un recepteur.
15. Source de l’image de la Figure 2.42 : www.bannerengineering.com16. Source de l’image de la Figure 2.43 : Osiprox
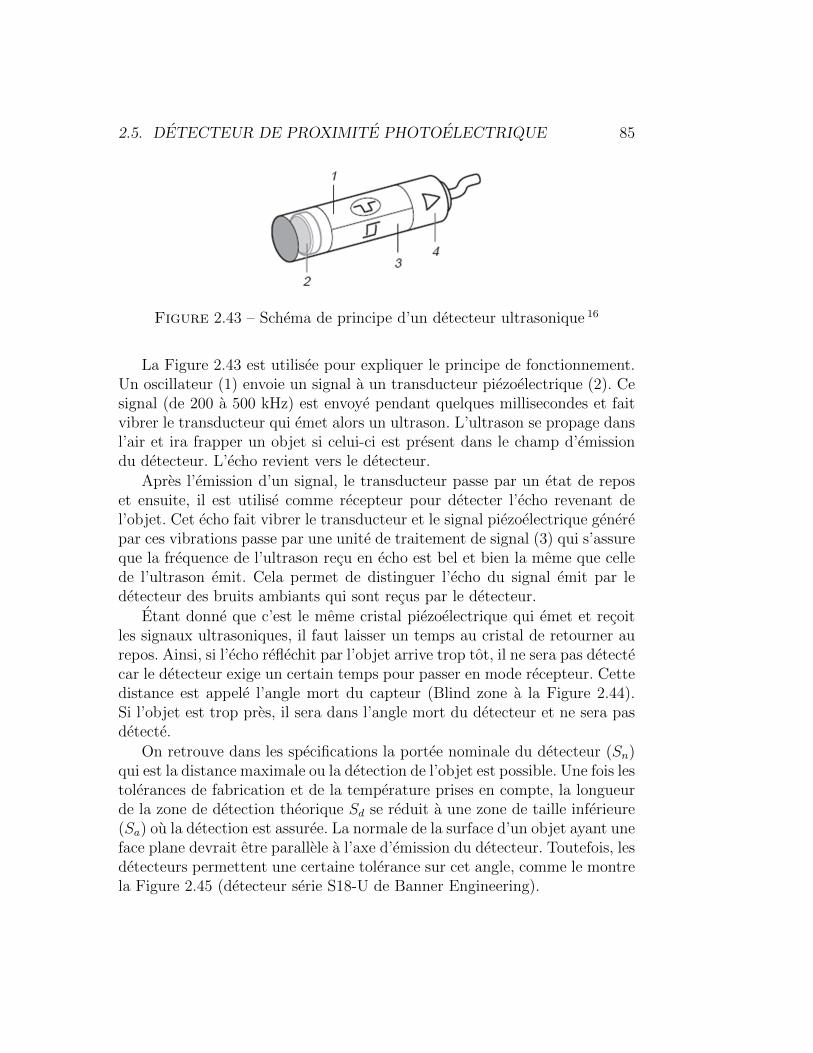
2.5. DETECTEUR DE PROXIMITE PHOTOELECTRIQUE 85
Figure 2.43 – Schema de principe d’un detecteur ultrasonique 16
La Figure 2.43 est utilisee pour expliquer le principe de fonctionnement.Un oscillateur (1) envoie un signal a un transducteur piezoelectrique (2). Cesignal (de 200 a 500 kHz) est envoye pendant quelques millisecondes et faitvibrer le transducteur qui emet alors un ultrason. L’ultrason se propage dansl’air et ira frapper un objet si celui-ci est present dans le champ d’emissiondu detecteur. L’echo revient vers le detecteur.
Apres l’emission d’un signal, le transducteur passe par un etat de reposet ensuite, il est utilise comme recepteur pour detecter l’echo revenant del’objet. Cet echo fait vibrer le transducteur et le signal piezoelectrique generepar ces vibrations passe par une unite de traitement de signal (3) qui s’assureque la frequence de l’ultrason recu en echo est bel et bien la meme que cellede l’ultrason emit. Cela permet de distinguer l’echo du signal emit par ledetecteur des bruits ambiants qui sont recus par le detecteur.
Etant donne que c’est le meme cristal piezoelectrique qui emet et recoitles signaux ultrasoniques, il faut laisser un temps au cristal de retourner aurepos. Ainsi, si l’echo reflechit par l’objet arrive trop tot, il ne sera pas detectecar le detecteur exige un certain temps pour passer en mode recepteur. Cettedistance est appele l’angle mort du capteur (Blind zone a la Figure 2.44).Si l’objet est trop pres, il sera dans l’angle mort du detecteur et ne sera pasdetecte.
On retrouve dans les specifications la portee nominale du detecteur (Sn)qui est la distance maximale ou la detection de l’objet est possible. Une fois lestolerances de fabrication et de la temperature prises en compte, la longueurde la zone de detection theorique Sd se reduit a une zone de taille inferieure(Sa) ou la detection est assuree. La normale de la surface d’un objet ayant uneface plane devrait etre parallele a l’axe d’emission du detecteur. Toutefois, lesdetecteurs permettent une certaine tolerance sur cet angle, comme le montrela Figure 2.45 (detecteur serie S18-U de Banner Engineering).
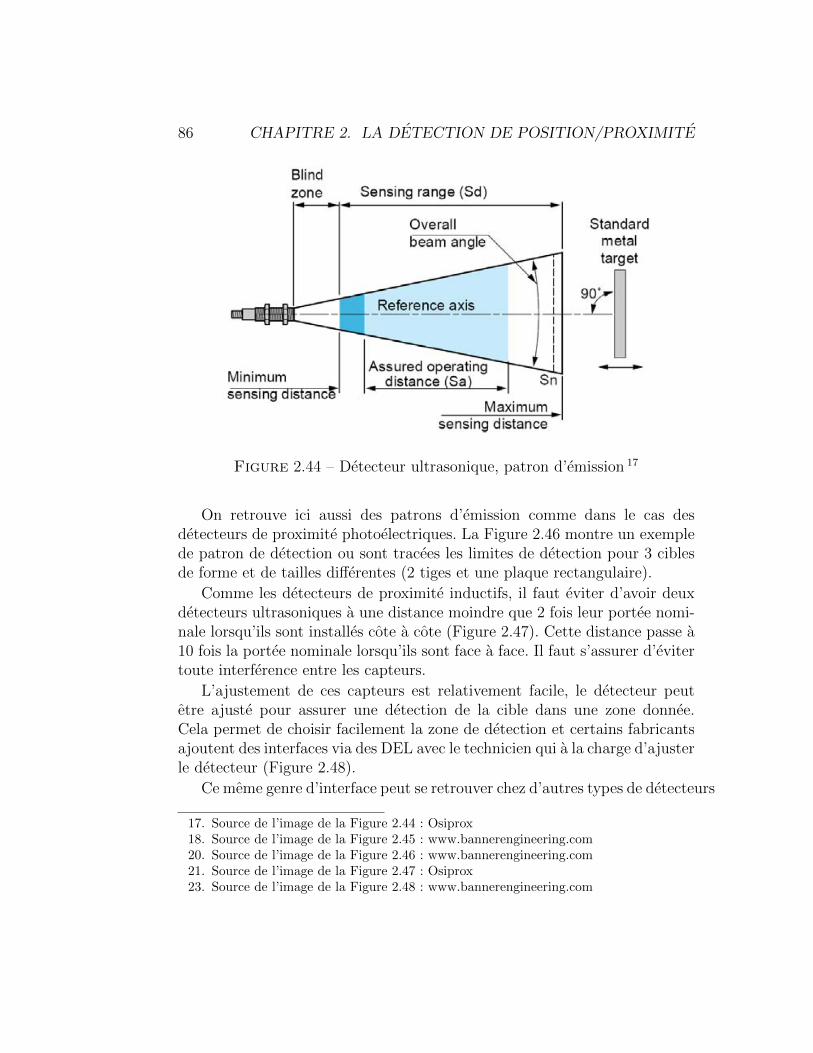
86 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Figure 2.44 – Detecteur ultrasonique, patron d’emission 17
On retrouve ici aussi des patrons d’emission comme dans le cas desdetecteurs de proximite photoelectriques. La Figure 2.46 montre un exemplede patron de detection ou sont tracees les limites de detection pour 3 ciblesde forme et de tailles differentes (2 tiges et une plaque rectangulaire).
Comme les detecteurs de proximite inductifs, il faut eviter d’avoir deuxdetecteurs ultrasoniques a une distance moindre que 2 fois leur portee nomi-nale lorsqu’ils sont installes cote a cote (Figure 2.47). Cette distance passe a10 fois la portee nominale lorsqu’ils sont face a face. Il faut s’assurer d’evitertoute interference entre les capteurs.
L’ajustement de ces capteurs est relativement facile, le detecteur peutetre ajuste pour assurer une detection de la cible dans une zone donnee.Cela permet de choisir facilement la zone de detection et certains fabricantsajoutent des interfaces via des DEL avec le technicien qui a la charge d’ajusterle detecteur (Figure 2.48).
Ce meme genre d’interface peut se retrouver chez d’autres types de detecteurs
17. Source de l’image de la Figure 2.44 : Osiprox18. Source de l’image de la Figure 2.45 : www.bannerengineering.com20. Source de l’image de la Figure 2.46 : www.bannerengineering.com21. Source de l’image de la Figure 2.47 : Osiprox23. Source de l’image de la Figure 2.48 : www.bannerengineering.com
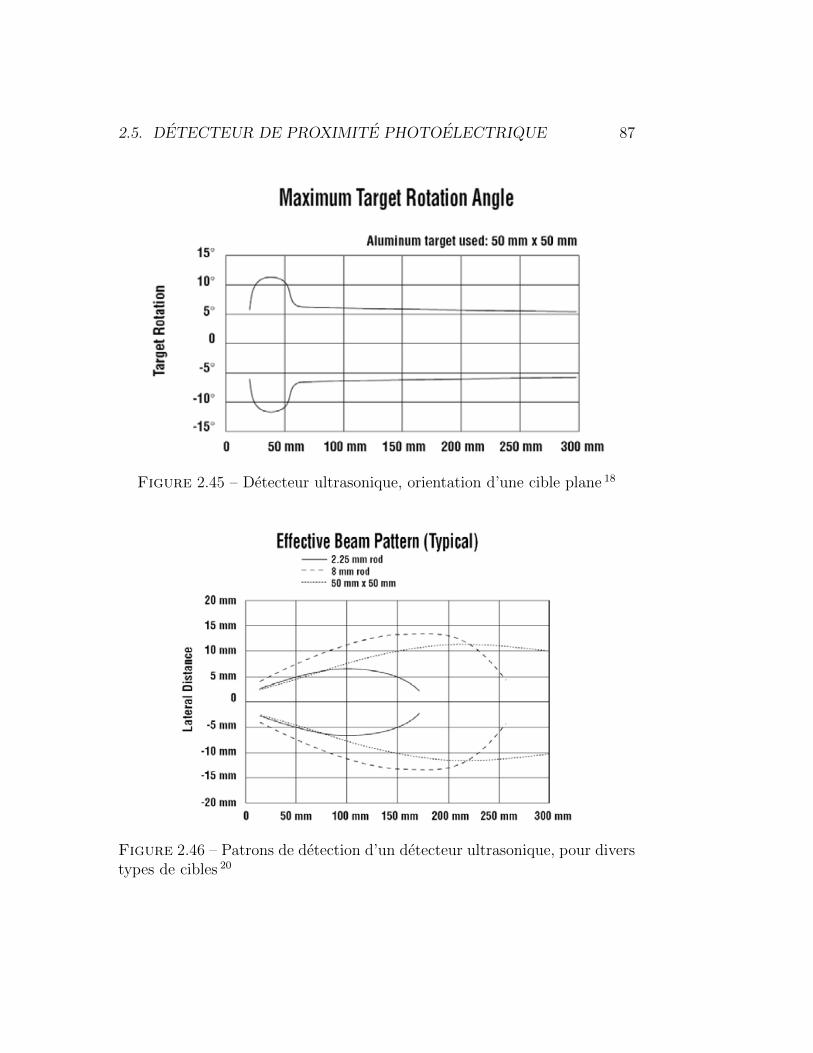
2.5. DETECTEUR DE PROXIMITE PHOTOELECTRIQUE 87
Figure 2.45 – Detecteur ultrasonique, orientation d’une cible plane 18
Figure 2.46 – Patrons de detection d’un detecteur ultrasonique, pour diverstypes de cibles 20
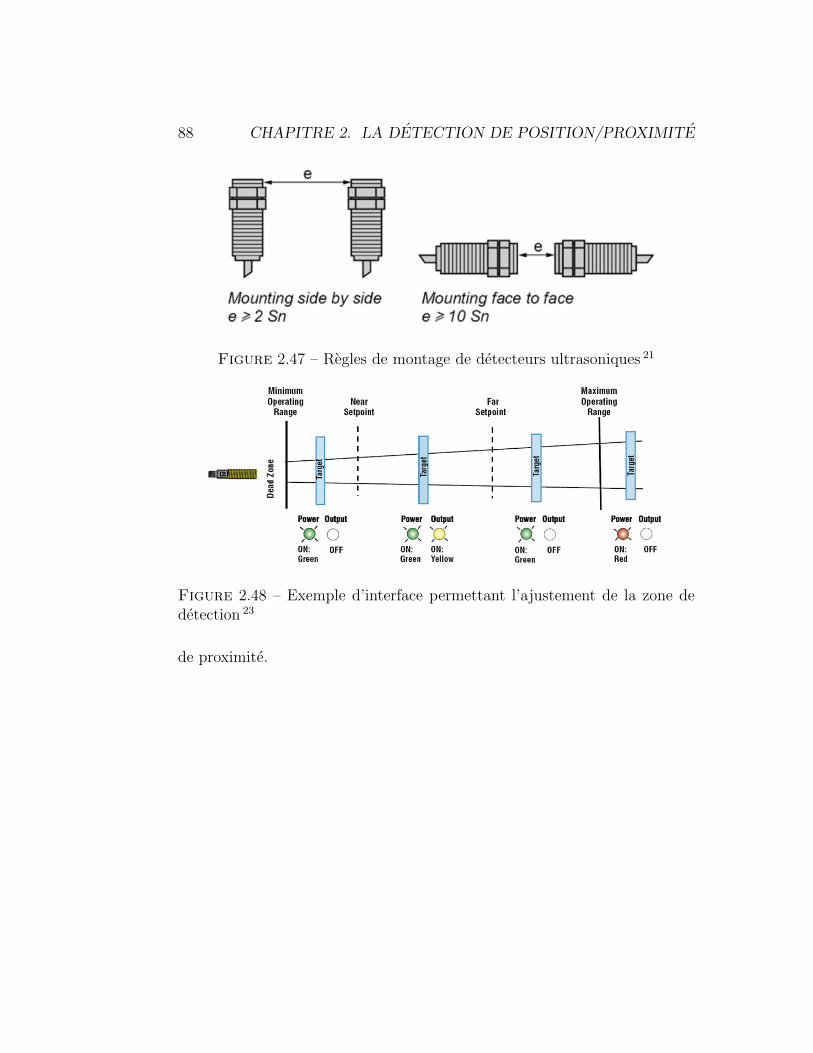
88 CHAPITRE 2. LA DETECTION DE POSITION/PROXIMITE
Figure 2.47 – Regles de montage de detecteurs ultrasoniques 21
Figure 2.48 – Exemple d’interface permettant l’ajustement de la zone dedetection 23
de proximite.
Chapitre 3
La mesure de deplacement
3.1 Introduction
Le deplacement est une grandeur physique importante, puisque plusieursgrandeurs physiques entrainent la deformation de corps d’epreuve. Un defor-mation de grande amplitude peut etre mesuree avec un capteur de deplace-ment. Ce chapitre considere les mesures de deplacement lineaire et angulaire.
Differentes technologies sont disponibles. Parmi les technologies dispo-nibles, nous retrouvons :
• Les potentiometres ;• Les LVDT (Linear Variable Displacement Transformer) ;• Les synchromachines : Les resolvers ; Les synchromachines ; Les Inductosyn.• Les codeurs de deplacements (ou encodeurs) : Les encodeurs absolus ; Les encodeurs relatifs ;• Les capteurs de deplacement au LASER.
Les capteurs de deplacement inductifs, capacitifs et ultrasoniques etantles versions analogiques des detecteurs correspondants abordes au chapitreprecedent, ils ne seront pas couverts dans ce chapitre. La seule differenceetant qu’une sortie analogique remplace la sortie logique, les principes defonctionnement etant similaires.
89
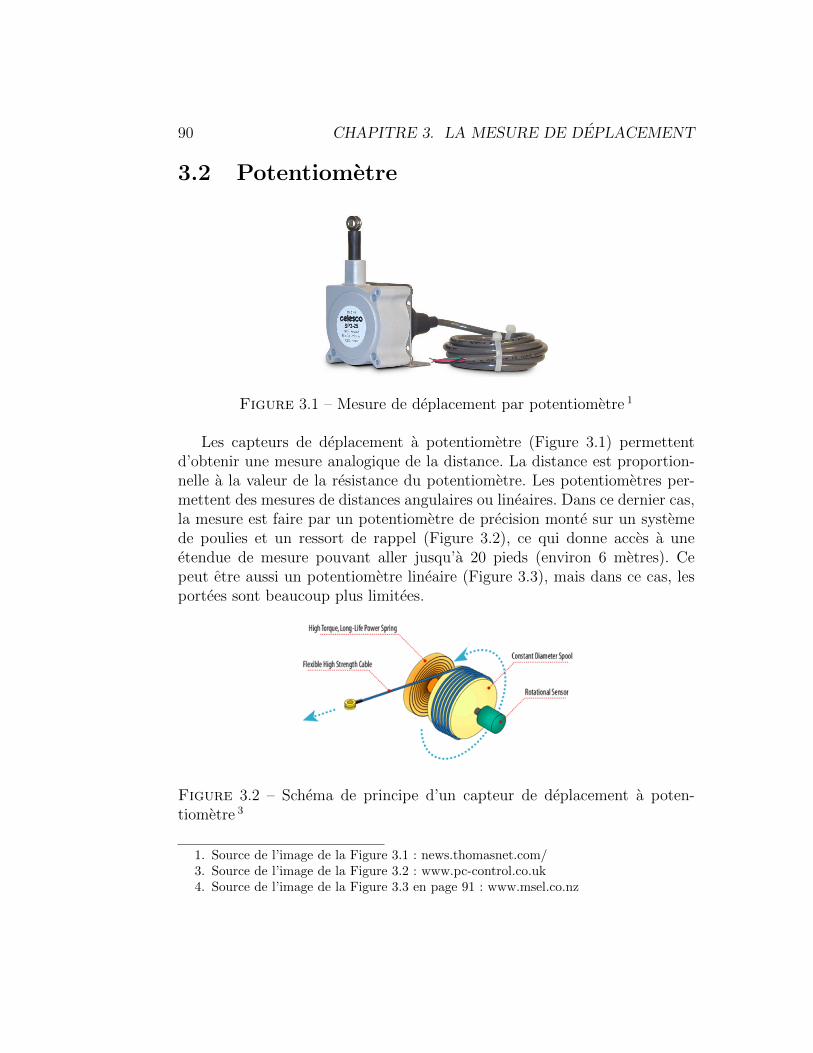
90 CHAPITRE 3. LA MESURE DE DEPLACEMENT
3.2 Potentiometre
Figure 3.1 – Mesure de deplacement par potentiometre 1
Les capteurs de deplacement a potentiometre (Figure 3.1) permettentd’obtenir une mesure analogique de la distance. La distance est proportion-nelle a la valeur de la resistance du potentiometre. Les potentiometres per-mettent des mesures de distances angulaires ou lineaires. Dans ce dernier cas,la mesure est faire par un potentiometre de precision monte sur un systemede poulies et un ressort de rappel (Figure 3.2), ce qui donne acces a uneetendue de mesure pouvant aller jusqu’a 20 pieds (environ 6 metres). Cepeut etre aussi un potentiometre lineaire (Figure 3.3), mais dans ce cas, lesportees sont beaucoup plus limitees.
Figure 3.2 – Schema de principe d’un capteur de deplacement a poten-tiometre 3
1. Source de l’image de la Figure 3.1 : news.thomasnet.com/3. Source de l’image de la Figure 3.2 : www.pc-control.co.uk4. Source de l’image de la Figure 3.3 en page 91 : www.msel.co.nz
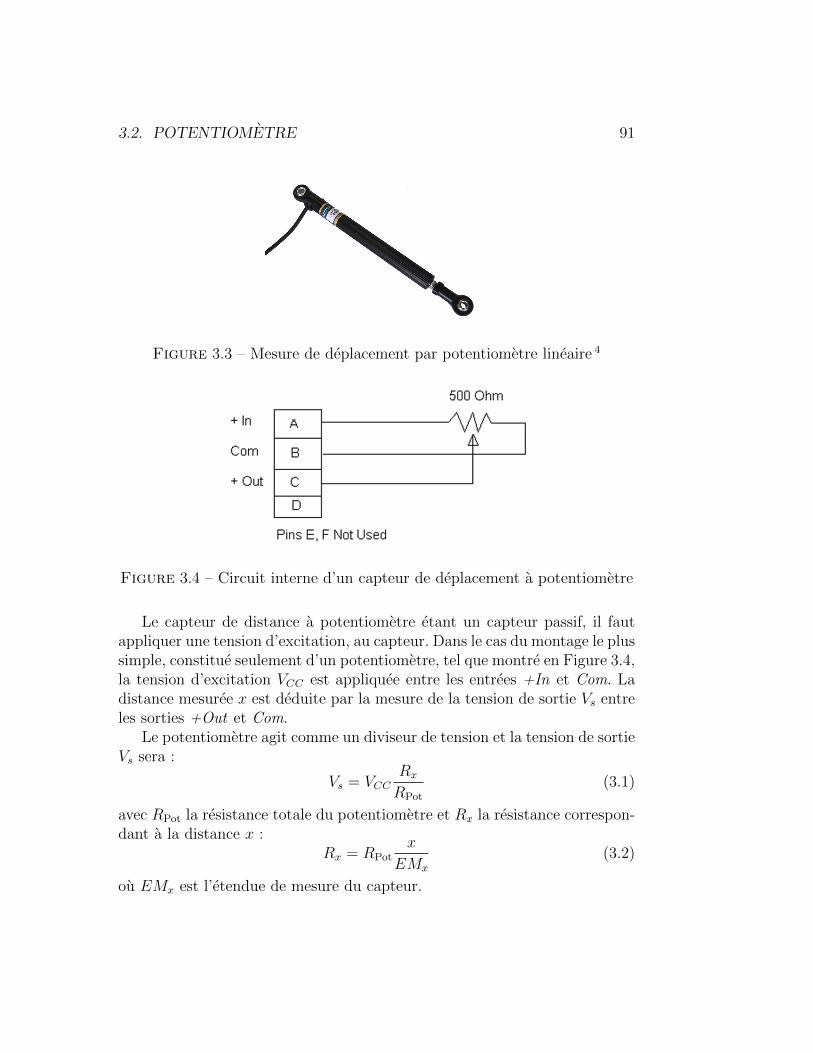
3.2. POTENTIOMETRE 91
Figure 3.3 – Mesure de deplacement par potentiometre lineaire 4
Figure 3.4 – Circuit interne d’un capteur de deplacement a potentiometre
Le capteur de distance a potentiometre etant un capteur passif, il fautappliquer une tension d’excitation, au capteur. Dans le cas du montage le plussimple, constitue seulement d’un potentiometre, tel que montre en Figure 3.4,la tension d’excitation VCC est appliquee entre les entrees +In et Com. Ladistance mesuree x est deduite par la mesure de la tension de sortie Vs entreles sorties +Out et Com.
Le potentiometre agit comme un diviseur de tension et la tension de sortieVs sera :
Vs = VCCRx
RPot
(3.1)
avec RPot la resistance totale du potentiometre et Rx la resistance correspon-dant a la distance x :
Rx = RPotx
EMx
(3.2)
ou EMx est l’etendue de mesure du capteur.
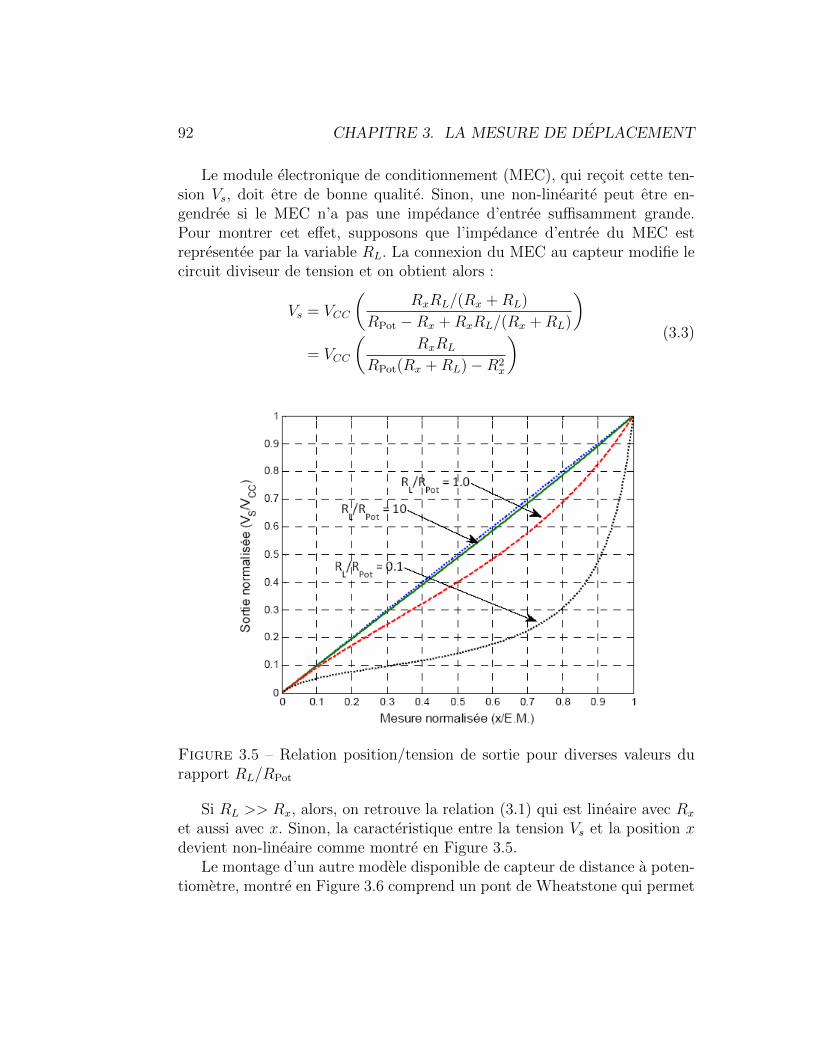
92 CHAPITRE 3. LA MESURE DE DEPLACEMENT
Le module electronique de conditionnement (MEC), qui recoit cette ten-sion Vs, doit etre de bonne qualite. Sinon, une non-linearite peut etre en-gendree si le MEC n’a pas une impedance d’entree suffisamment grande.Pour montrer cet effet, supposons que l’impedance d’entree du MEC estrepresentee par la variable RL. La connexion du MEC au capteur modifie lecircuit diviseur de tension et on obtient alors :
Vs = VCC
(RxRL/(Rx +RL)
RPot −Rx +RxRL/(Rx +RL)
)= VCC
(RxRL
RPot(Rx +RL)−R2x
) (3.3)
Figure 3.5 – Relation position/tension de sortie pour diverses valeurs durapport RL/RPot
Si RL >> Rx, alors, on retrouve la relation (3.1) qui est lineaire avec Rx
et aussi avec x. Sinon, la caracteristique entre la tension Vs et la position xdevient non-lineaire comme montre en Figure 3.5.
Le montage d’un autre modele disponible de capteur de distance a poten-tiometre, montre en Figure 3.6 comprend un pont de Wheatstone qui permet
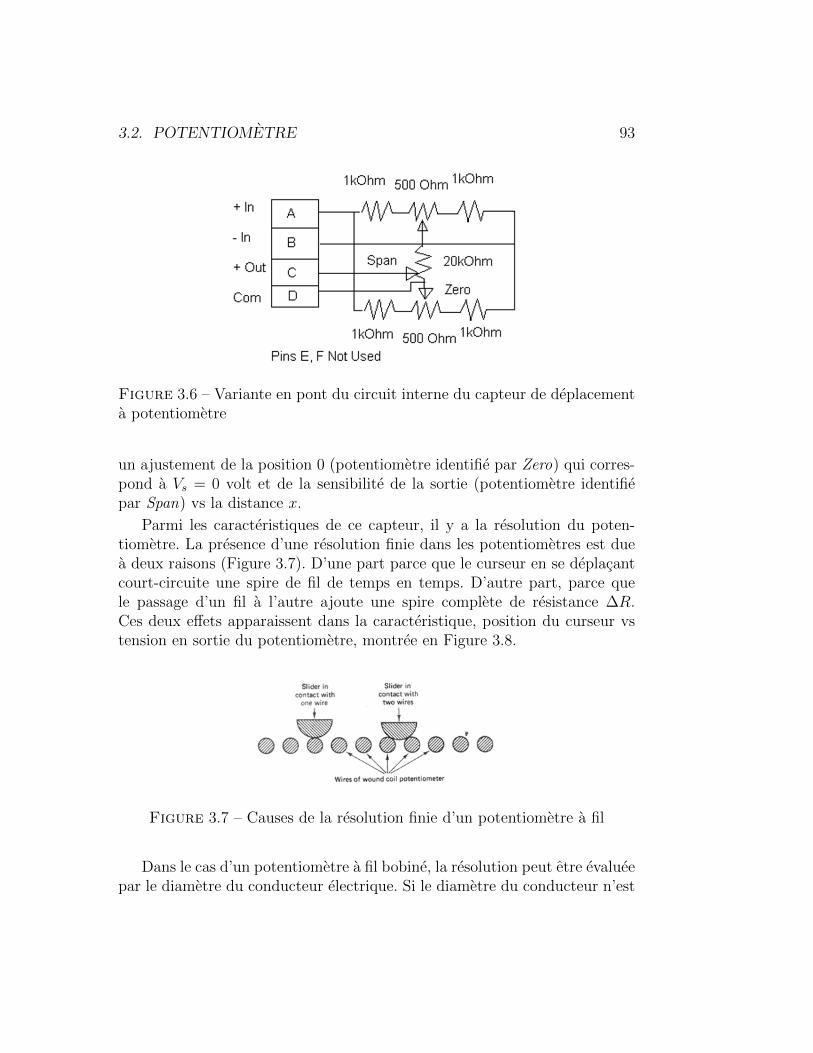
3.2. POTENTIOMETRE 93
Figure 3.6 – Variante en pont du circuit interne du capteur de deplacementa potentiometre
un ajustement de la position 0 (potentiometre identifie par Zero) qui corres-pond a Vs = 0 volt et de la sensibilite de la sortie (potentiometre identifiepar Span) vs la distance x.
Parmi les caracteristiques de ce capteur, il y a la resolution du poten-tiometre. La presence d’une resolution finie dans les potentiometres est duea deux raisons (Figure 3.7). D’une part parce que le curseur en se deplacantcourt-circuite une spire de fil de temps en temps. D’autre part, parce quele passage d’un fil a l’autre ajoute une spire complete de resistance ∆R.Ces deux effets apparaissent dans la caracteristique, position du curseur vstension en sortie du potentiometre, montree en Figure 3.8.
Figure 3.7 – Causes de la resolution finie d’un potentiometre a fil
Dans le cas d’un potentiometre a fil bobine, la resolution peut etre evalueepar le diametre du conducteur electrique. Si le diametre du conducteur n’est
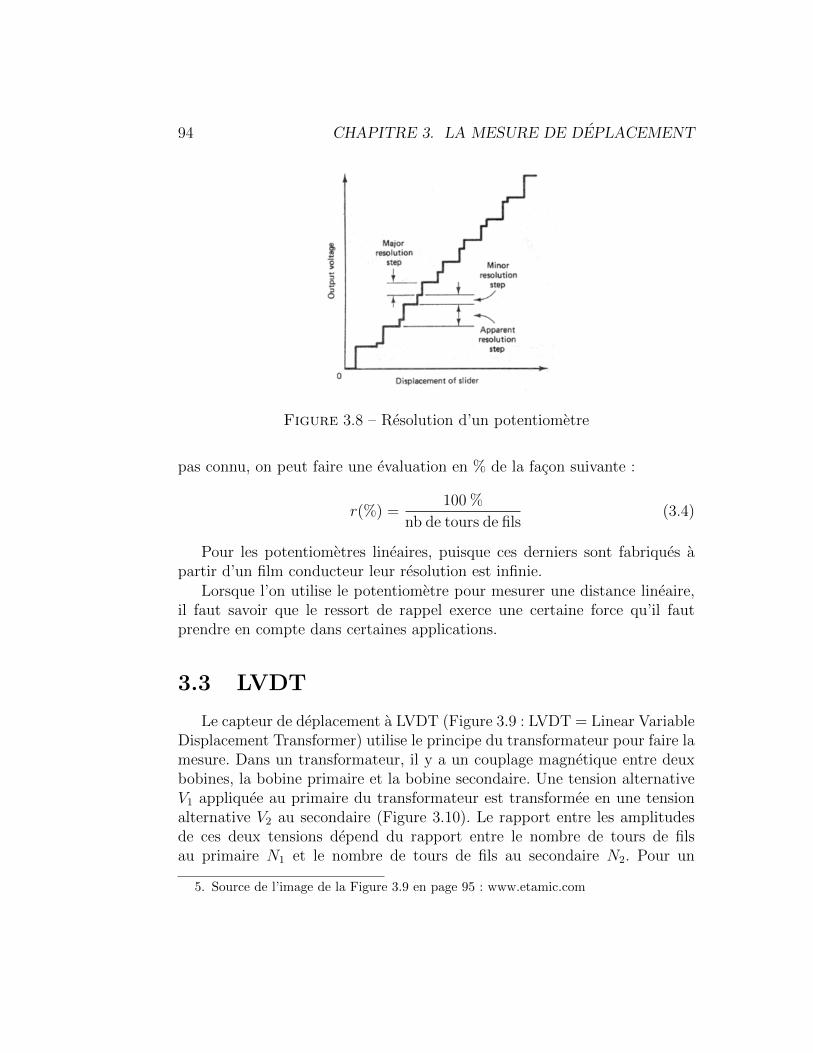
94 CHAPITRE 3. LA MESURE DE DEPLACEMENT
Figure 3.8 – Resolution d’un potentiometre
pas connu, on peut faire une evaluation en % de la facon suivante :
r(%) =100 %
nb de tours de fils(3.4)
Pour les potentiometres lineaires, puisque ces derniers sont fabriques apartir d’un film conducteur leur resolution est infinie.
Lorsque l’on utilise le potentiometre pour mesurer une distance lineaire,il faut savoir que le ressort de rappel exerce une certaine force qu’il fautprendre en compte dans certaines applications.
3.3 LVDT
Le capteur de deplacement a LVDT (Figure 3.9 : LVDT = Linear VariableDisplacement Transformer) utilise le principe du transformateur pour faire lamesure. Dans un transformateur, il y a un couplage magnetique entre deuxbobines, la bobine primaire et la bobine secondaire. Une tension alternativeV1 appliquee au primaire du transformateur est transformee en une tensionalternative V2 au secondaire (Figure 3.10). Le rapport entre les amplitudesde ces deux tensions depend du rapport entre le nombre de tours de filsau primaire N1 et le nombre de tours de fils au secondaire N2. Pour un
5. Source de l’image de la Figure 3.9 en page 95 : www.etamic.com
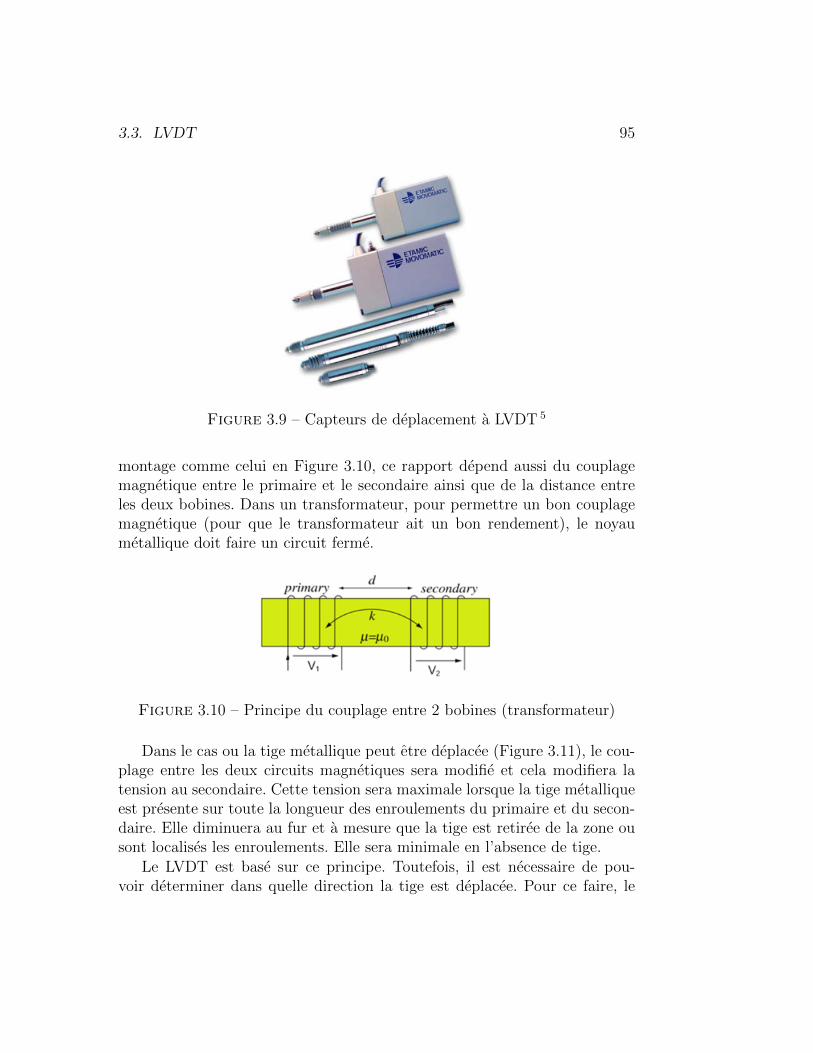
3.3. LVDT 95
Figure 3.9 – Capteurs de deplacement a LVDT 5
montage comme celui en Figure 3.10, ce rapport depend aussi du couplagemagnetique entre le primaire et le secondaire ainsi que de la distance entreles deux bobines. Dans un transformateur, pour permettre un bon couplagemagnetique (pour que le transformateur ait un bon rendement), le noyaumetallique doit faire un circuit ferme.
Figure 3.10 – Principe du couplage entre 2 bobines (transformateur)
Dans le cas ou la tige metallique peut etre deplacee (Figure 3.11), le cou-plage entre les deux circuits magnetiques sera modifie et cela modifiera latension au secondaire. Cette tension sera maximale lorsque la tige metalliqueest presente sur toute la longueur des enroulements du primaire et du secon-daire. Elle diminuera au fur et a mesure que la tige est retiree de la zone ousont localises les enroulements. Elle sera minimale en l’absence de tige.
Le LVDT est base sur ce principe. Toutefois, il est necessaire de pou-voir determiner dans quelle direction la tige est deplacee. Pour ce faire, le
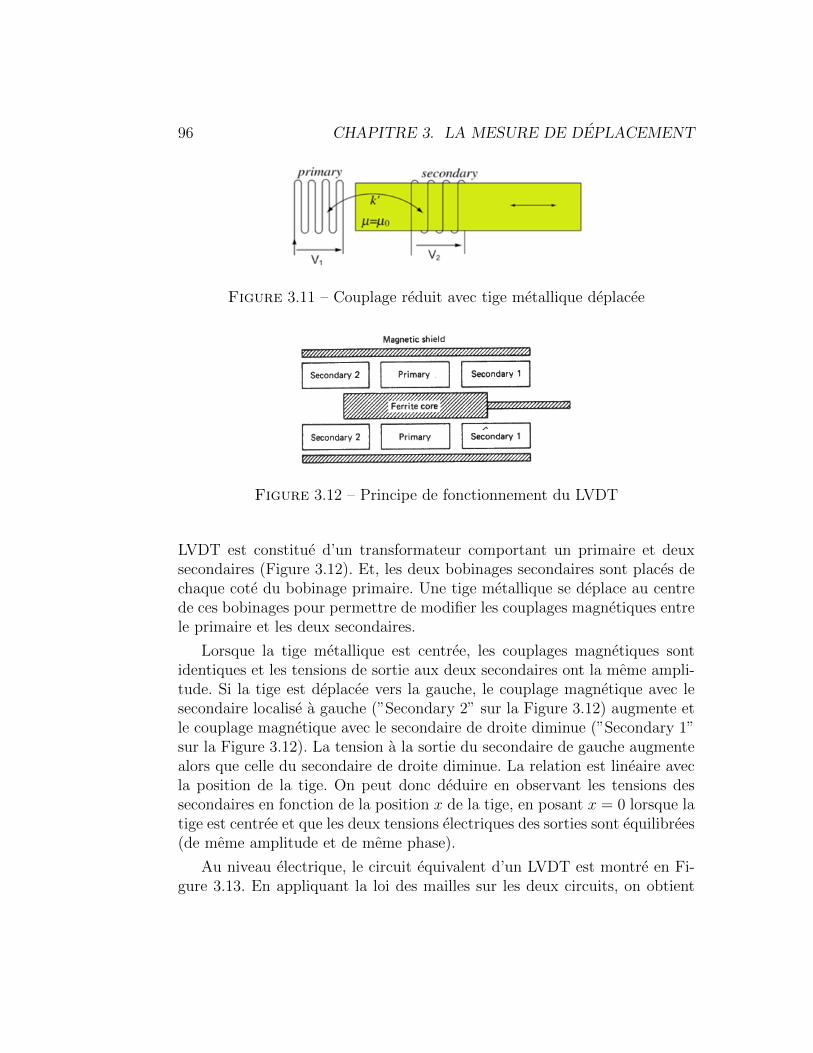
96 CHAPITRE 3. LA MESURE DE DEPLACEMENT
Figure 3.11 – Couplage reduit avec tige metallique deplacee
Figure 3.12 – Principe de fonctionnement du LVDT
LVDT est constitue d’un transformateur comportant un primaire et deuxsecondaires (Figure 3.12). Et, les deux bobinages secondaires sont places dechaque cote du bobinage primaire. Une tige metallique se deplace au centrede ces bobinages pour permettre de modifier les couplages magnetiques entrele primaire et les deux secondaires.
Lorsque la tige metallique est centree, les couplages magnetiques sontidentiques et les tensions de sortie aux deux secondaires ont la meme ampli-tude. Si la tige est deplacee vers la gauche, le couplage magnetique avec lesecondaire localise a gauche (”Secondary 2” sur la Figure 3.12) augmente etle couplage magnetique avec le secondaire de droite diminue (”Secondary 1”sur la Figure 3.12). La tension a la sortie du secondaire de gauche augmentealors que celle du secondaire de droite diminue. La relation est lineaire avecla position de la tige. On peut donc deduire en observant les tensions dessecondaires en fonction de la position x de la tige, en posant x = 0 lorsque latige est centree et que les deux tensions electriques des sorties sont equilibrees(de meme amplitude et de meme phase).
Au niveau electrique, le circuit equivalent d’un LVDT est montre en Fi-gure 3.13. En appliquant la loi des mailles sur les deux circuits, on obtient
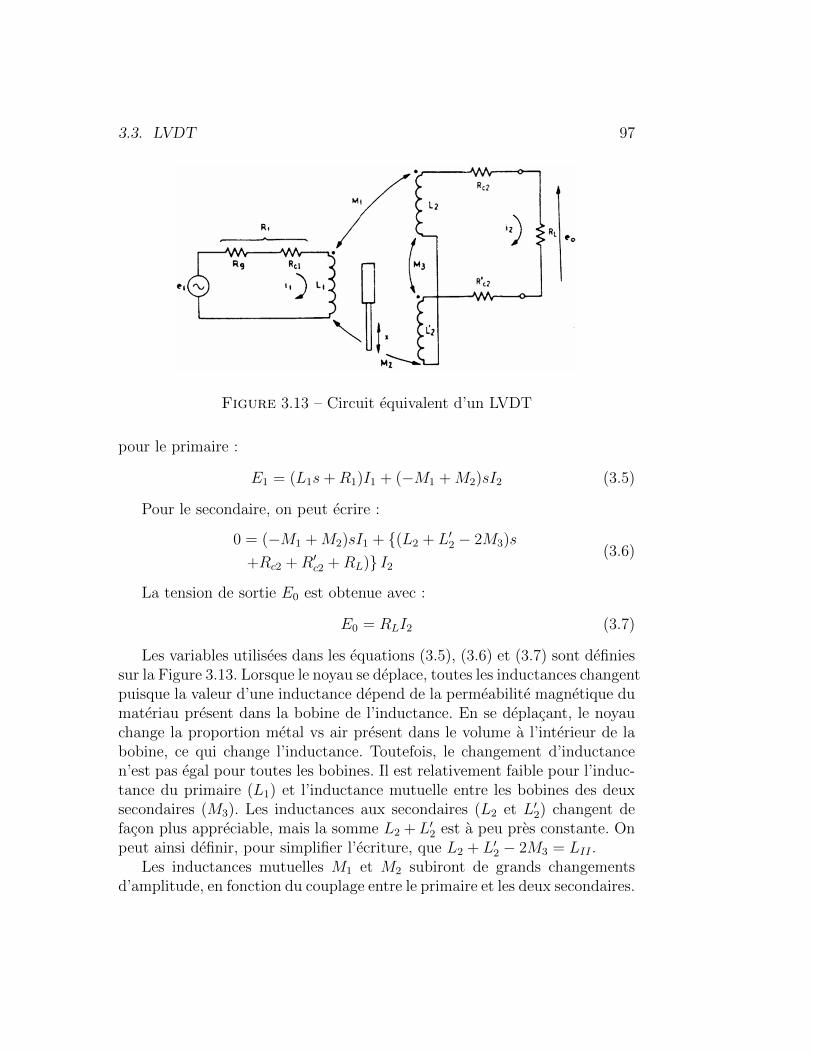
3.3. LVDT 97
Figure 3.13 – Circuit equivalent d’un LVDT
pour le primaire :
E1 = (L1s+R1)I1 + (−M1 +M2)sI2 (3.5)
Pour le secondaire, on peut ecrire :
0 = (−M1 +M2)sI1 + (L2 + L′2 − 2M3)s
+Rc2 +R′c2 +RL) I2
(3.6)
La tension de sortie E0 est obtenue avec :
E0 = RLI2 (3.7)
Les variables utilisees dans les equations (3.5), (3.6) et (3.7) sont definiessur la Figure 3.13. Lorsque le noyau se deplace, toutes les inductances changentpuisque la valeur d’une inductance depend de la permeabilite magnetique dumateriau present dans la bobine de l’inductance. En se deplacant, le noyauchange la proportion metal vs air present dans le volume a l’interieur de labobine, ce qui change l’inductance. Toutefois, le changement d’inductancen’est pas egal pour toutes les bobines. Il est relativement faible pour l’induc-tance du primaire (L1) et l’inductance mutuelle entre les bobines des deuxsecondaires (M3). Les inductances aux secondaires (L2 et L′2) changent defacon plus appreciable, mais la somme L2 + L′2 est a peu pres constante. Onpeut ainsi definir, pour simplifier l’ecriture, que L2 + L′2 − 2M3 = LII .
Les inductances mutuelles M1 et M2 subiront de grands changementsd’amplitude, en fonction du couplage entre le primaire et les deux secondaires.

98 CHAPITRE 3. LA MESURE DE DEPLACEMENT
Mais, la difference M2 −M1 change lineairement par rapport a la positioncentrale du noyau, definie par x0. Lorsque le noyau ferromagnetique est centredans le LVDT, le couplage est de meme amplitude entre le primaire et chacundes secondaires, ce qui implique que les deux inductances mutuelles M1 et M2
ont exactement la meme amplitude. Quand M1 = M2, la valeur du courantI2 devient egale a 0 et la tension de sortie E0 sera aussi nulle.
En l’absence de charge (i.e., RL = ∞), on peut reecrire l’equation ducircuit secondaire comme suit :
0 = (−M1 +M2)sI1 + E0 (3.8)
Et, (3.5) peut etre combinee avec (3.8) (avec I2 = 0) pour obtenir larelation entre les tensions E0 et E1 :
E0 =(M1 −M2)sE1
L1s+R1
(3.9)
Il est a noter que dans (3.9), le courant circulant dans la bobine du primaireI1 est approxime par :
I1 ≈E1
L1s+R1
(3.10)
S’il y a une charge RL connecte au LVDT, alors :
E0 =RL(M1 −M2)sE1
Z2s2 + Z1s+ Z0
(3.11)
avec Z2 = LIIL1 + (M1 − M2)2, Z1 = Rc2L1 + R′c2L1 + RLL1 + R1LII etZ0 = (Rc2 +R′c2 +RL)R1.
Cette equation peut etre simplifiee puisque l’on peut supposer que LIIL1 >>(M1 −M2)2 ce qui permet de simplifier le terme Z2 de l’equation (3.11) quel’on peut reecrire : Z2 = LIIL1.
Il existe une frequence angulaire ωn du signal d’entree sinusoıdal E1, pourlaquelle les tensions E0 et E1 sont en phase. A cette frequence, −LIIL1ω
2n +
Z0 = 0. Donc, la frequence est calculee comme suit :
ωn =
√(Rc2 +R′c2 +RL)R1
LIIL1
(3.12)
Comme fn = ωn/(2π), la frequence en Hertz correspondante est :
fn =1
2π
√(Rc2 +R′c2 +RL)R1
LIIL1
(3.13)
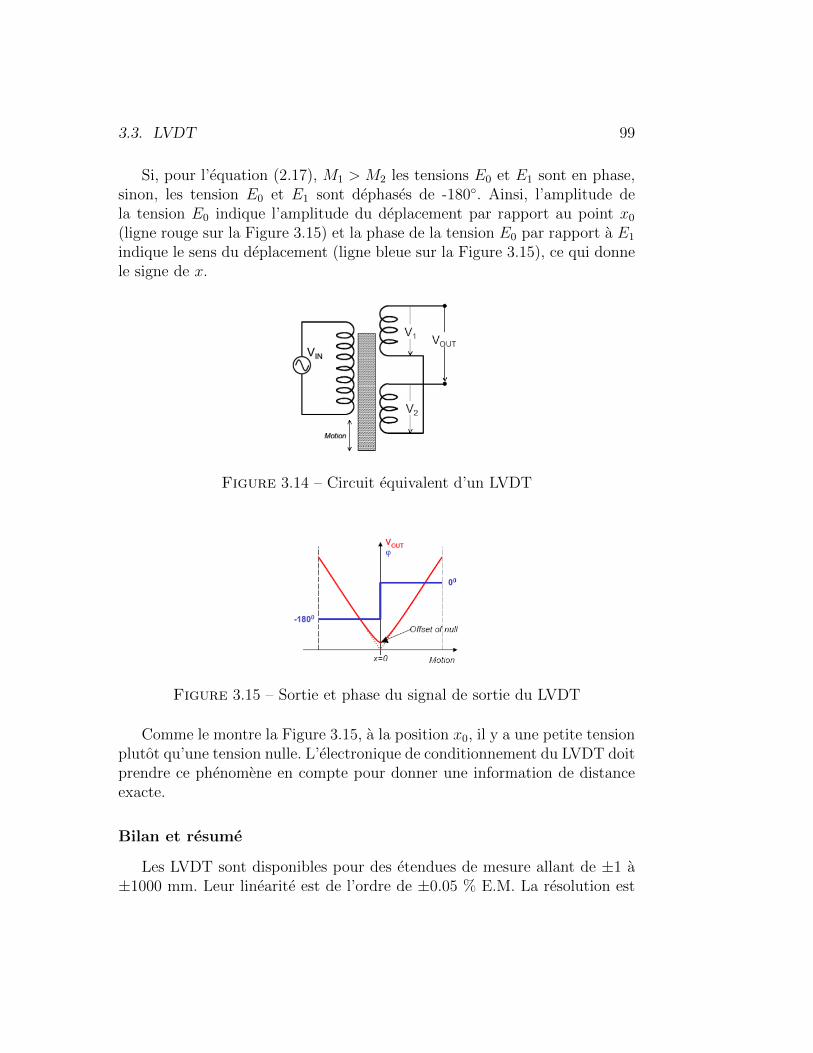
3.3. LVDT 99
Si, pour l’equation (2.17), M1 > M2 les tensions E0 et E1 sont en phase,sinon, les tension E0 et E1 sont dephases de -180. Ainsi, l’amplitude dela tension E0 indique l’amplitude du deplacement par rapport au point x0
(ligne rouge sur la Figure 3.15) et la phase de la tension E0 par rapport a E1
indique le sens du deplacement (ligne bleue sur la Figure 3.15), ce qui donnele signe de x.
Figure 3.14 – Circuit equivalent d’un LVDT
Figure 3.15 – Sortie et phase du signal de sortie du LVDT
Comme le montre la Figure 3.15, a la position x0, il y a une petite tensionplutot qu’une tension nulle. L’electronique de conditionnement du LVDT doitprendre ce phenomene en compte pour donner une information de distanceexacte.
Bilan et resume
Les LVDT sont disponibles pour des etendues de mesure allant de ±1 a±1000 mm. Leur linearite est de l’ordre de ±0.05 % E.M. La resolution est
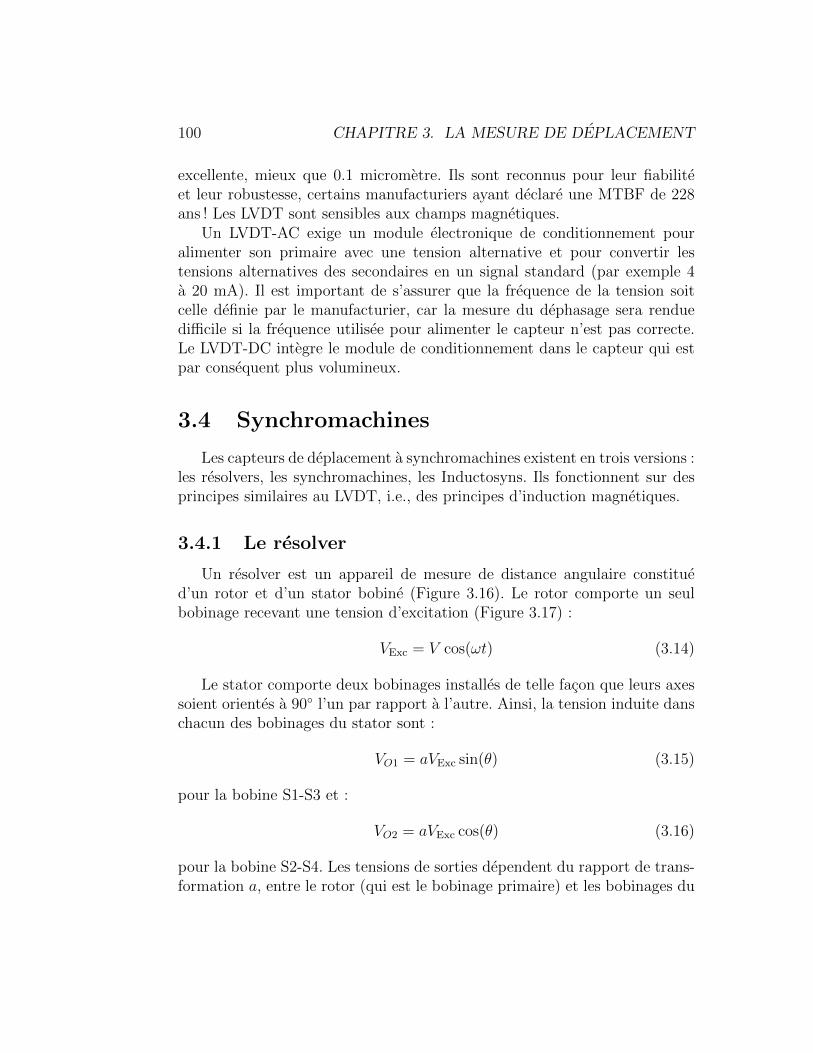
100 CHAPITRE 3. LA MESURE DE DEPLACEMENT
excellente, mieux que 0.1 micrometre. Ils sont reconnus pour leur fiabiliteet leur robustesse, certains manufacturiers ayant declare une MTBF de 228ans ! Les LVDT sont sensibles aux champs magnetiques.
Un LVDT-AC exige un module electronique de conditionnement pouralimenter son primaire avec une tension alternative et pour convertir lestensions alternatives des secondaires en un signal standard (par exemple 4a 20 mA). Il est important de s’assurer que la frequence de la tension soitcelle definie par le manufacturier, car la mesure du dephasage sera renduedifficile si la frequence utilisee pour alimenter le capteur n’est pas correcte.Le LVDT-DC integre le module de conditionnement dans le capteur qui estpar consequent plus volumineux.
3.4 Synchromachines
Les capteurs de deplacement a synchromachines existent en trois versions :les resolvers, les synchromachines, les Inductosyns. Ils fonctionnent sur desprincipes similaires au LVDT, i.e., des principes d’induction magnetiques.
3.4.1 Le resolver
Un resolver est un appareil de mesure de distance angulaire constitued’un rotor et d’un stator bobine (Figure 3.16). Le rotor comporte un seulbobinage recevant une tension d’excitation (Figure 3.17) :
VExc = V cos(ωt) (3.14)
Le stator comporte deux bobinages installes de telle facon que leurs axessoient orientes a 90 l’un par rapport a l’autre. Ainsi, la tension induite danschacun des bobinages du stator sont :
VO1 = aVExc sin(θ) (3.15)
pour la bobine S1-S3 et :
VO2 = aVExc cos(θ) (3.16)
pour la bobine S2-S4. Les tensions de sorties dependent du rapport de trans-formation a, entre le rotor (qui est le bobinage primaire) et les bobinages du
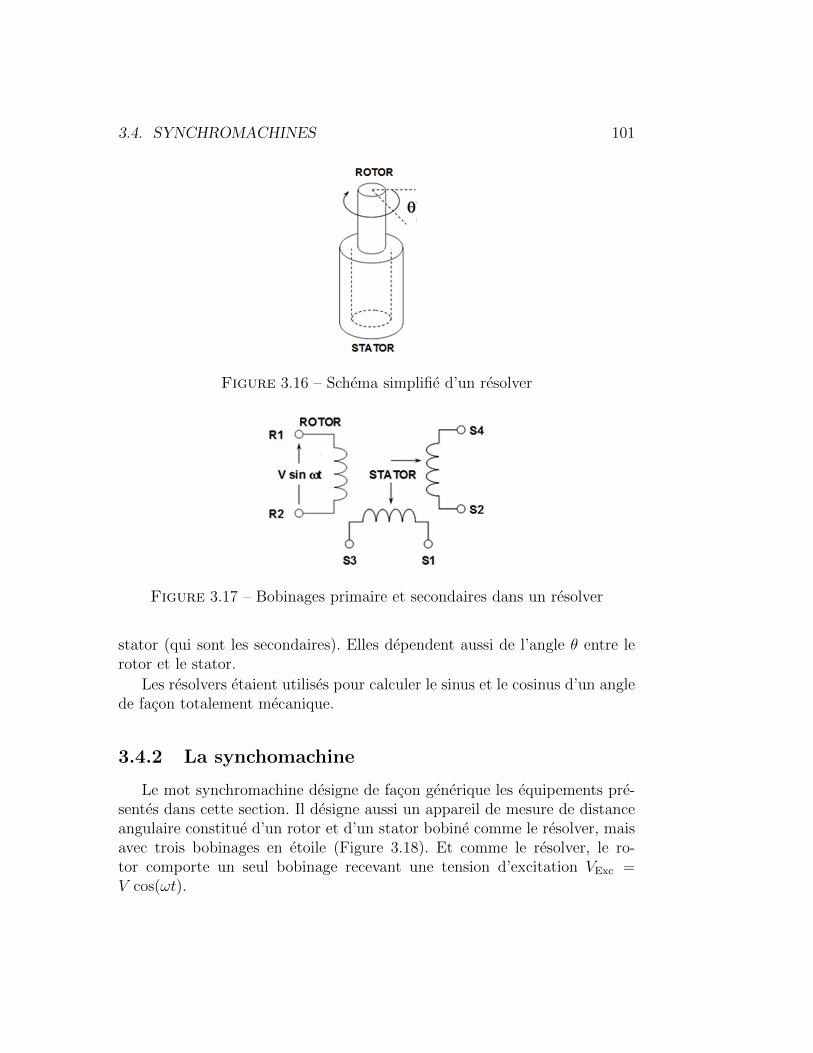
3.4. SYNCHROMACHINES 101
Figure 3.16 – Schema simplifie d’un resolver
Figure 3.17 – Bobinages primaire et secondaires dans un resolver
stator (qui sont les secondaires). Elles dependent aussi de l’angle θ entre lerotor et le stator.
Les resolvers etaient utilises pour calculer le sinus et le cosinus d’un anglede facon totalement mecanique.
3.4.2 La synchomachine
Le mot synchromachine designe de facon generique les equipements pre-sentes dans cette section. Il designe aussi un appareil de mesure de distanceangulaire constitue d’un rotor et d’un stator bobine comme le resolver, maisavec trois bobinages en etoile (Figure 3.18). Et comme le resolver, le ro-tor comporte un seul bobinage recevant une tension d’excitation VExc =V cos(ωt).

102 CHAPITRE 3. LA MESURE DE DEPLACEMENT
Figure 3.18 – Bobinages primaire et secondaires dans une synchromachineresolver
C’est au niveau du stator qu’une difference apparait au niveau du bobi-nage. Trois bobines sont montees en Y, comme pour un moteur a courantalternatif (CA) asynchrone. Les axes des bobines sont decalees de 120 l’unepar rapport a l’autre. La tension induite entre S1 et S3 est :
VO1 = aVExc sin(θ) (3.17)
celle entre S3 et S2 :
VO1 = aVExc sin(θ + 2π/3) (3.18)
et enfin, celle entre S2 et S1 :
VO1 = aVExc sin(θ + 4π/3) (3.19)
Les significations de a et θ sont les memes que pour le resolver.
3.4.3 L’Inductosyn
L’Inductosyn est un autre systeme de mesure lineaire ou angulaire per-mettant la mesure de deplacement (Inductosyn lineaire en Figure 3.20). Unetension d’excitation est appliquee sur une base fixe fait avec une bobine telleque montree en Figure 3.20.
Le pas de la bobine dans la base fixe et des bobines dans la glissiere estxp (Figure 3.20). Dans le cas de l’Inductosyn lineaire, une glissiere se deplace
6. Source de l’image de la Figure 3.19 en page 103 : www.ruhle.com7. Source de l’image de la Figure 3.20 en page 103 : www.ibiblio.org
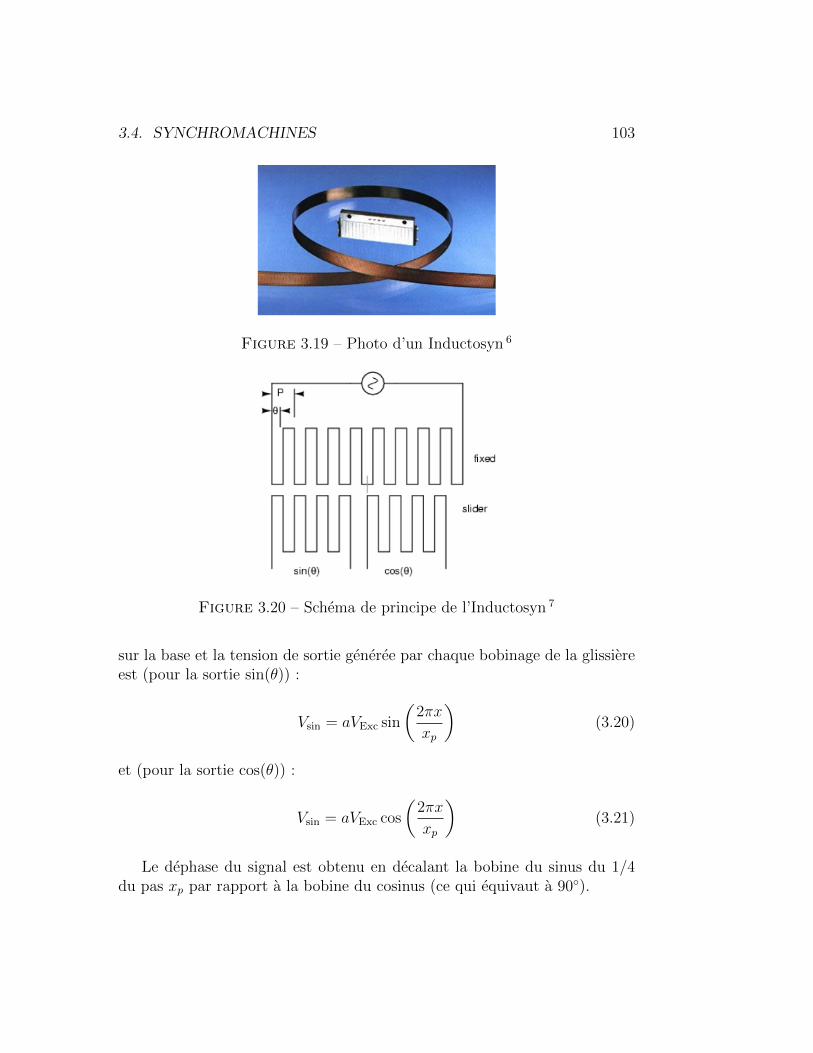
3.4. SYNCHROMACHINES 103
Figure 3.19 – Photo d’un Inductosyn 6
Figure 3.20 – Schema de principe de l’Inductosyn 7
sur la base et la tension de sortie generee par chaque bobinage de la glissiereest (pour la sortie sin(θ)) :
Vsin = aVExc sin
(2πx
xp
)(3.20)
et (pour la sortie cos(θ)) :
Vsin = aVExc cos
(2πx
xp
)(3.21)
Le dephase du signal est obtenu en decalant la bobine du sinus du 1/4du pas xp par rapport a la bobine du cosinus (ce qui equivaut a 90).

104 CHAPITRE 3. LA MESURE DE DEPLACEMENT
3.4.4 Bilan et resume
Les capteurs a synchromachine ont une course tres etendue. Ils sont re-connus pour leur fiabilite et leur robustesse. La mesure angulaire est exces-sivement precise, allant jusqu’a 1.5 seconde d’arc (1 = 60 minutes d’arc =3600 secondes d’arc). Comme le LVDT, il faut faire attention aux champsmagnetiques et en raison de leur grande precision, ces capteurs sont couteux.
3.5 Les codeurs de deplacement (encodeurs)
Figure 3.21 – Codeur de deplacement 8
La mesure de distance angulaire peut utiliser des capteurs ayant des sor-ties numeriques : ce sont les codeurs (Figure 3.21). Le codeur existe en deuxversions, selon que la sortie est un signal numerique parallele (encodeur ab-solu) ou serie (compteur ou encodeur incremental).
Le principe d’un codeur repose sur l’usage d’un materiau ayant une pro-priete binaire (opaque vs transparent dans le cas d’un codeur optique). Apartir cette information binaire on peut deduire la position.
3.5.1 Encodeur absolu
L’encodeur absolu comprend plusieurs bandes paralleles de zones de pro-priete binaire permettant de construire l’information de position (Figure 3.22et Figure 3.23). Chaque position angulaire possede un code unique. En Figure
8. Source de l’image de la Figure 3.21 : http ://www.baumer.ca/
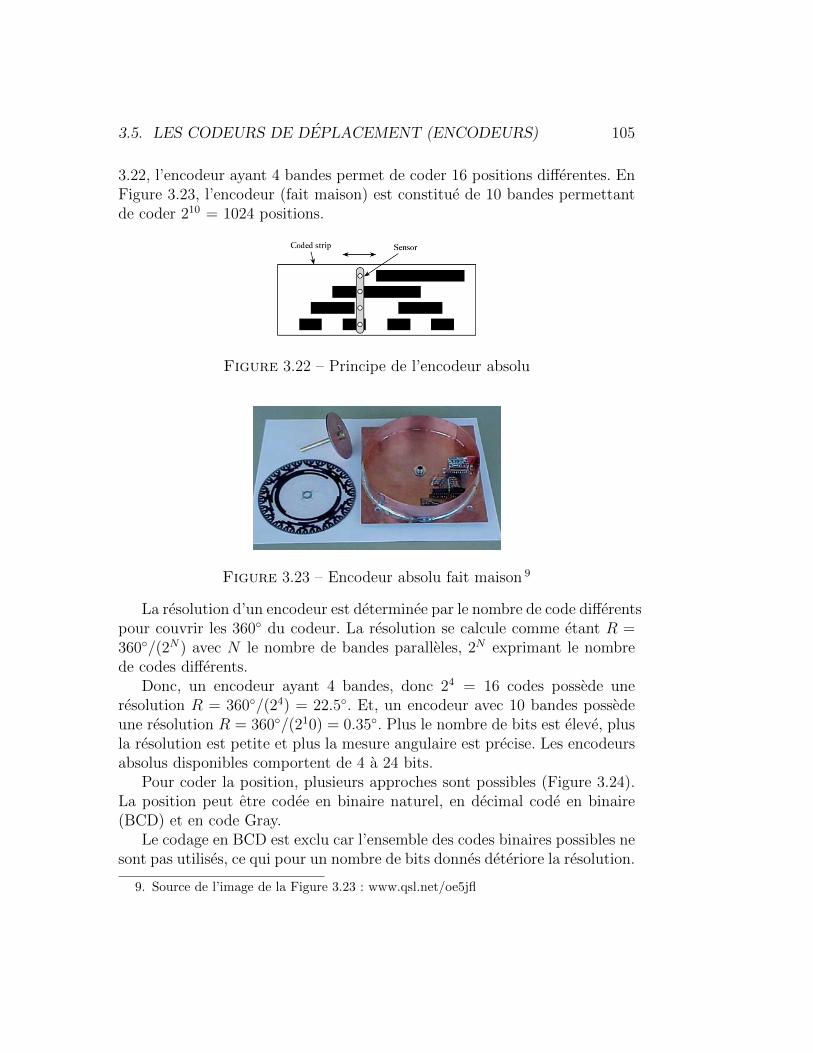
3.5. LES CODEURS DE DEPLACEMENT (ENCODEURS) 105
3.22, l’encodeur ayant 4 bandes permet de coder 16 positions differentes. EnFigure 3.23, l’encodeur (fait maison) est constitue de 10 bandes permettantde coder 210 = 1024 positions.
Figure 3.22 – Principe de l’encodeur absolu
Figure 3.23 – Encodeur absolu fait maison 9
La resolution d’un encodeur est determinee par le nombre de code differentspour couvrir les 360 du codeur. La resolution se calcule comme etant R =360/(2N) avec N le nombre de bandes paralleles, 2N exprimant le nombrede codes differents.
Donc, un encodeur ayant 4 bandes, donc 24 = 16 codes possede uneresolution R = 360/(24) = 22.5. Et, un encodeur avec 10 bandes possedeune resolution R = 360/(210) = 0.35. Plus le nombre de bits est eleve, plusla resolution est petite et plus la mesure angulaire est precise. Les encodeursabsolus disponibles comportent de 4 a 24 bits.
Pour coder la position, plusieurs approches sont possibles (Figure 3.24).La position peut etre codee en binaire naturel, en decimal code en binaire(BCD) et en code Gray.
Le codage en BCD est exclu car l’ensemble des codes binaires possibles nesont pas utilises, ce qui pour un nombre de bits donnes deteriore la resolution.
9. Source de l’image de la Figure 3.23 : www.qsl.net/oe5jfl
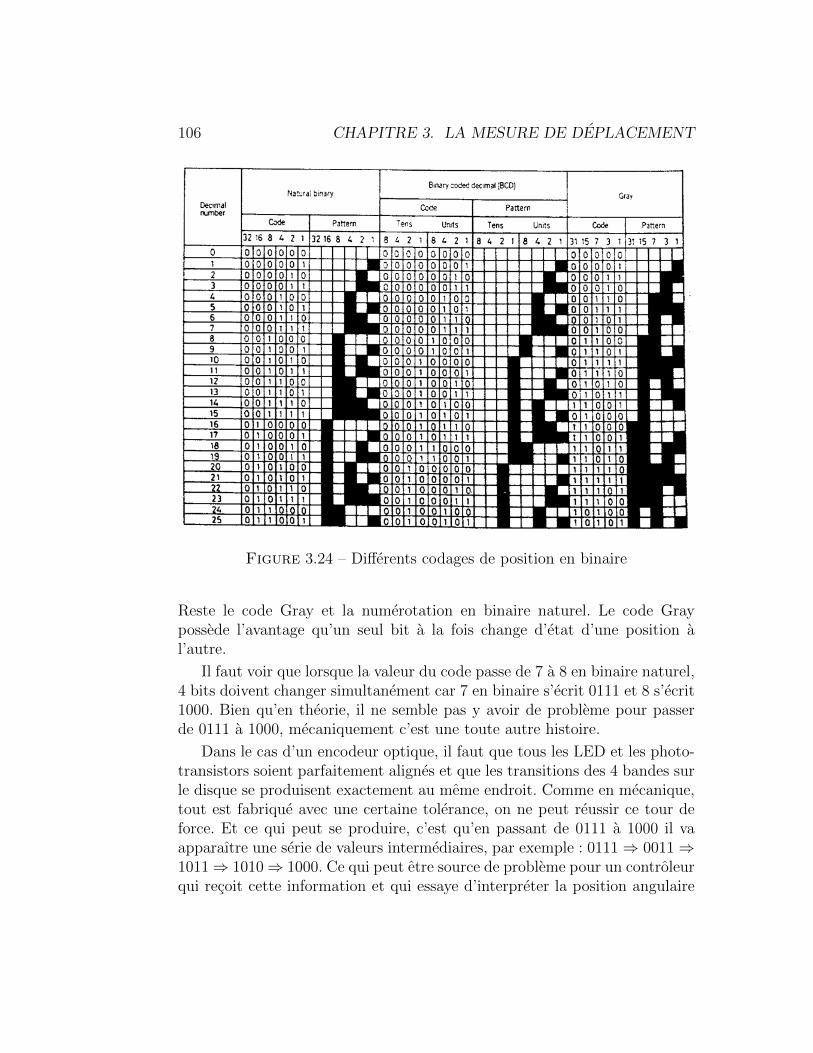
106 CHAPITRE 3. LA MESURE DE DEPLACEMENT
Figure 3.24 – Differents codages de position en binaire
Reste le code Gray et la numerotation en binaire naturel. Le code Graypossede l’avantage qu’un seul bit a la fois change d’etat d’une position al’autre.
Il faut voir que lorsque la valeur du code passe de 7 a 8 en binaire naturel,4 bits doivent changer simultanement car 7 en binaire s’ecrit 0111 et 8 s’ecrit1000. Bien qu’en theorie, il ne semble pas y avoir de probleme pour passerde 0111 a 1000, mecaniquement c’est une toute autre histoire.
Dans le cas d’un encodeur optique, il faut que tous les LED et les photo-transistors soient parfaitement alignes et que les transitions des 4 bandes surle disque se produisent exactement au meme endroit. Comme en mecanique,tout est fabrique avec une certaine tolerance, on ne peut reussir ce tour deforce. Et ce qui peut se produire, c’est qu’en passant de 0111 a 1000 il vaapparaıtre une serie de valeurs intermediaires, par exemple : 0111⇒ 0011⇒1011⇒ 1010⇒ 1000. Ce qui peut etre source de probleme pour un controleurqui recoit cette information et qui essaye d’interpreter la position angulaire
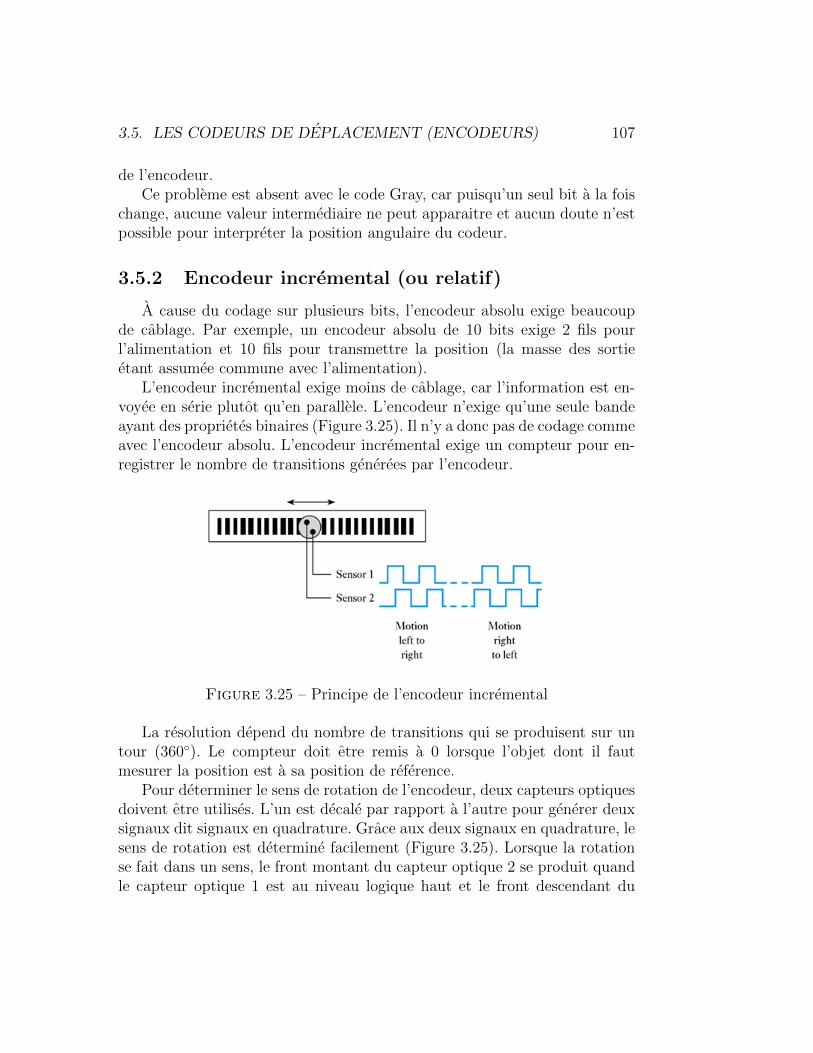
3.5. LES CODEURS DE DEPLACEMENT (ENCODEURS) 107
de l’encodeur.Ce probleme est absent avec le code Gray, car puisqu’un seul bit a la fois
change, aucune valeur intermediaire ne peut apparaitre et aucun doute n’estpossible pour interpreter la position angulaire du codeur.
3.5.2 Encodeur incremental (ou relatif)
A cause du codage sur plusieurs bits, l’encodeur absolu exige beaucoupde cablage. Par exemple, un encodeur absolu de 10 bits exige 2 fils pourl’alimentation et 10 fils pour transmettre la position (la masse des sortieetant assumee commune avec l’alimentation).
L’encodeur incremental exige moins de cablage, car l’information est en-voyee en serie plutot qu’en parallele. L’encodeur n’exige qu’une seule bandeayant des proprietes binaires (Figure 3.25). Il n’y a donc pas de codage commeavec l’encodeur absolu. L’encodeur incremental exige un compteur pour en-registrer le nombre de transitions generees par l’encodeur.
Figure 3.25 – Principe de l’encodeur incremental
La resolution depend du nombre de transitions qui se produisent sur untour (360). Le compteur doit etre remis a 0 lorsque l’objet dont il fautmesurer la position est a sa position de reference.
Pour determiner le sens de rotation de l’encodeur, deux capteurs optiquesdoivent etre utilises. L’un est decale par rapport a l’autre pour generer deuxsignaux dit signaux en quadrature. Grace aux deux signaux en quadrature, lesens de rotation est determine facilement (Figure 3.25). Lorsque la rotationse fait dans un sens, le front montant du capteur optique 2 se produit quandle capteur optique 1 est au niveau logique haut et le front descendant du
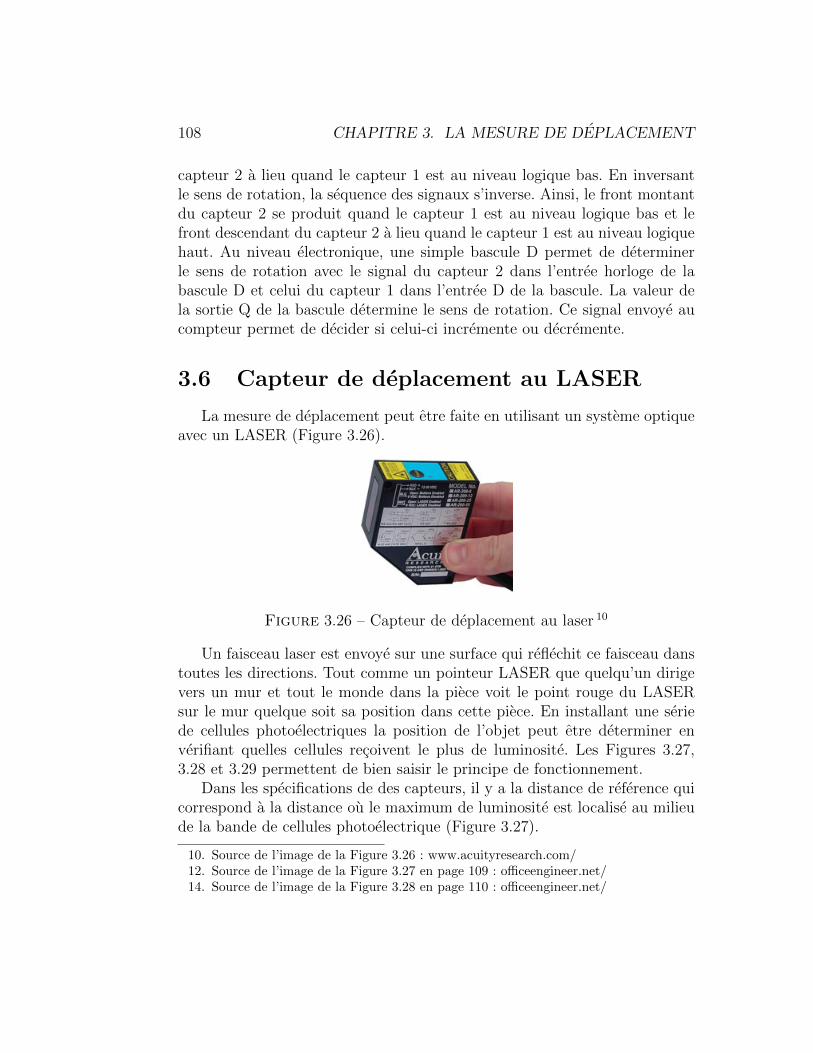
108 CHAPITRE 3. LA MESURE DE DEPLACEMENT
capteur 2 a lieu quand le capteur 1 est au niveau logique bas. En inversantle sens de rotation, la sequence des signaux s’inverse. Ainsi, le front montantdu capteur 2 se produit quand le capteur 1 est au niveau logique bas et lefront descendant du capteur 2 a lieu quand le capteur 1 est au niveau logiquehaut. Au niveau electronique, une simple bascule D permet de determinerle sens de rotation avec le signal du capteur 2 dans l’entree horloge de labascule D et celui du capteur 1 dans l’entree D de la bascule. La valeur dela sortie Q de la bascule determine le sens de rotation. Ce signal envoye aucompteur permet de decider si celui-ci incremente ou decremente.
3.6 Capteur de deplacement au LASER
La mesure de deplacement peut etre faite en utilisant un systeme optiqueavec un LASER (Figure 3.26).
Figure 3.26 – Capteur de deplacement au laser 10
Un faisceau laser est envoye sur une surface qui reflechit ce faisceau danstoutes les directions. Tout comme un pointeur LASER que quelqu’un dirigevers un mur et tout le monde dans la piece voit le point rouge du LASERsur le mur quelque soit sa position dans cette piece. En installant une seriede cellules photoelectriques la position de l’objet peut etre determiner enverifiant quelles cellules recoivent le plus de luminosite. Les Figures 3.27,3.28 et 3.29 permettent de bien saisir le principe de fonctionnement.
Dans les specifications de des capteurs, il y a la distance de reference quicorrespond a la distance ou le maximum de luminosite est localise au milieude la bande de cellules photoelectrique (Figure 3.27).
10. Source de l’image de la Figure 3.26 : www.acuityresearch.com/12. Source de l’image de la Figure 3.27 en page 109 : officeengineer.net/14. Source de l’image de la Figure 3.28 en page 110 : officeengineer.net/
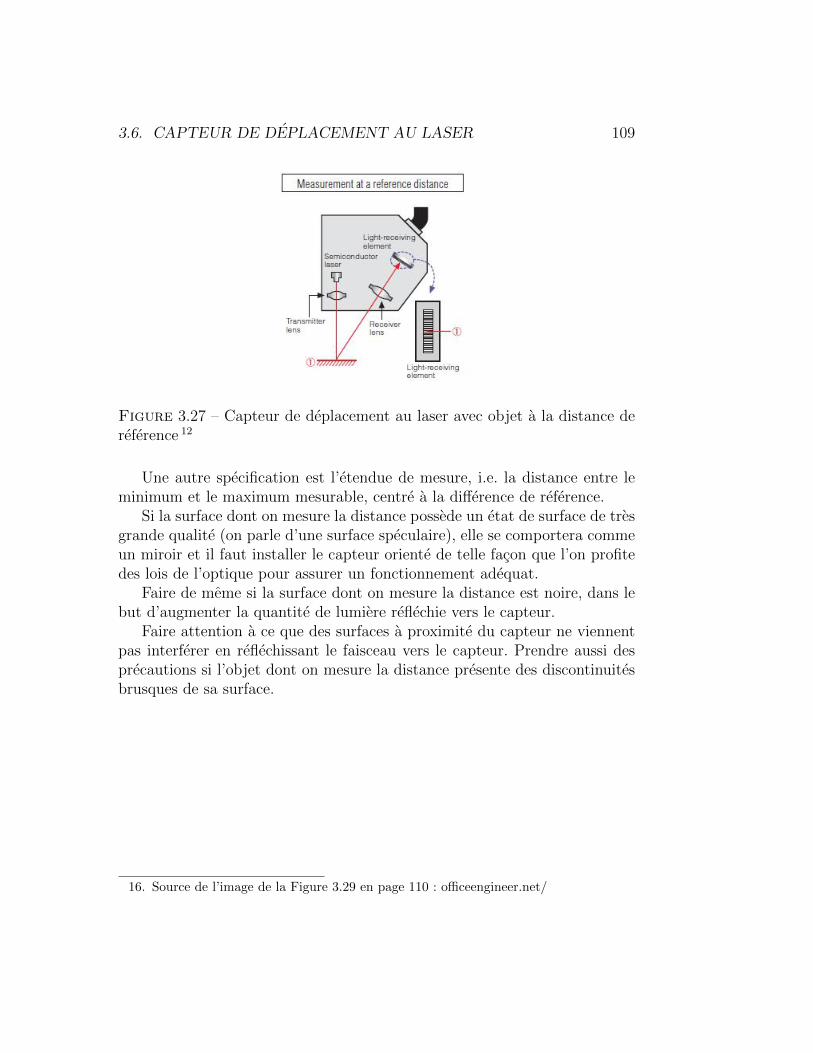
3.6. CAPTEUR DE DEPLACEMENT AU LASER 109
Figure 3.27 – Capteur de deplacement au laser avec objet a la distance dereference 12
Une autre specification est l’etendue de mesure, i.e. la distance entre leminimum et le maximum mesurable, centre a la difference de reference.
Si la surface dont on mesure la distance possede un etat de surface de tresgrande qualite (on parle d’une surface speculaire), elle se comportera commeun miroir et il faut installer le capteur oriente de telle facon que l’on profitedes lois de l’optique pour assurer un fonctionnement adequat.
Faire de meme si la surface dont on mesure la distance est noire, dans lebut d’augmenter la quantite de lumiere reflechie vers le capteur.
Faire attention a ce que des surfaces a proximite du capteur ne viennentpas interferer en reflechissant le faisceau vers le capteur. Prendre aussi desprecautions si l’objet dont on mesure la distance presente des discontinuitesbrusques de sa surface.
16. Source de l’image de la Figure 3.29 en page 110 : officeengineer.net/
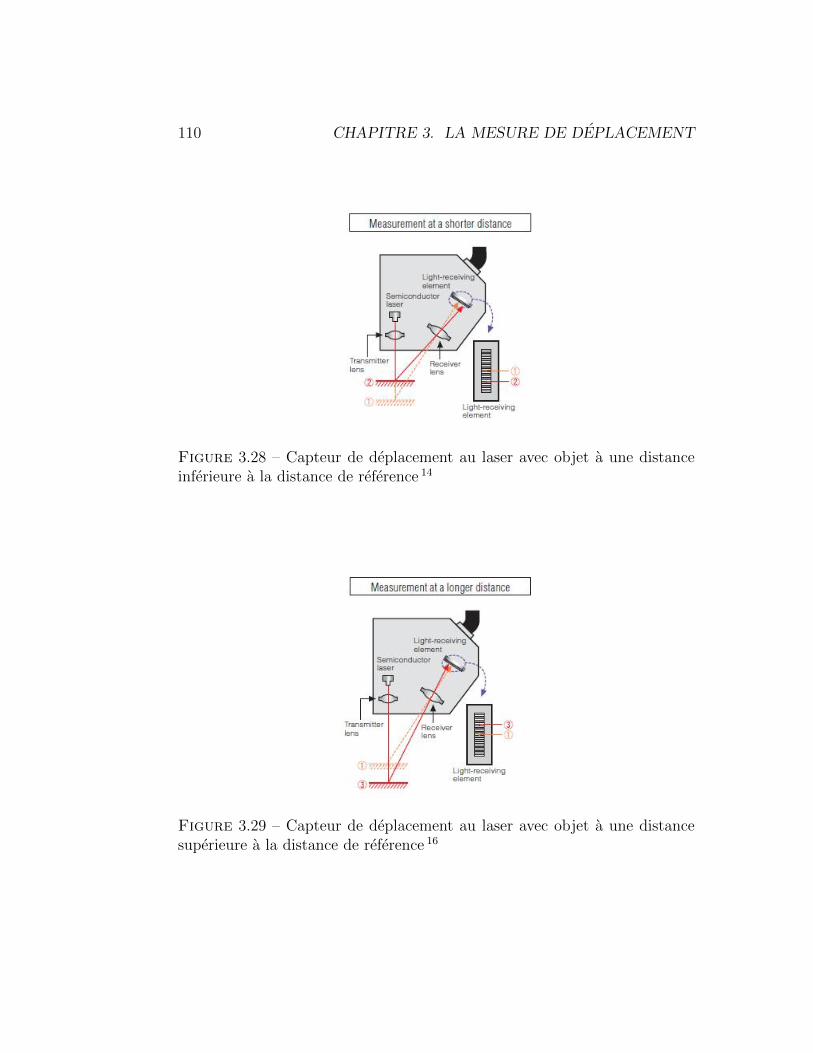
110 CHAPITRE 3. LA MESURE DE DEPLACEMENT
Figure 3.28 – Capteur de deplacement au laser avec objet a une distanceinferieure a la distance de reference 14
Figure 3.29 – Capteur de deplacement au laser avec objet a une distancesuperieure a la distance de reference 16
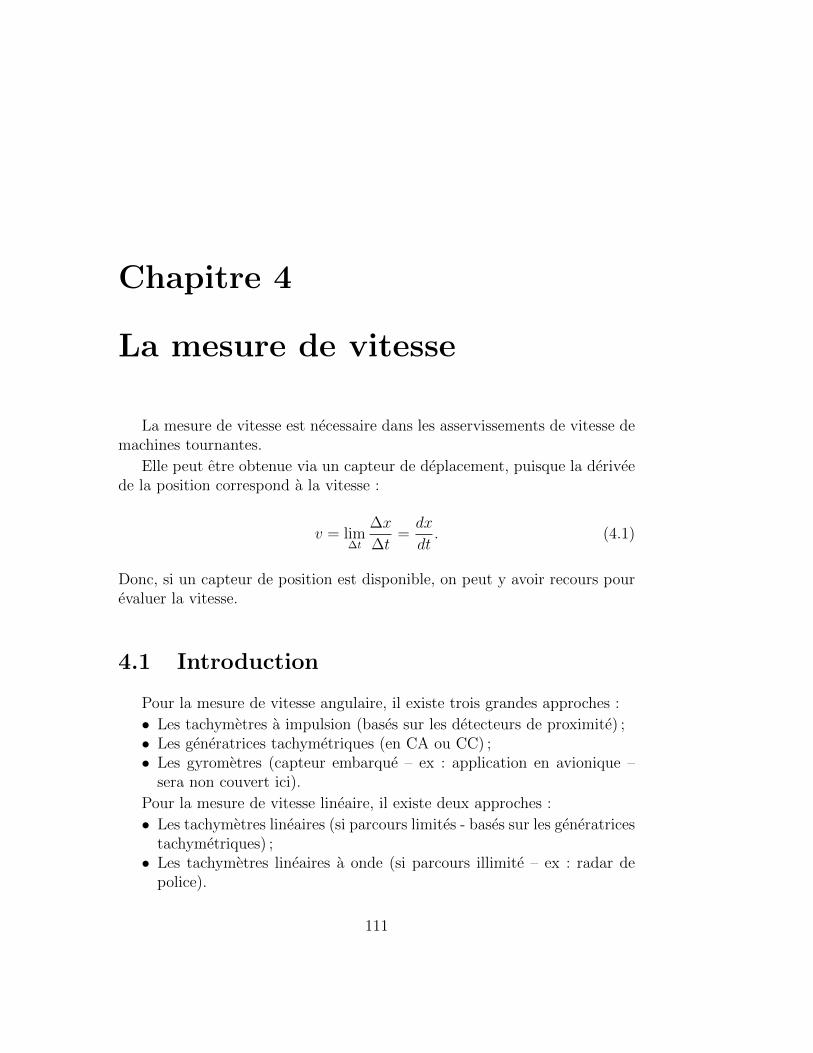
Chapitre 4
La mesure de vitesse
La mesure de vitesse est necessaire dans les asservissements de vitesse demachines tournantes.
Elle peut etre obtenue via un capteur de deplacement, puisque la deriveede la position correspond a la vitesse :
v = lim∆t
∆x
∆t=dx
dt. (4.1)
Donc, si un capteur de position est disponible, on peut y avoir recours pourevaluer la vitesse.
4.1 Introduction
Pour la mesure de vitesse angulaire, il existe trois grandes approches :
• Les tachymetres a impulsion (bases sur les detecteurs de proximite) ;• Les generatrices tachymetriques (en CA ou CC) ;• Les gyrometres (capteur embarque – ex : application en avionique –
sera non couvert ici).
Pour la mesure de vitesse lineaire, il existe deux approches :
• Les tachymetres lineaires (si parcours limites - bases sur les generatricestachymetriques) ;• Les tachymetres lineaires a onde (si parcours illimite – ex : radar de
police).
111
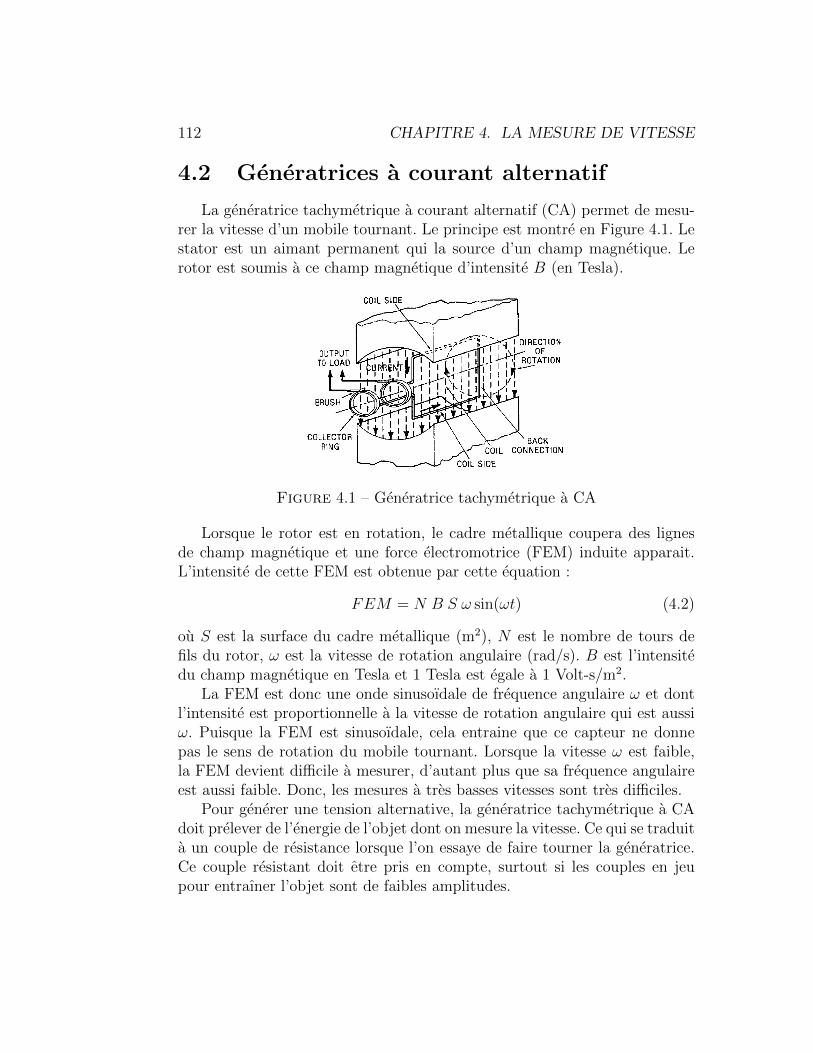
112 CHAPITRE 4. LA MESURE DE VITESSE
4.2 Generatrices a courant alternatif
La generatrice tachymetrique a courant alternatif (CA) permet de mesu-rer la vitesse d’un mobile tournant. Le principe est montre en Figure 4.1. Lestator est un aimant permanent qui la source d’un champ magnetique. Lerotor est soumis a ce champ magnetique d’intensite B (en Tesla).
Figure 4.1 – Generatrice tachymetrique a CA
Lorsque le rotor est en rotation, le cadre metallique coupera des lignesde champ magnetique et une force electromotrice (FEM) induite apparait.L’intensite de cette FEM est obtenue par cette equation :
FEM = N B S ω sin(ωt) (4.2)
ou S est la surface du cadre metallique (m2), N est le nombre de tours defils du rotor, ω est la vitesse de rotation angulaire (rad/s). B est l’intensitedu champ magnetique en Tesla et 1 Tesla est egale a 1 Volt-s/m2.
La FEM est donc une onde sinusoıdale de frequence angulaire ω et dontl’intensite est proportionnelle a la vitesse de rotation angulaire qui est aussiω. Puisque la FEM est sinusoıdale, cela entraine que ce capteur ne donnepas le sens de rotation du mobile tournant. Lorsque la vitesse ω est faible,la FEM devient difficile a mesurer, d’autant plus que sa frequence angulaireest aussi faible. Donc, les mesures a tres basses vitesses sont tres difficiles.
Pour generer une tension alternative, la generatrice tachymetrique a CAdoit prelever de l’energie de l’objet dont on mesure la vitesse. Ce qui se traduita un couple de resistance lorsque l’on essaye de faire tourner la generatrice.Ce couple resistant doit etre pris en compte, surtout si les couples en jeupour entraıner l’objet sont de faibles amplitudes.
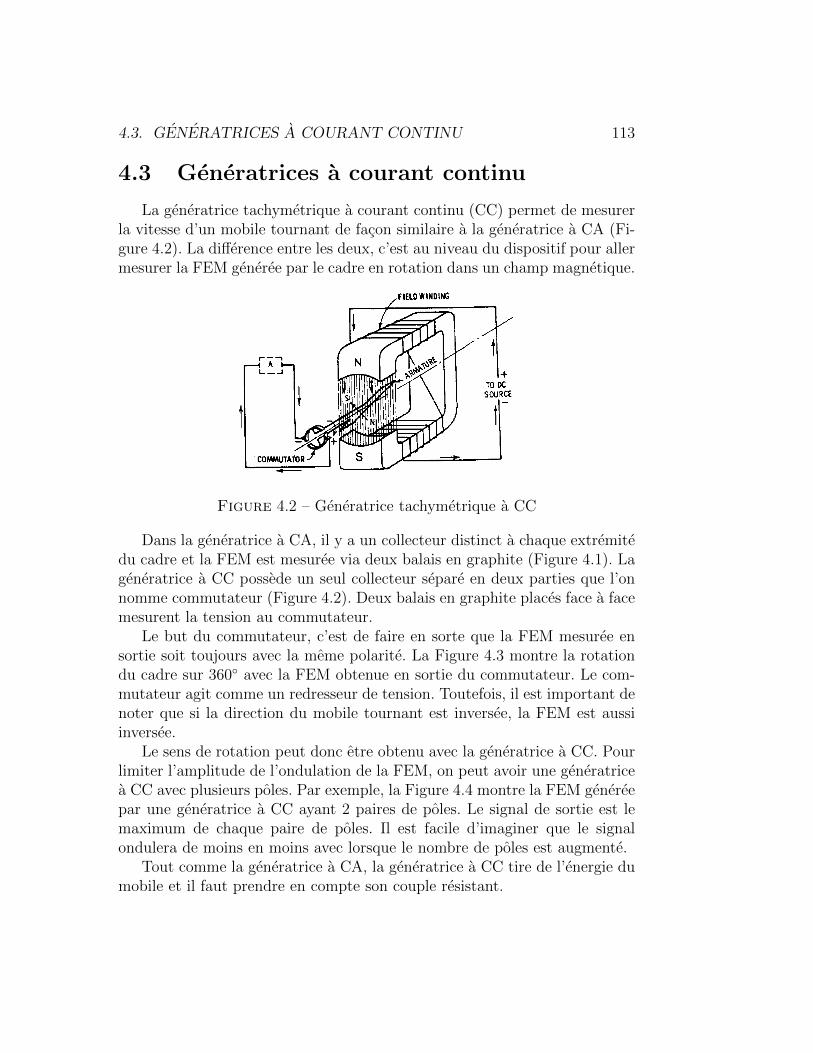
4.3. GENERATRICES A COURANT CONTINU 113
4.3 Generatrices a courant continu
La generatrice tachymetrique a courant continu (CC) permet de mesurerla vitesse d’un mobile tournant de facon similaire a la generatrice a CA (Fi-gure 4.2). La difference entre les deux, c’est au niveau du dispositif pour allermesurer la FEM generee par le cadre en rotation dans un champ magnetique.
Figure 4.2 – Generatrice tachymetrique a CC
Dans la generatrice a CA, il y a un collecteur distinct a chaque extremitedu cadre et la FEM est mesuree via deux balais en graphite (Figure 4.1). Lageneratrice a CC possede un seul collecteur separe en deux parties que l’onnomme commutateur (Figure 4.2). Deux balais en graphite places face a facemesurent la tension au commutateur.
Le but du commutateur, c’est de faire en sorte que la FEM mesuree ensortie soit toujours avec la meme polarite. La Figure 4.3 montre la rotationdu cadre sur 360 avec la FEM obtenue en sortie du commutateur. Le com-mutateur agit comme un redresseur de tension. Toutefois, il est important denoter que si la direction du mobile tournant est inversee, la FEM est aussiinversee.
Le sens de rotation peut donc etre obtenu avec la generatrice a CC. Pourlimiter l’amplitude de l’ondulation de la FEM, on peut avoir une generatricea CC avec plusieurs poles. Par exemple, la Figure 4.4 montre la FEM genereepar une generatrice a CC ayant 2 paires de poles. Le signal de sortie est lemaximum de chaque paire de poles. Il est facile d’imaginer que le signalondulera de moins en moins avec lorsque le nombre de poles est augmente.
Tout comme la generatrice a CA, la generatrice a CC tire de l’energie dumobile et il faut prendre en compte son couple resistant.
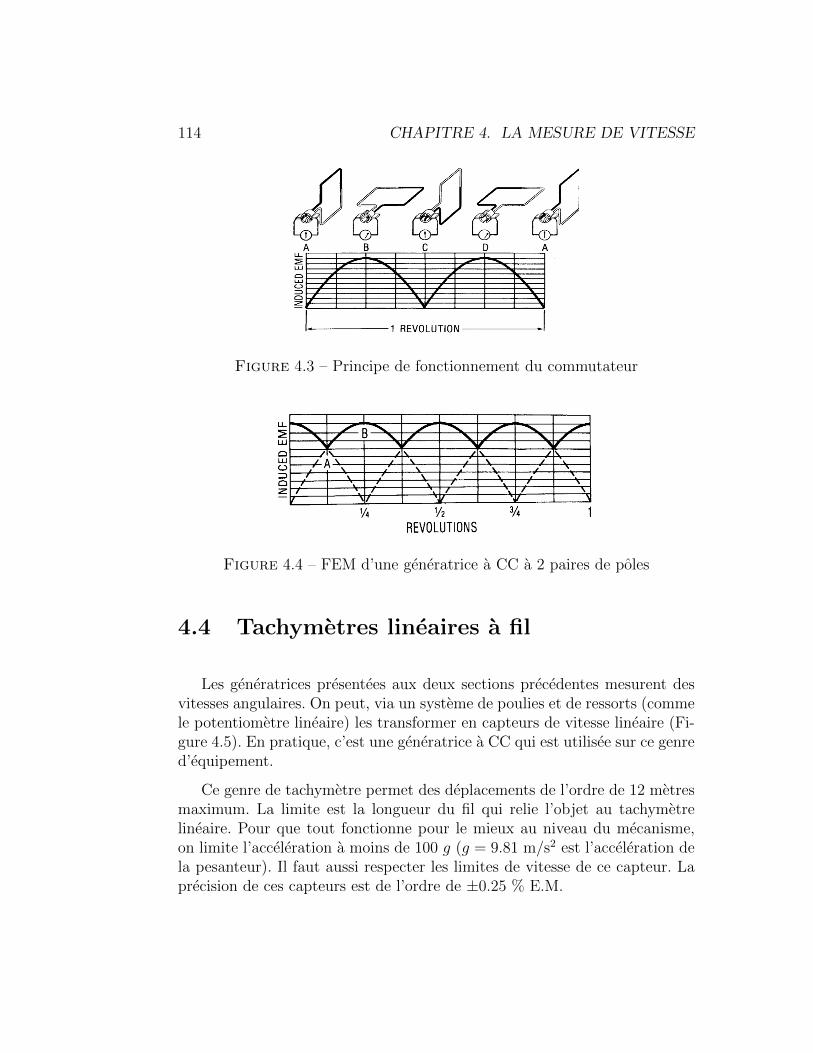
114 CHAPITRE 4. LA MESURE DE VITESSE
Figure 4.3 – Principe de fonctionnement du commutateur
Figure 4.4 – FEM d’une generatrice a CC a 2 paires de poles
4.4 Tachymetres lineaires a fil
Les generatrices presentees aux deux sections precedentes mesurent desvitesses angulaires. On peut, via un systeme de poulies et de ressorts (commele potentiometre lineaire) les transformer en capteurs de vitesse lineaire (Fi-gure 4.5). En pratique, c’est une generatrice a CC qui est utilisee sur ce genred’equipement.
Ce genre de tachymetre permet des deplacements de l’ordre de 12 metresmaximum. La limite est la longueur du fil qui relie l’objet au tachymetrelineaire. Pour que tout fonctionne pour le mieux au niveau du mecanisme,on limite l’acceleration a moins de 100 g (g = 9.81 m/s2 est l’acceleration dela pesanteur). Il faut aussi respecter les limites de vitesse de ce capteur. Laprecision de ces capteurs est de l’ordre de ±0.25 % E.M.
4.5. TACHYMETRES A IMPULSIONS 115
Figure 4.5 – Tachymetre lineaire a fil
4.5 Tachymetres a impulsions
On peut mesurer la vitesse d’un mobile tournant avec un capteur de proxi-mite optique detectant le passage des dents d’un engrenage associe au mobiletournant (Figure 4.6). La vitesse angulaire proportionnelle a la frequence dusignal logique en sortie du detecteur de proximite.
Figure 4.6 – Tachymetre a impulsions avec capteur de proximite inductif
Ce peut aussi etre un disque troue associe a un emetteur/recepteur op-tique qui peut etre utilise (Figure 4.7).
Supposons que nous avons sous la main une roue dentee que l’on utiliseraavec un detecteur de proximite pour mesurer la vitesse. Avec une largeurde dent definie par xd et un intervalle entre deux dents definie par xt, la

116 CHAPITRE 4. LA MESURE DE VITESSE
Figure 4.7 – Tachymetre a impulsions avec capteur de proximite optique
circonference C d’une roue dentee comportant N dents est :
C = N(xd + xt) (4.3)
Un tel systeme en rotation une vitesse de rotation de VRPS (exprimee enrotations par secondes) generera un signal ayant une frequence (en Hertz)de :
f = VRPSN =VRPM
60N (4.4)
avec VRPM la vitesse de rotation exprimee en rotations par minutes. Donc,de la frequence f on calcule la vitesse de rotation en RPM comme suit :
VRPM =60f
N(4.5)
En pratique, les temps de commutation et la frequence de commutationmaximale du detecteur de proximite limitera la vitesse de rotation maximalemesurable.
Il faut s’assurer que la frequence f calculee en (4.4) soit toujours inferieurea la frequence maximale du detecteur de proximite.
A la vitesse de rotation VRPS, la vitesse tangentielle de la roue dentee seraVtan = C VRPS. La duree de passage d’une dent est :
td =xdVtan
(4.6)
et celle de l’intervalle entre deux dents successives est :
tt =xtVtan
(4.7)
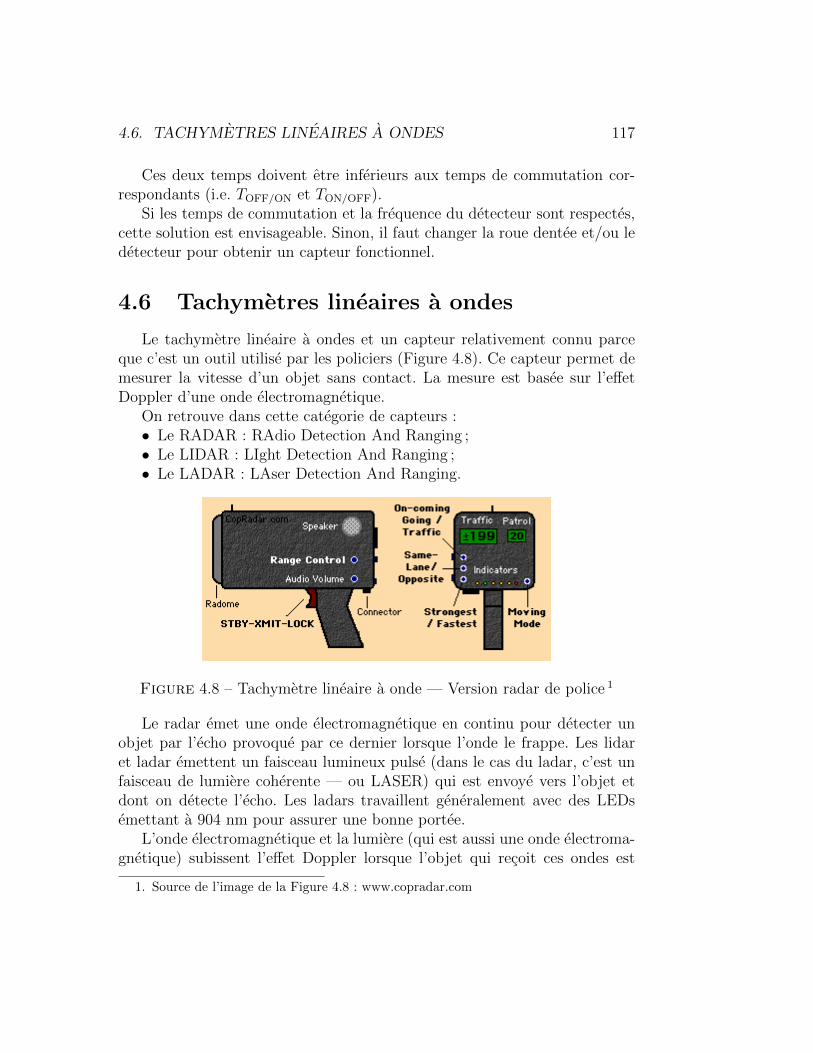
4.6. TACHYMETRES LINEAIRES A ONDES 117
Ces deux temps doivent etre inferieurs aux temps de commutation cor-respondants (i.e. TOFF/ON et TON/OFF).
Si les temps de commutation et la frequence du detecteur sont respectes,cette solution est envisageable. Sinon, il faut changer la roue dentee et/ou ledetecteur pour obtenir un capteur fonctionnel.
4.6 Tachymetres lineaires a ondes
Le tachymetre lineaire a ondes et un capteur relativement connu parceque c’est un outil utilise par les policiers (Figure 4.8). Ce capteur permet demesurer la vitesse d’un objet sans contact. La mesure est basee sur l’effetDoppler d’une onde electromagnetique.
On retrouve dans cette categorie de capteurs :• Le RADAR : RAdio Detection And Ranging ;• Le LIDAR : LIght Detection And Ranging ;• Le LADAR : LAser Detection And Ranging.
Figure 4.8 – Tachymetre lineaire a onde — Version radar de police 1
Le radar emet une onde electromagnetique en continu pour detecter unobjet par l’echo provoque par ce dernier lorsque l’onde le frappe. Les lidaret ladar emettent un faisceau lumineux pulse (dans le cas du ladar, c’est unfaisceau de lumiere coherente — ou LASER) qui est envoye vers l’objet etdont on detecte l’echo. Les ladars travaillent generalement avec des LEDsemettant a 904 nm pour assurer une bonne portee.
L’onde electromagnetique et la lumiere (qui est aussi une onde electroma-gnetique) subissent l’effet Doppler lorsque l’objet qui recoit ces ondes est
1. Source de l’image de la Figure 4.8 : www.copradar.com

118 CHAPITRE 4. LA MESURE DE VITESSE
en mouvement. Cela fait en sorte que l’onde de l’echo aura une frequencelegerement differente de l’onde de l’emetteur.
Un signal est emis, par une source fixe, a une certaine frequence f0 vafrapper un objet se deplacant a une vitesse v et revient vers le radar (lidarou ladar) avec une frequence differente f1. Cette frequence est :
f1 = f0 +2vf0
c(4.8)
avec c = 300000 km/s la vitesse de la lumiere. Par convention, la vitesse vest positive si l’objet d’approche du radar et negative si l’objet s’eloigne.
Par exemple, en supposant que la frequence f0 est de 50 MHz et que lavitesse a mesurer est de 120 kilometres a l’heure, le signal recu aura d’unefrequence decalee de +5.56 Hz si l’objet s’approche et de -5.56 Hz si l’objets’eloigne.
Si, le vecteur de vitesse de l’objet qui se deplace ne pointe pas directementvers le radar, il se produit une erreur de mesure qui depend de l’angle α entrele vecteur de vitesse et le vecteur reliant l’objet et le radar. La vitesse mesureepar le radar sera :
vmes = v cos(α) (4.9)
et le v de l’equation calculant f1 est remplace par vmes.L’erreur de mesure augmente avec l’angle α et lorsque α = 90, l’erreur
devient tres grande puisque le radar mesurera une vitesse nulle, meme sil’objet se deplace a une vitesse v, car le cosinus de 90 est 0.
Les radars ne peuvent pas etre utilises pour mesurer une vitesse inferieurea 15 km/h (radar de police), bien que certains manufacturiers mentionnentdescendre a 5 km/h et d’autres a 2 km/h.
Un ladar a une portee de 600 metres lorsque l’environnement est de tresbonne qualite (rappelez-vous la Table des Marges de fonctionnement desdetecteurs photoelectriques — MF = 1.5).
Chapitre 5
La mesure d’acceleration
L’acceleration est une mesure utile en industrie pour verifier l’amplitudeet la frequence de vibrations sur des machines. Entre autres, un accelerometrepeut etre utilise pour faire de la maintenance preventive de roulement a bille.En mesurant les vibrations il detectera une deterioration des roulements,avant que ceux-ci aient un bris majeur.
L’acceleration peut etre deduite des mesures d’un capteur de vitesse.L’acceleration est la derivee de la vitesse :
a = lim∆t
∆v
∆t=dv
dt. (5.1)
Toutefois, les capteurs de vitesse ayant souvent des signaux bruites, celarend cette approche relativement risquee. Et, pas question de faite une doublederivee de la position, la mesure resultante serait inexploitable.
5.1 Introduction
La mesure d’acceleration utilise trois technologies de capteurs differentes :• Accelerometres piezoelectriques ;• Accelerometres piezoresistifs ;• Accelerometres asservis.Ces trois technologies peuvent couvrir les trois principaux champs d’ap-
plication pour ces capteurs :• Mesure d’acceleration : En regime continu, amplitudes d’acceleration faibles, de frequences
inferieures a 100 Hertz ;
119
120 CHAPITRE 5. LA MESURE D’ACCELERATION
Figure 5.1 – Accelerometres piezoelectriques
• Mesure de vibration : En regime pseudo-continu, amplitudes d’acceleration moyennes, fre-
quence jusqu’a 10 kiloHertz ;• Mesure de choc : Phenomenes transitoires, amplitudes d’acceleration elevees, frequen-
ce jusqu’a 100 kiloHertz.
Le corps d’epreuve est le meme dans tous les capteurs d’accelerationet on le nomme une masse sismique. Lorsque le capteur est soumis a uneacceleration a (en metres par seconde), l’inertie de la masse sismique m (engrammes) resiste a son mouvement avec une force F = ma (en Newton). Ilfaut donc mesurer l’amplitude de cette force F pour deduire l’acceleration.Cela sera fait par l’element de transduction.
Certains accelerometres permettent une mesure triaxiale, i.e., une mesured’acceleration selon les trois axes, x, y et z. On peut alors connaitre lesaccelerations mesurees ax, ay et az par l’intermediaire de trois sorties.
Generalement, l’unite utilise dans la definition de l’etendue de mesured’un accelerometre est le ”g”. Le g correspond a l’acceleration de la pesanteuret sa valeur conventionnelle est etablie a 9.80665 metres par seconde au carre.
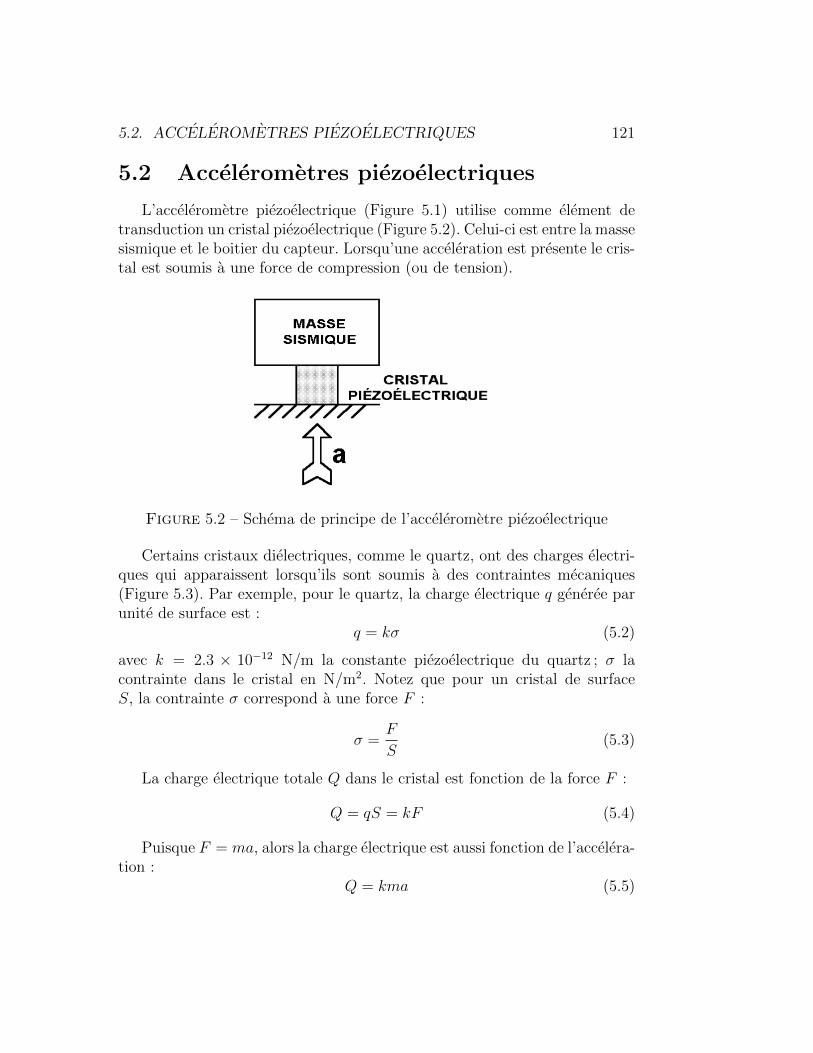
5.2. ACCELEROMETRES PIEZOELECTRIQUES 121
5.2 Accelerometres piezoelectriques
L’accelerometre piezoelectrique (Figure 5.1) utilise comme element detransduction un cristal piezoelectrique (Figure 5.2). Celui-ci est entre la massesismique et le boitier du capteur. Lorsqu’une acceleration est presente le cris-tal est soumis a une force de compression (ou de tension).
Figure 5.2 – Schema de principe de l’accelerometre piezoelectrique
Certains cristaux dielectriques, comme le quartz, ont des charges electri-ques qui apparaissent lorsqu’ils sont soumis a des contraintes mecaniques(Figure 5.3). Par exemple, pour le quartz, la charge electrique q generee parunite de surface est :
q = kσ (5.2)
avec k = 2.3 × 10−12 N/m la constante piezoelectrique du quartz ; σ lacontrainte dans le cristal en N/m2. Notez que pour un cristal de surfaceS, la contrainte σ correspond a une force F :
σ =F
S(5.3)
La charge electrique totale Q dans le cristal est fonction de la force F :
Q = qS = kF (5.4)
Puisque F = ma, alors la charge electrique est aussi fonction de l’accelera-tion :
Q = kma (5.5)
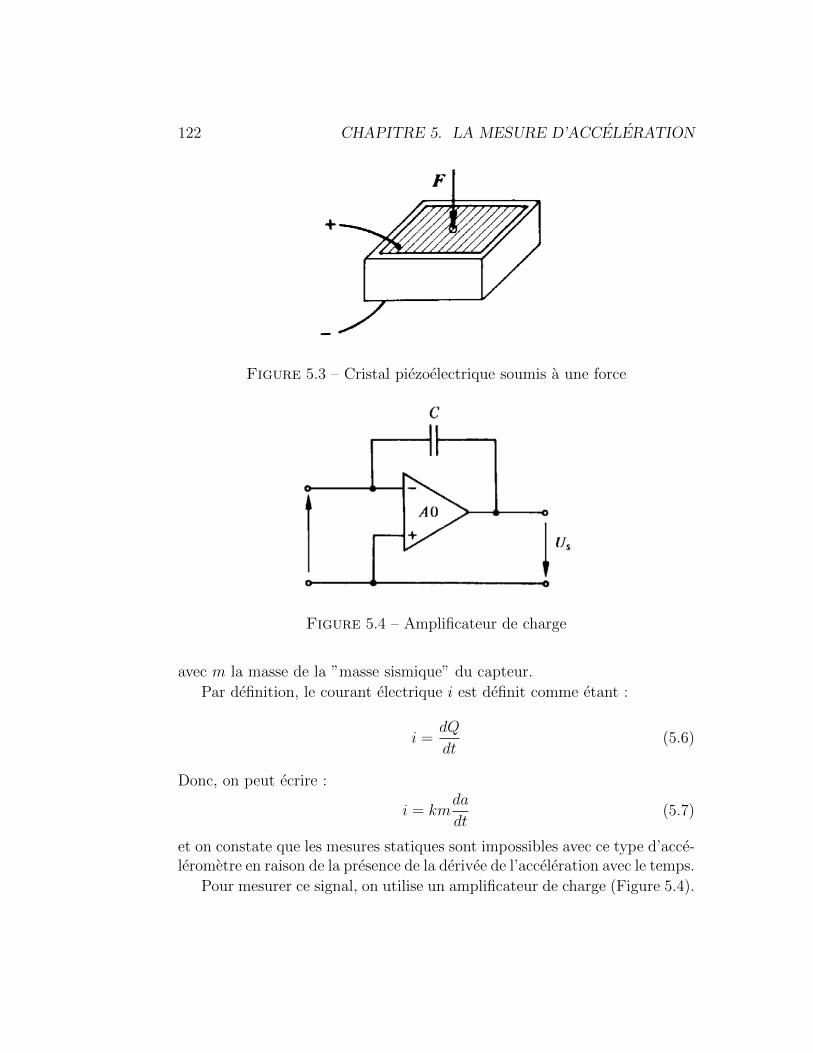
122 CHAPITRE 5. LA MESURE D’ACCELERATION
Figure 5.3 – Cristal piezoelectrique soumis a une force
Figure 5.4 – Amplificateur de charge
avec m la masse de la ”masse sismique” du capteur.
Par definition, le courant electrique i est definit comme etant :
i =dQ
dt(5.6)
Donc, on peut ecrire :
i = kmda
dt(5.7)
et on constate que les mesures statiques sont impossibles avec ce type d’acce-lerometre en raison de la presence de la derivee de l’acceleration avec le temps.
Pour mesurer ce signal, on utilise un amplificateur de charge (Figure 5.4).
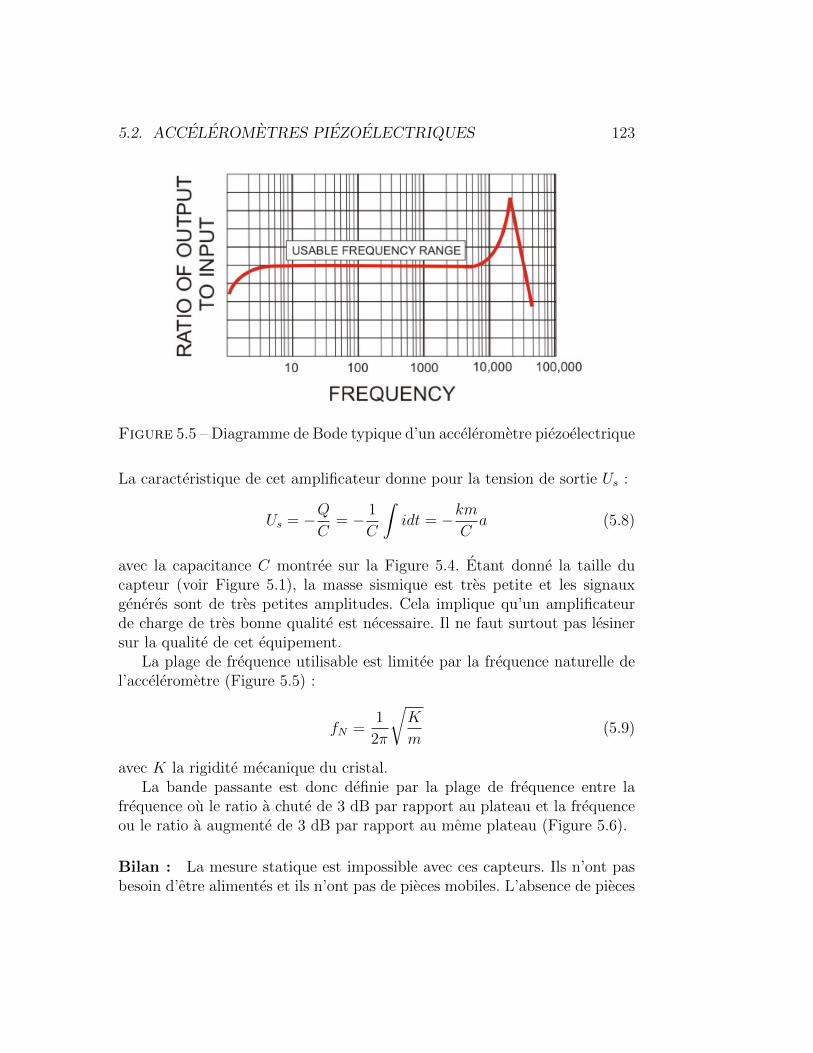
5.2. ACCELEROMETRES PIEZOELECTRIQUES 123
Figure 5.5 – Diagramme de Bode typique d’un accelerometre piezoelectrique
La caracteristique de cet amplificateur donne pour la tension de sortie Us :
Us = −QC
= − 1
C
∫idt = −km
Ca (5.8)
avec la capacitance C montree sur la Figure 5.4. Etant donne la taille ducapteur (voir Figure 5.1), la masse sismique est tres petite et les signauxgeneres sont de tres petites amplitudes. Cela implique qu’un amplificateurde charge de tres bonne qualite est necessaire. Il ne faut surtout pas lesinersur la qualite de cet equipement.
La plage de frequence utilisable est limitee par la frequence naturelle del’accelerometre (Figure 5.5) :
fN =1
2π
√K
m(5.9)
avec K la rigidite mecanique du cristal.La bande passante est donc definie par la plage de frequence entre la
frequence ou le ratio a chute de 3 dB par rapport au plateau et la frequenceou le ratio a augmente de 3 dB par rapport au meme plateau (Figure 5.6).
Bilan : La mesure statique est impossible avec ces capteurs. Ils n’ont pasbesoin d’etre alimentes et ils n’ont pas de pieces mobiles. L’absence de pieces
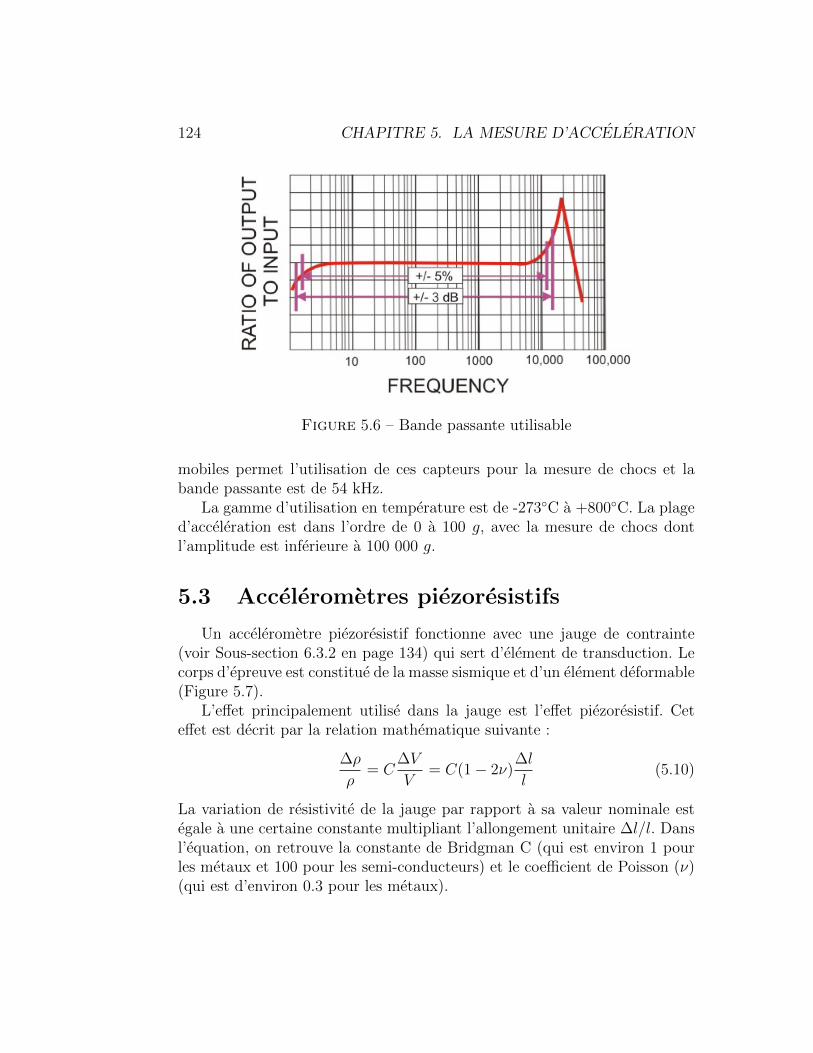
124 CHAPITRE 5. LA MESURE D’ACCELERATION
Figure 5.6 – Bande passante utilisable
mobiles permet l’utilisation de ces capteurs pour la mesure de chocs et labande passante est de 54 kHz.
La gamme d’utilisation en temperature est de -273C a +800C. La plaged’acceleration est dans l’ordre de 0 a 100 g, avec la mesure de chocs dontl’amplitude est inferieure a 100 000 g.
5.3 Accelerometres piezoresistifs
Un accelerometre piezoresistif fonctionne avec une jauge de contrainte(voir Sous-section 6.3.2 en page 134) qui sert d’element de transduction. Lecorps d’epreuve est constitue de la masse sismique et d’un element deformable(Figure 5.7).
L’effet principalement utilise dans la jauge est l’effet piezoresistif. Ceteffet est decrit par la relation mathematique suivante :
∆ρ
ρ= C
∆V
V= C(1− 2ν)
∆l
l(5.10)
La variation de resistivite de la jauge par rapport a sa valeur nominale estegale a une certaine constante multipliant l’allongement unitaire ∆l/l. Dansl’equation, on retrouve la constante de Bridgman C (qui est environ 1 pourles metaux et 100 pour les semi-conducteurs) et le coefficient de Poisson (ν)(qui est d’environ 0.3 pour les metaux).
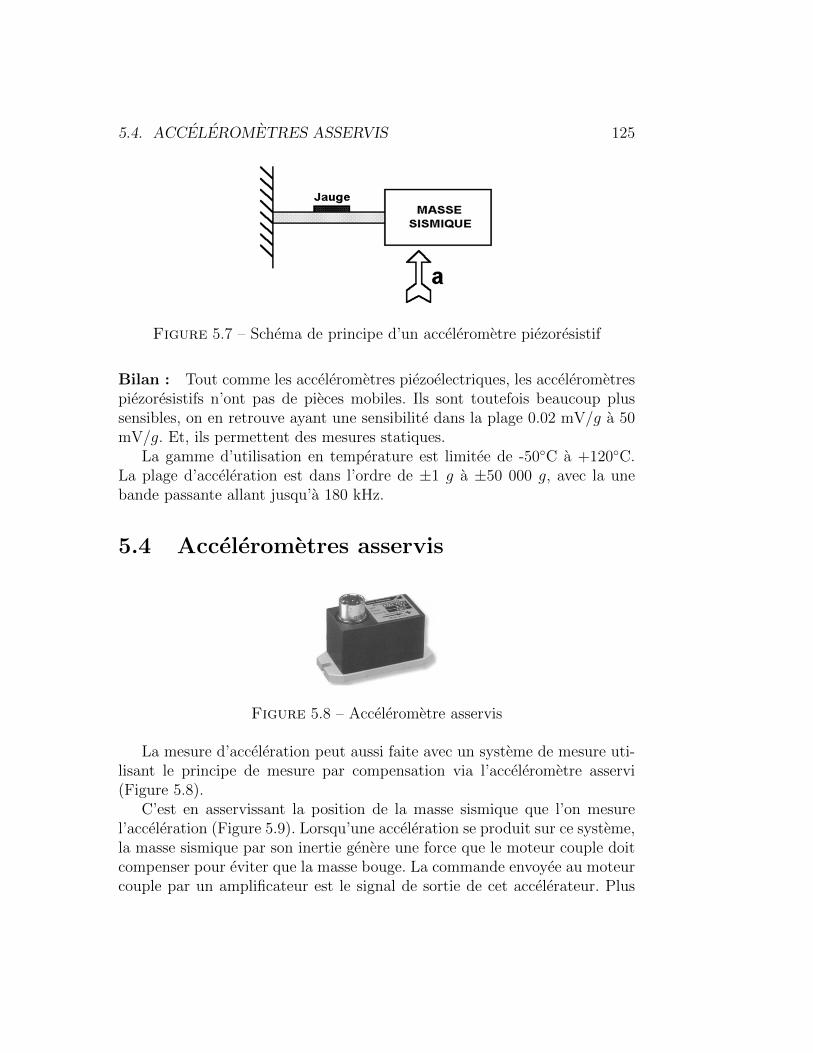
5.4. ACCELEROMETRES ASSERVIS 125
Figure 5.7 – Schema de principe d’un accelerometre piezoresistif
Bilan : Tout comme les accelerometres piezoelectriques, les accelerometrespiezoresistifs n’ont pas de pieces mobiles. Ils sont toutefois beaucoup plussensibles, on en retrouve ayant une sensibilite dans la plage 0.02 mV/g a 50mV/g. Et, ils permettent des mesures statiques.
La gamme d’utilisation en temperature est limitee de -50C a +120C.La plage d’acceleration est dans l’ordre de ±1 g a ±50 000 g, avec la unebande passante allant jusqu’a 180 kHz.
5.4 Accelerometres asservis
Figure 5.8 – Accelerometre asservis
La mesure d’acceleration peut aussi faite avec un systeme de mesure uti-lisant le principe de mesure par compensation via l’accelerometre asservi(Figure 5.8).
C’est en asservissant la position de la masse sismique que l’on mesurel’acceleration (Figure 5.9). Lorsqu’une acceleration se produit sur ce systeme,la masse sismique par son inertie genere une force que le moteur couple doitcompenser pour eviter que la masse bouge. La commande envoyee au moteurcouple par un amplificateur est le signal de sortie de cet accelerateur. Plus
126 CHAPITRE 5. LA MESURE D’ACCELERATION
Figure 5.9 – Schema bloc de l’accelerometre asservi
l’acceleration est forte, plus le couple applique par le moteur doit etre grandpour compenser. Donc, plus le signal de sortie de l’amplificateur est grand.Il est proportionnel a l’amplitude de l’acceleration.
Bilan : Les mesures statiques sont possibles et ces types de capteurs sontextremement sensibles (250 mV/g). Ces capteurs sont tres encombrants, carvolumineux.
La gamme d’utilisation en temperature est limitee de -50C a +100C.La plage d’acceleration est dans l’ordre de ±1 g a ±50 g, avec une bandepassante allant jusqu’a 300 Hertz.

Chapitre 6
La mesure de force
6.1 Introduction
La mesure de force est obtenue en mesurant l’un des effets de cette gran-deur physique sur un corps d’epreuve.
Ces effets sont :
• La deformation ;• Le changement de la permeabilite magnetique.
L’effet le plus utilise etant la deformation du corps d’epreuve par uneforce, la majorite de ce chapitre se consacrera donc en une enumeration desdiverses facons de mesurer les deformations pour ensuite deduire la force.
Les divers corps d’epreuve qui disponibles :
• Les ressorts ;• Les poutres encastrees ;• Les tiges ou tubes en traction ;• Les etriers en flexion ;• Les poutres en magnetostriction ;• Etc...
Les capteurs de force reposent principalement sur la deformation de di-vers corps d’epreuve. Differentes technologies existent pour mesurer cettedeformation :
• La transduction resistive ; Potentiometre (presente au Chapitre 3, section 3.2 — page 90) ; Jauge extensiometrique (ou jauge de contraintes) ;• La transduction piezoelectrique ;
127
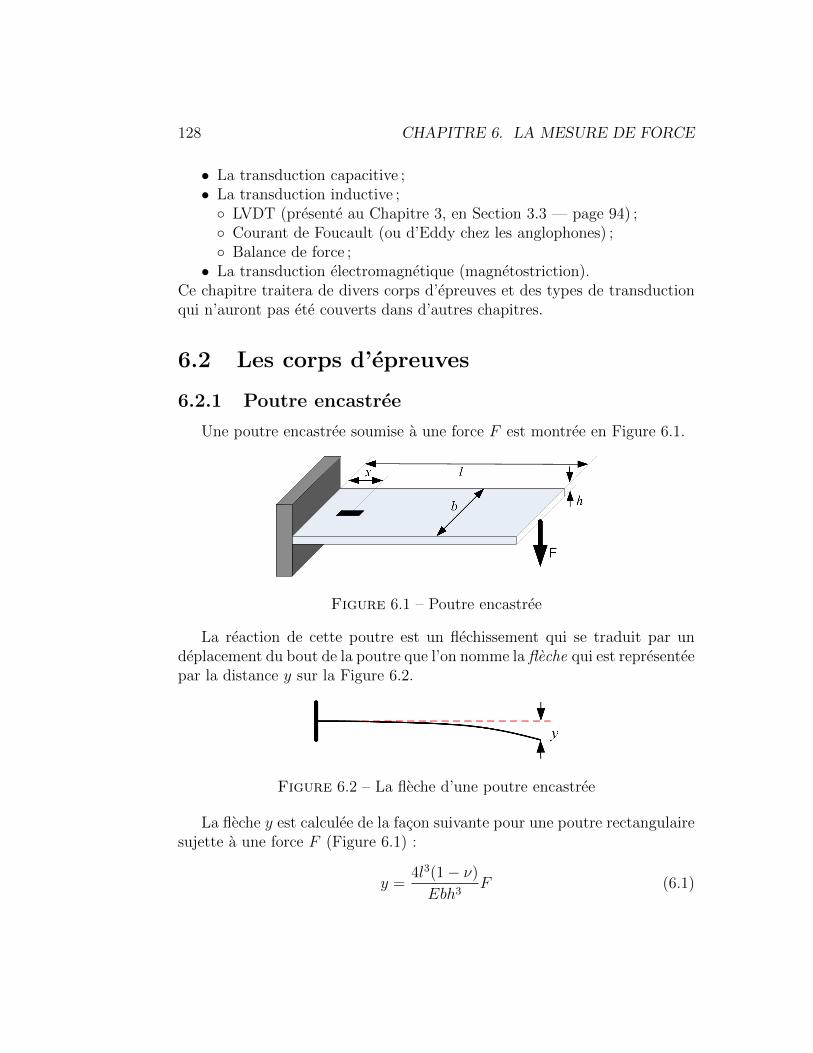
128 CHAPITRE 6. LA MESURE DE FORCE
• La transduction capacitive ;• La transduction inductive ; LVDT (presente au Chapitre 3, en Section 3.3 — page 94) ; Courant de Foucault (ou d’Eddy chez les anglophones) ; Balance de force ;• La transduction electromagnetique (magnetostriction).
Ce chapitre traitera de divers corps d’epreuves et des types de transductionqui n’auront pas ete couverts dans d’autres chapitres.
6.2 Les corps d’epreuves
6.2.1 Poutre encastree
Une poutre encastree soumise a une force F est montree en Figure 6.1.
Figure 6.1 – Poutre encastree
La reaction de cette poutre est un flechissement qui se traduit par undeplacement du bout de la poutre que l’on nomme la fleche qui est representeepar la distance y sur la Figure 6.2.
Figure 6.2 – La fleche d’une poutre encastree
La fleche y est calculee de la facon suivante pour une poutre rectangulairesujette a une force F (Figure 6.1) :
y =4l3(1− ν)
Ebh3F (6.1)

6.2. LES CORPS D’EPREUVES 129
avec b la largeur de la poutre, h l’epaisseur de la poutre, l la longueur effective,E le module de Young et ν le coefficient de Poisson. Dans ce calcul, on assumeque la largeur de la poutre est tres superieure a son epaisseur, i.e., que b >> h.
Toutefois, la fleche est une deformation de tres faible amplitude, ce quipeut rendre difficile sa mesure.
Une autre deformation qui se produit dans une poutre encastree en flexion,c’est l’allongement des fibres superieures et le retrecissement des fibres infe-rieures (avec la force orientee vers le bas, comme en Figure 6.1).
Cette deformation, bien que tres faible, est plus facilement mesurableque la fleche. La mesure de cette deformation est faite en collant une jaugeextensiometrique sur la surface de la poutre. Si la jauge est bien collee, ellesubira les memes deformations que la poutre.
La deformation unitaire de la fibre superieure avec une jauge orientee dansle sens de la longueur (l) et localisee a une distance x du point d’encastrementest :
ε1 =6(l − x)
Ebh2F (6.2)
La deformation unitaire represente la deformation par unite de longueurde la poutre. La deformation reelle sera simplement le produit de la deforma-tion unitaire par la longueur de la poutre, soit ε1 × l.
Si la jauge est oriente dans le sens de la largeur (b) de la poutre, l’allon-gement unitaire ε2 est :
ε2 = −6ν(l − x)
Ebh2F (6.3)
Le signe negatif revele que la deformation est un retrecissement plutotqu’un allongement. Cela vient du fait que la section de la poutre en chargese deforme comme le montre la Figure 6.3.
Si les jauges etaient installees sous la poutre rectangulaire plutot que surle dessus, les deformations unitaires ε1 et ε2 seraient de meme amplitude,mais de signes inverses, car la fibre inferieure retrecit et la largeur du bas dela poutre augmente.
6.2.2 Tige rectangulaire en traction
On peut mesurer une force en mesurant la deformation subie par une tigerectangulaire en traction (Figure 6.4).
Cette tige rectangulaire aura tendance a s’allonger lorsque sous traction.L’allongement unitaire dans le sens de la longueur de la tige (ou le sens
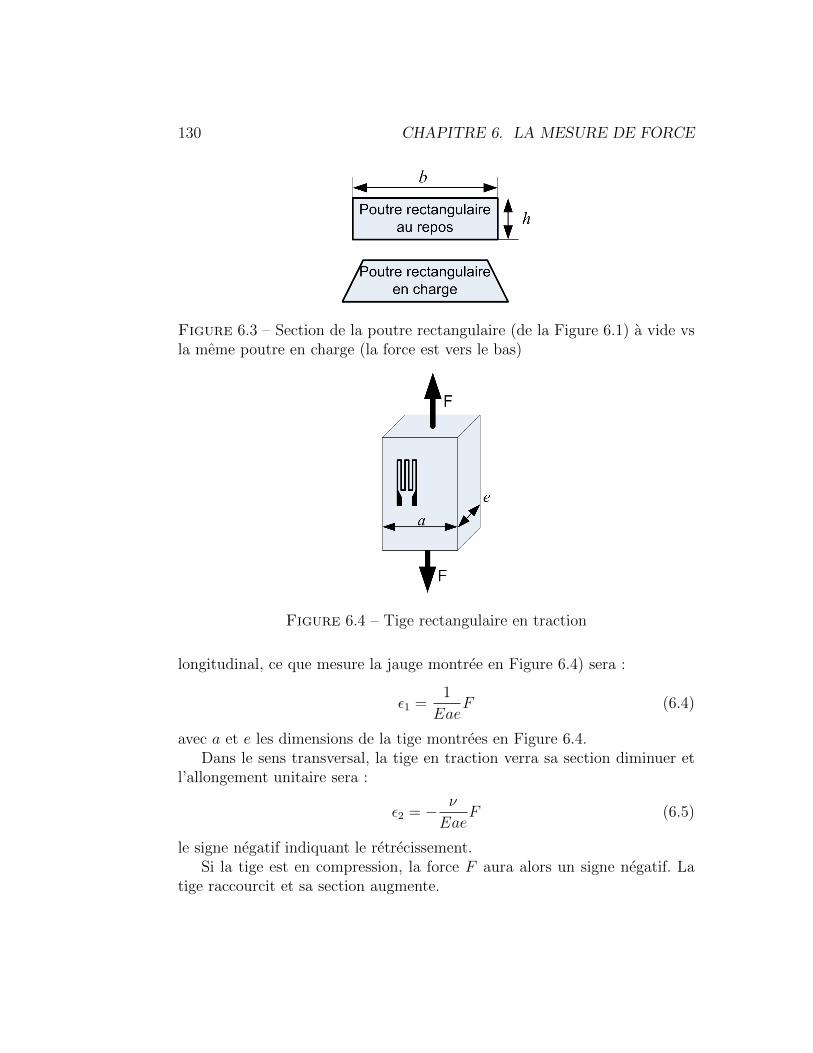
130 CHAPITRE 6. LA MESURE DE FORCE
Figure 6.3 – Section de la poutre rectangulaire (de la Figure 6.1) a vide vsla meme poutre en charge (la force est vers le bas)
Figure 6.4 – Tige rectangulaire en traction
longitudinal, ce que mesure la jauge montree en Figure 6.4) sera :
ε1 =1
EaeF (6.4)
avec a et e les dimensions de la tige montrees en Figure 6.4.Dans le sens transversal, la tige en traction verra sa section diminuer et
l’allongement unitaire sera :
ε2 = − ν
EaeF (6.5)
le signe negatif indiquant le retrecissement.Si la tige est en compression, la force F aura alors un signe negatif. La
tige raccourcit et sa section augmente.
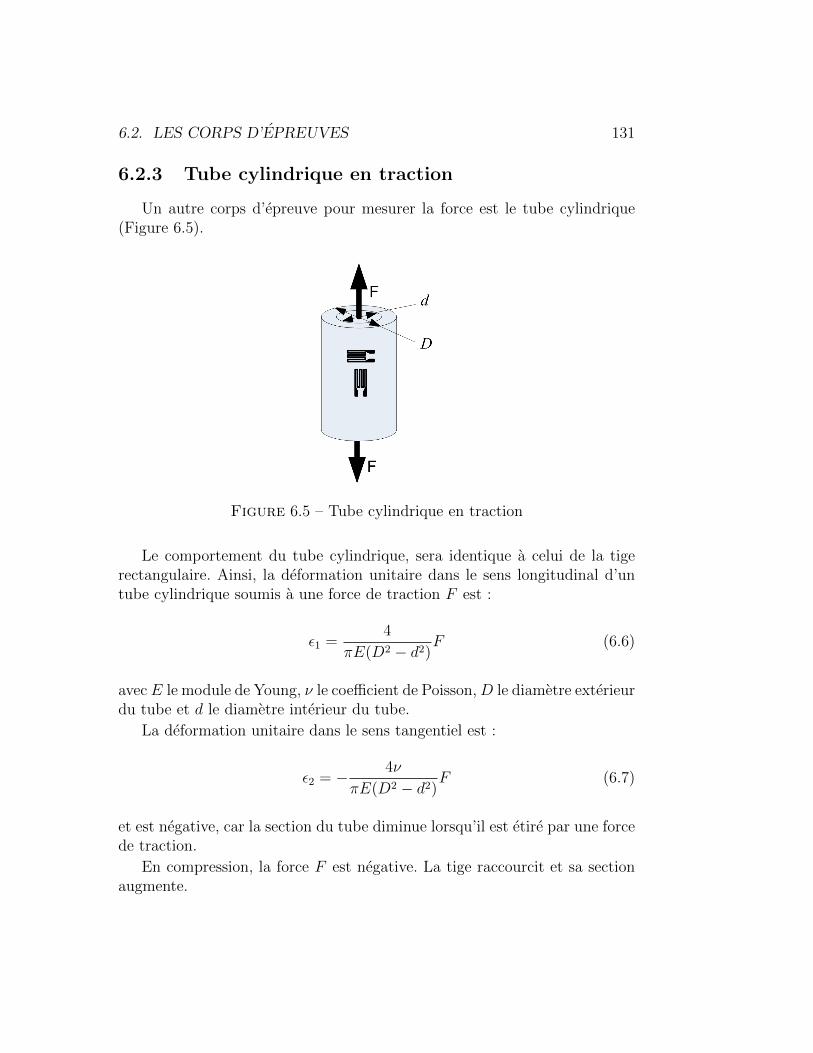
6.2. LES CORPS D’EPREUVES 131
6.2.3 Tube cylindrique en traction
Un autre corps d’epreuve pour mesurer la force est le tube cylindrique(Figure 6.5).
Figure 6.5 – Tube cylindrique en traction
Le comportement du tube cylindrique, sera identique a celui de la tigerectangulaire. Ainsi, la deformation unitaire dans le sens longitudinal d’untube cylindrique soumis a une force de traction F est :
ε1 =4
πE(D2 − d2)F (6.6)
avec E le module de Young, ν le coefficient de Poisson,D le diametre exterieurdu tube et d le diametre interieur du tube.
La deformation unitaire dans le sens tangentiel est :
ε2 = − 4ν
πE(D2 − d2)F (6.7)
et est negative, car la section du tube diminue lorsqu’il est etire par une forcede traction.
En compression, la force F est negative. La tige raccourcit et sa sectionaugmente.

132 CHAPITRE 6. LA MESURE DE FORCE
Figure 6.6 – Etrier en flexion
6.2.4 Etrier en flexion
Un autre corps d’epreuve pour mesurer la force est l’etrier en flexion.L’etrier est une piece en forme de ”C” (Figure 6.6).
La mesure de la deformation peut se faire sur la face exterieure (flechebleue du cote droit) ou la face interieure (fleche rouge du cote gauche).
Lorsque l’on mesure la deformation unitaire sur la face exterieure et dansle sens longitudinal (selon la direction de b) de l’etrier, on utilise la relationsuivante :
ε1 =1
Eae
(6c
e− 1
)F (6.8)
avec a, c et e les dimensions montrees en Figure 6.6. La deformation unitairedans le sens transversal (selon la direction de a) est :
ε2 = − ν
Eae
(6c
e− 1
)F (6.9)
La deformation unitaire sur la face interieure et dans le sens longitudinal
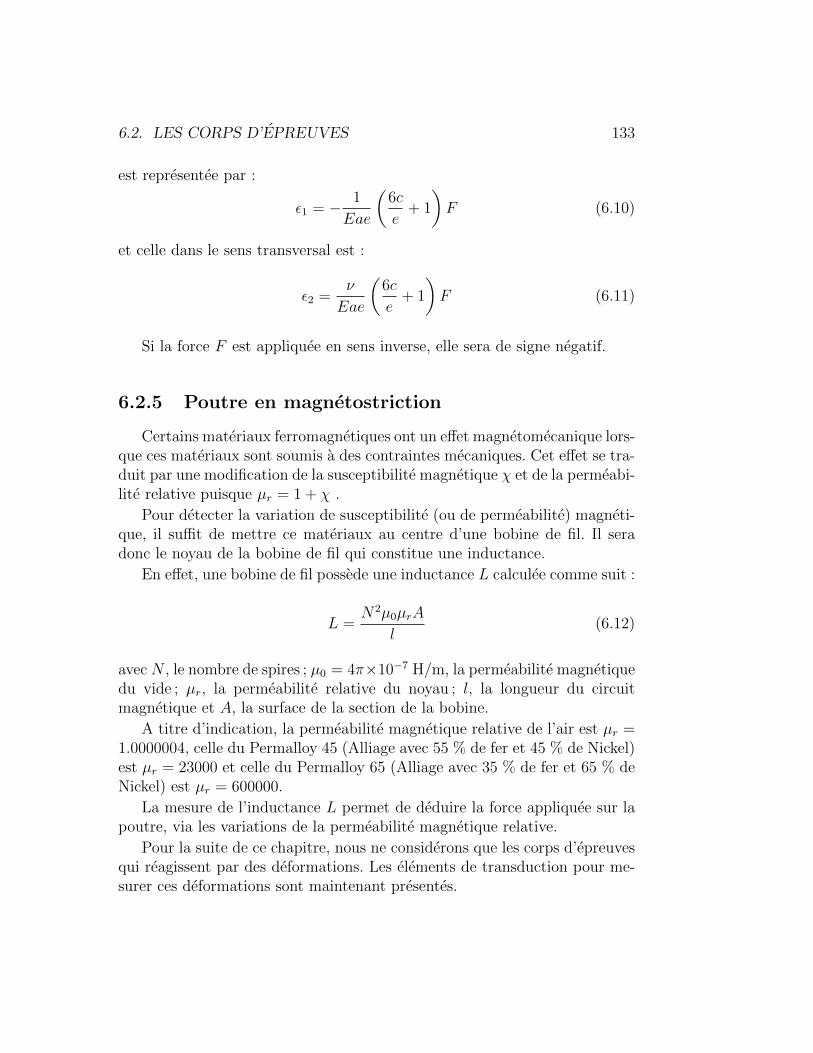
6.2. LES CORPS D’EPREUVES 133
est representee par :
ε1 = − 1
Eae
(6c
e+ 1
)F (6.10)
et celle dans le sens transversal est :
ε2 =ν
Eae
(6c
e+ 1
)F (6.11)
Si la force F est appliquee en sens inverse, elle sera de signe negatif.
6.2.5 Poutre en magnetostriction
Certains materiaux ferromagnetiques ont un effet magnetomecanique lors-que ces materiaux sont soumis a des contraintes mecaniques. Cet effet se tra-duit par une modification de la susceptibilite magnetique χ et de la permeabi-lite relative puisque µr = 1 + χ .
Pour detecter la variation de susceptibilite (ou de permeabilite) magneti-que, il suffit de mettre ce materiaux au centre d’une bobine de fil. Il seradonc le noyau de la bobine de fil qui constitue une inductance.
En effet, une bobine de fil possede une inductance L calculee comme suit :
L =N2µ0µrA
l(6.12)
avec N , le nombre de spires ; µ0 = 4π×10−7 H/m, la permeabilite magnetiquedu vide ; µr, la permeabilite relative du noyau ; l, la longueur du circuitmagnetique et A, la surface de la section de la bobine.
A titre d’indication, la permeabilite magnetique relative de l’air est µr =1.0000004, celle du Permalloy 45 (Alliage avec 55 % de fer et 45 % de Nickel)est µr = 23000 et celle du Permalloy 65 (Alliage avec 35 % de fer et 65 % deNickel) est µr = 600000.
La mesure de l’inductance L permet de deduire la force appliquee sur lapoutre, via les variations de la permeabilite magnetique relative.
Pour la suite de ce chapitre, nous ne considerons que les corps d’epreuvesqui reagissent par des deformations. Les elements de transduction pour me-surer ces deformations sont maintenant presentes.
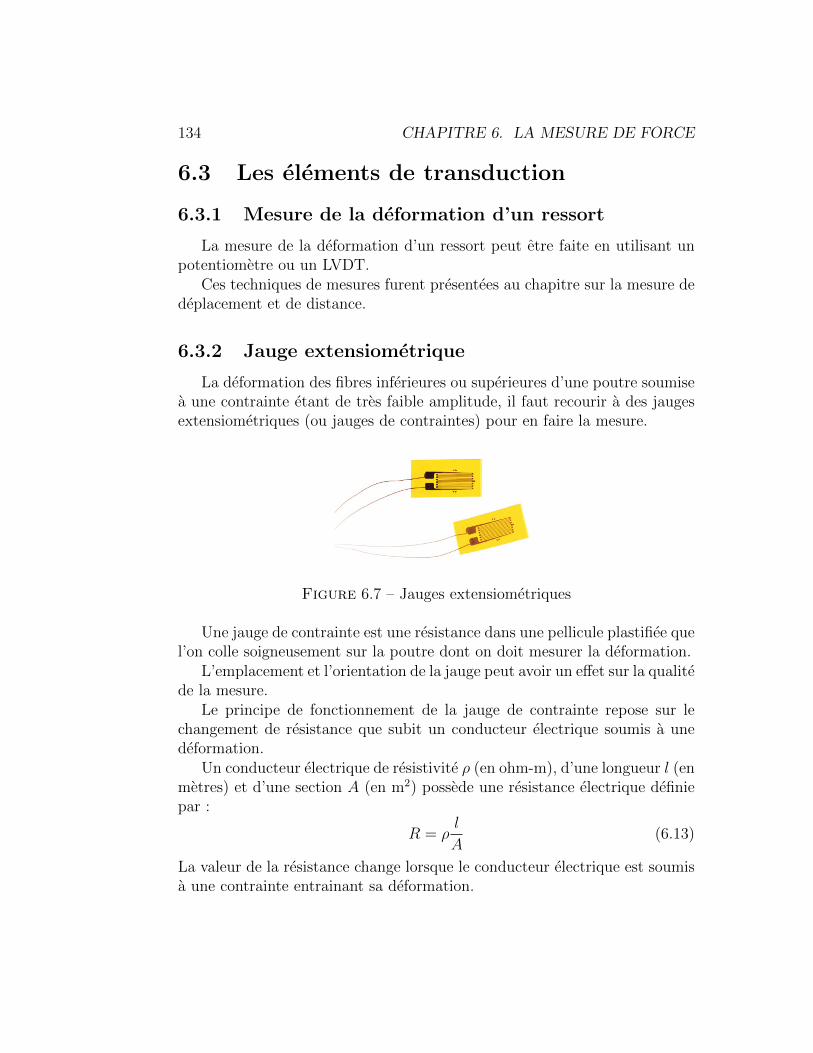
134 CHAPITRE 6. LA MESURE DE FORCE
6.3 Les elements de transduction
6.3.1 Mesure de la deformation d’un ressort
La mesure de la deformation d’un ressort peut etre faite en utilisant unpotentiometre ou un LVDT.
Ces techniques de mesures furent presentees au chapitre sur la mesure dedeplacement et de distance.
6.3.2 Jauge extensiometrique
La deformation des fibres inferieures ou superieures d’une poutre soumisea une contrainte etant de tres faible amplitude, il faut recourir a des jaugesextensiometriques (ou jauges de contraintes) pour en faire la mesure.
Figure 6.7 – Jauges extensiometriques
Une jauge de contrainte est une resistance dans une pellicule plastifiee quel’on colle soigneusement sur la poutre dont on doit mesurer la deformation.
L’emplacement et l’orientation de la jauge peut avoir un effet sur la qualitede la mesure.
Le principe de fonctionnement de la jauge de contrainte repose sur lechangement de resistance que subit un conducteur electrique soumis a unedeformation.
Un conducteur electrique de resistivite ρ (en ohm-m), d’une longueur l (enmetres) et d’une section A (en m2) possede une resistance electrique definiepar :
R = ρl
A(6.13)
La valeur de la resistance change lorsque le conducteur electrique est soumisa une contrainte entrainant sa deformation.

6.3. LES ELEMENTS DE TRANSDUCTION 135
Lorsque le conducteur se deforme d’une longueur ∆l (solidairement avecle corps rigide sur lequel elle est collee), plusieurs effets se superposent.
Premierement, la resistance changera de valeur en raison de l’allongement∆l. L’effet de l’allongement est represente par :
∆R
R=
∆l
l(6.14)
avec ∆R, la variation de resistance resultant de la variation de la longueur∆l. Ce que cette equation nous indique, c’est que si cet effet etait le seul aavoir lieu, un changement de longueur de 1 % entraıne un changement deresistance de 1 % puisque les variations unitaires sont les meme.
Deuxiemement, l’allongement du conducteur d’une longueur ∆l entrainela diminution de la section du conducteur. C’est un phenomene bien connuen resistance des materiaux, lorsqu’une barre subit une force de traction, elles’allonge, mais en vertu de la loi de Poisson, sa section diminue. Comme unelastique que l’on etire.
Le rapport entre l’allongement unitaire, qui est definit par le rapport∆l/l, et le changement de surface est defini par la loi de Poisson :
∆A
A= −2ν
∆l
l(6.15)
ou le parametre ν est le coefficient de Poisson. Le signe moins indique que lasection diminue avec l’allongement.
Troisiemement, un autre effet du a la deformation de la jauge, c’est l’ef-fet piezoelectrique. Cet effet est provoque par le changement de la mobilitedes electrons dans le conducteur, car la contrainte affecte la structure duconducteur. Cela entraine un changement de la resistivite du conducteur. Onexprime cet effet par la relation suivante :
∆ρ
ρ= C
∆V
V(6.16)
avec C la constante de Bridgman. Comme le volume du conducteur est egalau produit de la section A par la longueur l, la relation devient alors :
∆ρ
ρ= C(1− 2ν)
∆l
l(6.17)
La combinaison des trois effets causes par une contrainte dans un conduc-teur se resume par cette equation :
∆R
R= (1 + 2ν + C(1− 2ν))
∆l
l(6.18)

136 CHAPITRE 6. LA MESURE DE FORCE
Le terme (1 + 2ν + C(1− 2ν)) depend du conducteur electrique utilise et ilest designe sous le vocable facteur de jauge. C’est une specification impor-tante du manufacturier.
Le facteur de jauge G est ainsi definit par :
G = 1 + 2ν + C(1− 2ν) (6.19)
ce qui mene a :∆R
R= G
∆l
l(6.20)
Divers materiaux peuvent etre utilises dans les jauges extensiometriques.Les conducteurs ont generalement des facteurs de jauge G de l’ordre de 1.8a 2.4 environ. Les semi-conducteurs ont des facteurs de jauge plus eleves, del’ordre de 50 a 200. Les jauges a semi-conducteurs sont donc plus sensibles.Toutefois, les materiaux semi-conducteurs sont beaucoup moins ductiles queles materiaux conducteurs.
Pour donner un ordre de grandeur, definissons tout d’abord le strain.Cette unite represente la deformation par unite de longueur, que l’on connaitsous le vocable ”deformation unitaire”. Normalement, la deformation unitairene comporte pas d’unites, mais certains auteurs preferent utiliser le ”strain”.
Comme les deformations des materiaux sont d’une tres faible amplitude,on utilise habituellement le micro-strain, ce qui correspond a une deformationunitaire de 1 micro-metre par metre de longueur du conducteur 1.
Les jauges de contrainte utilisant des conducteurs tolerent des extensionsmaximales de 0.1 a 40000 micro-strains. Ceux utilisant des semi-conducteurstolerent des extensions maximales de 0.001 a 0.003 micro-strain.
Les specifications des manufacturiers a considerer pour la selection d’unejauge de contrainte sont :• Le facteur de jauge ;• La deformation maximale acceptable ;• La duree de vie utile ;• La resistance de la jauge au repos.La jauge de contrainte possede une valeur de resistance au repos. La
resistance change avec l’allongement du conducteur due a la contrainte quela jauge subit.
Supposons une jauge de contrainte metallique avec un facteur de jaugeG = 2.4 et une deformation unitaire maximale de 40000 micro-strains.
1. Ce pourrait aussi etre un micro-pied par pied.
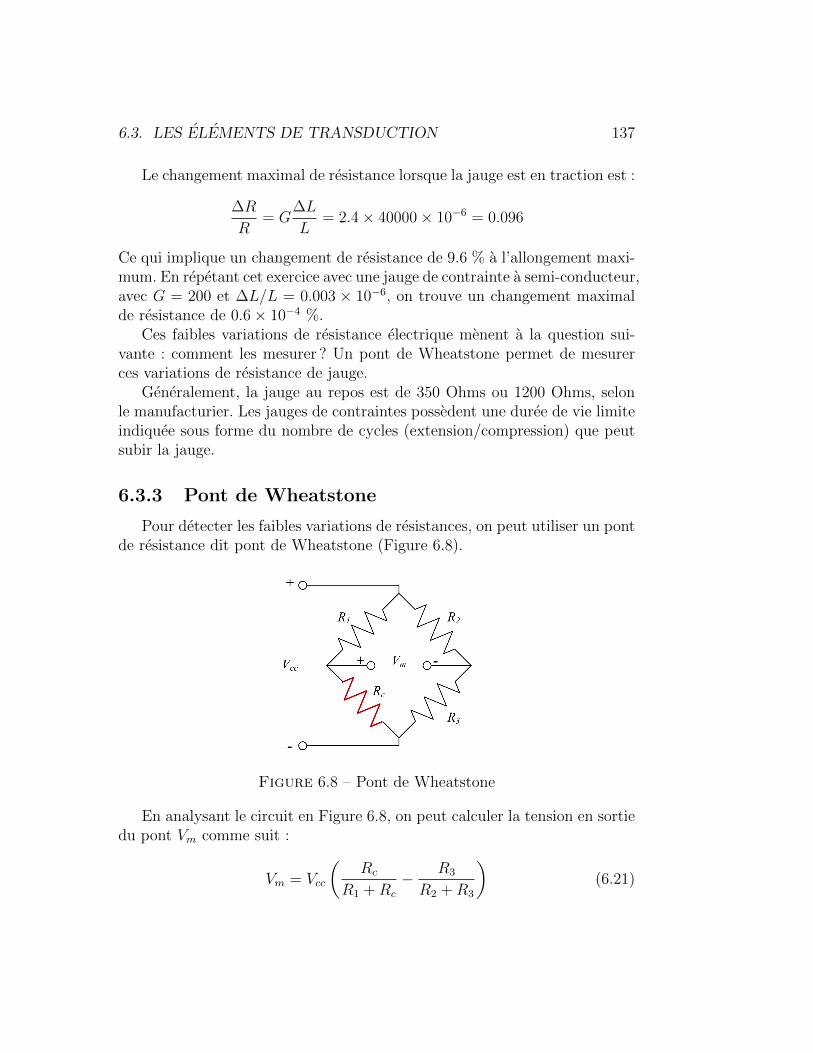
6.3. LES ELEMENTS DE TRANSDUCTION 137
Le changement maximal de resistance lorsque la jauge est en traction est :
∆R
R= G
∆L
L= 2.4× 40000× 10−6 = 0.096
Ce qui implique un changement de resistance de 9.6 % a l’allongement maxi-mum. En repetant cet exercice avec une jauge de contrainte a semi-conducteur,avec G = 200 et ∆L/L = 0.003 × 10−6, on trouve un changement maximalde resistance de 0.6× 10−4 %.
Ces faibles variations de resistance electrique menent a la question sui-vante : comment les mesurer ? Un pont de Wheatstone permet de mesurerces variations de resistance de jauge.
Generalement, la jauge au repos est de 350 Ohms ou 1200 Ohms, selonle manufacturier. Les jauges de contraintes possedent une duree de vie limiteindiquee sous forme du nombre de cycles (extension/compression) que peutsubir la jauge.
6.3.3 Pont de Wheatstone
Pour detecter les faibles variations de resistances, on peut utiliser un pontde resistance dit pont de Wheatstone (Figure 6.8).
Figure 6.8 – Pont de Wheatstone
En analysant le circuit en Figure 6.8, on peut calculer la tension en sortiedu pont Vm comme suit :
Vm = Vcc
(Rc
R1 +Rc
− R3
R2 +R3
)(6.21)
138 CHAPITRE 6. LA MESURE DE FORCE
avec Vcc la tension d’alimentation du pont, Rc la resistance de la jauge et R1,R2 et R3 les autres resistances du pont.
Pour simplifier le montage, on choisi les trois resistances du pont toutesidentiques, i.e., R1 = R2 = R3 = R. De plus, la valeur de la resistance R estla valeur de la resistance nominale de la jauge au repos.
Ce qui permet de reecrire la tension en sortie du pont Vm :
Vm = Vcc
(Rc
R +Rc
− R
R +R
)= Vcc
(Rc
R +Rc
− 1
2
) (6.22)
Pour simplifier encore plus l’analyse, on definit que la resistance de lajauge en deformation est Rc = R+ ∆R avec ∆R la variation de la resistancede la jauge par rapport a sa valeur au repos (R).
La tension en sortie du pont Vm devient :
Vm = Vcc
(R + ∆R
R +R + ∆R− 1
2
)= Vcc
(R + ∆R
2R + ∆R− 1
2
)= Vcc
(∆R
2(2R + ∆R)
) (6.23)
Il est evident que la relation entre Vm et ∆R est non-lineaire.On peut lineariser la relation en remplacant la resistance R1 par une
resistance de jauge se comportant a l’inverse de la resistance de jauge Rc, i.e.R1 = R−∆R.
Ainsi, la tension en sortie du pont Vm serait :
Vm = Vcc
(R + ∆R
R−∆R +R + ∆R− 1
2
)= Vcc
(R + ∆R
2R− 1
2
)= Vcc
(∆R
2R
) (6.24)
La relation entre Vm et ∆R est maintenant lineaire. Et, en prime, la sensibiliteest doublee.
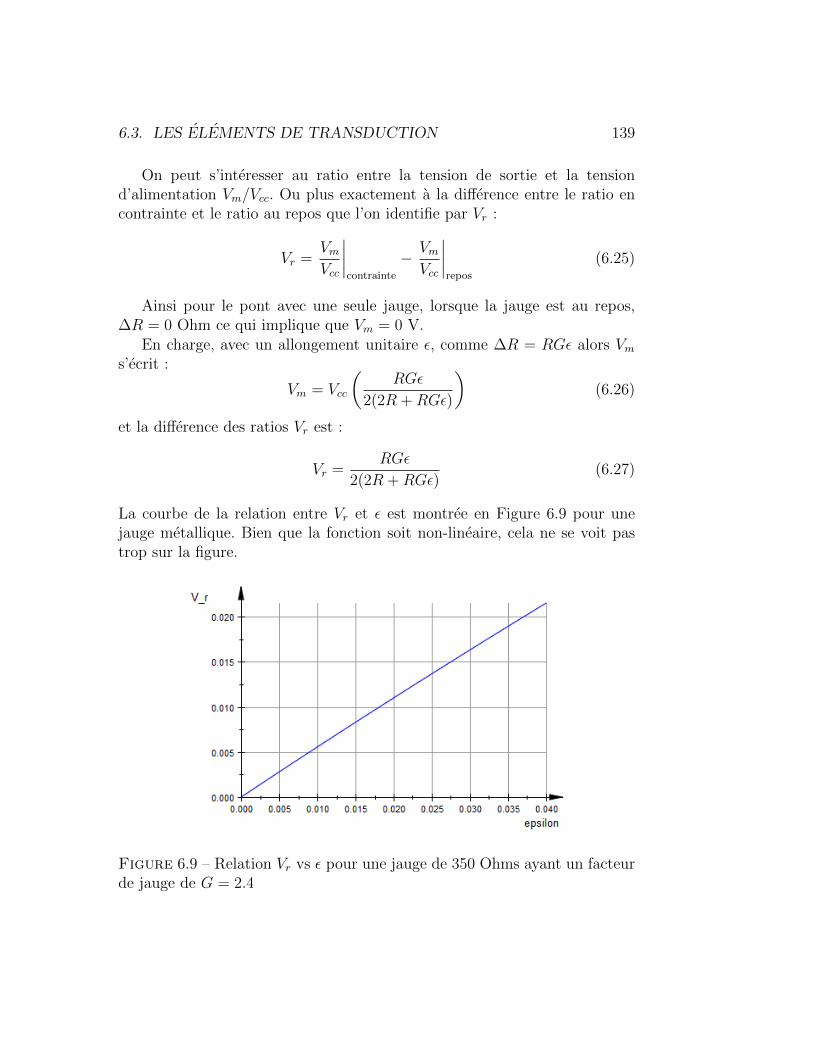
6.3. LES ELEMENTS DE TRANSDUCTION 139
On peut s’interesser au ratio entre la tension de sortie et la tensiond’alimentation Vm/Vcc. Ou plus exactement a la difference entre le ratio encontrainte et le ratio au repos que l’on identifie par Vr :
Vr =VmVcc
∣∣∣∣contrainte
− VmVcc
∣∣∣∣repos
(6.25)
Ainsi pour le pont avec une seule jauge, lorsque la jauge est au repos,∆R = 0 Ohm ce qui implique que Vm = 0 V.
En charge, avec un allongement unitaire ε, comme ∆R = RGε alors Vms’ecrit :
Vm = Vcc
(RGε
2(2R +RGε)
)(6.26)
et la difference des ratios Vr est :
Vr =RGε
2(2R +RGε)(6.27)
La courbe de la relation entre Vr et ε est montree en Figure 6.9 pour unejauge metallique. Bien que la fonction soit non-lineaire, cela ne se voit pastrop sur la figure.
Figure 6.9 – Relation Vr vs ε pour une jauge de 350 Ohms ayant un facteurde jauge de G = 2.4

140 CHAPITRE 6. LA MESURE DE FORCE
A partir de cette equation, on peut trouver la deformation unitaire cor-respondant a une valeur Vr donnee :
ε =4Vr
G(1− 2Vr)(6.28)
Dans le cas du montage a deux jauges (Rc et R1), l’equation serait :
ε =2VrG
(6.29)
A titre d’exercice, vous pouvez en faire la demonstration.
6.3.4 Jauge a deux fils
Il peut arriver que la jauge ne soit pas a proximite du pont de Wheatstone.La jauge de contrainte est alors reliee au pont par une paire de fils quiintroduisent leur resistance (Rf par fil) en serie avec la resistance de la jauge(Figure 6.10). Ce qui implique que la resistance de jauge vue par le pont estRc + 2Rf = R + ∆R + 2Rf .
Figure 6.10 – Pont de Wheatstone avec jauge a deux fils
Dans cette configuration, la tension en sortie du pont Vm est :
Vm = Vcc
(Rc
R +Rc
− 1
2
)= Vcc
(R + ∆R + 2Rf
2R + ∆R + 2Rf
− 1
2
)= Vcc
(∆R + 2Rf
2(2R + ∆R + 2Rf )
) (6.30)

6.3. LES ELEMENTS DE TRANSDUCTION 141
Maintenant, lorsque la jauge est au repos (∆R = 0), le rapport Vm/Vccn’est plus nul, mais plutot egal a :
VmVcc
∣∣∣∣repos
=Rf
2(R +Rf )(6.31)
et la deformation est calculee de la facon suivante :
ε =4Vr
G(
RR+Rf
− 2Vr
) (1 +Rf
R
)≈ 4VrG (1− 2Vr)
(1 +
Rf
R
)(6.32)
puisque R >> Rf .
6.3.5 Jauge a trois fils
Pour reduire l’erreur induite par une jauge a deux fils, on peut en uti-liser une a trois fils (Figure 6.10). Dans ce cas, la resistance de jauge vuepar le pont est Rc = R + ∆R + Rf et la resistance R1 devient R + Rf .Le troisieme fils introduit aussi une resistance Rf , mais il est en serie avecl’impedance d’entree du systeme qui mesure la tension Vm. Comme cetteimpedance d’entree est normalement tres elevee, l’effet de la resistance de cetroisieme fil est neglige.
Figure 6.11 – Pont de Wheatstone avec jauge a trois fils

142 CHAPITRE 6. LA MESURE DE FORCE
Avec la jauge a trois fils, la tension en sortie du pont Vm est :
Vm = Vcc
(Rc
R +Rf +Rc
− 1
2
)= Vcc
(R + ∆R +Rf
2R + ∆R + 2Rf
− 1
2
)= Vcc
(∆R
2(2R + ∆R + 2Rf )
) (6.33)
et la deformation est calculee a partir de Vr comme suit :
ε =4Vr
G(1− 2Vr)
(1 +
Rf
R
)(6.34)
6.4 Bilan
La mesure de force peut etre obtenue par la mesure de la deformationd’une jauge de contrainte collee sur l’element dont on mesure la deformation.
Les jauges metalliques presentent les caracteristiques suivantes :• Bonne precision ;• Plage d’utilisation en temperature etendue ;• Electronique de traitement simple (pont de resistance) ;• Facteur de Jauge faible ;• Probleme de vieillissement de la colle.Les jauges a semi-conducteurs presentent les caracteristiques suivantes :• Tres bonne precision ;• Facteur de jauge eleve (gain) ;• Integration possible des circuits de traitement ;• Miniaturisation possible ;• Derive importante avec la temperature ;• Probleme de vieillissement de la colle.Heureusement, nous n’avons que rarement a fabriquer un capteur de force
complet en choisissant son corps d’epreuve et la jauge de contrainte. Endimensionnant le corps d’epreuve en fonction de l’etendue de mesure de laforce et la deformation maximale que peut supporter la jauge.
Il existe des capteurs de forces ou le montage complet est fait. On lesdesigne sous le nom de cellules de charges (en anglais ”load cell”). Il restesimplement a choisir la cellule de charge en fonction de l’etendue de mesure

6.4. BILAN 143
de la force a mesure, de la nature de cette force (traction, compression) etde l’espace disponible. Certaines cellules de charges sont plus encombrantesque d’autres. Bien sur, l’aspect budgetaire est un autre element important,comme la precision requise pour la mesure de la force.
144 CHAPITRE 6. LA MESURE DE FORCE
Chapitre 7
La mesure de couple
La mesure de couple n’est pas une mesure facile a faire, en particulier surdes pieces en rotation.
La mesure du couple est basee principalement sur la mesure d’une force,puisque le couple T peut etre considere comme une force F appliquee sur unbras de levier de longueur l :
T = Fl (7.1)
Quatre approches peuvent etre utilisees pour mesurer le couple :• Mesure de couple par jauges ;• Mesure du couple par torsion ;• Mesure du couple par reaction ;• Mesure du couple par le courant.
7.1 Mesure du couple par jauge
La mesure du couple peut etre faite en utilisant des jauges de contraintes.Elle se fait en inserant une piece mecanique entre la partie sur laquelle uncouple est applique et une autre partie qui recoit ce couple (Figure 7.1).L’effort est transmit par les deux plaques metalliques trouees reliant les deuxsections de la piece.
Un gros plan de l’une de ces plaques est montre en Figure 7.2. Un trou estperce pour provoquer des concentrations de contraintes (et ainsi augmenterla sensibilite) et des jauges de contraintes y sont installees.
Les contraintes mesurees sont proportionnelles au couple entre les deuxelements connectes a cette piece mecanique. Generalement, ce systeme ne
145
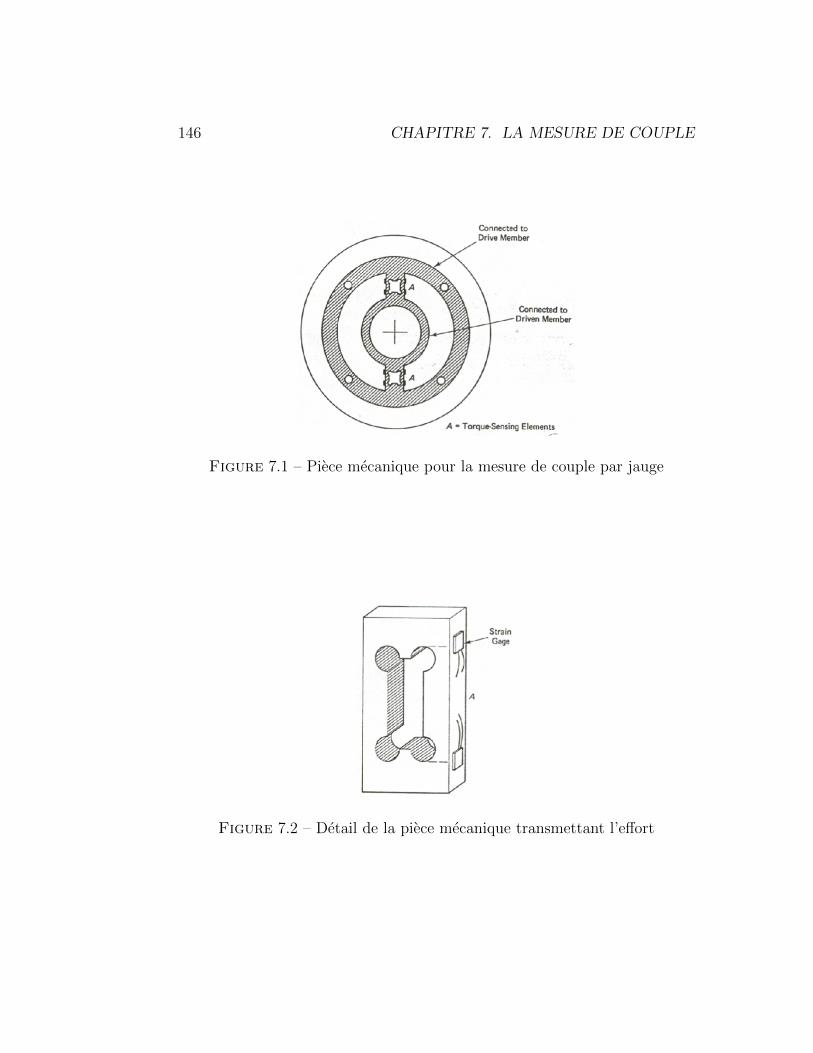
146 CHAPITRE 7. LA MESURE DE COUPLE
Figure 7.1 – Piece mecanique pour la mesure de couple par jauge
Figure 7.2 – Detail de la piece mecanique transmettant l’effort
7.2. MESURE DU COUPLE PAR TORSION 147
Figure 7.3 – Capteur de couple par jauge de Futek 1
permet pas de grande rotation, puisque les jauges de contraintes doiventetre connectees avec un systeme d’acquisition. Toutefois, la compagnie Futekvend un capteur de couple par jauge (Figure 7.3) en mesure de fonctionnersur un systeme tournant, en utilisant un systeme de balais et de bagues pourtransmettre les signaux des jauges.
7.2 Mesure du couple par torsion
La mesure du couple par torsion est basee sur la torsion subie par unarbre soumis a un couple (Figure 7.4).
A chaque extremite de l’arbre sont installes des roues dentees metalliqueset deux detecteurs de proximite inductifs. Lorsque l’arbre tourne et qu’aucuncouple n’est present, il n’y a pas de torsion et le dephasage entre les deuxsorties des detecteurs est egal a 0.
Lorsque l’arbre subit un couple T , l’arbre subit une torsion et un depha-sage apparait entre les deux sorties des detecteurs. La relation entre le coupleT (Newton-metre) et le dephasage θ (en radians) est :
T =GJθ
lN(7.2)
ouG represente le module en cisaillement du materiau de l’arbre, J representeson moment d’inertie, l represente la distance entre les capteurs et N lenombre de dents des roues dentees metalliques.
Ce qui est interessant avec cette approche, c’est que la mesure peut etrefaite sur une machine tournante.
1. Source de l’image en Figure 7.3 : www.futek.com
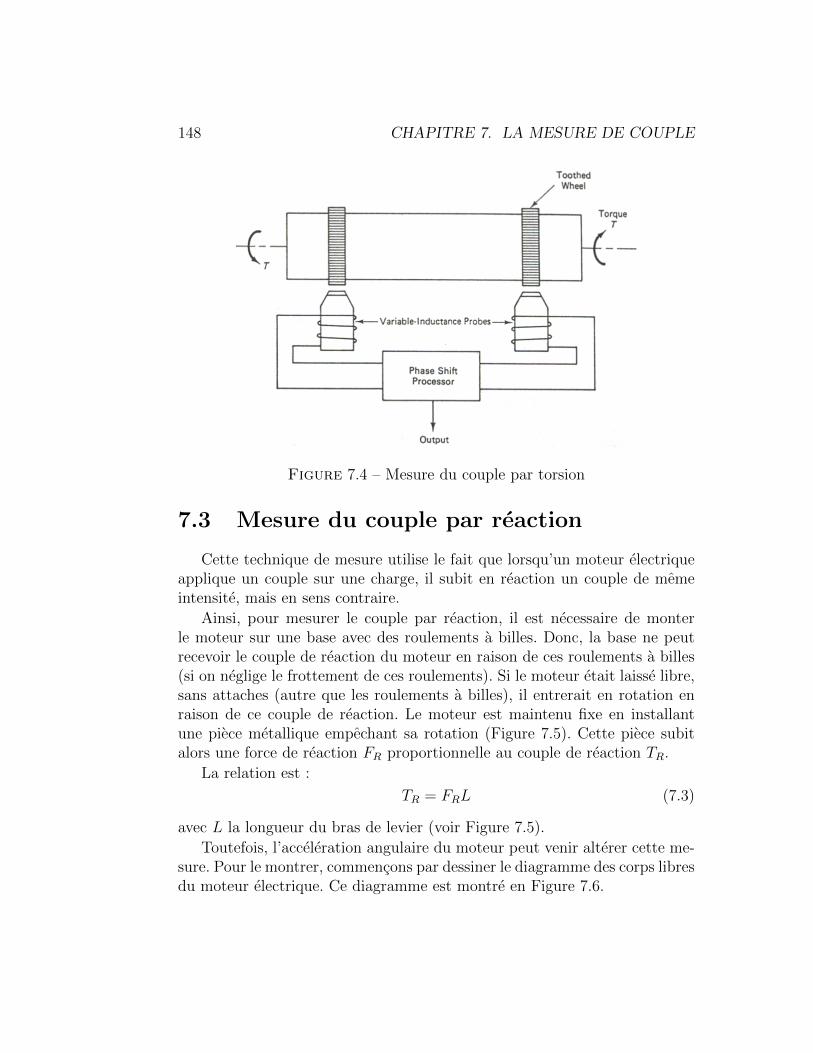
148 CHAPITRE 7. LA MESURE DE COUPLE
Figure 7.4 – Mesure du couple par torsion
7.3 Mesure du couple par reaction
Cette technique de mesure utilise le fait que lorsqu’un moteur electriqueapplique un couple sur une charge, il subit en reaction un couple de memeintensite, mais en sens contraire.
Ainsi, pour mesurer le couple par reaction, il est necessaire de monterle moteur sur une base avec des roulements a billes. Donc, la base ne peutrecevoir le couple de reaction du moteur en raison de ces roulements a billes(si on neglige le frottement de ces roulements). Si le moteur etait laisse libre,sans attaches (autre que les roulements a billes), il entrerait en rotation enraison de ce couple de reaction. Le moteur est maintenu fixe en installantune piece metallique empechant sa rotation (Figure 7.5). Cette piece subitalors une force de reaction FR proportionnelle au couple de reaction TR.
La relation est :
TR = FRL (7.3)
avec L la longueur du bras de levier (voir Figure 7.5).
Toutefois, l’acceleration angulaire du moteur peut venir alterer cette me-sure. Pour le montrer, commencons par dessiner le diagramme des corps libresdu moteur electrique. Ce diagramme est montre en Figure 7.6.
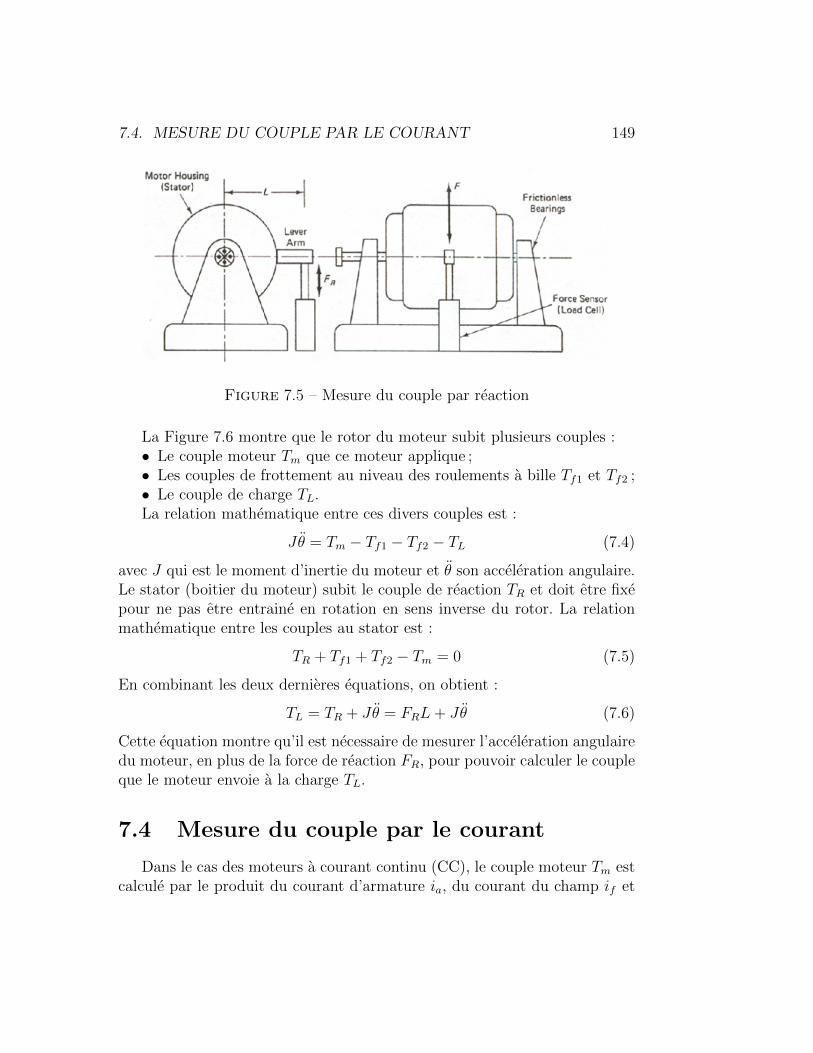
7.4. MESURE DU COUPLE PAR LE COURANT 149
Figure 7.5 – Mesure du couple par reaction
La Figure 7.6 montre que le rotor du moteur subit plusieurs couples :• Le couple moteur Tm que ce moteur applique ;• Les couples de frottement au niveau des roulements a bille Tf1 et Tf2 ;• Le couple de charge TL.La relation mathematique entre ces divers couples est :
Jθ = Tm − Tf1 − Tf2 − TL (7.4)
avec J qui est le moment d’inertie du moteur et θ son acceleration angulaire.Le stator (boitier du moteur) subit le couple de reaction TR et doit etre fixepour ne pas etre entraine en rotation en sens inverse du rotor. La relationmathematique entre les couples au stator est :
TR + Tf1 + Tf2 − Tm = 0 (7.5)
En combinant les deux dernieres equations, on obtient :
TL = TR + Jθ = FRL+ Jθ (7.6)
Cette equation montre qu’il est necessaire de mesurer l’acceleration angulairedu moteur, en plus de la force de reaction FR, pour pouvoir calculer le coupleque le moteur envoie a la charge TL.
7.4 Mesure du couple par le courant
Dans le cas des moteurs a courant continu (CC), le couple moteur Tm estcalcule par le produit du courant d’armature ia, du courant du champ if et
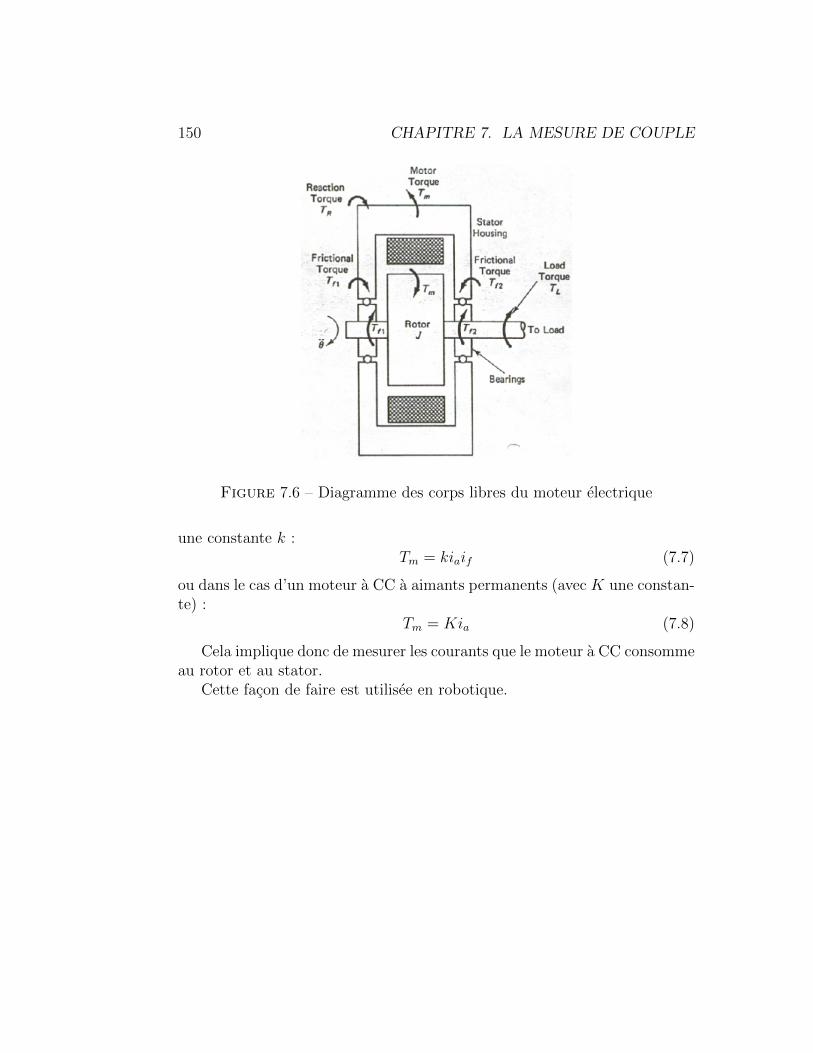
150 CHAPITRE 7. LA MESURE DE COUPLE
Figure 7.6 – Diagramme des corps libres du moteur electrique
une constante k :Tm = kiaif (7.7)
ou dans le cas d’un moteur a CC a aimants permanents (avec K une constan-te) :
Tm = Kia (7.8)
Cela implique donc de mesurer les courants que le moteur a CC consommeau rotor et au stator.
Cette facon de faire est utilisee en robotique.
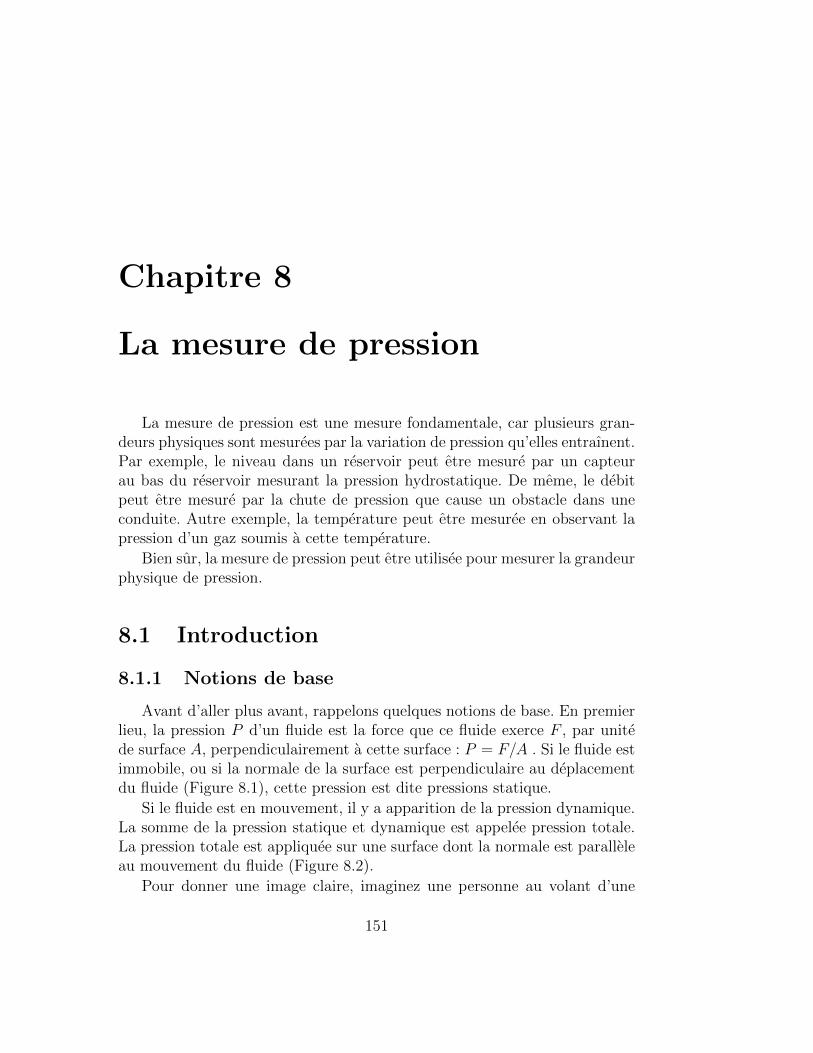
Chapitre 8
La mesure de pression
La mesure de pression est une mesure fondamentale, car plusieurs gran-deurs physiques sont mesurees par la variation de pression qu’elles entraınent.Par exemple, le niveau dans un reservoir peut etre mesure par un capteurau bas du reservoir mesurant la pression hydrostatique. De meme, le debitpeut etre mesure par la chute de pression que cause un obstacle dans uneconduite. Autre exemple, la temperature peut etre mesuree en observant lapression d’un gaz soumis a cette temperature.
Bien sur, la mesure de pression peut etre utilisee pour mesurer la grandeurphysique de pression.
8.1 Introduction
8.1.1 Notions de base
Avant d’aller plus avant, rappelons quelques notions de base. En premierlieu, la pression P d’un fluide est la force que ce fluide exerce F , par unitede surface A, perpendiculairement a cette surface : P = F/A . Si le fluide estimmobile, ou si la normale de la surface est perpendiculaire au deplacementdu fluide (Figure 8.1), cette pression est dite pressions statique.
Si le fluide est en mouvement, il y a apparition de la pression dynamique.La somme de la pression statique et dynamique est appelee pression totale.La pression totale est appliquee sur une surface dont la normale est paralleleau mouvement du fluide (Figure 8.2).
Pour donner une image claire, imaginez une personne au volant d’une
151
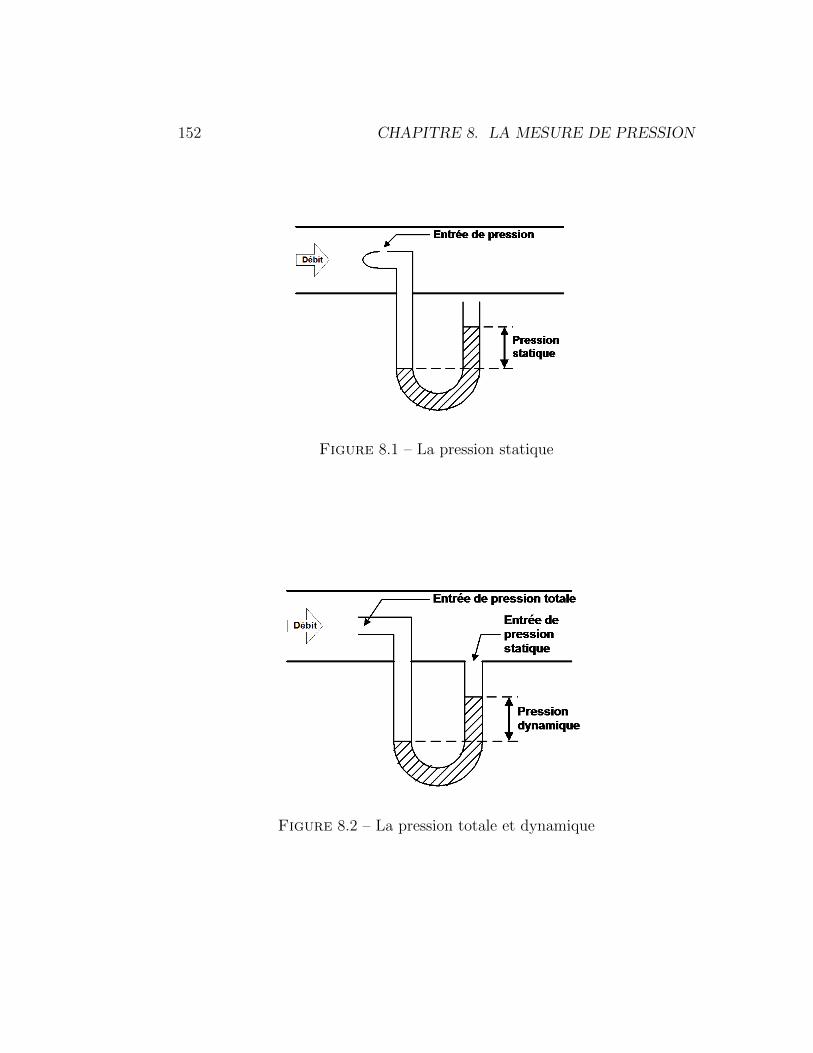
152 CHAPITRE 8. LA MESURE DE PRESSION
Figure 8.1 – La pression statique
Figure 8.2 – La pression totale et dynamique
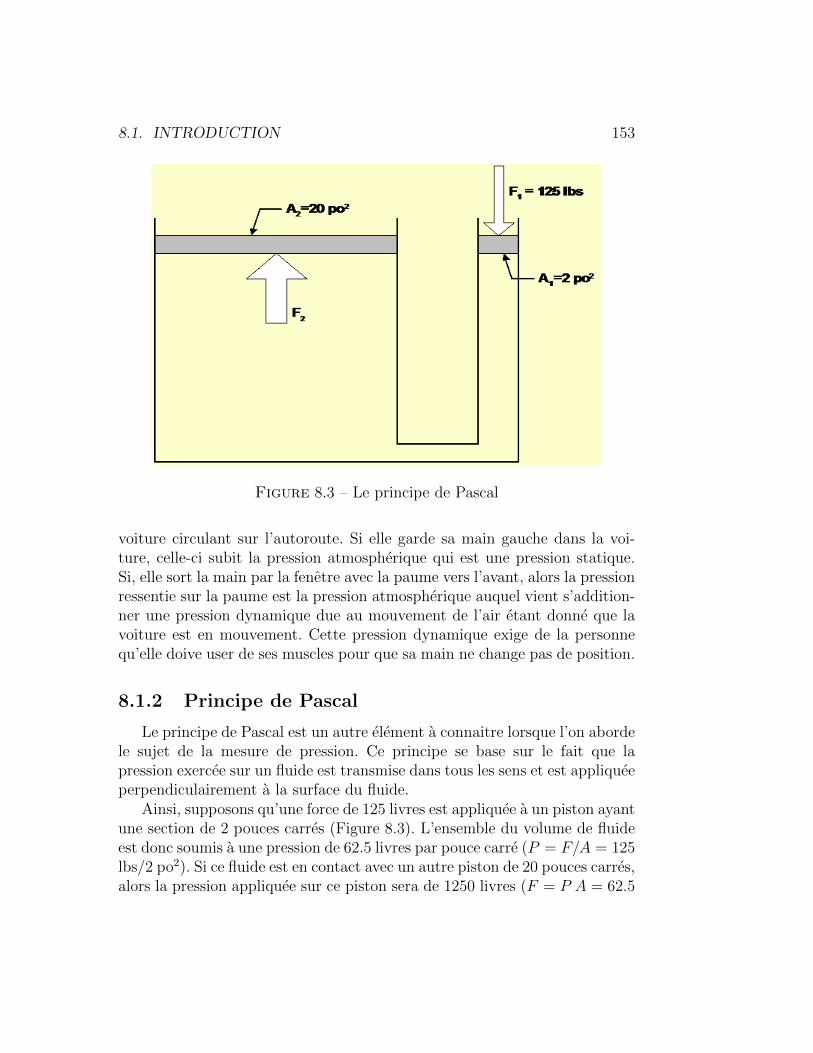
8.1. INTRODUCTION 153
Figure 8.3 – Le principe de Pascal
voiture circulant sur l’autoroute. Si elle garde sa main gauche dans la voi-ture, celle-ci subit la pression atmospherique qui est une pression statique.Si, elle sort la main par la fenetre avec la paume vers l’avant, alors la pressionressentie sur la paume est la pression atmospherique auquel vient s’addition-ner une pression dynamique due au mouvement de l’air etant donne que lavoiture est en mouvement. Cette pression dynamique exige de la personnequ’elle doive user de ses muscles pour que sa main ne change pas de position.
8.1.2 Principe de Pascal
Le principe de Pascal est un autre element a connaitre lorsque l’on abordele sujet de la mesure de pression. Ce principe se base sur le fait que lapression exercee sur un fluide est transmise dans tous les sens et est appliqueeperpendiculairement a la surface du fluide.
Ainsi, supposons qu’une force de 125 livres est appliquee a un piston ayantune section de 2 pouces carres (Figure 8.3). L’ensemble du volume de fluideest donc soumis a une pression de 62.5 livres par pouce carre (P = F/A = 125lbs/2 po2). Si ce fluide est en contact avec un autre piston de 20 pouces carres,alors la pression appliquee sur ce piston sera de 1250 livres (F = P A = 62.5

154 CHAPITRE 8. LA MESURE DE PRESSION
Figure 8.4 – Verins hydraulique 1
lbs/po2 × 20 po2).En termes mathematiques, puisque la pression est egale partout et qu’une
pression est le rapport d’une force sur une surface, alors on peut ecrire :
P1 = P2
F1
A1
=F2
A2
(8.1)
et ainsi, on peut deduire la force au point 2 a partir de la force au point 1 etdu rapport des surfaces :
F2 =A2
A1
F1 (8.2)
Ce principe est utilise pour amplifier une force, car si la surface A2 estegale a kA1, alors la force F2 resultante sera k fois la force F1. Un verinhydraulique (Figure 8.4) utilise ce principe pour permettre a une personnede soulever des charges elevees.
8.1.3 Unites de mesure
Les unites de mesures utilisees pour quantifier la pression sont diverseset exigent d’etre expliquees. Tout d’abord, il est necessaire de distinguerentre : la pression absolue, la pression relative et la pression differentielle.
1. Source de l’image de la Figure 8.4 : www.allproducts.com

8.1. INTRODUCTION 155
La pression absolue est la pression thermodynamique, par rapport au videabsolu. La pression ne peut etre qu’une valeur positive ou egale a 0 dans levide absolu. Puisque nous vivons sur une planete dotee d’une atmosphere,cette derniere exerce une pression dite atmospherique. Lorsque la pression estmesuree par rapport a la pression atmospherique, on l’identifie sous le nomde pression relative. La pression relative peut prendre une valeur positiveou negative. La pression relative est negative lorsque l’on mesure la pressiond’un vacuum.
Dans certaines applications, on desire connaıtre la difference de pression.C’est le cas d’un debitmetre a organe deprimogeme, ou ce qui est mesure c’estla chute de pression provoquee par un obstacle intentionnellement introduitdans la conduite. Dans ce cas, la mesure en est une de pression differentielle.
Passons maintenant aux unites de mesure de pression. Dans le systemeimperial, l’unite la plus couramment utilisee est la livre par pouce carre, quel’on identifie par l’acronyme psi (pound per square inch). Pour distinguer sila pression est relative ou absolue, un suffixe est ajoute. Un psig identifie unepression relative (psi gage) alors qu’un psia identifie une pression absolue (psiabsolute). La pression atmospherique est de 14.7 psia ou 0 psig.
Dans le systeme metrique, la pression est mesuree en Pascal. Toutefois, lePascal est une tres petite unite, car elle correspond a une force de 1 Newtonappliquee sur une surface de 1 metre carre. Ainsi, les pressions du systememetrique sont souvent exprimees en kilopascal ou en megapascal. La pressionatmospherique est de 101325 Pa ou 101.325 kPa. Un psi equivaut a 6894.7Pa.
D’autres unites de mesure sont aussi utilisees :• La pression en millimetre de mercure (Hg) ou en torr : 1 mm Hg =
1 torr = 133 Pa ;• La pression en pouce de mercure : 1 po Hg = 0.49 psi = 3386.39 Pa ;• La pression en pouce d’eau : 1 psi = 27.7 po. H2O ;• La pression en bar : 1 bar = 100 kPa ;• La pression en atmosphere.Du cote imperial, la pression est aussi souvent identifie par une hauteur
manometrique dite ”tete d’eau” dans le langage populaire. Quand on indiquequ’une pompe a une tete d’eau de 200 pieds, cela implique que la pressionfournie par la pompe equivaut a la pression hydrostatique qu’une colonned’eau d’une hauteur de 200 pieds. Sachant qu’il y a 12 pouces dans un piedet qu’un psi est egal a 27.7 pouces d’eau, il est donc possible de convertir unehauteur manometrique en psi, ou en tout autre unite de mesure.
156 CHAPITRE 8. LA MESURE DE PRESSION
La hauteur manometrique represente en fait une pression dite hydrosta-tique. Cette pression est representee par l’expression mathematique suivante :
P = ρgh (8.3)
La pression depend de la masse volumique du fluide ρ, de l’acceleration dela pesanteur g et de la hauteur de fluide h au dessus du point de mesure. Et,cette pression est independante du volume de liquide au dessus du point demesure. Un plongeur nageant a 3 metres de profondeur ressentira la memepression qu’il soit dans une piscine ou dans un lac (en assumant une massevolumique identique a ces deux endroits pour l’eau). On peut convenir qu’unepiscine a un volume d’eau largement inferieur a celui d’un lac.
Le fonctionnement des capteurs de pression est base principalement sur lamesure de la deformation de corps d’epreuve. Les capteurs pression couvertsdans ce chapitre sont enumeres dans la liste suivante :
• Manometre a section uniforme ;• Manometre a reservoir ;• Tube de Bourdon ;• Capsule aneroıde ;• Soufflet ;• Membranes.
8.2 Manometres a section uniforme
Le manometre a section uniforme (Figure 8.5) est represente par un tubeen U, de section constante A, dont chaque branche recoit une pression : P1
d’un cote et P2 de l’autre cote. On suppose que P1 ≥ P2. Le tube est remplid’un liquide uniforme de masse volumique ρ.
La pression P1 appliquee sur la surface A donne une force F1 = P1 A. Dememe, la pression P2 appliquee sur la surface A donne une force F2 = P2A. Siles pressions sont d’amplitudes differentes, il en sera de meme pour les forceset cela entraınera un mouvement du liquide. Un point d’equilibre sera atteintet la colonne de liquide du cote subissant la haute pression (P1) sera a unniveau inferieur celle du cote basse pression (P2). La difference de niveau hentre les deux cotes du tube en U fera en sorte qu’une masse de liquide ρAhsupplementaire sera presente du cote basse pression. Ainsi, la force F1 seracontrebalancee par la force F2 et la force de la gravite associee a la masse de
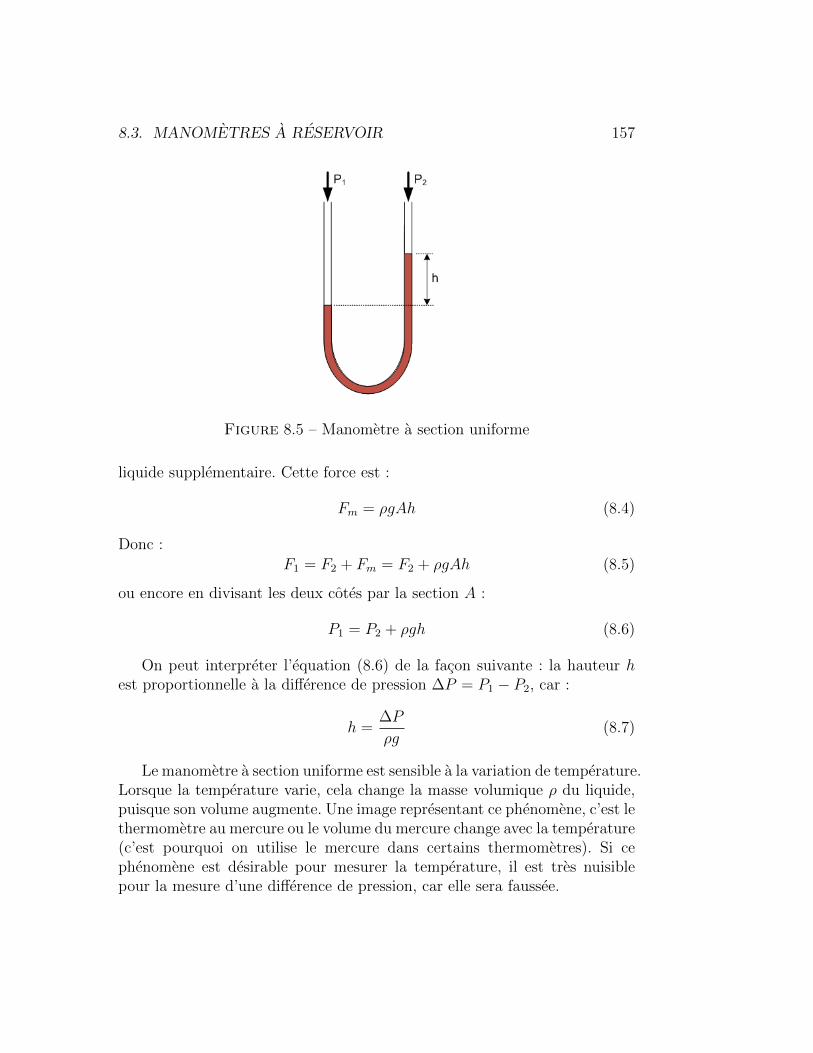
8.3. MANOMETRES A RESERVOIR 157
Figure 8.5 – Manometre a section uniforme
liquide supplementaire. Cette force est :
Fm = ρgAh (8.4)
Donc :
F1 = F2 + Fm = F2 + ρgAh (8.5)
ou encore en divisant les deux cotes par la section A :
P1 = P2 + ρgh (8.6)
On peut interpreter l’equation (8.6) de la facon suivante : la hauteur hest proportionnelle a la difference de pression ∆P = P1 − P2, car :
h =∆P
ρg(8.7)
Le manometre a section uniforme est sensible a la variation de temperature.Lorsque la temperature varie, cela change la masse volumique ρ du liquide,puisque son volume augmente. Une image representant ce phenomene, c’est lethermometre au mercure ou le volume du mercure change avec la temperature(c’est pourquoi on utilise le mercure dans certains thermometres). Si cephenomene est desirable pour mesurer la temperature, il est tres nuisiblepour la mesure d’une difference de pression, car elle sera faussee.
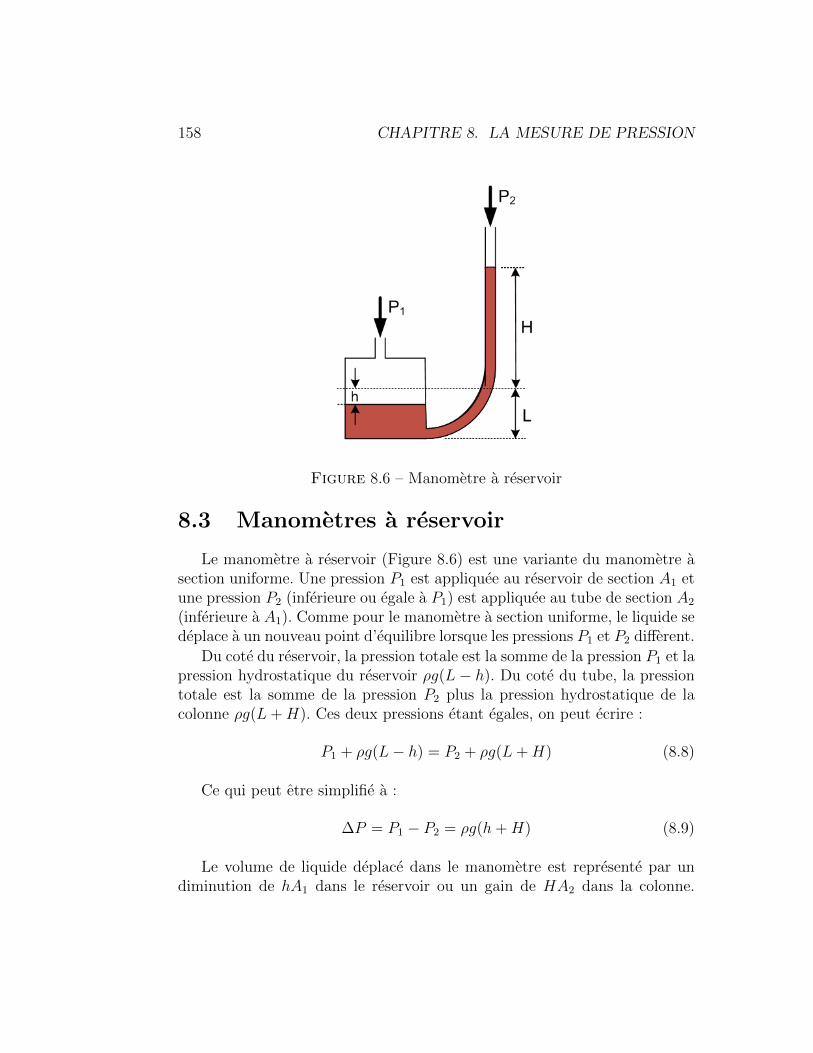
158 CHAPITRE 8. LA MESURE DE PRESSION
Figure 8.6 – Manometre a reservoir
8.3 Manometres a reservoir
Le manometre a reservoir (Figure 8.6) est une variante du manometre asection uniforme. Une pression P1 est appliquee au reservoir de section A1 etune pression P2 (inferieure ou egale a P1) est appliquee au tube de section A2
(inferieure a A1). Comme pour le manometre a section uniforme, le liquide sedeplace a un nouveau point d’equilibre lorsque les pressions P1 et P2 different.
Du cote du reservoir, la pression totale est la somme de la pression P1 et lapression hydrostatique du reservoir ρg(L − h). Du cote du tube, la pressiontotale est la somme de la pression P2 plus la pression hydrostatique de lacolonne ρg(L+H). Ces deux pressions etant egales, on peut ecrire :
P1 + ρg(L− h) = P2 + ρg(L+H) (8.8)
Ce qui peut etre simplifie a :
∆P = P1 − P2 = ρg(h+H) (8.9)
Le volume de liquide deplace dans le manometre est represente par undiminution de hA1 dans le reservoir ou un gain de HA2 dans la colonne.

8.4. TUBE DE BOURDON 159
Ces deux quantites sont par consequent egales, ce qui fait que h et H sontproportionnels :
h = HA2
A1
(8.10)
Si la section A1 du reservoir est beaucoup plus grande que la section A2 dutube (A1 >> A2), alors on peut negliger la hauteur h dans l’equation (8.9) :
∆P ≈ ρgH (8.11)
Pour les memes raisons que pour le manometre a section uniforme, lemanometre a reservoir est sensible a la variation de temperature.
8.4 Tube de Bourdon
Le tube de Bourdon est un corps d’epreuve souvent utilise dans les ma-nometres de pression (Figure 8.7). Il consiste en un tube plie en force de”C” (Figure 8.8). Lorsque l’interieur du tube subit une pression, celle-ci estappliquee sur toutes les parois du tube.
Figure 8.7 – Tube de Bourdon
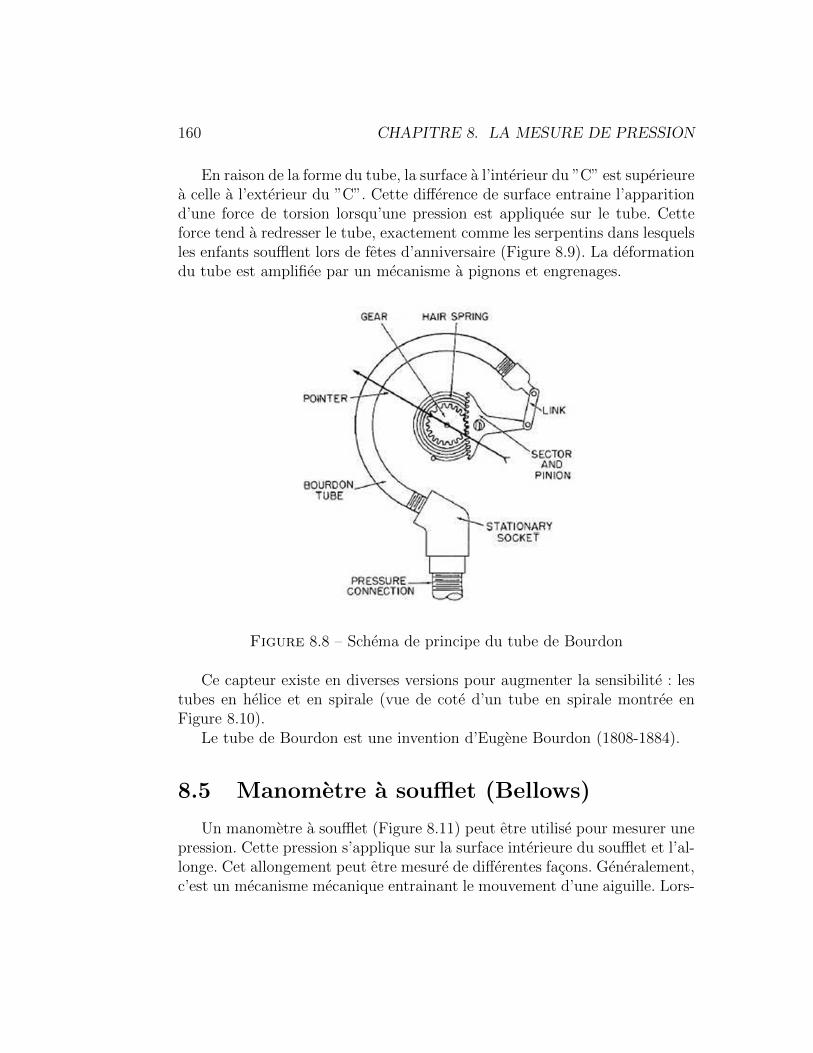
160 CHAPITRE 8. LA MESURE DE PRESSION
En raison de la forme du tube, la surface a l’interieur du ”C” est superieurea celle a l’exterieur du ”C”. Cette difference de surface entraine l’apparitiond’une force de torsion lorsqu’une pression est appliquee sur le tube. Cetteforce tend a redresser le tube, exactement comme les serpentins dans lesquelsles enfants soufflent lors de fetes d’anniversaire (Figure 8.9). La deformationdu tube est amplifiee par un mecanisme a pignons et engrenages.
Figure 8.8 – Schema de principe du tube de Bourdon
Ce capteur existe en diverses versions pour augmenter la sensibilite : lestubes en helice et en spirale (vue de cote d’un tube en spirale montree enFigure 8.10).
Le tube de Bourdon est une invention d’Eugene Bourdon (1808-1884).
8.5 Manometre a soufflet (Bellows)
Un manometre a soufflet (Figure 8.11) peut etre utilise pour mesurer unepression. Cette pression s’applique sur la surface interieure du soufflet et l’al-longe. Cet allongement peut etre mesure de differentes facons. Generalement,c’est un mecanisme mecanique entrainant le mouvement d’une aiguille. Lors-
8.6. CAPSULE ANEROIDE 161
Figure 8.9 – Serpentin
Figure 8.10 – Tube de Bourdon en spirale
que le soufflet est metallique, la plage de mesure disponible varie de 0.5 a 75psig. Avec un ressort, on peut monter jusqu’a 1000 psig.
8.6 Capsule aneroıde
Les capsules aneroıdes sont une variante des soufflets. Une capsule aneroıdepeut etre une capsule etanche en forme de disque dont le vide a ete fait al’interieur. Les variations de la pression a l’exterieur de la capsule causent sadeformation que l’on mesure pour deduire la pression. La capsule aneroıdepeut aussi etre recevoir la pression a mesurer de l’interieur, comme montre
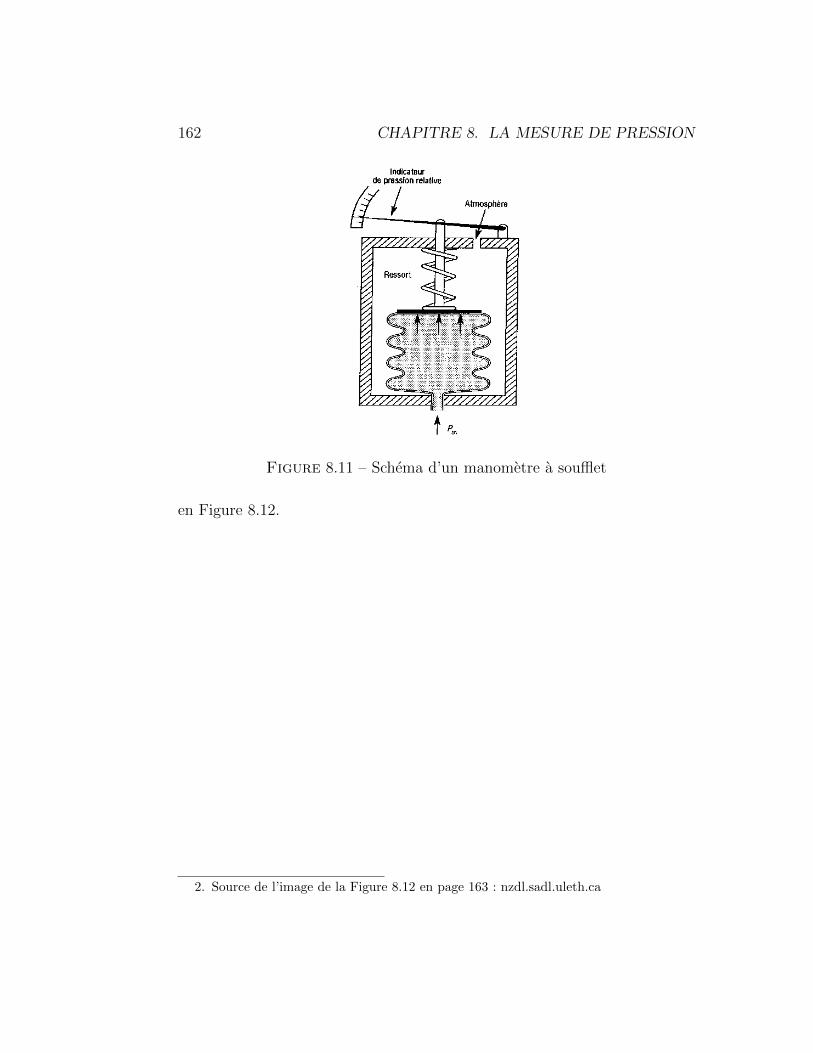
162 CHAPITRE 8. LA MESURE DE PRESSION
Figure 8.11 – Schema d’un manometre a soufflet
en Figure 8.12.
2. Source de l’image de la Figure 8.12 en page 163 : nzdl.sadl.uleth.ca
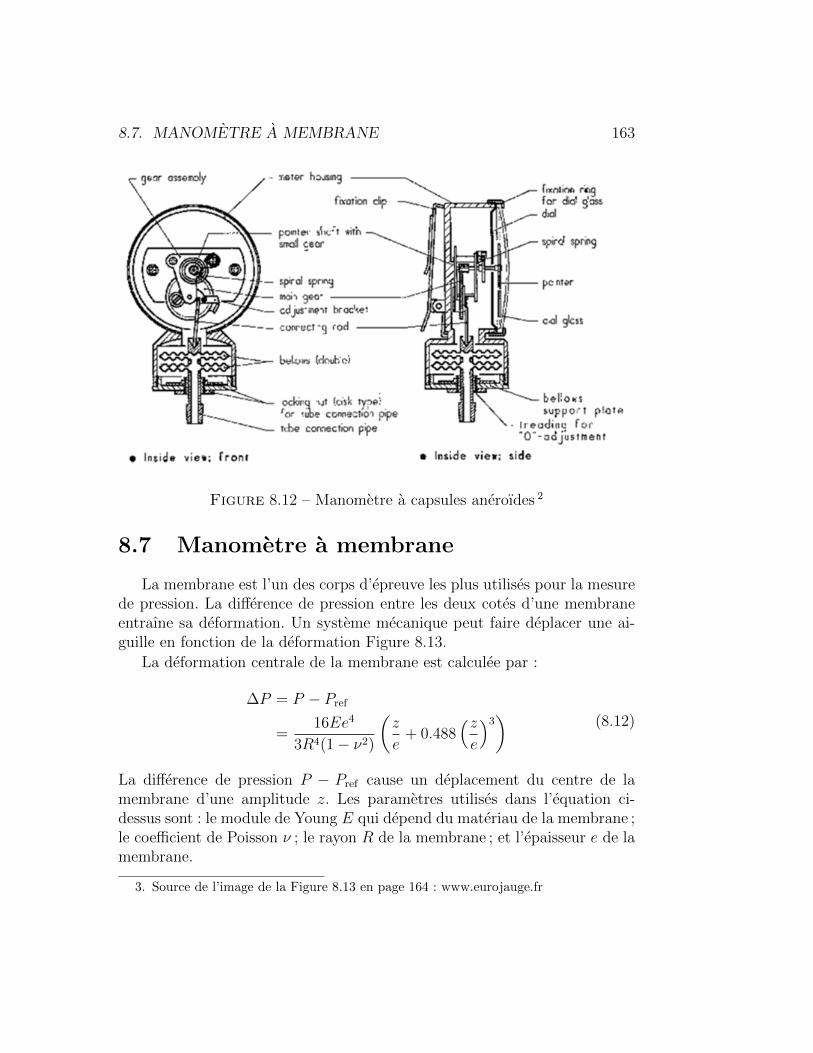
8.7. MANOMETRE A MEMBRANE 163
Figure 8.12 – Manometre a capsules aneroıdes 2
8.7 Manometre a membrane
La membrane est l’un des corps d’epreuve les plus utilises pour la mesurede pression. La difference de pression entre les deux cotes d’une membraneentraıne sa deformation. Un systeme mecanique peut faire deplacer une ai-guille en fonction de la deformation Figure 8.13.
La deformation centrale de la membrane est calculee par :
∆P = P − Pref
=16Ee4
3R4(1− ν2)
(z
e+ 0.488
(ze
)3)
(8.12)
La difference de pression P − Pref cause un deplacement du centre de lamembrane d’une amplitude z. Les parametres utilises dans l’equation ci-dessus sont : le module de Young E qui depend du materiau de la membrane ;le coefficient de Poisson ν ; le rayon R de la membrane ; et l’epaisseur e de lamembrane.
3. Source de l’image de la Figure 8.13 en page 164 : www.eurojauge.fr
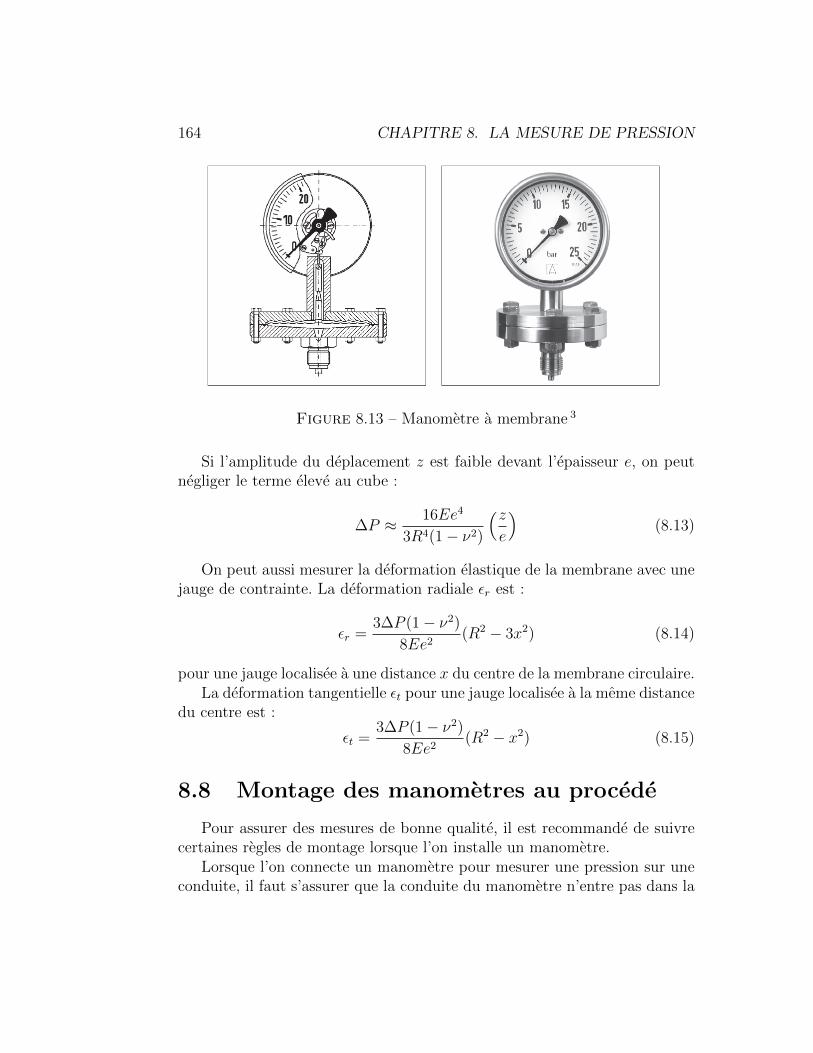
164 CHAPITRE 8. LA MESURE DE PRESSION
Figure 8.13 – Manometre a membrane 3
Si l’amplitude du deplacement z est faible devant l’epaisseur e, on peutnegliger le terme eleve au cube :
∆P ≈ 16Ee4
3R4(1− ν2)
(ze
)(8.13)
On peut aussi mesurer la deformation elastique de la membrane avec unejauge de contrainte. La deformation radiale εr est :
εr =3∆P (1− ν2)
8Ee2(R2 − 3x2) (8.14)
pour une jauge localisee a une distance x du centre de la membrane circulaire.La deformation tangentielle εt pour une jauge localisee a la meme distance
du centre est :
εt =3∆P (1− ν2)
8Ee2(R2 − x2) (8.15)
8.8 Montage des manometres au procede
Pour assurer des mesures de bonne qualite, il est recommande de suivrecertaines regles de montage lorsque l’on installe un manometre.
Lorsque l’on connecte un manometre pour mesurer une pression sur uneconduite, il faut s’assurer que la conduite du manometre n’entre pas dans la
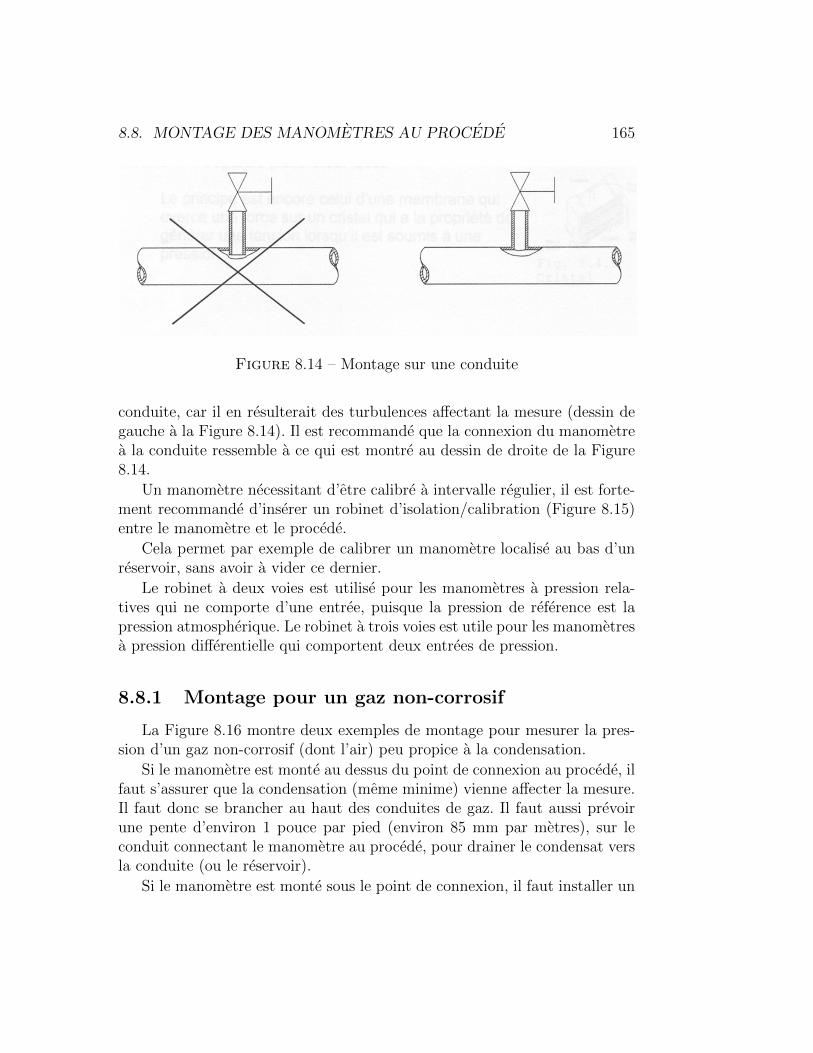
8.8. MONTAGE DES MANOMETRES AU PROCEDE 165
Figure 8.14 – Montage sur une conduite
conduite, car il en resulterait des turbulences affectant la mesure (dessin degauche a la Figure 8.14). Il est recommande que la connexion du manometrea la conduite ressemble a ce qui est montre au dessin de droite de la Figure8.14.
Un manometre necessitant d’etre calibre a intervalle regulier, il est forte-ment recommande d’inserer un robinet d’isolation/calibration (Figure 8.15)entre le manometre et le procede.
Cela permet par exemple de calibrer un manometre localise au bas d’unreservoir, sans avoir a vider ce dernier.
Le robinet a deux voies est utilise pour les manometres a pression rela-tives qui ne comporte d’une entree, puisque la pression de reference est lapression atmospherique. Le robinet a trois voies est utile pour les manometresa pression differentielle qui comportent deux entrees de pression.
8.8.1 Montage pour un gaz non-corrosif
La Figure 8.16 montre deux exemples de montage pour mesurer la pres-sion d’un gaz non-corrosif (dont l’air) peu propice a la condensation.
Si le manometre est monte au dessus du point de connexion au procede, ilfaut s’assurer que la condensation (meme minime) vienne affecter la mesure.Il faut donc se brancher au haut des conduites de gaz. Il faut aussi prevoirune pente d’environ 1 pouce par pied (environ 85 mm par metres), sur leconduit connectant le manometre au procede, pour drainer le condensat versla conduite (ou le reservoir).
Si le manometre est monte sous le point de connexion, il faut installer un
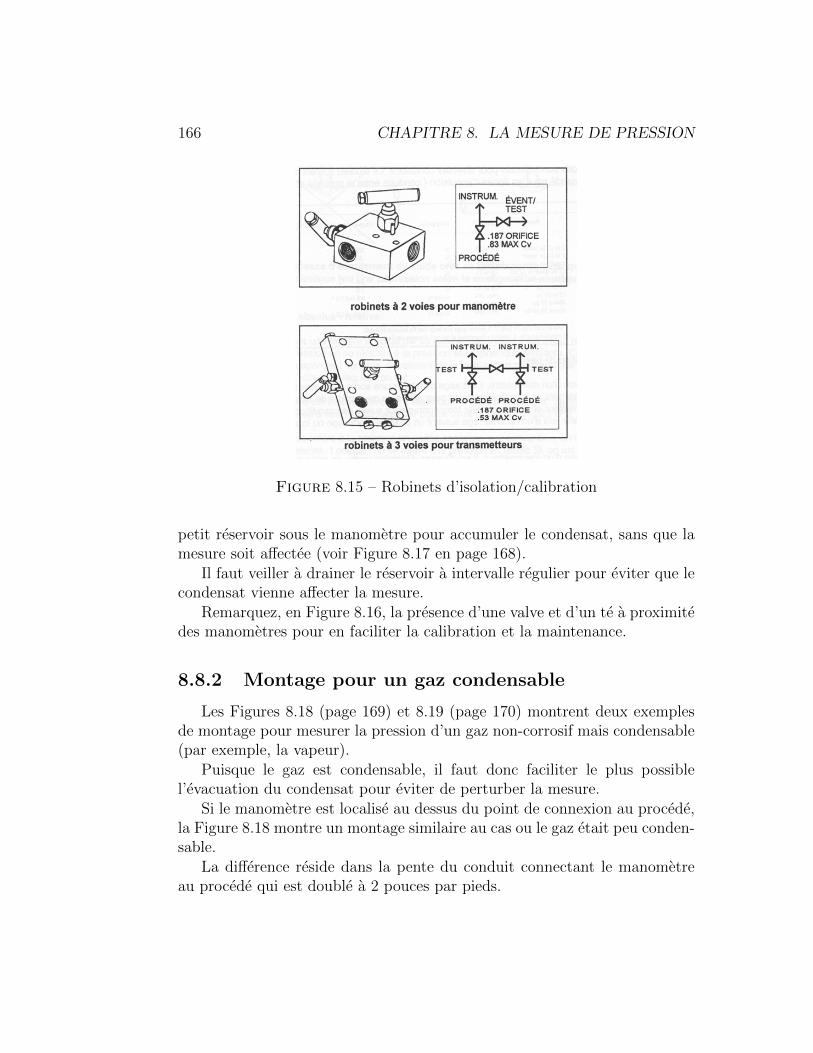
166 CHAPITRE 8. LA MESURE DE PRESSION
Figure 8.15 – Robinets d’isolation/calibration
petit reservoir sous le manometre pour accumuler le condensat, sans que lamesure soit affectee (voir Figure 8.17 en page 168).
Il faut veiller a drainer le reservoir a intervalle regulier pour eviter que lecondensat vienne affecter la mesure.
Remarquez, en Figure 8.16, la presence d’une valve et d’un te a proximitedes manometres pour en faciliter la calibration et la maintenance.
8.8.2 Montage pour un gaz condensable
Les Figures 8.18 (page 169) et 8.19 (page 170) montrent deux exemplesde montage pour mesurer la pression d’un gaz non-corrosif mais condensable(par exemple, la vapeur).
Puisque le gaz est condensable, il faut donc faciliter le plus possiblel’evacuation du condensat pour eviter de perturber la mesure.
Si le manometre est localise au dessus du point de connexion au procede,la Figure 8.18 montre un montage similaire au cas ou le gaz etait peu conden-sable.
La difference reside dans la pente du conduit connectant le manometreau procede qui est double a 2 pouces par pieds.
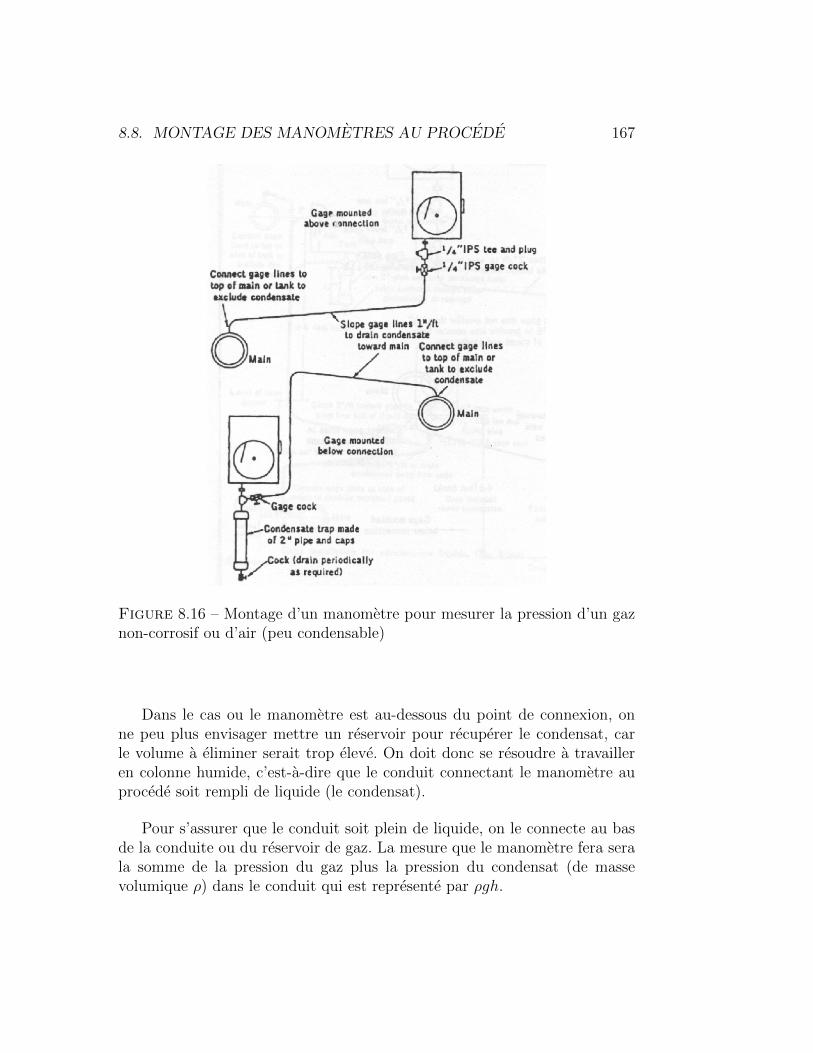
8.8. MONTAGE DES MANOMETRES AU PROCEDE 167
Figure 8.16 – Montage d’un manometre pour mesurer la pression d’un gaznon-corrosif ou d’air (peu condensable)
Dans le cas ou le manometre est au-dessous du point de connexion, onne peu plus envisager mettre un reservoir pour recuperer le condensat, carle volume a eliminer serait trop eleve. On doit donc se resoudre a travailleren colonne humide, c’est-a-dire que le conduit connectant le manometre auprocede soit rempli de liquide (le condensat).
Pour s’assurer que le conduit soit plein de liquide, on le connecte au basde la conduite ou du reservoir de gaz. La mesure que le manometre fera serala somme de la pression du gaz plus la pression du condensat (de massevolumique ρ) dans le conduit qui est represente par ρgh.
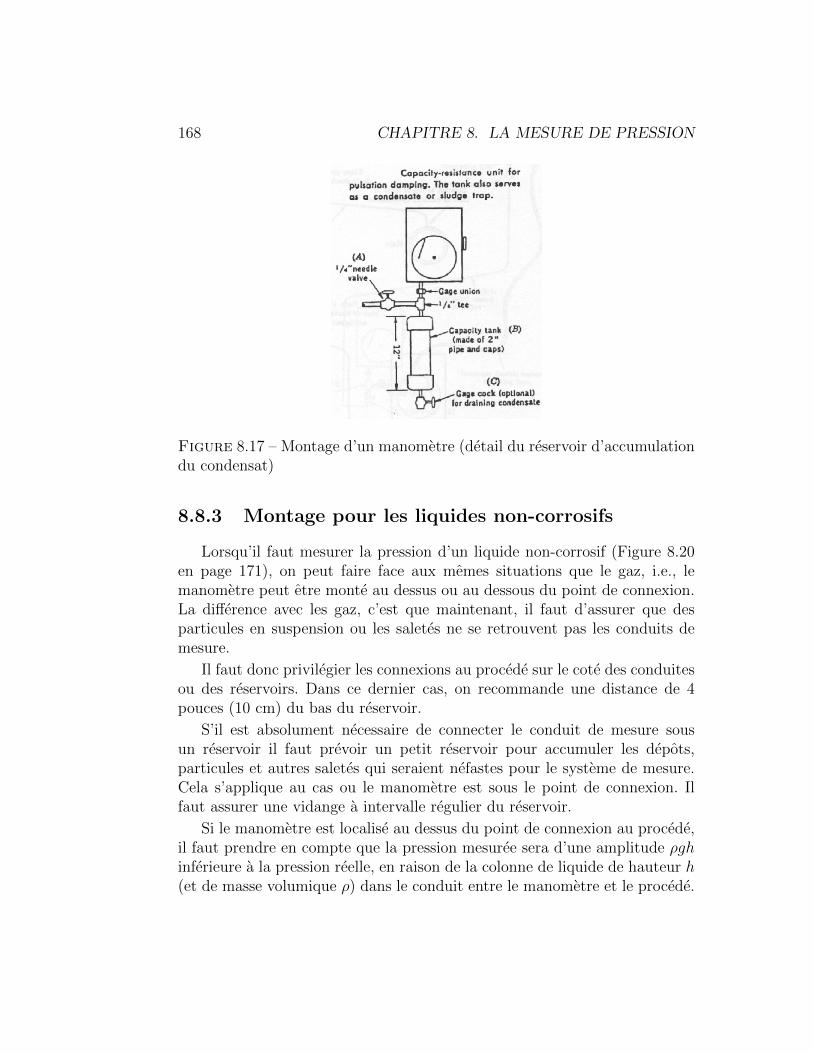
168 CHAPITRE 8. LA MESURE DE PRESSION
Figure 8.17 – Montage d’un manometre (detail du reservoir d’accumulationdu condensat)
8.8.3 Montage pour les liquides non-corrosifs
Lorsqu’il faut mesurer la pression d’un liquide non-corrosif (Figure 8.20en page 171), on peut faire face aux memes situations que le gaz, i.e., lemanometre peut etre monte au dessus ou au dessous du point de connexion.La difference avec les gaz, c’est que maintenant, il faut d’assurer que desparticules en suspension ou les saletes ne se retrouvent pas les conduits demesure.
Il faut donc privilegier les connexions au procede sur le cote des conduitesou des reservoirs. Dans ce dernier cas, on recommande une distance de 4pouces (10 cm) du bas du reservoir.
S’il est absolument necessaire de connecter le conduit de mesure sousun reservoir il faut prevoir un petit reservoir pour accumuler les depots,particules et autres saletes qui seraient nefastes pour le systeme de mesure.Cela s’applique au cas ou le manometre est sous le point de connexion. Ilfaut assurer une vidange a intervalle regulier du reservoir.
Si le manometre est localise au dessus du point de connexion au procede,il faut prendre en compte que la pression mesuree sera d’une amplitude ρghinferieure a la pression reelle, en raison de la colonne de liquide de hauteur h(et de masse volumique ρ) dans le conduit entre le manometre et le procede.
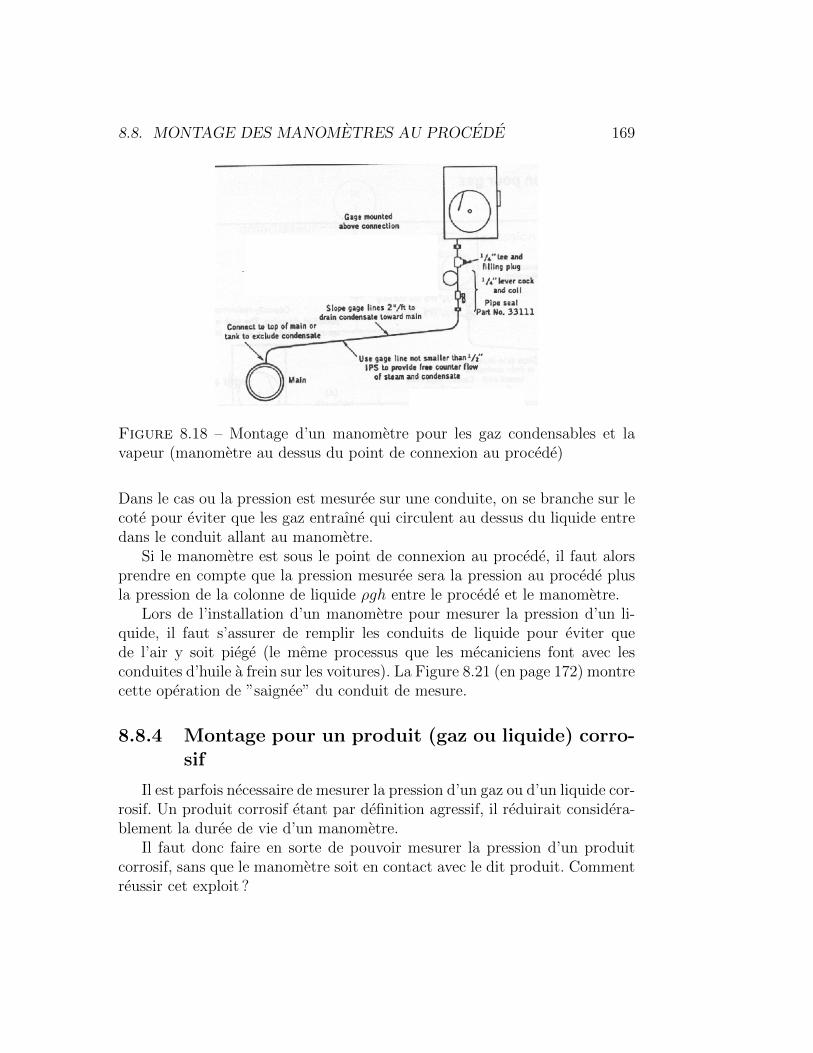
8.8. MONTAGE DES MANOMETRES AU PROCEDE 169
Figure 8.18 – Montage d’un manometre pour les gaz condensables et lavapeur (manometre au dessus du point de connexion au procede)
Dans le cas ou la pression est mesuree sur une conduite, on se branche sur lecote pour eviter que les gaz entraıne qui circulent au dessus du liquide entredans le conduit allant au manometre.
Si le manometre est sous le point de connexion au procede, il faut alorsprendre en compte que la pression mesuree sera la pression au procede plusla pression de la colonne de liquide ρgh entre le procede et le manometre.
Lors de l’installation d’un manometre pour mesurer la pression d’un li-quide, il faut s’assurer de remplir les conduits de liquide pour eviter quede l’air y soit piege (le meme processus que les mecaniciens font avec lesconduites d’huile a frein sur les voitures). La Figure 8.21 (en page 172) montrecette operation de ”saignee” du conduit de mesure.
8.8.4 Montage pour un produit (gaz ou liquide) corro-sif
Il est parfois necessaire de mesurer la pression d’un gaz ou d’un liquide cor-rosif. Un produit corrosif etant par definition agressif, il reduirait considera-blement la duree de vie d’un manometre.
Il faut donc faire en sorte de pouvoir mesurer la pression d’un produitcorrosif, sans que le manometre soit en contact avec le dit produit. Commentreussir cet exploit ?
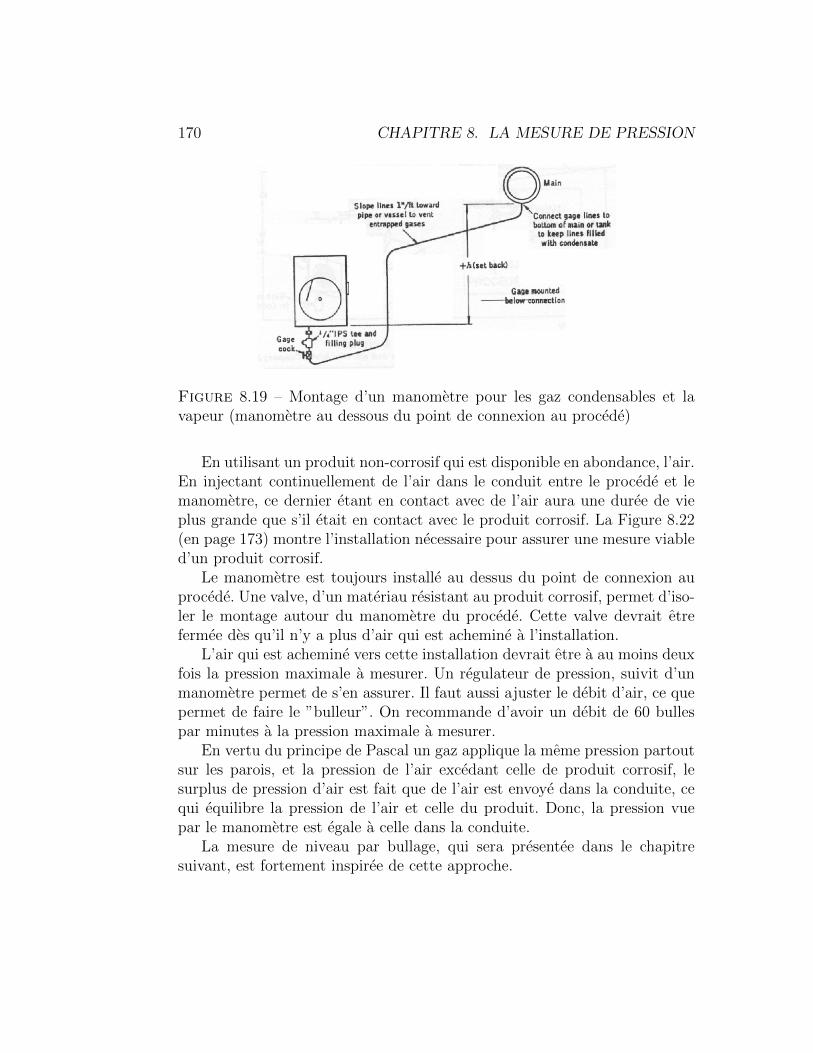
170 CHAPITRE 8. LA MESURE DE PRESSION
Figure 8.19 – Montage d’un manometre pour les gaz condensables et lavapeur (manometre au dessous du point de connexion au procede)
En utilisant un produit non-corrosif qui est disponible en abondance, l’air.En injectant continuellement de l’air dans le conduit entre le procede et lemanometre, ce dernier etant en contact avec de l’air aura une duree de vieplus grande que s’il etait en contact avec le produit corrosif. La Figure 8.22(en page 173) montre l’installation necessaire pour assurer une mesure viabled’un produit corrosif.
Le manometre est toujours installe au dessus du point de connexion auprocede. Une valve, d’un materiau resistant au produit corrosif, permet d’iso-ler le montage autour du manometre du procede. Cette valve devrait etrefermee des qu’il n’y a plus d’air qui est achemine a l’installation.
L’air qui est achemine vers cette installation devrait etre a au moins deuxfois la pression maximale a mesurer. Un regulateur de pression, suivit d’unmanometre permet de s’en assurer. Il faut aussi ajuster le debit d’air, ce quepermet de faire le ”bulleur”. On recommande d’avoir un debit de 60 bullespar minutes a la pression maximale a mesurer.
En vertu du principe de Pascal un gaz applique la meme pression partoutsur les parois, et la pression de l’air excedant celle de produit corrosif, lesurplus de pression d’air est fait que de l’air est envoye dans la conduite, cequi equilibre la pression de l’air et celle du produit. Donc, la pression vuepar le manometre est egale a celle dans la conduite.
La mesure de niveau par bullage, qui sera presentee dans le chapitresuivant, est fortement inspiree de cette approche.
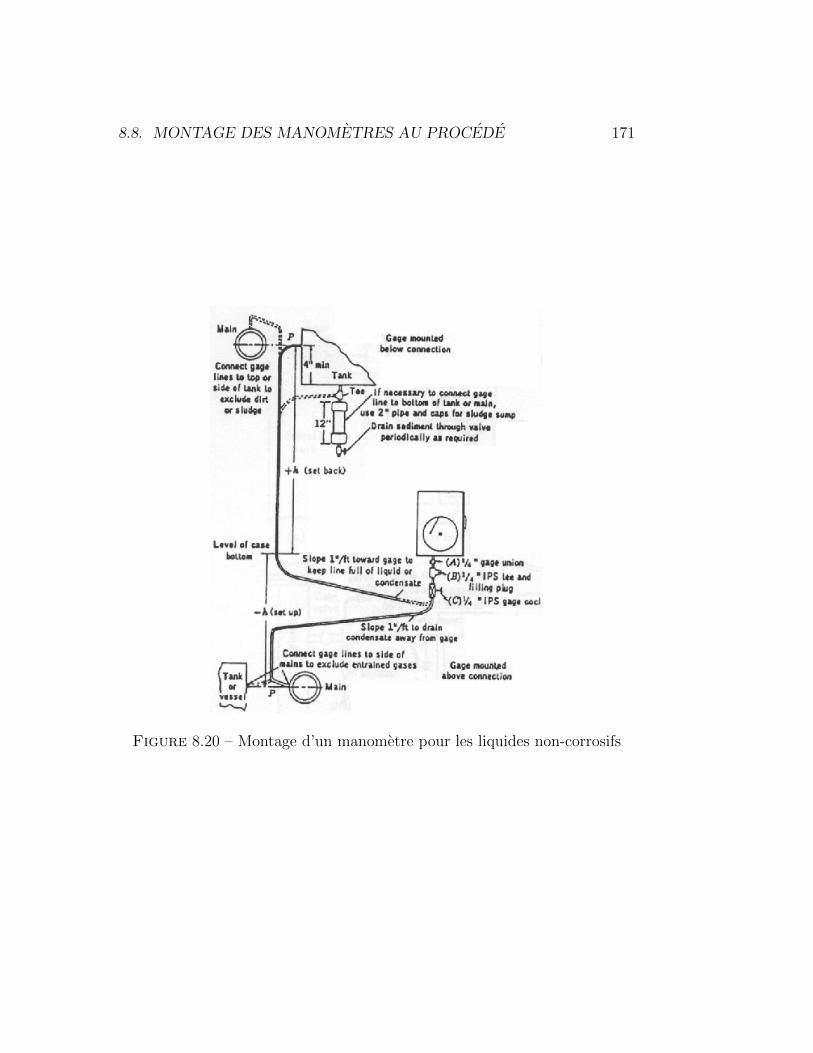
8.8. MONTAGE DES MANOMETRES AU PROCEDE 171
Figure 8.20 – Montage d’un manometre pour les liquides non-corrosifs
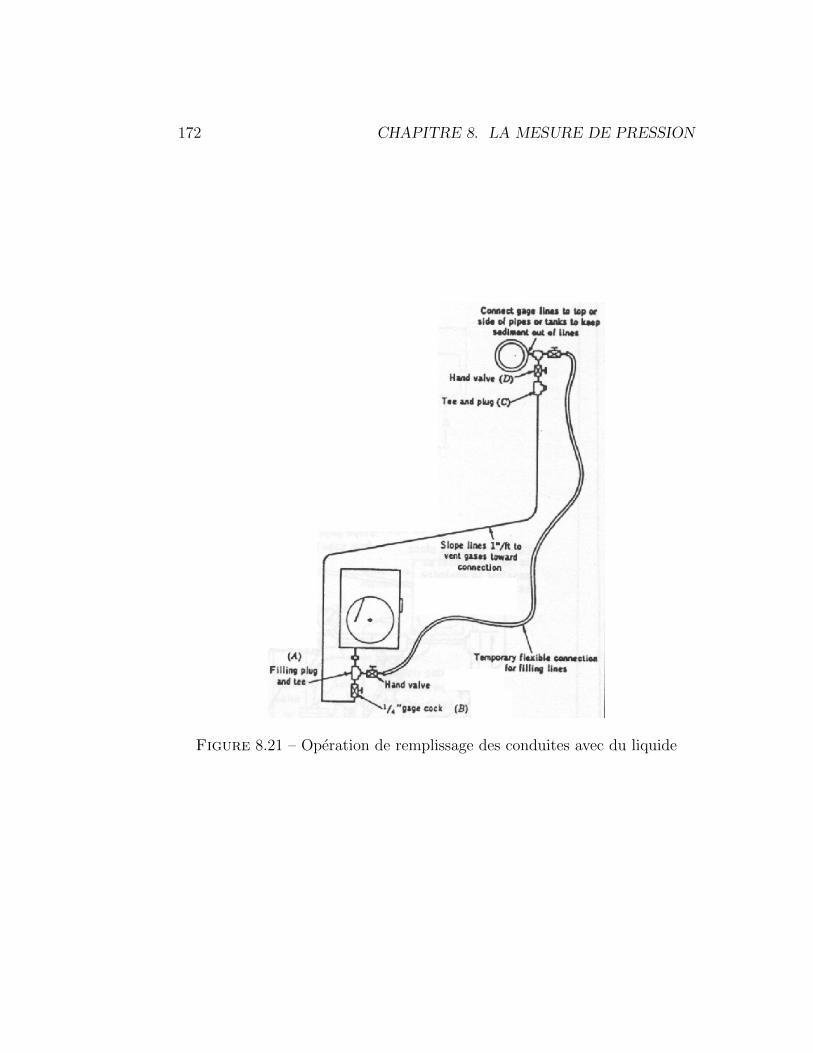
172 CHAPITRE 8. LA MESURE DE PRESSION
Figure 8.21 – Operation de remplissage des conduites avec du liquide
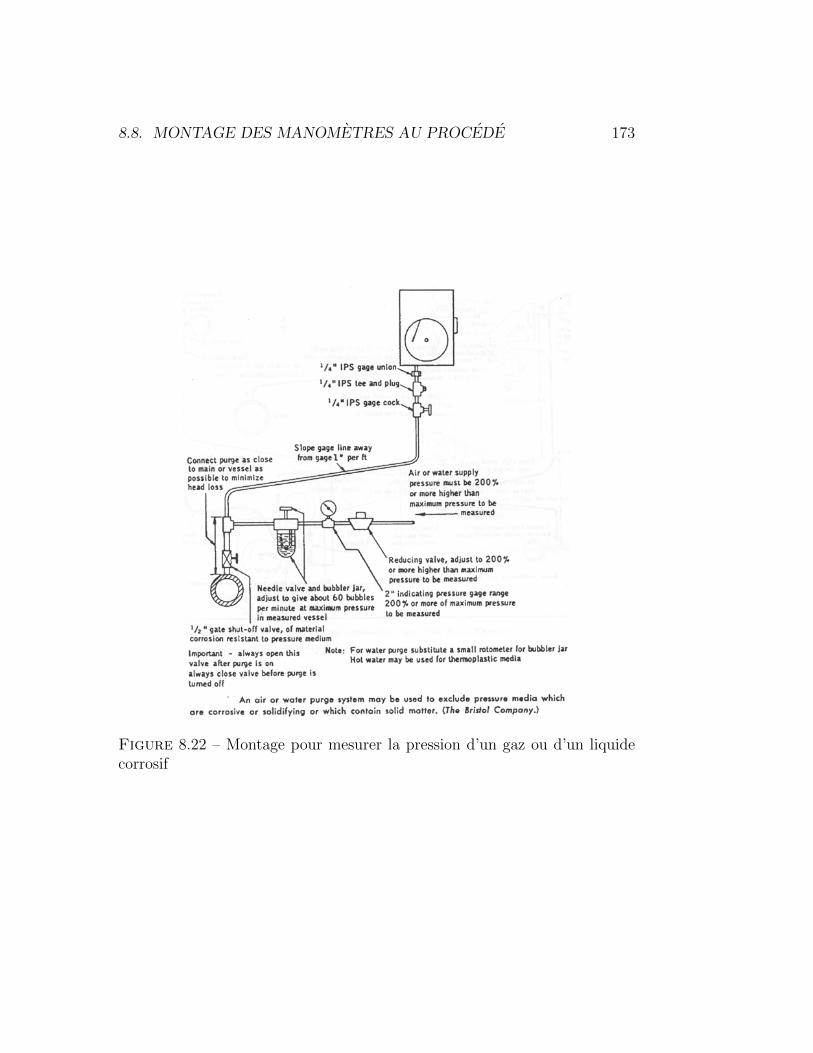
8.8. MONTAGE DES MANOMETRES AU PROCEDE 173
Figure 8.22 – Montage pour mesurer la pression d’un gaz ou d’un liquidecorrosif
174 CHAPITRE 8. LA MESURE DE PRESSION

Chapitre 9
La mesure de niveau
9.1 Introduction
Une mesure frequemment faite en milieu industriel est la mesure de ni-veau de materiaux solides et liquides. Ce chapitre presente les diverses ap-proches utilisees pour mesurer le niveau ainsi que les calculs necessaires pourselectionner le bon equipement.
Lorsqu’un capteur de niveau doit etre choisi, on doit prendre en compteplusieurs criteres. Ainsi, il faut savoir si la mesure se fait dans un reservoiretanche ou non. Autre possibilite, la mesure de niveau peut etre faite en pleinair, sur un bassin ou un canal. Il faut aussi connaitre la nature du produitdont il faut mesurer le niveau, a savoir s’il est sous forme solide ou liquide.Enfin, il faut savoir si le capteur peut etre en contact ou non avec le produitdont on mesure le niveau.
Les capteurs de niveau peuvent etre classifies selon la methode de mesure.Cette mesure peut etre visuelle (avec des tubes de verre). Elle peut etreaussi hydrostatique, i.e., basee sur les principes d’Archimede ou encore surla pression hydrostatique due a la hauteur de liquide au dessus du capteur.Certains capteurs de niveau utilisent des principes electriques bases sur desvariations d’impedance comme les sondes de niveau capacitives.
9.2 Flotteur
La loi d’Archimede dit que : Tout corps partiellement ou completementplonge dans un liquide recoit, de la part de ce fluide, une poussee verticale,
175
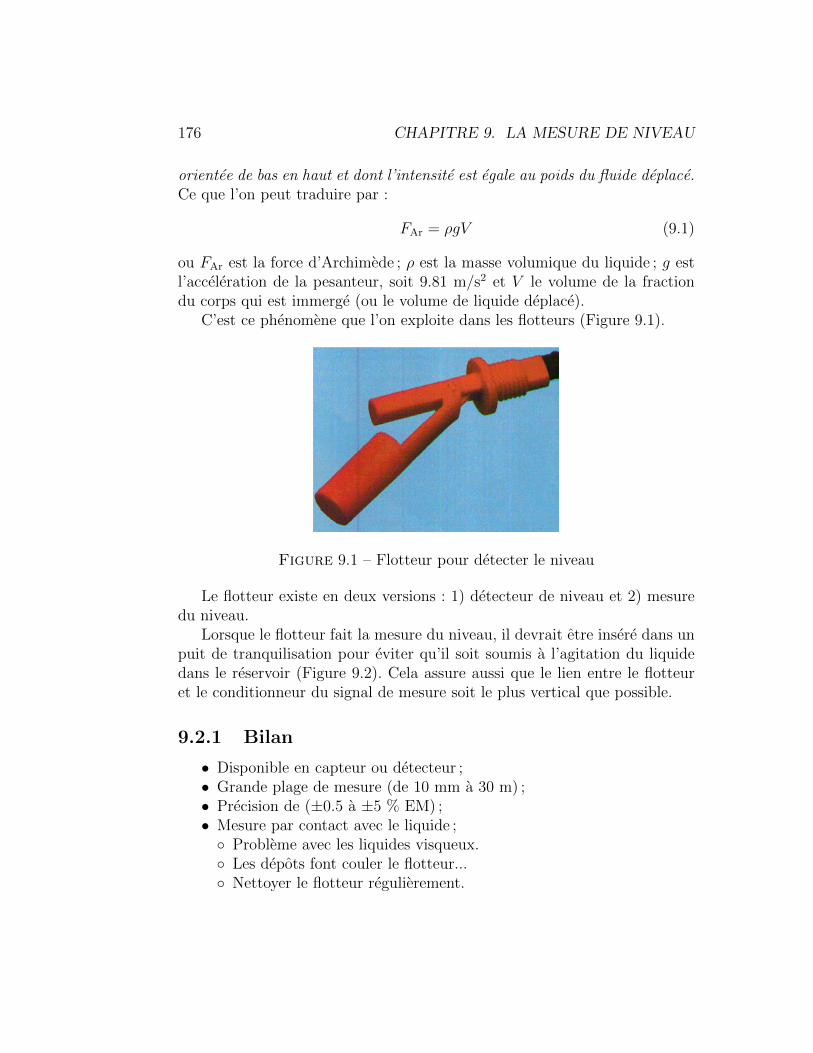
176 CHAPITRE 9. LA MESURE DE NIVEAU
orientee de bas en haut et dont l’intensite est egale au poids du fluide deplace.Ce que l’on peut traduire par :
FAr = ρgV (9.1)
ou FAr est la force d’Archimede ; ρ est la masse volumique du liquide ; g estl’acceleration de la pesanteur, soit 9.81 m/s2 et V le volume de la fractiondu corps qui est immerge (ou le volume de liquide deplace).
C’est ce phenomene que l’on exploite dans les flotteurs (Figure 9.1).
Figure 9.1 – Flotteur pour detecter le niveau
Le flotteur existe en deux versions : 1) detecteur de niveau et 2) mesuredu niveau.
Lorsque le flotteur fait la mesure du niveau, il devrait etre insere dans unpuit de tranquilisation pour eviter qu’il soit soumis a l’agitation du liquidedans le reservoir (Figure 9.2). Cela assure aussi que le lien entre le flotteuret le conditionneur du signal de mesure soit le plus vertical que possible.
9.2.1 Bilan
• Disponible en capteur ou detecteur ;• Grande plage de mesure (de 10 mm a 30 m) ;• Precision de (±0.5 a ±5 % EM) ;• Mesure par contact avec le liquide ; Probleme avec les liquides visqueux. Les depots font couler le flotteur... Nettoyer le flotteur regulierement.
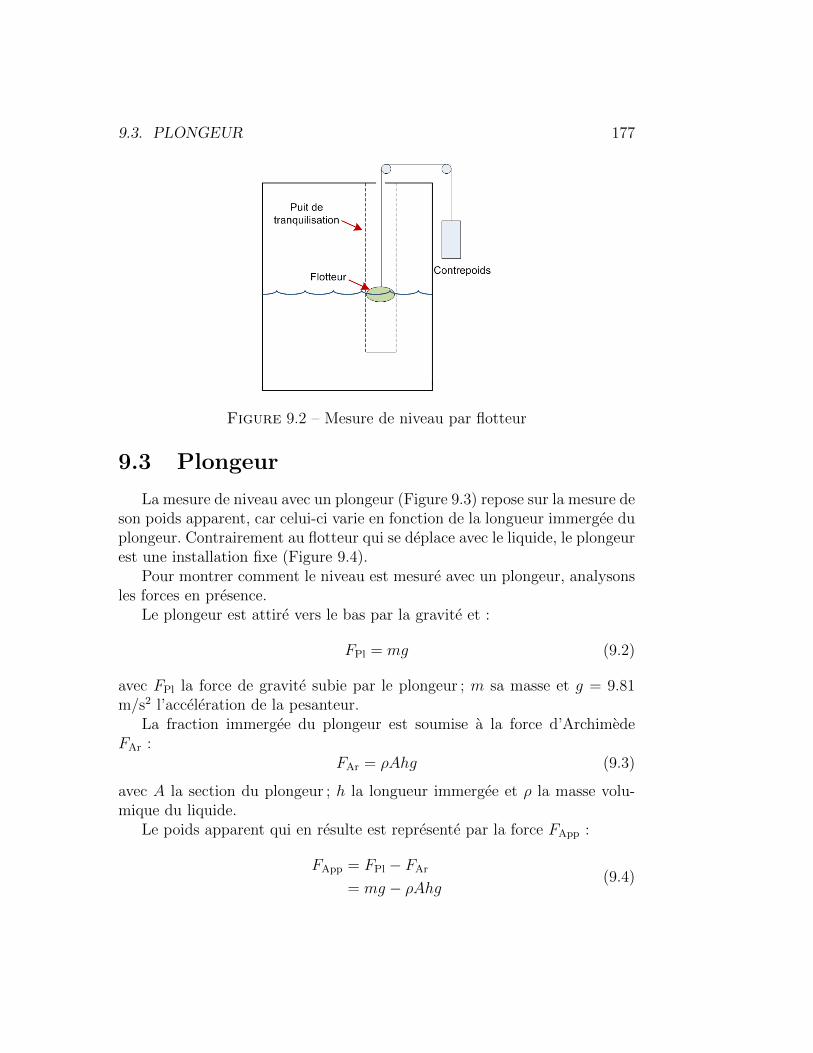
9.3. PLONGEUR 177
Figure 9.2 – Mesure de niveau par flotteur
9.3 Plongeur
La mesure de niveau avec un plongeur (Figure 9.3) repose sur la mesure deson poids apparent, car celui-ci varie en fonction de la longueur immergee duplongeur. Contrairement au flotteur qui se deplace avec le liquide, le plongeurest une installation fixe (Figure 9.4).
Pour montrer comment le niveau est mesure avec un plongeur, analysonsles forces en presence.
Le plongeur est attire vers le bas par la gravite et :
FPl = mg (9.2)
avec FPl la force de gravite subie par le plongeur ; m sa masse et g = 9.81m/s2 l’acceleration de la pesanteur.
La fraction immergee du plongeur est soumise a la force d’ArchimedeFAr :
FAr = ρAhg (9.3)
avec A la section du plongeur ; h la longueur immergee et ρ la masse volu-mique du liquide.
Le poids apparent qui en resulte est represente par la force FApp :
FApp = FPl − FAr
= mg − ρAhg(9.4)
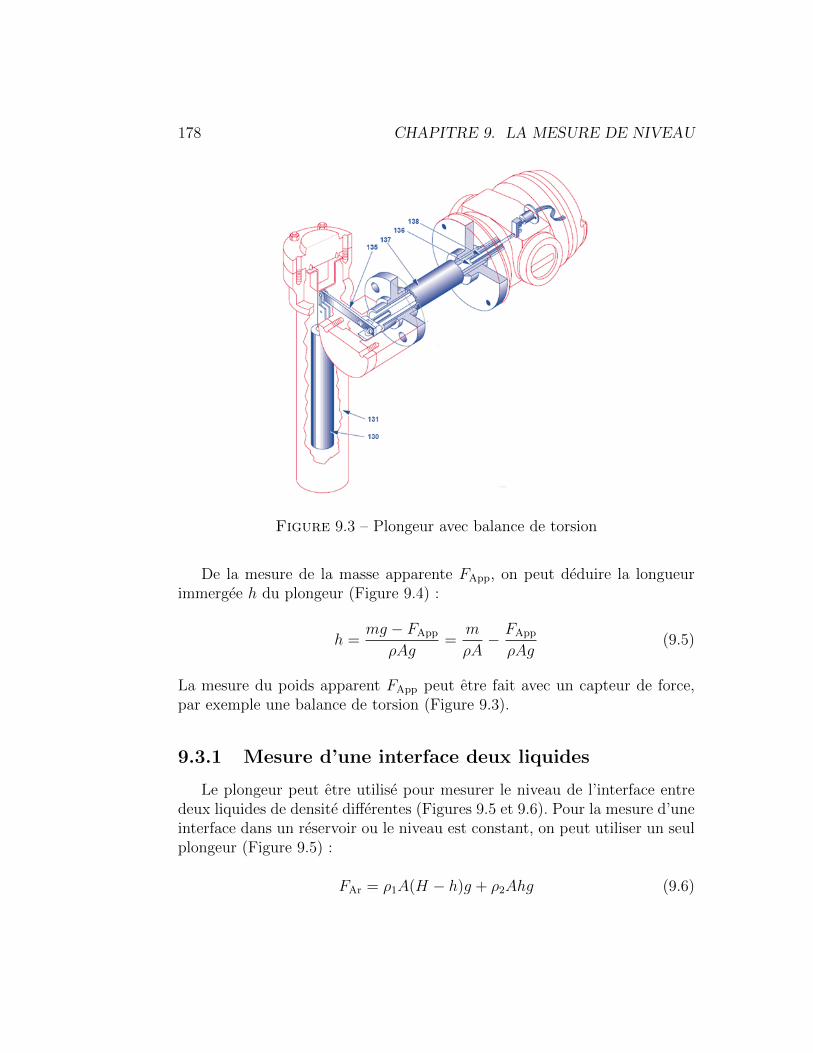
178 CHAPITRE 9. LA MESURE DE NIVEAU
Figure 9.3 – Plongeur avec balance de torsion
De la mesure de la masse apparente FApp, on peut deduire la longueurimmergee h du plongeur (Figure 9.4) :
h =mg − FApp
ρAg=
m
ρA− FApp
ρAg(9.5)
La mesure du poids apparent FApp peut etre fait avec un capteur de force,par exemple une balance de torsion (Figure 9.3).
9.3.1 Mesure d’une interface deux liquides
Le plongeur peut etre utilise pour mesurer le niveau de l’interface entredeux liquides de densite differentes (Figures 9.5 et 9.6). Pour la mesure d’uneinterface dans un reservoir ou le niveau est constant, on peut utiliser un seulplongeur (Figure 9.5) :
FAr = ρ1A(H − h)g + ρ2Ahg (9.6)
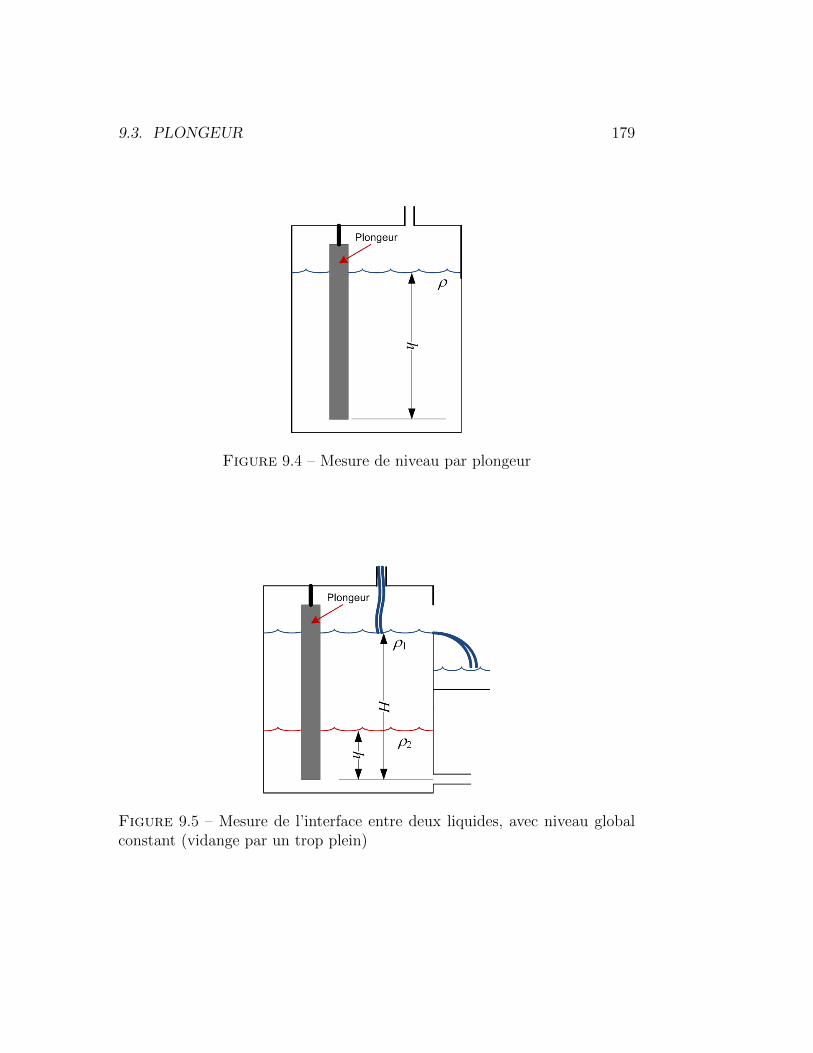
9.3. PLONGEUR 179
Figure 9.4 – Mesure de niveau par plongeur
Figure 9.5 – Mesure de l’interface entre deux liquides, avec niveau globalconstant (vidange par un trop plein)
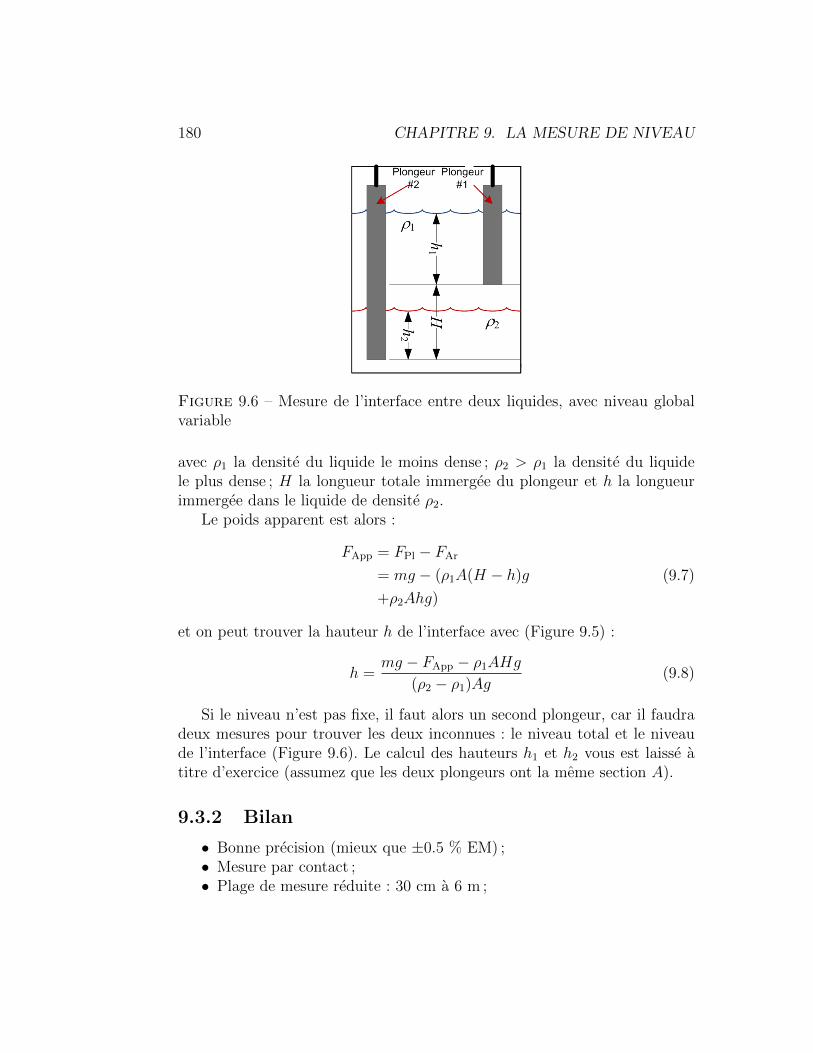
180 CHAPITRE 9. LA MESURE DE NIVEAU
Figure 9.6 – Mesure de l’interface entre deux liquides, avec niveau globalvariable
avec ρ1 la densite du liquide le moins dense ; ρ2 > ρ1 la densite du liquidele plus dense ; H la longueur totale immergee du plongeur et h la longueurimmergee dans le liquide de densite ρ2.
Le poids apparent est alors :
FApp = FPl − FAr
= mg − (ρ1A(H − h)g
+ρ2Ahg)
(9.7)
et on peut trouver la hauteur h de l’interface avec (Figure 9.5) :
h =mg − FApp − ρ1AHg
(ρ2 − ρ1)Ag(9.8)
Si le niveau n’est pas fixe, il faut alors un second plongeur, car il faudradeux mesures pour trouver les deux inconnues : le niveau total et le niveaude l’interface (Figure 9.6). Le calcul des hauteurs h1 et h2 vous est laisse atitre d’exercice (assumez que les deux plongeurs ont la meme section A).
9.3.2 Bilan
• Bonne precision (mieux que ±0.5 % EM) ;• Mesure par contact ;• Plage de mesure reduite : 30 cm a 6 m ;
9.4. PALPEUR 181
• Convient aux liquides visqueux.• Permet la mesure du niveau de l’interface de deux liquides de densite
differente.
9.4 Palpeur
Le palpeur (Figure 9.7) est un appareil dont le principe de fonctionnementest fort simple. Il s’apparente a celui utilise anciennement par les marinspour determiner la profondeur des eaux dans lequel leur navire circulait. Enattachant un poids au bout d’une corde et en la descendant dans l’eau, lemarin pouvait determiner la profondeur en mesurant la longueur de cordequ’il fut necessaire de derouler avant que le poids touche le fond.
Figure 9.7 – Palpeur
Le principe est le meme car un poids est descendu jusqu’a ce que l’ontouche le produit, puis on mesure la longueur de cable deroule. Cette mesureest repetee periodiquement et n’est donc pas continue comme le serait lamesure avec un flotteur.
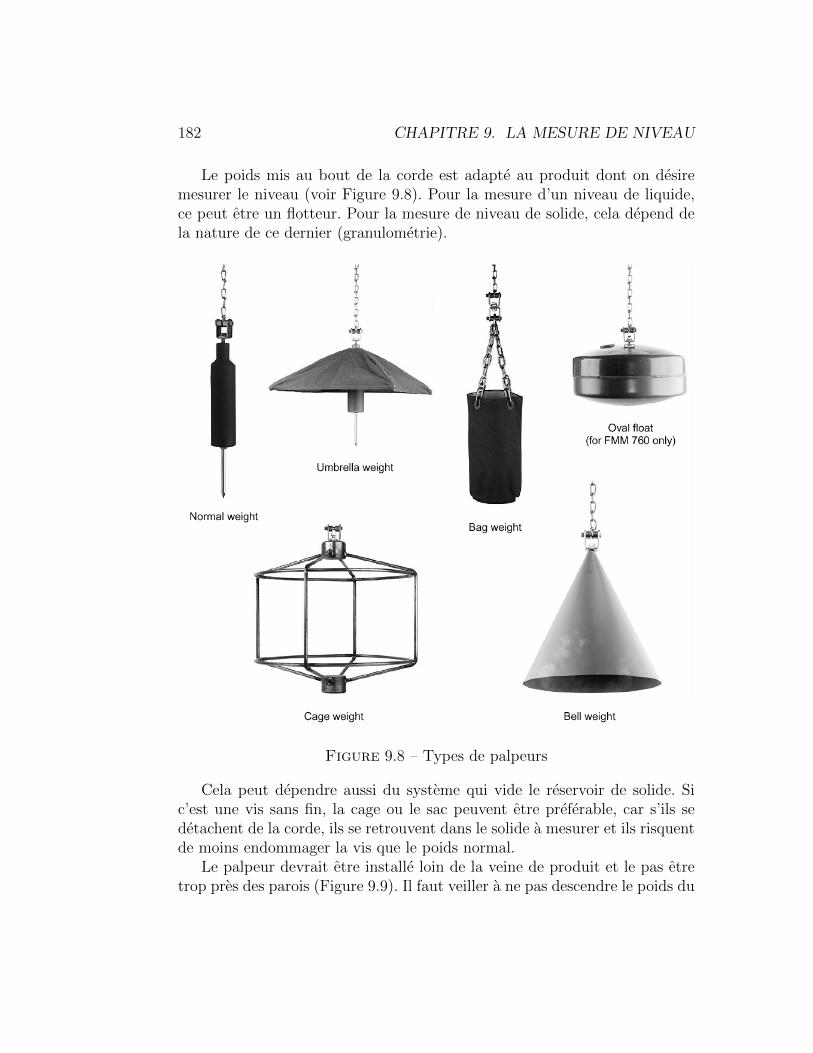
182 CHAPITRE 9. LA MESURE DE NIVEAU
Le poids mis au bout de la corde est adapte au produit dont on desiremesurer le niveau (voir Figure 9.8). Pour la mesure d’un niveau de liquide,ce peut etre un flotteur. Pour la mesure de niveau de solide, cela depend dela nature de ce dernier (granulometrie).
Figure 9.8 – Types de palpeurs
Cela peut dependre aussi du systeme qui vide le reservoir de solide. Sic’est une vis sans fin, la cage ou le sac peuvent etre preferable, car s’ils sedetachent de la corde, ils se retrouvent dans le solide a mesurer et ils risquentde moins endommager la vis que le poids normal.
Le palpeur devrait etre installe loin de la veine de produit et le pas etretrop pres des parois (Figure 9.9). Il faut veiller a ne pas descendre le poids du
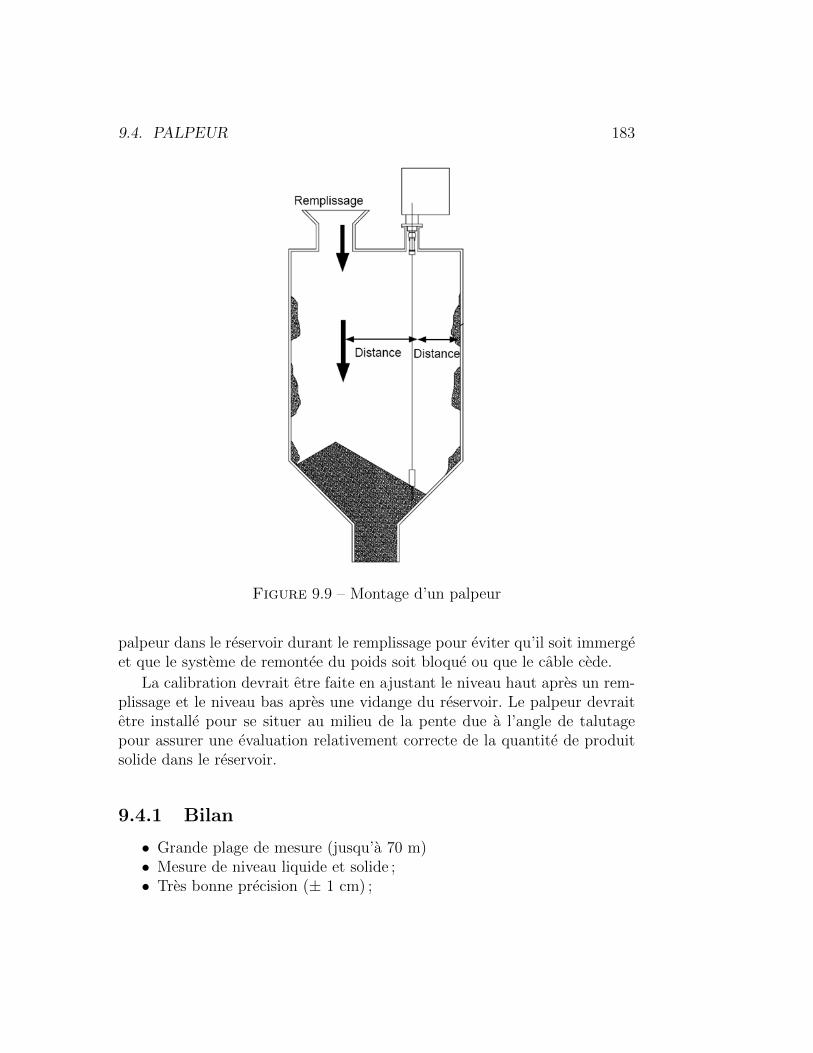
9.4. PALPEUR 183
Figure 9.9 – Montage d’un palpeur
palpeur dans le reservoir durant le remplissage pour eviter qu’il soit immergeet que le systeme de remontee du poids soit bloque ou que le cable cede.
La calibration devrait etre faite en ajustant le niveau haut apres un rem-plissage et le niveau bas apres une vidange du reservoir. Le palpeur devraitetre installe pour se situer au milieu de la pente due a l’angle de talutagepour assurer une evaluation relativement correcte de la quantite de produitsolide dans le reservoir.
9.4.1 Bilan
• Grande plage de mesure (jusqu’a 70 m)• Mesure de niveau liquide et solide ;• Tres bonne precision (± 1 cm) ;
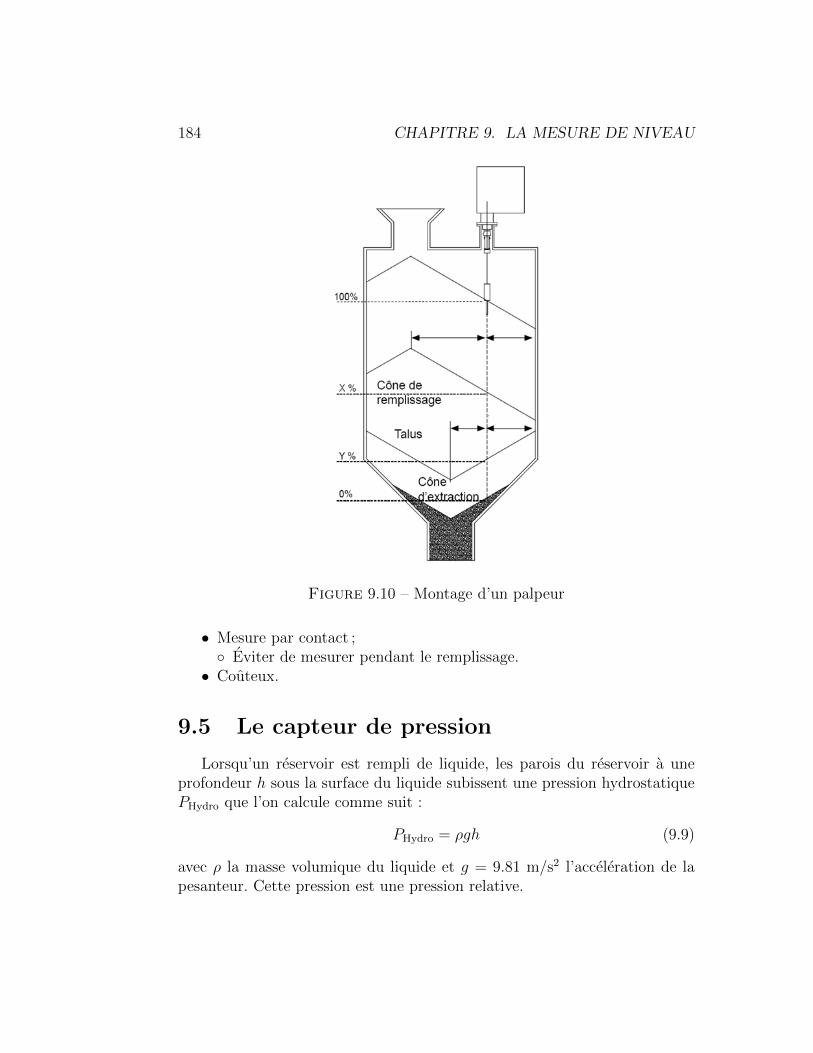
184 CHAPITRE 9. LA MESURE DE NIVEAU
Figure 9.10 – Montage d’un palpeur
• Mesure par contact ; Eviter de mesurer pendant le remplissage.• Couteux.
9.5 Le capteur de pression
Lorsqu’un reservoir est rempli de liquide, les parois du reservoir a uneprofondeur h sous la surface du liquide subissent une pression hydrostatiquePHydro que l’on calcule comme suit :
PHydro = ρgh (9.9)
avec ρ la masse volumique du liquide et g = 9.81 m/s2 l’acceleration de lapesanteur. Cette pression est une pression relative.
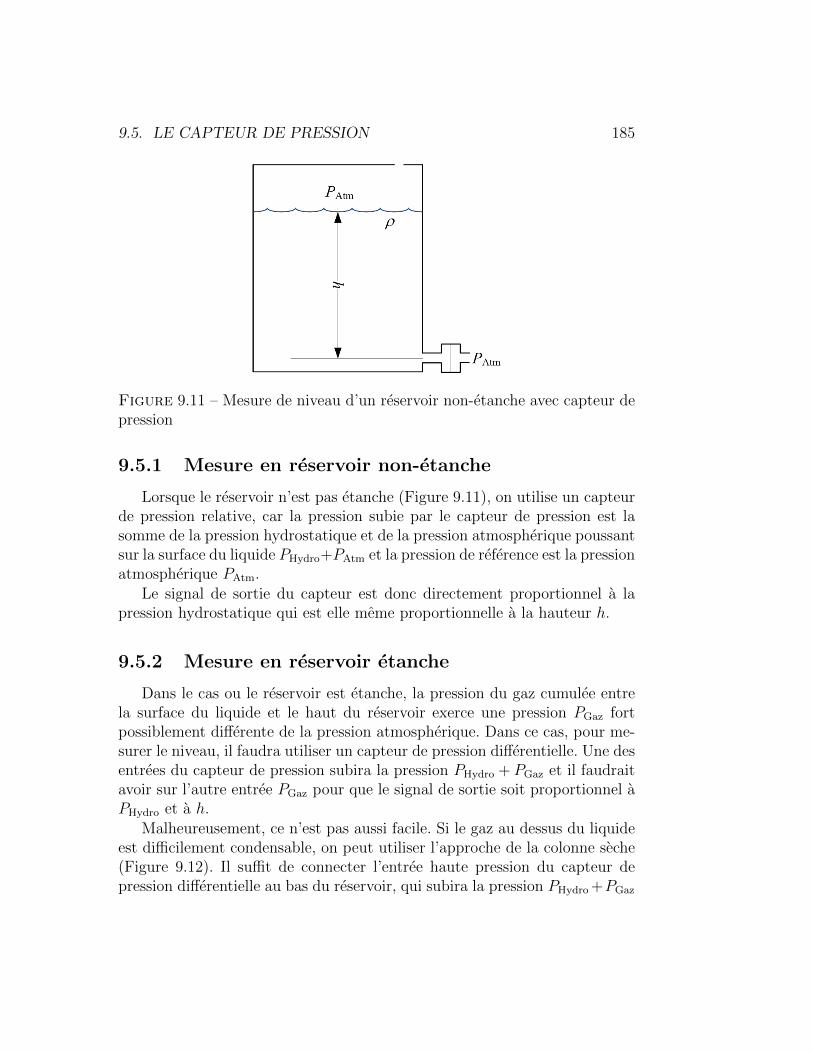
9.5. LE CAPTEUR DE PRESSION 185
Figure 9.11 – Mesure de niveau d’un reservoir non-etanche avec capteur depression
9.5.1 Mesure en reservoir non-etanche
Lorsque le reservoir n’est pas etanche (Figure 9.11), on utilise un capteurde pression relative, car la pression subie par le capteur de pression est lasomme de la pression hydrostatique et de la pression atmospherique poussantsur la surface du liquide PHydro+PAtm et la pression de reference est la pressionatmospherique PAtm.
Le signal de sortie du capteur est donc directement proportionnel a lapression hydrostatique qui est elle meme proportionnelle a la hauteur h.
9.5.2 Mesure en reservoir etanche
Dans le cas ou le reservoir est etanche, la pression du gaz cumulee entrela surface du liquide et le haut du reservoir exerce une pression PGaz fortpossiblement differente de la pression atmospherique. Dans ce cas, pour me-surer le niveau, il faudra utiliser un capteur de pression differentielle. Une desentrees du capteur de pression subira la pression PHydro + PGaz et il faudraitavoir sur l’autre entree PGaz pour que le signal de sortie soit proportionnel aPHydro et a h.
Malheureusement, ce n’est pas aussi facile. Si le gaz au dessus du liquideest difficilement condensable, on peut utiliser l’approche de la colonne seche(Figure 9.12). Il suffit de connecter l’entree haute pression du capteur depression differentielle au bas du reservoir, qui subira la pression PHydro +PGaz
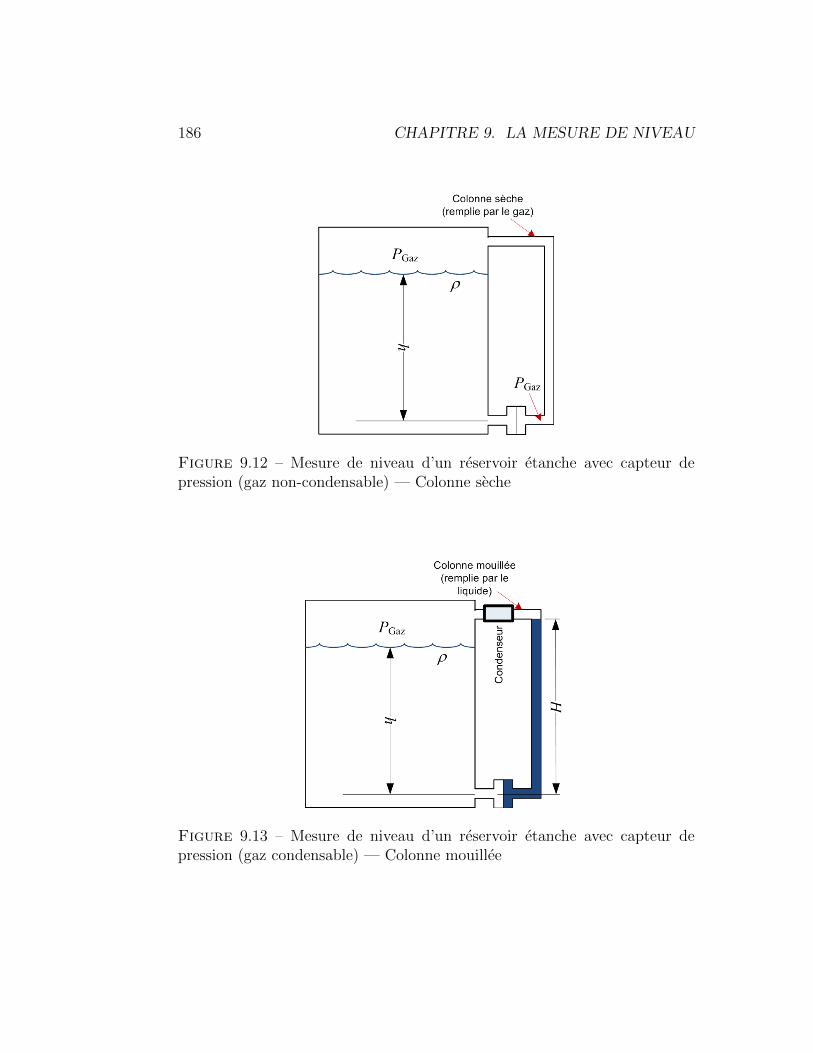
186 CHAPITRE 9. LA MESURE DE NIVEAU
Figure 9.12 – Mesure de niveau d’un reservoir etanche avec capteur depression (gaz non-condensable) — Colonne seche
Figure 9.13 – Mesure de niveau d’un reservoir etanche avec capteur depression (gaz condensable) — Colonne mouillee
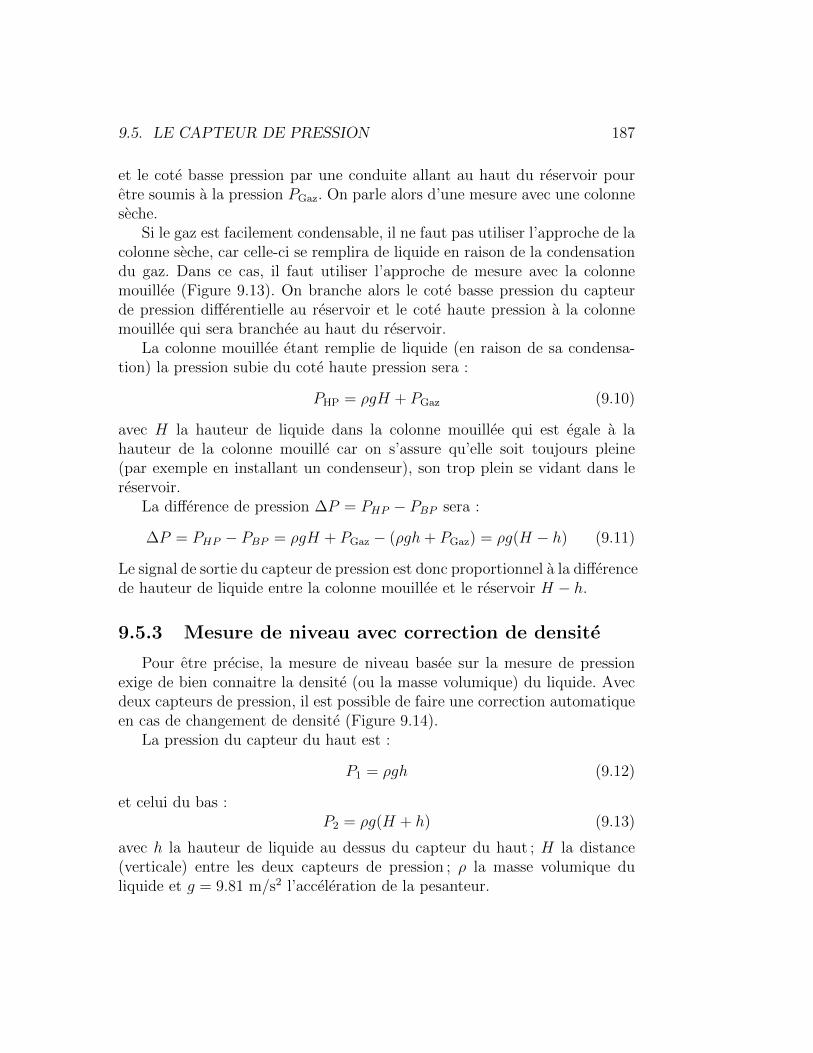
9.5. LE CAPTEUR DE PRESSION 187
et le cote basse pression par une conduite allant au haut du reservoir pouretre soumis a la pression PGaz. On parle alors d’une mesure avec une colonneseche.
Si le gaz est facilement condensable, il ne faut pas utiliser l’approche de lacolonne seche, car celle-ci se remplira de liquide en raison de la condensationdu gaz. Dans ce cas, il faut utiliser l’approche de mesure avec la colonnemouillee (Figure 9.13). On branche alors le cote basse pression du capteurde pression differentielle au reservoir et le cote haute pression a la colonnemouillee qui sera branchee au haut du reservoir.
La colonne mouillee etant remplie de liquide (en raison de sa condensa-tion) la pression subie du cote haute pression sera :
PHP = ρgH + PGaz (9.10)
avec H la hauteur de liquide dans la colonne mouillee qui est egale a lahauteur de la colonne mouille car on s’assure qu’elle soit toujours pleine(par exemple en installant un condenseur), son trop plein se vidant dans lereservoir.
La difference de pression ∆P = PHP − PBP sera :
∆P = PHP − PBP = ρgH + PGaz − (ρgh+ PGaz) = ρg(H − h) (9.11)
Le signal de sortie du capteur de pression est donc proportionnel a la differencede hauteur de liquide entre la colonne mouillee et le reservoir H − h.
9.5.3 Mesure de niveau avec correction de densite
Pour etre precise, la mesure de niveau basee sur la mesure de pressionexige de bien connaitre la densite (ou la masse volumique) du liquide. Avecdeux capteurs de pression, il est possible de faire une correction automatiqueen cas de changement de densite (Figure 9.14).
La pression du capteur du haut est :
P1 = ρgh (9.12)
et celui du bas :P2 = ρg(H + h) (9.13)
avec h la hauteur de liquide au dessus du capteur du haut ; H la distance(verticale) entre les deux capteurs de pression ; ρ la masse volumique duliquide et g = 9.81 m/s2 l’acceleration de la pesanteur.

188 CHAPITRE 9. LA MESURE DE NIVEAU
Figure 9.14 – Mesure de volume avec correction de densite
La difference de pression entre le capteur de bas et celui du haut est :
∆P = P2 − P1 = ρg(H + h)− ρgh = ρgH (9.14)
La masse volumique est obtenue a partie de ∆P en calculant :
ρ =∆P
gH(9.15)
et le niveau est calcule comme suit :
h =P1
ρg=
P1
∆PH =
P1
(P2 − P1)H (9.16)
9.5.4 Mesure du niveau d’une interface
Tout comme le plongeur, un capteur de pression peut-etre utilise pourmesurer le niveau d’une interface entre deux liquides de masses volumiquesdifferentes. Si le niveau du reservoir est constant, on peut faire une mesured’interface (Figure 9.15). Ainsi :
P = ρ1g(H − h) + ρ2gh = ρ1gH + (ρ2 − ρ1)gh (9.17)
avec ρ1 la masse volumique du liquide le moins dense ; ρ2 > ρ1 la massevolumique du liquide le plus dense ; H la hauteur totale de liquide au dessusdu capteur de pression et h la hauteur de liquide de masse volumique ρ2 audessus du capteur de pression.
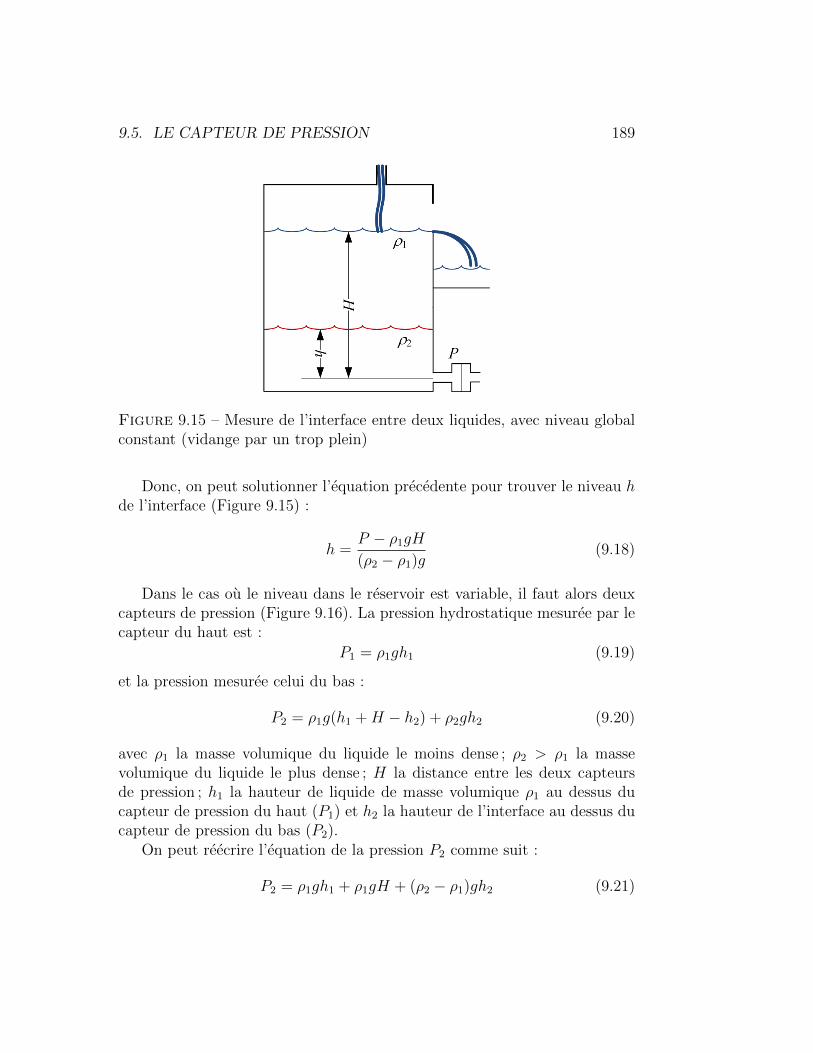
9.5. LE CAPTEUR DE PRESSION 189
Figure 9.15 – Mesure de l’interface entre deux liquides, avec niveau globalconstant (vidange par un trop plein)
Donc, on peut solutionner l’equation precedente pour trouver le niveau hde l’interface (Figure 9.15) :
h =P − ρ1gH
(ρ2 − ρ1)g(9.18)
Dans le cas ou le niveau dans le reservoir est variable, il faut alors deuxcapteurs de pression (Figure 9.16). La pression hydrostatique mesuree par lecapteur du haut est :
P1 = ρ1gh1 (9.19)
et la pression mesuree celui du bas :
P2 = ρ1g(h1 +H − h2) + ρ2gh2 (9.20)
avec ρ1 la masse volumique du liquide le moins dense ; ρ2 > ρ1 la massevolumique du liquide le plus dense ; H la distance entre les deux capteursde pression ; h1 la hauteur de liquide de masse volumique ρ1 au dessus ducapteur de pression du haut (P1) et h2 la hauteur de l’interface au dessus ducapteur de pression du bas (P2).
On peut reecrire l’equation de la pression P2 comme suit :
P2 = ρ1gh1 + ρ1gH + (ρ2 − ρ1)gh2 (9.21)

190 CHAPITRE 9. LA MESURE DE NIVEAU
Figure 9.16 – Mesure de l’interface entre deux liquides, avec niveau globalvariable
Le capteur de pression du haut permet d’obtenir le niveau total h1 dansle reservoir (Figure 9.16) :
h1 =P1
ρ1g(9.22)
La difference de pression n’est dependante que de la hauteur de l’interfaceh2 :
∆P = P2 − P1 = ρ1gH + (ρ2 − ρ1)gh2 (9.23)
et en rearrangeant cette equation, on obtient (Figure 9.16) :
h2 =∆P − ρ1gH
(ρ2 − ρ1)g(9.24)
Ces equations sont valides en autant que h1 > 0 et 0 < h2 < H, c’est-a-dire que le capteur du haut soit immerge et que l’interface entre les deuxliquides soit entre les deux capteurs de pression.
9.5.5 Bilan
La precision de cette approche de mesure du niveau d’un liquide dans unreservoir depend de la precision du capteur de pression et de la precision aveclaquelle la densite du liquide est connue.
9.6. LA SONDE CONDUCTRICE 191
9.6 La sonde conductrice
Le principe de detection de niveau le moins couteux est l’utilisation d’unesonde conductrice. Pour que cette approche soit viable, il faut que le liquidesoit conducteur.
Figure 9.17 – Detection de niveau avec des sondes conductrices
Lorsque le liquide entre en contact avec deux electrodes de la sonde, ilferme le circuit et permet la detection de niveau.
Un capteur peut presenter plusieurs points de commutation pour detecterdivers niveaux dans le reservoir.
9.6.1 Bilan
• Detection tout-ou-rien ;• Usage limite aux liquides conducteurs ;• Sensible aux liquides corrosifs ;• Sensible aux liquides visqueux laissant des depots isolant ;• Peut detecter le niveau de charbon en poudre ;• Temperatures de -200 a +400 C ;• Point de commutation a prix minimum.
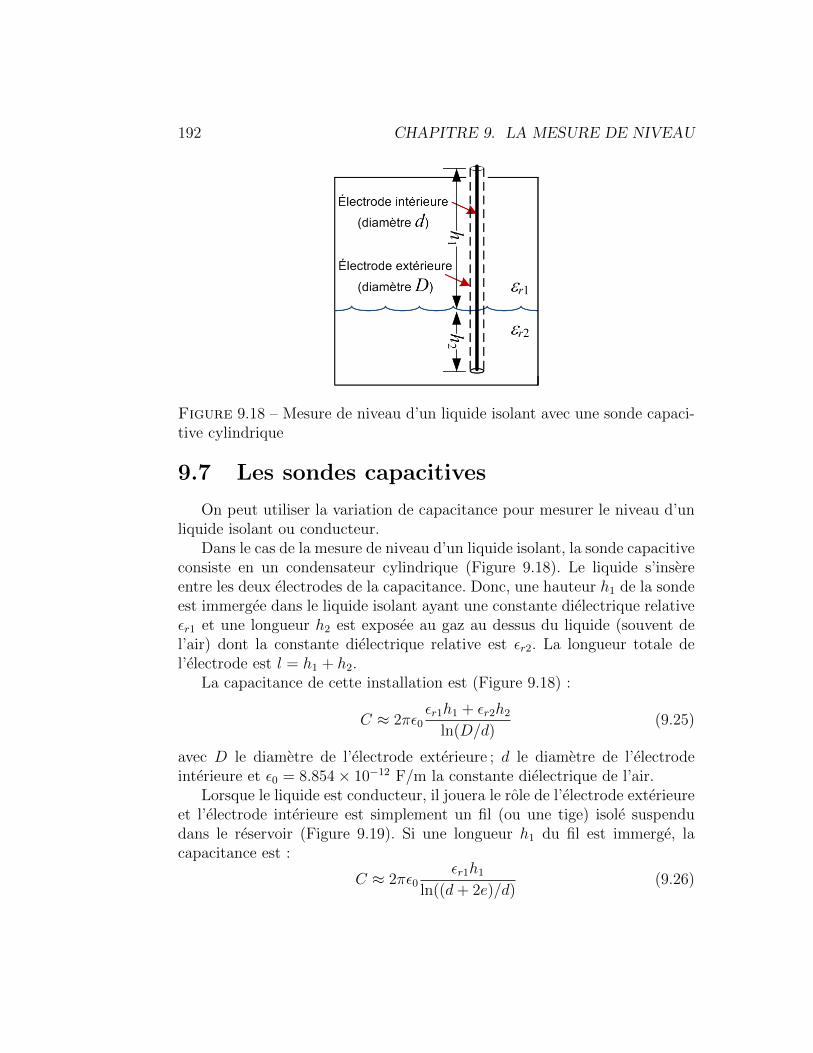
192 CHAPITRE 9. LA MESURE DE NIVEAU
Figure 9.18 – Mesure de niveau d’un liquide isolant avec une sonde capaci-tive cylindrique
9.7 Les sondes capacitives
On peut utiliser la variation de capacitance pour mesurer le niveau d’unliquide isolant ou conducteur.
Dans le cas de la mesure de niveau d’un liquide isolant, la sonde capacitiveconsiste en un condensateur cylindrique (Figure 9.18). Le liquide s’insereentre les deux electrodes de la capacitance. Donc, une hauteur h1 de la sondeest immergee dans le liquide isolant ayant une constante dielectrique relativeεr1 et une longueur h2 est exposee au gaz au dessus du liquide (souvent del’air) dont la constante dielectrique relative est εr2. La longueur totale del’electrode est l = h1 + h2.
La capacitance de cette installation est (Figure 9.18) :
C ≈ 2πε0εr1h1 + εr2h2
ln(D/d)(9.25)
avec D le diametre de l’electrode exterieure ; d le diametre de l’electrodeinterieure et ε0 = 8.854× 10−12 F/m la constante dielectrique de l’air.
Lorsque le liquide est conducteur, il jouera le role de l’electrode exterieureet l’electrode interieure est simplement un fil (ou une tige) isole suspendudans le reservoir (Figure 9.19). Si une longueur h1 du fil est immerge, lacapacitance est :
C ≈ 2πε0εr1h1
ln((d+ 2e)/d)(9.26)
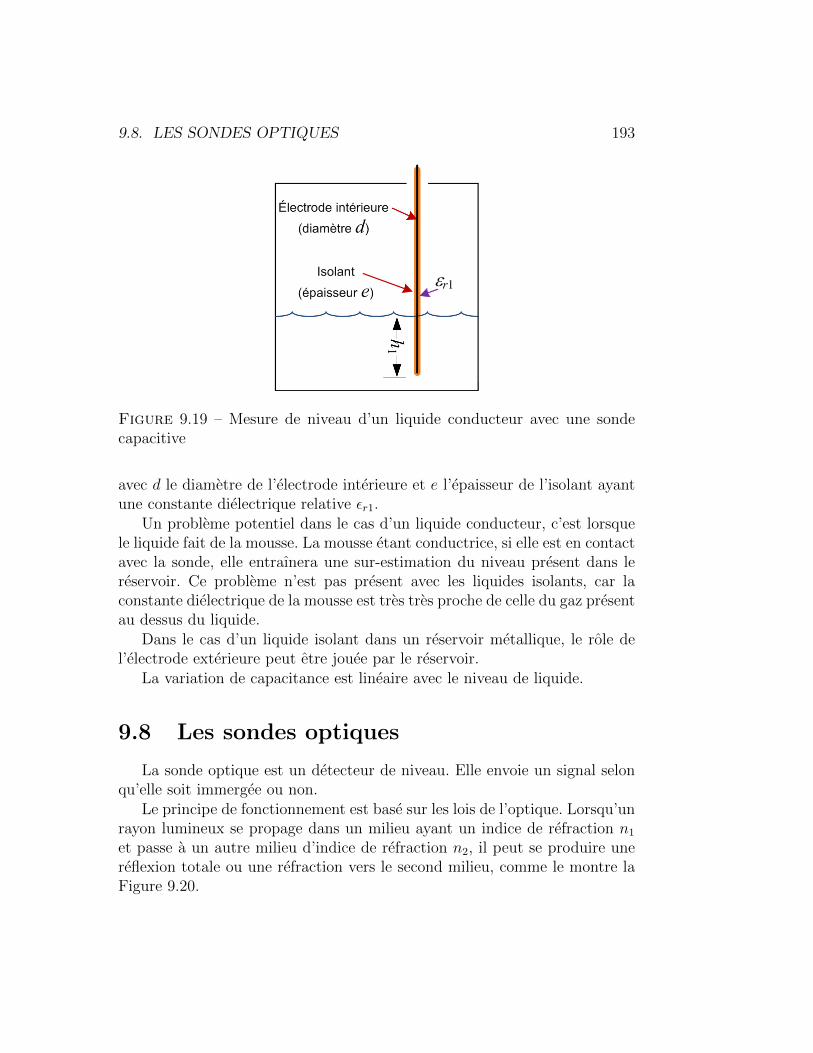
9.8. LES SONDES OPTIQUES 193
Figure 9.19 – Mesure de niveau d’un liquide conducteur avec une sondecapacitive
avec d le diametre de l’electrode interieure et e l’epaisseur de l’isolant ayantune constante dielectrique relative εr1.
Un probleme potentiel dans le cas d’un liquide conducteur, c’est lorsquele liquide fait de la mousse. La mousse etant conductrice, si elle est en contactavec la sonde, elle entraınera une sur-estimation du niveau present dans lereservoir. Ce probleme n’est pas present avec les liquides isolants, car laconstante dielectrique de la mousse est tres tres proche de celle du gaz presentau dessus du liquide.
Dans le cas d’un liquide isolant dans un reservoir metallique, le role del’electrode exterieure peut etre jouee par le reservoir.
La variation de capacitance est lineaire avec le niveau de liquide.
9.8 Les sondes optiques
La sonde optique est un detecteur de niveau. Elle envoie un signal selonqu’elle soit immergee ou non.
Le principe de fonctionnement est base sur les lois de l’optique. Lorsqu’unrayon lumineux se propage dans un milieu ayant un indice de refraction n1
et passe a un autre milieu d’indice de refraction n2, il peut se produire unereflexion totale ou une refraction vers le second milieu, comme le montre laFigure 9.20.
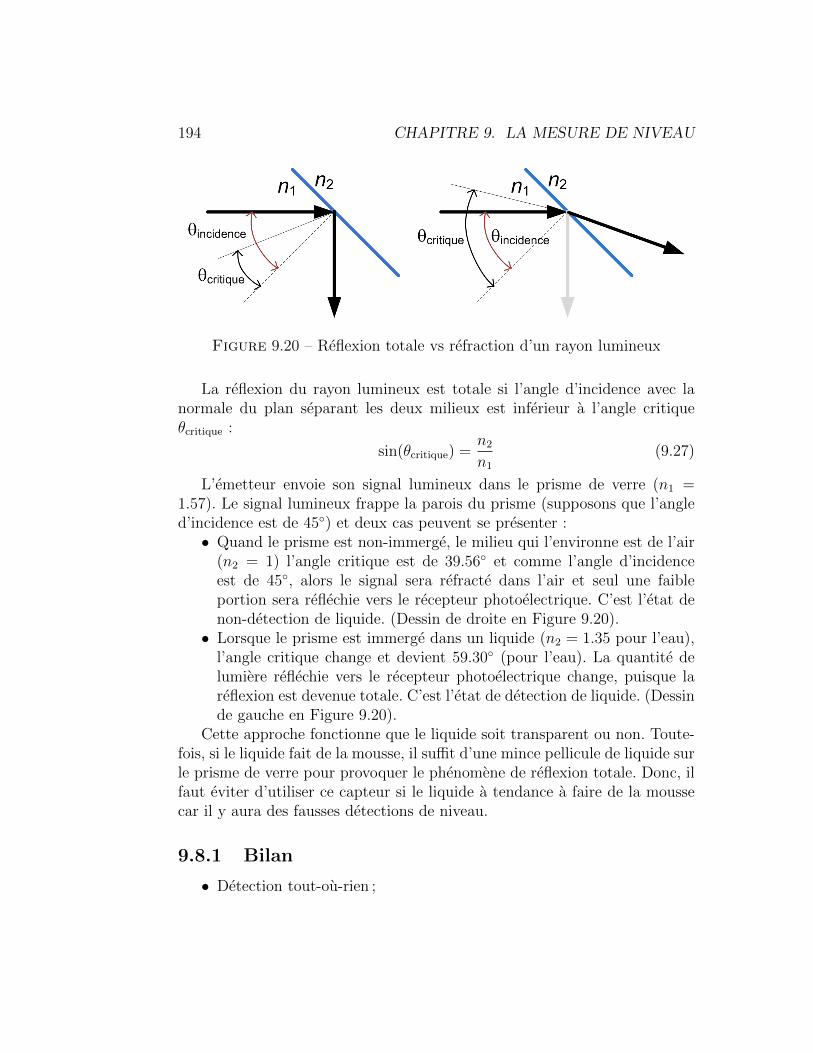
194 CHAPITRE 9. LA MESURE DE NIVEAU
Figure 9.20 – Reflexion totale vs refraction d’un rayon lumineux
La reflexion du rayon lumineux est totale si l’angle d’incidence avec lanormale du plan separant les deux milieux est inferieur a l’angle critiqueθcritique :
sin(θcritique) =n2
n1
(9.27)
L’emetteur envoie son signal lumineux dans le prisme de verre (n1 =1.57). Le signal lumineux frappe la parois du prisme (supposons que l’angled’incidence est de 45) et deux cas peuvent se presenter :• Quand le prisme est non-immerge, le milieu qui l’environne est de l’air
(n2 = 1) l’angle critique est de 39.56 et comme l’angle d’incidenceest de 45, alors le signal sera refracte dans l’air et seul une faibleportion sera reflechie vers le recepteur photoelectrique. C’est l’etat denon-detection de liquide. (Dessin de droite en Figure 9.20).• Lorsque le prisme est immerge dans un liquide (n2 = 1.35 pour l’eau),
l’angle critique change et devient 59.30 (pour l’eau). La quantite delumiere reflechie vers le recepteur photoelectrique change, puisque lareflexion est devenue totale. C’est l’etat de detection de liquide. (Dessinde gauche en Figure 9.20).
Cette approche fonctionne que le liquide soit transparent ou non. Toute-fois, si le liquide fait de la mousse, il suffit d’une mince pellicule de liquide surle prisme de verre pour provoquer le phenomene de reflexion totale. Donc, ilfaut eviter d’utiliser ce capteur si le liquide a tendance a faire de la moussecar il y aura des fausses detections de niveau.
9.8.1 Bilan
• Detection tout-ou-rien ;
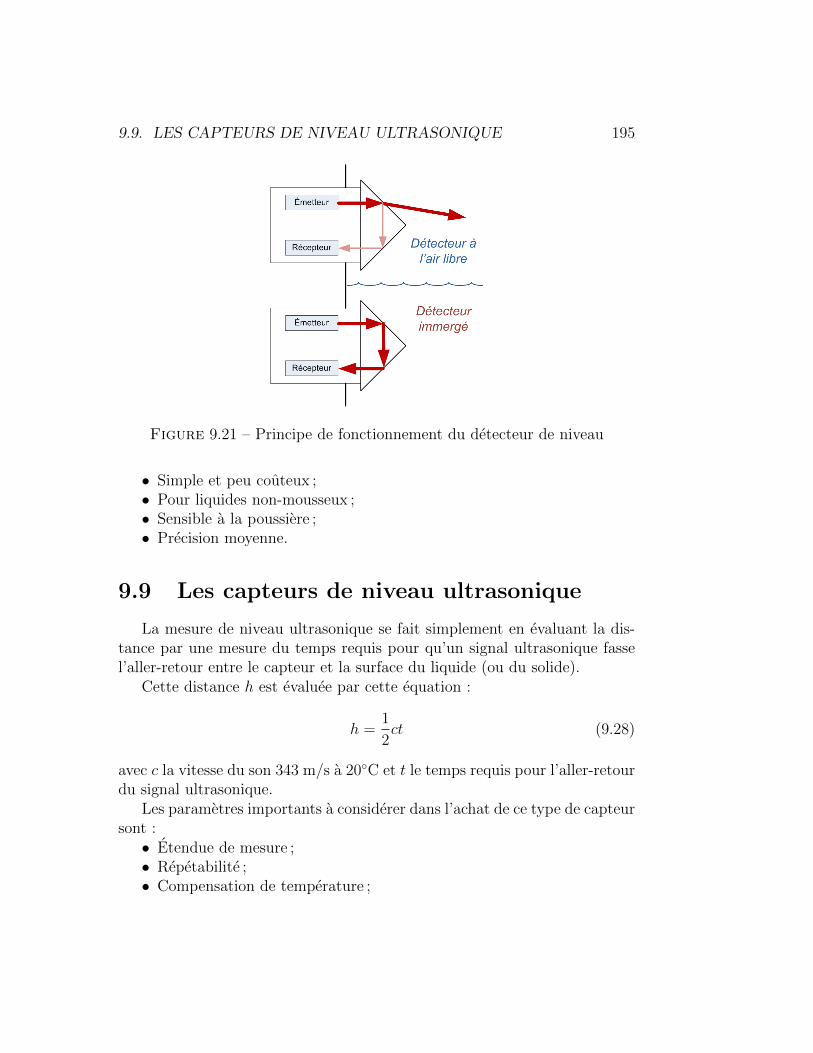
9.9. LES CAPTEURS DE NIVEAU ULTRASONIQUE 195
Figure 9.21 – Principe de fonctionnement du detecteur de niveau
• Simple et peu couteux ;• Pour liquides non-mousseux ;• Sensible a la poussiere ;• Precision moyenne.
9.9 Les capteurs de niveau ultrasonique
La mesure de niveau ultrasonique se fait simplement en evaluant la dis-tance par une mesure du temps requis pour qu’un signal ultrasonique fassel’aller-retour entre le capteur et la surface du liquide (ou du solide).
Cette distance h est evaluee par cette equation :
h =1
2ct (9.28)
avec c la vitesse du son 343 m/s a 20C et t le temps requis pour l’aller-retourdu signal ultrasonique.
Les parametres importants a considerer dans l’achat de ce type de capteursont :• Etendue de mesure ;• Repetabilite ;• Compensation de temperature ;
196 CHAPITRE 9. LA MESURE DE NIVEAU
Figure 9.22 – Capteurs de niveau ultrasonique
Figure 9.23 – Principe de fonctionnement d’un capteur de niveau ultraso-nique
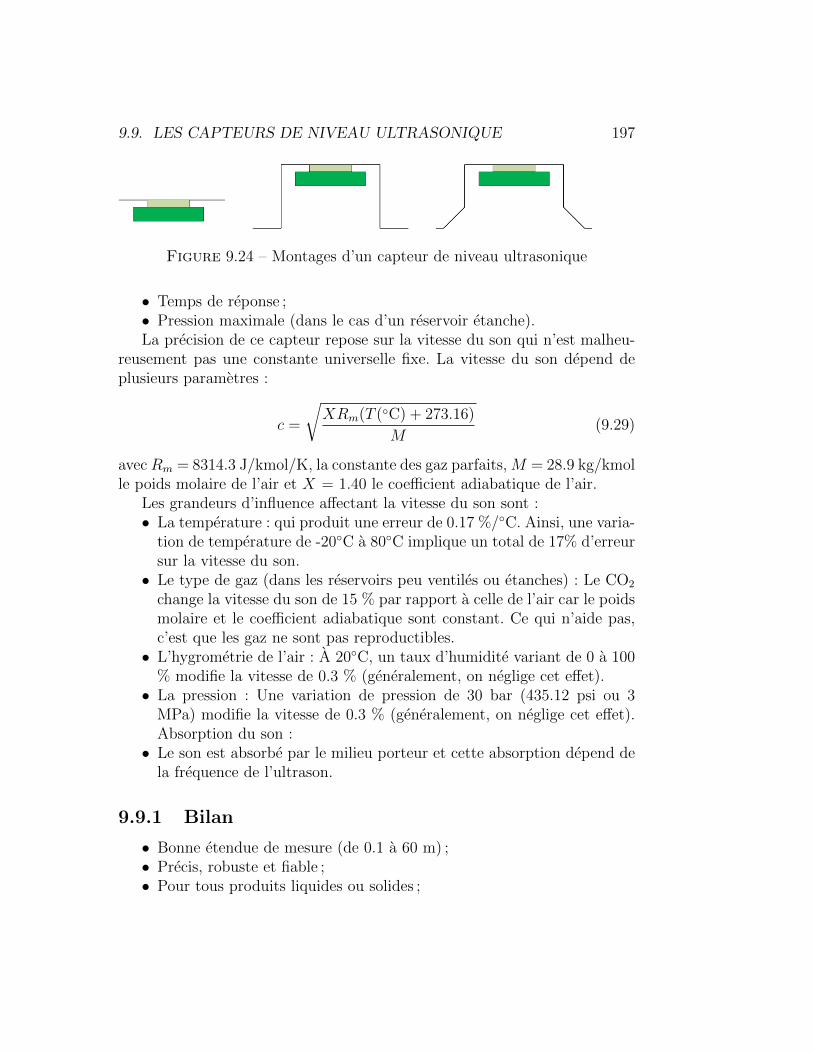
9.9. LES CAPTEURS DE NIVEAU ULTRASONIQUE 197
Figure 9.24 – Montages d’un capteur de niveau ultrasonique
• Temps de reponse ;• Pression maximale (dans le cas d’un reservoir etanche).La precision de ce capteur repose sur la vitesse du son qui n’est malheu-
reusement pas une constante universelle fixe. La vitesse du son depend deplusieurs parametres :
c =
√XRm(T (C) + 273.16)
M(9.29)
avec Rm = 8314.3 J/kmol/K, la constante des gaz parfaits,M = 28.9 kg/kmolle poids molaire de l’air et X = 1.40 le coefficient adiabatique de l’air.
Les grandeurs d’influence affectant la vitesse du son sont :• La temperature : qui produit une erreur de 0.17 %/C. Ainsi, une varia-
tion de temperature de -20C a 80C implique un total de 17% d’erreursur la vitesse du son.• Le type de gaz (dans les reservoirs peu ventiles ou etanches) : Le CO2
change la vitesse du son de 15 % par rapport a celle de l’air car le poidsmolaire et le coefficient adiabatique sont constant. Ce qui n’aide pas,c’est que les gaz ne sont pas reproductibles.• L’hygrometrie de l’air : A 20C, un taux d’humidite variant de 0 a 100
% modifie la vitesse de 0.3 % (generalement, on neglige cet effet).• La pression : Une variation de pression de 30 bar (435.12 psi ou 3
MPa) modifie la vitesse de 0.3 % (generalement, on neglige cet effet).Absorption du son :• Le son est absorbe par le milieu porteur et cette absorption depend de
la frequence de l’ultrason.
9.9.1 Bilan
• Bonne etendue de mesure (de 0.1 a 60 m) ;• Precis, robuste et fiable ;• Pour tous produits liquides ou solides ;
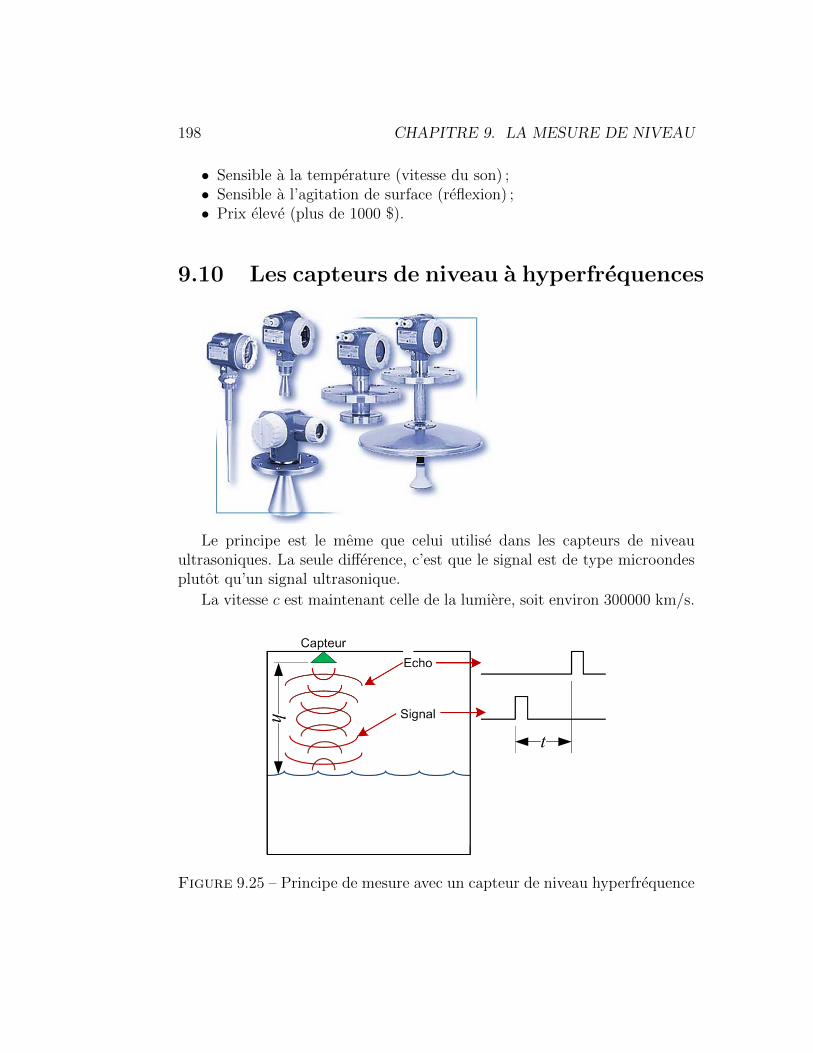
198 CHAPITRE 9. LA MESURE DE NIVEAU
• Sensible a la temperature (vitesse du son) ;• Sensible a l’agitation de surface (reflexion) ;• Prix eleve (plus de 1000 $).
9.10 Les capteurs de niveau a hyperfrequences
Le principe est le meme que celui utilise dans les capteurs de niveauultrasoniques. La seule difference, c’est que le signal est de type microondesplutot qu’un signal ultrasonique.
La vitesse c est maintenant celle de la lumiere, soit environ 300000 km/s.
Figure 9.25 – Principe de mesure avec un capteur de niveau hyperfrequence
9.11. LES CAPTEURS DE NIVEAU PAR GAMMAMETRIE 199
Voici comment cela fonctionne. Une antenne emet une microonde qui sepropage dans l’air. Cette microonde subira une reflexion lorsqu’il y a unbrusque changement d’impedance. Ce qui fait que pour un bon fonctionne-ment, il faut que la constante dielectrique relative du liquide (ou du solide)soit differente de celle du gaz (generalement de l’air). Sinon, le signal reflechitsera trop faible pour etre distingue du bruit electromagnetique.
9.10.1 Bilan
• Bonne etendue de mesure (jusqu’a 35 m) ;• Precis, robuste et fiable ;• Pour tous produits liquides ou solides ;• Insensible a la poussiere et aux mousses ;• Prix eleve (5 × plus cher que ultrasoniques).• Pas dangereux : La densite de puissance dans un four microondes do-
mestique est de 1 W/cm2, alors que celle du capteur n’est que de 0.21µW/cm2.
9.11 Les capteurs de niveau par gammametrie
Cette technique de mesure de niveau est basee sur le fait qu’un liquideou un solide interagit avec le rayonnement gamma. En effet, le rayonnementgamma subit l’effet Compton lorsqu’il traverse un liquide (ou un solide).
L’effet Compton, c’est le transfert d’energie qui se produit lorsqu’un rayongamma frappe un electron. Le rayon gamma perd de l’energie et est deviede sa trajectoire, alors que l’electron est ejecte de son orbite en raison del’energie recue.
L’abaissement de l’energie d’une radiation qui a servi a ioniser un atomeest exprimee par :
hν ′ =hν
1 + hν(1− cos(θ))/(moc2)(9.30)
Les parametres sont : l’energie du rayon gamma avant la collision hν, l’energieapres la collision hν ′, la constante de Plank h, la frequence du rayonnementavant la collision ν, celle apres ν ′, la masse de l’electron mo, la vitesse de lalumiere c et l’angle de deviation du rayon gamma θ.
200 CHAPITRE 9. LA MESURE DE NIVEAU
Figure 9.26 – Source radioactive
Figure 9.27 – Conteneur et collimateur pour la source de radiation
La source radioactive (Figure 9.26) est generalement du Cobalt 60 ou duCesium 137. Cette source est installee dans un conteneur (Figure 9.27) quine laisse passer le rayonnement que dans une direction bien precise.
La detection des rayons gamma qui ont reussi a traverse le reservoir sansencombre est assuree par un scintillateur (Figure 9.28) place du cote opposedu reservoir, par rapport a la source de rayonnement (Figure 9.29).
Si le scintillateur est installe horizontalement, on peut alors faire de ladetection de niveau.
En raison de la decroissance de la radiation emise par la source de rayongamma, il faut compenser pour eviter de fausser la mesure. Cette decroissanceetant exponentielle, on utilise la ”demi-vie” de cette source pour representer
Figure 9.28 – Scintillateur pour detecter les radiations
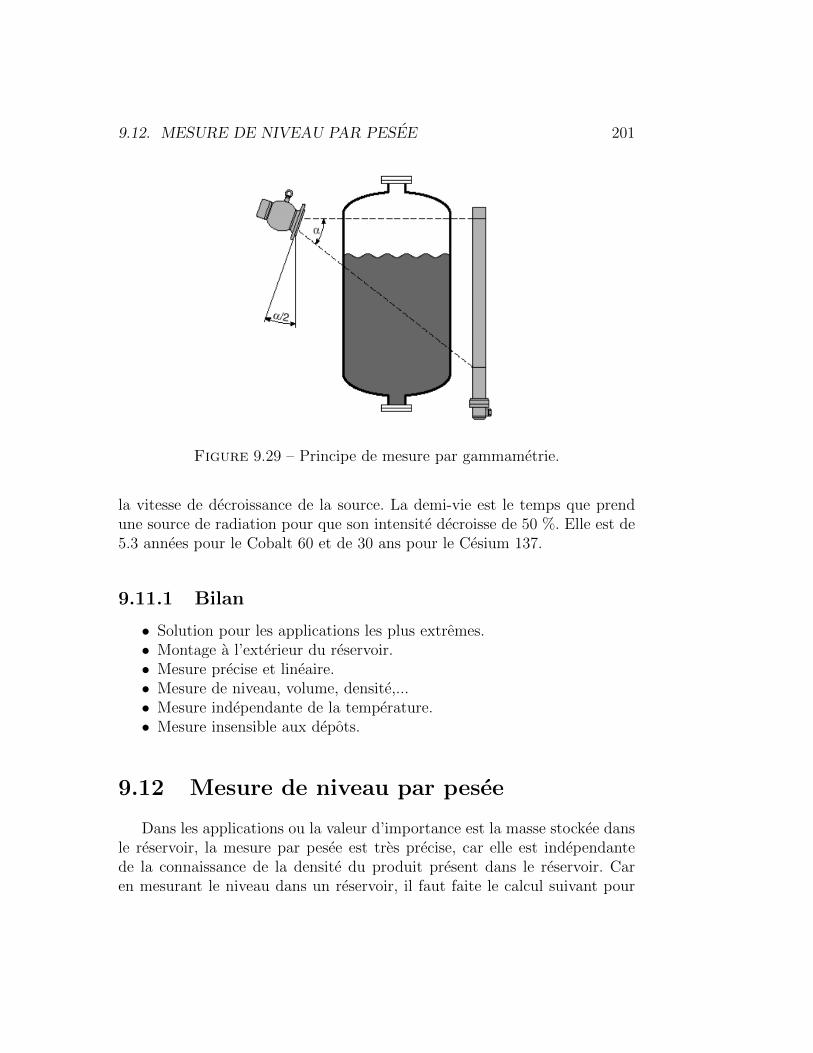
9.12. MESURE DE NIVEAU PAR PESEE 201
Figure 9.29 – Principe de mesure par gammametrie.
la vitesse de decroissance de la source. La demi-vie est le temps que prendune source de radiation pour que son intensite decroisse de 50 %. Elle est de5.3 annees pour le Cobalt 60 et de 30 ans pour le Cesium 137.
9.11.1 Bilan
• Solution pour les applications les plus extremes.• Montage a l’exterieur du reservoir.• Mesure precise et lineaire.• Mesure de niveau, volume, densite,...• Mesure independante de la temperature.• Mesure insensible aux depots.
9.12 Mesure de niveau par pesee
Dans les applications ou la valeur d’importance est la masse stockee dansle reservoir, la mesure par pesee est tres precise, car elle est independantede la connaissance de la densite du produit present dans le reservoir. Caren mesurant le niveau dans un reservoir, il faut faite le calcul suivant pour
202 CHAPITRE 9. LA MESURE DE NIVEAU
connaitre la masse m de produit :
m = ρAh (9.31)
Il faut donc connaitre la surface A avec precision, de meme que la massevolumetrique ρ.
C’est la technique de mesure utilisee dans les cimenteries pour s’assurerde faire les recettes de beton avec une precision acceptable.
Il suffit d’installer des cellules de charge au niveau des supports du reservoirpour connaitre la masse.
9.12.1 Bilan
• Une correction necessaire pour obtenir volume si la densite change(cette application est a utiliser sur la grandeur physique d’interet estla masse dans le reservoir) ;• La precision de ce systeme de mesure de masse est celle des cellules de
charge (jusqu’a ± 0.1%) ;• Applicable aussi aux solides : peut permettre de determiner le volume
si la granulometrie et la composition sont constantes.
9.13 Lame vibrante et palpeur rotationnel
La detection de niveau de solide peut etre obtenue en utilisant des lamesvibrantes (Figure 9.30) et des palpeurs rotationnels (Figure 9.31).
Dans le cas de la lame vibrante, un cristal piezoelectrique est excite avecune tension alternative pour forcer la vibration des lames. Lorsque les lamesvibrent dans l’air libre, elles vibrent avec une certaine amplitude. Lorsque leslames sont immergees dans un solide ou un liquide, la vibration des lamesdevient beaucoup moins grande et le changement de l’amplitude de la vibra-tion est detecte. On peut donc distinguer une lame vibrante immergee d’unequi est non-immergee.
Le palpeur rotationnel detecte la presence du liquide ou du solide, sim-plement car les palettes tourneront plus lentement lorsque immergees.
9.13.1 Bilan
• Universelle pour tous les produits pulverents et granules (granulometriemaximale de 10 mm) ;
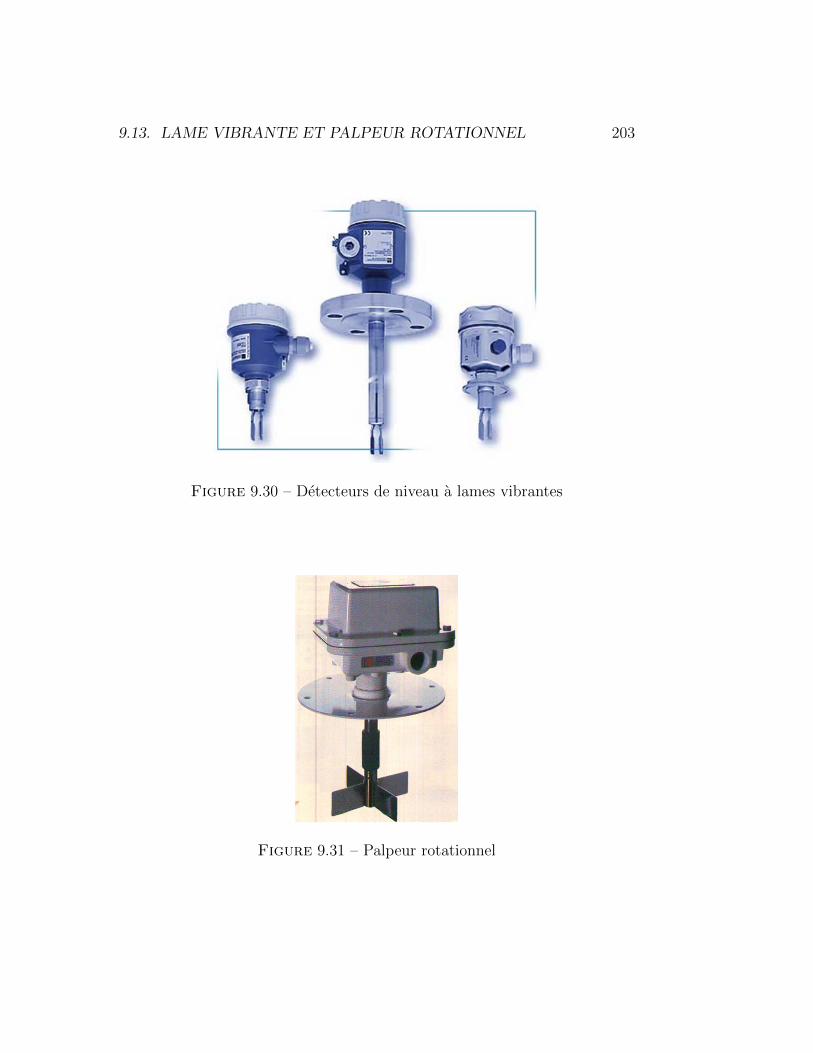
9.13. LAME VIBRANTE ET PALPEUR ROTATIONNEL 203
Figure 9.30 – Detecteurs de niveau a lames vibrantes
Figure 9.31 – Palpeur rotationnel

204 CHAPITRE 9. LA MESURE DE NIVEAU
• Installation mecanique et electrique tres simple ;• Insensible a la densite, temperature, ... ;• Detection de niveau liquide.
Chapitre 10
Mesure de debit
Figure 10.1 – Debimetre
10.1 Un survol de la mecanique des fluides
10.1.1 La loi de Bernoulli
Les fluides obeissent a certaines lois et l’une d’entre elles est la loi de Ber-noulli (qui date de 1738). Cette loi couvre l’aspect energetique de l’ecoulementd’un fluide. Selon Bernoulli, l’energie reste constante le long d’une ligne defluide, ce que represente l’equation de Bernoulli :
v2
2g+
p
ρg+ z = constante (10.1)
205

206 CHAPITRE 10. MESURE DE DEBIT
Dans cette equation chaque terme est une hauteur manometrique et lesvariables sont : v la vitesse d’ecoulement du fluide, g = 9.81 m/s2 l’accelerationde la pesanteur, p la pression statique, ρ la masse volumique et z la hauteurdu point ou l’on evalue (10.1) au dessus d’une hauteur de reference (ou z = 0).Notez que le terme ρg designe le poids volumique.
Toutefois, dans l’equation (10.1), Bernoulli assume que :• La viscosite est nulle ;• Les pertes de charge sont nulles ;• Le fluide est incompressible.
Exemple : Pour montrer comment on applique la loi de Bernouilli, considerezle reservoir en Figure 10.2. Ce reservoir contient un liquide qui se vide pargravite dans la conduite connectee au bas de celui-ci.
Figure 10.2 – Reservoir se vidant par gravite
En vertu de la loi de Bernoulli, l’energie en ”1” est la meme qu’en ”2”,ce qui correspond a l’egalite suivante :
v21
2g+p1
ρg+ z1 =
v22
2g+p2
ρg+ z2 (10.2)
Or, la vitesse a laquelle le niveau descend est beaucoup plus petite quecelle a laquelle le liquide circule dans la conduite, puisque l’on peut aisementsupposer que la section du reservoir est beaucoup plus grande que celle de laconduite. Ainsi, on peut poser que v1 ≈ 0 m/s.
La pression appliquee a la surface du reservoir en ”1” est la pressionatmospherique et la meme pression atmospherique est applique sur le liquidequi sort de la conduite en ”2”, donc P1 = P2 = Patm.

10.1. UN SURVOL DE LA MECANIQUE DES FLUIDES 207
Si bien qu’apres avoir simplifie et rearrange les termes l’on peut reecrire(10.2) comme suit :
v22
2g= z1 − z2 = h (10.3)
puisque la difference de hauteur entre le point ”1” et le point ”2” est le niveaude liquide dans le reservoir qui est represente par h.
En isolant la vitesse d’ecoulement v2, on trouve :
v2 =√
2gh (10.4)
et cette equation est la formule de Torricelli (trouvee en 1644). Et le debiten conduite Q2 est :
Q2 = A2v2 = A2
√2gh (10.5)
avec A2 la surface de la conduite.J
10.1.2 Les pertes de charge
En pratique, pour un liquide reel, la viscosite est non nulle. Pour l’eaucette viscosite est de 1.005 centiPoise (a 20C).
De plus, les pertes de charges sont non nulles. Il y a une perte d’energiedue au frottement du fluide sur la conduite. Cette perte depend de plusieursparametres, soit :
• du debit du fluide ;• du materiau utilise pour la conduite ;• de la taille de la conduite ;• et de la viscosite du liquide.
Il existe de nombreuses tables et equations pour calculer les pertes decharges. La Figure 10.3, qui est tiree de ”Glover, Thomas J., POCKET REF,Sequoia Publishing, 1997”, montre un exemple de table de pertes de charges.
Dans cette table, on retrouve comme parametres de debit (flow) en premie-re colonne, une donnee qui depend du materiau de la conduite (ici, C = 60dans l’entete de la table) et la dimension de la conduite (pipe diameter). Lefluide est de l’eau et les valeurs dans le tableau sont les pertes de charges par100 pieds de longueur equivalente de conduite.
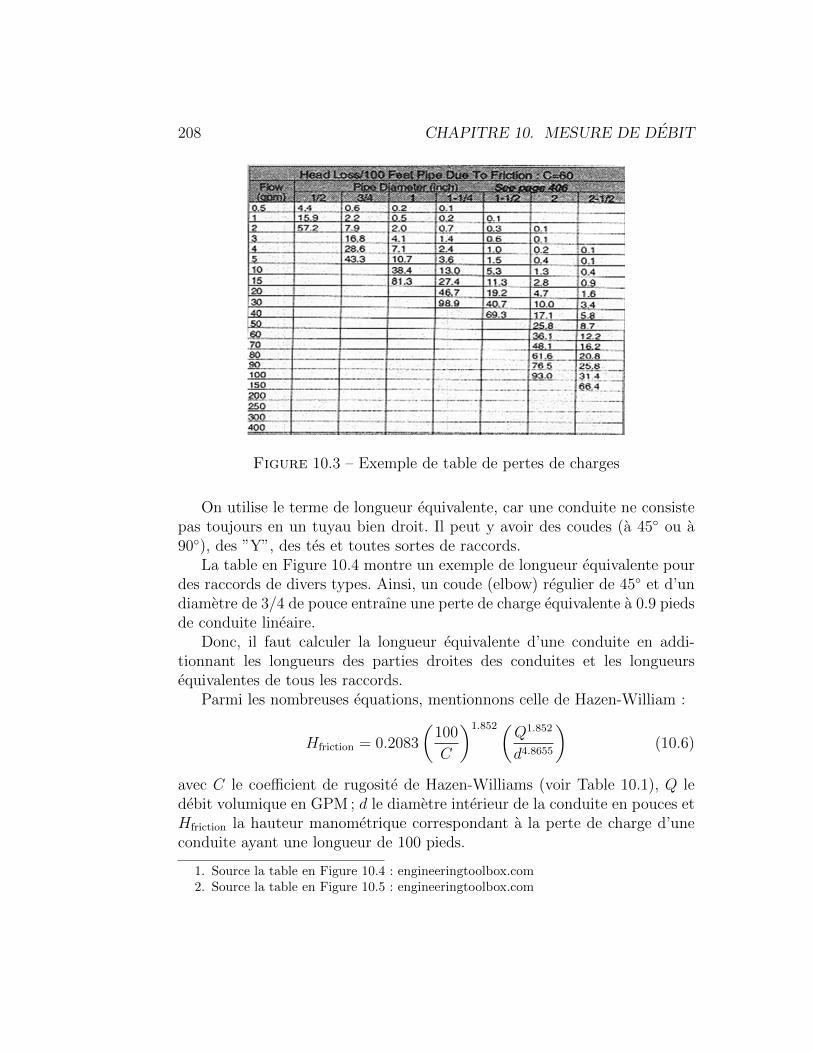
208 CHAPITRE 10. MESURE DE DEBIT
Figure 10.3 – Exemple de table de pertes de charges
On utilise le terme de longueur equivalente, car une conduite ne consistepas toujours en un tuyau bien droit. Il peut y avoir des coudes (a 45 ou a90), des ”Y”, des tes et toutes sortes de raccords.
La table en Figure 10.4 montre un exemple de longueur equivalente pourdes raccords de divers types. Ainsi, un coude (elbow) regulier de 45 et d’undiametre de 3/4 de pouce entraıne une perte de charge equivalente a 0.9 piedsde conduite lineaire.
Donc, il faut calculer la longueur equivalente d’une conduite en addi-tionnant les longueurs des parties droites des conduites et les longueursequivalentes de tous les raccords.
Parmi les nombreuses equations, mentionnons celle de Hazen-William :
Hfriction = 0.2083
(100
C
)1.852(Q1.852
d4.8655
)(10.6)
avec C le coefficient de rugosite de Hazen-Williams (voir Table 10.1), Q ledebit volumique en GPM ; d le diametre interieur de la conduite en pouces etHfriction la hauteur manometrique correspondant a la perte de charge d’uneconduite ayant une longueur de 100 pieds.
1. Source la table en Figure 10.4 : engineeringtoolbox.com2. Source la table en Figure 10.5 : engineeringtoolbox.com
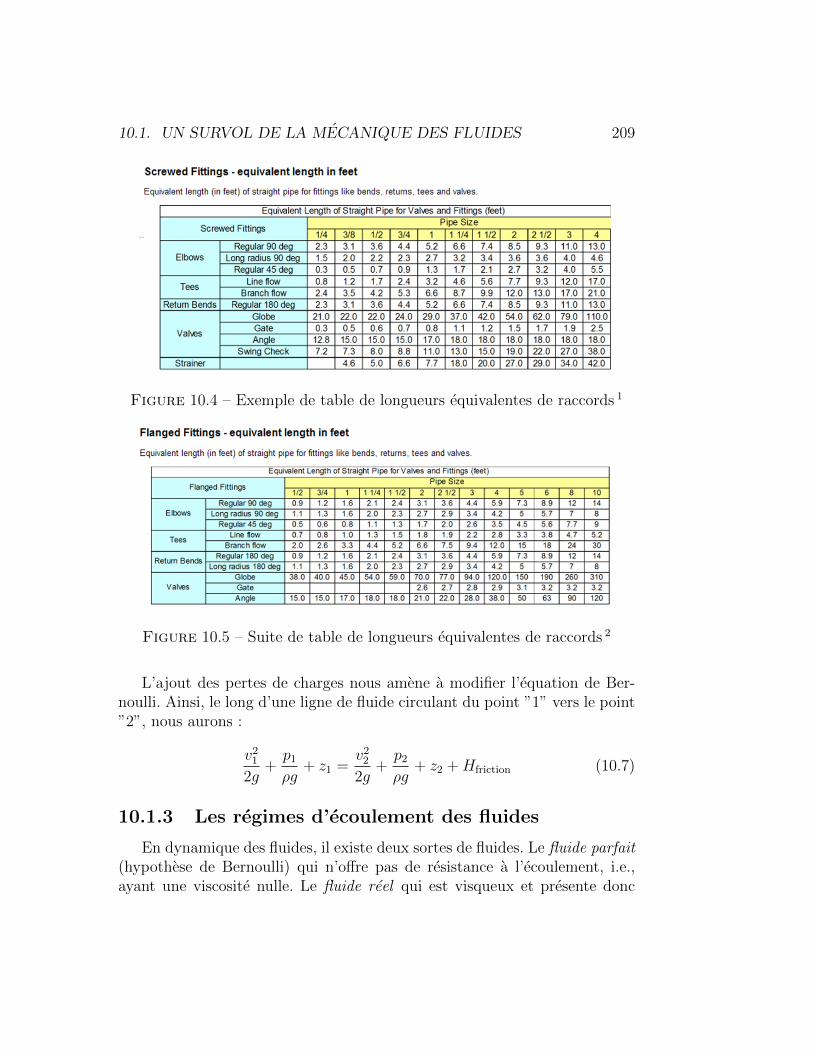
10.1. UN SURVOL DE LA MECANIQUE DES FLUIDES 209
Figure 10.4 – Exemple de table de longueurs equivalentes de raccords 1
Figure 10.5 – Suite de table de longueurs equivalentes de raccords 2
L’ajout des pertes de charges nous amene a modifier l’equation de Ber-noulli. Ainsi, le long d’une ligne de fluide circulant du point ”1” vers le point”2”, nous aurons :
v21
2g+p1
ρg+ z1 =
v22
2g+p2
ρg+ z2 +Hfriction (10.7)
10.1.3 Les regimes d’ecoulement des fluides
En dynamique des fluides, il existe deux sortes de fluides. Le fluide parfait(hypothese de Bernoulli) qui n’offre pas de resistance a l’ecoulement, i.e.,ayant une viscosite nulle. Le fluide reel qui est visqueux et presente donc
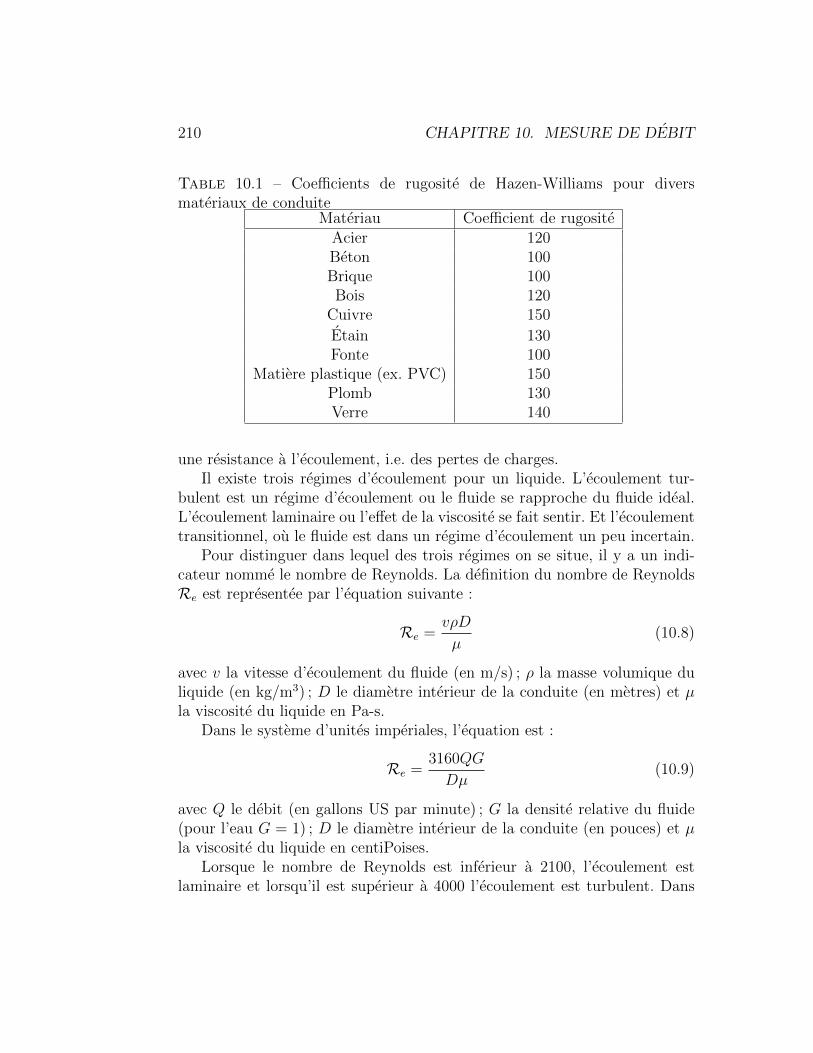
210 CHAPITRE 10. MESURE DE DEBIT
Table 10.1 – Coefficients de rugosite de Hazen-Williams pour diversmateriaux de conduite
Materiau Coefficient de rugositeAcier 120Beton 100Brique 100Bois 120
Cuivre 150
Etain 130Fonte 100
Matiere plastique (ex. PVC) 150Plomb 130Verre 140
une resistance a l’ecoulement, i.e. des pertes de charges.Il existe trois regimes d’ecoulement pour un liquide. L’ecoulement tur-
bulent est un regime d’ecoulement ou le fluide se rapproche du fluide ideal.L’ecoulement laminaire ou l’effet de la viscosite se fait sentir. Et l’ecoulementtransitionnel, ou le fluide est dans un regime d’ecoulement un peu incertain.
Pour distinguer dans lequel des trois regimes on se situe, il y a un indi-cateur nomme le nombre de Reynolds. La definition du nombre de ReynoldsRe est representee par l’equation suivante :
Re =vρD
µ(10.8)
avec v la vitesse d’ecoulement du fluide (en m/s) ; ρ la masse volumique duliquide (en kg/m3) ; D le diametre interieur de la conduite (en metres) et µla viscosite du liquide en Pa-s.
Dans le systeme d’unites imperiales, l’equation est :
Re =3160QG
Dµ(10.9)
avec Q le debit (en gallons US par minute) ; G la densite relative du fluide(pour l’eau G = 1) ; D le diametre interieur de la conduite (en pouces) et µla viscosite du liquide en centiPoises.
Lorsque le nombre de Reynolds est inferieur a 2100, l’ecoulement estlaminaire et lorsqu’il est superieur a 4000 l’ecoulement est turbulent. Dans
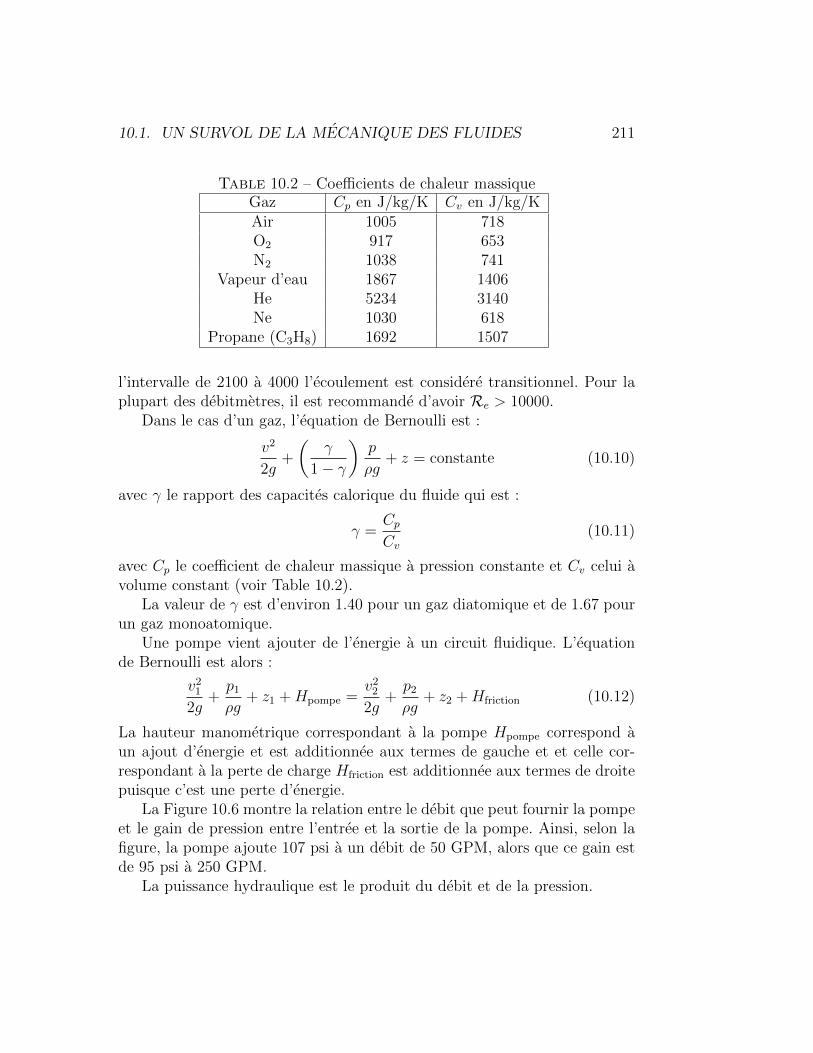
10.1. UN SURVOL DE LA MECANIQUE DES FLUIDES 211
Table 10.2 – Coefficients de chaleur massiqueGaz Cp en J/kg/K Cv en J/kg/KAir 1005 718O2 917 653N2 1038 741
Vapeur d’eau 1867 1406He 5234 3140Ne 1030 618
Propane (C3H8) 1692 1507
l’intervalle de 2100 a 4000 l’ecoulement est considere transitionnel. Pour laplupart des debitmetres, il est recommande d’avoir Re > 10000.
Dans le cas d’un gaz, l’equation de Bernoulli est :
v2
2g+
(γ
1− γ
)p
ρg+ z = constante (10.10)
avec γ le rapport des capacites calorique du fluide qui est :
γ =CpCv
(10.11)
avec Cp le coefficient de chaleur massique a pression constante et Cv celui avolume constant (voir Table 10.2).
La valeur de γ est d’environ 1.40 pour un gaz diatomique et de 1.67 pourun gaz monoatomique.
Une pompe vient ajouter de l’energie a un circuit fluidique. L’equationde Bernoulli est alors :
v21
2g+p1
ρg+ z1 +Hpompe =
v22
2g+p2
ρg+ z2 +Hfriction (10.12)
La hauteur manometrique correspondant a la pompe Hpompe correspond aun ajout d’energie et est additionnee aux termes de gauche et et celle cor-respondant a la perte de charge Hfriction est additionnee aux termes de droitepuisque c’est une perte d’energie.
La Figure 10.6 montre la relation entre le debit que peut fournir la pompeet le gain de pression entre l’entree et la sortie de la pompe. Ainsi, selon lafigure, la pompe ajoute 107 psi a un debit de 50 GPM, alors que ce gain estde 95 psi a 250 GPM.
La puissance hydraulique est le produit du debit et de la pression.
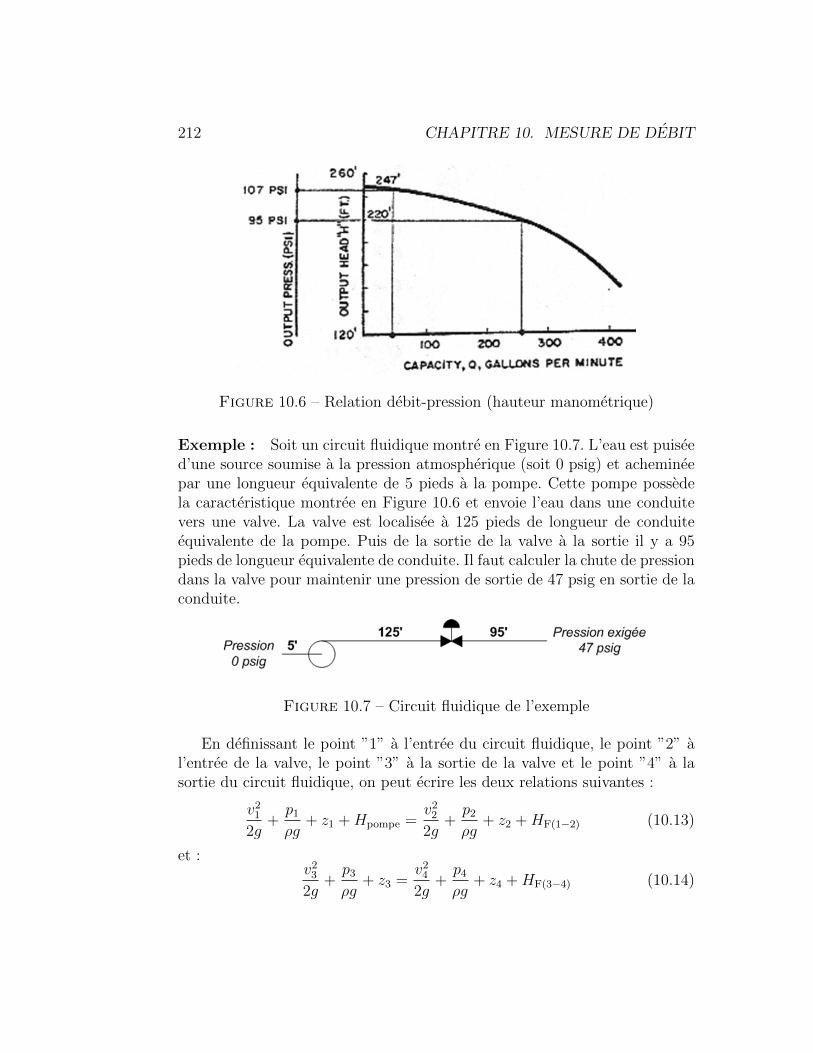
212 CHAPITRE 10. MESURE DE DEBIT
Figure 10.6 – Relation debit-pression (hauteur manometrique)
Exemple : Soit un circuit fluidique montre en Figure 10.7. L’eau est puiseed’une source soumise a la pression atmospherique (soit 0 psig) et achemineepar une longueur equivalente de 5 pieds a la pompe. Cette pompe possedela caracteristique montree en Figure 10.6 et envoie l’eau dans une conduitevers une valve. La valve est localisee a 125 pieds de longueur de conduiteequivalente de la pompe. Puis de la sortie de la valve a la sortie il y a 95pieds de longueur equivalente de conduite. Il faut calculer la chute de pressiondans la valve pour maintenir une pression de sortie de 47 psig en sortie de laconduite.
Figure 10.7 – Circuit fluidique de l’exemple
En definissant le point ”1” a l’entree du circuit fluidique, le point ”2” al’entree de la valve, le point ”3” a la sortie de la valve et le point ”4” a lasortie du circuit fluidique, on peut ecrire les deux relations suivantes :
v21
2g+p1
ρg+ z1 +Hpompe =
v22
2g+p2
ρg+ z2 +HF(1−2) (10.13)
et :v2
3
2g+p3
ρg+ z3 =
v24
2g+p4
ρg+ z4 +HF(3−4) (10.14)

10.1. UN SURVOL DE LA MECANIQUE DES FLUIDES 213
En assumant les quatre hauteurs egales (z1 = z2 = z3 = z4) et les quatrevitesses identiques puisque la conduite a une section constante (v1 = v2 =v3 = v4), on peut ecrire apres simplification :
p1
ρg+Hpompe =
p2
ρg+HF(1−2) (10.15)
et :p3
ρg=p4
ρg+HF(3−4) (10.16)
Puisque la pression p1 = 0 psig, la pression p3 = p2 − ∆P (avec ∆P lachute de pression dans la valve) et p4 = 47 psig, on peut ecrire :
Hpompe =p2
ρg+HF(1−2) (10.17)
et :p2 −∆P
ρg=
47 psig
ρg+HF(3−4) (10.18)
En rearrangeant ces deux equations, on peut calculer :
Hpompe =∆P
ρg+
47 psig
ρg+HF(3−4) +HF(1−2)
=∆P
ρg+
47 psig
ρg+HF(1−4)
(10.19)
Le poids volumique de l’eau ρg est de 62.4 livres par pied cube.En utilisant l’equation de Hazel-William avec C = 120 et d = 3 pouces
les pertes de charges par 100 pieds sont :
Hfriction = 0.2083
(100
C
)1.852(Q1.852
d4.8655
)= 0.2083
(100
120
)1.852(Q1.852
34.8655
)= 7.089× 10−4Q1.852
(10.20)
Puisque la longueur equivalente de conduite est de 225 pieds (soit : 5’ +125’ + 95’) alors :
HF(1−4) = 2.25×Hfriction = 15.95× 10−4Q1.852 (10.21)
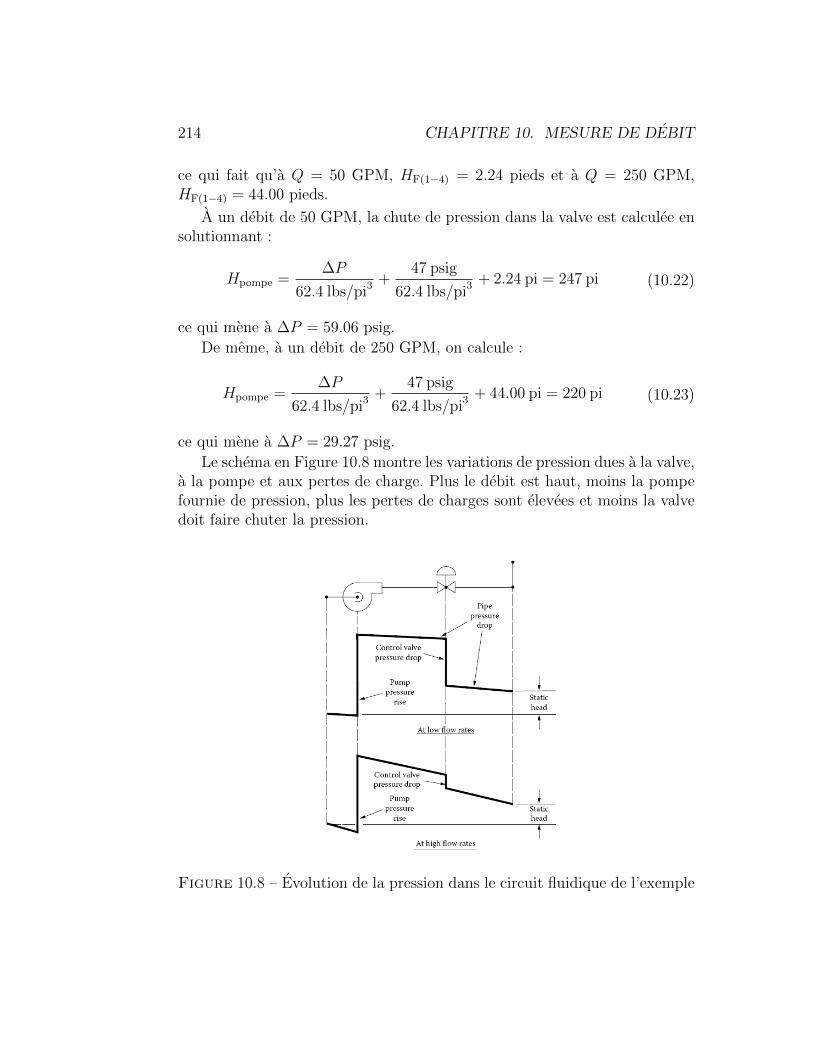
214 CHAPITRE 10. MESURE DE DEBIT
ce qui fait qu’a Q = 50 GPM, HF(1−4) = 2.24 pieds et a Q = 250 GPM,HF(1−4) = 44.00 pieds.
A un debit de 50 GPM, la chute de pression dans la valve est calculee ensolutionnant :
Hpompe =∆P
62.4 lbs/pi3+
47 psig
62.4 lbs/pi3+ 2.24 pi = 247 pi (10.22)
ce qui mene a ∆P = 59.06 psig.
De meme, a un debit de 250 GPM, on calcule :
Hpompe =∆P
62.4 lbs/pi3+
47 psig
62.4 lbs/pi3+ 44.00 pi = 220 pi (10.23)
ce qui mene a ∆P = 29.27 psig.
Le schema en Figure 10.8 montre les variations de pression dues a la valve,a la pompe et aux pertes de charge. Plus le debit est haut, moins la pompefournie de pression, plus les pertes de charges sont elevees et moins la valvedoit faire chuter la pression.
Figure 10.8 – Evolution de la pression dans le circuit fluidique de l’exemple
10.2. LES DETECTEURS DE CIRCULATION 215
Cet exemple montre l’analyse a faire pour determiner la pression que lavalve doit enlever a debit minimum et maximum dans le but de la dimen-sionner.J
10.2 Les detecteurs de circulation
Figure 10.9 – Detecteurs de circulation 3
Un detecteur de circulation est un dispositif insere dans une conduitepour verifier si le liquide est en mouvement ou non.
Le detecteur indiquera que le liquide est en mouvement si la plaque estsoulevee d’un angle suffisamment eleve, ce qui correspond a un certain debit.Il indiquera que le liquide n’est plus en mouvement lorsque la plaque estsoulevee d’un angle inferieur a un certain seuil (ce qui correspond a un autredebit).
3. Source de l’image en Figure ?? : omega.ca
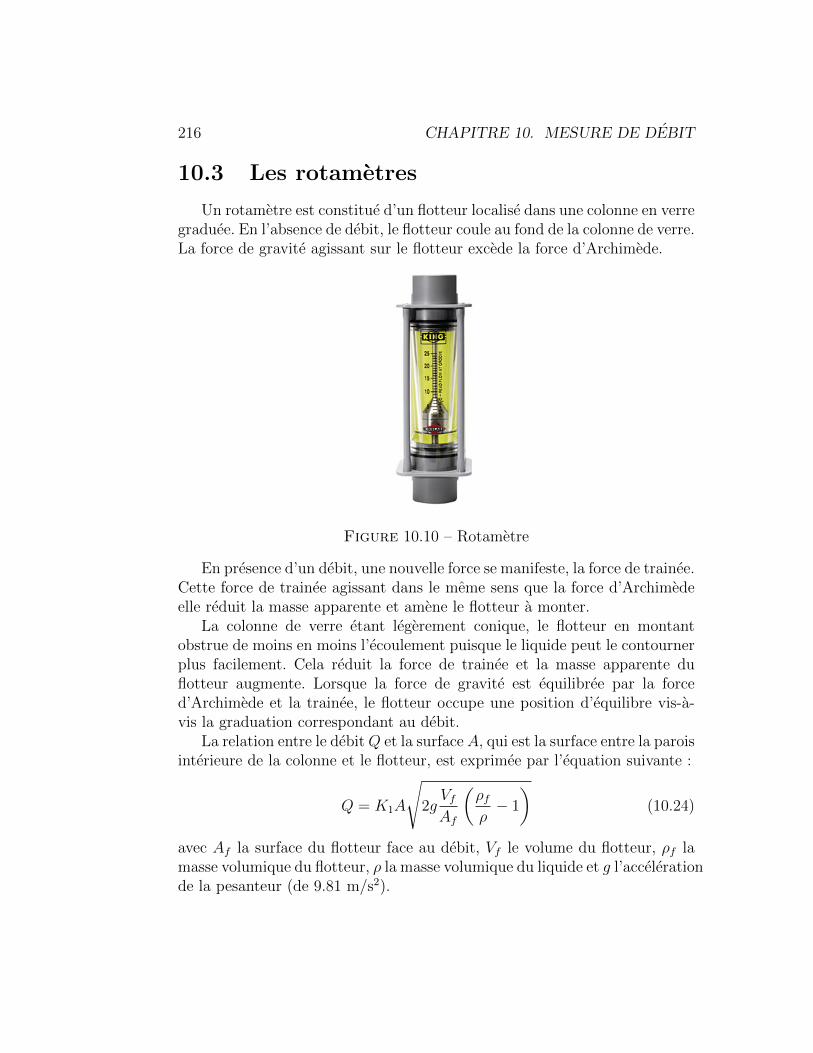
216 CHAPITRE 10. MESURE DE DEBIT
10.3 Les rotametres
Un rotametre est constitue d’un flotteur localise dans une colonne en verregraduee. En l’absence de debit, le flotteur coule au fond de la colonne de verre.La force de gravite agissant sur le flotteur excede la force d’Archimede.
Figure 10.10 – Rotametre
En presence d’un debit, une nouvelle force se manifeste, la force de trainee.Cette force de trainee agissant dans le meme sens que la force d’Archimedeelle reduit la masse apparente et amene le flotteur a monter.
La colonne de verre etant legerement conique, le flotteur en montantobstrue de moins en moins l’ecoulement puisque le liquide peut le contournerplus facilement. Cela reduit la force de trainee et la masse apparente duflotteur augmente. Lorsque la force de gravite est equilibree par la forced’Archimede et la trainee, le flotteur occupe une position d’equilibre vis-a-vis la graduation correspondant au debit.
La relation entre le debitQ et la surface A, qui est la surface entre la paroisinterieure de la colonne et le flotteur, est exprimee par l’equation suivante :
Q = K1A
√2gVfAf
(ρfρ− 1
)(10.24)
avec Af la surface du flotteur face au debit, Vf le volume du flotteur, ρf lamasse volumique du flotteur, ρ la masse volumique du liquide et g l’accelerationde la pesanteur (de 9.81 m/s2).
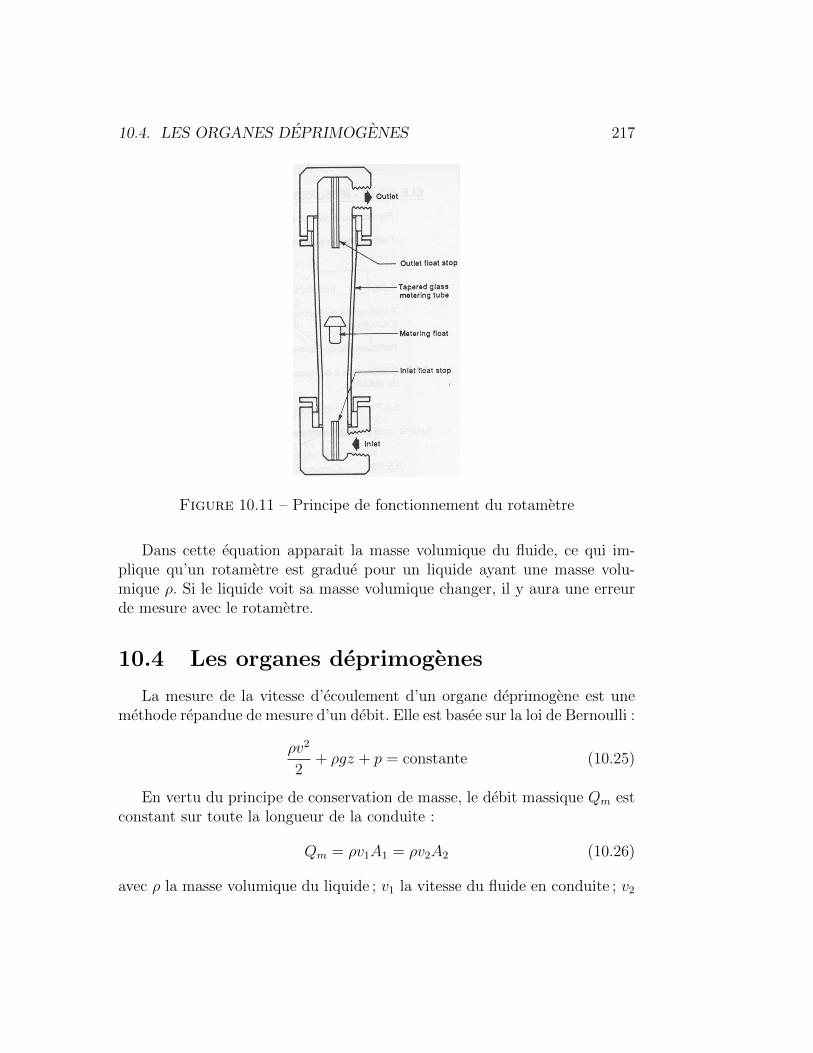
10.4. LES ORGANES DEPRIMOGENES 217
Figure 10.11 – Principe de fonctionnement du rotametre
Dans cette equation apparait la masse volumique du fluide, ce qui im-plique qu’un rotametre est gradue pour un liquide ayant une masse volu-mique ρ. Si le liquide voit sa masse volumique changer, il y aura une erreurde mesure avec le rotametre.
10.4 Les organes deprimogenes
La mesure de la vitesse d’ecoulement d’un organe deprimogene est unemethode repandue de mesure d’un debit. Elle est basee sur la loi de Bernoulli :
ρv2
2+ ρgz + p = constante (10.25)
En vertu du principe de conservation de masse, le debit massique Qm estconstant sur toute la longueur de la conduite :
Qm = ρv1A1 = ρv2A2 (10.26)
avec ρ la masse volumique du liquide ; v1 la vitesse du fluide en conduite ; v2
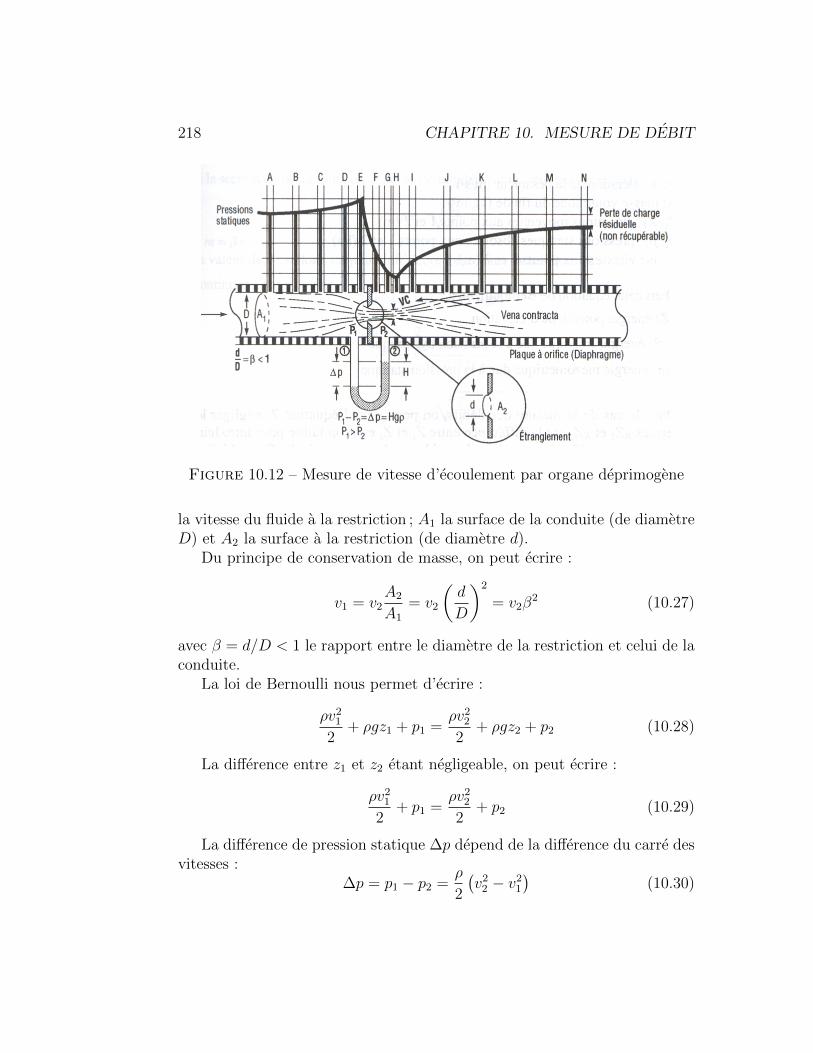
218 CHAPITRE 10. MESURE DE DEBIT
Figure 10.12 – Mesure de vitesse d’ecoulement par organe deprimogene
la vitesse du fluide a la restriction ; A1 la surface de la conduite (de diametreD) et A2 la surface a la restriction (de diametre d).
Du principe de conservation de masse, on peut ecrire :
v1 = v2A2
A1
= v2
(d
D
)2
= v2β2 (10.27)
avec β = d/D < 1 le rapport entre le diametre de la restriction et celui de laconduite.
La loi de Bernoulli nous permet d’ecrire :
ρv21
2+ ρgz1 + p1 =
ρv22
2+ ρgz2 + p2 (10.28)
La difference entre z1 et z2 etant negligeable, on peut ecrire :
ρv21
2+ p1 =
ρv22
2+ p2 (10.29)
La difference de pression statique ∆p depend de la difference du carre desvitesses :
∆p = p1 − p2 =ρ
2
(v2
2 − v21
)(10.30)

10.4. LES ORGANES DEPRIMOGENES 219
Puisque v1 = β2v2, alors on peut ecrire :
∆p =ρ
2v2
2
(1−
(d
D
)4)
=ρ
2v2
2
(1− β4
)(10.31)
Donc en mesurant la chute de pression statique ∆p, on peut calculer lavitesse d’ecoulement dans l’orifice :
v2 =
√1
(1− β4)
2
ρ∆p = E
√2
ρ∆p (10.32)
avec E = 1/√
(1− β4). Cette relation est non-lineaire.On peut passer de la vitesse au debit volumique en multipliant celle-ci
par la surface de la restriction A2 :
Q = v2A2 = A2E
√2
ρ∆p (10.33)
En pratique, il y a des pertes de charges et pour les prendre en compteon ajoute un coefficient de correction C < 1 :
Q = CA2E
√2
ρ∆p (10.34)
Ce coefficient de correction est le produit du coefficient de contraction Ccet du coefficient de decharge Cd.
Pour simplifier l’ecriture, definissons α = CE :
Q = αA2
√2
ρ∆p (10.35)
En pratique, puisque l’on fait le dimensionnement de la restriction del’organe deprimogene, on ne connait donc pas la surface A2. Toutefois, ladimension D de la conduite (et sa surface A1 = πD2/4) ou l’on installe cedebitmetre est connue. Ainsi, on peut ecrire finalement 4 :
Q = αβ2A1
√2
ρ∆p (10.36)
4. Bsata, Abdalla, ”Instrumentation et Automatisation dans le controle des procedes”,Le Griffon d’argile, 1994.
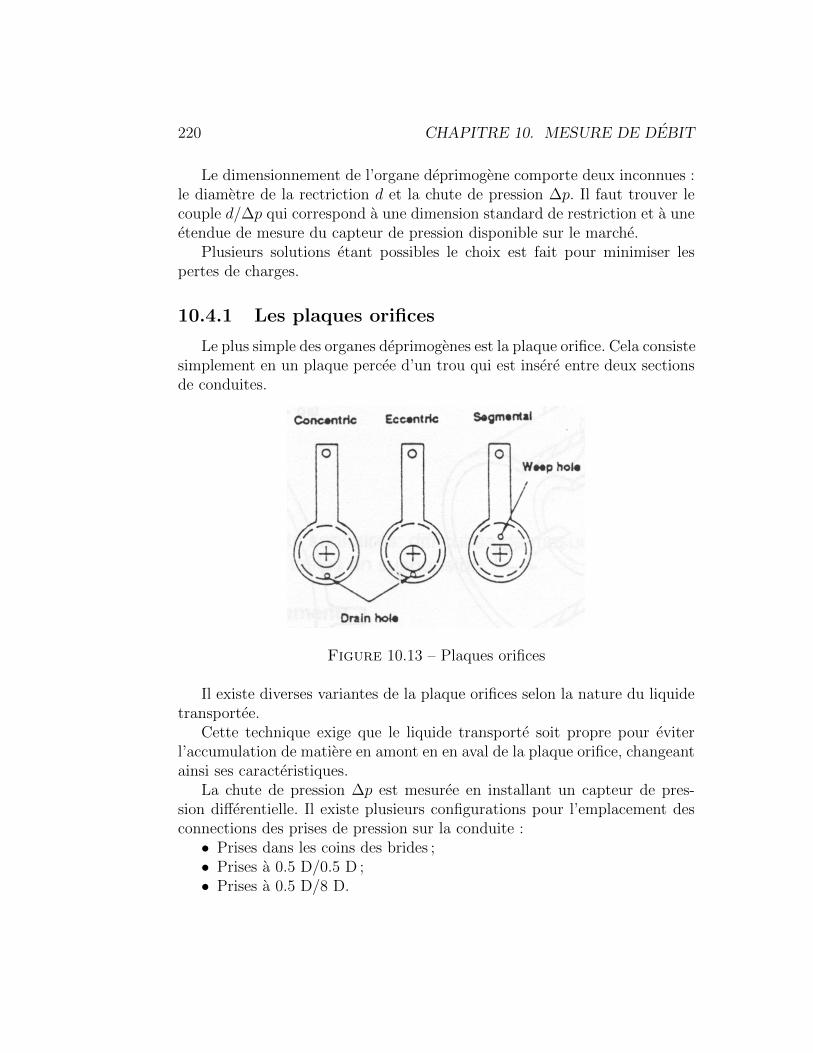
220 CHAPITRE 10. MESURE DE DEBIT
Le dimensionnement de l’organe deprimogene comporte deux inconnues :le diametre de la rectriction d et la chute de pression ∆p. Il faut trouver lecouple d/∆p qui correspond a une dimension standard de restriction et a uneetendue de mesure du capteur de pression disponible sur le marche.
Plusieurs solutions etant possibles le choix est fait pour minimiser lespertes de charges.
10.4.1 Les plaques orifices
Le plus simple des organes deprimogenes est la plaque orifice. Cela consistesimplement en un plaque percee d’un trou qui est insere entre deux sectionsde conduites.
Figure 10.13 – Plaques orifices
Il existe diverses variantes de la plaque orifices selon la nature du liquidetransportee.
Cette technique exige que le liquide transporte soit propre pour eviterl’accumulation de matiere en amont en en aval de la plaque orifice, changeantainsi ses caracteristiques.
La chute de pression ∆p est mesuree en installant un capteur de pres-sion differentielle. Il existe plusieurs configurations pour l’emplacement desconnections des prises de pression sur la conduite :• Prises dans les coins des brides ;• Prises a 0.5 D/0.5 D ;• Prises a 0.5 D/8 D.
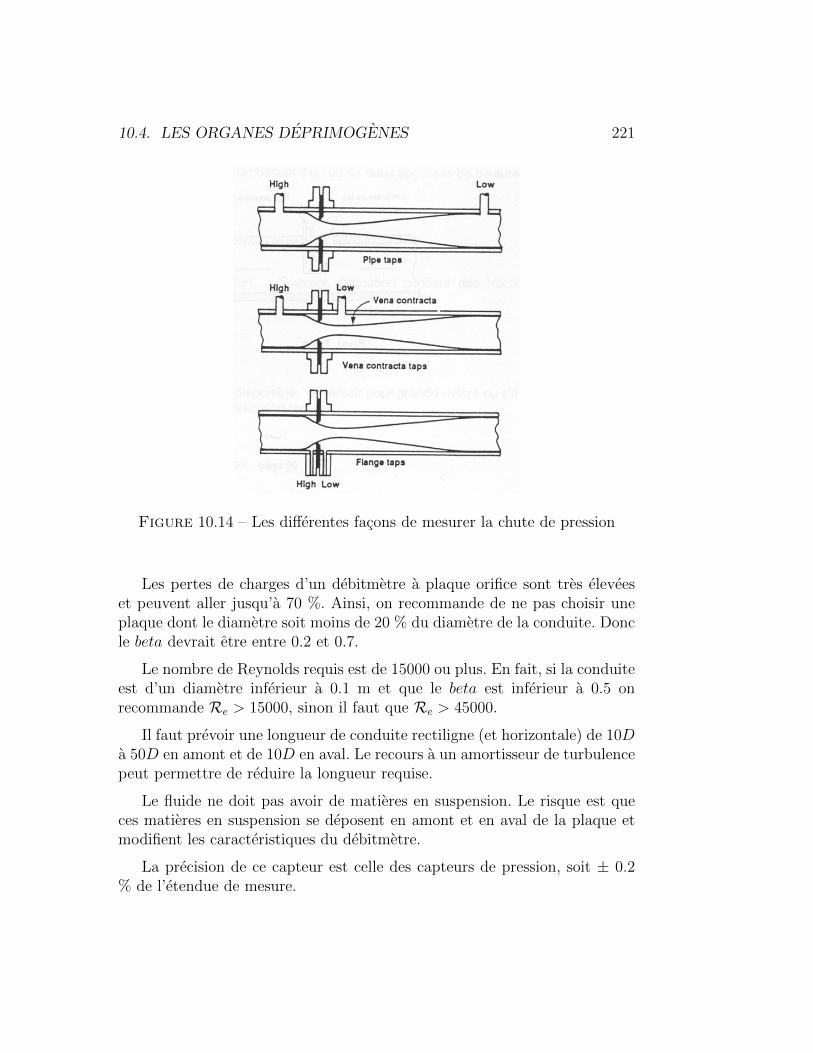
10.4. LES ORGANES DEPRIMOGENES 221
Figure 10.14 – Les differentes facons de mesurer la chute de pression
Les pertes de charges d’un debitmetre a plaque orifice sont tres eleveeset peuvent aller jusqu’a 70 %. Ainsi, on recommande de ne pas choisir uneplaque dont le diametre soit moins de 20 % du diametre de la conduite. Doncle beta devrait etre entre 0.2 et 0.7.
Le nombre de Reynolds requis est de 15000 ou plus. En fait, si la conduiteest d’un diametre inferieur a 0.1 m et que le beta est inferieur a 0.5 onrecommande Re > 15000, sinon il faut que Re > 45000.
Il faut prevoir une longueur de conduite rectiligne (et horizontale) de 10Da 50D en amont et de 10D en aval. Le recours a un amortisseur de turbulencepeut permettre de reduire la longueur requise.
Le fluide ne doit pas avoir de matieres en suspension. Le risque est queces matieres en suspension se deposent en amont et en aval de la plaque etmodifient les caracteristiques du debitmetre.
La precision de ce capteur est celle des capteurs de pression, soit ± 0.2% de l’etendue de mesure.
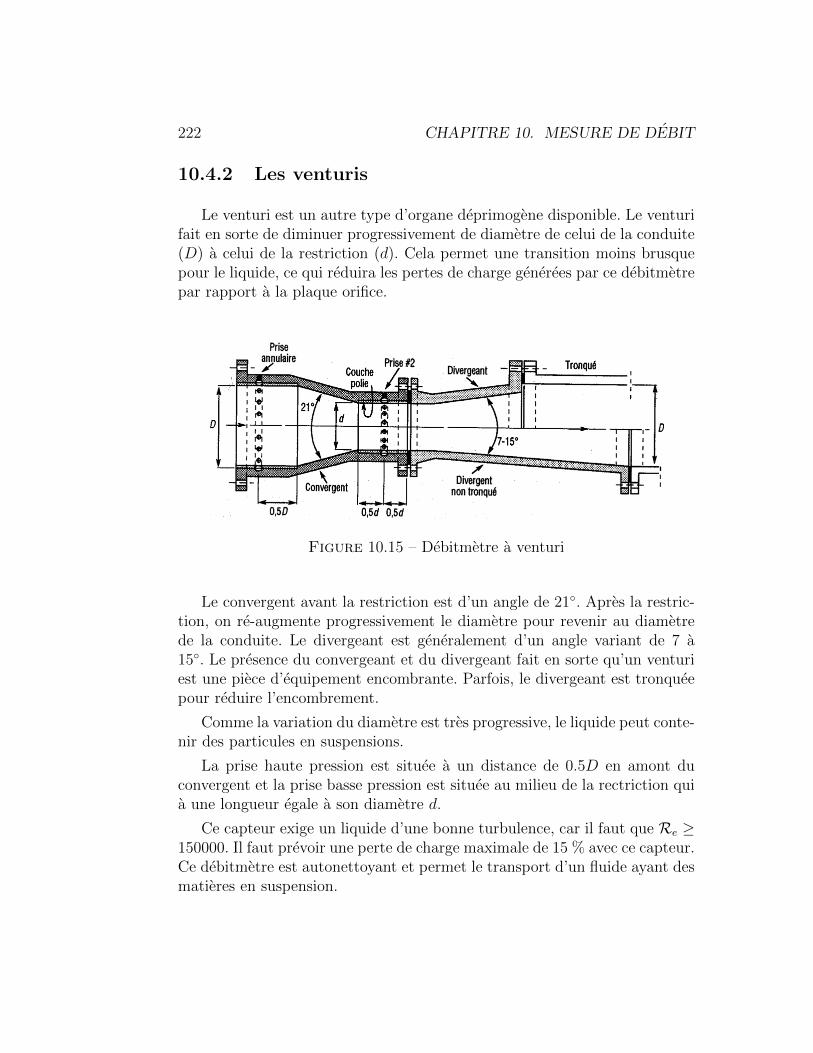
222 CHAPITRE 10. MESURE DE DEBIT
10.4.2 Les venturis
Le venturi est un autre type d’organe deprimogene disponible. Le venturifait en sorte de diminuer progressivement de diametre de celui de la conduite(D) a celui de la restriction (d). Cela permet une transition moins brusquepour le liquide, ce qui reduira les pertes de charge generees par ce debitmetrepar rapport a la plaque orifice.
Figure 10.15 – Debitmetre a venturi
Le convergent avant la restriction est d’un angle de 21. Apres la restric-tion, on re-augmente progressivement le diametre pour revenir au diametrede la conduite. Le divergeant est generalement d’un angle variant de 7 a15. Le presence du convergeant et du divergeant fait en sorte qu’un venturiest une piece d’equipement encombrante. Parfois, le divergeant est tronqueepour reduire l’encombrement.
Comme la variation du diametre est tres progressive, le liquide peut conte-nir des particules en suspensions.
La prise haute pression est situee a un distance de 0.5D en amont duconvergent et la prise basse pression est situee au milieu de la rectriction quia une longueur egale a son diametre d.
Ce capteur exige un liquide d’une bonne turbulence, car il faut que Re ≥150000. Il faut prevoir une perte de charge maximale de 15 % avec ce capteur.Ce debitmetre est autonettoyant et permet le transport d’un fluide ayant desmatieres en suspension.
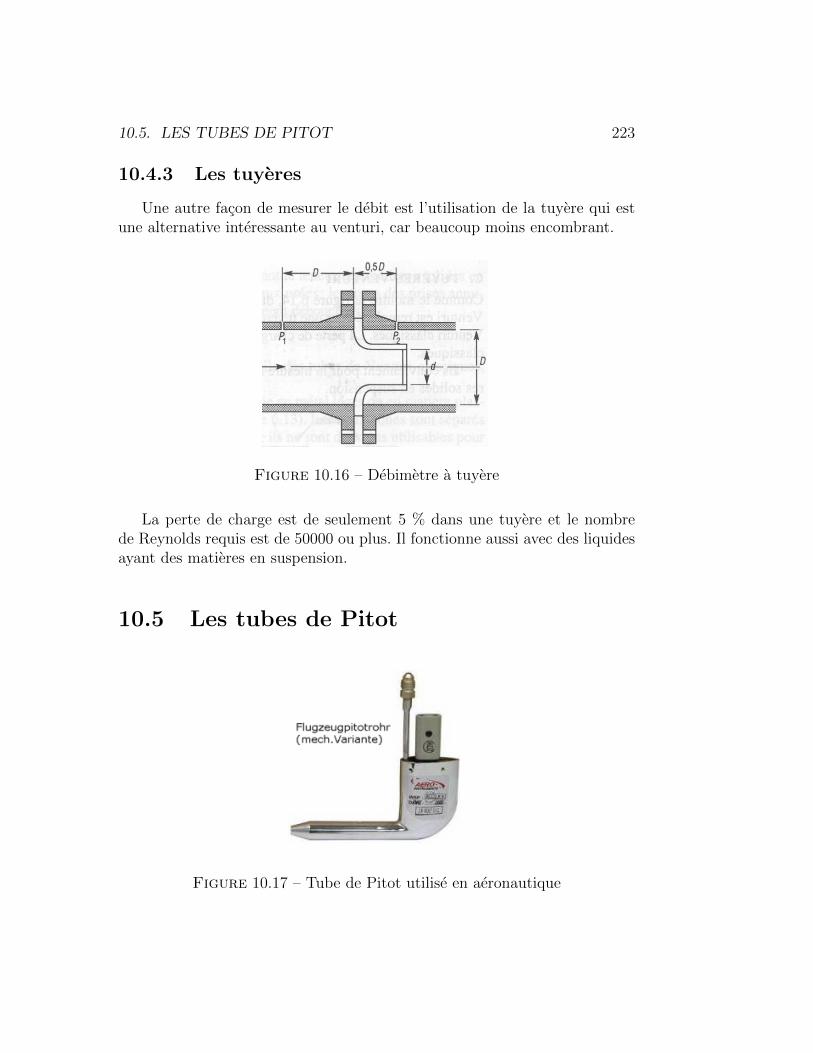
10.5. LES TUBES DE PITOT 223
10.4.3 Les tuyeres
Une autre facon de mesurer le debit est l’utilisation de la tuyere qui estune alternative interessante au venturi, car beaucoup moins encombrant.
Figure 10.16 – Debimetre a tuyere
La perte de charge est de seulement 5 % dans une tuyere et le nombrede Reynolds requis est de 50000 ou plus. Il fonctionne aussi avec des liquidesayant des matieres en suspension.
10.5 Les tubes de Pitot
Figure 10.17 – Tube de Pitot utilise en aeronautique
224 CHAPITRE 10. MESURE DE DEBIT
Figure 10.18 – Principe de fonctionnement du tube de Pitot
Le mesure de vitesse d’ecoulement d’un fluide peut etre faite en mesu-rant la pression dynamique. La pression dynamique est la difference entre lapression totale et la pression statique.
Le tube de Pitot fait la mesure de la vitesse en appliquant ces deuxpressions a un capteur de pression differentielle.
La pression totale etant la somme de la pression statique et la pressiondynamique :
pt = pd + ps (10.37)
Donc, la difference entre les deux est :
∆p = pt − ps = pd =ρv2
2(10.38)
ce qui permet d’obtenir la vitesse v du fluide en fonction de la difference depression ∆p :
v =
√2
ρ∆p (10.39)
Cette technique de mesure est utilisee en aeronautique pour mesurer lavitesse relative d’un avion par rapport a l’air.
Cette approche inventee par Henri Pitot en 1732 exige une longueur deconduite rectiligne de 10D en amont et 5D en aval.
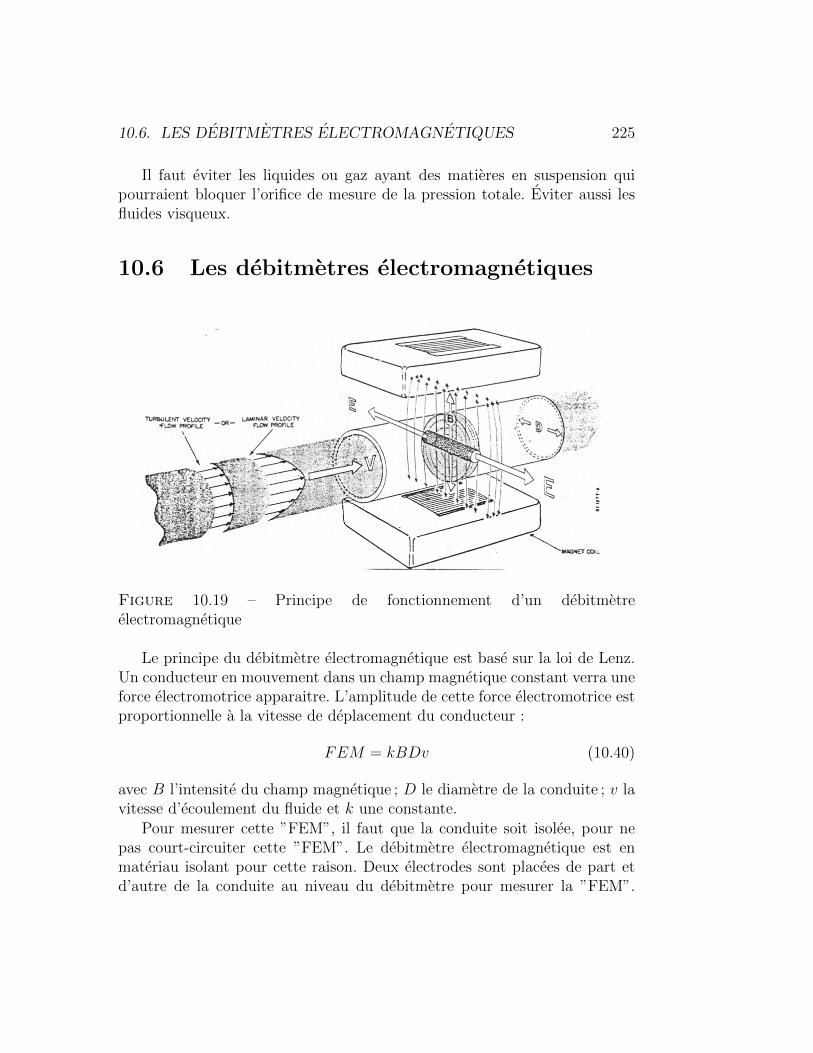
10.6. LES DEBITMETRES ELECTROMAGNETIQUES 225
Il faut eviter les liquides ou gaz ayant des matieres en suspension quipourraient bloquer l’orifice de mesure de la pression totale. Eviter aussi lesfluides visqueux.
10.6 Les debitmetres electromagnetiques
Figure 10.19 – Principe de fonctionnement d’un debitmetreelectromagnetique
Le principe du debitmetre electromagnetique est base sur la loi de Lenz.Un conducteur en mouvement dans un champ magnetique constant verra uneforce electromotrice apparaitre. L’amplitude de cette force electromotrice estproportionnelle a la vitesse de deplacement du conducteur :
FEM = kBDv (10.40)
avec B l’intensite du champ magnetique ; D le diametre de la conduite ; v lavitesse d’ecoulement du fluide et k une constante.
Pour mesurer cette ”FEM”, il faut que la conduite soit isolee, pour nepas court-circuiter cette ”FEM”. Le debitmetre electromagnetique est enmateriau isolant pour cette raison. Deux electrodes sont placees de part etd’autre de la conduite au niveau du debitmetre pour mesurer la ”FEM”.
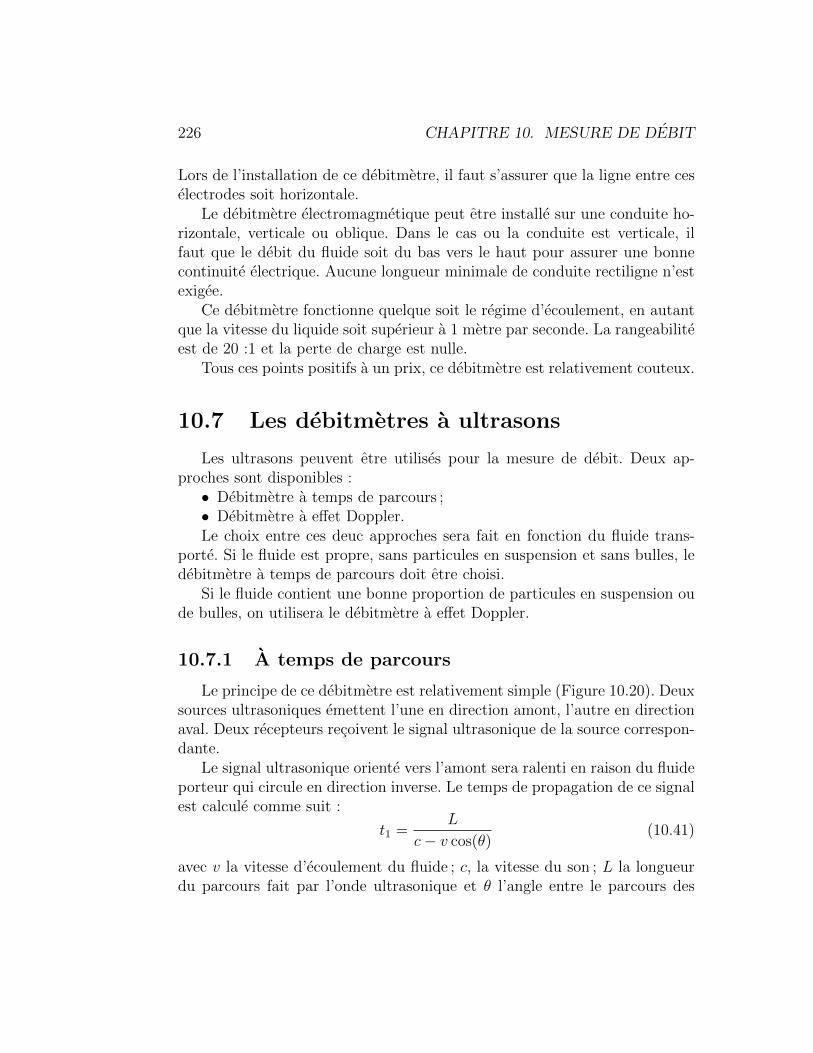
226 CHAPITRE 10. MESURE DE DEBIT
Lors de l’installation de ce debitmetre, il faut s’assurer que la ligne entre ceselectrodes soit horizontale.
Le debitmetre electromagmetique peut etre installe sur une conduite ho-rizontale, verticale ou oblique. Dans le cas ou la conduite est verticale, ilfaut que le debit du fluide soit du bas vers le haut pour assurer une bonnecontinuite electrique. Aucune longueur minimale de conduite rectiligne n’estexigee.
Ce debitmetre fonctionne quelque soit le regime d’ecoulement, en autantque la vitesse du liquide soit superieur a 1 metre par seconde. La rangeabiliteest de 20 :1 et la perte de charge est nulle.
Tous ces points positifs a un prix, ce debitmetre est relativement couteux.
10.7 Les debitmetres a ultrasons
Les ultrasons peuvent etre utilises pour la mesure de debit. Deux ap-proches sont disponibles :• Debitmetre a temps de parcours ;• Debitmetre a effet Doppler.Le choix entre ces deuc approches sera fait en fonction du fluide trans-
porte. Si le fluide est propre, sans particules en suspension et sans bulles, ledebitmetre a temps de parcours doit etre choisi.
Si le fluide contient une bonne proportion de particules en suspension oude bulles, on utilisera le debitmetre a effet Doppler.
10.7.1 A temps de parcours
Le principe de ce debitmetre est relativement simple (Figure 10.20). Deuxsources ultrasoniques emettent l’une en direction amont, l’autre en directionaval. Deux recepteurs recoivent le signal ultrasonique de la source correspon-dante.
Le signal ultrasonique oriente vers l’amont sera ralenti en raison du fluideporteur qui circule en direction inverse. Le temps de propagation de ce signalest calcule comme suit :
t1 =L
c− v cos(θ)(10.41)
avec v la vitesse d’ecoulement du fluide ; c, la vitesse du son ; L la longueurdu parcours fait par l’onde ultrasonique et θ l’angle entre le parcours des
10.7. LES DEBITMETRES A ULTRASONS 227
Figure 10.20 – Principe du debitmetre ultrasonique a temps de parcours
ultrasons et l’axe de la conduite.Le signal ultrasonique oriente vers l’aval sera accelere en raison du fluide
porteur qui circule dans la meme direction. Le temps de propagation est :
t2 =L
c+ v cos(θ)(10.42)
La difference entre ces deux temps de propagation ∆t = t1 − t2 est :
v =
√L2 + c2∆t2 − L
∆t cos(θ)(10.43)
que l’on peut approximer a :
v ≈ ∆tc2
2L cos(θ)(10.44)
ce qui fait que la vitesse d’ecoulement v a peu pres proportionnelle a ladifference des temps de parcours ∆t.
La presence de particules en suspension nuit a la mesure puisqu’ellesbloquent la propagation du signal ultrasonique qui ne se rend pas au detecteur.
Bilan
• Echelle lineaire et reponse instantanee ;• Rangeabilite elevee 20 :1 ou plus ;• Debits de 0.03 a 30 m/s ;• Precision de l’ordre de ± 1 % EM.• Mesure dans des conduits de 3 a 5000 mm ;• Mesure dans les deux sens ;
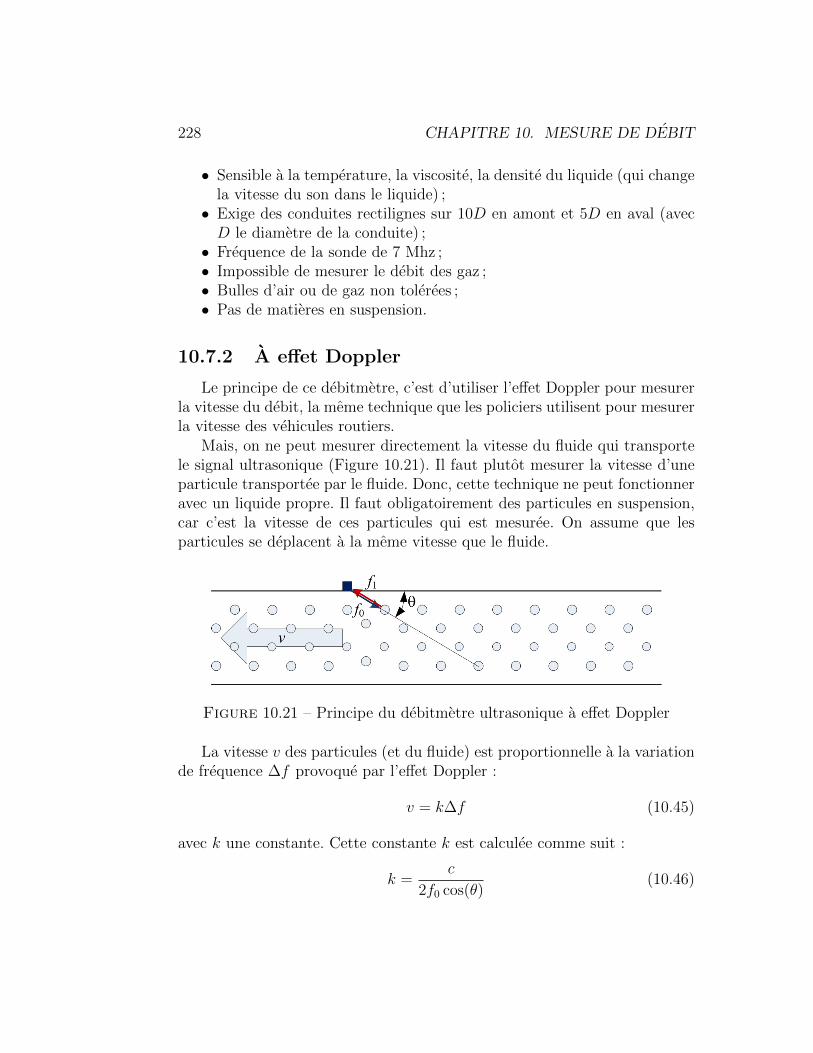
228 CHAPITRE 10. MESURE DE DEBIT
• Sensible a la temperature, la viscosite, la densite du liquide (qui changela vitesse du son dans le liquide) ;• Exige des conduites rectilignes sur 10D en amont et 5D en aval (avecD le diametre de la conduite) ;• Frequence de la sonde de 7 Mhz ;• Impossible de mesurer le debit des gaz ;• Bulles d’air ou de gaz non tolerees ;• Pas de matieres en suspension.
10.7.2 A effet Doppler
Le principe de ce debitmetre, c’est d’utiliser l’effet Doppler pour mesurerla vitesse du debit, la meme technique que les policiers utilisent pour mesurerla vitesse des vehicules routiers.
Mais, on ne peut mesurer directement la vitesse du fluide qui transportele signal ultrasonique (Figure 10.21). Il faut plutot mesurer la vitesse d’uneparticule transportee par le fluide. Donc, cette technique ne peut fonctionneravec un liquide propre. Il faut obligatoirement des particules en suspension,car c’est la vitesse de ces particules qui est mesuree. On assume que lesparticules se deplacent a la meme vitesse que le fluide.
Figure 10.21 – Principe du debitmetre ultrasonique a effet Doppler
La vitesse v des particules (et du fluide) est proportionnelle a la variationde frequence ∆f provoque par l’effet Doppler :
v = k∆f (10.45)
avec k une constante. Cette constante k est calculee comme suit :
k =c
2f0 cos(θ)(10.46)
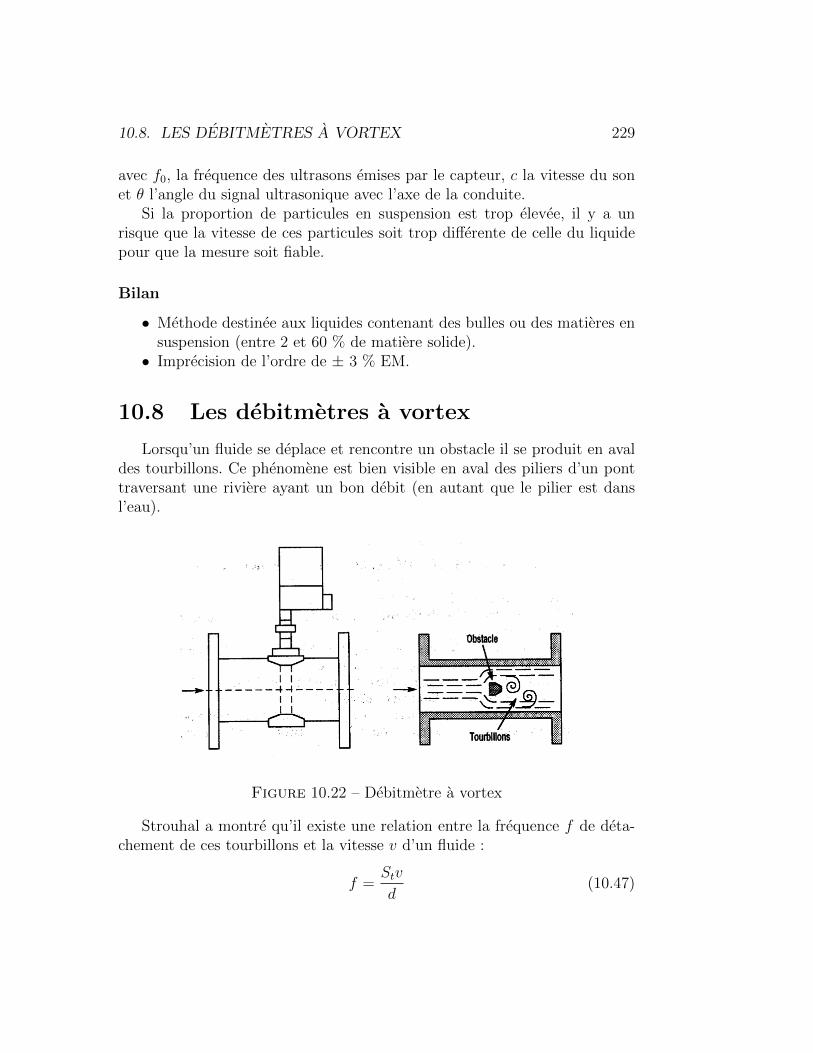
10.8. LES DEBITMETRES A VORTEX 229
avec f0, la frequence des ultrasons emises par le capteur, c la vitesse du sonet θ l’angle du signal ultrasonique avec l’axe de la conduite.
Si la proportion de particules en suspension est trop elevee, il y a unrisque que la vitesse de ces particules soit trop differente de celle du liquidepour que la mesure soit fiable.
Bilan
• Methode destinee aux liquides contenant des bulles ou des matieres ensuspension (entre 2 et 60 % de matiere solide).• Imprecision de l’ordre de ± 3 % EM.
10.8 Les debitmetres a vortex
Lorsqu’un fluide se deplace et rencontre un obstacle il se produit en avaldes tourbillons. Ce phenomene est bien visible en aval des piliers d’un ponttraversant une riviere ayant un bon debit (en autant que le pilier est dansl’eau).
Figure 10.22 – Debitmetre a vortex
Strouhal a montre qu’il existe une relation entre la frequence f de deta-chement de ces tourbillons et la vitesse v d’un fluide :
f =Stv
d(10.47)
230 CHAPITRE 10. MESURE DE DEBIT
avec St le nombre de Strouhal et d la largeur du corps perturbateur. Lafrequence de ces tourbillons est mesuree en mesurant la variation de pressionprovoquee par ces tourbillons.
Cette methode de mesure s’applique aux gaz comme aux liquides. Strou-hal a d’ailleurs decouvert la relation frequence/vitesse lors d’une experienceavec un fil tendu dans l’air. La frequence de sifflement du fil est proportion-nelle a la vitesse du vent.
10.8.1 Bilan
• Le capteur est simple et robuste ;• La precision est de l’ordre de ±0.5 % EM ;• Le temps de reponse est tres rapide (de l’ordre du millieme de seconde) ;• Ce capteur est disponible pour faire des mesures dans des conduites de
5 a 60 cm de diametre ;• Le nombre de Reynolds requis est dans la plage entre 10000 et 300000,
car c’est la zone ou le nombre de Strouhal est relativement constant(car il depend de facon non-lineaire avec le nombre de Reynolds) ;• L’obstacle permettant de generer les fameux tourbillons entraıne un
perte de charge ;• Le capteur est sensible aux variations de la temperature, de la viscosite
et de la pression ;• Ce capteur requiert des longueurs rectilignes de 10D en amont et de
5D en aval (D = diametre de la conduite) ;• La rangeabilite du capteur est excellente de l’ordre de 30 :1.
10.9 Debitmetre-masse a effet Coriolis
Un objet en mouvement dans un dans un milieu en rotation sera sujeta une force inertielle agissant perpendiculairement a son mouvement. Cetteforce, nommee ”force de Coriolis” est une force fictive au meme titre que laforce centrifuge.
Ainsi, pour obtenir une force de Coriolis sur un liquide en mouvement, ilfaut deplacer la conduite sur un arc de cercle pour lui donner un mouvementcirculaire.
Comme on ne peut faire tourner la conduite de 360 autour d’un centre derotation, car l’installation serait trop compliquee, on fait simplement osciller
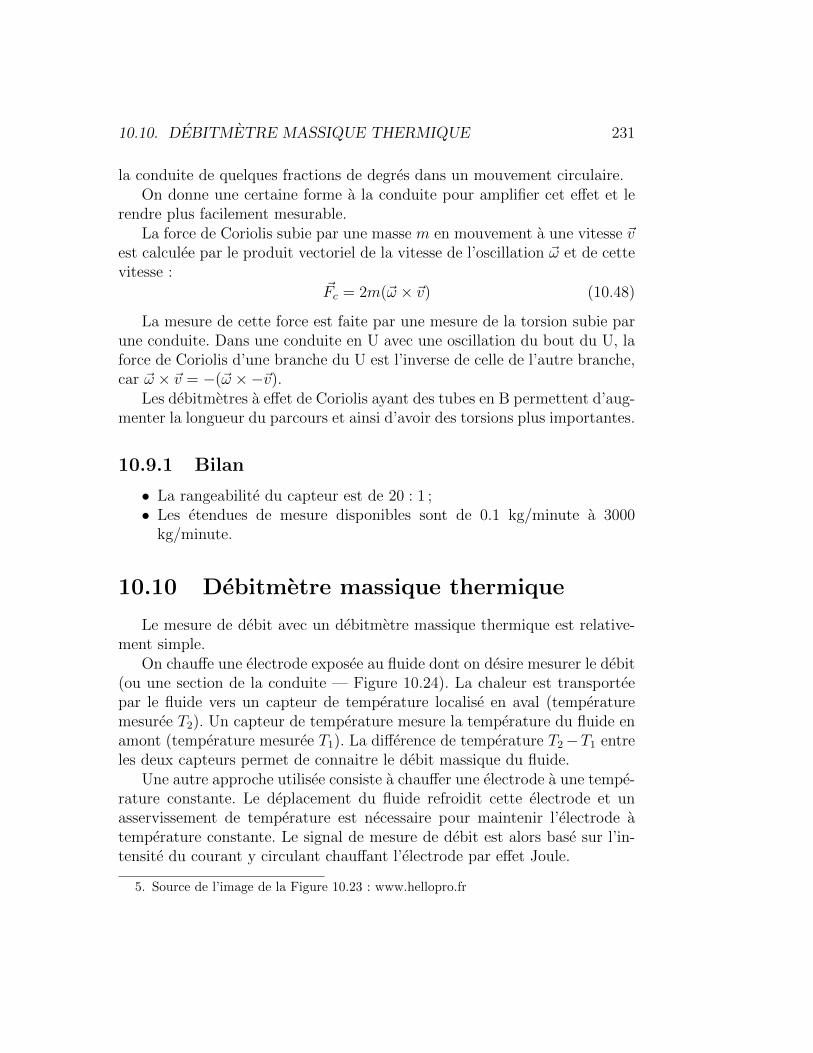
10.10. DEBITMETRE MASSIQUE THERMIQUE 231
la conduite de quelques fractions de degres dans un mouvement circulaire.On donne une certaine forme a la conduite pour amplifier cet effet et le
rendre plus facilement mesurable.La force de Coriolis subie par une masse m en mouvement a une vitesse ~v
est calculee par le produit vectoriel de la vitesse de l’oscillation ~ω et de cettevitesse :
~Fc = 2m(~ω × ~v) (10.48)
La mesure de cette force est faite par une mesure de la torsion subie parune conduite. Dans une conduite en U avec une oscillation du bout du U, laforce de Coriolis d’une branche du U est l’inverse de celle de l’autre branche,car ~ω × ~v = −(~ω ×−~v).
Les debitmetres a effet de Coriolis ayant des tubes en B permettent d’aug-menter la longueur du parcours et ainsi d’avoir des torsions plus importantes.
10.9.1 Bilan
• La rangeabilite du capteur est de 20 : 1 ;• Les etendues de mesure disponibles sont de 0.1 kg/minute a 3000
kg/minute.
10.10 Debitmetre massique thermique
Le mesure de debit avec un debitmetre massique thermique est relative-ment simple.
On chauffe une electrode exposee au fluide dont on desire mesurer le debit(ou une section de la conduite — Figure 10.24). La chaleur est transporteepar le fluide vers un capteur de temperature localise en aval (temperaturemesuree T2). Un capteur de temperature mesure la temperature du fluide enamont (temperature mesuree T1). La difference de temperature T2−T1 entreles deux capteurs permet de connaitre le debit massique du fluide.
Une autre approche utilisee consiste a chauffer une electrode a une tempe-rature constante. Le deplacement du fluide refroidit cette electrode et unasservissement de temperature est necessaire pour maintenir l’electrode atemperature constante. Le signal de mesure de debit est alors base sur l’in-tensite du courant y circulant chauffant l’electrode par effet Joule.
5. Source de l’image de la Figure 10.23 : www.hellopro.fr
232 CHAPITRE 10. MESURE DE DEBIT
Figure 10.23 – Debitmetre massique thermique 5
Figure 10.24 – Principe du debitmetre massique thermique
Lorsque ce debitmetre mesure le debit massique d’un gaz, certains l’iden-tifient sous le nom d’anemometre a fil chaud.
Bilan
• Mesure de debit massique de liquides et de gaz ;• Precision de l’ordre de ± 1 % a ± 2 % ;• E.M. de 0.5 gr/m a 20 000 kg/h ;• Rangeabilite de 20 :1.
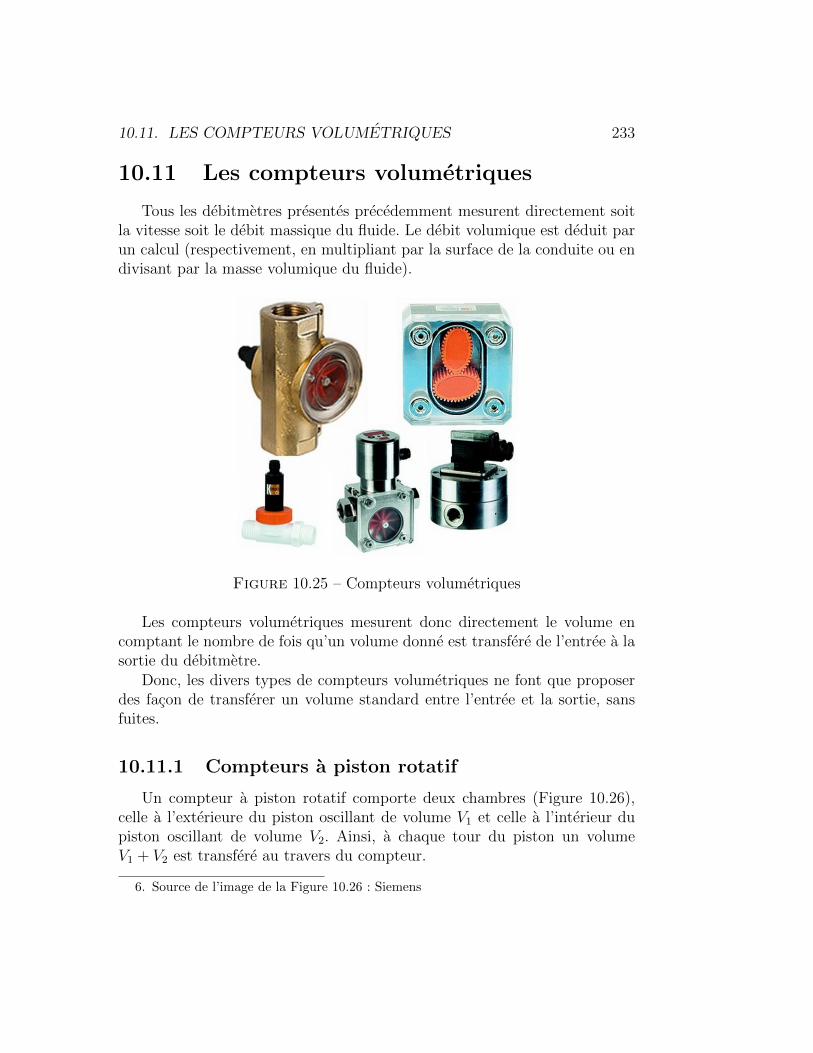
10.11. LES COMPTEURS VOLUMETRIQUES 233
10.11 Les compteurs volumetriques
Tous les debitmetres presentes precedemment mesurent directement soitla vitesse soit le debit massique du fluide. Le debit volumique est deduit parun calcul (respectivement, en multipliant par la surface de la conduite ou endivisant par la masse volumique du fluide).
Figure 10.25 – Compteurs volumetriques
Les compteurs volumetriques mesurent donc directement le volume encomptant le nombre de fois qu’un volume donne est transfere de l’entree a lasortie du debitmetre.
Donc, les divers types de compteurs volumetriques ne font que proposerdes facon de transferer un volume standard entre l’entree et la sortie, sansfuites.
10.11.1 Compteurs a piston rotatif
Un compteur a piston rotatif comporte deux chambres (Figure 10.26),celle a l’exterieure du piston oscillant de volume V1 et celle a l’interieur dupiston oscillant de volume V2. Ainsi, a chaque tour du piston un volumeV1 + V2 est transfere au travers du compteur.
6. Source de l’image de la Figure 10.26 : Siemens
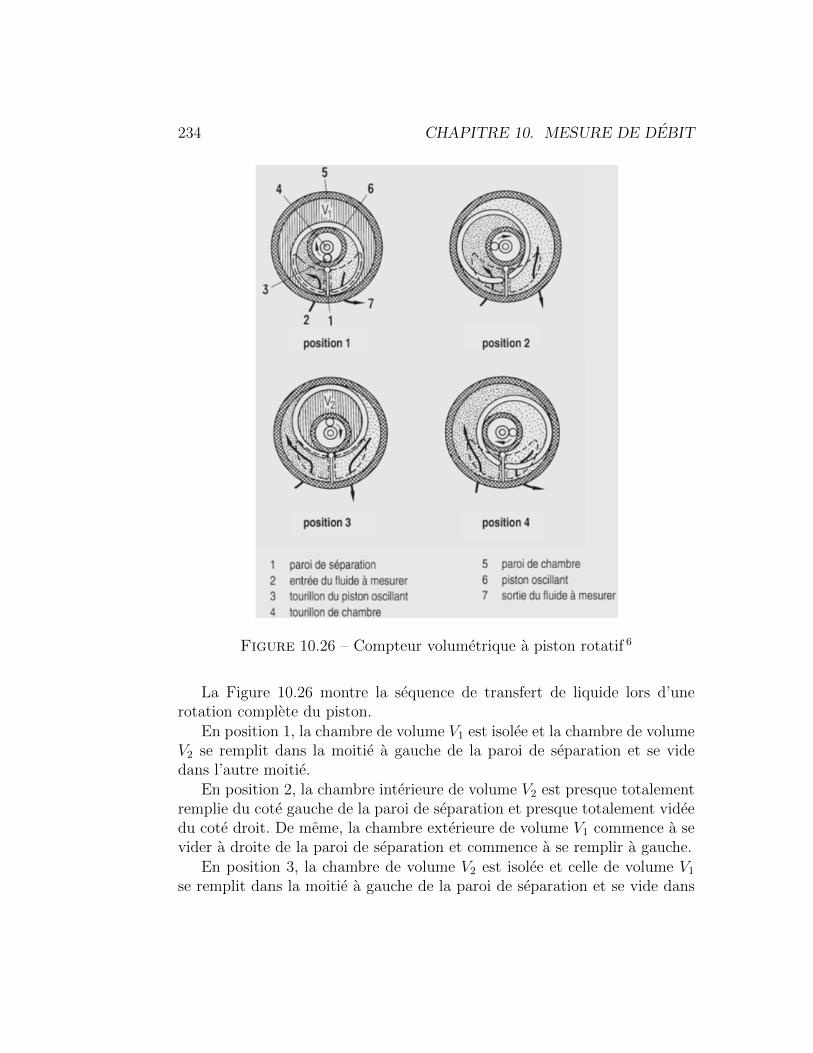
234 CHAPITRE 10. MESURE DE DEBIT
Figure 10.26 – Compteur volumetrique a piston rotatif 6
La Figure 10.26 montre la sequence de transfert de liquide lors d’unerotation complete du piston.
En position 1, la chambre de volume V1 est isolee et la chambre de volumeV2 se remplit dans la moitie a gauche de la paroi de separation et se videdans l’autre moitie.
En position 2, la chambre interieure de volume V2 est presque totalementremplie du cote gauche de la paroi de separation et presque totalement videedu cote droit. De meme, la chambre exterieure de volume V1 commence a sevider a droite de la paroi de separation et commence a se remplir a gauche.
En position 3, la chambre de volume V2 est isolee et celle de volume V1
se remplit dans la moitie a gauche de la paroi de separation et se vide dans

10.11. LES COMPTEURS VOLUMETRIQUES 235
l’autre moitie.
En position 3, la chambre interieure de volume V2 commence a se videra droite de la paroi de separation et commence a se remplir a gauche. Dememe, la chambre exterieure de volume V1 est presque totalement rempliedu cote gauche de la paroi de separation et presque totalement videe du cotedroit.
Et on reprend avec la position 1.
Le mouvement du piston en rotation permet le transfert de liquide del’entree a la sortie. Pour eviter l’abrasion des surfaces de contact, il fauteviter d’avoir un liquide ayant des matieres en suspension, en particulier sicelles-ci sont abrasives.
Bilan
• Debit max. : 40 m3/h• Precision : ±1 % EM.• Rangeabilite de 20 :1 ;• Fidelite de ±0.001 % EM ;• Precision de ±0.1 % EM ;• Non recommande si matieres en suspension, ni si matieres abrasives.
10.11.2 Compteurs a disque oscillant
Un compteur a disque oscillant transfere a chaque rotation le volumepiege entre le dessus du disque et les parois de la chambre du compteur etcelui piege entre le dessous du disque et les parois de la chambre du compteur(Figure 10.27).
Le remplissage et la vidange de ces volumes se fait en alternance. Pendantque le volume au dessus du disque se remplit, celui au dessous se vide et vice-versa.
On retrouve ce compteur volumetrique dans les applications ou l’on me-sure la consommation de l’eau.
Bilan
• Debit max. : 40 m3/h ;• Precision : ± 0.5 % EM ;• Rangeabitite de 10 : 1.
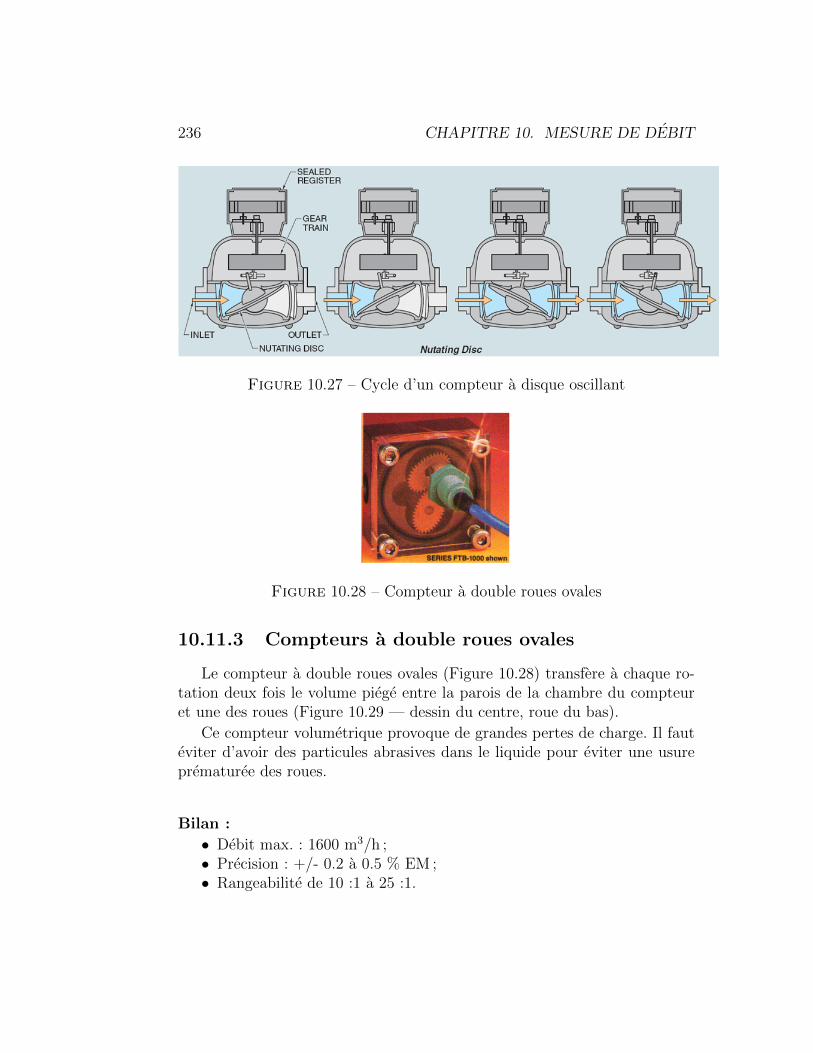
236 CHAPITRE 10. MESURE DE DEBIT
Figure 10.27 – Cycle d’un compteur a disque oscillant
Figure 10.28 – Compteur a double roues ovales
10.11.3 Compteurs a double roues ovales
Le compteur a double roues ovales (Figure 10.28) transfere a chaque ro-tation deux fois le volume piege entre la parois de la chambre du compteuret une des roues (Figure 10.29 — dessin du centre, roue du bas).
Ce compteur volumetrique provoque de grandes pertes de charge. Il fauteviter d’avoir des particules abrasives dans le liquide pour eviter une usureprematuree des roues.
Bilan :
• Debit max. : 1600 m3/h ;• Precision : +/- 0.2 a 0.5 % EM ;• Rangeabilite de 10 :1 a 25 :1.
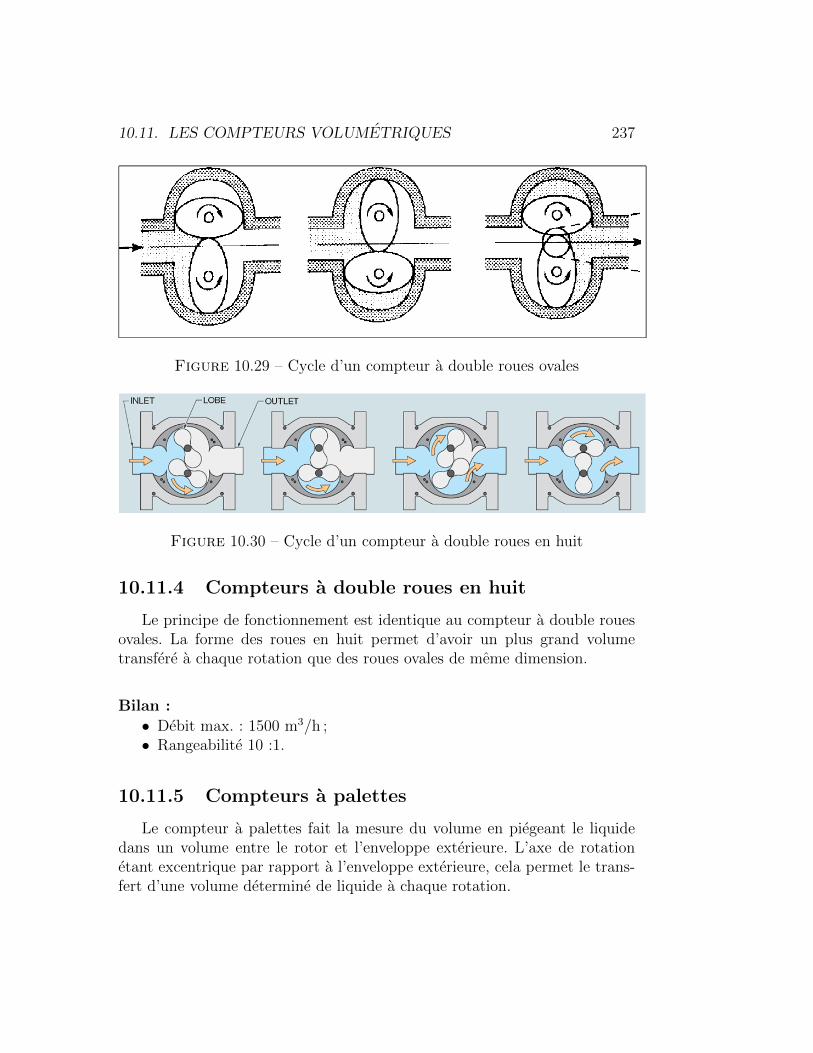
10.11. LES COMPTEURS VOLUMETRIQUES 237
Figure 10.29 – Cycle d’un compteur a double roues ovales
Figure 10.30 – Cycle d’un compteur a double roues en huit
10.11.4 Compteurs a double roues en huit
Le principe de fonctionnement est identique au compteur a double rouesovales. La forme des roues en huit permet d’avoir un plus grand volumetransfere a chaque rotation que des roues ovales de meme dimension.
Bilan :
• Debit max. : 1500 m3/h ;• Rangeabilite 10 :1.
10.11.5 Compteurs a palettes
Le compteur a palettes fait la mesure du volume en piegeant le liquidedans un volume entre le rotor et l’enveloppe exterieure. L’axe de rotationetant excentrique par rapport a l’enveloppe exterieure, cela permet le trans-fert d’une volume determine de liquide a chaque rotation.
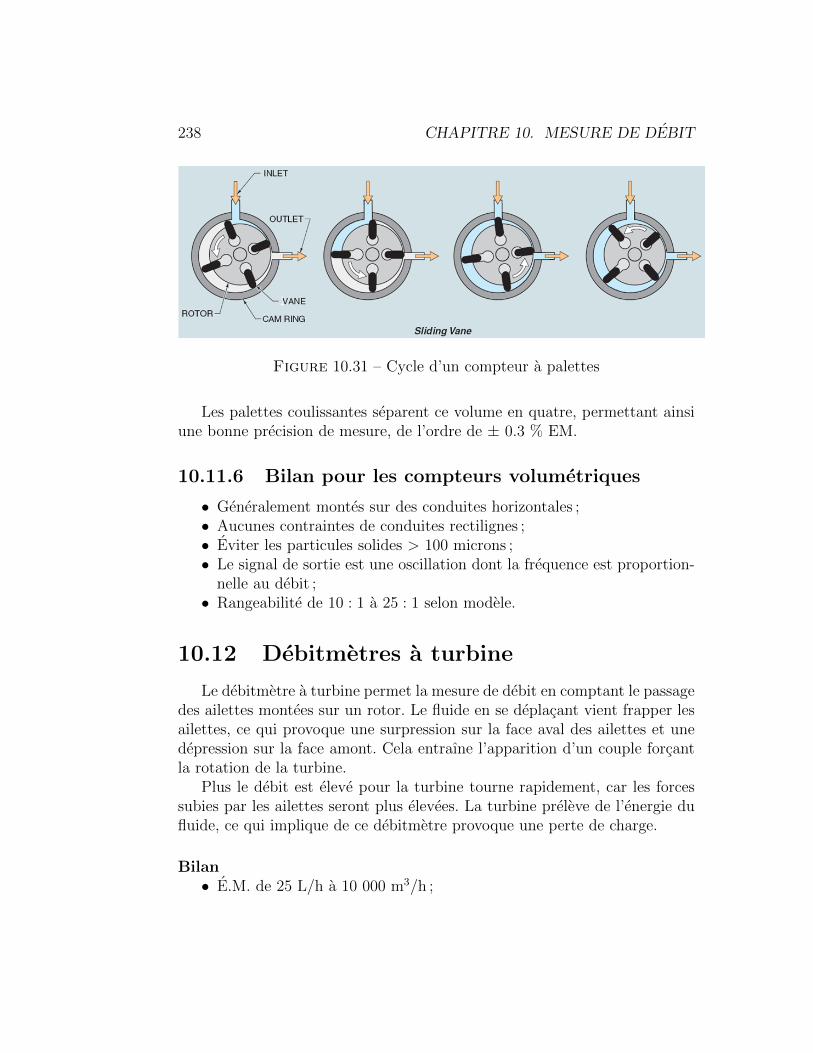
238 CHAPITRE 10. MESURE DE DEBIT
Figure 10.31 – Cycle d’un compteur a palettes
Les palettes coulissantes separent ce volume en quatre, permettant ainsiune bonne precision de mesure, de l’ordre de ± 0.3 % EM.
10.11.6 Bilan pour les compteurs volumetriques
• Generalement montes sur des conduites horizontales ;• Aucunes contraintes de conduites rectilignes ;• Eviter les particules solides > 100 microns ;• Le signal de sortie est une oscillation dont la frequence est proportion-
nelle au debit ;• Rangeabilite de 10 : 1 a 25 : 1 selon modele.
10.12 Debitmetres a turbine
Le debitmetre a turbine permet la mesure de debit en comptant le passagedes ailettes montees sur un rotor. Le fluide en se deplacant vient frapper lesailettes, ce qui provoque une surpression sur la face aval des ailettes et unedepression sur la face amont. Cela entraıne l’apparition d’un couple forcantla rotation de la turbine.
Plus le debit est eleve pour la turbine tourne rapidement, car les forcessubies par les ailettes seront plus elevees. La turbine preleve de l’energie dufluide, ce qui implique de ce debitmetre provoque une perte de charge.
Bilan• E.M. de 25 L/h a 10 000 m3/h ;
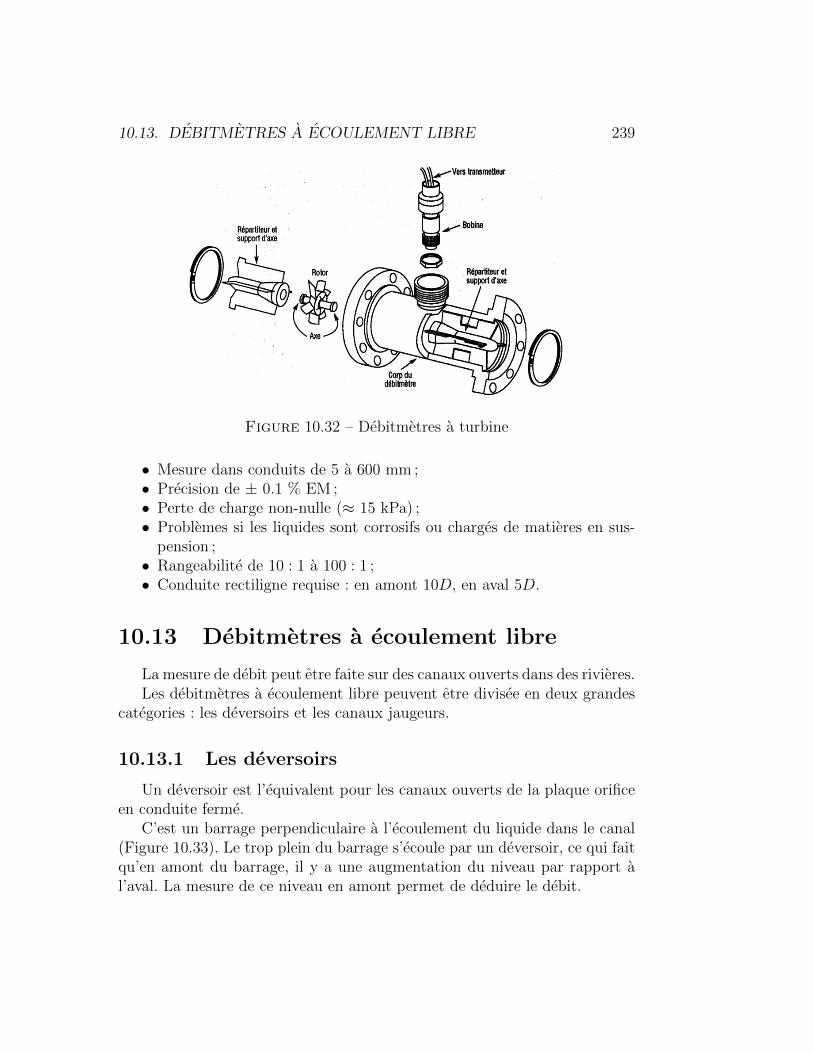
10.13. DEBITMETRES A ECOULEMENT LIBRE 239
Figure 10.32 – Debitmetres a turbine
• Mesure dans conduits de 5 a 600 mm ;• Precision de ± 0.1 % EM ;• Perte de charge non-nulle (≈ 15 kPa) ;• Problemes si les liquides sont corrosifs ou charges de matieres en sus-
pension ;• Rangeabilite de 10 : 1 a 100 : 1 ;• Conduite rectiligne requise : en amont 10D, en aval 5D.
10.13 Debitmetres a ecoulement libre
La mesure de debit peut etre faite sur des canaux ouverts dans des rivieres.Les debitmetres a ecoulement libre peuvent etre divisee en deux grandes
categories : les deversoirs et les canaux jaugeurs.
10.13.1 Les deversoirs
Un deversoir est l’equivalent pour les canaux ouverts de la plaque orificeen conduite ferme.
C’est un barrage perpendiculaire a l’ecoulement du liquide dans le canal(Figure 10.33). Le trop plein du barrage s’ecoule par un deversoir, ce qui faitqu’en amont du barrage, il y a une augmentation du niveau par rapport al’aval. La mesure de ce niveau en amont permet de deduire le debit.
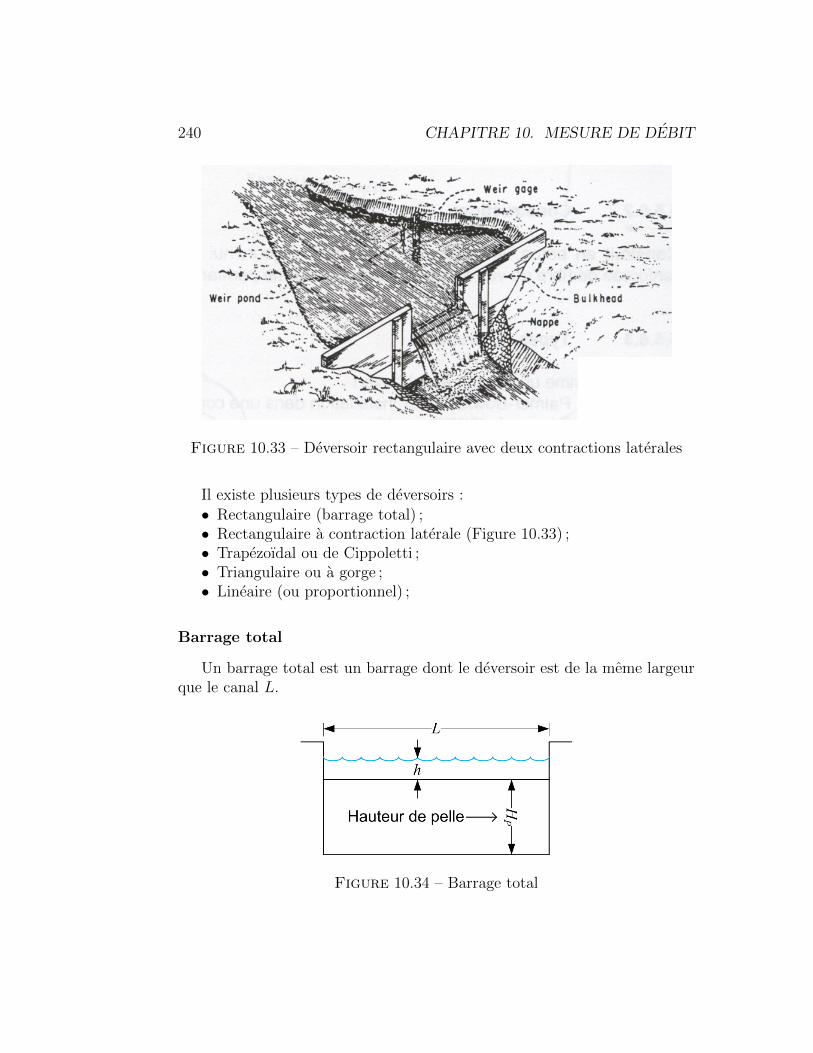
240 CHAPITRE 10. MESURE DE DEBIT
Figure 10.33 – Deversoir rectangulaire avec deux contractions laterales
Il existe plusieurs types de deversoirs :
• Rectangulaire (barrage total) ;• Rectangulaire a contraction laterale (Figure 10.33) ;• Trapezoıdal ou de Cippoletti ;• Triangulaire ou a gorge ;• Lineaire (ou proportionnel) ;
Barrage total
Un barrage total est un barrage dont le deversoir est de la meme largeurque le canal L.
Figure 10.34 – Barrage total
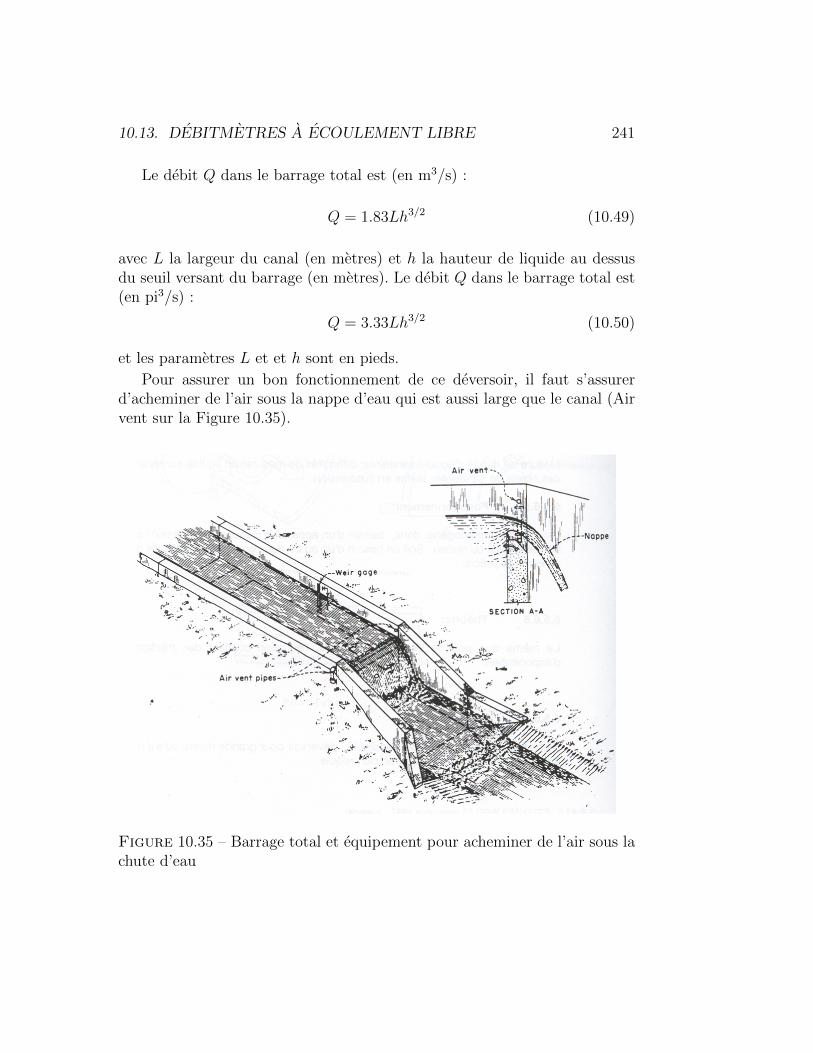
10.13. DEBITMETRES A ECOULEMENT LIBRE 241
Le debit Q dans le barrage total est (en m3/s) :
Q = 1.83Lh3/2 (10.49)
avec L la largeur du canal (en metres) et h la hauteur de liquide au dessusdu seuil versant du barrage (en metres). Le debit Q dans le barrage total est(en pi3/s) :
Q = 3.33Lh3/2 (10.50)
et les parametres L et et h sont en pieds.
Pour assurer un bon fonctionnement de ce deversoir, il faut s’assurerd’acheminer de l’air sous la nappe d’eau qui est aussi large que le canal (Airvent sur la Figure 10.35).
Figure 10.35 – Barrage total et equipement pour acheminer de l’air sous lachute d’eau

242 CHAPITRE 10. MESURE DE DEBIT
Figure 10.36 – Barrage a contractions
Barrage a contractions
Un barrage a contractions est un barrage dont le deversoir est de largeurinferieure au canal L. Si le barrage comporte une contraction de largeur l ledeversoir est alors de largeur x = L− l et s’il comporte deux contractions salargeur se reduit a x = L− 2l.
Le debit Q dans le barrage a contractions est (en m3/s) :
Q = 1.83(x− 0.1 n h)h3/2 (10.51)
avec n le nombre de contactions (1 ou 2) et les dimensions sont en en metres.Dans le systeme imperial, le debit Q est (en pi3/s) :
Q = 3.33(x− 0.1 n h)h3/2 (10.52)
et les parametres x et et h sont en pieds.
Barrage a deversoir trapezoıdal
Un barrage a deversoir trapezoıdal comporte une ouverture trapezoıdaledont le seuil versant est de largeur x et les faces de chaque cote du deversoiront une pente de 4 :1 (lire 4 metres vertical par metre horizontal).
Le debit Q dans le barrage a deversoir trapezoıdal est (en m3/s) :
Q = 1.86xh3/2 (10.53)
avec les parametres x et et h sont en metres. Dans le systeme imperial, ledebit Q est (en pi3/s) :
Q = 3.367xh3/2 (10.54)
et les parametres x et et h sont en pieds.
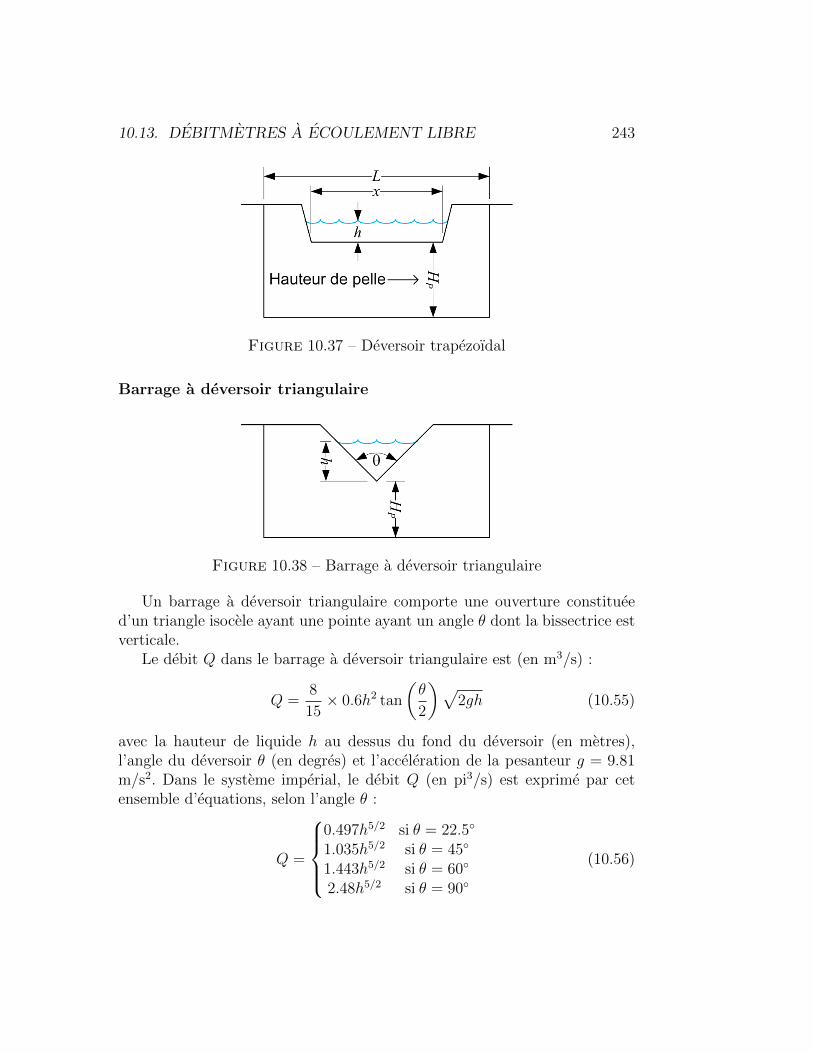
10.13. DEBITMETRES A ECOULEMENT LIBRE 243
Figure 10.37 – Deversoir trapezoıdal
Barrage a deversoir triangulaire
Figure 10.38 – Barrage a deversoir triangulaire
Un barrage a deversoir triangulaire comporte une ouverture constitueed’un triangle isocele ayant une pointe ayant un angle θ dont la bissectrice estverticale.
Le debit Q dans le barrage a deversoir triangulaire est (en m3/s) :
Q =8
15× 0.6h2 tan
(θ
2
)√2gh (10.55)
avec la hauteur de liquide h au dessus du fond du deversoir (en metres),l’angle du deversoir θ (en degres) et l’acceleration de la pesanteur g = 9.81m/s2. Dans le systeme imperial, le debit Q (en pi3/s) est exprime par cetensemble d’equations, selon l’angle θ :
Q =
0.497h5/2 si θ = 22.5
1.035h5/2 si θ = 45
1.443h5/2 si θ = 60
2.48h5/2 si θ = 90
(10.56)
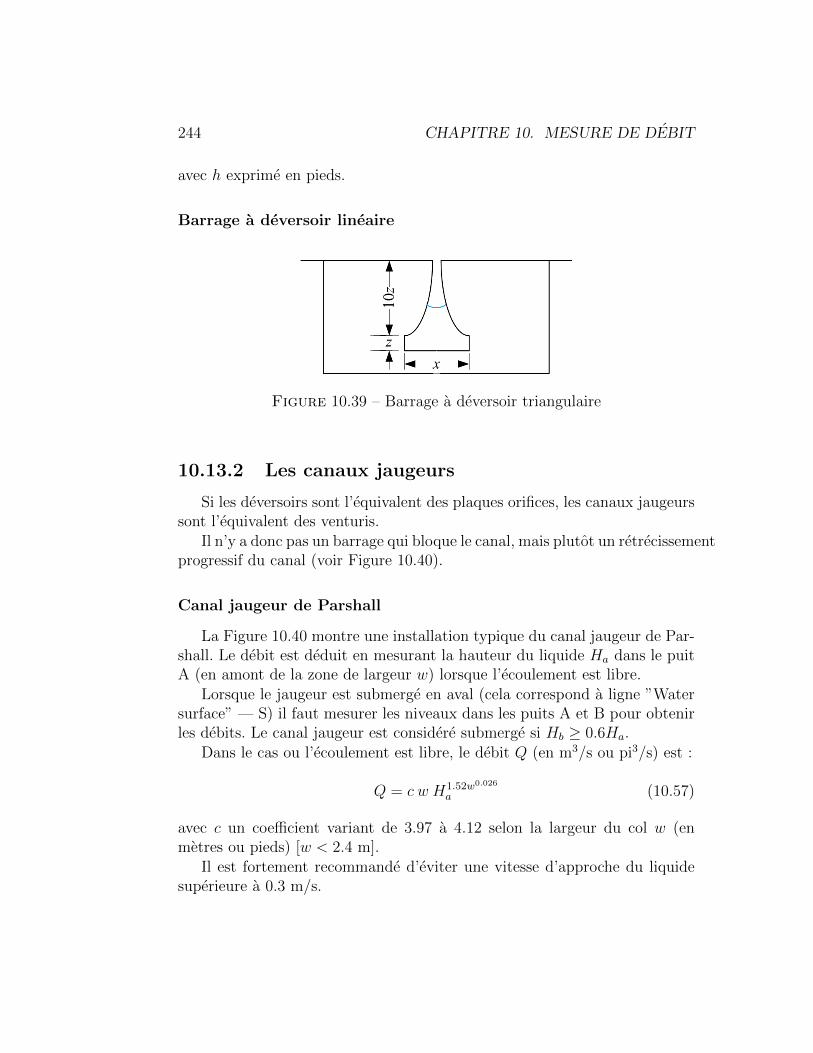
244 CHAPITRE 10. MESURE DE DEBIT
avec h exprime en pieds.
Barrage a deversoir lineaire
Figure 10.39 – Barrage a deversoir triangulaire
10.13.2 Les canaux jaugeurs
Si les deversoirs sont l’equivalent des plaques orifices, les canaux jaugeurssont l’equivalent des venturis.
Il n’y a donc pas un barrage qui bloque le canal, mais plutot un retrecissementprogressif du canal (voir Figure 10.40).
Canal jaugeur de Parshall
La Figure 10.40 montre une installation typique du canal jaugeur de Par-shall. Le debit est deduit en mesurant la hauteur du liquide Ha dans le puitA (en amont de la zone de largeur w) lorsque l’ecoulement est libre.
Lorsque le jaugeur est submerge en aval (cela correspond a ligne ”Watersurface” — S) il faut mesurer les niveaux dans les puits A et B pour obtenirles debits. Le canal jaugeur est considere submerge si Hb ≥ 0.6Ha.
Dans le cas ou l’ecoulement est libre, le debit Q (en m3/s ou pi3/s) est :
Q = c w H1.52w0.026
a (10.57)
avec c un coefficient variant de 3.97 a 4.12 selon la largeur du col w (enmetres ou pieds) [w < 2.4 m].
Il est fortement recommande d’eviter une vitesse d’approche du liquidesuperieure a 0.3 m/s.
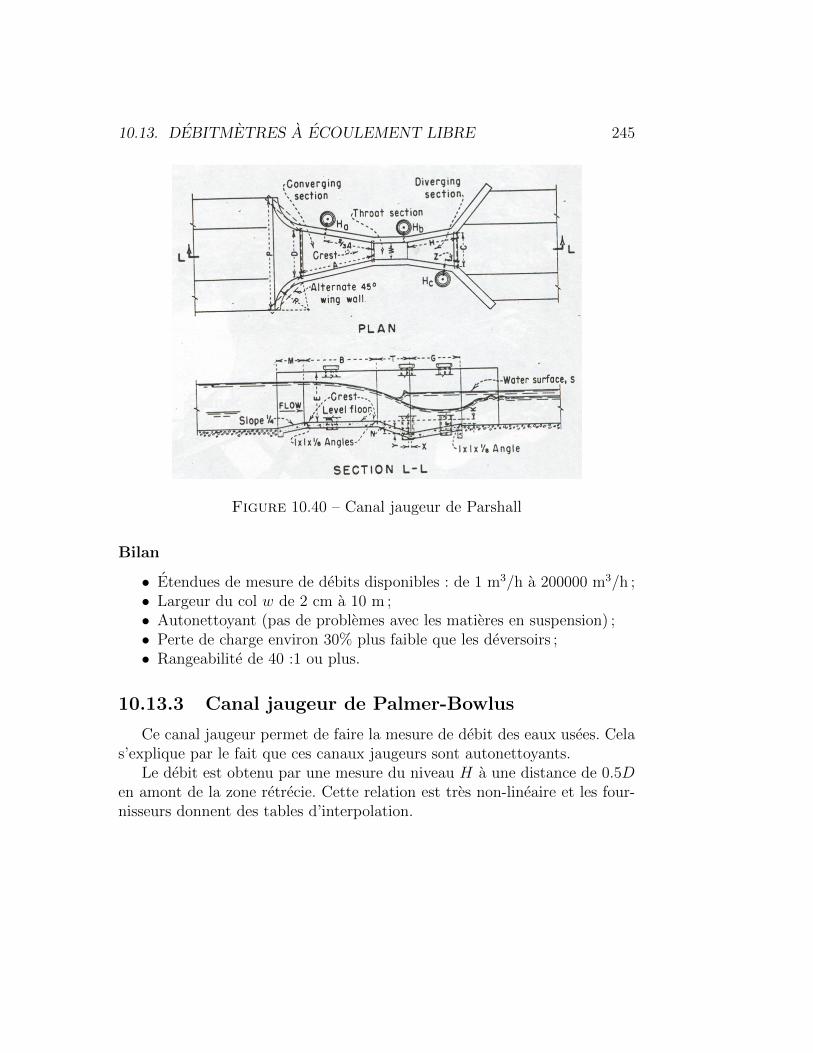
10.13. DEBITMETRES A ECOULEMENT LIBRE 245
Figure 10.40 – Canal jaugeur de Parshall
Bilan
• Etendues de mesure de debits disponibles : de 1 m3/h a 200000 m3/h ;• Largeur du col w de 2 cm a 10 m ;• Autonettoyant (pas de problemes avec les matieres en suspension) ;• Perte de charge environ 30% plus faible que les deversoirs ;• Rangeabilite de 40 :1 ou plus.
10.13.3 Canal jaugeur de Palmer-Bowlus
Ce canal jaugeur permet de faire la mesure de debit des eaux usees. Celas’explique par le fait que ces canaux jaugeurs sont autonettoyants.
Le debit est obtenu par une mesure du niveau H a une distance de 0.5Den amont de la zone retrecie. Cette relation est tres non-lineaire et les four-nisseurs donnent des tables d’interpolation.
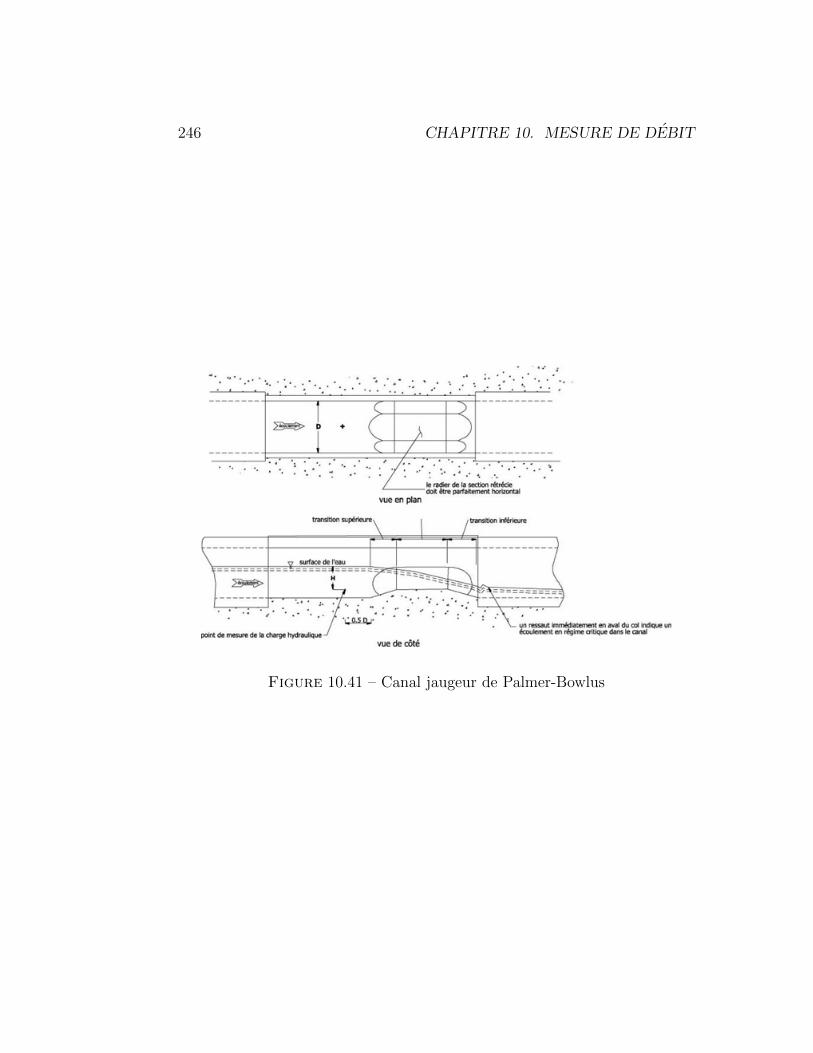
246 CHAPITRE 10. MESURE DE DEBIT
Figure 10.41 – Canal jaugeur de Palmer-Bowlus




![Rôle des capteurs - [TIMC-IMAG] : Pages individuellesmembres-timc.imag.fr/Yves.Usson/COURS/capteurs.pdf · Types de capteurs Les capteurs ponctuels : Ils permettent de mesurer l’intensité](https://static.fdocuments.fr/doc/165x107/5b986eaa09d3f22f0a8bfaac/role-des-capteurs-timc-imag-pages-individuellesmembres-timcimagfryvesussoncours.jpg)



![[Cours] Capteurs Et Actionneurs en Instrumentation](https://static.fdocuments.fr/doc/165x107/55cf8e64550346703b91ac89/cours-capteurs-et-actionneurs-en-instrumentation.jpg)